JP5028219B2 - マニピュレータ装置および医療機器システム - Google Patents
マニピュレータ装置および医療機器システム Download PDFInfo
- Publication number
- JP5028219B2 JP5028219B2 JP2007282144A JP2007282144A JP5028219B2 JP 5028219 B2 JP5028219 B2 JP 5028219B2 JP 2007282144 A JP2007282144 A JP 2007282144A JP 2007282144 A JP2007282144 A JP 2007282144A JP 5028219 B2 JP5028219 B2 JP 5028219B2
- Authority
- JP
- Japan
- Prior art keywords
- manipulator
- joint
- trajectory
- joints
- freedom
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000011282 treatment Methods 0.000 description 17
- 238000000034 method Methods 0.000 description 10
- 238000003384 imaging method Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000005286 illumination Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 230000008407 joint function Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000002192 cholecystectomy Methods 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1643—Programme controls characterised by the control loop redundant control
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00305—Constructional details of the flexible means
- A61B2017/00314—Separate linked members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
- A61B2034/306—Wrists with multiple vertebrae
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Robotics (AREA)
- Surgery (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
- Endoscopes (AREA)
Description
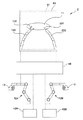
図1は、本発明の実施の形態にかかる医療機器システム2の概要を説明するための概要図である。図1において、表示手段である表示装置60の表示画面には、後述する内視鏡装置50の撮像手段であるCCD51が撮像した体内10の撮像画像61が表示されている。そして撮像画像61には、体内10の患部11の処置を行う2つの複数の関節を有するマニピュレータ100、200が表示されている。マニピュレータ100の先端部101にはハンドアームが配設されており、一方のマニピュレータ200の先端部201にはナイフアームが配設されている。
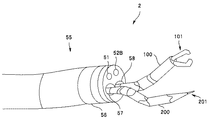
次に図3から図6を用いて本実施の形態のマニピュレータの構造を説明する。図3はマニピュレータ200の関節機能を説明するための図であり、図4はマニピュレータ200の外観斜視図であり、図5はマニピュレータ200の断面図であり、図6はマニピュレータ200の動作を説明するための断面図である。
次に図7を用い、本実施の形態の医療機器システム2の構成を説明する。図7は、本実施の形態の医療機器システム2の構成図である。なお、以下では、説明を簡単にするため、1つのマニピュレータ200を有する医療機器システム2について説明するが、複数のマニピュレータ装置1を有する医療機器システム2についても、それぞれのマニピュレータ装置1のための構成要素が追加されるだけであり、基本的な構成および動作は以下の説明と同様である。
次に、図8のフローチャートを用いてマニピュレータ装置1の動作について説明する。図8は、マニピュレータ装置1の動作の流れを説明するためのフローチャートである。
パラメータ入力手段44を用いて、各関節の関節パラメータを入力し、パラメータ記憶手段46に記憶する。関節パラメータの入力は予め入力しておけば毎回行う必要はない。
軌道入力手段42により、マニピュレータの先端を現在の位置および姿勢から目標の位置および姿勢に移動する軌道計画が入力される。
自由度選択手段43により、マニピュレータの自由度を制限する情報が入力される。本実施の形態のマニピュレータは、3次元空間の任意の位置において任意の姿勢が可能な6自由度を有している。
軌道設定手段45は、関節パラメータおよび軌道計画に基づき、それぞれの関節の関節角軌道を設定する。軌道設定手段45は、パラメータ記憶手段46に記憶されたそれぞれの関節の最大力量を基に、目標の位置および姿勢に移動可能な最少の駆動関節数の関節角軌道のうち、最大力量の関節角軌道を設定する。なお、最大力量の関節角軌道を設定するとは、必ずしも最大力量を発生することの可能な関節を選択し関節角軌道を設定することではなく、力量の大きい関節(大きな力を発生させることの可能な関節)を優先的に選択し、最大力量を発生するような関節角軌道を設定するということである。
駆動制御手段47は、軌道設定手段45が設定した関節角軌道に従い、各関節の駆動手段23の駆動を開始する。
各関節の駆動手段23の駆動が開始すると、各関節には負荷が発生する。特に、医療機器システム2のマニピュレータ装置1においては、処置する生体部位および個人差等により、その硬さや弾性等の物性値が大きく異なるために、処置を開始しないと関節にかかる負荷は予測が困難である。
軌道設定手段45は、現在使用している関節よりも負荷許容量の大きい駆動していない関節がある場合(Yes)には、ステップS18において、駆動する関節を変更する。そして、再度、関節角軌道を算出する。
軌道設定手段45は、全ての関節を駆動していなかった場合(Yes)には、駆動する関節数をステップS20において1だけ増加する。そして、再度、関節角軌道を算出する。
ステップS19において、軌道設定手段45は、全ての関節を駆動していた場合(No)には、入力された軌道に従いマニピュレータ先端部を目標の位置および姿勢に移動することは不可能であるため、警告手段70により警告を発生し、術者に知らせる。警告は、表示装置60への視覚による表示、音、振動等、公知の方法を用いることができる。
マニピュレータ装置1は、マニピュレータ先端部が目標の位置および姿勢に移動するまで駆動制御手段47は、軌道設定手段45が設定した関節角軌道に従い、各関節の駆動手段23を駆動し、ステップS23における処置終了信号があるまで、マニピュレータ装置1は動作を続ける。
Claims (5)
- 複数の関節を有するマニピュレータと、
前記複数の関節の、それぞれの関節の関節パラメータを記憶するパラメータ記憶手段と、
前記マニピュレータの先端を現在の位置および姿勢から目標の位置および姿勢に移動する軌道を軌道計画として入力する軌道入力手段と、
前記関節パラメータおよび前記軌道計画に基づき、前記それぞれの関節の関節角軌道を設定する軌道設定手段と、を有し、
前記軌道設定手段は、前記パラメータ記憶手段に記憶された前記それぞれの関節の最大力量を基に、前記目標の位置および姿勢に移動可能な最少の駆動関節数の関節角軌道のうち、前記最大力量の大きい関節が優先的に選択され、発生力量が最も大きい関節角軌道を設定することを特徴とするマニピュレータ装置。 - 前記それぞれの関節の負荷量を検出する負荷検出手段を有し、
前記軌道設定手段は、前記パラメータ記憶手段に記憶された前記それぞれの関節の負荷許容量を基に、前記それぞれの関節の前記負荷量が、負荷許容量を超えることのない関節角軌道を設定することを特徴とする請求項1に記載のマニピュレータ装置。 - 前記マニピュレータの自由度を制限する選択をする自由度選択手段を有し
前記軌道設定手段は、制限された自由度方向への前記軌道入力手段の入力をキャンセルすることを特徴とする請求項1または請求項2に記載のマニピュレータ装置。 - 体内で使用される請求項1から請求項3のいずれか1項に記載のマニピュレータ装置を有することを特徴とする医療機器システム。
- 前記マニピュレータが、内視鏡先端部から突出していることを特徴とする請求項4に記載の医療機器システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007282144A JP5028219B2 (ja) | 2007-10-30 | 2007-10-30 | マニピュレータ装置および医療機器システム |
| CN2008101749426A CN101422901B (zh) | 2007-10-30 | 2008-10-24 | 机械手装置和医疗设备系统 |
| EP08018811.3A EP2058090B1 (en) | 2007-10-30 | 2008-10-28 | Manipulator apparatus and medical device system |
| US12/260,437 US8388605B2 (en) | 2007-10-30 | 2008-10-29 | Manipulator apparatus and medical device system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007282144A JP5028219B2 (ja) | 2007-10-30 | 2007-10-30 | マニピュレータ装置および医療機器システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009107074A JP2009107074A (ja) | 2009-05-21 |
| JP2009107074A5 JP2009107074A5 (ja) | 2009-12-24 |
| JP5028219B2 true JP5028219B2 (ja) | 2012-09-19 |
Family
ID=40473663
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007282144A Active JP5028219B2 (ja) | 2007-10-30 | 2007-10-30 | マニピュレータ装置および医療機器システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8388605B2 (ja) |
| EP (1) | EP2058090B1 (ja) |
| JP (1) | JP5028219B2 (ja) |
| CN (1) | CN101422901B (ja) |
Families Citing this family (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5509673B2 (ja) * | 2009-05-22 | 2014-06-04 | 株式会社Ihi | ロボット制御装置およびその制御方法 |
| JP4875784B2 (ja) * | 2009-10-09 | 2012-02-15 | オリンパスメディカルシステムズ株式会社 | 医療装置 |
| CN102236336B (zh) * | 2010-04-26 | 2013-08-28 | 鸿富锦精密工业(深圳)有限公司 | 运动控制系统及方法 |
| US20130190774A1 (en) | 2010-08-11 | 2013-07-25 | Ecole Polytechnique Ferderale De Lausanne (Epfl) | Mechanical positioning system for surgical instruments |
| JP5612971B2 (ja) * | 2010-09-07 | 2014-10-22 | オリンパス株式会社 | マスタスレーブマニピュレータ |
| US10092359B2 (en) | 2010-10-11 | 2018-10-09 | Ecole Polytechnique Federale De Lausanne | Mechanical manipulator for surgical instruments |
| WO2012074564A1 (en) | 2010-12-02 | 2012-06-07 | Freehand Endoscopic Devices, Inc. | Surgical tool |
| US9119655B2 (en) | 2012-08-03 | 2015-09-01 | Stryker Corporation | Surgical manipulator capable of controlling a surgical instrument in multiple modes |
| US9921712B2 (en) | 2010-12-29 | 2018-03-20 | Mako Surgical Corp. | System and method for providing substantially stable control of a surgical tool |
| CN102528802B (zh) * | 2010-12-31 | 2014-12-03 | 北京中科广视科技有限公司 | 九自由度机器人的运动驱动方法 |
| JP5796982B2 (ja) * | 2011-03-31 | 2015-10-21 | オリンパス株式会社 | 手術用システムの制御装置及び制御方法 |
| JP5715304B2 (ja) | 2011-07-27 | 2015-05-07 | エコール ポリテクニーク フェデラル デ ローザンヌ (イーピーエフエル) | 遠隔操作のための機械的遠隔操作装置 |
| EP2768419B1 (en) * | 2011-10-21 | 2020-05-13 | Intuitive Surgical Operations, Inc. | Grip force control for robotic surgical instrument end effector |
| KR101289785B1 (ko) * | 2011-12-28 | 2013-07-26 | 한국과학기술원 | 로봇 머니퓰레이터의 관절 토크 변화량을 최소화하는 최적 궤적 생성시스템 및 그 방법 |
| JP5938954B2 (ja) * | 2012-03-06 | 2016-06-22 | 株式会社ジェイテクト | ロボットのキャリブレーション方法及びキャリブレーション装置 |
| JP6083076B2 (ja) * | 2012-04-04 | 2017-02-22 | 大平 猛 | モーションメモリ型細径手術ロボットシステム |
| US9226796B2 (en) | 2012-08-03 | 2016-01-05 | Stryker Corporation | Method for detecting a disturbance as an energy applicator of a surgical instrument traverses a cutting path |
| KR102603224B1 (ko) | 2012-08-03 | 2023-11-16 | 스트리커 코포레이션 | 로봇 수술을 위한 시스템 및 방법 |
| US9820818B2 (en) | 2012-08-03 | 2017-11-21 | Stryker Corporation | System and method for controlling a surgical manipulator based on implant parameters |
| WO2014199413A1 (ja) * | 2013-06-13 | 2014-12-18 | テルモ株式会社 | 医療用マニピュレータおよびその制御方法 |
| EP3096705A1 (en) * | 2014-01-24 | 2016-11-30 | Koninklijke Philips N.V. | Robotic control of imaging devices with optical shape sensing |
| CN106659540B (zh) | 2014-02-03 | 2019-03-05 | 迪斯塔莫申股份公司 | 包括能互换远端器械的机械遥控操作装置 |
| JP6270537B2 (ja) | 2014-02-27 | 2018-01-31 | オリンパス株式会社 | 医療用システム |
| CA2946595A1 (en) | 2014-05-05 | 2015-11-12 | Vicarious Surgical Inc. | Virtual reality surgical device |
| JP6169049B2 (ja) * | 2014-06-19 | 2017-07-26 | オリンパス株式会社 | マニピュレータの制御方法、マニピュレータ、およびマニピュレータシステム |
| EP3185808B1 (en) | 2014-08-27 | 2022-02-23 | DistalMotion SA | Surgical system for microsurgical techniques |
| JP6416560B2 (ja) | 2014-09-11 | 2018-10-31 | 株式会社デンソー | 位置決め制御装置 |
| CN107205787B (zh) | 2014-12-19 | 2020-03-20 | 迪斯透莫森公司 | 用于微创手术的可再用手术器械 |
| US11039820B2 (en) | 2014-12-19 | 2021-06-22 | Distalmotion Sa | Sterile interface for articulated surgical instruments |
| WO2016097873A2 (en) | 2014-12-19 | 2016-06-23 | Distalmotion Sa | Articulated handle for mechanical telemanipulator |
| US10864052B2 (en) | 2014-12-19 | 2020-12-15 | Distalmotion Sa | Surgical instrument with articulated end-effector |
| US10864049B2 (en) | 2014-12-19 | 2020-12-15 | Distalmotion Sa | Docking system for mechanical telemanipulator |
| US10888996B2 (en) * | 2015-04-03 | 2021-01-12 | Think Surgical, Inc. | Robotic system with intuitive motion control |
| WO2016162751A1 (en) | 2015-04-09 | 2016-10-13 | Distalmotion Sa | Articulated hand-held instrument |
| WO2016162752A1 (en) | 2015-04-09 | 2016-10-13 | Distalmotion Sa | Mechanical teleoperated device for remote manipulation |
| WO2016199228A1 (ja) * | 2015-06-09 | 2016-12-15 | オリンパス株式会社 | 医療用マニピュレータ制御装置 |
| DE102015009048B3 (de) * | 2015-07-13 | 2016-08-18 | Kuka Roboter Gmbh | Steuern eines nachgiebig geregelten Roboters |
| EP3340897B1 (en) | 2015-08-28 | 2024-10-09 | DistalMotion SA | Surgical instrument with increased actuation force |
| EP3328308B1 (en) * | 2016-09-27 | 2019-05-29 | Brainlab AG | Efficient positioning of a mechatronic arm |
| WO2018112025A1 (en) | 2016-12-16 | 2018-06-21 | Mako Surgical Corp. | Techniques for modifying tool operation in a surgical robotic system based on comparing actual and commanded states of the tool relative to a surgical site |
| CN106667534A (zh) * | 2017-01-07 | 2017-05-17 | 吕海 | 用于切除腰椎间盘突出的微创手术系统 |
| US11058503B2 (en) | 2017-05-11 | 2021-07-13 | Distalmotion Sa | Translational instrument interface for surgical robot and surgical robot systems comprising the same |
| CN111556734A (zh) * | 2018-01-04 | 2020-08-18 | 柯惠Lp公司 | 包括具有扭矩传递和机械操纵的高关节式运动腕组件的机器人手术器械 |
| JP7064190B2 (ja) * | 2018-01-23 | 2022-05-10 | 国立大学法人東海国立大学機構 | 手術用器具制御装置および手術用器具制御方法 |
| CA3089681A1 (en) | 2018-02-07 | 2019-08-15 | Distalmotion Sa | Surgical robot systems comprising robotic telemanipulators and integrated laparoscopy |
| CN109551478A (zh) * | 2018-11-16 | 2019-04-02 | 重庆邮电大学 | 一种基于集散控制系统的双机器人主从协调控制方法 |
| CN110251277B (zh) * | 2019-05-29 | 2022-02-08 | 广东工业大学 | 个性化髋臼假体的制作方法及全髋关节置换术的辅助方法 |
| US11771507B2 (en) * | 2019-08-21 | 2023-10-03 | Cilag Gmbh International | Articulable wrist with flexible member and pivot guides |
| CN111887906B (zh) * | 2019-09-10 | 2021-05-11 | 深圳市精锋医疗科技有限公司 | 手术机器人及其机械臂的控制方法、控制装置 |
| EP4401666A1 (en) | 2021-09-13 | 2024-07-24 | DistalMotion SA | Instruments for surgical robotic system and interfaces for the same |
| KR102616257B1 (ko) * | 2021-10-18 | 2023-12-22 | 주식회사 로엔서지컬 | 가요성 튜브의 히스테리시스 보상 제어장치 및 그 방법 |
| KR102685186B1 (ko) * | 2022-10-07 | 2024-07-18 | 주식회사 로엔서지컬 | 가요성 튜브의 히스테리시스 보상 제어장치 |
| US11844585B1 (en) | 2023-02-10 | 2023-12-19 | Distalmotion Sa | Surgical robotics systems and devices having a sterile restart, and methods thereof |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59175987A (ja) * | 1983-03-26 | 1984-10-05 | 株式会社東芝 | 多関節ロボツト装置 |
| JPS626306A (ja) * | 1985-07-03 | 1987-01-13 | Hitachi Ltd | 多関節ア−ムの制御方法 |
| JPS62232006A (ja) * | 1986-04-02 | 1987-10-12 | Yokogawa Electric Corp | ロボツト・システム |
| US4835710A (en) * | 1987-07-17 | 1989-05-30 | Cincinnati Milacron Inc. | Method of moving and orienting a tool along a curved path |
| JP2698660B2 (ja) * | 1989-06-12 | 1998-01-19 | 株式会社日立製作所 | マニピュレータの制御方法及び制御装置並びにマニピュレータ装置 |
| JP3012709B2 (ja) * | 1991-08-07 | 2000-02-28 | 株式会社リコー | ファクシミリ装置 |
| US5515478A (en) | 1992-08-10 | 1996-05-07 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| JPH06342121A (ja) | 1993-04-06 | 1994-12-13 | Olympus Optical Co Ltd | マイクロマニピュレータ |
| JP3717552B2 (ja) | 1995-09-01 | 2005-11-16 | オリンパス株式会社 | 医療用マニピュレータシステム |
| SE505981C2 (sv) * | 1996-02-14 | 1997-10-27 | Asea Brown Boveri | Förfarande för styrning av en industrirobot med hänsyn till moment och belastning |
| US6493608B1 (en) * | 1999-04-07 | 2002-12-10 | Intuitive Surgical, Inc. | Aspects of a control system of a minimally invasive surgical apparatus |
| JP4422257B2 (ja) * | 1999-11-24 | 2010-02-24 | オリンパス株式会社 | マニピュレータ制御装置 |
| ES2304430T3 (es) * | 2001-01-29 | 2008-10-16 | The Acrobot Company Limited | Robots con limitacion activa. |
| US7155316B2 (en) * | 2002-08-13 | 2006-12-26 | Microbotics Corporation | Microsurgical robot system |
| JP3934524B2 (ja) * | 2002-10-09 | 2007-06-20 | 株式会社日立製作所 | 手術用マニピュレータ |
| US7930065B2 (en) * | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| EP1815949A1 (en) * | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Medical robotic system with manipulator arm of the cylindrical coordinate type |
| EP1815950A1 (en) * | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| KR101477125B1 (ko) * | 2006-06-13 | 2014-12-29 | 인튜어티브 서지컬 인코포레이티드 | 미소절개 수술 시스템 |
| CA3068216C (en) * | 2006-06-22 | 2023-03-07 | Board Of Regents Of The University Of Nebraska | Magnetically coupleable robotic devices and related methods |
| JP4891823B2 (ja) * | 2007-03-29 | 2012-03-07 | オリンパスメディカルシステムズ株式会社 | 内視鏡装置 |
-
2007
- 2007-10-30 JP JP2007282144A patent/JP5028219B2/ja active Active
-
2008
- 2008-10-24 CN CN2008101749426A patent/CN101422901B/zh active Active
- 2008-10-28 EP EP08018811.3A patent/EP2058090B1/en active Active
- 2008-10-29 US US12/260,437 patent/US8388605B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101422901B (zh) | 2011-12-14 |
| EP2058090B1 (en) | 2019-01-02 |
| JP2009107074A (ja) | 2009-05-21 |
| EP2058090A2 (en) | 2009-05-13 |
| US8388605B2 (en) | 2013-03-05 |
| CN101422901A (zh) | 2009-05-06 |
| EP2058090A3 (en) | 2017-09-06 |
| US20090112316A1 (en) | 2009-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5028219B2 (ja) | マニピュレータ装置および医療機器システム | |
| US11717309B2 (en) | Medical manipulator and method of controlling the same | |
| JP6538360B2 (ja) | 手術ロボット用マスター装置及びその制御方法 | |
| JP5612971B2 (ja) | マスタスレーブマニピュレータ | |
| JP6117922B2 (ja) | 医療用マニピュレータおよびその作動方法 | |
| JP5669590B2 (ja) | マスタスレーブマニピュレータ及び医療用マスタスレーブマニピュレータ | |
| EP3468498A1 (en) | Computer-assisted tele-operated surgery systems and methods | |
| US20140142592A1 (en) | Surgical robot and surgical robot control method | |
| JPH07328016A (ja) | 手術用マニピュレータシステム | |
| Wortman et al. | Single-site colectomy with miniature in vivo robotic platform | |
| US20200214779A1 (en) | Control device, control method, and master-slave system | |
| JP6739544B2 (ja) | 医療システムとその制御方法 | |
| CN116056655A (zh) | 通过外科机器人控制内窥镜 | |
| Low et al. | A review of master–slave robotic systems for surgery | |
| Yamashita et al. | Handheld laparoscopic forceps manipulator using multi-slider linkage mechanisms | |
| JP6097390B2 (ja) | 医療用マニピュレータ | |
| Evangeliou et al. | Development of an sma-actuated redundant robotic platform for minimally invasive surgery | |
| JPWO2020105616A1 (ja) | 屈曲機構及び医療装置 | |
| JP4346615B2 (ja) | 医療用マニピュレータ | |
| US11926062B2 (en) | Methods and apparatus for controlling a continuum robot | |
| Maeda et al. | Scaling method for force feedback of forceps manipulator based on beam theory | |
| US20220401088A1 (en) | Method for controlling an articulating instrument | |
| JP2001137257A (ja) | 医療用マスタースレーブシステム | |
| Miayazaki et al. | Pneumatically-driven hand-held forceps with wrist joint operated by built-in master controller | |
| Kam et al. | Minimally invasive surgery instruments based on a four-bar linkage design |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091105 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120131 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120605 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120625 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150629 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5028219 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |