EP2037794B1 - Minimally invasive surgical system - Google Patents
Minimally invasive surgical system Download PDFInfo
- Publication number
- EP2037794B1 EP2037794B1 EP07798487.0A EP07798487A EP2037794B1 EP 2037794 B1 EP2037794 B1 EP 2037794B1 EP 07798487 A EP07798487 A EP 07798487A EP 2037794 B1 EP2037794 B1 EP 2037794B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- guide tube
- instrument
- surgical
- surgical instrument
- distal end
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 246
- 238000003384 imaging method Methods 0.000 claims description 176
- 230000005540 biological transmission Effects 0.000 claims description 57
- 239000000835 fiber Substances 0.000 claims description 13
- 239000012636 effector Substances 0.000 description 165
- 230000033001 locomotion Effects 0.000 description 133
- 210000000707 wrist Anatomy 0.000 description 64
- 210000001519 tissue Anatomy 0.000 description 51
- 210000001503 joint Anatomy 0.000 description 46
- 238000003780 insertion Methods 0.000 description 45
- 230000037431 insertion Effects 0.000 description 45
- 239000011295 pitch Substances 0.000 description 37
- 230000000712 assembly Effects 0.000 description 36
- 238000000429 assembly Methods 0.000 description 36
- 239000000523 sample Substances 0.000 description 31
- 230000006870 function Effects 0.000 description 24
- 238000001356 surgical procedure Methods 0.000 description 19
- 238000005286 illumination Methods 0.000 description 18
- 238000005452 bending Methods 0.000 description 16
- 238000000034 method Methods 0.000 description 13
- 238000005457 optimization Methods 0.000 description 11
- 238000005096 rolling process Methods 0.000 description 11
- 241001631457 Cannula Species 0.000 description 10
- 210000000245 forearm Anatomy 0.000 description 10
- 230000002262 irrigation Effects 0.000 description 10
- 238000003973 irrigation Methods 0.000 description 10
- 150000001875 compounds Chemical class 0.000 description 9
- 239000013307 optical fiber Substances 0.000 description 8
- 230000008901 benefit Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 6
- 239000012809 cooling fluid Substances 0.000 description 6
- 230000008878 coupling Effects 0.000 description 6
- 238000010168 coupling process Methods 0.000 description 6
- 238000005859 coupling reaction Methods 0.000 description 6
- 238000013461 design Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 125000006850 spacer group Chemical group 0.000 description 6
- 238000012546 transfer Methods 0.000 description 6
- 210000003484 anatomy Anatomy 0.000 description 5
- 238000001816 cooling Methods 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 5
- 238000002604 ultrasonography Methods 0.000 description 5
- 230000009471 action Effects 0.000 description 4
- 239000012530 fluid Substances 0.000 description 4
- 210000003128 head Anatomy 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 210000001113 umbilicus Anatomy 0.000 description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 4
- 238000004140 cleaning Methods 0.000 description 3
- 230000002950 deficient Effects 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 238000002324 minimally invasive surgery Methods 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 229920003023 plastic Polymers 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 210000000323 shoulder joint Anatomy 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 206010023230 Joint stiffness Diseases 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 2
- 206010052428 Wound Diseases 0.000 description 2
- 208000027418 Wounds and injury Diseases 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 210000005013 brain tissue Anatomy 0.000 description 2
- 210000002310 elbow joint Anatomy 0.000 description 2
- 210000003238 esophagus Anatomy 0.000 description 2
- 230000005057 finger movement Effects 0.000 description 2
- 238000002594 fluoroscopy Methods 0.000 description 2
- 230000002496 gastric effect Effects 0.000 description 2
- 208000014674 injury Diseases 0.000 description 2
- 238000005304 joining Methods 0.000 description 2
- 238000002595 magnetic resonance imaging Methods 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 230000014616 translation Effects 0.000 description 2
- 230000008733 trauma Effects 0.000 description 2
- 210000003857 wrist joint Anatomy 0.000 description 2
- 239000004698 Polyethylene Substances 0.000 description 1
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 1
- 208000002847 Surgical Wound Diseases 0.000 description 1
- 210000001015 abdomen Anatomy 0.000 description 1
- 210000000683 abdominal cavity Anatomy 0.000 description 1
- 238000012084 abdominal surgery Methods 0.000 description 1
- 210000003815 abdominal wall Anatomy 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 210000000436 anus Anatomy 0.000 description 1
- MPHPHYZQRGLTBO-UHFFFAOYSA-N apazone Chemical compound CC1=CC=C2N=C(N(C)C)N3C(=O)C(CCC)C(=O)N3C2=C1 MPHPHYZQRGLTBO-UHFFFAOYSA-N 0.000 description 1
- 238000001574 biopsy Methods 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 239000010839 body fluid Substances 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000112 colonic effect Effects 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 239000002274 desiccant Substances 0.000 description 1
- 210000003717 douglas' pouch Anatomy 0.000 description 1
- 210000000613 ear canal Anatomy 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009760 electrical discharge machining Methods 0.000 description 1
- 229920001746 electroactive polymer Polymers 0.000 description 1
- 238000002674 endoscopic surgery Methods 0.000 description 1
- 238000001839 endoscopy Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000003000 extruded plastic Substances 0.000 description 1
- 210000004704 glottis Anatomy 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 238000000338 in vitro Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 238000002357 laparoscopic surgery Methods 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000005058 metal casting Methods 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 239000002985 plastic film Substances 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
- 238000002432 robotic surgery Methods 0.000 description 1
- 230000001953 sensory effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 210000000115 thoracic cavity Anatomy 0.000 description 1
- 230000000451 tissue damage Effects 0.000 description 1
- 231100000827 tissue damage Toxicity 0.000 description 1
- 238000013334 tissue model Methods 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 210000003708 urethra Anatomy 0.000 description 1
- 210000001215 vagina Anatomy 0.000 description 1
Images



























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00087—Tools
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00149—Holding or positioning arrangements using articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00154—Holding or positioning arrangements using guiding arrangements for insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/0016—Holding or positioning arrangements using motor drive units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00165—Optical arrangements with light-conductive means, e.g. fibre optics
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00193—Optical arrangements adapted for stereoscopic vision
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/002—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor having rod-lens arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0055—Constructional details of insertion parts, e.g. vertebral elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/32—Surgical robots operating autonomously
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/72—Micromanipulators
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0084—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters
- A61B5/0086—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters using infrared radiation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/40—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to mechanical, radiation or invasive therapies, e.g. surgery, laser therapy, dialysis or acupuncture
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/67—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for remote operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00225—Systems for controlling multiple different instruments, e.g. microsurgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00305—Constructional details of the flexible means
- A61B2017/00314—Separate linked members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00323—Cables or rods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/0034—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means adapted to be inserted through a working channel of an endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
- A61B2017/3445—Cannulas used as instrument channel for multiple instruments
- A61B2017/3447—Linked multiple cannulas
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
- A61B2034/306—Wrists with multiple vertebrae
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/062—Measuring instruments not otherwise provided for penetration depth
Definitions
- aspects of the invention are associated with systems used for minimally invasive surgery, and more particularly to telemanipulative systems used for such surgery.
- Minimally invasive surgery is known under various names (e.g., endoscopy, laparoscopy, arthroscopy, endovascular, keyhole, etc.), often specific to the anatomical area in which work is done.
- Such surgery includes the use of both hand-held and teleoperated/telemanipulated/telepresence (robot assisted/telerobotics) equipment, such as the da Vinci® Surgical System made by Intuitive Surgical, Inc. of Sunnyvale, California. Both diagnostic (e.g., biopsy) and therapeutic procedures are done. Instruments may be inserted into a patient percutaneously via surgical incision or via natural orifice.
- a new, experimental minimally invasive surgery variation is Natural Orifice Transluminal Endoscopic Surgery (NOTES), in which instruments enter via a natural orifice (e.g., mouth, nostril, ear canal, anus, vagina, urethra) and continue to a surgical site via a transluminal incision (e.g., in a gastric or colonic wall) within the body.
- NOTES Natural Orifice Transluminal Endoscopic Surgery
- a natural orifice e.g., mouth, nostril, ear canal, anus, vagina, urethra
- a transluminal incision e.g., in a gastric or colonic wall
- teleoperative surgery using the da Vinci® Surgical System provides great benefits over, for instance, many hand-held procedures, for some patients and for some anatomical areas the da Vinci® Surgical System is unable to effectively access a surgical site.
- further reducing the size and number of incisions aids patient recovery and helps reduce patient trauma and discomfort.
- the number of degrees of freedom (DOFs) is the number of independent variables that uniquely identify the pose/configuration of a system. Since robotic manipulators are kinematic chains that map the (input) joint space into the (output) Cartesian space, the notion of DOF can be expressed in any of these two spaces.
- the set of joint DOFs is the set of joint variables for all the independently controlled joints.
- joints are mechanisms that provide a single translational (prismatic joints) or rotational (revolute joints) DOF. Any mechanism that provides more than one DOF motion is considered, from a kinematic modeling perspective, as two or more separate joints.
- the set of Cartesian DOFs is usually represented by the three translational (position) variables (e.g., surge, heave, sway) and by the three rotational (orientation) variables (e.g. Euler angles or roll/pitch/yaw angles) that describe the position and orientation of an end effector (or tip) frame with respect to a given reference Cartesian frame.
- position e.g., surge, heave, sway
- orientation e.g. Euler angles or roll/pitch/yaw angles
- a planar mechanism with an end effector mounted on two independent and perpendicular rails has the capability of controlling the x/y position within the area spanned by the two rails (prismatic DOFs). If the end effector can be rotated around an axis perpendicular to the plane of the rails, then there are then three input DOFs (the two rail positions and the yaw angle) that correspond to three output DOFs (the x/y position and the orientation angle of the end effector).
- the number of Cartesian DOFs is at most six, a condition in which all the translational and orientational variables are independently controlled, the number of joint DOFs is generally the result of design choices that involve considerations of the complexity of the mechanism and the task specifications. Accordingly, the number of joint DOFs can be more than, equal to, or less than six. For non-redundant kinematic chains, the number of independently controlled joints is equal to the degree of mobility for the end effector frame.
- the end effector frame will have an equal number of DOFs (except when in singular configurations) in Cartesian space that will correspond to a combination of translational (x/y/z position) and rotational (roll/pitch/yaw orientation angle) motions.
- additional degrees of freedom can be used to control not just the end effector position and orientation but also the "shape" of the manipulator itself
- mechanisms may have other DOFs, such as the pivoting lever movement of gripping jaws or scissors blades.
- a single DOF change in joint space may result in a motion that combines changes in the Cartesian translational and orientational variables of the frame attached to the distal tip of one of the links (the frame at the distal tip both rotates and translates through space).
- Kinematics describes the process of converting from one measurement space to another. For example, using joint space measurements to determine the Cartesian space position and orientation of a reference frame at the tip of a kinematic chain is "forward" kinematics.
- Cartesian space position and orientation for the reference frame at the tip of a kinematic chain to determine the required joint positions is "inverse" kinematics. If there are any revolute joints, kinematics involves non-linear (trigonometric) functions.
- US 2005/065397 discloses systems, devices and methods for endoscopic procedures involving tissue manipulations.
- the systems include an elongated main body having a scope therethrough and at least one steerable tool arm which extends from the distal end of the main body.
- the system also includes two tool arms, each arm steerable to form a curve laterally outward which then bends laterally inward so that the arms form an angular shape.
- end effectors extend from the distal ends of each tool arm for use in manipulation of tissue.
- the angular shape brings the end effectors together in view of the scope for cooperative movements which are continuously visible by the surgeon;
- the tool arms may be steerable in any additional direction and may be rotateable to allow grasping, elevation and more complex manipulation of tissue.
- US 2001/021843 discloses a medical instrument for insertion into an examination subject, as well as a medical examination device or treatment device employing such an instrument, the instrument has an elongated instrument body formed by a number of successively arranged rigid sections, with respective, successive sections being connected to one another via articulated joints which can be angled relative to one another. At least one optical fiber supplied with light is conducted along the instrument body, and at least one fiber Bragg grating is fashioned in the optical fiber in a region adjacent to a joint which is deformed to a degree corresponding to angling of the adjacent sections to the joint, thereby modulating the light in the optical fiber.
- US 2002/0087166 discloses a remote control flexible instrument system, employing a shaft which supports a tool, in which the shaft has proximal and distal ends with at least a portion thereof extending through a lumen of the human body so as to locate the shaft at an internal target site.
- a master station including an input device provides control of the instrument situated at a slave station. The master station can control at least one degree-of-freedom of the flexible instrument.
- a controller intercouples the master and slave stations and is operated in accordance with a computer algorithm that receives a command from the input device for controlling at least one degree-of-freedom of the catheter so as to respond in accordance with action at the input device.
- the flexible instrument further comprises a controlled flexible segment along the shaft, for controlled bending at the flexible segment to guide the shaft and to dispose the tool at an operative site. Further relevant prior art is disclosed in WO 2005/087128 A1 .
- An object of aspects of the invention is to provide a surgical system as set out in the appended claims. Also disclosed are multiple telemanipulated surgical instruments, each surgical instrument working independently of the other and each having an end effector with at least six actively controlled degrees of freedom in Cartesian space (i.e., surge, heave, sway, roll, pitch, yaw), via a single entry port in a patient.
- Cartesian space i.e., surge, heave, sway, roll, pitch, yaw
- Cartesian space i.e., surge, heave, sway, roll, pitch, yaw
- a surgical system comprising: a robotic manipulator arm comprising a distal end, wherein the manipulator arm provides multiple degrees of freedom; a platform rotatably mounted at the distal end of the robotic manipulator arm; an actuator assembly mounted on the platform, the actuator assembly comprising a group of telemanipulation actuators, the group of telemanipulation actuators comprising one or more motors; a telemanipulation actuator coupled to the actuator assembly and the platform to move the actuator assembly relative to the platform in one of six Cartesian degrees of freedom, the telemanipulation actuator being different from the group of telemanipulation actuators, the telemanipulation actuator and the group of telemanipulation actuators comprising a plurality of telemanipulation actuators; a guide tube comprising a first channel and a distal end; and a surgical instrument comprising a transmission mechanism and a distal portion, part of the surgical instrument being inserted through the first channel of the guide tube so
- spatially relative terms such as “beneath”, “below”, “lower”, “above”, “upper”, “proximal”, “distal”, and the like—may be used to describe one element's or feature's relationship to another element or feature as illustrated in the figures.
- These spatially relative terms are intended to encompass different positions and orientations of the device in use or operation in addition to the position and orientation shown in the figures. For example, if the device in the figures is turned over, elements described as “below” or “beneath” other elements or features would then be “above” or “over” the other elements or features.
- the exemplary term “below” can encompass both positions and orientations of above and below.
- the device may be otherwise oriented (rotated 90 degrees or at other orientations), and the spatially relative descriptors used herein interpreted accordingly. Likewise, descriptions of movement along and around various axes includes various special device positions and orientations. Components described as coupled may be electrically or mechanically directly coupled, or they may be indirectly coupled via one or more intermediate components.
- Telemanipulation and like terms generally refer to an operator manipulating a master device (e.g., an input kinematic chain) in a relatively natural way (e.g., a natural hand or finger movement), whereupon the master device movements are made into commands that are processed and transmitted in real time to a slave device (e.g., an output kinematic chain) that reacts nearly instantaneously to the commands and to environmental forces.
- a master device e.g., an input kinematic chain
- a relatively natural way e.g., a natural hand or finger movement
- a slave device e.g., an output kinematic chain
- An end effector is the part of the minimally invasive surgical instrument or assembly that performs a specific surgical function (e.g., forceps/graspers, needle drivers, scissors, electrocautery hooks, staplers, clip appliers/removers, etc.).
- Many end effectors have a single DOF (e.g., graspers that open and close).
- the end effector may be coupled to the surgical instrument body with a mechanism that provides one or more additional DOFs, such as "wrist" type mechanisms. Examples of such mechanisms are shown in U.S. Patent No. 6,371,952 (Madhani et al.
- imaging system and the like as used herein should be broadly construed to include both image capture components and combinations of image capture components with associated circuitry and hardware, within the context of the aspects and embodiments being described.
- Such endoscopic imaging systems include systems with distally positioned image sensing chips and associated circuits that relay captured image data via a wired or wireless connection to outside the body.
- Such endoscopic imaging systems also include systems that relay images for capture outside the body (e.g., by using rod lenses or fiber optics).
- a direct view optical system the endoscopic image is viewed directly at an eyepiece
- An example of a distally positioned semiconductor stereoscopic imaging system is described in U.S. Patent Application No. 11/614,661 , published as US 2008-0151041 A1, "Stereoscopic Endoscope" (Shafer et al. ).
- Illumination for endoscopic imaging is typically represented in the drawings by a single illumination port. It should be understood that these depictions are exemplary. The sizes, positions, and numbers of illumination ports may vary. Illumination ports are typically arranged on multiple sides of the imaging apertures, or completely surrounding the imaging apertures, to minimize deep shadows.
- cannulas are typically used to prevent a surgical instrument or guide tube from rubbing on patient tissue. Cannulas may be used for both incisions and natural orifices. For situations in which an instrument or guide tube does not frequently translate or rotate relative to its insertion (longitudinal) axis, a cannula may not be used. For situations that require insufflation, the cannula may include a seal to prevent excess insufflation gas leakage past the instrument or guide tube. For example, for thoracic surgery that does not require insufflation, the cannula seal may be omitted, and if instruments or guide tube insertion axis movement is minimal, then the cannula itself may be omitted.
- a rigid guide tube may function as a cannula in some configurations for instruments that are inserted relative to the guide tube.
- Cannulas and guide tubes may be, e.g., steel or extruded plastic.
- Plastic which is less expensive than steel, may be suitable for one-time use.
- a segment or an instrument or guide tube may be a continuously curving flexible structure, such as one based on a helical wound coil or on tubes with various segments removed (e.g., kerf-type cuts).
- the flexible part may be made of a series of short, pivotally connected segments (“vertebrae") that provide a snake-like approximation of a continuously curving structure.
- Instrument and guide tube structures may include those in U.S. Patent Application Pub. No. US 2004/0138700 (Cooper et al. ).
- the figures and associated descriptions generally show only two segments of instruments and guide tubes, termed proximal (closer to the transmission mechanism; farther from the surgical site) and distal (farther from the transmission mechanism; closer to the surgical site).
- the instruments and guide tubes may be divided into three or more segments, each segment being rigid, passively flexible, or actively flexible. Flexing and bending as described for a distal segment, a proximal segment, or an entire mechanism also apply to intermediate segments that have been omitted for clarity. For instance, an intermediate segment between proximal and distal segments may bend in a simple or compound curve. Flexible segments may be various lengths.
- Segments with a smaller outside diameter may have a smaller minimum radius of curvature while bending than segments with a larger outside diameter.
- unacceptably high cable friction or binding limits minimum radius of curvature and the total bend angle while bending.
- the guide tube's (or any joint's) minimum bend radius is such that it does not kink or otherwise inhibit the smooth motion of the inner surgical instrument's mechanism.
- Flexible components may be, for example, up to approximately 1.2 metres (four feet) in length and approximately 15.2 mm (0.6 inches) in diameter. Other lengths and diameters (e.g., shorter, smaller) and the degree of flexibility for a specific mechanism may be determined by the target anatomy for which the mechanism has been designed.
- a distal segment of an instrument or guide tube is flexible, and the proximal segment is rigid. In other instances, the entire segment of the instrument or guide tube that is inside the patient is flexible. In still other instances, an extreme distal segment may be rigid, and one or more other proximal segments are flexible.
- the flexible segments may be passive or they may be actively controllable (“steerable”). Such active control may be done using, for example, sets of opposing cables (e.g., one set controlling "pitch” and an orthogonal set controlling "yaw”; three cables can be used to perform similar action).
- control elements such as small electric or magnetic actuators, shape memory alloys, electroactive polymers ("artificial muscle”), pneumatic or hydraulic bellows or pistons, and the like may be used.
- a segment of an instrument or guide tube is fully or partially inside another guide tube
- various combinations of passive and active flexibility may exist.
- an actively flexible instrument inside a passively flexible guide tube may exert sufficient lateral force to flex the surrounding guide tube.
- an actively flexible guide tube may flex a passively flexible instrument inside it.
- Actively flexible segments of guide tubes and instruments may work in concert.
- control cables placed farther from the center longitudinal axis may provide a mechanical advantage over cables placed nearer to the center longitudinal axis, depending on compliance considerations in the various designs.
- the flexible segment's compliance may vary from being almost completely flaccid (small internal frictions exist) to being substantially rigid.
- the compliance is controllable.
- a segment or all of a flexible segment of an instrument or guide tube can be made substantially (i.e., effectively but not infinitely) rigid (the segment is "rigidizable” or “lockable”).
- the lockable segment may be locked in a straight, simple curve or in a compound curve shape. Locking may be accomplished by applying tension to one or more cables that run longitudinally along the instrument or guide tube that is sufficient to cause friction to prevent adjacent vertebrae from moving.
- the cable or cables may run through a large, central hole in each vertebra or may run through smaller holes near the vertebra's outer circumference.
- the drive element of one or more motors that move one or more control cables may be soft-locked in position (e.g., by servocontrol) to hold the cables in position and thereby prevent instrument or guide tube movement, thus locking the vertebrae in place. Keeping a motor drive element in place may be done to effectively keep other movable instrument and guide tube components in place as well.
- stiffness under servocontrol although effective, is generally less than the stiffness that may be obtained with braking placed directly on joints, such as the braking used to keep passive setup joints in place. Cable stiffness generally dominates because it is generally less than servosystem or braked joint stiffness.
- the compliance of the flexible segment may be continuously varied between flaccid and rigid states. For example, locking cable tension can be increased to increase stiffness but without locking the flexible segment in a rigid state. Such intermediate compliance may allow for telesurgical operation while reducing tissue trauma that may occur due to movements caused by reactive forces from the surgical site.
- Suitable bend sensors incorporated into the flexible segment allow the telesurgical system to determine instrument and/or guide tube position as it bends.
- U.S. Patent Application Pub. No. US 2006/0013523 discloses a fiber optic position shape sensing device and method.
- U.S. Patent Application No. 11/491,384 (Larkin et al. ), published as US 2007-0156019 A1 , discloses fiber optic bend sensors (e.g., fiber Bragg gratings) used in the control of such segments and flexible devices.
- a surgeon's inputs to control aspects of the minimally invasive surgical instrument assemblies, instruments, and end effectors as described herein are generally done using an intuitive, camera referenced control interface.
- the da Vinci® Surgical System includes a Surgeon's console with such a control interface, which may be modified to control aspects described herein.
- the surgeon manipulates one or more master manual input mechanisms having, e.g., 6 DOFs to control the slave instrument assembly and instrument.
- the input mechanisms include a finger-operated grasper to control one or more end effector DOFs (e.g., closing grasping jaws).
- Intuitive control is provided by orienting the relative positions of the end effectors and the endoscopic imaging system with the positions of the surgeon's input mechanisms and image output display.
- Figure 1 is a diagrammatic view of a minimally invasive surgical instrument 1 and its motion.
- surgical instrument 1 is a straight, rigid instrument that is inserted via a small incision 2 into a body cavity (e.g., the abdominal cavity) or lumen 3.
- Incision 2 is made in a relatively thin body wall tissue structure 4, such as the abdominal wall.
- a surgeon moves instrument 1 either by hand (e.g., by operating a conventional laparoscopic instrument) or by robotic teleoperation (e.g., using Intuitive Surgical, Inc.'s da Vinci® Surgical System). Since instrument 1 is straight, its movement is partially constrained by incision 2.
- Instrument 1 may be translated in the direction of its longitudinal axis (inserted or withdrawn) and may be rotated around its longitudinal axis. Instrument 1 also pivots at a center point 5, which is approximately at incision 2, to sweep an end effector 7 through a volume 6. An optional wrist mechanism (not shown) at the distal end of instrument 1 may be used to control end effector 7's orientation. In some situations, however, an intermediate tissue structure (e.g., an organ or vessel, a thick tissue wall 4, a curving body lumen wall, etc.) prevents instrument 1 from pivoting around its center point 5 at incision 2 in some or all directions, which prevents a surgeon from reaching a desired surgical site.
- an intermediate tissue structure e.g., an organ or vessel, a thick tissue wall 4, a curving body lumen wall, etc.
- a minimally invasive surgical instrument is designed to bend between the position at which it enters the patient and the surgical site, then the intermediate tissue structure does not constrain positioning of the instrument's end effector.
- Such bending may be done in two ways. First, two or more long, rigid body segments are each coupled together by a joint. Second, a flexible mechanism as described above is used. The position of the rigid body segment(s) and the flexible mechanism are actively controlled to position and orient the end effector at the instrument's distal end.
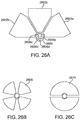
- Figure 2A is a diagrammatic view of another minimally invasive surgical instrument 10 and its motion in accordance with aspects of the invention.
- instrument 10 includes an illustrative proximal instrument body segment 10a and an illustrative distal instrument body segment 10b.
- proximal and distal body segments 10a,10b are straight and rigid.
- one or both body segments 10a,10b could be curved for a particular path or task.
- the two body segments 10a,10b are coupled at a joint 11 that allows distal body segment 10b to move.
- joint 11 allows segment 10b to move with a single DOF with reference to segment 10a, and in other aspects joint 11 allows segment 10b to move with two DOFs with reference to segment 10asegment.
- Instrument 10 can be translated along its longitudinal (insertion) axis.
- proximal segment 10 can be rolled around its longitudinal axis.
- end effector 7 positioned at the distal end of distal body segment 10b can be positioned within a volume 12.
- joint 11 provides a single DOF, and so end effector 7 sweeps along a planar curve that rotates as proximal segment 10a rotates around its longitudinal axis.
- joint 11 provides two DOFs, and so end effector 7 sweeps along a curved surface.
- volume 12 depends on the amount of instrument 10's insertion.
- Volume 12 is shown as an illustrative cylinder with concave/convex ends. Other volume shapes are possible, depending on the segments and joint motions at instrument 10's distal end.
- distal segment 10b may be displaced by an angle ⁇ from segment 10a's longitudinal axis that is larger than 90 degrees (this bending back on itself is termed "retroflexive").
- An optional wrist mechanism (not shown) may be used to change end effector 7's orientation.
- instrument 10 is not constrained by a pivot point at a body wall because joint 11 is located deep within the patient. Therefore, instrument 10 can be inserted into a patient past intermediate tissue structures 13 that would otherwise constrain instrument 1's motion (e.g., the esophagus, if gastric surgery is to be performed) or that cannot be disturbed (e.g., brain tissues if neurosurgery is to be performed). Accordingly, aspects of surgical instrument 10 allow a surgeon to reach tissue that cannot be reached or operated upon by using instrument 1. Removing the constraint that the surgical instrument segments be straight and rigid allows even more surgical access to tissue structures.
- FIG. 2B is a diagrammatic view of another minimally invasive surgical instrument 15 and its motion in accordance with aspects of the invention.
- surgical instrument 15 has a proximal instrument body segment 15a and a distal instrument body segment 15b.
- distal body segment 15b is flexible as described above.
- flexible distal segment 15b is coupled to straight (or, alternatively, curved), rigid proximal segment 15a at an intermediate position 15c.
- both proximal instrument body segment 15a and distal instrument body segment 15b are flexible, and intermediate instrument body position 15c is illustrative of the position at which the two segments are jointed.
- Instrument body segment 15b is shown with an illustrative simple curve. In other aspects as discussed below body segment 15b may be a compound curve in either two or three dimensions.
- instrument 15 positions end effector 7 at various positions in illustrative volume 16.
- Instrument body segment 15a remains constrained by intermediate tissue structures 13 and instrument body segment 15b flexes.
- Distal segment 15b's length and bend radius determines if instrument 15 can operate retroflexively. It can be seen that compound bending of instrument body segment 15b will allow a surgeon to maneuver around another intermediate tissue structure 13a within volume 16. (A similar action may be performed if instrument 10 ( Figure 2A ) has two or more distal segments.)
- An optional wrist mechanism (not shown) is used to control end effector 7's orientation.
- end effector 7 can be rolled by rolling instrument 15 (either with or without a wrist mechanism).
- the surgical instruments 10 and 15 illustrated in Figures 2A and 2B are not limited to single instruments.
- the architectures illustrated by instruments 10 and 15 may be applied to assemblies that combine one or more of various guide tubes, surgical instruments, and guide probes such as those described below.
- one or more imaging systems may be added to such instruments and instrument assemblies.
- the aspects described below in association with the figures are illustrative of aspects generally described in Figures 2A and 2B . Therefore, aspects of the invention provide multiple telemanipulated surgical instruments, each surgical instrument working independently of the other and each having an end effector with at least six actively controlled DOFs in Cartesian space (i.e., surge, heave, sway, roll, pitch, yaw), via a single entry port in a patient.
- DOFs in Cartesian space
- aspects of the invention provide multiple telemanipulated surgical instruments, each surgical instrument working independently of the other and each having an end effector with at least six actively controlled DOFs in Cartesian space (i.e., surge, heave, sway, roll, pitch, yaw), via a single entry port in a patient and past intermediate tissue that restricts lateral movement of a rigid instrument body.
- the end effectors' six DOFs in Cartesian space are in addition to DOFs provided by, e.g., moving a guide tube through which the instruments extend to reach a surgical site.
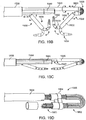
- FIG 3 is a schematic view of a minimally invasive surgical instrument 300.
- Surgical instrument 300 is typically inserted into a patient's body via a cannula 302 or via a natural orifice or incision.
- An end effector 304 is mounted at the end of instrument 300.
- instrument 300's body is passively flexible along its entire length in a manner similar to existing flexible minimally invasive surgical instruments.
- a cable axially runs through a helical wound wire coil and outer sheath that protects the cable, and the cable translates within the coil to operate the end effector (e.g., a "Bowden" cable).
- a series of small, annular vertebra segments may be used to make instrument 300 flexible.
- instrument 300's body may be separated into a proximal segment 306 and a distal segment 308.
- Each instrument body segment 306,308 may be rigid, passively flexible, or actively flexible. Flexible segments may be made rigid ("rigidizable” or “lockable") in various straight or curved positions. As shown in Figure 3 , for example, proximal segment 306 may be inherently or lockably rigid, and distal segment 308 may be passively or actively flexible. In other instances, both proximal and distal segments 306,308 (essentially the entire segment of instrument 302 that is inside the patient's body) may be passively or actively flexible and rigidizable in various combinations.
- the surgical instrument 300 shown in Figure 3 provides various degrees of freedom for end effector 304.
- a combination of instrument 300 insertion and distal segment 308 bending is specified.
- a combination of instrument 300 roll and distal segment 308 bending is specified. Accordingly, if distal segment 308 can only be placed in a simple curve (as illustrated by alternate position 310), then 4 DOFs are available.
- end effector 304 position is specified, then end effector 304 pitch and yaw is a function of the position.
- end effector 304 orientation is specified, then the heave and sway position is a function of the orientation.
- a distal wrist mechanism is added to control end effector 304's orientation so that both position and orientation may be specified. If distal segment 308 can be placed in a compound curve (as illustrated by alternate position 312), then 6 DOFs are available, and end effector 304's position and orientation may be specified. Even though end effector 304's position and orientation may be independently specified in such a 6 DOF instrument, a distal wrist mechanism may be added to provide enhanced control over end effector 304's orientation.
- This enhanced control allows, e.g., a pitch and yaw displacement that is larger than provided by the various poses that distal segment 308 can assume, pitch and yaw displacement while distal segment 308 remains in a particular pose, and pitch and yaw displacement in surgical situations where tissue constrains the shape of distal segment 308's pose.
- Figure 4 is a schematic view that illustrates aspects of a minimally invasive surgical instrument assembly 400.
- Instrument assembly 400 includes a surgical instrument 402, which may be similar to surgical instrument 300 as described with reference to Figure 3 , and a guide tube 404.
- Guide tube 404 has at least one longitudinal channel 406, which may be fully or partially enclosed, that runs from proximal end 408 to distal end 410.
- Surgical instrument 402 runs through channel 406 and may be, for example, snap-fitted into a non-rotating socket to maintain position within guide tube 404.
- Guide tube 404 may have other channels (not shown) through which, e.g., irrigation or suction may be provided to a surgical site, in addition to channels associated with active control mechanisms (e.g., cables for steering or locking).
- End effector 412 is coupled to the distal end of surgical instrument 402.
- Instrument assembly 400 is inserted into a patient via cannula 414 or via natural orifice or incision.
- a cannula-type guide may be used to assist insertion via natural orifice.
- Cannula 414 and such cannula-type guides may be straight or curved to facilitate insertion (e.g., for laryngeal surgery).
- Surgical instrument assembly 400's cross section may be circular or other shape (e.g., elliptical, rounded polygon).
- Various combinations of surgical instrument 402 and guide tube 404 may be rigid, passively flexible, and actively flexible, as well as variably compliant and/or lockable, as described above.
- an optional endoscopic imaging system (not shown) may be at the distal end of guide tube 404.
- surgical instrument assembly 400 may be similarly flexed to move end effector 412 to various positions and orientations.
- Distal end segment 416, or the entire length of instrument assembly 400 may be actively flexed to heave and/or sway end effector 412. Combinations of bending and rolling may also be used to displace end effector 412. Compound bends may prevent end effector 412 from pitching and/or yawing during lateral translations as described above. Alternate positions 418 and 420 illustrate these active flexings.
- distal segment 416 of guide tube 404 provides small, wrist-like pitch and yaw orientation for end effector 412.
- Other segments of instrument assembly 400 provide end effector roll and position.
- Surgical instrument assembly 400 potentially provides more DOFs, some redundant, for end effector 412 than surgical instrument 300 provides for end effector 304, as described with reference to Figure 3 .
- surgical instrument 402 may rotate within guide tube 404, and/or guide tube 404 may rotate within cannula 414 (or the natural orifice), to cause end effector 412 to be displaced in roll around instrument assembly 400's longitudinal axis.
- Instrument 402 may translate within guide tube 404, and/or guide tube 404 may translate within cannula 414, to cause end effector 412 to be displaced (surged) along instrument assembly 400's longitudinal axis.
- instrument 402 is held in position within guide tube 404 as described below.
- end effector 412 may be coupled to the distal end of surgical instrument 402 via a wrist mechanism that provides one or more additional DOFs (e.g., roll, pitch, yaw).
- DOFs e.g., roll, pitch, yaw
- Figure 4 also illustrates that when a guide tube bends, the bend must not bind operation of an instrument or another guide tube that runs inside it.
- guide tube 404 must not bend in such a way that a cable operating end effector 412 is frictionally bound or permanently kinked.
- the radius of curvature is mechanically limited by, e.g., the structure of the individual vertebrae that make up the flexible guide tube.
- the radius of curvature is limited by a control system, described below, to provide, e.g., a smoother behavior during actuation.
- cables for inner instruments or guide tubes must not shift to a shorter path between their proximal and distal ends so that the components they control are not affected as the guide tube bends (such shifting may be compensated for by using distal bend/shape sensors and a control system that maintains proper cable length).
- Cable path lengths may be stabilized by using sheathes (e.g. Bowden cables) for cables running through the center of the flexible joints or by routing cables through the joint peripheries as described below for virtual pivot point joints.
- surgical instrument 402 is removable and may be replaced with a different surgical instrument that has a structure similar to instrument 402 but a different end effector so as to perform a different surgical task.
- a single guide tube 404 may be used to provide wrist-like DOFs for one or more interchangeable surgical instruments 402.
- the surgical instruments may be interchanged while guide tube 404 remains in the patient. Such interchangeability is described in more detail below.
- the guide tube allows the newly inserted instrument to be positioned directly at the surgical site, regardless of the trajectory. And, one guide tube 404 may be withdrawn and replaced with another during surgery, either with or without an instrument 402 fully or partially inserted. Since some or all of the controllable DOFs are in the guide tube, in some aspects the instrument can be inexpensively made and therefore disposable, and the guide tube can be made sterilizable and reusable.
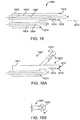
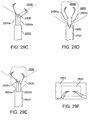
- FIGS 4A and 4B are diagrammatic perspective views that illustrate aspects of a removable instrument that is held in place within guide tube 440.
- the distal end 442 of guide tube 440 has an opening 444 though which the distal end of the instrument passes. Opening 444 is optionally made non-round to prevent the instrument from rolling within guide tube 440.
- An optional fitting 446 e.g., a spring that snaps into a detent, etc. holds the instrument's end effector 448 in position to keep the instrument from translating through the guide tube.
- a round opening 444 allows the instrument to roll while fitting 446 keeps the instrument from translating. When the fitting 446 releases the instrument (e.g., when sufficient pulling force is applied), the instrument may be withdrawn from the guide tube.
- Distal end 442 may be a wrist mechanism for the instrument's end effector in some aspects.
- the roll prevention configuration and the fitting are illustratively shown at the distal end of the guide tube but may be placed at various positions (e.g., at the insertion end of the guide tube).
- the roll prevention configuration and the fitting can be used in the various aspects described below for other instrument and guide tube combinations, with the understanding that the roll preventing configuration and the fitting will remove a redundant insertion DOF and/or a redundant roll DOF.
- Instrument assembly 400 may be inserted in a rigidized or locked state, or it may be actively steered during insertion in order to reach a target surgical site.
- instrument 402 and guide tube 404 are alternatively coaxially advanced.
- instrument 402 is actively steered part way along the trajectory to the surgical site and then locked (only the distal section of the instrument (or guide tube) need be actively steerable; the more proximal sections may be passive or may use curve propagation as the instrument (or guide tube) advances). Curve propagation is disclosed in, e.g., Ikuta, K.
- Guide tube 404 is then passively advanced to the distal end of instrument 402 and locked to support further advancement of instrument 402. The coaxial alternating advancing and locking continues until the surgical site is reached along the desired trajectory.
- guide tube 404 is actively steerable and lockable, and instrument 402 is passively advanced and locked within guide tube until the surgical site is reached. If both surgical instrument 402 and guide tube 404 are actively steerable, then they may "leapfrog" each other as they coaxially advance and lock along the trajectory to the surgical site.
- Such coaxial insertion may also be used with any combination of two or more instruments and guide tubes described herein.
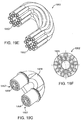
- FIG. 5 is a schematic view that illustrates aspects of a second minimally invasive surgical instrument assembly 500.
- Surgical instrument assembly 500 illustrates that two or more surgical instruments 502a,502b may be surrounded by a single guide tube 504.
- Surgical instruments 502a,502b may run longitudinally through guide tube 504 in a single channel 506.
- surgical instruments 502a,502b may each run through guide tube 504 in unique, individual channels 506a,506b.
- End effectors 508a,508b are each coupled to the distal ends of instruments 502a,502b.
- Instrument assembly 500 is inserted via cannula 510 and as described above.
- Instrument assembly 500's cross section may be circular, elliptical, or other shape (e.g., rounded rectangle or other polygon).
- Various combinations of surgical instruments 502a,502b and guide tube 504 may be rigid, passively flexible, and actively flexible, as well as lockable, as described above.
- An illustrative optional imaging system 511 e.g., one or more image capture chips with associated optics and electronics is positioned at the distal end of guide tube 504.
- the imaging system 511 has a field of view that may be used to assist advancing guide tube 504 and that allows a surgeon to view end effectors 508a,508b working at a surgical site.
- Surgical instrument assembly 500 operates in a manner similar to that of surgical instrument assembly 400 ( Figure 4 ), except that it is illustrative of aspects in which two or more surgical instruments extend through a single guide tube from a proximal to a distal end. Accordingly, the descriptions above of additional channels, active and passive flexibility, locking/rigidizing, various DOFs, the optional use of wrist mechanisms, instrument interchangeability, alternating coaxial advancing, and cannulas apply to instrument assembly 500. Distal end segment and entire assembly flexibility are illustrated by alternate position lines 512 and 514, similar to those shown in the preceding figures as described above. Compound bending of guide tube 504 provides at least 6 DOFs for end effectors 508a,508b as described above.
- FIG 6 is a schematic view that illustrates aspects of a third minimally invasive surgical instrument assembly 600.
- Surgical instrument assembly 600 operates in a manner similar to that of surgical instrument assembly 400 ( Figure 4 ), except that it is illustrative of aspects in which a surgical instrument 602's actively flexible distal segment 604 extends beyond the distal end of guide tube 606. Active flexibility of guide tube 606's distal end segment 608 and/or of the entire guide tube 606 are illustrated by alternate position lines 610 and 612. Active flexibility of instrument 602's distal segment 604 moves end effector 614 to illustrative alternate position 616.
- instrument assembly 600 illustrates aspects in which combinations of instruments and guide tubes provide redundant position and orientation DOFs for end effector 614.
- additional channels, active and passive flexibility, locking/rigidizing, various degrees of freedom, increased lateral force application and stiffness, the optional use of wrist mechanisms and imaging systems, instrument interchangeability, alternating coaxial advancing, and cannulas apply to instrument assembly 600.
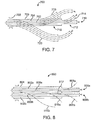
- Figure 7 is a schematic view that illustrates aspects of a fourth minimally invasive surgical instrument assembly 700.
- surgical instrument 702 extends through primary guide tube 704 along instrument assembly 700's longitudinal axis.
- primary guide tube 704 extends through secondary guide tube 706 along the longitudinal axis.
- surgical instrument assembly 700 is inserted via a cannula 708.
- End effector 710 is coupled to the distal end of surgical instrument 702 so that it extends just beyond primary guide tube 704's distal end.
- End effector 710's redundant DOFs other than the inherent one or more DOFs associated with its specific task (e.g., gripping), are provided in various ways.
- Surgical instrument 702 may rotate within primary guide tube 704, and/or primary guide tube 704 may rotate within secondary guide tube 706, and/or secondary guide tube 706 may rotate within cannula 708 (or a natural orifice or incision), which causes end effector 710 to be displaced in roll around instrument assembly 700's longitudinal axis.
- Surgical instrument 702 may translate within primary guide tube 704, and/or primary guide tube 704 may translate within secondary guide tube 706, and/or secondary guide tube 706 may translate within cannula 708, to displace (surge) end effector 710 along instrument assembly 700's longitudinal axis.
- an actively flexible distal segment 712 of primary guide tube 704 extends beyond secondary guide tube 706's distal end.
- Distal segment 712 may cause end effector 710 to be heaved and/or swayed (with incidental pitch and yaw as discussed above), adding one or two additional degrees of freedom as illustrated by alternate position 714.
- an actively flexible distal segment 716 of secondary guide tube 706, or the entire secondary guide tube 706, may cause end effector 710 to be heaved and/or swayed, adding one or two more degrees of freedom as illustrated by alternate positions 718 and 720.
- instrument assembly 700 provides various combinations of roll, heave, and sway displacements for end effector 710
- a wrist-type mechanism may not be required to couple end effector 710 to surgical instrument 702, although such a mechanism may be used to provide an additional one or more degrees of freedom (e.g., roll, pitch, yaw).
- the primary and secondary guide tubes can maneuver end effector 710 with various combinations of simple and compound bends.
- secondary guide tube 702's active flexibility is used for relatively large movements of end effector 710
- primary guide tube distal segment 712's active flexibility is used for relatively small, wrist-type movements of end effector 710. The amount of such motion depends on the distance that distal segment 712 extends beyond secondary guide tube 706, and so may provide motion similar to that described in Figure 2B .
- surgical instrument 702 may extend beyond primary guide tube 704 as described in Figure 6 .
- additional channels, active and passive flexibility, locking/rigidizing, various DOFs, increased lateral force application and stiffness, instrument interchangeability, alternating coaxial advancing, and cannulas apply to instrument assembly 700.
- secondary guide tube 706 has an even greater outer diameter than primary guide tube 704, actuation and locking mechanisms for secondary guide tube 706 may provide an increased lateral force and stiffness against reaction forces than either instrument 702 or primary guide tube 704 may provide alone or together.
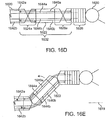
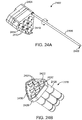
- FIG 8 is a schematic view that illustrates aspects of a fifth minimally invasive surgical instrument assembly 800.
- Surgical instrument assembly 800 illustrates that two or more primary guide tubes 802a,802b may be surrounded by a single secondary guide tube 804.
- An illustrative surgical instrument 806a,806b runs though each of primary guide tubes 802a,802b.
- the primary guide tubes 802a,802b have an architecture generally similar to surgical instrument assembly 400 ( Figure 4 ). In some instances, however, one or more primary guide tubes 802 may have an architecture similar to surgical instrument assembly 500 ( Figure 5 ) or surgical instrument assembly 600 ( Figure 6 ).
- Active flexibility of the distal segments of primary guide tubes 802a,802b that extend beyond the distal end of secondary guide tube 804 are illustrated by alternate position lines 808a,808b.
- the distal segments of primary guide tubes 802a,802b can move end effectors 809a,809b adjacent one another at various positions at a surgical site within a patient so as to perform various surgical tasks.
- Various active flexibilities of secondary guide tube 804 are illustrated by alternate position lines 810a,810b.
- additional channels, active and passive flexibility, locking/rigidizing, various DOFs, increased lateral force application and stiffness, the optional use of wrist mechanisms, instrument interchangeability, alternating coaxial advancing, and cannulas apply to instrument assembly 800.
- an endoscopic imaging system 812 is positioned at secondary guide tube 804's distal end.
- Imaging system 812 may be mono- or stereoscopic as described above and may have a viewing angle aligned with or angled (e.g., 30 degrees) from instrument assembly 800's longitudinal axis.
- imaging system 812 is positioned between primary guide tubes 802a,802b.
- imaging system 812 is positioned above, below, or to the side of primary guide tubes 802a,802b to make secondary guide tube 804's cross section more compact (e.g., one stereoscopic lens window above and one below the primary guide tubes 802a,802b; camera referenced control for this configuration is made possible if the primary guide tubes bend out and then inwards towards the surgical site roughly coplanar with the interpupillary axis).
- Figure 9 is a schematic view that illustrates aspects of a sixth minimally invasive surgical instrument assembly 900.
- Instrument assembly 900 is similar to instrument assembly 800 ( Figure 8 ), except that an illustrative additional surgical instrument 902 extends through secondary guide tube 904, but surgical instrument 902 is not surrounded by a primary guide tube. Accordingly, the relationship between surgical instrument 902 and secondary guide tube 904 is similar to that described between the surgical instruments and guide tubes as shown in Figures 4 and 6 .
- the relationship between the primary guide tube 906a,906b and instrument 908a,908b assemblies is similar to that described for aspects illustrated by Figures 7 and 8 .
- Instrument assembly 900 is illustrative of a secondary guide tube through which extend various combinations of one or more primary guide tube and instrument assemblies as well as one or more instruments without guide tubes.
- surgical instrument 902 is rigid or passively flexible and its end effector 910 is used to grasp and pull tissue to assist the surgical tasks that end effectors 912a,912b at the ends of instruments 908a,908b perform. Although rigid or passively flexible, instrument 902 is capable of pulling with considerable force. In other instances surgical instrument may perform other functions, such as retraction, irrigation, suction, etc. Further, if an endoscopic imaging system is placed at the distal end of secondary guide tube 904, as illustrated by instrument assembly 800 ( Figure 8 ), then instrument 902 may be used to service (e.g., clean with a jet of fluid) the imaging system's window(s).
- service e.g., clean with a jet of fluid
- surgical instrument 902's distal end is actively flexible, and end effector 910 is replaced by an endoscopic imaging system 914 as shown in Figure 9A .
- a distal imaging device may be coupled to the actively flexible end of surgical instrument 902 with a wrist-type mechanism 916 that provides at least a DOF in pitch.
- Such an architecture allows the image sensing device to be moved out from between the distal ends of primary guide tubes 906a,906b and then the viewing angle is pitched (and/or yawed) to align the center of the visual field with the area at which the end effectors 912a,912b are working.
- This architecture enables a surgeon to work, at a surgical site via a single entry port into the body, with two independently actuated surgical end effectors and an endoscopic imaging system that is independent of the surgical instruments.
- Another benefit of the independently controlled imaging system illustrated in Figure 9A is tissue retraction, as shown and described more fully with reference to Figure 17A below.
- one or more surgical instruments exit at the distal end of an guide tube, which may be a flat face or other shape, square or inclined to the assembly's longitudinal axis. In accordance with other aspects, one or more surgical instruments exit from the side of a guide tube.
- Figure 10 is a schematic view that illustrates such aspects in a seventh minimally invasive surgical assembly 1000.
- two surgical instruments 1002a,1002b extend longitudinally through guide tube 1004.
- Instruments 1002a,1002b exit guide tube 1004's distal segment 1006 via side exit ports 1008a,1008b instead of at guide tube 1004's extreme distal end.
- the side exit ports 1008a,1008b may be oriented to be generally opposite each other (i.e., displaced approximately 180 degrees from each other) or they may be separated by a lesser angle (e.g., 120 degrees).
- the side exit ports may have various angular orientations around distal segment 1006 in aspects in which more than two exit ports are used for one, two, or more than two instruments 1002.
- one side exit port is farther from guide tube 104's distal tip than another side exit port.
- Instrument 1002a's distal segment 1010a and instrument 1002b's distal segment 1010b are each independently actively flexible so as to move end effectors 1012a,1012b for work at a surgical site.
- Various combinations of simple or compound bending with instrument roll and insertion, along with optional wrist mechanisms, provide the required end effector DOFs.
- An endoscopic imaging system 1014 is positioned at the distal end of guide tube 1004. Imaging system 1014's viewing angle may be aligned with instrument assembly 1000's longitudinal axis, or the viewing angle may be angled (e.g., 30 degrees) from the longitudinal axis.
- the viewing angle may be actively changed during a surgical procedure using, e.g., one or move movable reflecting surfaces (mirrors, prisms).
- movable reflecting surfaces e.g., mirrors, prisms.
- additional channels, active and passive flexibility, locking/rigidizing, various DOFS, increased lateral force and stiffness, the optional use of wrist mechanisms, instrument interchangeability, and cannulas apply to instrument assembly 1000.
- Surgical assembly 1000 is inserted into a patient via incision or natural orifice, in some instances through cannula 1016 or a similar guiding structure as described above.
- surgical instruments 1002a, 1002b are either fully or partly retracted so that they do not extend beyond openings 1008a, 1008b as guide tube 1004 advances towards a surgical site. Images from imaging system 1014 may assist advancement.
- instruments 1002a,1002b may then be inserted and/or advanced within guide tube 1004 to reach the surgical site.
- Guide tube 1004 may be actively flexed during a surgical procedure to provide gross movements at the surgical site while instrument distal segments 1010a,1010b perform fine movements to complete the surgical task, as illustrated by alternate position lines 1018a,1018b.
- the surgeon views images from imaging system 1014 while performing surgical tasks with end effectors 1012a,1012b. Since the surgeon cannot see images from imaging system 1014 of distal segments 1010a,1010b as they exit side ports 1008a,1008b, in some aspects a control system, described below, controls distal segments 1010a,1010b as they exit from guide tube 1004 so that they curve to meet in front of imaging system 1014.
- a luminal space is mapped as described below, and the control system uses the mapping data to guide the end effectors into imaging system 1014's field of view.
- the distal end of the guide tube may be moved, e.g., to the left from a known space, thereby allowing the right instrument to be inserted into the "safe" space to the right of the guide tube. Then, likewise, the distal end of guide tube is moved to the right and the left instrument is moved into the "safe" space to the left of the guide tube.
- the instruments may be similarly inserted into the "safe" space underneath the upwardly displaced distal end of the guide tube.
- instruments 1002a,1002b may be withdrawn through side exit ports 1008a,1008b, either partially into or entirely from guide tube 1004.
- FIG 11 is a schematic view that illustrates aspects of an eighth minimally invasive surgical assembly 1100.
- surgical instrument 1102a extends through primary guide tube 1104a along its longitudinal axis.
- surgical instrument 1102b extends through primary guide tube 1104b along its longitudinal axis.
- End effectors 1106a,1106b are coupled to the distal ends of instruments 1102a,1102b.
- Primary guide tubes 1104a,1104b extend longitudinally through secondary guide tube 1108. In a manner similar to the way surgical instruments 1002a,1002b exit side ports 1008a,1008b of guide tube 1004's distal segment 1106, primary guide tubes 1104a, 1104b exit side ports 1110a, 1110b of secondary guide tube 1108.
- the distal segments 1112a,1112b of primary guide tubes 1104a, 1104b actively flex to move end effectors 1106a, 1106b, as illustrated by alternate position lines 1114a, 1114b.
- An endoscopic imaging system 1116 is positioned at secondary guide tube 1108's distal end.
- Instrument assembly 1100 operates in a manner similar to instrument assembly 1000 ( Figure 10 ).
- the principal difference between the two aspects is the use of both secondary and primary guide tubes in assembly 1100.
- the relationship between instrument assemblies 1100 and 1000 is therefore akin to the relationship between instrument assemblies 800 ( Figure 8 ) and 500 ( Figure 5 ).
- the descriptions above of insertion, full or partial instrument retraction during insertion and repositioning, use of the imaging system, use of primary and secondary guide tubes, and controlled extension of instruments apply to aspects of instrument assembly 1100.
- Figures 11A and 11B are diagrammatic end views of surgical instrument assemblies, and they illustrate that a side-exit assembly such as assemblies 1000 ( Figure 10 ) and 1100 ( Figure 11 ) may be used to reduce the overall cross-sectional area of a guide tube or secondary guide tube.
- Figure 11A is an illustrative view of an assembly, such as assembly 800 (the circular cross-sectional shape is merely illustrative), in which instrument/guide tube combinations 802a,806a and 802b,806b exit from the distal end of a guide tube or secondary guide tube.
- imaging system 812 is a stereoscopic imaging system with an interpupillary distance 1120 between imaging ports and an illustrative illumination port 1122.
- the side-exit assembly's instrument/distal guide tube segment combinations 1102a, 1112a and 1102b, 1112b have the same cross-sectional dimensions as combinations 802a,806a and 802b,806b shown in Figure 11A .
- illustrative stereoscopic imaging system 1116 has the same interpupillary distance 1120 as imaging system 812 as shown in Figure 11A . If the endoscopic image is captured and digitized at the distal end of the guide tube, then the guide tube area proximal of the image capture and digitizing components can be used for instruments and actuation instead of for optics (e.g., fiber bundles, rod lenses, etc.).
- the oblong-shaped cross-sectional area of Figure 11B 's side-exit guide tube is smaller than the cross-sectional area of Figure 11A 's end-exit guide tube, and the imaging system's interpupillary distance is the same.
- This reduced cross-sectional area may be an advantage for, e.g., the size and location of an incision to be used, for the size of a particular natural orifice, or for the position of intermediate tissue between the entry port and the surgical site.
- Such an oblong cross-sectional shape can be used in other instrument assembly guide tubes described herein.
- Figure 12 is a schematic view that illustrates aspects of a ninth minimally invasive surgical instrument assembly 1200.
- Instrument assembly 1200 is similar to instrument assembly 1100, with an additional surgical instrument 1202 that extends from the distal end of secondary guide tube 1204.
- Surgical instrument 1202 operates in a manner similar to surgical instrument 902 ( Figure 9 ), being in some aspects rigid and in others passively or actively flexible as described above.
- end effector 1206 may be replaced with an endoscopic imaging system as described with reference to Figures 9 and 9A or Figures 17 and 17A so that in some aspects instrument assembly 1200 has an independently operated, optionally wrist-mounted, endoscopic imaging system 1208 as illustrated in Figure 12 .
- Figures 12A and 12B are diagrammatic views of embodiments that illustrate retroflexive positions in examples of side-exit guide tubes, similar to retroflexive movement for end-exit guide tubes discussed above.
- Figure 12A illustrates that in one aspect the side-exit instrument assembly 1220 actively bends in a plane that is approximately coplanar with the side exit ports 1222a and 1222b (yaw with reference to the visual field reference).
- Figure 12B illustrates that in another aspect the side exit instrument assembly 1230 actively bends in a plane that is approximately perpendicular to the side exit ports 1232a and 1232b (hidden) (pitch with reference to the visual field reference).
- Assembly 1230's bend radius may be smaller than assembly 1220's bend radius, other dimensions being substantially the same, due to the mechanical structure.
- the side-exit instrument assembly may simultaneously yaw and pitch, and the assembly may yaw/pitch distally of the side exit ports.
- Figures 13 and 14 are schematic views that illustrate tenth and eleventh aspects of minimally invasive surgical instrument assemblies 1300 ( Figure 13 ) and 1400 ( Figure 1400).
- Surgical instrument assemblies 1300 and 1400 combine aspects of surgical instrument assemblies illustrated in Figures 3-12B and the associated descriptions.
- instrument assembly 1300 illustrates aspects in which one or more surgical instruments 1302 exit the end of a distal segment 1304 of a guide tube 1306, and one or more other surgical instruments 1308 exit from a side exit port 1310 at guide tube 1306's distal segment 1304.
- instrument assembly 1400 illustrates aspects in which one or more surgical instruments 1402 run coaxially within one or more primary guide tubes 1404 that exit the end of a distal segment 1406 of a secondary guide tube 1408, and one or more other surgical instruments 1410 run coaxially through one or more other primary guide tubes 1412 that run coaxially within secondary guide tube 1408 and exit from one or more side exit ports 1414 at secondary guide tube 1408's distal segment 1406.
- additional channels, active and passive flexibility, locking/rigidizing, various DOFs, increased lateral force application and stiffness, the optional use of wrist mechanisms, instrument interchangeability, cannulas, and endoscopic imaging systems apply to instrument assemblies 1300 and 1400.
- an instrument or instrument assembly as described herein can be actively or passively positioned at a surgical site.
- a sufficiently flexible and maneuverable surgical instrument or surgical instrument assembly such as those described herein, may be inserted with one or more segments of the instrument or assembly functioning in accordance with the insertion description below.
- a guide probe can be used to initially define some or all of the trajectory between the entry port and the surgical site.
- the guide probe may be maneuvered using, e.g., image data from an imaging system at the guide probe's distal tip, real time image data from an external imaging system (e.g., ultrasound, fluoroscopy, MRI), preoperative image data and computer analysis of likely trajectory, and various combinations of these data.
- FIGS 15A-15D are schematic views that illustrate aspects of inserting a flexible, steerable surgical instrument and surgical instrument assembly, such as those described herein, by using a guide probe to maneuver past intermediate tissue structures so as to reach a surgical site within a patient. Insertion may be via natural orifice or incision, either with or without using a cannula (not shown) as described above.
- a first intermediate tissue structure 1502 prevents a surgical instrument or surgical instrument assembly from operating with a pivoting center point generally where it enters the body, as shown in Figure 1 .
- a second intermediate tissue structure 1504 exists between the position where the instrument or instrument assembly passes the first intermediate tissue structure 1502 and the target surgical site 1506, as shown in Figure 2B . An instrument or instrument assembly must be guided between and around the intermediate tissue structures to reach the surgical site.
- a guide probe 1508 is inserted past first intermediate structure 1502 and is then actively maneuvered around second intermediate tissue structure 1504 to reach surgical site 1506 or another desired position.
- the guide probe's primary function is to establish a trajectory to the surgical site.
- An optional endoscopic imaging system 1509 may be mounted at guide probe 1508's distal tip.
- curve propagation as described above is used during insertion— curves initially formed by steering the distal end are automatically propagated in a proximal direction on the guide probe as it is advanced towards the surgical site. Such curve propagation is done using, e.g., control systems as described below.
- guide probe 1508 is then rigidized so as to maintain its two- or three-dimensional curved shape.
- a guide tube 1510 is inserted coaxially over guide probe 1508, as shown in Figure 15B .
- the guide tube 1510 may be inserted to an intermediate position as shown, or it may be inserted and maneuvered to a position at surgical site 1506 as shown by the alternate position lines.
- the guide probe and guide tube may be coaxially inserted, first one, then the other in a repeated, alternating way.
- Guide tube 1510 is illustrative of various primary and secondary guide tubes, such as those shown in Figures 4 ⁇ 14. Once in a desired position, guide tube 1510 is then rigidized to maintain the shape defined by guide probe 1508, which is then withdrawn as shown in Figure 15C . After the guide probe is withdrawn, a surgical instrument or surgical instrument assembly 1512 may then be inserted through guide tube 1510 to reach surgical site 1506, as shown in Figure 15D .
- the guide probe extends beyond the coaxial guide tube by a distance sufficient to allow the guide probe to enter a patient and reach the surgical site. Then, the guide probe is coaxially inserted.
- a proximal portion e.g., the transmission mechanism; see Figure 27 for an illustrative view
- the guide probe is removable to allow the guide tube to be coaxially inserted over the guide probe.
- a guide probe is inserted, guide tube 404 is inserted over the guide probe, the guide probe is withdrawn, and then surgical instrument 402 is inserted through guide tube 404.
- a similar procedure can be used for guide tubes with multiple instrument channels, such as surgical instrument assembly 500 ( Figure 5 ).
- surgical instrument assembly 700 Figure 7
- a guide probe is inserted, primary guide tube 704 is inserted over the guide probe, secondary guide tube 706 is inserted over primary guide tube 704, the guide probe is withdrawn, and instrument 702 is inserted through primary guide tube 704.
- a guide probe having a relatively larger outer diameter is inserted, secondary guide tube 706 is inserted over the guide probe, the guide probe is withdrawn, and primary guide tube 704 and instrument 706 are then inserted through secondary guide tube 706.
- a similar procedure can be used for secondary guide tubes that have two or more primary guide tube and/or instrument channels.
- guide tube 1510 is analogous to cannula 708, and instrument assembly 700 is inserted through guide tube 1510. Many variations in insertion order are possible and are within the scope of the invention.
- a rigid distal segment of a minimally invasive surgical instrument can also provide access to a large volume deep within the body that is accessed through an intermediate tissue structure.
- Such mechanisms may be mechanically simpler to build and operate, and therefore may be less expensive and easier to control than systems that use flexible technology. And, in some aspects such mechanisms may work back on themselves to provide a capability similar to the retroflexive bending described above.
- Figure 16 is a schematic view that illustrates aspects of a twelfth minimally invasive surgical instrument assembly 1600.
- two surgical instruments 1602a,1602b extend through channels 1604a,1604b that extend longitudinally through rigid guide tube 1606.
- guide tube 1606 is straight and in others it is curved to accommodate a particular insertion port (the instruments are similarly curved to facilitate insertion).
- Guide tube 1606 may have various cross-sectional shapes (e.g., circular, oval, rounded polygon), and various numbers of surgical instruments and channels may be used. Some optional working channels may be used to provide supporting surgical functions such as irrigation and suction.
- an endoscopic imaging system (e.g., mono- or stereoscopic image capture or direct view) is at guide tube 1606's distal end 1610.
- guide tube 1606 is inserted into a patient via an incision (e.g., approximately 2.0 cm at the umbilicus) or natural orifice, either with or without the use of a cannula 1612 or similar guiding structure.
- guide tube 1606 may rotate within cannula 1612.
- surgical instruments 1602a and 1602b function in a like manner, and many instrument functions (body roll, wrist operation, end effector operation, etc.) are similar to the surgical instruments used in the da Vinci® Surgical System (both 8 mm and 5 mm instrument body diameters).
- the instruments may function differently and/or have capabilities not embodied in da Vinci® Surgical System instruments (e.g., one instrument may be straight, one instrument may be jointed, one instrument may be flexible, etc.).
- instrument 1602a includes a transmission portion (not shown) at its proximal end, an elongated instrument body 1614, one of various surgical end effectors 1630, and a snake-like, two degree of freedom wrist mechanism 1626 that couples end effector 1630 instrument body 1614.
- the transmission portion includes disks that interface with electrical actuators (e.g., servomotors) permanently mounted on a support arm so that instruments may easily be changed.
- electrical actuators e.g., servomotors
- Other linkages such as matching gimbal plates and levers may be used to transfer actuating forces at the mechanical interface.
- Mechanical mechanisms in the transmission portion transfer the actuating forces from the disks to cables, wires, and/or cable, wire, and hypotube combinations that run through one or more channels in instrument body 1614 (which may include one or more articulated segments) to control wrist 1626 and end effector 1630 movement.
- one or more disks and associated mechanisms transfer actuating forces that roll instrument body 1614 around its longitudinal axis 1619 as shown.
- the actuators for a particular instrument are themselves mounted on a single linear actuator that moves instrument body 1614 longitudinally as shown within channel 1604a.
- the main segment of instrument body 1614 is a substantially rigid single tube, although in some aspects it may be slightly resiliently flexible.
- proximal body segment 1620 proximal of guide tube 1606 i.e., outside the patient
- This flexing is minimal (e.g., less than or equal to about a 5-degree bend angle in one embodiment) and does not induce significant friction because the bend angle for the control cables and hypotubes inside the instrument body is small.
- instruments 1602a and 1602b each include a proximal body segment that extends through the guide tube and at least one distal body segment that is positioned beyond the guide tube's distal end.
- instrument 1602a includes proximal body segment 1620 that extends through guide tube 1606, a distal body segment 1622 that is coupled to proximal body segment 1620 at a joint 1624, a wrist mechanism 1626 that is coupled to distal body segment 1622 at another joint 1628 (the coupling may include another, short distal body segment), and an end effector 1630.
- distal body segment 1622 and joints 1624 and 1628 function as a parallel motion mechanism 1632 in which the position of a reference frame at the distal end of the mechanism may be changed with respect to a reference frame at the proximal end of the mechanism without changing the orientation of the distal reference frame.
- Figure 16A is a side elevation view of an embodiment of the distal end of instrument 1602a, which includes parallel motion mechanism 1632, wrist mechanism 1626, and end effector 1630.
- parallel motion mechanism 1632's diameter is approximately 7 mm
- wrist 1626's diameter is approximately 5 mm.
- joints 1624 and 1628 each have two hinges that pivot around orthogonal axes. As one hinge pivots in joint 1624, the corresponding hinge pivots an equal amount in the opposite direction in joint 1628. Accordingly, as distal body segment 1622 moves, the orientation of wrist 1626 and end effector 1630 remain essentially unaffected.
- the hinges are constructed with rolling contact so that cable lengths on each side of the pivot remain balanced ("virtual pivot points"); details are disclosed in U.S. Patent No. 6,817,974 (Cooper et al. ).
- U.S. Patent No. 6,817,974 further discloses details about the Yaw-Pitch-Pitch- Yaw (YPPY; alternately PYYP) arrangement of the hinges in parallel motion mechanism 1632 (wrist 1626 is similarly configured), which provides a constant velocity roll configuration. Consequently, roll of proximal body segment 1620 is smoothly transferred to end effector 1630.
- FIG. 16B is a perspective view
- Figure 16C is a cross-sectional view, of an illustrative embodiment of joints 1624,1628.
- parallel motion mechanism 1632 includes two joints 1624 and 1628. Since the joints 1624,1628 are coupled together, however, they do not operate independently of one another. Therefore, in joint space the entire parallel motion mechanism 1632 may be considered a single joint with two degrees of freedom (i.e., pitch and yaw) if "joints" 1624 and 1628 each have two orthogonal hinges (the position of the distal end of the mechanism may change in 3D Cartesian space), or as a single joint with one degree of freedom (i.e., pitch or yaw) if "joints" 1624 and 1628 each have a single hinge (the position of the distal end of the mechanism may change only in 2D Cartesian space).
- degrees of freedom i.e., pitch and yaw
- parallel motion mechanism 1632 If parallel motion mechanism 1632 has two DOFs in joint space, then it functions as a constant velocity joint and transmits roll. Mechanism 1632's motion is "parallel" because the relative orientations of the proximal and distal ends (frames) of the mechanism remain constant as the mechanism changes the distal end's (frame's) position.
- FIGS 16D and 16E are schematic views that illustrate aspects of parallel motion mechanism 1632's design and operation principles. For clarity, only one set (i.e., PP or YY) of corresponding pivoting hinges is shown. The other set of hinges works the same way. Each hinge has a proximal link disk and a distal link disk. As shown in Figure 16D , a first set of cables 1640a,1640b are positioned on opposite sides of parallel motion mechanism 1632 and couple the proximal link disk in hinge 1624a to the distal link disk in hinge 1628b.
- the two cables 1640a, 1640b are illustrative of various combinations of cables that may be used (e.g., two cables on each side for increased strength; three cables spaced approximately 120 degrees apart will maintain parallelism in both planes; etc.).
- a second set of cables 1642a,1642b are coupled to the distal link disk of hinge 1624a and run back through proximal body segment 1620 to the transmission mechanism (not shown).
- Other cables that control wrist mechanism 1626 and end effector 1630 are illustrated by a third set of cables 1644a,1644b.
- hinge 1624a pivots.
- the cable 1640a, 1640b coupling between the proximal link disk of hinge 1624a and the distal link disk of hinge 1628a causes hinge 1628a to pivot an equal amount in the opposite direction. Consequently, wrist 1626 and end effector 1630 are laterally displaced away from longitudinal axis 1619 of proximal body segment 1620.
- the lengths of cables 1644a,1644b are unaffected by the movement because of the hinge design, and so wrist 1626 and end effector 1630 orientation are also unaffected by the movement.
- proximal instrument body segment 1620 were to remain stationary, then end effector 1630 translates slightly in a direction aligned with longitudinal axis 1619 (surged) in the patient's reference frame. Therefore, the control system, described below, compensates for this small movement by moving proximate body segment 1620 by an amount necessary to keep end effector 1630 at a constant insertion depth in the patient's reference frame.
- each joint in the parallel movement mechanism may have only a single pivoting hinge.
- the parallel motion mechanism may be omitted.
- a proximal instrument body segment may be coupled to a distal instrument body segment at a joint with a single pivoting axis so that the proximal body segment must be rolled to move an end effector at the distal end of the distal body segment from side to side.
- two or more elongated distal body segments may be used. If roll is not required, then the cross section of the body segments does not have to be round. In some aspects, the wrist mechanism may be eliminated.
- Figure 16F is a diagrammatic end view of a link disk, and it illustrates aspects of cable routing in a parallel motion mechanism. As shown in Figure 16F , twelve cable routing holes are placed near the outside perimeter of link disk 1650. The cable routing holes are spaced 22.5 degrees apart from one another between the 3, 6, 9, and 12 O'clock positions on link disk 1650. Holes are not placed at the 3, 6, 9, and 12 O'clock positions because of the hinge components (not shown) on the obverse and reverse sides of link disk 1650. Starting at the 12 O'clock position, the holes are labeled 1652a-16521. Four sets of three cables each are dedicated to four functions.
- a first set of cables maintains the parallel function in the parallel motion mechanism and are routed through holes 1652a, 1652e, and 1652i.
- a second set of cables are used to move a distal part of a wrist mechanism (e.g., wrist mechanism 1626) and are routed through holes 1652b, 1652f, and 1652j.
- a third set of cables are used to move the parallel motion mechanism and are routed through holes 1652c, 1652g, and 1652k.
- a fourth set of cables are used to move a proximal part of the wrist mechanism and are routed through holes 1652d, 1652h, and 16521. Cables and other components associated with an end effector are routed through central hole 1654 in link disk 1650.
- Figure 16G is another diagrammatic end view of a link disk, and it illustrates further aspects of cable routing in a parallel motion mechanism.
- a first set of 12 cable routing holes are placed around the outside perimeter of link disk 1660 in a manner similar to those shown in Figure 16F .
- a second set of 12 cable routing holes are placed around a concentric circle inside the first set of holes.
- the outer ring of cable routing holes are labeled 1662a-16621
- the inner ring of holes are labeled 1664a-16641. Cables associated with the parallel motion mechanism are routed through the outer ring of holes 1662, and cables associated with the wrist mechanism are routed through the inner ring of holes 1664.
- a first set of three cable pairs maintains the parallel function in the parallel motion mechanism and are routed through adjacent holes 1662a and 16621, 1662d and 1662e, and 1662h and 1662i.
- a second set of three cable pairs are used to move the parallel motion mechanism and are routed through adjacent holes 1662b and 1662c, 1662f and 1662g, and 1662j and 1662k.
- a third set of three cable pairs is used to move a proximal part of the wrist mechanism and are routed through adjacent holes 1664a and 16641, 1664d and 1664e, and 1664h and 1664i.
- a fourth set of three cable pairs are used to move a distal part of the wrist mechanism and are routed through adjacent holes 1664b and 1664c, 1664f and 1664g, and 1664j and 1664k. Cables and other components associated with an end effector are routed through central hole 1666 in link disk 1660.
- cable pairs as illustrated in Figure 16G increases actuation stiffness above the stiffness of using a single cable.
- the increased stiffness allows the instrument components to be more accurately positioned during movement (e.g., the increased stiffness helps to reduce motion hysteresis).
- such cable pairs are used for an instrument with a parallel motion mechanism that is approximately 7 mm in diameter. Instruments with smaller diameters (e.g., approximately 5 mm in diameter), however, may not have sufficient internal space to accommodate cable pairs.
- single cables routed in accordance with Figure 16F may be coupled to a cable on the opposite side of the parallel motion mechanism. Aspects of such coupling are illustrated in Figures 16H-16J .
- Figure 16H is a diagrammatic perspective view of a stiffening bracket 1670 that couples cables routed on opposite sides of a parallel motion mechanism's body segment 1622.
- Bracket 1670 has a cross piece 1672 and two parallel support members 1674 attached (e.g., welded) on opposite sides of cross piece 1672.
- a hypotube 1676 is attached (e.g., welded) to each support member so that the hypotubes are parallel to each other.
- the hypotubes 1676 are spaced apart a distance slightly less than the free space distance between the two cables to be coupled.
- the cable 1678 that maintains the parallel motion mechanism's parallel function is threaded through its associated hypotube 1676 as the cable extends between its two anchor points in the parallel motion mechanism.
- the hypotube 1676 is crimped to keep cable 1678 in place.
- the end of cable 1680 that is used to move the parallel motion mechanism is threaded into its associated hypotube 1676, which is crimped to keep cable 1680 in place. Consequently, the distal end of cable 1680 is anchored to a middle position (not necessarily halfway) of cable 1678.
- cables running through holes 1652a and 1652g are coupled together, cables running through holes 1652c and 1652i are coupled together, and cables running through holes 1652e and 1652k are coupled together.
- Figure 16I illustrates an aspect of how multiple brackets 1670 may be positioned within the body of a parallel motion mechanism. That is, each cable that is associated with moving the parallel motion mechanism is coupled to an opposite side cable associated with maintaining the parallel function of the parallel motion mechanism.
- the cables that maintain the parallel function move within the body of the parallel motion mechanism, even though they are anchored at either end of the parallel motion mechanism. Therefore, for a given motion of the parallel motion mechanism, the cable coupling requires that the cables 1680, which move the parallel motion mechanism, move twice as far as they would if they were anchored to the parallel motion mechanism's body segment as illustrated in, e.g., Figures 16D-16E .
- the effect of this coupling increases joint stiffness approximately four times more than non-coupled cables because the cable moves twice as far, and because the load on the cable is half as great for a given joint torque.
- Figure 16J is a diagrammatic end view of a stiffening bracket 1670.
- cross piece 1672 is hollow so that cables and other components associated with an end effector may be routed through the cross piece.
- cross piece 1672 is made using electrical discharge machining.
- the proximal body portion, parallel motion mechanism, wrist, and end effector are aligned along longitudinal axis 1619 to allow the instrument to be inserted and withdrawn through guide tube 1606. Accordingly, two or more independently operating, exchangeable instruments, each with parallel motion mechanisms, can be simultaneously inserted via guide tube 1606 to allow a surgeon to enter a patient via a single entry port and work within a large volume deep within a patient.
- Each independent instrument's end effector has a full 6 DOF in Cartesian space (instrument insertion and the parallel motion mechanism provide the translation DOFs, and instrument body roll and the wrist mechanism provide the orientation DOFs). Further, the instruments 1602a,1602b may be partially withdrawn so that, e.g., only the wrist and end effectors extend from the guide tube 1606's distal end 1610. In this configuration, the one or more wrists and end effectors can perform limited surgical work.
- FIG 17 is a schematic view that illustrates aspects of a thirteenth minimally invasive surgical instrument assembly 1700.
- Surgical instrument assembly 1700 is similar to instrument assembly 1600 ( Figures 16-16J ) in that surgical instruments 1702a,1702b function similarly to instruments 1602a,1602b as described above, but instead of a fixed endoscopic imaging system at the end of the guide tube, assembly 1700 has an independently operating endoscopic imaging system 1704.
- imaging system 1704 is mechanically similar to surgical instruments 1602 as described above.
- optical system 1704 includes a substantially rigid elongate tubular proximal body segment 1706 that extends through guide tube 1708, and at proximal body segment 1706's distal end there is coupled a 1 or 2 DOF parallel motion mechanism 1712 that is similar to parallel motion mechanism 1622 ( Figures 16-16J ).
- Parallel motion mechanism 1712 includes a first joint 1714, an intermediate distal body segment 1716, and a second joint 1718.
- a wrist mechanism or other active joint (e.g., one DOF to allow changing pitch angle; two DOFs to allow changing pitch and yaw angles) 1720 couples an image capture component 1722 to second joint 1718.
- joint 1714 is an independently controllable one or two DOF joint (pitch/yaw)
- joint 1718 is another independently controllable one or two DOF joint (e.g., pitch/yaw)
- image capture component 1722 is coupled directly at the distal end of the joint 1718 mechanism.
- An example of a suitable stereoscopic image capture component is shown in U.S. Patent Application No. 11/614,66 1 , published as US 2008-0151041 A1 .
- imaging system 1704 moves longitudinally (surges) inside guide tube 1708. Control of imaging system 1704 is further described in concurrently filed U.S. Patent Application No. 11/762,236 (Diolaiti et al. ), published as US 2007-0287992 A1 , entitled "Control System Configured to Compensate for Non-Ideal Actuator-to- Joint Linkage Characteristics in a Medical Robotic System".
- roll may be undesirable because of a need to preserve a particular field of view orientation. Having heave, sway, surge, yaw, and pitch DOFs allows the image capture component to be moved to various positions while preserving a particular camera reference for assembly 1700 and viewing alignment for the surgeon.
- Figure 17A is, for illustrative purposes only, a side view schematic to Figure 17 's plan view schematic.
- Figure 17A shows that parallel motion mechanism 1712 moves image capture component 1722 away from surgical instrument assembly 1700's longitudinal centerline. This displacement provides an improved view of surgical site 1724 because some or all of the instrument body distal segment ends are not present in the image output to the surgeon as would occur in, e.g., instrument assembly 1600 ( Figure 16 ).
- the pitch of parallel motion mechanism 1712 and of image capture component 1722 is controllable, as illustrated by the arrows.
- FIG 17B is a diagrammatic perspective view that illustrates an embodiment of surgical instrument assembly 1700.
- two independently teleoperated surgical instruments 1740a, 1740b (each instrument is associated with a separate master — e.g. one left hand master for the left instrument and one right hand master for the right instrument) run through and emerge at the distal end of a rigid guide tube 1742.
- Each instrument 1740a, 1740b is a 6 DOF instrument, as described above, and includes a parallel motion mechanism 1744a,1 744b, as described above, with wrists 1746a,1746b and end effectors 1748a,1748b attached.
- an independently teleoperated endoscopic imaging system 1750 runs through and emerges at the distal end of guide tube 1742.
- imaging system 1750 also includes a parallel motion mechanism 1752, a pitch-only wrist mechanism 1754 at the distal end of the parallel motion mechanism 1752 (the mechanism may have either one or two DOFs in joint space), and a stereoscopic endoscopic image capture component 1756 coupled to wrist mechanism 1754.
- wrist mechanism 1754 may include a yaw DOF.
- the proximal and distal joints in imaging system 1750 are independently controlled.
- parallel motion mechanism 1752 heaves and sways image capture component 1756 up and to the side, and wrist mechanism 1754 orients image capture component 1756 to place the center of the field of view between the instrument tips if the instruments are working to the side of the guide tube's extended centerline.
- the distal body segment of imaging system is independently pitched up (in some aspects also independently yawed), and image capture component 1756 is independently pitched down (in some aspects also independently yawed).
- imaging system 1750 may be moved to various places to retract tissue.
- auxiliary channel 1760 through which, e.g., irrigation, suction, or other surgical items may be introduced or withdrawn.
- one or more small, steerable devices e.g., illustrated by instrument 902 in Figure 9
- a cleaning fluid e.g., pressurized water, gas
- a drying agent e.g., pressurized air or insufflation gas
- such a cleaning wand may be a passive device that attaches to the camera before insertion.
- the end of the wand is automatically hooked to the image capture component as the image capture component emerges from the guide tube's distal end. A spring gently pulls on the cleaning wand so that it tends to retract into the guide tube as the imaging system is withdrawn from the guide tube.
- Figure 17A further illustrates that as image capture component 1722 is moved away from assembly 1700's centerline it may press against and move an overlying tissue structure surface 1726, thereby retracting the tissue structure from the surgical site as shown.
- imaging system 1704 to retract tissue is illustrative of using other surgical instruments, or a device specifically designed for the task, to retract tissue.
- Such "tent-pole" type retraction may be performed by any of the various movable components described herein, such as the distal end exit or side exit flexible devices and the parallel motion mechanisms on the rigid body component devices, as well as other devices discussed below (e.g., with reference to Figure 31 ).
- one or more surgical instruments may exit from a guide tube generally aligned with the guide tube's longitudinal axis but not at the guide tube's distal end.
- Figure 18 is a schematic view that illustrates aspects of a fourteenth minimally invasive surgical instrument assembly 1800. As shown in Figure 18 , a first surgical instrument 1802 runs coaxially through primary guide tube 1804, and a second surgical instrument 1806 runs coaxially through primary guide tube 1808. Instrument and primary guide tube combinations 1802,1804 and 1806,1808 are illustrative of the various flexible and rigid instruments and instrument/guide tube combinations described above. Instrument/guide tube combination 1802,1804 extends through and exits at secondary guide tube 1810's extreme distal end 1812.
- Instrument/guide tube combination 1806,1808 extends through secondary guide tube 1810 and exits at an intermediate position 1814 that is proximally spaced from extreme distal end 1812. In contrast to the side exits that direct instruments away from the guide tube's longitudinal axis as shown in, e.g., assemblies 1300 ( Figure 13 ) and 1400 ( Figure 14 ), instrument/guide tube combination 1806,1808 exits generally aligned with secondary guide tube 1810's longitudinal axis 1816.
- the distal and intermediate position guide tube face angles may be other than perpendicular to axis 1816.
- Figure 18 also shows that endoscopic imaging system 1818 is positioned on secondary guide tube 1810 between extreme distal end 1812 and intermediate position 1814.
- Imaging system 1818's field of view is directed generally perpendicular to longitudinal axis 1816.
- instrument/guide tube combinations 1802,1804 and 1806,1808 working somewhat retrograde from its distal end 1812 exit
- Imaging system 1818 is, in some aspects, an electronic stereoscopic image capture system.
- a second imaging system 1820 (e.g., a monoscopic system with lower resolution than imaging system 1818) is located to have a field of view generally aligned with axis 1816 to assist instrument assembly 1800 insertion.
- the architecture illustrated in Figure 18 allows the guide tube's cross section to be relatively small— enough to accommodate the instruments and/or guide tubes that run through it (see e.g., Figure 11B and associated description)— but the imaging system dimensions (e.g., the interpupillary distance in a stereoscopic system) can be larger than if positioned at the guide tube's distal end face.
- Figure 18A is a schematic view that illustrates further aspects of an imaging system at the distal end of an illustrative instrument assembly 1801.
- one or more instruments and/or instrument/guide tube combinations exit from guide tube 1811's intermediate position 1814 as described above.
- Guide tube 1811's distal end segment 1822 is pivotally mounted so that it can be pitched in relation to guide tube 1811's main segment as shown by alternate position lines 1823, although not necessarily pivoting near the intermediate position as depicted.
- Alternate position 1823 is illustrative of various movements and mechanisms. For example, in one aspect a parallel motion mechanism as described above is used to displace imaging system 1818.
- alternate position 1823 represents positioning and orienting imaging system 1818 with two independently controllable 1 or 2 DOF joints. Other combinations of joints and links may be used. Accordingly, imaging system 1818's field of view direction can be altered, space permitting in the surgical site's vicinity. Distal end 1822 may be positioned above the exit ports as shown in Figure 18A , or it may be positioned between the exit ports to provide a smaller instrument assembly cross section as illustrated by Figure 18F .
- Figure 18B is another schematic view which shows that an imaging system 1824 may pivot in distal end segment 1822, as shown by the alternate position lines and arrow. Pivoting imaging system 1824 may be at the extreme distal end of the guide tube, or it may be positioned somewhat proximally from the extreme distal end (in which case in some aspects the second imaging system 1820 can be positioned at the distal end to provide viewing along the instrument assembly's longitudinal axis while imaging system 1824 is viewing to the side).
- FIG. 18C is a diagrammatic perspective view of an embodiment of a minimally invasive surgical instrument assembly that incorporates aspects of instrument assemblies 1800 and 1801.
- Each instrument 1830a,1830b includes an upper arm link 1836, a lower arm link 1838, and an end effector 1840 (illustrative grippers are shown).
- a shoulder joint 1842 couples upper arm link 1836 to the instrument body (not shown) that extends back through guide tube 1834.
- An elbow joint 1844 couples upper arm link 1836 to lower arm link 1838, and a wrist joint 1846 couples lower arm link 1838 to the end effector 1840.
- parallel motion mechanisms as described above with reference to figures 16A-16J may be used, and in other aspects the shoulder and elbow joints may be independently controlled, as are the wrist joints 1846. In some aspects only a single arm link is used; in others more than two arm links are used. In some aspects, one or both shoulder joints 1842 are fixed to guide tube 1834 so that there is no associated instrument body.
- Figure 18C further shows that a stereoscopic imaging system 1850 is mounted near the extreme distal end 1852 of guide tube 1834.
- imaging system 1850 includes right and left image capture elements 1854a,1854b, which may be positioned behind protective imaging ports, and illumination output ports (LEDs, optical fiber ends, and/or associated prisms that direct illumination light as desired) 1856.
- illumination output ports LEDs, optical fiber ends, and/or associated prisms that direct illumination light as desired
- imaging system 1850's field of view is generally perpendicular to guide tube 1834's longitudinal axis so that a surgeon clearly sees end effectors 1840 working at a surgical site to the side of guide tube 1834's distal end.
- the axis between the imaging apertures is preferably generally parallel to a line between the surgical instrument tips, an alignment that presents to the surgeon an orientation in which the instrument tips map into natural and comfortable hand positions at the master console.
- guide tube 1834's distal end pivots at a joint 1858 so that imaging system 1850's field of view direction can be changed, as described above.
- Joint 1858 may be positioned at various locations on guide tube 1834.
- guide tube 1834 is approximately 12 mm outer diameter
- the instruments are approximately 5 mm outer diameter
- imaging system 1850's lenses are about 3 mm across with an interpupillary distance of about 5 mm.
- Figure 18D is a diagrammatic perspective view that illustrates how the distal end pitches up and down so that imaging system 1850 can look forwards (toward the distal direction; anterograde viewing) or backwards (toward the proximal direction; retrograde viewing).
- instruments and/or guide tubes may be fixed at the end of, or at intermediate positions on, an instrument assembly structure so as to be integral with that structure.
- the fixed instruments and/or guide tubes may, however, be replaceable in vitro if the structure is removed from a patient. For example, a surgeon may remove the instrument assembly from the patient, replace one or more instruments that are attached (e.g., using known mechanisms) at the end or at an intermediate position with one or more other instruments, and then reinsert the instrument assembly.
- Figure 18E is a diagrammatic perspective view of an embodiment of a minimally invasive surgical instrument in which a movable surgical instrument 1860 (e.g., a U-Turn instrument as described below, a flexible arm, a multilink arm, and the like) is fixed at the extreme distal end 1861 of a guide tube 1862.
- a movable surgical instrument 1860 e.g., a U-Turn instrument as described below, a flexible arm, a multilink arm, and the like
- the combination of guide tube 1862 and instrument 1860 functions in a manner similar to segments 15a and 15b of instrument 15 as shown and described in Figure 2B .
- a second surgical instrument 1864 is either fixed at an intermediate position 1866 on guide tube 1862 or is removable as described above.
- an imaging system 1868 with a field of view direction generally perpendicular to guide tube 1862's longitudinal axis is positioned near guide tube 1862's distal end.
- instrument 1860 is straightened to be generally aligned with the longitudinal axis, and instrument 1864 is either similarly aligned with the longitudinal axis (if fixed; if removably attached) or is at least partially withdrawn into the guide tube.
- instrument 1860 may be retroflexively folded back against guide tube 1862.
- An optional second imaging system 1870 positioned at distal end 1861 may be used to assist insertion as described above.
- Figure 18F is an illustrative diagrammatic plan view of another aspect of a surgical instrument assembly with a movable imaging system at the distal tip of a guide tube.
- an endoscopic image capture component 1880 is at the distal end of parallel motion mechanism 1884, which is coupled at the distal end of guide tube 1882.
- parallel motion mechanism 1884 has a single DOF in joint space so that it moves image capture component 1880 out of the page, towards the person looking at the figure.
- parallel motion mechanism may be thinner (between the two instruments) than shown in the figure since it has only one DOF as shown.
- parallel motion mechanism 1884 may have two DOFs as described above.
- two independently controllable joints may be used, with each joint generally placed where the hinges are shown in parallel motion mechanism 1884.
- guide tube 1882 has an oblong cross section, as illustrated by Figure 11B .
- FIG. 18G illustrates that an independent yaw joint 1886 may be placed between parallel motion mechanism 1884 and image capture component 1880.
- Joint 1886 is illustrative of various single and multiple DOF joints that may be used (e.g., pitch or pitch/yaw).
- a flexible arm may be used instead of parallel motion mechanism 1884.
- Optics in image capture component 1880 may provide a down looking angle (e.g., 30 degrees).
- Figure 18F further shows that in one aspect parallel motion mechanism 1884 is long enough to allow the parallel motion mechanisms, wrist mechanisms, and end effectors of independently controllable instruments 1888a and 1888b to extend though intermediate position exit ports 1890a and 1890b in guide tube 1882 and move while image capture component 1880 is still aligned with the center of guide tube 1882.
- parallel motion mechanism 1884 moves image capture component 1880 away from being aligned with guide tube 1882, instruments 1888a and 1888b can extend underneath image capture component 1880 to reach a surgical site.
- FIG 19 is a diagrammatic perspective view that illustrates aspects of a fifteenth minimally invasive surgical instrument assembly, showing an illustrative distal segment 1900 of the assembly.
- This assembly 1900 like some of the variations of assembly 1800 ( Figures 18-18G ), is primarily intended for surgical work to be performed generally to the side of the assembly rather than in front of its distal end.
- a first surgical instrument 1902, a second surgical instrument 1904, and an imaging system 1906 extend through a guide tube 1908.
- Various combinations of instruments and imaging systems may be used, either removable or fixed as described above.
- Surgical instrument 1902 generally works like the various instruments described above, its distal segment 1902a being rigid or flexible as described.
- instrument 1902 is illustrative of aspects in which is used a primary guide tube and instrument combination as described above.
- Guide tube 1908 may be rigid or flexible as described above.
- the surgical instrument bodies are, e.g., about 7 mm in diameter.
- Imaging system 1906 has a field of view that is generally perpendicular to instrument assembly 1900's longitudinal axis so that the surgeon can work at a site located to the side of the assembly.
- Imaging system 1906 may translate longitudinally (surge) within a channel defined in guide tube 1908, may be fixed to the distal end of guide tube 1908, or may be an integral part of guide tube 1908 as illustrated by aspects of assembly 1800 ( Figures 18-18G ).
- imaging system 1906 may roll within the channel.
- the round instrument body must be large enough to accommodate, e.g., sensor data wiring (unless a wireless link is used) and an optical fiber illumination bundle.
- the distal end 1912 alone may roll about imaging system 1906's longitudinal axis, as shown by the arrows, so as to place the surgical site within the field of view. If the distal end 1912 alone rolls, then an interface allows the sensor data wiring (unless a wireless link is used) and, e.g., power wires or optical fibers for illumination to bend to accommodate the roll.
- Surgical instrument 1904 is designed to work primarily in retrograde. As shown in Figure 19 , the distal segment 1904a of instrument 1904 is joined to a body segment 1904b by a U Turn mechanism 1904c. Components (such as, e.g., levers, pulleys, gears, gimbals, cables, cable guide tubes, and the like) inside U-turn assembly 1904c transmit mechanical forces (e.g., from cable or cable/hypotube combinations) around the U-turn (not necessarily 180 degrees as shown; other turn angles may be used) to move distal segment 1904a and an optional wrist mechanism, and to operate an end effector (not shown).
- mechanical forces e.g., from cable or cable/hypotube combinations
- U-Turn mechanism 1904c is distinguished from flexible mechanical structures because, e.g., it transmits mechanical forces through a radius of curvature that is significantly less than the minimum radius of curvature of equivalently sized flexible mechanical structures. Further, since the U-Turn mechanism does not itself move, the distance between a point where an actuating force enters the U-Turn mechanism and the point where the actuating force exits the U-Turn mechanism is unchangeable. For aspects in which a joint is placed in body segment 1904b so that it is divided into proximal and distal segments, and if instrument body roll is not transmitted through the joint, then the distal tip 1904d may be configured to rotate around the distal segment's longitudinal axis.
- Figure 19A is another diagrammatic perspective view of the embodiment depicted in Figure 19 , and it illustrates that during surgical work the distal ends of instruments 1902 and 1904 are generally within imaging system 1906's field of view to the side of assembly 1900.
- Figures 19 and 19A further show that in some aspects the surgical instrument distal ends are coupled to the main bodies at a single pivot point 1914. Movement in more than one plane is facilitated by, e.g., a ball and socket type joint as illustrated above in Figure 18C (1842) and below in figures 19B and 19C . In other aspects, joints such as those shown in Figs. 16A-C are used. End effectors (not shown) may be coupled directly or via wrist mechanisms at the extreme distal ends 1916.
- Figure 19B is a plan view of a surgical instrument assembly embodiment that incorporates a U-turn surgical instrument 1920.
- Distal instrument forearm segment 1922 is coupled to instrument main body segment 1924 via U-Turn mechanism 1926 and an illustrative controllable ball joint 1928.
- Wrist 1930 ball and annular segment flexible mechanism is shown for illustration; other wrist mechanisms may be used as described above
- end effector 1932 couples end effector 1932 to the distal end of forearm segment 1922. Cables (not shown) that move forearm 1922, wrist 1930, and end effector 1932 are routed through individual cable guides in U-Turn mechanism 1926, as described in more detail below.
- the alternate position lines 1934 illustrate that in some instances wrist 1930 can bend at least 135 degrees in three dimensions to enable end effector 1932 to be oriented in various useful ways.
- An embodiment of such a wrist may incorporate, e.g., three 2-DOF joints of two hinges each, as described above with reference to Figs. 16A-C .
- Each 2-DOF joint allows about 45 degrees of pitch and yaw from being aligned with forearm link 1922's longitudinal axis.
- a parallel motion mechanism and wrist combination as described above may be used.
- the surgical instrument assembly shown in Figure 19C also incorporates a second surgical instrument 1936 that operates similarly to instrument 1920, except that it does not incorporate the U-Turn mechanism.
- Figure 19C is another plan view of the surgical instrument assembly embodiment shown in Figure 19B , with surgical instrument 1920 extended farther out of guide tube 1938.
- the end effectors are working close to and pointing generally at imaging system 1940.
- the end effectors are still working close to imaging system 1940, but they are now pointing generally perpendicular to imaging system 1940's viewing angle.
- Figure 19C illustrates that instrument 1920's extension distance from guide tube 1938 may depend on the end effector angle commanded by a master input control. It can also be seen that in some aspects if a command is given to change the end effector's orientation while maintaining its position, then the instrument body and forearm link must be moved to a new pose.
- FIG 19D is an exploded perspective view that illustrates aspects of routing cables (the term “cable” is illustrative of various filars (herein, the term “filars” should be broadly construed and includes, e.g., single- and multi-strand threads or even very fine hypotubes) that may be used) that control distal instrument components through a U-Turn mechanism.
- actuator cables 1950 for, e.g., forearm link 1922, wrist 1930, and end effector 1932 run through instrument main body segment 1924 and are routed through individual cable guide tubes 1952, which route cables 1950 around the U-Turn.
- the cable guide tubes are, e.g., stainless steel hypotubes.
- Brace 1954 clamps and therefore stabilizes both ends of the cable guide tubes 1952.
- the cable guide tubes may be soldered or brazed.
- An outer cover may cover and protect the cable guide tubes and also any tissue against which the U-Turn instrument may press as it extends from its guide tube.
- each individual cable guide tube is approximately the same length and has approximately the same bend radius (there are some small differences, as shown in the Figures).
- the approximately equal length and bend radius tubes make each cable's compliance, a function of diameter and length, approximately the same. Friction depends on the load and total bend angle of each cable.
- 18 cable guide tubes are shown.
- the theoretical minimum number of tension cables is DOFs + 1. More cables can be used for simplicity, to increase strength or stiffness, or to constrain joint behavior.
- two of the hinges are slaved through cables to two other hinges.
- 18 cables would be used to control 4 distal DOFs plus end effector grip.
- End effector roll is provided by rolling the instrument body shaft inside the guide tube. With coordinated movement of the other joints, rolling the instrument body shaft will roll the end effector around its end point.
- Figure 19E is a perspective view of an illustrative embodiment of the cable guide tubes 1952.
- a total of 18 cable guide tubes are shown.
- the cable guide tubes are arranged so as to form a central channel 1955, through which may be routed control cables for an end effector, surgical implements for suction, irrigation, or electrocautery, and the like.
- An optional sleeve (not shown) may be inserted within channel 1955 to reduce friction.
- Other numbers of guide tubes e.g., 9) may be used.
- Figure 19F is an end elevation view that shows the arrangement of guide tubes 1952 around the central channel 1955.
- Figure 19G is a perspective view of an illustrative embodiment of an alternate way of routing cables around the U-Turn. Instead of using the multiple cable guide tubes 1952 and brace 1954, they are constructed as a single part 1956. Metal casting or rapid metal prototyping is used to make the part, which includes individual channels 1957 through which the cables are routed, and a central channel 1958 through which other components may be routed as discussed above.
- FIG 19H is a perspective view that illustrates aspects of a surgical instrument with a U Turn mechanism passing through and exiting from a guide tube.
- a single channel 1960 in guide tube 1962 is shaped to accommodate both the instrument's main body segment 1924 and the retrograde segment 1964 (only the control cables for the retrograde segment are shown; see e.g., Figure 19B ), which is folded back towards the main body segment as the instrument moves within the channel.
- the channel is pinched in the middle, so that when the U-Turn mechanism and retrograde segment exit the guide tube, the portion of the channel through which the main body segment passes still securely holds the main body segment.
- the single piece U-Turn part 1956 is also pinched as shown so that they slide within channel 1960.
- Figure 19I is a perspective view that illustrates that once the U-Turn instrument exits the guide tube it may be rolled within the channel, and then the forearm link can be moved so that the end effector is positioned within the imaging system's field of view. In one aspect, keeping the end effector in position and rolling the instrument body within the guide tube rolls the end effector, as shown by the rotational arrows, because of the nature of the joints.
- Figure 19J is a perspective view that illustrates aspects of a surgical instrument assembly embodiment that uses more than one U-Turn retrograde surgical instrument.
- Using two U-Turn instruments allows the end effectors to work back closely to the guide tube.
- an illustrative independent imaging system 1970 is shown with an image capture component 1972 mounted at the end of an illustrative flexible mechanism 1979.
- a U-Turn mechanism or a series of rigid links may be used instead of a flexible mechanism. Retroflexing the imaging system allows image capture component 1972's field of view to encompass the two U-Turn instrument end effectors.
- an imaging system 1976 may be positioned at the side of the guide tube if the end effectors are to work generally to the side of the instrument assembly.
- Figure 19K is a plan view that illustrates another aspect of the U-turn mechanism 1990, which uses small levers, for example, to transmit forces from the main instrument body to the distal forearm link, wrist mechanism, and end effector.
- Various cables, wires, rods, hypotubes, and the like, and combinations of these components, may be used in the main body and forearm and are coupled to the force transmission components.
- illumination for the imaging system may be positioned at various places in side- and retroflexive-working systems.
- one or more illumination LEDs may be placed on the body of the retroflexive tool. Referring to Figure 19C , for example, one or more LEDs may be placed at an illustrative position 1942, along instrument main body segment 1924. Or, LEDs may be placed along the forearm segment at, e.g., 1938 as shown in Figure 19B . Likewise, LEDs may be placed at the inner curve of a retroflexing flexible mechanism, such as at positions 1978 shown in Figure 19J .
- An advantage of placing additional illumination some distance away from the imaging apertures is that the additional illumination may provide shadows, which provides better depth cues. Illumination near or surrounding the imaging apertures, however, prevents the shadows from becoming so deep that details are not visible in the shadowed areas. Accordingly, in some aspects illumination both near to and far from the imaging apertures is used.
- One or more channels, illustrated by dashed lines 1944 ( Figure 19C ) or 1980 ( Figure 19J ), in the structure on which the LEDs are mounted may carry cooling fluid (e.g., water) past the LEDs.
- the LED die (or multiple LED die) can be mounted on the obverse side of a thermally conductive substrate (e.g., an aluminum plate, a plated ceramic), which is bonded to the cooling channel so that the reverse side of the substrate is exposed to the cooling flow.
- a thermally conductive substrate e.g., an aluminum plate, a plated ceramic
- the cooling fluid may circulate in a closed system, or it may empty either inside or outside the patient.
- a sterile, biocompatible fluid e.g., sterile isotonic saline
- Suction may be used to remove the cooling fluid from the patient.
- the cooling fluid discharged into the patient may be used to perform other functions.
- the discharged cooling fluid may be directed across the imaging lenses. The fluid may clean the lenses or prevent body fluids, smoke, or surgical debris from sticking to the lenses.
- the amount of cooling fluid to keep an LED within an acceptable temperature range is fairly small.
- an LED that dissipates about 4 Watts of electrical power as heat can be cooled with a flow of about 0.1 cc/sec of water through 0.508 mm (0.020-inch) OD plastic tubing (e.g., 3.7 metres total (12 feet length); 1.8 metres (6 feet) supply and 1.8 metres (6 feet) return), and the water will experience only about a 10-degree Celsius temperature rise.
- LEDs as described above is an example of alternative illumination placement on the instruments.
- fiber light guides may be used, in which case cooling considerations do not apply.
- the cross-sectional area of a guide tube must accommodate instruments which themselves have distal portions with a relatively large cross-sectional area.
- more than one instrument is inserted through a single specially shaped channel.
- Figure 20A is an end elevation view of the distal end face of illustrative guide tube 2002.
- Guide tube 2002's lateral cross section is similarly configured (i.e., the channels depicted extend through the entire guide tube).
- guide tube 2002 has three channels (more or fewer channels may be used).
- Channel 2004 accommodates an endoluminal imaging system and may have various cross-sectional shapes (e.g., round, oval, rounded polygon, etc.).
- the shape illustrated in Figure 20A is a circle overlaid and centered on a rounded rectangle.
- the circular bore 2004a of channel 2004 accommodates the imaging system's body (illustrated by dashed lines), and the slots 2004b (the ends of the rounded rectangle) on either side of the circular bore 2004a allow the image capture element, which is wider than the cylindrical body segment, to pass through channel 2004. Since the circular bore 2004a has a slightly larger diameter than slots 2004b (the channel 2004 cross section is an oblong, biconvex shape), the imaging system's body segment is held in place within channel 2004 after the image capture element exits guide tube 2002's distal end.
- Channel 2006 depicted as a single, circular bore, is an optional auxiliary channel and may be used for irrigation, suction, small (e.g., 3 mm diameter) instruments, etc.
- Channel 2008 is uniquely shaped to simultaneously accommodate two surgical instruments in which one has a distal end segment larger than its body segment, such as instruments 1902 and 1904 ( Figure 19 ).
- channel 2008's cross-sectional shape is generally oblong with a pinched center across the major axis (the cross section is an oblong, biconcave shape).
- Channel 2008 includes two cylindrical bores 2008a,2008b through which cylindrical instrument bodies are inserted. The bores 2008a,2008b are interconnected by a slot 2008c.
- the instrument's distal portion As an instrument body (illustrated by the circular dashed line 2009a) is inserted through bore 2008a, for example, the instrument's distal portion, which is larger than its proximal body segment, passes through at least part of slot 2008c and possibly some or all of bore 2008b.
- Figure 19H illustrates this aspect.
- the instrument's distal portion Once the instrument's distal portion has been inserted beyond the guide tube's distal end, the instrument's proximal body segment is rotated within bore 2008a, which holds the proximal body segment in place. Consequently, another instrument (illustrated by the circular dashed line2009b), either cylindrical or with an enlarged distal portion that fits through slot 2008c, can be inserted through bore 2008b.
- This channel configuration and insertion process can be used for various instruments with odd- shaped distal portions, such as staplers, clip appliers, and other special task instruments, as well as for the retrograde working instruments described herein.
- an imaging device having a distal image capture component cross section larger than its body cross section and shaped to pass through the channel's oblong cross section may be similarly inserted, followed by one or more other instruments.
- the lip 2011 of channel 2008, or any channel is in some instances rounded or beveled as shown to facilitate instrument withdrawal into the guide tube.
- Figure 20B is an end elevation view of the distal end face of guide tube 2002 with an illustrative imaging system 2010 and two surgical instruments 2012,2014, all extending from their insertion channels 2004,2008.
- Instrument 2012 is a U-Turn mechanism type retrograde working instrument, similar to the illustrative embodiment shown in Figures 19 and 19A .
- Instrument 2014 is generally circular in cross section during insertion, although during insertion a portion of instrument 2014 may extend into any portion of slot 2008c that instrument 2012 does not occupy.
- an instrument with the multiple cable guide tube U-Turn mechanism similar to the embodiments shown in Figures 19B-19L may be inserted through channel 2008, with the body and distal portions of the instrument passing through the bores and the pinched portion of the U-Turn mechanism passing through the slot between the bores.
- FIG 20A can be adapted to allow, e.g., two instruments with large distal ends to be inserted through a guide tube, possibly adding a third instrument as well.
- Figure 20C is an end elevation view that illustrates aspects in which an instrument channel includes bores arranged in a "V" shape, although the "V” may be flattened so that three or more channel bores are side-by-side in a line.
- channel 2020 includes three cylindrical bores 2020a,2020b,2020c, with slot 2020d joining bores 2020a and 2020b, and slot 2020e joining bores 2020b and 2020c. Bores 2020a and 2020c are shown at the ends of the "V" shape, and bore 2020b is shown at the vertex of the "V" shape.
- a first retrograde working instrument with a U-Turn mechanism is inserted via bores 2020a and 2020b, and then a second retrograde working instrument with a U-Turn mechanism is inserted via bores 2020c and 2020b.
- the three bores allow either of the instruments to be independently removed—one instrument does not have to be removed to allow the other instrument to be removed.
- An optional third instrument may be inserted via bore 2020b once two other instruments are inserted with their proximal body segments held in place within bores 2020a and 2020c. It can be seen that two large-ended instruments and an optional third instrument may be inserted via channel 2020 in various combinations.
- An imaging system may be inserted via channel 2022, which may be a rounded rectangle as shown, circular, or various other shapes as illustrated herein (e.g., 2004 in Figure 20A ). Alternatively, if an imaging system has a suitably shaped distal end, it may be inserted via channel 2020. An assembly with two retrograde working instruments and an imaging system is illustrated in Figure 19J .
- Figures 20D, 20E, and 20F are each end elevation views that illustrate aspects of other channel configurations that may be used to accommodate one or more instruments with large distal ends.
- Figure 20D shows channel 2030 with three bores 2030a,2030b,2030c in a triangular arrangement.
- the slots that interconnect adjacent bores merge into a single opening that connects each bore with the other two (i.e., the top of the "V" shape illustrated in Figure 20C is joined by a third slot.
- the channel has a generally triangular cross section, and the bores are at the triangle's vertices).
- FIG. 20E illustrates that the channel can have any number of bores to accept surgical instruments (four are shown with the bores arranged at the corners of a square).
- Figure 20F illustrates a channel with a "T" shape, the bores for the instruments being the three ends of the "T".
- a spacer such as shown in Figure 20D may be used to keep instruments properly positioned within the "T", or the connecting openings between the bores may be slightly pinched to keep the instruments in their bores.
- cross-sectional channel shapes e.g., a cross or "X” shape; it can be seen that a "T” shape is part of such a cross or “X” shape
- a cross-sectional configuration may be used with a cross-sectional configuration or a separate component that keeps a surgical instrument's body or shaft in place within the channel.
- the bores that hold the proximal segments of the instrument and imaging system bodies are shown as circular, which allows the bodies to roll within the bores.
- some or all the bores may have non-circular cross sections to prevent the body segments from rolling within the bores.
- one non-circular bore may be dedicated to holding the proximal body segment of an imaging system, which is kept from rolling.
- specifically shaped bores may be used to ensure that only a particular device may be inserted into a particular bore.
- any surgical instrument or imaging system may be inserted via any bore.
- Figure 21A is a schematic view that illustrates aspects of a robot-assisted (telemanipulative) minimally invasive surgical system that uses aspects of the minimally invasive surgical instruments, instrument assemblies, and manipulation and control systems described herein.
- This system's general architecture is similar to the architecture of other such systems such as Intuitive Surgical, Inc.'s da Vinci® Surgical System and the Zeus® Surgical System.
- the three main components are a surgeon's console 2102, a patient side support system 2104, and a video system 2106, all interconnected 2108 by wired or wireless connections as shown.
- One or more electronic data processors may be variously located in these main components to provide system functionality.
- the surgeon's console 2102 includes, e.g., multiple DOF mechanical input (“master”) devices that allow the surgeon to manipulate the surgical instruments, guide tubes, and imaging system (“slave”) devices as described herein. These input devices may in some aspects provide haptic feedback from the instruments and instrument assembly components to the surgeon.
- Console 2102 also includes a stereoscopic video output display positioned such that images on the display are generally focused at a distance that corresponds to the surgeon's hands working behind/below the display screen.
- Control during insertion may be accomplished, for example, in a manner similar to telemanipulated endoscope control in the da Vinci® Surgical System—in one aspect the surgeon virtually moves the image with one or both of the masters; she uses the masters to move the image side to side and to pull it towards herself, consequently commanding the imaging system and its associated instrument assembly (e.g., a flexible guide tube) to steer towards a fixed center point on the output display and to advance inside the patient.
- the camera control is designed to give the impression that the masters are fixed to the image so that the image moves in the same direction that the master handles are moved, as in the da Vinci® surgical system.
- This design causes the masters to be in the correct location to control the instruments when the surgeon exits from camera control, and consequently it avoids the need to clutch (disengage), move, and declutch (engage) the masters back into position prior to beginning or resuming instrument control.
- the master position may be made proportional to the insertion velocity to avoid using a large master workspace.
- the surgeon may clutch and declutch the masters to use a ratcheting action for insertion.
- insertion e.g., past the glottis when entering via the esophagus
- automated insertion e.g., servomotor driven rollers
- image data e.g., MRI, X-ray
- the patient side support system 2104 includes a floor-mounted base 2110, or alternately a ceiling mounted base 2112 as shown by the alternate lines.
- the base may be movable or fixed (e.g., to the floor, ceiling, or other equipment such as an operating table).
- the manipulator arm assembly is a modified da Vinci® Surgical System arm assembly.
- the arm assembly includes two illustrative passive rotational setup joints 2114a,2114b, which allow manual positioning of the coupled links when their brakes are released.
- a passive prismatic setup joint (not shown) between the arm assembly and the base may be used to allow for large vertical adjustments.
- the arm assembly includes illustrative active roll joint 2116a and active yaw joint 2116b.
- Joints 2116c and 2116d act as a parallel mechanism so that a guide tube (of a surgical instrument assembly) held by guide manipulator 2118 moves around remote center 2120 at an entry port, such as patient 1222's umbilicus.
- An active prismatic joint 2124 is used to insert and withdraw the guide tube.
- One or more surgical instruments and an endoscopic imaging system are independently mounted to guide manipulator 2118. The various setup and active joints allow the manipulators to move the guide tube, instruments, and imaging system when patient 2122 is placed in various positions on movable table 2126.
- Figures 21B and 21C are schematic side and front elevation views of another illustrative embodiment of a patient side support system.
- Base 2150 is fixed (e.g., floor or ceiling mounted).
- Link 2152 is coupled to base 2150 at passive rotational setup joint 2154. As shown, joint 2154's rotational axis is aligned with remote center point 2156, which is generally the position at which a guide tube (of a surgical instrument assembly; not shown) enters the patient (e.g., at the umbilicus for abdominal surgery).
- Link 2158 is coupled to link 2152 at rotational joint 2160.
- Link 2162 is coupled to link 2158 at rotational joint 2164.
- Link 2166 is coupled to link 2162 at rotational joint 2168.
- Manipulator platform 2170 is supported and coupled to link 2166 by a prismatic joint 2172 and a rotational joint 2174.
- Prismatic joint 2172 inserts and withdraws the guide tube as it slides along link 2166.
- Joint 2174 includes a bearing assembly that holds a "C” shaped ring cantilever. As the "C” ring slides through the bearing it rotates around a center point inside the "C", thereby rolling the guide tube. The opening in the "C” allows guide tubes to be mounted or exchanged without moving overlying manipulators.
- Manipulator platform 2170 supports multiple manipulators 2176 for surgical instruments and an imaging system, described below.
- manipulator arm assemblies are used, for example, for instrument assemblies that include a rigid guide tube and are operated to move with reference to a remote center. Certain setup and active joints in the manipulator arm may be omitted if motion around a remote center is not required. It should be understood that manipulator arms may include various combinations of links, passive, and active joints (redundant DOFs may be provided) to achieve a necessary range of poses for surgery.
- video system 2106 performs image processing functions for, e.g., captured endoscopic imaging data of the surgical site and/or preoperative or real time image data from other imaging systems external to the patient.
- Imaging system 2106 outputs processed image data (e.g., images of the surgical site, as well as relevant control and patient information) to the surgeon at the surgeon's console 2102.
- the processed image data is output to an optional external monitor visible to other operating room personnel or to one or more locations remote from the operating room (e.g., a surgeon at another location may monitor the video; live feed video may be used for training; etc.).
- FIG 22A is a diagrammatic view that illustrates aspects of a centralized motion control and coordination system architecture for minimally invasive telesurgical systems that incorporate surgical instrument assemblies and components described herein.
- a motion coordinator system 2202 receives master inputs 2204, sensor inputs 2206, and optimization inputs 2208.
- Master inputs 2204 may include the surgeon's arm, wrist, hand, and finger movements on the master control mechanisms. Inputs may also be from other movements (e.g., finger, foot, knee, etc. pressing or moving buttons, levers, switches, etc.) and commands (e.g., voice) that control the position and orientation of a particular component or that control a task-specific operation (e.g., energizing an electrocautery end effector or laser, imaging system operation, and the like).
- movements e.g., finger, foot, knee, etc. pressing or moving buttons, levers, switches, etc.
- commands e.g., voice
- a task-specific operation e.g., energizing an electrocautery end effector or laser, imaging system operation, and the like.
- Sensor inputs 2206 may include position information from, e.g., measured servomotor position or sensed bend information.
- U.S. Patent Application No. 11/491,384 (Larkin, et al. ), published as US 2007-0156019 A1 , entitled "Robotic surgery system including position sensors using fiber Bragg gratings” describes the use of fiber Bragg gratings for position sensing.
- Such bend sensors may be incorporated into the various instruments and imaging systems described herein to be used when determining position and orientation information for a component (e.g., an end effector tip).
- Position and orientation information may also be generated by one or more sensors (e.g., fluoroscopy, MRI, ultrasound, and the like) positioned outside of the patient, and which in real time sense changes in position and orientation of components inside the patient.
- the user interface has three coupled control modes: a mode for the instrument (s), a mode for the imaging system, and a mode for the guide tube.
- These coupled modes enable the user to address the system as a whole rather than directly controlling a single portion. Therefore, the motion coordinator must determine how to take advantage of the overall system kinematics (i.e., the total DOFs of the system) in order to achieve certain goals. For example, one goal may be to optimize instrument workspace for a particular configuration. Another goal may be to keep the imaging system's field of view centered between two instruments. Therefore, optimization inputs 2208 may be high-level commands, or the inputs may include more detailed commands or sensory information. An example of a high level command would be a command to an intelligent controller to optimize a workspace. An example of a more detailed command would be for an imaging system to start or stop optimizing its camera. An example of a sensor input would be a signal that a workspace limit had been reached.
- Motion coordinator 2202 outputs command signals to various actuator controllers and actuators (e.g., servomotors) associated with manipulators for the various telesurgical system arms.
- Figure 22A depicts an example of output signals being sent to two instrument controllers 2210, to an imaging system controller 2212, and to a guide tube controller 2214. Other numbers and combinations of controllers may be used.
- such a motion coordination system may be used to control surgical instrument assembly 1700 ( Figure 17 ).
- Instrument controllers 2210 are associated with instruments 1702a,1702b
- imaging system controller 2212 is associated with imaging system 1704
- guide tube controller 2214 is associated with guide tube 1708.
- surgeon who operates the telesurgical system will simultaneously and automatically access at least the three control modes identified above: an instrument control mode for moving the instruments, an imaging system control mode for moving the imaging system, and a guide tube control mode for moving the guide tube.
- a similar centralized architecture may be adapted to work with the various other mechanism aspects described herein.
- FIG 22B is a diagrammatic view that illustrates aspects of a distributed motion control and coordination system architecture for minimally invasive telesurgical systems that incorporate surgical instrument assemblies and components described herein.
- control and transform processor 2220 exchanges information with two master arm optimizer/controllers 2222a,2222b, with three surgical instrument optimizer/controllers 2224a,2224b,2224c, with an imaging system optimizer/controller 2226, and with a guide tube optimizer/controller 2228.
- Each optimizer/controller is associated with a master or slave arm (which includes, e.g., the camera (imaging system) arm, the guide tube arm, and the instrument arms) in the telesurgical system.
- Each of the optimizer/controllers receives arm-specific optimization goals 2230a-2230g.
- control and transform processor 2220 routes the Following Data received from each optimizer/controller to all the optimizer/controllers so that each optimizer/controller has data about the current Cartesian configuration of all arms in the system.
- the optimizer/controller for each arm receives optimization goals that are unique for the arm.
- Each arm's optimizer/controller then uses the other arm positions as inputs and constraints as it pursues its optimization goals.
- each optimization controller uses an embedded local optimizer to pursue its optimization goals.
- the optimization module for each arm's optimizer/controller can be independently turned on or off. For example, the optimization module for only the imaging system and the guide tube may be turned on.
- the distributed control architecture provides more flexibility than the centralized architecture, although with the potential for decreased performance. It easier to add in a new arm and to change the overall system configuration if such a distributed control architecture is used rather than if a centralized architecture is used. In this distributed architecture, however, the optimization is local versus the global optimization that can be performed with the centralized architecture, in which a single module is aware of the full system's state.
- Figure 23 is a schematic view that illustrates aspects of an interface between surgical instrument assembly 2302, which represents flexible and rigid mechanisms as variously described herein, and an illustrative actuator assembly 2304.
- instrument assembly 2302 includes surgical instrument 2306, primary guide tube 2308 that surrounds instrument 2306, and secondary guide tube 2310 that surrounds primary guide tube 2308.
- a transmission mechanism is positioned at the proximal ends of each instrument or guide tube: transmission mechanism 2306a for instrument 2306, transmission mechanism 2308a for primary guide tube 2308, and transmission mechanism 2310a for secondary guide tube 2310.
- Each transmission mechanism is mechanically and removably coupled to an associated actuator mechanism: transmission mechanism 2306a to actuator mechanism 2312, transmission mechanism 2308a to actuator mechanism 2314, transmission mechanism 2310a to actuator mechanism 2316.
- mating disks are used as in the da Vinci® Surgical System instrument interface, as shown in more detail below.
- mating gimbal plates and levers are used.
- Each actuator mechanism includes at least one actuator (e.g., servomotor (brushed or brushless)) that controls movement at the distal end of the associated instrument or guide tube.
- actuator 2312a is an electric servomotor that controls surgical instrument 2306's end effector 2306b grip DOF.
- An instrument including a guide probe as described herein) or guide tube (or, collectively, the instrument assembly) may be decoupled from the associated actuator mechanism(s) and slid out as shown. It may then be replaced by another instrument or guide tube.
- an electronic interface between each transmission mechanism and actuator mechanism. This electronic interface allows data (e.g., instrument/guide tube type) to be transferred.
- one or more DOFs may be manually actuated.
- surgical instrument 2306 may be a passively flexible laparoscopic instrument with a hand-actuated end effector grip DOF, and guide tube 2308 may be actively steerable to provide wrist motion as described above.
- the surgeon servocontrols the guide tube DOFs and an assistant hand controls the instrument grip DOF.
- each actuator assembly may also include an actuator component (e.g., motor-driven cable, lead screw, pinion gear, etc.; linear motor; and the like) that provides motion along instrument assembly 2302's longitudinal axis (surge).
- actuator mechanism 2312 includes linear actuator 2312b
- actuator mechanism 2314 includes linear actuator 2314b
- actuator mechanism 2316 includes linear actuator 2316b, so that instrument 2306, primary guide tube 2308, and secondary guide tube 2310 can each be independently coaxially moved.
- actuator assembly 2316 is mounted to setup arm 2318, either passively or actively as described above. In active mounting architectures, the active mounting may be used to control one or more component DOFs (e.g., insertion of a rigid guide tube).
- Control signals from control system 2320 control the various servomotor actuators in actuator assembly 2304.
- the control signals are, e.g., associated with the surgeon's master inputs at input/output system 2322 to move instrument assembly 2302's mechanical slave components.
- various feedback signals from sensors in actuator assembly 2304, and/or instrument assembly 2302, and/or other components are passed to control system 2320.
- Such feedback signals may be pose information, as indicated by servomotor position or other position, orientation, and force information, such as may be obtained with the use of fiber Bragg grating-based sensors.
- Feedback signals may also include force sensing information, such as tissue reactive forces, to be, e.g., visually or haptically output to the surgeon at input/output system 2322.
- Image data from an endoscopic imaging system associated with instrument assembly 2302 are passed to image processing system 2324.
- image data may include, e.g., stereoscopic image data to be processed and output to the surgeon via input/output system 2322 as shown.
- Image processing may also be used to determine instrument position, which is input to the control system as a form of distal position feedback sensor.
- an optional sensing system 2326 positioned outside and near the patient may sense position or other data associated with instrument assembly 2302.
- Sensing system 2326 may be static or may be controlled by control system 2320 (the actuators are not shown, and may be similar to those depicted or to known mechanical servo components), and it may include one or more actual sensors positioned near the patient.
- Position information (e.g., from one or more wireless transmitters, RFID chips, etc.) and other data from sensing system 2326 may be routed to control system 2320. If such position information or other data is to be visually output to the surgeon, control system 2320 passes it in either raw or processed form to image processing system 2324 for integration with the surgeon's output display at input/output system 2322. Further, any image data, such as fluoroscopic or other real-time imaging (ultrasound, X-ray, MRI, and the like), from sensing system 2326 are sent to image processing system 2324 for integration with the surgeon's display. And, real-time images from sensing system 2326 may be integrated with preoperative images accessed by image processing system 2324 for integration with the surgeon's display.
- image processing system 2324 for integration with the surgeon's display.
- preoperative images of certain tissue are received from a data storage location 2328, may be enhanced for better visibility, the preoperative images are registered with other tissue landmarks in real time images, and the combined preoperative and real time images are used along with position information from instrument and actuator assemblies 2302,2304 and/or sensing system 2326 to present an output display that assists the surgeon to maneuver instrument assembly 2302 towards a surgical site without damaging intermediate tissue structures.
- tissue e.g., brain tissue structures
- Figure 24A is a perspective view of the proximal portion of a minimally invasive surgical instrument 2402.
- instrument 2402 includes a transmission mechanism 2404 coupled to the proximal end of an instrument body tube 2406.
- Components at body tube 2406's distal end 2408 are omitted for clarity and may include, e.g., the 2 DOF parallel motion mechanism, wrist, and end effector combination as described above; joints and an endoscopic imaging system as described above; etc.
- transmission mechanism 2404 includes six interface disks 2410.
- One or more disks 2410 are associated with a DOF for instrument 240.
- one disk may be associated with instrument body roll DOF, and a second disk may be associated with end effector grip DOF.
- the disks are arranged in a hexagonal lattice for compactness—in this case six disks in a triangular shape. Other lattice patterns or more arbitrary arrangements may be used.
- Mechanical components e.g., gears, levers, gimbals, cables, etc.
- transmission mechanism 2404 transmit roll torques on disks 2410 to e.g., body tube 2406 (for roll) and to components coupled to distal end mechanisms. Cables and/or cable and hypotube combinations that control distal end DOFs run through body tube 2406.
- the body tube is approximately 7 mm in diameter, and in another instance it is approximately 5 mm in diameter.
- Raised pins 2412 spaced eccentrically, provide proper disk 2410 orientation when mated with an associated actuator disk.
- One or more electronic interface connectors 2414 provide an electronic interface between instrument 2402 and its associated actuator mechanism.
- instrument 2402 may pass information stored in a semiconductor memory integrated circuit to the control system via its associated actuator mechanism. Such passed information may include instrument type identification, number of instrument uses, and the like.
- the control system may update the stored information (e.g., to record number of uses to determine routine maintenance scheduling or to prevent using an instrument after a prescribed number of times).
- U.S. Patent No. 6,866,671 (Tierney et al.
- the electronic interface may also include power for, e.g., an electrocautery end effector. Alternately, such a power connection may be positioned elsewhere on instrument 2402 (e.g., on transmission mechanism 2404's housing). Other connectors for, e.g., optical fiber lasers, optical fiber distal bend or force sensors, irrigation, suction, etc. may be included. As shown, transmission mechanism 2404's housing is roughly wedge- or pie-shaped to allow it to be closely positioned to similar housings, as illustrated below.
- Figure 24B is a perspective view of a portion of an actuator assembly 2420 that mates with and actuates components in surgical instrument 2402.
- Actuator disks 2422 are arranged to mate with interface disks 2410. Holes 2424 in disks 2422 are aligned to receive pins 2412 in only a single 360-degree orientation.
- Each disk 2422 is turned by an associated rotating servomotor actuator 2426, which receives servocontrol inputs as described above.
- a roughly wedge-shaped mounting bracket 2428 shaped to correspond to instrument 2402's transmission mechanism housing, supports the disks 2422, servomotor actuators 2426, and an electronic interface 2430 that mates with instrument 2402's interface connectors 2414.
- instrument 2402 is held against actuator assembly 2420 by spring clips (not shown) to allow easy removal.
- a portion 2432 of actuator assembly housing 2428 is truncated to allow instrument body tube 2406 to pass by.
- a hole may be placed in the actuator assembly to allow the body tube to pass through.
- Sterilized spacers reusable or disposable; usually plastic
- a sterile thin plastic sheet or "drape" e.g., 0.0508 mm (0.002-inch) thick polyethylene
- U.S. Patent No. 6,866,671 discusses such spacers and drapes.
- Figure 25A is a diagrammatic perspective view that illustrates aspects of mounting minimally invasive surgical instruments and their associated actuator assemblies at the end of a setup/manipulator arm.
- surgical instrument 2502a is mounted on actuator assembly 2504, so that the transmission mechanism mates with the actuator assembly (optional spacer/drape is not shown) as described above.
- Instrument 2502a's body tube 2506 extends past actuator assembly 2504 and enters a port in rigid guide tube 2508.
- body tube 2506 although substantially rigid, is bent slightly between the transmission mechanism housing and the guide tube as discussed above with reference to Figure 16 . This bending allows the instrument body tube bores in the entry guide to be spaced closer than the size of their transmission mechanisms would otherwise allow.
- the bend angle in the rigid instrument body tube is less than the bend angle for a flexible (e.g., flaccid) instrument body
- cables can be stiffer than in a flexible body.
- High cable stiffness is important because of the number of distal DOFs being controlled in the instrument
- the rigid instrument body is easier to insert into a guide tube than a flexible body.
- the bending is resilient so that the body tube assumes its straight shape when the instrument is withdrawn from the guide tube (the body tube may be formed with a permanent bend, which would prevent instrument body roll).
- Actuator assembly 2504 is mounted to a linear actuator 2510 (e.g. a servocontrolled lead screw and nut or a ball screw and nut assembly) that controls body tube 2506's insertion within guide tube 2508.
- the second instrument 2502b is mounted with similar mechanisms as shown.
- an imaging system (not shown) may be similarly mounted.
- Figure 25A further shows that guide tube 2508 is removably mounted to support platform 2512.
- This mounting may be, for example, similar to the mounting used to hold a cannula on a da Vinci® Surgical System manipulator arm.
- Removable and replaceable guide tubes allow different guide tubes that are designed for use with different procedures to be used with the same telemanipulative system (e.g., guide tubes with different cross-sectional shapes or various numbers and shapes of working and auxiliary channels).
- actuator platform 2512 is mounted to robot manipulator arm 2514 (e.g., 4 DOF) using one or more additional actuator mechanisms (e.g., for pitch, yaw, roll, insertion).
- manipulator arm 2514 may be mounted to a passive setup arm, as described above with reference to Figure 21A .
- Figure 25B is a diagrammatic perspective view that illustrates aspects shown in Figure 25A from a different angle and with reference to a patient.
- arm 2514 and platform 2512 are positioned so that guide tube 2508 enters the patient's abdomen at the umbilicus.
- This entry is illustrative of various natural orifice and incision entries, including percutaneous and transluminal (e.g., transgastric, transcolonic, transrectal, transvaginal, transrectouterine (Douglas pouch), etc.) incisions.
- Figure 25B also illustrates how the linear actuators for each instrument/imaging system operate independently by showing imaging system 2518 inserted and instruments 2502a,2502b withdrawn.
- manipulator arm moves to rotate guide tube 2508 around a remote center 2520 at the entry port into a patient. If intermediate tissue restricts movement around a remote center, however, the arm can maintain guide tube 2508 in position.
- the instruments and their transmission mechanisms are arranged around a guide tube in a generally pie-wedge layout as shown in Figure 26A , which is a diagrammatic end view of instrument transmission mechanisms and a guide tube (the vertices of the wedge shapes are oriented towards an extended centerline of the guide tube).
- the vertices of the wedge shapes are shown slightly truncated; the wedge shape should be understood to be broadly construed and to include both acute and obtuse vertex angles.
- Instrument transmission mechanisms 2602a,2602b transfer control forces from servomotors to instruments inserted via guide tube 2604's working channels 2606a,2606b.
- Imaging system transmission mechanism 2608 transfers control forces from servomotors to the multi-DOF imaging system instrument inserted via guide tube 2604's imaging system channel 2606c.
- One or more optional guide tube channels 2604d allow for manually inserting an instrument, irrigation, suction, etc.
- Figures 26B and 26C are similar diagrammatic end views and illustrate that transmission mechanisms may be spaced around the guide tube in other configurations, such as four wedges 2608 spaced 360 degrees around the guide tube ( Figure 26B ), or two half-circle shaped housings 2610 ( Figure 26C ).
- Figure 26D is another diagrammatic end view that illustrates that actuator mechanisms 2620 may be placed farther from guide tube 2622's extended centerline than the instrument/guide tube and imaging system transmission mechanisms 2624.
- Figure 26E is a diagrammatic exploded perspective view that illustrates that actuator mechanisms for more than one component may be placed in a single housing.
- actuator mechanism housing 2630 includes servomotors and associated components (not shown) used to move guide tube 2632. Housing 2630 also includes servomotors and associated components used to operate instrument 2634. Instrument 2634's body and distal segments are inserted through housing 2630 as shown, and interface components 2636 on housing 2630 connect with corresponding components (e.g., disks 2410 ( Figure 24 )) on instrument 2634.
- Such an arrangement may be used for, e.g., the side exit surgical instrument assemblies described herein, in which there are two housings 2634, each associated with one of the side exiting instruments or guide tubes.
- Figure 27 is a diagrammatic view that illustrates aspects of transmission mechanisms associated with flexible coaxial guide tubes and instruments.
- Figure 27 shows primary guide tube 2702 running coaxially through and exiting the distal end of secondary guide tube 2704.
- secondary guide tube 2704 runs coaxially through and exits the distal end of tertiary guide tube 2706.
- Transmission and actuator mechanism 2708 is associated with tertiary guide tube 2706.
- Transmission and actuator mechanism 2710 is associated with secondary guide tube 2704, and a proximal segment of guide tube 2704 extends through (alternatively, adjacent to) transmission and actuator mechanism 2710 before entering tertiary guide tube 2706.
- transmission and actuator mechanism 2712 is associated with primary guide tube 2702, and a proximal segment of guide tube 2702 extends through (alternatively, adjacent to) transmission and actuator mechanisms 2708,2710 before entering secondary and tertiary guide tubes 2704,2706.
- Transmission mechanisms for instruments and an imaging system (not shown) running through and exiting the distal ends of channels 2714 in primary guide tube 2702 may be similarly stacked generally along the instrument assembly's longitudinal axis, or they may be arranged around guide tube 2702's extended longitudinal axis at its proximal end as described above.
- controller positions may be combined side-by-side and stacked, such as for a side-exit assembly in which transmission mechanisms for the side-exiting components are positioned side-by-side, and both are stacked behind the guide tube transmission mechanism.
- Intermediate exit assemblies may be similarly configured.
- Instrument and/or imaging system actuators and controls may also be combined within the same housing as an actuator and transmission mechanism for a guide tube.
- Figure 28A is a diagrammatic view that illustrates multi-port aspects as three surgical instrument assemblies enter the body at three different ports.
- Instrument assembly 2802 includes a primary guide tube, a secondary guide tube, and two instruments, along with associated transmission and actuator mechanisms, as described above.
- instrument assembly 2804 includes a primary guide tube, a secondary guide tube, and a single instrument, along with associated transmission and actuator mechanisms, as described above.
- Imaging system assembly 2806 includes a guide tube and an imaging system, along with associated transmission and actuator mechanisms, as described above. Each of these mechanisms 2802,2804,2806 enters the body 2808 via a separate, unique port as shown.
- the devices shown are illustrative of the various rigid and flexible aspects described herein.
- Figure 28B is another diagrammatic view that illustrates multi-port aspects.
- Figure 28B shows three illustrative instruments or assemblies 2810 entering different natural orifices (nostrils, mouth) and then continuing via a single body lumen (throat) to reach a surgical site.
- Figures 29A and 29B are diagrammatic views that illustrate further aspects of minimally invasive surgical instrument assembly position sensing and motion control.
- the distal end 2902 of a surgical instrument device or assembly is advanced within the walls 2904 of a body lumen or other cavity towards surgical site 2906.
- Distal end 2902 is illustrative of various components, such as a guide probe or guide tube as described above.
- As distal end 2902 advances it is moved (flexed as shown, or pivoted at a joint) up and down and side to side, as depicted by the alternate position lines.
- actuator control system 2908 records the tip's position and stores the position data in memory 2910.
- Tip position information may come directly from the surgical instrument assembly or from an external sensor 2912, as described above.
- the tip may be bent in various 3-dimensional directions so that it touches or nearly touches walls 2904 in various patterns (e.g., a series of rings, a helix, a series of various crosses or stars, etc.), either under a surgeon's direct control or under automatic control by control system 2908.
- the space information is used to assist advancing subsequent surgical instrument assembly components, as illustrated in Figure 29B .
- a secondary guide tube 2911 with side exit ports is shown, and control system 2908 uses the map information to prevent primary guide tubes 2914a,2914b and their associated end effectors from interfering with walls 2904 as they are advanced towards surgical site 2906.
- Figures 29C-29E are diagrammatic plan views that illustrate further aspects of preventing undesired instrument collision with tissue.
- Instruments may collide with patient tissue outside of an imaging system's field of view in spaces confined by patient anatomy (e.g., laryngeal surgery). Such collisions may damage tissue.
- some DOFs may be inside the field of view while other, more proximal DOFs may be outside the field of view. Consequently, a surgeon may be unaware that tissue damage is occurring as these proximal DOFs move.
- an endoscopic imaging system 2920 extends from the end of guide tube 2922.
- the left side working instrument 2924a is placed so that all DOFs are within imaging system 2920's field of view 2926 (bounded by the dashed lines).
- the right side working instrument 2924b has proximal DOFs (an illustrative parallel motion mechanism as described above and wrist are shown) that are outside field of view 2926, even though instrument 2924b's end effector is within field of view 2926.
- This instrument position is illustrative of tasks such as tying sutures.
- field of view boundaries can be determined when the camera is manufactured so that the boundaries are known in relation to the camera head (image capture component).
- the boundary information is then stored in a nonvolatile memory associated with the imaging system that incorporates the camera head. Consequently, the control system can use the imaging system instrument's kinematic and joint position information to locate the camera head relative to the working instruments, and therefore the control system can determine the field of view boundaries relative to the working instruments. Instruments are then controlled to work within the boundaries.
- field of view boundaries can be determined relative to the instruments by using machine vision algorithms to identify the instruments and their positions in the field of view.
- This "tool tracking" subject is disclosed in U.S. Patent Application Publication No. US 2006/0258938 A1(Hoffman et al ).
- imaging system 2920 is placed so that the camera head is just at the distal end of guide tube 2922.
- Instruments 2924a and 2924b are extended from the distal end of the guide tube and within imaging system 2920's field of view.
- An "Allowable Volume” is defined to be coincident with the field of view boundaries.
- the control system prevents any part of instruments 2924a and 2924b from moving outside the Allowable Volume. Since the surgeon can see all distal moving parts of instruments 2924a and 2924b, the surgeon then moves the instruments without colliding with surrounding tissue. The instrument movements are recorded, and an "Instrument Volume" 2928 (bounded by the dotted lines), which is bounded by the farthest movements of the instruments, is determined.
- the Instrument Volume is a convex volume within which instruments may be moved without colliding with tissue.
- imaging system 2920 is inserted as shown in Figure 29E .
- field of view 2926 is also inserted, and parts of instruments 2924a,2924b are outside of the inserted field of view 2926.
- a new Allowable Volume is determined to be the newly inserted field of view plus the previously determined Instrument Volume that is outside of the field of view. Therefore, the control system will allow the surgeon to move an instrument anywhere within the new Allowable Volume. The process may be repeated for further field of view insertions or for guide tube 2922 movements.
- This scheme allows a surgeon to define the allowable instrument range of motion in real time without requiring a tissue model. The surgeon is only required to trace the boundaries of the instrument range of motion inside the field of view, and the control system will record this information as the field of view is changed.
- Figure 29F is a diagrammatic view of a display (e.g., stereoscopic) that a surgeon sees during a surgical procedure. As shown in Figure 29F , the image from the new, more inserted field of view 2940 (bounded by the dashed lines) is registered and mosaiced with the image from the old, more withdrawn field of view 2942.
- Image mosaicing is known (see e.g., U.S. Patents No. 4,673,988 (Jansson et al. ) and 5,999,662 (Burt et al. )) and has been applied to medical equipment (see e.g., U.S. Patent No.
- FIG. 30 is a schematic view that illustrates a mechanism for automatically exchanging minimally invasive surgical instruments (e.g., those of approximately 3 mm diameter, such as flexible laparoscopic instruments with a single grip DOF) during surgery.
- an instrument magazine 3002 has several instruments 3004a,3004b,3004c stored (e.g., three, as depicted). The instruments may be stored on a drum, linearly extended, or otherwise.
- the instruments in magazine 3002 are selected for each surgical procedure—that is, the surgeon determines the instruments to be used for a specific procedure, and magazine 3002 is configured accordingly.
- magazine 3002 is positioned to allow actuator control system 3006 to advance instrument 3004a into guide tube 3008.
- control system 3006 withdraws instrument 3004a from guide tube 3008 and repositions magazine 3002 to advance either instrument 3004b or 3004c into guide tube 3008.
- the magazine, instruments, and guide tube shown in Figure 30 are illustrative of various components described herein (e.g., instruments, primary and secondary guide tubes, guide probes, imaging systems (optical, infrared, ultrasound), and the like).
- Figure 30A is a schematic view that illustrates aspects of storing an instrument or other component on a drum.
- Instrument 3004 is extended as drum 3020 rotates inside magazine housing 3022.
- Actuator 3006 for instrument 3004's end effector 3008 is positioned on drum 3020.
- Actuator 3006 is illustrative of other actuator assemblies that may be used if, for example, a steerable guide tube is to be advanced instead.
- Instrument 3004 is coiled loosely enough so that the cable actuator for end effector 3008 does not bind within its flexible cover.
- Figure 30B is a schematic view that illustrates aspects of storing automatically replaceable instruments on spools 3030 mounted on individual capstans 3032.
- Figure 31 is a diagrammatic perspective view that shows aspects of an illustrative minimally invasive surgical instrument assembly that includes a multi-jointed instrument dedicated to retraction.
- guide tube 3102 includes a channel 3104, through which an imaging system is inserted, and three channels 3106a,3106b,3106c, through which surgical instruments may be inserted.
- Retraction instrument 3108 is shown extending through channel 3106c.
- retraction instrument 3108 includes a proximal instrument body 3110 and four serial links 3112a-d.
- joints 3114a-d couple proximal instrument body 3110 and links 3112a-d together.
- each joint 3114a-d is an independently controllable single DOF pitch joint. In other aspects the joints may have additional DOFs.
- An actively controlled (either hand or telemanipulated) gripper 3116 is mounted at the distal end of the most distal link 3112d via a passive roll joint 3118. In some aspects other end effectors, or none, may be substituted for the gripper.
- the combined length of links 3112a-d and gripper 3116 is sufficient to retract tissue beyond the working envelope of instruments that extend through channels 3106a and 3106b.
- the combined lengths of the links and the gripper may be approximately equal to the full insertion range (e.g., approximately 127 mm (5 inches)) of the instruments.
- Four links and joints are shown, and other numbers of links and joints may be used. Retraction is done using various combinations of pitching joints 3114a-d and rolling instrument 3108 within channel 3106c.
- instrument 3108 is inserted so that each joint 3114a-d is exposed one after the other. Insertion depth may be varied so that retraction can begin at various distances from the distal end of the guide tube with various numbers of joints as the joints exit from the guide tube's distal end. That is, for example, retraction may begin as soon as joint 3114d is inserted past the distal end of the guide tube.
- gripper 3116 may grip tissue. Passive roll joint 3118 prevents the gripped tissue from being torqued as instrument 3108 is rolled within channel 3106c.
- the control system couples the motions of instrument 3108 and guide tube 3102.
- This coupled control of motion allows tissue to be held in place by gripper 3116 as the guide tube is moved to the left or right "underneath" the retracted tissue.
- instrument 3108 is rolled (and joint 3114a-d pitch may be changed) to move gripper 3116 to the right.
- Figure 31 further illustrates an aspect of instrument position and control within guide tubes.
- the working surgical instruments need not be inserted though guide tube channels that correspond to or are aligned with their working position.
- the left side working instrument does not have to be inserted through the left-most channel 3106c. Instead, the left side working instrument may be inserted via the "bottom" channel 3106b. The right side working instrument may then be inserted via the right-most channel 3106a. Then, the left and right side working instruments may be controlled to work at a surgical site in alignment with the field of view of an imaging system inserted via channel 3104 that has not been rolled or yawed.
- left-right axis between the working instruments' insertion channels does not have to be aligned with the left-right axis between the working instruments' end effectors at the surgical site or with the left-right axis interpupillary axis of the stereoscopic imaging system.
- left-right instrument position may be varied.
- retraction instrument 3108 may be inserted via channel 3106a
- the right side working instrument may be inserted via channel 3106b
- the left side working instrument may be inserted via channel 3106c.
- the imaging system may be inserted via one of several channels.
- top channel 3104 and “bottom” channel 3106b may be oblong shaped with a center bore that holds a cylindrical instrument body, as shown in Figure 20A . Consequently, an imaging system may be inserted via the "top” or “bottom” channel, and a working instrument may be inserted via the other "top” or “bottom” channel.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Physics & Mathematics (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Optics & Photonics (AREA)
- Radiology & Medical Imaging (AREA)
- Robotics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Urology & Nephrology (AREA)
- Business, Economics & Management (AREA)
- General Business, Economics & Management (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21201271.0A EP4018910A1 (en) | 2006-06-13 | 2007-06-13 | Minimally invasive surgical system |
Applications Claiming Priority (14)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US81303006P | 2006-06-13 | 2006-06-13 | |
| US81302906P | 2006-06-13 | 2006-06-13 | |
| US81307506P | 2006-06-13 | 2006-06-13 | |
| US81313106P | 2006-06-13 | 2006-06-13 | |
| US81312506P | 2006-06-13 | 2006-06-13 | |
| US81312906P | 2006-06-13 | 2006-06-13 | |
| US81319806P | 2006-06-13 | 2006-06-13 | |
| US81317206P | 2006-06-13 | 2006-06-13 | |
| US81312606P | 2006-06-13 | 2006-06-13 | |
| US81317306P | 2006-06-13 | 2006-06-13 | |
| US81320706P | 2006-06-13 | 2006-06-13 | |
| US81332806P | 2006-06-13 | 2006-06-13 | |
| US81302806P | 2006-06-13 | 2006-06-13 | |
| PCT/US2007/071085 WO2007146987A2 (en) | 2006-06-13 | 2007-06-13 | Minimally invasive surgical system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21201271.0A Division EP4018910A1 (en) | 2006-06-13 | 2007-06-13 | Minimally invasive surgical system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2037794A2 EP2037794A2 (en) | 2009-03-25 |
| EP2037794A4 EP2037794A4 (en) | 2015-03-04 |
| EP2037794B1 true EP2037794B1 (en) | 2021-10-27 |
Family
ID=38832812
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07798487.0A Active EP2037794B1 (en) | 2006-06-13 | 2007-06-13 | Minimally invasive surgical system |
| EP21201271.0A Withdrawn EP4018910A1 (en) | 2006-06-13 | 2007-06-13 | Minimally invasive surgical system |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21201271.0A Withdrawn EP4018910A1 (en) | 2006-06-13 | 2007-06-13 | Minimally invasive surgical system |
Country Status (6)
| Country | Link |
|---|---|
| US (45) | US20080065106A1 (ja) |
| EP (2) | EP2037794B1 (ja) |
| JP (13) | JP5324432B2 (ja) |
| KR (7) | KR101477125B1 (ja) |
| CN (7) | CN101500470B (ja) |
| WO (1) | WO2007146987A2 (ja) |
Families Citing this family (1507)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8944070B2 (en) | 1999-04-07 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Non-force reflecting method for providing tool force information to a user of a telesurgical system |
| US10188471B2 (en) * | 1999-09-17 | 2019-01-29 | Intuitive Surgical Operations, Inc. | Tele-operative surgical systems and methods of control at joint limits using inverse kinematics |
| US20190090967A1 (en) * | 1999-12-14 | 2019-03-28 | Intuitive Surgical Operations, Inc. | Display of computer generated image of an out-of-view portion of a medical device adjacent a real-time image of an in-view portion of the medical device |
| US20040033600A1 (en) * | 2001-03-21 | 2004-02-19 | Palli Subba Reddy | Ecdysone receptor-based inducible gene expression system |
| US8414505B1 (en) | 2001-02-15 | 2013-04-09 | Hansen Medical, Inc. | Catheter driver system |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US8353897B2 (en) * | 2004-06-16 | 2013-01-15 | Carefusion 2200, Inc. | Surgical tool kit |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US8215531B2 (en) | 2004-07-28 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a medical substance dispenser |
| US11998198B2 (en) | 2004-07-28 | 2024-06-04 | Cilag Gmbh International | Surgical stapling instrument incorporating a two-piece E-beam firing mechanism |
| US11896225B2 (en) | 2004-07-28 | 2024-02-13 | Cilag Gmbh International | Staple cartridge comprising a pan |
| US20060149129A1 (en) * | 2005-01-05 | 2006-07-06 | Watts H D | Catheter with multiple visual elements |
| US8872906B2 (en) * | 2005-01-05 | 2014-10-28 | Avantis Medical Systems, Inc. | Endoscope assembly with a polarizing filter |
| US8797392B2 (en) * | 2005-01-05 | 2014-08-05 | Avantis Medical Sytems, Inc. | Endoscope assembly with a polarizing filter |
| US8197399B2 (en) * | 2006-05-19 | 2012-06-12 | Avantis Medical Systems, Inc. | System and method for producing and improving images |
| US8235887B2 (en) * | 2006-01-23 | 2012-08-07 | Avantis Medical Systems, Inc. | Endoscope assembly with retroscope |
| US8289381B2 (en) * | 2005-01-05 | 2012-10-16 | Avantis Medical Systems, Inc. | Endoscope with an imaging catheter assembly and method of configuring an endoscope |
| US20100312129A1 (en) | 2005-01-26 | 2010-12-09 | Schecter Stuart O | Cardiovascular haptic handle system |
| US8496647B2 (en) | 2007-12-18 | 2013-07-30 | Intuitive Surgical Operations, Inc. | Ribbed force sensor |
| US8073528B2 (en) | 2007-09-30 | 2011-12-06 | Intuitive Surgical Operations, Inc. | Tool tracking systems, methods and computer products for image guided surgery |
| US9492240B2 (en) * | 2009-06-16 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Virtual measurement tool for minimally invasive surgery |
| US8971597B2 (en) * | 2005-05-16 | 2015-03-03 | Intuitive Surgical Operations, Inc. | Efficient vision and kinematic data fusion for robotic surgical instruments and other applications |
| US9789608B2 (en) | 2006-06-29 | 2017-10-17 | Intuitive Surgical Operations, Inc. | Synthetic representation of a surgical robot |
| US10555775B2 (en) | 2005-05-16 | 2020-02-11 | Intuitive Surgical Operations, Inc. | Methods and system for performing 3-D tool tracking by fusion of sensor and/or camera derived data during minimally invasive robotic surgery |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US7673781B2 (en) | 2005-08-31 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with staple driver that supports multiple wire diameter staples |
| US9237891B2 (en) | 2005-08-31 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical stapling devices that produce formed staples having different lengths |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US11484312B2 (en) | 2005-08-31 | 2022-11-01 | Cilag Gmbh International | Staple cartridge comprising a staple driver arrangement |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US8628518B2 (en) | 2005-12-30 | 2014-01-14 | Intuitive Surgical Operations, Inc. | Wireless force sensor on a distal portion of a surgical instrument and method |
| US7930065B2 (en) * | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| US7907166B2 (en) * | 2005-12-30 | 2011-03-15 | Intuitive Surgical Operations, Inc. | Stereo telestration for robotic surgery |
| US9962066B2 (en) | 2005-12-30 | 2018-05-08 | Intuitive Surgical Operations, Inc. | Methods and apparatus to shape flexible entry guides for minimally invasive surgery |
| US9173550B2 (en) * | 2006-01-13 | 2015-11-03 | Olympus Corporation | Medical apparatus |
| US8556805B2 (en) * | 2006-01-13 | 2013-10-15 | Olympus Medical Systems Corp. | Rotational force transmission mechanism, force-attenuating apparatus, medical device, and medical instrument-operation mechanism |
| US8439828B2 (en) * | 2006-01-13 | 2013-05-14 | Olympus Medical Systems Corp. | Treatment endoscope |
| US9289112B2 (en) * | 2006-01-13 | 2016-03-22 | Olympus Corporation | Medical treatment endoscope having an operation stick formed to allow a procedure instrument to pass |
| US9308049B2 (en) * | 2006-01-13 | 2016-04-12 | Olympus Corporation | Medical treatment endoscope |
| US8617054B2 (en) * | 2006-01-13 | 2013-12-31 | Olympus Medical Systems Corp. | Medical treatment endoscope |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US20110024477A1 (en) | 2009-02-06 | 2011-02-03 | Hall Steven G | Driven Surgical Stapler Improvements |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US11278279B2 (en) | 2006-01-31 | 2022-03-22 | Cilag Gmbh International | Surgical instrument assembly |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US20110295295A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument having recording capabilities |
| US9861359B2 (en) | 2006-01-31 | 2018-01-09 | Ethicon Llc | Powered surgical instruments with firing system lockout arrangements |
| US11224427B2 (en) | 2006-01-31 | 2022-01-18 | Cilag Gmbh International | Surgical stapling system including a console and retraction assembly |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US8721630B2 (en) | 2006-03-23 | 2014-05-13 | Ethicon Endo-Surgery, Inc. | Methods and devices for controlling articulation |
| US8236010B2 (en) | 2006-03-23 | 2012-08-07 | Ethicon Endo-Surgery, Inc. | Surgical fastener and cutter with mimicking end effector |
| US20100228096A1 (en) * | 2009-03-06 | 2010-09-09 | Ethicon Endo-Surgery, Inc. | Methods and devices for providing access into a body cavity |
| US8287446B2 (en) * | 2006-04-18 | 2012-10-16 | Avantis Medical Systems, Inc. | Vibratory device, endoscope having such a device, method for configuring an endoscope, and method of reducing looping of an endoscope |
| US8518024B2 (en) | 2006-04-24 | 2013-08-27 | Transenterix, Inc. | System and method for multi-instrument surgical access using a single access port |
| EP2012650B1 (en) | 2006-04-24 | 2016-07-27 | TransEnterix Surgical, Inc. | Natural orifice surgical system |
| US8551076B2 (en) * | 2006-06-13 | 2013-10-08 | Intuitive Surgical Operations, Inc. | Retrograde instrument |
| KR101477125B1 (ko) | 2006-06-13 | 2014-12-29 | 인튜어티브 서지컬 인코포레이티드 | 미소절개 수술 시스템 |
| US8322455B2 (en) | 2006-06-27 | 2012-12-04 | Ethicon Endo-Surgery, Inc. | Manually driven surgical cutting and fastening instrument |
| US20090192523A1 (en) | 2006-06-29 | 2009-07-30 | Intuitive Surgical, Inc. | Synthetic representation of a surgical instrument |
| US10008017B2 (en) | 2006-06-29 | 2018-06-26 | Intuitive Surgical Operations, Inc. | Rendering tool information as graphic overlays on displayed images of tools |
| US9718190B2 (en) | 2006-06-29 | 2017-08-01 | Intuitive Surgical Operations, Inc. | Tool position and identification indicator displayed in a boundary area of a computer display screen |
| US10258425B2 (en) * | 2008-06-27 | 2019-04-16 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view of articulatable instruments extending out of a distal end of an entry guide |
| WO2008007355A1 (en) * | 2006-07-13 | 2008-01-17 | Stark Med Gmbh | Trans-douglas endoscopical surgical device (ted) |
| CN101998841B (zh) * | 2006-09-19 | 2013-04-10 | 纽约市哥伦比亚大学理事会 | 用于对解剖学上悬浮的中空器官进行外科手术的系统、设备和方法 |
| US20080078802A1 (en) | 2006-09-29 | 2008-04-03 | Hess Christopher J | Surgical staples and stapling instruments |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US10130359B2 (en) | 2006-09-29 | 2018-11-20 | Ethicon Llc | Method for forming a staple |
| US11980366B2 (en) | 2006-10-03 | 2024-05-14 | Cilag Gmbh International | Surgical instrument |
| WO2008041225A2 (en) * | 2006-10-03 | 2008-04-10 | Virtual Ports Ltd | Lens cleaning device, system and method for surgical procdures |
| EP2094167B1 (en) | 2006-11-30 | 2011-06-29 | Wilson-Cook Medical, Inc. | Visceral anchors for purse-string closure of perforations |
| US8814779B2 (en) | 2006-12-21 | 2014-08-26 | Intuitive Surgical Operations, Inc. | Stereoscopic endoscope |
| US8556807B2 (en) | 2006-12-21 | 2013-10-15 | Intuitive Surgical Operations, Inc. | Hermetically sealed distal sensor endoscope |
| US9232959B2 (en) | 2007-01-02 | 2016-01-12 | Aquabeam, Llc | Multi fluid tissue resection methods and devices |
| US20220096112A1 (en) | 2007-01-02 | 2022-03-31 | Aquabeam, Llc | Tissue resection with pressure sensing |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US8840603B2 (en) | 2007-01-10 | 2014-09-23 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US11291441B2 (en) | 2007-01-10 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with wireless communication between control unit and remote sensor |
| US8827133B2 (en) | 2007-01-11 | 2014-09-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling device having supports for a flexible drive mechanism |
| US11039836B2 (en) | 2007-01-11 | 2021-06-22 | Cilag Gmbh International | Staple cartridge for use with a surgical stapling instrument |
| JP4960112B2 (ja) * | 2007-02-01 | 2012-06-27 | オリンパスメディカルシステムズ株式会社 | 内視鏡手術装置 |
| US20090231419A1 (en) * | 2007-02-06 | 2009-09-17 | Avantis Medical Systems, Inc. | Endoscope Assembly and Method of Performing a Medical Procedure |
| US8864781B2 (en) * | 2007-02-28 | 2014-10-21 | Cook Medical Technologies Llc | Intestinal bypass using magnets |
| US8590762B2 (en) | 2007-03-15 | 2013-11-26 | Ethicon Endo-Surgery, Inc. | Staple cartridge cavity configurations |
| US8893946B2 (en) | 2007-03-28 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Laparoscopic tissue thickness and clamp load measuring devices |
| JP4891823B2 (ja) * | 2007-03-29 | 2012-03-07 | オリンパスメディカルシステムズ株式会社 | 内視鏡装置 |
| US8064666B2 (en) | 2007-04-10 | 2011-11-22 | Avantis Medical Systems, Inc. | Method and device for examining or imaging an interior surface of a cavity |
| US20080262300A1 (en) * | 2007-04-20 | 2008-10-23 | Usgi Medical, Inc. | Endoscopic system with disposable sheath |
| WO2008133956A2 (en) * | 2007-04-23 | 2008-11-06 | Hansen Medical, Inc. | Robotic instrument control system |
| US7798385B2 (en) * | 2007-05-16 | 2010-09-21 | The Invention Science Fund I, Llc | Surgical stapling instrument with chemical sealant |
| US7810691B2 (en) * | 2007-05-16 | 2010-10-12 | The Invention Science Fund I, Llc | Gentle touch surgical stapler |
| US7832611B2 (en) * | 2007-05-16 | 2010-11-16 | The Invention Science Fund I, Llc | Steerable surgical stapler |
| US20080287987A1 (en) * | 2007-05-16 | 2008-11-20 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Dispensing system for tissue sealants |
| US8485411B2 (en) * | 2007-05-16 | 2013-07-16 | The Invention Science Fund I, Llc | Gentle touch surgical stapler |
| US7823761B2 (en) * | 2007-05-16 | 2010-11-02 | The Invention Science Fund I, Llc | Maneuverable surgical stapler |
| US7922064B2 (en) | 2007-05-16 | 2011-04-12 | The Invention Science Fund, I, LLC | Surgical fastening device with cutter |
| US11672531B2 (en) | 2007-06-04 | 2023-06-13 | Cilag Gmbh International | Rotary drive systems for surgical instruments |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US9089256B2 (en) * | 2008-06-27 | 2015-07-28 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view including range of motion limitations for articulatable instruments extending out of a distal end of an entry guide |
| US8852208B2 (en) | 2010-05-14 | 2014-10-07 | Intuitive Surgical Operations, Inc. | Surgical system instrument mounting |
| US8620473B2 (en) | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US9469034B2 (en) | 2007-06-13 | 2016-10-18 | Intuitive Surgical Operations, Inc. | Method and system for switching modes of a robotic system |
| US9138129B2 (en) * | 2007-06-13 | 2015-09-22 | Intuitive Surgical Operations, Inc. | Method and system for moving a plurality of articulated instruments in tandem back towards an entry guide |
| US9084623B2 (en) * | 2009-08-15 | 2015-07-21 | Intuitive Surgical Operations, Inc. | Controller assisted reconfiguration of an articulated instrument during movement into and out of an entry guide |
| US8903546B2 (en) | 2009-08-15 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Smooth control of an articulated instrument across areas with different work space conditions |
| FR2917598B1 (fr) * | 2007-06-19 | 2010-04-02 | Medtech | Plateforme robotisee multi-applicative pour la neurochirurgie et procede de recalage |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US8308040B2 (en) | 2007-06-22 | 2012-11-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an articulatable end effector |
| DE102007029888B4 (de) * | 2007-06-28 | 2016-04-07 | Siemens Aktiengesellschaft | Bildgebendes Verfahren für die medizinische Diagnostik und nach diesem Verfahren arbeitende Einrichtung |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| US8082064B2 (en) * | 2007-08-24 | 2011-12-20 | Elite Engineering Corporation | Robotic arm and control system |
| WO2009035663A2 (en) * | 2007-09-12 | 2009-03-19 | Synecor, Llc | Multi-instrument access devices and systems |
| US20110060183A1 (en) * | 2007-09-12 | 2011-03-10 | Salvatore Castro | Multi-instrument access devices and systems |
| JP2009072368A (ja) * | 2007-09-20 | 2009-04-09 | Olympus Medical Systems Corp | 医療装置 |
| WO2009049324A1 (en) * | 2007-10-11 | 2009-04-16 | Avantis Medical Systems, Inc. | Method and device for reducing the fixed pattern noise of a digital image |
| US20090112243A1 (en) * | 2007-10-25 | 2009-04-30 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Surgical cutter with dispensing system for tissue sealants |
| US20090112256A1 (en) * | 2007-10-30 | 2009-04-30 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Suturing device with tissue sealant dispenser |
| JP5028219B2 (ja) * | 2007-10-30 | 2012-09-19 | オリンパスメディカルシステムズ株式会社 | マニピュレータ装置および医療機器システム |
| EP2214575A2 (en) * | 2007-11-29 | 2010-08-11 | SurgiQuest, Incorporated | Surgical instruments with improved dexterity for use in minimally invasive surgical procedures |
| JP4580973B2 (ja) * | 2007-11-29 | 2010-11-17 | オリンパスメディカルシステムズ株式会社 | 処置具システム |
| US20090143816A1 (en) * | 2007-11-30 | 2009-06-04 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Grasper with surgical sealant dispenser |
| US8561473B2 (en) | 2007-12-18 | 2013-10-22 | Intuitive Surgical Operations, Inc. | Force sensor temperature compensation |
| JP5325416B2 (ja) * | 2007-12-27 | 2013-10-23 | オリンパスメディカルシステムズ株式会社 | 内視鏡本体および内視鏡 |
| US9043018B2 (en) * | 2007-12-27 | 2015-05-26 | Intuitive Surgical Operations, Inc. | Medical device with orientable tip for robotically directed laser cutting and biomaterial application |
| US20100262162A1 (en) * | 2007-12-28 | 2010-10-14 | Terumo Kabushiki Kaisha | Medical manipulator and medical robot system |
| EP2186466A4 (en) * | 2007-12-28 | 2011-01-19 | Olympus Medical Systems Corp | MEDICAL INSTRUMENT SYSTEM |
| US7905381B2 (en) | 2008-09-19 | 2011-03-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with cutting member arrangement |
| US8561870B2 (en) | 2008-02-13 | 2013-10-22 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US8657174B2 (en) | 2008-02-14 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument having handle based power source |
| US11986183B2 (en) | 2008-02-14 | 2024-05-21 | Cilag Gmbh International | Surgical cutting and fastening instrument comprising a plurality of sensors to measure an electrical parameter |
| US9486292B2 (en) * | 2008-02-14 | 2016-11-08 | Immersion Corporation | Systems and methods for real-time winding analysis for knot detection |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| RU2493788C2 (ru) | 2008-02-14 | 2013-09-27 | Этикон Эндо-Серджери, Инк. | Хирургический режущий и крепежный инструмент, имеющий радиочастотные электроды |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| US9585657B2 (en) | 2008-02-15 | 2017-03-07 | Ethicon Endo-Surgery, Llc | Actuator for releasing a layer of material from a surgical end effector |
| US20090206131A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | End effector coupling arrangements for a surgical cutting and stapling instrument |
| US11272927B2 (en) | 2008-02-15 | 2022-03-15 | Cilag Gmbh International | Layer arrangements for surgical staple cartridges |
| EP2259742B1 (en) | 2008-03-06 | 2020-01-01 | AquaBeam LLC | Tissue ablation and cautery with optical energy carried in fluid stream |
| US7969866B2 (en) * | 2008-03-31 | 2011-06-28 | Telefonaktiebolaget L M Ericsson (Publ) | Hierarchical virtual private LAN service hub connectivity failure recovery |
| US7886743B2 (en) * | 2008-03-31 | 2011-02-15 | Intuitive Surgical Operations, Inc. | Sterile drape interface for robotic surgical instrument |
| US8727966B2 (en) | 2008-03-31 | 2014-05-20 | Intuitive Surgical Operations, Inc. | Endoscope with rotationally deployed arms |
| US10368838B2 (en) * | 2008-03-31 | 2019-08-06 | Intuitive Surgical Operations, Inc. | Surgical tools for laser marking and laser cutting |
| US8333755B2 (en) | 2008-03-31 | 2012-12-18 | Intuitive Surgical Operations, Inc. | Coupler to transfer controller motion from a robotic manipulator to an attached instrument |
| US10405936B2 (en) | 2008-04-11 | 2019-09-10 | The Regents Of The University Of Michigan | Parallel kinematic mechanisms with decoupled rotational motions |
| US9869339B2 (en) | 2008-04-11 | 2018-01-16 | Flexdex, Inc. | End-effector jaw closure transmission systems for remote access tools |
| EP2268211B1 (en) | 2008-04-11 | 2018-02-14 | The Regents of the University of Michigan | Minimal access tool |
| US9629689B2 (en) | 2008-04-11 | 2017-04-25 | Flexdex, Inc. | Attachment apparatus for remote access tools |
| WO2009146176A1 (en) * | 2008-04-14 | 2009-12-03 | Blake Larson | Device and method for mri-guided breast interventions |
| KR101336377B1 (ko) | 2008-04-18 | 2013-12-04 | 포티메딕스 서지컬 비.브이. | 내시경 용례 등을 위한 장비 |
| JP5336760B2 (ja) * | 2008-05-01 | 2013-11-06 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| US8343034B2 (en) * | 2008-05-13 | 2013-01-01 | Olympus Medical Systems Corp. | Electric medical instrument fitting which is attached to a medical instrument holding device |
| US8496648B2 (en) | 2008-05-27 | 2013-07-30 | Intuitive Surgical Operations, Inc. | Stiffening assembly |
| EP2127604A1 (en) * | 2008-05-30 | 2009-12-02 | Nederlandse Organisatie voor toegepast- natuurwetenschappelijk onderzoek TNO | An instrument for minimally invasive surgery |
| US9463003B2 (en) * | 2008-06-03 | 2016-10-11 | Virtual Ports Ltd. | Multi-components device, system and method for assisting minimally invasive procedures |
| ES2658968T3 (es) * | 2008-06-05 | 2018-03-13 | Carnegie Mellon University | Dispositivo de sonda articulado extensible |
| WO2009151205A1 (ko) * | 2008-06-11 | 2009-12-17 | (주)미래컴퍼니 | 수술용 로봇 암의 인스트루먼트 |
| US8864652B2 (en) | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| US9179832B2 (en) | 2008-06-27 | 2015-11-10 | Intuitive Surgical Operations, Inc. | Medical robotic system with image referenced camera control using partitionable orientational and translational modes |
| US7720322B2 (en) | 2008-06-30 | 2010-05-18 | Intuitive Surgical, Inc. | Fiber optic shape sensor |
| US8932207B2 (en) | 2008-07-10 | 2015-01-13 | Covidien Lp | Integrated multi-functional endoscopic tool |
| US8821480B2 (en) | 2008-07-16 | 2014-09-02 | Intuitive Surgical Operations, Inc. | Four-cable wrist with solid surface cable channels |
| US9204923B2 (en) | 2008-07-16 | 2015-12-08 | Intuitive Surgical Operations, Inc. | Medical instrument electronically energized using drive cables |
| US9186221B2 (en) * | 2008-07-16 | 2015-11-17 | Intuitive Surgical Operations Inc. | Backend mechanism for four-cable wrist |
| JP5407036B2 (ja) * | 2008-09-02 | 2014-02-05 | オリンパスメディカルシステムズ株式会社 | 処置用内視鏡 |
| CA2736248C (en) | 2008-09-05 | 2017-12-05 | Carnegie Mellon University | Multi-linked endoscopic device with spherical distal assembly |
| PL3476312T3 (pl) | 2008-09-19 | 2024-03-11 | Ethicon Llc | Stapler chirurgiczny z urządzeniem do dopasowania wysokości zszywek |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US9339342B2 (en) | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| CA2776320C (en) * | 2008-10-07 | 2017-08-29 | The Trustees Of Columbia University In The City Of New York | Systems, devices, and method for providing insertable robotic sensory and manipulation platforms for single port surgery |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US20100091094A1 (en) * | 2008-10-14 | 2010-04-15 | Marek Sekowski | Mechanism for Directing a Three-Dimensional Camera System |
| KR101075363B1 (ko) * | 2008-10-31 | 2011-10-19 | 정창욱 | 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 |
| CN102131474B (zh) * | 2008-11-14 | 2013-06-05 | 奥林巴斯医疗株式会社 | 医疗用系统 |
| EP2356299B1 (en) * | 2008-11-17 | 2020-09-30 | Dovi Brock | A method and a system for rapidly and controlled elevation of a raisable floor for pools |
| US9717403B2 (en) | 2008-12-05 | 2017-08-01 | Jeffrey B. Kleiner | Method and apparatus for performing retro peritoneal dissection |
| US8864654B2 (en) * | 2010-04-20 | 2014-10-21 | Jeffrey B. Kleiner | Method and apparatus for performing retro peritoneal dissection |
| CN101744656B (zh) * | 2008-12-11 | 2014-04-16 | 张春霖 | 防神经损伤脊柱微创手术机器人 |
| KR100994373B1 (ko) * | 2008-12-12 | 2010-11-15 | 주식회사 이턴 | 수술용 인스트루먼트 |
| KR101062188B1 (ko) * | 2008-12-12 | 2011-09-05 | 주식회사 이턴 | 수술용 인스트루먼트 및 수술용 로봇의 커플링 구조 |
| CN102264307A (zh) * | 2008-12-12 | 2011-11-30 | 伊顿株式会社 | 手术器械 |
| BRPI0805305A2 (pt) * | 2008-12-22 | 2010-09-08 | Imbros Administracao E Partici | aperfeiçoamento em eletrocautério |
| US20100160724A1 (en) * | 2008-12-23 | 2010-06-24 | Intuitive Surgical, Inc. | Flexible surgical instrument with links undergoing solid-state transitions |
| US20100168721A1 (en) * | 2008-12-30 | 2010-07-01 | Intuitive Surgical, Inc. | Lubricating tendons in a tendon-actuated surgical instrument |
| US8939963B2 (en) * | 2008-12-30 | 2015-01-27 | Intuitive Surgical Operations, Inc. | Surgical instruments with sheathed tendons |
| US8830224B2 (en) * | 2008-12-31 | 2014-09-09 | Intuitive Surgical Operations, Inc. | Efficient 3-D telestration for local robotic proctoring |
| US8184880B2 (en) | 2008-12-31 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Robust sparse image matching for robotic surgery |
| WO2010083480A2 (en) * | 2009-01-16 | 2010-07-22 | The Board Of Regents Of The University Of Texas System | Medical devices and methods |
| WO2010090059A1 (ja) * | 2009-02-03 | 2010-08-12 | オリンパスメディカルシステムズ株式会社 | マニピュレータ |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| JP2012517287A (ja) | 2009-02-06 | 2012-08-02 | エシコン・エンド−サージェリィ・インコーポレイテッド | 被駆動式手術用ステープラの改良 |
| US8444036B2 (en) | 2009-02-06 | 2013-05-21 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with mechanisms for adjusting a tissue gap within the end effector |
| US8453907B2 (en) | 2009-02-06 | 2013-06-04 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with cutting member reversing mechanism |
| US9737334B2 (en) * | 2009-03-06 | 2017-08-22 | Ethicon Llc | Methods and devices for accessing a body cavity |
| US20100228090A1 (en) * | 2009-03-06 | 2010-09-09 | Ethicon Endo-Surgery, Inc. | Methods and devices for providing access into a body cavity |
| US8924009B2 (en) * | 2009-03-11 | 2014-12-30 | The Board Of Trustees Of The Leland Stanford Junior University | Haptic device for telerobotic surgery |
| KR101092759B1 (ko) * | 2009-03-24 | 2011-12-09 | 한국과학기술원 | 내시경적 수술장치 및 그 제어방법 |
| CN102123670B (zh) * | 2009-03-24 | 2014-03-19 | 奥林巴斯医疗株式会社 | 内窥镜处置用机器人系统 |
| JP5087035B2 (ja) * | 2009-03-25 | 2012-11-28 | オリンパス株式会社 | カバー式処置内視鏡及び内視鏡カバー |
| US8834358B2 (en) | 2009-03-27 | 2014-09-16 | EndoSphere Surgical, Inc. | Cannula with integrated camera and illumination |
| ES2762203T3 (es) | 2009-03-27 | 2020-05-22 | New View Surgical Inc | Cánula con iluminación y cámara integrada |
| US8491574B2 (en) * | 2009-03-30 | 2013-07-23 | Intuitive Surgical Operations, Inc. | Polarization and temperature insensitive surgical instrument force transducer |
| US9894093B2 (en) | 2009-04-21 | 2018-02-13 | Bandura, Llc | Structuring data and pre-compiled exception list engines and internet protocol threat prevention |
| US8468220B2 (en) | 2009-04-21 | 2013-06-18 | Techguard Security Llc | Methods of structuring data, pre-compiled exception list engines, and network appliances |
| US20100286478A1 (en) * | 2009-04-23 | 2010-11-11 | Usgi Medical, Inc. | Flexible surgery access systems |
| US9254123B2 (en) | 2009-04-29 | 2016-02-09 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US20100292535A1 (en) * | 2009-05-18 | 2010-11-18 | Larry Paskar | Endoscope with multiple fields of view |
| JP5827219B2 (ja) * | 2009-05-29 | 2015-12-02 | ナンヤン テクノロジカル ユニヴァーシティNanyang Technological University | 柔軟な内視鏡検査のためのロボットシステム |
| WO2010140844A2 (ko) * | 2009-06-05 | 2010-12-09 | 주식회사 이턴 | 수술용 인스트루먼트 |
| KR101029997B1 (ko) * | 2009-06-05 | 2011-04-20 | 주식회사 이턴 | 수술용 인스트루먼트 |
| US9155592B2 (en) * | 2009-06-16 | 2015-10-13 | Intuitive Surgical Operations, Inc. | Virtual measurement tool for minimally invasive surgery |
| US9474440B2 (en) | 2009-06-18 | 2016-10-25 | Endochoice, Inc. | Endoscope tip position visual indicator and heat management system |
| US9101287B2 (en) | 2011-03-07 | 2015-08-11 | Endochoice Innovation Center Ltd. | Multi camera endoscope assembly having multiple working channels |
| US11278190B2 (en) | 2009-06-18 | 2022-03-22 | Endochoice, Inc. | Multi-viewing element endoscope |
| US8926502B2 (en) * | 2011-03-07 | 2015-01-06 | Endochoice, Inc. | Multi camera endoscope having a side service channel |
| US9402533B2 (en) | 2011-03-07 | 2016-08-02 | Endochoice Innovation Center Ltd. | Endoscope circuit board assembly |
| US9101268B2 (en) | 2009-06-18 | 2015-08-11 | Endochoice Innovation Center Ltd. | Multi-camera endoscope |
| US10130246B2 (en) | 2009-06-18 | 2018-11-20 | Endochoice, Inc. | Systems and methods for regulating temperature and illumination intensity at the distal tip of an endoscope |
| US11547275B2 (en) | 2009-06-18 | 2023-01-10 | Endochoice, Inc. | Compact multi-viewing element endoscope system |
| US9706903B2 (en) | 2009-06-18 | 2017-07-18 | Endochoice, Inc. | Multiple viewing elements endoscope system with modular imaging units |
| US9642513B2 (en) | 2009-06-18 | 2017-05-09 | Endochoice Inc. | Compact multi-viewing element endoscope system |
| US9492063B2 (en) | 2009-06-18 | 2016-11-15 | Endochoice Innovation Center Ltd. | Multi-viewing element endoscope |
| US9713417B2 (en) | 2009-06-18 | 2017-07-25 | Endochoice, Inc. | Image capture assembly for use in a multi-viewing elements endoscope |
| US10165929B2 (en) | 2009-06-18 | 2019-01-01 | Endochoice, Inc. | Compact multi-viewing element endoscope system |
| WO2012038958A2 (en) | 2010-09-20 | 2012-03-29 | Peermedical Ltd. | Multi-camera endoscope having fluid channels |
| WO2012056453A2 (en) | 2010-10-28 | 2012-05-03 | Peermedical Ltd. | Optical systems for multi-sensor endoscopes |
| US11864734B2 (en) | 2009-06-18 | 2024-01-09 | Endochoice, Inc. | Multi-camera endoscope |
| US9554692B2 (en) | 2009-06-18 | 2017-01-31 | EndoChoice Innovation Ctr. Ltd. | Multi-camera endoscope |
| US10524645B2 (en) | 2009-06-18 | 2020-01-07 | Endochoice, Inc. | Method and system for eliminating image motion blur in a multiple viewing elements endoscope |
| US9901244B2 (en) | 2009-06-18 | 2018-02-27 | Endochoice, Inc. | Circuit board assembly of a multiple viewing elements endoscope |
| US9872609B2 (en) | 2009-06-18 | 2018-01-23 | Endochoice Innovation Center Ltd. | Multi-camera endoscope |
| JP5674775B2 (ja) | 2009-06-26 | 2015-02-25 | クック メディカル テクノロジーズ エルエルシーCook Medical Technologies Llc | 吻合用の直線状クランプ |
| IT1395018B1 (it) | 2009-07-22 | 2012-09-05 | Surgica Robotica S R L | Apparecchiatura per procedure chirurgiche minimamente invasive |
| AU2010278901A1 (en) * | 2009-07-29 | 2012-03-15 | Transenterix, Inc. | Deflectable instrument ports |
| US8876830B2 (en) * | 2009-08-13 | 2014-11-04 | Zimmer, Inc. | Virtual implant placement in the OR |
| EP2465016A1 (en) * | 2009-08-14 | 2012-06-20 | ABB Technology AG | An industrial robot and a method for adjusting a robot program |
| US9492927B2 (en) | 2009-08-15 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Application of force feedback on an input device to urge its operator to command an articulated instrument to a preferred pose |
| US8918211B2 (en) | 2010-02-12 | 2014-12-23 | Intuitive Surgical Operations, Inc. | Medical robotic system providing sensory feedback indicating a difference between a commanded state and a preferred pose of an articulated instrument |
| KR100997194B1 (ko) * | 2009-08-18 | 2010-11-30 | 주식회사 이턴 | 간접적으로 수술감을 제공하는 원격 수술 로봇 시스템 및 그 제어 방법 |
| WO2011028627A2 (en) * | 2009-08-26 | 2011-03-10 | The Research Foundation Of State University Of New York | System and method for endovascular telerobotic access |
| WO2011023339A1 (de) * | 2009-08-27 | 2011-03-03 | Naviswiss Ag | Endoskop und verfahren zu dessen verwendung |
| DE102009041510A1 (de) * | 2009-09-14 | 2011-03-31 | Richard Wolf Gmbh | Endoskopisches Instrument |
| US8465476B2 (en) * | 2009-09-23 | 2013-06-18 | Intuitive Surgical Operations, Inc. | Cannula mounting fixture |
| US20110071541A1 (en) * | 2009-09-23 | 2011-03-24 | Intuitive Surgical, Inc. | Curved cannula |
| US8545515B2 (en) * | 2009-09-23 | 2013-10-01 | Intuitive Surgical Operations, Inc. | Curved cannula surgical system |
| US8888789B2 (en) | 2009-09-23 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Curved cannula surgical system control |
| US8623028B2 (en) | 2009-09-23 | 2014-01-07 | Intuitive Surgical Operations, Inc. | Surgical port feature |
| US8504134B2 (en) * | 2009-10-01 | 2013-08-06 | Intuitive Surgical Operations, Inc. | Laterally fenestrated cannula |
| US9474540B2 (en) * | 2009-10-08 | 2016-10-25 | Ethicon-Endo-Surgery, Inc. | Laparoscopic device with compound angulation |
| US10172669B2 (en) | 2009-10-09 | 2019-01-08 | Ethicon Llc | Surgical instrument comprising an energy trigger lockout |
| KR101063281B1 (ko) | 2009-12-10 | 2011-09-07 | 주식회사 이턴 | 싱글 포트 수술용 어댑터 |
| WO2011052939A2 (ko) * | 2009-10-26 | 2011-05-05 | 주식회사 이턴 | 수술용 인스트루먼트 및 싱글 포트 수술용 어댑터 |
| ES2388867B1 (es) * | 2009-10-27 | 2013-09-18 | Universitat Politècnica De Catalunya | Pinzas para cirugia laparoscópica mínimamente invasiva. |
| WO2011056445A1 (en) | 2009-11-03 | 2011-05-12 | Wilson-Cook Medical Inc. | Planar clamps for anastomosis |
| CN104799890B (zh) * | 2009-11-13 | 2017-03-22 | 直观外科手术操作公司 | 弯曲套管和机器人操纵器 |
| JP5824456B2 (ja) * | 2009-11-13 | 2015-11-25 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 湾曲カニューレ、ロボットマニピュレーター、および受動的に可撓性であるシャフトを有する外科手術器具 |
| US8996173B2 (en) | 2010-09-21 | 2015-03-31 | Intuitive Surgical Operations, Inc. | Method and apparatus for hand gesture control in a minimally invasive surgical system |
| BR112012011424B1 (pt) | 2009-11-13 | 2020-10-20 | Intuitive Surgical Operations, Inc | instrumento cirúrgico |
| EP3381397B1 (en) | 2009-11-13 | 2020-01-08 | Intuitive Surgical Operations Inc. | Motor interface for parallel drive shafts within an independently rotating member |
| US8521331B2 (en) | 2009-11-13 | 2013-08-27 | Intuitive Surgical Operations, Inc. | Patient-side surgeon interface for a minimally invasive, teleoperated surgical instrument |
| EP4059460A1 (en) * | 2009-11-13 | 2022-09-21 | Intuitive Surgical Operations, Inc. | Surgical tool with a compact wrist |
| US8682489B2 (en) * | 2009-11-13 | 2014-03-25 | Intuitive Sugical Operations, Inc. | Method and system for hand control of a teleoperated minimally invasive slave surgical instrument |
| US8543240B2 (en) * | 2009-11-13 | 2013-09-24 | Intuitive Surgical Operations, Inc. | Master finger tracking device and method of use in a minimally invasive surgical system |
| US8935003B2 (en) | 2010-09-21 | 2015-01-13 | Intuitive Surgical Operations | Method and system for hand presence detection in a minimally invasive surgical system |
| US8183520B2 (en) | 2009-11-13 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Optical fiber shape sensor calibration |
| US9259275B2 (en) | 2009-11-13 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Wrist articulation by linked tension members |
| EP2467073B1 (en) | 2009-11-13 | 2017-01-11 | Intuitive Surgical Operations, Inc. | Curved cannula and robotic manipulator |
| US8986201B2 (en) | 2009-11-14 | 2015-03-24 | Spiway Llc | Surgical tissue protection sheath |
| US20110118551A1 (en) * | 2009-11-14 | 2011-05-19 | SPI Surgical, Inc. | Collateral soft tissue protection surgical device |
| US9451981B2 (en) | 2009-11-14 | 2016-09-27 | Spiway Llc | Surgical tissue protection sheath |
| US9011326B2 (en) | 2009-11-14 | 2015-04-21 | Spiway Llc | Soft tissue shield for trans-orbital surgery |
| US9775640B2 (en) * | 2009-11-14 | 2017-10-03 | SPI Surgical, Inc. | Surgical device |
| US8870759B2 (en) * | 2009-12-04 | 2014-10-28 | Covidien Lp | Suspension system for minimally invasive surgery |
| US8747309B2 (en) | 2010-11-09 | 2014-06-10 | Covidien Lp | Suspension system for minimally invasive surgery |
| CN102470003B (zh) * | 2009-12-10 | 2014-08-06 | 奥林巴斯医疗株式会社 | 医疗用机械手 |
| US8887595B2 (en) * | 2009-12-22 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Instrument wrist with cycloidal surfaces |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US8851354B2 (en) | 2009-12-24 | 2014-10-07 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument that analyzes tissue thickness |
| US20110161172A1 (en) * | 2009-12-30 | 2011-06-30 | Wei-Yeh Lee | System and method for providing user control of the user's network usage data and personal profile information |
| US8608046B2 (en) | 2010-01-07 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Test device for a surgical tool |
| US20110166455A1 (en) * | 2010-01-07 | 2011-07-07 | Cully Edward H | Catheter |
| FR2955177B1 (fr) * | 2010-01-14 | 2012-07-27 | Snecma | Structure orientable du type endoscope |
| ES2662543T3 (es) | 2010-01-26 | 2018-04-06 | Artack Medical (2013) Ltd. | Instrumento médico articulado |
| US8454583B2 (en) * | 2010-01-30 | 2013-06-04 | Mi4Spine, Llc | Robotic surgical device implant system |
| US9339341B2 (en) | 2010-02-08 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Direct pull surgical gripper |
| US9877744B2 (en) | 2010-02-12 | 2018-01-30 | Intuitive Surgical Operations, Inc. | Entry guide for multiple instruments in a single port surgical system |
| US8652148B2 (en) | 2010-02-25 | 2014-02-18 | Zimmer, Inc. | Tracked cartilage repair system |
| US20110218400A1 (en) * | 2010-03-05 | 2011-09-08 | Tyco Healthcare Group Lp | Surgical instrument with integrated wireless camera |
| WO2011108840A2 (ko) * | 2010-03-05 | 2011-09-09 | 주식회사 이턴 | 수술용 인스트루먼트, 수술용 인스트루먼트의 커플링 구조 및 원점 조정 방법 |
| US20110218550A1 (en) * | 2010-03-08 | 2011-09-08 | Tyco Healthcare Group Lp | System and method for determining and adjusting positioning and orientation of a surgical device |
| WO2011115387A2 (ko) * | 2010-03-15 | 2011-09-22 | 주식회사 이턴 | 싱글포트 수술용 로봇 암 커플러 및 이를 구비한 수술용 로봇 |
| WO2011114568A1 (ja) * | 2010-03-17 | 2011-09-22 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| US8764632B2 (en) * | 2010-04-08 | 2014-07-01 | Eric James Kezirian | Endoscopic device and system |
| WO2011130388A1 (en) | 2010-04-14 | 2011-10-20 | Surti Vihar C | System for creating anastomoses |
| IT1399603B1 (it) * | 2010-04-26 | 2013-04-26 | Scuola Superiore Di Studi Universitari E Di Perfez | Apparato robotico per interventi di chirurgia minimamente invasiva |
| ITFI20100076A1 (it) * | 2010-04-26 | 2011-10-27 | Scuola Superiore Di Studi Universit Ari E Di Perfe | Apparato robotico per interventi di chirurgia minimamente invasiva |
| US9226760B2 (en) | 2010-05-07 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Laparoscopic devices with flexible actuation mechanisms |
| US8562592B2 (en) | 2010-05-07 | 2013-10-22 | Ethicon Endo-Surgery, Inc. | Compound angle laparoscopic methods and devices |
| US8734334B2 (en) | 2010-05-10 | 2014-05-27 | Nanamed, Llc | Method and device for imaging an interior surface of a corporeal cavity |
| US9033998B1 (en) | 2010-05-13 | 2015-05-19 | Titan Medical Inc. | Independent roll wrist mechanism |
| US8603077B2 (en) | 2010-05-14 | 2013-12-10 | Intuitive Surgical Operations, Inc. | Force transmission for robotic surgical instrument |
| US8644988B2 (en) * | 2010-05-14 | 2014-02-04 | Intuitive Surgical Operations, Inc. | Drive force control in medical instrument providing position measurements |
| JP5825537B2 (ja) * | 2010-05-17 | 2015-12-02 | インダストリー−ユニバーシティーコーペレイション ファンデーション ハンヤン ユニバーシティー エリカ キャンパス | 手術用医療機器 |
| GB2480498A (en) | 2010-05-21 | 2011-11-23 | Ethicon Endo Surgery Inc | Medical device comprising RF circuitry |
| KR101181569B1 (ko) | 2010-05-25 | 2012-09-10 | 정창욱 | 단일 통로 수술 모드와 다통로 수술 모드를 실현할 수 있는 수술용 로봇 시스템 및 그 제어 방법 |
| US8460337B2 (en) | 2010-06-09 | 2013-06-11 | Ethicon Endo-Surgery, Inc. | Selectable handle biasing |
| CA2743187A1 (en) * | 2010-06-11 | 2011-12-11 | The Hospital For Sick Children | Folding endoscope and method of using the same |
| KR101017954B1 (ko) * | 2010-06-18 | 2011-03-02 | 육근용 | 내시경 봉합장치 |
| US8672837B2 (en) | 2010-06-24 | 2014-03-18 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable medical device |
| US9211058B2 (en) | 2010-07-02 | 2015-12-15 | Intuitive Surgical Operations, Inc. | Method and system for fluorescent imaging with background surgical image composed of selective illumination spectra |
| US9019345B2 (en) | 2010-07-02 | 2015-04-28 | Intuitive Surgical Operations, Inc. | Imaging mode blooming suppression |
| US10682198B2 (en) | 2010-07-02 | 2020-06-16 | Intuitive Surgical Operations, Inc. | Method and system for fluorescent imaging with background surgical image composed of selective illumination spectra |
| US8295693B2 (en) | 2010-07-02 | 2012-10-23 | Intuitive Surgical Operations, Inc. | Dual optical path prism and camera in a minimally invasive surgical system |
| US8783543B2 (en) | 2010-07-30 | 2014-07-22 | Ethicon Endo-Surgery, Inc. | Tissue acquisition arrangements and methods for surgical stapling devices |
| US9498107B2 (en) | 2010-08-06 | 2016-11-22 | Carefusion 2200, Inc. | Clamping system |
| US8776800B2 (en) | 2010-09-30 | 2014-07-15 | Carefusion 2200, Inc. | Sterile drape having multiple drape interface mechanisms |
| JP5612971B2 (ja) * | 2010-09-07 | 2014-10-22 | オリンパス株式会社 | マスタスレーブマニピュレータ |
| DE102010040405B4 (de) * | 2010-09-08 | 2017-07-27 | Siemens Healthcare Gmbh | Instrumentensystem für einen Endoskopieroboter |
| US8360296B2 (en) | 2010-09-09 | 2013-01-29 | Ethicon Endo-Surgery, Inc. | Surgical stapling head assembly with firing lockout for a surgical stapler |
| US9289212B2 (en) | 2010-09-17 | 2016-03-22 | Ethicon Endo-Surgery, Inc. | Surgical instruments and batteries for surgical instruments |
| US20120071894A1 (en) | 2010-09-17 | 2012-03-22 | Tanner Neal A | Robotic medical systems and methods |
| US8632525B2 (en) | 2010-09-17 | 2014-01-21 | Ethicon Endo-Surgery, Inc. | Power control arrangements for surgical instruments and batteries |
| WO2012040239A1 (en) * | 2010-09-20 | 2012-03-29 | Spine View, Inc. | Cannulotome |
| US9560953B2 (en) | 2010-09-20 | 2017-02-07 | Endochoice, Inc. | Operational interface in a multi-viewing element endoscope |
| US8733613B2 (en) | 2010-09-29 | 2014-05-27 | Ethicon Endo-Surgery, Inc. | Staple cartridge |
| US9788834B2 (en) | 2010-09-30 | 2017-10-17 | Ethicon Llc | Layer comprising deployable attachment members |
| US9314246B2 (en) | 2010-09-30 | 2016-04-19 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorporating an anti-inflammatory agent |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US9414838B2 (en) | 2012-03-28 | 2016-08-16 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprised of a plurality of materials |
| US9232941B2 (en) | 2010-09-30 | 2016-01-12 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a reservoir |
| US9332974B2 (en) | 2010-09-30 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Layered tissue thickness compensator |
| US8740038B2 (en) | 2010-09-30 | 2014-06-03 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising a releasable portion |
| US9480476B2 (en) | 2010-09-30 | 2016-11-01 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising resilient members |
| US20120083825A1 (en) * | 2010-09-30 | 2012-04-05 | Carefusion 2200, Inc. | Detachable shaft |
| US9241714B2 (en) | 2011-04-29 | 2016-01-26 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator and method for making the same |
| US9307989B2 (en) | 2012-03-28 | 2016-04-12 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorportating a hydrophobic agent |
| BR112013007717B1 (pt) | 2010-09-30 | 2020-09-24 | Ethicon Endo-Surgery, Inc. | Sistema de grampeamento cirúrgico |
| US8740883B2 (en) | 2010-09-30 | 2014-06-03 | Carefusion 2200, Inc. | Detachable handle mechanism for use in instrument positioning |
| US9220501B2 (en) | 2010-09-30 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensators |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US8640706B2 (en) | 2010-09-30 | 2014-02-04 | Carefusion 2200, Inc. | Interface mechanism between a drape and a handle |
| US9204880B2 (en) | 2012-03-28 | 2015-12-08 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising capsules defining a low pressure environment |
| US8702592B2 (en) | 2010-09-30 | 2014-04-22 | David Allan Langlois | System and method for inhibiting injury to a patient during laparoscopic surgery |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US11298125B2 (en) | 2010-09-30 | 2022-04-12 | Cilag Gmbh International | Tissue stapler having a thickness compensator |
| US9320523B2 (en) | 2012-03-28 | 2016-04-26 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising tissue ingrowth features |
| US9364233B2 (en) | 2010-09-30 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Tissue thickness compensators for circular surgical staplers |
| US9055941B2 (en) | 2011-09-23 | 2015-06-16 | Ethicon Endo-Surgery, Inc. | Staple cartridge including collapsible deck |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| US20120095498A1 (en) * | 2010-10-13 | 2012-04-19 | Ethicon Endo-Surgery, Inc. | Methods and devices for mechanical space creation at a surgical site |
| US9706908B2 (en) | 2010-10-28 | 2017-07-18 | Endochoice, Inc. | Image capture and video processing systems and methods for multiple viewing element endoscopes |
| US10663714B2 (en) | 2010-10-28 | 2020-05-26 | Endochoice, Inc. | Optical system for an endoscope |
| US9101379B2 (en) | 2010-11-12 | 2015-08-11 | Intuitive Surgical Operations, Inc. | Tension control in actuation of multi-joint medical instruments |
| JP6063387B2 (ja) * | 2010-11-15 | 2017-01-18 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 手術器具における器具シャフトのロールとエンドエフェクタの作動の切り離し |
| US9055960B2 (en) | 2010-11-15 | 2015-06-16 | Intuitive Surgical Operations, Inc. | Flexible surgical devices |
| US9668811B2 (en) * | 2010-11-16 | 2017-06-06 | Boston Scientific Scimed, Inc. | Minimally invasive access for renal nerve ablation |
| KR101066164B1 (ko) | 2010-11-25 | 2011-09-20 | 육근용 | 내시경 봉합장치 |
| KR101291262B1 (ko) * | 2010-11-30 | 2013-07-30 | (주)미래컴퍼니 | 수술용 도구들의 가이드 시스템 및 이를 포함하는 미소절개 수술용 장치 |
| WO2012074564A1 (en) | 2010-12-02 | 2012-06-07 | Freehand Endoscopic Devices, Inc. | Surgical tool |
| US9486189B2 (en) | 2010-12-02 | 2016-11-08 | Hitachi Aloka Medical, Ltd. | Assembly for use with surgery system |
| US11889986B2 (en) | 2010-12-09 | 2024-02-06 | Endochoice, Inc. | Flexible electronic circuit board for a multi-camera endoscope |
| EP3420886B8 (en) | 2010-12-09 | 2020-07-15 | EndoChoice, Inc. | Flexible electronic circuit board multi-camera endoscope |
| CN103348470B (zh) | 2010-12-09 | 2017-05-03 | 恩多巧爱思创新中心有限公司 | 用于多摄像头内窥镜的柔性电子电路板 |
| WO2012078989A1 (en) | 2010-12-10 | 2012-06-14 | Wayne State University | Intelligent autonomous camera control for robotics with medical, military, and space applications |
| WO2012100030A2 (en) * | 2011-01-19 | 2012-07-26 | Duke University | Imaging and visualization systems, instruments, and methods using optical coherence tomography |
| US8888691B2 (en) * | 2011-01-24 | 2014-11-18 | Covidien Lp | Expanding surgical access port |
| US10517464B2 (en) | 2011-02-07 | 2019-12-31 | Endochoice, Inc. | Multi-element cover for a multi-camera endoscope |
| EP2672878B1 (en) | 2011-02-07 | 2017-11-22 | Endochoice Innovation Center Ltd. | Multi-element cover for a multi-camera endoscope |
| US8698885B2 (en) | 2011-02-14 | 2014-04-15 | Intuitive Surgical Operations, Inc. | Methods and apparatus for demosaicing images with highly correlated color channels |
| US8578810B2 (en) | 2011-02-14 | 2013-11-12 | Intuitive Surgical Operations, Inc. | Jointed link structures exhibiting preferential bending, and related methods |
| US8493224B2 (en) * | 2011-03-07 | 2013-07-23 | Terumo Cardiovascular Systems Corp. | Bowden cable wear detection in a tube clamp system for medical fluids |
| US9113884B2 (en) | 2011-03-14 | 2015-08-25 | Ethicon Endo-Surgery, Inc. | Modular surgical tool systems |
| US9527207B2 (en) * | 2011-03-23 | 2016-12-27 | Sri International | Dexterous telemanipulator system |
| MX2013011564A (es) | 2011-04-06 | 2014-04-30 | Medrobotics Corp | Herramientas quirurgicas de articulacion y vainas de herramientas, metodos para desplegar las mismas. |
| WO2012142442A2 (en) | 2011-04-13 | 2012-10-18 | University Of South Florida | Small diameter laparoscopic tool having releasable tip |
| US8942828B1 (en) | 2011-04-13 | 2015-01-27 | Stuart Schecter, LLC | Minimally invasive cardiovascular support system with true haptic coupling |
| JP5701140B2 (ja) * | 2011-04-21 | 2015-04-15 | キヤノン株式会社 | 立体内視鏡装置 |
| CA2834649C (en) | 2011-04-29 | 2021-02-16 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9901412B2 (en) | 2011-04-29 | 2018-02-27 | Vanderbilt University | Dexterous surgical manipulator and method of use |
| EP2706943A1 (en) * | 2011-05-12 | 2014-03-19 | Imperial Innovations Limited | Medical master/slave type device for minimally invasive surgery |
| KR20140029487A (ko) * | 2011-05-12 | 2014-03-10 | 임페리얼 이노베이션스 리미티드 | 수술 장치 |
| US9161771B2 (en) * | 2011-05-13 | 2015-10-20 | Intuitive Surgical Operations Inc. | Medical instrument with snake wrist structure |
| US11207064B2 (en) | 2011-05-27 | 2021-12-28 | Cilag Gmbh International | Automated end effector component reloading system for use with a robotic system |
| ITFI20110114A1 (it) | 2011-05-31 | 2012-12-01 | Scuola Superiore Di Studi Universit Arie Di Perfe | Piattaforma robotica per chirurgia mininvasiva |
| EP3714821A1 (en) | 2011-06-10 | 2020-09-30 | Board of Regents of the University of Nebraska | Surgical end effector |
| EP3588217A1 (en) | 2011-07-11 | 2020-01-01 | Board of Regents of the University of Nebraska | Robotic surgical devices, systems and related methods |
| US9138166B2 (en) | 2011-07-29 | 2015-09-22 | Hansen Medical, Inc. | Apparatus and methods for fiber integration and registration |
| US8684914B2 (en) | 2011-08-12 | 2014-04-01 | Intuitive Surgical Operations, Inc. | Image capture unit and an imaging pipeline with enhanced color performance in a surgical instrument and method |
| US8784301B2 (en) | 2011-08-12 | 2014-07-22 | Intuitive Surgical Operations, Inc. | Image capture unit and method with an extended depth of field |
| US8672838B2 (en) | 2011-08-12 | 2014-03-18 | Intuitive Surgical Operations, Inc. | Image capture unit in a surgical instrument |
| US8734328B2 (en) | 2011-08-12 | 2014-05-27 | Intuitive Surgical Operations, Inc. | Increased resolution and dynamic range image capture unit in a surgical instrument and method |
| US8764633B2 (en) | 2011-08-12 | 2014-07-01 | Intuitive Surgical Operations, Inc. | Feature differentiation image capture unit and method in a surgical instrument |
| US20130046137A1 (en) * | 2011-08-15 | 2013-02-21 | Intuitive Surgical Operations, Inc. | Surgical instrument and method with multiple image capture sensors |
| US10098703B2 (en) | 2011-08-16 | 2018-10-16 | Intuitive Surgical Operations, Inc. | Surgical instrument with commonly actuated robotic and manual features |
| WO2013026012A1 (en) * | 2011-08-18 | 2013-02-21 | President And Fellows Of Harvard College | Hybrid snake robot for minimally invasive intervention |
| KR101521289B1 (ko) * | 2011-08-29 | 2015-05-21 | 주식회사 모바수 | 개선된 관절부를 갖는 최소 침습 수술 기구 |
| KR101280065B1 (ko) * | 2011-09-08 | 2013-06-27 | 한국과학기술원 | 수술기구용 회전 관절 및 수술기구용 벤딩 관절 |
| WO2013043344A1 (en) * | 2011-09-21 | 2013-03-28 | Boston Scientific Scimed, Inc. | Systems and methods for preventing laser fiber misfiring within endoscopic access devices |
| US9050084B2 (en) | 2011-09-23 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Staple cartridge including collapsible deck arrangement |
| FR2980683B1 (fr) * | 2011-09-30 | 2014-11-21 | Univ Paris Curie | Dispositif de guidage d'un instrument medical insere dans une voie naturelle ou une voie artificielle d'un patient |
| US9387048B2 (en) | 2011-10-14 | 2016-07-12 | Intuitive Surgical Operations, Inc. | Catheter sensor systems |
| US9452276B2 (en) | 2011-10-14 | 2016-09-27 | Intuitive Surgical Operations, Inc. | Catheter with removable vision probe |
| US20130303944A1 (en) | 2012-05-14 | 2013-11-14 | Intuitive Surgical Operations, Inc. | Off-axis electromagnetic sensor |
| US10238837B2 (en) | 2011-10-14 | 2019-03-26 | Intuitive Surgical Operations, Inc. | Catheters with control modes for interchangeable probes |
| CN103874525B (zh) * | 2011-10-14 | 2017-06-16 | 直观外科手术操作公司 | 导管系统 |
| JP5893330B2 (ja) * | 2011-10-18 | 2016-03-23 | オリンパス株式会社 | 操作入力装置および操作入力装置の初期化方法 |
| JP6234932B2 (ja) | 2011-10-24 | 2017-11-22 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 医療用器具 |
| CN102499759B (zh) * | 2011-10-31 | 2013-11-20 | 上海交通大学 | 多自由度单创孔腹腔微创手术机器人灵巧手 |
| US9179927B2 (en) | 2011-12-02 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Surgical methods using a surgical device having a fixed angular orientation |
| US9211159B2 (en) | 2011-12-02 | 2015-12-15 | Ethicon Endo-Surgery, Inc. | Surgical devices with intracorporeal elbow joint |
| US9131987B2 (en) | 2011-12-02 | 2015-09-15 | Ethicon Endo-Surgery, Inc. | Elbow assembly for surgical devices |
| US8617203B2 (en) | 2011-12-02 | 2013-12-31 | Ethicon Endo-Surgery, Inc. | Jaw assembly for surgical devices |
| EP2604172B1 (en) | 2011-12-13 | 2015-08-12 | EndoChoice Innovation Center Ltd. | Rotatable connector for an endoscope |
| EP2604175B1 (en) | 2011-12-13 | 2019-11-20 | EndoChoice Innovation Center Ltd. | Removable tip endoscope |
| US9504604B2 (en) | 2011-12-16 | 2016-11-29 | Auris Surgical Robotics, Inc. | Lithotripsy eye treatment |
| US9151462B2 (en) | 2011-12-21 | 2015-10-06 | Gr Enterprises And Technologies | Light guide diffuser, and methods |
| US10046175B2 (en) | 2011-12-21 | 2018-08-14 | Spectrum Medical Technologies, Llc | Light delivery systems and related methods of use |
| KR101150350B1 (ko) * | 2011-12-26 | 2012-06-08 | 윤치순 | 삼차원 내시경 수술장치 |
| KR101256862B1 (ko) * | 2011-12-27 | 2013-04-22 | 전자부품연구원 | 다자유도 장치 및 이를 포함하는 수술 도구용 시스템 |
| US9226741B2 (en) * | 2012-01-09 | 2016-01-05 | Covidien Lp | Triangulation methods with hollow segments |
| US9271701B2 (en) * | 2012-01-09 | 2016-03-01 | Covidien Lp | Surgical articulation assembly |
| US9956042B2 (en) | 2012-01-13 | 2018-05-01 | Vanderbilt University | Systems and methods for robot-assisted transurethral exploration and intervention |
| US20130190573A1 (en) * | 2012-01-19 | 2013-07-25 | Covidien Lp | Wound protector including flexible and rigid liners |
| WO2013116869A1 (en) | 2012-02-02 | 2013-08-08 | Transenterix, Inc. | Mechanized multi-instrument surgical system |
| US9044230B2 (en) | 2012-02-13 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical cutting and fastening instrument with apparatus for determining cartridge and firing motion status |
| US9586323B2 (en) | 2012-02-15 | 2017-03-07 | Intuitive Surgical Operations, Inc. | User selection of robotic system operating modes using mode distinguishing operator actions |
| CN104114337B (zh) | 2012-02-15 | 2016-12-21 | 直观外科手术操作公司 | 一旦器械进入可由输入装置的操作者观察的显示区域将对器械的控制切换到输入装置 |
| WO2013130828A1 (en) * | 2012-02-29 | 2013-09-06 | Boston Scientific Scimed, Inc. | Electrosurgical device and system |
| BR112014021482B1 (pt) | 2012-02-29 | 2021-12-21 | Procept Biorobotics Corporation | Aparelho de ressecção de próstata |
| US9078653B2 (en) | 2012-03-26 | 2015-07-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with lockout system for preventing actuation in the absence of an installed staple cartridge |
| US9198662B2 (en) | 2012-03-28 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator having improved visibility |
| CN104334098B (zh) | 2012-03-28 | 2017-03-22 | 伊西康内外科公司 | 包括限定低压强环境的胶囊剂的组织厚度补偿件 |
| CN104379068B (zh) | 2012-03-28 | 2017-09-22 | 伊西康内外科公司 | 包括组织厚度补偿件的保持器组件 |
| RU2014143258A (ru) | 2012-03-28 | 2016-05-20 | Этикон Эндо-Серджери, Инк. | Компенсатор толщины ткани, содержащий множество слоев |
| US9211134B2 (en) | 2012-04-09 | 2015-12-15 | Carefusion 2200, Inc. | Wrist assembly for articulating laparoscopic surgical instruments |
| US9204787B2 (en) | 2012-04-10 | 2015-12-08 | Conmed Corporation | 360 degree panning stereo endoscope |
| WO2013158974A1 (en) | 2012-04-20 | 2013-10-24 | Vanderbilt University | Dexterous wrists for surgical intervention |
| US9539726B2 (en) | 2012-04-20 | 2017-01-10 | Vanderbilt University | Systems and methods for safe compliant insertion and hybrid force/motion telemanipulation of continuum robots |
| WO2013158983A1 (en) | 2012-04-20 | 2013-10-24 | Vanderbilt University | Robotic device for establishing access channel |
| CN102697442B (zh) * | 2012-04-24 | 2014-10-08 | 王东 | 基于电控驱动器械的软式内窥镜系统 |
| US20140142591A1 (en) * | 2012-04-24 | 2014-05-22 | Auris Surgical Robotics, Inc. | Method, apparatus and a system for robotic assisted surgery |
| CN102697443B (zh) * | 2012-04-24 | 2014-10-08 | 王东 | 端部执行器具有保护壳的内镜 |
| US10383765B2 (en) | 2012-04-24 | 2019-08-20 | Auris Health, Inc. | Apparatus and method for a global coordinate system for use in robotic surgery |
| EP2881064B1 (de) | 2012-04-27 | 2019-11-13 | KUKA Deutschland GmbH | Chirurgierobotersystem |
| US9498292B2 (en) | 2012-05-01 | 2016-11-22 | Board Of Regents Of The University Of Nebraska | Single site robotic device and related systems and methods |
| US20150148839A1 (en) * | 2012-05-07 | 2015-05-28 | Chang Wook Jeong | Minimally invasive surgery tool having variable bend |
| US9737364B2 (en) | 2012-05-14 | 2017-08-22 | Vanderbilt University | Local magnetic actuation of surgical devices |
| US9277205B2 (en) | 2012-05-14 | 2016-03-01 | Intuitive Surgical Operations, Inc. | Single-chip sensor multi-function imaging |
| US10028641B1 (en) * | 2012-05-18 | 2018-07-24 | John H. Prince | Combined ear, nose and throat inspection and operation instruments |
| KR101912717B1 (ko) | 2012-05-25 | 2018-10-29 | 삼성전자주식회사 | 수술 용구 및 이를 포함하는 매니플레이션 시스템 |
| US20130317519A1 (en) | 2012-05-25 | 2013-11-28 | Hansen Medical, Inc. | Low friction instrument driver interface for robotic systems |
| US10013082B2 (en) | 2012-06-05 | 2018-07-03 | Stuart Schecter, LLC | Operating system with haptic interface for minimally invasive, hand-held surgical instrument |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US11864745B2 (en) * | 2012-06-21 | 2024-01-09 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US20220008147A1 (en) * | 2012-06-21 | 2022-01-13 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US9119657B2 (en) | 2012-06-28 | 2015-09-01 | Ethicon Endo-Surgery, Inc. | Rotary actuatable closure arrangement for surgical end effector |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9101385B2 (en) | 2012-06-28 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Electrode connections for rotary driven surgical tools |
| US9282974B2 (en) | 2012-06-28 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Empty clip cartridge lockout |
| US20140005640A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical end effector jaw and electrode configurations |
| US9561038B2 (en) | 2012-06-28 | 2017-02-07 | Ethicon Endo-Surgery, Llc | Interchangeable clip applier |
| US11197671B2 (en) | 2012-06-28 | 2021-12-14 | Cilag Gmbh International | Stapling assembly comprising a lockout |
| US9072536B2 (en) | 2012-06-28 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Differential locking arrangements for rotary powered surgical instruments |
| US9204879B2 (en) | 2012-06-28 | 2015-12-08 | Ethicon Endo-Surgery, Inc. | Flexible drive member |
| US9125662B2 (en) | 2012-06-28 | 2015-09-08 | Ethicon Endo-Surgery, Inc. | Multi-axis articulating and rotating surgical tools |
| BR112014032776B1 (pt) | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| CN104487005B (zh) | 2012-06-28 | 2017-09-08 | 伊西康内外科公司 | 空夹仓闭锁件 |
| US9028494B2 (en) | 2012-06-28 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Interchangeable end effector coupling arrangement |
| US20140001234A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Coupling arrangements for attaching surgical end effectors to drive systems therefor |
| JP6053358B2 (ja) * | 2012-07-03 | 2016-12-27 | オリンパス株式会社 | 手術支援装置 |
| KR101721742B1 (ko) | 2012-07-03 | 2017-03-30 | 쿠카 레보라토리즈 게엠베하 | 외과용 기구 배열체, 외과용 기구를 위한, 특히 로봇에 의해 안내되는 외과용 기구를 위한 드라이브 트레인 배열체, 및 외과용 기구 |
| DE102013004487A1 (de) * | 2013-03-11 | 2014-09-11 | Kuka Laboratories Gmbh | Antriebsstranganordnung für ein, insbesondere robotergeführtes, chirurgisches Instrument |
| US9560954B2 (en) | 2012-07-24 | 2017-02-07 | Endochoice, Inc. | Connector for use with endoscope |
| JP5865500B2 (ja) * | 2012-07-31 | 2016-02-17 | オリンパス株式会社 | 医療用マニピュレータ |
| CN104519823B (zh) | 2012-08-02 | 2018-02-16 | 皇家飞利浦有限公司 | 机器人远程运动中心的控制器限定 |
| JP2015526171A (ja) | 2012-08-08 | 2015-09-10 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | ロボット手術用デバイス、システム及び関連の方法 |
| JP6441797B2 (ja) | 2012-08-14 | 2018-12-19 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 最小侵襲器具におけるコンポーネントを構成するためのシステム及び方法 |
| US9050527B2 (en) | 2012-08-23 | 2015-06-09 | Wms Gaming Inc. | Interactive tether using tension and feedback |
| US9826904B2 (en) | 2012-09-14 | 2017-11-28 | Vanderbilt University | System and method for detecting tissue surface properties |
| US20140081659A1 (en) * | 2012-09-17 | 2014-03-20 | Depuy Orthopaedics, Inc. | Systems and methods for surgical and interventional planning, support, post-operative follow-up, and functional recovery tracking |
| JP2014073143A (ja) * | 2012-10-02 | 2014-04-24 | Canon Inc | 内視鏡システム |
| US9386985B2 (en) | 2012-10-15 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Surgical cutting instrument |
| KR102038632B1 (ko) | 2012-11-06 | 2019-10-30 | 삼성전자주식회사 | 수술용 인스트루먼트, 서포터 장치, 및 수술 로봇 시스템 |
| CN104736074B (zh) | 2012-11-14 | 2018-05-25 | 直观外科手术操作公司 | 用于双控制手术器械的系统和方法 |
| WO2014082040A1 (en) * | 2012-11-26 | 2014-05-30 | Mayo Foundation For Medical Education And Research | Finger cot camera system |
| JP5908172B2 (ja) * | 2012-11-30 | 2016-04-26 | オリンパス株式会社 | 手術支援システムおよび手術支援システムの制御方法 |
| KR102218244B1 (ko) | 2012-12-10 | 2021-02-22 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 영상 포착 장치 및 조작 가능 장치 가동 아암들의 제어된 이동 중의 충돌 회피 |
| EP2931162A4 (en) * | 2012-12-11 | 2016-07-13 | Olympus Corp | ENDOSCOPY DEVICE AND METHOD FOR CONTROLLING AN ENDOSCOPY DEVICE |
| DE102012025102A1 (de) | 2012-12-20 | 2014-06-26 | avateramedical GmBH | Endoskop mit einem Mehrkamerasystem für die minimal-invasive Chirurgie |
| US20140188440A1 (en) | 2012-12-31 | 2014-07-03 | Intuitive Surgical Operations, Inc. | Systems And Methods For Interventional Procedure Planning |
| US8622896B1 (en) | 2013-01-04 | 2014-01-07 | Zafer Termanini | Liquid-cooled light source for endoscopy and irrigation/suction and power supply tubing and method thereof |
| US10485409B2 (en) | 2013-01-17 | 2019-11-26 | Vanderbilt University | Real-time pose and magnetic force detection for wireless magnetic capsule |
| US10231867B2 (en) | 2013-01-18 | 2019-03-19 | Auris Health, Inc. | Method, apparatus and system for a water jet |
| CN104936548B (zh) | 2013-01-28 | 2017-07-14 | 奥林巴斯株式会社 | 医疗用机械手和医疗用机械手的控制方法 |
| CN103110441B (zh) * | 2013-01-29 | 2016-06-15 | 北京派尔特医疗科技股份有限公司 | 电动外科装订器械的通用手柄 |
| US9386984B2 (en) | 2013-02-08 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Staple cartridge comprising a releasable cover |
| US9662176B2 (en) * | 2013-02-15 | 2017-05-30 | Intuitive Surgical Operations, Inc. | Systems and methods for proximal control of a surgical instrument |
| US10507066B2 (en) | 2013-02-15 | 2019-12-17 | Intuitive Surgical Operations, Inc. | Providing information of tools by filtering image areas adjacent to or on displayed images of the tools |
| BR112015021082B1 (pt) | 2013-03-01 | 2022-05-10 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| MX368026B (es) | 2013-03-01 | 2019-09-12 | Ethicon Endo Surgery Inc | Instrumento quirúrgico articulable con vías conductoras para la comunicación de la señal. |
| US9700309B2 (en) | 2013-03-01 | 2017-07-11 | Ethicon Llc | Articulatable surgical instruments with conductive pathways for signal communication |
| US9668814B2 (en) | 2013-03-07 | 2017-06-06 | Hansen Medical, Inc. | Infinitely rotatable tool with finite rotating drive shafts |
| US10149720B2 (en) | 2013-03-08 | 2018-12-11 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US9867635B2 (en) | 2013-03-08 | 2018-01-16 | Auris Surgical Robotics, Inc. | Method, apparatus and system for a water jet |
| US10080576B2 (en) | 2013-03-08 | 2018-09-25 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| KR20140112601A (ko) | 2013-03-11 | 2014-09-24 | 삼성전자주식회사 | 내시경 수술기구 |
| US9855066B2 (en) | 2013-03-12 | 2018-01-02 | Boston Scientific Scimed, Inc. | Retrieval device and related methods of use |
| US10986984B2 (en) | 2013-03-13 | 2021-04-27 | Spiway Llc | Surgical tissue protection sheath |
| US9057600B2 (en) | 2013-03-13 | 2015-06-16 | Hansen Medical, Inc. | Reducing incremental measurement sensor error |
| US20140276389A1 (en) * | 2013-03-13 | 2014-09-18 | Sean Walker | Selective grip device for drive mechanism |
| US20140263552A1 (en) | 2013-03-13 | 2014-09-18 | Ethicon Endo-Surgery, Inc. | Staple cartridge tissue thickness sensor system |
| US11039735B2 (en) | 2013-03-13 | 2021-06-22 | Spiway Llc | Surgical tissue protection sheath |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| US9332987B2 (en) | 2013-03-14 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Control arrangements for a drive member of a surgical instrument |
| US9498601B2 (en) | 2013-03-14 | 2016-11-22 | Hansen Medical, Inc. | Catheter tension sensing |
| US11213363B2 (en) | 2013-03-14 | 2022-01-04 | Auris Health, Inc. | Catheter tension sensing |
| US9326822B2 (en) | 2013-03-14 | 2016-05-03 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| CA2906672C (en) | 2013-03-14 | 2022-03-15 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to force control surgical systems |
| US20140296869A1 (en) | 2013-03-14 | 2014-10-02 | Intuitive Surgical Operations, Inc. | Surgical instrument shaft |
| US9173713B2 (en) | 2013-03-14 | 2015-11-03 | Hansen Medical, Inc. | Torque-based catheter articulation |
| US20140277334A1 (en) | 2013-03-14 | 2014-09-18 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9833350B2 (en) | 2013-03-15 | 2017-12-05 | Ez-Off Weightloss, Llc | Anchorable size-varying gastric balloons for weight loss |
| US10376672B2 (en) | 2013-03-15 | 2019-08-13 | Auris Health, Inc. | Catheter insertion system and method of fabrication |
| US9629595B2 (en) | 2013-03-15 | 2017-04-25 | Hansen Medical, Inc. | Systems and methods for localizing, tracking and/or controlling medical instruments |
| US20140276936A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Active drive mechanism for simultaneous rotation and translation |
| US9452018B2 (en) | 2013-03-15 | 2016-09-27 | Hansen Medical, Inc. | Rotational support for an elongate member |
| KR102188100B1 (ko) | 2013-03-15 | 2020-12-07 | 삼성전자주식회사 | 로봇 및 그 제어방법 |
| US9014851B2 (en) | 2013-03-15 | 2015-04-21 | Hansen Medical, Inc. | Systems and methods for tracking robotically controlled medical instruments |
| US9554932B2 (en) | 2013-03-15 | 2017-01-31 | Ez-Off Weight Loss, Llc | System and method for gastric restriction and malabsorption |
| US20140276647A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Vascular remote catheter manipulator |
| US9271663B2 (en) | 2013-03-15 | 2016-03-01 | Hansen Medical, Inc. | Flexible instrument localization from both remote and elongation sensors |
| WO2014146090A1 (en) | 2013-03-15 | 2014-09-18 | Intuitive Surgical Operations, Inc. | Inter-operative switching of tools in a robotic surgical system |
| US9408669B2 (en) | 2013-03-15 | 2016-08-09 | Hansen Medical, Inc. | Active drive mechanism with finite range of motion |
| ITFI20130055A1 (it) | 2013-03-18 | 2014-09-19 | Scuola Superiore Di Studi Universit Ari E Di Perfe | Dispositivo robotico miniaturizzato applicabile ad un endoscopio flessibile per la dissezione chirurgica di neoplasie superficiali del tratto gastro-intestinale |
| WO2014148068A1 (ja) | 2013-03-18 | 2014-09-25 | オリンパス株式会社 | マニピュレータ |
| WO2014157001A1 (ja) * | 2013-03-26 | 2014-10-02 | オリンパス株式会社 | 処置具 |
| US9572577B2 (en) | 2013-03-27 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Fastener cartridge comprising a tissue thickness compensator including openings therein |
| US9332984B2 (en) | 2013-03-27 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Fastener cartridge assemblies |
| US9795384B2 (en) | 2013-03-27 | 2017-10-24 | Ethicon Llc | Fastener cartridge comprising a tissue thickness compensator and a gap setting element |
| US10595714B2 (en) | 2013-03-28 | 2020-03-24 | Endochoice, Inc. | Multi-jet controller for an endoscope |
| US9993142B2 (en) | 2013-03-28 | 2018-06-12 | Endochoice, Inc. | Fluid distribution device for a multiple viewing elements endoscope |
| US9986899B2 (en) | 2013-03-28 | 2018-06-05 | Endochoice, Inc. | Manifold for a multiple viewing elements endoscope |
| US9636003B2 (en) | 2013-06-28 | 2017-05-02 | Endochoice, Inc. | Multi-jet distributor for an endoscope |
| CN105050530B (zh) | 2013-03-28 | 2017-07-28 | 奥林巴斯株式会社 | 处置器械更换装置和医疗系统 |
| GB2512910B (en) * | 2013-04-11 | 2016-10-19 | Lumenis Ltd | Endoscopic probe with rotatable sections to direct optical fibre |
| US10405857B2 (en) | 2013-04-16 | 2019-09-10 | Ethicon Llc | Powered linear surgical stapler |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| WO2014170782A1 (en) * | 2013-04-18 | 2014-10-23 | Koninklijke Philips N.V. | Optimal lumen design for optical shape sensing device |
| KR102195714B1 (ko) * | 2013-05-02 | 2020-12-28 | 삼성전자주식회사 | 수술용 트로카 및 이를 이용한 영상 획득 방법 |
| CN105358043B (zh) | 2013-05-07 | 2018-12-21 | 恩多巧爱思股份有限公司 | 与多观察元件内窥镜一起使用的白平衡外壳 |
| US10499794B2 (en) | 2013-05-09 | 2019-12-10 | Endochoice, Inc. | Operational interface in a multi-viewing element endoscope |
| KR20140134491A (ko) | 2013-05-14 | 2014-11-24 | 삼성전자주식회사 | 로봇 제어 방법 |
| US9949623B2 (en) | 2013-05-17 | 2018-04-24 | Endochoice, Inc. | Endoscope control unit with braking system |
| EP3799812B1 (en) | 2013-05-22 | 2023-11-29 | Covidien LP | Apparatus for controlling surgical instruments using a port assembly |
| AT514345B1 (de) * | 2013-05-22 | 2015-02-15 | Bernecker & Rainer Ind Elektronik Gmbh | Sicherheitsüberwachung einer seriellen Kinematik |
| US9574644B2 (en) | 2013-05-30 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Power module for use with a surgical instrument |
| US11020016B2 (en) | 2013-05-30 | 2021-06-01 | Auris Health, Inc. | System and method for displaying anatomy and devices on a movable display |
| US10744035B2 (en) | 2013-06-11 | 2020-08-18 | Auris Health, Inc. | Methods for robotic assisted cataract surgery |
| JP6274630B2 (ja) | 2013-06-19 | 2018-02-07 | タイタン メディカル インコーポレイテッドTitan Medical Inc. | 多関節器具位置決め装置およびそれを採用するシステム |
| DE102013212448A1 (de) * | 2013-06-27 | 2014-12-31 | Olympus Winter & Ibe Gmbh | Führungskatheter mit Verankerungsmechanismus und Verfahren zum Einführen eines Führungskatheters |
| WO2015009949A2 (en) | 2013-07-17 | 2015-01-22 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
| JP6137976B2 (ja) | 2013-07-25 | 2017-05-31 | オリンパス株式会社 | マニピュレータシステム |
| JP6116426B2 (ja) | 2013-07-25 | 2017-04-19 | オリンパス株式会社 | マニピュレータシステム |
| JP6164964B2 (ja) * | 2013-07-26 | 2017-07-19 | オリンパス株式会社 | 医療用システムおよびその制御方法 |
| JP6116429B2 (ja) * | 2013-07-26 | 2017-04-19 | オリンパス株式会社 | 治療用マニピュレータおよびマニピュレータシステム |
| JP6109001B2 (ja) * | 2013-07-26 | 2017-04-05 | オリンパス株式会社 | 医療用システムおよびその作動方法 |
| EP3027138A4 (en) * | 2013-07-29 | 2017-07-05 | Intuitive Surgical Operations, Inc. | Shape sensor systems with redundant sensing |
| DE102013108115A1 (de) * | 2013-07-30 | 2015-02-05 | gomtec GmbH | Verfahren und Vorrichtung zum Festlegen eines Arbeitsbereichs eines Roboters |
| CA2919658A1 (en) | 2013-08-05 | 2015-02-12 | Mary PATTISON | Transabdominal gastric surgery system and method |
| US10219799B2 (en) | 2013-08-05 | 2019-03-05 | Endo-Tagss, Llc | Transabdominal gastric device and method |
| KR20150017129A (ko) | 2013-08-06 | 2015-02-16 | 삼성전자주식회사 | 수술 로봇 시스템 및 그 제어 방법 |
| US10064541B2 (en) | 2013-08-12 | 2018-09-04 | Endochoice, Inc. | Endoscope connector cover detection and warning system |
| US10426661B2 (en) | 2013-08-13 | 2019-10-01 | Auris Health, Inc. | Method and apparatus for laser assisted cataract surgery |
| CN114587606A (zh) | 2013-08-15 | 2022-06-07 | 直观外科手术操作公司 | 通向器械无菌适配器的致动器接口 |
| CN105611892B (zh) | 2013-08-15 | 2019-02-19 | 直观外科手术操作公司 | 机器人器械从动元件 |
| EP3033029B1 (en) | 2013-08-15 | 2020-07-15 | Intuitive Surgical Operations, Inc. | Reusable surgical instrument with single-use tip and integrated tip cover |
| CN108992172B (zh) | 2013-08-15 | 2021-11-09 | 直观外科手术操作公司 | 可变器械预加载机构控制器 |
| US20160193012A1 (en) | 2013-08-15 | 2016-07-07 | Intuitive Surgical Operations, Inc. | Surgical instruments and methods of cleaning surgical instruments |
| EP3033034B1 (en) | 2013-08-15 | 2021-07-07 | Intuitive Surgical Operations, Inc. | Instrument sterile adapter drive interface |
| US10076348B2 (en) | 2013-08-15 | 2018-09-18 | Intuitive Surgical Operations, Inc. | Rotary input for lever actuation |
| EP3033036B1 (en) | 2013-08-15 | 2020-05-20 | Intuitive Surgical Operations, Inc. | Preloaded surgical instrument interface |
| US10550918B2 (en) | 2013-08-15 | 2020-02-04 | Intuitive Surgical Operations, Inc. | Lever actuated gimbal plate |
| US10271911B2 (en) | 2013-08-15 | 2019-04-30 | Intuitive Surgical Operations, Inc. | Instrument sterile adapter drive features |
| US20150053737A1 (en) | 2013-08-23 | 2015-02-26 | Ethicon Endo-Surgery, Inc. | End effector detection systems for surgical instruments |
| CN106028966B (zh) | 2013-08-23 | 2018-06-22 | 伊西康内外科有限责任公司 | 用于动力外科器械的击发构件回缩装置 |
| JP2015047376A (ja) * | 2013-09-03 | 2015-03-16 | 渡邊 剛 | 穿刺機能付きチューブ器具 |
| US10238457B2 (en) * | 2013-09-13 | 2019-03-26 | Vanderbilt University | System and method for endoscopic deployment of robotic concentric tube manipulators for performing surgery |
| US10149694B2 (en) | 2013-09-13 | 2018-12-11 | Vanderbilt University | Energy balance mechanism for flexure joint |
| US9943218B2 (en) | 2013-10-01 | 2018-04-17 | Endochoice, Inc. | Endoscope having a supply cable attached thereto |
| US9364289B2 (en) * | 2013-10-09 | 2016-06-14 | Wisconsin Alumni Research Foundation | Interleaved manipulator |
| US9737373B2 (en) | 2013-10-24 | 2017-08-22 | Auris Surgical Robotics, Inc. | Instrument device manipulator and surgical drape |
| JP6656148B2 (ja) * | 2013-10-24 | 2020-03-04 | オーリス ヘルス インコーポレイテッド | ロボット支援管腔内手術のためのシステムおよび関連する方法 |
| CN103519772B (zh) * | 2013-10-29 | 2016-03-16 | 上海交通大学 | 单孔腹腔镜微创手术成像系统 |
| KR102111621B1 (ko) | 2013-11-05 | 2020-05-18 | 삼성전자주식회사 | 매니퓰레이터 |
| US9295522B2 (en) * | 2013-11-08 | 2016-03-29 | Covidien Lp | Medical device adapter with wrist mechanism |
| DE102013225117A1 (de) * | 2013-12-06 | 2015-06-11 | Richard Wolf Gmbh | Antriebsanordnung für ein endoskopisches Schaftinstrument |
| CN105813582B (zh) | 2013-12-11 | 2019-05-28 | 柯惠Lp公司 | 用于机器人手术系统的腕组件及钳夹组件 |
| CA2932459C (en) | 2013-12-18 | 2022-01-04 | Covidien Lp | Electrosurgical end effectors |
| US9968242B2 (en) | 2013-12-18 | 2018-05-15 | Endochoice, Inc. | Suction control unit for an endoscope having two working channels |
| US9839428B2 (en) | 2013-12-23 | 2017-12-12 | Ethicon Llc | Surgical cutting and stapling instruments with independent jaw control features |
| US9681870B2 (en) | 2013-12-23 | 2017-06-20 | Ethicon Llc | Articulatable surgical instruments with separate and distinct closing and firing systems |
| US20150173756A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical cutting and stapling methods |
| US9687232B2 (en) | 2013-12-23 | 2017-06-27 | Ethicon Llc | Surgical staples |
| US9724092B2 (en) | 2013-12-23 | 2017-08-08 | Ethicon Llc | Modular surgical instruments |
| US9642620B2 (en) | 2013-12-23 | 2017-05-09 | Ethicon Endo-Surgery, Llc | Surgical cutting and stapling instruments with articulatable end effectors |
| JP6129087B2 (ja) | 2014-01-14 | 2017-05-17 | オリンパス株式会社 | 関節機構、マニピュレータおよびマニピュレータシステム |
| GB201400569D0 (en) | 2014-01-14 | 2014-03-05 | Randle Engineering Solutions Ltd | Articulation |
| WO2015112747A2 (en) | 2014-01-22 | 2015-07-30 | Endochoice, Inc. | Image capture and video processing systems and methods for multiple viewing element endoscopes |
| CN105228511A (zh) * | 2014-01-23 | 2016-01-06 | 奥林巴斯株式会社 | 外科用设备 |
| WO2015116282A1 (en) | 2014-01-31 | 2015-08-06 | Covidien Lp | Interfaces for surgical systems |
| CN105979902A (zh) * | 2014-02-04 | 2016-09-28 | 皇家飞利浦有限公司 | 用于机器人系统的使用光源的远程运动中心定义 |
| WO2015120080A1 (en) * | 2014-02-06 | 2015-08-13 | Faculty Physicians And Surgeons Of Loma Linda University School Of Medicine | Methods and devices for performing abdominal surgery |
| KR101525457B1 (ko) * | 2014-02-10 | 2015-06-03 | 한국과학기술연구원 | 고곡률 관절 구조체를 구비한 내시경 로봇 |
| US9962161B2 (en) | 2014-02-12 | 2018-05-08 | Ethicon Llc | Deliverable surgical instrument |
| JP6218631B2 (ja) * | 2014-02-18 | 2017-10-25 | オリンパス株式会社 | マニピュレータ装置の作動方法 |
| JP6353665B2 (ja) * | 2014-02-21 | 2018-07-04 | オリンパス株式会社 | マニピュレータの初期化方法、マニピュレータ、およびマニピュレータシステム |
| CN111481245A (zh) * | 2014-02-21 | 2020-08-04 | 直观外科手术操作公司 | 具有受约束运动的可铰接构件以及相关设备和方法 |
| KR102410823B1 (ko) | 2014-02-21 | 2022-06-21 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 기계식 조인트들, 및 관련된 시스템들과 방법들 |
| CN106028930B (zh) | 2014-02-21 | 2021-10-22 | 3D集成公司 | 包括手术器械的套件 |
| JP6462004B2 (ja) | 2014-02-24 | 2019-01-30 | エシコン エルエルシー | 発射部材ロックアウトを備える締結システム |
| US9693777B2 (en) | 2014-02-24 | 2017-07-04 | Ethicon Llc | Implantable layers comprising a pressed region |
| JP2015159955A (ja) * | 2014-02-27 | 2015-09-07 | オリンパス株式会社 | 手術システムおよび医療器具の干渉回避方法 |
| JP6278747B2 (ja) * | 2014-02-28 | 2018-02-14 | オリンパス株式会社 | マニピュレータのキャリブレーション方法、マニピュレータ、およびマニピュレータシステム |
| CN106456265B (zh) | 2014-03-17 | 2019-07-30 | 直观外科手术操作公司 | 使用逆运动学在关节极限下的遥控操作手术系统和控制方法 |
| WO2015142824A1 (en) | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Surgical drape and systems including surgical drape and attachment sensor |
| KR102456408B1 (ko) | 2014-03-17 | 2022-10-20 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술용 캐뉼라 마운트 및 관련된 시스템과 방법 |
| SG11201607930TA (en) * | 2014-03-19 | 2016-12-29 | Endomaster Pte Ltd | Master - slave flexible robotic endoscopy system |
| ES2915689T3 (es) * | 2014-03-19 | 2022-06-24 | Endomaster Pte Ltd | Un aparato endoscópico robótico y flexible mejorado |
| EP3243476B1 (en) | 2014-03-24 | 2019-11-06 | Auris Health, Inc. | Systems and devices for catheter driving instinctiveness |
| BR112016021943B1 (pt) | 2014-03-26 | 2022-06-14 | Ethicon Endo-Surgery, Llc | Instrumento cirúrgico para uso por um operador em um procedimento cirúrgico |
| US9913642B2 (en) | 2014-03-26 | 2018-03-13 | Ethicon Llc | Surgical instrument comprising a sensor system |
| US9820738B2 (en) | 2014-03-26 | 2017-11-21 | Ethicon Llc | Surgical instrument comprising interactive systems |
| US10013049B2 (en) | 2014-03-26 | 2018-07-03 | Ethicon Llc | Power management through sleep options of segmented circuit and wake up control |
| US10028761B2 (en) | 2014-03-26 | 2018-07-24 | Ethicon Llc | Feedback algorithms for manual bailout systems for surgical instruments |
| US10610313B2 (en) * | 2014-03-31 | 2020-04-07 | Intuitive Surgical Operations, Inc. | Surgical instrument with shiftable transmission |
| JP6830356B2 (ja) * | 2014-04-01 | 2021-02-17 | フェルティゴ メディカル リミテッド | 子宮を連続的に検知するための監視システム |
| CN106456158B (zh) | 2014-04-16 | 2019-02-05 | 伊西康内外科有限责任公司 | 包括非一致紧固件的紧固件仓 |
| US10327764B2 (en) | 2014-09-26 | 2019-06-25 | Ethicon Llc | Method for creating a flexible staple line |
| US9844369B2 (en) | 2014-04-16 | 2017-12-19 | Ethicon Llc | Surgical end effectors with firing element monitoring arrangements |
| BR112016023698B1 (pt) | 2014-04-16 | 2022-07-26 | Ethicon Endo-Surgery, Llc | Cartucho de prendedores para uso com um instrumento cirúrgico |
| CN106456159B (zh) | 2014-04-16 | 2019-03-08 | 伊西康内外科有限责任公司 | 紧固件仓组件和钉保持器盖布置结构 |
| US20150297223A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| US10046140B2 (en) | 2014-04-21 | 2018-08-14 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| US10080552B2 (en) * | 2014-04-21 | 2018-09-25 | Covidien Lp | Adapter assembly with gimbal for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| WO2015161677A1 (en) * | 2014-04-22 | 2015-10-29 | Bio-Medical Engineering (HK) Limited | Single access surgical robotic devices and systems, and methods of configuring single access surgical robotic devices and systems |
| US10500008B2 (en) | 2014-04-22 | 2019-12-10 | Bio-Medical Engineering (HK) Limited | Surgical arm system with internally driven gear assemblies |
| US11801099B2 (en) | 2014-04-22 | 2023-10-31 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US9855108B2 (en) | 2014-04-22 | 2018-01-02 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US11154368B2 (en) | 2014-04-22 | 2021-10-26 | Bio-Medical Engineering (HK) Limited | Port assembly for use with robotic devices and systems to perform single incision procedures and natural orifice translumenal endoscopic surgical procedures |
| US10555785B2 (en) | 2014-04-22 | 2020-02-11 | Bio-Medical Engineering (HK) Limited | Surgical arm system with internally driven gear assemblies |
| US20220378535A1 (en) * | 2014-04-22 | 2022-12-01 | Bio-Medical Engineering (HK) Limited | Surgical arm system with internally drive gear assemblies |
| US11090123B2 (en) * | 2014-04-22 | 2021-08-17 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US9724168B2 (en) | 2014-04-22 | 2017-08-08 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US9895200B2 (en) * | 2014-04-22 | 2018-02-20 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US11234581B2 (en) | 2014-05-02 | 2022-02-01 | Endochoice, Inc. | Elevator for directing medical tool |
| US20150313634A1 (en) * | 2014-05-05 | 2015-11-05 | Rainbow Medical Ltd. | Pericardial access device |
| CA2946595A1 (en) | 2014-05-05 | 2015-11-12 | Vicarious Surgical Inc. | Virtual reality surgical device |
| US10569052B2 (en) | 2014-05-15 | 2020-02-25 | Auris Health, Inc. | Anti-buckling mechanisms for catheters |
| CN103995476A (zh) * | 2014-05-22 | 2014-08-20 | 清华大学深圳研究生院 | 工业机器人模拟空间目标运动的方法 |
| WO2015182561A1 (ja) * | 2014-05-27 | 2015-12-03 | 並木精密宝石株式会社 | マニピュレータ |
| US20150343649A1 (en) * | 2014-05-28 | 2015-12-03 | Richard Galinson | Tentacle mechanism |
| US10045781B2 (en) | 2014-06-13 | 2018-08-14 | Ethicon Llc | Closure lockout systems for surgical instruments |
| JP6169049B2 (ja) * | 2014-06-19 | 2017-07-26 | オリンパス株式会社 | マニピュレータの制御方法、マニピュレータ、およびマニピュレータシステム |
| US9744335B2 (en) | 2014-07-01 | 2017-08-29 | Auris Surgical Robotics, Inc. | Apparatuses and methods for monitoring tendons of steerable catheters |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| US9788910B2 (en) | 2014-07-01 | 2017-10-17 | Auris Surgical Robotics, Inc. | Instrument-mounted tension sensing mechanism for robotically-driven medical instruments |
| US10792464B2 (en) | 2014-07-01 | 2020-10-06 | Auris Health, Inc. | Tool and method for using surgical endoscope with spiral lumens |
| US10987050B2 (en) | 2014-07-21 | 2021-04-27 | ProPep Surgical, LLC | System and method for laparoscopic nerve identification, nerve location marking, and nerve location recognition |
| WO2016014581A1 (en) | 2014-07-21 | 2016-01-28 | Endochoice, Inc. | Multi-focal, multi-camera endoscope systems |
| WO2016018618A1 (en) * | 2014-07-28 | 2016-02-04 | Intuitive Surgical Operations, Inc. | Guide apparatus for delivery of a flexible instrument and methods of use |
| US10390853B2 (en) | 2014-08-13 | 2019-08-27 | Covidien Lp | Robotically controlling mechanical advantage gripping |
| KR102699304B1 (ko) | 2014-08-15 | 2024-08-30 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 가변 엔트리 가이드 구성을 가진 수술 시스템 |
| NL2013369B1 (en) | 2014-08-26 | 2016-09-26 | Univ Eindhoven Tech | Surgical robotic system and control of surgical robotic system. |
| EP3185744B1 (en) | 2014-08-29 | 2024-10-23 | EndoChoice, Inc. | Systems and methods for varying stiffness of an endoscopic insertion tube |
| ES2848100T3 (es) | 2014-09-04 | 2021-08-05 | Memic Innovative Surgery Ltd | Control de dispositivo que incluye brazos mecánicos |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| US9757128B2 (en) | 2014-09-05 | 2017-09-12 | Ethicon Llc | Multiple sensors with one sensor affecting a second sensor's output or interpretation |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| CN107205623A (zh) | 2014-09-09 | 2017-09-26 | 范德比尔特大学 | 用于低资源地区中的胃癌筛查的喷液式胶囊内窥镜和方法 |
| US20160066882A1 (en) * | 2014-09-10 | 2016-03-10 | Tyco Electronics Corporation | Intracardiac Ultrasound Imaging Delivery Catheter |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| CN107427300B (zh) | 2014-09-26 | 2020-12-04 | 伊西康有限责任公司 | 外科缝合支撑物和辅助材料 |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| WO2016054256A1 (en) | 2014-09-30 | 2016-04-07 | Auris Surgical Robotics, Inc | Configurable robotic surgical system with virtual rail and flexible endoscope |
| US10076325B2 (en) | 2014-10-13 | 2018-09-18 | Ethicon Llc | Surgical stapling apparatus comprising a tissue stop |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US10314463B2 (en) | 2014-10-24 | 2019-06-11 | Auris Health, Inc. | Automated endoscope calibration |
| US10624807B2 (en) | 2014-10-27 | 2020-04-21 | Intuitive Surgical Operations, Inc. | System and method for integrated surgical table icons |
| KR20230096131A (ko) | 2014-10-27 | 2023-06-29 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 통합 수술 테이블을 위한 시스템 및 방법 |
| KR20240007964A (ko) | 2014-10-27 | 2024-01-17 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 통합 수술 테이블 운동을 위한 시스템 및 방법 |
| CN111166476B (zh) | 2014-10-27 | 2023-05-02 | 直观外科手术操作公司 | 具有主动制动器释放控制装置的医疗装置 |
| KR102479287B1 (ko) | 2014-10-27 | 2022-12-20 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 반응 운동 동안 제어점을 감시하기 위한 시스템 및 방법 |
| KR102617042B1 (ko) | 2014-10-27 | 2023-12-27 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술 테이블에 등록하기 위한 시스템 및 방법 |
| CN110584789B (zh) | 2014-10-27 | 2022-09-20 | 直观外科手术操作公司 | 用于器械干扰补偿的系统和方法 |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| US10376322B2 (en) | 2014-11-11 | 2019-08-13 | Board Of Regents Of The University Of Nebraska | Robotic device with compact joint design and related systems and methods |
| US9751624B2 (en) * | 2014-12-03 | 2017-09-05 | Bell Helicopter Textron Inc. | Individual blade control utilizing pneumatic muscles |
| DE102014118003A1 (de) * | 2014-12-05 | 2016-06-23 | Karl Storz Gmbh & Co. Kg | Endoskopisches Instrument sowie endoskopisches Instrumentensystem |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| WO2016092463A1 (en) * | 2014-12-11 | 2016-06-16 | Koninklijke Philips N.V. | Adaptive planning and delivery of high dose rate brachytherapy |
| US10188385B2 (en) | 2014-12-18 | 2019-01-29 | Ethicon Llc | Surgical instrument system comprising lockable systems |
| US9943309B2 (en) | 2014-12-18 | 2018-04-17 | Ethicon Llc | Surgical instruments with articulatable end effectors and movable firing beam support arrangements |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| US10117649B2 (en) | 2014-12-18 | 2018-11-06 | Ethicon Llc | Surgical instrument assembly comprising a lockable articulation system |
| BR112017012996B1 (pt) | 2014-12-18 | 2022-11-08 | Ethicon Llc | Instrumento cirúrgico com uma bigorna que é seletivamente móvel sobre um eixo geométrico imóvel distinto em relação a um cartucho de grampos |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| WO2016100173A1 (en) | 2014-12-18 | 2016-06-23 | Endochoice, Inc. | System and method for processing video images generated by a multiple viewing elements endoscope |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10159524B2 (en) | 2014-12-22 | 2018-12-25 | Ethicon Llc | High power battery powered RF amplifier topology |
| CN104490477A (zh) * | 2014-12-29 | 2015-04-08 | 天津大学 | 一种用于腹腔镜手术的多自由度单孔手术机器人 |
| US10271713B2 (en) | 2015-01-05 | 2019-04-30 | Endochoice, Inc. | Tubed manifold of a multiple viewing elements endoscope |
| CN104546028B (zh) * | 2015-01-27 | 2017-02-01 | 联合微创医疗器械(深圳)有限公司 | 一种可重复开启的标本取物袋 |
| CN104586516A (zh) * | 2015-02-04 | 2015-05-06 | 刘红军 | 神经外科防积血冲洗式手术装置 |
| FR3032346B1 (fr) * | 2015-02-05 | 2021-10-15 | Univ Pierre Et Marie Curie Paris 6 | Procede d'assistance a la manipulation d'un instrument |
| CN104622524A (zh) * | 2015-02-12 | 2015-05-20 | 苏州华奥医药科技有限公司 | 一种自动化内窥镜手术操作系统 |
| CN104622523A (zh) * | 2015-02-12 | 2015-05-20 | 苏州华奥医药科技有限公司 | 一种内窥镜手术操作系统 |
| US10376181B2 (en) | 2015-02-17 | 2019-08-13 | Endochoice, Inc. | System for detecting the location of an endoscopic device during a medical procedure |
| CN107249498B (zh) | 2015-02-19 | 2024-04-23 | 柯惠Lp公司 | 机器人手术系统的输入装置的重定位方法 |
| WO2016137612A1 (en) * | 2015-02-26 | 2016-09-01 | Covidien Lp | Robotically controlling remote center of motion with software and guide tube |
| US10159483B2 (en) | 2015-02-27 | 2018-12-25 | Ethicon Llc | Surgical apparatus configured to track an end-of-life parameter |
| US10180463B2 (en) | 2015-02-27 | 2019-01-15 | Ethicon Llc | Surgical apparatus configured to assess whether a performance parameter of the surgical apparatus is within an acceptable performance band |
| US9993258B2 (en) | 2015-02-27 | 2018-06-12 | Ethicon Llc | Adaptable surgical instrument handle |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US9895148B2 (en) | 2015-03-06 | 2018-02-20 | Ethicon Endo-Surgery, Llc | Monitoring speed control and precision incrementing of motor for powered surgical instruments |
| US9901342B2 (en) | 2015-03-06 | 2018-02-27 | Ethicon Endo-Surgery, Llc | Signal and power communication system positioned on a rotatable shaft |
| US9924961B2 (en) | 2015-03-06 | 2018-03-27 | Ethicon Endo-Surgery, Llc | Interactive feedback system for powered surgical instruments |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US10687806B2 (en) | 2015-03-06 | 2020-06-23 | Ethicon Llc | Adaptive tissue compression techniques to adjust closure rates for multiple tissue types |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| US10617412B2 (en) | 2015-03-06 | 2020-04-14 | Ethicon Llc | System for detecting the mis-insertion of a staple cartridge into a surgical stapler |
| US10245033B2 (en) | 2015-03-06 | 2019-04-02 | Ethicon Llc | Surgical instrument comprising a lockable battery housing |
| US9808246B2 (en) | 2015-03-06 | 2017-11-07 | Ethicon Endo-Surgery, Llc | Method of operating a powered surgical instrument |
| US10548504B2 (en) | 2015-03-06 | 2020-02-04 | Ethicon Llc | Overlaid multi sensor radio frequency (RF) electrode system to measure tissue compression |
| US10045776B2 (en) | 2015-03-06 | 2018-08-14 | Ethicon Llc | Control techniques and sub-processor contained within modular shaft with select control processing from handle |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| AU2016229897B2 (en) | 2015-03-10 | 2020-07-16 | Covidien Lp | Measuring health of a connector member of a robotic surgical system |
| US10078207B2 (en) | 2015-03-18 | 2018-09-18 | Endochoice, Inc. | Systems and methods for image magnification using relative movement between an image sensor and a lens assembly |
| CN107613832B (zh) | 2015-03-19 | 2020-07-28 | 恩达马斯特有限公司 | 增强型柔性机器人内窥镜检查装置 |
| US11819636B2 (en) | 2015-03-30 | 2023-11-21 | Auris Health, Inc. | Endoscope pull wire electrical circuit |
| US10390825B2 (en) | 2015-03-31 | 2019-08-27 | Ethicon Llc | Surgical instrument with progressive rotary drive systems |
| US10601608B2 (en) * | 2015-04-02 | 2020-03-24 | Agito Motion Systems Ltd. | Centralized networked topology for motion related control system |
| US10753439B2 (en) | 2015-04-03 | 2020-08-25 | The Regents Of The University Of Michigan | Tension management apparatus for cable-driven transmission |
| US10314638B2 (en) | 2015-04-07 | 2019-06-11 | Ethicon Llc | Articulating radio frequency (RF) tissue seal with articulating state sensing |
| US10226239B2 (en) * | 2015-04-10 | 2019-03-12 | Covidien Lp | Adapter assembly with gimbal for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| US20180110406A1 (en) * | 2015-04-21 | 2018-04-26 | Swati SARNAIK | Three dimensional vision system for interventional surgery |
| WO2016169361A1 (en) | 2015-04-22 | 2016-10-27 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| US10401611B2 (en) | 2015-04-27 | 2019-09-03 | Endochoice, Inc. | Endoscope with integrated measurement of distance to objects of interest |
| WO2016187124A1 (en) | 2015-05-17 | 2016-11-24 | Endochoice, Inc. | Endoscopic image enhancement using contrast limited adaptive histogram equalization (clahe) implemented in a processor |
| WO2016188538A1 (en) | 2015-05-27 | 2016-12-01 | Ambu A/S | An endoscope comprising a chassis having a shell structure |
| US10617284B2 (en) | 2015-05-27 | 2020-04-14 | Ambu A/S | Endoscope |
| CN107735010B (zh) | 2015-05-27 | 2020-02-18 | 安布股份有限公司 | 内窥镜 |
| CN107809940B (zh) | 2015-05-27 | 2021-08-27 | 安布股份有限公司 | 内窥镜 |
| WO2016188543A1 (en) * | 2015-05-27 | 2016-12-01 | Ambu A/S | An endoscope with a tool |
| US10624617B2 (en) | 2015-05-27 | 2020-04-21 | Ambu A/S | Endoscope |
| WO2016188541A1 (en) | 2015-05-27 | 2016-12-01 | Ambu A/S | An endoscope |
| CN106999012B (zh) | 2015-05-28 | 2019-03-19 | 奥林巴斯株式会社 | 护套部件、机械手以及机械手系统 |
| EP3302335A4 (en) | 2015-06-03 | 2019-02-20 | Covidien LP | OFFSET INSTRUMENT DRIVE UNIT |
| US10507068B2 (en) | 2015-06-16 | 2019-12-17 | Covidien Lp | Robotic surgical system torque transduction sensing |
| WO2016203858A1 (ja) * | 2015-06-18 | 2016-12-22 | オリンパス株式会社 | 医療システム |
| US10368861B2 (en) | 2015-06-18 | 2019-08-06 | Ethicon Llc | Dual articulation drive system arrangements for articulatable surgical instruments |
| WO2016205824A1 (en) | 2015-06-19 | 2016-12-22 | Neural Analytics, Inc. | Transcranial doppler probe |
| CN107820412B (zh) | 2015-06-23 | 2021-01-15 | 柯惠Lp公司 | 机器人手术组合件 |
| KR101700885B1 (ko) * | 2015-06-23 | 2017-02-01 | 한국과학기술연구원 | 복수의 튜브 연속체를 사용한 수술용 로봇 시스템 |
| EP3316946B1 (en) | 2015-07-02 | 2021-03-10 | Northgate Technologies Inc. | Gas recirculation system |
| KR101693677B1 (ko) | 2015-07-03 | 2017-01-10 | 전자부품연구원 | 수술 장치 |
| WO2017006373A1 (ja) * | 2015-07-09 | 2017-01-12 | 川崎重工業株式会社 | ロボットアームの関節及び外科機器 |
| EP3326764A4 (en) * | 2015-07-17 | 2019-03-13 | Olympus Corporation | MANIPULATOR |
| US11020144B2 (en) | 2015-07-21 | 2021-06-01 | 3Dintegrated Aps | Minimally invasive surgery system |
| EP3145419B1 (en) | 2015-07-21 | 2019-11-27 | 3dintegrated ApS | Cannula assembly kit, trocar assembly kit and minimally invasive surgery system |
| WO2017024081A1 (en) * | 2015-08-03 | 2017-02-09 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices systems and related methods |
| US10835249B2 (en) | 2015-08-17 | 2020-11-17 | Ethicon Llc | Implantable layers for a surgical instrument |
| MX2022009705A (es) | 2015-08-26 | 2022-11-07 | Ethicon Llc | Metodo para formar una grapa contra un yunque de un instrumento de engrapado quirurgico. |
| RU2725081C2 (ru) | 2015-08-26 | 2020-06-29 | ЭТИКОН ЭлЭлСи | Полоски с хирургическими скобами, допускающие наличие скоб с переменными свойствами и обеспечивающие простую загрузку кассеты |
| US10166026B2 (en) | 2015-08-26 | 2019-01-01 | Ethicon Llc | Staple cartridge assembly including features for controlling the rotation of staples when being ejected therefrom |
| EP3340897B1 (en) | 2015-08-28 | 2024-10-09 | DistalMotion SA | Surgical instrument with increased actuation force |
| MX2022006189A (es) | 2015-09-02 | 2022-06-16 | Ethicon Llc | Configuraciones de grapas quirurgicas con superficies de leva situadas entre porciones que soportan grapas quirurgicas. |
| US10357252B2 (en) | 2015-09-02 | 2019-07-23 | Ethicon Llc | Surgical staple configurations with camming surfaces located between portions supporting surgical staples |
| WO2017041052A1 (en) | 2015-09-03 | 2017-03-09 | Neptune Medical | Device for endoscopic advancement through the small intestine |
| US10987129B2 (en) * | 2015-09-04 | 2021-04-27 | Medos International Sarl | Multi-shield spinal access system |
| US11672562B2 (en) * | 2015-09-04 | 2023-06-13 | Medos International Sarl | Multi-shield spinal access system |
| CN113143355A (zh) | 2015-09-04 | 2021-07-23 | 美多斯国际有限公司 | 多护罩脊柱进入系统 |
| US20170239005A1 (en) | 2015-09-04 | 2017-08-24 | Memic Innovative Surgery Ltd. | Actuation of a device comprising mechanical arms |
| US11744447B2 (en) | 2015-09-04 | 2023-09-05 | Medos International | Surgical visualization systems and related methods |
| US11439380B2 (en) | 2015-09-04 | 2022-09-13 | Medos International Sarl | Surgical instrument connectors and related methods |
| CN113229942A (zh) | 2015-09-09 | 2021-08-10 | 奥瑞斯健康公司 | 手术器械装置操纵器 |
| CN108348139B (zh) * | 2015-09-17 | 2021-11-09 | 恩达马斯特有限公司 | 改进的挠性机器人内窥镜系统 |
| CN108778113B (zh) | 2015-09-18 | 2022-04-15 | 奥瑞斯健康公司 | 管状网络的导航 |
| US10076326B2 (en) | 2015-09-23 | 2018-09-18 | Ethicon Llc | Surgical stapler having current mirror-based motor control |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US10363036B2 (en) | 2015-09-23 | 2019-07-30 | Ethicon Llc | Surgical stapler having force-based motor control |
| US10327769B2 (en) | 2015-09-23 | 2019-06-25 | Ethicon Llc | Surgical stapler having motor control based on a drive system component |
| US10085751B2 (en) | 2015-09-23 | 2018-10-02 | Ethicon Llc | Surgical stapler having temperature-based motor control |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10299878B2 (en) | 2015-09-25 | 2019-05-28 | Ethicon Llc | Implantable adjunct systems for determining adjunct skew |
| KR101684799B1 (ko) * | 2015-09-25 | 2016-12-21 | 고려대학교 산학협력단 | 수술용 로봇팔 |
| WO2017053363A1 (en) | 2015-09-25 | 2017-03-30 | Covidien Lp | Robotic surgical assemblies and instrument drive connectors thereof |
| US10448805B2 (en) | 2015-09-28 | 2019-10-22 | Bio-Medical Engineering (HK) Limited | Endoscopic systems, devices and methods |
| US10478188B2 (en) | 2015-09-30 | 2019-11-19 | Ethicon Llc | Implantable layer comprising a constricted configuration |
| US10433846B2 (en) | 2015-09-30 | 2019-10-08 | Ethicon Llc | Compressible adjunct with crossing spacer fibers |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10980539B2 (en) | 2015-09-30 | 2021-04-20 | Ethicon Llc | Implantable adjunct comprising bonded layers |
| WO2017059412A1 (en) * | 2015-10-02 | 2017-04-06 | Vanderbilt University | Concentric tube robot |
| DE112016004507T5 (de) * | 2015-10-02 | 2018-07-12 | Sony Corporation | Medizinische Steuervorrichtung, Steuerverfahren und Programm. |
| CN108712886B (zh) | 2015-10-02 | 2021-06-04 | 弗莱克斯德克斯公司 | 提供无限制滚转的手柄机构 |
| US11896255B2 (en) | 2015-10-05 | 2024-02-13 | Flexdex, Inc. | End-effector jaw closure transmission systems for remote access tools |
| JP6886459B2 (ja) | 2015-10-05 | 2021-06-16 | フレックスデックス, インク.Flexdex, Inc. | 遠隔アクセスツール用のエンドエフェクタ顎閉鎖伝達システム |
| US11123149B2 (en) * | 2015-10-09 | 2021-09-21 | Covidien Lp | Methods of using an angled endoscope for visualizing a body cavity with robotic surgical systems |
| DK178899B1 (en) | 2015-10-09 | 2017-05-08 | 3Dintegrated Aps | A depiction system |
| CN105232149B (zh) * | 2015-10-13 | 2017-10-20 | 西安交通大学 | 混合驱动的柔性微创手术操作臂及制备方法 |
| ITUB20154977A1 (it) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Strumento medicale e metodo di fabbricazione di detto strumento medicale |
| ITUB20155057A1 (it) * | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Assieme robotico di chirurgia |
| US10959771B2 (en) | 2015-10-16 | 2021-03-30 | Ethicon Llc | Suction and irrigation sealing grasper |
| WO2017070275A1 (en) | 2015-10-23 | 2017-04-27 | Covidien Lp | Surgical system for detecting gradual changes in perfusion |
| US20170119474A1 (en) | 2015-10-28 | 2017-05-04 | Endochoice, Inc. | Device and Method for Tracking the Position of an Endoscope within a Patient's Body |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US10231793B2 (en) | 2015-10-30 | 2019-03-19 | Auris Health, Inc. | Object removal through a percutaneous suction tube |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US11135028B2 (en) * | 2015-10-31 | 2021-10-05 | Children's National Medical Center | Soft surgical tools |
| US10327812B2 (en) | 2015-11-04 | 2019-06-25 | Rainbow Medical Ltd. | Pericardial access device |
| CN108135665B (zh) * | 2015-11-11 | 2021-02-05 | 直观外科手术操作公司 | 可重新配置的末端执行器架构 |
| EP3269292A4 (en) * | 2015-11-17 | 2019-01-23 | Olympus Corporation | Borescope |
| WO2017087439A1 (en) | 2015-11-19 | 2017-05-26 | Covidien Lp | Optical force sensor for robotic surgical system |
| CN113425225B (zh) | 2015-11-24 | 2024-09-17 | 安多卓思公司 | 用于内窥镜的一次性空气/水阀和抽吸阀 |
| US10220515B2 (en) * | 2015-11-30 | 2019-03-05 | Seiko Epson Corporation | Robot and control method for robot |
| US10143526B2 (en) | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| DE102015223921A1 (de) * | 2015-12-01 | 2017-06-01 | Siemens Healthcare Gmbh | Verfahren zum Betreiben eines medizinisch-robotischen Geräts sowie medizinisch-robotisches Gerät |
| GB201521805D0 (en) * | 2015-12-10 | 2016-01-27 | Cambridge Medical Robotics Ltd | Guiding engagement of a robot arm and surgical instrument |
| GB201521807D0 (en) * | 2015-12-10 | 2016-01-27 | Cambridge Medical Robotics Ltd | Surgical instrument shaft spokes |
| JP2017104450A (ja) * | 2015-12-11 | 2017-06-15 | 川崎重工業株式会社 | 外科手術システム |
| US10368865B2 (en) | 2015-12-30 | 2019-08-06 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US10959806B2 (en) | 2015-12-30 | 2021-03-30 | Ethicon Llc | Energized medical device with reusable handle |
| US10265068B2 (en) | 2015-12-30 | 2019-04-23 | Ethicon Llc | Surgical instruments with separable motors and motor control circuits |
| EP3399920B1 (en) | 2016-01-05 | 2020-11-04 | Neural Analytics, Inc. | Integrated probe structure |
| US11589836B2 (en) | 2016-01-05 | 2023-02-28 | Novasignal Corp. | Systems and methods for detecting neurological conditions |
| CN108778140A (zh) | 2016-01-05 | 2018-11-09 | 神经系统分析公司 | 用于确定临床指征的系统和方法 |
| WO2017120027A1 (en) | 2016-01-07 | 2017-07-13 | Intuitive Surgical Operations, Inc. | Telescoping cannula arm |
| JPWO2017130567A1 (ja) * | 2016-01-25 | 2018-11-22 | ソニー株式会社 | 医療用安全制御装置、医療用安全制御方法、及び医療用支援システム |
| WO2017136357A1 (en) | 2016-02-01 | 2017-08-10 | Intuitive Surgical Operations, Inc. | Reduction of endoscope high frequency leakage current using a common-mode choke |
| CN113303917A (zh) | 2016-02-05 | 2021-08-27 | 得克萨斯系统大学董事会 | 手术设备 |
| CN112138264B (zh) | 2016-02-05 | 2022-10-25 | 得克萨斯系统大学董事会 | 用于制备医疗装置的离子电活性聚合物致动器的方法 |
| US10245030B2 (en) | 2016-02-09 | 2019-04-02 | Ethicon Llc | Surgical instruments with tensioning arrangements for cable driven articulation systems |
| BR112018016098B1 (pt) | 2016-02-09 | 2023-02-23 | Ethicon Llc | Instrumento cirúrgico |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| US10258331B2 (en) | 2016-02-12 | 2019-04-16 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US11224426B2 (en) | 2016-02-12 | 2022-01-18 | Cilag Gmbh International | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| WO2017139563A1 (en) | 2016-02-12 | 2017-08-17 | Intuitive Surgical Operations, Inc. | Matching surgical display technologies using virtual primaries |
| CN109068951A (zh) | 2016-02-24 | 2018-12-21 | 安多卓思公司 | 用于使用cmos传感器的多观察元件内窥镜的电路板组件 |
| WO2017146890A1 (en) | 2016-02-26 | 2017-08-31 | Intuitive Surgical Operations, Inc. | System and method for collision avoidance using virtual boundaries |
| CN108697475B (zh) * | 2016-03-03 | 2021-10-15 | 柯惠Lp公司 | 能够围绕侧倾轴线大幅旋转的用于机器人手术系统的输入装置手柄 |
| EP3426176B1 (en) * | 2016-03-07 | 2020-10-07 | Ethicon LLC | Robotic bi-polar instruments |
| EP3219283B1 (en) | 2016-03-09 | 2020-12-02 | Memic Innovative Surgery Ltd. | Modular surgical device comprising mechanical arms |
| US10292570B2 (en) | 2016-03-14 | 2019-05-21 | Endochoice, Inc. | System and method for guiding and tracking a region of interest using an endoscope |
| US11013567B2 (en) | 2016-03-17 | 2021-05-25 | Intuitive Surgical Operations, Inc. | Systems and methods for instrument insertion control |
| US10350016B2 (en) * | 2016-03-17 | 2019-07-16 | Intuitive Surgical Operations, Inc. | Stapler with cable-driven advanceable clamping element and dual distal pulleys |
| GB201604659D0 (en) * | 2016-03-18 | 2016-05-04 | Jri Orthopaedics Ltd | Surgical instrument |
| WO2017165183A1 (en) | 2016-03-25 | 2017-09-28 | Intuitive Surgical Operations, Inc. | Surgical platform supported by multiple arms |
| US10456140B2 (en) | 2016-04-01 | 2019-10-29 | Ethicon Llc | Surgical stapling system comprising an unclamping lockout |
| US11284890B2 (en) | 2016-04-01 | 2022-03-29 | Cilag Gmbh International | Circular stapling system comprising an incisable tissue support |
| US10314582B2 (en) | 2016-04-01 | 2019-06-11 | Ethicon Llc | Surgical instrument comprising a shifting mechanism |
| US10617413B2 (en) | 2016-04-01 | 2020-04-14 | Ethicon Llc | Closure system arrangements for surgical cutting and stapling devices with separate and distinct firing shafts |
| US10357246B2 (en) | 2016-04-01 | 2019-07-23 | Ethicon Llc | Rotary powered surgical instrument with manually actuatable bailout system |
| US11576562B2 (en) | 2016-04-07 | 2023-02-14 | Titan Medical Inc. | Camera positioning method and apparatus for capturing images during a medical procedure |
| US10492783B2 (en) | 2016-04-15 | 2019-12-03 | Ethicon, Llc | Surgical instrument with improved stop/start control during a firing motion |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US10335145B2 (en) | 2016-04-15 | 2019-07-02 | Ethicon Llc | Modular surgical instrument with configurable operating mode |
| JP6831642B2 (ja) * | 2016-04-15 | 2021-02-17 | 川崎重工業株式会社 | 外科手術システム |
| US11179150B2 (en) | 2016-04-15 | 2021-11-23 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10405859B2 (en) | 2016-04-15 | 2019-09-10 | Ethicon Llc | Surgical instrument with adjustable stop/start control during a firing motion |
| US10456137B2 (en) | 2016-04-15 | 2019-10-29 | Ethicon Llc | Staple formation detection mechanisms |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US11317917B2 (en) | 2016-04-18 | 2022-05-03 | Cilag Gmbh International | Surgical stapling system comprising a lockable firing assembly |
| US10478181B2 (en) | 2016-04-18 | 2019-11-19 | Ethicon Llc | Cartridge lockout arrangements for rotary powered surgical cutting and stapling instruments |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US10987156B2 (en) | 2016-04-29 | 2021-04-27 | Ethicon Llc | Electrosurgical instrument with electrically conductive gap setting member and electrically insulative tissue engaging members |
| US10454347B2 (en) | 2016-04-29 | 2019-10-22 | Auris Health, Inc. | Compact height torque sensing articulation axis assembly |
| US10856934B2 (en) | 2016-04-29 | 2020-12-08 | Ethicon Llc | Electrosurgical instrument with electrically conductive gap setting and tissue engaging members |
| US10888428B2 (en) | 2016-05-12 | 2021-01-12 | University Of Notre Dame Du Lac | Additive manufacturing device for biomaterials |
| WO2017201310A1 (en) | 2016-05-18 | 2017-11-23 | Virtual Incision Corporation | Robotic surgicla devices, systems and related methods |
| US11191600B2 (en) | 2016-05-26 | 2021-12-07 | Covidien Lp | Robotic surgical assemblies |
| AU2017269374B2 (en) | 2016-05-26 | 2021-07-08 | Covidien Lp | Instrument drive units |
| EP3463147A4 (en) | 2016-05-26 | 2020-01-22 | Covidien LP | ROBOTIC SURGICAL ARRANGEMENTS AND INSTRUMENT DRIVE UNITS THEREFOR |
| US11272992B2 (en) | 2016-06-03 | 2022-03-15 | Covidien Lp | Robotic surgical assemblies and instrument drive units thereof |
| CN113180835A (zh) | 2016-06-03 | 2021-07-30 | 柯惠Lp公司 | 用于机器人手术系统的控制臂 |
| WO2017210074A1 (en) | 2016-06-03 | 2017-12-07 | Covidien Lp | Passive axis system for robotic surgical systems |
| EP3463160A4 (en) * | 2016-06-03 | 2020-01-01 | Covidien LP | MULTI-INPUT ROBOTIC SURGICAL SYSTEM CONTROL DIAGRAM |
| CN109152612A (zh) | 2016-06-03 | 2019-01-04 | 柯惠Lp公司 | 具有嵌入式成像仪的机器人手术系统 |
| US11612446B2 (en) | 2016-06-03 | 2023-03-28 | Covidien Lp | Systems, methods, and computer-readable program products for controlling a robotically delivered manipulator |
| US10993605B2 (en) | 2016-06-21 | 2021-05-04 | Endochoice, Inc. | Endoscope system with multiple connection interfaces to interface with different video data signal sources |
| CN109310431B (zh) | 2016-06-24 | 2022-03-04 | 伊西康有限责任公司 | 包括线材钉和冲压钉的钉仓 |
| US11045169B2 (en) * | 2016-06-24 | 2021-06-29 | Arizona Board Of Regents On Behalf Of Arizona State University | Systems for multimodal real-time imaging for biopsies and related methods |
| USD850617S1 (en) | 2016-06-24 | 2019-06-04 | Ethicon Llc | Surgical fastener cartridge |
| US10702270B2 (en) | 2016-06-24 | 2020-07-07 | Ethicon Llc | Stapling system for use with wire staples and stamped staples |
| USD847989S1 (en) | 2016-06-24 | 2019-05-07 | Ethicon Llc | Surgical fastener cartridge |
| USD826405S1 (en) | 2016-06-24 | 2018-08-21 | Ethicon Llc | Surgical fastener |
| TWI616180B (zh) * | 2016-06-29 | 2018-03-01 | 國立成功大學 | 上消化道出血偵測裝置及方法 |
| KR20230164237A (ko) * | 2016-06-30 | 2023-12-01 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 영상 안내식 시술 중에 복수의 모드에서 안내 정보를 디스플레이하기 위한 그래픽 사용자 인터페이스 |
| JP7015256B2 (ja) | 2016-07-14 | 2022-02-15 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | コンピュータ支援遠隔操作システムにおける補助器具制御 |
| US11207145B2 (en) | 2016-07-14 | 2021-12-28 | Intuitive Surgical Operations, Inc. | Multi-cable medical instrument |
| WO2018013314A1 (en) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Instrument flushing system |
| EP4414144A2 (en) | 2016-07-14 | 2024-08-14 | Intuitive Surgical Operations, Inc. | Systems and methods for controlling a surgical instrument |
| EP3484405B1 (en) | 2016-07-14 | 2022-12-14 | Intuitive Surgical Operations, Inc. | A pressure test port contained within a body of surgical instrument |
| KR102533374B1 (ko) | 2016-07-14 | 2023-05-26 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 드레이핑을 위한 자동적인 매니퓰레이터 어셈블리 전개 |
| EP3484399A4 (en) | 2016-07-14 | 2020-03-18 | Intuitive Surgical Operations Inc. | SURGICAL APPARATUS COMPRISING A STERILE ADAPTER WITH MECHANICAL LOCKINGS |
| US11020190B2 (en) | 2016-07-14 | 2021-06-01 | Intuitive Surgical Operations, Inc. | Automated instrument preload engage/disengage mechanism |
| US11883123B2 (en) | 2016-07-14 | 2024-01-30 | Intuitive Surgical Operations, Inc. | Mechanism for managing and retaining a surgical drape |
| WO2018013298A1 (en) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Geared grip actuation for medical instruments |
| EP4193903A1 (en) | 2016-07-14 | 2023-06-14 | Intuitive Surgical Operations, Inc. | An endoscope including a plurality of individually testable subassemblies |
| WO2018013304A1 (en) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Controller controlled instrument preload mechanism |
| US11890070B2 (en) | 2016-07-14 | 2024-02-06 | Intuitive Surgical Operations, Inc. | Instrument release |
| WO2018013316A1 (en) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Geared roll drive for medical instrument |
| US10078908B2 (en) | 2016-08-12 | 2018-09-18 | Elite Robotics | Determination of relative positions |
| CN110191667B (zh) | 2016-08-18 | 2022-06-03 | 海王星医疗公司 | 用于增强小肠视觉效果的装置和方法 |
| KR101903074B1 (ko) * | 2016-08-24 | 2018-10-01 | 울산과학기술원 | 회전형 동축 광-전자기 도파관 집합체를 포함하는 광음향-초음파 내시경 시스템과 그 구현 방법 |
| US10463439B2 (en) | 2016-08-26 | 2019-11-05 | Auris Health, Inc. | Steerable catheter with shaft load distributions |
| US11241559B2 (en) | 2016-08-29 | 2022-02-08 | Auris Health, Inc. | Active drive for guidewire manipulation |
| EP3506817A4 (en) | 2016-08-30 | 2020-07-22 | The Regents of The University of California | METHOD FOR BIOMEDICAL TARGETING AND RELEASE, AND DEVICES AND SYSTEMS FOR IMPLEMENTING THEM |
| CN106175851B (zh) * | 2016-08-31 | 2019-04-09 | 北京术锐技术有限公司 | 一种基于柔性臂体的单孔腹腔镜手术系统 |
| KR20230096148A (ko) | 2016-08-31 | 2023-06-29 | 아우리스 헬스, 인코포레이티드 | 길이 보존 수술용 기구 |
| CN106420058B (zh) * | 2016-08-31 | 2019-02-05 | 北京术锐技术有限公司 | 一种驱动前置的单孔腹腔镜手术系统 |
| US10631933B2 (en) | 2016-08-31 | 2020-04-28 | Covidien Lp | Pathway planning for use with a navigation planning and procedure system |
| US11911003B2 (en) | 2016-09-09 | 2024-02-27 | Intuitive Surgical Operations, Inc. | Simultaneous white light and hyperspectral light imaging systems |
| WO2018052795A1 (en) * | 2016-09-19 | 2018-03-22 | Intuitive Surgical Operations, Inc. | Base positioning system for a controllable arm and related methods |
| US10751117B2 (en) | 2016-09-23 | 2020-08-25 | Ethicon Llc | Electrosurgical instrument with fluid diverter |
| US9931025B1 (en) * | 2016-09-30 | 2018-04-03 | Auris Surgical Robotics, Inc. | Automated calibration of endoscopes with pull wires |
| US10813781B2 (en) | 2016-10-04 | 2020-10-27 | Ez-Off Weight Loss, Llc | Sleeve-anchorable gastric balloon for weight loss |
| WO2018070040A1 (ja) | 2016-10-14 | 2018-04-19 | 株式会社メディカロイド | 把持機構 |
| SG10201809836TA (en) * | 2016-11-01 | 2018-12-28 | Bio Medical Eng Hk Ltd | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| WO2018082294A1 (en) * | 2016-11-01 | 2018-05-11 | Bio-Medical Engineering (HK) Limited | Robotic devices and systems for performing single incision procedures and natural orifice translumenal endoscopic surgical procedures, and methods of configuring robotic devices and systems |
| CN109893178A (zh) * | 2016-11-01 | 2019-06-18 | 香港生物医学工程有限公司 | 用于执行经自然腔道内窥镜手术的外科系统 |
| CN107440799B (zh) * | 2016-11-01 | 2022-11-04 | 香港生物医学工程有限公司 | 用于执行经自然腔道内窥镜手术的外科系统 |
| CN109567943B (zh) * | 2016-11-01 | 2023-01-10 | 香港生物医学工程有限公司 | 用于执行体内外科手术的外科系统 |
| US11241290B2 (en) | 2016-11-21 | 2022-02-08 | Intuitive Surgical Operations, Inc. | Cable length conserving medical instrument |
| US11793394B2 (en) | 2016-12-02 | 2023-10-24 | Vanderbilt University | Steerable endoscope with continuum manipulator |
| US10143524B2 (en) * | 2016-12-16 | 2018-12-04 | Ethicon Llc | Methods and systems for coupling a surgical tool to a tool driver of a robotic surgical system |
| US10813713B2 (en) | 2016-12-16 | 2020-10-27 | Ethicon Llc | Methods and systems for coupling a surgical tool to a tool driver of a robotic surgical system |
| US10945727B2 (en) | 2016-12-21 | 2021-03-16 | Ethicon Llc | Staple cartridge with deformable driver retention features |
| US10426471B2 (en) | 2016-12-21 | 2019-10-01 | Ethicon Llc | Surgical instrument with multiple failure response modes |
| US20180168609A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Firing assembly comprising a fuse |
| US10667811B2 (en) | 2016-12-21 | 2020-06-02 | Ethicon Llc | Surgical stapling instruments and staple-forming anvils |
| US10588632B2 (en) | 2016-12-21 | 2020-03-17 | Ethicon Llc | Surgical end effectors and firing members thereof |
| US11684367B2 (en) | 2016-12-21 | 2023-06-27 | Cilag Gmbh International | Stepped assembly having and end-of-life indicator |
| US20180168618A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling systems |
| US11134942B2 (en) | 2016-12-21 | 2021-10-05 | Cilag Gmbh International | Surgical stapling instruments and staple-forming anvils |
| US10568624B2 (en) | 2016-12-21 | 2020-02-25 | Ethicon Llc | Surgical instruments with jaws that are pivotable about a fixed axis and include separate and distinct closure and firing systems |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| MX2019007295A (es) | 2016-12-21 | 2019-10-15 | Ethicon Llc | Sistema de instrumento quirúrgico que comprende un bloqueo del efector de extremo y un bloqueo de la unidad de disparo. |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| US10736629B2 (en) | 2016-12-21 | 2020-08-11 | Ethicon Llc | Surgical tool assemblies with clutching arrangements for shifting between closure systems with closure stroke reduction features and articulation and firing systems |
| US11090048B2 (en) | 2016-12-21 | 2021-08-17 | Cilag Gmbh International | Method for resetting a fuse of a surgical instrument shaft |
| US10682138B2 (en) | 2016-12-21 | 2020-06-16 | Ethicon Llc | Bilaterally asymmetric staple forming pocket pairs |
| US11191539B2 (en) | 2016-12-21 | 2021-12-07 | Cilag Gmbh International | Shaft assembly comprising a manually-operable retraction system for use with a motorized surgical instrument system |
| US10687810B2 (en) | 2016-12-21 | 2020-06-23 | Ethicon Llc | Stepped staple cartridge with tissue retention and gap setting features |
| US10485543B2 (en) | 2016-12-21 | 2019-11-26 | Ethicon Llc | Anvil having a knife slot width |
| US10993715B2 (en) | 2016-12-21 | 2021-05-04 | Ethicon Llc | Staple cartridge comprising staples with different clamping breadths |
| US11419606B2 (en) | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| JP6983893B2 (ja) | 2016-12-21 | 2021-12-17 | エシコン エルエルシーEthicon LLC | 外科用エンドエフェクタ及び交換式ツールアセンブリのためのロックアウト構成 |
| BR112019011947A2 (pt) | 2016-12-21 | 2019-10-29 | Ethicon Llc | sistemas de grampeamento cirúrgico |
| US10758230B2 (en) | 2016-12-21 | 2020-09-01 | Ethicon Llc | Surgical instrument with primary and safety processors |
| US10537324B2 (en) | 2016-12-21 | 2020-01-21 | Ethicon Llc | Stepped staple cartridge with asymmetrical staples |
| US10758229B2 (en) | 2016-12-21 | 2020-09-01 | Ethicon Llc | Surgical instrument comprising improved jaw control |
| WO2018122946A1 (ja) | 2016-12-27 | 2018-07-05 | オリンパス株式会社 | 医療用マニピュレータの形状取得方法および制御方法 |
| US10543048B2 (en) | 2016-12-28 | 2020-01-28 | Auris Health, Inc. | Flexible instrument insertion using an adaptive insertion force threshold |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| WO2018144654A1 (en) * | 2017-01-31 | 2018-08-09 | Transenterix Surgical, Inc. | Hydraulic instrument drive system for minimally invasive surgery |
| GB2559420B (en) * | 2017-02-07 | 2022-02-23 | Cmr Surgical Ltd | Mounting an endoscope to a surgical robot |
| EP3579736B1 (en) | 2017-02-09 | 2024-09-04 | Vicarious Surgical Inc. | Virtual reality surgical tools system |
| WO2018152141A1 (en) | 2017-02-15 | 2018-08-23 | Covidien Lp | System and apparatus for crush prevention for medical robot applications |
| US11033325B2 (en) | 2017-02-16 | 2021-06-15 | Cilag Gmbh International | Electrosurgical instrument with telescoping suction port and debris cleaner |
| US10357321B2 (en) | 2017-02-24 | 2019-07-23 | Intuitive Surgical Operations, Inc. | Splayed cable guide for a medical instrument |
| AU2018227380B2 (en) * | 2017-02-28 | 2023-10-05 | Boston Scientific Scimed, Inc. | Articulating needles |
| US10806490B2 (en) * | 2017-03-08 | 2020-10-20 | Conmed Corporation | Single lumen gas sealed access port for use during endoscopic surgical procedures |
| US11779410B2 (en) | 2017-03-09 | 2023-10-10 | Momentis Surgical Ltd | Control console including an input arm for control of a surgical mechanical arm |
| US10973592B2 (en) | 2017-03-09 | 2021-04-13 | Memie Innovative Surgery Ltd. | Control console for surgical device with mechanical arms |
| US10799284B2 (en) | 2017-03-15 | 2020-10-13 | Ethicon Llc | Electrosurgical instrument with textured jaws |
| CN108990412B (zh) | 2017-03-31 | 2022-03-22 | 奥瑞斯健康公司 | 补偿生理噪声的用于腔网络导航的机器人系统 |
| US11497546B2 (en) | 2017-03-31 | 2022-11-15 | Cilag Gmbh International | Area ratios of patterned coatings on RF electrodes to reduce sticking |
| US10576622B2 (en) | 2017-04-21 | 2020-03-03 | Qualcomm Incorporated | Robotic manipulator |
| JP6836649B2 (ja) * | 2017-05-01 | 2021-03-03 | 株式会社メディカロイド | 医療用処置具および手術システム |
| EP4424266A2 (en) * | 2017-05-08 | 2024-09-04 | Platform Innovations Inc. | Laparoscopic device implantation and fixation system and method |
| US11065069B2 (en) | 2017-05-10 | 2021-07-20 | Mako Surgical Corp. | Robotic spine surgery system and methods |
| US11033341B2 (en) | 2017-05-10 | 2021-06-15 | Mako Surgical Corp. | Robotic spine surgery system and methods |
| US11058503B2 (en) * | 2017-05-11 | 2021-07-13 | Distalmotion Sa | Translational instrument interface for surgical robot and surgical robot systems comprising the same |
| US11529129B2 (en) | 2017-05-12 | 2022-12-20 | Auris Health, Inc. | Biopsy apparatus and system |
| WO2018209517A1 (en) | 2017-05-15 | 2018-11-22 | Bio-Medical Engineering(Hk) Limited | Systems, devices, and methods for performing surgical actions via externally driven driving assemblies |
| JP7301750B2 (ja) | 2017-05-17 | 2023-07-03 | オーリス ヘルス インコーポレイテッド | 交換可能な作業チャネル |
| EP3629979A4 (en) | 2017-05-24 | 2021-02-17 | Covidien LP | PRESENCE DETECTION FOR ELECTROSURGICAL TOOLS IN A ROBOTIC SYSTEM |
| EP3629981A4 (en) | 2017-05-25 | 2021-04-07 | Covidien LP | SYSTEMS AND METHODS FOR DETECTION OF OBJECTS WITHIN A FIELD OF VIEW OF AN IMAGE CAPTURING DEVICE |
| CN110621255B (zh) | 2017-05-25 | 2023-03-07 | 柯惠Lp公司 | 机器人手术系统和用于覆盖机器人手术系统的部件的盖布 |
| EP3629980A4 (en) | 2017-05-25 | 2021-03-10 | Covidien LP | ROBOTIC SURGICAL SYSTEM WITH AUTOMATED GUIDANCE |
| WO2018226892A1 (en) * | 2017-06-06 | 2018-12-13 | The Regents Of The University Of California | Multi-catheter flexible robotic system |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US10624633B2 (en) | 2017-06-20 | 2020-04-21 | Ethicon Llc | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument |
| US10390841B2 (en) | 2017-06-20 | 2019-08-27 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US11090046B2 (en) | 2017-06-20 | 2021-08-17 | Cilag Gmbh International | Systems and methods for controlling displacement member motion of a surgical stapling and cutting instrument |
| US10813639B2 (en) | 2017-06-20 | 2020-10-27 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on system conditions |
| USD890784S1 (en) | 2017-06-20 | 2020-07-21 | Ethicon Llc | Display panel with changeable graphical user interface |
| USD879809S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with changeable graphical user interface |
| US10881396B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Surgical instrument with variable duration trigger arrangement |
| US10327767B2 (en) | 2017-06-20 | 2019-06-25 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US11382638B2 (en) | 2017-06-20 | 2022-07-12 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified displacement distance |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US10888321B2 (en) | 2017-06-20 | 2021-01-12 | Ethicon Llc | Systems and methods for controlling velocity of a displacement member of a surgical stapling and cutting instrument |
| US11071554B2 (en) | 2017-06-20 | 2021-07-27 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on magnitude of velocity error measurements |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| USD879808S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with graphical user interface |
| US10980537B2 (en) | 2017-06-20 | 2021-04-20 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified number of shaft rotations |
| US10646220B2 (en) | 2017-06-20 | 2020-05-12 | Ethicon Llc | Systems and methods for controlling displacement member velocity for a surgical instrument |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US10368864B2 (en) | 2017-06-20 | 2019-08-06 | Ethicon Llc | Systems and methods for controlling displaying motor velocity for a surgical instrument |
| US10022192B1 (en) | 2017-06-23 | 2018-07-17 | Auris Health, Inc. | Automatically-initialized robotic systems for navigation of luminal networks |
| US10772629B2 (en) | 2017-06-27 | 2020-09-15 | Ethicon Llc | Surgical anvil arrangements |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| US20180368844A1 (en) | 2017-06-27 | 2018-12-27 | Ethicon Llc | Staple forming pocket arrangements |
| US11324503B2 (en) | 2017-06-27 | 2022-05-10 | Cilag Gmbh International | Surgical firing member arrangements |
| US10856869B2 (en) | 2017-06-27 | 2020-12-08 | Ethicon Llc | Surgical anvil arrangements |
| US11266405B2 (en) | 2017-06-27 | 2022-03-08 | Cilag Gmbh International | Surgical anvil manufacturing methods |
| USD869655S1 (en) | 2017-06-28 | 2019-12-10 | Ethicon Llc | Surgical fastener cartridge |
| EP3420947B1 (en) | 2017-06-28 | 2022-05-25 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| US11678880B2 (en) | 2017-06-28 | 2023-06-20 | Cilag Gmbh International | Surgical instrument comprising a shaft including a housing arrangement |
| US10211586B2 (en) | 2017-06-28 | 2019-02-19 | Ethicon Llc | Surgical shaft assemblies with watertight housings |
| US10603117B2 (en) | 2017-06-28 | 2020-03-31 | Ethicon Llc | Articulation state detection mechanisms |
| US11246592B2 (en) | 2017-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical instrument comprising an articulation system lockable to a frame |
| US11020114B2 (en) | 2017-06-28 | 2021-06-01 | Cilag Gmbh International | Surgical instruments with articulatable end effector with axially shortened articulation joint configurations |
| USD851762S1 (en) | 2017-06-28 | 2019-06-18 | Ethicon Llc | Anvil |
| US10903685B2 (en) | 2017-06-28 | 2021-01-26 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies forming capacitive channels |
| US10299870B2 (en) | 2017-06-28 | 2019-05-28 | Auris Health, Inc. | Instrument insertion compensation |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| US10716614B2 (en) | 2017-06-28 | 2020-07-21 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies with increased contact pressure |
| USD854151S1 (en) | 2017-06-28 | 2019-07-16 | Ethicon Llc | Surgical instrument shaft |
| US11259805B2 (en) | 2017-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical instrument comprising firing member supports |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| US11026758B2 (en) | 2017-06-28 | 2021-06-08 | Auris Health, Inc. | Medical robotics systems implementing axis constraints during actuation of one or more motorized joints |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US10398434B2 (en) | 2017-06-29 | 2019-09-03 | Ethicon Llc | Closed loop velocity control of closure member for robotic surgical instrument |
| US11007022B2 (en) | 2017-06-29 | 2021-05-18 | Ethicon Llc | Closed loop velocity control techniques based on sensed tissue parameters for robotic surgical instrument |
| US11389192B2 (en) | 2017-06-29 | 2022-07-19 | Cilag Gmbh International | Method of suturing a trocar path incision |
| US10898183B2 (en) | 2017-06-29 | 2021-01-26 | Ethicon Llc | Robotic surgical instrument with closed loop feedback techniques for advancement of closure member during firing |
| US10258418B2 (en) | 2017-06-29 | 2019-04-16 | Ethicon Llc | System for controlling articulation forces |
| US10568619B2 (en) | 2017-06-29 | 2020-02-25 | Ethicon Llc | Surgical port with wound closure channels |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| JP7229989B2 (ja) | 2017-07-17 | 2023-02-28 | ボイジャー セラピューティクス インコーポレイテッド | 軌道アレイガイドシステム |
| EP3654822B1 (en) * | 2017-07-20 | 2023-11-15 | Neptune Medical Inc. | Dynamically rigidizing overtube |
| CN107280718B (zh) * | 2017-07-27 | 2020-04-28 | 天津大学 | 一种用于自然腔道手术的折展变刚度器械臂 |
| US11974742B2 (en) | 2017-08-03 | 2024-05-07 | Cilag Gmbh International | Surgical system comprising an articulation bailout |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US11304695B2 (en) | 2017-08-03 | 2022-04-19 | Cilag Gmbh International | Surgical system shaft interconnection |
| CN116869664A (zh) | 2017-08-10 | 2023-10-13 | 直观外科手术操作公司 | 远程手术系统的增加的可用器械寿命 |
| US11583252B2 (en) | 2017-08-11 | 2023-02-21 | Arizona Board Of Regents On Behalf Of Arizona State University | Miniature transducer device and related methods |
| CN109381261B (zh) * | 2017-08-14 | 2022-10-28 | 新加坡国立大学 | 外科手术操作臂及外科手术机器人 |
| GB201713277D0 (en) * | 2017-08-18 | 2017-10-04 | Rolls Royce Plc | Hyper-redundant manipulators |
| WO2019038770A1 (en) | 2017-08-23 | 2019-02-28 | Memic Innovative Surgery Ltd. | TOOLS AND METHODS FOR VAGINAL ACCESS |
| KR102242501B1 (ko) * | 2017-09-01 | 2021-04-20 | 한양대학교 에리카산학협력단 | 천자 장비 및 그 동작방법 |
| EP3678572A4 (en) | 2017-09-05 | 2021-09-29 | Covidien LP | COLLISION HANDLING ALGORITHMS FOR SURGICAL ROBOTIC SYSTEMS |
| WO2019050878A2 (en) | 2017-09-06 | 2019-03-14 | Covidien Lp | SCALE OF LIMITS OF SURGICAL ROBOTS |
| WO2019055701A1 (en) | 2017-09-13 | 2019-03-21 | Vanderbilt University | MULTI-SCALE CONTINUUM MOVEMENT ROBOTS BY BALANCING MODULATION |
| WO2019055681A1 (en) | 2017-09-14 | 2019-03-21 | Vicarious Surgical Inc. | SURGICAL CAMERA SYSTEM WITH VIRTUAL REALITY |
| JP7405432B2 (ja) | 2017-09-27 | 2023-12-26 | バーチャル インシジョン コーポレイション | 追跡カメラ技術を有するロボット手術デバイスならびに関連するシステムおよび方法 |
| WO2019063055A1 (en) | 2017-09-28 | 2019-04-04 | Ambu A/S | Borescope |
| USD907648S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US11033323B2 (en) | 2017-09-29 | 2021-06-15 | Cilag Gmbh International | Systems and methods for managing fluid and suction in electrosurgical systems |
| USD917500S1 (en) | 2017-09-29 | 2021-04-27 | Ethicon Llc | Display screen or portion thereof with graphical user interface |
| US11399829B2 (en) | 2017-09-29 | 2022-08-02 | Cilag Gmbh International | Systems and methods of initiating a power shutdown mode for a surgical instrument |
| US10765429B2 (en) | 2017-09-29 | 2020-09-08 | Ethicon Llc | Systems and methods for providing alerts according to the operational state of a surgical instrument |
| US11490951B2 (en) | 2017-09-29 | 2022-11-08 | Cilag Gmbh International | Saline contact with electrodes |
| US10796471B2 (en) | 2017-09-29 | 2020-10-06 | Ethicon Llc | Systems and methods of displaying a knife position for a surgical instrument |
| US10743872B2 (en) | 2017-09-29 | 2020-08-18 | Ethicon Llc | System and methods for controlling a display of a surgical instrument |
| US11484358B2 (en) | 2017-09-29 | 2022-11-01 | Cilag Gmbh International | Flexible electrosurgical instrument |
| USD907647S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US10729501B2 (en) | 2017-09-29 | 2020-08-04 | Ethicon Llc | Systems and methods for language selection of a surgical instrument |
| WO2019070616A2 (en) | 2017-10-02 | 2019-04-11 | Intuitive Surgical Operations, Inc. | RADIATION RESEARCH TOOL |
| US20200281666A1 (en) * | 2017-10-02 | 2020-09-10 | The Regents Of The University Of California | Steerable catheter flexible robotic system for use with endoscopes |
| US11122965B2 (en) | 2017-10-09 | 2021-09-21 | Vanderbilt University | Robotic capsule system with magnetic actuation and localization |
| US10145747B1 (en) | 2017-10-10 | 2018-12-04 | Auris Health, Inc. | Detection of undesirable forces on a surgical robotic arm |
| US10555778B2 (en) | 2017-10-13 | 2020-02-11 | Auris Health, Inc. | Image-based branch detection and mapping for navigation |
| US11058493B2 (en) | 2017-10-13 | 2021-07-13 | Auris Health, Inc. | Robotic system configured for navigation path tracing |
| CA3053652C (en) | 2017-10-16 | 2022-08-02 | Epica International, Inc. | Robot-assisted surgical guide system for performing surgery |
| EP3700439B1 (en) | 2017-10-23 | 2024-05-15 | Globus Medical, Inc. | Rotary oscillating and linearly reciprocating surgical tool |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| US11090075B2 (en) | 2017-10-30 | 2021-08-17 | Cilag Gmbh International | Articulation features for surgical end effector |
| US10779903B2 (en) | 2017-10-31 | 2020-09-22 | Ethicon Llc | Positive shaft rotation lock activated by jaw closure |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| JP7383608B2 (ja) * | 2017-11-13 | 2023-11-20 | コーニンクレッカ フィリップス エヌ ヴェ | 解剖学的構造介入用の多段ロボット |
| US10675107B2 (en) | 2017-11-15 | 2020-06-09 | Intuitive Surgical Operations, Inc. | Surgical instrument end effector with integral FBG |
| CN109805881A (zh) * | 2017-11-22 | 2019-05-28 | 萧慕东 | 一种内窥镜 |
| US10667842B2 (en) | 2017-11-24 | 2020-06-02 | Rainbow Medical Ltd. | Pericardial needle mechanism |
| EP3716882A4 (en) | 2017-12-01 | 2021-08-25 | Covidien LP | DRAPE ADMINISTRATION ARRANGEMENTS FOR ROBOTIC SURGICAL SYSTEMS |
| JP7362610B2 (ja) | 2017-12-06 | 2023-10-17 | オーリス ヘルス インコーポレイテッド | コマンド指示されていない器具の回動を修正するシステムおよび方法 |
| WO2019118368A1 (en) | 2017-12-11 | 2019-06-20 | Auris Health, Inc. | Systems and methods for instrument based insertion architectures |
| WO2019118336A1 (en) | 2017-12-14 | 2019-06-20 | Intuitive Surgical Operations, Inc. | Medical tools having tension bands |
| US11510736B2 (en) | 2017-12-14 | 2022-11-29 | Auris Health, Inc. | System and method for estimating instrument location |
| US10828033B2 (en) | 2017-12-15 | 2020-11-10 | Ethicon Llc | Handheld electromechanical surgical instruments with improved motor control arrangements for positioning components of an adapter coupled thereto |
| US11033267B2 (en) | 2017-12-15 | 2021-06-15 | Ethicon Llc | Systems and methods of controlling a clamping member firing rate of a surgical instrument |
| US11197670B2 (en) | 2017-12-15 | 2021-12-14 | Cilag Gmbh International | Surgical end effectors with pivotal jaws configured to touch at their respective distal ends when fully closed |
| US10743874B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Sealed adapters for use with electromechanical surgical instruments |
| US10869666B2 (en) | 2017-12-15 | 2020-12-22 | Ethicon Llc | Adapters with control systems for controlling multiple motors of an electromechanical surgical instrument |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US11006955B2 (en) | 2017-12-15 | 2021-05-18 | Ethicon Llc | End effectors with positive jaw opening features for use with adapters for electromechanical surgical instruments |
| US10779825B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Adapters with end effector position sensing and control arrangements for use in connection with electromechanical surgical instruments |
| US10687813B2 (en) | 2017-12-15 | 2020-06-23 | Ethicon Llc | Adapters with firing stroke sensing arrangements for use in connection with electromechanical surgical instruments |
| US10743875B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Surgical end effectors with jaw stiffener arrangements configured to permit monitoring of firing member |
| US10966718B2 (en) | 2017-12-15 | 2021-04-06 | Ethicon Llc | Dynamic clamping assemblies with improved wear characteristics for use in connection with electromechanical surgical instruments |
| US11071543B2 (en) | 2017-12-15 | 2021-07-27 | Cilag Gmbh International | Surgical end effectors with clamping assemblies configured to increase jaw aperture ranges |
| EP3684283A4 (en) | 2017-12-18 | 2021-07-14 | Auris Health, Inc. | METHODS AND SYSTEMS FOR MONITORING AND NAVIGATION OF INSTRUMENTS IN LUMINAL NETWORKS |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| USD910847S1 (en) | 2017-12-19 | 2021-02-16 | Ethicon Llc | Surgical instrument assembly |
| US11045270B2 (en) | 2017-12-19 | 2021-06-29 | Cilag Gmbh International | Robotic attachment comprising exterior drive actuator |
| US10716565B2 (en) | 2017-12-19 | 2020-07-21 | Ethicon Llc | Surgical instruments with dual articulation drivers |
| US10729509B2 (en) | 2017-12-19 | 2020-08-04 | Ethicon Llc | Surgical instrument comprising closure and firing locking mechanism |
| US11020112B2 (en) | 2017-12-19 | 2021-06-01 | Ethicon Llc | Surgical tools configured for interchangeable use with different controller interfaces |
| US11129680B2 (en) | 2017-12-21 | 2021-09-28 | Cilag Gmbh International | Surgical instrument comprising a projector |
| US11076853B2 (en) | 2017-12-21 | 2021-08-03 | Cilag Gmbh International | Systems and methods of displaying a knife position during transection for a surgical instrument |
| US20190192147A1 (en) | 2017-12-21 | 2019-06-27 | Ethicon Llc | Surgical instrument comprising an articulatable distal head |
| US11311290B2 (en) | 2017-12-21 | 2022-04-26 | Cilag Gmbh International | Surgical instrument comprising an end effector dampener |
| CA3063459C (en) * | 2017-12-29 | 2020-10-27 | Colubrismx, Inc | End effector and end effector drive apparatus |
| CN111556735A (zh) | 2018-01-04 | 2020-08-18 | 柯惠Lp公司 | 将手术配件安装至机器人手术系统并且提供穿过其的通路的系统和组件 |
| CN111556734A (zh) | 2018-01-04 | 2020-08-18 | 柯惠Lp公司 | 包括具有扭矩传递和机械操纵的高关节式运动腕组件的机器人手术器械 |
| CN111770816B (zh) | 2018-01-05 | 2023-11-03 | 内布拉斯加大学董事会 | 具有紧凑型关节设计的单臂机器人装置及相关系统和方法 |
| US12029510B2 (en) | 2018-01-10 | 2024-07-09 | Covidien Lp | Determining positions and conditions of tools of a robotic surgical system utilizing computer vision |
| CN111867511A (zh) * | 2018-01-17 | 2020-10-30 | 奥瑞斯健康公司 | 具有改进的机器人臂的外科机器人系统 |
| EP3513706B1 (en) | 2018-01-19 | 2024-10-16 | Ambu A/S | A method for fixation of a wire portion of an endoscope, and an endoscope |
| JP7064190B2 (ja) | 2018-01-23 | 2022-05-10 | 国立大学法人東海国立大学機構 | 手術用器具制御装置および手術用器具制御方法 |
| US11259882B1 (en) | 2018-01-25 | 2022-03-01 | Integrity Implants Inc. | Robotic surgical instrument system |
| EP3517017B1 (en) | 2018-01-26 | 2023-01-18 | Ambu A/S | A method for fixation of a wire portion of an endoscope, and an endoscope |
| AU2019212626B2 (en) | 2018-01-26 | 2024-10-10 | Mako Surgical Corp. | End effectors, systems, and methods for impacting prosthetics guided by surgical robots |
| US12102403B2 (en) | 2018-02-02 | 2024-10-01 | Coviden Lp | Robotic surgical systems with user engagement monitoring |
| CA3089681A1 (en) | 2018-02-07 | 2019-08-15 | Distalmotion Sa | Surgical robot systems comprising robotic telemanipulators and integrated laparoscopy |
| US11497567B2 (en) | 2018-02-08 | 2022-11-15 | Intuitive Surgical Operations, Inc. | Jointed control platform |
| US11118661B2 (en) | 2018-02-12 | 2021-09-14 | Intuitive Surgical Operations, Inc. | Instrument transmission converting roll to linear actuation |
| US10765303B2 (en) | 2018-02-13 | 2020-09-08 | Auris Health, Inc. | System and method for driving medical instrument |
| US11189379B2 (en) | 2018-03-06 | 2021-11-30 | Digital Surgery Limited | Methods and systems for using multiple data structures to process surgical data |
| WO2019173267A1 (en) | 2018-03-07 | 2019-09-12 | Intuitive Surgical Operations, Inc. | Low-friction, small profile medical tools having easy-to-assemble components |
| CN111970985A (zh) | 2018-03-07 | 2020-11-20 | 直观外科手术操作公司 | 具有易组装构件的低摩擦小型医疗工具 |
| WO2019173266A1 (en) | 2018-03-07 | 2019-09-12 | Intuitive Surgical Operations, Inc. | Low-friction medical tools having roller-assisted tension members |
| AU2019232675B2 (en) | 2018-03-08 | 2020-11-12 | Covidien Lp | Surgical robotic systems |
| CN110269682B (zh) * | 2018-03-14 | 2020-09-01 | 深圳市精锋医疗科技有限公司 | 连接组件、操作臂、从操作设备及手术机器人 |
| CN108814718B (zh) * | 2018-03-23 | 2022-03-04 | 深圳市精锋医疗科技股份有限公司 | 操作臂 |
| US11986263B2 (en) | 2018-03-12 | 2024-05-21 | Shenzhen Edge Medical Co., Ltd. | Power mechanism and slave operating device |
| CN108888345B (zh) * | 2018-06-22 | 2021-01-01 | 深圳市精锋医疗科技有限公司 | 动力机构、从操作设备 |
| CN110269693B (zh) * | 2018-03-14 | 2021-07-09 | 深圳市精锋医疗科技有限公司 | 驱动丝驱动的连接组件、操作臂及手术机器人 |
| CN110269692B (zh) * | 2018-03-14 | 2021-01-05 | 深圳市精锋医疗科技有限公司 | 连接组件、操作臂、从操作设备及手术机器人 |
| CN110269686B (zh) * | 2018-03-14 | 2021-01-01 | 深圳市精锋医疗科技有限公司 | 具有转动部的连接组件、操作臂及手术机器人 |
| CN110269685B (zh) * | 2018-03-14 | 2021-02-19 | 深圳市精锋医疗科技有限公司 | 微创手术的连接组件、操作臂、从操作设备及手术机器人 |
| CN110269690B (zh) * | 2018-03-14 | 2021-01-05 | 深圳市精锋医疗科技有限公司 | 具有驱动丝的连接组件、操作臂及手术机器人 |
| CN110269694B (zh) * | 2018-03-14 | 2021-05-11 | 深圳市精锋医疗科技有限公司 | 连接组件、操作臂、从操作设备及手术机器人 |
| CN110269689B (zh) * | 2018-03-14 | 2021-01-05 | 深圳市精锋医疗科技有限公司 | 连接组件、操作臂、从操作设备及手术机器人 |
| CN110269695B (zh) * | 2018-03-14 | 2021-07-09 | 深圳市精锋医疗科技有限公司 | 连接组件、操作臂及手术机器人 |
| CN110269688B (zh) * | 2018-03-14 | 2021-03-09 | 深圳市精锋医疗科技有限公司 | 可平移的连接组件、操作臂及手术机器人 |
| CN110269687B (zh) * | 2018-03-14 | 2020-12-22 | 深圳市精锋医疗科技有限公司 | 可平移的连接组件、操作臂、从操作设备及手术机器人 |
| CN108567488B (zh) * | 2018-03-23 | 2021-07-09 | 深圳市精锋医疗科技有限公司 | 操作臂 |
| CN108567487A (zh) * | 2018-03-23 | 2018-09-25 | 深圳市精锋医疗科技有限公司 | 具有可调节连杆的从操作设备及手术机器人 |
| CN108567489B (zh) * | 2018-03-23 | 2022-05-13 | 深圳市精锋医疗科技股份有限公司 | 操作臂、从操作设备及手术机器人 |
| CN108852515B (zh) * | 2018-03-23 | 2022-06-24 | 深圳市精锋医疗科技股份有限公司 | 单切口手术的从操作设备及手术机器人 |
| CN108814713A (zh) * | 2018-03-23 | 2018-11-16 | 深圳市精锋医疗科技有限公司 | 微创手术操作臂、从操作设备及手术机器人 |
| JP7214747B2 (ja) | 2018-03-28 | 2023-01-30 | オーリス ヘルス インコーポレイテッド | 位置センサの位置合わせのためのシステム及び方法 |
| JP7225259B2 (ja) | 2018-03-28 | 2023-02-20 | オーリス ヘルス インコーポレイテッド | 器具の推定位置を示すためのシステム及び方法 |
| CN110831480B (zh) | 2018-03-28 | 2023-08-29 | 奥瑞斯健康公司 | 具有可变弯曲刚度分布曲线的医疗器械 |
| WO2019191561A1 (en) | 2018-03-29 | 2019-10-03 | Intuitive Surgical Operations, Inc. | Dual brake setup joint |
| US20210052854A1 (en) * | 2018-04-09 | 2021-02-25 | Magellan Biomedical Inc. | System and method for device steering,tracking, and navigation of devices for interventional procedures |
| WO2019199827A1 (en) | 2018-04-10 | 2019-10-17 | Intuitive Surgical Operations, Inc. | Articulable medical devices having flexible wire routing |
| WO2019204116A1 (en) * | 2018-04-19 | 2019-10-24 | Terumo Cardiovascular Systems Corporation | Flexible camera system for minimally invasive surgery |
| US11647888B2 (en) | 2018-04-20 | 2023-05-16 | Covidien Lp | Compensation for observer movement in robotic surgical systems having stereoscopic displays |
| WO2019204013A1 (en) | 2018-04-20 | 2019-10-24 | Covidien Lp | Systems and methods for surgical robotic cart placement |
| JP7085400B2 (ja) * | 2018-04-27 | 2022-06-16 | 川崎重工業株式会社 | 外科手術システム |
| JP7316762B2 (ja) | 2018-04-27 | 2023-07-28 | 川崎重工業株式会社 | 外科手術システム及び外科手術システムの制御方法 |
| US10842699B2 (en) * | 2018-04-27 | 2020-11-24 | Ormonde M. Mahoney | System and method for patient positioning in an automated surgery |
| US11980504B2 (en) | 2018-05-25 | 2024-05-14 | Intuitive Surgical Operations, Inc. | Fiber Bragg grating end effector force sensor |
| CN114601559B (zh) | 2018-05-30 | 2024-05-14 | 奥瑞斯健康公司 | 用于基于定位传感器的分支预测的系统和介质 |
| CN112236083B (zh) | 2018-05-31 | 2024-08-13 | 奥瑞斯健康公司 | 用于导航检测生理噪声的管腔网络的机器人系统和方法 |
| EP3801187B1 (en) | 2018-05-31 | 2024-02-07 | Neptune Medical Inc. | Device for enhanced visualization of the small intestine |
| KR102455671B1 (ko) | 2018-05-31 | 2022-10-20 | 아우리스 헬스, 인코포레이티드 | 이미지-기반 기도 분석 및 매핑 |
| EP3801189B1 (en) | 2018-05-31 | 2024-09-11 | Auris Health, Inc. | Path-based navigation of tubular networks |
| US20190365487A1 (en) * | 2018-06-04 | 2019-12-05 | Epica International, Inc. | Articulated apparatus for surgery |
| CN109009449B (zh) * | 2018-06-22 | 2020-08-11 | 深圳市精锋医疗科技有限公司 | 操作臂及从操作设备 |
| CN109091239B (zh) * | 2018-06-22 | 2021-06-01 | 深圳市精锋医疗科技有限公司 | 具有安装槽的手术机器人 |
| CN109009450B (zh) * | 2018-06-22 | 2021-03-09 | 深圳市精锋医疗科技有限公司 | 可靠性较高的从操作设备、连接机构、动力机构及操作臂 |
| CN112384121A (zh) | 2018-06-27 | 2021-02-19 | 奥瑞斯健康公司 | 用于医疗器械的对准系统和附接系统 |
| CN112105312A (zh) | 2018-07-03 | 2020-12-18 | 柯惠Lp公司 | 用于在手术程序期间检测图像退化的系统、方法和计算机可读介质 |
| WO2020006811A1 (en) * | 2018-07-06 | 2020-01-09 | Bio-Medical Engineering (HK) Limited | Port assembly for use with robotic devices and systems to perform single incision procedures and natural orifice translumenal endoscopic surgical procedures |
| CN109893249B (zh) * | 2018-07-06 | 2022-11-04 | 香港生物医学工程有限公司 | 外科系统以及端口组件 |
| US11259798B2 (en) | 2018-07-16 | 2022-03-01 | Intuitive Surgical Operations, Inc. | Medical devices having tissue grasping surfaces and features for manipulating surgical needles |
| US11612447B2 (en) | 2018-07-19 | 2023-03-28 | Intuitive Surgical Operations, Inc. | Medical devices having three tool members |
| JP2021531111A (ja) | 2018-07-19 | 2021-11-18 | ネプチューン メディカル インク. | 動的硬化医療用複合構造 |
| CN209253118U (zh) * | 2018-07-31 | 2019-08-16 | 深圳市精锋医疗科技有限公司 | 视野较好的从操作设备组件及手术机器人 |
| WO2020033318A1 (en) | 2018-08-07 | 2020-02-13 | Auris Health, Inc. | Combining strain-based shape sensing with catheter control |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| US11324501B2 (en) | 2018-08-20 | 2022-05-10 | Cilag Gmbh International | Surgical stapling devices with improved closure members |
| US10779821B2 (en) | 2018-08-20 | 2020-09-22 | Ethicon Llc | Surgical stapler anvils with tissue stop features configured to avoid tissue pinch |
| US10912559B2 (en) | 2018-08-20 | 2021-02-09 | Ethicon Llc | Reinforced deformable anvil tip for surgical stapler anvil |
| US10856870B2 (en) | 2018-08-20 | 2020-12-08 | Ethicon Llc | Switching arrangements for motor powered articulatable surgical instruments |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| US10842492B2 (en) | 2018-08-20 | 2020-11-24 | Ethicon Llc | Powered articulatable surgical instruments with clutching and locking arrangements for linking an articulation drive system to a firing drive system |
| US11045192B2 (en) | 2018-08-20 | 2021-06-29 | Cilag Gmbh International | Fabricating techniques for surgical stapler anvils |
| US11039834B2 (en) | 2018-08-20 | 2021-06-22 | Cilag Gmbh International | Surgical stapler anvils with staple directing protrusions and tissue stability features |
| USD914878S1 (en) | 2018-08-20 | 2021-03-30 | Ethicon Llc | Surgical instrument anvil |
| US11083458B2 (en) | 2018-08-20 | 2021-08-10 | Cilag Gmbh International | Powered surgical instruments with clutching arrangements to convert linear drive motions to rotary drive motions |
| US11253256B2 (en) | 2018-08-20 | 2022-02-22 | Cilag Gmbh International | Articulatable motor powered surgical instruments with dedicated articulation motor arrangements |
| CN109259717B (zh) * | 2018-08-27 | 2020-08-14 | 彭波 | 一种立体内窥镜及内窥镜测量方法 |
| BR112021003819A2 (pt) * | 2018-08-29 | 2021-05-25 | Ernesto Molmenti | dispositivo para amarrar nós para suturas cirúrgicas |
| JP2021534919A (ja) * | 2018-09-05 | 2021-12-16 | ニューヴェイジヴ,インコーポレイテッド | 脊椎外科的処置のためのシステム及び方法 |
| EP3852667A4 (en) | 2018-09-17 | 2022-06-15 | Covidien LP | SURGICAL ROBOTIC SYSTEMS |
| CN112956189B (zh) | 2018-09-18 | 2023-11-14 | 直观外科手术操作公司 | 用于增强的图像传感器定时的方法和系统 |
| US11179212B2 (en) | 2018-09-26 | 2021-11-23 | Auris Health, Inc. | Articulating medical instruments |
| JP7536752B2 (ja) | 2018-09-28 | 2024-08-20 | オーリス ヘルス インコーポレイテッド | 内視鏡支援経皮的医療処置のためのシステム及び方法 |
| WO2020069430A1 (en) | 2018-09-28 | 2020-04-02 | Auris Health, Inc. | Systems and methods for docking medical instruments |
| US10820947B2 (en) | 2018-09-28 | 2020-11-03 | Auris Health, Inc. | Devices, systems, and methods for manually and robotically driving medical instruments |
| US11065021B2 (en) | 2018-10-03 | 2021-07-20 | Daniel Ezra Walzman | Osteotomy device |
| US20200107902A1 (en) * | 2018-10-03 | 2020-04-09 | Daniel Ezra Walzman | Osteotomy Device |
| JP6462946B1 (ja) * | 2018-10-03 | 2019-01-30 | 株式会社トライフォース・マネジメント | 力覚センサ |
| WO2020076447A1 (en) | 2018-10-08 | 2020-04-16 | Auris Health, Inc. | Systems and instruments for tissue sealing |
| US11109746B2 (en) | 2018-10-10 | 2021-09-07 | Titan Medical Inc. | Instrument insertion system, method, and apparatus for performing medical procedures |
| US11707819B2 (en) | 2018-10-15 | 2023-07-25 | General Electric Company | Selectively flexible extension tool |
| JP7240705B2 (ja) * | 2018-10-24 | 2023-03-16 | 学校法人東京電機大学 | 手術用軟性術具交換装置およびその手術用軟性術具 |
| EP3880059A1 (en) * | 2018-11-13 | 2021-09-22 | Interscope, Inc. | Systems and methods of endoscopic instruments with articulating end |
| US11291514B2 (en) | 2018-11-15 | 2022-04-05 | Intuitive Surgical Operations, Inc. | Medical devices having multiple blades and methods of use |
| WO2020102778A1 (en) | 2018-11-15 | 2020-05-22 | Intuitive Surgical Operations, Inc. | Strain sensor with contoured deflection surface |
| US11213287B2 (en) | 2018-11-15 | 2022-01-04 | Intuitive Surgical Operations, Inc. | Support apparatus for a medical retractor device |
| KR102210452B1 (ko) | 2018-11-26 | 2021-02-02 | 한국로봇융합연구원 | 협소공간에서의 인명탐지 및 구호용 로봇 |
| US11583313B1 (en) | 2018-12-06 | 2023-02-21 | Spiway Llc | Surgical access sheath and methods of use |
| CN111317570B (zh) * | 2018-12-13 | 2022-01-25 | 中国科学院沈阳自动化研究所 | 形变联动机构 |
| JP6918368B2 (ja) * | 2018-12-18 | 2021-08-11 | 株式会社トライフォース・マネジメント | 力覚センサ |
| JP6488057B1 (ja) * | 2018-12-18 | 2019-03-20 | 株式会社トライフォース・マネジメント | 力覚センサ |
| US20210093163A1 (en) * | 2019-09-26 | 2021-04-01 | Boston Scientific Scimed, Inc. | Endoscope with integrated tissue acquisition capability |
| CN109498154A (zh) * | 2018-12-28 | 2019-03-22 | 北京术锐技术有限公司 | 一种双弯曲型柔性手术工具系统 |
| US11234783B2 (en) | 2018-12-28 | 2022-02-01 | Titan Medical Inc. | Articulated tool positioner for robotic surgery system |
| US11586106B2 (en) | 2018-12-28 | 2023-02-21 | Titan Medical Inc. | Imaging apparatus having configurable stereoscopic perspective |
| WO2020139973A1 (en) | 2018-12-28 | 2020-07-02 | Auris Health, Inc. | Medical instrument with articulable segment |
| US11730556B2 (en) | 2018-12-31 | 2023-08-22 | Asensus Surgical Us, Inc. | Compact actuation configuration and expandable instrument receiver for robotically controlled surgical instruments |
| US11690688B2 (en) | 2018-12-31 | 2023-07-04 | Asensus Surgical Us, Inc. | Compact actuation configuration and expandable instrument receiver for robotically controlled surgical instruments |
| JP7546926B2 (ja) | 2019-01-07 | 2024-09-09 | バーチャル インシジョン コーポレイション | ロボット支援手術システムと関連する装置と方法 |
| US11702955B2 (en) | 2019-01-14 | 2023-07-18 | General Electric Company | Component repair system and method |
| CN109770966B (zh) * | 2019-01-23 | 2021-11-09 | 吉林大学 | 一种多自由度集成一体化的单孔腔镜手术器械 |
| US11717355B2 (en) | 2019-01-29 | 2023-08-08 | Covidien Lp | Drive mechanisms for surgical instruments such as for use in robotic surgical systems |
| WO2020160129A1 (en) * | 2019-01-31 | 2020-08-06 | Intuitive Surgical Operations, Inc. | Systems and methods for facilitating insertion of a surgical instrument into a surgical space |
| US11576733B2 (en) | 2019-02-06 | 2023-02-14 | Covidien Lp | Robotic surgical assemblies including electrosurgical instruments having articulatable wrist assemblies |
| JP6941402B1 (ja) * | 2019-02-13 | 2021-09-29 | 株式会社トライフォース・マネジメント | 力覚センサ |
| US11484372B2 (en) | 2019-02-15 | 2022-11-01 | Covidien Lp | Articulation mechanisms for surgical instruments such as for use in robotic surgical systems |
| EP3890645A4 (en) | 2019-02-22 | 2022-09-07 | Auris Health, Inc. | SURGICAL PLATFORM EQUIPPED WITH MOTORIZED ARMS FOR ADJUSTABLE ARM SUPPORTS |
| WO2020180678A1 (en) * | 2019-03-01 | 2020-09-10 | Boston Scientific Scimed, Inc. | Systems, devices, and related methods for fastening tissue |
| CN113613580A (zh) | 2019-03-22 | 2021-11-05 | 奥瑞斯健康公司 | 用于使医疗器械上的输入部对准的系统和方法 |
| US11172929B2 (en) | 2019-03-25 | 2021-11-16 | Cilag Gmbh International | Articulation drive arrangements for surgical systems |
| US11147551B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11147553B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| EP3946130A4 (en) * | 2019-03-27 | 2023-05-10 | Sina Robotics & Medical Innovators Co., Ltd | CONTROL OF A LAPAROSCOPIC INSTRUMENT |
| AT16885U1 (de) | 2019-03-28 | 2020-11-15 | Palfinger Ag | Kran mit Kransteuerung |
| US11617627B2 (en) | 2019-03-29 | 2023-04-04 | Auris Health, Inc. | Systems and methods for optical strain sensing in medical instruments |
| CN109908455A (zh) * | 2019-04-01 | 2019-06-21 | 郭建宁 | 一种医用心胸外科护理胸腔管道固定支架 |
| US12048456B2 (en) | 2019-04-10 | 2024-07-30 | Saint Louis University | Systems and methods for guiding surgical tools |
| US11793392B2 (en) | 2019-04-17 | 2023-10-24 | Neptune Medical Inc. | External working channels |
| AU2020264112B2 (en) * | 2019-04-23 | 2023-01-19 | Boston Scientific Scimed, Inc. | Flexible ureteroscope with quick medical device access and exchange |
| US11364629B2 (en) * | 2019-04-27 | 2022-06-21 | The Johns Hopkins University | Data-driven position estimation and collision detection for flexible manipulator |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11432816B2 (en) | 2019-04-30 | 2022-09-06 | Cilag Gmbh International | Articulation pin for a surgical instrument |
| US11471157B2 (en) | 2019-04-30 | 2022-10-18 | Cilag Gmbh International | Articulation control mapping for a surgical instrument |
| US11253254B2 (en) | 2019-04-30 | 2022-02-22 | Cilag Gmbh International | Shaft rotation actuator on a surgical instrument |
| US11452528B2 (en) | 2019-04-30 | 2022-09-27 | Cilag Gmbh International | Articulation actuators for a surgical instrument |
| US11426251B2 (en) | 2019-04-30 | 2022-08-30 | Cilag Gmbh International | Articulation directional lights on a surgical instrument |
| CN111714162B (zh) * | 2019-05-10 | 2023-03-28 | 上海微创医疗机器人(集团)股份有限公司 | 手术装置及手术器械 |
| US12042209B2 (en) | 2019-05-16 | 2024-07-23 | Intuitive Surgical Operations, Inc. | Insert guide members for surgical instruments, and related devices, systems, and methods |
| US11123146B2 (en) | 2019-05-30 | 2021-09-21 | Titan Medical Inc. | Surgical instrument apparatus, actuator, and drive |
| US11628020B2 (en) | 2019-06-19 | 2023-04-18 | Virtuoso Surgical, Inc. | Insertable robot for minimally invasive surgery |
| CN114423573A (zh) * | 2019-06-24 | 2022-04-29 | 维卡瑞斯外科手术股份有限公司 | 用于机器人组件的装置和方法 |
| US11607278B2 (en) | 2019-06-27 | 2023-03-21 | Cilag Gmbh International | Cooperative robotic surgical systems |
| US11547468B2 (en) | 2019-06-27 | 2023-01-10 | Cilag Gmbh International | Robotic surgical system with safety and cooperative sensing control |
| US11376082B2 (en) | 2019-06-27 | 2022-07-05 | Cilag Gmbh International | Robotic surgical system with local sensing of functional parameters based on measurements of multiple physical inputs |
| US11413102B2 (en) | 2019-06-27 | 2022-08-16 | Cilag Gmbh International | Multi-access port for surgical robotic systems |
| US11723729B2 (en) | 2019-06-27 | 2023-08-15 | Cilag Gmbh International | Robotic surgical assembly coupling safety mechanisms |
| US11376083B2 (en) * | 2019-06-27 | 2022-07-05 | Cilag Gmbh International | Determining robotic surgical assembly coupling status |
| US11369443B2 (en) | 2019-06-27 | 2022-06-28 | Cilag Gmbh International | Method of using a surgical modular robotic assembly |
| US11399906B2 (en) | 2019-06-27 | 2022-08-02 | Cilag Gmbh International | Robotic surgical system for controlling close operation of end-effectors |
| US11612445B2 (en) | 2019-06-27 | 2023-03-28 | Cilag Gmbh International | Cooperative operation of robotic arms |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11298132B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Inlernational | Staple cartridge including a honeycomb extension |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11259803B2 (en) | 2019-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling system having an information encryption protocol |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11399837B2 (en) | 2019-06-28 | 2022-08-02 | Cilag Gmbh International | Mechanisms for motor control adjustments of a motorized surgical instrument |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US11246678B2 (en) | 2019-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical stapling system having a frangible RFID tag |
| US12004740B2 (en) | 2019-06-28 | 2024-06-11 | Cilag Gmbh International | Surgical stapling system having an information decryption protocol |
| US11376098B2 (en) | 2019-06-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument system comprising an RFID system |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11219455B2 (en) | 2019-06-28 | 2022-01-11 | Cilag Gmbh International | Surgical instrument including a lockout key |
| US11051807B2 (en) | 2019-06-28 | 2021-07-06 | Cilag Gmbh International | Packaging assembly including a particulate trap |
| US11426167B2 (en) | 2019-06-28 | 2022-08-30 | Cilag Gmbh International | Mechanisms for proper anvil attachment surgical stapling head assembly |
| US11241235B2 (en) | 2019-06-28 | 2022-02-08 | Cilag Gmbh International | Method of using multiple RFID chips with a surgical assembly |
| US11298127B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Interational | Surgical stapling system having a lockout mechanism for an incompatible cartridge |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11224497B2 (en) | 2019-06-28 | 2022-01-18 | Cilag Gmbh International | Surgical systems with multiple RFID tags |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11291451B2 (en) | 2019-06-28 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with battery compatibility verification functionality |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11439429B2 (en) | 2019-07-11 | 2022-09-13 | New View Surgical | Cannula assembly with deployable camera |
| CN114423369A (zh) * | 2019-07-17 | 2022-04-29 | 阿森塞斯(美国)手术公司 | 用于机器人控制的手术器械的紧凑致动构型和可扩展器械接纳器 |
| WO2021028883A1 (en) | 2019-08-15 | 2021-02-18 | Auris Health, Inc. | Medical device having multiple bending sections |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| WO2021038495A1 (en) | 2019-08-30 | 2021-03-04 | Auris Health, Inc. | Instrument image reliability systems and methods |
| JP2022546421A (ja) | 2019-08-30 | 2022-11-04 | オーリス ヘルス インコーポレイテッド | 位置センサの重みベースの位置合わせのためのシステム及び方法 |
| EP4025113A4 (en) * | 2019-09-07 | 2023-09-06 | Memic Innovative Surgery Ltd. | CABLE AND WIRE ROUTING IN A MECHANICAL ARM OF A SURGICAL DEVICE |
| CN110464469B (zh) * | 2019-09-10 | 2020-12-01 | 深圳市精锋医疗科技有限公司 | 手术机器人及末端器械的控制方法、控制装置、存储介质 |
| CN110559083B (zh) * | 2019-09-10 | 2020-08-25 | 深圳市精锋医疗科技有限公司 | 手术机器人及其末端器械的控制方法、控制装置 |
| CN111887906B (zh) * | 2019-09-10 | 2021-05-11 | 深圳市精锋医疗科技有限公司 | 手术机器人及其机械臂的控制方法、控制装置 |
| US11958183B2 (en) | 2019-09-19 | 2024-04-16 | The Research Foundation For The State University Of New York | Negotiation-based human-robot collaboration via augmented reality |
| US11737845B2 (en) | 2019-09-30 | 2023-08-29 | Auris Inc. | Medical instrument with a capstan |
| US20220330976A1 (en) | 2019-09-30 | 2022-10-20 | Intuitive Surgical Operations, Inc. | Single port instrument access device |
| US20220401125A1 (en) | 2019-09-30 | 2022-12-22 | Intuitive Surgical Operations, Inc. | Single port instrument access device |
| CN114430672A (zh) | 2019-09-30 | 2022-05-03 | 直观外科手术操作公司 | 器械进入引导件 |
| US11480068B2 (en) * | 2019-10-15 | 2022-10-25 | General Electric Company | Systems and method of servicing a turbomachine |
| EP4048134A4 (en) | 2019-10-21 | 2023-11-15 | New View Surgical, Inc. | THERMAL CONTROL OF AN IMAGING SYSTEM |
| CN114786592A (zh) * | 2019-11-08 | 2022-07-22 | 直观外科手术操作公司 | 使用器械方位数据的变化将器械配准到图像的系统和方法 |
| GB2589380B (en) * | 2019-11-29 | 2024-02-21 | Cmr Surgical Ltd | Controlling a surgical instrument |
| US20230039267A1 (en) | 2019-12-12 | 2023-02-09 | Intuitive Surgical Operations, Inc. | Instrument shafts with relief features, and related devices, systems, and methods |
| US11589864B2 (en) | 2019-12-13 | 2023-02-28 | Dinesh Vyas | Stapler apparatus and methods for use |
| US20220008068A1 (en) * | 2019-12-13 | 2022-01-13 | Dinesh Vyas | Stapler apparatus and methods for use |
| US20230056943A1 (en) * | 2019-12-13 | 2023-02-23 | Dinesh Vyas | Stapler apparatus and methods for use |
| US11291447B2 (en) | 2019-12-19 | 2022-04-05 | Cilag Gmbh International | Stapling instrument comprising independent jaw closing and staple firing systems |
| US11304696B2 (en) | 2019-12-19 | 2022-04-19 | Cilag Gmbh International | Surgical instrument comprising a powered articulation system |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11234698B2 (en) | 2019-12-19 | 2022-02-01 | Cilag Gmbh International | Stapling system comprising a clamp lockout and a firing lockout |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US12035913B2 (en) | 2019-12-19 | 2024-07-16 | Cilag Gmbh International | Staple cartridge comprising a deployable knife |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11931033B2 (en) | 2019-12-19 | 2024-03-19 | Cilag Gmbh International | Staple cartridge comprising a latch lockout |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| EP4084721A4 (en) | 2019-12-31 | 2024-01-03 | Auris Health, Inc. | IDENTIFICATION OF AN ANATOMIC FEATURE AND AIMING |
| CN114901200A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 高级篮式驱动模式 |
| CN114901188A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 动态滑轮系统 |
| EP4084720A4 (en) | 2019-12-31 | 2024-01-17 | Auris Health, Inc. | ALIGNMENT TECHNIQUES FOR PERCUTANE ACCESS |
| WO2021137108A1 (en) | 2019-12-31 | 2021-07-08 | Auris Health, Inc. | Alignment interfaces for percutaneous access |
| WO2021145490A1 (ko) * | 2020-01-17 | 2021-07-22 | 한국과학기술원 | 수술 로봇의 히스테리시스를 결정하는 방법, 이를 보상하는 방법 및 내시경 수술 장치 |
| KR102372305B1 (ko) * | 2020-01-20 | 2022-03-10 | 신승준 | 수술용 기구 |
| CN111012525B (zh) * | 2020-01-20 | 2020-10-27 | 北京华腾创新科技有限公司 | 一种神经外科蛇形持镜臂 |
| US11752622B2 (en) | 2020-01-23 | 2023-09-12 | General Electric Company | Extension tool having a plurality of links |
| US11692650B2 (en) | 2020-01-23 | 2023-07-04 | General Electric Company | Selectively flexible extension tool |
| US11613003B2 (en) | 2020-01-24 | 2023-03-28 | General Electric Company | Line assembly for an extension tool having a plurality of links |
| US11857159B2 (en) * | 2020-02-18 | 2024-01-02 | Boston Scientific Scimed, Inc. | Endoscope lumen accessory and methods of use |
| US11371437B2 (en) | 2020-03-10 | 2022-06-28 | Oliver Crispin Robotics Limited | Insertion tool |
| US11590362B2 (en) * | 2020-03-26 | 2023-02-28 | Siemens Healthineers International Ag | Radiotherapy treatment planning based on treatment delivery efficiency |
| US11911120B2 (en) | 2020-03-27 | 2024-02-27 | Verb Surgical Inc. | Training and feedback for a controller workspace boundary |
| EP4126095A4 (en) | 2020-03-30 | 2024-04-24 | Neptune Medical Inc. | LAYERED WALLS FOR STIFFENING DEVICES |
| CN115697173A (zh) * | 2020-05-26 | 2023-02-03 | 捷锐士阿希迈公司(以奥林巴斯美国外科技术名义) | 具有可变柔性的内窥镜 |
| US12030195B2 (en) | 2020-05-27 | 2024-07-09 | Covidien Lp | Tensioning mechanisms and methods for articulating surgical instruments such as for use in robotic surgical systems |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD966512S1 (en) | 2020-06-02 | 2022-10-11 | Cilag Gmbh International | Staple cartridge |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD975278S1 (en) | 2020-06-02 | 2023-01-10 | Cilag Gmbh International | Staple cartridge |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| US11950966B2 (en) | 2020-06-02 | 2024-04-09 | Flexdex, Inc. | Surgical tool and assembly |
| USD967421S1 (en) | 2020-06-02 | 2022-10-18 | Cilag Gmbh International | Staple cartridge |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| US12091981B2 (en) | 2020-06-11 | 2024-09-17 | General Electric Company | Insertion tool and method |
| USD963851S1 (en) | 2020-07-10 | 2022-09-13 | Covidien Lp | Port apparatus |
| EP4188262A2 (en) | 2020-07-28 | 2023-06-07 | Intuitive Surgical Operations, Inc. | Systems for selecting assignments for manipulator assemblies |
| EP4188261A2 (en) | 2020-07-28 | 2023-06-07 | Intuitive Surgical Operations, Inc. | Systems and methods for selecting assignments for components of computer-assisted devices |
| US20220031350A1 (en) | 2020-07-28 | 2022-02-03 | Cilag Gmbh International | Surgical instruments with double pivot articulation joint arrangements |
| US12023124B2 (en) * | 2020-08-11 | 2024-07-02 | Verb Surgical Inc. | Detection of disengagement in cable driven tool |
| CN114098845B (zh) * | 2020-08-28 | 2023-07-25 | 中国科学院沈阳自动化研究所 | 一种模块化手术机器人驱动装置 |
| CN112971994B (zh) * | 2020-08-31 | 2022-06-03 | 合肥工业大学 | 一种基于连续体构型的眼科手术机器人 |
| CN111991087B (zh) * | 2020-09-10 | 2022-02-11 | 苏州大学 | 一种微创手术机器人及其末端执行器 |
| CN112245011B (zh) * | 2020-10-23 | 2022-02-01 | 上海微创医疗机器人(集团)股份有限公司 | 手术机器人系统、调整方法、存储介质及终端 |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| US11452526B2 (en) | 2020-10-29 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising a staged voltage regulation start-up system |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US12053175B2 (en) | 2020-10-29 | 2024-08-06 | Cilag Gmbh International | Surgical instrument comprising a stowed closure actuator stop |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| CN112370167B (zh) * | 2020-11-10 | 2022-03-29 | 北京邮电大学 | 机器人手术器械臂及适用于各种孔数的微创手术机器人 |
| USD1022197S1 (en) | 2020-11-19 | 2024-04-09 | Auris Health, Inc. | Endoscope |
| US12082938B2 (en) | 2020-11-23 | 2024-09-10 | Arizona Board Of Regents On Behalf Of Arizona State University | Photoacoustic voltage indicators |
| EP4247285A1 (en) | 2020-11-23 | 2023-09-27 | Intuitive Surgical Operations, Inc. | Surgical instrument with electropolished tungsten cable |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| JP2023553137A (ja) * | 2020-12-10 | 2023-12-20 | マゼラン・バイオメディカル インコーポレーテッド | ケーブル駆動のパラレルマニピュレータ制御機構と関連するシステム及び方法 |
| EP4267017A1 (en) * | 2020-12-28 | 2023-11-01 | Boston Scientific Scimed, Inc. | Control mechanism for end effectors |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11980362B2 (en) | 2021-02-26 | 2024-05-14 | Cilag Gmbh International | Surgical instrument system comprising a power transfer coil |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US12108951B2 (en) | 2021-02-26 | 2024-10-08 | Cilag Gmbh International | Staple cartridge comprising a sensing array and a temperature control system |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| CN113040918B (zh) * | 2021-03-17 | 2022-07-26 | 山东大学 | 一种用于受限空间骨病变区清除的手术机器人 |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11944336B2 (en) | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US12102323B2 (en) | 2021-03-24 | 2024-10-01 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising a floatable component |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11654547B2 (en) | 2021-03-31 | 2023-05-23 | General Electric Company | Extension tool |
| US11832909B2 (en) | 2021-03-31 | 2023-12-05 | Moon Surgical Sas | Co-manipulation surgical system having actuatable setup joints |
| US11844583B2 (en) | 2021-03-31 | 2023-12-19 | Moon Surgical Sas | Co-manipulation surgical system having an instrument centering mode for automatic scope movements |
| US11812938B2 (en) * | 2021-03-31 | 2023-11-14 | Moon Surgical Sas | Co-manipulation surgical system having a coupling mechanism removeably attachable to surgical instruments |
| AU2022247392A1 (en) | 2021-03-31 | 2023-09-28 | Moon Surgical Sas | Co-manipulation surgical system for use with surgical instruments for performing laparoscopic surgery |
| US12042241B2 (en) | 2021-03-31 | 2024-07-23 | Moon Surgical Sas | Co-manipulation surgical system having automated preset robot arm configurations |
| US11819302B2 (en) | 2021-03-31 | 2023-11-21 | Moon Surgical Sas | Co-manipulation surgical system having user guided stage control |
| CN113116477B (zh) * | 2021-04-26 | 2022-04-08 | 清华大学 | 一种气动穿刺手术装置 |
| KR102555196B1 (ko) * | 2021-05-17 | 2023-07-14 | 주식회사 로엔서지컬 | 와이어 히스테리시스 보상 기능을 갖는 수술 도구 장치 및 그 제어방법 |
| US11998201B2 (en) | 2021-05-28 | 2024-06-04 | Cilag CmbH International | Stapling instrument comprising a firing lockout |
| US11948226B2 (en) | 2021-05-28 | 2024-04-02 | Covidien Lp | Systems and methods for clinical workspace simulation |
| US11964387B2 (en) * | 2021-06-25 | 2024-04-23 | University Of Tennessee Research Foundation | Methods for improving stability of concentric tube steerable devices using asymmetric flexural rigidity |
| US11974829B2 (en) | 2021-06-30 | 2024-05-07 | Cilag Gmbh International | Link-driven articulation device for a surgical device |
| US11931026B2 (en) | 2021-06-30 | 2024-03-19 | Cilag Gmbh International | Staple cartridge replacement |
| US11278303B1 (en) | 2021-07-29 | 2022-03-22 | Vita Solutions LLC | Minimally invasive surgical devices, systems, and methods |
| CN113858169B (zh) * | 2021-08-19 | 2024-07-26 | 浙江大学 | 一种多功能柔性执行器 |
| EP4401666A1 (en) | 2021-09-13 | 2024-07-24 | DistalMotion SA | Instruments for surgical robotic system and interfaces for the same |
| US11937798B2 (en) | 2021-09-29 | 2024-03-26 | Cilag Gmbh International | Surgical systems with port devices for instrument control |
| WO2023052961A1 (en) | 2021-09-29 | 2023-04-06 | Cilag Gmbh International | Surgical systems with port devices for instrument control |
| US20230096268A1 (en) * | 2021-09-29 | 2023-03-30 | Cilag Gmbh International | Methods for Controlling Cooperative Surgical Instruments |
| WO2023052931A1 (en) | 2021-09-29 | 2023-04-06 | Cilag Gmbh International | Surgical sealing systems for instrument stabilization |
| WO2023052932A1 (en) | 2021-09-29 | 2023-04-06 | Cilag Gmbh International | Surgical sealing devices for a natural body orifice |
| US20230100698A1 (en) * | 2021-09-29 | 2023-03-30 | Cilag Gmbh International | Methods for Controlling Cooperative Surgical Instruments |
| US11980363B2 (en) | 2021-10-18 | 2024-05-14 | Cilag Gmbh International | Row-to-row staple array variations |
| US11877745B2 (en) | 2021-10-18 | 2024-01-23 | Cilag Gmbh International | Surgical stapling assembly having longitudinally-repeating staple leg clusters |
| US11957337B2 (en) | 2021-10-18 | 2024-04-16 | Cilag Gmbh International | Surgical stapling assembly with offset ramped drive surfaces |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| US12089841B2 (en) | 2021-10-28 | 2024-09-17 | Cilag CmbH International | Staple cartridge identification systems |
| US11957342B2 (en) | 2021-11-01 | 2024-04-16 | Cilag Gmbh International | Devices, systems, and methods for detecting tissue and foreign objects during a surgical operation |
| CN113974838B (zh) * | 2021-11-02 | 2024-01-23 | 上海微创医疗机器人(集团)股份有限公司 | 手术器械系统和手术机器人 |
| CN113814986B (zh) * | 2021-11-23 | 2022-04-26 | 广东隆崎机器人有限公司 | 一种基于机器视觉控制scara机器人的方法及系统 |
| TW202419071A (zh) | 2021-11-30 | 2024-05-16 | 美商安督奎斯特機器人公司 | 機器人手術系統及其控制模組 |
| EP4440479A1 (en) | 2021-11-30 | 2024-10-09 | Endoquest Robotics, Inc. | Steerable overtube assemblies for robotic surgical systems |
| WO2023100178A1 (en) * | 2021-12-01 | 2023-06-08 | Tamar Robotics Ltd | Robotic endoscope configuration for tissue removal |
| GB2614076B (en) * | 2021-12-21 | 2024-05-15 | Prec Robotics Limited | An articulated member |
| EP4201610A1 (en) * | 2021-12-21 | 2023-06-28 | Rolls-Royce plc | Continuum robot stiffening |
| WO2023116578A1 (zh) * | 2021-12-24 | 2023-06-29 | 深圳市精锋医疗科技股份有限公司 | 具有平行关节的器械、手术机器人 |
| CN114343855B (zh) * | 2022-01-07 | 2024-01-30 | 内乡县人民医院 | 一种皮肤科用具有清创结构的疣体切割装置 |
| CN114469356B (zh) * | 2022-01-24 | 2023-09-15 | 重庆金山医疗机器人有限公司 | 一种主手的驱动方法及手术机器人医生控制台 |
| CN114668503B (zh) * | 2022-03-29 | 2024-06-04 | 吉林省金博弘智能科技有限责任公司 | 一种诊疗一体式手术机器人 |
| CN114668432B (zh) * | 2022-03-29 | 2024-06-07 | 吉林大学 | 一种经自然腔道诊疗一体式手术机器人 |
| US20230346205A1 (en) | 2022-04-27 | 2023-11-02 | Neptune Medical Inc. | Multi-lumen port adapter manifold devices and methods of use |
| EP4437993A1 (en) * | 2023-03-30 | 2024-10-02 | Koninklijke Philips N.V. | Device tracking and monitoring outside imaging field of view |
| WO2024126668A1 (en) * | 2022-12-16 | 2024-06-20 | Koninklijke Philips N.V. | Device tracking and monitoring outside imaging field of view |
| US11986165B1 (en) | 2023-01-09 | 2024-05-21 | Moon Surgical Sas | Co-manipulation surgical system for use with surgical instruments for performing laparoscopic surgery while estimating hold force |
| US11839442B1 (en) | 2023-01-09 | 2023-12-12 | Moon Surgical Sas | Co-manipulation surgical system for use with surgical instruments for performing laparoscopic surgery while estimating hold force |
| WO2024156054A1 (en) * | 2023-01-23 | 2024-08-02 | The Hospital For Sick Children | Articulable surgical instrument assembly and uses therefor |
| US11844585B1 (en) | 2023-02-10 | 2023-12-19 | Distalmotion Sa | Surgical robotics systems and devices having a sterile restart, and methods thereof |
| CN117100408B (zh) * | 2023-10-24 | 2024-02-13 | 深圳市精锋医疗科技股份有限公司 | 手术器械及手术机器人 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020087166A1 (en) * | 1998-02-24 | 2002-07-04 | Brock David L. | Flexible instrument |
| WO2005087128A1 (en) * | 2004-03-05 | 2005-09-22 | Hansen Medical, Inc. | Robotic catheter system |
| US20060074406A1 (en) * | 2004-09-30 | 2006-04-06 | Intuitive Surgical, Inc. | Offset remote center manipulator for robotic surgery |
Family Cites Families (752)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL106631C (nl) | 1960-02-04 | 1963-11-15 | Pieter Johannes Meijs | Ondersteunings- en vastzetinrichting, in het bijzonder voor een meetklok |
| US3557780A (en) * | 1967-04-20 | 1971-01-26 | Olympus Optical Co | Mechanism for controlling flexure of endoscope |
| US3546961A (en) | 1967-12-22 | 1970-12-15 | Gen Electric | Variable flexibility tether |
| US3546861A (en) | 1969-05-12 | 1970-12-15 | Int Harvester Co | Forage harvester |
| US3628535A (en) | 1969-11-12 | 1971-12-21 | Nibot Corp | Surgical instrument for implanting a prosthetic heart valve or the like |
| US3818284A (en) | 1972-12-07 | 1974-06-18 | Marotta Scientific Controls | Valve control with pulse width modulation |
| US3923166A (en) | 1973-10-11 | 1975-12-02 | Nasa | Remote manipulator system |
| US3858578A (en) * | 1974-01-21 | 1975-01-07 | Pravel Wilson & Matthews | Surgical retaining device |
| US3905215A (en) | 1974-06-26 | 1975-09-16 | John R Wright | Ultrasensitive force measuring instrument employing torsion balance |
| US4040413A (en) * | 1974-07-18 | 1977-08-09 | Fuji Photo Optical Co. Ltd. | Endoscope |
| US4150326A (en) | 1977-09-19 | 1979-04-17 | Unimation, Inc. | Trajectory correlation and error detection method and apparatus |
| US4349837A (en) | 1979-07-03 | 1982-09-14 | Spar Aerospace Limited | Satellite servicing |
| JPS56158630A (en) | 1980-05-09 | 1981-12-07 | Olympus Optical Co | Endoscope with ultrasonic diagnostic apparatus |
| JPS57190549A (en) | 1981-05-19 | 1982-11-24 | Olympus Optical Co | Ultrasonic diagnostic apparatus |
| US4601283A (en) | 1981-12-07 | 1986-07-22 | Machida Endoscope Co., Ltd. | Endoscope with a memory shape alloy to control tube bending |
| US5493595A (en) | 1982-02-24 | 1996-02-20 | Schoolman Scientific Corp. | Stereoscopically displayed three dimensional medical imaging |
| US4437114A (en) | 1982-06-07 | 1984-03-13 | Farrand Optical Co., Inc. | Robotic vision system |
| US4588348A (en) | 1983-05-27 | 1986-05-13 | At&T Bell Laboratories | Robotic system utilizing a tactile sensor array |
| US4557255A (en) * | 1983-08-22 | 1985-12-10 | Goodman Tobias M | Ureteroscope |
| GB2161389B (en) * | 1984-07-05 | 1988-06-08 | Wolf Gmbh Richard | Instrument insert for a uretero-renoscope |
| US4577621A (en) | 1984-12-03 | 1986-03-25 | Patel Jayendrakumar I | Endoscope having novel proximate and distal portions |
| JPS61230895A (ja) | 1985-04-04 | 1986-10-15 | 三菱重工業株式会社 | マニプレ−タ干渉防止装置 |
| US4673988A (en) | 1985-04-22 | 1987-06-16 | E.I. Du Pont De Nemours And Company | Electronic mosaic imaging process |
| US4742817A (en) | 1985-05-15 | 1988-05-10 | Olympus Optical Co., Ltd. | Endoscopic apparatus having a bendable insertion section |
| US4672963A (en) | 1985-06-07 | 1987-06-16 | Israel Barken | Apparatus and method for computer controlled laser surgery |
| US4644237A (en) | 1985-10-17 | 1987-02-17 | International Business Machines Corp. | Collision avoidance system |
| US4722056A (en) | 1986-02-18 | 1988-01-26 | Trustees Of Dartmouth College | Reference display systems for superimposing a tomagraphic image onto the focal plane of an operating microscope |
| JPH085018B2 (ja) | 1986-02-26 | 1996-01-24 | 株式会社日立製作所 | 遠隔マニピユレ−シヨン方法及び装置 |
| US4799474A (en) | 1986-03-13 | 1989-01-24 | Olympus Optical Co., Ltd. | Medical tube to be inserted in body cavity |
| US5078140A (en) * | 1986-05-08 | 1992-01-07 | Kwoh Yik S | Imaging device - aided robotic stereotaxis system |
| US4762456A (en) | 1986-06-11 | 1988-08-09 | Nelson Arthur J | Accommodations to exchange containers between vessels |
| JPH0766290B2 (ja) | 1986-06-26 | 1995-07-19 | 東芝機械株式会社 | 工具経路生成方法 |
| US4791934A (en) | 1986-08-07 | 1988-12-20 | Picker International, Inc. | Computer tomography assisted stereotactic surgery system and method |
| GB2194656B (en) | 1986-09-03 | 1991-10-09 | Ibm | Method and system for solid modelling |
| US4721097A (en) | 1986-10-31 | 1988-01-26 | Circon Corporation | Endoscope sheaths and method and apparatus for installation and removal |
| US4854301A (en) * | 1986-11-13 | 1989-08-08 | Olympus Optical Co., Ltd. | Endoscope apparatus having a chair with a switch |
| JPH0829509B2 (ja) | 1986-12-12 | 1996-03-27 | 株式会社日立製作所 | マニピユレ−タの制御装置 |
| US4832473A (en) | 1987-02-06 | 1989-05-23 | Olympus Optical Co., Ltd. | Endoscope with elastic actuator comprising a synthetic rubber tube with only radial expansion controlled by a mesh-like tube |
| US4839838A (en) | 1987-03-30 | 1989-06-13 | Labiche Mitchell | Spatial input apparatus |
| US4868644A (en) * | 1987-04-01 | 1989-09-19 | Olympus Optical Co. | Electronic endoscope with solid state imaging device |
| US4860215A (en) | 1987-04-06 | 1989-08-22 | California Institute Of Technology | Method and apparatus for adaptive force and position control of manipulators |
| US4809191A (en) | 1987-04-28 | 1989-02-28 | Barry Wright Corporation | Robotic position sensor |
| US4807593A (en) * | 1987-05-08 | 1989-02-28 | Olympus Optical Co. Ltd. | Endoscope guide tube |
| US4863133A (en) | 1987-05-26 | 1989-09-05 | Leonard Medical | Arm device for adjustable positioning of a medical instrument or the like |
| US4762455A (en) | 1987-06-01 | 1988-08-09 | Remote Technology Corporation | Remote manipulator |
| US4831549A (en) | 1987-07-28 | 1989-05-16 | Brigham Young University | Device and method for correction of robot inaccuracy |
| IT1235460B (it) * | 1987-07-31 | 1992-07-30 | Confida Spa | Endoscopio flessibile. |
| US4833383A (en) | 1987-08-13 | 1989-05-23 | Iowa State University Research Foundation, Inc. | Means and method of camera space manipulation |
| JPS6483238A (en) * | 1987-09-25 | 1989-03-29 | Toshiba Corp | Endoscope |
| US4792715A (en) | 1987-11-16 | 1988-12-20 | Barsky Michael F | Robot gripper control system using PVDF piezoelectric sensors |
| US5079699A (en) | 1987-11-27 | 1992-01-07 | Picker International, Inc. | Quick three-dimensional display |
| US5170347A (en) | 1987-11-27 | 1992-12-08 | Picker International, Inc. | System to reformat images for three-dimensional display using unique spatial encoding and non-planar bisectioning |
| US4815450A (en) | 1988-02-01 | 1989-03-28 | Patel Jayendra I | Endoscope having variable flexibility |
| US5251127A (en) | 1988-02-01 | 1993-10-05 | Faro Medical Technologies Inc. | Computer-aided surgery apparatus |
| EP0326768A3 (en) | 1988-02-01 | 1991-01-23 | Faro Medical Technologies Inc. | Computer-aided surgery apparatus |
| US5046022A (en) | 1988-03-10 | 1991-09-03 | The Regents Of The University Of Michigan | Tele-autonomous system and method employing time/position synchrony/desynchrony |
| US5187796A (en) | 1988-03-29 | 1993-02-16 | Computer Motion, Inc. | Three-dimensional vector co-processor having I, J, and K register files and I, J, and K execution units |
| US4989253A (en) | 1988-04-15 | 1991-01-29 | The Montefiore Hospital Association Of Western Pennsylvania | Voice activated microscope |
| US4979949A (en) | 1988-04-26 | 1990-12-25 | The Board Of Regents Of The University Of Washington | Robot-aided system for surgery |
| US4984157A (en) | 1988-09-21 | 1991-01-08 | General Electric Company | System and method for displaying oblique planar cross sections of a solid body using tri-linear interpolation to determine pixel position dataes |
| JPH0261588U (ja) * | 1988-10-24 | 1990-05-08 | ||
| GB2226245A (en) | 1988-11-18 | 1990-06-27 | Alan Crockard | Endoscope, remote actuator and aneurysm clip applicator. |
| US4942539A (en) | 1988-12-21 | 1990-07-17 | Gmf Robotics Corporation | Method and system for automatically determining the position and orientation of an object in 3-D space |
| US5099846A (en) | 1988-12-23 | 1992-03-31 | Hardy Tyrone L | Method and apparatus for video presentation from a variety of scanner imaging sources |
| US5098426A (en) | 1989-02-06 | 1992-03-24 | Phoenix Laser Systems, Inc. | Method and apparatus for precision laser surgery |
| US5184009A (en) | 1989-04-10 | 1993-02-02 | Wright Scott M | Optical attenuator movement detection system |
| US5053976A (en) | 1989-05-22 | 1991-10-01 | Honda Giken Kogyo Kabushiki Kaisha | Method of teaching a robot |
| US5257203A (en) | 1989-06-09 | 1993-10-26 | Regents Of The University Of Minnesota | Method and apparatus for manipulating computer-based representations of objects of complex and unique geometry |
| US4994079A (en) * | 1989-07-28 | 1991-02-19 | C. R. Bard, Inc. | Grasping forceps |
| US5114403A (en) | 1989-09-15 | 1992-05-19 | Eclipse Surgical Technologies, Inc. | Catheter torque mechanism |
| US4949927A (en) | 1989-10-17 | 1990-08-21 | John Madocks | Articulable column |
| DE3935256C1 (ja) * | 1989-10-23 | 1991-01-03 | Bauerfeind, Peter, Dr., 8264 Waldkraiburg, De | |
| US5181823A (en) | 1989-10-27 | 1993-01-26 | Grumman Aerospace Corporation | Apparatus and method for producing a video display |
| EP0647428A3 (en) | 1989-11-08 | 1995-07-12 | George S Allen | Interactive image-guided surgery system. |
| US5257617A (en) * | 1989-12-25 | 1993-11-02 | Asahi Kogaku Kogyo Kabushiki Kaisha | Sheathed endoscope and sheath therefor |
| US5405320A (en) | 1990-01-08 | 1995-04-11 | The Curators Of The University Of Missouri | Multiple lumen catheter for hemodialysis |
| JP2521830B2 (ja) | 1990-02-14 | 1996-08-07 | 川崎重工業株式会社 | 産業用ロボットの制御方法および装置 |
| US5086401A (en) | 1990-05-11 | 1992-02-04 | International Business Machines Corporation | Image-directed robotic system for precise robotic surgery including redundant consistency checking |
| US5037433A (en) * | 1990-05-17 | 1991-08-06 | Wilk Peter J | Endoscopic suturing device and related method and suture |
| DE69131681T2 (de) | 1990-11-22 | 2000-06-08 | Kabushiki Kaisha Toshiba, Kawasaki | Rechnergestütztes System zur Diagnose für medizinischen Gebrauch |
| US5231989A (en) | 1991-02-15 | 1993-08-03 | Raychem Corporation | Steerable cannula |
| US5217003A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| US5217453A (en) * | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| FR2674639A1 (fr) | 1991-03-29 | 1992-10-02 | Gaz De France | Fibre optique a reseau de bragg et ses applications. |
| US5176702A (en) | 1991-04-04 | 1993-01-05 | Symbiosis Corporation | Ratchet locking mechanism for surgical instruments |
| US5251611A (en) * | 1991-05-07 | 1993-10-12 | Zehel Wendell E | Method and apparatus for conducting exploratory procedures |
| US5313306A (en) * | 1991-05-13 | 1994-05-17 | Telerobotics International, Inc. | Omniview motionless camera endoscopy system |
| US5181514A (en) | 1991-05-21 | 1993-01-26 | Hewlett-Packard Company | Transducer positioning system |
| US5266875A (en) | 1991-05-23 | 1993-11-30 | Massachusetts Institute Of Technology | Telerobotic system |
| US5279309A (en) | 1991-06-13 | 1994-01-18 | International Business Machines Corporation | Signaling device and method for monitoring positions in a surgical operation |
| US5417210A (en) | 1992-05-27 | 1995-05-23 | International Business Machines Corporation | System and method for augmentation of endoscopic surgery |
| US5182641A (en) | 1991-06-17 | 1993-01-26 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Composite video and graphics display for camera viewing systems in robotics and teleoperation |
| US5159446A (en) | 1991-06-21 | 1992-10-27 | Olympus Optical Co., Ltd. | Electronic endoscope system provided with a separate camera controlling unit and motor controlling unit |
| US5261404A (en) | 1991-07-08 | 1993-11-16 | Mick Peter R | Three-dimensional mammal anatomy imaging system and method |
| US5184601A (en) | 1991-08-05 | 1993-02-09 | Putman John M | Endoscope stabilizer |
| US5343853A (en) * | 1991-09-20 | 1994-09-06 | Fuji Photo Optical Co., Ltd. | Side-looking type electronic endoscope which allows manipulating tool to be inserted thereinto |
| US5889670A (en) | 1991-10-24 | 1999-03-30 | Immersion Corporation | Method and apparatus for tactilely responsive user interface |
| US5230623A (en) | 1991-12-10 | 1993-07-27 | Radionics, Inc. | Operating pointer with interactive computergraphics |
| US5531742A (en) | 1992-01-15 | 1996-07-02 | Barken; Israel | Apparatus and method for computer controlled cryosurgery |
| JP3583777B2 (ja) * | 1992-01-21 | 2004-11-04 | エス・アール・アイ・インターナシヨナル | テレオペレータシステムとテレプレゼンス法 |
| US6788999B2 (en) * | 1992-01-21 | 2004-09-07 | Sri International, Inc. | Surgical system |
| US6963792B1 (en) | 1992-01-21 | 2005-11-08 | Sri International | Surgical method |
| US5631973A (en) | 1994-05-05 | 1997-05-20 | Sri International | Method for telemanipulation with telepresence |
| DE4204397C2 (de) | 1992-02-14 | 2001-08-30 | Sinz Dirk Peter | Transportbehälter |
| US5737500A (en) | 1992-03-11 | 1998-04-07 | California Institute Of Technology | Mobile dexterous siren degree of freedom robot arm with real-time control system |
| US5430643A (en) | 1992-03-11 | 1995-07-04 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Configuration control of seven degree of freedom arms |
| US5624380A (en) * | 1992-03-12 | 1997-04-29 | Olympus Optical Co., Ltd. | Multi-degree of freedom manipulator |
| JPH06511181A (ja) | 1992-03-18 | 1994-12-15 | ザ・スペクトラネティックス・コーポレーション | 可捩先端を有する繊維光学カテーテル |
| JP3285924B2 (ja) * | 1992-04-10 | 2002-05-27 | オリンパス光学工業株式会社 | 湾屈曲装置 |
| US5314466A (en) * | 1992-04-13 | 1994-05-24 | Ep Technologies, Inc. | Articulated unidirectional microwave antenna systems for cardiac ablation |
| US5336231A (en) * | 1992-05-01 | 1994-08-09 | Adair Edwin Lloyd | Parallel channel fixation, repair and ligation suture device |
| US5321353A (en) | 1992-05-13 | 1994-06-14 | Storage Technolgy Corporation | System and method for precisely positioning a robotic tool |
| US5482029A (en) | 1992-06-26 | 1996-01-09 | Kabushiki Kaisha Toshiba | Variable flexibility endoscope system |
| US5361768A (en) | 1992-06-30 | 1994-11-08 | Cardiovascular Imaging Systems, Inc. | Automated longitudinal position translator for ultrasonic imaging probes, and methods of using same |
| US5239246A (en) | 1992-07-08 | 1993-08-24 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Force reflection with compliance control |
| AT399647B (de) | 1992-07-31 | 1995-06-26 | Truppe Michael | Anordnung zur darstellung des inneren von körpern |
| US5515478A (en) | 1992-08-10 | 1996-05-07 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5754741A (en) | 1992-08-10 | 1998-05-19 | Computer Motion, Inc. | Automated endoscope for optimal positioning |
| US5524180A (en) | 1992-08-10 | 1996-06-04 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5762458A (en) | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US5657429A (en) | 1992-08-10 | 1997-08-12 | Computer Motion, Inc. | Automated endoscope system optimal positioning |
| JP3273084B2 (ja) * | 1992-08-20 | 2002-04-08 | オリンパス光学工業株式会社 | 医療器具ホルダ装置 |
| US5297536A (en) | 1992-08-25 | 1994-03-29 | Wilk Peter J | Method for use in intra-abdominal surgery |
| US5397323A (en) | 1992-10-30 | 1995-03-14 | International Business Machines Corporation | Remote center-of-motion robot for surgery |
| US5788688A (en) | 1992-11-05 | 1998-08-04 | Bauer Laboratories, Inc. | Surgeon's command and control |
| US6450950B2 (en) * | 1992-11-12 | 2002-09-17 | Karl Storz Gmbh & Co. Kg | Endoscope having stereo-lateral-view optics |
| US5346504A (en) | 1992-11-19 | 1994-09-13 | Ethicon, Inc. | Intraluminal manipulator with a head having articulating links |
| US5629594A (en) | 1992-12-02 | 1997-05-13 | Cybernet Systems Corporation | Force feedback system |
| US5536236A (en) * | 1993-02-12 | 1996-07-16 | Olympus Optical Co., Ltd. | Covered endoscope system |
| DE9302650U1 (de) | 1993-02-24 | 1993-04-15 | Karl Storz GmbH & Co, 7200 Tuttlingen | Medizinische Zange |
| US5674182A (en) * | 1993-02-26 | 1997-10-07 | Olympus Optical Co., Ltd. | Endoscope system including endoscope and protection cover |
| US5554098A (en) | 1993-02-26 | 1996-09-10 | Olympus Optical Co., Ltd. | Endoscope system including endoscope and disposable protection cover |
| US5439005A (en) * | 1993-03-02 | 1995-08-08 | Midas Rex Pneumatic Tools, Inc. | Surgical instrument with telescoping sleeve |
| JP3136500B2 (ja) | 1993-03-02 | 2001-02-19 | 三明電機株式会社 | 間隙測定具 |
| DE4306803A1 (de) * | 1993-03-04 | 1994-09-08 | Kreuzer Gmbh & Co Ohg | Deckenstativ |
| WO1994023375A1 (en) | 1993-03-31 | 1994-10-13 | Luma Corporation | Managing information in an endoscopy system |
| JP3250759B2 (ja) | 1993-04-02 | 2002-01-28 | オリンパス光学工業株式会社 | 可撓性管状挿入具の湾曲装置 |
| US6406472B1 (en) * | 1993-05-14 | 2002-06-18 | Sri International, Inc. | Remote center positioner |
| EP0699053B1 (en) | 1993-05-14 | 1999-03-17 | Sri International | Surgical apparatus |
| US5791231A (en) | 1993-05-17 | 1998-08-11 | Endorobotics Corporation | Surgical robotic system and hydraulic actuator therefor |
| US5486154A (en) * | 1993-06-08 | 1996-01-23 | Kelleher; Brian S. | Endoscope |
| FI932943A (fi) * | 1993-06-24 | 1994-12-25 | Irri Oy | Automaattinen työkalunvaihto |
| WO1995001757A1 (en) | 1993-07-07 | 1995-01-19 | Cornelius Borst | Robotic system for close inspection and remote treatment of moving parts |
| US5487757A (en) | 1993-07-20 | 1996-01-30 | Medtronic Cardiorhythm | Multicurve deflectable catheter |
| US5382885A (en) | 1993-08-09 | 1995-01-17 | The University Of British Columbia | Motion scaling tele-operating system with force feedback suitable for microsurgery |
| US5343385A (en) | 1993-08-17 | 1994-08-30 | International Business Machines Corporation | Interference-free insertion of a solid body into a cavity |
| US5503320A (en) | 1993-08-19 | 1996-04-02 | United States Surgical Corporation | Surgical apparatus with indicator |
| FR2709656B1 (fr) | 1993-09-07 | 1995-12-01 | Deemed Int Sa | Installation pour opération de microchirurgie assistée par ordinateur et procédés mis en Óoeuvre par ladite installation. |
| US5405344A (en) * | 1993-09-30 | 1995-04-11 | Ethicon, Inc. | Articulable socket joint assembly for an endoscopic instrument for surgical fastner track therefor |
| US5577992A (en) | 1993-10-05 | 1996-11-26 | Asahi Kogaku Kogyo Kabushiki Kaisha | Bendable portion of endoscope |
| SE9303253D0 (sv) | 1993-10-05 | 1993-10-05 | Siemens Elema Ab | Instrument för titthålskirurgi |
| US6059718A (en) | 1993-10-18 | 2000-05-09 | Olympus Optical Co., Ltd. | Endoscope form detecting apparatus in which coil is fixedly mounted by insulating member so that form is not deformed within endoscope |
| JPH08107875A (ja) | 1994-08-18 | 1996-04-30 | Olympus Optical Co Ltd | 内視鏡形状検出装置 |
| US5876325A (en) | 1993-11-02 | 1999-03-02 | Olympus Optical Co., Ltd. | Surgical manipulation system |
| US5402793A (en) * | 1993-11-19 | 1995-04-04 | Advanced Technology Laboratories, Inc. | Ultrasonic transesophageal probe for the imaging and diagnosis of multiple scan planes |
| US5842473A (en) | 1993-11-29 | 1998-12-01 | Life Imaging Systems | Three-dimensional imaging system |
| DE4340707C2 (de) * | 1993-11-30 | 1997-03-27 | Wolf Gmbh Richard | Manipulator |
| AU7601094A (en) | 1993-12-15 | 1995-07-03 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US6241725B1 (en) | 1993-12-15 | 2001-06-05 | Sherwood Services Ag | High frequency thermal ablation of cancerous tumors and functional targets with image data assistance |
| JPH07184923A (ja) | 1993-12-28 | 1995-07-25 | Hitachi Ltd | 遠隔微細手術支援装置 |
| USRE38335E1 (en) * | 1994-05-24 | 2003-11-25 | Endius Incorporated | Surgical instrument |
| US5454827A (en) * | 1994-05-24 | 1995-10-03 | Aust; Gilbert M. | Surgical instrument |
| US5766196A (en) * | 1994-06-06 | 1998-06-16 | Tnco, Inc. | Surgical instrument with steerable distal end |
| US5617515A (en) | 1994-07-11 | 1997-04-01 | Dynetics, Inc. | Method and apparatus for controlling and programming a robot or other moveable object |
| US5835693A (en) | 1994-07-22 | 1998-11-10 | Lynch; James D. | Interactive system for simulation and display of multi-body systems in three dimensions |
| US6115053A (en) | 1994-08-02 | 2000-09-05 | New York University | Computer animation method and system for synthesizing human-like gestures and actions |
| JP2843507B2 (ja) | 1994-08-09 | 1999-01-06 | 三鷹光器株式会社 | 関節式器具保持アーム |
| JP2802244B2 (ja) * | 1994-08-29 | 1998-09-24 | オリンパス光学工業株式会社 | 内視鏡用シース |
| NO300407B1 (no) | 1994-08-30 | 1997-05-26 | Vingmed Sound As | Apparat for endoskop- eller gastroskopundersökelse av pasienter |
| US6120433A (en) * | 1994-09-01 | 2000-09-19 | Olympus Optical Co., Ltd. | Surgical manipulator system |
| US5528955A (en) | 1994-09-08 | 1996-06-25 | Hannaford; Blake | Five axis direct-drive mini-robot having fifth actuator located at non-adjacent joint |
| US6597941B2 (en) | 1994-09-15 | 2003-07-22 | Stryker Corporation | Transillumination of body members for protection during body invasive procedures |
| JP3695779B2 (ja) | 1994-09-27 | 2005-09-14 | オリンパス株式会社 | マニピュレータシステム |
| US5765561A (en) | 1994-10-07 | 1998-06-16 | Medical Media Systems | Video-based surgical targeting system |
| US5575805A (en) * | 1994-10-07 | 1996-11-19 | Li Medical Technologies, Inc. | Variable tip-pressure surgical grasper |
| US5752973A (en) * | 1994-10-18 | 1998-05-19 | Archimedes Surgical, Inc. | Endoscopic surgical gripping instrument with universal joint jaw coupler |
| DE4439227C1 (de) * | 1994-11-03 | 1996-01-11 | Wolf Gmbh Richard | Endoskop und Verfahren zur Ermittlung von Objektabständen |
| US5649032A (en) | 1994-11-14 | 1997-07-15 | David Sarnoff Research Center, Inc. | System for automatically aligning images to form a mosaic image |
| JP3642812B2 (ja) | 1994-11-17 | 2005-04-27 | 株式会社町田製作所 | 医療用観察装置 |
| JP3640087B2 (ja) | 1994-11-29 | 2005-04-20 | 豊田工機株式会社 | 工作機械 |
| JPH08154321A (ja) | 1994-11-29 | 1996-06-11 | Tokyo Electric Power Co Inc:The | 遠隔操作ロボット |
| US5868760A (en) * | 1994-12-07 | 1999-02-09 | Mcguckin, Jr.; James F. | Method and apparatus for endolumenally resectioning tissue |
| JPH08164148A (ja) | 1994-12-13 | 1996-06-25 | Olympus Optical Co Ltd | 内視鏡下手術装置 |
| US5569270A (en) * | 1994-12-13 | 1996-10-29 | Weng; Edward E. | Laparoscopic surgical instrument |
| US5792164A (en) * | 1994-12-19 | 1998-08-11 | Lakatos; Nick | Surgical instrument |
| JP3539645B2 (ja) | 1995-02-16 | 2004-07-07 | 株式会社日立製作所 | 遠隔手術支援装置 |
| US6019724A (en) | 1995-02-22 | 2000-02-01 | Gronningsaeter; Aage | Method for ultrasound guidance during clinical procedures |
| JP3628742B2 (ja) * | 1995-02-22 | 2005-03-16 | オリンパス株式会社 | 医療用マニピュレータ |
| US5836880A (en) | 1995-02-27 | 1998-11-17 | Micro Chemical, Inc. | Automated system for measuring internal tissue characteristics in feed animals |
| US5665096A (en) * | 1995-03-07 | 1997-09-09 | Yoon; Inbae | Needle driving apparatus and methods of suturing tissue |
| US5797849A (en) | 1995-03-28 | 1998-08-25 | Sonometrics Corporation | Method for carrying out a medical procedure using a three-dimensional tracking and imaging system |
| US5817022A (en) | 1995-03-28 | 1998-10-06 | Sonometrics Corporation | System for displaying a 2-D ultrasound image within a 3-D viewing environment |
| JPH08275958A (ja) | 1995-04-07 | 1996-10-22 | Olympus Optical Co Ltd | 手術用マニピュレータ装置 |
| US5887121A (en) | 1995-04-21 | 1999-03-23 | International Business Machines Corporation | Method of constrained Cartesian control of robotic mechanisms with active and passive joints |
| JP3986099B2 (ja) | 1995-05-02 | 2007-10-03 | オリンパス株式会社 | 手術用マニピュレータシステム |
| US5814038A (en) | 1995-06-07 | 1998-09-29 | Sri International | Surgical manipulator for a telerobotic system |
| US5759151A (en) * | 1995-06-07 | 1998-06-02 | Carnegie Mellon University | Flexible steerable device for conducting exploratory procedures |
| US5649956A (en) | 1995-06-07 | 1997-07-22 | Sri International | System and method for releasably holding a surgical instrument |
| US5551432A (en) | 1995-06-19 | 1996-09-03 | New York Eye & Ear Infirmary | Scanning control system for ultrasound biomicroscopy |
| CN1155833A (zh) | 1995-06-20 | 1997-07-30 | 伍云升 | 用于医疗处理的活节机械手 |
| US5820623A (en) | 1995-06-20 | 1998-10-13 | Ng; Wan Sing | Articulated arm for medical procedures |
| US6702736B2 (en) | 1995-07-24 | 2004-03-09 | David T. Chen | Anatomical visualization system |
| US6256529B1 (en) | 1995-07-26 | 2001-07-03 | Burdette Medical Systems, Inc. | Virtual reality 3D visualization for surgical procedures |
| DE19529950C1 (de) | 1995-08-14 | 1996-11-14 | Deutsche Forsch Luft Raumfahrt | Verfahren zum Nachführen eines Stereo-Laparoskops in der minimalinvasiven Chirurgie |
| US5638819A (en) | 1995-08-29 | 1997-06-17 | Manwaring; Kim H. | Method and apparatus for guiding an instrument to a target |
| US5784542A (en) | 1995-09-07 | 1998-07-21 | California Institute Of Technology | Decoupled six degree-of-freedom teleoperated robot system |
| US5825982A (en) | 1995-09-15 | 1998-10-20 | Wright; James | Head cursor control interface for an automated endoscope system for optimal positioning |
| US5601085A (en) | 1995-10-02 | 1997-02-11 | Nycomed Imaging As | Ultrasound imaging |
| US5772576A (en) * | 1995-12-11 | 1998-06-30 | Embro Vascular L.L.C. | Apparatus and method for vein removal |
| IT1277690B1 (it) * | 1995-12-22 | 1997-11-11 | Bieffe Medital Spa | Sistema di sostegno ed attuazione a vertebre in particolare per strumenti chirurgici e diagnostici |
| WO1997024206A1 (fr) | 1995-12-27 | 1997-07-10 | Fanuc Ltd | Systeme robotique composite de detection |
| US5624398A (en) | 1996-02-08 | 1997-04-29 | Symbiosis Corporation | Endoscopic robotic surgical tools and methods |
| CA2246287C (en) | 1996-02-15 | 2006-10-24 | Biosense, Inc. | Medical procedures and apparatus using intrabody probes |
| CA2197614C (en) * | 1996-02-20 | 2002-07-02 | Charles S. Taylor | Surgical instruments and procedures for stabilizing the beating heart during coronary artery bypass graft surgery |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6063095A (en) | 1996-02-20 | 2000-05-16 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US6436107B1 (en) | 1996-02-20 | 2002-08-20 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US6699177B1 (en) | 1996-02-20 | 2004-03-02 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US5971976A (en) | 1996-02-20 | 1999-10-26 | Computer Motion, Inc. | Motion minimization and compensation system for use in surgical procedures |
| JP3225835B2 (ja) * | 1996-03-14 | 2001-11-05 | 富士写真光機株式会社 | 内視鏡の処置具固定機構 |
| US5792044A (en) | 1996-03-22 | 1998-08-11 | Danek Medical, Inc. | Devices and methods for percutaneous surgery |
| US5928143A (en) * | 1996-03-29 | 1999-07-27 | Arizona Board Of Regents On Behalf Of The University Of Arizona | Implantable multi-electrode microdrive array |
| US5813976A (en) * | 1996-04-02 | 1998-09-29 | Filipi; Charles J. | Stabilizing instrumentation for the performing of endoscopic surgical procedures |
| AU728802B2 (en) * | 1996-05-17 | 2001-01-18 | Biosense, Inc. | Self-aligning catheter |
| US5797900A (en) | 1996-05-20 | 1998-08-25 | Intuitive Surgical, Inc. | Wrist mechanism for surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5807377A (en) | 1996-05-20 | 1998-09-15 | Intuitive Surgical, Inc. | Force-reflecting surgical instrument and positioning mechanism for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5792135A (en) | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5755713A (en) | 1996-06-03 | 1998-05-26 | Bilof; Michael L. | Laparoscopic instrument assembly including a plurality of instruments |
| US6167296A (en) | 1996-06-28 | 2000-12-26 | The Board Of Trustees Of The Leland Stanford Junior University | Method for volumetric image navigation |
| US5785689A (en) | 1996-07-18 | 1998-07-28 | Act Medical, Inc. | Endoscopic catheter sheath position control |
| US6642836B1 (en) | 1996-08-06 | 2003-11-04 | Computer Motion, Inc. | General purpose distributed operating room control system |
| US6929481B1 (en) | 1996-09-04 | 2005-08-16 | Immersion Medical, Inc. | Interface device and method for interfacing instruments to medical procedure simulation systems |
| US6364888B1 (en) * | 1996-09-09 | 2002-04-02 | Intuitive Surgical, Inc. | Alignment of master and slave in a minimally invasive surgical apparatus |
| US5871495A (en) * | 1996-09-13 | 1999-02-16 | Eclipse Surgical Technologies, Inc. | Method and apparatus for mechanical transmyocardial revascularization of the heart |
| JP3550966B2 (ja) | 1996-09-18 | 2004-08-04 | 株式会社日立製作所 | 手術装置 |
| US5752112A (en) | 1996-11-06 | 1998-05-12 | George Paddock, Inc. | Mounting system for body mounted camera equipment |
| US5810008A (en) | 1996-12-03 | 1998-09-22 | Isg Technologies Inc. | Apparatus and method for visualizing ultrasonic images |
| US6331181B1 (en) * | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US7963913B2 (en) | 1996-12-12 | 2011-06-21 | Intuitive Surgical Operations, Inc. | Instrument interface of a robotic surgical system |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US8182469B2 (en) | 1997-11-21 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Surgical accessory clamp and method |
| US5892860A (en) | 1997-01-21 | 1999-04-06 | Cidra Corporation | Multi-parameter fiber optic sensor for use in harsh environments |
| US5853367A (en) | 1997-03-17 | 1998-12-29 | General Electric Company | Task-interface and communications system and method for ultrasound imager control |
| WO1998046120A2 (de) * | 1997-04-16 | 1998-10-22 | Karl Storz Gmbh & Co. | Endoskopisches system |
| WO1998049944A1 (en) * | 1997-05-02 | 1998-11-12 | Pilling Weck Incorporated | Adjustable supporting bracket having plural ball and socket joints |
| US5938678A (en) | 1997-06-11 | 1999-08-17 | Endius Incorporated | Surgical instrument |
| JPH11309A (ja) | 1997-06-12 | 1999-01-06 | Hitachi Ltd | 画像処理装置 |
| JP4093503B2 (ja) * | 1997-06-13 | 2008-06-04 | フジノン株式会社 | 立体視内視鏡 |
| US6231565B1 (en) * | 1997-06-18 | 2001-05-15 | United States Surgical Corporation | Robotic arm DLUs for performing surgical tasks |
| US6066090A (en) * | 1997-06-19 | 2000-05-23 | Yoon; Inbae | Branched endoscope system |
| GB9713018D0 (en) | 1997-06-20 | 1997-08-27 | Secr Defence | Optical fibre bend sensor |
| US6030130A (en) | 1997-07-07 | 2000-02-29 | George Paddock Ii, Inc. | Body mounted camera support system |
| US6330837B1 (en) | 1997-08-28 | 2001-12-18 | Microdexterity Systems, Inc. | Parallel mechanism |
| US6002184A (en) | 1997-09-17 | 1999-12-14 | Coactive Drive Corporation | Actuator with opposing repulsive magnetic forces |
| US6714839B2 (en) | 1998-12-08 | 2004-03-30 | Intuitive Surgical, Inc. | Master having redundant degrees of freedom |
| EP2362285B1 (en) | 1997-09-19 | 2015-03-25 | Massachusetts Institute of Technology | Robotic apparatus |
| US5993391A (en) | 1997-09-25 | 1999-11-30 | Kabushiki Kaisha Toshiba | Ultrasound diagnostic apparatus |
| US5865730A (en) * | 1997-10-07 | 1999-02-02 | Ethicon Endo-Surgery, Inc. | Tissue stabilization device for use during surgery having remotely actuated feet |
| US6132388A (en) | 1997-10-16 | 2000-10-17 | Scimed Life Systems, Inc. | Guide wire tip |
| JP4121615B2 (ja) * | 1997-10-31 | 2008-07-23 | オリンパス株式会社 | 内視鏡 |
| DE69816645T2 (de) | 1997-11-07 | 2004-04-15 | Hill-Rom Services, Inc., Batesville | Thermisches regelungssystem für patienten |
| US6129670A (en) | 1997-11-24 | 2000-10-10 | Burdette Medical Systems | Real time brachytherapy spatial registration and visualization system |
| US6171277B1 (en) | 1997-12-01 | 2001-01-09 | Cordis Webster, Inc. | Bi-directional control handle for steerable catheter |
| US5842993A (en) | 1997-12-10 | 1998-12-01 | The Whitaker Corporation | Navigable ultrasonic imaging probe assembly |
| US6277064B1 (en) * | 1997-12-30 | 2001-08-21 | Inbae Yoon | Surgical instrument with rotatably mounted offset endoscope |
| US5982791A (en) | 1998-01-14 | 1999-11-09 | Hewlett-Packard Company | Wavelength tracking in adjustable optical systems |
| US6292712B1 (en) | 1998-01-29 | 2001-09-18 | Northrop Grumman Corporation | Computer interface system for a robotic system |
| EP1053071A1 (en) | 1998-02-03 | 2000-11-22 | Hexel Corporation | Systems and methods employing a rotary track for machining and manufacturing |
| AU2775199A (en) | 1998-02-19 | 1999-09-06 | California Institute Of Technology | Apparatus and method for providing spherical viewing during endoscopic procedures |
| US7789875B2 (en) * | 1998-02-24 | 2010-09-07 | Hansen Medical, Inc. | Surgical instruments |
| US6692485B1 (en) * | 1998-02-24 | 2004-02-17 | Endovia Medical, Inc. | Articulated apparatus for telemanipulator system |
| US6843793B2 (en) * | 1998-02-24 | 2005-01-18 | Endovia Medical, Inc. | Surgical instrument |
| US7371210B2 (en) * | 1998-02-24 | 2008-05-13 | Hansen Medical, Inc. | Flexible instrument |
| US6810281B2 (en) | 2000-12-21 | 2004-10-26 | Endovia Medical, Inc. | Medical mapping system |
| US7297142B2 (en) | 1998-02-24 | 2007-11-20 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US20020095175A1 (en) | 1998-02-24 | 2002-07-18 | Brock David L. | Flexible instrument |
| US6860878B2 (en) * | 1998-02-24 | 2005-03-01 | Endovia Medical Inc. | Interchangeable instrument |
| US7901399B2 (en) * | 1998-02-24 | 2011-03-08 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| IL123646A (en) | 1998-03-11 | 2010-05-31 | Refael Beyar | Remote control catheterization |
| JP3582348B2 (ja) | 1998-03-19 | 2004-10-27 | 株式会社日立製作所 | 手術装置 |
| DE19815598B4 (de) * | 1998-04-07 | 2007-01-18 | Stm Medizintechnik Starnberg Gmbh | Flexibles Zugangsrohr mit Stülpschlauchsystem |
| JPH11299789A (ja) * | 1998-04-23 | 1999-11-02 | Olympus Optical Co Ltd | 体腔内超音波プローブ |
| US5980461A (en) | 1998-05-01 | 1999-11-09 | Rajan; Subramaniam D. | Ultrasound imaging apparatus for medical diagnostics |
| US6210323B1 (en) * | 1998-05-05 | 2001-04-03 | The University Of British Columbia | Surgical arm and tissue stabilizer |
| EP2289423A1 (en) | 1998-05-14 | 2011-03-02 | David N. Krag | System for bracketing tissue |
| US6191414B1 (en) | 1998-06-05 | 2001-02-20 | Cidra Corporation | Composite form as a component for a pressure transducer |
| US6425865B1 (en) | 1998-06-12 | 2002-07-30 | The University Of British Columbia | Robotically assisted medical ultrasound |
| US6629630B2 (en) | 1998-06-19 | 2003-10-07 | Scimed Life Systems, Inc. | Non-circular resection device and endoscope |
| US6184868B1 (en) | 1998-09-17 | 2001-02-06 | Immersion Corp. | Haptic feedback control devices |
| US6352503B1 (en) * | 1998-07-17 | 2002-03-05 | Olympus Optical Co., Ltd. | Endoscopic surgery apparatus |
| US6063021A (en) * | 1998-07-31 | 2000-05-16 | Pilling Weck Incorporated | Stabilizer for surgery |
| DE69940850D1 (de) | 1998-08-04 | 2009-06-18 | Intuitive Surgical Inc | Gelenkvorrichtung zur Positionierung eines Manipulators für Robotik-Chirurgie |
| US6383951B1 (en) | 1998-09-03 | 2002-05-07 | Micron Technology, Inc. | Low dielectric constant material for integrated circuit fabrication |
| US5993390A (en) | 1998-09-18 | 1999-11-30 | Hewlett- Packard Company | Segmented 3-D cardiac ultrasound imaging method and apparatus |
| US6951535B2 (en) | 2002-01-16 | 2005-10-04 | Intuitive Surgical, Inc. | Tele-medicine system that transmits an entire state of a subsystem |
| US6459926B1 (en) | 1998-11-20 | 2002-10-01 | Intuitive Surgical, Inc. | Repositioning and reorientation of master/slave relationship in minimally invasive telesurgery |
| US6852107B2 (en) | 2002-01-16 | 2005-02-08 | Computer Motion, Inc. | Minimally invasive surgical training using robotics and tele-collaboration |
| WO2000033723A2 (en) * | 1998-11-20 | 2000-06-15 | Intuitive Surgical, Inc. | Performing cardiac surgery without cardioplegia |
| US6398726B1 (en) | 1998-11-20 | 2002-06-04 | Intuitive Surgical, Inc. | Stabilizer for robotic beating-heart surgery |
| US6468265B1 (en) | 1998-11-20 | 2002-10-22 | Intuitive Surgical, Inc. | Performing cardiac surgery without cardioplegia |
| US6659939B2 (en) | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| AU1825400A (en) * | 1998-11-23 | 2000-06-13 | Microdexterity Systems, Inc. | Surgical manipulator |
| US6342889B1 (en) | 1998-11-27 | 2002-01-29 | Dicomit Dicom Information Technologies Corp. | Method and system for selecting at least one optimal view of a three dimensional image |
| US6493608B1 (en) | 1999-04-07 | 2002-12-10 | Intuitive Surgical, Inc. | Aspects of a control system of a minimally invasive surgical apparatus |
| US6770081B1 (en) | 2000-01-07 | 2004-08-03 | Intuitive Surgical, Inc. | In vivo accessories for minimally invasive robotic surgery and methods |
| US6799065B1 (en) | 1998-12-08 | 2004-09-28 | Intuitive Surgical, Inc. | Image shifting apparatus and method for a telerobotic system |
| US6522906B1 (en) | 1998-12-08 | 2003-02-18 | Intuitive Surgical, Inc. | Devices and methods for presenting and regulating auxiliary information on an image display of a telesurgical system to assist an operator in performing a surgical procedure |
| US6325808B1 (en) | 1998-12-08 | 2001-12-04 | Advanced Realtime Control Systems, Inc. | Robotic system, docking station, and surgical tool for collaborative control in minimally invasive surgery |
| US6620173B2 (en) | 1998-12-08 | 2003-09-16 | Intuitive Surgical, Inc. | Method for introducing an end effector to a surgical site in minimally invasive surgery |
| EP1148807B1 (en) * | 1998-12-08 | 2010-03-10 | Intuitive Surgical, Inc. | Image shifting telerobotic system |
| JP4242491B2 (ja) | 1998-12-09 | 2009-03-25 | オリンパス株式会社 | 内視鏡治療装置 |
| US6275628B1 (en) | 1998-12-10 | 2001-08-14 | Luna Innovations, Inc. | Single-ended long period grating optical device |
| US6451027B1 (en) | 1998-12-16 | 2002-09-17 | Intuitive Surgical, Inc. | Devices and methods for moving an image capture device in telesurgical systems |
| JP2000193893A (ja) | 1998-12-28 | 2000-07-14 | Suzuki Motor Corp | 検査用挿入管の屈曲装置 |
| US6224542B1 (en) | 1999-01-04 | 2001-05-01 | Stryker Corporation | Endoscopic camera system with non-mechanical zoom |
| CA2261488A1 (en) * | 1999-01-21 | 2000-07-21 | Anthony Paolitto | Transabdominal device for performing closed-chest cardiac surgery |
| US6394998B1 (en) | 1999-01-22 | 2002-05-28 | Intuitive Surgical, Inc. | Surgical tools for use in minimally invasive telesurgical applications |
| DE19906191A1 (de) * | 1999-02-15 | 2000-08-17 | Ingo F Herrmann | Endoskop |
| US6602185B1 (en) | 1999-02-18 | 2003-08-05 | Olympus Optical Co., Ltd. | Remote surgery support system |
| US6084371A (en) | 1999-02-19 | 2000-07-04 | Lockheed Martin Energy Research Corporation | Apparatus and methods for a human de-amplifier system |
| CA2330309C (en) | 1999-02-25 | 2008-01-08 | Tetsuya Korenaga | Electric therapeutic device |
| US6571639B1 (en) | 1999-03-01 | 2003-06-03 | Luna Innovations, Inc. | Fiber optic system |
| US7324081B2 (en) | 1999-03-02 | 2008-01-29 | Siemens Aktiengesellschaft | Augmented-reality system for situation-related support of the interaction between a user and an engineering apparatus |
| US6366722B1 (en) | 1999-03-04 | 2002-04-02 | Luna Innovations, Inc. | Optical waveguide sensors having high refractive index sensitivity |
| US6179776B1 (en) * | 1999-03-12 | 2001-01-30 | Scimed Life Systems, Inc. | Controllable endoscopic sheath apparatus and related method of use |
| US6396574B1 (en) | 1999-03-15 | 2002-05-28 | Korea Advanced Institute Science And Technology | Apparatus for measuring the wavelength, optical power and optical signal-to-noise ratio of each optical signal in wavelength-division multiplexing optical communication |
| US6243624B1 (en) * | 1999-03-19 | 2001-06-05 | Northwestern University | Non-Linear muscle-like compliant controller |
| US6569084B1 (en) | 1999-03-31 | 2003-05-27 | Olympus Optical Co., Ltd. | Endoscope holder and endoscope device |
| US6594552B1 (en) * | 1999-04-07 | 2003-07-15 | Intuitive Surgical, Inc. | Grip strength with tactile feedback for robotic surgery |
| US6424885B1 (en) | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US8944070B2 (en) | 1999-04-07 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Non-force reflecting method for providing tool force information to a user of a telesurgical system |
| JP2000300579A (ja) | 1999-04-26 | 2000-10-31 | Olympus Optical Co Ltd | 多機能マニピュレータ |
| JP3668865B2 (ja) | 1999-06-21 | 2005-07-06 | 株式会社日立製作所 | 手術装置 |
| US6835200B2 (en) * | 1999-06-22 | 2004-12-28 | Ndo Surgical. Inc. | Method and devices for tissue reconfiguration |
| US8287554B2 (en) * | 1999-06-22 | 2012-10-16 | Ethicon Endo-Surgery, Inc. | Method and devices for tissue reconfiguration |
| US7637905B2 (en) * | 2003-01-15 | 2009-12-29 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| US7744613B2 (en) | 1999-06-25 | 2010-06-29 | Usgi Medical, Inc. | Apparatus and methods for forming and securing gastrointestinal tissue folds |
| WO2001013060A1 (en) * | 1999-08-13 | 2001-02-22 | Advanced Sensor Technologies Llc | Probe position sensing system for use in a coordinate measuring machine |
| JP4302246B2 (ja) | 1999-08-25 | 2009-07-22 | 住友ベークライト株式会社 | 医療用処置具挿入具 |
| US8004229B2 (en) | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US8768516B2 (en) | 2009-06-30 | 2014-07-01 | Intuitive Surgical Operations, Inc. | Control of medical robotic system manipulator about kinematic singularities |
| JP2001087281A (ja) * | 1999-09-20 | 2001-04-03 | Olympus Optical Co Ltd | 多機能マニピュレータ |
| JP2001104333A (ja) | 1999-10-07 | 2001-04-17 | Hitachi Ltd | 手術支援装置 |
| US6312435B1 (en) | 1999-10-08 | 2001-11-06 | Intuitive Surgical, Inc. | Surgical instrument with extended reach for use in minimally invasive surgery |
| US6537205B1 (en) | 1999-10-14 | 2003-03-25 | Scimed Life Systems, Inc. | Endoscopic instrument system having reduced backlash control wire action |
| US6454702B1 (en) | 1999-10-14 | 2002-09-24 | Scimed Life Systems, Inc. | Endoscope and endoscopic instrument system having reduced backlash when moving the endoscopic instrument within a working channel of the endoscope |
| US6654031B1 (en) | 1999-10-15 | 2003-11-25 | Hitachi Kokusai Electric Inc. | Method of editing a video program with variable view point of picked-up image and computer program product for displaying video program |
| JP2001202531A (ja) | 1999-10-15 | 2001-07-27 | Hitachi Kokusai Electric Inc | 動画像編集方法 |
| AU4305201A (en) | 1999-11-29 | 2001-06-04 | Board Of Trustees Of The Leland Stanford Junior University | Method and apparatus for transforming view orientations in image-guided surgery |
| US6204620B1 (en) | 1999-12-10 | 2001-03-20 | Fanuc Robotics North America | Method of controlling an intelligent assist device |
| DE19961971B4 (de) * | 1999-12-22 | 2009-10-22 | Forschungszentrum Karlsruhe Gmbh | Vorrichtung zum sicheren automatischen Nachführen eines Endoskops und Verfolgen eines Instruments |
| US6847922B1 (en) | 2000-01-06 | 2005-01-25 | General Motors Corporation | Method for computer-aided layout of manufacturing cells |
| JP2001287183A (ja) | 2000-01-31 | 2001-10-16 | Matsushita Electric Works Ltd | 自動搬送ロボット |
| DE10004264C2 (de) | 2000-02-01 | 2002-06-13 | Storz Karl Gmbh & Co Kg | Vorrichtung zur intrakorporalen, minimal-invasiven Behandlung eines Patienten |
| JP3679674B2 (ja) * | 2000-02-03 | 2005-08-03 | オリンパス株式会社 | 内視鏡 |
| JP2004500767A (ja) | 2000-02-18 | 2004-01-08 | コーニング・インコーポレーテッド | 光学システムにおけるクロマチック分散の適応制御のための電子検波器 |
| DE10009020C2 (de) * | 2000-02-25 | 2002-03-28 | Wolf Gmbh Richard | Hysteroskop |
| US6527753B2 (en) * | 2000-02-29 | 2003-03-04 | Olympus Optical Co., Ltd. | Endoscopic treatment system |
| DE10011790B4 (de) | 2000-03-13 | 2005-07-14 | Siemens Ag | Medizinisches Instrument zum Einführen in ein Untersuchungsobjekt, sowie medizinisches Untersuchungs- oder Behandlungsgerät |
| US6817973B2 (en) | 2000-03-16 | 2004-11-16 | Immersion Medical, Inc. | Apparatus for controlling force for manipulation of medical instruments |
| JP4222706B2 (ja) * | 2000-03-22 | 2009-02-12 | オリンパス株式会社 | 医療用器具保持装置 |
| DE10015826A1 (de) | 2000-03-30 | 2001-10-11 | Siemens Ag | System und Verfahren zur Erzeugung eines Bildes |
| US6800056B2 (en) | 2000-04-03 | 2004-10-05 | Neoguide Systems, Inc. | Endoscope with guiding apparatus |
| US6974411B2 (en) | 2000-04-03 | 2005-12-13 | Neoguide Systems, Inc. | Endoscope with single step guiding apparatus |
| US6858005B2 (en) * | 2000-04-03 | 2005-02-22 | Neo Guide Systems, Inc. | Tendon-driven endoscope and methods of insertion |
| US6984203B2 (en) | 2000-04-03 | 2006-01-10 | Neoguide Systems, Inc. | Endoscope with adjacently positioned guiding apparatus |
| US6468203B2 (en) * | 2000-04-03 | 2002-10-22 | Neoguide Systems, Inc. | Steerable endoscope and improved method of insertion |
| US6837846B2 (en) * | 2000-04-03 | 2005-01-04 | Neo Guide Systems, Inc. | Endoscope having a guide tube |
| US6671055B1 (en) | 2000-04-13 | 2003-12-30 | Luna Innovations, Inc. | Interferometric sensors utilizing bulk sensing mediums extrinsic to the input/output optical fiber |
| JP4716594B2 (ja) * | 2000-04-17 | 2011-07-06 | オリンパス株式会社 | 内視鏡 |
| US20010055062A1 (en) | 2000-04-20 | 2001-12-27 | Keiji Shioda | Operation microscope |
| JP2001327460A (ja) | 2000-05-18 | 2001-11-27 | Olympus Optical Co Ltd | 内視鏡装置 |
| DE10025285A1 (de) | 2000-05-22 | 2001-12-06 | Siemens Ag | Vollautomatische, robotergestützte Kameraführung unter Verwendung von Positionssensoren für laparoskopische Eingriffe |
| US6743239B1 (en) | 2000-05-25 | 2004-06-01 | St. Jude Medical, Inc. | Devices with a bendable tip for medical procedures |
| US6508789B1 (en) | 2000-06-05 | 2003-01-21 | Merit Medical Systems, Inc. | Systems and methods for coupling a drainage catheter to a patient and decoupling the drainage catheter from the patient |
| US6645196B1 (en) * | 2000-06-16 | 2003-11-11 | Intuitive Surgical, Inc. | Guided tool change |
| US6975898B2 (en) | 2000-06-19 | 2005-12-13 | University Of Washington | Medical imaging, diagnosis, and therapy using a scanning single optical fiber system |
| DE10032203A1 (de) * | 2000-07-01 | 2002-01-17 | Deutsches Krebsforsch | Stereotaxiesystem |
| US6599247B1 (en) | 2000-07-07 | 2003-07-29 | University Of Pittsburgh | System and method for location-merging of real-time tomographic slice images with human vision |
| EP1303222A1 (en) * | 2000-07-21 | 2003-04-23 | Atropos Limited | A cannula |
| US6921361B2 (en) * | 2000-07-24 | 2005-07-26 | Olympus Corporation | Endoscopic instrument for forming an artificial valve |
| US6902560B1 (en) | 2000-07-27 | 2005-06-07 | Intuitive Surgical, Inc. | Roll-pitch-roll surgical tool |
| US6572629B2 (en) | 2000-08-17 | 2003-06-03 | Johns Hopkins University | Gastric reduction endoscopy |
| GB0020461D0 (en) | 2000-08-18 | 2000-10-11 | Oliver Crispin Consulting Ltd | Improvements in and relating to the robotic positioning of a work tool to a sensor |
| EP1182541A3 (de) | 2000-08-22 | 2005-11-30 | Siemens Aktiengesellschaft | System und Verfahren zum kombinierten Einsatz verschiedener Display-/Gerätetypen mit systemgesteuerter kontextabhängiger Informationsdarstellung |
| WO2002017810A2 (en) * | 2000-08-30 | 2002-03-07 | Johns Hopkins University | Controllable motorized device for percutaneous needle placement in soft tissue target and methods and systems related thereto |
| US6524303B1 (en) * | 2000-09-08 | 2003-02-25 | Stereotaxis, Inc. | Variable stiffness magnetic catheter |
| JP4765155B2 (ja) | 2000-09-28 | 2011-09-07 | ソニー株式会社 | オーサリング・システム及びオーサリング方法、並びに記憶媒体 |
| JP2002177201A (ja) * | 2000-10-02 | 2002-06-25 | Olympus Optical Co Ltd | 内視鏡 |
| JP2002112946A (ja) * | 2000-10-11 | 2002-04-16 | Olympus Optical Co Ltd | 内視鏡用フード |
| US7194118B1 (en) | 2000-11-10 | 2007-03-20 | Lucid, Inc. | System for optically sectioning and mapping surgically excised tissue |
| US6718194B2 (en) | 2000-11-17 | 2004-04-06 | Ge Medical Systems Global Technology Company, Llc | Computer assisted intramedullary rod surgery system with enhanced features |
| DE60143909D1 (de) * | 2000-11-28 | 2011-03-03 | Intuitive Surgical Operations | Z und gefässokklusionsverschluss |
| US6856400B1 (en) | 2000-12-14 | 2005-02-15 | Luna Technologies | Apparatus and method for the complete characterization of optical devices including loss, birefringence and dispersion effects |
| DE10063089C1 (de) | 2000-12-18 | 2002-07-25 | Siemens Ag | Anwendergesteuerte Verknüpfung von Informationen innerhalb eines Augmented-Reality-Systems |
| WO2002062199A2 (en) | 2001-01-16 | 2002-08-15 | Microdexterity Systems, Inc. | Surgical manipulator |
| US7699835B2 (en) * | 2001-02-15 | 2010-04-20 | Hansen Medical, Inc. | Robotically controlled surgical instruments |
| US7766894B2 (en) | 2001-02-15 | 2010-08-03 | Hansen Medical, Inc. | Coaxial catheter system |
| US20030135204A1 (en) * | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| US6578967B1 (en) | 2001-03-15 | 2003-06-17 | George Paddock Ii, Inc. | Mounting system for body mounted camera equipment and connector assemblies therefor |
| JP3769469B2 (ja) | 2001-03-28 | 2006-04-26 | 株式会社東芝 | 操作訓練用装置 |
| DE10115467A1 (de) * | 2001-03-29 | 2002-10-02 | Duerr Systems Gmbh | Werkzeugwechselsystem für eine Maschine |
| US6456901B1 (en) | 2001-04-20 | 2002-09-24 | Univ Michigan | Hybrid robot motion task level control system |
| US6666847B2 (en) * | 2001-05-18 | 2003-12-23 | Us Endoscopy Group, Inc. | Duodenoscope needle |
| US6808491B2 (en) | 2001-05-21 | 2004-10-26 | Syntheon, Llc | Methods and apparatus for on-endoscope instruments having end effectors and combinations of on-endoscope and through-endoscope instruments |
| US6846286B2 (en) * | 2001-05-22 | 2005-01-25 | Pentax Corporation | Endoscope system |
| US6862561B2 (en) | 2001-05-29 | 2005-03-01 | Entelos, Inc. | Method and apparatus for computer modeling a joint |
| US20040054355A1 (en) * | 2001-05-31 | 2004-03-18 | Intuitive Surgical, Inc. | Tool guide and method for introducing an end effector to a surgical site in minimally invasive surgery |
| US7607440B2 (en) | 2001-06-07 | 2009-10-27 | Intuitive Surgical, Inc. | Methods and apparatus for surgical planning |
| US6887245B2 (en) | 2001-06-11 | 2005-05-03 | Ge Medical Systems Global Technology Company, Llc | Surgical drill for use with a computer assisted surgery system |
| US20060178556A1 (en) * | 2001-06-29 | 2006-08-10 | Intuitive Surgical, Inc. | Articulate and swapable endoscope for a surgical robot |
| US20060199999A1 (en) * | 2001-06-29 | 2006-09-07 | Intuitive Surgical Inc. | Cardiac tissue ablation instrument with flexible wrist |
| CA2451824C (en) * | 2001-06-29 | 2015-02-24 | Intuitive Surgical, Inc. | Platform link wrist mechanism |
| US6817974B2 (en) * | 2001-06-29 | 2004-11-16 | Intuitive Surgical, Inc. | Surgical tool having positively positionable tendon-actuated multi-disk wrist joint |
| US20050182298A1 (en) * | 2002-12-06 | 2005-08-18 | Intuitive Surgical Inc. | Cardiac tissue ablation instrument with flexible wrist |
| US20040243147A1 (en) | 2001-07-03 | 2004-12-02 | Lipow Kenneth I. | Surgical robot and robotic controller |
| AU2002322504A1 (en) | 2001-07-13 | 2003-01-29 | Broks Automation, Inc. | Trajectory planning and motion control strategies for a planar three-degree-of-freedom robotic arm |
| US6824509B2 (en) * | 2001-07-23 | 2004-11-30 | Olympus Corporation | Endoscope |
| US6550757B2 (en) | 2001-08-07 | 2003-04-22 | Hewlett-Packard Company | Stapler having selectable staple size |
| JP3579379B2 (ja) | 2001-08-10 | 2004-10-20 | 株式会社東芝 | 医療用マニピュレータシステム |
| SE519630C2 (sv) | 2001-08-30 | 2003-03-18 | Gambro Lundia Ab | Kateter och metod för tillverkning därav |
| US6728599B2 (en) | 2001-09-07 | 2004-04-27 | Computer Motion, Inc. | Modularity system for computer assisted surgery |
| DE10147145C2 (de) | 2001-09-25 | 2003-12-18 | Kunz Reiner | Multifunktionsinstrument für die mikroinvasive Chirurgie |
| AU2002361572A1 (en) | 2001-10-19 | 2003-04-28 | University Of North Carolina At Chape Hill | Methods and systems for dynamic virtual convergence and head mountable display |
| US6635292B2 (en) * | 2001-10-26 | 2003-10-21 | Mars, Incorporated | Ultrasonic rotary forming of food products |
| JP3529373B2 (ja) | 2001-11-09 | 2004-05-24 | ファナック株式会社 | 作業機械のシミュレーション装置 |
| US6839612B2 (en) | 2001-12-07 | 2005-01-04 | Institute Surgical, Inc. | Microwrist system for surgical procedures |
| US6663559B2 (en) | 2001-12-14 | 2003-12-16 | Endactive, Inc. | Interface for a variable direction of view endoscope |
| US20030114732A1 (en) | 2001-12-18 | 2003-06-19 | Advanced Cardiovascular Systems, Inc. | Sheath for guiding imaging instruments |
| JP2003204920A (ja) * | 2002-01-11 | 2003-07-22 | Olympus Optical Co Ltd | 挿入補助具 |
| US7306574B2 (en) * | 2002-01-17 | 2007-12-11 | Optivia Medical, Llc | Steerable dilatation system, dilator, and related methods for stepped dilatation |
| US6941192B2 (en) | 2002-01-31 | 2005-09-06 | Abb Research Ltd. | Robot machining tool position and orientation calibration |
| CA2475239C (en) | 2002-02-06 | 2008-07-29 | The Johns Hopkins University | Remote center of motion robotic system and method |
| JP2003230565A (ja) | 2002-02-12 | 2003-08-19 | Univ Tokyo | 能動トロカール |
| DE60301284T2 (de) * | 2002-02-25 | 2006-06-01 | Olympus Corporation | Endoskop mit Kühleinrichtung |
| US7206626B2 (en) | 2002-03-06 | 2007-04-17 | Z-Kat, Inc. | System and method for haptic sculpting of physical objects |
| US7831292B2 (en) * | 2002-03-06 | 2010-11-09 | Mako Surgical Corp. | Guidance system and method for surgical procedures with improved feedback |
| US8010180B2 (en) | 2002-03-06 | 2011-08-30 | Mako Surgical Corp. | Haptic guidance system and method |
| US7261728B2 (en) * | 2002-03-15 | 2007-08-28 | Ethicon Endo-Surgery, Inc. | Biopsy forceps device and method |
| US7060024B2 (en) * | 2002-03-15 | 2006-06-13 | Ethicon Endo-Surgery, Inc. | Apparatus for guiding an instrument used with an endoscope |
| US6988987B2 (en) * | 2002-03-18 | 2006-01-24 | Olympus Corporation | Guide tube |
| JP2003300444A (ja) | 2002-04-11 | 2003-10-21 | Hitachi Ltd | 移動体の運転支援装置 |
| US6997866B2 (en) * | 2002-04-15 | 2006-02-14 | Simon Fraser University | Devices for positioning implements about fixed points |
| US6969385B2 (en) * | 2002-05-01 | 2005-11-29 | Manuel Ricardo Moreyra | Wrist with decoupled motion transmission |
| US7674270B2 (en) * | 2002-05-02 | 2010-03-09 | Laparocision, Inc | Apparatus for positioning a medical instrument |
| US6991603B2 (en) * | 2002-05-17 | 2006-01-31 | Optim, Inc. | Insertion tube device |
| JP4056791B2 (ja) | 2002-05-22 | 2008-03-05 | 策雄 米延 | 骨折整復誘導装置 |
| JP2004049891A (ja) * | 2002-05-29 | 2004-02-19 | Olympus Corp | 内視鏡装置 |
| US6678582B2 (en) | 2002-05-30 | 2004-01-13 | Kuka Roboter Gmbh | Method and control device for avoiding collisions between cooperating robots |
| US7041052B2 (en) | 2002-06-13 | 2006-05-09 | Usgi Medical Inc. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| US20050137454A1 (en) | 2002-06-13 | 2005-06-23 | Usgi Medical Corp. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| US6783491B2 (en) | 2002-06-13 | 2004-08-31 | Vahid Saadat | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| JP2004016410A (ja) * | 2002-06-14 | 2004-01-22 | Fuji Photo Optical Co Ltd | 立体電子内視鏡装置 |
| US6679836B2 (en) | 2002-06-21 | 2004-01-20 | Scimed Life Systems, Inc. | Universal programmable guide catheter |
| JP3973504B2 (ja) * | 2002-07-15 | 2007-09-12 | 株式会社日立製作所 | 牽引位置決め装置 |
| US7155316B2 (en) | 2002-08-13 | 2006-12-26 | Microbotics Corporation | Microsurgical robot system |
| JP4169549B2 (ja) | 2002-09-06 | 2008-10-22 | オリンパス株式会社 | 内視鏡 |
| US8298161B2 (en) * | 2002-09-12 | 2012-10-30 | Intuitive Surgical Operations, Inc. | Shape-transferring cannula system and method of use |
| US7947000B2 (en) | 2003-09-12 | 2011-05-24 | Intuitive Surgical Operations, Inc. | Cannula system for free-space navigation and method of use |
| JP2004105638A (ja) | 2002-09-20 | 2004-04-08 | Shimadzu Corp | 超音波診断装置 |
| JP3912251B2 (ja) * | 2002-10-02 | 2007-05-09 | 株式会社日立製作所 | マニピュレータ |
| US20040077940A1 (en) | 2002-10-11 | 2004-04-22 | Kienzle Thomas C. | Instrument guide for use with a tracking system |
| US6854327B2 (en) | 2002-11-06 | 2005-02-15 | Shell Oil Company | Apparatus and method for monitoring compaction |
| US6899672B2 (en) | 2002-11-08 | 2005-05-31 | Scimed Life Systems, Inc. | Endoscopic imaging system including removable deflection device |
| CN1486667A (zh) * | 2002-11-22 | 2004-04-07 | 带有一次性鞘套的内窥镜系统 | |
| JP2004174662A (ja) | 2002-11-27 | 2004-06-24 | Fanuc Ltd | ロボットの動作状態解析装置 |
| US7537561B2 (en) * | 2002-11-27 | 2009-05-26 | Olympus Corporation | Endoscope apparatus |
| US7386365B2 (en) | 2004-05-04 | 2008-06-10 | Intuitive Surgical, Inc. | Tool grip calibration for robotic surgery |
| EP1575439B1 (en) | 2002-12-06 | 2012-04-04 | Intuitive Surgical, Inc. | Flexible wrist for surgical tool |
| SE0203908D0 (sv) | 2002-12-30 | 2002-12-30 | Abb Research Ltd | An augmented reality system and method |
| US20040186350A1 (en) | 2003-01-13 | 2004-09-23 | Usgi Medical Corp. | Apparatus and methods for guiding an endoscope via a rigidizable wire guide |
| US20040249367A1 (en) * | 2003-01-15 | 2004-12-09 | Usgi Medical Corp. | Endoluminal tool deployment system |
| JP4270889B2 (ja) * | 2003-01-15 | 2009-06-03 | オリンパス株式会社 | 医療用器具保持装置 |
| JP2004223128A (ja) | 2003-01-27 | 2004-08-12 | Hitachi Ltd | 医療行為支援装置および方法 |
| FR2850775B1 (fr) | 2003-01-30 | 2005-07-22 | Ge Med Sys Global Tech Co Llc | Dispositif d'imagerie medicale a reorientation semi-automatique d'objet radiologique |
| US6925339B2 (en) | 2003-02-04 | 2005-08-02 | Zimmer Technology, Inc. | Implant registration device for surgical navigation system |
| US7158860B2 (en) | 2003-02-24 | 2007-01-02 | Intouch Technologies, Inc. | Healthcare tele-robotic system which allows parallel remote station observation |
| US20060041188A1 (en) * | 2003-03-25 | 2006-02-23 | Dirusso Carlo A | Flexible endoscope |
| US20050245789A1 (en) * | 2003-04-01 | 2005-11-03 | Boston Scientific Scimed, Inc. | Fluid manifold for endoscope system |
| DE60316610D1 (de) * | 2003-04-04 | 2007-11-08 | Univ Cattolica Sacro Cuore | Endoskopisches instrument mit zwei unabhängigen armen |
| JP3972854B2 (ja) | 2003-04-10 | 2007-09-05 | ソニー株式会社 | ロボットの運動制御装置 |
| US6836578B2 (en) | 2003-04-14 | 2004-12-28 | Lake Shore Cryotronics, Inc. | System and method for measuring physical stimuli using vertical cavity surface emitting lasers with integrated tuning means |
| JP2003275223A (ja) | 2003-04-21 | 2003-09-30 | Olympus Optical Co Ltd | 手術装置 |
| JP3975959B2 (ja) | 2003-04-23 | 2007-09-12 | トヨタ自動車株式会社 | ロボット動作規制方法とその装置およびそれを備えたロボット |
| JP2007512854A (ja) | 2003-04-28 | 2007-05-24 | ブラッコ イメージング ソチエタ ペル アチオニ | 手術用ナビゲーションシステム(カメラプローブ) |
| US7371028B2 (en) | 2003-05-01 | 2008-05-13 | George Paddock Ii, Inc. | Post mounting system |
| US7285088B2 (en) * | 2003-05-13 | 2007-10-23 | Olympus Corporation | Endoscope apparatus |
| EP1628632B1 (en) | 2003-05-21 | 2013-10-09 | The Johns Hopkins University | Devices and systems for minimally invasive surgery of the throat and other portions of mammalian body |
| US8182417B2 (en) * | 2004-11-24 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Articulating mechanism components and system for easy assembly and disassembly |
| US7410483B2 (en) * | 2003-05-23 | 2008-08-12 | Novare Surgical Systems, Inc. | Hand-actuated device for remote manipulation of a grasping tool |
| US7090637B2 (en) * | 2003-05-23 | 2006-08-15 | Novare Surgical Systems, Inc. | Articulating mechanism for remote manipulation of a surgical or diagnostic tool |
| US7569626B2 (en) * | 2003-06-05 | 2009-08-04 | Dfine, Inc. | Polymer composites for biomedical applications and methods of making |
| US8007511B2 (en) * | 2003-06-06 | 2011-08-30 | Hansen Medical, Inc. | Surgical instrument design |
| JP4460857B2 (ja) | 2003-06-23 | 2010-05-12 | オリンパス株式会社 | 外科手術用システム |
| JP4398184B2 (ja) * | 2003-06-24 | 2010-01-13 | オリンパス株式会社 | 内視鏡 |
| US7066879B2 (en) * | 2003-07-15 | 2006-06-27 | The Trustees Of Columbia University In The City Of New York | Insertable device and system for minimal access procedure |
| JP4547184B2 (ja) * | 2003-07-29 | 2010-09-22 | オリンパス株式会社 | 内視鏡用アダプター及び内視鏡 |
| US8753262B2 (en) * | 2003-07-29 | 2014-06-17 | Hoya Corporation | Internal treatment apparatus having circumferential side holes |
| US8216252B2 (en) * | 2004-05-07 | 2012-07-10 | Usgi Medical, Inc. | Tissue manipulation and securement system |
| US20050054895A1 (en) | 2003-09-09 | 2005-03-10 | Hoeg Hans David | Method for using variable direction of view endoscopy in conjunction with image guided surgical systems |
| JP4533695B2 (ja) * | 2003-09-23 | 2010-09-01 | オリンパス株式会社 | 処置用内視鏡 |
| US7850600B1 (en) * | 2003-09-23 | 2010-12-14 | Tyco Healthcare Group Lp | Laparoscopic instrument and trocar system and related surgical method |
| JP4559093B2 (ja) * | 2003-10-03 | 2010-10-06 | オリンパス株式会社 | 医療用具支持装置 |
| JP2005110878A (ja) | 2003-10-06 | 2005-04-28 | Olympus Corp | 手術支援システム |
| US7704223B2 (en) | 2003-10-07 | 2010-04-27 | Northgate Technologies Inc. | System and method for delivering a substance to a body cavity |
| JP3708097B2 (ja) | 2003-10-08 | 2005-10-19 | ファナック株式会社 | ロボットの手動送り装置 |
| US7762949B2 (en) * | 2003-10-16 | 2010-07-27 | Granit Medical Innovation, Llc | Endoscope with open channels |
| US7029435B2 (en) * | 2003-10-16 | 2006-04-18 | Granit Medical Innovation, Llc | Endoscope having multiple working segments |
| EP1680024A2 (en) | 2003-10-21 | 2006-07-19 | The Board Of Trustees Of The Leland Stanford Junior University | Systems and methods for intraoperative targetting |
| US20050096502A1 (en) | 2003-10-29 | 2005-05-05 | Khalili Theodore M. | Robotic surgical device |
| US7147650B2 (en) * | 2003-10-30 | 2006-12-12 | Woojin Lee | Surgical instrument |
| US20050165272A1 (en) * | 2003-12-01 | 2005-07-28 | Yuta Okada | Endoscope system |
| US7052489B2 (en) * | 2003-12-05 | 2006-05-30 | Scimed Life Systems, Inc. | Medical device with deflecting shaft and related methods of manufacture and use |
| US7481793B2 (en) | 2003-12-10 | 2009-01-27 | Boston Scientic Scimed, Inc. | Modular steerable sheath catheters |
| JP4504696B2 (ja) * | 2004-02-03 | 2010-07-14 | オリンパス株式会社 | 内視鏡用処置具及び内視鏡並びに内視鏡処置システム |
| JP4481029B2 (ja) * | 2004-02-06 | 2010-06-16 | オリンパス株式会社 | 内視鏡用処置具 |
| US7774044B2 (en) | 2004-02-17 | 2010-08-10 | Siemens Medical Solutions Usa, Inc. | System and method for augmented reality navigation in a medical intervention procedure |
| US8046049B2 (en) * | 2004-02-23 | 2011-10-25 | Biosense Webster, Inc. | Robotically guided catheter |
| JP2005237659A (ja) * | 2004-02-26 | 2005-09-08 | Olympus Corp | 内視鏡処置システム |
| JP3806934B2 (ja) * | 2004-03-01 | 2006-08-09 | フジノン株式会社 | 内視鏡システム |
| US6932824B1 (en) * | 2004-03-02 | 2005-08-23 | St. Jude Medical Puerto Rico B.V. | Three-needle closure device |
| US8052636B2 (en) * | 2004-03-05 | 2011-11-08 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US8021326B2 (en) * | 2004-03-05 | 2011-09-20 | Hansen Medical, Inc. | Instrument driver for robotic catheter system |
| US20060100610A1 (en) * | 2004-03-05 | 2006-05-11 | Wallace Daniel T | Methods using a robotic catheter system |
| US10251532B2 (en) * | 2004-03-20 | 2019-04-09 | Karl Storz Imaging, Inc. | Method and system for using a variable direction of view endoscope with a robotic endoscope holder |
| WO2005094665A2 (en) * | 2004-03-23 | 2005-10-13 | Boston Scientific Limited | In-vivo visualization system |
| EP1584300A3 (en) * | 2004-03-30 | 2006-07-05 | Kabushiki Kaisha Toshiba | Manipulator apparatus |
| JP4473027B2 (ja) * | 2004-03-31 | 2010-06-02 | 富士フイルム株式会社 | 内視鏡 |
| JP3922284B2 (ja) * | 2004-03-31 | 2007-05-30 | 有限会社エスアールジェイ | 保持装置 |
| JP4652713B2 (ja) * | 2004-04-02 | 2011-03-16 | オリンパス株式会社 | 内視鏡治療装置 |
| JP2005296412A (ja) * | 2004-04-13 | 2005-10-27 | Olympus Corp | 内視鏡治療装置 |
| US8992420B2 (en) | 2004-04-14 | 2015-03-31 | Usgi Medical, Inc. | Methods and apparatus for off-axis visualization |
| US8512229B2 (en) | 2004-04-14 | 2013-08-20 | Usgi Medical Inc. | Method and apparatus for obtaining endoluminal access |
| US20050272977A1 (en) * | 2004-04-14 | 2005-12-08 | Usgi Medical Inc. | Methods and apparatus for performing endoluminal procedures |
| US8277373B2 (en) * | 2004-04-14 | 2012-10-02 | Usgi Medical, Inc. | Methods and apparaus for off-axis visualization |
| US8562516B2 (en) * | 2004-04-14 | 2013-10-22 | Usgi Medical Inc. | Methods and apparatus for obtaining endoluminal access |
| US8444657B2 (en) | 2004-05-07 | 2013-05-21 | Usgi Medical, Inc. | Apparatus and methods for rapid deployment of tissue anchors |
| US20050251176A1 (en) | 2004-05-07 | 2005-11-10 | Usgi Medical Inc. | System for treating gastroesophageal reflux disease |
| US7837615B2 (en) | 2004-05-10 | 2010-11-23 | Usgi Medical, Inc. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| US8945116B2 (en) * | 2004-05-17 | 2015-02-03 | Boston Scientific Scimed, Inc. | Mapping and ablation method for the treatment of ventricular tachycardia |
| JP2005334237A (ja) * | 2004-05-26 | 2005-12-08 | Olympus Corp | 内視鏡装置 |
| US20050267359A1 (en) | 2004-05-27 | 2005-12-01 | General Electric Company | System, method, and article of manufacture for guiding an end effector to a target position within a person |
| US7678117B2 (en) * | 2004-06-07 | 2010-03-16 | Novare Surgical Systems, Inc. | Articulating mechanism with flex-hinged links |
| US7828808B2 (en) * | 2004-06-07 | 2010-11-09 | Novare Surgical Systems, Inc. | Link systems and articulation mechanisms for remote manipulation of surgical or diagnostic tools |
| US7931661B2 (en) * | 2004-06-14 | 2011-04-26 | Usgi Medical, Inc. | Apparatus and methods for performing transluminal gastrointestinal procedures |
| JP4767252B2 (ja) * | 2004-06-14 | 2011-09-07 | ヌームアールエックス・インコーポレーテッド | 肺のアクセス装置 |
| WO2006009688A2 (en) * | 2004-06-16 | 2006-01-26 | Pneumrx, Inc. | Intra-bronchial lung volume reduction system |
| CA2747236C (en) * | 2004-06-25 | 2013-08-20 | 059312 N.B. Inc. | Shape-acceleration measurement device and method |
| US7772541B2 (en) | 2004-07-16 | 2010-08-10 | Luna Innnovations Incorporated | Fiber optic position and/or shape sensing based on rayleigh scatter |
| US7781724B2 (en) | 2004-07-16 | 2010-08-24 | Luna Innovations Incorporated | Fiber optic position and shape sensing device and method relating thereto |
| US20060013523A1 (en) | 2004-07-16 | 2006-01-19 | Luna Innovations Incorporated | Fiber optic position and shape sensing device and method relating thereto |
| US7979157B2 (en) | 2004-07-23 | 2011-07-12 | Mcmaster University | Multi-purpose robotic operating system and method |
| US7811228B2 (en) * | 2004-07-26 | 2010-10-12 | Medtronic Xomed, Inc. | Disposable endoscope sheath having adjustable length |
| US8075476B2 (en) * | 2004-07-27 | 2011-12-13 | Intuitive Surgical Operations, Inc. | Cannula system and method of use |
| US8182491B2 (en) * | 2004-08-06 | 2012-05-22 | Depuy Spine, Inc. | Rigidly guided implant placement |
| US8016835B2 (en) | 2004-08-06 | 2011-09-13 | Depuy Spine, Inc. | Rigidly guided implant placement with control assist |
| US20060036267A1 (en) * | 2004-08-11 | 2006-02-16 | Usgi Medical Inc. | Methods and apparatus for performing malabsorptive bypass procedures within a patient's gastro-intestinal lumen |
| US7335159B2 (en) * | 2004-08-26 | 2008-02-26 | Scimed Life Systems, Inc. | Endoscope having auto-insufflation and exsufflation |
| JPWO2006028019A1 (ja) | 2004-09-07 | 2008-05-08 | オリンパス株式会社 | 内視鏡 |
| IL164260A0 (en) * | 2004-09-23 | 2005-12-18 | Medigus Ltd | An improved articulation section |
| US20060069312A1 (en) * | 2004-09-30 | 2006-03-30 | Scimed Life Systems, Inc. | System for retaining optical clarity in a medical imaging system |
| US9261172B2 (en) | 2004-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Multi-ply strap drive trains for surgical robotic arms |
| US7479106B2 (en) * | 2004-09-30 | 2009-01-20 | Boston Scientific Scimed, Inc. | Automated control of irrigation and aspiration in a single-use endoscope |
| US7597662B2 (en) * | 2004-09-30 | 2009-10-06 | Boston Scientific Scimed, Inc. | Multi-fluid delivery system |
| US7670281B2 (en) * | 2004-10-07 | 2010-03-02 | Kronner Richard F | Instrument support apparatus |
| US7621869B2 (en) * | 2005-05-06 | 2009-11-24 | Nitesh Ratnakar | Next generation colonoscope |
| US8585584B2 (en) * | 2004-10-11 | 2013-11-19 | Nitesh Ratnakar | Dual view endoscope |
| US20080275298A1 (en) * | 2004-10-11 | 2008-11-06 | Novation Science, Llc | Dual View Endoscope |
| JP4287354B2 (ja) * | 2004-10-25 | 2009-07-01 | 株式会社日立製作所 | 手術器具 |
| WO2006086021A2 (en) | 2004-10-25 | 2006-08-17 | University Of Dayton | Method and system to provide improved accuracies in multi-jointed robots through kinematic robot model parameters determination |
| DE102004052036A1 (de) | 2004-10-26 | 2006-04-27 | Stm Medizintechnik Starnberg Gmbh | Endoskop mit alternierendem Vortrieb |
| DE102004054866B3 (de) * | 2004-11-12 | 2006-08-03 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Vorrichtung zum Anschließen von konventionellen oder laparoskopischen Instrumenten an einen Roboter |
| US20060106288A1 (en) * | 2004-11-17 | 2006-05-18 | Roth Alex T | Remote tissue retraction device |
| US9700334B2 (en) * | 2004-11-23 | 2017-07-11 | Intuitive Surgical Operations, Inc. | Articulating mechanisms and link systems with torque transmission in remote manipulation of instruments and tools |
| US7785252B2 (en) * | 2004-11-23 | 2010-08-31 | Novare Surgical Systems, Inc. | Articulating sheath for flexible instruments |
| JP4588432B2 (ja) | 2004-12-15 | 2010-12-01 | 富士重工業株式会社 | 損傷探知用モジュール化センサの製造方法 |
| US8289381B2 (en) * | 2005-01-05 | 2012-10-16 | Avantis Medical Systems, Inc. | Endoscope with an imaging catheter assembly and method of configuring an endoscope |
| US8235887B2 (en) * | 2006-01-23 | 2012-08-07 | Avantis Medical Systems, Inc. | Endoscope assembly with retroscope |
| US8197399B2 (en) * | 2006-05-19 | 2012-06-12 | Avantis Medical Systems, Inc. | System and method for producing and improving images |
| JP4528136B2 (ja) * | 2005-01-11 | 2010-08-18 | 株式会社日立製作所 | 手術装置 |
| US7222000B2 (en) | 2005-01-18 | 2007-05-22 | Intouch Technologies, Inc. | Mobile videoconferencing platform with automatic shut-off features |
| US7763015B2 (en) | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| US20060178562A1 (en) | 2005-02-10 | 2006-08-10 | Usgi Medical Inc. | Apparatus and methods for obtaining endoluminal access with a steerable guide having a variable pivot |
| CA2826925C (en) | 2005-02-22 | 2017-01-24 | Mako Surgical Corp. | Haptic guidance system and method |
| US8182433B2 (en) | 2005-03-04 | 2012-05-22 | Endosense Sa | Medical apparatus system having optical fiber load sensing capability |
| US8075498B2 (en) | 2005-03-04 | 2011-12-13 | Endosense Sa | Medical apparatus system having optical fiber load sensing capability |
| US7752920B2 (en) | 2005-12-30 | 2010-07-13 | Intuitive Surgical Operations, Inc. | Modular force sensor |
| US20060235458A1 (en) * | 2005-04-15 | 2006-10-19 | Amir Belson | Instruments having an external working channel |
| US8414475B2 (en) * | 2005-04-18 | 2013-04-09 | M.S.T. Medical Surgery Technologies Ltd | Camera holder device and method thereof |
| CN101193600B (zh) * | 2005-04-29 | 2010-09-08 | 博维医药公司 | 实施内窥镜或关节镜手术的钳子 |
| US8108072B2 (en) | 2007-09-30 | 2012-01-31 | Intuitive Surgical Operations, Inc. | Methods and systems for robotic instrument tool tracking with adaptive fusion of kinematics information and image information |
| US9789608B2 (en) | 2006-06-29 | 2017-10-17 | Intuitive Surgical Operations, Inc. | Synthetic representation of a surgical robot |
| US8971597B2 (en) | 2005-05-16 | 2015-03-03 | Intuitive Surgical Operations, Inc. | Efficient vision and kinematic data fusion for robotic surgical instruments and other applications |
| WO2006123397A1 (ja) | 2005-05-16 | 2006-11-23 | Olympus Medical Systems Corp. | 内視鏡システム、内視鏡システムの制御プログラム、内視鏡システムの制御方法 |
| US10555775B2 (en) | 2005-05-16 | 2020-02-11 | Intuitive Surgical Operations, Inc. | Methods and system for performing 3-D tool tracking by fusion of sensor and/or camera derived data during minimally invasive robotic surgery |
| US8073528B2 (en) | 2007-09-30 | 2011-12-06 | Intuitive Surgical Operations, Inc. | Tool tracking systems, methods and computer products for image guided surgery |
| US9492240B2 (en) | 2009-06-16 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Virtual measurement tool for minimally invasive surgery |
| JP2006321027A (ja) | 2005-05-20 | 2006-11-30 | Hitachi Ltd | マスタ・スレーブ式マニピュレータシステム及びその操作入力装置 |
| AU2006255303B2 (en) | 2005-06-03 | 2011-12-15 | Covidien Lp | Battery powered surgical instrument |
| US8398541B2 (en) | 2006-06-06 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Interactive user interfaces for robotic minimally invasive surgical systems |
| KR101258912B1 (ko) | 2005-06-06 | 2013-04-30 | 인튜어티브 서지컬 인코포레이티드 | 복강경의 초음파 로보트 수술 시스템 |
| US20060287666A1 (en) | 2005-06-15 | 2006-12-21 | Usgi Medical Inc. | Apparatus and methods for endoluminal advancement |
| US20070005002A1 (en) | 2005-06-30 | 2007-01-04 | Intuitive Surgical Inc. | Robotic surgical instruments for irrigation, aspiration, and blowing |
| JP2007029232A (ja) | 2005-07-25 | 2007-02-08 | Hitachi Medical Corp | 内視鏡手術操作支援システム |
| US8160743B2 (en) * | 2005-08-16 | 2012-04-17 | Brainlab Ag | Anthropomorphic medical robot arm with movement restrictions |
| US20070055124A1 (en) * | 2005-09-01 | 2007-03-08 | Viswanathan Raju R | Method and system for optimizing left-heart lead placement |
| WO2007033379A2 (en) | 2005-09-14 | 2007-03-22 | Neoguide Systems, Inc. | Methods and apparatus for performing transluminal and other procedures |
| US20070072466A1 (en) * | 2005-09-27 | 2007-03-29 | Manabu Miyamoto | Instrument for endoscope |
| JP4728075B2 (ja) | 2005-09-28 | 2011-07-20 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| US7722631B2 (en) * | 2005-09-28 | 2010-05-25 | Olympus Medical Systems Corporation | Method for suturing perforation |
| EP3524202A1 (en) | 2005-10-20 | 2019-08-14 | Intuitive Surgical Operations Inc. | Auxiliary image display and manipulation on a computer display in a medical robotic system |
| EP1943938B9 (en) | 2005-11-04 | 2016-09-21 | Olympus Corporation | Endoscope system |
| EP1955239A4 (en) * | 2005-11-08 | 2011-06-22 | Univ Boston | MANIPULATORS EMPLOYING MULTIPLE DEFORMABLE ELONGABLE ELEMENTS |
| EP1973595B1 (en) * | 2005-11-15 | 2018-10-31 | The Johns Hopkins University | An active cannula for bio-sensing and surgical intervention |
| US20070135683A1 (en) | 2005-12-09 | 2007-06-14 | Konstantin Bob | Alternating propulsion type endoscope and continuous drive type endoscope |
| US8190238B2 (en) | 2005-12-09 | 2012-05-29 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US7689320B2 (en) | 2005-12-20 | 2010-03-30 | Intuitive Surgical Operations, Inc. | Robotic surgical system with joint motion controller adapted to reduce instrument tip vibrations |
| US8672922B2 (en) | 2005-12-20 | 2014-03-18 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| US8182470B2 (en) | 2005-12-20 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Telescoping insertion axis of a robotic surgical system |
| US7819859B2 (en) | 2005-12-20 | 2010-10-26 | Intuitive Surgical Operations, Inc. | Control system for reducing internally generated frictional and inertial resistance to manual positioning of a surgical manipulator |
| US9266239B2 (en) | 2005-12-27 | 2016-02-23 | Intuitive Surgical Operations, Inc. | Constraint based control in a minimally invasive surgical apparatus |
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| EP1965717B1 (en) | 2005-12-30 | 2012-05-16 | Intuitive Surgical Operations, Inc. | Surgical instrument with modular force sensor |
| US9962066B2 (en) | 2005-12-30 | 2018-05-08 | Intuitive Surgical Operations, Inc. | Methods and apparatus to shape flexible entry guides for minimally invasive surgery |
| US8617054B2 (en) * | 2006-01-13 | 2013-12-31 | Olympus Medical Systems Corp. | Medical treatment endoscope |
| US8241279B2 (en) * | 2006-02-23 | 2012-08-14 | Olympus Medical Systems Corp. | Overtube and natural opening medical procedures using the same |
| US8092371B2 (en) * | 2006-01-13 | 2012-01-10 | Olympus Medical Systems Corp. | Medical treatment endoscope |
| US20110295295A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument having recording capabilities |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| EP1815949A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Medical robotic system with manipulator arm of the cylindrical coordinate type |
| EP1815950A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| US20070265503A1 (en) | 2006-03-22 | 2007-11-15 | Hansen Medical, Inc. | Fiber optic instrument sensing system |
| US8167823B2 (en) | 2009-03-24 | 2012-05-01 | Biomet Manufacturing Corp. | Method and apparatus for aligning and securing an implant relative to a patient |
| ITMI20060443A1 (it) | 2006-03-13 | 2007-09-14 | Ethicon Endo Surgery Inc | Dispositivo per la manipolazione di tessuto corporeo |
| US7918783B2 (en) | 2006-03-22 | 2011-04-05 | Boston Scientific Scimed, Inc. | Endoscope working channel with multiple functionality |
| US8236010B2 (en) * | 2006-03-23 | 2012-08-07 | Ethicon Endo-Surgery, Inc. | Surgical fastener and cutter with mimicking end effector |
| US7998167B2 (en) * | 2006-04-14 | 2011-08-16 | Ethicon Endo-Surgery, Inc. | End effector and method of manufacture |
| US7955255B2 (en) * | 2006-04-20 | 2011-06-07 | Boston Scientific Scimed, Inc. | Imaging assembly with transparent distal cap |
| EP2012650B1 (en) * | 2006-04-24 | 2016-07-27 | TransEnterix Surgical, Inc. | Natural orifice surgical system |
| US8518024B2 (en) * | 2006-04-24 | 2013-08-27 | Transenterix, Inc. | System and method for multi-instrument surgical access using a single access port |
| US8924021B2 (en) | 2006-04-27 | 2014-12-30 | Honda Motor Co., Ltd. | Control of robots from human motion descriptors |
| DE602007007610D1 (de) | 2006-05-17 | 2010-08-19 | Hansen Medical Inc | Roboterinstrumentensystem |
| US8568299B2 (en) | 2006-05-19 | 2013-10-29 | Intuitive Surgical Operations, Inc. | Methods and apparatus for displaying three-dimensional orientation of a steerable distal tip of an endoscope |
| US10028789B2 (en) | 2006-05-19 | 2018-07-24 | Mako Surgical Corp. | Method and apparatus for controlling a haptic device |
| US7530984B2 (en) * | 2006-06-05 | 2009-05-12 | Medigus Ltd. | Transgastric method for carrying out a partial fundoplication |
| US8029516B2 (en) | 2006-06-13 | 2011-10-04 | Intuitive Surgical Operations, Inc. | Bracing of bundled medical devices for single port entry, robotically assisted medical procedures |
| US8597280B2 (en) * | 2006-06-13 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Surgical instrument actuator |
| US8419717B2 (en) | 2006-06-13 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Control system configured to compensate for non-ideal actuator-to-joint linkage characteristics in a medical robotic system |
| US8517933B2 (en) | 2006-06-13 | 2013-08-27 | Intuitive Surgical Operations, Inc. | Retraction of tissue for single port entry, robotically assisted medical procedures |
| US8551076B2 (en) | 2006-06-13 | 2013-10-08 | Intuitive Surgical Operations, Inc. | Retrograde instrument |
| US8377045B2 (en) | 2006-06-13 | 2013-02-19 | Intuitive Surgical Operations, Inc. | Extendable suction surface for bracing medial devices during robotically assisted medical procedures |
| KR101477125B1 (ko) | 2006-06-13 | 2014-12-29 | 인튜어티브 서지컬 인코포레이티드 | 미소절개 수술 시스템 |
| US10008017B2 (en) | 2006-06-29 | 2018-06-26 | Intuitive Surgical Operations, Inc. | Rendering tool information as graphic overlays on displayed images of tools |
| US10258425B2 (en) | 2008-06-27 | 2019-04-16 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view of articulatable instruments extending out of a distal end of an entry guide |
| US9718190B2 (en) | 2006-06-29 | 2017-08-01 | Intuitive Surgical Operations, Inc. | Tool position and identification indicator displayed in a boundary area of a computer display screen |
| US20090192523A1 (en) | 2006-06-29 | 2009-07-30 | Intuitive Surgical, Inc. | Synthetic representation of a surgical instrument |
| US8192422B2 (en) | 2006-08-14 | 2012-06-05 | Medrobotics Corporation | Steerable multi linked device having multiple working ports |
| JP2010502313A (ja) | 2006-09-01 | 2010-01-28 | ボエッジ メディカル, インコーポレイテッド | 心房細動の治療のための方法および装置 |
| DE102006046689A1 (de) | 2006-09-29 | 2008-04-10 | Siemens Ag | Medizintechnisches Behandlungssystem |
| EP2079564B1 (en) | 2006-10-24 | 2013-04-24 | Carnegie Mellon University | Steerable multi-linked device having a modular link assembly |
| US7831096B2 (en) | 2006-11-17 | 2010-11-09 | General Electric Company | Medical navigation system with tool and/or implant integration into fluoroscopic image projections and method of use |
| US9456877B2 (en) * | 2006-12-01 | 2016-10-04 | Boston Scientific Scimed, Inc. | Direct drive instruments and methods of use |
| US8814779B2 (en) | 2006-12-21 | 2014-08-26 | Intuitive Surgical Operations, Inc. | Stereoscopic endoscope |
| DE102006061178A1 (de) | 2006-12-22 | 2008-06-26 | Siemens Ag | System zur Durchführung und Überwachung minimal-invasiver Eingriffe |
| US7918785B2 (en) | 2007-01-17 | 2011-04-05 | Olympus Medical Systems Corp. | Medical apparatus, treatment instrument for endoscope and endoscope apparatus |
| WO2008103383A1 (en) | 2007-02-20 | 2008-08-28 | Gildenberg Philip L | Videotactic and audiotactic assisted surgical methods and procedures |
| JP4891823B2 (ja) | 2007-03-29 | 2012-03-07 | オリンパスメディカルシステムズ株式会社 | 内視鏡装置 |
| CA2682854A1 (en) | 2007-04-02 | 2008-10-09 | Wilson-Cook Medical, Inc. | Endoscopic apparatus having an outer rail |
| JP5543331B2 (ja) | 2007-04-16 | 2014-07-09 | ニューロアーム サージカル リミテッド | マニピュレータのツールの一軸に沿った移動を非機械的に制限および/またはプログラミングする方法、装置、およびシステム |
| CA2684475C (en) | 2007-04-16 | 2016-01-12 | Neuroarm Surgical Ltd. | Frame mapping and force feedback methods, devices and systems |
| JP2010524547A (ja) | 2007-04-16 | 2010-07-22 | ニューロアーム サージカル リミテッド | 医療用ロボットに関する自動化された動作のための方法、装置、及びシステム |
| US20080262300A1 (en) | 2007-04-20 | 2008-10-23 | Usgi Medical, Inc. | Endoscopic system with disposable sheath |
| US20100256446A1 (en) | 2007-05-11 | 2010-10-07 | Board Of Regents, The University Of Texas System | Medical scope carrier and scope as system and method |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US8620473B2 (en) | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US9469034B2 (en) | 2007-06-13 | 2016-10-18 | Intuitive Surgical Operations, Inc. | Method and system for switching modes of a robotic system |
| US9089256B2 (en) | 2008-06-27 | 2015-07-28 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view including range of motion limitations for articulatable instruments extending out of a distal end of an entry guide |
| US8852208B2 (en) | 2010-05-14 | 2014-10-07 | Intuitive Surgical Operations, Inc. | Surgical system instrument mounting |
| US9138129B2 (en) | 2007-06-13 | 2015-09-22 | Intuitive Surgical Operations, Inc. | Method and system for moving a plurality of articulated instruments in tandem back towards an entry guide |
| US9084623B2 (en) | 2009-08-15 | 2015-07-21 | Intuitive Surgical Operations, Inc. | Controller assisted reconfiguration of an articulated instrument during movement into and out of an entry guide |
| US8903546B2 (en) | 2009-08-15 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Smooth control of an articulated instrument across areas with different work space conditions |
| US8264777B2 (en) | 2007-06-26 | 2012-09-11 | Qd Vision, Inc. | Portable electronic device having an electro wetting display illuminated by quantum dots |
| JP2009006410A (ja) | 2007-06-26 | 2009-01-15 | Fuji Electric Systems Co Ltd | 遠隔操作支援装置および遠隔操作支援プログラム |
| JP2009012106A (ja) | 2007-07-03 | 2009-01-22 | Fuji Electric Systems Co Ltd | 遠隔操作支援装置および遠隔操作支援プログラム |
| US20090054728A1 (en) | 2007-08-21 | 2009-02-26 | Trusty Robert M | Manipulatable guide system and methods for natural orifice translumenal endoscopic surgery |
| US8663096B2 (en) | 2007-11-13 | 2014-03-04 | Covidien Lp | System and method for rigidizing flexible medical implements |
| US9066655B2 (en) | 2007-12-07 | 2015-06-30 | Ethicon Endo-Surgery, Inc. | Selective stiffening devices and methods |
| US9037295B2 (en) | 2008-03-07 | 2015-05-19 | Perception Raisonnement Action En Medecine | Dynamic physical constraint for hard surface emulation |
| US8155479B2 (en) | 2008-03-28 | 2012-04-10 | Intuitive Surgical Operations Inc. | Automated panning and digital zooming for robotic surgical systems |
| US8808164B2 (en) | 2008-03-28 | 2014-08-19 | Intuitive Surgical Operations, Inc. | Controlling a robotic surgical tool with a display monitor |
| US8333755B2 (en) | 2008-03-31 | 2012-12-18 | Intuitive Surgical Operations, Inc. | Coupler to transfer controller motion from a robotic manipulator to an attached instrument |
| US9055864B2 (en) | 2008-04-02 | 2015-06-16 | Usgi Medical, Inc. | Endoscopic system with torque transmitting sheath |
| US20090259105A1 (en) | 2008-04-10 | 2009-10-15 | Miyano Hiromichi | Medical treatment system and suturing method |
| WO2009146171A1 (en) | 2008-04-14 | 2009-12-03 | Carnegie Mellon University | Articulated device with visualization system |
| US8315738B2 (en) | 2008-05-21 | 2012-11-20 | Fanuc Robotics America, Inc. | Multi-arm robot system interference check via three dimensional automatic zones |
| ES2658968T3 (es) | 2008-06-05 | 2018-03-13 | Carnegie Mellon University | Dispositivo de sonda articulado extensible |
| US8220765B2 (en) | 2008-06-23 | 2012-07-17 | Intuitive Surgical Operations, Inc. | Spring counterbalance for rotating load |
| US8414469B2 (en) | 2008-06-27 | 2013-04-09 | Intuitive Surgical Operations, Inc. | Medical robotic system having entry guide controller with instrument tip velocity limiting |
| US8864652B2 (en) | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| US9179832B2 (en) | 2008-06-27 | 2015-11-10 | Intuitive Surgical Operations, Inc. | Medical robotic system with image referenced camera control using partitionable orientational and translational modes |
| US8490953B2 (en) | 2008-06-30 | 2013-07-23 | Intuitive Surgical Operations, Inc. | Spring counterbalance with failure detection |
| JP2012501792A (ja) | 2008-09-12 | 2012-01-26 | アキュレイ インコーポレイテッド | ターゲットの動きに基づくx線像形成の制御 |
| US8315720B2 (en) | 2008-09-26 | 2012-11-20 | Intuitive Surgical Operations, Inc. | Method for graphically providing continuous change of state directions to a user of a medical robotic system |
| US8126642B2 (en) | 2008-10-24 | 2012-02-28 | Gray & Company, Inc. | Control and systems for autonomously driven vehicles |
| US8720448B2 (en) | 2008-11-07 | 2014-05-13 | Hansen Medical, Inc. | Sterile interface apparatus |
| US20100331856A1 (en) | 2008-12-12 | 2010-12-30 | Hansen Medical Inc. | Multiple flexible and steerable elongate instruments for minimally invasive operations |
| ATE508401T1 (de) | 2008-12-17 | 2011-05-15 | Kuka Lab Gmbh | Verfahren zum abfahren einer vorgegebenen bahn durch einen manipulator, sowie steuervorrichtung zur durchführung eines solchen verfahrens |
| US8335590B2 (en) | 2008-12-23 | 2012-12-18 | Intuitive Surgical Operations, Inc. | System and method for adjusting an image capturing device attribute using an unused degree-of-freedom of a master control device |
| US8306656B1 (en) | 2009-01-12 | 2012-11-06 | Titan Medical Inc. | Method and system for performing medical procedure |
| US8120301B2 (en) | 2009-03-09 | 2012-02-21 | Intuitive Surgical Operations, Inc. | Ergonomic surgeon control console in robotic surgical systems |
| US8423182B2 (en) | 2009-03-09 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Adaptable integrated energy control system for electrosurgical tools in robotic surgical systems |
| US8337397B2 (en) | 2009-03-26 | 2012-12-25 | Intuitive Surgical Operations, Inc. | Method and system for providing visual guidance to an operator for steering a tip of an endoscopic device toward one or more landmarks in a patient |
| US8918212B2 (en) | 2009-06-24 | 2014-12-23 | Intuitive Surgical Operations, Inc. | Arm with a combined shape and force sensor |
| US9492927B2 (en) | 2009-08-15 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Application of force feedback on an input device to urge its operator to command an articulated instrument to a preferred pose |
| US8918211B2 (en) | 2010-02-12 | 2014-12-23 | Intuitive Surgical Operations, Inc. | Medical robotic system providing sensory feedback indicating a difference between a commanded state and a preferred pose of an articulated instrument |
| US8244402B2 (en) | 2009-09-22 | 2012-08-14 | GM Global Technology Operations LLC | Visual perception system and method for a humanoid robot |
| US8504134B2 (en) | 2009-10-01 | 2013-08-06 | Intuitive Surgical Operations, Inc. | Laterally fenestrated cannula |
| US8887595B2 (en) | 2009-12-22 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Instrument wrist with cycloidal surfaces |
| US9339341B2 (en) | 2010-02-08 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Direct pull surgical gripper |
| CN102711586B (zh) | 2010-02-11 | 2015-06-17 | 直观外科手术操作公司 | 在机器人内窥镜的远侧尖端自动维持操作者选择的滚动取向的方法和系统 |
| US10376331B2 (en) | 2010-02-12 | 2019-08-13 | Intuitive Surgical Operations, Inc. | Sheaths for jointed instruments |
| US9877744B2 (en) | 2010-02-12 | 2018-01-30 | Intuitive Surgical Operations, Inc. | Entry guide for multiple instruments in a single port surgical system |
| US8493608B2 (en) * | 2010-03-25 | 2013-07-23 | Kyocera Document Solutions Inc. | Image forming apparatus capable of managing job history, computer-readable recording medium storing job history management program code, and job history management method in the image forming apparatus |
| US8603077B2 (en) | 2010-05-14 | 2013-12-10 | Intuitive Surgical Operations, Inc. | Force transmission for robotic surgical instrument |
| US8661927B2 (en) | 2010-05-14 | 2014-03-04 | Intuitive Surgical Operations, Inc. | Cable re-ordering device |
| US8991278B2 (en) | 2010-05-14 | 2015-03-31 | Intuitive Surgical Operations, Inc. | Overforce protection mechanism |
| CN103068348B (zh) | 2010-08-02 | 2015-07-15 | 约翰霍普金斯大学 | 使用协作机器人控制和音频反馈呈现力传感器信息的方法 |
| KR20140029487A (ko) * | 2011-05-12 | 2014-03-10 | 임페리얼 이노베이션스 리미티드 | 수술 장치 |
| KR101800189B1 (ko) | 2012-04-30 | 2017-11-23 | 삼성전자주식회사 | 수술 로봇의 힘 제어 장치 및 방법 |
| CN104736085B (zh) | 2012-10-12 | 2018-01-30 | 直观外科手术操作公司 | 确定医疗器械在分支解剖结构中的位置 |
| US10507066B2 (en) | 2013-02-15 | 2019-12-17 | Intuitive Surgical Operations, Inc. | Providing information of tools by filtering image areas adjacent to or on displayed images of the tools |
| US9407838B2 (en) | 2013-04-23 | 2016-08-02 | Cedars-Sinai Medical Center | Systems and methods for recording simultaneously visible light image and infrared light image from fluorophores |
| KR102195714B1 (ko) | 2013-05-02 | 2020-12-28 | 삼성전자주식회사 | 수술용 트로카 및 이를 이용한 영상 획득 방법 |
| CN105473098B (zh) | 2013-08-15 | 2019-03-26 | 直观外科手术操作公司 | 用于医疗程序确认的系统和方法 |
| CN105451802B (zh) | 2013-08-15 | 2019-04-19 | 直观外科手术操作公司 | 用于导管定位和插入的图形用户界面 |
| US20150223765A1 (en) | 2014-02-07 | 2015-08-13 | Intuitive Surgical Operations, Inc. | Systems and methods for using x-ray field emission to determine instrument position and orientation |
| WO2015142824A1 (en) | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Surgical drape and systems including surgical drape and attachment sensor |
| US10912523B2 (en) | 2014-03-24 | 2021-02-09 | Intuitive Surgical Operations, Inc. | Systems and methods for anatomic motion compensation |
| US11351000B2 (en) | 2014-07-28 | 2022-06-07 | Intuitive Surgical Operations, Inc. | Systems and methods for planning multiple interventional procedures |
| JP6703524B2 (ja) | 2014-08-25 | 2020-06-03 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 医療器具力検知のためのシステム及び方法 |
| CN112057169B (zh) | 2014-12-16 | 2024-09-06 | 直观外科手术操作公司 | 利用波段选择性成像的输尿管检测 |
| US11202680B2 (en) | 2015-08-14 | 2021-12-21 | Intuitive Surgical Operations, Inc. | Systems and methods of registration for image-guided surgery |
| CN108024693B (zh) | 2015-09-10 | 2021-07-09 | 直观外科手术操作公司 | 在图像引导医疗程序中利用跟踪的系统和方法 |
| US11013567B2 (en) | 2016-03-17 | 2021-05-25 | Intuitive Surgical Operations, Inc. | Systems and methods for instrument insertion control |
| US11266387B2 (en) | 2016-06-15 | 2022-03-08 | Intuitive Surgical Operations, Inc. | Systems and methods of integrated real-time visualization |
| WO2018064566A1 (en) | 2016-09-30 | 2018-04-05 | Intuitive Surgical Operations, Inc. | Systems and methods for entry point localization |
| EP3579736B1 (en) | 2017-02-09 | 2024-09-04 | Vicarious Surgical Inc. | Virtual reality surgical tools system |
| US11464411B2 (en) | 2017-03-13 | 2022-10-11 | Intuitive Surgical Operations, Inc. | Systems and methods for medical procedures using optical coherence tomography sensing |
| AU2018346790B2 (en) | 2017-10-05 | 2024-09-26 | Mobius Imaging, Llc | Methods and systems for performing computer assisted surgery |
| WO2019125581A1 (en) | 2017-12-19 | 2019-06-27 | Intuitive Surgical Operations, Inc. | Imaging systems and methods of use |
| US11069012B2 (en) | 2017-12-28 | 2021-07-20 | Cilag Gmbh International | Interactive surgical systems with condition handling of devices and data capabilities |
| US11298505B2 (en) | 2018-03-05 | 2022-04-12 | Intuitive Surgical Operations, Inc. | Deployable bellows for delivery of a flexible, elongate device and methods of use |
-
2007
- 2007-06-13 KR KR1020147001546A patent/KR101477125B1/ko active IP Right Grant
- 2007-06-13 US US11/762,170 patent/US20080065106A1/en not_active Abandoned
- 2007-06-13 CN CN200780030036.2A patent/CN101500470B/zh active Active
- 2007-06-13 US US11/762,202 patent/US9345387B2/en active Active
- 2007-06-13 US US11/762,149 patent/US20080065101A1/en not_active Abandoned
- 2007-06-13 CN CN201510084464.XA patent/CN104688282A/zh active Pending
- 2007-06-13 US US11/762,191 patent/US8182415B2/en active Active
- 2007-06-13 US US11/762,132 patent/US8083667B2/en active Active
- 2007-06-13 CN CN201510083711.4A patent/CN104720887B/zh active Active
- 2007-06-13 US US11/762,118 patent/US9549663B2/en active Active
- 2007-06-13 WO PCT/US2007/071085 patent/WO2007146987A2/en active Application Filing
- 2007-06-13 US US11/762,127 patent/US20080064921A1/en not_active Abandoned
- 2007-06-13 KR KR1020147001541A patent/KR101392206B1/ko active IP Right Grant
- 2007-06-13 US US11/762,154 patent/US7942868B2/en active Active
- 2007-06-13 US US11/762,114 patent/US20080064931A1/en not_active Abandoned
- 2007-06-13 US US11/762,158 patent/US7967813B2/en active Active
- 2007-06-13 EP EP07798487.0A patent/EP2037794B1/en active Active
- 2007-06-13 US US11/762,196 patent/US9949620B2/en active Active
- 2007-06-13 JP JP2009515625A patent/JP5324432B2/ja active Active
- 2007-06-13 CN CN201510084717.3A patent/CN104688349B/zh active Active
- 2007-06-13 US US11/762,165 patent/US9060678B2/en active Active
- 2007-06-13 KR KR1020097000564A patent/KR101396840B1/ko active IP Right Grant
- 2007-06-13 US US11/762,120 patent/US20080071288A1/en not_active Abandoned
- 2007-06-13 US US11/762,135 patent/US8057385B2/en active Active
- 2007-06-13 KR KR1020147001505A patent/KR101477121B1/ko active IP Right Grant
- 2007-06-13 KR KR1020147001516A patent/KR101494283B1/ko active IP Right Grant
- 2007-06-13 CN CN201510083961.8A patent/CN104688327B/zh active Active
- 2007-06-13 CN CN201510084080.8A patent/CN104688281B/zh active Active
- 2007-06-13 US US11/762,204 patent/US8062211B2/en active Active
- 2007-06-13 US US11/762,200 patent/US7725214B2/en active Active
- 2007-06-13 KR KR1020147001522A patent/KR101477738B1/ko active IP Right Grant
- 2007-06-13 US US11/762,189 patent/US8986196B2/en active Active
- 2007-06-13 US US11/762,123 patent/US20080064927A1/en not_active Abandoned
- 2007-06-13 KR KR1020147001547A patent/KR101477133B1/ko active IP Right Grant
- 2007-06-13 US US11/762,161 patent/US20080065104A1/en not_active Abandoned
- 2007-06-13 US US11/762,143 patent/US20080065100A1/en not_active Abandoned
- 2007-06-13 EP EP21201271.0A patent/EP4018910A1/en not_active Withdrawn
- 2007-06-13 US US11/762,110 patent/US20080065097A1/en not_active Abandoned
- 2007-06-13 CN CN201510084088.4A patent/CN104688328B/zh active Active
-
2010
- 2010-04-08 US US12/756,266 patent/US20100198232A1/en not_active Abandoned
-
2011
- 2011-05-18 US US13/110,194 patent/US8377046B2/en active Active
- 2011-09-29 US US13/248,930 patent/US8672833B2/en active Active
- 2011-10-27 US US13/282,785 patent/US9173547B2/en active Active
- 2011-12-09 US US13/316,060 patent/US9215967B2/en active Active
-
2012
- 2012-04-13 US US13/446,417 patent/US8740885B2/en active Active
- 2012-05-07 US US13/465,842 patent/US9801526B2/en active Active
- 2012-09-13 US US13/614,659 patent/US8679099B2/en active Active
-
2013
- 2013-01-30 US US13/754,541 patent/US9320416B2/en active Active
- 2013-03-29 JP JP2013072931A patent/JP6087697B2/ja active Active
- 2013-08-30 JP JP2013179520A patent/JP5839614B2/ja active Active
- 2013-08-30 JP JP2013179509A patent/JP5851460B2/ja active Active
- 2013-08-30 JP JP2013179559A patent/JP5839616B2/ja active Active
- 2013-08-30 JP JP2013179511A patent/JP5839612B2/ja active Active
- 2013-08-30 JP JP2013179515A patent/JP5839613B2/ja active Active
- 2013-08-30 JP JP2013179532A patent/JP2014057852A/ja active Pending
- 2013-08-30 JP JP2013179531A patent/JP5744130B2/ja active Active
- 2013-08-30 JP JP2013179563A patent/JP2014057854A/ja active Pending
- 2013-08-30 JP JP2013179507A patent/JP5851459B2/ja active Active
- 2013-08-30 JP JP2013179526A patent/JP5839615B2/ja active Active
-
2014
- 2014-02-05 US US14/173,681 patent/US9510734B2/en active Active
-
2015
- 2015-03-25 JP JP2015062360A patent/JP6189889B2/ja active Active
- 2015-05-19 US US14/716,695 patent/US9980630B2/en active Active
- 2015-11-17 US US14/943,216 patent/US10448813B2/en active Active
-
2018
- 2018-04-26 US US15/963,825 patent/US10398520B2/en active Active
-
2019
- 2019-07-03 US US16/503,197 patent/US11659978B2/en active Active
- 2019-07-22 US US16/518,846 patent/US11666204B2/en active Active
- 2019-09-11 US US16/567,276 patent/US11304769B2/en active Active
-
2021
- 2021-07-23 US US17/384,176 patent/US20210361369A1/en active Pending
- 2021-07-23 US US17/384,026 patent/US20210353377A1/en active Pending
- 2021-07-23 US US17/383,736 patent/US20210346108A1/en active Pending
-
2022
- 2022-04-04 US US17/712,370 patent/US20220218429A1/en active Pending
- 2022-12-14 US US18/066,146 patent/US20230117543A1/en active Pending
-
2023
- 2023-04-18 US US18/302,715 patent/US20230309793A1/en active Pending
- 2023-04-18 US US18/302,698 patent/US12089809B2/en active Active
- 2023-04-27 US US18/308,477 patent/US11957304B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020087166A1 (en) * | 1998-02-24 | 2002-07-04 | Brock David L. | Flexible instrument |
| WO2005087128A1 (en) * | 2004-03-05 | 2005-09-22 | Hansen Medical, Inc. | Robotic catheter system |
| US20060074406A1 (en) * | 2004-09-30 | 2006-04-06 | Intuitive Surgical, Inc. | Offset remote center manipulator for robotic surgery |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11957304B2 (en) | Minimally invasive surgical system | |
| US20160235486A1 (en) | Preventing instrument/tissue collisions |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20090108 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK RS |
|
| DAX | Request for extension of the european patent (deleted) | ||
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: INTUITIVE SURGICAL OPERATIONS, INC. |
|
| A4 | Supplementary search report drawn up and despatched |
Effective date: 20150130 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A61B 17/00 20060101ALI20150126BHEP Ipc: A61B 1/00 20060101AFI20150126BHEP Ipc: A61B 19/00 20060101ALI20150126BHEP |
|
| 17Q | First examination report despatched |
Effective date: 20160104 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: INTUITIVE SURGICAL OPERATIONS INC. |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: INTUITIVE SURGICAL OPERATIONS, INC. |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R079 Ref document number: 602007061345 Country of ref document: DE Free format text: PREVIOUS MAIN CLASS: A61B0001000000 Ipc: A61B0034300000 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A61B 34/30 20160101AFI20210422BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20210526 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602007061345 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1441140 Country of ref document: AT Kind code of ref document: T Effective date: 20211115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20211027 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1441140 Country of ref document: AT Kind code of ref document: T Effective date: 20211027 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220127 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220227 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220228 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220128 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602007061345 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20220728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20220630 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20220613 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220613 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220630 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220613 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220630 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220613 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220630 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230510 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20070613 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240627 Year of fee payment: 18 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211027 |