JP2017170586A - エンドエフェクター、ロボット、およびロボット制御装置 - Google Patents
エンドエフェクター、ロボット、およびロボット制御装置 Download PDFInfo
- Publication number
- JP2017170586A JP2017170586A JP2016061381A JP2016061381A JP2017170586A JP 2017170586 A JP2017170586 A JP 2017170586A JP 2016061381 A JP2016061381 A JP 2016061381A JP 2016061381 A JP2016061381 A JP 2016061381A JP 2017170586 A JP2017170586 A JP 2017170586A
- Authority
- JP
- Japan
- Prior art keywords
- end effector
- robot
- hand
- recess
- operation unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/10—Gripping heads and other end effectors having finger members with three or more finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0019—End effectors other than grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0408—Connections means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0466—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof with means for checking exchange completion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/14—Programme-controlled manipulators characterised by positioning means for manipulator elements fluid
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1612—Programme controls characterised by the hand, wrist, grip control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39486—Fingered hand, multifingered hand
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39496—3-Fingered hand
Abstract
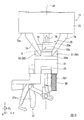
【解決手段】本発明のエンドエフェクターの一つの態様は、複数の第1可動部と第2可動部とを有するハンドを含むロボットによって、ハンドを用いて把持されるエンドエフェクターであって、第2可動部の第1方向への移動によって操作される操作部と、操作部の操作によって作動する作動部と、を備え、第1可動部が挿入される凹部が形成されていることを特徴とする。
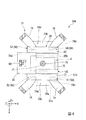
【選択図】図2
Description
この構成によれば、ロボットは、指部でエンドエフェクターを把持した状態において、掌部で操作部を操作する。そのため、ロボットがエンドエフェクターを用いた作業を行いやすい。
この構成によれば、第1部分〜第4部分によって、凹部に挿入された第1可動部の第1方向、第2方向、および第3方向の移動を規制し、ハンドに対するエンドエフェクターの各方向への移動、および各方向と平行な軸周りの回転を抑制することができる。したがって、エンドエフェクターを用いて行われる作業の精度をより向上させることができる。
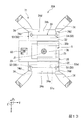
この構成によれば、目印部を検出することで、ハンドをエンドエフェクターに対して精度よく位置決めすることができる。これにより、ハンドによって、複数種類のエンドエフェクターのそれぞれを容易に、かつ、適切に把持することができる。
この構成によれば、第1可動部を4つの凹部にそれぞれ挿入することで、エンドエフェクターの本体部をより安定して把持することができる。
この構成によれば、空気圧を利用して、エンドエフェクターの作動部を駆動することができる。これにより、作動部の力制御を容易に行うことができる。また、ハンド自体に吸着させる機構を設けることなく、基板等の吸着把持を実現することができる。
この構成によれば、より安定してエンドエフェクターを把持することができる。
Claims (9)
- 複数の第1可動部と第2可動部とを有するハンドを含むロボットによって、前記ハンドを用いて把持されるエンドエフェクターであって、
前記第2可動部の第1方向への移動によって操作される操作部と、
前記操作部の操作によって作動する作動部と、
を備え、
前記第1可動部が挿入される凹部が形成されていることを特徴とするエンドエフェクター。 - 前記第1可動部は、指部であり、
前記第2可動部は、掌部である、請求項1に記載のエンドエフェクター。 - 前記凹部の内側面は、
前記第1方向に隙間を介して互いに対向する第1部分および第2部分と、
前記第1方向と直交する第2方向と交差する第3部分と、
前記第1方向と前記第2方向との両方と直交する第3方向と交差する第4部分と、
を含む、請求項1または2に記載のエンドエフェクター。 - 前記ロボットが前記エンドエフェクターを把持する際に、前記ロボットによって検出され、前記ハンドの位置決めに用いられる目印部をさらに備える、請求項1から3のいずれか一項に記載のエンドエフェクター。
- 前記凹部が形成された本体部をさらに備え、
前記凹部は、4つ形成され、
4つの前記凹部は、前記第1方向に沿って視た際に、前記本体部の中心を囲んで配置されている、請求項1から4のいずれか一項に記載のエンドエフェクター。 - 前記操作部は、シリンダーである、請求項1から5のいずれか一項に記載のエンドエフェクター。
- 請求項1から6のいずれか一項に記載のエンドエフェクターを把持するロボットであって、
アームと、
前記アームに設けられたハンドと、
を備え、
前記ハンドは、
前記凹部に挿入される複数の第1可動部と、
前記第1方向に移動し、前記操作部を操作する第2可動部と、
を有することを特徴とするロボット。 - 前記第1可動部は、前記凹部に嵌め合わされる嵌合部を有する、請求項7に記載のロボット。
- 請求項7または8に記載のロボットのロボット制御装置であって、
前記第1可動部を前記凹部に挿入させて前記エンドエフェクターを把持させ、
前記第2可動部を前記第1方向に移動させて前記操作部を操作するように前記ロボットを制御することを特徴とするロボット制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016061381A JP2017170586A (ja) | 2016-03-25 | 2016-03-25 | エンドエフェクター、ロボット、およびロボット制御装置 |
| CN201710160634.7A CN107443404A (zh) | 2016-03-25 | 2017-03-17 | 末端执行器、机器人、以及机器人控制装置 |
| US15/467,337 US10207413B2 (en) | 2016-03-25 | 2017-03-23 | End effector, robot, and robot control apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016061381A JP2017170586A (ja) | 2016-03-25 | 2016-03-25 | エンドエフェクター、ロボット、およびロボット制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017170586A true JP2017170586A (ja) | 2017-09-28 |
| JP2017170586A5 JP2017170586A5 (ja) | 2019-03-14 |
Family
ID=59897037
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016061381A Withdrawn JP2017170586A (ja) | 2016-03-25 | 2016-03-25 | エンドエフェクター、ロボット、およびロボット制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10207413B2 (ja) |
| JP (1) | JP2017170586A (ja) |
| CN (1) | CN107443404A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112018004819T5 (de) | 2017-09-05 | 2020-06-10 | Denso Corporation | Bildverarbeitungsvorrichtung |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6988757B2 (ja) * | 2018-09-26 | 2022-01-05 | オムロン株式会社 | エンドエフェクタおよびエンドエフェクタ装置 |
| US11559900B2 (en) * | 2019-04-05 | 2023-01-24 | Rmi | Systems, devices, components, and methods for a compact robotic gripper with palm-mounted sensing, grasping, and computing devices and components |
| WO2023006208A1 (en) * | 2021-07-29 | 2023-02-02 | Abb Schweiz Ag | Robot gripper and method of using it |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58126087A (ja) * | 1982-01-18 | 1983-07-27 | 株式会社日立製作所 | ロボツト用ハンド |
| JPH02117865U (ja) * | 1989-03-07 | 1990-09-20 | ||
| JPH02145987U (ja) * | 1989-05-15 | 1990-12-11 | ||
| JPH04189489A (ja) * | 1990-11-22 | 1992-07-07 | Mitsubishi Heavy Ind Ltd | 交換用マニピユレーターハンド |
| JPH0489259U (ja) * | 1990-11-30 | 1992-08-04 | ||
| US5146810A (en) * | 1989-06-16 | 1992-09-15 | Mueller Lawrence P | Grip system for hand tools and instruments |
| JPH05169383A (ja) * | 1991-12-24 | 1993-07-09 | Nitta Ind Corp | 自動工具交換用カップラーの脱落防止機構 |
| JP2007516854A (ja) * | 2003-12-30 | 2007-06-28 | ストライダー ラブス,インコーポレイテッド | 伸縮式の手のひらを有するロボットハンド |
| JP2012035391A (ja) * | 2010-08-11 | 2012-02-23 | Kawada Kogyo Kk | 作業ロボット用エンドエフェクタ交換装置およびその一部を具える作業ロボット |
| JP2015085481A (ja) * | 2013-11-01 | 2015-05-07 | セイコーエプソン株式会社 | ロボット、ロボットシステム、ロボット制御部及び把持方法 |
| US20150328784A1 (en) * | 2012-12-18 | 2015-11-19 | Isao AWAUCHI | Hairstyling scissors |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01118882U (ja) | 1988-02-08 | 1989-08-11 | ||
| US4883939A (en) * | 1988-06-21 | 1989-11-28 | Automatic Tool Control And Management Systems, Inc. | Automatic tool changer for workpiece processing machines |
| DE9103497U1 (ja) | 1991-03-21 | 1991-06-20 | Kuka Schweissanlagen + Roboter Gmbh, 8900 Augsburg, De | |
| JP3717218B2 (ja) | 1995-11-29 | 2005-11-16 | 株式会社安川電機 | ロボットハンド |
| JP3739756B2 (ja) | 2003-03-31 | 2006-01-25 | ファナック株式会社 | 配線・配管処理装置 |
| US20060277466A1 (en) * | 2005-05-13 | 2006-12-07 | Anderson Thomas G | Bimodal user interaction with a simulated object |
| JP2008229762A (ja) | 2007-03-19 | 2008-10-02 | Fanuc Ltd | 線条体収容型アームを備えたロボット |
| JP5880110B2 (ja) | 2012-02-16 | 2016-03-08 | セイコーエプソン株式会社 | ロボットハンド、およびロボット |
| US9867612B2 (en) * | 2013-04-16 | 2018-01-16 | Ethicon Llc | Powered surgical stapler |
| CN104339365B (zh) | 2013-07-26 | 2017-04-12 | 株式会社安川电机 | 机器人及机器人的制造方法 |
| JP5928416B2 (ja) | 2013-07-26 | 2016-06-01 | 株式会社安川電機 | ロボットおよびロボットの製造方法 |
| CN104608128A (zh) * | 2013-11-01 | 2015-05-13 | 精工爱普生株式会社 | 机器人、控制装置、机器人系统、以及机器人控制方法 |
| US10046461B2 (en) * | 2014-08-25 | 2018-08-14 | Paul Ekas | Link structure and assembly including cable guide system for robotic mechanical manipulator structure |
| US9554512B2 (en) * | 2014-09-12 | 2017-01-31 | Washington State University | Robotic systems, methods, and end-effectors for harvesting produce |
| US10898186B2 (en) * | 2016-12-21 | 2021-01-26 | Ethicon Llc | Staple forming pocket arrangements comprising primary sidewalls and pocket sidewalls |
-
2016
- 2016-03-25 JP JP2016061381A patent/JP2017170586A/ja not_active Withdrawn
-
2017
- 2017-03-17 CN CN201710160634.7A patent/CN107443404A/zh active Pending
- 2017-03-23 US US15/467,337 patent/US10207413B2/en not_active Expired - Fee Related
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58126087A (ja) * | 1982-01-18 | 1983-07-27 | 株式会社日立製作所 | ロボツト用ハンド |
| JPH02117865U (ja) * | 1989-03-07 | 1990-09-20 | ||
| JPH02145987U (ja) * | 1989-05-15 | 1990-12-11 | ||
| US5146810A (en) * | 1989-06-16 | 1992-09-15 | Mueller Lawrence P | Grip system for hand tools and instruments |
| JPH04189489A (ja) * | 1990-11-22 | 1992-07-07 | Mitsubishi Heavy Ind Ltd | 交換用マニピユレーターハンド |
| JPH0489259U (ja) * | 1990-11-30 | 1992-08-04 | ||
| JPH05169383A (ja) * | 1991-12-24 | 1993-07-09 | Nitta Ind Corp | 自動工具交換用カップラーの脱落防止機構 |
| JP2007516854A (ja) * | 2003-12-30 | 2007-06-28 | ストライダー ラブス,インコーポレイテッド | 伸縮式の手のひらを有するロボットハンド |
| JP2012035391A (ja) * | 2010-08-11 | 2012-02-23 | Kawada Kogyo Kk | 作業ロボット用エンドエフェクタ交換装置およびその一部を具える作業ロボット |
| US20150328784A1 (en) * | 2012-12-18 | 2015-11-19 | Isao AWAUCHI | Hairstyling scissors |
| JP2015085481A (ja) * | 2013-11-01 | 2015-05-07 | セイコーエプソン株式会社 | ロボット、ロボットシステム、ロボット制御部及び把持方法 |
Non-Patent Citations (2)
| Title |
|---|
| 深谷 直樹: "人体構造を模倣した人間型ロボット用構造要素", 東京都立産業技術研究センター研究成果発表会要旨集, JPN6020000631, 20 June 2013 (2013-06-20), JP, ISSN: 0004192156 * |
| 襟立 真奈,小枝 正直,杉山 正治,吉川 恒夫: "3本指ロボットハンドのための画像を用いた工具形状判別と把持位置決定手法", 日本ロボット学会学術講演会予稿集, JPN6020000630, 15 September 2009 (2009-09-15), JP, ISSN: 0004192155 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112018004819T5 (de) | 2017-09-05 | 2020-06-10 | Denso Corporation | Bildverarbeitungsvorrichtung |
Also Published As
| Publication number | Publication date |
|---|---|
| US10207413B2 (en) | 2019-02-19 |
| CN107443404A (zh) | 2017-12-08 |
| US20170274539A1 (en) | 2017-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9409291B2 (en) | Robot system, method for inspection, and method for producing inspection object | |
| US20170312921A1 (en) | Robot and robot system | |
| JP2017170586A (ja) | エンドエフェクター、ロボット、およびロボット制御装置 | |
| WO2018043525A1 (ja) | ロボットシステム、ロボットシステム制御装置、およびロボットシステム制御方法 | |
| US9561594B2 (en) | Robot, robot system, and robot control apparatus | |
| JP2009269110A (ja) | 組立装置 | |
| JPWO2017085897A1 (ja) | 製造システム、製造システムの構築方法、エンドエフェクタ、ロボット、及びロボットの作業方法 | |
| JP2019504776A (ja) | ロボット用エフェクタユニット、ロボットを有するワーキングデバイス、およびロボットのエフェクタを交換する方法 | |
| CN108972538B (zh) | 机器人控制装置、机器人及机器人系统 | |
| JP2015085455A (ja) | ロボット、ロボットシステム、ロボット制御装置 | |
| US20220288793A1 (en) | Robot hand, robot, robot system, and transfer method | |
| JP2015226965A (ja) | ロボット、ロボットシステム、制御装置、及び制御方法 | |
| US20170203434A1 (en) | Robot and robot system | |
| CN110520255B (zh) | 机械手装置和电子设备的制造方法 | |
| JP5917380B2 (ja) | 多関節型ロボットによるワーク位置決め方法およびそのワーク位置決め方法を用いた多関節型ロボットによるワーク装着方法 | |
| JP2011104759A (ja) | ロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システム | |
| JP6665450B2 (ja) | ロボット、制御装置、及びロボットシステム | |
| JP2006159399A (ja) | 作業用移動ロボット | |
| CN111618845B (zh) | 机器人系统 | |
| WO2020105295A1 (ja) | 画像情報処理装置、把持システム、および画像情報処理方法 | |
| JP2014188642A (ja) | ロボットおよびロボット制御方法 | |
| JP2016203282A (ja) | エンドエフェクタの姿勢変更機構を備えたロボット | |
| JP5544957B2 (ja) | カメラ脱着ロボット装置、ワーク把持システム、およびワーク把持方法 | |
| JP2016101632A (ja) | ロボット装置、ロボット制御装置、ロボット制御方法及びロボット手先効果器 | |
| JP2023532340A (ja) | ロボットシステム用自動教示装置およびそのための方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180907 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191218 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200121 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20200323 |