JP7087632B2 - ロボット制御装置 - Google Patents
ロボット制御装置 Download PDFInfo
- Publication number
- JP7087632B2 JP7087632B2 JP2018084922A JP2018084922A JP7087632B2 JP 7087632 B2 JP7087632 B2 JP 7087632B2 JP 2018084922 A JP2018084922 A JP 2018084922A JP 2018084922 A JP2018084922 A JP 2018084922A JP 7087632 B2 JP7087632 B2 JP 7087632B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- control device
- control program
- screen
- display
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
- B25J9/161—Hardware, e.g. neural networks, fuzzy logic, interfaces, processor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0081—Programme-controlled manipulators with master teach-in means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/42—Recording and playback systems, i.e. in which the programme is recorded from a cycle of operations, e.g. the cycle of operations being manually controlled, after which this record is played back on the same machine
- G05B19/425—Teaching successive positions by numerical control, i.e. commands being entered to control the positioning servo of the tool head or end effector
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/36—Nc in input of data, input key till input tape
- G05B2219/36489—Position and force
Description
図1は、第1実施形態におけるロボットシステムを示す斜視図である。このロボットシステムは、カメラ30と、搬送装置50と、ロボット100と、ロボット制御装置200と、を備えている。ロボット100とロボット制御装置200は、ケーブル又は無線を介して通信可能に接続される。
(1)メインビュー領域MV:後述する動作オブジェクト及び条件分岐オフジェクトの選択肢や、制御プログラムの実行結果、トラブルシュート(問題点の対策案)などを表示する領域である。
(2)動作フロー作成領域FL:複数のオブジェクトがグラフィカルに配置された動作フローを編集可能に表示する領域である。なお、動作フローで表される作業を「シーケンス」とも呼ぶ。
(3)シーケンス表示領域SQ:シーケンスのツリー構造を表示する領域である。
(4)パラメーター設定領域PR:作業全体に関する作業パラメーターや、個々の動作に関する動作パラメーターの設定を行うための領域である。
(5)結果領域RS:制御プログラムの実行結果を表示する領域である。
(6)実行指示領域RN:制御プログラムの実行を指示するための領域である。
(1)シーケンス名設定領域F21:新たなシーケンスの名称を設定するための領域である。図6Bの例では、シーケンス名が「Seq1」と入力されている。
(2)ロボット選択領域F22:使用するロボットのタイプを複数の選択肢から選択するための領域である。図6Bの例では、「RB1」というタイプのロボットが選択されている。
(3)シーケンスコピー指示領域F23:既に作成済みのシーケンスをコピーすることを指定するための領域である。この領域には、例えば、予めメモリー220内に登録されている複数のシーケンスのシーケンス名がプルダウンメニューとして表示される。シーケンスコピーを使用する場合には、図6Cで説明する設定は不要となり、後述する図6Dの画面に移行する。
(1)メインビュー領域MV:
動作フローを構成する動作や条件分岐の分類を示す複数のカテゴリーと、各カテゴリーに属するオブジェクトの名称及びアイコンと、オブジェクトの内容の説明と、オブジェクトの概要を示す図とが表示される。メインビュー領域MVに表示されたオブジェクトは、ドラッグアンドドロップ等の操作によって動作フロー作成領域FL内の動作フローに任意に追加可能である。
(2)動作フロー作成領域FL:
1つ以上のオブジェクトがグラフィカルに配置された動作フローが編集可能に表示される。図6Cに示すように、動作フローの作成の開始時には、シーケンスのラベルを示すシーケンスブロックSB1のみが動作フロー作成領域FL内に配置される。
(3)シーケンス表示領域SQ:
動作フロー作成領域FLに表示されたシーケンスのツリー構造が表示される。
(4)パラメーター設定領域PR:
動作フロー作成領域FLに配置されたブロックのいずれかが選択されると、選択されたブロックに対するパラメーターが表示される。
接触動作の分類は、接触オブジェクトを含む。図8Aに示すように、接触オブジェクトでは、エンドエフェクター140で保持したワークWKaを指定方向DDに移動させ、力検出器130で反力を検出した時にエンドエフェクター140を停止させる。なお、図8Aに示したワークWKa,WKbは、図1に示したワークWK1,WK2とは無関係であり、動作の概要を説明するための仮想的なワークである。この点は、後述する図8B~図8Dも同様である。
倣い動作の分類は、以下の3種類の動作オブジェクトを含む。
(a)脱力オブジェクト:指定軸の力が0になるように倣う動作である。
図8Bに示すように、脱力オブジェクトでは、指定軸の力が0になるように倣う動作が実行される。図8Bの例では、ワークWKa,WKb間のz軸方向の力が0でないときに-z方向にエンドエフェクター140を戻すことにより、力検出器130で検出されるz軸方向の力を0にしている。
(b)倣い移動オブジェクト:指定軸の力を0にするように倣いながら指定軌道を動く動作である。
(c)面合わせオブジェクト:指定方向に角度を倣いながら押し付けて、面と面とを合わせる動作である。
探り動作の分類は、以下の2種類の動作オブジェクトを含む。
(a)押付け探りオブジェクト:押付ながら指定された軌跡で探って穴を見つける動作である。
図8Cに示すように、押付け探りオブジェクトでは、エンドエフェクター140で保持したワークWKaを指定方向に押付けながら、指定方向の力がゼロとなる位置を探り、穴Hbの位置で停止させる。探りの軌跡としては、直線軌跡や螺旋軌跡などの複数の候補の中から1つの軌跡を選択することが可能である。
(b)接触探りオブジェクト:接触動作を繰り返して穴を見つける動作である。
押付け動作の分類は、以下の2種類の動作オブジェクトを含む。
(a)押付け(単純押付け)オブジェクト:指定方向に指定の力で押し付ける動作である。この動作では、他の指定軸については「倣う」動作を実行させることも可能である。
(b)押付け移動オブジェクト:指定方向に指定の力で押し付けながら移動する動作である。この動作では、他の指定軸については「倣う」動作を実行させることも可能である。図8Dに示すように、押付け移動オブジェクトでは、指定方向DDにエンドエフェクター140を移動させて指定の力で押付け、その後、指定の力での押付けを維持しながら(すなわち、倣いながら)指定方向と異なる方向に移動する。図8Dの例では、エンドエフェクター140で保持したワークWKaをワークWKbの穴Hbに挿入する動作が、押付け移動によって実行されている。
(1)動作を定義する動作パラメーターの例
・接触方向:-Z方向(接触方向は、作業パラメーターとして設定された嵌合方向から自動的に設定される。)
・接触予定距離:10mm
・動作速度:5mm/s
・接触時の力制御ゲイン:1.0
(2)終了条件の例
・目標力:5N(5Nを超えると動作を停止する)
(3)成否判定条件の例
・成否判定条件:タイムアウト時間=10秒(タイムアウト時間までに終了条件を満たした場合には動作が成功したものと判定し、終了条件を満たさなかった場合には動作が失敗したものと判定する。)
・失敗時動作:シーケンスを継続(動作が失敗したと判定された場合にどのように進めるかを指定する。シーケンスの継続又はシーケンスの終了を指定可能である。)
メインビュー領域MV内には、動作フローの実行時に力検出器130で検出された複数の力のうちから、X軸方向の力FxとX軸回りのトルクTxの時間変化が表示されている。なお、メインビュー領域MVには、力検出器130で検出された複数の力の中の任意の1つ以上の力の時間変化を選択して表示することが可能である。また、TCPの実測位置の時間変化や、TCPの目標位置と実測位置の偏差の時間変化をメインビュー領域MVに表示することも可能である。メインビュー領域MV内の結果表示の期間は、動作フロー中の任意の1つの動作オブジェクトの動作期間とすることも可能であり、また、実行開始から停止までの全期間とすることも可能である。例えば、動作フロー作成領域FL内で任意の動作オブジェクトを選択すると、その動作オブジェクトの動作期間の実行結果が表示される。また、シーケンスブロックSB1を選択すると、実行開始から停止までの全期間の結果が表示される。なお、メインビュー領域MV内の結果表示の期間は、複数の連続する動作オブジェクトに亘る動作期間としてもよい。結果領域RSにも、制御プログラムの実行結果の一部の情報が表示される。例えば、任意の動作オブジェクトについて、動作の終了状態(成功又は失敗)や、動作に要した時間、動作終了時の力、及び、動作終了時の位置などを結果領域RS内に表示可能である。なお、メインビュー領域MVには、図10Aに示したもの以外の種々の結果を表示できるようにしてもよい。例えば、ロボットの速度や各関節の角度などのロボットに関わる情報を表示してもよい。
・「接触せずにタイムアウトする」
・「時間がかかる」
・「接触時の力が大きい」
・「動かしたい方向に動かない」
・「接触前に接触と誤判定する」
これらの5つの項目は、「予め設定した所定の動作では無いことを示す項目」に相当する。
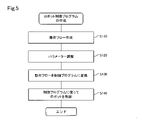
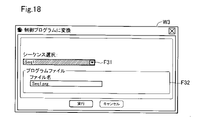
(1)動作フローを低級言語の制御プログラムに変換する。教示者は、変換された低級言語の制御プログラムを、自分で別個に記述した高級言語の制御プログラムから呼び出して実行する。この場合には、教示者が作業シーケンスを作成した後に、教示者が別個に記述する高級言語の制御プログラムの中で、例えば"FGRun シーケンス名"と記述することによって、そのシーケンスの制御プログラムが呼び出されて実行される。これは、最も基本的な実行方法である。
(2)動作フローを高級言語の制御プログラムに変換して、それを実行する。
(3)動作フローを低級言語の制御プログラムに変換して、それを直接実行する。
以下の説明では、主として上記(2)の方法で実行する場合を説明する。
本発明は、上述した実施形態に限られるものではなく、その趣旨を逸脱しない範囲において種々の形態で実現することができる。例えば、本発明は、以下の形態(aspect)によっても実現可能である。以下に記載した各形態中の技術的特徴に対応する上記実施形態中の技術的特徴は、本発明の課題の一部又は全部を解決するために、あるいは、本発明の効果の一部又は全部を達成するために、適宜、差し替えや、組み合わせを行うことが可能である。また、その技術的特徴が本明細書中に必須なものとして説明されていなければ、適宜、削除することが可能である。
このロボット制御装置によれば、制御実行部によって制御プログラムが実行された後に、表示制御部が予め設定した所定の動作を実現するための対策案を提示するので、その動作を正常に実行することが可能であり、教示者が問題点の無い制御プログラムを容易に作成できる。
このロボット制御装置によれば、制御プログラムの実行結果から予め設定した所定の動作ではないことを示す項目を表示させので、その動作を正常に実行させることが可能であり、教示者が問題点の無い制御プログラムを容易に作成できる。
このロボット制御装置によれば、対策案は、力制御動作を特定する複数のパラメーターのうち、前記項目に関連するパラメーターを含むので、教示者が問題点の無い制御プログラムを容易に作成できる。
このロボット制御装置によれば、前記項目が表示された場合に、画面にパラメーターの現在設定値と推奨設定値とを表示させるので、教示者が問題点の無い制御プログラムを容易に作成できる。
このロボット制御装置によれば、パラメーターの推奨設定値から算出した第1特性値を表示するので、教示者がその第1特性値を見て問題点の無い制御プログラムを容易に作成できる。
このロボット制御装置によれば、パラメーターから決まらない力制御動作の目標値が入力されると、その目標値とパラメーターの推奨設定値から算出した第2特性値を表示するので、教示者がその第2特性値を見て問題点の無い制御プログラムを容易に作成できる。
このロボット制御装置によれば、パラメーターの新規設定値を入力する設定値フィールドを表示させるので、教示者がその設定値フィールドに適切な設定値を任意に設定することによって、問題点の無い制御プログラムを容易に作成できる。
このロボット制御装置によれば、新規設定値を用いて制御プログラムが実行された後にその実行結果を提示する画面を表示するので、教示者がその動作の問題点が解消したか否かを容易に判断することが可能であり、教示者が問題点の無い制御プログラムを容易に作成できる。
このロボット制御装置によれば、パラメーターの設定値の履歴から過去の設定値を再度選択可能なので、教示者がその動作の問題点を容易に解消することが可能であり、教示者が問題点の無い制御プログラムを容易に作成できる。
このロボット制御装置によれば、制御プログラムが実行された後に、予め設定した所定の動作を実現するための対策案を提示するので、その動作を正常に実行させることが可能であり、教示者が問題点の無い制御プログラムを容易に作成できる。
Claims (6)
- 力検出器を備えるロボットの作業の制御プログラムを作成するロボット制御装置であって、
力制御動作を含む作業の動作フローを作成するための動作フロー作成領域を含む入力画面を表示装置に表示させる表示制御部と、
作成された動作フローを制御プログラムに変換する変換部と、
前記制御プログラムを実行して前記ロボットを制御する制御実行部と、
を備え、
前記表示制御部は、前記制御実行部によって前記制御プログラムが実行された後に、前記ロボットの動作が予め設定した所定の動作でない場合に、前記予め設定した所定の動作を実現するための対策案を提示する画面を前記表示装置に表示させ、
前記表示制御部は、前記制御プログラムの実行結果から前記予め設定した所定の動作ではないことを示す項目を表示させ、前記画面を前記表示装置に表示させ、
前記対策案は、前記力制御動作を特定する複数のパラメーターのうち、前記項目に関連するパラメーターを含み、
前記表示制御部は、前記項目が表示された場合に、前記画面に前記パラメーターの現在設定値と推奨設定値とを表示させる、ロボット制御装置。 - 請求項1に記載のロボット制御装置であって、
前記表示制御部は、前記画面に、前記パラメーターの前記推奨設定値から算出した第1特性値を表示させる、ロボット制御装置。 - 請求項2に記載のロボット制御装置であって、
前記表示制御部は、前記画面に、前記力制御動作の目標値を入力する目標値フィールドに前記目標値が入力されると、前記目標値と前記パラメーターの前記推奨設定値から算出した第2特性値を表示させる、ロボット制御装置。 - 請求項1~3のいずれか一項に記載のロボット制御装置であって、
前記表示制御部は、前記画面に、前記パラメーターの新規設定値を入力する設定値フィールドを表示させる、ロボット制御装置。 - 請求項4に記載のロボット制御装置であって、
前記表示制御部は、前記設定値フィールドに入力された前記新規設定値を用いて前記制御実行部によって前記制御プログラムが実行された後に、前記ロボットの動作が前記予め設定した所定の動作である場合、前記制御プログラムの実行結果を提示する画面を前記表示装置に表示させる、ロボット制御装置。 - 請求項1~4のいずれか一項に記載のロボット制御装置であって、
前記表示制御部は、前記パラメーターの設定値の履歴を表示させ、前記履歴から前記パラメーターの過去の設定値を選択可能な形態で前記画面を表示させる、ロボット制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018084922A JP7087632B2 (ja) | 2018-04-26 | 2018-04-26 | ロボット制御装置 |
| CN201910338198.7A CN110405729B (zh) | 2018-04-26 | 2019-04-25 | 机器人控制装置 |
| US16/394,178 US11389954B2 (en) | 2018-04-26 | 2019-04-25 | Robot control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018084922A JP7087632B2 (ja) | 2018-04-26 | 2018-04-26 | ロボット制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019188545A JP2019188545A (ja) | 2019-10-31 |
| JP2019188545A5 JP2019188545A5 (ja) | 2021-04-30 |
| JP7087632B2 true JP7087632B2 (ja) | 2022-06-21 |
Family
ID=68292037
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018084922A Active JP7087632B2 (ja) | 2018-04-26 | 2018-04-26 | ロボット制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11389954B2 (ja) |
| JP (1) | JP7087632B2 (ja) |
| CN (1) | CN110405729B (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230064484A1 (en) * | 2020-01-16 | 2023-03-02 | Omron Corporation | Control apparatus, control method, and computer-readable storage medium storing a control program |
| WO2023053368A1 (ja) * | 2021-09-30 | 2023-04-06 | ファナック株式会社 | 教示装置及びロボットシステム |
| WO2024004171A1 (ja) * | 2022-06-30 | 2024-01-04 | ファナック株式会社 | ロボット制御装置及びロボット制御システム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120317535A1 (en) | 2010-02-26 | 2012-12-13 | Kuka Laboratories Gmbh | Process Module Library And Programming Environment For Programming A Manipulator Process |
| JP2014128857A (ja) | 2012-12-28 | 2014-07-10 | Yaskawa Electric Corp | ロボット教示システムおよびロボット教示方法 |
| JP2015033745A (ja) | 2013-08-09 | 2015-02-19 | 株式会社安川電機 | ロボット制御装置及びロボット制御方法 |
| JP2017164822A (ja) | 2016-03-14 | 2017-09-21 | セイコーエプソン株式会社 | 制御装置、及びロボットシステム |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2950149B2 (ja) * | 1994-05-30 | 1999-09-20 | 株式会社デンソー | オートチューニングコントローラ |
| JPH08249026A (ja) * | 1995-03-10 | 1996-09-27 | Fanuc Ltd | ロボットを含むシステムのプログラミング方法 |
| JPH10151588A (ja) * | 1996-11-20 | 1998-06-09 | Tokyo Electric Power Co Inc:The | 架空電線作業装置 |
| WO2009107358A1 (ja) * | 2008-02-28 | 2009-09-03 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及びロボットアーム制御用集積電子回路 |
| US9599649B2 (en) * | 2011-05-02 | 2017-03-21 | Amber Precision Instruments, Inc. | System and method for electrostatic discharge testing of devices under test |
| JP5939202B2 (ja) | 2013-06-04 | 2016-06-22 | 株式会社安川電機 | ロボット教示補助装置、ロボットシステムおよびロボット教示方法 |
| EP2749974A2 (en) * | 2012-12-28 | 2014-07-02 | Kabushiki Kaisha Yaskawa Denki | Robot teaching system, robot teaching assistant device, and robot teaching method |
| US9278449B1 (en) * | 2014-05-21 | 2016-03-08 | Bot & Dolly, Llc | Closed-loop control system for robotic operation |
| JP5927259B2 (ja) * | 2014-09-30 | 2016-06-01 | ファナック株式会社 | 力制御を実行するロボットシステム |
| DE102014226787B3 (de) * | 2014-12-22 | 2016-03-17 | Kuka Roboter Gmbh | Sicherer Roboter mit Bahnfortschrittsvariablen |
| US9707680B1 (en) * | 2015-05-28 | 2017-07-18 | X Development Llc | Suggesting, selecting, and applying task-level movement parameters to implementation of robot motion primitives |
| CN107921634B (zh) * | 2015-08-25 | 2021-04-02 | 川崎重工业株式会社 | 机器人系统 |
| CN109906132B (zh) * | 2016-09-15 | 2022-08-09 | 谷歌有限责任公司 | 机器人操纵的深度强化学习 |
| JP6973119B2 (ja) * | 2018-01-26 | 2021-11-24 | セイコーエプソン株式会社 | ロボット制御装置及びロボットシステム |
| JP7069747B2 (ja) * | 2018-01-26 | 2022-05-18 | セイコーエプソン株式会社 | ロボット制御装置及びロボットシステム |
| JP7067107B2 (ja) * | 2018-02-19 | 2022-05-16 | セイコーエプソン株式会社 | ロボット制御装置及びロボットシステム |
-
2018
- 2018-04-26 JP JP2018084922A patent/JP7087632B2/ja active Active
-
2019
- 2019-04-25 US US16/394,178 patent/US11389954B2/en active Active
- 2019-04-25 CN CN201910338198.7A patent/CN110405729B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120317535A1 (en) | 2010-02-26 | 2012-12-13 | Kuka Laboratories Gmbh | Process Module Library And Programming Environment For Programming A Manipulator Process |
| JP2014128857A (ja) | 2012-12-28 | 2014-07-10 | Yaskawa Electric Corp | ロボット教示システムおよびロボット教示方法 |
| JP2015033745A (ja) | 2013-08-09 | 2015-02-19 | 株式会社安川電機 | ロボット制御装置及びロボット制御方法 |
| JP2017164822A (ja) | 2016-03-14 | 2017-09-21 | セイコーエプソン株式会社 | 制御装置、及びロボットシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190329404A1 (en) | 2019-10-31 |
| CN110405729A (zh) | 2019-11-05 |
| CN110405729B (zh) | 2022-10-18 |
| US11389954B2 (en) | 2022-07-19 |
| JP2019188545A (ja) | 2019-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7069747B2 (ja) | ロボット制御装置及びロボットシステム | |
| JP6973119B2 (ja) | ロボット制御装置及びロボットシステム | |
| JP5545534B2 (ja) | ロボットの教示再生装置、教示再生方法、及び教示データ作成方法 | |
| JP6924145B2 (ja) | ロボット教示方法及びロボットアーム制御装置 | |
| JP5077323B2 (ja) | ロボット制御システム | |
| EP1712969B1 (en) | Robot program correcting apparatus | |
| JP6450960B2 (ja) | ロボット、ロボットシステム及び教示方法 | |
| JP7087632B2 (ja) | ロボット制御装置 | |
| EP3875230A1 (en) | External input device, robot system, control method for robot system, control program, and recording medium | |
| US20180029232A1 (en) | Control apparatus and robot | |
| US20190202058A1 (en) | Method of programming an industrial robot | |
| JP5071361B2 (ja) | 複腕ロボットの作業プログラム作成方法および複腕ロボット | |
| JP7067107B2 (ja) | ロボット制御装置及びロボットシステム | |
| WO2004085120A1 (ja) | ロボットシミュレーション装置、および、シミュレーションプログラム | |
| US20180117764A1 (en) | Force control coordinate axis setting device, robot, and force control coordinate axis setting method | |
| Bolano et al. | Virtual reality for offline programming of robotic applications with online teaching methods | |
| CN115338855A (zh) | 双臂机器人组装系统 | |
| Kumar et al. | Intuitive human-robot interaction using augmented reality: A simulation study on KUKA IIWA robot | |
| JP2021037594A (ja) | ロボットシミュレーション装置 | |
| WO2022269927A1 (ja) | プログラム作成装置 | |
| Syrjänen | Task level robot programming: Background, methods and current state | |
| US11712803B2 (en) | Teaching method | |
| JP7469457B2 (ja) | ロボットプログラミング装置及びロボットプログラミング方法 | |
| JP2002361581A (ja) | 作業自動化装置、作業自動化方法およびその方法を記憶した記憶媒体 | |
| JP3435954B2 (ja) | プログラム作成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210317 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210317 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220523 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7087632 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |