JP4875784B2 - 医療装置 - Google Patents
医療装置 Download PDFInfo
- Publication number
- JP4875784B2 JP4875784B2 JP2011513782A JP2011513782A JP4875784B2 JP 4875784 B2 JP4875784 B2 JP 4875784B2 JP 2011513782 A JP2011513782 A JP 2011513782A JP 2011513782 A JP2011513782 A JP 2011513782A JP 4875784 B2 JP4875784 B2 JP 4875784B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- manipulator
- coordinate system
- treatment
- marking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- UAEPNZWRGJTJPN-UHFFFAOYSA-N CC1CCCCC1 Chemical compound CC1CCCCC1 UAEPNZWRGJTJPN-UHFFFAOYSA-N 0.000 description 1
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; Determining position of diagnostic devices within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/064—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00059—Operational features of endoscopes provided with identification means for the endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0055—Constructional details of insertion parts, e.g. vertebral elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Physics & Mathematics (AREA)
- Animal Behavior & Ethology (AREA)
- Optics & Photonics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Human Computer Interaction (AREA)
- Endoscopes (AREA)
- Surgical Instruments (AREA)
- Manipulator (AREA)
Description
【0001】
本発明は、挿入部と、挿入部の挿通路に挿通される処置具とを備える医療装置に関する。
【背景技術】
【0002】
一般に、内視鏡を体腔内に挿入し、内視鏡又は内視鏡とは別体のチューブ体の処置挿通路を介して内視鏡又はチューブ体の先端からマニピュレータを突出させる内視鏡装置が用いられている。内視鏡装置では、内視鏡の観察下、マニピュレータが体腔内で処置を行う。
【0003】
処置時においてマニピュレータを湾曲作動、把持作動する際に正確な操作を行うため、術者はマニピュレータの先端部の軸回り方向についてのロール量を認識することが重要である。従来の内視鏡装置では、マニピュレータの基端部に検出部を設け、この検出部でマニピュレータの基端部の軸回り方向についてのロール量を検出している。そして、マニピュレータの基端部でのロール量を、マニピュレータの先端部での軸回り方向についてのロール量として決定している。
【0004】
特許文献1には、内視鏡の鉗子チャンネルに挿通される把持鉗子を備える内視鏡装置が開示されている。この内視鏡装置では、鉗子チャンネルの基端部に、把持鉗子の進退に応じて回転するローラが設けられている。ローラの回転角度が検出部により検出され、検出された回転角度に基づき、把持鉗子の長手方向への進退量が算出される。
【0005】
特許文献2には、処置具であるエンドフェクタを支持する硬質なマニピュレータと、マニピュレータを支持する硬質なリンケージと、画像撮影システムとを備えるロボット外科用システムが開示されている。リンケージは複数のアーム部を関節部で連結して構成され、サーボ機構によりリンケージの関節部が作動する。また、このロボット外科用システムは、画像撮影システムの撮像素子を原点とするカメラ座標系と、マニピュレータの先端を原点とするマニピュレータ座標系とを有する。マニピュレータ座標系は、リンケージの関節部の作動により変化する。この際、リンケージに接続されるセンサシステムにより検出される関節部の動作量に基づいて、マニピュレータの軸回り方向についてのロール量が算出される。そして、マニピュレータのロール量に基づいて、カメラ座標系とマニピュレータ座標系との関係が求められる。処置を行う際、術者はカメラ座標系を基準としてコントローラから指示を入力する。しかし、マニピュレータはマニピュレータ座標系に基づいて操作されるため、カメラ座標系とマニピュレータ座標系との関係を考慮する必要がある。術者がカメラ座標系とマニピュレータ座標系との関係を考慮しないでカメラ座標系を基準として操作を行った場合、術者が意図する方向と異なる方向にマニピュレータが移動することがある。そこで、このロボット外科用システムでは、カメラ座標系とマニピュレータ座標との関係に基づいて、サーボ機構がコントローラからのカメラ座標系を基準とした指示入力をマニピュレータ座標系に基づく指示に変換する。この変換により術者は、カメラ座標系とマニピュレータ座標系との関係を考慮することなく、意図した方向にマニピュレータを移動することが可能となる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】
特開2008−212349号公報
【特許文献2】
米国特許第6441577号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、実際のマニピュレータは、長尺で可撓性を有するマニピュレータ挿入部を有する。また、マニピュレータを処置具挿通路に挿通した状態では、マニピュレータと処置具挿通路の内壁との間に摩擦が存在する。このため、マニピュレータの基端部でのトルクが、マニピュレータの先端部に十分に伝達されない場合がある。この場合、マニピュレータの基端部と先端部とでは、軸回り方向についてのロール量が異なる。したがって、従来の内視鏡装置の構成では、術者はマニピュレータの先端部でのロール量を正確に認識できない。
【0008】
マニピュレータの先端部にロール量を検出する検出部を配置することも考えられるが、マニピュレータの先端部の構成が複雑化する。このため、マニピュレータの径が大きくなってしまう。
【0009】
上記特許文献1では、把持鉗子の長手方向への進退量を算出する構成は示されている。しかし、把持鉗子の先端部の軸回り方向のロール量を算出する構成は示されていない。
【0010】
上記特許文献2では、リンケージのアーム部及びマニピュレータは硬質である。このため、リンケージの関節部の作動によりマニピュレータがロールした状態でも、マニピュレータの基端部と先端部とではロール量は同一である。したがって、リンケージの関節部の動作量を検出することで、マニピュレータの先端部のロール量が算出される。しかし、軟性内視鏡タイプの内視鏡装置で用いられるマニピュレータでは、基端部と先端部とのロール量が異なる。このため、検出されるマニピュレータの基端部でのロール量から、マニピュレータの先端部のロール量を正確には算出できない。したがって、軟性内視鏡タイプの内視鏡装置に上記特許文献2の指示入力を変換する構成を適用しても、カメラ座標系とマニピュレータ座標系との関係が求められず、コントローラから指示入力の変換が不可能となる。
【0011】
本発明は上記課題に着目してなされたものであり、その目的とするところは、マニピュレータの先端部に検出部を設けることなく、マニピュレータの先端部のロール量を正確に算出可能な医療装置を提供することにある。
【0012】
上記目的を達成するため、本発明のある態様の医療装置は、長手方向に沿って延設される挿入部と、前記挿入部の先端部において先端が開口する挿通路を前記挿入部に前記長手方向に沿って規定する通路規定部と、前記挿通路の前記先端の前記開口から先端方向に突出した状態で設けられる処置部を備え、前記挿通路に挿通される処置具と、前記挿入部とは別体に前記長手方向に沿って設けられる挿入部材、又は、前記挿入部に設けられ、被写体及び前記処置具の前記処置部の撮像を行う撮像素子と、前記処置部を湾曲動作させる湾曲動作駆動部と、前記処置具を軸回り方向にロール動作させるロール動作駆動部と、前記処置部を所望の位置まで移動させる指示が入力される指示入力ユニットと、前記処置具の前記処置部で、かつ、前記撮像素子の撮像範囲内に設けられ、前記処置具の前記挿入部に対するロール動作により軸回り方向についての位置が変化するマーキング部と、前記撮像素子での観察画像に基づいて、前記挿入部の前記先端部に対する前記処置部の位置及び姿勢を検出する位置姿勢検出部であって、前記観察画像から前記マーキング部を検出することにより前記処置部の前記位置及び前記姿勢を検出する位置検出部と、検出された前記処置部の前記位置及び前記姿勢、及び、前記指示入力ユニットでの前記入力に基づいて、前記所望の位置へ前記処置部が移動する際の前記湾曲動作駆動部及び前記ロール動作駆動部の駆動情報を算出する駆動情報算出部と、算出された前記駆動情報に基づいて、前記湾曲操作駆動部及び前記ロール動作駆動部を駆動制御する制御ユニットと、を備える。
【0015】
本発明によると、マニピュレータの先端部に検出部を設けることなく、マニピュレータの先端部のロール量を正確に算出可能な医療装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施形態に係る内視鏡装置が用いられるシステムを示す斜視図。
【図2A】第1の実施形態に係る内視鏡装置を示すブロック図。
【図2B】第1の実施形態に係る内視鏡装置のモータユニットの構成を示すブロック図。
【図3】第1の実施形態に係る内視鏡装置の内視鏡及びマニピュレータの先端部の構成を示す斜視図。
【図4】第1の実施形態に係る内視鏡装置のマニピュレータの先端部の構成を示す斜視図。
【図5】第1の実施形態に係る内視鏡装置のマニピュレータの先端部の構成を示す模式図。
【図6】第1の実施形態に係るマニピュレータの第3の湾曲駒の構成を示す断面図。
【図7】第1の実施形態に係る内視鏡装置の計算ユニットの構成を示すブロック図。
【図8】第1の実施形態に係る内視鏡装置の、内視鏡での観察画像からマニピュレータの先端部のロール量を算出する手法を示すフローチャート。
【図9A】第1の実施形態に係る内視鏡装置のある特定の状態での観察画像を示す概略図。
【図9B】図9Aの状態からマニピュレータを内視鏡に対して略90°だけロールさせ、マニピュレータ湾曲部の第1の関節部を湾曲させた状態での観察画像を示す概略図。
【図10】本発明の第2の実施形態に係る内視鏡装置の計算ユニットの構成を示すブロック図。
【図11A】第2の実施形態に係る内視鏡装置の非ロール状態での観察画像を示す概略図。
【図11B】図11Aの非ロール状態からマニピュレータの先端部を内視鏡に対して軸回り方向に略90°ロールさせた状態での観察画像を示す概略図。
【図12】第2の実施形態に係る内視鏡装置の入力指示変換部により術者の入力指示を変換する手法を示すフローチャート。
【図13】本発明の変形例に係るマニピュレータの第3の湾曲駒の構成を示す断面図。
【図14】本発明の別の変形例に係る内視鏡装置の内視鏡及びマニピュレータの先端部の構成を示す斜視図。
【発明を実施するための形態】
【0017】
(第1の実施形態)
本発明の第1の実施形態について図1乃至図9Bを参照して説明する。
【0018】
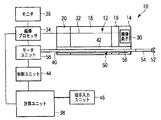
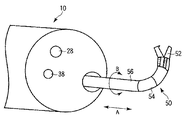
図1は内視鏡装置が用いられるシステムを示す図であり、図2Aは内視鏡装置を示す図である。図1に示すように、内視鏡装置の能動内視鏡10(以下、単に内視鏡10と称する)は、体腔内に挿入される内視鏡挿入部12を備える。内視鏡挿入部12には、最も先端方向側の先端硬性部14と、湾曲作動される内視鏡湾曲部16と、長尺で可撓性を有する内視鏡可撓管部18とが、先端方向側から順に配設されている。内視鏡挿入部12の基端方向側には、内視鏡操作部20が連結されている。内視鏡操作部20は、可動式内視鏡スタンド22に着脱自在に装着される。可動式内視鏡スタンド22によって、内視鏡操作部20を任意の位置に移動させて固定することが可能となっている。
【0019】
図1に示すように、内視鏡装置は、光源ユニット24を備える。光源ユニット24には、ライトガイド26が接続されている。ライトガイド26は、内視鏡操作部20、内視鏡可撓管部18及び内視鏡湾曲部16の内部を通って、先端硬性部14まで延設されている。光源ユニット24から出射した光は、ライトガイド26により先端硬性部14まで導光され、先端硬性部14の先端面に設けられる照明窓28(図3参照)から被写体を照射する。
【0020】
図2Aに示すように、内視鏡挿入部12の先端硬性部14には、被写体の撮像を行う撮像素子30が内蔵されている。撮像素子30には、撮像ケーブル32が接続されている。撮像ケーブル32は、内視鏡湾曲部16、内視鏡可撓管部18及び内視鏡操作部20の内部を通って、内視鏡10の外部に設けられる画像処理部である画像プロセッサ34に接続されている。画像プロセッサ34は、表示部であるモニタ36及び計算ユニット38に接続されている。撮像素子30により観察窓37(図3参照)を通して撮像された観察画像は、画像信号に変換され、画像プロセッサ34へ出力される。そして、画像プロセッサ34で画像処理を行い、モニタ36に観察画像を表示する。また、画像プロセッサ34は画像信号として入力された画像データを、計算ユニット38に出力する。
【0021】
図2Aに示すように、内視鏡10の内視鏡操作部20には、処置具挿入口40が配設されている。処置具挿入口40から処置具挿通路である処置具チャンネル42が、先端硬性部14まで延設されている。内視鏡10の処置具チャンネル42には、処置具であるマニピュレータ50が長手方向に進退自在に挿通される。マニピュレータ50は、可動式内視鏡スタンド22(図1参照)に配設されるモータユニット58に接続されている。モータユニット58は、モータユニット58を駆動制御する制御ユニット44に接続されている。制御ユニット44は計算ユニット38に接続され、計算ユニット38は指示入力ユニット46に接続されている。制御ユニット44は、指示入力ユニット46での指示入力及び計算ユニット38での計算結果に基づいて、モータユニット58の駆動制御を行っている。
【0022】
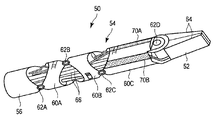
図2Aに示すように、マニピュレータ50には、開閉作動される把持部52と、湾曲作動されるマニピュレータ湾曲部54と、長尺で可撓性を有するマニピュレータ挿入部56とが、先端方向側から順に配設されている。マニピュレータ挿入部56は、モータユニット58まで基端方向側に延設されている。図2Bに示すように、モータユニット58は、マニピュレータ50の進退動作の駆動源であるモータ等の進退動作駆動部58aと、マニピュレータ50のロール動作の駆動源であるモータ等のロール動作駆動部58bとを備える。モータユニット58の進退動作駆動部58aを駆動することにより、マニピュレータ挿入部56が長手方向に進退動作を行う(図3の矢印A)。また、モータユニット58のロール動作駆動部58bを駆動することにより、マニピュレータ挿入部56がマニピュレータ50の軸回り方向にロール動作を行う(図3の矢印B)。以上のようにして、マニピュレータ50の進退動作、ロール動作が実現される。また、モータユニット58は、マニピュレータ50の長手方向への進退動作量を検出するエンコーダ(図示しない)を備える。
【0023】
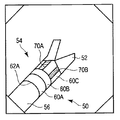
図4及び図5は、マニピュレータ50の先端部の構成を示す図である。図4及び図5に示すように、マニピュレータ湾曲部54は、3つの湾曲駒60A〜60Cを備える。3つの湾曲駒60A〜60Cの中で最も基端方向側に配置される第1の湾曲駒60Aは、第1の関節部62Aを介してマニピュレータ挿入部56に略同軸に連結されている。第1の湾曲駒60Aの先端方向側には、第2の湾曲駒60Bが第2の関節部62Bを介して略同軸に連結されている。同様に、第2の湾曲駒60Bの先端方向側には、第3の湾曲駒60Cが第3の関節部62Cを介して略同軸に連結され、第3の湾曲駒60Cの先端方向側には、把持部52が第4の関節部62Dを介して略同軸に連結されている。第1の湾曲駒60Aは、マニピュレータ挿入部56に対して第1の関節部62Aの回動軸を中心に回動自在となっている。第1の湾曲駒60A及び第2の湾曲駒60Bは、第2の関節部62Bの回動軸を中心に互いに回動自在となっている。同様に、第2の湾曲駒60B及び第3の湾曲駒60Cは、第3の関節部62Cの回動軸を中心に互いに回動自在であり、第3の湾曲駒60C及び把持部52は、第4の関節部62Dの回動軸を中心に互いに回動自在となっている。また、把持部52では、一対のジョー64が第4の関節部62Dの回動軸を支点として開閉自在となっている。第1の関節部62A及び第3の関節部62Cの回動軸は、マニピュレータ50の軸に略直交している。第2の関節部62B及び第4の関節部62Dの回動軸は、マニピュレータ50の軸に略直交し、かつ、第1の関節部62A及び第3の関節部62Cの回動軸に略直交している。第1の関節部62A及び第3の関節部62Cの回動軸が第2の関節部62B及び第4の関節部62Dの回動軸に対して略直交することにより、第1の関節部62A及び第3の関節部62Cの湾曲方向が、第2の関節部62B及び第4の関節部62Dの湾曲方向と略直交している。このため、マニピュレータ湾曲部54は2自由度の湾曲部となっている。
【0024】
図4に示すように、把持部52には複数の操作ワイヤ66が接続されている。それぞれの操作ワイヤ66は、把持部52の開閉作動、又は、マニピュレータ湾曲部54の湾曲作動に用いられる。それぞれの操作ワイヤ66は、マニピュレータ挿入部56の内部を通って、モータユニット58に接続されている。図2Bに示すように、モータユニット58は、把持部52の開閉動作の駆動源である開閉動作駆動部58cと、マニピュレータ湾曲部54の湾曲動作の駆動源である湾曲動作駆動部58dとを備える。開閉動作駆動部58cは、複数のモータ、プーリ等から構成されている。開閉動作駆動部58cを駆動することにより、把持部52の開閉作動用の操作ワイヤ66が長手方向に移動し、把持部52のジョー64が開閉動作を行う。湾曲動作駆動部58dは、複数のモータ、プーリ等から構成されている。湾曲動作駆動部58dを駆動することにより、湾曲作動用の操作ワイヤ66が長手方向に移動し、第1〜第4の関節部62A〜62Dのそれぞれが回動軸を中心に回動動作を行う。これにより、マニピュレータ湾曲部54が湾曲動作を行う。また、モータユニット58は、それぞれの操作ワイヤ66の長手方向への移動量を検出するエンコーダ(図示しない)を備える。エンコーダでの検出結果は、計算ユニット38に出力される。計算ユニット38では、エンコーダでの検出結果に基づいて把持部52の開閉動作量及び第1〜第4の関節部62A〜62Dのそれぞれの回動動作量が算出される。
【0025】
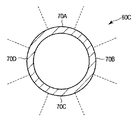
図6は、第3の湾曲駒60Cの構成を示す図である。図4及び図6に示すように、マニピュレータ湾曲部54の第3の湾曲駒60Cの外周面には、長手方向に沿って延設される(本実施形態では4つの)帯形状のマーキング部70A〜70Dが設けられている。それぞれのマーキング部70A〜70Dには、マニピュレータ50とは異なる色が付されている。それぞれのマーキング部70A〜70Dでは、他のマーキング部70A〜70Dとは付される色が異なっている。例えば、第1のマーキング部70Aには青色、第2のマーキング部70Bには黄色、第3のマーキング部70Cには緑色、第4のマーキング部70Dには黒色が付されている。すなわち、マーキング部70A〜70Dは、長手方向に延設され、それぞれに互いに異なる色が付された複数の帯形状部である。それぞれのマーキング部70A〜70Dは、マニピュレータ50の軸回り方向について互いに離間した状態で、かつ、マニピュレータ50の軸回り方向に互いに略90°離れて配置されている。それぞれのマーキング部70A〜70Dのマニピュレータ50の軸回り方向についての位置は、マニピュレータ50のロール動作に対応して変化する。
【0026】
図7は、計算ユニット38の構成を示す図である。図7に示すように、計算ユニット38は、画像プロセッサ34に接続される歪除去部80と、ハフ(Hough)変換部82と、記録部であるメモリ84と、ロール情報算出部86とを備える。歪除去部80は、ハフ変換部82及びメモリ84に接続されている。ハフ変換部82及びメモリ84は、ロール情報算出部86に接続されている。
【0027】
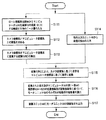
次に、内視鏡10での観察画像からマニピュレータ50の先端部のロール量を算出する手法について、図8乃至図9Bを参照して説明する。図8に示すように、動作開始時には、歪除去部80に画像プロセッサ34から観察画像の画像信号が入力される(ステップS101)。メモリ84には、観察画像の歪情報が記録されている。歪除去部80は、メモリ84からの歪情報に基づいて、観察画像から歪を除去する(ステップS102)。
【0028】
歪が除去された観察画像は、ハフ変換部82に入力される(ステップS103)。ハフ変換部82は、歪を除去した観察画像に対しハフ変換を行う(ステップS104)。ハフ変換とは、観察画像に存在するマーキング部70A〜70Dの観察画像内での位置及び姿勢を抽出する手法である。すなわち、ハフ変換により、特定の色のマーキングが施された帯形状のマーキング部70A〜70Dが、観察画像上でどこに位置し、どのような姿勢で配置されているかを認識する。ハフ変換の具体的な手法については参照文献1(Duda, R. O. and P. E. Hart, “Use of the Hough Transformation to Detect Lines and Curves in Pictures,” Comm. ACM, 1972年1月, Vol. 15, pp. 11-pp.15 )に記載されているため、詳細な説明は省略する。
【0029】
それぞれのマーキング部70A〜70Dは、マニピュレータ50の軸回り方向について互いに離間した状態で、かつ、マニピュレータ50の軸回り方向に互いに略90°離れて配置されている。図9Aはある特定の状態でモニタ36上に表示される観察画像であり、図9Bは図9Aの状態からマニピュレータ50を内視鏡10に対して略90°だけロールさせ、マニピュレータ湾曲部54の第1の関節部62Aを湾曲させた状態での観察画像である。上述のようにマーキング部70A〜70Dが配置されるため、図9A及び図9Bに示すように、いずれの状態においても、少なくとも1つのマーキング部70A〜70Dのマニピュレータ50の軸回り方向についての寸法が、観察画面上で認識可能となっている。すなわち、撮像素子30の画角、撮像素子30とマニピュレータ50との位置関係、マニピュレータ50の湾曲、ロール動作量等に関係なく、少なくとも1つのマーキング部70A〜70Dの帯形状が、観察画面上で認識可能となっている。このため、ハフ変換により、少なくとも1つのマーキング部70A〜70Dの観察画像上での位置及び姿勢が認識される(ステップS105)。すなわち、ハフ変換部82が、少なくとも1つのマーキング部70A〜70Dの観察画像上での位置及び姿勢を抽出するマーキング抽出部となっている。ハフ変換により抽出された少なくとも1つのマーキング部70A〜70Dの色及び観察画面上での位置及び姿勢の情報は、ロール情報算出部86に入力される(ステップS106)。
【0030】
メモリ84には、マニピュレータ50でのマーキング部70A〜70Dの位置、寸法、色情報及び撮像素子30の画角情報等の既知情報が、記録されている。ロール情報算出部86は、ハフ変換部82から入力される情報及びメモリ84に記録される既知情報に基づいて、観察画面上でのマニピュレータ50の第3の湾曲駒60Cの位置情報及び姿勢情報を算出する(ステップS107)。そして、算出された第3の湾曲駒60Cの位置情報及び姿勢情報に基づいて、マニピュレータ50の先端部の内視鏡10に対する軸回り方向のロール量を算出する(ステップS108)。
【0031】
次に、本実施形態の内視鏡装置の作用について説明する。術者が内視鏡装置を用いて処置を行う際、内視鏡10の処置具チャンネル42にマニピュレータ50を挿通する。そして、モータユニット58によってマニピュレータ50が進退作動、ロール作動、湾曲作動、把持作動することにより、患部の処置を行う。この際、光源ユニット24からの出射光がライトガイド26により内視鏡10の先端硬性部14まで導光され、先端硬性部14の照明窓28から被写体を照射する。そして、先端硬性部14に設けられる撮像素子30により観察窓37を通して被写体を撮像し、画像信号を画像プロセッサ34へ出力する。出力された画像信号は画像プロセッサ34で画像処理され、モニタ36に観察画像が表示される。モニタ36の観察画像には、患部、マニピュレータ50の先端部の状態が表示されている。術者は、表示される観察画像を見ながらマニピュレータ50を操作し、患部の処置を行う。
【0032】
マニピュレータ50のマニピュレータ湾曲部54の第3の湾曲駒60Cには、マーキング部70A〜70Dが設けられている。観察画像上では、少なくとも1つのマーキング部70A〜70Dのマニピュレータ50の軸回り方向についての寸法が、認識可能となっている。また、マニピュレータ50が内視鏡10に対して軸回り方向にロールしていない非ロール状態では、それぞれのマーキング部70A〜70Dの内視鏡10に対する軸回り方向についての位置が術者に認識されている。したがって、術者は、観察画像上でのマーキング部70A〜70Dの情報、及び、非ロール状態でのマーキング部70A〜70Dの位置情報に基づいて、マニピュレータ50の先端部の内視鏡10に対する軸回り方向のおおよそのロール量が認識可能となる。
【0033】
また、画像プロセッサ34に出力された画像信号は、計算ユニット38の歪除去部80に入力される。歪除去部80は、メモリ84からの歪情報に基づいて観察画像から歪を除去する。そして、ハフ変換部82により、歪が除去された観察画像に対してハフ変換を行う。ハフ変換により、上述したように少なくとも1つのマーキング部70A〜70Dの観察画像上での位置及び姿勢が認識される。そして、ハフ変換により抽出された少なくとも1つのマーキング部70A〜70Dのマーキングの色及び観察画面上での位置及び姿勢の情報が、ロール情報算出部86に入力される。ロール情報算出部86は、ハフ変換部82から入力される情報及びメモリ84に記録される既知情報に基づいて、上述したようにマニピュレータ50の先端部の内視鏡10に対する軸回り方向のロール量を算出する。以上のようにして、マニピュレータ50の先端部に検出部を設けることなく、マニピュレータ50の先端部の軸回り方向についてのロール量を正確に算出することが可能となっている。
【0034】
そこで上記構成の内視鏡装置では、以下の効果を奏する。すなわち本実施形態の内視鏡装置では、マニピュレータ50のマニピュレータ湾曲部54の第3の湾曲駒60Cに、マーキング部70A〜70Dが設けられている。観察画像上では、少なくとも1つのマーキング部70A〜70Dのマニピュレータ50の軸回り方向についての寸法が、認識可能となっている。また、マニピュレータ50が内視鏡10に対して軸回り方向にロールしていない非ロール状態では、それぞれのマーキング部70A〜70Dの内視鏡10に対する軸回り方向についての位置が術者に認識されている。したがって、術者は、観察画像上でのマーキング部70A〜70Dの情報、及び、非ロール状態でのマーキング部70A〜70Dの位置情報に基づいて、マニピュレータ50の先端部の内視鏡10に対する軸回り方向のおおよそのロール量を認識することができる。
【0035】
また、本実施形態の内視鏡装置では、画像プロセッサ34から画像信号が、計算ユニット38の歪除去部80に入力さる。歪除去部80は、メモリ84からの歪情報に基づいて観察画像から歪を除去する。そして、ハフ変換部82により、歪が除去された観察画像に対してハフ変換を行う。ハフ変換により、少なくとも1つのマーキング部70A〜70Dの観察画像上での位置及び姿勢が認識される。そして、ハフ変換により抽出された少なくとも1つのマーキング部70A〜70Dのマーキングの色及び観察画面上での位置及び姿勢の情報が、ロール情報算出部86に入力される。ロール情報算出部86は、ハフ変換部82から入力される情報及びメモリ84に記録される既知情報に基づいて、マニピュレータ50の先端部の内視鏡10に対する軸回り方向のロール量を算出する。以上のようにして、マニピュレータ50の先端部に検出部を設けることなく、マニピュレータ50の先端部の軸回り方向についてのロール量を正確に算出することができる。
【0036】
(第2の実施形態)
次に、本発明の第2の実施形態について図10乃至図12を参照して説明する。本実施形態では第1の実施形態の構成を次の通り変更したものである。なお、第1の実施形態と同一の部材及び同一の機能を有する部材には適宜に同一の符号を付し、詳しい説明を省略する。
【0037】
図10は、本実施形態の計算ユニット90の構成を示す図である。図10に示すように、計算ユニット90は、第1の実施形態の計算ユニット38と同様に、歪除去部80と、ハフ変換部82と、メモリ84と、ロール情報算出部86とを備える。ロール情報算出部86は、計算ユニット90に設けられる入力指示変換部92に接続されている。入力指示変換部92は、制御ユニット44及び指示入力ユニット46に接続されている。
【0038】
以下、入力指示変換部92について図11A乃至図12を参照して詳細に説明する。モニタ36に表示される観察画像上では、内視鏡10の先端硬性部14の撮像素子33を原点とするカメラ座標系と、マニピュレータ50の先端の把持部52を原点とするマニピュレータ座標系とが存在する。カメラ座標系は、撮像素子33の内視鏡10の軸回り方向についての回動により、すなわち内視鏡10をロール作動することにより変化する。一方、マニピュレータ座標系は、マニピュレータ50をロール作動することにより変化する。したがって、内視鏡10に対してマニピュレータ50がロールすることにより、カメラ座標系とマニピュレータ座標系との関係が変化する。
【0039】
例えば、マニピュレータ50が内視鏡10に対して軸回り方向にロールしていない非ロール状態では、図11Aに示すような観察画像がモニタ36に表示される。ここで、観察画像上の上方向をカメラ座標系のX方向とすると、カメラ座標系のX方向はマニピュレータ座標系のa方向と略一致する。マニピュレータ座標系のa方向は、マニピュレータ50の第3の湾曲駒60Cの中心軸から視て第1のマーキング部70Aが配置される方向と略一致する。通常、マニピュレータ50の操作はマニピュレータ座標系に基づいて行われる。このため、図11Aの状態でマニピュレータ50をカメラ座標系のX方向に湾曲するためには、例えば第4の関節部62Dをマニピュレータ座標系のa方向に湾曲させる指示を指示入力ユニット46に入力する必要がある。
【0040】
図11Aの非ロール状態からマニピュレータ50の先端部を内視鏡10に対して軸回り方向に略90°ロールさせると、図11Bに示すような観察画像がモニタ36に表示される。この際、カメラ座標系のX方向はマニピュレータ座標系のb方向と略一致する。マニピュレータ座標系のb方向はa方向と略直交する方向であり、マニピュレータ50の第3の湾曲駒60Cの中心軸から視て第4のマーキング部70Dが配置される方向と略一致する。通常、指示入力ユニット46からの入力及びマニピュレータ50の操作はマニピュレータ座標系に基づいて行われる。このため、図11Bの状態でマニピュレータ50をカメラ座標系のX方向に湾曲するためには、例えば第4の関節部62Dと略直交する方向に湾曲する第3の関節部62Cをマニピュレータ座標系のb方向に湾曲させる指示を指示入力ユニット46に入力する必要がある。
【0041】
しかし、観察画像を見ながら処置を行う術者はカメラ座標系が基準となるため、内視鏡10に対するマニピュレータ50のロール量を考慮せず指示を行うことがある。すなわち、カメラ座標系とマニピュレータ座標系との関係を考慮せず指示を行うことがある。例えば、図11Bの状態でマニピュレータ50をカメラ座標系のX方向に湾曲する場合を考える。この場合、術者は、内視鏡10に対するマニピュレータ50のロール量を考慮せず、第4の関節部62Dをマニピュレータ座標のa方向に湾曲させる指示を指示入力装置46に入力することがある。しかし、図11Bの状態では、図11Aの非ロール状態からマニピュレータ50の先端部が内視鏡10に対して軸回り方向に略90°ロールしている。このため、マニピュレータ座標のa方向に湾曲させる指示を入力することにより、マニピュレータ50はカメラ座標系のY方向(X方向と略直交する方向)に湾曲する。すなわち、術者が意図する方向と異なる方向に、マニピュレータ50が湾曲する。
【0042】
そこで、本実施形態の内視鏡装置では、入力指示変換部92が、ロール情報算出部86によって算出されるマニピュレータ50の先端部の内視鏡10に対する軸回り方向のロール量に基づいて、術者の入力指示の変換を行っている。これにより、術者は、内視鏡10に対するマニピュレータ50のロール量を考慮することなく、マニピュレータ50を操作可能となる。すなわち、カメラ座標系とマニピュレータ座標系との関係を考慮することなく、カメラ座標系に基づいてマニピュレータ50を操作可能となる。
【0043】
図12は、入力指示変換部92により術者の入力指示を変換する手法を示すフローチャートである。図12に示すように、入力指示変換部92には、ロール情報算出部86からマニピュレータ50の先端部の内視鏡10に対する軸回り方向のロール量が入力される(ステップS111)。入力されたマニピュレータ50の先端部の内視鏡10に対するロール量に基づいて、カメラ座標系とマニピュレータ座標系との関係が求められる(ステップS112)。そして、カメラ座標系をマニピュレータ座標系に変換する変換行列Cが算出される(ステップS113)。ここで、変換行列Cは、カメラ座標系とマニピュレータ座標系との関係により変化する。
【0044】
また、入力指示変換部92には、指示入力ユニット46から術者からの指示が入力される(ステップS114)。この際、術者からの指示はカメラ座標系に基づいて入力される。例えば術者は、マニピュレータ50の先端部を図11A及び図11Bのカメラ座標系のX方向に湾曲させる指示を指示入力ユニット46に入力する。
【0045】
そして、ステップS113で算出した変換行列Cを用いて、術者からの指示の変換を行う。変換行列Cにより、カメラ座標系に基づく指示がマニピュレータ座標系に基づく指示に変換される(ステップS115)。例えば、図11A及び図11Bのそれぞれの状態で、マニピュレータ50の先端部をカメラ座標系のX方向に湾曲させる指示が指示入力ユニット46に入力されたとする。この場合、図11Aの状態では、マニピュレータ50の先端部をマニピュレータ座標系のa方向に湾曲させる指示に変換される。図11Bの状態では、マニピュレータ50の先端部をマニピュレータ座標系のb方向に湾曲させる指示に変換される。
【0046】
そして、変換された指示及びマニピュレータ50の第1〜第4の関節部62A〜62Dの位置情報及び姿勢情報等に基づいて、モータユニット58のそれぞれの駆動部の駆動量を算出する(ステップS116)。ここで、第1〜第4の関節部62A〜62Dの位置情報及び姿勢情報は、モータユニット58のそれぞれのエンコーダ(図示しない)での検出結果、内視鏡10に対するマニピュレータ50の先端部のロール量等に基づいて、計算ユニット90で算出される。そして、ステップS116で算出された結果に基づいて、制御ユニット44にモータユニット58の制御指示を出力する(ステップS117)。例えば、図11A及び図11Bのそれぞれの状態で、マニピュレータ50の先端部をカメラ座標系のX方向に湾曲させるとする。この場合、図11Aの状態では、例えば第4の関節部62Dをマニピュレータ座標系のa方向に湾曲させるようにモータユニット58が駆動制御される。図11Bの状態では、例えば第4の関節部62Dと略直交する方向に湾曲する第3の関節部62Cをマニピュレータ座標のb方向に湾曲させるようにモータユニット58が駆動制御される。
【0047】
次に、本実施形態の内視鏡装置の作用について説明する。内視鏡装置を用いて処置を行う際、術者はカメラ座標系に基づく指示を指示入力ユニット46に入力し、マニピュレータ50の操作を行う。この際、計算ユニット90の入力指示変換部92では、ロール情報算出部86によって算出されるマニピュレータ50の先端部の内視鏡10に対する軸回り方向のロール量に基づいて、カメラ座標系とマニピュレータ座標系との関係が求められる。そして、入力指示変換部92は、カメラ座標系とマニピュレータ座標系との関係に基づいて、カメラ座標系に基づく術者からの指示をマニピュレー座標系に基づく指示に変換する。制御ユニット44は、入力指示変換部92により変換された指示に基づいて、モータユニット58の駆動制御を行っている。これにより、術者は、内視鏡10に対するマニピュレータ50のロール量を考慮することなく、マニピュレータ50を操作可能となる。すなわち、カメラ座標系とマニピュレータ座標系との関係を考慮することなく、カメラ座標系に基づいてマニピュレータ50を操作可能となる。
【0048】
そこで上記構成の内視鏡装置では、以下の効果を奏する。すなわち本実施形態の内視鏡装置では、マニピュレータ50のマニピュレータ湾曲部54の第3の湾曲駒60Cに、マーキング部70A〜70Dが設けられている。観察画像上では、少なくとも1つのマーキング部70A〜70Dのマニピュレータ50の軸回り方向についての寸法が、認識可能となっている。また、マニピュレータ50が内視鏡10に対して軸回り方向にロールしていない非ロール状態では、それぞれのマーキング部70A〜70Dの内視鏡10に対する軸回り方向についての位置が術者に認識されている。したがって、術者は、観察画像上でのマーキング部70A〜70Dの情報、及び、非ロール状態でのマーキング部70A〜70Dの位置情報に基づいて、マニピュレータ50の先端部の内視鏡10に対する軸回り方向のおおよそのロール量を認識することができる。
【0049】
また、本実施形態の内視鏡装置では、画像プロセッサ34から画像信号が、計算ユニット90の歪除去部80に入力さる。歪除去部80は、メモリ84からの歪情報に基づいて観察画像から歪を除去する。そして、ハフ変換部82により、歪が除去された観察画像に対してハフ変換を行う。ハフ変換により、少なくとも1つのマーキング部70A〜70Dの観察画像上での位置及び姿勢が認識される。そして、ハフ変換により抽出された少なくとも1つのマーキング部70A〜70Dのマーキングの色及び観察画面上での位置及び姿勢の情報が、ロール情報算出部86に入力される。ロール情報算出部86は、ハフ変換部82から入力される情報及びメモリ84に記録される既知情報に基づいて、マニピュレータ50の先端部の内視鏡10に対する軸回り方向のロール量を算出する。以上のようにして、マニピュレータ50の先端部に検出部を設けることなく、マニピュレータ50の先端部の軸回り方向についてのロール量を正確に算出することができる。
【0050】
さらに、本実施形態の内視鏡装置では、術者はカメラ座標系に基づく指示を指示入力ユニット46に入力し、マニピュレータ50の操作を行う。この際、計算ユニット90の入力指示変換部92では、ロール情報算出部86によって算出されるマニピュレータ50の先端部の内視鏡10に対する軸回り方向のロール量に基づいて、カメラ座標系とマニピュレータ座標系との関係が求められる。そして、入力指示変換部92は、カメラ座標系とマニピュレータ座標系との関係に基づいて、カメラ座標系に基づく術者からの指示をマニピュレー座標系に基づく指示に変換する。制御ユニット44は、入力指示変換部92により変換された指示に基づいて、モータユニット58の駆動制御を行っている。これにより、術者は、内視鏡10に対するマニピュレータ50のロール量を考慮することなく、マニピュレータ50を操作することができる。すなわち、カメラ座標系とマニピュレータ座標系との関係を考慮することなく、カメラ座標系に基づいてマニピュレータ50を操作することができる。
【0051】
(変形例)
なお、上述した2つの実施形態では、マーキング部70A〜70Dは第3の湾曲駒60Cに設けられているが、第1又は第2の湾曲駒60A,60Bに設けられてもよく、把持部52に設けられてもよい。また、第1〜第3の湾曲駒60A〜60C及び把持部52の中の複数の部位にマーキング部が設けられてもよい。すなわち、マーキング部は、撮像素子30の撮像範囲内に設けられ、撮像画面上で認識可能であればよい。
【0052】
また、上述した実施形態では、異なる色が付された4つのマーキング部70A〜70Dが軸回り方向について互いに離間して設けられているが、マーキング部の態様はこれに限るものではない。例えば、図13に示すように、異なる色が付された4つのマーキング部70A〜70Dが軸回り方向について互いに離間していない状態で設けられてもよい。この場合、それぞれのマーキング部70A〜70Dが、第3の湾曲駒60Cの軸回り方向について略90°の範囲を占めることとなる。また、マーキング部70A〜70Dに付される色は、上述した色に限るものではない。ただし、マニピュレータ50と同一、類似色及び血と同一、類似色は用いないことが好ましい。また、それぞれのマーキング部70A〜70Dに異なる色を付す代わりに、それぞれのマーキング部70A〜70Dに異なるパターンの模様を付してもよい。この場合、マーキング部70A〜70Dは、長手方向に延設され、それぞれに互いに異なるパターンの模様が付された複数の帯形状部となる。さらに、マーキング部の数は4つに限るものではない。ただし、ハフ変換部82によりマーキング部の観察画像上での位置及び姿勢の抽出を行う場合は、撮像素子30の画角、撮像素子30とマニピュレータ50との位置関係、マニピュレータ50の湾曲、ロール動作等に関係なく、少なくとも1つのマーキング部の形状が、観察画面上で認識可能となっていることが必要である。
【0053】
また、上述した実施形態では、ハフ変換部82により、帯形状のマーキング部70A〜70Dの観察画像上での位置及び姿勢を抽出しているが、マーキング部70A〜70Dの観察画像上での位置及び姿勢の抽出するマーキング抽出部はハフ変換部82に限るものではない。
【0054】
また、上述した実施形態では、マニピュレータ50は把持部52により組織を保持する構成であるが、この構成に限るものではない。例えば、把持部52の代わりに、超音波により処置を行う処置部を設けてもよい。また、内視鏡10に複数の処置具チャンネル42を設け、複数のマニピュレータにより処置を行ってもよい。
【0055】
さらに、上述した実施形態では、マニピュレータ50を挿通する処置具チャンネル42は内視鏡10に設けられているが、これに限るものではない。例えば、図14に示すように、内視鏡装置は、内視鏡10とは別体の処置具用チューブ95を備えてもよい。この場合、処置具用チューブ95には処置具チャンネルが設けられ、処置具チャンネルにマニピュレータ50が挿通される。
【0056】
以上、本発明の実施形態について説明したが、本発明は上記の実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変形ができることは勿論である。
以下、本出願の他の特徴的な技術事項を下記の通り付記する。
記
(付記項1)
最も先端方向側に先端硬性部を備える内視鏡と、
前記内視鏡又は前記内視鏡とは別体のチューブに設けられる挿通路に挿通されるマニピュレータと、
前記内視鏡の前記先端硬性部に設けられ、被写体及び前記マニピュレータの先端部の撮像を行う撮像素子と、
前記マニピュレータの先端部で、かつ、前記撮像素子の撮像範囲内に設けられ、前記マニピュレータの前記内視鏡に対するロール動作により軸回り方向についての位置が変化するマーキング部と、
を具備する内視鏡装置。
(付記項2)
前記撮像素子により撮像された観察画像の画像信号を処理する画像処理部と、
前記画像処理部からの前記画像信号に基づいて前記内視鏡に対する前記マニピュレータの軸回り方向のロール量を算出する計算ユニットと、
をさらに具備する付記項1の内視鏡装置。
(付記項3)
前記計算ユニットは、
既知情報が記録される記録部と、
前記観察画像から歪を除去する歪除去部と、
歪が除去された前記観察画像上での前記マーキング部の位置情報及び姿勢情報を抽出するマーキング抽出部と、
抽出された前記観察画像上での前記マーキング部の前記位置情報、前記姿勢情報及び前記記録部に記録される前記既知情報に基づいて、前記内視鏡に対する前記マニピュレータの軸回り方向の前記ロール量を算出するロール情報算出部と、
を備える付記項2の内視鏡装置。
(付記項4)
前記観察画像上で前記撮像素子を原点とするカメラ座標系に基づく指示が、前記マニピュレータの操作のために入力される指示入力ユニットをさらに具備し、
前記計算ユニットは、前記ロール情報算出部により算出された前記内視鏡に対する前記マニピュレータの前記ロール量に基づいて前記カメラ座標系と前記観察画像上で前記マニピュレータの先端を原点とするマニピュレータ座標系との関係を求め、かつ、前記カメラ座標系と前記マニピュレータ座標系との関係に基づいて前記指示入力ユニットからの前記カメラ座標系に基づく前記指示を前記マニピュレータ座標系に基づく指示に変換する入力指示変換部を備える付記項3の内視鏡装置。
(付記項5)
前記マーキング部は、長手方向に延設され、前記マニピュレータとは異なる色が付された複数の帯形状部であって、それぞれに互いに異なる色が付された複数の帯形状部を含む付記項1の内視鏡装置。
(付記項6)
前記マーキング部は、長手方向に延設され、それぞれに互いに異なるパターンの模様が付された複数の帯形状部を含む付記項1の内視鏡装置。
Claims (5)
- 長手方向に沿って延設される挿入部と、
前記挿入部の先端部において先端が開口する挿通路を前記挿入部に前記長手方向に沿って規定する通路規定部と、
前記挿通路の前記先端の前記開口から先端方向に突出した状態で設けられる処置部を備え、前記挿通路に挿通される処置具と、
前記挿入部とは別体に前記長手方向に沿って設けられる挿入部材、又は、前記挿入部に設けられ、被写体及び前記処置具の前記処置部の撮像を行う撮像素子と、
前記処置部を湾曲動作させる湾曲動作駆動部と、
前記処置具を軸回り方向にロール動作させるロール動作駆動部と、
前記処置部を所望の位置まで移動させる指示が入力される指示入力ユニットと、
前記処置具の前記処置部で、かつ、前記撮像素子の撮像範囲内に設けられ、前記処置具の前記挿入部に対するロール動作により軸回り方向についての位置が変化するマーキング部と、
前記撮像素子での観察画像に基づいて、前記挿入部の前記先端部に対する前記処置部の位置及び姿勢を検出する位置姿勢検出部であって、前記観察画像から前記マーキング部を検出することにより前記処置部の前記位置及び前記姿勢を検出する位置検出部と、
検出された前記処置部の前記位置及び前記姿勢、及び、前記指示入力ユニットでの前記入力に基づいて、前記所望の位置へ前記処置部が移動する際の前記湾曲動作駆動部及び前記ロール動作駆動部の駆動情報を算出する駆動情報算出部と、
算出された前記駆動情報に基づいて、前記湾曲操作駆動部及び前記ロール動作駆動部を駆動制御する制御ユニットと、
を具備する医療装置。 - 前記位置姿勢検出部は、
既知情報が記録される記録部と、
前記観察画像から歪を除去する歪除去部と、
歪が除去された前記観察画像上での前記マーキング部の位置情報及び姿勢情報を抽出するマーキング抽出部と、
抽出された前記観察画像上での前記マーキング部の前記位置情報及び前記姿勢情報、及び、前記記録部に記録される前記既知情報に基づいて、前記挿入部に対する前記処置具の軸回り方向のロール量を算出するロール情報算出部と、
を備える請求項1の医療装置。 - 前記指示入力ユニットでは、前記観察画像上で前記撮像素子を原点とするカメラ座標系に基づく前記指示が入力され、
前記駆動情報算出部は、前記ロール情報算出部で算出される前記ロール量に基づいて前記カメラ座標系と前記観察画像上で前記処置具の先端を原点とする処置具座標系との関係を求め、かつ、前記カメラ座標系と前記処置具座標系との関係に基づいて前記指示入力ユニットからの前記カメラ座標系に基づく前記指示を前記処置具座標系に基づく指示に変換する入力指示変換部を備える請求項2の医療装置。 - 前記マーキング部は、長手方向に延設され、前記処置具とは異なる色が付された複数の帯形状部であって、それぞれに互いに異なる色が付された複数の帯形状部を含む請求項1の医療装置。
- 前記マーキング部は、長手方向に延設され、それぞれに互いに異なるパターンの模様が付された複数の帯形状部を含む請求項1の医療装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011513782A JP4875784B2 (ja) | 2009-10-09 | 2010-09-29 | 医療装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009235411 | 2009-10-09 | ||
| JP2009235411 | 2009-10-09 | ||
| PCT/JP2010/066980 WO2011043234A1 (ja) | 2009-10-09 | 2010-09-29 | 内視鏡装置 |
| JP2011513782A JP4875784B2 (ja) | 2009-10-09 | 2010-09-29 | 医療装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4875784B2 true JP4875784B2 (ja) | 2012-02-15 |
| JPWO2011043234A1 JPWO2011043234A1 (ja) | 2013-03-04 |
Family
ID=43856692
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011513782A Expired - Fee Related JP4875784B2 (ja) | 2009-10-09 | 2010-09-29 | 医療装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20110245661A1 (ja) |
| EP (1) | EP2486846A4 (ja) |
| JP (1) | JP4875784B2 (ja) |
| CN (1) | CN102469927A (ja) |
| WO (1) | WO2011043234A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011161564A1 (en) * | 2010-06-22 | 2011-12-29 | Koninklijke Philips Electronics N.V. | System and method for real-time endoscope calibration |
| JP6141410B2 (ja) * | 2013-03-29 | 2017-06-07 | オリンパス株式会社 | マニピュレータ、マニピュレータシステム及びマニピュレータの作動方法 |
| JP5959723B2 (ja) * | 2013-03-29 | 2016-08-02 | 富士フイルム株式会社 | 内視鏡下外科手術装置 |
| EP2979619B1 (en) * | 2013-03-29 | 2018-10-31 | FUJIFILM Corporation | Device for endoscopic surgery |
| CN105188506B (zh) * | 2013-03-29 | 2017-04-12 | 富士胶片株式会社 | 内窥镜下外科手术装置 |
| JP6173089B2 (ja) | 2013-07-24 | 2017-08-02 | オリンパス株式会社 | 医療用マスタースレーブシステムの制御方法 |
| WO2016136613A1 (ja) | 2015-02-26 | 2016-09-01 | オリンパス株式会社 | マニピュレータシステム |
| US20200237191A1 (en) * | 2016-06-01 | 2020-07-30 | Endomaster Pte. Ltd. | Endoscopy system components |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08224244A (ja) * | 1995-02-22 | 1996-09-03 | Olympus Optical Co Ltd | 医療用マニピュレータ |
| JPH0919403A (ja) * | 1995-07-07 | 1997-01-21 | Toshiba Corp | 内視鏡用デバイスおよび内視鏡装置 |
| JPH11113919A (ja) * | 1997-10-09 | 1999-04-27 | Asahi Optical Co Ltd | 内視鏡用鉗子 |
| JP2006170533A (ja) * | 2004-12-16 | 2006-06-29 | Seiko Epson Corp | 被加熱体の乾燥方法、加熱炉、及びデバイスの製造方法 |
| JP2008212349A (ja) * | 2007-03-02 | 2008-09-18 | Olympus Medical Systems Corp | 内視鏡装置 |
| JP2008237812A (ja) * | 2007-03-29 | 2008-10-09 | Olympus Medical Systems Corp | 多関節湾曲機構及び多関節湾曲機構を備えた医療器具 |
| JP2008245838A (ja) * | 2007-03-29 | 2008-10-16 | Olympus Medical Systems Corp | 内視鏡装置に搭載されるロボティクスアームシステム |
| JP2008245840A (ja) * | 2007-03-29 | 2008-10-16 | Olympus Medical Systems Corp | 内視鏡装置 |
| JP2009066144A (ja) * | 2007-09-12 | 2009-04-02 | Olympus Medical Systems Corp | 医療機器システム |
| JP2009101077A (ja) * | 2007-10-25 | 2009-05-14 | Olympus Medical Systems Corp | 医療装置 |
| JP2009207793A (ja) * | 2008-03-06 | 2009-09-17 | Fujifilm Corp | 内視鏡システム |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2334343Y (zh) * | 1997-12-25 | 1999-08-25 | 孙广智 | 带有深度标志的内窥镜活检钳 |
| EP1109497B1 (en) | 1998-08-04 | 2009-05-06 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| US20050272971A1 (en) * | 2002-08-30 | 2005-12-08 | Olympus Corporation | Medical treatment system, endoscope system, endoscope insert operation program, and endoscope device |
| EP1607035A4 (en) * | 2003-03-25 | 2009-03-11 | Olympus Corp | GUIDE WIRE |
| US9867669B2 (en) * | 2008-12-31 | 2018-01-16 | Intuitive Surgical Operations, Inc. | Configuration marker design and detection for instrument tracking |
| JP4914735B2 (ja) * | 2007-02-14 | 2012-04-11 | オリンパスメディカルシステムズ株式会社 | 処置具の位置制御を行う内視鏡システム |
| JP2008281418A (ja) * | 2007-05-10 | 2008-11-20 | Mitsubishi Heavy Ind Ltd | 位置姿勢推定方法 |
| JP5028219B2 (ja) * | 2007-10-30 | 2012-09-19 | オリンパスメディカルシステムズ株式会社 | マニピュレータ装置および医療機器システム |
| JP5477800B2 (ja) * | 2008-02-27 | 2014-04-23 | 株式会社日立製作所 | 回転状態検出装置の作動方法および回転状態検出装置 |
| JP5372406B2 (ja) * | 2008-05-23 | 2013-12-18 | オリンパスメディカルシステムズ株式会社 | 医療機器 |
| US8245594B2 (en) * | 2008-12-23 | 2012-08-21 | Intuitive Surgical Operations, Inc. | Roll joint and method for a surgical apparatus |
| US20110015648A1 (en) * | 2009-07-16 | 2011-01-20 | Hansen Medical, Inc. | Endoscopic robotic catheter system |
-
2010
- 2010-09-29 JP JP2011513782A patent/JP4875784B2/ja not_active Expired - Fee Related
- 2010-09-29 WO PCT/JP2010/066980 patent/WO2011043234A1/ja not_active Ceased
- 2010-09-29 CN CN2010800325304A patent/CN102469927A/zh active Pending
- 2010-09-29 EP EP10821905.6A patent/EP2486846A4/en not_active Withdrawn
-
2011
- 2011-04-05 US US13/080,169 patent/US20110245661A1/en not_active Abandoned
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08224244A (ja) * | 1995-02-22 | 1996-09-03 | Olympus Optical Co Ltd | 医療用マニピュレータ |
| JPH0919403A (ja) * | 1995-07-07 | 1997-01-21 | Toshiba Corp | 内視鏡用デバイスおよび内視鏡装置 |
| JPH11113919A (ja) * | 1997-10-09 | 1999-04-27 | Asahi Optical Co Ltd | 内視鏡用鉗子 |
| JP2006170533A (ja) * | 2004-12-16 | 2006-06-29 | Seiko Epson Corp | 被加熱体の乾燥方法、加熱炉、及びデバイスの製造方法 |
| JP2008212349A (ja) * | 2007-03-02 | 2008-09-18 | Olympus Medical Systems Corp | 内視鏡装置 |
| JP2008237812A (ja) * | 2007-03-29 | 2008-10-09 | Olympus Medical Systems Corp | 多関節湾曲機構及び多関節湾曲機構を備えた医療器具 |
| JP2008245838A (ja) * | 2007-03-29 | 2008-10-16 | Olympus Medical Systems Corp | 内視鏡装置に搭載されるロボティクスアームシステム |
| JP2008245840A (ja) * | 2007-03-29 | 2008-10-16 | Olympus Medical Systems Corp | 内視鏡装置 |
| JP2009066144A (ja) * | 2007-09-12 | 2009-04-02 | Olympus Medical Systems Corp | 医療機器システム |
| JP2009101077A (ja) * | 2007-10-25 | 2009-05-14 | Olympus Medical Systems Corp | 医療装置 |
| JP2009207793A (ja) * | 2008-03-06 | 2009-09-17 | Fujifilm Corp | 内視鏡システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2011043234A1 (ja) | 2013-03-04 |
| EP2486846A1 (en) | 2012-08-15 |
| WO2011043234A1 (ja) | 2011-04-14 |
| CN102469927A (zh) | 2012-05-23 |
| EP2486846A4 (en) | 2016-07-13 |
| US20110245661A1 (en) | 2011-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4875784B2 (ja) | 医療装置 | |
| US11786106B2 (en) | Robotic endoscope probe having orientation reference markers | |
| KR102542848B1 (ko) | 영상 안내 절차에서의 병리학적 데이터의 표시를 위한 시스템 및 방법 | |
| JP5024785B2 (ja) | 内視鏡装置に搭載されるアームシステム | |
| KR102542190B1 (ko) | 영상 안내 수술에서의 정합 보상의 시스템 및 방법 | |
| US8556803B2 (en) | Medical apparatus system | |
| KR20210005901A (ko) | 세장형 장치와 관련된 시스템 및 방법 | |
| KR100997194B1 (ko) | 간접적으로 수술감을 제공하는 원격 수술 로봇 시스템 및 그 제어 방법 | |
| EP2870942B1 (en) | Surgery assistance device | |
| CN104284637B (zh) | 手术辅助装置 | |
| JP7300514B2 (ja) | 内視鏡挿入制御装置、内視鏡の作動方法及び内視鏡挿入制御プログラム | |
| WO2025117336A1 (en) | Steerable catheters and wire force differences | |
| CN117243700B (zh) | 一种内镜输送长度的检测方法和相关装置 | |
| WO2022230829A1 (ja) | ロボットシステム | |
| CN115444562B (zh) | 机械臂装置、手术机器人及其控制方法 | |
| US20250345140A1 (en) | Struggling motion identification and detection for flexible elongate devices | |
| EP4588418A1 (en) | A soft robotic imaging device, an imaging system for minimally invasive surgical procedures and a controlling method of the soft robotic imaging device and the imaging system | |
| WO2025160225A1 (en) | Tool insertion position sensing | |
| WO2024206262A1 (en) | Insertable tool identification for flexible elongate devices | |
| WO2025030175A1 (en) | Flexible elongate device articulation control based on tool insertion distance | |
| WO2025019569A1 (en) | Intra-operative imaging to robotic-assisted navigation | |
| KR20250148700A (ko) | 가요성 내시경의 원격 및 자율 제어를 위한 시스템, 방법 및 디바이스 | |
| WO2025059207A1 (en) | Medical apparatus with support structure and method of use thereof | |
| WO2025076034A1 (en) | Restoring the state of systems after a system restart | |
| CN120549610A (zh) | 用于导航隐藏解剖通路的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111101 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111125 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4875784 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |