JP2014171904A - 発射システムロックアウト装置を備える電動外科用器具 - Google Patents
発射システムロックアウト装置を備える電動外科用器具 Download PDFInfo
- Publication number
- JP2014171904A JP2014171904A JP2014047365A JP2014047365A JP2014171904A JP 2014171904 A JP2014171904 A JP 2014171904A JP 2014047365 A JP2014047365 A JP 2014047365A JP 2014047365 A JP2014047365 A JP 2014047365A JP 2014171904 A JP2014171904 A JP 2014171904A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- trigger
- sensor
- end effector
- surgical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B17/07207—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously the staples being applied sequentially
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00115—Electrical control of surgical instruments with audible or visual output
- A61B2017/00119—Electrical control of surgical instruments with audible or visual output alarm; indicating an abnormal situation
- A61B2017/00123—Electrical control of surgical instruments with audible or visual output alarm; indicating an abnormal situation and automatic shutdown
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00199—Electrical control of surgical instruments with a console, e.g. a control panel with a display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00685—Archimedes screw
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/0725—Stapler heads with settable gap between anvil and cartridge, e.g. for different staple heights at different shots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07278—Stapler heads characterised by its sled or its staple holder
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/065—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring contact or contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
- A61B2090/0811—Indication means for the position of a particular part of an instrument with respect to the rest of the instrument, e.g. position of the anvil of a stapling instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0814—Preventing re-use
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/30—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure
- A61B2090/309—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure using white LEDs
Abstract
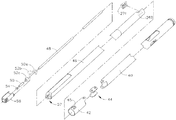
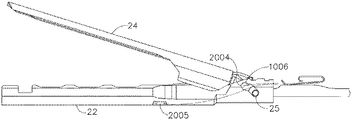
【解決手段】 ジョーのうちの少なくとも1つは、複数の外科用締結具を収容するカートリッジを受容するためのチャネルを備え得る。また、電動アクチュエータは、外科用締結具を配備するためのものであり、かつ電源及びモーターを備え得る。起動機構は、一対のジョーを開放位置から閉鎖位置へ移動させ、かつ電動アクチュエータを起動するためにハンドルに取り付けられ得る。ロックアウト機構は、一対のジョーが閉鎖位置にあるとき、電流が電源からモーターへ流れることを可能にし、一対のジョーが開放位置にあるとき、電流が電源からモーターへ流れることを防止するように構成され得る。
【選択図】 図1
Description
本出願は、米国特許法第120条に基づき2006年1月31日に出願された米国特許出願第11/343,803号、現在は米国特許第7,845,537号の継続出願である、米国特許法第121条に基づき2010年11月18日に出願された米国特許出願第12/949,099号、現在は米国特許第8,167,185号の分割出願である、米国特許法第120条に基づき2012年3月20日に出願された米国特許出願第13/424,648号の一部継続出願であり、それぞれの全体の開示が参照により本明細書に組み込まれている。本出願はまた、米国特許法第119条(e)に基づき2009年2月6日に出願された米国特許仮出願第61/150,382号の利益を主張する、米国特許法第120条に基づき2010年1月26日に出願された米国特許出願第12/693,460号の一部継続出願である、米国特許法第120条に基づき2010年7月29日に出願された米国特許出願第12/846,228号の一部継続出願でもあり、それぞれのすべての開示が参照により本明細書に組み込まれる。
本出願は、以下の同時出願された米国特許出願に関するものであり、それぞれの全体の開示が参照により本明細書に組み込まれる。
MOTOR−DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH USER FEEDBACK SYSTEMと題された、発明者:Frederick E.Shelton,IV、John Ouwerkerk、及びJerome R.Morganの米国特許出願第11/343,498号、現在は米国特許第7,766,210号、
MOTOR−DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH LOADING FORCE FEEDBACKと題された、発明者:Frederick E.Shelton,IV、John N.Ouwerkerk、Jerome R.Morgan、及びJeffrey S.Swayzeの米国特許出願第11/343,573号、現在は米国特許第7,416,101号、
MOTOR−DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACKと題された、発明者:Frederick E.Shelton,IV、John N.Ouwerkerk、Jerome R.Morgan、及びJeffrey S.Swayzeの米国特許出願第11/344,035号、現在は米国特許第7,422,139号、
MOTOR−DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH ADAPTIVE USER FEEDBACKと題された、発明者:Frederick E.Shelton,IV、John N.Ouwerkerk、及びJerome R.Morganの米国特許出願第11/343,447号、現在は米国特許第7,770,775号、
MOTOR−DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH ARTICULATABLE END EFFECTORと題された、発明者:Frederick E.Shelton,IV及びChristoph L.Gillumの米国特許出願第11/343,562号、現在は米国特許第7,568,603号、
MOTOR−DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH MECHANICAL CLOSURE SYSTEMと題された、発明者:Frederick E.Shelton,IV及びChristoph L.Gillumの米国特許出願第11/344,024号、現在は米国特許第8,186,555号、
SURGICAL CUTTING AND FASTENING INSTRUMENT WITH CLOSURE TRIGGER LOCKING MECHANISMと題された、発明者:Frederick E.Shelton,IV及びKevin R.Dollの米国特許出願第11/343,321号、現在は米国特許公開第2007/0175955号、
GEARING SELECTOR FOR A POWERED SURGICAL CUTTING AND FASTENING STAPLING INSTRUMENTと題された、発明者:Frederick E.Shelton,IV、Jeffrey S.Swayze、Eugene L.Timpermanの米国特許出願第11/343,563号、現在は米国特許公開第2007/0175951号、
SURGICAL INSTRUMENT HAVING A REMOVABLE BATTERYと題された、発明者:Frederick E.Shelton,IV、Kevin R.Doll、Jeffrey S.Swayze、及びEugene Timpermanの米国特許出願第11/344,020号、現在は米国特許第7,464,846号、
ELECTRONIC LOCKOUTS AND SURGICAL INSTRUMENT INCLUDING SAMEと題された、発明者:Jeffrey S.Swayze、Frederick E.Shelton,IV、Kevin R.Dollの米国特許出願第11/343,439号、現在は米国特許第7,644,848号、
ENDOSCOPIC SURGICAL INSTRUMENT WITH A HANDLE THAT CAN ARTICULATE WITH RESPECT TO THE SHAFTと題された、発明者:Frederick E.Shelton,IV、Jeffrey S.Swayze、Mark S.Ortiz、及びLeslie M.Fugikawaの米国特許出願第11/343,547号、現在は米国特許第7,753,904号、
ELECTRO−MECHANICAL SURGICAL CUTTING AND FASTENING INSTRUMENT HAVING A ROTARY FIRING AND CLOSURE SYSTEM WITH PARALLEL CLOSURE AND ANVIL ALIGNMENT COMPONENTSと題された、発明者:Frederick E.Shelton,IV、Stephen J.Balek、及びEugene L.Timpermanの米国特許出願第11/344,021号、現在は米国特許第7,464,849号、
DISPOSABLE STAPLE CARTRIDGE HAVING AN ANVIL WITH TISSUE LOCATOR FOR USE WITH A SURGICAL CUTTING AND FASTENING INSTRUMENT AND MODULAR END EFFECTOR SYSTEM THEREFORと題された、発明者:Frederick E.Shelton,IV、Michael S.Cropper、Joshua M.Broehl、Ryan S.Crisp、Jamison J.Float、Eugene L.Timpermanの米国特許出願第11/343,546号、現在は米国特許公開第2007/0175950号、及び
SURGICAL INSTRUMENT HAVING A FEEDBACK SYSTEMと題された、発明者:Frederick E.Shelton,IV、Jerome R.Morgan、Kevin R.Doll、Jeffrey S.Swayze、及びEugene Timpermanの米国特許出願第11/343,545号、現在は米国特許公開第2007/0175949号。
「Motor Driven Surgical Fastener Device With Cutting Member Reversing Mechanism」と題される米国特許出願であって、2010年7月29日に出願された、米国特許出願第12/846,249号、米国特許出願公開第US−2011−006103 A1号、及び
「Motor Driven Surgical Fastener Device With Mechanisms For Adjusting a Tissue Gap Within the End Effector」と題される米国特許出願であって、2010年7月29日に出願された、米国特許出願第12/846,237号、米国特許出願公開第US−2011−0011915−A1号。
(1) 外科用締結装置であって、
ハンドルと、
開放位置及び閉鎖位置を有する一対のジョーを備えるエンドエフェクターであって、前記ジョーのうちの少なくとも1つが、複数の外科用締結具を収容するカートリッジを受容するためのチャネルを備える、エンドエフェクターと、
前記外科用締結具を配備するための電動アクチュエータであって、電源及びモーターを備える、電動アクチュエータと、
前記一対のジョーを前記開放位置から前記閉鎖位置に移動させて、前記アクチュエータを起動するために前記ハンドルに取り付けられる起動機構と、
前記一対のジョーが前記閉鎖位置にあるとき、電流が前記電源から前記モーターへ流れることを可能にし、前記一対のジョーが前記開放位置にあるとき、電流が前記電源から前記モーターへ流れることを防止するように構成されるロックアウト機構と、を備える、外科用締結装置。
(2) 前記ハンドルと前記エンドエフェクターとの間に位置付けられるシャフト、を更に備え、前記シャフトが、前記ハンドルに取り付けられる近位端及び前記エンドエフェクターに取り付けられる遠位端を画定する、実施態様1に記載の外科用締結装置。
(3) 前記ロックアウト機構が、前記一対のジョーが前記閉鎖位置にあるとき、電流が前記電源から前記モーターへ流れることを可能にし、前記一対のジョーが前記開放位置にあるとき、電流が前記電源から前記モーターへ流れることを防止するように、前記ロックアウト機構が、前記電源及び前記モーターに接続される閉鎖ロックスイッチ、を更に備える、実施態様1に記載の外科用締結装置。
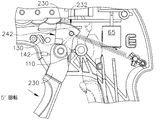
(4) 前記起動機構が、発射トリガー及び閉鎖トリガーを備え、前記閉鎖トリガーが、前記一対のジョーに前記開放位置をとるようにさせる第1の位置と、前記一対のジョーに前記閉鎖位置をとるようにさせる第2の位置とを有し、
前記ロックアウト機構が、走行モーターセンサー(run motor sensor)を備え、前記走行モーターセンサーが、前記発射トリガーによる作動時に電流が前記電源から前記モーターに流れることを可能にするように位置付けられ、
前記発射トリガー及び閉鎖トリガーが相対的に位置付けられ、これによって、前記発射トリガーの作動により、前記閉鎖トリガーが前記第2の位置にあるとき前記走行モーターセンサーが作動され、前記発射トリガーの作動により、前記閉鎖トリガーが前記第1の位置にあるとき前記走行モーターセンサーが作動されないようにさせる、実施態様1に記載の外科用締結装置。
(5) 前記ロックアウト機構が、ロックアウトセンサースイッチを備え、前記ロックアウトセンサースイッチが、前記一対のジョーが前記開放位置にあるとき、電流が前記電源から前記モーターへ流れることを防止するように開かれ、前記一対のジョーが前記閉鎖位置にあるとき、電流が前記電源から前記モーターへ流れることを可能にするように閉じられる、実施態様1に記載の外科用締結装置。
(7) 前記ロックアウト機構が、前記第1のジョー部材と第2のジョー部材との間に適用される締め付け力の大きさを感知するように位置付けられる力センサーを更に備え、前記ロックアウトセンサースイッチが、力センサーに反応する、実施態様5に記載の外科用締結装置。
(8) 前記ロックアウト機構が、前記力センサー及び前記ロックアウトセンサースイッチと連絡する比較回路を更に備え、前記比較回路がまた、前記力センサーから受信される信号が、前記第1のジョー部材と第2のジョー部材との間に適用される前記締め付け力の前記大きさが第1の閾値を超えることを示すとき、前記ロックアウトセンサースイッチを閉じるように構成される、実施態様7に記載の外科用締結装置。
(9) 前記ロックアウトセンサースイッチが、前記一対のジョーが前記閉鎖位置に移動された後、所定の時間閉じられるように構成される、実施態様5に記載の外科用締結装置。
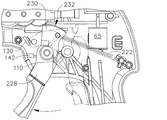
(10) 前記起動機構が、
前記ハンドルに取り付けられる第1のトリガーであって、前記第1のトリガーが完全な作動位置にあるとき、前記エンドエフェクターが前記開放位置から前記閉鎖位置に移動されるように、前記エンドエフェクターと連絡している、第1のトリガーと、
前記アクチュエータを起動するために前記ハンドルに取り付けられる第2のトリガーと、を備え、
前記外科用締結装置が、前記完全な作動位置に前記第1のトリガーを解放可能に保持するために、前記ハンドル及び前記第1のトリガーのうちの1つに動作可能に装着されるラッチを更に備え、
前記ロックアウト機構が、前記ラッチに関連付けられる閉鎖ロックスイッチを備え、前記ラッチが前記完全な作動位置に前記第1のトリガーを保持するとき、前記閉鎖ロックスイッチが、電流が前記電源から前記モーターへ流れることを可能にし、前記第1のトリガーが前記完全な作動位置にラッチ留めされないとき、前記閉鎖ロックスイッチが、電流が前記電源から前記モーターへ流れることを防止するように、前記閉鎖ロックスイッチが前記電源及び前記モーターに接続される、実施態様1に記載の外科用締結装置。
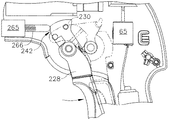
(12) 前記フックが、前記ラッチ位置に付勢される、実施態様11に記載の外科用締結装置。
(13) 前記カートリッジが、前記エンドエフェクターのチャネル部分内に着脱自在に支持され、前記外科用締結装置が、前記電源及び前記モーターに接続されるカートリッジセンサースイッチを備え、前記カートリッジセンサースイッチが、カートリッジが前記エンドエフェクターの前記チャネル部分内に動作可能に支持されない限り、電流が前記電源から前記モーターへ流れることを防止する、実施態様1に記載の外科用締結装置。
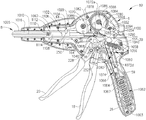
(14) 前記アクチュエータが、非配備位置と配備位置との間で前記エンドエフェクター内で移動可能なアクチュエータ部分を更に備え、前記モーターが、前記非配備位置から前記配備位置へ前記アクチュエータ部分を移動させるように遠位駆動運動を前記アクチュエータ部分に選択的に適用し、かつ、前記配備位置から前記非配備位置へ前記アクチュエータ部分を後退させるように近位駆動運動を前記アクチュエータ部分に選択的に適用するように、該アクチュエータ部分と動作可能に連動する、実施態様1に記載の外科用締結装置。
(15) 前記電動アクチュエータが、
前記エンドエフェクター内で回転可能に支持され、前記モーターから回転運動を受容するために前記モーターに動作可能に連結される回転駆動シャフトと、
前記回転駆動シャフトと動作可能に連動するアクチュエータ部分であって、第1の方向における前記モーターへの電流の印加時に、前記アクチュエータ部分が前記エンドエフェクター内で非配備位置から配備位置へ駆動され、第2の方向における前記モーターへの電流の印加時に、前記アクチュエータ部分が前記配備位置から前記非配備位置へ駆動されるようになっている、アクチュエータ部分と、を更に備える、実施態様1に記載の外科用締結装置。
(17) 前記カートリッジが前記エンドエフェクターに装着されるとき、電流が前記電源から前記モーターへ流れることを可能にし、前記カートリッジが前記エンドエフェクターに装着されないとき、電流が前記電源から前記モーターへ流れることを防止するように構成される第2のロックアウト機構を更に備える、実施態様1に記載の外科用締結装置。
(18) 外科用器具であって、
開放位置及び閉鎖位置を有する一対のジョーを備えるエンドエフェクターであって、前記ジョーのうちの少なくとも1つが、複数の外科用締結具を収容するカートリッジを受容するためのチャネルを備える、エンドエフェクターと、
前記外科用締結具を配備するための電動アクチュエータであって、電源及びモーターを備える、電動アクチュエータと、
前記一対のジョーを前記開放位置から前記閉鎖位置に移動させて、前記アクチュエータを起動するために前記ハンドルに取り付けられる起動機構と、
前記一対のジョーが前記閉鎖位置にあるとき、電流が前記電源から前記モーターへ流れることを可能にし、前記一対のジョーが前記開放位置にあるとき、電流が前記電源から前記モーターへ流れることを防止するように構成されるロックアウト機構と、を含む、外科用器具。
(19) ハンドルを更に備え、前記起動機構が、
前記ハンドルに取り付けられる第1のトリガーであって、前記第1のトリガーが完全な作動位置にあるとき、前記エンドエフェクターが前記開放位置から前記閉鎖位置に移動されるように前記エンドエフェクターと連絡している、第1のトリガーと、
前記アクチュエータを起動するために前記ハンドルに取り付けられる第2のトリガーと、を備え、
前記外科用締結装置が、前記第1のトリガーを前記完全な作動位置で解放可能に保持するために、前記ハンドル及び前記第1のトリガーのうちの1つに動作可能に装着されるラッチを更に備え、
前記ロックアウト機構が、前記ラッチに関連付けられる閉鎖ロックスイッチを備え、前記ラッチが前記完全な作動位置に前記第1のトリガーを保持するとき、前記閉鎖ロックスイッチが、電流が前記電源から前記モーターへ流れることを可能にし、前記第1のトリガーが前記完全な作動位置にラッチ留めされないとき、前記閉鎖ロックスイッチが、電流が前記電源から前記モーターへ流れることを防止するように、前記閉鎖ロックスイッチが前記電源及び前記モーターに接続される、実施態様18に記載の外科用器具。
(20) 前記起動機構が、発射トリガー及び閉鎖トリガーを備え、前記閉鎖トリガーが、前記一対のジョーに前記開放位置をとるようにさせる第1の位置と、前記一対のジョーに前記閉鎖位置をとるようにさせる第2の位置とを有し、
前記ロックアウト機構が、走行モーターセンサーを備え、前記走行モーターセンサーが、前記発射トリガーによる作動時に電流が前記電源から前記モーターに流れることを可能にするように位置付けられ、
前記発射トリガー及び閉鎖トリガーは、前記発射トリガーの作動により、前記閉鎖トリガーが前記第2の位置にあるとき前記走行モーターセンサーが作動され、前記発射トリガーの作動により、前記閉鎖トリガーが前記第1の位置にあるとき前記走行モーターセンサーが作動されないように、相対的に位置付けられる、実施態様18に記載の外科用器具。
エンドエフェクターであって、
第1のジョーと、
第2のジョーであって、前記第1のジョーが開放位置と閉鎖位置との間で前記第2のジョーに対して移動可能である、第2のジョーと、
内部に着脱自在に保存される複数の締結具を備える締結具カートリッジと、を備える、エンドエフェクターと、
ハンドルであって、
電気モーターと、
前記電気モーターを動作させるように構成されるアクチュエータと、
前記電気モーターに電力を供給するように構成される電池と、を備える、ハンドルと、
発射部材であって、前記モーターが前記締結具カートリッジから前記締結具を射出するために発射運動を前記発射部材に付与するように構成される、発射部材と、
前記第1のジョーが前記閉鎖位置にあるとき、前記モーターが前記発射運動を前記発射部材に適用することを可能にし、前記第1のジョーが前記開放位置にあるとき、前記モーターが前記発射運動を前記発射部材に適用することを防止するように構成されるロックアウトシステムと、を備える、外科用締結装置。
(22) 前記締結具カートリッジが、前記第2のジョーによって支持される、実施態様21に記載の外科用締結装置。
(23) 前記締結具カートリッジが、前記エンドエフェクターに着脱自在に取り付けられる、実施態様21に記載の外科用締結装置。
(24) 前記ハンドルから延出するシャフト、を更に備え、前記エンドエフェクターが前記シャフトと係合し、かつ前記シャフトによって支持される、実施態様21に記載の外科用締結装置。
Claims (24)
- 外科用締結装置であって、
ハンドルと、
開放位置及び閉鎖位置を有する一対のジョーを備えるエンドエフェクターであって、前記ジョーのうちの少なくとも1つが、複数の外科用締結具を収容するカートリッジを受容するためのチャネルを備える、エンドエフェクターと、
前記外科用締結具を配備するための電動アクチュエータであって、電源及びモーターを備える、電動アクチュエータと、
前記一対のジョーを前記開放位置から前記閉鎖位置に移動させて、前記アクチュエータを起動するために前記ハンドルに取り付けられる起動機構と、
前記一対のジョーが前記閉鎖位置にあるとき、電流が前記電源から前記モーターへ流れることを可能にし、前記一対のジョーが前記開放位置にあるとき、電流が前記電源から前記モーターへ流れることを防止するように構成されるロックアウト機構と、を備える、外科用締結装置。 - 前記ハンドルと前記エンドエフェクターとの間に位置付けられるシャフト、を更に備え、前記シャフトが、前記ハンドルに取り付けられる近位端及び前記エンドエフェクターに取り付けられる遠位端を画定する、請求項1に記載の外科用締結装置。
- 前記ロックアウト機構が、前記一対のジョーが前記閉鎖位置にあるとき、電流が前記電源から前記モーターへ流れることを可能にし、前記一対のジョーが前記開放位置にあるとき、電流が前記電源から前記モーターへ流れることを防止するように、前記ロックアウト機構が、前記電源及び前記モーターに接続される閉鎖ロックスイッチ、を更に備える、請求項1に記載の外科用締結装置。
- 前記起動機構が、発射トリガー及び閉鎖トリガーを備え、前記閉鎖トリガーが、前記一対のジョーに前記開放位置をとるようにさせる第1の位置と、前記一対のジョーに前記閉鎖位置をとるようにさせる第2の位置とを有し、
前記ロックアウト機構が、走行モーターセンサーを備え、前記走行モーターセンサーが、前記発射トリガーによる作動時に電流が前記電源から前記モーターに流れることを可能にするように位置付けられ、
前記発射トリガー及び閉鎖トリガーが相対的に位置付けられ、これによって、前記発射トリガーの作動により、前記閉鎖トリガーが前記第2の位置にあるとき前記走行モーターセンサーが作動され、前記発射トリガーの作動により、前記閉鎖トリガーが前記第1の位置にあるとき前記走行モーターセンサーが作動されないようにさせる、請求項1に記載の外科用締結装置。 - 前記ロックアウト機構が、ロックアウトセンサースイッチを備え、前記ロックアウトセンサースイッチが、前記一対のジョーが前記開放位置にあるとき、電流が前記電源から前記モーターへ流れることを防止するように開かれ、前記一対のジョーが前記閉鎖位置にあるとき、電流が前記電源から前記モーターへ流れることを可能にするように閉じられる、請求項1に記載の外科用締結装置。
- 前記ロックアウトセンサースイッチが、前記エンドエフェクターに位置付けられる、請求項5に記載の外科用締結装置。
- 前記ロックアウト機構が、前記第1のジョー部材と第2のジョー部材との間に適用される締め付け力の大きさを感知するように位置付けられる力センサーを更に備え、前記ロックアウトセンサースイッチが、力センサーに反応する、請求項5に記載の外科用締結装置。
- 前記ロックアウト機構が、前記力センサー及び前記ロックアウトセンサースイッチと連絡する比較回路を更に備え、前記比較回路がまた、前記力センサーから受信される信号が、前記第1のジョー部材と第2のジョー部材との間に適用される前記締め付け力の前記大きさが第1の閾値を超えることを示すとき、前記ロックアウトセンサースイッチを閉じるように構成される、請求項7に記載の外科用締結装置。
- 前記ロックアウトセンサースイッチが、前記一対のジョーが前記閉鎖位置に移動された後、所定の時間閉じられるように構成される、請求項5に記載の外科用締結装置。
- 前記起動機構が、
前記ハンドルに取り付けられる第1のトリガーであって、前記第1のトリガーが完全な作動位置にあるとき、前記エンドエフェクターが前記開放位置から前記閉鎖位置に移動されるように、前記エンドエフェクターと連絡している、第1のトリガーと、
前記アクチュエータを起動するために前記ハンドルに取り付けられる第2のトリガーと、を備え、
前記外科用締結装置が、前記完全な作動位置に前記第1のトリガーを解放可能に保持するために、前記ハンドル及び前記第1のトリガーのうちの1つに動作可能に装着されるラッチを更に備え、
前記ロックアウト機構が、前記ラッチに関連付けられる閉鎖ロックスイッチを備え、前記ラッチが前記完全な作動位置に前記第1のトリガーを保持するとき、前記閉鎖ロックスイッチが、電流が前記電源から前記モーターへ流れることを可能にし、前記第1のトリガーが前記完全な作動位置にラッチ留めされないとき、前記閉鎖ロックスイッチが、電流が前記電源から前記モーターへ流れることを防止するように、前記閉鎖ロックスイッチが前記電源及び前記モーターに接続される、請求項1に記載の外科用締結装置。 - 前記ラッチが、前記ハンドルに旋回可能に取り付けられ、かつ非ラッチ位置からラッチ位置に選択的に移動可能であるフックを備え、前記フックが、前記第1のトリガーの一部を保持するように係合する、請求項10に記載の外科用締結装置。
- 前記フックが、前記ラッチ位置に付勢される、請求項11に記載の外科用締結装置。
- 前記カートリッジが、前記エンドエフェクターのチャネル部分内に着脱自在に支持され、前記外科用締結装置が、前記電源及び前記モーターに接続されるカートリッジセンサースイッチを備え、前記カートリッジセンサースイッチが、カートリッジが前記エンドエフェクターの前記チャネル部分内に動作可能に支持されない限り、電流が前記電源から前記モーターへ流れることを防止する、請求項1に記載の外科用締結装置。
- 前記アクチュエータが、非配備位置と配備位置との間で前記エンドエフェクター内で移動可能なアクチュエータ部分を更に備え、前記モーターが、前記非配備位置から前記配備位置へ前記アクチュエータ部分を移動させるように遠位駆動運動を前記アクチュエータ部分に選択的に適用し、かつ、前記配備位置から前記非配備位置へ前記アクチュエータ部分を後退させるように近位駆動運動を前記アクチュエータ部分に選択的に適用するように、該アクチュエータ部分と動作可能に連動する、請求項1に記載の外科用締結装置。
- 前記電動アクチュエータが、
前記エンドエフェクター内で回転可能に支持され、前記モーターから回転運動を受容するために前記モーターに動作可能に連結される回転駆動シャフトと、
前記回転駆動シャフトと動作可能に連動するアクチュエータ部分であって、第1の方向における前記モーターへの電流の印加時に、前記アクチュエータ部分が前記エンドエフェクター内で非配備位置から配備位置へ駆動され、第2の方向における前記モーターへの電流の印加時に、前記アクチュエータ部分が前記配備位置から前記非配備位置へ駆動されるようになっている、アクチュエータ部分と、を更に備える、請求項1に記載の外科用締結装置。 - 前記アクチュエータ部分が、作動運動を前記カートリッジ内の前記複数の外科用締結具に適用するための切断部材及びスレッド部分を備える、請求項15に記載の外科用締結装置。
- 前記カートリッジが前記エンドエフェクターに装着されるとき、電流が前記電源から前記モーターへ流れることを可能にし、前記カートリッジが前記エンドエフェクターに装着されないとき、電流が前記電源から前記モーターへ流れることを防止するように構成される第2のロックアウト機構を更に備える、請求項1に記載の外科用締結装置。
- 外科用器具であって、
開放位置及び閉鎖位置を有する一対のジョーを備えるエンドエフェクターであって、前記ジョーのうちの少なくとも1つが、複数の外科用締結具を収容するカートリッジを受容するためのチャネルを備える、エンドエフェクターと、
前記外科用締結具を配備するための電動アクチュエータであって、電源及びモーターを備える、電動アクチュエータと、
前記一対のジョーを前記開放位置から前記閉鎖位置に移動させて、前記アクチュエータを起動するために前記ハンドルに取り付けられる起動機構と、
前記一対のジョーが前記閉鎖位置にあるとき、電流が前記電源から前記モーターへ流れることを可能にし、前記一対のジョーが前記開放位置にあるとき、電流が前記電源から前記モーターへ流れることを防止するように構成されるロックアウト機構と、を含む、外科用器具。 - ハンドルを更に備え、前記起動機構が、
前記ハンドルに取り付けられる第1のトリガーであって、前記第1のトリガーが完全な作動位置にあるとき、前記エンドエフェクターが前記開放位置から前記閉鎖位置に移動されるように前記エンドエフェクターと連絡している、第1のトリガーと、
前記アクチュエータを起動するために前記ハンドルに取り付けられる第2のトリガーと、を備え、
前記外科用締結装置が、前記第1のトリガーを前記完全な作動位置で解放可能に保持するために、前記ハンドル及び前記第1のトリガーのうちの1つに動作可能に装着されるラッチを更に備え、
前記ロックアウト機構が、前記ラッチに関連付けられる閉鎖ロックスイッチを備え、前記ラッチが前記完全な作動位置に前記第1のトリガーを保持するとき、前記閉鎖ロックスイッチが、電流が前記電源から前記モーターへ流れることを可能にし、前記第1のトリガーが前記完全な作動位置にラッチ留めされないとき、前記閉鎖ロックスイッチが、電流が前記電源から前記モーターへ流れることを防止するように、前記閉鎖ロックスイッチが前記電源及び前記モーターに接続される、請求項18に記載の外科用器具。 - 前記起動機構が、発射トリガー及び閉鎖トリガーを備え、前記閉鎖トリガーが、前記一対のジョーに前記開放位置をとるようにさせる第1の位置と、前記一対のジョーに前記閉鎖位置をとるようにさせる第2の位置とを有し、
前記ロックアウト機構が、走行モーターセンサーを備え、前記走行モーターセンサーが、前記発射トリガーによる作動時に電流が前記電源から前記モーターに流れることを可能にするように位置付けられ、
前記発射トリガー及び閉鎖トリガーは、前記発射トリガーの作動により、前記閉鎖トリガーが前記第2の位置にあるとき前記走行モーターセンサーが作動され、前記発射トリガーの作動により、前記閉鎖トリガーが前記第1の位置にあるとき前記走行モーターセンサーが作動されないように、相対的に位置付けられる、請求項18に記載の外科用器具。 - 外科用締結装置であって、
エンドエフェクターであって、
第1のジョーと、
第2のジョーであって、前記第1のジョーが開放位置と閉鎖位置との間で前記第2のジョーに対して移動可能である、第2のジョーと、
内部に着脱自在に保存される複数の締結具を備える締結具カートリッジと、を備える、エンドエフェクターと、
ハンドルであって、
電気モーターと、
前記電気モーターを動作させるように構成されるアクチュエータと、
前記電気モーターに電力を供給するように構成される電池と、を備える、ハンドルと、
発射部材であって、前記モーターが前記締結具カートリッジから前記締結具を射出するために発射運動を前記発射部材に付与するように構成される、発射部材と、
前記第1のジョーが前記閉鎖位置にあるとき、前記モーターが前記発射運動を前記発射部材に適用することを可能にし、前記第1のジョーが前記開放位置にあるとき、前記モーターが前記発射運動を前記発射部材に適用することを防止するように構成されるロックアウトシステムと、を備える、外科用締結装置。 - 前記締結具カートリッジが、前記第2のジョーによって支持される、請求項21に記載の外科用締結装置。
- 前記締結具カートリッジが、前記エンドエフェクターに着脱自在に取り付けられる、請求項21に記載の外科用締結装置。
- 前記ハンドルから延出するシャフト、を更に備え、前記エンドエフェクターが前記シャフトと係合し、かつ前記シャフトによって支持される、請求項21に記載の外科用締結装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/796,996 | 2013-03-12 | ||
| US13/796,996 US9861359B2 (en) | 2006-01-31 | 2013-03-12 | Powered surgical instruments with firing system lockout arrangements |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014171904A true JP2014171904A (ja) | 2014-09-22 |
| JP2014171904A5 JP2014171904A5 (ja) | 2018-04-19 |
Family
ID=50272381
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014047365A Pending JP2014171904A (ja) | 2013-03-12 | 2014-03-11 | 発射システムロックアウト装置を備える電動外科用器具 |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP2777524A3 (ja) |
| JP (1) | JP2014171904A (ja) |
| CN (1) | CN104042267A (ja) |
| BR (1) | BR102014005779A2 (ja) |
| MX (1) | MX356570B (ja) |
| RU (1) | RU2675082C2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018507071A (ja) * | 2015-03-06 | 2018-03-15 | エシコン エルエルシーEthicon LLC | 外科用ステープラへのステープルカートリッジの誤挿入を検出するためのシステム |
| JP2018509966A (ja) * | 2015-02-27 | 2018-04-12 | エシコン エルエルシーEthicon LLC | 寿命末期パラメータを追跡するように構成されている外科用装置 |
| JP2019506276A (ja) * | 2016-02-09 | 2019-03-07 | エシコン エルエルシーEthicon LLC | 閉鎖ストローク低減構成を備えた外科用器具 |
| JP2019513530A (ja) * | 2016-04-18 | 2019-05-30 | エシコン エルエルシーEthicon LLC | ロックアウトを備える外科用器具 |
| JP2019518487A (ja) * | 2016-04-15 | 2019-07-04 | エシコン エルエルシーEthicon LLC | 発射運動中に複数のプログラム応答を行う外科用器具 |
| JP2021509332A (ja) * | 2017-12-28 | 2021-03-25 | エシコン エルエルシーEthicon LLC | 感知されたパラメータに基づく任意のロックアウト及び強制的ロックアウトの両方を有するステープル留め装置 |
| JP2021517837A (ja) * | 2018-04-23 | 2021-07-29 | コヴィディエン リミテッド パートナーシップ | 手術ロボットシステムにおいて使用するためのステープルカートリッジアセンブリ |
Families Citing this family (407)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US8215531B2 (en) | 2004-07-28 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a medical substance dispenser |
| US11896225B2 (en) | 2004-07-28 | 2024-02-13 | Cilag Gmbh International | Staple cartridge comprising a pan |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US9237891B2 (en) | 2005-08-31 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical stapling devices that produce formed staples having different lengths |
| US11484312B2 (en) | 2005-08-31 | 2022-11-01 | Cilag Gmbh International | Staple cartridge comprising a staple driver arrangement |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US20110295295A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument having recording capabilities |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US11224427B2 (en) | 2006-01-31 | 2022-01-18 | Cilag Gmbh International | Surgical stapling system including a console and retraction assembly |
| US20110024477A1 (en) | 2009-02-06 | 2011-02-03 | Hall Steven G | Driven Surgical Stapler Improvements |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US11278279B2 (en) | 2006-01-31 | 2022-03-22 | Cilag Gmbh International | Surgical instrument assembly |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US8322455B2 (en) | 2006-06-27 | 2012-12-04 | Ethicon Endo-Surgery, Inc. | Manually driven surgical cutting and fastening instrument |
| US7506791B2 (en) | 2006-09-29 | 2009-03-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with mechanical mechanism for limiting maximum tissue compression |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US11291441B2 (en) | 2007-01-10 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with wireless communication between control unit and remote sensor |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US8701958B2 (en) | 2007-01-11 | 2014-04-22 | Ethicon Endo-Surgery, Inc. | Curved end effector for a surgical stapling device |
| US11039836B2 (en) | 2007-01-11 | 2021-06-22 | Cilag Gmbh International | Staple cartridge for use with a surgical stapling instrument |
| US7669747B2 (en) | 2007-03-15 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Washer for use with a surgical stapling instrument |
| US8893946B2 (en) | 2007-03-28 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Laparoscopic tissue thickness and clamp load measuring devices |
| US11564682B2 (en) | 2007-06-04 | 2023-01-31 | Cilag Gmbh International | Surgical stapler device |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| JP5410110B2 (ja) | 2008-02-14 | 2014-02-05 | エシコン・エンド−サージェリィ・インコーポレイテッド | Rf電極を有する外科用切断・固定器具 |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US20130153641A1 (en) | 2008-02-15 | 2013-06-20 | Ethicon Endo-Surgery, Inc. | Releasable layer of material and surgical end effector having the same |
| US11272927B2 (en) | 2008-02-15 | 2022-03-15 | Cilag Gmbh International | Layer arrangements for surgical staple cartridges |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| EP2393430A1 (en) | 2009-02-06 | 2011-12-14 | Ethicon Endo-Surgery, Inc. | Driven surgical stapler improvements |
| US8444036B2 (en) | 2009-02-06 | 2013-05-21 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with mechanisms for adjusting a tissue gap within the end effector |
| US8851354B2 (en) | 2009-12-24 | 2014-10-07 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument that analyzes tissue thickness |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US8783543B2 (en) | 2010-07-30 | 2014-07-22 | Ethicon Endo-Surgery, Inc. | Tissue acquisition arrangements and methods for surgical stapling devices |
| US11298125B2 (en) | 2010-09-30 | 2022-04-12 | Cilag Gmbh International | Tissue stapler having a thickness compensator |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US9839420B2 (en) | 2010-09-30 | 2017-12-12 | Ethicon Llc | Tissue thickness compensator comprising at least one medicament |
| US8746535B2 (en) | 2010-09-30 | 2014-06-10 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising detachable portions |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US9386988B2 (en) | 2010-09-30 | 2016-07-12 | Ethicon End-Surgery, LLC | Retainer assembly including a tissue thickness compensator |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9566061B2 (en) | 2010-09-30 | 2017-02-14 | Ethicon Endo-Surgery, Llc | Fastener cartridge comprising a releasably attached tissue thickness compensator |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US9517063B2 (en) | 2012-03-28 | 2016-12-13 | Ethicon Endo-Surgery, Llc | Movable member for use with a tissue thickness compensator |
| US9364233B2 (en) | 2010-09-30 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Tissue thickness compensators for circular surgical staplers |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| AU2012250197B2 (en) | 2011-04-29 | 2017-08-10 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US11207064B2 (en) | 2011-05-27 | 2021-12-28 | Cilag Gmbh International | Automated end effector component reloading system for use with a robotic system |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US9044230B2 (en) | 2012-02-13 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical cutting and fastening instrument with apparatus for determining cartridge and firing motion status |
| RU2644272C2 (ru) | 2012-03-28 | 2018-02-08 | Этикон Эндо-Серджери, Инк. | Узел ограничения, включающий компенсатор толщины ткани |
| MX358135B (es) | 2012-03-28 | 2018-08-06 | Ethicon Endo Surgery Inc | Compensador de grosor de tejido que comprende una pluralidad de capas. |
| RU2639857C2 (ru) | 2012-03-28 | 2017-12-22 | Этикон Эндо-Серджери, Инк. | Компенсатор толщины ткани, содержащий капсулу для среды с низким давлением |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US11202631B2 (en) | 2012-06-28 | 2021-12-21 | Cilag Gmbh International | Stapling assembly comprising a firing lockout |
| US9226751B2 (en) | 2012-06-28 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument system including replaceable end effectors |
| US20140005718A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Multi-functional powered surgical device with external dissection features |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| BR112014032776B1 (pt) | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| US9649111B2 (en) | 2012-06-28 | 2017-05-16 | Ethicon Endo-Surgery, Llc | Replaceable clip cartridge for a clip applier |
| EP2866686A1 (en) | 2012-06-28 | 2015-05-06 | Ethicon Endo-Surgery, Inc. | Empty clip cartridge lockout |
| RU2672520C2 (ru) | 2013-03-01 | 2018-11-15 | Этикон Эндо-Серджери, Инк. | Шарнирно поворачиваемые хирургические инструменты с проводящими путями для передачи сигналов |
| RU2669463C2 (ru) | 2013-03-01 | 2018-10-11 | Этикон Эндо-Серджери, Инк. | Хирургический инструмент с мягким упором |
| US9332987B2 (en) | 2013-03-14 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Control arrangements for a drive member of a surgical instrument |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US9867612B2 (en) | 2013-04-16 | 2018-01-16 | Ethicon Llc | Powered surgical stapler |
| MX369362B (es) | 2013-08-23 | 2019-11-06 | Ethicon Endo Surgery Llc | Dispositivos de retraccion de miembros de disparo para instrumentos quirurgicos electricos. |
| US9775609B2 (en) | 2013-08-23 | 2017-10-03 | Ethicon Llc | Tamper proof circuit for surgical instrument battery pack |
| US9962161B2 (en) | 2014-02-12 | 2018-05-08 | Ethicon Llc | Deliverable surgical instrument |
| JP6462004B2 (ja) | 2014-02-24 | 2019-01-30 | エシコン エルエルシー | 発射部材ロックアウトを備える締結システム |
| US10028761B2 (en) | 2014-03-26 | 2018-07-24 | Ethicon Llc | Feedback algorithms for manual bailout systems for surgical instruments |
| US20150272557A1 (en) | 2014-03-26 | 2015-10-01 | Ethicon Endo-Surgery, Inc. | Modular surgical instrument system |
| BR112016021943B1 (pt) | 2014-03-26 | 2022-06-14 | Ethicon Endo-Surgery, Llc | Instrumento cirúrgico para uso por um operador em um procedimento cirúrgico |
| US9826977B2 (en) | 2014-03-26 | 2017-11-28 | Ethicon Llc | Sterilization verification circuit |
| US20150297223A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| CN106456176B (zh) | 2014-04-16 | 2019-06-28 | 伊西康内外科有限责任公司 | 包括具有不同构型的延伸部的紧固件仓 |
| JP6532889B2 (ja) | 2014-04-16 | 2019-06-19 | エシコン エルエルシーEthicon LLC | 締結具カートリッジ組立体及びステープル保持具カバー配置構成 |
| US10206677B2 (en) | 2014-09-26 | 2019-02-19 | Ethicon Llc | Surgical staple and driver arrangements for staple cartridges |
| US9844369B2 (en) | 2014-04-16 | 2017-12-19 | Ethicon Llc | Surgical end effectors with firing element monitoring arrangements |
| JP6612256B2 (ja) | 2014-04-16 | 2019-11-27 | エシコン エルエルシー | 不均一な締結具を備える締結具カートリッジ |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US20160066913A1 (en) | 2014-09-05 | 2016-03-10 | Ethicon Endo-Surgery, Inc. | Local display of tissue parameter stabilization |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| JP6648119B2 (ja) | 2014-09-26 | 2020-02-14 | エシコン エルエルシーEthicon LLC | 外科ステープル留めバットレス及び付属物材料 |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| US10076325B2 (en) | 2014-10-13 | 2018-09-18 | Ethicon Llc | Surgical stapling apparatus comprising a tissue stop |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US10004501B2 (en) | 2014-12-18 | 2018-06-26 | Ethicon Llc | Surgical instruments with improved closure arrangements |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| US10188385B2 (en) | 2014-12-18 | 2019-01-29 | Ethicon Llc | Surgical instrument system comprising lockable systems |
| RU2703684C2 (ru) | 2014-12-18 | 2019-10-21 | ЭТИКОН ЭНДО-СЕРДЖЕРИ, ЭлЭлСи | Хирургический инструмент с упором, который выполнен с возможностью избирательного перемещения относительно кассеты со скобами вокруг дискретной неподвижной оси |
| US20160249910A1 (en) | 2015-02-27 | 2016-09-01 | Ethicon Endo-Surgery, Llc | Surgical charging system that charges and/or conditions one or more batteries |
| US10180463B2 (en) | 2015-02-27 | 2019-01-15 | Ethicon Llc | Surgical apparatus configured to assess whether a performance parameter of the surgical apparatus is within an acceptable performance band |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US9901342B2 (en) | 2015-03-06 | 2018-02-27 | Ethicon Endo-Surgery, Llc | Signal and power communication system positioned on a rotatable shaft |
| US10052044B2 (en) | 2015-03-06 | 2018-08-21 | Ethicon Llc | Time dependent evaluation of sensor data to determine stability, creep, and viscoelastic elements of measures |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US9808246B2 (en) | 2015-03-06 | 2017-11-07 | Ethicon Endo-Surgery, Llc | Method of operating a powered surgical instrument |
| US10687806B2 (en) | 2015-03-06 | 2020-06-23 | Ethicon Llc | Adaptive tissue compression techniques to adjust closure rates for multiple tissue types |
| US9924961B2 (en) | 2015-03-06 | 2018-03-27 | Ethicon Endo-Surgery, Llc | Interactive feedback system for powered surgical instruments |
| US10245033B2 (en) | 2015-03-06 | 2019-04-02 | Ethicon Llc | Surgical instrument comprising a lockable battery housing |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| US10433844B2 (en) | 2015-03-31 | 2019-10-08 | Ethicon Llc | Surgical instrument with selectively disengageable threaded drive systems |
| CN104921770B (zh) * | 2015-06-25 | 2017-05-24 | 苏州法兰克曼医疗器械有限公司 | 一种能够先缝合后切割的外科切割缝合器 |
| US10835249B2 (en) | 2015-08-17 | 2020-11-17 | Ethicon Llc | Implantable layers for a surgical instrument |
| US10357251B2 (en) | 2015-08-26 | 2019-07-23 | Ethicon Llc | Surgical staples comprising hardness variations for improved fastening of tissue |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US10363036B2 (en) | 2015-09-23 | 2019-07-30 | Ethicon Llc | Surgical stapler having force-based motor control |
| US10327769B2 (en) | 2015-09-23 | 2019-06-25 | Ethicon Llc | Surgical stapler having motor control based on a drive system component |
| US10299878B2 (en) | 2015-09-25 | 2019-05-28 | Ethicon Llc | Implantable adjunct systems for determining adjunct skew |
| US10980539B2 (en) | 2015-09-30 | 2021-04-20 | Ethicon Llc | Implantable adjunct comprising bonded layers |
| US10603039B2 (en) | 2015-09-30 | 2020-03-31 | Ethicon Llc | Progressively releasable implantable adjunct for use with a surgical stapling instrument |
| US10271849B2 (en) | 2015-09-30 | 2019-04-30 | Ethicon Llc | Woven constructs with interlocked standing fibers |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10292705B2 (en) * | 2015-11-06 | 2019-05-21 | Covidien Lp | Surgical apparatus |
| GB201521807D0 (en) * | 2015-12-10 | 2016-01-27 | Cambridge Medical Robotics Ltd | Surgical instrument shaft spokes |
| US10368865B2 (en) | 2015-12-30 | 2019-08-06 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10265068B2 (en) | 2015-12-30 | 2019-04-23 | Ethicon Llc | Surgical instruments with separable motors and motor control circuits |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US10433837B2 (en) | 2016-02-09 | 2019-10-08 | Ethicon Llc | Surgical instruments with multiple link articulation arrangements |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| BR112018016098B1 (pt) | 2016-02-09 | 2023-02-23 | Ethicon Llc | Instrumento cirúrgico |
| US10258331B2 (en) | 2016-02-12 | 2019-04-16 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US11224426B2 (en) | 2016-02-12 | 2022-01-18 | Cilag Gmbh International | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10617413B2 (en) | 2016-04-01 | 2020-04-14 | Ethicon Llc | Closure system arrangements for surgical cutting and stapling devices with separate and distinct firing shafts |
| US10314582B2 (en) | 2016-04-01 | 2019-06-11 | Ethicon Llc | Surgical instrument comprising a shifting mechanism |
| CN109310432B (zh) * | 2016-04-01 | 2021-08-24 | 伊西康有限责任公司 | 包括钳口附接闭锁件的外科缝合系统 |
| JP6965265B2 (ja) * | 2016-04-01 | 2021-11-10 | エシコン エルエルシーEthicon LLC | 組織圧迫ロックアウトを備える外科用ステープル留めシステム |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10335145B2 (en) | 2016-04-15 | 2019-07-02 | Ethicon Llc | Modular surgical instrument with configurable operating mode |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US10456137B2 (en) | 2016-04-15 | 2019-10-29 | Ethicon Llc | Staple formation detection mechanisms |
| US11179150B2 (en) | 2016-04-15 | 2021-11-23 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10405859B2 (en) | 2016-04-15 | 2019-09-10 | Ethicon Llc | Surgical instrument with adjustable stop/start control during a firing motion |
| US10492783B2 (en) | 2016-04-15 | 2019-12-03 | Ethicon, Llc | Surgical instrument with improved stop/start control during a firing motion |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US11317917B2 (en) | 2016-04-18 | 2022-05-03 | Cilag Gmbh International | Surgical stapling system comprising a lockable firing assembly |
| US10426469B2 (en) * | 2016-04-18 | 2019-10-01 | Ethicon Llc | Surgical instrument comprising a primary firing lockout and a secondary firing lockout |
| US10888322B2 (en) | 2016-12-21 | 2021-01-12 | Ethicon Llc | Surgical instrument comprising a cutting member |
| US11191540B2 (en) | 2016-12-21 | 2021-12-07 | Cilag Gmbh International | Protective cover arrangements for a joint interface between a movable jaw and actuator shaft of a surgical instrument |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US11090048B2 (en) | 2016-12-21 | 2021-08-17 | Cilag Gmbh International | Method for resetting a fuse of a surgical instrument shaft |
| US10675025B2 (en) | 2016-12-21 | 2020-06-09 | Ethicon Llc | Shaft assembly comprising separately actuatable and retractable systems |
| US11134942B2 (en) | 2016-12-21 | 2021-10-05 | Cilag Gmbh International | Surgical stapling instruments and staple-forming anvils |
| US10588630B2 (en) | 2016-12-21 | 2020-03-17 | Ethicon Llc | Surgical tool assemblies with closure stroke reduction features |
| US10856868B2 (en) | 2016-12-21 | 2020-12-08 | Ethicon Llc | Firing member pin configurations |
| US10568624B2 (en) | 2016-12-21 | 2020-02-25 | Ethicon Llc | Surgical instruments with jaws that are pivotable about a fixed axis and include separate and distinct closure and firing systems |
| US10568625B2 (en) | 2016-12-21 | 2020-02-25 | Ethicon Llc | Staple cartridges and arrangements of staples and staple cavities therein |
| CN110099612B (zh) * | 2016-12-21 | 2022-05-27 | 爱惜康有限责任公司 | 具有闭合行程减少特征部的外科工具组件 |
| JP6983893B2 (ja) | 2016-12-21 | 2021-12-17 | エシコン エルエルシーEthicon LLC | 外科用エンドエフェクタ及び交換式ツールアセンブリのためのロックアウト構成 |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| US10610224B2 (en) | 2016-12-21 | 2020-04-07 | Ethicon Llc | Lockout arrangements for surgical end effectors and replaceable tool assemblies |
| US11419606B2 (en) | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| US20180168625A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with smart staple cartridges |
| CN110114006B (zh) * | 2016-12-21 | 2022-08-09 | 爱惜康有限责任公司 | 具有用于增加钳口开口距离的钳口开口特征部的外科器械 |
| US10426471B2 (en) | 2016-12-21 | 2019-10-01 | Ethicon Llc | Surgical instrument with multiple failure response modes |
| US10695055B2 (en) | 2016-12-21 | 2020-06-30 | Ethicon Llc | Firing assembly comprising a lockout |
| US20180168598A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Staple forming pocket arrangements comprising zoned forming surface grooves |
| MX2019007311A (es) | 2016-12-21 | 2019-11-18 | Ethicon Llc | Sistemas de engrapado quirurgico. |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US10368864B2 (en) | 2017-06-20 | 2019-08-06 | Ethicon Llc | Systems and methods for controlling displaying motor velocity for a surgical instrument |
| US10980537B2 (en) | 2017-06-20 | 2021-04-20 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified number of shaft rotations |
| USD879809S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with changeable graphical user interface |
| USD890784S1 (en) | 2017-06-20 | 2020-07-21 | Ethicon Llc | Display panel with changeable graphical user interface |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| US10813639B2 (en) | 2017-06-20 | 2020-10-27 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on system conditions |
| USD879808S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with graphical user interface |
| US11090046B2 (en) | 2017-06-20 | 2021-08-17 | Cilag Gmbh International | Systems and methods for controlling displacement member motion of a surgical stapling and cutting instrument |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US10390841B2 (en) | 2017-06-20 | 2019-08-27 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US10646220B2 (en) | 2017-06-20 | 2020-05-12 | Ethicon Llc | Systems and methods for controlling displacement member velocity for a surgical instrument |
| US10888321B2 (en) | 2017-06-20 | 2021-01-12 | Ethicon Llc | Systems and methods for controlling velocity of a displacement member of a surgical stapling and cutting instrument |
| US10624633B2 (en) | 2017-06-20 | 2020-04-21 | Ethicon Llc | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument |
| US10327767B2 (en) | 2017-06-20 | 2019-06-25 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US11382638B2 (en) | 2017-06-20 | 2022-07-12 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified displacement distance |
| US11071554B2 (en) | 2017-06-20 | 2021-07-27 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on magnitude of velocity error measurements |
| US10881396B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Surgical instrument with variable duration trigger arrangement |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US10631859B2 (en) | 2017-06-27 | 2020-04-28 | Ethicon Llc | Articulation systems for surgical instruments |
| US10772629B2 (en) | 2017-06-27 | 2020-09-15 | Ethicon Llc | Surgical anvil arrangements |
| US11266405B2 (en) | 2017-06-27 | 2022-03-08 | Cilag Gmbh International | Surgical anvil manufacturing methods |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| US11324503B2 (en) | 2017-06-27 | 2022-05-10 | Cilag Gmbh International | Surgical firing member arrangements |
| US10856869B2 (en) | 2017-06-27 | 2020-12-08 | Ethicon Llc | Surgical anvil arrangements |
| US11259805B2 (en) | 2017-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical instrument comprising firing member supports |
| US20190000461A1 (en) | 2017-06-28 | 2019-01-03 | Ethicon Llc | Surgical cutting and fastening devices with pivotable anvil with a tissue locating arrangement in close proximity to an anvil pivot axis |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| US10903685B2 (en) | 2017-06-28 | 2021-01-26 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies forming capacitive channels |
| US11246592B2 (en) | 2017-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical instrument comprising an articulation system lockable to a frame |
| US10211586B2 (en) | 2017-06-28 | 2019-02-19 | Ethicon Llc | Surgical shaft assemblies with watertight housings |
| EP4070740A1 (en) | 2017-06-28 | 2022-10-12 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| US10716614B2 (en) | 2017-06-28 | 2020-07-21 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies with increased contact pressure |
| USD854151S1 (en) | 2017-06-28 | 2019-07-16 | Ethicon Llc | Surgical instrument shaft |
| US11678880B2 (en) | 2017-06-28 | 2023-06-20 | Cilag Gmbh International | Surgical instrument comprising a shaft including a housing arrangement |
| USD851762S1 (en) | 2017-06-28 | 2019-06-18 | Ethicon Llc | Anvil |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US10398434B2 (en) | 2017-06-29 | 2019-09-03 | Ethicon Llc | Closed loop velocity control of closure member for robotic surgical instrument |
| US11007022B2 (en) | 2017-06-29 | 2021-05-18 | Ethicon Llc | Closed loop velocity control techniques based on sensed tissue parameters for robotic surgical instrument |
| US10898183B2 (en) | 2017-06-29 | 2021-01-26 | Ethicon Llc | Robotic surgical instrument with closed loop feedback techniques for advancement of closure member during firing |
| US10258418B2 (en) | 2017-06-29 | 2019-04-16 | Ethicon Llc | System for controlling articulation forces |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11304695B2 (en) | 2017-08-03 | 2022-04-19 | Cilag Gmbh International | Surgical system shaft interconnection |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US10729501B2 (en) * | 2017-09-29 | 2020-08-04 | Ethicon Llc | Systems and methods for language selection of a surgical instrument |
| USD907647S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US10743872B2 (en) | 2017-09-29 | 2020-08-18 | Ethicon Llc | System and methods for controlling a display of a surgical instrument |
| USD907648S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US11399829B2 (en) | 2017-09-29 | 2022-08-02 | Cilag Gmbh International | Systems and methods of initiating a power shutdown mode for a surgical instrument |
| USD917500S1 (en) | 2017-09-29 | 2021-04-27 | Ethicon Llc | Display screen or portion thereof with graphical user interface |
| US10796471B2 (en) | 2017-09-29 | 2020-10-06 | Ethicon Llc | Systems and methods of displaying a knife position for a surgical instrument |
| US10765429B2 (en) | 2017-09-29 | 2020-09-08 | Ethicon Llc | Systems and methods for providing alerts according to the operational state of a surgical instrument |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| US11090075B2 (en) | 2017-10-30 | 2021-08-17 | Cilag Gmbh International | Articulation features for surgical end effector |
| US10779903B2 (en) | 2017-10-31 | 2020-09-22 | Ethicon Llc | Positive shaft rotation lock activated by jaw closure |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| US10743874B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Sealed adapters for use with electromechanical surgical instruments |
| US10779825B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Adapters with end effector position sensing and control arrangements for use in connection with electromechanical surgical instruments |
| US10966718B2 (en) | 2017-12-15 | 2021-04-06 | Ethicon Llc | Dynamic clamping assemblies with improved wear characteristics for use in connection with electromechanical surgical instruments |
| US10743875B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Surgical end effectors with jaw stiffener arrangements configured to permit monitoring of firing member |
| US10828033B2 (en) | 2017-12-15 | 2020-11-10 | Ethicon Llc | Handheld electromechanical surgical instruments with improved motor control arrangements for positioning components of an adapter coupled thereto |
| US10687813B2 (en) | 2017-12-15 | 2020-06-23 | Ethicon Llc | Adapters with firing stroke sensing arrangements for use in connection with electromechanical surgical instruments |
| US11006955B2 (en) | 2017-12-15 | 2021-05-18 | Ethicon Llc | End effectors with positive jaw opening features for use with adapters for electromechanical surgical instruments |
| US11071543B2 (en) | 2017-12-15 | 2021-07-27 | Cilag Gmbh International | Surgical end effectors with clamping assemblies configured to increase jaw aperture ranges |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US11033267B2 (en) | 2017-12-15 | 2021-06-15 | Ethicon Llc | Systems and methods of controlling a clamping member firing rate of a surgical instrument |
| US10869666B2 (en) | 2017-12-15 | 2020-12-22 | Ethicon Llc | Adapters with control systems for controlling multiple motors of an electromechanical surgical instrument |
| US11197670B2 (en) | 2017-12-15 | 2021-12-14 | Cilag Gmbh International | Surgical end effectors with pivotal jaws configured to touch at their respective distal ends when fully closed |
| US10716565B2 (en) | 2017-12-19 | 2020-07-21 | Ethicon Llc | Surgical instruments with dual articulation drivers |
| US11020112B2 (en) | 2017-12-19 | 2021-06-01 | Ethicon Llc | Surgical tools configured for interchangeable use with different controller interfaces |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| USD910847S1 (en) | 2017-12-19 | 2021-02-16 | Ethicon Llc | Surgical instrument assembly |
| US11045270B2 (en) | 2017-12-19 | 2021-06-29 | Cilag Gmbh International | Robotic attachment comprising exterior drive actuator |
| US10729509B2 (en) | 2017-12-19 | 2020-08-04 | Ethicon Llc | Surgical instrument comprising closure and firing locking mechanism |
| US11129680B2 (en) | 2017-12-21 | 2021-09-28 | Cilag Gmbh International | Surgical instrument comprising a projector |
| US11311290B2 (en) | 2017-12-21 | 2022-04-26 | Cilag Gmbh International | Surgical instrument comprising an end effector dampener |
| US11337691B2 (en) | 2017-12-21 | 2022-05-24 | Cilag Gmbh International | Surgical instrument configured to determine firing path |
| US11076853B2 (en) | 2017-12-21 | 2021-08-03 | Cilag Gmbh International | Systems and methods of displaying a knife position during transection for a surgical instrument |
| CN108042165B (zh) * | 2017-12-25 | 2019-07-23 | 苏州英途康医疗科技有限公司 | 用于腔镜吻合器的适配器和腔镜吻合器 |
| CN108451598B (zh) * | 2018-03-20 | 2024-01-02 | 广州德脉医疗器械有限公司 | 一种电驱动的包皮环切机构及包皮缝合环切器 |
| US11083458B2 (en) | 2018-08-20 | 2021-08-10 | Cilag Gmbh International | Powered surgical instruments with clutching arrangements to convert linear drive motions to rotary drive motions |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| US11253256B2 (en) | 2018-08-20 | 2022-02-22 | Cilag Gmbh International | Articulatable motor powered surgical instruments with dedicated articulation motor arrangements |
| US11324501B2 (en) | 2018-08-20 | 2022-05-10 | Cilag Gmbh International | Surgical stapling devices with improved closure members |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| USD914878S1 (en) | 2018-08-20 | 2021-03-30 | Ethicon Llc | Surgical instrument anvil |
| US11045192B2 (en) | 2018-08-20 | 2021-06-29 | Cilag Gmbh International | Fabricating techniques for surgical stapler anvils |
| US10856870B2 (en) | 2018-08-20 | 2020-12-08 | Ethicon Llc | Switching arrangements for motor powered articulatable surgical instruments |
| US10842492B2 (en) | 2018-08-20 | 2020-11-24 | Ethicon Llc | Powered articulatable surgical instruments with clutching and locking arrangements for linking an articulation drive system to a firing drive system |
| US10779821B2 (en) | 2018-08-20 | 2020-09-22 | Ethicon Llc | Surgical stapler anvils with tissue stop features configured to avoid tissue pinch |
| US11039834B2 (en) | 2018-08-20 | 2021-06-22 | Cilag Gmbh International | Surgical stapler anvils with staple directing protrusions and tissue stability features |
| US10912559B2 (en) | 2018-08-20 | 2021-02-09 | Ethicon Llc | Reinforced deformable anvil tip for surgical stapler anvil |
| US11147553B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11147551B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11172929B2 (en) | 2019-03-25 | 2021-11-16 | Cilag Gmbh International | Articulation drive arrangements for surgical systems |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11426251B2 (en) | 2019-04-30 | 2022-08-30 | Cilag Gmbh International | Articulation directional lights on a surgical instrument |
| US11432816B2 (en) | 2019-04-30 | 2022-09-06 | Cilag Gmbh International | Articulation pin for a surgical instrument |
| US11253254B2 (en) | 2019-04-30 | 2022-02-22 | Cilag Gmbh International | Shaft rotation actuator on a surgical instrument |
| US11471157B2 (en) | 2019-04-30 | 2022-10-18 | Cilag Gmbh International | Articulation control mapping for a surgical instrument |
| US11452528B2 (en) | 2019-04-30 | 2022-09-27 | Cilag Gmbh International | Articulation actuators for a surgical instrument |
| CN111870317B (zh) * | 2019-05-01 | 2024-04-02 | 江苏风和医疗器材股份有限公司 | 控制装置、外科器械及其控制方法 |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11259803B2 (en) | 2019-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling system having an information encryption protocol |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11224497B2 (en) | 2019-06-28 | 2022-01-18 | Cilag Gmbh International | Surgical systems with multiple RFID tags |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US11399837B2 (en) | 2019-06-28 | 2022-08-02 | Cilag Gmbh International | Mechanisms for motor control adjustments of a motorized surgical instrument |
| US11291451B2 (en) | 2019-06-28 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with battery compatibility verification functionality |
| US11298127B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Interational | Surgical stapling system having a lockout mechanism for an incompatible cartridge |
| US11241235B2 (en) | 2019-06-28 | 2022-02-08 | Cilag Gmbh International | Method of using multiple RFID chips with a surgical assembly |
| US11376098B2 (en) | 2019-06-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument system comprising an RFID system |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11246678B2 (en) | 2019-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical stapling system having a frangible RFID tag |
| US11051807B2 (en) | 2019-06-28 | 2021-07-06 | Cilag Gmbh International | Packaging assembly including a particulate trap |
| US11298132B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Inlernational | Staple cartridge including a honeycomb extension |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11426167B2 (en) | 2019-06-28 | 2022-08-30 | Cilag Gmbh International | Mechanisms for proper anvil attachment surgical stapling head assembly |
| US11219455B2 (en) | 2019-06-28 | 2022-01-11 | Cilag Gmbh International | Surgical instrument including a lockout key |
| CN110786899A (zh) * | 2019-12-05 | 2020-02-14 | 山东威瑞外科医用制品有限公司 | 一种限制一次性器械使用次数的装置及一次性机械 |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11931033B2 (en) | 2019-12-19 | 2024-03-19 | Cilag Gmbh International | Staple cartridge comprising a latch lockout |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11291447B2 (en) | 2019-12-19 | 2022-04-05 | Cilag Gmbh International | Stapling instrument comprising independent jaw closing and staple firing systems |
| US11304696B2 (en) | 2019-12-19 | 2022-04-19 | Cilag Gmbh International | Surgical instrument comprising a powered articulation system |
| US11234698B2 (en) | 2019-12-19 | 2022-02-01 | Cilag Gmbh International | Stapling system comprising a clamp lockout and a firing lockout |
| RU198781U1 (ru) * | 2020-03-24 | 2020-07-28 | ООО "Силиника МС" | Беспроводной хирургический электроинструмент |
| USD975278S1 (en) | 2020-06-02 | 2023-01-10 | Cilag Gmbh International | Staple cartridge |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| USD967421S1 (en) | 2020-06-02 | 2022-10-18 | Cilag Gmbh International | Staple cartridge |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| USD966512S1 (en) | 2020-06-02 | 2022-10-11 | Cilag Gmbh International | Staple cartridge |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| US11883024B2 (en) | 2020-07-28 | 2024-01-30 | Cilag Gmbh International | Method of operating a surgical instrument |
| US11452526B2 (en) | 2020-10-29 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising a staged voltage regulation start-up system |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11944336B2 (en) | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US11826047B2 (en) | 2021-05-28 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising jaw mounts |
| US11957337B2 (en) | 2021-10-18 | 2024-04-16 | Cilag Gmbh International | Surgical stapling assembly with offset ramped drive surfaces |
| US11877745B2 (en) | 2021-10-18 | 2024-01-23 | Cilag Gmbh International | Surgical stapling assembly having longitudinally-repeating staple leg clusters |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| CN115153702B (zh) * | 2022-06-30 | 2023-03-21 | 天津瑞奇外科器械股份有限公司 | 一种装载单元及外科器械 |
| CN115349907B (zh) * | 2022-09-01 | 2024-03-08 | 苏州英途康医疗科技有限公司 | 钉仓装置及吻合器 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007203057A (ja) * | 2006-01-31 | 2007-08-16 | Ethicon Endo Surgery Inc | 電子ロックアウトおよび電子ロックアウトを含む手術器具 |
| JP2007229448A (ja) * | 2006-01-31 | 2007-09-13 | Ethicon Endo Surgery Inc | 記録機能を備えた手術器具 |
| US20110006103A1 (en) * | 2009-02-06 | 2011-01-13 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with cutting member reversing mechanism |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69232781T2 (de) * | 1991-11-01 | 2003-08-07 | Medical Scient Inc | Elektrochirurgisches schneidwerkzeug |
| US5709680A (en) | 1993-07-22 | 1998-01-20 | Ethicon Endo-Surgery, Inc. | Electrosurgical hemostatic device |
| US5688270A (en) | 1993-07-22 | 1997-11-18 | Ethicon Endo-Surgery,Inc. | Electrosurgical hemostatic device with recessed and/or offset electrodes |
| US5465895A (en) | 1994-02-03 | 1995-11-14 | Ethicon Endo-Surgery, Inc. | Surgical stapler instrument |
| US6716223B2 (en) | 2001-11-09 | 2004-04-06 | Micrus Corporation | Reloadable sheath for catheter system for deploying vasoocclusive devices |
| US6646307B1 (en) | 2002-02-21 | 2003-11-11 | Advanced Micro Devices, Inc. | MOSFET having a double gate |
| US6978921B2 (en) | 2003-05-20 | 2005-12-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an E-beam firing mechanism |
| US7044352B2 (en) * | 2003-05-20 | 2006-05-16 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a single lockout mechanism for prevention of firing |
| US6981628B2 (en) | 2003-07-09 | 2006-01-03 | Ethicon Endo-Surgery, Inc. | Surgical instrument with a lateral-moving articulation control |
| US6964363B2 (en) | 2003-07-09 | 2005-11-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having articulation joint support plates for supporting a firing bar |
| US6786382B1 (en) | 2003-07-09 | 2004-09-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an articulation joint for a firing bar track |
| US7111769B2 (en) | 2003-07-09 | 2006-09-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an articulation mechanism having rotation about the longitudinal axis |
| US7055731B2 (en) | 2003-07-09 | 2006-06-06 | Ethicon Endo-Surgery Inc. | Surgical stapling instrument incorporating a tapered firing bar for increased flexibility around the articulation joint |
| US7083075B2 (en) | 2003-09-29 | 2006-08-01 | Ethicon Endo-Surgery, Inc. | Multi-stroke mechanism with automatic end of stroke retraction |
| US6905057B2 (en) | 2003-09-29 | 2005-06-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a firing mechanism having a linked rack transmission |
| US20090090763A1 (en) * | 2007-10-05 | 2009-04-09 | Tyco Healthcare Group Lp | Powered surgical stapling device |
| US7467740B2 (en) | 2005-09-21 | 2008-12-23 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments having flexible channel and anvil features for adjustable staple heights |
| US7407078B2 (en) | 2005-09-21 | 2008-08-05 | Ehthicon Endo-Surgery, Inc. | Surgical stapling instrument having force controlled spacing end effector |
| US7673783B2 (en) | 2005-11-04 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments structured for delivery of medical agents |
| US7607557B2 (en) | 2005-11-04 | 2009-10-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments structured for pump-assisted delivery of medical agents |
| US7670334B2 (en) | 2006-01-10 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument having an articulating end effector |
| US8161977B2 (en) * | 2006-01-31 | 2012-04-24 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US7422139B2 (en) | 2006-01-31 | 2008-09-09 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting fastening instrument with tactile position feedback |
| US7766210B2 (en) | 2006-01-31 | 2010-08-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with user feedback system |
| US7416101B2 (en) * | 2006-01-31 | 2008-08-26 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with loading force feedback |
| US7819297B2 (en) * | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with reprocessible handle assembly |
| US8608044B2 (en) * | 2008-02-15 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Feedback and lockout mechanism for surgical instrument |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US7918377B2 (en) | 2008-10-16 | 2011-04-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with apparatus for providing anvil position feedback |
| US8397971B2 (en) * | 2009-02-05 | 2013-03-19 | Ethicon Endo-Surgery, Inc. | Sterilizable surgical instrument |
| US8444036B2 (en) | 2009-02-06 | 2013-05-21 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with mechanisms for adjusting a tissue gap within the end effector |
-
2014
- 2014-03-11 JP JP2014047365A patent/JP2014171904A/ja active Pending
- 2014-03-11 RU RU2014109134A patent/RU2675082C2/ru not_active IP Right Cessation
- 2014-03-11 CN CN201410088343.8A patent/CN104042267A/zh active Pending
- 2014-03-11 EP EP14158917.6A patent/EP2777524A3/en not_active Withdrawn
- 2014-03-12 BR BRBR102014005779-0A patent/BR102014005779A2/pt not_active Application Discontinuation
- 2014-03-12 MX MX2014002978A patent/MX356570B/es active IP Right Grant
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007203057A (ja) * | 2006-01-31 | 2007-08-16 | Ethicon Endo Surgery Inc | 電子ロックアウトおよび電子ロックアウトを含む手術器具 |
| JP2007229448A (ja) * | 2006-01-31 | 2007-09-13 | Ethicon Endo Surgery Inc | 記録機能を備えた手術器具 |
| US20110006103A1 (en) * | 2009-02-06 | 2011-01-13 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with cutting member reversing mechanism |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018509966A (ja) * | 2015-02-27 | 2018-04-12 | エシコン エルエルシーEthicon LLC | 寿命末期パラメータを追跡するように構成されている外科用装置 |
| JP2018507071A (ja) * | 2015-03-06 | 2018-03-15 | エシコン エルエルシーEthicon LLC | 外科用ステープラへのステープルカートリッジの誤挿入を検出するためのシステム |
| JP2019506276A (ja) * | 2016-02-09 | 2019-03-07 | エシコン エルエルシーEthicon LLC | 閉鎖ストローク低減構成を備えた外科用器具 |
| JP2019518487A (ja) * | 2016-04-15 | 2019-07-04 | エシコン エルエルシーEthicon LLC | 発射運動中に複数のプログラム応答を行う外科用器具 |
| JP2019513530A (ja) * | 2016-04-18 | 2019-05-30 | エシコン エルエルシーEthicon LLC | ロックアウトを備える外科用器具 |
| JP7106522B2 (ja) | 2016-04-18 | 2022-07-26 | エシコン エルエルシー | ロックアウトを備える外科用器具 |
| JP2021509332A (ja) * | 2017-12-28 | 2021-03-25 | エシコン エルエルシーEthicon LLC | 感知されたパラメータに基づく任意のロックアウト及び強制的ロックアウトの両方を有するステープル留め装置 |
| JP7427593B2 (ja) | 2017-12-28 | 2024-02-05 | エシコン エルエルシー | 感知されたパラメータに基づく任意のロックアウト及び強制的ロックアウトの両方を有するステープル留め装置 |
| JP2021517837A (ja) * | 2018-04-23 | 2021-07-29 | コヴィディエン リミテッド パートナーシップ | 手術ロボットシステムにおいて使用するためのステープルカートリッジアセンブリ |
Also Published As
| Publication number | Publication date |
|---|---|
| MX2014002978A (es) | 2015-03-25 |
| RU2014109134A (ru) | 2015-09-20 |
| CN104042267A (zh) | 2014-09-17 |
| RU2675082C2 (ru) | 2018-12-14 |
| BR102014005779A2 (pt) | 2014-11-11 |
| EP2777524A3 (en) | 2017-04-19 |
| MX356570B (es) | 2018-06-04 |
| EP2777524A2 (en) | 2014-09-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11793518B2 (en) | Powered surgical instruments with firing system lockout arrangements | |
| US10952728B2 (en) | Powered surgical instruments with firing system lockout arrangements | |
| US11051813B2 (en) | Powered surgical instruments with firing system lockout arrangements | |
| US11166717B2 (en) | Surgical instrument with firing lockout | |
| JP2014171904A (ja) | 発射システムロックアウト装置を備える電動外科用器具 | |
| US9861359B2 (en) | Powered surgical instruments with firing system lockout arrangements | |
| US8453907B2 (en) | Motor driven surgical fastener device with cutting member reversing mechanism | |
| JP5847816B2 (ja) | エンドエフェクタ内の組織隙間を調節するための機構を有するモーター駆動式外科用締結装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170310 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171222 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20180307 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180309 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180424 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180703 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20181225 |