WO2017033377A1 - ロボットシステム - Google Patents
ロボットシステム Download PDFInfo
- Publication number
- WO2017033377A1 WO2017033377A1 PCT/JP2016/003061 JP2016003061W WO2017033377A1 WO 2017033377 A1 WO2017033377 A1 WO 2017033377A1 JP 2016003061 W JP2016003061 W JP 2016003061W WO 2017033377 A1 WO2017033377 A1 WO 2017033377A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- command value
- teaching
- robot
- robot system
- slave arm
- Prior art date
Links
- 238000012937 correction Methods 0.000 description 37
- 238000004364 calculation method Methods 0.000 description 19
- 238000010586 diagram Methods 0.000 description 18
- 230000006870 function Effects 0.000 description 15
- 230000005540 biological transmission Effects 0.000 description 11
- 238000000034 method Methods 0.000 description 10
- 238000003860 storage Methods 0.000 description 9
- 230000004048 modification Effects 0.000 description 8
- 238000012986 modification Methods 0.000 description 8
- 230000000694 effects Effects 0.000 description 7
- 238000004519 manufacturing process Methods 0.000 description 5
- 239000012636 effector Substances 0.000 description 2
- 238000010422 painting Methods 0.000 description 2
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000012888 cubic function Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 238000012887 quadratic function Methods 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/32—Surgical robots operating autonomously
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P19/00—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes
- B23P19/04—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes for assembling or disassembling parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q15/00—Automatic control or regulation of feed movement, cutting velocity or position of tool or work
- B23Q15/007—Automatic control or regulation of feed movement, cutting velocity or position of tool or work while the tool acts upon the workpiece
- B23Q15/12—Adaptive control, i.e. adjusting itself to have a performance which is optimum according to a preassigned criterion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/003—Controls for manipulators by means of an audio-responsive input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/006—Controls for manipulators by means of a wireless system for controlling one or several manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/02—Hand grip control means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/02—Hand grip control means
- B25J13/025—Hand grip control means comprising haptic means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/06—Control stands, e.g. consoles, switchboards
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/06—Control stands, e.g. consoles, switchboards
- B25J13/065—Control stands, e.g. consoles, switchboards comprising joy-sticks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
- B25J13/084—Tactile sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/087—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices for sensing other physical parameters, e.g. electrical or chemical properties
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/028—Piezoresistive or piezoelectric sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/04—Viewing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J3/00—Manipulators of master-slave type, i.e. both controlling unit and controlled unit perform corresponding spatial movements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J3/00—Manipulators of master-slave type, i.e. both controlling unit and controlled unit perform corresponding spatial movements
- B25J3/04—Manipulators of master-slave type, i.e. both controlling unit and controlled unit perform corresponding spatial movements involving servo mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0081—Programme-controlled manipulators with master teach-in means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0084—Programme-controlled manipulators comprising a plurality of manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0084—Programme-controlled manipulators comprising a plurality of manipulators
- B25J9/0087—Dual arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
- B25J9/161—Hardware, e.g. neural networks, fuzzy logic, interfaces, processor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1612—Programme controls characterised by the hand, wrist, grip control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/163—Programme controls characterised by the control loop learning, adaptive, model based, rule based expert control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1638—Programme controls characterised by the control loop compensation for arm bending/inertia, pay load weight/inertia
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1641—Programme controls characterised by the control loop compensation for backlash, friction, compliance, elasticity in the joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1646—Programme controls characterised by the control loop variable structure system, sliding mode control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1653—Programme controls characterised by the control loop parameters identification, estimation, stiffness, accuracy, error analysis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1669—Programme controls characterised by programming, planning systems for manipulators characterised by special application, e.g. multi-arm co-operation, assembly, grasping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1682—Dual arm manipulator; Coordination of several manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1692—Calibration of manipulator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1694—Programme controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/418—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM]
- G05B19/41815—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the cooperation between machine tools, manipulators and conveyor or other workpiece supply system, workcell
- G05B19/4182—Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] characterised by the cooperation between machine tools, manipulators and conveyor or other workpiece supply system, workcell manipulators and conveyor only
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
- G06T7/62—Analysis of geometric attributes of area, perimeter, diameter or volume
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
- H04N23/611—Control of cameras or camera modules based on recognised objects where the recognised objects include parts of the human body
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P21/00—Machines for assembling a multiplicity of different parts to compose units, with or without preceding or subsequent working of such parts, e.g. with programme control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P21/00—Machines for assembling a multiplicity of different parts to compose units, with or without preceding or subsequent working of such parts, e.g. with programme control
- B23P21/002—Machines for assembling a multiplicity of different parts to compose units, with or without preceding or subsequent working of such parts, e.g. with programme control the units stationary whilst being composed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/33—Director till display
- G05B2219/33007—Automatically control, manually limited, operator can override control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/35—Nc in input of data, input till input file format
- G05B2219/35464—Glove, movement of fingers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/37—Measurements
- G05B2219/37297—Two measurements, on driving motor and on slide or on both sides of motor
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39004—Assisted by automatic control system for certain functions
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39102—Manipulator cooperating with conveyor
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39439—Joystick, handle, lever controls manipulator directly, manually by operator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39531—Several different sensors integrated into hand
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39533—Measure grasping posture and pressure distribution
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40022—Snatching, dynamic pick, effector contacts object, moves with object
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40134—Force sensation of slave converted to vibration for operator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40136—Stereo audio and vision
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40139—Force from slave converted to a digital display like fingers and object
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40142—Temperature sensation, thermal feedback to operator fingers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40143—Slip, texture sensation feedback, by vibration stimulation of fingers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40145—Force sensation of slave converted to audio signal for operator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40146—Telepresence, teletaction, sensor feedback from slave to operator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40161—Visual display of machining, operation, remote viewing
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40162—Sound display of machining operation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40163—Measuring, predictive information feedback to operator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40169—Display of actual situation at the remote site
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40182—Master has different configuration than slave manipulator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40183—Tele-machining
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40195—Tele-operation, computer assisted manual operation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40387—Modify without repeating teaching operation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40627—Tactile image sensor, matrix, array of tactile elements, tixels
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/03—Teaching system
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/06—Communication with another machine
- Y10S901/08—Robot
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/09—Closed loop, sensor feedback controls arm movement
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/09—Closed loop, sensor feedback controls arm movement
- Y10S901/10—Sensor physically contacts and follows work contour
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/27—Arm part
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/30—End effector
- Y10S901/41—Tool
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/46—Sensing device
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/46—Sensing device
- Y10S901/47—Optical
Definitions
- the present invention relates to a robot system.
- the robot's position coordinates are input using the teaching pendant, which requires a lot of time and labor, and is a burden on the instructor.
- the part is changed (for example, the operation correction of the robot during automatic operation).
- an object of the present invention is to provide a robot system that can easily reduce the operation load of an operator and easily correct a preset robot operation.
- a robot system includes a robot body having a plurality of joints, a control device that controls the operation of the robot body, and an automatic operation of the robot body.
- An operation device having a teaching device that teaches position information of the robot body or angle information of the plurality of joints to the control device, and an operation device that corrects an operation of the robot body during automatic operation. .
- the robot system of the present invention it is possible to reduce an operator's work load and easily correct a preset robot operation.
- FIG. 1 is a block diagram showing a schematic configuration of the robot system according to the first embodiment.
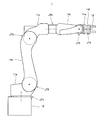
- FIG. 2 is a schematic diagram showing a schematic configuration of the slave arm shown in FIG.
- FIG. 3 is a block diagram illustrating an example of a control system of the robot system according to the first embodiment.
- FIG. 4 is a block diagram showing an example of a control system of the corrected automatic driving means shown in FIGS.
- FIG. 5 is a block diagram showing a schematic configuration of the robot system according to the second embodiment.
- FIG. 6 is a block diagram illustrating a schematic configuration of the robot system according to the first modification example in the second embodiment.
- FIG. 7 is a block diagram showing a schematic configuration of the robot system according to the third embodiment.
- FIG. 8 is a block diagram showing a schematic configuration of the robot system according to the fourth embodiment.
- FIG. 9 is a block diagram showing a schematic configuration of the robot system according to the fifth embodiment.
- the robot system includes a robot body having a plurality of joints, a control device that controls the operation of the robot body, and the robot body position information or a plurality of pieces of information to execute automatic operation of the robot body.
- An operating device having a teaching device that teaches joint angle information to a control device and an operating device that corrects an operation of the robot body during automatic operation.
- control device inputs the operation command value of the robot body in automatic operation and the correction command value output from the operating device, and the operation command value and the correction command value are input. May be provided.
- the teaching device and the operating device may be arranged in different cases.
- control device switches the command value output from the adder and the teaching command value output from the teaching device and outputs the switching device to the robot body. You may have.
- FIG. 1 is a block diagram showing a schematic configuration of the robot system according to the first embodiment.
- a robot system 100 includes an operating device 2 having a slave arm (robot body) 1, a teaching pendant (teacher) 21, and an operating device 22, a control device 4, and a memory.
- the apparatus 5 is provided, and the slave arm 1 can be automatically operated by setting the position coordinates of the slave arm 1 and / or the angles of the respective joints by the teaching pendant 21.
- the robot system 100 according to the first embodiment is configured such that the operation of the slave arm 1 can be corrected by the operator operating the operating device 22 while the slave arm 1 is in automatic operation. ing.
- a control mode in which the slave arm 1 operates according to a preset task program is referred to as an “automatic operation mode”.
- the slave arm 1 automatically performs a predetermined work without the operation of the operating device 2 by the operator.
- the control mode in which the slave arm 1 operates based on the operation of the operator received by the operating device 22 of the operating device 2 is referred to as “manual operation mode”.
- the slave arm 1 may be operated so as to completely follow the operation instruction received from the operation device 22, and the operation instruction received from the operation device 22 can be operated according to a preset program.
- the slave arm 1 may be operated while performing correction (for example, camera shake correction).
- control mode in which the slave arm 1 operating according to a preset task program is corrected by the operation of the operator who has received the operation device 22 is referred to as a “correction automatic operation mode”.
- the slave arm 1 is a robot that is installed in the work space and performs a series of operations including a plurality of processes. Examples of a series of operations composed of a plurality of steps include operations such as assembly of parts to products and painting.
- the slave arm 1 is used in a production factory that assembles electric / electronic parts and the like to produce a product in a line production system or a cell production system, and follows a work table provided in the production factory.
- the articulated robot is capable of performing at least one of operations such as transferring, assembling or rearranging parts, changing the posture, and the like with respect to the work on the work table.
- the embodiment of the slave arm 1 is not limited to the above, and can be widely applied to an articulated robot regardless of a horizontal articulated type or a vertical articulated type.
- FIG. 2 is a schematic diagram showing a schematic configuration of the slave arm shown in FIG.
- the slave arm 1 includes a connecting body of a plurality of links (here, the first link 11a to the sixth link 11f) and a plurality of joints (here, the first joint JT1 to the sixth joint JT6). ) And a base 15 for supporting them.
- the base 15 and the base end portion of the first link 11a are coupled so as to be rotatable about an axis extending in the vertical direction.
- the distal end portion of the first link 11a and the proximal end portion of the second link 11b are coupled to be rotatable about an axis extending in the horizontal direction.
- the distal end portion of the second link 11b and the proximal end portion of the third link 11c are coupled to be rotatable about an axis extending in the horizontal direction.
- the distal end portion of the third link 11c and the proximal end portion of the fourth link 11d are coupled so as to be rotatable around an axis extending in the longitudinal direction of the fourth link 11d.
- the distal end portion of the fourth link 11d and the proximal end portion of the fifth link 11e are coupled so as to be rotatable around an axis orthogonal to the longitudinal direction of the fourth link 11d.
- the distal end portion of the fifth link 11e and the proximal end portion of the sixth link 11f are coupled so as to be able to rotate.
- the mechanical interface is provided in the front-end
- An end effector 12 corresponding to the work content is detachably attached to the mechanical interface.
- the first joint JT1 to the sixth joint JT6 are provided with drive motors M1 to M6 as examples of actuators that relatively rotate two members connected to each joint.
- the drive motors M1 to M6 may be servomotors that are servo-controlled by the control device 4, for example.
- the first joint JT1 to the sixth joint JT6 have rotation sensors E1 to E6 (see FIG. 4) for detecting the rotational positions of the drive motors M1 to M6 and currents for controlling the rotations of the drive motors M1 to M6, respectively.
- Current sensors C1 to C6 are provided.
- the rotation sensors E1 to E6 may be encoders, for example.
- the operating device 2 includes the teaching pendant 21 and the operating device 22. Since the teaching pendant 21 has the same configuration as a known teaching pendant, a detailed description thereof will be omitted. In the first embodiment, the teaching pendant 21 and the operating device 22 are respectively disposed in two different housings.
- the operating device 22 is a device that receives an operation instruction from an operator. In addition, when operating the slave arm 1 in the manual operation mode or the corrected automatic operation mode, the operation device 22 performs operations such as position information, posture information, a moving direction, or a moving speed of the slave arm 1 by an operation of the operator.
- the command value is output to the control device 4.
- the operation device 22 for example, a master arm, a joystick, a tablet, or the like can be used.
- the operation device 22 is provided with an input unit for inputting a work start instruction, a notification of completion of work by manual operation, an adjuster 22a for adjusting the second coefficient B (see FIG. 4), and the like. May be. Examples of the adjuster 22a include a volume knob.
- the storage device 5 is a readable / writable recording medium, and stores a task program 51 and operation sequence information 52 of the robot system 100.
- the storage device 5 is provided separately from the control device 4, but may be provided integrally with the control device 4.
- the task program 51 is created, for example, when an operator teaches using the teaching pendant 21, and is stored in the storage device 5 in association with the identification information of the slave arm 1 and the task.
- the task program 51 may be created as an operation flow for each work.
- the operation sequence information 52 is information related to an operation sequence that defines a series of work steps performed by the slave arm 1 in the work space.
- the operation order of the work process and the control mode of the slave arm 1 are associated with each other.
- a task program for causing the slave arm 1 to automatically execute the work is associated with each work process.
- the operation sequence information 52 may include a program for causing the slave arm 1 to automatically execute the work for each work process.
- the control device 4 controls the operation of the slave arm 1, and includes a corrected automatic operation means 42 including a transmission / reception unit 40, an operation control unit 41, and an adder 42a as functional blocks.
- the control device 4 includes, for example, a calculation unit (not shown) including a microcontroller, MPU, PLC (Programmable Logic Controller), logic circuit, and the like, and a memory unit (not shown) including a ROM or RAM. can do.
- each functional block with which the control apparatus 4 is provided is realizable when the calculating part of the control apparatus 4 reads and executes the program stored in the memory part or the memory
- control device 4 is not only configured as a single control device, but also configured as a control device group that controls the slave arm 1 (robot system 100) in cooperation with a plurality of control devices. It may be a form.
- the transmission / reception unit 40 receives an input signal transmitted from the outside of the control device 4 and transmits an output signal from the control device 4 to the slave arm 1 or the like, for example.
- a signal transmitted from the operation device 2 for example, a signal transmitted from an operation instruction unit (not shown) other than the operation device 2, or a rotation sensor E of the slave arm 1 described later is transmitted.
- the position signal (position information) of the slave arm 1 is used.
- the operation command signal (operation command value; position information, speed information, torque value, etc.) which instruct
- the operation control unit 41 determines an operation mode of a process performed by the slave arm 1 in a series of operations using the operation instruction as a trigger.
- the operation control unit 41 can determine the operation mode of the process performed by the slave arm 1 next with reference to the operation sequence information 52 stored in the storage device 5.
- the operation control unit 41 controls the slave arm 1 to operate in the determined operation mode.
- the operation control unit 41 determines to operate the slave arm 1 in the automatic operation mode
- the operation specified by the task program 51 or the operation sequence information 52 is read, and the program included in the operation sequence information 52
- the slave arm 1 is controlled so as to carry out the operation defined by.
- the operation control unit 41 determines that the slave arm 1 is to be operated in the manual operation mode, the operation control unit 41 controls the slave arm 1 so as to operate based on the operation instruction received by the transmission / reception unit 40 from the operation device 22. .
- the operation control unit 41 determines that the slave arm 1 is to be operated in the corrected automatic operation mode
- the operation control unit 41 reads the operation and operation sequence information 52 defined by the task program 51, and the program included in the operation sequence information 52
- the transmission / reception unit 40 receives a correction instruction signal as an input signal from the operation device 22 while the slave arm 1 is operating in the automatic operation mode
- the operation by the automatic operation of the slave arm 1 is performed.
- the operation is corrected according to the correction instruction signal from 22.
- the correction automatic operation means 42 instructs the operation control unit 41 to correct the operation of the slave arm 1. To do. A specific method for correcting the operation of the slave arm 1 will be described later.
- FIG. 3 is a block diagram illustrating an example of a control system of the robot system according to the first embodiment.
- the teaching command value calculation unit 43 calculates an output amount (current value) of a current for operating the drive motor M arranged at each joint based on the position coordinate information or the angle information, and calculates the current value. Output to the switch 44.
- the switching unit 44 switches between a current value input from the teaching command value calculation unit 43 and a current value input from the automatic operation program 45 or the corrected automatic operation means 42 described later, and outputs the result to the slave arm 1. It is configured.
- the switcher 44 may adopt a mode in which the input current value is switched by a predetermined program and output to the slave arm 1, and the input destination is switched electrically (changed) by a switch (element). ) Form may be employed. Further, by making the protocol of the current value output from the teaching command value calculation unit 43 different from the protocol of the current value output from the automatic operation program 45 or the corrected automatic operation means 42, the switch 44 is changed. You may employ
- the switch 44 outputs the current value input from the teaching command value calculation unit 43 to the slave arm 1.
- the drive motor M arranged at each joint rotates so that the angles of the first joint JT1 to the sixth joint JT6 become the target angles.
- the rotation sensor E disposed at each joint detects the angle of each joint and feeds back the detected angle to the teaching command value calculation unit 43.
- the teaching command value calculation unit 43 calculates the position coordinates of the slave arm 1 from the angles of the joints input from the rotation sensor E.
- the calculated position coordinates of the slave arm 1 are stored in the task program 51 of the storage device 5.
- the operator operates the teaching pendant 21, defines the operation of the slave arm 1, sets the position coordinates of the slave arm 1 necessary for operating in the automatic operation mode, and performs the task program 51.
- the control device 4 is executing the automatic operation program 45 when the control device 4 reads out the task program 51 created as described above.
- the automatic operation program 45 is based on the position coordinate information of the slave arm 1 stored in the task program 51 or the angle information of the first joint JT1 to the sixth joint JT6.
- the current value for operating is calculated, and the current value is output to the switch 44.
- the switch 44 outputs the current value input from the automatic operation program 45 to the slave arm 1.
- the drive motor M arranged at each joint rotates so that the angles of the first joint JT1 to the sixth joint JT6 become the target angles.
- the rotation sensor E arranged at each joint detects the angle of each joint and feeds back the detected angle to the automatic operation program 45.
- the automatic driving program 45 calculates the position coordinates of the slave arm 1 from the angles of the joints input from the rotation sensor E.
- the operator operates the operating device 22 to change the correction instruction signal (correction command value) for correcting the operation of the slave arm 1 to the correction command value.
- the data is output to the calculation unit 46.
- the operating device 22 can output the position information, posture information, moving direction, moving speed, or the like of the slave arm 1.
- the position information is sent to the correction command value calculation unit 46. The case of outputting will be described.
- the correction command value calculation unit 46 outputs the position coordinate information input from the operation device 22 to the correction automatic operation means 42 via the switch 47.
- the switch 47 may adopt a mode for switching whether or not to output the input position coordinate information to the corrected automatic driving means 42 by a predetermined program, and the position electrically input by the switch. You may employ
- the corrected automatic driving means 42 In the corrected automatic driving means 42, the position coordinate information (hereinafter referred to as position command value ⁇ P1) input from the automatic operation program 45 and the position coordinate information (hereinafter referred to as correction command value ⁇ P2) input from the correction command value calculation unit 46.
- position command value ⁇ P1 position coordinate information
- correction command value ⁇ P2 position coordinate information
- the current value for operating the drive motor M arranged at each joint is calculated, and the current value is output to the switch 44.
- corrected automatic driving means 42 will be described in more detail with reference to FIG.
- FIG. 4 is a block diagram showing an example of a control system of the corrected automatic driving means shown in FIGS.
- the corrected automatic driving means 42 includes an adder 42a, subtracters 42b, 42e, 42g, a position controller 42c, a differentiator 42d, and a speed controller 42f.
- the adder 42a generates a corrected position command value by adding ⁇ P2 to ⁇ P1. At this time, the adder 42a generates a position command value according to the following equation (1).
- the first coefficient A and the second coefficient B are variables, and when one coefficient increases, the other coefficient decreases. More specifically, the first coefficient A and the second coefficient B may be coefficients in which a value obtained by integrating the first coefficient A and the second coefficient B becomes a preset first predetermined value. A coefficient obtained by summing the coefficient A and the second coefficient B may be a predetermined second predetermined value. Note that the first predetermined value or the second predetermined value may be 1, 10 or 100.
- the subtractor 42b subtracts the current position value detected by the rotation sensor E from the corrected position command value to generate an angle deviation.
- the subtractor 42b outputs the generated angle deviation to the position controller 42c.
- the position controller 42c generates a speed command value from the angular deviation input from the subtractor 42b by a calculation process based on a predetermined transfer function or proportional coefficient.
- the position controller 42c outputs the generated speed command value to the subtractor 42e.
- the differentiator 42d differentiates the current position value information detected by the rotation sensor E, and generates a change amount per unit time of the rotation angle of the drive motor M, that is, a current speed value.
- the differentiator 42d outputs the generated current speed value to the subtractor 42e.
- the subtractor 42e subtracts the current speed value input from the differentiator 42d from the speed command value input from the position controller 42c to generate a speed deviation.
- the subtractor 42e outputs the generated speed deviation to the speed controller 42f.
- the speed controller 42f generates a torque command value (current command value) from the speed deviation input from the subtractor 42e by a calculation process based on a predetermined transfer function or proportional coefficient.
- the speed controller 42f outputs the generated torque command value to the subtractor 42g.
- the subtractor 42g subtracts the current current value detected by the current sensor C from the torque command value input from the speed controller 42f to generate a current deviation.
- the subtractor 42g outputs the generated current deviation to the drive motor M, and drives the drive motor M.
- the second coefficient B may be input to the corrected automatic driving means 42 by manually adjusting the adjuster 22a provided in the operation device 22 of the operation device 2 as described above. Further, as the adjuster 22a, for example, at a position far away from the work object (such as a structure to which the work is to be attached), the second coefficient B is 0, and the second coefficient B is gradually increased as the work object is approached. A program for increasing the size may be stored in the storage device 5 in advance.
- the second coefficient B may be a variable that becomes a value input over a predetermined time after the value is input from the adjuster 22a to the corrected automatic operation means 42.
- the variable may be a value set in advance over a predetermined time after the correction command value ⁇ P2 is input to the means 42.
- the predetermined time may be, for example, 0.5 seconds or longer, or 1 second or longer from the viewpoint of suppressing correction of the rapid operation of the slave arm 1. Further, the predetermined time may be within 2 seconds, within 3 seconds, or within 5 seconds from the viewpoint of the operator recognizing that the correction operation of the slave arm 1 is reflected. May be.
- the value of the second coefficient B is input from the adjuster 22a to the corrected automatic driving means 42, or the correction command value ⁇ P2 is input from the operating device 22 to the corrected automatic driving means 42.
- the relationship between the time elapsed since the time and the amount of change ⁇ B per unit time may be a variable that is a linear function.
- the second coefficient B may be a variable in which the relationship between the elapsed time and the change amount ⁇ B per unit time is a high-order function such as a quadratic function or a cubic function, May be a variable.
- the second coefficient B may be a variable in which the relationship between the elapsed time and the change amount ⁇ B per unit time increases stepwise.
- the corrected automatic driving means 42 calculates a current value (current deviation) for operating the drive motor M arranged at each joint, and outputs the current value to the switch 44 (FIG. 3).
- the switch 44 outputs the current value input from the corrected automatic operation means 42 to the slave arm 1.
- the drive motor M arranged at each joint rotates so that the angles of the first joint JT1 to the sixth joint JT6 become target angles.
- the rotation sensor E arranged at each joint detects the angle of each joint and feeds back the detected angle to the correction command value calculation unit 46.
- the correction command value calculation unit 46 calculates the position coordinates of the slave arm 1 from the angles of the joints input from the rotation sensor E.
- the operation of the robot set in advance is corrected using the operation device 22. Since the operating device 22 can output the position information, posture information, moving direction, moving speed, or the like of the slave arm 1, the operation device 22 is operated as compared with the case where the operation of the robot is corrected using the teaching pendant 21. The work burden on the person can be reduced.
- the position coordinate information is input as the correction command value ⁇ P2 from the correction command value calculation unit 46 to the correction automatic driving means 42.
- the present invention is not limited to this.
- a form using ⁇ P2 as a speed command value may be adopted, or a form using a torque command value may be adopted.
- ⁇ P2 is a speed command value
- a value (manual speed command value) obtained by adding the second coefficient B to the speed command value as ⁇ P2 is input to the subtractor 42e.
- the subtractor 42e is a value obtained by adding the first coefficient A to the speed command value generated by the position controller 42c based on the robot operation command ( ⁇ P1; position command value) and the current position value in automatic operation (correction). Speed command value) is input. Further, the current speed value generated by the differentiator 42d is input from the differentiator 42d to the subtractor 42e.
- the subtractor 42e adds the corrected speed command value to the input manual speed command value, and generates a speed deviation from the value obtained by subtracting the current speed value.
- the operation after the subtractor 42e generates the speed deviation is executed in the same manner as described above.
- ⁇ P2 is a torque command value
- a value (manual torque command value) obtained by adding the second coefficient B to the torque command value as ⁇ P2 is input to the subtractor 42g.
- the subtractor 42g receives from the speed deviation input to the speed controller 42f via the position controller 42c and the subtractor 42e from the robot operation command ( ⁇ P1; position command value) in automatic operation.
- a value (corrected torque command value) obtained by adding the first coefficient A to the torque command value generated by the controller 42f is input.
- the current current value detected by the current sensor C is input to the subtractor 42g.
- the subtractor 42g adds the corrected torque command value to the input manual torque command value and subtracts the current current value to generate a current deviation.
- the subtractor 42 g sends the generated current deviation to the drive motor M to drive the drive motor M.
- the robot system according to the second embodiment is the same as the robot system according to the first embodiment, wherein the control device has a common connection terminal connected to the teaching device or the operation device, When teaching the joint angle information to the control device, connect the teaching device to the common connection terminal and manually operate the robot body, or when correcting the operation during automatic operation of the robot body, connect the operation device to the common connection terminal. Connecting.
- FIG. 5 is a block diagram showing a schematic configuration of the robot system according to the second embodiment.
- the robot system 100 according to the second embodiment has the same basic configuration as the robot system 100 according to the first embodiment, but the control device 4 has the teaching pendant 21 or the operating device 22.
- the control device 4 has the teaching pendant 21 or the operating device 22.
- the control device 4 has a common connection terminal 48 for connection to the terminal.
- the operator teaches the position information of the slave arm 1 or the angle information of a plurality of joints to the control device 4, the operator connects the teaching pendant 21 to the common connection terminal 48 to manually operate the slave arm 1 or the slave arm 1.
- the operating device 22 is connected to the common connection terminal 48.
- the robot system 100 according to the second embodiment configured as described above has the same effects as the robot system 100 according to the first embodiment.
- the common connection terminal 48 may be configured not to connect the other device when any one of the teaching pendant 21 and the operation device 22 is connected. You may be comprised so that both of the operation devices 22 can be connected simultaneously.
- the robot system includes a first switch that switches between a teaching command value output from the teaching device and an operation command value output from the operating device, and outputs the first switching device to the control device. Further prepare.
- FIG. 6 is a block diagram showing a schematic configuration of the robot system according to the first modification in the second embodiment.
- the robot system 100 according to the first modification has the same basic configuration as the robot system 100 according to the second embodiment, but the teaching command value output from the teaching pendant 21, The operation command value output from 22 is switched, and the point which further includes the 1st switch 6 output to the control apparatus 4 differs.
- the output terminal of the teaching pendant 21 and the output terminal of the operating device 22 are electrically connected to the input terminal of the first switch 6, respectively.
- the output terminal of the first switch 6 is electrically connected to the common connection terminal 48 of the control device 4.
- the 1st switch 6 may employ
- a mode of switching (changing) the input destination may be adopted.
- the robot system 100 according to the first modification configured as described above has the same effects as the robot system 100 according to the second embodiment.
- the robot system according to the third embodiment is configured such that the correction command value output from the operation device is input to the control device via the teaching device in the robot system according to the first embodiment. .
- FIG. 7 is a block diagram showing a schematic configuration of the robot system according to the third embodiment.
- the robot system 100 according to the third embodiment has the same basic configuration as the robot system 100 according to the first embodiment, but the corrections output from the operating device 22 and the adjuster 22a.
- the command value is different in that it is configured to be input to the control device 4 via the teaching pendant 21.
- the robot system according to the fourth embodiment is the same as the robot system according to any one of the first to third embodiments, but the teaching device and the operation device are arranged in one casing. .
- the operating device further includes a command value generator that generates a teaching command value output from the teaching device and an operation command value output from the operating device. It may be.
- FIG. 8 is a block diagram showing a schematic configuration of the robot system according to the fourth embodiment.
- the robot system 100 according to the fourth embodiment has the same basic configuration as the robot system 100 according to the first embodiment, but includes a teaching pendant 21, an operating device 22, and an adjuster 22a.
- casing 23 and the point in which the operating device 2 is further provided with the command value generator 24 differ.
- the command value generator 24 is output to the control device 4 from the input position coordinates of the slave arm 1 or numerical values such as the angles of the first joint JT1 to the sixth joint JT6 by the operator operating the teaching pendant 21. It has a function of generating command values such as position coordinate information or angle information.
- the command value generator 24 is a position coordinate that is output to the control device 4 from the position information, posture information, moving direction, moving speed, or the like of the slave arm 1 input by the operator operating the operating device 22. It has a function of generating command values such as information.
- the command value generator 24 generates command values for both information input to the teaching pendant 21 and information input to the operating device 22, switches each command value, and outputs the command value to the control device 4. .
- the command value generator 24 generates command values using different protocols so that the information from the teaching pendant 21 and the information from the operation device 22 can be distinguished.
- the robot system 100 according to the fourth embodiment configured as described above has the same effects as the robot system according to the first embodiment.
- the robot system according to the fifth embodiment is configured such that the teaching device has the function of an operating device in any one of the first to fourth embodiments.
- the operating device may further include a second switch that switches between a function as a teaching device and a function as an operating device.
- FIG. 9 is a block diagram showing a schematic configuration of the robot system according to the fifth embodiment.
- the robot system 100 according to the fifth embodiment has the same basic configuration as the robot system 100 according to the first embodiment, but the teaching pendant 21 has the function of the operating device 22. It is different in that it is configured.
- the controller device 2 is configured to have the functions of both the teaching pendant 21 and the controller 22.
- the operating device 2 (teaching pendant 21) has a moving direction of the slave arm 1 in addition to buttons for inputting numerical values such as position coordinates of the slave arm 1.
- a cross button, a direction key, a lever, a stick, or the like may be arranged.
- the robot system 100 according to the fifth embodiment is different from the robot system 100 according to the first embodiment in that the second switch 25 is provided.
- the second switch 25 is a switch for switching whether the operator functions the operating device 2 as the teaching pendant 21 or the operating device 22.
- the operating device 2 When the operator operates the second switch 25 so that the operating device 2 functions as the teaching pendant 21, the operating device 2 generates a command value as the teaching pendant 21 and outputs it to the control device 4. To do.
- the controller device 2 may generate command values using different protocols so that the command value as the teaching pendant 21 and the command value as the operation device 22 can be distinguished.
- the robot system 100 according to the fifth embodiment configured as described above has the same effects as the robot system 100 according to the first embodiment.
- the robot system of the present invention is useful in the field of industrial robots because it can reduce the work burden on the operator and can easily correct the preset robot operation.
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Molecular Biology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- General Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Signal Processing (AREA)
- Quality & Reliability (AREA)
- Manufacturing & Machinery (AREA)
- Computer Networks & Wireless Communication (AREA)
- Software Systems (AREA)
- Artificial Intelligence (AREA)
- Mathematical Physics (AREA)
- Fuzzy Systems (AREA)
- Evolutionary Computation (AREA)
- Geometry (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Control Of Position Or Direction (AREA)
- Automatic Assembly (AREA)
Abstract
Description
本実施の形態1に係るロボットシステムは、複数の関節を有するロボット本体と、ロボット本体の動作を制御する制御装置と、ロボット本体の自動運転を実行するために、ロボット本体の位置情報又は複数の関節の角度情報を制御装置に教示する教示器と、ロボット本体の自動運転中の動作を修正する操作器と、を有する操作装置と、を備える。
図1は、本実施の形態1に係るロボットシステムの概略構成を示すブロック図である。
次に、本実施の形態1に係るロボットシステム100の動作及び作用効果について、図1~図4を参照しながら説明する。なお、操作者が操作器22を操作して、スレーブアーム1を動作させて、一連の作業を行う動作については、公知のロボットシステムと同様に実行されるため、その詳細な説明は省略する。また、以下の動作は、制御装置4の演算部が、制御装置4のメモリ部又は記憶装置5に格納されているプログラムを読み出すことにより実行される。
ここで、第1係数Aと第2係数Bは変数であり、一方の係数が増加すると、他方の係数が減少する関係にある。より詳細には、第1係数Aと第2係数Bは、第1係数Aと第2係数Bを積算した値が予め設定されている第1所定値となる係数であってもよく、第1係数Aと第2係数Bを和算した値が予め設定されている第2所定値となる係数であってもよい。なお、第1所定値、又は第2所定値は、1であってもよく、10であってもよく、100であってもよい。
本実施の形態2に係るロボットシステムは、実施の形態1に係るロボットシステムにおいて、制御装置は、教示器、又は操作器と接続される共通接続端子を有し、ロボット本体の位置情報又は複数の関節の角度情報を制御装置に教示するときには、教示器を共通接続端子に接続し、ロボット本体を手動動作させる、又はロボット本体の自動運転中の動作を修正するときには、操作器を共通接続端子に接続する。
図5は、本実施の形態2に係るロボットシステムの概略構成を示すブロック図である。
次に、本実施の形態2に係るロボットシステム100の変形例について、図6を参照しながら説明する。
本実施の形態3に係るロボットシステムは、実施の形態1に係るロボットシステムにおいて、操作器から出力される修正指令値は、教示器を介して、制御装置に入力されるように構成されている。
図7は、本実施の形態3に係るロボットシステムの概略構成を示すブロック図である。
本実施の形態4に係るロボットシステムは、実施の形態1~実施の形態3のいずれか1つの実施の形態に係るロボットシステムにおいて、教示器と操作器は、1つの筐体内に配置されている。
図8は、本実施の形態4に係るロボットシステムの概略構成を示すブロック図である。
本実施の形態5に係るロボットシステムは、実施の形態1~実施の形態4のいずれかの実施の形態において、教示器が、操作器の機能を有するように構成されている。
図9は、本実施の形態5に係るロボットシステムの概略構成を示すブロック図である。
2 操作装置
4 制御装置
5 記憶装置
6 第1切替器
11a 第1リンク
11b 第2リンク
11c 第3リンク
11d 第4リンク
11e 第5リンク
11f 第6リンク
12 エンドエフェクタ
15 基台
21 ティーチングペンダント
22 操作器
22a 調整器
23 筐体
24 指令値生成器
25 第2切換器
31b 減算器
40 送受信部
41 動作制御部
42 修正自動運転手段
42a 加算器
42b 減算器
42c 位置制御器
42d 微分器
42e 減算器
42f 制御器
42g 減算器
43 教示指令値算出部
44 切換器
45 自動運転プログラム
46 修正指令値算出部
47 切換器
48 共通接続端子
51 タスクプログラム
52 動作シーケンス情報
100 ロボットシステム
JT1 第1関節
JT2 第2関節
JT3 第3関節
JT4 第4関節
JT5 第5関節
JT6 第6関節
M 駆動モータ
Claims (8)
- 複数の関節を有するロボット本体と、
前記ロボット本体の動作を制御する制御装置と、
前記ロボット本体の自動運転を実行するために、前記ロボット本体の位置情報又は前記複数の関節の角度情報を前記制御装置に教示する教示器と、操作者からの操作指示を受け付けて、前記ロボット本体を手動動作させる、又は前記ロボット本体の自動運転中の動作を修正する、操作器と、を有する操作装置と、を備える、ロボットシステム。 - 前記制御装置は、教示器、又は操作器と接続される共通接続端子を有し、
前記ロボット本体の位置情報又は前記複数の関節の角度情報を前記制御装置に教示するときには、前記教示器を前記共通接続端子に接続し、
前記ロボット本体を手動動作させる、又は前記ロボット本体の自動運転中の動作を修正するときには、前記操作器を前記共通接続端子に接続する、請求項1に記載のロボットシステム。 - 前記ロボットシステムは、前記教示器から出力される教示指令値と、前記操作器から出力される動作指令値と、を切り替えて、前記制御装置に出力する第1切替器をさらに備える、請求項1又は2に記載のロボットシステム。
- 前記操作器から出力される動作指令値は、前記教示器を介して、前記制御装置に入力される、請求項1に記載のロボットシステム。
- 前記教示器と前記操作器は、1つの筐体内に配置されている、請求項1~4のいずれか1項に記載のロボットシステム。
- 前記操作装置は、前記教示器から出力される教示指令値と、前記操作器から出力される動作指令値と、を生成する指令値生成器をさらに有する、請求項1~5のいずれか1項に記載のロボットシステム。
- 前記教示器は、前記操作器の機能を有するように構成されている、請求項1~6のいずれか1項に記載のロボットシステム。
- 前記操作装置は、前記教示器として機能と、前記操作器としての機能と、を切り替える第2切換器をさらに有する、請求項7に記載のロボットシステム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16838729.8A EP3342559A4 (en) | 2015-08-25 | 2016-06-24 | ROBOTIC SYSTEM |
| JP2017536184A JP6782240B2 (ja) | 2015-08-25 | 2016-06-24 | ロボットシステム |
| CN201680041781.6A CN107848112B (zh) | 2015-08-25 | 2016-06-24 | 机器人系统 |
| US15/755,108 US11116593B2 (en) | 2015-08-25 | 2016-06-24 | Robot system |
| TW105124427A TW201713472A (en) | 2015-08-25 | 2016-08-02 | Robot system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-165479 | 2015-08-25 | ||
| JP2015165479 | 2015-08-25 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017033377A1 true WO2017033377A1 (ja) | 2017-03-02 |
Family
ID=58099621
Family Applications (24)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/002583 WO2017033356A1 (ja) | 2015-08-25 | 2016-05-27 | ロボットシステム |
| PCT/JP2016/002576 WO2017033352A1 (ja) | 2015-08-25 | 2016-05-27 | 産業用遠隔操作ロボットシステム |
| PCT/JP2016/002585 WO2017033358A1 (ja) | 2015-08-25 | 2016-05-27 | 複数のロボットシステム間の情報共有システム及び情報共有方法 |
| PCT/JP2016/002587 WO2017033360A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操縦マニピュレータシステム及びその運転方法 |
| PCT/JP2016/002575 WO2017033351A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002594 WO2017033365A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002582 WO2017033355A1 (ja) | 2015-08-25 | 2016-05-27 | マニピュレータシステム |
| PCT/JP2016/002577 WO2017033353A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002596 WO2017033366A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002584 WO2017033357A1 (ja) | 2015-08-25 | 2016-05-27 | ロボットシステム |
| PCT/JP2016/002597 WO2017033367A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002589 WO2017033362A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操縦マニピュレータシステム及びその運転方法 |
| PCT/JP2016/002586 WO2017033359A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002588 WO2017033361A1 (ja) | 2015-08-25 | 2016-05-27 | ロボットシステム及びその運転方法 |
| PCT/JP2016/002591 WO2017033364A1 (ja) | 2015-08-25 | 2016-05-27 | ロボットシステム |
| PCT/JP2016/002574 WO2017033350A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム及びその運転方法 |
| PCT/JP2016/002590 WO2017033363A1 (ja) | 2015-08-25 | 2016-05-27 | ロボットシステム |
| PCT/JP2016/003067 WO2017033380A1 (ja) | 2015-08-25 | 2016-06-24 | ロボットシステム |
| PCT/JP2016/003060 WO2017033376A1 (ja) | 2015-08-25 | 2016-06-24 | 産業用ロボットおよびその運転方法 |
| PCT/JP2016/003061 WO2017033377A1 (ja) | 2015-08-25 | 2016-06-24 | ロボットシステム |
| PCT/JP2016/003063 WO2017033378A1 (ja) | 2015-08-25 | 2016-06-24 | ロボットシステム |
| PCT/JP2016/003069 WO2017033381A1 (ja) | 2015-08-25 | 2016-06-24 | ロボットシステム |
| PCT/JP2016/003064 WO2017033379A1 (ja) | 2015-08-25 | 2016-06-24 | ロボットシステム |
| PCT/JP2016/003356 WO2017033391A1 (ja) | 2015-08-25 | 2016-07-15 | ロボットシステム及びその運転方法 |
Family Applications Before (19)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/002583 WO2017033356A1 (ja) | 2015-08-25 | 2016-05-27 | ロボットシステム |
| PCT/JP2016/002576 WO2017033352A1 (ja) | 2015-08-25 | 2016-05-27 | 産業用遠隔操作ロボットシステム |
| PCT/JP2016/002585 WO2017033358A1 (ja) | 2015-08-25 | 2016-05-27 | 複数のロボットシステム間の情報共有システム及び情報共有方法 |
| PCT/JP2016/002587 WO2017033360A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操縦マニピュレータシステム及びその運転方法 |
| PCT/JP2016/002575 WO2017033351A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002594 WO2017033365A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002582 WO2017033355A1 (ja) | 2015-08-25 | 2016-05-27 | マニピュレータシステム |
| PCT/JP2016/002577 WO2017033353A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002596 WO2017033366A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002584 WO2017033357A1 (ja) | 2015-08-25 | 2016-05-27 | ロボットシステム |
| PCT/JP2016/002597 WO2017033367A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002589 WO2017033362A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操縦マニピュレータシステム及びその運転方法 |
| PCT/JP2016/002586 WO2017033359A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム |
| PCT/JP2016/002588 WO2017033361A1 (ja) | 2015-08-25 | 2016-05-27 | ロボットシステム及びその運転方法 |
| PCT/JP2016/002591 WO2017033364A1 (ja) | 2015-08-25 | 2016-05-27 | ロボットシステム |
| PCT/JP2016/002574 WO2017033350A1 (ja) | 2015-08-25 | 2016-05-27 | 遠隔操作ロボットシステム及びその運転方法 |
| PCT/JP2016/002590 WO2017033363A1 (ja) | 2015-08-25 | 2016-05-27 | ロボットシステム |
| PCT/JP2016/003067 WO2017033380A1 (ja) | 2015-08-25 | 2016-06-24 | ロボットシステム |
| PCT/JP2016/003060 WO2017033376A1 (ja) | 2015-08-25 | 2016-06-24 | 産業用ロボットおよびその運転方法 |
Family Applications After (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/003063 WO2017033378A1 (ja) | 2015-08-25 | 2016-06-24 | ロボットシステム |
| PCT/JP2016/003069 WO2017033381A1 (ja) | 2015-08-25 | 2016-06-24 | ロボットシステム |
| PCT/JP2016/003064 WO2017033379A1 (ja) | 2015-08-25 | 2016-06-24 | ロボットシステム |
| PCT/JP2016/003356 WO2017033391A1 (ja) | 2015-08-25 | 2016-07-15 | ロボットシステム及びその運転方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (24) | US11197730B2 (ja) |
| EP (24) | EP3321044A4 (ja) |
| JP (26) | JP7030518B2 (ja) |
| KR (14) | KR102039077B1 (ja) |
| CN (24) | CN107921636B (ja) |
| TW (24) | TW201716195A (ja) |
| WO (24) | WO2017033356A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102378622B1 (ko) * | 2020-11-28 | 2022-03-25 | 이비오 주식회사 | 직교 좌표를 이용한 교시장치 및 그 장치의 직접 교시 방법 |
Families Citing this family (346)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9789603B2 (en) | 2011-04-29 | 2017-10-17 | Sarcos Lc | Teleoperated robotic system |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| US9314924B1 (en) * | 2013-06-14 | 2016-04-19 | Brain Corporation | Predictive robotic controller apparatus and methods |
| US10514687B2 (en) * | 2015-01-08 | 2019-12-24 | Rethink Robotics Gmbh | Hybrid training with collaborative and conventional robots |
| EP3321044A4 (en) * | 2015-08-25 | 2019-05-29 | Kawasaki Jukogyo Kabushiki Kaisha | REMOTELY CONTROLLED MANIPULATOR SYSTEM AND METHOD FOR OPERATION THEREOF |
| JP6067805B1 (ja) * | 2015-09-07 | 2017-01-25 | Ntn株式会社 | リンク作動装置を用いた複合作業装置 |
| KR102344021B1 (ko) * | 2015-12-23 | 2021-12-28 | 삼성전자주식회사 | 디바이스를 제어하는 방법 및 장치 |
| US20170259433A1 (en) * | 2016-03-11 | 2017-09-14 | Seiko Epson Corporation | Robot control device, information processing device, and robot system |
| CN109414817B (zh) * | 2016-07-14 | 2022-07-19 | 西门子医疗保健诊断公司 | 校准在机器人夹具和部件之间的位置取向的方法和设备 |
| US20180021949A1 (en) * | 2016-07-20 | 2018-01-25 | Canon Kabushiki Kaisha | Robot apparatus, robot controlling method, program, and recording medium |
| CN107962563B (zh) * | 2016-10-20 | 2022-10-04 | 精工爱普生株式会社 | 控制装置、机器人以及机器人系统 |
| JP2018069361A (ja) * | 2016-10-27 | 2018-05-10 | セイコーエプソン株式会社 | 力制御座標軸設定装置、ロボットおよび力制御座標軸設定方法 |
| JP6484213B2 (ja) * | 2016-12-09 | 2019-03-13 | ファナック株式会社 | 複数のロボットを含むロボットシステム、ロボット制御装置、及びロボット制御方法 |
| JP6811635B2 (ja) * | 2017-02-10 | 2021-01-13 | 川崎重工業株式会社 | ロボットシステム及びその制御方法 |
| JP6869060B2 (ja) * | 2017-03-15 | 2021-05-12 | 株式会社オカムラ | マニピュレータの制御装置、制御方法およびプログラム、ならびに作業システム |
| US10742865B2 (en) * | 2017-04-14 | 2020-08-11 | International Business Machines Corporation | Configuring cognitive robot vision |
| JP2018176397A (ja) * | 2017-04-21 | 2018-11-15 | オムロン株式会社 | ロボットシステム |
| JP6487489B2 (ja) * | 2017-05-11 | 2019-03-20 | ファナック株式会社 | ロボット制御装置及びロボット制御プログラム |
| JP7049069B2 (ja) * | 2017-05-19 | 2022-04-06 | 川崎重工業株式会社 | ロボットシステム及びロボットシステムの制御方法 |
| JP7185749B2 (ja) * | 2017-05-19 | 2022-12-07 | 川崎重工業株式会社 | ロボットシステム及びロボットシステムの制御方法 |
| JP6959762B2 (ja) * | 2017-05-19 | 2021-11-05 | 川崎重工業株式会社 | 遠隔操作ロボットシステム |
| JP7223493B2 (ja) * | 2017-05-19 | 2023-02-16 | 川崎重工業株式会社 | ロボットシステム |
| JP7244985B2 (ja) * | 2017-05-19 | 2023-03-23 | 川崎重工業株式会社 | 操作装置及び操作システム |
| DE102017115833A1 (de) * | 2017-07-13 | 2019-01-17 | SW Automation GmbH | Verfahren zum Betreiben einer Werkstück-Bearbeitungs-Anlage und Werkstück-Bearbeitungs-Anlage |
| CN107391340B (zh) * | 2017-07-21 | 2020-10-20 | 苏州浪潮智能科技有限公司 | 一种整机柜服务器节点热拔插系统和控制方法 |
| CN107378976A (zh) * | 2017-07-21 | 2017-11-24 | 诺伯特智能装备(山东)有限公司 | 一种开放式工业机器人控制系统 |
| JP6633580B2 (ja) * | 2017-08-02 | 2020-01-22 | ファナック株式会社 | ロボットシステム及びロボット制御装置 |
| JP7066357B2 (ja) * | 2017-08-31 | 2022-05-13 | 川崎重工業株式会社 | ロボットシステム及びその運転方法 |
| JP6906404B2 (ja) * | 2017-09-08 | 2021-07-21 | 株式会社安川電機 | ロボットシステム、ロボット制御装置および被加工物の製造方法 |
| CN107378954A (zh) * | 2017-09-22 | 2017-11-24 | 苏州诺乐智能科技有限公司 | 一种工业机器人用自动化控制软件 |
| JP6606145B2 (ja) * | 2017-09-25 | 2019-11-13 | ファナック株式会社 | ロボットシステム |
| JP6942420B2 (ja) * | 2017-09-29 | 2021-09-29 | 東芝情報システム株式会社 | 無人無索潜水機システム |
| JP2019063952A (ja) * | 2017-10-02 | 2019-04-25 | 株式会社オカムラ | 管理システム及び制御方法 |
| JP6861604B2 (ja) * | 2017-10-02 | 2021-04-21 | 株式会社オカムラ | 管理システム及び制御方法 |
| JP6971754B2 (ja) * | 2017-10-02 | 2021-11-24 | 株式会社オカムラ | 管理システム、管理システムの制御方法及びプログラム |
| US11358290B2 (en) * | 2017-10-19 | 2022-06-14 | Canon Kabushiki Kaisha | Control apparatus, robot system, method for operating control apparatus, and storage medium |
| US11510741B2 (en) | 2017-10-30 | 2022-11-29 | Cilag Gmbh International | Method for producing a surgical instrument comprising a smart electrical system |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US10959744B2 (en) | 2017-10-30 | 2021-03-30 | Ethicon Llc | Surgical dissectors and manufacturing techniques |
| US11564756B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| JP7041492B2 (ja) * | 2017-10-31 | 2022-03-24 | 川崎重工業株式会社 | ロボットシステム |
| JP6763846B2 (ja) * | 2017-11-24 | 2020-09-30 | ファナック株式会社 | ロボットの教示操作を行う教示装置および教示方法 |
| EP3718707A4 (en) * | 2017-11-28 | 2021-08-25 | Kawasaki Jukogyo Kabushiki Kaisha | SKILLS TRANSFER MACHINE |
| DE102017221397A1 (de) * | 2017-11-29 | 2019-05-29 | Krones Ag | Transportanlage für Behälter in der Getränkeindustrie und Schmierverfahren |
| DE102017011130B4 (de) * | 2017-12-01 | 2021-03-04 | Kuka Deutschland Gmbh | Verfahren und System zum Steuern eines Roboters |
| US10613619B2 (en) | 2017-12-15 | 2020-04-07 | Google Llc | Ultra-low power mode for a low-cost force-sensing device |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US11058498B2 (en) * | 2017-12-28 | 2021-07-13 | Cilag Gmbh International | Cooperative surgical actions for robot-assisted surgical platforms |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11202570B2 (en) | 2017-12-28 | 2021-12-21 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US11672605B2 (en) | 2017-12-28 | 2023-06-13 | Cilag Gmbh International | Sterile field interactive control displays |
| US11464559B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Estimating state of ultrasonic end effector and control system therefor |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11076921B2 (en) | 2017-12-28 | 2021-08-03 | Cilag Gmbh International | Adaptive control program updates for surgical hubs |
| US11937769B2 (en) | 2017-12-28 | 2024-03-26 | Cilag Gmbh International | Method of hub communication, processing, storage and display |
| US11969216B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Surgical network recommendations from real time analysis of procedure variables against a baseline highlighting differences from the optimal solution |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11666331B2 (en) | 2017-12-28 | 2023-06-06 | Cilag Gmbh International | Systems for detecting proximity of surgical end effector to cancerous tissue |
| CN107891432B (zh) * | 2017-12-28 | 2021-08-10 | 长春工业大学 | 一种小型钻铣机器人结构及控制系统 |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11903601B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Surgical instrument comprising a plurality of drive systems |
| US10892995B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11659023B2 (en) | 2017-12-28 | 2023-05-23 | Cilag Gmbh International | Method of hub communication |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US20190206569A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method of cloud based data analytics for use with the hub |
| US12096916B2 (en) | 2017-12-28 | 2024-09-24 | Cilag Gmbh International | Method of sensing particulate from smoke evacuated from a patient, adjusting the pump speed based on the sensed information, and communicating the functional parameters of the system to the hub |
| US20190201139A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Communication arrangements for robot-assisted surgical platforms |
| US11576677B2 (en) | 2017-12-28 | 2023-02-14 | Cilag Gmbh International | Method of hub communication, processing, display, and cloud analytics |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11257589B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Real-time analysis of comprehensive cost of all instrumentation used in surgery utilizing data fluidity to track instruments through stocking and in-house processes |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11678881B2 (en) | 2017-12-28 | 2023-06-20 | Cilag Gmbh International | Spatial awareness of surgical hubs in operating rooms |
| US11998193B2 (en) | 2017-12-28 | 2024-06-04 | Cilag Gmbh International | Method for usage of the shroud as an aspect of sensing or controlling a powered surgical device, and a control algorithm to adjust its default operation |
| US11589888B2 (en) | 2017-12-28 | 2023-02-28 | Cilag Gmbh International | Method for controlling smart energy devices |
| US20190201146A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Safety systems for smart powered surgical stapling |
| US11376002B2 (en) | 2017-12-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument cartridge sensor assemblies |
| US11633237B2 (en) | 2017-12-28 | 2023-04-25 | Cilag Gmbh International | Usage and technique analysis of surgeon / staff performance against a baseline to optimize device utilization and performance for both current and future procedures |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US11612408B2 (en) | 2017-12-28 | 2023-03-28 | Cilag Gmbh International | Determining tissue composition via an ultrasonic system |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11844579B2 (en) | 2017-12-28 | 2023-12-19 | Cilag Gmbh International | Adjustments based on airborne particle properties |
| US12062442B2 (en) | 2017-12-28 | 2024-08-13 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11969142B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
| US11786245B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Surgical systems with prioritized data transmission capabilities |
| US20190201039A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Situational awareness of electrosurgical systems |
| WO2019139815A1 (en) | 2018-01-12 | 2019-07-18 | Duke University | Apparatus, method and article to facilitate motion planning of an autonomous vehicle in an environment having dynamic objects |
| TWI660255B (zh) * | 2018-01-19 | 2019-05-21 | 所羅門股份有限公司 | Workpiece processing method and processing system |
| TWI750310B (zh) * | 2018-01-29 | 2021-12-21 | 達明機器人股份有限公司 | 複製機器手臂作業點位的方法 |
| JP6662926B2 (ja) | 2018-01-31 | 2020-03-11 | ファナック株式会社 | ロボットおよびロボットに関する保守時期の報知方法 |
| TWI822729B (zh) | 2018-02-06 | 2023-11-21 | 美商即時機器人股份有限公司 | 用於儲存一離散環境於一或多個處理器之一機器人之運動規劃及其改良操作之方法及設備 |
| JP6994411B2 (ja) * | 2018-02-28 | 2022-01-14 | オークマ株式会社 | 工作機械システム |
| US11399858B2 (en) | 2018-03-08 | 2022-08-02 | Cilag Gmbh International | Application of smart blade technology |
| US11337746B2 (en) | 2018-03-08 | 2022-05-24 | Cilag Gmbh International | Smart blade and power pulsing |
| US11259830B2 (en) | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| JP6964293B2 (ja) * | 2018-03-08 | 2021-11-10 | 地方独立行政法人神奈川県立産業技術総合研究所 | 力触覚伝達システム、力触覚伝達方法及びプログラム |
| EP3769174B1 (en) | 2018-03-21 | 2022-07-06 | Realtime Robotics, Inc. | Motion planning of a robot for various environments and tasks and improved operation of same |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| US11259806B2 (en) | 2018-03-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling devices with features for blocking advancement of a camming assembly of an incompatible cartridge installed therein |
| JP6737827B2 (ja) * | 2018-03-29 | 2020-08-12 | ファナック株式会社 | 協働ロボットの制御装置及び制御方法 |
| KR102102190B1 (ko) * | 2018-04-11 | 2020-06-01 | 한국생산기술연구원 | 임펠러 재설계에 따라 출력 변경이 가능한 단일채널펌프의 설계안 도출방법 |
| US11874101B2 (en) | 2018-04-12 | 2024-01-16 | Faro Technologies, Inc | Modular servo cartridges for precision metrology |
| US10969760B2 (en) * | 2018-04-12 | 2021-04-06 | Faro Technologies, Inc. | Coordinate measurement system with auxiliary axis |
| JP6816060B2 (ja) | 2018-04-23 | 2021-01-20 | ファナック株式会社 | 作業ロボットシステムおよび作業ロボット |
| JP6849631B2 (ja) * | 2018-04-23 | 2021-03-24 | ファナック株式会社 | 作業ロボットシステムおよび作業ロボット |
| JP6810093B2 (ja) * | 2018-04-25 | 2021-01-06 | ファナック株式会社 | ロボットのシミュレーション装置 |
| TWI677414B (zh) * | 2018-04-25 | 2019-11-21 | 國立中興大學 | 用於操作一加工裝置的方法和系統 |
| JP7225560B2 (ja) * | 2018-04-26 | 2023-02-21 | セイコーエプソン株式会社 | 制御装置、ロボットシステム、及び表示制御方法 |
| JP6919622B2 (ja) * | 2018-04-26 | 2021-08-18 | オムロン株式会社 | 制御システム、制御方法、および制御プログラム |
| JP7087632B2 (ja) * | 2018-04-26 | 2022-06-21 | セイコーエプソン株式会社 | ロボット制御装置 |
| CN108712632A (zh) * | 2018-04-28 | 2018-10-26 | 广东电网有限责任公司 | 站内光缆巡视系统及巡视方法 |
| JP7056733B2 (ja) * | 2018-05-11 | 2022-04-19 | 日産自動車株式会社 | 異常検出装置及び異常検出方法 |
| DE102018207354B3 (de) * | 2018-05-11 | 2019-05-29 | Kuka Deutschland Gmbh | Verfahren und System zum Steuern eines Roboters |
| CN110480291B (zh) * | 2018-05-15 | 2021-07-16 | 中国科学院沈阳自动化研究所 | 一种基于6自由度工业机器人的复杂结构件精密对接方法 |
| JP7079435B2 (ja) * | 2018-05-21 | 2022-06-02 | Telexistence株式会社 | ロボット制御装置、ロボット制御方法及びロボット制御プログラム |
| JP7135437B2 (ja) * | 2018-05-22 | 2022-09-13 | セイコーエプソン株式会社 | ロボットシステムの制御方法及びロボットシステム |
| JP7039389B2 (ja) | 2018-05-25 | 2022-03-22 | 川崎重工業株式会社 | ロボットシステム及びロボット制御方法 |
| JP2019205111A (ja) * | 2018-05-25 | 2019-11-28 | セイコーエプソン株式会社 | 画像処理装置、ロボット、及び、ロボットシステム |
| JP7267688B2 (ja) | 2018-05-31 | 2023-05-02 | キヤノン株式会社 | ロボットシステム、ロボットアームの制御方法、物品の製造方法、駆動装置および駆動装置の制御方法 |
| JP6901434B2 (ja) * | 2018-06-15 | 2021-07-14 | ファナック株式会社 | ロボットシステムおよびロボット |
| JP7173765B2 (ja) * | 2018-06-25 | 2022-11-16 | 川崎重工業株式会社 | ロボット制御システム |
| CN110480684A (zh) * | 2018-07-10 | 2019-11-22 | 肇庆市高新区晓靖科技有限公司 | 一种机械手的无死角识别器 |
| CN110733034B (zh) * | 2018-07-20 | 2022-10-21 | 台达电子工业股份有限公司 | 机械手臂校正方法、机械手臂校正系统以及输送系统 |
| EP3824364B1 (en) * | 2018-07-20 | 2023-10-11 | Lingdong Technology (Beijing) Co. Ltd | Smart self-driving systems with side follow and obstacle avoidance |
| JP7167518B2 (ja) * | 2018-07-20 | 2022-11-09 | セイコーエプソン株式会社 | 制御装置、ヘッドマウントディスプレイおよびロボットシステム |
| JP7065721B2 (ja) * | 2018-07-31 | 2022-05-12 | 川崎重工業株式会社 | ロボットシステム |
| JP7161334B2 (ja) * | 2018-07-31 | 2022-10-26 | 川崎重工業株式会社 | ロボットシステム |
| JP6977686B2 (ja) * | 2018-08-06 | 2021-12-08 | オムロン株式会社 | 制御システムおよび制御装置 |
| JP2020025992A (ja) * | 2018-08-09 | 2020-02-20 | 株式会社東芝 | 制御装置、制御方法、およびプログラム |
| KR102518766B1 (ko) * | 2018-08-10 | 2023-04-06 | 카와사키 주코교 카부시키 카이샤 | 데이터 생성 장치, 데이터 생성 방법, 데이터 생성 프로그램 및 원격 조작 시스템 |
| JP7401184B2 (ja) * | 2018-08-10 | 2023-12-19 | 川崎重工業株式会社 | ロボットシステム |
| EP3836068A4 (en) * | 2018-08-10 | 2022-06-08 | Kawasaki Jukogyo Kabushiki Kaisha | INTERCHANGE DEVICE AND METHOD OF INTERCHANGE THEREWITH |
| JP7281349B2 (ja) * | 2018-08-10 | 2023-05-25 | 川崎重工業株式会社 | 遠隔操作システム |
| WO2020032218A1 (ja) * | 2018-08-10 | 2020-02-13 | 川崎重工業株式会社 | トレーニング処理装置、仲介装置、トレーニングシステム及びトレーニング処理方法 |
| CN109318238B (zh) * | 2018-08-15 | 2022-06-17 | 南阳师范学院 | 一种火灾阀门关闭消防机器人 |
| CN108972626A (zh) * | 2018-08-22 | 2018-12-11 | 珠海格力电器股份有限公司 | 一种重力补偿方法、装置、存储介质及机器人 |
| DE102019122790B4 (de) * | 2018-08-24 | 2021-03-25 | Nvidia Corp. | Robotersteuerungssystem |
| DE102018120748A1 (de) * | 2018-08-24 | 2020-02-27 | 8Sense Gmbh | Betätigungsmodul und Verfahren mit einem Betätigungsmodul |
| US11833681B2 (en) * | 2018-08-24 | 2023-12-05 | Nvidia Corporation | Robotic control system |
| JP2020032320A (ja) | 2018-08-27 | 2020-03-05 | コベルコ建機株式会社 | 解体システム |
| KR102543596B1 (ko) * | 2018-08-31 | 2023-06-19 | 삼성전자주식회사 | 외력의 측정을 위한 적어도 하나의 파라미터를 산출하는 방법 및 이를 수행하는 전자 장치 |
| KR102112836B1 (ko) | 2018-09-03 | 2020-05-19 | 창원대학교 산학협력단 | 로봇암 제어 시스템 |
| KR102092575B1 (ko) * | 2018-09-06 | 2020-03-24 | 주식회사 에스에프에이 | 둘 이상의 핸드를 구비하는 이송 장치 및 그 동작 방법 |
| JP6666400B1 (ja) * | 2018-09-10 | 2020-03-13 | Telexistence株式会社 | ロボット制御装置、ロボット制御方法及びロボット制御システム |
| US11597084B2 (en) | 2018-09-13 | 2023-03-07 | The Charles Stark Draper Laboratory, Inc. | Controlling robot torque and velocity based on context |
| CN109397285B (zh) * | 2018-09-17 | 2021-09-07 | 鲁班嫡系机器人(深圳)有限公司 | 一种装配方法、装配装置及装配设备 |
| JP2020044610A (ja) * | 2018-09-19 | 2020-03-26 | 株式会社デンソーウェーブ | ロボットの制御方法 |
| TWI699851B (zh) * | 2018-09-21 | 2020-07-21 | 景興精密機械有限公司 | 自動定位系統及其自動定位方法 |
| GB2608752B (en) * | 2018-10-03 | 2023-06-14 | Cmr Surgical Ltd | Methods and systems for providing assistance to a user of a surgical robot system |
| US11505341B1 (en) * | 2018-10-05 | 2022-11-22 | Douglas Machine Inc. | Robotic case packer platform and packing method |
| JP6916157B2 (ja) | 2018-10-23 | 2021-08-11 | ファナック株式会社 | 人と協働作業を行うロボットシステム、及びロボット制御方法 |
| WO2020090809A1 (ja) * | 2018-11-01 | 2020-05-07 | キヤノン株式会社 | 外部入力装置、ロボットシステム、ロボットシステムの制御方法、制御プログラム、及び記録媒体 |
| JP7205752B2 (ja) * | 2018-11-09 | 2023-01-17 | オムロン株式会社 | ロボット制御装置、ロボット制御方法、及びロボット制御プログラム |
| CN109785391A (zh) * | 2018-11-29 | 2019-05-21 | 昆山睿力得软件技术有限公司 | 一种基于视觉引导的自动搪锡系统 |
| DE102018130462A1 (de) * | 2018-11-30 | 2020-06-04 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren, System und Computerprogramm zum Betreiben eines oder mehrerer Roboters, eines Robotersystems und/oder eines Roboterschwarms |
| CN109500815B (zh) * | 2018-12-03 | 2023-06-02 | 日照市越疆智能科技有限公司 | 用于前置姿态判断学习的机器人 |
| CN109571478B (zh) * | 2018-12-17 | 2021-07-27 | 浙江大学昆山创新中心 | 一种串联多自由度机械臂末端循迹控制方法 |
| JP6878391B2 (ja) * | 2018-12-18 | 2021-05-26 | ファナック株式会社 | ロボットシステムとその調整方法 |
| CN113165161B (zh) * | 2018-12-21 | 2024-02-06 | 川崎重工业株式会社 | 机器人系统以及机器人系统的控制方法 |
| JP6865262B2 (ja) * | 2018-12-26 | 2021-04-28 | 川崎重工業株式会社 | ロボットシステムの制御装置 |
| JP7117237B2 (ja) * | 2018-12-27 | 2022-08-12 | 川崎重工業株式会社 | ロボット制御装置、ロボットシステム及びロボット制御方法 |
| CN109407174A (zh) * | 2018-12-28 | 2019-03-01 | 同方威视技术股份有限公司 | 安全检测系统及方法 |
| CN109623824A (zh) * | 2018-12-29 | 2019-04-16 | 深圳市越疆科技有限公司 | 人工智能轨迹复现方法 |
| CN109739357B (zh) * | 2019-01-02 | 2020-12-11 | 京东方科技集团股份有限公司 | 机械手的控制方法及装置 |
| WO2020149275A1 (ja) * | 2019-01-16 | 2020-07-23 | 株式会社ナイルワークス | ドローンシステム、ドローン、移動体、区画部材、ドローンシステムの制御方法、および、ドローンシステム制御プログラム |
| JP7190919B2 (ja) | 2019-01-25 | 2022-12-16 | 株式会社ソニー・インタラクティブエンタテインメント | 画像解析システム |
| JP7309371B2 (ja) * | 2019-01-25 | 2023-07-18 | 株式会社ソニー・インタラクティブエンタテインメント | ロボット制御システム |
| CN109822570A (zh) * | 2019-01-31 | 2019-05-31 | 秒针信息技术有限公司 | 机械臂的监控方法及装置 |
| JP6989542B2 (ja) * | 2019-01-31 | 2022-01-05 | ファナック株式会社 | ロボット制御装置 |
| US11298129B2 (en) | 2019-02-19 | 2022-04-12 | Cilag Gmbh International | Method for providing an authentication lockout in a surgical stapler with a replaceable cartridge |
| US11751872B2 (en) | 2019-02-19 | 2023-09-12 | Cilag Gmbh International | Insertable deactivator element for surgical stapler lockouts |
| CN109986559B (zh) * | 2019-02-28 | 2021-08-10 | 深圳镁伽科技有限公司 | 参数编辑方法和系统、控制设备及存储介质 |
| CN109859605A (zh) * | 2019-02-28 | 2019-06-07 | 江苏集萃微纳自动化系统与装备技术研究所有限公司 | 工业机器人无示教器的3d示教方法 |
| WO2020195928A1 (ja) * | 2019-03-22 | 2020-10-01 | 川崎重工業株式会社 | ロボットシステム |
| JP2020157467A (ja) * | 2019-03-22 | 2020-10-01 | 川崎重工業株式会社 | ロボットシステム |
| CN109822575B (zh) * | 2019-03-25 | 2020-12-08 | 华中科技大学 | 一种利用投影特征图像进行移动加工的机器人系统及方法 |
| JP7318258B2 (ja) * | 2019-03-26 | 2023-08-01 | コベルコ建機株式会社 | 遠隔操作システムおよび遠隔操作サーバ |
| US20220163945A1 (en) * | 2019-04-16 | 2022-05-26 | King Abdullah University Of Science And Technology | Virtual fab and lab system and method |
| CN113891786B (zh) * | 2019-04-17 | 2024-07-12 | 优傲机器人公司 | 基于自适应摩擦来控制机器人臂的方法 |
| CN113905855B (zh) | 2019-04-17 | 2023-08-25 | 实时机器人有限公司 | 运动规划图生成用户界面、系统、方法和规则 |
| KR102379245B1 (ko) * | 2019-04-30 | 2022-03-28 | 치루 유니버시티 오브 테크놀로지 | 웨어러블 디바이스 기반의 이동 로봇 제어 시스템 및 제어 방법 |
| JP7339776B2 (ja) * | 2019-05-28 | 2023-09-06 | 川崎重工業株式会社 | 制御システム、機械装置システム及び制御方法 |
| JP7333197B2 (ja) * | 2019-05-28 | 2023-08-24 | 川崎重工業株式会社 | 制御システム、機械装置システム及び制御方法 |
| WO2020239184A2 (en) * | 2019-05-29 | 2020-12-03 | Universal Robots A/S | Control of a multipurpose robot arm |
| US11009964B2 (en) * | 2019-06-06 | 2021-05-18 | Finch Technologies Ltd. | Length calibration for computer models of users to generate inputs for computer systems |
| US11440199B2 (en) | 2019-06-18 | 2022-09-13 | Gang Hao | Robotic service system in restaurants |
| CN110181517B (zh) * | 2019-06-21 | 2022-05-10 | 西北工业大学 | 一种基于虚拟夹具的双人遥操作训练方法 |
| JP7396819B2 (ja) * | 2019-06-21 | 2023-12-12 | ファナック株式会社 | ロボット装置の動作を動画にて撮像するカメラを備える監視装置 |
| CN114025928A (zh) * | 2019-06-27 | 2022-02-08 | 松下知识产权经营株式会社 | 末端执行器的控制系统以及末端执行器的控制方法 |
| CN110181521A (zh) * | 2019-06-28 | 2019-08-30 | 长沙开山斧智能科技有限公司 | 确定机器人轨迹的操作控制方法及其控制系统 |
| CN110181520A (zh) * | 2019-06-28 | 2019-08-30 | 长沙开山斧智能科技有限公司 | 多轴机器人控制系统及其控制方法 |
| CN110428465A (zh) * | 2019-07-12 | 2019-11-08 | 中国科学院自动化研究所 | 基于视觉和触觉的机械臂抓取方法、系统、装置 |
| CN110549331B (zh) * | 2019-07-16 | 2024-05-03 | 浙江工业大学 | 精密孔轴自动装配的方法和设备 |
| JP6733973B1 (ja) * | 2019-07-17 | 2020-08-05 | 株式会社リッコー | ロボットボディケアシステム、ロボットボディケア方法、およびロボットボディケアプログラム |
| JP7475649B2 (ja) * | 2019-07-17 | 2024-04-30 | 株式会社リッコー | ロボットボディケアシステム、ロボットボディケア方法、およびロボットボディケアプログラム |
| CN110509282B (zh) * | 2019-07-18 | 2022-11-08 | 上海大学 | 一种摄像机器人遥操作装置 |
| EP4000820A4 (en) * | 2019-07-18 | 2023-03-22 | Kabushiki Kaisha Yaskawa Denki | ROBOT SYSTEM, ROBOT CONTROL METHOD AND SERVO SYSTEM |
| CN110340894B (zh) * | 2019-07-18 | 2020-10-16 | 浙江大学 | 一种基于模糊逻辑的遥操作系统自适应多边控制方法 |
| JP7339806B2 (ja) * | 2019-08-05 | 2023-09-06 | 川崎重工業株式会社 | 制御システム、ロボットシステム及び制御方法 |
| JP2021023705A (ja) * | 2019-08-08 | 2021-02-22 | 川崎重工業株式会社 | 手術マニピュレータの入力装置 |
| WO2021029205A1 (ja) * | 2019-08-09 | 2021-02-18 | ソニー株式会社 | 情報処理装置、情報処理方法、プログラム、およびロボット |
| DE102020207520A1 (de) * | 2019-09-02 | 2021-03-04 | Robert Bosch Gesellschaft mit beschränkter Haftung | Werkzeugmaschinenvorrichtung |
| JP7404717B2 (ja) * | 2019-09-03 | 2023-12-26 | セイコーエプソン株式会社 | プログラム識別方法、およびロボットシステム |
| TWI707214B (zh) * | 2019-09-18 | 2020-10-11 | 崑山科技大學 | 機械手臂教學模組 |
| DE102019214418A1 (de) * | 2019-09-23 | 2021-03-25 | Robert Bosch Gmbh | Verfahren zum Fernsteuern eines Roboters |
| JP7339113B2 (ja) * | 2019-10-09 | 2023-09-05 | ファナック株式会社 | ロボット制御装置及びロボット制御方法 |
| JP7402450B2 (ja) * | 2019-10-09 | 2023-12-21 | Telexistence株式会社 | ロボット制御装置、ロボット制御方法及びロボット制御システム |
| CN110712205B (zh) * | 2019-10-11 | 2021-07-02 | 达闼机器人有限公司 | 异常监控方法、电子设备及计算机可读存储介质 |
| US11772262B2 (en) | 2019-10-25 | 2023-10-03 | Dexterity, Inc. | Detecting slippage from robotic grasp |
| US11607816B2 (en) | 2019-10-25 | 2023-03-21 | Dexterity, Inc. | Detecting robot grasp of very thin object or feature |
| CN110834331A (zh) * | 2019-11-11 | 2020-02-25 | 路邦科技授权有限公司 | 一种基于视觉控制的仿生机器人动作控制方法 |
| CN111221408A (zh) * | 2019-11-11 | 2020-06-02 | 路邦科技授权有限公司 | 一种机器人触感反馈手套的控制系统 |
| BR112022007991A2 (pt) * | 2019-11-13 | 2022-07-05 | Jfe Steel Corp | Método de operação e sistema de operação para instalações de produção |
| CN110757461A (zh) * | 2019-11-13 | 2020-02-07 | 江苏方时远略科技咨询有限公司 | 一种工业移动机器人的控制系统及其控制方法 |
| CN110815223B (zh) * | 2019-11-14 | 2021-05-14 | 哈尔滨玄智科技有限公司 | 一种机器人无线控制方法和系统 |
| KR102266074B1 (ko) * | 2019-11-14 | 2021-06-16 | 재단법인 한국섬유기계융합연구원 | 원단 자동 카운트 장치 |
| CN110919638B (zh) * | 2019-11-15 | 2021-11-02 | 华中科技大学 | 一种3+4构型双臂协作机器人加工系统及方法 |
| CN110716481A (zh) * | 2019-11-15 | 2020-01-21 | 徐州合卓机械科技有限公司 | 一种基于5g网络的随车起重机远程控制系统 |
| CN110695999B (zh) * | 2019-11-19 | 2020-11-27 | 山东大学 | 一种基于触觉与听觉的机械臂柔性装配方法 |
| CN112894794B (zh) * | 2019-11-19 | 2022-08-05 | 深圳市优必选科技股份有限公司 | 人体手臂动作模仿方法、装置、终端设备及存储介质 |
| JP7374867B2 (ja) * | 2019-11-27 | 2023-11-07 | 株式会社安川電機 | 制御システム、ローカルコントローラ及び制御方法 |
| CN112894764A (zh) * | 2019-12-03 | 2021-06-04 | 台达电子工业股份有限公司 | 机械手臂系统及机械手臂控制方法 |
| CN110936377A (zh) * | 2019-12-04 | 2020-03-31 | 路邦科技授权有限公司 | 一种机器人的动作传感与电脑编程互换控制系统 |
| JP7401277B2 (ja) * | 2019-12-04 | 2023-12-19 | ファナック株式会社 | ロボットプログラミング装置 |
| JP6990340B2 (ja) * | 2019-12-13 | 2022-01-12 | 川崎重工業株式会社 | ロボットシステム |
| WO2021117701A1 (ja) * | 2019-12-13 | 2021-06-17 | 川崎重工業株式会社 | マスタスレーブシステム及び制御方法 |
| JP7464386B2 (ja) * | 2019-12-20 | 2024-04-09 | ファナック株式会社 | 制御装置、及び制御方法 |
| CN111113429B (zh) * | 2019-12-31 | 2021-06-25 | 深圳市优必选科技股份有限公司 | 一种动作模仿方法、动作模仿装置及终端设备 |
| CN111086003A (zh) * | 2020-01-08 | 2020-05-01 | 北京仙进机器人有限公司 | 机器人仿型控制方法及其装置 |
| CN111098319A (zh) * | 2020-01-19 | 2020-05-05 | 路邦科技授权有限公司 | 一种工业级机械臂多联控制系统 |
| JP2021116491A (ja) | 2020-01-27 | 2021-08-10 | 富士フイルムビジネスイノベーション株式会社 | 触覚提示装置 |
| JP6875690B1 (ja) * | 2020-02-12 | 2021-05-26 | リバーフィールド株式会社 | 手術ロボット、及び手術ロボットの制御ユニット |
| JP6807122B1 (ja) * | 2020-02-12 | 2021-01-06 | リバーフィールド株式会社 | 手術ロボット、及び手術ロボットの制御ユニット |
| US12097617B2 (en) * | 2020-02-28 | 2024-09-24 | Ati Industrial Automation, Inc. | Controlling contact force in a machine tool |
| JP2021133470A (ja) * | 2020-02-28 | 2021-09-13 | セイコーエプソン株式会社 | ロボットの制御方法およびロボットシステム |
| CN111452038B (zh) * | 2020-03-03 | 2021-08-24 | 重庆大学 | 一种高精度工件组件及高精度工件组件的装配方法 |
| CN111421529B (zh) * | 2020-03-11 | 2021-08-03 | 哈尔滨工业大学(深圳)(哈尔滨工业大学深圳科技创新研究院) | 一种绳驱柔性臂的控制方法 |
| JP7483420B2 (ja) * | 2020-03-12 | 2024-05-15 | キヤノン株式会社 | ロボットシステム、制御装置、情報処理装置、制御方法、情報処理方法、物品の製造方法、プログラム、および記録媒体 |
| EP4120951A4 (en) * | 2020-03-19 | 2024-04-24 | Auris Health, Inc. | SYSTEMS AND METHODS FOR DYNAMIC ADJUSTMENTS BASED ON LOAD INPUT FOR ROBOT SYSTEMS |
| CN111438673B (zh) * | 2020-03-24 | 2022-04-22 | 西安交通大学 | 基于立体视觉和手势控制的高空作业遥操作方法及系统 |
| US11691282B2 (en) * | 2020-03-26 | 2023-07-04 | Mitsubishi Electric Corporation | Friction compensation device, and robot control device |
| CN115361930A (zh) * | 2020-04-10 | 2022-11-18 | 川崎重工业株式会社 | 医疗用移动体系统及其运行方法 |
| CN111546329B (zh) * | 2020-04-10 | 2022-03-04 | 驰驱电气(嘉兴)有限公司 | 一种多关节机器人伺服增益一致性控制方法 |
| CN111452029B (zh) * | 2020-04-14 | 2023-12-29 | 山东乐普韦尔自动化技术有限公司 | 一种带电作业机器人控制系统及带电作业机器人 |
| CN111469109A (zh) * | 2020-04-28 | 2020-07-31 | 深圳供电局有限公司 | 巡检机器人系统 |
| US11945123B2 (en) * | 2020-04-28 | 2024-04-02 | Altec Industries, Inc. | Head mounted display for remote operation of machinery |
| US11685043B2 (en) * | 2020-05-09 | 2023-06-27 | Ubtech Robotics Corp Ltd | Mechanical arm |
| CN111633686B (zh) * | 2020-05-19 | 2022-04-12 | 华为技术有限公司 | 机器人的安全防护方法、装置与机器人 |
| CN111409079B (zh) * | 2020-05-19 | 2023-08-01 | 路邦科技授权有限公司 | 一种工业级机械臂的多联及互联控制系统 |
| GB2595289A (en) * | 2020-05-21 | 2021-11-24 | Bae Systems Plc | Collaborative robot system |
| WO2021237351A1 (en) * | 2020-05-26 | 2021-12-02 | Magna International Inc. | Fixture with vision system |
| DE102020114737A1 (de) | 2020-06-03 | 2021-12-09 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren, System sowie Computerprogramm zum Betreiben eines oder mehrerer Roboter, eines Robotersystems und/oder eines Roboterschwarms |
| DE102020114738A1 (de) | 2020-06-03 | 2021-12-09 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren, System sowie Computerprogramm zum Betreiben eines oder mehrerer Roboter, eines Robotersystems und/oder eines Roboterschwarms |
| CN111745645A (zh) * | 2020-06-09 | 2020-10-09 | 北京理工大学 | 机器人控制方法、装置和系统 |
| JP7132976B2 (ja) * | 2020-06-10 | 2022-09-07 | 三菱ロジスネクスト株式会社 | フォークリフト、フォークリフトの制御方法、及びプログラム |
| WO2021254613A1 (en) * | 2020-06-18 | 2021-12-23 | Brainlab Ag | Compensation of gravity-related displacements of medical carrier structures |
| CN111604910A (zh) * | 2020-06-19 | 2020-09-01 | 天津工业大学 | 一种电力检修无人机用异物清除装置 |
| WO2021256463A1 (ja) * | 2020-06-19 | 2021-12-23 | 川崎重工業株式会社 | 撮像システム及びロボットシステム |
| WO2021261539A1 (ja) * | 2020-06-25 | 2021-12-30 | キヤノン株式会社 | 連続体ロボットの制御システム及びその制御方法、並びに、プログラム |
| US20220014476A1 (en) * | 2020-07-09 | 2022-01-13 | Gerald Brantner | Facilitating human intervention in an autonomous device |
| CN111941423B (zh) * | 2020-07-24 | 2021-08-24 | 武汉万迪智慧科技有限公司 | 一种人机交互机械抓手控制系统及方法 |
| CN111781934A (zh) * | 2020-07-29 | 2020-10-16 | 浙江树人学院(浙江树人大学) | 一种主从分布式协同装置及其控制方法 |
| CN112025679B (zh) * | 2020-08-26 | 2021-09-24 | 大连理工大学 | 视触觉融合的五指机械手仿人抓取方法 |
| KR102350638B1 (ko) * | 2020-08-26 | 2022-01-17 | 주식회사 이엠에스 | 인공지능형 로봇 시스템 |
| JP7301238B2 (ja) | 2020-09-14 | 2023-06-30 | 三菱電機株式会社 | ロボット制御装置 |
| CN112428247B (zh) * | 2020-09-28 | 2021-12-21 | 燕山大学 | 一种针对多主-多从遥操作系统的增强透明性能控制方法 |
| JP2022061761A (ja) * | 2020-10-07 | 2022-04-19 | 川崎重工業株式会社 | ロボットシステム及びその制御方法 |
| JP7365991B2 (ja) * | 2020-10-26 | 2023-10-20 | 三菱電機株式会社 | 遠隔操作システム |
| US20220134557A1 (en) * | 2020-10-30 | 2022-05-05 | Sintokogio, Ltd. | Control device, robot control system, program, and control method |
| CN112123341B (zh) * | 2020-11-24 | 2021-03-02 | 季华实验室 | 机器人双臂协调运动控制方法、装置和电子设备 |
| CN112496696A (zh) * | 2020-11-24 | 2021-03-16 | 福州大学 | 一种智能手机内部射频线自动组装视觉测量系统 |
| JP7148938B2 (ja) * | 2020-11-30 | 2022-10-06 | 株式会社 情報システムエンジニアリング | 状態判定システム、状態判定方法、及び状態判定プログラム |
| JP2022092831A (ja) * | 2020-12-11 | 2022-06-23 | セイコーエプソン株式会社 | ソフトウェアスイッチプログラム、選択肢の選択方法および情報処理装置 |
| CN112847300A (zh) * | 2020-12-19 | 2021-05-28 | 北京工业大学 | 一种基于移动工业机器人示教器的示教系统及其示教方法 |
| CN112873218B (zh) * | 2020-12-23 | 2022-11-25 | 中国计量大学 | 一种变电站巡检机器人及巡检方法 |
| US11794345B2 (en) * | 2020-12-31 | 2023-10-24 | Sarcos Corp. | Unified robotic vehicle systems and methods of control |
| CN112847304A (zh) * | 2020-12-31 | 2021-05-28 | 哈尔滨工业大学 | 一种有监督无接触的机械臂示教方法 |
| CN112894820A (zh) * | 2021-01-29 | 2021-06-04 | 清华大学深圳国际研究生院 | 柔性机械臂遥操作人机交互装置及系统 |
| CN112894821B (zh) * | 2021-01-30 | 2022-06-28 | 同济大学 | 基于电流法的协作机器人拖动示教控制方法、装置及设备 |
| JP2024508805A (ja) * | 2021-02-25 | 2024-02-28 | ナノトロニクス イメージング インコーポレイテッド | 製造環境における模倣学習 |
| WO2022186134A1 (ja) * | 2021-03-04 | 2022-09-09 | ソニーグループ株式会社 | ロボット、エンドエフェクタおよびロボットシステム |
| KR102392538B1 (ko) * | 2021-03-17 | 2022-04-29 | 주식회사 나우로보틱스 | 다관절 로봇 및 협동로봇의 장점이 융합된 응용로봇 |
| KR102387294B1 (ko) * | 2021-03-17 | 2022-04-15 | 주식회사 나우로보틱스 | 컨트롤러 및 ui부를 탑재한 사출 성형기용 다관절 로봇 |
| US11897706B2 (en) * | 2021-03-30 | 2024-02-13 | Dexterity, Inc. | Robotic system with zone-based control |
| US11981517B2 (en) | 2021-03-30 | 2024-05-14 | Dexterity, Inc. | Robotic line kitting system safety features |
| KR102277162B1 (ko) | 2021-04-02 | 2021-07-14 | 주식회사 스누아이랩 | 산업 로봇 감시장치 및 그 장치의 구동방법 |
| CN113084872B (zh) * | 2021-04-08 | 2022-09-20 | 国核自仪系统工程有限公司 | 用于核电站的检查维护机器人 |
| CN113276110B (zh) * | 2021-04-22 | 2022-12-16 | 国网浙江省电力有限公司嘉兴供电公司 | 一种基于ar技术的变电站操作机器人控制系统及方法 |
| KR102529082B1 (ko) * | 2021-04-22 | 2023-05-03 | 재단법인대구경북과학기술원 | 촉각 감지 방법 및 장치 |
| CN113878590B (zh) * | 2021-04-22 | 2022-11-25 | 北京邮电大学 | 一种具备自动规划抽脂功能的机器人系统 |
| JP2022187879A (ja) * | 2021-06-08 | 2022-12-20 | 川崎重工業株式会社 | 手術支援システム、操作者側装置および手術支援システムの制御方法 |
| US20220395940A1 (en) * | 2021-06-09 | 2022-12-15 | Honda Motor Co., Ltd. | Apparatus and method to press articles on components of vehicle assembly |
| JP2023003592A (ja) * | 2021-06-24 | 2023-01-17 | セイコーエプソン株式会社 | 力制御パラメーターの調整方法および力制御パラメーター調整装置 |
| EP4265377A4 (en) | 2021-06-28 | 2024-07-10 | Samsung Electronics Co Ltd | ROBOT AND ITS CONTROL METHOD |
| CN113370220A (zh) * | 2021-07-13 | 2021-09-10 | 崔成武 | 一种机械手臂控制系统 |
| JP2024525498A (ja) | 2021-07-15 | 2024-07-12 | シェフラー テクノロジーズ アー・ゲー ウント コー. カー・ゲー | ハンドジェスチャコントロールおよび視覚慣性オドメトリを使用するロボットシステムのティーチング |
| CN113580131A (zh) * | 2021-07-26 | 2021-11-02 | 成都飞机工业(集团)有限责任公司 | 一种基于动作映射的机械臂末端位姿控制装置及控制方法 |
| KR102549111B1 (ko) * | 2021-08-02 | 2023-06-29 | 주식회사 로엔서지컬 | 수술용 로봇의 제어 장치 및 제어 방법 |
| KR102532351B1 (ko) * | 2021-08-05 | 2023-05-15 | 서울대학교병원 | 헤드셋 기반의 비접촉 손동작 인식 기술을 활용한 수술 로봇 제어 시스템 |
| CN113842209B (zh) * | 2021-08-24 | 2024-02-09 | 深圳市德力凯医疗设备股份有限公司 | 超声设备控制方法、超声设备及计算机可读存储介质 |
| US11422632B1 (en) * | 2021-08-27 | 2022-08-23 | Andrew Flessas | System and method for precise multi-dimensional movement of haptic stimulator |
| CN113715037A (zh) * | 2021-09-01 | 2021-11-30 | 光华临港工程应用技术研发(上海)有限公司 | 一种可远程遥操作的智能化护士机器人系统 |
| CN113681566A (zh) * | 2021-09-10 | 2021-11-23 | 广东电网有限责任公司广州供电局 | 一种引流线作业机器人的控制方法及控制器 |
| CN113696186B (zh) * | 2021-10-09 | 2022-09-30 | 东南大学 | 复杂光照条件下基于视触融合的机械臂自主移动抓取方法 |
| US20230120598A1 (en) * | 2021-10-15 | 2023-04-20 | Fanuc Corporation | Robot program generation method from human demonstration |
| WO2023074336A1 (ja) * | 2021-10-29 | 2023-05-04 | 慶應義塾 | 補償システム、補償装置、補償方法及びプログラム |
| TWI785875B (zh) * | 2021-11-03 | 2022-12-01 | 任源企業股份有限公司 | 具感知回饋的測試系統 |
| CN114227187B (zh) * | 2021-11-30 | 2023-03-28 | 浪潮(山东)计算机科技有限公司 | 一种插接部件安装方法、系统及相关组件 |
| CN114227689B (zh) * | 2021-12-30 | 2023-11-17 | 深圳市优必选科技股份有限公司 | 机器人动作控制系统及其动作控制方法 |
| JPWO2023135902A1 (ja) * | 2022-01-14 | 2023-07-20 | ||
| CN114505662B (zh) * | 2022-02-16 | 2023-04-11 | 广西腾智投资有限公司 | 一种自动安装设备 |
| US20230278223A1 (en) * | 2022-03-04 | 2023-09-07 | Sanctuary Cognitive Systems Corporation | Robots, tele-operation systems, computer program products, and methods of operating the same |
| AU2023232562A1 (en) | 2022-03-08 | 2024-09-05 | Equashield Medical Ltd | Fluid transfer station in a robotic pharmaceutical preparation system |
| JP7513292B2 (ja) | 2022-03-16 | 2024-07-09 | Necプラットフォームズ株式会社 | 制御システム、制御方法およびプログラム |
| CN114442490B (zh) * | 2022-04-07 | 2022-06-24 | 杭州柳叶刀机器人有限公司 | 基于自适应力反馈的血管介入机器人系统主端控制方法 |
| JP2023157744A (ja) * | 2022-04-15 | 2023-10-26 | 川崎重工業株式会社 | 遠隔制御システム、ロボットの遠隔制御方法及び遠隔制御プログラム |
| CN114872017B (zh) * | 2022-04-26 | 2024-05-14 | 中国科学院自动化研究所 | 双臂灵巧操作机器人系统 |
| CN114777676B (zh) * | 2022-05-11 | 2023-07-04 | 青岛盛瀚色谱技术有限公司 | 一种自适应太赫兹三维层析成像装置及方法 |
| WO2023228280A1 (ja) | 2022-05-24 | 2023-11-30 | リバーフィールド株式会社 | アーム機構 |
| CN114926905B (zh) * | 2022-05-31 | 2023-12-26 | 江苏濠汉信息技术有限公司 | 基于带手套的手势识别的电缆附件工序判别方法和系统 |
| CN115227390B (zh) * | 2022-06-30 | 2023-03-28 | 中国科学院自动化研究所 | 机器人主操作手 |
| US11997429B2 (en) | 2022-07-28 | 2024-05-28 | Altec Industries, nc. | Reducing latency in head-mounted display for the remote operation of machinery |
| US11794359B1 (en) | 2022-07-28 | 2023-10-24 | Altec Industries, Inc. | Manual operation of a remote robot assembly |
| US11697209B1 (en) | 2022-07-28 | 2023-07-11 | Altec Industries, Inc. | Coordinate mapping for motion control |
| US11839962B1 (en) | 2022-07-28 | 2023-12-12 | Altec Industries, Inc. | Rotary tool for remote power line operations |
| US11717969B1 (en) | 2022-07-28 | 2023-08-08 | Altec Industries, Inc. | Cooperative high-capacity and high-dexterity manipulators |
| US11689008B1 (en) * | 2022-07-28 | 2023-06-27 | Altec Industries, Inc. | Wire tensioning system |
| US11660750B1 (en) * | 2022-07-28 | 2023-05-30 | Altec Industries, Inc. | Autonomous and semi-autonomous control of aerial robotic systems |
| US11742108B1 (en) | 2022-07-28 | 2023-08-29 | Altec Industries, Inc. | Operation and insulation techniques |
| US11749978B1 (en) | 2022-07-28 | 2023-09-05 | Altec Industries, Inc. | Cross-arm phase-lifter |
| GB2621587A (en) * | 2022-08-15 | 2024-02-21 | Cmr Surgical Ltd | Control of a surgical robot arm |
| CN115444565B (zh) * | 2022-08-22 | 2024-01-30 | 北京长木谷医疗科技股份有限公司 | 手术机器人系统及其执行末端的反馈控制系统和方法 |
| KR102682481B1 (ko) * | 2022-08-30 | 2024-07-04 | 한국로봇융합연구원 | 진공 챔버 내 매니퓰레이터를 위한 원격 마스터 암 장치 |
| US20240085981A1 (en) | 2022-09-08 | 2024-03-14 | Hamilton Sundstrand Corporation | Multimodal spacesuit smart glove |
| CN115609255B (zh) * | 2022-09-30 | 2024-06-04 | 陕西法士特齿轮有限责任公司 | 一种钢丝螺套安装异常处理系统及方法 |
| CN115946109B (zh) * | 2022-10-12 | 2024-09-03 | 北京航天飞行控制中心 | 空间机械臂运动过程监视方法及装置 |
| CN115781635B (zh) * | 2022-11-04 | 2024-08-06 | 北京镁伽机器人科技有限公司 | 机器人示教方法以及装置、电子设备以及存储介质 |
| WO2024181994A1 (en) * | 2023-03-01 | 2024-09-06 | Siemens Corporation | Robotic visual tactile surface inspection system |
| KR102595007B1 (ko) * | 2023-03-24 | 2023-10-27 | 주식회사 아임토리 | 교착 지점의 딜레이 보상 기능을 갖는 로봇 공정 최적화 방법 및 장치 |
| CN116713709B (zh) * | 2023-05-29 | 2023-12-19 | 苏州索力伊智能科技有限公司 | 一种连接器自动组装设备控制系统及其方法 |
| CN117017507B (zh) * | 2023-10-09 | 2023-12-19 | 华中科技大学同济医学院附属协和医院 | 一种穿刺手术机器人的精密主从控制系统 |
| CN117381776B (zh) * | 2023-10-24 | 2024-06-21 | 深圳市磐锋精密技术有限公司 | 一种机器手关节自动校正控制系统 |
| CN117481801B (zh) * | 2023-10-26 | 2024-07-16 | 北京瞳沐医疗科技有限公司 | 基于图像的眼科机器人控制方法、系统、设备及介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5639884A (en) * | 1979-08-29 | 1981-04-15 | Kobe Steel Ltd | Method and device for correcting partial operation of cp control type industrial robot |
| JPS59135507A (ja) * | 1983-01-22 | 1984-08-03 | Hitachi Constr Mach Co Ltd | プレイバツク制御方式 |
| JPS6249403A (ja) * | 1985-08-28 | 1987-03-04 | Agency Of Ind Science & Technol | マニピユレ−タ制御装置 |
| JPH04310396A (ja) * | 1991-04-09 | 1992-11-02 | Hitachi Ltd | ロボット制御装置 |
| JP2006346827A (ja) * | 2005-06-17 | 2006-12-28 | Denso Wave Inc | ロボットの教示システム |
| JP2011224696A (ja) * | 2010-04-19 | 2011-11-10 | Yaskawa Electric Corp | ロボットの教示再生装置および教示再生方法 |
Family Cites Families (464)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6241704B1 (en) * | 1901-11-22 | 2001-06-05 | Sims Deltec, Inc. | Drug pump systems and methods |
| US3893573A (en) * | 1973-08-20 | 1975-07-08 | Nasa | Variable ratio mixed-mode bilateral master-slave control system for shuttle remote manipulator system |
| FR2275816A1 (fr) * | 1974-06-19 | 1976-01-16 | Commissariat Energie Atomique | Dispositif de commande d'un organe mecanique avec retour d'effort |
| FR2416094A1 (fr) * | 1978-02-01 | 1979-08-31 | Zarudiansky Alain | Dispositif de manipulation a distance |
| JPS5519178A (en) * | 1978-07-29 | 1980-02-09 | Matsushita Electric Works Ltd | Hair curl instrument |
| JPS55140903A (en) * | 1979-04-20 | 1980-11-04 | Shin Meiwa Ind Co Ltd | Position control method |
| JPS58132474A (ja) * | 1982-02-03 | 1983-08-06 | 日本原子力発電株式会社 | 摩擦力補償装置 |
| SE436848B (sv) * | 1982-06-28 | 1985-01-28 | Asea Ab | Styrsystem for industrirobot |
| JPH0683971B2 (ja) * | 1982-10-15 | 1994-10-26 | 株式会社日立製作所 | バイラテラルサーボマニピユレータ制御方法 |
| JPS59133507A (ja) * | 1983-01-20 | 1984-07-31 | Takashi Mori | 人工光源装置 |
| SE8305378L (sv) | 1983-09-30 | 1985-03-31 | Asea Ab | Industrirobot |
| JPS60191308A (ja) * | 1984-03-13 | 1985-09-28 | Mitsubishi Electric Corp | 産業機械の制御装置 |
| JPS60217781A (ja) | 1984-04-13 | 1985-10-31 | Toshiba Corp | 遠隔マルチビデオ装置 |
| JPS60170812U (ja) * | 1984-04-16 | 1985-11-12 | 株式会社小松製作所 | ステツプ試運転制御装置のプログラム表示装置 |
| JPS6111801A (ja) * | 1984-06-28 | 1986-01-20 | Fanuc Ltd | 操縦桿制御方式 |
| JPS6161191U (ja) | 1984-09-25 | 1986-04-24 | ||
| JPS6190209A (ja) * | 1984-10-09 | 1986-05-08 | Amada Co Ltd | 可動体の教示操作時におけるncデ−タ設定方法 |
| JPS61293787A (ja) * | 1985-06-20 | 1986-12-24 | トキコ株式会社 | 工業用ロボツト |
| JPH0685795B2 (ja) * | 1985-10-14 | 1994-11-02 | 株式会社アマダ | 看護介助ロボツト |
| JPS62106511A (ja) * | 1985-11-05 | 1987-05-18 | Mitsubishi Electric Corp | 複数ロボツト教示装置 |
| JPS62154009A (ja) | 1985-12-26 | 1987-07-09 | Komatsu Ltd | 操縦式マニピユレ−タ |
| JPH085018B2 (ja) | 1986-02-26 | 1996-01-24 | 株式会社日立製作所 | 遠隔マニピユレ−シヨン方法及び装置 |
| JPS62213975A (ja) * | 1986-03-14 | 1987-09-19 | 工業技術院長 | マスタ・スレ−ブ指マニプレ−タのマスタ側操作器 |
| JPS6374582A (ja) * | 1986-09-19 | 1988-04-05 | 三菱電機株式会社 | 遠隔操作式マニピユレ−タ装置 |
| JPS63106007A (ja) | 1986-10-22 | 1988-05-11 | Nec Corp | 数値制御装置の指令パルス発生装置 |
| JPS63150184A (ja) * | 1986-12-15 | 1988-06-22 | 株式会社日立製作所 | ロボツトのテイ−チング装置 |
| JPS63283878A (ja) * | 1987-05-18 | 1988-11-21 | 株式会社東芝 | 半自動遠隔操作装置 |
| JP2507449B2 (ja) * | 1987-07-15 | 1996-06-12 | 株式会社日立製作所 | 冗長関節を有するマスタ・スレ―ブマニピュレ―タ及び該マニピュレ―タの制御方法 |
| JPS6434686A (en) | 1987-07-29 | 1989-02-06 | Kubota Ltd | Master/slave manipulator |
| JPH01124002A (ja) * | 1987-11-09 | 1989-05-16 | Mitsubishi Electric Corp | 数値制御装置 |
| US4942538A (en) * | 1988-01-05 | 1990-07-17 | Spar Aerospace Limited | Telerobotic tracker |
| JP2676793B2 (ja) * | 1988-06-30 | 1997-11-17 | トヨタ自動車株式会社 | 倣い制御ロボット |
| US5116180A (en) * | 1988-07-18 | 1992-05-26 | Spar Aerospace Limited | Human-in-the-loop machine control loop |
| JPH0676929B2 (ja) * | 1988-09-13 | 1994-09-28 | 工業技術院長 | 分布型圧覚センサ |
| JPH02160487A (ja) | 1988-12-12 | 1990-06-20 | Fanuc Ltd | ロボット手動送り補正方式 |
| JP2501508Y2 (ja) * | 1989-02-08 | 1996-06-19 | 株式会社明電舎 | バイラテラルマスタ・スレ―ブマニプレ―タ |
| JPH03142179A (ja) * | 1989-10-25 | 1991-06-17 | Toshiba Corp | マスタスレーブ制御装置 |
| JPH03190688A (ja) * | 1989-12-19 | 1991-08-20 | Fanuc Ltd | ロボット非常停止回路 |
| US5447403A (en) * | 1990-01-05 | 1995-09-05 | Engler, Jr.; Charles D. | Dexterous programmable robot and control system |
| US5072361A (en) * | 1990-02-01 | 1991-12-10 | Sarcos Group | Force-reflective teleoperation control system |
| JP2824134B2 (ja) * | 1990-08-13 | 1998-11-11 | 株式会社日立製作所 | 異構造マスタスレーブマニピュレータの制御装置 |
| JP3217383B2 (ja) * | 1991-02-01 | 2001-10-09 | 衛 光石 | 臨場感再現システムおよび加工システム |
| JPH04269185A (ja) * | 1991-02-20 | 1992-09-25 | Fujitsu Ltd | ロボットの遠隔制御装置 |
| JPH04275887A (ja) * | 1991-02-28 | 1992-10-01 | Toshiba Corp | マスタスレーブマニピュレータ |
| JPH04299714A (ja) * | 1991-03-28 | 1992-10-22 | Yanmar Diesel Engine Co Ltd | バイラテラル操縦装置 |
| JPH04300173A (ja) | 1991-03-28 | 1992-10-23 | Nachi Fujikoshi Corp | マスタスレーブマニピュレータ |
| US5182641A (en) * | 1991-06-17 | 1993-01-26 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Composite video and graphics display for camera viewing systems in robotics and teleoperation |
| EP0776738B1 (en) * | 1992-01-21 | 2002-04-03 | Sri International | An endoscopic surgical instrument |
| JP3200136B2 (ja) | 1992-03-03 | 2001-08-20 | 株式会社アマダ | 溶接ロボットの溶接位置補正方法及び溶接位置補正装置 |
| JP3137210B2 (ja) * | 1992-05-08 | 2001-02-19 | 日本電信電話株式会社 | 双方向型マスタスレーブ運動制御方法 |
| US5331413A (en) * | 1992-09-28 | 1994-07-19 | The United States Of America As Represented By The United States National Aeronautics And Space Administration | Adjustable control station with movable monitors and cameras for viewing systems in robotics and teleoperations |
| JPH06110543A (ja) * | 1992-09-30 | 1994-04-22 | Nippon Telegr & Teleph Corp <Ntt> | 直接教示装置 |
| JP2819367B2 (ja) * | 1992-12-18 | 1998-10-30 | 日東工器株式会社 | マニピュレータの安全操作システム |
| US5451924A (en) * | 1993-01-14 | 1995-09-19 | Massachusetts Institute Of Technology | Apparatus for providing sensory substitution of force feedback |
| JPH06210581A (ja) * | 1993-01-20 | 1994-08-02 | Olympus Optical Co Ltd | 操作装置 |
| JPH06250730A (ja) * | 1993-03-01 | 1994-09-09 | Nissan Motor Co Ltd | 産業用ロボットの教示装置 |
| JPH06262545A (ja) | 1993-03-08 | 1994-09-20 | Meidensha Corp | 産業用マニプレータの制御装置 |
| JP3686686B2 (ja) * | 1993-05-11 | 2005-08-24 | 松下電器産業株式会社 | 力覚呈示デバイス、データ入力装置、及びデータ入力デバイス装置 |
| JPH06328380A (ja) * | 1993-05-21 | 1994-11-29 | Hitachi Ltd | ロボットの教示装置および産業用ロボット、並びに操作装置 |
| JPH06344279A (ja) * | 1993-06-07 | 1994-12-20 | Hitachi Ltd | 遠隔作業装置及び方法 |
| JPH0775993A (ja) * | 1993-09-10 | 1995-03-20 | Olympus Optical Co Ltd | 操作状況報知装置 |
| US5625576A (en) * | 1993-10-01 | 1997-04-29 | Massachusetts Institute Of Technology | Force reflecting haptic interface |
| JP2567197B2 (ja) * | 1993-10-29 | 1996-12-25 | 株式会社明電舎 | マスタスレーブ形マニプレータ |
| JP3339953B2 (ja) | 1993-12-29 | 2002-10-28 | オリンパス光学工業株式会社 | 医療用マスタースレーブ式マニピュレータ |
| JPH07251394A (ja) * | 1994-03-17 | 1995-10-03 | Fujitsu Ltd | ロボットの状況監視装置 |
| JPH07266272A (ja) | 1994-03-29 | 1995-10-17 | Nippon Telegr & Teleph Corp <Ntt> | マニピュレータ用追従方法及び装置 |
| JP3255207B2 (ja) * | 1994-04-01 | 2002-02-12 | 澁谷工業株式会社 | 容器整列装置 |
| BR9502777A (pt) | 1994-06-13 | 1996-04-23 | Praxair Technology Inc | Equipamento e processo para a atomização de combustível líquido |
| US6120433A (en) * | 1994-09-01 | 2000-09-19 | Olympus Optical Co., Ltd. | Surgical manipulator system |
| JP3129115B2 (ja) | 1994-09-14 | 2001-01-29 | ブラザー工業株式会社 | 機械制御装置 |
| JP2762943B2 (ja) * | 1995-01-24 | 1998-06-11 | 株式会社明電舎 | 多軸マスタ・スレーブ形サーボマニプレータのマスタアーム操作装置 |
| US5652849A (en) * | 1995-03-16 | 1997-07-29 | Regents Of The University Of Michigan | Apparatus and method for remote control using a visual information stream |
| GB2298931B (en) * | 1995-03-17 | 1999-03-10 | Marconi Gec Ltd | Virtual force feedback for synthetic environment |
| JPH08257948A (ja) * | 1995-03-20 | 1996-10-08 | Yaskawa Electric Corp | ロボットの遠隔操作装置 |
| JPH08272520A (ja) * | 1995-03-29 | 1996-10-18 | Asako Hanno | 手袋命令発信装置 |
| JPH08267381A (ja) | 1995-03-30 | 1996-10-15 | Nippon Steel Corp | ロボット手動送り制御装置 |
| JPH08286759A (ja) * | 1995-04-14 | 1996-11-01 | Fanuc Ltd | 静摩擦を補償するロボット駆動制御方法 |
| US7113166B1 (en) * | 1995-06-09 | 2006-09-26 | Immersion Corporation | Force feedback devices using fluid braking |
| US5706195A (en) | 1995-09-05 | 1998-01-06 | General Electric Company | Augmented reality maintenance system for multiple rovs |
| US5710870A (en) * | 1995-09-07 | 1998-01-20 | California Institute Of Technology | Decoupled six degree-of-freedom robot manipulator |
| CN1060715C (zh) | 1995-09-14 | 2001-01-17 | 株式会社安川电机 | 机器人的示教装置 |
| JPH0976063A (ja) * | 1995-09-16 | 1997-03-25 | Sanshiyuuzen Kogyo Kk | 溶接装置 |
| JP4014662B2 (ja) | 1995-09-18 | 2007-11-28 | ファナック株式会社 | ロボット教示操作盤 |
| JPH0991015A (ja) * | 1995-09-26 | 1997-04-04 | Central Motor Co Ltd | 同期作業ロボット |
| US5745387A (en) | 1995-09-28 | 1998-04-28 | General Electric Company | Augmented reality maintenance system employing manipulator arm with archive and comparison device |
| WO1997020305A1 (en) * | 1995-11-30 | 1997-06-05 | Virtual Technologies, Inc. | Tactile feedback man-machine interface device |
| GB9525047D0 (en) * | 1995-12-07 | 1996-02-07 | Philips Electronics Nv | Virtual body control device |
| US6142581A (en) * | 1995-12-26 | 2000-11-07 | Denso Corporation | Hydraulic circuit having a rotary type pump and brake apparatus for a vehicle provided with the same |
| JPH09212219A (ja) * | 1996-01-31 | 1997-08-15 | Fuji Facom Corp | 三次元仮想モデル作成装置及び制御対象物の監視制御装置 |
| US5624398A (en) * | 1996-02-08 | 1997-04-29 | Symbiosis Corporation | Endoscopic robotic surgical tools and methods |
| JP2776477B2 (ja) * | 1996-02-13 | 1998-07-16 | 川崎重工業株式会社 | ロボット3次元位置姿勢教示システム |
| JPH09272096A (ja) * | 1996-04-04 | 1997-10-21 | Nissan Motor Co Ltd | 生産設備の安全装置 |
| JPH09273868A (ja) * | 1996-04-05 | 1997-10-21 | Nippon Steel Corp | 溶融金属用樋の耐火物補修装置及び耐火物補修方法 |
| JP2836577B2 (ja) * | 1996-05-15 | 1998-12-14 | 日本電気株式会社 | マニピュレータ操作装置 |
| JPH09305209A (ja) | 1996-05-21 | 1997-11-28 | Meidensha Corp | ロボットの制御装置および制御方法 |
| JPH1044074A (ja) * | 1996-07-30 | 1998-02-17 | Nippon Telegr & Teleph Corp <Ntt> | マルチ作業方法及び装置 |
| US5689619A (en) * | 1996-08-09 | 1997-11-18 | The United States Of America As Represented By The Secretary Of The Army | Eyetracker control of heads-up displays |
| US6141863A (en) * | 1996-10-24 | 2000-11-07 | Fanuc Ltd. | Force-controlled robot system with visual sensor for performing fitting operation |
| JP3300625B2 (ja) * | 1997-01-27 | 2002-07-08 | ファナック株式会社 | ロボットの制御方式 |
| JPH10249786A (ja) * | 1997-03-14 | 1998-09-22 | Yaskawa Electric Corp | マニピュレータの制御装置および操作支援装置 |
| JPH10270535A (ja) * | 1997-03-25 | 1998-10-09 | Nikon Corp | 移動ステージ装置、及び該ステージ装置を用いた回路デバイス製造方法 |
| JPH1124873A (ja) * | 1997-06-30 | 1999-01-29 | Toshiba Corp | 三次元形状情報入力装置 |
| US6016385A (en) * | 1997-08-11 | 2000-01-18 | Fanu America Corp | Real time remotely controlled robot |
| US6190091B1 (en) * | 1997-08-26 | 2001-02-20 | Novellent Technologies Llc | Tension control device for tensile elements |
| DE69830295T2 (de) * | 1997-11-27 | 2005-10-13 | Matsushita Electric Industrial Co., Ltd., Kadoma | Steuerungsverfahren |
| JPH11198067A (ja) * | 1998-01-08 | 1999-07-27 | Honda Motor Co Ltd | 双腕型マニピュレータ操縦装置 |
| US6070109A (en) * | 1998-03-10 | 2000-05-30 | Fanuc Robotics North America, Inc. | Robot calibration system |
| US6244644B1 (en) * | 1999-01-25 | 2001-06-12 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Compact dexterous robotic hand |
| US6278906B1 (en) * | 1999-01-29 | 2001-08-21 | Georgia Tech Research Corporation | Uncalibrated dynamic mechanical system controller |
| US6424885B1 (en) * | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| JP3323912B2 (ja) * | 1999-06-21 | 2002-09-09 | 独立行政法人 航空宇宙技術研究所 | 予測力による拘束軌道作業の制御方法及びそのシステム |
| JP2001084375A (ja) * | 1999-09-13 | 2001-03-30 | Atr Media Integration & Communications Res Lab | 動作検証システムおよび非接触マニピュレーションシステム |
| JP3538362B2 (ja) * | 1999-09-16 | 2004-06-14 | ファナック株式会社 | 複数ロボットの同期又は協調動作制御装置 |
| DE60035651T2 (de) * | 1999-09-16 | 2008-05-21 | Fanuc Ltd. | Steuerungssystem zum synchronen kooperativen Betreiben einer Mehrzahl von Robotern |
| US9510911B2 (en) * | 1999-09-17 | 2016-12-06 | Intuitive Surgical Operations, Inc. | System and methods for managing multiple null-space objectives and SLI behaviors |
| US8004229B2 (en) * | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| JP2001087281A (ja) * | 1999-09-20 | 2001-04-03 | Olympus Optical Co Ltd | 多機能マニピュレータ |
| JP4122652B2 (ja) | 1999-09-27 | 2008-07-23 | 松下電器産業株式会社 | ロボットの制御装置 |
| JP4403474B2 (ja) * | 1999-12-09 | 2010-01-27 | ソニー株式会社 | 触覚提示機構及びこれを用いた力触覚提示装置 |
| US6313595B2 (en) * | 1999-12-10 | 2001-11-06 | Fanuc Robotics North America, Inc. | Method of controlling an intelligent assist device in a plurality of distinct workspaces |
| KR100357550B1 (ko) * | 1999-12-23 | 2002-10-19 | 현대자동차주식회사 | 컨베이어 속도 동기식 로봇 시스템 및 이를 이용한 차량시트 투입 방법 |
| JP2001222309A (ja) * | 2000-02-10 | 2001-08-17 | Yaskawa Electric Corp | ロボット制御装置 |
| JP3948189B2 (ja) | 2000-03-28 | 2007-07-25 | 松下電器産業株式会社 | ロボットの教示装置 |
| EP1142675B1 (en) * | 2000-04-04 | 2005-08-24 | Honda Giken Kogyo Kabushiki Kaisha | Multifinger hand device |
| JP4281208B2 (ja) | 2000-04-04 | 2009-06-17 | ソニー株式会社 | ロボット遠隔制御システム |
| JP3726009B2 (ja) * | 2000-05-19 | 2005-12-14 | 本田技研工業株式会社 | 脚式移動ロボットの床形状推定装置 |
| US6645196B1 (en) * | 2000-06-16 | 2003-11-11 | Intuitive Surgical, Inc. | Guided tool change |
| JP3978640B2 (ja) * | 2000-08-31 | 2007-09-19 | 富士フイルム株式会社 | 電子カメラ |
| JP3504222B2 (ja) * | 2000-09-04 | 2004-03-08 | ファナック株式会社 | ロボット制御装置 |
| EP1355765B1 (en) * | 2001-01-29 | 2008-05-07 | The Acrobot Company Limited | Active-constraint robots |
| JP3594016B2 (ja) | 2001-01-30 | 2004-11-24 | 日本電気株式会社 | ロボットのプログラム実行方法、ロボットシステムおよびプログラム処理装置 |
| US6804396B2 (en) * | 2001-03-28 | 2004-10-12 | Honda Giken Kogyo Kabushiki Kaisha | Gesture recognition system |
| SE0101199D0 (sv) * | 2001-04-02 | 2001-04-02 | Abb Ab | An industrial robot |
| SE0101200D0 (sv) * | 2001-04-02 | 2001-04-02 | Abb Ab | An industrial robot |
| JP4524729B2 (ja) * | 2001-07-25 | 2010-08-18 | 株式会社安川電機 | 遠隔操縦ロボットの制御装置 |
| JP2003062776A (ja) * | 2001-08-22 | 2003-03-05 | Taito Corp | コミュニケーション小形ロボットシステム |
| JP2003080482A (ja) * | 2001-09-07 | 2003-03-18 | Yaskawa Electric Corp | ロボット教示装置 |
| JP2003170375A (ja) * | 2001-11-30 | 2003-06-17 | Tmsuk Co Ltd | ロボット遠隔制御システム |
| KR100454714B1 (ko) * | 2002-02-16 | 2004-11-05 | 한국과학기술연구원 | 작업용 로봇, 작업용 로봇을 위한 액츄에이터 및 작업용 로봇의 제어방법 |
| US7209859B2 (en) * | 2002-03-02 | 2007-04-24 | Linxberg Technology, Llc | Method and apparatus for sequentially collecting and analyzing real time data with interactive monitoring |
| AU2003218010A1 (en) | 2002-03-06 | 2003-09-22 | Z-Kat, Inc. | System and method for using a haptic device in combination with a computer-assisted surgery system |
| JP3924495B2 (ja) * | 2002-04-24 | 2007-06-06 | 株式会社日立製作所 | 遠隔操作制御装置 |
| US6898484B2 (en) * | 2002-05-01 | 2005-05-24 | Dorothy Lemelson | Robotic manufacturing and assembly with relative radio positioning using radio based location determination |
| JP2003334781A (ja) | 2002-05-13 | 2003-11-25 | Canon Inc | ロボット動作制御方法 |
| JP2004001122A (ja) * | 2002-05-31 | 2004-01-08 | Suzuki Motor Corp | ピッキング装置 |
| AU2003243948A1 (en) * | 2002-06-24 | 2004-01-06 | Matsushita Electric Industrial Co., Ltd. | Articulated driving mechanism, method of manufacturing the mechanism, and holding hand and robot using the mechanism |
| DK2278816T3 (da) * | 2002-07-11 | 2013-05-21 | Panasonic Corp | Post-afkoder-buffer-styring til en H.264-SVC MPEG-bitstrøm |
| JP3910130B2 (ja) * | 2002-09-30 | 2007-04-25 | ファナック株式会社 | ロボットシステム |
| JP3990262B2 (ja) * | 2002-12-02 | 2007-10-10 | ファナック株式会社 | 産業用ロボット |
| JP4127043B2 (ja) * | 2002-12-11 | 2008-07-30 | ソニー株式会社 | 脚式移動ロボット並びに脚式移動ロボットの関節軸として適用されるアクチュエータ装置 |
| AU2003289022A1 (en) * | 2002-12-12 | 2004-06-30 | Matsushita Electric Industrial Co., Ltd. | Robot control device |
| DE10305384A1 (de) * | 2003-02-11 | 2004-08-26 | Kuka Roboter Gmbh | Verfahren und Vorrichtung zur Visualisierung rechnergestützter Informationen |
| JP3805317B2 (ja) * | 2003-03-17 | 2006-08-02 | ファナック株式会社 | 教示位置修正方法及び教示位置修正装置 |
| JP2004291223A (ja) * | 2003-03-26 | 2004-10-21 | Toyo High Mech Kk | 可搬式コミュニケーションロボット |
| DE10314025B4 (de) | 2003-03-28 | 2010-04-01 | Kuka Roboter Gmbh | Verfahren und Vorrichtung zum Steuern einer Mehrzahl von Handhabungsgeräten |
| US7295893B2 (en) * | 2003-03-31 | 2007-11-13 | Kabushiki Kaisha Toshiba | Manipulator and its control apparatus and method |
| JP3752494B2 (ja) * | 2003-03-31 | 2006-03-08 | 株式会社東芝 | マスタスレーブマニピュレータ、その制御装置及び制御方法 |
| JP3975959B2 (ja) * | 2003-04-23 | 2007-09-12 | トヨタ自動車株式会社 | ロボット動作規制方法とその装置およびそれを備えたロボット |
| CA2522097C (en) * | 2003-04-28 | 2012-09-25 | Stephen James Crampton | Cmm arm with exoskeleton |
| JP2004330370A (ja) * | 2003-05-08 | 2004-11-25 | Nitta Ind Corp | ロボットハンド用触覚センサ |
| JP4134812B2 (ja) * | 2003-05-20 | 2008-08-20 | 株式会社安川電機 | ロボット制御装置 |
| US9002518B2 (en) * | 2003-06-30 | 2015-04-07 | Intuitive Surgical Operations, Inc. | Maximum torque driving of robotic surgical tools in robotic surgical systems |
| US7672741B2 (en) * | 2003-07-24 | 2010-03-02 | Keio University | Position/force control device |
| EP1652634B1 (en) * | 2003-07-29 | 2011-12-28 | Panasonic Corporation | Robot arm control method and control device |
| JP2005118953A (ja) * | 2003-10-17 | 2005-05-12 | Nippon Telegr & Teleph Corp <Ntt> | 管内検査装置 |
| JP2005138245A (ja) | 2003-11-07 | 2005-06-02 | Yaskawa Electric Corp | 人間介入型ロボットの制御装置 |
| JP3733364B2 (ja) * | 2003-11-18 | 2006-01-11 | ファナック株式会社 | 教示位置修正方法 |
| US7181314B2 (en) * | 2003-11-24 | 2007-02-20 | Abb Research Ltd. | Industrial robot with controlled flexibility and simulated force for automated assembly |
| WO2005065264A2 (en) * | 2003-12-30 | 2005-07-21 | Strider Labs | Robotic hand with extendable palm |
| FR2866826B1 (fr) * | 2004-02-26 | 2006-08-04 | Commissariat Energie Atomique | Bras de telemanipulation en deux parties |
| US8160205B2 (en) * | 2004-04-06 | 2012-04-17 | Accuray Incorporated | Robotic arm for patient positioning assembly |
| CN1696872A (zh) * | 2004-05-13 | 2005-11-16 | 中国科学院自动化研究所 | 一种触觉反馈数据手套 |
| US7949616B2 (en) | 2004-06-01 | 2011-05-24 | George Samuel Levy | Telepresence by human-assisted remote controlled devices and robots |
| JP4461994B2 (ja) * | 2004-10-05 | 2010-05-12 | 株式会社安川電機 | マスタスレーブマニピュレータの制御装置 |
| JP2006113858A (ja) * | 2004-10-15 | 2006-04-27 | Mitsubishi Heavy Ind Ltd | 移動体の遠隔操作支援方法及びシステム |
| JP4556617B2 (ja) * | 2004-10-29 | 2010-10-06 | 株式会社デンソーウェーブ | 自動作業システム |
| SE0402696D0 (sv) * | 2004-11-04 | 2004-11-04 | Abb Ab | Industrial robot system |
| DE102004057814B4 (de) * | 2004-11-30 | 2014-02-06 | Daimler Ag | Verfahren zum Steuern der Stellung von Werkstück und Werkzeug mit einem Roboter in einer Bearbeitungsmaschine |
| JP2006191460A (ja) * | 2005-01-07 | 2006-07-20 | Ricoh Co Ltd | 環境情報取得再生システム、テレビ会議システム、乗り物、衣類及び遠隔操作システム |
| JP4261500B2 (ja) * | 2005-03-04 | 2009-04-30 | ファナック株式会社 | 制御システム |
| JP2006293445A (ja) * | 2005-04-06 | 2006-10-26 | Honda Motor Co Ltd | 生産管理システム |
| JP2006289531A (ja) * | 2005-04-07 | 2006-10-26 | Seiko Epson Corp | ロボット位置教示のための移動制御装置、ロボットの位置教示装置、ロボット位置教示のための移動制御方法、ロボットの位置教示方法及びロボット位置教示のための移動制御プログラム |
| US7860609B2 (en) * | 2005-05-06 | 2010-12-28 | Fanuc Robotics America, Inc. | Robot multi-arm control system |
| US9789608B2 (en) * | 2006-06-29 | 2017-10-17 | Intuitive Surgical Operations, Inc. | Synthetic representation of a surgical robot |
| JP4737668B2 (ja) * | 2005-05-30 | 2011-08-03 | コニカミノルタセンシング株式会社 | 3次元計測方法および3次元計測システム |
| EP1728601A1 (en) | 2005-06-03 | 2006-12-06 | Abb Ab | An industrial robot system with a teaching portable unit and a detecting unit for detecting when the TPU leaves the robot cell |
| US8398541B2 (en) * | 2006-06-06 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Interactive user interfaces for robotic minimally invasive surgical systems |
| EP1894113B1 (de) * | 2005-06-23 | 2020-06-03 | Hilscher Gesellschaft für Systemautomation mbH | Verfahren zur datenkommunikation von busteilnehmern eines offenen automatisierungssystems |
| US20070005002A1 (en) * | 2005-06-30 | 2007-01-04 | Intuitive Surgical Inc. | Robotic surgical instruments for irrigation, aspiration, and blowing |
| JP4864363B2 (ja) * | 2005-07-07 | 2012-02-01 | 東芝機械株式会社 | ハンドリング装置、作業装置及びプログラム |
| WO2007010795A1 (ja) * | 2005-07-19 | 2007-01-25 | Omron Corporation | 作業者安全管理システム |
| JP4247213B2 (ja) * | 2005-07-20 | 2009-04-02 | ファナック株式会社 | 複数のロボット制御装置を備えるロボットシステム及びロボット制御装置 |
| JP2007030087A (ja) | 2005-07-26 | 2007-02-08 | Fanuc Ltd | 物流トラッキング装置 |
| JP4548784B2 (ja) * | 2005-08-29 | 2010-09-22 | 株式会社不二越 | ロボット制御装置、ロボットシステム及びプログラム |
| EP1927038A2 (en) * | 2005-09-23 | 2008-06-04 | Braintech Canada, Inc. | System and method of visual tracking |
| US20070075048A1 (en) * | 2005-09-30 | 2007-04-05 | Nachi-Fujikoshi Corp. | Welding teaching point correction system and calibration method |
| KR100765648B1 (ko) * | 2005-10-06 | 2007-10-10 | 현대자동차주식회사 | 동기주행기능을 갖춘 도어 장착 시스템 |
| TW200715142A (en) | 2005-10-13 | 2007-04-16 | Univ Nat Tsing Hua | Method of command syntax and operation of main syntax production digital operation defined by use of the operation of time measure investigation |
| EP1937176B1 (en) * | 2005-10-20 | 2019-04-17 | Intuitive Surgical Operations, Inc. | Auxiliary image display and manipulation on a computer display in a medical robotic system |
| JP4137932B2 (ja) * | 2005-10-28 | 2008-08-20 | ファナック株式会社 | ロボット制御装置 |
| US7819859B2 (en) * | 2005-12-20 | 2010-10-26 | Intuitive Surgical Operations, Inc. | Control system for reducing internally generated frictional and inertial resistance to manual positioning of a surgical manipulator |
| US7453227B2 (en) * | 2005-12-20 | 2008-11-18 | Intuitive Surgical, Inc. | Medical robotic system with sliding mode control |
| US8219178B2 (en) * | 2007-02-16 | 2012-07-10 | Catholic Healthcare West | Method and system for performing invasive medical procedures using a surgical robot |
| JP4153528B2 (ja) * | 2006-03-10 | 2008-09-24 | ファナック株式会社 | ロボットシミュレーションのための装置、プログラム、記録媒体及び方法 |
| CN101326034A (zh) * | 2006-03-24 | 2008-12-17 | 松下电器产业株式会社 | 机械手的控制方法以及控制系统 |
| JP2007280054A (ja) * | 2006-04-06 | 2007-10-25 | Sony Corp | 学習装置および学習方法、並びにプログラム |
| JP2007285784A (ja) | 2006-04-14 | 2007-11-01 | Kobe Univ | 圧力分布情報検出装置及び圧力分布情報検出方法 |
| US8108092B2 (en) * | 2006-07-14 | 2012-01-31 | Irobot Corporation | Autonomous behaviors for a remote vehicle |
| JP4877937B2 (ja) * | 2006-05-25 | 2012-02-15 | 国立大学法人岐阜大学 | 触覚インターフェイス |
| JP4221014B2 (ja) * | 2006-06-20 | 2009-02-12 | ファナック株式会社 | ロボット制御装置 |
| KR100772915B1 (ko) * | 2006-07-05 | 2007-11-05 | 삼성전자주식회사 | 이동 로봇에 장착된 자이로의 바이어스를 보정하는 장치 및방법 |
| US8965578B2 (en) * | 2006-07-05 | 2015-02-24 | Battelle Energy Alliance, Llc | Real time explosive hazard information sensing, processing, and communication for autonomous operation |
| JP4821516B2 (ja) * | 2006-08-31 | 2011-11-24 | 旭光電機株式会社 | 多関節構造体 |
| WO2008032661A1 (fr) * | 2006-09-12 | 2008-03-20 | National Institute Of Advanced Industrial Science And Technology | Procédé de mesure de valeur de distribution et système de mesure utilisant un capteur de valeur de distribution pour celui-ci |
| US8588904B2 (en) * | 2006-10-13 | 2013-11-19 | Lifescience Solutions Llc | Pacemaker |
| EP1915963A1 (en) * | 2006-10-25 | 2008-04-30 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Force estimation for a minimally invasive robotic surgery system |
| JP4890199B2 (ja) * | 2006-11-09 | 2012-03-07 | 本田技研工業株式会社 | ロボットハンドおよびロボット |
| CN101211495B (zh) * | 2006-12-31 | 2010-12-01 | 财团法人工业技术研究院 | 分布式保全系统 |
| FR2912274B1 (fr) * | 2007-02-02 | 2009-10-16 | Binocle Sarl | Procede de commande a partir d'un signal oculaire volontaire, notamment pour une prise de vues |
| JP2008188722A (ja) * | 2007-02-06 | 2008-08-21 | Fanuc Ltd | ロボット制御装置 |
| JP4973926B2 (ja) * | 2007-02-13 | 2012-07-11 | 株式会社安川電機 | 自動機械システムおよびその制御方法 |
| JP2008194789A (ja) * | 2007-02-14 | 2008-08-28 | Shin Meiwa Ind Co Ltd | 力覚提示装置、および、それを備えたパワーアシストアームおよびパワーアシスト装置 |
| US7922693B2 (en) * | 2007-03-19 | 2011-04-12 | Hansen Medical, Inc. | Apparatus systems and methods for flushing gas from a catheter of a robotic catheter system |
| DE602007007576D1 (de) * | 2007-03-30 | 2010-08-19 | Abb Research Ltd | Verfahren zum Betrieb ferngesteuerter Kameras in einem industriellen Verfahren |
| DE102007016662C5 (de) * | 2007-04-04 | 2022-09-15 | Kuka Deutschland Gmbh | Omnidirektionales Fahrzeug und mobiler Industrieroboter |
| EP2142095A1 (en) * | 2007-05-02 | 2010-01-13 | Earlysense Ltd. | Monitoring, predicting and treating clinical episodes |
| EP2158454B1 (en) * | 2007-05-18 | 2018-08-22 | University of Southern California | Biomimetic tactile sensor for control of grip |
| JP2008296310A (ja) | 2007-05-30 | 2008-12-11 | Fanuc Ltd | 加工ロボットの制御装置 |
| JP2008296330A (ja) * | 2007-05-31 | 2008-12-11 | Fanuc Ltd | ロボットシミュレーション装置 |
| US8620473B2 (en) * | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US9469034B2 (en) * | 2007-06-13 | 2016-10-18 | Intuitive Surgical Operations, Inc. | Method and system for switching modes of a robotic system |
| JP4368392B2 (ja) * | 2007-06-13 | 2009-11-18 | 東海ゴム工業株式会社 | 変形センサシステム |
| US9089256B2 (en) * | 2008-06-27 | 2015-07-28 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view including range of motion limitations for articulatable instruments extending out of a distal end of an entry guide |
| JP4271249B2 (ja) * | 2007-06-14 | 2009-06-03 | ファナック株式会社 | 嵌合装置 |
| TW200919210A (en) | 2007-07-18 | 2009-05-01 | Steven Kays | Adaptive electronic design |
| JP5003336B2 (ja) * | 2007-07-31 | 2012-08-15 | ソニー株式会社 | 検出装置、ロボット装置、および入力装置 |
| JP2009034743A (ja) * | 2007-07-31 | 2009-02-19 | Sony Corp | 検出装置および方法、並びにプログラム |
| JP2009050958A (ja) * | 2007-08-27 | 2009-03-12 | Fanuc Ltd | 停止監視機能を備えたロボット制御装置 |
| WO2009036169A1 (en) * | 2007-09-13 | 2009-03-19 | Henderson Toby D | Patient positioner system |
| JP5109573B2 (ja) * | 2007-10-19 | 2012-12-26 | ソニー株式会社 | 制御システム及び制御方法、並びにロボット装置 |
| JP2009125881A (ja) * | 2007-11-26 | 2009-06-11 | Toyota Motor Corp | ロボットハンド |
| JP5190761B2 (ja) | 2008-01-10 | 2013-04-24 | 株式会社Ihi | 移動ロボットの監視装置および監視方法 |
| US8740840B2 (en) * | 2008-01-16 | 2014-06-03 | Catheter Robotics Inc. | Remotely controlled catheter insertion system |
| JP2009196040A (ja) * | 2008-02-21 | 2009-09-03 | Panasonic Corp | ロボットシステム |
| US8321075B2 (en) * | 2008-02-25 | 2012-11-27 | Sri International | Mitigating effects of biodynamic feedthrough on an electronic control device |
| JP4443615B2 (ja) * | 2008-02-27 | 2010-03-31 | トヨタ自動車株式会社 | パワーアシスト装置及びその制御方法 |
| CN101909829B (zh) * | 2008-02-28 | 2012-08-29 | 松下电器产业株式会社 | 机器人手臂的控制装置及控制方法、机器人、机器人手臂的控制程序、及机器人手臂控制用集成电子电路 |
| EP2271465A1 (en) * | 2008-03-31 | 2011-01-12 | Abb Research | Robot parts assembly on a workpiece moving on an assembly line |
| JP2009262279A (ja) * | 2008-04-25 | 2009-11-12 | Nec Corp | ロボット、ロボットプログラム共有システム、ロボットプログラム共有方法およびプログラム |
| JP2009282720A (ja) | 2008-05-21 | 2009-12-03 | Nagaoka Univ Of Technology | 操作方法および操作装置 |
| JP2009285753A (ja) | 2008-05-28 | 2009-12-10 | Shibuya Kogyo Co Ltd | ロボット制御システム |
| KR101000780B1 (ko) * | 2008-06-03 | 2010-12-15 | 재단법인서울대학교산학협력재단 | 암호 신호 복호화 장치, 이를 포함하는 rfid 시스템, 및 이의 동작 방법 |
| US8805585B2 (en) * | 2008-06-05 | 2014-08-12 | Toshiba Kikai Kabushiki Kaisha | Handling apparatus, control device, control method, and program |
| EP2144127B1 (de) * | 2008-07-08 | 2014-04-30 | Siemens Aktiengesellschaft | Verfahren und Steuergerät zum Aufsynchronisieren eines Aufnehmers eines Handlingsgerätes |
| US20100017033A1 (en) * | 2008-07-18 | 2010-01-21 | Remus Boca | Robotic systems with user operable robot control terminals |
| CN101637908B (zh) * | 2008-07-29 | 2010-11-03 | 上海发那科机器人有限公司 | 一种用于机器人搬运作业的视觉定位方法 |
| ES2792457T3 (es) * | 2008-10-29 | 2020-11-11 | Sms Group Gmbh | Sistema de interacción de robot |
| US8428781B2 (en) * | 2008-11-17 | 2013-04-23 | Energid Technologies, Inc. | Systems and methods of coordination control for robot manipulation |
| JP5175691B2 (ja) * | 2008-11-20 | 2013-04-03 | トヨタ自動車株式会社 | ロボットアームの教示システム及び方法 |
| JP5281377B2 (ja) * | 2008-12-04 | 2013-09-04 | トヨタ自動車株式会社 | ロボット装置 |
| JP4586092B2 (ja) * | 2008-12-04 | 2010-11-24 | ファナック株式会社 | 複数のロボット機構部を備えたロボットシステム |
| US8335590B2 (en) * | 2008-12-23 | 2012-12-18 | Intuitive Surgical Operations, Inc. | System and method for adjusting an image capturing device attribute using an unused degree-of-freedom of a master control device |
| JP4568795B2 (ja) * | 2009-01-09 | 2010-10-27 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、並びに、集積電子回路 |
| KR101590331B1 (ko) | 2009-01-20 | 2016-02-01 | 삼성전자 주식회사 | 이동 가능한 디스플레이 장치와 이를 구비한 로봇 및 그 디스플레이 방법 |
| JP4648486B2 (ja) * | 2009-01-26 | 2011-03-09 | ファナック株式会社 | 人間とロボットとの協調動作領域を有する生産システム |
| CN102047191B (zh) * | 2009-02-09 | 2014-07-30 | 松下电器产业株式会社 | 机器人系统、机器人控制装置及机器人系统的软件更新方法 |
| US9393691B2 (en) * | 2009-02-12 | 2016-07-19 | Mitsubishi Electric Corporation | Industrial robot system including action planning circuitry for temporary halts |
| JP2010188458A (ja) * | 2009-02-17 | 2010-09-02 | Yaskawa Electric Corp | ロボット制御システム |
| CN102159355A (zh) * | 2009-02-25 | 2011-08-17 | 松下电器产业株式会社 | 焊接方法和焊接系统 |
| JP5571902B2 (ja) * | 2009-03-17 | 2014-08-13 | 川崎重工業株式会社 | ロボット、及びオートゼロイング方法 |
| US20110306986A1 (en) | 2009-03-24 | 2011-12-15 | Min Kyu Lee | Surgical robot system using augmented reality, and method for controlling same |
| JP5375297B2 (ja) * | 2009-04-16 | 2013-12-25 | 株式会社安川電機 | ロボットシステム |
| US8574178B2 (en) * | 2009-05-26 | 2013-11-05 | The Hong Kong Polytechnic University | Wearable power assistive device for helping a user to move their hand |
| JP5308249B2 (ja) * | 2009-06-22 | 2013-10-09 | 三菱重工業株式会社 | サーボ制御装置 |
| JP4653844B2 (ja) * | 2009-07-08 | 2011-03-16 | ファナック株式会社 | ロボットシステムのための画像処理装置及びこれを備えるロボットシステム |
| US8483880B2 (en) * | 2009-07-22 | 2013-07-09 | The Shadow Robot Company Limited | Robotic hand |
| US9492927B2 (en) * | 2009-08-15 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Application of force feedback on an input device to urge its operator to command an articulated instrument to a preferred pose |
| US8918211B2 (en) * | 2010-02-12 | 2014-12-23 | Intuitive Surgical Operations, Inc. | Medical robotic system providing sensory feedback indicating a difference between a commanded state and a preferred pose of an articulated instrument |
| US8473101B2 (en) * | 2009-08-21 | 2013-06-25 | Harris Corporation | Coordinated action robotic system and related methods |
| JP2011048621A (ja) * | 2009-08-27 | 2011-03-10 | Honda Motor Co Ltd | ロボットのオフライン教示方法 |
| US8483861B2 (en) * | 2009-08-31 | 2013-07-09 | Applied Materials, Inc. | Scheduling modeling system for adaptive, automated data collection and performance analysis of manufacturing system for optimal scheduling |
| CN102300679B (zh) | 2009-09-28 | 2014-12-10 | 松下电器产业株式会社 | 机器人手臂的控制装置及控制方法、机器人及机器人手臂控制用集成电路 |
| JP2011073128A (ja) * | 2009-09-30 | 2011-04-14 | Almedio Inc | ロボットシステム |
| JP5467508B2 (ja) | 2009-10-30 | 2014-04-09 | 株式会社Ihi | ハンドガイド装置とその制御方法 |
| JP5467510B2 (ja) * | 2009-10-30 | 2014-04-09 | 株式会社Ihi | 外部操作ハンドガイド装置とその制御方法 |
| US8521331B2 (en) * | 2009-11-13 | 2013-08-27 | Intuitive Surgical Operations, Inc. | Patient-side surgeon interface for a minimally invasive, teleoperated surgical instrument |
| US8996173B2 (en) * | 2010-09-21 | 2015-03-31 | Intuitive Surgical Operations, Inc. | Method and apparatus for hand gesture control in a minimally invasive surgical system |
| US8682489B2 (en) * | 2009-11-13 | 2014-03-25 | Intuitive Sugical Operations, Inc. | Method and system for hand control of a teleoperated minimally invasive slave surgical instrument |
| WO2012044334A2 (en) * | 2009-11-13 | 2012-04-05 | Intuitive Surgical Operations, Inc. | Method and apparatus for hand gesture control in a minimally invasive surgical system |
| KR20110055062A (ko) * | 2009-11-19 | 2011-05-25 | 삼성전자주식회사 | 로봇 시스템 및 그 제어 방법 |
| JP2011110620A (ja) | 2009-11-24 | 2011-06-09 | Toyota Industries Corp | ロボットの動作を制御する方法およびロボットシステム |
| JP4927927B2 (ja) * | 2009-11-26 | 2012-05-09 | ファナック株式会社 | スポット溶接システム |
| KR100968944B1 (ko) * | 2009-12-14 | 2010-07-14 | (주) 아이알로봇 | 로봇 동기화 장치 및 그 방법 |
| WO2011080882A1 (ja) | 2009-12-28 | 2011-07-07 | パナソニック株式会社 | 動作空間提示装置、動作空間提示方法およびプログラム |
| JP2011140077A (ja) * | 2010-01-06 | 2011-07-21 | Honda Motor Co Ltd | 加工システム及び加工方法 |
| CN101777250B (zh) * | 2010-01-25 | 2012-01-25 | 中国科学技术大学 | 家用电器的通用遥控装置及方法 |
| JP5530204B2 (ja) | 2010-01-29 | 2014-06-25 | Dmg森精機株式会社 | 加工状況監視装置 |
| EP2420359A4 (en) * | 2010-02-03 | 2013-04-17 | Panasonic Corp | CONTROL PROCEDURE FOR A ROBOT SYSTEM |
| US9107684B2 (en) * | 2010-03-05 | 2015-08-18 | Covidien Lp | System and method for transferring power to intrabody instruments |
| JP5577770B2 (ja) * | 2010-03-15 | 2014-08-27 | 日本電気株式会社 | 座標補正方法 |
| US20110238079A1 (en) * | 2010-03-18 | 2011-09-29 | SPI Surgical, Inc. | Surgical Cockpit Comprising Multisensory and Multimodal Interfaces for Robotic Surgery and Methods Related Thereto |
| JP5447048B2 (ja) * | 2010-03-18 | 2014-03-19 | 株式会社デンソーウェーブ | ロボットの制御装置及びロボットの位置修正制御方法 |
| US20130079905A1 (en) * | 2010-06-03 | 2013-03-28 | Hitachi, Ltd. | Human-Operated Working Machine System |
| US8740882B2 (en) * | 2010-07-30 | 2014-06-03 | Lg Electronics Inc. | Medical robotic system and method of controlling the same |
| US20120041599A1 (en) * | 2010-08-11 | 2012-02-16 | Townsend William T | Teleoperator system with master controller device and multiple remote slave devices |
| JP4938118B2 (ja) * | 2010-08-17 | 2012-05-23 | ファナック株式会社 | 人間協調ロボットシステム |
| WO2012029227A1 (ja) * | 2010-08-31 | 2012-03-08 | パナソニック株式会社 | マスタースレーブロボットの制御装置及び制御方法、マスタースレーブロボット、制御プログラム、並びに、集積電子回路 |
| WO2012030304A1 (en) * | 2010-09-01 | 2012-03-08 | Agency For Science, Technology And Research | A robotic device for use in image-guided robot assisted surgical training |
| JP5612971B2 (ja) * | 2010-09-07 | 2014-10-22 | オリンパス株式会社 | マスタスレーブマニピュレータ |
| JP5670147B2 (ja) * | 2010-10-15 | 2015-02-18 | 株式会社ダイヘン | アーク溶接ロボット制御装置 |
| WO2012065175A2 (en) * | 2010-11-11 | 2012-05-18 | The Johns Hopkins University | Human-machine collaborative robotic systems |
| KR101390383B1 (ko) * | 2010-11-16 | 2014-04-29 | 한국전자통신연구원 | 가상현실 기반 훈련 시뮬레이터를 위한 가변형 플랫폼 관리 장치 |
| KR20120053098A (ko) * | 2010-11-17 | 2012-05-25 | 포항대학 산학협력단 | 로봇 제어 시스템 |
| CN103237633B (zh) * | 2010-11-30 | 2015-07-22 | 奥林巴斯株式会社 | 主操作输入装置以及主-从机械手 |
| US9364171B2 (en) * | 2010-12-22 | 2016-06-14 | Veebot Systems, Inc. | Systems and methods for autonomous intravenous needle insertion |
| US9119655B2 (en) | 2012-08-03 | 2015-09-01 | Stryker Corporation | Surgical manipulator capable of controlling a surgical instrument in multiple modes |
| US8918215B2 (en) * | 2011-01-19 | 2014-12-23 | Harris Corporation | Telematic interface with control signal scaling based on force sensor feedback |
| JP5669590B2 (ja) * | 2011-01-20 | 2015-02-12 | オリンパス株式会社 | マスタスレーブマニピュレータ及び医療用マスタスレーブマニピュレータ |
| CN102169348B (zh) * | 2011-01-22 | 2012-07-04 | 浙江大学 | 用视线控制服务机器人的方法 |
| CN103038028B (zh) * | 2011-01-27 | 2015-05-27 | 松下电器产业株式会社 | 机器人手臂的控制装置及控制方法、机器人、以及集成电路 |
| CN104898652B (zh) * | 2011-01-28 | 2018-03-13 | 英塔茨科技公司 | 与一个可移动的远程机器人相互交流 |
| JP5316563B2 (ja) * | 2011-02-15 | 2013-10-16 | オムロン株式会社 | 画像処理装置および画像処理システム |
| US8918210B2 (en) * | 2011-03-18 | 2014-12-23 | Denso Wave Incorporated | Method of detecting an inter-axis offset of 6-axis robot |
| EP3954512A3 (en) * | 2011-03-21 | 2022-03-02 | SRI International Inc. | Mobile robotic manipulator system |
| JP5796982B2 (ja) * | 2011-03-31 | 2015-10-21 | オリンパス株式会社 | 手術用システムの制御装置及び制御方法 |
| JP2012232370A (ja) | 2011-04-28 | 2012-11-29 | Seiko Epson Corp | ロボットコントローラー、簡易設置型ロボット、及び簡易設置型ロボットの制御方法 |
| US20170028557A1 (en) * | 2015-07-28 | 2017-02-02 | Comprehensive Engineering Solutions, Inc. | Robotic navigation system and method |
| US8942846B2 (en) * | 2011-04-29 | 2015-01-27 | Raytheon Company | System and method for controlling a teleoperated robotic agile lift system |
| US9789603B2 (en) * | 2011-04-29 | 2017-10-17 | Sarcos Lc | Teleoperated robotic system |
| US8718822B1 (en) | 2011-05-06 | 2014-05-06 | Ryan Hickman | Overlaying sensor data in a user interface |
| US8886359B2 (en) * | 2011-05-17 | 2014-11-11 | Fanuc Corporation | Robot and spot welding robot with learning control function |
| US8639386B2 (en) | 2011-05-20 | 2014-01-28 | Harris Corporation | Haptic device for manipulator and vehicle control |
| US8414349B2 (en) * | 2011-06-01 | 2013-04-09 | Nintendo Co., Ltd. | Remotely controlled mobile device control system |
| US9566710B2 (en) * | 2011-06-02 | 2017-02-14 | Brain Corporation | Apparatus and methods for operating robotic devices using selective state space training |
| US9104271B1 (en) * | 2011-06-03 | 2015-08-11 | Richard Adams | Gloved human-machine interface |
| JP5472214B2 (ja) * | 2011-06-20 | 2014-04-16 | 株式会社安川電機 | ピッキングシステム |
| JP5787642B2 (ja) * | 2011-06-28 | 2015-09-30 | キヤノン株式会社 | 対象物保持装置、対象物保持装置の制御方法、およびプログラム |
| CN103607971B (zh) | 2011-07-07 | 2016-08-31 | 奥林巴斯株式会社 | 医疗主从操作器 |
| JP5800610B2 (ja) * | 2011-07-07 | 2015-10-28 | オリンパス株式会社 | 医療用マスタスレーブマニピュレータ |
| JP5800616B2 (ja) * | 2011-07-15 | 2015-10-28 | オリンパス株式会社 | マニピュレータシステム |
| WO2013018861A1 (ja) * | 2011-08-04 | 2013-02-07 | オリンパス株式会社 | 医療用マニピュレータおよびその制御方法 |
| JP5936914B2 (ja) * | 2011-08-04 | 2016-06-22 | オリンパス株式会社 | 操作入力装置およびこれを備えるマニピュレータシステム |
| JP5583282B2 (ja) * | 2011-08-24 | 2014-09-03 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、並びに、集積電子回路 |
| WO2013035244A1 (ja) * | 2011-09-06 | 2013-03-14 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、ロボット、制御プログラム、並びに、集積電子回路 |
| CA2849739C (en) * | 2011-09-22 | 2018-09-04 | Aethon, Inc. | Monitoring, diagnostic and tracking tool for autonomous mobile robots |
| JP2013071231A (ja) | 2011-09-29 | 2013-04-22 | Panasonic Corp | ロボットアームの教示装置、ロボット装置、教示方法、ロボットアームの制御装置、ロボットアームの制御プログラム、並びに、集積電子回路 |
| JP2013091114A (ja) | 2011-10-05 | 2013-05-16 | Kyokko Denki Kk | インタラクション操作システム |
| US8996244B2 (en) * | 2011-10-06 | 2015-03-31 | Harris Corporation | Improvised explosive device defeat system |
| US8930009B2 (en) * | 2011-10-20 | 2015-01-06 | Kabushiki Kaisha Yaskawa Denki | Robot system and processed object manufacturing method |
| EP2814642B1 (en) * | 2012-02-15 | 2018-11-14 | Intuitive Surgical Operations, Inc. | User selection of robotic system operating modes using mode distinguishing operator actions |
| KR101978740B1 (ko) * | 2012-02-15 | 2019-05-15 | 삼성전자주식회사 | 원격조종시스템 및 그 제어방법 |
| US9605952B2 (en) * | 2012-03-08 | 2017-03-28 | Quality Manufacturing Inc. | Touch sensitive robotic gripper |
| CN107009374A (zh) * | 2012-03-08 | 2017-08-04 | 品质制造有限公司 | 触敏机器人抓手 |
| JP5977544B2 (ja) * | 2012-03-09 | 2016-08-24 | キヤノン株式会社 | 情報処理装置、情報処理方法 |
| US8843236B2 (en) * | 2012-03-15 | 2014-09-23 | GM Global Technology Operations LLC | Method and system for training a robot using human-assisted task demonstration |
| JP6025386B2 (ja) * | 2012-05-02 | 2016-11-16 | キヤノン株式会社 | 画像計測装置、画像計測方法及び画像計測プログラム |
| CN102707637B (zh) * | 2012-05-09 | 2014-10-29 | 固高科技(深圳)有限公司 | 机器人手持示教器 |
| JP5426722B2 (ja) * | 2012-05-24 | 2014-02-26 | ファナック株式会社 | ロボットプログラム変更装置 |
| JP5962246B2 (ja) * | 2012-06-20 | 2016-08-03 | 富士電機株式会社 | 負荷対象物のリモートハンドリング装置およびその補助装置 |
| US9517556B2 (en) * | 2012-06-29 | 2016-12-13 | Mitsubishi Electric Corporation | Robot control apparatus and robot control method |
| CN102729254A (zh) * | 2012-07-04 | 2012-10-17 | 杭州电子科技大学 | 基于触觉临场感的遥操作机器人肌电控制方法 |
| JP6128767B2 (ja) * | 2012-07-05 | 2017-05-17 | キヤノン株式会社 | ロボット制御装置、及びロボット制御方法 |
| US9452020B2 (en) * | 2012-08-15 | 2016-09-27 | Intuitive Surgical Operations, Inc. | User initiated break-away clutching of a surgical mounting platform |
| CN102785246B (zh) * | 2012-08-24 | 2015-01-21 | 电子科技大学 | 一种可实现自动轨迹修正的机器人标定方法 |
| US10081109B2 (en) * | 2012-09-06 | 2018-09-25 | Fanuc America Corporation | Haptic teach pendant |
| JP2014065100A (ja) | 2012-09-25 | 2014-04-17 | Denso Wave Inc | ロボットシステム、及びロボットのティーチング方法 |
| KR102023910B1 (ko) * | 2012-11-23 | 2019-09-23 | 삼성전자주식회사 | 로봇 및 로봇의 마찰 보상 방법 |
| JP6221224B2 (ja) * | 2012-11-27 | 2017-11-01 | セイコーエプソン株式会社 | ロボットシステム、プログラム、生産システム及びロボット |
| US9085080B2 (en) * | 2012-12-06 | 2015-07-21 | International Business Machines Corp. | Human augmentation of robotic work |
| CN104936748B (zh) * | 2012-12-14 | 2017-10-27 | Abb技术有限公司 | 徒手机器人路径教导 |
| KR101419139B1 (ko) * | 2012-12-28 | 2014-07-14 | 김범기 | 압력 분포 측정 센서를 포함한 기판 처리 장치 |
| US10292887B2 (en) * | 2012-12-31 | 2019-05-21 | Mako Surgical Corp. | Motorized joint positioner |
| JP6112300B2 (ja) * | 2013-01-10 | 2017-04-12 | パナソニックIpマネジメント株式会社 | マスタースレーブロボットの制御装置及び制御方法、マスタースレーブロボット、並びに、制御プログラム |
| JP6008121B2 (ja) * | 2013-01-28 | 2016-10-19 | セイコーエプソン株式会社 | ロボットおよびロボット制御装置 |
| JP5905840B2 (ja) * | 2013-01-30 | 2016-04-20 | トヨタ自動車株式会社 | 触覚センサシステム、軌道取得装置、及び、ロボットハンド |
| CN105074899B (zh) * | 2013-02-25 | 2017-06-09 | 苹果公司 | 质量转移工具操纵器组件和具有集成位移传感器的微型拾取阵列支座 |
| EA033708B1 (ru) * | 2013-02-26 | 2019-11-19 | Ahmet Sinan Kabakci | Роботизированная манипуляционная система |
| CN109171975B (zh) * | 2013-03-15 | 2021-04-09 | 直观外科手术操作公司 | 用于管理多个零空间目标和饱和sli行为的系统和方法 |
| JP5742862B2 (ja) * | 2013-03-18 | 2015-07-01 | 株式会社安川電機 | ロボット装置及び被加工物の製造方法 |
| JP5846145B2 (ja) * | 2013-03-18 | 2016-01-20 | 株式会社安川電機 | ロボットシステム、及び、ロボットシステムの制御方法 |
| CN105073349B (zh) * | 2013-03-19 | 2017-05-10 | 松下知识产权经营株式会社 | 机器人系统的控制方法以及机器人系统 |
| KR20140121933A (ko) * | 2013-04-08 | 2014-10-17 | 삼성전자주식회사 | 수술 로봇 |
| KR20140121581A (ko) * | 2013-04-08 | 2014-10-16 | 삼성전자주식회사 | 수술 로봇 시스템 |
| CN105144575B (zh) * | 2013-04-11 | 2016-11-09 | 松下知识产权经营株式会社 | 电动机驱动装置 |
| JP5616478B1 (ja) * | 2013-04-18 | 2014-10-29 | ファナック株式会社 | ワークを搬送するロボットを備えるロボットシステム |
| KR102061511B1 (ko) * | 2013-04-26 | 2020-01-02 | 삼성전자주식회사 | 청소 로봇, 홈 모니터링 장치 및 그 제어 방법 |
| JP6168890B2 (ja) | 2013-04-30 | 2017-07-26 | 株式会社ダイヘン | ロボット制御装置および多層盛溶接ロボットにおけるオフセット値の教示方法 |
| KR20140139840A (ko) * | 2013-05-28 | 2014-12-08 | 삼성전자주식회사 | 디스플레이 장치 및 그 제어방법 |
| US9403279B2 (en) * | 2013-06-13 | 2016-08-02 | The Boeing Company | Robotic system with verbal interaction |
| US9314924B1 (en) * | 2013-06-14 | 2016-04-19 | Brain Corporation | Predictive robotic controller apparatus and methods |
| JP6188440B2 (ja) * | 2013-06-17 | 2017-08-30 | キヤノン株式会社 | ロボット装置及びロボット制御方法 |
| JP6164948B2 (ja) * | 2013-06-20 | 2017-07-19 | キヤノン株式会社 | ロボット装置及び部品の製造方法 |
| JP6473919B2 (ja) * | 2013-06-24 | 2019-02-27 | パナソニックIpマネジメント株式会社 | マスタスレーブロボットの制御装置及び制御方法、ロボット、マスタスレーブロボットの制御プログラム、並びに、マスタスレーブロボットの制御用集積電子回路 |
| US9162357B2 (en) * | 2013-06-26 | 2015-10-20 | Canon Kabushiki Kaisha | Control method for robot system and robot system |
| JP6109001B2 (ja) * | 2013-07-26 | 2017-04-05 | オリンパス株式会社 | 医療用システムおよびその作動方法 |
| CN104345871B (zh) * | 2013-07-26 | 2017-06-23 | 株式会社东芝 | 设备选择系统 |
| US20150032258A1 (en) * | 2013-07-29 | 2015-01-29 | Brain Corporation | Apparatus and methods for controlling of robotic devices |
| JP6097174B2 (ja) * | 2013-08-05 | 2017-03-15 | 株式会社東芝 | ロボット制御装置 |
| JP6410022B2 (ja) * | 2013-09-06 | 2018-10-24 | パナソニックIpマネジメント株式会社 | マスタスレーブロボットの制御装置及び制御方法、ロボット、マスタスレーブロボットの制御プログラム、並びに、マスタスレーブロボットの制御用集積電子回路 |
| JP6476662B2 (ja) * | 2013-09-20 | 2019-03-06 | 株式会社デンソーウェーブ | ロボット操作装置、ロボットシステム、及びロボット操作プログラム |
| JP2015071206A (ja) * | 2013-10-03 | 2015-04-16 | セイコーエプソン株式会社 | 制御装置、ロボット、教示データ生成方法及びプログラム |
| CN104802174B (zh) * | 2013-10-10 | 2016-09-07 | 精工爱普生株式会社 | 机器人控制系统、机器人、程序以及机器人控制方法 |
| WO2015058297A1 (en) * | 2013-10-25 | 2015-04-30 | Vakanski Aleksandar | Image-based trajectory robot programming planning approach |
| JP6314426B2 (ja) * | 2013-10-31 | 2018-04-25 | セイコーエプソン株式会社 | ロボット制御装置およびロボット制御方法 |
| DE102013222456A1 (de) * | 2013-11-05 | 2015-05-07 | Kuka Laboratories Gmbh | Verfahren zum Programmieren von Bewegungsabläufen eines redundanten Industrieroboters und zugehöriger Industrieroboter |
| CN105792996B (zh) * | 2013-11-28 | 2017-07-25 | 三菱电机株式会社 | 机器人系统以及机器人系统的控制方法 |
| KR101527176B1 (ko) * | 2013-12-09 | 2015-06-09 | (주)미래컴퍼니 | 수술 로봇 장치 및 수술 로봇 장치의 제어 방법 |
| JP5815761B2 (ja) * | 2014-01-23 | 2015-11-17 | ファナック株式会社 | 視覚センサのデータ作成システム及び検出シミュレーションシステム |
| US9358685B2 (en) * | 2014-02-03 | 2016-06-07 | Brain Corporation | Apparatus and methods for control of robot actions based on corrective user inputs |
| TWI530375B (zh) * | 2014-02-05 | 2016-04-21 | 廣明光電股份有限公司 | 機器手臂的教導裝置及方法 |
| US20150224639A1 (en) * | 2014-02-07 | 2015-08-13 | Control Interfaces LLC | Remotely operated manipulator and rov control systems and methods |
| CN104827457B (zh) | 2014-02-07 | 2016-09-14 | 广明光电股份有限公司 | 机器手臂的教导装置及方法 |
| US9314922B2 (en) * | 2014-02-07 | 2016-04-19 | Control Interfaces LLC | Remotely operated manipulator and ROV control systems and methods |
| JP5860079B2 (ja) * | 2014-02-21 | 2016-02-16 | ファナック株式会社 | 複数のロボット制御装置を含むロボットシステム |
| JP6249403B2 (ja) | 2014-02-27 | 2017-12-20 | 国立研究開発法人情報通信研究機構 | 光遅延線及び電子バッファ融合型光パケットバッファ制御装置 |
| US9186794B2 (en) * | 2014-03-04 | 2015-11-17 | Fanuc Corporation | Robot controller having function to simplify teaching operation and improve motion performance of robot |
| CN103895022A (zh) * | 2014-03-17 | 2014-07-02 | 东南大学 | 穿戴式体感控制机械手 |
| CN106103012B (zh) * | 2014-03-27 | 2017-12-12 | 松下知识产权经营株式会社 | 机器人控制方法 |
| JP6156236B2 (ja) * | 2014-04-04 | 2017-07-05 | トヨタ自動車株式会社 | マスタスレーブマニピュレータの位置姿勢合わせ方法 |
| CA2945189C (en) * | 2014-04-10 | 2022-10-11 | Quanser Consulting Inc. | Robotic systems and methods of operating robotic systems |
| US10118714B2 (en) * | 2014-04-30 | 2018-11-06 | The Boeing Company | System and method for positioning an automated assembly tool relative to a structure |
| US9713982B2 (en) * | 2014-05-22 | 2017-07-25 | Brain Corporation | Apparatus and methods for robotic operation using video imagery |
| JP6397226B2 (ja) | 2014-06-05 | 2018-09-26 | キヤノン株式会社 | 装置、装置の制御方法およびプログラム |
| US9696813B2 (en) * | 2015-05-27 | 2017-07-04 | Hsien-Hsiang Chiu | Gesture interface robot |
| JP6440385B2 (ja) * | 2014-06-10 | 2018-12-19 | キヤノン株式会社 | ロボットアーム、表示装置およびロボットシステム |
| CN203973551U (zh) * | 2014-06-13 | 2014-12-03 | 济南翼菲自动化科技有限公司 | 一种通过身体姿势操控的远程控制机器人 |
| CN203973550U (zh) * | 2014-06-13 | 2014-12-03 | 济南翼菲自动化科技有限公司 | 一种非接触式手势控制机器人 |
| JP6350011B2 (ja) * | 2014-06-20 | 2018-07-04 | オムロン株式会社 | ロボット制御システム |
| US10540597B1 (en) * | 2014-06-25 | 2020-01-21 | Bosch Sensortec Gmbh | Method and apparatus for recognition of sensor data patterns |
| DE102014213262A1 (de) * | 2014-07-08 | 2016-01-14 | Kuka Roboter Gmbh | Maschine und Verfahren zum Betreiben einer Maschine |
| JP6140112B2 (ja) * | 2014-07-17 | 2017-05-31 | ファナック株式会社 | 停止機能を備えたロボット制御システム |
| JP5905537B2 (ja) * | 2014-07-30 | 2016-04-20 | ファナック株式会社 | 教示操作盤が着脱可能なロボット制御装置 |
| WO2016025941A1 (en) * | 2014-08-15 | 2016-02-18 | University Of Central Florida Research Foundation, Inc. | Control interface for robotic humanoid avatar system and related methods |
| JP6660102B2 (ja) * | 2014-08-27 | 2020-03-04 | キヤノン株式会社 | ロボット教示装置およびその制御方法、ロボットシステム、プログラム |
| US11232855B2 (en) * | 2014-09-23 | 2022-01-25 | Airstrip Ip Holdings, Llc | Near-real-time transmission of serial patient data to third-party systems |
| US9290905B1 (en) * | 2014-09-29 | 2016-03-22 | The United States Of America As Represented By The Secretary Of The Navy | Remote excavation tool |
| JP6512790B2 (ja) | 2014-10-24 | 2019-05-15 | キヤノン株式会社 | ロボット制御方法、ロボット装置、プログラム、記録媒体及び物品の製造方法 |
| US10022867B2 (en) * | 2014-11-11 | 2018-07-17 | X Development Llc | Dynamically maintaining a map of a fleet of robotic devices in an environment to facilitate robotic action |
| CN104589356B (zh) * | 2014-11-27 | 2016-08-24 | 北京工业大学 | 基于Kinect人手运动捕捉的灵巧手遥操作控制方法 |
| CN107155370B (zh) | 2014-12-26 | 2020-07-31 | 川崎重工业株式会社 | 搬送装置的控制装置 |
| CN204450555U (zh) * | 2015-02-16 | 2015-07-08 | 南京信息工程大学 | 一种基于Kinect的人体姿势同步机器人装置 |
| JP6748088B2 (ja) * | 2015-02-25 | 2020-08-26 | マコ サージカル コーポレーション | 外科手術中の追跡中断を低減するナビゲーションシステム及び方法 |
| US9649766B2 (en) * | 2015-03-17 | 2017-05-16 | Amazon Technologies, Inc. | Systems and methods to facilitate human/robot interaction |
| CN104647331B (zh) * | 2015-03-23 | 2017-07-21 | 常州米泽智能装备科技有限公司 | 一种主从随动示教工业机器人系统 |
| JP6088583B2 (ja) * | 2015-06-08 | 2017-03-01 | ファナック株式会社 | ロボットと力の表示機能を備えたロボット制御装置 |
| US9167418B1 (en) * | 2015-06-22 | 2015-10-20 | Invictus Technology Group, Inc. | Method and apparatus for controlling input to a mobile computing device located inside a vehicle |
| JP6520478B2 (ja) * | 2015-06-30 | 2019-05-29 | 株式会社デンソーウェーブ | ロボットアームの操作システム |
| JP6378143B2 (ja) * | 2015-07-16 | 2018-08-22 | ファナック株式会社 | エンドエフェクタの位置および姿勢を定めるガイド部を備えるロボットの教示装置 |
| US9815198B2 (en) * | 2015-07-23 | 2017-11-14 | X Development Llc | System and method for determining a work offset |
| US20170028549A1 (en) * | 2015-07-28 | 2017-02-02 | Comprehensive Engineering Solutions, Inc. | Robotic navigation system and method |
| US10335951B2 (en) * | 2015-07-29 | 2019-07-02 | Canon Kabushiki Kaisha | Information processing apparatus, information processing method, robot control apparatus, and robot system |
| EP3321044A4 (en) * | 2015-08-25 | 2019-05-29 | Kawasaki Jukogyo Kabushiki Kaisha | REMOTELY CONTROLLED MANIPULATOR SYSTEM AND METHOD FOR OPERATION THEREOF |
| US10124491B2 (en) * | 2015-08-31 | 2018-11-13 | Avaya Inc. | Operational parameters |
| US10350757B2 (en) * | 2015-08-31 | 2019-07-16 | Avaya Inc. | Service robot assessment and operation |
| CN204997657U (zh) | 2015-09-18 | 2016-01-27 | 广东技术师范学院 | 一种具有模仿功能的仿生机械手 |
| CN105328700A (zh) | 2015-11-12 | 2016-02-17 | 东北大学 | 一种机器人灵巧手示教编程的数据手套 |
| US10268495B2 (en) * | 2016-02-18 | 2019-04-23 | Verizon Patent And Licensing Inc. | Virtual device model system |
| US9990685B2 (en) * | 2016-03-21 | 2018-06-05 | Recognition Robotics, Inc. | Automated guidance system and method for a coordinated movement machine |
| CN205600721U (zh) * | 2016-04-19 | 2016-09-28 | 长春理工大学 | 一种新型工业运转机械手 |
| JP2018012188A (ja) * | 2016-06-03 | 2018-01-25 | ファナック アメリカ コーポレイション | 複数のロボットによる動的レーザタッチセンシング及び動的ユーザ座標系 |
| US10059005B2 (en) * | 2016-06-22 | 2018-08-28 | Quanta Storage Inc. | Method for teaching a robotic arm to pick or place an object |
| SG11201901805TA (en) * | 2016-09-14 | 2019-04-29 | Armatron Systems Llc | Method of reinforced cementitious construction by high speed extrusion printing and apparatus for using same |
| US11305431B2 (en) * | 2016-11-10 | 2022-04-19 | Cognibotics Ab | System and method for instructing a robot |
| FR3063667B1 (fr) * | 2017-03-13 | 2019-04-19 | Staubli Faverges | Procede de commande d'une cellule de travail automatisee |
-
2016
- 2016-05-27 EP EP16838712.4A patent/EP3321044A4/en not_active Withdrawn
- 2016-05-27 CN CN201680048486.3A patent/CN107921636B/zh active Active
- 2016-05-27 JP JP2017536165A patent/JP7030518B2/ja active Active
- 2016-05-27 JP JP2017536167A patent/JP6788593B2/ja active Active
- 2016-05-27 US US15/755,135 patent/US11197730B2/en active Active
- 2016-05-27 WO PCT/JP2016/002583 patent/WO2017033356A1/ja active Application Filing
- 2016-05-27 EP EP16838713.2A patent/EP3342554B1/en active Active
- 2016-05-27 EP EP16838717.3A patent/EP3342562A4/en not_active Withdrawn
- 2016-05-27 US US15/755,104 patent/US11103322B2/en active Active
- 2016-05-27 JP JP2017536173A patent/JP6731412B2/ja active Active
- 2016-05-27 WO PCT/JP2016/002576 patent/WO2017033352A1/ja active Application Filing
- 2016-05-27 KR KR1020187007674A patent/KR102039077B1/ko active IP Right Grant
- 2016-05-27 CN CN201680041092.5A patent/CN107848111A/zh active Pending
- 2016-05-27 CN CN201680047123.8A patent/CN107921634B/zh active Active
- 2016-05-27 CN CN201680048695.8A patent/CN107921620B/zh active Active
- 2016-05-27 JP JP2017536170A patent/JP6821572B2/ja active Active
- 2016-05-27 EP EP16838718.1A patent/EP3342563A4/en not_active Withdrawn
- 2016-05-27 JP JP2017536172A patent/JP6814735B2/ja active Active
- 2016-05-27 CN CN201680048659.1A patent/CN107921637B/zh active Active
- 2016-05-27 EP EP16838716.5A patent/EP3342557A4/en active Pending
- 2016-05-27 KR KR1020187007680A patent/KR20180041218A/ko not_active Application Discontinuation
- 2016-05-27 US US15/755,324 patent/US10722313B2/en active Active
- 2016-05-27 EP EP16838711.6A patent/EP3342561B1/en active Active
- 2016-05-27 JP JP2017536163A patent/JP6754363B2/ja active Active
- 2016-05-27 KR KR1020187008047A patent/KR102018242B1/ko active IP Right Grant
- 2016-05-27 EP EP16838702.5A patent/EP3342549B1/en active Active
- 2016-05-27 US US15/755,105 patent/US10792114B2/en active Active
- 2016-05-27 KR KR1020187006315A patent/KR102055317B1/ko active IP Right Grant
- 2016-05-27 WO PCT/JP2016/002585 patent/WO2017033358A1/ja active Application Filing
- 2016-05-27 US US15/755,139 patent/US10806534B2/en active Active
- 2016-05-27 JP JP2017536168A patent/JP6924142B2/ja active Active
- 2016-05-27 US US15/755,449 patent/US10631942B2/en active Active
- 2016-05-27 WO PCT/JP2016/002587 patent/WO2017033360A1/ja active Application Filing
- 2016-05-27 JP JP2017536169A patent/JP6843050B2/ja active Active
- 2016-05-27 KR KR1020187007675A patent/KR102094439B1/ko active IP Right Grant
- 2016-05-27 EP EP16838708.2A patent/EP3342551A4/en active Pending
- 2016-05-27 CN CN201680048747.1A patent/CN107921639B/zh active Active
- 2016-05-27 US US15/755,121 patent/US11039895B2/en active Active
- 2016-05-27 KR KR1020187001796A patent/KR102015522B1/ko active IP Right Grant
- 2016-05-27 EP EP16838710.8A patent/EP3342553A4/en active Pending
- 2016-05-27 CN CN201680048289.1A patent/CN107921635B/zh active Active
- 2016-05-27 CN CN201680044158.6A patent/CN107848116B/zh active Active
- 2016-05-27 JP JP2017536166A patent/JP6839084B2/ja active Active
- 2016-05-27 JP JP2017536171A patent/JP6843051B2/ja active Active
- 2016-05-27 JP JP2017536174A patent/JP6858124B2/ja active Active
- 2016-05-27 EP EP16838704.1A patent/EP3342542A4/en active Pending
- 2016-05-27 KR KR1020187006316A patent/KR20180038480A/ko not_active Application Discontinuation
- 2016-05-27 CN CN201680048923.1A patent/CN107921645B/zh active Active
- 2016-05-27 JP JP2017536164A patent/JP6826532B2/ja active Active
- 2016-05-27 WO PCT/JP2016/002575 patent/WO2017033351A1/ja active Application Filing
- 2016-05-27 CN CN201680049044.0A patent/CN107921641B/zh active Active
- 2016-05-27 US US15/755,384 patent/US10631941B2/en active Active
- 2016-05-27 US US15/755,246 patent/US11147641B2/en active Active
- 2016-05-27 WO PCT/JP2016/002594 patent/WO2017033365A1/ja active Application Filing
- 2016-05-27 EP EP16838703.3A patent/EP3342541B1/en active Active
- 2016-05-27 WO PCT/JP2016/002582 patent/WO2017033355A1/ja active Application Filing
- 2016-05-27 CN CN201680048742.9A patent/CN107921638A/zh active Pending
- 2016-05-27 JP JP2017536175A patent/JP6871857B2/ja active Active
- 2016-05-27 WO PCT/JP2016/002577 patent/WO2017033353A1/ja active Application Filing
- 2016-05-27 KR KR1020187008053A patent/KR20180044946A/ko not_active Application Discontinuation
- 2016-05-27 WO PCT/JP2016/002596 patent/WO2017033366A1/ja active Application Filing
- 2016-05-27 KR KR1020187006756A patent/KR102052038B1/ko active IP Right Grant
- 2016-05-27 EP EP16838714.0A patent/EP3342555A4/en not_active Withdrawn
- 2016-05-27 US US15/755,141 patent/US10932874B2/en active Active
- 2016-05-27 US US15/755,201 patent/US10905508B2/en active Active
- 2016-05-27 EP EP16838719.9A patent/EP3342564A4/en not_active Withdrawn
- 2016-05-27 JP JP2017536177A patent/JP6778198B2/ja active Active
- 2016-05-27 US US15/755,179 patent/US10980606B2/en active Active
- 2016-05-27 EP EP16838707.4A patent/EP3342550A4/en active Pending
- 2016-05-27 WO PCT/JP2016/002584 patent/WO2017033357A1/ja active Application Filing
- 2016-05-27 US US15/755,304 patent/US10702350B2/en active Active
- 2016-05-27 EP EP16838715.7A patent/EP3342556A4/en not_active Withdrawn
- 2016-05-27 WO PCT/JP2016/002597 patent/WO2017033367A1/ja active Application Filing
- 2016-05-27 US US15/755,213 patent/US10813709B2/en active Active
- 2016-05-27 WO PCT/JP2016/002589 patent/WO2017033362A1/ja active Application Filing
- 2016-05-27 CN CN201680049058.2A patent/CN107921624B/zh active Active
- 2016-05-27 WO PCT/JP2016/002586 patent/WO2017033359A1/ja active Application Filing
- 2016-05-27 US US15/755,112 patent/US10959795B2/en active Active
- 2016-05-27 KR KR1020187006757A patent/KR102091192B1/ko active IP Right Grant
- 2016-05-27 US US15/755,115 patent/US10980605B2/en active Active
- 2016-05-27 JP JP2017536178A patent/JP7007910B2/ja active Active
- 2016-05-27 WO PCT/JP2016/002588 patent/WO2017033361A1/ja active Application Filing
- 2016-05-27 JP JP2017536179A patent/JP6778199B2/ja active Active
- 2016-05-27 CN CN201680049063.3A patent/CN107921625B/zh active Active
- 2016-05-27 CN CN201680048942.4A patent/CN107921646B/zh active Active
- 2016-05-27 US US15/755,102 patent/US10835333B2/en active Active
- 2016-05-27 JP JP2017536176A patent/JP6754364B2/ja active Active
- 2016-05-27 CN CN201680049056.3A patent/CN107921642B/zh active Active
- 2016-05-27 WO PCT/JP2016/002591 patent/WO2017033364A1/ja active Application Filing
- 2016-05-27 WO PCT/JP2016/002574 patent/WO2017033350A1/ja active Application Filing
- 2016-05-27 EP EP16838705.8A patent/EP3342543A4/en not_active Withdrawn
- 2016-05-27 CN CN201680048927.XA patent/CN107921640B/zh active Active
- 2016-05-27 WO PCT/JP2016/002590 patent/WO2017033363A1/ja active Application Filing
- 2016-05-27 EP EP16838709.0A patent/EP3342552B1/en active Active
- 2016-05-27 CN CN201680048711.3A patent/CN107921644A/zh active Pending
- 2016-06-24 CN CN201680049053.XA patent/CN107921623B/zh active Active
- 2016-06-24 WO PCT/JP2016/003067 patent/WO2017033380A1/ja active Application Filing
- 2016-06-24 JP JP2017536185A patent/JP6954836B2/ja active Active
- 2016-06-24 US US15/755,218 patent/US10842578B2/en active Active
- 2016-06-24 US US15/755,108 patent/US11116593B2/en active Active
- 2016-06-24 US US15/755,107 patent/US10856945B2/en active Active
- 2016-06-24 WO PCT/JP2016/003060 patent/WO2017033376A1/ja active Application Filing
- 2016-06-24 CN CN201680048757.5A patent/CN107921621A/zh active Pending
- 2016-06-24 WO PCT/JP2016/003061 patent/WO2017033377A1/ja active Application Filing
- 2016-06-24 CN CN201680048758.XA patent/CN107921622A/zh active Pending
- 2016-06-24 US US15/755,465 patent/US10702351B2/en active Active
- 2016-06-24 JP JP2017536183A patent/JPWO2017033376A1/ja active Pending
- 2016-06-24 JP JP2017536187A patent/JPWO2017033380A1/ja active Pending
- 2016-06-24 KR KR1020187008072A patent/KR102031232B1/ko active IP Right Grant
- 2016-06-24 EP EP16838732.2A patent/EP3342545A4/en not_active Withdrawn
- 2016-06-24 EP EP16838733.0A patent/EP3342546A4/en not_active Withdrawn
- 2016-06-24 US US15/755,228 patent/US20180243923A1/en not_active Abandoned
- 2016-06-24 US US15/755,479 patent/US10716638B2/en active Active
- 2016-06-24 EP EP16838729.8A patent/EP3342559A4/en not_active Withdrawn
- 2016-06-24 JP JP2017536188A patent/JPWO2017033381A1/ja active Pending
- 2016-06-24 EP EP16838731.4A patent/EP3342544B1/en active Active
- 2016-06-24 WO PCT/JP2016/003063 patent/WO2017033378A1/ja active Application Filing
- 2016-06-24 JP JP2017536184A patent/JP6782240B2/ja active Active
- 2016-06-24 CN CN201680041781.6A patent/CN107848112B/zh active Active
- 2016-06-24 EP EP16838730.6A patent/EP3342565B1/en active Active
- 2016-06-24 CN CN201680049046.XA patent/CN108349095B/zh active Active
- 2016-06-24 WO PCT/JP2016/003069 patent/WO2017033381A1/ja active Application Filing
- 2016-06-24 EP EP16838728.0A patent/EP3342558B1/en active Active
- 2016-06-24 WO PCT/JP2016/003064 patent/WO2017033379A1/ja active Application Filing
- 2016-06-24 CN CN201680043602.2A patent/CN107848114B/zh active Active
- 2016-06-24 JP JP2017536186A patent/JP6839085B2/ja active Active
- 2016-06-24 KR KR1020187008054A patent/KR20180043326A/ko not_active Application Discontinuation
- 2016-07-15 US US15/755,111 patent/US11065070B2/en active Active
- 2016-07-15 KR KR1020187001794A patent/KR102227422B1/ko active IP Right Grant
- 2016-07-15 KR KR1020197027865A patent/KR20190110653A/ko active Application Filing
- 2016-07-15 CN CN201680043288.8A patent/CN107848113B/zh active Active
- 2016-07-15 WO PCT/JP2016/003356 patent/WO2017033391A1/ja active Application Filing
- 2016-07-15 JP JP2017536195A patent/JP6755874B2/ja active Active
- 2016-07-15 EP EP16838743.9A patent/EP3342560B1/en active Active
- 2016-08-02 TW TW105124425A patent/TW201716195A/zh unknown
- 2016-08-02 TW TW105124427A patent/TW201713472A/zh unknown
- 2016-08-12 TW TW105125737A patent/TWI673148B/zh active
- 2016-08-18 TW TW105126373A patent/TWI666099B/zh active
- 2016-08-18 TW TW105126372A patent/TW201707880A/zh unknown
- 2016-08-19 TW TW105126540A patent/TW201707890A/zh unknown
- 2016-08-19 TW TW105126542A patent/TWI625207B/zh active
- 2016-08-19 TW TW105126545A patent/TWI604930B/zh active
- 2016-08-19 TW TW105126539A patent/TW201713473A/zh unknown
- 2016-08-22 TW TW105126759A patent/TW201707884A/zh unknown
- 2016-08-22 TW TW105126749A patent/TWI611883B/zh active
- 2016-08-22 TW TW105126689A patent/TW201707883A/zh unknown
- 2016-08-22 TW TW105126751A patent/TWI609748B/zh active
- 2016-08-22 TW TW105126753A patent/TW201711814A/zh unknown
- 2016-08-23 TW TW105126884A patent/TW201707895A/zh unknown
- 2016-08-23 TW TW105126883A patent/TW201707894A/zh unknown
- 2016-08-23 TW TW105126882A patent/TW201707893A/zh unknown
- 2016-08-24 TW TW105127049A patent/TW201707885A/zh unknown
- 2016-08-24 TW TW105127050A patent/TWI595987B/zh active
- 2016-08-24 TW TW105127055A patent/TWI631447B/zh active
- 2016-08-24 TW TW105127052A patent/TW201714102A/zh unknown
- 2016-08-24 TW TW105127054A patent/TWI627039B/zh active
- 2016-08-25 TW TW105127261A patent/TWI623398B/zh active
- 2016-08-25 TW TW105127260A patent/TW201707886A/zh unknown
-
2020
- 2020-12-23 JP JP2020213587A patent/JP2021053802A/ja active Pending
-
2022
- 2022-05-31 JP JP2022089225A patent/JP7411012B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5639884A (en) * | 1979-08-29 | 1981-04-15 | Kobe Steel Ltd | Method and device for correcting partial operation of cp control type industrial robot |
| JPS59135507A (ja) * | 1983-01-22 | 1984-08-03 | Hitachi Constr Mach Co Ltd | プレイバツク制御方式 |
| JPS6249403A (ja) * | 1985-08-28 | 1987-03-04 | Agency Of Ind Science & Technol | マニピユレ−タ制御装置 |
| JPH04310396A (ja) * | 1991-04-09 | 1992-11-02 | Hitachi Ltd | ロボット制御装置 |
| JP2006346827A (ja) * | 2005-06-17 | 2006-12-28 | Denso Wave Inc | ロボットの教示システム |
| JP2011224696A (ja) * | 2010-04-19 | 2011-11-10 | Yaskawa Electric Corp | ロボットの教示再生装置および教示再生方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102378622B1 (ko) * | 2020-11-28 | 2022-03-25 | 이비오 주식회사 | 직교 좌표를 이용한 교시장치 및 그 장치의 직접 교시 방법 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017033377A1 (ja) | ロボットシステム | |
| WO2018066601A1 (ja) | ロボットシステム及びその運転方法 | |
| US11878423B2 (en) | Robot system | |
| WO2020027106A1 (ja) | ロボットシステム | |
| WO2019107208A1 (ja) | 作業機の動作制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16838729 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017536184 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15755108 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016838729 Country of ref document: EP |