JP5077323B2 - ロボット制御システム - Google Patents
ロボット制御システム Download PDFInfo
- Publication number
- JP5077323B2 JP5077323B2 JP2009245090A JP2009245090A JP5077323B2 JP 5077323 B2 JP5077323 B2 JP 5077323B2 JP 2009245090 A JP2009245090 A JP 2009245090A JP 2009245090 A JP2009245090 A JP 2009245090A JP 5077323 B2 JP5077323 B2 JP 5077323B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- amount
- control system
- hand
- work
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Description
ここでインピーダンス制御とは、ロボットの手先に外から力を加えた場合に生じる機械的なインピーダンス(慣性、減衰係数、剛性)を、目的とする作業に都合の良い値に設定するための位置と力の制御手法のことである。
ロボットの手先にバネやダンパなどの機械要素を取り付けて手先のインピーダンスを変更する受動インピーダンス法と、手先の位置、速度、力などの測定値を用いたフィードバック制御でインピーダンスを変更する能動インピーダンス法がある。
図6は、従来の産業用ロボットの構成図である。図6において、101はロボットであり、複数の関節軸とリンクを有するマニピュレータである。各関節軸には、エンコーダつきの駆動モータが内蔵されており、各関節を独立に駆動することができる。102はロボット101のコントローラであり、各関節軸駆動モータのエンコーダ信号をもとにフィードバック制御(位置制御系)を構成し、ロボット101の運動を制御するための装置である。103は可搬式教示操作盤であり、教示者がロボットを手動(JOG)操作したり、動作プログラムを作成・編集したりするためのインターフェイスである。可搬式教示操作盤103は主に操作ボタン群103aと表示画面103bで構成されている。104はロボット101の手首部に設けられたエンドエフェクタである。エンドエフェクタはアプリケーションに応じて様々なツールを取り付ける。図6の場合は部品を把持するためのハンド(グリッパ)を取り付けている。
ここで、M,D,Kはそれぞれ、慣性マトリクス、粘性係数マトリクス、剛性マトリクス(バネ定数)である。通常、これらは対角行列として、各軸方向独立なインピーダンス特性を設定する。また、sはラプラス演算子であり、時間に関する一階微分に相当する。
直交座標系における位置修正量δPは、ヤコビ行列J(θ)を用いて次式により関節座標系の位置修正量δθに分解される(106d)。
このδθをθrefに足し合わせた位置指令θref’を位置制御系106aに与えることによって、外力やモーメントに対して、M,D,Kで指定された特性を保ちながらロボットが動作する。例えば、Kにより外力に対してロボットがバネのように動作し、その際、MおよびDを小さくすることによって軽くスムーズに動作する。
特許文献1は、アーム部に設けた歪みゲージでワークを持ち上げたときにかかる力を監視し、滑ったときに静止摩擦から動摩擦に変化する力のピーク値を検出することでワークの滑りを検出している。
ロボットアームと、インピーダンス制御部を有し前記ロボットアームを駆動するコントローラを備え、前記ロボットアームに設けたハンドによって把持された把持部品をハンドリング作業する際に前記把持部品と前記ハンド間の滑りを検出するロボット制御システムであって、前記ハンドに作用する力を検出する力センサと、前記力センサの力センサ信号から前記ハンドに加わる力を算出する力算出部と、前記ロボットアームの各関節軸駆動モータの位置検出信号から前記部品の移動量を算出する移動量算出部と、前記移動量から移動速度を算出する移動速度算出部と、前記ハンドに加わる力と前記移動速度の積を時間積分して移動時に消費される仕事量を算出する仕事量算出部と、前記移動量を第1軸、前記仕事量を第2軸とする2次元平面内において、前記移動量と前記仕事量の時間変化の軌跡の少なくとも一部が予め設定した閉領域の内側にあるか外側にあるかを判定する領域判定部とを設けたものである。
また、前記領域抽出部は、前記軌跡中の前記ハンドリング作業完了時の軌跡点群を包含する閉領域を抽出することを特徴とするものである。
また、前記領域抽出部は、前記ハンドリング作業開始から完了までの全ての軌跡を包含する閉領域を抽出することを特徴とするものである。
また、前記テスト運転時に前記領域抽出部によって抽出された前記閉領域を使用して、プレイバック時に前記領域判定部が前記軌跡に対する領域判定をすることを特徴とするものである。
また、前記領域判定部は、前記ハンドリング作業開始から完了までの前記移動量と前記仕事量の軌跡の一部が前記2次元平面内に予め設定した閉領域の外側にある場合に前記把持部品とハンド間の滑りが発生したと判定することを特徴とするものである。
また、前記領域判定部が前記把持部品とハンド間の滑りが発生したと判定すると滑り発生の警告を出すことを特徴とするものである。
また、前記ハンドリング作業は挿入作業であることを特徴とするものである。
また、前記ハンドリング作業は直線移動であることを特徴とするものである。
また、前記移動量はプレイバック時の移動量であることを特徴とするものである。
また、前記仕事量はプレイバック時の仕事量であることを特徴とするものである。
特に挿入作業の場合では、消費される仕事量と挿入量の軌跡が予め設定した領域の内側にあるか外側にあるかを判定するようにしたので、挿入作業に使用する力センサとロボットアームに元来備わっている位置情報だけから、ハンドとワーク間の滑りの有無を正確に検出できるという効果がある。
手首部の力を検出する力センサの力検出信号はインピーダンス制御部109、力算出部114の両方へ入力するので、新たに滑り検出用センサを設ける必要が無い。このようにインピーダンス制御用の力センサと滑り検出用の力センサの両方をひとつの力センサで共用できる。
図1に本発明に係わる挿入作業時の滑り検出装置の構成図である。同図において、図6〜8と同一名称には同一符号を付け重複説明を省略する。
図1において、111が挿入作業時の滑り検出装置であり、ロボットコントローラ102内部に実装される構成112〜118と可搬式教示操作盤103内部に実装される構成119〜121に分かれている。
112はロボット101の各軸エンコーダ信号から接触検知後のハンド104の移動量(挿入量)を算出する挿入量算出部(移動量算出部)である。113は挿入量算出部から得られた挿入量を時間微分して挿入速度を算出する挿入速度算出部(移動速度算出部)である。114はロボット101の手首部に設けられた力センサ105の信号をもとにハンド104が把持した嵌合部品110aが被嵌合部品110bに加える挿入力を算出する挿入力算出部(力算出部)である。115は挿入速度と挿入力から挿入作業中の仕事量(エネルギー消費量)を算出する仕事量算出部である。116は挿入量と仕事量が指定された領域内にあるかどうかを判定する領域判定部である。117は挿入開始してから終了するまでの挿入量と仕事量の軌跡を保存する軌跡保存部である。118は軌跡保存部に保存された軌跡あるいはその一部を包含する閉領域を抽出する領域抽出部である。
図3は、挿入作業時における挿入力と挿入量の時間応答を示している。図3の(a)において横軸は時間を、縦軸はステップ状の力モーメント指令Frefを加えた場合に力センサ105が検出する力モーメントフィードバック値Ffbである。また図3の(b)において横軸は時間を、縦軸は挿入距離である挿入量Lを表わしている。挿入力は挿入力算出部114で、挿入量Lは挿入量算出部112で算出され、それらの実測値は力センサとモータの位置検出であるエンコーダから検出できる。
図3において、実線で示した301aおよび302aはそれぞれ正常(滑りが発生しない)時の挿入力と挿入量の時間応答である。一方、破線で示した301bおよび302bはそれぞれ異常(滑り発生)時の挿入力と挿入量の時間応答である。滑りが発生した場合の挿入力は、発生しない場合に比べて平均的に小さくなる。なお、その結果、挿入速度は平均的に速くなる。この様子は図3の(b)において302bが302aより応答グラフの傾き(挿入速度dL/dt)が大きい領域があることから一目瞭然である。この領域が滑りが発生した領域に相当する。さらに、挿入作業中の仕事量をWとすると、仕事量Wは仕事量算出部115によって次式で算出できる。
仕事量Wについては、滑りが発生した場合の方が小さくなることが実験的に確かめられる。
領域判定部が把持部品とハンド間の滑りが発生したと判定すると監視員へ知らせるために滑り発生の警告音や警告表示を出す。警告表示は可搬式教示操作盤103の表示画面やロボットコントローラ102に接続された外部計算機(パーソナルコンピュータ)の表示画面へ表示する。
102 コントローラ
103 可搬式教示操作盤
103a 操作ボタン群
103b 表示画面
104 エンドエフェクタ
105 力センサ
106 インピーダンス制御部
106a 位置制御系
106b インピーダンス制御演算部
106c インピーダンスモデル
106d 速度分解演算部
107 アクチュエータ駆動アンプ部
108 動作プログラム記憶部
109 動作プログラム実行部
110a 嵌合部品
110b 被嵌合部品
111 滑り検出装置
112 挿入量算出部(移動量算出部)
113 挿入速度算出部(移動速度算出部)
114 挿入力算出部(力算出部)
115 仕事量算出部
116 領域判定部
117 軌跡保存部
118 領域抽出部
119 軌跡領域表示部
120 軌跡選別部
121 領域編集部
301a 滑りなし時の挿入力の時間応答
301b 滑り発生時の挿入力の時間応答
302a 滑りなし時の挿入量の時間応答
302b 滑り発生時の挿入量の時間応答
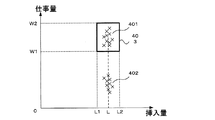
401 滑りなし時の挿入完了時の状態群
402 滑り発生時の挿入完了時に状態群
403 閉領域(長方形)
501 滑りなし時の挿入作業中の軌跡群
502 滑り発生時の挿入作業中の軌跡群
503 閉領域(台形)
Claims (13)
- ロボットアームと、インピーダンス制御部を有し前記ロボットアームを駆動するコントローラを備え、前記ロボットアームに設けたハンドによって把持された把持部品をハンドリング作業する際に前記把持部品と前記ハンド間の滑りを検出するロボット制御システムであって、
前記ハンドに作用する力を検出する力センサと、
前記力センサの力センサ信号から前記ハンドに加わる力を算出する力算出部と、
前記ロボットアームの各関節軸駆動モータの位置検出信号から前記部品の移動量を算出する移動量算出部と、
前記移動量から移動速度を算出する移動速度算出部と、
前記ハンドに加わる力と前記移動速度の積を時間積分して移動時に消費される仕事量を算出する仕事量算出部と、
前記移動量を第1軸、前記仕事量を第2軸とする2次元平面内において、前記移動量と前記仕事量の時間変化の軌跡の少なくとも一部が予め設定した閉領域の内側にあるか外側にあるかを判定する領域判定部と、
を設けたロボット制御システム。 - 前記ハンドリング作業を複数回テスト運転させ、テスト運転時の前記移動量と前記仕事量の時間変化である軌跡を複数保存する軌跡保存部と、
前記軌跡保存部によって保存された複数の前記軌跡を取捨選択する軌跡選別部と、
前記軌跡選別部によって選択された複数の軌跡から、軌跡の一部あるいは全体を包含する閉領域を抽出する領域抽出部と、
前記領域抽出部によって抽出された前記閉領域と複数の前記軌跡とを、移動量を第1軸、仕事量を第2軸とする2次元平面に表示する軌跡領域表示部と、
前記軌跡領域表示部に表示された前記閉領域を編集する閉領域編集部と、
を設けたことを特徴とする請求項1に記載のロボット制御システム。 - 前記領域抽出部は、前記軌跡中の前記ハンドリング作業完了時の軌跡点群を包含する閉領域を抽出することを特徴とする請求項2に記載のロボット制御システム。
- 前記領域抽出部は、前記ハンドリング作業開始から完了までの全ての軌跡を包含する閉領域を抽出することを特徴とする請求項2に記載のロボット制御システム。
- 前記テスト運転時に前記領域抽出部によって抽出された前記閉領域を使用して、プレイバック時に前記領域判定部が前記軌跡に対する領域判定をすることを特徴とする請求項2乃至4のいずれか一項に記載のロボット制御システム。
- 前記領域判定部は、前記ハンドリング作業完了時の前記移動量と前記仕事量が前記2次元平面内に予め設定した閉領域の外側にある場合に前記把持部品と前記ハンド間の滑りが発生したと判定することを特徴とする請求項1乃至5のいずれか一項に記載のロボット制御システム。
- 前記領域判定部は、前記ハンドリング作業開始から完了までの前記移動量と前記仕事量の軌跡の一部が前記2次元平面内に予め設定した閉領域の外側にある場合に前記把持部品とハンド間の滑りが発生したと判定することを特徴とする請求項1乃至5のいずれか一項に記載のロボット制御システム。
- 前記領域判定部が前記把持部品とハンド間の滑りが発生したと判定すると滑り発生の警告を出すことを特徴とする請求項6または7記載のロボット制御システム。
- 前記ハンドリング作業は挿入作業であることを特徴とする請求項1乃至8のいずれか一項記載のロボット制御システム。
- 前記ハンドリング作業は直線移動であることを特徴とする請求項1乃至8のいずれか一項記載のロボット制御システム。
- 前記移動量はプレイバック時の移動量であることを特徴とする請求項1記載のロボット制御システム。
- 前記仕事量はプレイバック時の仕事量であることを特徴とする請求項1記載のロボット制御システム。
- ロボットアームと、インピーダンス制御部を有し前記ロボットアームを駆動するコントローラを備え、前記ロボットアームに設けたハンドによって把持された把持部品をハンドリング作業する際に前記把持部品と前記ハンド間の滑りを検出するロボット制御システムであって、
前記ハンドに作用する力を検出する力センサと、
前記力センサの力センサ信号から前記ハンドに加わる力を算出する力算出部と、
前記ロボットアームの各関節軸駆動モータの位置検出信号から前記部品の移動量を算出する移動量算出部と、
前記移動量から移動速度を算出する移動速度算出部と、
前記ハンドに加わる力と前記移動速度の積を時間積分して移動時に消費される仕事量を算出する仕事量算出部と、
前記移動量を第1軸、前記仕事量を第2軸とする2次元平面内において、前記移動量と前記仕事量の時間変化の軌跡と滑りが無い場合に予め設定した閉領域とを比較する領域判定部と、
を設けたロボット制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009245090A JP5077323B2 (ja) | 2009-10-26 | 2009-10-26 | ロボット制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009245090A JP5077323B2 (ja) | 2009-10-26 | 2009-10-26 | ロボット制御システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011088260A JP2011088260A (ja) | 2011-05-06 |
| JP2011088260A5 JP2011088260A5 (ja) | 2011-09-15 |
| JP5077323B2 true JP5077323B2 (ja) | 2012-11-21 |
Family
ID=44106992
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009245090A Expired - Fee Related JP5077323B2 (ja) | 2009-10-26 | 2009-10-26 | ロボット制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5077323B2 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140148673A1 (en) | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Method of anchoring pullwire directly articulatable region in catheter |
| JP5939267B2 (ja) * | 2014-03-05 | 2016-06-22 | 株式会社安川電機 | ロボット監視システム、ロボット監視装置、ロボット監視方法、ロボット監視モジュール、およびロボット監視プログラム |
| EP3243476B1 (en) | 2014-03-24 | 2019-11-06 | Auris Health, Inc. | Systems and devices for catheter driving instinctiveness |
| CN107427327A (zh) * | 2014-09-30 | 2017-12-01 | 奥瑞斯外科手术机器人公司 | 具有虚拟轨迹和柔性内窥镜的可配置机器人外科手术系统 |
| US10314463B2 (en) | 2014-10-24 | 2019-06-11 | Auris Health, Inc. | Automated endoscope calibration |
| US10143526B2 (en) | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| US9931025B1 (en) | 2016-09-30 | 2018-04-03 | Auris Surgical Robotics, Inc. | Automated calibration of endoscopes with pull wires |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| KR20240035632A (ko) | 2017-05-12 | 2024-03-15 | 아우리스 헬스, 인코포레이티드 | 생검 장치 및 시스템 |
| EP3645100A4 (en) | 2017-06-28 | 2021-03-17 | Auris Health, Inc. | INSTRUMENT INSERTION COMPENSATION |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| US10145747B1 (en) | 2017-10-10 | 2018-12-04 | Auris Health, Inc. | Detection of undesirable forces on a surgical robotic arm |
| KR102645922B1 (ko) | 2017-12-06 | 2024-03-13 | 아우리스 헬스, 인코포레이티드 | 지시되지 않은 기구 롤을 수정하기 위한 시스템 및 방법 |
| KR20200100613A (ko) | 2017-12-14 | 2020-08-26 | 아우리스 헬스, 인코포레이티드 | 기구 위치 추정을 위한 시스템 및 방법 |
| JP7301884B2 (ja) | 2018-02-13 | 2023-07-03 | オーリス ヘルス インコーポレイテッド | 医療用器具を駆動するためのシステム及び方法 |
| AU2019347767A1 (en) | 2018-09-28 | 2021-04-08 | Auris Health, Inc. | Systems and methods for docking medical instruments |
| US11660147B2 (en) | 2019-12-31 | 2023-05-30 | Auris Health, Inc. | Alignment techniques for percutaneous access |
| JP2023508719A (ja) | 2019-12-31 | 2023-03-03 | オーリス ヘルス インコーポレイテッド | 経皮的アクセスのための位置合わせインターフェース |
| CN114901194A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 解剖特征识别和瞄准 |
| JP2021194725A (ja) | 2020-06-11 | 2021-12-27 | セイコーエプソン株式会社 | 目標力上限値設定方法およびロボットシステム |
| CN114131657B (zh) * | 2021-12-28 | 2024-01-23 | 芜湖藦卡机器人科技有限公司 | 一种工业机器人轨迹检测装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3607009B2 (ja) * | 1996-07-18 | 2005-01-05 | 株式会社不二越 | 産業用ロボットの故障予知方法 |
| JP2003127081A (ja) * | 2001-10-18 | 2003-05-08 | Ricoh Co Ltd | 組立ロボット及び当該組立ロボットによる部品組立方法 |
| JP3978155B2 (ja) * | 2003-06-23 | 2007-09-19 | 株式会社不二越 | 潤滑剤の劣化監視方法および装置 |
| JP4625110B2 (ja) * | 2008-05-07 | 2011-02-02 | ファナック株式会社 | 把握型ハンド |
-
2009
- 2009-10-26 JP JP2009245090A patent/JP5077323B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011088260A (ja) | 2011-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5077323B2 (ja) | ロボット制御システム | |
| US9114524B2 (en) | Method of operating a wearable robot | |
| US9427873B2 (en) | Robot controller, simple installation-type robot, and method of controlling simple installation-type robot | |
| JP5148715B2 (ja) | 産業用ロボット及び産業用ロボットのプログラミング方法 | |
| US9393687B2 (en) | Method for programming an industrial robot and industrial robot | |
| JP5545534B2 (ja) | ロボットの教示再生装置、教示再生方法、及び教示データ作成方法 | |
| EP1921526B1 (en) | Method of evaluating and correcting robot program and device for evaluating and correcting robot program | |
| US11548153B2 (en) | Robot comprising safety system ensuring stopping time and distance | |
| JP6145153B2 (ja) | ロボットの非常停止の発生状況を記録するロボット制御装置 | |
| JP6450960B2 (ja) | ロボット、ロボットシステム及び教示方法 | |
| US11766780B2 (en) | System identification of industrial robot dynamics for safety-critical applications | |
| US20130297072A1 (en) | Control apparatus and method for master-slave robot, master-slave robot, control program, and integrated electronic circuit | |
| JP5338297B2 (ja) | ロボットの制御装置 | |
| US20170173792A1 (en) | Work device | |
| JP2014126939A (ja) | 工作機械の負荷表示装置 | |
| CN109048901B (zh) | 基于虚拟摩擦力的牵引示教轨迹规划方法及装置 | |
| US10987742B2 (en) | Method of controlling positioning control apparatus and positioning control apparatus | |
| JP2016168650A (ja) | ロボット装置、ロボット制御方法、プログラム及び記録媒体 | |
| CN110405729B (zh) | 机器人控制装置 | |
| JP4880020B2 (ja) | 可動電極による溶接ワーク位置検出方法 | |
| US10377041B2 (en) | Apparatus for and method of setting boundary plane | |
| JP4289219B2 (ja) | 人間介入型ロボットの制御装置 | |
| US20240139948A1 (en) | Robot, robot control method, article manufacturing method using robot, and control program and storage medium | |
| JP3855629B2 (ja) | ロボットの干渉検出装置 | |
| WO2023062796A1 (ja) | 複数の構成部材を含むロボットを制御する制御装置、制御装置を備えるロボット装置、およびパラメータを設定する操作装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110803 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111025 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120424 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120606 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120731 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120813 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150907 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |