JP7362610B2 - コマンド指示されていない器具の回動を修正するシステムおよび方法 - Google Patents
コマンド指示されていない器具の回動を修正するシステムおよび方法 Download PDFInfo
- Publication number
- JP7362610B2 JP7362610B2 JP2020530977A JP2020530977A JP7362610B2 JP 7362610 B2 JP7362610 B2 JP 7362610B2 JP 2020530977 A JP2020530977 A JP 2020530977A JP 2020530977 A JP2020530977 A JP 2020530977A JP 7362610 B2 JP7362610 B2 JP 7362610B2
- Authority
- JP
- Japan
- Prior art keywords
- coordinate system
- reference frame
- instrument
- patient
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
- G06T7/248—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments involving reference images or patches
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2048—Tracking techniques using an accelerometer or inertia sensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10068—Endoscopic image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30196—Human being; Person
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Robotics (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Radiology & Medical Imaging (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Gynecology & Obstetrics (AREA)
- Multimedia (AREA)
- Endoscopes (AREA)
Description
Sheetにおいて特定される外国および国内の優先権主張を伴うすべての出願は、37 CFR 1.56の下、参照により本願に援用する。
または複数の解剖学的特徴に基づく。(g)前記目標基準系を取得することは、前記患者上に配置された1つまたは複数の電磁パッチからのデータに基づく。(h)前記目標基準系を取得することは、前記先端基準系に基づく。(i)前記調整を特定することは、解剖学的特徴の少なくとも1つの画像から導出される1つまたは複数の特徴と、前記解剖学的特徴の少なくとも1つのモデルから導出される1つまたは複数の特徴との比較に基づく。(j)解剖学的特徴の前記少なくとも1つの画像は、前記器具の前記遠位端にある前記画像処理装置から取得される。(k)前記調整を特定することは、前記器具の前記遠位端の1つまたは複数の電磁センサからのデータと、前記患者上に配置された1つまたは複数の
電磁パッチからのデータとの比較に基づく。(l)前記調整を特定することは、重力を計測する加速度計からのデータに基づく。(m)前記視覚基準系または前記制御基準系を変換することは、前記視覚基準系または前記制御基準系を前記器具の長手方向軸に対して回動することを含む。(n)前記視覚基準系または前記制御基準系を変換することは、前記視覚基準系または前記制御基準系を前記先端基準系または前記目標基準系に一致するように回動することを含む。(o)前記視覚基準系または前記制御基準系を変換することは、ユーザ入力に基づく。(p)前記変換された視覚基準系または前記変換された制御基準系を検証する。(q)前記変換された視覚基準系または前記変換された制御基準系を検証することは、前記器具を一方向に移動させることと、前記視覚基準系または前記制御基準系において、前記器具の前記移動に応じて予測される変化を計算することと、前記視覚基準系または前記制御基準系における実際の変化と前記予測される変化とを比較することと、を含む。
少なくとも前記患者の1つまたは複数の解剖学的特徴に基づいて、前記目標基準系を特定すること、を実行させる。(k)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記患者の前記1つまたは複数の解剖学的特徴を表す画像の1つまたは複数の画素値に基づいて、前記目標基準系を特定すること、を実行させる。(l)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記患者上に配置された1つまたは複数の電磁パッチからのデータに基づいて、前記目標基準系を特定すること、を実行させる。(m)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも解剖学的特徴の少なくとも1つの画像と前記解剖学的特徴の少なくとも1つのモデルとの間の1つまたは複数の違いを特定することと、前記少なくとも1つの画像と前記少なくとも1つのモデルとの間の前記違いに基づいて、前記制御基準系を変換すること、を実行させる。(n)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記制御基準系を前記目標基準系に一致するように前記医療器具の長手方向軸に対して回動すること、を実行させる。(o)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくともユーザ入力に基づいて前記制御基準系を変換すること、を実行させる。(p)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記変換された制御基準系を検証すること、を実行させる。(q)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記医療器具を一方向に移動させることと、前記制御基準系において、前記器具の前記移動に応じて予測される変化を特定することと、前記制御基準系における実際の変化と前記予測される変化とを比較することと、を実行させる。(r)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記医療器具を摺動可能に覆うシースの遠位端の向きを表すシース基準系を取得することと、前記制御基準系または前記目標基準系に基づいて、前記シース基準系を変換することと、を実行させる。
せる。(c)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記制御システムから前記制御基準系を受信すること、を実行させる。(d)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記1つまたは複数のプルワイヤを作動させて前記器具の前記部分を移動させることと、前記器具の前記部分の前記移動に基づいて、前記制御基準系を特定することと、を実行させる。(e)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記少なくとも1つのセンサからデータを受信することと、前記少なくとも1つのセンサからの前記データに基づいて、視覚基準系を特定することと、前記先端基準系および前記目標基準系に基づいて、前記視覚基準系を変換することと、を実行させる。(f)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記患者の1つまたは複数の解剖学的特徴に基づいて、前記目標基準系を特定すること、を実行させる。(g)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記患者上に配置された1つまたは複数の電磁パッチからのデータに基づいて、前記目標基準系を特定すること、を実行させる。(h)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも解剖学的特徴の少なくとも1つの画像と前記解剖学的特徴の少なくとも1つのモデルとの間の1つまたは複数の違いを特定することと、前記少なくとも1つの画像と前記少なくとも1つのモデルとの間の前記違いに基づいて、前記制御基準系を変換すること、を実行させる。(i)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記制御基準系を前記目標基準系に一致するように前記器具の長手方向軸に対して回動すること、を実行させる。(j)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくともユーザ入力に基づいて前記制御基準系を変換すること、を実行させる。(k)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記変換された制御基準系を検証すること、を実行させる。(l)前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記1つまたは複数のプルワイヤを作動させて前記器具の前記一部を移動させることと、前記制御基準系において、前記器具の前記一部の前記移動に応じて予測される変化を特定することと、前記制御基準系における実際の変化と前記予測される変化とを比較することと、を実行させる。(m)前記操縦可能な器具は前記器具の少なくとも一部を摺動可能に覆うシースをさらに有し、前記少なくとも1つのコンピュータ可読メモリと通信する前記1つまたは複数のプロセッサは、前記命令を実行して前記システムに少なくとも前記シースの遠位端の向きを表すシース基準系を取得することと、前記制御基準系または前記目標基準系に基づいて、前記シース基準系を変換することと、を実行させる。
本件開示の側面は、腹腔鏡検査などの低侵襲の手技や内視鏡検査などの非侵襲の手技を含む種々の医療手技を実行可能なロボット対応医療システムに組み込むことができる。内視鏡検査の手技においては、本システムは、気管支鏡検査、尿管鏡検査、消化器病検査などを実行することができる。
ロボット対応医療システムは、特定手技に応じてさまざまに構成することができる。図1は、気管支鏡検査の診断手技および/または治療樹技用に配置されたカートベースのロボット対応システム10の一実施形態を示す。気管支検査時に、システム10は、気管支鏡検査用の手技に特化した気管支鏡を自然開口のアクセスポイント(この例ではテーブルに配置された患者の口など)に操作可能な内視鏡13などの医療器具を搬送して診断用の
道具および/または治療用の道具を搬送するための、1つまたは複数のロボットアーム12を有するカート11を備える。図に示すように、カート11は、当該アクセスポイントにアクセスするために、患者の上半身に近い位置に配置されている。同様に、ロボットアーム12は、当該アクセスポイントに対して気管支鏡を配置するように作動可能である。図1に示す配置は、胃腸に関する(GI;gastro-intestinal)手技用の特別な内視鏡で
ある胃鏡を用いた胃腸に関する手技を行うときにも使用できる。図2は、カートの一例である実施形態をより詳細に示す。
た場所に収容することができる。
ことができる。タワー30はまた、医療器具内または医療器具上の電磁センサによる検出のために電磁場発生器を収容し、位置決めするために使用されてもよい。
ができるが、制御、光学、流体、および/またはナビゲーションのための支持体は別個のケーブルを介して提供することができる。
セス範囲を実現しながら、空間内の所望の位置から医療器具を位置決めしたり方向付けたりすることが可能になる。
。動脈内への挿入後、医療器具34は、器具ドライバ28を移動させることによって方向付けられ、挿入されてもよい。あるいは、カートが例えば、肩および手首の近くの頸動脈および上腕動脈などの代替の血管アクセスポイントに到達するために、患者の上腹部の周りに配置されてもよい。
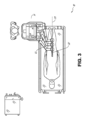
ロボット対応医療システムの実施形態はまた、患者のテーブルを組み込んでもよい。テーブルを組み込むことにより、カートを取り外すことによって手術室内の資本設備の量が減少し、患者へのアクセスがより大きくなる。図5は、気管支鏡検査手順のために配置されたそのようなロボット使用可能システムの実施形態を示す。システム36は、床の上にプラットフォーム38(「テーブル」または「ベッド」として示される)を支持するための支持構造または支柱37を含む。カートベースのシステムと同様に、システム36のロボットアーム39のエンドエフェクタは、図5の気管支鏡40などの細長い医療器具を、器具ドライバ42の直線的な位置合わせから形成された仮想レール41を通して、またはそれに沿って操作するように設計された器具ドライバ42を備える。実際には、X線透視画像を提供するためのCアームがテーブル38の周りにエミッタおよび検出器を配置することによって、患者の上腹部領域の上に配置され得る。
めのリードスクリューと、リードスクリューに基づいて前記キャリッジの移動を機械化するためのモータとを備えることができる。カラム37はまた、キャリッジ43およびその上に取り付けられたロボットアーム39に電力および制御信号を伝達することができる。
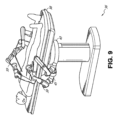
ト使用可能なテーブルベースのシステムの実施形態を示す。図9に示されるように、システム36のキャリッジ43はテーブル38の両側にロボットアーム39の対を位置決めするように回動され、垂直に調整され、その結果、腹腔鏡59は患者の腹腔に到達するために患者の両側の最小切開部を通過するようにアームマウント45を使用して位置決めされ得る。
めに腹腔の空間を空ける。
システムのロボットアームのエンドエフェクタは、(1)医療器具を作動させるための電気機械的手段を組み込む器具ドライバ(あるいは「器具駆動機構」または「器具装置マニピュレータ(IDM;instrument device manipulator)」と呼ばれる)と、(2)モ
ータなどの任意の電気機械的構成要素を削除できる取り外し可能または取り外し可能な医療器具とを備える。この二分法は、医療手技に使用される医療器具を滅菌する必要性、およびそれらの複雑な機械的アセンブリおよび繊細な電子機器のために高価な資本設備を適切に滅菌することができないことが起因となりうる。したがって、医療器具は医師または医師のスタッフによる個々の滅菌または廃棄のために、器具ドライバ(したがってシステム)から取り外し、取り外し、および交換されるように設計されてもよい。対照的に、器具ドライバは、交換または滅菌される必要はなく、保護のためにドレープで覆われてもよい。
ャフトの速度を測定し、制御回路にフィードバックを提供するためのエンコーダ67と、制御信号を受信し、駆動ユニットを作動させるための制御回路68とを備える。各駆動ユニット63は独立して制御され、電動化されており、器具ドライバ62は、医療器具に複数(図12に示すように4つ)の独立した駆動出力を提供することができる。動作中、制御回路68は制御信号を受信し、モータ信号をモータ66に送信し、エンコーダ67によって測定された結果のモータ速度を所望の速度と比較し、モータ信号を変調して所望のトルクを生成する。
図13は、組になった器具ドライバを有する例示的な医療器具を示す。ロボットシステムと共に使用するように設計された他の器具と同様に、医療器具70は、細長いシャフト71(または細長い本体)および器具基部72を備える。医師による手動操作向けの設計として「器具ハンドル」とも呼ばれる器具基部72は、全体として、ロボットアーム76の遠位端で器具ドライバ75上の駆動インタフェースを通って延びる駆動出力74と嵌合するように設計された、回動可能な駆動入力73、例えば、レセプタクル、プーリ、またはスプールを備えてもよい。物理的に接続され、ラッチされ、および/または結合されると、器具基部72の嵌合された駆動入力73は器具ドライバ75内の駆動出力74と回動軸を共有し、駆動出力74から駆動入力73へのトルクの伝達が可能になる。いくつかの実施形態では、駆動出力74が駆動入力73上のレセプタクルと嵌合するように設計されたスプラインを備えてもよい。
の個々の駆動入力73に個々に固定することができる。ハンドル72から、テンドンは、細長いシャフト71内の1つ以上のプルルーメンに向けられ、細長いシャフト71の遠位部分に固定される。腹腔鏡検査では、これらのテンドンが手首、把持器、またはさみなどの遠位に取り付けられたエンドエフェクタに結合されてもよい。このような構成の下では、駆動入力73に及ぼされるトルクがテンドンに表面張力を伝達し、それによってエンドエフェクタを何らかの方法で作動させる。腹腔鏡検査では、テンドンは関節を軸の周りに回動させ、それによってエンドエフェクタを一指示または別の指示に移動させることができる。あるいはテンドンは細長いシャフト71の遠位端において、把持器の1つ以上の顎に接続され得、ここで、テンドンからの張力によって把持器が閉じる。
ちの1つによって駆動される器具ドライバ80の回動アセンブリ83内に収容される。回動駆動ユニットによって提供されるトルクに応じて、回動アセンブリ83は、回動アセンブリ83を器具ドライバの非回動部分84に接続する円形ベアリングに沿って回動する。電気接点を介して器具ドライバ80の非回動部分84から回動アセンブリ83に電力および制御信号を伝達することができ、この信号は、ブラシ付きスリップリング接続(図示せず)による回動によって維持することができる。他の実施形態では、回動アセンブリ83が非回動部分84に一体化され、したがって他の駆動ユニットと平行ではない別個の駆動ユニットに応答することができる。回動機構83は、器具ドライバ80が器具ドライバ軸85の周りに単一のユニットとして、駆動ユニットおよびそれぞれの駆動出力81を回動させることができる。
従来の内視鏡検査には、X線透視法(例えば、Cアームを介して送達され得るよう)および他の形態の放射線ベースの画像化モダリティの使用が含まれ、操作者の医師に管腔内ガイダンスが提供される。一方、本件開示によって実現されるロボットシステムは、放射線に対する医師の曝露を低減し、手術室内の器具の数を減らすために、非放射線ベースのナビゲーションおよび位置決め手段を提供する。本明細書で使用されるように、用語「位置決め」は、基準系における物体の位置を特定および/または監視することを指すことができる。術前マッピング、コンピュータビジョン、リアルタイム電磁追跡、およびロボットコマンドデータなどの技術は放射線を用いない運用環境を達成するために、個別に、または組み合わせて使用されてもよい。放射線ベースの画像モダリティが依然として使用される他の場合には、術前マッピング、コンピュータビジョン、リアルタイム電磁追跡、およびロボットコマンドデータは放射線ベースの画像モダリティによってのみ得られる情報を改善するために、個別に、または組み合わせて使用されてもよい。
ドし、この電流は、電磁センサと電磁界発生器との間の距離および角度を特定するために解析され得る。これらの距離および向きは、座標系内の単一の位置を患者の解剖学的構造の手術前モデル内の位置と位置合わせさせる幾何学的変換を特定するために、患者の解剖学的構造(例えば、手術前モデル)に対して手術中に「位置合わせ」されてもよい。一旦位置合わせされると、医療器具の1つ以上の位置(例えば、内視鏡の遠位先端)に埋め込まれた電磁追跡装置は、患者の解剖学的構造を通る医療器具の進歩のリアルタイムの指示を提供し得る。
本開示の実施形態は、コマンド指示されていない器具の移動を補正するために使用されるシステムおよび手法に関し、これは、特定の実施形態において、コマンド指示されていない器具の回動を修正することを含む。操作者(例えば、医師、手術医、気管支鏡医、またはロボット制御システム)が患者の体内の軟性の管状器具を制御する場合、器具は、器具の向きを変化させるように動作する。例えば、器具は、操作者によるコマンド指示とは無関係に(例えば、器具の長手方向軸に対して)回動することができる。このようなコマンド指示されていない動作は、例えば、軟性の管状器具が気管内チューブを介して挿入される場合、および/または器具が湾曲した解剖学的構造を通過し、その形状が構造に適合する場合のような種々の状況において発生しうる。このコマンド指示されていない回動は、軟性の管状器具の操作者にとって1つまたは複数の座標系に関する問題を引き起こす可能性がある。というのは、コマンド指示されていない回動は、操作者が望むまたは予測す
る基準系と矛盾する視覚基準系および/または制御基準系を表す可能性があるからである。本明細書に開示される特定の実施形態は、そのような意図しない器具の動きを修正するための方法およびシステムに関係する。
ど)。これらの位置における異なる変位を追跡するために、多数の異なる電磁パッチセンサ105を体表面上で離間させて配置することができる。例えば、肺の周辺部は、中央気道よりも呼吸による動きが大きく、図に示すように多数の電磁パッチセンサ105を配置することにより、これらの運動をより正確に分析することができる。これにより、管腔ネットワーク140の異なる領域を通って移動する内視鏡に対して、これらの異なる領域を通過する際の患者の呼吸に起因するさまざまな位置ずれが生じる、内視鏡の遠位端を正確に追跡することが可能となる。
320への開口をさらに有し、器具(例えば、生検針、細胞診ブラシ、鉗子)は器具シャフトに沿って挿入することができ、器具の遠位端300に近い領域へのアクセスが可能になる。
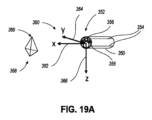
の構成要素に類似する1つ以上の構成要素(例えば、画像処理装置356および/または電磁センサコイル358)を含む遠位先端352を有する。医療器具350はまた、器具350の遠位先端352を操作または関節動作させるように構成された1つ以上のプルワイヤ354を含む。先端基準系360は、器具350の遠位端352の向きを表す。先端基準系360は、x軸362、y軸364、およびz軸366を含む。以下により詳細に説明されるように、先端基準系360は、1つ以上の画像処理装置(例えば、画像処理装置356)、位置センサ(例えば、電磁パッチセンサ105)、電磁コイル(例えば、電磁センサコイル358)、任意の他の適当なセンサ(例えば、器具350の重力または他の運動を測定する加速度計)、またはこれらの組み合わせによって特定されてもよい。
示す例では、医療器具450の遠位先端452は、遠位先端452が、コマンド指示されていない回動に起因して斜め方向を向いていることを示す。したがって、x軸462、y軸464、およびz軸466を含む先端基準系460もまた、斜め方向を向いている。目標基準系468は、頂点469が上方向を向く三角形のピラミッドによって表される。
されるものではない。いくつかの場合において、例示的な処理600の1つ以上のブロックは、システムのユーザによって実行されてもよい。
気管支の中心線が横軸に実質的に一致していることである。患者の解剖学的特徴(例えば、術前データまたは仮定/既知から得られるもの)に基づいて目標基準系を決定するための例示的なプロセスは、図25を参照しながら以下に説明する。
は制御基準系に応じて調整できる。視覚基準系および制御基準系に対する調整が目標基準系に基づいて特定される調整プロセス例について、図19A~図21B、図24A~図24Dを参照しながら説明する。
と少なくとも実質的に一致していてもよい。例えば、視覚表示782内の上方向、下方向、左方向、および右方向は、制御基準系の指標790、792、794、および796の上方向、下方向、左方向、および右方向に少なくとも実質的に対応してもよい。
トリ902、904、906、および908のすべてを有していてもよい。いくつかの実施形態では、制御システム900は、入力データリポジトリ902、904、906、および908のうちの2つ以上を有していてもよい。いくつかの実施形態では、制御システム900は、出力データリポジトリ912および914のすべてを有していなくてもよい。いくつかの実施形態では、制御システム900は、出力データリポジトリ912および914のうちの2つ以上を有していてもよい。以下の説明を明確化する目的で図24では別々に示されているが、データリポジトリの一部または全部が、単一のメモリまたは一連のメモリにまとめて記憶されてもよい。
本明細書に開示される実施形態は、コマンド指示されていない器具の回動を修正するためのシステム、方法、および装置を提供する。
て第2の構成要素に間接的に接続されるか、または第2の構成要素に直接接続されることができることに留意されたい。
Network)(1つまたは複数のセルラーネットワーク)、無線LAN(Local Area Network)(IEEE 802.11(Wi-Fi(登録商標)など、1つまたは複数の規格用)、Bluetooth(
登録商標)、データ転送ケーブルなどを含み、これらに限定されない、任意の有線または無線データ転送媒体を表す。
開示は、本明細書に示される実装に限定されることを意図するものではなく、本明細書に開示される原理および新規な特徴と一致する最も広い範囲を与えられるべきである。
Claims (19)
- 患者に挿入されるロボット制御された医療器具であって、ユーザ指示に基づいて移動された前記医療器具においてコントローラフィードバックシステムを調整する方法であって、
前記ユーザ指示で指示されていない前記医療器具の前記医療器具の長手方向軸を中心とした回転を、下記(A)~(D)によって検出することと、
(A)前記医療器具の遠位端にある少なくとも1つの画像処理装置または位置センサからデータを受信することと、
(B)前記少なくとも1つの画像処理装置または位置センサからの前記データに基づいて、先端座標系を特定することであって、前記先端座標系は、前記医療器具の前記遠位端の現在の向きを表す、ことと、
(C)解剖学的座標系またはグローバル座標系を表す目標座標系を取得することと、
(D)前記画像処理装置によって取得される画像であって解剖学的特徴の少なくとも1つの画像から導出される1つまたは複数の特徴と、前記解剖学的特徴の少なくとも1つのモデルから導出される1つまたは複数の特徴と、の比較に基づいて、前記先端座標系と前記目標座標系との間の相違を検出すること、
(1)前記画像処理装置の表示出力の向きを表す視覚座標系または(2)前記ユーザ指示と前記医療器具の動きの向きを表す制御座標系の少なくとも一方に対する調整を、前記先端座標系および前記目標座標系の間の相違に基づいて特定することと、
前記視覚座標系または前記制御座標系が前記目標座標系に一致するように前記特定された調整に基づいて前記視覚座標系または前記制御座標系を変換することと、
を含むことを特徴とする方法。 - 前記少なくとも1つの位置センサは電磁センサを含むことを特徴とする請求項1に記載の方法。
- 前記目標座標系を取得することは、前記患者の前記1つまたは複数の解剖学的特徴を表す画像の1つまたは複数の画素値に基づくことを特徴とする請求項1に記載の方法。
- 前記目標座標系を取得することは、前記患者の主竜骨(main carina)の1つまたは複数の解剖学的特徴に基づくことを特徴とする請求項1に記載の方法。
- 前記目標座標系を取得することは、前記患者上に配置された1つまたは複数の電磁パッチからのデータに基づくことを特徴とする請求項1に記載の方法。
- 前記調整を特定することは、前記医療器具の前記遠位端の1つまたは複数の電磁センサからのデータと、前記患者上に配置された1つまたは複数の電磁パッチからのデータとの比較に基づくことを特徴とする請求項1に記載の方法。
- 前記調整を特定することは、重力を計測する加速度計からのデータに基づくことを特徴とする請求項1に記載の方法。
- 前記視覚座標系または前記制御座標系を変換することは、前記視覚座標系または前記制御座標系を前記医療器具の長手方向軸に対して回動することを含むことを特徴とする請求項1に記載の方法。
- 前記視覚座標系または前記制御座標系を変換することが、ユーザ入力に基づいて開始されることを特徴とする請求項1に記載の方法。
- 前記変換された視覚座標系または前記変換された制御座標系を、
前記医療器具を一方向に移動させることと、
前記視覚座標系または前記制御座標系において、前記医療器具の一方向への移動に応じて予測される変化を計算することと、
(1)前記視覚座標系または前記制御座標系における実際の変化と、(2)前記予測される変化と、を比較することと、
によって検証することをさらに含むことを特徴とする請求項1に記載の方法。 - 患者に挿入されるロボット制御された医療器具であって、ユーザ指示に基づいて移動された前記医療器具においてコントローラフィードバックシステムを調整する方法であって、
前記ユーザ指示で指示されていない前記医療器具の前記医療器具の長手方向軸を中心とした回転を、下記(A)~(D)によって検出することと、
(A)前記医療器具の遠位端にある少なくとも1つの画像処理装置または位置センサからデータを受信することと、
(B)前記少なくとも1つの画像処理装置または位置センサからの前記データに基づいて、先端座標系を特定することであって、前記先端座標系は、前記医療器具の前記遠位端の現在の向きを表す、ことと、
(C)前記患者上に配置された1つまたは複数の電磁パッチからのデータに基づいて目標座標系を取得することと、
(D)前記先端座標系と前記目標座標系の間の相違を検出すること、
(1)前記画像処理装置の表示出力の向きを表す視覚座標系または(2)前記ユーザ指示と前記医療器具の動きの向きを表す制御座標系の少なくとも一方に対する調整を、前記先端座標系および前記目標座標系の間の相違に基づいて特定することと、
前記視覚座標系または前記制御座標系が前記目標座標系に一致するように前記特定された調整に基づいて前記視覚座標系または前記制御座標系を変換することと、
を含むことを特徴とする方法。 - 前記少なくとも1つの位置センサは電磁センサを含むことを特徴とする請求項11に記載の方法。
- 前記目標座標系を取得することは、前記患者の前記1つまたは複数の解剖学的特徴を表す画像の1つまたは複数の画素値に基づくことを特徴とする請求項11に記載の方法。
- 前記目標座標系を取得することは、前記患者の主竜骨(main carina)の1つまたは複数の解剖学的特徴に基づくことを特徴とする請求項11に記載の方法。
- 前記調整を特定することは、前記医療器具の前記遠位端の1つまたは複数の電磁センサからのデータと、前記患者上に配置された1つまたは複数の電磁パッチからのデータとの比較に基づくことを特徴とする請求項11に記載の方法。
- 前記調整を特定することは、重力を計測する加速度計からのデータに基づくことを特徴とする請求項11に記載の方法。
- 前記視覚座標系または前記制御座標系を変換することは、前記視覚座標系または前記制御座標系を前記医療器具の長手方向軸に対して回動することを含むことを特徴とする請求項11に記載の方法。
- 前記視覚座標系または前記制御座標系を変換することは、ユーザ入力に基づいて開始されることを特徴とする請求項11に記載の方法。
- 前記変換された視覚座標系または前記変換された制御座標系を、
前記医療器具を一方向に移動させることと、
前記視覚座標系または前記制御座標系において、前記医療器具の一方向への移動に応じて予測される変化を計算することと、
(1)前記視覚座標系または前記制御座標系における実際の変化と、(2)前記予測される変化と、を比較することと、
によって検証することをさらに含むことを特徴とする請求項11に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762595455P | 2017-12-06 | 2017-12-06 | |
| US62/595,455 | 2017-12-06 | ||
| PCT/US2018/064126 WO2019113249A1 (en) | 2017-12-06 | 2018-12-05 | Systems and methods to correct for uncommanded instrument roll |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021505270A JP2021505270A (ja) | 2021-02-18 |
| JP7362610B2 true JP7362610B2 (ja) | 2023-10-17 |
Family
ID=66658356
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020530977A Active JP7362610B2 (ja) | 2017-12-06 | 2018-12-05 | コマンド指示されていない器具の回動を修正するシステムおよび方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US10987179B2 (ja) |
| EP (1) | EP3684282B1 (ja) |
| JP (1) | JP7362610B2 (ja) |
| KR (1) | KR102645922B1 (ja) |
| CN (1) | CN110831536B (ja) |
| AU (1) | AU2018380139B2 (ja) |
| WO (1) | WO2019113249A1 (ja) |
Families Citing this family (155)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8414505B1 (en) | 2001-02-15 | 2013-04-09 | Hansen Medical, Inc. | Catheter driver system |
| WO2005087128A1 (en) | 2004-03-05 | 2005-09-22 | Hansen Medical, Inc. | Robotic catheter system |
| US9232959B2 (en) | 2007-01-02 | 2016-01-12 | Aquabeam, Llc | Multi fluid tissue resection methods and devices |
| ES2769535T3 (es) | 2008-03-06 | 2020-06-26 | Aquabeam Llc | Ablación de tejido y cauterización con energía óptica transportada en una corriente de fluido |
| US9254123B2 (en) | 2009-04-29 | 2016-02-09 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US8672837B2 (en) | 2010-06-24 | 2014-03-18 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable medical device |
| US20120071752A1 (en) | 2010-09-17 | 2012-03-22 | Sewell Christopher M | User interface and method for operating a robotic medical system |
| US9138166B2 (en) | 2011-07-29 | 2015-09-22 | Hansen Medical, Inc. | Apparatus and methods for fiber integration and registration |
| ES2687817T3 (es) | 2012-02-29 | 2018-10-29 | Procept Biorobotics Corporation | Resección y tratamiento de tejido guiado por imagen automatizada |
| US20130317519A1 (en) | 2012-05-25 | 2013-11-28 | Hansen Medical, Inc. | Low friction instrument driver interface for robotic systems |
| US20140148673A1 (en) | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Method of anchoring pullwire directly articulatable region in catheter |
| US10231867B2 (en) | 2013-01-18 | 2019-03-19 | Auris Health, Inc. | Method, apparatus and system for a water jet |
| US9668814B2 (en) | 2013-03-07 | 2017-06-06 | Hansen Medical, Inc. | Infinitely rotatable tool with finite rotating drive shafts |
| US10149720B2 (en) | 2013-03-08 | 2018-12-11 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US9566414B2 (en) | 2013-03-13 | 2017-02-14 | Hansen Medical, Inc. | Integrated catheter and guide wire controller |
| US9057600B2 (en) | 2013-03-13 | 2015-06-16 | Hansen Medical, Inc. | Reducing incremental measurement sensor error |
| US9326822B2 (en) | 2013-03-14 | 2016-05-03 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9173713B2 (en) | 2013-03-14 | 2015-11-03 | Hansen Medical, Inc. | Torque-based catheter articulation |
| US11213363B2 (en) | 2013-03-14 | 2022-01-04 | Auris Health, Inc. | Catheter tension sensing |
| US20140277334A1 (en) | 2013-03-14 | 2014-09-18 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9408669B2 (en) | 2013-03-15 | 2016-08-09 | Hansen Medical, Inc. | Active drive mechanism with finite range of motion |
| US9283046B2 (en) | 2013-03-15 | 2016-03-15 | Hansen Medical, Inc. | User interface for active drive apparatus with finite range of motion |
| US20140276936A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Active drive mechanism for simultaneous rotation and translation |
| US9271663B2 (en) | 2013-03-15 | 2016-03-01 | Hansen Medical, Inc. | Flexible instrument localization from both remote and elongation sensors |
| US9629595B2 (en) | 2013-03-15 | 2017-04-25 | Hansen Medical, Inc. | Systems and methods for localizing, tracking and/or controlling medical instruments |
| US10849702B2 (en) | 2013-03-15 | 2020-12-01 | Auris Health, Inc. | User input devices for controlling manipulation of guidewires and catheters |
| US9452018B2 (en) | 2013-03-15 | 2016-09-27 | Hansen Medical, Inc. | Rotational support for an elongate member |
| US9014851B2 (en) | 2013-03-15 | 2015-04-21 | Hansen Medical, Inc. | Systems and methods for tracking robotically controlled medical instruments |
| US20140276647A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Vascular remote catheter manipulator |
| US10376672B2 (en) | 2013-03-15 | 2019-08-13 | Auris Health, Inc. | Catheter insertion system and method of fabrication |
| US11020016B2 (en) | 2013-05-30 | 2021-06-01 | Auris Health, Inc. | System and method for displaying anatomy and devices on a movable display |
| WO2014201165A1 (en) | 2013-06-11 | 2014-12-18 | Auris Surgical Robotics, Inc. | System for robotic assisted cataract surgery |
| US10426661B2 (en) | 2013-08-13 | 2019-10-01 | Auris Health, Inc. | Method and apparatus for laser assisted cataract surgery |
| EP3243476B1 (en) | 2014-03-24 | 2019-11-06 | Auris Health, Inc. | Systems and devices for catheter driving instinctiveness |
| US10046140B2 (en) | 2014-04-21 | 2018-08-14 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| US10569052B2 (en) | 2014-05-15 | 2020-02-25 | Auris Health, Inc. | Anti-buckling mechanisms for catheters |
| US10792464B2 (en) | 2014-07-01 | 2020-10-06 | Auris Health, Inc. | Tool and method for using surgical endoscope with spiral lumens |
| US9744335B2 (en) | 2014-07-01 | 2017-08-29 | Auris Surgical Robotics, Inc. | Apparatuses and methods for monitoring tendons of steerable catheters |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| CN107427327A (zh) | 2014-09-30 | 2017-12-01 | 奥瑞斯外科手术机器人公司 | 具有虚拟轨迹和柔性内窥镜的可配置机器人外科手术系统 |
| US10499999B2 (en) | 2014-10-09 | 2019-12-10 | Auris Health, Inc. | Systems and methods for aligning an elongate member with an access site |
| US10314463B2 (en) | 2014-10-24 | 2019-06-11 | Auris Health, Inc. | Automated endoscope calibration |
| US11819636B2 (en) | 2015-03-30 | 2023-11-21 | Auris Health, Inc. | Endoscope pull wire electrical circuit |
| US20160287279A1 (en) | 2015-04-01 | 2016-10-06 | Auris Surgical Robotics, Inc. | Microsurgical tool for robotic applications |
| WO2016164824A1 (en) | 2015-04-09 | 2016-10-13 | Auris Surgical Robotics, Inc. | Surgical system with configurable rail-mounted mechanical arms |
| WO2016187054A1 (en) | 2015-05-15 | 2016-11-24 | Auris Surgical Robotics, Inc. | Surgical robotics system |
| EP3346899B1 (en) | 2015-09-09 | 2022-11-09 | Auris Health, Inc. | Instrument device manipulator for a surgical robotics system |
| JP6824967B2 (ja) | 2015-09-18 | 2021-02-03 | オーリス ヘルス インコーポレイテッド | 管状網のナビゲーション |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US10639108B2 (en) | 2015-10-30 | 2020-05-05 | Auris Health, Inc. | Process for percutaneous operations |
| US10143526B2 (en) | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| US10932861B2 (en) | 2016-01-14 | 2021-03-02 | Auris Health, Inc. | Electromagnetic tracking surgical system and method of controlling the same |
| US10932691B2 (en) | 2016-01-26 | 2021-03-02 | Auris Health, Inc. | Surgical tools having electromagnetic tracking components |
| US11324554B2 (en) | 2016-04-08 | 2022-05-10 | Auris Health, Inc. | Floating electromagnetic field generator system and method of controlling the same |
| US10454347B2 (en) | 2016-04-29 | 2019-10-22 | Auris Health, Inc. | Compact height torque sensing articulation axis assembly |
| US11037464B2 (en) | 2016-07-21 | 2021-06-15 | Auris Health, Inc. | System with emulator movement tracking for controlling medical devices |
| US10463439B2 (en) | 2016-08-26 | 2019-11-05 | Auris Health, Inc. | Steerable catheter with shaft load distributions |
| US11241559B2 (en) | 2016-08-29 | 2022-02-08 | Auris Health, Inc. | Active drive for guidewire manipulation |
| KR20230096148A (ko) | 2016-08-31 | 2023-06-29 | 아우리스 헬스, 인코포레이티드 | 길이 보존 수술용 기구 |
| US9931025B1 (en) * | 2016-09-30 | 2018-04-03 | Auris Surgical Robotics, Inc. | Automated calibration of endoscopes with pull wires |
| US10136959B2 (en) | 2016-12-28 | 2018-11-27 | Auris Health, Inc. | Endolumenal object sizing |
| US10543048B2 (en) | 2016-12-28 | 2020-01-28 | Auris Health, Inc. | Flexible instrument insertion using an adaptive insertion force threshold |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| JP7159192B2 (ja) | 2017-03-28 | 2022-10-24 | オーリス ヘルス インコーポレイテッド | シャフト作動ハンドル |
| KR102558061B1 (ko) | 2017-03-31 | 2023-07-25 | 아우리스 헬스, 인코포레이티드 | 생리적 노이즈를 보상하는 관강내 조직망 항행을 위한 로봇 시스템 |
| US10285574B2 (en) | 2017-04-07 | 2019-05-14 | Auris Health, Inc. | Superelastic medical instrument |
| KR20230106716A (ko) | 2017-04-07 | 2023-07-13 | 아우리스 헬스, 인코포레이티드 | 환자 삽입기(Introducer) 정렬 |
| US10881482B2 (en) * | 2017-05-09 | 2021-01-05 | Boston Scientific Scimed, Inc. | Operating room devices, methods, and systems |
| KR20240035632A (ko) | 2017-05-12 | 2024-03-15 | 아우리스 헬스, 인코포레이티드 | 생검 장치 및 시스템 |
| AU2018270785B2 (en) | 2017-05-17 | 2023-11-23 | Auris Health, Inc. | Exchangeable working channel |
| US10022192B1 (en) | 2017-06-23 | 2018-07-17 | Auris Health, Inc. | Automatically-initialized robotic systems for navigation of luminal networks |
| JP7330902B2 (ja) | 2017-06-28 | 2023-08-22 | オーリス ヘルス インコーポレイテッド | 電磁歪み検出 |
| EP3645100A4 (en) | 2017-06-28 | 2021-03-17 | Auris Health, Inc. | INSTRUMENT INSERTION COMPENSATION |
| EP3644885B1 (en) | 2017-06-28 | 2023-10-11 | Auris Health, Inc. | Electromagnetic field generator alignment |
| US11026758B2 (en) | 2017-06-28 | 2021-06-08 | Auris Health, Inc. | Medical robotics systems implementing axis constraints during actuation of one or more motorized joints |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| US10464209B2 (en) | 2017-10-05 | 2019-11-05 | Auris Health, Inc. | Robotic system with indication of boundary for robotic arm |
| US10016900B1 (en) | 2017-10-10 | 2018-07-10 | Auris Health, Inc. | Surgical robotic arm admittance control |
| US10145747B1 (en) | 2017-10-10 | 2018-12-04 | Auris Health, Inc. | Detection of undesirable forces on a surgical robotic arm |
| US10555778B2 (en) | 2017-10-13 | 2020-02-11 | Auris Health, Inc. | Image-based branch detection and mapping for navigation |
| US11058493B2 (en) | 2017-10-13 | 2021-07-13 | Auris Health, Inc. | Robotic system configured for navigation path tracing |
| CN116059454A (zh) | 2017-12-08 | 2023-05-05 | 奥瑞斯健康公司 | 用于执行医疗手术的系统和用以移除肾结石的医疗装置 |
| WO2019113391A1 (en) | 2017-12-08 | 2019-06-13 | Auris Health, Inc. | System and method for medical instrument navigation and targeting |
| EP3723655A4 (en) | 2017-12-11 | 2021-09-08 | Auris Health, Inc. | SYSTEMS AND METHODS FOR INSTRUMENT-BASED INSERTION ARCHITECTURES |
| KR20200100613A (ko) | 2017-12-14 | 2020-08-26 | 아우리스 헬스, 인코포레이티드 | 기구 위치 추정을 위한 시스템 및 방법 |
| KR20200101334A (ko) | 2017-12-18 | 2020-08-27 | 아우리스 헬스, 인코포레이티드 | 관강내 조직망 내 기구 추적 및 항행을 위한 방법 및 시스템 |
| CN111885980B (zh) | 2018-01-17 | 2023-03-28 | 奥瑞斯健康公司 | 具有可调式臂支撑件的外科平台 |
| US10888386B2 (en) | 2018-01-17 | 2021-01-12 | Auris Health, Inc. | Surgical robotics systems with improved robotic arms |
| USD924410S1 (en) | 2018-01-17 | 2021-07-06 | Auris Health, Inc. | Instrument tower |
| USD901018S1 (en) | 2018-01-17 | 2020-11-03 | Auris Health, Inc. | Controller |
| USD901694S1 (en) | 2018-01-17 | 2020-11-10 | Auris Health, Inc. | Instrument handle |
| USD873878S1 (en) | 2018-01-17 | 2020-01-28 | Auris Health, Inc. | Robotic arm |
| USD932628S1 (en) | 2018-01-17 | 2021-10-05 | Auris Health, Inc. | Instrument cart |
| JP7301884B2 (ja) | 2018-02-13 | 2023-07-03 | オーリス ヘルス インコーポレイテッド | 医療用器具を駆動するためのシステム及び方法 |
| JP7225259B2 (ja) | 2018-03-28 | 2023-02-20 | オーリス ヘルス インコーポレイテッド | 器具の推定位置を示すためのシステム及び方法 |
| CN117017505A (zh) | 2018-03-28 | 2023-11-10 | 奥瑞斯健康公司 | 复合器械和机器人系统 |
| EP3773131A4 (en) | 2018-03-28 | 2021-12-15 | Auris Health, Inc. | LOCATION SENSOR RECORDING SYSTEMS AND METHODS |
| US10872449B2 (en) | 2018-05-02 | 2020-12-22 | Covidien Lp | System and method for constructing virtual radial ultrasound images from CT data and performing a surgical navigation procedure using virtual ultrasound images |
| KR20210010871A (ko) | 2018-05-18 | 2021-01-28 | 아우리스 헬스, 인코포레이티드 | 로봇식 원격작동 시스템을 위한 제어기 |
| CN110831486B (zh) | 2018-05-30 | 2022-04-05 | 奥瑞斯健康公司 | 用于基于定位传感器的分支预测的系统和方法 |
| KR20210018858A (ko) | 2018-05-31 | 2021-02-18 | 아우리스 헬스, 인코포레이티드 | 관상 네트워크의 경로-기반 내비게이션 |
| WO2019232236A1 (en) | 2018-05-31 | 2019-12-05 | Auris Health, Inc. | Image-based airway analysis and mapping |
| CN112236083A (zh) | 2018-05-31 | 2021-01-15 | 奥瑞斯健康公司 | 用于导航检测生理噪声的管腔网络的机器人系统和方法 |
| EP3813714A4 (en) | 2018-06-07 | 2022-02-09 | Auris Health, Inc. | HIGH FORCE INSTRUMENT ROBOTIC MEDICAL SYSTEMS |
| EP3813632A4 (en) | 2018-06-27 | 2022-03-09 | Auris Health, Inc. | ALIGNMENT AND MOUNTING SYSTEMS FOR MEDICAL INSTRUMENTS |
| WO2020005370A1 (en) | 2018-06-27 | 2020-01-02 | Auris Health, Inc. | Systems and techniques for providing multiple perspectives during medical procedures |
| JP7391886B2 (ja) | 2018-06-28 | 2023-12-05 | オーリス ヘルス インコーポレイテッド | 滑車共有を組み込んだ医療システム |
| KR20230169481A (ko) | 2018-08-07 | 2023-12-15 | 아우리스 헬스, 인코포레이티드 | 카테터 제어와의 변형-기반 형상 감지의 조합 |
| CN112566584A (zh) | 2018-08-15 | 2021-03-26 | 奥瑞斯健康公司 | 用于组织烧灼的医疗器械 |
| US10639114B2 (en) | 2018-08-17 | 2020-05-05 | Auris Health, Inc. | Bipolar medical instrument |
| AU2019326548B2 (en) | 2018-08-24 | 2023-11-23 | Auris Health, Inc. | Manually and robotically controllable medical instruments |
| MX2021003099A (es) | 2018-09-17 | 2021-05-13 | Auris Health Inc | Sistemas y metodos para procedimientos medicos concomitantes. |
| CN112770689A (zh) | 2018-09-26 | 2021-05-07 | 奥瑞斯健康公司 | 用于抽吸和冲洗的系统和器械 |
| EP3813634A4 (en) | 2018-09-26 | 2022-04-06 | Auris Health, Inc. | ARTICULATING MEDICAL INSTRUMENTS |
| CN112752534A (zh) | 2018-09-28 | 2021-05-04 | 奥瑞斯健康公司 | 用于手动和机器人驱动医疗器械的装置、系统和方法 |
| AU2019347767A1 (en) | 2018-09-28 | 2021-04-08 | Auris Health, Inc. | Systems and methods for docking medical instruments |
| US11576738B2 (en) | 2018-10-08 | 2023-02-14 | Auris Health, Inc. | Systems and instruments for tissue sealing |
| WO2020131186A1 (en) | 2018-12-20 | 2020-06-25 | Auris Health, Inc. | Systems and methods for robotic arm alignment and docking |
| US11950863B2 (en) | 2018-12-20 | 2024-04-09 | Auris Health, Inc | Shielding for wristed instruments |
| WO2020140072A1 (en) | 2018-12-28 | 2020-07-02 | Auris Health, Inc. | Percutaneous sheath for robotic medical systems and methods |
| EP3883492A4 (en) | 2019-01-25 | 2022-11-30 | Auris Health, Inc. | VESSEL SEALING DEVICE HAVING HEATING AND COOLING CAPABILITIES |
| US11625825B2 (en) * | 2019-01-30 | 2023-04-11 | Covidien Lp | Method for displaying tumor location within endoscopic images |
| EP3890644A4 (en) | 2019-02-08 | 2022-11-16 | Auris Health, Inc. | MANIPULATION AND CLOT REMOVAL WITH ROBOTIC CONTROL |
| CN113453642A (zh) | 2019-02-22 | 2021-09-28 | 奥瑞斯健康公司 | 具有用于可调式臂支撑件的机动臂的外科平台 |
| US10945904B2 (en) | 2019-03-08 | 2021-03-16 | Auris Health, Inc. | Tilt mechanisms for medical systems and applications |
| WO2020197671A1 (en) | 2019-03-22 | 2020-10-01 | Auris Health, Inc. | Systems and methods for aligning inputs on medical instruments |
| WO2020197625A1 (en) | 2019-03-25 | 2020-10-01 | Auris Health, Inc. | Systems and methods for medical stapling |
| US11617627B2 (en) | 2019-03-29 | 2023-04-04 | Auris Health, Inc. | Systems and methods for optical strain sensing in medical instruments |
| CN114173698A (zh) | 2019-04-08 | 2022-03-11 | 奥瑞斯健康公司 | 用于伴随规程的系统、方法和工作流程 |
| US11369386B2 (en) | 2019-06-27 | 2022-06-28 | Auris Health, Inc. | Systems and methods for a medical clip applier |
| WO2020263949A1 (en) | 2019-06-28 | 2020-12-30 | Auris Health, Inc. | Medical instruments including wrists with hybrid redirect surfaces |
| EP3989793A4 (en) | 2019-06-28 | 2023-07-19 | Auris Health, Inc. | CONSOLE OVERLAY ITS METHODS OF USE |
| USD975275S1 (en) | 2019-08-15 | 2023-01-10 | Auris Health, Inc. | Handle for a medical instrument |
| JP2022544554A (ja) | 2019-08-15 | 2022-10-19 | オーリス ヘルス インコーポレイテッド | 複数の屈曲部を有する医療デバイス |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| USD978348S1 (en) | 2019-08-15 | 2023-02-14 | Auris Health, Inc. | Drive device for a medical instrument |
| EP4021329A4 (en) | 2019-08-30 | 2023-05-03 | Auris Health, Inc. | SYSTEM AND METHOD FOR INSTRUMENT IMAGE RELIABILITY |
| CN114340542B (zh) | 2019-08-30 | 2023-07-21 | 奥瑞斯健康公司 | 用于位置传感器的基于权重的配准的系统和方法 |
| US11324558B2 (en) | 2019-09-03 | 2022-05-10 | Auris Health, Inc. | Electromagnetic distortion detection and compensation |
| US11234780B2 (en) | 2019-09-10 | 2022-02-01 | Auris Health, Inc. | Systems and methods for kinematic optimization with shared robotic degrees-of-freedom |
| US10959792B1 (en) | 2019-09-26 | 2021-03-30 | Auris Health, Inc. | Systems and methods for collision detection and avoidance |
| WO2021064536A1 (en) | 2019-09-30 | 2021-04-08 | Auris Health, Inc. | Medical instrument with capstan |
| US11737835B2 (en) | 2019-10-29 | 2023-08-29 | Auris Health, Inc. | Braid-reinforced insulation sheath |
| WO2021137071A1 (en) | 2019-12-31 | 2021-07-08 | Auris Health, Inc. | Advanced basket drive mode |
| JP2023508719A (ja) | 2019-12-31 | 2023-03-03 | オーリス ヘルス インコーポレイテッド | 経皮的アクセスのための位置合わせインターフェース |
| US11660147B2 (en) | 2019-12-31 | 2023-05-30 | Auris Health, Inc. | Alignment techniques for percutaneous access |
| CN114901194A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 解剖特征识别和瞄准 |
| WO2021137104A1 (en) | 2019-12-31 | 2021-07-08 | Auris Health, Inc. | Dynamic pulley system |
| CN111550480B (zh) * | 2020-04-29 | 2021-03-23 | 四川大学 | 一种空间精密位姿对准方法 |
| US11701492B2 (en) | 2020-06-04 | 2023-07-18 | Covidien Lp | Active distal tip drive |
| EP4171427A1 (en) | 2020-06-29 | 2023-05-03 | Auris Health, Inc. | Systems and methods for detecting contact between a link and an external object |
| US11357586B2 (en) | 2020-06-30 | 2022-06-14 | Auris Health, Inc. | Systems and methods for saturated robotic movement |
| CN115734765A (zh) | 2020-06-30 | 2023-03-03 | 奥瑞斯健康公司 | 具有碰撞接近度指示器的机器人医疗系统 |
| US11730926B2 (en) | 2020-08-31 | 2023-08-22 | Avent, Inc. | System and method for detecting medical device location and orientation in relation to patient anatomy |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000079087A (ja) | 1998-09-03 | 2000-03-21 | Olympus Optical Co Ltd | 内視鏡形状検出装置 |
| JP2003265500A (ja) | 2002-03-15 | 2003-09-24 | Hitachi Ltd | 手術支援装置 |
| JP2006116289A (ja) | 2004-09-27 | 2006-05-11 | Olympus Corp | 湾曲制御装置 |
| JP2006218027A (ja) | 2005-02-09 | 2006-08-24 | Olympus Corp | 内視鏡装置 |
| JP2014023818A (ja) | 2012-07-30 | 2014-02-06 | Mitsubishi Electric Engineering Co Ltd | 撮像システムおよび撮像システムに適用される機能制御方法 |
| JP2014083156A (ja) | 2012-10-22 | 2014-05-12 | Ge Medical Systems Global Technology Co Llc | 表示装置、医用装置、表示方法、およびプログラム |
| US20150265368A1 (en) | 2014-03-24 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Systems and Methods for Anatomic Motion Compensation |
Family Cites Families (346)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4644237A (en) | 1985-10-17 | 1987-02-17 | International Business Machines Corp. | Collision avoidance system |
| US4748969A (en) | 1987-05-07 | 1988-06-07 | Circon Corporation | Multi-lumen core deflecting endoscope |
| US4745908A (en) | 1987-05-08 | 1988-05-24 | Circon Corporation | Inspection instrument fexible shaft having deflection compensation means |
| US5194791A (en) | 1990-07-19 | 1993-03-16 | Mcdonnell Douglas Corporation | Compliant stereo vision target |
| US5251611A (en) | 1991-05-07 | 1993-10-12 | Zehel Wendell E | Method and apparatus for conducting exploratory procedures |
| JP3067346B2 (ja) | 1991-10-30 | 2000-07-17 | 株式会社町田製作所 | 内視鏡用重力方向指示装置 |
| US5408263A (en) | 1992-06-16 | 1995-04-18 | Olympus Optical Co., Ltd. | Electronic endoscope apparatus |
| NL9301210A (nl) | 1993-07-09 | 1995-02-01 | Robert Philippe Koninckx | Beeldweergavestelsel met beeldpositiecorrectie. |
| JP3540362B2 (ja) * | 1994-06-14 | 2004-07-07 | オリンパス株式会社 | 手術用マニピュレータの制御システム及びその制御方法 |
| US6690963B2 (en) | 1995-01-24 | 2004-02-10 | Biosense, Inc. | System for determining the location and orientation of an invasive medical instrument |
| US5769086A (en) | 1995-12-06 | 1998-06-23 | Biopsys Medical, Inc. | Control system and method for automated biopsy device |
| US5672877A (en) | 1996-03-27 | 1997-09-30 | Adac Laboratories | Coregistration of multi-modality data in a medical imaging system |
| WO1999050721A1 (en) | 1997-09-19 | 1999-10-07 | Massachusetts Institute Of Technology | Robotic apparatus |
| US6004016A (en) | 1996-08-06 | 1999-12-21 | Trw Inc. | Motion planning and control for systems with multiple mobile objects |
| US8182469B2 (en) | 1997-11-21 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Surgical accessory clamp and method |
| AU5391999A (en) | 1998-08-04 | 2000-02-28 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| US6198974B1 (en) | 1998-08-14 | 2001-03-06 | Cordis Webster, Inc. | Bi-directional steerable catheter |
| US6459926B1 (en) | 1998-11-20 | 2002-10-01 | Intuitive Surgical, Inc. | Repositioning and reorientation of master/slave relationship in minimally invasive telesurgery |
| US6179776B1 (en) | 1999-03-12 | 2001-01-30 | Scimed Life Systems, Inc. | Controllable endoscopic sheath apparatus and related method of use |
| US10820949B2 (en) | 1999-04-07 | 2020-11-03 | Intuitive Surgical Operations, Inc. | Medical robotic system with dynamically adjustable slave manipulator characteristics |
| US8442618B2 (en) | 1999-05-18 | 2013-05-14 | Mediguide Ltd. | Method and system for delivering a medical device to a selected position within a lumen |
| US8004229B2 (en) | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US8271130B2 (en) | 2009-03-09 | 2012-09-18 | Intuitive Surgical Operations, Inc. | Master controller having redundant degrees of freedom and added forces to create internal motion |
| US7037258B2 (en) | 1999-09-24 | 2006-05-02 | Karl Storz Imaging, Inc. | Image orientation for endoscopic video displays |
| US7366562B2 (en) | 2003-10-17 | 2008-04-29 | Medtronic Navigation, Inc. | Method and apparatus for surgical navigation |
| US6458076B1 (en) | 2000-02-01 | 2002-10-01 | 5 Star Medical | Multi-lumen medical device |
| DE10011790B4 (de) | 2000-03-13 | 2005-07-14 | Siemens Ag | Medizinisches Instrument zum Einführen in ein Untersuchungsobjekt, sowie medizinisches Untersuchungs- oder Behandlungsgerät |
| US6837846B2 (en) | 2000-04-03 | 2005-01-04 | Neo Guide Systems, Inc. | Endoscope having a guide tube |
| US6858005B2 (en) | 2000-04-03 | 2005-02-22 | Neo Guide Systems, Inc. | Tendon-driven endoscope and methods of insertion |
| DE10033723C1 (de) | 2000-07-12 | 2002-02-21 | Siemens Ag | Visualisierung von Positionen und Orientierung von intrakorporal geführten Instrumenten während eines chirurgischen Eingriffs |
| WO2002007587A2 (en) | 2000-07-14 | 2002-01-31 | Xillix Technologies Corporation | Compact fluorescent endoscopy video system |
| CN100491914C (zh) | 2001-01-30 | 2009-05-27 | Z-凯特公司 | 器具的校准器及跟踪器系统 |
| JP3808321B2 (ja) | 2001-04-16 | 2006-08-09 | ファナック株式会社 | ロボット制御装置 |
| US7607440B2 (en) | 2001-06-07 | 2009-10-27 | Intuitive Surgical, Inc. | Methods and apparatus for surgical planning |
| US6835173B2 (en) | 2001-10-05 | 2004-12-28 | Scimed Life Systems, Inc. | Robotic endoscope |
| US7277833B2 (en) | 2002-02-06 | 2007-10-02 | Siemens Corporate Research, Inc. | Modeling of the workspace and active pending behavior of an endscope using filter functions |
| DE10210646A1 (de) | 2002-03-11 | 2003-10-09 | Siemens Ag | Verfahren zur Bilddarstellung eines in einen Untersuchungsbereich eines Patienten eingebrachten medizinischen Instruments |
| US20050256398A1 (en) | 2004-05-12 | 2005-11-17 | Hastings Roger N | Systems and methods for interventional medicine |
| AU2003275402A1 (en) | 2002-09-30 | 2004-04-19 | Stereotaxis, Inc. | A method and apparatus for improved surgical navigation employing electronic indentification with automatically actuated flexible medical devices |
| KR100449765B1 (ko) | 2002-10-12 | 2004-09-22 | 삼성에스디아이 주식회사 | 리튬전지용 리튬메탈 애노드 |
| US7697972B2 (en) | 2002-11-19 | 2010-04-13 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| EP1442720A1 (en) | 2003-01-31 | 2004-08-04 | Tre Esse Progettazione Biomedica S.r.l | Apparatus for the maneuvering of flexible catheters in the human cardiovascular system |
| EP1644782B1 (en) | 2003-06-20 | 2009-03-04 | Fanuc Robotics America, Inc. | Multiple robot arm tracking and mirror jog |
| US9002518B2 (en) | 2003-06-30 | 2015-04-07 | Intuitive Surgical Operations, Inc. | Maximum torque driving of robotic surgical tools in robotic surgical systems |
| US7280863B2 (en) | 2003-10-20 | 2007-10-09 | Magnetecs, Inc. | System and method for radar-assisted catheter guidance and control |
| US20050107917A1 (en) | 2003-11-14 | 2005-05-19 | Smith Paul E. | Robotic system for sequencing multiple specimens between a holding tray and a microscope |
| WO2005053912A1 (en) | 2003-12-01 | 2005-06-16 | Newsouth Innovations Pty Limited | A method for controlling a system formed from interdependent units |
| US7901348B2 (en) | 2003-12-12 | 2011-03-08 | University Of Washington | Catheterscope 3D guidance and interface system |
| FI20040255A (fi) | 2004-02-18 | 2005-08-19 | Jurilab Ltd Oy | Menetelmä pre-eklampsian riskin havaitsemiseksi |
| US8046049B2 (en) | 2004-02-23 | 2011-10-25 | Biosense Webster, Inc. | Robotically guided catheter |
| WO2005087128A1 (en) | 2004-03-05 | 2005-09-22 | Hansen Medical, Inc. | Robotic catheter system |
| AU2005228956B2 (en) | 2004-03-23 | 2011-08-18 | Boston Scientific Limited | In-vivo visualization system |
| US9345456B2 (en) | 2004-03-24 | 2016-05-24 | Devicor Medical Products, Inc. | Biopsy device |
| JP3922284B2 (ja) | 2004-03-31 | 2007-05-30 | 有限会社エスアールジェイ | 保持装置 |
| US7303528B2 (en) | 2004-05-18 | 2007-12-04 | Scimed Life Systems, Inc. | Serialization of single use endoscopes |
| US7632265B2 (en) | 2004-05-28 | 2009-12-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Radio frequency ablation servo catheter and method |
| US7197354B2 (en) | 2004-06-21 | 2007-03-27 | Mediguide Ltd. | System for determining the position and orientation of a catheter |
| US7772541B2 (en) | 2004-07-16 | 2010-08-10 | Luna Innnovations Incorporated | Fiber optic position and/or shape sensing based on rayleigh scatter |
| US7395116B2 (en) | 2004-08-19 | 2008-07-01 | Medtronic, Inc. | Lead body-to-connector transition zone |
| JP4709513B2 (ja) | 2004-08-19 | 2011-06-22 | オリンパス株式会社 | 電動湾曲制御装置 |
| US7831294B2 (en) | 2004-10-07 | 2010-11-09 | Stereotaxis, Inc. | System and method of surgical imagining with anatomical overlay for navigation of surgical devices |
| US20060200026A1 (en) | 2005-01-13 | 2006-09-07 | Hansen Medical, Inc. | Robotic catheter system |
| US7763015B2 (en) | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| US8182433B2 (en) | 2005-03-04 | 2012-05-22 | Endosense Sa | Medical apparatus system having optical fiber load sensing capability |
| US8945095B2 (en) | 2005-03-30 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Force and torque sensing for surgical instruments |
| WO2006119495A2 (en) * | 2005-05-03 | 2006-11-09 | Hansen Medical, Inc. | Robotic catheter system |
| US20070016130A1 (en) | 2005-05-06 | 2007-01-18 | Leeflang Stephen A | Complex Shaped Steerable Catheters and Methods for Making and Using Them |
| US7860609B2 (en) | 2005-05-06 | 2010-12-28 | Fanuc Robotics America, Inc. | Robot multi-arm control system |
| US10555775B2 (en) | 2005-05-16 | 2020-02-11 | Intuitive Surgical Operations, Inc. | Methods and system for performing 3-D tool tracking by fusion of sensor and/or camera derived data during minimally invasive robotic surgery |
| US9789608B2 (en) | 2006-06-29 | 2017-10-17 | Intuitive Surgical Operations, Inc. | Synthetic representation of a surgical robot |
| US20070043455A1 (en) | 2005-07-26 | 2007-02-22 | Viswanathan Raju R | Apparatus and methods for automated sequential movement control for operation of a remote navigation system |
| US8079950B2 (en) | 2005-09-29 | 2011-12-20 | Intuitive Surgical Operations, Inc. | Autofocus and/or autoscaling in telesurgery |
| US7835785B2 (en) * | 2005-10-04 | 2010-11-16 | Ascension Technology Corporation | DC magnetic-based position and orientation monitoring system for tracking medical instruments |
| US8498691B2 (en) | 2005-12-09 | 2013-07-30 | Hansen Medical, Inc. | Robotic catheter system and methods |
| DE102005059271B4 (de) | 2005-12-12 | 2019-02-21 | Siemens Healthcare Gmbh | Kathetervorrichtung |
| US7819859B2 (en) | 2005-12-20 | 2010-10-26 | Intuitive Surgical Operations, Inc. | Control system for reducing internally generated frictional and inertial resistance to manual positioning of a surgical manipulator |
| US8672922B2 (en) | 2005-12-20 | 2014-03-18 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| US9586327B2 (en) | 2005-12-20 | 2017-03-07 | Intuitive Surgical Operations, Inc. | Hook and pivot electro-mechanical interface for robotic medical arms |
| US9266239B2 (en) | 2005-12-27 | 2016-02-23 | Intuitive Surgical Operations, Inc. | Constraint based control in a minimally invasive surgical apparatus |
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| US8469945B2 (en) | 2006-01-25 | 2013-06-25 | Intuitive Surgical Operations, Inc. | Center robotic arm with five-bar spherical linkage for endoscopic camera |
| US8161977B2 (en) | 2006-01-31 | 2012-04-24 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| EP1815950A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| EP1815949A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Medical robotic system with manipulator arm of the cylindrical coordinate type |
| US8191359B2 (en) | 2006-04-13 | 2012-06-05 | The Regents Of The University Of California | Motion estimation using hidden markov model processing in MRI and other applications |
| US8112292B2 (en) | 2006-04-21 | 2012-02-07 | Medtronic Navigation, Inc. | Method and apparatus for optimizing a therapy |
| US8628520B2 (en) | 2006-05-02 | 2014-01-14 | Biosense Webster, Inc. | Catheter with omni-directional optical lesion evaluation |
| EP2329788A3 (en) | 2006-05-17 | 2011-11-16 | Hansen Medical, Inc. | Robotic instrument system |
| US7505810B2 (en) | 2006-06-13 | 2009-03-17 | Rhythmia Medical, Inc. | Non-contact cardiac mapping, including preprocessing |
| US8419717B2 (en) | 2006-06-13 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Control system configured to compensate for non-ideal actuator-to-joint linkage characteristics in a medical robotic system |
| US9345387B2 (en) | 2006-06-13 | 2016-05-24 | Intuitive Surgical Operations, Inc. | Preventing instrument/tissue collisions |
| JP4878526B2 (ja) | 2006-09-05 | 2012-02-15 | 国立大学法人 名古屋工業大学 | 可撓性線状体の圧縮力計測装置 |
| US8150498B2 (en) | 2006-09-08 | 2012-04-03 | Medtronic, Inc. | System for identification of anatomical landmarks |
| US20080108870A1 (en) | 2006-11-06 | 2008-05-08 | Wiita Bruce E | Apparatus and method for stabilizing an image from an endoscopic camera |
| US20140163664A1 (en) | 2006-11-21 | 2014-06-12 | David S. Goldsmith | Integrated system for the ballistic and nonballistic infixion and retrieval of implants with or without drug targeting |
| DE102006061178A1 (de) | 2006-12-22 | 2008-06-26 | Siemens Ag | System zur Durchführung und Überwachung minimal-invasiver Eingriffe |
| US7783133B2 (en) | 2006-12-28 | 2010-08-24 | Microvision, Inc. | Rotation compensation and image stabilization system |
| WO2008095032A2 (en) | 2007-01-30 | 2008-08-07 | Hansen Medical, Inc. | Robotic instrument systems controlled using kinematics and mechanics models |
| JP4550849B2 (ja) | 2007-03-22 | 2010-09-22 | 株式会社東芝 | アーム搭載移動ロボット |
| EP1972416B1 (en) | 2007-03-23 | 2018-04-25 | Honda Research Institute Europe GmbH | Robots with occlusion avoidance functionality |
| US8391957B2 (en) | 2007-03-26 | 2013-03-05 | Hansen Medical, Inc. | Robotic catheter systems and methods |
| US8738181B2 (en) | 2007-04-16 | 2014-05-27 | Alexander Greer | Methods, devices, and systems for automated movements involving medical robots |
| JP5444209B2 (ja) | 2007-04-16 | 2014-03-19 | ニューロアーム サージカル リミテッド | フレームマッピングおよびフォースフィードバックの方法、装置およびシステム |
| US9089256B2 (en) | 2008-06-27 | 2015-07-28 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view including range of motion limitations for articulatable instruments extending out of a distal end of an entry guide |
| EP2158834A4 (en) | 2007-06-20 | 2012-12-05 | Olympus Medical Systems Corp | ENDOSCOPIC SYSTEM, IMAGING SYSTEM, AND IMAGE PROCESSING DEVICE |
| US20130165945A9 (en) | 2007-08-14 | 2013-06-27 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable instrument |
| EP2626030A3 (en) | 2007-08-14 | 2017-03-08 | Koninklijke Philips N.V. | Robotic instrument systems and methods utilizing optical fiber sensors |
| ES2661490T3 (es) | 2007-09-13 | 2018-04-02 | Toby D. Henderson | Sistema de posicionador de pacientes |
| US8180428B2 (en) | 2007-10-03 | 2012-05-15 | Medtronic, Inc. | Methods and systems for use in selecting cardiac pacing sites |
| US10498269B2 (en) | 2007-10-05 | 2019-12-03 | Covidien Lp | Powered surgical stapling device |
| US8396595B2 (en) | 2007-11-01 | 2013-03-12 | Honda Motor Co., Ltd. | Real-time self collision and obstacle avoidance using weighting matrix |
| US20090184825A1 (en) | 2008-01-23 | 2009-07-23 | General Electric Company | RFID Transponder Used for Instrument Identification in an Electromagnetic Tracking System |
| US8343096B2 (en) | 2008-03-27 | 2013-01-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US8155479B2 (en) | 2008-03-28 | 2012-04-10 | Intuitive Surgical Operations Inc. | Automated panning and digital zooming for robotic surgical systems |
| JP5424570B2 (ja) | 2008-04-10 | 2014-02-26 | Hoya株式会社 | 電子内視鏡用プロセッサ、ビデオスコープ及び電子内視鏡装置 |
| US9125562B2 (en) | 2009-07-01 | 2015-09-08 | Avinger, Inc. | Catheter-based off-axis optical coherence tomography imaging system |
| KR101479233B1 (ko) | 2008-05-13 | 2015-01-05 | 삼성전자 주식회사 | 로봇 및 그 협조작업 제어방법 |
| US7720322B2 (en) * | 2008-06-30 | 2010-05-18 | Intuitive Surgical, Inc. | Fiber optic shape sensor |
| US20100030061A1 (en) * | 2008-07-31 | 2010-02-04 | Canfield Monte R | Navigation system for cardiac therapies using gating |
| CN102046059A (zh) | 2008-08-08 | 2011-05-04 | 松下电器产业株式会社 | 吸尘器的控制装置及控制方法、吸尘器、吸尘器的控制程序以及集成电子电路 |
| US8126114B2 (en) | 2008-09-12 | 2012-02-28 | Accuray Incorporated | Seven or more degrees of freedom robotic manipulator having at least one redundant joint |
| US9610131B2 (en) | 2008-11-05 | 2017-04-04 | The Johns Hopkins University | Rotating needle driver and apparatuses and methods related thereto |
| US8720448B2 (en) | 2008-11-07 | 2014-05-13 | Hansen Medical, Inc. | Sterile interface apparatus |
| US8083691B2 (en) | 2008-11-12 | 2011-12-27 | Hansen Medical, Inc. | Apparatus and method for sensing force |
| US8374723B2 (en) | 2008-12-31 | 2013-02-12 | Intuitive Surgical Operations, Inc. | Obtaining force information in a minimally invasive surgical procedure |
| KR101038417B1 (ko) * | 2009-02-11 | 2011-06-01 | 주식회사 이턴 | 수술 로봇 시스템 및 그 제어 방법 |
| KR100961661B1 (ko) | 2009-02-12 | 2010-06-09 | 주식회사 래보 | 수술용 항법 장치 및 그 방법 |
| US8120301B2 (en) | 2009-03-09 | 2012-02-21 | Intuitive Surgical Operations, Inc. | Ergonomic surgeon control console in robotic surgical systems |
| EP2241179B1 (en) | 2009-04-16 | 2017-05-17 | DeLaval Holding AB | A milking parlour and method for operating the same |
| JP5836267B2 (ja) | 2009-05-18 | 2015-12-24 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 電磁追跡内視鏡システムのためのマーカーなし追跡の位置合わせおよび較正のための方法およびシステム |
| ES2388029B1 (es) | 2009-05-22 | 2013-08-13 | Universitat Politècnica De Catalunya | Sistema robótico para cirugia laparoscópica. |
| CN102368944B (zh) | 2009-06-11 | 2015-07-08 | 奥林巴斯医疗株式会社 | 医疗用控制装置 |
| WO2011001569A1 (ja) | 2009-07-02 | 2011-01-06 | パナソニック株式会社 | ロボット、ロボットアームの制御装置、及びロボットアームの制御プログラム |
| US9492927B2 (en) | 2009-08-15 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Application of force feedback on an input device to urge its operator to command an articulated instrument to a preferred pose |
| US9724167B2 (en) | 2009-10-01 | 2017-08-08 | Mako Surgical Corp. | System with brake to limit manual movement of member and control system for same |
| JP5077323B2 (ja) | 2009-10-26 | 2012-11-21 | 株式会社安川電機 | ロボット制御システム |
| JP4781492B2 (ja) | 2009-11-10 | 2011-09-28 | オリンパスメディカルシステムズ株式会社 | 多関節マニピュレータ装置及びそれを有する内視鏡システム |
| CN104799890B (zh) | 2009-11-13 | 2017-03-22 | 直观外科手术操作公司 | 弯曲套管和机器人操纵器 |
| KR101762638B1 (ko) | 2009-11-13 | 2017-07-28 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 최소 침습 수술 시스템에서 손 제스처 제어를 위한 방법 및 장치 |
| US8374819B2 (en) | 2009-12-23 | 2013-02-12 | Biosense Webster (Israel), Ltd. | Actuator-based calibration system for a pressure-sensitive catheter |
| US9675302B2 (en) | 2009-12-31 | 2017-06-13 | Mediguide Ltd. | Prolapse detection and tool dislodgement detection |
| US8668638B2 (en) | 2010-02-11 | 2014-03-11 | Intuitive Surgical Operations, Inc. | Method and system for automatically maintaining an operator selected roll orientation at a distal tip of a robotic endoscope |
| WO2011114568A1 (ja) | 2010-03-17 | 2011-09-22 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| DE102010012621A1 (de) | 2010-03-24 | 2011-09-29 | Siemens Aktiengesellschaft | Verfahren und Vorrichtung zur automatischen Adaption eines Referenzbildes |
| IT1401669B1 (it) | 2010-04-07 | 2013-08-02 | Sofar Spa | Sistema di chirurgia robotizzata con controllo perfezionato. |
| JP4679668B1 (ja) | 2010-04-21 | 2011-04-27 | 日本ライフライン株式会社 | カテーテル |
| DE102010029745A1 (de) | 2010-06-07 | 2011-12-08 | Kuka Laboratories Gmbh | Werkstück-Handhabungssystem und Verfahren zum Manipulieren von Werkstücken mittels kooperierender Manipulatoren |
| US20120130217A1 (en) | 2010-11-23 | 2012-05-24 | Kauphusman James V | Medical devices having electrodes mounted thereon and methods of manufacturing therefor |
| US10737398B2 (en) | 2010-07-08 | 2020-08-11 | Vanderbilt University | Continuum devices and control methods thereof |
| US20120071752A1 (en) | 2010-09-17 | 2012-03-22 | Sewell Christopher M | User interface and method for operating a robotic medical system |
| US9101379B2 (en) | 2010-11-12 | 2015-08-11 | Intuitive Surgical Operations, Inc. | Tension control in actuation of multi-joint medical instruments |
| EP2476455A1 (de) | 2011-01-13 | 2012-07-18 | BIOTRONIK SE & Co. KG | Implantierbare Elektrodenleitung |
| US10391277B2 (en) | 2011-02-18 | 2019-08-27 | Voxel Rad, Ltd. | Systems and methods for 3D stereoscopic angiovision, angionavigation and angiotherapeutics |
| FR2972915B1 (fr) | 2011-03-24 | 2013-04-19 | Gen Electric | Systeme d'imagerie medicale multiplan |
| US10362963B2 (en) | 2011-04-14 | 2019-07-30 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Correction of shift and drift in impedance-based medical device navigation using magnetic field information |
| US8900131B2 (en) | 2011-05-13 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Medical system providing dynamic registration of a model of an anatomical structure for image-guided surgery |
| JP6061926B2 (ja) | 2011-06-27 | 2017-01-18 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 身体管腔のライブ3d画像を提供するためのシステム、その作動方法及びコンピュータプログラム |
| US20130018306A1 (en) | 2011-07-13 | 2013-01-17 | Doron Moshe Ludwin | System for indicating catheter deflection |
| CN102973317A (zh) | 2011-09-05 | 2013-03-20 | 周宁新 | 微创手术机器人机械臂布置结构 |
| WO2013038313A1 (en) | 2011-09-13 | 2013-03-21 | Koninklijke Philips Electronics N.V. | Vascular outlining with ostia visualization |
| EP2755591B1 (en) | 2011-09-16 | 2020-11-18 | Auris Health, Inc. | System for displaying an image of a patient anatomy on a movable display |
| US9452276B2 (en) | 2011-10-14 | 2016-09-27 | Intuitive Surgical Operations, Inc. | Catheter with removable vision probe |
| EP3372143B1 (en) | 2011-10-21 | 2020-09-02 | Viking Systems, Inc. | Steerable electronic stereoscopic endoscope |
| DE112012004860T5 (de) | 2011-11-22 | 2014-11-20 | Ascension Technology Corp. | Verfolgen eines Führungsdrahtes |
| US9504604B2 (en) | 2011-12-16 | 2016-11-29 | Auris Surgical Robotics, Inc. | Lithotripsy eye treatment |
| US8920368B2 (en) | 2011-12-22 | 2014-12-30 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Multi-user touch-based control of a remote catheter guidance system (RCGS) |
| US9636040B2 (en) | 2012-02-03 | 2017-05-02 | Intuitive Surgical Operations, Inc. | Steerable flexible needle with embedded shape sensing |
| US20130218005A1 (en) | 2012-02-08 | 2013-08-22 | University Of Maryland, Baltimore | Minimally invasive neurosurgical intracranial robot system and method |
| US9129417B2 (en) | 2012-02-21 | 2015-09-08 | Siemens Aktiengesellschaft | Method and system for coronary artery centerline extraction |
| US10383765B2 (en) | 2012-04-24 | 2019-08-20 | Auris Health, Inc. | Apparatus and method for a global coordinate system for use in robotic surgery |
| US20140142591A1 (en) | 2012-04-24 | 2014-05-22 | Auris Surgical Robotics, Inc. | Method, apparatus and a system for robotic assisted surgery |
| EP2849668B1 (en) * | 2012-05-14 | 2018-11-14 | Intuitive Surgical Operations Inc. | Systems and methods for registration of a medical device using rapid pose search |
| US10039473B2 (en) | 2012-05-14 | 2018-08-07 | Intuitive Surgical Operations, Inc. | Systems and methods for navigation based on ordered sensor records |
| US9700737B2 (en) | 2012-05-15 | 2017-07-11 | Koninklijke Philips N.V. | Brachytherapy apparatus |
| WO2013181516A1 (en) | 2012-06-01 | 2013-12-05 | Intuitive Surgical Operations, Inc. | Systems and methods for avoiding collisions between manipulator arms using a null-space |
| BR112015001895A2 (pt) | 2012-08-02 | 2017-07-04 | Koninklijke Philips Nv | sistema cirúrgico robótico, e método robótico |
| US9226796B2 (en) | 2012-08-03 | 2016-01-05 | Stryker Corporation | Method for detecting a disturbance as an energy applicator of a surgical instrument traverses a cutting path |
| US9008757B2 (en) * | 2012-09-26 | 2015-04-14 | Stryker Corporation | Navigation system including optical and non-optical sensors |
| GB201220688D0 (en) | 2012-11-16 | 2013-01-02 | Trw Ltd | Improvements relating to electrical power assisted steering systems |
| US8894610B2 (en) | 2012-11-28 | 2014-11-25 | Hansen Medical, Inc. | Catheter having unirail pullwire architecture |
| US20140148673A1 (en) | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Method of anchoring pullwire directly articulatable region in catheter |
| US10231867B2 (en) | 2013-01-18 | 2019-03-19 | Auris Health, Inc. | Method, apparatus and system for a water jet |
| DE102013100605A1 (de) | 2013-01-22 | 2014-07-24 | Rg Mechatronics Gmbh | Robotersystem und Verfahren zum Steuern eines Robotersystems für die minimal invasive Chirurgie |
| US11172809B2 (en) | 2013-02-15 | 2021-11-16 | Intuitive Surgical Operations, Inc. | Vision probe with access port |
| US10431438B2 (en) | 2013-03-06 | 2019-10-01 | Jx Nippon Mining & Metals Corporation | Titanium target for sputtering and manufacturing method thereof |
| US9867635B2 (en) | 2013-03-08 | 2018-01-16 | Auris Surgical Robotics, Inc. | Method, apparatus and system for a water jet |
| US10080576B2 (en) | 2013-03-08 | 2018-09-25 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US10149720B2 (en) | 2013-03-08 | 2018-12-11 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US9057600B2 (en) | 2013-03-13 | 2015-06-16 | Hansen Medical, Inc. | Reducing incremental measurement sensor error |
| US9498601B2 (en) | 2013-03-14 | 2016-11-22 | Hansen Medical, Inc. | Catheter tension sensing |
| US9173713B2 (en) | 2013-03-14 | 2015-11-03 | Hansen Medical, Inc. | Torque-based catheter articulation |
| US9889568B2 (en) | 2013-03-14 | 2018-02-13 | Sri International | Compact robotic wrist |
| US9326822B2 (en) | 2013-03-14 | 2016-05-03 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9014851B2 (en) | 2013-03-15 | 2015-04-21 | Hansen Medical, Inc. | Systems and methods for tracking robotically controlled medical instruments |
| US9271663B2 (en) | 2013-03-15 | 2016-03-01 | Hansen Medical, Inc. | Flexible instrument localization from both remote and elongation sensors |
| US9629595B2 (en) | 2013-03-15 | 2017-04-25 | Hansen Medical, Inc. | Systems and methods for localizing, tracking and/or controlling medical instruments |
| US9782198B2 (en) | 2013-03-28 | 2017-10-10 | Koninklijke Philips N.V. | Localization of robotic remote center of motion point using custom trocar |
| RU2699331C2 (ru) | 2013-04-12 | 2019-09-04 | Конинклейке Филипс Н.В. | Чувствительный к форме ультразвуковой зонд |
| US9414859B2 (en) | 2013-04-19 | 2016-08-16 | Warsaw Orthopedic, Inc. | Surgical rod measuring system and method |
| US9387045B2 (en) | 2013-05-14 | 2016-07-12 | Intuitive Surgical Operations, Inc. | Grip force normalization for surgical instrument |
| US9592095B2 (en) | 2013-05-16 | 2017-03-14 | Intuitive Surgical Operations, Inc. | Systems and methods for robotic medical system integration with external imaging |
| US11020016B2 (en) | 2013-05-30 | 2021-06-01 | Auris Health, Inc. | System and method for displaying anatomy and devices on a movable display |
| WO2014201165A1 (en) | 2013-06-11 | 2014-12-18 | Auris Surgical Robotics, Inc. | System for robotic assisted cataract surgery |
| WO2015002097A1 (ja) | 2013-07-02 | 2015-01-08 | オリンパスメディカルシステムズ株式会社 | 医療機器 |
| JP6037964B2 (ja) | 2013-07-26 | 2016-12-07 | オリンパス株式会社 | マニピュレータシステム |
| US10426661B2 (en) | 2013-08-13 | 2019-10-01 | Auris Health, Inc. | Method and apparatus for laser assisted cataract surgery |
| CN105451802B (zh) * | 2013-08-15 | 2019-04-19 | 直观外科手术操作公司 | 用于导管定位和插入的图形用户界面 |
| US10098565B2 (en) * | 2013-09-06 | 2018-10-16 | Covidien Lp | System and method for lung visualization using ultrasound |
| JP6506295B2 (ja) | 2013-09-20 | 2019-04-24 | ザ ブリガム アンド ウィメンズ ホスピタル インコーポレイテッドThe Brigham and Women’s Hospital, Inc. | 制御装置、及び腱駆動装置 |
| DE102013220798A1 (de) | 2013-10-15 | 2015-04-16 | Kuka Laboratories Gmbh | Verfahren zum Handhaben von Objekten mittels wenigstens zweier Industrieroboter, und zugehöriger Industrieroboter |
| US9763741B2 (en) | 2013-10-24 | 2017-09-19 | Auris Surgical Robotics, Inc. | System for robotic-assisted endolumenal surgery and related methods |
| US9713509B2 (en) | 2013-10-24 | 2017-07-25 | Auris Surgical Robotics, Inc. | Instrument device manipulator with back-mounted tool attachment mechanism |
| CN103565529B (zh) | 2013-11-11 | 2015-06-17 | 哈尔滨工程大学 | 一种机器人辅助微创外科手术多功能器械臂 |
| CN103735313B (zh) | 2013-12-11 | 2016-08-17 | 中国科学院深圳先进技术研究院 | 一种手术机器人及其状态监测方法 |
| CN105828738B (zh) | 2013-12-20 | 2018-10-09 | 奥林巴斯株式会社 | 柔性机械手用引导部件和柔性机械手 |
| CN103767659B (zh) | 2014-01-02 | 2015-06-03 | 中国人民解放军总医院 | 消化内窥镜机器人 |
| US11617623B2 (en) | 2014-01-24 | 2023-04-04 | Koninklijke Philips N.V. | Virtual image with optical shape sensing device perspective |
| JP2017511707A (ja) | 2014-01-24 | 2017-04-27 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 経食道心エコープローブ用のセンサレス力制御 |
| EP3979210A1 (en) | 2014-02-04 | 2022-04-06 | Intuitive Surgical Operations, Inc. | Systems and methods for non-rigid deformation of tissue for virtual navigation of interventional tools |
| US11051878B2 (en) | 2014-02-06 | 2021-07-06 | St. Jude Medical, Cardiology Division, Inc. | Elongate medical device including chamfered ring electrode and variable shaft |
| US20150223902A1 (en) | 2014-02-07 | 2015-08-13 | Hansen Medical, Inc. | Navigation with 3d localization using 2d images |
| WO2015126815A1 (en) | 2014-02-18 | 2015-08-27 | Siemens Aktiengesellschaft | System and method for real-time simulation of patient-specific cardiac electrophysiology including the effect of the electrical conduction system of the heart |
| JP6353665B2 (ja) | 2014-02-21 | 2018-07-04 | オリンパス株式会社 | マニピュレータの初期化方法、マニピュレータ、およびマニピュレータシステム |
| JP6138071B2 (ja) | 2014-02-26 | 2017-05-31 | オリンパス株式会社 | 弛み補正機構、マニピュレータ及びマニピュレータシステム |
| JP6549604B2 (ja) | 2014-02-27 | 2019-07-24 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 治療手順を実行するためのシステム |
| JP6270537B2 (ja) | 2014-02-27 | 2018-01-31 | オリンパス株式会社 | 医療用システム |
| KR20150103938A (ko) | 2014-03-04 | 2015-09-14 | 현대자동차주식회사 | 리튬황 배터리 분리막 |
| US10548459B2 (en) | 2014-03-17 | 2020-02-04 | Intuitive Surgical Operations, Inc. | Systems and methods for control of imaging instrument orientation |
| CN104931059B (zh) | 2014-03-21 | 2018-09-11 | 比亚迪股份有限公司 | 车载救援导航系统和方法 |
| EP3243476B1 (en) | 2014-03-24 | 2019-11-06 | Auris Health, Inc. | Systems and devices for catheter driving instinctiveness |
| US10046140B2 (en) | 2014-04-21 | 2018-08-14 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| US20150305650A1 (en) | 2014-04-23 | 2015-10-29 | Mark Hunter | Apparatuses and methods for endobronchial navigation to and confirmation of the location of a target tissue and percutaneous interception of the target tissue |
| AU2015258819B2 (en) | 2014-05-16 | 2019-12-12 | Applied Medical Resources Corporation | Electrosurgical system |
| US9549781B2 (en) | 2014-05-30 | 2017-01-24 | The Johns Hopkins University | Multi-force sensing surgical instrument and method of use for robotic surgical systems |
| WO2015188071A2 (en) | 2014-06-05 | 2015-12-10 | Medrobotics Corporation | Articulating robotic probes, systems and methods incorporating the same, and methods for performing surgical procedures |
| US20170007337A1 (en) | 2014-07-01 | 2017-01-12 | Auris Surgical Robotics, Inc. | Driver-mounted torque sensing mechanism |
| US9788910B2 (en) | 2014-07-01 | 2017-10-17 | Auris Surgical Robotics, Inc. | Instrument-mounted tension sensing mechanism for robotically-driven medical instruments |
| US10159533B2 (en) | 2014-07-01 | 2018-12-25 | Auris Health, Inc. | Surgical system with configurable rail-mounted mechanical arms |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| US20160270865A1 (en) | 2014-07-01 | 2016-09-22 | Auris Surgical Robotics, Inc. | Reusable catheter with disposable balloon attachment and tapered tip |
| US9744335B2 (en) | 2014-07-01 | 2017-08-29 | Auris Surgical Robotics, Inc. | Apparatuses and methods for monitoring tendons of steerable catheters |
| US10792464B2 (en) | 2014-07-01 | 2020-10-06 | Auris Health, Inc. | Tool and method for using surgical endoscope with spiral lumens |
| US9633431B2 (en) | 2014-07-02 | 2017-04-25 | Covidien Lp | Fluoroscopic pose estimation |
| US20160000414A1 (en) | 2014-07-02 | 2016-01-07 | Covidien Lp | Methods for marking biopsy location |
| US9603668B2 (en) | 2014-07-02 | 2017-03-28 | Covidien Lp | Dynamic 3D lung map view for tool navigation inside the lung |
| KR102628063B1 (ko) | 2014-07-22 | 2024-01-23 | 엑시미스 서지컬 인코포레이티드 | 대용적 조직 감소 및 제거 시스템 및 방법 |
| US20160051221A1 (en) | 2014-08-25 | 2016-02-25 | Covidien Lp | System and Method for Planning, Monitoring, and Confirming Treatment |
| JP6460690B2 (ja) | 2014-09-16 | 2019-01-30 | キヤノン株式会社 | ロボット装置、ロボット制御方法、プログラム及び記録媒体 |
| EP3193727A1 (en) | 2014-09-18 | 2017-07-26 | Koninklijke Philips N.V. | Ultrasound imaging apparatus |
| CN107427327A (zh) | 2014-09-30 | 2017-12-01 | 奥瑞斯外科手术机器人公司 | 具有虚拟轨迹和柔性内窥镜的可配置机器人外科手术系统 |
| US10441374B2 (en) | 2014-10-08 | 2019-10-15 | Mohammad Ali Tavallaei | System for catheter manipulation |
| US10314463B2 (en) | 2014-10-24 | 2019-06-11 | Auris Health, Inc. | Automated endoscope calibration |
| DE102014222293A1 (de) | 2014-10-31 | 2016-05-19 | Siemens Aktiengesellschaft | Verfahren zur automatischen Überwachung des Eindringverhaltens eines von einem Roboterarm gehaltenen Trokars und Überwachungssystem |
| JP2017537149A (ja) | 2014-11-11 | 2017-12-14 | ヴァンダービルト ユニバーシティー | 急性腎傷害を制限するための方法 |
| WO2016087970A1 (en) | 2014-12-01 | 2016-06-09 | Koninklijke Philips N.V. | Virtually-oriented electromagnetic tracking coil for catheter based navigation |
| CN106998993B (zh) | 2014-12-19 | 2019-01-08 | 奥林巴斯株式会社 | 插拔辅助装置及插拔辅助方法 |
| WO2016098577A1 (ja) * | 2014-12-19 | 2016-06-23 | オリンパス株式会社 | 内視鏡システム |
| WO2016098251A1 (ja) | 2014-12-19 | 2016-06-23 | オリンパス株式会社 | 挿抜支援装置及び挿抜支援方法 |
| AU2016229897B2 (en) | 2015-03-10 | 2020-07-16 | Covidien Lp | Measuring health of a connector member of a robotic surgical system |
| US10413377B2 (en) | 2015-03-19 | 2019-09-17 | Medtronic Navigation, Inc. | Flexible skin based patient tracker for optical navigation |
| US9302702B1 (en) | 2015-03-27 | 2016-04-05 | Proterra Inc. | Steering control mechanisms for an electric vehicle |
| JP6360455B2 (ja) | 2015-03-30 | 2018-07-18 | 富士フイルム株式会社 | 検査画像閲覧支援装置、その作動方法及び作動プログラム |
| US10226193B2 (en) | 2015-03-31 | 2019-03-12 | Medtronic Ps Medical, Inc. | Wireless pressure measurement and monitoring for shunts |
| US20160287279A1 (en) | 2015-04-01 | 2016-10-06 | Auris Surgical Robotics, Inc. | Microsurgical tool for robotic applications |
| WO2016164824A1 (en) | 2015-04-09 | 2016-10-13 | Auris Surgical Robotics, Inc. | Surgical system with configurable rail-mounted mechanical arms |
| CN105030331A (zh) * | 2015-04-24 | 2015-11-11 | 长春理工大学 | 位置传感器与三维腹腔镜摄像机标定装置及方法 |
| WO2016187054A1 (en) | 2015-05-15 | 2016-11-24 | Auris Surgical Robotics, Inc. | Surgical robotics system |
| US20160354057A1 (en) | 2015-06-08 | 2016-12-08 | General Electric Company | Ultrasound imaging system and ultrasound-based method for guiding a catheter |
| WO2016205653A1 (en) | 2015-06-19 | 2016-12-22 | SolidEnergy Systems | Multi-layer polymer coated li anode for high density li metal battery |
| US20170056215A1 (en) | 2015-09-01 | 2017-03-02 | Medtronic, Inc. | Stent assemblies including passages to provide blood flow to coronary arteries and methods of delivering and deploying such stent assemblies |
| EP3346899B1 (en) | 2015-09-09 | 2022-11-09 | Auris Health, Inc. | Instrument device manipulator for a surgical robotics system |
| CN108348139B (zh) | 2015-09-17 | 2021-11-09 | 恩达马斯特有限公司 | 改进的挠性机器人内窥镜系统 |
| JP6824967B2 (ja) | 2015-09-18 | 2021-02-03 | オーリス ヘルス インコーポレイテッド | 管状網のナビゲーション |
| US20170106904A1 (en) | 2015-10-16 | 2017-04-20 | Ford Global Technologies, Llc | Control Method For Vehicle With Electronic Steering Column Lock |
| ITUB20154977A1 (it) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Strumento medicale e metodo di fabbricazione di detto strumento medicale |
| US10639108B2 (en) | 2015-10-30 | 2020-05-05 | Auris Health, Inc. | Process for percutaneous operations |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US10143526B2 (en) | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| CN105511881A (zh) | 2015-12-10 | 2016-04-20 | 中国航空工业集团公司西安航空计算技术研究所 | 一种通用机载交互数据的管理方法 |
| CN105559850B (zh) | 2015-12-17 | 2017-08-25 | 天津工业大学 | 一种用于机器人辅助外科具有力传感功能的手术钻器械 |
| US10932861B2 (en) | 2016-01-14 | 2021-03-02 | Auris Health, Inc. | Electromagnetic tracking surgical system and method of controlling the same |
| US10932691B2 (en) | 2016-01-26 | 2021-03-02 | Auris Health, Inc. | Surgical tools having electromagnetic tracking components |
| US10485579B2 (en) | 2016-02-25 | 2019-11-26 | Indian Wells Medical, Inc. | Steerable endoluminal punch |
| US11324554B2 (en) | 2016-04-08 | 2022-05-10 | Auris Health, Inc. | Floating electromagnetic field generator system and method of controlling the same |
| US10786224B2 (en) | 2016-04-21 | 2020-09-29 | Covidien Lp | Biopsy devices and methods of use thereof |
| US10454347B2 (en) | 2016-04-29 | 2019-10-22 | Auris Health, Inc. | Compact height torque sensing articulation axis assembly |
| US11037464B2 (en) | 2016-07-21 | 2021-06-15 | Auris Health, Inc. | System with emulator movement tracking for controlling medical devices |
| KR20230096148A (ko) | 2016-08-31 | 2023-06-29 | 아우리스 헬스, 인코포레이티드 | 길이 보존 수술용 기구 |
| US9931025B1 (en) | 2016-09-30 | 2018-04-03 | Auris Surgical Robotics, Inc. | Automated calibration of endoscopes with pull wires |
| US10543048B2 (en) | 2016-12-28 | 2020-01-28 | Auris Health, Inc. | Flexible instrument insertion using an adaptive insertion force threshold |
| US10136959B2 (en) | 2016-12-28 | 2018-11-27 | Auris Health, Inc. | Endolumenal object sizing |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| CN107328016B (zh) | 2017-05-31 | 2020-05-05 | 广东美的制冷设备有限公司 | 空调器以及空调器中运动部件的检测控制装置和方法 |
| CN107028659B (zh) * | 2017-01-23 | 2023-11-28 | 新博医疗技术有限公司 | 一种ct图像引导下的手术导航系统及导航方法 |
| WO2018175737A1 (en) | 2017-03-22 | 2018-09-27 | Intuitive Surgical Operations, Inc. | Systems and methods for intelligently seeding registration |
| US11078945B2 (en) | 2017-03-26 | 2021-08-03 | Verb Surgical Inc. | Coupler to attach robotic arm to surgical table |
| JP7159192B2 (ja) | 2017-03-28 | 2022-10-24 | オーリス ヘルス インコーポレイテッド | シャフト作動ハンドル |
| KR102558061B1 (ko) | 2017-03-31 | 2023-07-25 | 아우리스 헬스, 인코포레이티드 | 생리적 노이즈를 보상하는 관강내 조직망 항행을 위한 로봇 시스템 |
| US10285574B2 (en) | 2017-04-07 | 2019-05-14 | Auris Health, Inc. | Superelastic medical instrument |
| KR20230106716A (ko) | 2017-04-07 | 2023-07-13 | 아우리스 헬스, 인코포레이티드 | 환자 삽입기(Introducer) 정렬 |
| KR20240035632A (ko) | 2017-05-12 | 2024-03-15 | 아우리스 헬스, 인코포레이티드 | 생검 장치 및 시스템 |
| AU2018270785B2 (en) | 2017-05-17 | 2023-11-23 | Auris Health, Inc. | Exchangeable working channel |
| US10022192B1 (en) | 2017-06-23 | 2018-07-17 | Auris Health, Inc. | Automatically-initialized robotic systems for navigation of luminal networks |
| JP7330902B2 (ja) | 2017-06-28 | 2023-08-22 | オーリス ヘルス インコーポレイテッド | 電磁歪み検出 |
| EP3644885B1 (en) | 2017-06-28 | 2023-10-11 | Auris Health, Inc. | Electromagnetic field generator alignment |
| US11026758B2 (en) | 2017-06-28 | 2021-06-08 | Auris Health, Inc. | Medical robotics systems implementing axis constraints during actuation of one or more motorized joints |
| EP3645100A4 (en) | 2017-06-28 | 2021-03-17 | Auris Health, Inc. | INSTRUMENT INSERTION COMPENSATION |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| US10464209B2 (en) | 2017-10-05 | 2019-11-05 | Auris Health, Inc. | Robotic system with indication of boundary for robotic arm |
| US10145747B1 (en) | 2017-10-10 | 2018-12-04 | Auris Health, Inc. | Detection of undesirable forces on a surgical robotic arm |
| US10016900B1 (en) | 2017-10-10 | 2018-07-10 | Auris Health, Inc. | Surgical robotic arm admittance control |
| US10555778B2 (en) | 2017-10-13 | 2020-02-11 | Auris Health, Inc. | Image-based branch detection and mapping for navigation |
| US11058493B2 (en) | 2017-10-13 | 2021-07-13 | Auris Health, Inc. | Robotic system configured for navigation path tracing |
| CN116059454A (zh) | 2017-12-08 | 2023-05-05 | 奥瑞斯健康公司 | 用于执行医疗手术的系统和用以移除肾结石的医疗装置 |
| WO2019113391A1 (en) | 2017-12-08 | 2019-06-13 | Auris Health, Inc. | System and method for medical instrument navigation and targeting |
| EP3723655A4 (en) | 2017-12-11 | 2021-09-08 | Auris Health, Inc. | SYSTEMS AND METHODS FOR INSTRUMENT-BASED INSERTION ARCHITECTURES |
| KR20200100613A (ko) | 2017-12-14 | 2020-08-26 | 아우리스 헬스, 인코포레이티드 | 기구 위치 추정을 위한 시스템 및 방법 |
| KR20200101334A (ko) | 2017-12-18 | 2020-08-27 | 아우리스 헬스, 인코포레이티드 | 관강내 조직망 내 기구 추적 및 항행을 위한 방법 및 시스템 |
| CN111885980B (zh) | 2018-01-17 | 2023-03-28 | 奥瑞斯健康公司 | 具有可调式臂支撑件的外科平台 |
| US10888386B2 (en) | 2018-01-17 | 2021-01-12 | Auris Health, Inc. | Surgical robotics systems with improved robotic arms |
| JP7301884B2 (ja) | 2018-02-13 | 2023-07-03 | オーリス ヘルス インコーポレイテッド | 医療用器具を駆動するためのシステム及び方法 |
| JP2021514761A (ja) | 2018-03-01 | 2021-06-17 | オーリス ヘルス インコーポレイテッド | マッピング及びナビゲーションのための方法及びシステム |
| CN117017505A (zh) | 2018-03-28 | 2023-11-10 | 奥瑞斯健康公司 | 复合器械和机器人系统 |
| JP7225259B2 (ja) | 2018-03-28 | 2023-02-20 | オーリス ヘルス インコーポレイテッド | 器具の推定位置を示すためのシステム及び方法 |
| EP3773131A4 (en) | 2018-03-28 | 2021-12-15 | Auris Health, Inc. | LOCATION SENSOR RECORDING SYSTEMS AND METHODS |
| KR20200139200A (ko) | 2018-03-29 | 2020-12-11 | 아우리스 헬스, 인코포레이티드 | 회전 오프셋을 갖는 다기능 엔드 이펙터를 가진 로봇식 의료 시스템 |
| CN110831486B (zh) | 2018-05-30 | 2022-04-05 | 奥瑞斯健康公司 | 用于基于定位传感器的分支预测的系统和方法 |
| CN112236083A (zh) | 2018-05-31 | 2021-01-15 | 奥瑞斯健康公司 | 用于导航检测生理噪声的管腔网络的机器人系统和方法 |
| KR20210018858A (ko) | 2018-05-31 | 2021-02-18 | 아우리스 헬스, 인코포레이티드 | 관상 네트워크의 경로-기반 내비게이션 |
| WO2019232236A1 (en) | 2018-05-31 | 2019-12-05 | Auris Health, Inc. | Image-based airway analysis and mapping |
| US10744981B2 (en) | 2018-06-06 | 2020-08-18 | Sensata Technologies, Inc. | Electromechanical braking connector |
| EP3813714A4 (en) | 2018-06-07 | 2022-02-09 | Auris Health, Inc. | HIGH FORCE INSTRUMENT ROBOTIC MEDICAL SYSTEMS |
| WO2020005370A1 (en) | 2018-06-27 | 2020-01-02 | Auris Health, Inc. | Systems and techniques for providing multiple perspectives during medical procedures |
| JP7391886B2 (ja) | 2018-06-28 | 2023-12-05 | オーリス ヘルス インコーポレイテッド | 滑車共有を組み込んだ医療システム |
| KR20230169481A (ko) | 2018-08-07 | 2023-12-15 | 아우리스 헬스, 인코포레이티드 | 카테터 제어와의 변형-기반 형상 감지의 조합 |
| CN112566584A (zh) | 2018-08-15 | 2021-03-26 | 奥瑞斯健康公司 | 用于组织烧灼的医疗器械 |
| US10639114B2 (en) | 2018-08-17 | 2020-05-05 | Auris Health, Inc. | Bipolar medical instrument |
| AU2019326548B2 (en) | 2018-08-24 | 2023-11-23 | Auris Health, Inc. | Manually and robotically controllable medical instruments |
| EP3813634A4 (en) | 2018-09-26 | 2022-04-06 | Auris Health, Inc. | ARTICULATING MEDICAL INSTRUMENTS |
| CN112770689A (zh) | 2018-09-26 | 2021-05-07 | 奥瑞斯健康公司 | 用于抽吸和冲洗的系统和器械 |
| CN112752534A (zh) | 2018-09-28 | 2021-05-04 | 奥瑞斯健康公司 | 用于手动和机器人驱动医疗器械的装置、系统和方法 |
| AU2019347767A1 (en) | 2018-09-28 | 2021-04-08 | Auris Health, Inc. | Systems and methods for docking medical instruments |
| KR20210069670A (ko) | 2018-09-28 | 2021-06-11 | 아우리스 헬스, 인코포레이티드 | 동시 내시경술 및 경피 의료 절차를 위한 로봇 시스템 및 방법 |
| US11576738B2 (en) | 2018-10-08 | 2023-02-14 | Auris Health, Inc. | Systems and instruments for tissue sealing |
| WO2020140072A1 (en) | 2018-12-28 | 2020-07-02 | Auris Health, Inc. | Percutaneous sheath for robotic medical systems and methods |
-
2018
- 2018-12-05 KR KR1020207014158A patent/KR102645922B1/ko active IP Right Grant
- 2018-12-05 CN CN201880044511.XA patent/CN110831536B/zh active Active
- 2018-12-05 JP JP2020530977A patent/JP7362610B2/ja active Active
- 2018-12-05 AU AU2018380139A patent/AU2018380139B2/en active Active
- 2018-12-05 EP EP18886855.8A patent/EP3684282B1/en active Active
- 2018-12-05 WO PCT/US2018/064126 patent/WO2019113249A1/en unknown
- 2018-12-05 US US16/210,971 patent/US10987179B2/en active Active
-
2021
- 2021-01-19 US US17/152,085 patent/US11801105B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000079087A (ja) | 1998-09-03 | 2000-03-21 | Olympus Optical Co Ltd | 内視鏡形状検出装置 |
| JP2003265500A (ja) | 2002-03-15 | 2003-09-24 | Hitachi Ltd | 手術支援装置 |
| JP2006116289A (ja) | 2004-09-27 | 2006-05-11 | Olympus Corp | 湾曲制御装置 |
| JP2006218027A (ja) | 2005-02-09 | 2006-08-24 | Olympus Corp | 内視鏡装置 |
| JP2014023818A (ja) | 2012-07-30 | 2014-02-06 | Mitsubishi Electric Engineering Co Ltd | 撮像システムおよび撮像システムに適用される機能制御方法 |
| JP2014083156A (ja) | 2012-10-22 | 2014-05-12 | Ge Medical Systems Global Technology Co Llc | 表示装置、医用装置、表示方法、およびプログラム |
| US20150265368A1 (en) | 2014-03-24 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Systems and Methods for Anatomic Motion Compensation |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3684282B1 (en) | 2024-02-21 |
| JP2021505270A (ja) | 2021-02-18 |
| AU2018380139B2 (en) | 2024-01-25 |
| CN110831536A (zh) | 2020-02-21 |
| CN110831536B (zh) | 2021-09-07 |
| US11801105B2 (en) | 2023-10-31 |
| US20210137621A1 (en) | 2021-05-13 |
| KR20200096910A (ko) | 2020-08-14 |
| EP3684282A1 (en) | 2020-07-29 |
| US10987179B2 (en) | 2021-04-27 |
| KR102645922B1 (ko) | 2024-03-13 |
| EP3684282A4 (en) | 2021-06-09 |
| WO2019113249A1 (en) | 2019-06-13 |
| US20190167366A1 (en) | 2019-06-06 |
| AU2018380139A1 (en) | 2020-05-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7362610B2 (ja) | コマンド指示されていない器具の回動を修正するシステムおよび方法 | |
| JP7271774B2 (ja) | 医療器具の圧縮の補償のためのシステムおよび方法 | |
| JP7322026B2 (ja) | 器具の位置推定のシステムおよび方法 | |
| JP7350726B2 (ja) | 画像ベースの分岐検出およびナビゲーション用マッピング | |
| US11472030B2 (en) | Robotic system with indication of boundary for robotic arm | |
| CN110831480B (zh) | 具有可变弯曲刚度分布曲线的医疗器械 | |
| KR102582808B1 (ko) | 관강 네트워크에서 의료 디바이스의 포즈를 결정하기 위한 로봇 시스템 | |
| US20210282863A1 (en) | Robotic system configured for navigation path tracing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20210428 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20210428 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210511 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211203 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230124 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230424 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230619 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230912 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231004 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7362610 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |