RU2678366C2 - Хирургическая инструментальная система (варианты) - Google Patents
Хирургическая инструментальная система (варианты) Download PDFInfo
- Publication number
- RU2678366C2 RU2678366C2 RU2015148784A RU2015148784A RU2678366C2 RU 2678366 C2 RU2678366 C2 RU 2678366C2 RU 2015148784 A RU2015148784 A RU 2015148784A RU 2015148784 A RU2015148784 A RU 2015148784A RU 2678366 C2 RU2678366 C2 RU 2678366C2
- Authority
- RU
- Russia
- Prior art keywords
- end effector
- drive
- barrel
- surgical instrument
- handle
- Prior art date
Links
- 239000012636 effector Substances 0.000 claims abstract description 412
- 230000003993 interaction Effects 0.000 claims description 78
- 238000004891 communication Methods 0.000 claims description 40
- 230000005355 Hall effect Effects 0.000 claims description 8
- 230000006870 function Effects 0.000 abstract description 70
- 230000009471 action Effects 0.000 abstract description 13
- 230000004044 response Effects 0.000 abstract description 11
- 230000000694 effects Effects 0.000 abstract description 2
- 239000003814 drug Substances 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 230000005540 biological transmission Effects 0.000 description 183
- 230000033001 locomotion Effects 0.000 description 167
- 230000007246 mechanism Effects 0.000 description 95
- 238000013461 design Methods 0.000 description 62
- 239000007858 starting material Substances 0.000 description 53
- 238000005520 cutting process Methods 0.000 description 52
- 230000004913 activation Effects 0.000 description 47
- 238000000034 method Methods 0.000 description 46
- 238000007514 turning Methods 0.000 description 40
- 239000004744 fabric Substances 0.000 description 38
- 230000003213 activating effect Effects 0.000 description 37
- 238000012546 transfer Methods 0.000 description 31
- 238000010168 coupling process Methods 0.000 description 25
- 230000008878 coupling Effects 0.000 description 24
- 238000005859 coupling reaction Methods 0.000 description 24
- 210000002105 tongue Anatomy 0.000 description 22
- 230000036961 partial effect Effects 0.000 description 19
- 230000002441 reversible effect Effects 0.000 description 17
- 230000006835 compression Effects 0.000 description 13
- 238000007906 compression Methods 0.000 description 13
- 238000006073 displacement reaction Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 12
- 230000001360 synchronised effect Effects 0.000 description 12
- 210000000936 intestine Anatomy 0.000 description 11
- 238000012986 modification Methods 0.000 description 11
- 230000004048 modification Effects 0.000 description 11
- 238000003825 pressing Methods 0.000 description 11
- 230000008901 benefit Effects 0.000 description 10
- 230000008859 change Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 10
- 239000000463 material Substances 0.000 description 10
- 238000000926 separation method Methods 0.000 description 10
- 238000003860 storage Methods 0.000 description 9
- 230000000670 limiting effect Effects 0.000 description 8
- 238000001356 surgical procedure Methods 0.000 description 8
- 238000010276 construction Methods 0.000 description 7
- 230000007935 neutral effect Effects 0.000 description 7
- 230000002093 peripheral effect Effects 0.000 description 7
- 239000012190 activator Substances 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 239000004033 plastic Substances 0.000 description 6
- 230000001954 sterilising effect Effects 0.000 description 6
- 238000004659 sterilization and disinfection Methods 0.000 description 6
- 229910052799 carbon Inorganic materials 0.000 description 5
- 230000005855 radiation Effects 0.000 description 5
- 230000008719 thickening Effects 0.000 description 5
- 229910052782 aluminium Inorganic materials 0.000 description 4
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 4
- 230000003872 anastomosis Effects 0.000 description 4
- 238000000605 extraction Methods 0.000 description 4
- 210000001035 gastrointestinal tract Anatomy 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 229910001416 lithium ion Inorganic materials 0.000 description 4
- 230000013011 mating Effects 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 230000002829 reductive effect Effects 0.000 description 4
- 230000008093 supporting effect Effects 0.000 description 4
- 238000004804 winding Methods 0.000 description 4
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 3
- 244000273256 Phragmites communis Species 0.000 description 3
- 235000014676 Phragmites communis Nutrition 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 3
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 230000000903 blocking effect Effects 0.000 description 3
- 239000003990 capacitor Substances 0.000 description 3
- 238000004140 cleaning Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000002224 dissection Methods 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 230000006698 induction Effects 0.000 description 3
- 238000011068 loading method Methods 0.000 description 3
- 229920000642 polymer Polymers 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 230000007958 sleep Effects 0.000 description 3
- 125000006850 spacer group Chemical group 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 210000003813 thumb Anatomy 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 229920001621 AMOLED Polymers 0.000 description 2
- 229920004943 Delrin® Polymers 0.000 description 2
- 239000004677 Nylon Substances 0.000 description 2
- 238000007792 addition Methods 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 239000010941 cobalt Substances 0.000 description 2
- 229910017052 cobalt Inorganic materials 0.000 description 2
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 2
- 210000001072 colon Anatomy 0.000 description 2
- 239000003086 colorant Substances 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 239000013078 crystal Substances 0.000 description 2
- 230000006266 hibernation Effects 0.000 description 2
- 230000001976 improved effect Effects 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 238000005304 joining Methods 0.000 description 2
- 230000014759 maintenance of location Effects 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 229920001778 nylon Polymers 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 238000010008 shearing Methods 0.000 description 2
- 230000008054 signal transmission Effects 0.000 description 2
- 230000011664 signaling Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- XUKUURHRXDUEBC-KAYWLYCHSA-N Atorvastatin Chemical compound C=1C=CC=CC=1C1=C(C=2C=CC(F)=CC=2)N(CC[C@@H](O)C[C@@H](O)CC(O)=O)C(C(C)C)=C1C(=O)NC1=CC=CC=C1 XUKUURHRXDUEBC-KAYWLYCHSA-N 0.000 description 1
- 241000894006 Bacteria Species 0.000 description 1
- 229910001369 Brass Inorganic materials 0.000 description 1
- 229910000906 Bronze Inorganic materials 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 241000579895 Chlorostilbon Species 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- IAYPIBMASNFSPL-UHFFFAOYSA-N Ethylene oxide Chemical compound C1CO1 IAYPIBMASNFSPL-UHFFFAOYSA-N 0.000 description 1
- 241000208202 Linaceae Species 0.000 description 1
- 235000004431 Linum usitatissimum Nutrition 0.000 description 1
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 239000004775 Tyvek Substances 0.000 description 1
- 229920000690 Tyvek Polymers 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 238000004026 adhesive bonding Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 238000005219 brazing Methods 0.000 description 1
- 239000010974 bronze Substances 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- KUNSUQLRTQLHQQ-UHFFFAOYSA-N copper tin Chemical compound [Cu].[Sn] KUNSUQLRTQLHQQ-UHFFFAOYSA-N 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000004132 cross linking Methods 0.000 description 1
- 230000002939 deleterious effect Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 229910052876 emerald Inorganic materials 0.000 description 1
- 239000010976 emerald Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000007717 exclusion Effects 0.000 description 1
- 238000001125 extrusion Methods 0.000 description 1
- 239000010408 film Substances 0.000 description 1
- 210000003811 finger Anatomy 0.000 description 1
- 239000012634 fragment Substances 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 230000017525 heat dissipation Effects 0.000 description 1
- 230000002439 hemostatic effect Effects 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000000968 intestinal effect Effects 0.000 description 1
- 150000002500 ions Chemical class 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 229910052744 lithium Inorganic materials 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000013081 microcrystal Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 239000003607 modifier Substances 0.000 description 1
- 239000002991 molded plastic Substances 0.000 description 1
- 238000003032 molecular docking Methods 0.000 description 1
- 238000002355 open surgical procedure Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 210000000664 rectum Anatomy 0.000 description 1
- 238000004064 recycling Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000004353 relayed correlation spectroscopy Methods 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000009958 sewing Methods 0.000 description 1
- 150000003384 small molecules Chemical class 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000011477 surgical intervention Methods 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 208000037816 tissue injury Diseases 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images















































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/0682—Surgical staplers, e.g. containing multiple staples or clamps for applying U-shaped staples or clamps, e.g. without a forming anvil
- A61B17/0686—Surgical staplers, e.g. containing multiple staples or clamps for applying U-shaped staples or clamps, e.g. without a forming anvil having a forming anvil staying below the tissue during stapling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B17/07207—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously the staples being applied sequentially
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B17/115—Staplers for performing anastomosis in a single operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B17/115—Staplers for performing anastomosis in a single operation
- A61B17/1155—Circular staplers comprising a plurality of staples
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/2812—Surgical forceps with a single pivotal connection
- A61B17/282—Jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00115—Electrical control of surgical instruments with audible or visual output
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00199—Electrical control of surgical instruments with a console, e.g. a control panel with a display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0023—Surgical instruments, devices or methods, e.g. tourniquets disposable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00389—Button or wheel for performing multiple functions, e.g. rotation of shaft and end effector
- A61B2017/00393—Button or wheel for performing multiple functions, e.g. rotation of shaft and end effector with means for switching between functions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
- A61B2017/00464—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable for use with different instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
- A61B2017/00473—Distal part, e.g. tip or head
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00734—Aspects not otherwise provided for battery operated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B2017/0688—Packages or dispensers for surgical staplers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07221—Stapler heads curved
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07235—Stapler heads containing different staples, e.g. staples of different shapes, sizes or materials
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07242—Stapler heads achieving different staple heights during the same shot, e.g. using an anvil anvil having different heights or staples of different sizes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/0725—Stapler heads with settable gap between anvil and cartridge, e.g. for different staple heights at different shots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2902—Details of shaft characterized by features of the actuating rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2902—Details of shaft characterized by features of the actuating rod
- A61B2017/2903—Details of shaft characterized by features of the actuating rod transferring rotary motion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
- A61B2017/2919—Handles transmission of forces to actuating rod or piston details of linkages or pivot points
- A61B2017/2922—Handles transmission of forces to actuating rod or piston details of linkages or pivot points toggle linkages
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
- A61B2017/2923—Toothed members, e.g. rack and pinion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2933—Transmission of forces to jaw members camming or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2933—Transmission of forces to jaw members camming or guiding means
- A61B2017/2936—Pins in guiding slots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2943—Toothed members, e.g. rack and pinion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2946—Locking means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/038—Automatic limiting or abutting means, e.g. for safety during shipment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
- A61B2090/0811—Indication means for the position of a particular part of an instrument with respect to the rest of the instrument, e.g. position of the anvil of a stapling instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A90/00—Technologies having an indirect contribution to adaptation to climate change
- Y02A90/10—Information and communication technologies [ICT] supporting adaptation to climate change, e.g. for weather forecasting or climate simulation
Abstract
Группа изобретений относится к медицинской технике, а именно к хирургической инструментальной системе. Хирургическая инструментальная система содержит рукоятку, первый ствол и второй ствол. Рукоятка содержит электрический двигатель и исполнительный механизм. Исполнительный механизм выполнен с возможностью приведения в действие электродвигателя. Первый ствол, прикрепляемый к рукоятке, содержит первый концевой эффектор и первую приводную систему. Первый концевой эффектор содержит первый упор и первую кассету со скобками. Первая приводная система выполнена с возможностью осуществления функции первого концевого эффектора. Первая приводная система выполнена с возможностью взаимодействия при работе с электрическим двигателем, причем электрический двигатель выполнен с возможностью функционирования в первом направлении для выполнения функции первого концевого эффектора. Второй ствол, прикрепляемый к рукоятке вместо первого ствола, содержит второй концевой эффектор и вторую приводную систему. Второй концевой эффектор содержит второй упор и вторую кассету со скобками. Вторая приводная система выполнена с возможностью осуществления функции второго концевого эффектора. Вторая приводная система выполнена с возможностью взаимодействия при работе с электрическим двигателем, причем электрический двигатель выполнен с возможностью функционирования во втором направлении для выполнения функции второго концевого эффектора. Функция первого концевого эффектора содержит перемещение первого упора в направлении первой кассеты со скобками. Функция второго концевого эффектора содержит перемещение второго упора в направлении второй кассеты со скобками. Второе направление является противоположным первому направлению. Рукоятка содержит по меньшей мере один датчик, выполненный с возможностью обнаружения того, первый или второй ствол был прикреплен к рукоятке, и передачи этой информации микропроцессору. Микропроцессор выполнен так, что, когда исполнительный механизм приходит в действие для выполнения функции первого или второго концевого эффектора, микропроцессор поворачивает электрический двигатель в первом направлении или во втором направлении, в зависимости от того, первый или второй ствол был соответственно прикреплен к рукоятке. Во втором варианте выполнения хирургическая инструментальная система содержит вышеуказанные рукоятку, первый ствол и второй ствол. Электрический двигатель выполнен с возможностью осуществления первого и второго количества вращений для выполнения функции первого и второго концевого эффектора. Функция первого концевого эффектора содержит перемещение указанного первого упора в направлении указанной первой кассеты со скобками. Функция второго концевого эффектора содержит перемещение указанного второго упора в направлении второй кассеты со скобками. Первое количество вращений отличается от второго количества вращений. Группа изобретений характеризуется присутствием микропроцессора в рукоятке, который может регулировать направление вращения двигателя, в частности, в ответ на информацию о том, какой ствол прикреплен в данный момент. 2 н. и 14 з.п. ф-лы, 121 ил.
Description
ПЕРЕКРЕСТНАЯ ССЫЛКА НА СМЕЖНЫЕ ЗАЯВКИ
Настоящая безусловная заявка на патент испрашивает приоритет в соответствии с §119(e) ст. 35 Свода законов США по предварительной заявке на патент США № 61/812,365 «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МНОЖЕСТВОМ ФУНКЦИЙ, ОСУЩЕСТВЛЯЕМЫХ ОДНИМ ДВИГАТЕЛЕМ», поданной 16 апреля 2013 года, которая полностью включена в настоящий документ путем ссылки. Настоящая безусловная заявка на патент также испрашивает приоритет в соответствии с §119(e) ст. 35 Свода законов США по предварительной заявке на патент США № 61/812,376 «ЛИНЕЙНЫЙ РЕЖУЩИЙ ИНСТРУМЕНТ С С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ», поданной 16 апреля 2013 года, которая полностью включена в настоящий документ путем ссылки. Настоящая безусловная заявка на патент также испрашивает приоритет в соответствии с §119(e) ст. 35 Свода законов США по предварительной заявке на патент США № 61/812,382 «ЛИНЕЙНЫЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ДВИГАТЕЛЕМ И ПИСТОЛЕТНОЙ РУКОЯТКОЙ», поданной 16 апреля 2013 года, которая полностью включена в настоящий документ путем ссылки. Настоящая безусловная заявка на патент испрашивает приоритет в соответствии с §119(e) ст. 35 Свода законов США по предварительной заявке на патент США № 61/812,385 «РУКОЯТКА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА С МНОЖЕСТВОМ АКТИВИРУЮЩИХ ДВИГАТЕЛЕЙ И С УПРАВЛЕНИЕМ ДВИГАТЕЛЯМИ», поданной 16 апреля 2013 года, которая полностью включена в настоящий документ путем ссылки. Настоящая безусловная заявка на патент также испрашивает приоритет в соответствии с §119(e) ст. 35 Свода законов США по предварительной заявке на патент США № 61/812,372 «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МНОЖЕСТВОМ ФУНКЦИЙ, ОСУЩЕСТВЛЯЕМЫХ ОДНИМ ДВИГАТЕЛЕМ», поданной 16 апреля 2013 года, которая полностью включена в настоящий документ путем ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Различные формы изобретения относятся к хирургическим инструментам, а в различных вариантах осуществления - к хирургическим режущим и сшивающим инструментам и кассетам со скобками для них, которые выполнены с возможностью рассечения и сшивания ткани скобками.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Различные элементы и преимущества настоящего изобретения, а также способы их достижения станут более очевидны, а само изобретение станет более понятным путем ссылки на следующее описание вариантов осуществления настоящего изобретения в совокупности с сопроводительными рисунками, причем:
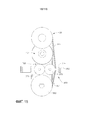
на ФИГ. 1 представлен вид в перспективе модульной хирургической системы, содержащей хирургический инструмент с с исполнительным механизмом и три взаимозаменяемых концевых эффектора;
на ФИГ. 2 представлен вид сбоку в перспективе хирургического инструмента с исполнительным механизмом, причем участок корпуса рукоятки удален для ясности;
на ФИГ. 3 представлен частичный вид с пространственным разделением компонентов узла хирургического инструмента, изображенного на ФИГ. 2;
на ФИГ. 4 представлен другой вид с пространственным разделением компонентов хирургического инструмента, изображенного на ФИГ. 2 и 3;
на ФИГ. 5 представлен вид сбоку в вертикальной проекции хирургического инструмента с исполнительным механизмом, причем участок корпуса рукоятки удален;
на ФИГ. 6 представлен вид в перспективе электроприводной системы и узла трансмиссии, причем узел трансмиссии находится в первом приводном положении, при этом активация двигателя приведет к активации первой приводной системы хирургического инструмента, изображенного на ФИГ. 2–5;
на ФИГ. 6A представлен вид в перспективе альтернативной передаточной каретки с блокирующими механизмами;
на ФИГ. 6B представлен вид в перспективе электроприводной системы и узла трансмиссии, включающего в себя передаточную каретку, изображенную на ФИГ. 6A, причем узел трансмиссии находится в первом приводном положении, при этом активация двигателя приведет к активации первой приводной системы, а вторая приводная система заблокирована блокирующими механизмами;
на ФИГ. 6C представлен вид в перспективе электроприводной системы и узла трансмиссии, изображенных на ФИГ. 6B, причем узел трансмиссии находится во втором приводном положении, при этом активация двигателя приведет к активации второй приводной системы, а первая приводная система заблокирована блокирующими механизмами;
на ФИГ. 7 представлен еще один вид в перспективе электроприводной системы и узла трансмиссии, изображенных на ФИГ. 6, причем узел трансмиссии находится во втором приводном положении, при этом активация двигателя приведет к активации второй приводной системы;
на ФИГ. 8 представлен вид сбоку в вертикальной проекции другого хирургического инструмента с исполнительным механизмом, причем участок корпуса рукоятки и другие его участки опущены для ясности;
на ФИГ. 9 представлен вид в перспективе двигателя, узла трансмиссии и первой и второй приводных систем хирургического инструмента, изображенного на ФИГ. 8, причем узел трансмиссии находится в первом приводном положении;
на ФИГ. 10 представлен вид в поперечном сечении в вертикальной проекции двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 9, причем узел трансмиссии находится в первом приводном положении;
на ФИГ. 11 представлен другой вид в перспективе двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 9 и 10, причем узел трансмиссии находится во втором приводном положении;
на ФИГ. 12 представлен еще один вид в поперечном сечении в вертикальной проекции двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 9–11, причем узел трансмиссии находится во втором приводном положении;
на ФИГ. 13 представлен частичный вид сзади в перспективе участка другого хирургического инструмента с исполнительным механизмом;
на ФИГ. 14 представлен вид сбоку в вертикальной проекции двигателя, узла трансмиссии и первой и второй приводных систем хирургического инструмента, изображенного на ФИГ. 13;
на ФИГ. 15 представлен вид в поперечном сечении узла трансмиссии хирургического инструмента, изображенного на ФИГ. 13 и 14, в первом положении исполнительного механизма;
на ФИГ. 16 представлен другой вид в поперечном сечении узла трансмиссии хирургического инструмента, изображенного на ФИГ. 13–15, во втором положении исполнительного механизма;
на ФИГ. 17 представлен вид в перспективе другой конструкции хирургического инструмента с исполнительным механизмом, причем участок корпуса удален для ясности;
на ФИГ. 18 представлен вид в перспективе двигателя, узла трансмиссии и первой и второй приводных систем хирургического инструмента, изображенного на ФИГ. 17;
на ФИГ. 19 представлен общий вид с пространственным разделением компонентов двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 18;
на ФИГ. 20 представлен вид в поперечном сечении участков двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 18 и 19, причем узел передаточного ствола находится в первом приводном положении;
на ФИГ. 21 представлен другой вид в поперечном сечении участков двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 20, причем узел передаточного стержня находится в первом приводном положении;
на ФИГ. 22 представлен вид в перспективе другого двигателя, узла трансмиссии и первой и второй приводных систем одной формы хирургического инструмента настоящего изобретения;
на ФИГ. 23 представлен общий вид с пространственным разделением компонентов двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 22;
на ФИГ. 24 представлен вид в поперечном сечении двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 22 и 23, причем узел трансмиссии находится в первом приводном положении;
на ФИГ. 25 представлен еще один вид в поперечном сечении двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 22–24, причем узел трансмиссии находится во втором приводном положении;
на ФИГ. 26 представлен еще один вид в поперечном сечении двигателя и узла трансмиссии, изображенных на ФИГ. 22–25, причем узел трансмиссии находится в первом приводном положении;
на ФИГ. 27 представлен еще один вид в поперечном сечении двигателя и узла трансмиссии, изображенных на ФИГ. 22–26, причем узел трансмиссии находится во втором приводном положении;
на ФИГ. 28 представлен вид сбоку в вертикальной проекции участка другого хирургического инструмента с исполнительным механизмом, причем участок корпуса удален для ясности;
на ФИГ. 29 представлен вид в перспективе участка другого хирургического инструмента с исполнительным механизмом, причем участок корпуса удален для ясности;
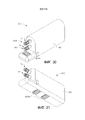
на ФИГ. 30 представлен вид спереди в перспективе блока с исполнительным механизмом с первой и второй системами вращательных исполнительных механизмов;
на ФИГ. 31 представлен вид в перспективе блока с исполнительным механизмом, изображенного на ФИГ. 30;
на ФИГ. 32 представлен вид в перспективе блока с с исполнительным механизмом, изображенного на ФИГ. 31 и 32, с которого удален корпус;
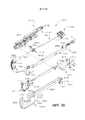
на ФИГ. 33 представлен общий вид с пространственным разделением компонентов механической соединительной системы для функционального соединения друг с другом четырех вращательных приводных стволов;
на ФИГ. 34 представлен вид спереди в перспективе хирургического концевого эффектора, причем участок корпуса концевого эффектора удален для ясности;
на ФИГ. 35 представлен другой вид спереди в перспективе хирургического концевого эффектора, изображенного на ФИГ. 34, причем участки закрывающей системы и нижней бранши опущены для ясности;
на ФИГ. 36 представлен общий вид в перспективе с пространственным разделением компонентов хирургического концевого эффектора, изображенного на ФИГ. 34 и 35;
на ФИГ. 37 представлен вид в вертикальной проекции сбоку хирургического концевого эффектора, изображенного на ФИГ. 33–36, причем участок корпуса опущен для ясности;
на ФИГ. 38 представлен вид в перспективе сбоку слева другой конструкции концевого эффектора, причем участок корпуса концевого эффектора опущен для ясности;
на ФИГ. 39 представлен общий вид с пространственным разделением компонентов концевого эффектора, изображенного на ФИГ. 38;
на ФИГ. 40 представлен вид в перспективе сбоку конструкции концевого эффектора, изображенного на ФИГ. 37 и 38, причем другой участок концевого эффектора опущен для ясности;
на ФИГ. 41 представлен вид в поперечном сечении конструкции концевого эффектора, представленного на ФИГ. 38–40;
на ФИГ. 42 представлен вид в поперечном сечении в перспективе другого варианта осуществления хирургического концевого эффектора;
на ФИГ. 43 представлен частичный общий вид с пространственным разделением компонентов хирургического концевого эффектора, представленного на ФИГ. 42;
на ФИГ. 44 представлен другой частичный вид в перспективе участка хирургического концевого эффектора, изображенного на ФИГ. 42 и 43;
на ФИГ. 45 представлен другой вид в поперечном сечении хирургического концевого эффектора, представленного на ФИГ. 42–44;
на ФИГ. 46 представлен вид в перспективе конструкции концевого эффектора с узлом высвобождения исполнительного механизма;
на ФИГ. 47 представлен частичный вид в перспективе хирургического концевого эффектора, изображенного на ФИГ. 46, некоторые участки которого опущены для ясности и проксимальный участок приводного механизма закрывающей системы отсоединены от дистального участка приводного механизма закрывающей системы;
на ФИГ. 48 представлен частичный вид в перспективе хирургического концевого эффектора, изображенного на ФИГ. 46 и 47, причем его участки опущены для ясности, дистальный соединительный элемент установлен в паз проксимального соединительного элемента, а соединительный штифт исполнительного механизма удален из них;
на ФИГ. 49 представлен другой частичный вид в перспективе хирургического концевого эффектора, изображенного на ФИГ. 48, демонстрирующий участки пусковой системы концевого эффектора;
на ФИГ. 50 представлен вид в перспективе другой конструкции хирургического концевого эффектора;
на ФИГ. 50A представлен увеличенный вид участка хирургического концевого эффектора, показанного на ФИГ. 50;
на ФИГ. 51 представлен вид в перспективе участка концевого эффектора, изображенного на ФИГ. 50, причем участок корпуса опущен для ясности;
на ФИГ. 52 представлен еще один вид в перспективе концевого эффектора, изображенного на ФИГ. 50 и 51, причем участки корпуса и закрывающей системы опущены для ясности;
на ФИГ. 53 представлен другой вид в перспективе концевого эффектора, изображенного на ФИГ. 50–52, причем участки закрывающей системы и участок корпуса опущены для ясности;
на ФИГ. 54 представлен вид в перспективе другого концевого эффектора, который оборудован узлом высвобождения исполнительного механизма;
на ФИГ. 55 показан вид сбоку в вертикальной проекции концевого эффектора, изображенного на ФИГ. 54;
на ФИГ. 56 представлен вид в перспективе участка концевого эффектора, изображенного на ФИГ. 54 и 55, причем участок корпуса концевого эффектора опущен для ясности;
на ФИГ. 57 представлен другой вид в перспективе концевого эффектора, показанного на ФИГ. 54–56, на котором головка инструмента находится в закрытом положении;
на ФИГ. 58 представлен другой частичный вид в перспективе концевого эффектора, изображенного на ФИГ. 57, причем участок корпуса концевого эффектора опущен для ясности;
на ФИГ. 59 представлен другой вид в перспективе концевого эффектора, изображенного на ФИГ. 58, причем соединительный штифт исполнительного механизма удален;
на ФИГ. 60 представлен другой вид в перспективе концевого эффектора, изображенного на ФИГ. 59, с удаленным соединительным штифтом исполнительного механизма и узлом балки закрывающего исполнительного механизма, перемещенным проксимально для открытия головки инструмента;
на ФИГ. 61 представлена блок-схема модульного хирургического инструмента с с исполнительным механизмом, содержащего рукояточный участок и стволовой участок;
на ФИГ. 62 представлена таблица, демонстрирующая общее время выполнения рабочего хода и требования по нагрузочному току для различных операций различных стволов устройства;
на ФИГ. 63, которая разделена на ФИГ. 63-A и 63-B, представлена подробная схема электрической системы в рукояточном участке модульного хирургического инструмента с с исполнительным механизмом;
на ФИГ. 64 представлена блок-схема электрической системы рукояточного и стволового участков модульного хирургического инструмента с с исполнительным механизмом;
на ФИГ. 65 показана механическая переключательная система управления движениями для устранения микропроцессорного управления функциями двигателя;
на ФИГ. 66 представлен вид в перспективе соединительной конструкции, содержащей корпус соединителя и пару гнезд внутри корпуса соединителя в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 67 представлен вид в поперечном сечении в перспективе соединительной конструкции, изображенной на ФИГ. 66, представляющий пару приводных элементов, отсоединенных от пары гнезд, и дополнительно показывающий соединительную конструкцию в незаблокированной конфигурации в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 68 представлен вид в поперечном сечении в перспективе соединительной конструкции, изображенной на ФИГ. 66, показывающий пару приводных элементов, соединенных с парой гнезд, и дополнительно показывающий соединительную конструкцию в заблокированной конфигурации в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 69 представлен вид в поперечном сечении в перспективе соединительной конструкции, изображенной на ФИГ. 66, показывающий пару приводных элементов, соединенных с парой гнезд, и дополнительно показывающий соединительную конструкцию в незаблокированной конфигурации в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 70 представлен вид в перспективе вставки соединительной конструкции, изображенной на ФИГ. 66, в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 71 представлен вид в перспективе гнезда соединительной конструкции, изображенной на ФИГ. 66, в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 72 представлен вид в перспективе защелки соединительной конструкции, изображенной на ФИГ. 66, в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 73 представлен вид в поперечном сечении в вертикальной проекции хирургического концевого эффектора-насадки для применения с рукояткой хирургического инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 74 представлен вид в перспективе с пространственным разделением компонентов приводных систем хирургического концевого эффектора-насадки, изображенной на ФИГ. 73, в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 75 представлен вид в перспективе рукоятки для хирургического инструмента, причем рукоятка содержит приводную систему, имеющую первый выходной приводной узел и второй выходной приводной узел в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 76 представлен вид в перспективе приводной системы, изображенной на ФИГ. 75, в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 77 представлен вид в поперечном сечении в вертикальной проекции рукоятки, изображенной на ФИГ. 75, показывающий приводную систему, взаимодействующую с первым выходным приводным узлом и высвобожденную от второго выходного приводного узла в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 78 представлен вид в поперечном сечении в вертикальной проекции приводной системы, изображенной на ФИГ. 75, демонстрирующий приводную систему, взаимодействующую со вторым выходным приводным узлом и высвобожденную из взаимодействия с первым выходным приводным узлом в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 79 представлен частичный вид в поперечном сечении в перспективе хирургического инструмента, включающего в себя поворачиваемый приводной ствол, закрывающий привод, приводимый в действие упомянутым приводным стволом, и пусковой привод, приводимый в действие упомянутым приводным стволом, причем закрывающий исполнительный механизм исполнительный механизм показан в частично открытой конфигурации, а пусковой исполнительный механизм исполнительный механизм показан в незапущенной конфигурации;
на ФИГ. 80 представлен вид в перспективе поворачиваемого приводного ствола, изображенного на ФИГ. 79;
на ФИГ. 81 представлен частичный вид в поперечном сечении в перспективе хирургического инструмента, изображенного на ФИГ. 79, с закрывающим с исполнительным механизмом в открытой конфигурации и пусковым с исполнительным механизмом в незапущенной конфигурации;
на ФИГ. 82 представлен частичный вид в поперечном сечении в перспективе хирургического инструмента, изображенного на ФИГ. 79, с закрывающим с исполнительным механизмом в закрытой конфигурации и пусковым с исполнительным механизмом в незапущенной конфигурации;
на ФИГ. 83 представлен частичный вид в поперечном сечении в перспективе хирургического инструмента, изображенного на ФИГ. 79, с закрывающим с исполнительным механизмом в закрытой конфигурации и пусковым с исполнительным механизмом в запущенной конфигурации;
на ФИГ. 84 представлен частичный вид в поперечном сечении в перспективе хирургического инструмента, изображенного на ФИГ. 79, с пусковым с исполнительным механизмом в оттянутой конфигурации и закрывающим с исполнительным механизмом в процессе повторного открытия;
на ФИГ. 85 представлен частичный вид в поперечном сечении концевого эффектора и ствола хирургического инструмента, изображенных в закрытой, незапущенной конфигурации;
на ФИГ. 86 представлен вид в перспективе трансмиссии для работы с хирургическим инструментом, изображенным на ФИГ. 85, в конфигурации, соответствующей конфигурации, показанной на ФИГ. 85;
на ФИГ. 87 представлен вид с пространственным разделением компонентов трансмиссии, показанной на ФИГ. 86;
на ФИГ. 88 представлен частичный вид в поперечном сечении концевого эффектора и ствола, представленного на ФИГ. 85, изображенных в открытой, незапущенной конфигурации;
на ФИГ. 89 представлен вид в перспективе трансмиссии, изображенной на ФИГ. 86, в конфигурации, соответствующей конфигурации, показанной на ФИГ. 88;
на ФИГ. 90 представлен частичный вид в поперечном сечении концевого эффектора и ствола, изображенного на ФИГ. 85, показанных в закрытой, незапущенной конфигурации;
на ФИГ. 91 представлен вид в перспективе трансмиссии, изображенной на ФИГ. 86, в конфигурации, соответствующей конфигурации, показанной на ФИГ. 90;
на ФИГ. 92 представлен частичный вид в поперечном сечении концевого эффектора и ствола, изображенного на ФИГ. 85, показанных в закрытой, запущенной конфигурации;
на ФИГ. 93 представлен вид в перспективе трансмиссии, изображенной на ФИГ. 86, в конфигурации, соответствующей конфигурации, показанной на ФИГ. 92;
на ФИГ. 94 представлен вид в перспективе хирургического сшивающего инструмента в соответствии с по меньшей мере одним вариантом осуществления;
на ФИГ. 95 представлен вид с пространственным разделением компонентов рукоятки хирургического сшивающего инструмента, изображенного на ФИГ. 94;
на ФИГ. 96 представлен вид с пространственным разделением компонентов концевого эффектора хирургического сшивающего инструмента, изображенного на ФИГ. 94;
на ФИГ. 97 представлен вид в перспективе двигателя и узла зубчатых колес хирургического сшивающего инструмента, изображенного на ФИГ. 94;
на ФИГ. 98 представлен вид в вертикальной проекции в поперечном сечении хирургического сшивающего инструмента, изображенного на ФИГ. 94;
на ФИГ. 99 представлен вид в перспективе хирургического сшивающего инструмента в соответствии с по меньшей мере одним вариантом осуществления, изображенным в открытом, незафиксированном состоянии;
на ФИГ. 100 представлен вид в перспективе хирургического сшивающего инструмента, изображенного на ФИГ. 99, в закрытом незафиксированном состоянии;
на ФИГ. 101 представлен вид в перспективе хирургического сшивающего инструмента, изображенного на ФИГ. 99, в закрытом зафиксированном состоянии;
на ФИГ. 102 представлен вид в горизонтальной проекции хирургического сшивающего инструмента, изображенного на ФИГ. 99;
на ФИГ. 103 представлен вид в поперечном сечении хирургического сшивающего инструмента, изображенного на ФИГ. 99;
на ФИГ. 104 представлен подробный вид в поперечном сечении хирургического сшивающего инструмента, изображенного на ФИГ. 99;
на ФИГ. 105 представлен вид с пространственным разделением компонентов пускового исполнительного механизма хирургического сшивающего инструмента, изображенного на ФИГ. 99;
на ФИГ. 106 представлен вид с пространственным разделением компонентов закрывающего исполнительного механизма хирургического сшивающего инструмента, изображенного на ФИГ. 99;
на ФИГ. 107 представлен вид в поперечном сечении хирургического сшивающего инструмента в соответствии с по меньшей мере одним вариантом осуществления, содержащим рукоятку, ствол и концевой эффектор;
на ФИГ. 108 представлен вид в поперечном сечении рукоятки хирургического сшивающего инструмента, изображенного на ФИГ. 107, показанного в открытой конфигурации;
на ФИГ. 109 представлен вид в поперечном сечении рукоятки хирургического сшивающего инструмента, изображенного на ФИГ. 107, показанного в закрытой конфигурации;
на ФИГ. 110 представлен вид в перспективе рукоятки хирургического сшивающего инструмента, изображенного на ФИГ. 107, причем некоторые компоненты удалены;
на ФИГ. 111 представлен вид в перспективе хирургического сшивающего инструмента в соответствии с по меньшей мере одним вариантом осуществления, содержащим рукоятку и ствол;
на ФИГ. 112 представлен вид в перспективе хирургического сшивающего инструмента, изображенного на ФИГ. 111, причем рукоятка отделена от ствола;
на ФИГ. 113 представлен вид с пространственным разделением компонентов хирургического сшивающего инструмента, изображенного на ФИГ. 111;
на ФИГ. 114 представлен частичный вид в поперечном сечении рукоятки, изображенной на ФИГ. 111, демонстрирующий трансмиссию, функционально взаимодействующую с закрывающей системой хирургического сшивающего инструмента, изображенного на ФИГ. 111;
на ФИГ. 115 представлен частичный вид в поперечном сечении рукоятки, изображенной на ФИГ. 111, показывающий трансмиссию, изображенную на ФИГ. 114, функционально взаимодействующую с пусковой системой хирургического сшивающего инструмента, изображенного на ФИГ. 111;
на ФИГ. 116 представлен вид с пространственным разделением компонентов трансмиссии, показанной на ФИГ. 114;
на ФИГ. 117 представлен вид в перспективе хирургического сшивающего инструмента в соответствии с по меньшей мере одним вариантом осуществления, причем некоторые компоненты удалены и показаны в открытой конфигурации;
на ФИГ. 118 представлен вид в перспективе хирургического сшивающего инструмента, изображенного на ФИГ. 117, причем некоторые компоненты удалены и показаны в закрытой конфигурации;
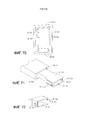
на ФИГ. 119 представлен вид в перспективе другой конструкции концевого эффектора и варианта осуществления блока скоб к нему перед установкой блока скоб в концевой эффектор;
на ФИГ. 120 представлен еще один вид в перспективе концевого эффектора и блока скоб, изображенных на ФИГ. 119, причем блок скоб установлен в концевой эффектор; и
на ФИГ. 121 представлен другой вид в перспективе концевого эффектора и блока скоб, изображенных на ФИГ. 120, причем элемент держателя блока скоб с него удален.
Соответствующие элементы на разных видах обозначаются соответствующими условными обозначениями. Иллюстрации, прилагаемые к настоящей заявке, предназначены исключительно для демонстрации предпочтительных вариантов осуществления изобретения, они не должны толковаться как ограничивающие объем настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Заявителю настоящей заявки принадлежат нижеуказанные заявки на патенты, поданные 1 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США с серийным № 13/782,295, озаглавленная «ШАРНИРНО ПОВОРАЧИВАЕМЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ПРОВОДЯЩИМИ ДОРОЖКАМИ ДЛЯ ПЕРЕДАЧИ СИГНАЛА»;
- заявка на патент США с серийным № 13/782,323, озаглавленная «ВРАЩАТЕЛЬНЫЕ ШАРНИРНЫЕ СОЧЛЕНЕНИЯ С ЭЛЕКТРОПИТАНИЕМ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782,338, озаглавленная «МЕХАНИЗМЫ ДИСКОВОГО ПЕРЕКЛЮЧАТЕЛЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782,499, озаглавленная «ЭЛЕКТРОМЕХАНИЧЕСКОЕ ХИРУРГИЧЕСКОЕ УСТРОЙСТВО С МЕХАНИЗМОМ СИГНАЛЬНОГО РЕЛЕ»;
- заявка на патент США с серийным № 13/782,460, озаглавленная «МНОГОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782,358, озаглавленная «УЗЛЫ РЫЧАЖНОГО ПЕРЕКЛЮЧАТЕЛЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782 481, озаглавленная «КОНЦЕВОЙ ЗАЖИМ, ВЫПРЯМЛЯЕМЫЙ С ПОМОЩЬЮ ДАТЧИКА ВО ВРЕМЯ ИЗВЛЕЧЕНИЯ ЧЕРЕЗ ТРОКАР»;
- заявка на патент США с серийным № 13/782,518, озаглавленная «СПОСОБЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ СО СЪЕМНЫМИ РАБОЧИМИ ЧАСТЯМИ»;
- заявка на патент США с серийным № 13/782,375, озаглавленная «ВРАЩАЮЩИЕСЯ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ЭЛЕКТРОПИТАНИЕМ С МНОЖЕСТВОМ СТЕПЕНЕЙ СВОБОДЫ»; и
- заявка на патент США с серийным № 13/782,536, озаглавленная «МЯГКИЙ ОГРАНИЧИТЕЛЬ ХОДА ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА», которые полностью включены в настоящий документ путем ссылки.
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные 14 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США с серийным № 13/803 097, озаглавленная «ШАРНИРНЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПУСКОВОЙ ПРИВОД»;
- заявка на патент США с серийным 13/803 193, озаглавленная «УСТРОЙСТВА УПРАВЛЕНИЯ ДЛЯ ПРИВОДНОГО ЭЛЕМЕНТА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА»;
- заявка на патент США с серийным № 13/803 053, озаглавленная «ВЗАИМОЗАМЕНЯЕМЫЕ УЗЛЫ СТВОЛОВ ДЛЯ ИСПОЛЬЗОВАНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ»;
- заявка на патент США с порядковым № 13/803 086, озаглавленная «ШАРНИРНЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ФИКСАТОР ШАРНИРА»;
- заявка на патент США с серийным № 13/803 210, озаглавленная «КОМПОНОВКА ДАТЧИКА ДЛЯ СИСТЕМЫ АБСОЛЮТНОГО ПОЗИЦИОНИРОВАНИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/803 148, озаглавленная «МНОГОФУНКЦИОНАЛЬНЫЙ ДВИГАТЕЛЬ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/803 066, озаглавленная «КОНСТРУКЦИЯ БЛОКИРОВКИ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/803 117, озаглавленная «СИСТЕМА УПРАВЛЕНИЯ ШАРНИРНЫМИ СОЕДИНЕНИЯМИ ДЛЯ ШАРНИРНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США сер. № 13/803,130, озаглавленная «КОНСТРУКЦИИ АВТОРЕГУЛИРОВКИ ПРИВОДНОГО МЕХАНИЗМА ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»; и
- заявка на патент США сер. № 13/803,159, озаглавленная «СПОСОБ И СИСТЕМА ДЛЯ РАБОТЫ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ».
Заявителю настоящей заявки принадлежат нижеуказанные заявки на патенты, поданные 25 марта 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США сер. № 14/226,106, озаглавленная «СИСТЕМЫ УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ ЭЛЕКТРОПИТАНИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
заявка на патент США сер. № 14/226,099, озаглавленная «СХЕМА ПРОВЕРКИ СТЕРИЛИЗАЦИИ»;
заявка на патент США сер. № 14/226,094, озаглавленная «ПРОВЕРКА ЧИСЛА ЗАМЕН БАТАРЕИ/КОЛИЧЕСТВА ПРОЦЕДУР»;
заявка на патент США сер. № 14/226,117, озаглавленная «РАСПРЕДЕЛЕНИЕ ПИТАНИЯ ПРИ ПОМОЩИ ВАРИАНТОВ СПЯЩЕГО РЕЖИМА СЕГМЕНТИРОВАННОЙ СХЕМЫ И УПРАВЛЕНИЯ ВЫХОДОМ ИЗ СПЯЩЕГО РЕЖИМА»;
заявка на патент США сер. № 14/226,075, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МОДУЛЬНЫМ ЭЛЕКТРОПИТАНИЕМ И С ОТСОЕДИНЯЕМЫМИ УЗЛАМИ СТВОЛА»;
заявка на патент США сер. № 14/226,093, озаглавленная «АЛГОРИТМЫ ОБРАТНОЙ СВЯЗИ ДЛЯ РУЧНЫХ АВАРИЙНЫХ СИСТЕМ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
заявка на патент США сер. № 14/226,116, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИСПОЛЬЗУЮЩИЙ АДАПТАЦИЮ ПО ДАТЧИКАМ»;
заявка на патент США сер. № 14/226,071, озаглавленная «СХЕМА УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ, ИМЕЮЩАЯ ПРОЦЕССОР БЕЗОПАСНОСТИ»;
заявка на патент США сер. № 14/226 097, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ИНТЕРАКТИВНЫЕ СИСТЕМЫ»;
заявка на патент США сер. № 14/226 126, озаглавленная «СТЫКОВОЧНЫЕ СИСТЕМЫ ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ»;
заявка на патент США сер. № 14/226,133, озаглавленная «МОДУЛЬНАЯ СИСТЕМА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА»;
заявка на патент США сер. № 14/226,081, озаглавленная «СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ СЕГМЕНТИРОВАННОЙ СХЕМОЙ»;
заявка на патент США сер. № 14/226,076, озаглавленная «РАСПРЕДЕЛЕНИЕ ПИТАНИЯ ПРИ ПОМОЩИ СЕГМЕНТИРОВАННОЙ СХЕМЫ И ЗАЩИТА С ПЕРЕМЕННЫМ НАПРЯЖЕНИЕМ»;
заявка на патент США с сер. № 14/226,111, озаглавленная «СИСТЕМА ХИРУРГИЧЕСКОГО СШИВАЮЩЕГО ИНСТРУМЕНТА»; и
заявка на патент США сер. № 14/226,125, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПОВОРАЧИВАЕМЫЙ СТВОЛ».
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные в тот же день, причем каждая из них полностью включена в настоящий документ путем ссылки:
- заявка на патент США сер. № ___________, озаглавленная «ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ С БЛОКИРУЕМЫМИ ДВОЙНЫМИ ПРИВОДНЫМИ СТВОЛАМИ», досье патентного поверенного № END7406USNP/140054;
- заявка на патент США сер. № __________________, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ЗАКРЫВАЮЩИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ И ПУСКОВОЙ ПРИВОД, УПРАВЛЯЕМЫЕ ОДНИМ ВРАЩАЮЩИМСЯ ВНЕШНИМ УСТРОЙСТВОМ»", досье патентного поверенного № END7407USNP/140055;
- заявка на патент США сер. № ___________, озаглавленная «ЛИНЕЙНЫЙ ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПИТАНИЕМ», досье патентного поверенного № END7409USNP/140057;
- заявка на патент США сер. № ___________, озаглавленная «КОНСТРУКЦИЯ ТРАНСМИССИИ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА», досье патентного поверенного № END7410USNP/140058;
- заявка на патент США сер. № ___________, озаглавленная «МОДУЛЬНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ С ВЫРАВНИВАЮЩИМИ ЭЛЕМЕНТАМИ ДЛЯ ВЫРАВНИВАНИЯ ВРАЩАТЕЛЬНЫХ ПРИВОДНЫХ СТВОЛОВ С СТВОЛАМИ ХИРУРГИЧЕСКОГО КОНЦЕВОГО ЭФФЕКТОРА», досье патентного поверенного № END7411USNP/140059;
- заявка на патент США сер. № ___________, озаглавленная «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПИТАНИЕМ», досье патентного поверенного № END7412USNP/140060;
- заявка на патент США сер. № ___________, озаглавленная «КОНСТРУКЦИЯ ДЛЯ ОТСОЕДИНЕНИЯ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА», досье патентного поверенного № END7413USNP/140061; и
- заявка на патент США сер. № ___________, озаглавленная «МОДУЛЬНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ С КОНСТРУКЦИЯМИ ДЛЯ УКАЗАНИЯ СОСТОЯНИЯ», досье патентного поверенного № END7414USNP/140062.
Для обеспечения полного понимания принципов работы конструкции, функционирования, производства и применения устройств и способов, описанных в настоящем документе, приводится описание некоторых примеров вариантов осуществления. Один или более примеров данных вариантов осуществления показаны на сопроводительных рисунках. Обычным специалистам в данной области будет понятно, что устройства и способы, конкретно описанные в настоящем документе и проиллюстрированные на сопроводительных рисунках, представляют собой не имеющие ограничительного характера примеры осуществления и что объем различных вариантов осуществления настоящего изобретения определен только формулой изобретения. Особенности, показанные или описанные в связи с одним примером осуществления, можно комбинировать с особенностями других вариантов осуществления. Предполагается, что объем настоящего изобретения включает такие модификации и варианты.
В настоящем описании ссылка на «различные варианты осуществления», «некоторые варианты осуществления», «один вариант осуществления», «вариант осуществления» или т. п. означает, что конкретная особенность, конструкция или характеристика, описанные в связи с вариантом осуществления, включены, по меньшей мере, в один вариант осуществления настоящего изобретения. Таким образом, фразы «в различных вариантах осуществления», «в некоторых вариантах осуществления», «в одном варианте осуществления» или «в варианте осуществления» или т. п. в настоящем описании не обязательно относятся к одному и тому же варианту осуществления. Более того, конкретные особенности, конструкции или характеристики можно скомбинировать любым подходящим способом в одном или более вариантах осуществления. Таким образом, конкретные особенности, конструкции или характеристики, проиллюстрированные или описанные в связи с одним вариантом осуществления, можно без ограничений полностью или частично скомбинировать с особенностями, конструкциями или характеристиками одного или более других вариантов осуществления. Предполагается, что объем настоящего изобретения включает такие модификации и варианты.
Термины «проксимальный» и «дистальный» в настоящем документе определяются относительно врача, управляющего рукояткой хирургического инструмента. Термин «проксимальный» относится к части, лежащей ближе к врачу, а термин «дистальный» относится к части, удаленной от врача. Предлагается также для удобства и ясности применительно к рисункам использовать в настоящем документе такие пространственные термины, как «вертикальный», «горизонтальный», «вверх» и «вниз». Тем не менее, поскольку использование хирургических инструментов предполагает множество ориентаций и положений, указанные термины не следует толковать как ограничивающие и (или) абсолютные.
При лапароскопических манипуляциях и хирургических операциях с минимальным вмешательством используются различные типичные приспособления и методы. Однако, специалисты в данной области смогут оценить по достоинству различные методы и приспособления, описанные в данном документе, которые могут быть использованы в многочисленных хирургических процедурах и сферах применения, включая, например, те, что связаны с открытыми хирургическими манипуляциями. Углубляясь в настоящее подробное описание, специалисты в данной области также смогут оценить, что различные аппараты, представленные в данном документе, могут вставляться в тело человека любым способом, как то через естественное отверстие, через разрез или прокол в ткани и т.д. Рабочие блоки или блоки концевого эффектора инструментов могут вставляться напрямую в тело человека или могут вставляться через приспособления для доступа, оснащенные рабочим желобом, через который могут продвигаться концевой эффектор и удлиненный ствол хирургического аппарата.
В настоящем изобретении раскрыта хирургическая инструментальная система, содержащая: рукоятку, содержащую: электрический двигатель; и исполнительный механизм, выполненный с возможностью приведения в действие электродвигателя; первый ствол, прикрепляемый к рукоятке, содержащий; первый концевой эффектор, содержащий первый упор и первую кассету со скобками; и первую приводную систему, выполненную с возможностью осуществления функции первого концевого эффектора, при этом первая приводная система выполнена с возможностью взаимодействия при работе с электрическим двигателем, причем электрический двигатель выполнен с возможностью функционирования в первом направлении для выполнения функции первого концевого эффектора; и второй ствол, прикрепляемый к рукоятке вместо первого ствола, причем второй ствол содержит: второй концевой эффектор, содержащий второй упор и вторую кассету со скобками; и вторую приводную систему, выполненную с возможностью осуществления функции второго концевого эффектора, при этом вторая приводная система выполнена с возможностью взаимодействия при работе с электрическим двигателем, причем электрический двигатель выполнен с возможностью функционирования во втором направлении для выполнения функции второго концевого эффектора, причем указанная функция первого концевого эффектора содержит перемещение указанного первого упора в направлении указанной первой кассеты со скобками, при этом указанная функция второго концевого эффектора содержит перемещение указанного второго упора в направлении второй кассеты со скобками, и при этом второе направление является противоположным первому направлению, причем рукоятка содержит по меньшей мере один датчик, выполненный с возможностью обнаружения того, первый или второй ствол был прикреплен к рукоятке и передачи этой информации микропроцессору, причем микропроцессор выполнен так, что когда исполнительный механизм приходит в действие для выполнения функции первого или второго концевого эффектора, микропроцессор поворачивает электрический двигатель в первом направлении или во втором направлении, в зависимости от того, первый или второй ствол был, соответственно прикреплен к рукоятке.
В одном варианте выполнения хирургическая инструментальная система, содержит: рукоятку, содержащую: электрический двигатель; и исполнительный механизм, выполненный с возможностью приведения в действие электродвигателя; первый ствол, прикрепляемый к рукоятке, содержащий; первый концевой эффектор, содержащий первый упор и первую кассету со скобками; и первую приводную систему, выполненную с возможностью выполнения функции первого концевого эффектора, причем первая приводная система выполнена с возможностью взаимодействия при работе с электрическим двигателем, и причем электрический двигатель выполнен с возможностью осуществления первого количества вращений для выполнения функции первого концевого эффектора; и второй ствол, прикрепляемый к рукоятке вместо первого ствола, причем второй ствол содержит: второй концевой эффектор, содержащий второй упор и вторую кассету со скобками; и вторую приводную систему, выполненную с возможностью выполнения функции второго концевого эффектора, причем вторая приводная система выполнена с возможностью взаимодействия при работе с электрическим двигателем, и при этом электрический двигатель выполнен с возможностью осуществления второго количества вращений для выполнения функции второго концевого эффектора, причем указанная функция первого концевого эффектора содержит перемещение указанного первого упора в направлении указанной первой кассеты со скобками, при этом указанная функция второго концевого эффектора содержит перемещение указанного второго упора в направлении второй кассеты со скобками, и при этом первое количество вращений отличается от второго количества вращений, причем рукоятка содержит по меньшей мере один датчик, выполненный с возможностью обнаружения того, первый или второй ствол был прикреплен к рукоятке и передачи этой информации микропроцессору, причем микропроцессор выполнен так, что когда исполнительный механизм приходит в действие для выполнения функции первого или второго концевого эффектора, микропроцессор поворачивает электрический двигатель в первом направлении или во втором направлении, в зависимости от того, первый или второй ствол был, соответственно прикреплен к рукоятке.
В еще одном варианте выполнения первая кассета со скобками содержит продольный массив гнезд для скоб, проходящий между проксимальным концом и дистальным концом, и причем указанная вторая кассета со скобками содержит круговой массив гнезд для скоб. Рукоятка также может содержать пусковой двигатель, причем указанный первый ствол содержит первую пусковую систему, способную функционально взаимодействовать с указанным пусковым двигателем, и причем указанный пусковой двигатель выполнен с возможностью работы в том же направлении для продвижения указанной первой пусковой системы через пусковой ход для выпуска скобок из указанной первой кассеты со скобками, и указанной второй пусковой системы через пусковой ход для выпуска скобок из указанной второй кассеты со скобками.
В одном варианте первый ствол содержит первый датчик конца хода, выполненный с возможностью определения момента, когда указанный первый упор находится в первой закрытой позиции, причем указанный первый датчик конца хода, выполнен с возможностью остановки указанного электрического двигателя, когда указанный первый упор находится в указанной первой закрытой позиции, и при этом указанный второй ствол содержит второй датчик конца хода, выполненный с возможностью определения момента, когда указанный второй упор находится в указанной второй закрытой позиции, и причем указанная первая закрытая позиция отличается от указанной второй закрытой позиции. Рукоятка также может содержать пусковой двигатель, причем указанный первый ствол содержит первую пусковую систему, выполненную с возможностью функционального взаимодействия с указанный пусковым двигателем, при этом указанный второй ствол содержит вторую пусковую систему, выполненную с возможностью функционального взаимодействия с указанным пусковым двигателем, причем указанный пусковой двигатель выполнен с возможностью работы для продвижения указанной первой пусковой системы через пусковой ход для выпуска скобок из указанной первой кассеты со скобками, и указанную вторую систему через пусковой ход для выпуска скобок из указанной второй кассеты со скобками, и причем указанный пусковой двигатель не способен действовать до тех пор пока указанный первый датчик конца хода не определил, что указанный первый упор достиг указанной первой закрытой позиции, или указанный второй датчик конца хода не определил, что указанный второй упор достиг указанной второй закрытой позиции.
В одном варианте выполнения первый датчик конца хода и второй датчик конца хода находятся в сигнальном сообщении с указанным микропроцессором. Система также может содержать датчик пускового хода, выполненный с возможностью определения момента активации указанного пускового двигателя, в которой указанная система хирургического инструмента также содержит закрывающую питающую схему, выполненную с возможностью функционального соединения указанного электрического двигателя с источником питания, и причем указанная закрывающая питающая схема открыта когда указанный датчик пускового хода обнаружил, что указанный пусковой двигатель активирован. Указанный первый датчик конца хода содержит первый датчик эффекта Холла, выполненный с возможностью обнаружения первого обнаруживаемого элемента на указанном первом пусковом приводе для определения, находится ли указанный первый упор в указанной первой закрытой позиции, причем указанный второй датчик конца хода содержит второй датчик эффекта Холла, выполненный с возможностью обнаружения второго обнаруживаемого элемента на указанном втором пусковом приводе для определения, находится ли указанный второй упор в указанной второй позиции, и при этом указанный первый датчик эффекта Холла и указанный второй датчик эффекта Холла находятся в сигнальном сообщении с указанным микропроцессором.
В одном варианте выполнения исполнительный механизм выполнен с возможностью работы в том же направлении для выполнения указанной функции первого концевого эффектора и указанной функции второго концевого эффектора.
Обращаясь к рисункам, на которых аналогичные цифры обозначают аналогичные компоненты, на ФИГ. 1 представлена модульная система хирургического инструмента, по существу обозначенная пунктом 2, которая в одной форме включает в себя хирургический инструмент 10 с исполнительным механизмом, который может использоваться в сочетании с различными хирургическими концевыми эффекторами, например, концевыми эффекторами 1000, 2000 и 3000. В показанном варианте осуществления хирургический инструмент с электродвигателем 10 включает корпус 12, состоящий из рукоятки 14, выполненной с возможностью захвата, манипулирования и активирования врачом. По ходу настоящего подробного описания будет понятно, что различные уникальные и новые конструкции приводных систем, представленные в сочетании с рукояткой 14, а также различные конструкции концевых эффекторов, описанные в настоящем документе, также могут эффективно применяться в сочетании с роботизированными хирургическими инструментами. Таким образом, термин «корпус» также может относится к корпусу или сходному участку роботизированной системы, которая может размещать в себе или иным образом функционально удерживать различные формы приводных систем, представленных в настоящем документе, и которая может быть выполнена с возможностью генерации управляющих движений, пригодных для использования при активации конструкций концевых эффекторов, описанных в настоящем документе, и их соответствующих эквистволентных структур. Термин «рама» может относиться к части ручного хирургического инструмента. Термин «рама» также может представлять собой участок системы с с исполнительным механизмом двигателя или хирургического инструмента с роботизированным управлением и/или участок роботизированной системы, которая может применяться для функционального управления хирургическим инструментом. Например, конструкции приводных систем и конструкции концевых эффекторов, описанные в настоящем документе, могут применяться с различными роботизированными системами, инструментами, компонентами и способами, изложенными в заявке на патент США сер. № 13/118,241, озаглавленной «ХИРУРГИЧЕСКИЕ СШИВАЮЩИЕ ИНСТРУМЕНТЫ С ПОВОРАЧИВАЕМЫМИ КОНСТРУКЦИЯМИ ДЛЯ УСТАНОВКИ СКОБ», в настоящее время опубликованной заявке на патент США № 2012/0298719, которая полностью включена в настоящий документ путем ссылки.
Как показано на ФИГ. 2–5, рукоятка 14 может содержать пару корпусных сегментов 16 и 18 рукоятки, которые могут быть соединены винтами, защелками, адгезивом и т. п. В показанной конструкции корпусные сегменты 16 и 18 рукоятки в совокупности образуют участок 19 пистолетной рукоятки, которую можно захватывать рукой и которой может манипулировать врач. Как будет дополнительно описано более подробно, рукоятка 14 функционально удерживает в себе две вращательные приводные системы 20, 40, выполненные с возможностью генерации и приложения различных управляющих движений к соответствующим участкам приводных стволов соединенного с ними конкретного концевого эффектора. Первая вращательная приводная система 20 может, например, применяться для приложения «закрывающих» движений к соответствующей конструкции закрывающего приводного ствола, функционально удерживаемой в концевом эффекторе, и вторая вращательная приводная система 40 может применяться для приложения «пусковых» движений к соответствующей конструкции пускового приводного ствола в присоединенном к ней концевом эффекторе.
Первая и вторая вращательные приводные системы 20, 40 приводятся в действие двигателем 80 через уникальный новый «сдвигаемый» узел 60 трансмиссии, который по существу переключает питание/движение между двумя силовыми блоками. Первая вращательная приводная система 20 содержит первый вращательный приводной ствол 22, удерживаемый с возможностью поворота в корпусе 12 рукоятки 14 и образующий ось первого приводного ствола «FDA-FDA». Первая приводная шестерня 24 закреплена шпонкой или иным образом присоединена без возможности поворота к первому вращательному приводному стволу 22 для поворота вместе с ним вокруг оси первого приводного ствола FDA-FDA. Аналогично, вторая вращательная приводная система 40 содержит второй вращательный приводной ствол 42, удерживаемый с возможностью поворота в корпусе 12 рукоятки 14 и образующий ось второго приводного ствола «SDA-SDA». По меньшей мере в одной конструкции ось второго приводного ствола SDA-SDA смещена, параллельна или по существу параллельна оси первого приводного ствола FDA-FDA. В данном контексте термин «смещена» означает, что оси первого и второго приводных стволов, например, не совпадают. Второй вращательный приводной ствол 42 имеет вторую приводную шестерню 44, которая закреплена шпонкой или иным образом присоединена без возможности поворота ко второму вращательному приводному стволу 42 для поворота вместе с ним вокруг оси второго приводного ствола SDA-SDA. Кроме того, второй приводной ствол 42 имеет промежуточную приводную шестерню 46, установленную на него с возможностью поворота так, что промежуточная приводная шестерня 46 может свободно поворачиваться на втором вращательном приводном стволу 42 вокруг оси второго приводного ствола SDA-SDA.
Как показано на ФИГ. 2–5, в одной форме двигатель 80 содержит выходной ствол 81 двигателя, к которому без возможности поворота прикреплена приводная шестерня 82 двигателя. Приводная шестерня 82 двигателя выполнена с возможностью зацепляющего «функционального» взаимодействия с узлом 60 трансмиссии, что будет дополнительно подробно описано ниже. По меньшей мере, в одной форме узел 60 трансмиссии включает в себя передаточную каретку 62, удерживаемую с возможностью продвижения по оси между приводной шестерней 82 и шестернями 44 и 46 на втором вращательном приводном стволу 42. Например, передаточная каретка 62 может быть установлена с возможностью скольжения на опорный ствол 63, установленный в корпусе 12 на кронштейн 61 ствола таким образом, чтобы линия действия передаточной каретки была перпендикулярна блоку шестерен вращательных приводных систем. Кронштейн 61 ствола выполнен с возможностью жесткой поддержки в пазах или иных элементах внутри корпуса 10. Передающая каретка 62 включает в себя шестерню каретки 64, удерживаемую с возможностью поворота на опорном стволу 63, и выполненную с возможностью избирательного зубчатого взаимодействия с шестернями 44 и 46, находясь при этом в приводном взаимодействии с приводной шестерней 82. В конструкции, представленной на ФИГ. 2–5, передаточная каретка 62 функционально прикреплена у сдвигателю или «механизму сдвигания» 70, выполненному с возможностью сдвигания передаточной каретки 62 по оси между «первым приводным положением» и «вторым приводным положением». Например, в одной форме механизм сдвигания 70 включает в себя сдвигающий соленоид 71, удерживаемый внутри корпуса 12 рукоятки 14. Сдвигающий соленоид 71 может представлять собой соленоид с двумя устойчивыми положениями или, например, может представлять собой «двухпозиционный подпружиненный» соленоид. Показанная конструкция, например, включает в себя пружину 72, которая смещает передаточную каретку 62 в дистальном направлении «DD» в первое приводное положение, причем шестерня 64 каретки находится в зубчатом взаимодействии с промежуточной приводной шестерней 46, и также находится в зубчатом соединении с приводной шестерней 82. В этом первом приводном положении активация двигателя 80 приведет к повороту шестерней 82, 46 и 24, что в итоге приведет к повороту первого приводного ствола 22. Как будет дополнительно подробно описано далее, сдвигающий соленоид 71 может активироваться пусковым крючком 90, установленным с возможностью поворота на корпусе 12 рукоятки 14, как показано на ФИГ. 2 и 5. В показанном варианте осуществления пусковой крючок 90 поддерживается с возможностью поворота на стволе 92 пускового крючка, установленном в рукоятке 14. Пусковой крючок 90 обычно смещен в неактивированное положение посредством пружины 94 пускового крючка. См. ФИГ. 3. Пусковой крючок 90 установлен с возможностью функциональной активации пускового переключателя 96, функционально установленного на узле 100 платы со схемой управления. В представленном варианте осуществления активация пускового крючка 90 приводит к активации сдвигающего соленоида 71. Как описано ниже более подробно применительно к ФИГ. 61, 63, 64, процессор 7024 рукоятки подает приводной сигнал на сдвигающий соленоид 7032 (71). Таким образом, снова возвращаясь к ФИГ. 2–5, активация пускового крючка 90 приводит к тому, что сдвигающий соленоид 71 тянет передаточную каретку 62 в проксимальном направлении «PD», таким образом переводя шестерню 64 каретки в зубчатое взаимодействие со второй приводной шестерней 44. См. ФИГ. 7. Активация двигателя 80 в то время, когда шестерня 64 каретки находится в зубчатом взаимодействии с приводной шестерней 82 и второй приводной шестерней 44, приведет к повороту второго приводного ствола 42 вокруг оси второго приводного ствола «SDA». Как можно видеть также на ФИГ. 2–5, сдвигаемый узел 60 трансмиссии также может включать в себя индикаторную систему 74, которая включает в себя пару переключателей 75 и 76, функционально связанных с платой управления 100, а также со световым индикатором 77 трансмиссии. Переключатели 75, 76 предназначены для обнаружения положения передаточной каретки 62, в результате которого управляющая система активирует световой индикатор 77 в зависимости от положения передаточной каретки 62. Например, энергообеспечение на световой индикатор 77 может подаваться, когда передаточная каретка 62 находится в первом приводном положении. Это дает врачу указание на то, что активация двигателя 80 приведет к активации первой приводной системы 20.
Различные хирургические инструменты, описанные в настоящем документе, также могут включать в себя узел 60’ трансмиссии, который по существу идентичен узлу 60 трансмиссии, но также включает в себя блокирующий узел или механизм (в целом обозначенный пунктом 65) для блокировки первой и второй приводной систем 20, 40 для предотвращения их случайного срабатывания, когда такое срабатывание не предусмотрено. Например, на ФИГ. 6A показана альтернативная передаточная каретка 62’, которая включает в себя первый фиксирующий элемент 66 исполнительного механизма и второй фиксирующий элемент исполнительного механизма 68. Первый фиксирующий элемент 66 исполнительного механизма содержит первый взаимодействующий с шестерней элемент или зуб на передаточной каретке 62’, который размещен с возможностью зубчатого взаимодействия со второй приводной шестерней 44, когда шестерня 64 каретки находится в приводном взаимодействии с промежуточной шестерней 46 (т. е. когда узел 60’ трансмиссии находится в первом приводном положении). См. ФИГ. 6B. Следовательно, когда узел 60’ трансмиссии находится в первом приводном положении, первый фиксирующий элемент 66 исполнительного механизма находится в зубчатом взаимодействии со второй приводной шестерней 44, предотвращая ее относительный поворот, когда первый приводной ствол 22 поворачивается описанным выше способом. Аналогично, когда узел 60’ трансмиссии находится во втором приводном положении (т. е., шестерня 64 каретки находится в зубчатом взаимодействии со второй приводной шестерней 44), второй фиксирующий элемент 68 исполнительного механизма находится в зубчатом взаимодействии с промежуточной приводной шестерней 46. См. ФИГ. 6C. Следовательно, когда узел трансмиссии 60’ находится во втором приводном положении, второй фиксирующий элемент 68 исполнительного механизма предотвращает поворот промежуточной шестерни 46, также предотвращая поворот первой приводной шестерни 24. По этой причине, когда врач приводит в действие двигатель 80 для активации первой приводной системы 20, вторая приводная система 40 заблокирована на месте. Аналогично, когда врач приводит в действие вторую приводную систему 40, первая приводная система 20 заблокирована на месте.
Систему управления двигателем 80, как описано ниже в настоящем документе применительно к ФИГ. 61, 63, 64, можно запрограммировать таким образом, чтобы она всегда останавлистволась в такой ориентации, когда один зуб шестерен 42, 44 был расположен вертикально или в ином заданном положении, в зависимости от ориентации другой соответствующей шестерни. Этот элемент призван избежать сопряжения между зубцами шестерен при сдвигании. При сдвигании блокирующие элементы также сдвигаются и блокируют положение не поворачивающегося блока шестерен. При применении в сочетании с концевым эффектором, включающим в себя конструкцию с кассетой/упором или другую зажимающую конструкцию, еще одним преимуществом от блокирования не поворачивающегося (т. е. без электропитания) блока шестерен является удерживание эффектора/упора в стабильном положении при пуске.
Двигатель 80 может представлять собой приводной щеточный двигатель постоянного тока с максимальной скоростью поворота, например, приблизительно 25000 оборотов в минуту. В других конфигурациях двигатель может включать в себя бесщеточный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой подходящий электрический двигатель, включая двигатели, которые могут быть пригодны к автоклавной стерилизации. Двигатель 80 может получать электропитание от источника питания 84, который в одной форме может содержать блок питания 86, хранящийся с возможностью извлечения в рукоятке 14. Например, как видно на ФИГ. 2–5, блок питания 86 может быть размещен с возможностью извлечения внутри участка пистолетной рукоятки 19 рукоятки 14. Чтобы получить доступ к блоку питания 86, врач снимает съемный колпачок 17, прикрепленный к участку пистолетной рукоятки 19. Блок питания 86 может функционально вмещать в себя несколько батарей (не показаны). Каждая батарея может представлять собой, например, литий-ионную («LI») или другую подходящую батарею. Блок питания 86 предназначен для съемного функционального соединения с узлом 100 платы схемы управления, который также функционально соединен с двигателем 80 и установлен внутри рукоятки 14. В качестве источника питания хирургического инструмента может применяться ряд последовательно подсоединенных элементов питания. Кроме этого, источник питания 84 может быть сменным и/или перезаряжаемым и, по меньшей мере, в одном варианте, может включать в себя, например, батареи CR123. Двигатель 80 может активироваться «пусковым переключателем-качели» 110, установленным с возможностью поворота к участку 19 пистолетной части рукоятки 14. Пусковой переключатель-качели 110 выполнен с возможностью активации первого переключателя 112 двигателя, функционально соединенного с платой управления 100. Первый переключатель 112 двигателя может представлять собой нажимной переключатель, приводимый в действие путем поворота пускового переключателя-качели 110 с введением его с ним в контакт. Активация первого переключателя 112 двигателя приводит к активации двигателя 80 так, что приводная шестерня 82 поворачивается в первом вращательном направлении. Второй переключатель 114 двигателя также соединен с платой схемы 100 и установлен с возможностью избирательного контакта с пусковым переключателем-качели 110. Активация второго переключателя 114 двигателя приводит к активации двигателя 80 так, что приводная шестерня 82 поворачивается во втором направлении. Например, в процессе применения полярность напряжения, обеспечиваемая источником питания 84, позволяет электрическому двигателю 80 работать в направлении по часовой стрелке, причем полярность напряжения, приложенная к электрическому двигателю батареей, может быть изменена на обратную для работы электрического двигателя 80 в направлении против часовой стрелки. Как и в других формах, описанных в настоящем документе, рукоятка 14 также может включать в себя датчик, выполненный с возможностью обнаруживать направления, в которых перемещаются приводные системы. Один конкретный вариант осуществления двигателя 80 описан в настоящем документе применительно к ФИГ. 61, 63, 64, где описан бесщеточный двигатель постоянного тока 7038. Двигатель постоянного тока 7038 может быть пригодным для автоклавирования.
На ФИГ. 8–12 представлена другая форма хирургического инструмента 10’, которая может быть идентична хирургическому инструменту 10, за исключением указанных ниже отличий. Компоненты хирургического инструмента 10’, такие же как компоненты вышеописанного хирургического инструмента 10, будут обозначены теми же номерами. Компоненты хирургического инструмента 10’, которые могут быть сходны в работе, но не идентичны соответствующим компонентам хирургического инструмента 10, будут обозначаться теми же номерами компонентов в сочетании “’’’ или в некоторых случаях “””. Как можно видеть, например, на ФИГ. 8, ось первого приводного ствола «FDA» смещена и параллельна или по существу параллельна оси второго приводного ствола «SDA». Как показано, например, на ФИГ. 9, узел 60 трансмиссии и, более конкретно, передаточная каретка 62” может быть выполнена с возможностью сдвигания вручную посредством тягового узла 120, функционально соединенного с пусковым крючком 90’. Как можно видеть, например, на этой ФИГ., тяговый узел 120 включает в себя первую тягу 122 трансмиссии, которая функционально соединена с пусковым крючком 90’, проходит по оси и функционально соединена с вилкой 124 трансмиссии. Вилка 124 трансмиссии имеет подвижное штифтовое соединение с передаточной кареткой 62”. Таким образом, приведение в действие пускового крючка 90’ приводит к осевому перемещению передаточной каретки 62”. Следовательно, понятно, что тяговый узел 120 по существу осуществляет активирующее движение, аналогично движению сдвигающего соленоида 71, который был описан выше. В контексте такого варианта осуществления, применительно к движению передаточной каретки 62”, термин «сдвигаемый вручную» относится к перемещению передаточной каретки между первым и вторым приводным положениями без применения электричества или иных устройств питания, за исключением нажатия на пусковой крючок 90’.
Как видно также на ФИГ. 8–12, вторая приводная шестерня 44’ отделена от промежуточной шестерни 46’ на втором приводном стволу 42’ посредством разделителя 45. Вторая приводная шестерня 44’ закреплена шпонкой или иным способом прикреплена без возможности поворота ко второму приводному стволу 42’, тогда как промежуточная приводная шестерня 46’ установлена с возможностью поворота на второй приводной ствол 42’ и свободно поворачивается относительно него. В одной форме, например, дистальная приводная шестерня 130 удерживается в зубчатом взаимодействии с промежуточной приводной шестерней 46’. Аналогично, проксимальная приводная шестерня 136 удерживается в зубчатом взаимодействии со второй приводной шестерней 44’. Однако в такой конструкции передаточная каретка 62” также включает в себя расположенный по центру узел 140 передаточных шестерен, функционально соединенный с передаточной кареткой 62’ с возможностью продвижения по оси вместе с ней. Как показано на ФИГ. 8–12, узел 140 передаточных шестерен включает в себя расположенную по центру сдвигающую приводную шестерню 142, которая находится в скользящем зубчатом взаимодействии с приводной шестерней 82 двигателя. Следовательно, поворот приводной шестерни 82 двигателя приводит к повороту сдвигающей приводной шестерни 142. Кроме этого, к сдвигающей приводной шестерне 142 присоединена проходящая проксимально коническая приводная шестерня 144, предназначенная для избирательного зубчатого взаимодействия с гнездом 146 проксимальной шестерни, прикрепленным к проксимальной приводной шестерне 136. Аналогично, проходящая дистально коническая приводная шестерня 148 предназначена для избирательного зубчатого взаимодействия с гнездом 150 дистальной шестерни, прикрепленным к дистальной приводной шестерне 130.
Когда врач желает активировать первую приводную систему 20, врач перемещает пусковой крючок 90’ для перемещения вдоль оси узел 140 передаточных шестерен, вводя проходящую дистально коническую приводную шестерню 148 в прилегающее зубчатое взаимодействие с гнездом 150 дистальной шестерни, прикрепленным к дистальной приводной шестерне 130. См. ФИГ. 8-10. В этом положении работа двигателя 80 приведет к повороту приводной шестерни 82 двигателя, сдвигающей приводной шестерни 142, дистальной приводной шестерни 130, промежуточной приводной шестерни 46’, первой приводной шестерни 24 и первого приводного ствола 22. Когда врач желает активировать вторую приводную систему 40, врач перемещает пусковой крючок 90’ в положение, показанное на ФИГ. 11 и 12, таким образом вводя проходящую проксимально коническую приводную шестерню 144 в прилегающее зубчатое взаимодействие с гнездом 146 проксимальной шестерни, прикрепленным к проксимальной приводной шестерне 136. В этом положении работа двигателя 80 приведет к повороту приводной шестерни 82, сдвигающей приводной шестерни 142, проксимальной приводной шестерни 136, второй приводной шестерни 44’ и второго приводного ствола 42’. Как можно видеть также на ФИГ. 8–12, можно применять датчики 152 и 154 для детектирования положения передаточной каретки 62”, что будет дополнительно подробно описано ниже. Например, датчики 152 и 154 могут быть реализованы в виде датчиков Холла 7028, описанных ниже применительно к ФИГ. 61, 63, 64.
На ФИГ. 13–16 представлена другая форма хирургического инструмента 310 с с исполнительным механизмом, которая может быть идентична хирургическому инструменту 10, за исключением указанных ниже отличий. Компоненты хирургического инструмента 310, такие же как компоненты вышеописанного хирургического инструмента 10, будут обозначены теми же номерами. В такой конструкции первая и вторая приводные системы 20, 40 приводятся в действие двигателем 80 посредством уникального и нового «сдвигаемого» узла 360 трансмиссии. Первая приводная система 20 включает в себя первый приводной ствол 22, который имеет первый приводной шкив 324, закрепленный на нем шпонкой или иным способом без возможности поворота. Аналогично, вторая приводная система 40 включает в себя второй приводной ствол 42, который имеет второй приводной шкив 344, закрепленный на нем шпонкой или иным способом без возможности поворота. Как можно видеть, например, на ФИГ. 14, ось первого приводного ствола «FDA» смещена и параллельна или по существу параллельна оси второго приводного ствола «SDA».
Как показано на ФИГ. 13–16, в одной форме двигатель 80 включает в себя первый шкив 382 двигателя, прикрепленный без возможности поворота с стволом двигателя 80. Первый шкив 382 двигателя приводит в движение первый приводной ремень 385, который принимается на первом приводном шкиве 324. Кроме этого, второй шкив 384 двигателя установлен без возможности поворота к стволу двигателя и функционально удерживает на себе второй приводной ремень 387. Второй приводной ремень 387 также принимается на втором приводном шкиве 344 на втором приводном стволу 42. Первый и второй приводные ремни 385, 387 могут представлять собой, например, V-образные ремни.
Инструмент 310 также включает в себя узел 360 трансмиссии, содержащий передаточную каретку 362, установленную с возможностью продвижения по оси внутри корпуса инструмента. Передаточная каретка 362 функционально взаимодействует с промежуточной кареткой 374, удерживаемой с возможностью латерального перемещения в ответ на контакт с передаточной кареткой 362 в процессе перемещения передаточной каретки 362 по оси посредством сдвигающего соленоида 71. Вспомогательная каретка 374 включает в себя первый вспомогательный шкив 375 и второй вспомогательный шкив 376, установленные на ней. В показанном варианте осуществления пружина 72 смещает передаточную каретку 362 в дистальном направлении «DD» в первое приводное положение, в котором передаточная каретка 362 заставляет вспомогательную каретку 374 переместиться в первое латеральное положение «FLD», и это приводит к тому, что первый вспомогательный шкив 375 удаляет слабину первого приводного ремня 385. В этом положении второй вспомогательный шкив 376 размещен за пределами взаимодействия со вторым приводным ремнем 387. Следовательно, работа двигателя 80 будет приводить к повороту первого приводного ствола 22. Хотя второй шкив 384 двигателя также будет поворачиваться при активации двигателя 80, слабина второго приводного ремня 387 предотвращает передачу этого вращательного движения на второй приводной шкив 344. Таким образом, вращательное движение не будет передано на вторую приводную систему 40. Как описыстволось выше, сдвигающий соленоид 71 может активироваться пусковым крючком 90. Однако в альтернативных конструкциях сдвигающий соленоид 71 также можно заменить активируемым вручную тяговым узлом, например, описанного выше типа. В представленном варианте осуществления активация пускового крючка 90 заставляет сдвигающий соленоид 71 тянуть передаточную каретку 362 в проксимальном направлении «PD», таким образом смещая вспомогательную каретку 374 латерально во втором латеральном направлении «SLD» и вводя второй вспомогательный шкив 376 в контакт со вторым приводным ремнем 387 для устранения его слабины. Такое латеральное перемещение вспомогательной каретки 374 также перемещает первой вспомогательный шкив 375 за пределы взаимодействия с первым приводным ремнем 385, допуская ослабление первого приводного ремня 385. Следовательно, в этом втором приводном положении активация двигателя 80 приводит к активации второй приводной системы 40. Слабина первого приводного ремня 385 препятствует передаче вращательного движения на первую приводную систему 20.
Узел 360 трансмиссии может обеспечить ряд очевидных преимуществ. Например, применение V-образных ремней устраняет необходимость в сцепляющихся шестернях и выравнивании шестерней механизмом сцепления. Более того, такую конструкцию трансмиссии можно активировать и деактивировать под нагрузкой. Кроме этого, для высвобождения из взаимодействия и взаимодействия с узлом 360 трансмиссии требуется небольшое смещение.
На ФИГ. 17-21 представлена другая форма хирургического инструмента 410 с с исполнительным механизмом, которая может быть идентична хирургическому инструменту 10, за исключением указанных ниже отличий. Компоненты хирургического инструмента 410, такие же как компоненты вышеописанного хирургического инструмента 10, будут обозначены теми же номерами. В такой конструкции первая и вторая приводные системы 20, 40 приводятся в действие двигателем 480 посредством уникального и нового «сдвигаемого» узла 460 трансмиссии. Первая приводная система 20 включает в себя первый приводной ствол 22, который имеет первый приводной шкив 424, закрепленный на нем шпонкой или иным способом без возможности поворота. Аналогично, вторая приводная система 40 включает в себя второй приводной ствол 42, который имеет второй приводной шкив 444, закрепленный на нем шпонкой или иным способом без возможности поворота. Как можно видеть, например, на ФИГ. 18, ось первого приводного ствола «FDA» смещена и параллельна или по существу параллельна оси второго приводного ствола «SDA».
Как показано на ФИГ. 19, в одной форме двигатель 480 включает в себя шлицованный приводной ствол 481, выполненный с возможностью вдвигаемого взаимодействия с узлом передаточного ствола 490, выполненного с возможностью взаимодействия с передаточной кареткой 462 так, что осевое перемещение передаточной каретки 462 приводит к осевому перемещению узла передаточного ствола 490 на шлицованном приводном стволу 481. Как можно видеть на ФИГ. 19, внутри узла передаточного ствола 490 имеется шлицованный канал 491 для вдвигаемого и функционального получения в нем шлицованного приводного ствола 481. Кроме этого, на дистальном конце узла передаточного ствола 490 сформировано дистальное соединительное кольцо 492. Дистальное соединительное кольцо 492 выполнено с кольцевой канавкой 493, которая выполнена с возможностью принимать в ней двух противолежащих штифтов 465 вилки, прикрепленных к вилочному участку 464 передаточной каретки 462. Такая конструкция служит для соединения передаточной каретки 462 с узлом передаточного ствола 490, с возможностью для узла передаточного ствола 490 поворачиваться относительно передаточной каретки 462.
Как показано на ФИГ. 19, первый шкив 482 двигателя предназначен для избирательного приводного соединения с узлом передаточного ствола 490. Как видно, например, на ФИГ. 19, узел передаточного ствола 490 имеет опорное кольцо 494, образованное на его проксимальном конце, размер которого позволяет его принимать с возможностью скольжения и поворота в канале 483 первого шкива 482 двигателя. Кроме этого, первый шкив 482 двигателя также включает в себя звездообразную проксимальную приводную полость 488, выполненную с возможностью зубчатого взаимодействия с имеющей комплементарную форму приводной частью 495, сформированной на узле передаточного ствола 490. Первый шкив 482 двигателя приводит в движение первый приводной ремень 485, который также принимается на первом приводном шкиве 424. Хирургический инструмент 410 также включает в себя второй шкив 484 двигателя, имеющий канал 489 звездообразной формы, выполненный с возможностью зубчатого взаимодействия с вводимой в него приводной частью 495 узла передаточного ствола 490. На втором шкиве 484 двигателя функционально удерживается второй приводной ремень 487, который также принимается на втором приводном шкиве 444.
Как указано выше, инструмент 410 также включает в себя узел 460 трансмиссии, включающий в себя передаточную каретку 462, удерживаемую внутри корпуса инструмента с возможностью продвижения по оси. Передаточная каретка 462 функционально взаимодействует с узлом передаточного ствола 490, также перемещая узел передаточного ствола 490 вдоль оси, тогда как узел передаточного ствола 490 остается во взаимодействии с стволом 481 двигателя. На ФИГ. 20 показан сдвигающий соленоид 71 в неактивированном положении. Как видно на этой ФИГ., передаточная каретка 462 переместила узел передаточного ствола 490 в крайнее проксимальное положение, которое также может быть названо «первым приводным положением», в котором приводная часть 495 находится в приводном взаимодействии со звездообразным каналом 488 в первом шкиве 482 двигателя. Таким образом, поворот ствола 481 двигателя приведет к повороту узла передаточного ствола 490 и первого шкива 482 двигателя. Поворот первого шкива 482 двигателя приведет к повороту первого приводного ремня 485, которое в итоге приведет к повороту первого приводного ствола 22. Когда узел передаточного ствола 490 находится в первом приводном положении, узел передаточного ствола 490 свободно поворачивается относительно второго шкива 484 двигателя. Следовательно, когда активируется первая приводная система 20, вторая приводная система 40 остается неактивированной. При активации сдвигающего соленоида 71 с переходом в положение, показанное на ФИГ. 21 (путем активации пускового крючка 90), передаточная каретка 462 перемещает узел передаточного ствола 490 в крайнее дистальное положение на стволу 481 двигателя, которое также может быть названо «вторым приводным положением». Как видно на ФИГ. 21, когда узел передаточного ствола 490 переходит во второе приводное положение, его приводной участок 495 входит в зубчатое взаимодействие со звездообразным каналом 489 во втором шкиве 484 двигателя. Следовательно, поворот ствола 481 двигателя будет приводить к повороту второго шкива 484 двигателя. Поворот второго шкива 484 двигателя приведет к повороту второго приводного ремня 487, которое приведет к повороту второго приводного ствола 42. В этом втором приводном положении узел передаточного ствола 490 свободно поворачивается внутри первого шкива 482 двигателя. Следовательно, когда активируется вторая приводная система 40, первая приводная система 20 будет неактивирована.
На ФИГ. 22–27 представлены другой двигатель, узел трансмиссии и первая и вторая приводные системы, которые могут применяться с различными хирургическими инструментами, описанными в настоящем документе. Показанная конструкция включает в себя двигатель 580, имеющий ствол 581 двигателя. См. ФИГ. 23 и 24. Приводная шестерня 582 двигателя или «центральная шестерня» 582 прикреплена без возможности поворота к стволу 581 двигателя для поворота вместе с ним. Конструкция дополнительно включает в себя 570 узел планетарных шестерней, включающий в себя три планетарные шестерни 572, удерживаемые с возможностью поворота между дистальным несущим кронштейном 573 и проксимальным несущим кронштейном 574. Проксимальный несущий кронштейн 574 удерживается на втулочной части центральной шестерни 582, так что центральная шестерня 582 может поворачиваться относительно проксимального несущего кронштейна 574. Дистальный несущий кронштейн 573 присоединен ко второму приводному стволу 542 второй приводной системы 40 таким образом, что поворот дистального несущего кронштейна 573 будет приводить к повороту второго приводного ствола 542 второй приводной системы 40. Три планетарные шестерни 572 удерживаются в зубчатом взаимодействии с узлом 575 кольцевой шестерни. Более конкретно, планетарные шестерни 572 находятся в зубчатом взаимодействии с внутренней кольцевой шестерней 576 узла 575 кольцевой шестерни. Узел 575 кольцевой шестерни дополнительно включает в себя внешнюю кольцевую шестерню 577, находящуюся в зубчатом взаимодействии с первой приводной шестерней 524, соединенной с первым приводным стволом 522 первой приводной системы 20. Как можно видеть, например, на ФИГ. 24, ось первого приводного ствола «FDA» смещена и параллельна или по существу параллельна оси второго приводного ствола «SDA».
Как видно на ФИГ. 23, конструкция дополнительно включает в себя соленоид 71, с которым может приводиться в действие пусковым крючком различными способами, описанными в настоящем документе. В этой конструкции узел 560 трансмиссии прикреплен к стволу 73 соленоида 71. На ФИГ. 24 показан узел 560 трансмиссии в первом положении исполнительного механизма. В одной форме узел 560 трансмиссии включает в себя блокирующий узел, по существу обозначенный номером 590, который содержит первый или проксимальный участок 592 фиксирующего утолщения и вторую или дистальную часть 594 фиксирующего утолщения на узле 560 трансмиссии. Как видно на этой ФИГ., узел 560 трансмиссии расположен таким образом, что проксимальный участок 592 фиксирующего утолщения находится во взаимодействии с проксимальным несущим кронштейном 574. В таком первом приводном положении проксимальный участок 592 фиксирующего утолщения препятствует повороту узла 570 планетарных шестерней как единого целого с центральной шестерней 582. Однако поворот центральной шестерни 582 приводит к повороту планетарных шестерней 572. Поворот планетарных шестерней 572 приводит к повороту узла 575 кольцевой шестерни. Поворот узла 575 кольцевой шестерни приводит к повороту первой приводной шестерни 524 и первого приводного ствола 522. Поскольку поворот проксимального несущего кронштейна 574 предотвращается, поворот дистального несущего кронштейна 573 также предотвращается. Следовательно, поворот второго приводного ствола 544 также предотвращается, в то время как первый приводной ствол 522 поворачивается. Для смещения соленоида 71 (и прикрепленного к нему узла 560 трансмиссии) в это «первое приводное положение» можно применять пружину (не показана). Когда врач желает активировать вторую приводную систему 40, можно активировать соленоид 71 посредством пускового крючка, как описано выше, и переместить ствол 73 соленоида в положение, показанное на ФИГ. 25. Когда узел трансмиссии 560 находится в этом «втором пусковом положении», дистальный участок 594 фиксирующего утолщения входит в удерживающее взаимодействие с узлом 575 кольцевой шестерни, предотвращается его поворот. Таким образом, при повороте центральной шестерни 582 держатель планетарных шестерен (т. е. дистальный несущий кронштейн 573 и проксимальный несущий кронштейн 574) также будет поворачиваться. Планетарные шестерни 572 будут поворачиваться внутри зафиксированной внутренней кольцевой шестерни 576. Такое вращательное движение будет передаваться на второй приводной ствол 542, в то время как первый приводной ствол 522 останется неактивированным.
На ФИГ. 28 показана другая форма хирургического инструмента 610 с с исполнительным механизмом, которая может быть идентична хирургическому инструменту 10, за исключением указанных ниже отличий. Компоненты хирургического инструмента 610, такие же как компоненты вышеописанного хирургического инструмента 10, будут обозначены теми же номерами. Как можно видеть, например, на ФИГ. 28, ось первого приводного ствола «FDA» смещена и параллельна или по существу параллельна оси второго приводного ствола «SDA». Такая конструкция содержит двигатель 680, который имеет два независимо активируемых ствола 681, 683 двигателя. Двигатель 680 может управляться посредством различных типов конструкции пускового крючка, описанных в настоящем документе, так, чтобы активация пускового крючка одним способом заставляла двигатель 680 поворачивать первый ствол 681 двигателя, а активация пускового крючка другим способом заставляла двигатель 680 поворачивать второй ствол 683 двигателя. В такой конструкции первая шестерня 682 двигателя установлена на первый ствол 681 двигателя и удерживается в зубчатом взаимодействии с промежуточной шестерней 646. Промежуточная шестерня 646 функционально удерживается в зубчатом взаимодействии с первой приводной шестерней 624, установленной на первый приводной ствол 622 первой приводной системы 620. Следовательно, активация первого ствола 681 двигателя будет приводить к активации первой приводной системы 620. Аналогично, вторая шестерня 684 двигателя установлена на втором стволу 683 двигателя и удерживается в зубчатом взаимодействии со второй приводной шестерней 644, установленной на втором приводном стволу 642 второй приводной системы 640. По этой причине активация второго ствола 683 двигателя будет приводить к активации второй приводной системы 640.
На ФИГ. 29 показана другая форма хирургического инструмента 710 с с исполнительным механизмом, которая может быть идентична хирургическому инструменту 10, за исключением указанных ниже отличий. Компоненты хирургического инструмента 710, такие же как компоненты вышеописанного хирургического инструмента 10, будут обозначены теми же номерами. Как можно видеть, например, на ФИГ. 29, ось первого приводного ствола «FDA» смещена и параллельна или по существу параллельна оси второго приводного ствола «SDA». В такой конструкции первая и вторая приводные системы 720, 740 приводятся в действие двигателем 780 посредством уникального и нового «переключаемого» узла 760 трансмиссии. Первая приводная система 720 включает в себя первый приводной ствол 722, который имеет первую приводную шестерню 724, закрепленную на нем шпонкой или иным способом без возможности поворота. Аналогично, вторая приводная система 740 включает в себя второй приводной ствол 742, который имеет вторую приводную шестерню 744, закрепленную на нем шпонкой или иным способом без возможности поворота. Двигатель 780 включает в себя шестерню 782 двигателя, прикрепленную без возможности поворота к стволу 781 двигателя 780.
В представленном варианте осуществления второй двигатель 750 применяется для сдвигания узла 760 трансмиссии, как будет дополнительно подробно описано ниже. Второй двигатель 750 может управляться, например, посредством различных конструкций пускового крючка и переключателей, описанных в настоящем документе. Второй двигатель 750 может управляться способом, сходным с управлением двигателем 7038, как описано ниже более подробно применительно к ФИГ. 61, 63, 64. Как видно на ФИГ. 29, первый передающий шкив 753 соединен шпонкой или иным образом прикреплен без возможности поворота к стволу 752 двигателя. Первый поворотный ствол 754 установлен с возможностью поворота внутри корпуса 12 рукоятки 14. Первый поворотный ствол образует ось поворота «PA». Второй передающий шкив 755 установлен без возможности поворота на первом поворотном стволу 754, и передающий ремень 756 установлен на первый и второй передающие шкивы 753, 755. В одной форме сдвигаемый узел 760 трансмиссии включает в себя передающую тягу 762, прикрепленную к первому поворотному стволу 754. Кроме этого, к передающей тяге 762 прикреплен вспомогательный ствол 763, на котором функционально установлена промежуточная шестерня 764. Сдвигаемый узел 760 трансмиссии выполнен с возможностью перемещения между первым приводным положением и вторым приводным положением. Для перемещения сдвигаемого узла 760 трансмиссии в первое приводное положение врач активирует второй двигатель 750 для вращения поворотного ствола 763 и промежуточной шестерни 764 вокруг оси поворота PA, так что она входит в зубчатое взаимодействие с шестерней 782 двигателя и первой приводной шестерней 724. В этом положении активация двигателя 780 приведет к активации первой приводной системы 720. Когда врач желает активировать вторую приводную систему 740, он активирует второй двигатель 750 для поворота промежуточной шестерни 764 вокруг оси поворота PA с введением в зубчатое взаимодействие с шестерней 782 двигателя и второй приводной шестерней 744. В этом положении активация двигателя 780 приводит к активации второй приводной системы 740. Одним из преимуществ, обеспечиваемых такой конструкцией, является то, что точная ориентация шестерен не требуется. При отклонении промежуточной шестерни 764 в нужное положение она может поворачиваться и автоматически находить сопрягающийся зубец.
На ФИГ. 30–32 представлен новый уникальный блок двигателей 800, который можно устанавливать в корпусах описанных в настоящем документе типов. Блок двигателей 800 может включать в себя отдельную конструкцию-кожух 801, функционально удерживающую первый двигатель 802 с первым стволом 803 двигателя, которые образуют первую приводную систему 804. Блок двигателей 800 может включать в себя второй двигатель 805 со вторым стволом 806 двигателя, которые образуют вторую приводную систему 807. Как можно видеть, например, на ФИГ. 8, ось первого приводного ствола «FDA» смещена и параллельна или по существу параллельна оси второго приводного ствола «SDA». Блок 800 может дополнительно включать в себя узел 808 платы со схемой управления, которая контактирует с 808A, которая функционально соединяется с соответствующими контактами на узле платы, установленном или иным образом удерживаемом внутри корпуса инструмента, и сообщаются с системой управления инструмента. Корпус дополнительно может включать в себя электрические контакты 808B, выполненные с возможностью функционального соединения с соответствующими электрическими контактами на присоединенном к нему концевом эффекторе.
Как показано на ФИГ. 1, модульная хирургическая система 2 может включать в себя различные иные конструкции хирургических концевых эффекторов 1000, 2000 и 3000, которые могут использоваться в сочетании с различными описанными в настоящем документе хирургическими инструментами. Как будет дополнительно подробно описано ниже, каждый из концевых эффекторов 1000, 2000, 3000 включает в себя две отдельные «первую и вторую приводные системы концевого эффектора», выполненные с возможностью функционального соединения с первой и второй приводными системами хирургического инструмента, чтобы принимать от них управляющие движения. Каждая приводная система концевого эффектора выполнена с возможностью линейного перемещения соответствующих активирующих компонентов концевого эффектора из первых или начальных линейных положений во вторые или конечные линейные положения в ответ на приложение соответствующих вращательных движений к приводным системам концевого эффектора хирургическим инструментом, к которому концевой эффектор функционально прикреплен. Активирующие компоненты концевого эффектора прилагают линейные активирующие движения к различным компонентам концевого эффектора, расположенные в инструментальной головной части концевого эффектора, с целью выполнения различных хирургических процедур. Как будет дополнительно подробно описано ниже, в концевых эффекторах применяются уникальные компоненты и системы, помогающие врачу соединить первый и второй приводные стволы хирургического инструмента с соответствующими приводными стволами концевого эффектора. Поскольку четыре приводных ствола соединяются вместе по существу одновременно, можно применять различные соединительные конструкции и средства управления, чтобы стволы оказались в верных положениях или «приблизительно верных положениях», что будет способствовать такому одновременному соединению приводных систем.
Как показано на ФИГ. 33, одну форму механической соединительной системы 50 можно применять для способствования одновременному разъемному и функциональному соединению двух приводных систем в хирургическом инструменте с соответствующими «ведомыми» стволами в концевых эффекторах. Соединительная система 50 может содержать штырьковые соединители, которые могут прикрепляться к приводным стволам в хирургическом инструменте, и соответствующие гнездовые соединители, прикрепленные к ведомым стволам в хирургическом концевом эффекторе. Например, на ФИГ. 9 показаны штырьковые соединители 51, прикрепленные к первому и второму приводным стволам 22, 42 посредством зажимных винтов 52. Снова обращаясь к ФИГ. 33, каждый из штырьковых соединителей 51 выполнен с возможностью получения с передачей приводного усилия в соответствующих гнездовых соединителях 57, которые также могут быть прикреплены к приводным стволам внутри концевого эффектора. В одной форме каждый штырьковый соединитель 51 включает в себя по меньшей мере три приводных ребра 53, равномерно распределенных вокруг центрального участка 54 штырькового соединителя 51. В показанном варианте осуществления, например, пять приводных ребер 53 равномерно распределены вокруг центрального участка 54. Каждое приводное ребро 53 имеет заостренный дистальный конец 55. Каждое приводное ребро 53 может быть выполнено с несколько закругленными краями 56 для способствованию их вставке в соответствующие желоба 58 гнезд внутри гнездового соединителя 57. Каждый желоб 58 гнезда имеет конусовидный проксимальный входной участок 59 для способствования вставке в него соответствующего приводного ребра 53. Заостренный дистальный конец 55 каждого приводного ребра 53 в сочетании с конусовидным входом 59 каждого из желобов 58 гнезда будет компенсировать некоторую невыровненность между штырьковым соединителем 51 и соответствующим гнездовым соединителем 57 в процессе соединения. Кроме того, закругленные края 57 на заостренном дистальном конце 55 также помогают скользящей вставке штырькового соединителя 51 в соответствующий гнездовой соединитель 58.
В одной форме по меньшей мере один из штырьковых соединителей 51 прикреплен с возможностью перемещения к соответствующему первому или второму приводному стволу хирургического инструмента или соответствующему ему первому или второму ведомому стволу хирургического концевого эффектора. Более конкретно, штырьковый соединитель 51 может быть прикреплен с возможностью радиального или углового продвижения к стволу на «первую заданную величину радиального перемещения» по стволу. Это может быть реализовано, например, посредством конструкции со шпонкой и шпоночным пазом, размер которых относительно друг друга способствует некоторой величине радиального или углового продвижения штырькового соединителя 51 по стволу. Иными словами, например, на стволу может быть образована или иным образом установлена на него шпонка, размер которой меньше соответствующего шпоночного паза, образованного в штырьковом соединителе 51 так, что шпонка может двигаться внутри шпоночного паза и устанавливать первую заданную величину радиального продвижения. Эта первая заданная величина радиального продвижения предпочтительно является достаточной для передвижения соединителя назад или вперед. Для штырькового соединителя 51 с пятью ребрами 53, например, первая заданная величина радиального продвижения может составлять, например, 5–37 градусов. Могут существовать варианты осуществления, в которых первый заданный диапазон радиального продвижения может составлять менее 5°, а предпочтительно, например, не более 4°. Такой диапазон радиального или углового продвижения может быть достаточным если, например, соответствующий гнездовой соединитель 57 жестко зафиксирован на соответствующем приводном стволу и иначе не способен ни к какому радиальному продвижению. Однако если и штырьковый, и гнездовой соединители имеют способность к радиальному или угловому продвижению, такой диапазон можно уменьшить на 50%, обеспечивая каждому соединителю (штырьковому и соответствующему гнездовому соединителю) диапазон продвижения приблизительно 3–16 градусов. Величина радиального или углового продвижения, на которую гнездовой соединитель 57 может перемещаться на соответствующем стволу, в настоящем документе может называться «второй заданной величиной радиального продвижения». Гнездовые соединители 57 также могут прикрепляться к соответствующим приводным стволам конструкцией со шпонкой и шпоночным пазом, как описано выше, что обеспечивает желаемую вторую заданную величину радиального продвижения. Могут существовать варианты осуществления, в которых второй заданный диапазон радиального продвижения может составлять менее 5°, а предпочтительно, например, не более 4°.
Возможны различные комбинации и конструкции установки штырьковых соединителей и гнездовых соединителей. Например, один или оба штырьковых соединителя могут быть установлены с возможностью перемещения к соответствующим приводным стволам хирургического инструмента (или ведомым стволам хирургического концевого эффектора) различными способами, описанными в настоящем документе Аналогично, один или оба гнездовых соединителя могут быть установлены с возможностью перемещения к соответствующим ведомым стволам концевого эффектора (или приводным стволам хирургического инструмента) различными способами, описанными в настоящем документе. Например, на одном из первого и второго приводных стволов штырьковый соединитель может быть установлен с возможностью перемещения. Другой штырьковый соединитель, прикрепленный к другому приводному стволу, может быть установлен на нем без возможности перемещения. Гнездовой соединитель на ведомом стволу, который соответствует подвижно установленному штырьковому соединителю, может быть прикреплен к ведомому стволу без возможности перемещения, а гнездовой соединитель, установленный на другой ведомый ствол и соответствующий закрепленному без возможности перемещения соединителю, может быть установлен на ведомому стволу с возможностью перемещения. Таким образом, один из штырькового и гнездового соединителей «соединительной пары» выполнен с возможностью перемещения. Термин «соединительная пара» обозначает штырьковый соединитель и соответствующий гнездовой соединитель, которые выполнены с возможностью соединения вместе с целью функционального соединения приводного ствола хирургического инструмента с соответствующим ведомым стволом концевого эффектора. В других конструкциях и штырьковый соединитель, и гнездовой соединитель соединительной пары могут быть соединены с соответствующими стволами с возможностью перемещения.
Такая конструкция соединителей служит, например, для создания небольшого углового запаса между соединительными компонентами, чтобы компоненты могли немного поворачиваться для достаточного выравнивания, что позволяет одновременно выровнять соединительные компоненты, прикрепленные к двум отдельным вращательным приводным механизмам. Кроме того, возможно наличие достаточного бокового зазора или запаса в приводных механизмах для обеспечения процесса соединения. Такой боковой зазор или запас может быть реализован формированием шпонок и шпоночных пазов в шестернях, соединителях и/или сопрягающих стволах для обеспечения возможности такого небольшого поворота компонентов. Кроме этого, применительно к различным сдвигаемым узлам трансмиссии можно применять переключающую конструкцию, которая может активировать двигатель и вызывать небольшой поворот приводных стволов с целью соединения.
Этот и другие способы управления можно применять для того, чтобы обеспечить нахождение приводных стволов в хирургических инструментах в нужных положениях, что способствует их соединению с соответствующими приводными стволами в концевых эффекторах. Эта уникальная новая система 50 механического соединения служит для обеспечения дополнительной гибкости в процессе соединения, позволяя соединить приводные стволы в том случае, когда имеется некоторая невыровненность между соответствующими стволами. Следует понимать, что хотя в различных вариантах осуществления, описанных в настоящем документе, показаны штырьковые соединители 51, прикрепленные к приводным стволам внутри хирургического инструмента, и гнездовые соединители 58, прикрепленные к приводным стволам концевого эффектора, штырьковые соединители 51 могут быть прикреплены к приводным стволам концевого эффектора, а гнездовые соединители 58 могут быть прикреплены к приводным стволам инструмента.
На ФИГ. 34–37 представлен хирургический концевой эффектор 1000, содержащий хирургический режущий и сшивающий инструмент того типа, который обычно называется «открытым линейным» сшивающим инструментом. Различные формы таких открытых линейных сшивающих устройств описаны, например, патенте США № 5,415,334, озаглавленная «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ И КАССЕТА СО СКОБКАМИ», и в патенте США № 8,561,870, озаглавленном «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ», все содержимое которых включается в настоящий документ путем ссылки. Концевой эффектор 1000 содержит корпус 1010 концевого эффектора, который может быть изготовлен из корпусных сегментов 1012, 1014, соединенных вместе с возможностью извлечения винтами, захватами, защелками и т. п. Из корпуса 1010 концевого эффектора выступают нижняя бранша 1020 и верхняя бранша 1040, которые в совокупности могут образовывать инструментальную головку 1004 концевого эффектора. Нижняя бранша 1020 содержит раму 1022 нижней бранши, выполненную с возможностью функционального удерживания внутри нее кассеты 1060 с хирургическими скобками. Такие кассеты с хирургическими скобками хорошо известны специалистам в данной области и, следовательно, не будут описываться подробно в настоящем документе. Если коротко, кассета с хирургическими скобками 1060 может содержать корпус кассеты 1062, в котором выполнены ряды гнезд 1066 для скоб с боковых сторон от продольного паза 1068, расположенного по центру корпуса кассеты 1062. Паз 1068 выполнен с возможностью обеспечения продольного продвижения по нему режущего элемента 1090, как будет дополнительно подробно описано далее. Хирургическая скобка или скобки (не показаны) удерживаются в гнездах 1066 для скоб на выталкивающих скобки элементах (не показаны), которые выполнены с возможностью перемещения вверх внутри соответствующего гнезда 1066 в процессе пуска. Кассета 1060 со скобками может быть выполнена с возможностью удаления из рамы 1022 нижней бранши и замены другой, неизрасходованной кассетой, создавая возможность многоразового использования концевого эффектора 1000. Однако концевой эффектор 1000 также может быть предназначен для одноразового применения.
Как показано на ФИГ. 36, рама 1022 нижней бранши может быть выполнена из металлического материала и иметь U-образную дистальную часть 1024, выполненную с возможностью принимать кассету 1060 с хирургическими скобками. Боковые стенки 1026 U-образного дистального участка 1024 могут иметь дистальный конец 1028, выполненный с возможностью высвобождаемого и удерживающего взаимодействия с участком кассеты 1060 с хирургическими скобками. Корпус 1062 кассеты со скобками может также иметь элементы 1064 взаимодействия, выполненные с возможностью разъемного взаимодействия с выступающими участками 1030 стенки рамы 1022 нижней бранши. Концевой эффектор 1000 дополнительно содержит верхнюю браншу 1040, включающую участок упора 1042. Участок упора 1042 может включать в себя нижнюю сторону (не показана) со множеством углублений для формирования скоб на ней. Верхняя бранша 1040 дополнительно включает в себя проксимальный участок корпуса 1044, имеющий дистальный штифт 1046 поворотного механизма, проходящий через него. Концы дистального штифта 1046 поворотного механизма, латерально выступающие из проксимального конца проксимального участка 1044 корпуса принимаются с возможностью поворота в отверстиях 1032 поворотного механизма в нижней бранше 1020. Штифт 1046 поворотного механизма образует ось крепления AA-AA, вокруг которой вращается проксимальный конец верхней бранши 1040 относительно нижней бранши 1020 так, что участок упора 1042 выполнен с возможностью перемещения между открытым положением, отстоящим от кассеты 1060 со скобками, установленной в нижней бранше 1020, и закрытым положением, смежным с кассетой 1060 со скобками и/или тканью, расположенной между ними. Концевой эффектор 1000 может дополнительно включать в себя поперечную ось 1050 поворота, входящую в карманы 1034, образованные в выступающих стенках 1030 нижней бранши 1020, и установленную внутри отверстий 1016 в частях корпуса 1012, 1014. Ось поворота 1050 может служить осью поворота или поверхностью, вокруг которой вращается участок 1042 упора.
Перемещением участка 1042 упора между открытым и закрытым положениями управляет первая приводная система концевого эффектора, также называемая здесь закрывающей системой концевого эффектора 1070. В одном варианте, например, закрывающая система концевого эффектора 1070 включает в себя челнок закрытия 1072, проходящий вокруг проксимального участка корпуса 1024 нижней бранши 1020. Челнок закрытия 1072 может также называться «первым исполнительным механизмом концевого эффектора». Челнок закрытия 1072 может включать в себя U-образный участок, включающий в себя дистальные выступающие стенки 1074 и проксимальные выступающие стенки 1076. Каждая дистальная выступающая стенка 1074 включает в себя дугообразный криволинейный паз 1078, выполненный с возможностью принимать соответствующий участок штифта криволинейного сечения 1048, прикрепленного к верхней бранше 1040. Таким образом, осевое или линейное перемещение челнока закрытия 1072 относительно нижней бранши 1020 вызывает вращение верхней бранши 1040 на оси поворота 1050 и вокруг оси крепления AA-AA посредством взаимодействия штифта криволинейного сечения 1048 в криволинейных пазах 1078.
В различных вариантах закрывающая система 1070 включает в себя поворотный ствол 1080 закрытия концевого эффектора с резьбой и дистальный концевой участок 1082, удерживаемый с возможностью поворота внутри корпуса 1010 концевого эффектора. Ствол 1080 закрытия концевого эффектора образует ось ствола закрытия CSA-CSA. См. ФИГ. 37. Гнездовой соединитель 57 присоединен к проксимальному концу ствола закрытия 1080, чтобы способствовать соединению ствола закрытия 1080 со штырьковым соединителем 51, прикрепленным к первому приводному стволу в хирургическом инструменте. Закрывающая система 1070 дополнительно включает гайку закрытия 1084, устанавливаемую с помощью резьбы на ствол закрытия 1080. Гайка закрытия 1084 выполнена с возможностью установки в монтажных пазах 1077 в выступающих стенках 1076 челнока закрытия 1072. Таким образом, поворот ствола закрытия 1080 в первом направлении заставляет гайку закрытия 1084 выталкивать челнок закрытия 1072 в дистальном направлении DD. Перемещение челнока закрытия 1072 в дистальном направлении DD приводит к шарнирному перемещению верхней бранши 1040 из открытого положения в закрытое. Аналогично, перемещение челнока закрытия 1084 в проксимальном направлении PD приведет к перемещению верхней бранши 1040 из закрытого положения назад в открытое.
Концевой эффектор 1000 дополнительно включает в себя вторую приводную систему концевого эффектора, также называемую в настоящем документе пусковой системой 1100 для перемещения режущего ткань элемента 1090 и узла 1092 клиновидных салазок между начальным и конечным положениями. Когда узел 1092 клиновидных салазок выталкивается дистально через кассету 1060 с хирургическими скобками, узел 1092 клиновидных салазок функционально взаимодействует с выталкивателями в кассете 1060, на которой удерживаются хирургические скобки. По мере дистального выталкивания узел клиновидных салазок 1092 выталкиватели перемещаются вверх в соответствующих углублениях, чтобы вытолкнуть скобки, удерживаемые там, в формирующее взаимодействие с нижней стороной участка упора 1042 верхней бранши 1040. В одном варианте пусковая система 1100 дополнительно включает поворотный пусковой ствол 1102 с резьбой, удерживаемый с возможностью поворота на корпусе концевого эффектора 1010. Пусковой ствол 1102 образует ось пускового ствола FSA-FSA, параллельную или по существу параллельную оси ствола закрытия CSA-CSA. См., например, ФИГ. 37. Пусковой ствол 1102 включает дистальный концевой участок 1104, удерживаемый с возможностью поворота на монтажном блоке 1106, установленном в корпусе 1010 концевого эффектора. Гнездовой соединитель 57 присоединен к проксимальному концу пускового ствола 1102, чтобы способствовать соединению пускового ствола 1102 со штырьковым соединителем 51, прикрепленным ко второму приводному стволу в хирургическом инструменте. Пусковая система 1100 дополнительно включает пусковую гайку 1110, устанавливаемую с помощью резьбы на пусковой ствол 1102. Таким образом, поворот пускового ствола 1102 приводит к осевому перемещению пусковой гайки 1110 в корпусе концевого эффектора 1010. В одном варианте режущий ткань элемент 1090 и узел клиновидных салазок 1092 соединен с пусковой гайкой 1110 пусковой штангой или пусковыми штангами 1112. Пусковая штанга или штанги могут также называться в настоящем документе «вторым исполнительным механизмом концевого эффектора», линейно или по оси перемещаемым в ответ на активацию системы пуска. Таким образом, поворот пускового ствола 1102 в первом направлении будет выталкивать пусковую гайку 1110, пусковую(ые) штангу(и) 1112, режущий ткань элемент 1090 и узел клиновидных салазок 1092 в дистальном направлении DD из, например, начального положения (ФИГ. 35) в конечное положение, в котором режущий ткань элемент 1090 и узел клиновидных салазок 1092 вытолкнуты к дистальному концу кассеты с хирургическими скобками 1060. Поворот пускового ствола 1102 в противоположном направлении будет выталкивать пусковую гайку 1110, пусковую(ые) штангу(и) 1112, режущий ткань элемент 1090 и узел клиновидных салазок 1092 в проксимальном направлении PD из их соответствующих конечных положений назад в их соответствующие начальные положения. В некоторых вариантах осуществления узел клиновидных салазок может оставаться на дистальном конце кассеты с хирургическими скобками и не возвращаться с режущим ткань элементом 1090 в начальное положение. В других вариантах осуществления режущий ткань элемент и элемент узла клиновидных салазок могут оставаться на дистальном конце элемента кассеты со скобками.
Концевой эффектор 1000 может также быть оснащен различными датчиками, соединенными с контактной пластиной 1120 концевого эффектора, установленной в корпусе 1010 концевого эффектора. Контактная пластина 1120 может быть расположена в корпусе 1020 концевого эффектора так, что когда концевой эффектор 1000 функционально соединен с хирургическим инструментом, контактная пластина 1120 концевого эффектора электрически соединена с контактной пластиной 30 хирургического инструмента, установленной в корпусе хирургического инструмента 12. См., например, ФИГ. 1. Как показано на ФИГ. 34, датчик закрытия 1122 может быть установлен в корпусе концевого эффектора 1010 и электрически соединен с контактной пластиной концевого эффектора 1120 так, что когда концевой эффектор 1000 функционально соединен с хирургическим инструментом, датчик закрытия 1122 обменивается данными с системой управления хирургического инструмента. Датчик закрытия 1122 может включать датчик Холла 7028, как показано ниже, например, в связи с ФИГ. 61, 63, выполненный с возможностью обнаружения положения выступа переключателя 1086 на гайке закрытия 1084. Кроме того, пусковой датчик 1124 может также устанавливаться в корпусе концевого эффектора 1010, чтобы обнаруживать наличие пусковой штанги 1112. Пусковой датчик 1112 может включать датчик Холла 7028, как показано ниже, например, в связи с ФИГ. 61, 63 и быть электрически соединенным с контактной пластиной концевого эффектора 1120 для конечной связи с системой управления хирургического инструмента, такой как процессор рукоятки 7024, более подробно описанный ниже в связи с ФИГ. 61, 63, 64.
Ниже описано применение концевого эффектора 1000 в соединении с хирургическим инструментом 10. Однако следует понимать, что концевой эффектор 1000 может быть функционально соединен с различными другими описанными в настоящем документе конструкциями хирургических инструментов. Перед использованием ствол закрытия 1080 и пусковой ствол 1102 «зафиксированы» или расположены в их соответствующих начальных положениях, чтобы способствовать прикреплению к первому и второму приводным стволам 22, 42, соответственно. Например, чтобы соединить концевой эффектор 1000 с хирургическим инструментом 10, врач перемещает концевой эффектор 1000 в положение, в котором ось ствола закрытия CA-CA выровнена по оси с осью первого приводного ствола FDA-FDA, а ось пускового ствола FSA-FSA выровнена по оси с осью второго приводного ствола SDA-SDA. Гнездовой соединитель 57 на стволе закрытия 1080 вступает в функциональное взаимодействие со штырьковым соединителем 51 на первом приводном стволу 22. Аналогично, гнездовой соединитель 57 на пусковом стволе 1102 вступает в функциональное взаимодействие со штырьковым соединителем 51 на втором приводном стволу 42. Таким образом, находясь в этом положении, ствол закрытия 1080 функционально соединен с первым приводным стволом 22, а пусковой ствол 1102 функционально соединен со вторым приводным стволом 42. Контактная пластина 1120 концевого эффектора функционально соединена с контактной пластиной 30 хирургического инструмента так, что датчики 1122, 1124 (и любые другие датчики в пределах концевого эффектора 1000) находятся в функциональной связи с системой управления хирургического инструмента. Чтобы удержать концевой эффектор 1000 в соединенном функциональном взаимодействии с хирургическим инструментом 10, концевой эффектор 1000 включает в себя защелку 1130 ограничителя, прикрепленную к корпусу концевого эффектора 1010 и выполненную с возможностью разъемного взаимодействия с участком корпуса 12 инструмента. Защелка 1130 ограничителя может включать в себя удерживающий выступ 1132, который может разъемно взаимодействовать с полостью 15 ограничителя, образованной в корпусе 12. См. ФИГ. 1.
При соединении вместе датчик закрытия 1122 обнаруживает положение гайки закрытия 1084, а пусковой датчик 1124 обнаруживает положение пусковой штанги 1112. Эта информация направляется системе управления хирургического инструмента. Кроме того, врач может подтвердить, что сдвигаемый узел трансмиссии (или ее передаточная каретка 62) находится в первом приводном положении. Это может быть подтверждено активацией светового индикатора 77 на корпусе 12, как описано выше. Если сдвигаемый узел трансмиссии 60 не находится в своем первом приводном положении, врач может активировать пусковой крючок 92, чтобы переместить каретку передачи 62 в первое приводное положение так, что активация пускового переключателя-качели 110 для активации двигателя 80 приведет к активации первой приводной системы 20. Если закрывающая система 1070 и пусковая система 1100 находятся в своих соответствующих начальных положениях, а в концевом эффекторе 1000 правильно установлена неизрасходованная кассета со скобками 1060, врач может расположить бранши 1020, 1040 относительно целевой ткани, которую необходимо разрезать и сшить скобками. Врач может закрыть верхнюю браншу 1040, активируя пусковой переключатель-качели 110, чтобы включить двигатель 80 и повернуть первый приводной ствол 22. После того, как целевая ткань будет зажата между верхней браншей 1040 и кассетой 1060 с хирургическими скобками в нижней бранше 1020, врач сможет активировать пусковой крючок 92, чтобы сдвинуть каретку передачи 62 в ее второе приводное положение так, что активация двигателя 80 приведет к повороту второго приводного ствола 42. Когда каретка передачи 62 передвинута во второе приводное положение, врач может еще раз активировать пусковой переключатель-качели 110, чтобы активировать вторую приводную систему 40 и чтобы пусковая система 1100 в концевом эффекторе 1000 вытолкнула режущий ткань элемент 1090 и узел клиновидных салазок 1092 дистально через кассету 1060 с хирургическими скобками. Поскольку режущий ткань элемент 1090 и узел клиновидных салазок 1092 выталкиваются дистально, целевая ткань, зажатая между браншами 1020, 1040, разрезается и сшивается скобками. После того как режущий ткань элемент 1090 и узел клиновидных салазок 1092 вытолкнуты в их крайние дистальные положения в кассете 1060 с хирургическими скобками, врач может активировать пусковой переключатель-качели 110, чтобы изменить направление вращения двигателя на противоположное и вернуть пусковую систему 1100 в ее начальное положение.
При использовании концевого эффектора 1000 и другого концевого эффектора и хирургических инструментов, описанных в настоящем документе и имеющих аналогичные конструкции браншей, могут возникнуть сложности с надлежащей очисткой углублений упора на его нижней стороне. Кроме того, углубления упора могут истираться, стачиваться или просто изнашиваться со временем, становясь малопригодными для дальнейшего использования. Кроме того, в зависимости от применения, загрузка и удаление кассеты с хирургическими скобками может быть связана с затруднениями. На ФИГ. 119–121 изображен «комплект скоб» одноразового применения 1300, который может решить некоторые или даже все из указанных проблем.
На ФИГ. 119 показан участок концевого эффектора 1000’, который может быть аналогичным по конструкции и использованию, например, концевому эффектору 1000, а также другим раскрытым здесь концевым эффекторам, за исключением описанных ниже конкретных различий. Как представлено на ФИГ. 119, верхняя бранша 1240 включает в себя открытый дистальный конец 1243. Верхняя бранша 1240 может быть выполнена из металлического материала и иметь U-образную форму, если смотреть с дистального конца, и включать два выступающих внутрь и расположенных друг напротив друга удерживающих выступа 1245. Концевой эффектор 1000’ дополнительно включает раму нижней бранши 1222, аналогичную, например, описанной в настоящем документе раме нижней бранши 1222. Как представлено на Фиг., рама 1222 нижней бранши также имеет открытый дистальный конец 1223.
Также согласно ФИГ. 119 один вариант комплекта 1300 скоб для одноразового применения включает в себя упор 1302, имеющий поверхность для формирования скоб 1304, включающий множество образованных в ней углублений для формирования скоб (не изображены). Комплект 1300 скоб дополнительно включает кассету 1310, со скобками имеющую платформу кассеты 1312, расположенную напротив нижней поверхности для формирования скоб 1304 упора 1302. Кассета 1310 со скобками может быть аналогична другим кассетам со скобками, более подробно описанным в настоящем документе, и может функционально удерживать в себе множество хирургических скоб. Комплект 1300 скоб дополнительно включает в себя одноразовый элемент для хранения 1320, имеющий размеры и форму, подходящие для фрикционного взаимодействия с упором 1302 и кассетой 1310 со скобками таким образом, чтобы удерживать выравнивание между углублениями для скоб в нижней поверхности для формировании скоб 1304 и скоб (не показаны) в кассете 1310 со скобками перед их применением. Удерживающий элемент 1320 может также включать в себя разделитель 1322, проходящий между упором 1302 и кассетой 1310 со скобками. Удерживающий элемент может, например, быть сформован из пластмассы или другого подходящего полимерного материала, а разделительная подкладка 1322 может быть изготовлен из металла. Разделительная подкладка 1322 может удерживаться за счет трения в пазе или другом удерживающем элементе, образованном в удерживающем элементе 1320.
Как показано на ФИГ. 120, комплект 1300 скоб устанавливается путем выравнивания упора 1302 с открытым дистальным концом 1243 в верхней бранше 1240, при этом кассета 1310 со скобками выравнивается с открытым дистальным концом 1245 на раме нижней бранши 1222. После этого комплект скоб 1300 перемещают в проксимальном направлении PD в положение, показанное на ФИГ. 120. Удерживающие выступы 1245 служат для удерживания упора 1302 в верхней бранше 1240. Концевой эффектор 1000’ может также включать в себя активируемый вручную элемент 1340 защелки, который может перемещаться из нефиксированного положения (ФИГ. 119) в зафиксированное положение (ФИГ. 121). Например, в зафиксированном положении элемент 1340 защелки удерживает упор 1302 в верхней бранше 1240, а кассету 1310 со скобками - в раме нижней бранши 1222. Например, элемент 1340 защелки может включать в себя выполненный с возможностью перемещения верхний плечо 1342 защелки, выполненный с возможностью разъемного взаимодействия с участком (например, выступом, стопором, буртом или другим удерживающим элементом или элементами), образованными на проксимальном конце упора 1302. Аналогично, элемент 1340 защелки может включать в себя выполненный с возможностью перемещения нижний плечо 1344 защелки, выполненный с возможностью разъемного взаимодействия с участком (например, выступом, стопором, буртом или другим удерживающим элементом или элементами), образованными на кассете 1310 со скобками. Верхний и нижний плечи 1342, 1344 защелки могут шарнирно или иным образом удерживаться с возможностью перемещения на концевом эффекторе 1000’ для избирательного перемещения между зафиксированным и незафиксированным положениями. В различных вариантах верхний и нижний плечи 1342, 1344 защелки могут, как правило, смещаться в зафиксированное положение пружиной или пружинами (не показаны). В таких конструкциях врач может вставить комплект скоб 1300 в верхнюю браншу 1240 и раму нижней бранши 1222. При контакте проксимального конца упора 1302 с верхним плечом 1342 защелки, верхний плечо 1342 защелки вращается или перемещается, чтобы позволить установить упор 1302 на место. Как только упор установлен на место, верхний плечо 1342 защелки смещается в фиксирующее взаимодействие с упором 1302 (в случае применения пружины или смещающего элемента). В альтернативных конструкциях верхний плечо 1342 защелки может перемещаться в зафиксированное положение вручную. Аналогично, при контакте проксимального конца кассеты 1310 со скобками с нижним плечом 1344 защелки, нижний плечо 1344 защелки вращается или перемещается, чтобы позволить кассете 1310 со скобками встать на место. Как только кассета 1310 со скобками встанет на место, нижний плечо 1344 защелки смещается в фиксирующее взаимодействие с кассетой 1310 со скобками, чтобы удерживать ее на месте (в случае применения пружины или смещающей конструкции). В альтернативных вариантах осуществления нижний плечо 1344 защелки может перемещаться в зафиксированное положение вручную. После установки комплекта скоб 1300 и фиксации или иного прикрепления упора 1302 и кассеты 1310 со скобками к концевому эффектору 1000’ врач может удалить узел 1320 элемента для хранения. См., например, ФИГ. 121. После использования комплекта скоб 1300 врач может установить удерживающий элемент 1320 на место, в дистальные концы упора 1302 и кассеты 1310 со скобками. Это может быть выполнено путем выравнивания открытого конца удерживающего элемента 1320 и последующего введения с усилием удерживающего элемента 1320 обратно в фрикционное взаимодействие с упором 1302 и кассетой 1310 со скобками. После установки дистальных концов упора 1302 и кассеты 1310 со скобками в удерживающий элемент 1320 врач может переместить верхний и нижний плечи 1342, 1344 защелки в их незафиксированные положения, чтобы получить возможность извлечь комплект 1300 скоб из верхней бранши 1240 и рамы 1222 нижней бранши. После этого комплект 1300 скоб можно утилизировать единым блоком. В других ситуациях врач может отдельно удалить упор 1302 и кассету 1310 со скобками из концевого эффектора 1000’ без первоначальной установки удерживающего элемента 1320.
На ФИГ. 38–41 представлен хирургический концевой эффектор 2000, содержащий хирургический режущий и сшивающий инструмент. Он относится к типу инструментов, обычно называемому «изогнутый режуще-сживающий инструмент». Различные варианты таких сшивающих устройств описаны, например, в Патенте США № 6,988,650, озаглавленном МЕХАНИЗМ ПРОДВИЖЕНИЯ РЫЧАГА УДЕРЖИВАЮЩЕГО ШТИФТА ДЛЯ ИЗОГНУТОГО РЕЖУЩЕ-СШИВАЮЩЕГО ИНСТРУМЕНТА, и Патенте США № 7,134,587, озаглавленном ПЛЕЧО ОТТЯГИВАНИЯ СКАЛЬПЕЛЯ ДЛЯ ИЗОГНУТОГО РЕЖУЩЕ-СШИВАЮЩЕГО ИНСТРУМЕНТА, которые включены в данное описание в полном объеме посредством ссылки. Концевой эффектор 2000 содержит корпус концевого эффектора 2010, который может быть изготовлен из сегментов 2012, 2014 корпуса, соединенных между собой с возможностью извлечения с помощью винтов, утолщений, защелкивающихся элементов и т. д. Из корпуса концевого эффектора 2010 выступает удлиненный узел 2020 рамы, прерывающийся на головке 2002 инструмента концевого эффектора. В одном варианте узел 2020 рамы содержит пару разделенных в пространстве распорок или пластин 2022 рамы, которые устойчиво прикреплены к корпусу 2010 и выступают из него дистально. С-образная опорная конструкция 2024 прикреплена к дистальному концу пластин 2022 рамы. Термин «С-образный» используется во всем описании для указания на вогнутую форму опорной конструкции 2024 и модуля кассеты с хирургическими скобками 2060. С-образная конструкция способствует улучшенной функциональности, и термин «С-образный» в данном описании следует понимать как включающий в себя множество вогнутых форм, которые аналогичным образом улучшают функциональность хирургических сшивающих и режущих инструментов. Опорная конструкция 2024 прикреплена к пластинам 2022 рамы заклепкой 2023 буртика и стволами 2026, которые проходят от опорной конструкции 2024 в соответствующие отверстия для их приема в пластинах 2022 рамы. В различных вариантах опорная конструкция 2024 может быть образована в виде одной детали. Конкретнее, опорная конструкция 2024 может быть образована из экструдированного алюминиевого материала. При формировании опорной конструкции 2024 таким образом не требуется применения множества частей, и связанная с этим стоимость изготовления и сборки значительно снижается. Кроме того, считается, что унитарная конструкция опорной конструкции 2024 повышает общую стабильность концевого эффектора 2000. Кроме того, унитарная экструдированная конструкция опорной конструкции 2024 обеспечивает уменьшение массы, облегчение стерилизации, поскольку облучение кобальтовым источником обеспечивает эффективное проникновение через экструдированный алюминий, а также уменьшение травмирования тканей благодаря более гладкой наружной поверхности, достигаемой путем экструзии.
Концевой эффектор 2000 дополнительно включает первую приводную систему концевого эффектора, также называемую закрывающей системой концевого эффектора 2070, и вторую приводную систему концевого эффектора, также упоминаемую в настоящем документе как пусковая система 2100. В одном варианте, например, закрывающая система 2070 концевого эффектора включает в себя узел 2072 закрывающего ригеля, имеющий размеры, необходимые для скользящей установки между распорками 2022 рамы для осевого перемещения между ними. Узел 2072 закрывающего ригеля может также упоминаться как первый исполнительный механизм концевого эффектора. У него открытая нижняя часть, выполненная с возможностью скользящей установки в нее узла 2112 пусковой штанги пусковой системы 2100, как будет более подробно описано ниже. В одном варианте, например, узел 2072 закрывающего ригеля является сформованным пластмассовым элементом, имеющим форму, подходящую для перемещений и функций, которые будут дополнительно описаны ниже. Изготовление узла 2072 закрывающего ригеля из пластмассы позволяет сократить производственные издержки, а также уменьшить массу концевого эффектора 2000. Кроме того, возможно упрощение стерилизации концевого эффектора 2000 облучением из кобальтового источника, поскольку излучение легче проникает через пластмассу, чем через нержавеющую сталь. В альтернативном варианте конструкции узел 2072 закрывающего ригеля может быть выполнен из экструдированного алюминия с последующей машинной обработкой для изготовления требуемых в окончательной конструкции элементов. Хотя конструкция узла закрывающего ригеля из экструдированного алюминия может быть не настолько простой в производстве, как пластмассовый компонент, она все же обеспечит такие же преимущества (т. е. устранение компонентов, облегчение сборки, меньшая масса, легче стерилизовать).
Узел 2072 закрывающего ригеля включает изогнутый дистальный конец 2074, имеющий размеры, позволяющие его принимать между боковыми стенками 2027 опорной конструкции 2024. Изогнутый дистальный конец 2074 имеет размеры и форму, позволяющие его принимать и удерживать в корпусе 2062 кассеты модуля 2060 кассеты. В различных вариантах проксимальный конец узла 2072 закрывающего ригеля соединен с гайкой закрытия 2084, устанавливаемой посредством резьбы на ствол закрытия 2080. Ствол закрытия 2080 образует ось ствола закрытия CSA-CSA и имеет гнездовой соединитель 57, присоединенный к его проксимальному концу, чтобы способствовать соединению ствола закрытия 2080 со штырьковым соединителем 51, прикрепленным к первому приводному стволу хирургического инструмента. Поворот ствола закрытия 2080 в первом направлении приводит к тому, что гайка закрытия 2084 выталкивает узел 2072 закрывающего ригеля в дистальном направлении DD. Поворот ствола закрытия 2080 в противоположном направлении аналогично приводит к проксимальному перемещению гайки закрытия 2084 и узла 2072 закрывающего ригеля.
Как указано выше, дистальный конец 2074 узла 2072 закрывающего ригеля выполнен с возможностью функционального удерживания в нем корпуса 2062 кассеты модуля 2060 кассеты. Модуль 2060 кассеты включает множество хирургических скоб (не показаны) на выталкивателе скоб (не показан), который при выдвижении по оси выталкивает хирургические скобки из их соответствующих углублений 2066, расположенных с каждой стороны паза 1068, который выполнен с возможностью обеспечения прохождения через него элемента 2115 скальпеля. Модуль 2060 кассеты может, например, быть в чем-то аналогичным модулям кассеты, описанным, например, в патентах США №№ 6,988,650 и 7,134,587, которые полностью включены посредством ссылки в данное описание, за исключением указанных отличий. Концевой эффектор 2000 можно утилизовать после однократного применения, или концевой эффектор 2000 может использоваться многократно путем замены использованного модуля кассеты в ходе выполняемой операции или в рамках подготовки к новой операции после повторной стерилизации.
Концевой эффектор 2000 дополнительно включает пусковую систему 2100, включающую узел 2112 пусковой штанги, который выполнен с возможностью скользящей установки в открытую нижнюю часть узла 2072 закрывающего ригеля. См. ФИГ. 39. В одном варианте пусковая система 2100 дополнительно включает пусковой ствол 2102, который на дистальном конце 2104 имеет нарезанную резьбу, а проксимальный участок 2106 имеет квадратное поперечное сечение. Дистальный конец 2104 с резьбой принимается с возможностью ввинчивания в пусковой гайке 2110 с резьбой, прикрепленной к проксимальному концу узла 2112 пусковой штанга. Пусковая гайка 2110 с резьбой имеет размеры, позволяющей ее принимать с возможностью скольжения в осевой полости 2085 узла 2084 гайки закрытия. См. ФИГ. 41. Такая конструкция позволяет пусковой гайке 2110 выдвигаться по оси с узлом 2084 гайки закрытия, когда концевой эффектор 2000 перемещен в закрытое положение, а затем перемещаться по оси относительно гайки закрытия 2084 и узла 2072 закрывающего ригеля при активации пусковой системы 2100. Пусковой ствол 2102 образует ось пускового ствола FSA-FSA, параллельную или по существу параллельную оси ствола закрытия CSA-CSA. См., например, ФИГ. 41. На ФИГ. 39 и 41 также видно, что проксимальный участок 2106 пускового ствола 2102 принимается с возможностью скольжения в удлиненном канале 2105 в гнездовом соединителе 57’, который во всем остальном идентичен описанному здесь гнездовому соединителю. Удлиненный канал 2105 имеет квадратное поперечное сечение, размер которого позволяет скользяще устанавливать в него проксимальную часть 2106 пускового ствола 2102. Такая конструкция позволяет пусковому стержню 2102 перемещаться по оси относительно охватывающего торцевого соединителя 57’ с возможным вращением вместе с охватывающим торцевым соединителем 57’. Таким образом, когда узел 2072 закрывающего ригеля выдвигается в дистальном направлении «DD» после активации первой приводной системы в хирургическом инструменте, пусковая гайка 2110 будет двигаться в дистальном направлении «DD» в узле гайки закрытия 2084. Проксимальная часть 2106 пускового ствола 2102 будет двигаться по оси в канале 2105 в гнездовом соединителе 57’, в то же время оставаясь во взаимодействии с ним. После этого активация второй приводной системы в одном направлении поворота в хирургическом инструменте, функционально соединенном с охватывающим торцевым соединителем 57’, будет приводить к вращению пускового ствола 2102, приводя к движению узла 2112 пусковой штанги в дистальном направлении DD. По мере перемещения узла 2112 пусковой штанги в дистальном направлении держатель скальпеля 2115 выдвигается дистально через модуль 2060 кассеты. Активация второй приводной системы во втором направлении поворота приводит к перемещению узла 2112 пусковой штанги в проксимальном направлении « PD ».
Дистальный конец узла 2112 пусковой штанги включает приводной элемент 2114 и элемент 2115 скальпеля, дистально выступающий из него. Как видно на ФИГ. 39, элемент 2115 скальпеля принимается с возможностью,скольжения в участке 2142 упора узла 2140 упора, выполненном с возможностью установки в изогнутый участок 2025 упора опорной конструкции 2024. Более подробная информация относительно узла 2140 упора приведена в патентах США №№ 6,988,650 и 7,134,587. Концевой эффектор 2000 может также включать в себя предохранительный механизм 2150 блокировки (ФИГ. 39) для предотвращения пуска ранее запущенного модуля 2060 кассеты. Более подробное описание взаимодействия между модулем 2060 кассеты и предохранительным механизмом блокировки приведено в патентах США №№ 6,988,650 и 7,134,587.
Концевой эффектор 2000 также включает в себя приводной механизм 2160 штифта тканевого фиксатора. Приводной механизм 2160 штифта тканевого фиксатора включает в себя седловидный ползунок 2162, расположенный в верхнем участке 2010 корпуса. Ползунок 2162 шарнирно подсоединен к приводу 2163 штока толкателя, удерживаемым с возможностью скольжения внутри корпуса 2010. Исполнительный механизм Исполнительный механизм 2163 штока толкателя ограничен в продольном перемещении вдоль длинной оси концевого эффектора 2000. Исполнительный механизм Исполнительный механизм 2163 штока толкателя подсоединен к штоку 2164 толкателя кольцевым желобом 2165 на штоке 2164 толкателя, который защелкивается в паз 2166 исполнительного механизма 2163 штока толкателя. См. ФИГ. 41. Дистальный конец штока 2164 толкателя содержит кольцевой желоб 2167, который взаимосвязан с канавкой 2172 в проксимальном конце муфты 2170, которая прикреплена к модулю 2160 кассеты (лучше всего показан на ФИГ. 41). Дистальный конец муфты 2170 содержит желоб 2174 для взаимосвязи с кольцевым пазом 2182 на удерживающем штифте 2180. Ручное перемещение ползунка 2162 приводит к перемещению штока 2164 толкателя. Дистальное перемещение или проксимальное втягивание штока 2164 толкателя приводит к соответствующему перемещению удерживающего штифта 2180. Механизм активации 2160 удерживающего штифта 2180 также функционально взаимодействует с узлом 2072 закрывающего ригеля так, что активация закрывающей системы 2070 приводит к автоматическому дистальному перемещению удерживающего штифта 2180, если он уже не был перемещен вручную в крайнее проксимальное положение. При продвижении удерживающего штифта 2180 он проходит через корпус 2062 кассеты в узел 2140 упора, чтобы, таким образом, захватить ткань между модулем 2060 кассеты и узлом 2140 упора.
В одном варианте приводной механизм 2160 удерживающего штифта включает в себя направляющую вилку 2190, с возможностью поворота или шарнирно удерживаемую в корпусе 2010 посредством шарнирного штифта 2192. Узел 2072 закрывающего ригеля дополнительно включает в себя стержни или выступы 2073, проходящие латерально с обеих сторон узла 2072 закрывающего ригеля в корпусе 2010. Эти стержни 2073 принимаются с возможностью скольжения в соответствующие дугообразные пазы 2194 в вилке 2190. Вилка 2190 содержит штифты 2196 криволинейного сечения, расположенные так, чтобы толкать криволинейные поверхности 2168 исполнительного механизма 2163 штока толкателя. Вилка 2190 не прикреплена непосредственно к удерживающему штифту 2180, так что хирург может решить выдвинуть удерживающий штифт 2180 вручную. Удерживающий штифт 2180 выдвинется автоматически, если хирург решит не использовать удерживающий штифт 2180, когда узел 2072 закрывающего ригеля выдвигается дистально в закрытое положение. Хирург должен втянуть удерживающий штифт 2180 вручную. При такой конструкции приводного механизма 2160 удерживающего штифта возможно закрытие и втягивание удерживающего штифта 2180 вручную. Если хирург не закрывает удерживающий штифт 21280 вручную, имеющийся приводной механизм 2160 удерживающего штифта сделает это автоматически во время зажатия инструмента. Более подробная информация относительно активации и применения удерживающего штифта приведена в патентах США №№ 6,988,650 и 7,134,587.
Концевой эффектор 2000 может также быть оснащен различными датчиками, соединенными с контактной пластиной 2120 концевого эффектора, установленной в корпусе 2010 концевого эффектора. Например, концевой эффектор 2000 может включать в себя датчик закрытия 2122, установленный в корпусе 2010 концевого эффектора и электрически соединенный с контактной пластиной 2120 концевого эффектора так, что когда концевой эффектор 2000 функционально соединен с хирургическим инструментом, датчик закрытия 2122 обменивается данными с системой управления хирургического инструмента. Датчик закрытия 2122 может включать датчик Холла 7028, как показано ниже в связи с ФИГ. 61, 63, выполненный с возможностью обнаружения положения выступа переключателя 2086 на гайке закрытия 21084. См. ФИГ. 40. Кроме того, пусковой датчик 2124 может также быть установлен в корпусе 2010 концевого эффектора и выполнен с возможностью обнаружения местонахождения пусковой гайки 2110 в гайке закрытия 2084. Пусковой датчик 2124 может включать датчик Холла 7028, как описано ниже в связи с ФИГ. 61, 63 и быть электрически соединенным с контактной пластиной 2120 концевого эффектора для конечной связи с системой управления хирургического инструмента, как описано выше. Контактная пластина 2120 может быть расположена в корпусе 2020 концевого эффектора так, что когда концевой эффектор 2000 функционально соединен с хирургическим инструментом, контактная пластина 2120 концевого эффектора электрически соединена с контактной пластиной 30 хирургического инструмента, установленной в корпусе 12 хирургического инструмента, как описано выше.
Ниже описано применение концевого эффектора 2000 в связи с хирургическим инструментом 10. Однако следует понимать, что концевой эффектор 2000 может быть функционально соединен с различными другими описанными в настоящем документе конструкциями хирургических инструментов. Перед использованием ствол закрытия 2080 и пусковой ствол 2102 «зафиксированы» или расположены в их начальных положениях, чтобы способствовать прикреплению к первому и второму приводным стволам 22, 42 соответственно. Например, чтобы соединить концевой эффектор 2000 с хирургическим инструментом 10, врач перемещает концевой эффектор 2000 в положение, в котором ось ствола закрытия CSA-CSA выровнена по оси с осью первого приводного ствола FDA-FDA, а ось пускового ствола FSA-FSA выровнена по оси с осью второго приводного ствола SDA-SDA. Гнездовой соединитель 57 на стволе закрытия 2080 вступает в функциональное взаимодействие со штырьковым соединителем 51 на первом приводном стволу 22. Аналогично, гнездовой соединитель 57’ на пусковом стволе 2102 вступает в функциональное взаимодействие со штырьковым соединителем 51 на втором приводном стволу 42. Таким образом, находясь в этом положении, ствол закрытия 2080 функционально соединен с первым приводным стволом 22, а пусковой ствол 2102 функционально соединен со вторым приводным стволом 42. Контактная пластина 1120 концевого эффектора функционально соединена с контактной пластиной 30 хирургического инструмента так, что датчики в пределах концевого эффектора 2000 находятся в функциональной связи с системой управления хирургического инструмента. Чтобы удержать концевой эффектор 2000 в соединенном функциональном взаимодействии с хирургическим инструментом 10, концевой эффектор 2000 включает фиксатор 2130 ограничителя, прикрепленный к корпусу концевого эффектора 2010 и выполненный с возможностью разъемного взаимодействия с участком корпуса инструмента 12. Защелка 2130 ограничителя может включать в себя удерживающий выступ 2132, который может разъемно взаимодействовать с полостью 15 ограничителя, образованной в корпусе 12. См. ФИГ. 1. При соединении вместе датчик закрытия 2122 обнаруживает положение гайки закрытия 2084, а пусковой датчик 2124 обнаруживает положение пусковой гайки 2110. Эта информация направляется системе управления хирургического инструмента. Кроме того, врач может подтвердить, что сдвигаемый узел трансмиссии (или ее передаточная каретка 62) находится в первом приводном положении. Это может быть подтверждено активацией светового индикатора 77 на корпусе 12, как описано выше. Если сдвигаемый узел трансмиссии 60 не находится в своем первом приводном положении, врач может активировать пусковой крючок 92, чтобы переместить каретку передачи 62 в первое приводное положение так, что активация пускового переключателя-качели 110 для активации двигателя 80 приведет к активации первой приводной системы 20. Если закрывающая система 2070 и пусковая система 2100 находятся в своих соответствующих начальных положениях, а в концевом эффекторе 2000 правильно установлен неизрасходованный модуль 2060 кассеты со скобками, врач может активировать закрывающую систему 2070, чтобы захватить целевую ткань между модулем 2060 кассеты и узлом 2140 упора.
Врач может переместить в дистальном направлении узел 2072 закрывающего ригеля, воздействуя на пусковой переключатель-качели 110, чтобы включить двигатель 80 и повернуть первый приводной ствол 22. Эта активация приводит к перемещению модуля 2060 кассеты к узлу упора 2140 для зажатия находящейся между ними целевой ткани. По мере перемещения 2072 закрывающего ригеля дистально взаимодействие стержней 2073 и вилки 2190 будет вызывать активацию приводного механизма 2160 штифта тканевого фиксатора, выталкивающий удерживающий штифт 2180 дистально через участок 2161 платформы и через узел 2140 упора в находящееся там углубление 2141 штифта (см. ФИГ. 41). Удерживающий штифт 2180 служит для захвата целевой ткани между узлом 2140 упора и модулем 2060 кассеты. После того, как целевая ткань будет зажата между узлом 2140 упора и модулем 2060 кассеты, врач сможет активировать пусковой крючок 92, чтобы сдвинуть каретку передачи 62 в ее второе приводное положение, так что активация двигателя 80 приведет к повороту второго приводного ствола 42. Когда каретка передачи 62 перемещается во второе приводное положение, врач может еще раз активировать пусковой переключатель-качели 110, чтобы активировать вторую приводную систему 40 и пусковая система 2100 в концевом эффекторе 2000 вытолкнет дистально узел 2112 пусковой штанги, который также выталкивает элемент 2115 скальпеля дистально через модуль 2060 кассеты, разрезая целевую ткань, зажатую между узлом 2140 упора и модулем 2060 кассеты. По мере перемещения узла 2112 пусковой штанги дистально приводной элемент 2114 также выталкивает хирургические скобки, удерживаемые в модуле 2060 кассеты, из модуля 2060 кассеты через целевую ткань и в формирующий контакт с узлом 2140 упора. После завершения действия разрезания и сшивания врач может активировать пусковой переключатель-качели 110, чтобы изменить направление вращения двигателя на противоположное и вернуть пусковую систему 2100 в ее начальное положение. Затем с помощью пускового крючка 92 врач может вернуть каретку передачи 62 в ее первое приводное положение, так что активация пускового переключателя-качели 110 в противоположном направлении приведет к тому, что двигатель 80 будет поворачиваться в обратном направлении, возвращая узел 2073 закрывающего ригеля в его начальное положение. По мере перемещения узла 2073 закрывающего ригеля в проксимальном направлении вилка 2190 может взаимодействовать с приводным механизмом 2160 штифта тканевого фиксатора для отведения удерживающего штифта 2180 в его начальное положение. В альтернативном варианте врач может вручную оттянуть удерживающий штифт 2180 в его начальное положение, используя седловидный ползунок 2162. Врач может оттянуть удерживающий штифт 2180 в его начальное положение до активации закрывающей системы 2070, чтобы вернуть закрывающий ригель 2072 в его начальное положение. Более подробная информация относительно использования изогнутого режуще-сживающего инструмента приведена в патентах США №№ 6,988,650 и 7,134,587.
На ФИГ. 42–45 изображен хирургический концевой эффектор 3000, содержащий хирургический режущий и сшивающий инструмент. Он относится к типу инструментов, обычно называемому «круговой хирургический сшивающий инструмент». При некоторых видах хирургических вмешательств использование хирургических сшивающих инструментов является предпочтительным способом соединения тканей. Таким образом, были разработаны специальным образом конфигурированные хирургические сшивающие инструменты для данных сфер применения. Например, существуют внутрипросветные или круговые сшивающие инструменты для выполнения хирургических операций на нижних отделах толстой кишки, где участки нижних отделов толстой кишки соединяют вместе после иссечения пораженного сегмента. Круговые сшивающие инструменты, используемые для выполнения таких операций, раскрыты, например, в патентах США №№ 5,104,025; 5,205,459; 5,285,945; 5,309,927; 8,353,439; и 8,360,297, содержание каждого из которых в полном объеме включено в настоящий документ путем ссылки.
Как видно на ФИГ. 42, концевой эффектор 3000 содержит корпус 3010 концевого эффектора, который может изготовлен из сегментов корпуса 3012, 3014, соединенных между собой с возможностью извлечения с помощью винтов, утолщений, защелкивающихся элементов и т. д. Из корпуса 3010 концевого эффектора выступает узел 3020 удлиненного ствола. Узел 3020 удлиненного ствола выполнен с возможностью функциональной поддержки и взаимодействия с круговой головкой 3300 инструмента и упором 3320. В приведенных выше в качестве примеров патентах США указано, что в данной области известно множество различных конструкций круговой кассеты со скобками и упора. Например, как показано на ФИГ. 43, головка 3300 кругового сшивающего инструмента может включать в себя элемент 3302 корпуса, который удерживает узел опоры кассеты в виде кругового узла 3304 выталкивателя скоб, выполненного с возможностью стыковки с круговой кассетой 3306 со скобками и выталкивания находящихся там скоб в формирующий контакт с нижней поверхностью 3326 формирования скоб упора 3320. Круговой элемент 3308 скальпеля также размещается в центре узла 3304 выталкивателя скоб. Проксимальный конец элемента корпуса 3302 может быть соединен с внешним трубчатым кожухом 3022 дугообразного узла стержня 3020 при помощи дистального элемента соединительной муфты 3024. Упор 3320 включает в себя круговой корпусный участок 3322, имеющий ствол упора 3324 для прикрепления к нему троакара. Корпус 3322 упора имеет нижнюю поверхность формирования скоб 3326 и может также иметь колпак 3328, прикрепленный к его дистальному концу. Ствол 3324 упора может быть также оснащен парой удерживающих зажимов троакара или листовыми пружинами 3330, которые служат для разъемного удержания троакара 3042 в удерживающем взаимодействии со стволом упора 3324, как будет более подробно рассмотрено ниже.
В одном варианте узел 3020 ствола включает в себя компрессионный ствол 3030, дистальный участок 3032 компрессионного ствола и узел 3040 стяжного хомута, которые функционально удерживаются во внешнем трубчатом колпаке 3022. Кончик 3042 троакара прикреплен к дистальному концу узла 3040 стяжного хомута крепежными элементами 3041. Как известно, кончик 3042 троакара может быть вставлен в ствол 3324 упора 3320 и удерживаться во взаимодействии с удерживающими зажимами троакара 3330.
Хирургический концевой эффектор 3000 дополнительно включает в себя закрывающую систему 3070 и пусковую систему 3100. По меньшей мере в одном варианте закрывающая система 3070 включает в себя узел гайки закрытия 3084, прикрепленный к проксимальному концу стяжного хомута 3040. Как видно на ФИГ. 42 и 43, узел гайки закрытия 3084 включает в себя проксимальный соединитель 3085, прикрепленный к проксимальному концу стяжного хомута 3040 крепежным элементом 3087. закрывающая система 3070 дополнительно включает в себя ствол закрытия с резьбой 3080, находящийся в резьбовом соединении с гайкой закрытия 3084. Ствол закрытия 3080 образует ось ствола закрытия CSA-CSA и имеет гнездовой соединитель 57, присоединенный к его проксимальному концу, чтобы способствовать соединению ствола закрытия 3080 со штырьковым соединителем 51, прикрепленным к первому приводному стволу хирургического инструмента. Поворот ствола закрытия 3080 в первом направлении приводит к тому, что гайка закрытия 3084 выталкивает узел 3040 стяжного хомута в дистальном направлении DD. Поворот ствола закрытия 3080 в противоположном направлении аналогично приводит к проксимальному перемещению гайки закрытия 3084 и узла 3040 стяжного хомута.
Как видно на ФИГ. 43, дистальный участок 3032 компрессионного ствола соединен с узлом 3304 выталкивателя скоб. Таким образом, осевое перемещение ствола 3030 сжатия внутри внешнего трубчатого чехла 3022 воздействует на узел 3304 выталкивателя скоб для осевого перемещения внутри элемента 3302 корпуса. Осевым перемещением компрессионного ствола 3030 управляет пусковая система 3100. В одном варианте пусковая система 3100 включает пусковой ствол с резьбой 3102, находящийся в резьбовом соединении со снабженной резьбой пусковой гайкой 3110, прикрепленной к проксимальному концу компрессионного ствола 3030. Пусковой ствол 3102 образует ось пускового ствола FSA-FSA, параллельную или по существу параллельную оси ствола закрытия CSA-CSA. См., например, ФИГ. 44 и 45. Проксимальный конец пускового ствола 3102 имеет присоединенный к нему гнездовой соединитель 57, чтобы способствовать соединению пускового ствола 3102 со штырьковым соединителем 51, прикрепленным ко второму приводному стволу хирургического инструмента. Активация второй приводной системы хирургического инструмента в одном направлении вращения будет обеспечивать вращение пускового ствола 3102 в первом направлении, чтобы таким образом выталкивать компрессионный ствол 3030 в дистальном направлении «DD». По мере перемещения компрессионного ствола 3030 в дистальном направлении «DD» узел 3304 кругового выталкивателя скоб выталкивается дистально для выталкивания хирургически скоб из кассеты 3306 со скобками в формирующий контакт с нижней стороной 3326 корпуса 3322 упора. Кроме того, круговой элемент 3308 скальпеля выталкивается сквозь ткань, зажатую между корпусом 3322 упора и кассетой 3306 со скобками. Активация второй приводной системы во втором направлении поворота приводит к перемещению компрессионного ствола 3030 в проксимальном направлении «PD».
Концевой эффектор 3000 может также быть оснащен различными датчиками, соединенными с контактной пластиной 3120 концевого эффектора, установленной в корпусе 3010 концевого эффектора. Например, концевой эффектор 3000 может включать в себя датчик(и) закрытия 3122, установленный(ые) в корпусе 3010 концевого эффектора и электрически соединенный(ые) с контактной пластиной 3120 концевого эффектора так, что когда концевой эффектор 3000 функционально соединен с хирургическим инструментом, датчик(и) закрытия 3122 обменивается(ются) данными с системой управления хирургического инструмента. Датчик(и) закрытия 3122 может(гут) включать в себя датчики Холла 7028, как описано ниже в связи с ФИГ. 61, 63, выполненные с возможностью обнаружения положения гайки закрытия 3084. См. ФИГ. 44. Кроме того, пусковой(ые) датчик(и) 3124 может(гут) также быть установлен(ы) в корпусе 3010 концевого эффектора и выполнен(ы) с возможностью обнаружения местонахождения пусковой гайки 3110 в гайке закрытия 3084. Пусковой(ые) датчик(и) 3124 может(гут) также включать в себя датчики Холла 7028, как описано ниже в связи с ФИГ. 61, 63, и быть электрически соединенным(и) с контактной пластиной 3120 концевого эффектора для конечной связи с системой управления хирургического инструмента, такой как процессор 7024 рукоятки, например, описанный ниже в связи с ФИГ. 61, 63, 64. Контактная пластина 3120 может быть расположена в корпусе 3020 концевого эффектора так, что когда концевой эффектор 3000 функционально соединен с хирургическим инструментом, контактная пластина 3120 концевого эффектора электрически соединена с контактной пластиной 30 хирургического инструмента, установленной в корпусе 12 хирургического инструмента, как описано выше.
Ниже описано применение концевого эффектора 3000 в связи с хирургическим инструментом 10. Однако следует понимать, что концевой эффектор 3000 может быть функционально соединен с различными другими описанными в настоящем документе конструкциями хирургических инструментов. Перед использованием ствол закрытия 3080 и пусковой ствол 3102 «зафиксированы» или расположены в их начальных положениях, чтобы способствовать прикреплению к первому и второму приводным стволам 22, 42 соответственно. Например, чтобы соединить концевой эффектор 3000 с хирургическим инструментом 10, врач перемещает концевой эффектор 3000 в положение, в котором ось ствола закрытия CSA-CSA выровнена по оси с осью первого приводного ствола FDA-FDA, а ось пускового ствола FSA-FSA выровнена по оси с осью второго приводного ствола SDA-SDA. Гнездовой соединитель 57 на стволе закрытия 3080 вступает в функциональное взаимодействие со штырьковым соединителем 51 на первом приводном стволу 22. Аналогично, гнездовой соединитель 57 на пусковом стволе 3102 вступает в функциональное взаимодействие со штырьковым соединителем 51 на втором приводном стволу 42. Таким образом, находясь в этом положении, ствол закрытия 3080 функционально соединен с первым приводным стволом 22, а пусковой ствол 3102 функционально соединен со вторым приводным стволом 42. Контактная пластина 3120 концевого эффектора функционально соединена с контактной пластиной 30 хирургического инструмента так, что датчики 3122, 3124 в пределах концевого эффектора 3000 находятся в функциональной связи с системой управления хирургического инструмента. Чтобы удержать концевой эффектор 3000 в соединенном функциональном взаимодействии с хирургическим инструментом 10, концевой эффектор 3000 включает в себя защелку 3130 ограничителя, прикрепленную к корпусу концевого эффектора 3010 и выполненный с возможностью разъемного взаимодействия с участком корпуса 12 инструмента. Защелка 3130 ограничителя может включать в себя удерживающий выступ 3132, который может разъемно взаимодействовать с полостью 15 ограничителя, образованной в корпусе 12. См. ФИГ. 1. При соединении вместе датчик закрытия 3122 обнаруживает положение гайки закрытия 3084, а пусковой датчик 3124 обнаруживает положение пусковой гайки 3110. Эта информация направляется системе управления хирургического инструмента. Кроме того, врач может подтвердить, что сдвигаемый узел трансмиссии (или ее передаточная каретка 62) находится в первом приводном положении. Это может быть подтверждено активацией светового индикатора 77 на корпусе 12, как описано выше. Если сдвигаемый узел трансмиссии 60 не находится в своем первом приводном положении, врач может активировать пусковой крючок 92, чтобы переместить каретку передачи 62 в первое приводное положение так, что активация пускового переключателя-качели 110 для активации двигателя 80 приведет к активации первой приводной системы 20. Если закрывающая система 3070 и пусковая система 3100 находятся в своих соответствующих начальных положениях, а в концевом эффекторе 3000 правильно установлен непустой модуль кассеты со скобками, концевой эффектор 3000 готов к использованию.
Как известно, при выполнении анастомоза с помощью кругового сшивающего инструмента сшивание скобками кишки может осуществляться с использованием обычного хирургического сшивающего инструмента путем размещения множества рядов скоб по обе стороны целевого участка (т. е. образца) кишки. Целевой участок, как правило, разрезается одновременно со сшиванием скобками. После удаления целевого образца врач вставляет упор 3320 в проксимальную часть кишки, проксимально по отношению к линии скоб. Это может быть выполнено путем введения корпуса 3322 упора в разрез, выполненный в проксимальном участке кишки, либо упор 3320 может быть введен трансанально путем установки упора 3320 на дистальном конце концевого эффектора 3000 и введения инструмента через прямую кишку. Затем врач прикрепляет ствол 3324 упора к кончику 3042 троакара концевого эффектора 3000 и вставляет упор 3320 в дистальный участок кишки. Затем врач может с помощью нити или другого обычного сшивающего приспособления прикрепить дистальный конец проксимального участка кишки к стволу 3324 упора, а также связать прикрепить проксимальный конец дистального участка кишки вокруг ствола 3324 упора с помощью другой нити.
Затем врач может перемещать в проксимальном направлении узел 3040 стяжного хомута, кончик 3042 троакара и прикрепленный к нему упор 3320, воздействуя на пусковой переключатель-качели 110, чтобы включить двигатель 80 и запустить вращение первого приводного ствола 22. Эта активация приводит к перемещению упора 3320 к кассете 3306, находящейся в элементе корпуса 3302 головки 3300 сшивающего инструмента, чтобы закрыть зазор между ними, и, таким образом, взаимодействует с проксимальным концом дистального участка кишки и дистальным концом проксимального участка кишки в зазоре между ними. Врач продолжает активировать первую приводную систему 20, пока не будет достигнута требуемая степень сжатия ткани. Как только участки кишки будут зажаты между узлом 3320 упора и головкой 3300 сшивающего инструмента, врач может активировать пусковой крючок 92, чтобы передвинуть каретку передачи 62 в ее второе приводное положение, так что активация двигателя 80 приведет к повороту второго приводного ствола 42. Когда каретка передачи 62 передвинута во второе приводное положение, врач может еще раз воздействовать на пусковой переключатель-качели 110, чтобы активировать вторую приводную систему 40, и чтобы пусковая система 3100 в концевом эффекторе 3000 вытолкнула дистально компрессионный ствол 3030, что также приведет к выталкиванию дистально узла 3304 кругового выталкивателя скоб и кругового элемента 3308 скальпеля. Такие действия служат для разрезания зажатых частей кишки и выталкивания хирургических скоб через оба зажатых конца кишки, таким образом соединяя участки кишки и формируя трубчатый канал. В то же время по мере выталкивания и формирования скоб циркулярный нож 3308 выталкивают через концы ткани кишечника, обрезая концы смежно с внутренним рядом скоб. После этого врач может извлечь концевой эффектор 3000 из кишечника и завершить анастомоз.
На ФИГ. 46–49 показан другой хирургический концевой эффектор 3000’, который может быть схож с описанным выше хирургическим концевым эффектором 3000, за исключением рассмотренных ниже отличий. Эти компоненты хирургического концевого эффектора 3000’, которые идентичны компонентам вышеописанного хирургического концевого эффектора 3000, будут обозначены теми же номерами элементов. Эти компоненты хирургического концевого эффектора 3000’, которые могут быть сходны в работе, но не идентичны соответствующим компонентам хирургического концевого эффектора 3000, будут обозначаться теми же номерами компонентов в сочетании с “’’. Как видно на Фиг. 46–49, хирургический концевой эффектор 3000’ включает в себя узел расцепления исполнительного механизма, который в целом обозначен номером позиции 3090 и преимущественно выполнен с предоставлением врачу возможности высвободить дистальный участок приводного механизма от проксимального участка приводного механизма.
В представленном варианте осуществления узел 3090 высвобождения исполнительного механизма используется совместно с закрывающей системой 3070’, таким образом, в случае случайного заедания или иного ограничения работоспособности дистального участка закрывающей системы врач может быстро механически отсоединить дистальный участок приводного механизма от проксимального участка приводного механизма закрывающей системы механическим путем. Точнее и со ссылкой на ФИГ. 47 узел стяжного хомута 3040 и кончик троакара 3042 (см. ФИГ. 42, 43 и 45) могут именоваться «дистальный участок приводного механизма» 3092 закрывающей системы 3070’, а закрывающий ствол 3080 и узел 3084 закрывающей гайки могут, например, именоваться «проксимальный участок приводного механизма» 3094 закрывающей системы 3070’. Как показано на ФИГ. 47, одна форма узла 3090 высвобождения исполнительного механизма включает в себя дистальный соединительный элемент 3095, прикрепленный к проксимальному концу узла стяжного хомута 3040. Дистальный соединительный элемент 3095 может быть прикреплен к узлу стяжного хомута 3040 путем установки с натягом, адгезивного соединения, низкотемпературной пайки, сварки и т. п., или любой комбинации таких крепежных конфигураций. Размер дистального соединительного элемента 3095 позволяет его принимать с возможностью скольжения внутри паза 3097 в проксимальном соединительном элементе 3085’, прикрепленном к узлу 3084 закрывающей гайки. Дистальный соединительный элемент 3095 включает в себя дистальное отверстие 3096, проходящее через него и выполненное с возможностью совмещения по оси с проксимальным отверстием 3098 в проксимальном соединительном элементе 3085’ при размещении дистального соединительного элемента 3095 внутри паза 3097. См. ФИГ. 48. Узел 3090 высвобождения исполнительного механизма дополнительно содержит соединительный штифт 3099 исполнительного механизма, размер которого позволяет его принимать внутри совмещенных по оси отверстий 3096, 3098, надежно соединяя дистальный соединительный элемент 3095 с проксимальным соединительным элементом 3085’. Другими словами, соединительный штифт 3099 исполнительного механизма служит для механического соединения дистальной части приводного механизма 3092 с проксимальной частью приводного механизма 3094 с возможностью высвобождения. Соединительный штифт 3099 исполнительного механизма проходит вдоль оси соединения CA-CA, поперечной оси ствола закрытия CSA. Для обеспечения зазора, необходимого для перемещения соединительного штифта 3099 исполнительного механизма по оси относительно пусковой гайки 3110, в пусковой гайке 3110 предусмотрен осевой паз 3111. Как видно на ФИГ. 46, участок 3014’ корпуса концевого эффектора снабжен проходящим по оси зазором 3016, способствующим перемещению соединительного штифта 3099 исполнительного механизма по оси при активации закрывающей системы 3070’. Такая конфигурация позволяет врачу быстро отсоединить дистальный участок приводного механизма 3092 от проксимального участка приводного механизма 3094 в любой момент во время применения концевого эффектора 3000’ путем удаления или вытягивания соединительного штифта 3099 исполнительного механизма в поперечном направлении из отверстий 3096, 3098, что позволяет высвободить дистальный соединительный элемент 3095 от проксимального соединительного элемента 3085’.
Хотя узел 3090 высвобождения исполнительного механизма описан применительно к закрывающей системе 3070’ концевого эффектора 3000’, в альтернативном варианте узел высвобождения исполнительного механизма может применяться вместе с пусковой системой 3100 концевого эффектора 3000’. В других конфигурациях узел 3090 высвобождения исполнительного механизма может быть связан с закрывающей системой, и второй узел высвобождения исполнительного механизма может быть связан с пусковой системой. Таким образом, один или оба проксимальных участка приводного механизма могут быть выборочно механически отсоединены от их соответствующих дистальных участков приводного механизма. Дополнительно такой узел высвобождения исполнительного механизма может эффективно использоваться вместе с системами закрытия и/или пуска по меньшей мере некоторых других хирургических концевых эффекторов, описанных здесь, включая, без ограничений, например, концевой эффектор 1000 и концевой эффектор 2000 и их соответствующие эквистволентные конфигурации.
На ФИГ. 50-53 показан другой хирургический концевой эффектор 2000’, который может быть идентичен с описанным выше хирургическим концевым эффектором 2000, за исключением рассмотренных ниже отличий. Эти компоненты хирургического концевого эффектора 2000’, которые идентичны компонентам вышеописанного хирургического концевого эффектора 2000, будут обозначены теми же номерами элементов. Эти компоненты хирургического концевого эффектора 2000’, которые могут быть сходны в работе, но не идентичны соответствующим компонентам хирургического концевого эффектора 2000, будут обозначаться теми же номерами компонентов в сочетании с “’’. Как показано на ФИГ. 51-53, хирургический концевой эффектор 2000’ может быть обеспечен индикаторными конструкциями для обеспечения визуальной индикации статуса срабатывания систем закрытия и пуска.
Конкретнее и со ссылкой на ФИГ. 51 и 52, закрывающая система 2070 включает в себя узел статуса закрывающей системы, по существу обозначенный как 2090. В одной форме, например, узел статуса закрывающей системы 2090 включает в себя элемент индикации закрытия 2092, прикрепленный к или иначе проходящий от закрывающей гайки 2084’. Узел статуса закрывающей системы 2090 дополнительно включает в себя окошко индикации закрытия 2094 или отверстие в корпусе 2010 концевого эффектора так, что врач может оценить положение элемента индикации закрытия 2092, наблюдая за элементом индикации закрытия 2092 через окошко индикации закрытия 2094. Аналогично этому, пусковая система 2100’ может включать в себя узел статуса пусковой системы, по существу обозначенный как 2130. В одной форме, например, узел 2130 статуса пусковой системы включает в себя элемент индикации пуска 2132, прикрепленный к или иначе проходящий от пусковой гайки 2110’. Узел статуса пусковой системы 2130 дополнительно включает в себя окошко индикации пуска или отверстие 2134 в корпусе 2010 концевого эффектора так, что врач может оценить положение элемента индикации пуска 2132, наблюдая за элементом индикации пуска 2132 через окошко индикации пуска 2134.
Узел статуса закрывающей системы 2090 и узел статуса пусковой системы 2130 показывают механическое состояние закрывающей системы 2070 и пусковой системы 2100. Врач может по существу следить за механическим состоянием дистального конца концевого эффектора, но иногда он покрыт или загорожен тканью. Механическое состояние проксимального участка концевого эффектора невозможно увидеть без конструкции окошка или выступающего индикатора. Кроме того, цветовая маркировка на наружной поверхности ствола и/или на индикаторе также может применяться для уведомления врача о полном закрытии или запуске концевого эффектора (например, индикатор полностью на зеленом цветовом поле – полное закрытие). Например, на элемент индикации закрытия 2092 может быть нанесена отметка закрытия 2093, видимая через окошко индикации закрытия 2094. Кроме того, корпус 2010 может иметь первое устройство индикации закрытия 2095 и второе устройство индикации закрытия 2096 рядом с окошком индикации закрытия 2094 для оценки положения индикатора закрытия 2092. Например, первое устройство индикации закрытия 2095 может содержать первый ригель первого цвета (например, оранжевый, красный и т. п.), и второе устройство индикации закрытия может содержать ригель или сегмент второго цвета, который отличается от первого цвета (например, зеленый). При совмещении отметки закрытия 2093 на элементе индикации закрытия 2092 с самым проксимальным концом ригеля первого устройства индикации закрытия 2095 (это положение обозначено номером элемента 2097 на ФИГ. 50) врач может видеть, что закрывающая система 2070 находится в неактивированном положении. При расположении отметки закрытия 2093 в пределах ригеля первого устройства индикации закрытия 2095 врач может видеть, что закрывающая система 2070 частично активирована, но не активирована полностью или полностью не закрыта. При совмещении отметки закрытия 2093 со вторым устройством индикации закрытия 2096 (обозначено номером элемента 2098 на ФИГ. 50) врач может видеть, что закрывающая система 2070 полностью активирована или находится в полностью закрытом положении.
Аналогично этому, на элемент индикации пуска 2132 может быть нанесена отметка пуска 2133, видимая через окошко индикации пуска 2134. Кроме того, сегмент 2014’ корпуса может иметь первое устройство индикации пуска 2135 и второе устройство индикации пуска 2136 рядом с окошком индикации пуска 2134 для оценки положения индикатора пуска 2132. Например, первое устройство индикации пуска 2135 может содержать первый пусковой ригель первого цвета пуска (например, оранжевый, красный и т. п.), и второе устройство индикации пуска может содержать второй пусковой ригель или сегмент второго цвета пуска, отличающегося от первого цвета пуска (например, зеленый). При совмещении отметки пуска 2133 на элементе индикации пуска 2132 с самым проксимальным концом ригеля первого устройства индикации пуска 2135 (это положение представлено номером элемента 2137 на ФИГ. 50) врач может видеть, что пусковая система 2100 находится в неактивированном положении. При выравнивании отметки пуска 2133 в пределах ригеля первого устройства индикации пуска 2135 врач может видеть, что пусковая система 2100 частично активирована, но не полностью активирована или не полностью запущена. При выравнивании отметки пуска 2133 со вторым устройством индикации пуска 2136 (обозначено номером элемента 2138 на ФИГ. 50) врач может видеть, что пусковая система 2170 полностью приведена активирован или полностью запущена. Таким образом, врач может определить степень срабатывания систем закрытия и пуска, наблюдая за положением индикаторов через соответствующие окошки.
В альтернативной конфигурации окна индикации 2094 и 2134 могут быть предусмотрены в корпусе концевого эффектора 2010’ так, что когда закрывающая система 2070 и пусковая система 2100’ находятся в стартовом или неактивированном положении, соответствующие индикаторы 2092, 2132 могут быть полностью видны через окошки индикации 2094, 2134, соответственно. При срабатывании закрывающей системы 2070 и пусковой системы 2100’ их индикаторы 2092, 2132 перемещаются за пределы окошка индикации 2094, 2134. Затем врач может оценить степень активации каждой из систем 2070, 2100’, проверив насколько индикаторы 2092, 2132 видны через окошки 2094, 2134.
Узел статуса закрывающей системы 2090 и узел статуса пусковой системы 2130 отражают механическое состояние закрывающей системы 2070 и пусковой системы 2100, независимо от того прикреплен ли концевой эффектор 2000’ к рукоятке или корпусу хирургического инструмента или нет. Если концевой эффектор 2000 прикреплен к рукоятке или корпусу, узел статуса закрывающей системы 2090 и узел статуса пусковой системы 2130 позволят врачу определить механическое состояние этих систем по первичной или вторичной проверке статуса, показанного на рукоятке или корпусе хирургического инструмента. Узел статуса закрывающей системы 2090 и узел статуса пусковой системы 2130 также служат для первичной проверки, когда концевой эффектор 2000’ отсоединен от рукоятки или корпуса хирургического инструмента. Дополнительно такие узлы статуса закрывающей системы и статуса пусковой системы могут эффективно использоваться вместе с системами закрытия и/или пуска по меньшей мере в некоторых других хирургических концевых эффекторах, описанных в настоящем документе, включая, но, без ограничений, например, концевой эффектор 1000 и концевой эффектор 3000, и их соответствующие эквистволентные конфигурации.
На ФИГ. 54–60 показан другой хирургический концевой эффектор 2000’’, который может быть идентичен с описанным выше хирургическим концевым эффектором 2000’, за исключением рассмотренных ниже отличий. Компоненты хирургического концевого эффектора 2000”, такие же как компоненты описанного выше хирургического концевого эффектора 2000’ и/или концевого эффектора 2000, будут обозначены теми же номерами элементов. Компоненты хирургического концевого эффектора 2000”, которые могут быть сходны в работе, но не идентичны соответствующим компонентам хирургического концевого эффектора 2000’ и/или 2000, будут обозначаться теми же номерами компонентов в сочетании с “’’’. Как показано на ФИГ. 54–60, хирургический концевой эффектор 2000” включает в себя узел высвобождения исполнительного механизма, по существу обозначенный как 2200, и преимущественно выполнен с предоставлением врачу возможности высвободить дистальный участок приводного механизма от проксимального участка приводного механизма.
В представленном варианте осуществления узел 2200 высвобождения исполнительного механизма используется вместе с закрывающей системой 2070” концевого эффектора 2000”, таким образом, в случае случайного заедания или иного ограничения работоспособности дистального участка закрывающей системы врач может быстро механически отсоединить дистальный участок приводного механизма от проксимального участка приводного механизма закрывающей системы. Точнее и со ссылкой на ФИГ. 56 узел закрывающего ригеля 2072 может также именоваться «дистальным участком приводного механизма» 2202 закрывающей системы 2070”, а закрывающий ствол 2080 и узел 2084” закрывающей гайки могут, например, именоваться «проксимальным участком приводного механизма» 2204 закрывающей системы 2070”. Как показано на ФИГ. 59, узел 2084” закрывающей гайки, будучи по существу идентичным описанным выше узлам 2084, 2084’ закрывающих гаек, предусмотрен в двух частях. Конкретнее, узел 2084” закрывающей гайки включает в себя верхний резьбовой 2210, выполненный с возможностью резьбового взаимодействия с закрывающим стволом 2080, и нижний участок 2214, обеспечивающий перемещение пусковой гайки 2110 в нем по оси, как описано выше. Нижний участок 2214 узла 2084” закрывающей гайки прикреплен непосредственно к узлу закрывающего ригеля 2072 и включает в себя элемент индикации закрытия 2092”, работающий по тому же принципу, что и описанный выше индикатор закрытия 2092.
По меньшей мере в одной форме узел 2200 высвобождения исполнительного механизма включает в себя соединительный штифт 2220 исполнительного механизма, служащий для присоединения нижнего участка 2214 узла 2084” закрывающей гайки к верхнему участку 2210. Как показано на ФИГ. 59, например, верхний участок 2210 узла 2084” закрывающей гайки включает в себя сегмент 2212 паза в виде ласточкиного хвоста, выполненный с возможностью выравнивания со вторым сегментом паза в виде ласточкиного хвоста 2216 на нижнем участке 2214 узла 2084” закрывающей гайки. При совмещении первого и второго сегментов 2212, 2216 паза в виде ласточкиного хвоста, как показано на ФИГ. 59, они образуют отверстие 2215, в которое может вставляться участок 2222 цилиндра соединительного штифта 2220 исполнительного механизма для соединения вместе верхнего и нижнего участков 2010 и 2014, как показано на ФИГ. 56. Другими словами, соединительный штифт 2220 исполнительного механизма служит для механического соединения дистального участка приводного механизма 2202 с проксимальным участком приводного механизма 2204 закрывающей системы 2070” с возможностью высвобождения. Соединительный штифт 2220 исполнительного механизма проходит вдоль оси соединения CA-CA, поперечной оси ствола закрытия CSA. См. ФИГ. 56. Для обеспечения зазора, необходимого для перемещения соединительного штифта 2220 исполнительного механизма по оси вместе с узлом 2084” закрывающей гайки, в сегменте корпуса 2014” корпуса 2010” концевого эффектора предусмотрен проходящий по оси паз 2224. Такая конфигурация позволяет врачу быстро отсоединить дистальный участок 2202 приводного механизма от проксимального участка 2204 приводного механизма в любой момент в процессе использования концевого эффектора 2000” путем извлечения или вытягивания соединительного штифта 2220 исполнительного механизма в поперечном направлении из отверстия 2215, образованного сегментами 2212, 2216 паза в виде ласточкиного хвоста. После извлечения соединительного штифта 2220 исполнительного механизма из отверстия 2215 нижний участок 2214 узла закрытия 2084” может перемещаться относительно верхнего участка 2212, таким образом позволяя высвободить ткань из положения между модулем 2060 кассеты и узлом 2140 упора.
На ФИГ. 54–56 представлен концевой эффектор 2000” в «открытом» положении перед применением. Как показано на этих фигурах, например, модуль 2060 кассеты установлен и готов к применению. На ФИГ. 57 и 58 представлен концевой эффектор 2000 в закрытом состоянии. Другими словами, закрывающий ригель 2080 повернут к узлу 2084” закрывающей гайки в дистальном направлении DD. Поскольку нижний участок 2214 узла 2084” закрывающей гайки прикреплен к верхнему участку 2210 посредством соединительного штифта 2220 исполнительного механизма, узел 2072 закрывающего ригеля (поскольку он прикреплен к нижнему участку 2214) также перемещается дистально в закрытое положение для захвата целевой ткани между модулем 2260 кассеты и узлом 2140 упора. Как обсуждается выше, при дистальном перемещении седловидной кнопки-ползунка 2162 на корпусе 2010” удерживающий штифт проходит через корпус кассеты в узел 2140 упора, зажимая, таким образом, ткань между модулем 2060 кассеты и узлом 2140 упора. Как подробно обсуждается выше, при дистальном перемещении узла 2084” закрывающей гайки пусковая гайка 2110 также перемещается дистально, что заставляет проксимальный участок 2106 пускового ствола 2102 выйти из удлиненного канала внутри гнездового соединителя 57’. См. ФИГ. 58. На ФИГ. 59 показан соединительный штифт 2220 исполнительного механизма, извлеченный из отверстия 2215, образованного сегментами 2212, 2216 паза в виде ласточкино хвоста. После извлечения соединительного штифта 2220 исполнительного механизма из отверстия 2215 проксимальный участок 2202 приводного механизма (узел 2072 закрывающего ригеля) может быть перемещен в проксимальном направлении «PD» путем проксимального перемещения седловидной кнопки-ползунка 2162. Такое перемещение кнопки 2162 переместит узел 2072 закрывающего ригеля, нижний участок 2014 узла закрывающей гайки 2084”, пусковую гайку 2110 и узел 2112 пускового ригеля, а также будет удерживать штифт в проксимальном положении. Такое перемещение позволит высвободить ткань из положения между модулем 2060 кассеты и узлом 2140 упора.
На ФИГ. 61 представлена блок-схема модульного хирургического инструмента 7000 с с исполнительным механизмом, содержащего рукояточный участок 7002 и стволовой участок 7004; Модульный хирургический инструмент 7000 с с исполнительным механизмом является характерным представителем модульной системы хирургического инструмента, по существу обозначенной пунктом 2, которая в одной форме включает в себя хирургический инструмент 10 с с исполнительным механизмом, который может использоваться в сочетании с различными хирургическими концевыми эффекторами, такими как, например, концевые эффекторы 1000, 2000 и 3000, как показано на ФИГ. 1. Учитывая приведенное выше детальное описание различных функциональных и операционных аспектов модульного хирургического инструмента 10 с с исполнительным механизмом, для краткости и ясности изложения эти детали не будут повторяться в последующем описании, относящемся к ФИГ. 61–64. Кроме этого, описание ФИГ. 61–64 будет сконцентрировано главным образом на функциональных и операционных аспектах электрических систем и подсистем модульного хирургического инструмента 7000 с с исполнительным механизмом, которые могут быть приложены полностью или частично к вышеизложенному описанию модульного хирургического инструмента с с исполнительным механизмом.
Соответственно, как показано на ФИГ. 61, модульный хирургический инструмент 7000 с с исполнительным механизмом, содержит рукояточный участок 7002 и стволовой участок 7004. Рукояточный и стволовой участки 7002, 7004 содержат соответствующие электрические подсистемы 7006, 7008, электрически соединенные посредством коммуникационных связей и интерфейса 7010 питающего устройства. Компоненты электрической подсистемы 7006 рукояточного участка 7002 удерживаются на вышеописанной плате управления 100. Коммуникационные связи и интерфейс 7010 питающего устройства выполнены так, что возможен свободный обмен электрическими сигналами и питанием между рукояточным участком 7002 и стволовым участком 7004.
В представленном примере электрическая подсистема 7006 рукояточного участка 7002 электрически соединена с различными электрическими элементами 7012 и дисплеем 7014. В одном варианте дисплей 7014 представляет собой дисплей на органических светодиодах (OLED), однако не следует ограничивать дисплей 7014 этим контекстом. Электрическая подсистема 7008 стволового участка 7004 имеет электрическое соединение с различными электрическими элементами 7016, которые будут описаны ниже более подробно.
В одном аспекте электрическая подсистема 7006 рукояточного участка 7002 содержит соленоидный толкатель 7018, акселерометр 7020, контроллер/драйвер 7022 двигателя, процессор 7024 рукоятки и регулятор напряжения 7026, и выполнена с возможностью принимать входные сигналы от множества переключателей 7028. Хотя в представленном варианте осуществления переключатели 7028 обозначены как переключатели на датчике Холла, переключатели 7028 не имеют ограничений в этом контексте. В различных аспектах датчики Холла или переключатели 7028 могут располагаться в участке концевого эффектора инструмента, стволе и/или рукоятке.
В одном аспекте электрическая подсистема 7006 рукояточного участка 7002 выполнена с возможностью принимать сигналы от соленоида 7032, датчика 7034 положения зажима, переключателя 7036 пускового положения, двигателя 7038, батареи 7040, платы 7042 интерфейса OLED, переключателя 7044 открытия, переключателя 7046 закрытия и пускового переключателя 7048. В одном аспекте двигатель 7038 представляет собой бесщеточный двигатель постоянного тока, хотя в различных аспектах двигатель не имеет ограничений в этом контексте. Тем не менее описание двигателя 7038 может быть приложено к вышеописанным двигателям 80, 480, 580, 680, 750 и 780. Соленоид 7032 является характерным примером ранее описанного сдвигающего соленоида 71.
В одном аспекте электрическая подсистема 7008 стволового участка 7004 содержит процессор 7030 ствола. Электрическая подсистема 7008 ствола выполнена с возможностью принимать сигналы от различных переключателей и датчиков, размещенных в участке концевого эффектора инструмента, и указывающих состояние зажимных браншей и режущего элемента в концевом эффекторе. Как показано на ФИГ. 61, электрическая подсистема 7008 ствола выполнена с возможностью принимать сигналы от переключателя 7050 открытого состояния зажима, переключателя 7052 закрытого состояния зажима, переключателя 7054 состояния начала пуска и переключателя 7056 состояния конца пуска, которые указывают состояние зажима и режущего элемента.
В одном аспекте процессор 7024 рукоятки может представлять собой микроконтроллер общего назначения, подходящий для применения в медицинских и хирургических инструментах, и включающий в себя средства управления движениями. В одном варианте процессор 7024 рукоятки может представлять собой микроконтроллер TM4C123BH6ZRB производства Texas Instruments. Процессор 7024 рукоятки может содержать, среди других элементов, 32-битное процессорное ядро ARM® Cortex™-M4 80 МГц с системным таймером (SysTick), интегрированным встроенным векторным контроллером прерываний (NVIC), активизирующим контроллером прерываний (WIC) с пропусканием по таймеру, блоком защиты памяти (MPU), модулем обработки операций с плавающей точкой (FPU) одинарной точности, соответствующий стандарту IEEE754, встроенными макрокомандами трассировки и портом трассировки, блоком управления системой (SCB) и набором инструкций thumb-2. Процессор 7024 рукоятки может содержать встроенную в интегральную схему память, такую как 256 КБ одноцикловой флеш-памяти с частотой до 40 МГц. Может быть предусмотрен буфер предвыборки для повышения производительности выше 40 МГц. Дополнительная память включает в себя 32 КБ одноцикловой статической ОЗУ с произвольной выборкой (SRAM), внутренняя ПЗУ с загруженным программным обеспечением TivaWare™ for C Series, 2 КБ перепрограммируемого ПЗУ, среди других элементов, таких как два модуля контроллерной сети (Controller Area Network, CAN), использующих протокол CAN версии 2.0 часть A/B со скоростью передачи до 1 Мбит/с.
В одном аспекте процессор 7024 рукоятки может содержать передовые средства интеграции с последовательной передачей данных, включая восемь универсальных асинхронных приемников/передатчиков (UART) с поддержкой IrDA 9 бит, и ISO 7816 (одна схема UART со статусом модема и управлением потоком данных модема). Предусмотрены четыре модуля синхронного последовательного интерфейса (Synchronous Serial Interface, SSI) для поддержки работы с синхронными последовательными интерфейсами Freescale SPI, MICROWIRE или Texas Instruments. Кроме этого, шесть модулей Inter-Integrated Circuit (I2C) обеспечивают, например, стандартную (100 Кбит/с) и быструю (400 Кбит/с) передачу и поддержку отправки и приема данных в качестве ведущего или ведомого устройства.
В одном аспекте процессор 7024 рукоятки также содержит 32-канальный конфигурируемый контроллер μDMA ARM PrimeCell®, позволяющий снять с процессора Cortex™-M4 задачи по передаче данных, что дает возможность более эффективно применять процессор и имеющуюся пропускную способность шины. Функция поддержки работы с аналоговыми сигналами включает в себя, например, два 12-битных аналогово-цифровых конвертера (АЦП) с 24 аналоговыми входными каналами и частотой дискретизации один миллион измерений/с, три аналоговых компаратора, 16 цифровых компараторов и один встроенный в микросхему регулятор напряжения.
В одном аспекте процессор рукоятки 7024 также имеет передовую функцию управления движениями, такую как восемь генераторных блоков широтно-импульсной модуляции (ШИМ), причем каждый с одним 16-битным счетчиком, двумя ШИМ-компараторами, генератором сигнала для ШИМ, генератором временных пауз и селектором прерывания/АЦП-триггера. Предусмотрены восемь аварийных вводов ШИМ для прекращения работы с малой задержкой. Предусмотрены два модуля интерфейса импульсных датчиков положения (quadrature encoder interface, QEI) с позиционным интегратором для отслеживания положения датчиков и регистрации скорости с использованием встроенного таймера.
В одном аспекте предусмотрены два совместимых с ARM FiRM сторожевых таймера, а также шесть 32-битных таймеров общего назначения (до двенадцати 16-битных). Предусмотрены шесть широких 64-битных таймеров общего назначения (до двенадцати 32-битных), а также, например, 12 16/32-битных и 12 32/64-битных контактов захвата/сравнения/ШИМ (capture compare PWM, CCP). Могут быть предусмотрены до 120 входов/выходов общего назначения (GPIO), в зависимости от конфигурации, с программируемым контролем прерываний GPIO и конфигурации контактов и высокой степенью гибкости при мультиплексировании контактов. Процессор 7024 рукоятки также содержит маломощный модуль гибернации с резервным питанием от батареи и часами реального времени. Предусмотрены множество источников сигналов времени для часов микроконтроллерной системы, и включают в себя прецизионный осциллятор (PIOSC), главный осциллятор (MOSC), внешний осциллятор 32,768 кГц для модуля гибернации и внутренний осциллятор 30 кГц.
В одном аспекте акселерометр 7020 электрической подсистемы 7006 рукояточного участка 7002 может представлять собой датчик движения на основе микроэлектромеханической системы (MEMS). Как известно, технология MEMS сочетает компьютеры с миниатюрными механическими устройствами, такими как датчики, вентили, шестерни, зеркала и исполнительные механизмы, встроенные в полупроводниковые чипы. В одном примере акселерометр 7020 на основе технологии MEMS может представлять собой сверхмаломощный 8-битный трехосевой цифровой акселерометр, например, такой как LIS331DLM производства STMicroelectronics.
В одном аспекте акселерометр 7020, такой как LIS331DLM, может представлять собой сверхмаломощный высокоэффективный трехосевой линейный акселерометр, относящийся к «нано» семейству, со стандартным выводом через цифровой последовательный интерфейс I2C/SPI, подходящий для сообщения с процессором 7024 рукоятки. Акселерометр 7020 может характеризоваться рабочими режимами со сверхнизким потреблением питания, что обеспечивает передовые возможности экономии питания и высокотехнологичные функции спящего режима - выхода из спящего режима. Акселерометр 7020 может включать в себя динамические выбираемые пользователем полные шкалы ±2g/±4g/±8g и способен измерять ускорения с частотой выходных данных, например, от 0,5 Гц до 400 Гц.
В одном аспекте акселерометр 7020 может включать в себя функцию самопроверки, позволяющую пользователю проверять функционирование датчика при конечном применении. Акселерометр 7020 может быть выполнен с возможностью генерации сигнала прерывания в результате событий инерционной активизации/свободного падения, а также в зависимости от положения самого инструмента. Пороги и временные параметры генераторов прерываний могут программироваться на ходу.
В одном аспекте контроллер/драйвер 7022 двигателя может представлять собой трехфазный бесщеточный контроллер постоянного тока (BLDC) и драйвер на канальных МОП-транзисторах (MOSFET), такой как, например, контроллер/драйвер A3930 производства Allegro. Контроллер/драйвер 7022 3-фазного бесщеточного двигателя постоянного тока можно применять с N-канальными МОП-транзисторами с внешним питанием, например, с целью приведения в действие BLDC-двигателя 7038. В одном варианте контроллер/драйвер 7022 двигателя может включать схему, необходимую для эффективной трехфазной электроприводной системы. В одном варианте контроллер/драйвер 7022 двигателя содержит регулятор накачки заряда для обеспечения адекватного (>10 В) напряжения запирания вентиля для напряжений батареи до 7 В и позволяет контроллеру/драйверу 7022 двигателя работать при сниженном напряжении запирания вентиля, при напряжении батареи вплоть до 5,5 В. Рассеивание мощности в регуляторе накачки заряда можно свести к минимуму путем переключения из режима удвоения напряжения при низком подаваемом напряжении в режим сброса при номинальном рабочем напряжении 14 В. В одном аспекте для обеспечения необходимого для работы N-канальных МОП-транзисторов напряжения, более высокого, чем напряжение батареи, используется форсирующий конденсатор. Внутренний генератор накачки заряда для исполнительного механизма верхнего плеча обеспечивает работу с постоянным током (100% рабочий цикл).
Максимальный ток нагрузки регулирует внутренняя схема управления ШИМ-током фиксированной частоты. Предел пикового нагрузочного тока можно задать подбором входного референтного напряжения и внешнего измерительного резистора. Частоту ШИМ можно задать при помощи выбранной пользователем резисторно-емкостной (RC) тайминговой сети. Для дополнительной гибкости ввод ШИМ можно применять для контроля скорости и вращающего момента, позволяя внутренней схеме управления током задать предел по максимальному току.
Эффективность работы контроллера/драйвера 7022 двигателя можно повысить, используя синхронное детектирование. Силовые МОП-транзисторы защищены от пробоя интегрированной схемой контроля критического потенциала с бестоковой паузой. Бестоковую паузу можно задать при помощи одного внешнего резистора.
В одном аспекте контроллер/драйвер 7022 двигателя указывает на логическую ошибку в результате комбинации всех нулей на вводах от датчиков Холла. Другие особенности контроллера/драйвера 7022 двигателя включают в себя высокотоковый трехфазный механизм затвора для N-канальных МОП-транзисторов, синхронное детектирование, защита от поперечной проводимости, накачка заряда и накачка заряда с прерыванием для 100% ШИМ, интегрированная схема коммутационного декодера, работа в диапазоне напряжений от 5,5 до 50 В, диагностический выход, обеспечение подачи питания +5 В на датчики Холла и режим сна с низким потреблением тока.
В одном аспекте модульный хирургический инструмент 7000 с с исполнительным механизмом оснащен бесщеточным электродвигателем постоянного тока 7038 (BLDC-двигатель, BL-двигатель), также именуемым электродвигателем с электронной коммутацией (ECM, EC-двигатель). Одним из таких двигателей является BLDC-двигатель B0610H4314 производства Portescap. BLDC-двигатель B0610H4314 может быть автоклавируемым. BLDC-двигатель 7038 представляет собой синхронный двигатель с электропитанием от источника постоянного тока через интегрированный инверторный/импульсный блок питания, который генерирует переменный электрический сигнал для приведения в действие двигателя, такой как драйвер/контроллер 7022 двигателя, описанный в вышеприведенных абзацах. В этом контексте переменный ток не предполагает синусоидальной формы волны, а предполагает двунаправленный ток без ограничений на форму волны. Дополнительные датчики и электронные компоненты управляют выходной амплитудой и формой волны инвертора (и, таким образом, процентом/эффективностью использования шины постоянного тока) и частоту (т. е., скорость ротора).
Роторная часть BLDC-двигателя 7038 представляет собой синхронный двигатель с постоянным магнитом, но в других аспектах BLDC-двигатели также могут представлять собой вентильно-индукторные или индукционные двигатели. Хотя некоторые бесщеточные двигатели постоянного тока можно описать как шаговые двигатели, термин «шаговый двигатель» обычно применяют к двигателям, которые выполнены с возможностью работы в режиме, в котором их часто останавливают с определенным угловым положением ротора.
В одном аспекте контроллер/драйвер 7022 BLDC-двигателя должен управлять поворотом ротора. Соответственно, контроллер/драйвер 7022 BLDC-двигателя нуждается в каких-то механизмах определения ориентации/положения ротора (относительно катушек статора). В одном варианте роторная часть BLDC-двигателя 7038 выполнена с датчиками Холла или преобразователем углового положения, чтобы напрямую измерять положение ротора. В других вариантах, чтобы вывести положение ротора, измеряют обратную электродвижущую силу (ЭДС) в пассивных катушках, что устраняет необходимость в отдельных датчиках Холла и, таким образом, их часто называют бездатчиковыми контроллерами.
В одном аспекте контроллер/драйвер 7022 BLDC-двигателя имеет 3 двусторонних вывода (т. е., трехфазный выход с регулируемой частотой), которыми управляет логическая схема. В других, более простых контроллерах, могу использоваться компараторы для определения опережения для выходной фазы, тогда как в более передовых контроллерах используется микроконтроллер для контроля ускорения, управления скоростью и для тонкой настройки эффективности.
Исполнительные механизмы, генерирующие линейное движение, называются линейными двигателями. Преимущество линейных двигателей состоит в том, что они могут генерировать линейное движение без необходимости в трансмиссионной системе, такой как «шар и ходовой винт», «реечно-шестереночная передача», кулачок, шестерни или ремни, которые были бы необходимы для роторных двигателей. Известно, что трансмиссионные системы уменьшают скорость реакции и снижают точность. Прямой привод, BLDC-двигатель 7038, может содержать имеющий пазы статор с магнитными зубцами и перемещающийся исполнительный механизм, который содержит постоянные магниты и катушечные обмотки. Для получения линейного движения контроллер/драйвер 7022 BLDC-двигателя возбуждает катушечные обмотки в исполнительном механизме, вызывая взаимодействие магнитных полей, приводящее к линейному движению.
В одном аспекте BLDC-двигатель 7038 представляет собой бесщеточный двигатель постоянного тока Portescap BO610, который обеспечивает комбинацию долговечности, эффективности, вращающего момента и скорости в кожухе, подходящем для применения в модульном хирургическом инструменте 7000 с с исполнительным механизмом. Такие BLDC-двигатели 7038 обеспечивают подходящую интенсивность вращающего момента, скорость, управление положением и длительный срок службы. В беспазовом BLDC-двигателе 7038 применяется не содержащая железа цилиндрическая катушка, выполненная с помощью той же методики намотки, как в не содержащих железо двигателях постоянного тока. Пазовые BLDC-двигатели 7038 также можно подвергать автоклавированию. Пазовый BLDC-двигатель 7038 может включать в себя статор, состоящий из уложенных стальных пластин с обмотками, помещенными в прорези, которые вырезаны по оси вдоль внутренней периферии. Бесщеточный пазовый BLDC-двигатель 7038 постоянного тока обеспечивает высокую интенсивность вращающего момента и рассеивания тепла, а также высокое ускорение. Трехфазная конфигурация BLDC-двигателя 7038 включает в себя соединения по схеме «звезда», датчики Холла, а подаваемое напряжение составляет 4,5-24В. Корпус BLDC-двигателя 7038 может быть изготовлен из материала 303SS, а ствол может быть изготовлен из материала 17-4ph.
В одном аспекте переключатели 7028 на датчиках Холла могут представлять собой датчики Холла, продаваемые под торговым наименованием BU520245G, и представляющие собой униполярные датчики Холла на интегральной микросхеме. Такие датчики работают в диапазоне напряжения питания 2,4–3,6 В.
В одном аспекте в регуляторе напряжения 7026 вместо обычного проходного PNP транзистора используется проходной элемент p-канальной МОП-структуры. Поскольку проходной элемент p-канальной МОП-структуры ведет себя как резистор низкого номинала, малое падение напряжения, как правило, 415 мВ при нагрузочном токе 50 A, является прямо пропорциональным нагрузочному току. Низкий ток покоя (обычно 3,2 мкА) стабилен по всему диапазону выходного тока нагрузки (от 0 мА до 50 мА).
В одном аспекте регулятор напряжения 7026 представляет собой регулятор с малым падением напряжения (LDO), такой как LDO-регулятор напряжения TPS71533 производства Texas Instruments. Такие LDO-регуляторы напряжения 7026 обладают такими преимуществами, как высокое входное напряжение, малое падение напряжения, работа при низком уровне питания и миниатюрный корпус. Регулятор напряжения 7026 может работать при входном диапазоне от 2,5 В до 24 В и стабилен с любым конденсатором (≥ 0,47 мкФ). Малое падение напряжения и низкий ток покоя позволяют работать при чрезвычайно низком уровне питания, и, следовательно, регулятор напряжения 7026 подходит для питания интегральных схем, управляющих батареями. В частности, регулятор напряжения 7026 включается, как только прилагаемое напряжение достигает минимального входного напряжения, и быстро становится доступным выходное напряжение для питания постоянно работающих заряжающих батареи интегральных схем рукояточного участка 7002.
В одном аспекте батарея 7040 представляет собой литий-ион-полимерную (LIPO) батарею; полимер-литий-ионные или более часто литий-полимерные батареи (сокращенные названия Li-poly, Li-Pol, LiPo, LIP, PLI или LiP) являются перезаряжаемыми (аккумуляторными) батареями. LIPO-батарея 7040 может содержать несколько идентичных аккумуляторных ячеек, подключенных параллельно для увеличения токовой емкости, и часто они предлагаются в виде последовательно подключаемых «блоков» для увеличения общего доступного напряжения.
Дополнительное питание для модульного хирургического инструмента 7000 с с исполнительным механизмом может обеспечивать шаговый преобразователь пост.ток-пост.ток 7058 (ФИГ. 63-A), оптимизированный для сфер применения с высокой плотностью мощности, таких как семейство TPS6217X производства Texas Instruments. Может применяться высокая частота переключений, как правило, 2,25 МГц, чтобы позволять применение малых катушек индуктивности и обеспечивать быстрый нестационарный ответ, а также высокая точность выходного напряжения в результате использования топологии DCS-Control™.
Благодаря широкому диапазону рабочих входных напряжений от 3 до 17 В синхронный шаговый конвертер пост.ток - пост.ток 7058 (ФИГ. 63-A) хорошо подходит для системы модульного хирургического инструмента 7000 с с исполнительным механизмом с электропитанием от литий-ионной или иной батареи, а также от промежуточных шин питания 12В. В одном аспекте синхронный шаговый конвертер пост.ток-пост.ток 7058 поддерживает непрерывный выходной ток 0,5A при выходных напряжениях от 0,9В до 6В (в режиме 100% коэффициента использования).
Также возможно задание последовательности переключения питания путем конфигурирования контактов Enable и Power Good со свободным стоком. В режиме экономии питания синхронный шаговый конвертер пост.ток-пост.ток 7058 (ФИГ. 63-A) демонстрирует ток покоя приблизительно 17 мкА при входном напряжении VIN. Режим экономии энергии включается автоматически и беспрепятственно, если нагрузка низкая, и по всему диапазону нагрузок поддерживается высокая эффективность. В режиме отключения синхронный шаговый конвертер пост.ток-пост.ток 7058 выключается, и потребление тока в отключенном состоянии составляет менее 2 μA.
В одном аспекте OLED-интерфейс 7042 представляет собой интерфейс с OLED-дисплеем 7014. OLED-дисплей 7014 содержит органические светодиоды, в которых излучающий электролюминесцентный слой представляет собой пленку из органической композиции, которая изучает свет под действием электрического тока. Этот слой органического полупроводника расположен между двумя электродами, причем, как правило, по меньшей мере один из этих электродов является прозрачным. OLED-дисплей 7014 может включать в себя диоды OLED из двух основных семейств: на основе низкомолекулярных соединений и на основе полимеров. Добавление мобильных ионов к OLED позволяет получить светоизлучающую электрохимическую ячейку (LEC), которая имеет несколько иной режим функционирования. В OLED-дисплее 7014 можно использовать схему адресации либо с пассивной матрицей (PMOLED), либо с активной матрицей. Для диодов OLED с активной матрицей (AMOLED) требуется сборочная плата с тонкопленочными транзисторами для включения и выключения каждого индивидуального пикселя, однако они позволяют получить более высокое разрешение и дисплеи большего размера. В одном варианте OLED-дисплей 7014 работает без подсветки. Следовательно, он может отображать более глубокие уровни черного цвета, и дисплей может быть тоньше и легче, чем жидкокристаллический дисплей (ЖКД), что делает его идеально подходящим для применения в рукояточном участке 7002 модульного хирургического инструмента с с исполнительным механизмом 7000.
В одном аспекте процессор 7030 ствола из электрической подсистемы 7008 стволового участка 7004 может быть выполнен в виде сверхмаломощного 16-битного микроконтроллера для смешанных сигналов, такого как сверхмаломощный микроконтроллер MSP430FR5738 производства Texas Instruments. Процессор 7030 ствола представляет собой сверхмаломощный микроконтроллер, состоящий из нескольких устройств, имеющих встроенную ферритовую (FRAM) энергонезависимую память, сверхмаломощный 16-битный ЦП MSP430 и дополнительные периферические устройства, ориентированные на разные сферы применения. Архитектура, FRAM и периферические устройства в сочетании с семью маломощными режимами оптимизированы для достижения увеличения срока службы батареи в сферах портативных устройств и беспроводной связи. FRAM представляет собой новую энергонезависимую память, сочетающую скорость, универсальность и долговечность статической оперативной памяти (SRAM) со стабильностью и надежностью флэш-памяти, все это при низком суммарном потреблении питания. Периферические устройства включают в себя среди других элементов, 10-битный аналого-цифровой преобразователь, 16-канальный компаратор с возможностями генерации опорного напряжения и функциями гистерезиса, три улучшенных последовательных канала с поддержкой протоколов I2C, SPI или UART, внутренний прямой доступ к памяти (DMA), аппаратный умножитель, часы реального времени, пять 16-битных таймеров.
Процессор 7030 ствола включает в себя 16-битную архитектуру RISC, часы с частотой до 24 МГц, работает в широком диапазоне напряжений питания от 2 В до 3,6 В, и оптимизирован для сверхнизкой мощности. Процессор 7030 ствола также включает в себя интеллектуальную цифровую периферию, сверхнизкомощную ферроэлектрическую оперативную память и до 16 КБ энергонезависимой памяти. Встроенный микроконтроллер обеспечивает запись при сверхнизкой мощности, быстрый цикл записи 125 нс на слово, 16 КБ за 1 мс, и включает в себя встроенный модуль кодирования и коррекции ошибок (ECC) и модуль защиты памяти (MPU).
После приведенного описания электрической системы, подсистем и компонентов рукояточного и стволового участков 7002, 7004 модульного хирургического инструмента 7000 с с исполнительным механизмом, будут описаны функциональные аспекты системы управления. Соответственно, при работе электрическая подсистема 7006 рукояточного участка 7002 выполнена с возможностью принимать сигналы от переключателя 7044 открытия, переключателя 7046 закрытия и переключателя 7048 пуска, удерживаемых на корпусе рукояточного участка 7002. При приеме сигнала от переключателя 7046 закрытия процессор 7024 рукоятки приводит в действие двигатель 7038, запуская закрывание плеча зажима. После закрытия зажима переключатель 7052 закрытого состояния зажима в концевом эффекторе посылает сигнал процессору 7030 ствола, который передает информацию о состоянии плеча зажима процессору 7024 рукоятки посредством интерфейса 7010 коммуникационных связей и питания.
После зажатия намеченной ткани можно активировать переключатель 7048 пуска для генерации сигнала, принимаемого процессором 7024 рукоятки. В ответ на это процессор 7024 рукоятки активирует передаточную каретку во второе приводное положение так, что активация двигателя 7038 приведет к повороту второго приводного ствола, как подробно описано выше применительно к ФИГ. 1–8. После размещения режущего элемента переключатель 7054 состояния начала пуска, расположенный в концевом эффекторе, посылает сигнал, указывающий положение режущего элемента, процессору 7030 ствола, который передает данные о положении обратно процессору 7024 рукоятки через интерфейс 7010 коммуникационных связей и питания.
Активация первого переключателя 7048 снова посылает сигнал процессору 7038 рукоятки, который в ответ активирует вторую приводную систему и пусковую систему в концевом эффекторе для выталкивания режущего ткань элемента и узла клиновидных салазок в дистальном направлении через кассету с хирургическими скобками. Как только режущий ткань элемент и узел клиновидных салазок вытолкнуты в крайние дистальные положения в хирургической кассете со скобками, переключатель 7056 конца пуска посылает сигнал процессору 7030 ствола, который передает информацию о положении процессору 7024 рукоятки через интерфейс 7010. Теперь можно активировать переключатель 7048 пуска для отправки сигнала процессору 7024 рукоятки, который приводит в действие двигатель 7038, вызывая обратный поворот, для возврата пусковой системы в исходное положение.
Активация переключателя 7044 открытия снова посылает сигнал процессору 7024 рукоятки, который приводит в действие двигатель 7038, открывая зажим. После открытия зажима переключатель 7050 открытого состояния зажима в концевом эффекторе посылает сигнал процессору 7030 ствола, который передает информацию о положении зажима процессору 7024 рукоятки. Переключатель 7034 положения зажима и переключатель 7036 пускового положения подают процессору 7024 рукоятки сигналы, указывающие соответствующие положения плеча зажима и режущего элемента.
На ФИГ. 62 представлена таблица 7060, демонстрирующая общее время выполнения рабочего такта и требования по нагрузочному току для различных операций различных стволов устройства; В первом столбце 7062 слева перечислены круговые, профилированные и TLC-устройства/стволы. Такие устройства/стволы сравниваются в трех разных операциях закрытия, открытия и пуска, как показано во втором столбце 7064. В третьем столбце 7066 представлено общее время в секундах, необходимое для того, чтобы устройство/ствол, перечисленное в первом столбце 7063, совершило один ход. В четвертом столбце 7068 перечислены требования по нагрузочному току в амперах, чтобы устройства/стволы, перечисленные в первом столбце 7062, выполнили операцию, перечисленную во втором столбце 7064, в течение полного хода, как указано в третьем столбце 7066. Как указано на схеме, закрытие и открытие плеча зажима у каждого из устройств, перечисленных в первом столбце 7062, требует приблизительно одинакового времени. В случае пусковой операции круговое устройство/ствол требует наибольшего нагрузочного тока 15,69 A, а TLC-устройство/ствол требует наименьшего нагрузочного тока 0,69 A.
На ФИГ. 63-A представлена детальная схема электрической системы рукояточного участка 7002 модульного хирургического инструмента 7000 с с исполнительным механизмом; Как показано на ФИГ. 63-A, регулятор напряжения 7026 и преобразователь пост.ток-пост.ток 7058 обеспечивают рабочие напряжения для электрической системы. Регулятор напряжения 7026 регулирует напряжение батареи 7040. Процессор 7024 рукоятки принимает входные сигналы от акселерометра 7020. Логическая схема VSS-ON/OFF Logic 7086 обеспечивает входное напряжение на процессоре 7024 рукоятки и входной сигнал VSS на преобразователь пост.ток-пост. ток (DC-DC converter) 7058.
Трехцветный светодиод 7072 электрически соединен с процессором 7024 рукоятки. Процессор 7024 рукоятки подает питание на красный, синий или зеленый светодиод 7072 для обеспечения визуальной обратной связи.
Три датчика Холла 7028 U10, U11, U12 имеют три отдельных выхода U1_Hall1, U1_Hall2, U1_Hall3 датчиков Холла, которые соединяются с процессором 7024 рукоятки, как показано. Выход U1_Hall3 активирует находящийся на плате светодиод 7088. В одном аспекте выходы U1_Hall1, U1_Hall2, U1_Hall3 датчиков Холла и сигнала ANALOG_CLAMP соединяются с процессором 7024 для определения положения плеча зажима и режущего элемента на участке концевого эффектора модульного хирургического инструмента 7000 с с исполнительным механизмом или положения других элементов инструмента 7000.
Пользовательский переключатель 7070 представляет собой характерный пример вышеописанного «крючка-тумблера» 110, который установлен с возможностью поворота на участке пистолетной части рукоятки. Пользовательский переключатель 7070 функционирует с возможностью активации первого переключателя 7044 двигателя, функционально соединенного с процессором 7024 рукоятки. Первый переключатель 7044 двигателя может представлять собой нажимной переключатель, приводимый в действие путем поворота пользовательского переключателя 7070 с введением его с ним в контакт. Активация первого переключателя 7044 двигателя приводит к активации двигателя 7038 так, что приводная шестерня поворачивается в первом направлении вращения. Второй переключатель 7046 двигателя также соединен с процессором 7024 рукоятки и установлен с возможностью избирательного контакта с пользовательским переключателем 7070. Активация второго переключателя 7046 двигателя приводит к активации двигателя 7038 так, что приводная шестерня поворачивается во втором направлении. Пусковой переключатель 7048 соединен с процессором 7024 рукоятки. Активация пускового переключателя 7048 приводит к осевому перемещению передаточной каретки и выдвижению режущего элемента, как описано выше.
К процессору 7024 рукоятки также присоединен вход Joint Test Action Group (JTAG) 7074. Вход JTAG 7074 представляет собой соответствующий стандарту IEEE 1149.1 порт тестового доступа и архитектуру периферийного сканирования, разработанную для отладочных портов интегральных схем (ИС). Процессор 7024 рукоятки задействует JTAG 7074 для выполнения отладочных операций, таких как пошаговое выполнение и установка контрольных точек.
Универсальный асинхронный интерфейс (UART) 7076 соединен с процессором 7024 рукоятки. UART 7076 преобразует данные между параллельной и последовательной формами. UART 7076 часто применяют в сочетании с коммуникационными стандартами, такими как EIA, RS-232, RS-422 или RS-485. Слово «универсальный» указывает, что формат данных и скорость передачи можно настраивать. Уровни электрических сигналов и способы (такие как дифференциальная передача и т. п.) обрабатываются схемой формирователя, внешней по отношению к UART 7076. UART 7076 может представлять собой отдельную интегральную схему (или ее часть), применяемую для последовательной коммуникационной связи через последовательный порт процессора 1024 рукоятки. UART 7076 может быть включен в процессор 1024 рукоятки.
Описание остальных функциональных и операционных аспектов электрической подсистемы 7006 рукояточного участка 7002 модульного хирургического инструмента 7000 с с исполнительным механизмом будет далее излагаться применительно к ФИГ. 63-B. Как показано, процессор 7024 рукоятки обеспечивает сигнал, активирующий соленоид 7032. Модуль 7078 ствола передает сигналы о положении SHAFT _IDO, SHAFT_ID1, CLAMP_HOME и FIRE_HOME процессору 7024 рукоятки. Модуль положения 7080 шестерен подает сигнал о положении зажима и режущего элемента процессору 7024 рукоятки. Информация о положениях, обеспечиваемая модулем 7078 ствола и модулем 7080 положения шестерен, позволяет процессору 7024 рукоятки должным образом активировать двигатель 7038 при приеме от пользовательского переключателя 7070 сигналов на открытие зажима, закрытие зажима и/или запуск режущего элемента.
Контроллер 7022 двигателя получает команды от процессора 7024 рукоятки и обеспечивает команды МОП-транзисторному драйверу 7084, который активирует трехфазный BLDC-двигатель 7038 (ФИГ. 61). Как описыстволось выше, контроллер 7022 BLDC-двигателя должен направлять поворот ротора. Соответственно, контроллер/драйвер 7022 BLDC-двигателя определяет положение/ориентацию ротора относительно катушек статора. Соответственно, роторная часть BLDC-двигателя 7038 выполнена с датчиками Холла 7028, чтобы напрямую измерять положение ротора. Контроллер 7022 BLDC-двигателя имеет 3 двусторонних выхода (т. е., трехфазный выход с регулируемой частотой), которыми управляет логическая схема.
Соответственно, как описано на ФИГ. 61, 63-A, 63-B и 64, система управления двигателем, содержащая контроллер 7022 двигателя, драйвер 7084 двигателя, датчики Холла 7028 для определения положения двигателя в сочетании с модулем 7080 положения шестерней и/или модулем 7078 стволов, может быть выполнена с возможностью синхронизации шестерен так, что штырьковые соединители в рукояточном участке легко соединяются с гнездовыми соединителями в стволовом участке хирургических инструментов, описанных в настоящем документе. Хотя в одном случае, например, могут быть предусмотрены определенные допуски для облегчения смещения или шпоночного соединения, система управления двигателем выполнена с возможностью отслеживания положения шестерней, чтобы не допустить остановки шестерен в таком положении, которое не позволит сдвинуть друг относительно друга или установить два поворотных шпоночных соединения. В другом случае двигатель может быть выполнен с возможностью медленного дискретного поворота в процессе установки или сдвига для устранения любых небольших проблем рассинхронизации. Те же самые проблемы могут возникнуть в примере, описанном применительно к ФИГ. 6, когда инструмент сдвигается между двумя исполнительного механизмами, а не только при установке новых концевых эффекторов. Такую ситуацию можно разрешить путем надлежащей синхронизации шестерен с использованием системы управления двигателем, описанной применительно к ФИГ. 61, 63-A, 63-B и 64. В других случаях могут использоваться преобразователи, отслеживающие повороты шестерен/стволов.
На ФИГ. 64 представлена блок-схема электрической системы рукояточного и стволового участков модульного хирургического инструмента с с исполнительным механизмом. Как показано на ФИГ. 64, процессор 7024 рукоятки получает входные сигналы от переключателя 7044 открытия, переключателя 7046 закрытия, пускового переключателя 7048, переключателя 7034 положения зажима и переключателя 7036 пускового положения. Кроме того, процессор 7024 рукоятки принимает входные сигналы от переключателя 7090 исходного положения зажима и переключателя 7092 исходного пускового положения из модуля 7078 стволов. На основе различных комбинаций входных сигналов переключателей процессор 7024 рукоятки обеспечивает надлежащие команды двигателю 7038 и соленоиду 7032. Схема 7088 мониторинга батареи отслеживает входное электропитание процессора 7024 рукоятки относительно земли. Процессор 7024 рукоятки управляет трехцветным светодиодом 7072. Акселерометр 7020 подает входные сигналы ориентации по трем осям процессору 7024 рукоятки для определения различных параметров, таких как ориентация инструмента 7000 и того, не роняли ли инструмент 7000. Регулятор напряжения 7026 обеспечивает регулируемую подачу электропитания в систему. Модуль 7094 определения тока предназначен для анализа тока, проходящего от блока питания.
На ФИГ. 65 показана механическая переключательная система управления движениями 7095 для избавления от микропроцессорного управления функциями двигателя; В системе, описанной применительно к ФИГ. 61–64, для управления работой двигателя 7038 используется микропроцессор, такой как процессор 7024 рукоятки. Процессор 7024 рукоятки исполняет управляющий алгоритм на основе различных состояний переключателей, установленных в инструменте 7000. Это требует применения процессора 7024 рукоятки и соответствующих идентификационных функций для обеспечения управления разными концевыми эффекторами.
Однако, как показано на ФИГ. 65, для управления двигателем 7038 можно применять альтернативную методику, которая устраняет необходимость в процессоре 7024 рукоятки путем помещения связанных с движениями переключателей 7096A, 7096B, 7096C, 7096D в ствол концевого эффектора. Переключатели 7096A-D в этом случае выполнены с возможностью включения и отключения определенных функций двигателя 7038 или изменения направления вращения двигателя 7038 в зависимости от того, где находятся определенные компоненты концевого эффектора. В одном варианте переключатель, который указывает на полное выдвижение режущего элемента, можно использовать для переключения функций двигателя 7038 с целью изменения направления вращения и отведения режущего элемента. В другом варианте переключатели 7096A-D могут быть выполнены с возможностью обнаружения давления или силы так, что простое закрытие упора на ткани подастволо бы сигнал включающий/выключающий сигнал на закрывающий двигатель 7038, останавливая закрывающее движение.
В различных вариантах хирургический инструмент может включать в себя рукоятку, электродвигатель, расположенный внутри рукоятки, ствол, выполненный с возможностью прикрепления к рукоятке, и концевой эффектор, проходящий от ствола, причем электродвигатель выполнен с возможностью обуславливания функции концевого эффектора на концевом эффекторе. В некоторых вариантах хирургический инструмент может включать в себя систему управления, содержащую один или более датчиков, и микропроцессор, который может принимать входные сигналы от датчиков, отслеживать работу хирургического инструмента и приводить в действие электродвигатель для выполнения функций концевого эффектора на основании входных сигналов от датчиков. По меньшей мере в одном таком варианте осуществления рукоятка хирургического инструмента может использоваться более чем с одним стволом. Например, на рукоятке могут быть собраны ствол для линейного сшивания или ствол для кругового сшивания. Рукоятка может включать в себя по меньшей мере один датчик, выполненный с возможностью обнаружения типа ствола, собранного на ней, и передачи этой информации микропроцессору. Микропроцессор может отличным образом приводить в действие электродвигатель в ответ на входящие сигналы от датчиков, в зависимости от типа ствола, собранного на рукоятке. Например, если электродвигатель выполнен с возможностью приводить в действие закрывающую систему концевого эффектора, микропроцессор будет поворачивать электродвигатель в первом направлении, чтобы закрыть упор ствола кругового сшивающего инструмента, и во втором, или противоположном направлении, чтобы закрыть упор ствола линейного сшивающего инструмента. Предусмотрены другие системы управления, в которых аналогичное функциональное управление электродвигателем может достигаться без применения микропроцессора. По меньшей мере, в одном таком варианте стволы и/или рукоятка хирургического инструмента могут включать в себя переключатели, которые могут по-разному приводит в действие хирургический инструмент, в зависимости от типа ствола, собранного на рукоятке.
В различных вариантах система хирургического инструмента может включать в себя источник питания, первый двигатель, выполненный с возможностью осуществления первой функции концевого эффектора, второй двигатель, выполненный с возможностью осуществления второй функции концевого эффектора, и управляющую систему переключателей, выполненную с возможностью избирательного соединения источника питания с первым двигателем и вторым двигателем под действием управляющей системы переключателей. В различных вариантах такая система хирургического инструмента может не включать в себя микропроцессор. Первый двигатель может представлять собой закрывающий двигатель закрывающей системы, выполненный с возможностью закрытия упора концевого эффектора, а второй двигатель может представлять собой пусковой двигатель из пусковой системы, выполненный с возможностью выпускания скоб из кассеты со скобками концевого эффектора. Управляющая система переключателей может включать в себя переключатель закрывающего спускового механизма, который при закрытии может закрывать закрывающую питающую схему, которая соединяет источник питания с закрывающим двигателем. Управляющая система может дополнительно включать в себя переключатель конца хода закрывания, который может открываться закрывающей системой, когда упор находится в полностью закрытом положении, и открывать закрывающую схему питания, останавливая закрывающий двигатель и закрывающий привод. Управляющая система переключателей может также включать в себя переключатель пускового крючка, который может быть частью пусковой схемы питания, соединяющей источник питания с пусковым двигателем. В различных ситуациях пусковая схема питания по умолчанию может быть разомкнута, что может предотвращать приведение в действие пускового двигателя, прежде чем будет замкнута пусковая схема питания. Следовательно, одно замыкание пускового крючка не может замкнуть пусковую питающую схему и привести в действие пусковой двигатель. Пусковая схема питания дополнительно может включать в себя второй переключатель конца закрывающего хода, который может замыкаться закрывающей системой, когда упор находится в полностью закрытом положении. Замыкание пускового переключателя и второго переключателя конца закрывающего хода могут замкнуть пусковую питающую схему и привести в действие пусковой двигатель. Управляющая схема может дополнительно включать в себя переключатель конца пускового хода, который может размыкаться пусковым с исполнительным механизмом, когда пусковой исполнительный механизм исполнительный механизм достигает конца пускового хода. Размыкание переключателя конца пускового хода может размыкать пусковую питающую схему и останавливать пусковой двигатель. Управляющая система может дополнительно включать в себя второй переключатель конца пускового хода, который может замыкаться пусковым с исполнительным механизмом и замыкать реверсивную пусковую питающую схему, которая обращает полярность питания, прилагаемого к пусковому двигателю, и приводит в действие пусковой двигатель в противоположном направлении и оттягивает пусковой привод. Для замыкания реверсивной пусковой схемы питания также может требоваться, чтобы переключатель пускового крючка находился в закрытом положении. Когда пусковой исполнительный механизм исполнительный механизм достигает полностью оттянутого положения, он может замыкать проксимальный пусковой переключатель. Замыкание проксимального пускового переключателя может замыкать реверсивную закрывающую схему питания, которая может обращать полярность питания, прилагаемого к закрывающему двигателю, и приводит в действие закрывающий двигатель в противоположном направлении, открывая упор. Для замыкания реверсивной закрывающей схемы питания также может требоваться, чтобы переключатель закрывающего крючка находился в закрытом положении. Когда упор достигает полностью открытого положения, упор может размыкать проксимальный закрывающий переключатель, который может размыкать реверсивную закрывающую схему питания и останавливать закрывающий двигатель. Это лишь один пример.
В различных вариантах, как описано в настоящем документе, рукоятка хирургического инструмента может использоваться с несколькими разными узлами стволов, которые можно избирательно прикреплять к рукоятке. В некоторых вариантах, что также описано в настоящем документе, рукоятка может быть выполнена с возможностью обнаружения типа ствола, собранного на рукоятке, и работа рукоятки может определяться управляющей схемой, содержащейся внутри рукоятки. Например, рукоятка может включать в себя микропроцессор и по меньшей мере один модуль памяти, в котором могут храниться и выполняться множество рабочих программ, каждая из которых выполнена с возможностью приведения в действие определенного узла ствола. Предусмотрены другие варианты осуществления, в которых рукоятка не включает в себя системы управления; вместо этого каждый узел ствола может содержать собственную систему управления. Например, первый узел ствола может содержать первую систему управления, второй узел ствола может содержать вторую систему управления, и так далее. В различных вариантах рукоятка может содержать электродвигатель, источник питания, такой как батарея и/или входной кабель и, например, электрическую схему, выполненную с возможностью приведения в действие электрического двигателя на основе управляющих входных сигналов от прикрепленного узла ствола. Рукоятка может дополнительно содержать исполнительный механизм, который в сочетании с системой управления ствола может управлять электродвигателем. В различных вариантах рукоятка может не содержать дополнительных управляющих логических схем и/или микропроцессора, например, для управления электродвигателем. За исключением рукояточного исполнительного механизма, система управления в узле ствола, прикрепленном к рукоятке, может включать в себя управляющую логику, необходимую для приведения в действие электрического двигателя. В различных вариантах управляющая система узла ствола может включать в себя микропроцессор, тогда как в других вариантах она может не содержать его. В некоторых вариантах первая управляющая система первого узла ствола может включать в себя первый микропроцессор, вторая управляющая система второго узла ствола может включать в себя второй микропроцессор и т. д. В различных вариантах рукоятка может включать в себя первый электродвигатель, такой как закрывающий двигатель, и второй электродвигатель, такой как пусковой двигатель, причем управляющая система в прикрепленном узле ствола может приводить в действие закрывающий двигатель и пусковой двигатель. В некоторых вариантах рукоятка может содержать закрывающий исполнительный механизм и пусковой исполнительный механизм. За исключением закрывающего исполнительного механизма и пускового исполнительного механизма, система управления в узле ствола, прикрепленном к рукоятке, может включать в себя управляющую логику, необходимую для приведения в действие закрывающего двигателя и пускового двигателя. В различных вариантах рукоятка может включать в себя интерфейс ствола, а каждый узел ствола может включать в себя интерфейс рукоятки, выполненный с возможностью взаимодействия с интерфейсом ствола. Интерфейс ствола может включать в себя электрический разъем, выполненный с возможностью взаимодействия с электрическим разъемом интерфейса рукоятки, когда узел ствола собирается на рукоятке. По меньшей мере в одном варианте осуществления каждый разъем может содержать только один электрический контакт, и при сопряжении образуется только один канал управления между рукояткой и узлом ствола. В других вариантах каждый разъем может содержать два электрических контакта, которые формируют две сопряженные пары при прикреплении узла ствола к рукоятке. В таких вариантах могут присутствовать только двух каналов управления между рукояткой и узлом ствола. Предусмотрены и другие варианты осуществления, в которых между рукояткой и узлом ствола присутствует более двух каналов управления.
В различных вариантах прикрепляемые хирургические концевые эффекторы могут быть совместимы с рукояткой хирургического инструмента. Например, хирургический концевой эффектор может присоединяться к рукоятке хирургического инструмента и может подавать и/или реализовывать приводное движение, инициированное в рукоятке хирургического инструмента. Как показано на ФИГ. 73 и 74, хирургический концевой эффектор 8010 может представлять собой один из нескольких хирургических концевых эффекторов, которые могут быть совместимы с рукояткой 8000 хирургического инструмента. Разнообразные другие хирургические концевые эффекторы описаны в тексте настоящего описания и представлены на соответствующих ФИГ. Читателю следует понимать, что эти разнообразные, различающиеся хирургические концевые эффекторы, описанные и представленные в настоящем документе, могут быть совместимы, например, с одной и той же рукояткой хирургического инструмента и/или могут быть совместимы с более чем одним типом рукояток хирургических инструментов.
Рукоятка 8000 может включать в себя приводные системы, которые, например, могут быть выполнены с возможностью передачи приводного движения от рукоятки 8000 хирургического инструмента к компоненту, узлу и/или системе концевого эффектора 8010. Например, рукоятка 8000 может включать в себя первую приводную систему 8002a и вторую приводную систему 8004a. В некоторых вариантах одна из приводных систем 8002a, 8004a может быть выполнена, например, с возможностью подачи закрывающего приводного движения к узлу браншей концевого эффектора 8010 (ФИГ. 73), а одна из приводных систем 8002a, 8004a может быть выполнена, например, с возможностью подачи пускового приводного движения на пусковой элемент в концевом эффекторе 8010. Приводные системы 8002a, 8004a могут быть выполнены с возможностью передачи линейного движения, смещения и/или поступательного перемещения от рукоятки 8000 к концевому эффектору 8010. В различных вариантах первая приводная система 8002a может включать в себя приводную штангу 8006, которая может быть выполнена с возможностью поступательного перемещения и/или линейного смещения после активации первой приводной системы 8002a. Аналогично, вторая приводная система 8004a может включать в себя приводную штангу 8008, которая может быть выполнена с возможностью поступательного перемещения и/или линейного смещения после активации второй приводной системы 8004a.
В различных вариантах узел концевого эффектора 8010 может включать в себя первую приводную систему 8002b, которая может соответствовать, например, первой приводной системе 8002a рукоятки 8000, и также может включать в себя вторую приводную систему 8004b, которая может соответствовать, например, второй приводной системе 8004a рукоятки 8000. В различных вариантах первая приводная система 8002b в концевом эффекторе 8010 может включать в себя приводной элемент 8012, который может быть функционально и с возможностью высвобождения соединен, например, с приводной штангой 8006 первой приводной системы 8002a рукоятки 8000, и может быть, например, выполнен с возможностью принимать линейное движение от приводной штанги 8006. Кроме того, вторая приводная система 8004b в концевом эффекторе 8010 может включать в себя приводной элемент 8014, который может быть функционально и с возможностью высвобождения соединен, например, с приводной штангой 8008 второй приводной системы 8004a рукоятки 8000, и может быть, например, выполнен с возможностью принимать линейное движение от приводной штанги 8008.
В различных вариантах рукоятка 8000 и/или концевой эффектор 8010 могут включать в себя соединительную конструкцию, выполненную с возможностью осуществления разъемного соединения, например, приводной штанги 8006 с приводным элементом 8012, и/или, например, приводной штанги 8008 с приводным элементом 8014. Иными словами, соединительная конструкция может соединять первую приводную систему 8002a рукоятки 8000 с первой приводной системой 8002b концевого эффектора 8010 и вторую приводную систему 8004a рукоятки 8000 со второй приводной системой 8004b концевого эффектора 8010, так что приводное усилие, инициированное в рукоятке 8000 хирургического инструмента, может передавать к соответствующей приводной системе 8002b, 8004b прикрепленного хирургического концевого эффектора 8010. Хотя хирургическая система, представленная на ФИГ. 73 и 74, включает в себя пару приводных систем 8002a, 8004a в рукоятке 8000 и соответствующую пару приводных систем 8002b, 8004b в концевом эффекторе 8010, читателю следует понимать, что различные соединительные конструкции, описанные в настоящем документе, также можно использовать в хирургическом концевом эффекторе и/или рукоятке, содержащей, например, одну приводную систему или более двух приводных систем.
В различных вариантах соединительная конструкция для прикрепления приводной системы в рукоятке хирургического инструмента к приводной системе в прикрепленном концевом эффекторе может включать в себя фиксатор, который может быть выполнен с возможностью удерживания и закрепления соединения между соответствующими приводными системами рукоятки и концевого эффектора. Как описано в настоящем документе более подробно, фиксатор может быть подпружиненным и может быть соединен, например, со спусковым механизмом, выполненным с возможностью функционального преодоления смещения пружины, например, для разблокировки, открытия и/или высвобождения соединительной конструкции. В различных вариантах соединительная конструкция может включать в себя независимые и/или отдельные соединительные механизмы и/или сочленения для каждой приводной системы 8002b, 8004b в хирургическом концевом эффекторе 8010. В таких вариантах одну из приводных систем 8002b, 8004b можно активировать без активации другой приводной системы 8002b, 8004b. В других вариантах приводные системы 8002b, 8004b можно активировать, например, одновременно и/или параллельно.
На ФИГ. 66–72 представлена соединительная конструкция 8100 для применения в хирургическом концевом эффекторе. Например, хирургический концевой эффектор может быть прикреплен к рукоятке 8170 (ФИГ. 67-69) хирургического инструмента, посредством соединительной конструкции 8100. В различных вариантах соединительная конструкция 8100 может включать в себя корпус или раму 8102 соединителя. Корпус 8102 соединителя может располагаться, например, внутри проксимального крепежного участка концевого эффектора. Кроме того, корпус 8102 соединителя может включать в себя, например, каретку 8104, которая может быть выполнена с возможностью перемещения, например, относительно корпуса 8102 соединителя. Например, корпус 8102 соединителя может включать в себя канал 8103, размер и конструкция которого подходят для приема в нем каретки 8104 с возможностью скольжения и/или сдвига. Например, каретка 8104 может быть заключена в корпус 8102 соединителя так, что каретка 8104 удерживается с возможностью перемещения в канале 8103 и может перемещаться и/или скользить внутри канала 8103. Канал 8103 может, например, направлять и/или ограничивать перемещение каретки 8014 относительно корпуса 8102. В некоторых вариантах каретка 8104 может иметь наклонную поверхность, такую как уклон или клин 8106, который может дополнительно, например, направлять и/или способствовать перемещению каретки 8104.
В различных вариантах соединительная конструкция 8100 может включать в себя спусковой механизм 8120, находящийся в скользящем взаимодействии с уклоном 8106 каретки 8104. Например, спусковой механизм 8120 может включать в себя наклонную поверхность 8122, выполненную с возможностью скольжения вдоль уклона 8106 каретки 8104 при перемещении спускового механизма 8120, например, между первым, или неактивированным положением (ФИГ. 68) и вторым, или активированным, положением (ФИГ. 67 и 69). В некоторых вариантах соединительная конструкция 8100 может включать в себя направляющую, такую как направляющие шины 8110, которые могут быть расположены и иметь конструкцию, подходящую для направления спускового механизма 8120, например, между первым, неактивированным положением и вторым, активированным положением. Например, корпус 8102 соединителя может включать в себя пару направляющих шин 8110, которые могут образовывать активационную траекторию для спускового механизма 8120.
В различных вариантах, когда спусковой механизм 8120 перемещается по активационной траектории, образованной по меньшей мере одной направляющей шиной 8110 в направлении D1 (ФИГ. 67 и 69) из неактивированного положения (ФИГ. 68) в активированное положение (ФИГ. 67 и 69), например, каретка 8104 может сдвигаться вниз или в направлении D3 (ФИГ. 67 и 69) внутри канала 8103 посредством наклонной поверхности 8122 спускового механизма 8120 и уклона 8106 каретки 8104. Соответственно, активация спускового механизма 8120 может сдвигать каретку 8104, например, относительно корпуса 8102 соединителя, спускового механизма 8120 и/или различных других компонентов, узлов и/или систем соединительной конструкции 8100.
В различных вариантах при перемещении спускового механизма 8120 вдоль по меньшей мере одной направляющей шины 8110 в направлении D2 (ФИГ. 68) из активированного положения (ФИГ. 67 и 69) в неактивированное положение (ФИГ. 68), например, каретка 8104 может сдвигаться вверх или в направлении D4 (ФИГ. 68) внутри канала 8103 посредством наклонной поверхности 8122 спускового механизма 8120 и уклона 8106 каретки 8104. Соответственно, активация спускового механизма 8120 может влиять на перемещение каретки 8104, например, относительно корпуса 8102 соединителя. В некоторых вариантах пружина и/или иной смещающий механизм может быть выполнен с возможностью смещения каретки 8104 и/или спускового механизма 8120 к заданному положению, например, относительно канала 8103 и/или корпуса 8102 соединителя.
Как показано на ФИГ. 66, в различных вариантах в корпусе 8102 соединителя и/или концевом эффекторе может быть образован паз 8112. Размер паза 8112 может быть пригоден для приема в нем, например, приводного элемента 8172 рукоятки 8170 хирургического инструмента. В некоторых вариантах в корпусе 8102 соединителя может быть выполнена пара пазов 8112, и каждый паз 8112 может быть выполнена например, с возможностью принимать в нем один из приводных элементов 8172 рукоятки 8170. Как описано в настоящем документе более подробно, приводные элементы 8172 могут быть соединены и/или иным образом приводимы в движение приводной системой в рукоятке 8170. Например, каждый приводной элемент 8172 может иметь соединение и/или иным образом приводиться в движение линейным исполнительным механизмом приводной системы в рукоятке 8170, которая может быть выполнена с возможностью поступательного перемещения и подачи линейного приводного движения на соответствующую приводную систему в концевом эффекторе.
В различных вариантах каретка 8104 также может быть выполнена с возможностью перемещения и/или сдвига относительно гнезда 8130 приводного элемента соединительной конструкции 8100. Гнездо 8130 приводного элемента может быть выполнено с возможностью принимать, например, один из приводных элементов 8172 рукоятки 8170. Как показано главным образом на ФИГ. 71, гнездо 8103 может включать в себя отверстие 8136, размер и/или конструкция которого подходят для приема в нем компонента приводной системы рукоятки 8170. Например, как показано главным образом на ФИГ. 67, отверстие 8136 может быть выполнено с возможностью принимать в нем дистальный участок приводной штанги 8172. В таких вариантах, когда приводная штанга 8172 закреплена внутри отверстия 8136 в гнезде 8130, как описано в настоящем документе более подробно, гнездо 8130 может иметь возможность передачи приводной силы от рукоятки 8170 к хирургическому концевому эффектору, например, посредством взаимодействия приводной штанги 8172 и гнезда 8130.
Как показано на ФИГ. 67, приводная штанга 8172 может, например, включать в себя фаску 8176 и желоб или углубление 8174, которые могут способствовать взаимодействию и/или блокировке приводной штанги 8172 в гнезде 8130. В различных вариантах гнездо приводного элемента 8130 может быть закреплено и/или зафиксировано, например, внутри концевого эффектора и/или внутри корпуса 8102 соединителя, и каретка 8104 может быть выполнена с возможностью перемещения и/или сдвига относительно и/или в области гнезда 8130 при скольжении каретки 8104 внутри канала 8103 корпуса 8102 соединителя.
Как показано главным образом на ФИГ. 71, гнездо 8130 может включать в себя по меньшей мере один гибкий язычок 8132a, 8132b. Гибкий язычок 8132a, 8132b может смещаться внутрь к отверстию 8136 и/или может включать в себя, например, смещающийся внутрь зубец. В некоторых вариантах гибкий язычок 8132a, 8132b может включать в себя, например, зубец 8133, выполненный с возможностью взаимодействия с желобом 8174 в приводной штанге 8172, когда приводная штанга 8172 вставляется в отверстие 8136 гнезда 8130. Например, фаска 8176 приводной штанги 8172 может проходить мимо зубца 8133 внутри отверстия 8136 гнезда и может разгибать или отклонять язычок 8132 наружу от отверстия 8136. По мере того, как приводная штанга 8172 продолжает входить в отверстие 8136 гнезда 8130, зубец 8136 язычка 8132a, 8132b может входить во взаимодействие или захватывать желоб 8174 в приводной штанге 8172. В таких вариантах взаимодействие зубца 8136 и желоба 8174 позволяет, например, удерживать с возможностью высвобождения приводную штангу 8172 внутри гнезда 8130.
В различных вариантах гнездо 8130 может включать в себя выемку 8134, выполненную с возможностью введения в нее, например, пружины 8150. В других вариантах гнездо 8136 может включать в себя несколько углублений 8134, и соединительная конструкция 8100 может включать в себя, например, более чем одну пружину 8150. Более того, в некоторых вариантах гнездо 8130 может включать в себя более одного гибкого язычка 8132a, 8132b. Например, гнездо 8130 может включать в себя пару латерально расположенных язычков 8132a, 8132b. Первый язычок 8132a может быть расположен, например, на первой боковой стороне гнезда 8130, а второй язычок 8132b может быть расположен, например, на второй боковой стороне гнезда 8130. В некоторых вариантах язычки 8132a, 8132b могут, например, отклоняться наружу от отверстия 8136 для обеспечения входа приводной штанги 8172. В других вариантах гнездо 8130 может, например, не включать в себя отклоняющегося внутрь язычка и/или может включать в себя более двух язычков.
В различных вариантах соединительная конструкция 8100 также может включать в себя фиксатор или гильзу 8140, который может быть расположен с возможностью перемещения относительно гнезда 8130. Например, фиксатор 8140 может включать в себя отверстие 8142 (ФИГ. 72), размер и конструкция которого подходят для по меньшей мере частичного заключения в себе по меньшей мере участка гнезда 8130. Например, фиксатор 8140 может располагаться вокруг гнезда 8130 и может располагаться, например, с возможностью перемещения относительно язычков 8132a, 8132b гнезда 8130. В различных вариантах пружина 8150 может находиться, например, между участком гнезда 8130 и участком фиксатора 8140, так что пружина 8150 может смещать фиксатор 8140 к фиксирующему гнездо положению (ФИГ. 68). Например, пружина 8150 может смещать фиксатор 8140 в фиксирующее гнездо положение (ФИГ. 68), в котором фиксатор 8140 располагается так, что окружает и/или ограничивает отгибание язычка(ов) 8132a, 8132b наружу.
В различных вариантах, когда фиксатор 8140 расположен так, что ограничивает и/или предотвращает отгибание наружу язычка(ов) 8132a, 8132b, т. е., в фиксирующем гнездо положении, смещение язычка(ов) 8132a, 8132b наружу от отверстия 8136 может быть ограничено так, что язычок(и) 8132a, 8132b, например, могут блокировать и/или иным образом предотвращать вход и/или высвобождение приводной штанги 8172 относительно отверстия 8136 в гнезде 8130. Кроме того, когда спусковой механизм 8120 перемещается из неактивированного положения (ФИГ. 68) в активированное положение (ФИГ. 67 и 69), фиксатор 8140 может, например, преодолеть смещающее действие пружины 8150 и может переместиться из фиксирующего гнездо положения (ФИГ. 68) в нефиксированное положение (ФИГ. 67 и 69). В нефиксированном положении фиксатор 8140 можно сдвинуть от гибкого язычка(ов) 8132a, 8132b так, что гибкий язычок(и) 8132a, 8132b, например, можно будет отогнуть наружу и гнездо 8130, например, может принять приводную штангу 8172.
В различных вариантах фиксатор 8140 может содержать утолщение или выступ 8144. Кроме того, как показано главным образом на ФИГ. 70, каретка 8104 в корпусе 8102 соединителя может включать в себя смещающий элемент 8108. Смещающий элемент 8108 может включать в себя, например, уклон или наклонную поверхность, которая может быть выполнена с возможностью перемещения выступа 8144 и, следовательно, фиксатора 8140, например, между первым или фиксирующим гнездо положением (ФИГ. 67 и 69) и вторым или нефиксированным положением (ФИГ. 68). Например, когда движение спускового механизма 8120 заставляет каретку 8104 двигаться относительно корпуса 8102 соединителя и гнезда 8130, как описано в настоящем документе, выступ 8144 может скользить по наклонной поверхности смещающего элемента 8108 так, что фиксатор 8140 будет перемещаться относительно гибкого язычка 8132 гнезда 8130. В таких вариантах активация спускового механизма 8120 позволяет преодолеть смещающее действие пружины 8150 и оттянуть фиксатор 8140 из фиксирующего гнездо положения вокруг гибкого язычка(ов) 8132 гнезда 8130 в нефиксированное положение. В таких вариантах при оттягивании фиксатора 8140 гибкий язычок(и) 8132 может получить возможность отогнуться и/или взаимодействовать с приводной штангой 8172. Кроме этого, когда спусковой механизм не активирован, пружина 8150 может смещать фиксатор 8140 в положение относительно и/или в области гибкого язычка(ов) 8132a, 8132b так, что отгибание язычка(ов) 8132a, 8132b и, следовательно, взаимодействие с приводной штангой 8172, например, ограничивается или предотвращается.
В некоторых вариантах фиксатор 8140 может включать в себя пару латерально противоположных выступов 8144, которые могут находиться в скользящем взаимодействии с латерально противоположными смещающими элементами 8108 каретки 8104. Кроме того, в тех случаях, в которых соединительная конструкция 8100 соединяет более одной приводной системы между рукояткой 8170 и хирургическим концевым эффектором, например, каретка 8104 может включать в себя множество смещающих элементов 8108 и/или множество пар смещающих элементов 8108. Например, каждое гнездо 8130 может включать в себя пару латерально расположенных выступов 8144, а каретка 8104 может включать в себя, например, по смещающему элементу 8108 на каждый выступ 8144.
Как показано главным образом на ФИГ. 68, перед активацией спускового механизма 8120 и/или после высвобождения спускового механизма 8120, спусковой механизм 8120 может располагаться в дистальном, неактивированном положении, каретка 8104 может располагаться в поднятом положении относительно корпуса 8102 соединителя, а фиксатор 8140 может располагаться в фиксирующем гнездо положении. В такой конфигурации фиксатор 8140 может, например, предотвращать вход и/или взаимодействие приводной штанги 8172 с гнездом 8130. В различных вариантах пружина(ы) 8150 и/или иной пружинный и/или смещающий элемент может, например, смещать спусковой механизм 8120 в неактивированное положение, каретку 8104 - в поднятое положение и/или фиксатор 8140 - в фиксирующее гнездо положение. Для соединения и/или прикрепления одной из приводных штанг 8172 к одному из гнезд 8130, как показано на ФИГ. 67, спусковой механизм 8120 можно перевести в проксимальное, активированное положение, что позволяет, например, сместить каретку 8104 в опущенное положение, что может сдвигать фиксатор 8140 в нефиксированное положение. В такой конфигурации приводная штанга 8172, например, может быть выполнена с возможностью входить в гнездо 8130 или принимать ее в нем.
Далее, если высвободить спусковой механизм 8120, как показано на ФИГ. 68, например, пружина(ы) 8150 может(ут) сместить спусковой механизм 8120 обратно в дистальное, неактивированное положение, может(ут) сместить каретку 8104 обратно в поднятое положение и может(ут) сместить фиксатор 8140 обратно в фиксирующее гнездо положение. Соответственно, приводной элемент 8172 может быть заблокирован во взаимодействии с гнездом 8130, поскольку фиксатор 8140 может предотвращать отгибание наружу гибких язычков 8132a, 8132b и, следовательно, может, например, закрепить приводной элемент 8172 внутри гнезда 8130. Соответственно, как показано на ФИГ. 69, для отсоединения приводного элемента 8172 от гнезда 8130, спусковой механизм 8120 можно снова переместить в проксимальное, активированное положение, что может, например, сдвинуть каретку 8104 в опущенное положение, что может сдвинуть фиксатор 8140 в нефиксированное положение. В такой конфигурации, т. е. когда гнездо 8130 не зафиксировано, приводной элемент 8172, например, можно удалить из гнезда 8130.
В различных вариантах хирургический инструмент может включать в себя приводную систему, соединенную с двигателем. В некоторых вариантах двигатель и приводная система могут влиять на различные хирургические функции. Например, двигатель и приводная система, например, могут влиять на открытие и/или закрытие хирургического концевого эффектора и могут влиять на разрезающий и/или пусковой ход. В некоторых вариантах двигатель и приводная система могут влиять на множество отдельных хирургических функций. Например, открытие и закрытие хирургического концевого эффектора могут быть разделены и отличны от разрезания и/или выпуска крепежных элементов из хирургического концевого эффектора. В таких вариантах приводная система может включать в себя узел трансмиссии и/или захвата, который, например, может сдвигать приводную систему для взаимодействия с разными выходными системами.
В различных вариантах хирургический инструмент может включать в себя приводную систему, содержащую множество выходных стволов, и сцепление для переключения между разными выходными стволами. В некоторых вариантах выходные стволы могут соответствовать разным хирургическим функциям. Например, первый выходной ствол может соответствовать движению закрытия концевого эффектора, а второй выходной ствол может соответствовать пусковому движению концевого эффектора. В различных вариантах приводная система может переключаться, например, между соединением с первым выходным стволом и вторым выходным стволом так, что хирургические функции являются разделенными, отличающимися и/или независимыми. Например, движение закрытия концевого эффектора может быть отделено и отлично от пускового движения концевого эффектора. Например, может быть предпочтительным начинать закрывающее движение, а по завершению закрывающего движения начинать отдельное пусковое движение. Более того, может быть предпочтительно управлять и/или осуществлять независимые закрывающее движение и пусковое движение посредством одной приводной системы, которая может быть соединена, например, с одним электродвигателем. В других вариантах первый выходной ствол и второй выходной ствол могут быть функционально соединены, и различные хирургические функции и/или движения могут происходить, например, одновременно и/или по меньшей мере частично одновременно.
Как показано на ФИГ. 75–78, рукоятка 8600 хирургического инструмента может включать в себя приводную систему 8602, которая может включать в себя, например, первую выходную приводную систему 8610 и вторую выходную приводную систему 8620. В различных вариантах, при прикреплении концевого эффектора к рукоятке 8600 первая выходная приводная система 8610 может соединяться с первой приводной системой в прикрепленном концевом эффекторе, а вторая выходная приводная система 8620 может соединяться со второй приводной системой в прикрепленном концевом эффекторе. Первая выходная приводная система 8610 может влиять на первую хирургическую функцию, такую как сжатие бранш концевого эффектора, а вторая выходная приводная система 8620 может влиять на вторую хирургическую функцию, такую как запуск движения пускового элемента по концевому эффектору. В других вариантах хирургические функции, относящиеся к первой выходной приводной системе 8610 и второй выходной приводной системе 8620, могут, например, изменяться на обратную и/или меняться иным образом.
В различных вариантах приводная система 8602 может включать в себя узел двигателя, который может включать в себя электродвигатель 8640 и ствол 8642 двигателя. Приводная шестерня 8644 может быть установлена, например, на стволе 8642 двигателя, так что электродвигатель 8640 осуществляет и/или влияет на поворот приводной шестерни 8644. В различных вариантах первая выходная приводная система 8610 может включать в себя первый приводной ствол 8612 и первую ведомую шестерню 8612. Первая ведомая шестерня 8614 может быть установлена на первом приводном стволу 8612, например, так, что поворот первой ведомой шестерни 8614 влияет на вращение первого приводного ствола 8612. В различных вариантах, линейный исполнительный механизм 8616 может быть расположен при помощи резьбы на первом приводном стволу 8612, и поворот первого приводного ствола 8612 может влиять, например, на линейное перемещение линейного исполнительного механизма 8616. Более того, в различных вариантах вторая выходная приводная система 8620 может включать в себя второй приводной ствол 8622 и вторую ведомую шестерню 8624. Вторая ведомая шестерня 8624 может быть установлена на втором приводном стволу 8622, например, так, что поворот второй ведомой шестерни 8624 влияет на вращение второго приводного ствола 8622. В различных вариантах, линейный исполнительный механизм 8626 может быть расположен при помощи резьбы на втором приводном стволу 8624, и поворот второго приводного ствола 8624 может влиять, например, на линейное смещение линейного исполнительного механизм 8626.
В различных вариантах приводная система 8602 может дополнительно содержать узел 8648 трансмиссии или сдвигателя. Узел 8648 сдвигателя может быть выполнен с возможностью сдвигать взаимодействие приводной шестерни 8644, например, между первой выходной приводной системой 8610 и второй выходной приводной системой 8620. В некоторых вариантах узел сдвигателя 8648 может включать в себя сдвигающую шестерню 8652, которая может, например, находиться в зубчатом взаимодействии с приводной шестерней 8644. Кроме этого, сдвигающая шестерня 8652 может быть выполнена, например, с возможностью сдвигания или перемещения в пределах диапазона положений, и она может оставаться в зубчатом взаимодействии с приводной шестерней 8644 при перемещении сдвигающей шестерни 8652 в пределах этого диапазона положений.
Например, сдвигающая шестерня 8652 может входить во взаимодействие и/или выходить из взаимодействия с, по меньшей мере, одной из первой ведомой шестерни 8614 и/или второй ведомой шестерни 8624. В различных вариантах сдвигающая шестерня 8652 может входить в зубчатое взаимодействие со второй приводной шестерней 8624 второй выходной приводной системы 8620. Например, в первом положении (ФИГ. 78) диапазона положений сдвигающая шестерня 8652 может высвобождаться от второй ведомой шестерни 8624, а например во втором положении (ФИГ. 77) диапазона положений сдвигающая шестерня 8652 может входить во взаимодействие со второй ведомой шестерней 8624. В тех случаях, когда сдвигающая шестерня 8652 взаимодействует со второй приводной шестерней 8624, сдвигающая шестерня 8652 может передавать усилие от приводной шестерни 8644 на вторую ведомую шестерню 8624 так, что двигатель 8640 может влиять на хирургическую функцию посредством, например, второй выходной приводной системы 8620. Кроме того, в вариантах, когда сдвигающая шестерня 8652 высвобождается от второй ведомой шестерни 8624, поворот двигателя 8640, например, не может передаваться ко второй выходной приводной системе 8620.
В различных вариантах узел переключения 8648 дополнительно может содержать промежуточную и/или передаточную шестерню 8654. Передаточная шестерня 8642 может быть выполнена с возможностью передачи приводного усилия от сдвигающей шестерни 8652, например, к первой ведомой шестерне 8614. В различных вариантах передаточная шестерня 8654 может находиться в зубчатом взаимодействии, например, с первой ведомой шестерней 8614 так, что поворот передаточной шестерни 8654 передается на первую ведомую шестерню 8614. Кроме того, в различных вариантах сдвигающая шестерня 8652 может входить и/или выходить из взаимодействия с передаточной шестерней 8654. Например, в первом положении (ФИГ. 78) диапазона положений сдвигающая шестерня 8652 может высвобождаться от передаточной шестерни 8654, а например во втором положении (ФИГ. 77) из диапазона положений сдвигающая шестерня 8652 высвобождаться от передаточной шестерни 8654. В вариантах, когда сдвигающая шестерня 8652 взаимодействует с передаточной шестерней 8654, сдвигающая шестерня 8652 может передавать усилие от приводной шестерни 8644 на первую ведомую шестерню 8614 через передаточную шестерню 8654. В таких вариантах двигатель 8640 может влиять на хирургическую функцию, например, посредством первой выходной приводной системы 8610. Кроме того, в вариантах, когда сдвигающая шестерня 8652 высвобождается от передаточной шестерни 8654, поворот двигателя 8640, например, не может передаваться к первой выходной приводной системе 8610.
В различных вариантах передаточная шестерня 8654 может быть установлена с возможностью поворота на второй приводной ствол 8622 второй выходной приводной системы 8620. Например, передаточная шестерня 8654 может быть выполнена с возможностью поворота относительно второго приводного ствола 8622, не влияя при этом на поворот второго приводного ствола 8622 и присоединенной к нему второй ведомой шестерни 8624. В различных вариантах узел переключения 8648 может включать в себя держатель или кольцо 8650, которое может, по меньшей мере, частично окружать сдвигающую шестерню 8652. Держатель 8650 может располагаться, например, вокруг сдвигающей шестерни 8652, так что перемещение держателя 8650 может приводить к перемещению сдвигающей шестерни 8652.
В различных вариантах рукоятка 8600 и/или сдвигающий узел 8648 дополнительно может включать в себя спусковой механизм или собачку 8630. Собачка 8630 может быть выполнена с возможностью сдвига держателя 8650 и/или сдвигающей шестерни 8652 в пределах диапазона положений. Например, собачка 8630 может представлять собой спусковой механизм, проходящий от рукоятки 8600, и может взаимодействовать с держателем 8650 и/или сдвигающей шестерней 8652. В различных вариантах держатель 8650 может включать в себя штифт 8656, который может проходить от держателя 8640 в отверстие 8638 (ФИГ. 75) в собачке 8630. Например, собачка 8630 может включать в себя плечо 8632 и/или пару плеч 8632, соединенных с осью поворота 8634 на рукоятке 8600. Собачка 8630 может, например, поворачиваться вокруг оси поворота 8634, и поворот плеча(ей) 8632 может приводить к перемещению штифта 8656 держателя 8560. Перемещение держателя 8650 позволяет сдвигать сдвигающую шестерню 8652, например, между первым положением (ФИГ. 78) и вторым положением (ФИГ. 77).
В различных вариантах перемещение держателя 8650 может быть ограничено так, что сдвигающая шестерня 8652 будет двигаться вдоль продольной оси по диапазону положений. Кроме этого, рабочий ход поворота и/или диапазон перемещения собачки 8630 может быть, например, фиксированным и/или ограниченным так, что сдвигающая шестерня 8652 будет оставаться в пределах диапазона положений в процессе поворота собачки 8630. Более того, отверстие 8638 (ФИГ. 75) в собачке 8630 может быть выполнено и/или сконструировано таким образом, чтобы оставлять и/или удерживать сдвигающую шестерню 8652 в пределах диапазона положений и/или в выравнивании, например, со второй ведомой шестерней 8624 и/или передаточной шестерней 8654. В различных вариантах рукоятка 8600 может включать в себя пружину или иной смещающий механизм для смещения сдвигающей шестерни 8652 в первое или во второе положение. В некоторых вариантах рукоятка 8600 может включать в себя ограничительный механизм с двумя устойчивыми состояниями для удерживания сдвигающей шестерни 8652 в первом положении или втором положении. В ситуации, когда сдвигающая шестерня 8652 находится между первым и вторым положениями, этот ограничительный механизм с двумя устойчивыми состояниями может быть динамически неустойчивым и может действовать на сдвигающую шестерню 8652, переводя ее в первое положение или во второе положение. В альтернативном варианте осуществления сдвигающая шестерня 8652 может смещаться в промежуточное положение, в котором сдвигающая шестерня 8652 может, например, одновременно взаимодействовать с первой выходной приводной системой 8610 и со второй выходной приводной системой 8620. В качестве дополнения или альтернативы, рукоятка 8600 может включать в себя блокиратор и/или стопор для удерживания сдвигающей шестерни 8652, например, в одном из первого или второго положений.
Хирургический инструмент может включать в себя поворачиваемый приводной ствол, выполненный с возможностью приведения в действие закрывающего исполнительного механизма и пусковогой исполнительного механизма хирургического инструмента. Как показано на ФИГ. 79–84, хирургический инструмент 10000 может включать в себя поворачиваемый приводной ствол 10020, закрывающий исполнительный механизм исполнительный механизм 10030 и пусковой исполнительный механизм исполнительный механизм 10040. Как будет описано ниже более подробно, приводной ствол 10020 может включать в себя первую резьбу 10024, выполненную с возможностью приведения в действие закрывающего исполнительного механизма 10030, и вторую резьбу 10026, выполненную с возможностью приведения в действие пускового исполнительного механизма 10040. В различных случаях инструмент 10000 могут представлять собой, например, круговой сшивающий инструмент.
Хирургический инструмент 10000 может содержать раму 10002 и средства для генерации вращательных движений. В некоторых вариантах вращательное движение может создаваться, например, заводной ручкой с ручным с исполнительным механизмом, а в различных других вариантах вращательное движение может создаваться электродвигателем. В любом случае сгенерированное вращательное движение может быть передано на вращательный входной ствол 10010. Входной ствол 10010 может включать в себя проксимальный подшипниковый участок 10011 и дистальный подшипниковый участок 10013, которые удерживаются с возможностью поворота рамой 10002. В различных вариантах проксимальная подшипниковая часть 10011 и/или дистальная подшипниковая часть 10013 могут удерживаться непосредственно рамой 10002, тогда как в некоторых вариантах проксимальная подшипниковая часть 10011 и/или дистальная подшипниковая часть 10013 может включать в себя подшипник, расположенный между входным стволом 10010 и рамой 10002. Входной ствол 10010 может дополнительно включать в себя шестерню 10012, которая установлена и/или закреплена шпонкой на входном стволу 10010 так, что когда входной ствол 10010 поворачивается в направлении A (ФИГ. 79), шестерня 10012 также поворачивается в направлении A. Соответственно, когда входной ствол 10010 поворачивается во втором направлении, т. е., направлении A’ (ФИГ. 82), шестерня 10012 также поворачивается в направлении A’.
Как показано преимущественно на ФИГ. 79 и 80, приводной ствол 10020 может включать в себя проксимальный конец 10021 и дистальный конец 10023. Проксимальный конец 10021 и дистальный конец 10023 могут удерживаться с возможностью поворота рамой 10002. В различных вариантах проксимальный конец 10021 и/или дистальный конец 10023 может удерживаться непосредственно рамой 10002, тогда как в некоторых вариантах проксимальный конец 10021 и/или дистальный конец 10023 может включать в себя подшипник, расположенный между приводным стволом 10020 и рамой 10002. Шестерня 10022 может быть установлена и/или закреплена шпонкой на проксимальном конце 10021 приводного ствола 10020. Шестерня 10022 находится в зубчатом взаимодействии с шестерней 10012 так, что когда входной ствол 10010 поворачивается в направлении A, приводной ствол 10020 поворачивается в направлении B. Соответственно, как показано на ФИГ. 81, когда входной ствол 10010 поворачивается в направлении A’, приводной ствол 10020 поворачивается в направлении B’.
Как показано на ФИГ. 79, система 10030 закрывающего исполнительного механизма может включать в себя закрывающий штифт 10032, взаимодействующий с первой резьбой 10024 приводного ствола 10020. Система 10030 закрывающего исполнительного механизма может дополнительно содержать закрывающий элемент 10033, выполненный с возможностью поступательного перемещения. Закрывающий штифт 10032 расположен внутри отверстия, образованного в проксимальном конце закрывающего элемента 10033. Закрывающий штифт 10032 может включать в себя первый конец, расположенный внутри желоба, образованного первой резьбой 10024. При повороте приводного ствола 10020 боковая стенка желоба может входить в контакт с первым концом закрывающего штифта 10032 и обеспечивать смещение закрывающего штифта 10032 проксимально или дистально в зависимости от направления поворота приводного ствола 10020. Например, при повороте приводного ствола 10020 в направлении B (ФИГ. 79) закрывающий штифт 10032 может смещаться или поступательно перемещаться дистально, как указано в направлении D. Соответственно, при повороте приводного ствола 10020 в направлении B’ (ФИГ. 82) закрывающий штифт 10032 может смещаться или поступательно перемещаться проксимально, как указано в направлении P. Закрывающий штифт 10032 может плотно приниматься в отверстии, образованном в закрывающем элементе 10033 так, что смещение или поступательное перемещение закрывающего штифта 10032 сообщается закрывающему элементу 10033. Читателю следует понимать, что закрывающий штифт 10032 и закрывающий элемент 10033 ограничены в возможности поворота относительно рамы 10002 так, что поворот приводного ствола 10020 преобразуется в поступательное перемещение закрывающего штифта 10032 и закрывающего элемента 10033.
Как преимущественно показано на ФИГ. 80, первая резьба 10024 проходит вдоль первой длины 10025 приводного ствола 10020. В некоторых случаях первая резьба 10024 может проходить вдоль всей длины приводного ствола 10020, тогда как в других обстоятельствах первая резьба 10024 может проходить вдоль участка, длина которого меньше, чем вся длина приводного ствола 10020. Первая резьба 10024 может включать в себя проксимальный участок, смежный с проксимальным концом 10021 приводного ствола 10020, и дистальный участок, смежный с дистальным концом 10023 приводного ствола 10020. Когда закрывающий штифт 10032 находится в дистальном участке первой резьбы 10024, как показано на ФИГ. 81, закрывающий элемент 10033 может располагать упор хирургического инструмента 10000 в открытом положении. При повороте приводного ствола 10020 в направлении B’ закрывающий штифт 10032 может поступательно перемещаться до тех пор, пока закрывающий штифт 10032 не достигнет проксимального участка первой резьбы 10024, как показано на ФИГ. 82. При перемещении закрывающего штифта 10032 проксимально закрывающий штифт 10032 может вытягивать закрывающий элемент 10033 и упор проксимально. При достижении закрывающим штифтом 10032 проксимального участка первой резьбы 10024 упор может быть в полностью закрытом положении.
В дополнение к указанному выше, закрывающий исполнительный механизм 10030 может приводиться в действие, чтобы перемещать упор хирургического инструмента 10000 в подходящее положение относительно кассеты со скобками. В различных вариантах хирургический инструмент 10000 может включать в себя исполнительный механизм, который может приводиться в действие в первом направлении для поворота входного ствола 10010 в направлении A и приводного ствола 10020 в направлении B, и во втором направлении для поворота входного ствола 10010 в направлении A’ и приводного ствола 10020 в направлении B’. В различных вариантах хирургический инструмент 10000 может включать в себя исполнительный механизм, выполненный с возможностью поворачивать входной ствол 10010 в направлении A и приводной ствол 10020 в направлении B при приведении в действие, и второй исполнительный механизм, выполненный с возможностью поворачивать входной ствол 10010 в направлении A’ и приводной ствол 10020 в направлении B’ при приведении в действие. В любом случае пользователь хирургического инструмента 10000 может по мере необходимости перемещать упор хирургического инструмента 10000 к кассете со скобками и от нее для получения желаемого зазора между упором и кассетой со скобками. Такой желаемый зазор может создаваться или не создаваться, когда упор находится в полностью закрытом положении.
В дополнение к указанному выше, хирургический инструмент 10000 может включать в себя захват, выполненный с возможностью принимать и удерживать с возможностью высвобождения приводной штифт 10032 при переходе закрывающей системы 10030 в полностью закрытую конфигурацию. Как показано преимущественно на ФИГ. 81 и 82, хирургический инструмент 10000 может включать в себя захватывающий ригель 10073, содержащий захватное отверстие 10077, образованное в нем. При выдвижении приводного штифта 10032 проксимально приводной штифт 10032 может выравниваться с захватным отверстием 10077, а затем по меньшей мере частично заходит в него. Захватный штифт 10032 может смещаться к захватывающему ригелю 10073 под действием пружины 10035, расположенной между закрывающим элементом 10033 и кольцевой головкой 10037, проходящей вокруг захватного штифта 10032. При расположении захватного штифта 10032 дистально относительно захватного отверстия 10077 пружина 10035 может смещать приводной штифт 10032 к захватывающему ригелю 10073. При перемещении захватного штифта 10032 проксимально посредством поворота приводного винта 10020 и его выравнивании с захватным отверстием 10077 пружина 10035 может перемещать приводной штифт 10032 вверх в захватное отверстие 10077. Приводной штифт 10032 может перемещаться вверх посредством пружины 10035 до тех пор, пока головка приводного штифта 10032 не вступит в контакт с захватывающим ригелем 10073. В частности, перемещение приводного штифта 10032 к захватному отверстию 10077 может вызывать высвобождение приводного штифта 10032 из функционального взаимодействия с первой резьбой 10024. Таким образом, закрывающая система 10030 может быть дезактивирована при достижении приводным штифтом 10032 захватного отверстия 10077 так, что при последующем повороте приводной ствол 10020 не перемещает приводной штифт 10032, закрывающий элемент 10033 и упор, находящиеся в функциональном взаимодействии с ним, по меньшей мере до тех пор, пока приводной штифт 10032 повторно не вступит во взаимодействие с первой резьбой 10024, как дополнительно описано ниже.
Как сказано выше, вход приводного штифта 10032 в захватное отверстие 10077 захватывающего ригеля 10073 может означать окончание закрывающего хода закрывающей системы 10030 и полностью закрытое положение упора. В различных вариантах захватывающий ригель 10073 может не быть выполнен с возможностью перемещения относительно рамы 10002, и захватное отверстие 10077 может определять границы неподвижного положения. В других вариантах захватывающий ригель 10073 может быть выполнен с возможностью перемещения относительно рамы 10002. В таких вариантах конечное, закрытое положение упора будет зависеть от положения захватного отверстия 10077. Таким образом, зазор между упором и кассетой со скобками хирургического инструмента 10000 будет зависеть от положения захватного отверстия 10077. Как по существу показано на ФИГ. 79, хирургический инструмент 10000 может дополнительно содержать систему 10070 регулирования зазора, выполненную с возможностью перемещать захватывающий ригель 10073. Система регулирования зазора 10070 может содержать поворачиваемую ручку 10072 и приводную шестерню 10071, взаимодействующую с поворачиваемой ручкой 10072. Захватывающий ригель 10073 может включать в себя рейку 10075, проходящую от него и содержащую множество зубьев. Приводная шестерня 10071 имеет зубчатое взаимодействие с рейкой 10075 так, что при повороте ручки 10072 в первом направлении рейка 10075 может выталкивать захватывающий ригель 10073 дистально, и при повороте ручки 10072 во втором направлении, противоположном первому направлению, рейка 10075 может выталкивать захватывающий ригель 10073 проксимально. При перемещении захватывающего ригеля 10073 дистально захватное отверстие 10077 может располагаться так, что между упором и кассетой со скобками образуется больший зазор, когда закрывающий исполнительный механизм 10030 находится в полностью закрытом положении. При перемещении захватывающего ригеля 10073 проксимально захватное отверстие 10077 может располагаться так, что между упором и кассетой со скобками образуется меньший зазор, когда закрывающий исполнительный механизм 10030 находится в полностью закрытом положении. В различных вариантах захватное отверстие 10077 может быть выполнено с возможностью установки в пределах диапазона положений, способного вместить диапазон расстояний между упором и кассетой со скобками хирургического инструмента 10000.
В различных вариантах система 10070 регулирования зазора может содержать фиксирующий элемент ручки, выполненный с возможностью высвобождения удерживать ручку 10072 на месте. Например, рама 10002 может включать в себя фиксирующий выступ 10004, проходящий от нее и который может приниматься в одном или более фиксирующих отверстиях 10074, образованных в ручке 10072. Фиксирующие отверстия 10074 могут быть расположены вдоль кольцевой траектории. Каждое фиксирующее отверстие 10074 может соответствовать заданному положению 10030 закрывающего исполнительного механизма и заданному расстоянию зазора между упором и кассетой со скобками хирургического инструмента 10000. Например, при расположении фиксирующего выступа 10004 в первом фиксирующем отверстии 10074 закрывающий исполнительный механизм 10030 удерживается в первом заданном положении, и соответственно упор удерживается на первом заданном расстоянии от кассеты со скобками. Для перемещения ручки 10072 во второе заданное положение ручка 10072 может подниматься от рамы 10002 так, что фиксирующий выступ 10004 больше не будет расположен в первом фиксирующем отверстии 10074, поворачиваться с выталкиванием рейки 10075 и захватывающего ригеля 10073 и затем перемещаться к раме 10002 так, что фиксирующий выступ 10004 входит во второе фиксирующее отверстие 10074, образованное в ручке 10072. При расположении фиксирующего выступа 10004 во втором фиксирующем отверстии 10074 закрывающий исполнительный механизм 10030 может удерживаться во втором заданном положении, и, соответственно, упор может удерживаться на втором заданном расстоянии от кассеты со скобками, отличающемся от первого заданного расстояния. Для перемещения ручки 10072 в третье заданное положение ручка 10072 может подниматься от рамы 10002 так, что фиксирующий выступ 10004 больше не будет расположен в первом или втором фиксирующем отверстии 10074, поворачиваться с выталкиванием рейки 10075 и захватывающего ригеля 10073 и затем перемещаться к раме 10002 так, что фиксирующий выступ 10004 входит в третье фиксирующее отверстие 10074, образованное в ручке 10072. При расположении фиксирующего выступа 10004 в третьем фиксирующем отверстии 10074 закрывающий исполнительный механизм 10030 может удерживаться в третьем заданном положении, и соответственно упор удерживается на третьем заданном расстоянии от кассеты со скобками, отличающемся от первого и второго заданных расстояний. Система 10070 регулирования зазора может дополнительно включать в себя смещающий элемент, выполненный с возможностью смещать ручку 10072 к раме 10002. Например, система 10070 регулирования зазора может включать в себя пружину 10076, расположенную между корпусом 10002 и приводной шестерней 10071, например, выполненной с возможностью смещать фиксирующее отверстие 10074 во взаимодействие с фиксирующим выступом 10004.
В отдельных вариантах пользователь хирургического инструмента 10000 может определить положение закрывающей системы 10030, наблюдая за положением упора. Однако в некоторых вариантах упор нельзя увидеть в пределах хирургического поля. Как преимущественно показано на ФИГ. 79, хирургический инструмент 10000 может дополнительно содержать систему 10050 указания положения упора, выполненную с возможностью указания положения упора. Система 10050 указания положения упора может включать в себя окошко 10058, образованное в раме 10002, и поворотный элемент 10051, который можно наблюдать через окошко 10058. Поворотный элемент 10051 может включать в себя шарнир 10052, установленный с возможностью поворота на раме 10002, приводной конец 10054 и дисплейный конец 10056. Поворотный элемент 10051 может быть выполнен с возможностью перемещения между первым положением (ФИГ. 81), указывающим на то, что упор находится в полностью открытом положении, вторым положением (ФИГ. 82), указывающим а то, что упор находится в полностью закрытом положении, и диапазоном положений между первым положением и вторым положением, отражающими ряд положений упора. Закрывающая система 10030 может быть выполнена с возможностью входить в контакт с приводным концом 10054 поворотного элемента 10051 с целью перемещения поворотного элемента 10051. При перемещении приводного штифта 10032 проксимально посредством приводного ствола 10020, как преимущественно показано на ФИГ. 82, приводной штифт 10032 может вытягивать закрывающий элемент 10033 проксимально так, что буртик 10036, образованный на закрывающем элементе 10033, может взаимодействовать с приводным концом 10054 поворотного элемента 10051 и поворачивать поворотный элемент 10051 вокруг шарнира 10052. Поворот поворотного элемента 10051 заставляет дисплейный конец 10056 перемещаться в пределах окошка 10058, указывая положение упора. Чтобы способствовать наблюдению рама 10002 и/или окошко 10058 могут включать в себя одну или более пограничных отметок 10059, которые могут указывать положение упора. Например, при совмещении дисплейного конца 10056 поворотного элемента 10051 с проксимальной пограничной отметкой 10059 (ФИГ. 81) пользователь может определить, что упор находится в открытом положении, и при выравнивании дисплейного конца 10056 с дистальной пограничной отметкой 10059 (ФИГ. 82) пользователь может определить, что упор находится в закрытом положении. Если дисплейный конец 10056 расположен в промежутке между проксимальной и дистальной пограничными отметками 10059 пользователь может предположить, что упор находится в положении между открытым положением и закрытым положением. Дополнительные пограничные отметки 10059 между проксимальной и дистальной пограничными отметками 10059 могут использоваться для указания дополнительных положений упора. При перемещении закрывающего элемента 10033 дистально для открытия упора (ФИГ. 84) поворотный элемент 10051 может поворачиваться обратно в первое положение и вновь выравниваться с проксимальной пограничной отметкой 10059. Система 10050 указания положения может дополнительно включать в себя смещающий элемент, например, такой как пружина, выполненный с возможностью смещать поворотный элемент 10051 в первое положение.
Как сказано выше, закрывающую систему 10030 хирургического инструмента 10000 можно при приведении в действие, чтобы расположить упор хирургического инструмента 10000 относительно кассеты со скобками. Во время работы закрывающей системы 10030 пусковая система 10040 может не работать. Пусковая система 10040 может быть выполнена без возможности функционального взаимодействия с приводным стволом 10020 до тех пор, пока закрывающий исполнительный механизм 10030 не достигнет полностью закрытого положения. Хирургический инструмент 10000 может включать в себя переключатель, например, такой как переключатель 10060, выполненный с возможностью переключать хирургический инструмент между режимом закрытия упора и режимом выталкивания скоб. Закрывающий исполнительный механизм 10030 может дополнительно включать в себя переключающий штифт 10031, проходящий от проксимального конца закрывающего элемента 10033. Сравнив ФИГ. 81 и 82, читатель поймет, что переключающий штифт 10031 взаимодействует с переключателем 10060 при выдвижении закрывающего штифта 10032 проксимально для закрытия упора. Переключатель 10060 может быть установлен с возможностью поворота на раме 10002 вокруг шарнира 10062 и может включать в себя один или более плеч 10064, проходящих от него. Переключающий штифт 10031 может входить в контакт с плечами 10064 и поворачивать переключатель 10060 вокруг шарнира 10062 при достижении приводным штифтом 10032 полностью закрытого положения. Переключатель 10060 может дополнительно содержать плечо 10066, проходящее от него и выполненное с возможностью толкать пусковую гайку 10042 пускового исполнительного механизма 10040 в функциональное взаимодействие с приводным стволом 10020, при повороте переключателя 10060 вокруг шарнира 10062. Конкретнее, по меньшей мере в одном случае плечо 10066 может быть выполнен с возможностью дистально смещать толкающую штангу 10044, которая в свою очередь толкает пусковую гайку 10042 на вторую резьбу 10026. В этот момент приводной штифт 10032 и закрывающая система 10030 могут не взаимодействовать с первой резьбой 10024 благодаря захватному отверстию 10077, описанному выше, и пусковая гайка 10042 и пусковая система 10040 могут вступить во взаимодействие со второй резьбой 10026.
В дополнение к указанному выше, пусковая гайка 10042 может содержать резьбовое отверстие 10041, образованное в ней, которое может входить в резьбовое взаимодействие со второй резьбой 10026. Во время приведения в действие 10030 закрывающего исполнительного механизма, в дополнение к указанному выше, пусковая гайка 10042 может располагаться проксимально относительно второй резьбы 10026 так, что резьбовое отверстие 10041 не находится в резьбовом взаимодействии со второй резьбой 10026. В таких обстоятельствах пусковая гайка 10042 может оставаться не задействованной во время поворота приводного ствола 10020 с целью приведения в действие закрывающей системы 10030. При смещении пусковой гайки 10042 дистально, в дополнение к указанному выше, резьбовое отверстие 10041 может вступить в резьбовое взаимодействие со второй резьбой 10026. После вступления пусковой гайки 10042 в резьбовое взаимодействие со второй резьбой 10026 поворот приводного ствола 10020 в направлении B’ (ФИГ. 82) обуславливает смещение пусковой гайки 10042 дистально. Пусковая гайка 10042 может включать в себя один или более противовращательных элементов, например, таких как фланцы 10043, которые могут взаимодействовать с возможностью скольжения с рамой 10002 для предотвращения поворота пусковой гайки 10042 вместе с приводным стволом 10020. Пусковой исполнительный механизм 10040 может дополнительно включать в себя пусковой элемент, соединенный с пусковой гайкой 10042, который может проталкиваться дистально посредством пусковой гайки 10042. Пусковой элемент может быть выполнен с возможностью выталкивать скоб из кассеты со скобками. При достижении пусковой гайкой 10042 дистального конца второй резьбы 10026 пусковая гайка 10042 может высвобождаться из резьбового взаимодействия со второй резьбой 10026, причем дополнительный поворот приводного ствола 10020 в направлении B’ может больше не выдвигать вперед пусковую гайку 10042.
Как преимущественно показано на ФИГ. 82 и 83, хирургический инструмент 10000 может дополнительно содержать исполнительный механизм 10047 обратного действия, расположенный на дистальном конце второй резьбы 10026. Пусковая гайка 10042 может быть выполнена с возможностью входить в контакт с исполнительным механизмом 10047 обратного действия и смещать исполнительный механизм 10047 обратного действия дистально при достижении пусковой гайкой 10042 дистального конца второй резьбы 10026. Смещающий элемент, например, такой как пружина 10048, может быть расположен между исполнительным механизмом 10047 обратного действия и рамой 10002 и может быть выполнен с возможностью препятствовать дистальному перемещению исполнительного механизма 10047 обратного действия. Дистальное перемещение исполнительного механизма 10047 обратного действия может обуславливать сжатие пружины 10048, как показано на ФИГ. 83, и прикладывать к пусковой гайке 10042 проксимальное смещающее усилие. При повороте приводного ствола 10020 в направлении B проксимальное смещающее усилие, прикладываемое к пусковой гайке 10042, обеспечивает повторное вступление резьбового отверстия 10041 пусковой гайки 10042 во взаимодействие со второй резьбой 10026, и пусковая гайка 10042 может перемещаться проксимально, как показано на ФИГ. 84. Проксимальное перемещение пусковой гайки 10042 может перемещать пусковой элемент проксимально. При проксимальном перемещении пусковая гайка 10042 может смещать толкающую штангу 10044 так, что толкающая штанга 10044 вступает в контакт с рычагом 10066 переключателя 10060 и поворачивает выключатель 10060 в противоположном направлении, назад в выключенное положение. В этот момент пусковая гайка 10042 высвобождается из резьбового взаимодействия со второй резьбой 10026, и последующий поворот приводного ствола 10020 в направлении B не вызывает дальнейшего смещения пусковой гайки 10042 проксимально. В этот момент пусковая гайка 10042 возвращается в положение холостого хода.
При повороте переключателя 10060 назад в исходное положение, в дополнение к указанному выше, плечи 10064 переключателя 10060 могут толкать переключающий штифт 10031 и закрывающий элемент 10033 дистально. Дистальное перемещение переключающего штифта 10031 и закрывающего элемента 10033 оможет смещать приводной штифт 10032 из захватного отверстия 10077, образованного в захватывающем ригеле 10073. При выходе приводного штифта 10032 из захватного отверстия 10077 приводной штифт 10032 может перемещаться вниз, против смещающего усилия пружины 10035, скользя под захватывающим ригелем 10073. Перемещение приводного штифта 10032 вниз может обуславливать повторное вступление приводного штифта 10032 во взаимодействие с первой резьбой 10024. Последующий поворот приводного ствола 10020 в направлении B сместит приводной штифт 10032 и закрывающий элемент 10033 дистально с открытием упора хирургического инструмента 10000. В этот момент хирургический инструмент 10000 будет перенастроен для последующего применения. В различных вариантах кассета со скобками может быть заменена и/или перезагружена, и хирургический инструмент 10000 может снова использоваться.
Читателю следует понимать из вышеизложенного, что приводной винт 10020 может смещать приводной штифт 10032 с целью приведения в действие закрывающего исполнительного механизма 10030 и пусковой гайки 10042 с целью приведения в действие пускового исполнительного механизма 10040. В дополнение к указанному выше, приводной винт 10020 может смещать приводной штифт 10032 вдоль первой длины 10025 приводного винта 10020. Аналогично, приводной винт 10020 может смещать пусковую гайку 10042 вдоль второй длины 10027 приводного винта 10020. Первая длина 10025 может образовывать ход закрытия закрывающей системы 10030, и вторая длина 10027 может образовывать пусковой ход пускового хода 10040. Первая длина 10025 может быть больше, чем вторая длина 10027, хотя в некоторых вариантах вторая длина 10027 может быть больше, чем первая длина 10025. В процессе применения пусковая гайка 10042 может пропускать закрывающий штифт 10032. Например, при перемещении закрывающего штифта 10032 проксимально с целью закрытия упора пусковая гайка 10042 может пропускать закрывающий штифт 10032, когда пусковая гайка 10042 находится в положении холостого хода. Аналогично, пусковая гайка 10042, находясь в положении холостого хода, может пропускать закрывающий штифт 10032 при перемещении закрывающего штифта 10032 дистально с целью открытия упора. Для способствования этому относительному перемещению пусковая гайка 10042 может включать в себя отверстие, например, такое как сквозной паз 10046, образованный в ней, который может пропускать через себя закрывающий штифт 10032 при перемещении закрывающего штифта 10032 относительно пусковой гайки 10042. Такое отверстие, образованное в пусковой гайке 10042, также позволяет пусковой гайке 10042 скользить по закрывающему штифту 10032 в различных других вариантах осуществления.
В дополнение к указанному выше, первая длина 10025 и вторая длина 10027 могут по меньшей мере частично накладываться друг на друга. Более того, первая резьба 10024 и вторая резьба 10026 могут по меньшей мере частично накладываться друг на друга. Первая резьба 10024 и вторая резьба 10026 могут быть образованы на одном и том же участке приводного винта 10020. Первая резьба 10024 и вторая резьба 10026 могут существенно различаться так, что закрывающий штифт 10032 не может следовать по второй резьбе 10026, и так, что пусковая гайка 10042 не может следовать по первой резьбе 10024. Например, первая резьба 10024 может включать в себя шаг первой резьбы, и вторая резьба 10026 может включать в себя шаг второй резьбы, отличающийся от шага первой резьбы. Шаг первой резьбы первой резьбы 10024 может быть, а может и не быть постоянным. В случае если шаг первой резьбы является постоянным, закрывающий штифт 10032 и упор, функционального взаимодействующие с первой резьбой 10024, будут перемещаться с постоянной скоростью на всем протяжении закрывающего хода при данной скорости поворота приводного ствола 10020. В случае если шаг первой резьбы не является постоянным, закрывающий штифт 10032 и упор будут перемещаться с различными скоростями во время закрывающего хода при данной скорости поворота приводного ствола 10020. Например, дистальный участок первой резьбы 10024 может включать в себя шаг резьбы большего размера, чем шаг резьбы проксимального участка первой резьбы 10024. В таких обстоятельствах упор будет быстро перемещаться от открытого положения и значительно медленнее при приближении к закрытому положению при данной скорости поворота приводного ствола 10020. Такая конфигурация обеспечит быстрое перемещение упора в положение вплотную к ткани, расположенной между упором и кассетой со скобками, и затем, после вступления упора во взаимодействие с тканью, медленное перемещение, чтобы уменьшить возможность чрезмерного сжатия ткани. В различных других вариантах дистальный участок первой резьбы 10024 может включать в себя шаг резьбы меньшего размера, чем шаг резьбы проксимального участка первой резьбы 10024. В любом случае шаг резьбы может изменяться в промежутке между концами первой резьбы 10024. Такое изменение может быть линейным и\или нелинейным.
В дополнение к указанному выше, шаг второй резьбы второй резьбы 10026 может быть, а может и не быть постоянным. В случае если шаг второй резьбы является постоянным, пусковая гайка 10042 и пусковой элемент, функционального взаимодействующие со второй резьбой 10026, будут перемещаться с постоянной скоростью на всем протяжении закрывающего хода при данной скорости поворота приводного ствола 10020. В случае если шаг второй резьбы не является постоянным, пусковая гайка 10042 и пусковой элемент будут перемещаться с различными скоростями во время пускового хода при данной скорости поворота приводного ствола 10020. Например, дистальный участок второй резьбы 10026 может включать в себя шаг резьбы меньшего размера, чем шаг резьбы проксимального участка второй резьбы 10026. В таких обстоятельствах пусковой элемент будет перемещаться медленнее в конце пускового хода при данной скорости поворота приводного ствола 10020. Такая конфигурация обеспечит замедление пускового элемента при достижении им конечного этапа способа формирования скоб. Более того, такая конфигурация позволяет генерировать больший момент в конце пускового хода, что соотносится с окончанием способа формирования скоб. В различных других вариантах дистальный участок второй резьбы 10026 может включать в себя шаг резьбы большего размера, чем шаг резьбы проксимального участка второй резьбы 10026. В любом случае шаг резьбы может изменяться в промежутке между концами второй резьбы 10026. Такое изменение может быть линейным и\или нелинейным.
Как показано на ФИГ. 86–93, хирургический инструмент 10500 может включать в себя ствол 10504 и концевой эффектор 10505. Концевой эффектор 10505 может включать в себя кассету со скобками 10506 и упор 10508, выполненный с возможностью перемещения. Хирургический инструмент 10500 может включать в себя закрывающий привод, включая закрывающий элемент, выполненный с возможностью функционального взаимодействия с упором 10504, и пусковой привод, включая пусковой элемент, выполненный с возможностью размещения скоб из кассеты 10506 со скобками. Хирургический инструмент 10500 может включать в себя средства для генерирования вращательного движения, например, такие как ручной кривошип и/или электрический двигатель. Вращательное движение может передаваться на входной ствол 10510. Хирургический инструмент 10500 может включать в себя трансмиссию 10502, выполненную с возможностью избирательно передавать поворот входного ствола 10510 закрывающему приводу и пусковому приводу, как дополнительно описано ниже.
Входной ствол 10510 может включать в себя входную шестерню 10512, установленную на нем и/или закрепленную шпонкой и вращающуюся вместе с входным стволом 10510. Входной ствол 10510 может удерживаться с возможностью поворота рамой хирургического инструмента 10500 посредством проксимального конца 10511 и дистального конца 10519. Входная шестерня 10512 может находиться в зубчатом взаимодействии с промежуточной шестерней 10522, установленной на промежуточном стволе 10520 и/или закрепленной шпонкой. Таким образом, при повороте входного ствола 10510 и входной шестерни 10512 в направлении A (ФИГ. 89) промежуточный ствол 10520 и промежуточная шестерня 10522 поворачиваются в направлении B (ФИГ. 89). Аналогично указанному выше, промежуточный ствол 10520 может удерживаться с возможностью поворота рамой хирургического инструмента посредством проксимального конца 10521 и дистального конца 10529. Промежуточный ствол 10520 может дополнительно включать в себя резьбовой участок 10524, который может находиться в резьбовом взаимодействии с фиксатором 10526 сдвигателя. Как преимущественно показано на ФИГ. 87, фиксатор 10526 сдвигателя может включать в себя одно или более резьбовых отверстий 10527, находящихся в резьбовом взаимодействии с резьбовым участком 10524. При повороте промежуточного ствола 10520 в направлении B, как преимущественно показано на ФИГ. 89, промежуточный ствол 10520 может смещать фиксатор 10526 сдвигателя проксимально.
В дополнение к указанному выше, фиксатор 10526 сдвигателя может включать в себя паз 10528 шестерни, образованный в нем. Входной ствол 10510 может дополнительно включать в себя скользящую шестерню 10516, установленную на нем с возможностью скольжения и расположенную в пазу 10528 шестерни. При перемещении фиксатора 10526 сдвигателя проксимально посредством промежуточного ствола 10520, как указано выше, фиксатор 10526 сдвигателя может толкать скользящую шестерню 10516 проксимально вдоль сцепленного участка 10514 входного ствола. Как преимущественно показано на ФИГ. 87, скользящая шестерня 10516 может включать в себя отверстие 10517, образованное в ней и включающее в себя, например, одну или более плоских поверхностей, выровненных с соответствующими плоскими поверхностями на сцепленном участке 10514 входного ствола. Плоские поверхности отверстия 10517 и сцепленного участка 10514 входного ствола могут позволить скользящей шестерне 10516 скользить продольно вдоль входного ствола 10510 и, кроме того, взаимодействуют, что передавать поворотное движение от скользящей шестерни 10516 приводному стволу 10510 и наоборот. Как будет более подробно описано ниже, фиксатор 10526 сдвигателя может перемещать скользящую шестерню 10516 через первый диапазон положений, в котором скользящая шестерня 10516 взаимодействует со стволом закрытия 10530, второй диапазон положений, в котором скользящая шестерня 10516 взаимодействует с пусковым стволом 10540, и нейтральное положение или диапазон нейтральных положений между первым диапазоном и вторым диапазоном положений, в котором скользящая шестерня 10516 не взаимодействует ни с закрывающим стволом 10530, ни с пусковым стволом 10540.
В дополнение к указанному выше, на ФИГ. 85 отображен упор 10508 концевого эффектора 10505 в полностью закрытом положении и пусковой шкив 10548 в неактивированном положении. На ФИГ. 86 отображена трансмиссия 10502 в конфигурации, соответствующей конфигурации концевого эффектора 10505, представленной на ФИГ. 85. Конкретнее, скользящая шестерня 10516 находится в нейтральном положении или положении холостого хода и не взаимодействует функционально со стволом закрытия 10530 закрывающего исполнительного механизма или пусковым стволом 10540 пускового исполнительного механизма. Когда скользящая шестерня 10516 находится в нейтральном положении, скользящая шестерня 10516 расположена между закрывающей шестерней 10532, установленной на закрывающем стволе 10530 и/или сцепленной с ним, и пусковой шестерней 10542, установленной на пусковом стволе 10540 и/или сцепленной с ним. Более того, скользящая шестерня 10516 не взаимодействует с закрывающей шестерней 10532 или пусковой шестерней 10542, когда скользящая шестерня 10516 находится в положении холостого хода. Для перемещения упора 10508 в открытое положение и/или высвобождения упора 10508 от концевого эффектора 10505, как показано на ФИГ. 88, входной ствол 10510 может поворачиваться в направлении A, как показано на ФИГ. 89. Как указано выше, поворот входного ствола 10510 в направлении A может поворачивать промежуточный ствол 10520 в направлении B и перемещать фиксатор 10526 сдвигателя проксимально. При перемещении фиксатора 10526 сдвигателя проксимально фиксатор 10526 сдвигателя вводит скользящую шестерню 10516 в функциональное взаимодействие с закрывающей шестерней 10532. В этот момент продолжающийся поворот входного ствола 10510 в направлении A может передаваться стволу закрытия 10530 посредством зубчатого взаимодействия скользящей шестерни 10516 и закрывающей шестерни 10532. При зубчатом взаимодействии скользящей шестерни 10516 с закрывающей шестерней 10532 поворот входного ствола 10510 в направлении A будет поворачивать выходной ствол 10530 в направлении C, как показано на ФИГ. 89. Закрывающий исполнительный механизм может дополнительно включать в себя закрывающую гайку 10536, содержащую образованное в ней резьбовое отверстие 10537, которая находится в резьбовом взаимодействии с резьбовым участком 10534 ствола закрытия 10530. Закрывающая гайка 10536 может включать в себя один или более противовращательных элементов, взаимодействующих с возможностью скольжения с рамой хирургического инструмента, которые, например, могут препятствовать повороту закрывающей гайки 10536 вместе со стволом закрытия 10530 так, что поворотное движение ствола закрытия 10530 может преобразоваться в продольное перемещение закрывающей гайки 10536. Закрывающая система может дополнительно включать в себя закрывающий элемент 10538, проходящий от закрывающей гайки 10536, которая может взаимодействовать с упором 10508. При повороте ствола закрытия 10530 в направлении C, как показано на ФИГ. 89, закрывающая гайка 10536 и закрывающий элемент 10538 могут выдвигаться дистально, перемещая упор 10508 в открытое положение.
В дополнение к указанному выше, на ФИГ. 89 отображена трансмиссия 10502 в конфигурации закрытия, то есть в конфигурации, в которой упор 10508 может открываться и закрываться. При зубчатом взаимодействии скользящей шестерни 10516 с закрывающей шестерней 10532 входной ствол 10510 будет непосредственно приводить в действие ствол закрытия 10530. Одновременно, входной ствол 10510 будет непосредственно приводить в действие промежуточный ствол 10520 благодаря зубчатому взаимодействию между входной шестерней 10512 и промежуточной шестерней 10522. Кроме того, при зубчатом взаимодействии скользящей шестерни 10516 с закрывающей шестерней 10532 скользящая шестерня 10516 не имеет зубчатого взаимодействия с пусковой шестерней 10542 и, как таковой, входной ствол 10510 не будет приводить в действие пусковой ствол 10540, когда трансмиссия 10502 находится в закрывающей конфигурации.
После перемещения упора 10508 в открытое положение и/или отсоединения от закрывающего элемента 10538, в дополнение к указанному выше, ткань может быть расположена между упором 10508 и кассетой со скобками 10506. Затем, как показано на ФИГ. 90 и 91, упор 10508 может перемещаться в закрытое положение посредством поворота входного ствола 10510 в противоположном направлении, то есть в направлении A’, при этом ствол закрытия 10530 будет поворачиваться в противоположном направлении, то есть в направлении C’, перемещая закрывающую гайку 10536, закрывающий элемент 10538 и упор 10508 проксимально. Входной ствол 10510 также будет поворачивать промежуточный ствол 10520 в противоположном направлении, то есть в направлении B’, при повороте входного ствола 10510 в направлении A’. При повороте промежуточного ствола 10520 в направлении B’, промежуточный ствол 10520 смещает фиксатор 10526 сдвигателя и скользящую шестерню 10516 дистально. Фиксатор 10526 сдвигателя может толкать скользящую шестерню 10516 дистально до высвобождения скользящей шестерни 10516 из зубчатого взаимодействия с закрывающей шестерней 10532 и возвращения скользящей шестерни 10516 в положение холостого хода. Дополнительный поворот промежуточного ствола 10520 в направлении B’ заставляет фиксатор 10526 сдвигателя смещать скользящую шестерню 10516 дистально до введения скользящей шестерни 10516 в зубчатое взаимодействие с пусковой шестерней 10542. В этот момент, как показано на ФИГ. 92 и 93, входной ствол 10510 может непосредственно приводить в действие пусковой ствол 10540. Затем, входной ствол 10510 может поворачивать пусковой ствол 10540 в направлении D’ при вращении входного ствола 10510 в направлении A’. Пусковая система может дополнительно содержать пусковую гайку 10546, включающую в себя резьбовое отверстие 10547, которое находится в резьбовом взаимодействии с резьбовым участком 10544 ствола закрытия 10540. При вращении пускового ствола 10410 в направлении A’ пусковой ствол 10540 может выдвигать пусковую гайку 10546 дистально. Пусковая гайка 10546 может включать в себя один или более противовращательных элементов, взаимодействующих с возможностью скольжения с рамой хирургического инструмента так, что пусковая гайка 10546 не поворачивается вместе с пусковым стволом 10540, и так, что поворотное движение пускового ствола 10540 может преобразоваться в продольное перемещение пусковой гайки 10546. Пусковой исполнительный механизм может дополнительно включать в себя пусковой элемент 10548, проходящий от пусковой гайки 10546 и выдвигающийся дистально для выталкивания скоб из кассеты со скобками 10506. На протяжении всего пускового хода пусковой системы фиксатор 10526 сдвигателя непрерывно выдвигает скользящую шестерню 10516 дистально. Пусковой ход может быть завершен, когда фиксатор 10526 сдвигателя выдвигает скользящую шестерню 10516 дистально в точку, в которой скользящая шестерня 10516 больше не находится в резьбовом взаимодействии с пусковым стволом 10542. В этот момент пусковой элемент 10548 может находиться в полностью активированном положении.
В дополнение к указанному выше, на ФИГ. 93 представлена трансмиссия 10502 в пусковой конфигурации, то есть в конфигурации, в которой пусковой элемент 10548 может выдвигаться и втягиваться. При зубчатом взаимодействии скользящей шестерни 10516 с пусковой шестерней 10542 входной ствол 10510 будет непосредственно приводить в действие пусковой ствол 10540. Одновременно, входной ствол 10510 будет непосредственно приводить в действие промежуточный ствол 10520 благодаря зубчатому взаимодействию между входной шестерней 10512 и промежуточной шестерней 10522. Кроме того, при зубчатом взаимодействии скользящей шестерни 10516 с пусковой шестерней 10542 скользящая шестерня 10516 не имеет зубчатого взаимодействия с закрывающей шестерней 10532 и, следовательно, входной ствол 10510 не будет приводить в действие ствол закрытия 10530, когда трансмиссия 10502 находится в пусковой конфигурации.
Для втягивания пускового элемента 10548 входной ствол 10510 может поворачиваться в направлении A, поворачивая промежуточный ствол 10520 в направлении B, смещая фиксатор 10526 сдвигателя проксимально и повторно вводя скользящую шестерню 10516 во взаимодействие с пусковой шестерней 10542. В этот момент непрерывный поворот входного ствола 10510 в направлении A будет поворачивать пусковой ствол 10540 в направлении, противоположном направлению D’, смещение пусковой гайки 10546 проксимально и втягивать пусковой элемент 10548. При повороте пусковой шестерни 10542 посредством скользящей шестерни 10516 фиксатор 10526 сдвигателя продолжает вытягивать скользящую шестерню 10516 проксимально до высвобождения скользящей шестерни 10516 из зубчатого взаимодействия с пусковой шестерней 10542 и достижения скользящей шестерней 10516 положения холостого хода. В этот момент непрерывный поворот входного ствола 10510 в направлении A будет продолжать смещение фиксатора 10526 сдвигателя и скользящей шестерни 10516 проксимально и повторное введение скользящей шестерни 10516 во взаимодействие с закрывающей шестерней 10532 для повторного открытия упора 10508.
На ФИГ. 94–98 показан хирургический инструмент 11010, выполненный с возможностью сшивания и/или рассечения ткани. Хирургический инструмент 11010 может включать в себя пистолетную рукоятку 11015. Рукоятка 11015 включает в себя первый участок 11020 рукоятки, образующий продольную ось 11030, от которого могут проходить бранши 11070 и 11090. Рукоятка 11015 включает в себя второй участок рукоятки, то есть захват 11040 рукоятки, образующий ось 11050 второго участка. Ось 11050 второго участка образует угол 11060 с продольной осью 11030. В различных вариантах угол 11060 может представлять собой любой подходящий угол, например, такой как равный приблизительно 120 градусов. Бранша 11070 может содержать канал кассеты, включающий в себя отверстие, выполненное с возможностью извлечения принимать кассету 11080 со скобками. Кассета 11080 со скобками может включать в себя множество скоб, хранящихся с возможностью извлечения в полостях для скоб, расположенных по меньшей мере в два продольных ряда, по одному с каждой стороны канала, по которому продвигается скальпель для рассечения ткани, как подробно описано ниже. По меньшей мере в одном случае три продольных ряда полостей для скоб могут быть расположены на первой стороне канала для скальпеля, притом что три продольных ряда полостей для скоб могут быть расположены на второй стороне канала для скальпеля. Бранша 11090 может содержать упор, выполненный с возможностью поворачиваться в положение, противоположное и соосное с кассетой 11080 со скобками так, что углубления, образованные в упоре 11090 огут принимать и формировать скобки, выталкиваемые из кассеты 11080 со скобками. На ФИГ. 98 представлен упор 11090 в открытом положении, а на ФИГ. 94 представлен упор 11090 в закрытом положении. Хотя это не показано, предусматриваются варианты осуществления, в которых бранша, включающая в себя кассету 11080 со скобками, выполнена с возможностью поворота относительно упора 11090. В любом случае, как будет более подробно описано ниже, рукоятка 11015 может дополнительно включать в себя закрывающую кнопку 11065 (ФИГ. 98), выполненную с возможностью приведения в действие закрывающей системы, которая перемещает упор 11090 между открытым и закрытым положениями, и пусковую кнопку 11055, выполненную с возможностью действия на пусковую систему, которая выталкивает скобки из кассеты 11080 со скобками. Закрывающая кнопка 11065 может быть расположена и выполнена на рукоятке 11015, например, так, что пользователь может легко дотянуться до нее большим пальцем руки, удерживающей рукоятку 11015, тогда как пусковая кнопка 11055 может быть расположена и выполнена так, что пользователь может легко дотянуться до нее указательным пальцем руки, удерживающей рукоятку 11015.
В дополнение к указанному выше, упор 11090 может перемещаться к кассете 11080 со скобками и от нее во время применения. В различных вариантах закрывающая кнопка 11065 может включать в себя двунаправленный переключатель. При нажатии закрывающей кнопки 11065 в первом направлении закрывающая система хирургического инструмента 11010 может перемещать упор 11090 к кассете 11080 со скобками, и при нажатии закрывающей кнопки 11065 во втором направлении закрывающая система может перемещать упор 11090 от кассеты 11080 со скобками. Как преимущественно показано на ФИГ. 95 и 97, закрывающая система может включать в себя закрывающий двигатель 11110, выполненный с возможностью перемещать упор 11090. Закрывающий двигатель 11110 может включать в себя проходящий от него ствол закрытия 11130, выполненный с возможностью поворота, к которому может быть прикреплена первая закрывающая шестерня 11140. Закрывающий двигатель 11110 может поворачивать ствол закрытия 11130, и ствол закрытия 11130 может поворачивать первую закрывающую шестерню 11140. Первая закрывающая шестерня 11140 может находиться в зубчатом взаимодействии с промежуточной шестерней 11150, которая, в свою очередь, может находиться в зубчатом взаимодействии с приводной шестерней 11160 закрывающего ходового винта. Приводная шестерня 11160 закрывающего ходового винта прикреплена к закрывающему ходовому винту 11170. При повороте первой закрывающей шестерни 11140 посредством ствола закрытия 11130 первая закрывающая шестерня 11140 может поворачивать промежуточную шестерню 11150, промежуточная шестерня 11150 может поворачивать приводную шестерню 11160 закрывающего ходового винта, и приводная шестерня 11160 закрывающего ходового винта может поворачивать закрывающий ходовой винт 11170.
Как преимущественно показано на ФИГ. 97, ствол закрытия 11130, первая закрывающая шестерня 11140, промежуточная шестерня 11150 и приводная шестерня 11160 закрывающего ходового винта могут удерживаться с возможностью поворота на фиксаторе 11125 двигателя, закрепленного внутри участка 11120 рукоятки. Закрывающий ходовой винт 11170 может включать в себя первый конец, который также удерживается с возможностью поворота на фиксаторе 11125 двигателя, и/или второй конец, который удерживается с возможностью поворота на корпусе 11015 рукоятки. Закрывающий ходовой винт 11170 может дополнительно содержать резьбовой участок между первым концом и вторым концом. Закрывающая система может дополнительно содержать закрывающий фиксатор 11175 (ФИГ. 96), который может включать в себя резьбовое отверстие 11176, находящееся в резьбовом взаимодействии с резьбовым участком закрывающего ходового винта 11170. Поворот закрывающего фиксатора 11175 может быть ограничен закрывающим ходовым винтом 11170 так, что при вращении закрывающего ходового винта 11170, закрывающий ходовой винт 11170 может смещать закрывающий фиксатор 11175 проксимально или дистально в зависимости от направления поворота закрывающего ходового винта 11170. Например, при повороте закрывающего ходового винта 11170 в первом направлении закрывающий ходовой винт 11170 может смещать закрывающий фиксатор 11175 дистально, и при повороте закрывающего ходового винта 11170 во втором, или противоположном, направлении закрывающий ходовой винт 11170 может смещать закрывающий фиксатор 11175 проксимально. Как преимущественно показано на ФИГ. 96, закрывающий фиксатор 11175 может быть установлен на элементе фиксатора в форме закрывающего канала 11180, проходящего вдоль внешней стороны канала 11170 кассеты. В различных вариантах закрывающий канал 11180 может быть заключен внутри участка 11120 рукоятки, тогда как в некоторых вариантах закрывающий канал 11180 может выступать из участка 11120 рукоятки. Закрывающий канал 11180 может содержать приблизительно U-образный канал, если смотреть с конца, и может включать в себя противоположные боковые стенки 11182. Каждая боковая стенка 11182 может включать в себя образованный в ней криволинейный паз 11190. Как будет дополнительно подробно описано ниже, криволинейные пазы 11190 могут быть выполнены с возможностью взаимодействия с упором 11090 и перемещения упора 11090 относительно кассеты 11080 со скобками.
В дополнение к указанному выше, закрывающий канал 11180 охватывает канал 11070 кассеты так, что канал 11070 кассеты оказывается вставленным в U-образную форму закрывающего канала 11180. Как преимущественно показано на ФИГ. 96, канал 11070 кассеты может включать в себя удлиненные пазы 11195, образованные в нем, и закрывающий канал 11180 может включать в себя штифты, проходящие вовнутрь в удлиненные пазы 11195. Штифты закрывающего канала и удлиненные пазы 11195 могут ограничивать движение закрывающего канала 11180 так, что закрывающий канал 11180 поступательно перемещается относительно канала 11070 кассеты вдоль продольного пути. Поступательное перемещение закрывающего канала 11180 обуславливает поворот упора 11090. Упор 11090 может быть подсоединен к закрывающему каналу 11180 посредством дистального закрывающего штифта 11210, проходящего через криволинейные отверстия 11211 упора, образованные в упоре 11090, и криволинейные пазы 11190, образованные в закрывающем канале 11180. Каждый криволинейный паз 11190 может включать первый, или дистальный, конец 11191 и второй, или проксимальный, конец 11192. Каждый криволинейный паз 11190 может дополнительно включать в себя первую, или проксимальную, выталкивающую поверхность 11193 и вторую, или дистальную, выталкивающую поверхность 11194. Когда закрывающая система находится в открытой конфигурации, и упор 11090 находится в открытом положении, закрывающий канал 11180 может находиться в первом, или невыдвинутом, положении, и дистальный закрывающий штифт 11210 может находиться в первых, или дистальных, концах 11191 криволинейных пазов 11190. При выдвижении закрывающего канала 11180 дистально с целью перемещения упора 11090 к кассете 11080 со скобками первая выталкивающая поверхность 11193 может входить во взаимодействие с дистальным закрывающим штифтом 11210 и толкать дистальный закрывающий штифт 11210 вниз к кассете 11080 со скобками. Когда закрывающая поверхность находится в закрытой конфигурации и упор 11090 находится в закрытом положении противоположно кассете 11080 со скобками, закрывающий канал 11180 может находиться во втором, или полностью выдвинутом, положении, и дистальный закрывающий штифт 11210 может находиться во вторых, проксимальных концах 11192 криволинейных пазов 11190.
Каждый криволинейный паз 11190 может иметь изогнутую, или дугообразную, траекторию. Первая выталкивающая поверхность 11193 может содержать первую дугообразную поверхность, и вторая выталкивающая поверхность 11194 может содержать вторую дугообразную поверхность. В различных вариантах каждый криволинейный паз 11190 может включать в себя по меньшей мере один изогнутый участок и по меньшей мере прямолинейный участок. По меньшей мере в одном случае каждая первая выталкивающая поверхность 11193 может содержать плоскую поверхность на дистальном конце 11191 криволинейного паза 11190. Плоская поверхность может содержать вертикальную поверхность, перпендикулярную, или по меньшей мере по существу перпендикулярную, продольно оси 11030 инструмента 11010. Такая плоская поверхность может выступать в качестве стопора, при этом может потребоваться усилие исходной величины для смещения закрывающего штифта 11210 в дугообразный участок криволинейного паза 11190. В некоторых вариантах каждая первая выталкивающая поверхность 11193 может содержать плоскую поверхность 11196 на проксимальном конце 11192 криволинейного паза 11190. Каждая плоская поверхность 11196 может содержать горизонтальную поверхность, параллельную, или по меньшей мере по существу параллельную, продольной оси 11030. Плоские поверхности 11196 могут обеспечивать большое передаточное отношение между закрывающим каналом 11180 и упором 11090. В различных примерах первые выталкивающие поверхности 11193 могут прилагать незначительное передаточное отношение на закрывающий штифт 11210, когда закрывающий штифт 11210 находится в дистальных концах 11191 пазов 11190; однако при скольжении закрывающего штифта 11210 по криволинейным пазам 11190 к проксимальным концам 11192 передаточное отношение, прикладываемое к закрывающему штифту 11210 первыми сопряженными поверхностями 11193, может увеличиваться. Когда закрывающий штифт 11210 входит в проксимальные концы 11192, передаточное отношение, прикладываемое первыми выталкивающими поверхностями 11193, может достигать максимума и быть определенно больше, чем передаточное отношение, прикладываемое первыми выталкивающими поверхностями 11193, когда закрывающий штифт 11210 находится в дистальных концах 11191 криволинейных пазов 11190. Тем не менее, когда дистальные концы 11191 могут прикладывать меньшее передаточное отношение к закрывающему штифту 11210, дистальные концы 11191 могут быстро смещать закрывающий штифт 11210 относительно кассеты 11080. При выдвижении закрывающего канала 11180 дистально и увеличении передаточного отношения, прикладываемого к закрывающему штифту 11210, как описано выше, первые выталкивающие поверхности 11193 перемещают упор 11090 медленнее при данной скорости закрывающего канала 11180.
Как показано на ФИГ. 96, канал 11070 кассеты может дополнительно включать в себя образованные в нем дистальные закрывающие пазы 11215, которые могут быть выполнены с возможностью принимать дистальный закрывающий штифт 11210 при приближении упора 11090 к закрытому положению. Дистальные закрывающие пазы 11215 являются по существу вертикальными и могут включать в себя открытые концы в верхней части канала 11070 кассеты, а их противоположные концы могут быть закрытыми. Открытые концы пазов 11215 могут быть шире, чем их закрытые концы. В различных вариантах закрывающий штифт 11210 может входить в контакт с закрытыми концами закрывающих пазов 11215 при достижении упором 11090 закрытого положения. В таких вариантах закрытые концы закрывающих пазов 11215 могут останавливать перемещение упора 11090. В некоторых вариантах упор 11090 может входить в контакт с кассетой 11080 со скобками, когда упор 11090 находится в своем закрытом положении. По меньшей мере в одном случае упор 11090 выполнен с возможностью поворота вокруг шарнирного штифта 11200 до вступления дистального конца 11091 упора 11090 в контакт с дистальным концом 11081 кассеты 11080 со скобками. Как показано на ФИГ. 98, дистальный закрывающий штифт 11210, перемещающий упор 11090, расположен дистально относительно шарнирного штифта 11220. Таким образом, закрывающее усилие, прикладываемое к упору 11090 закрывающим с исполнительным механизмом, воздействует дистально относительно шарнира, соединяющего упор 11090 с каналом 11070 кассеты с возможностью поворота. Таким образом, открывающие усилие, прикладываемое к упору 11090 закрывающим с исполнительным механизмом, прикладывается дистально относительно шарнира, соединяющего упор 11090 с каналом 11070 кассеты с возможностью поворота.
Как сказано выше, рукоятка 11015 может включать в себя закрывающую кнопку 11065, выполненную с возможностью приводить в действие закрывающей системы хирургического инструмента 11010. Перемещение закрывающей кнопки 11065 может обнаруживаться, например, датчиком или переключателем. При нажатии закрывающей кнопки 11065 закрывающий переключатель 11285 может быть активирован, или замкнут, при этом питание направляется к закрывающему двигателю 11110. В таких вариантах переключатель 11285 может замыкать цепь, подающую электропитание на закрывающий двигатель 11110. В различных вариантах хирургический инструмент 11010 может включать в себя, например, микропроцессор. В таких вариантах закрывающий переключатель 11285 может находиться в связи для передачи сигнала с микропроцессором, и, после закрытия закрывающего переключателя 11285 микропроцессор может функционально связывать подачу электропитания на закрывающий двигатель 11110. В любом случае, первая полярность напряжения может прикладываться к закрывающему двигателю 11110 с целью поворота закрывающего выходного ствола 11130 в первом направлении и закрытия упора 11090, и, кроме того, вторая, или противоположная, полярность напряжения может прикладываться к закрывающему двигателю 11110 с целью поворота закрывающего выходного ствола 11130 во втором, или противоположном, направлении и открытия упора 11090.
В различных вариантах хирургический инструмент 11010 может быть выполнен так, что пользователь хирургического инструмента 11010 должен удерживать закрывающую кнопку 11065 во вдавленном состоянии до достижения закрывающим с исполнительным механизмом полностью закрытой конфигурации. В случае высвобождения закрывающей кнопки 11065 микропроцессор может остановить закрывающий двигатель 11110. Альтернативно микропроцессор может изменить направление закрывающего двигателя 11110 в случае высвобождения закрывающей кнопки 11065 до перехода закрывающего исполнительного механизма в полностью закрытую конфигурацию. После перехода закрывающего исполнительного механизма в полностью закрытую конфигурацию микропроцессор может остановить закрывающий двигатель 11110. В различных вариантах, как подробно описано ниже, хирургический инструмент 11010 может содержать датчик закрытия 11300 (ФИГ. 96 и 98), выполненный с возможностью обнаруживать достижение закрывающей системой полностью закрытой конфигурации. Датчик закрытия 11300 может быть находиться в связи для передачи сигнала с микропроцессором, который может отсоединять подачу электропитания на закрывающий двигатель 11110 в случае получения микропроцессором от датчика закрытия 11300 сигнала о закрытии упора 11090. В различных вариантах повторное нажатие закрывающей кнопки 11065 после перехода закрывающей системы в закрытую конфигурацию, но перед приведением в действие пусковой системы, может воздействовать на микропроцессор с изменением направления закрывающего двигателя 11110 и повторным открытием упора 11090. В некоторых вариантах микропроцессор может повторно отрыть упор 11090, переведя его в полностью открытое положение, в других вариантах микропроцессор может повторно открыть упор 11090, переведя его в частично открытое положение.
По существу после закрытия упора 11090 пусковая система хирургического инструмента 11010 может быть приведена в действие. Как преимущественно показано на ФИГ. 95 и 97, пусковая система может включать в себя пусковой двигатель 11120. Пусковой двигатель 11120 может быть расположен смежно с закрывающим двигателем 11110. Закрывающий двигатель 11110 может проходить вдоль первой продольной оси двигателя, и пусковой двигатель 11120 может проходить вдоль второй продольной оси двигателя, параллельной, или по существу параллельной, первой оси двигателя. Первая продольная ось двигателя и вторая продольная ось двигателя могут быть параллельны продольной оси 11030 хирургического инструмента 11010. Закрывающий двигатель 11110 может быть расположен на первой стороне продольной оси 11030, а пусковой двигатель 11120 может быть расположен на второй стороне продольной оси 11030. В таких вариантах первая продольная ось двигателя может проходить вдоль первой стороны продольной оси 11030 и вторая продольная ось двигателя может проходить вдоль второй стороны продольной оси 11030. В различных вариантах первая продольная ось двигателя может проходить через центр ствола закрытия 11130. Аналогично указанному выше, пусковой двигатель 11120 может включать в себя проходящий от него поворачиваемый пусковой ствол 11230. Также аналогично указанному выше, вторая продольная ось двигателя может проходить через центр пускового ствола 11230.
В дополнение к описанному выше, первая пусковая шестерня 11240 может быть установлена на пусковом стволе 11230. Первая пусковая шестерня 11240 находится в зубчатом взаимодействии с приводной шестерней 11250 пускового ходового винта, установленной на пусковом ходовом винте 11260. При повороте пускового ствола 11230 посредством двигателя 11120 пусковой ствол 11230 может поворачивать первую пусковую шестерню 11240, первая пусковая шестерня 11240 может поворачивать приводную шестерню 11250 пускового ходового винта, и приводная шестерня 11250 пускового ходового винта может поворачивать пусковой ходовой винт 11260. Как преимущественно показано на ФИГ. 97, пусковой ствол 11230, первая пусковая шестерня 11240, приводная гайка 11250 пускового ходового винта и/или пусковой ходовой винт 11260 могут удерживаться на фиксаторе 11125 двигателя с возможностью поворота. Первая пусковая шестерня 11240 и приводная шестерня 11250 пускового ходового винта могут быть расположены между фиксатором 11125 двигателя и первой пластиной 11126 фиксатора. Первая пластина 11126 фиксатора может быть установлена на фиксаторе 11125 двигателя и может также удерживать с возможностью поворота, пусковой ствол 11230, первую пусковую шестерню 11240, приводную шестерню 11250 пускового ходового винта и/или пусковой ходовой винт 11260. В различных вариантах хирургический инструмент 11010 может дополнительно содержать вторую пластину 11127 фиксатора, которая может быть установлена на первой пластине 11126 фиксатора. Аналогично указанному выше, первая закрывающая шестерня 11140, промежуточная шестерня 11150 и приводная шестерня 11160 закрывающего ходового винта могут быть расположены между первой пластиной 11126 фиксатора и второй пластиной 11127 фиксатора. В различных вариантах первая пластина 11126 фиксатора и/или вторая пластина 11127 фиксатора могут удерживать с возможностью поворота ствол закрытия 11130, первую закрывающую шестерню 11140, промежуточную шестерню 11150, приводную шестерню 11160 закрывающего ходового винта и/или закрывающий ходовой винт 11170.
Конфигурация двигателя и шестерни, описанная выше, позволяет сэкономить пространство внутри рукоятки 11015 хирургического инструмента 11010. Как указано выше и как преимущественно показано на ФИГ. 97, закрывающий двигатель 11110 и пусковой двигатель 11120 расположены на фиксаторе 11125 двигателя. Закрывающий двигатель 11110 расположен на одной стороне с пусковым двигателем 11120, несколько проксимальнее его. Расположение одного двигателя проксимально относительно другого обеспечивает пространство для двух блоков шестерен, причем один блок шестерен расположен за другим блоком шестерен. Например, блок закрывающих шестерен, содержащий первую закрывающую шестерню 11140, закрывающую промежуточную шестерню 11150 и приводную шестерню 11160 закрывающего ходового винта, расположен проксимальнее блока пусковых шестерен, содержащего первую пусковую шестерню 11240 и приводную шестерню 11250 пускового ходового винта. Благодаря тому, что стволы двигателя проходят проксимально от браншей, и основной корпус двигателя проходит дистально к браншам, в рукоятке 11015 образуется пространство и позволяет укоротить рукоятку 11015 за счет параллельного выравнивания основного корпуса двигателей 11110 и 11120 вдоль других частей внутри рукоятки 11015.
В дополнение к указанному выше, конструкция блоков закрывающих и пусковых шестерен также обеспечивает экономию пространства. В варианте осуществления, представленном на ФИГ. 97, закрывающий двигатель 11110 приводит в действие три шестерни, тогда как пусковой двигатель 11120 приводит в действие две шестерни; однако блок закрывающих шестерен и блок пусковых шестерен могут включать в себя любое подходящее число шестерен. Добавление третьей шестерни, то есть закрывающей промежуточной шестерни 11150 в блок закрывающих шестерен обеспечивает смещение закрывающего ходового винта 11170 вниз относительно пускового ходового винта 11260 так, что отдельные ходовые винты могут поворачиваться вокруг различных осей. Кроме того, третья шестерня устраняет необходимость в шестернях с большим диаметром для смещения осей ходовых винтов, таким образом, внешний диаметр пространства, необходимого для блоков шестерен, и объем рукоятки 11015 можно уменьшить.
Как преимущественно показано на ФИГ. 98, закрывающий ходовой винт 11170 может проходить вдоль первой продольной оси ствола, и пусковой ходовой винт 11260 может проходить вдоль второй продольной оси ствола. Первая продольная ось ствола и вторая продольная ось ствола могут быть параллельны продольной оси 11030 хирургического инструмента 11010. Первая продольная ось ствола или вторая продольная ось ствола могут располагаться на одной прямой с продольной осью 11030. В различных вариантах пусковой ходовой винт 11260 может проходить вдоль продольной оси 11030, и вторая продольная ось ствола может располагаться на одной прямой с продольной осью 11030. В таких вариантах, закрывающий ходовой винт 11170 и первая продольная ось ствола могут быть смещены относительно продольной оси 11030.
В дополнение к указанному выше, пусковой ходовой винт 11260 может включать в себя, например, первый конец, удерживаемый с возможностью поворота на фиксаторе 11125 двигателя, второй конец, удерживаемый с возможностью поворота на рукоятке 11015, и резьбовой участок, проходящий между первым концом и вторым концом. Пусковой ходовой винт 11260 может располагаться в U-образной форме канала 11070 кассеты над закрывающим ходовым винтом 11170. Как преимущественно показано на ФИГ. 95, пусковой исполнительный механизм может дополнительно содержать пусковой фиксатор 11265, который может включать в себя резьбовое отверстие 11266, находящееся в резьбовом взаимодействии с резьбовым участком пускового ходового винта 11260. Поворот закрывающего фиксатора 11265 может быть ограничено пусковым ходовым винтом 11260 так, что при повороте пускового ходового винта закрывающий ходовой винт 11260 может поступательно перемещать пусковой фиксатор 11265 проксимально или дистально в зависимости от направления поворота пускового ходового винта 11260 посредством пускового двигателя 11120. Например, при повороте пускового ходового винта 11260 в первом направлении пусковой ходовой винт 11260 может смещать пусковой фиксатор 11265 дистально, и при повороте пускового ходового 11260 во втором направлении пусковой ходовой винт 11260 может смещать пусковой фиксатор 11265 проксимально. Как подробно описано ниже, пусковой фиксатор 11265 может выдвигаться дистально, чтобы выталкивать скобки, хранящиеся с возможностью извлечения в кассете 11080 со скобками, и/или рассекает ткань, зажатую между кассетой 11080 со скобками и упором 11090.
В дополнение к указанному выше, пусковой фиксатор 11265 может быть зафиксирована на фиксаторе 11270 толкателя так, что фиксатор 11270 толкателя поступательно перемещается вместе с пусковым фиксатором 11265. Пусковая система может дополнительно включать в себя пусковые клинья 11280, прикрепленные к и проходящие дистально от фиксатора 11270 толкателя. Каждый из пусковых клиньев 11280 может включать в себя по меньшей мере одну криволинейную поверхность на своем дистальном конце, которая может быть выполнена с возможностью выталкивания скоб из кассеты 11080 со скобками. Пусковая система может дополнительно содержать фиксатор 11281 скальпеля, выполненный с возможностью скольжения вдоль пусковых клиньев 11280. В различных вариантах начальное дистальное перемещение пускового фиксатора 11265 может не передаваться фиксатору 11281 скальпеля; однако при дальнейшем выдвижении пускового фиксатора 11265 дистально фиксатор 11270 толкателя может входить во взаимодействие, например, с фиксатором 11281 скальпеля, и толкать фиксатор 11281 скальпеля и установленный на нем скальпель 11282 дистально. В других вариантах фиксатор 11281 скальпеля может быть установлен на пусковых клиньях 11280 так, что фиксатор 11281 скальпеля и скальпель 11282 перемещаются вместе с пусковыми клиньями 11280 на протяжении всего перемещения пусковых клиньев 11280. Пусковой фиксатор 11265, фиксатор 11270 толкателя, пусковые клинья 11280, фиксатор 11281 скальпеля и скальпель 11282 могут образовывать узел фиксатора толкателя и скальпеля. В любом случае, пусковые клинья 11280 и скальпель 11282 могут перемещаться дистально с целью одновременного выталкивания скоб, хранящихся внутри кассеты 11080 со скобками, и рассечения ткани, зажатой между кассетой 11080 со скобками и упором 11090. Криволинейные поверхности пусковых клиньев 11280 могут быть расположены дистально относительно режущей поверхности скальпеля 11282 так, что сшивание ткани, зажатой между кассетой 11080 со скобками, и упором 11090, скобками может происходить до ее рассечения.
Как указано выше, закрывающая кнопка 11065 при нажатии взаимодействует с закрывающим переключателем 11285 для подачи питания на закрывающий двигатель 11110. Аналогично этому, пусковая кнопка 11055 при нажатии вступает во взаимодействие с пусковым переключателем 11290 для подачи питания на пусковой двигатель 11120. В различных вариантах пусковой переключатель 11290 может замыкать силовую цепь, подающую электропитание на пусковой двигатель 11120. В некоторых вариантах пусковой переключатель 11290 может быть находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 11010, и после закрытия пускового переключателя 11290 микропроцессор может функционально подключать подачу электропитания к пусковому двигателю 11120. В любом случае первая полярность напряжения может прикладываться к пусковому двигателю 11120 с целью поворота пускового выходного ствола 11230 в первом направлении и выдвижения пускового узла дистально, и вторая, или противоположная, полярность напряжения может прикладываться к пусковому двигателю 11120 с целью поворота пускового выходного ствола 11230 во втором, или противоположном, направлении и втягивания пускового узла. В различных вариантах пусковая кнопка 11055 может включать в себя двунаправленный переключатель, выполненный с возможностью приводить в действие пусковой двигатель 11120 в первом направлении при нажатии пусковой кнопки 11055 в первом направлении, и во втором направлении при нажатии пусковой кнопки 11055 во втором направлении.
Как указано выше, пусковая система может быть активирована после достаточного закрытия упора 11090 посредством закрывающей системы. В различных вариантах упор 11090 может быть достаточно закрыт при достижении им полностью закрытого положения. Хирургический инструмент 11010 может быть выполнен с возможностью обнаруживать достижение упором 11090 полностью закрытого положения. Как преимущественно показано на ФИГ. 98, хирургический инструмент 11010 может включать в себя датчик закрытия 11300, выполненный с возможностью обнаруживать достижение закрывающим каналом 11180 конца закрывающего хода, и, таким образом, обнаруживать нахождение упора 11090 в закрытом положении. Датчик закрытия 11300 может быть расположен на дистальном конце закрывающего ходового винта 11170 или смежно с ним. По меньшей мере в одном варианте датчик закрытия 11300 может содержать датчик приближения, выполненный с возможностью воспринимать приближение и/или соприкосновение закрывающего канала 11180 с датчиком закрытия 11300. Аналогично указанному выше, датчик закрытия 11300 может находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 11010. После приема микропроцессором сигнала от датчика закрытия 11300 о том, что закрывающий канал 11180 достиг полностью выдвинутого положения, и упор 11090 находится в закрытом положении, микропроцессор может разрешить активирование пусковой системы. Кроме того, микропроцессор может не допускать активирования пусковой системы до тех пор, пока микропроцессор не примет такой сигнал от датчика 11300 закрытия. В таких вариантах микропроцессор может избирательно подавать питание от источника питания на пусковой двигатель 11120, или избирательно управлять питанием, подаваемым на пусковой двигатель 11120, на основе входного сигнала от датчика 11300 закрытия. И наконец, во всех вариантах осуществления пусковой переключатель 11290 не может инициировать пусковой ход до закрытия инструмента.
Предусмотрены некоторые варианты осуществления, в которых пусковая система хирургического инструмента 11010 может быть приведена в действие, даже если закрывающая система находится в частично закрытой конфигурации, и упор 11090 находится в частично закрытом положении. По меньшей мере в одном варианте осуществления пусковой узел хирургического инструмента 11010 может быть выполнен с возможностью взаимодействия с упором 11090 и перемещения упора 11090 в полностью закрытое положение при выдвижении пускового узла дистально с целью выталкивания скоб, хранящихся в кассете 11080 со скобками. Например, скальпель 11282 может включать в себя кулачковый элемент, выполненный с возможностью взаимодействия с упором 11090 при выдвижении скальпеля 11282 дистально, в результате чего упор 11090 перемещается в полностью закрытое положение. Скальпель 11282 также может включать в себя второй кулачковый элемент, выполненный с возможностью взаимодействия с каналом 11070 кассеты. Кулачковые элементы могут быть выполнены с возможностью устанавливать упор 11090 относительно кассеты 11080 со скобками и задавать размер зазора для ткани между ними. По меньшей мере в одном случае скальпель 11282 может содержать двутавровый профиль, смещенный дистально для задания зазора для ткани, выталкивания скоб из кассеты 11080 со скобками и рассечения ткани.
Хирургический инструмент 11010 может включать в себя датчик, выполненный с возможностью обнаруживать завершение пусковой системой пускового хода. По меньшей мере в одном случае хирургический инструмент 11010 может включать в себя датчик, например, такой как энкодер, который может быть выполнен с возможностью регистрации и подсчета числа поворотов пускового ходового винта 11260. Такой датчик может находиться в связи с микропроцессором хирургического инструмента 11010 для передачи сигнала. Микропроцессор может быть выполнен с возможностью подсчета числа поворотов пускового ходового винта 11260 и после совершения пусковым ходовым винтом 11260 числа оборотов, достаточного для выталкивания всех скоб из кассеты 11080 со скобками, микропроцессор может приостановить подачу питания на пусковой двигатель 11120 для установки пускового ходового винта 11260. В некоторых вариантах микропроцессор может менять полярность напряжения, прикладываемого к пусковому двигателю 11120, для автоматического втягивания пускового узла после выталкивания всех скоб пусковым узлом.
Как указано выше, хирургический инструмент 11010 может включать в себя источник питания. Источник питания может включать в себя источник питания, расположенный вне рукоятки 11015, и кабель, который может, например, проходить в рукоятку 11015. Источник питания может включать в себя по меньшей мере одну батарею, содержащуюся в рукоятке 11015. Батарея может быть расположена в первом участке 11020 рукоятки и/или в захвате 11040 рукоятки. Предполагается, что батареи, шестерни, двигатели и вращающиеся стволы могут быть объединены в один узел, выполненный с возможностью отделения от остальной рукоятки 11015. Такой блок может быть выполнен с возможностью очистки и стерилизации.
В различных вариантах хирургический инструмент 11010 может включать в себя один или более индикаторов, выполненных с возможностью указания состояния хирургического инструмента 11010. По меньшей мере в одном таком варианте осуществления хирургический инструмент 11010 может включать в себя, например, светодиод 11100. Для передачи сигнала о состоянии хирургического инструмента пользователю светодиод 11100 может светиться различными цветами во время различных рабочих состояний хирургического инструмента 11010. Например, светодиод 11100 может светиться первым цветом при подаче питания на хирургический инструмент 11010 и отсутствии неиспользованной кассеты 11080 со скобками в канале 11070 кассеты. Хирургический инструмент 11010 может включать в себя один или более датчиков, выполненных с возможностью обнаруживать наличие кассеты 11080 со скобками в канале 11070 кассеты и выталкивания скоб из кассеты 11080 со скобками. Светодиод 11100 может светиться вторым цветом при подаче питания на хирургический инструмент 11010 и расположения неизрасходованной кассеты 11080 со скобками в канале 11070 кассеты. Светодиод 11010 может светиться третьим цветом при подаче питания на инструмент 11010, загрузке неизрасходованной кассеты 11080 со скобками в канал 11070 кассеты и нахождении упора 11090 в закрытом положении. Такой третий цвет может указывать на то, что хирургический инструмент 11010 готов к активации скоб из кассеты 11080 со скобками. Светодиод 11100 может светиться четвертым цветом после начала пускового процесса. Светодиод может светиться пятым цветом после завершения пускового процесса. Это только один пример осуществления. Любое подходящее количество цветов может применяться для указания любого подходящего числа состояний хирургического инструмента 11010. Помимо применения одного или более светодиодов для передачи сигнала о состоянии хирургического инструмента допускается применение других индикаторов.
В процессе применения пользователь хирургического инструмента 11010 может сначала загрузить кассету 11080 со скобками в хирургический инструмент 11010, поместив кассету 11080 со скобками в канал 11070 кассеты. Загрузка кассеты 11080 в канал 11070 кассеты может вызвать изменение цвета светодиода 11100 с первого цвета на второй цвет. Пользователь может ухватиться за захват 11040 рукоятки и при помощи большого пальца руки активировать закрывающий переключатель 11065 чтобы открыть упор 11090 хирургического инструмента 11010 с целью размещения кассеты 11080 со скобками внутри канала 11070 кассеты. Затем пользователь может установить кассету 11080 со скобками с одной стороны ткани, требующей сшивания скобками и рассечения, и упор 11090 с противоположной стороны ткани. Удерживая закрывающую кнопку 11065 большим пальцем руки, пользователь может закрыть хирургический инструмент 11010. Высвобождение закрывающей кнопки 11065 до завершения закрывающего хода может привести к повторному открытию упора 11090 и позволить пользователю. при необходимости, переместить хирургический инструмент 11010. Пользователь обладает преимуществом использования открытого линейного режущего инструмента с выполненными с возможностью поворота браншами без необходимости сборки частей линейного режущего инструмента. Пользователь может дополнительно использовать преимущества пистолетной рукоятки.
При перемещении упора 11090 в полностью закрытое положение закрывающий канал 11080 может входить в контакт с датчиком 11300 закрытия, и датчик 11300 закрытия может передавать микропроцессору сигнал о необходимости приведения в действие пускового переключателя 11290. В этот момент светодиод 11100 может светиться третьим цветом, указывая на то, что хирургический инструмент 11010 заряжен, закрыт и готов к пуску. Затем, пользователь может нажать пусковую кнопку 11055, которая взаимодействует с пусковым переключателем 11290 и воздействует пусковой переключатель 11290 с подачей питания на пусковой двигатель 11120. При подаче питания пусковой двигатель 11120 поворачивает пусковой ствол 11230, который, в свою очередь, вращает первую пусковую шестерню 11240 и приводную шестерню 11250 пускового ходового винта. Приводная шестерня пускового ходового винта 11250 поворачивает пусковой ходовой винт 11260. Резьба пускового ходового винта 11260 взаимодействует и прикладывает усилие к внутренней резьбе, образованной в пусковом фиксаторе 11265, для перемещения пускового фиксатора 11265 дистально. Пусковой фиксатор 11265 перемещает фиксатор 11270 толкателя дистально, отводя пусковые клинья 11280 дистально. Криволинейные поверхности 11305 на дистальном конце пусковых клиньев 11280 поднимают скобки, хранящиеся в кассете со скобками 11080, к упору 11090, и упор 11090 может формировать скобки, закрепляя ткань. Фиксатор 11270 толкателя взаимодействует с блоком 11281 скальпеля для проталкивания фиксатора 11281 скальпеля и скальпеля 11282 дистально для рассечения сшитой скобками ткани. После завершения пускового хода направление поворота пускового двигателя 11120 может быть изменено на обратное с целью возвращения фиксатора 11270 толкателя, фиксатора 11281 скальпеля, пусковых клиньев 11280 и скальпеля 11282 в исходное состояние. Хирургический инструмент 11010 может включать в себя кнопку и/или переключатель, автоматически дающий команду микропроцессору втягивать пусковой узел, даже если пусковой ход еще не завершен. В некоторых вариантах пусковой узел может быть выполнен без возможности втягивания. В любом случае пользователь может открыть хирургический инструмент 11010 путем нажатия закрывающей кнопки 11065. Закрывающая кнопка 11065 может взаимодействовать с закрывающим переключателем 11285 и подавать питание на закрывающий двигатель 11110. Закрывающий двигатель 11110 может работать в обратном направлении для втягивания закрывающего канала 11180 проксимально с целью повторного открытия упора 11090 хирургического инструмента 11010. Светодиод 11100 может светиться четвертым цветом, указывающим на то, что кассета использована и процедура завершена.
Хирургический сшивающий инструмент 12010 показан на ФИГ. 99–106. Инструмент 12010 может включать в себя рукоятку 12015, закрывающий привод, содержащий фиксатор 12050 закрытия, выполненный с возможностью сжимать ткань между кассетой 12080 со скобками и упором 12090, и пусковой привод, выполненный с возможностью выталкивать скобки из кассеты 12080 со скобками и рассекать ткань. На ФИГ. 99 отображен инструмент 12010 в открытом, разблокированном состоянии. Когда инструмент 12010 находится в открытом, разблокированном состоянии, упор 12090 вращается от кассеты 12080 со скобками. В различных вариантах упор 12090 может вращаться относительно кассеты 12080 со скобками в широкоугольном диапазоне так, что упор 12090 и кассета 12080 со скобками легко могут быть установлены на противоположных сторонах ткани. На ФИГ. 100 отображен инструмент 12010 в закрытом, разблокированном состоянии. Когда инструмент 12010 находится в закрытом, разблокированном состоянии, упор 12090 поворачивается к кассете 12080 со скобками в закрытое положение напротив кассеты 12080 со скобками. В различных вариантах закрытое положение упора 12090 может зависеть от толщины ткани, расположенной между упором 12090 и кассетой 12080 со скобками. Например, упор 12090 может достигать закрытого положения дальше от кассеты 12080 со скобками, в случае когда ткань, расположенная между упором 12090 и кассетой 12080 со скобками, толще по сравнению с теми случаями, когда ткань тоньше. На ФИГ. 101 отображен инструмент 12010 в закрытом, заблокированном состоянии. Когда инструмент 12010 в закрытом, заблокированном состоянии, фиксатор 12050 закрытия взаимодействует с упором 12090, и фиксирует положение упора 12090 относительно кассеты 12080 со скобками. В этот момент, как подробно описано ниже, пусковой исполнительный механизм хирургического инструмента 12010 может быть активирован с целью выталкивания скоб из кассеты 12080 со скобками и рассечения ткани.
Как показано преимущественно на ФИГ. 106, хирургический инструмент 12010 может включать раму 12020, направленную от рукоятки 12015. Рама 12020 может включать в себя канал 12022 рамы, образованный в ней и выполненный с возможностью принимать и/или удерживать канал 12070 кассеты. Канал 12070 кассеты может включать проксимальный конец и дистальный конец. Проксимальный конец канала 12070 кассеты может быть подсоединен к раме 12020. Дистальный конец канала 12070 кассеты может быть выполнен с возможностью извлечения принимать кассету 12080. Канал 12022 рамы может включать в себя шарнирные отверстия 12207, образованные на его противоположных сторонах. Шарнирный штифт 12205 может удерживаться в шарнирных отверстиях 12207 и может проходить между сторонами канала 12022. Фиксатор 12050 закрытия может включать в себя раму 12051 фиксатора, содержащую планки 12052 фиксатора. Планки 12052 фиксатора могут быть установлены с возможностью поворота на раму 12020 при помощи шарнирного штифта 12205, который может проходить через шарнирные отверстия 12206, образованные в планках 12052 фиксатора. В различных вариантах шарнирные отверстия 12206, 12207 и шарнирный штифт 12205 могут образовывать неподвижную ось 12208, вокруг которой может поворачиваться фиксатор 12050 закрытия. Фиксатор 12050 закрытия может дополнительно включать в себя корпус 12057 фиксатора, установленный на планки 12052 фиксатора. При перемещении корпуса 12057 фиксатора пользователем хирургического инструмента 12010 корпус 12057 фиксатора может перемещать планки 12052 фиксатора. Эксплуатация фиксатора 12050 закрытия подробно описана ниже.
В дополнение к указанному выше упор 12090 может включать в себя проксимальный конец и дистальный конец. Дистальный конец упора 12090 может включать в себя множество углублений для формирования скоб, выполненных с возможностью выравнивания или совмещения с полостями для скоб, образованными в кассете 12080 для скоб, когда упор 12090 в закрытом положении. Проксимальный конец упора 12090 может быть подсоединен к раме 12020 с возможностью поворота. Упор 12090 может включать в себя шарнирное отверстие 12201, которое может быть выравнено с шарнирными отверстиями 12202, образованными в канале 12207 кассеты, и шарнирным отверстием 12203, образованным в раме 12020. Шарнирный штифт 12200 может проходить через шарнирные отверстия 12201, 12202 и 12203 и может соединять с возможностью поворота упор 12090 с каналом 12207 кассеты. В различных вариантах шарнирные отверстия 12201, 12202 и 12203 и шарнирный штифт 12200 могут образовывать неподвижную ось, вокруг которой может поворачиваться упор 12090. В некоторых вариантах шарнирные отверстия 12201, 12202 и/или 12203 могут быть продольно вытянутыми, например, так, что шарнирный штифт 12200 может скользить в шарнирных отверстиях 12201, 12202 и/или 12203. В таких вариантах упор 12090 может поворачиваться вокруг оси относительно канала 12070 кассеты, и, кроме того, поступательно перемещаться относительно канала 12070 кассеты. Упор 12090 может дополнительно включать в себя установленный на него корпус 12097 упора. При перемещении корпуса 12097 упора пользователем хирургического инструмента 12010 корпус 12097 упора может перемещать упор 12090 так, что упор 12090 может поворачиваться между открытым положением (ФИГ. 99) и закрытым положением (ФИГ. 100).
В дополнение к указанному выше, упор 12090 может дополнительно включать в себя защелкивающий штифт 12210. Упор 12090 может включать в себя отверстия 12211 защелкивающего штифта, и корпус 12097 упора может включать в себя отверстия 12212 защелкивающего штифта, выполненные с возможностью принимать и удерживать защелкивающий штифт 12210. После перемещения упора 12090 в закрытое положение или положение, смежное с закрытым положением, защелка 12050 может взаимодействовать с защелкивающим штифтом 12210 и вытягивать упор 12090 к кассете 12080 со скобками. В различных вариантах каждая планка 12052 защелки 12050 может включать в себя плечо 12053 защелки, выполненное с возможностью взаимодействия с защелкивающим штифтом 12210. Защелка 12050 может поворачиваться между разблокированным положением (ФИГ. 100), в котором плечи 12053 защелки не взаимодействуют со защелкивающим штифтом 12210, и заблокированным положением (ФИГ. 101). При перемещении защелки 12050 между разблокированным положением и заблокированным положением рычаги 12053 защелки могут взаимодействовать с защелкивающим штифтом 12210 и перемещать упор 12090 к кассете 12080 со скобками. Каждое плечо 12053 защелки может включать в себя криволинейную поверхность, выполненную с возможностью контакта с защелкивающим штифтом 12210. Криволинейные поверхности могут быть выполнены с возможностью толкать и направлять защелкивающий штифт 12210 к кассете 12080 со скобками. При достижении защелкой 12050 заблокированного положения защелкивающий штифт 12210 оказывается захваченным в пазах 12054 защелки, образованных в планках 12052 защелки. Пазы 12054 защелки могут быть по меньшей мере частично образованы плечами 12053 защелки. Противоположные стороны пазов 12054 защелки могут включать в себя несущие поверхности, которые могут быть выполнены с возможностью взаимодействия с защелкивающим штифтом 12210 и подъема упора 12090 от кассеты 12080 со скобками при повороте защелки 12050 между заблокированным положением и разблокированным положением с целью открытия инструмента 12010, как дополнительно подробно описано ниже.
Как указано выше, упор 12090 может быть перемещен к кассете 12080 со скобками. В различных вариантах перемещение упора 12090 к кассете 12080 со скобками может быть остановлено, когда дистальный конец упора 12090 вступает в контакт с дистальным концом кассеты 12080 со скобками. В некоторых вариантах перемещение упора 12090 может быть остановлено при соприкосновении защелкивающего штифта 12210 с каналом 12070 кассеты. Канал 12070 кассеты может включать в себя образованные в нем пазы 12215, выполненные с возможностью принимать защелкивающий штифт 12210. Каждый паз 12215 может включать в себя обращенный вверх открытый конец, через который защелкивающий штифт 12210 может входить в паз 12215, и, кроме того, закрытый конец. В различных вариантах защелкивающий штифт 12210 может входить в контакт с закрытыми концами пазов 12215 при достижении упором 12090 закрытого положения. В некоторых вариантах защелкивающий штифт 12210 может не входить в контакт с закрытыми концами пазов 12215, если между упором 12090 и кассетой 12080 со скобками располагается толстая ткань. По меньшей мере в одном варианте упор 12090 может дополнительно включать в себя ограничительный штифт 12095. Ограничительный штифт 12095 может быть установлен и может удерживаться на упоре 12090 посредством образованных в нем отверстий 12096 для штифта. Ограничительный штифт 12095 может быть выполнен с возможностью входить в контакт с каналом 12070 кассеты и останавливать перемещение упора 12090 к кассете 12080 со скобками. Аналогично указанному выше, канал 12070 кассеты может дополнительно включать в себя образованные в нем ограничительные отверстия 12075, которые могут быть выполнены с возможностью принимать ограничительный штифт 12095. Каждый ограничительный паз 12075 может включать в себя обращенный вверх открытый конец, через который ограничительный штифт 12095 может заходить в ограничительный паз 12275, и, кроме того, закрытый конец. В различных вариантах ограничительный штифт 12095 может входить в контакт с закрытыми концами ограничительных пазов 12075 при достижении упором 12090 закрытого положения. В некоторых вариантах ограничительный штифт 12095 может не входить в контакт с закрытыми концами ограничительных пазов 12075, если между упором 12090 и кассетой 12080 со скобками располагается толстая ткань.
Как указано выше, канал 12070 кассеты может быть установлен на раме 12020. В различных вариантах канал 12070 кассеты может быть жестко и неподвижно установлен на раме 12020. В таких вариантах канал 12070 кассеты может не быть выполнен без возможности перемещения относительно рамы 12020 и/или рукоятки 12015. В некоторых вариантах канал 12070 кассеты может быть соединен с рамой 12020 с возможностью поворота. По меньшей мере в одном таком варианте канал 12070 кассеты может включать образованные в нем шарнирные отверстия 12202, которые могут быть выполнены с возможностью принимать шарнирный штифт 12200. В таких обстоятельствах как упор 12090, так и канал 12070 кассеты могут быть выполнены с возможностью поворота относительно рамы 12020 вокруг шарнирного штифта 12200. Защелка 12050 может удерживать упор 12090 и канал 12070 кассеты на месте при взаимодействии защелки 12050 с защелкивающим штифтом 12210.
В некоторых вариантах, в дополнение к указанному выше, инструмент 12010 может включать в себя один или более датчиков, выполненных с возможностью обнаруживать нахождение упора 12090 в закрытом положении. По меньшей мере в одном варианте инструмент 12010 может включать в себя датчик давления, расположенный между рамой 12020 и каналом 12070 кассеты. Датчик давления может быть установлен, например, на канале 12022 рамы или дне канала 12070 кассеты. Если датчик давления установлен на дне канала 12070 кассеты, датчик давления может входить в контакт с каналом 12022 рамы при перемещении канала 12070 кассеты к каналу 12022 рамы. Канал 12070 кассеты может перемещаться к каналу 12022 рамы, если канал 12070 кассеты выполнен с возможностью поворота относительно канала 12022 рамы, как указано выше. Кроме этого или вместо указанного выше, канал 12070 кассеты может перемещаться к каналу 12022 рамы, если канал 12070 кассеты сгибается к каналу 12022 рамы. Канал 12070 кассеты может сгибаться к каналу 12022 рамы при возникновении сжимающей нагрузки между упором 12090 и каналом 12070 кассеты. Сжимающая нагрузка между упором 12090 и каналом 12070 кассеты может возникнуть при перемещении упора 12090 в закрытое положение и/или при перемещении упора 12090 к каналу 12070 кассеты посредством защелки 12050. При проталкивании упора 12090 к каналу 12070 кассеты и/или при применении фиксатора 12050 для вытягивания упора 12090 к каналу 12070 кассеты канал 12070 кассеты может упираться в шарнирный штифт 12205. В различных вариантах канал 12070 кассеты может включать в себя образованный в нем паз или желоб 12209, который может быть выполнен с возможностью принимать шарнирный штифт 12205. В любом случае, датчик давления может быть выполнен с возможностью обнаруживать давление или усилие, прикладываемое к каналу 12070 кассеты. Датчик давления может находится в связи с микропроцессором хирургического инструмента 12010 для передачи сигнала. Если давление или усилие, обнаруживаемое датчиком давления, превышает пороговое значение, микропроцессор может разрешить активирование пусковой системы инструмента 12010 для приведения в действие. Перед тем как давление или усилие превысит пороговое значение, микропроцессор может предупредить пользователя хирургического инструмента 12010 о том, что упор 12090 не может быть закрыт, или по в достаточной мере закрыт, при попытке пользователя привести в действие пусковую систему. Кроме этого или вместо предупреждения микропроцессор может препятствовать приведению в действие пусковой системы инструмента 12010, если давление или усилие, обнаруживаемое датчиком давления, не превышает порогового значения.
В некоторых вариантах, в дополнение к указанному выше, инструмент 12010 может включать в себя один или более датчиков, выполненных с возможностью обнаруживать, находится ли защелка 12050 в заблокированном положении. По меньшей мере в одном варианте инструмент 12010 может включать в себя датчик 12025, расположенный между рамой 12020 и каналом 12070 кассеты. Датчик 12025 может быть установлен, например, на канале 12022 рамы или на дне канала 12070 кассеты. Если датчик 12025 установлен на дне канала 12070 кассеты, защелка 12050 может взаимодействовать с датчиком 12025 при перемещении защелки 12050 из разблокированного положения в заблокированное положение. Датчик 12025 может находиться в связи с микропроцессором хирургического инструмента 12010 для передачи сигнала. При обнаружении датчиком 12025 того, что защелка 12050 находится в заблокированном положении, микропроцессор может разрешить приведение в действие пусковой системы инструмента 12010. Перед тем как датчик 12025 обнаруживает, что защелка 12050 находится в заблокированном положении, микропроцессор может предупреждать пользователя хирургического инструмента 12010 о том, что упор 12090 не может быть закрыт, или в достаточной мере закрыт, при попытке пользователя привести в действие пусковую систему. Кроме этого или вместо такого предупреждения микропроцессор может предотвращать приведение в действие пусковой системы инструмента 12010, если защелка 12050 не обнаруживается в заблокированном положении. В различных вариантах датчик 12025 может представлять собой, например, датчик ближней локации. В конкретных вариантах датчик 12025 может представлять собой, например, датчик Холла. По меньшей мере в одном таком варианте защелка 12050 может включать в себя по меньшей мере один магнитный элемент, например, такой как постоянный магнит, который может обнаруживаться датчиком Холла. В различных вариантах для фиксации датчика 12025 может применяться, например, кронштейн 12026.
Как показано преимущественно на ФИГ. 105, пусковая система хирургического инструмента 12010 может включать в себя пусковой двигатель 12120, выполненный с возможностью поворота пускового ствола 12230. Пусковой двигатель 12120 может быть установлен на раме 12125 двигателя внутри рукоятки 12015 хирургического инструмента 12010 так, что пусковой ствол 12230 проходит дистально. Пусковая система может дополнительно содержать фиксатор шестерен, включающий в себя, во-первых, первую пусковую шестерню 12240, установленную на закрывающем стволе 12230, и, во-вторых, шестерню 12250 ходового винта, установленную на ходовом винте 12260. Первая пусковая шестерня 12240 может находиться в зубчатом взаимодействим с шестерней 12250 ходового винта так, что при вращении первой пусковой шестерни 12240 посредством пускового ствола 12230 первая пусковая шестерня 12240 может поворачивать шестерню 12250 ходового винта, и шестерня 12250 ходового винта может поворачивать ходовой винт 12260. Как преимущественно показано на ФИГ. 104, ходовой винт 12260 может содержать первый конец 12261, установленный с возможностью поворота 12250 в отверстии, образованном в фиксаторе 12125 двигателя, и второй конец 12263, удерживаемый с возможностью поворота в подшипнике, установленном на участке 12264 подшипника рукоятки 12015. Ходовой винт 12260 может дополнительно включать в себя резьбовой участок 12262, проходящий между первым концом 12261 и вторым концом 12263. Пусковая система может дополнительно содержать пусковую гайку 12265, находящуюся в резьбовом взаимодействии с резьбовым участком 12262 ходового винта 12260. Вращение пусковой гайки 12265 может быть ограничено ходовым винтом 12260 так, что при повороте ходового винта 12260 в первом направлении посредством пускового двигателя 12120 ходовой винт 12260 может выдвигать пусковую гайку 12265 дистально и, соответственно, при повороте ходового винта 12260 во втором, или противоположном, направлении посредством пускового двигателя 12120 ходовой винт 12260 может втягивать пусковую гайку 12265 проксимально.
В дополнение к указанному выше, пусковая гайка 12265 может быть установлена на пусковой фиксатор 12270, который может поступательно перемещаться с пусковой гайкой 12265. В различных вариантах пусковая гайка 12265 и пусковой фиксатор 12270 могут представлять собой единое целое. Аналогично указанному выше, пусковая система может дополнительно включать в себя проходящие от нее пусковые штанги 12280, поступательно перемещающиеся вместе с пусковой гайкой 12265 и пусковым блоком 12270. В различных вариантах пусковая гайка 12265, пусковой фиксатор 12270 и пусковые штанги 12280 могут образовывать пусковой узел, поступательно перемещаемый проксимально и/или дистально посредством ходового винта 12160. При выдвижении пускового узла дистально посредством ходового винта 12260 пусковые штанги 12280 могут заходить в кассету 12080 со скобками и выталкивать скобки из нее. Пусковая система может дополнительно содержать фиксатор 12281 скальпеля и установленный на нем держатель 12282 скальпеля, проходящий от фиксатора 12281 скальпеля. При выдвижении пускового фиксатора 12270 дистально пусковые штанги 12280 могут взаимодействовать с фиксатором 12281 скальпеля и выдвигать фиксатор 12281 скальпеля и держатель 12282 скальпеля дистально. В различных вариантах пусковой фиксатор 12270 может перемещаться относительно фиксатора 12281 скальпеля на начальном этапе пускового хода и затем перемещаться вместе с ним на заключительном этапе пускового хода. По меньшей мере в одном таком случае пусковые штанги 12280 могут скользить через пазы, образованные в фиксаторе 12281 скальпеля, до тех пор, пока одна или более рельефных поверхностей, проходящих от пусковых штанг 12280, не вступит в контакт с блоком 12281 скальпеля и не протолкнет фиксатор 12281 скальпеля дистально с пусковыми штангами 12280. В различных вариантах пусковой узел может дополнительно включать в себя фиксатор 12281 скальпеля и держатель 12282 скальпеля, которые могут перемещаться одновременно с пусковым фиксатором 12270 и пусковыми штангами 12280. В любом случае, при выдвижении держателя 12282 скальпеля дистально режущий край 12283 держателя 12282 скальпеля может рассекать ткань, зажатую между упором 12090 и кассетой 12080 со скобками. Содержание патента США № 4,633,874, озаглавленного «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С МЕХАНИЗМОМ БЛОКИРОВКИ БРАНШИ И ОДНОРАЗОВЫМ ДОЗАТОРОМ», выданного 6 января 1987 г., в полном объеме включен в настоящий документ путем ссылки.
Как показано преимущественно на ФИГ. 106, пусковая система хирургического инструмента 12010 может включать в себя пусковую кнопку 12055 и пусковой переключатель 12290. Когда пользователь хирургического инструмента 12010 нажимает кнопку пуска 12055, кнопка пуска 12055 может входить в контакт с пусковым переключателем 12290 и замыкать пусковую схему, которая может приводить в действие пусковой двигатель 12120. Когда пользователь хирургического инструмента 12010 отпускает пусковую кнопку 12055, пусковая схема может размыкаться и подача питания на пусковой двигатель 12120 может прекращаться. Пусковую кнопку 12055 можно нажать повторно, снова приводя в действие пусковой двигатель 12120. В некоторых вариантах пусковая кнопка 12055 может иметь двухходовой переключатель, который при нажатии в первом направлении может приводить в действие пусковой двигатель 12120 в первом направлении, а при нажатии во втором направлении может приводить в действие пусковой двигатель 12120 во втором, или противоположном направлении. Пусковой переключатель 12090 и/или любая подходящая конструкция пусковых переключателей может находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 12010, который может быть выполнен с возможностью управления подачей питания на пусковой двигатель 12120. В некоторых вариантах в дополнение к указанному выше микропроцессор может игнорировать сигналы от пусковой кнопки 12055 до тех пор, пока датчик 12025 не обнаружит, что защелка 12050 закрыта. В любом случае пусковую кнопку 12055 можно нажать в первом направлении для выдвигания пусковых штанг 12280 и скальпеля 12282 дистально, и можно нажать во втором направлении для втягивания пусковых штанг 12280 и скальпеля 12282 проксимально. В некоторых вариантах осуществления хирургический инструмент 12010 может включать в себя пусковую кнопку и переключатель, выполненные с возможностью приведения в действие пускового двигателя 12120 в первом направлении, и втягивающую кнопку и переключатель, выполненные с возможностью приведения в действие пускового двигателя 12120 во втором направлении. После втягивания пусковых штанг 12280 и скальпеля 12282 защелку 12050 можно переместить из зафиксированного положения в незафиксированное положение, высвобождая плечи 12053 защелки от штифта 12210 защелки. Далее упор 12090 может вращаться от кассеты 12080 со скобками и возвращать хирургический инструмент 12010 в открытое, незафиксированное состояние. Аналогично указанному выше, хирургический инструмент 12010 может включать в себя один или несколько индикаторов, таких как, например, светодиод 12100, выполненный с возможностью указания статуса хирургического инструмента 12010. Светодиод 12100 может находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 12010, и может работать подобно тому, как описано, например, применительно к светодиоду 11100. Светодиод 12100 может удерживаться на месте, например, посредством кронштейна 12101.
В различных вариантах инструмент 12010 может включать в себя систему пусковой блокировки, которая может блокировать выдвижение скальпеля 12282 и/или пусковых штанг 12280, если упор 12090 не находится в закрытом или в достаточной мере закрытом положении. Как показано на ФИГ. 104 и 106, инструмент 12010 может содержать смещающий элемент 12400 установленный, например, на канале 12070 кассеты и способный смещать скальпель 12282 во взаимодействие с фиксирующим участком рукоятки 12015. При повороте упора 12090 в закрытое положение, упор 12090 может толкать скальпель 12282 вниз от фиксирующего участка, против действия смещающей силы смещающего элемента 12400. В этот момент скальпель 12282 можно выдвинуть дистально. Аналогично, инструмент 12010 может включать в себя смещающий элемент, способный смещать пусковые штанги 12280 во взаимодействие с фиксирующим участком рукоятки 12015, причем упор 12090 может высвобождать пусковые штанги 12280 от фиксирующего участка при перемещении упора 12090 в закрытое положение.
Хирургический инструмент 12010 может содержать закрывающую систему с ручным с исполнительным механизмом и пусковую систему сшивания скобками с с исполнительным механизмом. Участок 12040 рукоятки 12015 может захватываться одной рукой пользователя хирургического инструмента 12010, а манипулирование упором 12090 и защелкой 12050 можно осуществлять другой рукой. В процессе закрытия защелки 12050, по меньшей мере в одном варианте осуществления, пользователь может двигать одну из своих рук в общем направлении своей другой руки, что может уменьшать непредвиденное или случайное перемещение хирургического инструмента 12010. Хирургический инструмент 12010 получать электропитание от любого подходящего источника питания. Например, электрический кабель может проходить от внешнего источника питания внутрь рукоятки 12015. В некоторых вариантах батарея может храниться, например, в рукоятке 12015.
Хирургический сшивающий инструмент 13010 показан на ФИГ. 107–110. На ФИГ. 107 представлен вид сбоку хирургического инструмента 13010, причем некоторые компоненты удалены, а другие показаны в поперечном разрезе. Инструмент 13010 может содержать рукоятку 13015, первый исполнительный механизм 13020, второй исполнительный механизм 13030, узел ствола 13040 и концевой эффектор 13012, включающий в себя упор 13050 и кассету 13055 со скобками. Стволовой участок 13040 и упор 13050 могут работать, как показано и описано в патенте США № 5,704,534, озаглавленном «УЗЕЛ ШАРНИРА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», выданном 6 января 1998 г. Описание патента США № 5,704,534, озаглавленного «УЗЕЛ ШАРНИРА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», выданного 6 января 1998 г., полностью включено в настоящий документ путем ссылки. Электрический входной кабель 13018 может соединять инструмент 13010 с внешним источником питания. По меньшей мере в одном варианте осуществления внешний источник питания может представлять собой генератор, например, генератор GEN11 производства Ethicon Energy, г. Цинциннати, штат Огайо, США. В различных вариантах осуществления внешний источник питания может содержать преобразователь переменного тока в постоянный. В некоторых вариантах инструмент 13010 может получать электропитание от внутренней батареи, таких как батареи, показанные и описанные в патенте США № 8,210,411, озаглавленном «ХИРУРГИЧЕСКИЙ РАЗРЕЗАЮЩИЙ ИНСТРУМЕНТ С С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ», выданном 3 июля 2012 г. Описание патента США 8,210,411, озаглавленного «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ», выданного 3 июля 2012 г., полностью включено в настоящий документ путем ссылки.
В различных вариантах осуществления, как показано главным образом на ФИГ. 107, упор 13050 концевого эффектора 13012 может быть выполнен с возможностью перемещения между открытым положением, как показано на ФИГ. 107, и закрытым положением, в котором упор 13050 примыкает или соприкасается с кассетой 13055 со скобками, как дополнительно описано ниже более подробно. По меньшей мере в одном таком варианте кассета 13055 со скобками может быть выполнена без возможности поворота относительно упора 13050. В некоторых не показанных вариантах кассета 13055 со скобками может быть выполнена с возможностью поворота относительно упора 13050. По меньшей мере в одном таком варианте упор 13050 может быть выполнен без возможности поворота относительно кассеты 13055 со скобками. В любом случае пользователь инструмента 13010 может манипулировать концевым эффектором 13012 для того, чтобы разместить ткань T между упором 13050 и кассетой 13055. После подходящего размещения ткани T между упором 13050 и кассетой 13055 со скобками пользователь может потянуть первый исполнительный механизм 13020 и активировать закрывающую систему инструмента 13010. Закрывающая система может переместить упор 13050 относительно кассеты 13055 со скобками. Например, первый исполнительный механизм 13020 можно потянуть к участку пистолетной рукоятки 13016 рукоятки 13015 для закрытия упора 13050, как дополнительно описано ниже более подробно.
Закрывающий исполнительный механизм может включать в себя закрывающий двигатель 13105 (ФИГ. 110), выполненный с возможностью перемещения упора 13050. Закрывающий двигатель 13105 можно прикрепить к рукоятке 13015, например, посредством кронштейна 13101 двигателя. Сжимание первого исполнительного механизма 13020 из открытого положения (ФИГ. 108) в закрытое положение (ФИГ. 109) может подавать питание на закрывающий двигатель 13105. Как показано главным образом на ФИГ. 110, закрывающий двигатель 13105 может включать в себя поворачиваемый выходной ствол, функционально взаимодействующий с закрывающим ходовым винтом 13110. Когда закрывающий двигатель 13105 поворачивает выходной ствол в первом направлении, выходной ствол может поворачивать закрывающий ходовой винт 13110 в первом направлении. Закрывающий ходовой винт 13110 может функционально удерживаться внутри рукоятки 13015 с возможностью поворота и может включать в себя резьбовой участок. Закрывающий исполнительный механизм также может дополнительно содержать закрывающую гайку, находящуюся в резьбовом взаимодействии с резьбовым участком закрывающего ходового винта 13110. Закрывающая гайка может не иметь возможности поворота вместе с закрывающим ходовым винтом 13110 так, что вращательное движение закрывающего ходового винта 13110 может поступательно перемещать закрывающую гайку. Закрывающая гайка может входить в контакт или может быть образована заодно с закрывающей вилкой 13120. Когда закрывающий двигатель 13015 поворачивается в первом направлении, закрывающий ходовой винт 13110 может выдвигать закрывающую вилку 13120 дистально. В различных вариантах осуществления закрывающая вилка 13120 может удерживаться с возможностью скольжения внутри рукоятки 13015 посредством направляющих 13122, проходящих от рукоятки 13015, которые ограничивают перемещение закрывающей вилки 13120 траекторией вдоль продольной оси. Такая ось может быть параллельной, по существу параллельной, коллинеарной или по существу коллинеарной продольной оси, образованной узлом 13040 ствола. Закрывающий исполнительный механизм дополнительно может содержать закрывающую трубку 13125, проходящую дистально от закрывающей вилки 13120. Закрывающая трубка 13125 также может быть частью узла ствола 13040 и может поступательно перемещаться относительно рамы узла 13040 ствола. При дистальном выдвигании закрывающей вилки 13120 посредством закрывающего ходового винта 13110, закрывающая вилка 13120 может выдвигать дистально закрывающую трубку 13125. Дистальный конец закрывающей трубки 13125 может входить в функциональное взаимодействие с упором 13050 так, что когда закрывающая трубка 13125 выдвигается дистально, эта закрывающая трубка 13125 может толкать упор 13050 из открытого положения в закрытое положение. В патенте США № 5,704,534, озаглавленном «ШАРНИРНЫЙ УЗЕЛ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», выданном 6 января 1998 года, описывается закрывающая система с ручным с исполнительным механизмом.
По меньшей мере, в одной форме инструмент 13010 может включать в себя переключатель закрывающей системы, расположенный в рукоятке 13015, который может замыкаться при перемещении первого исполнительного механизма 13020 из открытого положения (ФИГ. 108) в закрытое положение (ФИГ. 109). В некоторых вариантах переключатель закрывающей системы может замыкаться, когда первый исполнительный механизм 13020 находится в закрытом положении (ФИГ. 109). В любом случае, когда переключатель закрывающей системы замкнут, схема питания закрывающей системы может быть замкнута и подавать электроэнергию к закрывающему двигателю 13105 с целью поворота закрывающего двигателя 13105 в первом направлении, как описыстволось выше. В некоторых вариантах хирургически инструмент 13010 может включать в себя микропроцессор и, аналогично указанному выше, переключатель закрывающей системы может находиться в связи для передачи сигнала с микропроцессором. Когда переключатель закрывающей системы посылает микропроцессору сигнал, указывающий на то, что первый исполнительный механизм 13020 закрыт, микропроцессор может подавать питание на закрывающий двигатель 13105 для приведения в действие закрывающего двигателя 13105 в первом направлении и перемещения упора 13050 к закрытому положению. В различных вариантах осуществления закрывающий двигатель 13105 может перемещать упор 13050 к закрытому положению до тех пор, пока первый исполнительный механизм 13020 является по меньшей мере частично активированным, и пока переключатель закрывающей системы находится в замкнутом состоянии. Когда пользователь высвобождает первый исполнительный механизм 13020, и первый исполнительный механизм 13020 возвращается в неактивированное положение, переключатель закрывающей системы может размыкаться, и подача питания на закрывающий двигатель 13105 может прерываться. Такие варианты могут оставлять упор 13050 в частично закрытом положении. При повторной активации первого исполнительного механизма 13020 и замыкании переключателя закрывающей системы питание снова может подаваться на закрывающий двигатель 13105 для перемещения упора 13050 к закрытому положению. В свете вышеизложенного пользователь хирургического инструмента 13010 может активировать первый исполнительный механизм 13020 и подождать, пока закрывающий двигатель 13105 переведет упор 13050 в полностью закрытое положение.
По меньшей мере в одной форме перемещение первого исполнительного механизма 13020 может быть пропорциональным перемещению упора 13050. Первый исполнительный механизм 13020 может перемещаться через первый, или относящийся к активатору, диапазон движения при переходе между открытым положением (ФИГ. 108) и закрытым положением (ФИГ. 109). Аналогично, упор 13050 может перемещаться через второй или относящийся к упору диапазон движения при перемещении между открытым положением (ФИГ. 107) и закрытым положением. Диапазон движения исполнительного механизма может соответствовать диапазону движения упора. В качестве примера, диапазон движения исполнительного механизма может быть равным диапазону движения упора. Например, диапазон движения исполнительного механизма может составлять приблизительно 30 градусов, и диапазон движения упора может составлять приблизительно 30 градусов. В таких вариантах упор 13050 может находиться в своем полностью открытом положении, когда первый исполнительный механизм 13020 находится в своем полностью открытом положении, упор 13050 может быть повернут на 10 градусов к своему закрытому положению, когда первый исполнительный механизм 13020 повернут на 10 градусов к своему закрытому положению, упор 13050 может быть повернут на 20 градусов к своему закрытому положению, когда первый исполнительный механизм 13020 повернут на 20 градусов к своему закрытому положению и т. д. Такое прямо пропорциональное перемещение первого исполнительного механизма 13020 и упора 13050 может дать пользователю инструмента 13010 чувство положения упора 13050 относительно кассеты 13055 со скобками в том случае, когда упор 13050 скрыт от взгляда в операционном поле.
В дополнение к указанному выше, упор 13050 может реагировать как на закрывающее, так и на открывающее движения первого исполнительного механизма 13020. Например, при перемещении первого исполнительного механизма 13020 на 10 градусов к пистолетной рукоятке 13016 упор 13050 может переместиться на 10 градусов к кассете 13055 со скобками, а при перемещении первого исполнительного механизма 13020 на 10 градусов от пистолетной рукоятки 13016 упор 13050 может перемещаться на 10 градусов от кассеты 13055 со скобками. Хотя движение первого исполнительного механизма 13020 и движение упора 13050 могут быть прямо пропорциональными в соотношении 1:1, другие соотношения также возможны. Например, движение первого исполнительного механизма 13020 и движение упора 13050 могут быть прямо пропорциональными, например, в соотношении 2:1. В таких вариантах осуществления упор 13050 переместится на 1 градус относительно кассеты 13055 со скобками при перемещении первого исполнительного механизма 13020 на 2 градуса относительно пистолетной рукоятки 13016. Кроме этого, в таких случаях диапазон движения первого исполнительного механизма 13020 может быть вдвое большим, чем диапазон движения упора 13050. В другом варианте осуществления движение первого исполнительного механизма 13020 и движение упора 13050 могут быть прямо пропорциональными, например, в соотношении 1:2. В таких вариантах осуществления упор 13050 переместится на 2 градуса относительно кассеты 13055 со скобками при перемещении первого исполнительного механизма 13020 на 1 градус относительно пистолетной рукоятки 13016. Кроме этого, в таких случаях диапазон движения первого исполнительного механизма 13020 может быть вдвое меньшим, чем диапазон движения упора 13050. В различных вариантах осуществления движение первого исполнительного механизма 13020 может быть линейно пропорциональным движению упора 13050. В других вариантах осуществления движение первого исполнительного механизма 13020 может быть нелинейно пропорциональным движению упора 13050. Независимо от используемого соотношения, такие варианты осуществления могут быть возможны благодаря, например, применению потенциометра, который может оценивать поворот первого исполнительного механизма 13020, что будет дополнительно описано ниже более подробно.
В дополнение к указанному выше, как показано на ФИГ. 108–110, закрывающая система инструмента 13010 может содержать ползунковый потенциометр 13090, который может обнаруживать перемещение первого исполнительного механизма 13020. Первый исполнительный механизм 13020 может быть установлен с возможностью поворота на рукоятку 13015, например, посредством шарнира 13021. Первый исполнительный механизм 13020 может содержать шестереночный участок 13070, который содержит несколько шестереночных зубцов, проходящих по окружности вокруг шарнира 13021. Дополнительно к вышеизложенному, при повороте первого исполнительного механизма 13020 проксимально к пистолетной рукоятке 13016 шестереночный участок 13070 может поворачиваться дистально. Соответственно, при повороте первого исполнительного механизма 13020 дистально от пистолетной рукоятки 13016 шестереночный участок 13070 может поворачиваться проксимально. Закрывающая система может дополнительно содержать рейку 13080 закрывающей вилки, удерживаемую с возможностью скольжения внутри рукоятки 13015. Рейка 13080 закрывающей вилки может содержать продольный массив зубцов, проходящих вдоль ее нижней поверхности, которые обращены к шестереночному участку 13070 первого исполнительного механизма 13020. Шестереночный участок 13070 первого исполнительного механизма 13020 может находиться в зацепляющем взаимодействии с массивом зубцов, выполненных в рейке 13080 закрывающей вилки так, что при повороте первого исполнительного механизма 13020 вокруг шарнира 13021 первый исполнительный механизм 13020 может смещать рейку 13080 закрывающей вилки проксимально или дистально, в зависимости от направления поворота первого исполнительного механизма 13020. Например, при повороте первого исполнительного механизма 13020 в сторону пистолетной рукоятки 13016 первый исполнительный механизм 13020 может смещать рейку 13080 закрывающей вилки дистально. Соответственно, при повороте первого исполнительного механизма 13020 от пистолетной рукоятки 13016 первый исполнительный механизм 13020 может смещать рейку 13080 закрывающей вилки проксимально. Рукоятка 13015 может включать в себя направляющий паз, образованный в ней, который может быть выполнен с возможностью скользящего удерживания рейки 13080 закрывающей вилки и ограничения перемещения рейки 13080 закрывающей вилки траекторией, образованной вдоль продольной оси. Такая продольная ось может быть параллельной, по существу параллельной, коллинеарной или по существу коллинеарной продольной оси узла 13040 ствола.
Рейка 13080 закрывающей вилки может включать в себя обнаруживаемый элемент 13081, установленный на ней. Обнаруживаемый элемент 13081 может содержать магнитный элемент, например, постоянный магнит. Обнаруживаемый элемент 13081 может быть выполнен с возможностью поступательного перемещения внутри продольного паза 13091, образованного в ползунковом потенциометре 13090, при перемещении рейки 13080 закрывающей вилки внутри рукоятки 13015. Ползунковый потенциометр 13090 может быть выполнен с возможностью обнаружения положения обнаруживаемого элемента 13081 внутри продольного паза 13091 и передачи этого положения микропроцессору хирургического инструмента 13010. Например, когда первый исполнительный механизм 13020 находится в открытом, неактивированном положении (ФИГ. 108), обнаруживаемый элемент 13081 может находиться на проксимальном конце продольного паза 13091, и потенциометр 13090 может передавать микропроцессору сигнал, указывающий микропроцессору, что первый исполнительный механизм 13020 находится в открытом положении. Используя эту информацию, микропроцессор может поддерживать упор 13050 в открытом положении. При повороте первого исполнительного механизма 13020 к пистолетной рукоятке 13016 обнаруживаемый элемент 13081 может скользить в дистальном направлении внутри продольного паза 13091. Потенциометр 13090 может передать микропроцессору сигнал или множество сигналов, которые могут указывать положение первого исполнительного механизма 13020. В ответ на такой сигнал или множество сигналов микропроцессор может приводить в действие закрывающий двигатель 13105 для перемещения упора 13055 в положение, соответствующее положению первого исполнительного механизма 13020. Когда первый исполнительный механизм 13020 находится в закрытом, полностью активированном положении (ФИГ. 109), обнаруживаемый элемент 13081 может находиться на дистальном конце продольного паза 13091, и потенциометр 13090 может передавать микропроцессору сигнал, указывающий микропроцессору, что первый исполнительный механизм 13020 находится в закрытом положении. Используя эту информацию, микропроцессор может перемещать упор 13050 в закрытое положение.
Когда первый исполнительный механизм 13020 тянут так, что он по существу смежен с пистолетной рукояткой 13016 рукоятки 13015, как описано выше, рейка 13080 закрывающей вилки перемещается к крайнее дистальное положение. Когда рейка 13080 закрывающей вилки находится в крайнем дистальном положении, освобождающая закрывающую систему кнопка 13140 может входить в контакт с рейкой 13080 закрывающей вилки и удерживать с возможностью высвобождения рейку 13080 закрывающей вилки в крайнем дистальном положении, в результате чего упор 13050 удерживается в закрытом положении с возможностью высвобождения. Как показано главным образом на ФИГ. 108, освобождающая закрывающую систему кнопка 13140 может быть установлена на рукоятке 13015 с возможностью поворота вокруг шарнира 13141. Высвобождающая закрывающую систему кнопка 13140 может включать в себя фиксирующее плечо 13142, проходящее от нее. Когда первый исполнительный механизм 13120 находится в неактивированном положении, и рейка 13080 закрывающей вилки находится в крайнем проксимальном положении, фиксирующее плечо 13142 может располагаться над и/или примыкать к верхней поверхности рейки 13080 закрывающей вилки. В таком положении рейка 13080 закрывающей вилки может скользить относительно фиксирующего плеча 13142. В некоторых ситуациях фиксирующее плечо 13142 может смещаться к верхней поверхности рейки 13080 закрывающей вилки. Как будет описано ниже более подробно, инструмент 13010 может дополнительно содержать фиксирующий элемент 13290, выполненный для удерживания с возможностью высвобождения первого исполнительного механизма 13020 и второго исполнительного механизма 13030 в неактивированной конфигурации, представленной на ФИГ. 108. Между блокиратором 13290 и пусковой кнопкой 13140 может располагаться пружина 13150, которая может смещать с возможностью поворота высвобождающую закрывающую систему кнопку 13140 вокруг шарнира 13141 и располагать фиксирующее плечо 13142 вплотную к верхней поверхности рейки 13080 закрывающей вилки. В различных вариантах осуществления фиксирующий элемент 13290 может включать в себя проксимальный выступ 13296, а высвобождающая закрывающую систему кнопка 13140 может включать в себя дистальный выступ 13146, которые могут быть выполнены с возможностью удерживания и выравнивания пружины 13150 в положении между фиксирующим элементом 13290 и высвобождающей закрывающую систему кнопкой 13140. При повороте первого исполнительного механизма 13020 в активированное положение, как показано на ФИГ. 109, рейка 13080 закрывающей вилки может находиться в крайнем дистальном положении, и фиксирующее плечо 13142 может сдвигаться или падать в вырез 13082, сформированный в проксимальном конце рейки 13080 закрывающей вилки. Более того, при перемещении первого исполнительного механизма 13020 в закрытое, или активированное положение, показанное на ФИГ. 109 и 110, первый исполнительный механизм 13020 может толкать фиксирующий элемент 13290 проксимально и поворачивать фиксирующий элемент 13290 вокруг шарнира 13214. По меньшей мере в одном варианте осуществления первый исполнительный механизм 13020 может включать в себя проходящий от него выступ 13025 активатора, выполненный с возможностью взаимодействия с дистальным выступом 13295, отходящим от фиксирующего элемента 13290. Такое движение фиксирующего элемента 13290 может сжимать пружину 13150 между фиксирующим элементом 13290 и высвобождающей закрывающую систему кнопкой 13140 и увеличивать смещающую силу, прикладываемую к высвобождающей закрывающую систему кнопке 13140. Как только фиксирующее плечо 13142 взаимодействует с вырезом 13082, рейка 13080 закрывающей вилки может лишиться возможности перемещения или по меньшей мере существенного перемещения в проксимальном направлении или дистальном направлении.
Как описано выше, первый исполнительный механизм 13020 и второй исполнительный механизм 13030 могут удерживаться с возможностью освобождения и/или смещаться в неактивированное положение, показанное на ФИГ. 108. Инструмент 13010 может включать в себя возвратную пружину 13210, включающую в себя первый конец, соединенный с шарниром 13214, и второй конец, соединенный с пружинной опорой 13034, проходящей от второго исполнительного механизма 13030. Второй исполнительный механизм 13030 может быть установлен на рукоятке 13015 с возможностью поворота вокруг шарнира 13021, и возвратная пружина 13210 может прикладывать смещающее усилие ко второму исполнительному механизму 13030 для поворота второго активатора 13030 вокруг шарнира 13021. Фиксирующий элемент 13290 может останавливать поворот второго исполнительного механизма 13030 вокруг шарнира 13021. Более конкретно, пружина 13150, действие которой состоит во введении освобождающей закрывающую систему кнопки 13140 во взаимодействие с рейкой 13080 закрывающей вилки, также может толкать фиксирующий элемент 13290 дистально так, что фиксирующее плечо 13292 фиксирующего элемента 13290 будет находиться позади буртика 13032, выполненного на втором исполнительном механизме 13030, который может ограничивать поворот второго исполнительного механизма 13030 и удерживать второй исполнительный механизм 13030 в неактивированном положении, как показано на ФИГ. 108. Как показано преимущественно на ФИГ. 110, второй исполнительный механизм 13030 может содержать буртик 13031, который может быть выполнен с возможностью упора в шестереночный участок 13070 первого исполнительного механизма 13020 и перемещения первого исполнительного механизма 13020 в неактивированное положение (ФИГ. 108). Когда первый исполнительный механизм 13020 поворачивается в сторону активированного положения (ФИГ. 109), первый исполнительный механизм 13020 может по меньшей мере частично поворачивать второй исполнительный механизм 13030 в сторону пистолетной рукоятки 13016 против действия смещающей силы, создаваемой пружиной 13210. Фактически, активация первого исполнительного механизма 13020 может делать второй исполнительный механизм 13030 доступным для пользователя хирургического инструмента 13010. До активации первого активатора 13020 второй исполнительный механизм 13030 может быть недоступен для пользователя. В любом случае, читатель помнит, что активация первого исполнительного механизма 13020 толкает фиксирующий элемент 13295 проксимально. Такое проксимальное движение фиксирующего элемента 13295 может смещать фиксирующий элемент 13295 из положения позади буртика 13032, образованного во втором исполнительном механизме 13030.
Как только первый исполнительный механизм 13020 переместился и был заблокирован в полностью активированном положении (ФИГ. 109), и упор 13050 переместился в закрытое положение, как описано выше, инструмент 13010 можно использовать для сшивания ткани, находящейся между упором 13050 и кассетой 13055 со скобками. Если пользователь не удовлетворен расположением ткани между упором 13050 и кассетой 13055 со скобками, пользователь может разблокировать упор 13050, нажав высвобождающую закрывающую систему кнопку 13140. При нажатии на высвобождающую закрывающую систему кнопку 13140 фиксирующее плечо 13142 высвобождающей закрывающую систему кнопки 13140 может повернуться вверх из прорези 13082, что может позволить рейке 13080 закрывающей вилки переместиться проксимально. Кроме этого возвратная пружина 13210 может вернуть первый исполнительный механизм 13120 и второй исполнительный механизм 13130 в неактивированные положения, показанные на ФИГ. 109 и, благодаря зубчатому взаимодействию между шестереночным участком 13070 и рейкой 13080 закрывающей вилки, возвратная пружина 13210 может вернуть рейку 13080 закрывающей вилки обратно в проксимальное положение. Такое движение рейки 13080 закрывающей вилки можно обнаруживать ползунковым потенциометром 13090, который может передать микропроцессору инструмента 13010 сигнал, что первый исполнительный механизм 13020 вернулся в неактивированное положение, и что упор 13050 следует вернуть в открытое положение. В результате микропроцессор может заставить закрывающий двигатель 13105 вращаться во втором направлении, перемещать закрывающую гайку закрывающей системы проксимально и оттягивать закрывающую трубку 13125 проксимально, в результате чего упор 13050 вернется в открытое положение. Далее пользователь может изменить положение упора 13050 и кассеты 13055 со скобками и снова закрыть упор 13050, повторно активируя первый исполнительный механизм 13020. В различных вариантах осуществления микропроцессор инструмента 13010 может быть выполнен с возможностью игнорирования входных сигналов от второго исполнительного механизма 13030 до тех пор, пока потенциометр 13090 не обнаружит, что упор 13050 находится в закрытом или по существу закрытом положении.
Когда пользователь удовлетворен положением упора 13050 и кассеты 13055 со скобками, дополнительно к вышеизложенному, пользователь может потянуть второй исполнительный механизм 13030 в закрытое или активированное положение так, что он будет в непосредственной близости к первому исполнительному механизму 13020. Активация второго исполнительного механизма 13030 может приводить к нажатию или замыканию пускового переключателя 13180 в рукоятке 13015. В различных вариантах осуществления пусковой переключатель 13180 может удерживаться крепежным элементом 13102 двигателя, который также может быть выполнен с возможностью удерживания закрывающего двигателя 13105 и/или пускового двигателя 13100. Замыкание пускового переключателя 13180 может приводить в действие пусковой двигатель 13100. В некоторых вариантах пусковой переключатель 13180 может находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 13010. Когда микропроцессор получает от пускового переключателя 13180 сигнал, что второй исполнительный механизм 13030 в достаточной мере активирован, микропроцессор может подать сигнал на пусковой двигатель 13100. В различных вариантах осуществления замыкание пускового переключателя 13180 может соединять пусковой двигатель 13100 непосредственно с источником питания постоянного или переменного тока, предназначенным для приведения в действие пускового двигателя 13100. По меньшей мере в одном варианте осуществления пусковой переключатель 13180 может быть расположен так, что пусковой переключатель 13180 не будет замыкаться до тех пор, пока второй исполнительный механизм 13030 не достигнет полностью закрытого положения. Как показано преимущественно на ФИГ. 110, поворот второго исполнительного механизма 13030 можно остановить в полностью закрытом положении, когда он войдет в контакт с первым исполнительным механизмом 13020. По меньшей мере в одном таком варианте осуществления первый исполнительный механизм 13020 может содержать стопорное углубление 13023, выполненное с возможностью принимать в нем стопорный выступ 13033, проходящий от второго исполнительного механизма 13030, при достижении вторым исполнительным механизмом 13030 закрытого положения.
Пусковой двигатель 13100 может включать в себя вращательный выходной ствол, который функционально взаимодействует с пусковым ходовым винтом 13190 пусковой системы. Когда пусковой двигатель 13100 приводится в действие с вращением его выходного ствола в первом направлении, выходной ствол может поворачивать пусковой ходовой винт 13190 в первом направлении. Когда пусковой двигатель 13100 приводится в действие с вращением его выходного ствола во втором, противоположном направлении, выходной ствол может поворачивать пусковой ходовой винт 13190 во втором направлении. Пусковая система может дополнительно содержать пусковую гайку, находящуюся в резьбовом взаимодействии с резьбовым участком пускового ходового винта 13190. Пусковая гайка может не иметь возможности вращения вместе с пусковым ходовым винтом 13190 так, что вращение пускового ходового винта 13190 позволяет поступательно перемещать пусковую гайку проксимально или дистально в зависимости от направления вращения пускового ходового винта 13190. Пусковая система может дополнительно содержать пусковой ствол 13220, функционально подсоединенный к пусковой гайке, который может смещаться с пусковой гайкой. Пусковая система может также содержать держатель скальпеля 13200 и выпускающие скобки пусковые полоски, которые проходят дистально от пускового ствола 13220. При вращении пускового двигателя 13020 в первом направлении пусковой ходовой винт 13190 может смещать пусковую гайку, пусковой ствол 13220, держатель скальпеля 13200 и пусковые полоски дистально, выталкивая скобки из кассеты 13055 со скобками и разрезая ткань, находящуюся между упором 13050 и кассетой 13055 со скобками. Как только скальпель 13200 и пусковые полоски достигают конца своего хода, микропроцессор может поворачивать пусковой двигатель 13100 во втором, противоположном направлении, возвращая скальпель 13200 и дорожки в их исходное положение. В различных вариантах осуществления инструмент 13010 может включать в себя датчик конца хода, находящийся в связи для передачи сигнала с микропроцессором для передачи сигнала, и подающий микропроцессору сигнал, что пусковой исполнительный механизм достиг конца пускового хода, и что пусковой ход следует выполнить в обратном направлении. Такой датчик конца хода может располагаться, например, в упоре 13050 и/или в кассете 13055 со скобками. В некоторых вариантах осуществления датчик углового положения, функционально соединенный с пусковым двигателем 13100, может определить, что пусковой двигатель 13100 совершил достаточное количество оборотов, чтобы скальпель 13200 и пусковые полоски достигли конца своего хода, и может подать сигнал микропроцессору, что пусковую систему необходимо оттянуть.
Однако после активации второго исполнительного механизма 13030 инструмент 13010 находится в пусковом состоянии, и микропроцессор может быть выполнен с возможностью игнорирования любых входных сигналов от первого исполнительного механизма 13020 и/или ползункового потенциометра 13090, пока пусковая система не вернется в исходное положение. В различных вариантах осуществления инструмент 13010 может включать в себя кнопку отмены, которая при нажатии может посылать микропроцессору сигнал, что пусковой узел следует немедленно оттянуть. По меньшей мере, в одном таком варианте пусковая последовательность может быть остановлена при нажатии высвобождающей закрывающую систему кнопки 13140. Как указано выше, нажатие высвобождающей закрывающую систему кнопки 13140 перемещает рейку 13080 закрывающей вилки проксимально, что в свою очередь перемещает обнаруживаемый элемент 13081 проксимально. Проксимальное перемещение обнаруживаемого элемента 13081 может обнаруживаться ползунковым потенциометром 13090, который может подавать микропроцессору сигнал изменить направление поворота пускового двигателя 13100 для втягивания пускового узла и/или приведения в действие закрывающий двигатель 13105 для открытия упора 13050.
Инструмент 13010 также может включать в себя один или более индикаторов, таких как, например, светодиод 13300, выполненных с возможностью указания рабочего состояния инструмента 13010. В различных вариантах светодиод 13300 может работать, например, аналогично светодиоду 11100. Инструмент 13010 также обладает способностью к шарнирному повороту концевого эффектора 13012. Это осуществляется посредством ручки 13240 шарнира, как описано в патенте США № 5,704,534. Ручной поворот узла 13040 ствола также описывается в патенте США № 5,704,534.
В модульной конструкции инструмента 13010 узел 13040 ствола и концевой эффектор 13012 могут быть одноразовыми, и могут крепиться к рукоятке 13015 многоразового использования. В другом варианте осуществления упор 13050 и кассета 13055 со скобками являются одноразовыми, а узел 13040 ствола и рукоятка 13015 допускают многоразовое использование. В различных вариантах осуществления концевой эффектор 13012, в том числе, упор 13015, узел 13040 ствола и рукоятка 13015, могут быть многоразового использования, а кассета 13055 со скобками может быть сменной.
На ФИГ. 111 представлен вид в перспективе хирургического сшивающего инструмента 14010. Инструмент 14010 может содержать исполнительный механизм или рукоятку 14020, стволовой участок 14030, трубчатый кожух 14040 кассеты и упор 14050. Инструмент 14010 может дополнительно включать в себя закрывающую систему, выполненную с возможностью перемещения упора 14050 между открытым положением и закрытым положением. Исполнительный механизм 14020 может содержать поворотную закрывающую ручку 14075, которая может приводить в действие закрывающую систему, как дополнительно описано ниже более подробно. Инструмент 14010 также может включать в себя пусковую систему, выполненную с возможностью выталкивания скоб, которые хранятся с возможностью извлечения в кожухе 14040 кассеты. Исполнительный механизм 14020 может дополнительно содержать пусковой крючок активации 14070, который может приводить в действие систему пуска, как дополнительно описано ниже более подробно. Стволовая часть 14030, кожух 14040 кассеты и упор 14050 могут работать способом, аналогичным показанному и описанному в патенте США № 5,292,053, под названием «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ ДЛЯ АНАСТОМОЗА», выданном 8 марта 1994 г. Описание патента США № 5,292,053, озаглавленного «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ ДЛЯ АНАСТОМОЗА», выданного 8 марта 1994 г., полностью включено в настоящий документ путем ссылки.
В дополнение к вышеизложенному исполнительный механизм 14020 может включать в себя трансмиссию 14000 и кнопку 14060 ползунка, выполненную с возможностью приводить в действие трансмиссию 14000. Кнопка 14060 ползунка выполнена с возможностью перемещения между дистальным положением (ФИГ. 115), которое ближе к кожуху 14040 кассеты, и проксимальным положением (ФИГ. 114), которое дальше от кожуха 14040 кассеты. Когда кнопка 14060 ползунка находится в проксимальном положении, исполнительный механизм 14020 находится в первом рабочем режиме, или режиме закрывания, и может перемещать упор 14050 к кожуху 14040 кассеты и от него. Когда кнопка 14060 ползунка находится в дистальном положении, исполнительный механизм 14020 находится во втором рабочем режиме, или режиме пуска, и может выталкивать скобки из кожуха 14040 кассеты к упору 14050. Когда исполнительный механизм 14020 находится в режиме закрывания, поворотную закрывающую ручку 14075 можно поворачивать вокруг продольной оси, проходящей через исполнительный механизм 14020, перемещая упор 14050 проксимально или дистально, в зависимости от направления поворота закрывающей ручки 14075. Когда исполнительный механизм 14020 находится в пусковом режиме, пусковой крючок 14070 можно повернуть проксимально для выталкивания скоб из кожуха 14040 кассеты. Закрывающая система и пусковая система подробно описаны далее.
Исполнительный механизм 14020 может содержать электродвигатель, такой как двигатель 14090 (ФИГ. 113–115), который может приводить в действие закрывающий исполнительный механизм и пусковой исполнительный механизм посредством трансмиссии 14000. Двигатель 14090 может удерживаться внутри корпуса 14080 исполнительного механизма 14020. Как показано главным образом на ФИГ. 113, корпус исполнительного механизма 14080 может содержать две половины, правую половину 14080a корпуса исполнительного механизма и левую половину 14080b корпуса исполнительного механизма. Половины 14080a и 14080b корпуса исполнительного механизма могут соединяться винтами, хотя при сборке корпуса 14080 исполнительного механизма можно использовать любые подходящие крепежные элементы и/или адгезив. Двигатель 14090 может удерживаться между половинами 14080a и 14080b корпуса исполнительного механизма, и может включать в себя поворачиваемый ствол 14100, отходящий от него дистально. В некоторых вариантах осуществления исполнительный механизм 14020 может содержать опору 14101 двигателя, расположенную внутри корпуса 14080 и выполненную с возможностью удерживания корпуса 14100 двигателя и предотвращения поворота корпуса двигателя относительно корпуса 14080 исполнительного механизма. В различных вариантах поворачиваемый ствол 14100 может содержать прикрепленную к нему удлинительную часть 14110. Стержень 14100 и удлинительная часть 14110 могут быть соединены с возможностью поворота так, что они могут поворачиваться вместе.
В дополнение к вышеизложенному, как показано преимущественно на ФИГ. 116, удлинительная часть 14110 может содержать цилиндрический или по меньшей мере по существу цилиндрический основной элемент 14111 и плоский участок 14120, образованный на дистальном конце 14113 удлинительной части 14110. Цилиндрический основной элемент 14111 удлинительной части 14110 может удерживаться с возможностью поворота внутри корпуса 14080 исполнительного механизма посредством подшипника 14105. Дистальный конец 14113 удлинительной части 14110 может располагаться внутри отверстия 14114, образованного в ползунке 14115. Ползунок 14115, как будет дополнительно описано более подробно ниже, является частью трансмиссии 14000, и может переключаться между проксимальным положением (ФИГ. 114), в котором ползунок 14115 передает вращательное движение двигателя 14090 к закрывающей системе, и дистальным положением (ФИГ. 115), в котором ползунок 14115 передает вращательное движение двигателя 14090 к системе пуска. При перемещении ползунка 14115 между проксимальным положением (ФИГ. 114) и дистальным положением (ФИГ. 115) ползунок 14115 может скользить относительно удлинительной части 14110. Отверстие 14114, образованное в ползунке 14115, может образовывать периметр, соответствующий или по меньшей мере по существу соответствующий периметру дистального конца 14113 удлинительной части 14110, так, что, во-первых, удлинительная часть 14110 и ползунок 14115 соединены друг с другом с возможностью поворота и, во-вторых, ползунок 14115 может поступательно перемещаться относительно удлинительной части 14110. По меньшей мере в одном варианте осуществления отверстие 14114 ползунка имеет цилиндрический участок 14116, соответствующий цилиндрическому основному элементу 14111 удлинительной части 14110, и плоский участок 14117, соответствующий плоскому участку 14120 на дистальном конце 14113 ползунка 14115.
В дополнение к указанному выше, ползунок 14115 может иметь трубчатую или по существу трубчатую конструкцию. Ползунок 14115 может иметь дистальный конец 14118 и множество наружных расположенных по окружности шлиц 14130, проходящих вокруг внешней поверхности дистального конца 14118, которые могут функционально взаимодействовать с пусковым с исполнительным механизмом, как показано на ФИГ. 115. Ползунок 14115 может содержать множество внутренних расположенных по окружности шлиц 14140, образованных в дистальном конце отверстия 14114 ползунка, которые могут функционально взаимодействовать с закрывающим с исполнительным механизмом, как показано на ФИГ. 114. Ползунок 14115 может являться частью узла 14150 ползунка. Как показано преимущественно на ФИГ. 116, узел 14150 ползунка может дополнительно содержать верхний опорный подшипник 14160, нижний опорный подшипник 14170, кнопку 14060 ползунка и пружину 14180 ползунка. Верхний опорный подшипник 14160 и нижний опорный подшипник 14170 в совокупности образуют опорный подшипник скольжения, который может, во-первых, удерживать ползунок 14115 достаточно неплотно так, что ползунок 14115 может поворачиваться внутри опорного подшипника, и, во-вторых, смещать ползунок 14115 проксимально и дистально. Как показано главным образом на ФИГ. 116, ползунок 14115 может иметь отходящие от него дистальный фланец 14121 и проксимальный фланец 14122, между которыми может образовываться углубление 14123, образованное с возможностью плотно принимать в нем опорный подшипник. При нажатии кнопки 14060 ползунка дистально опорный подшипник может упираться в дистальный фланец 14121 и толкать ползунок 14115 дистально. Соответственно, при нажатии кнопки 14060 ползунка проксимально опорный подшипник может упираться в проксимальный фланец 14122 и толкать ползунок 14115 проксимально.
Узел стержня 14150 может содержать предохранитель, выполненный с возможностью удерживания ползунка 14115 на одном месте с возможностью освобождения. Как показано главным образом на ФИГ. 116, кнопка 14060 ползунка может содержать фланец 14181, который может избирательно входить в первое углубление, образованное на первом или проксимальном конце продольного паза в корпусе 14080 исполнительного механизма и во второе углубление, образованное на втором или дистальном конце продольного паза. Когда фланец 14181 взаимодействует с проксимальным углублением, фланец 14181 может удерживать узел 14150 ползунка в проксимальном положении, в котором ползунок 14115 и закрывающий исполнительный механизм функционально взаимодействуют с двигателем 14090. Когда фланец 14181 взаимодействует с дистальным углублением, фланец 14181 может удерживать узел 14150 ползунка в дистальном положении, в котором ползунок 14115 и пусковой исполнительный механизм функционально взаимодействуют с двигателем 14090. Верхний опорный подшипник 14160 может включать в себя отверстие 14161 подшипника, выполненное с возможностью скользяще принимать в нем ствол 14061 кнопки 14060. Кнопку 14060 можно вдавить вниз, внутрь отверстия 14161 подшипника, для высвобождения фланца 14181 от корпуса 14080 исполнительного механизма. Как только фланец 14181 высвобожден от корпуса 14080 исполнительного механизма, кнопка 14060 может войти внутрь продольного паза в корпусе 14080 исполнительного механизма и перемещать ползунок 14115 между проксимальным и дистальным положениями. Пружина 14180 может быть выполнена с возможностью смещения фланца 14181 в сторону корпуса 14080 исполнительного механизма и, когда пользователь хирургического инструмента 14010 отпускает кнопку 14060, пружина 14180 может снова смещать кнопку 14060 вверх, во взаимодействие с корпусом 14080 исполнительного механизма.
Когда узел 14150 ползунка находится в проксимальном положении, в дополнение к вышеизложенному, ползунок 14115 входит во взаимодействие с закрывающей гайкой 14190 закрывающего исполнительного механизма. Закрывающая гайка 14190 включает в себя удлиненную трубчатую конструкцию, включающую в себя образованные на ее проксимальном конце внешние шлицы 14200 закрывающей гайки. Когда ползунок 14115 находится в проксимальном положении, внутренние шлицы 14140 ползунка 14115 входят в зубчатое взаимодействие с внешними шлицами 14200 закрывающей гайки 14190 так, что при повороте ползунка 14115 двигателем 14090 закрывающая гайка 14190 поворачивается посредством ползунка 14115. Закрывающая гайка 14190 может удерживаться с возможностью поворота внутри корпуса 14080 исполнительного механизма посредством одного или нескольких подшипников, например, подшипником скольжения 14220, который удерживает с возможностью поворота дистальный конец закрывающей гайки 14190. Подшипник скольжения 14220 закрывающей гайки может быть образован из, например, делрина, нейлона, меди, латуни, бронзы и/или углерода. В некоторых вариантах подшипник 14220 закрывающей гайки может представлять собой, например, шариковый подшипник или роликовый подшипник. В различных вариантах подшипник 14220 закрывающей гайки может быть выполнен заодно с корпусом 14080 исполнительного механизма.
Закрывающая гайка 14190 может содержать продольный канал 14191. Закрывающая система может дополнительно содержать закрывающий шток 14230, который может по меньшей мере частично располагаться внутри продольного канала 14191. На закрывающем штоке 14230 может содержаться резьба 14231, находящаяся в резьбовом соединении с резьбой 14210 закрывающей гайки, образованной в продольном канале 14191. Закрывающий шток 14230 может не иметь возможности поворота вместе с закрывающей гайкой 14190, так что при повороте закрывающей гайки 14190 в первом направлении посредством двигателя 14090 закрывающий шток 14230 может поступательно перемещаться закрывающей гайкой 14190 проксимально. Как показано на ФИГ. 115, закрывающий шток 14230 может проксимально перемещаться внутри продольного канала 14191 закрывающей гайки 14190. Аналогично, когда закрывающая гайка 14190 поворачивается в противоположном втором направлении посредством двигателя 14090, закрывающий шток 14230 может поступательно перемещаться посредством закрывающей гайки 14190 дистально. Как будет более подробно описано ниже, закрывающий шток 14230 может функционально взаимодействовать с упором 14050 так, что при проксимальном движении закрывающего штока 14230 упор 14050 может перемещаться в сторону кожуха 14040 кассеты. Соответственно, при дистальном движении закрывающего штока 14230 упор 14050 может перемещаться от кожуха 14040 кассеты. В различных вариантах осуществления длину закрывающего хода закрывающей системы можно измерять между открытым положением и закрытым положением упора 14050. Закрывающий шток 14230 может иметь длину по меньшей мере равную длине закрывающего хода, чтобы соответствовать ей.
Как описано выше, кнопка 14060 исполнительного механизма 14020 выполнена с возможностью перемещения между проксимальным положением (ФИГ. 114), в котором трансмиссия 14000 соединена с закрывающим с исполнительным механизмом, и дистальным положением (ФИГ. 115), в котором трансмиссия 14000 соединена с пусковым с исполнительным механизмом. Таким образом, трансмиссию 14000 можно использовать для избирательного соединения закрывающего исполнительного механизма и пускового исполнительного механизма с двигателем 14090. Когда пользователь хирургического инструмента 14010 удовлетворен положением упора 14050 относительно кожуха 14040 кассеты, пользователь может сместить кнопку 14060 дистально, как показано на ФИГ. 115, чтобы высвободить ползунок 14115 от закрывающего исполнительного механизма и установить взаимодействие ползунка 14115 с пусковым с исполнительным механизмом. Когда ползунок 14115 скользит дистально, внутренние шлицы 14140 ползунка 14115 отсоединяются от внешних шлиц 14200 закрывающей гайки 14190 так, что последующий поворот ползунка 14115 более не передается на закрывающую гайку 14190 и закрывающую систему. Параллельно с высвобождением ползунка от закрывающей системы, ползунок 14115 может входить во взаимодействие с пусковой системой. В альтернативном варианте осуществления ползунок 14115 может высвобождаться от закрывающей системы при дистальном смещении ползунка 14115, и благодаря дополнительному дистальному смещению ползунка 14115, ползунок 14115 может войти во взаимодействие с системой пуска. В таких ситуациях трансмиссия 14000 не может одновременно функционально соединять с двигателем 14090 и закрывающую систему, и систему пуска. В любом случае, пусковая система может включать в себя пусковую гайку 14260, которая может взаимодействовать с ползунком 14115 при дистальном перемещении ползунка 14115.
В дополнение к указанному выше, как показано преимущественно на ФИГ. 116, пусковая гайка 14260 может включать в себя образованное в ней отверстие 14261, которое может быть выполнено с возможностью принимать в себя дистальный конец 14118 ползунка 14115 при выдвигании ползунка 14115 в его дистальное положение (ФИГ. 115). Отверстие 14261 пусковой гайки может включать в себя шлицы 14270 пусковой гайки, образованные по ее внутренней окружности, которые могут сцепляться со шлицами 14130, расположенными по внешней окружности ползунка 14115. Когда шлицы 14130 внешней окружности ползунка 14115 взаимодействуют со шлицами 14270 пусковой гайки 14260, ползунок 14115 может соединяться с возможностью поворота с пусковой гайкой 14260 так, что поворот ползунка 14115 передается на пусковую гайку 14260. Исполнительный механизм 14020 дополнительно может содержать подшипник 14275 пусковой гайки, удерживающий с возможностью поворота 14260. Подшипник 14275 пусковой гайки может представлять собой игольчатый подшипник, подшипник из делрина, нейлона и/или иного пластика, металлический подшипник, или он может являться, например, частью корпуса 14080 исполнительного механизма. Пусковая гайка 14260 дополнительно может содержать внутреннюю резьбу 14272, образованную на дистальной внутренней поверхности отверстия 14261 пусковой гайки. Пусковая система может дополнительно содержать пусковую трубку 14280, находящуюся в резьбовом взаимодействии с внутренней резьбой 14272 пусковой гайки 14260.
В различных вариантах, в дополнение к указанному выше, пусковая трубка 14280 может включать в себя резьбу 14281, образованную на ее наружной поверхности, которая находится в резьбовом соединении с внутренней резьбой 14272. Пусковая трубка 14280 может не иметь возможности поворота вместе с пусковой гайкой 14260 так, что при повороте пусковой гайки 14260 посредством двигателя 14090 и ползунка 14115 пусковая гайка 14260 может поступательно перемещать пусковую трубку 14280. Например, при повороте пусковой гайки 14260 в первом направлении пусковая трубка 14280 может смещаться посредством пусковой гайки 14260 дистально, а при повороте пусковой гайки 14260 во втором, противоположном направлении, пусковая трубка 14280 может смещаться посредством пусковой гайки 14260 проксимально. По меньшей мере часть пусковой трубки 14280 может располагаться внутри отверстия 14261, образованного в пусковой гайке 14260. При проксимальном смещении пусковой трубки 14280, пусковая трубка 14280 может перемещаться внутри отверстия 14261 проксимально. При дистальном смещении пусковой трубки 14280, пусковая трубка 14280 может перемещаться внутри отверстия 14261 дистально. Как будет более подробно описано ниже, пусковая трубка 14280 может быть функционально подсоединена к пусковому элементу, способным выталкивать скобки из корпуса 14040 кассеты при выдвижении пусковой трубки 14280 дистально. Пусковая трубка 14280 может втягивать пусковой элемент, когда пусковая трубка 14280 перемещается проксимально. Пусковая трубка 14280 может быть достаточно длинной, чтобы обеспечить пусковой ход пускового элемента при перемещении пускового элемента между неактивированным и активированным положениями. В различных вариантах резьбовой участок пусковой трубки 14280 является более коротким, чем резьбовой участок закрывающего штока 14230. В таких обстоятельствах пусковой ход может быть короче, чем закрывающий ход. В других вариантах резьбовой участок пусковой трубки 14280 может иметь ту же длину, что и резьбовой участок закрывающего штока 14230. В таких вариантах пусковой ход может иметь такую же длину, как закрывающий ход. В некоторых вариантах резьбовой участок пусковой трубки 14280 является более длинным, чем резьбовой участок закрывающего штока 14230. В таких обстоятельствах пусковой ход может быть длиннее, чем закрывающий ход.
В дополнение к указанному выше, исполнительный механизм 14020 и стволовой участок 14030 могут представлять собой единую систему. В различных вариантах исполнительный механизм 14020 и стволовой участок 14030 могут представлять собой единый узел. В некоторых вариантах исполнительный механизм 14020 может разбираться от стволового участка 14030. На ФИГ. 34 представлен вид в перспективе хирургического сшивающего инструмента 14010, представляющий исполнительный механизм 14020 разобранным от стволового участка 14030. Инструмент 14010 может содержать один или более фиксирующих элементов или защелок, выполненных с возможностью разъемного удерживания стволового участка 14030 на исполнительном механизме 14020. Например, исполнительный механизм 14020 может включать в себя на своих противоположных сторонах защелки 14025, выполненные с возможностью разъемного удерживания стволового участка 14030 на исполнительном механизме 14020. Защелки 14025 могут скользить между первым положением, в котором они взаимодействуют со стволовым участком 14030, и вторым положением, в котором они высвобождены от стволового участка 14030. Как более подробно описано ниже, исполнительный механизм 14020 и стволовой участок 14030 могут содержать участки закрывающей системы, которые функционально собираются вместе при сборке стволового участка 14030 с исполнительным механизмом 14020. Аналогично, исполнительный механизм 14020 и стволовой участок 14030 могут содержать участки пусковой системы, которые функционально собираются вместе при сборке стволового участка 14030 с активатором 14020.
В дополнение к указанному выше, как показано преимущественно на ФИГ. 113, закрывающая система дополнительно может содержать закрывающую фиксаторную деталь 14240, присоединенную к дистальному концу закрывающего штока 14230. В различных вариантах винт может блокировать закрывающую фиксаторную деталь 14240 на закрывающем штоке 14230 так, что закрывающая фиксаторная деталь 14240 поступательно перемещается дистально при поступательном перемещении закрывающего штока 14230 дистально и, соответственно, поступательно перемещается проксимально при поступательном перемещении закрывающего штока 14230 проксимально. Закрывающая фиксаторная деталь 14240 может содержать один или более боковых выступов, которые могут входить в желоба корпуса 14080 исполнительного механизма для выравнивания закрывающей фиксаторной детали 14240 и закрывающего штока 14230. Боковые выступы могут также предотвращать поворот закрывающего штока 14230 и закрывающей фиксаторной детали 14240, когда закрывающий шток 14230 двигается посредством закрывающей гайки 14190, как описано выше. Закрывающая фиксаторная деталь 14240 может содержать выходной элемент закрывающего исполнительного механизма исполнительного механизма 14020 и может быть прикреплена к входному элементу закрывающего исполнительного механизма стволового участка 14030. Входной элемент закрывающего исполнительного механизма стволового участка 14030 может содержать вторую фиксаторную деталь 14250, которая может прикрепляться к закрывающей фиксаторной детали 14240 при сборке стволового участка 14030 на исполнительном механизме 14020. Закрывающая фиксаторная деталь 14240 может толкать вторую фиксаторную деталь 14250 дистально при дистальном выдвижении закрывающей фиксаторной детали 14240 закрывающим штоком 14230; соответственно, закрывающая фиксаторная деталь 14240 может тянуть вторую фиксаторную деталь 14250 проксимально при проксимальном втягивании закрывающей фиксаторной детали 14240 закрывающим штоком 14230.
Участок закрывающего исполнительного механизма стволового участка 14030 дополнительно может содержать одну или более стяжных хомутов 14252 и 14253, которые крепятся ко второй фиксаторной детали 14250 и проходят от нее. Стяжные хомуты 14252 и 14253 могут крепиться ко второй фиксаторной детали 14250 так, что вторая фиксаторная деталь 14250 может толкать стяжные хомуты 14252, 14253 дистально при выдвижении второй фиксаторной детали 14250 дистально посредством закрывающей фиксаторной детали 14240 и, соответственно, так, что вторая фиксаторная деталь 14250 может тянуть стяжные хомуты 14252, 14253 проксимально при проксимальном втягивании второй фиксаторной детали 14250 посредством закрывающей фиксаторной детали 14240. В различных вариантах стволовой участок 14030 может быть изогнутым и по меньшей мере в одном варианте осуществления может включать в себя изогнутый корпус 14031 ствола, проходящий от проксимального крепежного элемента 14032 корпуса. В некоторых вариантах стяжные хомуты 14252 и 14253 могут быть гибкими, чтобы приспосабливаться к изогнутой траектории участка закрывающего исполнительного механизма стволового участка 14030. Участок закрывающего исполнительного механизма стволового участка 14030 может дополнительно содержать крепежный участок, или троакар 14258, прикрепленный к стяжным хомутам 14253 и 14253. Троакар 14258 может крепиться к стяжным хомутам 14252, 14253 так, что троакар 14258 выдвигается и втягивается вместе со стяжными хомутами 14252, 14253. Троакар 14258 может содержать дистальный конец, который может быть выполнен с возможностью разъемного взаимодействия с упором 14050 так, что упор 14050 выдвигается и втягивается вместе с троакаром 14258, когда упор 14050 собран на троакаре 14258. В вышеупомянутом патенте США №. 5,292,503 это описывается более подробно.
В дополнение к указанному выше, как показано главным образом на ФИГ. 113, пусковая система дополнительно может содержать пусковую фиксаторную деталь 14290, присоединенную к дистальному концу пусковой трубки 14280. В различных вариантах винт может блокировать пусковую фиксаторную деталь 14290 на пусковой трубке 14280 так, что пусковая фиксаторная деталь 14290 поступательно перемещается дистально при поступательном перемещении пусковой трубки 14280 дистально и, соответственно, поступательно перемещается проксимально при поступательно перемещении пусковой трубки 14280 проксимально. Пусковая фиксаторная деталь 14290 может содержать один или более боковых выступов, которые входят в желоба 14080 корпуса исполнительного механизма для выравнивания пусковой фиксаторной детали 14290 и пусковой трубки 14280. Боковые выступы могут также предотвращать поворот пусковой трубки 14280 и пусковой фиксаторной детали 14290, когда пусковая трубка 14280 двигается посредством пусковой гайки 14260, как описано выше. Пусковая фиксаторная деталь 14290 может содержать выходной элемент пускового исполнительного механизма исполнительного механизма 14020 и может быть прикреплена к входному элементу пускового исполнительного механизма стволового участка 14030. Входной элемент пускового исполнительного механизма стволового участка 14030 может содержать вторую фиксаторную деталь 14300, которая может прикрепляться к пусковой фиксаторной детали 14290 при сборке стволового участка 14030 на исполнительном механизме 14020. Пусковая фиксаторная деталь 14290 может сопрягаться по принципу язычок-в-желоб со второй пусковой фиксаторной деталью 14300. В собранном состоянии пусковая фиксаторная деталь 14290 может толкать вторую фиксаторную деталь 14300 дистально при дистальном выдвижении пусковой фиксаторной детали 14290 пусковой трубкой 14280; соответственно, пусковая фиксаторная деталь 14290 может тянуть вторую фиксаторную деталь 14300 проксимально при проксимальном втягивании пусковой фиксаторной детали 14290 пусковой трубкой 14280.
Пусковой исполнительный механизм дополнительно может содержать выталкиватель 14310 скоб, соединенный со второй фиксаторной деталью 14300 так, что выталкиватель 14310 скоб перемещается проксимально и дистально вместе со второй фиксаторной деталью 14300. При перемещении выталкивателя 14310 скоб дистально посредством второй фиксаторной детали 14300 выталкиватель 14310 скоб может выталкивать скобки из корпуса 14040 кассеты. В различных вариантах вторая фиксаторная деталь 14300 может дистально выдвигать скальпель 14320 вместе с выталкивателем 14310 скоб для разрезания ткани, захваченной между упором 14050 и корпусом 14040 кассеты. Вторая фиксаторная деталь 14300 может втягивать выталкиватель 14310 скоб и скальпель 14320 проксимально при проксимальном втягивании второй фиксаторной детали 14300 посредством пусковой фиксаторной детали 14290.
В дополнение к указанному выше можно отметить, что части закрывающей системы, содержащей закрывающую гайку 14190 и закрывающий шток 14230, а также части пусковой системы, содержащей пусковую гайку 14260 и пусковую трубку 14280, могут быть концентрическими и встроенными. Пусковую гайку 14260 и пусковую трубку 14280 можно считать внешним механизмом, а закрывающую гайку 14190 и закрывающий шток 14 230 можно считать внутренним механизмом. Вместе с ползунком 14115, закрывающая гайка 14190, закрывающий шток 14230, пусковая гайка 14260 и пусковая трубка 14280 могут образовывать трансмиссию 14000. Концентрическая и встроенная конструкция трансмиссии 14000 позволяет уменьшить место, занимаемое закрывающими системами и системами пуска, и создать исполнительный механизм 14020 меньшего размера, более удобный для удерживания. Такая конструкция также позволяет внешнему механизму служить опорой и обеспечивать несущие поверхности для перемещающихся частей внутреннего механизма. В представленном варианте осуществления поступательно перемещающиеся элементы внутреннего механизма показаны более длинными, чем поступательно перемещающиеся элементы внешнего механизма. Закрывающий шток 14230, например, может иметь длину порядка 5,08 сантиметров (два дюйма), а пусковая трубка 14280 может иметь длину, например, порядка 2,54 сантиметров (один дюйм); однако можно использовать любую подходящую длину. Более длинные перемещающиеся элементы подходят, если требуется более длинная дистанция перемещения. В представленных вариантах внутренний механизм или закрывающий исполнительный механизм может двигать нагрузку на большее расстояние, чем внешний механизм или пусковой привод. Иными словами, закрывающий исполнительный механизм может двигать нагрузку дальше, чем пусковой привод.
Как описано выше, исполнительный механизм 14020 и стволовой участок 14030 разработаны с возможностью удобной сборки. Пусковая фиксаторная деталь 14290 имеет полукруглый выступ на конце дистально выступающего фланца. Этот полукруглый выступ входит в полукруглый желоб на проксимальном конце второй пусковой фиксаторной детали 14300. Поскольку соединение происходит по полукруглой поверхности, соединить пусковую фиксаторную деталь 14290 со второй пусковой фиксаторной деталью 14300 можно путем перемещения пусковой фиксаторной детали 14290 ко второй пусковой фиксаторной детали 14300 в направлении, поперечном или перпендикулярном общей продольной оси этих деталей. Соединение деталей закрывающего узла также облегчено, по существу, таким же способом. Например, закрывающая фиксаторная деталь 14240 может содержать дистально проходящий фланец. На дистальном конце этого фланца имеется полукруглый выступ, проходящий от по существу полукруглой части закрывающей фиксаторной детали 14240. Кольцевой желоб на проксимальном участке второй фиксаторной детали 14250 принимает этот полукруглый выступ и прикрепляет закрывающую фиксаторную деталь 14240 ко второй фиксаторной детали 14250. Учитывая полукруглую форму закрывающей фиксаторной детали 14240, закрывающую фиксаторную деталь 14240 и вторую фиксаторную деталь 14250 можно собирать и разбирать путем поступательного перемещения, поперечного или перпендикулярного общей продольной оси этих деталей, что способствует быстрому соединению и отсоединению стволового участка 14030 и исполнительного механизма 14020.
Как по существу показано на ФИГ. 113 пусковой механизм 14070 и закрывающая ручка 14075 дополнительно показаны с пространственным разделением компонентов, чтобы лучше видеть их взаимодействие с соседними деталями. Закрывающая ручка 14075 выполнена с возможностью поворота в первом направлении, по часовой стрелке, и во втором направлении, против часовой стрелки. При повороте закрывающей ручки 14075 в первом направлении, закрывающая ручка 14075 может входить в контакт и замыкать первый переключатель, а при повороте закрывающей ручки 14075 во втором направлении закрывающая ручка 14075 может входить в контакт и замыкать второй переключатель. При замыкании первого переключателя замыкающей ручкой 14075 на двигатель 14090 может быть подано питание и он может работать в первом направлении, а при замыкании второго переключателя закрывающей ручкой, на двигатель 14090 может быть подано питание и он может работать во втором направлении. При работе двигателя 14090 в первом направлении двигатель 14090 может двигать закрывающий шток 14230 дистально, чтобы перемещать упор 14050 от корпуса 14040 кассеты, а при работе двигателя 14090 во втором направлении двигатель 14090 может двигать закрывающий шток 14230 проксимально, чтобы перемещать упор 14050 к корпусу 14040 кассеты. Закрывающая ручка 14075 может быть выполнена с возможностью установки в центральном или нейтральном положении, в котором ни первый переключатель, ни второй переключатель не замкнуты, и двигатель 14090 не реагирует на закрывающую ручку 14075. В различных вариантах инструмент 14010 может содержать по меньшей мере одну пружину, такую как, например, пружина 14076, выполненная с возможностью смещения закрывающей ручки 14075, например, в нейтральное положение.
Если обратиться к пусковому крючку 14070, пусковой механизм 14070 шарнирно соединен с корпусом 14080 исполнительного механизма с возможностью поворота, и подпружинен торсионной пружиной 14071, которая переводит пусковой механизм 14070 в положение, повернутое от корпуса 14080 исполнительного механизма. Пусковой переключатель 14305, расположенный вблизи пускового механизма 14070, находится в положении, позволяющем ему входить в контакт с пусковым механизмом 14070, когда пусковой механизм 14070 поворачивается к корпусу 14080 исполнительного механизма против действия торсионной пружины 14071. Пусковой механизм 14070 может замыкать пусковой переключатель 14305 при активации пускового механизма 14070. При замыкании пускового переключателя 14305 двигатель 14090 может работать в первом направлении, выдвигая пусковую трубку 14280 и выталкиватель 14310 скоб дистально. При высвобождении пускового механизма 14070 торсионная пружина 14071 может перемещать пусковой механизм 14070 обратно в неактивированное положение, выводя его из контакта с пусковым переключателем 14305. В этот момент пусковой переключатель 14305 может быть не замкнут, и двигатель 14090 может не реагировать на пусковой механизм 14070. В различных вариантах инструмент 14010 дополнительно может содержать предохранительную защелку 14320, шарнирно соединенную с возможностью поворота с корпусом 14080 исполнительного механизма, и которая может поворачиваться между заблокированным положением, в котором пусковой механизм 14070 не может быть активирован, и вторым положением, в котором пусковой механизм 14070 может быть активирован для замыкания пускового переключателя 14035. В любом случае двигатель 14090 может работать во втором направлении, втягивая пусковую трубку 14280 и выталкиватель 14310 скоб. В некоторых вариантах двигатель 14090 можно переключать между первым направлением поворота и вторым направлением поворота, когда пусковая система достигает конца своего пускового хода. В некоторых вариантах исполнительный механизм 14020 дополнительно может содержать кнопку реверса и переключатель, которые могут приводиться в действие для работы двигателя 14090 во втором направлении.
В свете вышеизложенного, ниже предлагается способ использования инструмента 14010, хотя можно использовать любой подходящий способ. Кроме этого, выше описано, что исполнительный механизм 14020 способен предоставить два выхода, а стволовой участок 14030 способен принять два входа для выполнения двух функций. Эти функции описаны как функция закрывания и функция пуска, но изобретение этим не ограничивается. Функции могут включать в себя любые подходящие функции, такие как, например, функция шарнирного поворота. Для применения исполнительного механизма 14020 в различных вариантах пользователь сначала может собрать исполнительный механизм 14020 с стволовым участком 14030, перемещая исполнительный механизм 14020 в сторону стволового участка 14030 перпендикулярно продольной оси исполнительного механизма 14020, как видно на ФИГ. 112. Пользователь может выравнять открытую сторону проксимального конца стволового участка 14030 с открытой стороной дистальной части исполнительного механизма 14020 и соединить эти детали вместе. Такая сборка позволяет соединить закрывающую и пусковую фиксаторные детали, как описано выше. Как также описано выше, защелки 14025 на активаторе 14020 могут захватывать буртики на корпусе 14032 стволового участка и удерживать исполнительный механизм 14020 и стволовой участок 14030 вместе с возможностью высвобождения. После сборки исполнительного механизма 14020 и стволового участка 14030 пользователь может перевести узел 14150 ползунка в первое положение, чтобы применить первую нужную функцию хирургического инструмента и прикрепленной части. Как описано выше, для перемещения узла 14150 ползунка в первое положение можно использовать кнопку 14060.
Как показано главным образом на ФИГ. 114, внутренние шлицы 14140 на ползунке 14115 могут взаимодействовать с внешними шлицами 14200 закрывающей гайки 14190, когда узел 14150 ползунка находится в первом положении. Далее пользователь может повернуть закрывающую ручку 14075, чтобы расположить упор 14050 относительно корпуса 14040 кассеты. Как описано выше, закрывающую ручку 14075 можно поворачивать в первом направлении, замыкая первый закрывающий переключатель и перемещая упор 14050 от корпуса 14040 кассеты, и во втором направлении, замыкая второй закрывающий переключатель и перемещая упор 14050 к корпусу 14040 кассеты. В некоторых вариантах замыкание первого закрывающего переключателя может приводить к замыканию схемы, приводящей в действие двигатель 14090 в первом направлении и, соответственно, замыкание второго закрывающего переключателя может приводить к замыканию схемы, приводящей в действие двигатель 14090 во втором направлении. В некоторых вариантах первый закрывающий переключатель и второй закрывающий переключатель могут обмениваться данными с микропроцессором хирургического инструмента 14010, который может управлять подачей электропитания, включая полярностью подаваемого электропитания, к двигателю 14090 на основе входного сигнала от первого закрывающего переключателя и второго закрывающего переключателя. Как описано выше, двигатель 14090 может поворачивать поворачиваемый ствол 14100, удлинительную часть 14110, ползунок 14115 и, благодаря конструкции трансмиссии 14000, закрывающую гайку 14190. Как описано выше, закрывающая гайка 14190 находится в резьбовом взаимодействии с закрывающим штоком 14230, который перемещает упор 14050 проксимально и дистально. Альтернативно закрывающий шток 14230 может выполнять какую-либо иную функцию.
Когда узел 14150 ползунка находится в первом, проксимальном положении, как показано на ФИГ. 114, двигатель 14090 может реагировать на закрывающую ручку 14075, но не на пусковой механизм 14070. По меньшей мере в одном варианте нижний опорный подшипник 14170 узла 14150 ползунка может входить в контакт и замыкать первый переключатель 14340 трансмиссии, когда узел 14150 ползунка находится в первом положении. В различных вариантах первый переключатель 14340 трансмиссии может обмениваться данными с микропроцессором хирургического инструмента 14010, который может быть выполнен с возможностью игнорировать входной сигнал от пускового переключателя 14305, когда первый переключатель 14340 трансмиссии замкнут. В таких обстоятельствах пользователь хирургического инструмента 14010 может нажать пусковой механизм 14070, но двигатель 14090 не отреагирует на это. Вместо этого, в таких обстоятельствах двигатель 14090 реагирует на первый и второй закрывающие переключатели, активируемые закрывающей ручкой 14075 для перемещения упора 14050. При перемещении узла 14150 ползунка во второе, или дистальное положение, как показано на ФИГ. 115, нижний опорный подшипник 14170 высвобождается из взаимодействия с первым переключателем 14340 трансмиссии, и первый переключатель 14340 трансмиссии возвращается в разомкнутое состояние. При перемещении узла 14150 ползунка во второе, или дистальное положение, нижний опорный подшипник 14170 может входить в контакт и замыкать второй переключатель 14350 трансмиссии. В различных вариантах второй переключатель 14350 трансмиссии может обмениваться данными с микропроцессором хирургического инструмента 14010, который может быть выполнен с возможностью игнорировать входной сигнал от закрывающей ручки 14075, когда второй переключатель 14350 трансмиссии замкнут. В таких обстоятельствах пользователь хирургического инструмента 14010 может повернуть закрывающую ручку 14075, но двигатель 14090 не отреагирует на это. Вместо этого в таких обстоятельствах двигатель 14090 реагирует на пусковой переключатель 14305, активируемый пусковым крючком 14070.
Для перемещения узла 14150 ползунка из первого положения во второе положение, как описано выше, пользователь может нажать кнопку 14060 ползунка, чтобы высвободить кнопку 14060 от стопора и переместить узел 14150 ползунка дистально во второе положение. В таких обстоятельствах ползунок 14115 может высвободиться из взаимодействия с закрывающей гайкой 14160 и входить во взаимодействие с пусковой гайкой 14260. Более конкретно, внутренние шлицы 14140 на ползунке 14115 могут высвободиться из взаимодействия с внешними шлицами 14200 на закрывающей гайке 14190 и, более того, внешние шлицы 14130 ползунка 14150 могут вступить во взаимодействие с внутренними шлицами 14270 пусковой гайки 14260. В этот момент пользователь может повернуть предохранительную защелку 14320 в разблокированное положение, чтобы подготовить пусковой механизм 14070 к пуску. Пользователь может запустить пусковую систему, повернув пусковой механизм 14070 против часовой стрелки, как показано на ФИГ. 115 в сторону корпуса 14080 исполнительного механизма. Как описано выше, пусковой механизм 14070 может вступить в контакт с пусковым переключателем 14305, который может подавать электропитание на двигатель 14090. Аналогично первой конфигурации трансмиссии 14000, двигатель 14090 может поворачивать поворачиваемый ствол 14100, удлинительную часть 14110 и ползунок 14115; однако во второй конфигурации трансмиссии 14000 ползунок 14115 поворачивает пусковую гайку 14260 и поступательно перемещает пусковую трубку 14280.
В различных вариантах электропитание на инструмент 14010 может подаваться от внешнего источника питания. В некоторых вариантах можно использовать одну или более батарей, расположенных внутри исполнительного механизма 14020. Батареи могут представлять собой, например, литиевые аккумуляторные батареи. В некоторых вариантах батареи и двигатель 14090 могут располагаться в герметичном съемном корпусе, который может допускать очистку, стерилизацию и многоразовое использование.
После использования исполнительного механизма 14020 в ходе хирургической операции пользователь может разобрать исполнительный механизм 14020 от стволового участка 14030. Для разборки исполнительного механизма 14020 от стволового участка 14030 пользователь может нажать на защелки 14025. После этого исполнительный механизм 14020 может подвергаться очистке, стерилизации и многократному использованию или утилизации. Аналогично, стволовой участок 14030 может подвергаться очистке, стерилизации и многократному использованию или утилизации. В случае многократного использования стволового участка 14030 в корпус 14040 кассеты можно повторно загрузить скобки. В некоторых вариантах корпус 14040 кассеты может включать в себя сменную кассету, которую можно использовать для повторной загрузки скоб. В различных вариантах различные части исполнительного механизма 14020 также могут быть объединены в герметизированном, разделенном на отсеки модуле, который можно легко вставить в корпус 14080 исполнительного механизма и удалить из него. Например, двигатель 14090, поворачиваемый ствол 14100, удлинительная часть 14110, узел 14150 ползунка, закрывающая гайка 14190, закрывающий шток 14230, пусковая гайка 14260 и пусковая трубка 14280 могут быть объединены в модульный узел, который может быть извлечен из корпуса 14080 исполнительного механизма. Кроме этого, детали исполнительного механизма 14020 могут входить в отдельные собираемые модули. Например, электронные части исполнительного механизма 14020, такие как двигатель 14090 и батарея, могут составлять один модуль, а механические узлы, содержащие вращающиеся и/или перемещающиеся части, могут составлять второй модуль. В таких обстоятельствах первый модуль можно стерилизовать способами, отличными от второго модуля. Такие ситуации могут способствовать применению для второго модуля, например, гамма-излучения, которое может не подходить для стерилизации первого модуля.
Предусмотрены различные дополнения к исполнительному механизму 14020. Например, функции микропроцессора можно использовать для обнаружения положений конца рабочего хода закрывающей и/или пусковой системы и подачи двигателю 14090 сигнала на остановку закрывающего хода и/или пускового хода. Функции микропроцессора также можно использовать для определения типа узла ствола, который прикреплен к исполнительному механизму 14020. Например, исполнительный механизм 14020 может включать в себя датчик, находящийся в связи для передачи сигнала с микропроцессором в исполнительном механизме 14020, сигнализирующий, что к исполнительному механизму 14020 присоединен стволовой узел кругового сшивающего инструмента или что к исполнительному механизму 14020 присоединен стволовой узел линейного сшивающего инструмента. Предусматривается, что исполнительный механизм 14020 может обеспечить питание многих типов хирургических инструментов, требующих, например, по меньшей мере одного или, возможно, двух входных продольных движений. В различных вариантах исполнительный механизм 14020 может обеспечивать работу, например, кругового сшивающего инструмента, линейного сшивающего инструмента, прямоугольного сшивающего инструмента, ножниц, зажимов и/или других типов хирургических инструментов.
Дополнительные модификации исполнительного механизма 14020 включают в себя использование нескольких двигателей так, что можно увеличить число функций, которые может применять исполнительный механизм 14020. Некоторые модификации исполнительного механизма 14020 включают в себя выполнение более чем двух функций с использованием одного двигателя. Например, предусмотрена третья позиция узла 14150 ползунка, в которой третья функция реализуется третьим встроенным механизмом. В некоторых вариантах, в дополнение к указанному выше, узел 14150 ползунка может иметь третье положение, например, положение покоя или нейтральное положение, в котором двигатель 14090 не реализует никакой функции.
Дополнительные модификации могут включать в себя применение электрических и/или магнитных способов поступательного перемещения ползунка 14115 из одной позиции в другую. Например, для перемещения ползунка 14115 из одной позиции в другую может использоваться соленоид. Пружина может предварительно переводить ползунок 14115 в исходное положение, а подача питания на соленоид может перемещать ползунок 14115 из исходного положения во второе положение.
Хирургический сшивающий инструмент 15010 показан на ФИГ. 117 и 118. Аналогично указанному выше, инструмент 15010 может содержать рукоятку, закрывающую систему, выполненную с возможностью перемещения упора 15090 между открытым положением (ФИГ. 117) и закрытым положением (ФИГ. 118) относительно кассеты 15080 со скобками и, кроме этого, пусковую систему, выполненную с возможностью размещения скоб из кассеты 15080 со скобками и разрезания ткани, захваченной между упором 15090 и кассетой 15080 со скобками. Корпус рукоятки хирургического инструмента на ФИГ. 117 и 118 удален, чтобы показать содержащиеся внутри компоненты. Также аналогично указанному выше, закрывающая система инструмента 15010 может содержать закрывающий двигатель 15110, закрывающий блок шестерен, содержащий a шестерню 15160 винта закрывающего исполнительного механизма, функционально соединенную с закрывающим двигателем 15110, и винт 15170 закрывающего исполнительного механизма, функционально соединенный с шестерней 15160 винта закрывающего исполнительного механизма. В различных вариантах закрывающий двигатель 15110 может удерживаться рамой 15125 двигателя, которая кроме этого может удерживать с возможностью поворота шестерню 15160 винта закрывающего исполнительного механизма и ходовой винт 15170 закрывающего исполнительного механизма. Закрывающая система дополнительно может включать в себя закрывающую кнопку 15065, выполненную с возможностью входить в контакт и замыкать закрывающий переключатель 15285, который при замыкании может приводить в действие закрывающий двигатель 15110. В некоторых вариантах, в дополнение к указанному выше, закрывающая кнопка 15065 может быть выполнена с возможностью входить в контакт с закрывающий переключателем, выполненным с возможностью приводить в действие закрывающий двигатель 15110 в первом направлении и закрывать упор 15090, и открывающим переключателем, выполненным с возможностью приводить в действие закрывающий двигатель 15110 во втором направлении и открывать упор 15090.
В дополнение к указанному выше, закрывающая система также может содержать каретку 15180, выполненную с возможностью взаимодействия с упором 15090 и перемещения упора 15090 между открытым положением (ФИГ. 117) и закрытым положением (ФИГ. 118). Каретка 15180 может включать в себя участок 15175 резьбовой гайки, имеющий резьбовое соединение с резьбовой частью ходового винта 15170 закрывающего исполнительного механизма. Каретка 15180 может не иметь возможности поворота вместе с ходовым винтом 15170 закрывающего исполнительного механизма так, что поворот ходового винта 15170 закрывающего исполнительного механизма может поступательно перемещать каретку 15180 проксимально и дистально, в зависимости от направления поворота ходового винта 15170 закрывающего исполнительного механизма. При повороте ходового винта 15170 закрывающего исполнительного механизма в первом направлении посредством закрывающего двигателя 15110, ходовой винт 15170 закрывающего исполнительного механизма может смещать каретку 15180 дистально, закрывая упор 15090. Соответственно, при повороте ходового винта 15170 закрывающего исполнительного механизма во втором, противоположном направлении посредством закрывающего двигателя 15110, ходовой винт 15170 закрывающего исполнительного механизма может смещать каретку 15180 проксимально, открывая упор 15090. Каретка 15180 может, по меньшей мере, частично располагаться вокруг канала 15070 кассеты, и в различных вариантах может фиксироваться с возможностью скольжения к каналу 15070 кассеты. Как показано преимущественно на ФИГ. 118, канал 15070 кассеты может включать в себя один или более пазов 15195, образованных в его противоположных сторонах, которые выполнены с возможностью принимать с возможностью скольжения один или более выступов 15185, проходящих внутрь от каретки 15080. В других ситуациях канал 15070 может содержать выступы 15185, а каретка 15080 может содержать пазы 15195. В любом случае пазы 15195 и выступы 15185 могут быть выполнены с возможностью ограничения перемещения каретки 15180, например, по продольной или по существу продольной траектории.
Каретка 15080 может перемещаться из первого, проксимального положения (ФИГ. 117) во второе, дистальное положение (ФИГ. 118) для закрывания упора 15090. Каретка 15080 может включать в себя поперечную планку 15081, выполненную с возможностью входить в контакт и перемещения упора 15090 при перемещении каретки 15080 относительно упора 15090. В различных вариантах упор 15090 может быть соединен с каналом 15070 кассеты с возможностью поворота вокруг шарнира 15200, и упор 15090 может вращаться вокруг шарнира 15200 посредством поперечной планки 15081 каретки. Более конкретно, поперечная планка 15181 каретки может быть выполнена с возможностью входить в контакт с верхней или кулачковой поверхностью 15092 упора 15090 и скользить по этой верхней поверхности 15092 по мере того как каретка 15080 перемещается дистально для поворота упора 15090 в сторону кассеты 15080, расположенной внутри канала 15070 кассеты. В некоторых вариантах дистальный конец 15091 упора 15090 может входить в контакт с дистальным концом 15081 кассеты 15080, когда упор 15090 достигает полностью закрытого положения. Каретка 15180 может дистально выдвигаться до тех пор, пока не достигнет своего крайнего дистального положения, и/или упор 15090 не достигнет своего полностью закрытого положения, показанного на ФИГ. 118. В различных обстоятельствах каретка 15180 может входить в контакт и замыкать датчик конца рабочего хода при достижении кареткой 15180 крайнего дистального положения. В некоторых вариантах датчик конца рабочего хода может находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 15010. При замыкании датчика конца рабочего хода кареткой 15180, микропроцессор может прерывать подачу питания на закрывающий двигатель 15110 и останавливать выдвигание каретки 15180.
Как описано выше, поперечная планка 15181 каретки 15180 может двигать по кулачку упор 15090 к кассете 15080 со скобками, толкая кулачковую поверхность 15092 вниз. Упор 15090 дополнительно может содержать защелкивающий штифт 15210, проходящий от его боковых сторон, который может приниматься в пазах 15215, образованных в боковых сторонах канала 15070 кассеты, при повороте упора 15090 к кассете 15080 с скобками. В различных вариантах защелкивающий штифт 15210 может входить в контакт с закрытыми концами пазов 15215, например, при достижении упором 15090 закрытого положения. В некоторых вариантах упор 15090 может находиться в закрытом положении, а защелкивающий штифт 15210 может не контактировать с закрытыми концами пазов 15215. В некоторых вариантах закрывающая система может содержать один или более фиксаторов 15190, выполненных с возможностью взаимодействия с защелкивающим штифтом 15210 и/или перемещения упора 15090 ближе к кассете 15080 со скобками. Защелки 15190 могут соединяться с возможностью поворота с каналом 15070 кассеты при помощи шарнирного штифта 15191, и могут поворачиваться вокруг оси шарнира, взаимодействуя с защелкивающим штифтом 15210. В некоторых вариантах защелки 15190 могут захватывать защелкивающий штифт 15210 и размещать защелкивающий штифт 15210 вплотную к закрытым концам пазов 15215. Каждая защелка 15190 может содержать плечо 15192 защелки, которое может скользить по защелкивающему штифту 15210 и толкать защелкивающий штифт 15210 вниз при повороте защелки 15190 дистально в закрытое положение. Каждое плечо защелки 15192 может образовывать, по меньшей мере, часть паза 15193 защелки, которая может быть выполнена с возможностью принимать защелкивающий штифт 15210 при перемещении защелок 15190 в активированные положения. Плечи 15192 защелок и закрытые концы пазов 15215 в процессе взаимодействия могут захватывать и/или удерживать защелкивающий штифт 15210 в нужном положении.
В дополнение к указанному выше, защелки 15190 могут перемещаться между незафиксированным положением (ФИГ. 117) и зафиксированным положением (ФИГ. 118) посредством каретки 15180 при дистальном выдвигании каретки 15180. Защелки 15190 могут перемещать упор 15090 в полностью закрытое положения на то расстояние, на которое упор 15090 не перемещен в полностью закрытое положение посредством поперечной планки 15181. В различных вариантах каретка 15180 может включать в себя дистальные кулачковые поверхности 15182, которые могут взаимодействовать с защелками 15190 при выдвижении каретки 15180 дистально. По меньшей мере, в одном таком варианте каждая кулачковая поверхность 15182 может содержать, например, косую или наклонную поверхность. При повороте ходового винта 15170 закрывающего исполнительного механизма во втором направлении и проксимальном втягивании каретки 15180 посредством ходового винта 15170 закрывающего исполнительного механизма защелки 15190 могут вернуться в неактивированные положения. В различных вариантах инструмент 15010 может дополнительно содержать, например, одну или несколько смещающих пружин 15195, которые могут быть выполнены с возможностью поворота защелок 15190 в проксимальном направлении, когда дистальные кулачковые поверхности 15182 втягиваются от защелок 15190. Каждая защелка 15190 может включать в себя отверстие 15194, образованное с возможностью принимать первый конец пружины 15195. Второй конец каждой пружины 15195 может соединяться с пружинной опорой 15079, проходящей от канала 15070 кассеты. При дистальном повороте защелок 15190 из незафиксированного положения в зафиксированное положение посредством каретки 15180, как описано выше, пружины 15195 могут упруго растягиваться так, что при втягивании каретки 15180 пружины 15195 могу упруго вернуться в исходное состояние, таким образом прикладывая к защелкам 15090 усилие, например, через отверстия 15194. В любом случае, когда защелки 15190 вернулись в незафиксированное положение, упор 15090 можно снова переместить относительно кассеты 15080 со скобками.
Как описано выше, поперечная планка 15181 каретки 15180 может входить в контакт с кулачковой поверхностью 15092 упора 15090 и поворачивать упор 15090 в сторону кассеты 15080 со скобками. Каретка 15180 также может быть выполнена с возможностью поворота упора 15090 от кассеты 15080 со скобками. По меньшей мере в одном таком варианте на упоре 15090 может быть образована вторая кулачковая поверхность 15093, которая может входить в контакт с поперечной планкой 15181 каретки 15080 при проксимальном перемещении каретки 15080 ходовым винтом 15170 закрывающего исполнительного механизма. Следует понимать, что закрывающая кулачковая поверхность 15092 может быть образована на первой стороне от шарнирного штифта 15200, а открывающая кулачковая поверхность 15093 может быть образована на второй, противоположной стороне от шарнирного штифта 15200. Открывающая кулачковая поверхность 15093 может проходить под углом относительно закрывающей кулачковой поверхности 15092. В различных вариантах поперечная планка 15181 может входить в контакт и скользить относительно открывающей кулачковой поверхности 15093 при втягивании каретки 15180. Открывающая кулачковая поверхность 15093 может быть выполнена так, что степень или величина открытия упора 15090 относительно кассеты 15080 со скобками зависит от расстояния, на которое поперечная планка 15181 втягивается в проксимальном направлении. Например, если поперечная планка 15181 втягивается проксимальнее шарнира 15200 на первое расстояние, поперечная планка 15181 может вращать упор 15090 вверх, от кассеты 15080 со скобками, на первую величину, а если поперечная планка 15181 втягивается проксимальнее шарнира 14200 на второе расстояние, большее чем первое расстояние, то поперечная планка 15181 может вращать упор 15090 вверх, от кассеты 15080 со скобками, на вторую величину, большую, чем первая величина.
Вышеописанная закрывающая система может позволить пользователю хирургического инструмента вращать упор 15090 между открытым и закрытым положением без необходимости ручных манипуляций с упором 15090. Вышеописанная закрывающая система также может фиксировать или блокировать упор 15090 в закрытом положении автоматически, не требуя применения отдельного исполнительного механизма. Если пользователь не удовлетворен положением ткани между упором 15090 и кассетой 15080 со скобками, когда упор 15090 находится в закрытом положении, пользователь снова может открыть упор 15090, изменить положение упора 15090 и кассеты 15080 со скобками относительно ткани, а затем снова закрыть упор 15090. Пользователь может открывать и закрывать упор 15090 столько раз, сколько нужно, прежде чем активировать пусковую систему инструмента 15010. Пусковая система может содержать пусковой двигатель 15120, установленный на раме 15125 двигателя, узел шестерен пускового исполнительного механизма, функционально соединенный с пусковым двигателем 15120, и содержащий пусковую шестерню 15240, шестерню 15250 ходового винта пускового исполнительного механизма и ходовой винт 15260 пускового исполнительного механизма. Аналогично указанному выше, узел шестерен пускового исполнительного механизма и/или ходовой винт 15260 пускового исполнительного механизма могут удерживаться с возможностью поворота на раме 15125 двигателя. Пусковой исполнительный механизм дополнительно может содержать пусковой механизм 15055, выполненный с возможностью замыкания пускового переключателя 15290 при нажатии пускового механизма 15055 с целью приведения в действие пускового двигателя 15120. При приведении в действие пускового двигателя 15120 в первом направлении с поворотом ходового винта 15260 пускового исполнительного механизма в первом направлении, пусковой исполнительный механизм может размещать скобки, хранящиеся с возможностью извлечения в кассете 15080 со скобками, и разрезать ткань, захваченную между упором 15090 и кассетой 15080 со скобками. При приведении в действие пускового двигателя 15120 во втором направлении с поворотом ходового винта 15260 пускового исполнительного механизма во втором, противоположном направлении, пусковой исполнительный механизм может втягиваться. После этого упор 15090 можно снова открыть для удаления ткани из пространства между упором 15090 и кассетой со скобками 15080. В некоторых вариантах может быть не нужно втягивать пусковой исполнительный механизм для открытия упора 15090. В таких вариантах пусковой исполнительный механизм может не взаимодействовать с упором 15090 при своем дистальном выдвижении. По меньшей мере в одном таком варианте пусковой исполнительный механизм может входить в кассету 15080 со скобками и выталкивать из нее скобки, а режущая кромка скальпеля может продвигаться между кассетой 15080 со скобками и упором 15090 и разрезать ткань. Пусковой исполнительный механизм может не блокировать упор 15090 в закрытом положении, хотя предусмотрены варианты осуществления, в которых пусковой исполнительный механизм может блокировать упор 15090 в закрытом положении. В таких вариантах осуществления, например, может использоваться двутавровый элемент, который может взаимодействовать с упором 15090 и кассетой со скобками 15080 и удерживать их в нужном положении относительно друг друга по мере дистального продвижения двутаврового элемента.
Инструмент 15010 может получать питание от внешнего источника питания и/или внутреннего источника питания. Кабель может входить в корпус 15080 исполнительного механизма и подавать питание, например, от внешнего источника питания. Одна или более батарей, таких как, например, батарея 15400, могут располагаться внутри рукоятки инструмента 15010, подавая питание, например, от внутреннего источника. Инструмент 15010 дополнительно может содержать один или более индикаторов, таких как, например, светодиодный индикатор 15100, которые могут указывать рабочее состояние инструмента 15010. Светодиодный индикатор 15100 может работать аналогичным или сходным образом, что и, например, вышеописанный Светодиодный индикатор 11100. Светодиодный индикатор 15100 может находиться в связи для передачи сигнала с микроконтроллером инструмента 15010, который может располагаться, например, на печатной плате 15500.
В предыдущих хирургических инструментах использостволась закрывающая система с ручным с исполнительным механизмом, выполненная с возможностью перемещения упора между открытым положением и закрытым положением. В различных вариантах осуществления, описанных в настоящем документе, используется закрывающая система с с исполнительным механизмом, выполненная с возможностью перемещения упора между открытым положением и закрытым положением относительно фиксированной кассеты со скобками. Предусмотрены и другие варианты осуществления, в которых упор может быть фиксированным, а закрывающая система с с исполнительным механизмом может перемещать кассету со скобками между закрытым и открытым положениями. В любом случае двигатель закрывающей системы может задавать тканевый зазор между упором и кассетой со скобками. В различных вариантах закрывающая система хирургического инструмента является отдельной и отличной от пусковой системы. В других вариантах осуществления закрывающая и пусковая системы могут представлять собой единое целое. Когда закрывающая система и пусковая система раздельны и различаются, пользователь хирургического инструмента может оценить положение упора и кассеты со скобками относительно сшиваемой и разрезаемой ткани перед запуском пусковой системы.
Как описано выше, пусковой эффектор хирургического инструмента, такой как, например, пусковой эффектор 1000, может быть выполнен с возможностью зажимания ткани между своей браншей 1040 упора и кассетой 1060 со скобками. Когда бранша 1040 упора находится в закрытом положении, между браншей 1040 упора и кассетой 1060 со скобками образуется зазор для ткани. В некоторых вариантах концевой эффектор 1000 может подходить для применения с тонкой тканью, толстой тканью и тканью промежуточной толщины между тонкой и толстой тканью. Наиболее тонкая и наиболее толстая ткань, к работе с которыми подходит концевой эффектор 1000, могут образовывать диапазон толщины ткани для концевого эффектора 1000. В различных вариантах система хирургического инструмента может включать в себя рукоятку и несколько концевых эффекторов, которые могут быть присоединены к рукоятке, причем один или более концевых эффекторов могут иметь разные диапазоны толщины ткани. Например, первый концевой эффектор может иметь первый диапазон толщины ткани, а второй концевой эффектор может иметь второй диапазон толщины ткани, отличный от первого диапазона толщины ткани. В некоторых вариантах первый диапазон толщины ткани и второй диапазон толщины ткани могут быть раздельными, тогда как в других вариантах первый диапазон толщины ткани и второй диапазон толщины ткани могут частично перекрываться. Системы хирургических инструментов могут использовать любое подходящее количество концевых эффекторов, имеющих разные диапазоны толщины ткани, причем некоторые из диапазонов толщины ткани могут по меньшей мере частично перекрываться, а другие диапазоны толщины ткани могут совершенно не перекрываться.
В различных вариантах, в дополнение к указанному выше, кассета со скобками концевого эффектора, такая как, например, кассета 1060 со скобками концевого эффектора 1000, может быть сменной. В различных вариантах кассета 1060 со скобками может быть выполнена с возможностью съемной фиксации внутри нижней бранши 1020 концевого эффектора 1000. После съемной фиксации платформа или контактирующая с тканью поверхность кассеты 1060 со скобками может не перемещаться или по меньшей мере существенно не перемещаться относительно нижней бранши 1020. Таким образом, при движении бранши 1040 упора в сторону закрытого положения между браншей 1040 упора и поверхностью платформы кассеты 1060 со скобками может образовываться фиксированное расстояние или тканевый зазор. Для изменения этого фиксированного расстояния кассету 1060 со скобками можно удалить из нижней бранши 1020, и можно зафиксировать внутри нижней бранши 1020 другую кассету со скобками с возможностью высвобождения. Поверхность платформы другой кассеты со скобками может быть выполнена с возможностью образования тканевого зазора, отличного от зазора, обеспечиваемого кассетой 1060 со скобками. Предусмотрены варианты осуществления, в которых система хирургического инструмента включает в себя рукоятку, множество концевых эффекторов, которые могут быть собраны на рукоятке, и множество кассет со скобками, которые могут быть вставлены с возможностью замены в концевые эффекторы. Такой вариант осуществления позволяет пользователю выбрать концевой эффектор, пригодный для использования с некоторым диапазоном толщины ткани, а кассета со скобками, выбранная для применения с концевым эффектором, позволяет отрегулировать или точно настроить толщину ткани, которую может сшить концевой эффектор. В некоторых вариантах первая кассета со скобками системы хирургического инструмента может включать в себя первый тип скоб, а вторая кассета со скобками может включать в себя второй тип скоб. Например, первая кассета со скобками может включать в себя скобки, имеющие первую высоту в несформированном, или неактивированном, состоянии, а вторая кассета со скобками может включать в себя скобки, имеющие вторую высоту в несформированном, или неактивированном, состоянии, отличную от первой высоты.
Полное описание:
патента США № 5,403,312, озаглавленного «ЭЛЕКТРОХИРУРГИЧЕСКОЕ ГЕМОСТАТИЧЕСКОЕ УСТРОЙСТВО», выданного 4 апреля 1995;
патента США № 7,000,818, озаглавленного «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ РАЗДЕЛЬНЫЕ ОБОСОБЛЕННЫЕ ЗАКРЫВАЮЩУЮ И ПУСКОВУЮ СИСТЕМЫ», выданного 21 февраля 2006 г.;
патента США № 7,422,139, озаглавленного «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ С С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ И ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ», выданного 9 сентября 2008 г.;
патента США № 7,464,849, озаглавленного «ЭЛЕКТРОМЕХАНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ЗАКРЫВАЮЩЕЙ СИСТЕМОЙ И КОМПОНЕНТАМИ ВЫРАВНИВАНИЯ УПОРА», выданного 16 декабря 2008 г.;
патента США № 7,670,334, озаглавленного «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ШАРНИРНЫЙ КОНЦЕВОЙ ЭФФЕКТОР», выданного 2 марта 2010 г.;
патента США № 7,753,245, озаглавленного «ХИРУРГИЧЕСКИЕ СШИВАЮЩИЕ ИНСТРУМЕНТЫ», выданного 13 июля 2010 г.;
патента США № 8,393,514, озаглавленного «ИЗБИРАТЕЛЬНО ФУНКЦИОНИРУЮЩАЯ ИМПЛАНТИРУЕМАЯ КАССЕТА С КРЕПЕЖНЫМИ ЭЛЕМЕНТАМИ», выданного 12 марта 2013 г.;
заявки на патент США с сер. № 11/343,803, озаглавленной «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ВОЗМОЖНОСТЬЮ ЗАПИСИ», поданной 31 января 2006 г., в настоящее время патент США № 7,845,537;
заявки на патент США № 12/031,573, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ РЧ-ЭЛЕКТРОДЫ», поданной 14 февраля 2008 г.;
заявки на патент США с сер. № 12/031,873, озаглавленной «КОНЦЕВЫЕ ЭФФЕКТОРЫ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СШИВАЮЩЕГО ИНСТРУМЕНТА», поданной 15 февраля 2008 г., в настоящее время патент США № 7,980,443;
заявки на патент США с сер. № 12/235,782, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ», поданной 23 сентября 2008 г., в настоящее время патент США № 8,210,411;
заявки на патент США с сер. № 12/249,117, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ АППАРАТ С ЭЛЕКТРОПИТАНИЕМ И ВОЗМОЖНОСТЬЮ РУЧНОГО ВТЯГИВАНИЯ ПУСКОВОЙ СИСТЕМЫ», поданной 10 октября 2008 г., в настоящее время патент США № 8,608,045;
заявки на патент США с сер. № 12/647,100, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ И ЭЛЕКТРИЧЕСКИМ ИСПОЛНИТЕЛЬНЫМ УЗЛОМ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ», поданной 24 декабря 2009 г., в настоящее время патент США № 8,220,688;
заявки на патент США с сер. № 12/893,461, озаглавленной «КАССЕТА СО СКОБКАМИ», поданной 29 сентября 2012 г., в настоящее время публикация заявки на патент США № 2012/0074198;
заявки на патент США с сер. № 13/036,647, озаглавленной «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ», поданной 28 февраля 2011 г., в настоящее время патент США № 8,561,870;
заявки на патент США с сер. № 13/118,241, озаглавленной «ХИРУРГИЧЕСКИЕ СШИВАЮЩИЕ ИНСТРУМЕНТЫ С ПОВОРАЧИВАЕМЫМИ КОНФИГУРАЦИЯМИ ДЛЯ РАЗМЕЩЕНИЯ СКОБ», в настоящее время публикация заявки на патент США № 2012/0298719;
заявки на патент США с сер. № 13/524,049, озаглавленной «ШАРНИРНО ПОВОРАЧИВАЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПУСКОВОЙ ПРИВОД», поданной 15 июня 2012 г., в настоящее время публикация заявки на патент США № 2013/0334278;
заявки на патент США с сер. № 13/800,025, озаглавленной «СИСТЕМА ДАТЧИКА ТОЛЩИНЫ ТКАНИ В КАССЕТЕ СО СКОБКАМИ», поданной 13 марта 2013 г.;
заявки на патент США с сер. № 13/800 067, озаглавленной «СИСТЕМА ДАТЧИКА ТОЛЩИНЫ ТКАНИ В КАССЕТЕ СО СКОБКАМИ», поданной 13 марта 2013 г.;
публикации заявки на патент США № 2007/0175955, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ С МЕХАНИЗМОМ БЛОКИРОВКИ ЗАКРЫВАЮЩЕГО СПУСКОВОГО МЕХАНИЗМА», поданной 31 января 2006 г.; и
публикации заявки на патент США № 2010/0264194, озаглавленной «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ШАРНИРНО ПОВОРАЧИВАЕМЫМ КОНЦЕВЫМ ЭФФЕКТОРОМ», поданной 22 апреля 2010 г., в настоящее время патент США № 8,308,040, включено в настоящий документ путем ссылки.
Как описано ранее, датчики могут быть выполнены с возможностью обнаружения и сбора данных, связанных с хирургическим устройством. Процессор обрабатывает данные, полученные от датчика(ов).
Процессор может быть выполнен с возможностью исполнения команд функциональной логики. Процессор может представлять собой любой из нескольких одноядерных или многоядерных процессоров, известных в данной области техники. Память может представлять собой энергозависимое или энергонезависимое устройство хранения, выполненное с возможностью хранения постоянной и временной (рабочей) копии команд функциональной логики.
В различных вариантах осуществления функциональная логика может быть выполнена с возможностью обработки данных, связанных с движениями, как описано выше. В различных вариантах осуществления функциональная логика может быть выполнена с возможностью выполнения первичной обработки и передачи данных в компьютер, содержащий приложение для определения и генерации инструкций. Для этих вариантов осуществления функциональная логика может быть дополнительно выполнена с возможностью приема информации от главного компьютера и передачи данных обратной связи в главный компьютер. В альтернативных вариантах осуществления функциональная логика может быть выполнена с возможностью принятия на себя более важной роли в приеме информации и формировании обратной связи. В любом случае, независимо от того, выполняет ли функциональная логика это самостоятельно или реагируя на инструкции компьютера, функциональная логика может быть дополнительно выполнена с возможностью управления и передачи данных обратной связи пользователю.
В различных вариантах осуществления функциональная логика может быть реализована в инструкциях, поддерживаемых архитектурой системы команд (ISA) процессора, или на языках более высокого уровня, компилируемых в поддерживаемую архитектуру ISA. Функциональная логика может содержать один или более логических блоков или модулей. Функциональная логика может быть реализована объектно-ориентированным способом. Функциональная логика может быть выполнена с возможностью исполнения многозадачным и/или многопоточным способом. В других вариантах осуществления функциональная логика может быть реализована в аппаратном обеспечении, таком как вентильная матрица.
В различных вариантах осуществления коммуникационный интерфейс может быть выполнен с возможностью облегчения коммуникации между периферическим устройством и компьютерной системой. Сообщение может включать в себя передачу собранных биометрических данных, связанных с положением, позой и/или движением части(ей) тела пользователя на главный компьютер, и передачу данных, связанных с тактильной обратной связью от главного компьютера к периферийному устройству. В различных вариантах осуществления коммуникационный интерфейс может представлять собой проводной или беспроводной коммуникационный интерфейс. Например, проводной коммуникационный интерфейс может включать в себя, без ограничений, интерфейс универсальной последовательной шины (Universal Serial Bus, USB). Например, беспроводной коммуникационный интерфейс может включать в себя, без ограничений, интерфейс Bluetooth.
В различных вариантах осуществления процессор может быть заключен в один корпус с функциональной логикой. В различных вариантах осуществления процессор может быть установлен в один корпус вместе с функциональной логикой с образованием однокорпусной системы (System-in-Package, SiP). В различных вариантах осуществления процессор может быть интегрирован в один кристалл интегральной схемы с функциональной логикой. В различных вариантах осуществления процессор может быть установлен вместе с функциональной логикой с образованием однокристальной системы (System on Chip, SoC).
Различные варианты осуществления могут быть описаны в настоящем документе в общем контексте исполняемых инструкций для компьютера, такие как программное обеспечение, программные модули и/или подсистемы, исполняемые процессором. По существу, программное обеспечение, программные модули и/или подсистемы включают в себя любой программный элемент, созданный для выполнения конкретных операций или реализации определенных абстрактных типов данных. Программное обеспечение, программные модули и/или подсистемы могут включать в себя процедуры, программы, объекты, компоненты, структуры данных и т. п., выполняющие конкретные задачи и реализующие определенные абстрактные типы данных. Реализация компонентов и методов программного обеспечения, программных модулей и/или подсистем может храниться и/или передаваться посредством какой-либо формы машиночитаемого носителя. В этом отношении машиночитаемый носитель может представлять собой любой существующий носитель или носители для хранения информации, доступные для компьютерного устройства. Некоторые варианты осуществления также могут использоваться в распределенных вычислительных средах, в которых операции выполняются одним или несколькими удаленными устройствами, соединенными коммуникационной сетью. В распределенной вычислительной среде программное обеспечение, программные модули и/или подсистемы могут размещаться как в локальных, так и в удаленных компьютерных хранилищах, включая устройства памяти. Для хранения информации и инструкций, исполняемых процессором, можно применять оперативное запоминающее устройство (ОЗУ) или другое динамическое устройство хранения. Память также можно использовать для хранения временных переменных или другой промежуточной информации при выполнении инструкций, исполняемых процессором.
Хотя некоторые варианты осуществления могут быть показаны и описаны как содержащие функциональные компоненты, программное обеспечение, подсистемы и/или модули, выполняющие различные операции, следует понимать, что такие компоненты или модули могут быть реализованы при помощи одного или более аппаратных компонентов, программных компонентов и/или их сочетания. Функциональные компоненты, программное обеспечение, подсистемы и/или модули могут быть реализованы, например, посредством логики (например, инструкций, данных и/или кода), предназначенной для исполнения логическим устройством (например, процессором). Такая логика может храниться на одном или нескольких машиночитаемых носителях, внутренних или внешних по отношению к логическому устройству. В других вариантах осуществления функциональные компоненты, такие как программное обеспечение, двигатели и/или модули, могут быть реализованы элементами аппаратного обеспечения, которые могут включать в себя процессоры, микропроцессоры, схемы, элементы схем (например, транзисторы, резисторы, конденсаторы, индукционные катушки и т. д.), интегральные схемы, специализированные интегральные схемы (СИС), программируемые логические устройства (ПЛУ), процессоры для обработки цифровых сигналов (DSP), программируемые пользователем вентильные матрицы (ППВМ), логические вентили, регистры, полупроводниковые устройства, кристаллы, микрокристаллы, наборы кристаллов и т. д.
Примеры программного обеспечения, подсистем и/или модулей могут включать в себя программные компоненты, программы, приложения, компьютерные программы, прикладные программы, системные программы, машинные программы, программное обеспечение операционных систем, промежуточное программное обеспечение, встроенное программное обеспечение, программные модули, стандартные программы, подпрограммы, функции, методы, процедуры, программные интерфейсы, интерфейсы прикладного программирования (API), наборы инструкций, вычислительный код, компьютерный код, сегменты кода, сегменты компьютерного кода, слова, значения, символы или любые их комбинации. Выбор реализации варианта осуществления с использованием аппаратных элементов и/или программных элементов может зависеть от любого числа факторов, таких как нужная скорость вычислений, величина мощности, устойчивость к нагреву, бюджет вычислительного цикла, скорость ввода данных, скорость вывода данных, ресурсы памяти, скорость шины данных и другие ограничения конструкции или производительности.
Один или более модулей, описанных в настоящем документе, могут содержать одно или более встроенных приложений, реализованных в качестве встроенной программы, программного обеспечения, аппаратного обеспечения или любой их комбинации. Один или более модулей, описанных в настоящем документе, могут содержать различные исполняемые модули, такие как программное обеспечение, программы, данные, драйверы, интерфейсы прикладных программ и так далее. Встроенное программное обеспечение может храниться в памяти контроллера 2016 и/или контроллера 2022, которая может содержать энергонезависимую память, например, доступную только для чтения память с побитовым маскированием (ПЗУ) или флеш-память. В различных вариантах хранение встроенной программы в ПЗУ может высвободить флэш-память. Энергонезависимая память может содержать другие типы памяти, в том числе, например, программируемое ПЗУ (ППЗУ), стираемое программируемое ПЗУ (СППЗУ), электрически стираемое программируемое ПЗУ (ЭСППЗУ) или оперативное запоминающее устройство (ОЗУ) с резервированием от аккумуляторной батареи, например динамическое ЗУ (ДЗУ), динамическую оперативную память c удвоенной скоростью передачи данных и/или синхронную динамическую оперативную память.
В некоторых случаях различные варианты осуществления могут быть реализованы в виде промышленного изделия. Промышленное изделие может включать в себя машиночитаемый носитель информации, способный хранить логику, инструкции и/или данные для выполнения различных операций одного или более вариантов осуществления. Например, в различных вариантах осуществления, производственное изделие может представлять собой магнитный диск, оптический диск, флеш-память или встроенное ПО, содержащее инструкции компьютерной программы, подходящие для выполнения процессором общего назначения или специализированным процессором. Однако указанные примеры осуществления изобретения не ограничиваются данной областью использования.
Функции различных функциональных элементов, логических блоков, модулей и элементов схем, описанные в настоящем документе, могут быть реализованы в общем контексте исполняемых компьютером инструкций, таких как программное обеспечение, управляющие модули, логика и/или логические модули, выполняемые процессором. По существу, программное обеспечение, управляющие модули, логика и/или логические модули представляют собой любой программный элемент, предназначенный для выполнения конкретных операций. Программное обеспечение, управляющие модули и/или логические модули могут содержать процедуры, программы, объекты, компоненты, структуры данных и т. п., выполняющие конкретные задачи и реализующие определенные абстрактные типы данных. Реализация программного обеспечения, управляющих модулей, логики и/или логических модулей и методов может храниться и/или передаваться посредством какой-либо формы машиночитаемого носителя. В этом отношении машиночитаемый носитель может представлять собой любой существующий носитель или носители для хранения информации, доступные для компьютерного устройства. Некоторые варианты осуществления также могут использоваться в распределенных вычислительных средах, в которых операции выполняются одним или несколькими удаленными устройствами, соединенными коммуникационной сетью. В распределенной вычислительной среде программное обеспечение, управляющие модули логика и/или логические модули могут размещаться как в локальных, так и в удаленных компьютерных хранилищах, включая в устройствах памяти.
Кроме того, следует понимать, что варианты осуществления, описанные в настоящем документе, показывают примеры реализации, и что функциональные элементы, логические блоки, модули и элементы схем могут быть реализованы различными другими способами, также согласующимися с описанными вариантами осуществления. Кроме того, операции, выполняемые такими функциональными элементами, логическими блоками, модулями и элементами схем, могут объединяться и/или разделяться в конкретной реализации, и могут выполняться большим или меньшим числом компонентов или модулей. Как будет очевидно специалисту в данной области при чтении настоящего изложения, каждый из описанных и показанных в настоящем документе индивидуальных вариантов осуществления имеет дискретные компоненты и особенности, которые могут быть легко отделены или объединены с элементами любого из других нескольких аспектов, не отступая от сферы действия настоящего изобретения. Любой описанный способ может осуществляться в описанном порядке событий или в любом другом логически возможном порядке.
Следует заметить, что любые ссылки на фразы «один вариант осуществления» или «вариант осуществления» означают, что конкретный элемент, структура или характеристика, описанные в связи с этим вариантом осуществления, содержится по меньшей мере в одном варианте осуществления. Все фразы «в одном варианте осуществления» или «в одном аспекте», появляющиеся в данной спецификации, не обязательно относятся к одному варианту осуществления.
Если иное не указано специально, следует понимать, что такие термины как «обработка», «вычисление», «расчет», «определение» и т. п., относятся к действию и/или процессам компьютера или вычислительной системы, или сходного электронного компьютерного устройства, такого как процессор общего назначения, процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) или другое программируемое логическое устройство, логический элемент на дискретных компонентах или транзисторах, дискретные аппаратные компоненты или любое их сочетание, каковое устройство предназначено для выполнения функций, описанных в настоящем документе, и которое осуществляет манипуляции и/или преобразования данных, представленных в виде физических величин (например, электронных) внутри регистров и/или памяти в другие данные, сходным образом представленные внутри памяти, регистров или иных устройств для хранения, передачи и отображения информации.
Следует отметить, что варианты осуществления могут быть описаны выражениями «соединенный» и «подсоединенный», а также их производными. Такие термины не являются синонимами. Например, некоторые варианты осуществления могут описываться с использованием терминов «подсоединенный» и/или «соединенный», указывающих на то, что два или более элемента находятся в непосредственном физическом или электрическом контакте друг с другом. Однако термин «сочлененный» также может обозначать, что два или более элемента косвенно контактируют друг с другом, но все же взаимодействуют или кооперируют свою работу друг с другом. Применительно к программным элементам, например, термин «соединенный» может относиться к интерфейсам, интерфейсам сообщений, интерфейсам прикладного программирования (API), обмену сообщениями и т. п.
Следует учитывать, что любой патент, публикация или другой материал описания, полностью или частично включенный в настоящий документ путем ссылки, включены в него только в той степени, в которой включенный материал не противоречит существующим определениям, заявлениям или другим материалам описания, представленным в настоящем описании. Таким образом, в необходимой степени раскрытие, как явно представлено в настоящем документе, имеет преимущество перед любым противоречащим материалом, включенным в настоящий документ путем ссылки. Любой материал или его часть, указанная как включенная в настоящий документ путем ссылки, но противоречащая существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включена в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Описанные варианты осуществления имеют применение в обычных эндоскопических и открытых хирургических приборах, а также применяются при автоматических операциях.
Варианты устройств, описанные здесь, могут быть разработаны для утилизации после однократного использования, или для многократного использования. Варианты устройств, в одном или обоих случаях, могут подготавливаться для повторного использования. Подготовка для повторного применения может включать любую комбинацию стадий разборки устройства, затем очистки или замены конкретных фрагментов и последующей повторной сборки. В частности, варианты устройств могут быть разобраны для замены любого количества конкретных деталей или частей в любой комбинации. После очистки и (или) замены определенных деталей устройство можно собрать для последующего использования в специальном отделении, выполняющем подготовку к повторному использованию или силами хирургической бригады перед проведением хирургического вмешательства. Специалистам в данной области будет понятно, что подготовка устройства к повторному применению может включать различные методики разборки, чистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
В качестве примера, описанные здесь варианты могут быть осуществлены до операции. Во-первых, новый или использованный инструмент может быть получен и при необходимости обработан. Прибор может быть стерилизован. Согласно одному способу стерилизации инструмент помещают в закрытый и герметичный контейнер, например пластиковый пакет или пакет Тайвек (TYVEK). Контейнер и прибор могут помещаться в поле излидеи, которое может проникнуть в контейнер, например, гамма-излучение, рентгеновские лучи или электроны высоких энергий. Излучение способно убить бактерии, находящиеся на поверхности устройства и в емкости. Стерилизованный инструмент может быть сохранен в стерильном контейнер. Герметичный контейнер может держать инструмент стерильным, пока не возникнет необходимость его использования в медицинском учреждении. Устройство также можно стерилизовать с применением любой другой методики, известной в данной области, включая, среди прочего, бета- или гамма-излучение, этиленоксид или пар.
Специалисту в данной области будет понятно, что описанные в настоящем документе компоненты (например, операции), устройства, объекты и сопровождающее их описание применяются в качестве примеров для концептуальной ясности и что допускаются различные модификации конфигурации. Следовательно, приведенные в настоящем документе конкретные примеры и сопроводительное описание считаются представителями их более общих классов. Как правило, применение любого конкретного примера считается представляющим его класс, и неисключение конкретных компонентов (например, операций), устройств и объектов не следует считать ограничивающими.
В отношении применения по существу любых случаев множественного и/или единственного числа для терминов в настоящем документе, специалисты в данной области могут изменять множественное на единственное и/или единственное на множественное в соответствии с требованиями контекста и/или сферой применения. Различные комбинации единственного/множественного числа для ясности в настоящем документе явным образом не указаны.
Описанный в настоящем документе объект изобретения иногда иллюстрирует различные компоненты, содержащиеся внутри различных других компонентов или соединенные с ними. Следует понимать, что такие показанные архитектуры являются лишь примерами и что фактически могут быть реализованы многие другие архитектуры с такой же функциональностью. В концептуальном смысле любая конфигурация компонентов для достижения такой же функциональности практически «связывается» так, чтобы достичь желаемой функциональности. Таким образом, любые два компонента, скомбинированные в настоящем документе для достижения конкретной функциональности, могут рассматриваться как «связанные» друг с другом так, чтобы достигалась желаемая функциональность, независимо от архитектур или промежуточных компонентов. Аналогичным образом любые два компонента, соединенные таким образом, можно рассматривать как «функционально соединенные» или «функционально связанные» друг с другом для достижения желаемой функциональности, и любые два компонента, которые могут быть связаны таким образом, также могут рассматриваться как «функционально соединяемые» друг с другом для достижения желаемой функциональности. Конкретные примеры функционально соединяемых компонентов включают, помимо прочего, физически сопрягаемые, и/или физически взаимодействующие компоненты, и/или беспроводно взаимодействующие, и/или логически взаимодействующие, и/или логически взаимодействующие компоненты.
Некоторые аспекты могут быть описаны выражениями «сочлененный» и «соединенный», а также их производными. Следует понимать, что такие термины не являются синонимами. Например, некоторые аспекты могут описываться с использованием термина «соединенный», обозначающего, что два или более элемента находятся в непосредственном физическом или электрическом контакте друг с другом. В другом примере, некоторые аспекты могут описываться с использованием термина «сочлененный», обозначающего, что два или более элемента находятся в непосредственном физическом или электрическом контакте. Однако термин «сочлененный» также может обозначать, что два или более элемента косвенно контактируют друг с другом, но все же взаимодействуют или кооперируют свою работу друг с другом.
В некоторых примерах, один или более компонентов могут быть описаны в настоящем документе как «выполненный с возможностью», «выполненный для», «функционирующий/функциональный для», «приспособленный/адаптированный», «способный», «согласующийся/соответствующий» и т.д. Специалистам в данной области техники будет понятно, что термин может охватывать активные и/или неактивные компоненты и/или компоненты в режиме ожидания, если в контексте не требуется иное.
Хотя были показаны и описаны конкретные аспекты настоящего объекта изобретения, описанного в этом документе, специалистам в данной области техники будет очевидно, что на основании описанных в настоящем документе способов могут быть выполнены изменения и модификации, и такие изменения и модификации не будут являться отхождением от объекта изобретения, описанного в настоящем документе, и его расширенных аспектов, а, следовательно, прилагаемые пункты формулы изобретения призваны охватить все такие изменения и модификации, которые составляют истинную сущность и объем объекта изобретения, описанного в настоящем документе. Специалистам в данной области техники будет понятно, что в общем термины, используемые в настоящем документе, и особенно в прилагаемых пунктах формулы изобретения (например, основное содержание прилагаемых пунктов формулы изобретения), как правило, подразумевают их использование в «открытом» смысле (например, термин «в том числе» должен интерпретироваться как «в том числе без ограничения», термин «имеющий» должен интерпретироваться как «имеющий по меньшей мере», термин «содержит» должен интерпретироваться как «содержит без ограничения» и т.д.). К тому же специалистам в данной области техники будет понятно, что если в конкретной мере подразумевается использование ссылки на представленный пункт формулы изобретения, то такое предназначение будет явно изложено в таком пункте формулы изобретения, а в отсутствии такой ссылки такое предназначение не подразумевается. Например, для простоты понимания, заметим, что в следующей прилагаемой формуле изобретения могут применяться вступительные фразы «по меньшей мере один» или «один и более» с целью представления изложения пункта формулы изобретения. Однако использование таких фраз не должно восприниматься как указание на то, что введение упоминания в единственном числе относит любой конкретный пункт формулы изобретения, содержащий такое упоминание, только к пунктам, содержащим только одно такое упоминание, даже если тот же пункт включает в себя вводные фразы «один или более» или «по меньшей мере один», и упоминание в единственном числе следует обычно интерпретировать как означающее «по меньшей мере один» или «один или более»; это же относится и к упоминаниям с использованием определений «этот», «данный» и «настоящий».
Кроме того, даже если определенное количество представленного изложения пункта формулы изобретения цитируется явно, специалистам в данной области техники будет понятно, что такое цитирование, как правило, должно быть интерпретировано в виду по меньшей мере, приведенного количества (например, простое цитирование фразы «два изложения» без других модификаторов, как правило, означает, по меньшей мере, два изложения или два или более изложений). Кроме того, в случаях использования традиционных аналогов фразы «по меньшей мере, один из A, B, C и т.д.» как правило подразумевается, что специалисты в данной области техники смогут понять традиционность аналогии (например, «система, имеющая по меньшей мере один из A, B, и C» будет содержать, без ограничения, системы, которые имеют только А, только B, только C, и B вместе, и А и С вместе, и В и С вместе и/или А, В, и С вместе и т.д.). В случаях использования традиционных аналогов фразы «по меньшей мере один из A, B или C и т.д.» как правило подразумевается, что специалисты в данной области техники смогут понять традиционность аналогии (например, «система, имеющая по меньшей мере один из A, B или C» будет содержать, без ограничения, системы, которые имеют только А, только B, только C, ии B вместе, и А и С вместе, и В и С вместе и/или А, В, и С вместе и т.д.). Кроме того, специалистам в данной области техники будет понятно, что, как правило, дизъюнктивное слово и/или фраза, представляя два или более альтернативных термина, будь то в описании изобретения, формуле изобретения или на чертежах, должна быть понята, как имеющая в виду возможности включения одного из терминов, любого из терминов или обоих этих терминов, если контекст не требует иного. Например, фраза «A или B» обычно будет подразумевать включение возможностей «A» или «B» или «A и B».
В отношении прилагаемых пунктов формулы изобретения специалисты в данной области поймут, что упомянутые в них операции могут по существу выполняться в любом порядке. Также, хотя различные операционные потоки представлены в виде последовательности (-ей), следует понимать, что различные операции могут выполняться в другом порядке, отличном от показанного, или же могут выполняться одновременно. Примеры таких альтернативных порядков могут включать в себя перекрывающийся, перемежающийся, прерываемый, перестраиваемый, инкрементный, предварительный, дополнительный, одновременный, обратный или другие варианты порядка, если контекст не требует иного. Более того, предполагается, что такие термины как «чувствительный к», «связанный с» или другие прилагательные, связанные с прошедшим временем, по существу не исключают таких вариантов, если контекст не требует иного.
В целом использование описанных в настоящем документе принципов настоящего изобретения обеспечивает получение множества преимуществ. Представленное выше описание одного или более вариантов осуществления было представлено для целей иллюстрации и описания. Считается, что описание не является исчерпывающим или ограничивающим точной раскрытым вариантом. В свете всего вышесказанного возможны модификации и варианты. Один или более вариантов осуществления были выбраны и описаны для иллюстрации принципов и способов практической реализации, посредством чего позволяя специалисту в данной области использовать различные варианты осуществления изобретения, а также с различными модификациями, соответствующими конкретной предполагаемой сфере применения. Предполагается, что полный объем изобретения определен в прилагаемых пунктах формулы изобретения.
Claims (37)
1. Хирургическая инструментальная система, содержащая:
рукоятку, содержащую:
электрический двигатель и
исполнительный механизм, выполненный с возможностью приведения в действие электродвигателя;
первый ствол, прикрепляемый к рукоятке, содержащий:
первый концевой эффектор, содержащий первый упор и первую кассету со скобками; и
первую приводную систему, выполненную с возможностью осуществления функции первого концевого эффектора, при этом первая приводная система выполнена с возможностью взаимодействия при работе с электрическим двигателем, причем электрический двигатель выполнен с возможностью функционирования в первом направлении для выполнения функции первого концевого эффектора; и
второй ствол, прикрепляемый к рукоятке вместо первого ствола, причем второй ствол содержит:
второй концевой эффектор, содержащий второй упор и вторую кассету со скобками; и
вторую приводную систему, выполненную с возможностью осуществления функции второго концевого эффектора, при этом вторая приводная система выполнена с возможностью взаимодействия при работе с электрическим двигателем, причем электрический двигатель выполнен с возможностью функционирования во втором направлении для выполнения функции второго концевого эффектора, причем указанная функция первого концевого эффектора содержит перемещение указанного первого упора в направлении указанной первой кассеты со скобками, при этом указанная функция второго концевого эффектора содержит перемещение указанного второго упора в направлении второй кассеты со скобками и при этом второе направление является противоположным первому направлению, причем
рукоятка содержит по меньшей мере один датчик, выполненный с возможностью обнаружения того, первый или второй ствол был прикреплен к рукоятке и передачи этой информации микропроцессору, причем микропроцессор выполнен так, что, когда исполнительный механизм приходит в действие для выполнения функции первого или второго концевого эффектора, микропроцессор поворачивает электрический двигатель в первом направлении или во втором направлении, в зависимости от того, первый или второй ствол был соответственно прикреплен к рукоятке.
2. Хирургическая инструментальная система по п. 1, в которой указанная первая кассета со скобками содержит продольный массив гнезд для скоб, проходящий между проксимальным концом и дистальным концом, и причем указанная вторая кассета со скобками содержит круговой массив гнезд для скоб.
3. Хирургическая инструментальная система по п. 1, в которой указанная рукоятка также содержит пусковой двигатель, причем указанный первый ствол содержит первую пусковую систему, способную функционально взаимодействовать с указанным пусковым двигателем, и причем указанный пусковой двигатель выполнен с возможностью работы в том же направлении для продвижения указанной первой пусковой системы через пусковой ход для выпуска скобок из указанной первой кассеты со скобками и указанной второй пусковой системы через пусковой ход для выпуска скобок из указанной второй кассеты со скобками.
4. Хирургическая инструментальная система по п. 1, в которой указанный первый ствол содержит первый датчик конца хода, выполненный с возможностью определения момента, когда указанный первый упор находится в первой закрытой позиции, причем указанный первый датчик конца хода выполнен с возможностью остановки указанного электрического двигателя, когда указанный первый упор находится в указанной первой закрытой позиции, и при этом указанный второй ствол содержит второй датчик конца хода, выполненный с возможностью определения момента, когда указанный второй упор находится в указанной второй закрытой позиции, и причем указанная первая закрытая позиция отличается от указанной второй закрытой позиции.
5. Хирургическая инструментальная система по п. 4, в которой указанная рукоятка также содержит пусковой двигатель, причем указанный первый ствол содержит первую пусковую систему, выполненную с возможностью функционального взаимодействия с указанным пусковым двигателем, при этом указанный второй ствол содержит вторую пусковую систему, выполненную с возможностью функционального взаимодействия с указанным пусковым двигателем, причем указанный пусковой двигатель выполнен с возможностью работы для продвижения указанной первой пусковой системы через пусковой ход для выпуска скобок из указанной первой кассеты со скобками и указанной второй системы через пусковой ход для выпуска скобок из указанной второй кассеты со скобками, и причем указанный пусковой двигатель не способен действовать до тех пор, пока указанный первый датчик конца хода не определил, что указанный первый упор достиг указанной первой закрытой позиции, или указанный второй датчик конца хода не определил, что указанный второй упор достиг указанной второй закрытой позиции.
6. Хирургическая инструментальная система по п. 5, в которой указанный первый датчик конца хода и указанный второй датчик конца хода находятся в сигнальном сообщении с указанным микропроцессором.
7. Хирургическая инструментальная система по п. 5, также содержащая датчик пускового хода, выполненный с возможностью определения момента активации указанного пускового двигателя, в которой указанная система хирургического инструмента также содержит закрывающую питающую схему, выполненную с возможностью функционального соединения указанного электрического двигателя с источником питания, и причем указанная закрывающая питающая схема открыта, когда указанный датчик пускового хода обнаружил, что указанный пусковой двигатель активирован.
8. Хирургическая инструментальная система по п. 4, в которой указанный первый датчик конца хода содержит первый датчик эффекта Холла, выполненный с возможностью обнаружения первого обнаруживаемого элемента на указанном первом пусковом приводе для определения, находится ли указанный первый упор в указанной первой закрытой позиции, причем указанный второй датчик конца хода содержит второй датчик эффекта Холла, выполненный с возможностью обнаружения второго обнаруживаемого элемента на указанном втором пусковом приводе для определения, находится ли указанный второй упор в указанной второй позиции, и при этом указанный первый датчик эффекта Холла и указанный второй датчик эффекта Холла находятся в сигнальном сообщении с указанным микропроцессором.
9. Хирургическая инструментальная система по п. 1, в которой указанный исполнительный механизм выполнен с возможностью работы в том же направлении для выполнения указанной функции первого концевого эффектора и указанной функции второго концевого эффектора.
10. Хирургическая инструментальная система, содержащая:
рукоятку, содержащую:
электрический двигатель и
исполнительный механизм, выполненный с возможностью приведения в действие электродвигателя;
первый ствол, прикрепляемый к рукоятке, содержащий:
первый концевой эффектор, содержащий первый упор и первую кассету со скобками; и
первую приводную систему, выполненную с возможностью выполнения функции первого концевого эффектора, причем первая приводная система выполнена с возможностью взаимодействия при работе с электрическим двигателем и причем электрический двигатель выполнен с возможностью осуществления первого количества вращений для выполнения функции первого концевого эффектора; и
второй ствол, прикрепляемый к рукоятке вместо первого ствола, причем второй ствол содержит:
второй концевой эффектор, содержащий второй упор и вторую кассету со скобками; и
вторую приводную систему, выполненную с возможностью выполнения функции второго концевого эффектора, причем вторая приводная система выполнена с возможностью взаимодействия при работе с электрическим двигателем и при этом электрический двигатель выполнен с возможностью осуществления второго количества вращений для выполнения функции второго концевого эффектора,
причем указанная функция первого концевого эффектора содержит перемещение указанного первого упора в направлении указанной первой кассеты со скобками, при этом указанная функция второго концевого эффектора содержит перемещение указанного второго упора в направлении второй кассеты со скобками и при этом первое количество вращений отличается от второго количества вращений, причем
рукоятка содержит по меньшей мере один датчик, выполненный с возможностью обнаружения того, первый или второй ствол был прикреплен к рукоятке и передачи этой информации микропроцессору, причем микропроцессор выполнен так, что, когда исполнительный механизм приходит в действие для выполнения функции первого или второго концевого эффектора, микропроцессор поворачивает электрический двигатель в первом направлении или во втором направлении, в зависимости от того, первый или второй ствол был соответственно прикреплен к рукоятке.
11. Хирургическая инструментальная система по п. 10, в которой указанная первая кассета со скобками содержит продольный массив гнезд для скоб, проходящий между проксимальным концом и дистальным концом, причем указанная вторая кассета со скобками содержит круговой массив гнезд для скобок.
12. Хирургическая инструментальная система по п. 10, в которой указанный первый ствол содержит первый датчик конца хода, выполненный с возможностью определения момента, когда указанный первый упор находится в первой закрытой позиции, причем указанный первый датчик конца хода выполнен с возможностью остановки указанного электрического двигателя, когда указанный первый упор находится в указанной первой закрытой позиции, при этом указанный второй ствол содержит второй датчик конца хода, выполненный с возможностью определения момента, когда указанный второй упор находится указанной второй закрытой позиции, и при этом указанная первая закрытая позиция отличается от указанной второй закрытой позиции.
13. Хирургическая инструментальная система по п. 12, в которой указанная рукоятка также содержит пусковой двигатель, причем указанный первый ствол содержит первую пусковую систему, выполненную с возможностью функционального взаимодействия с указанным пусковым двигателем, и причем указанный второй ствол содержит вторую пусковую систему, выполненную с возможностью функционально взаимодействовать с указанным пусковым двигателем, при этом указанный пусковой двигатель выполнен с возможностью продвижения указанной первой пусковой системы через пусковой ход для выпуска скобок из указанной первой кассеты со скобками и указанной второй системы через пусковой ход для выпуска скобок из указанной второй кассеты со скобками, и при этом указанный пусковой двигатель не способен действовать до тех пор, пока указанный первый датчик конца хода не определил, что указанный первый упор достиг указанной первой закрытой позиции, или указанный второй датчик конца хода не определил, что указанный второй упор достиг указанной второй закрытой позиции.
14. Хирургическая инструментальная система по п. 13, в которой указанный первый датчик конца хода и указанный второй датчик конца хода находятся в сигнальном сообщении с указанным микропроцессором.
15. Хирургическая инструментальная система по п. 13, также содержащая датчик пускового хода, выполненный с возможностью определения момента активации указанного пускового двигателя, в которой указанная система хирургического инструмента также содержит закрывающую питающую схему, выполненную с возможностью функционального соединения указанного электрического двигателя с источником питания, причем указанная закрывающая питающая схема открыта, когда указанный датчик пускового хода обнаружил, что указанный пусковой двигатель активирован.
16. Хирургическая инструментальная система по п. 10, в которой указанный электрический двигатель выполнен с возможностью работы в первом направлении для выполнения указанной функции первого концевого эффектора, причем указанный электрический двигатель выполнен с возможностью работы во втором направлении для выполнения указанной функции второго концевого эффектора и при этом указанное первое направление отличается от указанного второго направления.
Applications Claiming Priority (19)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361812376P | 2013-04-16 | 2013-04-16 | |
| US201361812372P | 2013-04-16 | 2013-04-16 | |
| US201361812365P | 2013-04-16 | 2013-04-16 | |
| US201361812385P | 2013-04-16 | 2013-04-16 | |
| US201361812382P | 2013-04-16 | 2013-04-16 | |
| US61/812,376 | 2013-04-16 | ||
| US61/812,382 | 2013-04-16 | ||
| US61/812,372 | 2013-04-16 | ||
| US61/812,385 | 2013-04-16 | ||
| US61/812,365 | 2013-04-16 | ||
| US14/248,591 US10149680B2 (en) | 2013-04-16 | 2014-04-09 | Surgical instrument comprising a gap setting system |
| US14/248,581 US9649110B2 (en) | 2013-04-16 | 2014-04-09 | Surgical instrument comprising a closing drive and a firing drive operated from the same rotatable output |
| US14/248,595 US9844368B2 (en) | 2013-04-16 | 2014-04-09 | Surgical system comprising first and second drive systems |
| US14/248,586 US10136887B2 (en) | 2013-04-16 | 2014-04-09 | Drive system decoupling arrangement for a surgical instrument |
| US14/248,588 US10405857B2 (en) | 2013-04-16 | 2014-04-09 | Powered linear surgical stapler |
| US14/248,584 US9801626B2 (en) | 2013-04-16 | 2014-04-09 | Modular motor driven surgical instruments with alignment features for aligning rotary drive shafts with surgical end effector shafts |
| US14/248,587 US9867612B2 (en) | 2013-04-16 | 2014-04-09 | Powered surgical stapler |
| US14/248,595 | 2014-04-09 | ||
| PCT/US2014/033895 WO2014172210A2 (en) | 2013-04-16 | 2014-04-12 | Surgical instrument shaft including switches for controlling the operation of the surgical instrument |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| RU2015148784A RU2015148784A (ru) | 2017-05-22 |
| RU2015148784A3 RU2015148784A3 (ru) | 2018-08-07 |
| RU2678366C2 true RU2678366C2 (ru) | 2019-01-28 |
Family
ID=71995727
Family Applications (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2015148779A RU2690895C2 (ru) | 2013-04-16 | 2014-04-12 | Концевой эффектор для применения с хирургическим инструментом |
| RU2015148783A RU2677531C2 (ru) | 2013-04-16 | 2014-04-12 | Линейный хирургический сшивающий инструмент с электрическим питанием |
| RU2015148980A RU2665132C2 (ru) | 2013-04-16 | 2014-04-12 | Разъемная конструкция приводной системы для хирургического инструмента |
| RU2015148781A RU2676439C2 (ru) | 2013-04-16 | 2014-04-12 | Хирургическая инструментальная система (варианты) и механическая соединительная система для разъемного соединения сдвоенных поворотных приводных валов хирургического инструмента |
| RU2015148663A RU2653625C2 (ru) | 2013-04-16 | 2014-04-12 | Хирургический сшивающий инструмент с электропитанием |
| RU2015148784A RU2678366C2 (ru) | 2013-04-16 | 2014-04-12 | Хирургическая инструментальная система (варианты) |
Family Applications Before (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2015148779A RU2690895C2 (ru) | 2013-04-16 | 2014-04-12 | Концевой эффектор для применения с хирургическим инструментом |
| RU2015148783A RU2677531C2 (ru) | 2013-04-16 | 2014-04-12 | Линейный хирургический сшивающий инструмент с электрическим питанием |
| RU2015148980A RU2665132C2 (ru) | 2013-04-16 | 2014-04-12 | Разъемная конструкция приводной системы для хирургического инструмента |
| RU2015148781A RU2676439C2 (ru) | 2013-04-16 | 2014-04-12 | Хирургическая инструментальная система (варианты) и механическая соединительная система для разъемного соединения сдвоенных поворотных приводных валов хирургического инструмента |
| RU2015148663A RU2653625C2 (ru) | 2013-04-16 | 2014-04-12 | Хирургический сшивающий инструмент с электропитанием |
Country Status (8)
| Country | Link |
|---|---|
| US (14) | US10405857B2 (ru) |
| EP (17) | EP3248554B1 (ru) |
| JP (6) | JP6345768B2 (ru) |
| CN (6) | CN105324083B (ru) |
| MX (6) | MX2015014563A (ru) |
| PL (1) | PL2792320T3 (ru) |
| RU (6) | RU2690895C2 (ru) |
| WO (9) | WO2014172214A2 (ru) |
Families Citing this family (1113)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US8182501B2 (en) | 2004-02-27 | 2012-05-22 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical shears and method for sealing a blood vessel using same |
| US8215531B2 (en) | 2004-07-28 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a medical substance dispenser |
| US11896225B2 (en) | 2004-07-28 | 2024-02-13 | Cilag Gmbh International | Staple cartridge comprising a pan |
| PL1802245T3 (pl) | 2004-10-08 | 2017-01-31 | Ethicon Endosurgery Llc | Ultradźwiękowy przyrząd chirurgiczny |
| US9237891B2 (en) | 2005-08-31 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical stapling devices that produce formed staples having different lengths |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US11484312B2 (en) | 2005-08-31 | 2022-11-01 | Cilag Gmbh International | Staple cartridge comprising a staple driver arrangement |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US8365976B2 (en) | 2006-09-29 | 2013-02-05 | Ethicon Endo-Surgery, Inc. | Surgical staples having dissolvable, bioabsorbable or biofragmentable portions and stapling instruments for deploying the same |
| US7673781B2 (en) | 2005-08-31 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with staple driver that supports multiple wire diameter staples |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US8628518B2 (en) | 2005-12-30 | 2014-01-14 | Intuitive Surgical Operations, Inc. | Wireless force sensor on a distal portion of a surgical instrument and method |
| US7621930B2 (en) | 2006-01-20 | 2009-11-24 | Ethicon Endo-Surgery, Inc. | Ultrasound medical instrument having a medical ultrasonic blade |
| US11278279B2 (en) | 2006-01-31 | 2022-03-22 | Cilag Gmbh International | Surgical instrument assembly |
| US20110290856A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument with force-feedback capabilities |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US20110006101A1 (en) | 2009-02-06 | 2011-01-13 | EthiconEndo-Surgery, Inc. | Motor driven surgical fastener device with cutting member lockout arrangements |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US20110024477A1 (en) | 2009-02-06 | 2011-02-03 | Hall Steven G | Driven Surgical Stapler Improvements |
| US11224427B2 (en) | 2006-01-31 | 2022-01-18 | Cilag Gmbh International | Surgical stapling system including a console and retraction assembly |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US9861359B2 (en) | 2006-01-31 | 2018-01-09 | Ethicon Llc | Powered surgical instruments with firing system lockout arrangements |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US8236010B2 (en) | 2006-03-23 | 2012-08-07 | Ethicon Endo-Surgery, Inc. | Surgical fastener and cutter with mimicking end effector |
| US7552854B2 (en) | 2006-05-19 | 2009-06-30 | Applied Medical Resources Corporation | Surgical stapler with firing lock mechanism |
| US8322455B2 (en) | 2006-06-27 | 2012-12-04 | Ethicon Endo-Surgery, Inc. | Manually driven surgical cutting and fastening instrument |
| US10130359B2 (en) | 2006-09-29 | 2018-11-20 | Ethicon Llc | Method for forming a staple |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US11291441B2 (en) | 2007-01-10 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with wireless communication between control unit and remote sensor |
| US20080169332A1 (en) | 2007-01-11 | 2008-07-17 | Shelton Frederick E | Surgical stapling device with a curved cutting member |
| US11039836B2 (en) | 2007-01-11 | 2021-06-22 | Cilag Gmbh International | Staple cartridge for use with a surgical stapling instrument |
| US8727197B2 (en) | 2007-03-15 | 2014-05-20 | Ethicon Endo-Surgery, Inc. | Staple cartridge cavity configuration with cooperative surgical staple |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| US8911460B2 (en) | 2007-03-22 | 2014-12-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8893946B2 (en) | 2007-03-28 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Laparoscopic tissue thickness and clamp load measuring devices |
| US11672531B2 (en) | 2007-06-04 | 2023-06-13 | Cilag Gmbh International | Rotary drive systems for surgical instruments |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US8308040B2 (en) | 2007-06-22 | 2012-11-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an articulatable end effector |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| US8808319B2 (en) | 2007-07-27 | 2014-08-19 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8523889B2 (en) | 2007-07-27 | 2013-09-03 | Ethicon Endo-Surgery, Inc. | Ultrasonic end effectors with increased active length |
| US8512365B2 (en) | 2007-07-31 | 2013-08-20 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US9044261B2 (en) | 2007-07-31 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Temperature controlled ultrasonic surgical instruments |
| US8430898B2 (en) | 2007-07-31 | 2013-04-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| EP2796102B1 (en) | 2007-10-05 | 2018-03-14 | Ethicon LLC | Ergonomic surgical instruments |
| US10010339B2 (en) | 2007-11-30 | 2018-07-03 | Ethicon Llc | Ultrasonic surgical blades |
| US8561870B2 (en) | 2008-02-13 | 2013-10-22 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument |
| US8657174B2 (en) | 2008-02-14 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument having handle based power source |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| BRPI0901282A2 (pt) | 2008-02-14 | 2009-11-17 | Ethicon Endo Surgery Inc | instrumento cirúrgico de corte e fixação dotado de eletrodos de rf |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| US11272927B2 (en) | 2008-02-15 | 2022-03-15 | Cilag Gmbh International | Layer arrangements for surgical staple cartridges |
| US9585657B2 (en) | 2008-02-15 | 2017-03-07 | Ethicon Endo-Surgery, Llc | Actuator for releasing a layer of material from a surgical end effector |
| US20090206131A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | End effector coupling arrangements for a surgical cutting and stapling instrument |
| PL3476312T3 (pl) | 2008-09-19 | 2024-03-11 | Ethicon Llc | Stapler chirurgiczny z urządzeniem do dopasowania wysokości zszywek |
| US7857186B2 (en) | 2008-09-19 | 2010-12-28 | Ethicon Endo-Surgery, Inc. | Surgical stapler having an intermediate closing position |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| US8444036B2 (en) | 2009-02-06 | 2013-05-21 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with mechanisms for adjusting a tissue gap within the end effector |
| BRPI1008667A2 (pt) | 2009-02-06 | 2016-03-08 | Ethicom Endo Surgery Inc | aperfeiçoamento do grampeador cirúrgico acionado |
| US8650728B2 (en) | 2009-06-24 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Method of assembling a transducer for a surgical instrument |
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US8851354B2 (en) | 2009-12-24 | 2014-10-07 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument that analyzes tissue thickness |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US8608046B2 (en) | 2010-01-07 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Test device for a surgical tool |
| US8951272B2 (en) | 2010-02-11 | 2015-02-10 | Ethicon Endo-Surgery, Inc. | Seal arrangements for ultrasonically powered surgical instruments |
| US8486096B2 (en) | 2010-02-11 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Dual purpose surgical instrument for cutting and coagulating tissue |
| GB2480498A (en) | 2010-05-21 | 2011-11-23 | Ethicon Endo Surgery Inc | Medical device comprising RF circuitry |
| US8783543B2 (en) | 2010-07-30 | 2014-07-22 | Ethicon Endo-Surgery, Inc. | Tissue acquisition arrangements and methods for surgical stapling devices |
| US8360296B2 (en) | 2010-09-09 | 2013-01-29 | Ethicon Endo-Surgery, Inc. | Surgical stapling head assembly with firing lockout for a surgical stapler |
| US9289212B2 (en) | 2010-09-17 | 2016-03-22 | Ethicon Endo-Surgery, Inc. | Surgical instruments and batteries for surgical instruments |
| US8632525B2 (en) | 2010-09-17 | 2014-01-21 | Ethicon Endo-Surgery, Inc. | Power control arrangements for surgical instruments and batteries |
| US8733613B2 (en) | 2010-09-29 | 2014-05-27 | Ethicon Endo-Surgery, Inc. | Staple cartridge |
| US9320523B2 (en) | 2012-03-28 | 2016-04-26 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising tissue ingrowth features |
| US9220501B2 (en) | 2010-09-30 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensators |
| US9272406B2 (en) | 2010-09-30 | 2016-03-01 | Ethicon Endo-Surgery, Llc | Fastener cartridge comprising a cutting member for releasing a tissue thickness compensator |
| US9332974B2 (en) | 2010-09-30 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Layered tissue thickness compensator |
| US9364233B2 (en) | 2010-09-30 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Tissue thickness compensators for circular surgical staplers |
| US9301752B2 (en) | 2010-09-30 | 2016-04-05 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising a plurality of capsules |
| CN103140178B (zh) | 2010-09-30 | 2015-09-23 | 伊西康内外科公司 | 包括保持矩阵和对齐矩阵的紧固件系统 |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9307989B2 (en) | 2012-03-28 | 2016-04-12 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorportating a hydrophobic agent |
| US9211120B2 (en) | 2011-04-29 | 2015-12-15 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a plurality of medicaments |
| US11298125B2 (en) | 2010-09-30 | 2022-04-12 | Cilag Gmbh International | Tissue stapler having a thickness compensator |
| US9314246B2 (en) | 2010-09-30 | 2016-04-19 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorporating an anti-inflammatory agent |
| US8657176B2 (en) | 2010-09-30 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator for a surgical stapler |
| US9277919B2 (en) | 2010-09-30 | 2016-03-08 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising fibers to produce a resilient load |
| US9301753B2 (en) | 2010-09-30 | 2016-04-05 | Ethicon Endo-Surgery, Llc | Expandable tissue thickness compensator |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US20120080498A1 (en) | 2010-09-30 | 2012-04-05 | Ethicon Endo-Surgery, Inc. | Curved end effector for a stapling instrument |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US9517063B2 (en) | 2012-03-28 | 2016-12-13 | Ethicon Endo-Surgery, Llc | Movable member for use with a tissue thickness compensator |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| US9089330B2 (en) | 2011-03-14 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Surgical bowel retractor devices |
| CA2834649C (en) | 2011-04-29 | 2021-02-16 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising staples positioned within a compressible portion thereof |
| EP2524773B1 (en) | 2011-05-19 | 2017-06-21 | Black & Decker Inc. | Electronic power apparatus for a power tool |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US11207064B2 (en) | 2011-05-27 | 2021-12-28 | Cilag Gmbh International | Automated end effector component reloading system for use with a robotic system |
| US9050084B2 (en) | 2011-09-23 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Staple cartridge including collapsible deck arrangement |
| US9414880B2 (en) | 2011-10-24 | 2016-08-16 | Ethicon Endo-Surgery, Llc | User interface in a battery powered device |
| US9044230B2 (en) | 2012-02-13 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical cutting and fastening instrument with apparatus for determining cartridge and firing motion status |
| CN103291844A (zh) * | 2012-03-02 | 2013-09-11 | 博世电动工具(中国)有限公司 | 电动工具及其传动装置 |
| US10245042B2 (en) * | 2012-03-13 | 2019-04-02 | Medtronic Xomed, Inc. | Check valve vented sterilizable powered surgical handpiece |
| US9078653B2 (en) | 2012-03-26 | 2015-07-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with lockout system for preventing actuation in the absence of an installed staple cartridge |
| MX350846B (es) | 2012-03-28 | 2017-09-22 | Ethicon Endo Surgery Inc | Compensador de grosor de tejido que comprende cápsulas que definen un ambiente de baja presión. |
| BR112014024102B1 (pt) | 2012-03-28 | 2022-03-03 | Ethicon Endo-Surgery, Inc | Conjunto de cartucho de prendedores para um instrumento cirúrgico, e conjunto de atuador de extremidade para um instrumento cirúrgico |
| BR112014024194B1 (pt) | 2012-03-28 | 2022-03-03 | Ethicon Endo-Surgery, Inc | Conjunto de cartucho de grampos para um grampeador cirúrgico |
| US9198662B2 (en) | 2012-03-28 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator having improved visibility |
| WO2013159933A1 (de) * | 2012-04-27 | 2013-10-31 | Kuka Laboratories Gmbh | Chirurgierobotersystem und chirurgisches instrument |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US9364220B2 (en) | 2012-06-19 | 2016-06-14 | Covidien Lp | Apparatus for endoscopic procedures |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US9125662B2 (en) | 2012-06-28 | 2015-09-08 | Ethicon Endo-Surgery, Inc. | Multi-axis articulating and rotating surgical tools |
| US9072536B2 (en) | 2012-06-28 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Differential locking arrangements for rotary powered surgical instruments |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9101385B2 (en) | 2012-06-28 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Electrode connections for rotary driven surgical tools |
| BR112014032776B1 (pt) | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| US9226751B2 (en) | 2012-06-28 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument system including replaceable end effectors |
| US9204879B2 (en) | 2012-06-28 | 2015-12-08 | Ethicon Endo-Surgery, Inc. | Flexible drive member |
| CN104487005B (zh) | 2012-06-28 | 2017-09-08 | 伊西康内外科公司 | 空夹仓闭锁件 |
| US11197671B2 (en) | 2012-06-28 | 2021-12-14 | Cilag Gmbh International | Stapling assembly comprising a lockout |
| US9028494B2 (en) | 2012-06-28 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Interchangeable end effector coupling arrangement |
| US9561038B2 (en) | 2012-06-28 | 2017-02-07 | Ethicon Endo-Surgery, Llc | Interchangeable clip applier |
| US20140005705A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulating shafts |
| US9649111B2 (en) | 2012-06-28 | 2017-05-16 | Ethicon Endo-Surgery, Llc | Replaceable clip cartridge for a clip applier |
| US20140005640A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical end effector jaw and electrode configurations |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9820768B2 (en) | 2012-06-29 | 2017-11-21 | Ethicon Llc | Ultrasonic surgical instruments with control mechanisms |
| US9386985B2 (en) | 2012-10-15 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Surgical cutting instrument |
| US9486209B2 (en) | 2012-12-13 | 2016-11-08 | Ethicon Endo-Surgery, Llc | Transmission for driving circular needle |
| US20140207124A1 (en) | 2013-01-23 | 2014-07-24 | Ethicon Endo-Surgery, Inc. | Surgical instrument with selectable integral or external power source |
| US9386984B2 (en) | 2013-02-08 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Staple cartridge comprising a releasable cover |
| BR112015021098B1 (pt) | 2013-03-01 | 2022-02-15 | Ethicon Endo-Surgery, Inc | Cobertura para uma junta de articulação e instrumento cirúrgico |
| US9782169B2 (en) | 2013-03-01 | 2017-10-10 | Ethicon Llc | Rotary powered articulation joints for surgical instruments |
| MX364729B (es) | 2013-03-01 | 2019-05-06 | Ethicon Endo Surgery Inc | Instrumento quirúrgico con una parada suave. |
| US20140263552A1 (en) | 2013-03-13 | 2014-09-18 | Ethicon Endo-Surgery, Inc. | Staple cartridge tissue thickness sensor system |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| CA2904678C (en) | 2013-03-14 | 2022-07-12 | Applied Medical Resources Corporation | Surgical stapler with partial pockets |
| US10226273B2 (en) | 2013-03-14 | 2019-03-12 | Ethicon Llc | Mechanical fasteners for use with surgical energy devices |
| US9883860B2 (en) | 2013-03-14 | 2018-02-06 | Ethicon Llc | Interchangeable shaft assemblies for use with a surgical instrument |
| US9788830B2 (en) | 2014-06-06 | 2017-10-17 | Ethicon Llc | Needle cartridge with cage |
| KR20240039202A (ko) | 2013-03-15 | 2024-03-26 | 어플라이드 메디컬 리소시스 코포레이션 | 회전가능 샤프트를 구비한 구동 메커니즘을 갖는 수술용 스테이플러 |
| KR102399394B1 (ko) | 2013-03-15 | 2022-05-19 | 어플라이드 메디컬 리소시스 코포레이션 | 확장가능 조를 갖는 수술용 스테이플러 |
| US9332984B2 (en) | 2013-03-27 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Fastener cartridge assemblies |
| US9572577B2 (en) | 2013-03-27 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Fastener cartridge comprising a tissue thickness compensator including openings therein |
| US9795384B2 (en) | 2013-03-27 | 2017-10-24 | Ethicon Llc | Fastener cartridge comprising a tissue thickness compensator and a gap setting element |
| US10405857B2 (en) | 2013-04-16 | 2019-09-10 | Ethicon Llc | Powered linear surgical stapler |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US9574644B2 (en) | 2013-05-30 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Power module for use with a surgical instrument |
| US9510828B2 (en) | 2013-08-23 | 2016-12-06 | Ethicon Endo-Surgery, Llc | Conductor arrangements for electrically powered surgical instruments with rotatable end effectors |
| CN106028966B (zh) | 2013-08-23 | 2018-06-22 | 伊西康内外科有限责任公司 | 用于动力外科器械的击发构件回缩装置 |
| US10709452B2 (en) | 2013-09-23 | 2020-07-14 | Ethicon Llc | Methods and systems for performing circular stapling |
| US20150083772A1 (en) * | 2013-09-23 | 2015-03-26 | Ethicon Endo-Surgery, Inc. | Surgical stapler with rotary cam drive and return |
| US10980542B2 (en) * | 2016-11-14 | 2021-04-20 | Ethicon Llc | Circular surgical stapler with recessed deck |
| US9713469B2 (en) * | 2013-09-23 | 2017-07-25 | Ethicon Llc | Surgical stapler with rotary cam drive |
| CA2926782A1 (en) | 2013-11-04 | 2015-05-07 | Covidien Lp | Surgical fastener applying apparatus |
| WO2015065485A1 (en) | 2013-11-04 | 2015-05-07 | Covidien Lp | Surgical fastener applying apparatus |
| CA2926748A1 (en) | 2013-11-04 | 2015-05-07 | Covidien Lp | Surgical fastener applying apparatus |
| FR3013206B1 (fr) * | 2013-11-18 | 2015-12-11 | Galiana Jean Marc | Dispositif chirurgical multifonctionnel rechargeable et jetable |
| GB2521229A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| WO2015095727A2 (en) | 2013-12-20 | 2015-06-25 | Barnet Corbin | Surgical system and related methods |
| US9681870B2 (en) | 2013-12-23 | 2017-06-20 | Ethicon Llc | Articulatable surgical instruments with separate and distinct closing and firing systems |
| US9642620B2 (en) | 2013-12-23 | 2017-05-09 | Ethicon Endo-Surgery, Llc | Surgical cutting and stapling instruments with articulatable end effectors |
| US9839428B2 (en) | 2013-12-23 | 2017-12-12 | Ethicon Llc | Surgical cutting and stapling instruments with independent jaw control features |
| US20150173756A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical cutting and stapling methods |
| US9724092B2 (en) | 2013-12-23 | 2017-08-08 | Ethicon Llc | Modular surgical instruments |
| US9763662B2 (en) | 2013-12-23 | 2017-09-19 | Ethicon Llc | Fastener cartridge comprising a firing member configured to directly engage and eject fasteners from the fastener cartridge |
| US9962161B2 (en) | 2014-02-12 | 2018-05-08 | Ethicon Llc | Deliverable surgical instrument |
| US9839423B2 (en) | 2014-02-24 | 2017-12-12 | Ethicon Llc | Implantable layers and methods for modifying the shape of the implantable layers for use with a surgical fastening instrument |
| JP6462004B2 (ja) | 2014-02-24 | 2019-01-30 | エシコン エルエルシー | 発射部材ロックアウトを備える締結システム |
| US20180132850A1 (en) * | 2014-03-26 | 2018-05-17 | Ethicon Llc | Surgical instrument comprising a sensor system |
| US20150272557A1 (en) | 2014-03-26 | 2015-10-01 | Ethicon Endo-Surgery, Inc. | Modular surgical instrument system |
| US10013049B2 (en) | 2014-03-26 | 2018-07-03 | Ethicon Llc | Power management through sleep options of segmented circuit and wake up control |
| BR112016021943B1 (pt) | 2014-03-26 | 2022-06-14 | Ethicon Endo-Surgery, Llc | Instrumento cirúrgico para uso por um operador em um procedimento cirúrgico |
| US9913642B2 (en) | 2014-03-26 | 2018-03-13 | Ethicon Llc | Surgical instrument comprising a sensor system |
| US9743929B2 (en) * | 2014-03-26 | 2017-08-29 | Ethicon Llc | Modular powered surgical instrument with detachable shaft assemblies |
| US9737355B2 (en) | 2014-03-31 | 2017-08-22 | Ethicon Llc | Controlling impedance rise in electrosurgical medical devices |
| KR102455799B1 (ko) | 2014-03-31 | 2022-10-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 시프트 가능한 트랜스미션을 가진 수술 기구 |
| BR112016023698B1 (pt) | 2014-04-16 | 2022-07-26 | Ethicon Endo-Surgery, Llc | Cartucho de prendedores para uso com um instrumento cirúrgico |
| US10426476B2 (en) | 2014-09-26 | 2019-10-01 | Ethicon Llc | Circular fastener cartridges for applying radially expandable fastener lines |
| CN106456158B (zh) | 2014-04-16 | 2019-02-05 | 伊西康内外科有限责任公司 | 包括非一致紧固件的紧固件仓 |
| US9833241B2 (en) | 2014-04-16 | 2017-12-05 | Ethicon Llc | Surgical fastener cartridges with driver stabilizing arrangements |
| US20150297223A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| JP6532889B2 (ja) | 2014-04-16 | 2019-06-19 | エシコン エルエルシーEthicon LLC | 締結具カートリッジ組立体及びステープル保持具カバー配置構成 |
| US10512461B2 (en) | 2014-05-15 | 2019-12-24 | Covidien Lp | Surgical fastener applying apparatus |
| US9901341B2 (en) | 2014-05-16 | 2018-02-27 | Covidien Lp | Surgical instrument |
| US9526495B2 (en) | 2014-06-06 | 2016-12-27 | Ethicon Endo-Surgery, Llc | Articulation control for surgical instruments |
| ES2861258T3 (es) | 2014-06-11 | 2021-10-06 | Applied Med Resources | Grapadora quirúrgica con disparo circunferencial |
| US10045781B2 (en) | 2014-06-13 | 2018-08-14 | Ethicon Llc | Closure lockout systems for surgical instruments |
| US9987099B2 (en) | 2014-06-18 | 2018-06-05 | Covidien Lp | Disposable housings for encasing handle assemblies |
| US9730694B2 (en) * | 2014-07-01 | 2017-08-15 | Covidien Lp | Loading unit including shipping assembly |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US9737301B2 (en) | 2014-09-05 | 2017-08-22 | Ethicon Llc | Monitoring device degradation based on component evaluation |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| EP3949872B1 (en) | 2014-09-15 | 2023-11-22 | Applied Medical Resources Corporation | Surgical stapler with self-adjusting staple height |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| JP6648119B2 (ja) | 2014-09-26 | 2020-02-14 | エシコン エルエルシーEthicon LLC | 外科ステープル留めバットレス及び付属物材料 |
| US10076325B2 (en) | 2014-10-13 | 2018-09-18 | Ethicon Llc | Surgical stapling apparatus comprising a tissue stop |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US10226254B2 (en) * | 2014-10-21 | 2019-03-12 | Covidien Lp | Adapter, extension, and connector assemblies for surgical devices |
| US10085735B2 (en) * | 2014-10-29 | 2018-10-02 | Smith & Nephew, Inc. | Modular tissue repair kit and devices and method related thereto |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US11504192B2 (en) | 2014-10-30 | 2022-11-22 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| CN104367361B (zh) * | 2014-11-14 | 2017-01-25 | 常州海尔斯医疗器械科技有限公司 | 一次性使用消化道智能吻合器及其使用方法 |
| US9375853B1 (en) * | 2014-12-03 | 2016-06-28 | Google Inc. | Methods and systems to provide feedback based on a motion per path metric indicative of an effect of motion associated with components of a robotic device |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| US10188385B2 (en) * | 2014-12-18 | 2019-01-29 | Ethicon Llc | Surgical instrument system comprising lockable systems |
| US10117649B2 (en) | 2014-12-18 | 2018-11-06 | Ethicon Llc | Surgical instrument assembly comprising a lockable articulation system |
| MX2017008108A (es) | 2014-12-18 | 2018-03-06 | Ethicon Llc | Instrumento quirurgico con un yunque que puede moverse de manera selectiva sobre un eje discreto no movil con relacion a un cartucho de grapas. |
| US9943309B2 (en) | 2014-12-18 | 2018-04-17 | Ethicon Llc | Surgical instruments with articulatable end effectors and movable firing beam support arrangements |
| MX2017008106A (es) * | 2014-12-18 | 2018-03-06 | Ethicon Llc | Instrumentos quirurgicos con arreglos de cierre mejorados. |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| US10159524B2 (en) | 2014-12-22 | 2018-12-25 | Ethicon Llc | High power battery powered RF amplifier topology |
| US10039549B2 (en) * | 2015-01-07 | 2018-08-07 | Covidien Lp | Loading unit retention clip for surgical stapling instrument |
| EP3253300B1 (en) | 2015-02-04 | 2021-12-15 | Smith & Nephew, Inc. | Articulating needle |
| US10111665B2 (en) * | 2015-02-19 | 2018-10-30 | Covidien Lp | Electromechanical surgical systems |
| US10039545B2 (en) | 2015-02-23 | 2018-08-07 | Covidien Lp | Double fire stapling |
| US10085749B2 (en) | 2015-02-26 | 2018-10-02 | Covidien Lp | Surgical apparatus with conductor strain relief |
| US10130367B2 (en) | 2015-02-26 | 2018-11-20 | Covidien Lp | Surgical apparatus |
| US9993258B2 (en) * | 2015-02-27 | 2018-06-12 | Ethicon Llc | Adaptable surgical instrument handle |
| US10180463B2 (en) | 2015-02-27 | 2019-01-15 | Ethicon Llc | Surgical apparatus configured to assess whether a performance parameter of the surgical apparatus is within an acceptable performance band |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US10321907B2 (en) | 2015-02-27 | 2019-06-18 | Ethicon Llc | System for monitoring whether a surgical instrument needs to be serviced |
| US9895148B2 (en) | 2015-03-06 | 2018-02-20 | Ethicon Endo-Surgery, Llc | Monitoring speed control and precision incrementing of motor for powered surgical instruments |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US9924961B2 (en) | 2015-03-06 | 2018-03-27 | Ethicon Endo-Surgery, Llc | Interactive feedback system for powered surgical instruments |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US9901342B2 (en) | 2015-03-06 | 2018-02-27 | Ethicon Endo-Surgery, Llc | Signal and power communication system positioned on a rotatable shaft |
| US10687806B2 (en) | 2015-03-06 | 2020-06-23 | Ethicon Llc | Adaptive tissue compression techniques to adjust closure rates for multiple tissue types |
| US9808246B2 (en) | 2015-03-06 | 2017-11-07 | Ethicon Endo-Surgery, Llc | Method of operating a powered surgical instrument |
| US10617412B2 (en) * | 2015-03-06 | 2020-04-14 | Ethicon Llc | System for detecting the mis-insertion of a staple cartridge into a surgical stapler |
| US10052044B2 (en) | 2015-03-06 | 2018-08-21 | Ethicon Llc | Time dependent evaluation of sensor data to determine stability, creep, and viscoelastic elements of measures |
| US9993248B2 (en) * | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| US10245033B2 (en) | 2015-03-06 | 2019-04-02 | Ethicon Llc | Surgical instrument comprising a lockable battery housing |
| US10045776B2 (en) * | 2015-03-06 | 2018-08-14 | Ethicon Llc | Control techniques and sub-processor contained within modular shaft with select control processing from handle |
| US10390825B2 (en) * | 2015-03-31 | 2019-08-27 | Ethicon Llc | Surgical instrument with progressive rotary drive systems |
| CN108135598B (zh) * | 2015-03-31 | 2020-10-02 | 伊西康有限责任公司 | 具有渐进式旋转驱动系统的外科器械 |
| US10463368B2 (en) | 2015-04-10 | 2019-11-05 | Covidien Lp | Endoscopic stapler |
| GB201506710D0 (en) * | 2015-04-21 | 2015-06-03 | Cambridge Medical Robotics Ltd | Load cells in an instrument drive |
| US10022120B2 (en) | 2015-05-26 | 2018-07-17 | Ethicon Llc | Surgical needle with recessed features |
| US10349941B2 (en) | 2015-05-27 | 2019-07-16 | Covidien Lp | Multi-fire lead screw stapling device |
| US10172615B2 (en) | 2015-05-27 | 2019-01-08 | Covidien Lp | Multi-fire push rod stapling device |
| FR3037269B1 (fr) * | 2015-06-12 | 2017-07-14 | Robocath | Chaine de transmission de mouvement entre des actionneurs et un socle d'organe d'entrainement d'un element mobile |
| US9987001B2 (en) * | 2015-06-12 | 2018-06-05 | Covidien Lp | Surgical anastomosis apparatus |
| US9888914B2 (en) | 2015-06-16 | 2018-02-13 | Ethicon Endo-Surgery, Llc | Suturing instrument with motorized needle drive |
| US9782164B2 (en) | 2015-06-16 | 2017-10-10 | Ethicon Endo-Surgery, Llc | Suturing instrument with multi-mode cartridges |
| US9839419B2 (en) * | 2015-06-16 | 2017-12-12 | Ethicon Endo-Surgery, Llc | Suturing instrument with jaw having integral cartridge component |
| US11020140B2 (en) | 2015-06-17 | 2021-06-01 | Cilag Gmbh International | Ultrasonic surgical blade for use with ultrasonic surgical instruments |
| US10178992B2 (en) | 2015-06-18 | 2019-01-15 | Ethicon Llc | Push/pull articulation drive systems for articulatable surgical instruments |
| BR112017027281B1 (pt) | 2015-06-18 | 2022-12-13 | Ethicon Llc | Instrumento cirúrgico |
| US10271841B2 (en) * | 2015-06-26 | 2019-04-30 | Ethicon Llc | Bailout assembly for surgical stapler |
| US10265066B2 (en) | 2015-06-26 | 2019-04-23 | Ethicon Llc | Surgical stapler with incomplete firing indicator |
| US10188386B2 (en) * | 2015-06-26 | 2019-01-29 | Ethicon Llc | Surgical stapler with anvil state indicator |
| US10517602B2 (en) * | 2015-06-26 | 2019-12-31 | Ethicon Llc | Surgical stapler with reversible polarity |
| US10905415B2 (en) * | 2015-06-26 | 2021-02-02 | Ethicon Llc | Surgical stapler with electromechanical lockout |
| US10405855B2 (en) * | 2015-06-26 | 2019-09-10 | Ethicon Llc | Firing circuit for surgical stapler |
| US10456134B2 (en) * | 2015-06-26 | 2019-10-29 | Ethicon Llc | Surgical stapler with reversible motor |
| US10357303B2 (en) | 2015-06-30 | 2019-07-23 | Ethicon Llc | Translatable outer tube for sealing using shielded lap chole dissector |
| ITUB20151790A1 (it) * | 2015-07-02 | 2017-01-02 | J M C S R L | Suturatrice chirurgica |
| US10064622B2 (en) | 2015-07-29 | 2018-09-04 | Covidien Lp | Surgical stapling loading unit with stroke counter and lockout |
| US10045782B2 (en) | 2015-07-30 | 2018-08-14 | Covidien Lp | Surgical stapling loading unit with stroke counter and lockout |
| JP6821653B2 (ja) * | 2015-07-30 | 2021-01-27 | エシコン エルエルシーEthicon LLC | 外科用器具の適切な連続的動作を確実にするためのシステムを備える外科用器具 |
| RU2721293C2 (ru) * | 2015-07-30 | 2020-05-18 | ЭТИКОН ЭлЭлСи | Хирургический инструмент, содержащий системы для обеспечения опционального рассекания ткани |
| US11154300B2 (en) | 2015-07-30 | 2021-10-26 | Cilag Gmbh International | Surgical instrument comprising separate tissue securing and tissue cutting systems |
| US10194913B2 (en) * | 2015-07-30 | 2019-02-05 | Ethicon Llc | Surgical instrument comprising systems for assuring the proper sequential operation of the surgical instrument |
| CA2994554A1 (en) | 2015-08-06 | 2017-02-09 | Applied Medical Resources Corporation | Surgical stapler having locking articulation joint |
| US11058425B2 (en) | 2015-08-17 | 2021-07-13 | Ethicon Llc | Implantable layers for a surgical instrument |
| US10098642B2 (en) | 2015-08-26 | 2018-10-16 | Ethicon Llc | Surgical staples comprising features for improved fastening of tissue |
| JP6828018B2 (ja) | 2015-08-26 | 2021-02-10 | エシコン エルエルシーEthicon LLC | ステープルの特性変更を可能にし、カートリッジへの充填を容易にする外科用ステープルストリップ |
| MX2022006192A (es) | 2015-09-02 | 2022-06-16 | Ethicon Llc | Configuraciones de grapas quirurgicas con superficies de leva situadas entre porciones que soportan grapas quirurgicas. |
| US10314587B2 (en) | 2015-09-02 | 2019-06-11 | Ethicon Llc | Surgical staple cartridge with improved staple driver configurations |
| DE102015115559A1 (de) * | 2015-09-15 | 2017-03-16 | Karl Storz Gmbh & Co. Kg | Manipulationssystem sowie Handhabungsvorrichtung für chirurgische Instrumente |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US10076326B2 (en) | 2015-09-23 | 2018-09-18 | Ethicon Llc | Surgical stapler having current mirror-based motor control |
| US10363036B2 (en) | 2015-09-23 | 2019-07-30 | Ethicon Llc | Surgical stapler having force-based motor control |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10085751B2 (en) | 2015-09-23 | 2018-10-02 | Ethicon Llc | Surgical stapler having temperature-based motor control |
| US10327769B2 (en) | 2015-09-23 | 2019-06-25 | Ethicon Llc | Surgical stapler having motor control based on a drive system component |
| US10299878B2 (en) | 2015-09-25 | 2019-05-28 | Ethicon Llc | Implantable adjunct systems for determining adjunct skew |
| EP3352695B1 (en) * | 2015-09-25 | 2024-04-17 | Covidien LP | Robotic surgical assemblies and electromechanical instruments thereof |
| WO2017053363A1 (en) * | 2015-09-25 | 2017-03-30 | Covidien Lp | Robotic surgical assemblies and instrument drive connectors thereof |
| JP6802265B2 (ja) * | 2015-09-25 | 2020-12-16 | コヴィディエン リミテッド パートナーシップ | 外科用ロボットアセンブリ及びその器具用アダプタ |
| US10182813B2 (en) * | 2015-09-29 | 2019-01-22 | Ethicon Llc | Surgical stapling instrument with shaft release, powered firing, and powered articulation |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US11690623B2 (en) | 2015-09-30 | 2023-07-04 | Cilag Gmbh International | Method for applying an implantable layer to a fastener cartridge |
| US10980539B2 (en) | 2015-09-30 | 2021-04-20 | Ethicon Llc | Implantable adjunct comprising bonded layers |
| US10271849B2 (en) | 2015-09-30 | 2019-04-30 | Ethicon Llc | Woven constructs with interlocked standing fibers |
| US11033322B2 (en) | 2015-09-30 | 2021-06-15 | Ethicon Llc | Circuit topologies for combined generator |
| US10213204B2 (en) | 2015-10-02 | 2019-02-26 | Covidien Lp | Micro surgical instrument and loading unit for use therewith |
| US10959771B2 (en) | 2015-10-16 | 2021-03-30 | Ethicon Llc | Suction and irrigation sealing grasper |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| EP3364885B1 (en) * | 2015-10-20 | 2020-12-02 | Covidien LP | Circular stapler with tissue gap indicator assembly |
| DE102015013923A1 (de) * | 2015-10-21 | 2017-04-27 | Karl Storz Gmbh & Co. Kg | Mikrochirurgisches Instrument, Handhabe und Motorblock für ein mikrochirurgisches Instrument |
| US10772632B2 (en) | 2015-10-28 | 2020-09-15 | Covidien Lp | Surgical stapling device with triple leg staples |
| US10939952B2 (en) * | 2015-11-06 | 2021-03-09 | Covidien Lp | Adapter, extension, and connector assemblies for surgical devices |
| US10390831B2 (en) * | 2015-11-10 | 2019-08-27 | Covidien Lp | Endoscopic reposable surgical clip applier |
| US10595864B2 (en) | 2015-11-24 | 2020-03-24 | Covidien Lp | Adapter assembly for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| US10271836B2 (en) * | 2015-12-01 | 2019-04-30 | Covidien Lp | Powered endoscopic suturing device |
| US10111660B2 (en) | 2015-12-03 | 2018-10-30 | Covidien Lp | Surgical stapler flexible distal tip |
| USD800306S1 (en) | 2015-12-10 | 2017-10-17 | Ethicon Llc | Surgical suturing device |
| CN105411642B (zh) * | 2015-12-22 | 2018-09-11 | 苏州英途康医疗科技有限公司 | 电动吻合器及其闭合、击发控制方法 |
| CN105395232B (zh) | 2015-12-22 | 2019-02-15 | 苏州英途康医疗科技有限公司 | 电动吻合器 |
| CN105411641B (zh) * | 2015-12-22 | 2018-07-06 | 苏州英途康医疗科技有限公司 | 吻合器 |
| CN105476678B (zh) * | 2015-12-22 | 2018-11-09 | 苏州英途康医疗科技有限公司 | 线性切割吻合器 |
| US10253847B2 (en) * | 2015-12-22 | 2019-04-09 | Covidien Lp | Electromechanical surgical devices with single motor drives and adapter assemblies therfor |
| CN105596046B (zh) * | 2015-12-22 | 2018-05-08 | 苏州英途康医疗科技有限公司 | 吻合器 |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US10959806B2 (en) | 2015-12-30 | 2021-03-30 | Ethicon Llc | Energized medical device with reusable handle |
| US10265068B2 (en) | 2015-12-30 | 2019-04-23 | Ethicon Llc | Surgical instruments with separable motors and motor control circuits |
| CN105496486B (zh) * | 2015-12-30 | 2018-10-30 | 山东大学齐鲁医院(青岛) | 一种具有驱动调节装置的吻合器 |
| US10368865B2 (en) | 2015-12-30 | 2019-08-06 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10610219B2 (en) | 2015-12-31 | 2020-04-07 | Ethicon Llc | Surgical stapler with curved outer surface on anvil |
| US10258334B2 (en) | 2015-12-31 | 2019-04-16 | Ethicon Llc | Surgical stapler with variable height drivers for uniform staple formation |
| US10045780B2 (en) | 2015-12-31 | 2018-08-14 | Ethicon Llc | Method of applying staples in lower anterior bowel resection |
| US10561474B2 (en) * | 2015-12-31 | 2020-02-18 | Ethicon Llc | Surgical stapler with end of stroke indicator |
| US10966717B2 (en) | 2016-01-07 | 2021-04-06 | Covidien Lp | Surgical fastener apparatus |
| US10660623B2 (en) | 2016-01-15 | 2020-05-26 | Covidien Lp | Centering mechanism for articulation joint |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| CN105496488B (zh) | 2016-02-03 | 2018-09-21 | 苏州英途康医疗科技有限公司 | 电动吻合器 |
| CN105476679B (zh) * | 2016-02-06 | 2018-07-17 | 苏州英途康医疗科技有限公司 | 线性切割吻合器钉仓组件及线性切割吻合器 |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| JP6911054B2 (ja) | 2016-02-09 | 2021-07-28 | エシコン エルエルシーEthicon LLC | 非対称の関節構成を備えた外科用器具 |
| US10433837B2 (en) | 2016-02-09 | 2019-10-08 | Ethicon Llc | Surgical instruments with multiple link articulation arrangements |
| US10349937B2 (en) | 2016-02-10 | 2019-07-16 | Covidien Lp | Surgical stapler with articulation locking mechanism |
| US10398439B2 (en) * | 2016-02-10 | 2019-09-03 | Covidien Lp | Adapter, extension, and connector assemblies for surgical devices |
| US10420559B2 (en) | 2016-02-11 | 2019-09-24 | Covidien Lp | Surgical stapler with small diameter endoscopic portion |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US11224426B2 (en) | 2016-02-12 | 2022-01-18 | Cilag Gmbh International | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10258331B2 (en) | 2016-02-12 | 2019-04-16 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| JP2017170586A (ja) * | 2016-03-25 | 2017-09-28 | セイコーエプソン株式会社 | エンドエフェクター、ロボット、およびロボット制御装置 |
| DE102016105789A1 (de) * | 2016-03-30 | 2017-10-05 | Aesculap Ag | Sensorisches Gebersystem |
| US11284890B2 (en) | 2016-04-01 | 2022-03-29 | Cilag Gmbh International | Circular stapling system comprising an incisable tissue support |
| CN109310432B (zh) * | 2016-04-01 | 2021-08-24 | 伊西康有限责任公司 | 包括钳口附接闭锁件的外科缝合系统 |
| US20170281186A1 (en) | 2016-04-01 | 2017-10-05 | Ethicon Endo-Surgery, Llc | Surgical stapling system comprising a contourable shaft |
| CN109219400B (zh) * | 2016-04-01 | 2021-07-16 | 伊西康有限责任公司 | 包括包含可重新取向显示字段的显示器的外科缝合系统 |
| CN109310418B (zh) * | 2016-04-01 | 2021-08-20 | 伊西康有限责任公司 | 具有可重新构造的握柄部分的外科器械柄部组件 |
| US10413297B2 (en) | 2016-04-01 | 2019-09-17 | Ethicon Llc | Surgical stapling system configured to apply annular rows of staples having different heights |
| CN109219406B (zh) * | 2016-04-01 | 2021-07-20 | 伊西康有限责任公司 | 包括用过的仓闭锁件的外科缝合系统 |
| US10307159B2 (en) | 2016-04-01 | 2019-06-04 | Ethicon Llc | Surgical instrument handle assembly with reconfigurable grip portion |
| CN109310412B (zh) * | 2016-04-01 | 2022-05-27 | 伊西康有限责任公司 | 包括显示器的模块化外科缝合系统 |
| CN109310435B (zh) * | 2016-04-01 | 2021-07-13 | 伊西康有限责任公司 | 包括组织压缩闭锁件的外科缝合系统 |
| BR112018070094A2 (pt) * | 2016-04-01 | 2019-02-05 | Ethicon Llc | sistema de grampeamento cirúrgico |
| US10617413B2 (en) | 2016-04-01 | 2020-04-14 | Ethicon Llc | Closure system arrangements for surgical cutting and stapling devices with separate and distinct firing shafts |
| JP7010838B2 (ja) * | 2016-04-01 | 2022-01-26 | エシコン エルエルシー | 外科用ステープル留め器具 |
| JP6932716B2 (ja) * | 2016-04-01 | 2021-09-08 | エシコン エルエルシーEthicon LLC | シフト機構を備える外科用器具 |
| CN109219403B (zh) * | 2016-04-01 | 2021-06-11 | 伊西康有限责任公司 | 具有砧座同心驱动构件的外科切割和缝合端部执行器 |
| JP7010837B2 (ja) | 2016-04-01 | 2022-01-26 | エシコン エルエルシー | 組織の選択的切断を提供するように構成されている外科用ステープル留めシステム |
| AU2017250206B2 (en) | 2016-04-12 | 2022-03-24 | Applied Medical Resources Corporation | Surgical stapler having a powered handle |
| AU2017250184B2 (en) | 2016-04-12 | 2022-03-24 | Applied Medical Resources Corporation | Surgical stapler having articulation mechanism |
| KR102535333B1 (ko) | 2016-04-12 | 2023-05-30 | 어플라이드 메디컬 리소시스 코포레이션 | 수술용 스테이플러에 대한 재장전 샤프트 어셈블리 |
| KR102429815B1 (ko) * | 2016-04-14 | 2022-08-08 | 트랜스엔테릭스 서지컬, 인크. | 선형 구동식 기기 롤을 포함하는 전기기계 수술 시스템 |
| US11179150B2 (en) | 2016-04-15 | 2021-11-23 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10492783B2 (en) | 2016-04-15 | 2019-12-03 | Ethicon, Llc | Surgical instrument with improved stop/start control during a firing motion |
| US10405859B2 (en) | 2016-04-15 | 2019-09-10 | Ethicon Llc | Surgical instrument with adjustable stop/start control during a firing motion |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10335145B2 (en) | 2016-04-15 | 2019-07-02 | Ethicon Llc | Modular surgical instrument with configurable operating mode |
| US10456137B2 (en) | 2016-04-15 | 2019-10-29 | Ethicon Llc | Staple formation detection mechanisms |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US11317917B2 (en) | 2016-04-18 | 2022-05-03 | Cilag Gmbh International | Surgical stapling system comprising a lockable firing assembly |
| US10433840B2 (en) | 2016-04-18 | 2019-10-08 | Ethicon Llc | Surgical instrument comprising a replaceable cartridge jaw |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US10856934B2 (en) | 2016-04-29 | 2020-12-08 | Ethicon Llc | Electrosurgical instrument with electrically conductive gap setting and tissue engaging members |
| US10987156B2 (en) | 2016-04-29 | 2021-04-27 | Ethicon Llc | Electrosurgical instrument with electrically conductive gap setting member and electrically insulative tissue engaging members |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| US10561419B2 (en) | 2016-05-04 | 2020-02-18 | Covidien Lp | Powered end effector assembly with pivotable channel |
| US10736637B2 (en) * | 2016-05-10 | 2020-08-11 | Covidien Lp | Brake for adapter assemblies for surgical devices |
| US11065022B2 (en) | 2016-05-17 | 2021-07-20 | Covidien Lp | Cutting member for a surgical instrument |
| DE102016208541A1 (de) * | 2016-05-18 | 2017-11-23 | Olympus Winter & Ibe Gmbh | Chirurgisches Instrument, insbesondere elektrochirurgisches Instrument |
| AU2017272075B2 (en) * | 2016-05-26 | 2021-04-29 | Covidien Lp | Robotic surgical assemblies |
| USD822206S1 (en) | 2016-06-24 | 2018-07-03 | Ethicon Llc | Surgical fastener |
| USD850617S1 (en) | 2016-06-24 | 2019-06-04 | Ethicon Llc | Surgical fastener cartridge |
| JP6957532B2 (ja) | 2016-06-24 | 2021-11-02 | エシコン エルエルシーEthicon LLC | ワイヤステープル及び打ち抜き加工ステープルを含むステープルカートリッジ |
| USD847989S1 (en) | 2016-06-24 | 2019-05-07 | Ethicon Llc | Surgical fastener cartridge |
| USD826405S1 (en) | 2016-06-24 | 2018-08-21 | Ethicon Llc | Surgical fastener |
| US11000278B2 (en) | 2016-06-24 | 2021-05-11 | Ethicon Llc | Staple cartridge comprising wire staples and stamped staples |
| GB201611306D0 (en) | 2016-06-29 | 2016-08-10 | Norwegian Univ Of Science And Tech (Ntnu) | Surgical stapler and a method of stapling tissue |
| US10245064B2 (en) | 2016-07-12 | 2019-04-02 | Ethicon Llc | Ultrasonic surgical instrument with piezoelectric central lumen transducer |
| GB2554070B (en) | 2016-09-14 | 2021-11-10 | Cmr Surgical Ltd | Packaging insert |
| GB2552541A (en) | 2016-07-29 | 2018-01-31 | Cambridge Medical Robotics Ltd | Drive transfer |
| GB2595785B (en) * | 2016-07-29 | 2022-05-25 | Cmr Surgical Ltd | Drive transfer |
| USD847990S1 (en) | 2016-08-16 | 2019-05-07 | Ethicon Llc | Surgical instrument |
| US10478256B2 (en) * | 2016-08-16 | 2019-11-19 | Ethicon Llc | Robotics tool bailouts |
| US10363035B2 (en) * | 2016-08-16 | 2019-07-30 | Ethicon Llc | Stapler tool with rotary drive lockout |
| US10736702B2 (en) * | 2016-08-16 | 2020-08-11 | Ethicon Llc | Activating and rotating surgical end effectors |
| US10548673B2 (en) * | 2016-08-16 | 2020-02-04 | Ethicon Llc | Surgical tool with a display |
| US11350959B2 (en) | 2016-08-25 | 2022-06-07 | Cilag Gmbh International | Ultrasonic transducer techniques for ultrasonic surgical instrument |
| US10952759B2 (en) * | 2016-08-25 | 2021-03-23 | Ethicon Llc | Tissue loading of a surgical instrument |
| AU2017331465B2 (en) * | 2016-09-23 | 2022-03-10 | U.S. Patent Innovations Llc | Robotic surgical system |
| US10751117B2 (en) | 2016-09-23 | 2020-08-25 | Ethicon Llc | Electrosurgical instrument with fluid diverter |
| US10390834B2 (en) | 2016-09-27 | 2019-08-27 | Ethicon Llc | Circular surgical staplers with isolating sleeves stored inside anvil |
| CN106333720B (zh) * | 2016-10-14 | 2019-02-15 | 苏州英途康医疗科技有限公司 | 智能腔镜吻合器 |
| KR101838188B1 (ko) * | 2016-10-31 | 2018-03-13 | 비앤알(주) | 원형 문합기 |
| US10631857B2 (en) | 2016-11-04 | 2020-04-28 | Covidien Lp | Loading unit for surgical instruments with low profile pushers |
| US11642126B2 (en) | 2016-11-04 | 2023-05-09 | Covidien Lp | Surgical stapling apparatus with tissue pockets |
| US10492784B2 (en) | 2016-11-08 | 2019-12-03 | Covidien Lp | Surgical tool assembly with compact firing assembly |
| US10603041B2 (en) * | 2016-11-14 | 2020-03-31 | Ethicon Llc | Circular surgical stapler with angularly asymmetric deck features |
| US10463371B2 (en) | 2016-11-29 | 2019-11-05 | Covidien Lp | Reload assembly with spent reload indicator |
| US10987177B2 (en) * | 2016-12-20 | 2021-04-27 | Ethicon Llc | Robotic endocutter drivetrain with bailout and manual opening |
| US10398460B2 (en) * | 2016-12-20 | 2019-09-03 | Ethicon Llc | Robotic endocutter drivetrain with bailout and manual opening |
| CN110167462B (zh) * | 2016-12-21 | 2022-05-31 | 爱惜康有限责任公司 | 用于在带有闭合行程减少特征部的闭合系统以及关节运动和击发系统之间转换的具有离合布置的外科工具组件 |
| US20180168648A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Durability features for end effectors and firing assemblies of surgical stapling instruments |
| CN110099629B (zh) * | 2016-12-21 | 2022-10-25 | 爱惜康有限责任公司 | 外科端部执行器及其适合的击发构件 |
| US11571210B2 (en) | 2016-12-21 | 2023-02-07 | Cilag Gmbh International | Firing assembly comprising a multiple failed-state fuse |
| US10617414B2 (en) | 2016-12-21 | 2020-04-14 | Ethicon Llc | Closure member arrangements for surgical instruments |
| US10758230B2 (en) | 2016-12-21 | 2020-09-01 | Ethicon Llc | Surgical instrument with primary and safety processors |
| US10898186B2 (en) | 2016-12-21 | 2021-01-26 | Ethicon Llc | Staple forming pocket arrangements comprising primary sidewalls and pocket sidewalls |
| US10485543B2 (en) | 2016-12-21 | 2019-11-26 | Ethicon Llc | Anvil having a knife slot width |
| JP6983893B2 (ja) | 2016-12-21 | 2021-12-17 | エシコン エルエルシーEthicon LLC | 外科用エンドエフェクタ及び交換式ツールアセンブリのためのロックアウト構成 |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| US10945727B2 (en) | 2016-12-21 | 2021-03-16 | Ethicon Llc | Staple cartridge with deformable driver retention features |
| US11419606B2 (en) * | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| US10426471B2 (en) | 2016-12-21 | 2019-10-01 | Ethicon Llc | Surgical instrument with multiple failure response modes |
| US10687810B2 (en) | 2016-12-21 | 2020-06-23 | Ethicon Llc | Stepped staple cartridge with tissue retention and gap setting features |
| US10993715B2 (en) | 2016-12-21 | 2021-05-04 | Ethicon Llc | Staple cartridge comprising staples with different clamping breadths |
| US10893864B2 (en) | 2016-12-21 | 2021-01-19 | Ethicon | Staple cartridges and arrangements of staples and staple cavities therein |
| US10667809B2 (en) | 2016-12-21 | 2020-06-02 | Ethicon Llc | Staple cartridge and staple cartridge channel comprising windows defined therein |
| MX2019007311A (es) | 2016-12-21 | 2019-11-18 | Ethicon Llc | Sistemas de engrapado quirurgico. |
| CN110099624B (zh) * | 2016-12-21 | 2023-04-28 | 爱惜康有限责任公司 | 用于将轴组件附接到外科器械或者附接到外科机器人的方法 |
| US10736629B2 (en) | 2016-12-21 | 2020-08-11 | Ethicon Llc | Surgical tool assemblies with clutching arrangements for shifting between closure systems with closure stroke reduction features and articulation and firing systems |
| US10758229B2 (en) | 2016-12-21 | 2020-09-01 | Ethicon Llc | Surgical instrument comprising improved jaw control |
| CN110300551B (zh) * | 2016-12-21 | 2022-08-02 | 爱惜康有限责任公司 | 包括用于与机动化外科器械系统一起使用的可手动操作的回缩系统的轴组件 |
| US11684367B2 (en) | 2016-12-21 | 2023-06-27 | Cilag Gmbh International | Stepped assembly having and end-of-life indicator |
| US10471282B2 (en) * | 2016-12-21 | 2019-11-12 | Ethicon Llc | Ultrasonic robotic tool actuation |
| US10492785B2 (en) | 2016-12-21 | 2019-12-03 | Ethicon Llc | Shaft assembly comprising a lockout |
| MX2019007537A (es) | 2016-12-21 | 2019-10-24 | Ethicon Llc | Configuraciones de pasador de miembro de disparo. |
| US10588632B2 (en) | 2016-12-21 | 2020-03-17 | Ethicon Llc | Surgical end effectors and firing members thereof |
| US10141682B2 (en) * | 2016-12-21 | 2018-11-27 | Teledyne Instruments, Inc. | Subsea electrical connector with removable ROV mating tool |
| CN110099631B (zh) | 2016-12-21 | 2022-08-26 | 爱惜康有限责任公司 | 具有非对称轴布置的能够关节运动的外科端部执行器 |
| US10537325B2 (en) | 2016-12-21 | 2020-01-21 | Ethicon Llc | Staple forming pocket arrangement to accommodate different types of staples |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US11134942B2 (en) | 2016-12-21 | 2021-10-05 | Cilag Gmbh International | Surgical stapling instruments and staple-forming anvils |
| US10709901B2 (en) | 2017-01-05 | 2020-07-14 | Covidien Lp | Implantable fasteners, applicators, and methods for brachytherapy |
| USD865964S1 (en) | 2017-01-05 | 2019-11-05 | Ethicon Llc | Handle for electrosurgical instrument |
| US10952767B2 (en) | 2017-02-06 | 2021-03-23 | Covidien Lp | Connector clip for securing an introducer to a surgical fastener applying apparatus |
| US11033325B2 (en) | 2017-02-16 | 2021-06-15 | Cilag Gmbh International | Electrosurgical instrument with telescoping suction port and debris cleaner |
| US11523833B2 (en) * | 2017-02-17 | 2022-12-13 | Globus Medical, Inc. | Surgical rotary tool |
| US20180235618A1 (en) | 2017-02-22 | 2018-08-23 | Covidien Lp | Loading unit for surgical instruments with low profile pushers |
| US10849621B2 (en) | 2017-02-23 | 2020-12-01 | Covidien Lp | Surgical stapler with small diameter endoscopic portion |
| US11350915B2 (en) | 2017-02-23 | 2022-06-07 | Covidien Lp | Surgical stapler with small diameter endoscopic portion |
| US20180242967A1 (en) | 2017-02-26 | 2018-08-30 | Endoevolution, Llc | Apparatus and method for minimally invasive suturing |
| US10299790B2 (en) | 2017-03-03 | 2019-05-28 | Covidien Lp | Adapter with centering mechanism for articulation joint |
| US10799284B2 (en) | 2017-03-15 | 2020-10-13 | Ethicon Llc | Electrosurgical instrument with textured jaws |
| US10660641B2 (en) | 2017-03-16 | 2020-05-26 | Covidien Lp | Adapter with centering mechanism for articulation joint |
| US11497546B2 (en) | 2017-03-31 | 2022-11-15 | Cilag Gmbh International | Area ratios of patterned coatings on RF electrodes to reduce sticking |
| US11497560B2 (en) | 2017-04-28 | 2022-11-15 | Biosense Webster (Israel) Ltd. | Wireless tool with accelerometer for selective power saving |
| US11324502B2 (en) | 2017-05-02 | 2022-05-10 | Covidien Lp | Surgical loading unit including an articulating end effector |
| US10603035B2 (en) | 2017-05-02 | 2020-03-31 | Covidien Lp | Surgical loading unit including an articulating end effector |
| US10524784B2 (en) | 2017-05-05 | 2020-01-07 | Covidien Lp | Surgical staples with expandable backspan |
| US10390826B2 (en) | 2017-05-08 | 2019-08-27 | Covidien Lp | Surgical stapling device with elongated tool assembly and methods of use |
| EP3629942B1 (en) * | 2017-05-24 | 2022-12-28 | Senuysal, Hilal | A continuous stapling instrument |
| US10420551B2 (en) | 2017-05-30 | 2019-09-24 | Covidien Lp | Authentication and information system for reusable surgical instruments |
| US10478185B2 (en) | 2017-06-02 | 2019-11-19 | Covidien Lp | Tool assembly with minimal dead space |
| US11071554B2 (en) | 2017-06-20 | 2021-07-27 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on magnitude of velocity error measurements |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US10368864B2 (en) | 2017-06-20 | 2019-08-06 | Ethicon Llc | Systems and methods for controlling displaying motor velocity for a surgical instrument |
| US10888321B2 (en) | 2017-06-20 | 2021-01-12 | Ethicon Llc | Systems and methods for controlling velocity of a displacement member of a surgical stapling and cutting instrument |
| US10646220B2 (en) | 2017-06-20 | 2020-05-12 | Ethicon Llc | Systems and methods for controlling displacement member velocity for a surgical instrument |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| USD879808S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with graphical user interface |
| US10390841B2 (en) | 2017-06-20 | 2019-08-27 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US10980537B2 (en) | 2017-06-20 | 2021-04-20 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified number of shaft rotations |
| US11382638B2 (en) | 2017-06-20 | 2022-07-12 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified displacement distance |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US10813639B2 (en) | 2017-06-20 | 2020-10-27 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on system conditions |
| USD890784S1 (en) | 2017-06-20 | 2020-07-21 | Ethicon Llc | Display panel with changeable graphical user interface |
| US10881396B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Surgical instrument with variable duration trigger arrangement |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| USD879809S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with changeable graphical user interface |
| US10327767B2 (en) | 2017-06-20 | 2019-06-25 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US10624633B2 (en) | 2017-06-20 | 2020-04-21 | Ethicon Llc | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument |
| US11090046B2 (en) | 2017-06-20 | 2021-08-17 | Cilag Gmbh International | Systems and methods for controlling displacement member motion of a surgical stapling and cutting instrument |
| US10888324B2 (en) * | 2017-06-27 | 2021-01-12 | Ethicon Llc | Powered surgical instrument with independent selectively applied rotary and linear drivetrains |
| US10828029B2 (en) * | 2017-06-27 | 2020-11-10 | Ethicon Llc | Surgical stapler with independently actuated drivers to provide varying staple heights |
| WO2019003031A1 (en) | 2017-06-27 | 2019-01-03 | Ethicon Llc | SURGICAL ENCLOSURE ARRANGEMENTS |
| US10667812B2 (en) * | 2017-06-27 | 2020-06-02 | Ethicon Llc | Modular powered electrical connection for surgical instrument with features to prevent electrical discharge |
| US10772629B2 (en) | 2017-06-27 | 2020-09-15 | Ethicon Llc | Surgical anvil arrangements |
| US20180368844A1 (en) | 2017-06-27 | 2018-12-27 | Ethicon Llc | Staple forming pocket arrangements |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| US11324503B2 (en) | 2017-06-27 | 2022-05-10 | Cilag Gmbh International | Surgical firing member arrangements |
| US11071548B2 (en) * | 2017-06-27 | 2021-07-27 | Cilag Gmbh International | Powered circular stapler with reciprocating drive member to provide independent stapling and cutting of tissue |
| US11266405B2 (en) | 2017-06-27 | 2022-03-08 | Cilag Gmbh International | Surgical anvil manufacturing methods |
| US10856869B2 (en) | 2017-06-27 | 2020-12-08 | Ethicon Llc | Surgical anvil arrangements |
| US10716614B2 (en) | 2017-06-28 | 2020-07-21 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies with increased contact pressure |
| US10211586B2 (en) | 2017-06-28 | 2019-02-19 | Ethicon Llc | Surgical shaft assemblies with watertight housings |
| US11246592B2 (en) | 2017-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical instrument comprising an articulation system lockable to a frame |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| US11696759B2 (en) | 2017-06-28 | 2023-07-11 | Cilag Gmbh International | Surgical stapling instruments comprising shortened staple cartridge noses |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| CN110799135B (zh) * | 2017-06-28 | 2023-02-28 | 爱惜康有限责任公司 | 用于保持可枢转外科器械钳口与第二外科器械钳口的可枢转保持接合的钳口保持器布置 |
| US20190000459A1 (en) | 2017-06-28 | 2019-01-03 | Ethicon Llc | Surgical instruments with jaws constrained to pivot about an axis upon contact with a closure member that is parked in close proximity to the pivot axis |
| US11259805B2 (en) | 2017-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical instrument comprising firing member supports |
| USD869655S1 (en) | 2017-06-28 | 2019-12-10 | Ethicon Llc | Surgical fastener cartridge |
| US10603117B2 (en) * | 2017-06-28 | 2020-03-31 | Ethicon Llc | Articulation state detection mechanisms |
| USD854151S1 (en) | 2017-06-28 | 2019-07-16 | Ethicon Llc | Surgical instrument shaft |
| EP3420947B1 (en) | 2017-06-28 | 2022-05-25 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| USD851762S1 (en) | 2017-06-28 | 2019-06-18 | Ethicon Llc | Anvil |
| CN110831515B (zh) * | 2017-06-28 | 2023-12-05 | 爱惜康有限责任公司 | 包括具有闭合管特征的轴的外科器械 |
| US10903685B2 (en) | 2017-06-28 | 2021-01-26 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies forming capacitive channels |
| US11298128B2 (en) | 2017-06-28 | 2022-04-12 | Cilag Gmbh International | Surgical system couplable with staple cartridge and radio frequency cartridge, and method of using same |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US10398434B2 (en) | 2017-06-29 | 2019-09-03 | Ethicon Llc | Closed loop velocity control of closure member for robotic surgical instrument |
| US10258418B2 (en) | 2017-06-29 | 2019-04-16 | Ethicon Llc | System for controlling articulation forces |
| US10898183B2 (en) * | 2017-06-29 | 2021-01-26 | Ethicon Llc | Robotic surgical instrument with closed loop feedback techniques for advancement of closure member during firing |
| US11007022B2 (en) | 2017-06-29 | 2021-05-18 | Ethicon Llc | Closed loop velocity control techniques based on sensed tissue parameters for robotic surgical instrument |
| GB201711177D0 (en) * | 2017-07-12 | 2017-08-23 | Depuy Ireland Ultd Co | Surgical tool release mechanism |
| BR112020001931A2 (pt) * | 2017-08-03 | 2020-07-28 | Ethicon Llc | retração de sistema cirúrgico |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11304695B2 (en) | 2017-08-03 | 2022-04-19 | Cilag Gmbh International | Surgical system shaft interconnection |
| US10624636B2 (en) | 2017-08-23 | 2020-04-21 | Covidien Lp | Surgical stapling device with floating staple cartridge |
| US10806452B2 (en) | 2017-08-24 | 2020-10-20 | Covidien Lp | Loading unit for a surgical stapling instrument |
| US10966720B2 (en) | 2017-09-01 | 2021-04-06 | RevMedica, Inc. | Surgical stapler with removable power pack |
| US11331099B2 (en) | 2017-09-01 | 2022-05-17 | Rev Medica, Inc. | Surgical stapler with removable power pack and interchangeable battery pack |
| US10695060B2 (en) | 2017-09-01 | 2020-06-30 | RevMedica, Inc. | Loadable power pack for surgical instruments |
| US11058428B2 (en) * | 2017-09-27 | 2021-07-13 | Cilag Gmbh International | Circular stapling instrument with asymmetric molded shroud components |
| US10796471B2 (en) | 2017-09-29 | 2020-10-06 | Ethicon Llc | Systems and methods of displaying a knife position for a surgical instrument |
| US11490951B2 (en) | 2017-09-29 | 2022-11-08 | Cilag Gmbh International | Saline contact with electrodes |
| US11399829B2 (en) | 2017-09-29 | 2022-08-02 | Cilag Gmbh International | Systems and methods of initiating a power shutdown mode for a surgical instrument |
| US11484358B2 (en) | 2017-09-29 | 2022-11-01 | Cilag Gmbh International | Flexible electrosurgical instrument |
| US10729501B2 (en) * | 2017-09-29 | 2020-08-04 | Ethicon Llc | Systems and methods for language selection of a surgical instrument |
| US11033323B2 (en) | 2017-09-29 | 2021-06-15 | Cilag Gmbh International | Systems and methods for managing fluid and suction in electrosurgical systems |
| USD907647S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| USD907648S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US10765429B2 (en) | 2017-09-29 | 2020-09-08 | Ethicon Llc | Systems and methods for providing alerts according to the operational state of a surgical instrument |
| US10743872B2 (en) | 2017-09-29 | 2020-08-18 | Ethicon Llc | System and methods for controlling a display of a surgical instrument |
| USD917500S1 (en) | 2017-09-29 | 2021-04-27 | Ethicon Llc | Display screen or portion thereof with graphical user interface |
| US11446104B2 (en) * | 2017-10-26 | 2022-09-20 | Cilag Gmbh International | Manual release assembly for robotic surgical tool |
| CN107693069A (zh) * | 2017-10-27 | 2018-02-16 | 无锡贝恩外科器械有限公司 | 一种一次性腔镜直线切割吻合器 |
| US11109878B2 (en) | 2017-10-30 | 2021-09-07 | Cilag Gmbh International | Surgical clip applier comprising an automatic clip feeding system |
| US11564756B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11090075B2 (en) | 2017-10-30 | 2021-08-17 | Cilag Gmbh International | Articulation features for surgical end effector |
| EP3476303A3 (en) | 2017-10-30 | 2019-06-26 | Ethicon LLC | Reactive algorithm for surgical system |
| US11116485B2 (en) | 2017-10-30 | 2021-09-14 | Cilag Gmbh International | Surgical instrument with modular power sources |
| US11317919B2 (en) | 2017-10-30 | 2022-05-03 | Cilag Gmbh International | Clip applier comprising a clip crimping system |
| US10932804B2 (en) | 2017-10-30 | 2021-03-02 | Ethicon Llc | Surgical instrument with sensor and/or control systems |
| US11510741B2 (en) | 2017-10-30 | 2022-11-29 | Cilag Gmbh International | Method for producing a surgical instrument comprising a smart electrical system |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| JP7330959B2 (ja) | 2017-10-30 | 2023-08-22 | エシコン エルエルシー | ハンドル構成を備える外科用器具システム |
| EP3476348A3 (en) | 2017-10-30 | 2019-07-31 | Ethicon LLC | Surgical dissectors configured to apply mechanical and electrical energy |
| US11291510B2 (en) | 2017-10-30 | 2022-04-05 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11229436B2 (en) | 2017-10-30 | 2022-01-25 | Cilag Gmbh International | Surgical system comprising a surgical tool and a surgical hub |
| EP3476306A3 (en) | 2017-10-30 | 2019-11-20 | Ethicon LLC | Surgical instrument systems comprising handle arrangements |
| EP3476302A3 (en) | 2017-10-30 | 2019-07-31 | Ethicon LLC | Surgical suturing instrument comprising a non-circular needle |
| EP3476333B1 (en) | 2017-10-30 | 2023-10-11 | Ethicon LLC | Surgical instrument systems comprising battery arrangements |
| EP3476305B1 (en) | 2017-10-30 | 2022-09-21 | Ethicon LLC | Adaptive control programs for a surgical system comprising more than one type of cartridge |
| EP3476331B1 (en) | 2017-10-30 | 2021-05-26 | Ethicon LLC | Surgical instrument comprising an adaptive electrical system |
| EP3476325A1 (en) | 2017-10-30 | 2019-05-01 | Ethicon LLC | Surgical suturing instrument configured to manipulate tissue using mechanical and electrical power |
| US11413042B2 (en) | 2017-10-30 | 2022-08-16 | Cilag Gmbh International | Clip applier comprising a reciprocating clip advancing member |
| EP3476301A1 (en) | 2017-10-30 | 2019-05-01 | Ethicon LLC | Surgical suturing instrument |
| EP3476332A1 (en) | 2017-10-30 | 2019-05-01 | Ethicon LLC | Surgical dissectors and manufacturing techniques |
| WO2019089296A1 (en) | 2017-10-30 | 2019-05-09 | Ethicon Llc | Surgical instrument systems comprising feedback mechanisms |
| EP3476329B1 (en) | 2017-10-30 | 2022-06-22 | Ethicon LLC | Surgical instruments comprising a system for articulation and rotation compensation |
| US11129634B2 (en) | 2017-10-30 | 2021-09-28 | Cilag Gmbh International | Surgical instrument with rotary drive selectively actuating multiple end effector functions |
| EP3476339A3 (en) | 2017-10-30 | 2019-07-31 | Ethicon LLC | Surgical clip applier comprising an empty clip cartridge lockout |
| EP3476326A1 (en) | 2017-10-30 | 2019-05-01 | Ethicon LLC | Control system arrangements for a modular surgical instrument |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| EP3488801B1 (en) | 2017-10-30 | 2021-07-14 | Ethicon LLC | Surgical instruments comprising a lockable end effector socket |
| EP3477654A1 (en) | 2017-10-30 | 2019-05-01 | Ethicon LLC | Electrical power output control based on mechanical forces |
| US11311342B2 (en) | 2017-10-30 | 2022-04-26 | Cilag Gmbh International | Method for communicating with surgical instrument systems |
| US10779903B2 (en) | 2017-10-31 | 2020-09-22 | Ethicon Llc | Positive shaft rotation lock activated by jaw closure |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| US10925603B2 (en) | 2017-11-14 | 2021-02-23 | Covidien Lp | Reload with articulation stabilization system |
| US10675107B2 (en) | 2017-11-15 | 2020-06-09 | Intuitive Surgical Operations, Inc. | Surgical instrument end effector with integral FBG |
| US10863987B2 (en) | 2017-11-16 | 2020-12-15 | Covidien Lp | Surgical instrument with imaging device |
| US10863988B2 (en) | 2017-11-29 | 2020-12-15 | Intuitive Surgical Operations, Inc. | Surgical instrument with lockout mechanism |
| CN109207536B (zh) * | 2017-12-08 | 2021-12-03 | 北大方正集团有限公司 | 一种提高米尔贝霉素发酵产物中米尔贝霉素a3含量的方法 |
| US10722236B2 (en) * | 2017-12-12 | 2020-07-28 | Covidien Lp | Endoscopic reposable surgical clip applier |
| US11071543B2 (en) | 2017-12-15 | 2021-07-27 | Cilag Gmbh International | Surgical end effectors with clamping assemblies configured to increase jaw aperture ranges |
| US10743874B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Sealed adapters for use with electromechanical surgical instruments |
| US11197670B2 (en) | 2017-12-15 | 2021-12-14 | Cilag Gmbh International | Surgical end effectors with pivotal jaws configured to touch at their respective distal ends when fully closed |
| US11033267B2 (en) | 2017-12-15 | 2021-06-15 | Ethicon Llc | Systems and methods of controlling a clamping member firing rate of a surgical instrument |
| US10869666B2 (en) | 2017-12-15 | 2020-12-22 | Ethicon Llc | Adapters with control systems for controlling multiple motors of an electromechanical surgical instrument |
| US10687813B2 (en) | 2017-12-15 | 2020-06-23 | Ethicon Llc | Adapters with firing stroke sensing arrangements for use in connection with electromechanical surgical instruments |
| US10828033B2 (en) | 2017-12-15 | 2020-11-10 | Ethicon Llc | Handheld electromechanical surgical instruments with improved motor control arrangements for positioning components of an adapter coupled thereto |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US10966718B2 (en) | 2017-12-15 | 2021-04-06 | Ethicon Llc | Dynamic clamping assemblies with improved wear characteristics for use in connection with electromechanical surgical instruments |
| US10743875B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Surgical end effectors with jaw stiffener arrangements configured to permit monitoring of firing member |
| US11006955B2 (en) | 2017-12-15 | 2021-05-18 | Ethicon Llc | End effectors with positive jaw opening features for use with adapters for electromechanical surgical instruments |
| US10779825B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Adapters with end effector position sensing and control arrangements for use in connection with electromechanical surgical instruments |
| US11020112B2 (en) | 2017-12-19 | 2021-06-01 | Ethicon Llc | Surgical tools configured for interchangeable use with different controller interfaces |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| US10729509B2 (en) | 2017-12-19 | 2020-08-04 | Ethicon Llc | Surgical instrument comprising closure and firing locking mechanism |
| USD910847S1 (en) | 2017-12-19 | 2021-02-16 | Ethicon Llc | Surgical instrument assembly |
| US10716565B2 (en) | 2017-12-19 | 2020-07-21 | Ethicon Llc | Surgical instruments with dual articulation drivers |
| US11045270B2 (en) | 2017-12-19 | 2021-06-29 | Cilag Gmbh International | Robotic attachment comprising exterior drive actuator |
| US11179152B2 (en) | 2017-12-21 | 2021-11-23 | Cilag Gmbh International | Surgical instrument comprising a tissue grasping system |
| US11076853B2 (en) | 2017-12-21 | 2021-08-03 | Cilag Gmbh International | Systems and methods of displaying a knife position during transection for a surgical instrument |
| US11129680B2 (en) | 2017-12-21 | 2021-09-28 | Cilag Gmbh International | Surgical instrument comprising a projector |
| US11311290B2 (en) | 2017-12-21 | 2022-04-26 | Cilag Gmbh International | Surgical instrument comprising an end effector dampener |
| CN108042165B (zh) * | 2017-12-25 | 2019-07-23 | 苏州英途康医疗科技有限公司 | 用于腔镜吻合器的适配器和腔镜吻合器 |
| JP7301847B2 (ja) | 2017-12-28 | 2023-07-03 | エシコン エルエルシー | 歪みゲージ回路からの入力を使用する制御システムを備える外科用器具 |
| US11266468B2 (en) | 2017-12-28 | 2022-03-08 | Cilag Gmbh International | Cooperative utilization of data derived from secondary sources by intelligent surgical hubs |
| US20190200981A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
| US11419630B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Surgical system distributed processing |
| US20190201034A1 (en) * | 2017-12-28 | 2019-07-04 | Ethicon Llc | Powered stapling device configured to adjust force, advancement speed, and overall stroke of cutting member based on sensed parameter of firing or clamping |
| US10944728B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Interactive surgical systems with encrypted communication capabilities |
| US11324557B2 (en) | 2017-12-28 | 2022-05-10 | Cilag Gmbh International | Surgical instrument with a sensing array |
| US11160605B2 (en) | 2017-12-28 | 2021-11-02 | Cilag Gmbh International | Surgical evacuation sensing and motor control |
| US11903601B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Surgical instrument comprising a plurality of drive systems |
| US10849697B2 (en) | 2017-12-28 | 2020-12-01 | Ethicon Llc | Cloud interface for coupled surgical devices |
| US10892899B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Self describing data packets generated at an issuing instrument |
| US11540855B2 (en) | 2017-12-28 | 2023-01-03 | Cilag Gmbh International | Controlling activation of an ultrasonic surgical instrument according to the presence of tissue |
| US11069012B2 (en) | 2017-12-28 | 2021-07-20 | Cilag Gmbh International | Interactive surgical systems with condition handling of devices and data capabilities |
| US11147607B2 (en) | 2017-12-28 | 2021-10-19 | Cilag Gmbh International | Bipolar combination device that automatically adjusts pressure based on energy modality |
| US11529187B2 (en) | 2017-12-28 | 2022-12-20 | Cilag Gmbh International | Surgical evacuation sensor arrangements |
| US11364075B2 (en) | 2017-12-28 | 2022-06-21 | Cilag Gmbh International | Radio frequency energy device for delivering combined electrical signals |
| US11291495B2 (en) | 2017-12-28 | 2022-04-05 | Cilag Gmbh International | Interruption of energy due to inadvertent capacitive coupling |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US20190201087A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Smoke evacuation system including a segmented control circuit for interactive surgical platform |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11304699B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11602393B2 (en) | 2017-12-28 | 2023-03-14 | Cilag Gmbh International | Surgical evacuation sensing and generator control |
| US11571234B2 (en) | 2017-12-28 | 2023-02-07 | Cilag Gmbh International | Temperature control of ultrasonic end effector and control system therefor |
| US10892995B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11633237B2 (en) | 2017-12-28 | 2023-04-25 | Cilag Gmbh International | Usage and technique analysis of surgeon / staff performance against a baseline to optimize device utilization and performance for both current and future procedures |
| US11058498B2 (en) | 2017-12-28 | 2021-07-13 | Cilag Gmbh International | Cooperative surgical actions for robot-assisted surgical platforms |
| US10987178B2 (en) | 2017-12-28 | 2021-04-27 | Ethicon Llc | Surgical hub control arrangements |
| US11937769B2 (en) | 2017-12-28 | 2024-03-26 | Cilag Gmbh International | Method of hub communication, processing, storage and display |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11612444B2 (en) | 2017-12-28 | 2023-03-28 | Cilag Gmbh International | Adjustment of a surgical device function based on situational awareness |
| US11304745B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical evacuation sensing and display |
| US10695081B2 (en) | 2017-12-28 | 2020-06-30 | Ethicon Llc | Controlling a surgical instrument according to sensed closure parameters |
| US11045591B2 (en) | 2017-12-28 | 2021-06-29 | Cilag Gmbh International | Dual in-series large and small droplet filters |
| US20190200997A1 (en) * | 2017-12-28 | 2019-07-04 | Ethicon Llc | Stapling device with both compulsory and discretionary lockouts based on sensed parameters |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11076921B2 (en) | 2017-12-28 | 2021-08-03 | Cilag Gmbh International | Adaptive control program updates for surgical hubs |
| US11432885B2 (en) | 2017-12-28 | 2022-09-06 | Cilag Gmbh International | Sensing arrangements for robot-assisted surgical platforms |
| US11678881B2 (en) | 2017-12-28 | 2023-06-20 | Cilag Gmbh International | Spatial awareness of surgical hubs in operating rooms |
| US11424027B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11464559B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Estimating state of ultrasonic end effector and control system therefor |
| US20190201027A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Surgical instrument with acoustic-based motor control |
| US11284936B2 (en) | 2017-12-28 | 2022-03-29 | Cilag Gmbh International | Surgical instrument having a flexible electrode |
| US11056244B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Automated data scaling, alignment, and organizing based on predefined parameters within surgical networks |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US10966791B2 (en) | 2017-12-28 | 2021-04-06 | Ethicon Llc | Cloud-based medical analytics for medical facility segmented individualization of instrument function |
| US11100631B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Use of laser light and red-green-blue coloration to determine properties of back scattered light |
| US11026751B2 (en) | 2017-12-28 | 2021-06-08 | Cilag Gmbh International | Display of alignment of staple cartridge to prior linear staple line |
| US11234756B2 (en) | 2017-12-28 | 2022-02-01 | Cilag Gmbh International | Powered surgical tool with predefined adjustable control algorithm for controlling end effector parameter |
| US11179175B2 (en) | 2017-12-28 | 2021-11-23 | Cilag Gmbh International | Controlling an ultrasonic surgical instrument according to tissue location |
| US11051876B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Surgical evacuation flow paths |
| US11559307B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method of robotic hub communication, detection, and control |
| US11202570B2 (en) | 2017-12-28 | 2021-12-21 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US20190201039A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Situational awareness of electrosurgical systems |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11423007B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Adjustment of device control programs based on stratified contextual data in addition to the data |
| US11278281B2 (en) | 2017-12-28 | 2022-03-22 | Cilag Gmbh International | Interactive surgical system |
| US11464535B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Detection of end effector emersion in liquid |
| US11786245B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Surgical systems with prioritized data transmission capabilities |
| US11096693B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Adjustment of staple height of at least one row of staples based on the sensed tissue thickness or force in closing |
| US11376002B2 (en) | 2017-12-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument cartridge sensor assemblies |
| US11410259B2 (en) | 2017-12-28 | 2022-08-09 | Cilag Gmbh International | Adaptive control program updates for surgical devices |
| US11317937B2 (en) | 2018-03-08 | 2022-05-03 | Cilag Gmbh International | Determining the state of an ultrasonic end effector |
| US11273001B2 (en) | 2017-12-28 | 2022-03-15 | Cilag Gmbh International | Surgical hub and modular device response adjustment based on situational awareness |
| US11308075B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical network, instrument, and cloud responses based on validation of received dataset and authentication of its source and integrity |
| US11576677B2 (en) | 2017-12-28 | 2023-02-14 | Cilag Gmbh International | Method of hub communication, processing, display, and cloud analytics |
| US11253315B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Increasing radio frequency to create pad-less monopolar loop |
| US10932872B2 (en) | 2017-12-28 | 2021-03-02 | Ethicon Llc | Cloud-based medical analytics for linking of local usage trends with the resource acquisition behaviors of larger data set |
| US11304720B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Activation of energy devices |
| US11257589B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Real-time analysis of comprehensive cost of all instrumentation used in surgery utilizing data fluidity to track instruments through stocking and in-house processes |
| US20190201146A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Safety systems for smart powered surgical stapling |
| US11832840B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical instrument having a flexible circuit |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11304763B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Image capturing of the areas outside the abdomen to improve placement and control of a surgical device in use |
| US11559308B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method for smart energy device infrastructure |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US10943454B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Detection and escalation of security responses of surgical instruments to increasing severity threats |
| US11419667B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Ultrasonic energy device which varies pressure applied by clamp arm to provide threshold control pressure at a cut progression location |
| US11446052B2 (en) | 2017-12-28 | 2022-09-20 | Cilag Gmbh International | Variation of radio frequency and ultrasonic power level in cooperation with varying clamp arm pressure to achieve predefined heat flux or power applied to tissue |
| US11311306B2 (en) | 2017-12-28 | 2022-04-26 | Cilag Gmbh International | Surgical systems for detecting end effector tissue distribution irregularities |
| US11666331B2 (en) | 2017-12-28 | 2023-06-06 | Cilag Gmbh International | Systems for detecting proximity of surgical end effector to cancerous tissue |
| US11179208B2 (en) | 2017-12-28 | 2021-11-23 | Cilag Gmbh International | Cloud-based medical analytics for security and authentication trends and reactive measures |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US11589888B2 (en) | 2017-12-28 | 2023-02-28 | Cilag Gmbh International | Method for controlling smart energy devices |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11659023B2 (en) | 2017-12-28 | 2023-05-23 | Cilag Gmbh International | Method of hub communication |
| US11013563B2 (en) | 2017-12-28 | 2021-05-25 | Ethicon Llc | Drive arrangements for robot-assisted surgical platforms |
| GB201800696D0 (en) | 2018-01-16 | 2018-02-28 | Depuy Ireland Ultd Co | Replaceable battery unit for a surgical power tool |
| US10945732B2 (en) | 2018-01-17 | 2021-03-16 | Covidien Lp | Surgical stapler with self-returning assembly |
| WO2019157500A2 (en) | 2018-02-12 | 2019-08-15 | Intuitive Surgical, Inc. | Surgical instrument with lockout mechanism |
| US10695140B2 (en) * | 2018-02-15 | 2020-06-30 | Ethicon Llc | Near field communication between a surgical instrument and a robotic surgical system |
| EP3758619B1 (en) | 2018-02-26 | 2024-04-03 | Intuitive Surgical Operations, Inc. | Surgical instrument with lockout mechanism |
| EP3758620A1 (en) | 2018-02-27 | 2021-01-06 | Applied Medical Resources Corporation | Surgical stapler having a powered handle |
| US20190261982A1 (en) * | 2018-02-27 | 2019-08-29 | Covidien Lp | Powered stapler having varying staple heights and sizes |
| US11369371B2 (en) | 2018-03-02 | 2022-06-28 | Covidien Lp | Surgical stapling instrument |
| US11457944B2 (en) | 2018-03-08 | 2022-10-04 | Cilag Gmbh International | Adaptive advanced tissue treatment pad saver mode |
| US11678927B2 (en) | 2018-03-08 | 2023-06-20 | Cilag Gmbh International | Detection of large vessels during parenchymal dissection using a smart blade |
| US11259830B2 (en) | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| US11471156B2 (en) | 2018-03-28 | 2022-10-18 | Cilag Gmbh International | Surgical stapling devices with improved rotary driven closure systems |
| US11166716B2 (en) | 2018-03-28 | 2021-11-09 | Cilag Gmbh International | Stapling instrument comprising a deactivatable lockout |
| US11207067B2 (en) | 2018-03-28 | 2021-12-28 | Cilag Gmbh International | Surgical stapling device with separate rotary driven closure and firing systems and firing member that engages both jaws while firing |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| US11219453B2 (en) | 2018-03-28 | 2022-01-11 | Cilag Gmbh International | Surgical stapling devices with cartridge compatible closure and firing lockout arrangements |
| US10973520B2 (en) | 2018-03-28 | 2021-04-13 | Ethicon Llc | Surgical staple cartridge with firing member driven camming assembly that has an onboard tissue cutting feature |
| US11096688B2 (en) | 2018-03-28 | 2021-08-24 | Cilag Gmbh International | Rotary driven firing members with different anvil and channel engagement features |
| US11278280B2 (en) | 2018-03-28 | 2022-03-22 | Cilag Gmbh International | Surgical instrument comprising a jaw closure lockout |
| US11259806B2 (en) | 2018-03-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling devices with features for blocking advancement of a camming assembly of an incompatible cartridge installed therein |
| US20190298353A1 (en) | 2018-03-28 | 2019-10-03 | Ethicon Llc | Surgical stapling devices with asymmetric closure features |
| US11071441B2 (en) | 2018-04-20 | 2021-07-27 | Verb Surgical Inc. | Surgical robotic tool multi-motor actuator and controller |
| DE102018111234B3 (de) * | 2018-05-09 | 2019-08-29 | Otto Bock Healthcare Products Gmbh | Orthopädisches Hilfsmittel |
| WO2019217353A1 (en) * | 2018-05-09 | 2019-11-14 | Covidien Lp | Surgical robotic systems |
| US20210205043A1 (en) * | 2018-05-25 | 2021-07-08 | Intuitive Surgical Operations, Inc. | Fiber bragg grating end effector force sensor |
| US20190365360A1 (en) * | 2018-06-05 | 2019-12-05 | Transmed7, Llc | Soft and hard tissue excisional devices and methods |
| US10849622B2 (en) | 2018-06-21 | 2020-12-01 | Covidien Lp | Articulated stapling with fire lock |
| CN110623697A (zh) * | 2018-06-21 | 2019-12-31 | 北京博辉瑞进生物科技有限公司 | 单电机电动手术器械手持组件及电动手术器械 |
| US20190388085A1 (en) * | 2018-06-21 | 2019-12-26 | Covidien Lp | Power endo stitch |
| US11272948B2 (en) * | 2018-07-10 | 2022-03-15 | Covidien Lp | Hand-held surgical instruments |
| US11197665B2 (en) | 2018-08-06 | 2021-12-14 | Covidien Lp | Needle reload device for use with endostitch device |
| US10736631B2 (en) * | 2018-08-07 | 2020-08-11 | Covidien Lp | End effector with staple cartridge ejector |
| US10856870B2 (en) | 2018-08-20 | 2020-12-08 | Ethicon Llc | Switching arrangements for motor powered articulatable surgical instruments |
| US20200054321A1 (en) | 2018-08-20 | 2020-02-20 | Ethicon Llc | Surgical instruments with progressive jaw closure arrangements |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| USD914878S1 (en) | 2018-08-20 | 2021-03-30 | Ethicon Llc | Surgical instrument anvil |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| US11045192B2 (en) | 2018-08-20 | 2021-06-29 | Cilag Gmbh International | Fabricating techniques for surgical stapler anvils |
| US10842492B2 (en) | 2018-08-20 | 2020-11-24 | Ethicon Llc | Powered articulatable surgical instruments with clutching and locking arrangements for linking an articulation drive system to a firing drive system |
| US11324501B2 (en) | 2018-08-20 | 2022-05-10 | Cilag Gmbh International | Surgical stapling devices with improved closure members |
| US11253256B2 (en) | 2018-08-20 | 2022-02-22 | Cilag Gmbh International | Articulatable motor powered surgical instruments with dedicated articulation motor arrangements |
| US10912559B2 (en) | 2018-08-20 | 2021-02-09 | Ethicon Llc | Reinforced deformable anvil tip for surgical stapler anvil |
| US11039834B2 (en) | 2018-08-20 | 2021-06-22 | Cilag Gmbh International | Surgical stapler anvils with staple directing protrusions and tissue stability features |
| US10779821B2 (en) | 2018-08-20 | 2020-09-22 | Ethicon Llc | Surgical stapler anvils with tissue stop features configured to avoid tissue pinch |
| US11083458B2 (en) | 2018-08-20 | 2021-08-10 | Cilag Gmbh International | Powered surgical instruments with clutching arrangements to convert linear drive motions to rotary drive motions |
| US11260538B2 (en) * | 2018-08-22 | 2022-03-01 | Flexiv Ltd. | Robot training system including a motion bar |
| EP3840669B1 (en) * | 2018-08-24 | 2024-04-17 | Covidien LP | Powered circular stapling device |
| CN109009264A (zh) * | 2018-08-24 | 2018-12-18 | 微创(上海)医疗机器人有限公司 | 蛇形手术器械 |
| JP6745306B2 (ja) * | 2018-08-28 | 2020-08-26 | 株式会社メディカロイド | アダプタおよび接続方法 |
| US10849620B2 (en) | 2018-09-14 | 2020-12-01 | Covidien Lp | Connector mechanisms for surgical stapling instruments |
| US11395655B2 (en) | 2019-12-06 | 2022-07-26 | Covidien Lp | Hand-held surgical instruments |
| US11510669B2 (en) | 2020-09-29 | 2022-11-29 | Covidien Lp | Hand-held surgical instruments |
| US11389159B2 (en) * | 2018-09-21 | 2022-07-19 | Covidien Lp | Powered surgical tack applier |
| US11871924B2 (en) * | 2018-09-21 | 2024-01-16 | Covidien Lp | Hand-held surgical instruments |
| US11090051B2 (en) | 2018-10-23 | 2021-08-17 | Covidien Lp | Surgical stapling device with floating staple cartridge |
| US11419665B2 (en) | 2018-10-26 | 2022-08-23 | Covidien Lp | Electrosurgical forceps |
| US11197673B2 (en) | 2018-10-30 | 2021-12-14 | Covidien Lp | Surgical stapling instruments and end effector assemblies thereof |
| USD895112S1 (en) | 2018-11-15 | 2020-09-01 | Ethicon Llc | Laparoscopic bipolar electrosurgical device |
| WO2020131692A1 (en) * | 2018-12-21 | 2020-06-25 | Intuitive Surgical Operations, Inc. | Surgical instruments having mechanisms for identifying and/or deactivating stapler cartridges |
| US11857188B2 (en) | 2018-12-21 | 2024-01-02 | Intuitive Surgical Operations, Inc. | Articulation assemblies for surgical instruments |
| EP3897404A4 (en) | 2018-12-21 | 2023-01-04 | Intuitive Surgical Operations, Inc. | SURGICAL INSTRUMENTS WITH A REINFORCED STAPLER CARTRIDGE |
| USD926318S1 (en) | 2018-12-28 | 2021-07-27 | Cilag Gmbh International | Surgical stapler deck with tissue engagement recess features |
| USD926317S1 (en) | 2018-12-28 | 2021-07-27 | Cilag Gmbh International | Surgical stapler deck with tissue engagement cleat features |
| US10912563B2 (en) | 2019-01-02 | 2021-02-09 | Covidien Lp | Stapling device including tool assembly stabilizing member |
| CN111466974B (zh) * | 2019-01-24 | 2021-05-14 | 苏州英途康医疗科技有限公司 | 外科手术器械和直线型吻合器 |
| CN111466983B (zh) * | 2019-01-24 | 2021-05-14 | 苏州英途康医疗科技有限公司 | 吻合器手柄系统及吻合器 |
| US11304743B2 (en) | 2019-01-30 | 2022-04-19 | Covidien Lp | Electrosurgical forceps |
| US11510725B2 (en) | 2019-01-30 | 2022-11-29 | Covidien Lp | Electrosurgical forceps |
| US11497545B2 (en) | 2019-02-14 | 2022-11-15 | Covidien Lp | Electrosurgical forceps |
| US11464511B2 (en) | 2019-02-19 | 2022-10-11 | Cilag Gmbh International | Surgical staple cartridges with movable authentication key arrangements |
| US11291444B2 (en) | 2019-02-19 | 2022-04-05 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a closure lockout |
| US11357503B2 (en) | 2019-02-19 | 2022-06-14 | Cilag Gmbh International | Staple cartridge retainers with frangible retention features and methods of using same |
| US11317915B2 (en) | 2019-02-19 | 2022-05-03 | Cilag Gmbh International | Universal cartridge based key feature that unlocks multiple lockout arrangements in different surgical staplers |
| US11369377B2 (en) | 2019-02-19 | 2022-06-28 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a firing lockout |
| AU2020227757A1 (en) | 2019-02-27 | 2021-08-19 | Applied Medical Resources Corporation | Surgical stapling instrument having a two-position lockout mechanism |
| US11344297B2 (en) | 2019-02-28 | 2022-05-31 | Covidien Lp | Surgical stapling device with independently movable jaws |
| US11337701B2 (en) * | 2019-03-01 | 2022-05-24 | Covidien Lp | Devices and methods for assembling adapter assemblies |
| TWM579415U (zh) | 2019-03-08 | 2019-06-11 | 華碩電腦股份有限公司 | 功能組件以及包含其之電子裝置 |
| US11259808B2 (en) | 2019-03-13 | 2022-03-01 | Covidien Lp | Tool assemblies with a gap locking member |
| US11147553B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11147551B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11172929B2 (en) | 2019-03-25 | 2021-11-16 | Cilag Gmbh International | Articulation drive arrangements for surgical systems |
| JP2022527154A (ja) | 2019-03-29 | 2022-05-31 | アプライド メディカル リソーシーズ コーポレイション | 外科ステープル留めシステムのための再装填カバー |
| US11284892B2 (en) | 2019-04-01 | 2022-03-29 | Covidien Lp | Loading unit and adapter with modified coupling assembly |
| US11284893B2 (en) | 2019-04-02 | 2022-03-29 | Covidien Lp | Stapling device with articulating tool assembly |
| US11241228B2 (en) | 2019-04-05 | 2022-02-08 | Covidien Lp | Surgical instrument including an adapter assembly and an articulating surgical loading unit |
| US11944302B2 (en) | 2019-04-15 | 2024-04-02 | Intuitive Surgical Operations, Inc. | Staple cartridge for a surgical instrument |
| CN109998617A (zh) * | 2019-04-29 | 2019-07-12 | 上海博洽医疗器械有限公司 | 多用途的腔镜外科器械 |
| US20200345359A1 (en) | 2019-04-30 | 2020-11-05 | Ethicon Llc | Tissue stop for a surgical instrument |
| US11432816B2 (en) | 2019-04-30 | 2022-09-06 | Cilag Gmbh International | Articulation pin for a surgical instrument |
| US11426251B2 (en) | 2019-04-30 | 2022-08-30 | Cilag Gmbh International | Articulation directional lights on a surgical instrument |
| US11471157B2 (en) | 2019-04-30 | 2022-10-18 | Cilag Gmbh International | Articulation control mapping for a surgical instrument |
| US11452528B2 (en) | 2019-04-30 | 2022-09-27 | Cilag Gmbh International | Articulation actuators for a surgical instrument |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11253254B2 (en) | 2019-04-30 | 2022-02-22 | Cilag Gmbh International | Shaft rotation actuator on a surgical instrument |
| US20200345356A1 (en) | 2019-04-30 | 2020-11-05 | Ethicon Llc | Intelligent firing associated with a surgical instrument |
| US20200345357A1 (en) | 2019-04-30 | 2020-11-05 | Ethicon Llc | Intelligent firing associated with a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| CN111870319B (zh) * | 2019-05-01 | 2024-03-08 | 江苏风和医疗器材股份有限公司 | 驱动装置、外科器械及其操作方法 |
| CN112006738B (zh) * | 2019-05-29 | 2024-03-22 | 苏州英途康医疗科技有限公司 | 端部执行器和直线型吻合器 |
| US11896224B2 (en) | 2019-05-31 | 2024-02-13 | Intuitive Surgical Operations, Inc. | Staple cartridge for a surgical instrument |
| CA3139541A1 (en) | 2019-05-31 | 2020-12-03 | Covidien Lp | Circular stapling device |
| USD950728S1 (en) | 2019-06-25 | 2022-05-03 | Cilag Gmbh International | Surgical staple cartridge |
| USD964564S1 (en) | 2019-06-25 | 2022-09-20 | Cilag Gmbh International | Surgical staple cartridge retainer with a closure system authentication key |
| USD952144S1 (en) | 2019-06-25 | 2022-05-17 | Cilag Gmbh International | Surgical staple cartridge retainer with firing system authentication key |
| US11399906B2 (en) | 2019-06-27 | 2022-08-02 | Cilag Gmbh International | Robotic surgical system for controlling close operation of end-effectors |
| US11547468B2 (en) | 2019-06-27 | 2023-01-10 | Cilag Gmbh International | Robotic surgical system with safety and cooperative sensing control |
| US11369443B2 (en) | 2019-06-27 | 2022-06-28 | Cilag Gmbh International | Method of using a surgical modular robotic assembly |
| US11413102B2 (en) | 2019-06-27 | 2022-08-16 | Cilag Gmbh International | Multi-access port for surgical robotic systems |
| US11607278B2 (en) | 2019-06-27 | 2023-03-21 | Cilag Gmbh International | Cooperative robotic surgical systems |
| US11376083B2 (en) | 2019-06-27 | 2022-07-05 | Cilag Gmbh International | Determining robotic surgical assembly coupling status |
| US11612445B2 (en) | 2019-06-27 | 2023-03-28 | Cilag Gmbh International | Cooperative operation of robotic arms |
| US11376082B2 (en) | 2019-06-27 | 2022-07-05 | Cilag Gmbh International | Robotic surgical system with local sensing of functional parameters based on measurements of multiple physical inputs |
| US11723729B2 (en) | 2019-06-27 | 2023-08-15 | Cilag Gmbh International | Robotic surgical assembly coupling safety mechanisms |
| US11278362B2 (en) * | 2019-06-27 | 2022-03-22 | Cilag Gmbh International | Surgical instrument drive systems |
| US11207146B2 (en) | 2019-06-27 | 2021-12-28 | Cilag Gmbh International | Surgical instrument drive systems with cable-tightening system |
| US11224497B2 (en) | 2019-06-28 | 2022-01-18 | Cilag Gmbh International | Surgical systems with multiple RFID tags |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11399837B2 (en) | 2019-06-28 | 2022-08-02 | Cilag Gmbh International | Mechanisms for motor control adjustments of a motorized surgical instrument |
| US11051807B2 (en) | 2019-06-28 | 2021-07-06 | Cilag Gmbh International | Packaging assembly including a particulate trap |
| US11219455B2 (en) | 2019-06-28 | 2022-01-11 | Cilag Gmbh International | Surgical instrument including a lockout key |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11298132B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Inlernational | Staple cartridge including a honeycomb extension |
| US11246678B2 (en) | 2019-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical stapling system having a frangible RFID tag |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US11291451B2 (en) | 2019-06-28 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with battery compatibility verification functionality |
| US11853835B2 (en) | 2019-06-28 | 2023-12-26 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11298127B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Interational | Surgical stapling system having a lockout mechanism for an incompatible cartridge |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11376098B2 (en) | 2019-06-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument system comprising an RFID system |
| US11350938B2 (en) | 2019-06-28 | 2022-06-07 | Cilag Gmbh International | Surgical instrument comprising an aligned rfid sensor |
| US11361176B2 (en) | 2019-06-28 | 2022-06-14 | Cilag Gmbh International | Surgical RFID assemblies for compatibility detection |
| US11426167B2 (en) | 2019-06-28 | 2022-08-30 | Cilag Gmbh International | Mechanisms for proper anvil attachment surgical stapling head assembly |
| US11259803B2 (en) | 2019-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling system having an information encryption protocol |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11786325B2 (en) | 2019-07-02 | 2023-10-17 | Intuitive Surgical Operations, Inc. | Remotely controlling a system using video |
| EP3998960A4 (en) | 2019-07-19 | 2022-12-14 | Revmedica, Inc. | SURGICAL STAPLER WITH REMOVABLE POWER SUPPLY |
| JP7417704B2 (ja) * | 2019-07-31 | 2024-01-18 | コヴィディエン リミテッド パートナーシップ | 手持ち電気機械式手術器具 |
| WO2021022407A1 (en) | 2019-08-02 | 2021-02-11 | Covidien Lp | Surgical stapling device with curved tool assembly |
| US11224424B2 (en) | 2019-08-02 | 2022-01-18 | Covidien Lp | Linear stapling device with vertically movable knife |
| CA3151258C (en) * | 2019-08-29 | 2024-03-26 | Touchstone International Medical Science Co., Ltd. | Closure driving mechanism and surgical stapler |
| TWI731413B (zh) * | 2019-09-11 | 2021-06-21 | 茂達電子股份有限公司 | 具有拴鎖保護模式的馬達驅動裝置 |
| CN110613489B (zh) * | 2019-09-23 | 2020-08-21 | 宋勇 | 一种内窥镜手术器械 |
| US11406385B2 (en) | 2019-10-11 | 2022-08-09 | Covidien Lp | Stapling device with a gap locking member |
| US20220346790A1 (en) * | 2019-10-18 | 2022-11-03 | Intuitive Surgical Operations, Inc. | Surgical instrument with adjustable jaws |
| WO2021081984A1 (en) | 2019-11-01 | 2021-05-06 | Covidien Lp | Surgical stapling device with knife blade lock |
| US11123068B2 (en) | 2019-11-08 | 2021-09-21 | Covidien Lp | Surgical staple cartridge |
| EP4065027A4 (en) | 2019-11-28 | 2024-01-03 | Microbot Medical Ltd | MODULAR ROBOT SYSTEM FOR DRIVING SURGICAL TOOLS |
| US11707274B2 (en) | 2019-12-06 | 2023-07-25 | Covidien Lp | Articulating mechanism for surgical instrument |
| US11109862B2 (en) | 2019-12-12 | 2021-09-07 | Covidien Lp | Surgical stapling device with flexible shaft |
| US11737747B2 (en) | 2019-12-17 | 2023-08-29 | Covidien Lp | Hand-held surgical instruments |
| JP2023513999A (ja) | 2019-12-18 | 2023-04-05 | コヴィディエン リミテッド パートナーシップ | 出荷用キャップ付き外科用ステープル留めデバイス |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11234698B2 (en) | 2019-12-19 | 2022-02-01 | Cilag Gmbh International | Stapling system comprising a clamp lockout and a firing lockout |
| US11304696B2 (en) | 2019-12-19 | 2022-04-19 | Cilag Gmbh International | Surgical instrument comprising a powered articulation system |
| US11291447B2 (en) | 2019-12-19 | 2022-04-05 | Cilag Gmbh International | Stapling instrument comprising independent jaw closing and staple firing systems |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US20210186501A1 (en) | 2019-12-19 | 2021-06-24 | Ethicon Llc | Staple cartridge comprising a deployable knife |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11931033B2 (en) | 2019-12-19 | 2024-03-19 | Cilag Gmbh International | Staple cartridge comprising a latch lockout |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US11707318B2 (en) | 2019-12-30 | 2023-07-25 | Cilag Gmbh International | Surgical instrument with jaw alignment features |
| US11589916B2 (en) | 2019-12-30 | 2023-02-28 | Cilag Gmbh International | Electrosurgical instruments with electrodes having variable energy densities |
| US11937866B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Method for an electrosurgical procedure |
| US11723716B2 (en) | 2019-12-30 | 2023-08-15 | Cilag Gmbh International | Electrosurgical instrument with variable control mechanisms |
| US20210196269A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Surgical instrument comprising a feedback control circuit |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US20210196266A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Surgical instrument comprising a control system responsive to software configurations |
| US20210196267A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Surgical instrument comprising an orientation detection system |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US20210196270A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Surgical instrument comprising a flex circuit |
| US11452525B2 (en) | 2019-12-30 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising an adjustment system |
| US11786294B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Control program for modular combination energy device |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11642129B2 (en) | 2020-01-15 | 2023-05-09 | Intuitive Surgical Operations, Inc. | Staple cartridge and drive member for surgical instrument |
| US11452524B2 (en) | 2020-01-31 | 2022-09-27 | Covidien Lp | Surgical stapling device with lockout |
| US11278282B2 (en) | 2020-01-31 | 2022-03-22 | Covidien Lp | Stapling device with selective cutting |
| JP2023523507A (ja) | 2020-02-14 | 2023-06-06 | コヴィディエン リミテッド パートナーシップ | 外科用ステープルのための、かつ周壁に組織を把持するための隆起を有する、カートリッジホルダ |
| US11622767B2 (en) | 2020-02-19 | 2023-04-11 | Covidien Lp | Sealed trocar assembly for stapling device |
| US11779343B2 (en) | 2020-02-26 | 2023-10-10 | Covidien Lp | Staple reload assembly with releasable knife |
| US11344301B2 (en) | 2020-03-02 | 2022-05-31 | Covidien Lp | Surgical stapling device with replaceable reload assembly |
| US11344302B2 (en) | 2020-03-05 | 2022-05-31 | Covidien Lp | Articulation mechanism for surgical stapling device |
| US11246593B2 (en) | 2020-03-06 | 2022-02-15 | Covidien Lp | Staple cartridge |
| US11707278B2 (en) | 2020-03-06 | 2023-07-25 | Covidien Lp | Surgical stapler tool assembly to minimize bleeding |
| US11317911B2 (en) | 2020-03-10 | 2022-05-03 | Covidien Lp | Tool assembly with replaceable cartridge assembly |
| US11357505B2 (en) | 2020-03-10 | 2022-06-14 | Covidien Lp | Surgical stapling apparatus with firing lockout mechanism |
| US11406383B2 (en) | 2020-03-17 | 2022-08-09 | Covidien Lp | Fire assisted powered EGIA handle |
| US11426159B2 (en) | 2020-04-01 | 2022-08-30 | Covidien Lp | Sled detection device |
| US11331098B2 (en) | 2020-04-01 | 2022-05-17 | Covidien Lp | Sled detection device |
| US11504117B2 (en) | 2020-04-02 | 2022-11-22 | Covidien Lp | Hand-held surgical instruments |
| US20230093375A1 (en) * | 2020-05-08 | 2023-03-23 | Covidien Lp | Surgical robotic systems |
| US11937794B2 (en) | 2020-05-11 | 2024-03-26 | Covidien Lp | Powered handle assembly for surgical devices |
| US11406387B2 (en) | 2020-05-12 | 2022-08-09 | Covidien Lp | Surgical stapling device with replaceable staple cartridge |
| US11191537B1 (en) * | 2020-05-12 | 2021-12-07 | Covidien Lp | Stapling device with continuously parallel jaws |
| US11653925B2 (en) | 2020-05-21 | 2023-05-23 | Covidien Lp | Tissue relaxation monitoring for optimized tissue stapling |
| US11547405B2 (en) | 2020-05-22 | 2023-01-10 | Covidien Lp | Surgical stapling device |
| US11534167B2 (en) | 2020-05-28 | 2022-12-27 | Covidien Lp | Electrotaxis-conducive stapling |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| USD966512S1 (en) | 2020-06-02 | 2022-10-11 | Cilag Gmbh International | Staple cartridge |
| USD975278S1 (en) | 2020-06-02 | 2023-01-10 | Cilag Gmbh International | Staple cartridge |
| USD967421S1 (en) | 2020-06-02 | 2022-10-18 | Cilag Gmbh International | Staple cartridge |
| US11191538B1 (en) | 2020-06-08 | 2021-12-07 | Covidien Lp | Surgical stapling device with parallel jaw closure |
| US11744584B2 (en) | 2020-06-09 | 2023-09-05 | Covidien Lp | Alignment pin assembly for surgical stapler |
| US20210386424A1 (en) * | 2020-06-10 | 2021-12-16 | Covidien Lp | Sealed electrical connection between surgical loading unit and adapter |
| US20230255627A1 (en) * | 2020-06-12 | 2023-08-17 | Covidien Lp | Curved surgical stapling device |
| US11833675B2 (en) * | 2020-06-22 | 2023-12-05 | Cilag Gmbh International | Structural exoskeleton for robotic surgical tool |
| US11844517B2 (en) | 2020-06-25 | 2023-12-19 | Covidien Lp | Linear stapling device with continuously parallel jaws |
| US11324500B2 (en) | 2020-06-30 | 2022-05-10 | Covidien Lp | Surgical stapling device |
| US11517305B2 (en) | 2020-07-09 | 2022-12-06 | Covidien Lp | Contoured staple pusher |
| US11446028B2 (en) | 2020-07-09 | 2022-09-20 | Covidien Lp | Tool assembly with pivotable clamping beam |
| US11553921B2 (en) | 2020-07-15 | 2023-01-17 | Covidien Lp | Surgical stapling device with flexible shaft |
| US20220015761A1 (en) * | 2020-07-16 | 2022-01-20 | Ethicon Llc | Firing circuit and control algorithm for surgical stapler |
| US20220031350A1 (en) | 2020-07-28 | 2022-02-03 | Cilag Gmbh International | Surgical instruments with double pivot articulation joint arrangements |
| TWM604078U (zh) * | 2020-07-30 | 2020-11-11 | 第一傳動科技股份有限公司 | 具有線材保護機制的電動推桿 |
| US11266402B2 (en) | 2020-07-30 | 2022-03-08 | Covidien Lp | Sensing curved tip for surgical stapling instruments |
| US11439392B2 (en) | 2020-08-03 | 2022-09-13 | Covidien Lp | Surgical stapling device and fastener for pathological exam |
| CN114052809B (zh) * | 2020-08-04 | 2022-12-23 | 苏州英途康医疗科技有限公司 | 电动吻合器及其手柄低功耗控制方法、装置及存储介质 |
| US11395654B2 (en) | 2020-08-07 | 2022-07-26 | Covidien Lp | Surgical stapling device with articulation braking assembly |
| US11627966B2 (en) | 2020-08-26 | 2023-04-18 | Covidien Lp | Surgical stapling device |
| US11602342B2 (en) | 2020-08-27 | 2023-03-14 | Covidien Lp | Surgical stapling device with laser probe |
| US11678878B2 (en) | 2020-09-16 | 2023-06-20 | Covidien Lp | Articulation mechanism for surgical stapling device |
| US11801054B2 (en) | 2020-09-22 | 2023-10-31 | Covidien Lp | Surgical stapler with oval tool assembly |
| USD915163S1 (en) | 2020-09-25 | 2021-04-06 | James Reynolds | Staple punch |
| CN112206561A (zh) * | 2020-09-28 | 2021-01-12 | 郭爱堂 | 一种能够清洁滤网细小碎屑的智能清屑装置 |
| US11660092B2 (en) | 2020-09-29 | 2023-05-30 | Covidien Lp | Adapter for securing loading units to handle assemblies of surgical stapling instruments |
| US11911030B2 (en) * | 2020-10-02 | 2024-02-27 | Cilag Gmbh International | Communication capability of a surgical device with component |
| US11712509B2 (en) | 2020-10-02 | 2023-08-01 | Covidien Lp | Seal assembly for circular stapling instrument |
| US11406384B2 (en) | 2020-10-05 | 2022-08-09 | Covidien Lp | Stapling device with drive assembly stop member |
| US11576674B2 (en) | 2020-10-06 | 2023-02-14 | Covidien Lp | Surgical stapling device with articulation lock assembly |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11730475B2 (en) | 2020-10-29 | 2023-08-22 | Applied Medical Resources Corporation | Surgical stapler having a powered handle |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| US11452526B2 (en) | 2020-10-29 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising a staged voltage regulation start-up system |
| US11771428B2 (en) | 2020-10-29 | 2023-10-03 | Applied Medical Resources Corporation | Actuation shaft retention mechanism for surgical stapler |
| US20220133300A1 (en) | 2020-10-29 | 2022-05-05 | Ethicon Llc | Surgical instrument comprising a stowed closure actuator stop |
| US20220133303A1 (en) | 2020-10-29 | 2022-05-05 | Ethicon Llc | Surgical instrument comprising sealable interface |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| US11890007B2 (en) | 2020-11-18 | 2024-02-06 | Covidien Lp | Stapling device with flex cable and tensioning mechanism |
| US11627967B2 (en) | 2020-11-23 | 2023-04-18 | Covidien Lp | Trans-anastomotic insertion device |
| CN114552277A (zh) * | 2020-11-24 | 2022-05-27 | 台达电子工业股份有限公司 | 充电枪 |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11737774B2 (en) | 2020-12-04 | 2023-08-29 | Covidien Lp | Surgical instrument with articulation assembly |
| CN112617928B (zh) * | 2020-12-04 | 2021-11-19 | 苏州法兰克曼医疗器械有限公司 | 一种切刀驱动机构可弧线形切割的吻合器 |
| US11819200B2 (en) | 2020-12-15 | 2023-11-21 | Covidien Lp | Surgical instrument with articulation assembly |
| US11802609B2 (en) | 2020-12-15 | 2023-10-31 | Covidien Lp | Handle assemblies for hand-held surgical instruments |
| US11553914B2 (en) | 2020-12-22 | 2023-01-17 | Covidien Lp | Surgical stapling device with parallel jaw closure |
| US11759206B2 (en) | 2021-01-05 | 2023-09-19 | Covidien Lp | Surgical stapling device with firing lockout mechanism |
| US11744582B2 (en) | 2021-01-05 | 2023-09-05 | Covidien Lp | Surgical stapling device with firing lockout mechanism |
| US11877750B2 (en) | 2021-01-21 | 2024-01-23 | Covidien Lp | Surgical stapler with powered and manual functions |
| US11759207B2 (en) | 2021-01-27 | 2023-09-19 | Covidien Lp | Surgical stapling apparatus with adjustable height clamping member |
| US11517313B2 (en) | 2021-01-27 | 2022-12-06 | Covidien Lp | Surgical stapling device with laminated drive member |
| US11786241B2 (en) | 2021-02-16 | 2023-10-17 | Covidien Lp | Surgical stapling device including a hydraulic staple formation mechanism |
| WO2022175835A1 (en) * | 2021-02-17 | 2022-08-25 | Auris Health, Inc. | Instrument roll control |
| CN112890899B (zh) * | 2021-02-19 | 2022-02-08 | 苏州法兰克曼医疗器械有限公司 | 一种带有阻挡机构的高安全性切割吻合器 |
| US20220273294A1 (en) | 2021-02-26 | 2022-09-01 | Cilag Gmbh International | Surgical instrument system comprising a power transfer coil |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US20220273303A1 (en) | 2021-02-26 | 2022-09-01 | Ethicon Llc | Staple cartridge comrising a sensing array and a temperature control system |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| CN113048210B (zh) * | 2021-03-10 | 2022-03-15 | 极限人工智能有限公司 | 一种多轴传动传递扭矩和推拉力的结构模组 |
| US11717300B2 (en) | 2021-03-11 | 2023-08-08 | Covidien Lp | Surgical stapling apparatus with integrated visualization |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11944336B2 (en) | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11497495B2 (en) | 2021-03-31 | 2022-11-15 | Covidien Lp | Continuous stapler strip for use with a surgical stapling device |
| US11666330B2 (en) | 2021-04-05 | 2023-06-06 | Covidien Lp | Surgical stapling device with lockout mechanism |
| CN113081086B (zh) * | 2021-04-27 | 2022-04-01 | 极限人工智能有限公司 | 一种手术辅助器械 |
| US20220346853A1 (en) | 2021-04-30 | 2022-11-03 | Cilag Gmbh International | Electrosurgical techniques for sealing, short circuit detection, and system determination of power level |
| US11857184B2 (en) | 2021-04-30 | 2024-01-02 | Cilag Gmbh International | Surgical instrument comprising a rotation-driven and translation-driven tissue cutting knife |
| US11944295B2 (en) | 2021-04-30 | 2024-04-02 | Cilag Gmbh International | Surgical instrument comprising end effector with longitudinal sealing step |
| US20220346784A1 (en) | 2021-04-30 | 2022-11-03 | Cilag Gmbh International | Surgical instrument comprising a closure bar and a firing bar |
| US20220346859A1 (en) | 2021-04-30 | 2022-11-03 | Cilag Gmbh International | Surgical instrument comprising independently activatable segmented electrodes |
| US11931035B2 (en) | 2021-04-30 | 2024-03-19 | Cilag Gmbh International | Articulation system for surgical instrument |
| US20220346787A1 (en) | 2021-04-30 | 2022-11-03 | Cilag Gmbh International | Interchangeable end effector reloads |
| US20220346861A1 (en) | 2021-04-30 | 2022-11-03 | Cilag Gmbh International | Surgical systems configured to cooperatively control end effector function and application of therapeutic energy |
| US11826043B2 (en) | 2021-04-30 | 2023-11-28 | Cilag Gmbh International | Staple cartridge comprising formation support features |
| US20220346773A1 (en) | 2021-04-30 | 2022-11-03 | Cilag Gmbh International | Surgical staple for use with combination electrosurgical instruments |
| US20220346785A1 (en) | 2021-04-30 | 2022-11-03 | Cilag Gmbh International | Surgical instrument comprising end effector with energy sensitive resistance elements |
| US11918275B2 (en) | 2021-04-30 | 2024-03-05 | Cilag Gmbh International | Electrosurgical adaptation techniques of energy modality for combination electrosurgical instruments based on shorting or tissue impedance irregularity |
| US20220346860A1 (en) | 2021-04-30 | 2022-11-03 | Cilag Gmbh International | Surgical systems configured to control therapeutic energy application to tissue based on cartridge and tissue parameters |
| US20220346786A1 (en) | 2021-04-30 | 2022-11-03 | Cilag Gmbh International | Shaft system for surgical instrument |
| US20220346781A1 (en) | 2021-04-30 | 2022-11-03 | Cilag Gmbh International | Staple cartridge comprising staple drivers and stability supports |
| US11553920B2 (en) | 2021-05-03 | 2023-01-17 | Covidien Lp | Trocar retainer assembly for surgical stapler |
| JP2024516156A (ja) * | 2021-05-03 | 2024-04-12 | コヴィディエン リミテッド パートナーシップ | ロボット支援封止器具のためのモータ位置制御及び方法 |
| US11576670B2 (en) | 2021-05-06 | 2023-02-14 | Covidien Lp | Surgical stapling device with optimized drive assembly |
| EP4178458A1 (en) | 2021-05-10 | 2023-05-17 | Cilag GmbH International | System of surgical staple cartridges comprising absorbable staples |
| WO2022238836A1 (en) | 2021-05-10 | 2022-11-17 | Cilag Gmbh International | Bioabsorbable staple comprising mechanisms for slowing the absorption of the staple |
| US20220370065A1 (en) | 2021-05-10 | 2022-11-24 | Cilag Gmbh International | Dissimilar staple cartridges with different bioabsorbable components |
| WO2022238847A1 (en) | 2021-05-10 | 2022-11-17 | Cilag Gmbh International | Adaptive control of surgical stapling instrument based on staple cartridge type |
| WO2022238844A1 (en) | 2021-05-10 | 2022-11-17 | Cilag Gmbh International | Absorbable surgical staple comprising a coating |
| US11890004B2 (en) | 2021-05-10 | 2024-02-06 | Cilag Gmbh International | Staple cartridge comprising lubricated staples |
| US11490894B1 (en) | 2021-05-12 | 2022-11-08 | Covidien Lp | Surgical device with grease filter |
| US11642131B2 (en) | 2021-05-17 | 2023-05-09 | Covidien Lp | Devices and methods for shortening a rectal stump during a lower anterior resection procedure |
| US11812956B2 (en) | 2021-05-18 | 2023-11-14 | Covidien Lp | Dual firing radial stapling device |
| US11696755B2 (en) | 2021-05-19 | 2023-07-11 | Covidien Lp | Surgical stapling device with reload assembly removal lockout |
| US11612400B2 (en) | 2021-05-24 | 2023-03-28 | Covidien Lp | Trocar assembly with bearing assembly for load sharing |
| US11510673B1 (en) | 2021-05-25 | 2022-11-29 | Covidien Lp | Powered stapling device with manual retraction |
| US11771423B2 (en) | 2021-05-25 | 2023-10-03 | Covidien Lp | Powered stapling device with manual retraction |
| US11701119B2 (en) | 2021-05-26 | 2023-07-18 | Covidien Lp | Powered stapling device with rack release |
| WO2022249088A1 (en) | 2021-05-28 | 2022-12-01 | Cilag Gmbh International | Stapling instrument comprising a staple cartridge insertion stop |
| WO2022249094A1 (en) | 2021-05-28 | 2022-12-01 | Cilag Gmbh International | Stapling instrument comprising a control system that controls a firiing stroke length |
| EP4167872A1 (en) | 2021-05-28 | 2023-04-26 | Cilag GmbH International | Stapling instrument comprising jaw mounts |
| US11826047B2 (en) | 2021-05-28 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising jaw mounts |
| WO2022249091A1 (en) | 2021-05-28 | 2022-12-01 | Cilag Gmbh International | Stapling instrument comprising a mounted shaft orientation sensor |
| BR112023023121A2 (pt) | 2021-05-28 | 2024-02-06 | Cilag Gmbh Int | Instrumento de grampeamento compreendendo um mostruário de controle de articulação |
| EP4164515A1 (en) | 2021-05-28 | 2023-04-19 | Cilag GmbH International | Stapling instrument comprising a firing lockout |
| US11576675B2 (en) | 2021-06-07 | 2023-02-14 | Covidien Lp | Staple cartridge with knife |
| US11617579B2 (en) | 2021-06-29 | 2023-04-04 | Covidien Lp | Ultra low profile surgical stapling instrument for tissue resections |
| US11707275B2 (en) | 2021-06-29 | 2023-07-25 | Covidien Lp | Asymmetrical surgical stapling device |
| US11771432B2 (en) * | 2021-06-29 | 2023-10-03 | Covidien Lp | Stapling and cutting to default values in the event of strain gauge data integrity loss |
| US11931026B2 (en) | 2021-06-30 | 2024-03-19 | Cilag Gmbh International | Staple cartridge replacement |
| US11602344B2 (en) | 2021-06-30 | 2023-03-14 | Covidien Lp | Surgical stapling apparatus with firing lockout assembly |
| US11737759B2 (en) | 2021-08-05 | 2023-08-29 | Covidien Lp | Surgical stapling device accommodating prolapsed tissue |
| US11540831B1 (en) | 2021-08-12 | 2023-01-03 | Covidien Lp | Staple cartridge with actuation sled detection |
| US11779334B2 (en) | 2021-08-19 | 2023-10-10 | Covidien Lp | Surgical stapling device including a manual retraction assembly |
| US11707277B2 (en) | 2021-08-20 | 2023-07-25 | Covidien Lp | Articulating surgical stapling apparatus with pivotable knife bar guide assembly |
| US11576671B1 (en) | 2021-08-20 | 2023-02-14 | Covidien Lp | Small diameter linear surgical stapling apparatus |
| US11883028B2 (en) | 2021-09-08 | 2024-01-30 | Covidien Lp | Systems and methods for post-operative anastomotic leak detection |
| US11864761B2 (en) | 2021-09-14 | 2024-01-09 | Covidien Lp | Surgical instrument with illumination mechanism |
| US11653922B2 (en) | 2021-09-29 | 2023-05-23 | Covidien Lp | Surgical stapling device with firing lockout mechanism |
| US11660094B2 (en) | 2021-09-29 | 2023-05-30 | Covidien Lp | Surgical fastening instrument with two-part surgical fasteners |
| US11849949B2 (en) | 2021-09-30 | 2023-12-26 | Covidien Lp | Surgical stapling device with firing lockout member |
| US11717299B2 (en) | 2021-10-12 | 2023-08-08 | Covidien Lp | Surgical stapling device with probiotics |
| US11877745B2 (en) | 2021-10-18 | 2024-01-23 | Cilag Gmbh International | Surgical stapling assembly having longitudinally-repeating staple leg clusters |
| EP4255319A1 (en) | 2021-10-18 | 2023-10-11 | Cilag GmbH International | Surgical stapling assembly with offset ramped drive surfaces |
| US20230121835A1 (en) | 2021-10-18 | 2023-04-20 | Cilag Gmbh International | Anvil comprising an arrangement of forming pockets proximal to tissue stop |
| US20230121658A1 (en) | 2021-10-18 | 2023-04-20 | Cilag Gmbh International | Row-to-row staple array variations |
| US20230135282A1 (en) | 2021-10-28 | 2023-05-04 | Cilag Gmbh International | Staple cartridge identification systems |
| US20230134883A1 (en) | 2021-10-28 | 2023-05-04 | Cilag Gmbh International | Alternate means to establish resistive load force |
| US20230138743A1 (en) | 2021-10-28 | 2023-05-04 | Cilag Gmbh International | Method and device for transmitting uart communications over a security short range wireless communication |
| US20230135811A1 (en) | 2021-10-28 | 2023-05-04 | Cilag Gmbh International | Surgical instrument cartridge with unique resistor for surgical instrument identification |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| US20230138314A1 (en) | 2021-10-28 | 2023-05-04 | Cilag Gmbh International | Surgical device with internal communication that combines multiple signals per wire |
| CN114259270B (zh) * | 2021-12-23 | 2023-06-30 | 苏州贝诺医疗器械有限公司 | 一种具有击发度显示的电动吻合器 |
| WO2023170680A1 (en) | 2022-03-08 | 2023-09-14 | Equashield Medical Ltd | Fluid transfer station in a robotic pharmaceutical preparation system |
| US20230301675A1 (en) * | 2022-03-25 | 2023-09-28 | Cilag Gmbh International | Surgical stapler features for stapling variable thickness tissue |
| WO2024023682A1 (en) * | 2022-07-25 | 2024-02-01 | Covidien Lp | Powered surgical stapling device with end effector articulation |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000072765A1 (en) * | 1999-06-02 | 2000-12-07 | Powermed, Inc. | An electromechanical driver device for use with anastomosing, stapling, and resecting instruments |
| RU2161450C1 (ru) * | 1999-07-22 | 2001-01-10 | Каншин Николай Николаевич | Хирургический сшиватель |
| EP2316345A1 (en) * | 2001-06-22 | 2011-05-04 | Tyco Healthcare Group LP | Electro-mechanical surgical device |
| US20120104071A1 (en) * | 2010-11-02 | 2012-05-03 | Tyco Healthcare Group Lp | Adapter for powered surgical devices |
Family Cites Families (6004)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1314601A (en) | 1919-09-02 | Flexible shaft | ||
| US66052A (en) | 1867-06-25 | smith | ||
| US2120951A (en) | 1938-06-14 | Steering repeater compass | ||
| US1306107A (en) | 1919-06-10 | Assigotob to amebxcak | ||
| DE273689C (ru) | 1913-08-07 | 1914-05-08 | ||
| US662587A (en) | 1900-05-18 | 1900-11-27 | Charles Chandler Blake | Insulated support for electric conductors. |
| US670748A (en) | 1900-10-25 | 1901-03-26 | Paul Weddeler | Flexible shafting. |
| US719487A (en) | 1901-09-16 | 1903-02-03 | William E Minor | Dilator. |
| US804229A (en) | 1904-07-27 | 1905-11-14 | Thomas C Hutchinson | Forceps and the like. |
| FR5738E (fr) | 1905-02-11 | 1906-08-08 | Georges Robert Maurice Sweetin | Procédé d'extraction du cuivre de ses minerais |
| US903739A (en) | 1908-07-30 | 1908-11-10 | William Lesemann | Gearing. |
| US951393A (en) | 1909-04-06 | 1910-03-08 | John N Hahn | Staple. |
| US988650A (en) | 1910-07-26 | 1911-04-04 | Harry E Norris | Explosive-engine. |
| FR459743A (fr) | 1912-09-14 | 1913-11-12 | Bariquant Et Marre Des Atel | Transmission flexible |
| US1082105A (en) | 1912-10-17 | 1913-12-23 | George A Anderson | Releasable driving mechanism. |
| US1075556A (en) | 1913-05-12 | 1913-10-14 | American Carbon & Battery Company | Battery. |
| US1188721A (en) | 1915-05-05 | 1916-06-27 | Frank Bittner | Pipe-wrench. |
| US1466128A (en) | 1921-11-28 | 1923-08-28 | Baker Bros | Drill-press control |
| US1677337A (en) | 1924-09-27 | 1928-07-17 | Thomas E Grove | Antrum drill |
| US1849427A (en) | 1927-10-17 | 1932-03-15 | Westminster Tool And Electric | Handle of tools driven by flexible shafts |
| US1794907A (en) | 1929-07-19 | 1931-03-03 | Joseph N Kelly | Worm and gear |
| US1944116A (en) | 1930-05-26 | 1934-01-16 | Edward A Stratman | Lever locking device |
| US1954048A (en) | 1931-01-06 | 1934-04-10 | Jeffrey Mfg Co | Tool holder |
| US2028635A (en) | 1933-09-11 | 1936-01-21 | Wappler Frederick Charles | Forcipated surgical instrument |
| US2037727A (en) | 1934-12-27 | 1936-04-21 | United Shoe Machinery Corp | Fastening |
| US2132295A (en) | 1937-05-05 | 1938-10-04 | Hawkins Earl | Stapling device |
| US2211117A (en) | 1937-09-06 | 1940-08-13 | Rieter Joh Jacob & Cie Ag | Device for drawing rovings in speeders and spinning machines |
| US2161632A (en) | 1937-12-20 | 1939-06-06 | Martin L Nattenheimer | Fastening device |
| US2214870A (en) | 1938-08-10 | 1940-09-17 | William J West | Siding cutter |
| US2224108A (en) | 1939-04-15 | 1940-12-03 | Ingersoll Milling Machine Co | Machine tool |
| US2224882A (en) | 1939-08-01 | 1940-12-17 | Herbert G Peck | Umbrella |
| US2329440A (en) | 1941-04-02 | 1943-09-14 | Bocjl Corp | Fastener |
| US2318379A (en) | 1941-04-17 | 1943-05-04 | Walter S Davis | Suture package |
| US2406389A (en) | 1942-11-30 | 1946-08-27 | Lee Engineering Res Corp | Electric motor |
| US2420552A (en) | 1942-12-05 | 1947-05-13 | Gen Electric | Driving mechanism |
| US2377581A (en) | 1944-03-09 | 1945-06-05 | Matthew J Shaffrey | Divided nut construction |
| US2441096A (en) | 1944-09-04 | 1948-05-04 | Singer Mfg Co | Control means for portable electric tools |
| US2448741A (en) | 1945-04-25 | 1948-09-07 | American Cystoscope Makers Inc | Endoscopic surgical instrument |
| US2578686A (en) | 1945-04-27 | 1951-12-18 | Tubing Appliance Co Inc | Open-sided-socket ratchet wrench |
| US2450527A (en) | 1945-10-27 | 1948-10-05 | P & V Quicklocking Co | Semiautomatic coupling |
| US2507872A (en) | 1946-01-18 | 1950-05-16 | Unsinger Ap Corp | Implement or toolholder |
| US2491872A (en) | 1946-06-15 | 1949-12-20 | Int Resistance Co | Liquid cooled resistor |
| US2526902A (en) | 1947-07-31 | 1950-10-24 | Norman C Rublee | Insulating staple |
| US2527256A (en) | 1947-11-07 | 1950-10-24 | Earle R Jackson | Connector for brushes, brooms, and the like |
| FR999646A (fr) | 1949-11-16 | 1952-02-04 | Dispositif serre-câble | |
| US2742955A (en) | 1951-01-13 | 1956-04-24 | Richard A Dominguez | Collapsible seat structure |
| US2638901A (en) | 1951-07-30 | 1953-05-19 | Everett D Sugarbaker | Surgical clamp |
| US2701489A (en) | 1951-09-12 | 1955-02-08 | Leonard C Osborn | Cam-actuated slidable jaw wrench |
| US2674149A (en) | 1952-03-01 | 1954-04-06 | Jerry S Benson | Multiple pronged fastener device with spreading means |
| US2711461A (en) | 1953-12-24 | 1955-06-21 | Singer Mfg Co | Portable electric tool handle assemblies |
| US2724289A (en) | 1954-04-27 | 1955-11-22 | Janette Electric Mfg Co | Coupling apparatus |
| US2804848A (en) | 1954-09-30 | 1957-09-03 | Chicago Pneumatic Tool Co | Drilling apparatus |
| FR1112936A (fr) | 1954-10-20 | 1956-03-20 | Moteur électrique et commande à trois vitesses enfermés dans une gaine | |
| US2887004A (en) | 1954-11-04 | 1959-05-19 | William H Stewart | Staple having flat depressed head with reinforcing ridge |
| US2825178A (en) | 1955-10-07 | 1958-03-04 | Havilah S Hawkins | Articulated toy set of building blocks |
| US2808482A (en) | 1956-04-12 | 1957-10-01 | Miniature Switch Corp | Toggle switch construction |
| US2853074A (en) | 1956-06-15 | 1958-09-23 | Edward A Olson | Stapling instrument for surgical purposes |
| US2856192A (en) | 1956-10-29 | 1958-10-14 | Hi Shear Rivet Tool Company | Collet with spring jaws |
| US3060972A (en) | 1957-08-22 | 1962-10-30 | Bausch & Lomb | Flexible tube structures |
| US3972734A (en) | 1957-12-27 | 1976-08-03 | Catalyst Research Corporation | Thermal deferred action battery |
| US2959974A (en) | 1958-05-28 | 1960-11-15 | Melvin H Emrick | Forward and reverse friction drive tapping attachment |
| DE1775926U (de) | 1958-06-11 | 1958-10-16 | Rudolf W Dipl Ing Ihmig | Kugelschreibermine. |
| US2957353A (en) | 1958-08-26 | 1960-10-25 | Teleflex Inc | Connector |
| US3032769A (en) | 1959-08-18 | 1962-05-08 | John R Palmer | Method of making a bracket |
| US3078465A (en) | 1959-09-09 | 1963-02-26 | Bobrov Boris Sergueevitch | Instrument for stitching gastric stump |
| US3080564A (en) | 1959-09-10 | 1963-03-12 | Strekopitov Alexey Alexeevich | Instrument for stitching hollow organs |
| GB939929A (en) | 1959-10-30 | 1963-10-16 | Vasilii Fedotovich Goodov | Instrument for stitching blood vessels, intestines, bronchi and other soft tissues |
| US3079606A (en) | 1960-01-04 | 1963-03-05 | Bobrov Boris Sergeevich | Instrument for placing lateral gastrointestinal anastomoses |
| US3035256A (en) | 1960-02-02 | 1962-05-15 | Thompson Ramo Wooldridge Inc | Remote frequency indicator |
| US3075062A (en) | 1960-02-02 | 1963-01-22 | J B T Instr Inc | Toggle switch |
| US4034143A (en) | 1960-02-24 | 1977-07-05 | Catalyst Research Corporation | Thermal deferred action battery with interconnecting, foldable electrodes |
| SU143738A1 (ru) | 1960-06-15 | 1960-11-30 | А.А. Стрекопытов | Способ ушивани ткани легкого двухр дными погружными швами |
| US3026744A (en) | 1960-07-14 | 1962-03-27 | Cutler Hammer Inc | Motor operated and overriding manual drive for rotatable shaft operated devices |
| US3204731A (en) | 1961-05-26 | 1965-09-07 | Gardner Denver Co | Positive engaging jaw clutch or brake |
| US3187308A (en) | 1961-07-03 | 1965-06-01 | Gen Electric | Information storage system for microwave computer |
| US3157308A (en) | 1961-09-05 | 1964-11-17 | Clark Mfg Co J L | Canister type container and method of making the same |
| US3196869A (en) | 1962-06-13 | 1965-07-27 | William M Scholl | Buttress pad and method of making the same |
| US3166072A (en) | 1962-10-22 | 1965-01-19 | Jr John T Sullivan | Barbed clips |
| US3180236A (en) | 1962-12-20 | 1965-04-27 | Beckett Harcum Co | Fluid motor construction |
| US3266494A (en) | 1963-08-26 | 1966-08-16 | Possis Machine Corp | Powered forceps |
| US3317105A (en) | 1964-03-25 | 1967-05-02 | Niiex Khirurgicheskoi Apparatu | Instrument for placing lateral intestinal anastomoses |
| US3269630A (en) | 1964-04-30 | 1966-08-30 | Fleischer Harry | Stapling instrument |
| US3269631A (en) | 1964-06-19 | 1966-08-30 | Takaro Timothy | Surgical stapler |
| US3359978A (en) | 1964-10-26 | 1967-12-26 | Jr Raymond M Smith | Guide needle for flexible catheters |
| US3317103A (en) | 1965-05-03 | 1967-05-02 | Cullen | Apparatus for handling hose or similar elongate members |
| US3275211A (en) | 1965-05-10 | 1966-09-27 | United States Surgical Corp | Surgical stapler with replaceable cartridge |
| US3357296A (en) | 1965-05-14 | 1967-12-12 | Keuneth W Lefever | Staple fastener |
| US3315863A (en) | 1965-07-06 | 1967-04-25 | United States Surgical Corp | Medical instrument |
| US3726755A (en) | 1966-09-29 | 1973-04-10 | Owens Corning Fiberglass Corp | High-strength foam material |
| US3509629A (en) | 1966-10-01 | 1970-05-05 | Mitsubishi Electric Corp | Portable and adjustable contra-angle dental instrument |
| US3494533A (en) | 1966-10-10 | 1970-02-10 | United States Surgical Corp | Surgical stapler for stitching body organs |
| GB1210522A (en) | 1966-10-10 | 1970-10-28 | United States Surgical Corp | Instrument for placing lateral gastro-intestinal anastomoses |
| US3490675A (en) | 1966-10-10 | 1970-01-20 | United States Surgical Corp | Instrument for placing lateral gastrointestinal anastomoses |
| US3377893A (en) | 1967-03-06 | 1968-04-16 | John A. Shorb | Wrench having pivoted jaws adjustable by a lockable exterior camming sleeve |
| US3499591A (en) | 1967-06-23 | 1970-03-10 | United States Surgical Corp | Instrument for placing lateral gastro-intestinal anastomoses |
| US3480193A (en) | 1967-09-15 | 1969-11-25 | Robert E Ralston | Power-operable fastener applying device |
| DE1791114B1 (de) | 1967-09-19 | 1971-12-02 | Vnii Chirurgitscheskoj Apparat | Chirurgisches Geraet zum Klammernaehen von Geweben |
| US3503396A (en) | 1967-09-21 | 1970-03-31 | American Hospital Supply Corp | Atraumatic surgical clamp |
| GB1217159A (en) | 1967-12-05 | 1970-12-31 | Coventry Gauge & Tool Co Ltd | Torque limiting device |
| US3583393A (en) | 1967-12-26 | 1971-06-08 | Olympus Optical Co | Bendable tube assembly |
| JPS4711908Y1 (ru) | 1968-01-18 | 1972-05-02 | ||
| DE1775926A1 (de) | 1968-08-28 | 1972-01-27 | Ver Deutsche Metallwerke Ag | Versfaerkungen fuer Kunststoff-Bowdenzugfuehrungsschlaeuche ohne Drahtverstaerkung |
| US3568675A (en) | 1968-08-30 | 1971-03-09 | Clyde B Harvey | Fistula and penetrating wound dressing |
| US3551987A (en) | 1968-09-12 | 1971-01-05 | Jack E Wilkinson | Stapling clamp for gastrointestinal surgery |
| US4369013A (en) | 1969-02-13 | 1983-01-18 | Velo-Bind, Inc. | Bookbinding strips |
| US3640317A (en) | 1969-03-21 | 1972-02-08 | Jack Panfili | Clip for closing fragile stuffed casings |
| US3661339A (en) | 1969-03-27 | 1972-05-09 | Nippon Kogaku Kk | Film rewinding mechanism for cameras |
| US3572159A (en) | 1969-06-12 | 1971-03-23 | Teleflex Inc | Motion transmitting remote control assembly |
| US3635394A (en) | 1969-07-30 | 1972-01-18 | Rohe Scientific Corp | Automated clinical laboratory |
| US3604561A (en) | 1969-08-07 | 1971-09-14 | Codman & Shurtleff | Multiple stapler cartridge |
| US3643851A (en) | 1969-08-25 | 1972-02-22 | United States Surgical Corp | Skin stapler |
| US3688966A (en) | 1969-11-10 | 1972-09-05 | Spotnails | Magazine and feed assembly for a fastener-driving tool |
| US3709221A (en) | 1969-11-21 | 1973-01-09 | Pall Corp | Microporous nonadherent surgical dressing |
| US3598943A (en) | 1969-12-01 | 1971-08-10 | Illinois Tool Works | Actuator assembly for toggle switch |
| US3744495A (en) | 1970-01-02 | 1973-07-10 | M Johnson | Method of securing prolapsed vagina in cattle |
| US3608549A (en) | 1970-01-15 | 1971-09-28 | Merrill Edward Wilson | Method of administering drugs and capsule therefor |
| US3662939A (en) | 1970-02-26 | 1972-05-16 | United States Surgical Corp | Surgical stapler for skin and fascia |
| FR2084475A5 (ru) | 1970-03-16 | 1971-12-17 | Brumlik George | |
| US3618842A (en) | 1970-03-20 | 1971-11-09 | United States Surgical Corp | Surgical stapling cartridge with cylindrical driving cams |
| US3902247A (en) | 1970-05-15 | 1975-09-02 | Siemens Ag | Device for operating dental hand pieces |
| US3638652A (en) | 1970-06-01 | 1972-02-01 | James L Kelley | Surgical instrument for intraluminal anastomosis |
| US3695646A (en) | 1970-06-18 | 1972-10-03 | Metal Matic Inc | Ball and socket pipe joint with clip spring |
| US3685250A (en) | 1970-07-09 | 1972-08-22 | Woodman Co | Cam interrupted sealing jaws for product stripping |
| US3661666A (en) | 1970-08-06 | 1972-05-09 | Philip Morris Inc | Method for making swab applicators |
| US3650453A (en) | 1970-08-13 | 1972-03-21 | United States Surgical Corp | Staple cartridge with drive belt |
| US3740994A (en) | 1970-10-13 | 1973-06-26 | Surgical Corp | Three stage medical instrument |
| US3837555A (en) | 1970-12-14 | 1974-09-24 | Surgical Corp | Powering instrument for stapling skin and fascia |
| US3717294A (en) | 1970-12-14 | 1973-02-20 | Surgical Corp | Cartridge and powering instrument for stapling skin and fascia |
| US3799151A (en) | 1970-12-21 | 1974-03-26 | Olympus Optical Co | Controllably bendable tube of an endoscope |
| US3727904A (en) | 1971-03-12 | 1973-04-17 | E Gabbey | Concentricity coil for screw threads |
| US3746002A (en) | 1971-04-29 | 1973-07-17 | J Haller | Atraumatic surgical clamp |
| US3724237A (en) | 1971-06-07 | 1973-04-03 | Black & Decker Mfg Co | Attachment coupling for power tool |
| US3836171A (en) | 1971-07-07 | 1974-09-17 | Tokai Rika Co Ltd | Safety belt locking device |
| CA960189A (en) | 1971-07-12 | 1974-12-31 | Hilti Aktiengesellschaft | Nail holder assembly |
| US3752161A (en) | 1971-08-02 | 1973-08-14 | Minnesota Mining & Mfg | Fluid operated surgical tool |
| US3747692A (en) | 1971-08-30 | 1973-07-24 | Parrott Bell Seltzer Park & Gi | Stonesetter{40 s hand tool |
| US3851196A (en) | 1971-09-08 | 1974-11-26 | Xynetics Inc | Plural axis linear motor structure |
| US3747603A (en) | 1971-11-03 | 1973-07-24 | B Adler | Cervical dilators |
| US3883624A (en) | 1971-11-18 | 1975-05-13 | Grandview Ind Limited | Recovery and utilization of scrap in production of foamed thermoplastic polymeric products |
| US3734207A (en) | 1971-12-27 | 1973-05-22 | M Fishbein | Battery powered orthopedic cutting tool |
| US3940844A (en) | 1972-02-22 | 1976-03-02 | Pci Group, Inc. | Method of installing an insulating sleeve on a staple |
| US3751902A (en) | 1972-02-22 | 1973-08-14 | Emhart Corp | Apparatus for installing insulation on a staple |
| US4198734A (en) | 1972-04-04 | 1980-04-22 | Brumlik George C | Self-gripping devices with flexible self-gripping means and method |
| GB1339394A (en) | 1972-04-06 | 1973-12-05 | Vnii Khirurgicheskoi Apparatur | Dies for surgical stapling instruments |
| JPS5212039B2 (ru) | 1972-04-14 | 1977-04-04 | ||
| US3819100A (en) | 1972-09-29 | 1974-06-25 | United States Surgical Corp | Surgical stapling instrument |
| USRE28932E (en) | 1972-09-29 | 1976-08-17 | United States Surgical Corporation | Surgical stapling instrument |
| US3892228A (en) | 1972-10-06 | 1975-07-01 | Olympus Optical Co | Apparatus for adjusting the flexing of the bending section of an endoscope |
| US3821919A (en) | 1972-11-10 | 1974-07-02 | Illinois Tool Works | Staple |
| US3887393A (en) | 1972-12-15 | 1975-06-03 | Bell & Howell Co | Battery holder assembly |
| JPS5140421B2 (ru) | 1973-01-12 | 1976-11-04 | ||
| US3959879A (en) | 1973-02-26 | 1976-06-01 | Rockwell International Corporation | Electrically powered grass trimmer |
| US3944163A (en) | 1973-03-24 | 1976-03-16 | Kabushiki Kaisha Tokai Rika Denki Seisakusho | Seat belt retractor |
| US3826978A (en) | 1973-04-03 | 1974-07-30 | Dynalysis Of Princeton | Waveguide refractometer |
| US3863940A (en) | 1973-04-04 | 1975-02-04 | Philip T Cummings | Wide opening collet |
| US3808452A (en) | 1973-06-04 | 1974-04-30 | Gte Automatic Electric Lab Inc | Power supply system having redundant d. c. power supplies |
| SU511939A1 (ru) | 1973-07-13 | 1976-04-30 | Центральная Научно-Исследовательская Лаборатория При 4-М Главном Управлении | Аппарат дл наложени дугообразного шва на большую кривизну желудка |
| JPS5033988U (ru) | 1973-07-21 | 1975-04-11 | ||
| JPS5333899B2 (ru) | 1973-08-17 | 1978-09-18 | ||
| US3885491A (en) | 1973-12-21 | 1975-05-27 | Illinois Tool Works | Locking staple |
| JPS552966Y2 (ru) | 1974-02-08 | 1980-01-24 | ||
| JPS543B2 (ru) | 1974-02-28 | 1979-01-05 | ||
| US3952747A (en) | 1974-03-28 | 1976-04-27 | Kimmell Jr Garman O | Filter and filter insertion instrument |
| US3863639A (en) | 1974-04-04 | 1975-02-04 | Richard N Kleaveland | Disposable visceral retainer |
| CA1015829A (en) | 1974-05-23 | 1977-08-16 | Kurt Pokrandt | Current sensing circuitry |
| US4459519A (en) | 1974-06-24 | 1984-07-10 | General Electric Company | Electronically commutated motor systems and control therefor |
| US4169990A (en) | 1974-06-24 | 1979-10-02 | General Electric Company | Electronically commutated motor |
| US3894174A (en) | 1974-07-03 | 1975-07-08 | Emhart Corp | Insulated staple and method of making the same |
| US3973179A (en) | 1974-08-23 | 1976-08-03 | The Black And Decker Manufacturing Company | Modular cordless tools |
| DE2442260A1 (de) | 1974-09-04 | 1976-03-18 | Bosch Gmbh Robert | Handwerkzeugmaschine |
| US3955581A (en) | 1974-10-18 | 1976-05-11 | United States Surgical Corporation | Three-stage surgical instrument |
| DE2530261C2 (de) | 1974-10-22 | 1986-10-23 | Asea S.p.A., Mailand/Milano | Programmiereinrichtung für einen Manipulator |
| US4129059A (en) | 1974-11-07 | 1978-12-12 | Eck William F Van | Staple-type fastener |
| US3950686A (en) | 1974-12-11 | 1976-04-13 | Trw Inc. | Series redundant drive system |
| US3999110A (en) | 1975-02-06 | 1976-12-21 | The Black And Decker Manufacturing Company | Battery pack and latch |
| GB1491083A (en) | 1975-03-19 | 1977-11-09 | Newage Kitchens Ltd | Joint assemblies |
| US4108211A (en) | 1975-04-28 | 1978-08-22 | Fuji Photo Optical Co., Ltd. | Articulated, four-way bendable tube structure |
| SU566574A1 (ru) | 1975-05-04 | 1977-07-30 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Аппарат дл наложени линейного скобочного шва на органы и ткани |
| US4185701A (en) | 1975-05-19 | 1980-01-29 | Sps Technologies, Inc. | Tightening apparatus |
| US4060089A (en) | 1975-09-03 | 1977-11-29 | United States Surgical Corporation | Surgical fastening method and device therefor |
| US4027746A (en) | 1975-09-05 | 1977-06-07 | Shimano Industrial Company, Limited | Center-pull type caliper brake for a bicycle |
| US4085337A (en) | 1975-10-07 | 1978-04-18 | Moeller Wolfgang W | Electric drill multi-functional apparatus |
| JPS607357B2 (ja) | 1976-06-02 | 1985-02-23 | 株式会社日立ホームテック | シーズヒータ |
| DE2628508A1 (de) | 1976-06-25 | 1977-12-29 | Hilti Ag | Schwenkmutter mit zwei u-foermigen scheiben |
| US4054108A (en) | 1976-08-02 | 1977-10-18 | General Motors Corporation | Internal combustion engine |
| US4100820A (en) | 1976-09-13 | 1978-07-18 | Joel Evett | Shift lever and integral handbrake apparatus |
| AU518664B2 (en) | 1976-10-08 | 1981-10-15 | K. Jarvik Robert | Surgical' clip applicator |
| US4226242A (en) | 1977-09-13 | 1980-10-07 | United States Surgical Corporation | Repeating hemostatic clip applying instruments and multi-clip cartridges therefor |
| US4127227A (en) | 1976-10-08 | 1978-11-28 | United States Surgical Corporation | Wide fascia staple cartridge |
| DE2649052C2 (de) | 1976-10-28 | 1979-01-25 | Roland Offsetmaschinenfabrik Faber & Schleicher Ag, 6050 Offenbach | Vorrichtung zum Ausschalten des Lagerspiels an Druckzylindern von Druckmaschinen, insbesondere Rotationsoffsetdruckmaschinen |
| SU674747A1 (ru) | 1976-11-24 | 1979-07-25 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Аппарат дл механического сшивани тканей |
| FR2446509A1 (fr) | 1977-04-29 | 1980-08-08 | Garret Roger | Programmateur |
| SU728848A1 (ru) | 1977-05-24 | 1980-04-25 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический сшивающий аппарат |
| US4304236A (en) | 1977-05-26 | 1981-12-08 | United States Surgical Corporation | Stapling instrument having an anvil-carrying part of particular geometric shape |
| US4573468A (en) | 1977-05-26 | 1986-03-04 | United States Surgical Corporation | Hollow body organ stapling instrument and disposable cartridge employing relief vents |
| US4135517A (en) | 1977-07-21 | 1979-01-23 | Minnesota Mining And Manufacturing Company | Femoral prosthesis trial fitting device |
| CA1124605A (en) | 1977-08-05 | 1982-06-01 | Charles H. Klieman | Surgical stapler |
| US4452376A (en) | 1977-08-05 | 1984-06-05 | Charles H. Klieman | Hemostatic clip applicator |
| USD261356S (en) | 1977-09-07 | 1981-10-20 | Ofrex Group Limited | Strip of insulated cable clips |
| US5133727A (en) | 1990-05-10 | 1992-07-28 | Symbiosis Corporation | Radial jaw biopsy forceps |
| US6264617B1 (en) | 1977-09-12 | 2001-07-24 | Symbiosis Corporation | Radial jaw biopsy forceps |
| US4154122A (en) | 1977-09-16 | 1979-05-15 | Severin Hubert J | Hand-powered tool |
| US4106620A (en) | 1977-10-03 | 1978-08-15 | Brimmer Frances M | Surgical blade dispenser |
| JPS6060024B2 (ja) | 1977-10-19 | 1985-12-27 | 株式会社日立製作所 | エンジン制御方法 |
| US4203444A (en) | 1977-11-07 | 1980-05-20 | Dyonics, Inc. | Surgical instrument suitable for closed surgery such as of the knee |
| US4241861A (en) | 1977-12-20 | 1980-12-30 | Fleischer Harry N | Scissor-type surgical stapler |
| US4160857A (en) | 1978-02-16 | 1979-07-10 | Codman & Shurtleff, Inc. | Canister and removable battery pack unit therefor |
| US4900303A (en) | 1978-03-10 | 1990-02-13 | Lemelson Jerome H | Dispensing catheter and method |
| US4190042A (en) | 1978-03-16 | 1980-02-26 | Manfred Sinnreich | Surgical retractor for endoscopes |
| US4207898A (en) | 1978-03-27 | 1980-06-17 | Senco Products, Inc. | Intralumenal anastomosis surgical stapling instrument |
| US4321002A (en) | 1978-03-27 | 1982-03-23 | Minnesota Mining And Manufacturing Company | Medical stapling device |
| US4274304A (en) | 1978-03-29 | 1981-06-23 | Cooper Industries, Inc. | In-line reversing mechanism |
| SU1036324A1 (ru) | 1978-03-31 | 1983-08-23 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический сшивающий аппарат |
| US4198982A (en) | 1978-03-31 | 1980-04-22 | Memorial Hospital For Cancer And Allied Diseases | Surgical stapling instrument and method |
| GB2024012B (en) | 1978-04-10 | 1982-07-28 | Johnson & Johnson | Oxygen-generating surgical dressing |
| US4180285A (en) | 1978-05-11 | 1979-12-25 | Reneau Bobby J | Articulated ball connector for use with pipeline |
| DE2839990C2 (de) | 1978-09-14 | 1980-05-14 | Audi Nsu Auto Union Ag, 7107 Neckarsulm | Verfahren zum Umschmelzhärten der Oberfläche eines um seine Drehachse rotierenden Werkstücks, welche Oberfläche unterschiedlichen Abstand von der Drehachse hat |
| US4321746A (en) | 1978-11-01 | 1982-03-30 | White Consolidated Industries, Inc. | Tool changer for vertical boring machine |
| SU886897A1 (ru) | 1978-12-25 | 1981-12-07 | Всесоюзный Научно-Исследовательский Институт Медицинской Техники | Хирургический аппарат дл наложени боковых желудочнокишечных анастомозов |
| SE419421B (sv) | 1979-03-16 | 1981-08-03 | Ove Larson | Bojlig arm i synnerhet robotarm |
| US4340331A (en) | 1979-03-26 | 1982-07-20 | Savino Dominick J | Staple and anviless stapling apparatus therefor |
| SU886900A1 (ru) | 1979-03-26 | 1981-12-07 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический сшивающий аппарат дл наложени линейных швов |
| JPS55138634A (en) | 1979-04-16 | 1980-10-29 | Kansai Electric Power Co Inc:The | Fault diagnosis apparatus of apparatus |
| US4512038A (en) | 1979-04-27 | 1985-04-23 | University Of Medicine And Dentistry Of New Jersey | Bio-absorbable composite tissue scaffold |
| US4274398A (en) | 1979-05-14 | 1981-06-23 | Scott Jr Frank B | Surgical retractor utilizing elastic tubes frictionally held in spaced notches |
| US4261244A (en) | 1979-05-14 | 1981-04-14 | Senco Products, Inc. | Surgical staple |
| US4289131A (en) | 1979-05-17 | 1981-09-15 | Ergo Instruments, Inc. | Surgical power tool |
| US4272662A (en) | 1979-05-21 | 1981-06-09 | C & K Components, Inc. | Toggle switch with shaped wire spring contact |
| US4275813A (en) | 1979-06-04 | 1981-06-30 | United States Surgical Corporation | Coherent surgical staple array |
| US4272002A (en) | 1979-07-23 | 1981-06-09 | Lawrence M. Smith | Internal surgical stapler |
| US4296654A (en) | 1979-08-20 | 1981-10-27 | Mercer Albert E | Adjustable angled socket wrench extension |
| US4250436A (en) | 1979-09-24 | 1981-02-10 | The Singer Company | Motor braking arrangement and method |
| US4357940A (en) | 1979-12-13 | 1982-11-09 | Detroit Neurosurgical Foundation | Tissue pneumatic separator structure |
| SU1022703A1 (ru) | 1979-12-20 | 1983-06-15 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический аппарат дл наложени компрессионных швов |
| US4278091A (en) | 1980-02-01 | 1981-07-14 | Howmedica, Inc. | Soft tissue retainer for use with bone implants, especially bone staples |
| CA1205525A (en) | 1980-02-01 | 1986-06-03 | Russell H. Taggart | Current detector |
| US4429695A (en) | 1980-02-05 | 1984-02-07 | United States Surgical Corporation | Surgical instruments |
| AU534210B2 (en) | 1980-02-05 | 1984-01-12 | United States Surgical Corporation | Surgical staples |
| US4376380A (en) | 1980-02-05 | 1983-03-15 | John D. Brush & Co., Inc. | Combination lock |
| JPS56112235A (en) | 1980-02-07 | 1981-09-04 | Vnii Ispytatel Med Tech | Surgical suturing implement for suturing staple |
| JPS56113007A (en) | 1980-02-08 | 1981-09-05 | Toyota Motor Corp | Exhaust gas purifier for internal combustion engine |
| SU1042742A1 (ru) | 1980-02-08 | 1983-09-23 | Всесоюзный Научно-Исследовательский Институт Клинической И Экспериментальной Хирургии | Хирургический сшивающий аппарат дл наложени линейных швов |
| US4368731A (en) | 1980-02-12 | 1983-01-18 | Schramm Heinrich W | Pistol-type syringe |
| US4396139A (en) | 1980-02-15 | 1983-08-02 | Technalytics, Inc. | Surgical stapling system, apparatus and staple |
| US4317451A (en) | 1980-02-19 | 1982-03-02 | Ethicon, Inc. | Plastic surgical staple |
| US4312363A (en) | 1980-02-26 | 1982-01-26 | Senco Products, Inc. | Surgical tissue thickness measuring instrument |
| US4319576A (en) * | 1980-02-26 | 1982-03-16 | Senco Products, Inc. | Intralumenal anastomosis surgical stapling instrument |
| US4361057A (en) | 1980-02-28 | 1982-11-30 | John Sigan | Handlebar adjusting device |
| US4289133A (en) | 1980-02-28 | 1981-09-15 | Senco Products, Inc. | Cut-through backup washer for the scalpel of an intraluminal surgical stapling instrument |
| US4296881A (en) | 1980-04-03 | 1981-10-27 | Sukoo Lee | Surgical stapler using cartridge |
| US4428376A (en) | 1980-05-02 | 1984-01-31 | Ethicon Inc. | Plastic surgical staple |
| US4331277A (en) | 1980-05-23 | 1982-05-25 | United States Surgical Corporation | Self-contained gas powered surgical stapler |
| US5445604A (en) | 1980-05-22 | 1995-08-29 | Smith & Nephew Associated Companies, Ltd. | Wound dressing with conformable elastomeric wound contact layer |
| US4293604A (en) | 1980-07-11 | 1981-10-06 | Minnesota Mining And Manufacturing Company | Flocked three-dimensional network mat |
| US4380312A (en) | 1980-07-17 | 1983-04-19 | Minnesota Mining And Manufacturing Company | Stapling tool |
| US4606343A (en) | 1980-08-18 | 1986-08-19 | United States Surgical Corporation | Self-powered surgical fastening instrument |
| US4328839A (en) | 1980-09-19 | 1982-05-11 | Drilling Development, Inc. | Flexible drill pipe |
| US4353371A (en) | 1980-09-24 | 1982-10-12 | Cosman Eric R | Longitudinally, side-biting, bipolar coagulating, surgical instrument |
| DE3036217C2 (de) | 1980-09-25 | 1986-12-18 | Siemens AG, 1000 Berlin und 8000 München | Fernbedienbares medizinisches Gerät |
| US4349028A (en) | 1980-10-03 | 1982-09-14 | United States Surgical Corporation | Surgical stapling apparatus having self-contained pneumatic system for completing manually initiated motion sequence |
| AU542936B2 (en) | 1980-10-17 | 1985-03-28 | United States Surgical Corporation | Self centering staple |
| JPS5778844A (en) | 1980-11-04 | 1982-05-17 | Kogyo Gijutsuin | Lasre knife |
| US4430997A (en) | 1980-11-19 | 1984-02-14 | Ethicon, Inc. | Multiple clip applier |
| US4500024A (en) | 1980-11-19 | 1985-02-19 | Ethicon, Inc. | Multiple clip applier |
| US4347450A (en) | 1980-12-10 | 1982-08-31 | Colligan Wallace M | Portable power tool |
| SU1235495A1 (ru) | 1980-12-29 | 1986-06-07 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Устройство дл наложени компрессионных анастомозов |
| US4451743A (en) | 1980-12-29 | 1984-05-29 | Citizen Watch Company Limited | DC-to-DC Voltage converter |
| US4382326A (en) | 1981-01-19 | 1983-05-10 | Minnesota Mining & Manufacturing Company | Staple supporting and staple removing strip |
| US4409057A (en) | 1981-01-19 | 1983-10-11 | Minnesota Mining & Manufacturing Company | Staple supporting and removing strip |
| US4394613A (en) | 1981-01-19 | 1983-07-19 | California Institute Of Technology | Full-charge indicator for battery chargers |
| US4348603A (en) | 1981-01-29 | 1982-09-07 | Black & Decker Inc. | Printed-circuit board and trigger-switch arrangement for a portable electric tool |
| FR2499395A1 (fr) | 1981-02-10 | 1982-08-13 | Amphoux Andre | Conduit deformable tel que bras d'aspiration de fluide gazeux |
| FR2499782A1 (fr) | 1981-02-11 | 1982-08-13 | Faiveley Sa | Procede pour regler l'alimentation d'un moteur a courant continu et dispositif pour sa mise en oeuvre |
| US4379457A (en) | 1981-02-17 | 1983-04-12 | United States Surgical Corporation | Indicator for surgical stapler |
| US4350151A (en) | 1981-03-12 | 1982-09-21 | Lone Star Medical Products, Inc. | Expanding dilator |
| SU1009439A1 (ru) | 1981-03-24 | 1983-04-07 | Предприятие П/Я Р-6094 | Хирургический сшивающий аппарат дл наложени анастомозов на пищеварительном тракте |
| US4389963A (en) | 1981-03-26 | 1983-06-28 | Pearson Richard W | Apparatus and method for monitoring periodic dispensation of pills |
| US4526174A (en) | 1981-03-27 | 1985-07-02 | Minnesota Mining And Manufacturing Company | Staple and cartridge for use in a tissue stapling device and a tissue closing method |
| SU982676A1 (ru) | 1981-04-07 | 1982-12-23 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургическа скобка |
| DE3115192C2 (de) | 1981-04-15 | 1983-05-19 | Christian Prof. Dr.med. 2400 Lübeck Krüger | Medizinisches Instrument |
| US4406621A (en) | 1981-05-04 | 1983-09-27 | Young Dental Manufacturing Company, Inc. | Coupling ensemble for dental handpiece |
| US4383634A (en) | 1981-05-26 | 1983-05-17 | United States Surgical Corporation | Surgical stapler apparatus with pivotally mounted actuator assemblies |
| JPS57211361A (en) | 1981-06-23 | 1982-12-25 | Terumo Corp | Liquid injecting apparatus |
| US4485816A (en) | 1981-06-25 | 1984-12-04 | Alchemia | Shape-memory surgical staple apparatus and method for use in surgical suturing |
| US4421264A (en) | 1981-06-26 | 1983-12-20 | International Business Machines Corporation | Variable thickness set compensation for stapler |
| FR2509490B1 (fr) | 1981-07-09 | 1985-02-22 | Tractel Sa | Mecanisme de debrayage pour appareil de traction agissant sur un cable qui le traverse |
| US4486928A (en) | 1981-07-09 | 1984-12-11 | Magnavox Government And Industrial Electronics Company | Apparatus for tool storage and selection |
| US4373147A (en) | 1981-07-23 | 1983-02-08 | General Signal Corporation | Torque compensated electric motor |
| US4475679A (en) | 1981-08-07 | 1984-10-09 | Fleury Jr George J | Multi-staple cartridge for surgical staplers |
| US4632290A (en) | 1981-08-17 | 1986-12-30 | United States Surgical Corporation | Surgical stapler apparatus |
| US4417890A (en) | 1981-08-17 | 1983-11-29 | Baxter Travenol Laboratories, Inc. | Antibacterial closure |
| US4576167A (en) | 1981-09-03 | 1986-03-18 | United States Surgical Corporation | Surgical stapler apparatus with curved shaft |
| US4461305A (en) | 1981-09-04 | 1984-07-24 | Cibley Leonard J | Automated biopsy device |
| JPS5844033A (ja) | 1981-09-11 | 1983-03-14 | 富士写真光機株式会社 | 内視鏡用アダプタ−型処置具導入装置 |
| US4402445A (en) | 1981-10-09 | 1983-09-06 | United States Surgical Corporation | Surgical fastener and means for applying same |
| JPS5861747A (ja) | 1981-10-08 | 1983-04-12 | 馬渕 健一 | 美容具 |
| DE3277287D1 (en) | 1981-10-15 | 1987-10-22 | Olympus Optical Co | Endoscope system with an electric bending mechanism |
| US4483562A (en) | 1981-10-16 | 1984-11-20 | Arnold Schoolman | Locking flexible shaft device with live distal end attachment |
| US4809695A (en) | 1981-10-21 | 1989-03-07 | Owen M. Gwathmey | Suturing assembly and method |
| US4416276A (en) | 1981-10-26 | 1983-11-22 | Valleylab, Inc. | Adaptive, return electrode monitoring system |
| US4415112A (en) | 1981-10-27 | 1983-11-15 | United States Surgical Corporation | Surgical stapling assembly having resiliently mounted anvil |
| JPS5878639A (ja) | 1981-11-04 | 1983-05-12 | オリンパス光学工業株式会社 | 内視鏡 |
| US4423456A (en) | 1981-11-13 | 1983-12-27 | Medtronic, Inc. | Battery reversal protection |
| JPS5887494U (ja) | 1981-12-05 | 1983-06-14 | 株式会社モリタ製作所 | 医療用小型モ−タの速度制御装置 |
| US4442964A (en) | 1981-12-07 | 1984-04-17 | Senco Products, Inc. | Pressure sensitive and working-gap controlled surgical stapling instrument |
| US4586502A (en) | 1982-02-03 | 1986-05-06 | Ethicon, Inc. | Surgical instrument actuator with non-collinear hydraulic pistons |
| US4724840A (en) | 1982-02-03 | 1988-02-16 | Ethicon, Inc. | Surgical fastener applier with rotatable front housing and laterally extending curved needle for guiding a flexible pusher |
| US4471781A (en) | 1982-02-03 | 1984-09-18 | Ethicon, Inc. | Surgical instrument with rotatable front housing and latch mechanism |
| US4448194A (en) | 1982-02-03 | 1984-05-15 | Ethicon, Inc. | Full stroke compelling mechanism for surgical instrument with drum drive |
| US4478220A (en) | 1982-02-05 | 1984-10-23 | Ethicon, Inc. | Ligating clip cartridge |
| US4471780A (en) | 1982-02-05 | 1984-09-18 | Ethicon, Inc. | Multiple ligating clip applier instrument |
| US4480641A (en) | 1982-02-05 | 1984-11-06 | Ethicon, Inc. | Tip configuration for a ligating clip applier |
| DE3204532C2 (de) | 1982-02-10 | 1983-12-08 | B. Braun Melsungen Ag, 3508 Melsungen | Chirurgische Hautklammer |
| SU1114405A1 (ru) | 1982-02-23 | 1984-09-23 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический сшивающий аппарат дл наложени компрессионных анастомозов на органы пищеварительного тракта |
| US4425915A (en) | 1982-02-26 | 1984-01-17 | Ethicon, Inc. | Surgical clip applier with in-line cartridge and interruptable biased feeder |
| DE3210466A1 (de) | 1982-03-22 | 1983-09-29 | Peter Dipl.-Kfm. Dr. 6230 Frankfurt Gschaider | Verfahren und vorrichtung zur durchfuehrung von handhabungsprozessen |
| USD278081S (en) | 1982-04-02 | 1985-03-19 | United States Surgical Corporation | Linear anastomosis surgical staple cartridge |
| US4408692A (en) | 1982-04-12 | 1983-10-11 | The Kendall Company | Sterile cover for instrument |
| US4664305A (en) | 1982-05-04 | 1987-05-12 | Blake Joseph W Iii | Surgical stapler |
| JPS58201360A (ja) | 1982-05-19 | 1983-11-24 | Nec Corp | 半導体装置の製造方法 |
| US4473077A (en) | 1982-05-28 | 1984-09-25 | United States Surgical Corporation | Surgical stapler apparatus with flexible shaft |
| US4485817A (en) | 1982-05-28 | 1984-12-04 | United States Surgical Corporation | Surgical stapler apparatus with flexible shaft |
| US4467805A (en) | 1982-08-25 | 1984-08-28 | Mamoru Fukuda | Skin closure stapling device for surgical procedures |
| US4488523A (en) | 1982-09-24 | 1984-12-18 | United States Surgical Corporation | Flexible, hydraulically actuated device for applying surgical fasteners |
| JPS5949356U (ja) | 1982-09-25 | 1984-04-02 | 新正工業株式会社 | カセツト式乾電池ケ−ス |
| US4476864A (en) | 1982-09-29 | 1984-10-16 | Jirayr Tezel | Combined multiple punch and single punch hair transplant cutting device |
| FR2534801A1 (fr) | 1982-10-21 | 1984-04-27 | Claracq Michel | Dispositif d'occlusion partielle d'un vaisseau, en particulier de la veine cave caudale, et partie constitutive de ce dispositif |
| US4604786A (en) | 1982-11-05 | 1986-08-12 | The Grigoleit Company | Method of making a composite article including a body having a decorative metal plate attached thereto |
| US4790225A (en) | 1982-11-24 | 1988-12-13 | Panduit Corp. | Dispenser of discrete cable ties provided on a continuous ribbon of cable ties |
| US4676245A (en) | 1983-02-09 | 1987-06-30 | Mamoru Fukuda | Interlocking surgical staple assembly |
| JPS59163608A (ja) | 1983-03-08 | 1984-09-14 | Hitachi Koki Co Ltd | ジグソ− |
| JPS59168848A (ja) | 1983-03-11 | 1984-09-22 | エチコン・インコ−ポレ−テツド | 非金属製の生物に適合性の無菌の外科装置 |
| US4652820A (en) | 1983-03-23 | 1987-03-24 | North American Philips Corporation | Combined position sensor and magnetic motor or bearing |
| US4506671A (en) | 1983-03-30 | 1985-03-26 | United States Surgical Corporation | Apparatus for applying two-part surgical fasteners |
| US4556058A (en) | 1983-08-17 | 1985-12-03 | United States Surgical Corporation | Apparatus for ligation and division with fixed jaws |
| US4569346A (en) | 1983-03-30 | 1986-02-11 | United States Surgical Corporation | Safety apparatus for surgical occluding and cutting device |
| US4481458A (en) | 1983-04-11 | 1984-11-06 | Levitt-Safety Limited | Miners lamp power pack |
| US4530357A (en) | 1983-04-18 | 1985-07-23 | Pawloski James A | Fluid actuated orthopedic tool |
| GB2138298B (en) | 1983-04-21 | 1986-11-05 | Hundon Forge Ltd | Pellet implanter |
| US4522327A (en) | 1983-05-18 | 1985-06-11 | United States Surgical Corporation | Surgical fastener applying apparatus |
| JPS59226738A (ja) | 1983-06-03 | 1984-12-19 | Toyota Motor Corp | 副変速機のギア比切替駆動制御装置 |
| US4527724A (en) | 1983-06-10 | 1985-07-09 | Senmed, Inc. | Disposable linear surgical stapling instrument |
| US4531522A (en) | 1983-06-20 | 1985-07-30 | Ethicon, Inc. | Two-piece tissue fastener with locking top and method for applying same |
| US4548202A (en) | 1983-06-20 | 1985-10-22 | Ethicon, Inc. | Mesh tissue fasteners |
| US4532927A (en) | 1983-06-20 | 1985-08-06 | Ethicon, Inc. | Two-piece tissue fastener with non-reentry bent leg staple and retaining receiver |
| US4693248A (en) | 1983-06-20 | 1987-09-15 | Ethicon, Inc. | Two-piece tissue fastener with deformable retaining receiver |
| US4573469A (en) | 1983-06-20 | 1986-03-04 | Ethicon, Inc. | Two-piece tissue fastener with coinable leg staple and retaining receiver and method and instrument for applying same |
| GR81919B (ru) | 1983-06-20 | 1984-12-12 | Ethicon Inc | |
| DE3325282C2 (de) | 1983-07-13 | 1986-09-25 | Howmedica International, Inc., 2301 Schönkirchen | Verfahren zur Ladung eines Akkumulators |
| SU1175891A1 (ru) | 1983-08-16 | 1985-08-30 | Предприятие П/Я А-7840 | Устройство дл формовани изделий |
| US4944443A (en) | 1988-04-22 | 1990-07-31 | Innovative Surgical Devices, Inc. | Surgical suturing instrument and method |
| US4669647A (en) | 1983-08-26 | 1987-06-02 | Technalytics, Inc. | Surgical stapler |
| US4530453A (en) | 1983-10-04 | 1985-07-23 | United States Surgical Corporation | Surgical fastener applying apparatus |
| US4667674A (en) | 1983-10-04 | 1987-05-26 | United States Surgical Corporation | Surgical fastener exhibiting improved hemostasis |
| US4589416A (en) | 1983-10-04 | 1986-05-20 | United States Surgical Corporation | Surgical fastener retainer member assembly |
| US4505414A (en) | 1983-10-12 | 1985-03-19 | Filipi Charles J | Expandable anvil surgical stapler |
| US4610383A (en) | 1983-10-14 | 1986-09-09 | Senmed, Inc. | Disposable linear surgical stapler |
| US4571213A (en) | 1983-11-17 | 1986-02-18 | Nikko Co., Ltd. | Direction-converting device for a toy car |
| JPS60113007A (ja) | 1983-11-24 | 1985-06-19 | Nissan Motor Co Ltd | 内燃機関の吸・排気弁制御装置 |
| US4565109A (en) | 1983-12-27 | 1986-01-21 | Tsay Chi Chour | Instantaneous direction changing rotation mechanism |
| US4576165A (en) | 1984-01-23 | 1986-03-18 | United States Surgical Corporation | Surgical ligation and cutting device with safety means |
| US4635638A (en) | 1984-02-07 | 1987-01-13 | Galil Advanced Technologies Ltd. | Power-driven gripping tool particularly useful as a suturing device |
| USD287278S (en) | 1984-02-21 | 1986-12-16 | Senmed, Inc. | Flexible surgical stapler |
| US4589870A (en) | 1984-02-21 | 1986-05-20 | Indicon, Inc. | Incremental actuator for syringe |
| JPS60137406U (ja) | 1984-02-24 | 1985-09-11 | シ−アイ化成株式会社 | マグネツトシ−ト |
| US4600037A (en) | 1984-03-19 | 1986-07-15 | Texas Eastern Drilling Systems, Inc. | Flexible drill pipe |
| US4612933A (en) | 1984-03-30 | 1986-09-23 | Senmed, Inc. | Multiple-load cartridge assembly for a linear surgical stapling instrument |
| US4608980A (en) | 1984-04-13 | 1986-09-02 | Osada Electric Co., Ltd. | Laser hand piece |
| US4619391A (en) | 1984-04-18 | 1986-10-28 | Acme United Corporation | Surgical stapling instrument |
| US4607638A (en) | 1984-04-20 | 1986-08-26 | Design Standards Corporation | Surgical staples |
| JPS60232124A (ja) | 1984-05-04 | 1985-11-18 | 旭光学工業株式会社 | 内視鏡の湾曲操作装置 |
| US4894051A (en) | 1984-05-14 | 1990-01-16 | Surgical Systems & Instruments, Inc. | Atherectomy system with a biasing sleeve and method of using the same |
| US5002553A (en) | 1984-05-14 | 1991-03-26 | Surgical Systems & Instruments, Inc. | Atherectomy system with a clutch |
| US4628636A (en) | 1984-05-18 | 1986-12-16 | Holmes-Hally Industries, Inc. | Garage door operator mechanism |
| US5464013A (en) | 1984-05-25 | 1995-11-07 | Lemelson; Jerome H. | Medical scanning and treatment system and method |
| US4781186A (en) | 1984-05-30 | 1988-11-01 | Devices For Vascular Intervention, Inc. | Atherectomy device having a flexible housing |
| GB8417562D0 (en) | 1984-07-10 | 1984-08-15 | Surgical Design Services | Fasteners |
| IN165375B (ru) | 1984-07-16 | 1989-10-07 | Ethicon Inc | |
| US4741336A (en) | 1984-07-16 | 1988-05-03 | Ethicon, Inc. | Shaped staples and slotted receivers (case VII) |
| DE3426173A1 (de) | 1984-07-16 | 1986-01-23 | Hilti Ag, Schaan | Eintreibgeraet fuer befestigungselemente, wie naegel, klammern und dergleichen |
| US4585153A (en) | 1984-07-16 | 1986-04-29 | Ethicon, Inc. | Surgical instrument for applying two-piece fasteners comprising frictionally held U-shaped staples and receivers (Case III) |
| US4591085A (en) | 1984-07-16 | 1986-05-27 | Ethicon, Inc. | Surgical instrument for applying fasteners, said instrument having an improved trigger interlocking mechanism (Case VI) |
| US4607636A (en) | 1984-07-16 | 1986-08-26 | Ethicon, Inc. | Surgical instrument for applying fasteners having tissue locking means for maintaining the tissue in the instrument while applying the fasteners (case I) |
| US4605004A (en) | 1984-07-16 | 1986-08-12 | Ethicon, Inc. | Surgical instrument for applying fasteners said instrument including force supporting means (case IV) |
| DE3427329A1 (de) | 1984-07-25 | 1986-01-30 | Mannesmann Kienzle GmbH, 7730 Villingen-Schwenningen | Verfahren zum positionieren eines einem geschwindigkeitsbegrenzer zugeordneten schalters |
| US4655222A (en) | 1984-07-30 | 1987-04-07 | Ethicon, Inc. | Coated surgical staple |
| US4754909A (en) | 1984-08-09 | 1988-07-05 | Barker John M | Flexible stapler |
| US4671445A (en) | 1984-08-09 | 1987-06-09 | Baxter Travenol Laboratories, Inc. | Flexible surgical stapler assembly |
| US4560915A (en) | 1984-08-23 | 1985-12-24 | Wen Products, Inc. | Electronic charging circuit for battery operated appliances |
| US4589582A (en) | 1984-08-23 | 1986-05-20 | Senmed, Inc. | Cartridge and driver assembly for a surgical stapling instrument |
| IL73079A (en) | 1984-09-26 | 1989-01-31 | Porat Michael | Gripper means for medical instruments |
| USD286180S (en) | 1984-10-16 | 1986-10-14 | United States Surgical Corporation | Surgical fastener |
| US4566620A (en) | 1984-10-19 | 1986-01-28 | United States Surgical Corporation | Articulated surgical fastener applying apparatus |
| US4633861A (en) | 1984-10-19 | 1987-01-06 | Senmed, Inc. | Surgical stapling instrument with jaw clamping mechanism |
| US4605001A (en) | 1984-10-19 | 1986-08-12 | Senmed, Inc. | Surgical stapling instrument with dual staple height mechanism |
| US4767044A (en) | 1984-10-19 | 1988-08-30 | United States Surgical Corporation | Surgical fastener applying apparatus |
| US4633874A (en) | 1984-10-19 | 1987-01-06 | Senmed, Inc. | Surgical stapling instrument with jaw latching mechanism and disposable staple cartridge |
| US4608981A (en) | 1984-10-19 | 1986-09-02 | Senmed, Inc. | Surgical stapling instrument with staple height adjusting mechanism |
| US4573622A (en) | 1984-10-19 | 1986-03-04 | United States Surgical Corporation | Surgical fastener applying apparatus with variable fastener arrays |
| US4580712A (en) | 1984-10-19 | 1986-04-08 | United States Surgical Corporation | Surgical fastener applying apparatus with progressive application of fastener |
| IT1180106B (it) | 1984-11-05 | 1987-09-23 | Olivetti & Co Spa | Circuito per il pilotaggio dei motori elettrici di selezione tabulazione ed interlinea di una macchina per scrivere elettronica |
| US4949707A (en) | 1984-11-08 | 1990-08-21 | Minnesota Scientific, Inc. | Retractor apparatus |
| US4787387A (en) | 1984-11-08 | 1988-11-29 | American Cyanamid Company | Surgical closure element |
| DE3543096A1 (de) | 1984-12-05 | 1986-06-05 | Olympus Optical Co., Ltd., Tokio/Tokyo | Vorrichtung zur zertruemmerung von steinen, wie nieren- und gallensteinen oder dergleichen |
| US4646722A (en) | 1984-12-10 | 1987-03-03 | Opielab, Inc. | Protective endoscope sheath and method of installing same |
| US4828542A (en) | 1986-08-29 | 1989-05-09 | Twin Rivers Engineering | Foam substrate and micropackaged active ingredient particle composite dispensing materials |
| SU1271497A1 (ru) | 1985-01-07 | 1986-11-23 | Научно-производственное объединение "Мединструмент" | Устройство дл сведени краев раны |
| US4671278A (en) | 1985-01-14 | 1987-06-09 | Thomas J. Fogarty | Scalp hemostatic clip and dispenser therefor |
| US4641076A (en) | 1985-01-23 | 1987-02-03 | Hall Surgical-Division Of Zimmer, Inc. | Method and apparatus for sterilizing and charging batteries |
| US4705038A (en) | 1985-01-23 | 1987-11-10 | Dyonics, Inc. | Surgical system for powered instruments |
| US4643173A (en) | 1985-01-29 | 1987-02-17 | Bell John H | Heated traction belt |
| JPS61129692U (ru) | 1985-02-02 | 1986-08-14 | ||
| US4651734A (en) | 1985-02-08 | 1987-03-24 | The United States Of America As Represented By The United States Department Of Energy | Electrosurgical device for both mechanical cutting and coagulation of bleeding |
| JPH0663165B2 (ja) | 1985-11-20 | 1994-08-17 | ユニ・チヤ−ム株式会社 | 不織布の製造方法および装置 |
| US4569469A (en) | 1985-02-15 | 1986-02-11 | Minnesota Mining And Manufacturing Company | Bone stapler cartridge |
| IL74405A0 (en) | 1985-02-21 | 1985-05-31 | Moshe Meller | Illuminated dental drill |
| JPS61209647A (ja) | 1985-03-14 | 1986-09-17 | 須广 久善 | 血管吻合用の切開口拡開器 |
| JPS635697Y2 (ru) | 1985-04-04 | 1988-02-17 | ||
| JPS61235446A (ja) | 1985-04-11 | 1986-10-20 | Karupu Kogyo Kk | 産業ロボツト用外被管 |
| SU1377052A1 (ru) | 1985-04-17 | 1988-02-28 | Всесоюзный онкологический научный центр | Устройство дл соединени полых органов |
| US4833937A (en) | 1985-04-22 | 1989-05-30 | Shimano Industrial Company Limited | Adjusting device for a control cable for a bicycle |
| US4807628A (en) | 1985-04-26 | 1989-02-28 | Edward Weck & Company, Inc. | Method and apparatus for storing, dispensing, and applying surgical staples |
| DE3515659C1 (de) | 1985-05-02 | 1986-08-28 | Goetze Ag, 5093 Burscheid | Kolbenring |
| US4671280A (en) | 1985-05-13 | 1987-06-09 | Ethicon, Inc. | Surgical fastening device and method for manufacture |
| US4642618A (en) | 1985-07-23 | 1987-02-10 | Ibm Corporation | Tool failure detector |
| US5012411A (en) | 1985-07-23 | 1991-04-30 | Charles J. Policastro | Apparatus for monitoring, storing and transmitting detected physiological information |
| US4665916A (en) | 1985-08-09 | 1987-05-19 | United States Surgical Corporation | Surgical stapler apparatus |
| US4643731A (en) | 1985-08-16 | 1987-02-17 | Alza Corporation | Means for providing instant agent from agent dispensing system |
| US4750902A (en) | 1985-08-28 | 1988-06-14 | Sonomed Technology, Inc. | Endoscopic ultrasonic aspirators |
| US4750488A (en) | 1986-05-19 | 1988-06-14 | Sonomed Technology, Inc. | Vibration apparatus preferably for endoscopic ultrasonic aspirator |
| US4728020A (en) | 1985-08-30 | 1988-03-01 | United States Surgical Corporation | Articulated surgical fastener applying apparatus |
| SE457228B (sv) | 1985-09-10 | 1988-12-12 | Vnii Ispytatel Med Tech | Kirurgiskt instrument foer anbringande av linjaera bygelsuturer |
| SU1377053A1 (ru) | 1985-10-02 | 1988-02-28 | В. Г. Сахаутдинов, Р. А. Талипов, Р. М. Халиков и 3. X. Гарифуллин | Хирургический сшивающий аппарат |
| US4610250A (en) | 1985-10-08 | 1986-09-09 | United States Surgical Corporation | Two-part surgical fastener for fascia wound approximation |
| US4715520A (en) | 1985-10-10 | 1987-12-29 | United States Surgical Corporation | Surgical fastener applying apparatus with tissue edge control |
| US4721099A (en) | 1985-10-30 | 1988-01-26 | Kabushiki Kaisha Machida Seisakusho | Operating mechanism for bendable section of endoscope |
| EP0226426B1 (en) | 1985-12-06 | 1990-05-16 | Desoutter, Limited | Two speed gearbox |
| SU1333319A2 (ru) | 1985-12-10 | 1987-08-30 | Петрозаводский государственный университет им.О.В.Куусинена | Ушиватель полых органов |
| US4634419A (en) | 1985-12-13 | 1987-01-06 | Cooper Lasersonics, Inc. | Angulated ultrasonic surgical handpieces and method for their production |
| USD297764S (en) | 1985-12-18 | 1988-09-20 | Ethicon, Inc. | Surgical staple cartridge |
| US4679719A (en) | 1985-12-27 | 1987-07-14 | Senco Products, Inc. | Electronic control for a pneumatic fastener driving tool |
| USD286442S (en) | 1985-12-31 | 1986-10-28 | United States Surgical Corporation | Surgical fastener |
| US4763669A (en) | 1986-01-09 | 1988-08-16 | Jaeger John C | Surgical instrument with adjustable angle of operation |
| US4728876A (en) | 1986-02-19 | 1988-03-01 | Minnesota Mining And Manufacturing Company | Orthopedic drive assembly |
| US4672964A (en) | 1986-02-21 | 1987-06-16 | Dee Robert N | Scalpel with universally adjustable blade |
| US4662555A (en) | 1986-03-11 | 1987-05-05 | Edward Weck & Company, Inc. | Surgical stapler |
| US4675944A (en) | 1986-03-17 | 1987-06-30 | Wells Daryl F | Pneumatic meat saw |
| JPS62221897A (ja) | 1986-03-24 | 1987-09-29 | Mitsubishi Electric Corp | 電動機の制御装置 |
| US4903697A (en) | 1986-03-27 | 1990-02-27 | Semion Resnick | Cartridge assembly for a surgical stapling instrument |
| US4700703A (en) | 1986-03-27 | 1987-10-20 | Semion Resnick | Cartridge assembly for a surgical stapling instrument |
| US4909789A (en) | 1986-03-28 | 1990-03-20 | Olympus Optical Co., Ltd. | Observation assisting forceps |
| US4827911A (en) | 1986-04-02 | 1989-05-09 | Cooper Lasersonics, Inc. | Method and apparatus for ultrasonic surgical fragmentation and removal of tissue |
| US4988334A (en) | 1986-04-09 | 1991-01-29 | Valleylab, Inc. | Ultrasonic surgical system with aspiration tubulation connector |
| US4747820A (en) | 1986-04-09 | 1988-05-31 | Cooper Lasersonics, Inc. | Irrigation/aspiration manifold and fittings for ultrasonic surgical aspiration system |
| JPS62170011U (ru) | 1986-04-16 | 1987-10-28 | ||
| JPH01500966A (ja) | 1986-04-21 | 1989-04-06 | グローベ コントロール フイナンツ アクチエンゲゼルシヤフト | 吻合部を作成する装置と方法 |
| SU1561964A1 (ru) | 1986-04-24 | 1990-05-07 | Благовещенский государственный медицинский институт | Хирургический сшивающий аппарат |
| US4688555A (en) | 1986-04-25 | 1987-08-25 | Circon Corporation | Endoscope with cable compensating mechanism |
| US4691703A (en) | 1986-04-25 | 1987-09-08 | Board Of Regents, University Of Washington | Thermal cautery system |
| EP0251444A1 (en) | 1986-04-30 | 1988-01-07 | Minnesota Mining And Manufacturing Company | Anvil assembly |
| FR2598905B1 (fr) | 1986-05-22 | 1993-08-13 | Chevalier Jean Michel | Dispositif d'interruption de la circulation d'un fluide dans un conduit a paroi souple, notamment un viscere creux et ensemble de pince comportant ce dispositif |
| US4709120A (en) | 1986-06-06 | 1987-11-24 | Pearson Dean C | Underground utility equipment vault |
| USD298967S (en) | 1986-06-09 | 1988-12-13 | Ethicon, Inc. | Surgical staple cartridge |
| US5190544A (en) | 1986-06-23 | 1993-03-02 | Pfizer Hospital Products Group, Inc. | Modular femoral fixation system |
| US4744363A (en) | 1986-07-07 | 1988-05-17 | Hasson Harrith M | Intra-abdominal organ stabilizer, retractor and tissue manipulator |
| DE8620714U1 (ru) | 1986-08-01 | 1986-11-20 | C. & E. Fein Gmbh & Co, 7000 Stuttgart, De | |
| US4727308A (en) | 1986-08-28 | 1988-02-23 | International Business Machines Corporation | FET power converter with reduced switching loss |
| US4743214A (en) | 1986-09-03 | 1988-05-10 | Tai Cheng Yang | Steering control for toy electric vehicles |
| US4875486A (en) | 1986-09-04 | 1989-10-24 | Advanced Techtronics, Inc. | Instrument and method for non-invasive in vivo testing for body fluid constituents |
| US4890613A (en) | 1986-09-19 | 1990-01-02 | Ethicon, Inc. | Two piece internal organ fastener |
| US4893622A (en) | 1986-10-17 | 1990-01-16 | United States Surgical Corporation | Method of stapling tubular body organs |
| US4752024A (en) | 1986-10-17 | 1988-06-21 | Green David T | Surgical fastener and surgical stapling apparatus |
| CH674058A5 (ru) | 1986-10-22 | 1990-04-30 | Festo Kg | |
| US4933843A (en) | 1986-11-06 | 1990-06-12 | Storz Instrument Company | Control system for ophthalmic surgical instruments |
| US4954960A (en) | 1986-11-07 | 1990-09-04 | Alcon Laboratories | Linear power control for ultrasonic probe with tuned reactance |
| US4970656A (en) | 1986-11-07 | 1990-11-13 | Alcon Laboratories, Inc. | Analog drive for ultrasonic probe with tunable phase angle |
| JPH0418209Y2 (ru) | 1986-11-14 | 1992-04-23 | ||
| JPH0755222B2 (ja) | 1986-12-12 | 1995-06-14 | オリンパス光学工業株式会社 | 処置具 |
| SE457680B (sv) | 1987-01-15 | 1989-01-16 | Toecksfors Verkstads Ab | Elektronisk brytare innefattande en i ett hoelje roerlig manoeverdel |
| US4832158A (en) | 1987-01-20 | 1989-05-23 | Delaware Capital Formation, Inc. | Elevator system having microprocessor-based door operator |
| US4865030A (en) | 1987-01-21 | 1989-09-12 | American Medical Systems, Inc. | Apparatus for removal of objects from body passages |
| CA1322314C (en) | 1987-02-10 | 1993-09-21 | Paul Mulhauser | Venous cuff applicator |
| US4873977A (en) | 1987-02-11 | 1989-10-17 | Odis L. Avant | Stapling method and apparatus for vesicle-urethral re-anastomosis following retropubic prostatectomy and other tubular anastomosis |
| US4719917A (en) | 1987-02-17 | 1988-01-19 | Minnesota Mining And Manufacturing Company | Surgical staple |
| US5217478A (en) | 1987-02-18 | 1993-06-08 | Linvatec Corporation | Arthroscopic surgical instrument drive system |
| GB8704265D0 (en) | 1987-02-24 | 1987-04-01 | Yang T H | Manual electric tools(1) |
| US4950268A (en) | 1987-02-27 | 1990-08-21 | Xintec Corporation | Laser driver and control circuit |
| DE3807004A1 (de) | 1987-03-02 | 1988-09-15 | Olympus Optical Co | Ultraschall-behandlungsgeraet |
| DE3709067A1 (de) | 1987-03-19 | 1988-09-29 | Ewald Hensler | Medizinisches, insbesondere chirurgisches instrument |
| US5001649A (en) | 1987-04-06 | 1991-03-19 | Alcon Laboratories, Inc. | Linear power control for ultrasonic probe with tuned reactance |
| US4730726A (en) | 1987-04-21 | 1988-03-15 | United States Surgical Corporation | Sealed sterile package |
| US4777780A (en) | 1987-04-21 | 1988-10-18 | United States Surgical Corporation | Method for forming a sealed sterile package |
| SU1443874A1 (ru) | 1987-04-23 | 1988-12-15 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический аппарат дл наложени компрессионных анастомозов |
| JPS63270040A (ja) | 1987-04-28 | 1988-11-08 | Haruo Takase | 外科手術における縫合方法および縫合器 |
| US4941623A (en) | 1987-05-12 | 1990-07-17 | United States Surgical Corporation | Stapling process and device for use on the mesentery of the abdomen |
| US5542949A (en) | 1987-05-14 | 1996-08-06 | Yoon; Inbae | Multifunctional clip applier instrument |
| US4928699A (en) | 1987-05-18 | 1990-05-29 | Olympus Optical Co., Ltd. | Ultrasonic diagnosis device |
| US4838859A (en) | 1987-05-19 | 1989-06-13 | Steve Strassmann | Steerable catheter |
| US5285944A (en) | 1987-05-26 | 1994-02-15 | United States Surgical Corporation | Surgical stapler apparatus |
| US5158222A (en) | 1987-05-26 | 1992-10-27 | United States Surgical Corp. | Surgical stapler apparatus |
| USD309350S (en) | 1987-06-01 | 1990-07-17 | Pfizer Hospital Products Group, Inc. | Surgical sternotomy band tightening instrument |
| US4844068A (en) | 1987-06-05 | 1989-07-04 | Ethicon, Inc. | Bariatric surgical instrument |
| US4761326A (en) | 1987-06-09 | 1988-08-02 | Precision Fabrics Group, Inc. | Foam coated CSR/surgical instrument wrap fabric |
| SU1475611A1 (ru) | 1987-06-10 | 1989-04-30 | Предприятие П/Я А-3697 | Устройство дл соединени трубчатых органов |
| US4930503A (en) | 1987-06-11 | 1990-06-05 | Pruitt J Crayton | Stapling process and device for use on the mesenteries of the abdomen |
| US4848637A (en) | 1987-06-11 | 1989-07-18 | Pruitt J Crayton | Staple device for use on the mesenteries of the abdomen |
| US5027834A (en) | 1987-06-11 | 1991-07-02 | United States Surgical Corporation | Stapling process for use on the mesenteries of the abdomen |
| US4773420A (en) | 1987-06-22 | 1988-09-27 | U.S. Surgical Corporation | Purse string applicator |
| JPS63318824A (ja) | 1987-06-22 | 1988-12-27 | Oki Electric Ind Co Ltd | 容量結合形ロ−タリカプラ |
| DE3723310A1 (de) | 1987-07-15 | 1989-01-26 | John Urquhart | Pharmazeutisches praeparat und verfahren zu seiner herstellung |
| US4817643A (en) | 1987-07-30 | 1989-04-04 | Olson Mary Lou C | Chinese finger cuff dental floss |
| US4821939A (en) | 1987-09-02 | 1989-04-18 | United States Surgical Corporation | Staple cartridge and an anvilless surgical stapler |
| US5158567A (en) | 1987-09-02 | 1992-10-27 | United States Surgical Corporation | One-piece surgical staple |
| SU1509051A1 (ru) | 1987-09-14 | 1989-09-23 | Институт прикладной физики АН СССР | Ушиватель органов |
| GB2209673B (en) | 1987-09-15 | 1991-06-12 | Wallace Ltd H G | Catheter and cannula assembly |
| US5025559A (en) | 1987-09-29 | 1991-06-25 | Food Industry Equipment International, Inc. | Pneumatic control system for meat trimming knife |
| US5015227A (en) | 1987-09-30 | 1991-05-14 | Valleylab Inc. | Apparatus for providing enhanced tissue fragmentation and/or hemostasis |
| US4931047A (en) | 1987-09-30 | 1990-06-05 | Cavitron, Inc. | Method and apparatus for providing enhanced tissue fragmentation and/or hemostasis |
| US4921479A (en) | 1987-10-02 | 1990-05-01 | Joseph Grayzel | Catheter sheath with longitudinal seam |
| US4834096A (en) | 1987-10-26 | 1989-05-30 | Edward Weck Incorporated | Plastic ligating clips |
| US4805617A (en) | 1987-11-05 | 1989-02-21 | Ethicon, Inc. | Surgical fastening systems made from polymeric materials |
| US4830855A (en) | 1987-11-13 | 1989-05-16 | Landec Labs, Inc. | Temperature-controlled active agent dispenser |
| GB2212433B (en) | 1987-11-16 | 1992-07-29 | Canon Kk | A sheet stapler |
| FR2622429A1 (fr) | 1987-11-16 | 1989-05-05 | Blagoveschensky G | Appareil de suture chirurgicale |
| US5106627A (en) | 1987-11-17 | 1992-04-21 | Brown University Research Foundation | Neurological therapy devices |
| US5018515A (en) | 1987-12-14 | 1991-05-28 | The Kendall Company | See through absorbent dressing |
| US5062491A (en) | 1987-12-23 | 1991-11-05 | Honda Giken Kogyo Kabushiki Kaisha | Apparatus for controlling nut runner |
| US4834720A (en) | 1987-12-24 | 1989-05-30 | Becton, Dickinson And Company | Implantable port septum |
| US4951860A (en) | 1987-12-28 | 1990-08-28 | Edward Weck & Co. | Method and apparatus for storing, dispensing and applying surgical staples |
| US4819853A (en) | 1987-12-31 | 1989-04-11 | United States Surgical Corporation | Surgical fastener cartridge |
| US5197970A (en) | 1988-01-15 | 1993-03-30 | United States Surgical Corporation | Surgical clip applicator |
| US5084057A (en) | 1989-07-18 | 1992-01-28 | United States Surgical Corporation | Apparatus and method for applying surgical clips in laparoscopic or endoscopic procedures |
| US5100420A (en) | 1989-07-18 | 1992-03-31 | United States Surgical Corporation | Apparatus and method for applying surgical clips in laparoscopic or endoscopic procedures |
| US5383881A (en) | 1989-07-18 | 1995-01-24 | United States Surgical Corporation | Safety device for use with endoscopic instrumentation |
| GB8800909D0 (en) | 1988-01-15 | 1988-02-17 | Ethicon Inc | Gas powered surgical stapler |
| US5030226A (en) | 1988-01-15 | 1991-07-09 | United States Surgical Corporation | Surgical clip applicator |
| JPH01182196A (ja) | 1988-01-18 | 1989-07-20 | Sanshin Ind Co Ltd | シフト補助装置 |
| DE3805179A1 (de) | 1988-02-19 | 1989-08-31 | Wolf Gmbh Richard | Geraet mit einem rotierend angetriebenen chirurgischen instrument |
| US5060658A (en) | 1988-02-23 | 1991-10-29 | Vance Products Incorporated | Fine-needle aspiration cell sampling apparatus |
| US4860644A (en) | 1988-02-29 | 1989-08-29 | Donaldson Company, Inc. | Articulatable fume exhauster trunk |
| US4862891A (en) | 1988-03-14 | 1989-09-05 | Canyon Medical Products | Device for sequential percutaneous dilation |
| US4827552A (en) | 1988-03-14 | 1989-05-09 | Better Health Concepts, Inc. | Rotary electric toothbrush |
| FR2628488B1 (fr) | 1988-03-14 | 1990-12-28 | Ecia Equip Composants Ind Auto | Attache rapide du type a baionnette perfectionnee |
| US4790314A (en) | 1988-03-16 | 1988-12-13 | Kenneth Weaver | Orifice dilator |
| US4805823A (en) | 1988-03-18 | 1989-02-21 | Ethicon, Inc. | Pocket configuration for internal organ staplers |
| US4856078A (en) | 1988-03-23 | 1989-08-08 | Zenith Electronics Corporation | DC fan speed control |
| FR2631396B1 (fr) | 1988-05-11 | 1991-01-04 | Marot Jacques | Dispositif d'assemblage pour elements demontables ou modulaires |
| US4933800A (en) | 1988-06-03 | 1990-06-12 | Yang Tai Her | Motor overload detection with predetermined rotation reversal |
| US4880015A (en) | 1988-06-03 | 1989-11-14 | Nierman David M | Biopsy forceps |
| GB2220919B (en) | 1988-06-10 | 1992-04-08 | Seikosha Kk | Automatic feeder |
| JPH01313783A (ja) | 1988-06-14 | 1989-12-19 | Philips Kk | 電池の容量計測回路 |
| US5193731A (en) | 1988-07-01 | 1993-03-16 | United States Surgical Corporation | Anastomosis surgical stapling instrument |
| KR920001244Y1 (ko) | 1988-07-06 | 1992-02-20 | 이재희 | 호치키스 |
| US5185717A (en) | 1988-08-05 | 1993-02-09 | Ryoichi Mori | Tamper resistant module having logical elements arranged in multiple layers on the outer surface of a substrate to protect stored information |
| US5444113A (en) | 1988-08-08 | 1995-08-22 | Ecopol, Llc | End use applications of biodegradable polymers |
| ES2011110A6 (es) | 1988-09-02 | 1989-12-16 | Lopez Hervas Pedro | Aparato hidraulico de cuerpo flexible para anastomosis quirurgicas. |
| CA1327424C (en) | 1988-09-16 | 1994-03-08 | James C. Armour | Compact tampon applicator |
| DE3831607A1 (de) | 1988-09-17 | 1990-03-22 | Haubold Kihlberg Gmbh | Durch druckluft betriebenes schlaggeraet mit entlueftungsventil fuer das hauptventil |
| US5024671A (en) | 1988-09-19 | 1991-06-18 | Baxter International Inc. | Microporous vascular graft |
| US5071052A (en) | 1988-09-22 | 1991-12-10 | United States Surgical Corporation | Surgical fastening apparatus with activation lockout |
| US5024652A (en) | 1988-09-23 | 1991-06-18 | Dumenek Vladimir A | Ophthalmological device |
| DE3832528C1 (ru) | 1988-09-24 | 1989-11-16 | Fresenius Ag, 6380 Bad Homburg, De | |
| US4869415A (en) | 1988-09-26 | 1989-09-26 | Ethicon, Inc. | Energy storage means for a surgical stapler |
| US4948327A (en) | 1988-09-28 | 1990-08-14 | Crupi Jr Theodore P | Towing apparatus for coupling to towed vehicle undercarriage |
| CA1308782C (en) | 1988-10-13 | 1992-10-13 | Gyrus Medical Limited | Screening and monitoring instrument |
| JP2625176B2 (ja) | 1988-10-14 | 1997-07-02 | 株式会社テック | 充電式電気かみそり |
| US4892244A (en) | 1988-11-07 | 1990-01-09 | Ethicon, Inc. | Surgical stapler cartridge lockout device |
| US4962681A (en) | 1988-11-09 | 1990-10-16 | Yang Tai Her | Modular manual electric appliance |
| ES2078231T3 (es) | 1988-11-11 | 1995-12-16 | United States Surgical Corp | Instrumento de cirugia. |
| US5197648A (en) | 1988-11-29 | 1993-03-30 | Gingold Bruce S | Surgical stapling apparatus |
| US4915100A (en) | 1988-12-19 | 1990-04-10 | United States Surgical Corporation | Surgical stapler apparatus with tissue shield |
| US4978333A (en) | 1988-12-20 | 1990-12-18 | Valleylab, Inc. | Resonator for surgical handpiece |
| US4986808A (en) | 1988-12-20 | 1991-01-22 | Valleylab, Inc. | Magnetostrictive transducer |
| US5098360A (en) | 1988-12-26 | 1992-03-24 | Tochigifujisangyo Kabushiki Kaisha | Differential gear with limited slip and locking mechanism |
| US5108368A (en) | 1990-01-04 | 1992-04-28 | Pilot Cardiovascular System, Inc. | Steerable medical device |
| US5111987A (en) | 1989-01-23 | 1992-05-12 | Moeinzadeh Manssour H | Semi-disposable surgical stapler |
| US5089606A (en) | 1989-01-24 | 1992-02-18 | Minnesota Mining And Manufacturing Company | Water-insoluble polysaccharide hydrogel foam for medical applications |
| US4919679A (en) | 1989-01-31 | 1990-04-24 | Osteonics Corp. | Femoral stem surgical instrument system |
| US5077506A (en) | 1989-02-03 | 1991-12-31 | Dyonics, Inc. | Microprocessor controlled arthroscopic surgical system |
| US5061269A (en) | 1989-02-07 | 1991-10-29 | Joseph J. Berke | Surgical rongeur power grip structure and method |
| EP0389102B1 (en) | 1989-02-22 | 1995-05-10 | United States Surgical Corporation | Skin fastener |
| US4930674A (en) | 1989-02-24 | 1990-06-05 | Abiomed, Inc. | Surgical stapler |
| US5186711A (en) | 1989-03-07 | 1993-02-16 | Albert Einstein College Of Medicine Of Yeshiva University | Hemostasis apparatus and method |
| US5522817A (en) | 1989-03-31 | 1996-06-04 | United States Surgical Corporation | Absorbable surgical fastener with bone penetrating elements |
| US5062563A (en) | 1989-04-10 | 1991-11-05 | United States Surgical Corporation | Fascia stapler |
| US5104397A (en) | 1989-04-14 | 1992-04-14 | Codman & Shurtleff, Inc. | Multi-position latching mechanism for forceps |
| US5038247A (en) | 1989-04-17 | 1991-08-06 | Delco Electronics Corporation | Method and apparatus for inductive load control with current simulation |
| US5119009A (en) | 1989-04-20 | 1992-06-02 | Motorola, Inc. | Lithium battery deactivator |
| US5164652A (en) | 1989-04-21 | 1992-11-17 | Motorola, Inc. | Method and apparatus for determining battery type and modifying operating characteristics |
| US6200320B1 (en) | 1989-04-24 | 2001-03-13 | Gary Karlin Michelson | Surgical rongeur |
| US5009661A (en) | 1989-04-24 | 1991-04-23 | Michelson Gary K | Protective mechanism for surgical rongeurs |
| DE69027678T2 (de) | 1989-05-03 | 1997-02-20 | Medical Technologies Inc Enter | Instrument zur intraluminalen entlastung von stenosen |
| SU1708312A1 (ru) | 1989-05-16 | 1992-01-30 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический аппарат дл сшивани костной ткани |
| US5222976A (en) | 1989-05-16 | 1993-06-29 | Inbae Yoon | Suture devices particularly useful in endoscopic surgery |
| US5040715B1 (en) | 1989-05-26 | 1994-04-05 | United States Surgical Corp | Apparatus and method for placing staples in laparoscopic or endoscopic procedures |
| US5413268A (en) | 1989-05-26 | 1995-05-09 | United States Surgical Corporation | Apparatus and method for placing stables in laparoscopic or endoscopic procedures |
| US4955959A (en) | 1989-05-26 | 1990-09-11 | United States Surgical Corporation | Locking mechanism for a surgical fastening apparatus |
| US5106008A (en) | 1989-05-26 | 1992-04-21 | United States Surgical Corporation | Locking mechanism for a surgical fastening apparatus |
| US5318221A (en) | 1989-05-26 | 1994-06-07 | United States Surgical Corporation | Apparatus and method for placing staples in laparoscopic or endoscopic procedures |
| US5505363A (en) | 1989-05-26 | 1996-04-09 | United States Surgical Corporation | Surgical staples with plated anvils |
| US5031814A (en) | 1989-05-26 | 1991-07-16 | United States Surgical Corporation | Locking mechanism for surgical fastening apparatus |
| US4978049A (en) | 1989-05-26 | 1990-12-18 | United States Surgical Corporation | Three staple drive member |
| US5100422A (en) | 1989-05-26 | 1992-03-31 | Impra, Inc. | Blood vessel patch |
| US5104400A (en) | 1989-05-26 | 1992-04-14 | Impra, Inc. | Blood vessel patch |
| US5035040A (en) | 1989-05-30 | 1991-07-30 | Duo-Fast Corporation | Hog ring fastener, tool and methods |
| US5151102A (en) | 1989-05-31 | 1992-09-29 | Kyocera Corporation | Blood vessel coagulation/stanching device |
| JPH034831A (ja) | 1989-06-01 | 1991-01-10 | Toshiba Corp | 内視鏡装置 |
| US4946067A (en) | 1989-06-07 | 1990-08-07 | Wickes Manufacturing Company | Inflation valve with actuating lever interlock |
| US4987049A (en) | 1989-07-21 | 1991-01-22 | Konica Corporation | Image-receiving element for heat transfer type dye image |
| US5009222A (en) | 1989-07-24 | 1991-04-23 | Her Ming Long | Diving case massager |
| USD327323S (en) | 1989-08-02 | 1992-06-23 | Ethicon,Inc. | Combination skin stapler and rotating head |
| US6004330A (en) | 1989-08-16 | 1999-12-21 | Medtronic, Inc. | Device or apparatus for manipulating matter |
| US4932960A (en) | 1989-09-01 | 1990-06-12 | United States Surgical Corporation | Absorbable surgical fastener |
| DE3929575A1 (de) | 1989-09-06 | 1991-03-07 | Vascomed Kathetertech | Dilatationskatheter zum erweitern von blutgefaessen mit motorantrieb |
| US5155941A (en) | 1989-09-18 | 1992-10-20 | Olympus Optical Co., Ltd. | Industrial endoscope system having a rotary treatment member |
| US4965709A (en) | 1989-09-25 | 1990-10-23 | General Electric Company | Switching converter with pseudo-resonant DC link |
| US4984564A (en) | 1989-09-27 | 1991-01-15 | Frank Yuen | Surgical retractor device |
| CH677728A5 (ru) | 1989-10-17 | 1991-06-28 | Bieffe Medital Sa | |
| US5264218A (en) | 1989-10-25 | 1993-11-23 | C. R. Bard, Inc. | Modifiable, semi-permeable, wound dressing |
| GB8924806D0 (en) | 1989-11-03 | 1989-12-20 | Neoligaments Ltd | Prosthectic ligament system |
| US5239981A (en) | 1989-11-16 | 1993-08-31 | Effner Biomet Gmbh | Film covering to protect a surgical instrument and an endoscope to be used with the film covering |
| US5176677A (en) | 1989-11-17 | 1993-01-05 | Sonokinetics Group | Endoscopic ultrasonic rotary electro-cauterizing aspirator |
| JPH0737603Y2 (ja) | 1989-11-30 | 1995-08-30 | 晴夫 高瀬 | 外科手術用縫合器 |
| US5098004A (en) | 1989-12-19 | 1992-03-24 | Duo-Fast Corporation | Fastener driving tool |
| JPH0527929Y2 (ru) | 1989-12-19 | 1993-07-16 | ||
| US5156609A (en) | 1989-12-26 | 1992-10-20 | Nakao Naomi L | Endoscopic stapling device and method |
| US5109722A (en) | 1990-01-12 | 1992-05-05 | The Toro Company | Self-detenting transmission shift key |
| US6033378A (en) | 1990-02-02 | 2000-03-07 | Ep Technologies, Inc. | Catheter steering mechanism |
| US5195968A (en) | 1990-02-02 | 1993-03-23 | Ingemar Lundquist | Catheter steering mechanism |
| AU7082091A (en) | 1990-02-13 | 1991-08-15 | Ethicon Inc. | Rotating head skin stapler |
| US5100042A (en) | 1990-03-05 | 1992-03-31 | United States Surgical Corporation | Surgical fastener apparatus |
| US5244462A (en) | 1990-03-15 | 1993-09-14 | Valleylab Inc. | Electrosurgical apparatus |
| US5088997A (en) | 1990-03-15 | 1992-02-18 | Valleylab, Inc. | Gas coagulation device |
| US5217457A (en) | 1990-03-15 | 1993-06-08 | Valleylab Inc. | Enhanced electrosurgical apparatus |
| US5014899A (en) | 1990-03-30 | 1991-05-14 | United States Surgical Corporation | Surgical stapling apparatus |
| SU1722476A1 (ru) | 1990-04-02 | 1992-03-30 | Свердловский Филиал Научно-Производственного Объединения "Фтизиопульмонология" | Устройство дл временной окклюзии трубчатых органов |
| US5005754A (en) | 1990-04-04 | 1991-04-09 | Ethicon, Inc. | Bladder and mandrel for use with surgical stapler |
| US5002543A (en) | 1990-04-09 | 1991-03-26 | Bradshaw Anthony J | Steerable intramedullary fracture reduction device |
| US5343391A (en) | 1990-04-10 | 1994-08-30 | Mushabac David R | Device for obtaining three dimensional contour data and for operating on a patient and related method |
| US5124990A (en) | 1990-05-08 | 1992-06-23 | Caterpillar Inc. | Diagnostic hardware for serial datalink |
| US5613499A (en) | 1990-05-10 | 1997-03-25 | Symbiosis Corporation | Endoscopic biopsy forceps jaws and instruments incorporating same |
| US5431645A (en) | 1990-05-10 | 1995-07-11 | Symbiosis Corporation | Remotely activated endoscopic tools such as endoscopic biopsy forceps |
| US5454378A (en) | 1993-02-11 | 1995-10-03 | Symbiosis Corporation | Biopsy forceps having a detachable proximal handle and distal jaws |
| US5331971A (en) | 1990-05-10 | 1994-07-26 | Symbiosis Corporation | Endoscopic surgical instruments |
| US5086401A (en) | 1990-05-11 | 1992-02-04 | International Business Machines Corporation | Image-directed robotic system for precise robotic surgery including redundant consistency checking |
| AU630294B2 (en) | 1990-05-11 | 1992-10-22 | Sumitomo Bakelite Company Limited | Surgical ultrasonic horn |
| US5290271A (en) | 1990-05-14 | 1994-03-01 | Jernberg Gary R | Surgical implant and method for controlled release of chemotherapeutic agents |
| US5116349A (en) | 1990-05-23 | 1992-05-26 | United States Surgical Corporation | Surgical fastener apparatus |
| US5396635A (en) | 1990-06-01 | 1995-03-07 | Vadem Corporation | Power conservation apparatus having multiple power reduction levels dependent upon the activity of the computer system |
| US5074454A (en) | 1990-06-04 | 1991-12-24 | Peters Ronald L | Surgical stapler |
| US5342395A (en) | 1990-07-06 | 1994-08-30 | American Cyanamid Co. | Absorbable surgical repair devices |
| NL9001564A (nl) | 1990-07-09 | 1992-02-03 | Optische Ind De Oude Delft Nv | In het lichaam brengbare buis voorzien van een manipulator. |
| SU1752361A1 (ru) | 1990-07-10 | 1992-08-07 | Производственное Объединение "Челябинский Тракторный Завод Им.В.И.Ленина" | Хирургический сшивающий аппарат |
| RU2008830C1 (ru) | 1990-07-13 | 1994-03-15 | Константин Алексеевич Додонов | Электрохирургический аппарат |
| US5163598A (en) | 1990-07-23 | 1992-11-17 | Rudolph Peters | Sternum stapling apparatus |
| US5033552A (en) | 1990-07-24 | 1991-07-23 | Hu Cheng Te | Multi-function electric tool |
| US5234447A (en) | 1990-08-28 | 1993-08-10 | Robert L. Kaster | Side-to-end vascular anastomotic staple apparatus |
| US5094247A (en) | 1990-08-31 | 1992-03-10 | Cordis Corporation | Biopsy forceps with handle having a flexible coupling |
| US5389102A (en) | 1990-09-13 | 1995-02-14 | United States Surgical Corporation | Apparatus and method for subcuticular stapling of body tissue |
| US5253793A (en) | 1990-09-17 | 1993-10-19 | United States Surgical Corporation | Apparatus for applying two-part surgical fasteners |
| US5156315A (en) | 1990-09-17 | 1992-10-20 | United States Surgical Corporation | Arcuate apparatus for applying two-part surgical fasteners |
| US5653373A (en) | 1990-09-17 | 1997-08-05 | United States Surgical Corporation | Arcuate apparatus for applying two-part surgical fasteners |
| US5156614A (en) | 1990-09-17 | 1992-10-20 | United States Surgical Corporation | Apparatus for applying two-part surgical fasteners |
| US5080556A (en) | 1990-09-28 | 1992-01-14 | General Electric Company | Thermal seal for a gas turbine spacer disc |
| US5104025A (en) | 1990-09-28 | 1992-04-14 | Ethicon, Inc. | Intraluminal anastomotic surgical stapler with detached anvil |
| EP0484677B2 (en) | 1990-10-05 | 2000-07-05 | United States Surgical Corporation | Apparatus for placing staples in laparoscopic or endoscopic procedures |
| US5088979A (en) | 1990-10-11 | 1992-02-18 | Wilson-Cook Medical Inc. | Method for esophageal invagination and devices useful therein |
| US5042707A (en) | 1990-10-16 | 1991-08-27 | Taheri Syde A | Intravascular stapler, and method of operating same |
| USD330699S (en) | 1990-10-19 | 1992-11-03 | W. W. Cross, Inc. | Insulated staple |
| FR2668361A1 (fr) | 1990-10-30 | 1992-04-30 | Mai Christian | Agrafe et plaque d'osteosynthese a compression dynamique auto-retentive. |
| US5344454A (en) | 1991-07-24 | 1994-09-06 | Baxter International Inc. | Closed porous chambers for implanting tissue in a host |
| US5658307A (en) | 1990-11-07 | 1997-08-19 | Exconde; Primo D. | Method of using a surgical dissector instrument |
| GB9025131D0 (en) | 1990-11-19 | 1991-01-02 | Ofrex Group Holdings Plc | Improvements in or relating to a stapling machine |
| US5129570A (en) | 1990-11-30 | 1992-07-14 | Ethicon, Inc. | Surgical stapler |
| US5470009A (en) | 1990-12-06 | 1995-11-28 | United States Surgical Corporation | Surgical fastening apparatus with locking mechanism |
| CA2055943C (en) | 1990-12-06 | 2003-09-23 | Daniel P. Rodak | Surgical fastening apparatus with locking mechanism |
| USRE36720E (en) | 1990-12-13 | 2000-05-30 | United States Surgical Corporation | Apparatus and method for applying latchless surgical clips |
| US5209747A (en) | 1990-12-13 | 1993-05-11 | Knoepfler Dennis J | Adjustable angle medical forceps |
| US5122156A (en) | 1990-12-14 | 1992-06-16 | United States Surgical Corporation | Apparatus for securement and attachment of body organs |
| US7384417B2 (en) | 1990-12-14 | 2008-06-10 | Cucin Robert L | Air-powered tissue-aspiration instrument system employing curved bipolar-type electro-cauterizing dual cannula assembly |
| US5141144A (en) | 1990-12-18 | 1992-08-25 | Minnesota Mining And Manufacturing Company | Stapler and firing device |
| DE69119607T2 (de) | 1990-12-18 | 1996-11-14 | United States Surgical Corp | Sicherheitsvorrichtung für chirurgische klammersetzgeräte |
| US5083695A (en) | 1990-12-18 | 1992-01-28 | Minnesota Mining And Manufacturing Company | Stapler and firing device |
| CA2055985A1 (en) | 1990-12-20 | 1992-06-21 | Daniel Shichman | Fascia clip |
| US5195505A (en) | 1990-12-27 | 1993-03-23 | United States Surgical Corporation | Surgical retractor |
| EP0566694A1 (en) | 1991-01-09 | 1993-10-27 | EndoMedix Corporation | Method and device for intracorporeal liquidization of tissue and/or intracorporeal fragmentation of calculi during endoscopic surgical procedures |
| US5354303A (en) | 1991-01-09 | 1994-10-11 | Endomedix Corporation | Devices for enclosing, manipulating, debulking and removing tissue through minimal incisions |
| US5222963A (en) | 1991-01-17 | 1993-06-29 | Ethicon, Inc. | Pull-through circular anastomosic intraluminal stapler with absorbable fastener means |
| US5188111A (en) | 1991-01-18 | 1993-02-23 | Catheter Research, Inc. | Device for seeking an area of interest within a body |
| US5425355A (en) | 1991-01-28 | 1995-06-20 | Laserscope | Energy discharging surgical probe and surgical process having distal energy application without concomitant proximal movement |
| US5342385A (en) | 1991-02-05 | 1994-08-30 | Norelli Robert A | Fluid-expandable surgical retractor |
| CA2060635A1 (en) | 1991-02-12 | 1992-08-13 | Keith D'alessio | Bioabsorbable medical implants |
| US5690675A (en) | 1991-02-13 | 1997-11-25 | Fusion Medical Technologies, Inc. | Methods for sealing of staples and other fasteners in tissue |
| US5168605A (en) | 1991-02-15 | 1992-12-08 | Russell Bartlett | Method and apparatus for securing a tarp |
| US5329923A (en) | 1991-02-15 | 1994-07-19 | Lundquist Ingemar H | Torquable catheter |
| DE4104755A1 (de) | 1991-02-15 | 1992-08-20 | Heidmueller Harald | Chirurgisches instrument |
| US5571285A (en) | 1991-02-19 | 1996-11-05 | Ethicon, Inc. | Surgical staple for insertion into tissue |
| AU1102192A (en) | 1991-02-19 | 1992-08-27 | Ethicon Inc. | Surgical staple for insertion into tissue |
| US5324489A (en) | 1991-03-04 | 1994-06-28 | Johnson & Johnson Medical, Inc. | Medical instrument sterilization container with a contaminant plug |
| US5219111A (en) | 1991-03-11 | 1993-06-15 | Ethicon, Inc. | Pneumatically actuated linear stapling device |
| US5445155A (en) | 1991-03-13 | 1995-08-29 | Scimed Life Systems Incorporated | Intravascular imaging apparatus and methods for use and manufacture |
| US5438997A (en) | 1991-03-13 | 1995-08-08 | Sieben; Wayne | Intravascular imaging apparatus and methods for use and manufacture |
| US5353798A (en) | 1991-03-13 | 1994-10-11 | Scimed Life Systems, Incorporated | Intravascular imaging apparatus and methods for use and manufacture |
| CA2061885A1 (en) | 1991-03-14 | 1992-09-15 | David T. Green | Approximating apparatus for surgical jaw structure |
| US5336232A (en) | 1991-03-14 | 1994-08-09 | United States Surgical Corporation | Approximating apparatus for surgical jaw structure and method of using the same |
| JP2760666B2 (ja) | 1991-03-15 | 1998-06-04 | 株式会社東芝 | Pwmコンバ―タの制御方法及び装置 |
| US5170925A (en) | 1991-03-18 | 1992-12-15 | Ethicon, Inc. | Laparoscopic stapler with knife means |
| US5217453A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| SU1814161A1 (en) | 1991-03-19 | 1993-05-07 | Penzen Nii Elektronno Mekh Pri | Electric motor |
| USD338729S (en) | 1991-03-22 | 1993-08-24 | Ethicon, Inc. | Linear surgical stapler |
| US5171253A (en) | 1991-03-22 | 1992-12-15 | Klieman Charles H | Velcro-like closure system with absorbable suture materials for absorbable hemostatic clips and surgical strips |
| US5065929A (en) | 1991-04-01 | 1991-11-19 | Ethicon, Inc. | Surgical stapler with locking means |
| US5171249A (en) | 1991-04-04 | 1992-12-15 | Ethicon, Inc. | Endoscopic multiple ligating clip applier |
| US5171247A (en) | 1991-04-04 | 1992-12-15 | Ethicon, Inc. | Endoscopic multiple ligating clip applier with rotating shaft |
| US5470010A (en) | 1991-04-04 | 1995-11-28 | Ethicon, Inc. | Multiple fire endoscopic stapling mechanism |
| US5246156A (en) | 1991-09-12 | 1993-09-21 | Ethicon, Inc. | Multiple fire endoscopic stapling mechanism |
| US5359993A (en) | 1992-12-31 | 1994-11-01 | Symbiosis Corporation | Apparatus for counting the number of times a medical instrument has been used |
| JPH05226945A (ja) | 1991-04-09 | 1993-09-03 | Olympus Optical Co Ltd | 電圧電流変換回路及び該回路を有する差動増幅回路 |
| JPH05208014A (ja) | 1991-04-10 | 1993-08-20 | Olympus Optical Co Ltd | 処置具 |
| US5297714A (en) | 1991-04-17 | 1994-03-29 | Ethicon, Inc. | Surgical staple with modified "B" shaped configuration |
| US5339799A (en) | 1991-04-23 | 1994-08-23 | Olympus Optical Co., Ltd. | Medical system for reproducing a state of contact of the treatment section in the operation unit |
| US5338317A (en) | 1991-05-03 | 1994-08-16 | Vance Products Incorporated | Rotational surgical instrument handle |
| US5257713A (en) | 1991-05-07 | 1993-11-02 | United States Surgical Corporation | Surgical fastening device |
| AU671685B2 (en) | 1991-05-14 | 1996-09-05 | United States Surgical Corporation | Surgical stapler with spent cartridge sensing and lockout means |
| US5413267A (en) | 1991-05-14 | 1995-05-09 | United States Surgical Corporation | Surgical stapler with spent cartridge sensing and lockout means |
| US5137198A (en) | 1991-05-16 | 1992-08-11 | Ethicon, Inc. | Fast closure device for linear surgical stapling instrument |
| DE4116343A1 (de) | 1991-05-18 | 1992-11-19 | Bosch Gmbh Robert | Handgefuehrtes elektrowerkzeug, insbesondere bohrmaschine |
| US5181514A (en) | 1991-05-21 | 1993-01-26 | Hewlett-Packard Company | Transducer positioning system |
| JP2581082Y2 (ja) | 1991-05-24 | 1998-09-17 | 三洋電機株式会社 | 電池装置 |
| FI93607C (fi) | 1991-05-24 | 1995-05-10 | John Koivukangas | Leikkaustoimenpidelaite |
| US5370134A (en) | 1991-05-29 | 1994-12-06 | Orgin Medsystems, Inc. | Method and apparatus for body structure manipulation and dissection |
| US5527264A (en) | 1991-05-29 | 1996-06-18 | Origin Medsystem, Inc. | Methods of using endoscopic inflatable retraction devices |
| US5361752A (en) | 1991-05-29 | 1994-11-08 | Origin Medsystems, Inc. | Retraction apparatus and methods for endoscopic surgery |
| US5258010A (en) | 1991-05-30 | 1993-11-02 | United States Surgical Corporation | Anvilless surgical apparatus for applying surgical fasteners |
| US5190517A (en) | 1991-06-06 | 1993-03-02 | Valleylab Inc. | Electrosurgical and ultrasonic surgical system |
| US5221036A (en) | 1991-06-11 | 1993-06-22 | Haruo Takase | Surgical stapler |
| US5190560A (en) | 1991-06-20 | 1993-03-02 | Woods John B | Instrument for ligation and castration |
| US5262678A (en) | 1991-06-21 | 1993-11-16 | Lutron Electronics Co., Inc. | Wallbox-mountable switch and dimmer |
| US5207697A (en) | 1991-06-27 | 1993-05-04 | Stryker Corporation | Battery powered surgical handpiece |
| US5268622A (en) | 1991-06-27 | 1993-12-07 | Stryker Corporation | DC powered surgical handpiece having a motor control circuit |
| US5735290A (en) | 1993-02-22 | 1998-04-07 | Heartport, Inc. | Methods and systems for performing thoracoscopic coronary bypass and other procedures |
| US5176688A (en) | 1991-07-17 | 1993-01-05 | Perinchery Narayan | Stone extractor and method |
| US5190657A (en) | 1991-07-22 | 1993-03-02 | Lydall, Inc. | Blood filter and method of filtration |
| US5261877A (en) | 1991-07-22 | 1993-11-16 | Dow Corning Wright | Method of performing a thrombectomy procedure |
| US5173133A (en) | 1991-07-23 | 1992-12-22 | United States Surgical Corporation | Method for annealing stapler anvils |
| US5187422A (en) | 1991-07-31 | 1993-02-16 | Stryker Corporation | Charger for batteries of different type |
| US5391180A (en) | 1991-08-05 | 1995-02-21 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| US5383888A (en) | 1992-02-12 | 1995-01-24 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| US5490819A (en) | 1991-08-05 | 1996-02-13 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| AU2063592A (en) | 1991-08-09 | 1993-02-11 | Emerson Electric Co. | Cordless power tool |
| US5282829A (en) | 1991-08-15 | 1994-02-01 | United States Surgical Corporation | Hollow body implants |
| US5302148A (en) | 1991-08-16 | 1994-04-12 | Ted Heinz | Rotatable demountable blocks of several shapes on a central elastic anchor |
| US5350104A (en) | 1991-08-23 | 1994-09-27 | Ethicon, Inc. | Sealing means for endoscopic surgical anastomosis stapling instrument |
| US5333773A (en) | 1991-08-23 | 1994-08-02 | Ethicon, Inc. | Sealing means for endoscopic surgical anastomosis stapling instrument |
| GR920100358A (el) | 1991-08-23 | 1993-06-07 | Ethicon Inc | Οργανο συρραφής χειρουργικής αναστομώσεως. |
| US5259835A (en) | 1991-08-29 | 1993-11-09 | Tri-Point Medical L.P. | Wound closure means and method using flowable adhesive |
| US5263973A (en) | 1991-08-30 | 1993-11-23 | Cook Melvin S | Surgical stapling method |
| US5142932A (en) | 1991-09-04 | 1992-09-01 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Flexible robotic arm |
| US5200280A (en) | 1991-09-05 | 1993-04-06 | Black & Decker Inc. | Terminal cover for a battery pack |
| IT1251206B (it) | 1991-09-18 | 1995-05-04 | Magneti Marelli Spa | Impianto elettrico di un autoveicolo, comprendente almeno un supercondensatore. |
| US5476479A (en) | 1991-09-26 | 1995-12-19 | United States Surgical Corporation | Handle for endoscopic surgical instruments and jaw structure |
| CA2075319C (en) | 1991-09-26 | 1998-06-30 | Ernie Aranyi | Handle for surgical instruments |
| US5431654A (en) | 1991-09-30 | 1995-07-11 | Stryker Corporation | Bone cement injector |
| US5220269A (en) | 1991-10-04 | 1993-06-15 | Innova Electronics Corporation | Power supply unit |
| US5369565A (en) | 1991-10-04 | 1994-11-29 | Innova Electronics Corp. | Modular power supply system |
| JP2817749B2 (ja) | 1991-10-07 | 1998-10-30 | 三菱電機株式会社 | レーザ加工装置 |
| US5292503A (en) | 1991-10-09 | 1994-03-08 | General Electric Company | Stable water in oil emulsions |
| US5697909A (en) | 1992-01-07 | 1997-12-16 | Arthrocare Corporation | Methods and apparatus for surgical cutting |
| USD348930S (en) | 1991-10-11 | 1994-07-19 | Ethicon, Inc. | Endoscopic stapler |
| USD347474S (en) | 1991-10-11 | 1994-05-31 | Ethicon, Inc. | Endoscopic stapler |
| US5275608A (en) | 1991-10-16 | 1994-01-04 | Implemed, Inc. | Generic endoscopic instrument |
| CA2075141C (en) | 1991-10-17 | 1998-06-30 | Donald A. Morin | Anvil for surgical staplers |
| US5497933A (en) | 1991-10-18 | 1996-03-12 | United States Surgical Corporation | Apparatus and method for applying surgical staples to attach an object to body tissue |
| US5397046A (en) | 1991-10-18 | 1995-03-14 | United States Surgical Corporation | Lockout mechanism for surgical apparatus |
| US5366134A (en) | 1991-10-18 | 1994-11-22 | United States Surgical Corporation | Surgical fastening apparatus |
| US5307976A (en) | 1991-10-18 | 1994-05-03 | Ethicon, Inc. | Linear stapling mechanism with cutting means |
| US5326013A (en) | 1991-10-18 | 1994-07-05 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5431322A (en) | 1991-10-18 | 1995-07-11 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5443198A (en) | 1991-10-18 | 1995-08-22 | United States Surgical Corporation | Surgical fastener applying apparatus |
| CA2078794C (en) | 1991-10-18 | 1998-10-06 | Frank J. Viola | Locking device for an apparatus for applying surgical fasteners |
| US5478003A (en) | 1991-10-18 | 1995-12-26 | United States Surgical Corporation | Surgical apparatus |
| AU660712B2 (en) | 1991-10-18 | 1995-07-06 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US5364001A (en) | 1991-10-18 | 1994-11-15 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5308576A (en) | 1991-10-18 | 1994-05-03 | United States Surgical Corporation | Injection molded anvils |
| US5474223A (en) | 1991-10-18 | 1995-12-12 | United States Surgical Corporation | Surgical fastener applying apparatus |
| DE69217808T2 (de) | 1991-10-18 | 1997-07-24 | United States Surgical Corp | Gerät zum Anbringen von chirurgischen Befestigungen |
| US5395312A (en) | 1991-10-18 | 1995-03-07 | Desai; Ashvin | Surgical tool |
| AU657364B2 (en) | 1991-10-18 | 1995-03-09 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5289963A (en) | 1991-10-18 | 1994-03-01 | United States Surgical Corporation | Apparatus and method for applying surgical staples to attach an object to body tissue |
| US5332142A (en) | 1991-10-18 | 1994-07-26 | Ethicon, Inc. | Linear stapling mechanism with cutting means |
| US5312023A (en) | 1991-10-18 | 1994-05-17 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| CA2075227C (en) | 1991-10-18 | 2004-02-10 | Robert J. Geiste | Surgical fastening apparatus with shipping interlock |
| US5711472A (en) | 1991-10-18 | 1998-01-27 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5356064A (en) | 1991-10-18 | 1994-10-18 | United States Surgical Corporation | Apparatus and method for applying surgical staples to attach an object to body tissue |
| US5579978A (en) | 1991-10-18 | 1996-12-03 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US6250532B1 (en) | 1991-10-18 | 2001-06-26 | United States Surgical Corporation | Surgical stapling apparatus |
| EP0540461A1 (de) | 1991-10-29 | 1993-05-05 | SULZER Medizinaltechnik AG | Steriles Punktiergerät für Blutgefässe mit nichtsteriler Ultraschallsonde und Vorrichtung zum Vorbereiten des Geräts |
| US5197649A (en) | 1991-10-29 | 1993-03-30 | The Trustees Of Columbia University In The City Of New York | Gastrointestinal endoscoptic stapler |
| EP0541950B1 (en) | 1991-10-30 | 2004-03-10 | Sherwood Services AG | Stapling device comprising malleable, bioabsorbable, plastic staples |
| US5240163A (en) | 1991-10-30 | 1993-08-31 | American Cyanamid Company | Linear surgical stapling instrument |
| US5350400A (en) | 1991-10-30 | 1994-09-27 | American Cyanamid Company | Malleable, bioabsorbable, plastic staple; and method and apparatus for deforming such staple |
| US5290310A (en) | 1991-10-30 | 1994-03-01 | Howmedica, Inc. | Hemostatic implant introducer |
| US5531744A (en) | 1991-11-01 | 1996-07-02 | Medical Scientific, Inc. | Alternative current pathways for bipolar surgical cutting tool |
| WO1993008754A1 (en) | 1991-11-01 | 1993-05-13 | Medical Scientific, Inc. | Electrosurgical cutting tool |
| US5665085A (en) | 1991-11-01 | 1997-09-09 | Medical Scientific, Inc. | Electrosurgical cutting tool |
| JPH05123325A (ja) | 1991-11-01 | 1993-05-21 | Olympus Optical Co Ltd | 処置具 |
| US5713896A (en) | 1991-11-01 | 1998-02-03 | Medical Scientific, Inc. | Impedance feedback electrosurgical system |
| US5741271A (en) | 1991-11-05 | 1998-04-21 | Nakao; Naomi L. | Surgical retrieval assembly and associated method |
| US5395034A (en) | 1991-11-07 | 1995-03-07 | American Cyanamid Co. | Linear surgical stapling instrument |
| US5383874A (en) | 1991-11-08 | 1995-01-24 | Ep Technologies, Inc. | Systems for identifying catheters and monitoring their use |
| WO1993008755A1 (en) | 1991-11-08 | 1993-05-13 | Ep Technologies, Inc. | Ablation electrode with insulated temperature sensing elements |
| RU2069981C1 (ru) | 1991-11-15 | 1996-12-10 | Ялмар Яковлевич Татти | Хирургический сшивающий аппарат |
| US5476481A (en) | 1991-11-15 | 1995-12-19 | Robert Ley | Electrotherapy apparatus with superimposed AC fields |
| US5242456A (en) | 1991-11-21 | 1993-09-07 | Kensey Nash Corporation | Apparatus and methods for clamping tissue and reflecting the same |
| US5173053A (en) | 1991-11-26 | 1992-12-22 | Caterpillar Inc. | Electrical connector for an electromechanical device |
| US5439467A (en) | 1991-12-03 | 1995-08-08 | Vesica Medical, Inc. | Suture passer |
| US5458579A (en) | 1991-12-31 | 1995-10-17 | Technalytics, Inc. | Mechanical trocar insertion apparatus |
| WO1993013704A1 (en) | 1992-01-09 | 1993-07-22 | Endomedix Corporation | Bi-directional miniscope |
| US5383880A (en) | 1992-01-17 | 1995-01-24 | Ethicon, Inc. | Endoscopic surgical system with sensing means |
| US5433721A (en) * | 1992-01-17 | 1995-07-18 | Ethicon, Inc. | Endoscopic instrument having a torsionally stiff drive shaft for applying fasteners to tissue |
| DE69331789T2 (de) | 1992-01-21 | 2003-03-13 | Stanford Res Inst Int | Endoskopisches chirurgisches Instrument |
| EP0623008A1 (en) | 1992-01-21 | 1994-11-09 | Valleylab, Inc. | Electrosurgical control for a trocar |
| US5631973A (en) | 1994-05-05 | 1997-05-20 | Sri International | Method for telemanipulation with telepresence |
| US6963792B1 (en) | 1992-01-21 | 2005-11-08 | Sri International | Surgical method |
| US5284128A (en) | 1992-01-24 | 1994-02-08 | Applied Medical Resources Corporation | Surgical manipulator |
| EP0625077B1 (en) | 1992-02-07 | 1997-07-09 | Valleylab, Inc. | Ultrasonic surgical apparatus |
| US5271543A (en) | 1992-02-07 | 1993-12-21 | Ethicon, Inc. | Surgical anastomosis stapling instrument with flexible support shaft and anvil adjusting mechanism |
| WO1993015648A1 (en) | 1992-02-07 | 1993-08-19 | Wilk Peter J | Endoscope with disposable insertion member |
| US5348259A (en) | 1992-02-10 | 1994-09-20 | Massachusetts Institute Of Technology | Flexible, articulable column |
| US5514157A (en) | 1992-02-12 | 1996-05-07 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| US5350355A (en) | 1992-02-14 | 1994-09-27 | Automated Medical Instruments, Inc. | Automated surgical instrument |
| US5626595A (en) | 1992-02-14 | 1997-05-06 | Automated Medical Instruments, Inc. | Automated surgical instrument |
| EP0625891B1 (en) | 1992-02-14 | 1997-01-08 | Board Of Regents The University Of Texas System | Multi-phase bioerodible implant/carrier and method of manufacturing and using same |
| US5261922A (en) | 1992-02-20 | 1993-11-16 | Hood Larry L | Improved ultrasonic knife |
| US5282806A (en) | 1992-08-21 | 1994-02-01 | Habley Medical Technology Corporation | Endoscopic surgical instrument having a removable, rotatable, end effector assembly |
| CA2089999A1 (en) | 1992-02-24 | 1993-08-25 | H. Jonathan Tovey | Resilient arm mesh deployer |
| US5658238A (en) | 1992-02-25 | 1997-08-19 | Olympus Optical Co., Ltd. | Endoscope apparatus capable of being switched to a mode in which a curvature operating lever is returned and to a mode in which the curvature operating lever is not returned |
| US5282826A (en) | 1992-03-05 | 1994-02-01 | Quadtello Corporation | Dissector for endoscopic and laparoscopic use |
| US5352235A (en) | 1992-03-16 | 1994-10-04 | Tibor Koros | Laparoscopic grasper and cutter |
| GR1002537B (el) | 1992-03-30 | 1997-01-27 | Ethicon Inc. | Χειρουργικος συνδετηρας για εισαγωγη εντος ιστου. |
| US5281216A (en) | 1992-03-31 | 1994-01-25 | Valleylab, Inc. | Electrosurgical bipolar treating apparatus |
| US5484095A (en) | 1992-03-31 | 1996-01-16 | United States Surgical Corporation | Apparatus for endoscopically applying staples individually to body tissue |
| US5223675A (en) | 1992-04-02 | 1993-06-29 | Taft Anthony W | Cable fastener |
| DE4211230C2 (de) | 1992-04-03 | 1997-06-26 | Ivoclar Ag | Wiederaufladbares Lichthärtgerät |
| US5314424A (en) | 1992-04-06 | 1994-05-24 | United States Surgical Corporation | Surgical instrument locking mechanism |
| US5411481A (en) | 1992-04-08 | 1995-05-02 | American Cyanamid Co. | Surgical purse string suturing instrument and method |
| FR2689749B1 (fr) | 1992-04-13 | 1994-07-22 | Toledano Haviv | Instrument d'agrafage chirurgical flexible pour anastomoses circulaires. |
| US5672945A (en) | 1992-04-13 | 1997-09-30 | Smith & Nephew Endoscopy, Inc. | Motor controlled surgical system and method having self clearing motor control |
| US5314466A (en) | 1992-04-13 | 1994-05-24 | Ep Technologies, Inc. | Articulated unidirectional microwave antenna systems for cardiac ablation |
| US5602449A (en) | 1992-04-13 | 1997-02-11 | Smith & Nephew Endoscopy, Inc. | Motor controlled surgical system and method having positional control |
| US5563481A (en) | 1992-04-13 | 1996-10-08 | Smith & Nephew Endoscopy, Inc. | Brushless motor |
| WO1993020886A1 (en) | 1992-04-13 | 1993-10-28 | Ep Technologies, Inc. | Articulated systems for cardiac ablation |
| US5236440A (en) | 1992-04-14 | 1993-08-17 | American Cyanamid Company | Surgical fastener |
| DK50592A (da) | 1992-04-15 | 1993-10-16 | Jane Noeglebaek Christensen | Baekkenbundstraeningsapparat |
| US5355897A (en) | 1992-04-16 | 1994-10-18 | Ethicon, Inc. | Method of performing a pyloroplasty/pylorectomy using a stapler having a shield |
| US5603318A (en) | 1992-04-21 | 1997-02-18 | University Of Utah Research Foundation | Apparatus and method for photogrammetric surgical localization |
| US5417203A (en) | 1992-04-23 | 1995-05-23 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| US5443463A (en) | 1992-05-01 | 1995-08-22 | Vesta Medical, Inc. | Coagulating forceps |
| US5261135A (en) | 1992-05-01 | 1993-11-16 | Mitchell Brent R | Screw gun router for drywall installation |
| AU662407B2 (en) | 1992-05-06 | 1995-08-31 | Ethicon Inc. | Endoscopic ligation and division instrument |
| US5242457A (en) | 1992-05-08 | 1993-09-07 | Ethicon, Inc. | Surgical instrument and staples for applying purse string sutures |
| US5484451A (en) | 1992-05-08 | 1996-01-16 | Ethicon, Inc. | Endoscopic surgical instrument and staples for applying purse string sutures |
| US5211655A (en) | 1992-05-08 | 1993-05-18 | Hasson Harrith M | Multiple use forceps for endoscopy |
| US5258007A (en) | 1992-05-14 | 1993-11-02 | Robert F. Spetzler | Powered surgical instrument |
| US5389098A (en) | 1992-05-19 | 1995-02-14 | Olympus Optical Co., Ltd. | Surgical device for stapling and/or fastening body tissues |
| JPH0630945A (ja) | 1992-05-19 | 1994-02-08 | Olympus Optical Co Ltd | 縫合器 |
| US5344059A (en) | 1992-05-19 | 1994-09-06 | United States Surgical Corporation | Surgical apparatus and anvil delivery system therefor |
| US5405378A (en) | 1992-05-20 | 1995-04-11 | Strecker; Ernst P. | Device with a prosthesis implantable in the body of a patient |
| US5197966A (en) | 1992-05-22 | 1993-03-30 | Sommerkamp T Greg | Radiodorsal buttress blade plate implant for repairing distal radius fractures |
| US5192288A (en) | 1992-05-26 | 1993-03-09 | Origin Medsystems, Inc. | Surgical clip applier |
| US5906625A (en) | 1992-06-04 | 1999-05-25 | Olympus Optical Co., Ltd. | Tissue-fixing surgical instrument, tissue-fixing device, and method of fixing tissue |
| US5658300A (en) | 1992-06-04 | 1997-08-19 | Olympus Optical Co., Ltd. | Tissue fixing surgical instrument, tissue-fixing device, and method of fixing tissues |
| JPH0647050A (ja) | 1992-06-04 | 1994-02-22 | Olympus Optical Co Ltd | 組織縫合結紮器 |
| US5236424A (en) | 1992-06-05 | 1993-08-17 | Cardiac Pathways Corporation | Catheter with retractable cannula for delivering a plurality of chemicals |
| JP3442423B2 (ja) | 1992-06-05 | 2003-09-02 | 積水化学工業株式会社 | 簡易コルセット及び簡易コルセット貼付体 |
| US5361902A (en) | 1992-06-05 | 1994-11-08 | Leonard Bloom | Surgical blade dispenser and disposal system for use during an operating procedure and method thereof |
| US5389072A (en) | 1992-06-05 | 1995-02-14 | Mircor Biomedical, Inc. | Mechanism for manipulating a tool and flexible elongate device using the same |
| US5279416A (en) | 1992-06-05 | 1994-01-18 | Edward Weck Incorporated | Ligating device cartridge with separable retainer |
| US7928281B2 (en) | 1992-06-19 | 2011-04-19 | Arizant Technologies Llc | Wound covering |
| US5263629A (en) | 1992-06-29 | 1993-11-23 | Ethicon, Inc. | Method and apparatus for achieving hemostasis along a staple line |
| US5221281A (en) | 1992-06-30 | 1993-06-22 | Valleylab Inc. | Electrosurgical tubular trocar |
| US5258012A (en) | 1992-06-30 | 1993-11-02 | Ethicon, Inc. | Surgical fasteners |
| US5341807A (en) | 1992-06-30 | 1994-08-30 | American Cardiac Ablation Co., Inc. | Ablation catheter positioning system |
| US5258009A (en) | 1992-06-30 | 1993-11-02 | American Cyanamid Company | Malleable, bioabsorbable,plastic staple having a knotted configuration; and method and apparatus for deforming such staple |
| US5368606A (en) | 1992-07-02 | 1994-11-29 | Marlow Surgical Technologies, Inc. | Endoscopic instrument system |
| JP3217463B2 (ja) | 1992-07-07 | 2001-10-09 | 住友大阪セメント株式会社 | ファイバー端面干渉計 |
| US5222975A (en) | 1992-07-13 | 1993-06-29 | Lawrence Crainich | Surgical staples |
| US5360428A (en) | 1992-07-22 | 1994-11-01 | Hutchinson Jr William B | Laparoscopic instrument with electrical cutting wires |
| US5313967A (en) | 1992-07-24 | 1994-05-24 | Medtronic, Inc. | Helical guidewire |
| US5511564A (en) | 1992-07-29 | 1996-04-30 | Valleylab Inc. | Laparoscopic stretching instrument and associated method |
| US5258008A (en) | 1992-07-29 | 1993-11-02 | Wilk Peter J | Surgical stapling device and associated method |
| US5330486A (en) | 1992-07-29 | 1994-07-19 | Wilk Peter J | Laparoscopic or endoscopic anastomosis technique and associated instruments |
| US5657429A (en) | 1992-08-10 | 1997-08-12 | Computer Motion, Inc. | Automated endoscope system optimal positioning |
| US5524180A (en) | 1992-08-10 | 1996-06-04 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5762458A (en) | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| CA2142338C (en) | 1992-08-14 | 1999-11-30 | John Stuart Bladen | Position location system |
| US5375588A (en) | 1992-08-17 | 1994-12-27 | Yoon; Inbae | Method and apparatus for use in endoscopic procedures |
| US5291133A (en) | 1992-08-24 | 1994-03-01 | General Motors Corporation | Multi-bit encoder signal conditioning circuit having common mode disturbance compensation |
| US5308358A (en) | 1992-08-25 | 1994-05-03 | Bond Albert L | Rigid-shaft surgical instruments that can be disassembled for improved cleaning |
| DE4228909C2 (de) | 1992-08-28 | 1994-06-09 | Ethicon Gmbh | Endoskopisches Instrument zur Applizierung von Ligaturbindern und Ligaturbinder |
| US5308353A (en) | 1992-08-31 | 1994-05-03 | Merrimac Industries, Inc. | Surgical suturing device |
| DE69321963T2 (de) | 1992-09-01 | 1999-04-01 | Adair Edwin Lloyd | Sterilisierbares endoskop mit einer trennbaren wegwerfbaren rohranordnung |
| US5630782A (en) | 1992-09-01 | 1997-05-20 | Adair; Edwin L. | Sterilizable endoscope with separable auxiliary assembly |
| CA2104345A1 (en) | 1992-09-02 | 1994-03-03 | David T. Green | Surgical clamp apparatus |
| US5368215A (en) | 1992-09-08 | 1994-11-29 | United States Surgical Corporation | Surgical apparatus and detachable anvil rod therefor |
| US5285381A (en) | 1992-09-09 | 1994-02-08 | Vanderbilt University | Multiple control-point control system and method of use |
| US5772597A (en) | 1992-09-14 | 1998-06-30 | Sextant Medical Corporation | Surgical tool end effector |
| CA2100532C (en) | 1992-09-21 | 2004-04-20 | David T. Green | Device for applying a meniscal staple |
| US5485952A (en) | 1992-09-23 | 1996-01-23 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US5465819A (en) | 1992-09-29 | 1995-11-14 | Borg-Warner Automotive, Inc. | Power transmitting assembly |
| US5281400A (en) | 1992-09-30 | 1994-01-25 | Carr Metal Products | Plastic autoclave tray and lid combination |
| US5423471A (en) | 1992-10-02 | 1995-06-13 | United States Surgical Corporation | Apparatus for applying two-part surgical fasteners in laparoscopic or endoscopic procedures |
| US5573169A (en) | 1992-10-02 | 1996-11-12 | United States Surgical Corporation | Apparatus for applying two-part surgical fasteners in laparoscopic or endoscopic procedures |
| US5383460A (en) | 1992-10-05 | 1995-01-24 | Cardiovascular Imaging Systems, Inc. | Method and apparatus for ultrasound imaging and atherectomy |
| US5569161A (en) | 1992-10-08 | 1996-10-29 | Wendell V. Ebling | Endoscope with sterile sleeve |
| US5374277A (en) | 1992-10-09 | 1994-12-20 | Ethicon, Inc. | Surgical instrument |
| US5330502A (en) | 1992-10-09 | 1994-07-19 | Ethicon, Inc. | Rotational endoscopic mechanism with jointed drive mechanism |
| US5381943A (en) | 1992-10-09 | 1995-01-17 | Ethicon, Inc. | Endoscopic surgical stapling instrument with pivotable and rotatable staple cartridge |
| US5601224A (en) | 1992-10-09 | 1997-02-11 | Ethicon, Inc. | Surgical instrument |
| US5662662A (en) | 1992-10-09 | 1997-09-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument and method |
| US5286253A (en) | 1992-10-09 | 1994-02-15 | Linvatec Corporation | Angled rotating surgical instrument |
| US5431323A (en) | 1992-10-09 | 1995-07-11 | Ethicon, Inc. | Endoscopic surgical instrument with pivotable and rotatable staple cartridge |
| US5626587A (en) | 1992-10-09 | 1997-05-06 | Ethicon Endo-Surgery, Inc. | Method for operating a surgical instrument |
| US5222945A (en) | 1992-10-13 | 1993-06-29 | Basnight Robert W | Hypodermic syringe with protective shield |
| US5350391A (en) | 1992-10-19 | 1994-09-27 | Benedetto Iacovelli | Laparoscopic instruments |
| US5718548A (en) | 1992-10-20 | 1998-02-17 | Clipmaster Corporation Pty Ltd | Staple assembly |
| CA2108605A1 (en) | 1992-10-21 | 1994-04-22 | Nagabhushanam Totakura | Bioabsorbable foam pledget |
| US5309927A (en) | 1992-10-22 | 1994-05-10 | Ethicon, Inc. | Circular stapler tissue retention spring method |
| US5578052A (en) | 1992-10-27 | 1996-11-26 | Koros; Tibor | Insulated laparoscopic grasper with removable shaft |
| US5259366A (en) | 1992-11-03 | 1993-11-09 | Boris Reydel | Method of using a catheter-sleeve assembly for an endoscope |
| US5409498A (en) | 1992-11-05 | 1995-04-25 | Ethicon, Inc. | Rotatable articulating endoscopic fastening instrument |
| GB2272159A (en) | 1992-11-10 | 1994-05-11 | Andreas G Constantinides | Surgical/diagnostic aid |
| IL103737A (en) | 1992-11-13 | 1997-02-18 | Technion Res & Dev Foundation | Stapler device particularly useful in medical suturing |
| US5441483A (en) | 1992-11-16 | 1995-08-15 | Avitall; Boaz | Catheter deflection control |
| US5389104A (en) | 1992-11-18 | 1995-02-14 | Symbiosis Corporation | Arthroscopic surgical instruments |
| US5346504A (en) | 1992-11-19 | 1994-09-13 | Ethicon, Inc. | Intraluminal manipulator with a head having articulating links |
| US5372602A (en) | 1992-11-30 | 1994-12-13 | Device For Vascular Intervention, Inc. | Method of removing plaque using catheter cutter with torque control |
| WO1994012108A1 (en) | 1992-11-30 | 1994-06-09 | Valleylab, Inc. | An ultrasonic surgical handpiece and an energy initiator to maintain the vibration and linear dynamics |
| US5769640A (en) | 1992-12-02 | 1998-06-23 | Cybernet Systems Corporation | Method and system for simulating medical procedures including virtual reality and control method and system for use therein |
| US5333422A (en) | 1992-12-02 | 1994-08-02 | The United States Of America As Represented By The United States Department Of Energy | Lightweight extendable and retractable pole |
| US5400267A (en) | 1992-12-08 | 1995-03-21 | Hemostatix Corporation | Local in-device memory feature for electrically powered medical equipment |
| US5356006A (en) | 1992-12-16 | 1994-10-18 | Ethicon, Inc. | Sterile package for surgical devices |
| US5330487A (en) | 1992-12-17 | 1994-07-19 | Tfi Acquistion Corp. | Drive mechanism for surgical instruments |
| JP3042816B2 (ja) | 1992-12-18 | 2000-05-22 | 矢崎総業株式会社 | 給電コネクタ |
| US5807393A (en) | 1992-12-22 | 1998-09-15 | Ethicon Endo-Surgery, Inc. | Surgical tissue treating device with locking mechanism |
| US5558671A (en) | 1993-07-22 | 1996-09-24 | Yates; David C. | Impedance feedback monitor for electrosurgical instrument |
| US5403312A (en) | 1993-07-22 | 1995-04-04 | Ethicon, Inc. | Electrosurgical hemostatic device |
| FR2699806B1 (fr) | 1992-12-30 | 1995-03-24 | Duthoit Francois | Instrument, destiné notamment à permettre l'extraction de tronçons veineux pathologiques tels que des varices. |
| EP0604789A1 (de) | 1992-12-31 | 1994-07-06 | K. Widmann Ag | Für chirurgische Zwecke bestimmtes Klemmelement zur Herstellung einer Tabaksbeutelnaht |
| US5313935A (en) | 1992-12-31 | 1994-05-24 | Symbiosis Corporation | Apparatus for counting the number of times a surgical instrument has been used |
| US5236269A (en) | 1993-01-14 | 1993-08-17 | Mattel, Inc. | Battery-powered dispenser for hot melt adhesive |
| US5468253A (en) | 1993-01-21 | 1995-11-21 | Ethicon, Inc. | Elastomeric medical device |
| US5358510A (en) | 1993-01-26 | 1994-10-25 | Ethicon, Inc. | Two part surgical fastener |
| JP2857555B2 (ja) | 1993-01-27 | 1999-02-17 | 三菱電機株式会社 | 電動式パワーステアリング装置 |
| CA2114282A1 (en) | 1993-01-28 | 1994-07-29 | Lothar Schilder | Multi-layered implant |
| US5304204A (en) | 1993-02-09 | 1994-04-19 | Ethicon, Inc. | Receiverless surgical fasteners |
| US5336229A (en) | 1993-02-09 | 1994-08-09 | Laparomed Corporation | Dual ligating and dividing apparatus |
| US5383895A (en) | 1993-02-10 | 1995-01-24 | Unisurge, Inc. | Endoscopic surgical grasper and method |
| US5263937A (en) | 1993-02-11 | 1993-11-23 | Shipp John I | Trocar with profile to reduce insertion force |
| US5342381A (en) | 1993-02-11 | 1994-08-30 | Everest Medical Corporation | Combination bipolar scissors and forceps instrument |
| US5553624A (en) | 1993-02-11 | 1996-09-10 | Symbiosis Corporation | Endoscopic biopsy forceps jaws and instruments incorporating same |
| JPH06237937A (ja) | 1993-02-12 | 1994-08-30 | Olympus Optical Co Ltd | 外科用縫合器 |
| US5403276A (en) | 1993-02-16 | 1995-04-04 | Danek Medical, Inc. | Apparatus for minimally invasive tissue removal |
| DE4304571A1 (de) | 1993-02-16 | 1994-08-18 | Mdc Med Diagnostic Computing | Verfahren zur Planung und Kontrolle eines chirurgischen Eingriffs |
| CA2154172A1 (en) | 1993-02-22 | 1994-09-01 | William Gorman | A laparoscopic dissection tension retractor device and method |
| US5613937A (en) | 1993-02-22 | 1997-03-25 | Heartport, Inc. | Method of retracting heart tissue in closed-chest heart surgery using endo-scopic retraction |
| US5749968A (en) | 1993-03-01 | 1998-05-12 | Focal, Inc. | Device for priming for improved adherence of gels to substrates |
| US5643294A (en) | 1993-03-01 | 1997-07-01 | United States Surgical Corporation | Surgical apparatus having an increased range of operability |
| US5342396A (en) | 1993-03-02 | 1994-08-30 | Cook Melvin S | Staples |
| EP0689400A4 (en) | 1993-03-02 | 1996-08-28 | Melvin S Cook | IMPROVED STAPLES |
| DE4306786C1 (de) | 1993-03-04 | 1994-02-10 | Wolfgang Daum | Chirurgischer Manipulator |
| US5336130A (en) | 1993-03-04 | 1994-08-09 | Metal-Fab, Inc. | Adjustable exhauster arm assembly |
| US5431676A (en) | 1993-03-05 | 1995-07-11 | Innerdyne Medical, Inc. | Trocar system having expandable port |
| US5397324A (en) | 1993-03-10 | 1995-03-14 | Carroll; Brendan J. | Surgical stapler instrument and method for vascular hemostasis |
| DE4308454A1 (de) | 1993-03-17 | 1994-09-22 | Ferdinand Dr Koeckerling | Chirurgische Nahtklemme, insbesondere Tabaksbeutel-Nahtklemme |
| US5360305A (en) | 1993-03-19 | 1994-11-01 | Duo-Fast Corporation | Clinch staples and method of manufacturing and applying clinch staples |
| US5343382A (en) | 1993-04-05 | 1994-08-30 | Delco Electronics Corp. | Adaptive current control |
| US5312329A (en) | 1993-04-07 | 1994-05-17 | Valleylab Inc. | Piezo ultrasonic and electrosurgical handpiece |
| US5456917A (en) | 1993-04-12 | 1995-10-10 | Cambridge Scientific, Inc. | Method for making a bioerodible material for the sustained release of a medicament and the material made from the method |
| US5303606A (en) | 1993-04-15 | 1994-04-19 | Kokinda Mark A | Anti-backlash nut having a free floating insert for applying an axial force to a lead screw |
| US5370645A (en) | 1993-04-19 | 1994-12-06 | Valleylab Inc. | Electrosurgical processor and method of use |
| USD352780S (en) | 1993-04-19 | 1994-11-22 | Valleylab Inc. | Combined suction, irrigation and electrosurgical handle |
| ES2109539T3 (es) | 1993-04-20 | 1998-01-16 | United States Surgical Corp | Grapadora quirurgica. |
| US5540375A (en) | 1993-04-20 | 1996-07-30 | United States Surgical Corporation | Endoscopic stapler |
| CA2121861A1 (en) | 1993-04-23 | 1994-10-24 | William D. Fox | Mechanical morcellator |
| EP0622048B1 (en) | 1993-04-27 | 1997-05-21 | American Cyanamid Company | Automatic laparoscopic ligation clip applicator |
| JPH06304176A (ja) | 1993-04-27 | 1994-11-01 | Olympus Optical Co Ltd | 縫合結紮装置 |
| US5467911A (en) | 1993-04-27 | 1995-11-21 | Olympus Optical Co., Ltd. | Surgical device for stapling and fastening body tissues |
| US5407293A (en) | 1993-04-29 | 1995-04-18 | Crainich; Lawrence | Coupling apparatus for medical instrument |
| US5464300A (en) | 1993-04-29 | 1995-11-07 | Crainich; Lawrence | Medical instrument and coupling apparatus for same |
| US5431668A (en) | 1993-04-29 | 1995-07-11 | Ethicon, Inc. | Ligating clip applier |
| EP0696179B1 (en) | 1993-04-30 | 1998-10-28 | United States Surgical Corporation | Surgical instrument having an articulated jaw structure |
| US6716232B1 (en) | 1993-04-30 | 2004-04-06 | United States Surgical Corporation | Surgical instrument having an articulated jaw structure and a detachable knife |
| US5447265A (en) | 1993-04-30 | 1995-09-05 | Minnesota Mining And Manufacturing Company | Laparoscopic surgical instrument with a mechanism for preventing its entry into the abdominal cavity once it is depleted and removed from the abdominal cavity |
| GB9309142D0 (en) | 1993-05-04 | 1993-06-16 | Gyrus Medical Ltd | Laparoscopic instrument |
| GB9309151D0 (en) | 1993-05-04 | 1993-06-16 | Zeneca Ltd | Syringes and syringe pumps |
| US5415334A (en) | 1993-05-05 | 1995-05-16 | Ethicon Endo-Surgery | Surgical stapler and staple cartridge |
| US5364003A (en) | 1993-05-05 | 1994-11-15 | Ethicon Endo-Surgery | Staple cartridge for a surgical stapler |
| US5509918A (en) | 1993-05-11 | 1996-04-23 | David Romano | Method and apparatus for drilling a curved bore in an object |
| US5449370A (en) | 1993-05-12 | 1995-09-12 | Ethicon, Inc. | Blunt tipped ultrasonic trocar |
| US5352229A (en) | 1993-05-12 | 1994-10-04 | Marlowe Goble E | Arbor press staple and washer and method for its use |
| US6406472B1 (en) | 1993-05-14 | 2002-06-18 | Sri International, Inc. | Remote center positioner |
| DE69417229T2 (de) | 1993-05-14 | 1999-07-08 | Stanford Res Inst Int | Chirurgiegerät |
| US5549621A (en) | 1993-05-14 | 1996-08-27 | Byron C. Sutherland | Apparatus and method for performing vertical banded gastroplasty |
| US5791231A (en) | 1993-05-17 | 1998-08-11 | Endorobotics Corporation | Surgical robotic system and hydraulic actuator therefor |
| JPH06327684A (ja) | 1993-05-19 | 1994-11-29 | Olympus Optical Co Ltd | 外科用縫合具 |
| CA2124109A1 (en) | 1993-05-24 | 1994-11-25 | Mark T. Byrne | Endoscopic surgical instrument with electromagnetic sensor |
| JP3172977B2 (ja) | 1993-05-26 | 2001-06-04 | 富士重工業株式会社 | 車載バッテリの残存容量計 |
| US5601604A (en) | 1993-05-27 | 1997-02-11 | Inamed Development Co. | Universal gastric band |
| US5404870A (en) | 1993-05-28 | 1995-04-11 | Ethicon, Inc. | Method of using a transanal inserter |
| US5489290A (en) | 1993-05-28 | 1996-02-06 | Snowden-Pencer, Inc. | Flush port for endoscopic surgical instruments |
| US5381649A (en) | 1993-06-04 | 1995-01-17 | Webb; Stephen A. | Medical staple forming die and punch |
| US5443197A (en) | 1993-06-16 | 1995-08-22 | United States Surgical Corporation | Locking mechanism for a skin stapler cartridge |
| RU2066128C1 (ru) | 1993-06-21 | 1996-09-10 | Иван Александрович Корольков | Хирургический сшивающий аппарат и скобка |
| US5409703A (en) | 1993-06-24 | 1995-04-25 | Carrington Laboratories, Inc. | Dried hydrogel from hydrophilic-hygroscopic polymer |
| US5341724A (en) | 1993-06-28 | 1994-08-30 | Bronislav Vatel | Pneumatic telescoping cylinder and method |
| US6063025A (en) | 1993-07-09 | 2000-05-16 | Bioenterics Corporation | Apparatus for holding intestines out of an operative field |
| US5651762A (en) | 1993-07-09 | 1997-07-29 | Bridges; Doye R. | Apparatus for holding intestines out of an operative field |
| GB9314391D0 (en) | 1993-07-12 | 1993-08-25 | Gyrus Medical Ltd | A radio frequency oscillator and an electrosurgical generator incorporating such an oscillator |
| DE4323585A1 (de) | 1993-07-14 | 1995-01-19 | Delma Elektro Med App | Bipolares Hochfrequenz-Chirurgieinstrument |
| US5478354A (en) | 1993-07-14 | 1995-12-26 | United States Surgical Corporation | Wound closing apparatus and method |
| US5501654A (en) | 1993-07-15 | 1996-03-26 | Ethicon, Inc. | Endoscopic instrument having articulating element |
| DE4323815C2 (de) | 1993-07-15 | 1997-09-25 | Siemens Ag | Verfahren und Vorrichtung zur hygienischen Aufbereitung von medizinischen, insbesondere zahnmedizinischen Instrumenten |
| DE9310601U1 (de) | 1993-07-15 | 1993-09-02 | Siemens Ag | Kassette zur Aufnahme ärztlicher, insbesondere zahnärztlicher Instrumente |
| US5805140A (en) | 1993-07-16 | 1998-09-08 | Immersion Corporation | High bandwidth force feedback interface using voice coils and flexures |
| WO1995003001A1 (en) | 1993-07-21 | 1995-02-02 | Klieman Charles H | Surgical instrument for endoscopic and general surgery |
| US5827323A (en) | 1993-07-21 | 1998-10-27 | Charles H. Klieman | Surgical instrument for endoscopic and general surgery |
| US5792165A (en) | 1993-07-21 | 1998-08-11 | Charles H. Klieman | Endoscopic instrument with detachable end effector |
| US5582617A (en) | 1993-07-21 | 1996-12-10 | Charles H. Klieman | Surgical instrument for endoscopic and general surgery |
| US5709680A (en) | 1993-07-22 | 1998-01-20 | Ethicon Endo-Surgery, Inc. | Electrosurgical hemostatic device |
| US5810811A (en) | 1993-07-22 | 1998-09-22 | Ethicon Endo-Surgery, Inc. | Electrosurgical hemostatic device |
| US5693051A (en) | 1993-07-22 | 1997-12-02 | Ethicon Endo-Surgery, Inc. | Electrosurgical hemostatic device with adaptive electrodes |
| US5688270A (en) | 1993-07-22 | 1997-11-18 | Ethicon Endo-Surgery,Inc. | Electrosurgical hemostatic device with recessed and/or offset electrodes |
| GR940100335A (el) | 1993-07-22 | 1996-05-22 | Ethicon Inc. | Ηλεκτροχειρουργικη συσκευη τοποθετησης συρραπτικων αγκυλων. |
| US5817093A (en) | 1993-07-22 | 1998-10-06 | Ethicon Endo-Surgery, Inc. | Impedance feedback monitor with query electrode for electrosurgical instrument |
| US5372596A (en) | 1993-07-27 | 1994-12-13 | Valleylab Inc. | Apparatus for leakage control and method for its use |
| JPH079622U (ja) | 1993-07-27 | 1995-02-10 | 和光化成工業株式会社 | 車両用サンバイザのホルダー構造 |
| US5441494A (en) | 1993-07-29 | 1995-08-15 | Ethicon, Inc. | Manipulable hand for laparoscopy |
| US5503320A (en) | 1993-08-19 | 1996-04-02 | United States Surgical Corporation | Surgical apparatus with indicator |
| US5447417A (en) | 1993-08-31 | 1995-09-05 | Valleylab Inc. | Self-adjusting pump head and safety manifold cartridge for a peristaltic pump |
| USD357981S (en) | 1993-09-01 | 1995-05-02 | United States Surgical Corporation | Surgical stapler |
| DE4432596A1 (de) | 1993-09-16 | 1995-03-23 | Whitaker Corp | Modulartige elektrische Kontaktanordnung |
| US5441193A (en) | 1993-09-23 | 1995-08-15 | United States Surgical Corporation | Surgical fastener applying apparatus with resilient film |
| DE69426414T2 (de) | 1993-09-24 | 2001-05-03 | Takiron Co | Implantatmaterial |
| US5419766A (en) | 1993-09-28 | 1995-05-30 | Critikon, Inc. | Catheter with stick protection |
| CA2133159A1 (en) | 1993-09-30 | 1995-03-31 | Eric J. Butterfield | Surgical instrument having improved manipulating means |
| US5405344A (en) | 1993-09-30 | 1995-04-11 | Ethicon, Inc. | Articulable socket joint assembly for an endoscopic instrument for surgical fastner track therefor |
| DE4333983A1 (de) | 1993-10-05 | 1995-04-06 | Delma Elektro Med App | Elektrochirurgisches Hochfrequenz-Instrument |
| US5542594A (en) | 1993-10-06 | 1996-08-06 | United States Surgical Corporation | Surgical stapling apparatus with biocompatible surgical fabric |
| CA2132917C (en) | 1993-10-07 | 2004-12-14 | John Charles Robertson | Circular anastomosis device |
| US5439155A (en) | 1993-10-07 | 1995-08-08 | United States Surgical Corporation | Cartridge for surgical fastener applying apparatus |
| US5496312A (en) | 1993-10-07 | 1996-03-05 | Valleylab Inc. | Impedance and temperature generator control |
| US6210403B1 (en) | 1993-10-07 | 2001-04-03 | Sherwood Services Ag | Automatic control for energy from an electrosurgical generator |
| US5725554A (en) | 1993-10-08 | 1998-03-10 | Richard-Allan Medical Industries, Inc. | Surgical staple and stapler |
| US5560532A (en) | 1993-10-08 | 1996-10-01 | United States Surgical Corporation | Apparatus and method for applying surgical staples to body tissue |
| US5562682A (en) | 1993-10-08 | 1996-10-08 | Richard-Allan Medical Industries, Inc. | Surgical Instrument with adjustable arms |
| US5607436A (en) | 1993-10-08 | 1997-03-04 | United States Surgical Corporation | Apparatus for applying surgical clips |
| US5487499A (en) | 1993-10-08 | 1996-01-30 | United States Surgical Corporation | Surgical apparatus for applying surgical fasteners including a counter |
| RU2098025C1 (ru) | 1993-10-11 | 1997-12-10 | Аркадий Вениаминович Дубровский | Поворотное устройство |
| US5556416A (en) | 1993-10-12 | 1996-09-17 | Valleylab, Inc. | Endoscopic instrument |
| US5724025A (en) | 1993-10-21 | 1998-03-03 | Tavori; Itzchak | Portable vital signs monitor |
| US5427298A (en) | 1993-10-28 | 1995-06-27 | Tegtmeier; C. Allen | Method and apparatus for indicating quantity of fasteners in a fastening device |
| US5571100B1 (en) | 1993-11-01 | 1998-01-06 | Gyrus Medical Ltd | Electrosurgical apparatus |
| GB9322464D0 (en) | 1993-11-01 | 1993-12-22 | Gyrus Medical Ltd | Electrosurgical apparatus |
| JP3414455B2 (ja) | 1993-11-02 | 2003-06-09 | オリンパス光学工業株式会社 | 縫合装置 |
| US5376095A (en) | 1993-11-04 | 1994-12-27 | Ethicon Endo-Surgery | Endoscopic multi-fire flat stapler with low profile |
| US5487377A (en) | 1993-11-05 | 1996-01-30 | Clinical Innovation Associates, Inc. | Uterine manipulator and manipulator tip assembly |
| US5531305A (en) | 1993-11-05 | 1996-07-02 | Borg-Warner Automotive, Inc. | Synchronizer clutch assembly for multiple ratio gearing |
| US5658298A (en) | 1993-11-09 | 1997-08-19 | Inamed Development Company | Laparoscopic tool |
| US5562690A (en) | 1993-11-12 | 1996-10-08 | United States Surgical Corporation | Apparatus and method for performing compressional anastomoses |
| US5503635A (en) | 1993-11-12 | 1996-04-02 | United States Surgical Corporation | Apparatus and method for performing compressional anastomoses |
| US5449355A (en) | 1993-11-24 | 1995-09-12 | Valleylab Inc. | Retrograde tissue splitter and method |
| US5633374A (en) | 1993-11-26 | 1997-05-27 | The Upjohn Company | Pyrimidine, cyanoguanidines as K-channel blockers |
| DE4340707C2 (de) | 1993-11-30 | 1997-03-27 | Wolf Gmbh Richard | Manipulator |
| US5514129A (en) | 1993-12-03 | 1996-05-07 | Valleylab Inc. | Automatic bipolar control for an electrosurgical generator |
| US5465894A (en) | 1993-12-06 | 1995-11-14 | Ethicon, Inc. | Surgical stapling instrument with articulated stapling head assembly on rotatable and flexible support shaft |
| US5405073A (en) | 1993-12-06 | 1995-04-11 | Ethicon, Inc. | Flexible support shaft assembly |
| US5543695A (en) | 1993-12-15 | 1996-08-06 | Stryker Corporation | Medical instrument with programmable torque control |
| US5743456A (en) | 1993-12-16 | 1998-04-28 | Stryker Corporation | Hand actuable surgical handpiece |
| US5470008A (en) | 1993-12-20 | 1995-11-28 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US5422567A (en) | 1993-12-27 | 1995-06-06 | Valleylab Inc. | High frequency power measurement |
| US5643293A (en) | 1993-12-29 | 1997-07-01 | Olympus Optical Co., Ltd. | Suturing instrument |
| US5564658A (en) | 1993-12-29 | 1996-10-15 | B-Line Systems, Inc. | Support system for data transmission lines |
| AU688384B2 (en) | 1993-12-30 | 1998-03-12 | Sherwood Services Ag | Bipolar ultrasonic surgery |
| US5441191A (en) | 1993-12-30 | 1995-08-15 | Linden; Gerald E. | Indicating "staples low" in a paper stapler |
| AU1558995A (en) | 1994-01-04 | 1995-08-01 | Alpha Surgical Technologies, Inc. | Stapling device |
| US5437681A (en) | 1994-01-13 | 1995-08-01 | Suturtek Inc. | Suturing instrument with thread management |
| US5382247A (en) | 1994-01-21 | 1995-01-17 | Valleylab Inc. | Technique for electrosurgical tips and method of manufacture and use |
| US5452837A (en) | 1994-01-21 | 1995-09-26 | Ethicon Endo-Surgery, Inc. | Surgical stapler with tissue gripping ridge |
| JP2925036B2 (ja) | 1994-01-31 | 1999-07-26 | ヴァリーラブ・インコーポレーテッド | 非侵襲型治療法用の入り子式に伸縮可能な双極型電極 |
| US5465895A (en) | 1994-02-03 | 1995-11-14 | Ethicon Endo-Surgery, Inc. | Surgical stapler instrument |
| US5597107A (en) | 1994-02-03 | 1997-01-28 | Ethicon Endo-Surgery, Inc. | Surgical stapler instrument |
| US5487500A (en) | 1994-02-03 | 1996-01-30 | Ethicon Endo-Surgery, Inc. | Surgical stapler instrument |
| US5452836A (en) | 1994-02-07 | 1995-09-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with improved jaw closure and staple firing actuator mechanism |
| US5503638A (en) | 1994-02-10 | 1996-04-02 | Bio-Vascular, Inc. | Soft tissue stapling buttress |
| US5527320A (en) | 1994-02-10 | 1996-06-18 | Pilling Weck Inc. | Surgical clip applying instrument |
| US5413107A (en) | 1994-02-16 | 1995-05-09 | Tetrad Corporation | Ultrasonic probe having articulated structure and rotatable transducer head |
| US5507773A (en) | 1994-02-18 | 1996-04-16 | Ethicon Endo-Surgery | Cable-actuated jaw assembly for surgical instruments |
| US5431666A (en) | 1994-02-24 | 1995-07-11 | Lasersurge, Inc. | Surgical suture instrument |
| JPH0833642A (ja) | 1994-02-25 | 1996-02-06 | Ethicon Endo Surgery Inc | 外科用ステープラのための改良アンビル承口 |
| WO1995023557A1 (en) | 1994-03-01 | 1995-09-08 | United States Surgical Corporation | Surgical stapler with anvil sensor and lockout |
| CA2143560C (en) | 1994-03-02 | 2007-01-16 | Mark Fogelberg | Sterile occlusion fasteners and instrument and method for their placement |
| US5445142A (en) | 1994-03-15 | 1995-08-29 | Ethicon Endo-Surgery, Inc. | Surgical trocars having optical tips defining one or more viewing ports |
| DE9404459U1 (de) | 1994-03-16 | 1994-07-14 | Renz Chr Gmbh & Co | Vorrichtung zum Verpacken von Bindeelementen |
| CA2144211C (en) | 1994-03-16 | 2005-05-24 | David T. Green | Surgical instruments useful for endoscopic spinal procedures |
| US5484398A (en) | 1994-03-17 | 1996-01-16 | Valleylab Inc. | Methods of making and using ultrasonic handpiece |
| JP3421117B2 (ja) | 1994-03-17 | 2003-06-30 | テルモ株式会社 | 外科用器具 |
| RU2052979C1 (ru) | 1994-03-22 | 1996-01-27 | Товарищество с ограниченной ответственностью "Дипы" ЛТД | Аппарат для наложения зажимающих скрепок и магазин для прошивающих скобок или зажимающих скрепок |
| US5561881A (en) | 1994-03-22 | 1996-10-08 | U.S. Philips Corporation | Electric toothbrush |
| US5472442A (en) | 1994-03-23 | 1995-12-05 | Valleylab Inc. | Moveable switchable electrosurgical handpiece |
| US5860581A (en) | 1994-03-24 | 1999-01-19 | United States Surgical Corporation | Anvil for circular stapler |
| US5541376A (en) | 1994-03-28 | 1996-07-30 | Valleylab Inc | Switch and connector |
| CA2145723A1 (en) | 1994-03-30 | 1995-10-01 | Steven W. Hamblin | Surgical stapling instrument with remotely articulated stapling head assembly on rotatable support shaft |
| US5715987A (en) | 1994-04-05 | 1998-02-10 | Tracor Incorporated | Constant width, adjustable grip, staple apparatus and method |
| US5695524A (en) | 1994-04-05 | 1997-12-09 | Tracor Aerospace, Inc. | Constant width, adjustable grip, staple apparatus and method |
| CA2144818C (en) | 1994-04-07 | 2006-07-11 | Henry Bolanos | Graduated anvil for surgical stapling instruments |
| US5415335A (en) | 1994-04-07 | 1995-05-16 | Ethicon Endo-Surgery | Surgical stapler cartridge containing lockout mechanism |
| US5626979A (en) | 1994-04-08 | 1997-05-06 | Sony Corporation | Battery device and electronic equipment employing the battery device as power source |
| US5653677A (en) | 1994-04-12 | 1997-08-05 | Fuji Photo Optical Co. Ltd | Electronic endoscope apparatus with imaging unit separable therefrom |
| JPH07285089A (ja) | 1994-04-14 | 1995-10-31 | Mitsubishi Heavy Ind Ltd | 5指手腕機構 |
| US5529235A (en) | 1994-04-28 | 1996-06-25 | Ethicon Endo-Surgery, Inc. | Identification device for surgical instrument |
| US5489058A (en) | 1994-05-02 | 1996-02-06 | Minnesota Mining And Manufacturing Company | Surgical stapler with mechanisms for reducing the firing force |
| US5470007A (en) | 1994-05-02 | 1995-11-28 | Minnesota Mining And Manufacturing Company | Laparoscopic stapler with overload sensor and interlock |
| US5474566A (en) | 1994-05-05 | 1995-12-12 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| US5628446A (en) | 1994-05-05 | 1997-05-13 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| CA2148667A1 (en) | 1994-05-05 | 1995-11-06 | Carlo A. Mililli | Self-contained powered surgical apparatus |
| US5498164A (en) | 1994-05-09 | 1996-03-12 | Ward; Mark C. | Automotive steering column electrical connector |
| US5843021A (en) | 1994-05-09 | 1998-12-01 | Somnus Medical Technologies, Inc. | Cell necrosis apparatus |
| US5480409A (en) | 1994-05-10 | 1996-01-02 | Riza; Erol D. | Laparoscopic surgical instrument |
| US5782749A (en) | 1994-05-10 | 1998-07-21 | Riza; Erol D. | Laparoscopic surgical instrument with adjustable grip |
| US6704210B1 (en) | 1994-05-20 | 2004-03-09 | Medtronic, Inc. | Bioprothesis film strip for surgical stapler and method of attaching the same |
| USRE38335E1 (en) | 1994-05-24 | 2003-11-25 | Endius Incorporated | Surgical instrument |
| US5454827A (en) | 1994-05-24 | 1995-10-03 | Aust; Gilbert M. | Surgical instrument |
| CA2150507C (en) | 1994-05-30 | 1999-05-18 | Soichiro Kawakami | Rechargeable batteries |
| US5814057A (en) | 1994-06-03 | 1998-09-29 | Gunze Limited | Supporting element for staple region |
| GB9411429D0 (en) | 1994-06-08 | 1994-07-27 | Seton Healthcare Group Plc | Wound dressings |
| US5553675A (en) | 1994-06-10 | 1996-09-10 | Minnesota Mining And Manufacturing Company | Orthopedic surgical device |
| US5522831A (en) | 1994-06-13 | 1996-06-04 | Dennis R. Sleister | Incising trocar and cannula assembly |
| US5473204A (en) | 1994-06-16 | 1995-12-05 | Temple; Thomas D. | Time delay switch |
| US5881943A (en) | 1994-06-17 | 1999-03-16 | Heartport, Inc. | Surgical anastomosis apparatus and method thereof |
| CA2192819A1 (en) | 1994-06-17 | 1995-12-28 | Christopher Francis Heck | Surgical stapling instrument and method thereof |
| US5732872A (en) | 1994-06-17 | 1998-03-31 | Heartport, Inc. | Surgical stapling instrument |
| US5558665A (en) | 1994-06-24 | 1996-09-24 | Archimedes Surgical, Inc. | Surgical instrument and method for intraluminal retraction of an anatomic structure |
| US5807376A (en) | 1994-06-24 | 1998-09-15 | United States Surgical Corporation | Apparatus and method for performing surgical tasks during laparoscopic procedures |
| US5800429A (en) | 1994-06-24 | 1998-09-01 | Somnus Medical Technologies, Inc. | Noninvasive apparatus for ablating turbinates |
| US5651821A (en) | 1994-06-27 | 1997-07-29 | Ricoh Company, Ltd. | Battery disposal and collection apparatus |
| DE4422621C1 (de) | 1994-06-28 | 1995-08-31 | Aesculap Ag | Chirurgisches Instrument |
| GB9413070D0 (en) | 1994-06-29 | 1994-08-17 | Gyrus Medical Ltd | Electrosurgical apparatus |
| US5551622A (en) | 1994-07-13 | 1996-09-03 | Yoon; Inbae | Surgical stapler |
| US5833695A (en) | 1994-07-13 | 1998-11-10 | Yoon; Inbae | Surgical stapling system and method of applying staples from multiple staple cartridges |
| US5623582A (en) | 1994-07-14 | 1997-04-22 | Immersion Human Interface Corporation | Computer interface or control input device for laparoscopic surgical instrument and other elongated mechanical objects |
| US5533521A (en) | 1994-07-15 | 1996-07-09 | United States Surgical Corporation | Interchangeable tissue measuring device |
| US5629577A (en) | 1994-07-15 | 1997-05-13 | Micro Medical Devices | Miniature linear motion actuator |
| US5712460A (en) | 1994-07-19 | 1998-01-27 | Linvatec Corporation | Multi-function surgical device control system |
| US5544802A (en) | 1994-07-27 | 1996-08-13 | Crainich; Lawrence | Surgical staple and stapler device therefor |
| US5583114A (en) | 1994-07-27 | 1996-12-10 | Minnesota Mining And Manufacturing Company | Adhesive sealant composition |
| DE9412228U1 (de) | 1994-07-28 | 1994-09-22 | Loctite Europa Eeig | Schlauchpumpe zur genauen Dosierung kleiner Flüssigkeitsmengen |
| US5582907A (en) | 1994-07-28 | 1996-12-10 | Pall Corporation | Melt-blown fibrous web |
| AU694225B2 (en) | 1994-08-02 | 1998-07-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic hemostatic and cutting instrument |
| RU2104671C1 (ru) | 1994-08-03 | 1998-02-20 | Виктор Алексеевич Липатов | Хирургический сшиватель |
| US5507426A (en) | 1994-08-05 | 1996-04-16 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US5779130A (en) | 1994-08-05 | 1998-07-14 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| EP0699418A1 (en) | 1994-08-05 | 1996-03-06 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| JPH0860708A (ja) | 1994-08-10 | 1996-03-05 | Karl Schaeff Gmbh & Co Mas Fab | 土木車両 |
| US5509916A (en) | 1994-08-12 | 1996-04-23 | Valleylab Inc. | Laser-assisted electrosurgery system |
| US5480089A (en) | 1994-08-19 | 1996-01-02 | United States Surgical Corporation | Surgical stapler apparatus with improved staple pockets |
| CA2146508C (en) | 1994-08-25 | 2006-11-14 | Robert H. Schnut | Anvil for circular stapler |
| US6120433A (en) | 1994-09-01 | 2000-09-19 | Olympus Optical Co., Ltd. | Surgical manipulator system |
| JPH08136626A (ja) | 1994-09-16 | 1996-05-31 | Seiko Epson Corp | バッテリー残存容量計及びバッテリー残存容量の演算方法 |
| US5609601A (en) | 1994-09-23 | 1997-03-11 | United States Surgical Corporation | Endoscopic surgical apparatus with rotation lock |
| US5569284A (en) | 1994-09-23 | 1996-10-29 | United States Surgical Corporation | Morcellator |
| DE4434864C2 (de) | 1994-09-29 | 1997-06-19 | United States Surgical Corp | Chirurgischer Klammerapplikator mit auswechselbarem Klammermagazin |
| US5916225A (en) | 1994-09-29 | 1999-06-29 | Surgical Sense, Inc. | Hernia mesh patch |
| US5571116A (en) | 1994-10-02 | 1996-11-05 | United States Surgical Corporation | Non-invasive treatment of gastroesophageal reflux disease |
| US5685474A (en) | 1994-10-04 | 1997-11-11 | United States Surgical Corporation | Tactile indicator for surgical instrument |
| US5901895A (en) | 1994-10-05 | 1999-05-11 | United States Surgical Corporation | Articulating apparatus for applying surgical fasteners to body tissue |
| US5797538A (en) | 1994-10-05 | 1998-08-25 | United States Surgical Corporation | Articulating apparatus for applying surgical fasteners to body tissue |
| US5540374A (en) | 1994-10-06 | 1996-07-30 | Minnesota Mining And Manufacturing Company | Bone stapler cartridge |
| US5575805A (en) | 1994-10-07 | 1996-11-19 | Li Medical Technologies, Inc. | Variable tip-pressure surgical grasper |
| EP0705571A1 (en) | 1994-10-07 | 1996-04-10 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| CA2157744C (en) | 1994-10-07 | 2005-08-23 | Charles R. Sherts | Endoscopic vascular suturing apparatus |
| US5571090A (en) | 1994-10-07 | 1996-11-05 | United States Surgical Corporation | Vascular suturing apparatus |
| CN1163558A (zh) | 1994-10-11 | 1997-10-29 | 查尔斯·H·克利曼 | 具有可拆卸的端部操作装置的内窥镜仪器 |
| US5718714A (en) | 1994-10-11 | 1998-02-17 | Circon Corporation | Surgical instrument with removable shaft assembly |
| US5591170A (en) | 1994-10-14 | 1997-01-07 | Genesis Orthopedics | Intramedullary bone cutting saw |
| AU706434B2 (en) | 1994-10-18 | 1999-06-17 | Ethicon Inc. | Injectable liquid copolymers for soft tissue repair and augmentation |
| US5752973A (en) | 1994-10-18 | 1998-05-19 | Archimedes Surgical, Inc. | Endoscopic surgical gripping instrument with universal joint jaw coupler |
| US5599852A (en) | 1994-10-18 | 1997-02-04 | Ethicon, Inc. | Injectable microdispersions for soft tissue repair and augmentation |
| US5549627A (en) | 1994-10-21 | 1996-08-27 | Kieturakis; Maciej J. | Surgical instruments and method for applying progressive intracorporeal traction |
| US5620454A (en) | 1994-10-25 | 1997-04-15 | Becton, Dickinson And Company | Guarded surgical scalpel |
| USD381077S (en) | 1994-10-25 | 1997-07-15 | Ethicon Endo-Surgery | Multifunctional surgical stapling instrument |
| US5575789A (en) | 1994-10-27 | 1996-11-19 | Valleylab Inc. | Energizable surgical tool safety device and method |
| US5549637A (en) | 1994-11-10 | 1996-08-27 | Crainich; Lawrence | Articulated medical instrument |
| JPH08136628A (ja) | 1994-11-11 | 1996-05-31 | Fujitsu Ltd | 電池容量監視装置 |
| US5989244A (en) | 1994-11-15 | 1999-11-23 | Gregory; Kenton W. | Method of use of a sheet of elastin or elastin-based material |
| US5709934A (en) | 1994-11-22 | 1998-01-20 | Tissue Engineering, Inc. | Bipolymer foams having extracellular matrix particulates |
| US5891558A (en) | 1994-11-22 | 1999-04-06 | Tissue Engineering, Inc. | Biopolymer foams for use in tissue repair and reconstruction |
| US6206897B1 (en) | 1994-12-02 | 2001-03-27 | Ethicon, Inc. | Enhanced visualization of the latching mechanism of latching surgical devices |
| US7235089B1 (en) | 1994-12-07 | 2007-06-26 | Boston Scientific Corporation | Surgical apparatus and method |
| US5868760A (en) | 1994-12-07 | 1999-02-09 | Mcguckin, Jr.; James F. | Method and apparatus for endolumenally resectioning tissue |
| US5988479A (en) | 1994-12-13 | 1999-11-23 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US5636779A (en) | 1994-12-13 | 1997-06-10 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| JPH08164141A (ja) | 1994-12-13 | 1996-06-25 | Olympus Optical Co Ltd | 処置具 |
| US5569270A (en) | 1994-12-13 | 1996-10-29 | Weng; Edward E. | Laparoscopic surgical instrument |
| US5541489A (en) | 1994-12-15 | 1996-07-30 | Intel Corporation | Smart battery power availability feature based on battery-specific characteristics |
| US5632432A (en) | 1994-12-19 | 1997-05-27 | Ethicon Endo-Surgery, Inc. | Surgical instrument |
| US5713505A (en) | 1996-05-13 | 1998-02-03 | Ethicon Endo-Surgery, Inc. | Articulation transmission mechanism for surgical instruments |
| US5704534A (en) | 1994-12-19 | 1998-01-06 | Ethicon Endo-Surgery, Inc. | Articulation assembly for surgical instruments |
| US5492671A (en) | 1994-12-20 | 1996-02-20 | Zimmer, Inc. | Sterilization case and method of sterilization |
| US5613966A (en) | 1994-12-21 | 1997-03-25 | Valleylab Inc | System and method for accessory rate control |
| US5628743A (en) | 1994-12-21 | 1997-05-13 | Valleylab Inc. | Dual mode ultrasonic surgical apparatus |
| GB9425781D0 (en) | 1994-12-21 | 1995-02-22 | Gyrus Medical Ltd | Electrosurgical instrument |
| US5695494A (en) | 1994-12-22 | 1997-12-09 | Valleylab Inc | Rem output stage topology |
| AU701320B2 (en) | 1994-12-22 | 1999-01-28 | Ethicon Endo-Surgery, Inc. | Impedance feedback monitor with query electrode for electrosurgical instrument |
| US5620452A (en) | 1994-12-22 | 1997-04-15 | Yoon; Inbae | Surgical clip with ductile tissue penetrating members |
| US5713895A (en) | 1994-12-30 | 1998-02-03 | Valleylab Inc | Partially coated electrodes |
| US5466020A (en) | 1994-12-30 | 1995-11-14 | Valleylab Inc. | Bayonet connector for surgical handpiece |
| US6430298B1 (en) | 1995-01-13 | 2002-08-06 | Lonnie Joe Kettl | Microphone mounting structure for a sound amplifying respirator and/or bubble suit |
| US5637110A (en) | 1995-01-31 | 1997-06-10 | Stryker Corporation | Electrocautery surgical tool with relatively pivoted tissue engaging jaws |
| CA2168404C (en) | 1995-02-01 | 2007-07-10 | Dale Schulze | Surgical instrument with expandable cutting element |
| WO1996023536A1 (en) | 1995-02-03 | 1996-08-08 | Inbae Yoon | Cannula with distal end valve |
| USD372086S (en) | 1995-02-03 | 1996-07-23 | Valleylab Inc. | Aspirator attachment for a surgical device |
| JPH10503408A (ja) | 1995-02-03 | 1998-03-31 | ヴァリーラブ・インコーポレーテッド | ペンシルと組み合わせた電気外科用吸引器 |
| US5669907A (en) | 1995-02-10 | 1997-09-23 | Valleylab Inc. | Plasma enhanced bipolar electrosurgical system |
| DE69610723T2 (de) | 1995-02-10 | 2001-10-18 | Raymond Corp | Flurförderfahrzeug mit interner Temperaturüberwachung |
| US6409722B1 (en) | 1998-07-07 | 2002-06-25 | Medtronic, Inc. | Apparatus and method for creating, maintaining, and controlling a virtual electrode used for the ablation of tissue |
| US6110187A (en) | 1995-02-24 | 2000-08-29 | Heartport, Inc. | Device and method for minimizing heart displacements during a beating heart surgical procedure |
| US5695504A (en) | 1995-02-24 | 1997-12-09 | Heartport, Inc. | Devices and methods for performing a vascular anastomosis |
| US6213999B1 (en) | 1995-03-07 | 2001-04-10 | Sherwood Services Ag | Surgical gas plasma ignition apparatus and method |
| US5669904A (en) | 1995-03-07 | 1997-09-23 | Valleylab Inc. | Surgical gas plasma ignition apparatus and method |
| US5735445A (en) | 1995-03-07 | 1998-04-07 | United States Surgical Corporation | Surgical stapler |
| US5681341A (en) | 1995-03-14 | 1997-10-28 | Origin Medsystems, Inc. | Flexible lifting apparatus |
| DE19509115C2 (de) | 1995-03-16 | 1997-11-27 | Deutsche Forsch Luft Raumfahrt | Chirurgisches Gerät zum Vorbereiten einer Anastomose in minimal invasiver Operationstechnik |
| DE19509116C2 (de) | 1995-03-16 | 2000-01-05 | Deutsch Zentr Luft & Raumfahrt | Flexible Struktur |
| US5575799A (en) | 1995-03-30 | 1996-11-19 | United States Surgical Corporation | Articulating surgical apparatus |
| US5599350A (en) | 1995-04-03 | 1997-02-04 | Ethicon Endo-Surgery, Inc. | Electrosurgical clamping device with coagulation feedback |
| US5618307A (en) | 1995-04-03 | 1997-04-08 | Heartport, Inc. | Clamp assembly and method of use |
| US5619992A (en) | 1995-04-06 | 1997-04-15 | Guthrie; Robert B. | Methods and apparatus for inhibiting contamination of reusable pulse oximetry sensors |
| US6669690B1 (en) | 1995-04-06 | 2003-12-30 | Olympus Optical Co., Ltd. | Ultrasound treatment system |
| US6056735A (en) | 1996-04-04 | 2000-05-02 | Olympus Optical Co., Ltd. | Ultrasound treatment system |
| US5624452A (en) | 1995-04-07 | 1997-04-29 | Ethicon Endo-Surgery, Inc. | Hemostatic surgical cutting or stapling instrument |
| DE69625660T2 (de) | 1995-04-21 | 2003-11-06 | Gore & Ass | Spendevorrichtung für chirurgische befestigungsplättchen |
| JPH08289895A (ja) | 1995-04-21 | 1996-11-05 | Olympus Optical Co Ltd | 縫合器 |
| US5553765A (en) | 1995-04-28 | 1996-09-10 | Ethicon Endo-Surgery, Inc. | Surgical stapler with improved operating lever mounting arrangement |
| US5773991A (en) | 1995-05-02 | 1998-06-30 | Texas Instruments Incorporated | Motor current sense circuit using H bridge circuits |
| US5657417A (en) | 1995-05-02 | 1997-08-12 | Burndy Corporation | Control for battery powered tool |
| JP3526487B2 (ja) | 1995-05-08 | 2004-05-17 | 株式会社伊垣医療設計 | 医療用縫合材 |
| JP3795100B2 (ja) | 1995-05-08 | 2006-07-12 | 株式会社伊垣医療設計 | 医療用縫合材 |
| JP3446394B2 (ja) | 1995-05-11 | 2003-09-16 | 大同特殊鋼株式会社 | 析出硬化型ステンレス鋼 |
| AU5741296A (en) | 1995-05-12 | 1996-11-29 | Rodney C. Perkins | Translumenal circumferential injector |
| US5540705A (en) | 1995-05-19 | 1996-07-30 | Suturtek, Inc. | Suturing instrument with thread management |
| US6123241A (en) | 1995-05-23 | 2000-09-26 | Applied Tool Development Corporation | Internal combustion powered tool |
| US5630540A (en) | 1995-05-24 | 1997-05-20 | United States Surgical Corporation | Surgical staple and staple drive member |
| US5678748A (en) | 1995-05-24 | 1997-10-21 | Vir Engineering | Surgical stapler with improved safety mechanism |
| US5720744A (en) | 1995-06-06 | 1998-02-24 | Valleylab Inc | Control system for neurosurgery |
| US5628745A (en) | 1995-06-06 | 1997-05-13 | Bek; Robin B. | Exit spark control for an electrosurgical generator |
| WO1996039086A1 (en) | 1995-06-06 | 1996-12-12 | Valleylab Inc. | Power control for an electrosurgical generator |
| EP0836433A1 (en) | 1995-06-06 | 1998-04-22 | Valleylab, Inc. | Digital waveform generation for electrosurgical generators |
| US5599344A (en) | 1995-06-06 | 1997-02-04 | Valleylab Inc. | Control apparatus for electrosurgical generator power output |
| US5614887A (en) | 1995-06-07 | 1997-03-25 | Buchbinder; Dale | Patient monitoring system and method thereof |
| US5814038A (en) | 1995-06-07 | 1998-09-29 | Sri International | Surgical manipulator for a telerobotic system |
| US5667864A (en) | 1995-06-07 | 1997-09-16 | Landoll; Leo M. | Absorbant laminates and method of making same |
| US5649956A (en) | 1995-06-07 | 1997-07-22 | Sri International | System and method for releasably holding a surgical instrument |
| US5620326A (en) | 1995-06-09 | 1997-04-15 | Simulab Corporation | Anatomical simulator for videoendoscopic surgical training |
| DE19521257C2 (de) | 1995-06-10 | 1999-01-28 | Winter & Ibe Olympus | Chirurgische Zange |
| FR2735350B1 (fr) | 1995-06-15 | 1997-12-26 | Maurice Lanzoni | Dispositif developpeur d'efforts d'une pince coupante |
| US5849011A (en) | 1995-06-19 | 1998-12-15 | Vidamed, Inc. | Medical device with trigger actuation assembly |
| US6780180B1 (en) | 1995-06-23 | 2004-08-24 | Gyrus Medical Limited | Electrosurgical instrument |
| GB9526627D0 (en) | 1995-12-29 | 1996-02-28 | Gyrus Medical Ltd | An electrosurgical instrument and an electrosurgical electrode assembly |
| GB9604770D0 (en) | 1995-06-23 | 1996-05-08 | Gyrus Medical Ltd | An electrosurgical generator and system |
| ES2233239T3 (es) | 1995-06-23 | 2005-06-16 | Gyrus Medical Limited | Instrumento electroquirurgico. |
| GB9600377D0 (en) | 1996-01-09 | 1996-03-13 | Gyrus Medical Ltd | Electrosurgical instrument |
| US6293942B1 (en) | 1995-06-23 | 2001-09-25 | Gyrus Medical Limited | Electrosurgical generator method |
| CA2224975A1 (en) | 1995-06-23 | 1997-01-09 | Gyrus Medical Limited | An electrosurgical instrument |
| US6015406A (en) | 1996-01-09 | 2000-01-18 | Gyrus Medical Limited | Electrosurgical instrument |
| US6185356B1 (en) | 1995-06-27 | 2001-02-06 | Lumitex, Inc. | Protective cover for a lighting device |
| US6077280A (en) | 1995-06-29 | 2000-06-20 | Thomas Jefferson University | Surgical clamp |
| JPH11508791A (ja) | 1995-07-03 | 1999-08-03 | フレーター・ダーク・エイ | 組織ステープラに支持材を取り付ける装置 |
| US5878607A (en) | 1995-07-06 | 1999-03-09 | Johnson & Johnson Professional, Inc. | Surgical cast cutter |
| US5752644A (en) | 1995-07-11 | 1998-05-19 | United States Surgical Corporation | Disposable loading unit for surgical stapler |
| USRE38708E1 (en) | 1995-07-11 | 2005-03-01 | United States Surgical Corporation | Disposable loading unit for surgical stapler |
| US5591187A (en) | 1995-07-14 | 1997-01-07 | Dekel; Moshe | Laparoscopic tissue retrieval device and method |
| US5706998A (en) | 1995-07-17 | 1998-01-13 | United States Surgical Corporation | Surgical stapler with alignment pin locking mechanism |
| CN1193899A (zh) | 1995-07-18 | 1998-09-23 | G·U·爱德华兹 | 挠性轴 |
| US5749896A (en) | 1995-07-18 | 1998-05-12 | Cook; Melvin S. | Staple overlap |
| US6447518B1 (en) | 1995-07-18 | 2002-09-10 | William R. Krause | Flexible shaft components |
| US5810855A (en) | 1995-07-21 | 1998-09-22 | Gore Enterprise Holdings, Inc. | Endoscopic device and method for reinforcing surgical staples |
| US5556020A (en) | 1995-07-21 | 1996-09-17 | Hou; Chang F. | Power staple gun |
| US5702409A (en) | 1995-07-21 | 1997-12-30 | W. L. Gore & Associates, Inc. | Device and method for reinforcing surgical staples |
| US6023638A (en) | 1995-07-28 | 2000-02-08 | Scimed Life Systems, Inc. | System and method for conducting electrophysiological testing using high-voltage energy pulses to stun tissue |
| JP3264607B2 (ja) | 1995-07-28 | 2002-03-11 | 株式会社モリタ製作所 | 歯科用ハンドピースのモータ制御装置 |
| US5810846A (en) | 1995-08-03 | 1998-09-22 | United States Surgical Corporation | Vascular hole closure |
| RU2110965C1 (ru) | 1995-08-03 | 1998-05-20 | Ярослав Петрович Кулик | Устройство для осуществления лапароскопических вмешательств |
| US5549583A (en) | 1995-08-04 | 1996-08-27 | Adam Spence Corporation | Surgical connector |
| US5611709A (en) | 1995-08-10 | 1997-03-18 | Valleylab Inc | Method and assembly of member and terminal |
| US5718359A (en) | 1995-08-14 | 1998-02-17 | United States Of America Surgical Corporation | Surgical stapler with lockout mechanism |
| US5715988A (en) | 1995-08-14 | 1998-02-10 | United States Surgical Corporation | Surgical stapler with lockout mechanism |
| US5839639A (en) | 1995-08-17 | 1998-11-24 | Lasersurge, Inc. | Collapsible anvil assembly and applicator instrument |
| US5931853A (en) | 1995-08-25 | 1999-08-03 | Mcewen; James A. | Physiologic tourniquet with safety circuit |
| US5782396A (en) | 1995-08-28 | 1998-07-21 | United States Surgical Corporation | Surgical stapler |
| US6032849A (en) | 1995-08-28 | 2000-03-07 | United States Surgical | Surgical stapler |
| US5762256A (en) | 1995-08-28 | 1998-06-09 | United States Surgical Corporation | Surgical stapler |
| US5574431A (en) | 1995-08-29 | 1996-11-12 | Checkpoint Systems, Inc. | Deactivateable security tag |
| US5664404A (en) | 1995-08-31 | 1997-09-09 | Ethicon, Inc. | Automatic zipper package winding and packaging machine |
| US5667526A (en) | 1995-09-07 | 1997-09-16 | Levin; John M. | Tissue retaining clamp |
| US5891094A (en) | 1995-09-07 | 1999-04-06 | Innerdyne, Inc. | System for direct heating of fluid solution in a hollow body organ and methods |
| US6075441A (en) | 1996-09-05 | 2000-06-13 | Key-Trak, Inc. | Inventoriable-object control and tracking system |
| DE19534043A1 (de) | 1995-09-14 | 1997-03-20 | Carisius Christensen Gmbh Dr | Chirurgische Arbeitsmaschine |
| DE19534112A1 (de) | 1995-09-14 | 1997-03-20 | Wolf Gmbh Richard | Endoskopisches Instrument |
| JP3132991B2 (ja) | 1995-09-18 | 2001-02-05 | ウエスト電気株式会社 | 照射角可変閃光装置 |
| US5814055A (en) | 1995-09-19 | 1998-09-29 | Ethicon Endo-Surgery, Inc. | Surgical clamping mechanism |
| US5662667A (en) | 1995-09-19 | 1997-09-02 | Ethicon Endo-Surgery, Inc. | Surgical clamping mechanism |
| US5827271A (en) | 1995-09-19 | 1998-10-27 | Valleylab | Energy delivery system for vessel sealing |
| US5704087A (en) | 1995-09-19 | 1998-01-06 | Strub; Richard | Dental care apparatus and technique |
| US5776130A (en) | 1995-09-19 | 1998-07-07 | Valleylab, Inc. | Vascular tissue sealing pressure control |
| US5797959A (en) | 1995-09-21 | 1998-08-25 | United States Surgical Corporation | Surgical apparatus with articulating jaw structure |
| US5797927A (en) | 1995-09-22 | 1998-08-25 | Yoon; Inbae | Combined tissue clamping and suturing instrument |
| DE19535179A1 (de) | 1995-09-22 | 1997-03-27 | Wolf Gmbh Richard | Abwinkelbares Rohr und Verfahren zu seiner Herstellung |
| US5772659A (en) | 1995-09-26 | 1998-06-30 | Valleylab Inc. | Electrosurgical generator power control circuit and method |
| US5702387A (en) | 1995-09-27 | 1997-12-30 | Valleylab Inc | Coated electrosurgical electrode |
| US5732821A (en) | 1995-09-28 | 1998-03-31 | Biomet, Inc. | System for sterilizing medical devices |
| US5707392A (en) | 1995-09-29 | 1998-01-13 | Symbiosis Corporation | Hermaphroditic stamped forceps jaw for disposable endoscopic biopsy forceps and method of making the same |
| US5796188A (en) | 1995-10-05 | 1998-08-18 | Xomed Surgical Products, Inc. | Battery-powered medical instrument with power booster |
| US5804726A (en) | 1995-10-16 | 1998-09-08 | Mtd Products Inc. | Acoustic signature analysis for a noisy enviroment |
| US5697542A (en) | 1995-10-19 | 1997-12-16 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical stapler with compact profile |
| US5809441A (en) | 1995-10-19 | 1998-09-15 | Case Corporation | Apparatus and method of neutral start control of a power transmission |
| US5653721A (en) | 1995-10-19 | 1997-08-05 | Ethicon Endo-Surgery, Inc. | Override mechanism for an actuator on a surgical instrument |
| US5700270A (en) | 1995-10-20 | 1997-12-23 | United States Surgical Corporation | Surgical clip applier |
| US5839369A (en) | 1995-10-20 | 1998-11-24 | Eastman Kodak Company | Method of controlled laser imaging of zirconia alloy ceramic lithographic member to provide localized melting in exposed areas |
| US5997552A (en) | 1995-10-20 | 1999-12-07 | United States Surgical Corporation | Meniscal fastener applying device |
| GB9521772D0 (en) | 1995-10-24 | 1996-01-03 | Gyrus Medical Ltd | An electrosurgical instrument |
| US5941442A (en) | 1995-10-27 | 1999-08-24 | United States Surgical | Surgical stapler |
| CA2188738A1 (en) | 1995-10-27 | 1997-04-28 | Lisa W. Heaton | Surgical stapler having interchangeable loading units |
| US5651491A (en) | 1995-10-27 | 1997-07-29 | United States Surgical Corporation | Surgical stapler having interchangeable loading units |
| US5804936A (en) | 1995-10-31 | 1998-09-08 | Smith & Nephew, Inc. | Motor controlled surgical system |
| US5827298A (en) | 1995-11-17 | 1998-10-27 | Innovasive Devices, Inc. | Surgical fastening system and method for using the same |
| US5860953A (en) | 1995-11-21 | 1999-01-19 | Catheter Imaging Systems, Inc. | Steerable catheter having disposable module and sterilizable handle and method of connecting same |
| JPH09149941A (ja) | 1995-12-01 | 1997-06-10 | Tokai Rika Co Ltd | 体内挿入用医療器具のセンサ |
| US5658281A (en) | 1995-12-04 | 1997-08-19 | Valleylab Inc | Bipolar electrosurgical scissors and method of manufacture |
| US5656917A (en) | 1995-12-14 | 1997-08-12 | Motorola, Inc. | Battery identification apparatus and associated method |
| US5638582A (en) | 1995-12-20 | 1997-06-17 | Flexible Steel Lacing Company | Belt fastener with pre-set staples |
| US5865638A (en) | 1995-12-21 | 1999-02-02 | Alcoa Fujikura Ltd. | Electrical connector |
| US5971916A (en) | 1995-12-27 | 1999-10-26 | Koren; Arie | Video camera cover |
| BR9612395A (pt) | 1995-12-29 | 1999-07-13 | Gyrus Medical Ltd | Instrumento eletrocirúrgico e um conjunto de eltrodo eletrocirúrgico |
| US6013076A (en) | 1996-01-09 | 2000-01-11 | Gyrus Medical Limited | Electrosurgical instrument |
| US6090106A (en) | 1996-01-09 | 2000-07-18 | Gyrus Medical Limited | Electrosurgical instrument |
| GB9600354D0 (en) | 1996-01-09 | 1996-03-13 | Gyrus Medical Ltd | Electrosurgical instrument |
| US5755717A (en) | 1996-01-16 | 1998-05-26 | Ethicon Endo-Surgery, Inc. | Electrosurgical clamping device with improved coagulation feedback |
| US5738648A (en) | 1996-01-23 | 1998-04-14 | Valleylab Inc | Method and apparatus for a valve and irrigator |
| US6015417A (en) | 1996-01-25 | 2000-01-18 | Reynolds, Jr.; Walker | Surgical fastener |
| DE19603889C2 (de) | 1996-02-03 | 1999-05-06 | Aesculap Ag & Co Kg | Chirurgisches Anlegegerät |
| US7166117B2 (en) | 1996-02-07 | 2007-01-23 | Hellenkamp Johann F | Automatic surgical device and control assembly for cutting a cornea |
| US20070244496A1 (en) | 1996-02-07 | 2007-10-18 | Hellenkamp Johann F | Automatic surgical device and control assembly for cutting a cornea |
| GB9602580D0 (en) | 1996-02-08 | 1996-04-10 | Dual Voltage Ltd | Plastics flexible core |
| US5624398A (en) | 1996-02-08 | 1997-04-29 | Symbiosis Corporation | Endoscopic robotic surgical tools and methods |
| US5620289A (en) | 1996-02-09 | 1997-04-15 | Curry; Rinda M. | Colored staples |
| ATE307525T1 (de) | 1996-02-13 | 2005-11-15 | Conmed Corp | Chirurgische zugangsvorrichtung |
| US5749889A (en) | 1996-02-13 | 1998-05-12 | Imagyn Medical, Inc. | Method and apparatus for performing biopsy |
| US5713128A (en) | 1996-02-16 | 1998-02-03 | Valleylab Inc | Electrosurgical pad apparatus and method of manufacture |
| CA2197614C (en) | 1996-02-20 | 2002-07-02 | Charles S. Taylor | Surgical instruments and procedures for stabilizing the beating heart during coronary artery bypass graft surgery |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6063095A (en) | 1996-02-20 | 2000-05-16 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US5725536A (en) | 1996-02-20 | 1998-03-10 | Richard-Allen Medical Industries, Inc. | Articulated surgical instrument with improved articulation control mechanism |
| US5820009A (en) | 1996-02-20 | 1998-10-13 | Richard-Allan Medical Industries, Inc. | Articulated surgical instrument with improved jaw closure mechanism |
| US6436107B1 (en) | 1996-02-20 | 2002-08-20 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US6699177B1 (en) | 1996-02-20 | 2004-03-02 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US6010054A (en) | 1996-02-20 | 2000-01-04 | Imagyn Medical Technologies | Linear stapling instrument with improved staple cartridge |
| US5797537A (en) | 1996-02-20 | 1998-08-25 | Richard-Allan Medical Industries, Inc. | Articulated surgical instrument with improved firing mechanism |
| US5762255A (en) | 1996-02-20 | 1998-06-09 | Richard-Allan Medical Industries, Inc. | Surgical instrument with improvement safety lockout mechanisms |
| US5894843A (en) | 1996-02-20 | 1999-04-20 | Cardiothoracic Systems, Inc. | Surgical method for stabilizing the beating heart during coronary artery bypass graft surgery |
| US6402780B2 (en) | 1996-02-23 | 2002-06-11 | Cardiovascular Technologies, L.L.C. | Means and method of replacing a heart valve in a minimally invasive manner |
| US5800379A (en) | 1996-02-23 | 1998-09-01 | Sommus Medical Technologies, Inc. | Method for ablating interior sections of the tongue |
| US5891160A (en) | 1996-02-23 | 1999-04-06 | Cardiovascular Technologies, Llc | Fastener delivery and deployment mechanism and method for placing the fastener in minimally invasive surgery |
| US5716370A (en) | 1996-02-23 | 1998-02-10 | Williamson, Iv; Warren | Means for replacing a heart valve in a minimally invasive manner |
| US5868664A (en) | 1996-02-23 | 1999-02-09 | Envision Medical Corporation | Electrically isolated sterilizable endoscopic video camera head |
| DE29603447U1 (de) | 1996-02-26 | 1996-04-18 | Aesculap Ag | Bohrmaschine für chirurgische Zwecke |
| US6099537A (en) | 1996-02-26 | 2000-08-08 | Olympus Optical Co., Ltd. | Medical treatment instrument |
| US5951575A (en) | 1996-03-01 | 1999-09-14 | Heartport, Inc. | Apparatus and methods for rotationally deploying needles |
| US5810721A (en) | 1996-03-04 | 1998-09-22 | Heartport, Inc. | Soft tissue retractor and method for providing surgical access |
| US5673842A (en) | 1996-03-05 | 1997-10-07 | Ethicon Endo-Surgery | Surgical stapler with locking mechanism |
| US5697543A (en) | 1996-03-12 | 1997-12-16 | Ethicon Endo-Surgery, Inc. | Linear stapler with improved firing stroke |
| US5605272A (en) | 1996-03-12 | 1997-02-25 | Ethicon Endo-Surgery, Inc. | Trigger mechanism for surgical instruments |
| US5810240A (en) | 1996-03-15 | 1998-09-22 | United States Surgical Corporation | Surgical fastener applying device |
| US5732859A (en) | 1996-03-20 | 1998-03-31 | Leblanc; Kevin A. | Apparatus for pressing garments |
| IL117607A0 (en) | 1996-03-21 | 1996-07-23 | Dev Of Advanced Medical Produc | Surgical stapler and method of surgical fastening |
| WO1997035533A1 (en) | 1996-03-25 | 1997-10-02 | Enrico Nicolo | Surgical mesh prosthetic material and methods of use |
| US5747953A (en) | 1996-03-29 | 1998-05-05 | Stryker Corporation | Cordless, battery operated surical tool |
| US5772099A (en) | 1996-04-01 | 1998-06-30 | United States Surgical Corporation | Surgical fastening apparatus with alignment pin |
| USD416089S (en) | 1996-04-08 | 1999-11-02 | Richard-Allan Medical Industries, Inc. | Endoscopic linear stapling and dividing surgical instrument |
| US5728121A (en) | 1996-04-17 | 1998-03-17 | Teleflex Medical, Inc. | Surgical grasper devices |
| US5785232A (en) | 1996-04-17 | 1998-07-28 | Vir Engineering | Surgical stapler |
| US5836503A (en) | 1996-04-22 | 1998-11-17 | United States Surgical Corporation | Insertion device for surgical apparatus |
| US6149660A (en) | 1996-04-22 | 2000-11-21 | Vnus Medical Technologies, Inc. | Method and apparatus for delivery of an appliance in a vessel |
| US6050472A (en) | 1996-04-26 | 2000-04-18 | Olympus Optical Co., Ltd. | Surgical anastomosis stapler |
| JP3791856B2 (ja) | 1996-04-26 | 2006-06-28 | オリンパス株式会社 | 医療用縫合器 |
| US5928137A (en) | 1996-05-03 | 1999-07-27 | Green; Philip S. | System and method for endoscopic imaging and endosurgery |
| US6221007B1 (en) | 1996-05-03 | 2001-04-24 | Philip S. Green | System and method for endoscopic imaging and endosurgery |
| US5741305A (en) | 1996-05-06 | 1998-04-21 | Physio-Control Corporation | Keyed self-latching battery pack for a portable defibrillator |
| DE19618291A1 (de) | 1996-05-07 | 1998-01-29 | Storz Karl Gmbh & Co | Instrument mit einem abwinkelbaren Handgriff |
| US5823066A (en) | 1996-05-13 | 1998-10-20 | Ethicon Endo-Surgery, Inc. | Articulation transmission mechanism for surgical instruments |
| US5797900A (en) | 1996-05-20 | 1998-08-25 | Intuitive Surgical, Inc. | Wrist mechanism for surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5792135A (en) | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5772379A (en) | 1996-05-24 | 1998-06-30 | Evensen; Kenneth | Self-filling staple fastener |
| JPH09323068A (ja) | 1996-06-07 | 1997-12-16 | Chowa Kogyo Kk | 起振用偏心重錘の位相差制御方法、および同位相差制御機構 |
| US6119913A (en) | 1996-06-14 | 2000-09-19 | Boston Scientific Corporation | Endoscopic stapler |
| GB2314274A (en) | 1996-06-20 | 1997-12-24 | Gyrus Medical Ltd | Electrode construction for an electrosurgical instrument |
| US5735874A (en) | 1996-06-21 | 1998-04-07 | Ethicon Endo-Surgery, Inc. | Variable position handle locking mechanism |
| US6911916B1 (en) | 1996-06-24 | 2005-06-28 | The Cleveland Clinic Foundation | Method and apparatus for accessing medical data over a network |
| US5736271A (en) | 1996-06-28 | 1998-04-07 | Telxon Corporation | Battery pack for portable electronic device |
| US5853366A (en) | 1996-07-08 | 1998-12-29 | Kelsey, Inc. | Marker element for interstitial treatment and localizing device and method using same |
| US5782748A (en) | 1996-07-10 | 1998-07-21 | Symbiosis Corporation | Endoscopic surgical instruments having detachable proximal and distal portions |
| US5957831A (en) | 1996-07-12 | 1999-09-28 | Adair; Edwin L. | Sterile encapsulated endoscopic video monitor |
| US5732712A (en) | 1996-07-12 | 1998-03-31 | Adair; Edwin L. | Sterile encapsulated operating room video monitor and video monitor support device |
| US5812188A (en) | 1996-07-12 | 1998-09-22 | Adair; Edwin L. | Sterile encapsulated endoscopic video monitor |
| US5765565A (en) | 1996-07-12 | 1998-06-16 | Adair; Edwin L. | Sterile encapsulated operating room video monitor and video monitor support device |
| US5702408A (en) | 1996-07-17 | 1997-12-30 | Ethicon Endo-Surgery, Inc. | Articulating surgical instrument |
| US6024748A (en) | 1996-07-23 | 2000-02-15 | United States Surgical Corporation | Singleshot anastomosis instrument with detachable loading unit and method |
| US6440146B2 (en) | 1996-07-23 | 2002-08-27 | United States Surgical Corporation | Anastomosis instrument and method |
| US6083234A (en) | 1996-07-23 | 2000-07-04 | Surgical Dynamics, Inc. | Anastomosis instrument and method |
| US5785647A (en) | 1996-07-31 | 1998-07-28 | United States Surgical Corporation | Surgical instruments useful for spinal surgery |
| US6054142A (en) | 1996-08-01 | 2000-04-25 | Cyto Therapeutics, Inc. | Biocompatible devices with foam scaffolds |
| JP3752737B2 (ja) | 1996-08-12 | 2006-03-08 | トヨタ自動車株式会社 | 角速度検出装置 |
| US6017354A (en) | 1996-08-15 | 2000-01-25 | Stryker Corporation | Integrated system for powered surgical tools |
| US5830598A (en) | 1996-08-15 | 1998-11-03 | Ericsson Inc. | Battery pack incorporating battery pack contact assembly and method |
| USD393067S (en) | 1996-08-27 | 1998-03-31 | Valleylab Inc. | Electrosurgical pencil |
| US5997528A (en) | 1996-08-29 | 1999-12-07 | Bausch & Lomb Surgical, Inc. | Surgical system providing automatic reconfiguration |
| US5873885A (en) | 1996-08-29 | 1999-02-23 | Storz Instrument Company | Surgical handpiece |
| US6065679A (en) | 1996-09-06 | 2000-05-23 | Ivi Checkmate Inc. | Modular transaction terminal |
| US6364888B1 (en) | 1996-09-09 | 2002-04-02 | Intuitive Surgical, Inc. | Alignment of master and slave in a minimally invasive surgical apparatus |
| US5730758A (en) | 1996-09-12 | 1998-03-24 | Allgeyer; Dean O. | Staple and staple applicator for use in skin fixation of catheters |
| US20050143769A1 (en) | 2002-08-19 | 2005-06-30 | White Jeffrey S. | Ultrasonic dissector |
| US5833696A (en) | 1996-10-03 | 1998-11-10 | United States Surgical Corporation | Apparatus for applying surgical clips |
| US6036667A (en) | 1996-10-04 | 2000-03-14 | United States Surgical Corporation | Ultrasonic dissection and coagulation system |
| US6109500A (en) | 1996-10-04 | 2000-08-29 | United States Surgical Corporation | Lockout mechanism for a surgical stapler |
| US5843132A (en) | 1996-10-07 | 1998-12-01 | Ilvento; Joseph P. | Self-contained, self-powered temporary intravenous pacing catheter assembly |
| US5904647A (en) | 1996-10-08 | 1999-05-18 | Asahi Kogyo Kabushiki Kaisha | Treatment accessories for an endoscope |
| US5851179A (en) | 1996-10-10 | 1998-12-22 | Nellcor Puritan Bennett Incorporated | Pulse oximeter sensor with articulating head |
| JP3091420B2 (ja) | 1996-10-18 | 2000-09-25 | 株式会社貝印刃物開発センター | 内視鏡用処置具 |
| US5752965A (en) | 1996-10-21 | 1998-05-19 | Bio-Vascular, Inc. | Apparatus and method for producing a reinforced surgical fastener suture line |
| US5769892A (en) | 1996-10-22 | 1998-06-23 | Mitroflow International Inc. | Surgical stapler sleeve for reinforcing staple lines |
| US6043626A (en) | 1996-10-29 | 2000-03-28 | Ericsson Inc. | Auxiliary battery holder with multicharger functionality |
| US6162537A (en) | 1996-11-12 | 2000-12-19 | Solutia Inc. | Implantable fibers and medical articles |
| US6033105A (en) | 1996-11-15 | 2000-03-07 | Barker; Donald | Integrated bone cement mixing and dispensing system |
| UA58527C2 (ru) | 1996-11-15 | 2003-08-15 | Майкл Стюарт Гарднер | Аппликатор ушной бирки |
| AU742708B2 (en) | 1996-11-18 | 2002-01-10 | Ethicon Endo-Surgery, Inc. | Systems, methods, and instruments for minimally invasive surgery |
| US6165184A (en) | 1996-11-18 | 2000-12-26 | Smith & Nephew, Inc. | Systems methods and instruments for minimally invasive surgery |
| US5993466A (en) | 1997-06-17 | 1999-11-30 | Yoon; Inbae | Suturing instrument with multiple rotatably mounted spreadable needle holders |
| US6159224A (en) | 1996-11-27 | 2000-12-12 | Yoon; Inbae | Multiple needle suturing instrument and method |
| FR2756574B1 (fr) | 1996-11-29 | 1999-01-08 | Staubli Lyon | Dispositif de selection, mecanique d'armure a trois positions et metier a tisser equipe d'une telle mecanique d'armure |
| US6165188A (en) | 1996-12-02 | 2000-12-26 | Angiotrax, Inc. | Apparatus for percutaneously performing myocardial revascularization having controlled cutting depth and methods of use |
| US6102926A (en) | 1996-12-02 | 2000-08-15 | Angiotrax, Inc. | Apparatus for percutaneously performing myocardial revascularization having means for sensing tissue parameters and methods of use |
| US5899915A (en) | 1996-12-02 | 1999-05-04 | Angiotrax, Inc. | Apparatus and method for intraoperatively performing surgery |
| US5766186A (en) | 1996-12-03 | 1998-06-16 | Simon Fraser University | Suturing device |
| US6050990A (en) | 1996-12-05 | 2000-04-18 | Thermolase Corporation | Methods and devices for inhibiting hair growth and related skin treatments |
| CA2224366C (en) | 1996-12-11 | 2006-10-31 | Ethicon, Inc. | Meniscal repair device |
| US8206406B2 (en) | 1996-12-12 | 2012-06-26 | Intuitive Surgical Operations, Inc. | Disposable sterile surgical adaptor |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US6019780A (en) | 1996-12-17 | 2000-02-01 | Tnco, Inc. | Dual pin and groove pivot for micro-instrument |
| GB9626512D0 (en) | 1996-12-20 | 1997-02-05 | Gyrus Medical Ltd | An improved electrosurgical generator and system |
| US5966126A (en) | 1996-12-23 | 1999-10-12 | Szabo; Andrew J. | Graphic user interface for database system |
| US6063098A (en) | 1996-12-23 | 2000-05-16 | Houser; Kevin | Articulable ultrasonic surgical apparatus |
| IL119883A0 (en) | 1996-12-23 | 1997-03-18 | Dev Of Advanced Medical Produc | Connector of rod posts in surgical stapler apparatus |
| US5849023A (en) | 1996-12-27 | 1998-12-15 | Mericle; Robert William | Disposable remote flexible drive cutting apparatus |
| US6007521A (en) | 1997-01-07 | 1999-12-28 | Bidwell; Robert E. | Drainage catheter system |
| DE19700402C2 (de) | 1997-01-08 | 1999-12-30 | Ferdinand Peer | Instrument zur Kompensation des Handzitterns bei der Manipulation feiner Strukturen |
| US5931847A (en) | 1997-01-09 | 1999-08-03 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument with improved cutting edge |
| US6074401A (en) | 1997-01-09 | 2000-06-13 | Coalescent Surgical, Inc. | Pinned retainer surgical fasteners, instruments and methods for minimally invasive vascular and endoscopic surgery |
| US5769748A (en) | 1997-01-16 | 1998-06-23 | Hughes Electronics Corporation | Gimbal employing differential combination of offset drives |
| JPH10200699A (ja) | 1997-01-16 | 1998-07-31 | Ricoh Co Ltd | 画像形成装置のスキャナにおけるサーボ制御装置 |
| GB2323744B (en) | 1997-01-17 | 1999-03-24 | Connell Anne O | Method of supporting unknown addresses in an interface for data transmission in an asynchronous transfer mode |
| US6485667B1 (en) | 1997-01-17 | 2002-11-26 | Rayonier Products And Financial Services Company | Process for making a soft, strong, absorbent material for use in absorbent articles |
| US5784934A (en) | 1997-01-30 | 1998-07-28 | Shinano Pneumatic Industries, Inc. | Ratchet wrench with pivotable head |
| US5908402A (en) | 1997-02-03 | 1999-06-01 | Valleylab | Method and apparatus for detecting tube occlusion in argon electrosurgery system |
| US6376971B1 (en) | 1997-02-07 | 2002-04-23 | Sri International | Electroactive polymer electrodes |
| US6545384B1 (en) | 1997-02-07 | 2003-04-08 | Sri International | Electroactive polymer devices |
| US5899824A (en) | 1997-02-12 | 1999-05-04 | Accudart Corporation | Snap-fit dart and adapter |
| US5732749A (en) | 1997-02-14 | 1998-03-31 | Albany International Corp. | Pin seam for laminated integrally woven papermaker's fabric |
| US5797637A (en) | 1997-02-21 | 1998-08-25 | Ervin; Scott P. | Roll mover and method of using |
| DE19707373C1 (de) | 1997-02-25 | 1998-02-05 | Storz Karl Gmbh & Co | Bajonettkupplung zum lösbaren Verbinden zweier Rohrschaftinstrumente oder -instrumententeile |
| US5907211A (en) | 1997-02-28 | 1999-05-25 | Massachusetts Institute Of Technology | High-efficiency, large stroke electromechanical actuator |
| IT1291164B1 (it) | 1997-03-04 | 1998-12-29 | Coral Spa | Condotto universale di convogliamento di fumi o gas nocivi da un posto di lavorazione. |
| CA2283392C (en) | 1997-03-05 | 2009-06-30 | The Trustees Of Columbia University In The City Of New York | Electrothermal device for sealing and joining or cutting tissue |
| US5810821A (en) | 1997-03-28 | 1998-09-22 | Biomet Inc. | Bone fixation screw system |
| ES2296330T3 (es) | 1997-03-31 | 2008-04-16 | Kabushikikaisha Igaki Iryo Sekkei | Elemento de sujecion de sutura para usar en tratamientos medicos. |
| US6050172A (en) | 1997-04-04 | 2000-04-18 | Emhart Glass S.A. | Pneumatically operated mechanism |
| US5846254A (en) | 1997-04-08 | 1998-12-08 | Ethicon Endo-Surgery, Inc. | Surgical instrument for forming a knot |
| US5843169A (en) | 1997-04-08 | 1998-12-01 | Taheri; Syde A. | Apparatus and method for stapling graft material to a blood vessel wall while preserving the patency of orifices |
| US6033399A (en) | 1997-04-09 | 2000-03-07 | Valleylab, Inc. | Electrosurgical generator with adaptive power control |
| US6270916B1 (en) | 1997-04-10 | 2001-08-07 | Alcatel | Complete discharge device for lithium battery |
| RU2144791C1 (ru) | 1997-04-14 | 2000-01-27 | Дубровский Аркадий Вениаминович | Пологое поворотное устройство |
| USD462437S1 (en) | 1997-04-14 | 2002-09-03 | Baxter International Inc. | Manually operable irrigation surgical instrument |
| TW473600B (en) | 1997-04-15 | 2002-01-21 | Swagelok Co | Tube fitting, rear ferrule for a two ferrule tube fitting and ferrule for a tube fitting and a non-flared tube fitting |
| US5919198A (en) | 1997-04-17 | 1999-07-06 | Ethicon Endo-Surgery, Inc. | Disposable cartridge with drivers |
| DE29720616U1 (de) | 1997-04-18 | 1998-08-20 | Kaltenbach & Voigt | Handstück für medizinische Zwecke, insbesondere für eine ärztliche oder zahnärztliche Behandlungseinrichtung, vorzugsweise für eine spanabhebende Bearbeitung eines Zahn-Wurzelkanals |
| US5893878A (en) | 1997-04-24 | 1999-04-13 | Pierce; Javin | Micro traumatic tissue manipulator apparatus |
| GB9708268D0 (en) | 1997-04-24 | 1997-06-18 | Gyrus Medical Ltd | An electrosurgical instrument |
| JPH10296660A (ja) | 1997-04-25 | 1998-11-10 | Hitachi Koki Co Ltd | 電池式携帯用工具 |
| US5906577A (en) | 1997-04-30 | 1999-05-25 | University Of Massachusetts | Device, surgical access port, and method of retracting an incision into an opening and providing a channel through the incision |
| US6157169A (en) | 1997-04-30 | 2000-12-05 | Samsung Electronics Co., Ltd. | Monitoring technique for accurately determining residual capacity of a battery |
| US6037724A (en) | 1997-05-01 | 2000-03-14 | Osteomed Corporation | Electronic controlled surgical power tool |
| US6017358A (en) | 1997-05-01 | 2000-01-25 | Inbae Yoon | Surgical instrument with multiple rotatably mounted offset end effectors |
| US6867248B1 (en) | 1997-05-12 | 2005-03-15 | Metabolix, Inc. | Polyhydroxyalkanoate compositions having controlled degradation rates |
| USH1904H (en) | 1997-05-14 | 2000-10-03 | Ethicon Endo-Surgery, Inc. | Electrosurgical hemostatic method and device |
| USH2037H1 (en) | 1997-05-14 | 2002-07-02 | David C. Yates | Electrosurgical hemostatic device including an anvil |
| US7048716B1 (en) | 1997-05-15 | 2006-05-23 | Stanford University | MR-compatible devices |
| US5817091A (en) | 1997-05-20 | 1998-10-06 | Medical Scientific, Inc. | Electrosurgical device having a visible indicator |
| DE19721076A1 (de) | 1997-05-20 | 1998-11-26 | Trw Repa Gmbh | Verfahren zum Herstellen eines Seilabschnittes mit einem Befestigungselement für ein Fahrzeuginsassen-Rückhaltesystem sowie mit diesem Verfahren hergestellter Seilabschnitt |
| US5997952A (en) | 1997-05-23 | 1999-12-07 | The Dow Chemical Company | Fast-setting latex coating and formulations |
| US5851212A (en) | 1997-06-11 | 1998-12-22 | Endius Incorporated | Surgical instrument |
| US5899914A (en) | 1997-06-11 | 1999-05-04 | Endius Incorporated | Surgical instrument |
| US6231565B1 (en) | 1997-06-18 | 2001-05-15 | United States Surgical Corporation | Robotic arm DLUs for performing surgical tasks |
| US5947996A (en) | 1997-06-23 | 1999-09-07 | Medicor Corporation | Yoke for surgical instrument |
| US5951552A (en) | 1997-06-30 | 1999-09-14 | Ethicon Endo-Surgery, Inc. | Capacitively coupled cordless electrosurgical instrument |
| US5849020A (en) | 1997-06-30 | 1998-12-15 | Ethicon Endo-Surgery, Inc. | Inductively coupled electrosurgical instrument |
| US7021878B1 (en) | 1997-07-03 | 2006-04-04 | Trackers Company | Categorizing fasteners and construction connectors using visual identifiers |
| US6049145A (en) | 1997-07-07 | 2000-04-11 | Motorola, Inc. | Tamper proof safety circuit |
| FR2765794B1 (fr) | 1997-07-11 | 1999-09-03 | Joel Bardeau | Dispositif d'eveinage notamment pour endoeveinage |
| US6338737B1 (en) | 1997-07-17 | 2002-01-15 | Haviv Toledano | Flexible annular stapler for closed surgery of hollow organs |
| GB9900964D0 (en) | 1999-01-15 | 1999-03-10 | Gyrus Medical Ltd | An electrosurgical system |
| US6923803B2 (en) | 1999-01-15 | 2005-08-02 | Gyrus Medical Limited | Electrosurgical system and method |
| EP0996377A1 (en) | 1997-07-18 | 2000-05-03 | Gyrus Medical Limited | An electrosurgical instrument |
| GB2327352A (en) | 1997-07-18 | 1999-01-27 | Gyrus Medical Ltd | Electrosurgical instrument |
| DE69824851T2 (de) | 1997-07-18 | 2005-07-21 | Gyrus Medical Ltd., St. Mellons | Ein elektrochirurgisches instrument |
| US5937951A (en) | 1997-07-18 | 1999-08-17 | Ethicon Endo-Surgery, Inc. | Skin stapler with rack and pinion staple feed mechanism |
| JP2001510066A (ja) | 1997-07-18 | 2001-07-31 | ガイラス・メディカル・リミテッド | 電気外科用器具 |
| US7278994B2 (en) | 1997-07-18 | 2007-10-09 | Gyrus Medical Limited | Electrosurgical instrument |
| JP2001510715A (ja) | 1997-07-24 | 2001-08-07 | マグキン、ジェームス、エフ、ジュニア | 任意の分離可能な外筒を有する静止中央トンネル診断カテーテル |
| ES2242289T3 (es) | 1997-07-25 | 2005-11-01 | MINNESOTA INNOVATIVE TECHNOLOGIES & INSTRUMENTS CORPORATION (MITI) | Dispositivo de control para suministrar oxigeno suplementario para respiracion. |
| US5948030A (en) | 1997-07-25 | 1999-09-07 | General Motors Corporation | Steering angle determaination method and apparatus |
| US6532958B1 (en) | 1997-07-25 | 2003-03-18 | Minnesota Innovative Technologies & Instruments Corporation | Automated control and conservation of supplemental respiratory oxygen |
| US6371114B1 (en) | 1998-07-24 | 2002-04-16 | Minnesota Innovative Technologies & Instruments Corporation | Control device for supplying supplemental respiratory oxygen |
| WO1999005167A1 (en) | 1997-07-25 | 1999-02-04 | University Of Massachusetts | Designed protein pores as components for biosensors |
| CA2265798C (en) | 1997-07-29 | 2007-10-09 | Thomas & Betts International, Inc. | Improved cable tie dispensing apparatus |
| JP3811291B2 (ja) | 1998-07-02 | 2006-08-16 | オリンパス株式会社 | 内視鏡システム |
| US5878938A (en) | 1997-08-11 | 1999-03-09 | Ethicon Endo-Surgery, Inc. | Surgical stapler with improved locking mechanism |
| US6024750A (en) | 1997-08-14 | 2000-02-15 | United States Surgical | Ultrasonic curved blade |
| US5904702A (en) | 1997-08-14 | 1999-05-18 | University Of Massachusetts | Instrument for thoracic surgical procedures |
| US6024764A (en) | 1997-08-19 | 2000-02-15 | Intermedics, Inc. | Apparatus for imparting physician-determined shapes to implantable tubular devices |
| US6211626B1 (en) | 1997-08-26 | 2001-04-03 | Color Kinetics, Incorporated | Illumination components |
| US6083223A (en) | 1997-08-28 | 2000-07-04 | Baker; James A. | Methods and apparatus for welding blood vessels |
| AUPO889497A0 (en) | 1997-09-01 | 1997-09-25 | N.J. Phillips Pty. Limited | An applicator |
| US6731976B2 (en) | 1997-09-03 | 2004-05-04 | Medtronic, Inc. | Device and method to measure and communicate body parameters |
| US6267761B1 (en) | 1997-09-09 | 2001-07-31 | Sherwood Services Ag | Apparatus and method for sealing and cutting tissue |
| CA2303194C (en) | 1997-09-10 | 2006-04-11 | James Gilbert Chandler | Bipolar instrument for vessel fusion |
| AU9478498A (en) | 1997-09-11 | 1999-03-29 | Genzyme Corporation | Articulating endoscopic implant rotator surgical apparatus and method for using same |
| EP2362283B1 (en) | 1997-09-19 | 2015-11-25 | Massachusetts Institute Of Technology | Robotic apparatus |
| US6214001B1 (en) | 1997-09-19 | 2001-04-10 | Oratec Interventions, Inc. | Electrocauterizing tool for orthopedic shave devices |
| US6017356A (en) | 1997-09-19 | 2000-01-25 | Ethicon Endo-Surgery Inc. | Method for using a trocar for penetration and skin incision |
| US20040236352A1 (en) | 1997-09-22 | 2004-11-25 | Yulun Wang | Method and apparatus for performing minimally invasive cardiac procedures |
| US5865361A (en) | 1997-09-23 | 1999-02-02 | United States Surgical Corporation | Surgical stapling apparatus |
| US5921956A (en) | 1997-09-24 | 1999-07-13 | Smith & Nephew, Inc. | Surgical instrument |
| WO1999016347A1 (en) | 1997-09-29 | 1999-04-08 | Scimed Life Systems, Inc. | Intravascular imaging guidewire |
| US6173074B1 (en) | 1997-09-30 | 2001-01-09 | Lucent Technologies, Inc. | Acoustic signature recognition and identification |
| US6174318B1 (en) | 1998-04-23 | 2001-01-16 | Scimed Life Systems, Inc. | Basket with one or more moveable legs |
| US6053899A (en) | 1997-10-02 | 2000-04-25 | Scimed Life Systems, Inc. | Material delivery device and method of using the same |
| GB2329840C (en) | 1997-10-03 | 2007-10-05 | Johnson & Johnson Medical | Biopolymer sponge tubes |
| US5984949A (en) | 1997-10-06 | 1999-11-16 | Levin; John M. | Tissue hooks and tools for applying same |
| US5944172A (en) | 1997-10-06 | 1999-08-31 | Allen-Bradley Company, Llc | Biasing assembly for a switching device |
| US6165173A (en) | 1997-10-06 | 2000-12-26 | Somnus Medical Technologies, Inc. | Memory for regulating device utilization and behavior |
| US7030904B2 (en) | 1997-10-06 | 2006-04-18 | Micro-Medical Devices, Inc. | Reduced area imaging device incorporated within wireless endoscopic devices |
| US6206894B1 (en) | 1997-10-09 | 2001-03-27 | Ethicon Endo-Surgery, Inc. | Electrically powered needle holder to assist in suturing |
| EP1027000A4 (en) | 1997-10-09 | 2001-09-12 | Camran Nezhat | ORGAN RESECTION METHODS AND SYSTEMS |
| US5947984A (en) | 1997-10-10 | 1999-09-07 | Ethicon Endo-Surger, Inc. | Ultrasonic clamp coagulator apparatus having force limiting clamping mechanism |
| US5893835A (en) | 1997-10-10 | 1999-04-13 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having dual rotational positioning |
| US6171316B1 (en) | 1997-10-10 | 2001-01-09 | Origin Medsystems, Inc. | Endoscopic surgical instrument for rotational manipulation |
| US6241723B1 (en) | 1997-10-15 | 2001-06-05 | Team Medical Llc | Electrosurgical system |
| US6117148A (en) | 1997-10-17 | 2000-09-12 | Ravo; Biagio | Intraluminal anastomotic device |
| US6511468B1 (en) | 1997-10-17 | 2003-01-28 | Micro Therapeutics, Inc. | Device and method for controlling injection of liquid embolic composition |
| US6224617B1 (en) | 1997-10-17 | 2001-05-01 | Angiotrax, Inc. | Methods and apparatus for defibrillating a heart refractory to electrical stimuli |
| US6142149A (en) | 1997-10-23 | 2000-11-07 | Steen; Scot Kenneth | Oximetry device, open oxygen delivery system oximetry device and method of controlling oxygen saturation |
| US5903117A (en) | 1997-10-28 | 1999-05-11 | Xomed Surgical Products, Inc. | Method and adaptor for connecting a powered surgical instrument to a medical console |
| JP4121615B2 (ja) | 1997-10-31 | 2008-07-23 | オリンパス株式会社 | 内視鏡 |
| US6086600A (en) | 1997-11-03 | 2000-07-11 | Symbiosis Corporation | Flexible endoscopic surgical instrument for invagination and fundoplication |
| US7435249B2 (en) | 1997-11-12 | 2008-10-14 | Covidien Ag | Electrosurgical instruments which reduces collateral damage to adjacent tissue |
| US6050996A (en) | 1997-11-12 | 2000-04-18 | Sherwood Services Ag | Bipolar electrosurgical instrument with replaceable electrodes |
| US6187003B1 (en) | 1997-11-12 | 2001-02-13 | Sherwood Services Ag | Bipolar electrosurgical instrument for sealing vessels |
| US5946978A (en) | 1997-11-13 | 1999-09-07 | Shimano Inc. | Cable adjustment device |
| US6228083B1 (en) | 1997-11-14 | 2001-05-08 | Sherwood Services Ag | Laparoscopic bipolar electrosurgical instrument |
| FR2771145B1 (fr) | 1997-11-19 | 2000-02-25 | Car X | Gaine souple a soufflet pour joint articule et outillages de mise en place de cette gaine |
| US6010513A (en) | 1997-11-26 | 2000-01-04 | Bionx Implants Oy | Device for installing a tissue fastener |
| US6273876B1 (en) | 1997-12-05 | 2001-08-14 | Intratherapeutics, Inc. | Catheter segments having circumferential supports with axial projection |
| US6254642B1 (en) | 1997-12-09 | 2001-07-03 | Thomas V. Taylor | Perorally insertable gastroesophageal anti-reflux valve prosthesis and tool for implantation thereof |
| US6068627A (en) | 1997-12-10 | 2000-05-30 | Valleylab, Inc. | Smart recognition apparatus and method |
| US6171330B1 (en) | 1997-12-15 | 2001-01-09 | Sofradim Production | Pneumatic surgical instrument for the distribution and placement of connecting or fastening means |
| US6248116B1 (en) | 1997-12-16 | 2001-06-19 | B. Braun Celsa | Medical treatment of a diseased anatomical duct |
| US6472784B2 (en) | 1997-12-16 | 2002-10-29 | Fred N. Miekka | Methods and apparatus for increasing power of permanent magnet motors |
| US6055062A (en) | 1997-12-19 | 2000-04-25 | Hewlett-Packard Company | Electronic printer having wireless power and communications connections to accessory units |
| US6228089B1 (en) | 1997-12-19 | 2001-05-08 | Depuy International Limited | Device for positioning and guiding a surgical instrument during orthopaedic interventions |
| EP0923907A1 (en) | 1997-12-19 | 1999-06-23 | Gyrus Medical Limited | An electrosurgical instrument |
| JPH11178833A (ja) | 1997-12-24 | 1999-07-06 | Olympus Optical Co Ltd | 超音波処置具 |
| US6033427A (en) | 1998-01-07 | 2000-03-07 | Lee; Benjamin I. | Method and device for percutaneous sealing of internal puncture sites |
| US6156056A (en) | 1998-01-09 | 2000-12-05 | Ethicon, Inc. | Suture buttress |
| US6245081B1 (en) | 1998-01-09 | 2001-06-12 | Steven M. Bowman | Suture buttress |
| US6620166B1 (en) | 1998-01-09 | 2003-09-16 | Ethicon, Inc. | Suture buttress system |
| GB2336214A (en) | 1998-01-16 | 1999-10-13 | David William Taylor | Preventionof multiple use of limited use devices |
| US6200311B1 (en) | 1998-01-20 | 2001-03-13 | Eclipse Surgical Technologies, Inc. | Minimally invasive TMR device |
| US6072299A (en) | 1998-01-26 | 2000-06-06 | Medtronic Physio-Control Manufacturing Corp. | Smart battery with maintenance and testing functions |
| US6096074A (en) | 1998-01-27 | 2000-08-01 | United States Surgical | Stapling apparatus and method for heart valve replacement |
| US6228454B1 (en) | 1998-02-02 | 2001-05-08 | Fort James Corporation | Sheet material having weakness zones and a system for dispensing the material |
| US6296640B1 (en) | 1998-02-06 | 2001-10-02 | Ethicon Endo-Surgery, Inc. | RF bipolar end effector for use in electrosurgical instruments |
| US6165175A (en) | 1999-02-02 | 2000-12-26 | Ethicon Endo-Surgery, Inc. | RF bipolar mesentery takedown device including improved bipolar end effector |
| US6457625B1 (en) | 1998-02-17 | 2002-10-01 | Bionx Implants, Oy | Device for installing a tissue fastener |
| US7052499B2 (en) | 1998-02-18 | 2006-05-30 | Walter Lorenz Surgical, Inc. | Method and apparatus for bone fracture fixation |
| US6645201B1 (en) | 1998-02-19 | 2003-11-11 | Curon Medical, Inc. | Systems and methods for treating dysfunctions in the intestines and rectum |
| US20020087148A1 (en) | 1998-02-24 | 2002-07-04 | Brock David L. | Flexible instrument |
| US6949106B2 (en) | 1998-02-24 | 2005-09-27 | Endovia Medical, Inc. | Surgical instrument |
| US7713190B2 (en) | 1998-02-24 | 2010-05-11 | Hansen Medical, Inc. | Flexible instrument |
| US6554844B2 (en) | 1998-02-24 | 2003-04-29 | Endovia Medical, Inc. | Surgical instrument |
| US8414598B2 (en) | 1998-02-24 | 2013-04-09 | Hansen Medical, Inc. | Flexible instrument |
| US20020138082A1 (en) | 1998-02-24 | 2002-09-26 | Brock David L. | Surgical instrument |
| US7775972B2 (en) | 1998-02-24 | 2010-08-17 | Hansen Medical, Inc. | Flexible instrument |
| US20020087048A1 (en) | 1998-02-24 | 2002-07-04 | Brock David L. | Flexible instrument |
| US7090683B2 (en) | 1998-02-24 | 2006-08-15 | Hansen Medical, Inc. | Flexible instrument |
| US7789875B2 (en) | 1998-02-24 | 2010-09-07 | Hansen Medical, Inc. | Surgical instruments |
| US6183442B1 (en) | 1998-03-02 | 2001-02-06 | Board Of Regents Of The University Of Texas System | Tissue penetrating device and methods for using same |
| US5909062A (en) | 1998-03-10 | 1999-06-01 | Krietzman; Mark Howard | Secondary power supply for use with handheld illumination devices |
| RU2141279C1 (ru) | 1998-03-11 | 1999-11-20 | Кондратюк Георгий Константинович | Универсальная насадка |
| US6099551A (en) | 1998-03-12 | 2000-08-08 | Shelhigh, Inc. | Pericardial strip and stapler assembly for dividing and sealing visceral tissues and method of use thereof |
| US7491232B2 (en) | 1998-09-18 | 2009-02-17 | Aptus Endosystems, Inc. | Catheter-based fastener implantation apparatus and methods with implantation force resolution |
| US6042601A (en) | 1998-03-18 | 2000-03-28 | United States Surgical Corporation | Apparatus for vascular hole closure |
| US6592538B1 (en) | 1998-03-20 | 2003-07-15 | New York Society For The Ruptured And Crippled Maintaining The Hospital For Special Surgery | Dynamic orthopedic braces |
| US20020025921A1 (en) | 1999-07-26 | 2002-02-28 | Petito George D. | Composition and method for growing, protecting, and healing tissues and cells |
| AU3157599A (en) | 1998-03-26 | 1999-10-18 | Gyrus Medical Limited | An electrosurgical instrument |
| GB9807303D0 (en) | 1998-04-03 | 1998-06-03 | Gyrus Medical Ltd | An electrode assembly for an electrosurgical instrument |
| US6656215B1 (en) | 2000-11-16 | 2003-12-02 | Cordis Corporation | Stent graft having an improved means for attaching a stent to a graft |
| GB2335858A (en) | 1998-04-03 | 1999-10-06 | Gyrus Medical Ltd | Resectoscope having pivoting electrode assembly |
| US6347241B2 (en) | 1999-02-02 | 2002-02-12 | Senorx, Inc. | Ultrasonic and x-ray detectable biopsy site marker and apparatus for applying it |
| US6001112A (en) | 1998-04-10 | 1999-12-14 | Endicor Medical, Inc. | Rotational atherectomy device |
| US6482217B1 (en) | 1998-04-10 | 2002-11-19 | Endicor Medical, Inc. | Neuro thrombectomy catheter |
| US6249076B1 (en) | 1998-04-14 | 2001-06-19 | Massachusetts Institute Of Technology | Conducting polymer actuator |
| US6047861A (en) | 1998-04-15 | 2000-04-11 | Vir Engineering, Inc. | Two component fluid dispenser |
| FR2777443B1 (fr) | 1998-04-21 | 2000-06-30 | Tornier Sa | Ancillaire pour la mise en place et le retrait d'un implant et plus particulierement d'une ancre de suture |
| US6450989B2 (en) | 1998-04-27 | 2002-09-17 | Artemis Medical, Inc. | Dilating and support apparatus with disease inhibitors and methods for use |
| US6023641A (en) | 1998-04-29 | 2000-02-08 | Medtronic, Inc. | Power consumption reduction in medical devices employing multiple digital signal processors |
| US6003517A (en) | 1998-04-30 | 1999-12-21 | Ethicon Endo-Surgery, Inc. | Method for using an electrosurgical device on lung tissue |
| US6010520A (en) | 1998-05-01 | 2000-01-04 | Pattison; C. Phillip | Double tapered esophageal dilator |
| US6030384A (en) | 1998-05-01 | 2000-02-29 | Nezhat; Camran | Bipolar surgical instruments having focused electrical fields |
| US6514252B2 (en) | 1998-05-01 | 2003-02-04 | Perfect Surgical Techniques, Inc. | Bipolar surgical instruments having focused electrical fields |
| US6171305B1 (en) | 1998-05-05 | 2001-01-09 | Cardiac Pacemakers, Inc. | RF ablation apparatus and method having high output impedance drivers |
| US6558378B2 (en) | 1998-05-05 | 2003-05-06 | Cardiac Pacemakers, Inc. | RF ablation system and method having automatic temperature control |
| US6517566B1 (en) | 1998-05-11 | 2003-02-11 | Surgical Connections, Inc. | Devices and methods for treating e.g. urinary stress incontinence |
| US6062360A (en) | 1998-05-13 | 2000-05-16 | Brunswick Corporation | Synchronizer for a gear shift mechanism for a marine propulsion system |
| US6039126A (en) | 1998-05-15 | 2000-03-21 | Hsieh; An-Fu | Multi-usage electric tool with angle-changeable grip |
| US6165929A (en) | 1998-05-18 | 2000-12-26 | Phillips Petroleum Company | Compositions that can produce polymers |
| US6261679B1 (en) | 1998-05-22 | 2001-07-17 | Kimberly-Clark Worldwide, Inc. | Fibrous absorbent material and methods of making the same |
| KR20010052459A (ko) | 1998-05-29 | 2001-06-25 | 바이-패스, 인크. | 혈관 수술용 방법 및 그 장치 |
| US20050283188A1 (en) | 1998-05-29 | 2005-12-22 | By-Pass, Inc. | Vascular closure device |
| US6309403B1 (en) | 1998-06-01 | 2001-10-30 | Board Of Trustees Operating Michigan State University | Dexterous articulated linkage for surgical applications |
| WO2000015144A1 (en) | 1998-06-10 | 2000-03-23 | Advanced Bypass Technologies, Inc. | Aortic aneurysm treatment systems |
| JP2000002228A (ja) | 1998-06-12 | 2000-01-07 | Chuo Spring Co Ltd | プルケーブルの端末構造 |
| JP3331172B2 (ja) | 1998-06-12 | 2002-10-07 | 旭光学工業株式会社 | 内視鏡用異物回収具 |
| US6585144B2 (en) | 1998-06-19 | 2003-07-01 | Acimed Life Systems, Inc. | Integrated surgical staple retainer for a full thickness resectioning device |
| US6601749B2 (en) | 1998-06-19 | 2003-08-05 | Scimed Life Systems, Inc. | Multi fire full thickness resectioning device |
| US6629630B2 (en) | 1998-06-19 | 2003-10-07 | Scimed Life Systems, Inc. | Non-circular resection device and endoscope |
| US6126058A (en) | 1998-06-19 | 2000-10-03 | Scimed Life Systems, Inc. | Method and device for full thickness resectioning of an organ |
| US6478210B2 (en) | 2000-10-25 | 2002-11-12 | Scimed Life Systems, Inc. | Method and device for full thickness resectioning of an organ |
| US6018227A (en) | 1998-06-22 | 2000-01-25 | Stryker Corporation | Battery charger especially useful with sterilizable, rechargeable battery packs |
| US5941890A (en) | 1998-06-26 | 1999-08-24 | Ethicon Endo-Surgery, Inc. | Implantable surgical marker |
| CA2276316C (en) | 1998-06-29 | 2008-02-12 | Ethicon Endo-Surgery, Inc. | Method of balancing asymmetric ultrasonic surgical blades |
| CA2276313C (en) | 1998-06-29 | 2008-01-29 | Ethicon Endo-Surgery, Inc. | Balanced ultrasonic blade including a plurality of balance asymmetries |
| US6309400B2 (en) | 1998-06-29 | 2001-10-30 | Ethicon Endo-Surgery, Inc. | Curved ultrasonic blade having a trapezoidal cross section |
| US6066132A (en) | 1998-06-30 | 2000-05-23 | Ethicon, Inc. | Articulating endometrial ablation device |
| US6228098B1 (en) | 1998-07-10 | 2001-05-08 | General Surgical Innovations, Inc. | Apparatus and method for surgical fastening |
| US6352503B1 (en) | 1998-07-17 | 2002-03-05 | Olympus Optical Co., Ltd. | Endoscopic surgery apparatus |
| JP3806518B2 (ja) | 1998-07-17 | 2006-08-09 | オリンパス株式会社 | 内視鏡治療装置 |
| US5977746A (en) | 1998-07-21 | 1999-11-02 | Stryker Corporation | Rechargeable battery pack and method for manufacturing same |
| JP2000055752A (ja) | 1998-08-03 | 2000-02-25 | Kayaba Ind Co Ltd | トルク検出装置 |
| AU5391999A (en) | 1998-08-04 | 2000-02-28 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| AU771701B2 (en) | 1998-08-14 | 2004-04-01 | Genzyme Corporation | Methods, instruments and materials for chondrocyte cell transplantation |
| US6818018B1 (en) | 1998-08-14 | 2004-11-16 | Incept Llc | In situ polymerizable hydrogels |
| DE19836950B4 (de) | 1998-08-17 | 2004-09-02 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Chirurgisches Instrument in Form eines Nahtklammergerätes |
| DE19837258A1 (de) | 1998-08-17 | 2000-03-02 | Deutsch Zentr Luft & Raumfahrt | Vorrichtung zum Betätigen eines chirurgischen Instrumentariums zur Anastomose von Hohlorganen |
| US6554798B1 (en) | 1998-08-18 | 2003-04-29 | Medtronic Minimed, Inc. | External infusion device with remote programming, bolus estimator and/or vibration alarm capabilities |
| US6050989A (en) | 1998-08-24 | 2000-04-18 | Linvatec Corporation | Angularly adjustable powered surgical handpiece |
| US6458147B1 (en) | 1998-11-06 | 2002-10-01 | Neomend, Inc. | Compositions, systems, and methods for arresting or controlling bleeding or fluid leakage in body tissue |
| USH2086H1 (en) | 1998-08-31 | 2003-10-07 | Kimberly-Clark Worldwide | Fine particle liquid filtration media |
| US6726651B1 (en) | 1999-08-04 | 2004-04-27 | Cardeon Corporation | Method and apparatus for differentially perfusing a patient during cardiopulmonary bypass |
| US6131790A (en) | 1998-09-02 | 2000-10-17 | Piraka; Hadi A. | Surgical stapler and cartridge |
| DE19840163A1 (de) | 1998-09-03 | 2000-03-16 | Webasto Karosseriesysteme | Antriebsvorrichtung und Verfahren zum Verstellen eines Fahrzeugteils |
| US6924781B1 (en) | 1998-09-11 | 2005-08-02 | Visible Tech-Knowledgy, Inc. | Smart electronic label employing electronic ink |
| FR2783429B1 (fr) | 1998-09-18 | 2002-04-12 | Imedex Biomateriaux | Materiau collagenique bicomposite,son procede d'obtention et ses applications therapeutiques |
| US6402748B1 (en) | 1998-09-23 | 2002-06-11 | Sherwood Services Ag | Electrosurgical device having a dielectrical seal |
| US6445530B1 (en) | 1998-09-25 | 2002-09-03 | Seagate Technology Llc | Class AB H-bridge using current sensing MOSFETs |
| JP3766552B2 (ja) | 1998-10-01 | 2006-04-12 | 富士写真フイルム株式会社 | データ写し込み装置付きレンズ付きフイルムユニット |
| US6262216B1 (en) | 1998-10-13 | 2001-07-17 | Affymetrix, Inc. | Functionalized silicon compounds and methods for their synthesis and use |
| US6245084B1 (en) | 1998-10-20 | 2001-06-12 | Promex, Inc. | System for controlling a motor driven surgical cutting instrument |
| US6398779B1 (en) | 1998-10-23 | 2002-06-04 | Sherwood Services Ag | Vessel sealing system |
| JP2002528161A (ja) | 1998-10-23 | 2002-09-03 | アプライド メディカル リソーシーズ コーポレイション | 挿入体を用いた外科手術用把持装置および同装置の使用方法 |
| ES2251260T3 (es) | 1998-10-23 | 2006-04-16 | Sherwood Services Ag | Forceps de obturacion de vasos abiertos con miembro de tope. |
| ES2241369T3 (es) | 1998-10-23 | 2005-10-16 | Sherwood Services Ag | Forceps bipolar electroquirurgico endoscopico. |
| US7267677B2 (en) | 1998-10-23 | 2007-09-11 | Sherwood Services Ag | Vessel sealing instrument |
| US5951574A (en) | 1998-10-23 | 1999-09-14 | Ethicon Endo-Surgery, Inc. | Multiple clip applier having a split feeding mechanism |
| WO2000024448A2 (en) | 1998-10-23 | 2000-05-04 | Boston Scientific Limited | Improved system and method for intraluminal imaging |
| US7137980B2 (en) | 1998-10-23 | 2006-11-21 | Sherwood Services Ag | Method and system for controlling output of RF medical generator |
| US6270508B1 (en) | 1998-10-26 | 2001-08-07 | Charles H. Klieman | End effector and instrument for endoscopic and general surgery needle control |
| JP2000210299A (ja) | 1999-01-20 | 2000-08-02 | Olympus Optical Co Ltd | 手術装置 |
| DE19851291A1 (de) | 1998-11-06 | 2000-01-05 | Siemens Ag | Operationsarbeitsplatztaugliches Dateneingabegerät |
| JP3034508B1 (ja) | 1998-11-12 | 2000-04-17 | 本田技研工業株式会社 | 電動機駆動装置 |
| US6249105B1 (en) | 1998-11-13 | 2001-06-19 | Neal Andrews | System and method for detecting performance components of a battery pack |
| US6887710B2 (en) | 1998-11-13 | 2005-05-03 | Mesosystems Technology, Inc. | Robust system for screening mail for biological agents |
| US6659939B2 (en) | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| US6459926B1 (en) | 1998-11-20 | 2002-10-01 | Intuitive Surgical, Inc. | Repositioning and reorientation of master/slave relationship in minimally invasive telesurgery |
| US6398726B1 (en) | 1998-11-20 | 2002-06-04 | Intuitive Surgical, Inc. | Stabilizer for robotic beating-heart surgery |
| US6142933A (en) | 1998-11-23 | 2000-11-07 | Ethicon Endo-Surgery, Inc. | Anoscope for hemorrhoidal surgery |
| US6102271A (en) | 1998-11-23 | 2000-08-15 | Ethicon Endo-Surgery, Inc. | Circular stapler for hemorrhoidal surgery |
| US6200330B1 (en) | 1998-11-23 | 2001-03-13 | Theodore V. Benderev | Systems for securing sutures, grafts and soft tissue to bone and periosteum |
| DE69918569T2 (de) | 1998-11-23 | 2005-03-24 | Microdexterity Systems Inc., Memphis | Chirurgischer manipulator |
| US6167185A (en) | 1998-11-24 | 2000-12-26 | Jds Fitel Inc. | Adjustable optical attenuator |
| US7537564B2 (en) | 1998-12-01 | 2009-05-26 | Atropos Limited | Wound retractor device |
| JP2000171730A (ja) | 1998-12-08 | 2000-06-23 | Olympus Optical Co Ltd | バッテリ式携帯内視鏡装置 |
| US7125403B2 (en) | 1998-12-08 | 2006-10-24 | Intuitive Surgical | In vivo accessories for minimally invasive robotic surgery |
| US6309397B1 (en) | 1999-12-02 | 2001-10-30 | Sri International | Accessories for minimally invasive robotic surgery and methods |
| JP4233656B2 (ja) | 1998-12-11 | 2009-03-04 | ジョンソン・エンド・ジョンソン株式会社 | 自動吻合器及び該吻合器に装着可能な案内バルーン |
| US6828902B2 (en) | 1998-12-14 | 2004-12-07 | Soundcraft, Inc. | Wireless data input to RFID reader |
| US6126670A (en) | 1998-12-16 | 2000-10-03 | Medtronic, Inc. | Cordless surgical handpiece with disposable battery; and method |
| US6887244B1 (en) | 1998-12-16 | 2005-05-03 | Medtronic, Inc. | Cordless surgical handpiece with disposable battery; and method |
| DE19858512C1 (de) | 1998-12-18 | 2000-05-25 | Storz Karl Gmbh & Co Kg | Bipolares medizinisches Instrument |
| DE19860444C2 (de) | 1998-12-28 | 2001-03-29 | Storz Karl Gmbh & Co Kg | Handgriff für ein medizinisches Rohrschaftinstrument |
| DE19860611C1 (de) | 1998-12-29 | 2000-03-23 | Fraunhofer Ges Forschung | Verfahren zur Herstellung von Formkörpern aus Polymer-Schaumpartikeln |
| US6806867B1 (en) | 1998-12-31 | 2004-10-19 | A.T.X. International, Inc. | Palm pad system |
| US6147135A (en) | 1998-12-31 | 2000-11-14 | Ethicon, Inc. | Fabrication of biocompatible polymeric composites |
| US6113618A (en) | 1999-01-13 | 2000-09-05 | Stryker Corporation | Surgical saw with spring-loaded, low-noise cutting blade |
| US7001380B2 (en) | 1999-01-15 | 2006-02-21 | Gyrus Medical Limited | Electrosurgical system and method |
| US20040030333A1 (en) | 1999-01-15 | 2004-02-12 | Gyrus Medical Ltd. | Electrosurgical system and method |
| US6554861B2 (en) | 1999-01-19 | 2003-04-29 | Gyrus Ent L.L.C. | Otologic prosthesis |
| US6273252B1 (en) | 1999-01-20 | 2001-08-14 | Burke H. Mitchell | Protective covering for a hand-held device |
| ES2153313B1 (es) | 1999-01-21 | 2001-11-16 | Biomed S A | Aparato para la aplicacion guiada de una grapa retractil para el cierre precutaneo de orificios, incisiones o laceraciones en vasos, conductos o estructuras anatomicas humanas, grapa retractil y procedimiento para su aplicacion. |
| US6394998B1 (en) | 1999-01-22 | 2002-05-28 | Intuitive Surgical, Inc. | Surgical tools for use in minimally invasive telesurgical applications |
| US8529588B2 (en) | 1999-01-25 | 2013-09-10 | Applied Medical Resources Corporation | Multiple clip applier apparatus and method |
| DE19905085A1 (de) | 1999-01-29 | 2000-08-03 | Black & Decker Inc N D Ges D S | Batteriegetriebenes, handgeführtes Elektrowerkzeug |
| US6387113B1 (en) | 1999-02-02 | 2002-05-14 | Biomet, Inc. | Method and apparatus for repairing a torn meniscus |
| US6174309B1 (en) | 1999-02-11 | 2001-01-16 | Medical Scientific, Inc. | Seal & cut electrosurgical instrument |
| DE19906191A1 (de) | 1999-02-15 | 2000-08-17 | Ingo F Herrmann | Endoskop |
| US6295888B1 (en) | 1999-02-16 | 2001-10-02 | Shimano Inc. | Gear indicator for a bicycle |
| US6083242A (en) | 1999-02-17 | 2000-07-04 | Holobeam, Inc. | Surgical staples with deformation zones of non-uniform cross section |
| US6065919A (en) | 1999-02-18 | 2000-05-23 | Peck; Philip D. | Self-tapping screw with an improved thread design |
| USD429252S (en) | 1999-02-22 | 2000-08-08 | 3Com Corporation | Computer icon for a display screen |
| US6806808B1 (en) | 1999-02-26 | 2004-10-19 | Sri International | Wireless event-recording device with identification codes |
| US6666875B1 (en) | 1999-03-05 | 2003-12-23 | Olympus Optical Co., Ltd. | Surgical apparatus permitting recharge of battery-driven surgical instrument in noncontact state |
| GB9905211D0 (en) | 1999-03-05 | 1999-04-28 | Gyrus Medical Ltd | Electrosurgery system and instrument |
| US20020022836A1 (en) | 1999-03-05 | 2002-02-21 | Gyrus Medical Limited | Electrosurgery system |
| US6582427B1 (en) | 1999-03-05 | 2003-06-24 | Gyrus Medical Limited | Electrosurgery system |
| GB9905210D0 (en) | 1999-03-05 | 1999-04-28 | Gyrus Medical Ltd | Electrosurgical system |
| US6398781B1 (en) | 1999-03-05 | 2002-06-04 | Gyrus Medical Limited | Electrosurgery system |
| GB9905209D0 (en) | 1999-03-05 | 1999-04-28 | Gyrus Medical Ltd | Electrosurgery system |
| US6190386B1 (en) | 1999-03-09 | 2001-02-20 | Everest Medical Corporation | Electrosurgical forceps with needle electrodes |
| US6179776B1 (en) | 1999-03-12 | 2001-01-30 | Scimed Life Systems, Inc. | Controllable endoscopic sheath apparatus and related method of use |
| US6159146A (en) | 1999-03-12 | 2000-12-12 | El Gazayerli; Mohamed Mounir | Method and apparatus for minimally-invasive fundoplication |
| US6512360B1 (en) | 1999-03-15 | 2003-01-28 | Amiteq Co., Ltd | Self-induction-type stroke sensor |
| DE19912038C1 (de) | 1999-03-17 | 2001-01-25 | Storz Karl Gmbh & Co Kg | Handgriff für ein medizinisches Instrument |
| JP2000271141A (ja) | 1999-03-23 | 2000-10-03 | Olympus Optical Co Ltd | 手術装置 |
| AU778081B2 (en) | 1999-03-25 | 2004-11-11 | Tepha, Inc. | Medical devices and applications of polyhydroxyalkanoate polymers |
| US6186957B1 (en) | 1999-03-30 | 2001-02-13 | Michael W. Milam | Stethoscope cover |
| US6086544A (en) | 1999-03-31 | 2000-07-11 | Ethicon Endo-Surgery, Inc. | Control apparatus for an automated surgical biopsy device |
| AU4187800A (en) | 1999-03-31 | 2000-10-16 | Peter L. Rosenblatt | Systems and methods for soft tissue reconstruction |
| US6416486B1 (en) | 1999-03-31 | 2002-07-09 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical device having an embedding surface and a coagulating surface |
| US6120462A (en) | 1999-03-31 | 2000-09-19 | Ethicon Endo-Surgery, Inc. | Control method for an automated surgical biopsy device |
| JP2000287987A (ja) | 1999-04-01 | 2000-10-17 | Olympus Optical Co Ltd | 充電式医療装置 |
| DE19915291A1 (de) | 1999-04-03 | 2000-10-05 | Gardena Kress & Kastner Gmbh | Fluid-Kupplungsanordnung |
| US6228084B1 (en) | 1999-04-06 | 2001-05-08 | Kirwan Surgical Products, Inc. | Electro-surgical forceps having recessed irrigation channel |
| US6424885B1 (en) | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US6565554B1 (en) | 1999-04-07 | 2003-05-20 | Intuitive Surgical, Inc. | Friction compensation in a minimally invasive surgical apparatus |
| US6594552B1 (en) | 1999-04-07 | 2003-07-15 | Intuitive Surgical, Inc. | Grip strength with tactile feedback for robotic surgery |
| US7226467B2 (en) | 1999-04-09 | 2007-06-05 | Evalve, Inc. | Fixation device delivery catheter, systems and methods of use |
| ATE484241T1 (de) | 1999-04-09 | 2010-10-15 | Evalve Inc | Verfahren und vorrichtung zur herzklappenreperation |
| US10327743B2 (en) | 1999-04-09 | 2019-06-25 | Evalve, Inc. | Device and methods for endoscopic annuloplasty |
| US6182673B1 (en) | 1999-04-12 | 2001-02-06 | Mike Kindermann Marketing/Vertriebs Gmbh | Dump facility for cassette sewage tanks |
| US6308089B1 (en) | 1999-04-14 | 2001-10-23 | O.B. Scientific, Inc. | Limited use medical probe |
| US7160311B2 (en) | 1999-04-16 | 2007-01-09 | Integrated Vascular Interventional Technologies, L.C. (Ivit Lc) | Locking compression plate anastomosis apparatus |
| US6689153B1 (en) | 1999-04-16 | 2004-02-10 | Orthopaedic Biosystems Ltd, Inc. | Methods and apparatus for a coated anchoring device and/or suture |
| US6248117B1 (en) | 1999-04-16 | 2001-06-19 | Vital Access Corp | Anastomosis apparatus for use in intraluminally directed vascular anastomosis |
| JP2000304153A (ja) | 1999-04-19 | 2000-11-02 | Honda Motor Co Ltd | 電磁石アクチュエータ駆動装置 |
| US6319510B1 (en) | 1999-04-20 | 2001-11-20 | Alayne Yates | Gum pad for delivery of medication to mucosal tissues |
| US6325805B1 (en) | 1999-04-23 | 2001-12-04 | Sdgi Holdings, Inc. | Shape memory alloy staple |
| US20050222665A1 (en) | 1999-04-23 | 2005-10-06 | Ernest Aranyi | Endovascular fastener applicator |
| TNSN00088A1 (fr) | 1999-04-26 | 2002-05-30 | Int Paper Co | Systeme et methode a mouvement variable |
| US6181105B1 (en) | 1999-04-26 | 2001-01-30 | Exonix Corporation | Self contained transportable power source maintenance and charge |
| DE59900101D1 (de) | 1999-04-29 | 2001-06-28 | Storz Karl Gmbh & Co Kg | Medizinisches Instrument zum Präparieren von Gewebe |
| US6383201B1 (en) | 1999-05-14 | 2002-05-07 | Tennison S. Dong | Surgical prosthesis for repairing a hernia |
| JP4503725B2 (ja) | 1999-05-17 | 2010-07-14 | オリンパス株式会社 | 内視鏡治療装置 |
| AU5150600A (en) | 1999-05-18 | 2000-12-05 | Vascular Innovations, Inc. | Tissue punch |
| US6921412B1 (en) | 1999-05-18 | 2005-07-26 | Cryolife, Inc. | Self-supporting, shaped, three-dimensional biopolymeric materials and methods |
| US6063020A (en) | 1999-05-21 | 2000-05-16 | Datex-Ohmeda, Inc. | Heater door safety interlock for infant warming apparatus |
| GB9911954D0 (en) | 1999-05-21 | 1999-07-21 | Gyrus Medical Ltd | Electrosurgery system and instrument |
| GB9911956D0 (en) | 1999-05-21 | 1999-07-21 | Gyrus Medical Ltd | Electrosurgery system and method |
| US6547786B1 (en) | 1999-05-21 | 2003-04-15 | Gyrus Medical | Electrosurgery system and instrument |
| US6762339B1 (en) | 1999-05-21 | 2004-07-13 | 3M Innovative Properties Company | Hydrophilic polypropylene fibers having antimicrobial activity |
| US6454781B1 (en) | 1999-05-26 | 2002-09-24 | Ethicon Endo-Surgery, Inc. | Feedback control in an ultrasonic surgical instrument for improved tissue effects |
| DE19924311A1 (de) | 1999-05-27 | 2000-11-30 | Walter A Rau | Klammerschneidegerät und Zusatzvorrichtung für ein solches |
| GB9912627D0 (en) | 1999-05-28 | 1999-07-28 | Gyrus Medical Ltd | An electrosurgical instrument |
| US6409724B1 (en) | 1999-05-28 | 2002-06-25 | Gyrus Medical Limited | Electrosurgical instrument |
| GB9912625D0 (en) | 1999-05-28 | 1999-07-28 | Gyrus Medical Ltd | An electrosurgical generator and system |
| US6981941B2 (en) | 1999-06-02 | 2006-01-03 | Power Medical Interventions | Electro-mechanical surgical device |
| US6517565B1 (en) | 1999-06-02 | 2003-02-11 | Power Medical Interventions, Inc. | Carriage assembly for controlling a steering wire steering mechanism within a flexible shaft |
| US8229549B2 (en) | 2004-07-09 | 2012-07-24 | Tyco Healthcare Group Lp | Surgical imaging device |
| US6491201B1 (en) | 2000-02-22 | 2002-12-10 | Power Medical Interventions, Inc. | Fluid delivery mechanism for use with anastomosing, stapling, and resecting instruments |
| US8241322B2 (en) | 2005-07-27 | 2012-08-14 | Tyco Healthcare Group Lp | Surgical device |
| US7951071B2 (en) | 1999-06-02 | 2011-05-31 | Tyco Healthcare Group Lp | Moisture-detecting shaft for use with an electro-mechanical surgical device |
| US7032798B2 (en) | 1999-06-02 | 2006-04-25 | Power Medical Interventions, Inc. | Electro-mechanical surgical device |
| US8025199B2 (en) | 2004-02-23 | 2011-09-27 | Tyco Healthcare Group Lp | Surgical cutting and stapling device |
| US7751870B2 (en) | 2002-01-30 | 2010-07-06 | Power Medical Interventions, Llc | Surgical imaging device |
| US6264087B1 (en) | 1999-07-12 | 2001-07-24 | Powermed, Inc. | Expanding parallel jaw device for use with an electromechanical driver device |
| US6793652B1 (en) | 1999-06-02 | 2004-09-21 | Power Medical Interventions, Inc. | Electro-mechanical surgical device |
| US7695485B2 (en) | 2001-11-30 | 2010-04-13 | Power Medical Interventions, Llc | Surgical device |
| US6315184B1 (en) | 1999-06-02 | 2001-11-13 | Powermed, Inc. | Stapling device for use with an electromechanical driver device for use with anastomosing, stapling, and resecting instruments |
| US6716233B1 (en) | 1999-06-02 | 2004-04-06 | Power Medical Interventions, Inc. | Electromechanical driver and remote surgical instrument attachment having computer assisted control capabilities |
| US6223833B1 (en) | 1999-06-03 | 2001-05-01 | One World Technologies, Inc. | Spindle lock and chipping mechanism for hammer drill |
| EP1058177A1 (en) | 1999-06-04 | 2000-12-06 | Alps Electric Co., Ltd. | Input device for game machine |
| GB9913652D0 (en) | 1999-06-11 | 1999-08-11 | Gyrus Medical Ltd | An electrosurgical generator |
| US6273902B1 (en) | 1999-06-18 | 2001-08-14 | Novare Surgical Systems, Inc. | Surgical clamp having replaceable pad |
| SE519023C2 (sv) | 1999-06-21 | 2002-12-23 | Micromuscle Ab | Kateterburna mikrokirurgiska verktygsset |
| US6494888B1 (en) | 1999-06-22 | 2002-12-17 | Ndo Surgical, Inc. | Tissue reconfiguration |
| US7637905B2 (en) | 2003-01-15 | 2009-12-29 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| FR2795301B1 (fr) | 1999-06-25 | 2001-08-31 | Prec | Instrument de chirurgie endoscopique |
| US6257351B1 (en) | 1999-06-29 | 2001-07-10 | Microaire Surgical Instruments, Inc. | Powered surgical instrument having locking systems and a clutch mechanism |
| US6355699B1 (en) | 1999-06-30 | 2002-03-12 | Ethicon, Inc. | Process for manufacturing biomedical foams |
| US6325810B1 (en) | 1999-06-30 | 2001-12-04 | Ethicon, Inc. | Foam buttress for stapling apparatus |
| US6175290B1 (en) | 1999-06-30 | 2001-01-16 | Gt Development Corporation | Contactless stalk mounted control switch |
| US6306424B1 (en) | 1999-06-30 | 2001-10-23 | Ethicon, Inc. | Foam composite for the repair or regeneration of tissue |
| US6333029B1 (en) | 1999-06-30 | 2001-12-25 | Ethicon, Inc. | Porous tissue scaffoldings for the repair of regeneration of tissue |
| US6488196B1 (en) | 1999-06-30 | 2002-12-03 | Axya Medical, Inc. | Surgical stapler and method of applying plastic staples to body tissue |
| US6104304A (en) | 1999-07-06 | 2000-08-15 | Conexant Systems, Inc. | Self-test and status reporting system for microcontroller-controlled devices |
| US6117158A (en) | 1999-07-07 | 2000-09-12 | Ethicon Endo-Surgery, Inc. | Ratchet release mechanism for hand held instruments |
| JP3293802B2 (ja) | 1999-07-07 | 2002-06-17 | エスエムシー株式会社 | 位置検出機能付きチャック |
| US6168605B1 (en) | 1999-07-08 | 2001-01-02 | Ethicon Endo-Surgery, Inc. | Curved laparoscopic scissor having arcs of curvature |
| JP2001035827A (ja) | 1999-07-16 | 2001-02-09 | Memc Kk | 高濃度オゾン水、同オゾン水の調製方法、および同オゾン水を使用した洗浄方法 |
| US6436110B2 (en) | 1999-07-23 | 2002-08-20 | Ethicon, Inc. | Method of securing a graft using a graft fixation device |
| US6402766B2 (en) | 1999-07-23 | 2002-06-11 | Ethicon, Inc. | Graft fixation device combination |
| US7303570B2 (en) | 1999-07-28 | 2007-12-04 | Cardica, Inc. | Anastomosis tool having a connector holder |
| US7766924B1 (en) | 1999-07-28 | 2010-08-03 | Cardica, Inc. | System for performing anastomosis |
| US7063712B2 (en) | 2001-04-27 | 2006-06-20 | Cardica, Inc. | Anastomosis method |
| US7682368B1 (en) | 1999-07-28 | 2010-03-23 | Cardica, Inc. | Anastomosis tool actuated with stored energy |
| US7285131B1 (en) | 1999-07-28 | 2007-10-23 | Cardica, Inc. | System for performing anastomosis |
| US6391038B2 (en) | 1999-07-28 | 2002-05-21 | Cardica, Inc. | Anastomosis system and method for controlling a tissue site |
| DE19935725C2 (de) | 1999-07-29 | 2003-11-13 | Wolf Gmbh Richard | Medizinisches Instrument, insbesondere Rektoskop |
| DE19935904C1 (de) | 1999-07-30 | 2001-07-12 | Karlsruhe Forschzent | Applikatorspitze eines chirurgischen Applikators zum Setzen von Clips/Klammern für die Verbindung von Gewebe |
| US20020116063A1 (en) | 1999-08-02 | 2002-08-22 | Bruno Giannetti | Kit for chondrocyte cell transplantation |
| US6767352B2 (en) | 1999-08-03 | 2004-07-27 | Onux Medical, Inc. | Surgical suturing instrument and method of use |
| US6527785B2 (en) | 1999-08-03 | 2003-03-04 | Onux Medical, Inc. | Surgical suturing instrument and method of use |
| US6788018B1 (en) | 1999-08-03 | 2004-09-07 | Intuitive Surgical, Inc. | Ceiling and floor mounted surgical robot set-up arms |
| CA2380111A1 (en) | 1999-08-03 | 2001-02-08 | Smith & Nephew, Inc. | Controlled release implantable devices |
| IT1307263B1 (it) | 1999-08-05 | 2001-10-30 | Sorin Biomedica Cardio Spa | Stent per angioplastica con azione antagonista della restenosi,relativo corredo e componenti. |
| US6488659B1 (en) | 1999-08-05 | 2002-12-03 | Biocardia, Inc. | System and method for delivering thermally sensitive and reverse-thermal gelation materials |
| WO2001010421A1 (en) | 1999-08-06 | 2001-02-15 | Board Of Regents, The University Of Texas System | Drug releasing biodegradable fiber implant |
| US6358197B1 (en) | 1999-08-13 | 2002-03-19 | Enteric Medical Technologies, Inc. | Apparatus for forming implants in gastrointestinal tract and kit for use therewith |
| US6666860B1 (en) | 1999-08-24 | 2003-12-23 | Olympus Optical Co., Ltd. | Electric treatment system |
| JP2001069758A (ja) | 1999-08-26 | 2001-03-16 | Asahi Optical Co Ltd | 内視鏡用電源装置 |
| DE19941859C2 (de) | 1999-09-02 | 2002-06-13 | Siemens Audiologische Technik | Digitales Hörhilfegerät |
| US6387092B1 (en) | 1999-09-07 | 2002-05-14 | Scimed Life Systems, Inc. | Systems and methods to identify and disable re-used single use devices based on time elapsed from first therapeutic use |
| US6237604B1 (en) | 1999-09-07 | 2001-05-29 | Scimed Life Systems, Inc. | Systems and methods for preventing automatic identification of re-used single use devices |
| US6611793B1 (en) | 1999-09-07 | 2003-08-26 | Scimed Life Systems, Inc. | Systems and methods to identify and disable re-use single use devices based on detecting environmental changes |
| ATE363235T1 (de) | 1999-09-09 | 2007-06-15 | Tuebingen Scient Medical Gmbh | Chirurgisches instrument für minimal invasive eingriffe |
| US6077290A (en) | 1999-09-10 | 2000-06-20 | Tnco, Incorporated | Endoscopic instrument with removable front end |
| US6104162A (en) | 1999-09-11 | 2000-08-15 | Sainsbury; Simon R. | Method and apparatus for multi-power source for power tools |
| US7662161B2 (en) | 1999-09-13 | 2010-02-16 | Rex Medical, L.P | Vascular hole closure device |
| US7267679B2 (en) | 1999-09-13 | 2007-09-11 | Rex Medical, L.P | Vascular hole closure device |
| US6317616B1 (en) | 1999-09-15 | 2001-11-13 | Neil David Glossop | Method and system to facilitate image guided surgery |
| US6636412B2 (en) | 1999-09-17 | 2003-10-21 | Taser International, Inc. | Hand-held stun gun for incapacitating a human target |
| US7075770B1 (en) | 1999-09-17 | 2006-07-11 | Taser International, Inc. | Less lethal weapons and methods for halting locomotion |
| US6358224B1 (en) | 1999-09-24 | 2002-03-19 | Tyco Healthcare Group Lp | Irrigation system for endoscopic surgery |
| US6356072B1 (en) | 1999-09-24 | 2002-03-12 | Jacob Chass | Hall effect sensor of displacement of magnetic core |
| JP2001087272A (ja) | 1999-09-24 | 2001-04-03 | Motoko Iwabuchi | 生体組織切除用自動縫合器 |
| US6325811B1 (en) | 1999-10-05 | 2001-12-04 | Ethicon Endo-Surgery, Inc. | Blades with functional balance asymmetries for use with ultrasonic surgical instruments |
| US6458142B1 (en) | 1999-10-05 | 2002-10-01 | Ethicon Endo-Surgery, Inc. | Force limiting mechanism for an ultrasonic surgical instrument |
| CA2322061A1 (en) | 1999-10-05 | 2001-04-05 | Anil K. Nalagatla | Stapling instrument having two staple forming surfaces |
| US6312435B1 (en) | 1999-10-08 | 2001-11-06 | Intuitive Surgical, Inc. | Surgical instrument with extended reach for use in minimally invasive surgery |
| US6206903B1 (en) | 1999-10-08 | 2001-03-27 | Intuitive Surgical, Inc. | Surgical tool with mechanical advantage |
| CN1169493C (zh) | 1999-10-14 | 2004-10-06 | 阿特波斯有限公司 | 创口牵引器 |
| EP1092487A3 (de) | 1999-10-15 | 2004-08-25 | Gustav Klauke GmbH | Verpressgerät mit Pressbacken |
| US7887535B2 (en) | 1999-10-18 | 2011-02-15 | Covidien Ag | Vessel sealing wave jaw |
| US6320123B1 (en) | 1999-10-20 | 2001-11-20 | Steven S. Reimers | System and method for shielding electrical components from electromagnetic waves |
| US6780151B2 (en) | 1999-10-26 | 2004-08-24 | Acmi Corporation | Flexible ureteropyeloscope |
| US6749560B1 (en) | 1999-10-26 | 2004-06-15 | Circon Corporation | Endoscope shaft with slotted tube |
| EP1095627A1 (en) | 1999-10-27 | 2001-05-02 | Everest Medical Corporation | Electrosurgical probe for surface treatment |
| US6471659B2 (en) | 1999-12-27 | 2002-10-29 | Neothermia Corporation | Minimally invasive intact recovery of tissue |
| DE19951940C2 (de) | 1999-10-28 | 2001-11-29 | Karlsruhe Forschzent | Endoskopisch einsetzbares Klammernahtgerät |
| US6716215B1 (en) | 1999-10-29 | 2004-04-06 | Image-Guided Neurologics | Cranial drill with sterile barrier |
| SE515391C2 (sv) | 1999-11-08 | 2001-07-23 | Tagmaster Ab | Identifieringsbricka och läsare med interferensskydd |
| DE19954497C1 (de) | 1999-11-11 | 2001-04-19 | Norbert Lemke | Vorrichtung zum Ansteuern eines elektrischen Gerätes für den Einsatz im Sterilbereich bei medizinischen Operationen |
| US6666846B1 (en) | 1999-11-12 | 2003-12-23 | Edwards Lifesciences Corporation | Medical device introducer and obturator and methods of use |
| US6558379B1 (en) | 1999-11-18 | 2003-05-06 | Gyrus Medical Limited | Electrosurgical system |
| US6482063B1 (en) | 1999-11-18 | 2002-11-19 | Charles Raymond Frigard | Articulating blocks toy |
| DE19955412A1 (de) | 1999-11-18 | 2001-05-23 | Hilti Ag | Bohr- und Meisselgerät |
| US6592572B1 (en) | 1999-11-22 | 2003-07-15 | Olympus Optical Co., Ltd. | Surgical operation apparatus |
| US6324339B1 (en) | 1999-11-29 | 2001-11-27 | Eveready Battery Company, Inc. | Battery pack including input and output waveform modification capability |
| US6494896B1 (en) | 1999-11-30 | 2002-12-17 | Closure Medical Corporation | Applicator for laparoscopic or endoscopic surgery |
| US20020022810A1 (en) | 1999-12-07 | 2002-02-21 | Alex Urich | Non-linear flow restrictor for a medical aspiration system |
| US6184655B1 (en) | 1999-12-10 | 2001-02-06 | Stryker Corporation | Battery charging system with internal power manager |
| US6352532B1 (en) | 1999-12-14 | 2002-03-05 | Ethicon Endo-Surgery, Inc. | Active load control of ultrasonic surgical instruments |
| US6736825B2 (en) | 1999-12-14 | 2004-05-18 | Integrated Vascular Interventional Technologies, L C (Ivit Lc) | Paired expandable anastomosis devices and related methods |
| US6428487B1 (en) | 1999-12-17 | 2002-08-06 | Ethicon Endo-Surgery, Inc. | Surgical biopsy system with remote control for selecting an operational mode |
| US6432065B1 (en) | 1999-12-17 | 2002-08-13 | Ethicon Endo-Surgery, Inc. | Method for using a surgical biopsy system with remote control for selecting and operational mode |
| TW429637B (en) | 1999-12-17 | 2001-04-11 | Synergy Scientech Corp | Electrical energy storage device |
| USD535657S1 (en) | 1999-12-20 | 2007-01-23 | Apple Computer, Inc. | User interface for computer display |
| US6254619B1 (en) | 1999-12-28 | 2001-07-03 | Antoine Garabet | Microkeratome |
| US6197042B1 (en) | 2000-01-05 | 2001-03-06 | Medical Technology Group, Inc. | Vascular sheath with puncture site closure apparatus and methods of use |
| US6942674B2 (en) | 2000-01-05 | 2005-09-13 | Integrated Vascular Systems, Inc. | Apparatus and methods for delivering a closure device |
| US6364828B1 (en) | 2000-01-06 | 2002-04-02 | Hubert K. Yeung | Elongated flexible inspection neck |
| RU2181566C2 (ru) | 2000-01-10 | 2002-04-27 | Дубровский Аркадий Вениаминович | Управляемый поворотный механизм |
| US6361546B1 (en) | 2000-01-13 | 2002-03-26 | Endotex Interventional Systems, Inc. | Deployable recoverable vascular filter and methods for use |
| US6770078B2 (en) | 2000-01-14 | 2004-08-03 | Peter M. Bonutti | Movable knee implant and methods therefor |
| US8221402B2 (en) | 2000-01-19 | 2012-07-17 | Medtronic, Inc. | Method for guiding a medical device |
| US6699214B2 (en) | 2000-01-19 | 2004-03-02 | Scimed Life Systems, Inc. | Shear-sensitive injectable delivery system |
| WO2001053154A1 (en) | 2000-01-20 | 2001-07-26 | Bioaccess, Inc. | A method and apparatus for introducing a non-sterile component into a sterile device |
| US6193129B1 (en) | 2000-01-24 | 2001-02-27 | Ethicon Endo-Surgery, Inc. | Cutting blade for a surgical anastomosis stapling instrument |
| HU225908B1 (en) | 2000-01-24 | 2007-12-28 | Ethicon Endo Surgery Europe | Surgical circular stapling head |
| DE10003020C2 (de) | 2000-01-25 | 2001-12-06 | Aesculap Ag & Co Kg | Bipolares Faßinstrument |
| US6377011B1 (en) | 2000-01-26 | 2002-04-23 | Massachusetts Institute Of Technology | Force feedback user interface for minimally invasive surgical simulator and teleoperator and other similar apparatus |
| US20010034530A1 (en) | 2000-01-27 | 2001-10-25 | Malackowski Donald W. | Surgery system |
| JP2001208655A (ja) | 2000-01-28 | 2001-08-03 | Rion Co Ltd | 故障診断方法及びその装置 |
| US6429611B1 (en) | 2000-01-28 | 2002-08-06 | Hui Li | Rotary and linear motor |
| DE10004264C2 (de) | 2000-02-01 | 2002-06-13 | Storz Karl Gmbh & Co Kg | Vorrichtung zur intrakorporalen, minimal-invasiven Behandlung eines Patienten |
| GB0002666D0 (en) | 2000-02-04 | 2000-03-29 | Univ London | Blockade of voltage dependent sodium channels |
| MXPA02007506A (es) | 2000-02-04 | 2004-08-23 | Imagyn Medical Technologies Ca | Aplicador de grapas quirurgicas. |
| US20040181219A1 (en) | 2000-02-08 | 2004-09-16 | Gyrus Medical Limited | Electrosurgical instrument and an electrosugery system including such an instrument |
| US20040068307A1 (en) | 2000-02-08 | 2004-04-08 | Gyrus Medical Limited | Surgical instrument |
| GB0002849D0 (en) | 2000-02-08 | 2000-03-29 | Gyrus Medical Ltd | An electrosurgical instrument and an electosurgery system including such an instrument |
| US6758846B2 (en) | 2000-02-08 | 2004-07-06 | Gyrus Medical Limited | Electrosurgical instrument and an electrosurgery system including such an instrument |
| GB0223348D0 (en) | 2002-10-08 | 2002-11-13 | Gyrus Medical Ltd | A surgical instrument |
| US6756705B2 (en) | 2000-02-10 | 2004-06-29 | Tri-Tech., Inc | Linear stepper motor |
| US7963964B2 (en) | 2000-02-10 | 2011-06-21 | Santilli Albert N | Surgical clamp assembly with electrodes |
| US6911033B2 (en) | 2001-08-21 | 2005-06-28 | Microline Pentax Inc. | Medical clip applying device |
| US6569171B2 (en) | 2001-02-28 | 2003-05-27 | Microline, Inc. | Safety locking mechanism for a medical clip device |
| US6306149B1 (en) | 2000-02-15 | 2001-10-23 | Microline, Inc. | Medical clip device with cyclical pusher mechanism |
| US6589164B1 (en) | 2000-02-15 | 2003-07-08 | Transvascular, Inc. | Sterility barriers for insertion of non-sterile apparatus into catheters or other medical devices |
| DE10007919C2 (de) | 2000-02-21 | 2003-07-17 | Wolf Gmbh Richard | Zange zum Freipräparieren von Gewebe in einer Körperhöhle |
| US6348061B1 (en) | 2000-02-22 | 2002-02-19 | Powermed, Inc. | Vessel and lumen expander attachment for use with an electromechanical driver device |
| US6533157B1 (en) | 2000-02-22 | 2003-03-18 | Power Medical Interventions, Inc. | Tissue stapling attachment for use with an electromechanical driver device |
| GB0004179D0 (en) | 2000-02-22 | 2000-04-12 | Gyrus Medical Ltd | Tissue resurfacing |
| US7770773B2 (en) | 2005-07-27 | 2010-08-10 | Power Medical Interventions, Llc | Surgical device |
| US8016855B2 (en) | 2002-01-08 | 2011-09-13 | Tyco Healthcare Group Lp | Surgical device |
| US6629974B2 (en) | 2000-02-22 | 2003-10-07 | Gyrus Medical Limited | Tissue treatment method |
| EP3146914A1 (en) | 2000-02-22 | 2017-03-29 | Covidien LP | An electromechanical driver and remote surgical instrument attachment having computer assisted control capabilities |
| US6488197B1 (en) | 2000-02-22 | 2002-12-03 | Power Medical Interventions, Inc. | Fluid delivery device for use with anastomosing resecting and stapling instruments |
| US7335199B2 (en) | 2000-02-22 | 2008-02-26 | Rhytec Limited | Tissue resurfacing |
| US6723091B2 (en) | 2000-02-22 | 2004-04-20 | Gyrus Medical Limited | Tissue resurfacing |
| US6603050B2 (en) | 2000-02-23 | 2003-08-05 | Uxb International, Inc. | Destruction of energetic materials |
| US6582441B1 (en) | 2000-02-24 | 2003-06-24 | Advanced Bionics Corporation | Surgical insertion tool |
| WO2001062173A2 (en) | 2000-02-25 | 2001-08-30 | The Board Of Trustees Of The Leland Stanford Junior University | Methods and apparatuses for maintaining a trajectory in sterotaxi for tracking a target inside a body |
| US6273897B1 (en) | 2000-02-29 | 2001-08-14 | Ethicon, Inc. | Surgical bettress and surgical stapling apparatus |
| US6904909B2 (en) | 2000-03-04 | 2005-06-14 | Emphasys Medical, Inc. | Methods and devices for use in performing pulmonary procedures |
| US6763307B2 (en) | 2000-03-06 | 2004-07-13 | Bioseek, Inc. | Patient classification |
| CA2646518C (en) | 2000-03-06 | 2011-01-18 | Tyco Healthcare Group Lp | Apparatus and method for performing a bypass procedure in a digestive system |
| US6953461B2 (en) | 2002-05-16 | 2005-10-11 | Tissuelink Medical, Inc. | Fluid-assisted medical devices, systems and methods |
| US6423079B1 (en) | 2000-03-07 | 2002-07-23 | Blake, Iii Joseph W | Repeating multi-clip applier |
| USD455758S1 (en) | 2000-03-08 | 2002-04-16 | Ethicon Endo-Surgery, Inc. | Operational mode icon for a display screen of a control unit for a surgical device |
| GB0005897D0 (en) | 2000-03-10 | 2000-05-03 | Black & Decker Inc | Power tool |
| US6663623B1 (en) | 2000-03-13 | 2003-12-16 | Olympus Optical Co., Ltd. | Electric surgical operation apparatus |
| US6525499B2 (en) | 2000-03-15 | 2003-02-25 | Keihin Corporation | System for controlling vehicle power sliding door |
| IL138632A (en) | 2000-09-21 | 2008-06-05 | Minelu Zonnenschein | A multi-eyed endoscope |
| US7819799B2 (en) | 2000-03-16 | 2010-10-26 | Immersion Medical, Inc. | System and method for controlling force applied to and manipulation of medical instruments |
| AU3952501A (en) | 2000-03-16 | 2001-09-24 | Medigus Ltd | Fundoplication apparatus and method |
| US6510854B2 (en) | 2000-03-16 | 2003-01-28 | Gyrus Medical Limited | Method of treatment of prostatic adenoma |
| IL139788A (en) | 2000-11-20 | 2006-10-05 | Minelu Zonnenschein | Stapler for endoscopes |
| US6770070B1 (en) | 2000-03-17 | 2004-08-03 | Rita Medical Systems, Inc. | Lung treatment apparatus and method |
| US9314339B2 (en) | 2000-03-27 | 2016-04-19 | Formae, Inc. | Implants for replacing cartilage, with negatively-charged hydrogel surfaces and flexible matrix reinforcement |
| DE10015398A1 (de) | 2000-03-28 | 2001-10-11 | Bosch Gmbh Robert | Elektrogerät |
| JP2001276091A (ja) | 2000-03-29 | 2001-10-09 | Toshiba Corp | 医療用マニピュレータ |
| US6778846B1 (en) | 2000-03-30 | 2004-08-17 | Medtronic, Inc. | Method of guiding a medical device and system regarding same |
| JP2001275941A (ja) | 2000-03-31 | 2001-10-09 | Olympus Optical Co Ltd | 電動湾曲内視鏡装置 |
| US6802822B1 (en) | 2000-03-31 | 2004-10-12 | 3M Innovative Properties Company | Dispenser for an adhesive tissue sealant having a flexible link |
| US6869430B2 (en) | 2000-03-31 | 2005-03-22 | Rita Medical Systems, Inc. | Tissue biopsy and treatment apparatus and method |
| US6858005B2 (en) | 2000-04-03 | 2005-02-22 | Neo Guide Systems, Inc. | Tendon-driven endoscope and methods of insertion |
| US6837846B2 (en) | 2000-04-03 | 2005-01-04 | Neo Guide Systems, Inc. | Endoscope having a guide tube |
| US6984203B2 (en) | 2000-04-03 | 2006-01-10 | Neoguide Systems, Inc. | Endoscope with adjacently positioned guiding apparatus |
| US8888688B2 (en) | 2000-04-03 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Connector device for a controllable instrument |
| EP1662972A4 (en) | 2000-04-03 | 2010-08-25 | Intuitive Surgical Inc | ACTIVATED POLYMER GENTLE INSTRUMENTS AND INTRODUCTION METHOD |
| IL135571A0 (en) | 2000-04-10 | 2001-05-20 | Doron Adler | Minimal invasive surgery imaging system |
| US6517528B1 (en) | 2000-04-13 | 2003-02-11 | Scimed Life Systems, Inc. | Magnetic catheter drive shaft clutch |
| JP4716594B2 (ja) | 2000-04-17 | 2011-07-06 | オリンパス株式会社 | 内視鏡 |
| USD445745S1 (en) | 2000-04-18 | 2001-07-31 | Honda Giken Kogyo Kabushiki Kaisha | Indicator icon for a vehicle display screen |
| US6415542B1 (en) | 2000-04-19 | 2002-07-09 | International Business Machines Corporation | Location-based firearm discharge prevention |
| AU2001253654A1 (en) | 2000-04-27 | 2001-11-12 | Medtronic, Inc. | Vibration sensitive ablation apparatus and method |
| US6905498B2 (en) | 2000-04-27 | 2005-06-14 | Atricure Inc. | Transmural ablation device with EKG sensor and pacing electrode |
| RU2187249C2 (ru) | 2000-04-27 | 2002-08-20 | Общество с ограниченной ответственностью "ЭНДОМЕДИУМ+" | Хирургический инструмент |
| US6527735B1 (en) | 2000-04-27 | 2003-03-04 | Renaltech International Llc | Method of peritoneal dialysis |
| US6412639B1 (en) | 2000-04-28 | 2002-07-02 | Closure Medical Corporation | Medical procedure kit having medical adhesive |
| US6387114B2 (en) | 2000-04-28 | 2002-05-14 | Scimed Life Systems, Inc. | Gastrointestinal compression clips |
| DE10058796A1 (de) | 2000-05-09 | 2001-11-15 | Heidelberger Druckmasch Ag | Sammelhefter mit getrennten Antrieben |
| FR2808674B1 (fr) | 2000-05-12 | 2002-08-02 | Cie Euro Etude Rech Paroscopie | Anneau de gastroplastie a pattes de prehension |
| US6305891B1 (en) | 2000-05-15 | 2001-10-23 | Mark S. Burlingame | Fastening device and a spacer, and a method of using the same |
| US6361542B1 (en) | 2000-05-17 | 2002-03-26 | Prism Enterprises, Inc. | Obstetrical vacuum extractor cup with force measuring capabilities |
| US7510566B2 (en) | 2000-05-19 | 2009-03-31 | Coapt Systems, Inc. | Multi-point tissue tension distribution device and method, a chin lift variation |
| US6485503B2 (en) | 2000-05-19 | 2002-11-26 | Coapt Systems, Inc. | Multi-point tissue tension distribution device, a brow and face lift variation, and a method of tissue approximation using the device |
| US7172615B2 (en) | 2000-05-19 | 2007-02-06 | Coapt Systems, Inc. | Remotely anchored tissue fixation device |
| US6419695B1 (en) | 2000-05-22 | 2002-07-16 | Shlomo Gabbay | Cardiac prosthesis for helping improve operation of a heart valve |
| DE10026683C2 (de) | 2000-05-30 | 2003-07-10 | Ethicon Endo Surgery Europe | Chirurgisches Klammersetzgerät |
| US6805273B2 (en) | 2002-11-04 | 2004-10-19 | Federico Bilotti | Surgical stapling instrument |
| WO2001093025A2 (en) | 2000-06-01 | 2001-12-06 | Allegrix, Inc. | Systems and methods for application service provision |
| US6306423B1 (en) | 2000-06-02 | 2001-10-23 | Allergan Sales, Inc. | Neurotoxin implant |
| US6602262B2 (en) | 2000-06-02 | 2003-08-05 | Scimed Life Systems, Inc. | Medical device having linear to rotation control |
| US6883199B1 (en) | 2000-06-06 | 2005-04-26 | Koninklijke Philips Electronics, N.V. | Short-life power toothbrush for trial use |
| WO2001093766A1 (en) | 2000-06-07 | 2001-12-13 | Stereotaxis, Inc. | Guide for medical devices |
| GB0014059D0 (en) | 2000-06-09 | 2000-08-02 | Chumas Paul D | Method and apparatus |
| GB0014120D0 (en) | 2000-06-10 | 2000-08-02 | Sinton Richard T | Hand instrument |
| US6492785B1 (en) | 2000-06-27 | 2002-12-10 | Deere & Company | Variable current limit control for vehicle electric drive system |
| DE10031436A1 (de) | 2000-06-28 | 2002-01-10 | Alexander Von Fuchs | Gleitschutz für einen Gehäusekopf medizinischer Instrumente |
| US6863694B1 (en) | 2000-07-03 | 2005-03-08 | Osteotech, Inc. | Osteogenic implants derived from bone |
| JP3789733B2 (ja) | 2000-07-06 | 2006-06-28 | アルプス電気株式会社 | 複合操作スイッチ |
| DE10033344B4 (de) | 2000-07-08 | 2011-04-07 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Auswertung eines Sensorsignals |
| US6660008B1 (en) | 2001-06-07 | 2003-12-09 | Opus Medical, Inc. | Method and apparatus for attaching connective tissues to bone using a suture anchoring device |
| JP3897962B2 (ja) | 2000-07-19 | 2007-03-28 | 株式会社モリタ製作所 | 識別型のインスツルメント体、識別型のアダプタ、識別型のチューブ、これらを用いた診療装置 |
| JP2004504095A (ja) | 2000-07-20 | 2004-02-12 | ティヴァ メディカル インコーポレイテッド | 手作動で関節運動する外科器具 |
| US20100241137A1 (en) | 2000-07-20 | 2010-09-23 | Mark Doyle | Hand-actuated articulating surgical tool |
| WO2002007618A1 (en) | 2000-07-21 | 2002-01-31 | Atropos Limited | A cannula |
| US6447799B1 (en) | 2000-07-24 | 2002-09-10 | Joseph M. Ullman | Thromboplastic system |
| JP2004520865A (ja) | 2000-07-25 | 2004-07-15 | リタ メディカル システムズ インコーポレイテッド | 局在化インピーダンス測定を使用する腫瘍の検出および処置のための装置 |
| US6494882B1 (en) | 2000-07-25 | 2002-12-17 | Verimetra, Inc. | Cutting instrument having integrated sensors |
| US6902560B1 (en) | 2000-07-27 | 2005-06-07 | Intuitive Surgical, Inc. | Roll-pitch-roll surgical tool |
| US6392854B1 (en) | 2000-07-27 | 2002-05-21 | Motorola, Inc. | Method and system for testing continuity of a motor and associated drive circuitry |
| US6746443B1 (en) | 2000-07-27 | 2004-06-08 | Intuitive Surgical Inc. | Roll-pitch-roll surgical tool |
| US6585664B2 (en) | 2000-08-02 | 2003-07-01 | Ethicon Endo-Surgery, Inc. | Calibration method for an automated surgical biopsy device |
| US8366787B2 (en) | 2000-08-04 | 2013-02-05 | Depuy Products, Inc. | Hybrid biologic-synthetic bioabsorbable scaffolds |
| JP5162782B2 (ja) | 2000-08-07 | 2013-03-13 | 株式会社小松製作所 | 作業機械の表示装置 |
| JP2002054903A (ja) | 2000-08-10 | 2002-02-20 | Nippon Densan Corp | 変位検出装置 |
| JP2002051974A (ja) | 2000-08-14 | 2002-02-19 | Fuji Photo Optical Co Ltd | 内視鏡処置具 |
| US6572629B2 (en) | 2000-08-17 | 2003-06-03 | Johns Hopkins University | Gastric reduction endoscopy |
| GB0020461D0 (en) | 2000-08-18 | 2000-10-11 | Oliver Crispin Consulting Ltd | Improvements in and relating to the robotic positioning of a work tool to a sensor |
| US6533723B1 (en) | 2000-08-25 | 2003-03-18 | Ge Marquette Medical Systems, Inc. | Multiple-link cable management apparatus |
| US6876850B2 (en) | 2000-08-30 | 2005-04-05 | Sony Corporation | Communication apparatus and communication method |
| US6830174B2 (en) | 2000-08-30 | 2004-12-14 | Cerebral Vascular Applications, Inc. | Medical instrument |
| US20040093024A1 (en) | 2000-09-01 | 2004-05-13 | James Lousararian | Advanced wound site management systems and methods |
| US6767356B2 (en) | 2000-09-01 | 2004-07-27 | Angiolink Corporation | Advanced wound site management systems and methods |
| GB0021799D0 (en) | 2000-09-05 | 2000-10-18 | Gyrus Medical Ltd | Electrosurgery system |
| WO2002019918A2 (en) | 2000-09-07 | 2002-03-14 | Eva Arkin | Fluorescent surgical device |
| JP2002078674A (ja) | 2000-09-08 | 2002-03-19 | Fuji Photo Optical Co Ltd | 内視鏡の湾曲部構造 |
| EP1294288B1 (en) | 2000-09-08 | 2011-03-30 | Abbott Vascular Inc. | Surgical staple |
| US6712773B1 (en) | 2000-09-11 | 2004-03-30 | Tyco Healthcare Group Lp | Biopsy system |
| JP4297603B2 (ja) | 2000-09-19 | 2009-07-15 | 株式会社トップ | 外科用ステープラ |
| JP4993839B2 (ja) | 2000-09-24 | 2012-08-08 | メドトロニック,インコーポレイテッド | 外科用ハンドピースのモータ制御システム |
| WO2002026143A1 (en) | 2000-09-27 | 2002-04-04 | Applied Medical Resources | Surgical apparatus with detachable handle assembly |
| US6755843B2 (en) | 2000-09-29 | 2004-06-29 | Olympus Optical Co., Ltd. | Endoscopic suturing device |
| JP4014792B2 (ja) | 2000-09-29 | 2007-11-28 | 株式会社東芝 | マニピュレータ |
| DE50011717D1 (de) | 2000-10-04 | 2005-12-29 | Synthes Ag | Vorrichtung zur versorgung eines elektro-pens mit elektrischer energie |
| US7007176B2 (en) | 2000-10-10 | 2006-02-28 | Primarion, Inc. | System and method for highly phased power regulation using adaptive compensation control |
| US6817508B1 (en) | 2000-10-13 | 2004-11-16 | Tyco Healthcare Group, Lp | Surgical stapling device |
| US7334717B2 (en) | 2001-10-05 | 2008-02-26 | Tyco Healthcare Group Lp | Surgical fastener applying apparatus |
| WO2003079909A2 (en) | 2002-03-19 | 2003-10-02 | Tyco Healthcare Group, Lp | Surgical fastener applying apparatus |
| US7032799B2 (en) | 2001-10-05 | 2006-04-25 | Tyco Healthcare Group Lp | Surgical stapling apparatus and method |
| US7407076B2 (en) | 2000-10-13 | 2008-08-05 | Tyco Healthcare Group Lp | Surgical stapling device |
| EP2305137B1 (en) | 2000-10-13 | 2012-12-26 | Covidien LP | Surgical fastener applying apparatus |
| US6551333B2 (en) | 2000-10-19 | 2003-04-22 | Ethicon Endo-Surgery, Inc. | Method for attaching hernia mesh |
| EP1326524B1 (en) | 2000-10-19 | 2010-09-01 | Applied Medical Resources Corporation | Surgical access apparatus and method |
| US6773438B1 (en) | 2000-10-19 | 2004-08-10 | Ethicon Endo-Surgery | Surgical instrument having a rotary lockout mechanism |
| US7485124B2 (en) | 2000-10-19 | 2009-02-03 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a fastener delivery mechanism |
| US7273483B2 (en) | 2000-10-20 | 2007-09-25 | Ethicon Endo-Surgery, Inc. | Apparatus and method for alerting generator functions in an ultrasonic surgical system |
| US6945981B2 (en) | 2000-10-20 | 2005-09-20 | Ethicon-Endo Surgery, Inc. | Finger operated switch for controlling a surgical handpiece |
| US20040267310A1 (en) | 2000-10-20 | 2004-12-30 | Racenet David C | Directionally biased staple and anvil assembly for forming the staple |
| US6908472B2 (en) | 2000-10-20 | 2005-06-21 | Ethicon Endo-Surgery, Inc. | Apparatus and method for altering generator functions in an ultrasonic surgical system |
| US7665995B2 (en) | 2000-10-23 | 2010-02-23 | Toly Christopher C | Medical training simulator including contact-less sensors |
| US6500176B1 (en) | 2000-10-23 | 2002-12-31 | Csaba Truckai | Electrosurgical systems and techniques for sealing tissue |
| US6656177B2 (en) | 2000-10-23 | 2003-12-02 | Csaba Truckai | Electrosurgical systems and techniques for sealing tissue |
| US6913608B2 (en) | 2000-10-23 | 2005-07-05 | Viacor, Inc. | Automated annular plication for mitral valve repair |
| US20020188287A1 (en) | 2001-05-21 | 2002-12-12 | Roni Zvuloni | Apparatus and method for cryosurgery within a body cavity |
| US6605090B1 (en) | 2000-10-25 | 2003-08-12 | Sdgi Holdings, Inc. | Non-metallic implant devices and intra-operative methods for assembly and fixation |
| US6793661B2 (en) | 2000-10-30 | 2004-09-21 | Vision Sciences, Inc. | Endoscopic sheath assemblies having longitudinal expansion inhibiting mechanisms |
| US20030139741A1 (en) | 2000-10-31 | 2003-07-24 | Gyrus Medical Limited | Surgical instrument |
| US6843789B2 (en) | 2000-10-31 | 2005-01-18 | Gyrus Medical Limited | Electrosurgical system |
| US6893435B2 (en) | 2000-10-31 | 2005-05-17 | Gyrus Medical Limited | Electrosurgical system |
| FR2815842B1 (fr) | 2000-10-31 | 2003-05-09 | Assist Publ Hopitaux De Paris | Pince-agrafeuse mecanique pour chirurgie du rectum |
| GB0026586D0 (en) | 2000-10-31 | 2000-12-13 | Gyrus Medical Ltd | An electrosurgical system |
| JP2002149860A (ja) | 2000-11-07 | 2002-05-24 | Japan Institute Of Plant Maintenance | 製造業務における設備の保全管理方法および保全管理支援システム |
| JP2002143078A (ja) | 2000-11-08 | 2002-05-21 | Olympus Optical Co Ltd | 内視鏡用外付チューブ |
| US6749600B1 (en) | 2000-11-15 | 2004-06-15 | Impulse Dynamics N.V. | Braided splittable catheter sheath |
| US6506197B1 (en) | 2000-11-15 | 2003-01-14 | Ethicon, Inc. | Surgical method for affixing a valve to a heart using a looped suture combination |
| JP3822433B2 (ja) | 2000-11-16 | 2006-09-20 | オリンパス株式会社 | 処置具、処置具用制御装置および医療用処置システム |
| US6498480B1 (en) | 2000-11-22 | 2002-12-24 | Wabash Technologies, Inc. | Magnetic non-contacting rotary transducer |
| US8286845B2 (en) | 2000-11-27 | 2012-10-16 | Boston Scientific Scimed, Inc. | Full thickness resection device control handle |
| US6821282B2 (en) | 2000-11-27 | 2004-11-23 | Scimed Life Systems, Inc. | Full thickness resection device control handle |
| US6520971B1 (en) | 2000-11-27 | 2003-02-18 | Scimed Life Systems, Inc. | Full thickness resection device control handle |
| JP2002159500A (ja) | 2000-11-28 | 2002-06-04 | Koseki Ika Kk | 靭帯固定システム |
| US7081114B2 (en) | 2000-11-29 | 2006-07-25 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Electrophysiology/ablation catheter having lariat configuration of variable radius |
| US6899915B2 (en) | 2000-11-29 | 2005-05-31 | President And Fellows Of Harvard College | Methods and compositions for culturing a biological tooth |
| JP2002170622A (ja) | 2000-11-30 | 2002-06-14 | Sumitomo Wiring Syst Ltd | コネクタ |
| US6398795B1 (en) | 2000-11-30 | 2002-06-04 | Scimed Life Systems, Inc. | Stapling and cutting in resectioning for full thickness resection devices |
| US6439446B1 (en) | 2000-12-01 | 2002-08-27 | Stephen J. Perry | Safety lockout for actuator shaft |
| US20020138086A1 (en) | 2000-12-06 | 2002-09-26 | Robert Sixto | Surgical clips particularly useful in the endoluminal treatment of gastroesophageal reflux disease (GERD) |
| US6569085B2 (en) | 2001-08-16 | 2003-05-27 | Syntheon, Llc | Methods and apparatus for delivering a medical instrument over an endoscope while the endoscope is in a body lumen |
| US6588931B2 (en) | 2000-12-07 | 2003-07-08 | Delphi Technologies, Inc. | Temperature sensor with flexible circuit substrate |
| EP1341484B1 (en) | 2000-12-08 | 2009-05-06 | Osteotech, Inc. | Implant for orthopedic applications |
| US20020127265A1 (en) | 2000-12-21 | 2002-09-12 | Bowman Steven M. | Use of reinforced foam implants with enhanced integrity for soft tissue repair and regeneration |
| CA2365376C (en) | 2000-12-21 | 2006-03-28 | Ethicon, Inc. | Use of reinforced foam implants with enhanced integrity for soft tissue repair and regeneration |
| US6406440B1 (en) | 2000-12-21 | 2002-06-18 | Ethicon Endo-Surgery, Inc. | Specimen retrieval bag |
| US6852330B2 (en) | 2000-12-21 | 2005-02-08 | Depuy Mitek, Inc. | Reinforced foam implants with enhanced integrity for soft tissue repair and regeneration |
| US6599323B2 (en) | 2000-12-21 | 2003-07-29 | Ethicon, Inc. | Reinforced tissue implants and methods of manufacture and use |
| US20020185514A1 (en) | 2000-12-22 | 2002-12-12 | Shane Adams | Control module for flywheel operated hand tool |
| KR100498302B1 (ko) | 2000-12-27 | 2005-07-01 | 엘지전자 주식회사 | 리니어 컴프레샤의 용량가변형 모터 |
| US6503259B2 (en) | 2000-12-27 | 2003-01-07 | Ethicon, Inc. | Expandable anastomotic device |
| US7041868B2 (en) | 2000-12-29 | 2006-05-09 | Kimberly-Clark Worldwide, Inc. | Bioabsorbable wound dressing |
| US6840938B1 (en) | 2000-12-29 | 2005-01-11 | Intuitive Surgical, Inc. | Bipolar cauterizing instrument |
| US6482200B2 (en) | 2001-01-03 | 2002-11-19 | Ronald D. Shippert | Cautery apparatus and method |
| WO2002053808A1 (en) | 2001-01-03 | 2002-07-11 | Wen Lu | Stable conjugated polymer electrochromic devices incorporating ionic liquids |
| AU2002251732A1 (en) | 2001-01-04 | 2002-08-28 | Becomm Corporation | Universal media bar for controlling different types of media |
| EP1349492A2 (en) | 2001-01-04 | 2003-10-08 | Medtronic, Inc. | Implantable medical device with sensor |
| US7037314B2 (en) | 2001-01-09 | 2006-05-02 | Armstrong David N | Multiple band ligator and anoscope system and method for using same |
| US20020133131A1 (en) | 2001-01-09 | 2002-09-19 | Krishnakumar Rangachari | Absorbent material incorporating synthetic fibers and process for making the material |
| JP2004524076A (ja) | 2001-01-11 | 2004-08-12 | ギブン・イメージング・リミテツド | 生体内処置のための装置およびシステム |
| US6439439B1 (en) | 2001-01-12 | 2002-08-27 | Telios Orthopedic Systems, Inc. | Bone cement delivery apparatus and hand-held fluent material dispensing apparatus |
| US6494885B1 (en) | 2001-01-17 | 2002-12-17 | Avtar S. Dhindsa | Endoscopic stone extraction device with rotatable basket |
| US6695774B2 (en) | 2001-01-19 | 2004-02-24 | Endactive, Inc. | Apparatus and method for controlling endoscopic instruments |
| JP4121730B2 (ja) | 2001-01-19 | 2008-07-23 | 富士通コンポーネント株式会社 | ポインティングデバイス及び携帯型情報機器 |
| DE60227235D1 (de) | 2001-01-24 | 2008-08-07 | Tyco Healthcare | Instrument und verfahren zur durchführung einer anastomose |
| US6620161B2 (en) | 2001-01-24 | 2003-09-16 | Ethicon, Inc. | Electrosurgical instrument with an operational sequencing element |
| US6626834B2 (en) | 2001-01-25 | 2003-09-30 | Shane Dunne | Spiral scanner with electronic control |
| US20020111624A1 (en) | 2001-01-26 | 2002-08-15 | Witt David A. | Coagulating electrosurgical instrument with tissue dam |
| US20020134811A1 (en) | 2001-01-29 | 2002-09-26 | Senco Products, Inc. | Multi-mode power tool utilizing attachment |
| DE60226410D1 (de) | 2001-01-29 | 2008-06-19 | Acrobot Co Ltd | Roboter mit aktiven beschränkungen |
| JP4202138B2 (ja) | 2001-01-31 | 2008-12-24 | レックス メディカル インコーポレイテッド | 胃食道組織をステープルおよび切除するための装置および方法 |
| US20020103494A1 (en) | 2001-01-31 | 2002-08-01 | Pacey John Allen | Percutaneous cannula delvery system for hernia patch |
| US6997931B2 (en) | 2001-02-02 | 2006-02-14 | Lsi Solutions, Inc. | System for endoscopic suturing |
| US8313496B2 (en) | 2001-02-02 | 2012-11-20 | Lsi Solutions, Inc. | System for endoscopic suturing |
| US9050192B2 (en) | 2001-02-05 | 2015-06-09 | Formae, Inc. | Cartilage repair implant with soft bearing surface and flexible anchoring device |
| JP3939158B2 (ja) | 2001-02-06 | 2007-07-04 | オリンパス株式会社 | 内視鏡装置 |
| US6723109B2 (en) | 2001-02-07 | 2004-04-20 | Karl Storz Endoscopy-America, Inc. | Deployable surgical clamp with delivery/retrieval device and actuator |
| US6302743B1 (en) | 2001-02-09 | 2001-10-16 | Pen-Li Chiu | Electric outlet assembly with rotary receptacles |
| US7699835B2 (en) | 2001-02-15 | 2010-04-20 | Hansen Medical, Inc. | Robotically controlled surgical instruments |
| US7766894B2 (en) | 2001-02-15 | 2010-08-03 | Hansen Medical, Inc. | Coaxial catheter system |
| US20030135204A1 (en) | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| AU2002244016A1 (en) | 2001-02-15 | 2002-10-03 | Cunningham, Robert | Flexible surgical instrument |
| AU2002251958A1 (en) | 2001-02-15 | 2002-09-04 | Brock Rogers Surgical, Inc. | Surgical master/slave system |
| US7008433B2 (en) | 2001-02-15 | 2006-03-07 | Depuy Acromed, Inc. | Vertebroplasty injection device |
| DE10108732A1 (de) | 2001-02-23 | 2002-09-05 | Philips Corp Intellectual Pty | Vorrichtung mit einem magnetischen Positionssensor |
| US6533784B2 (en) | 2001-02-24 | 2003-03-18 | Csaba Truckai | Electrosurgical working end for transecting and sealing tissue |
| EP1234587B1 (en) | 2001-02-26 | 2005-11-23 | Ethicon, Inc. | Biocompatible foam composite |
| WO2002067798A1 (en) | 2001-02-26 | 2002-09-06 | Ntero Surgical, Inc. | System and method for reducing post-surgical complications |
| USD454951S1 (en) | 2001-02-27 | 2002-03-26 | Visionary Biomedical, Inc. | Steerable catheter |
| CA2766682A1 (en) | 2001-02-27 | 2002-09-06 | Tyco Healthcare Group Lp | External mixer assembly |
| US7139016B2 (en) | 2001-02-28 | 2006-11-21 | Eastman Kodak Company | Intra-oral camera system with chair-mounted display |
| US6682527B2 (en) | 2001-03-13 | 2004-01-27 | Perfect Surgical Techniques, Inc. | Method and system for heating tissue with a bipolar instrument |
| US6582387B2 (en) | 2001-03-20 | 2003-06-24 | Therox, Inc. | System for enriching a bodily fluid with a gas |
| US20020135474A1 (en) | 2001-03-21 | 2002-09-26 | Sylliassen Douglas G. | Method and device for sensor-based power management of a consumer electronic device |
| US6802844B2 (en) | 2001-03-26 | 2004-10-12 | Nuvasive, Inc | Spinal alignment apparatus and methods |
| US7605826B2 (en) | 2001-03-27 | 2009-10-20 | Siemens Corporate Research, Inc. | Augmented reality guided instrument positioning with depth determining graphics |
| JP2002282269A (ja) | 2001-03-28 | 2002-10-02 | Gc Corp | 歯科用組織再生膜固定用ピン |
| US6861954B2 (en) | 2001-03-30 | 2005-03-01 | Bruce H. Levin | Tracking medical products with integrated circuits |
| US20030181900A1 (en) | 2002-03-25 | 2003-09-25 | Long Gary L. | Endoscopic ablation system with a plurality of electrodes |
| US7097644B2 (en) | 2001-03-30 | 2006-08-29 | Ethicon Endo-Surgery, Inc. | Medical device with improved wall construction |
| US6769590B2 (en) | 2001-04-02 | 2004-08-03 | Susan E. Vresh | Luminal anastomotic device and method |
| US6605669B2 (en) | 2001-04-03 | 2003-08-12 | E. I. Du Pont De Nemours And Company | Radiation-curable coating compounds |
| AU2002257122B2 (en) | 2001-04-03 | 2006-09-14 | Covidien Lp | Surgical stapling device for performing circular anastomoses |
| WO2002080802A2 (en) | 2001-04-05 | 2002-10-17 | John Martin Heasley | General field isolation rubber dam |
| US7101371B2 (en) | 2001-04-06 | 2006-09-05 | Dycus Sean T | Vessel sealer and divider |
| DE60121229T2 (de) | 2001-04-06 | 2007-05-24 | Sherwood Services Ag | Vorrichtung zum abdichten und teilen eines gefässes mit nichtleitendem endanschlag |
| US7090673B2 (en) | 2001-04-06 | 2006-08-15 | Sherwood Services Ag | Vessel sealer and divider |
| US7101372B2 (en) | 2001-04-06 | 2006-09-05 | Sherwood Sevices Ag | Vessel sealer and divider |
| DE10117597C1 (de) | 2001-04-07 | 2002-11-28 | Itt Mfg Enterprises Inc | Wippschalter |
| US6638285B2 (en) | 2001-04-16 | 2003-10-28 | Shlomo Gabbay | Biological tissue strip and system and method to seal tissue |
| JP2002314298A (ja) | 2001-04-18 | 2002-10-25 | Matsushita Electric Ind Co Ltd | 電子部品実装装置 |
| US6994708B2 (en) | 2001-04-19 | 2006-02-07 | Intuitive Surgical | Robotic tool with monopolar electro-surgical scissors |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| US7367973B2 (en) | 2003-06-30 | 2008-05-06 | Intuitive Surgical, Inc. | Electro-surgical instrument with replaceable end-effectors and inhibited surface conduction |
| US7824401B2 (en) | 2004-10-08 | 2010-11-02 | Intuitive Surgical Operations, Inc. | Robotic tool with wristed monopolar electrosurgical end effectors |
| ATE551955T1 (de) | 2001-04-20 | 2012-04-15 | Tyco Healthcare | Chirurgische vorrichtung mit bipolaren oder ultraschalleigenschaften |
| US6620111B2 (en) | 2001-04-20 | 2003-09-16 | Ethicon Endo-Surgery, Inc. | Surgical biopsy device having automatic rotation of the probe for taking multiple samples |
| WO2002085254A1 (en) | 2001-04-20 | 2002-10-31 | The Research Foundation Of State University Of Newyork | Apparatus and method for fixation of vascular grafts |
| US20040110439A1 (en) | 2001-04-20 | 2004-06-10 | Chaikof Elliot L | Native protein mimetic fibers, fiber networks and fabrics for medical use |
| ATE398413T1 (de) | 2001-04-20 | 2008-07-15 | Power Med Interventions Inc | Abbildungsvorrichtung |
| MXPA03009727A (es) | 2001-04-26 | 2004-01-29 | Control Delivery Sys Inc | SISTEMA DE SUMINISTRO DE FaRMACOS DE LIBERACIoN PROLONGADA QUE CONTIENE COFARMACOS. |
| US20020158593A1 (en) | 2001-04-27 | 2002-10-31 | Henderson Jeffery L. | Circuit for controlling dynamic braking of a motor shaft in a power tool |
| US20020188170A1 (en) | 2001-04-27 | 2002-12-12 | Santamore William P. | Prevention of myocardial infarction induced ventricular expansion and remodeling |
| US7225959B2 (en) | 2001-04-30 | 2007-06-05 | Black & Decker, Inc. | Portable, battery-powered air compressor for a pneumatic tool system |
| NZ511444A (en) | 2001-05-01 | 2004-01-30 | Deep Video Imaging Ltd | Information display |
| US6586898B2 (en) | 2001-05-01 | 2003-07-01 | Magnon Engineering, Inc. | Systems and methods of electric motor control |
| US6535764B2 (en) | 2001-05-01 | 2003-03-18 | Intrapace, Inc. | Gastric treatment and diagnosis device and method |
| US6913579B2 (en) | 2001-05-01 | 2005-07-05 | Surgrx, Inc. | Electrosurgical working end and method for obtaining tissue samples for biopsy |
| DE10121305A1 (de) | 2001-05-02 | 2002-12-12 | Ethicon Endo Surgery Europe | Chirurgisches Instrument |
| US6349868B1 (en) | 2001-05-03 | 2002-02-26 | Chris A. Mattingly | Multipurpose stapler |
| ATE412372T1 (de) | 2001-05-06 | 2008-11-15 | Stereotaxis Inc | System zum vorschieben eines katheter |
| US6503257B2 (en) | 2001-05-07 | 2003-01-07 | Ethicon Endo-Surgery, Inc. | Method for releasing buttress material attached to a surgical fastening device |
| US6592597B2 (en) | 2001-05-07 | 2003-07-15 | Ethicon Endo-Surgery, Inc. | Adhesive for attaching buttress material to a surgical fastening device |
| US6827725B2 (en) | 2001-05-10 | 2004-12-07 | Gyrus Medical Limited | Surgical instrument |
| JP4252316B2 (ja) | 2001-05-10 | 2009-04-08 | リタ メディカル システムズ インコーポレイテッド | Rf組織切除装置および方法 |
| US6630047B2 (en) | 2001-05-21 | 2003-10-07 | 3M Innovative Properties Company | Fluoropolymer bonding composition and method |
| US6588277B2 (en) | 2001-05-21 | 2003-07-08 | Ethicon Endo-Surgery | Method for detecting transverse mode vibrations in an ultrasonic hand piece/blade |
| US20050020960A1 (en) | 2001-05-24 | 2005-01-27 | Brugger James M. | Blood treatment cartridge and blood processing machine with slot |
| US20020177848A1 (en) | 2001-05-24 | 2002-11-28 | Csaba Truckai | Electrosurgical working end for sealing tissue |
| US6766957B2 (en) | 2001-05-25 | 2004-07-27 | Sony Corporation | Optical device for bar-code reading, method for manufacturing an optical device, and light projection/receiving package |
| US6558400B2 (en) | 2001-05-30 | 2003-05-06 | Satiety, Inc. | Obesity treatment tools and methods |
| US8740987B2 (en) | 2001-06-04 | 2014-06-03 | Warsaw Orthopedic, Inc. | Tissue-derived mesh for orthopedic regeneration |
| IES20010547A2 (en) | 2001-06-07 | 2002-12-11 | Christy Cummins | Surgical Staple |
| US7258546B2 (en) | 2001-06-07 | 2007-08-21 | Kaltenbach & Voigt Gmbh & Co. Kg | Medical or dental instrument and/or supply unit and/or care unit and/or system for the medical or dental instrument |
| US7041068B2 (en) | 2001-06-12 | 2006-05-09 | Pelikan Technologies, Inc. | Sampling module device and method |
| US11134978B2 (en) | 2016-01-15 | 2021-10-05 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with self-diagnosing control switches for reusable handle assembly |
| US7371403B2 (en) | 2002-06-14 | 2008-05-13 | Providence Health System-Oregon | Wound dressing and method for controlling severe, life-threatening bleeding |
| AU2002256296B2 (en) | 2001-06-14 | 2006-12-07 | Intuitive Surgical Operations, Inc. | Apparatus and method for surgical suturing with thread management |
| DE20121753U1 (de) | 2001-06-15 | 2003-04-17 | Bema Gmbh & Co Kg Endochirurgi | Griff für ein chirurgisches Instrument |
| US20030040670A1 (en) | 2001-06-15 | 2003-02-27 | Assaf Govari | Method for measuring temperature and of adjusting for temperature sensitivity with a medical device having a position sensor |
| USD465226S1 (en) | 2001-06-18 | 2002-11-05 | Bellsouth Intellecutal Property Corporation | Display screen with a user interface icon |
| WO2003001329A2 (en) | 2001-06-20 | 2003-01-03 | Power Medical Interventions, Inc. | A method and system for integrated medical tracking |
| US7000911B2 (en) | 2001-06-22 | 2006-02-21 | Delaware Capital Formation, Inc. | Motor pack for automated machinery |
| US6726706B2 (en) | 2001-06-26 | 2004-04-27 | Steven Dominguez | Suture tape and method for use |
| US20050182298A1 (en) | 2002-12-06 | 2005-08-18 | Intuitive Surgical Inc. | Cardiac tissue ablation instrument with flexible wrist |
| US6817974B2 (en) | 2001-06-29 | 2004-11-16 | Intuitive Surgical, Inc. | Surgical tool having positively positionable tendon-actuated multi-disk wrist joint |
| CA2451824C (en) | 2001-06-29 | 2015-02-24 | Intuitive Surgical, Inc. | Platform link wrist mechanism |
| US20060199999A1 (en) | 2001-06-29 | 2006-09-07 | Intuitive Surgical Inc. | Cardiac tissue ablation instrument with flexible wrist |
| US20060178556A1 (en) | 2001-06-29 | 2006-08-10 | Intuitive Surgical, Inc. | Articulate and swapable endoscope for a surgical robot |
| US20040243147A1 (en) | 2001-07-03 | 2004-12-02 | Lipow Kenneth I. | Surgical robot and robotic controller |
| US7607189B2 (en) | 2004-07-14 | 2009-10-27 | Colgate-Palmolive | Oral care implement |
| JP3646162B2 (ja) | 2001-07-04 | 2005-05-11 | 独立行政法人産業技術総合研究所 | 軟骨組織の再生用移植体 |
| CN2488482Y (zh) | 2001-07-05 | 2002-05-01 | 天津市华志计算机应用有限公司 | 机械臂的关节锁紧机构 |
| US6696814B2 (en) | 2001-07-09 | 2004-02-24 | Tyco Electronics Corporation | Microprocessor for controlling the speed and frequency of a motor shaft in a power tool |
| JP2004534591A (ja) | 2001-07-09 | 2004-11-18 | タイコ ヘルスケア グループ エルピー | 直角クリップアプライア装置および方法 |
| US7056123B2 (en) | 2001-07-16 | 2006-06-06 | Immersion Corporation | Interface apparatus with cable-driven force feedback and grounded actuators |
| EP1416879A4 (en) | 2001-07-16 | 2007-04-25 | Depuy Products Inc | UNITARY SURGICAL DEVICE AND METHOD |
| US8025896B2 (en) | 2001-07-16 | 2011-09-27 | Depuy Products, Inc. | Porous extracellular matrix scaffold and method |
| DE60239342D1 (de) | 2001-07-16 | 2011-04-14 | Depuy Products Inc | Gerät zur reparatur von knorpelmaterial |
| DE50109817D1 (de) | 2001-07-19 | 2006-06-22 | Hilti Ag | Bolzensetzgerät mit Setztiefenregelung |
| IL144446A0 (en) | 2001-07-19 | 2002-05-23 | Prochon Biotech Ltd | Plasma protein matrices and methods for their preparation |
| US7510534B2 (en) | 2001-07-20 | 2009-03-31 | Ethicon Endo-Surgery, Inc. | Method for operating biopsy device |
| JP3646163B2 (ja) | 2001-07-31 | 2005-05-11 | 国立大学法人 東京大学 | 能動鉗子 |
| DE20112837U1 (de) | 2001-08-02 | 2001-10-04 | Aesculap Ag & Co Kg | Zangen- oder pinzettenförmiges chirurgisches Instrument |
| WO2003013374A1 (en) | 2001-08-06 | 2003-02-20 | Penn State Research Foundation | Multifunctional tool and method for minimally invasive surgery |
| JP4235105B2 (ja) | 2001-08-07 | 2009-03-11 | 並木精密宝石株式会社 | 磁気式マイクロエンコーダ及びマイクロモータ |
| EP1285633B1 (en) | 2001-08-07 | 2006-12-13 | Universitair Medisch Centrum Utrecht | Device for connecting a surgical instrument to a stable basis |
| EP2308395A1 (en) | 2001-08-08 | 2011-04-13 | Stryker Corporation | Surgical tool system including a navigation unit that receives information about the implant the system is to implant and that responds to the received information |
| IES20010748A2 (en) | 2001-08-09 | 2003-02-19 | Christy Cummins | Surgical Stapling Device and Method |
| US6592608B2 (en) | 2001-12-07 | 2003-07-15 | Biopsy Sciences, Llc | Bioabsorbable sealant |
| DE10139153A1 (de) | 2001-08-09 | 2003-02-27 | Ingo F Herrmann | Einweg-Endoskopmantel |
| ATE333094T1 (de) | 2001-08-10 | 2006-08-15 | Hoffmann La Roche | Verfahren zur herstellung von protein-beladenen mikropartikeln |
| JP3926119B2 (ja) | 2001-08-10 | 2007-06-06 | 株式会社東芝 | 医療用マニピュレータ |
| US6705503B1 (en) | 2001-08-20 | 2004-03-16 | Tricord Solutions, Inc. | Electrical motor driven nail gun |
| US6692507B2 (en) | 2001-08-23 | 2004-02-17 | Scimed Life Systems, Inc. | Impermanent biocompatible fastener |
| US7563862B2 (en) | 2001-08-24 | 2009-07-21 | Neuren Pharmaceuticals Limited | Neural regeneration peptides and methods for their use in treatment of brain damage |
| EP1287788B1 (en) | 2001-08-27 | 2011-04-20 | Gyrus Medical Limited | Electrosurgical system |
| GB0425051D0 (en) | 2004-11-12 | 2004-12-15 | Gyrus Medical Ltd | Electrosurgical generator and system |
| US7344532B2 (en) | 2001-08-27 | 2008-03-18 | Gyrus Medical Limited | Electrosurgical generator and system |
| US6966907B2 (en) | 2001-08-27 | 2005-11-22 | Gyrus Medical Limited | Electrosurgical generator and system |
| US6929641B2 (en) | 2001-08-27 | 2005-08-16 | Gyrus Medical Limited | Electrosurgical system |
| US6808525B2 (en) | 2001-08-27 | 2004-10-26 | Gyrus Medical, Inc. | Bipolar electrosurgical hook probe for cutting and coagulating tissue |
| WO2004078051A2 (en) | 2001-08-27 | 2004-09-16 | Gyrus Medial Limited | Electrosurgical system |
| US7282048B2 (en) | 2001-08-27 | 2007-10-16 | Gyrus Medical Limited | Electrosurgical generator and system |
| US6629988B2 (en) | 2001-08-28 | 2003-10-07 | Ethicon, Inc. | Composite staple for completing an anastomosis |
| US6755338B2 (en) | 2001-08-29 | 2004-06-29 | Cerebral Vascular Applications, Inc. | Medical instrument |
| US20030045835A1 (en) | 2001-08-30 | 2003-03-06 | Vascular Solutions, Inc. | Method and apparatus for coagulation and closure of pseudoaneurysms |
| NL1018874C2 (nl) | 2001-09-03 | 2003-03-05 | Michel Petronella Hub Vleugels | Chirurgisch instrument. |
| US6747121B2 (en) | 2001-09-05 | 2004-06-08 | Synthes (Usa) | Poly(L-lactide-co-glycolide) copolymers, methods for making and using same, and devices containing same |
| JP2003070804A (ja) | 2001-09-05 | 2003-03-11 | Olympus Optical Co Ltd | 遠隔医療支援システム |
| JP4857504B2 (ja) | 2001-09-10 | 2012-01-18 | マックス株式会社 | 電動ステープラのステープル検出機構 |
| KR100431690B1 (ko) | 2001-09-12 | 2004-05-17 | 김중한 | 와이어 결속장치 |
| US6799669B2 (en) | 2001-09-13 | 2004-10-05 | Siemens Vdo Automotive Corporation | Dynamic clutch control |
| US6802843B2 (en) | 2001-09-13 | 2004-10-12 | Csaba Truckai | Electrosurgical working end with resistive gradient electrodes |
| US6773409B2 (en) | 2001-09-19 | 2004-08-10 | Surgrx Llc | Surgical system for applying ultrasonic energy to tissue |
| GB2379878B (en) | 2001-09-21 | 2004-11-10 | Gyrus Medical Ltd | Electrosurgical system and method |
| US6955864B1 (en) | 2001-09-21 | 2005-10-18 | Defibtech, Llc | Medical device battery pack with active status indication |
| DE10147145C2 (de) | 2001-09-25 | 2003-12-18 | Kunz Reiner | Multifunktionsinstrument für die mikroinvasive Chirurgie |
| US6587750B2 (en) | 2001-09-25 | 2003-07-01 | Intuitive Surgical, Inc. | Removable infinite roll master grip handle and touch sensor for robotic surgery |
| US6578751B2 (en) | 2001-09-26 | 2003-06-17 | Scimed Life Systems, Inc. | Method of sequentially firing staples using springs and a rotary or linear shutter |
| JP3557186B2 (ja) | 2001-09-26 | 2004-08-25 | 三洋電機株式会社 | Dc−dcコンバータ |
| EP1429678B1 (en) | 2001-09-28 | 2006-03-22 | Rita Medical Systems, Inc. | Impedance controlled tissue ablation apparatus |
| US7108701B2 (en) | 2001-09-28 | 2006-09-19 | Ethicon, Inc. | Drug releasing anastomosis devices and methods for treating anastomotic sites |
| SE523684C2 (sv) | 2001-10-04 | 2004-05-11 | Isaberg Rapid Ab | Styranordning för en drivmotor i en häftapparat |
| US6770027B2 (en) | 2001-10-05 | 2004-08-03 | Scimed Life Systems, Inc. | Robotic endoscope with wireless interface |
| ATE295155T1 (de) | 2001-10-05 | 2005-05-15 | Surmodics Inc | Beschichtungen mit immobilisierten partikeln sowie verwendungen derselben |
| US6835173B2 (en) | 2001-10-05 | 2004-12-28 | Scimed Life Systems, Inc. | Robotic endoscope |
| ES2547219T3 (es) | 2001-10-05 | 2015-10-02 | Covidien Lp | Dispositivo de grapado quirúrgico |
| ES2357343T3 (es) | 2001-10-05 | 2011-04-25 | Tyco Healthcare Group Lp | Yunque con parte superior inclinable para un dispositivo de sujeción quirúrgico. |
| US7070597B2 (en) | 2001-10-18 | 2006-07-04 | Surgrx, Inc. | Electrosurgical working end for controlled energy delivery |
| US6929644B2 (en) | 2001-10-22 | 2005-08-16 | Surgrx Inc. | Electrosurgical jaw structure for controlled energy delivery |
| US7464847B2 (en) | 2005-06-03 | 2008-12-16 | Tyco Healthcare Group Lp | Surgical stapler with timer and feedback display |
| US7052454B2 (en) | 2001-10-20 | 2006-05-30 | Applied Medical Resources Corporation | Sealed surgical access device |
| US10285694B2 (en) | 2001-10-20 | 2019-05-14 | Covidien Lp | Surgical stapler with timer and feedback display |
| US7083619B2 (en) | 2001-10-22 | 2006-08-01 | Surgrx, Inc. | Electrosurgical instrument and method of use |
| US6905497B2 (en) | 2001-10-22 | 2005-06-14 | Surgrx, Inc. | Jaw structure for electrosurgical instrument |
| US6926716B2 (en) | 2001-11-09 | 2005-08-09 | Surgrx Inc. | Electrosurgical instrument |
| US6770072B1 (en) | 2001-10-22 | 2004-08-03 | Surgrx, Inc. | Electrosurgical jaw structure for controlled energy delivery |
| US7041102B2 (en) | 2001-10-22 | 2006-05-09 | Surgrx, Inc. | Electrosurgical working end with replaceable cartridges |
| US7011657B2 (en) | 2001-10-22 | 2006-03-14 | Surgrx, Inc. | Jaw structure for electrosurgical instrument and method of use |
| US7125409B2 (en) | 2001-10-22 | 2006-10-24 | Surgrx, Inc. | Electrosurgical working end for controlled energy delivery |
| US20030216732A1 (en) | 2002-05-20 | 2003-11-20 | Csaba Truckai | Medical instrument with thermochromic or piezochromic surface indicators |
| WO2003054849A1 (en) | 2001-10-23 | 2003-07-03 | Immersion Corporation | Method of using tactile feedback to deliver silent status information to a user of an electronic device |
| US6677687B2 (en) | 2001-10-23 | 2004-01-13 | Sun Microsystems, Inc. | System for distributing power in CPCI computer architecture |
| US20060020336A1 (en) | 2001-10-23 | 2006-01-26 | Liddicoat John R | Automated annular plication for mitral valve repair |
| FR2831417B1 (fr) | 2001-10-30 | 2004-08-06 | Eurosurgical | Instrument chirurgical |
| JP2003135473A (ja) | 2001-11-01 | 2003-05-13 | Mizuho Co Ltd | 内視鏡手術用能動鉗子 |
| AUPR865901A0 (en) | 2001-11-02 | 2002-01-24 | Poly Systems Pty Ltd | Projectile firing device |
| US6716223B2 (en) | 2001-11-09 | 2004-04-06 | Micrus Corporation | Reloadable sheath for catheter system for deploying vasoocclusive devices |
| US8089509B2 (en) | 2001-11-09 | 2012-01-03 | Karl Storz Imaging, Inc. | Programmable camera control unit with updatable program |
| FR2832262A1 (fr) | 2001-11-09 | 2003-05-16 | France Telecom | Procede et dispositif d'alimentation en energie electrique d'un appareil |
| US6471106B1 (en) | 2001-11-15 | 2002-10-29 | Intellectual Property Llc | Apparatus and method for restricting the discharge of fasteners from a tool |
| US6993200B2 (en) | 2001-11-20 | 2006-01-31 | Sony Corporation | System and method for effectively rendering high dynamic range images |
| US6997935B2 (en) | 2001-11-20 | 2006-02-14 | Advanced Medical Optics, Inc. | Resonant converter tuning for maintaining substantially constant phaco handpiece power under increased load |
| GB2382226A (en) | 2001-11-20 | 2003-05-21 | Black & Decker Inc | Switch mechanism for a power tool |
| JP2003164066A (ja) | 2001-11-21 | 2003-06-06 | Hitachi Koki Co Ltd | 電池パック |
| US6605078B2 (en) | 2001-11-26 | 2003-08-12 | Scimed Life Systems, Inc. | Full thickness resection device |
| DE10158246C1 (de) | 2001-11-28 | 2003-08-21 | Ethicon Endo Surgery Europe | Chirurgisches Klammersetzinstrument |
| US6671185B2 (en) | 2001-11-28 | 2003-12-30 | Landon Duval | Intelligent fasteners |
| US9320503B2 (en) | 2001-11-28 | 2016-04-26 | Medtronic Vascular, Inc. | Devices, system, and methods for guiding an operative tool into an interior body region |
| US20070073389A1 (en) | 2001-11-28 | 2007-03-29 | Aptus Endosystems, Inc. | Endovascular aneurysm devices, systems, and methods |
| ATE488342T1 (de) | 2001-11-29 | 2010-12-15 | Max Co Ltd | Elektrischer hefter |
| US10098640B2 (en) | 2001-12-04 | 2018-10-16 | Atricure, Inc. | Left atrial appendage devices and methods |
| US7591818B2 (en) | 2001-12-04 | 2009-09-22 | Endoscopic Technologies, Inc. | Cardiac ablation devices and methods |
| US7542807B2 (en) | 2001-12-04 | 2009-06-02 | Endoscopic Technologies, Inc. | Conduction block verification probe and method of use |
| EP1453432B1 (en) | 2001-12-04 | 2012-08-01 | Tyco Healthcare Group LP | System and method for calibrating a surgical instrument |
| US20050090837A1 (en) | 2003-03-25 | 2005-04-28 | Sixto Robert Jr. | Endoscopic surgical instrument having a force limiting actuator |
| US7918867B2 (en) | 2001-12-07 | 2011-04-05 | Abbott Laboratories | Suture trimmer |
| US20030121586A1 (en) | 2001-12-11 | 2003-07-03 | 3M Innovative Properties Company | Tack-on-pressure films for temporary surface protection and surface modification |
| GB2383006A (en) | 2001-12-13 | 2003-06-18 | Black & Decker Inc | Mechanism for use in a power tool and a power tool including such a mechanism |
| US20030114851A1 (en) | 2001-12-13 | 2003-06-19 | Csaba Truckai | Electrosurgical jaws for controlled application of clamping pressure |
| US6723087B2 (en) | 2001-12-14 | 2004-04-20 | Medtronic, Inc. | Apparatus and method for performing surgery on a patient |
| US6974462B2 (en) | 2001-12-19 | 2005-12-13 | Boston Scientific Scimed, Inc. | Surgical anchor implantation device |
| US7122028B2 (en) | 2001-12-19 | 2006-10-17 | Allegiance Corporation | Reconfiguration surgical apparatus |
| US6939358B2 (en) | 2001-12-20 | 2005-09-06 | Gore Enterprise Holdings, Inc. | Apparatus and method for applying reinforcement material to a surgical stapler |
| US7729742B2 (en) | 2001-12-21 | 2010-06-01 | Biosense, Inc. | Wireless position sensor |
| WO2003053289A1 (en) | 2001-12-21 | 2003-07-03 | Simcha Milo | Implantation system for annuloplasty rings |
| RU2225170C2 (ru) | 2001-12-25 | 2004-03-10 | Дубровский Аркадий Вениаминович | Инструмент с поворотным устройством |
| US20060264929A1 (en) | 2001-12-27 | 2006-11-23 | Gyrus Group Plc | Surgical system |
| CN100362969C (zh) | 2001-12-27 | 2008-01-23 | 盖勒斯集团股份有限公司 | 电外科器械 |
| US6942662B2 (en) | 2001-12-27 | 2005-09-13 | Gyrus Group Plc | Surgical Instrument |
| GB0425842D0 (en) | 2004-11-24 | 2004-12-29 | Gyrus Group Plc | An electrosurgical instrument |
| GB0130975D0 (en) | 2001-12-27 | 2002-02-13 | Gyrus Group Plc | A surgical instrument |
| US6729119B2 (en) | 2001-12-28 | 2004-05-04 | The Schnipke Family Limited Liability Company | Robotic loader for surgical stapling cartridge |
| US6913594B2 (en) | 2001-12-31 | 2005-07-05 | Biosense Webster, Inc. | Dual-function catheter handle |
| US6602252B2 (en) | 2002-01-03 | 2003-08-05 | Starion Instruments Corporation | Combined dissecting, cauterizing, and stapling device |
| US6740030B2 (en) | 2002-01-04 | 2004-05-25 | Vision Sciences, Inc. | Endoscope assemblies having working channels with reduced bending and stretching resistance |
| AU2002359847A1 (en) | 2002-01-09 | 2003-07-30 | Neoguide Systems, Inc | Apparatus and method for endoscopic colectomy |
| DE60335080D1 (de) | 2002-01-16 | 2011-01-05 | Toyota Motor Co Ltd | Zungsverfahren, speichermedium, programm, antriebs |
| JP2005515031A (ja) | 2002-01-16 | 2005-05-26 | イーバ コーポレイション | カテーテルのハンドピース装置および該装置を使用する方法 |
| US6869435B2 (en) | 2002-01-17 | 2005-03-22 | Blake, Iii John W | Repeating multi-clip applier |
| US6999821B2 (en) | 2002-01-18 | 2006-02-14 | Pacesetter, Inc. | Body implantable lead including one or more conductive polymer electrodes and methods for fabricating same |
| US7091412B2 (en) | 2002-03-04 | 2006-08-15 | Nanoset, Llc | Magnetically shielded assembly |
| US6676660B2 (en) | 2002-01-23 | 2004-01-13 | Ethicon Endo-Surgery, Inc. | Feedback light apparatus and method for use with an electrosurgical instrument |
| DE10203282A1 (de) | 2002-01-29 | 2003-08-21 | Behrens Ag Friedrich Joh | Befestigungsmittel und Verfahren zu seiner Herstellung |
| US7530985B2 (en) | 2002-01-30 | 2009-05-12 | Olympus Corporation | Endoscopic suturing system |
| US7501198B2 (en) | 2002-02-07 | 2009-03-10 | Linvatec Corporation | Sterile transfer battery container |
| US20030149406A1 (en) | 2002-02-07 | 2003-08-07 | Lucie Martineau | Multi-layer dressing as medical drug delivery system |
| US7625370B2 (en) | 2002-02-13 | 2009-12-01 | Applied Medical Resources Corporation | Tissue fusion/welder apparatus and method |
| EP1336392A1 (de) | 2002-02-14 | 2003-08-20 | John S. Geis | Gefässstütze und Kathetersystem |
| US7494499B2 (en) | 2002-02-15 | 2009-02-24 | Olympus Corporation | Surgical therapeutic instrument |
| US6524180B1 (en) | 2002-02-19 | 2003-02-25 | Maury Simms | Adjustable duct assembly for fume and dust removal |
| CN101898004A (zh) | 2002-02-20 | 2010-12-01 | 21世纪国际新技术株式会社 | 施用药物的装置 |
| US6646307B1 (en) | 2002-02-21 | 2003-11-11 | Advanced Micro Devices, Inc. | MOSFET having a double gate |
| US7400752B2 (en) | 2002-02-21 | 2008-07-15 | Alcon Manufacturing, Ltd. | Video overlay system for surgical apparatus |
| US7197965B1 (en) | 2002-02-25 | 2007-04-03 | Anderson Steven P | Hinged socket wrench speed handle |
| US6847190B2 (en) | 2002-02-26 | 2005-01-25 | Linvatec Corporation | Method and apparatus for charging sterilizable rechargeable batteries |
| US6747300B2 (en) | 2002-03-04 | 2004-06-08 | Ternational Rectifier Corporation | H-bridge drive utilizing a pair of high and low side MOSFETs in a common insulation housing |
| AU2003218010A1 (en) | 2002-03-06 | 2003-09-22 | Z-Kat, Inc. | System and method for using a haptic device in combination with a computer-assisted surgery system |
| US7831292B2 (en) | 2002-03-06 | 2010-11-09 | Mako Surgical Corp. | Guidance system and method for surgical procedures with improved feedback |
| US8010180B2 (en) | 2002-03-06 | 2011-08-30 | Mako Surgical Corp. | Haptic guidance system and method |
| USD473239S1 (en) | 2002-03-08 | 2003-04-15 | Dca Design International Limited | Portion of a display panel with a computer icon image |
| US7289139B2 (en) | 2002-03-12 | 2007-10-30 | Karl Storz Imaging, Inc. | Endoscope reader |
| GB0206208D0 (en) | 2002-03-15 | 2002-05-01 | Gyrus Medical Ltd | A surgical instrument |
| US7660988B2 (en) | 2002-03-18 | 2010-02-09 | Cognomina, Inc. | Electronic notary |
| EP2322078A1 (en) | 2002-03-18 | 2011-05-18 | Optim, Inc. | Method of sterilising an endoscope |
| USD478986S1 (en) | 2002-03-22 | 2003-08-26 | Gyrus Ent L.L.C. | Surgical tool |
| USD484595S1 (en) | 2002-03-22 | 2003-12-30 | Gyrus Ent L.L.C. | Surgical tool blade holder |
| USD484977S1 (en) | 2002-03-22 | 2004-01-06 | Gyrus Ent L.L.C. | Surgical tool blade holder |
| US7247161B2 (en) | 2002-03-22 | 2007-07-24 | Gyrus Ent L.L.C. | Powered surgical apparatus, method of manufacturing powered surgical apparatus, and method of using powered surgical apparatus |
| USD484243S1 (en) | 2002-03-22 | 2003-12-23 | Gyrus Ent L.L.C. | Surgical tool blade holder |
| USD478665S1 (en) | 2002-03-22 | 2003-08-19 | Gyrus Ent L.L.C. | Disposable trigger |
| USD484596S1 (en) | 2002-03-22 | 2003-12-30 | Gyrus Ent L.L.C. | Surgical tool blade holder |
| JP4071642B2 (ja) | 2002-03-25 | 2008-04-02 | 株式会社リコー | 用紙処理装置及び画像形成システム |
| US6991146B2 (en) | 2002-03-25 | 2006-01-31 | Design Circle, Inc. | Stapler having detached base |
| US7137981B2 (en) | 2002-03-25 | 2006-11-21 | Ethicon Endo-Surgery, Inc. | Endoscopic ablation system with a distally mounted image sensor |
| US7128748B2 (en) | 2002-03-26 | 2006-10-31 | Synovis Life Technologies, Inc. | Circular stapler buttress combination |
| WO2003086507A1 (en) | 2002-04-09 | 2003-10-23 | Yushin Medical Co., Ltd | Indwelling fecal diverting device |
| JP2003300416A (ja) | 2002-04-10 | 2003-10-21 | Kyowa Sangyo Kk | 車両用サンバイザ |
| AU2003226050A1 (en) | 2002-04-11 | 2003-10-27 | Tyco Healthcare Group, Lp | Surgical stapling apparatus including an anvil and cartridge each having cooperating mating surfaces |
| AU2003234718A1 (en) | 2002-04-15 | 2003-11-03 | Tyco Healthcare Group, Lp | Instrument introducer |
| EP1494594B1 (en) | 2002-04-15 | 2011-07-06 | Cook Biotech Incorporated | Apparatus and method for producing a reinforced surgical staple line |
| EP1494595B1 (en) | 2002-04-16 | 2011-03-02 | Tyco Healthcare Group LP | Surgical stapler |
| US7547287B2 (en) | 2002-04-19 | 2009-06-16 | Pelikan Technologies, Inc. | Method and apparatus for penetrating tissue |
| US6846811B2 (en) | 2002-04-22 | 2005-01-25 | Wisconsin Alumni Research Foundation | (20S) 1α-hydroxy-2α-methyl and 2β-methyl-19-nor-vitamin D3 and their uses |
| KR20050006180A (ko) | 2002-04-22 | 2005-01-15 | 마시오 마크 애브리우 | 생물학적 파라미터 측정 장치 및 방법 |
| US8241308B2 (en) | 2002-04-24 | 2012-08-14 | Boston Scientific Scimed, Inc. | Tissue fastening devices and processes that promote tissue adhesion |
| US7141055B2 (en) | 2002-04-24 | 2006-11-28 | Surgical Connections, Inc. | Resection and anastomosis devices and methods |
| US7161580B2 (en) | 2002-04-25 | 2007-01-09 | Immersion Corporation | Haptic feedback using rotary harmonic moving mass |
| US8603110B2 (en) | 2002-04-25 | 2013-12-10 | Terumo Kabushiki Kaisha | Organism tissue suturing apparatus |
| ES2377483T3 (es) | 2002-04-25 | 2012-03-28 | Tyco Healthcare Group Lp | Instrumentos quirúrgicos que incluyen sistemas microelectromecánicos (MEMS) |
| US6692692B2 (en) | 2002-04-29 | 2004-02-17 | Eric J. Stetzel | Dental drill sterilization through application of high amperage current |
| US6969385B2 (en) | 2002-05-01 | 2005-11-29 | Manuel Ricardo Moreyra | Wrist with decoupled motion transmission |
| AU2003228858A1 (en) | 2002-05-02 | 2003-11-17 | Scimed Life Systems, Inc. | Energetically-controlled delivery of biologically active material from an implanted medical device |
| US7674270B2 (en) | 2002-05-02 | 2010-03-09 | Laparocision, Inc | Apparatus for positioning a medical instrument |
| CN2710244Y (zh) | 2002-05-08 | 2005-07-13 | 精工爱普生株式会社 | 具有过压输出保护电路的稳压开关电源及电子设备 |
| US8802124B2 (en) | 2002-05-08 | 2014-08-12 | Radi Medical Systems Ab | Erodible vessel sealing device without chemical or biological degradation |
| WO2003095152A1 (fr) | 2002-05-09 | 2003-11-20 | Toshiyuki Kameyama | Cartouche pour agrafeuse et agrafeuse |
| EP1503671B1 (en) | 2002-05-10 | 2006-10-11 | Tyco Healthcare Group Lp | Wound closure material applicator and stapler |
| EP2292151B1 (en) | 2002-05-10 | 2014-08-27 | Covidien LP | Surgical stapling apparatus having a wound closure material applicator assembly |
| DE60307820T2 (de) | 2002-05-10 | 2007-03-29 | Tyco Healthcare Group Lp, Norwalk | Elektrochirurgisches klammergerät |
| US6736854B2 (en) | 2002-05-10 | 2004-05-18 | C. R. Bard, Inc. | Prosthetic repair fabric with erosion resistant edge |
| TWI237916B (en) | 2002-05-13 | 2005-08-11 | Sun Bridge Corp | Cordless device system |
| AU2003234551A1 (en) | 2002-05-13 | 2003-11-11 | Tyco Healthcare Group, Lp | Surgical stapler and disposable loading unit having different size staples |
| US20040254455A1 (en) | 2002-05-15 | 2004-12-16 | Iddan Gavriel J. | Magneic switch for use in a system that includes an in-vivo device, and method of use thereof |
| US20040158261A1 (en) | 2002-05-15 | 2004-08-12 | Vu Dinh Q. | Endoscopic device for spill-proof laparoscopic ovarian cystectomy |
| AU2003241479B2 (en) | 2002-05-16 | 2008-08-28 | Scott Laboratories, Inc. | System and method for permitting sterile operation of a sedation and analgesia system |
| US7968569B2 (en) | 2002-05-17 | 2011-06-28 | Celgene Corporation | Methods for treatment of multiple myeloma using 3-(4-amino-1-oxo-1,3-dihydro-isoindol-2-yl)-piperidine-2,6-dione |
| US7967839B2 (en) | 2002-05-20 | 2011-06-28 | Rocky Mountain Biosystems, Inc. | Electromagnetic treatment of tissues and cells |
| US8147421B2 (en) | 2003-01-15 | 2012-04-03 | Nuvasive, Inc. | System and methods for determining nerve direction to a surgical instrument |
| US6638297B1 (en) | 2002-05-30 | 2003-10-28 | Ethicon Endo-Surgery, Inc. | Surgical staple |
| US7056330B2 (en) | 2002-05-31 | 2006-06-06 | Ethicon Endo-Surgery, Inc. | Method for applying tissue fastener |
| US6989034B2 (en) | 2002-05-31 | 2006-01-24 | Ethicon, Inc. | Attachment of absorbable tissue scaffolds to fixation devices |
| US7004174B2 (en) | 2002-05-31 | 2006-02-28 | Neothermia Corporation | Electrosurgery with infiltration anesthesia |
| US20030225439A1 (en) | 2002-05-31 | 2003-12-04 | Cook Alonzo D. | Implantable product with improved aqueous interface characteristics and method for making and using same |
| US6769594B2 (en) | 2002-05-31 | 2004-08-03 | Tyco Healthcare Group, Lp | End-to-end anastomosis instrument and method for performing same |
| US6543456B1 (en) | 2002-05-31 | 2003-04-08 | Ethicon Endo-Surgery, Inc. | Method for minimally invasive surgery in the digestive system |
| US6861142B1 (en) | 2002-06-06 | 2005-03-01 | Hills, Inc. | Controlling the dissolution of dissolvable polymer components in plural component fibers |
| EP1369208B1 (en) | 2002-06-07 | 2008-04-23 | Black & Decker Inc. | A power tool provided with a locking mechanism |
| US6790173B2 (en) | 2002-06-13 | 2004-09-14 | Usgi Medical, Inc. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| US7166133B2 (en) | 2002-06-13 | 2007-01-23 | Kensey Nash Corporation | Devices and methods for treating defects in the tissue of a living being |
| US20050137455A1 (en) | 2002-06-13 | 2005-06-23 | Usgi Medical Corp. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| ES2278167T3 (es) | 2002-06-14 | 2007-08-01 | Power Medical Interventions, Inc. | Dispositivo para pinzar, cortar y grapar tejido. |
| US7717873B2 (en) | 2002-06-14 | 2010-05-18 | Mcneil-Ppc, Inc. | Applicator device for suppositories and the like |
| EP1719461B1 (en) | 2002-06-17 | 2009-06-03 | Tyco Healthcare Group Lp | Annular support structures |
| DE60327907D1 (de) | 2002-06-17 | 2009-07-16 | Tyco Healthcare | Ringförmige halterungsstruktur |
| US7063671B2 (en) | 2002-06-21 | 2006-06-20 | Boston Scientific Scimed, Inc. | Electronically activated capture device |
| US20030234194A1 (en) | 2002-06-21 | 2003-12-25 | Clark Dan Warren | Protective shield for a patient control unit |
| US6635838B1 (en) | 2002-06-24 | 2003-10-21 | Brent A. Kornelson | Switch actuating device and method of mounting same |
| RU2284160C2 (ru) | 2002-06-24 | 2006-09-27 | Аркадий Вениаминович Дубровский | Устройство для поворота инструмента с дистанционным управлением |
| US7112214B2 (en) | 2002-06-25 | 2006-09-26 | Incisive Surgical, Inc. | Dynamic bioabsorbable fastener for use in wound closure |
| US6726705B2 (en) | 2002-06-25 | 2004-04-27 | Incisive Surgical, Inc. | Mechanical method and apparatus for bilateral tissue fastening |
| GB2390024B (en) | 2002-06-27 | 2005-09-21 | Gyrus Medical Ltd | Electrosurgical system |
| US7699856B2 (en) | 2002-06-27 | 2010-04-20 | Van Wyk Robert A | Method, apparatus, and kit for thermal suture cutting |
| US7220260B2 (en) | 2002-06-27 | 2007-05-22 | Gyrus Medical Limited | Electrosurgical system |
| US9126317B2 (en) | 2002-06-27 | 2015-09-08 | Snap-On Incorporated | Tool apparatus system and method of use |
| US8287561B2 (en) | 2002-06-28 | 2012-10-16 | Boston Scientific Scimed, Inc. | Balloon-type actuator for surgical applications |
| AUPS322702A0 (en) | 2002-06-28 | 2002-07-18 | Cochlear Limited | Cochlear implant electrode array |
| US7033356B2 (en) | 2002-07-02 | 2006-04-25 | Gyrus Medical, Inc. | Bipolar electrosurgical instrument for cutting desiccating and sealing tissue |
| US20040006340A1 (en) | 2002-07-02 | 2004-01-08 | Gyrus Medical, Inc. | Bipolar electrosurgical instrument for cutting, desiccating and sealing tissue |
| CA2490581A1 (en) | 2002-07-03 | 2004-01-15 | Christy Cummins | Surgical stapling device |
| US6932218B2 (en) | 2002-07-03 | 2005-08-23 | Monica Rich Kosann Photography Llc | Folding photo case |
| US20040006335A1 (en) | 2002-07-08 | 2004-01-08 | Garrison Lawrence L. | Cauterizing surgical saw |
| US7029439B2 (en) | 2002-07-09 | 2006-04-18 | Welch Allyn, Inc. | Medical diagnostic instrument |
| AU2003237588A1 (en) | 2002-07-11 | 2004-02-02 | Sightline Technologies Ltd. | Piston-actuated endoscopic steering system |
| US7035762B2 (en) | 2002-07-11 | 2006-04-25 | Alcatel Canada Inc. | System and method for tracking utilization data for an electronic device |
| US20040006860A1 (en) | 2002-07-15 | 2004-01-15 | Haytayan Harry M. | Method and apparatus for attaching structural components with fasteners |
| US20040166169A1 (en) | 2002-07-15 | 2004-08-26 | Prasanna Malaviya | Porous extracellular matrix scaffold and method |
| US7769427B2 (en) | 2002-07-16 | 2010-08-03 | Magnetics, Inc. | Apparatus and method for catheter guidance control and imaging |
| US7054696B2 (en) | 2002-07-18 | 2006-05-30 | Black & Decker Inc. | System and method for data retrieval in AC power tools via an AC line cord |
| EP3656802A1 (en) | 2002-07-22 | 2020-05-27 | Aspen Aerogels Inc. | Polyimide aerogels, carbon aerogels, and metal carbide aerogels and methods of making same |
| IL150853A0 (en) | 2002-07-22 | 2003-02-12 | Niti Medical Technologies Ltd | Imppoved intussusception and anastomosis apparatus |
| JP4046569B2 (ja) | 2002-07-30 | 2008-02-13 | オリンパス株式会社 | 外科用処置具 |
| JP4063166B2 (ja) | 2002-07-31 | 2008-03-19 | 日産自動車株式会社 | 電動機の制御装置 |
| ES2364043T3 (es) | 2002-07-31 | 2011-08-23 | Tyco Healthcare Group Lp | Recubrimiento de elemento de herramienta y dispositivo de despliegue de recubrimiento. |
| US8016881B2 (en) | 2002-07-31 | 2011-09-13 | Icon Interventional Systems, Inc. | Sutures and surgical staples for anastamoses, wound closures, and surgical closures |
| US7179223B2 (en) | 2002-08-06 | 2007-02-20 | Olympus Optical Co., Ltd. | Endoscope apparatus having an internal channel |
| JP4142369B2 (ja) | 2002-08-07 | 2008-09-03 | オリンパス株式会社 | 内視鏡処置システム |
| US6969395B2 (en) | 2002-08-07 | 2005-11-29 | Boston Scientific Scimed, Inc. | Electroactive polymer actuated medical devices |
| US6720734B2 (en) | 2002-08-08 | 2004-04-13 | Datex-Ohmeda, Inc. | Oximeter with nulled op-amp current feedback |
| US9271753B2 (en) | 2002-08-08 | 2016-03-01 | Atropos Limited | Surgical device |
| AU2003257309A1 (en) | 2002-08-13 | 2004-02-25 | Microbotics Corporation | Microsurgical robot system |
| US6863668B2 (en) | 2002-08-16 | 2005-03-08 | Edwards Lifesciences Corporation | Articulation mechanism for medical devices |
| US20040044295A1 (en) | 2002-08-19 | 2004-03-04 | Orthosoft Inc. | Graphical user interface for computer-assisted surgery |
| CA2455538A1 (en) | 2002-08-21 | 2004-02-21 | Neothermia Corporation | Device and method for minimally invasive and intact recovery of tissue |
| US7494460B2 (en) | 2002-08-21 | 2009-02-24 | Medtronic, Inc. | Methods and apparatus providing suction-assisted tissue engagement through a minimally invasive incision |
| US8663106B2 (en) | 2002-08-22 | 2014-03-04 | Bodymedia, Inc. | Non-invasive temperature monitoring device |
| WO2004019803A1 (de) | 2002-08-28 | 2004-03-11 | Heribert Schmid | Zahnmedizinisches behandlungssystem |
| US20040044364A1 (en) | 2002-08-29 | 2004-03-04 | Devries Robert | Tissue fasteners and related deployment systems and methods |
| US6784775B2 (en) | 2002-08-29 | 2004-08-31 | Ljm Associates, Inc. | Proximity safety switch suitable for use in a hair dryer for disabling operation |
| US6981978B2 (en) | 2002-08-30 | 2006-01-03 | Satiety, Inc. | Methods and devices for maintaining a space occupying device in a relatively fixed location within a stomach |
| US7174636B2 (en) | 2002-09-04 | 2007-02-13 | Scimed Life Systems, Inc. | Method of making an embolic filter |
| DE10240719B4 (de) | 2002-09-04 | 2006-01-19 | Hilti Ag | Elektrohandwerkzeugmaschine mit Sanftanlauf |
| US20040049121A1 (en) | 2002-09-06 | 2004-03-11 | Uri Yaron | Positioning system for neurological procedures in the brain |
| US7223230B2 (en) | 2002-09-06 | 2007-05-29 | C. R. Bard, Inc. | External endoscopic accessory control system |
| US7666195B2 (en) | 2002-09-09 | 2010-02-23 | Brian Kelleher | Device and method for endoluminal therapy |
| US6925849B2 (en) | 2002-09-10 | 2005-08-09 | Acco Brands, Inc. | Stapler anvil |
| US6895176B2 (en) | 2002-09-12 | 2005-05-17 | General Electric Company | Method and apparatus for controlling electronically commutated motor operating characteristics |
| US8298161B2 (en) | 2002-09-12 | 2012-10-30 | Intuitive Surgical Operations, Inc. | Shape-transferring cannula system and method of use |
| US7096972B2 (en) | 2002-09-17 | 2006-08-29 | Orozco Jr Efrem | Hammer drill attachment |
| KR100450086B1 (ko) | 2002-09-18 | 2004-09-30 | 삼성테크윈 주식회사 | 전지수납수단 |
| GB0221707D0 (en) | 2002-09-18 | 2002-10-30 | Gyrus Medical Ltd | Electrical system |
| JP3680050B2 (ja) | 2002-09-18 | 2005-08-10 | 株式会社東芝 | 医療用マニピュレータ及びその制御方法 |
| US7033378B2 (en) | 2002-09-20 | 2006-04-25 | Id, Llc | Surgical fastener, particularly for the endoluminal treatment of gastroesophageal reflux disease (GERD) |
| US7001408B2 (en) | 2002-09-20 | 2006-02-21 | Ethicon Endo-Surgery,Inc. | Surgical device with expandable member |
| US8454628B2 (en) | 2002-09-20 | 2013-06-04 | Syntheon, Llc | Surgical fastener aligning instrument particularly for transoral treatment of gastroesophageal reflux disease |
| US6814154B2 (en) | 2002-09-23 | 2004-11-09 | Wen San Chou | Power tool having automatically selective driving direction |
| US7256695B2 (en) | 2002-09-23 | 2007-08-14 | Microstrain, Inc. | Remotely powered and remotely interrogated wireless digital sensor telemetry system |
| WO2004028402A2 (en) | 2002-09-26 | 2004-04-08 | Bioaccess, Inc. | Orthopedic medical device with unitary components |
| US8100823B2 (en) | 2002-09-27 | 2012-01-24 | Surgitech, Llc | Surgical file system with a visualization instrument |
| AU2002368279A1 (en) | 2002-09-27 | 2004-05-04 | Aesculap Ag And Co. Kg | Set of instruments for performing a surgical operation |
| EP1549200A4 (en) | 2002-09-30 | 2008-05-07 | Sightline Techn Ltd | PISTONED ENDOSCOPIC INSTRUMENT |
| US7326203B2 (en) | 2002-09-30 | 2008-02-05 | Depuy Acromed, Inc. | Device for advancing a functional element through tissue |
| US7087054B2 (en) | 2002-10-01 | 2006-08-08 | Surgrx, Inc. | Electrosurgical instrument and method of use |
| US20040068224A1 (en) | 2002-10-02 | 2004-04-08 | Couvillon Lucien Alfred | Electroactive polymer actuated medication infusion pumps |
| JP4049217B2 (ja) | 2002-10-02 | 2008-02-20 | イーメックス株式会社 | 導電性高分子成形品及び積層体を用いた装置 |
| US20040068161A1 (en) | 2002-10-02 | 2004-04-08 | Couvillon Lucien Alfred | Thrombolysis catheter |
| US6836611B2 (en) | 2002-10-03 | 2004-12-28 | J. W. Speaker Corporation | Light guide and lateral illuminator |
| ES2379225T3 (es) | 2002-10-04 | 2012-04-24 | Tyco Healthcare Group Lp | Grapadora quirúrgica con articulación universal y sujección previa de tejidos |
| US7588177B2 (en) | 2002-10-04 | 2009-09-15 | Tyco Healthcare Group Lp | Tool assembly for surgical stapling device |
| CA2500785C (en) | 2002-10-04 | 2011-04-26 | Philip C. Roy | Pneumatic powered surgical stapling device |
| US7083626B2 (en) | 2002-10-04 | 2006-08-01 | Applied Medical Resources Corporation | Surgical access device with pendent valve |
| AU2012268848B2 (en) | 2002-10-04 | 2016-01-28 | Covidien Lp | Surgical stapler with universal articulation and tissue pre-clamp |
| US7135027B2 (en) | 2002-10-04 | 2006-11-14 | Baxter International, Inc. | Devices and methods for mixing and extruding medically useful compositions |
| EP2055246B1 (en) | 2002-10-04 | 2012-04-18 | Tyco Healthcare Group LP | Surgical stapling device |
| CA2712039C (en) | 2002-10-04 | 2013-03-12 | Tyco Healthcare Group Lp | Tool assembly for surgical stapling device |
| US7276068B2 (en) | 2002-10-04 | 2007-10-02 | Sherwood Services Ag | Vessel sealing instrument with electrical cutting mechanism |
| US20040070369A1 (en) | 2002-10-11 | 2004-04-15 | Makita Corporation | Adapters for battery chargers |
| US7041088B2 (en) | 2002-10-11 | 2006-05-09 | Ethicon, Inc. | Medical devices having durable and lubricious polymeric coating |
| US6958035B2 (en) | 2002-10-15 | 2005-10-25 | Dusa Pharmaceuticals, Inc | Medical device sheath apparatus and method of making and using same |
| US7023159B2 (en) | 2002-10-18 | 2006-04-04 | Black & Decker Inc. | Method and device for braking a motor |
| US8100872B2 (en) | 2002-10-23 | 2012-01-24 | Tyco Healthcare Group Lp | Medical dressing containing antimicrobial agent |
| US20040092992A1 (en) | 2002-10-23 | 2004-05-13 | Kenneth Adams | Disposable battery powered rotary tissue cutting instruments and methods therefor |
| EP1556428B1 (en) | 2002-10-28 | 2014-06-11 | Covidien LP | Fast curing compositions |
| JP4086621B2 (ja) | 2002-10-28 | 2008-05-14 | 株式会社トップ | 外科用器具のハンドル構造 |
| US6923093B2 (en) | 2002-10-29 | 2005-08-02 | Rizwan Ullah | Tool drive system |
| US20040085180A1 (en) | 2002-10-30 | 2004-05-06 | Cyntec Co., Ltd. | Current sensor, its production substrate, and its production process |
| US7083620B2 (en) | 2002-10-30 | 2006-08-01 | Medtronic, Inc. | Electrosurgical hemostat |
| US20090149871A9 (en) | 2002-11-01 | 2009-06-11 | Jonathan Kagan | Devices and methods for treating morbid obesity |
| US7037344B2 (en) | 2002-11-01 | 2006-05-02 | Valentx, Inc. | Apparatus and methods for treatment of morbid obesity |
| US8142515B2 (en) | 2002-11-04 | 2012-03-27 | Sofradim Production | Prosthesis for reinforcement of tissue structures |
| US20040218451A1 (en) | 2002-11-05 | 2004-11-04 | Said Joe P. | Accessible user interface and navigation system and method |
| US6884392B2 (en) | 2002-11-12 | 2005-04-26 | Minntech Corporation | Apparatus and method for steam reprocessing flexible endoscopes |
| US6951562B2 (en) | 2002-11-13 | 2005-10-04 | Ralph Fritz Zwirnmann | Adjustable length tap and method for drilling and tapping a bore in bone |
| CA2505743A1 (en) | 2002-11-14 | 2004-06-03 | Ethicon Endo-Surgery, Inc. | Methods and devices for detecting tissue cells |
| US20050256452A1 (en) | 2002-11-15 | 2005-11-17 | Demarchi Thomas | Steerable vascular sheath |
| DE10253572A1 (de) | 2002-11-15 | 2004-07-29 | Vega Grieshaber Kg | Drahtlose Kommunikation |
| US7211092B2 (en) | 2002-11-19 | 2007-05-01 | Pilling Weck Incorporated | Automated-feed surgical clip applier and related methods |
| JP4456488B2 (ja) | 2002-11-22 | 2010-04-28 | タイコ ヘルスケア グループ エルピー | シース導入装置および方法 |
| CN1486667A (zh) | 2002-11-22 | 2004-04-07 | 带有一次性鞘套的内窥镜系统 | |
| US20040101822A1 (en) | 2002-11-26 | 2004-05-27 | Ulrich Wiesner | Fluorescent silica-based nanoparticles |
| DE10257760A1 (de) | 2002-11-26 | 2004-06-17 | Stefan Koscher | Chirurgisches Instrument |
| US6801009B2 (en) | 2002-11-27 | 2004-10-05 | Siemens Vdo Automotive Inc. | Current limitation process of brush and brushless DC motors during severe voltage changes |
| US20040102783A1 (en) | 2002-11-27 | 2004-05-27 | Sutterlin Chester E. | Powered Kerrison-like Rongeur system |
| EP1590517A4 (en) | 2002-11-29 | 2010-03-10 | John R Liddicoat | DEVICE AND METHOD FOR MANIPULATING TISSUE |
| US20060252981A1 (en) | 2002-12-05 | 2006-11-09 | Hikaru Matsuda | Biocompatible implant and use of the same |
| KR100486596B1 (ko) | 2002-12-06 | 2005-05-03 | 엘지전자 주식회사 | 왕복동식 압축기의 운전장치 및 제어방법 |
| US7386365B2 (en) | 2004-05-04 | 2008-06-10 | Intuitive Surgical, Inc. | Tool grip calibration for robotic surgery |
| JP3686947B2 (ja) | 2002-12-09 | 2005-08-24 | 国立大学法人 東京大学 | 能動鉗子用高剛性鉗子先端部構体およびそれを具える能動鉗子 |
| KR100803798B1 (ko) | 2002-12-16 | 2008-02-14 | 군제 가부시키가이샤 | 의료용 필름 |
| WO2004058079A2 (en) | 2002-12-17 | 2004-07-15 | Applied Medical Resources Corporation | Surgical staple-clip and applier |
| JP2006510879A (ja) | 2002-12-18 | 2006-03-30 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 磁気位置センサ |
| US20040122419A1 (en) | 2002-12-18 | 2004-06-24 | Ceramoptec Industries, Inc. | Medical device recognition system with write-back feature |
| US20040147909A1 (en) | 2002-12-20 | 2004-07-29 | Gyrus Ent L.L.C. | Surgical instrument |
| US7343920B2 (en) | 2002-12-20 | 2008-03-18 | Toby E Bruce | Connective tissue repair system |
| US7348763B1 (en) | 2002-12-20 | 2008-03-25 | Linvatec Corporation | Method for utilizing temperature to determine a battery state |
| US7682686B2 (en) | 2002-12-20 | 2010-03-23 | The Procter & Gamble Company | Tufted fibrous web |
| US7249267B2 (en) | 2002-12-21 | 2007-07-24 | Power-One, Inc. | Method and system for communicating filter compensation coefficients for a digital power control system |
| US6931830B2 (en) | 2002-12-23 | 2005-08-23 | Chase Liao | Method of forming a wire package |
| US6863924B2 (en) | 2002-12-23 | 2005-03-08 | Kimberly-Clark Worldwide, Inc. | Method of making an absorbent composite |
| US7131445B2 (en) | 2002-12-23 | 2006-11-07 | Gyrus Medical Limited | Electrosurgical method and apparatus |
| GB0230055D0 (en) | 2002-12-23 | 2003-01-29 | Gyrus Medical Ltd | Electrosurgical method and apparatus |
| US20040119185A1 (en) | 2002-12-23 | 2004-06-24 | Chen Ching Hsi | Method for manufacturing opened-cell plastic foams |
| US20040186349A1 (en) | 2002-12-24 | 2004-09-23 | Usgi Medical Corp. | Apparatus and methods for achieving endoluminal access |
| JP4160381B2 (ja) | 2002-12-27 | 2008-10-01 | ローム株式会社 | 音声出力装置を有する電子装置 |
| JP2004208922A (ja) | 2002-12-27 | 2004-07-29 | Olympus Corp | 医療装置及び医療用マニピュレータ並びに医療装置の制御方法 |
| US7455687B2 (en) | 2002-12-30 | 2008-11-25 | Advanced Cardiovascular Systems, Inc. | Polymer link hybrid stent |
| US7914561B2 (en) | 2002-12-31 | 2011-03-29 | Depuy Spine, Inc. | Resilient bone plate and screw system allowing bi-directional assembly |
| JP2004209042A (ja) | 2003-01-06 | 2004-07-29 | Olympus Corp | 超音波処置装置 |
| US7195627B2 (en) | 2003-01-09 | 2007-03-27 | Gyrus Medical Limited | Electrosurgical generator |
| GB0426648D0 (en) | 2004-12-03 | 2005-01-05 | Gyrus Medical Ltd | An electrosurgical generator |
| AU2003290301B2 (en) | 2003-01-09 | 2009-01-08 | Gyrus Medical Limited | An electrosurgical generator |
| US7287682B1 (en) | 2003-01-20 | 2007-10-30 | Hazem Ezzat | Surgical device and method |
| TWI225129B (en) | 2003-01-21 | 2004-12-11 | Honda Motor Co Ltd | Transmission |
| US20040143297A1 (en) | 2003-01-21 | 2004-07-22 | Maynard Ramsey | Advanced automatic external defibrillator powered by alternative and optionally multiple electrical power sources and a new business method for single use AED distribution and refurbishment |
| US6960220B2 (en) | 2003-01-22 | 2005-11-01 | Cardia, Inc. | Hoop design for occlusion device |
| US6821284B2 (en) | 2003-01-22 | 2004-11-23 | Novare Surgical Systems, Inc. | Surgical clamp inserts with micro-tractive surfaces |
| US6852122B2 (en) | 2003-01-23 | 2005-02-08 | Cordis Corporation | Coated endovascular AAA device |
| US20040225186A1 (en) | 2003-01-29 | 2004-11-11 | Horne Guy E. | Composite flexible endoscope insertion shaft with tubular substructure |
| US7341591B2 (en) | 2003-01-30 | 2008-03-11 | Depuy Spine, Inc. | Anterior buttress staple |
| JP2004229976A (ja) | 2003-01-31 | 2004-08-19 | Nippon Zeon Co Ltd | 鉗子型電気処置器具 |
| EP1442720A1 (en) | 2003-01-31 | 2004-08-04 | Tre Esse Progettazione Biomedica S.r.l | Apparatus for the maneuvering of flexible catheters in the human cardiovascular system |
| US6968908B2 (en) | 2003-02-05 | 2005-11-29 | Makita Corporation | Power tools |
| US7067038B2 (en) | 2003-02-06 | 2006-06-27 | The Procter & Gamble Company | Process for making unitary fibrous structure comprising randomly distributed cellulosic fibers and non-randomly distributed synthetic fibers |
| US7045026B2 (en) | 2003-02-06 | 2006-05-16 | The Procter & Gamble Company | Process for making a fibrous structure comprising cellulosic and synthetic fibers |
| US20090318557A1 (en) | 2003-12-22 | 2009-12-24 | Stockel Richard F | Dermatological compositions |
| KR101011312B1 (ko) | 2003-02-07 | 2011-02-07 | 막스 가부시키가이샤 | 스테이플용 리필 |
| DE602004015729D1 (de) | 2003-02-11 | 2008-09-25 | Olympus Corp | Überrohr |
| CN100442622C (zh) | 2003-02-18 | 2008-12-10 | 美商波特-凯博公司 | 电动工具中电池过电流的保护的安培数控制 |
| US20040167572A1 (en) | 2003-02-20 | 2004-08-26 | Roth Noah M. | Coated medical devices |
| ES2300746T3 (es) | 2003-02-20 | 2008-06-16 | Covidien Ag | Detector del movimiento para controlar la salida electroquirurgica. |
| US7083615B2 (en) | 2003-02-24 | 2006-08-01 | Intuitive Surgical Inc | Surgical tool having electrocautery energy supply conductor with inhibited current leakage |
| JP4231707B2 (ja) | 2003-02-25 | 2009-03-04 | オリンパス株式会社 | カプセル型医療装置 |
| US7252641B2 (en) | 2003-02-25 | 2007-08-07 | Ethicon Endo-Surgery, Inc. | Method of operating a biopsy device |
| BRPI0407847A (pt) * | 2003-02-25 | 2006-02-14 | Ethicon Endo Surgery Inc | dispositivo de biópsia com avanço de cortador de velocidade variável |
| EP2604215B1 (en) | 2003-02-25 | 2017-10-11 | Tria Beauty, Inc. | Eye-safe dermatologic treatment apparatus and method |
| JP4361082B2 (ja) | 2003-02-25 | 2009-11-11 | トリア ビューティ インコーポレイテッド | 内蔵型ダイオードレーザ利用皮膚病学的処置装置 |
| US7476237B2 (en) | 2003-02-27 | 2009-01-13 | Olympus Corporation | Surgical instrument |
| CA2515239A1 (en) | 2003-03-04 | 2004-10-21 | Steven P. Anderson | Hinged socket wrench speed handle |
| CN1780655B (zh) | 2003-03-04 | 2010-12-15 | 诺顿·希尔思凯尔有限公司 | 具有指示内部药物容器状态的显示器的药物分配设备 |
| EP1599146B1 (en) | 2003-03-05 | 2007-10-03 | Gyrus Medical Limited | Electrosurgical generator and system |
| US8197837B2 (en) | 2003-03-07 | 2012-06-12 | Depuy Mitek, Inc. | Method of preparation of bioabsorbable porous reinforced tissue implants and implants thereof |
| US7368124B2 (en) | 2003-03-07 | 2008-05-06 | Depuy Mitek, Inc. | Method of preparation of bioabsorbable porous reinforced tissue implants and implants thereof |
| IL154814A0 (en) | 2003-03-09 | 2003-10-31 | Edward G Shifrin | Sternal closure system, method and apparatus therefor |
| US7126879B2 (en) | 2003-03-10 | 2006-10-24 | Healthtrac Systems, Inc. | Medication package and method |
| FR2852226B1 (fr) | 2003-03-10 | 2005-07-15 | Univ Grenoble 1 | Instrument medical localise a ecran orientable |
| FR2852210B1 (fr) | 2003-03-12 | 2005-04-15 | Lafuma Sa | Dispositif de portage a dos d'une charge et de reglage de sa position |
| US20060064086A1 (en) | 2003-03-13 | 2006-03-23 | Darren Odom | Bipolar forceps with multiple electrode array end effector assembly |
| EP3222218A1 (en) | 2003-03-17 | 2017-09-27 | Covidien LP | Endoscopic tissue removal apparatus and method |
| CA2433205A1 (en) | 2003-03-18 | 2004-09-18 | James Alexander Keenan | Drug delivery, bodily fluid drainage, and biopsy device with enhanced ultrasonic visibility |
| US6928902B1 (en) | 2003-03-20 | 2005-08-16 | Luis P. Eyssallenne | Air powered wrench device with pivotable head and method of using |
| US20060041188A1 (en) | 2003-03-25 | 2006-02-23 | Dirusso Carlo A | Flexible endoscope |
| US20040193189A1 (en) | 2003-03-25 | 2004-09-30 | Kortenbach Juergen A. | Passive surgical clip |
| WO2004086987A1 (en) | 2003-03-26 | 2004-10-14 | Tyco Healthcare Group, Lp | Energy stored in spring with controlled release |
| DE10314072B4 (de) | 2003-03-28 | 2009-01-15 | Aesculap Ag | Chirurgisches Instrument |
| US7014640B2 (en) | 2003-03-28 | 2006-03-21 | Depuy Products, Inc. | Bone graft delivery device and method of use |
| JP3944108B2 (ja) | 2003-03-31 | 2007-07-11 | 株式会社東芝 | 医療用マニピュレータの動力伝達機構およびマニピュレータ |
| JP3752494B2 (ja) | 2003-03-31 | 2006-03-08 | 株式会社東芝 | マスタスレーブマニピュレータ、その制御装置及び制御方法 |
| US7295893B2 (en) | 2003-03-31 | 2007-11-13 | Kabushiki Kaisha Toshiba | Manipulator and its control apparatus and method |
| US7527632B2 (en) | 2003-03-31 | 2009-05-05 | Cordis Corporation | Modified delivery device for coated medical devices |
| DE10314827B3 (de) | 2003-04-01 | 2004-04-22 | Tuebingen Scientific Surgical Products Gmbh | Chirurgisches Instrument |
| DE10324844A1 (de) | 2003-04-01 | 2004-12-23 | Tuebingen Scientific Surgical Products Gmbh | Chirurgisches Instrument mit Instrumentengriff und Nullpunkteinstellung |
| DE10330604A1 (de) | 2003-04-01 | 2004-10-28 | Tuebingen Scientific Surgical Products Gmbh | Chirurgisches Instrument |
| US7591783B2 (en) | 2003-04-01 | 2009-09-22 | Boston Scientific Scimed, Inc. | Articulation joint for video endoscope |
| US20040243163A1 (en) | 2003-04-02 | 2004-12-02 | Gyrus Ent L.L.C | Surgical instrument |
| US20040197375A1 (en) | 2003-04-02 | 2004-10-07 | Alireza Rezania | Composite scaffolds seeded with mammalian cells |
| US20040199181A1 (en) | 2003-04-02 | 2004-10-07 | Knodel Bryan D. | Surgical device for anastomosis |
| US20070010702A1 (en) | 2003-04-08 | 2007-01-11 | Xingwu Wang | Medical device with low magnetic susceptibility |
| US20040204735A1 (en) | 2003-04-11 | 2004-10-14 | Shiroff Jason Alan | Subcutaneous dissection tool incorporating pharmacological agent delivery |
| US6754959B1 (en) | 2003-04-15 | 2004-06-29 | Guiette, Iii William E. | Hand-held, cartridge-actuated cutter |
| US20050116673A1 (en) | 2003-04-18 | 2005-06-02 | Rensselaer Polytechnic Institute | Methods and systems for controlling the operation of a tool |
| CN100515381C (zh) | 2003-04-23 | 2009-07-22 | 株式会社大塚制药工厂 | 填充了药液的塑料安瓿及其制造方法 |
| AU2004231389B8 (en) | 2003-04-23 | 2009-10-01 | Otsuka Pharmaceutical Factory, Inc. | Drug solution filling plastic ampoule and production method therefor |
| WO2004096015A2 (en) | 2003-04-25 | 2004-11-11 | Applied Medical Resources Corporation | Steerable kink-resistant sheath |
| US20040243151A1 (en) | 2003-04-29 | 2004-12-02 | Demmy Todd L. | Surgical stapling device with dissecting tip |
| US9597078B2 (en) | 2003-04-29 | 2017-03-21 | Covidien Lp | Surgical stapling device with dissecting tip |
| US8714429B2 (en) | 2003-04-29 | 2014-05-06 | Covidien Lp | Dissecting tip for surgical stapler |
| TWI231076B (en) | 2003-04-29 | 2005-04-11 | Univ Nat Chiao Tung | Evanescent-field optical amplifiers and lasers |
| RU32984U1 (ru) | 2003-04-30 | 2003-10-10 | Институт экспериментальной ветеринарии Сибири и Дальнего Востока СО РАСХН | Кутиметр |
| US7160299B2 (en) | 2003-05-01 | 2007-01-09 | Sherwood Services Ag | Method of fusing biomaterials with radiofrequency energy |
| US8128624B2 (en) | 2003-05-01 | 2012-03-06 | Covidien Ag | Electrosurgical instrument that directs energy delivery and protects adjacent tissue |
| WO2004098701A1 (en) | 2003-05-06 | 2004-11-18 | Enpath Medical, Inc. | Rotatable lead introducer |
| JP4391762B2 (ja) | 2003-05-08 | 2009-12-24 | オリンパス株式会社 | 外科用処置具 |
| US6722550B1 (en) | 2003-05-09 | 2004-04-20 | Illinois Tool Works Inc. | Fuel level indicator for combustion tools |
| EP1624811B1 (en) | 2003-05-09 | 2007-02-21 | Tyco Healthcare Group Lp | Anastomotic staple with fluid dispensing capillary |
| US7404449B2 (en) | 2003-05-12 | 2008-07-29 | Bermingham Construction Limited | Pile driving control apparatus and pile driving system |
| US7025775B2 (en) | 2003-05-15 | 2006-04-11 | Applied Medical Resources Corporation | Surgical instrument with removable shaft apparatus and method |
| US7615005B2 (en) | 2003-05-16 | 2009-11-10 | Ethicon Endo-Surgery, Inc. | Medical apparatus for use with an endoscope |
| US7615003B2 (en) | 2005-05-13 | 2009-11-10 | Ethicon Endo-Surgery, Inc. | Track for medical devices |
| US7815565B2 (en) | 2003-05-16 | 2010-10-19 | Ethicon Endo-Surgery, Inc. | Endcap for use with an endoscope |
| US7561637B2 (en) | 2003-05-19 | 2009-07-14 | Telefonaktiebolaget L M Ericsson (Publ) | Determination of a channel estimate of a transmission channel |
| US7380696B2 (en) | 2003-05-20 | 2008-06-03 | Ethicon Endo-Surgery, Inc. | Articulating surgical stapling instrument incorporating a two-piece E-beam firing mechanism |
| US20070010838A1 (en) | 2003-05-20 | 2007-01-11 | Shelton Frederick E Iv | Surgical stapling instrument having a firing lockout for an unclosed anvil |
| US7380695B2 (en) | 2003-05-20 | 2008-06-03 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a single lockout mechanism for prevention of firing |
| US7044352B2 (en) | 2003-05-20 | 2006-05-16 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a single lockout mechanism for prevention of firing |
| US7286850B2 (en) | 2003-05-20 | 2007-10-23 | Agere Systems Inc. | Wireless communication module system and method for performing a wireless communication |
| US6978921B2 (en) | 2003-05-20 | 2005-12-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an E-beam firing mechanism |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US7140528B2 (en) | 2003-05-20 | 2006-11-28 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated single lockout mechanism for prevention of firing |
| US7143923B2 (en) | 2003-05-20 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a firing lockout for an unclosed anvil |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US6988649B2 (en) | 2003-05-20 | 2006-01-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a spent cartridge lockout |
| USD502994S1 (en) | 2003-05-21 | 2005-03-15 | Blake, Iii Joseph W | Repeating multi-clip applier |
| US7090637B2 (en) | 2003-05-23 | 2006-08-15 | Novare Surgical Systems, Inc. | Articulating mechanism for remote manipulation of a surgical or diagnostic tool |
| US8100824B2 (en) | 2003-05-23 | 2012-01-24 | Intuitive Surgical Operations, Inc. | Tool with articulation lock |
| US7410483B2 (en) | 2003-05-23 | 2008-08-12 | Novare Surgical Systems, Inc. | Hand-actuated device for remote manipulation of a grasping tool |
| NL1023532C2 (nl) | 2003-05-26 | 2004-11-29 | Innosource B V | Toerentalregeling voor een borstelloze gelijkstroommotor. |
| US6921397B2 (en) | 2003-05-27 | 2005-07-26 | Cardia, Inc. | Flexible delivery device |
| US6965183B2 (en) | 2003-05-27 | 2005-11-15 | Pratt & Whitney Canada Corp. | Architecture for electric machine |
| US7413563B2 (en) | 2003-05-27 | 2008-08-19 | Cardia, Inc. | Flexible medical device |
| US7583063B2 (en) | 2003-05-27 | 2009-09-01 | Pratt & Whitney Canada Corp. | Architecture for electric machine |
| CN100398061C (zh) | 2003-05-28 | 2008-07-02 | 皇家飞利浦电子股份有限公司 | 一种包括移动支承件的人员检查装置 |
| DE10325393B3 (de) | 2003-05-28 | 2005-01-05 | Karl Storz Gmbh & Co. Kg | Retraktor |
| JP3521910B1 (ja) | 2003-05-29 | 2004-04-26 | 清輝 司馬 | 内視鏡の外部鉗子チャンネル装置 |
| US7346344B2 (en) | 2003-05-30 | 2008-03-18 | Aol Llc, A Delaware Limited Liability Company | Identity-based wireless device configuration |
| US6796921B1 (en) | 2003-05-30 | 2004-09-28 | One World Technologies Limited | Three speed rotary power tool |
| US20040247415A1 (en) | 2003-06-04 | 2004-12-09 | Mangone Peter G. | Slotted fastener and fastening method |
| US8007511B2 (en) | 2003-06-06 | 2011-08-30 | Hansen Medical, Inc. | Surgical instrument design |
| WO2004109223A1 (ja) | 2003-06-09 | 2004-12-16 | Mitutoyo Corporation | 測定器 |
| WO2004110553A1 (en) | 2003-06-09 | 2004-12-23 | The University Of Cincinnati | Actuation mechanisms for a heart actuation device |
| EP1635702A4 (en) | 2003-06-11 | 2009-01-21 | Pelikan Technologies Inc | METHOD AND APPARATUS FOR SAMPLING BODY LIQUID AND ANALYTE DETECTION |
| DE10326677A1 (de) | 2003-06-13 | 2005-01-20 | Zf Friedrichshafen Ag | Planetengetriebe |
| US7597693B2 (en) | 2003-06-13 | 2009-10-06 | Covidien Ag | Vessel sealer and divider for use with small trocars and cannulas |
| US7905902B2 (en) | 2003-06-16 | 2011-03-15 | Ethicon Endo-Surgery, Inc. | Surgical implant with preferential corrosion zone |
| US20060052825A1 (en) | 2003-06-16 | 2006-03-09 | Ransick Mark H | Surgical implant alloy |
| US20060052824A1 (en) | 2003-06-16 | 2006-03-09 | Ransick Mark H | Surgical implant |
| US7862546B2 (en) | 2003-06-16 | 2011-01-04 | Ethicon Endo-Surgery, Inc. | Subcutaneous self attaching injection port with integral moveable retention members |
| US20040254590A1 (en) | 2003-06-16 | 2004-12-16 | Hoffman Gary H. | Method and instrument for the performance of stapled anastamoses |
| US7494039B2 (en) | 2003-06-17 | 2009-02-24 | Tyco Healthcare Group Lp | Surgical stapling device |
| US7038421B2 (en) | 2003-06-17 | 2006-05-02 | International Business Machines Corporation | Method and system for multiple servo motor control |
| AU2012200594B2 (en) | 2003-06-17 | 2014-03-27 | Covidien Lp | Surgical stapling device |
| EP1635713B1 (en) | 2003-06-17 | 2012-04-11 | Tyco Healthcare Group LP | Surgical stapling device |
| US20040260315A1 (en) | 2003-06-17 | 2004-12-23 | Dell Jeffrey R. | Expandable tissue support member and method of forming the support member |
| JP4665432B2 (ja) | 2003-06-20 | 2011-04-06 | 日立工機株式会社 | 燃焼式動力工具 |
| EP1635712B1 (en) | 2003-06-20 | 2015-09-30 | Covidien LP | Surgical stapling device |
| US20070093869A1 (en) | 2003-06-20 | 2007-04-26 | Medtronic Vascular, Inc. | Device, system, and method for contracting tissue in a mammalian body |
| US20060154546A1 (en) | 2003-06-25 | 2006-07-13 | Andover Coated Products, Inc. | Air permeable pressure-sensitive adhesive tapes |
| GB0314863D0 (en) | 2003-06-26 | 2003-07-30 | Univ Dundee | Medical apparatus and method |
| SE526852C2 (sv) | 2003-06-26 | 2005-11-08 | Kongsberg Automotive Ab | Metod och arrangemang för styrning av likströmsmotor |
| DE10328934B4 (de) | 2003-06-27 | 2005-06-02 | Christoph Zepf | Motorischer Antrieb für chirurgische Instrumente |
| JP2005013573A (ja) | 2003-06-27 | 2005-01-20 | Olympus Corp | 電子内視鏡システム |
| US9002518B2 (en) | 2003-06-30 | 2015-04-07 | Intuitive Surgical Operations, Inc. | Maximum torque driving of robotic surgical tools in robotic surgical systems |
| US6998816B2 (en) | 2003-06-30 | 2006-02-14 | Sony Electronics Inc. | System and method for reducing external battery capacity requirement for a wireless card |
| US8226715B2 (en) | 2003-06-30 | 2012-07-24 | Depuy Mitek, Inc. | Scaffold for connective tissue repair |
| DE102004063606B4 (de) | 2004-02-20 | 2015-10-22 | Carl Zeiss Meditec Ag | Haltevorrichtung, insbesondere für ein medizinisch-optisches Instrument, mit einer Einrichtung zur aktiven Schwingungsdämpfung |
| US7042184B2 (en) | 2003-07-08 | 2006-05-09 | Board Of Regents Of The University Of Nebraska | Microrobot for surgical applications |
| US7126303B2 (en) | 2003-07-08 | 2006-10-24 | Board Of Regents Of The University Of Nebraska | Robot for surgical applications |
| US20050010213A1 (en) | 2003-07-08 | 2005-01-13 | Depuy Spine, Inc. | Attachment mechanism for surgical instrument |
| US7147648B2 (en) | 2003-07-08 | 2006-12-12 | Board Of Supervisors Of Louisiana State University And Agricultural And Mechanical College | Device for cutting and holding a cornea during a transplant procedure |
| US6981628B2 (en) | 2003-07-09 | 2006-01-03 | Ethicon Endo-Surgery, Inc. | Surgical instrument with a lateral-moving articulation control |
| US7111769B2 (en) | 2003-07-09 | 2006-09-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an articulation mechanism having rotation about the longitudinal axis |
| US7055731B2 (en) | 2003-07-09 | 2006-06-06 | Ethicon Endo-Surgery Inc. | Surgical stapling instrument incorporating a tapered firing bar for increased flexibility around the articulation joint |
| US7213736B2 (en) | 2003-07-09 | 2007-05-08 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an electroactive polymer actuated firing bar track through an articulation joint |
| US6786382B1 (en) | 2003-07-09 | 2004-09-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an articulation joint for a firing bar track |
| US6964363B2 (en) | 2003-07-09 | 2005-11-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having articulation joint support plates for supporting a firing bar |
| US7066879B2 (en) | 2003-07-15 | 2006-06-27 | The Trustees Of Columbia University In The City Of New York | Insertable device and system for minimal access procedure |
| EP1498077B8 (de) | 2003-07-15 | 2005-12-28 | University Of Dundee | Medizinisches Greif- und/oder Schneidinstrument |
| US7931695B2 (en) | 2003-07-15 | 2011-04-26 | Kensey Nash Corporation | Compliant osteosynthesis fixation plate |
| JP4755983B2 (ja) | 2003-07-16 | 2011-08-24 | タイコ ヘルスケア グループ リミテッド パートナーシップ | 組織テンショナーを備えた外科用ステープル留めデバイス |
| WO2005008769A1 (ja) | 2003-07-16 | 2005-01-27 | Tokyo Electron Limited | 搬送装置及び駆動機構 |
| ATE482656T1 (de) | 2003-07-17 | 2010-10-15 | Gunze Kk | Nahtverstärkungsmaterial für ein automatisches nähgerät |
| US7183737B2 (en) | 2003-07-17 | 2007-02-27 | Asmo Co., Ltd. | Motor control device and motor control method |
| JP4124041B2 (ja) | 2003-07-18 | 2008-07-23 | 日立工機株式会社 | 充電機能付き直流電源装置 |
| DE102004034444A1 (de) | 2003-07-18 | 2005-02-03 | Pentax Corp. | Kapsel-Vorrichtung |
| US7712182B2 (en) | 2003-07-25 | 2010-05-11 | Milwaukee Electric Tool Corporation | Air flow-producing device, such as a vacuum cleaner or a blower |
| US6949196B2 (en) | 2003-07-28 | 2005-09-27 | Fkos, Llc | Methods and systems for improved dosing of a chemical treatment, such as chlorine dioxide, into a fluid stream, such as a wastewater stream |
| US7121773B2 (en) | 2003-08-01 | 2006-10-17 | Nitto Kohki Co., Ltd. | Electric drill apparatus |
| US20050032511A1 (en) | 2003-08-07 | 2005-02-10 | Cardiac Pacemakers, Inc. | Wireless firmware download to an external device |
| JP4472395B2 (ja) | 2003-08-07 | 2010-06-02 | オリンパス株式会社 | 超音波手術システム |
| FI120333B (fi) | 2003-08-20 | 2009-09-30 | Bioretec Oy | Huokoinen lääketieteellinen väline ja menetelmä sen valmistamiseksi |
| US7313430B2 (en) | 2003-08-28 | 2007-12-25 | Medtronic Navigation, Inc. | Method and apparatus for performing stereotactic surgery |
| JP3853807B2 (ja) | 2003-08-28 | 2006-12-06 | 本田技研工業株式会社 | 音振解析装置及び音振解析方法並びに音振解析用のプログラムを記録したコンピュータ読み取り可能な記録媒体及び音振解析用のプログラム |
| US7686201B2 (en) | 2003-09-01 | 2010-03-30 | Tyco Healthcare Group Lp | Circular stapler for hemorrhoid operations |
| CA2439536A1 (en) | 2003-09-04 | 2005-03-04 | Jacek Krzyzanowski | Variations of biopsy jaw and clevis and method of manufacture |
| JP4190983B2 (ja) | 2003-09-04 | 2008-12-03 | ジョンソン・エンド・ジョンソン株式会社 | ステープル装置 |
| US7205959B2 (en) | 2003-09-09 | 2007-04-17 | Sony Ericsson Mobile Communications Ab | Multi-layered displays providing different focal lengths with optically shiftable viewing formats and terminals incorporating the same |
| JP4722849B2 (ja) | 2003-09-12 | 2011-07-13 | マイルストーン サイアンティフィック インク | 圧力検知を使用した組織を同定した薬剤注入装置 |
| US20050058890A1 (en) | 2003-09-15 | 2005-03-17 | Kenneth Brazell | Removable battery pack for a portable electric power tool |
| EP2311520B1 (en) | 2003-09-15 | 2014-12-03 | Apollo Endosurgery, Inc. | Implantable device fastening system |
| US20050059997A1 (en) | 2003-09-17 | 2005-03-17 | Bauman Ann M. | Circular stapler buttress |
| US7547312B2 (en) | 2003-09-17 | 2009-06-16 | Gore Enterprise Holdings, Inc. | Circular stapler buttress |
| US20090325859A1 (en) | 2003-09-19 | 2009-12-31 | Northwestern University | Citric acid polymers |
| DE20321118U1 (de) | 2003-09-29 | 2005-12-22 | Robert Bosch Gmbh | Akkuschrauber |
| US7000819B2 (en) | 2003-09-29 | 2006-02-21 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having multistroke firing incorporating a traction-biased ratcheting mechanism |
| US7094202B2 (en) | 2003-09-29 | 2006-08-22 | Ethicon Endo-Surgery, Inc. | Method of operating an endoscopic device with one hand |
| US7303108B2 (en) | 2003-09-29 | 2007-12-04 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multi-stroke firing mechanism with a flexible rack |
| US7434715B2 (en) | 2003-09-29 | 2008-10-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having multistroke firing with opening lockout |
| US7364061B2 (en) | 2003-09-29 | 2008-04-29 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multistroke firing position indicator and retraction mechanism |
| US7083075B2 (en) | 2003-09-29 | 2006-08-01 | Ethicon Endo-Surgery, Inc. | Multi-stroke mechanism with automatic end of stroke retraction |
| US6959852B2 (en) | 2003-09-29 | 2005-11-01 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with multistroke firing incorporating an anti-backup mechanism |
| US6905057B2 (en) | 2003-09-29 | 2005-06-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a firing mechanism having a linked rack transmission |
| US20050070929A1 (en) | 2003-09-30 | 2005-03-31 | Dalessandro David A. | Apparatus and method for attaching a surgical buttress to a stapling apparatus |
| JP4296894B2 (ja) | 2003-09-30 | 2009-07-15 | 東海ゴム工業株式会社 | 流体移送用チューブのブラケット |
| US20050075561A1 (en) | 2003-10-01 | 2005-04-07 | Lucent Medical Systems, Inc. | Method and apparatus for indicating an encountered obstacle during insertion of a medical device |
| US7202576B1 (en) | 2003-10-03 | 2007-04-10 | American Power Conversion Corporation | Uninterruptible power supply systems and enclosures |
| US7556647B2 (en) | 2003-10-08 | 2009-07-07 | Arbor Surgical Technologies, Inc. | Attachment device and methods of using the same |
| US7097650B2 (en) | 2003-10-14 | 2006-08-29 | Satiety, Inc. | System for tissue approximation and fixation |
| US7533906B2 (en) | 2003-10-14 | 2009-05-19 | Water Pik, Inc. | Rotatable and pivotable connector |
| US7914543B2 (en) | 2003-10-14 | 2011-03-29 | Satiety, Inc. | Single fold device for tissue fixation |
| US20060161050A1 (en) | 2003-10-15 | 2006-07-20 | John Butler | A surgical sealing device |
| US7029435B2 (en) | 2003-10-16 | 2006-04-18 | Granit Medical Innovation, Llc | Endoscope having multiple working segments |
| US10022123B2 (en) | 2012-07-09 | 2018-07-17 | Covidien Lp | Surgical adapter assemblies for use between surgical handle assembly and surgical end effectors |
| US7840253B2 (en) | 2003-10-17 | 2010-11-23 | Medtronic Navigation, Inc. | Method and apparatus for surgical navigation |
| US10105140B2 (en) | 2009-11-20 | 2018-10-23 | Covidien Lp | Surgical console and hand-held surgical device |
| US10588629B2 (en) | 2009-11-20 | 2020-03-17 | Covidien Lp | Surgical console and hand-held surgical device |
| US10041822B2 (en) | 2007-10-05 | 2018-08-07 | Covidien Lp | Methods to shorten calibration times for powered devices |
| US9055943B2 (en) | 2007-09-21 | 2015-06-16 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US8806973B2 (en) | 2009-12-02 | 2014-08-19 | Covidien Lp | Adapters for use between surgical handle assembly and surgical end effector |
| US9113880B2 (en) | 2007-10-05 | 2015-08-25 | Covidien Lp | Internal backbone structural chassis for a surgical device |
| USD509297S1 (en) | 2003-10-17 | 2005-09-06 | Tyco Healthcare Group, Lp | Surgical instrument |
| JP4642770B2 (ja) | 2003-10-17 | 2011-03-02 | タイコ ヘルスケア グループ リミテッド パートナーシップ | 独立先端部回転を備えた外科用ステープル留めデバイス |
| AU2004281833B2 (en) | 2003-10-17 | 2010-07-01 | Covidien Lp | Surgical stapling device |
| US7296722B2 (en) | 2003-10-17 | 2007-11-20 | Tyco Healthcare Group Lp | Surgical fastener applying apparatus with controlled beam deflection |
| US20090090763A1 (en) | 2007-10-05 | 2009-04-09 | Tyco Healthcare Group Lp | Powered surgical stapling device |
| USD509589S1 (en) | 2003-10-17 | 2005-09-13 | Tyco Healthcare Group, Lp | Handle for surgical instrument |
| US8968276B2 (en) | 2007-09-21 | 2015-03-03 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US20050090817A1 (en) | 2003-10-22 | 2005-04-28 | Scimed Life Systems, Inc. | Bendable endoscopic bipolar device |
| AU2003284929B2 (en) | 2003-10-23 | 2010-07-22 | Covidien Ag | Redundant temperature monitoring in electrosurgical systems for safety mitigation |
| US7786288B2 (en) | 2003-10-23 | 2010-08-31 | Karp Nelson M | Immunizing compositions encoding an epitope obtained from the HIV-1 capsid protein cyclophilin A binding site |
| US7190147B2 (en) | 2003-10-24 | 2007-03-13 | Eagle-Picher Technologies, Llc | Battery with complete discharge device |
| US20070018958A1 (en) | 2003-10-24 | 2007-01-25 | Tavakoli Seyed M | Force reflective robotic control system and minimally invasive surgical device |
| NZ547208A (en) | 2003-10-28 | 2009-10-30 | Ibex Ind Ltd | Powered hand tool |
| ES2311879T3 (es) | 2003-10-30 | 2009-02-16 | Mcneil-Ppc, Inc. | Materiales compuestos que comprenden nanoparticulas exfoliadas cargadas con metales. |
| US7842028B2 (en) | 2005-04-14 | 2010-11-30 | Cambridge Endoscopic Devices, Inc. | Surgical instrument guide device |
| US7338513B2 (en) | 2003-10-30 | 2008-03-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7147650B2 (en) | 2003-10-30 | 2006-12-12 | Woojin Lee | Surgical instrument |
| US7686826B2 (en) | 2003-10-30 | 2010-03-30 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| JP2005131173A (ja) | 2003-10-31 | 2005-05-26 | Olympus Corp | 内視鏡用外付けチャンネル |
| JP2005131211A (ja) | 2003-10-31 | 2005-05-26 | Olympus Corp | 内視鏡用の外付けチャンネル |
| JP2005131212A (ja) | 2003-10-31 | 2005-05-26 | Olympus Corp | 内視鏡用の外付けチャンネル及び内視鏡装置 |
| JP2005131163A (ja) | 2003-10-31 | 2005-05-26 | Olympus Corp | 内視鏡用の外付けチャンネル |
| JP2005131164A (ja) | 2003-10-31 | 2005-05-26 | Olympus Corp | 内視鏡用の外付けチャンネル |
| US20050096683A1 (en) | 2003-11-01 | 2005-05-05 | Medtronic, Inc. | Using thinner laminations to reduce operating temperature in a high speed hand-held surgical power tool |
| JP2005137423A (ja) | 2003-11-04 | 2005-06-02 | Olympus Corp | 内視鏡用の外付けチャンネルおよび外付けチャンネル用分岐部材 |
| US7397364B2 (en) | 2003-11-11 | 2008-07-08 | Biosense Webster, Inc. | Digital wireless position sensor |
| AU2004289336B2 (en) | 2003-11-12 | 2010-07-29 | Applied Medical Resources Corporation | Surgical instrument having jaw spines |
| WO2005050378A2 (en) | 2003-11-18 | 2005-06-02 | Burke Robert M Ii | System for regulating access to and distributing content in a network |
| DE10353846A1 (de) | 2003-11-18 | 2005-06-16 | Maquet Gmbh & Co. Kg | Verfahren zur Vorbereitung von für die Durchführung von medizinischen oder chirurgischen Eingriffen bestimmten Geräten |
| US6899593B1 (en) | 2003-11-18 | 2005-05-31 | Dieter Moeller | Grinding apparatus for blending defects on turbine blades and associated method of use |
| JP4594612B2 (ja) | 2003-11-27 | 2010-12-08 | オリンパス株式会社 | 挿入補助具 |
| GB0327904D0 (en) | 2003-12-02 | 2004-01-07 | Qinetiq Ltd | Gear change mechanism |
| US8257393B2 (en) | 2003-12-04 | 2012-09-04 | Ethicon, Inc. | Active suture for the delivery of therapeutic fluids |
| US8389588B2 (en) | 2003-12-04 | 2013-03-05 | Kensey Nash Corporation | Bi-phasic compressed porous reinforcement materials suitable for implant |
| US8133500B2 (en) | 2003-12-04 | 2012-03-13 | Kensey Nash Bvf Technology, Llc | Compressed high density fibrous polymers suitable for implant |
| GB2408936B (en) | 2003-12-09 | 2007-07-18 | Gyrus Group Plc | A surgical instrument |
| US7439354B2 (en) | 2003-12-11 | 2008-10-21 | E.I. Du Pont De Nemours And Company | Process for preparing amide acetals |
| WO2005058731A2 (en) | 2003-12-12 | 2005-06-30 | Automated Merchandising Systems Inc. | Adjustable storage rack for a vending machine |
| US7378817B2 (en) | 2003-12-12 | 2008-05-27 | Microsoft Corporation | Inductive power adapter |
| US7375493B2 (en) | 2003-12-12 | 2008-05-20 | Microsoft Corporation | Inductive battery charger |
| US7604118B2 (en) | 2003-12-15 | 2009-10-20 | Panasonic Corporation | Puncture needle cartridge and lancet for blood collection |
| US20050131457A1 (en) | 2003-12-15 | 2005-06-16 | Ethicon, Inc. | Variable stiffness shaft |
| JP4460890B2 (ja) | 2003-12-15 | 2010-05-12 | 衛 光石 | 多自由度マニピュレータ |
| US7091191B2 (en) | 2003-12-19 | 2006-08-15 | Ethicon, Inc. | Modified hyaluronic acid for use in musculoskeletal tissue repair |
| US8221424B2 (en) | 2004-12-20 | 2012-07-17 | Spinascope, Inc. | Surgical instrument for orthopedic surgery |
| JP4552435B2 (ja) | 2003-12-22 | 2010-09-29 | 住友化学株式会社 | オキシムの製造方法 |
| US7742036B2 (en) | 2003-12-22 | 2010-06-22 | Immersion Corporation | System and method for controlling haptic devices having multiple operational modes |
| US8590764B2 (en) | 2003-12-24 | 2013-11-26 | Boston Scientific Scimed, Inc. | Circumferential full thickness resectioning device |
| JP4398716B2 (ja) | 2003-12-24 | 2010-01-13 | 呉羽テック株式会社 | 鮮明なエンボス模様が施された高伸縮性不織布、及びその製造方法 |
| CN1634601A (zh) | 2003-12-26 | 2005-07-06 | 吉林省中立实业有限公司 | 一种用于医疗器械灭菌的方法 |
| US7618427B2 (en) | 2003-12-29 | 2009-11-17 | Ethicon Endo-Surgery, Inc. | Device and method for intralumenal anastomosis |
| US6988650B2 (en) | 2003-12-30 | 2006-01-24 | Ethicon Endo-Surgery, Inc. | Retaining pin lever advancement mechanism for a curved cutter stapler |
| US20050143759A1 (en) | 2003-12-30 | 2005-06-30 | Kelly William D. | Curved cutter stapler shaped for male pelvis |
| US7147139B2 (en) | 2003-12-30 | 2006-12-12 | Ethicon Endo-Surgery, Inc | Closure plate lockout for a curved cutter stapler |
| US7766207B2 (en) | 2003-12-30 | 2010-08-03 | Ethicon Endo-Surgery, Inc. | Articulating curved cutter stapler |
| US7147140B2 (en) | 2003-12-30 | 2006-12-12 | Ethicon Endo - Surgery, Inc. | Cartridge retainer for a curved cutter stapler |
| US7134587B2 (en) | 2003-12-30 | 2006-11-14 | Ethicon Endo-Surgery, Inc. | Knife retraction arm for a curved cutter stapler |
| US7204404B2 (en) | 2003-12-30 | 2007-04-17 | Ethicon Endo-Surgery, Inc. | Slotted pins guiding knife in a curved cutter stapler |
| US7549563B2 (en) | 2003-12-30 | 2009-06-23 | Ethicon Endo-Surgery, Inc. | Rotating curved cutter stapler |
| US7207472B2 (en) | 2003-12-30 | 2007-04-24 | Ethicon Endo-Surgery, Inc. | Cartridge with locking knife for a curved cutter stapler |
| US20050139636A1 (en) | 2003-12-30 | 2005-06-30 | Schwemberger Richard F. | Replaceable cartridge module for a surgical stapling and cutting instrument |
| US20050191936A1 (en) | 2004-01-07 | 2005-09-01 | Marine Jon C. | Doll |
| US6995729B2 (en) | 2004-01-09 | 2006-02-07 | Biosense Webster, Inc. | Transponder with overlapping coil antennas on a common core |
| TWI228850B (en) | 2004-01-14 | 2005-03-01 | Asia Optical Co Inc | Laser driver circuit for burst mode and making method thereof |
| GB2410161B (en) | 2004-01-16 | 2008-09-03 | Btg Int Ltd | Method and system for calculating and verifying the integrity of data in data transmission system |
| US7146191B2 (en) | 2004-01-16 | 2006-12-05 | United States Thermoelectric Consortium | Wireless communications apparatus and method |
| US7219980B2 (en) | 2004-01-21 | 2007-05-22 | Silverbrook Research Pty Ltd | Printhead assembly with removable cover |
| ES2375930T5 (es) | 2004-01-23 | 2014-10-31 | Apollo Endosurgery, Inc. | Sistema de fijación de dispositivos implantables |
| US20050171522A1 (en) | 2004-01-30 | 2005-08-04 | Christopherson Mark A. | Transurethral needle ablation system with needle position indicator |
| JP2005211455A (ja) | 2004-01-30 | 2005-08-11 | Olympus Corp | 外科用切除装置 |
| US7204835B2 (en) | 2004-02-02 | 2007-04-17 | Gyrus Medical, Inc. | Surgical instrument |
| US20050177176A1 (en) | 2004-02-05 | 2005-08-11 | Craig Gerbi | Single-fold system for tissue approximation and fixation |
| DE102004005709A1 (de) | 2004-02-05 | 2005-08-25 | Polydiagnost Gmbh | Endoskop mit einer flexiblen Sonde |
| JP4845382B2 (ja) | 2004-02-06 | 2011-12-28 | キヤノン株式会社 | 画像処理装置及びその制御方法、並びに、コンピュータプログラム及びコンピュータ可読記憶媒体 |
| KR100855957B1 (ko) | 2004-02-09 | 2008-09-02 | 삼성전자주식회사 | 화면 주변부의 밝기를 보상하는 고체 촬상 소자 및 그구동 방법 |
| US11395865B2 (en) | 2004-02-09 | 2022-07-26 | DePuy Synthes Products, Inc. | Scaffolds with viable tissue |
| CA2553681A1 (en) | 2004-02-10 | 2005-08-25 | Synecor, Llc | Intravascular delivery system for therapeutic agents |
| GB0403020D0 (en) | 2004-02-11 | 2004-03-17 | Pa Consulting Services | Portable charging device |
| US7979137B2 (en) | 2004-02-11 | 2011-07-12 | Ethicon, Inc. | System and method for nerve stimulation |
| WO2005079295A2 (en) | 2004-02-12 | 2005-09-01 | Ndi Medical, Llc | Portable assemblies, systems and methods for providing functional or therapeutic neuromuscular stimulation |
| US7886952B2 (en) | 2004-02-17 | 2011-02-15 | Tyco Healthcare Group Lp | Surgical stapling apparatus with locking mechanism |
| US20100191292A1 (en) | 2004-02-17 | 2010-07-29 | Demeo Joseph | Oriented polymer implantable device and process for making same |
| ES2282940T3 (es) | 2004-02-17 | 2007-10-16 | Tyco Healthcare Group Lp | Aparato para la aplicacion de grapas quirurgicas con mecanismo de bloqueo. |
| US7143924B2 (en) | 2004-02-17 | 2006-12-05 | Tyco Healthcare Group Lp | Surgical stapling apparatus with locking mechanism |
| US7172104B2 (en) | 2004-02-17 | 2007-02-06 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| US8920443B2 (en) | 2004-02-17 | 2014-12-30 | Cook Biotech Incorporated | Medical devices and methods useful for applying bolster material |
| EP1563791B1 (en) | 2004-02-17 | 2007-04-18 | Tyco Healthcare Group Lp | Surgical stapling apparatus with locking mechanism |
| US20050182443A1 (en) | 2004-02-18 | 2005-08-18 | Closure Medical Corporation | Adhesive-containing wound closure device and method |
| US6953138B1 (en) | 2004-02-18 | 2005-10-11 | Frank W. Dworak | Surgical stapler anvil with nested staple forming pockets |
| US7086267B2 (en) | 2004-02-18 | 2006-08-08 | Frank W. Dworak | Metal-forming die and method for manufacturing same |
| US20050187545A1 (en) | 2004-02-20 | 2005-08-25 | Hooven Michael D. | Magnetic catheter ablation device and method |
| US8046049B2 (en) | 2004-02-23 | 2011-10-25 | Biosense Webster, Inc. | Robotically guided catheter |
| US20050186240A1 (en) | 2004-02-23 | 2005-08-25 | Ringeisen Timothy A. | Gel suitable for implantation and delivery system |
| GB2411527B (en) | 2004-02-26 | 2006-06-28 | Itt Mfg Enterprises Inc | Electrical connector |
| JP2005279253A (ja) | 2004-03-02 | 2005-10-13 | Olympus Corp | 内視鏡 |
| US20050209614A1 (en) | 2004-03-04 | 2005-09-22 | Fenter Felix W | Anastomosis apparatus and methods with computer-aided, automated features |
| US7850642B2 (en) | 2004-03-05 | 2010-12-14 | Hansen Medical, Inc. | Methods using a robotic catheter system |
| EP2384715B1 (en) | 2004-03-05 | 2015-07-08 | Hansen Medical, Inc. | Robotic catheter system |
| US8052636B2 (en) | 2004-03-05 | 2011-11-08 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US9028511B2 (en) | 2004-03-09 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Devices and methods for placement of partitions within a hollow body organ |
| US8252009B2 (en) | 2004-03-09 | 2012-08-28 | Ethicon Endo-Surgery, Inc. | Devices and methods for placement of partitions within a hollow body organ |
| US8449560B2 (en) | 2004-03-09 | 2013-05-28 | Satiety, Inc. | Devices and methods for placement of partitions within a hollow body organ |
| WO2005084556A1 (ja) | 2004-03-10 | 2005-09-15 | Olympus Corporation | 外科用処置具 |
| JP4610934B2 (ja) | 2004-06-03 | 2011-01-12 | オリンパス株式会社 | 外科用処置具 |
| WO2005087125A2 (en) | 2004-03-10 | 2005-09-22 | Depuy International Ltd | Orthopaedic operating systems, methods, implants and instruments |
| US7066944B2 (en) | 2004-03-11 | 2006-06-27 | Laufer Michael D | Surgical fastening system |
| GB2412232A (en) | 2004-03-15 | 2005-09-21 | Ims Nanofabrication Gmbh | Particle-optical projection system |
| US7118528B1 (en) | 2004-03-16 | 2006-10-10 | Gregory Piskun | Hemorrhoids treatment method and associated instrument assembly including anoscope and cofunctioning tissue occlusion device |
| AU2005221424B2 (en) | 2004-03-18 | 2011-02-17 | Kimberly-Clark Worldwide, Inc. | Apparatus for the prevention of urinary incontinence in females |
| FI20040415A (fi) | 2004-03-18 | 2005-09-19 | Stora Enso Oyj | Einespakkaus ja sen valmistusmenetelmä |
| WO2005091986A2 (en) | 2004-03-19 | 2005-10-06 | Tyco Healthcare Group, Lp | Anvil assembly with improved cut ring |
| US8181840B2 (en) | 2004-03-19 | 2012-05-22 | Tyco Healthcare Group Lp | Tissue tensioner assembly and approximation mechanism for surgical stapling device |
| US7093492B2 (en) | 2004-03-19 | 2006-08-22 | Mechworks Systems Inc. | Configurable vibration sensor |
| US7625388B2 (en) | 2004-03-22 | 2009-12-01 | Alcon, Inc. | Method of controlling a surgical system based on a load on the cutting tip of a handpiece |
| DE102004014011A1 (de) | 2004-03-23 | 2005-10-20 | Airtec Pneumatic Gmbh | Stoßwellen-Therapiegerät |
| JP4727158B2 (ja) | 2004-03-23 | 2011-07-20 | オリンパス株式会社 | 内視鏡システム |
| TWI234339B (en) | 2004-03-25 | 2005-06-11 | Richtek Techohnology Corp | High-efficiency voltage transformer |
| EP1584300A3 (en) | 2004-03-30 | 2006-07-05 | Kabushiki Kaisha Toshiba | Manipulator apparatus |
| DE102004015667B3 (de) | 2004-03-31 | 2006-01-19 | Sutter Medizintechnik Gmbh | Bipolares Doppelgelenkinstrument |
| EP1584418B1 (en) | 2004-04-02 | 2008-05-07 | BLACK & DECKER INC. | Fastening tool with mode selector switch |
| US7331403B2 (en) | 2004-04-02 | 2008-02-19 | Black & Decker Inc. | Lock-out for activation arm mechanism in a power tool |
| US7036680B1 (en) | 2004-04-07 | 2006-05-02 | Avery Dennison Corporation | Device for dispensing plastic fasteners |
| JP2005296412A (ja) | 2004-04-13 | 2005-10-27 | Olympus Corp | 内視鏡治療装置 |
| US7566300B2 (en) | 2004-04-15 | 2009-07-28 | Wilson-Cook Medical, Inc. | Endoscopic surgical access devices and methods of articulating an external accessory channel |
| US6960107B1 (en) | 2004-04-16 | 2005-11-01 | Brunswick Corporation | Marine transmission with a cone clutch used for direct transfer of torque |
| WO2005102193A2 (en) | 2004-04-19 | 2005-11-03 | Acumed, Llc | Placement of fasteners into bone |
| US7361168B2 (en) | 2004-04-21 | 2008-04-22 | Acclarent, Inc. | Implantable device and methods for delivering drugs and other substances to treat sinusitis and other disorders |
| US7758612B2 (en) | 2004-04-27 | 2010-07-20 | Tyco Healthcare Group Lp | Surgery delivery device and mesh anchor |
| US7377918B2 (en) | 2004-04-28 | 2008-05-27 | Gyrus Medical Limited | Electrosurgical method and apparatus |
| US7336183B2 (en) | 2004-04-30 | 2008-02-26 | Kimberly-Clark Worldwide, Inc. | Decommissioning an electronic data tag |
| US7098794B2 (en) | 2004-04-30 | 2006-08-29 | Kimberly-Clark Worldwide, Inc. | Deactivating a data tag for user privacy or tamper-evident packaging |
| US7151455B2 (en) | 2004-04-30 | 2006-12-19 | Kimberly-Clark Worldwide, Inc. | Activating a data tag by load or orientation or user control |
| US7948381B2 (en) | 2004-04-30 | 2011-05-24 | Binforma Group Limited Liability Company | Reversibly deactivating a radio frequency identification data tag |
| EP1744679A2 (en) | 2004-05-03 | 2007-01-24 | AMS Research Corporation | Surgical implants and related methods |
| US7348875B2 (en) | 2004-05-04 | 2008-03-25 | Battelle Memorial Institute | Semi-passive radio frequency identification (RFID) tag with active beacon |
| CA2563426C (en) | 2004-05-05 | 2013-12-24 | Direct Flow Medical, Inc. | Unstented heart valve with formed in place support structure |
| WO2005110280A2 (en) | 2004-05-07 | 2005-11-24 | Valentx, Inc. | Devices and methods for attaching an endolumenal gastrointestinal implant |
| US20050251063A1 (en) | 2004-05-07 | 2005-11-10 | Raghuveer Basude | Safety device for sampling tissue |
| US7736374B2 (en) | 2004-05-07 | 2010-06-15 | Usgi Medical, Inc. | Tissue manipulation and securement system |
| US8333764B2 (en) | 2004-05-12 | 2012-12-18 | Medtronic, Inc. | Device and method for determining tissue thickness and creating cardiac ablation lesions |
| US8251891B2 (en) | 2004-05-14 | 2012-08-28 | Nathan Moskowitz | Totally wireless electronically embedded action-ended endoscope utilizing differential directional illumination with digitally controlled mirrors and/or prisms |
| JP2005328882A (ja) | 2004-05-18 | 2005-12-02 | Olympus Corp | 内視鏡用処置具及び内視鏡システム |
| US7158032B2 (en) | 2004-05-20 | 2007-01-02 | Xerox Corporation | Diagnosis of programmable modules |
| US7260431B2 (en) | 2004-05-20 | 2007-08-21 | Cardiac Pacemakers, Inc. | Combined remodeling control therapy and anti-remodeling therapy by implantable cardiac device |
| GB2414185A (en) | 2004-05-20 | 2005-11-23 | Gyrus Medical Ltd | Morcellating device using cutting electrodes on end-face of tube |
| JP2005335432A (ja) | 2004-05-24 | 2005-12-08 | Nissan Motor Co Ltd | 後輪転舵制御装置 |
| IES20040368A2 (en) | 2004-05-25 | 2005-11-30 | James E Coleman | Surgical stapler |
| US7450991B2 (en) | 2004-05-28 | 2008-11-11 | Advanced Neuromodulation Systems, Inc. | Systems and methods used to reserve a constant battery capacity |
| US7828808B2 (en) | 2004-06-07 | 2010-11-09 | Novare Surgical Systems, Inc. | Link systems and articulation mechanisms for remote manipulation of surgical or diagnostic tools |
| DE102004027850A1 (de) | 2004-06-08 | 2006-01-05 | Henke-Sass Wolf Gmbh | Biegbarer Abschnitt eines Einführtubus eines Endoskopes und Verfahren zu dessen Herstellung |
| US7695493B2 (en) | 2004-06-09 | 2010-04-13 | Usgi Medical, Inc. | System for optimizing anchoring force |
| US7446131B1 (en) | 2004-06-10 | 2008-11-04 | The United States Of America As Represented By The Secretary Of Agriculture | Porous polymeric matrices made of natural polymers and synthetic polymers and optionally at least one cation and methods of making |
| GB2415140A (en) | 2004-06-18 | 2005-12-21 | Gyrus Medical Ltd | A surgical instrument |
| US20050283226A1 (en) | 2004-06-18 | 2005-12-22 | Scimed Life Systems, Inc. | Medical devices |
| US8663245B2 (en) | 2004-06-18 | 2014-03-04 | Medtronic, Inc. | Device for occlusion of a left atrial appendage |
| US7331406B2 (en) | 2004-06-21 | 2008-02-19 | Duraspin Products Llc | Apparatus for controlling a fastener driving tool, with user-adjustable torque limiting control |
| USD530339S1 (en) | 2004-06-23 | 2006-10-17 | Cellco Partnership | Animated icon for a cellularly communicative electronic device |
| USD511525S1 (en) | 2004-06-24 | 2005-11-15 | Verizon Wireless | Icon for the display screen of a cellulary communicative electronic device |
| US7367485B2 (en) | 2004-06-30 | 2008-05-06 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multistroke firing mechanism having a rotary transmission |
| US7229408B2 (en) | 2004-06-30 | 2007-06-12 | Ethicon, Inc. | Low profile surgical retractor |
| WO2006005061A2 (en) | 2004-06-30 | 2006-01-12 | Sitzmann James V | Medical devices for minimally invasive surgeries and other internal procedures |
| US7059508B2 (en) | 2004-06-30 | 2006-06-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an uneven multistroke firing mechanism having a rotary transmission |
| EP1612477B1 (en) | 2004-07-02 | 2018-02-28 | Discus Dental, LLC | Illumination system for dentistry applications |
| US7443547B2 (en) | 2004-07-03 | 2008-10-28 | Science Forge, Inc. | Portable electronic faxing, scanning, copying, and printing device |
| US7966236B2 (en) | 2004-07-07 | 2011-06-21 | Ubs Financial Services Inc. | Method and system for real time margin calculation |
| JP4257270B2 (ja) | 2004-07-14 | 2009-04-22 | オリンパス株式会社 | 生体組織縫合方法及び生体組織縫合器 |
| US7485133B2 (en) | 2004-07-14 | 2009-02-03 | Warsaw Orthopedic, Inc. | Force diffusion spinal hook |
| US20060020258A1 (en) | 2004-07-20 | 2006-01-26 | Medtronic, Inc. | Surgical apparatus with a manually actuatable assembly and a method of operating same |
| JP4596844B2 (ja) | 2004-07-23 | 2010-12-15 | テルモ株式会社 | 医療用物品及び医療用物品の受発注システム |
| US20090078736A1 (en) | 2004-07-26 | 2009-03-26 | Van Lue Stephen J | Surgical stapler with magnetically secured components |
| RU42750U1 (ru) | 2004-07-26 | 2004-12-20 | Альбертин Сергей Викторович | Устройство для дозированной подачи веществ |
| US8075476B2 (en) | 2004-07-27 | 2011-12-13 | Intuitive Surgical Operations, Inc. | Cannula system and method of use |
| US7143925B2 (en) | 2004-07-28 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating EAP blocking lockout mechanism |
| CA2512948C (en) | 2004-07-28 | 2013-10-01 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated medical substance dispenser |
| US7487899B2 (en) | 2004-07-28 | 2009-02-10 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating EAP complete firing system lockout mechanism |
| US8057508B2 (en) | 2004-07-28 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an electrically actuated articulation locking mechanism |
| US7143926B2 (en) | 2005-02-07 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multi-stroke firing mechanism with return spring rotary manual retraction system |
| US8317074B2 (en) | 2004-07-28 | 2012-11-27 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based articulation mechanism for circular stapler |
| US7513408B2 (en) | 2004-07-28 | 2009-04-07 | Ethicon Endo-Surgery, Inc. | Multiple firing stroke surgical instrument incorporating electroactive polymer anti-backup mechanism |
| US20060025812A1 (en) | 2004-07-28 | 2006-02-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an electrically actuated pivoting articulation mechanism |
| US8905977B2 (en) | 2004-07-28 | 2014-12-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated medical substance dispenser |
| US7857183B2 (en) | 2004-07-28 | 2010-12-28 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an electrically actuated articulation mechanism |
| US7914551B2 (en) | 2004-07-28 | 2011-03-29 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based articulation mechanism for multi-fire surgical fastening instrument |
| AU2005203215B2 (en) | 2004-07-28 | 2011-06-09 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an electrically actuated pivoting articulation mechanism |
| US7354447B2 (en) | 2005-11-10 | 2008-04-08 | Ethicon Endo-Surgery, Inc. | Disposable loading unit and surgical instruments including same |
| US7147138B2 (en) | 2004-07-28 | 2006-12-12 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated buttress deployment mechanism |
| US7862579B2 (en) | 2004-07-28 | 2011-01-04 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based articulation mechanism for grasper |
| US8215531B2 (en) | 2004-07-28 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a medical substance dispenser |
| US7506790B2 (en) | 2004-07-28 | 2009-03-24 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an electrically actuated articulation mechanism |
| US7404509B2 (en) | 2004-07-28 | 2008-07-29 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based articulation mechanism for linear stapler |
| DE202004012389U1 (de) | 2004-07-30 | 2004-09-30 | Aesculap Ag & Co. Kg | Chirurgische Maschine |
| DE102004038414A1 (de) | 2004-07-30 | 2006-03-23 | Aesculap Ag & Co. Kg | Chirurgische Maschine und Verfahren zum Betreiben einer chirurgischen Maschine |
| DE102004038415A1 (de) | 2004-07-30 | 2006-03-23 | Aesculap Ag & Co. Kg | Chirurgische Maschine und Verfahren zum Steuern und/oder Regeln einer chirurgischen Maschine |
| US7210609B2 (en) | 2004-07-30 | 2007-05-01 | Tools For Surgery, Llc | Stapling apparatus having a curved anvil and driver |
| WO2006017859A2 (en) | 2004-08-06 | 2006-02-16 | Genentech, Inc. | Assays and methods using biomarkers |
| CN2716900Y (zh) | 2004-08-09 | 2005-08-10 | 陈永 | 新感觉鼠标 |
| US7779737B2 (en) | 2004-08-12 | 2010-08-24 | The Chisel Works, LLC. | Multi-axis panel saw |
| WO2006023578A2 (en) | 2004-08-17 | 2006-03-02 | Tyco Healthcare Group, Lp | Stapling support structures |
| EP2202250B1 (en) | 2004-08-19 | 2013-10-09 | Covidien LP | Water-swellable copolymers and articles and coating made therefrom |
| US7182239B1 (en) | 2004-08-27 | 2007-02-27 | Myers Stephan R | Segmented introducer device for a circular surgical stapler |
| DE102004041871B4 (de) | 2004-08-27 | 2014-01-30 | W.O.M. World Of Medicine Ag | Verfahren zur Herstellung einer autoklavierbaren Fernbedienung und autoklavierbare Fernbedienung |
| EP1786335B1 (en) | 2004-08-31 | 2013-07-24 | Surgical Solutions, LLC | Medical device with articulating shaft |
| US8657808B2 (en) | 2004-08-31 | 2014-02-25 | Medtronic, Inc. | Surgical apparatus including a hand-activated, cable assembly and method of using same |
| DE102004042886A1 (de) | 2004-09-04 | 2006-03-30 | Roche Diagnostics Gmbh | Lanzettenvorrichtung zum Erzeugen einer Einstichwunde |
| WO2006029092A1 (en) | 2004-09-05 | 2006-03-16 | Gateway Plastics, Inc. | Closure for a container |
| US7128254B2 (en) | 2004-09-07 | 2006-10-31 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multistroke firing mechanism having a rotary slip-clutch transmission |
| WO2006027014A1 (en) | 2004-09-10 | 2006-03-16 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument |
| KR100646762B1 (ko) | 2004-09-10 | 2006-11-23 | 인하대학교 산학협력단 | 수술용 스테이플 및 이를 구비한 수술용 자동 문합기 |
| US7162758B2 (en) | 2004-09-14 | 2007-01-16 | Skinner Lyle J | Multipurpose gripping tool |
| CA2581009C (en) | 2004-09-15 | 2011-10-04 | Synthes (U.S.A.) | Calibrating device |
| US7391164B2 (en) | 2004-09-15 | 2008-06-24 | Research In Motion Limited | Visual notification methods for candy-bar type cellphones |
| JP2006081687A (ja) | 2004-09-15 | 2006-03-30 | Max Co Ltd | 医療用ステープラ |
| US8123764B2 (en) | 2004-09-20 | 2012-02-28 | Endoevolution, Llc | Apparatus and method for minimally invasive suturing |
| GB0519252D0 (en) | 2005-09-21 | 2005-10-26 | Dezac Ltd | Laser hair removal device |
| US7540872B2 (en) | 2004-09-21 | 2009-06-02 | Covidien Ag | Articulating bipolar electrosurgical instrument |
| US7336184B2 (en) | 2004-09-24 | 2008-02-26 | Intel Corporation | Inertially controlled switch and RFID tag |
| AU2004323848B2 (en) | 2004-09-30 | 2011-07-28 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument |
| EP1804776A2 (en) | 2004-09-30 | 2007-07-11 | Cytori Therapeutics, Inc. | Methods for making and using composites, polymer scaffolds, and composite scaffolds |
| US10646292B2 (en) | 2004-09-30 | 2020-05-12 | Intuitive Surgical Operations, Inc. | Electro-mechanical strap stack in robotic arms |
| US9261172B2 (en) | 2004-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Multi-ply strap drive trains for surgical robotic arms |
| UA88321C2 (ru) | 2004-09-30 | 2009-10-12 | Ковалон Текнолоджиз Инк. | Неадгезивные эластичные желатиновые матрицы |
| FR2876020B1 (fr) | 2004-10-06 | 2007-03-09 | Sofradim Production Sa | Appareil de stockage, distribution et pose d'attaches chirurgicales |
| USD541418S1 (en) | 2004-10-06 | 2007-04-24 | Sherwood Services Ag | Lung sealing device |
| US20120046547A1 (en) | 2004-10-06 | 2012-02-23 | Guided Therapy Systems, Llc | System and method for cosmetic treatment |
| US8409222B2 (en) | 2004-10-08 | 2013-04-02 | Covidien Lp | Endoscopic surgical clip applier |
| ES2616731T3 (es) | 2004-10-08 | 2017-06-14 | Covidien Lp | Aparato para aplicar sujetadores quirúrgicos |
| US9763668B2 (en) | 2004-10-08 | 2017-09-19 | Covidien Lp | Endoscopic surgical clip applier |
| AU2005294209B2 (en) | 2004-10-08 | 2011-04-07 | Covidien Lp | Endoscopic surgical clip applier |
| US7819886B2 (en) | 2004-10-08 | 2010-10-26 | Tyco Healthcare Group Lp | Endoscopic surgical clip applier |
| PL1802245T3 (pl) | 2004-10-08 | 2017-01-31 | Ethicon Endosurgery Llc | Ultradźwiękowy przyrząd chirurgiczny |
| WO2006044581A2 (en) | 2004-10-13 | 2006-04-27 | Medtronic, Inc. | Single-use transurethral needle ablation device |
| US7857813B2 (en) | 2006-08-29 | 2010-12-28 | Baxano, Inc. | Tissue access guidewire system and method |
| US20100331883A1 (en) | 2004-10-15 | 2010-12-30 | Schmitz Gregory P | Access and tissue modification systems and methods |
| US8257356B2 (en) | 2004-10-15 | 2012-09-04 | Baxano, Inc. | Guidewire exchange systems to treat spinal stenosis |
| US8372094B2 (en) | 2004-10-15 | 2013-02-12 | Covidien Lp | Seal element for anastomosis |
| US7938307B2 (en) | 2004-10-18 | 2011-05-10 | Tyco Healthcare Group Lp | Support structures and methods of using the same |
| US7744624B2 (en) | 2004-10-18 | 2010-06-29 | Tyco Healthcare Group Lp | Extraluminal sealant applicator and method |
| JP4801083B2 (ja) | 2004-10-18 | 2011-10-26 | タイコ ヘルスケア グループ エルピー | スプレー可能な創傷処置材料を付与するための構造物 |
| US7845536B2 (en) | 2004-10-18 | 2010-12-07 | Tyco Healthcare Group Lp | Annular adhesive structure |
| US7455682B2 (en) | 2004-10-18 | 2008-11-25 | Tyco Healthcare Group Lp | Structure containing wound treatment material |
| AU2005295487B2 (en) | 2004-10-18 | 2010-12-02 | Covidien Lp | Surgical fasteners coated with wound treatment materials |
| AU2005301150B2 (en) | 2004-10-18 | 2011-02-03 | Covidien Lp | Apparatus for applying wound treatment material using tissue-penetrating needles |
| US7688028B2 (en) | 2004-10-18 | 2010-03-30 | Black & Decker Inc. | Cordless power system |
| US7717313B2 (en) | 2004-10-18 | 2010-05-18 | Tyco Healthcare Group Lp | Surgical apparatus and structure for applying sprayable wound treatment material |
| EP2441396B1 (en) | 2004-10-18 | 2015-01-21 | Covidien LP | Annular adhesive structure |
| DE102004052204A1 (de) | 2004-10-19 | 2006-05-04 | Karl Storz Gmbh & Co. Kg | Auslenkbares endoskopisches Instrument |
| US9070068B2 (en) | 2004-10-19 | 2015-06-30 | Michael E. Coveley | Passive tamper-resistant seal and applications therefor |
| CA2626683C (en) | 2004-10-20 | 2013-07-02 | Ethicon, Inc. | A reinforced absorbable multilayered fabric for use in tissue repair and regeneration |
| US8128662B2 (en) | 2004-10-20 | 2012-03-06 | Vertiflex, Inc. | Minimally invasive tooling for delivery of interspinous spacer |
| ATE554717T1 (de) | 2004-10-20 | 2012-05-15 | Atricure Inc | Chirurgische klemme |
| US20060087746A1 (en) | 2004-10-22 | 2006-04-27 | Kenneth Lipow | Remote augmented motor-sensory interface for surgery |
| US9463012B2 (en) | 2004-10-26 | 2016-10-11 | P Tech, Llc | Apparatus for guiding and positioning an implant |
| US20060086032A1 (en) | 2004-10-27 | 2006-04-27 | Joseph Valencic | Weapon and input device to record information |
| EP1827212B1 (en) | 2004-11-02 | 2010-09-22 | Medtronic, Inc. | Methods for data retention in an implantable medical device |
| US20060097699A1 (en) | 2004-11-05 | 2006-05-11 | Mathews Associates, Inc. | State of charge indicator for battery |
| KR20060046933A (ko) | 2004-11-12 | 2006-05-18 | 노틸러스효성 주식회사 | 핀패드 모듈의 보호장치 |
| US20060106369A1 (en) | 2004-11-12 | 2006-05-18 | Desai Jaydev P | Haptic interface for force reflection in manipulation tasks |
| US20060226957A1 (en) | 2004-11-15 | 2006-10-12 | Miller Ronald H | Health care operating system with radio frequency information transfer |
| CN2738962Y (zh) | 2004-11-15 | 2005-11-09 | 胡建坤 | 电动剃须刀及带有充电器的电动剃须刀 |
| US7492261B2 (en) | 2004-11-22 | 2009-02-17 | Warsaw Orthopedic, Inc. | Control system for an RFID-based system for assembling and verifying outbound surgical equipment corresponding to a particular surgery |
| US7641671B2 (en) | 2004-11-22 | 2010-01-05 | Design Standards Corporation | Closing assemblies for clamping device |
| EP1838223A2 (en) | 2004-11-23 | 2007-10-03 | Novare Surgical Systems, Inc. | Articulating mechanisms and link systems with torque transmission in remote manipulation of instruments and tools |
| US9700334B2 (en) | 2004-11-23 | 2017-07-11 | Intuitive Surgical Operations, Inc. | Articulating mechanisms and link systems with torque transmission in remote manipulation of instruments and tools |
| US7182763B2 (en) | 2004-11-23 | 2007-02-27 | Instrasurgical, Llc | Wound closure device |
| GB0425843D0 (en) | 2004-11-24 | 2004-12-29 | Gyrus Group Plc | An electrosurgical instrument |
| CA2526541C (en) | 2004-12-01 | 2013-09-03 | Tyco Healthcare Group Lp | Novel biomaterial drug delivery and surface modification compositions |
| US7255012B2 (en) | 2004-12-01 | 2007-08-14 | Rosemount Inc. | Process fluid flow device with variable orifice |
| JP2006158525A (ja) | 2004-12-03 | 2006-06-22 | Olympus Medical Systems Corp | 超音波手術装置及び超音波処置具の駆動方法 |
| US7328829B2 (en) | 2004-12-13 | 2008-02-12 | Niti Medical Technologies Ltd. | Palm size surgical stapler for single hand operation |
| US7121446B2 (en) | 2004-12-13 | 2006-10-17 | Niti Medical Technologies Ltd. | Palm-size surgical stapler for single hand operation |
| US7568619B2 (en) | 2004-12-15 | 2009-08-04 | Alcon, Inc. | System and method for identifying and controlling ophthalmic surgical devices and components |
| US7384403B2 (en) | 2004-12-17 | 2008-06-10 | Depuy Products, Inc. | Wireless communication system for transmitting information from a medical device |
| US7678121B1 (en) | 2004-12-23 | 2010-03-16 | Cardica, Inc. | Surgical stapling tool |
| US7896869B2 (en) | 2004-12-29 | 2011-03-01 | Depuy Products, Inc. | System and method for ensuring proper medical instrument use in an operating room |
| US20060142772A1 (en) | 2004-12-29 | 2006-06-29 | Ralph James D | Surgical fasteners and related implant devices having bioabsorbable components |
| US7611474B2 (en) | 2004-12-29 | 2009-11-03 | Ethicon Endo-Surgery, Inc. | Core sampling biopsy device with short coupled MRI-compatible driver |
| US8182422B2 (en) | 2005-12-13 | 2012-05-22 | Avantis Medical Systems, Inc. | Endoscope having detachable imaging device and method of using |
| US7118020B2 (en) | 2005-01-05 | 2006-10-10 | Chung-Heng Lee | Stapler |
| US7419321B2 (en) | 2005-01-05 | 2008-09-02 | Misha Tereschouk | Hand applicator of encapsulated liquids |
| US7686804B2 (en) | 2005-01-14 | 2010-03-30 | Covidien Ag | Vessel sealer and divider with rotating sealer and cutter |
| JP4681961B2 (ja) | 2005-01-14 | 2011-05-11 | オリンパスメディカルシステムズ株式会社 | 外科用処置具 |
| US7713542B2 (en) | 2005-01-14 | 2010-05-11 | Ada Foundation | Three dimensional cell protector/pore architecture formation for bone and tissue constructs |
| US20060161185A1 (en) | 2005-01-14 | 2006-07-20 | Usgi Medical Inc. | Methods and apparatus for transmitting force to an end effector over an elongate member |
| US7770776B2 (en) | 2005-01-26 | 2010-08-10 | Suzhou Touchstone International Medical Science Co., Ltd | Rotatable stapling head of a surgical stapler |
| US20060167471A1 (en) | 2005-01-27 | 2006-07-27 | Vector Surgical | Surgical marker |
| US20060173470A1 (en) | 2005-01-31 | 2006-08-03 | Oray B N | Surgical fastener buttress material |
| US20060176031A1 (en) | 2005-02-04 | 2006-08-10 | Ess Technology, Inc. | Dual output switching regulator and method of operation |
| US20060176242A1 (en) | 2005-02-08 | 2006-08-10 | Blue Belt Technologies, Inc. | Augmented reality device and method |
| US8007440B2 (en) | 2005-02-08 | 2011-08-30 | Volcano Corporation | Apparatus and methods for low-cost intravascular ultrasound imaging and for crossing severe vascular occlusions |
| WO2006085389A1 (en) | 2005-02-09 | 2006-08-17 | Johnson & Johnson Kabushiki Kaisha | Stapling instrument |
| EP1690638A1 (en) | 2005-02-09 | 2006-08-16 | BLACK & DECKER INC. | Power tool gear-train and torque overload clutch therefor |
| US7706853B2 (en) | 2005-02-10 | 2010-04-27 | Terumo Cardiovascular Systems Corporation | Near infrared spectroscopy device with reusable portion |
| JP2006218129A (ja) | 2005-02-10 | 2006-08-24 | Olympus Corp | 手術支援システム |
| GB2423199B (en) | 2005-02-11 | 2009-05-13 | Pa Consulting Services | Power supply systems for electrical devices |
| JP2008530915A (ja) | 2005-02-11 | 2008-08-07 | ラダテック インコーポレイテッド | 高温環境に適したマイクロストリップパッチアンテナ |
| JP2006218228A (ja) | 2005-02-14 | 2006-08-24 | Olympus Corp | バッテリユニット、そのバッテリユニットを有するバッテリ装置、医療機器および内視鏡 |
| US20060180633A1 (en) | 2005-02-17 | 2006-08-17 | Tyco Healthcare Group, Lp | Surgical staple |
| US7780054B2 (en) * | 2005-02-18 | 2010-08-24 | Ethicon Endo-Surgery, Inc. | Surgical instrument with laterally moved shaft actuator coupled to pivoting articulation joint |
| US20060289602A1 (en) | 2005-06-23 | 2006-12-28 | Ethicon Endo-Surgery, Inc. | Surgical instrument with articulating shaft with double pivot closure and single pivot frame ground |
| US7559450B2 (en) | 2005-02-18 | 2009-07-14 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating a fluid transfer controlled articulation mechanism |
| US7784662B2 (en) | 2005-02-18 | 2010-08-31 | Ethicon Endo-Surgery, Inc. | Surgical instrument with articulating shaft with single pivot closure and double pivot frame ground |
| US7559452B2 (en) | 2005-02-18 | 2009-07-14 | Ethicon Endo-Surgery, Inc. | Surgical instrument having fluid actuated opposing jaws |
| US7654431B2 (en) | 2005-02-18 | 2010-02-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument with guided laterally moving articulation member |
| US7572285B2 (en) | 2005-02-18 | 2009-08-11 | Smiths Medical Asd, Inc. | System for providing actuated optimal inflation to multiple temperature regulated blankets and method therefor |
| US7878981B2 (en) | 2005-03-01 | 2011-02-01 | Checkpoint Surgical, Llc | Systems and methods for intra-operative stimulation |
| GB2423931B (en) | 2005-03-03 | 2009-08-26 | Michael John Radley Young | Ultrasonic cutting tool |
| US7699846B2 (en) | 2005-03-04 | 2010-04-20 | Gyrus Ent L.L.C. | Surgical instrument and method |
| WO2006096686A1 (en) | 2005-03-04 | 2006-09-14 | C.R. Bard, Inc. | Access port identification systems and methods |
| US7674263B2 (en) | 2005-03-04 | 2010-03-09 | Gyrus Ent, L.L.C. | Surgical instrument and method |
| US20060206100A1 (en) | 2005-03-09 | 2006-09-14 | Brasseler Usa Medical Llc | Surgical apparatus and power module for same, and a method of preparing a surgical apparatus |
| US20060217729A1 (en) | 2005-03-09 | 2006-09-28 | Brasseler Usa Medical Llc | Surgical apparatus and tools for same |
| US20060201989A1 (en) | 2005-03-11 | 2006-09-14 | Ojeda Herminio F | Surgical anvil and system for deploying the same |
| US7064509B1 (en) | 2005-03-14 | 2006-06-20 | Visteon Global Technologies, Inc. | Apparatus for DC motor position detection with capacitive ripple current extraction |
| US9364229B2 (en) | 2005-03-15 | 2016-06-14 | Covidien Lp | Circular anastomosis structures |
| AU2012200178B2 (en) | 2005-03-15 | 2013-07-11 | Covidien Lp | Anastomosis composite gasket |
| US7942890B2 (en) | 2005-03-15 | 2011-05-17 | Tyco Healthcare Group Lp | Anastomosis composite gasket |
| US20070203510A1 (en) | 2006-02-28 | 2007-08-30 | Bettuchi Michael J | Annular disk for reduction of anastomotic tension and methods of using the same |
| CN2785249Y (zh) | 2005-03-16 | 2006-05-31 | 刘文辉 | 一种h桥串联电压型逆变器中h桥功率模块的旁路电路 |
| US7431230B2 (en) | 2005-03-16 | 2008-10-07 | Medtronic Ps Medical, Inc. | Apparatus and method for bone morselization for surgical grafting |
| CA2601626C (en) | 2005-03-17 | 2015-05-12 | Stryker Corporation | Surgical tool arrangement |
| US7784663B2 (en) | 2005-03-17 | 2010-08-31 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having load sensing control circuitry |
| JP4887838B2 (ja) | 2005-03-18 | 2012-02-29 | 株式会社ジェイ・エム・エス | 多孔質体の製造方法およびそれを用いた多孔質体 |
| CN2796654Y (zh) | 2005-03-21 | 2006-07-19 | 强生(上海)医疗器材有限公司 | 直线型切割缝合器 |
| US7116100B1 (en) | 2005-03-21 | 2006-10-03 | Hr Textron, Inc. | Position sensing for moveable mechanical systems and associated methods and apparatus |
| JP2008534045A (ja) | 2005-03-22 | 2008-08-28 | アトロポス・リミテッド | 手術器具 |
| US20060252993A1 (en) | 2005-03-23 | 2006-11-09 | Freed David I | Medical devices and systems |
| US7918848B2 (en) | 2005-03-25 | 2011-04-05 | Maquet Cardiovascular, Llc | Tissue welding and cutting apparatus and method |
| US7670337B2 (en) | 2005-03-25 | 2010-03-02 | Boston Scientific Scimed, Inc. | Ablation probe having a plurality of arrays of electrodes |
| EP1707153B1 (en) | 2005-03-29 | 2012-02-01 | Kabushiki Kaisha Toshiba | Manipulator |
| JP2006271697A (ja) | 2005-03-29 | 2006-10-12 | Fujinon Corp | 電子内視鏡 |
| US8945095B2 (en) | 2005-03-30 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Force and torque sensing for surgical instruments |
| US9138226B2 (en) | 2005-03-30 | 2015-09-22 | Covidien Lp | Cartridge assembly for a surgical stapling device |
| JP4857585B2 (ja) | 2005-04-04 | 2012-01-18 | 日立工機株式会社 | コードレス電動工具 |
| US7780055B2 (en) | 2005-04-06 | 2010-08-24 | Tyco Healthcare Group Lp | Loading unit having drive assembly locking mechanism |
| US7408310B2 (en) | 2005-04-08 | 2008-08-05 | Lg Electronics Inc. | Apparatus for controlling driving of reciprocating compressor and method thereof |
| US7211979B2 (en) | 2005-04-13 | 2007-05-01 | The Broad Of Trustees Of The Leland Stanford Junior University | Torque-position transformer for task control of position controlled robots |
| US7297149B2 (en) | 2005-04-14 | 2007-11-20 | Ethicon Endo-Surgery, Inc. | Surgical clip applier methods |
| US8523882B2 (en) | 2005-04-14 | 2013-09-03 | Ethicon Endo-Surgery, Inc. | Clip advancer mechanism with alignment features |
| US8038686B2 (en) | 2005-04-14 | 2011-10-18 | Ethicon Endo-Surgery, Inc. | Clip applier configured to prevent clip fallout |
| US7731724B2 (en) | 2005-04-14 | 2010-06-08 | Ethicon Endo-Surgery, Inc. | Surgical clip advancement and alignment mechanism |
| US7699860B2 (en) | 2005-04-14 | 2010-04-20 | Ethicon Endo-Surgery, Inc. | Surgical clip |
| WO2006113394A2 (en) | 2005-04-15 | 2006-10-26 | Surgisense Corporation | Surgical instruments with sensors for detecting tissue properties, and systems using such instruments |
| WO2006111173A1 (de) | 2005-04-16 | 2006-10-26 | Aesculap Ag & Co. Kg | Chirurgische maschine und verfahren zum steuern und/oder regeln einer chirurgischen maschine |
| US8298224B2 (en) | 2005-04-21 | 2012-10-30 | Asthmatx, Inc. | Control methods and devices for energy delivery |
| EP1877111A1 (en) | 2005-04-26 | 2008-01-16 | Rimon Therapeutics Ltd. | Pro-angiogenic polymer scaffolds |
| US8268344B2 (en) | 2005-04-27 | 2012-09-18 | The Regents Of The University Of Michigan | Particle-containing complex porous materials |
| US7837694B2 (en) | 2005-04-28 | 2010-11-23 | Warsaw Orthopedic, Inc. | Method and apparatus for surgical instrument identification |
| US20060244460A1 (en) | 2005-04-29 | 2006-11-02 | Weaver Jeffrey S | System and method for battery management |
| DE102005020377B4 (de) | 2005-05-02 | 2021-08-12 | Robert Bosch Gmbh | Verfahren zum Betreiben einer Elektrowerkzeugmaschine |
| US8084001B2 (en) | 2005-05-02 | 2011-12-27 | Cornell Research Foundation, Inc. | Photoluminescent silica-based sensors and methods of use |
| US20100100124A1 (en) | 2005-05-05 | 2010-04-22 | Tyco Healthcare Group Lp | Bioabsorbable surgical composition |
| US20100016888A1 (en) | 2005-05-05 | 2010-01-21 | Allison Calabrese | Surgical Gasket |
| US20090177226A1 (en) | 2005-05-05 | 2009-07-09 | Jon Reinprecht | Bioabsorbable Surgical Compositions |
| US20100012703A1 (en) | 2005-05-05 | 2010-01-21 | Allison Calabrese | Surgical Gasket |
| US7418078B2 (en) | 2005-05-06 | 2008-08-26 | Siemens Medical Solutions Usa, Inc. | Spot-size effect reduction |
| US20060252990A1 (en) | 2005-05-06 | 2006-11-09 | Melissa Kubach | Systems and methods for endoscope integrity testing |
| US7806871B2 (en) | 2005-05-09 | 2010-10-05 | Boston Scientific Scimed, Inc. | Method and device for tissue removal and for delivery of a therapeutic agent or bulking agent |
| WO2006122167A2 (en) | 2005-05-10 | 2006-11-16 | Cardinal Health 303, Inc | Medication safety system featuring a multiplexed rfid interrogator panel |
| JP4339275B2 (ja) | 2005-05-12 | 2009-10-07 | 株式会社エスティック | インパクト式のネジ締め装置の制御方法および装置 |
| US20060258904A1 (en) | 2005-05-13 | 2006-11-16 | David Stefanchik | Feeding tube and track |
| US7648457B2 (en) | 2005-05-13 | 2010-01-19 | Ethicon Endo-Surgery, Inc. | Method of positioning a device on an endoscope |
| US8108072B2 (en) | 2007-09-30 | 2012-01-31 | Intuitive Surgical Operations, Inc. | Methods and systems for robotic instrument tool tracking with adaptive fusion of kinematics information and image information |
| JP2006325395A (ja) | 2005-05-17 | 2006-11-30 | Milwaukee Electric Tool Corp | 動力工具、バッテリ、充電器、およびそれらを動作させる方法 |
| CA2547104C (en) | 2005-05-17 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Surgical stapler having an aluminum head |
| DE102005000062A1 (de) | 2005-05-18 | 2006-11-23 | Hilti Ag | Elektrisch betriebenes Eintreibgerät |
| US7415827B2 (en) | 2005-05-18 | 2008-08-26 | United Technologies Corporation | Arrangement for controlling fluid jets injected into a fluid stream |
| US20060263444A1 (en) | 2005-05-19 | 2006-11-23 | Xintian Ming | Antimicrobial composition |
| US8840876B2 (en) | 2005-05-19 | 2014-09-23 | Ethicon, Inc. | Antimicrobial polymer compositions and the use thereof |
| US7682561B2 (en) | 2005-05-19 | 2010-03-23 | Sage Products, Inc. | Needleless hub disinfection device and method |
| US20060265031A1 (en) | 2005-05-20 | 2006-11-23 | Medtronic, Inc. | Operation indicator for a portable therapy delivery device |
| US7758594B2 (en) | 2005-05-20 | 2010-07-20 | Neotract, Inc. | Devices, systems and methods for treating benign prostatic hyperplasia and other conditions |
| US8157815B2 (en) | 2005-05-20 | 2012-04-17 | Neotract, Inc. | Integrated handle assembly for anchor delivery system |
| US20060261763A1 (en) | 2005-05-23 | 2006-11-23 | Masco Corporation | Brushed motor position control based upon back current detection |
| JP2008541814A (ja) | 2005-05-25 | 2008-11-27 | ギラス メディカル インコーポレイテッド | 手術器具 |
| US20060271042A1 (en) | 2005-05-26 | 2006-11-30 | Gyrus Medical, Inc. | Cutting and coagulating electrosurgical forceps having cam controlled jaw closure |
| DE202005009061U1 (de) | 2005-05-31 | 2006-10-12 | Karl Storz Gmbh & Co. Kg | Clip und Clipsetzer zum Verschließen von Blutgefäßen |
| JP2006334029A (ja) | 2005-05-31 | 2006-12-14 | Olympus Medical Systems Corp | 外科用手術装置 |
| CA2549209C (en) | 2005-06-02 | 2014-03-25 | Tyco Healthcare Group Lp | Multiple coil staple and staple applier |
| US20060291981A1 (en) | 2005-06-02 | 2006-12-28 | Viola Frank J | Expandable backspan staple |
| US11291443B2 (en) | 2005-06-03 | 2022-04-05 | Covidien Lp | Surgical stapler with timer and feedback display |
| US7909191B2 (en) | 2005-06-03 | 2011-03-22 | Greatbatch Ltd. | Connectable instrument trays for creating a modular case |
| AU2012203035B2 (en) | 2005-06-03 | 2014-10-23 | Covidien Lp | Surgical stapler with timer and feedback display |
| US20060276726A1 (en) | 2005-06-03 | 2006-12-07 | Holsten Henry E | Tissue tension detection system |
| US7717312B2 (en) | 2005-06-03 | 2010-05-18 | Tyco Healthcare Group Lp | Surgical instruments employing sensors |
| WO2006132992A2 (en) | 2005-06-03 | 2006-12-14 | Tyco Healthcare Group Lp | Battery powered surgical instrument |
| WO2007142625A2 (en) | 2006-06-02 | 2007-12-13 | Tyco Healthcare Group Lp | Surgical stapler with timer and feedback display |
| CN101366168B (zh) | 2005-06-06 | 2011-08-10 | 路创电子公司 | 用于静音可变的电机速度控制的方法和装置 |
| US7824579B2 (en) | 2005-06-07 | 2010-11-02 | E. I. Du Pont De Nemours And Company | Aluminum thick film composition(s), electrode(s), semiconductor device(s) and methods of making thereof |
| TW200642841A (en) | 2005-06-08 | 2006-12-16 | Nanoforce Technologies Corp | After glow lighting film having UV filtering and explosion-proof |
| US7265374B2 (en) | 2005-06-10 | 2007-09-04 | Arima Computer Corporation | Light emitting semiconductor device |
| US7295907B2 (en) | 2005-06-14 | 2007-11-13 | Trw Automotive U.S. Llc | Recovery of calibrated center steering position after loss of battery power |
| EP1736112B1 (en) | 2005-06-20 | 2011-08-17 | Heribert Schmid | Medical device |
| US7655003B2 (en) | 2005-06-22 | 2010-02-02 | Smith & Nephew, Inc. | Electrosurgical power control |
| WO2007002180A2 (en) | 2005-06-28 | 2007-01-04 | Stryker Corporation | Powered surgical tool with control module that contains a sensor for remotely monitoring the tool power generating unit |
| US7898198B2 (en) | 2005-06-29 | 2011-03-01 | Drs Test & Energy Management, Llc | Torque controller in an electric motor |
| KR100846472B1 (ko) | 2005-06-29 | 2008-07-17 | 엘지전자 주식회사 | 리니어 모터 |
| US20070005002A1 (en) | 2005-06-30 | 2007-01-04 | Intuitive Surgical Inc. | Robotic surgical instruments for irrigation, aspiration, and blowing |
| JP2008544814A (ja) | 2005-06-30 | 2008-12-11 | インテュイティブ サージカル, インコーポレイテッド | マルチアームロボット遠隔手術におけるツール状態および通信のためのインディケータ |
| USD605201S1 (en) | 2005-07-01 | 2009-12-01 | Roche Diagnostics Operations, Inc. | Image for a risk evaluation system for a portion of a computer screen |
| US20080312686A1 (en) | 2005-07-01 | 2008-12-18 | Abbott Laboratories | Antimicrobial closure element and closure element applier |
| US7709136B2 (en) | 2005-07-01 | 2010-05-04 | Perimeter Technologies Incorporated | Battery pack assembly |
| KR100751733B1 (ko) | 2005-07-07 | 2007-08-24 | 한국과학기술연구원 | 겔 방사 성형법을 이용한 조직공학용 다공성 고분자지지체의 제조 방법 |
| JP4879645B2 (ja) | 2005-07-12 | 2012-02-22 | ローム株式会社 | モータ駆動装置及びこれを用いた電気機器 |
| US7837685B2 (en) | 2005-07-13 | 2010-11-23 | Covidien Ag | Switch mechanisms for safe activation of energy on an electrosurgical instrument |
| US8409175B2 (en) | 2005-07-20 | 2013-04-02 | Woojin Lee | Surgical instrument guide device |
| JP4756943B2 (ja) | 2005-07-22 | 2011-08-24 | オリンパス株式会社 | 内視鏡用縫合装置 |
| US20070055228A1 (en) | 2005-07-22 | 2007-03-08 | Berg Howard K | Ultrasonic scalpel device |
| US7597699B2 (en) | 2005-07-25 | 2009-10-06 | Rogers William G | Motorized surgical handpiece |
| US7554343B2 (en) | 2005-07-25 | 2009-06-30 | Piezoinnovations | Ultrasonic transducer control method and system |
| US8627995B2 (en) | 2006-05-19 | 2014-01-14 | Ethicon Endo-Sugery, Inc. | Electrically self-powered surgical instrument with cryptographic identification of interchangeable part |
| US8627993B2 (en) | 2007-02-12 | 2014-01-14 | Ethicon Endo-Surgery, Inc. | Active braking electrical surgical instrument and method for braking such an instrument |
| US7959050B2 (en) | 2005-07-26 | 2011-06-14 | Ethicon Endo-Surgery, Inc | Electrically self-powered surgical instrument with manual release |
| US9554803B2 (en) | 2005-07-26 | 2017-01-31 | Ethicon Endo-Surgery, Llc | Electrically self-powered surgical instrument with manual release |
| US8123523B2 (en) | 2005-07-26 | 2012-02-28 | Angstrom Manufacturing, Inc. | Prophy angle and adapter |
| US8679154B2 (en) | 2007-01-12 | 2014-03-25 | Ethicon Endo-Surgery, Inc. | Adjustable compression staple and method for stapling with adjustable compression |
| US8038046B2 (en) | 2006-05-19 | 2011-10-18 | Ethicon Endo-Surgery, Inc. | Electrical surgical instrument with optimized power supply and drive |
| US8579176B2 (en) | 2005-07-26 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting device and method for using the device |
| US7479608B2 (en) | 2006-05-19 | 2009-01-20 | Ethicon Endo-Surgery, Inc. | Force switch |
| JP4336386B2 (ja) | 2005-07-26 | 2009-09-30 | エシコン エンド−サージェリー,インク. | 外科用ステープリング及び切断デバイスおよびこのデバイスの使用方法 |
| US9662116B2 (en) | 2006-05-19 | 2017-05-30 | Ethicon, Llc | Electrically self-powered surgical instrument with cryptographic identification of interchangeable part |
| ATE523298T1 (de) | 2005-07-27 | 2011-09-15 | Tyco Healthcare | Klammertaschenanordnung für chirurgischen klammerapparat |
| CN102988087B (zh) | 2005-07-27 | 2015-09-09 | 柯惠Lp公司 | 例如用于机电手术设备的轴 |
| EP1912571B1 (en) | 2005-07-27 | 2016-12-21 | Covidien LP | System and method for forming staple pockets of a surgical stapler |
| US20070026040A1 (en) | 2005-07-29 | 2007-02-01 | Crawley Jerald M | Composite self-cohered web materials |
| US7604668B2 (en) | 2005-07-29 | 2009-10-20 | Gore Enterprise Holdings, Inc. | Composite self-cohered web materials |
| US20070027551A1 (en) | 2005-07-29 | 2007-02-01 | Farnsworth Ted R | Composite self-cohered web materials |
| US7655288B2 (en) | 2005-07-29 | 2010-02-02 | Gore Enterprise Holdings, Inc. | Composite self-cohered web materials |
| US20070155010A1 (en) | 2005-07-29 | 2007-07-05 | Farnsworth Ted R | Highly porous self-cohered fibrous tissue engineering scaffold |
| AU2006276044B2 (en) | 2005-07-29 | 2010-02-11 | W. L. Gore & Associates, Inc. | Highly porous self-cohered web materials having haemostatic properties |
| US20070026039A1 (en) | 2005-07-29 | 2007-02-01 | Drumheller Paul D | Composite self-cohered web materials |
| US8048503B2 (en) | 2005-07-29 | 2011-11-01 | Gore Enterprise Holdings, Inc. | Highly porous self-cohered web materials |
| US7655584B2 (en) | 2005-07-29 | 2010-02-02 | Gore Enterprise Holdings, Inc. | Highly porous self-cohered web materials |
| US20070027468A1 (en) | 2005-08-01 | 2007-02-01 | Wales Kenneth S | Surgical instrument with an articulating shaft locking mechanism |
| US10130830B2 (en) | 2005-08-01 | 2018-11-20 | Laboratorios Miret, S.A. | Preservative systems comprising cationic surfactants |
| JP4675709B2 (ja) | 2005-08-03 | 2011-04-27 | 株式会社リコー | 光走査装置及び画像形成装置 |
| US7641092B2 (en) | 2005-08-05 | 2010-01-05 | Ethicon Endo - Surgery, Inc. | Swing gate for device lockout in a curved cutter stapler |
| US7559937B2 (en) | 2005-08-09 | 2009-07-14 | Towertech Research Group | Surgical fastener apparatus and reinforcing material |
| US7101187B1 (en) | 2005-08-11 | 2006-09-05 | Protex International Corp. | Rotatable electrical connector |
| US7398908B2 (en) | 2005-08-15 | 2008-07-15 | Tyco Healthcare Group Lp | Surgical stapling instruments including a cartridge having multiple staple sizes |
| US8579178B2 (en) | 2005-08-15 | 2013-11-12 | Covidien Lp | Surgical stapling instruments including a cartridge having multiple staples sizes |
| US7407075B2 (en) | 2005-08-15 | 2008-08-05 | Tyco Healthcare Group Lp | Staple cartridge having multiple staple sizes for a surgical stapling instrument |
| US7401721B2 (en) | 2005-08-15 | 2008-07-22 | Tyco Healthcare Group Lp | Surgical stapling instruments including a cartridge having multiple staple sizes |
| US7388484B2 (en) | 2005-08-16 | 2008-06-17 | Honeywell International Inc. | Conductive tamper switch for security devices |
| DE102005038919A1 (de) | 2005-08-17 | 2007-03-15 | BSH Bosch und Siemens Hausgeräte GmbH | Elektromotorisches Küchengerät mit elektrischer oder elektronischer Verriegelung |
| JP4402629B2 (ja) | 2005-08-19 | 2010-01-20 | オリンパスメディカルシステムズ株式会社 | 超音波凝固切開装置 |
| US8657814B2 (en) | 2005-08-22 | 2014-02-25 | Medtronic Ablation Frontiers Llc | User interface for tissue ablation system |
| US9661991B2 (en) | 2005-08-24 | 2017-05-30 | Koninklijke Philips N.V. | System, method and devices for navigated flexible endoscopy |
| US7828794B2 (en) | 2005-08-25 | 2010-11-09 | Covidien Ag | Handheld electrosurgical apparatus for controlling operating room equipment |
| US20070049949A1 (en) | 2005-08-25 | 2007-03-01 | Microline Pentax Inc | Clip feeder mechanism for clip applying device |
| US20080177392A1 (en) | 2005-08-30 | 2008-07-24 | Williams Michael S | Closed system artificial intervertebral disc |
| US8800838B2 (en) | 2005-08-31 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Robotically-controlled cable-based surgical end effectors |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US8365976B2 (en) | 2006-09-29 | 2013-02-05 | Ethicon Endo-Surgery, Inc. | Surgical staples having dissolvable, bioabsorbable or biofragmentable portions and stapling instruments for deploying the same |
| US9237891B2 (en) | 2005-08-31 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical stapling devices that produce formed staples having different lengths |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US7500979B2 (en) | 2005-08-31 | 2009-03-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with multiple stacked actuator wedge cams for driving staple drivers |
| US7673781B2 (en) | 2005-08-31 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with staple driver that supports multiple wire diameter staples |
| CN2815700Y (zh) | 2005-09-01 | 2006-09-13 | 煜日升电子(深圳)有限公司 | 电动订书机 |
| US20070051375A1 (en) | 2005-09-06 | 2007-03-08 | Milliman Keith L | Instrument introducer |
| US7778004B2 (en) | 2005-09-13 | 2010-08-17 | Taser International, Inc. | Systems and methods for modular electronic weaponry |
| US20070135803A1 (en) | 2005-09-14 | 2007-06-14 | Amir Belson | Methods and apparatus for performing transluminal and other procedures |
| US7472815B2 (en) | 2005-09-21 | 2009-01-06 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with collapsible features for controlling staple height |
| US7407078B2 (en) | 2005-09-21 | 2008-08-05 | Ehthicon Endo-Surgery, Inc. | Surgical stapling instrument having force controlled spacing end effector |
| CA2520413C (en) | 2005-09-21 | 2016-10-11 | Sherwood Services Ag | Bipolar forceps with multiple electrode array end effector assembly |
| WO2007033414A1 (en) | 2005-09-21 | 2007-03-29 | Bhc Pharmaceuticals Pty Ltd | Cutting instrument |
| US7772725B2 (en) | 2005-09-22 | 2010-08-10 | Eastman Kodak Company | Apparatus and method for current control in H-Bridge load drivers |
| EP1767163A1 (en) | 2005-09-22 | 2007-03-28 | Sherwood Services AG | Bipolar forceps with multiple electrode array end effector assembly |
| US7691106B2 (en) | 2005-09-23 | 2010-04-06 | Synvasive Technology, Inc. | Transverse acting surgical saw blade |
| US7451904B2 (en) | 2005-09-26 | 2008-11-18 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having end effector gripping surfaces |
| JP4190530B2 (ja) | 2005-09-26 | 2008-12-03 | オリンパスメディカルシステムズ株式会社 | 超音波診断装置 |
| JP2007097252A (ja) | 2005-09-27 | 2007-04-12 | Nayuta:Kk | 電源装置およびその双方向昇降圧コンバータ |
| JP4927371B2 (ja) | 2005-09-28 | 2012-05-09 | 興和株式会社 | 眼内レンズ |
| US8079950B2 (en) | 2005-09-29 | 2011-12-20 | Intuitive Surgical Operations, Inc. | Autofocus and/or autoscaling in telesurgery |
| US7357287B2 (en) | 2005-09-29 | 2008-04-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having preloaded firing assistance mechanism |
| DE102005047320A1 (de) | 2005-09-30 | 2007-04-05 | Biotronik Crm Patent Ag | Detektor für atriales Flimmern und Flattern |
| EP1769765B1 (en) | 2005-09-30 | 2012-03-21 | Covidien AG | Insulating boot for electrosurgical forceps |
| US7722607B2 (en) | 2005-09-30 | 2010-05-25 | Covidien Ag | In-line vessel sealer and divider |
| AU2006222753B2 (en) | 2005-09-30 | 2012-09-27 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based actuation mechanism for linear surgical stapler |
| US20070078484A1 (en) | 2005-10-03 | 2007-04-05 | Joseph Talarico | Gentle touch surgical instrument and method of using same |
| US20080190989A1 (en) | 2005-10-03 | 2008-08-14 | Crews Samuel T | Endoscopic plication device and method |
| US9055942B2 (en) | 2005-10-03 | 2015-06-16 | Boston Scienctific Scimed, Inc. | Endoscopic plication devices and methods |
| US7635074B2 (en) | 2005-10-04 | 2009-12-22 | Tyco Healthcare Group Lp | Staple drive assembly |
| US7641091B2 (en) | 2005-10-04 | 2010-01-05 | Tyco Healthcare Group Lp | Staple drive assembly |
| US8096459B2 (en) | 2005-10-11 | 2012-01-17 | Ethicon Endo-Surgery, Inc. | Surgical stapler with an end effector support |
| CA2563147C (en) | 2005-10-14 | 2014-09-23 | Tyco Healthcare Group Lp | Surgical stapling device |
| AU2006304141B2 (en) | 2005-10-14 | 2012-07-05 | Applied Medical Resources Corporation | Gel cap for wound retractor |
| AU2006228045B2 (en) | 2005-10-14 | 2011-11-24 | Covidien Lp | Apparatus for laparoscopic or endoscopic procedures |
| US8266232B2 (en) | 2005-10-15 | 2012-09-11 | International Business Machines Corporation | Hardware processing of commands within virtual client computing environment |
| US20070173870A2 (en) | 2005-10-18 | 2007-07-26 | Jaime Zacharias | Precision Surgical System |
| US7966269B2 (en) | 2005-10-20 | 2011-06-21 | Bauer James D | Intelligent human-machine interface |
| US20070244471A1 (en) | 2005-10-21 | 2007-10-18 | Don Malackowski | System and method for managing the operation of a battery powered surgical tool and the battery used to power the tool |
| CN102624055B (zh) | 2005-10-21 | 2014-12-17 | 史赛克公司 | 具有基于电池温度拉出不同电流的内部控制器的电池 |
| US20070103437A1 (en) | 2005-10-26 | 2007-05-10 | Outland Research, Llc | Haptic metering for minimally invasive medical procedures |
| US8080004B2 (en) | 2005-10-26 | 2011-12-20 | Earl Downey | Laparoscopic surgical instrument |
| US7850623B2 (en) | 2005-10-27 | 2010-12-14 | Boston Scientific Scimed, Inc. | Elongate medical device with continuous reinforcement member |
| EP1780867B1 (en) | 2005-10-28 | 2016-11-30 | Black & Decker Inc. | Battery pack for cordless power tools |
| EP1780825B1 (en) | 2005-10-31 | 2018-08-29 | Black & Decker, Inc. | Battery pack and internal component arrangement within the battery pack for cordless power tool system |
| US7656131B2 (en) | 2005-10-31 | 2010-02-02 | Black & Decker Inc. | Methods of charging battery packs for cordless power tool systems |
| CN101030709A (zh) | 2005-11-01 | 2007-09-05 | 布莱克和戴克公司 | 可再充电电池组和操作系统 |
| US20070102472A1 (en) | 2005-11-04 | 2007-05-10 | Ethicon Endo-Surgery, Inc. | Electrosurgical stapling instrument with disposable severing / stapling unit |
| US8182444B2 (en) | 2005-11-04 | 2012-05-22 | Medrad, Inc. | Delivery of agents such as cells to tissue |
| US7328828B2 (en) | 2005-11-04 | 2008-02-12 | Ethicon Endo-Surgery, Inc, | Lockout mechanisms and surgical instruments including same |
| US7607557B2 (en) | 2005-11-04 | 2009-10-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments structured for pump-assisted delivery of medical agents |
| US7673783B2 (en) | 2005-11-04 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments structured for delivery of medical agents |
| US20070106113A1 (en) | 2005-11-07 | 2007-05-10 | Biagio Ravo | Combination endoscopic operative delivery system |
| US7673780B2 (en) | 2005-11-09 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Articulation joint with improved moment arm extension for articulating an end effector of a surgical instrument |
| US7799039B2 (en) | 2005-11-09 | 2010-09-21 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a hydraulically actuated end effector |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| CN2868212Y (zh) | 2005-11-11 | 2007-02-14 | 钟李宽 | 随换式腹腔镜手术钳 |
| JP4827498B2 (ja) | 2005-11-11 | 2011-11-30 | キヤノン株式会社 | レイアウト方法及びその装置 |
| PL1785703T3 (pl) | 2005-11-15 | 2012-07-31 | Mettler Toledo Gmbh | Sposób monitorowania i/lub określania stanu siłomierza oraz siłomierz |
| US8152756B2 (en) | 2005-11-15 | 2012-04-10 | The Johns Hopkins University | Active cannula for bio-sensing and surgical intervention |
| US7272002B2 (en) | 2005-11-16 | 2007-09-18 | Adc Dsl Systems, Inc. | Auxiliary cooling methods and systems for electrical device housings |
| US20090216113A1 (en) | 2005-11-17 | 2009-08-27 | Eric Meier | Apparatus and Methods for Using an Electromagnetic Transponder in Orthopedic Procedures |
| US20070118115A1 (en) | 2005-11-22 | 2007-05-24 | Sherwood Services Ag | Bipolar electrosurgical sealing instrument having an improved tissue gripping device |
| US7651017B2 (en) | 2005-11-23 | 2010-01-26 | Ethicon Endo-Surgery, Inc. | Surgical stapler with a bendable end effector |
| US7896895B2 (en) | 2005-11-23 | 2011-03-01 | Ethicon Endo-Surgery, Inc. | Surgical clip and applier device and method of use |
| US7246734B2 (en) | 2005-12-05 | 2007-07-24 | Ethicon Endo-Surgery, Inc. | Rotary hydraulic pump actuated multi-stroke surgical instrument |
| DE102005058107A1 (de) | 2005-12-05 | 2007-07-26 | Müller, Erich Johann, Dr. med. | Chirurgisches Bearbeitungswerkzeug |
| US9446226B2 (en) | 2005-12-07 | 2016-09-20 | Ramot At Tel-Aviv University Ltd. | Drug-delivering composite structures |
| US8190238B2 (en) | 2005-12-09 | 2012-05-29 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US8498691B2 (en) | 2005-12-09 | 2013-07-30 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US20070135686A1 (en) | 2005-12-14 | 2007-06-14 | Pruitt John C Jr | Tools and methods for epicardial access |
| CN2868208Y (zh) | 2005-12-14 | 2007-02-14 | 苏州天臣国际医疗科技有限公司 | 设有自动保险机构的圆管型装订仪 |
| WO2007075864A1 (en) | 2005-12-20 | 2007-07-05 | Intuitive Surgical, Inc. | Instrument interface of a robotic surgical system |
| US8672922B2 (en) | 2005-12-20 | 2014-03-18 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| WO2007075844A1 (en) | 2005-12-20 | 2007-07-05 | Intuitive Surgical, Inc. | Telescoping insertion axis of a robotic surgical system |
| US7464845B2 (en) | 2005-12-22 | 2008-12-16 | Welcome Co., Ltd. | Hand-held staple gun having a safety device |
| RU61114U1 (ru) | 2005-12-23 | 2007-02-27 | Мирзакарим Санакулович Норбеков | Аппарат для развития мозговой деятельности |
| CN101346204B (zh) | 2005-12-26 | 2010-12-29 | 日东工器株式会社 | 移动式钻床 |
| US20100145146A1 (en) | 2005-12-28 | 2010-06-10 | Envisionier Medical Technologies, Inc. | Endoscopic digital recording system with removable screen and storage device |
| WO2007074430A1 (en) | 2005-12-28 | 2007-07-05 | Given Imaging Ltd. | Device, system and method for activation of an in vivo device |
| US8628518B2 (en) | 2005-12-30 | 2014-01-14 | Intuitive Surgical Operations, Inc. | Wireless force sensor on a distal portion of a surgical instrument and method |
| US7481824B2 (en) | 2005-12-30 | 2009-01-27 | Ethicon Endo-Surgery, Inc. | Surgical instrument with bending articulation controlled articulation pivot joint |
| US7553173B2 (en) | 2005-12-30 | 2009-06-30 | Click, Inc. | Vehicle connector lockout apparatus and method of using same |
| TWI288526B (en) | 2005-12-30 | 2007-10-11 | Yen Sun Technology Corp | Speed transmission control circuit of a brushless DC motor |
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| USD552623S1 (en) | 2006-01-04 | 2007-10-09 | Microsoft Corporation | User interface for a portion of a display screen |
| US7955257B2 (en) | 2006-01-05 | 2011-06-07 | Depuy Spine, Inc. | Non-rigid surgical retractor |
| JP4597871B2 (ja) | 2006-01-05 | 2010-12-15 | 富士フイルム株式会社 | デジタルカメラ |
| US7835823B2 (en) | 2006-01-05 | 2010-11-16 | Intuitive Surgical Operations, Inc. | Method for tracking and reporting usage events to determine when preventive maintenance is due for a medical robotic system |
| US8202535B2 (en) | 2006-01-06 | 2012-06-19 | Acelrx Pharmaceuticals, Inc. | Small-volume oral transmucosal dosage forms |
| US7670334B2 (en) | 2006-01-10 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument having an articulating end effector |
| KR100752548B1 (ko) | 2006-01-10 | 2007-08-29 | (주)이앤아이 | 하이브리드 전동기의 제어 장치 및 그 제어 방법 |
| DE102006001677B3 (de) | 2006-01-12 | 2007-05-03 | Gebr. Brasseler Gmbh & Co. Kg | Chirurgische Kupplungsvorrichtung |
| WO2007080783A1 (ja) | 2006-01-13 | 2007-07-19 | Olympus Medical Systems Corp. | 回転自走式内視鏡システム、プログラム、回転自走式内視鏡システムの駆動方法 |
| US20120064483A1 (en) | 2010-09-13 | 2012-03-15 | Kevin Lint | Hard-wired and wireless system with footswitch for operating a dental or medical treatment apparatus |
| US20070173872A1 (en) | 2006-01-23 | 2007-07-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument for cutting and coagulating patient tissue |
| US8147485B2 (en) | 2006-01-24 | 2012-04-03 | Covidien Ag | System and method for tissue sealing |
| US20070173813A1 (en) | 2006-01-24 | 2007-07-26 | Sherwood Services Ag | System and method for tissue sealing |
| CA2574934C (en) | 2006-01-24 | 2015-12-29 | Sherwood Services Ag | System and method for closed loop monitoring of monopolar electrosurgical apparatus |
| US20070198039A1 (en) | 2006-01-27 | 2007-08-23 | Wilson-Cook Medical, Inc. | Intragastric device for treating obesity |
| JP5355094B2 (ja) | 2006-01-27 | 2013-11-27 | スターテック インコーポレイテッド | 組織閉鎖装置および方法 |
| US7705559B2 (en) | 2006-01-27 | 2010-04-27 | Stryker Corporation | Aseptic battery with a removal cell cluster, the cell cluster configured for charging in a socket that receives a sterilizable battery |
| US7644848B2 (en) | 2006-01-31 | 2010-01-12 | Ethicon Endo-Surgery, Inc. | Electronic lockouts and surgical instrument including same |
| US7568603B2 (en) | 2006-01-31 | 2009-08-04 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with articulatable end effector |
| US7464849B2 (en) | 2006-01-31 | 2008-12-16 | Ethicon Endo-Surgery, Inc. | Electro-mechanical surgical instrument with closure system and anvil alignment components |
| US7416101B2 (en) | 2006-01-31 | 2008-08-26 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with loading force feedback |
| US7766210B2 (en) | 2006-01-31 | 2010-08-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with user feedback system |
| US20110006101A1 (en) | 2009-02-06 | 2011-01-13 | EthiconEndo-Surgery, Inc. | Motor driven surgical fastener device with cutting member lockout arrangements |
| US20110024477A1 (en) | 2009-02-06 | 2011-02-03 | Hall Steven G | Driven Surgical Stapler Improvements |
| US8161977B2 (en) | 2006-01-31 | 2012-04-24 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| GB2435214B (en) | 2006-01-31 | 2010-01-20 | Michael John Radley Young | Ultrasonic Cutting Tool |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US20070175955A1 (en) | 2006-01-31 | 2007-08-02 | Shelton Frederick E Iv | Surgical cutting and fastening instrument with closure trigger locking mechanism |
| US7422139B2 (en) | 2006-01-31 | 2008-09-09 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting fastening instrument with tactile position feedback |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US9861359B2 (en) | 2006-01-31 | 2018-01-09 | Ethicon Llc | Powered surgical instruments with firing system lockout arrangements |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US20110290856A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument with force-feedback capabilities |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US11278279B2 (en) | 2006-01-31 | 2022-03-22 | Cilag Gmbh International | Surgical instrument assembly |
| US7575144B2 (en) | 2006-01-31 | 2009-08-18 | Ethicon Endo-Surgery, Inc. | Surgical fastener and cutter with single cable actuator |
| US7464846B2 (en) | 2006-01-31 | 2008-12-16 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a removable battery |
| US7770775B2 (en) | 2006-01-31 | 2010-08-10 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with adaptive user feedback |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US20070175951A1 (en) | 2006-01-31 | 2007-08-02 | Shelton Frederick E Iv | Gearing selector for a powered surgical cutting and fastening instrument |
| US7891531B1 (en) | 2006-01-31 | 2011-02-22 | Ward Gary L | Sub-miniature surgical staple cartridge |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US11224427B2 (en) | 2006-01-31 | 2022-01-18 | Cilag Gmbh International | Surgical stapling system including a console and retraction assembly |
| US20070175950A1 (en) | 2006-01-31 | 2007-08-02 | Shelton Frederick E Iv | Disposable staple cartridge having an anvil with tissue locator for use with a surgical cutting and fastening instrument and modular end effector system therefor |
| US8763879B2 (en) | 2006-01-31 | 2014-07-01 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of surgical instrument |
| US7595642B2 (en) | 2006-02-01 | 2009-09-29 | Qualcomm Incorporated | Battery management system for determining battery charge sufficiency for a task |
| US7422138B2 (en) | 2006-02-01 | 2008-09-09 | Ethicon Endo-Surgery, Inc. | Elliptical intraluminal surgical stapler for anastomosis |
| US8062236B2 (en) | 2006-02-02 | 2011-11-22 | Tyco Healthcare Group, Lp | Method and system to determine an optimal tissue compression time to implant a surgical element |
| US9629626B2 (en) | 2006-02-02 | 2017-04-25 | Covidien Lp | Mechanically tuned buttress material to assist with proper formation of surgical element in diseased tissue |
| GB0602192D0 (en) | 2006-02-03 | 2006-03-15 | Tissuemed Ltd | Tissue-adhesive materials |
| EP1815950A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| EP1837041A1 (en) | 2006-03-20 | 2007-09-26 | Tissuemed Limited | Tissue-adhesive materials |
| US20070185545A1 (en) | 2006-02-06 | 2007-08-09 | Medtronic Emergency Response Systems, Inc. | Post-download patient data protection in a medical device |
| WO2007092852A2 (en) | 2006-02-06 | 2007-08-16 | Mynosys Cellular Devices, Inc. | Microsurgical cutting instruments |
| DE102006005998B4 (de) | 2006-02-08 | 2008-05-08 | Schnier, Dietmar, Dr. | Schraubenmutter mit mindestens zwei Teilen |
| US20070190110A1 (en) | 2006-02-10 | 2007-08-16 | Pameijer Cornelis H | Agents and devices for providing blood clotting functions to wounds |
| US7854735B2 (en) | 2006-02-16 | 2010-12-21 | Ethicon Endo-Surgery, Inc. | Energy-based medical treatment system and method |
| WO2007098220A2 (en) | 2006-02-20 | 2007-08-30 | Black & Decker Inc. | Dc motor with dual commutator bar set and selectable series and parallel connected coils |
| US9186046B2 (en) | 2007-08-14 | 2015-11-17 | Koninklijke Philips Electronics N.V. | Robotic instrument systems and methods utilizing optical fiber sensor |
| US20070208375A1 (en) | 2006-02-23 | 2007-09-06 | Kouji Nishizawa | Surgical device |
| JP4910423B2 (ja) | 2006-02-27 | 2012-04-04 | ソニー株式会社 | バッテリパック、電子機器、およびバッテリ残量検出方法 |
| US8500628B2 (en) | 2006-02-28 | 2013-08-06 | Olympus Endo Technology America, Inc. | Rotate-to-advance catheterization system |
| US20070208359A1 (en) | 2006-03-01 | 2007-09-06 | Hoffman Douglas B | Method for stapling tissue |
| US20070207010A1 (en) | 2006-03-03 | 2007-09-06 | Roni Caspi | Split nut with magnetic coupling |
| US8706316B1 (en) | 2006-03-14 | 2014-04-22 | Snap-On Incorporated | Method and system for enhanced scanner user interface |
| US7955380B2 (en) | 2006-03-17 | 2011-06-07 | Medtronic Vascular, Inc. | Prosthesis fixation apparatus and methods |
| US7771396B2 (en) | 2006-03-22 | 2010-08-10 | Ethicon Endo-Surgery, Inc. | Intubation device for enteral feeding |
| US8236010B2 (en) | 2006-03-23 | 2012-08-07 | Ethicon Endo-Surgery, Inc. | Surgical fastener and cutter with mimicking end effector |
| US20110163146A1 (en) | 2006-03-23 | 2011-07-07 | Ortiz Mark S | Surgical Stapling And Cuttting Device |
| US8348959B2 (en) | 2006-03-23 | 2013-01-08 | Symmetry Medical Manufacturing, Inc. | Angled surgical driver |
| US8721630B2 (en) | 2006-03-23 | 2014-05-13 | Ethicon Endo-Surgery, Inc. | Methods and devices for controlling articulation |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| JP4689511B2 (ja) | 2006-03-24 | 2011-05-25 | 株式会社エヌ・ティ・ティ・ドコモ | 可搬型基地局装置 |
| US9675375B2 (en) | 2006-03-29 | 2017-06-13 | Ethicon Llc | Ultrasonic surgical system and method |
| US20070270660A1 (en) | 2006-03-29 | 2007-11-22 | Caylor Edward J Iii | System and method for determining a location of an orthopaedic medical device |
| JP5450050B2 (ja) | 2006-03-31 | 2014-03-26 | ロナティ エッセ.ピ.ア. | 靴下類等のための円形編機 |
| US8535304B2 (en) | 2006-03-31 | 2013-09-17 | Ablacor Medical Corporation | System and method for advancing, orienting, and immobilizing on internal body tissue a catheter or other therapeutic device |
| US20090020958A1 (en) | 2006-03-31 | 2009-01-22 | Soul David F | Methods and apparatus for operating an internal combustion engine |
| US7836400B2 (en) | 2006-03-31 | 2010-11-16 | Research In Motion Limited | Snooze support for event reminders |
| JP4102409B2 (ja) | 2006-04-03 | 2008-06-18 | オリンパス株式会社 | 縫合・結紮具アプライヤー |
| US7635922B2 (en) | 2006-04-03 | 2009-12-22 | C.E. Niehoff & Co. | Power control system and method |
| US8915842B2 (en) | 2008-07-14 | 2014-12-23 | Ethicon Endo-Surgery, Inc. | Methods and devices for maintaining visibility and providing irrigation and/or suction during surgical procedures |
| US8926506B2 (en) | 2009-03-06 | 2015-01-06 | Ethicon Endo-Surgery, Inc. | Methods and devices for providing access into a body cavity |
| US20100081883A1 (en) | 2008-09-30 | 2010-04-01 | Ethicon Endo-Surgery, Inc. | Methods and devices for performing gastroplasties using a multiple port access device |
| US8485970B2 (en) | 2008-09-30 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Surgical access device |
| CA2648283A1 (en) | 2006-04-07 | 2007-10-18 | Societe De Commercialisation Des Produits De La Recherche Appliquee Socp Ra Sciences Et Genie S.E.C. | Integrated cement delivery system for bone augmentation procedures and methods |
| WO2007119757A1 (ja) | 2006-04-11 | 2007-10-25 | Nsk Ltd. | 電動パワーステアリング装置及びその組付方法 |
| ES2394111T3 (es) | 2006-04-11 | 2013-01-21 | Tyco Healthcare Group Lp | Apósitos para heridas con agentes antimicrobianos y que contienen cinc |
| US7741273B2 (en) | 2006-04-13 | 2010-06-22 | Warsaw Orthopedic, Inc. | Drug depot implant designs |
| KR100739165B1 (ko) | 2006-04-13 | 2007-07-13 | 엘지전자 주식회사 | 리니어 압축기의 운전제어장치 및 방법 |
| US20070243227A1 (en) | 2006-04-14 | 2007-10-18 | Michael Gertner | Coatings for surgical staplers |
| US7450010B1 (en) | 2006-04-17 | 2008-11-11 | Tc License Ltd. | RFID mutual authentication verification session |
| US8267849B2 (en) | 2006-04-18 | 2012-09-18 | Wazer David E | Radioactive therapeutic fastening instrument |
| NZ572043A (en) | 2006-04-20 | 2010-05-28 | Illinois Tool Works | Fastener-driving tool having trigger control mechanism for alternatively permitting bump firing and sequential firing modes of operation |
| US8518024B2 (en) | 2006-04-24 | 2013-08-27 | Transenterix, Inc. | System and method for multi-instrument surgical access using a single access port |
| US20070246505A1 (en) | 2006-04-24 | 2007-10-25 | Medical Ventures Inc. | Surgical buttress assemblies and methods of uses thereof |
| US7278563B1 (en) | 2006-04-25 | 2007-10-09 | Green David T | Surgical instrument for progressively stapling and incising tissue |
| US7650185B2 (en) | 2006-04-25 | 2010-01-19 | Cardiac Pacemakers, Inc. | System and method for walking an implantable medical device from a sleep state |
| JP4566943B2 (ja) | 2006-04-26 | 2010-10-20 | 株式会社マキタ | 充電装置 |
| AU2007245256A1 (en) | 2006-04-28 | 2007-11-08 | Biomagnesium Systems Ltd. | Biodegradable magnesium alloys and uses thereof |
| EP2012697A4 (en) | 2006-04-29 | 2010-07-21 | Univ Texas | DEVICE FOR USE IN TRANSLUMINAL AND ENDOLUMINAL SURGERY |
| JP5148598B2 (ja) | 2006-05-03 | 2013-02-20 | ラプトール リッジ, エルエルシー | 組織閉鎖のシステムおよび方法 |
| US20070260132A1 (en) | 2006-05-04 | 2007-11-08 | Sterling Bernhard B | Method and apparatus for processing signals reflecting physiological characteristics from multiple sensors |
| WO2007129121A1 (en) | 2006-05-08 | 2007-11-15 | Tayside Health Board | Device and method for improved surgical suturing |
| US20070262592A1 (en) | 2006-05-08 | 2007-11-15 | Shih-Ming Hwang | Mounting plate for lock and lock therewith |
| JP2007306710A (ja) | 2006-05-11 | 2007-11-22 | Mitsubishi Electric Corp | 電動パワーステアリング装置 |
| JP4829005B2 (ja) | 2006-05-12 | 2011-11-30 | テルモ株式会社 | マニピュレータ |
| JP4584186B2 (ja) | 2006-05-15 | 2010-11-17 | トヨタ自動車株式会社 | 故障診断方法及び故障診断装置 |
| EP2486867A3 (en) | 2006-05-19 | 2014-04-02 | Ethicon Endo-Surgery, Inc. | Mechanical force switch for a medical device |
| CA2725183C (en) | 2006-05-19 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Electrical surgical instrument |
| US7552854B2 (en) | 2006-05-19 | 2009-06-30 | Applied Medical Resources Corporation | Surgical stapler with firing lock mechanism |
| CA2651782C (en) | 2006-05-19 | 2018-03-06 | Mako Surgical Corp. | System and method for verifying calibration of a surgical device |
| US7586289B2 (en) | 2006-05-23 | 2009-09-08 | Ultralife Corporation | Complete discharge device |
| US8105350B2 (en) | 2006-05-23 | 2012-01-31 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US20070275035A1 (en) | 2006-05-24 | 2007-11-29 | Microchips, Inc. | Minimally Invasive Medical Implant Devices for Controlled Drug Delivery |
| US20080039746A1 (en) | 2006-05-25 | 2008-02-14 | Medtronic, Inc. | Methods of using high intensity focused ultrasound to form an ablated tissue area containing a plurality of lesions |
| US20070276409A1 (en) | 2006-05-25 | 2007-11-29 | Ethicon Endo-Surgery, Inc. | Endoscopic gastric restriction methods and devices |
| US20090188964A1 (en) | 2006-06-01 | 2009-07-30 | Boris Orlov | Membrane augmentation, such as of for treatment of cardiac valves, and fastening devices for membrane augmentation |
| EP3192463A1 (en) | 2006-06-02 | 2017-07-19 | Ethicon Endo-Surgery, Inc. | Surgical device |
| US7530984B2 (en) | 2006-06-05 | 2009-05-12 | Medigus Ltd. | Transgastric method for carrying out a partial fundoplication |
| US7615067B2 (en) | 2006-06-05 | 2009-11-10 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| IL176133A0 (en) | 2006-06-05 | 2006-10-05 | Medigus Ltd | Stapler |
| US8551076B2 (en) | 2006-06-13 | 2013-10-08 | Intuitive Surgical Operations, Inc. | Retrograde instrument |
| DE202007003114U1 (de) | 2006-06-13 | 2007-06-21 | Olympus Winter & Ibe Gmbh | Medizinische Zange mit Bajonettverbindung |
| US9561045B2 (en) | 2006-06-13 | 2017-02-07 | Intuitive Surgical Operations, Inc. | Tool with rotation lock |
| KR101477738B1 (ko) | 2006-06-13 | 2014-12-31 | 인튜어티브 서지컬 인코포레이티드 | 미소절개 수술 시스템 |
| EP2038712B2 (en) | 2006-06-13 | 2019-08-28 | Intuitive Surgical Operations, Inc. | Control system configured to compensate for non-ideal actuator-to-joint linkage characteristics in a medical robotic system |
| US20070286892A1 (en) | 2006-06-13 | 2007-12-13 | Uri Herzberg | Compositions and methods for preventing or reducing postoperative ileus and gastric stasis in mammals |
| US8491603B2 (en) | 2006-06-14 | 2013-07-23 | MacDonald Dettwiller and Associates Inc. | Surgical manipulator |
| US20080125634A1 (en) | 2006-06-14 | 2008-05-29 | Cornova, Inc. | Method and apparatus for identifying and treating myocardial infarction |
| US8560047B2 (en) | 2006-06-16 | 2013-10-15 | Board Of Regents Of The University Of Nebraska | Method and apparatus for computer aided surgery |
| US8376865B2 (en) | 2006-06-20 | 2013-02-19 | Cardiacmd, Inc. | Torque shaft and torque shaft drive |
| CA2655770C (en) | 2006-06-21 | 2013-07-30 | Rudolf Steffen | Device for insertion and positioning of surgical instruments and corresponding method |
| US9579088B2 (en) | 2007-02-20 | 2017-02-28 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical visualization and device manipulation |
| US8974542B2 (en) | 2006-06-27 | 2015-03-10 | University of Pittsburgh—of the Commonwealth System of Higher Education | Biodegradable elastomeric patch for treating cardiac or cardiovascular conditions |
| US8322455B2 (en) | 2006-06-27 | 2012-12-04 | Ethicon Endo-Surgery, Inc. | Manually driven surgical cutting and fastening instrument |
| US9718190B2 (en) | 2006-06-29 | 2017-08-01 | Intuitive Surgical Operations, Inc. | Tool position and identification indicator displayed in a boundary area of a computer display screen |
| EP1872729B1 (en) | 2006-06-29 | 2009-10-21 | The University of Dundee | Medical instrument for grasping on object, in particular needle holder |
| US9492192B2 (en) | 2006-06-30 | 2016-11-15 | Atheromed, Inc. | Atherectomy devices, systems, and methods |
| US7391173B2 (en) | 2006-06-30 | 2008-06-24 | Intuitive Surgical, Inc | Mechanically decoupled capstan drive |
| US20080200835A1 (en) | 2006-06-30 | 2008-08-21 | Monson Gavin M | Energy Biopsy Device for Tissue Penetration and Hemostasis |
| US20080003196A1 (en) | 2006-06-30 | 2008-01-03 | Jonn Jerry Y | Absorbable cyanoacrylate compositions |
| CN101500630B (zh) | 2006-07-03 | 2012-05-30 | 诺沃-诺迪斯克有限公司 | 用于注射装置的联结器 |
| JP4157574B2 (ja) | 2006-07-04 | 2008-10-01 | オリンパスメディカルシステムズ株式会社 | 外科用処置具 |
| EP2423297B1 (en) | 2006-07-06 | 2013-06-05 | Nippon Oil Corporation | Hydraulic oil composition |
| EP1875870B1 (en) | 2006-07-07 | 2009-12-02 | Ethicon Endo-Surgery, Inc. | A surgical stapling instrument. |
| US7776037B2 (en) | 2006-07-07 | 2010-08-17 | Covidien Ag | System and method for controlling electrode gap during tissue sealing |
| ATE486527T1 (de) | 2006-07-07 | 2010-11-15 | Ethicon Endo Surgery Inc | Chirurgischer klammerapplikator und klammermagazin und klammer für ein solches gerät |
| CA2592221C (en) | 2006-07-11 | 2014-10-07 | Tyco Healthcare Group Lp | Skin staples with thermal properties |
| DE102006031971A1 (de) | 2006-07-11 | 2008-01-17 | Karl Storz Gmbh & Co. Kg | Medizinisches Instrument |
| US7993360B2 (en) | 2006-07-11 | 2011-08-09 | Arthrex, Inc. | Rotary shaver with improved connection between flexible and rigid rotatable tubes |
| FR2903696B1 (fr) | 2006-07-12 | 2011-02-11 | Provence Technologies | Procede de purification de composes diaminophenothiazium |
| RU61122U1 (ru) | 2006-07-14 | 2007-02-27 | Нина Васильевна Гайгерова | Хирургический сшиватель |
| IL176889A0 (en) | 2006-07-16 | 2006-10-31 | Medigus Ltd | Devices and methods for treating morbid obesity |
| DE102007020583B4 (de) | 2006-07-19 | 2012-10-11 | Erbe Elektromedizin Gmbh | Elektrodeneinrichtung mit einerImnpedanz-Messeinrichtung und Verfahren zum Herstellen einer derartigen Elektrodeneinrichtung |
| WO2008011351A2 (en) | 2006-07-19 | 2008-01-24 | Boston Scientific Scimed, Inc. | Apparatus for tissue resection |
| US7748632B2 (en) | 2006-07-25 | 2010-07-06 | Hand Held Products, Inc. | Portable data terminal and battery therefor |
| WO2008013863A2 (en) | 2006-07-26 | 2008-01-31 | Cytori Therapeutics, Inc. | Generation of adipose tissue and adipocytes |
| US20080029574A1 (en) | 2006-08-02 | 2008-02-07 | Shelton Frederick E | Pneumatically powered surgical cutting and fastening instrument with actuator at distal end |
| US7431189B2 (en) | 2006-08-02 | 2008-10-07 | Ethicon Endo-Surgery, Inc. | Pneumatically powered surgical cutting and fastening instrument with mechanical linkage coupling end effector and trigger motion |
| US7740159B2 (en) | 2006-08-02 | 2010-06-22 | Ethicon Endo-Surgery, Inc. | Pneumatically powered surgical cutting and fastening instrument with a variable control of the actuating rate of firing with mechanical power assist |
| US20080030170A1 (en) | 2006-08-03 | 2008-02-07 | Bruno Dacquay | Safety charging system for surgical hand piece |
| JP4755047B2 (ja) | 2006-08-08 | 2011-08-24 | テルモ株式会社 | 作業機構及びマニピュレータ |
| AU2007297516A1 (en) | 2006-08-09 | 2008-03-27 | Coherex Medical, Inc. | Devices for reducing the size of an internal tissue opening |
| US20080042861A1 (en) | 2006-08-16 | 2008-02-21 | Bruno Dacquay | Safety battery meter system for surgical hand piece |
| US7708758B2 (en) | 2006-08-16 | 2010-05-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| CN200942099Y (zh) | 2006-08-17 | 2007-09-05 | 苏州天臣国际医疗科技有限公司 | 装订仪保险机构 |
| DE102006038515A1 (de) | 2006-08-17 | 2008-02-21 | Karl Storz Gmbh & Co. Kg | Medizinisches Rohrschaftinstrument |
| US7674253B2 (en) | 2006-08-18 | 2010-03-09 | Kensey Nash Corporation | Catheter for conducting a procedure within a lumen, duct or organ of a living being |
| US20080051833A1 (en) | 2006-08-25 | 2008-02-28 | Vincent Gramuglia | Suture passer and method of passing suture material |
| US20080196253A1 (en) | 2006-08-28 | 2008-08-21 | Richard Simon Ezra | Precision knife and blade dispenser for the same |
| US20080125749A1 (en) | 2006-08-29 | 2008-05-29 | Boston Scientific Scimed, Inc. | Self-powered medical devices |
| DE102006041951B4 (de) | 2006-08-30 | 2022-05-05 | Deltatech Controls Usa, Llc | Wippschalter |
| JP4834074B2 (ja) | 2006-08-30 | 2011-12-07 | ローム株式会社 | モータ駆動回路およびモータユニットならびにそれを用いた電子機器 |
| US8323789B2 (en) | 2006-08-31 | 2012-12-04 | Cambridge Enterprise Limited | Nanomaterial polymer compositions and uses thereof |
| US20080071328A1 (en) | 2006-09-06 | 2008-03-20 | Medtronic, Inc. | Initiating medical system communications |
| US8982195B2 (en) | 2006-09-07 | 2015-03-17 | Abbott Medical Optics Inc. | Digital video capture system and method with customizable graphical overlay |
| US8403196B2 (en) | 2006-09-08 | 2013-03-26 | Covidien Lp | Dissection tip and introducer for surgical instrument |
| US8136711B2 (en) | 2006-09-08 | 2012-03-20 | Tyco Healthcare Group Lp | Dissection tip and introducer for surgical instrument |
| US20080065153A1 (en) | 2006-09-08 | 2008-03-13 | Warsaw Orthopedic, Inc. | Surgical staple |
| DE602006008783D1 (de) | 2006-09-08 | 2009-10-08 | Ethicon Endo Surgery Inc | Chirurgisches Instrument und Betätigungsvorrichtung zur Bewegungsübertragung dafür |
| US20080064920A1 (en) | 2006-09-08 | 2008-03-13 | Ethicon Endo-Surgery, Inc. | Medical drive system for providing motion to at least a portion of a medical apparatus |
| US8794496B2 (en) | 2006-09-11 | 2014-08-05 | Covidien Lp | Rotating knob locking mechanism for surgical stapling device |
| CN100464715C (zh) | 2006-09-11 | 2009-03-04 | 苏州天臣国际医疗科技有限公司 | 外科装订仪装订机构 |
| JP5148092B2 (ja) | 2006-09-11 | 2013-02-20 | オリンパスメディカルシステムズ株式会社 | エネルギ手術装置 |
| EP2068743B1 (en) | 2006-09-12 | 2017-03-15 | Vidacare LLC | Medical procedures trays, kits and related methods |
| US8944069B2 (en) | 2006-09-12 | 2015-02-03 | Vidacare Corporation | Assemblies for coupling intraosseous (IO) devices to powered drivers |
| US7648519B2 (en) | 2006-09-13 | 2010-01-19 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| DE502006007177D1 (de) | 2006-09-15 | 2010-07-22 | Brainlab Ag | Vorrichtung und Verfahren zum Messen geometrischer Eigenschaften medizintechnischer Behandlungsvorrichtungen, insbesondere zur automatischen Verifikation, Kalibrierung und Vermessung von Instrumenten für computerassistierte Chirurgie |
| US7887755B2 (en) | 2006-09-20 | 2011-02-15 | Binforma Group Limited Liability Company | Packaging closures integrated with disposable RFID devices |
| US7780663B2 (en) | 2006-09-22 | 2010-08-24 | Ethicon Endo-Surgery, Inc. | End effector coatings for electrosurgical instruments |
| US10130359B2 (en) | 2006-09-29 | 2018-11-20 | Ethicon Llc | Method for forming a staple |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US20100133317A1 (en) | 2006-09-29 | 2010-06-03 | Shelton Iv Frederick E | Motor-Driven Surgical Cutting And Fastening Instrument with Tactile Position Feedback |
| US20200038018A1 (en) | 2006-09-29 | 2020-02-06 | Ethicon Llc | End effector for use with a surgical fastening instrument |
| US20080082114A1 (en) | 2006-09-29 | 2008-04-03 | Mckenna Robert H | Adhesive Mechanical Fastener for Lumen Creation Utilizing Tissue Necrosing Means |
| US20190269402A1 (en) | 2006-09-29 | 2019-09-05 | Ethicon Llc | Surgical staple having a deformable member with a non-circular cross-sectional geometry |
| US20080081948A1 (en) | 2006-10-03 | 2008-04-03 | Ethicon Endo-Surgery, Inc. | Apparatus for cleaning a distal scope end of a medical viewing scope |
| US8372090B2 (en) | 2006-10-05 | 2013-02-12 | Covidien Lp | Flexible endoscopic stitching devices |
| US8226667B2 (en) | 2006-10-05 | 2012-07-24 | Tyco Healthcare Group Lp | Axial stitching device |
| DE102006047204B4 (de) | 2006-10-05 | 2015-04-23 | Erbe Elektromedizin Gmbh | Rohrschaftinstrument |
| US8708210B2 (en) | 2006-10-05 | 2014-04-29 | Covidien Lp | Method and force-limiting handle mechanism for a surgical instrument |
| US8475453B2 (en) | 2006-10-06 | 2013-07-02 | Covidien Lp | Endoscopic vessel sealer and divider having a flexible articulating shaft |
| CN101522127B (zh) | 2006-10-06 | 2011-11-16 | Tyco医疗健康集团 | 具有柔性铰接轴的内窥镜血管密封及分割装置 |
| US7845535B2 (en) | 2006-10-06 | 2010-12-07 | Tyco Healthcare Group Lp | Surgical instrument having a plastic surface |
| US7866525B2 (en) | 2006-10-06 | 2011-01-11 | Tyco Healthcare Group Lp | Surgical instrument having a plastic surface |
| US7481348B2 (en) | 2006-10-06 | 2009-01-27 | Tyco Healthcare Group Lp | Surgical instrument with articulating tool assembly |
| US8807414B2 (en) | 2006-10-06 | 2014-08-19 | Covidien Lp | System and method for non-contact electronic articulation sensing |
| US7967178B2 (en) | 2006-10-06 | 2011-06-28 | Tyco Healthcare Group Lp | Grasping jaw mechanism |
| US8733614B2 (en) | 2006-10-06 | 2014-05-27 | Covidien Lp | End effector identification by mechanical features |
| CN101273908A (zh) | 2006-10-06 | 2008-10-01 | 伊西康内外科公司 | 减轻手术后肠梗阻的装置 |
| US20080086078A1 (en) | 2006-10-06 | 2008-04-10 | Powell Darrel M | Devices for reduction of post operative ileus |
| US20080085296A1 (en) | 2006-10-06 | 2008-04-10 | Powell Darrel M | Methods for reduction of post operative ileus. |
| DE602006007712D1 (de) | 2006-10-06 | 2009-08-20 | Ethicon Endo Surgery Inc | Verbesserungen betreffend einen Applikator zum Anbringen von Anastomosenringen |
| DE102006047882B3 (de) | 2006-10-10 | 2007-08-02 | Rasmussen Gmbh | Steckverbindungsanordnung für einen Schlauch und ein Rohr |
| US7736254B2 (en) | 2006-10-12 | 2010-06-15 | Intuitive Surgical Operations, Inc. | Compact cable tension tender device |
| DE602007007031D1 (de) | 2006-10-13 | 2010-07-22 | Toshiba Kk | Manipulator |
| EP2314232B1 (en) | 2006-10-17 | 2015-03-25 | Covidien LP | Apparatus for applying surgical clips |
| US7862502B2 (en) | 2006-10-20 | 2011-01-04 | Ellipse Technologies, Inc. | Method and apparatus for adjusting a gastrointestinal restriction device |
| US8226635B2 (en) | 2006-10-23 | 2012-07-24 | Boston Scientific Scimed, Inc. | Device for circulating heated fluid |
| US8157793B2 (en) | 2006-10-25 | 2012-04-17 | Terumo Kabushiki Kaisha | Manipulator for medical use |
| EP1915963A1 (en) | 2006-10-25 | 2008-04-30 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Force estimation for a minimally invasive robotic surgery system |
| JP5085996B2 (ja) | 2006-10-25 | 2012-11-28 | テルモ株式会社 | マニピュレータシステム |
| JP5198014B2 (ja) | 2006-10-25 | 2013-05-15 | テルモ株式会社 | 医療用マニピュレータ |
| WO2008057281A2 (en) | 2006-10-26 | 2008-05-15 | Tyco Healthcare Group Lp | Methods of using shape memory alloys for buttress attachment |
| US7845533B2 (en) | 2007-06-22 | 2010-12-07 | Tyco Healthcare Group Lp | Detachable buttress material retention systems for use with a surgical stapling device |
| US7828854B2 (en) | 2006-10-31 | 2010-11-09 | Ethicon, Inc. | Implantable repair device |
| US8822934B2 (en) | 2006-11-03 | 2014-09-02 | Accuray Incorporated | Collimator changer |
| US20080129253A1 (en) | 2006-11-03 | 2008-06-05 | Advanced Desalination Inc. | Battery energy reclamation apparatus and method thereby |
| CN101534744B (zh) | 2006-11-03 | 2013-10-23 | 皇家飞利浦电子股份有限公司 | 用于维持电池操作的牙刷的性能的系统和方法 |
| JP2008114339A (ja) | 2006-11-06 | 2008-05-22 | Terumo Corp | マニピュレータ |
| SE530262C2 (sv) | 2006-11-08 | 2008-04-15 | Atlas Copco Tools Ab | Kraftverktyg med utbytbar växelenhet |
| US7780685B2 (en) | 2006-11-09 | 2010-08-24 | Ethicon Endo-Surgery, Inc. | Adhesive and mechanical fastener |
| US7946453B2 (en) | 2006-11-09 | 2011-05-24 | Ethicon Endo-Surgery, Inc. | Surgical band fluid media dispenser |
| US7708180B2 (en) | 2006-11-09 | 2010-05-04 | Ethicon Endo-Surgery, Inc. | Surgical fastening device with initiator impregnation of a matrix or buttress to improve adhesive application |
| US20080114251A1 (en) | 2006-11-10 | 2008-05-15 | Penrith Corporation | Transducer array imaging system |
| US8834498B2 (en) | 2006-11-10 | 2014-09-16 | Ethicon Endo-Surgery, Inc. | Method and device for effecting anastomosis of hollow organ structures using adhesive and fasteners |
| US7721930B2 (en) | 2006-11-10 | 2010-05-25 | Thicon Endo-Surgery, Inc. | Disposable cartridge with adhesive for use with a stapling device |
| US7935130B2 (en) | 2006-11-16 | 2011-05-03 | Intuitive Surgical Operations, Inc. | Two-piece end-effectors for robotic surgical tools |
| US9011439B2 (en) | 2006-11-20 | 2015-04-21 | Poly-Med, Inc. | Selectively absorbable/biodegradable, fibrous composite constructs and applications thereof |
| WO2008061566A1 (en) | 2006-11-23 | 2008-05-29 | Tte Germany Gmbh | Power failure detection circuit |
| CN200984209Y (zh) | 2006-11-24 | 2007-12-05 | 苏州天臣国际医疗科技有限公司 | 外科装订仪钉砧成型槽 |
| US8114100B2 (en) | 2006-12-06 | 2012-02-14 | Ethicon Endo-Surgery, Inc. | Safety fastener for tissue apposition |
| US20080140159A1 (en) | 2006-12-06 | 2008-06-12 | Transoma Medical, Inc. | Implantable device for monitoring biological signals |
| US20080154299A1 (en) | 2006-12-08 | 2008-06-26 | Steve Livneh | Forceps for performing endoscopic surgery |
| US7871440B2 (en) | 2006-12-11 | 2011-01-18 | Depuy Products, Inc. | Unitary surgical device and method |
| US20080308504A1 (en) | 2006-12-12 | 2008-12-18 | Hallan Matthew J | Element loading mechanism and method |
| US8062306B2 (en) | 2006-12-14 | 2011-11-22 | Ethicon Endo-Surgery, Inc. | Manually articulating devices |
| CN200991269Y (zh) | 2006-12-20 | 2007-12-19 | 张红 | 消化道缝合器的钉仓结构 |
| US7434716B2 (en) | 2006-12-21 | 2008-10-14 | Tyco Healthcare Group Lp | Staple driver for articulating surgical stapler |
| PT2094173T (pt) | 2006-12-21 | 2016-07-11 | Doheny Eye Inst | Peça de mão descartável para vitrectomia |
| WO2008078879A1 (en) | 2006-12-22 | 2008-07-03 | Hyun Duk Uhm | Structure of staple magazine having permanent magnet |
| US8292801B2 (en) | 2006-12-22 | 2012-10-23 | Olympus Medical Systems Corp. | Surgical treatment apparatus |
| CN201001747Y (zh) | 2006-12-25 | 2008-01-09 | 苏州天臣国际医疗科技有限公司 | 可照明圆管型外科手术装订仪 |
| JP2008154804A (ja) | 2006-12-25 | 2008-07-10 | Cyber Firm Inc | 生体状態鑑別用装置及びレーザ血流計 |
| ES1070456Y (es) | 2007-01-02 | 2009-11-25 | La Torre Martinez Ruben De | Pinza de clampado con sistema de seguridad e identificacion |
| CN201029899Y (zh) | 2007-01-05 | 2008-03-05 | 苏州天臣国际医疗科技有限公司 | 微创外科侧侧装订器械 |
| US7900805B2 (en) | 2007-01-10 | 2011-03-08 | Ethicon Endo-Surgery, Inc. | Surgical instrument with enhanced battery performance |
| US11291441B2 (en) | 2007-01-10 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with wireless communication between control unit and remote sensor |
| US7954682B2 (en) | 2007-01-10 | 2011-06-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument with elements to communicate between control unit and end effector |
| US7738971B2 (en) | 2007-01-10 | 2010-06-15 | Ethicon Endo-Surgery, Inc. | Post-sterilization programming of surgical instruments |
| US20110174861A1 (en) | 2007-01-10 | 2011-07-21 | Shelton Iv Frederick E | Surgical Instrument With Wireless Communication Between Control Unit and Remote Sensor |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US8459520B2 (en) | 2007-01-10 | 2013-06-11 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and remote sensor |
| US7721936B2 (en) | 2007-01-10 | 2010-05-25 | Ethicon Endo-Surgery, Inc. | Interlock and surgical instrument including same |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US7721931B2 (en) | 2007-01-10 | 2010-05-25 | Ethicon Endo-Surgery, Inc. | Prevention of cartridge reuse in a surgical instrument |
| US20080169332A1 (en) | 2007-01-11 | 2008-07-17 | Shelton Frederick E | Surgical stapling device with a curved cutting member |
| US20220061862A1 (en) | 2007-01-11 | 2022-03-03 | Cilag Gmbh International | Surgical stapling device with a curved end effector |
| US11039836B2 (en) | 2007-01-11 | 2021-06-22 | Cilag Gmbh International | Staple cartridge for use with a surgical stapling instrument |
| US20080169328A1 (en) | 2007-01-11 | 2008-07-17 | Shelton Frederick E | Buttress material for use with a surgical stapler |
| AU2011218702B2 (en) | 2007-01-12 | 2013-06-06 | Ethicon Endo-Surgery, Inc | Adjustable compression staple and method for stapling with adjustable compression |
| WO2008089404A2 (en) | 2007-01-19 | 2008-07-24 | Synovis Life Technologies, Inc. | Circular stapler anvil introducer |
| EP2122798A1 (en) | 2007-01-25 | 2009-11-25 | Eveready Battery Company, Inc. | Portable power supply |
| US7753246B2 (en) | 2007-01-31 | 2010-07-13 | Tyco Healthcare Group Lp | Surgical instrument with replaceable loading unit |
| US7950562B2 (en) | 2007-01-31 | 2011-05-31 | Tyco Healthcare Group Lp | Surgical instrument with replaceable loading unit |
| US20110125149A1 (en) | 2007-02-06 | 2011-05-26 | Rizk El-Galley | Universal surgical function control system |
| US7789883B2 (en) | 2007-02-14 | 2010-09-07 | Olympus Medical Systems Corp. | Curative treatment system, curative treatment device, and treatment method for living tissue using energy |
| US20080200911A1 (en) | 2007-02-15 | 2008-08-21 | Long Gary L | Electrical ablation apparatus, system, and method |
| US7655004B2 (en) | 2007-02-15 | 2010-02-02 | Ethicon Endo-Surgery, Inc. | Electroporation ablation apparatus, system, and method |
| US20080200934A1 (en) | 2007-02-15 | 2008-08-21 | Fox William D | Surgical devices and methods using magnetic force to form an anastomosis |
| US20080262480A1 (en) | 2007-02-15 | 2008-10-23 | Stahler Gregory J | Instrument assembly for robotic instrument system |
| US20080200755A1 (en) | 2007-02-15 | 2008-08-21 | Bakos Gregory J | Method and device for retrieving suture tags |
| US20080200933A1 (en) | 2007-02-15 | 2008-08-21 | Bakos Gregory J | Surgical devices and methods for forming an anastomosis between organs by gaining access thereto through a natural orifice in the body |
| US20080200762A1 (en) | 2007-02-16 | 2008-08-21 | Stokes Michael J | Flexible endoscope shapelock |
| US7430675B2 (en) | 2007-02-16 | 2008-09-30 | Apple Inc. | Anticipatory power management for battery-powered electronic device |
| US20080196419A1 (en) | 2007-02-16 | 2008-08-21 | Serge Dube | Build-up monitoring system for refrigerated enclosures |
| EP1961433A1 (en) | 2007-02-20 | 2008-08-27 | National University of Ireland Galway | Porous substrates for implantation |
| US7681725B2 (en) | 2007-02-23 | 2010-03-23 | The Procter And Gamble Company | Container with ability to transfer a material to container content |
| US9265559B2 (en) | 2007-02-25 | 2016-02-23 | Avent, Inc. | Electrosurgical method |
| US7682367B2 (en) | 2007-02-28 | 2010-03-23 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| JP5096020B2 (ja) | 2007-03-02 | 2012-12-12 | オリエンタルモーター株式会社 | インダクタンス負荷制御装置 |
| EP1983312B1 (en) | 2007-03-05 | 2018-02-28 | LG Electronics Inc. | Automatic Liquid Dispenser And Refrigerator With The Same |
| US9888924B2 (en) | 2007-03-06 | 2018-02-13 | Covidien Lp | Wound closure material |
| US8011555B2 (en) | 2007-03-06 | 2011-09-06 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| EP3087929B1 (en) | 2007-03-06 | 2020-04-29 | Covidien LP | Surgical stapling apparatus |
| CA2678889A1 (en) | 2007-03-06 | 2008-09-12 | Tyco Healthcare Group Lp | Wound closure material |
| US20100076489A1 (en) | 2007-03-06 | 2010-03-25 | Joshua Stopek | Wound closure material |
| US8011550B2 (en) | 2009-03-31 | 2011-09-06 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| US7533790B1 (en) | 2007-03-08 | 2009-05-19 | Cardica, Inc. | Surgical stapler |
| US7815662B2 (en) | 2007-03-08 | 2010-10-19 | Ethicon Endo-Surgery, Inc. | Surgical suture anchors and deployment device |
| US20100318085A1 (en) | 2007-03-13 | 2010-12-16 | Smith & Nephew, Inc. | Internal fixation devices |
| US20110016960A1 (en) | 2007-03-13 | 2011-01-27 | Franck Debrailly | Device For Detecting Angular Position, Electric Motor, Steering Column And Reduction Gear |
| US20150127021A1 (en) | 2007-03-13 | 2015-05-07 | Longevity Surgical, Inc. | Devices for reconfiguring a portion of the gastrointestinal tract |
| EP1969919B1 (en) | 2007-03-14 | 2012-01-18 | Robert Bosch Gmbh | Hedge cutting or trimming apparatus |
| US7431188B1 (en) | 2007-03-15 | 2008-10-07 | Tyco Healthcare Group Lp | Surgical stapling apparatus with powered articulation |
| US7422136B1 (en) | 2007-03-15 | 2008-09-09 | Tyco Healthcare Group Lp | Powered surgical stapling device |
| US8727197B2 (en) | 2007-03-15 | 2014-05-20 | Ethicon Endo-Surgery, Inc. | Staple cartridge cavity configuration with cooperative surgical staple |
| US20110052660A1 (en) | 2007-03-16 | 2011-03-03 | Board Of Regents Of The University Of Texas System | Ceramic scaffolds for bone repair |
| US7776065B2 (en) | 2007-03-20 | 2010-08-17 | Symmetry Medical New Bedford Inc | End effector mechanism for a surgical instrument |
| US8308725B2 (en) | 2007-03-20 | 2012-11-13 | Minos Medical | Reverse sealing and dissection instrument |
| JP4916011B2 (ja) | 2007-03-20 | 2012-04-11 | 株式会社日立製作所 | マスタ・スレーブ式マニピュレータシステム |
| EP2139411B1 (en) | 2007-03-22 | 2017-05-03 | Covidien LP | Apparatus for forming variable height surgical fasteners |
| US8226675B2 (en) | 2007-03-22 | 2012-07-24 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US20080234709A1 (en) | 2007-03-22 | 2008-09-25 | Houser Kevin L | Ultrasonic surgical instrument and cartilage and bone shaping blades therefor |
| US8142461B2 (en) | 2007-03-22 | 2012-03-27 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8911460B2 (en) | 2007-03-22 | 2014-12-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8608745B2 (en) | 2007-03-26 | 2013-12-17 | DePuy Synthes Products, LLC | System, apparatus, and method for cutting bone during an orthopaedic surgical procedure |
| AU2008230841B2 (en) | 2007-03-26 | 2013-09-12 | Covidien Lp | Endoscopic surgical clip applier |
| US8142200B2 (en) | 2007-03-26 | 2012-03-27 | Liposonix, Inc. | Slip ring spacer and method for its use |
| US8056787B2 (en) | 2007-03-28 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting instrument with travel-indicating retraction member |
| US7490749B2 (en) | 2007-03-28 | 2009-02-17 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting instrument with manually retractable firing member |
| US20080243088A1 (en) | 2007-03-28 | 2008-10-02 | Docusys, Inc. | Radio frequency identification drug delivery device and monitoring system |
| US8893946B2 (en) | 2007-03-28 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Laparoscopic tissue thickness and clamp load measuring devices |
| US8496153B2 (en) | 2007-03-29 | 2013-07-30 | Covidien Lp | Anvil-mounted dissecting tip for surgical stapling device |
| AU2008233166B2 (en) | 2007-03-30 | 2013-05-16 | Covidien Lp | Laparoscopic port assembly |
| US8377044B2 (en) | 2007-03-30 | 2013-02-19 | Ethicon Endo-Surgery, Inc. | Detachable end effectors |
| US7630841B2 (en) | 2007-03-30 | 2009-12-08 | Texas Instruments Incorporated | Supervising and sequencing commonly driven power supplies with digital information |
| US7923144B2 (en) | 2007-03-31 | 2011-04-12 | Tesla Motors, Inc. | Tunable frangible battery pack system |
| US20080242939A1 (en) | 2007-04-02 | 2008-10-02 | William Johnston | Retractor system for internal in-situ assembly during laparoscopic surgery |
| USD570868S1 (en) | 2007-04-02 | 2008-06-10 | Tokyo Electron Limited | Computer generated image for a display panel or screen |
| JP5090045B2 (ja) | 2007-04-03 | 2012-12-05 | テルモ株式会社 | マニピュレータ及びその制御方法 |
| JP5006093B2 (ja) | 2007-04-03 | 2012-08-22 | テルモ株式会社 | マニピュレータシステム及び制御装置 |
| US20080249608A1 (en) | 2007-04-04 | 2008-10-09 | Vipul Dave | Bioabsorbable Polymer, Bioabsorbable Composite Stents |
| JP4728996B2 (ja) | 2007-04-04 | 2011-07-20 | 三菱電機株式会社 | 粒子線治療装置及び粒子線照射線量算出方法 |
| FR2914554B1 (fr) | 2007-04-05 | 2009-07-17 | Germitec Soc Par Actions Simpl | Procede de suivi de l'uitilisation d'un appareil medical. |
| US20090270898A1 (en) | 2007-04-06 | 2009-10-29 | Interlace Medical, Inc. | Tissue removal device with high reciprocation rate |
| US9427223B2 (en) | 2007-04-09 | 2016-08-30 | Creative Surgical, Llc | Frame device |
| US8006885B2 (en) | 2007-04-09 | 2011-08-30 | Tyco Healthcare Group Lp | Surgical stapling apparatus with powered retraction |
| US20080255420A1 (en) | 2007-04-10 | 2008-10-16 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| EP2139401B1 (en) | 2007-04-11 | 2014-01-08 | Covidien LP | Surgical clip applier |
| US8800837B2 (en) | 2007-04-13 | 2014-08-12 | Covidien Lp | Powered surgical instrument |
| US7950560B2 (en) | 2007-04-13 | 2011-05-31 | Tyco Healthcare Group Lp | Powered surgical instrument |
| USD582934S1 (en) | 2007-04-13 | 2008-12-16 | Samsung Electronics Co., Ltd. | Transitional video image display for portable phone |
| US20080255413A1 (en) | 2007-04-13 | 2008-10-16 | Michael Zemlok | Powered surgical instrument |
| US20080255663A1 (en) | 2007-04-13 | 2008-10-16 | Akpek Esen K | Artificial Cornea and Method of Making Same |
| JP5756289B2 (ja) | 2007-04-16 | 2015-07-29 | スミス アンド ネフュー インコーポレーテッドSmith & Nephew,Inc. | 電動外科用システム |
| US7839109B2 (en) | 2007-04-17 | 2010-11-23 | Lutron Electronics Co., Inc. | Method of controlling a motorized window treatment |
| US7708182B2 (en) | 2007-04-17 | 2010-05-04 | Tyco Healthcare Group Lp | Flexible endoluminal surgical instrument |
| US8323271B2 (en) | 2007-04-20 | 2012-12-04 | Doheny Eye Institute | Sterile surgical tray |
| ES2400538T3 (es) | 2007-04-20 | 2013-04-10 | Doheny Eye Institute | Centro quirúrgico independiente |
| DE102007019409B3 (de) | 2007-04-23 | 2008-11-13 | Lösomat Schraubtechnik Neef Gmbh | Kraftschrauber |
| JP4668946B2 (ja) | 2007-04-25 | 2011-04-13 | 株式会社デンソー | 車載エアコン用操作ユニット及びそれを用いた車載エアコン制御装置 |
| EP1986123A1 (en) | 2007-04-27 | 2008-10-29 | Italdata Ingegneria Dell'Idea S.p.A. | Data survey device, integrated with an anti-tamper system |
| US7823760B2 (en) | 2007-05-01 | 2010-11-02 | Tyco Healthcare Group Lp | Powered surgical stapling device platform |
| US8028882B2 (en) | 2007-05-01 | 2011-10-04 | Tyco Healthcare Group | Anvil position detector for a surgical stapler |
| US8486047B2 (en) | 2007-05-03 | 2013-07-16 | Covidien Lp | Packaged medical device |
| JP2007289715A (ja) | 2007-05-07 | 2007-11-08 | Olympus Corp | 超音波診断治療システム |
| US20080281332A1 (en) | 2007-05-07 | 2008-11-13 | Warsaw Orthopedic, Inc. | Surgical screwdriver |
| EP2146649A4 (en) | 2007-05-07 | 2013-08-07 | Covidien Lp | UNIFORM COMPRESSION CLAMP WITH CHANGING SIZE |
| US20080281171A1 (en) | 2007-05-08 | 2008-11-13 | Abbott Diabetes Care, Inc. | Analyte monitoring system and methods |
| US7931660B2 (en) | 2007-05-10 | 2011-04-26 | Tyco Healthcare Group Lp | Powered tacker instrument |
| JP4348714B2 (ja) | 2007-05-10 | 2009-10-21 | シャープ株式会社 | データ送信システム及びデータ送信方法 |
| WO2008141288A1 (en) | 2007-05-12 | 2008-11-20 | Barosense, Inc. | Devices and methods for stomach partitioning |
| DE102007023585B4 (de) | 2007-05-16 | 2009-08-20 | Esab Cutting Systems Gmbh | Einrichtung und Verfahren zum Einmessen von Schwenkaggregaten, insbesondere an Schneidmaschinen |
| US7823761B2 (en) | 2007-05-16 | 2010-11-02 | The Invention Science Fund I, Llc | Maneuverable surgical stapler |
| US7832611B2 (en) | 2007-05-16 | 2010-11-16 | The Invention Science Fund I, Llc | Steerable surgical stapler |
| US7810691B2 (en) | 2007-05-16 | 2010-10-12 | The Invention Science Fund I, Llc | Gentle touch surgical stapler |
| US9545258B2 (en) | 2007-05-17 | 2017-01-17 | Boston Scientific Scimed, Inc. | Tissue aperture securing and sealing apparatuses and related methods of use |
| US8910846B2 (en) | 2007-05-17 | 2014-12-16 | Covidien Lp | Gear driven knife drive mechanism |
| US7981102B2 (en) | 2007-05-21 | 2011-07-19 | Asante Solutions, Inc. | Removable controller for an infusion pump |
| US20080293910A1 (en) | 2007-05-24 | 2008-11-27 | Tyco Healthcare Group Lp | Adhesive formulatiions |
| US8038045B2 (en) | 2007-05-25 | 2011-10-18 | Tyco Healthcare Group Lp | Staple buttress retention system |
| US7810693B2 (en) | 2007-05-30 | 2010-10-12 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting instrument with articulatable end effector |
| US8943780B1 (en) | 2007-05-30 | 2015-02-03 | Walgreen Co. | Method and system for verification of product transfer from an intermediate loading cartridge to a multi-container blister pack |
| US7798386B2 (en) | 2007-05-30 | 2010-09-21 | Ethicon Endo-Surgery, Inc. | Surgical instrument articulation joint cover |
| US7549564B2 (en) | 2007-06-22 | 2009-06-23 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an articulating end effector |
| US20080297287A1 (en) | 2007-05-30 | 2008-12-04 | Magnetecs, Inc. | Magnetic linear actuator for deployable catheter tools |
| US8157145B2 (en) | 2007-05-31 | 2012-04-17 | Ethicon Endo-Surgery, Inc. | Pneumatically powered surgical cutting and fastening instrument with electrical feedback |
| US20080296346A1 (en) | 2007-05-31 | 2008-12-04 | Shelton Iv Frederick E | Pneumatically powered surgical cutting and fastening instrument with electrical control and recording mechanisms |
| US7939152B2 (en) | 2007-06-01 | 2011-05-10 | M-Tech Corporation | Heat-shrinkable anti-fomitic device |
| KR101349639B1 (ko) | 2007-06-04 | 2014-01-09 | 타이코 일렉트로닉스 저팬 지.케이. | 일체형 감지스위치를 갖는 메모리카드 및 sim카드장착소켓 |
| US7819299B2 (en) | 2007-06-04 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a common trigger for actuating an end effector closing system and a staple firing system |
| US7832408B2 (en) | 2007-06-04 | 2010-11-16 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a directional switching mechanism |
| US7905380B2 (en) | 2007-06-04 | 2011-03-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a multiple rate directional switching mechanism |
| US20080298784A1 (en) | 2007-06-04 | 2008-12-04 | Mark Allen Kastner | Method of Sensing Speed of Electric Motors and Generators |
| US8534528B2 (en) | 2007-06-04 | 2013-09-17 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a multiple rate directional switching mechanism |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US7780309B2 (en) | 2007-06-05 | 2010-08-24 | Eveready Battery Company, Inc. | Preparedness flashlight |
| US8016841B2 (en) | 2007-06-11 | 2011-09-13 | Novus Scientific Pte. Ltd. | Mesh implant with an interlocking knitted structure |
| US8899460B2 (en) | 2007-06-12 | 2014-12-02 | Black & Decker Inc. | Magazine assembly for nailer |
| JP2008307383A (ja) | 2007-06-12 | 2008-12-25 | Tyco Healthcare Group Lp | 外科手術用ファスナー |
| US8620473B2 (en) | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US9096033B2 (en) | 2007-06-13 | 2015-08-04 | Intuitive Surgical Operations, Inc. | Surgical system instrument sterile adapter |
| US7588176B2 (en) | 2007-06-18 | 2009-09-15 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument with improved closure system |
| US7665646B2 (en) | 2007-06-18 | 2010-02-23 | Tyco Healthcare Group Lp | Interlocking buttress material retention system |
| US7950561B2 (en) | 2007-06-18 | 2011-05-31 | Tyco Healthcare Group Lp | Structure for attachment of buttress material to anvils and cartridges of surgical staplers |
| USD578644S1 (en) | 2007-06-20 | 2008-10-14 | Abbott Laboratories | Medical device delivery handle |
| US7604150B2 (en) | 2007-06-22 | 2009-10-20 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an anti-back up mechanism |
| US8308040B2 (en) | 2007-06-22 | 2012-11-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an articulatable end effector |
| TR201808012T4 (tr) | 2007-06-22 | 2018-06-21 | Medical Components Inc | Hemostaz valfi ile yırtmalı kın düzeneği. |
| US7597229B2 (en) | 2007-06-22 | 2009-10-06 | Ethicon Endo-Surgery, Inc. | End effector closure system for a surgical stapling instrument |
| US7441685B1 (en) | 2007-06-22 | 2008-10-28 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with a return mechanism |
| US7658311B2 (en) | 2007-06-22 | 2010-02-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with a geared return mechanism |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US8062330B2 (en) | 2007-06-27 | 2011-11-22 | Tyco Healthcare Group Lp | Buttress and surgical stapling apparatus |
| US20090004455A1 (en) | 2007-06-27 | 2009-01-01 | Philippe Gravagna | Reinforced composite implant |
| US10219832B2 (en) | 2007-06-29 | 2019-03-05 | Actuated Medical, Inc. | Device and method for less forceful tissue puncture |
| US8093572B2 (en) | 2007-06-29 | 2012-01-10 | Accuray Incorporated | Integrated variable-aperture collimator and fixed-aperture collimator |
| CA2698728C (en) | 2007-06-29 | 2016-08-02 | Ethicon Endo-Surgery, Inc. | Washer for use with a surgical stapling instrument |
| CN101873834B (zh) | 2007-06-29 | 2012-12-05 | 伊西康内外科公司 | 与外科手术缝合器械一起使用的垫圈 |
| DE102007031008A1 (de) | 2007-07-04 | 2009-01-08 | Braun Gmbh | Vorrichtung mit elektrischem Gerät und Ladestation |
| US7600663B2 (en) | 2007-07-05 | 2009-10-13 | Green David T | Apparatus for stapling and incising tissue |
| US8758366B2 (en) | 2007-07-09 | 2014-06-24 | Neotract, Inc. | Multi-actuating trigger anchor delivery system |
| US9358113B2 (en) | 2007-07-10 | 2016-06-07 | Warsaw Orthopedic, Inc. | Delivery system |
| US8348972B2 (en) | 2007-07-11 | 2013-01-08 | Covidien Lp | Surgical staple with augmented compression area |
| US7967791B2 (en) | 2007-07-23 | 2011-06-28 | Ethicon Endo-Surgery, Inc. | Surgical access device |
| US9539061B2 (en) | 2007-07-25 | 2017-01-10 | Karl Storz Gmbh & Co. Kg | Medical manipulator and welding method |
| JP2009028157A (ja) | 2007-07-25 | 2009-02-12 | Terumo Corp | 医療用マニピュレータシステム |
| WO2009012601A1 (en) | 2007-07-26 | 2009-01-29 | Sanofi Pasteur Limited | Antigen-adjuvant compositions and methods |
| US8808319B2 (en) | 2007-07-27 | 2014-08-19 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| JP5042738B2 (ja) | 2007-07-30 | 2012-10-03 | テルモ株式会社 | 医療用マニピュレータの作業機構及び洗浄方法 |
| US8430898B2 (en) | 2007-07-31 | 2013-04-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US9044261B2 (en) | 2007-07-31 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Temperature controlled ultrasonic surgical instruments |
| JP4365894B2 (ja) | 2007-08-07 | 2009-11-18 | パナソニック株式会社 | 炭化珪素半導体素子の製造方法 |
| US7747146B2 (en) | 2007-08-08 | 2010-06-29 | Allegro Microsystems, Inc. | Motor controller having a multifunction port |
| US7787256B2 (en) | 2007-08-10 | 2010-08-31 | Gore Enterprise Holdings, Inc. | Tamper respondent system |
| US8202549B2 (en) | 2007-08-14 | 2012-06-19 | The Regents Of The University Of California | Mesocellular oxide foams as hemostatic compositions and methods of use |
| US20090048589A1 (en) | 2007-08-14 | 2009-02-19 | Tomoyuki Takashino | Treatment device and treatment method for living tissue |
| US7556185B2 (en) | 2007-08-15 | 2009-07-07 | Tyco Healthcare Group Lp | Surgical instrument with flexible drive mechanism |
| WO2009023851A1 (en) | 2007-08-15 | 2009-02-19 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US7714334B2 (en) | 2007-08-16 | 2010-05-11 | Lin Peter P W | Polarless surface mounting light emitting diode |
| US8165663B2 (en) | 2007-10-03 | 2012-04-24 | The Invention Science Fund I, Llc | Vasculature and lymphatic system imaging and ablation |
| JP2009050288A (ja) | 2007-08-23 | 2009-03-12 | Terumo Corp | 医療用マニピュレータの作業機構 |
| US9005238B2 (en) | 2007-08-23 | 2015-04-14 | Covidien Lp | Endoscopic surgical devices |
| US7967181B2 (en) | 2007-08-29 | 2011-06-28 | Tyco Healthcare Group Lp | Rotary knife cutting systems |
| US8465515B2 (en) | 2007-08-29 | 2013-06-18 | Ethicon Endo-Surgery, Inc. | Tissue retractors |
| KR101387404B1 (ko) | 2007-08-30 | 2014-04-21 | 삼성전자주식회사 | 디지털 영상 처리장치의 제어장치 및 그 방법 |
| US8061576B2 (en) | 2007-08-31 | 2011-11-22 | Tyco Healthcare Group Lp | Surgical instrument |
| US8262655B2 (en) | 2007-11-21 | 2012-09-11 | Ethicon Endo-Surgery, Inc. | Bipolar forceps |
| US8579897B2 (en) | 2007-11-21 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Bipolar forceps |
| JP2009056164A (ja) | 2007-08-31 | 2009-03-19 | Terumo Corp | 医療用マニピュレータシステム |
| US7624902B2 (en) | 2007-08-31 | 2009-12-01 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| US9168039B1 (en) | 2007-09-06 | 2015-10-27 | Cardica, Inc. | Surgical stapler with staples of different sizes |
| FR2920683B1 (fr) | 2007-09-06 | 2010-02-12 | Pellenc Sa | Appareils electroportatifs polyvalents. |
| US7988026B2 (en) | 2007-09-06 | 2011-08-02 | Cardica, Inc. | Endocutter with staple feed |
| US8257386B2 (en) | 2007-09-11 | 2012-09-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| GB2452720A (en) | 2007-09-11 | 2009-03-18 | Ethicon Inc | Wound dressing with an antimicrobial absorbent layer and an apertured cover sheet |
| US8556151B2 (en) | 2007-09-11 | 2013-10-15 | Covidien Lp | Articulating joint for surgical instruments |
| US8317790B2 (en) | 2007-09-14 | 2012-11-27 | W. L. Gore & Associates, Inc. | Surgical staple line reinforcements |
| US20090076506A1 (en) | 2007-09-18 | 2009-03-19 | Surgrx, Inc. | Electrosurgical instrument and method |
| EP2039302A3 (en) | 2007-09-18 | 2009-06-10 | Ethicon Endo-Surgery, Inc. | Devices for reduction of post operative ileus |
| US7513407B1 (en) | 2007-09-20 | 2009-04-07 | Acuman Power Tools Corp. | Counterforce-counteracting device for a nailer |
| AU2008302039B2 (en) * | 2007-09-21 | 2013-07-18 | Covidien Lp | Surgical device |
| JP5357161B2 (ja) | 2007-09-21 | 2013-12-04 | コヴィディエン リミテッド パートナーシップ | 外科用装置 |
| US9023014B2 (en) | 2007-09-21 | 2015-05-05 | Covidien Lp | Quick connect assembly for use between surgical handle assembly and surgical accessories |
| US8678263B2 (en) | 2007-09-24 | 2014-03-25 | Covidien Lp | Materials delivery system for stapling device |
| US9597080B2 (en) | 2007-09-24 | 2017-03-21 | Covidien Lp | Insertion shroud for surgical instrument |
| US8721666B2 (en) | 2007-09-26 | 2014-05-13 | Ethicon, Inc. | Method of facial reconstructive surgery using a self-anchoring tissue lifting device |
| US20090088659A1 (en) | 2007-09-27 | 2009-04-02 | Immersion Corporation | Biological Sensing With Haptic Feedback |
| US7703653B2 (en) | 2007-09-28 | 2010-04-27 | Tyco Healthcare Group Lp | Articulation mechanism for surgical instrument |
| US20090132400A1 (en) | 2007-09-28 | 2009-05-21 | Verizon Services Organization Inc. | Data metering |
| US9050120B2 (en) | 2007-09-30 | 2015-06-09 | Intuitive Surgical Operations, Inc. | Apparatus and method of user interface with alternate tool mode for robotic surgical tools |
| US8084969B2 (en) | 2007-10-01 | 2011-12-27 | Allegro Microsystems, Inc. | Hall-effect based linear motor controller |
| US9707003B2 (en) | 2007-10-02 | 2017-07-18 | Covidien Lp | Articulating surgical instrument |
| US8285367B2 (en) | 2007-10-05 | 2012-10-09 | The Invention Science Fund I, Llc | Vasculature and lymphatic system imaging and ablation associated with a reservoir |
| US7945798B2 (en) | 2007-10-03 | 2011-05-17 | Lenovo (Singapore) Pte. Ltd. | Battery pack for portable computer |
| US8960520B2 (en) | 2007-10-05 | 2015-02-24 | Covidien Lp | Method and apparatus for determining parameters of linear motion in a surgical instrument |
| US10271844B2 (en) | 2009-04-27 | 2019-04-30 | Covidien Lp | Surgical stapling apparatus employing a predictive stapling algorithm |
| US20130214025A1 (en) | 2007-10-05 | 2013-08-22 | Covidien Lp | Powered surgical stapling device |
| US8517241B2 (en) | 2010-04-16 | 2013-08-27 | Covidien Lp | Hand-held surgical devices |
| US10498269B2 (en) | 2007-10-05 | 2019-12-03 | Covidien Lp | Powered surgical stapling device |
| EP2044888B1 (en) * | 2007-10-05 | 2016-12-07 | Covidien LP | Articulation mechanism for a surgical instrument |
| US10500309B2 (en) | 2007-10-05 | 2019-12-10 | Cook Biotech Incorporated | Absorbable adhesives and their formulation for use in medical applications |
| US20110022032A1 (en) | 2007-10-05 | 2011-01-27 | Tyco Healthcare Group Lp | Battery ejection design for a surgical device |
| US8967443B2 (en) | 2007-10-05 | 2015-03-03 | Covidien Lp | Method and apparatus for determining parameters of linear motion in a surgical instrument |
| US10779818B2 (en) | 2007-10-05 | 2020-09-22 | Covidien Lp | Powered surgical stapling device |
| US8012170B2 (en) | 2009-04-27 | 2011-09-06 | Tyco Healthcare Group Lp | Device and method for controlling compression of tissue |
| JP5426558B2 (ja) | 2007-10-08 | 2014-02-26 | ゴア エンタープライズ ホールディングス,インコーポレイティド | 外科用ステープルラインの補強材を供給するための装置 |
| US20120289979A1 (en) | 2007-10-08 | 2012-11-15 | Sherif Eskaros | Apparatus for Supplying Surgical Staple Line Reinforcement |
| US8044536B2 (en) | 2007-10-10 | 2011-10-25 | Ams Research Corporation | Powering devices having low and high voltage circuits |
| US8992409B2 (en) | 2007-10-11 | 2015-03-31 | Peter Forsell | Method for controlling flow in a bodily organ |
| US20090099579A1 (en) | 2007-10-16 | 2009-04-16 | Tyco Healthcare Group Lp | Self-adherent implants and methods of preparation |
| EP2752169B1 (en) | 2007-10-17 | 2015-10-14 | Davol, Inc. | Fixating means between a mesh and mesh deployment means especially useful for hernia repair surgeries |
| CN101188900B (zh) | 2007-10-17 | 2011-07-20 | 廖云峰 | 双床双管医用诊断x射线高频高压发生器 |
| US7945792B2 (en) | 2007-10-17 | 2011-05-17 | Spansion Llc | Tamper reactive memory device to secure data from tamper attacks |
| EP2052678A1 (de) | 2007-10-24 | 2009-04-29 | F. Hoffmann-Roche AG | Medizinisches System mit Verbrauchsmittel-Überwachung |
| US8142425B2 (en) | 2007-10-30 | 2012-03-27 | Hemostatix Medical Techs, LLC | Hemostatic surgical blade, system and method of blade manufacture |
| CN101203085B (zh) | 2007-10-30 | 2011-08-10 | 杨扬 | 医用诊断x射线高频高压发生器 |
| JP5011067B2 (ja) | 2007-10-31 | 2012-08-29 | 株式会社東芝 | マニピュレータシステム |
| US20090112234A1 (en) | 2007-10-31 | 2009-04-30 | Lawrence Crainich | Reloadable laparoscopic fastener deploying device for use in a gastric volume reduction procedure |
| US7922063B2 (en) | 2007-10-31 | 2011-04-12 | Tyco Healthcare Group, Lp | Powered surgical instrument |
| WO2009059055A2 (en) | 2007-10-31 | 2009-05-07 | Cordis Corporation | Method of making a vascular closure device |
| US20090118762A1 (en) | 2007-10-31 | 2009-05-07 | Lawrence Crainch | Disposable cartridge for use in a gastric volume reduction procedure |
| JP5364255B2 (ja) | 2007-10-31 | 2013-12-11 | テルモ株式会社 | 医療用マニピュレータ |
| KR100877721B1 (ko) | 2007-11-05 | 2009-01-07 | (주)건양트루넷 | 리벳팅장치 |
| US7954685B2 (en) | 2007-11-06 | 2011-06-07 | Tyco Healthcare Group Lp | Articulation and firing force mechanisms |
| US7954687B2 (en) | 2007-11-06 | 2011-06-07 | Tyco Healthcare Group Lp | Coated surgical staples and an illuminated staple cartridge for a surgical stapling instrument |
| JP2009115640A (ja) | 2007-11-07 | 2009-05-28 | Honda Motor Co Ltd | ナビゲーション装置 |
| CN101854928A (zh) | 2007-11-08 | 2010-10-06 | 希普洛有限公司 | 包含燕麦蒽酰胺的组合物 |
| US8425600B2 (en) | 2007-11-14 | 2013-04-23 | G. Patrick Maxwell | Interfaced medical implant assembly |
| US8125168B2 (en) | 2007-11-19 | 2012-02-28 | Honeywell International Inc. | Motor having controllable torque |
| US20090131819A1 (en) | 2007-11-20 | 2009-05-21 | Ritchie Paul G | User Interface On Biopsy Device |
| AU2008327660B2 (en) | 2007-11-21 | 2014-02-13 | Smith & Nephew Plc | Wound dressing |
| WO2009067649A2 (en) | 2007-11-21 | 2009-05-28 | Ethicon Endo-Surgery, Inc. | Bipolar forceps having a cutting element |
| CA2954433C (en) | 2007-11-21 | 2022-08-09 | Smith & Nephew Plc | Wound dressing |
| GB0722820D0 (en) | 2007-11-21 | 2008-01-02 | Smith & Nephew | Vacuum assisted wound dressing |
| US8457757B2 (en) | 2007-11-26 | 2013-06-04 | Micro Transponder, Inc. | Implantable transponder systems and methods |
| DE102007057033A1 (de) | 2007-11-27 | 2009-05-28 | Robert Bosch Gmbh | Elektrisch antreibbare Handwerkzeugmaschine |
| US7791009B2 (en) | 2007-11-27 | 2010-09-07 | University Of Washington | Eliminating illumination crosstalk while using multiple imaging devices with plural scanning devices, each coupled to an optical fiber |
| US8377059B2 (en) | 2007-11-28 | 2013-02-19 | Covidien Ag | Cordless medical cauterization and cutting device |
| JP5283209B2 (ja) | 2007-11-29 | 2013-09-04 | マニー株式会社 | 医療用ステイプル |
| US20090143855A1 (en) | 2007-11-29 | 2009-06-04 | Boston Scientific Scimed, Inc. | Medical Device Including Drug-Loaded Fibers |
| WO2009073577A2 (en) | 2007-11-29 | 2009-06-11 | Surgiquest, Inc. | Surgical instruments with improved dexterity for use in minimally invasive surgical procedures |
| JP5377944B2 (ja) | 2007-11-30 | 2013-12-25 | 住友ベークライト株式会社 | 胃瘻用シース、シース付きダイレータ、挿入補助具付き胃瘻用シース、胃瘻カテーテルキット |
| US9314261B2 (en) | 2007-12-03 | 2016-04-19 | Covidien Ag | Battery-powered hand-held ultrasonic surgical cautery cutting device |
| US9107690B2 (en) | 2007-12-03 | 2015-08-18 | Covidien Ag | Battery-powered hand-held ultrasonic surgical cautery cutting device |
| US8435257B2 (en) | 2007-12-03 | 2013-05-07 | Covidien Ag | Cordless hand-held ultrasonic cautery cutting device and method |
| US8663262B2 (en) | 2007-12-03 | 2014-03-04 | Covidien Ag | Battery assembly for battery-powered surgical instruments |
| US20090143800A1 (en) | 2007-12-03 | 2009-06-04 | Derek Dee Deville | Cordless Hand-Held Ultrasonic Cautery Cutting Device |
| US7772720B2 (en) | 2007-12-03 | 2010-08-10 | Spx Corporation | Supercapacitor and charger for secondary power |
| US8338726B2 (en) | 2009-08-26 | 2012-12-25 | Covidien Ag | Two-stage switch for cordless hand-held ultrasonic cautery cutting device |
| US9017355B2 (en) | 2007-12-03 | 2015-04-28 | Covidien Ag | Battery-powered hand-held ultrasonic surgical cautery cutting device |
| US8061014B2 (en) | 2007-12-03 | 2011-11-22 | Covidien Ag | Method of assembling a cordless hand-held ultrasonic cautery cutting device |
| US8511308B2 (en) | 2007-12-06 | 2013-08-20 | Cpair, Inc. | CPR system with feed back instruction |
| US8319002B2 (en) | 2007-12-06 | 2012-11-27 | Nanosys, Inc. | Nanostructure-enhanced platelet binding and hemostatic structures |
| JP5235394B2 (ja) | 2007-12-06 | 2013-07-10 | 株式会社ハーモニック・エイディ | 切替式回転駆動装置 |
| US8180458B2 (en) | 2007-12-17 | 2012-05-15 | Thermage, Inc. | Method and apparatus for digital signal processing for radio frequency surgery measurements |
| AU2008345557B2 (en) | 2007-12-21 | 2014-11-27 | Smith & Nephew, Inc. | Surgical drilling aimer |
| US8352004B2 (en) | 2007-12-21 | 2013-01-08 | Covidien Lp | Medical sensor and technique for using the same |
| JP5071103B2 (ja) | 2007-12-29 | 2012-11-14 | ブラザー工業株式会社 | 表示体及び表示体構造 |
| US20090171147A1 (en) | 2007-12-31 | 2009-07-02 | Woojin Lee | Surgical instrument |
| TWI348086B (en) | 2008-01-02 | 2011-09-01 | Mstar Semiconductor Inc | Dc power converter and mode-switching method |
| US8727199B2 (en) | 2008-01-03 | 2014-05-20 | Covidien Lp | Surgical stapler |
| US9192376B2 (en) | 2008-01-04 | 2015-11-24 | Luis Jose Almodovar | Rotational driver |
| JP5116490B2 (ja) | 2008-01-08 | 2013-01-09 | 株式会社マキタ | モータ制御装置とそれを用いた電動工具 |
| JP5535084B2 (ja) | 2008-01-10 | 2014-07-02 | コヴィディエン リミテッド パートナーシップ | 外科用デバイスのための撮像システム |
| US8647258B2 (en) | 2008-01-10 | 2014-02-11 | Covidien Lp | Apparatus for endoscopic procedures |
| US8031069B2 (en) | 2008-01-14 | 2011-10-04 | Oded Yair Cohn | Electronic security seal and system |
| US20090181290A1 (en) | 2008-01-14 | 2009-07-16 | Travis Baldwin | System and Method for an Automated Battery Arrangement |
| US8490851B2 (en) | 2008-01-15 | 2013-07-23 | Covidien Lp | Surgical stapling apparatus |
| WO2009091497A2 (en) | 2008-01-16 | 2009-07-23 | John Hyoung Kim | Minimally invasive surgical instrument |
| JP5583601B2 (ja) | 2008-01-25 | 2014-09-03 | スミス アンド ネフュー ピーエルシー | 多層足場 |
| US8192350B2 (en) | 2008-01-28 | 2012-06-05 | Ethicon Endo-Surgery, Inc. | Methods and devices for measuring impedance in a gastric restriction system |
| WO2009096857A1 (en) | 2008-01-29 | 2009-08-06 | Milux Holding Sa | A device, system and method for treating obesity |
| WO2009097468A2 (en) | 2008-01-29 | 2009-08-06 | Kliman Gilbert H | Drug delivery devices, kits and methods therefor |
| US20090192534A1 (en) | 2008-01-29 | 2009-07-30 | Ethicon Endo-Surgery, Inc. | Sensor trigger |
| US8006365B2 (en) | 2008-01-30 | 2011-08-30 | Easylap Ltd. | Device and method for applying rotary tacks |
| JP4672031B2 (ja) | 2008-01-31 | 2011-04-20 | オリンパスメディカルシステムズ株式会社 | 医療器具 |
| CN101219648B (zh) | 2008-01-31 | 2010-12-08 | 北京经纬恒润科技有限公司 | 车灯转向驱动装置 |
| US20100249947A1 (en) | 2009-03-27 | 2010-09-30 | Evera Medical, Inc. | Porous implant with effective extensibility and methods of forming an implant |
| US20090198272A1 (en) | 2008-02-06 | 2009-08-06 | Lawrence Kerver | Method and apparatus for articulating the wrist of a laparoscopic grasping instrument |
| US8870867B2 (en) | 2008-02-06 | 2014-10-28 | Aesculap Ag | Articulable electrosurgical instrument with a stabilizable articulation actuator |
| US8114345B2 (en) | 2008-02-08 | 2012-02-14 | Ethicon Endo-Surgery, Inc. | System and method of sterilizing an implantable medical device |
| US8561870B2 (en) | 2008-02-13 | 2013-10-22 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument |
| US8453908B2 (en) | 2008-02-13 | 2013-06-04 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with improved firing trigger arrangement |
| US7766209B2 (en) | 2008-02-13 | 2010-08-03 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with improved firing trigger arrangement |
| US8540133B2 (en) | 2008-09-19 | 2013-09-24 | Ethicon Endo-Surgery, Inc. | Staple cartridge |
| US7810692B2 (en) | 2008-02-14 | 2010-10-12 | Ethicon Endo-Surgery, Inc. | Disposable loading unit with firing indicator |
| US8657174B2 (en) | 2008-02-14 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument having handle based power source |
| US7913891B2 (en) | 2008-02-14 | 2011-03-29 | Ethicon Endo-Surgery, Inc. | Disposable loading unit with user feedback features and surgical instrument for use therewith |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| BRPI0901282A2 (pt) | 2008-02-14 | 2009-11-17 | Ethicon Endo Surgery Inc | instrumento cirúrgico de corte e fixação dotado de eletrodos de rf |
| US7819297B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with reprocessible handle assembly |
| US8622274B2 (en) | 2008-02-14 | 2014-01-07 | Ethicon Endo-Surgery, Inc. | Motorized cutting and fastening instrument having control circuit for optimizing battery usage |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US7793812B2 (en) | 2008-02-14 | 2010-09-14 | Ethicon Endo-Surgery, Inc. | Disposable motor-driven loading unit for use with a surgical cutting and stapling apparatus |
| US8584919B2 (en) | 2008-02-14 | 2013-11-19 | Ethicon Endo-Sugery, Inc. | Surgical stapling apparatus with load-sensitive firing mechanism |
| US8459525B2 (en) | 2008-02-14 | 2013-06-11 | Ethicon Endo-Sugery, Inc. | Motorized surgical cutting and fastening instrument having a magnetic drive train torque limiting device |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US7861906B2 (en) | 2008-02-14 | 2011-01-04 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with articulatable components |
| US7819296B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with retractable firing systems |
| US7857185B2 (en) | 2008-02-14 | 2010-12-28 | Ethicon Endo-Surgery, Inc. | Disposable loading unit for surgical stapling apparatus |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| US8752749B2 (en) | 2008-02-14 | 2014-06-17 | Ethicon Endo-Surgery, Inc. | Robotically-controlled disposable motor-driven loading unit |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US20090206133A1 (en) | 2008-02-14 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | Articulatable loading units for surgical stapling and cutting instruments |
| JP5496520B2 (ja) | 2008-02-14 | 2014-05-21 | エシコン・エンド−サージェリィ・インコーポレイテッド | バッテリ使用を最適化するための制御回路を有する、モーター付き切断・固定器具 |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US8608044B2 (en) | 2008-02-15 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Feedback and lockout mechanism for surgical instrument |
| US8398673B2 (en) | 2008-02-15 | 2013-03-19 | Surgical Innovations V.O.F. | Surgical instrument for grasping and cutting tissue |
| US20090206131A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | End effector coupling arrangements for a surgical cutting and stapling instrument |
| US8047100B2 (en) | 2008-02-15 | 2011-11-01 | Black & Decker Inc. | Tool assembly having telescoping fastener support |
| JP5507093B2 (ja) | 2008-02-15 | 2014-05-28 | エシコン・エンド−サージェリィ・インコーポレイテッド | 支持体保持特徴部を有する外科手術用エンドエフェクタ |
| US9585657B2 (en) | 2008-02-15 | 2017-03-07 | Ethicon Endo-Surgery, Llc | Actuator for releasing a layer of material from a surgical end effector |
| US20090206137A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | Disposable loading units for a surgical cutting and stapling instrument |
| US7959051B2 (en) | 2008-02-15 | 2011-06-14 | Ethicon Endo-Surgery, Inc. | Closure systems for a surgical cutting and stapling instrument |
| US11272927B2 (en) | 2008-02-15 | 2022-03-15 | Cilag Gmbh International | Layer arrangements for surgical staple cartridges |
| US20090206139A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | Buttress material for a surgical instrument |
| US7980443B2 (en) | 2008-02-15 | 2011-07-19 | Ethicon Endo-Surgery, Inc. | End effectors for a surgical cutting and stapling instrument |
| WO2009105479A1 (en) | 2008-02-18 | 2009-08-27 | Texas Scottish Rite Hospital For Children | Tool and method for external fixation strut adjustment |
| JP5377991B2 (ja) | 2008-02-26 | 2013-12-25 | テルモ株式会社 | マニピュレータ |
| JP2009207260A (ja) | 2008-02-27 | 2009-09-10 | Denso Corp | モータ制御装置 |
| US8733611B2 (en) | 2008-03-12 | 2014-05-27 | Covidien Lp | Ratcheting mechanism for surgical stapling device |
| US8118206B2 (en) | 2008-03-15 | 2012-02-21 | Surgisense Corporation | Sensing adjunct for surgical staplers |
| US20090234273A1 (en) | 2008-03-17 | 2009-09-17 | Alfred Intoccia | Surgical trocar with feedback |
| US8020741B2 (en) | 2008-03-18 | 2011-09-20 | Barosense, Inc. | Endoscopic stapling devices and methods |
| US8328802B2 (en) | 2008-03-19 | 2012-12-11 | Covidien Ag | Cordless medical cauterization and cutting device |
| US8491581B2 (en) | 2008-03-19 | 2013-07-23 | Covidien Ag | Method for powering a surgical instrument |
| US8197501B2 (en) | 2008-03-20 | 2012-06-12 | Medtronic Xomed, Inc. | Control for a powered surgical instrument |
| JP2009226028A (ja) | 2008-03-24 | 2009-10-08 | Terumo Corp | マニピュレータ |
| US20090247901A1 (en) | 2008-03-25 | 2009-10-01 | Brian Zimmer | Latching side removal spacer |
| EP2272235B1 (en) | 2008-03-25 | 2018-05-30 | Alcatel Lucent | Methods and entities using ipsec esp to support security functionality for udp-based oma enablers |
| US8136713B2 (en) | 2008-03-25 | 2012-03-20 | Tyco Healthcare Group Lp | Surgical stapling instrument having transducer effecting vibrations |
| US20090242610A1 (en) | 2008-03-26 | 2009-10-01 | Shelton Iv Frederick E | Disposable loading unit and surgical instruments including same |
| US8317744B2 (en) | 2008-03-27 | 2012-11-27 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter manipulator assembly |
| US8684962B2 (en) | 2008-03-27 | 2014-04-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter device cartridge |
| US8808164B2 (en) | 2008-03-28 | 2014-08-19 | Intuitive Surgical Operations, Inc. | Controlling a robotic surgical tool with a display monitor |
| US20090248100A1 (en) | 2008-03-28 | 2009-10-01 | Defibtech, Llc | System and Method for Conditioning a Lithium Battery in an Automatic External Defibrillator |
| EP2359762B1 (en) | 2008-03-31 | 2013-03-06 | Applied Medical Resources Corporation | Electrosurgical system selectively configurable for cutting or coagulation |
| JP2009240605A (ja) | 2008-03-31 | 2009-10-22 | Gc Corp | 細胞工学用支持体及びその製造方法 |
| US7843158B2 (en) | 2008-03-31 | 2010-11-30 | Intuitive Surgical Operations, Inc. | Medical robotic system adapted to inhibit motions resulting in excessive end effector forces |
| US7886743B2 (en) | 2008-03-31 | 2011-02-15 | Intuitive Surgical Operations, Inc. | Sterile drape interface for robotic surgical instrument |
| US20090247368A1 (en) | 2008-03-31 | 2009-10-01 | Boson Technology Co., Ltd. | Sports health care apparatus with physiological monitoring function |
| US10368838B2 (en) | 2008-03-31 | 2019-08-06 | Intuitive Surgical Operations, Inc. | Surgical tools for laser marking and laser cutting |
| US9895813B2 (en) | 2008-03-31 | 2018-02-20 | Intuitive Surgical Operations, Inc. | Force and torque sensing in a surgical robot setup arm |
| WO2009146090A1 (en) | 2008-04-01 | 2009-12-03 | Cardiomems, Inc. | Strain monitoring system and apparatus |
| FR2929544B1 (fr) | 2008-04-02 | 2010-09-03 | Facom | Appareil electrique portatif autonome a verrouillage du bloc d'alimentation electrique. |
| US8534527B2 (en) | 2008-04-03 | 2013-09-17 | Black & Decker Inc. | Cordless framing nailer |
| JP5301867B2 (ja) | 2008-04-07 | 2013-09-25 | オリンパスメディカルシステムズ株式会社 | 医療用マニピュレータシステム |
| JP5145103B2 (ja) | 2008-04-08 | 2013-02-13 | ローム株式会社 | インバータおよびその制御回路、制御方法、ならびにそれらを用いた液晶ディスプレイ装置 |
| DE102008018158A1 (de) | 2008-04-10 | 2009-10-15 | Aesculap Ag | Ligaturklammermagazin und Lagerkörper zur Verwendung in diesem |
| US8231040B2 (en) | 2008-04-14 | 2012-07-31 | Tyco Healthcare Group Lp | Variable compression surgical fastener cartridge |
| US8100310B2 (en) | 2008-04-14 | 2012-01-24 | Tyco Healthcare Group Lp | Variable compression surgical fastener apparatus |
| US8231041B2 (en) | 2008-04-14 | 2012-07-31 | Tyco Healthcare Group Lp | Variable compression surgical fastener cartridge |
| US20090255974A1 (en) | 2008-04-14 | 2009-10-15 | Tyco Healthcare Group Lp | Single loop surgical fastener apparatus for applying variable compression |
| US7926691B2 (en) | 2008-04-14 | 2011-04-19 | Tyco Healthcare Group, L.P. | Variable compression surgical fastener cartridge |
| US8170241B2 (en) | 2008-04-17 | 2012-05-01 | Intouch Technologies, Inc. | Mobile tele-presence system with a microphone system |
| US20090261141A1 (en) | 2008-04-18 | 2009-10-22 | Stratton Lawrence D | Ergonomic stapler and method for setting staples |
| US20090262078A1 (en) | 2008-04-21 | 2009-10-22 | David Pizzi | Cellular phone with special sensor functions |
| US8021375B2 (en) | 2008-04-21 | 2011-09-20 | Conmed Corporation | Surgical clip applicator |
| US8028884B2 (en) | 2008-04-22 | 2011-10-04 | Tyco Healthcare Group Lp | Cartridge for applying varying amounts of tissue compression |
| US8357158B2 (en) | 2008-04-22 | 2013-01-22 | Covidien Lp | Jaw closure detection system |
| EP2283784B1 (en) | 2008-04-30 | 2016-06-22 | Educational Foundation Jichi Medical University | Surgical system for natural orifice transluminal endoscopic surgery (notes) |
| US7997468B2 (en) | 2008-05-05 | 2011-08-16 | Tyco Healthcare Group Lp | Surgical instrument with clamp |
| CA2665017A1 (en) | 2008-05-05 | 2009-11-05 | Tyco Healthcare Group Lp | Surgical instrument with sequential clamping and cutting |
| EP2271275B1 (en) | 2008-05-05 | 2012-06-27 | Stryker Corporation | Powered surgical tool with a memory, conductors over which power and memory interrogation signals are applied to the tool and an isolation circuit that prevents the power signals from adversely affecting the memory |
| WO2009137410A1 (en) | 2008-05-06 | 2009-11-12 | Corindus Ltd. | Catheter system |
| DE102008001664B4 (de) | 2008-05-08 | 2015-07-30 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Medizinischer Roboter und Verfahren zur Erfüllung der Performanceanforderung eines medizinischen Roboters |
| JP5145113B2 (ja) | 2008-05-09 | 2013-02-13 | Hoya株式会社 | 内視鏡用処置具の操作部 |
| US8464922B2 (en) | 2008-05-09 | 2013-06-18 | Covidien Lp | Variable compression surgical fastener cartridge |
| US8186556B2 (en) | 2008-05-09 | 2012-05-29 | Tyco Healthcare Group Lp | Variable compression surgical fastener apparatus |
| US9016541B2 (en) | 2008-05-09 | 2015-04-28 | Covidien Lp | Varying tissue compression with an anvil configuration |
| EP2116272B1 (en) | 2008-05-09 | 2013-04-03 | Greatbatch Ltd. | Bi-directional sheath deflection mechanism |
| US8091756B2 (en) | 2008-05-09 | 2012-01-10 | Tyco Healthcare Group Lp | Varying tissue compression using take-up component |
| WO2009137761A2 (en) | 2008-05-09 | 2009-11-12 | Elmer Valin | Laparoscopic gastric and intestinal trocar |
| US8006577B2 (en) | 2008-05-09 | 2011-08-30 | The Schnipke Family, LLC | Method and apparatus for testing for the presence of excess drivers in a surgical cartridge |
| US8967446B2 (en) | 2008-05-09 | 2015-03-03 | Covidien Lp | Variable compression surgical fastener cartridge |
| US8409079B2 (en) | 2008-05-14 | 2013-04-02 | Olympus Medical Systems Corp. | Electric bending operation device and medical treatment system including electric bending operation device |
| DE102008024438A1 (de) | 2008-05-14 | 2009-11-19 | Aesculap Ag | Chirurgische Antriebseinheit, chirurgisches Instrument und chirurgisches Antriebssystem |
| US8273404B2 (en) | 2008-05-19 | 2012-09-25 | Cordis Corporation | Extraction of solvents from drug containing polymer reservoirs |
| US20090290016A1 (en) | 2008-05-20 | 2009-11-26 | Hoya Corporation | Endoscope system |
| US7922061B2 (en) | 2008-05-21 | 2011-04-12 | Ethicon Endo-Surgery, Inc. | Surgical instrument with automatically reconfigurable articulating end effector |
| WO2009143331A1 (en) | 2008-05-21 | 2009-11-26 | Cook Biotech Incorporated | Devices and methods for applying bolster materials to surgical fastening apparatuses |
| EP3175806B1 (en) | 2008-05-27 | 2018-10-17 | Maquet Cardiovascular LLC | Surgical instrument |
| US8179705B2 (en) | 2008-05-27 | 2012-05-15 | Power-One, Inc. | Apparatus and method of optimizing power system efficiency using a power loss model |
| US8771260B2 (en) | 2008-05-30 | 2014-07-08 | Ethicon Endo-Surgery, Inc. | Actuating and articulating surgical device |
| ES2797126T3 (es) | 2008-05-30 | 2020-12-01 | Xbiotech Inc | Usos de anticuerpos IL-1 alfa |
| US8016176B2 (en) | 2008-06-04 | 2011-09-13 | Tyco Healthcare Group, Lp | Surgical stapling instrument with independent sequential firing |
| US8403926B2 (en) | 2008-06-05 | 2013-03-26 | Ethicon Endo-Surgery, Inc. | Manually articulating devices |
| US7789283B2 (en) | 2008-06-06 | 2010-09-07 | Tyco Healthcare Group Lp | Knife/firing rod connection for surgical instrument |
| US20090306639A1 (en) | 2008-06-06 | 2009-12-10 | Galil Medical Ltd. | Cryoprobe incorporating electronic module, and system utilizing same |
| US7942303B2 (en) | 2008-06-06 | 2011-05-17 | Tyco Healthcare Group Lp | Knife lockout mechanisms for surgical instrument |
| US8701959B2 (en) | 2008-06-06 | 2014-04-22 | Covidien Lp | Mechanically pivoting cartridge channel for surgical instrument |
| EP2298482B1 (en) | 2008-06-10 | 2016-01-13 | Makita Corporation | Circular saw |
| BRPI0915375B8 (pt) | 2008-06-12 | 2021-06-22 | Ethicon Endo Surgery Inc | grampeador cirúrgico destinado à instalação de grampos em tecidos |
| US8267951B2 (en) | 2008-06-12 | 2012-09-18 | Ncontact Surgical, Inc. | Dissecting cannula and methods of use thereof |
| US20110091515A1 (en) | 2008-06-12 | 2011-04-21 | Ramot At Tel-Aviv University Ltd. | Drug-eluting medical devices |
| US20090308907A1 (en) | 2008-06-12 | 2009-12-17 | Nalagatla Anil K | Partially reusable surgical stapler |
| US8628545B2 (en) | 2008-06-13 | 2014-01-14 | Covidien Lp | Endoscopic stitching devices |
| US9396669B2 (en) | 2008-06-16 | 2016-07-19 | Microsoft Technology Licensing, Llc | Surgical procedure capture, modelling, and editing interactive playback |
| US11083364B2 (en) | 2008-06-17 | 2021-08-10 | Apollo Endosurgery Us, Inc. | Endoscopic tissue grasping systems and methods |
| US20140100558A1 (en) | 2012-10-05 | 2014-04-10 | Gregory P. Schmitz | Micro-articulated surgical instruments using micro gear actuation |
| US7543730B1 (en) | 2008-06-24 | 2009-06-09 | Tyco Healthcare Group Lp | Segmented drive member for surgical instruments |
| DE102008002641A1 (de) | 2008-06-25 | 2009-12-31 | Biotronik Vi Patent Ag | Faserstrang und implantierbarer Stützkörper mit einem Faserstrang |
| US8414469B2 (en) | 2008-06-27 | 2013-04-09 | Intuitive Surgical Operations, Inc. | Medical robotic system having entry guide controller with instrument tip velocity limiting |
| US9179832B2 (en) | 2008-06-27 | 2015-11-10 | Intuitive Surgical Operations, Inc. | Medical robotic system with image referenced camera control using partitionable orientational and translational modes |
| US8011551B2 (en) | 2008-07-01 | 2011-09-06 | Tyco Healthcare Group Lp | Retraction mechanism with clutch-less drive for use with a surgical apparatus |
| DE102008040061A1 (de) | 2008-07-02 | 2010-01-07 | Robert Bosch Gmbh | Elektrowerkzeugmaschine |
| US20100005035A1 (en) | 2008-07-02 | 2010-01-07 | Cake Financial Corporation | Systems and Methods for a Cross-Linked Investment Trading Platform |
| US8206482B2 (en) | 2008-07-04 | 2012-06-26 | Emerson Electric Co. | Vacuum appliance filter assemblies and associated vacuum systems |
| AU2009268582B2 (en) | 2008-07-08 | 2014-08-07 | Covidien Lp | Surgical attachment for use with a robotic surgical system |
| DE102008040341A1 (de) | 2008-07-11 | 2010-01-14 | Robert Bosch Gmbh | Akkumulator mit mehreren Akkumulatorzellen |
| US8888792B2 (en) | 2008-07-14 | 2014-11-18 | Ethicon Endo-Surgery, Inc. | Tissue apposition clip application devices and methods |
| US8487487B2 (en) | 2008-07-15 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Magnetostrictive actuator of a medical ultrasound transducer assembly, and a medical ultrasound handpiece and a medical ultrasound system having such actuator |
| US8834465B2 (en) | 2008-07-15 | 2014-09-16 | Immersion Corporation | Modular tool with signal feedback |
| US8771270B2 (en) | 2008-07-16 | 2014-07-08 | Intuitive Surgical Operations, Inc. | Bipolar cautery instrument |
| US9204923B2 (en) | 2008-07-16 | 2015-12-08 | Intuitive Surgical Operations, Inc. | Medical instrument electronically energized using drive cables |
| US9186221B2 (en) | 2008-07-16 | 2015-11-17 | Intuitive Surgical Operations Inc. | Backend mechanism for four-cable wrist |
| US8074858B2 (en) | 2008-07-17 | 2011-12-13 | Tyco Healthcare Group Lp | Surgical retraction mechanism |
| WO2010011661A1 (en) | 2008-07-21 | 2010-01-28 | Atricure, Inc. | Apparatus and methods for occluding an anatomical structure |
| CA2694960A1 (en) | 2008-07-21 | 2010-01-28 | Dion Friesen | Portable power supply device |
| US20100022824A1 (en) | 2008-07-22 | 2010-01-28 | Cybulski James S | Tissue modification devices and methods of using the same |
| CN102099865B (zh) | 2008-07-22 | 2014-05-28 | Lsi公司 | 用于在闪存存储器中每信号电平编程多个编程值的方法和装置 |
| US20110088921A1 (en) | 2008-07-25 | 2011-04-21 | Sylvain Forgues | Pneumatic hand tool rotational speed control method and portable apparatus |
| US20100023024A1 (en) | 2008-07-25 | 2010-01-28 | Zeiner Mark S | Reloadable laparoscopic fastener deploying device with disposable cartridge for use in a gastric volume reduction procedure |
| US9061392B2 (en) | 2008-07-25 | 2015-06-23 | Sylvain Forgues | Controlled electro-pneumatic power tools and interactive consumable |
| US8317437B2 (en) | 2008-08-01 | 2012-11-27 | The Boeing Company | Adaptive positive feed drilling system |
| US8801752B2 (en) | 2008-08-04 | 2014-08-12 | Covidien Lp | Articulating surgical device |
| US8968355B2 (en) | 2008-08-04 | 2015-03-03 | Covidien Lp | Articulating surgical device |
| US8058771B2 (en) | 2008-08-06 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for cutting and coagulating with stepped output |
| US9089360B2 (en) | 2008-08-06 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Devices and techniques for cutting and coagulating tissue |
| US20100036370A1 (en) | 2008-08-07 | 2010-02-11 | Al Mirel | Electrosurgical instrument jaw structure with cutting tip |
| US8109426B2 (en) | 2008-08-12 | 2012-02-07 | Tyco Healthcare Group Lp | Surgical tilt anvil assembly |
| US8413661B2 (en) | 2008-08-14 | 2013-04-09 | Ethicon, Inc. | Methods and devices for treatment of obstructive sleep apnea |
| US8211125B2 (en) | 2008-08-15 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Sterile appliance delivery device for endoscopic procedures |
| US8465475B2 (en) | 2008-08-18 | 2013-06-18 | Intuitive Surgical Operations, Inc. | Instrument with multiple articulation locks |
| US7954688B2 (en) | 2008-08-22 | 2011-06-07 | Medtronic, Inc. | Endovascular stapling apparatus and methods of use |
| WO2010022329A1 (en) | 2008-08-22 | 2010-02-25 | Zevex, Inc. | Removable adapter for phacoemulsification handpiece having irrigation and aspiration fluid paths |
| US8532747B2 (en) | 2008-08-22 | 2013-09-10 | Devicor Medical Products, Inc. | Biopsy marker delivery device |
| US8465502B2 (en) | 2008-08-25 | 2013-06-18 | Covidien Lp | Surgical clip applier and method of assembly |
| JP2010054718A (ja) | 2008-08-27 | 2010-03-11 | Sony Corp | 表示装置 |
| US8409223B2 (en) | 2008-08-29 | 2013-04-02 | Covidien Lp | Endoscopic surgical clip applier with clip retention |
| US9358015B2 (en) | 2008-08-29 | 2016-06-07 | Covidien Lp | Endoscopic surgical clip applier with wedge plate |
| US8834353B2 (en) | 2008-09-02 | 2014-09-16 | Olympus Medical Systems Corp. | Medical manipulator, treatment system, and treatment method |
| US20100057118A1 (en) | 2008-09-03 | 2010-03-04 | Dietz Timothy G | Ultrasonic surgical blade |
| US20100051668A1 (en) | 2008-09-03 | 2010-03-04 | Milliman Keith L | Surgical instrument with indicator |
| US8113405B2 (en) | 2008-09-03 | 2012-02-14 | Tyco Healthcare Group, Lp | Surgical instrument with indicator |
| US20120125792A1 (en) | 2008-09-08 | 2012-05-24 | Mayo Foundation For Medical Education And Research | Devices, kits and methods for surgical fastening |
| EP2339952A1 (de) | 2008-09-09 | 2011-07-06 | Olympus Winter & Ibe Gmbh | Laparoskop mit verstellbarem schaft |
| US8808294B2 (en) | 2008-09-09 | 2014-08-19 | William Casey Fox | Method and apparatus for a multiple transition temperature implant |
| JP5089537B2 (ja) | 2008-09-10 | 2012-12-05 | 三菱電機株式会社 | 電動送風機の故障診断装置及びそれを搭載した電気機器 |
| CN101669833A (zh) | 2008-09-11 | 2010-03-17 | 苏州天臣国际医疗科技有限公司 | 自动荷包缝合器 |
| US8047236B2 (en) | 2008-09-12 | 2011-11-01 | Boston Scientific Scimed, Inc. | Flexible conduit with locking element |
| CN102149338B (zh) | 2008-09-12 | 2015-07-22 | 伊西康内外科公司 | 指尖控制的超声装置 |
| EP2163209A1 (en) | 2008-09-15 | 2010-03-17 | Zhiqiang Weng | Lockout mechanism for a surgical stapler |
| US7837080B2 (en) | 2008-09-18 | 2010-11-23 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with device for indicating when the instrument has cut through tissue |
| US8083120B2 (en) | 2008-09-18 | 2011-12-27 | Ethicon Endo-Surgery, Inc. | End effector for use with a surgical cutting and stapling instrument |
| US8290883B2 (en) | 2008-09-18 | 2012-10-16 | Honda Motor Co., Ltd. | Learning system and learning method comprising an event list database |
| US20100069942A1 (en) | 2008-09-18 | 2010-03-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with apparatus for measuring elapsed time between actions |
| BRPI0903919B8 (pt) | 2008-09-19 | 2021-06-22 | Ethicon Endo Surgery Inc | cartucho de grampos e grampeador cirúrgico |
| US7857186B2 (en) | 2008-09-19 | 2010-12-28 | Ethicon Endo-Surgery, Inc. | Surgical stapler having an intermediate closing position |
| BRPI0904975B1 (pt) | 2008-09-19 | 2019-09-10 | Ethicon Endo Surgery Inc | grampeador cirúrgico |
| US8628544B2 (en) | 2008-09-23 | 2014-01-14 | Covidien Lp | Knife bar for surgical instrument |
| US7896214B2 (en) | 2008-09-23 | 2011-03-01 | Tyco Healthcare Group Lp | Tissue stop for surgical instrument |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8360298B2 (en) | 2008-09-23 | 2013-01-29 | Covidien Lp | Surgical instrument and loading unit for use therewith |
| US8215532B2 (en) | 2008-09-23 | 2012-07-10 | Tyco Healthcare Group Lp | Tissue stop for surgical instrument |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US9050083B2 (en) | 2008-09-23 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US9327061B2 (en) | 2008-09-23 | 2016-05-03 | Senorx, Inc. | Porous bioabsorbable implant |
| US7988028B2 (en) | 2008-09-23 | 2011-08-02 | Tyco Healthcare Group Lp | Surgical instrument having an asymmetric dynamic clamping member |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| JP2010075242A (ja) | 2008-09-24 | 2010-04-08 | Terumo Corp | 医療用マニピュレータ |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| US9339342B2 (en) | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| JP5475262B2 (ja) | 2008-10-01 | 2014-04-16 | テルモ株式会社 | 医療用マニピュレータ |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US8808308B2 (en) | 2008-10-13 | 2014-08-19 | Alcon Research, Ltd. | Automated intraocular lens injector device |
| US8020743B2 (en) | 2008-10-15 | 2011-09-20 | Ethicon Endo-Surgery, Inc. | Powered articulatable surgical cutting and fastening instrument with flexible drive member |
| US20100094340A1 (en) | 2008-10-15 | 2010-04-15 | Tyco Healthcare Group Lp | Coating compositions |
| US8287487B2 (en) | 2008-10-15 | 2012-10-16 | Asante Solutions, Inc. | Infusion pump system and methods |
| US7918377B2 (en) | 2008-10-16 | 2011-04-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with apparatus for providing anvil position feedback |
| JP2010098844A (ja) | 2008-10-16 | 2010-04-30 | Toyota Motor Corp | 車両の電源システム |
| US20100100123A1 (en) | 2008-10-17 | 2010-04-22 | Confluent Surgical, Inc. | Hemostatic implant |
| US9889230B2 (en) | 2008-10-17 | 2018-02-13 | Covidien Lp | Hemostatic implant |
| US8063619B2 (en) | 2008-10-20 | 2011-11-22 | Dell Products L.P. | System and method for powering an information handling system in multiple power states |
| US8996165B2 (en) | 2008-10-21 | 2015-03-31 | Intouch Technologies, Inc. | Telepresence robot with a camera boom |
| US9370341B2 (en) | 2008-10-23 | 2016-06-21 | Covidien Lp | Surgical retrieval apparatus |
| CN101721236A (zh) | 2008-10-29 | 2010-06-09 | 苏州天臣国际医疗科技有限公司 | 外科切割装订器械 |
| US8561617B2 (en) | 2008-10-30 | 2013-10-22 | Ethicon, Inc. | Implant systems and methods for treating obstructive sleep apnea |
| KR101075363B1 (ko) | 2008-10-31 | 2011-10-19 | 정창욱 | 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 |
| MX2011004313A (es) | 2008-10-31 | 2011-06-16 | Dsm Ip Assets Bv | Composicion mejorada para producir un producto lacteo. |
| US8231042B2 (en) | 2008-11-06 | 2012-07-31 | Tyco Healthcare Group Lp | Surgical stapler |
| EP2346541A2 (en) | 2008-11-07 | 2011-07-27 | Sofradim Production | Medical implant including a 3d mesh of oxidized cellulose and a collagen sponge |
| US7934631B2 (en) | 2008-11-10 | 2011-05-03 | Barosense, Inc. | Multi-fire stapling systems and methods for delivering arrays of staples |
| US20110009694A1 (en) | 2009-07-10 | 2011-01-13 | Schultz Eric E | Hand-held minimally dimensioned diagnostic device having integrated distal end visualization |
| US8657821B2 (en) | 2008-11-14 | 2014-02-25 | Revascular Therapeutics Inc. | Method and system for reversibly controlled drilling of luminal occlusions |
| US9421030B2 (en) | 2008-11-14 | 2016-08-23 | Cole Isolation Technique, Llc | Follicular dissection device and method |
| JP5212039B2 (ja) | 2008-11-18 | 2013-06-19 | 宇部興産株式会社 | 繊維混入抄造板及びその製造方法 |
| US7886951B2 (en) | 2008-11-24 | 2011-02-15 | Tyco Healthcare Group Lp | Pouch used to deliver medication when ruptured |
| TWI414713B (zh) | 2008-11-24 | 2013-11-11 | Everlight Electronics Co Ltd | 發光二極體燈具製造方法 |
| US8157834B2 (en) | 2008-11-25 | 2012-04-17 | Ethicon Endo-Surgery, Inc. | Rotational coupling device for surgical instrument with flexible actuators |
| CN101756727A (zh) | 2008-11-27 | 2010-06-30 | 苏州天臣国际医疗科技有限公司 | 直线型切割闭合器的钉仓 |
| US8539866B2 (en) | 2008-12-01 | 2013-09-24 | Castrax, L.L.C. | Method and apparatus to remove cast from an individual |
| USD600712S1 (en) | 2008-12-02 | 2009-09-22 | Microsoft Corporation | Icon for a display screen |
| GB0822110D0 (en) | 2008-12-03 | 2009-01-07 | Angiomed Ag | Catheter sheath for implant delivery |
| GB2466180B (en) | 2008-12-05 | 2013-07-10 | Surgical Innovations Ltd | Surgical instrument, handle for a surgical instrument and surgical instrument system |
| US8348837B2 (en) | 2008-12-09 | 2013-01-08 | Covidien Lp | Anoscope |
| US8034363B2 (en) | 2008-12-11 | 2011-10-11 | Advanced Technologies And Regenerative Medicine, Llc. | Sustained release systems of ascorbic acid phosphate |
| US20100331856A1 (en) | 2008-12-12 | 2010-12-30 | Hansen Medical Inc. | Multiple flexible and steerable elongate instruments for minimally invasive operations |
| USD607010S1 (en) | 2008-12-12 | 2009-12-29 | Microsoft Corporation | Icon for a portion of a display screen |
| US8060250B2 (en) | 2008-12-15 | 2011-11-15 | GM Global Technology Operations LLC | Joint-space impedance control for tendon-driven manipulators |
| US20100147921A1 (en) | 2008-12-16 | 2010-06-17 | Lee Olson | Surgical Apparatus Including Surgical Buttress |
| US8770460B2 (en) | 2008-12-23 | 2014-07-08 | George E. Belzer | Shield for surgical stapler and method of use |
| US8245594B2 (en) | 2008-12-23 | 2012-08-21 | Intuitive Surgical Operations, Inc. | Roll joint and method for a surgical apparatus |
| US8374723B2 (en) | 2008-12-31 | 2013-02-12 | Intuitive Surgical Operations, Inc. | Obtaining force information in a minimally invasive surgical procedure |
| US8281974B2 (en) | 2009-01-14 | 2012-10-09 | Tyco Healthcare, Group LP | Surgical stapler with suture locator |
| US8632539B2 (en) | 2009-01-14 | 2014-01-21 | Covidien Lp | Vessel sealer and divider |
| US20130268062A1 (en) | 2012-04-05 | 2013-10-10 | Zeus Industrial Products, Inc. | Composite prosthetic devices |
| WO2010083110A1 (en) | 2009-01-16 | 2010-07-22 | Rhaphis Medical, Inc. | Surgical suturing latch |
| US20100180711A1 (en) | 2009-01-19 | 2010-07-22 | Comau, Inc. | Robotic end effector system and method |
| US20120330329A1 (en) | 2011-06-21 | 2012-12-27 | Harris Jason L | Methods of forming a laparoscopic greater curvature plication using a surgical stapler |
| US9713468B2 (en) | 2009-01-26 | 2017-07-25 | Ethicon Endo-Surgery, Inc. | Surgical stapler for applying a large staple through a small delivery port and a method of using the stapler to secure a tissue fold |
| US8833219B2 (en) | 2009-01-26 | 2014-09-16 | Illinois Tool Works Inc. | Wire saw |
| US20100191262A1 (en) | 2009-01-26 | 2010-07-29 | Harris Jason L | Surgical stapler for applying a large staple through small delivery port and a method of using the stapler to secure a tissue fold |
| US20110278343A1 (en) | 2009-01-29 | 2011-11-17 | Cardica, Inc. | Clamping of Hybrid Surgical Instrument |
| US8228048B2 (en) | 2009-01-30 | 2012-07-24 | Hewlett-Packard Development Company, L.P. | Method and system of regulating voltages |
| US8037591B2 (en) | 2009-02-02 | 2011-10-18 | Ethicon Endo-Surgery, Inc. | Surgical scissors |
| US8523900B2 (en) | 2009-02-03 | 2013-09-03 | Terumo Kabushiki Kaisha | Medical manipulator |
| US8414577B2 (en) | 2009-02-05 | 2013-04-09 | Ethicon Endo-Surgery, Inc. | Surgical instruments and components for use in sterile environments |
| US8397971B2 (en) | 2009-02-05 | 2013-03-19 | Ethicon Endo-Surgery, Inc. | Sterilizable surgical instrument |
| US8485413B2 (en) | 2009-02-05 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising an articulation joint |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| US20100193566A1 (en) | 2009-02-05 | 2010-08-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument |
| US8444036B2 (en) | 2009-02-06 | 2013-05-21 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with mechanisms for adjusting a tissue gap within the end effector |
| BRPI1008667A2 (pt) | 2009-02-06 | 2016-03-08 | Ethicom Endo Surgery Inc | aperfeiçoamento do grampeador cirúrgico acionado |
| US20110024478A1 (en) | 2009-02-06 | 2011-02-03 | Shelton Iv Frederick E | Driven Surgical Stapler Improvements |
| US8245899B2 (en) | 2009-02-06 | 2012-08-21 | Ethicon Endo-Surgery, Inc. | Driven surgical stapler improvements |
| US20120007442A1 (en) | 2009-02-06 | 2012-01-12 | Mark Rhodes | Rotary data and power transfer system |
| USD622286S1 (en) | 2009-02-11 | 2010-08-24 | Ricoh Company, Ltd. | Portion of liquid crystal panel with icon image |
| WO2010093333A1 (en) | 2009-02-11 | 2010-08-19 | Nanyang Technological University | Multi-layered surgical prosthesis |
| US8708211B2 (en) | 2009-02-12 | 2014-04-29 | Covidien Lp | Powered surgical instrument with secondary circuit board |
| WO2010093955A1 (en) | 2009-02-12 | 2010-08-19 | Osteotech,Inc. | Segmented delivery system |
| US20100204717A1 (en) | 2009-02-12 | 2010-08-12 | Cardica, Inc. | Surgical Device for Multiple Clip Application |
| US8690776B2 (en) | 2009-02-17 | 2014-04-08 | Inneroptic Technology, Inc. | Systems, methods, apparatuses, and computer-readable media for image guided surgery |
| US20100298636A1 (en) | 2009-02-19 | 2010-11-25 | Salvatore Castro | Flexible rigidizing instruments |
| US8349987B2 (en) | 2009-02-19 | 2013-01-08 | Covidien Lp | Adhesive formulations |
| JP2010193994A (ja) | 2009-02-24 | 2010-09-09 | Fujifilm Corp | クリップパッケージ及び連発式クリップシステム、並びに連発式クリップシステムの誤装填防止機構 |
| US8393516B2 (en) | 2009-02-26 | 2013-03-12 | Covidien Lp | Surgical stapling apparatus with curved cartridge and anvil assemblies |
| EP2442735B1 (en) | 2009-02-27 | 2020-09-02 | Amir Belson | Improved apparatus for hybrid endoscopic and laparoscopic surgery |
| DE102009012175A1 (de) | 2009-02-27 | 2010-09-02 | Andreas Stihl Ag & Co. Kg | Elektroarbeitsgerät mit einem Akkupack |
| US9030169B2 (en) | 2009-03-03 | 2015-05-12 | Robert Bosch Gmbh | Battery system and method for system state of charge determination |
| JP5431749B2 (ja) | 2009-03-04 | 2014-03-05 | テルモ株式会社 | 医療用マニピュレータ |
| US8858547B2 (en) | 2009-03-05 | 2014-10-14 | Intuitive Surgical Operations, Inc. | Cut and seal instrument |
| US20100228250A1 (en) | 2009-03-05 | 2010-09-09 | Intuitive Surgical Operations, Inc. | Cut and seal instrument |
| US8423182B2 (en) | 2009-03-09 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Adaptable integrated energy control system for electrosurgical tools in robotic surgical systems |
| US8397973B1 (en) | 2009-03-09 | 2013-03-19 | Cardica, Inc. | Wide handle for true multi-fire surgical stapler |
| US8356740B1 (en) | 2009-03-09 | 2013-01-22 | Cardica, Inc. | Controlling compression applied to tissue by surgical tool |
| US8418073B2 (en) | 2009-03-09 | 2013-04-09 | Intuitive Surgical Operations, Inc. | User interfaces for electrosurgical tools in robotic surgical systems |
| US8317071B1 (en) | 2009-03-09 | 2012-11-27 | Cardica, Inc. | Endocutter with auto-feed buttress |
| US8120301B2 (en) | 2009-03-09 | 2012-02-21 | Intuitive Surgical Operations, Inc. | Ergonomic surgeon control console in robotic surgical systems |
| US7918376B1 (en) | 2009-03-09 | 2011-04-05 | Cardica, Inc. | Articulated surgical instrument |
| US8007370B2 (en) | 2009-03-10 | 2011-08-30 | Cobra Golf, Inc. | Metal injection molded putter |
| JP5177683B2 (ja) | 2009-03-12 | 2013-04-03 | 株式会社リコー | 画像読取装置および複写機 |
| JP4875117B2 (ja) | 2009-03-13 | 2012-02-15 | 株式会社東芝 | 画像処理装置 |
| DE102009013034B4 (de) | 2009-03-16 | 2015-11-19 | Olympus Winter & Ibe Gmbh | Autoklavierbare Aufladevorrichtung für einen Energiespeicher eines chirurgischen Instruments sowie Verfahren zum Aufladen eines wiederaufladbaren Energiespeichers in einem autoklavierten chirurgischen Instrument oder für ein autoklaviertes chirurgisches Instrument |
| US8366719B2 (en) | 2009-03-18 | 2013-02-05 | Integrated Spinal Concepts, Inc. | Image-guided minimal-step placement of screw into bone |
| US8066167B2 (en) | 2009-03-23 | 2011-11-29 | Ethicon Endo-Surgery, Inc. | Circular surgical stapling instrument with anvil locking system |
| CN102421384B (zh) | 2009-03-27 | 2014-11-12 | 内球外科股份有限公司 | 具有集成的照相机和照明器具的套管 |
| JP5292155B2 (ja) | 2009-03-27 | 2013-09-18 | Tdkラムダ株式会社 | 電源供給制御装置、電源装置および電源供給制御方法 |
| US20100249497A1 (en) | 2009-03-30 | 2010-09-30 | Peine William J | Surgical instrument |
| US8110208B1 (en) | 2009-03-30 | 2012-02-07 | Biolife, L.L.C. | Hemostatic compositions for arresting blood flow from an open wound or surgical site |
| US8092443B2 (en) | 2009-03-30 | 2012-01-10 | Medtronic, Inc. | Element for implantation with medical device |
| US20100249520A1 (en) | 2009-03-31 | 2010-09-30 | Shelton Iv Frederick E | Method Of Surgical Access |
| US8365972B2 (en) | 2009-03-31 | 2013-02-05 | Covidien Lp | Surgical stapling apparatus |
| JP2010239817A (ja) | 2009-03-31 | 2010-10-21 | Brother Ind Ltd | 情報表示装置 |
| US8016178B2 (en) | 2009-03-31 | 2011-09-13 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| US8348126B2 (en) | 2009-03-31 | 2013-01-08 | Covidien Lp | Crimp and release of suture holding buttress material |
| US7988027B2 (en) | 2009-03-31 | 2011-08-02 | Tyco Healthcare Group Lp | Crimp and release of suture holding buttress material |
| US7967179B2 (en) | 2009-03-31 | 2011-06-28 | Tyco Healthcare Group Lp | Center cinch and release of buttress material |
| US9486215B2 (en) | 2009-03-31 | 2016-11-08 | Covidien Lp | Surgical stapling apparatus |
| US8945163B2 (en) | 2009-04-01 | 2015-02-03 | Ethicon Endo-Surgery, Inc. | Methods and devices for cutting and fastening tissue |
| US9277969B2 (en) | 2009-04-01 | 2016-03-08 | Covidien Lp | Microwave ablation system with user-controlled ablation size and method of use |
| KR101132659B1 (ko) | 2009-04-02 | 2012-04-02 | 한국과학기술원 | 4 자유도를 가진 복강경 수술장치 |
| CN102438537B (zh) | 2009-04-03 | 2014-11-26 | 利兰·斯坦福青年大学托管委员会 | 手术装置和方法 |
| US20100256675A1 (en) | 2009-04-03 | 2010-10-07 | Romans Matthew L | Absorbable surgical staple |
| WO2010114633A1 (en) | 2009-04-03 | 2010-10-07 | Biomerix Corporation | At least partially resorbable reticulated elastomeric matrix elements and methods of making same |
| FR2943906B1 (fr) | 2009-04-03 | 2013-03-22 | Univ Pierre Et Marie Curie Paris 6 | Instrument chirurgical. |
| US8419635B2 (en) | 2009-04-08 | 2013-04-16 | Ethicon Endo-Surgery, Inc. | Surgical access device having removable and replaceable components |
| US8257251B2 (en) | 2009-04-08 | 2012-09-04 | Ethicon Endo-Surgery, Inc. | Methods and devices for providing access into a body cavity |
| US8444549B2 (en) | 2009-04-16 | 2013-05-21 | Covidien Lp | Self-steering endoscopic device |
| US8523850B2 (en) | 2009-04-17 | 2013-09-03 | Domain Surgical, Inc. | Method for heating a surgical implement |
| US9131977B2 (en) | 2009-04-17 | 2015-09-15 | Domain Surgical, Inc. | Layered ferromagnetic coated conductor thermal surgical tool |
| US20100274160A1 (en) | 2009-04-22 | 2010-10-28 | Chie Yachi | Switching structure and surgical equipment |
| US8922163B2 (en) | 2009-04-24 | 2014-12-30 | Murray MacDonald | Automated battery and data delivery system |
| EP2424448A4 (en) | 2009-04-27 | 2015-03-04 | Intersect Ent Inc | DEVICES AND METHODS FOR TREATING A PAIN ASSOCIATED WITH AMYGDALECTOMIES |
| WO2010124785A1 (de) | 2009-04-29 | 2010-11-04 | Erbe Elektromedizin Gmbh | Hf-chirurgiegenerator und verfahren zum betreiben eines hf-chirurgiegenerators |
| JP5886043B2 (ja) | 2009-04-30 | 2016-03-16 | カール シュトルツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 医療用マニピュレータ |
| US9192430B2 (en) | 2009-05-01 | 2015-11-24 | Covidien Lp | Electrosurgical instrument with time limit circuit |
| US8631992B1 (en) | 2009-05-03 | 2014-01-21 | Cardica, Inc. | Feeder belt with padded staples for true multi-fire surgical stapler |
| US9038881B1 (en) | 2009-05-05 | 2015-05-26 | Cardica, Inc. | Feeder belt actuation mechanism for true multi-fire surgical stapler |
| US8167898B1 (en) | 2009-05-05 | 2012-05-01 | Cardica, Inc. | Flexible cutter for surgical stapler |
| US8365975B1 (en) | 2009-05-05 | 2013-02-05 | Cardica, Inc. | Cam-controlled knife for surgical instrument |
| US8328064B2 (en) | 2009-05-06 | 2012-12-11 | Covidien Lp | Pin locking mechanism for a surgical instrument |
| US8523881B2 (en) | 2010-07-26 | 2013-09-03 | Valtech Cardio, Ltd. | Multiple anchor delivery tool |
| US8127976B2 (en) | 2009-05-08 | 2012-03-06 | Tyco Healthcare Group Lp | Stapler cartridge and channel interlock |
| US8324585B2 (en) | 2009-05-11 | 2012-12-04 | General Electric Company | Digital image detector |
| US20100292540A1 (en) | 2009-05-12 | 2010-11-18 | Hess Christopher J | Surgical retractor and method |
| US8728099B2 (en) | 2009-05-12 | 2014-05-20 | Ethicon, Inc. | Surgical fasteners, applicator instruments, and methods for deploying surgical fasteners |
| JP5428515B2 (ja) | 2009-05-15 | 2014-02-26 | マックス株式会社 | 電動ステープラおよび電動ステープラのモータ駆動方法 |
| US9023069B2 (en) | 2009-05-18 | 2015-05-05 | Covidien Lp | Attachable clamp for use with surgical instruments |
| US8308043B2 (en) | 2009-05-19 | 2012-11-13 | Covidien Lp | Recognition of interchangeable component of a device |
| WO2010134913A1 (en) | 2009-05-20 | 2010-11-25 | California Institute Of Technology | Endoscope and system and method of operation thereof |
| EP2434970B1 (en) | 2009-05-26 | 2016-11-30 | Zimmer, Inc. | Handheld tool for driving a bone pin into a fractured bone |
| US9004339B1 (en) | 2009-05-26 | 2015-04-14 | Cardica, Inc. | Cartridgizable feeder belt for surgical stapler |
| US8070034B1 (en) | 2009-05-29 | 2011-12-06 | Cardica, Inc. | Surgical stapler with angled staple bays |
| SG10201402759QA (en) | 2009-05-29 | 2014-08-28 | Univ Nanyang Tech | Robotic System for Flexible Endoscopy |
| US8418909B2 (en) | 2009-06-02 | 2013-04-16 | Covidien Lp | Surgical instrument and method for performing a resection |
| US8056789B1 (en) | 2009-06-03 | 2011-11-15 | Cardica, Inc. | Staple and feeder belt configurations for surgical stapler |
| US9383881B2 (en) | 2009-06-03 | 2016-07-05 | Synaptics Incorporated | Input device and method with pressure-sensitive layer |
| US9086875B2 (en) | 2009-06-05 | 2015-07-21 | Qualcomm Incorporated | Controlling power consumption of a mobile device based on gesture recognition |
| US20100310623A1 (en) | 2009-06-05 | 2010-12-09 | Laurencin Cato T | Synergetic functionalized spiral-in-tubular bone scaffolds |
| US8132706B2 (en) | 2009-06-05 | 2012-03-13 | Tyco Healthcare Group Lp | Surgical stapling apparatus having articulation mechanism |
| US8821514B2 (en) | 2009-06-08 | 2014-09-02 | Covidien Lp | Powered tack applier |
| CH701320B1 (it) | 2009-06-16 | 2013-10-15 | Frii S A | Dispositivo per trattamenti di resezione/rimozione endoscopica dei tessuti. |
| US8827134B2 (en) | 2009-06-19 | 2014-09-09 | Covidien Lp | Flexible surgical stapler with motor in the head |
| US8701960B1 (en) | 2009-06-22 | 2014-04-22 | Cardica, Inc. | Surgical stapler with reduced clamp gap for insertion |
| US8087562B1 (en) | 2009-06-22 | 2012-01-03 | Cardica, Inc. | Anvil for surgical instrument |
| USD604325S1 (en) | 2009-06-26 | 2009-11-17 | Microsoft Corporation | Animated image for a portion of a display screen |
| US8784404B2 (en) | 2009-06-29 | 2014-07-22 | Carefusion 2200, Inc. | Flexible wrist-type element and methods of manufacture and use thereof |
| US9463260B2 (en) | 2009-06-29 | 2016-10-11 | Covidien Lp | Self-sealing compositions |
| US9030166B2 (en) | 2009-07-03 | 2015-05-12 | Nikon Corporation | Electronic device, and method controlling electronic power supply |
| KR101180665B1 (ko) | 2009-07-03 | 2012-09-07 | 주식회사 이턴 | 하이브리드 수술용 로봇 시스템 및 수술용 로봇 제어방법 |
| CN101940844A (zh) | 2009-07-03 | 2011-01-12 | 林翠琼 | 模拟狗尾摆动装置 |
| EP2451367B1 (en) | 2009-07-08 | 2020-01-22 | Edge Systems Corporation | Devices for treating the skin using time-release substances |
| US8146790B2 (en) | 2009-07-11 | 2012-04-03 | Tyco Healthcare Group Lp | Surgical instrument with safety mechanism |
| US8276802B2 (en) | 2009-07-11 | 2012-10-02 | Tyco Healthcare Group Lp | Surgical instrument with double cartridge and anvil assemblies |
| US8343150B2 (en) | 2009-07-15 | 2013-01-01 | Covidien Lp | Mechanical cycling of seal pressure coupled with energy for tissue fusion |
| PL2453813T3 (pl) | 2009-07-15 | 2017-11-30 | Ethicon Llc | Elektrochirurgiczne narzędzie ultradźwiękowe |
| US20110011916A1 (en) | 2009-07-16 | 2011-01-20 | New York University | Anastomosis device |
| USD606992S1 (en) | 2009-07-21 | 2009-12-29 | Micro-Star Int'l Co., Ltd. | Laptop computer |
| US8328062B2 (en) | 2009-07-21 | 2012-12-11 | Covidien Lp | Surgical instrument with curvilinear tissue-contacting surfaces |
| US8143520B2 (en) | 2009-07-22 | 2012-03-27 | Paul Cutler | Universal wall plate thermometer |
| US8205779B2 (en) | 2009-07-23 | 2012-06-26 | Tyco Healthcare Group Lp | Surgical stapler with tactile feedback system |
| US20110021871A1 (en) | 2009-07-27 | 2011-01-27 | Gerry Berkelaar | Laparoscopic surgical instrument |
| JP5440766B2 (ja) | 2009-07-29 | 2014-03-12 | 日立工機株式会社 | インパクト工具 |
| US20110025311A1 (en) | 2009-07-29 | 2011-02-03 | Logitech Europe S.A. | Magnetic rotary system for input devices |
| MX2012001210A (es) | 2009-07-29 | 2012-03-26 | Hitachi Koki Kk | Herramienta de impacto. |
| FR2948594B1 (fr) | 2009-07-31 | 2012-07-20 | Dexterite Surgical | Manipulateur ergonomique et semi-automatique et applications aux instruments pour chirurgie mini-invasive |
| EP2281506B1 (en) | 2009-08-03 | 2013-01-16 | Fico Mirrors, S.A. | Method and system for determining an individual's state of attention |
| US8968358B2 (en) | 2009-08-05 | 2015-03-03 | Covidien Lp | Blunt tissue dissection surgical instrument jaw designs |
| US8172004B2 (en) | 2009-08-05 | 2012-05-08 | Techtronic Power Tools Technology Limited | Automatic transmission for a power tool |
| US10383629B2 (en) | 2009-08-10 | 2019-08-20 | Covidien Lp | System and method for preventing reprocessing of a powered surgical instrument |
| US8276801B2 (en) | 2011-02-01 | 2012-10-02 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| DE202009011312U1 (de) | 2009-08-11 | 2010-12-23 | C. & E. Fein Gmbh | Handwerkzeug mit einem Oszillationsantrieb |
| US8955732B2 (en) | 2009-08-11 | 2015-02-17 | Covidien Lp | Surgical stapling apparatus |
| US20110036891A1 (en) | 2009-08-11 | 2011-02-17 | Tyco Healthcare Group Lp | Surgical stapler with visual positional indicator |
| US8360299B2 (en) | 2009-08-11 | 2013-01-29 | Covidien Lp | Surgical stapling apparatus |
| US8459524B2 (en) | 2009-08-14 | 2013-06-11 | Covidien Lp | Tissue fastening system for a medical device |
| CN102573983B (zh) | 2009-08-14 | 2015-05-20 | 伊西康内外科公司 | 超声外科设备和硅波导以及其使用方法 |
| US8733612B2 (en) | 2009-08-17 | 2014-05-27 | Covidien Lp | Safety method for powered surgical instruments |
| EP2467314A1 (en) | 2009-08-17 | 2012-06-27 | Culligan, Patrick John | Apparatus for housing a plurality of needles and method of use therefor |
| US8342378B2 (en) | 2009-08-17 | 2013-01-01 | Covidien Lp | One handed stapler |
| US9271718B2 (en) | 2009-08-18 | 2016-03-01 | Karl Storz Gmbh & Co. Kg | Suturing and ligating method |
| US9265500B2 (en) | 2009-08-19 | 2016-02-23 | Covidien Lp | Surgical staple |
| US8387848B2 (en) | 2009-08-20 | 2013-03-05 | Covidien Lp | Surgical staple |
| US8162965B2 (en) | 2009-09-09 | 2012-04-24 | Tyco Healthcare Group Lp | Low profile cutting assembly with a return spring |
| US8258745B2 (en) | 2009-09-10 | 2012-09-04 | Syntheon, Llc | Surgical sterilizer with integrated battery charging device |
| JP2011079510A (ja) | 2009-09-10 | 2011-04-21 | Makita Corp | 電動車 |
| TWI394362B (zh) | 2009-09-11 | 2013-04-21 | Anpec Electronics Corp | 驅動直流馬達的方法及其相關電路 |
| US8974932B2 (en) | 2009-09-14 | 2015-03-10 | Warsaw Orthopedic, Inc. | Battery powered surgical tool with guide wire |
| US9168144B2 (en) | 2009-09-14 | 2015-10-27 | Evgeny Rivin | Prosthesis for replacement of cartilage |
| US20110066156A1 (en) | 2009-09-14 | 2011-03-17 | Warsaw Orthopedic, Inc. | Surgical Tool |
| DE102009041329A1 (de) | 2009-09-15 | 2011-03-24 | Celon Ag Medical Instruments | Kombiniertes Ultraschall- und HF Chirurgisches System |
| DE102009042411A1 (de) | 2009-09-21 | 2011-03-31 | Richard Wolf Gmbh | Medizinisches Instrument |
| CN102549473B (zh) | 2009-09-29 | 2015-04-22 | 奥林巴斯株式会社 | 内窥镜系统 |
| JP2011072574A (ja) | 2009-09-30 | 2011-04-14 | Terumo Corp | 医療用マニピュレータ |
| WO2011041488A2 (en) | 2009-09-30 | 2011-04-07 | Mayo Foundation For Medical Education And Research | Tissue capture and occlusion systems and methods |
| US8470355B2 (en) | 2009-10-01 | 2013-06-25 | Covidien Lp | Mesh implant |
| WO2011041571A2 (en) | 2009-10-01 | 2011-04-07 | Kardium Inc. | Medical device, kit and method for constricting tissue or a bodily orifice, for example, a mitral valve |
| US8970507B2 (en) | 2009-10-02 | 2015-03-03 | Blackberry Limited | Method of waking up and a portable electronic device configured to perform the same |
| US8257634B2 (en) | 2009-10-06 | 2012-09-04 | Tyco Healthcare Group Lp | Actuation sled having a curved guide member and method |
| US8430892B2 (en) | 2009-10-06 | 2013-04-30 | Covidien Lp | Surgical clip applier having a wireless clip counter |
| US8236011B2 (en) | 2009-10-06 | 2012-08-07 | Ethicon Endo-Surgery, Inc. | Method for deploying fasteners for use in a gastric volume reduction procedure |
| US9474540B2 (en) | 2009-10-08 | 2016-10-25 | Ethicon-Endo-Surgery, Inc. | Laparoscopic device with compound angulation |
| US10194904B2 (en) | 2009-10-08 | 2019-02-05 | Covidien Lp | Surgical staple and method of use |
| US8496154B2 (en) | 2009-10-08 | 2013-07-30 | Covidien Lp | Pair of double staple pusher in triple row stapler |
| US8141762B2 (en) | 2009-10-09 | 2012-03-27 | Ethicon Endo-Surgery, Inc. | Surgical stapler comprising a staple pocket |
| IN2012DN02987A (ru) | 2009-10-09 | 2015-07-31 | Ethicon Endo Surgery Inc | |
| US10172669B2 (en) | 2009-10-09 | 2019-01-08 | Ethicon Llc | Surgical instrument comprising an energy trigger lockout |
| US10441345B2 (en) | 2009-10-09 | 2019-10-15 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US9168054B2 (en) | 2009-10-09 | 2015-10-27 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US8951248B2 (en) | 2009-10-09 | 2015-02-10 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US8152041B2 (en) | 2009-10-14 | 2012-04-10 | Tyco Healthcare Group Lp | Varying tissue compression aided by elastic members |
| US9610080B2 (en) | 2009-10-15 | 2017-04-04 | Covidien Lp | Staple line reinforcement for anvil and cartridge |
| US8157151B2 (en) | 2009-10-15 | 2012-04-17 | Tyco Healthcare Group Lp | Staple line reinforcement for anvil and cartridge |
| US9693772B2 (en) | 2009-10-15 | 2017-07-04 | Covidien Lp | Staple line reinforcement for anvil and cartridge |
| US10293553B2 (en) | 2009-10-15 | 2019-05-21 | Covidien Lp | Buttress brachytherapy and integrated staple line markers for margin identification |
| US20150231409A1 (en) | 2009-10-15 | 2015-08-20 | Covidien Lp | Buttress brachytherapy and integrated staple line markers for margin identification |
| US8038693B2 (en) | 2009-10-21 | 2011-10-18 | Tyco Healthcare Group Ip | Methods for ultrasonic tissue sensing and feedback |
| US8523042B2 (en) | 2009-10-21 | 2013-09-03 | The General Hospital Corporation | Apparatus and method for preserving a tissue margin |
| US20110095064A1 (en) | 2009-10-22 | 2011-04-28 | Taylor Walter J | Fuel level monitoring system for combustion-powered tools |
| JPWO2011052391A1 (ja) | 2009-10-28 | 2013-03-21 | オリンパスメディカルシステムズ株式会社 | 医療用装置 |
| US8413872B2 (en) | 2009-10-28 | 2013-04-09 | Covidien Lp | Surgical fastening apparatus |
| US8322590B2 (en) | 2009-10-28 | 2012-12-04 | Covidien Lp | Surgical stapling instrument |
| CN102378601B (zh) | 2009-10-28 | 2014-04-30 | 奥林巴斯医疗株式会社 | 高频手术装置以及医疗设备的动作方法 |
| US8430292B2 (en) | 2009-10-28 | 2013-04-30 | Covidien Lp | Surgical fastening apparatus |
| CA2779103A1 (en) | 2009-10-29 | 2011-05-05 | Prosidyan, Inc. | Bone graft material |
| US8657175B2 (en) | 2009-10-29 | 2014-02-25 | Medigus Ltd. | Medical device comprising alignment systems for bringing two portions into alignment |
| US8398633B2 (en) | 2009-10-30 | 2013-03-19 | Covidien Lp | Jaw roll joint |
| US8225979B2 (en) | 2009-10-30 | 2012-07-24 | Tyco Healthcare Group Lp | Locking shipping wedge |
| US8357161B2 (en) | 2009-10-30 | 2013-01-22 | Covidien Lp | Coaxial drive |
| US20120220990A1 (en) | 2009-11-04 | 2012-08-30 | Koninklijke Philips Electronics N.V. | Disposable tip with sheath |
| US8418907B2 (en) | 2009-11-05 | 2013-04-16 | Covidien Lp | Surgical stapler having cartridge with adjustable cam mechanism |
| US20110112530A1 (en) | 2009-11-06 | 2011-05-12 | Keller Craig A | Battery Powered Electrosurgery |
| US20110112517A1 (en) | 2009-11-06 | 2011-05-12 | Peine Willliam J | Surgical instrument |
| US8162138B2 (en) | 2009-11-09 | 2012-04-24 | Containmed, Inc. | Universal surgical fastener sterilization caddy |
| US8186558B2 (en) | 2009-11-10 | 2012-05-29 | Tyco Healthcare Group Lp | Locking mechanism for use with loading units |
| KR101999802B1 (ko) | 2009-11-13 | 2019-07-12 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 독립적으로 회전하는 부재 내의 병렬 구동 샤프트들을 위한 모터 연접부 |
| CN102596058B (zh) | 2009-11-13 | 2015-10-21 | 直观外科手术操作公司 | 具有复设的闭合机构的末端执行器 |
| WO2011060315A2 (en) | 2009-11-13 | 2011-05-19 | Intuitive Surgical Operations, Inc. | Surgical tool with a compact wrist |
| US20110118708A1 (en) | 2009-11-13 | 2011-05-19 | Intuitive Surgical Operations, Inc. | Double universal joint |
| US8899466B2 (en) | 2009-11-19 | 2014-12-02 | Ethicon Endo-Surgery, Inc. | Devices and methods for introducing a surgical circular stapling instrument into a patient |
| US8235272B2 (en) * | 2009-11-20 | 2012-08-07 | Tyco Healthcare Group Lp | Surgical stapling device with captive anvil |
| JP5073733B2 (ja) | 2009-11-30 | 2012-11-14 | シャープ株式会社 | 蓄電池の強制放電機構及び安全スイッチ装置 |
| JP5211022B2 (ja) | 2009-11-30 | 2013-06-12 | 株式会社日立製作所 | リチウムイオン二次電池 |
| US8167622B2 (en) | 2009-12-02 | 2012-05-01 | Mig Technology Inc. | Power plug with a freely rotatable delivery point |
| DE102009060987A1 (de) | 2009-12-07 | 2011-06-09 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Chirurgisches Manipulationsinstrument |
| US8136712B2 (en) | 2009-12-10 | 2012-03-20 | Ethicon Endo-Surgery, Inc. | Surgical stapler with discrete staple height adjustment and tactile feedback |
| FR2953752B1 (fr) | 2009-12-11 | 2012-01-20 | Prospection & Inventions | Outil de fixation a moteur a combustion interne a butee de chambre unique d'ouverture et de fermeture |
| CN101716090A (zh) | 2009-12-15 | 2010-06-02 | 李东瑞 | 管型吻合器的盖帽 |
| DE102009059196A1 (de) | 2009-12-17 | 2011-06-22 | Aesculap AG, 78532 | Chirurgisches System zum Verbinden von Körpergewebe |
| GB2476461A (en) | 2009-12-22 | 2011-06-29 | Neosurgical Ltd | Laparoscopic surgical device with jaws biased closed |
| DE102009060495A1 (de) | 2009-12-23 | 2011-06-30 | Karl Storz GmbH & Co. KG, 78532 | Haltevorrichtung für medizinische Instrumente |
| US8851354B2 (en) | 2009-12-24 | 2014-10-07 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument that analyzes tissue thickness |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US8267300B2 (en) | 2009-12-30 | 2012-09-18 | Ethicon Endo-Surgery, Inc. | Dampening device for endoscopic surgical stapler |
| US8714430B2 (en) | 2009-12-31 | 2014-05-06 | Covidien Lp | Indicator for surgical stapler |
| US8561871B2 (en) | 2009-12-31 | 2013-10-22 | Covidien Lp | Indicators for surgical staplers |
| US8261958B1 (en) | 2010-01-06 | 2012-09-11 | Cardica, Inc. | Stapler cartridge with staples frangibly affixed thereto |
| US8608046B2 (en) | 2010-01-07 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Test device for a surgical tool |
| US9475180B2 (en) | 2010-01-07 | 2016-10-25 | Black & Decker Inc. | Power tool having rotary input control |
| WO2011085194A1 (en) | 2010-01-07 | 2011-07-14 | Black & Decker Inc. | Power screwdriver having rotary input control |
| US20110173536A1 (en) | 2010-01-12 | 2011-07-14 | Mark Allan Payne | System and method for facilitating on-site stain removal |
| US8313509B2 (en) | 2010-01-19 | 2012-11-20 | Covidien Lp | Suture and retainer assembly and SULU |
| AU2011341678B2 (en) | 2010-01-21 | 2014-12-11 | OrthAlign, Inc. | Systems and methods for joint replacement |
| US10911515B2 (en) | 2012-05-24 | 2021-02-02 | Deka Products Limited Partnership | System, method, and apparatus for electronic patient care |
| US8469254B2 (en) | 2010-01-22 | 2013-06-25 | Covidien Lp | Surgical instrument having a drive assembly |
| CN102811675B (zh) | 2010-01-22 | 2016-01-20 | 奥林巴斯株式会社 | 治疗用处理器具、治疗用处理装置及治疗处理方法 |
| ES2662543T3 (es) | 2010-01-26 | 2018-04-06 | Artack Medical (2013) Ltd. | Instrumento médico articulado |
| US8322901B2 (en) | 2010-01-28 | 2012-12-04 | Michelotti William M | Illuminated vehicle wheel with bearing seal slip ring assembly |
| US9510925B2 (en) | 2010-02-02 | 2016-12-06 | Covidien Lp | Surgical meshes |
| US8328061B2 (en) | 2010-02-02 | 2012-12-11 | Covidien Lp | Surgical instrument for joining tissue |
| CA2789033A1 (en) | 2010-02-08 | 2011-08-11 | Jonathan Robert Coppeta | Low-permeability, laser-activated drug delivery device |
| JP5432761B2 (ja) | 2010-02-12 | 2014-03-05 | 株式会社マキタ | 複数のバッテリパックを電源とする電動工具 |
| JP5461221B2 (ja) | 2010-02-12 | 2014-04-02 | 株式会社マキタ | 複数のバッテリパックを電源とする電動工具 |
| US20110199225A1 (en) | 2010-02-15 | 2011-08-18 | Honeywell International Inc. | Use of token switch to indicate unauthorized manipulation of a protected device |
| CN101779977B (zh) | 2010-02-25 | 2011-12-14 | 上海创亿医疗器械技术有限公司 | 外科线形切割缝合器的钉仓 |
| US8672209B2 (en) | 2010-02-25 | 2014-03-18 | Design Standards Corporation | Laproscopic stapler |
| US8403945B2 (en) | 2010-02-25 | 2013-03-26 | Covidien Lp | Articulating endoscopic surgical clip applier |
| WO2011106792A2 (en) | 2010-02-26 | 2011-09-01 | Myskin, Inc. | Analytic methods of tissue evaluation |
| US8403832B2 (en) | 2010-02-26 | 2013-03-26 | Covidien Lp | Drive mechanism for articulation of a surgical instrument |
| US9610412B2 (en) | 2010-03-02 | 2017-04-04 | Covidien Lp | Internally pressurized medical devices |
| US20110218400A1 (en) | 2010-03-05 | 2011-09-08 | Tyco Healthcare Group Lp | Surgical instrument with integrated wireless camera |
| US20110218550A1 (en) | 2010-03-08 | 2011-09-08 | Tyco Healthcare Group Lp | System and method for determining and adjusting positioning and orientation of a surgical device |
| DE102010002702A1 (de) | 2010-03-09 | 2011-09-15 | Robert Bosch Gmbh | Elektrogerät, insbesondere Elektrohandwerkzeug |
| US8864761B2 (en) | 2010-03-10 | 2014-10-21 | Covidien Lp | System and method for determining proximity relative to a critical structure |
| AU2011200961B2 (en) | 2010-03-12 | 2014-05-29 | Covidien Lp | Method and apparatus for determining parameters of linear motion in a surgical instrument |
| WO2011114924A1 (ja) | 2010-03-15 | 2011-09-22 | テルモ株式会社 | 医療用マニピュレータ |
| US8288984B2 (en) | 2010-03-17 | 2012-10-16 | Tai-Her Yang | DC brushless motor drive circuit with speed variable-voltage |
| US8575880B2 (en) | 2010-03-17 | 2013-11-05 | Alan Lyndon Grantz | Direct current motor with independently driven and switchable stators |
| DE102010003339B4 (de) | 2010-03-26 | 2012-02-02 | Leica Microsystems (Schweiz) Ag | Sterile Bedieneinheit mit Sensorbildschirm |
| US8696665B2 (en) | 2010-03-26 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical cutting and sealing instrument with reduced firing force |
| US20110172495A1 (en) | 2010-03-26 | 2011-07-14 | Armstrong David N | Surgical retractor |
| DE102010013150A1 (de) | 2010-03-27 | 2011-09-29 | Volkswagen Ag | Vorrichtung zur thermischen Isolierung mindestens einer Fahrzeugbatterie |
| US20110241597A1 (en) | 2010-03-30 | 2011-10-06 | Lin Engineering | H-bridge drive circuit for step motor control |
| JP5758882B2 (ja) | 2010-03-30 | 2015-08-05 | カール シュトルツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 医療用マニピュレータシステム |
| US8894654B2 (en) | 2010-03-31 | 2014-11-25 | Smart Medical Devices, Inc. | Depth controllable and measurable medical driver devices and methods of use |
| US8074859B2 (en) | 2010-03-31 | 2011-12-13 | Tyco Healthcare Group Lp | Surgical instrument |
| CN201719298U (zh) | 2010-04-01 | 2011-01-26 | 江苏瑞安贝医疗器械有限公司 | 直线切割吻合器活动手柄防脱机构 |
| USD667018S1 (en) | 2010-04-02 | 2012-09-11 | Kewaunee Scientific Corporation | Display screen of a biological safety cabinet with graphical user interface |
| US20120265220A1 (en) | 2010-04-06 | 2012-10-18 | Pavel Menn | Articulating Steerable Clip Applier for Laparoscopic Procedures |
| US9722334B2 (en) | 2010-04-07 | 2017-08-01 | Black & Decker Inc. | Power tool with light unit |
| US8348127B2 (en) | 2010-04-07 | 2013-01-08 | Covidien Lp | Surgical fastener applying apparatus |
| US8662370B2 (en) | 2010-04-08 | 2014-03-04 | Hidehisa Thomas Takei | Introducer system and assembly for surgical staplers |
| US8961504B2 (en) | 2010-04-09 | 2015-02-24 | Covidien Lp | Optical hydrology arrays and system and method for monitoring water displacement during treatment of patient tissue |
| US8597295B2 (en) | 2010-04-12 | 2013-12-03 | Covidien Lp | Surgical instrument with non-contact electrical coupling |
| US8834518B2 (en) | 2010-04-12 | 2014-09-16 | Ethicon Endo-Surgery, Inc. | Electrosurgical cutting and sealing instruments with cam-actuated jaws |
| EP2377477B1 (en) | 2010-04-14 | 2012-05-30 | Tuebingen Scientific Medical GmbH | Surgical instrument with elastically moveable instrument head |
| US8734831B2 (en) | 2010-04-16 | 2014-05-27 | Snu R&Db Foundation | Method for manufacturing a porous ceramic scaffold having an organic/inorganic hybrid coating layer containing a bioactive factor |
| IT1399603B1 (it) | 2010-04-26 | 2013-04-26 | Scuola Superiore Di Studi Universitari E Di Perfez | Apparato robotico per interventi di chirurgia minimamente invasiva |
| US9451938B2 (en) | 2010-04-27 | 2016-09-27 | DePuy Synthes Products, Inc. | Insertion instrument for anchor assembly |
| CA2797582C (en) | 2010-04-29 | 2018-04-10 | Ethicon, Llc | High-density self-retaining sutures, manufacturing equipment and methods |
| US20110271186A1 (en) | 2010-04-30 | 2011-11-03 | John Colin Owens | Visual audio mixing system and method thereof |
| US9226760B2 (en) | 2010-05-07 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Laparoscopic devices with flexible actuation mechanisms |
| US8562592B2 (en) | 2010-05-07 | 2013-10-22 | Ethicon Endo-Surgery, Inc. | Compound angle laparoscopic methods and devices |
| US20110275901A1 (en) | 2010-05-07 | 2011-11-10 | Ethicon Endo-Surgery, Inc. | Laparoscopic devices with articulating end effectors |
| US20110276083A1 (en) | 2010-05-07 | 2011-11-10 | Ethicon Endo-Surgery, Inc. | Bendable shaft for handle positioning |
| US8464925B2 (en) | 2010-05-11 | 2013-06-18 | Ethicon Endo-Surgery, Inc. | Methods and apparatus for delivering tissue treatment compositions to stapled tissue |
| US8646674B2 (en) | 2010-05-11 | 2014-02-11 | Ethicon Endo-Surgery, Inc. | Methods and apparatus for delivering tissue treatment compositions to stapled tissue |
| CN101828940A (zh) | 2010-05-12 | 2010-09-15 | 苏州天臣国际医疗科技有限公司 | 弯曲型线性闭合切割器 |
| US8603077B2 (en) | 2010-05-14 | 2013-12-10 | Intuitive Surgical Operations, Inc. | Force transmission for robotic surgical instrument |
| US8685020B2 (en) | 2010-05-17 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instruments and end effectors therefor |
| US8958860B2 (en) | 2010-05-17 | 2015-02-17 | Covidien Lp | Optical sensors for intraoperative procedures |
| JP5085684B2 (ja) | 2010-05-19 | 2012-11-28 | オリンパスメディカルシステムズ株式会社 | 処置具システム及びマニピュレータシステム |
| JP5534327B2 (ja) | 2010-05-19 | 2014-06-25 | 日立工機株式会社 | 電動工具 |
| DE102010029100A1 (de) | 2010-05-19 | 2011-11-24 | Osram Gesellschaft mit beschränkter Haftung | Schaltungsanordnung zum Betreiben mindestens einer Entladungslampe und mindestens einer LED |
| US20110285507A1 (en) | 2010-05-21 | 2011-11-24 | Nelson Erik T | Tamper Detection RFID Tape |
| US20110293690A1 (en) | 2010-05-27 | 2011-12-01 | Tyco Healthcare Group Lp | Biodegradable Polymer Encapsulated Microsphere Particulate Film and Method of Making Thereof |
| US20110292258A1 (en) | 2010-05-28 | 2011-12-01 | C2Cure, Inc. | Two sensor imaging systems |
| US9091588B2 (en) | 2010-05-28 | 2015-07-28 | Prognost Systems Gmbh | System and method of mechanical fault detection based on signature detection |
| USD666209S1 (en) | 2010-06-05 | 2012-08-28 | Apple Inc. | Display screen or portion thereof with graphical user interface |
| US9144455B2 (en) | 2010-06-07 | 2015-09-29 | Just Right Surgical, Llc | Low power tissue sealing device and method |
| KR101095099B1 (ko) | 2010-06-07 | 2011-12-16 | 삼성전기주식회사 | 편평형 진동모터 |
| CN101856250B (zh) | 2010-06-07 | 2011-08-31 | 常州威克医疗器械有限公司 | 一次性自动保险圆形吻合器 |
| FR2961087B1 (fr) | 2010-06-09 | 2013-06-28 | Allflex Europ | Outil de prelevement d'un echantillon de tissu animal. |
| US8795276B2 (en) | 2010-06-09 | 2014-08-05 | Ethicon Endo-Surgery, Inc. | Electrosurgical instrument employing a plurality of electrodes |
| WO2011156776A2 (en) | 2010-06-10 | 2011-12-15 | The Regents Of The University Of California | Smart electric vehicle (ev) charging and grid integration apparatus and methods |
| US8825164B2 (en) | 2010-06-11 | 2014-09-02 | Enteromedics Inc. | Neural modulation devices and methods |
| US20120130217A1 (en) | 2010-11-23 | 2012-05-24 | Kauphusman James V | Medical devices having electrodes mounted thereon and methods of manufacturing therefor |
| US20110313894A1 (en) | 2010-06-18 | 2011-12-22 | Dye Alan W | System and Method for Surgical Pack Manufacture, Monitoring, and Tracking |
| US8596515B2 (en) | 2010-06-18 | 2013-12-03 | Covidien Lp | Staple position sensor system |
| US8302323B2 (en) | 2010-06-21 | 2012-11-06 | Confluent Surgical, Inc. | Hemostatic patch |
| EP2397309A1 (en) | 2010-06-21 | 2011-12-21 | Envision Energy (Denmark) ApS | A Wind Turbine and a Shaft for a Wind Turbine |
| US9028495B2 (en) | 2010-06-23 | 2015-05-12 | Covidien Lp | Surgical instrument with a separable coaxial joint |
| US8366559B2 (en) | 2010-06-23 | 2013-02-05 | Lenkbar, Llc | Cannulated flexible drive shaft |
| WO2011162753A1 (en) | 2010-06-23 | 2011-12-29 | Mako Sugical Corp. | Inertially tracked objects |
| US20110315413A1 (en) | 2010-06-25 | 2011-12-29 | Mako Surgical Corp. | Kit-Of Parts for Multi-Functional Tool, Drive Unit, and Operating Members |
| USD650789S1 (en) | 2010-06-25 | 2011-12-20 | Microsoft Corporation | Display screen with in-process indicator |
| US20120004636A1 (en) | 2010-07-02 | 2012-01-05 | Denny Lo | Hemostatic fibrous material |
| KR101143469B1 (ko) | 2010-07-02 | 2012-05-08 | 에스케이하이닉스 주식회사 | 반도체 메모리의 출력 인에이블 신호 생성 회로 |
| US20120008880A1 (en) | 2010-07-06 | 2012-01-12 | Landy Toth | Isolation system for a mobile computing device |
| EP2405439B1 (en) | 2010-07-07 | 2013-01-23 | Crocus Technology S.A. | Magnetic device with optimized heat confinement |
| US9149324B2 (en) | 2010-07-08 | 2015-10-06 | Ethicon Endo-Surgery, Inc. | Surgical instrument comprising an articulatable end effector |
| WO2012006306A2 (en) | 2010-07-08 | 2012-01-12 | Ethicon Endo-Surgery, Inc. | Surgical instrument comprising an articulatable end effector |
| US9089600B2 (en) | 2010-07-12 | 2015-07-28 | University Of Southern California | Systems and methods for in vitro and in vivo imaging of cells on a substrate |
| US8453906B2 (en) | 2010-07-14 | 2013-06-04 | Ethicon Endo-Surgery, Inc. | Surgical instruments with electrodes |
| US8613383B2 (en) | 2010-07-14 | 2013-12-24 | Ethicon Endo-Surgery, Inc. | Surgical instruments with electrodes |
| JP2012023847A (ja) | 2010-07-14 | 2012-02-02 | Panasonic Electric Works Co Ltd | 充電式電気機器 |
| US8439246B1 (en) | 2010-07-20 | 2013-05-14 | Cardica, Inc. | Surgical stapler with cartridge-adjustable clamp gap |
| US8840609B2 (en) | 2010-07-23 | 2014-09-23 | Conmed Corporation | Tissue fusion system and method of performing a functional verification test |
| US9011437B2 (en) | 2010-07-23 | 2015-04-21 | Ethicon Endo-Surgery, Inc. | Electrosurgical cutting and sealing instrument |
| US8663270B2 (en) | 2010-07-23 | 2014-03-04 | Conmed Corporation | Jaw movement mechanism and method for a surgical tool |
| US8979843B2 (en) | 2010-07-23 | 2015-03-17 | Ethicon Endo-Surgery, Inc. | Electrosurgical cutting and sealing instrument |
| WO2012013577A1 (en) | 2010-07-26 | 2012-02-02 | Laboratorios Miret, S.A. | Composition for coating medical devices containing lae and a polycationic amphoteric polymer |
| US8403946B2 (en) | 2010-07-28 | 2013-03-26 | Covidien Lp | Articulating clip applier cartridge |
| US8968337B2 (en) | 2010-07-28 | 2015-03-03 | Covidien Lp | Articulating clip applier |
| US8801734B2 (en) | 2010-07-30 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Circular stapling instruments with secondary cutting arrangements and methods of using same |
| US8783543B2 (en) | 2010-07-30 | 2014-07-22 | Ethicon Endo-Surgery, Inc. | Tissue acquisition arrangements and methods for surgical stapling devices |
| US8789740B2 (en) | 2010-07-30 | 2014-07-29 | Ethicon Endo-Surgery, Inc. | Linear cutting and stapling device with selectively disengageable cutting member |
| JP5686236B2 (ja) | 2010-07-30 | 2015-03-18 | 日立工機株式会社 | 電動工具及びネジ締め用電動工具 |
| US8900267B2 (en) | 2010-08-05 | 2014-12-02 | Microline Surgical, Inc. | Articulable surgical instrument |
| US8852199B2 (en) | 2010-08-06 | 2014-10-07 | Abyrx, Inc. | Method and device for handling bone adhesives |
| JP5881606B2 (ja) | 2010-08-06 | 2016-03-09 | 大日本住友製薬株式会社 | 脊髄損傷治療用製剤 |
| CN102378503A (zh) | 2010-08-06 | 2012-03-14 | 鸿富锦精密工业(深圳)有限公司 | 电子装置组合 |
| US8675820B2 (en) | 2010-08-10 | 2014-03-18 | Varian Medical Systems, Inc. | Electronic conical collimator verification |
| EP2417925B1 (en) | 2010-08-12 | 2016-12-07 | Immersion Corporation | Electrosurgical tool having tactile feedback |
| CN101912284B (zh) | 2010-08-13 | 2012-07-18 | 李东瑞 | 弧形切割吻合器 |
| US8298233B2 (en) | 2010-08-20 | 2012-10-30 | Tyco Healthcare Group Lp | Surgical instrument configured for use with interchangeable hand grips |
| CA2945596C (en) | 2010-08-25 | 2018-12-04 | Covidien Ag | Battery-powered hand-held ultrasonic surgical cautery cutting device |
| WO2012033860A1 (en) | 2010-09-07 | 2012-03-15 | Boston Scientific Scimed, Inc. | Self-powered ablation catheter for renal denervation |
| US8360296B2 (en) | 2010-09-09 | 2013-01-29 | Ethicon Endo-Surgery, Inc. | Surgical stapling head assembly with firing lockout for a surgical stapler |
| US8632525B2 (en) | 2010-09-17 | 2014-01-21 | Ethicon Endo-Surgery, Inc. | Power control arrangements for surgical instruments and batteries |
| US9289212B2 (en) | 2010-09-17 | 2016-03-22 | Ethicon Endo-Surgery, Inc. | Surgical instruments and batteries for surgical instruments |
| JPWO2012036296A1 (ja) | 2010-09-17 | 2014-02-03 | ユニバーサル・バイオ・リサーチ株式会社 | カートリッジおよび自動分析装置 |
| US20120078244A1 (en) | 2010-09-24 | 2012-03-29 | Worrell Barry C | Control features for articulating surgical device |
| US9220559B2 (en) | 2010-09-24 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Articulation joint features for articulating surgical device |
| US9545253B2 (en) | 2010-09-24 | 2017-01-17 | Ethicon Endo-Surgery, Llc | Surgical instrument with contained dual helix actuator assembly |
| US20130131651A1 (en) | 2010-09-24 | 2013-05-23 | Ethicon Endo-Surgery, Inc. | Features providing linear actuation through articulation joint in surgical instrument |
| US8733613B2 (en) | 2010-09-29 | 2014-05-27 | Ethicon Endo-Surgery, Inc. | Staple cartridge |
| EP2621339B1 (en) | 2010-09-29 | 2020-01-15 | Dexcom, Inc. | Advanced continuous analyte monitoring system |
| US11298125B2 (en) | 2010-09-30 | 2022-04-12 | Cilag Gmbh International | Tissue stapler having a thickness compensator |
| US9220501B2 (en) | 2010-09-30 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensators |
| US9277919B2 (en) | 2010-09-30 | 2016-03-08 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising fibers to produce a resilient load |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US9307989B2 (en) | 2012-03-28 | 2016-04-12 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorportating a hydrophobic agent |
| CN102440813B (zh) | 2010-09-30 | 2013-05-08 | 上海创亿医疗器械技术有限公司 | 带有链条关节的腔镜外科切割吻合器 |
| JP5902177B2 (ja) | 2010-09-30 | 2016-04-13 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 支持保持具を含む埋め込み可能な締結具カートリッジ |
| US9517063B2 (en) | 2012-03-28 | 2016-12-13 | Ethicon Endo-Surgery, Llc | Movable member for use with a tissue thickness compensator |
| US20120080498A1 (en) | 2010-09-30 | 2012-04-05 | Ethicon Endo-Surgery, Inc. | Curved end effector for a stapling instrument |
| US9272406B2 (en) | 2010-09-30 | 2016-03-01 | Ethicon Endo-Surgery, Llc | Fastener cartridge comprising a cutting member for releasing a tissue thickness compensator |
| BR112013007659B1 (pt) | 2010-09-30 | 2020-09-08 | Ethicon Endo-Surgery, Inc. | Instrumento cirúrgico |
| CN103140178B (zh) | 2010-09-30 | 2015-09-23 | 伊西康内外科公司 | 包括保持矩阵和对齐矩阵的紧固件系统 |
| US8893949B2 (en) | 2010-09-30 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Surgical stapler with floating anvil |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| CN103458808B (zh) | 2010-09-30 | 2016-10-05 | 伊西康内外科公司 | 具有紧凑铰接控制装置的外科缝合器械 |
| CA2813230C (en) | 2010-09-30 | 2019-01-15 | Ethicon Endo-Surgery, Inc. | Compressible fastener cartridge |
| US9320523B2 (en) | 2012-03-28 | 2016-04-26 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising tissue ingrowth features |
| US9301753B2 (en) | 2010-09-30 | 2016-04-05 | Ethicon Endo-Surgery, Llc | Expandable tissue thickness compensator |
| US9211120B2 (en) | 2011-04-29 | 2015-12-15 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a plurality of medicaments |
| US9314246B2 (en) | 2010-09-30 | 2016-04-19 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorporating an anti-inflammatory agent |
| US20120248169A1 (en) | 2010-09-30 | 2012-10-04 | Ethicon Endo-Surgery, Inc. | Methods for forming tissue thickness compensator arrangements for surgical staplers |
| BR112013007624B1 (pt) | 2010-09-30 | 2020-09-08 | Ethicon Endo-Surgery, Inc. | Instrumentos cirúrgicos de corte e de fixação com sistemas separados e distintos de corte de tecido e de implantação de prendedores |
| US8657176B2 (en) | 2010-09-30 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator for a surgical stapler |
| US9332974B2 (en) | 2010-09-30 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Layered tissue thickness compensator |
| US8757465B2 (en) | 2010-09-30 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Fastener system comprising a retention matrix and an alignment matrix |
| US9301752B2 (en) | 2010-09-30 | 2016-04-05 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising a plurality of capsules |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US9364233B2 (en) | 2010-09-30 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Tissue thickness compensators for circular surgical staplers |
| US8998061B2 (en) | 2010-10-01 | 2015-04-07 | Covidien Lp | Surgical fastener applying apparatus |
| US8888809B2 (en) | 2010-10-01 | 2014-11-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with jaw member |
| USD650074S1 (en) | 2010-10-01 | 2011-12-06 | Ethicon Endo-Surgery, Inc. | Surgical instrument |
| US8979890B2 (en) | 2010-10-01 | 2015-03-17 | Ethicon Endo-Surgery, Inc. | Surgical instrument with jaw member |
| US9750502B2 (en) | 2010-10-01 | 2017-09-05 | Covidien Lp | Surgical stapling device for performing circular anastomosis and surgical staples for use therewith |
| US8899461B2 (en) | 2010-10-01 | 2014-12-02 | Covidien Lp | Tissue stop for surgical instrument |
| CN103429182B (zh) | 2010-10-01 | 2016-01-20 | 伊西康内外科公司 | 具有钳口构件的外科器械 |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| JP5636247B2 (ja) | 2010-10-06 | 2014-12-03 | Hoya株式会社 | 電子内視鏡用プロセッサ及び電子内視鏡装置 |
| US20120086276A1 (en) | 2010-10-12 | 2012-04-12 | Sawyers Thomas P | Supplying Power To An Electronic Device Using Multiple Power Sources |
| US8828046B2 (en) | 2010-10-14 | 2014-09-09 | Ethicon Endo-Surgery, Inc. | Laparoscopic device with distal handle |
| US20110225105A1 (en) | 2010-10-21 | 2011-09-15 | Ford Global Technologies, Llc | Method and system for monitoring an energy storage system for a vehicle for trip planning |
| JP5753970B2 (ja) | 2010-10-22 | 2015-07-22 | パナソニックIpマネジメント株式会社 | 流量計測装置 |
| US9039694B2 (en) | 2010-10-22 | 2015-05-26 | Just Right Surgical, Llc | RF generator system for surgical vessel sealing |
| WO2012151073A2 (en) | 2011-05-03 | 2012-11-08 | Endosee Corporation | Method and apparatus for hysteroscopy and endometrial biopsy |
| US20120109186A1 (en) | 2010-10-29 | 2012-05-03 | Parrott David A | Articulating laparoscopic surgical instruments |
| US8568425B2 (en) | 2010-11-01 | 2013-10-29 | Covidien Lp | Wire spool for passing of wire through a rotational coupling |
| US9011471B2 (en) | 2010-11-05 | 2015-04-21 | Ethicon Endo-Surgery, Inc. | Surgical instrument with pivoting coupling to modular shaft and end effector |
| US20120116261A1 (en) | 2010-11-05 | 2012-05-10 | Mumaw Daniel J | Surgical instrument with slip ring assembly to power ultrasonic transducer |
| US9421062B2 (en) | 2010-11-05 | 2016-08-23 | Ethicon Endo-Surgery, Llc | Surgical instrument shaft with resiliently biased coupling to handpiece |
| US9597143B2 (en) | 2010-11-05 | 2017-03-21 | Ethicon Endo-Surgery, Llc | Sterile medical instrument charging device |
| US20120116265A1 (en) | 2010-11-05 | 2012-05-10 | Houser Kevin L | Surgical instrument with charging devices |
| US20120116381A1 (en) | 2010-11-05 | 2012-05-10 | Houser Kevin L | Surgical instrument with charging station and wireless communication |
| US9375255B2 (en) | 2010-11-05 | 2016-06-28 | Ethicon Endo-Surgery, Llc | Surgical instrument handpiece with resiliently biased coupling to modular shaft and end effector |
| US9526921B2 (en) | 2010-11-05 | 2016-12-27 | Ethicon Endo-Surgery, Llc | User feedback through end effector of surgical instrument |
| US9089338B2 (en) | 2010-11-05 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Medical device packaging with window for insertion of reusable component |
| US9782214B2 (en) | 2010-11-05 | 2017-10-10 | Ethicon Llc | Surgical instrument with sensor and powered control |
| US9017849B2 (en) | 2010-11-05 | 2015-04-28 | Ethicon Endo-Surgery, Inc. | Power source management for medical device |
| US9381058B2 (en) | 2010-11-05 | 2016-07-05 | Ethicon Endo-Surgery, Llc | Recharge system for medical devices |
| US9000720B2 (en) | 2010-11-05 | 2015-04-07 | Ethicon Endo-Surgery, Inc. | Medical device packaging with charging interface |
| US9039720B2 (en) | 2010-11-05 | 2015-05-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument with ratcheting rotatable shaft |
| US9072523B2 (en) | 2010-11-05 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Medical device with feature for sterile acceptance of non-sterile reusable component |
| US9161803B2 (en) | 2010-11-05 | 2015-10-20 | Ethicon Endo-Surgery, Inc. | Motor driven electrosurgical device with mechanical and electrical feedback |
| US9510895B2 (en) | 2010-11-05 | 2016-12-06 | Ethicon Endo-Surgery, Llc | Surgical instrument with modular shaft and end effector |
| US9017851B2 (en) | 2010-11-05 | 2015-04-28 | Ethicon Endo-Surgery, Inc. | Sterile housing for non-sterile medical device component |
| US8308041B2 (en) | 2010-11-10 | 2012-11-13 | Tyco Healthcare Group Lp | Staple formed over the wire wound closure procedure |
| US20120123463A1 (en) | 2010-11-11 | 2012-05-17 | Moises Jacobs | Mechanically-guided transoral bougie |
| WO2012068156A2 (en) | 2010-11-15 | 2012-05-24 | Intuitive Surgical Operations, Inc. | Decoupling instrument shaft roll and end effector actuation in a surgical instrument |
| US8480703B2 (en) | 2010-11-19 | 2013-07-09 | Covidien Lp | Surgical device |
| US20120175398A1 (en) | 2010-11-22 | 2012-07-12 | Mayo Foundation For Medical Education And Research | Stapling apparatus and methods of assembling or operating the same |
| US8679093B2 (en) | 2010-11-23 | 2014-03-25 | Microchips, Inc. | Multi-dose drug delivery device and method |
| KR20120059105A (ko) | 2010-11-30 | 2012-06-08 | 현대자동차주식회사 | 고전압 배터리팩의 수분 배출장치 |
| WO2012072133A1 (en) | 2010-12-01 | 2012-06-07 | Ethicon Endo-Surgery, Inc. | A surgical stapling device and a method for anchoring a liner to a hollow organ |
| JP5530911B2 (ja) * | 2010-12-02 | 2014-06-25 | Hoya株式会社 | ズーム式電子内視鏡 |
| EP2647472B1 (en) | 2010-12-02 | 2016-09-14 | Makita Corporation | Power tool |
| US8523043B2 (en) | 2010-12-07 | 2013-09-03 | Immersion Corporation | Surgical stapler having haptic feedback |
| US8801710B2 (en) | 2010-12-07 | 2014-08-12 | Immersion Corporation | Electrosurgical sealing tool having haptic feedback |
| CN102038532A (zh) | 2010-12-07 | 2011-05-04 | 苏州天臣国际医疗科技有限公司 | 钉仓组件 |
| DE102010053811A1 (de) | 2010-12-08 | 2012-06-14 | Moog Gmbh | Störungssicheres Betätigungssystem |
| US8714352B2 (en) | 2010-12-10 | 2014-05-06 | Covidien Lp | Cartridge shipping aid |
| US8348130B2 (en) | 2010-12-10 | 2013-01-08 | Covidien Lp | Surgical apparatus including surgical buttress |
| US20120239068A1 (en) | 2010-12-10 | 2012-09-20 | Morris James R | Surgical instrument |
| CN101991453B (zh) | 2010-12-10 | 2012-07-18 | 苏州天臣国际医疗科技有限公司 | 直线型切割缝合器 |
| CN101991452B (zh) | 2010-12-10 | 2012-07-04 | 苏州天臣国际医疗科技有限公司 | 一种直线型外科装订仪 |
| CN201949071U (zh) | 2010-12-10 | 2011-08-31 | 苏州天臣国际医疗科技有限公司 | 直线型切割缝合器 |
| FR2968564B1 (fr) | 2010-12-13 | 2013-06-21 | Perouse Medical | Dispositif medical destine a entrer en contact avec un tissu d'un patient et procede de fabrication associe. |
| US8736212B2 (en) | 2010-12-16 | 2014-05-27 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method of automatic detection and prevention of motor runaway |
| US8540735B2 (en) | 2010-12-16 | 2013-09-24 | Apollo Endosurgery, Inc. | Endoscopic suture cinch system |
| CN102068290B (zh) | 2010-12-16 | 2013-06-05 | 苏州天臣国际医疗科技有限公司 | 直线型切割缝合器 |
| CN201879759U (zh) | 2010-12-21 | 2011-06-29 | 南京迈迪欣医疗器械有限公司 | 可控制组织厚度的一次性使用旋转切割吻合器的钉仓装置 |
| US9579158B2 (en) | 2010-12-24 | 2017-02-28 | Ao Technology Ag | Surgical instrument |
| US9124097B2 (en) | 2010-12-29 | 2015-09-01 | International Safety And Development, Inc. | Polarity correcting device |
| CN102228387B (zh) | 2010-12-29 | 2012-11-07 | 北京中法派尔特医疗设备有限公司 | 数控外科装订器械 |
| US8936614B2 (en) | 2010-12-30 | 2015-01-20 | Covidien Lp | Combined unilateral/bilateral jaws on a surgical instrument |
| DE102011002404A1 (de) | 2011-01-03 | 2012-07-05 | Robert Bosch Gmbh | Handwerkzeugmaschinen-Energieversorgungseinheit |
| DE102012100086A1 (de) | 2011-01-07 | 2012-08-02 | Z-Medical Gmbh & Co. Kg | Chirurgisches Instrument |
| JP2012143283A (ja) | 2011-01-07 | 2012-08-02 | Tomato Inc:Kk | 光学式美容機器及びこれに用いられるハンドピース |
| JP6046635B2 (ja) | 2011-01-14 | 2016-12-21 | ニュー ホープ ベンチャーズ | 手術用ステープル綴じデバイス及び方法 |
| WO2012097381A1 (en) | 2011-01-14 | 2012-07-19 | Biomerix Corporation | At least partially resorbable reticulated elastomeric matrix elements and methods of making same |
| US8603089B2 (en) | 2011-01-19 | 2013-12-10 | Covidien Lp | Surgical instrument including inductively coupled accessory |
| US20130136969A1 (en) | 2011-01-25 | 2013-05-30 | Panasonic Corporation | Battery module and battery assembly used in battery module |
| US9084602B2 (en) | 2011-01-26 | 2015-07-21 | Covidien Lp | Buttress film with hemostatic action for surgical stapling apparatus |
| EP3964146B1 (en) | 2011-01-31 | 2023-10-18 | Boston Scientific Scimed Inc. | Medical devices having releasable coupling |
| US20120197239A1 (en) | 2011-01-31 | 2012-08-02 | Paul Smith | Endoscopic medical device with articulating joints |
| US9730717B2 (en) | 2011-02-03 | 2017-08-15 | Karl Storz Gmbh & Co. Kg | Medical manipulator system |
| US8336754B2 (en) | 2011-02-04 | 2012-12-25 | Covidien Lp | Locking articulation mechanism for surgical stapler |
| US8348124B2 (en) | 2011-02-08 | 2013-01-08 | Covidien Lp | Knife bar with geared overdrive |
| KR102156607B1 (ko) | 2011-02-15 | 2020-09-16 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 구동 샤프트에 의해 가동되는 관절식 말단 작동기를 구비한 수술 기구를 위한 시일 및 실링 방법 |
| US8989903B2 (en) | 2011-02-15 | 2015-03-24 | Intuitive Surgical Operations, Inc. | Methods and systems for indicating a clamping prediction |
| EP3278744B1 (en) | 2011-02-15 | 2021-10-20 | Intuitive Surgical Operations, Inc. | Indicator for knife location in a stapling or vessel sealing instrument |
| CN103338715B (zh) | 2011-02-15 | 2016-02-10 | 捷迈手术股份公司 | 动力型外科手术工具用的电池外壳 |
| US9393017B2 (en) | 2011-02-15 | 2016-07-19 | Intuitive Surgical Operations, Inc. | Methods and systems for detecting staple cartridge misfire or failure |
| KR102359695B1 (ko) | 2011-02-15 | 2022-02-09 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 클램핑 또는 발사 실패를 검출하기 위한 시스템 |
| DE102011011497A1 (de) | 2011-02-17 | 2012-08-23 | Kuka Roboter Gmbh | Chirurgisches Instrument |
| US9055961B2 (en) | 2011-02-18 | 2015-06-16 | Intuitive Surgical Operations, Inc. | Fusing and cutting surgical instrument and related methods |
| KR101964579B1 (ko) | 2011-02-18 | 2019-04-03 | 디퍼이 신테스 프로덕츠, 인코포레이티드 | 일체형 내비게이션 및 안내 시스템을 갖는 도구와 관련 장치 및 방법 |
| US20120211542A1 (en) | 2011-02-23 | 2012-08-23 | Tyco Healthcare Group I.P | Controlled tissue compression systems and methods |
| US8968340B2 (en) | 2011-02-23 | 2015-03-03 | Covidien Lp | Single actuating jaw flexible endolumenal stitching device |
| US9585672B2 (en) | 2011-02-25 | 2017-03-07 | Thd S.P.A. | Device for implanting a prosthesis in a tissue |
| US8479968B2 (en) | 2011-03-10 | 2013-07-09 | Covidien Lp | Surgical instrument buttress attachment |
| CA2829797C (en) | 2011-03-11 | 2018-09-11 | Stanley D. Winnard | Handheld drive device |
| US9089330B2 (en) | 2011-03-14 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Surgical bowel retractor devices |
| US8926598B2 (en) | 2011-03-15 | 2015-01-06 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulatable and rotatable end effector |
| US8857693B2 (en) | 2011-03-15 | 2014-10-14 | Ethicon Endo-Surgery, Inc. | Surgical instruments with lockable articulating end effector |
| US9044229B2 (en) | 2011-03-15 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical fastener instruments |
| US8540131B2 (en) | 2011-03-15 | 2013-09-24 | Ethicon Endo-Surgery, Inc. | Surgical staple cartridges with tissue tethers for manipulating divided tissue and methods of using same |
| US8800841B2 (en) | 2011-03-15 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Surgical staple cartridges |
| US20120234895A1 (en) | 2011-03-15 | 2012-09-20 | Ethicon Endo-Surgery, Inc. | Surgical staple cartridges and end effectors with vessel measurement arrangements |
| US8556935B1 (en) | 2011-03-15 | 2013-10-15 | Cardica, Inc. | Method of manufacturing surgical staples |
| US8397972B2 (en) | 2011-03-18 | 2013-03-19 | Covidien Lp | Shipping wedge with lockout |
| US9649096B2 (en) | 2011-03-22 | 2017-05-16 | Human Extensions Ltd. | Motorized surgical instruments |
| US9949754B2 (en) | 2011-03-28 | 2018-04-24 | Avinger, Inc. | Occlusion-crossing devices |
| US8575895B2 (en) | 2011-03-29 | 2013-11-05 | Rally Manufacturing, Inc. | Method and device for voltage detection and charging of electric battery |
| US20120253328A1 (en) | 2011-03-30 | 2012-10-04 | Tyco Healthcare Group Lp | Combined presentation unit for reposable battery operated surgical system |
| US10729458B2 (en) | 2011-03-30 | 2020-08-04 | Covidien Lp | Ultrasonic surgical instruments |
| US9375230B2 (en) | 2011-03-30 | 2016-06-28 | Covidien Lp | Ultrasonic surgical instruments |
| US20120251861A1 (en) | 2011-03-31 | 2012-10-04 | De Poan Pneumatic Corp. | Shock proof structure of battery pack for receiving battery cell |
| US20140330579A1 (en) | 2011-03-31 | 2014-11-06 | Healthspot, Inc. | Medical Kiosk and Method of Use |
| US9370362B2 (en) | 2011-04-07 | 2016-06-21 | Wake Forest University Health Sciences | Surgical staplers with tissue protection and related methods |
| WO2012137364A1 (ja) | 2011-04-08 | 2012-10-11 | オリンパスメディカルシステムズ株式会社 | 内視鏡 |
| DE102011007121A1 (de) | 2011-04-11 | 2012-10-11 | Karl Storz Gmbh & Co. Kg | Handhabungseinrichtung für ein mikroinvasiv-chirurgisches Instrument |
| WO2012141679A1 (en) | 2011-04-11 | 2012-10-18 | Hassan Chandra | Surgical technique(s) and/or device(s) |
| CA2774751C (en) | 2011-04-15 | 2018-11-06 | Covidien Ag | Battery powered hand-held ultrasonic surgical cautery cutting device |
| US9131950B2 (en) | 2011-04-15 | 2015-09-15 | Endoplus, Inc. | Laparoscopic instrument |
| EP2600440B1 (en) | 2011-04-18 | 2016-06-08 | Huawei Device Co., Ltd. | Battery, battery component and subscriber equipment |
| US8540646B2 (en) | 2011-04-18 | 2013-09-24 | Jose Arturo Mendez-Coll | Biopsy and sutureless device |
| US9021684B2 (en) | 2011-04-19 | 2015-05-05 | Tyco Electronics Corporation | Method of fabricating a slip ring component |
| US9655615B2 (en) | 2011-04-19 | 2017-05-23 | Dextera Surgical Inc. | Active wedge and I-beam for surgical stapler |
| CN102743201B (zh) | 2011-04-20 | 2014-03-12 | 苏州天臣国际医疗科技有限公司 | 直线型切割缝合器 |
| US20140039549A1 (en) | 2011-04-21 | 2014-02-06 | Novogate Medical Ltd | Tissue closure device and method of deliver and uses thereof |
| US8631990B1 (en) | 2011-04-25 | 2014-01-21 | Cardica, Inc. | Staple trap for surgical stapler |
| JP5839828B2 (ja) | 2011-04-25 | 2016-01-06 | キヤノン株式会社 | 画像形成装置、画像形成装置の制御方法、及びプログラム |
| US10603044B2 (en) | 2011-04-27 | 2020-03-31 | Covidien Lp | Surgical instruments for use with diagnostic scanning devices |
| US8789737B2 (en) | 2011-04-27 | 2014-07-29 | Covidien Lp | Circular stapler and staple line reinforcement material |
| EP3537565A1 (en) | 2011-04-28 | 2019-09-11 | ZOLL Circulation, Inc. | Battery management system for control of lithium cells |
| US9197079B2 (en) | 2011-04-28 | 2015-11-24 | Zoll Circulation, Inc. | System and method for tracking and archiving battery performance data |
| EP2702666A4 (en) | 2011-04-28 | 2014-10-29 | Zoll Circulation Inc | VIRAL DISTRIBUTION OF BATTERY MANAGEMENT PARAMETERS |
| CN103648410B (zh) | 2011-04-29 | 2016-10-26 | 伊西康内外科公司 | 可压缩钉仓组件 |
| AU2012201645B2 (en) | 2011-04-29 | 2015-04-16 | Covidien Lp | Surgical stapling apparatus |
| AU2012250138B2 (en) | 2011-04-29 | 2016-10-20 | Ethicon Endo-Surgery, Inc. | Staple cartridge loading assembly |
| CA2834503C (en) | 2011-04-29 | 2019-06-11 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator for a surgical stapler |
| CN103517716A (zh) | 2011-04-29 | 2014-01-15 | 西莱克塔生物科技公司 | 用于诱导调节性b细胞的致耐受性合成纳米载体 |
| CA2834649C (en) | 2011-04-29 | 2021-02-16 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9901412B2 (en) | 2011-04-29 | 2018-02-27 | Vanderbilt University | Dexterous surgical manipulator and method of use |
| CN102125450B (zh) | 2011-04-29 | 2012-07-25 | 常州市康迪医用吻合器有限公司 | 外科用切割吻合器 |
| CN102247182A (zh) | 2011-04-29 | 2011-11-23 | 常州市康迪医用吻合器有限公司 | 外科用电动吻合器 |
| US9820741B2 (en) | 2011-05-12 | 2017-11-21 | Covidien Lp | Replaceable staple cartridge |
| JP5816457B2 (ja) | 2011-05-12 | 2015-11-18 | オリンパス株式会社 | 術具装置 |
| US20120289811A1 (en) | 2011-05-13 | 2012-11-15 | Tyco Healthcare Group Lp | Mask on monitor hernia locator |
| US8852185B2 (en) | 2011-05-19 | 2014-10-07 | Covidien Lp | Apparatus for performing an electrosurgical procedure |
| FR2975534B1 (fr) | 2011-05-19 | 2013-06-28 | Electricite De France | Accumulateur metal-air avec dispositif de protection de l'electrode a air |
| US8733615B2 (en) | 2011-05-19 | 2014-05-27 | Ethicon Endo-Surgery, Inc. | Circular stapler with frictional reducing member |
| JP5159918B2 (ja) | 2011-05-20 | 2013-03-13 | 浩平 窪田 | 医療用打ち込み式ステープル |
| US20120296342A1 (en) | 2011-05-22 | 2012-11-22 | Kathleen Haglund Wendelschafer | Electric hand-held grooming tool |
| US9161807B2 (en) | 2011-05-23 | 2015-10-20 | Covidien Lp | Apparatus for performing an electrosurgical procedure |
| DK2714152T3 (en) | 2011-05-25 | 2018-03-26 | Sanofi Aventis Deutschland | COVER MEDICINE ADMINISTRATION DEVICE |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US11207064B2 (en) | 2011-05-27 | 2021-12-28 | Cilag Gmbh International | Automated end effector component reloading system for use with a robotic system |
| US10542978B2 (en) | 2011-05-27 | 2020-01-28 | Covidien Lp | Method of internally potting or sealing a handheld medical device |
| WO2012166817A2 (en) | 2011-05-31 | 2012-12-06 | Intuitive Surgical Operations, Inc. | Surgical instrument with single drive input for two end effector mechanisms |
| US9050089B2 (en) | 2011-05-31 | 2015-06-09 | Covidien Lp | Electrosurgical apparatus with tissue site sensing and feedback control |
| CN107485448B (zh) | 2011-05-31 | 2020-07-31 | 直观外科手术操作公司 | 机器人外科器械末端执行器的主动控制 |
| US9358065B2 (en) | 2011-06-23 | 2016-06-07 | Covidien Lp | Shaped electrode bipolar resection apparatus, system and methods of use |
| CN103561667B (zh) | 2011-05-31 | 2016-08-17 | 直观外科手术操作公司 | 机器人手术器械中的夹持力控制 |
| US8523787B2 (en) | 2011-06-03 | 2013-09-03 | Biosense Webster (Israel), Ltd. | Detection of tenting |
| CN102217963A (zh) | 2011-06-08 | 2011-10-19 | 刘忠臣 | 三明治钉书机式消化道吻合切割闭合器 |
| US9289209B2 (en) | 2011-06-09 | 2016-03-22 | Covidien Lp | Surgical fastener applying apparatus |
| WO2012171423A1 (zh) | 2011-06-14 | 2012-12-20 | 常州市康迪医用吻合器有限公司 | 肾状成形的外科吻合钉及其成形槽 |
| US8715302B2 (en) | 2011-06-17 | 2014-05-06 | Estech, Inc. (Endoscopic Technologies, Inc.) | Left atrial appendage treatment systems and methods |
| CN102835977A (zh) | 2011-06-21 | 2012-12-26 | 达华国际股份有限公司 | 微创医疗装置 |
| WO2012178075A2 (en) | 2011-06-24 | 2012-12-27 | Abbott Laboratories | Tamper-evident packaging |
| US9498231B2 (en) | 2011-06-27 | 2016-11-22 | Board Of Regents Of The University Of Nebraska | On-board tool tracking system and methods of computer assisted surgery |
| CN102243850B (zh) | 2011-06-27 | 2013-03-06 | 青岛海信电器股份有限公司 | 背光源驱动电路及其驱动方法、液晶电视机 |
| CN106913366B (zh) | 2011-06-27 | 2021-02-26 | 内布拉斯加大学评议会 | 工具承载的追踪系统和计算机辅助外科方法 |
| US8763876B2 (en) | 2011-06-30 | 2014-07-01 | Covidien Lp | Surgical instrument and cartridge for use therewith |
| US9474513B2 (en) | 2011-06-30 | 2016-10-25 | Karl Storz Gmbh & Co. Kg | Medical manipulator |
| US20130012983A1 (en) | 2011-07-08 | 2013-01-10 | Tyco Healthcare Group Lp | Surgical Instrument with Flexible Shaft |
| CA2841182A1 (en) | 2011-07-11 | 2013-01-17 | EON Surgical Ltd. | Laparoscopic graspers |
| WO2013009252A2 (en) | 2011-07-11 | 2013-01-17 | Medical Vision Research & Development Ab | Status control for electrically powered surgical tool systems |
| WO2013009699A2 (en) | 2011-07-11 | 2013-01-17 | Agile Endosurgery, Inc. | Surgical tool |
| US9521996B2 (en) | 2011-07-13 | 2016-12-20 | Cook Medical Technologies Llc | Surgical retractor device |
| US8758235B2 (en) | 2011-07-13 | 2014-06-24 | Cook Medical Technologies Llc | Foldable surgical retractor |
| US8960521B2 (en) | 2011-07-15 | 2015-02-24 | Covidien Lp | Loose staples removal system |
| US9421682B2 (en) | 2011-07-18 | 2016-08-23 | Black & Decker Inc. | Multi-head power tool with reverse lock-out capability |
| US8603135B2 (en) | 2011-07-20 | 2013-12-10 | Covidien Lp | Articulating surgical apparatus |
| CA2841961C (en) | 2011-07-20 | 2021-01-26 | International Paper Company | Substrate for wallboard joint tape and process for making same |
| US8574263B2 (en) | 2011-07-20 | 2013-11-05 | Covidien Lp | Coaxial coil lock |
| US20130023910A1 (en) | 2011-07-21 | 2013-01-24 | Solomon Clifford T | Tissue-identifying surgical instrument |
| US9259265B2 (en) | 2011-07-22 | 2016-02-16 | Ethicon Endo-Surgery, Llc | Surgical instruments for tensioning tissue |
| TWI581541B (zh) | 2011-07-26 | 2017-05-01 | 睿能創意公司 | 用於認證、保全及控制如電池組之電力儲存器件之裝置、方法及物品 |
| ES2754303T3 (es) | 2011-07-26 | 2020-04-16 | Gogoro Inc | Aparato, método y artículo para la seguridad física de los dispositivos de almacenamiento de energía en vehículos |
| US9017331B2 (en) | 2011-07-27 | 2015-04-28 | William Casey Fox | Bone staple, instrument and method of use and manufacturing |
| US8998059B2 (en) | 2011-08-01 | 2015-04-07 | Ethicon Endo-Surgery, Inc. | Adjunct therapy device having driver with cavity for hemostatic agent |
| JP5841451B2 (ja) | 2011-08-04 | 2016-01-13 | オリンパス株式会社 | 手術器具およびその制御方法 |
| WO2013021233A1 (en) | 2011-08-05 | 2013-02-14 | Mt Bilgi Teknolojileri Dis Tic, A.S. | Multi-communication featured, touch-operated or keyboard cash register with contact and non-contact credit card reader |
| US9724095B2 (en) | 2011-08-08 | 2017-08-08 | Covidien Lp | Surgical fastener applying apparatus |
| US20130041292A1 (en) | 2011-08-09 | 2013-02-14 | Tyco Healthcare Group Lp | Customizable Haptic Assisted Robot Procedure System with Catalog of Specialized Diagnostic Tips |
| US9492170B2 (en) | 2011-08-10 | 2016-11-15 | Ethicon Endo-Surgery, Inc. | Device for applying adjunct in endoscopic procedure |
| KR20130017624A (ko) | 2011-08-11 | 2013-02-20 | 주식회사 모바수 | 관절 구조를 고정시키기 위한 장치 |
| WO2013027202A2 (en) | 2011-08-21 | 2013-02-28 | M.S.T. Medical Surgery Technologies Ltd. | Device and method for asissting laparoscopic surgery - rule based approach |
| WO2013026922A1 (en) | 2011-08-25 | 2013-02-28 | Endocontrol | Actuating knob for a surgical instrument |
| US9004799B1 (en) | 2011-08-31 | 2015-04-14 | Skylar Tibbits | Transformable linked self-assembly system |
| US8956342B1 (en) | 2011-09-01 | 2015-02-17 | Microaire Surgical Instruments Llc | Method and device for ergonomically and ambidextrously operable surgical device |
| EP3656317A1 (en) | 2011-09-02 | 2020-05-27 | Stryker Corporation | Surgical system including an instrument and method for using the instrument |
| US9198661B2 (en) | 2011-09-06 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Stapling instrument comprising a plurality of staple cartridges stored therein |
| WO2013035870A1 (ja) | 2011-09-08 | 2013-03-14 | オリンパスメディカルシステムズ株式会社 | 多自由度鉗子 |
| US9099863B2 (en) | 2011-09-09 | 2015-08-04 | Covidien Lp | Surgical generator and related method for mitigating overcurrent conditions |
| USD677273S1 (en) | 2011-09-12 | 2013-03-05 | Microsoft Corporation | Display screen with icon |
| US8679098B2 (en) | 2011-09-13 | 2014-03-25 | Covidien Lp | Rotation knobs for surgical instruments |
| US8998060B2 (en) | 2011-09-13 | 2015-04-07 | Ethicon Endo-Surgery, Inc. | Resistive heated surgical staple cartridge with phase change sealant |
| US11363951B2 (en) | 2011-09-13 | 2022-06-21 | Glaukos Corporation | Intraocular physiological sensor |
| US9101359B2 (en) | 2011-09-13 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Surgical staple cartridge with self-dispensing staple buttress |
| DE102011113127B4 (de) | 2011-09-14 | 2015-05-13 | Olaf Storz | Medizinisches Handgerät und Leistungseinheit |
| US9999408B2 (en) | 2011-09-14 | 2018-06-19 | Ethicon Endo-Surgery, Inc. | Surgical instrument with fluid fillable buttress |
| DE102011113126B4 (de) | 2011-09-14 | 2015-05-13 | Olaf Storz | Leistungseinheit und medizinisches Handgerät |
| US8814025B2 (en) | 2011-09-15 | 2014-08-26 | Ethicon Endo-Surgery, Inc. | Fibrin pad matrix with suspended heat activated beads of adhesive |
| US20130068816A1 (en) | 2011-09-15 | 2013-03-21 | Venkataramanan Mandakolathur Vasudevan | Surgical instrument and buttress material |
| WO2013042118A1 (en) | 2011-09-20 | 2013-03-28 | A.A. Cash Technology Ltd | Methods and devices for occluding blood flow to an organ |
| US20130075447A1 (en) | 2011-09-22 | 2013-03-28 | II William B. Weisenburgh | Adjunct therapy device for applying hemostatic agent |
| US9198644B2 (en) | 2011-09-22 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Anvil cartridge for surgical fastening device |
| US9393018B2 (en) | 2011-09-22 | 2016-07-19 | Ethicon Endo-Surgery, Inc. | Surgical staple assembly with hemostatic feature |
| USD680646S1 (en) | 2011-09-23 | 2013-04-23 | Ethicon Endo-Surgery, Inc. | Circular stapler |
| US8985429B2 (en) | 2011-09-23 | 2015-03-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with adjunct material application feature |
| US8911448B2 (en) | 2011-09-23 | 2014-12-16 | Orthosensor, Inc | Device and method for enabling an orthopedic tool for parameter measurement |
| US9050084B2 (en) | 2011-09-23 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Staple cartridge including collapsible deck arrangement |
| CN104105957B (zh) | 2011-09-30 | 2018-06-19 | 生命科技公司 | 用于生物分析的光学系统和方法 |
| CN104025126B (zh) | 2011-09-30 | 2017-08-18 | 日立化成株式会社 | Rfid标签 |
| CN103874465A (zh) | 2011-09-30 | 2014-06-18 | 柯惠Lp公司 | 具有可溶胀抓紧部件的可植入装置 |
| US8899464B2 (en) | 2011-10-03 | 2014-12-02 | Ethicon Endo-Surgery, Inc. | Attachment of surgical staple buttress to cartridge |
| US9089326B2 (en) | 2011-10-07 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Dual staple cartridge for surgical stapler |
| US9629652B2 (en) | 2011-10-10 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Surgical instrument with clutching slip ring assembly to power ultrasonic transducer |
| US8585721B2 (en) | 2011-10-12 | 2013-11-19 | Covidien Lp | Mesh fixation system |
| DE102011084499A1 (de) | 2011-10-14 | 2013-04-18 | Robert Bosch Gmbh | Werkzeugvorsatz |
| US9153994B2 (en) | 2011-10-14 | 2015-10-06 | Welch Allyn, Inc. | Motion sensitive and capacitor powered handheld device |
| US8931679B2 (en) | 2011-10-17 | 2015-01-13 | Covidien Lp | Surgical stapling apparatus |
| US8708212B2 (en) | 2011-10-18 | 2014-04-29 | Covidien Lp | Tilt top anvil with torsion spring |
| US20130096568A1 (en) | 2011-10-18 | 2013-04-18 | Warsaw Orthopedic, Inc. | Modular tool apparatus and method |
| US9060794B2 (en) | 2011-10-18 | 2015-06-23 | Mako Surgical Corp. | System and method for robotic surgery |
| PL2768418T3 (pl) | 2011-10-19 | 2017-12-29 | Ethicon Endo-Surgery, Inc. | Urządzenie dopasowujące do nakładacza zacisków do zastosowania z robotem chirurgicznym |
| US8968308B2 (en) | 2011-10-20 | 2015-03-03 | Covidien Lp | Multi-circuit seal plates |
| US9161855B2 (en) | 2011-10-24 | 2015-10-20 | Ethicon, Inc. | Tissue supporting device and method |
| US9414880B2 (en) | 2011-10-24 | 2016-08-16 | Ethicon Endo-Surgery, Llc | User interface in a battery powered device |
| US8657177B2 (en) | 2011-10-25 | 2014-02-25 | Covidien Lp | Surgical apparatus and method for endoscopic surgery |
| US20130098970A1 (en) | 2011-10-25 | 2013-04-25 | David Racenet | Surgical Apparatus and Method for Endoluminal Surgery |
| US9492146B2 (en) | 2011-10-25 | 2016-11-15 | Covidien Lp | Apparatus for endoscopic procedures |
| US8672206B2 (en) | 2011-10-25 | 2014-03-18 | Covidien Lp | Apparatus for endoscopic procedures |
| US9480492B2 (en) | 2011-10-25 | 2016-11-01 | Covidien Lp | Apparatus for endoscopic procedures |
| US8899462B2 (en) | 2011-10-25 | 2014-12-02 | Covidien Lp | Apparatus for endoscopic procedures |
| US9016539B2 (en) | 2011-10-25 | 2015-04-28 | Covidien Lp | Multi-use loading unit |
| KR102115366B1 (ko) | 2011-10-26 | 2020-05-26 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 카트리지 상태 및 존재 검출 방법 및 장치 |
| US8912746B2 (en) | 2011-10-26 | 2014-12-16 | Intuitive Surgical Operations, Inc. | Surgical instrument motor pack latch |
| US9675351B2 (en) | 2011-10-26 | 2017-06-13 | Covidien Lp | Buttress release from surgical stapler by knife pushing |
| KR102019754B1 (ko) | 2011-10-26 | 2019-09-10 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 일체형 나이프 블레이드를 가진 수술 기구 |
| US8418908B1 (en) | 2011-10-26 | 2013-04-16 | Covidien Lp | Staple feeding and forming apparatus |
| US9364231B2 (en) | 2011-10-27 | 2016-06-14 | Covidien Lp | System and method of using simulation reload to optimize staple formation |
| JP2013099120A (ja) | 2011-10-31 | 2013-05-20 | Sanyo Electric Co Ltd | 充電器、電池パック装着ユニット、及び電池パックユニット |
| US9393354B2 (en) | 2011-11-01 | 2016-07-19 | J&M Shuler Medical, Inc. | Mechanical wound therapy for sub-atmospheric wound care system |
| JP5855423B2 (ja) | 2011-11-01 | 2016-02-09 | オリンパス株式会社 | 手術支援装置 |
| WO2013063674A1 (en) | 2011-11-04 | 2013-05-10 | Titan Medical Inc. | Apparatus and method for controlling an end-effector assembly |
| US8584920B2 (en) | 2011-11-04 | 2013-11-19 | Covidien Lp | Surgical stapling apparatus including releasable buttress |
| CN202313537U (zh) | 2011-11-07 | 2012-07-11 | 苏州天臣国际医疗科技有限公司 | 直线型缝切器的钉仓组件 |
| CN103083053A (zh) | 2011-11-07 | 2013-05-08 | 苏州天臣国际医疗科技有限公司 | 缝合器、缝切器的钉头组件 |
| US20130123816A1 (en) | 2011-11-10 | 2013-05-16 | Gerald Hodgkinson | Hydrophilic medical devices |
| US8992042B2 (en) | 2011-11-14 | 2015-03-31 | Halma Holdings, Inc. | Illumination devices using natural light LEDs |
| US9486213B2 (en) | 2011-11-14 | 2016-11-08 | Thd Lap Ltd. | Drive mechanism for articulating tacker |
| US20130131477A1 (en) | 2011-11-15 | 2013-05-23 | Oneeros, Inc. | Pulse oximetry system |
| KR102111471B1 (ko) | 2011-11-15 | 2020-05-19 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 스토잉하는 나이프 블레이드를 가진 수술 기구 |
| WO2013073523A1 (ja) | 2011-11-16 | 2013-05-23 | オリンパスメディカルシステムズ株式会社 | 医療機器 |
| US8968312B2 (en) | 2011-11-16 | 2015-03-03 | Covidien Lp | Surgical device with powered articulation wrist rotation |
| DE102011086826A1 (de) | 2011-11-22 | 2013-05-23 | Robert Bosch Gmbh | System mit einem Handwerkzeugakku und zumindest einer Handwerkzeugakkuladevorrichtung |
| JP5591213B2 (ja) | 2011-11-25 | 2014-09-17 | 三菱電機株式会社 | インバータ装置、およびそれを備えた空気調和機 |
| WO2013137942A1 (en) | 2012-03-13 | 2013-09-19 | Eca Medical Instruments | Bidirectional ramped disposable torque limiting device |
| US9486186B2 (en) | 2011-12-05 | 2016-11-08 | Devicor Medical Products, Inc. | Biopsy device with slide-in probe |
| US9125651B2 (en) | 2011-12-07 | 2015-09-08 | Ethicon Endo-Surgery, Inc. | Reusable linear stapler cartridge device for tissue thickness measurement |
| WO2013087092A1 (en) | 2011-12-13 | 2013-06-20 | Ethicon Endo-Surgery, Inc. | An applier and a method for anchoring a lining to a hollow organ |
| US9113885B2 (en) | 2011-12-14 | 2015-08-25 | Covidien Lp | Buttress assembly for use with surgical stapling device |
| US9351732B2 (en) | 2011-12-14 | 2016-05-31 | Covidien Lp | Buttress attachment to degradable polymer zones |
| US9010608B2 (en) | 2011-12-14 | 2015-04-21 | Covidien Lp | Releasable buttress retention on a surgical stapler |
| US9351731B2 (en) | 2011-12-14 | 2016-05-31 | Covidien Lp | Surgical stapling apparatus including releasable surgical buttress |
| US9237892B2 (en) | 2011-12-14 | 2016-01-19 | Covidien Lp | Buttress attachment to the cartridge surface |
| US8967448B2 (en) | 2011-12-14 | 2015-03-03 | Covidien Lp | Surgical stapling apparatus including buttress attachment via tabs |
| US9173657B2 (en) | 2011-12-15 | 2015-11-03 | Ethicon Endo-Surgery, Inc. | Devices and methods for endoluminal plication |
| US9113868B2 (en) | 2011-12-15 | 2015-08-25 | Ethicon Endo-Surgery, Inc. | Devices and methods for endoluminal plication |
| US9603599B2 (en) | 2011-12-16 | 2017-03-28 | Ethicon Endo-Surgery, Llc | Feature to reengage safety switch of tissue stapler |
| CN103169493A (zh) | 2011-12-20 | 2013-06-26 | 通用电气公司 | 超声探针引导装置、方法及超声系统 |
| CN202568350U (zh) | 2011-12-21 | 2012-12-05 | 常州市康迪医用吻合器有限公司 | 外科线形切割吻合器的夹紧厚度调节机构 |
| CN202426586U (zh) | 2011-12-22 | 2012-09-12 | 苏州天臣国际医疗科技有限公司 | 外科缝切器的钉仓 |
| US8920368B2 (en) | 2011-12-22 | 2014-12-30 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Multi-user touch-based control of a remote catheter guidance system (RCGS) |
| CA2796525A1 (en) | 2011-12-23 | 2013-06-23 | Covidien Lp | Apparatus for endoscopic procedures |
| USD701238S1 (en) | 2011-12-23 | 2014-03-18 | Citrix Systems, Inc. | Display screen with animated graphical user interface |
| JP5361983B2 (ja) | 2011-12-27 | 2013-12-04 | 株式会社東芝 | 情報処理装置及び制御方法 |
| US9220502B2 (en) | 2011-12-28 | 2015-12-29 | Covidien Lp | Staple formation recognition for a surgical device |
| CN104135959A (zh) | 2011-12-29 | 2014-11-05 | 波士顿科学西美德公司 | 用于肾神经调变监测的装置和方法 |
| US9402555B2 (en) | 2011-12-29 | 2016-08-02 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Drive assembly for use in a robotic control and guidance system |
| CN202397539U (zh) | 2011-12-29 | 2012-08-29 | 瑞奇外科器械(中国)有限公司 | 手术缝合器械及其缝钉驱动器 |
| CN202489990U (zh) | 2011-12-30 | 2012-10-17 | 苏州天臣国际医疗科技有限公司 | 一种外科用直线缝切器 |
| US9186148B2 (en) | 2012-01-05 | 2015-11-17 | Ethicon Endo-Surgery, Inc. | Tissue stapler anvil feature to prevent premature jaw opening |
| US9168042B2 (en) | 2012-01-12 | 2015-10-27 | Covidien Lp | Circular stapling instruments |
| USD736792S1 (en) | 2012-01-13 | 2015-08-18 | Htc Corporation | Display screen with graphical user interface |
| US9636091B2 (en) | 2012-01-13 | 2017-05-02 | Covidien Lp | Hand-held electromechanical surgical system |
| US8894647B2 (en) | 2012-01-13 | 2014-11-25 | Covidien Lp | System and method for performing surgical procedures with a reusable instrument module |
| CA2861710A1 (en) | 2012-01-18 | 2013-07-25 | Covidien Lp | Surgical fastener applying apparatus |
| US8864010B2 (en) | 2012-01-20 | 2014-10-21 | Covidien Lp | Curved guide member for articulating instruments |
| US20130211244A1 (en) | 2012-01-25 | 2013-08-15 | Surgix Ltd. | Methods, Devices, Systems, Circuits and Associated Computer Executable Code for Detecting and Predicting the Position, Orientation and Trajectory of Surgical Tools |
| US9326812B2 (en) | 2012-01-25 | 2016-05-03 | Covidien Lp | Portable surgical instrument |
| US9098153B2 (en) | 2012-02-01 | 2015-08-04 | Qualcomm Technologies, Inc. | Touch panel excitation using a drive signal having time-varying characteristics |
| BR112014019193B1 (pt) | 2012-02-02 | 2021-06-15 | Great Belief International Limited | Sistema cirúrgico motorizado |
| US9265510B2 (en) | 2012-02-06 | 2016-02-23 | Zimmer, Inc. | Cone lock quick connect mechanism |
| JP6165780B2 (ja) | 2012-02-10 | 2017-07-19 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | ロボット制御式の手術器具 |
| US9931116B2 (en) | 2012-02-10 | 2018-04-03 | Covidien Lp | Buttress composition |
| US9044230B2 (en) | 2012-02-13 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical cutting and fastening instrument with apparatus for determining cartridge and firing motion status |
| JP5620932B2 (ja) | 2012-02-14 | 2014-11-05 | 富士フイルム株式会社 | 内視鏡システム、内視鏡システムのプロセッサ装置、及び内視鏡システムの作動方法 |
| USD686244S1 (en) | 2012-02-23 | 2013-07-16 | JVC Kenwood Corporation | Display screen with an animated dial for a wireless communication device |
| USD725674S1 (en) | 2012-02-24 | 2015-03-31 | Samsung Electronics Co., Ltd. | Display screen or portion thereof with transitional graphical user interface |
| US8820606B2 (en) | 2012-02-24 | 2014-09-02 | Covidien Lp | Buttress retention system for linear endostaplers |
| US20130231661A1 (en) | 2012-03-01 | 2013-09-05 | Hasan M. Sh. Sh. Alshemari | Electrosurgical midline clamping scissors |
| ES2422332B1 (es) | 2012-03-05 | 2014-07-01 | Iv�n Jes�s ARTEAGA GONZ�LEZ | Dispositivo quirúrgico |
| KR101965892B1 (ko) | 2012-03-05 | 2019-04-08 | 삼성디스플레이 주식회사 | 전원 생성부 및 이를 이용한 유기전계발광 표시장치 |
| JP2015516182A (ja) | 2012-03-06 | 2015-06-11 | ブライトシード・エルエルシーBriteseed,Llc | 一体型センサーを有する外科器具 |
| US8752264B2 (en) | 2012-03-06 | 2014-06-17 | Covidien Lp | Surgical tissue sealer |
| JP2013188812A (ja) | 2012-03-13 | 2013-09-26 | Hitachi Koki Co Ltd | インパクト工具 |
| KR102122219B1 (ko) | 2012-03-13 | 2020-06-12 | 메드트로닉 좀드 인코퍼레이티드 | 전동식 로타리형 핸드피스를 포함하는 수술용 시스템 |
| US9113881B2 (en) | 2012-03-16 | 2015-08-25 | Covidien Lp | Travel clip for surgical staple cartridge |
| PL2827914T3 (pl) | 2012-03-22 | 2019-09-30 | Trb Chemedica International S.A. | Sposób naprawy więzadła lub ścięgna |
| US20130253480A1 (en) | 2012-03-22 | 2013-09-26 | Cory G. Kimball | Surgical instrument usage data management |
| US9078653B2 (en) | 2012-03-26 | 2015-07-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with lockout system for preventing actuation in the absence of an installed staple cartridge |
| WO2013147335A1 (ko) | 2012-03-27 | 2013-10-03 | (주)루트로닉 | 고주파 수술용 전극, 고주파 수술장치 및 이의 제어방법 |
| US9198662B2 (en) | 2012-03-28 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator having improved visibility |
| JP6193351B2 (ja) | 2012-03-28 | 2017-09-06 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 少なくとも1種類の薬物を備える組織厚さコンペンセータ |
| JP6305977B2 (ja) | 2012-03-28 | 2018-04-04 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 弾力性負荷を生成する構造を含む組織厚さコンペンセーター |
| US20130256373A1 (en) | 2012-03-28 | 2013-10-03 | Ethicon Endo-Surgery, Inc. | Devices and methods for attaching tissue thickness compensating materials to surgical stapling instruments |
| CN104349800B (zh) | 2012-03-28 | 2017-11-10 | 伊西康内外科公司 | 包括受控释放和膨胀的组织厚度补偿件 |
| BR112014024102B1 (pt) | 2012-03-28 | 2022-03-03 | Ethicon Endo-Surgery, Inc | Conjunto de cartucho de prendedores para um instrumento cirúrgico, e conjunto de atuador de extremidade para um instrumento cirúrgico |
| MX350846B (es) | 2012-03-28 | 2017-09-22 | Ethicon Endo Surgery Inc | Compensador de grosor de tejido que comprende cápsulas que definen un ambiente de baja presión. |
| RU2638273C2 (ru) | 2012-03-28 | 2017-12-12 | Этикон Эндо-Серджери, Инк. | Компенсатор толщины ткани, состоящий из множества материалов |
| BR112014024194B1 (pt) | 2012-03-28 | 2022-03-03 | Ethicon Endo-Surgery, Inc | Conjunto de cartucho de grampos para um grampeador cirúrgico |
| CN104334096B (zh) | 2012-03-28 | 2017-09-22 | 伊西康内外科公司 | 包括多个胶囊剂的组织厚度补偿件 |
| JP2015513978A (ja) | 2012-04-04 | 2015-05-18 | カーディカ インコーポレイテッド | 屈曲自在な先端部を有する外科用ステープルカートリッジ |
| US9526563B2 (en) | 2012-04-06 | 2016-12-27 | Covidien Lp | Spindle assembly with mechanical fuse for surgical instruments |
| US9237921B2 (en) | 2012-04-09 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Devices and techniques for cutting and coagulating tissue |
| EP2836123B1 (en) | 2012-04-09 | 2017-05-10 | Facet Technologies, LLC | Push-to-charge lancing device |
| US9439668B2 (en) | 2012-04-09 | 2016-09-13 | Ethicon Endo-Surgery, Llc | Switch arrangements for ultrasonic surgical instruments |
| US9724118B2 (en) | 2012-04-09 | 2017-08-08 | Ethicon Endo-Surgery, Llc | Techniques for cutting and coagulating tissue for ultrasonic surgical instruments |
| AU2013201737B2 (en) | 2012-04-09 | 2014-07-10 | Covidien Lp | Surgical fastener applying apparatus |
| US9241731B2 (en) | 2012-04-09 | 2016-01-26 | Ethicon Endo-Surgery, Inc. | Rotatable electrical connection for ultrasonic surgical instruments |
| EP2837172A4 (en) | 2012-04-09 | 2015-12-30 | Intel Corp | PARALLEL PROCESSING OF IMAGE DATA HAVING DEPENDENT PIXELS OF THE UPPER LEFT CORNER |
| US9113887B2 (en) | 2012-04-10 | 2015-08-25 | Covidien Lp | Electrosurgical generator |
| US9044238B2 (en) | 2012-04-10 | 2015-06-02 | Covidien Lp | Electrosurgical monopolar apparatus with arc energy vascular coagulation control |
| AU2013201994B2 (en) | 2012-04-11 | 2017-09-07 | Covidien Lp | Apparatus for endoscopic procedures |
| JP5883343B2 (ja) | 2012-04-12 | 2016-03-15 | 株式会社スズキプレシオン | 医療用マニピュレータ |
| US9788851B2 (en) | 2012-04-18 | 2017-10-17 | Ethicon Llc | Surgical instrument with tissue density sensing |
| EP2838439A4 (en) | 2012-04-18 | 2015-11-25 | Cardica Inc | SAFETY LOCK FOR A SURGICAL CLIP DEVICE |
| US9539726B2 (en) | 2012-04-20 | 2017-01-10 | Vanderbilt University | Systems and methods for safe compliant insertion and hybrid force/motion telemanipulation of continuum robots |
| US9507399B2 (en) | 2012-04-24 | 2016-11-29 | Analog Devices, Inc. | Accelerometer-controlled master power switch for electronic devices |
| US8818523B2 (en) | 2012-04-25 | 2014-08-26 | Medtronic, Inc. | Recharge of an implantable device in the presence of other conductive objects |
| US20130284792A1 (en) | 2012-04-26 | 2013-10-31 | Covidien Lp | Surgical Stapling Device Including A Camera |
| US9331721B2 (en) | 2012-04-30 | 2016-05-03 | The Trustees Of Columbia University In The City Of New York | Systems, devices, and methods for continuous time signal processing |
| KR101800189B1 (ko) | 2012-04-30 | 2017-11-23 | 삼성전자주식회사 | 수술 로봇의 힘 제어 장치 및 방법 |
| US9668807B2 (en) | 2012-05-01 | 2017-06-06 | Covidien Lp | Simplified spring load mechanism for delivering shaft force of a surgical instrument |
| US9204920B2 (en) | 2012-05-02 | 2015-12-08 | Covidien Lp | External reader for device management |
| WO2013169873A1 (en) | 2012-05-09 | 2013-11-14 | Boston Scientific Scimed, Inc. | Bushing arm deformation mechanism |
| DE102012207707A1 (de) | 2012-05-09 | 2013-11-28 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Minimalinvasives Instrument für die robotische Chirurgie |
| CA2873076A1 (en) | 2012-05-10 | 2013-11-14 | The Trustees Of The Stevens Institute Of Technology | Biphasic osteochondral scaffold for reconstruction of articular cartilage |
| US9364228B2 (en) | 2012-05-11 | 2016-06-14 | Ethicon, Llc | Applicator instruments having distal end caps for facilitating the accurate placement of surgical fasteners during open repair procedures |
| US10575716B2 (en) | 2012-05-11 | 2020-03-03 | Ethicon Llc | Applicator instruments with imaging systems for dispensing surgical fasteners during open repair procedures |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| WO2013177423A2 (en) | 2012-05-23 | 2013-11-28 | Stryker Corporation | Powered surgical tool assembly including a tool unit and a separate battery and control module that energizes and controls the tool unit |
| US8973805B2 (en) | 2012-05-25 | 2015-03-10 | Covidien Lp | Surgical fastener applying apparatus including a knife guard |
| AU2013203675B2 (en) | 2012-05-31 | 2014-11-27 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US9572592B2 (en) | 2012-05-31 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Surgical instrument with orientation sensing |
| US9681884B2 (en) | 2012-05-31 | 2017-06-20 | Ethicon Endo-Surgery, Llc | Surgical instrument with stress sensor |
| US9868198B2 (en) | 2012-06-01 | 2018-01-16 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical loading units, and methods of use |
| US9597104B2 (en) | 2012-06-01 | 2017-03-21 | Covidien Lp | Handheld surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US20130327552A1 (en) | 2012-06-08 | 2013-12-12 | Black & Decker Inc. | Power tool having multiple operating modes |
| US10039440B2 (en) | 2012-06-11 | 2018-08-07 | Intuitive Surgical Operations, Inc. | Systems and methods for cleaning a minimally invasive instrument |
| US20130334280A1 (en) | 2012-06-14 | 2013-12-19 | Covidien Lp | Sliding Anvil/Retracting Cartridge Reload |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US9364220B2 (en) | 2012-06-19 | 2016-06-14 | Covidien Lp | Apparatus for endoscopic procedures |
| US11589771B2 (en) | 2012-06-21 | 2023-02-28 | Globus Medical Inc. | Method for recording probe movement and determining an extent of matter removed |
| USD692916S1 (en) | 2012-06-22 | 2013-11-05 | Mako Surgical Corp. | Display device or portion thereof with graphical user interface |
| US20140107697A1 (en) | 2012-06-25 | 2014-04-17 | Castle Surgical, Inc. | Clamping Forceps and Associated Methods |
| US9641122B2 (en) | 2012-06-26 | 2017-05-02 | Johnson Controls Technology Company | HVAC actuator with automatic end stop recalibration |
| US20140005640A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical end effector jaw and electrode configurations |
| US9028494B2 (en) | 2012-06-28 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Interchangeable end effector coupling arrangement |
| US10194801B2 (en) | 2012-06-28 | 2019-02-05 | Koninklijke Philips N.V. | Fiber optic sensor guided navigation for vascular visualization and monitoring |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9101385B2 (en) | 2012-06-28 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Electrode connections for rotary driven surgical tools |
| US8747238B2 (en) | 2012-06-28 | 2014-06-10 | Ethicon Endo-Surgery, Inc. | Rotary drive shaft assemblies for surgical instruments with articulatable end effectors |
| CN104487005B (zh) | 2012-06-28 | 2017-09-08 | 伊西康内外科公司 | 空夹仓闭锁件 |
| US11197671B2 (en) | 2012-06-28 | 2021-12-14 | Cilag Gmbh International | Stapling assembly comprising a lockout |
| US9204879B2 (en) | 2012-06-28 | 2015-12-08 | Ethicon Endo-Surgery, Inc. | Flexible drive member |
| US9561038B2 (en) | 2012-06-28 | 2017-02-07 | Ethicon Endo-Surgery, Llc | Interchangeable clip applier |
| US9072536B2 (en) | 2012-06-28 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Differential locking arrangements for rotary powered surgical instruments |
| US9226751B2 (en) | 2012-06-28 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument system including replaceable end effectors |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US9119657B2 (en) | 2012-06-28 | 2015-09-01 | Ethicon Endo-Surgery, Inc. | Rotary actuatable closure arrangement for surgical end effector |
| US9125662B2 (en) | 2012-06-28 | 2015-09-08 | Ethicon Endo-Surgery, Inc. | Multi-axis articulating and rotating surgical tools |
| BR112014032776B1 (pt) | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| US9649111B2 (en) | 2012-06-28 | 2017-05-16 | Ethicon Endo-Surgery, Llc | Replaceable clip cartridge for a clip applier |
| US9283045B2 (en) | 2012-06-29 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Surgical instruments with fluid management system |
| US20140005702A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with distally positioned transducers |
| US9820768B2 (en) | 2012-06-29 | 2017-11-21 | Ethicon Llc | Ultrasonic surgical instruments with control mechanisms |
| US9226767B2 (en) | 2012-06-29 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Closed feedback control for electrosurgical device |
| EP2693954B1 (en) | 2012-06-29 | 2022-03-02 | Gyrus ACMI, Inc. | Blade retention mechanism for surgical instrument |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9039691B2 (en) | 2012-06-29 | 2015-05-26 | Covidien Lp | Surgical forceps |
| US9326788B2 (en) | 2012-06-29 | 2016-05-03 | Ethicon Endo-Surgery, Llc | Lockout mechanism for use with robotic electrosurgical device |
| US9220570B2 (en) | 2012-06-29 | 2015-12-29 | Children's National Medical Center | Automated surgical and interventional procedures |
| CN104394779B (zh) | 2012-07-02 | 2017-04-12 | 波士顿科学西美德公司 | 用于形成多个组织褶皱的钉合器 |
| KR101703407B1 (ko) | 2012-07-03 | 2017-02-06 | 쿠카 레보라토리즈 게엠베하 | 외과용 기구 배열체, 외과용 기구를 위한, 특히 로봇에 의해 안내되는 외과용 기구를 위한 드라이브 트레인 배열체, 및 외과용 기구 |
| DE102012211886A1 (de) | 2012-07-06 | 2014-01-09 | Technische Universität Berlin | Medizinisches Instrument und Verfahren zum Verschwenken eines solchen medizinischen Instruments |
| US9839480B2 (en) | 2012-07-09 | 2017-12-12 | Covidien Lp | Surgical adapter assemblies for use between surgical handle assembly and surgical end effectors |
| US10492814B2 (en) | 2012-07-09 | 2019-12-03 | Covidien Lp | Apparatus for endoscopic procedures |
| US9955965B2 (en) | 2012-07-09 | 2018-05-01 | Covidien Lp | Switch block control assembly of a medical device |
| US9408605B1 (en) | 2012-07-12 | 2016-08-09 | Cardica, Inc. | Single-trigger clamping and firing of surgical stapler |
| EP2872981A4 (en) | 2012-07-13 | 2016-10-19 | Samsung Electronics Co Ltd | METHOD FOR SENDING AND RECEIVING DATA BETWEEN A MEMO LAYER AND APPLICATION AND ELECTRONIC DEVICE THEREFOR |
| KR20150036650A (ko) | 2012-07-16 | 2015-04-07 | 미라빌리스 메디카 인코포레이티드 | 초음파 유도 치료를 위한 인간 인터페이스 및 장치 |
| US8939975B2 (en) | 2012-07-17 | 2015-01-27 | Covidien Lp | Gap control via overmold teeth and hard stops |
| US9572576B2 (en) | 2012-07-18 | 2017-02-21 | Covidien Lp | Surgical apparatus including surgical buttress |
| AU2013206807A1 (en) | 2012-07-18 | 2014-02-06 | Covidien Lp | Apparatus for endoscopic procedures |
| US9554796B2 (en) | 2012-07-18 | 2017-01-31 | Covidien Lp | Multi-fire surgical stapling apparatus including safety lockout and visual indicator |
| US10194907B2 (en) | 2012-07-18 | 2019-02-05 | Covidien Lp | Multi-fire stapler with electronic counter, lockout, and visual indicator |
| US9402604B2 (en) | 2012-07-20 | 2016-08-02 | Covidien Lp | Apparatus for endoscopic procedures |
| US20140022283A1 (en) | 2012-07-20 | 2014-01-23 | University Health Network | Augmented reality apparatus |
| EP2877105A1 (en) | 2012-07-26 | 2015-06-03 | Smith&Nephew, Inc. | Knotless anchor for instability repair |
| US9161769B2 (en) | 2012-07-30 | 2015-10-20 | Covidien Lp | Endoscopic instrument |
| DE102012213322A1 (de) | 2012-07-30 | 2014-01-30 | Siemens Aktiengesellschaft | Medizingerät und Sterilabdeckung für ein entsprechendes Medizingerät |
| US9629632B2 (en) | 2012-07-30 | 2017-04-25 | Conextions, Inc. | Soft tissue repair devices, systems, and methods |
| US8919951B2 (en) | 2012-08-09 | 2014-12-30 | Spello Holdings, Llc | Cycling safety glasses with rearview mirror |
| US9468447B2 (en) | 2012-08-14 | 2016-10-18 | Insurgical, LLC | Limited-use tool system and method of reprocessing |
| KR101359053B1 (ko) | 2012-08-14 | 2014-02-06 | 정창욱 | 관절 구조를 고정시키기 위한 장치 |
| AU2013206804B2 (en) | 2012-08-15 | 2017-12-07 | Covidien Lp | Buttress attachment to degradable polymer zones |
| US9277957B2 (en) | 2012-08-15 | 2016-03-08 | Ethicon Endo-Surgery, Inc. | Electrosurgical devices and methods |
| CN102783741B (zh) | 2012-08-16 | 2014-10-15 | 东华大学 | 多级展开散热的防火绝热复合织物、制备方法及用途 |
| US8690893B2 (en) | 2012-08-16 | 2014-04-08 | Coloplast A/S | Vaginal manipulator head with tissue index and head extender |
| US20140048580A1 (en) | 2012-08-20 | 2014-02-20 | Covidien Lp | Buttress attachment features for surgical stapling apparatus |
| US9610068B2 (en) | 2012-08-29 | 2017-04-04 | Boston Scientific Scimed, Inc. | Articulation joint with bending member |
| US9131957B2 (en) | 2012-09-12 | 2015-09-15 | Gyrus Acmi, Inc. | Automatic tool marking |
| US9353917B2 (en) | 2012-09-14 | 2016-05-31 | Cree, Inc. | High efficiency lighting device including one or more solid state light emitters, and method of lighting |
| US9713474B2 (en) | 2012-09-17 | 2017-07-25 | The Cleveland Clinic Foundation | Endoscopic stapler |
| EP2895098B1 (en) | 2012-09-17 | 2022-08-10 | Intuitive Surgical Operations, Inc. | Methods and systems for assigning input devices to teleoperated surgical instrument functions |
| CN102885641B (zh) | 2012-09-18 | 2015-04-01 | 上海逸思医疗科技有限公司 | 一种改进的外科器械的执行器 |
| EP2897543A4 (en) | 2012-09-19 | 2016-09-07 | Univ Nanyang Tech | FLEXIBLE ROBOTIC MASTER SLAVE ENDOSCOPY SYSTEM |
| JP6082553B2 (ja) | 2012-09-26 | 2017-02-15 | カール シュトルツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | ブレーキ解除機構及びこれを備えた医療用マニピュレータ |
| JP2014069252A (ja) | 2012-09-28 | 2014-04-21 | Hitachi Koki Co Ltd | 電動工具 |
| US20140094681A1 (en) | 2012-10-02 | 2014-04-03 | Covidien Lp | System for navigating surgical instruments adjacent tissue of interest |
| US9526564B2 (en) | 2012-10-08 | 2016-12-27 | Covidien Lp | Electric stapler device |
| US9161753B2 (en) | 2012-10-10 | 2015-10-20 | Covidien Lp | Buttress fixation for a circular stapler |
| US10842357B2 (en) | 2012-10-10 | 2020-11-24 | Moskowitz Family Llc | Endoscopic surgical system |
| US9386985B2 (en) | 2012-10-15 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Surgical cutting instrument |
| US9364217B2 (en) | 2012-10-16 | 2016-06-14 | Covidien Lp | In-situ loaded stapler |
| US9044281B2 (en) | 2012-10-18 | 2015-06-02 | Ellipse Technologies, Inc. | Intramedullary implants for replacing lost bone |
| US9421014B2 (en) | 2012-10-18 | 2016-08-23 | Covidien Lp | Loading unit velocity and position feedback |
| US10478182B2 (en) | 2012-10-18 | 2019-11-19 | Covidien Lp | Surgical device identification |
| US20140115229A1 (en) | 2012-10-19 | 2014-04-24 | Lsi Corporation | Method and system to reduce system boot loader download time for spi based flash memories |
| US10201365B2 (en) | 2012-10-22 | 2019-02-12 | Ethicon Llc | Surgeon feedback sensing and display methods |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
| US9265585B2 (en) | 2012-10-23 | 2016-02-23 | Covidien Lp | Surgical instrument with rapid post event detection |
| USD686240S1 (en) | 2012-10-25 | 2013-07-16 | Advanced Mediwatch Co., Ltd. | Display screen with graphical user interface for a sports device |
| WO2014065066A1 (ja) | 2012-10-26 | 2014-05-01 | Totsu Katsuyuki | 自動ねじ締め制御方法および装置 |
| US9368991B2 (en) | 2012-10-30 | 2016-06-14 | The Board Of Trustees Of The University Of Alabama | Distributed battery power electronics architecture and control |
| JP5154710B1 (ja) | 2012-11-01 | 2013-02-27 | 株式会社テクノプロジェクト | 医用画像交換システム、画像中継サーバ、医用画像送信システム及び医用画像受信システム |
| US9931106B2 (en) | 2012-11-02 | 2018-04-03 | Intuitive Surgical Operations, Inc. | Self-antagonistic drive for medical instruments |
| US20140131418A1 (en) | 2012-11-09 | 2014-05-15 | Covidien Lp | Surgical Stapling Apparatus Including Buttress Attachment |
| US9192384B2 (en) | 2012-11-09 | 2015-11-24 | Covidien Lp | Recessed groove for better suture retention |
| WO2014081411A1 (en) | 2012-11-20 | 2014-05-30 | West Pharmaceuticals Services, Inc. | System and method to distribute power to both an inertial device and a voltage sensitive device from a single current limited power source |
| JP5608837B1 (ja) | 2012-11-20 | 2014-10-15 | オリンパスメディカルシステムズ株式会社 | 組織切除装置 |
| USD748668S1 (en) | 2012-11-23 | 2016-02-02 | Samsung Electronics Co., Ltd. | Display screen or portion thereof with transitional graphical user interface |
| CN103829981A (zh) | 2012-11-26 | 2014-06-04 | 天津瑞贝精密机械技术研发有限公司 | 电动腔镜吻合器 |
| CN103841802B (zh) | 2012-11-27 | 2017-04-05 | 华硕电脑股份有限公司 | 电子装置 |
| US9289207B2 (en) | 2012-11-29 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical staple with integral pledget for tip deflection |
| US9295466B2 (en) | 2012-11-30 | 2016-03-29 | Covidien Lp | Surgical apparatus including surgical buttress |
| USD729274S1 (en) | 2012-11-30 | 2015-05-12 | Google Inc. | Portion of a display screen with icon |
| US9681936B2 (en) | 2012-11-30 | 2017-06-20 | Covidien Lp | Multi-layer porous film material |
| US9566062B2 (en) | 2012-12-03 | 2017-02-14 | Ethicon Endo-Surgery, Llc | Surgical instrument with secondary jaw closure feature |
| MX2015006990A (es) | 2012-12-05 | 2016-08-04 | Yoshida Kenji | Sistema de gestion de instalaciones de interfaz de control. |
| US20140158747A1 (en) | 2012-12-06 | 2014-06-12 | Ethicon Endo-Surgery, Inc. | Surgical stapler with varying staple widths along different circumferences |
| US9050100B2 (en) | 2012-12-10 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Surgical instrument with feedback at end effector |
| US9445808B2 (en) | 2012-12-11 | 2016-09-20 | Ethicon Endo-Surgery, Llc | Electrosurgical end effector with tissue tacking features |
| US8815594B2 (en) | 2012-12-12 | 2014-08-26 | Southwest Research Institute | Hybrid tissue scaffold for tissue engineering |
| US9402627B2 (en) | 2012-12-13 | 2016-08-02 | Covidien Lp | Folded buttress for use with a surgical apparatus |
| US9486209B2 (en) | 2012-12-13 | 2016-11-08 | Ethicon Endo-Surgery, Llc | Transmission for driving circular needle |
| CN102973300B (zh) | 2012-12-13 | 2014-10-15 | 常州市新能源吻合器总厂有限公司 | 直线形切割吻合器的组织夹持件及其钉仓座 |
| KR101484208B1 (ko) | 2012-12-14 | 2015-01-21 | 현대자동차 주식회사 | 연료전지자동차의 모터속도 보정장치 및 보정방법. |
| TR201807290T4 (tr) | 2012-12-17 | 2018-06-21 | Koninklijke Philips Nv | Ekstrüde edilebilir gıda ürünleri hazırlamak için bir cihaz ve yöntem. |
| EP2931365B1 (en) | 2012-12-17 | 2017-05-03 | Koninklijke Philips N.V. | Adaptive self-testing and stress analysis of medical devices |
| US9445816B2 (en) * | 2012-12-17 | 2016-09-20 | Ethicon Endo-Surgery, Llc | Circular stapler with selectable motorized and manual control |
| CN103860225B (zh) | 2012-12-18 | 2016-03-09 | 苏州天臣国际医疗科技有限公司 | 直线型缝切器 |
| CN103860221B (zh) | 2012-12-18 | 2016-08-17 | 苏州天臣国际医疗科技有限公司 | 直线缝切器钉头组件 |
| USD741895S1 (en) | 2012-12-18 | 2015-10-27 | 2236008 Ontario Inc. | Display screen or portion thereof with graphical user interface |
| AU2013266989A1 (en) | 2012-12-19 | 2014-07-03 | Covidien Lp | Buttress attachment to the cartridge surface |
| US9470297B2 (en) | 2012-12-19 | 2016-10-18 | Covidien Lp | Lower anterior resection 90 degree instrument |
| US9566065B2 (en) | 2012-12-21 | 2017-02-14 | Cardica, Inc. | Apparatus and methods for surgical stapler clamping and deployment |
| US9099922B2 (en) | 2012-12-21 | 2015-08-04 | Silicon Laboratories Inc. | System and method for adaptive current limit of a switching regulator |
| JP6024446B2 (ja) | 2012-12-22 | 2016-11-16 | 日立工機株式会社 | インパクト工具 |
| DE102012025393A1 (de) | 2012-12-24 | 2014-06-26 | Festool Group Gmbh & Co. Kg | Elektrogerät in Gestalt einer Hand-Werkzeugmaschine oder eines Sauggeräts |
| US20140181710A1 (en) | 2012-12-26 | 2014-06-26 | Harman International Industries, Incorporated | Proximity location system |
| US9614258B2 (en) | 2012-12-28 | 2017-04-04 | Semiconductor Energy Laboratory Co., Ltd. | Power storage device and power storage system |
| CN103908313A (zh) | 2012-12-29 | 2014-07-09 | 苏州天臣国际医疗科技有限公司 | 外科手术器械 |
| US9498215B2 (en) | 2012-12-31 | 2016-11-22 | Intuitive Surgical Operations, Inc. | Surgical staple cartridge with enhanced knife clearance |
| GB2509523A (en) | 2013-01-07 | 2014-07-09 | Anish Kumar Mampetta | Surgical instrument with flexible members and a motor |
| USD750129S1 (en) | 2013-01-09 | 2016-02-23 | Samsung Electronics Co., Ltd. | Display screen or portion thereof with graphical user interface |
| US9204881B2 (en) | 2013-01-11 | 2015-12-08 | Covidien Lp | Buttress retainer for EEA anvil |
| US9675354B2 (en) | 2013-01-14 | 2017-06-13 | Intuitive Surgical Operations, Inc. | Torque compensation |
| US9522003B2 (en) | 2013-01-14 | 2016-12-20 | Intuitive Surgical Operations, Inc. | Clamping instrument |
| US10265090B2 (en) | 2013-01-16 | 2019-04-23 | Covidien Lp | Hand held electromechanical surgical system including battery compartment diagnostic display |
| US9345480B2 (en) | 2013-01-18 | 2016-05-24 | Covidien Lp | Surgical instrument and cartridge members for use therewith |
| US9782187B2 (en) | 2013-01-18 | 2017-10-10 | Covidien Lp | Adapter load button lockout |
| RU2653808C2 (ru) | 2013-01-18 | 2018-05-14 | Этикон Эндо-Серджери, Инк. | Хирургический инструмент с электроприводом |
| US9433420B2 (en) | 2013-01-23 | 2016-09-06 | Covidien Lp | Surgical apparatus including surgical buttress |
| US20140207124A1 (en) | 2013-01-23 | 2014-07-24 | Ethicon Endo-Surgery, Inc. | Surgical instrument with selectable integral or external power source |
| US10918364B2 (en) | 2013-01-24 | 2021-02-16 | Covidien Lp | Intelligent adapter assembly for use with an electromechanical surgical system |
| WO2014115508A1 (en) | 2013-01-24 | 2014-07-31 | Hitachi Koki Co., Ltd. | Power tool |
| US9241758B2 (en) | 2013-01-25 | 2016-01-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument with blade compliant along vertical cutting edge plane |
| US9149325B2 (en) | 2013-01-25 | 2015-10-06 | Ethicon Endo-Surgery, Inc. | End effector with compliant clamping jaw |
| US20140209658A1 (en) | 2013-01-25 | 2014-07-31 | Covidien Lp | Foam application to stapling device |
| US9610114B2 (en) | 2013-01-29 | 2017-04-04 | Ethicon Endo-Surgery, Llc | Bipolar electrosurgical hand shears |
| JP6033698B2 (ja) | 2013-02-01 | 2016-11-30 | 株式会社マキタ | 電動工具 |
| US9028510B2 (en) | 2013-02-01 | 2015-05-12 | Olympus Medical Systems Corp. | Tissue excision method |
| DE102013101158A1 (de) | 2013-02-06 | 2014-08-07 | Karl Storz Gmbh & Co. Kg | Medizinische Vorrichtung und Verfahren zum Konfigurieren eines medizinischen Systems |
| RU2661143C2 (ru) | 2013-02-08 | 2018-07-11 | Этикон Эндо-Серджери, Инк. | Съемный слой материала и хирургический концевой зажим со съемным слоем материала |
| US20140224857A1 (en) | 2013-02-08 | 2014-08-14 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising a compressible portion |
| WO2014123872A2 (en) | 2013-02-08 | 2014-08-14 | Ethicon Endo-Surgery, Inc. | Multiple thickness implantable layers for surgical stapling devices |
| US9386984B2 (en) | 2013-02-08 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Staple cartridge comprising a releasable cover |
| JP6339109B2 (ja) | 2013-02-08 | 2018-06-06 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 解放可能なカバーを含むステープルカートリッジ |
| JP5733332B2 (ja) | 2013-02-13 | 2015-06-10 | 株式会社豊田自動織機 | 電池モジュール |
| USD759063S1 (en) | 2013-02-14 | 2016-06-14 | Healthmate International, LLC | Display screen with graphical user interface for an electrotherapy device |
| US10231728B2 (en) | 2013-02-15 | 2019-03-19 | Surgimatix, Inc. | Medical fastening device |
| US9216013B2 (en) | 2013-02-18 | 2015-12-22 | Covidien Lp | Apparatus for endoscopic procedures |
| US9421003B2 (en) | 2013-02-18 | 2016-08-23 | Covidien Lp | Apparatus for endoscopic procedures |
| US9622746B2 (en) | 2013-02-28 | 2017-04-18 | Ethicon Endo-Surgery, Llc | Distal tip features for end effector of surgical instrument |
| US20140239047A1 (en) | 2013-02-28 | 2014-08-28 | Covidien Lp | Adherence concepts for non-woven absorbable felt buttresses |
| US9867615B2 (en) | 2013-02-28 | 2018-01-16 | Ethicon Llc | Surgical instrument with articulation lock having a detenting binary spring |
| US9717497B2 (en) | 2013-02-28 | 2017-08-01 | Ethicon Llc | Lockout feature for movable cutting member of surgical instrument |
| US9517065B2 (en) | 2013-02-28 | 2016-12-13 | Ethicon Endo-Surgery, Llc | Integrated tissue positioning and jaw alignment features for surgical stapler |
| US9186142B2 (en) | 2013-02-28 | 2015-11-17 | Ethicon Endo-Surgery, Inc. | Surgical instrument end effector articulation drive with pinion and opposing racks |
| US9839421B2 (en) | 2013-02-28 | 2017-12-12 | Ethicon Llc | Jaw closure feature for end effector of surgical instrument |
| US9795379B2 (en) | 2013-02-28 | 2017-10-24 | Ethicon Llc | Surgical instrument with multi-diameter shaft |
| US10092292B2 (en) | 2013-02-28 | 2018-10-09 | Ethicon Llc | Staple forming features for surgical stapling instrument |
| US9808248B2 (en) | 2013-02-28 | 2017-11-07 | Ethicon Llc | Installation features for surgical instrument end effector cartridge |
| MX364729B (es) | 2013-03-01 | 2019-05-06 | Ethicon Endo Surgery Inc | Instrumento quirúrgico con una parada suave. |
| JP2014194211A (ja) | 2013-03-01 | 2014-10-09 | Aisan Ind Co Ltd | 電動バキュームポンプ |
| BR112015021098B1 (pt) | 2013-03-01 | 2022-02-15 | Ethicon Endo-Surgery, Inc | Cobertura para uma junta de articulação e instrumento cirúrgico |
| US9782169B2 (en) | 2013-03-01 | 2017-10-10 | Ethicon Llc | Rotary powered articulation joints for surgical instruments |
| BR112015021113B1 (pt) | 2013-03-01 | 2022-04-12 | Ethicon Endo-Surgery, Inc. | Instrumento cirúrgico |
| US9483095B2 (en) | 2013-03-04 | 2016-11-01 | Abbott Medical Optics Inc. | Apparatus and method for providing a modular power supply with multiple adjustable output voltages |
| US10561432B2 (en) | 2013-03-05 | 2020-02-18 | Covidien Lp | Pivoting screw for use with a pair of jaw members of a surgical instrument |
| US9839481B2 (en) | 2013-03-07 | 2017-12-12 | Intuitive Surgical Operations, Inc. | Hybrid manual and robotic interventional instruments and methods of use |
| AU2014200501B2 (en) | 2013-03-07 | 2017-08-24 | Covidien Lp | Powered surgical stapling device |
| US9706993B2 (en) | 2013-03-08 | 2017-07-18 | Covidien Lp | Staple cartridge with shipping wedge |
| USD711905S1 (en) | 2013-03-12 | 2014-08-26 | Arthrocare Corporation | Display screen for electrosurgical controller with graphical user interface |
| JP2014171904A (ja) | 2013-03-12 | 2014-09-22 | Ethicon Endo Surgery Inc | 発射システムロックアウト装置を備える電動外科用器具 |
| US9936951B2 (en) | 2013-03-12 | 2018-04-10 | Covidien Lp | Interchangeable tip reload |
| US9717498B2 (en) | 2013-03-13 | 2017-08-01 | Covidien Lp | Surgical stapling apparatus |
| EP3135225B1 (en) | 2013-03-13 | 2019-08-14 | Covidien LP | Surgical stapling apparatus |
| US9492189B2 (en) | 2013-03-13 | 2016-11-15 | Covidien Lp | Apparatus for endoscopic procedures |
| US9254170B2 (en) | 2013-03-13 | 2016-02-09 | Ethicon Endo-Surgery, Inc. | Electrosurgical device with disposable shaft having modular subassembly |
| US20140263552A1 (en) | 2013-03-13 | 2014-09-18 | Ethicon Endo-Surgery, Inc. | Staple cartridge tissue thickness sensor system |
| US9814463B2 (en) | 2013-03-13 | 2017-11-14 | Covidien Lp | Surgical stapling apparatus |
| US9668728B2 (en) | 2013-03-13 | 2017-06-06 | Covidien Lp | Surgical stapling apparatus |
| US9629628B2 (en) | 2013-03-13 | 2017-04-25 | Covidien Lp | Surgical stapling apparatus |
| US9883860B2 (en) | 2013-03-14 | 2018-02-06 | Ethicon Llc | Interchangeable shaft assemblies for use with a surgical instrument |
| US20140276730A1 (en) | 2013-03-14 | 2014-09-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with reinforced articulation section |
| US9352071B2 (en) | 2013-03-14 | 2016-05-31 | Ethicon, Inc. | Method of forming an implantable device |
| US10314559B2 (en) | 2013-03-14 | 2019-06-11 | Inneroptic Technology, Inc. | Medical device guidance |
| CA2904678C (en) | 2013-03-14 | 2022-07-12 | Applied Medical Resources Corporation | Surgical stapler with partial pockets |
| JP6114583B2 (ja) | 2013-03-14 | 2017-04-12 | カール シュトルツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 医療用マニピュレータ |
| US9867620B2 (en) | 2013-03-14 | 2018-01-16 | Covidien Lp | Articulation joint for apparatus for endoscopic procedures |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| US9592056B2 (en) | 2013-03-14 | 2017-03-14 | Covidien Lp | Powered stapling apparatus |
| US9655613B2 (en) | 2013-03-14 | 2017-05-23 | Dextera Surgical Inc. | Beltless staple chain for cartridge and cartridgeless surgical staplers |
| WO2014151852A1 (en) | 2013-03-15 | 2014-09-25 | Somark Innovations, Inc. | Microelectronic animal identification |
| US9283028B2 (en) | 2013-03-15 | 2016-03-15 | Covidien Lp | Crest-factor control of phase-shifted inverter |
| US9722236B2 (en) | 2013-03-15 | 2017-08-01 | General Atomics | Apparatus and method for use in storing energy |
| US20140263558A1 (en) | 2013-03-15 | 2014-09-18 | Cardica, Inc. | Extended curved tip for surgical apparatus |
| KR20240039202A (ko) | 2013-03-15 | 2024-03-26 | 어플라이드 메디컬 리소시스 코포레이션 | 회전가능 샤프트를 구비한 구동 메커니즘을 갖는 수술용 스테이플러 |
| US10105149B2 (en) | 2013-03-15 | 2018-10-23 | Board Of Regents Of The University Of Nebraska | On-board tool tracking system and methods of computer assisted surgery |
| CN105188592B (zh) | 2013-03-15 | 2018-07-27 | Sri国际公司 | 超灵巧型手术系统 |
| US10303851B2 (en) | 2013-03-15 | 2019-05-28 | Md24 Patent Technology, Llc | Physician-centric health care delivery platform |
| US8961191B2 (en) | 2013-03-15 | 2015-02-24 | Garmin Switzerland Gmbh | Electrical connector for pedal spindle |
| CN105358085A (zh) | 2013-03-15 | 2016-02-24 | 特拉科手术公司 | 工具承载的追踪系统以及计算机辅助手术方法 |
| US9615816B2 (en) | 2013-03-15 | 2017-04-11 | Vidacare LLC | Drivers and drive systems |
| WO2014153428A1 (en) | 2013-03-19 | 2014-09-25 | Surgisense Corporation | Apparatus, systems and methods for determining tissue oxygenation |
| FR3003660B1 (fr) | 2013-03-22 | 2016-06-24 | Schneider Electric Ind Sas | Systeme de dialogue homme-machine |
| US9510827B2 (en) | 2013-03-25 | 2016-12-06 | Covidien Lp | Micro surgical instrument and loading unit for use therewith |
| US9795384B2 (en) | 2013-03-27 | 2017-10-24 | Ethicon Llc | Fastener cartridge comprising a tissue thickness compensator and a gap setting element |
| US9572577B2 (en) | 2013-03-27 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Fastener cartridge comprising a tissue thickness compensator including openings therein |
| US9332984B2 (en) | 2013-03-27 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Fastener cartridge assemblies |
| US20140291379A1 (en) | 2013-03-27 | 2014-10-02 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a cutting member path |
| US20140303660A1 (en) | 2013-04-04 | 2014-10-09 | Elwha Llc | Active tremor control in surgical instruments |
| US9775610B2 (en) | 2013-04-09 | 2017-10-03 | Covidien Lp | Apparatus for endoscopic procedures |
| US9700318B2 (en) | 2013-04-09 | 2017-07-11 | Covidien Lp | Apparatus for endoscopic procedures |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US10405857B2 (en) | 2013-04-16 | 2019-09-10 | Ethicon Llc | Powered linear surgical stapler |
| AU2014253864B2 (en) | 2013-04-17 | 2018-11-08 | Maruho Medical, Inc. | Method and apparatus for passing suture |
| ITMI20130666A1 (it) | 2013-04-23 | 2014-10-24 | Valuebiotech S R L | Struttura di robot, particolarmente per chirurgia mini-invasiva attraverso singola incisione parietale o orifizio naturale. |
| WO2014176403A1 (en) | 2013-04-25 | 2014-10-30 | Intuitive Surgical Operations, Inc. | Surgical equipment control input visualization field |
| WO2014175894A1 (en) | 2013-04-25 | 2014-10-30 | Cardica, Inc. | Active wedge and i-beam for surgical stapler |
| KR20140129702A (ko) | 2013-04-30 | 2014-11-07 | 삼성전자주식회사 | 수술 로봇 시스템 및 그 제어방법 |
| USD741882S1 (en) | 2013-05-01 | 2015-10-27 | Viber Media S.A.R.L. | Display screen or a portion thereof with graphical user interface |
| US20140330298A1 (en) | 2013-05-03 | 2014-11-06 | Ethicon Endo-Surgery, Inc. | Clamp arm features for ultrasonic surgical instrument |
| US9956677B2 (en) | 2013-05-08 | 2018-05-01 | Black & Decker Inc. | Power tool with interchangeable power heads |
| US9687233B2 (en) | 2013-05-09 | 2017-06-27 | Dextera Surgical Inc. | Surgical stapling and cutting apparatus—deployment mechanisms, systems and methods |
| US9237900B2 (en) | 2013-05-10 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Surgical instrument with split jaw |
| JP2016523774A (ja) | 2013-05-10 | 2016-08-12 | ジュースロー,インコーポレイテッド | 搾汁システム及び方法 |
| ES2799580T3 (es) | 2013-05-15 | 2020-12-18 | Aesculap Ag | Aparato quirúrgico de grapado y corte |
| US9240740B2 (en) | 2013-05-30 | 2016-01-19 | The Boeing Company | Active voltage controller for an electric motor |
| US9574644B2 (en) | 2013-05-30 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Power module for use with a surgical instrument |
| US11020016B2 (en) | 2013-05-30 | 2021-06-01 | Auris Health, Inc. | System and method for displaying anatomy and devices on a movable display |
| US10722292B2 (en) | 2013-05-31 | 2020-07-28 | Covidien Lp | Surgical device with an end-effector assembly and system for monitoring of tissue during a surgical procedure |
| US9504520B2 (en) | 2013-06-06 | 2016-11-29 | Ethicon Endo-Surgery, Llc | Surgical instrument with modular motor |
| USD742893S1 (en) | 2013-06-09 | 2015-11-10 | Apple Inc. | Display screen or portion thereof with graphical user interface |
| USD740851S1 (en) | 2013-06-10 | 2015-10-13 | Apple Inc. | Display screen or portion thereof with icon |
| USD742894S1 (en) | 2013-06-10 | 2015-11-10 | Apple Inc. | Display screen or portion thereof with graphical user interface |
| DE102013106277A1 (de) | 2013-06-17 | 2014-12-18 | Aesculap Ag | Chirurgischer Clip-Applikator |
| US10117654B2 (en) | 2013-06-18 | 2018-11-06 | Covidien Lp | Method of emergency retraction for electro-mechanical surgical devices and systems |
| US20140367445A1 (en) | 2013-06-18 | 2014-12-18 | Covidien Lp | Emergency retraction for electro-mechanical surgical devices and systems |
| TWM473838U (zh) | 2013-06-19 | 2014-03-11 | Mouldex Co Ltd | 可旋轉式醫療用連接器 |
| US9797486B2 (en) | 2013-06-20 | 2017-10-24 | Covidien Lp | Adapter direct drive with manual retraction, lockout and connection mechanisms |
| CN203328751U (zh) | 2013-06-20 | 2013-12-11 | 瑞奇外科器械(中国)有限公司 | 外科手术器械及其驱动装置 |
| US10085746B2 (en) | 2013-06-28 | 2018-10-02 | Covidien Lp | Surgical instrument including rotating end effector and rotation-limiting structure |
| US9358004B2 (en) | 2013-06-28 | 2016-06-07 | Covidien Lp | Articulating apparatus for endoscopic procedures |
| US9351728B2 (en) | 2013-06-28 | 2016-05-31 | Covidien Lp | Articulating apparatus for endoscopic procedures |
| US9668730B2 (en) | 2013-06-28 | 2017-06-06 | Covidien Lp | Articulating apparatus for endoscopic procedures with timing system |
| WO2015002850A1 (en) | 2013-07-05 | 2015-01-08 | Rubin Jacob A | Whole-body human-computer interface |
| US9757129B2 (en) | 2013-07-08 | 2017-09-12 | Covidien Lp | Coupling member configured for use with surgical devices |
| KR101550600B1 (ko) | 2013-07-10 | 2015-09-07 | 현대자동차 주식회사 | 자동변속기의 유압회로 |
| US9750503B2 (en) | 2013-07-11 | 2017-09-05 | Covidien Lp | Methods and devices for performing a surgical anastomosis |
| JP6157258B2 (ja) | 2013-07-26 | 2017-07-05 | オリンパス株式会社 | マニピュレータ及びマニピュレータシステム |
| USD757028S1 (en) | 2013-08-01 | 2016-05-24 | Palantir Technologies Inc. | Display screen or portion thereof with graphical user interface |
| US10828089B2 (en) | 2013-08-02 | 2020-11-10 | Biosense Webster (Israel) Ltd. | Catheter with improved irrigated tip electrode having two-piece construction, and method of manufacturing therefor |
| USD749623S1 (en) | 2013-08-07 | 2016-02-16 | Robert Bosch Gmbh | Display screen with an animated graphical user interface |
| CN104337556B (zh) | 2013-08-09 | 2016-07-13 | 瑞奇外科器械(中国)有限公司 | 弯转控制装置及外科手术器械 |
| CN103391037B (zh) | 2013-08-13 | 2016-01-20 | 山东大学 | 基于arm单片机混沌映射控制的混沌搅拌控制系统 |
| US9597074B2 (en) | 2013-08-15 | 2017-03-21 | Ethicon Endo-Surgery, Llc | Endoluminal stapler with rotating wheel cam for multi-staple firing |
| US9561029B2 (en) | 2013-08-15 | 2017-02-07 | Ethicon Endo-Surgery, Llc | Surgical stapler with rolling anvil |
| US9636112B2 (en) | 2013-08-16 | 2017-05-02 | Covidien Lp | Chip assembly for reusable surgical instruments |
| JP6090576B2 (ja) | 2013-08-19 | 2017-03-08 | 日立工機株式会社 | 電動工具 |
| CN106028966B (zh) | 2013-08-23 | 2018-06-22 | 伊西康内外科有限责任公司 | 用于动力外科器械的击发构件回缩装置 |
| JP6602764B2 (ja) | 2013-08-23 | 2019-11-06 | エシコン エルエルシー | 動力付き外科用器具のための二次電池装置 |
| JP6278968B2 (ja) | 2013-08-23 | 2018-02-14 | 日本電産コパル電子株式会社 | 減速機構を備えたギヤモータ |
| US9510828B2 (en) | 2013-08-23 | 2016-12-06 | Ethicon Endo-Surgery, Llc | Conductor arrangements for electrically powered surgical instruments with rotatable end effectors |
| US9295514B2 (en) | 2013-08-30 | 2016-03-29 | Ethicon Endo-Surgery, Llc | Surgical devices with close quarter articulation features |
| US9662108B2 (en) | 2013-08-30 | 2017-05-30 | Covidien Lp | Surgical stapling apparatus |
| USD740414S1 (en) | 2013-08-30 | 2015-10-06 | Karl Storz Gmbh & Co. Kg | Operation handle for medical manipulator system |
| WO2015032797A1 (en) | 2013-09-03 | 2015-03-12 | Frank Wenger | Intraluminal stapler |
| WO2015035178A2 (en) | 2013-09-06 | 2015-03-12 | Brigham And Women's Hospital, Inc. | System and method for a tissue resection margin measurement device |
| US9220508B2 (en) | 2013-09-06 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Surgical clip applier with articulation section |
| CN104422849A (zh) | 2013-09-09 | 2015-03-18 | 南京南瑞继保电气有限公司 | 一种短路模拟试验电路及其试验方法 |
| USD751082S1 (en) | 2013-09-13 | 2016-03-08 | Airwatch Llc | Display screen with a graphical user interface for an email application |
| US20140018832A1 (en) | 2013-09-13 | 2014-01-16 | Ethicon Endo-Surgery, Inc. | Method For Applying A Surgical Clip Having A Compliant Portion |
| US20140014707A1 (en) | 2013-09-16 | 2014-01-16 | Ethicon Endo-Surgery, Inc. | Surgical Stapling Instrument Having An Improved Coating |
| US20140014704A1 (en) | 2013-09-16 | 2014-01-16 | Ethicon Endo-Surgery, Inc. | Medical Device Having An Improved Coating |
| US10172636B2 (en) | 2013-09-17 | 2019-01-08 | Ethicon Llc | Articulation features for ultrasonic surgical instrument |
| US9955966B2 (en) | 2013-09-17 | 2018-05-01 | Covidien Lp | Adapter direct drive with manual retraction, lockout, and connection mechanisms for improper use prevention |
| US20150076211A1 (en) | 2013-09-17 | 2015-03-19 | Covidien Lp | Surgical instrument controls with illuminated feedback |
| US10271840B2 (en) | 2013-09-18 | 2019-04-30 | Covidien Lp | Apparatus and method for differentiating between tissue and mechanical obstruction in a surgical instrument |
| CN103505264B (zh) | 2013-09-18 | 2015-06-24 | 大连理工大学 | 经椎弓根通道治疗胸腰椎爆裂骨折的微创手术器械 |
| USD768152S1 (en) | 2013-09-20 | 2016-10-04 | ACCO Brands Corporation | Display screen including a graphical user interface |
| US9642642B2 (en) | 2013-09-20 | 2017-05-09 | Kok Hoo LIM | Guide tip introducer and method to create thereof |
| US20150088547A1 (en) | 2013-09-22 | 2015-03-26 | Ricoh Company, Ltd. | Mobile Information Gateway for Home Healthcare |
| CN203564287U (zh) | 2013-09-23 | 2014-04-30 | 瑞奇外科器械(中国)有限公司 | 末端执行器、外科手术器械和荷包钳 |
| US20180132849A1 (en) | 2016-11-14 | 2018-05-17 | Ethicon Endo-Surgery, Llc | Staple forming pocket configurations for circular surgical stapler anvil |
| US10478189B2 (en) | 2015-06-26 | 2019-11-19 | Ethicon Llc | Method of applying an annular array of staples to tissue |
| US9907552B2 (en) | 2013-09-23 | 2018-03-06 | Ethicon Llc | Control features for motorized surgical stapling instrument |
| US9936949B2 (en) | 2013-09-23 | 2018-04-10 | Ethicon Llc | Surgical stapling instrument with drive assembly having toggle features |
| CN203564285U (zh) | 2013-09-23 | 2014-04-30 | 瑞奇外科器械(中国)有限公司 | 末端执行器、外科手术器械和荷包钳 |
| US20150082624A1 (en) | 2013-09-24 | 2015-03-26 | Covidien Lp | Aseptic bag to encapsulate an energy source of a surgical instrument |
| US20150087952A1 (en) | 2013-09-24 | 2015-03-26 | Alivecor, Inc. | Smartphone and ecg device microbial shield |
| US20150088127A1 (en) | 2013-09-24 | 2015-03-26 | Covidien Lp | Aseptic bag to encapsulate an energy source of a surgical instrument |
| US9392885B2 (en) | 2013-09-24 | 2016-07-19 | Marketing Impact Limited | Modular manual lift dispenser security systems and methods for assembling, manufacturing and/or utilizing said security systems |
| CN110074755A (zh) | 2013-09-25 | 2019-08-02 | 柯惠Lp公司 | 具有磁性传感器的手术器械 |
| JP5781252B1 (ja) | 2013-09-27 | 2015-09-16 | オリンパス株式会社 | 処置具及び処置システム |
| US20140175150A1 (en) | 2013-10-01 | 2014-06-26 | Ethicon Endo-Surgery, Inc. | Providing Near Real Time Feedback To A User of A Surgical Instrument |
| USD749128S1 (en) | 2013-10-04 | 2016-02-09 | Microsoft Corporation | Display screen with icon |
| CN104580654B (zh) | 2013-10-09 | 2019-05-10 | 中兴通讯股份有限公司 | 一种终端及电子防水的方法 |
| JP6516752B2 (ja) | 2013-10-10 | 2019-05-22 | ジャイラス エーシーエムアイ インク | 腹腔鏡鉗子 |
| US9295565B2 (en) | 2013-10-18 | 2016-03-29 | Spine Wave, Inc. | Method of expanding an intradiscal space and providing an osteoconductive path during expansion |
| CN203597997U (zh) | 2013-10-31 | 2014-05-21 | 山东威瑞外科医用制品有限公司 | 一种吻合器的钉仓及吻合器 |
| US11504346B2 (en) | 2013-11-03 | 2022-11-22 | Arizona Board Of Regents On Behalf Of The University Of Arizona | Redox-activated pro-chelators |
| DE102013018499B3 (de) | 2013-11-04 | 2014-12-24 | Wagner GmbH Fabrik für medizinische Geräte | Belüftungsventil-Anordnung für einen unter Unterdruck stehenden Sterilisierbehälter |
| US9295522B2 (en) | 2013-11-08 | 2016-03-29 | Covidien Lp | Medical device adapter with wrist mechanism |
| US20150134077A1 (en) | 2013-11-08 | 2015-05-14 | Ethicon Endo-Surgery, Inc. | Sealing materials for use in surgical stapling |
| US9936950B2 (en) | 2013-11-08 | 2018-04-10 | Ethicon Llc | Hybrid adjunct materials for use in surgical stapling |
| USD746459S1 (en) | 2013-11-14 | 2015-12-29 | Karl Storz Gmbh & Co. Kg | Laparoscopic vacuum grasper |
| US9907600B2 (en) | 2013-11-15 | 2018-03-06 | Ethicon Llc | Ultrasonic anastomosis instrument with piezoelectric sealing head |
| JP6007357B2 (ja) | 2013-11-18 | 2016-10-12 | 日信工業株式会社 | 電子制御装置および車両用ブレーキ液圧制御装置 |
| WO2015076780A1 (en) | 2013-11-19 | 2015-05-28 | Perfecseal, Inc | A vented rigid gas sterilization packaging tray |
| US10368892B2 (en) | 2013-11-22 | 2019-08-06 | Ethicon Llc | Features for coupling surgical instrument shaft assembly with instrument body |
| CN104682792B (zh) | 2013-11-27 | 2020-01-31 | 德昌电机(深圳)有限公司 | 直流电机控制电路 |
| EP2878274A1 (en) | 2013-12-02 | 2015-06-03 | Ethicon Endo-Surgery, Inc. | Electrically self-powered surgical instrument with cryptographic identification of interchangeable part |
| EP3077037B1 (en) | 2013-12-04 | 2021-11-17 | ReShape Lifesciences Inc. | System for locating intragastric devices |
| USD746854S1 (en) | 2013-12-04 | 2016-01-05 | Medtronic, Inc. | Display screen or portion thereof with graphical user interface |
| USD750122S1 (en) | 2013-12-04 | 2016-02-23 | Medtronic, Inc. | Display screen or portion thereof with graphical user interface |
| ES2755485T3 (es) | 2013-12-09 | 2020-04-22 | Covidien Lp | Conjunto de adaptador para la interconexión de dispositivos quirúrgicos electromecánicos y unidades de carga quirúrgica, y sistemas quirúrgicos de los mismos |
| EP3578119B1 (en) | 2013-12-11 | 2021-03-17 | Covidien LP | Wrist and jaw assemblies for robotic surgical systems |
| US9782193B2 (en) | 2013-12-11 | 2017-10-10 | Medos International Sàrl | Tissue shaving device having a fluid removal path |
| US10220522B2 (en) | 2013-12-12 | 2019-03-05 | Covidien Lp | Gear train assemblies for robotic surgical systems |
| CA2932285C (en) | 2013-12-17 | 2019-10-08 | Standard Bariatrics, Inc. | Resection line guide for a medical procedure and method of using same |
| USD744528S1 (en) | 2013-12-18 | 2015-12-01 | Aliphcom | Display screen or portion thereof with animated graphical user interface |
| USD769930S1 (en) | 2013-12-18 | 2016-10-25 | Aliphcom | Display screen or portion thereof with animated graphical user interface |
| US9867613B2 (en) | 2013-12-19 | 2018-01-16 | Covidien Lp | Surgical staples and end effectors for deploying the same |
| US9681870B2 (en) | 2013-12-23 | 2017-06-20 | Ethicon Llc | Articulatable surgical instruments with separate and distinct closing and firing systems |
| US20150173756A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical cutting and stapling methods |
| US9724092B2 (en) | 2013-12-23 | 2017-08-08 | Ethicon Llc | Modular surgical instruments |
| USD775336S1 (en) | 2013-12-23 | 2016-12-27 | Ethicon Endo-Surgery, Llc | Surgical fastener |
| US9839428B2 (en) | 2013-12-23 | 2017-12-12 | Ethicon Llc | Surgical cutting and stapling instruments with independent jaw control features |
| US9642620B2 (en) | 2013-12-23 | 2017-05-09 | Ethicon Endo-Surgery, Llc | Surgical cutting and stapling instruments with articulatable end effectors |
| US20150173789A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulatable shaft arrangements |
| US9763662B2 (en) | 2013-12-23 | 2017-09-19 | Ethicon Llc | Fastener cartridge comprising a firing member configured to directly engage and eject fasteners from the fastener cartridge |
| EP3087928A4 (en) | 2013-12-27 | 2017-11-08 | Olympus Corporation | Treatment tool handle and treatment tool |
| CN203736251U (zh) | 2013-12-30 | 2014-07-30 | 瑞奇外科器械(中国)有限公司 | 柔性驱动元件的支撑件、末端执行器和外科手术器械 |
| CN103690212B (zh) | 2013-12-31 | 2015-08-12 | 上海创亿医疗器械技术有限公司 | 具有自换切割刀功能的外科线形吻合器 |
| CN103750872B (zh) | 2013-12-31 | 2016-05-11 | 苏州天臣国际医疗科技有限公司 | 直线缝合切割装置 |
| US20150201918A1 (en) | 2014-01-02 | 2015-07-23 | Osseodyne Surgical Solutions, Llc | Surgical Handpiece |
| CN203693685U (zh) | 2014-01-09 | 2014-07-09 | 杨宗德 | 一种高速自停脊椎椎板钻 |
| US9655616B2 (en) | 2014-01-22 | 2017-05-23 | Covidien Lp | Apparatus for endoscopic procedures |
| US9629627B2 (en) | 2014-01-28 | 2017-04-25 | Coviden Lp | Surgical apparatus |
| US9802033B2 (en) | 2014-01-28 | 2017-10-31 | Ethicon Llc | Surgical devices having controlled tissue cutting and sealing |
| US9700312B2 (en) | 2014-01-28 | 2017-07-11 | Covidien Lp | Surgical apparatus |
| CN203815517U (zh) | 2014-01-29 | 2014-09-10 | 上海创亿医疗器械技术有限公司 | 带有弯钉沟的外科吻合钉成形槽 |
| US9936952B2 (en) | 2014-02-03 | 2018-04-10 | Covidien Lp | Introducer assembly for a surgical fastener applying apparatus |
| US9706674B2 (en) | 2014-02-04 | 2017-07-11 | Covidien Lp | Authentication system for reusable surgical instruments |
| US10213266B2 (en) | 2014-02-07 | 2019-02-26 | Covidien Lp | Robotic surgical assemblies and adapter assemblies thereof |
| USD787548S1 (en) | 2014-02-10 | 2017-05-23 | What Watch Ag | Display screen or portion thereof with animated graphical user interface |
| US11090109B2 (en) | 2014-02-11 | 2021-08-17 | Covidien Lp | Temperature-sensing electrically-conductive tissue-contacting plate configured for use in an electrosurgical jaw member, electrosurgical system including same, and methods of controlling vessel sealing using same |
| USD758433S1 (en) | 2014-02-11 | 2016-06-07 | Samsung Electronics Co., Ltd. | Display screen or portion thereof with graphical user interface |
| US9962161B2 (en) | 2014-02-12 | 2018-05-08 | Ethicon Llc | Deliverable surgical instrument |
| US9707005B2 (en) | 2014-02-14 | 2017-07-18 | Ethicon Llc | Lockout mechanisms for surgical devices |
| US9974541B2 (en) | 2014-02-14 | 2018-05-22 | Covidien Lp | End stop detection |
| EP3108447B1 (en) | 2014-02-17 | 2020-03-25 | Children's National Medical Center | Method and system for providing recommendation for optimal execution of surgical procedures |
| JP6218634B2 (ja) | 2014-02-20 | 2017-10-25 | オリンパス株式会社 | 内視鏡システム及び内視鏡の作動方法 |
| USD756373S1 (en) | 2014-02-21 | 2016-05-17 | Aliphcom | Display screen or portion thereof with graphical user interface |
| US9301691B2 (en) | 2014-02-21 | 2016-04-05 | Covidien Lp | Instrument for optically detecting tissue attributes |
| CN111481245A (zh) | 2014-02-21 | 2020-08-04 | 直观外科手术操作公司 | 具有受约束运动的可铰接构件以及相关设备和方法 |
| AU2015221258B2 (en) | 2014-02-21 | 2019-11-21 | Cilag Gmbh International | A set comprising a surgical instrument |
| USD755196S1 (en) | 2014-02-24 | 2016-05-03 | Kennedy-Wilson, Inc. | Display screen or portion thereof with graphical user interface |
| BR112016019398B1 (pt) | 2014-02-24 | 2022-11-29 | Ethicon Endo-Surgery, Llc | Cartucho de grampos e cartucho de prendedores |
| JP6462004B2 (ja) | 2014-02-24 | 2019-01-30 | エシコン エルエルシー | 発射部材ロックアウトを備える締結システム |
| US9839423B2 (en) | 2014-02-24 | 2017-12-12 | Ethicon Llc | Implantable layers and methods for modifying the shape of the implantable layers for use with a surgical fastening instrument |
| US20150238118A1 (en) | 2014-02-27 | 2015-08-27 | Biorasis, Inc. | Detection of the spatial location of an implantable biosensing platform and method thereof |
| CN103829983A (zh) | 2014-03-07 | 2014-06-04 | 常州威克医疗器械有限公司 | 具有多种钉高的防滑钉仓 |
| US20150256355A1 (en) | 2014-03-07 | 2015-09-10 | Robert J. Pera | Wall-mounted interactive sensing and audio-visual node devices for networked living and work spaces |
| US10342623B2 (en) | 2014-03-12 | 2019-07-09 | Proximed, Llc | Surgical guidance systems, devices, and methods |
| WO2015137040A1 (ja) | 2014-03-14 | 2015-09-17 | ソニー株式会社 | ロボットアーム装置、ロボットアーム制御方法及びプログラム |
| WO2015139012A1 (en) | 2014-03-14 | 2015-09-17 | Hrayr Karnig Shahinian | Endoscope system and method of operation thereof |
| EP3679885B1 (en) | 2014-03-17 | 2024-02-28 | Intuitive Surgical Operations, Inc. | Systems and methods for confirming disc engagement |
| US10456208B2 (en) | 2014-03-17 | 2019-10-29 | Intuitive Surgical Operations, Inc. | Surgical cannula mounts and related systems and methods |
| CA2978677A1 (en) | 2014-03-20 | 2015-09-24 | Stepwise Ltd | Convertible surgical tissue staplers and applications using thereof |
| JP6204858B2 (ja) | 2014-03-25 | 2017-09-27 | 富士フイルム株式会社 | タッチパネルモジュールおよび電子機器 |
| CN106413578B (zh) | 2014-03-26 | 2019-09-06 | 伊西康内外科有限责任公司 | 外科缝合器械系统 |
| US10013049B2 (en) | 2014-03-26 | 2018-07-03 | Ethicon Llc | Power management through sleep options of segmented circuit and wake up control |
| BR112016021943B1 (pt) | 2014-03-26 | 2022-06-14 | Ethicon Endo-Surgery, Llc | Instrumento cirúrgico para uso por um operador em um procedimento cirúrgico |
| US9913642B2 (en) | 2014-03-26 | 2018-03-13 | Ethicon Llc | Surgical instrument comprising a sensor system |
| US9743929B2 (en) | 2014-03-26 | 2017-08-29 | Ethicon Llc | Modular powered surgical instrument with detachable shaft assemblies |
| US20150272557A1 (en) | 2014-03-26 | 2015-10-01 | Ethicon Endo-Surgery, Inc. | Modular surgical instrument system |
| US20180132850A1 (en) | 2014-03-26 | 2018-05-17 | Ethicon Llc | Surgical instrument comprising a sensor system |
| US10130382B2 (en) | 2014-03-27 | 2018-11-20 | Medtronic Xomed, Inc. | Powered surgical handpiece having a surgical tool with an RFID tag |
| EP3125808B1 (en) | 2014-03-28 | 2023-01-04 | Intuitive Surgical Operations, Inc. | Quantitative three-dimensional visualization of instruments in a field of view |
| WO2015153340A2 (en) | 2014-03-29 | 2015-10-08 | Standard Bariatrics, Inc. | End effectors surgical stapling devices, and methods of using same |
| WO2015153324A1 (en) | 2014-03-29 | 2015-10-08 | Standard Bariatrics, Inc. | End effectors, surgical stapling devices, and methods of using same |
| US10537327B2 (en) | 2014-03-31 | 2020-01-21 | Adrian Edward Park | Minimally invasive surgery tissue (MIST) clip |
| US9757126B2 (en) | 2014-03-31 | 2017-09-12 | Covidien Lp | Surgical stapling apparatus with firing lockout mechanism |
| US9549750B2 (en) | 2014-03-31 | 2017-01-24 | Ethicon Endo-Surgery, Llc | Surgical devices with articulating end effectors and methods of using surgical devices with articulating end effectors |
| US10420577B2 (en) | 2014-03-31 | 2019-09-24 | Covidien Lp | Apparatus and method for tissue thickness sensing |
| KR102455799B1 (ko) | 2014-03-31 | 2022-10-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 시프트 가능한 트랜스미션을 가진 수술 기구 |
| US11116383B2 (en) | 2014-04-02 | 2021-09-14 | Asensus Surgical Europe S.à.R.L. | Articulated structured light based-laparoscope |
| US9918730B2 (en) | 2014-04-08 | 2018-03-20 | Ethicon Llc | Methods and devices for controlling motorized surgical devices |
| WO2015157459A1 (en) | 2014-04-08 | 2015-10-15 | Acuitybio Corporation | Delivery system for positioning and affixing surgical mesh or surgical buttress covering a surgical margin |
| US9980769B2 (en) | 2014-04-08 | 2018-05-29 | Ethicon Llc | Methods and devices for controlling motorized surgical devices |
| US9675405B2 (en) | 2014-04-08 | 2017-06-13 | Ethicon Llc | Methods and devices for controlling motorized surgical devices |
| US10405937B2 (en) | 2014-04-09 | 2019-09-10 | Arbutus Medical Inc. | Drill cover and chuck mechanism |
| US10105126B2 (en) | 2014-04-09 | 2018-10-23 | Lsi Solutions, Inc. | Self-articulating joint for a minimally invasive surgical apparatus |
| CN106456158B (zh) | 2014-04-16 | 2019-02-05 | 伊西康内外科有限责任公司 | 包括非一致紧固件的紧固件仓 |
| US10621686B2 (en) | 2014-04-16 | 2020-04-14 | Vios Medical, Inc. | Patient care and health information management system |
| JP6532889B2 (ja) | 2014-04-16 | 2019-06-19 | エシコン エルエルシーEthicon LLC | 締結具カートリッジ組立体及びステープル保持具カバー配置構成 |
| US20150297223A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| US9833241B2 (en) | 2014-04-16 | 2017-12-05 | Ethicon Llc | Surgical fastener cartridges with driver stabilizing arrangements |
| BR112016023698B1 (pt) | 2014-04-16 | 2022-07-26 | Ethicon Endo-Surgery, Llc | Cartucho de prendedores para uso com um instrumento cirúrgico |
| US10426476B2 (en) | 2014-09-26 | 2019-10-01 | Ethicon Llc | Circular fastener cartridges for applying radially expandable fastener lines |
| US20150297200A1 (en) | 2014-04-17 | 2015-10-22 | Covidien Lp | End of life transmission system for surgical instruments |
| USD756377S1 (en) | 2014-04-17 | 2016-05-17 | Google Inc. | Portion of a display panel with an animated computer icon |
| DE102015201574A1 (de) | 2014-04-17 | 2015-10-22 | Robert Bosch Gmbh | Akkuvorrichtung |
| US10164466B2 (en) | 2014-04-17 | 2018-12-25 | Covidien Lp | Non-contact surgical adapter electrical interface |
| US10080552B2 (en) | 2014-04-21 | 2018-09-25 | Covidien Lp | Adapter assembly with gimbal for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| US9668733B2 (en) | 2014-04-21 | 2017-06-06 | Covidien Lp | Stapling device with features to prevent inadvertent firing of staples |
| US10258363B2 (en) | 2014-04-22 | 2019-04-16 | Ethicon Llc | Method of operating an articulating ultrasonic surgical instrument |
| WO2015161677A1 (en) | 2014-04-22 | 2015-10-29 | Bio-Medical Engineering (HK) Limited | Single access surgical robotic devices and systems, and methods of configuring single access surgical robotic devices and systems |
| US9855108B2 (en) | 2014-04-22 | 2018-01-02 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US10133248B2 (en) | 2014-04-28 | 2018-11-20 | Covidien Lp | Systems and methods for determining an end of life state for surgical devices |
| CA2947530A1 (en) | 2014-04-30 | 2015-11-05 | Vanderbilt Universtiy | Surgical grasper |
| USD786280S1 (en) | 2014-05-01 | 2017-05-09 | Beijing Qihoo Technology Company Limited | Display screen with a graphical user interface |
| US10175127B2 (en) | 2014-05-05 | 2019-01-08 | Covidien Lp | End-effector force measurement drive circuit |
| US9872722B2 (en) | 2014-05-05 | 2018-01-23 | Covidien Lp | Wake-up system and method for powered surgical instruments |
| US9861366B2 (en) | 2014-05-06 | 2018-01-09 | Covidien Lp | Ejecting assembly for a surgical stapler |
| US20150324317A1 (en) | 2014-05-07 | 2015-11-12 | Covidien Lp | Authentication and information system for reusable surgical instruments |
| US9675368B2 (en) | 2014-05-07 | 2017-06-13 | Stmicroelectronics Asia Pacific Pte Ltd. | Touch panel scanning method, circuit and system |
| USD754679S1 (en) | 2014-05-08 | 2016-04-26 | Express Scripts, Inc. | Display screen with a graphical user interface |
| CN103981635B (zh) | 2014-05-09 | 2017-01-11 | 浙江省纺织测试研究院 | 一种多孔纤维无纺布制备方法 |
| US10512461B2 (en) | 2014-05-15 | 2019-12-24 | Covidien Lp | Surgical fastener applying apparatus |
| US9668734B2 (en) | 2014-05-16 | 2017-06-06 | Covidien Lp | In-situ loaded stapler |
| JP2015217112A (ja) | 2014-05-16 | 2015-12-07 | キヤノン株式会社 | 移動型放射線撮影装置及び移動型放射線発生用装置 |
| US9901341B2 (en) | 2014-05-16 | 2018-02-27 | Covidien Lp | Surgical instrument |
| JP1517663S (ru) | 2014-05-30 | 2015-02-16 | ||
| USD771112S1 (en) | 2014-06-01 | 2016-11-08 | Apple Inc. | Display screen or portion thereof with graphical user interface |
| WO2015187107A1 (en) | 2014-06-05 | 2015-12-10 | Eae Elektri̇k Asansör Endüstri̇si̇ İnşaat Sanayi̇ Ve Ti̇caret Anoni̇m Şi̇rketi̇ | Rotary connection mechanism carrying cable in the wind turbines |
| CN104027145B (zh) | 2014-06-06 | 2016-07-06 | 山东威瑞外科医用制品有限公司 | 防误操作型切割吻合器 |
| US10251725B2 (en) | 2014-06-09 | 2019-04-09 | Covidien Lp | Authentication and information system for reusable surgical instruments |
| US9913646B2 (en) | 2014-06-10 | 2018-03-13 | Ethicon Llc | Devices for sealing staples in tissue |
| US10172611B2 (en) | 2014-06-10 | 2019-01-08 | Ethicon Llc | Adjunct materials and methods of using same in surgical methods for tissue sealing |
| US9848871B2 (en) | 2014-06-10 | 2017-12-26 | Ethicon Llc | Woven and fibrous materials for reinforcing a staple line |
| ES2861258T3 (es) | 2014-06-11 | 2021-10-06 | Applied Med Resources | Grapadora quirúrgica con disparo circunferencial |
| US9918714B2 (en) | 2014-06-13 | 2018-03-20 | Cook Medical Technologies Llc | Stapling device and method |
| US10045781B2 (en) | 2014-06-13 | 2018-08-14 | Ethicon Llc | Closure lockout systems for surgical instruments |
| US20150366585A1 (en) | 2014-06-18 | 2015-12-24 | Matthieu Olivier Lemay | Tension-limiting temporary epicardial pacing wire extraction device |
| US9987099B2 (en) | 2014-06-18 | 2018-06-05 | Covidien Lp | Disposable housings for encasing handle assemblies |
| US9471969B2 (en) | 2014-06-23 | 2016-10-18 | Exxonmobil Upstream Research Company | Methods for differential image quality enhancement for a multiple detector system, systems and use thereof |
| US10314577B2 (en) | 2014-06-25 | 2019-06-11 | Ethicon Llc | Lockout engagement features for surgical stapler |
| US10064620B2 (en) | 2014-06-25 | 2018-09-04 | Ethicon Llc | Method of unlocking articulation joint in surgical stapler |
| US10456132B2 (en) | 2014-06-25 | 2019-10-29 | Ethicon Llc | Jaw opening feature for surgical stapler |
| US10335147B2 (en) | 2014-06-25 | 2019-07-02 | Ethicon Llc | Method of using lockout features for surgical stapler cartridge |
| US9693774B2 (en) | 2014-06-25 | 2017-07-04 | Ethicon Llc | Pivotable articulation joint unlocking feature for surgical stapler |
| JP2016007800A (ja) | 2014-06-25 | 2016-01-18 | 株式会社リコー | 異常検知システム、電子機器、異常検知方法およびプログラム |
| US9999423B2 (en) | 2014-06-25 | 2018-06-19 | Ethicon Llc | Translatable articulation joint unlocking feature for surgical stapler |
| US10561418B2 (en) | 2014-06-26 | 2020-02-18 | Covidien Lp | Adapter assemblies for interconnecting surgical loading units and handle assemblies |
| US20150374372A1 (en) | 2014-06-26 | 2015-12-31 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US10163589B2 (en) | 2014-06-26 | 2018-12-25 | Covidien Lp | Adapter assemblies for interconnecting surgical loading units and handle assemblies |
| US9987095B2 (en) | 2014-06-26 | 2018-06-05 | Covidien Lp | Adapter assemblies for interconnecting electromechanical handle assemblies and surgical loading units |
| USD753167S1 (en) | 2014-06-27 | 2016-04-05 | Opower, Inc. | Display screen of a communications terminal with graphical user interface |
| US9629631B2 (en) | 2014-07-01 | 2017-04-25 | Covidien Lp | Composite drive beam for surgical stapling |
| DE102014009893B4 (de) | 2014-07-04 | 2016-04-28 | gomtec GmbH | Endeffektor für ein Instrument |
| US10064649B2 (en) | 2014-07-07 | 2018-09-04 | Covidien Lp | Pleated seal for surgical hand or instrument access |
| CN112862775A (zh) | 2014-07-25 | 2021-05-28 | 柯惠Lp公司 | 增强手术现实环境 |
| US10717179B2 (en) | 2014-07-28 | 2020-07-21 | Black & Decker Inc. | Sound damping for power tools |
| JP6265859B2 (ja) | 2014-07-28 | 2018-01-24 | オリンパス株式会社 | 処置具駆動装置 |
| US10542976B2 (en) | 2014-07-31 | 2020-01-28 | Covidien Lp | Powered surgical instrument with pressure sensitive motor speed control |
| US10058395B2 (en) | 2014-08-01 | 2018-08-28 | Intuitive Surgical Operations, Inc. | Active and semi-active damping in a telesurgical system |
| WO2016021268A1 (ja) | 2014-08-04 | 2016-02-11 | オリンパス株式会社 | 手術用器具 |
| GB2546022B (en) | 2014-08-20 | 2020-09-16 | Synaptive Medical Barbados Inc | Intra-operative determination of dimensions for fabrication of artificial bone flap |
| US9877776B2 (en) | 2014-08-25 | 2018-01-30 | Ethicon Llc | Simultaneous I-beam and spring driven cam jaw closure mechanism |
| US20160051316A1 (en) | 2014-08-25 | 2016-02-25 | Ethicon Endo-Surgery, Inc. | Electrosurgical electrode mechanism |
| US10194976B2 (en) | 2014-08-25 | 2019-02-05 | Ethicon Llc | Lockout disabling mechanism |
| US10799649B2 (en) | 2014-08-28 | 2020-10-13 | Unl Holdings Llc | Sensor systems for drug delivery devices |
| US9877722B2 (en) | 2014-09-02 | 2018-01-30 | Ethicon Llc | Devices and methods for guiding surgical fasteners |
| US9700320B2 (en) | 2014-09-02 | 2017-07-11 | Ethicon Llc | Devices and methods for removably coupling a cartridge to an end effector of a surgical device |
| US9788835B2 (en) | 2014-09-02 | 2017-10-17 | Ethicon Llc | Devices and methods for facilitating ejection of surgical fasteners from cartridges |
| USD762659S1 (en) | 2014-09-02 | 2016-08-02 | Apple Inc. | Display screen or portion thereof with graphical user interface |
| US9795380B2 (en) | 2014-09-02 | 2017-10-24 | Ethicon Llc | Devices and methods for facilitating closing and clamping of an end effector of a surgical device |
| US9848877B2 (en) | 2014-09-02 | 2017-12-26 | Ethicon Llc | Methods and devices for adjusting a tissue gap of an end effector of a surgical device |
| US9943312B2 (en) | 2014-09-02 | 2018-04-17 | Ethicon Llc | Methods and devices for locking a surgical device based on loading of a fastener cartridge in the surgical device |
| US10004500B2 (en) | 2014-09-02 | 2018-06-26 | Ethicon Llc | Devices and methods for manually retracting a drive shaft, drive beam, and associated components of a surgical fastening device |
| US9413128B2 (en) | 2014-09-04 | 2016-08-09 | Htc Corporation | Connector module having a rotating element disposed within and rotatable relative to a case |
| US9737301B2 (en) | 2014-09-05 | 2017-08-22 | Ethicon Llc | Monitoring device degradation based on component evaluation |
| CN204092074U (zh) | 2014-09-05 | 2015-01-14 | 瑞奇外科器械(中国)有限公司 | 外科手术器械的驱动装置及外科手术器械 |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| US20160069449A1 (en) | 2014-09-08 | 2016-03-10 | Nidec Copal Electronics Corporation | Thin-type gear motor and muscle force assisting device using thin-type gear motor |
| WO2016037529A1 (zh) | 2014-09-12 | 2016-03-17 | 瑞奇外科器械(中国)有限公司 | 末端执行器及其钉匣组件、外科手术器械 |
| EP3949872B1 (en) | 2014-09-15 | 2023-11-22 | Applied Medical Resources Corporation | Surgical stapler with self-adjusting staple height |
| US10820939B2 (en) | 2014-09-15 | 2020-11-03 | Covidien Lp | Vessel-sealing device including force-balance interface and electrosurgical system including same |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| CN204158440U (zh) | 2014-09-26 | 2015-02-18 | 重庆康美唯外科器械有限公司 | 直线吻合器缝合钉仓结构 |
| JP6648119B2 (ja) | 2014-09-26 | 2020-02-14 | エシコン エルエルシーEthicon LLC | 外科ステープル留めバットレス及び付属物材料 |
| CN204158441U (zh) | 2014-09-26 | 2015-02-18 | 重庆康美唯外科器械有限公司 | 直线吻合器钉仓结构 |
| US9953193B2 (en) | 2014-09-30 | 2018-04-24 | Tego, Inc. | Operating systems for an RFID tag |
| US9924943B2 (en) | 2014-10-01 | 2018-03-27 | Covidien Lp | Method of manufacturing jaw members for surgical stapling instrument |
| US9901406B2 (en) | 2014-10-02 | 2018-02-27 | Inneroptic Technology, Inc. | Affected region display associated with a medical device |
| US10603128B2 (en) | 2014-10-07 | 2020-03-31 | Covidien Lp | Handheld electromechanical surgical system |
| USD766261S1 (en) | 2014-10-10 | 2016-09-13 | Salesforce.Com, Inc. | Display screen or portion thereof with animated graphical user interface |
| US10076325B2 (en) | 2014-10-13 | 2018-09-18 | Ethicon Llc | Surgical stapling apparatus comprising a tissue stop |
| US9974539B2 (en) | 2014-10-15 | 2018-05-22 | Ethicon Llc | Surgical instrument battery pack with voltage polling |
| GB2531994B (en) | 2014-10-15 | 2020-06-24 | Cmr Surgical Ltd | Surgical articulation |
| USD780803S1 (en) | 2014-10-16 | 2017-03-07 | Orange Research, Inc. | Display panel portion with icon |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| USD761309S1 (en) | 2014-10-17 | 2016-07-12 | Samsung Electronics Co., Ltd. | Display screen or portion thereof with animated graphical user interface |
| WO2016063603A1 (ja) | 2014-10-20 | 2016-04-28 | オリンパス株式会社 | 固体撮像装置およびこの固体撮像装置を備えた電子内視鏡 |
| US10729443B2 (en) | 2014-10-21 | 2020-08-04 | Covidien Lp | Adapter, extension, and connector assemblies for surgical devices |
| US10085750B2 (en) | 2014-10-22 | 2018-10-02 | Covidien Lp | Adapter with fire rod J-hook lockout |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US11504192B2 (en) | 2014-10-30 | 2022-11-22 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| ES2907269T3 (es) | 2014-11-07 | 2022-04-22 | Corium Inc | Envase de dispositivo médico. |
| WO2016076100A1 (ja) | 2014-11-11 | 2016-05-19 | オリンパス株式会社 | 処置具及び処置システム |
| USD772905S1 (en) | 2014-11-14 | 2016-11-29 | Volvo Car Corporation | Display screen with graphical user interface |
| WO2016079141A1 (en) | 2014-11-17 | 2016-05-26 | Lina Medical Aps | A device for use in hysteroscopy |
| SG11201704757UA (en) | 2014-12-10 | 2017-07-28 | Edwards Lifesciences Ag | Multiple-firing securing device and methods for using and manufacturing same |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| USD777773S1 (en) | 2014-12-11 | 2017-01-31 | Lenovo (Beijing) Co., Ltd. | Display screen or portion thereof with graphical user interface |
| WO2016100682A1 (en) | 2014-12-17 | 2016-06-23 | Maquet Cardiovascular Llc | Surgical device |
| WO2016095112A1 (en) | 2014-12-17 | 2016-06-23 | Covidien Lp | Surgical stapling device with firing indicator |
| US10117649B2 (en) | 2014-12-18 | 2018-11-06 | Ethicon Llc | Surgical instrument assembly comprising a lockable articulation system |
| US9943309B2 (en) | 2014-12-18 | 2018-04-17 | Ethicon Llc | Surgical instruments with articulatable end effectors and movable firing beam support arrangements |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US10188385B2 (en) | 2014-12-18 | 2019-01-29 | Ethicon Llc | Surgical instrument system comprising lockable systems |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US9993284B2 (en) | 2014-12-19 | 2018-06-12 | Ethicon Llc | Electrosurgical instrument with jaw cleaning mode |
| USD785794S1 (en) | 2014-12-23 | 2017-05-02 | Gyrus Acmi, Inc. | Adapter for a surgical device |
| JP3214069U (ja) | 2014-12-30 | 2017-12-21 | ▲蘇▼州天臣国▲際▼医▲療▼科技有限公司 | ステープリングヘッドアセンブリ及び内視鏡外科手術縫合切断装置 |
| CN104490440B (zh) | 2014-12-30 | 2016-09-14 | 苏州天臣国际医疗科技有限公司 | 外科手术器械 |
| WO2016107585A1 (zh) | 2014-12-30 | 2016-07-07 | 苏州天臣国际医疗科技有限公司 | 一种钉头组件以及腔镜外科手术缝切装置 |
| CN104434250B (zh) | 2014-12-30 | 2017-01-18 | 苏州天臣国际医疗科技有限公司 | 钉仓组件及使用该钉仓组件的医用吻合器 |
| BR112017013860B1 (pt) | 2014-12-31 | 2022-04-12 | Touchstone International Medical Science Co., Ltd | Conjunto do cartucho de grampos e grampeador médico |
| US9775611B2 (en) | 2015-01-06 | 2017-10-03 | Covidien Lp | Clam shell surgical stapling loading unit |
| US20170106302A1 (en) | 2015-01-16 | 2017-04-20 | Kma Concepts Limited | Toy Figure with Articulating Limbs and Body |
| AU2016200084B2 (en) | 2015-01-16 | 2020-01-16 | Covidien Lp | Powered surgical stapling device |
| CN104586463A (zh) | 2015-01-19 | 2015-05-06 | 鲁仁义 | 医用一次性电动锯钻 |
| EP3247291B1 (en) | 2015-01-20 | 2021-04-14 | Talon Medical, LLC | Tissue engagement devices and systems |
| US11026750B2 (en) | 2015-01-23 | 2021-06-08 | Queen's University At Kingston | Real-time surgical navigation |
| USD798319S1 (en) | 2015-02-02 | 2017-09-26 | Scanmaskin Sverige Ab | Portion of an electronic display panel with changeable computer-generated screens and icons |
| US9396369B1 (en) | 2015-02-03 | 2016-07-19 | Apple Inc. | Electronic tag transmissions corresponding to physical disturbance of tag |
| US10470767B2 (en) | 2015-02-10 | 2019-11-12 | Covidien Lp | Surgical stapling instrument having ultrasonic energy delivery |
| US10111658B2 (en) | 2015-02-12 | 2018-10-30 | Covidien Lp | Display screens for medical devices |
| CN204520822U (zh) | 2015-02-15 | 2015-08-05 | 王超航 | 一种用于外科缝合器的可换钉仓装置 |
| US10034668B2 (en) | 2015-02-19 | 2018-07-31 | Covidien Lp | Circular knife blade for linear staplers |
| US10111665B2 (en) | 2015-02-19 | 2018-10-30 | Covidien Lp | Electromechanical surgical systems |
| USD791784S1 (en) | 2015-02-20 | 2017-07-11 | Google Inc. | Portion of a display panel with a graphical user interface with icons |
| US10039545B2 (en) | 2015-02-23 | 2018-08-07 | Covidien Lp | Double fire stapling |
| WO2016138443A2 (en) | 2015-02-26 | 2016-09-01 | Stryker Corporation | Surgical instrument with articulation region |
| US10130367B2 (en) | 2015-02-26 | 2018-11-20 | Covidien Lp | Surgical apparatus |
| US10085749B2 (en) | 2015-02-26 | 2018-10-02 | Covidien Lp | Surgical apparatus with conductor strain relief |
| USD767624S1 (en) | 2015-02-26 | 2016-09-27 | Samsung Electronics Co., Ltd. | Display screen or portion thereof with animated graphical user interface |
| US10180463B2 (en) | 2015-02-27 | 2019-01-15 | Ethicon Llc | Surgical apparatus configured to assess whether a performance parameter of the surgical apparatus is within an acceptable performance band |
| US9993258B2 (en) | 2015-02-27 | 2018-06-12 | Ethicon Llc | Adaptable surgical instrument handle |
| USD770515S1 (en) | 2015-02-27 | 2016-11-01 | Samsung Electronics Co., Ltd. | Display screen or portion thereof with graphical user interface |
| JP6762952B2 (ja) | 2015-02-27 | 2020-09-30 | エシコン エルエルシーEthicon LLC | 検査ステーションを備える外科用器具システム |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US10321907B2 (en) | 2015-02-27 | 2019-06-18 | Ethicon Llc | System for monitoring whether a surgical instrument needs to be serviced |
| US9855040B2 (en) | 2015-03-04 | 2018-01-02 | Covidien Lp | Surgical stapling loading unit having articulating jaws |
| US20160256159A1 (en) | 2015-03-05 | 2016-09-08 | Covidien Lp | Jaw members and methods of manufacture |
| US20160256221A1 (en) | 2015-03-05 | 2016-09-08 | Donald L. Smith | Anesthesia cover system |
| US9901342B2 (en) | 2015-03-06 | 2018-02-27 | Ethicon Endo-Surgery, Llc | Signal and power communication system positioned on a rotatable shaft |
| US10052044B2 (en) | 2015-03-06 | 2018-08-21 | Ethicon Llc | Time dependent evaluation of sensor data to determine stability, creep, and viscoelastic elements of measures |
| US9924961B2 (en) | 2015-03-06 | 2018-03-27 | Ethicon Endo-Surgery, Llc | Interactive feedback system for powered surgical instruments |
| US10045776B2 (en) | 2015-03-06 | 2018-08-14 | Ethicon Llc | Control techniques and sub-processor contained within modular shaft with select control processing from handle |
| US10617412B2 (en) | 2015-03-06 | 2020-04-14 | Ethicon Llc | System for detecting the mis-insertion of a staple cartridge into a surgical stapler |
| US10687806B2 (en) | 2015-03-06 | 2020-06-23 | Ethicon Llc | Adaptive tissue compression techniques to adjust closure rates for multiple tissue types |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US9895148B2 (en) | 2015-03-06 | 2018-02-20 | Ethicon Endo-Surgery, Llc | Monitoring speed control and precision incrementing of motor for powered surgical instruments |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| US9808246B2 (en) | 2015-03-06 | 2017-11-07 | Ethicon Endo-Surgery, Llc | Method of operating a powered surgical instrument |
| US10245033B2 (en) | 2015-03-06 | 2019-04-02 | Ethicon Llc | Surgical instrument comprising a lockable battery housing |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US10190888B2 (en) | 2015-03-11 | 2019-01-29 | Covidien Lp | Surgical stapling instruments with linear position assembly |
| CN204636451U (zh) | 2015-03-12 | 2015-09-16 | 葛益飞 | 动静脉切开及吻合装置 |
| US10159506B2 (en) | 2015-03-16 | 2018-12-25 | Ethicon Llc | Methods and devices for actuating surgical instruments |
| US10092290B2 (en) | 2015-03-17 | 2018-10-09 | Covidien Lp | Surgical instrument, loading unit for use therewith and related methods |
| US9918717B2 (en) | 2015-03-18 | 2018-03-20 | Covidien Lp | Pivot mechanism for surgical device |
| US9883843B2 (en) | 2015-03-19 | 2018-02-06 | Medtronic Navigation, Inc. | Apparatus and method of counterbalancing axes and maintaining a user selected position of a X-Ray scanner gantry |
| US10595929B2 (en) | 2015-03-24 | 2020-03-24 | Ethicon Llc | Surgical instruments with firing system overload protection mechanisms |
| US10172617B2 (en) | 2015-03-25 | 2019-01-08 | Ethicon Llc | Malleable bioabsorbable polymer adhesive for releasably attaching a staple buttress to a surgical stapler |
| US10349939B2 (en) | 2015-03-25 | 2019-07-16 | Ethicon Llc | Method of applying a buttress to a surgical stapler |
| US10478187B2 (en) | 2015-03-25 | 2019-11-19 | Ethicon Llc | Biologically derived extracellular matrix with infused viscous absorbable copolymer for releasably attaching a staple buttress to a surgical stapler |
| US10136891B2 (en) | 2015-03-25 | 2018-11-27 | Ethicon Llc | Naturally derived bioabsorbable polymer gel adhesive for releasably attaching a staple buttress to a surgical stapler |
| US10863984B2 (en) | 2015-03-25 | 2020-12-15 | Ethicon Llc | Low inherent viscosity bioabsorbable polymer adhesive for releasably attaching a staple buttress to a surgical stapler |
| US10568621B2 (en) | 2015-03-25 | 2020-02-25 | Ethicon Llc | Surgical staple buttress with integral adhesive for releasably attaching to a surgical stapler |
| US10172618B2 (en) | 2015-03-25 | 2019-01-08 | Ethicon Llc | Low glass transition temperature bioabsorbable polymer adhesive for releasably attaching a staple buttress to a surgical stapler |
| US10548593B2 (en) | 2015-03-25 | 2020-02-04 | Ethicon Llc | Flowable bioabsorbable polymer adhesive for releasably attaching a staple buttress to a surgical stapler |
| USD832301S1 (en) | 2015-03-30 | 2018-10-30 | Creed Smith | Display screen or portion thereof with animated graphical user interface |
| US10390825B2 (en) | 2015-03-31 | 2019-08-27 | Ethicon Llc | Surgical instrument with progressive rotary drive systems |
| US20160287279A1 (en) | 2015-04-01 | 2016-10-06 | Auris Surgical Robotics, Inc. | Microsurgical tool for robotic applications |
| CA2981610C (en) | 2015-04-03 | 2020-05-12 | Conmed Corporation | Autoclave tolerant battery powered motorized surgical hand piece tool and motor control method |
| US10016656B2 (en) | 2015-04-07 | 2018-07-10 | Ohio State Innovation Foundation | Automatically adjustable treadmill control system |
| USD768167S1 (en) | 2015-04-08 | 2016-10-04 | Anthony M Jones | Display screen with icon |
| US10226239B2 (en) | 2015-04-10 | 2019-03-12 | Covidien Lp | Adapter assembly with gimbal for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| US10226274B2 (en) | 2015-04-16 | 2019-03-12 | Ethicon Llc | Ultrasonic surgical instrument with articulation joint having plurality of locking positions |
| US10111698B2 (en) | 2015-04-16 | 2018-10-30 | Ethicon Llc | Surgical instrument with rotatable shaft having plurality of locking positions |
| US10029125B2 (en) | 2015-04-16 | 2018-07-24 | Ethicon Llc | Ultrasonic surgical instrument with articulation joint having integral stiffening members |
| US10342567B2 (en) | 2015-04-16 | 2019-07-09 | Ethicon Llc | Ultrasonic surgical instrument with opposing thread drive for end effector articulation |
| EP3167816B1 (en) | 2015-04-20 | 2019-08-28 | Medi Tulip Co., Ltd | Surgical linear stapler |
| EP3741309A1 (en) | 2015-04-22 | 2020-11-25 | Covidien LP | Handheld electromechanical surgical system |
| US20160314716A1 (en) | 2015-04-27 | 2016-10-27 | KindHeart, Inc. | Telerobotic surgery system for remote surgeon training using remote surgery station and party conferencing and associated methods |
| US20160314717A1 (en) | 2015-04-27 | 2016-10-27 | KindHeart, Inc. | Telerobotic surgery system for remote surgeon training using robotic surgery station coupled to remote surgeon trainee and instructor stations and associated methods |
| US10117650B2 (en) | 2015-05-05 | 2018-11-06 | Covidien Lp | Adapter assembly and loading units for surgical stapling devices |
| US10299789B2 (en) | 2015-05-05 | 2019-05-28 | Covidie LP | Adapter assembly for surgical stapling devices |
| US10039532B2 (en) | 2015-05-06 | 2018-08-07 | Covidien Lp | Surgical instrument with articulation assembly |
| EP3294149B1 (en) | 2015-05-08 | 2023-03-08 | Bolder Surgical, LLC | Surgical stapler |
| CA3029355A1 (en) | 2015-05-22 | 2016-11-22 | Covidien Lp | Surgical instruments and methods for performing tonsillectomy, adenoidectomy, and other surgical procedures |
| CN107635481B (zh) | 2015-05-25 | 2021-01-05 | 柯惠有限合伙公司 | 小直径外科手术缝合装置 |
| US10022120B2 (en) | 2015-05-26 | 2018-07-17 | Ethicon Llc | Surgical needle with recessed features |
| US10349941B2 (en) | 2015-05-27 | 2019-07-16 | Covidien Lp | Multi-fire lead screw stapling device |
| US10172615B2 (en) | 2015-05-27 | 2019-01-08 | Covidien Lp | Multi-fire push rod stapling device |
| US10722293B2 (en) | 2015-05-29 | 2020-07-28 | Covidien Lp | Surgical device with an end effector assembly and system for monitoring of tissue before and after a surgical procedure |
| US10426555B2 (en) | 2015-06-03 | 2019-10-01 | Covidien Lp | Medical instrument with sensor for use in a system and method for electromagnetic navigation |
| USD772269S1 (en) | 2015-06-05 | 2016-11-22 | Apple Inc. | Display screen or portion thereof with graphical user interface |
| USD764498S1 (en) | 2015-06-07 | 2016-08-23 | Apple Inc. | Display screen or portion thereof with graphical user interface |
| US10201381B2 (en) | 2015-06-11 | 2019-02-12 | Conmed Corporation | Hand instruments with shaped shafts for use in laparoscopic surgery |
| US9888914B2 (en) | 2015-06-16 | 2018-02-13 | Ethicon Endo-Surgery, Llc | Suturing instrument with motorized needle drive |
| KR101719208B1 (ko) | 2015-06-17 | 2017-03-23 | 주식회사 하이딥 | 디스플레이 모듈을 포함하는 압력 검출 가능한 터치 입력 장치 |
| US10178992B2 (en) | 2015-06-18 | 2019-01-15 | Ethicon Llc | Push/pull articulation drive systems for articulatable surgical instruments |
| US10226276B2 (en) | 2015-06-26 | 2019-03-12 | Covidien Lp | Tissue-removing catheter including operational control mechanism |
| US10905415B2 (en) | 2015-06-26 | 2021-02-02 | Ethicon Llc | Surgical stapler with electromechanical lockout |
| US10194911B2 (en) | 2015-06-26 | 2019-02-05 | Ethicon Llc | Surgical stapler with ready state indicator |
| US11051873B2 (en) | 2015-06-30 | 2021-07-06 | Cilag Gmbh International | Surgical system with user adaptable techniques employing multiple energy modalities based on tissue parameters |
| USD769315S1 (en) | 2015-07-09 | 2016-10-18 | Monthly Gift Inc. | Display screen or portion thereof with graphical user interface |
| JP6776327B2 (ja) | 2015-07-21 | 2020-10-28 | スリーディインテグレイテッド アーペーエス3Dintegrated Aps | カニューレアセンブリキット、套管針アセンブリキット、スリーブアセンブリ、低侵襲性手術システム及び方法 |
| GB2540757B (en) | 2015-07-22 | 2021-03-31 | Cmr Surgical Ltd | Torque sensors |
| GB201512964D0 (en) | 2015-07-22 | 2015-09-02 | Cambridge Medical Robotics Ltd | Communication paths for robot arms |
| US10314580B2 (en) | 2015-07-28 | 2019-06-11 | Ethicon Llc | Surgical staple cartridge with compression feature at knife slot |
| US10201348B2 (en) | 2015-07-28 | 2019-02-12 | Ethicon Llc | Surgical stapler cartridge with compression features at staple driver edges |
| US10194912B2 (en) | 2015-07-28 | 2019-02-05 | Ethicon Llc | Surgical staple cartridge with outer edge compression features |
| US10064622B2 (en) | 2015-07-29 | 2018-09-04 | Covidien Lp | Surgical stapling loading unit with stroke counter and lockout |
| US10194913B2 (en) | 2015-07-30 | 2019-02-05 | Ethicon Llc | Surgical instrument comprising systems for assuring the proper sequential operation of the surgical instrument |
| US10045782B2 (en) | 2015-07-30 | 2018-08-14 | Covidien Lp | Surgical stapling loading unit with stroke counter and lockout |
| US11154300B2 (en) | 2015-07-30 | 2021-10-26 | Cilag Gmbh International | Surgical instrument comprising separate tissue securing and tissue cutting systems |
| USD768709S1 (en) | 2015-07-31 | 2016-10-11 | Gen-Probe Incorporated | Display screen or portion thereof with animated graphical user interface |
| USD763277S1 (en) | 2015-08-06 | 2016-08-09 | Fore Support Services, Llc | Display screen with an insurance authorization/preauthorization dashboard graphical user interface |
| US11058425B2 (en) | 2015-08-17 | 2021-07-13 | Ethicon Llc | Implantable layers for a surgical instrument |
| US10166023B2 (en) | 2015-08-24 | 2019-01-01 | Ethicon Llc | Method of applying a buttress to a surgical stapler end effector |
| US10098642B2 (en) | 2015-08-26 | 2018-10-16 | Ethicon Llc | Surgical staples comprising features for improved fastening of tissue |
| USD803234S1 (en) | 2015-08-26 | 2017-11-21 | General Electric Company | Display screen or portion thereof with graphical user interface |
| USD770476S1 (en) | 2015-08-27 | 2016-11-01 | Google Inc. | Display screen with animated graphical user interface |
| US10188389B2 (en) | 2015-08-31 | 2019-01-29 | Ethicon Llc | Adjunct material for delivery to colon tissue |
| US10569071B2 (en) | 2015-08-31 | 2020-02-25 | Ethicon Llc | Medicant eluting adjuncts and methods of using medicant eluting adjuncts |
| US9829698B2 (en) | 2015-08-31 | 2017-11-28 | Panasonic Corporation | Endoscope |
| US10130738B2 (en) | 2015-08-31 | 2018-11-20 | Ethicon Llc | Adjunct material to promote tissue growth |
| US10245034B2 (en) | 2015-08-31 | 2019-04-02 | Ethicon Llc | Inducing tissue adhesions using surgical adjuncts and medicants |
| US10314587B2 (en) | 2015-09-02 | 2019-06-11 | Ethicon Llc | Surgical staple cartridge with improved staple driver configurations |
| CA2997315A1 (en) | 2015-09-03 | 2017-03-09 | Stryker Corporation | Powered surgical drill with integral depth gauge that includes a probe that slides over the drill bit |
| US20170066054A1 (en) | 2015-09-08 | 2017-03-09 | Caterpillar Inc. | Powdered metal compacting |
| CA2998456A1 (en) | 2015-09-15 | 2017-03-23 | Alfacyte Ltd | Compositions and methods relating to the treatment of diseases |
| US20170079642A1 (en) | 2015-09-23 | 2017-03-23 | Ethicon Endo-Surgery, Llc | Surgical stapler having magnetic field-based motor control |
| US10076326B2 (en) | 2015-09-23 | 2018-09-18 | Ethicon Llc | Surgical stapler having current mirror-based motor control |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US10327769B2 (en) | 2015-09-23 | 2019-06-25 | Ethicon Llc | Surgical stapler having motor control based on a drive system component |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10363036B2 (en) | 2015-09-23 | 2019-07-30 | Ethicon Llc | Surgical stapler having force-based motor control |
| US10085751B2 (en) | 2015-09-23 | 2018-10-02 | Ethicon Llc | Surgical stapler having temperature-based motor control |
| US10299878B2 (en) | 2015-09-25 | 2019-05-28 | Ethicon Llc | Implantable adjunct systems for determining adjunct skew |
| US10642633B1 (en) | 2015-09-29 | 2020-05-05 | EMC IP Holding Company LLC | Intelligent backups with dynamic proxy in virtualized environment |
| US10182813B2 (en) | 2015-09-29 | 2019-01-22 | Ethicon Llc | Surgical stapling instrument with shaft release, powered firing, and powered articulation |
| US10314578B2 (en) | 2015-09-29 | 2019-06-11 | Ethicon Llc | Battery drain circuit for surgical instrument |
| US10271849B2 (en) | 2015-09-30 | 2019-04-30 | Ethicon Llc | Woven constructs with interlocked standing fibers |
| US11690623B2 (en) | 2015-09-30 | 2023-07-04 | Cilag Gmbh International | Method for applying an implantable layer to a fastener cartridge |
| US10980539B2 (en) | 2015-09-30 | 2021-04-20 | Ethicon Llc | Implantable adjunct comprising bonded layers |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10085810B2 (en) | 2015-10-02 | 2018-10-02 | Ethicon Llc | User input device for robotic surgical system |
| WO2017059228A1 (en) | 2015-10-02 | 2017-04-06 | Elucent Medical, Inc. | Signal tag detection components, devices, and systems |
| US10213204B2 (en) | 2015-10-02 | 2019-02-26 | Covidien Lp | Micro surgical instrument and loading unit for use therewith |
| US10959797B2 (en) | 2015-10-05 | 2021-03-30 | Flexdex, Inc. | Medical devices having smoothly articulating multi-cluster joints |
| US10404136B2 (en) | 2015-10-14 | 2019-09-03 | Black & Decker Inc. | Power tool with separate motor case compartment |
| US10499917B2 (en) | 2015-10-15 | 2019-12-10 | Ethicon Llc | Surgical stapler end effector with knife position indicators |
| US10265073B2 (en) | 2015-10-15 | 2019-04-23 | Ethicon Llc | Surgical stapler with terminal staple orientation crossing center line |
| US10226251B2 (en) | 2015-10-15 | 2019-03-12 | Ethicon Llc | Surgical staple actuating sled with actuation stroke having minimized distance relative to distal staple |
| US11141159B2 (en) | 2015-10-15 | 2021-10-12 | Cilag Gmbh International | Surgical stapler end effector with multi-staple driver crossing center line |
| US10342535B2 (en) | 2015-10-15 | 2019-07-09 | Ethicon Llc | Method of applying staples to liver and other organs |
| USD788140S1 (en) | 2015-10-16 | 2017-05-30 | Nasdaq, Inc. | Display screen or portion thereof with animated graphical user interface |
| USD788123S1 (en) | 2015-10-20 | 2017-05-30 | 23Andme, Inc. | Display screen or portion thereof with a graphical user interface for conveying genetic information |
| US10772632B2 (en) | 2015-10-28 | 2020-09-15 | Covidien Lp | Surgical stapling device with triple leg staples |
| USD788792S1 (en) | 2015-10-28 | 2017-06-06 | Technogym S.P.A. | Portion of a display screen with a graphical user interface |
| US10441286B2 (en) | 2015-10-29 | 2019-10-15 | Ethicon Llc | Multi-layer surgical stapler buttress assembly |
| US10517592B2 (en) | 2015-10-29 | 2019-12-31 | Ethicon Llc | Surgical stapler buttress assembly with adhesion to wet end effector |
| US10357248B2 (en) | 2015-10-29 | 2019-07-23 | Ethicon Llc | Extensible buttress assembly for surgical stapler |
| US10433839B2 (en) | 2015-10-29 | 2019-10-08 | Ethicon Llc | Surgical stapler buttress assembly with gel adhesive retainer |
| US10314588B2 (en) | 2015-10-29 | 2019-06-11 | Ethicon Llc | Fluid penetrable buttress assembly for a surgical stapler |
| US10251649B2 (en) | 2015-10-29 | 2019-04-09 | Ethicon Llc | Surgical stapler buttress applicator with data communication |
| US10499918B2 (en) | 2015-10-29 | 2019-12-10 | Ethicon Llc | Surgical stapler buttress assembly with features to interact with movable end effector components |
| US10765430B2 (en) | 2015-11-06 | 2020-09-08 | Intuitive Surgical Operations, Inc. | Knife with mechanical fuse |
| DE102015221998B4 (de) | 2015-11-09 | 2019-01-17 | Siemens Healthcare Gmbh | Verfahren zur Unterstützung eines Befunders bei der Ortsbeschreibung einer Zielstruktur in einer Brust, Vorrichtung und Computerprogramm |
| WO2017083201A1 (en) | 2015-11-11 | 2017-05-18 | Intuitive Surgical Operations, Inc. | Reconfigurable end effector architecture |
| US10307204B2 (en) | 2015-11-13 | 2019-06-04 | Ethicon Llc | Integrated bailout for motorized RF device |
| WO2017083126A1 (en) | 2015-11-13 | 2017-05-18 | Intuitive Surgical Operations, Inc. | Staple pusher with lost motion between ramps |
| US10709495B2 (en) | 2015-11-13 | 2020-07-14 | Ethicon Llc | Dual step bailout for motorized RF device |
| WO2017083129A1 (en) | 2015-11-13 | 2017-05-18 | Intuitive Surgical Operations, Inc. | Stapler anvil with compliant tip |
| US10143514B2 (en) | 2015-11-13 | 2018-12-04 | Ethicon Llc | Electronic bailout for motorized RF device |
| US10973517B2 (en) | 2015-11-13 | 2021-04-13 | Intuitive Surgical Operations, Inc. | Stapler with composite cardan and screw drive |
| WO2017083989A1 (en) | 2015-11-16 | 2017-05-26 | Ao Technology Ag | Surgical power drill including a measuring unit suitable for bone screw length determination |
| US10617411B2 (en) | 2015-12-01 | 2020-04-14 | Covidien Lp | Adapter assembly for surgical device |
| US10111660B2 (en) | 2015-12-03 | 2018-10-30 | Covidien Lp | Surgical stapler flexible distal tip |
| EP3977946A3 (en) | 2015-12-03 | 2022-06-29 | Boston Scientific Scimed, Inc. | Electrocautery hemostasis clip |
| USD803235S1 (en) | 2015-12-04 | 2017-11-21 | Capital One Services, Llc | Display screen with a graphical user interface |
| USD789384S1 (en) | 2015-12-09 | 2017-06-13 | Facebook, Inc. | Display screen with animated graphical user interface |
| GB201521803D0 (en) | 2015-12-10 | 2016-01-27 | Cambridge Medical Robotics Ltd | Surgical instrument articulation |
| US10952726B2 (en) | 2015-12-10 | 2021-03-23 | Covidien Lp | Handheld electromechanical surgical instruments |
| USD800766S1 (en) | 2015-12-11 | 2017-10-24 | Samsung Electronics Co., Ltd. | Display screen or portion thereof with graphical user interface |
| USD795919S1 (en) | 2015-12-17 | 2017-08-29 | The Procter & Gamble Company | Display screen with icon |
| AU2016262637B2 (en) | 2015-12-17 | 2020-12-10 | Covidien Lp | Multi-fire stapler with electronic counter, lockout, and visual indicator |
| US10624616B2 (en) | 2015-12-18 | 2020-04-21 | Covidien Lp | Surgical instruments including sensors |
| USD864388S1 (en) | 2015-12-21 | 2019-10-22 | avateramedical GmBH | Instrument unit |
| US10420554B2 (en) | 2015-12-22 | 2019-09-24 | Covidien Lp | Personalization of powered surgical devices |
| JP6180692B1 (ja) | 2015-12-28 | 2017-08-16 | オリンパス株式会社 | 医療用マニピュレータシステム |
| US10368865B2 (en) | 2015-12-30 | 2019-08-06 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10265068B2 (en) | 2015-12-30 | 2019-04-23 | Ethicon Llc | Surgical instruments with separable motors and motor control circuits |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US10561474B2 (en) | 2015-12-31 | 2020-02-18 | Ethicon Llc | Surgical stapler with end of stroke indicator |
| US10966717B2 (en) | 2016-01-07 | 2021-04-06 | Covidien Lp | Surgical fastener apparatus |
| WO2017123584A1 (en) | 2016-01-11 | 2017-07-20 | GYRUS ACMI, INC. (d/b/a OLYMPUS SURGICAL TECHNOLOGIES AMERICA) | Forceps with tissue stops |
| US10786248B2 (en) | 2016-01-11 | 2020-09-29 | Ethicon. Inc. | Intra dermal tissue fixation device |
| GB201600546D0 (en) | 2016-01-12 | 2016-02-24 | Gyrus Medical Ltd | Electrosurgical device |
| US11129670B2 (en) | 2016-01-15 | 2021-09-28 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| EP3192491B1 (de) | 2016-01-15 | 2020-01-08 | Evonik Operations GmbH | Zusammensetzung enthaltend polyglycerinester und hydroxy-alkylmodifiziertes guar |
| US10508720B2 (en) | 2016-01-21 | 2019-12-17 | Covidien Lp | Adapter assembly with planetary gear drive for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| JP2019508091A (ja) | 2016-01-29 | 2019-03-28 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 可変速度手術器具のためのシステム及び方法 |
| US10695123B2 (en) | 2016-01-29 | 2020-06-30 | Covidien Lp | Surgical instrument with sensor |
| USD782530S1 (en) | 2016-02-01 | 2017-03-28 | Microsoft Corporation | Display screen with animated graphical user interface |
| EP3410957B1 (en) | 2016-02-04 | 2020-06-03 | Covidien LP | Circular stapler with visual indicator mechanism |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| JP6911054B2 (ja) | 2016-02-09 | 2021-07-28 | エシコン エルエルシーEthicon LLC | 非対称の関節構成を備えた外科用器具 |
| US10433837B2 (en) | 2016-02-09 | 2019-10-08 | Ethicon Llc | Surgical instruments with multiple link articulation arrangements |
| US10349937B2 (en) | 2016-02-10 | 2019-07-16 | Covidien Lp | Surgical stapler with articulation locking mechanism |
| US10420559B2 (en) | 2016-02-11 | 2019-09-24 | Covidien Lp | Surgical stapler with small diameter endoscopic portion |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US20170231628A1 (en) | 2016-02-12 | 2017-08-17 | Ethicon Endo-Surgery, Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10258331B2 (en) | 2016-02-12 | 2019-04-16 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US11224426B2 (en) | 2016-02-12 | 2022-01-18 | Cilag Gmbh International | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US20170242455A1 (en) | 2016-02-24 | 2017-08-24 | Shavena Dickens | Sterile Screen Protector |
| US9824251B2 (en) | 2016-03-04 | 2017-11-21 | Motorola Mobility Llc | Automating device testing using RFID |
| US10315566B2 (en) | 2016-03-07 | 2019-06-11 | Lg Electronics Inc. | Vehicle control device mounted on vehicle and method for controlling the vehicle |
| US10625062B2 (en) | 2016-03-08 | 2020-04-21 | Acclarent, Inc. | Dilation catheter assembly with rapid change components |
| USD800904S1 (en) | 2016-03-09 | 2017-10-24 | Ethicon Endo-Surgery, Llc | Surgical stapling instrument |
| US20170262110A1 (en) | 2016-03-10 | 2017-09-14 | Synaptics Incorporated | Hybrid force sensor |
| CN111329552B (zh) | 2016-03-12 | 2021-06-22 | P·K·朗 | 包括机器人的用于引导骨切除的增强现实可视化 |
| US10631858B2 (en) | 2016-03-17 | 2020-04-28 | Intuitive Surgical Operations, Inc. | Stapler with cable-driven advanceable clamping element and distal pulley |
| US10350016B2 (en) | 2016-03-17 | 2019-07-16 | Intuitive Surgical Operations, Inc. | Stapler with cable-driven advanceable clamping element and dual distal pulleys |
| US10278703B2 (en) | 2016-03-21 | 2019-05-07 | Ethicon, Inc. | Temporary fixation tools for use with circular anastomotic staplers |
| USD800742S1 (en) | 2016-03-25 | 2017-10-24 | Illumina, Inc. | Display screen or portion thereof with graphical user interface |
| WO2017168267A1 (en) | 2016-03-31 | 2017-10-05 | Snpshot Trustee Limited | Biological sampler, collector and storage container |
| US10307159B2 (en) | 2016-04-01 | 2019-06-04 | Ethicon Llc | Surgical instrument handle assembly with reconfigurable grip portion |
| US20170281186A1 (en) | 2016-04-01 | 2017-10-05 | Ethicon Endo-Surgery, Llc | Surgical stapling system comprising a contourable shaft |
| US10413297B2 (en) | 2016-04-01 | 2019-09-17 | Ethicon Llc | Surgical stapling system configured to apply annular rows of staples having different heights |
| US11284890B2 (en) | 2016-04-01 | 2022-03-29 | Cilag Gmbh International | Circular stapling system comprising an incisable tissue support |
| US10617413B2 (en) | 2016-04-01 | 2020-04-14 | Ethicon Llc | Closure system arrangements for surgical cutting and stapling devices with separate and distinct firing shafts |
| US10743850B2 (en) | 2016-04-04 | 2020-08-18 | Ethicon Llc | Surgical instrument with locking articulation drive wheel |
| US10507034B2 (en) | 2016-04-04 | 2019-12-17 | Ethicon Llc | Surgical instrument with motorized articulation drive in shaft rotation knob |
| US10722233B2 (en) | 2016-04-07 | 2020-07-28 | Intuitive Surgical Operations, Inc. | Stapling cartridge |
| KR102535333B1 (ko) | 2016-04-12 | 2023-05-30 | 어플라이드 메디컬 리소시스 코포레이션 | 수술용 스테이플러에 대한 재장전 샤프트 어셈블리 |
| US20170297100A1 (en) | 2016-04-14 | 2017-10-19 | Desktop Metal, Inc. | Method for fabricating an interface layer to separate binder jetted objects from support structures |
| US10335145B2 (en) | 2016-04-15 | 2019-07-02 | Ethicon Llc | Modular surgical instrument with configurable operating mode |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10456137B2 (en) | 2016-04-15 | 2019-10-29 | Ethicon Llc | Staple formation detection mechanisms |
| US11179150B2 (en) | 2016-04-15 | 2021-11-23 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10405859B2 (en) | 2016-04-15 | 2019-09-10 | Ethicon Llc | Surgical instrument with adjustable stop/start control during a firing motion |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10492783B2 (en) | 2016-04-15 | 2019-12-03 | Ethicon, Llc | Surgical instrument with improved stop/start control during a firing motion |
| US10433840B2 (en) | 2016-04-18 | 2019-10-08 | Ethicon Llc | Surgical instrument comprising a replaceable cartridge jaw |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US11317917B2 (en) | 2016-04-18 | 2022-05-03 | Cilag Gmbh International | Surgical stapling system comprising a lockable firing assembly |
| EP3235445B1 (en) | 2016-04-18 | 2022-04-20 | Ethicon LLC | Surgical instrument comprising a lockout |
| US10285700B2 (en) | 2016-04-20 | 2019-05-14 | Ethicon Llc | Surgical staple cartridge with hydraulic staple deployment |
| USD786896S1 (en) | 2016-04-29 | 2017-05-16 | Salesforce.Com, Inc. | Display screen or portion thereof with animated graphical user interface |
| US10561419B2 (en) | 2016-05-04 | 2020-02-18 | Covidien Lp | Powered end effector assembly with pivotable channel |
| CA3225148A1 (en) | 2016-05-19 | 2017-11-23 | Mannkind Corporation | Apparatus, system and method for detecting and monitoring inhalations |
| US11076908B2 (en) | 2016-06-02 | 2021-08-03 | Gyrus Acmi, Inc. | Two-stage electrosurgical device for vessel sealing |
| US20170348010A1 (en) | 2016-06-03 | 2017-12-07 | Orion Biotech Inc. | Surgical drill and method of controlling the automatic stop thereof |
| USD790575S1 (en) | 2016-06-12 | 2017-06-27 | Apple Inc. | Display screen or portion thereof with graphical user interface |
| US10349963B2 (en) | 2016-06-14 | 2019-07-16 | Gyrus Acmi, Inc. | Surgical apparatus with jaw force limiter |
| US10959731B2 (en) | 2016-06-14 | 2021-03-30 | Covidien Lp | Buttress attachment for surgical stapling instrument |
| US20170360441A1 (en) | 2016-06-15 | 2017-12-21 | Covidien Lp | Tool assembly for leak resistant tissue dissection |
| WO2017214928A1 (zh) | 2016-06-16 | 2017-12-21 | 深圳市汇顶科技股份有限公司 | 触摸传感器、触摸检测装置及检测方法、触控设备 |
| US11000278B2 (en) | 2016-06-24 | 2021-05-11 | Ethicon Llc | Staple cartridge comprising wire staples and stamped staples |
| USD822206S1 (en) | 2016-06-24 | 2018-07-03 | Ethicon Llc | Surgical fastener |
| USD826405S1 (en) | 2016-06-24 | 2018-08-21 | Ethicon Llc | Surgical fastener |
| USD850617S1 (en) | 2016-06-24 | 2019-06-04 | Ethicon Llc | Surgical fastener cartridge |
| USD847989S1 (en) | 2016-06-24 | 2019-05-07 | Ethicon Llc | Surgical fastener cartridge |
| USD819682S1 (en) | 2016-06-29 | 2018-06-05 | Rockwell Collins, Inc. | Ground system display screen portion with transitional graphical user interface |
| CN105919642A (zh) | 2016-06-30 | 2016-09-07 | 江苏风和医疗器材有限公司 | 用于外科器械的钉仓及外科器械 |
| CN105997173A (zh) | 2016-06-30 | 2016-10-12 | 江苏风和医疗器材有限公司 | 用于外科器械的钉仓及外科器械 |
| CN109475266B (zh) | 2016-07-11 | 2021-08-10 | 奥林巴斯株式会社 | 内窥镜装置 |
| USD813899S1 (en) | 2016-07-20 | 2018-03-27 | Facebook, Inc. | Display screen with animated graphical user interface |
| USD844666S1 (en) | 2016-08-02 | 2019-04-02 | Smule, Inc. | Display screen or portion thereof with graphical user interface |
| USD845342S1 (en) | 2016-08-02 | 2019-04-09 | Smule, Inc. | Display screen or portion thereof with graphical user interface |
| USD844667S1 (en) | 2016-08-02 | 2019-04-02 | Smule, Inc. | Display screen or portion thereof with graphical user interface |
| US10993760B2 (en) | 2016-08-16 | 2021-05-04 | Ethicon, Llc | Modular surgical robotic tool |
| US10687904B2 (en) | 2016-08-16 | 2020-06-23 | Ethicon Llc | Robotics tool exchange |
| US10548673B2 (en) | 2016-08-16 | 2020-02-04 | Ethicon Llc | Surgical tool with a display |
| US9943377B2 (en) | 2016-08-16 | 2018-04-17 | Ethicon Endo-Surgery, Llc | Methods, systems, and devices for causing end effector motion with a robotic surgical system |
| US10413373B2 (en) | 2016-08-16 | 2019-09-17 | Ethicon, Llc | Robotic visualization and collision avoidance |
| US10849698B2 (en) | 2016-08-16 | 2020-12-01 | Ethicon Llc | Robotics tool bailouts |
| US10952759B2 (en) | 2016-08-25 | 2021-03-23 | Ethicon Llc | Tissue loading of a surgical instrument |
| US10682137B2 (en) | 2016-08-29 | 2020-06-16 | Ethicon Llc | Surgical stapler |
| CA3035243A1 (en) | 2016-09-02 | 2018-03-08 | Saudi Arabian Oil Company | Controlling hydrocarbon production |
| WO2018049211A1 (en) | 2016-09-09 | 2018-03-15 | Intuitive Surgical Operations, Inc. | Wrist architecture |
| CN106344091B (zh) | 2016-09-23 | 2018-09-14 | 普瑞斯星(常州)医疗器械有限公司 | 一次性腔内切割切缘吻合器的钉仓组件 |
| US10814102B2 (en) | 2016-09-28 | 2020-10-27 | Project Moray, Inc. | Base station, charging station, and/or server for robotic catheter systems and other uses, and improved articulated devices and systems |
| WO2018064646A2 (en) | 2016-09-30 | 2018-04-05 | Kerr Corporation | Electronic tool recognition system for dental devices |
| US10482292B2 (en) | 2016-10-03 | 2019-11-19 | Gary L. Sharpe | RFID scanning device |
| USD806108S1 (en) | 2016-10-07 | 2017-12-26 | General Electric Company | Display screen portion with graphical user interface for a healthcare command center computing system |
| JP7184762B2 (ja) | 2016-10-11 | 2022-12-06 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 一体型ナイフを含むステープラカートリッジ |
| CN107967874B (zh) | 2016-10-19 | 2020-04-28 | 元太科技工业股份有限公司 | 像素结构 |
| EP3533062A4 (en) | 2016-10-26 | 2020-05-13 | Virginia Flavin Pribanic | SYSTEM AND METHOD FOR SYNTHETIC INTERACTION WITH A USER AND DEVICES |
| US10610236B2 (en) | 2016-11-01 | 2020-04-07 | Covidien Lp | Endoscopic reposable surgical clip applier |
| US11642126B2 (en) | 2016-11-04 | 2023-05-09 | Covidien Lp | Surgical stapling apparatus with tissue pockets |
| USD819684S1 (en) | 2016-11-04 | 2018-06-05 | Microsoft Corporation | Display screen with graphical user interface |
| US10631857B2 (en) | 2016-11-04 | 2020-04-28 | Covidien Lp | Loading unit for surgical instruments with low profile pushers |
| US11116594B2 (en) | 2016-11-08 | 2021-09-14 | Covidien Lp | Surgical systems including adapter assemblies for interconnecting electromechanical surgical devices and end effectors |
| CN115068028A (zh) | 2016-11-10 | 2022-09-20 | 天津瑞奇外科器械股份有限公司 | 具有互锁功能的外科手术器械 |
| KR20180053811A (ko) | 2016-11-14 | 2018-05-24 | 재단법인 오송첨단의료산업진흥재단 | 종양의 실시간 위치 파악이 가능한 거리 검출 시스템 및 이를 이용한 거리 검출 방법 |
| USD833608S1 (en) | 2016-11-14 | 2018-11-13 | Ethicon Llc | Stapling head feature for surgical stapler |
| USD830550S1 (en) | 2016-11-14 | 2018-10-09 | Ethicon Llc | Surgical stapler |
| US10603041B2 (en) | 2016-11-14 | 2020-03-31 | Ethicon Llc | Circular surgical stapler with angularly asymmetric deck features |
| USD820307S1 (en) | 2016-11-16 | 2018-06-12 | Airbnb, Inc. | Display screen with graphical user interface for a video pagination indicator |
| US11116531B2 (en) | 2016-11-16 | 2021-09-14 | Cilag Gmbh International | Surgical instrument with removable clamp arm assembly |
| USD810099S1 (en) | 2016-11-17 | 2018-02-13 | Nasdaq, Inc. | Display screen or portion thereof with graphical user interface |
| US11382649B2 (en) | 2016-11-17 | 2022-07-12 | Covidien Lp | Rotation control systems for surgical instruments |
| US10337148B2 (en) | 2016-11-23 | 2019-07-02 | Kimberly-Clark Worldwide, Inc. | Hesperaloe tissue having improved cross-machine direction properties |
| US10463371B2 (en) | 2016-11-29 | 2019-11-05 | Covidien Lp | Reload assembly with spent reload indicator |
| US10251716B2 (en) | 2016-12-19 | 2019-04-09 | Ethicon Llc | Robotic surgical system with selective motion control decoupling |
| USD841667S1 (en) | 2016-12-19 | 2019-02-26 | Coren Intellect LLC | Display screen with employee survey graphical user interface |
| US10881446B2 (en) | 2016-12-19 | 2021-01-05 | Ethicon Llc | Visual displays of electrical pathways |
| USD831676S1 (en) | 2016-12-20 | 2018-10-23 | Hancom, Inc. | Display screen or portion thereof with icon |
| USD808989S1 (en) | 2016-12-20 | 2018-01-30 | Abbott Laboratories | Display screen with graphical user interface |
| US10398460B2 (en) | 2016-12-20 | 2019-09-03 | Ethicon Llc | Robotic endocutter drivetrain with bailout and manual opening |
| US10987177B2 (en) | 2016-12-20 | 2021-04-27 | Ethicon Llc | Robotic endocutter drivetrain with bailout and manual opening |
| US10758229B2 (en) | 2016-12-21 | 2020-09-01 | Ethicon Llc | Surgical instrument comprising improved jaw control |
| US10667809B2 (en) | 2016-12-21 | 2020-06-02 | Ethicon Llc | Staple cartridge and staple cartridge channel comprising windows defined therein |
| US10426471B2 (en) | 2016-12-21 | 2019-10-01 | Ethicon Llc | Surgical instrument with multiple failure response modes |
| US10492785B2 (en) | 2016-12-21 | 2019-12-03 | Ethicon Llc | Shaft assembly comprising a lockout |
| US10945727B2 (en) | 2016-12-21 | 2021-03-16 | Ethicon Llc | Staple cartridge with deformable driver retention features |
| US11419606B2 (en) | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| MX2019007311A (es) | 2016-12-21 | 2019-11-18 | Ethicon Llc | Sistemas de engrapado quirurgico. |
| US20180168648A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Durability features for end effectors and firing assemblies of surgical stapling instruments |
| JP7010957B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | ロックアウトを備えるシャフトアセンブリ |
| US10617414B2 (en) | 2016-12-21 | 2020-04-14 | Ethicon Llc | Closure member arrangements for surgical instruments |
| US10687810B2 (en) | 2016-12-21 | 2020-06-23 | Ethicon Llc | Stepped staple cartridge with tissue retention and gap setting features |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US10485543B2 (en) | 2016-12-21 | 2019-11-26 | Ethicon Llc | Anvil having a knife slot width |
| US10588632B2 (en) | 2016-12-21 | 2020-03-17 | Ethicon Llc | Surgical end effectors and firing members thereof |
| JP6983893B2 (ja) | 2016-12-21 | 2021-12-17 | エシコン エルエルシーEthicon LLC | 外科用エンドエフェクタ及び交換式ツールアセンブリのためのロックアウト構成 |
| US10736629B2 (en) | 2016-12-21 | 2020-08-11 | Ethicon Llc | Surgical tool assemblies with clutching arrangements for shifting between closure systems with closure stroke reduction features and articulation and firing systems |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| US11134942B2 (en) | 2016-12-21 | 2021-10-05 | Cilag Gmbh International | Surgical stapling instruments and staple-forming anvils |
| US11571210B2 (en) | 2016-12-21 | 2023-02-07 | Cilag Gmbh International | Firing assembly comprising a multiple failed-state fuse |
| US10758230B2 (en) | 2016-12-21 | 2020-09-01 | Ethicon Llc | Surgical instrument with primary and safety processors |
| US10993715B2 (en) | 2016-12-21 | 2021-05-04 | Ethicon Llc | Staple cartridge comprising staples with different clamping breadths |
| US10537325B2 (en) | 2016-12-21 | 2020-01-21 | Ethicon Llc | Staple forming pocket arrangement to accommodate different types of staples |
| US10471282B2 (en) | 2016-12-21 | 2019-11-12 | Ethicon Llc | Ultrasonic robotic tool actuation |
| US10898186B2 (en) | 2016-12-21 | 2021-01-26 | Ethicon Llc | Staple forming pocket arrangements comprising primary sidewalls and pocket sidewalls |
| US10893864B2 (en) | 2016-12-21 | 2021-01-19 | Ethicon | Staple cartridges and arrangements of staples and staple cavities therein |
| USD820867S1 (en) | 2016-12-30 | 2018-06-19 | Facebook, Inc. | Display screen with animated graphical user interface |
| US10952767B2 (en) | 2017-02-06 | 2021-03-23 | Covidien Lp | Connector clip for securing an introducer to a surgical fastener applying apparatus |
| US10806451B2 (en) | 2017-02-17 | 2020-10-20 | Ethicon Llc | Surgical stapler with cooperating distal tip features on anvil and staple cartridge |
| US11564687B2 (en) | 2017-02-17 | 2023-01-31 | Cilag Gmbh International | Method of surgical stapling with end effector component having a curved tip |
| US10828031B2 (en) | 2017-02-17 | 2020-11-10 | Ethicon Llc | Surgical stapler with elastically deformable tip |
| US10758231B2 (en) | 2017-02-17 | 2020-09-01 | Ethicon Llc | Surgical stapler with bent anvil tip, angled staple cartridge tip, and tissue gripping features |
| US10849621B2 (en) | 2017-02-23 | 2020-12-01 | Covidien Lp | Surgical stapler with small diameter endoscopic portion |
| US20180242970A1 (en) | 2017-02-28 | 2018-08-30 | Covidien Lp | Reusable powered surgical devices having improved durability |
| US20200060523A1 (en) | 2017-02-28 | 2020-02-27 | Sony Corporation | Medical support arm system and control device |
| US10813710B2 (en) | 2017-03-02 | 2020-10-27 | KindHeart, Inc. | Telerobotic surgery system using minimally invasive surgical tool with variable force scaling and feedback and relayed communications between remote surgeon and surgery station |
| USD854032S1 (en) | 2017-03-03 | 2019-07-16 | Deere & Company | Display screen with a graphical user interface |
| US10299790B2 (en) | 2017-03-03 | 2019-05-28 | Covidien Lp | Adapter with centering mechanism for articulation joint |
| US11078945B2 (en) | 2017-03-26 | 2021-08-03 | Verb Surgical Inc. | Coupler to attach robotic arm to surgical table |
| USD837244S1 (en) | 2017-03-27 | 2019-01-01 | Vudu, Inc. | Display screen or portion thereof with interactive graphical user interface |
| USD837245S1 (en) | 2017-03-27 | 2019-01-01 | Vudu, Inc. | Display screen or portion thereof with graphical user interface |
| USD819072S1 (en) | 2017-03-30 | 2018-05-29 | Facebook, Inc. | Display panel of a programmed computer system with a graphical user interface |
| JP6557274B2 (ja) | 2017-03-31 | 2019-08-07 | ファナック株式会社 | 部品実装位置ガイダンス装置、部品実装位置ガイダンスシステム、及び部品実装位置ガイダンス方法 |
| US10765442B2 (en) | 2017-04-14 | 2020-09-08 | Ethicon Llc | Surgical devices and methods for biasing an end effector to a closed configuration |
| US10524784B2 (en) | 2017-05-05 | 2020-01-07 | Covidien Lp | Surgical staples with expandable backspan |
| US10667408B2 (en) | 2017-05-18 | 2020-05-26 | Covidien Lp | Fully encapsulated electronics and printed circuit boards |
| US10588231B2 (en) | 2017-05-18 | 2020-03-10 | Covidien Lp | Hermetically sealed printed circuit boards |
| US10420551B2 (en) | 2017-05-30 | 2019-09-24 | Covidien Lp | Authentication and information system for reusable surgical instruments |
| JP1603246S (ru) | 2017-05-31 | 2018-05-07 | ||
| US10478185B2 (en) | 2017-06-02 | 2019-11-19 | Covidien Lp | Tool assembly with minimal dead space |
| AU2018202705B2 (en) | 2017-06-02 | 2023-11-16 | Covidien Lp | Handheld electromechanical surgical system |
| JP1601498S (ru) | 2017-06-05 | 2018-04-09 | ||
| US10932784B2 (en) | 2017-06-09 | 2021-03-02 | Covidien Lp | Handheld electromechanical surgical system |
| EP3634263B1 (en) | 2017-06-09 | 2023-09-20 | Stryker Corporation | Surgical systems with twist-lock battery connection |
| US10425894B2 (en) | 2017-06-16 | 2019-09-24 | Stryker Corporation | System and method for providing power from a battery to a medical device |
| USD836124S1 (en) | 2017-06-19 | 2018-12-18 | Abishkking Ltd. | Display screen or portion thereof with a graphical user interface |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| US10390841B2 (en) | 2017-06-20 | 2019-08-27 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US10888321B2 (en) | 2017-06-20 | 2021-01-12 | Ethicon Llc | Systems and methods for controlling velocity of a displacement member of a surgical stapling and cutting instrument |
| US11382638B2 (en) | 2017-06-20 | 2022-07-12 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified displacement distance |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US10813639B2 (en) | 2017-06-20 | 2020-10-27 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on system conditions |
| US10646220B2 (en) | 2017-06-20 | 2020-05-12 | Ethicon Llc | Systems and methods for controlling displacement member velocity for a surgical instrument |
| US20180360456A1 (en) | 2017-06-20 | 2018-12-20 | Ethicon Llc | Surgical instrument having controllable articulation velocity |
| US11090046B2 (en) | 2017-06-20 | 2021-08-17 | Cilag Gmbh International | Systems and methods for controlling displacement member motion of a surgical stapling and cutting instrument |
| USD879809S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with changeable graphical user interface |
| US10368864B2 (en) | 2017-06-20 | 2019-08-06 | Ethicon Llc | Systems and methods for controlling displaying motor velocity for a surgical instrument |
| USD890784S1 (en) | 2017-06-20 | 2020-07-21 | Ethicon Llc | Display panel with changeable graphical user interface |
| US10327767B2 (en) | 2017-06-20 | 2019-06-25 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| USD879808S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with graphical user interface |
| US10980537B2 (en) | 2017-06-20 | 2021-04-20 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified number of shaft rotations |
| US10624633B2 (en) | 2017-06-20 | 2020-04-21 | Ethicon Llc | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument |
| US11071554B2 (en) | 2017-06-20 | 2021-07-27 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on magnitude of velocity error measurements |
| US10881396B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Surgical instrument with variable duration trigger arrangement |
| US10677853B2 (en) | 2017-06-22 | 2020-06-09 | Stryker Corporation | System and method for determining an amount of degradation of a medical device battery |
| US10828029B2 (en) | 2017-06-27 | 2020-11-10 | Ethicon Llc | Surgical stapler with independently actuated drivers to provide varying staple heights |
| US11324503B2 (en) | 2017-06-27 | 2022-05-10 | Cilag Gmbh International | Surgical firing member arrangements |
| USD865174S1 (en) | 2017-06-27 | 2019-10-29 | Ethicon Llc | Shaft assembly for surgical stapler |
| US10856869B2 (en) | 2017-06-27 | 2020-12-08 | Ethicon Llc | Surgical anvil arrangements |
| US10772629B2 (en) | 2017-06-27 | 2020-09-15 | Ethicon Llc | Surgical anvil arrangements |
| US10639018B2 (en) | 2017-06-27 | 2020-05-05 | Ethicon Llc | Battery pack with integrated circuit providing sleep mode to battery pack and associated surgical instrument |
| US11266405B2 (en) | 2017-06-27 | 2022-03-08 | Cilag Gmbh International | Surgical anvil manufacturing methods |
| US20180368844A1 (en) | 2017-06-27 | 2018-12-27 | Ethicon Llc | Staple forming pocket arrangements |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| US11298128B2 (en) | 2017-06-28 | 2022-04-12 | Cilag Gmbh International | Surgical system couplable with staple cartridge and radio frequency cartridge, and method of using same |
| US10903685B2 (en) | 2017-06-28 | 2021-01-26 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies forming capacitive channels |
| US20190000459A1 (en) | 2017-06-28 | 2019-01-03 | Ethicon Llc | Surgical instruments with jaws constrained to pivot about an axis upon contact with a closure member that is parked in close proximity to the pivot axis |
| USD908216S1 (en) | 2017-06-28 | 2021-01-19 | Ethicon Llc | Surgical instrument |
| USD869655S1 (en) | 2017-06-28 | 2019-12-10 | Ethicon Llc | Surgical fastener cartridge |
| US10716614B2 (en) | 2017-06-28 | 2020-07-21 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies with increased contact pressure |
| US10888369B2 (en) | 2017-06-28 | 2021-01-12 | Ethicon Llc | Systems and methods for controlling control circuits for independent energy delivery over segmented sections |
| USD851762S1 (en) | 2017-06-28 | 2019-06-18 | Ethicon Llc | Anvil |
| USD854151S1 (en) | 2017-06-28 | 2019-07-16 | Ethicon Llc | Surgical instrument shaft |
| US11246592B2 (en) | 2017-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical instrument comprising an articulation system lockable to a frame |
| USD865175S1 (en) | 2017-06-28 | 2019-10-29 | Ethicon Llc | Staple cartridge for surgical instrument |
| US10211586B2 (en) | 2017-06-28 | 2019-02-19 | Ethicon Llc | Surgical shaft assemblies with watertight housings |
| US11013552B2 (en) | 2017-06-28 | 2021-05-25 | Cilag Gmbh International | Electrosurgical cartridge for use in thin profile surgical cutting and stapling instrument |
| USD893717S1 (en) | 2017-06-28 | 2020-08-18 | Ethicon Llc | Staple cartridge for surgical instrument |
| CN110799135B (zh) | 2017-06-28 | 2023-02-28 | 爱惜康有限责任公司 | 用于保持可枢转外科器械钳口与第二外科器械钳口的可枢转保持接合的钳口保持器布置 |
| US11065048B2 (en) | 2017-06-28 | 2021-07-20 | Cilag Gmbh International | Flexible circuit arrangement for surgical fastening instruments |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| US11259805B2 (en) | 2017-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical instrument comprising firing member supports |
| US10888325B2 (en) | 2017-06-28 | 2021-01-12 | Ethicon Llc | Cartridge arrangements for surgical cutting and fastening instruments with lockout disablement features |
| US10603117B2 (en) | 2017-06-28 | 2020-03-31 | Ethicon Llc | Articulation state detection mechanisms |
| US11129666B2 (en) | 2017-06-28 | 2021-09-28 | Cilag Gmbh International | Shaft module circuitry arrangements |
| US10813640B2 (en) | 2017-06-28 | 2020-10-27 | Ethicon Llc | Method of coating slip rings |
| US11696759B2 (en) | 2017-06-28 | 2023-07-11 | Cilag Gmbh International | Surgical stapling instruments comprising shortened staple cartridge noses |
| US10258418B2 (en) | 2017-06-29 | 2019-04-16 | Ethicon Llc | System for controlling articulation forces |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US10898183B2 (en) | 2017-06-29 | 2021-01-26 | Ethicon Llc | Robotic surgical instrument with closed loop feedback techniques for advancement of closure member during firing |
| US10398434B2 (en) | 2017-06-29 | 2019-09-03 | Ethicon Llc | Closed loop velocity control of closure member for robotic surgical instrument |
| US11007022B2 (en) | 2017-06-29 | 2021-05-18 | Ethicon Llc | Closed loop velocity control techniques based on sensed tissue parameters for robotic surgical instrument |
| USD865796S1 (en) | 2017-07-19 | 2019-11-05 | Lenovo (Beijing) Co., Ltd. | Smart glasses with graphical user interface |
| US20190038283A1 (en) | 2017-08-03 | 2019-02-07 | Ethicon Llc | Surgical system comprising an articulation bailout |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11304695B2 (en) | 2017-08-03 | 2022-04-19 | Cilag Gmbh International | Surgical system shaft interconnection |
| US10849625B2 (en) | 2017-08-07 | 2020-12-01 | Covidien Lp | Surgical buttress retention systems for surgical stapling apparatus |
| USD858767S1 (en) | 2017-08-10 | 2019-09-03 | Ethicon Llc | Surgical clip applier device |
| US10912562B2 (en) | 2017-08-14 | 2021-02-09 | Standard Bariatrics, Inc. | End effectors, surgical stapling devices, and methods of using same |
| US10163065B1 (en) | 2017-08-16 | 2018-12-25 | Nmetric, Llc | Systems and methods of ensuring and maintaining equipment viability for a task |
| USD855634S1 (en) | 2017-08-17 | 2019-08-06 | Samsung Electronics Co., Ltd. | Display screen or portion thereof with transitional graphical user interface |
| US20190059986A1 (en) | 2017-08-29 | 2019-02-28 | Ethicon Llc | Methods, systems, and devices for controlling electrosurgical tools |
| US10966720B2 (en) | 2017-09-01 | 2021-04-06 | RevMedica, Inc. | Surgical stapler with removable power pack |
| USD831209S1 (en) | 2017-09-14 | 2018-10-16 | Ethicon Llc | Surgical stapler cartridge |
| CN111406356B (zh) | 2017-09-26 | 2024-03-15 | 史赛克公司 | 用于给医疗器械的电池无线充电的系统和方法 |
| USD863343S1 (en) | 2017-09-27 | 2019-10-15 | Bigfoot Biomedical, Inc. | Display screen or portion thereof with graphical user interface associated with insulin delivery |
| US10729501B2 (en) | 2017-09-29 | 2020-08-04 | Ethicon Llc | Systems and methods for language selection of a surgical instrument |
| US10743872B2 (en) | 2017-09-29 | 2020-08-18 | Ethicon Llc | System and methods for controlling a display of a surgical instrument |
| US11399829B2 (en) | 2017-09-29 | 2022-08-02 | Cilag Gmbh International | Systems and methods of initiating a power shutdown mode for a surgical instrument |
| USD907648S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| USD907647S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US10765429B2 (en) | 2017-09-29 | 2020-09-08 | Ethicon Llc | Systems and methods for providing alerts according to the operational state of a surgical instrument |
| USD917500S1 (en) | 2017-09-29 | 2021-04-27 | Ethicon Llc | Display screen or portion thereof with graphical user interface |
| US10796471B2 (en) | 2017-09-29 | 2020-10-06 | Ethicon Llc | Systems and methods of displaying a knife position for a surgical instrument |
| NL2019672B1 (en) | 2017-10-05 | 2019-04-15 | N V Nederlandsche Apparatenfabriek Nedap | System of RFID reader units transmitting synchronized modulation using asynchronous carrier waves |
| USD847199S1 (en) | 2017-10-16 | 2019-04-30 | Caterpillar Inc. | Display screen with animated graphical user interface |
| US10624709B2 (en) | 2017-10-26 | 2020-04-21 | Ethicon Llc | Robotic surgical tool with manual release lever |
| US11510741B2 (en) | 2017-10-30 | 2022-11-29 | Cilag Gmbh International | Method for producing a surgical instrument comprising a smart electrical system |
| US11116485B2 (en) | 2017-10-30 | 2021-09-14 | Cilag Gmbh International | Surgical instrument with modular power sources |
| US11311342B2 (en) | 2017-10-30 | 2022-04-26 | Cilag Gmbh International | Method for communicating with surgical instrument systems |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11291510B2 (en) | 2017-10-30 | 2022-04-05 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11090075B2 (en) | 2017-10-30 | 2021-08-17 | Cilag Gmbh International | Articulation features for surgical end effector |
| US11317919B2 (en) | 2017-10-30 | 2022-05-03 | Cilag Gmbh International | Clip applier comprising a clip crimping system |
| US11129634B2 (en) | 2017-10-30 | 2021-09-28 | Cilag Gmbh International | Surgical instrument with rotary drive selectively actuating multiple end effector functions |
| US10932804B2 (en) | 2017-10-30 | 2021-03-02 | Ethicon Llc | Surgical instrument with sensor and/or control systems |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| US11229436B2 (en) | 2017-10-30 | 2022-01-25 | Cilag Gmbh International | Surgical system comprising a surgical tool and a surgical hub |
| US11109878B2 (en) | 2017-10-30 | 2021-09-07 | Cilag Gmbh International | Surgical clip applier comprising an automatic clip feeding system |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| EP3476339A3 (en) | 2017-10-30 | 2019-07-31 | Ethicon LLC | Surgical clip applier comprising an empty clip cartridge lockout |
| US11564756B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US10987104B2 (en) | 2017-10-30 | 2021-04-27 | Covidien Lp | Apparatus for endoscopic procedures |
| US11413042B2 (en) | 2017-10-30 | 2022-08-16 | Cilag Gmbh International | Clip applier comprising a reciprocating clip advancing member |
| US10779903B2 (en) | 2017-10-31 | 2020-09-22 | Ethicon Llc | Positive shaft rotation lock activated by jaw closure |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| USD848473S1 (en) | 2017-11-01 | 2019-05-14 | General Electric Company | Display screen with transitional graphical user interface |
| USD839900S1 (en) | 2017-11-06 | 2019-02-05 | Shenzhen Valuelink E-Commerce Co., Ltd. | Display screen with graphical user interface |
| JP1630005S (ru) | 2017-11-21 | 2019-04-22 | ||
| AU201812807S (en) | 2017-11-24 | 2018-06-14 | Dyson Technology Ltd | Display screen with graphical user interface |
| US11071543B2 (en) | 2017-12-15 | 2021-07-27 | Cilag Gmbh International | Surgical end effectors with clamping assemblies configured to increase jaw aperture ranges |
| US20190183502A1 (en) | 2017-12-15 | 2019-06-20 | Ethicon Llc | Systems and methods of controlling a clamping member |
| US10966718B2 (en) | 2017-12-15 | 2021-04-06 | Ethicon Llc | Dynamic clamping assemblies with improved wear characteristics for use in connection with electromechanical surgical instruments |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US10828033B2 (en) | 2017-12-15 | 2020-11-10 | Ethicon Llc | Handheld electromechanical surgical instruments with improved motor control arrangements for positioning components of an adapter coupled thereto |
| US11197670B2 (en) | 2017-12-15 | 2021-12-14 | Cilag Gmbh International | Surgical end effectors with pivotal jaws configured to touch at their respective distal ends when fully closed |
| US10743874B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Sealed adapters for use with electromechanical surgical instruments |
| US10743875B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Surgical end effectors with jaw stiffener arrangements configured to permit monitoring of firing member |
| US11033267B2 (en) | 2017-12-15 | 2021-06-15 | Ethicon Llc | Systems and methods of controlling a clamping member firing rate of a surgical instrument |
| US10687813B2 (en) | 2017-12-15 | 2020-06-23 | Ethicon Llc | Adapters with firing stroke sensing arrangements for use in connection with electromechanical surgical instruments |
| US10779825B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Adapters with end effector position sensing and control arrangements for use in connection with electromechanical surgical instruments |
| US11006955B2 (en) | 2017-12-15 | 2021-05-18 | Ethicon Llc | End effectors with positive jaw opening features for use with adapters for electromechanical surgical instruments |
| US10869666B2 (en) | 2017-12-15 | 2020-12-22 | Ethicon Llc | Adapters with control systems for controlling multiple motors of an electromechanical surgical instrument |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| US11045270B2 (en) | 2017-12-19 | 2021-06-29 | Cilag Gmbh International | Robotic attachment comprising exterior drive actuator |
| US10716565B2 (en) | 2017-12-19 | 2020-07-21 | Ethicon Llc | Surgical instruments with dual articulation drivers |
| US10729509B2 (en) | 2017-12-19 | 2020-08-04 | Ethicon Llc | Surgical instrument comprising closure and firing locking mechanism |
| USD910847S1 (en) | 2017-12-19 | 2021-02-16 | Ethicon Llc | Surgical instrument assembly |
| US11020112B2 (en) | 2017-12-19 | 2021-06-01 | Ethicon Llc | Surgical tools configured for interchangeable use with different controller interfaces |
| US11129680B2 (en) | 2017-12-21 | 2021-09-28 | Cilag Gmbh International | Surgical instrument comprising a projector |
| US11311290B2 (en) | 2017-12-21 | 2022-04-26 | Cilag Gmbh International | Surgical instrument comprising an end effector dampener |
| US11179152B2 (en) | 2017-12-21 | 2021-11-23 | Cilag Gmbh International | Surgical instrument comprising a tissue grasping system |
| US11076853B2 (en) | 2017-12-21 | 2021-08-03 | Cilag Gmbh International | Systems and methods of displaying a knife position during transection for a surgical instrument |
| US20190201112A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Computer implemented interactive surgical systems |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11266468B2 (en) | 2017-12-28 | 2022-03-08 | Cilag Gmbh International | Cooperative utilization of data derived from secondary sources by intelligent surgical hubs |
| US11576677B2 (en) | 2017-12-28 | 2023-02-14 | Cilag Gmbh International | Method of hub communication, processing, display, and cloud analytics |
| US10849697B2 (en) | 2017-12-28 | 2020-12-01 | Ethicon Llc | Cloud interface for coupled surgical devices |
| US11903601B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Surgical instrument comprising a plurality of drive systems |
| US20190206569A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method of cloud based data analytics for use with the hub |
| US11659023B2 (en) | 2017-12-28 | 2023-05-23 | Cilag Gmbh International | Method of hub communication |
| US10695081B2 (en) | 2017-12-28 | 2020-06-30 | Ethicon Llc | Controlling a surgical instrument according to sensed closure parameters |
| US20190200977A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method for usage of the shroud as an aspect of sensing or controlling a powered surgical device, and a control algorithm to adjust its default operation |
| US10932872B2 (en) | 2017-12-28 | 2021-03-02 | Ethicon Llc | Cloud-based medical analytics for linking of local usage trends with the resource acquisition behaviors of larger data set |
| US10987178B2 (en) | 2017-12-28 | 2021-04-27 | Ethicon Llc | Surgical hub control arrangements |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US20190201146A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Safety systems for smart powered surgical stapling |
| CN208625784U (zh) | 2017-12-28 | 2019-03-22 | 重庆西山科技股份有限公司 | 吻合器动力手柄的密封结构 |
| US11678881B2 (en) | 2017-12-28 | 2023-06-20 | Cilag Gmbh International | Spatial awareness of surgical hubs in operating rooms |
| US11069012B2 (en) | 2017-12-28 | 2021-07-20 | Cilag Gmbh International | Interactive surgical systems with condition handling of devices and data capabilities |
| US11937769B2 (en) | 2017-12-28 | 2024-03-26 | Cilag Gmbh International | Method of hub communication, processing, storage and display |
| US11589888B2 (en) | 2017-12-28 | 2023-02-28 | Cilag Gmbh International | Method for controlling smart energy devices |
| US20190201045A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method for smoke evacuation for surgical hub |
| US10966791B2 (en) | 2017-12-28 | 2021-04-06 | Ethicon Llc | Cloud-based medical analytics for medical facility segmented individualization of instrument function |
| US11410259B2 (en) | 2017-12-28 | 2022-08-09 | Cilag Gmbh International | Adaptive control program updates for surgical devices |
| US11432885B2 (en) | 2017-12-28 | 2022-09-06 | Cilag Gmbh International | Sensing arrangements for robot-assisted surgical platforms |
| US11304699B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11559307B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method of robotic hub communication, detection, and control |
| US20190201140A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Surgical hub situational awareness |
| US11076921B2 (en) | 2017-12-28 | 2021-08-03 | Cilag Gmbh International | Adaptive control program updates for surgical hubs |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US20190200906A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Dual cmos array imaging |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11424027B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US20190205567A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Data pairing to interconnect a device measured parameter with an outcome |
| US20190201594A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method of sensing particulate from smoke evacuated from a patient, adjusting the pump speed based on the sensed information, and communicating the functional parameters of the system to the hub |
| US20190200981A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
| US11559308B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method for smart energy device infrastructure |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US11179208B2 (en) | 2017-12-28 | 2021-11-23 | Cilag Gmbh International | Cloud-based medical analytics for security and authentication trends and reactive measures |
| US20190206564A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method for facility data collection and interpretation |
| US10944728B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Interactive surgical systems with encrypted communication capabilities |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11202570B2 (en) | 2017-12-28 | 2021-12-21 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US10892899B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Self describing data packets generated at an issuing instrument |
| US11058498B2 (en) | 2017-12-28 | 2021-07-13 | Cilag Gmbh International | Cooperative surgical actions for robot-assisted surgical platforms |
| US20190206555A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Cloud-based medical analytics for customization and recommendations to a user |
| US11026751B2 (en) | 2017-12-28 | 2021-06-08 | Cilag Gmbh International | Display of alignment of staple cartridge to prior linear staple line |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US20190206561A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Data handling and prioritization in a cloud analytics network |
| US20190201115A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Aggregation and reporting of surgical hub data |
| US11419630B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Surgical system distributed processing |
| US11013563B2 (en) | 2017-12-28 | 2021-05-25 | Ethicon Llc | Drive arrangements for robot-assisted surgical platforms |
| US11100631B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Use of laser light and red-green-blue coloration to determine properties of back scattered light |
| US20190201034A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Powered stapling device configured to adjust force, advancement speed, and overall stroke of cutting member based on sensed parameter of firing or clamping |
| US11324557B2 (en) | 2017-12-28 | 2022-05-10 | Cilag Gmbh International | Surgical instrument with a sensing array |
| US20190201027A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Surgical instrument with acoustic-based motor control |
| US11730552B2 (en) | 2018-01-04 | 2023-08-22 | Covidien Lp | Robotic surgical instrument including high articulation wrist assembly with torque transmission and mechanical manipulation |
| USD870742S1 (en) | 2018-01-26 | 2019-12-24 | Facebook, Inc. | Display screen or portion thereof with animated user interface |
| US10687819B2 (en) | 2018-02-06 | 2020-06-23 | Ethicon Llc | Clamping mechanism for linear surgical stapler |
| US10667818B2 (en) | 2018-02-06 | 2020-06-02 | Ethicon Llc | Lockout assembly for linear surgical stapler |
| US10210244B1 (en) | 2018-02-12 | 2019-02-19 | Asapp, Inc. | Updating natural language interfaces by processing usage data |
| EP3758620A1 (en) | 2018-02-27 | 2021-01-06 | Applied Medical Resources Corporation | Surgical stapler having a powered handle |
| US11134946B2 (en) | 2018-02-27 | 2021-10-05 | Bolder Surgical, Llc | Staple cartridge and methods for surgical staplers |
| USD861035S1 (en) | 2018-03-01 | 2019-09-24 | Google Llc | Display screen with animated icon |
| US11160601B2 (en) | 2018-03-13 | 2021-11-02 | Cilag Gmbh International | Supplying electrical energy to electrosurgical instruments |
| US10631860B2 (en) | 2018-03-23 | 2020-04-28 | Ethicon Llc | Surgical instrument with electrical contact under membrane |
| US11471156B2 (en) | 2018-03-28 | 2022-10-18 | Cilag Gmbh International | Surgical stapling devices with improved rotary driven closure systems |
| US11096688B2 (en) | 2018-03-28 | 2021-08-24 | Cilag Gmbh International | Rotary driven firing members with different anvil and channel engagement features |
| US20190298353A1 (en) | 2018-03-28 | 2019-10-03 | Ethicon Llc | Surgical stapling devices with asymmetric closure features |
| US11207067B2 (en) | 2018-03-28 | 2021-12-28 | Cilag Gmbh International | Surgical stapling device with separate rotary driven closure and firing systems and firing member that engages both jaws while firing |
| US11219453B2 (en) | 2018-03-28 | 2022-01-11 | Cilag Gmbh International | Surgical stapling devices with cartridge compatible closure and firing lockout arrangements |
| US11278280B2 (en) | 2018-03-28 | 2022-03-22 | Cilag Gmbh International | Surgical instrument comprising a jaw closure lockout |
| US10973520B2 (en) | 2018-03-28 | 2021-04-13 | Ethicon Llc | Surgical staple cartridge with firing member driven camming assembly that has an onboard tissue cutting feature |
| US11166716B2 (en) | 2018-03-28 | 2021-11-09 | Cilag Gmbh International | Stapling instrument comprising a deactivatable lockout |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| US11259806B2 (en) | 2018-03-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling devices with features for blocking advancement of a camming assembly of an incompatible cartridge installed therein |
| US10912578B2 (en) | 2018-04-24 | 2021-02-09 | Covidien Lp | Clamping device with parallel jaw closure |
| USD856359S1 (en) | 2018-05-30 | 2019-08-13 | Mindtronic Ai Co., Ltd. | Vehicle display screen or portion thereof with an animated graphical user interface |
| WO2019229158A2 (en) | 2018-06-01 | 2019-12-05 | Steerable Instruments nv | Controllable steerable fusing device |
| US10973515B2 (en) | 2018-07-16 | 2021-04-13 | Ethicon Llc | Permanent attachment means for curved tip of component of surgical stapling instrument |
| USD904613S1 (en) | 2018-08-13 | 2020-12-08 | Ethicon Llc | Cartridge for linear surgical stapler |
| USD904612S1 (en) | 2018-08-13 | 2020-12-08 | Ethicon Llc | Cartridge for linear surgical stapler |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| US11083458B2 (en) | 2018-08-20 | 2021-08-10 | Cilag Gmbh International | Powered surgical instruments with clutching arrangements to convert linear drive motions to rotary drive motions |
| US20200054321A1 (en) | 2018-08-20 | 2020-02-20 | Ethicon Llc | Surgical instruments with progressive jaw closure arrangements |
| US10856870B2 (en) | 2018-08-20 | 2020-12-08 | Ethicon Llc | Switching arrangements for motor powered articulatable surgical instruments |
| US10779821B2 (en) | 2018-08-20 | 2020-09-22 | Ethicon Llc | Surgical stapler anvils with tissue stop features configured to avoid tissue pinch |
| US11324501B2 (en) | 2018-08-20 | 2022-05-10 | Cilag Gmbh International | Surgical stapling devices with improved closure members |
| US11039834B2 (en) | 2018-08-20 | 2021-06-22 | Cilag Gmbh International | Surgical stapler anvils with staple directing protrusions and tissue stability features |
| US10912559B2 (en) | 2018-08-20 | 2021-02-09 | Ethicon Llc | Reinforced deformable anvil tip for surgical stapler anvil |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| US11045192B2 (en) | 2018-08-20 | 2021-06-29 | Cilag Gmbh International | Fabricating techniques for surgical stapler anvils |
| US10842492B2 (en) | 2018-08-20 | 2020-11-24 | Ethicon Llc | Powered articulatable surgical instruments with clutching and locking arrangements for linking an articulation drive system to a firing drive system |
| US11253256B2 (en) | 2018-08-20 | 2022-02-22 | Cilag Gmbh International | Articulatable motor powered surgical instruments with dedicated articulation motor arrangements |
| USD914878S1 (en) | 2018-08-20 | 2021-03-30 | Ethicon Llc | Surgical instrument anvil |
| WO2020060792A1 (en) | 2018-09-17 | 2020-03-26 | Covidien Lp | Highly articulated laparoscopic joint including electrical signal transmission therethrough |
| CN111134754A (zh) | 2018-11-02 | 2020-05-12 | 逸思(苏州)医疗科技有限公司 | 一种推杆自适应结构 |
| CN111134849A (zh) | 2018-11-02 | 2020-05-12 | 沃博手术股份有限公司 | 手术机器人系统 |
| US20220071632A1 (en) | 2018-12-21 | 2022-03-10 | Intuitive Surgical Operations, Inc. | Actuation mechanisms for surgical instruments |
| US11701109B2 (en) | 2018-12-28 | 2023-07-18 | Cilag Gmbh International | Surgical stapler with sloped staple deck for varying tissue compression |
| US11369373B2 (en) | 2019-01-23 | 2022-06-28 | Lexington Medical, Inc. | Surgical stapler |
| US11317915B2 (en) | 2019-02-19 | 2022-05-03 | Cilag Gmbh International | Universal cartridge based key feature that unlocks multiple lockout arrangements in different surgical staplers |
| US11464511B2 (en) | 2019-02-19 | 2022-10-11 | Cilag Gmbh International | Surgical staple cartridges with movable authentication key arrangements |
| US11291444B2 (en) | 2019-02-19 | 2022-04-05 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a closure lockout |
| US11369377B2 (en) | 2019-02-19 | 2022-06-28 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a firing lockout |
| US11357503B2 (en) | 2019-02-19 | 2022-06-14 | Cilag Gmbh International | Staple cartridge retainers with frangible retention features and methods of using same |
| US11376000B2 (en) | 2019-03-13 | 2022-07-05 | Covidien Lp | Surgical stapler anvil with directionally biased staple pockets |
| US11147553B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11172929B2 (en) | 2019-03-25 | 2021-11-16 | Cilag Gmbh International | Articulation drive arrangements for surgical systems |
| US11147551B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| JP2022527154A (ja) | 2019-03-29 | 2022-05-31 | アプライド メディカル リソーシーズ コーポレイション | 外科ステープル留めシステムのための再装填カバー |
| US11076933B2 (en) | 2019-04-19 | 2021-08-03 | Elt Sight, Inc. | Authentication systems and methods for an excimer laser system |
| US11432816B2 (en) | 2019-04-30 | 2022-09-06 | Cilag Gmbh International | Articulation pin for a surgical instrument |
| US20200345359A1 (en) | 2019-04-30 | 2020-11-05 | Ethicon Llc | Tissue stop for a surgical instrument |
| US11452528B2 (en) | 2019-04-30 | 2022-09-27 | Cilag Gmbh International | Articulation actuators for a surgical instrument |
| US20200345357A1 (en) | 2019-04-30 | 2020-11-05 | Ethicon Llc | Intelligent firing associated with a surgical instrument |
| US20200345356A1 (en) | 2019-04-30 | 2020-11-05 | Ethicon Llc | Intelligent firing associated with a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11471157B2 (en) | 2019-04-30 | 2022-10-18 | Cilag Gmbh International | Articulation control mapping for a surgical instrument |
| US11426251B2 (en) | 2019-04-30 | 2022-08-30 | Cilag Gmbh International | Articulation directional lights on a surgical instrument |
| US11253254B2 (en) | 2019-04-30 | 2022-02-22 | Cilag Gmbh International | Shaft rotation actuator on a surgical instrument |
| US11413102B2 (en) | 2019-06-27 | 2022-08-16 | Cilag Gmbh International | Multi-access port for surgical robotic systems |
| US11207146B2 (en) | 2019-06-27 | 2021-12-28 | Cilag Gmbh International | Surgical instrument drive systems with cable-tightening system |
| US11426167B2 (en) | 2019-06-28 | 2022-08-30 | Cilag Gmbh International | Mechanisms for proper anvil attachment surgical stapling head assembly |
| US11291451B2 (en) | 2019-06-28 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with battery compatibility verification functionality |
| US11376098B2 (en) | 2019-06-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument system comprising an RFID system |
| US11361176B2 (en) | 2019-06-28 | 2022-06-14 | Cilag Gmbh International | Surgical RFID assemblies for compatibility detection |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US20200405302A1 (en) | 2019-06-28 | 2020-12-31 | Ethicon Llc | Surgical stapling system having an information decryption protocol |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11224497B2 (en) | 2019-06-28 | 2022-01-18 | Cilag Gmbh International | Surgical systems with multiple RFID tags |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11219455B2 (en) | 2019-06-28 | 2022-01-11 | Cilag Gmbh International | Surgical instrument including a lockout key |
| US11298127B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Interational | Surgical stapling system having a lockout mechanism for an incompatible cartridge |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11853835B2 (en) | 2019-06-28 | 2023-12-26 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11399837B2 (en) | 2019-06-28 | 2022-08-02 | Cilag Gmbh International | Mechanisms for motor control adjustments of a motorized surgical instrument |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11259803B2 (en) | 2019-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling system having an information encryption protocol |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11298132B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Inlernational | Staple cartridge including a honeycomb extension |
| US20200405308A1 (en) | 2019-06-28 | 2020-12-31 | Ethicon Llc | Surgical instrument including a firing lockout |
| US11350938B2 (en) | 2019-06-28 | 2022-06-07 | Cilag Gmbh International | Surgical instrument comprising an aligned rfid sensor |
| US20200405292A1 (en) | 2019-06-28 | 2020-12-31 | Ethicon Llc | Surgical instrument including a battery unit |
| US20200405307A1 (en) | 2019-06-28 | 2020-12-31 | Ethicon Llc | Control circuit comprising a coating |
| US20200405306A1 (en) | 2019-06-28 | 2020-12-31 | Ethicon Llc | Surgical instrument including a firing system bailout |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11246678B2 (en) | 2019-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical stapling system having a frangible RFID tag |
| US11051807B2 (en) | 2019-06-28 | 2021-07-06 | Cilag Gmbh International | Packaging assembly including a particulate trap |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US11534168B2 (en) | 2019-09-16 | 2022-12-27 | Cilag Gmbh International | Compressible non-fibrous adjuncts |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11931033B2 (en) | 2019-12-19 | 2024-03-19 | Cilag Gmbh International | Staple cartridge comprising a latch lockout |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11304696B2 (en) | 2019-12-19 | 2022-04-19 | Cilag Gmbh International | Surgical instrument comprising a powered articulation system |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11291447B2 (en) | 2019-12-19 | 2022-04-05 | Cilag Gmbh International | Stapling instrument comprising independent jaw closing and staple firing systems |
| US11234698B2 (en) | 2019-12-19 | 2022-02-01 | Cilag Gmbh International | Stapling system comprising a clamp lockout and a firing lockout |
| US20210186501A1 (en) | 2019-12-19 | 2021-06-24 | Ethicon Llc | Staple cartridge comprising a deployable knife |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US20210212776A1 (en) | 2019-12-20 | 2021-07-15 | Auris Health, Inc. | Functional indicators for robotic medical systems |
| US20220031350A1 (en) | 2020-07-28 | 2022-02-03 | Cilag Gmbh International | Surgical instruments with double pivot articulation joint arrangements |
-
2014
- 2014-04-09 US US14/248,588 patent/US10405857B2/en active Active
- 2014-04-09 US US14/248,591 patent/US10149680B2/en active Active
- 2014-04-09 US US14/248,607 patent/US9814460B2/en active Active
- 2014-04-09 US US14/248,587 patent/US9867612B2/en active Active
- 2014-04-09 US US14/248,590 patent/US9826976B2/en active Active
- 2014-04-09 US US14/248,595 patent/US9844368B2/en active Active
- 2014-04-09 US US14/248,581 patent/US9649110B2/en active Active
- 2014-04-09 US US14/248,586 patent/US10136887B2/en active Active
- 2014-04-09 US US14/248,584 patent/US9801626B2/en active Active
- 2014-04-12 RU RU2015148779A patent/RU2690895C2/ru not_active IP Right Cessation
- 2014-04-12 RU RU2015148783A patent/RU2677531C2/ru not_active IP Right Cessation
- 2014-04-12 CN CN201480034184.1A patent/CN105324083B/zh active Active
- 2014-04-12 WO PCT/US2014/033899 patent/WO2014172214A2/en active Application Filing
- 2014-04-12 WO PCT/US2014/033896 patent/WO2014172211A2/en active Application Filing
- 2014-04-12 JP JP2016508990A patent/JP6345768B2/ja active Active
- 2014-04-12 CN CN201480034191.1A patent/CN105451667B/zh active Active
- 2014-04-12 CN CN201480034171.4A patent/CN105307576B/zh active Active
- 2014-04-12 MX MX2015014563A patent/MX2015014563A/es unknown
- 2014-04-12 WO PCT/US2014/033895 patent/WO2014172210A2/en active Application Filing
- 2014-04-12 RU RU2015148980A patent/RU2665132C2/ru not_active IP Right Cessation
- 2014-04-12 WO PCT/US2014/033898 patent/WO2014172213A2/en active Application Filing
- 2014-04-12 WO PCT/US2014/033893 patent/WO2014172208A1/en active Application Filing
- 2014-04-12 WO PCT/US2014/033897 patent/WO2014172212A2/en active Application Filing
- 2014-04-12 CN CN201480034188.XA patent/CN105324084B/zh active Active
- 2014-04-12 CN CN201480034185.6A patent/CN105307579B/zh active Active
- 2014-04-12 WO PCT/US2014/033901 patent/WO2014172216A1/en active Application Filing
- 2014-04-12 RU RU2015148781A patent/RU2676439C2/ru not_active IP Right Cessation
- 2014-04-12 JP JP2016508986A patent/JP6411462B2/ja active Active
- 2014-04-12 RU RU2015148663A patent/RU2653625C2/ru not_active IP Right Cessation
- 2014-04-12 RU RU2015148784A patent/RU2678366C2/ru not_active IP Right Cessation
- 2014-04-12 JP JP2016508988A patent/JP6339177B2/ja active Active
- 2014-04-12 WO PCT/US2014/033894 patent/WO2014172209A2/en active Application Filing
- 2014-04-12 MX MX2015014559A patent/MX2015014559A/es active IP Right Grant
- 2014-04-12 JP JP2016508985A patent/JP6411461B2/ja active Active
- 2014-04-12 JP JP2016508989A patent/JP6345767B2/ja active Active
- 2014-04-12 WO PCT/US2014/033900 patent/WO2014172215A2/en active Application Filing
- 2014-04-12 MX MX2015014556A patent/MX364727B/es active IP Right Grant
- 2014-04-12 MX MX2015014558A patent/MX361940B/es active IP Right Grant
- 2014-04-12 CN CN201480034197.9A patent/CN105324086B/zh active Active
- 2014-04-12 MX MX2015014561A patent/MX2015014561A/es unknown
- 2014-04-12 JP JP2016508987A patent/JP6339176B2/ja active Active
- 2014-04-12 MX MX2015014562A patent/MX2015014562A/es unknown
- 2014-04-16 EP EP17166923.7A patent/EP3248554B1/en active Active
- 2014-04-16 PL PL14164936T patent/PL2792320T3/pl unknown
- 2014-04-16 EP EP14164948.3A patent/EP2792309B1/en active Active
- 2014-04-16 EP EP14164968.1A patent/EP2792306B1/en active Active
- 2014-04-16 EP EP14164982.2A patent/EP2792313B1/en active Active
- 2014-04-16 EP EP14164935.0A patent/EP2792311B1/en active Active
- 2014-04-16 EP EP14164924.4A patent/EP2792308B1/en active Active
- 2014-04-16 EP EP18163364.5A patent/EP3395261B1/en active Active
- 2014-04-16 EP EP14164975.6A patent/EP2792312B1/en active Active
- 2014-04-16 EP EP17194635.3A patent/EP3318198B1/en active Active
- 2014-04-16 EP EP17162440.6A patent/EP3213701B1/en active Active
- 2014-04-16 EP EP14164936.8A patent/EP2792320B1/en active Active
- 2014-04-16 EP EP14164925.1A patent/EP2792310B1/en active Active
- 2014-04-16 EP EP20150582.3A patent/EP3659530B1/en active Active
- 2014-04-16 EP EP14165011.9A patent/EP2803324B1/en active Active
- 2014-04-16 EP EP18188837.1A patent/EP3431017B1/en active Active
- 2014-04-16 EP EP18178190.7A patent/EP3398532B1/en active Active
- 2014-04-16 EP EP20205498.7A patent/EP3799802A1/en active Pending
-
2018
- 2018-01-12 US US15/869,706 patent/US10702266B2/en active Active
- 2018-10-16 US US16/161,784 patent/US10888318B2/en active Active
-
2020
- 2020-01-17 US US16/746,114 patent/US11406381B2/en active Active
- 2020-09-22 US US17/028,292 patent/US11395652B2/en active Active
- 2020-09-22 US US17/028,294 patent/US11564679B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000072765A1 (en) * | 1999-06-02 | 2000-12-07 | Powermed, Inc. | An electromechanical driver device for use with anastomosing, stapling, and resecting instruments |
| RU2161450C1 (ru) * | 1999-07-22 | 2001-01-10 | Каншин Николай Николаевич | Хирургический сшиватель |
| EP2316345A1 (en) * | 2001-06-22 | 2011-05-04 | Tyco Healthcare Group LP | Electro-mechanical surgical device |
| US20120104071A1 (en) * | 2010-11-02 | 2012-05-03 | Tyco Healthcare Group Lp | Adapter for powered surgical devices |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2678366C2 (ru) | Хирургическая инструментальная система (варианты) | |
| RU2650585C2 (ru) | Хирургический инструмент, содержащий закрывающий привод и пусковой привод, работающие от одного поворачиваемого выхода | |
| RU2651066C2 (ru) | Модульные хирургические инструменты, приводимые в действие двигателем, с конструкциями индикации статуса | |
| US20220233185A1 (en) | Powered surgical stapler |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20210413 |