JP4034565B2 - 車両外部ライトを制御するシステム - Google Patents
車両外部ライトを制御するシステム Download PDFInfo
- Publication number
- JP4034565B2 JP4034565B2 JP2001568762A JP2001568762A JP4034565B2 JP 4034565 B2 JP4034565 B2 JP 4034565B2 JP 2001568762 A JP2001568762 A JP 2001568762A JP 2001568762 A JP2001568762 A JP 2001568762A JP 4034565 B2 JP4034565 B2 JP 4034565B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- light
- image
- control
- pixel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000035945 sensitivity Effects 0.000 claims description 65
- 230000008859 change Effects 0.000 claims description 49
- 238000003384 imaging method Methods 0.000 claims description 32
- 230000010354 integration Effects 0.000 claims description 23
- 230000004044 response Effects 0.000 claims description 16
- 238000000034 method Methods 0.000 abstract description 60
- 230000002401 inhibitory effect Effects 0.000 abstract 1
- 230000003287 optical effect Effects 0.000 description 90
- 230000006870 function Effects 0.000 description 83
- 239000000463 material Substances 0.000 description 65
- 239000000853 adhesive Substances 0.000 description 38
- 230000001070 adhesive effect Effects 0.000 description 38
- 238000001816 cooling Methods 0.000 description 37
- 238000012545 processing Methods 0.000 description 27
- 239000004065 semiconductor Substances 0.000 description 24
- 239000010410 layer Substances 0.000 description 22
- 238000010586 diagram Methods 0.000 description 21
- 239000000758 substrate Substances 0.000 description 21
- 239000004593 Epoxy Substances 0.000 description 16
- 238000004458 analytical method Methods 0.000 description 16
- 238000000576 coating method Methods 0.000 description 16
- 238000001514 detection method Methods 0.000 description 16
- 238000005286 illumination Methods 0.000 description 16
- 239000011248 coating agent Substances 0.000 description 15
- 238000004519 manufacturing process Methods 0.000 description 15
- 230000005855 radiation Effects 0.000 description 15
- 230000033001 locomotion Effects 0.000 description 14
- 238000005259 measurement Methods 0.000 description 14
- 230000007246 mechanism Effects 0.000 description 14
- 239000000499 gel Substances 0.000 description 13
- 230000004313 glare Effects 0.000 description 13
- 230000008569 process Effects 0.000 description 13
- 230000008901 benefit Effects 0.000 description 12
- 230000009471 action Effects 0.000 description 11
- 239000004973 liquid crystal related substance Substances 0.000 description 11
- 230000002829 reductive effect Effects 0.000 description 11
- 230000005540 biological transmission Effects 0.000 description 10
- 239000004020 conductor Substances 0.000 description 10
- 239000008393 encapsulating agent Substances 0.000 description 10
- 239000011521 glass Substances 0.000 description 9
- 241000519995 Stachys sylvatica Species 0.000 description 8
- 229910052751 metal Inorganic materials 0.000 description 8
- 239000002184 metal Substances 0.000 description 8
- 229920003023 plastic Polymers 0.000 description 8
- 239000002775 capsule Substances 0.000 description 7
- 230000002950 deficient Effects 0.000 description 7
- 238000005516 engineering process Methods 0.000 description 7
- 239000007788 liquid Substances 0.000 description 7
- 239000004033 plastic Substances 0.000 description 7
- 239000003086 colorant Substances 0.000 description 6
- 238000004891 communication Methods 0.000 description 6
- 230000007423 decrease Effects 0.000 description 6
- 239000000945 filler Substances 0.000 description 6
- 238000012360 testing method Methods 0.000 description 6
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 5
- 230000033228 biological regulation Effects 0.000 description 5
- 239000003550 marker Substances 0.000 description 5
- 239000003973 paint Substances 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 239000010703 silicon Substances 0.000 description 5
- 229910052710 silicon Inorganic materials 0.000 description 5
- 230000003595 spectral effect Effects 0.000 description 5
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 4
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 4
- 238000013459 approach Methods 0.000 description 4
- 239000002131 composite material Substances 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000001723 curing Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000004297 night vision Effects 0.000 description 4
- 230000036961 partial effect Effects 0.000 description 4
- 230000001699 photocatalysis Effects 0.000 description 4
- 229920000642 polymer Polymers 0.000 description 4
- 238000005070 sampling Methods 0.000 description 4
- 229910000679 solder Inorganic materials 0.000 description 4
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 3
- 229910052782 aluminium Inorganic materials 0.000 description 3
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 3
- 238000003491 array Methods 0.000 description 3
- 230000006399 behavior Effects 0.000 description 3
- 239000000919 ceramic Substances 0.000 description 3
- 239000000356 contaminant Substances 0.000 description 3
- 238000005562 fading Methods 0.000 description 3
- 229920002120 photoresistant polymer Polymers 0.000 description 3
- 238000002310 reflectometry Methods 0.000 description 3
- 229910052709 silver Inorganic materials 0.000 description 3
- 239000004332 silver Substances 0.000 description 3
- 239000007787 solid Substances 0.000 description 3
- 238000001228 spectrum Methods 0.000 description 3
- 239000000126 substance Substances 0.000 description 3
- 230000026676 system process Effects 0.000 description 3
- 230000003685 thermal hair damage Effects 0.000 description 3
- 239000010409 thin film Substances 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- WUPHOULIZUERAE-UHFFFAOYSA-N 3-(oxolan-2-yl)propanoic acid Chemical compound OC(=O)CCC1CCCO1 WUPHOULIZUERAE-UHFFFAOYSA-N 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- KDLHZDBZIXYQEI-UHFFFAOYSA-N Palladium Chemical compound [Pd] KDLHZDBZIXYQEI-UHFFFAOYSA-N 0.000 description 2
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 239000003570 air Substances 0.000 description 2
- 229910045601 alloy Inorganic materials 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 230000002457 bidirectional effect Effects 0.000 description 2
- 230000004397 blinking Effects 0.000 description 2
- 229910052980 cadmium sulfide Inorganic materials 0.000 description 2
- 239000003795 chemical substances by application Substances 0.000 description 2
- 239000012459 cleaning agent Substances 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 210000002858 crystal cell Anatomy 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 229910003460 diamond Inorganic materials 0.000 description 2
- 239000010432 diamond Substances 0.000 description 2
- 239000003989 dielectric material Substances 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 239000010408 film Substances 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 229910052737 gold Inorganic materials 0.000 description 2
- 239000010931 gold Substances 0.000 description 2
- 239000004519 grease Substances 0.000 description 2
- 230000017525 heat dissipation Effects 0.000 description 2
- 238000010348 incorporation Methods 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- QSHDDOUJBYECFT-UHFFFAOYSA-N mercury Chemical compound [Hg] QSHDDOUJBYECFT-UHFFFAOYSA-N 0.000 description 2
- 229910052753 mercury Inorganic materials 0.000 description 2
- 150000002739 metals Chemical class 0.000 description 2
- 230000003278 mimic effect Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 239000000615 nonconductor Substances 0.000 description 2
- 239000003921 oil Substances 0.000 description 2
- 238000004806 packaging method and process Methods 0.000 description 2
- 230000010287 polarization Effects 0.000 description 2
- 239000011148 porous material Substances 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 235000012239 silicon dioxide Nutrition 0.000 description 2
- 239000000377 silicon dioxide Substances 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 239000012780 transparent material Substances 0.000 description 2
- RLLPVAHGXHCWKJ-IEBWSBKVSA-N (3-phenoxyphenyl)methyl (1s,3s)-3-(2,2-dichloroethenyl)-2,2-dimethylcyclopropane-1-carboxylate Chemical compound CC1(C)[C@H](C=C(Cl)Cl)[C@@H]1C(=O)OCC1=CC=CC(OC=2C=CC=CC=2)=C1 RLLPVAHGXHCWKJ-IEBWSBKVSA-N 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-M Acrylate Chemical compound [O-]C(=O)C=C NIXOWILDQLNWCW-UHFFFAOYSA-M 0.000 description 1
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- -1 AllnGaP Inorganic materials 0.000 description 1
- 229910000980 Aluminium gallium arsenide Inorganic materials 0.000 description 1
- 229920002799 BoPET Polymers 0.000 description 1
- 229910000881 Cu alloy Inorganic materials 0.000 description 1
- 229910001218 Gallium arsenide Inorganic materials 0.000 description 1
- DGAQECJNVWCQMB-PUAWFVPOSA-M Ilexoside XXIX Chemical compound C[C@@H]1CC[C@@]2(CC[C@@]3(C(=CC[C@H]4[C@]3(CC[C@@H]5[C@@]4(CC[C@@H](C5(C)C)OS(=O)(=O)[O-])C)C)[C@@H]2[C@]1(C)O)C)C(=O)O[C@H]6[C@@H]([C@H]([C@@H]([C@H](O6)CO)O)O)O.[Na+] DGAQECJNVWCQMB-PUAWFVPOSA-M 0.000 description 1
- 206010023126 Jaundice Diseases 0.000 description 1
- 239000005041 Mylar™ Substances 0.000 description 1
- 235000011449 Rosa Nutrition 0.000 description 1
- 229920002472 Starch Polymers 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- GWEVSGVZZGPLCZ-UHFFFAOYSA-N Titan oxide Chemical compound O=[Ti]=O GWEVSGVZZGPLCZ-UHFFFAOYSA-N 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 239000012790 adhesive layer Substances 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 239000012080 ambient air Substances 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- DMFGNRRURHSENX-UHFFFAOYSA-N beryllium copper Chemical compound [Be].[Cu] DMFGNRRURHSENX-UHFFFAOYSA-N 0.000 description 1
- 239000011230 binding agent Substances 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 210000004027 cell Anatomy 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 230000003750 conditioning effect Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 239000012777 electrically insulating material Substances 0.000 description 1
- 238000005401 electroluminescence Methods 0.000 description 1
- 230000005670 electromagnetic radiation Effects 0.000 description 1
- 239000012776 electronic material Substances 0.000 description 1
- 238000005538 encapsulation Methods 0.000 description 1
- 229920006332 epoxy adhesive Polymers 0.000 description 1
- 125000003700 epoxy group Chemical group 0.000 description 1
- 230000004438 eyesight Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000009501 film coating Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000011010 flushing procedure Methods 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 229910010272 inorganic material Inorganic materials 0.000 description 1
- 239000011147 inorganic material Substances 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 238000011415 microwave curing Methods 0.000 description 1
- 239000003595 mist Substances 0.000 description 1
- 239000002991 molded plastic Substances 0.000 description 1
- 239000012778 molding material Substances 0.000 description 1
- 238000010137 moulding (plastic) Methods 0.000 description 1
- 229910001120 nichrome Inorganic materials 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000005693 optoelectronics Effects 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 229910052763 palladium Inorganic materials 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 230000002688 persistence Effects 0.000 description 1
- 239000011941 photocatalyst Substances 0.000 description 1
- 229920003217 poly(methylsilsesquioxane) Polymers 0.000 description 1
- 239000004417 polycarbonate Substances 0.000 description 1
- 229920000515 polycarbonate Polymers 0.000 description 1
- 229920000647 polyepoxide Polymers 0.000 description 1
- 238000004382 potting Methods 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 230000002285 radioactive effect Effects 0.000 description 1
- 230000035484 reaction time Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 238000007650 screen-printing Methods 0.000 description 1
- 239000000565 sealant Substances 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 229910052708 sodium Inorganic materials 0.000 description 1
- 239000011734 sodium Substances 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 239000002904 solvent Substances 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 239000008107 starch Substances 0.000 description 1
- 235000019698 starch Nutrition 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 229920005992 thermoplastic resin Polymers 0.000 description 1
- 229920001187 thermosetting polymer Polymers 0.000 description 1
- 210000002105 tongue Anatomy 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000001721 transfer moulding Methods 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
Images























































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/18—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights being additional front lights
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/14—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights having dimming means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/06—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle
- B60Q1/08—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically
- B60Q1/085—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically due to special conditions, e.g. adverse weather, type of road, badly illuminated road signs or potential dangers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/14—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights having dimming means
- B60Q1/1415—Dimming circuits
- B60Q1/1423—Automatic dimming circuits, i.e. switching between high beam and low beam due to change of ambient light or light level in road traffic
- B60Q1/143—Automatic dimming circuits, i.e. switching between high beam and low beam due to change of ambient light or light level in road traffic combined with another condition, e.g. using vehicle recognition from camera images or activation of wipers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/2603—Attenuation of the light according to ambient luminiosity, e.g. for braking or direction indicating lamps
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/10—Image acquisition
- G06V10/12—Details of acquisition arrangements; Constructional details thereof
- G06V10/14—Optical characteristics of the device performing the acquisition or on the illumination arrangements
- G06V10/141—Control of illumination
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/10—Terrestrial scenes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/05—Special features for controlling or switching of the light beam
- B60Q2300/054—Variable non-standard intensity, i.e. emission of various beam intensities different from standard intensities, e.g. continuous or stepped transitions of intensity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/05—Special features for controlling or switching of the light beam
- B60Q2300/056—Special anti-blinding beams, e.g. a standard beam is chopped or moved in order not to blind
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
- B60Q2300/112—Vehicle speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
- B60Q2300/114—Vehicle acceleration or deceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
- B60Q2300/116—Vehicle at a stop
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/12—Steering parameters
- B60Q2300/122—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/13—Attitude of the vehicle body
- B60Q2300/134—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/14—Other vehicle conditions
- B60Q2300/142—Turn signal actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/14—Other vehicle conditions
- B60Q2300/144—Rearward ratio actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/20—Indexing codes relating to the driver or the passengers
- B60Q2300/21—Manual control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/31—Atmospheric conditions
- B60Q2300/312—Adverse weather
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/31—Atmospheric conditions
- B60Q2300/314—Ambient light
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/32—Road surface or travel path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/32—Road surface or travel path
- B60Q2300/322—Road curvature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/331—Driving situation characterised by the driving side, e.g. on the left or right hand side
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/332—Driving situation on city roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/332—Driving situation on city roads
- B60Q2300/3321—Detection of streetlights
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/333—Driving situation on suburban or country roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/334—Driving situation on motorways
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/337—Tunnels or bridges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/40—Indexing codes relating to other road users or special conditions
- B60Q2300/41—Indexing codes relating to other road users or special conditions preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/40—Indexing codes relating to other road users or special conditions
- B60Q2300/42—Indexing codes relating to other road users or special conditions oncoming vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2400/00—Special features or arrangements of exterior signal lamps for vehicles
- B60Q2400/30—Daytime running lights [DRL], e.g. circuits or arrangements therefor
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Lighting Device Outwards From Vehicle And Optical Signal (AREA)
Description
(技術分野)
本発明は、車両の外部ライトを制御する制御システム及びこのような制御システムに使用できる構成部品に関する。
【0002】
(背景技術)
現代の自動車は、異なる運転状況で照明を行うための様々な異なる照明灯を備えている。前照灯は、通常、ロービーム状態及びハイビーム状態を交互に生じるように制御される。ロービームはハイビームよりも光量が低く、夜間、他の車両が存在する場合に前方の道を照明するために使用される。ハイビームはロービームよりも光量が相当高く、他の車両が存在しない場合に車両の前方の道を照明するために使用される。また、昼間走行灯は、広範囲に認可され始めている。更に、高輝度ハイビームは、高速の田舎道での使用が提案されている。また、一般的に、フォグライト等の悪天候灯が使用されている。他の車両外部ライトとしては、テールライト、ブレーキライト、中央取付け式ストップライト(CHMSL)、方向指示器、後退ライト、カーゴライト、パドルライト、ナンバープレート照明を挙げることができる。
【0003】
様々な国々の法律で車両の照明が規制されており、自動車メーカーは、これらの規制を遵守する車を製造する必要がある。例えば、米国運輸省(DOT)によって規定されている規制では、車両のハイビーム前照灯の光放射が規制されている。様々な州レベルの規制は、前方の車両(同じ方向を走行中の他の車両)及び対向車両(反対方向を走行中の他の車両)によるドライバが体験する眩輝量を制御するのに使用されている。
【0004】
DOT規制に基づく公知の車両ハイビーム前照灯の光放出は、光強度は、0°で40,000cd、3°で10,000cd、6°で3250cd、90°で1500cd、及び12°で750cdに制限されている。この規制を満足する光放出パターンの一例が、1998年11月17日にJoseph Scot Stam他の米国特許第5,837,994号「車両前照灯を自動的に減光する制御システム」の図1で示されている。これらの角度で別の車両に入射する0.1フットキャンドル(fc)の照度を回避するためには、車両同士が0°の角度にある場合には相手の車両から700フィート以内で、車両同士が3°の水平位置にある場合には相手の車両から350フィート以内で、他方の車両の位置が制御車両の縦軸に対して6°の角度にある場合には、他方の車両から200フィート以内で車両ハイビーム前照灯を減光する必要がある。従って、制御車両の直前(即ち0°の角度)の前方車両は、制御車両が前方車両に追いつくかなり前に識別される必要があるが、制御車両の前照灯が前方車両に対して減光されるべき距離は、後方からの眩輝は通常対向車の眩輝ほど視界を混乱させるものではないので対向車両に対しするものよりは幾分短くてもよいことが分かる。
【0005】
車両前照灯を自動制御するために、様々な前照灯減光制御システムが提案されている。他の車両のドライバが過度の眩輝レベルを受けるのを防ぐためには、自動前照灯減光システムは、対向車両の前照灯及び前方車両のテールライトの両方を感知する必要がある。有効に前照灯を検出する幾つかのシステムは、適切にテールライトを検出することができない。殆どの従来システムは、反射体、道路標識、街灯、家の照明等の厄介な光源と、前照灯制御を必要とする光源とを区別できない。従って、これらのシステムは、他の通行車両が存在しない場合にハイビームの望ましくない減光、及び他の車両が存在する場合にハイビームを点灯することがある。望ましくない性能に加えて、従来システムでは、車両前照灯の不必要な減光を回避しながら、ハイビーム制御に関する前述の法的要件を遵守することが難しい。
【0006】
フォグライトは、自動制御が難しい他の車両用照明灯の例である。車両は、前方及び後方に向いたフォグライトを備えることが知られている。ヨーロッパでは、霧が濃い状況で点灯される、非常に明るい赤色又は白色灯を車両後部に設けることが知られている。フォグライトは、霧で視界が所定量だけ低下すると即座に点灯し、霧がその濃さ以下に落ちた場合に消灯する必要がある。このようなフォグライトを自動制御する信頼性の高い方法は、これまで利用できなかった。
【0007】
従って、車両のための信頼性が高く知的なランプ制御に対する要求がある。
【0008】
(発明の開示)
本発明の1つの態様によれば、制御車両の外部ライトを制御する制御システムが提供される。本制御システムは、制御車両の前方の情景を撮像するように構成されている撮像システムと、撮像システムから取得した情景の画像を処理して、処理された情景内で検出された物体に応じてビームパターンを変えるように外部ライトを制御するための制御回路とを備え、制御回路は、車両ウインドシールドワイパの作動に応じて外部ライトの自動制御を無効にする。
【0009】
本発明の別の態様によれば、制御車両の外部ライトを制御する制御システムが提供される。本制御システムは、制御車両の前方の情景を撮像するように構成されている撮像システムと、撮像システムから取得した情景の画像を処理して、処理された情景内で検出された物体に応じてビームパターンを変えるように外部ライトを制御するための制御回路とを備え、制御回路は、車両フロントガラスデフロスタが最高速度で作動しているときに外部ライトの自動制御を無効にする。
【0010】
本発明の別の態様によれば、制御車両の外部ライトを制御する制御システムが提供される。本制御システムは、制御車両の前方の情景を撮像するように構成されている撮像システムと、撮像システムから取得した情景の画像を処理して、処理された情景内で検出された物体に応じてビームパターンを変えるように外部ライトを制御するための制御回路とを備え、制御回路は、降雪が検出されたときに外部ライトの自動制御を無効する。
【0011】
別の実施形態によれば、降雪又は霧を車両の外側で検出する方法を得る事ができる。本方法は、車両前方の光レベルと、車両上方の光レベルとを感知するステップと、車両前方及び車両上方の光レベルの相対輝度を比較するステップと、車両前方の相対輝度と車両上方の相対輝度の比が閾値に達したときに雪が降っているか又は霧が濃いことを判定するステップとを含む。
【0012】
本発明の別の態様によれば、車両の前照灯を制御する制御システムが提供される。本制御システムは、車両外側の周辺光レベルを感知する周辺光センサと、周辺光センサによって感知された周辺光レベルに応じて昼間走行灯のビームパターンを変える制御回路とを備える。
【0013】
本発明の別の態様によれば、車両のテールライトの輝度を制御する制御システムが提供される。本制御システムは、車両外側で周辺光を感知する周辺光センサと、周辺光センサによって感知された周辺光レベルに応じてテールライトの輝度を変える制御回路とを備える。
【0014】
本発明の更に別の態様によれば、制御車両の前照灯を制御する前照灯制御システムが提供される。本前照灯制御システムは、制御車両の前方の情景を撮像するように構成されている撮像システムと、撮像システムに接続され、撮像システムから取得した画像内の光源の輝度を識別及び判定し、且つ、画像内の光源の輝度の関数として前照灯のビームパターンを変えるように前照灯を制御するための制御回路と、制御回路に接続され、制御回路が画像内の光源に応じて前照灯を制御することになる感度をユーザが調整することを可能にするユーザ入力機構とを備える。
【0015】
本発明の更に別の態様によれば、制御車両の前照灯を制御する前照灯制御システムが提供される。本前照灯制御システムは、制御車両の前方の情景を撮像して、車両の外側の周辺光レベルを検出するように構成されている撮像システムと、撮像システムに接続され、撮像システムから取得した画像内の光源の輝度を識別及び判定するために車両の外側の周辺光レベルを判定して、周辺光レベルが閾値レベルを上回るときに画像内の光源の輝度の関数として前照灯のビームパターンを変えるように前照灯を制御するための制御回路とを備える。
【0016】
本発明の別の態様によれば、車両の外部ライトを制御する制御システムが提供される。本制御システムは、複数の画素を含む画像アレイセンサと、画像アレイセンサ上の制御車両の前方の情景を撮像するように構成され、最前面を含む光学系と、画像アレイセンサから取得した情景の画像を処理し、処理された情景内で検出された物体に応じて外部ライトを制御する制御回路とを備え、光学系は、最前面に親水被膜を含む。
【0017】
本発明の更に別の態様によれば、ハイビーム状態とロービーム状態との間で連続的に変わる輝度を有する連続可変式前照灯の輝度を制御する車両制御システムが提供される。本車両制御システムは、制御車両の前方の情景を撮像するように構成されている撮像システムと、撮像システムから取得した画像内の光源の輝度を識別及び判定し、画像内の光源の輝度の関数として前照灯の輝度を制御する制御回路と、制御回路に接続され、前照灯の相対輝度をドライバに表示するように車両内に配置されているインジケータとを備える。
【0018】
本発明の別の態様によれば、画素のアレイと、少なくとも1つの他の構成要素とを有する画像センサと、画像センサと撮像される情景との間に配置され、情景からの光が少なくとも1つの他の構成要素に達するのを妨げる光学バッフルとを備える車両用撮像システムが提供される。
【0019】
本発明の更なる態様によれば、制御車両の前方の情景を撮像するように構成されている撮像システムと、車両前照灯の制御に影響を与える機能に関するドライバの選択に手動入力のための切換え機構と、切換え機構と撮像システムとに接続され、撮像システムから取得した画像内の光源の輝度を識別及び判定し、画像内の光源の輝度の関数及び切換え機構の状態の関数として前照灯の輝度を制御するように外部ライトを制御するための制御回路とを備える車両用前照灯制御システムが提供される。
【0020】
本発明の別の態様によれば、車両前照灯に接続され、車両の点火装置のオフ又は車両からの降車に応じて車両の前照灯をオフ状態に減光するための制御回路を備える車両用前照灯制御システムが提供される。
【0021】
本発明の別の態様によれば、車両の外部ライトを制御する制御システムが提供される。本制御システムは、複数の画素を含む画像アレイセンサと、画像アレイセンサ上の制御車両の前方の情景を撮像するように構成され、最前面を含む光学系と、画像アレイセンサから取得した情景の画像を処理し、処理された情景内で検出された物体に応じて外部ライトを制御する制御回路とを備え、光学系は、最前面に光触媒被膜を含む。
【0022】
本発明の別の態様にとれば、車両の前照灯を制御する制御システムが提供される。本制御システムは、パッシング状態で車両前照灯の輝度を一時的に高めるためにドライバからの入力を受信する手動作動スイッチ機構と、車両の外側の周辺光を感知する周辺光センサと、周辺光センサと手動作動スイッチ機構とに接続され、周辺光センサによって感知された周辺光レベルに応じてパッシング中に前照灯のビームパターンを変えるための制御回路とを備える。
【0023】
本発明の更に別の態様によれば、衛星から信号を受信するマイクロ波受信器を有する車両の前照灯を制御する制御システムが提供される。本制御システムは、車両の位置を示すマイクロ波受信器からの信号を受信する制御回路を備え、制御回路は、前照灯を制御して、車両が住宅街を走行しているときに前照灯の知覚輝度が能力未満の所定のレベルを超えないように制限する。
【0024】
本発明の前述及び他の特長、利点、及び目的は、当業者であれば、本明細書、特許請求の範囲、及び添付の図面を参照することでさらに理解できるであろう。
【0025】
本発明の主題は、本明細書を締めくくる特許請求の範囲において特に明確に示されている。本発明は、更なる目的及び利点と共に、同様の数字は同様の構成要素を表している添付の図面と併せて以下の説明を参照することで最も良く理解することができる。
【0026】
(発明を実施するための最良の形態)
本発明は、全体としては車両の外部ライトを制御する制御システムに関する。前述のように、このような外部ライトには、前照灯、テールライト、フォグライト等の悪天候灯、ブレーキライト、中央取付け式ストップライト(CHMSL)、方向指示器、後退ライト、カーゴライト、パドルライト、ナンバープレート照明等がある。前照灯は、従来式のロービーム状態及びハイビーム状態を含む、複数の異なるモードでもって作動することができる。また、前照灯は、昼間走行灯として、更には許可されている国々では超輝度ハイビームとして機能することができる。また、前照灯の輝度は、ロー、ハイ、及びスーパーハイ状態の間で連続的に変えることができる。前照灯の各々の状態を得るために個別の照明を設けることができるが、実際の前照灯の輝度を変えてこれらの異なる前照灯状態を得ることもできる。いずれの場合でも、前照灯の「知覚輝度」が変えられる。本明細書で用いる場合、「知覚輝度」とは、車両の外側で観察者によって知覚されるような前照灯の輝度をいう。最も一般的には、このような観察者は、前方の車両又は同じ通りを反対方向に走行している車両内のドライバ又は乗員である。観察者が車両に関連して車両における「眩輝領域」(即ち、観察者が過度の眩輝を引き起すような外部ライトの輝度を知覚する領域)内に位置する場合、外部ライトは、観察者がもはや眩輝領域にいないようにビーム照明パターンが変更されるよう制御されることが理想的である。前照灯の知覚輝度及び/又は眩輝領域(及び/又はその他の外部ライト)は、前照灯を形成する1つ又はそれ以上の照明灯の照明出力を変えること、前照灯を形成する照明灯の1つ又はそれ以上の照準を変えるように1つ又はそれ以上の照明灯の向きを変えること、照明灯の幾つかの又は全てをオンにするか又はオフにすること、車両の前方の照明パターンを変えること、又はこれらを組み合わせることによって変えることができる。図50Aは、他の車両が制御車両5000の近傍又は前方に存在する場合に使用される典型的なロービームパターンを示す。図50Bは、ハイビームパターン及びロービームパターン、及び車両5000が曲がり角に接近する際に個々に作動されるサイドベンディング照明灯パターンを含む複合ビームパターンの例を示す。図50Cは、ロービームパターン、及び、ハイビームの焦点又は照準、並びにハイビームの輝度を変えることによって実現できる中間的な側面照準パターンを含む、複合ビームパターンを示す。図50Cに示す複合ビームパターンは、別の車両が対向車線又は隣接車線で接近してくるときに有用である。当業者であれば理解できるように、公知の前照灯機構を使用して多数の他のビームパターンを得ることができる。また、当業者には、前照灯の知覚輝度及び眩輝領域を調節する他の機構が明かであろう。
【0027】
本発明は、主として車両前照灯の制御に関連するが、テールライト及び悪天候灯を制御する実施形態を以下に説明する。いくつかの実施形態において、本発明は、一般的に「外部ライト」を制御するものとして説明するが、外部ライトには、広義の車両の外部ライトが含まれる。例えば、本発明は、特定の状況において、シグナルミラーを有する車両のドライバの目に過度の眩輝を引き起すことなく別の車両のドライバに合図を行うための十分な照明出力をもたらすように、外部ルームミラー組立体内に取付けられる方向指示器の知覚輝度を制御するために利用できる。また、本発明は、感知された周辺光に基づいて、計器盤ライト並びに他の内部表示ライトを制御するために用いることができる。他の例は当業者には明かであろう。
【0028】
自動前照灯減光装置を有する制御車両100(図1)は、対向車両105の前照灯104及び前方の車両110のテールライト108を検出する光学センサ組立体102を含む。制御車両100の前照灯111は、対向車両105のドライバの目に直接ハイビーム又は明るい光が入らないように、又は前方の車両110のドライバの目へ反射しないように自動制御される。光学センサ組立体102は、車両のフロントガラス領域に取付けた状態で図示するが、当業者であれば、センサは、センサが車両前方の情景を検査できる他の場所に取付け可能であることが理解できる。1つの特に好都合な取付け位置は、鮮明な視界を得るための車両フロントガラス上の高い位置であるが、この視界は、ルームミラーマウント、車両天井、サンバイザー、又はオーバーヘッドコンソール内に光学センサ組立体102を取付けることによって得られる。好都合に採用できる他の視界には、光学センサ組立体102をAピラー、ダッシュボード、又は前方の視野が得られる任意の他の場所が含まれる。しかし、最も好都合な取付け場所は、画像センサが車両のウインドシールドワイパによってきれいに保たれる領域を介して前方の情景を見ることができる場所である。
【0029】
図2a及び図2bを参照すると、光学センサ組立体102は、電子画像センサ201及び光を電子画像センサ201上に向ける光学系を含む。一般に、画像センサ201は、光感応構成要素のアレイ及び画像センサ201の表面に入射する光に応じて電子画素光レベル信号を出力する関連の回路を備える。光学系は、一般に4つの構成要素、即ち、レンズ構造体202、開口絞り部材203、遠視野バッフル204、及び随意的な赤外線フィルタ206を含む。光学系は、画像センサ201が検査する情景を制御する。特に、光学系は、遠視野バッフルの開口部207を通過する光線205を画像センサ組立体201内に収容されているアレイ201上に集中させる。
【0030】
画像センサ
画像センサ201の構成を図3に示す。画像センサは、CMOS画像センサ、電荷結合素子(CCD)画像センサ又は任意の他の適切な画像センサ等の、様々なセンサの1つから作ることができる画像アレイ301(図3)を含む。1つの実施形態において、画像センサは、CMOSフォトゲート・アクティブ画素画像センサである。CMOSフォトゲート・アクティブ画素画像センサについては、1995年11月28日にエリック・R・フォッサム他に付与された米国特許第5,471,515号「画素間の電荷移動によるアクティブ画素センサ」に説明されている。アレイを含むセンサシステムについては、Bechtel他の1999年11月23日に出願された米国特許出願番号09/448,364「画像センサのための制御回路」、Bechtel他による1997年9月16日出願された米国特許出願番号08/933,210「画像センサのための制御回路」(現在米国特許第5,990,469号)、及びJoseph Stam他による1997年4月2日出願された米国特許出願番号08/831,232「車両前照灯を自動的に減光する制御システム」(現在米国特許第5,837,994)に開示されている。
【0031】
アレイ301は、10μmから50μmの画素といったフォトゲート・アクティブ画素を備えることができる。アレイが低解像度アレイであることは好都合であり、アレイは、7000画素/平方mm未満、好ましくは、2500画素/平方mm未満の解像度をもつ。アレイは、25μm以上のフォトゲート・アクティブ画素を有する。特に、アレイは、200行×200列よりも小さな格子内に配置される30μm以上の画素を含むことができ、64行×80列の画素を有する矩形アレイを備えると好都合である。このような画像センサは、米国特許第5,471,515号に説明されている。アレイ301の光学的にアクティブな領域は、X方向に約1.9mm、Y方向に2.4mmである。このような低解像度の画像センサアレイを使用して制御車両100の前方視野を監視すると、結果的に、非常に信頼性が高く正確な車両前照灯制御を可能にしつつ、コスト効率の高い方法でもって高速処理を行うことができる比較的低解像度のセンサシステムを得ることができる。低解像度アレイは、関連回路のメモリ及び処理要件を低減する。このような大きな画素を使用すると高感度になり、低速で低コストの光学部品を使用することができる。しかし、当業者であれば、小さな画素を用いて解像度を高くするとセンサアレイ領域が少なくなるので、アレイ自体のコストを下げるのに好都合であることを理解できるであろう。高解像度画像センサを採用する場合は、高解像度画像センサに対応するために構成部品の高速化及び光学部品の品質の向上が必要となるであろう。光学的な製造技術の進歩に伴って、このような光学部品はコスト効率が高くなり、解像度の向上は経済的に現実になるであろう。更に、将来的には、より多くの画素を含む画像の処理に必要な処理装置及びメモリのコストが下がり、高解像度のシステムが実現可能になるであろう。高解像度になれば、遠くのテールライトを検出する性能が上がるであろう。しかし、現時点では、画素が比較的少ない低解像度のアレイを使用して本発明の経済性を維持して、結果的に、市場で広く受け入れられるようにすることが好ましい。
【0032】
従って、画像センサ及び制御回路を以下に詳細に説明するが、このようなシステムは、米国特許第5,990,469号に開示されている。
【0033】
アレイ301に加えて、画像センサ201は、シリアルタイミング及び制御回路309、コラム出力回路302、バイアス発生デジタル/アナログ変換器(DAC)305、フラッシュ型アナログ/デジタル変換器(ADC)304、及びアナログ増幅器303を含む。シリアルタイミング及び制御回路309は、マイクロコントローラ1105(図1)と画像センサ201との間の高速同期双方向のインタフェース接続を行う。米国特許第5,990,469号に説明されるように、制御回路309により、マイクロコントローラ1105は、測定のために露光される画素の選択と(即ち、露光されるアレイ301の領域を選択する。この領域を本明細書では「ウインドウ」と呼ぶ)、感度に影響を及ぼす露光時間と、バイアス電圧発生DAC305によって発生させるバイアス電圧と、増幅器303のアナログ利得とを制御するパラメータを出力できる。更なる特徴としては、各々のウインドウの画素のための増幅器303に対して同一の又は異なる利得設定値を使用して、2つのウインドウを同時に露光する能力、及び複数フレームのシーケンスを取得する能力を挙げることができる。また、制御回路309は、画像センサ組立体201のアナログ構成部品を無効するスリープ機能を可能にして、画像センサが使用状態にない場合に消費電力を低減することができる。また、画像センサは、供給電力入力Vdd、接地入力、シリアルデータバス入出力(I/O)308、シリアルデータクロックI/O311、スレーブセレクト入力307、及びクロック入力306を含む。
【0034】
レンズ構造体
レンズ構造体202(図2)は、レンズ208及び209を含む。2枚のレンズが開示されているが、画像センサ201は、1枚のレンズ又は3枚以上のレンズを使用することができる。2枚のレンズ208及び209は、以下で説明すると同時に米国特許第5,837,994号及び米国特許第5,990,469号に説明されているように、画像センサ201を使用して前照灯とテールライトとを適切に区別できるよう異なる色フィルタを介して同一の情景の2つの異なる画像を生成するのに使用される。撮像システムは、少なくとも1つの色フィルタ208、209を介して情景画像を取得することができる。1つの実施形態において、レンズ構造体は、第1の色フィルタを介して画像アレイ301の1つの領域の前方の情景を撮像すると共に、第2のフィルタを介して画像の別の領域の前方の情景を撮像するように構成されている。例えば、フィルタ209(図2aと図2b)は、赤色フィルタとすることができ、フィルタ208は、青色フィルタ、緑色フィルタ、シアンフィルタ、透明フィルタ(例えば、色フィルタなしの状態)、又は他の適切なフィルタの何れかとすることができる。光学システム内には、レンズ208、209以外に、画像センサ表面上等のフィルタを組み込むことができる種々の場所がある。しかし、レンズ構造体へレンズの組み込むと、光がフィルタの特定部分に集束しないという利点がある。フィルタを画像平面、即ちセンサ上に設けると、太陽がセンサの視野内のある太陽光線がフィルタ上に集束するので、有機フィルタは熱損傷を受ける場合がある。典型的に、フィルタ材料は、画像センサ自体よりもはるかに熱損傷を受けやすい。二色干渉フィルタは例外であり、このフィルタは熱損傷に非常に強い。このような耐熱フィルタを半導体画像センサ表面上に配置する方法を、本発明の変形実施形態に関連して以下に詳細に説明する。
【0035】
画像センサ表面上に組み込むことが可能なフィルタの例は、Philip E. Buchbaumに付与された米国特許第5,711,889号に開示されている二色フィルタアレイである。この米国特許で開示されている二色フィルタアレイは熱損傷に耐久性があるので、車両前照灯の制御で光源を検出するのに使用される画像センサに用いるのに適切である。このような二色フィルタアレイは、チェッカーボード又はモザイクパターンを含むことができ、隣接する画素に別個に1条の光が当たるようにアレイ上に配置することができる。異なる色の干渉フィルタを隣接する画素上に配置する方法は、前述の米国特許第5,711,889号で開示されている。1つの実施形態において、隣接する画素は、下表に示すように、赤色フィルタ(R)と無色フィルタ(透明(C))とで交互に覆われている。
【0036】

本実施形態において、光学部品は、前述のレンズ構造体及び色フィルタを含まないが、これは、色フィルタ処理機能がフィルタパターンによって行われるからである。同様に、光学部品は、画像センサの2つの部分の上の前方の情景を個別に撮像する必要はない。従って、画像センサの2倍に等しい面積を使用して、前方の情景の単一の画像を撮像することができる。しかし、本発明の別の実施形態によれば、光学部品は、依然として前述したように画像センサアレイの2つの個別の部分の上に前方の情景を撮像することができるが、色フィルタをレンズに組み込む代わりに、センサ上にパターンのある又はパターンがない多層干渉フィルタとして色フィルタを設けることができる点に留意されたい。
【0038】
本実施形態における光学部品は、遠くの点光源からのスポットサイズが少なくとも2つの画像をカバーするように若干焦点がずれている。このようにして、物体の赤色成分の正確な読み出しを判定することができる。本発明者は、典型的にポリマフィルタを用いる一般的な色フィルタアレイ技術は、集束された直射日光に弱いことを発見した。多くの自動車用途において、太陽がカメラの視野内に入るように車両が走行又は駐車される場合には、太陽光線がアレイ上に集束される可能性がある。干渉フィルタは非常に頑丈であり、不必要なスペクトルを含む何条もの光線を吸収することなく反射する。従って、干渉フィルタを使用すると、従来のフィルタ処理技術の制限を解消して、自動車用カメラを作ることができる。このフィルタは、車両機器を制御する用途で使用されるカメラと併用でき、更に画像を取得して視覚補助のためにドライバに表示する用途でも使用できる。
【0039】
別の実施形態において、3色干渉フィルタを使用して、下表に示すように、赤、緑、青(RGB)画素アレイ(又は他の補足)を作ることができる。
【0040】
各々の画素のフルカラー値は、現在の画素の色を使用して異なるフィルタ色を有する隣接する画素からの他の2色を挿入することによって決定される。この内挿法を実行する方法は、本技術では公知である。単純な方法では、4つの画素グループを1つの「スーパー画素」として扱う。点光源の画像が2×2の画素ブロック上で不鮮明になるように十分にレンズの焦点をずらす。各々の2×2画素ブロックについて、赤、緑、青の色の成分を個々の画素から判定する。このデータは、3つの個別の値として、即ち強度及び色の値として表すことができる。
【0042】
2×2のスーパー画素を使用すると処理が単純になり、記憶値の総数が少なくなる。この方法は、色画像化を必要とする用途において、他の任意の方法と組み合すことができる。ハイビーム前照灯制御システムといった用途に関しては、解像度を上げるために画像の中心近くでは従来型の色内挿法を使用し、スーパー画素を使用する方法は、中心から離れた場所で使用することができる。2×2のブロックよりも大きなスーパー画素は、実質的な解像度の低下を容認できる場所で使用できる。
【0043】
以下に図2a、図4、図5、及び図7を参照してレンズ202を詳細に説明する。レンズ構造体202は、他の車両からの光を画像アレイ301(図7)上に集束する第1のレンズ208及び第2のレンズ209を含む。2枚のレンズ要素208、209は、前方の情景を画像センサ画像アレイ301の異なるそれぞれの領域702、703上に撮像する。各々のレンズ要素208、209は、スペクトル帯域通過フィルタを含むので、各々の画像アレイ301のそれぞれの領域上に投射された前方の情景の画像は、画像の異なる色成分を表し、この場合、視野内の物体の相対色を判定することが好都合である。前述したように、及び図4と図5に示すように、レンズ要素208(図2)及び209は、それぞれシアンフィルタ及び赤色フィルタを備えることが特に好都合である。もしくは、レンズ209が赤色スペクトルフィルタを含み、レンズ208が透明であることが好都合であろう。
【0044】
センサシステムは、例えば、直径が0.5mmから2.5mmのレンズ要素208及び209を用いることができ、例えば直径が2.2mmといった1.0mmから2.5mmのレンズを備えることが好都合であろう。Y方向において、レンズ中心軸C1及びC2は、0.6mmから1.3mmだけ離間することができ、例えば、1.1mmから1.4mm、好ましくは1.3mmだけY方向に離間することができる(図5に示すように)。レンズの一部を片側で切り取ってこの離間を実現してもよい。レンズ中心軸C1、C2は、図4に示すようにX方向で位置合わせするか、又はオフセットしてもよい。レンズ要素208は、例えば、所望の焦点距離を得るために、0.446mm-1の曲率及び−0.5の円錐定数の非球面レンズを有するシアンフィルタを含むことができる。対照的に、レンズ要素209は、所望の焦点距離を得るために、0.450mm-1の曲率及び−0.5の円錐定数の非球面レンズを有する赤色フィルタを含むことができる。中心部では、各々のレンズは、厚さが0.5mmから1.5mmであり、厚さが1.0mmであることが好都合である。2枚のレンズの曲率の差は、レンズ材料のばらつきを補償すると共に、フィルタを通過するスペクトル帯域に対して各々のレンズを最適化する。これらのパラメータによって、結果的に、有効焦点距離4.5mmのレンズが得られ、従って、F#2が得られる。これらの光学部品は例示的であり、焦点距離及びF#が異なる他の光学部品を設けることができる点を理解されたい。
【0045】
レンズ構造体202は、アクリル等の光透過性プラスチックで成形すること、ガラスから作ること、又は他の適切な構成で生産することができる。レンズ208及び209をプラスチックで成形する場合、フィルタは、材料内へ染料を含有することによってプラスチックで一体成形すること、又は、特に画像センサが以下に説明するように表面取付け式フィルタを有する場合には、透明材料で成形することができる。赤色フィルタ染料を含むアクリル材の例としては、アメリカ合衆国カリフォルニア州ハンティングトンビーチのOptiColor社から入手できる部品番号RD−130を挙げることができる。シアンフィルタを組み込んだアクリル材としては、OptiColor社の部品番号BL−152を挙げることができる。これらの2つの材料のスペクトル透過率を図6に示す。最適な赤外線フィルタ206を使用すれば、約700nmより大きい波長の光を取り除くことができる。
【0046】
一体式フィルタを含むレンズ構造体202は、2色射出成形法を使用して作ることができる。レンズの半分、例えば、レンズ209を含む赤色部分をレンズの赤色部分を形成する機能を有するツールで成形する。次に、レンズの成形済み赤色部分を、赤色レンズ209を保持する機能に加えてレンズ構造体202のシアン部分に対応する機能を有するツールに挿入する。その後、レンズ構造体202のシアン部分を赤色レンズ209部分に接触させて射出成形して、2色レンズを形成する。もしくは、レンズ208及び209の各々は、Jon H. Bechtel他により1998年6月9日に出願された米国特許第6,130,421号「車両前照灯制御用撮像システム」に開示されたようなレンズ要素によって得ることができる。
【0047】
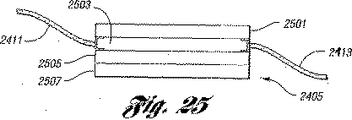
赤色フィルタ及びシアンフィルタ付きレンズ要素は、図示した実施形態において使用されるが、この用途には、他のレンズの組み合わせも適切であろう。例えば、シアンレンズ要素208の代わりに透明レンズを使用することが可能である。また、それぞれの色フィルタ、特に赤色フィルタ、緑色フィルタ、及び青色フィルタを有するレンズを使用してフルカラー画像を得ることが可能である。このような配置は、図4のY方向に沿って位置合わせした3枚のレンズ列を用いることができるが、1枚を中心軸上に配置して残りの2枚のレンズをこの中心レンズ近傍に配置する。レンズの間隔は、画像アレイ301の感光面に均一に間隔をあけた領域をもたらすように均一であることが好都合であろう。従って、前述の赤色及びシアンといったフィルタの色は、例示的なものであり、少なくとも2つの分離された又は重なり合ったスペクトル帯域の光を通過させて、テールライトと前照灯とを区別することができるフィルタの任意の組み合わせを使用できる。当業者であれば、フィルタにレンズ構造体202の平坦な裏面に塗布されたスクリーン印刷染料を組み込むこと、又は透明なレンズ構造体の表面へフィルタ材料を塗布すること等の他の方法を使用できることを理解できるであろう。更に、図24及び図25を参照して、1枚のレンズを使用する好都合なシステムを以下に説明する。
【0048】
開口絞り部材
開口絞り部材203は、レンズ208、209上に配置された開口240(図2a)及び242を含む不透明部材を備える。開口絞り部材203は、成形プラスチック等の任意の適切な材料で製造することができ、プラスチック材料が不透明ではない場合には、光の通過を阻止するように塗装するか又は他の方法で処理することができる。開口絞り部材203は、レンズ要素208及び209の開口240、242を構成する。また、開口絞り部材203は、レンズ要素208及び209以外のレンズ構造体202の領域を通る迷光の通過を阻止する。開口絞り部材203は、塗料がレンズ要素208及び209以外のレンズ構造体202の領域を通る迷光の通過を阻止するようにレンズ構造体202の表面に、及び随意的に光センサ組立体250の側壁に直接塗料を塗布することができることを理解されたい。また、開口絞り部材は、マイラー等の剛性材料から打ち抜いてレンズ構造体上に配置することができる。このような開口絞り部材は、レンズ構造体から延びる係合支柱に対する一対の位置合わせ孔を含むことができるので、開口絞り部材は、レンズ構造体202の対応するレンズ要素208及び209に位置合わせされている開口240、242を有するレンズ構造体202に対して、適正に位置決めされる。
【0049】
開口絞り部材及び/又はウインドウは、不透明領域から透明領域への変化を段階的にすることができる、さもなければ不透明なマスク内の透明なウインドウを備えることができる。このような階調度を設けることによって、受信及び処理される画像の空間閾値を容易に得ることができる。このような空間閾値化の目的は以下で更に詳細に説明する。
【0050】
遠視野バッフル
遠視野バッフル204(図2a及び図2b)は、画像センサ201の上に配置されている不透明エンクロージャである。バッフルは、画像センサに入る唯一の光路である開口部207を含む。図示の遠視野バッフル204は、4つの側壁215(図2bには4つのうち2つのみを示す)、開口部207を含む端壁217、及び開放端219を含む略矩形の箱である。開放端は、画像センサ201を支える支持部220に固定されている。支持部220は、例えば、回路基板又はハウジングとすることができ、遠視野バッフルによって構成されたチャンバへの光の侵入を阻止するように不透明であることが好ましい。遠視野バッフル204の壁215、217は不透明であり、金属打ち抜きやプラスチック成形等の任意の適切な構造とすることができる。壁の材料が不透明でない場合、光の侵入を阻止するために塗装又は他の方法で処理することができる。遠視野バッフルは、画像センサアレイ208によって検査される前方の情景を規定する。側壁215及び端壁217は、所望の視野の外側の斜光が侵入するのを防止すると共に、1枚のレンズを通って入射した光が、他のレンズ用のアレイ領域を横切らないように使用される。遠視野バッフルの開口207は、焦点距離約4から6であること、又は図示の実施形態においてはレンズ前面から約18mmであることが理想的である(単純化のためにこの図面の倍率は正確ではない)。図示の実施形態において、開口207、開口絞り部材203、及びレンズ208及び209を通る視野は、垂直方向に関して10°、及び車両前部の水平方向に関して25°である。この視野は、前述の実施形態において、Y方向において6mmから7mm、及びX方向において9mmから10mmの矩形又は楕円形の遠視野バッフル開口207を用いて実現できる。
【0051】
特に、遠視野バッフル204は、端壁217に開口部207を有する。画像アレイセンサの側壁215は、端壁217から直交して延びる。壁215、217は、成形又は打ち抜き法で一体的に形成するか、又は、製作後に接着剤又はファスナ等を使用して結合することができる。遠視野バッフルは、黒色プラスチック成形部材であることが好ましいが、側壁に入射する光の大半又は全てを吸収する任意の材料を使用して形成できる。光を吸収する遠視野バッフルの内側に壁面を設けることによって、壁は開口部207を通って画像センサ201上に入射する光を反射しない。図示の実施形態において、バッフルは矩形であるが、当業者であれば、バッフルは正方形、円筒形、又は任意の他の適切な形状であってもよいことが理解できるであろう。遠視野バッフルを含む撮像システムに関しては、Jon H. Bechtel他の1998年6月9日に出願された米国特許第6,130,421号「車両前照灯制御用撮像システム」に説明されている。
【0052】
遠視野バッフル204及び開口絞り部材203は、光が、回路基板221上に取付けることができる画像センサアレイ201以外の構成部品に達するのを防止するように構成されることが好ましい。CMOSセンサ等の特定のセンサは、露光によって損傷する可能性があるプリント回路基板上の画像センサアレイ以外の他の構成部品を含むことが多い。追加のバッフル構造体をこの目的に合わせて組み込むことができる。
【0053】
赤外線フィルタ
遠視野バッフルは、随意的な赤外線フィルタ206(図2a)を保持する。赤外線フィルタ206は、約700nmより長い波長の光が光学系によって撮像されるのを防止する。これは、700nm(図6)を越える光が赤色及びシアンフィルタを通過する場合に有用である。この光を取り除くことによって、考慮させる唯一の光は、赤色及び青色シアンフィルタの通過帯域の可視光線である。赤外線フィルタは、LEDテールライトの近年の商用化によって重要性が高くなってきた。白色光源は赤外線を放出するが、LED光源は赤外線を放出しないために、赤外線フィルタは、これらの2つの種類の光源の検出輝度を相殺するのに望ましい。
【0054】
赤外線フィルタは、カリフォルニア州サンタローザのOptical Coating Laboratoriesから販売されており、Wide Band Hot Mirrorと呼ばれている。赤外線フィルタ206は、接着剤、スナップコネクタ等の機械式ファスナを使用して端壁217に取付けることができ、遠視野バッフル内のチャンバを密閉してシステムへのホコリ及び水分の浸入によるシステムの性能低下を防止できる。
【0055】
もしくは、赤外線フィルタ206は、レンズ内の染料、レンズ上の被膜、画像センサ表面上の被膜、画像センサパッケージ上の蓋、又は画像センサ組立体内の他の部分として組み込むことができる。赤外線フィルタが遠視野バッフル204の開口部217のシールに使用できない場合、遠視野バッフル内部へホコリが侵入してセンサシステム102の性能を妨げないように、開口部217にガラス、プラスチック等の透明なウインドウを配置することが望ましい。
【0056】
親水被膜/光触媒被膜
赤外線フィルタとしての機能に加えて、フィルタ206は、破片及び液体が開口部207を通って画像センサ組立体へ達するのを防止する機能を果たす。赤外線フィルタを利用しない場合、この目的のための別の透明ウインドウを使用することができる。
【0057】
赤外線フィルタ206か又はウインドウを利用すると、開口部207内のフィルタ/ウインドウ206の外面へ液体滴下物の付着を防止することが望ましく、その理由は、液体滴下物は画像センサが受信して処理した画像を歪ませること、及び液体滴下物は乾燥するとフィルタ/ウインドウ206上に斑点として残る傾向があるからである。このような液体滴下物は、例えば、人がフィルタ/ウインドウ206の外面直近にあるフロントガラス内側に洗浄剤を噴霧する際にフィルタ/ウインドウ206上に形成される場合がある。フロントガラスを洗浄する人が画像センサのフィルタ/ウインドウに付着した洗浄剤を拭き取るのを忘れて、結果的に画像センサが取得する画像を不鮮明にする水滴の細かい霧がフィルタ/ウインドウ206表面に残る可能性が高い。
【0058】
この問題を解決するために、本発明では、フィルタ/ウインドウ206の外面上で親水被膜を用いることができる。親水被膜は、水滴/斑点が外面上に形成されないように、外面全体にわたって水又は他の液体を均一に吸収する多孔性外層を有する。多くのこのような親水被膜が被る1つの問題点は、外層の孔が油、グリース、又は他の汚染物質によって塞がれて、親水被膜の有効性がなくなってしまうことである。この問題を解決るために、親水被膜と併せて光触媒層を使用することができる。このような光触媒層は、紫外線が入射すると、親水層内の油、グリース、又は他の汚染物質を分解する。このことは、親水層内の汚染物質を含有する孔をきれいにして、親水層として効果的に作用することを可能にするからである。この目的のために使用できる親水被膜/光触媒被膜の一例が、William L. Tonar他の2000年6月23日に出願された米国特許出願番号09/602,919「自浄式親水被膜を有する電気光学装置」に開示されている。
【0059】
画像センサ組立体の組み立て
以下に図8の画像センサ組立体801を参照して、画像センサ組立体801内のゲル805を除いて画像センサ組立体250と同一の画像センサの組み立てについて説明する。画像センサ201、レンズ構造体202、及び開口絞り部材203を組み合わせて、一体式画像センサ組立体250(図2)又は801(図8)を形成する。単一の集積回路(IC)であることが好都合である画像センサ201は、チップ・オン・ボード技術等の任意の適切な従来の手段によってプリント回路基板220に取付ける。画像センサチップとの接続をワイヤボンド804等の任意の適切な手段によって行う。次に、結合されたICを随意的に透明な応力除去ゲル805で被覆する。この被覆に使用できる材料の一例は、マサチューセッツ州ダンバーのTransene Co.のSilicon Semi−GelタイプC、又はミシガン州ミドランドのDow Coning Corp.のDielectric Gel 3−6211である。次に、被覆処理されたICを、例えば、エポキシを含むことができる硬質の透明エンクロージャ802に封入する。エポキシを所望の形状に成形して、例えば、立方体を形成することができる。この立方体は、非常に小さい容積を占めるような寸法とすることができ、例えば、一辺が約1cmの長さ及び幅寸法、及び約5mmの厚さであってもよい。エンクロージャ802(図8)は、これらの2つの材料との間の界面における屈折を防止するように、応力除去ゲル805とほぼ同じ屈折率を有するように選択することができる。
【0060】
適切なエポキシの例は、マサチューセッツ州ビルリカのEpoxy Technology,Inc.のEpo−Tek 301−2FL、TranseneのEpoxy50、又はNitto Denko CorporationのDexter−Hysol OS 1900又は300Hである。エンクロージャ802の熱膨張係数が十分低く、膨張及び収縮が画像アレイセンサ201の予想作動温度範囲ではワイヤボンド804を破壊しない場合には、図2aの画像センサ組立体250においてワイヤボンド234上のエンクロージャ230によって示すように、応力除去ゲル805を省略できる。
【0061】
レンズ構造体202は、紫外線硬化型透明接着剤232を使用してエンクロージャ802(図8)又はエンクロージャ230(図2)に取付ける。紫外線硬化型接着剤232をエポキシ立方体802上に施して、紫外線硬化型接着剤232を用いてレンズ202を横並びに配置する。レンズ構造体202は、「無限大」の画像が所望の画像領域702及び703に焦点が合う距離だけ画像センサ201から間隔があけられる。
【0062】
紫外線硬化型接着剤232に紫外線を浴びせて硬化させ、レンズ構造体202を所定の位置に固定して、レンズ構造体202をエンクロージャ802に永久的に取付ける。レンズ構造体202の裏面と画像センサ201ダイスの頂部との間の総距離は、図示の例では6.7mmである。この距離は、レンズ202の裏面と画像アレイ201の前面との間の光路全体が、空気よりも屈折率が高い材料を通っているので、有効焦点距離4.4mmよりも相当長い。レンズと画像センサとの位置合わせ及びレンズを所定の位置に保持するための紫外線接着剤の硬化プロセスは、レンズ及び他の画像センサ組立体の構成部品の製造時のバラツキに対応するために、レンズの焦点合わせの間に行うことが理想的である。このプロセスは、組み立て時に画像センサの電源を入れて遠視野画像を画像センサからホストコンピュータに取り込むによって行う。紫外線硬化型接着剤をセンサの表面上に施して多軸ロボット又はポジショナを使用してレンズを紫外線硬化型接着剤上に位置決めする。レンズの位置は、センサによって取得した画像の焦点が合うまでロボットが調節する。この時点で、紫外線硬化型接着剤に紫外線を浴びせてレンズを所定の位置に接着する。この目的に適切なマイクロポジショニング機器は、ドイツのPhysik Instremente GhbH and Companyから販売されている。
【0063】
紫外線硬化型接着剤232は、レンズ202とエンクロージャ802との間の空間を充填する機能を果たし、エンクロージャ802の如何なるリップル又は他の平坦でない面を充填するので、結果的にレンズ202とエンクロージャ802との間に空隙が生成されるのを防止する。前述の所望の光学的特徴を得るために、紫外線硬化型接着剤232は、エンクロージャ802とほぼ同じ屈折率を有する必要がある。この構造には、2つの異なる媒体の間の屈折率の不一致が発生しかねない光学面の数を最小限に抑えるという明らかな利点があるので、撮像システムの光学的効率が高くなり迷光が少なくなる。適切な透明紫外線硬化型接着剤は、ニュージァージ州New BrunswickのNorland Productsが製造するNorland Optical Adhesive 68である。画像センサ組立体801を作るのに適切な他の材料は、Dymaxから入手可能である。
【0064】
ブロック802は、開口絞り部材203をレンズ202に取付けることによって完成する。開口絞り部が部材の場合、接着剤や1つ又はそれ以上の機械的ファスナ等を使用してレンズの外面に取付けてもよい。開口絞り部材が塗料の場合、レンズ208及び209をテープ等の取り外し可能なマスクで覆った後に、レンズ要素202に直接塗布してもよい。塗料が乾燥した後に、レンズ要素202に直接塗布してもよい。塗料が乾燥した後に、マスクを取り除いてもよい。次に、光学組立体801を支持部220に取付ける。特に、画像センサアレイ201は、従来の手段によって物理的にベース基板221に取付け、電気的にワイヤボンド、半田、又は1つ又はそれ以上のコネクタ等の電気コネクタによって回路(図2では図示せず)に接続する。ベース基板221は、例えば、プリント回路基板であってもよい。
【0065】
支持部220は、遠視野バッフル204と同じ材料で作ってもよく、又は異なる材料で作ってもよい。ベース基板221は、光学センサ組立体を支える支持部220又はハウジング(図示せず)のいずれかに、遠視野バッフル及び画像センサを直接取付ける場合は省略してもよい。例えば、支持部220は、画像センサ201及び遠視野バッフルが結合されるプリント回路基板であってもよい。ベース基板を設けるか否かに関わらず、遠視野バッフルは、接着剤、スナップコネクタ、又は機械式ファスナ等を使用して支持部220又はハウジング(図示せず)に取付ける。
【0066】
図9に別の実施形態による画像センサ組立体901を示す。本実施形態において、画像センサ201は、ガラス蓋を有するセラミックパッケージ又は透明プラスティックパッケージ等の従来の電子パッケージを利用して実装し、このパッケージは、例えば、クワド・フラット・パック又はデュアルインライン(DIP)パッケージとすることができる。実装された画像センサ901は、半田付け等の適切な従来の手段によってプリント回路基板901に取付ける。次に、紫外線(UV)硬化型接着剤905を画像センサ組立体901上に施す。使用する接着剤は、接着剤232に関して前述したのと同じ接着剤とすることができる。紫外線硬化型接着剤の厚さは、実装される画像センサ901の形式に基づく。所要の厚さが非常に厚い場合には、紫外線硬化型接着剤の層を積層するか、又はエポキシ層等の別の材料を紫外線硬化型接着剤の間にサンドイッチして接着剤層905の厚さを小さくすることができる。エポキシは、エンクロージャ230、802に関して前述したものと同じ材料であってもよい。レンズ構造体202は、紫外線硬化型接着剤905を用いて並べて配置して、前述の方法で焦点合わせを行う。最後に、接着剤、機械式ファスナ等を使用して、開口絞り部材203をレンズ構造体202に取付ける。
【0067】
前述の手段に加えて、レンズ構造体202は、機械式支持等の他の手段によって画像センサに対して支持してもよい。このような構造体に関しては、1998年6月9日に出願された米国特許第6,130,421号「車両前照灯制御用撮像システム」に開示されている。また、このような構造体を使用して、開口絞り部材及び遠視野バッフルを含む光学組立体の各構成部品の間の相対的な関係を位置合わせして維持することができる。機械的な結合構造は図24に関して以下に説明する。
【0068】
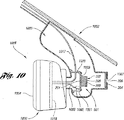
ミラー取付け式画像センサ組立体
前述のように、前照灯減光器は、図10に示すようにバックミラー1000に一体化することが好都合であり、光センサ組立体201は、自動減光エレクトロクロミック(EC)ミラー・サブ組立体1001又は他の可変屈折率ミラー組立体に一体化されている。この配置によって、一般に車両ウインドシールドワイパ(図示せず)によってきれいにされたフロントガラス領域を通した前方の視界が得られる。更に、画像センサをミラー組立体内に取付けることによって、電源、マイクロコントローラ、光センサ等の回路を共有することができる。更に詳細には、同じ周辺光センサを使用して、自動減光ミラー機能及び前照灯制御機能の両方に関する周辺光の測定を行うことができる。
【0069】
図10を参照すると、光センサ組立体801は、バックミラーマウント1003に取付けられ、バックミラーマウント1003は、車両フロントガラス1002に取付けられている。バックミラーマウント1003は、画像センサの不透明なエンクロージャとなる。図示のように、赤外線フィルタ206は、バックミラーマウント1003の孔1007の上に取付けることができる。もしくは、遠視野バッフル214は、その中に取付けられた赤外線フィルタ206と共に使用することができる。遠視野バッフル214を使用する場合、画像センサ組立体202と一緒に回路基板1008に取付ける。遠視野バッフルの使用するどうかに関係なく、取付けブラケット1020及び1021を使用して、回路基板1008をバックミラーマウント1003に取付ける。取付けブラケットは、金属ブラケット、ハウジング1003と一体的な又は別体の構成部品として形成できる樹脂ブラケット、又は回路基板1008と係合する機械式ファスナ等、適切な構造を利用して実現できる。個別のブラケットは、接着剤、金属ファスナ、又は他の機械式結合手段を使用して取付けることができる。従って、画像センサ組立体201は、従来の手段によって車両フロントガラス又はルーフにしっかりと取付けられているバックミラーマウント1003に取付けて、動かないように保持することができる。
【0070】
コネクタ1005は、適切な市販の回路基板コネクタ(図示せず)を使用して回路基板1008に接続され、次に、回路基板1008を介して画像センサ201に接続される。コネクタ1005は、ケーブル1006を介して主回路1015に接続される。主回路基板は、従来の手段によってバックミラーハウジング1004に取付けられている。前照灯111を含む車両電気系統との電力及び通信リンクは、車両配線ハーネス1017(図10)を介して行われる。
【0071】
電気系統
主回路基板1015に電気接続され、車両バックミラーハウジング1004(図10)に取付けられている画像センサ201を図11に示す。マイクロコントローラ1105は、画像センサ201から画像信号を受信し、画像を処理して出力信号を生成する。バックミラーハウジングに取付けられている回路基板を参照して説明するが、回路基板1105は、サンバイザー、オーバーヘッドコンソール、センターコンソール、ダッシュボード、プリズム式バックミラー、Aピラー等の車両付属品、又は車両内の他の適切な場所内に取付けることができる。制御車両(図1の100)がエレクトロクロミックミラーを含む場合、エレクトロクロミックミラーの回路は、マイクロコントローラ1105を備える主回路基板1015(図10)と共有することが好ましい。つまり、主回路基板1015は、ミラーハウジング1004内に取付けられる。EC回路は、周辺光センサ1107及び眩輝光センサ1109を更に含み、これらのセンサは、2000年1月25日に出願されたと米国特許出願番号09/307,191号「フォトダイオード光センサ」、及び1999年5月9日に出願された米国特許出願番号第09/491,192「半導体光センサ付き車両装置」に説明されているような、デジタルフォトダイオード光センサであることが好都合である。マイクロコントローラ1105は、周辺光センサ1107及び眩輝光センサ1109からの入力を使用して、エレクトロクロミックミラー要素1102の適切な状態を判定する。ミラーは、ECミラー駆動回路1111によって駆動され、このECミラー駆動回路1111は、Robert R. Turnbull他の1997年9月16日に出願された米国特許第5,956,012号「直列駆動回路」、Robert C.Knapp他の1997年9月16日に出願されたPCT出願番号PCT/US97/16946「個別ミラー制御システム」、及びJon H. Bechtel他の1999年5月7日に出願された米国特許出願番号09/236,969「積分電荷収集による半導体光センサを使用した自動減光ミラー」に説明されている駆動回路とすることができる。EC要素1102の駆動に使用することができる他の駆動回路は公知である。ECミラー駆動回路1111は、信号出力1127を介して電流をEC要素1102に供給する。
【0072】
このミラーは、Robert C.Knapp他の1999年8月3日に出願され本出願人に譲渡されている米国特許出願番号09/368,325「車両通信システム」に開示されているものと類似の方法で、シリアルリンクでもって光制御モジュールと通信することができる。
マイクロコントローラ1105は、前照灯111(図11ではハイビーム1131及びロービーム1132によって表す)及びエレクトロクロミックミラー1102の作動に関する判定を行う際に、車両の電気バス上を伝達する信号(車両速度等)の有効性を利用することができる。特に、速度入力117は、車両速度情報をマイクロコントローラ1105に供給し、これにより前照灯111の制御状態を判定するのに車両速度判定基準を用いることができる。バック信号1119は、車両がバックギヤに入っていることをマイクロコントローラ1105に知らせ、これに応じて、マイクロコントローラ1105は、周辺光センサ1107、1109からの信号出力に関係なく、エレクトロクロミックミラー要素1102をクリアする。自動ON/OFFスイッチ入力1121は、マイクロコントローラ1105に車両前照灯1131、1132を自動制御すべきか、又は手動制御すべきかを指示するために2つの状態を有するスイッチに接続される。自動ON/OFFスイッチ入力1121に接続される自動ON/OFFスイッチ(図示せず)は、従来、車両ダッシュボード上に取付けられている前照灯スイッチに一緒に組み込むか、又はハンドルコラムレバーに組み込むことができる。手動減光スイッチ入力1123は、手動作動式スイッチ(図示せず)に接続され、ハイビーム状態の手動オーバーライド信号を供給する。現在のハイビーム制御状態がONの場合、マイクロコントローラは、手動オーバーライド信号制御入力1123の作動信号に応じて、ドライバが操作を再開するまで、又は随意的に所定の時間が経過するまでハイビームを一時的にOFFにする。もしくは、ハイビームがOFFの場合、マイクロコントローラ1105は、入力1123の作動信号に応じてハイビームをONにする。制御車両100(図1)のハンドルコラム上に配置されているレバースイッチを使用して、手動ハイビーム制御スイッチを実現することができる。
【0073】
回路基板1101は、幾つかの出力を有する。エレクトロクロミック出力1127上の制御信号によって、エレクトロクロミックミラー要素1102に電流が供給される。追加のエレクトロクロミックバックミラー(図示せず)を設ける場合には、随意的に追加の出力(図示せず)を供給してこの追加ミラーを制御することができる。マイクロコントローラ1105は、ロービーム前照灯1131及びハイビーム前照灯1132の現在の状態を、前照灯制御出力1127を介して前照灯駆動回路1104に伝達する。マイクロコントローラ1105は、制御車両100のドライバにハイビーム前照灯の現在の状態を表示する随意的な可視インジケータ1115に導線1113(図11)を介して伝達される制御信号を生成する。ハイビームインジケータは、従来、車両ダッシュボード上の車両計器クラスタ内又はその近傍に配置されている。以下に詳細に説明するように、自動前照灯制御装置がアクティブか否かを表示するために、別個のインジケータを設けてもよい。双方向データバス1137を介して方位センサ1135を回路基板1015に接続することができる。コンパスは、米国特許第5,239,264号「発振器回路の期間を制御するコイル及びコアセンサを有するゼロオフセット磁気計」、米国特許第4,851,775号「高透磁率等方性コアに巻かれたセンサコイルを有するデジタルコンパス及び磁気計」、米国特許第5,878,370号「可変解像度を有する車両コンパスシステム」、米国特許第5,761,094号「車両コンパスシステム」、米国特許第5,664,335号「車両コンパス回路」、米国特許第4,953,305号「自動連続較正による車両コンパス」、米国特許第4,677,381号「フラックスゲートセンサ電気駆動方法及び回路」、米国特許第4,546,551号「電気制御システム」、米国特許第4,546,551号「車両磁気センサ」、及び米国特許第4,424,631号「電気コンパス」に説明されているもの等の、車両の進行方向を示すデジタル又はアナログ信号を生成する形式の市販のコンパスを使用して実現できる。フォグライト制御装置1141は、フォグライト制御出力1142を介して、マイクロコントローラ1105によって生成された制御信号を受信する。フォグライト制御装置1141は、前側フォグライト1143及び後側フォグライト1145をON及びOFF制御する。
【0074】
入力1117、1119、1121、1123、及び1135、及び、出力1127、1113、1127、及び1142、並びにハンドル入力等、他の考えられる入力又は出力の一部又は全部を、図11に示す通信バス1125を介して随意的に供給することができる。車両バス1125は、コントローラ・エリア・ネットワーク(CAN)バス等、任意の適切な標準通信バスを使用して実現できる。車両バス1125を使用する場合、マイクロコントローラ1105は、バス制御装置を含むことができ、又は制御インタフェースは、主回路基板1015上に構成部品を追加することで可能になる。
【0075】
図12は、ロービーム前照灯1131用駆動回路1203及びハイビーム前照灯1132用駆動回路1201を含む前照灯駆動回路1104を示す。バス1127は、ロービーム前照灯1131及びハイビーム前照灯1132を駆動するための、マイクロコントローラ1105によって生成されたパルス幅変調(PWM)信号を搬送するそれぞれのワイヤ1206及び1207を含む。もしくは、前照灯駆動回路1104は、出力1127上の制御信号に応じて、前照灯1131及び1132に供給される電圧、及び結果的にそれらの輝度を変更するためのDC電源を含むことができる。想定された更に別の変形例は、以下に説明するように、及びJoseph Stam他の1998年9月18日に出願された米国特許第6,049,171号「連続可変式前照灯制御」に教示されているように、ハイビーム前照灯1131の照準を変えるようになっている。
【0076】
前照灯駆動回路1104は、ハイビーム1131及びハイビーム前照灯1132へ電力を供給する。最も単純な場合では、前照灯駆動回路は、前照灯をON及びOFFする信号1127に応じて作動するリレーを含む。別の好適な実施形態において、ハイロービーム前照灯1131及びロービーム前照灯1132は、可変制御信号を生成する前照灯駆動回路1104によって制御され、漸進的にON又はOFFになる。このような制御システムに関しては、同時継続中の米国特許第6,049,171号に説明されている。一般的に、本発明は、パルス幅変調(PWM)供給を使用して前照灯に通電することによって、前照灯の可変発光制御を行うことができ、駆動回路の負荷サイクルは、0%から100%の間で変動して前照灯1131、1132からの連続可変輝度をもたらすことを教示する。
【0077】
マイクロコントローラ1105は、画像アレイ組立体201によって取得した画像を分析して、これらの画像に応じて前方視野内の対向車両又は前方の車両を検出する。マイクロコントローラ1105は、別の種々の入力と共にこの情報を使用して、前照灯1131、1132の現在の状態を判定する。前照灯の現在の制御状態は、ハイビーム及びロービームの輝度を示す。可変制御システムにおいて、この輝度は、前述したように、ビームの負荷サイクル又は前照灯に印加されるDC電圧を変えることによって変更できる。非可変システムにおいて、制御状態は、ハイビーム及びロービームがONであるか又はOFFであるか示す。図13は、マイクロコントローラ1105への接続を示す詳細な図面である。マイクロコントローラ1105は、マイクロコントローラ、マイクロプロセッサ、デジタル信号プロセッサ、プログラマブル論理ユニット、ディスクリート回路、又はその組み合わせを使用して実現することができる。更に、マイクロコントローラは、2つ以上のマイクロプロセッサを使用して実現することができる。
【0078】
作動
まず、レンズ構造体202及び遠視野バッフル204の組み合わせ作用について図2a及び図7を参照して説明する。前述したように、1つの実施形態において、画像アレイ301は、64本の列及び80本の行から成る30μm画素を含む。赤色レンズ209を通って撮像した前方の情景は、画像アレイ301の1つの領域703上に位置付けられる。他のレンズ要素208を通って撮像された前方の情景は、画像アレイ301の領域702上に位置付けられる。図示の実施形態において、これらの領域の各々は、画像アレイの幅60×高さ20の画素サブウインドウである。2つの領域702及び703の中心は、Y方向において1.2mm離れており、これはレンズ208及び209の中心軸と同じ間隔である。14本の画素行は、2つの領域702、703の間に横たわる帯域を形成し、これらの2つの領域を分離する境界、即ちバッファの機能を果たす。
【0079】
画像センサ組立体250は、幾つかの利点をもたらす。ブロックは中実であると考えられるので、画像センサ201ダイスとレンズ構造体202との間の表面が排除される。これらの表面を排除することによって迷光が少なくなる。第2に、好適な実施形態では、レンズのアクティブな位置合わせが可能であり、これは前記に詳細に説明したように種々の製造上のバラツキに対応するものである。最後に、この組立体は安価であり、高価なセラミック実装が不要になる。前述の利点の一部又は全ては、この構造の変形例により実現できる。例えば、エンクロージャ230、紫外線硬化型接着剤232、及び場合によっては応力除去ゲル805(図8)の代わりに紫外線硬化型エポキシ接着剤を使用することができる。
【0080】
作動時には、画像は露光期間中に画像アレイ301(図3)上に入射されるが、本明細書ではこの期間を統合期間と呼ぶ。露光期間終了時に、画素の各々に関する出力信号が格納されるが、米国特許第5,471,515号で説明されているフォトゲート画素アーキテクチャの場合には画素内に格納されることが好ましい。各々の画素からの出力信号は、各々の画素によって感知されている輝度を表す。この出力信号は、1度に1列毎に列出力回路302に伝達される。列出力回路は、行内の各々の画素のそれぞれの画素出力信号を格納するコンデンサを含む。次に、画素出力信号は、アナログ増幅器303によって連続的に増幅される。増幅器利得は調整可能であることが好都合であり、例えば、整数増分にて増幅器入力信号の振幅度を1倍(単位利得)から15倍の範囲で選択的に高めるよう制御できる。増幅器の利得の調節によって、システム感度を調整することができる。増幅器303からの増幅アナログ信号出力は、フラッシュ型アナログ−デジタル変換器(ADC)404によってサンプリングされる。フラッシュ型ADC404は、各々の画素に対応する増幅アナログ信号の各々を8ビットグレイスケール値に変換する。センサの種々のバイアス電圧は、デジタル/アナログ変換器(DAC)105によって生成される。バイアス発生器によって生成される電圧の2つは、ACDハイ及びロー基準値であり、これらの基準値によって、それぞれ、255及び0のデジタル値に対応するアナログ値を決定し、結果的にADCの範囲を設定する。
【0081】
シリアルタイミング及び制御回路309は、センサ作動のタイミングシーケンスを決定するが、このタイミングシーケンスは、1999年11月23日にJon H. Bechtel他に付与された、同時係属中の米国特許第5,990,469号「画像アレイセンサ用制御回路」に詳細に説明されている。
【0082】
以下に、画像センサ制御プロセスに関して最初に図14を参照して説明する。この制御プロセスは、エレクトロクロミック(EC)ミラーの制御を含むことができる。しかし、ECミラーの制御方法は公知であり、本明細書ではこのような方法を詳細に説明しない。エレクトロクロミック装置は一般的に知られており、一部は市販されているが、エレクトロクロミック装置及びその関連回路の例は、Bykerの米国特許第4,902,108号、Bechtel他のカナダ特許第1,300,945号、Bechtelの米国特許第5,204,778号、Bykerの米国特許第5,280,380号、Bykerの米国特許第5,336,448号、Bauer他の米国特許第5,434,407号、Tonarの米国特許第5,448,431号、Knappの米国特許第5,504,478号、Tonar他の米国特許第5,679,283号、Tonar他の米国特許第5,682,267号、Tonar他の米国特許第5,689,370号,Tonar他の米国特許第5,888,431号、Bechtel他の米国特許第5,451,822号、米国特許第5,956,012号、PCT出願番号PCT/US97/16946、及び米国特許出願番号09/236,969に開示されている。
【0083】
前側の周辺光センサ1107及び後側の眩輝センサ1109は、ステップ1401に示すように(図14)、前側及び後側の光レベルを測定する。前方周辺測定値を用いて、ロービーム前照灯1131及びハイビーム前照灯1132の両方、及びエレクトロクロミックミラー1102を制御する。更に、前方周辺測定値を用いて、昼間走行灯の輝度及びテールライトの輝度を制御することができる。後側眩輝測定値を用いてエレクトロクロミックミラー1102の反射率を制御する。前方周辺光レベル測定値は先の測定値と平均化され、前方時間平均化周辺光レベルを算出するようになっている。この平均光レベルは、25秒から30秒間隔でサンプリングした測定値の平均値として算出される。これに応答して、マイクロコントローラ1105は、ステップ1402において、センサ1107及び1109によって測定された光レベルの関数としてエレクトロクロミックミラー要素1102の制御状態を算出する。マイクロコントローラ1115がモトローラMCS912から選択したマイクロコントローラの場合、エレクトロクロミック要素駆動回路の状態は、エレクトロクロミック要素の所望の反射率レベルに対応するパルス幅変調(PWM)負荷サイクルをモトローラMCS912ファミリのマイクロコントローラ周辺機器のパルス変調幅にプログラムすることによって設定できる。次に、このPWM出力は、Robert R. Turnbull他の1997年9月16日に出願された米国特許第5,956,012号「直列駆動回路」に開示されているような方法で直列駆動回路に供給される。前照灯1131、1132がステップ1403での判定時に自動モードではない場合、これは信号1121に応じて手動で設定されるが、マイクロコントローラ1105は、マイクロコントローラがエレクトロクロミックミラー要素1102の可変反射率を継続して制御できるようにステップ1401に戻る。ハイビームがONの場合、判定1403は、ユーザに手動オーバーライドを与える。更に、ハイビームがOFFの場合、ステップ1403(判定結果はNOになる)においてハイビーム自動制御がスキップされる。
【0084】
ステップ1403において自動モードがアクティブであると判定された場合、マイクロコントローラ1105は、ステップ1401で測定した平均周辺光レベルを使用して、ステップ1404において周辺光レベルがロービーム最小閾値未満か否か判定する。例えば、閾値は、1ルックスから3ルックスまでであってもよく、1つの装置においては2ルックスであった。周辺光レベルが閾値より大きいこと、即ちハイビーム前照灯では大きな利点はないことを示す場合、ハイビーム制御は使用されず、マイクロコントローラ1105は、ステップ1401に戻る。周辺光レベルがロービーム最小値、例えば、約2ルックス未満の場合、ハイビーム前照灯の使用が望ましいであろう。この場合、マイクロコントローラ1105は、前照灯1131、1132を制御するように作動する。また、前述の平均周辺光レベルに加えて、瞬時周辺光レベルを考慮することが有利である。瞬時周辺光レベルが突然非常に低い値、例えば0.5ルックス未満に落ちた場合は、平均周辺光レベルがハイビーム作動の閾値に達する前に直ちに自動ハイビーム操作を開始できる。この状況は、十分な照明のある交差点を走行中の車両が突然交差点を横切って、直ちにハイビーム操作が望まれる暗い通りに入った場合に起こると考えられる。マイクロコントローラ1105は、画像センサ201によって取得した前方の情景の画像を分析して、ステップ1405に示すように、対向車両又は前方車両の存在を判定する。ステップ1406において、ステップ1405の結果に基づいてマイクロコントローラは前照灯の制御状態を設定する。1つの実施形態において、制御状態を設定するには、パルス駆動回路の負荷サイクルを設定する必要がある。モトローラMCS912ファミリのマイクロコントローラは、パルス幅変調信号1206及び1207を生成できるタイマ/カウンタ周辺機器を含む。一部の車両において、ハイビームの状態の関係なく、ロービーム前照灯は常時ONになっている。このような車両においては、ハイビームの負荷サイクルのみが変更される。ハイビームがONのときにロービームはOFFになる車両もあり、この場合は、ハイビーム負荷サイクルが高くなるとロービーム負荷サイクルは低くなる。PWM信号を使用する車両前照灯の制御に関しては、Joseph Stam他の1998年9月18日に出願されたと米国特許第6,049,171号「連続可変前照灯制御」に開示されている。
【0085】
車両の前方視野の画像を取得して分析するステップ1405について、図15を参照して更に詳細に説明する。ステップ1501において、図7に示す2つの視野702及び703に対応する赤色レンズ209及びシアンレンズ208の両方を介して第1の対の画像を取得する。結果的に得られた画像の視野は、64×26画素、レンズ光学部品、及び前述の遠視野バッフルを使用して、水平約25°及び垂直15°である。これらの画像は低感度で取得される。画像センサ201の感度は、例えば、フレーム露光時間、アナログ増幅器利得、及びDACハイ及びロー基準値によって決定することができる。画像センサは、まさに制御車両の前照灯を減光すべき最大距離で対向車両前照灯を撮像する程度の感度である必要がある。これらの画像は、明るい前照灯又は他のノイズ光源によって妨害されることなく、任意の距離の対象となる対向車両の前照灯及び近くのテールライトを検出するのに十分である。この方法において、センサは、反射性物体が制御車両に非常に近いところにある稀な場合を除いて、標識又は反射体からの反射を検出するほど感度が高くてはいけない。暗い周辺光の状況下では、この感度は照明物体だけを検出するのに十分な低い値である。
【0086】
また、ステップ1501において画像を取得する場合の画像センサの感度は、現在ハイビームがONか否かに応じて変えることができる。ハイビームを手動で制御する場合、一般に、ドライバは、前照灯111を減光する前に、対向車両105(図1)又は前方の車両110が制御車両のハイビームが迷惑になるほど近づくまで待つ。しかし、ハイビームがOFFの場合、大半のドライバは、対向車両105が遠く離れていてもハイビーム前照灯を作動させない。このことは、対向車両105は、制御車両のハイビーム前照灯が対向車両のドライバの迷惑になる距離まで直ぐに近づいて来るので、制御車両100のドライバは、ハイビームを作動し直後にOFFにする必要があることを予測するからである。この挙動を部分的にまねるために、ハイビームがONの場合よりも、ハイビームがOFFの場合に感度の高い画像を取得して遠くに離れた車両の検出を可能にする。例えば、ハイビームがOFFのときの画像センサは、ハイビームがONの場合よりも50%だけ高感度である。
【0087】
ステップ1502(図15)において、画像を分析して、画像内で捕捉した光源を突き止める。ステップ1503において、検出光源の特性を分析して、光源が対向車両、前方車両、又は他の物体からのものか判定する。前方車両110からの光源がハイビームを減光する必要があることを示すほど明るい場合、制御プロセスは、ステップ1510に進み、ハイビーム状態が設定される。
【0088】
ステップ1503において、車両が検出されない場合には、第2の対の画像は、更に高い感度でもってレンズ208及び209を介して取得される。最初に、ステップ1505において、ハイビームの状態の判定を行う。この判定は、第2の対の画像は、第1の対の画像の5倍から10倍の感度になる場合があるので行われる。画像の感度が高いほど、迷惑な光源が画像センサ201によって撮像される可能性が高くなる。一般に、これらの迷惑な状況は、道路標識又は道路反射体からの反射によって引き起こされるが、この反射は、ハイビームがONの状態では顕著である。ハイビームがONの場合、反射体又は反射性標識が視野に入らないように前方視野を制御車両の直前の領域に制限することが好都合である。理想的な狭めた視野は水平で約13°であり、これは約35画素に対して領域702及び703(図7)を縮小することで実現される。ハイビームがOFFの場合、ロービーム前照灯時の標識及び反射体からの反射は、ハイビームが使用されているときよりもはるかに少ないので、ステップ1501において取得した低感度画像と同じ視野の画像を使用することができる。従って、判定ステップ1505を使用して、ステップ1505の狭い視野か、又はステップ1507の広い視野のいずれかを選択する。いずれの視野に対しても、一対の画像を取得できる。ステップ1501の低感度画像の取得に関連して前述したように、ハイビーム前照灯の状態に応じて高感度画像の感度を変えて、迷惑な光源を回避するための追加の制御を可能にする。
【0089】
低感度画像の場合と同様に、ステップ1508において、高感度画像を分析して光源を検出する。これらの光源のいずれが、制御車両のハイビーム前照灯の減光を必要とするほどに接近した車両を示すかの判定を行う。
【0090】
高感度及び/又は異なる視野の付加的な画像は、前述の画像に加えて取得することができる。付加的な画像は、画像センサの動的範囲に依存して必要となる。例えば、遠く離れた前方車両のテールライトを検出するには、非常に狭い視野で非常に高感度の画像の取得を必要とする場合がある。もしくは、画像センサが十分な動的範囲を有する場合、1つの感度での一対の画像のみを必要とする場合がある。3セットの画像、即ち、低感度セット、中間感度セット、及び高感度セットの画像を使用することが好都合である。中間感度セットは、低利得感度の約5倍の感度を有し、高利得は、低利得感度の約20倍の感度を有する。低利得感度セットは主として前照灯の検出に利用され、中間及び高感度画像は主としてテールライトの検出に利用される。
【0091】
異なる波長の光における画像センサの量子効率及びレンズ要素208及び209に使用されるフィルタのフィルタ特性により、2つの領域702及び703に対して異なる感度を用いることが有利な場合もある。米国特許第5,990,469号に説明されているタイミング及び制御回路309は、同時に2つの異なる画素ウインドウを取得して各々のウインドウに対して異なるアナログ利得を用いて性能を高めることができる。このことは、各々のサブウインドウの取得時に使用されるアナログ増幅器の利得値を含むレジスタを付加することによって得られる。このようにして、2つの領域の相対感度は、自動的にバランスをとって、両方のレンズ要素を介して白色光源を撮像する場合に同じような出力を得ることができる。このことは、光線を濾過することなく、例えば、レンズ要素208を通過する光線に対してシアンフィルタではなくて透明レンズを使用することによって領域703の画像を取得する場合に特に好都合であろう。このレンズセットでは、白色光源を撮像する場合、領域702内の画素は、赤色フィルタを通過した光を受光する領域703の画素の約3倍の光を受光する。2つの領域の出力のバランスをとるために、赤色フィルタ処理領域703の画素に対してアナログ利得を3倍に設定することができる。
【0092】
ステップ1502及び1508に示す光源を検出するための画像の分析は、図16を参照して説明する。分析は、赤色レンズを介して取得した領域703の画像から始める。幾つかの迷惑光源は赤色光のかなりの量を含むわけではないので、赤色濾過画像から開始することが好都合である。これらの迷惑光源は、水銀街路灯、緑色交通信号灯、及び緑色及び青色高速道路標識からの反射光を含む。従って、幾つかの潜在的な迷惑光源を考慮の対象から外す。画素位置はX及びY座標で示し、(0、0)という画素位置は左上の画素に対応する。ステップ1602において、(0、0)画素1401から画像を通過するラスター走査で始まり、各々の画素を最小閾値と比較する。最小画素閾値は、対象となる画像内で最も光が弱い物体を決定する。ステップ1603において判定されるように、現在の画素が画素閾値未満であり、赤色画像ウインドウ内の最終画素でない場合には、分析はステップ1604に示すように次の画素へ進む。次の画素の位置は、画像を通過するラスター走査によって、最初に行の最終画素に達するまでX座標に沿って右に画素を検査し、その後、次の行の第1の画素に進むことによって判定する。
【0093】
現在の画素値が最小閾値よりも大きいと判定された場合、シードフィル分析アルゴリズムに入り、このステップにおいて、ステップ1605に示すように識別された光源のサイズ、輝度、及び他のパラメータを判定する。シードフィル・アルゴリズムは、一般の光源に関連する画像センサの画素を識別するために、結果的に画素判定基準を満足する関連画素を識別するために使用する。これは、それぞれの閾値レベルを超える隣接する画素を識別することによって達成することができる。シードフィル・アルゴリズムが完了すると、ステップ1606において、その後の分析(図15のステップ1503及びステップ1509)のために光源特性を光源リストに追加して、特定の条件を満足しているか否かを判定し、この条件は、その光源が対向車両又は前方の車両を表しているか否かを判定するのに使用する。その後、ステップ1607に示すように、リスト内の光源数のカウンタを増分する。その後、マイクロコントローラは、ステップ1603に進む。
【0094】
ステップ1603において、赤色画像内の最終画素が検査されたと判定された場合、マイクロコントローラ1105は、ステップ1608に示すように、検出光源がないか否かを判定する。ステップ1609に示すように、検出光源がない場合には画像の分析は終了する。赤色レンズ209を介して検出される1つ又はそれ以上の光源がある場合、光源の相対色を判定するために、シアン又は透明ウインドウ702を分析して他のレンズ208を介して撮像された光源の輝度を判定する。この状況においては、光源の「輝度」は、光源を撮像する全ての画素のグレイスケール値の合計、即ち、シードフィル・アルゴリズムによって算出された値を示す。ステップ1610において、リスト上の第1の光源を分析する。ステップ1611において、シードフィル・アルゴリズムを実行するが、シアン画像は、赤色画像で検出した光源の中心と同じ座標(ウインドウの左上に対して)有する画素で始まる。このようにして、赤色フィルタに関連するレンズを介して検査された光源で識別した画素だけが、他のフィルタを介して検査された光源として分析され、このことは、透明又はシアンフィルタを介して検査した場合に、そうでなければ分析されることになる多数の迷惑光源が赤色フィルタによって除去されるので好都合である。赤色フィルタを介して識別された光源のみを検討するので、他のフィルタを介し検査された光源に関連する情報を格納するのに必要なメモリが少なくなる。ステップ1612に示すように、他の画像702の光源の輝度に対する赤色画像703の光源の輝度の比率は、現在の光源に関してステップ1605で算出した他のパラメータと共に光源リストに格納される。この手順は、リスト1615内の全ての光源についてシアン対する赤色の比率が算出されるまで光源リスト1613内の他の光源に対して続けられ、分析は、ステップ1614で終了する。
【0095】
所要メモリを減らす他の方法として、画素データは、メモリ内の画像全体を格納することなく受信したときに処理することができる。このような処理アルゴリズムは、Joseph S. Stamの2001年3月5日出願され、本出願人に譲渡されている米国特許出願番号( )「前照灯及び他の車両機器を制御する画像処理システム」(代理人整理番号GEN10P380)に開示されている。
【0096】
光源数をカウントして運転環境のタイプを判定すること、特に都市街路又は田舎道を識別することが望ましい場合、シアン又は透明フィルタを介して検査された光源の全てをカウントすることが望ましいことを理解されたい。このようにして迷惑光源を計数することができる。もしくは、光源閾値数が識別された場合にハイビームONを禁止するために、赤色フィルタを介して検査された光源数をカウントすることができる。
【0097】
ステップ1605及び1611において使用されるシードフィル・アルゴリズムを図17aに示す。ステップ1605において、シードフィル・アルゴリズムの外側の部分は、現在の画素値でもって実行される。シードフィル・アルゴリズムの外側の部分は、各々のステップ1605において1度だけ実行されるが、内側の再帰的シードフィル・アルゴリズムは、画素判定基準を満足する全ての隣接画素が識別されるまで何回も実行される。シードフィル・アルゴリズムの外側の部分の開始ステップ1701の後、ステップ1702に示すように、幾つかの変数を初期化する。変数XAVG及びYAVGをゼロに設定する。これらの変数は、光源を撮像する画素の平均X座標及びY座標を算出するのに使用でき、これらの平均座標は、共に光源の中心に対応する。TOTALGV変数は、光源を撮像する全ての画素のグレイスケール値を合計するのに使用される。この値は光源の輝度を定義できる。SIZE変数は、光源を撮像する画素の総数を記録するのに使用される。MAX変数は、光源を撮像する任意の画素の最大グレイスケール値を格納する。CALLSは、メモリのオーバーフローの防止又は追跡のために内側の再帰的シードフィル機能への再帰呼出し回数を制限するのに使用される。
【0098】
ステップ1703において、最初に内側の再帰的シードフィル・アルゴリズムが実行される。ブロック1704は、最初及びそれ以降のシードフィル機能を呼び出すための内側の再帰的シードフィル機能の開始を示す。ステップ1705に示すように、内側再帰的シードフィル機能の最初のステップはCALLS変数を増分することである。次に、マイクロコントローラ1105は、ステップ1706において判定されるように、CALLS変数が再帰的呼び出しの最大許容回数よりも大きいか否かを判定する。再帰的呼び出し回数は、光源情報の格納に利用可能なメモリの量によって制限される。再帰的呼び出し回数が閾値を超えていると判定された場合、再帰的機能は、ステップ1719へ進み、カウンタは減分され、その後、再帰的機能が呼び出されたステップに戻る。これが発生した場合、現在の光源は、再帰的呼び出し回数が多すぎ、シードフィル・アルゴリズムによって算出されたパラメータが正しくないことを示すフラグが設定される。これによって、マイクロコントローラのメモリをオーバーフローする多数の反復レベルの発生が防止される。また、非再帰的にアルゴリズムを実行することが可能である。
【0099】
ステップ1706の判定結果が、CALL変数が最大許容値よりも大きくない場合、次に、ステップ1707において、マイクロコントローラ1105は、現在の画素を最小グレイスケール閾値と比較して、その画素が光源に含まれるほど著しく明るいか否かを判定する。ステップ1707において検討される閾値は、定数又は位置によって変わるものとすることができる。閾値が変わる場合、各々の画素又は画像センサの各々の領域に関して格納される各々の画素閾値を有する空間参照テーブル内に可変閾値を格納することができる。閾値が位置によって可変である場合、1つの場所の画素が関連の画素閾値を超えた場合、制御装置は、単一の光源に関連した隣接グループの画素を検索する間に、隣接画素に対してその閾値を継続的に使用できるか、又は空間参照テーブルに格納された各々の画素閾値を継続的に使用できることが想定されている。
【0100】
ステップ1707の条件を満足しない場合、内側再帰的シードフィル機能は、ステップ1719に進んで終了する。ステップ1707で判定されるように、画素が十分に高いグレイスケール値を有する場合、そのグレイスケール値を包括的TOTALGV変数1708に追加し、そのX座標及びY座標をXAVG及びYAVB変数1709及び1710に追加し、ステップ1711においてサイズ変数を増分する。ステップ1712で判定されるように、画素のグレイスケール値が現在のシードフィルで遭遇した他の画素よりも大きい場合、MAX変数値をこのグレイスケール値1713に設定する。
【0101】
ステップ1712において「NO」の判定の後、画素のグレイスケール値を0に設定して、更なる再帰的呼び出しがこの画素を含まないようにする。画素が0に設定されず、この画素において更なる再帰的呼び出しが発生する場合、2回目以降にその画素が追加される。画素を0に設定することによって、画素グレイスケール値は最小閾値よりも小さいのでその画素は2度と追加されない。更に、この画素は、分析中の画像走査の間に再度遭遇した場合にはステップ1602で無視される。
【0102】
次に、内側再帰的シードフィル・アルゴリズムは、上下左右に進んで各々の画素を検査し終わり、判定ステップ1707において最小画素閾値を超える隣接画素の全てを判断するまで、自動的に再帰的呼び出しを続ける。ステップ1715は、右に進んで画素を検査するためにステップ1704に戻ることを表わす。マイクロコントローラは、判定ステップ1706又は1707の判定基準を満足しない画素に達するまで右に進んで画素を検査し続ける。ステップ1716は、左に進んで画素を検査するためにステップ1704に戻ることを表わす。ステップ1717は、上の画素を検査するためにステップ1704に戻ることを表わす。ステップ1718は、下の画素を検査するためにステップ1704に戻ることを表わす。次に、マイクロコントローラは、判定ステップ1707を満足した最終画素の左に進んで画素を検査する。プロセッサは、隣接画素が存在する(即ち、目前の画素が端の画素でない)場合、ステップ1707の閾値を超える各々の画素に隣接する画素を検査する。ステップ1719では、このステップが実行される度にCALLS変数が減分され、マイクロコントローラは、CALLS値が0になるまで呼び出しプログラムに戻る。呼び出された機能へ戻ることは、内側再帰的機能の別の例であってもよく、又はこれが検査される最初の画素であれば、外側再帰的アルゴリズム1721へ戻る。
【0103】
以下に外側及び内側シードフィル・アルゴリズムの作動方法の一例を、図17bを参照して説明する。この例は、30個の画素を有する非常に小さい例示的な画像センサに関する。この例では、画素4、9、10、11、14、15、16、17、18、21、22、23、及び28は、ステップ1707の閾値を超える。更に、必要呼び出し回数は、ステップ1706の閾値を超えない。画像アレイ301は、光源1751を受光し、輪郭1751で示す。マイクロコントローラは、画素を評価するために以下のように作動する。画素1について、マイクロコントローラ1105は、ステップ1701においてシードフィル・アルゴリズムを実行し、ステップ1702において変数を初期化し、ステップ1703において現在の画素を設定する。次に、マイクロコントローラは、ステップ1704において内側シードフィル機能を実行する。ステップ1705においてCALLS変数を1つ増分するが、CALLS変数は、Maximum Calls閾値以下である。画素上には光がないので最小閾値を超えることはなく、マイクロコントローラは、ステップ1719に進み、ステップ1720においてCALLS変数を減分し、今回は内側シードフィル・プログラムが初回なので、マイクロコントローラはステップ1721からステップ1723まで進む。このプロセスを画素2及び3について繰り返すが、これらの画素は共にステップ1707で使用される最小画素閾値以下である。
【0104】
マイクロコントローラが画素4に達すると、ステップ1701において外側シードフィルを実行し、ステップ1702において変数を0に設定し、ステップ1703において現在の画素を画素4に設定し、内側シードフィル・アルゴリズムを実行する。今回は外側シードフィルが初回の画素なのでCALLS変数を1に増分する。CALLS変数は、Maximum Calls閾値よりも小さく、画素グレイスケール値は、最小閾値を超える。従って、グレイ値をTOTALGVに追加し、画素座標をXAVG及びYAVGに関する画素に追加し、サイズが1になるようにSIZEを増分する。画素4のグレイ値は、外側シードフィルでは唯一のグレイ値なので、MAXである。ステップ1714においてグレイ値を画素4に対して0に設定する。
【0105】
次に、マイクロコントローラは、ステップ1707において閾値を超える隣接画素の全てを識別する。特に、図17aに示す内側シードフィル・ルーチンによって、マイクロコントローラは、以下のように画素を加算する。画素4は、閾値(この場合の「閾値」はステップ1707の最小閾値を示す)よりも大きいグレイスケール値を有する最初の画素なので最初に加算される。次に、プログラムは、右の画素5の再帰的機能を呼び出すが、画素5は閾値以下なので加算されず、「加算」とは画素座標がXAVG及びYAVGに加算されることを意味し、画素のグレイスケール値はTOTALGVに加算され、SIZEが増分され、画素のグレイスケール値はMAXを超える場合には最大画素グレイスケール値になる。次に、左の画素3を呼び出すが、同じ理由で加算されない。画素4の上には画素がない。従って、ステップ1718において画素10のための再帰的機能を呼び出す。画素10の値は閾値よりも大きいので加算される。次に、マイクロコントローラ1105は、画素10の右、即ち画素11に進むが、画素11は閾値よりも大きいので加算される。次に、マイクロコントローラは、画素11の右の画素12を検査する。画素12は、グレイスケール値が閾値以下なので加算されない。画素11の左に進んで、画素10は、前回追加時に0にしたので加えられない。画素11の上に進んで、画素5は加算されない。画素11の下に進んで、画素17は加算される。次に、画素17の右の画素の再帰的ルーチンを呼び出す。画素18は加算される。画素18の再帰的ルーチンに進んで、画素18の右には画素がない。画素18の左を検査して、画素17は、加算された時に0にされたので加算されない。画素18の上を検査して、画素12は加算されない。画素18の下を検査して、画素24は、閾値以下なので加算されない。使い尽くされていない前回の再帰的機能に戻って、マイクロコントローラは、逆行して画素17の左の画素16に進む。画素16は加算される。再び再帰的機能を呼び出して、マイクロコントローラは、画素16の右に進む。画素17は、前回加算された後でクリアされているので加算されない。画素16の左に進んで、画素15は加算される。画素15で再帰的機能を呼び出して、マイクロコントローラは右の画素16に進む。画素16は、前回加算された後で0にされているので加算されない。左に進んで、画素14は加算される。画素14で再帰的機能を呼び出して、マイクロコントローラは、右の画素15に進んで、画素15は加算されない。画素14の左に進んで、画素13は加算されない。画素14の上に進んで、画素8は加算されない。画素14の下に進んで、画素20は加算されない。画素14の再帰的機能を呼び出した機能に戻って、マイクロコントローラは、画素15の上の画素9に進む。画素9は加算される。画素9の再帰的機能を呼び出し、右に進んで、画素10は加算されない。左に進んで、画素8は、閾値以下なので加算されない。上に進んで、画素3は加算されない。下に進んで、画素15は、前回クリアされたので加算されない。画素9の再帰的機能を呼び出した機能に戻って、マイクロコントローラは、画素15の下の画素を検査する。次に、画素21は加算される。画素21の再帰的機能を開始して、右に進んで、画素22は加算される。画素22の再帰的機能を開始して、画素23は、閾値を超えているので加えられる。画素23の再帰的機能を開始して、画素24は、閾値以下なので加算されない。左に移動して、画素22は、0にされたので加算されない。上に進んで、画素17は、加算された後に0にされたので加算されない。下を進んで、画素29は、閾値以下なので加算されない。画素23の再帰的機能を呼び出した機能に戻って、マイクロコントローラ1105は、画素22の左に進む。画素21は、クリアしたので加算されない。画素22の上に進んで、画素16は加算されない。画素22の下に進んで、画素28は加算される。画素28の再帰的機能を実行して、右の画素29は加算されず、左の画素27は加算されず、上の画素22は加算されず、画素28の下には画素がない。機能1つ分戻って、画素22についての再帰的機能を完了したので、マイクロコントローラは、画素21に戻る。画素21の左に進んで、画素20は加算されない。画素21の上の画素15は加算されず、画素21の下の画素27は加算されない。画素15の再帰的機能を使い尽くしたので、マイクロコントローラは、画素16の上の画素10に進むが、画素10は加算されない。画素16の下に進んで、画素22は加算されない。機能1つ分戻って、マイクロコントローラは、画素17の上の画素11に進むが、画素11は加算されない。画素17の下に進んで、画素23は加算されず、画素11の再帰的機能を完了した場合、マイクロコントローラは、隣接する画素の中の最後の未処理画素に戻る。マイクロコントローラは、画素10の左に進んで、画素9は加算されない。マイクロコントローラは、画素10の上に進んで画素4は加算されない。下に進んで、画素16は加算されない。以上で内側シードフィルは完了する。
【0106】
最後の画素を加算した後で、XAVG及びYAVG及びSIZEを使用して、ステップ1722及びステップ1723で光の中心を選択する。
【0107】
前述のフィルアルゴリズム法は、赤色画像703の分析には好適なシードフィル・アルゴリズムである。他の画像702については多少の変更が必要である。この必要性は、以下の例から理解できる。一対の対向車両の前照灯を赤色画像内の2つの個別の光と識別する場合、これらの光源は、(高輝度放電式前照灯にはよくあるが)スペクトルのシアンの半分の方が赤色の半分よりも多くの光を含む場合がある。この場合、赤色画像において2つの個別の光源と検出したものが、シアン画像では焦点が合わずに1つの光源になる可能性がある。従って、シアン画像では、赤色画像内の2つの光源に対応する光源は1つしかないことになる。赤色画像の第1の光源に対してステップ1611を完了した後に、焦点が合っていないシアン画像画素は、ステップ1714でクリアされてしまい、赤色画像内の第2の光源の分析で利用できなくなる場合がある。従って、シアン画像内の光源が第1の光源に対応すると判定された後に、シアン画像には、赤色画像内の第2の光源に対応する光源がないことになる。これを防ぐために、焦点が合っていない光源が赤色画像内の両方の光源に対応すると判定されるように、ステップ1714の場合のように、グレイスケール値を0に設定するのではなく、シアン画像用の画像メモリをもつことが好都合である。
【0108】
赤色画像は処理が終わっているので、赤色画像を格納したメモリをマップとして使用して、シアン画像内のどの画素の処理が終わっているかを示すことができる。赤色画像内の全ての画素は、処理の結果として、最小閾値以下のグレイスケール値に設定されている。光源として識別された画素は0になっているが、クリアされなかった光源は、多少低いグレイスケール値をもつことになる。この特性を用いて、赤色画像メモリ内の画素をシアン画像内の画素を処理するためのマーカーの機能を果たすように設定することができる。特に、シードフィル・アルゴリズムをシアン画像に対して実行する場合に、ステップ1714の代わりに、現在分析されているシアン画素に対応する赤色画像内の画素をマーカー値に設定するステップを使用する。このマーカー値は、例えば、(255−光源リストの現在の光源指数)とすることができる。数字225は、グレイスケール値として格納できる最大値である。このようにして、ステップ1611がリスト上の光に対して実行される度に、分析画素に対して赤色画像メモリ内に格納された独自のマーカーが存在する。前述のステップ1714の変更に加えて、ステップ1707の後に、現在分析されている画素に対する赤色画像メモリ内に格納された画素の値が、現在の光源指数のマーカー値に等しいか否かを判定する試験を追加する必要があるが、これによって、この画素が既に再帰的に処理されたことがわかり、その場合、マイクロコントローラは、ステップ1719に進むことになる。
【0109】
領域703内の赤色画像に関するステップ1501及びステップ1502、及び領域702内の他方の画像に関する対応のステップ1506、ステップ1507及びステップ1708は詳細に説明されている。ステップ1503及びステップ1509において、光源リストは分析されて、識別された光源の中に対向車両又は前方の車両が存在するか否かが判定される。図18は、光源の種類を判定するために先の分析ステップの間に光源リスト内の各々の光源に関して集められた情報に適用される一連の試験フローチャートである。図18の試験は、リスト内の各々の光源に対して独立して適用する。
【0110】
最初に、ステップ1801において判定されるように、この光源の再帰的シードフィル分析結果は、その後の許容再帰的呼び出し最大回数以上か否かを調べる。そうであれば、ステップ1803において、光源内の画素数は、多数の後続の再帰的呼び出し回数を引き起こすほど大きいに違いないので「非常に明るい光」に分類される。次に、TOTALGV変数は、「非常に明るい光」の閾値1802と比較する。また、TOTALGVがこの閾値を上回る場合には、ステップ1803において「非常に明るい光」に分類される。
【0111】
条件1801又は1802のいずれも満足していない場合、ステップ1804において、光源を分析して60Hz交流強度成分を有するか否かを判定するが、この成分によって光源がAC光源であることがわかり、DC電源を電源とする車両と区別できる。このようにして、高圧ナトリウムや水銀灯等の多くの街路灯を車両前照灯と有効に区別できる。AC成分を検出するために、例えば、480フレーム/秒でもって連続した8つの3×3画素画像を取得する。3×3画素ウインドウは、検査光源の中心に置かれる。各々の8つのフレームにおける9つの画素の合計を8つの値として格納する。これらの8つの値は、2サイクルの1/4サイクル間隔での光源の輝度を表す。これらの8つのサンプルの60Hzフーリエ級数成分の大きさは、以下の式で計算することができる。
【0112】
【0113】
1つのウインドウのみのAC検出法を説明するが、シアン及び赤色フィルタ、又は赤色及び透明フィルタの両方によって光源を撮像し、その後、2つのサンプルセットから算出される最大AC成分を使用してステップ1804のAC成分を判定することによって、前述の分析を行うことが好都合である。これは、スペクトル内に強い短い又は長い波長の何れかを有する光源の正確な測定を可能にする。ステップ1805に示すように、光源AC成分が最小閾値よりも大きい場合、ステップ1806に示すように、光源はAC光源であると判定する。感知された画像の上部領域に低いAC成分をもたらすが、中間から下部までの右手側には高い閾値を与えると共に中間から低までの左手側には中間閾値を与えるような、迷惑光源と前照灯との区別を助けるために別の手段を利用できる。
【0114】
次のステップは、道路標識又は他の大きな物体からの反射光である光源を区別するものである。道路標識は、前照灯又はテールライトの寸法と比べて大きい。その結果、道路標識は、前照灯が画像内で焦点が合わないほど明るい場合を除き、車両前照灯よりもはるかに多くの画素上に撮像される傾向にある。標識の反射光源は、SIZE変数で示される多数の画素数をもつが、平均グレイスケール値は、非常に高い輝度をもつ車両前照灯よりも低い。ステップ1807で判定されるように、SIZE変数が任意のサイズ閾値を超える場合、平均グレイスケール値(TOTALGV/SIZE)は、平均画素レベル閾値と比較するが、平均画素レベル閾値は、ステップ1801の最大標識平均グレイスケール値である。平均グレイスケール値がこの閾値以下の場合、ステップ1809に示すように、その光源は、標識からの反射光と判定する。
【0115】
一般に、曲線道路を旋回する場合に車両の前方に現れる黄色の標識の有無に関する更なる検査として、明るい物体の色を測定して、それらが同じ黄色であるか否かを判定する。低利得の画像を使用する場合でも、近くの標識からの反射光なので両サブウインドウの幾つかの画素が飽和状態になり、相対色の区別が難しくなる場合がある。しかし、AC検証を実行する際に取得したのと同じ高速画像を使用して、明るい画像の場合でも正確に相対色を判定することができる。これは、各々のレンズによる前述のF1からF7のフレームの平均値を検査することによって達成される。シアン又は透明レンズを介して検査したF1からF7のフレームの平均に対する赤色レンズを介して検査したF1からF7のフレームの平均の比率を計算する。この比率は、白色光の場合よりも黄色の標識の場合の方が高いが、テールライトほど高くはない。この比率が、黄色の標識である可能性が高いことを示す特定の範囲内である場合、この物体を無視すること、又はこの物体に対する減光閾値を下げることができ、非常に明るい黄色の物体の場合にのみハイビームを減光することができる。ハイビームを減光することによって本システムを明るい黄色の物体に応答できるようにすることで、前照灯の減光器は、前照灯を黄色の標識として誤判断した場合には光源に応答する。
【0116】
一度、潜在的な迷惑光源をフィルタ処理で除外すると、光源は、前照灯又はテールライトとして識別できる。ステップ1810において、ステップ1612で算出したシアンに対する赤色の比率を使用して、光源がテールライトと分類できるほど十分な赤色成分を有するか否かを判定する。この比率がテールライト赤色閾値よりも低い場合、制御はステップ1811へ進み、ここでは前照灯の閾値を決定する。この閾値は、幾つかの方法で決定できるが、最も簡単な方法は、本明細書で例示したモトローラのMCS912ファミリでは当然であるがマイクロコントローラが十分な読み出し専用メモリ(ROM)を有する場合に、2つの寸法参照テーブルを使用することである。
【0117】
光源の中心は、参照テーブルへの指数として使用して閾値を決定する。視野の異なる領域に対して異なる閾値が得られるように参照テーブルを作成する。例えば、車両直前の視野の領域の閾値は、側面寄りの領域に使用される閾値よりも低い。特定の車両のハイビーム放出パターンに対して参照テーブルを最適化して、種々の角度において、ハイビームが対向車両又は前方車両に対してどの程度迷惑を与えるかを判定することができる。車両ハイビーム作動時に使用される参照テーブルは、ハイビーム以外の参照テーブルとは異なることが理想的である。ハイビームがOFFの場合、車両の側方に対する閾値はハイビーム作動時よりも低い値に設定できる。これによって、高速道路でカーブを走行中に発生するような、車両が制御車両の前方に存在するが、制御車両の斜め方向の離れた位置に存在している場合にハイビームがONになることを防止できる。また、同じ理由で、高及び低感度画像に対して異なる参照テーブルを使用する。実際には、参照テーブルは、高感度画像の視野の特定の領域又は全ての領域に対して前照灯が完全に無視されることを示す。高感度画像は、低感度では対向車両又は前方車両を検出できない場合に限り分析されるので、高感度画像内の赤色以外の光源は、非常に遠くの前照灯又は迷惑光源である可能性が非常に高い。従って、高感度画像は、赤色光源についてのみ分析できる。
【0118】
ステップ1812において、適切な参照テーブルから判定されるように、総画素レベルであるTOTALGV変数は、前照灯の閾値総画素レベルと比較する。この変数が閾値よりも大きい場合、ステップ1813において、その値を、閾値×輝度乗数の値と比較する。TOTALGVがこの値よりも大きい場合、ステップ1815において、光源は高輝度前照灯であると判定する。TOTALGVがこの値よりも大きくない場合、ステップ1814に示すように、光源は前照灯である。前照灯と高輝度前照灯とを区別する必要性は、前照灯の制御状態を検討すると更に明確なるであろう。TOTALGVと閾値×輝度乗数との比較の代わりに、別の参照テーブルを設けて、高輝度前照灯の閾値を決定することができる。
【0119】
光源が赤色光源と判定された場合には、ステップ1816で説明したのと類似の手順を実行する。テールライト閾値に関して一連の参照テーブルを設け、適切な参照テーブルを使用して任意の光源に対する位置の閾値を決定する。ステップ1817において、テールライト閾値の総画素レベルは、TOTALGV変数と比較して、対象になるほど十分に明るい光源か否かを判定する。そうであれば、ステップ1819において、光源はテールライトに分類される。そうでなければ、ステップ1820で光源は無視される。
シアンレンズ要素301の代わりに透明レンズを使用する場合、ステップ1810において、異なる比率閾値を使用する。この場合、赤色光は、両方の画像ではほぼ同じ輝度を有することになるが、白色又は他の色の光は、透明レンズを介して撮像した場合の方が相当明るい。この比率は、赤色及びシアン(透明)画像の両方のアナログ利得設定値に基づいて決定する。
【0120】
ステップ1405において前方の視野の画像を取得して分析した後に、ステップ1406において前照灯の状態を判定する必要がある。このことはマイクロコントローラ1105で実行される状態マシンを検討することで最良に説明でき、この状態マシンは、図19に示す。以下の例において、前照灯駆動回路902は、パルス幅変調駆動回路であり、ハイビーム輝度は、パルス幅変調駆動回路の負荷サイクルを変えることによって変更できるものと想定する。また、ロービーム前照灯は、常時100%負荷サイクルにあると想定する。図19の状態の各々は、ハイビーム前照灯の制御状態を表す。ハイビーム前照灯の負荷サイクルを現在の制御状態によって表される値に設定する。制御状態の間の負荷サイクルの配分は、非線形であり、前照灯輝度が負荷サイクルの非線形関数であることを補償して、サイクル間の一定の変化率の状況をもたらすようになっている。
また、0パーセント及び100パーセント負荷サイクルには幾つかの状態が存在し、前照灯がON又はOFFを始める前に幾つかの状態を行き来する必要があることを示し、検出される光源が幾つかの画像上に持続することを保証する時間遅延をもたらす。状態の個数は例示的なものであり、当業者であれば、所望のハイビームの所望のフェードON及びOFF率、及びサイクル間の時間によって変わり得ることを理解できるであろう。更に、高輝度インジケータ(一般に車両のダッシュボード上に配置される)は、状態が状態11から状態14に移動したときにフェードONを行う。高輝度インジケータは、状態が状態7から状態4に移動したときにフェードOFFを行う。これによって、インジケータがON及びOFFで点滅するのを回避するための特定のヒステリシスが得られる。もしくは、インジケータがフェードON及びOFFを行わない場合、高輝度インジケータがONになる状態は、高輝度インジケータがOFFになる状態よりも高い状態であることが好ましい。いずれの場合でも、前照灯制御のヒステリシスが得られる。
【0121】
各々の制御サイクルの後に、前照灯制御状態は、同じ状態を維持するか、又は異なる状態に移動できる。各状態の間の移動のルールについて、図20を参照して説明する。最初に、ステップ2001で光源リスト内の光のいずれかが高輝度光と判定された場合、ステップ2002において、現在の制御状態を、直ちに0状態に設定する。これによって、フェードOFF機能の迂回、及び山間部で走行時に起こる前方視野内への前照灯の突然の出現に対する迅速な対応が可能となる。ステップ2003によって、前照灯又はテールライトが光源リストで検出されたか否かが判定される。検出されなかった場合、制御はステップ2004に進み、前回の状態が最終制御サイクルで減分されたか否かが判定される。
【0122】
可変ビーム構成の利点の1つは、ハイビームをフェードON及びOFFする能力である。標識又は反射体からの反射光が車両と誤判断された場合、ハイビームは減光し始める。そうすると、反射光源はもはや画像内に存在しないので、ハイビームは、おそらくドライバに迷惑をかけることなくフェードONする。前照灯輝度の増分と減分との間の急激な変動を防ぐために、制御状態は、方向転換する前に1サイクル分だけ現在の状態に留まる必要がある。従って、ステップ2004は前回のサイクル中のアクションを判断し、ステップ2005に示すように、システムは、前回のアクションが減分状態であった場合は現在の状態に留まる。
【0123】
前回のアクションが減分状態ではなかった場合、次に、ステップ2006において車両速度が判断される。車両が交差点で停止した場合に、ハイビームがONになり、通過車両があれば減光し、その後、再度ONになるとドライバは不快に感じる。これを防ぐために、車両が特定の速度、例えば20mph未満で走行中にはハイビームがONになるのを阻止する。最小速度閾値以下へ減速しても、対向車両又は前方車両が存在しない場合はハイビームを必ず減光する必要はない。もしくは、ハイビームは、車両が停止する毎にフェードOFFし、他の車両が存在しない場合は、車両が動き出すと再度フェードONするよう構成してもよい。ステップ2007において、ドライバが市街地を運転しているか否かの表示として、光源リスト内の光源数(ステップ1607でカウント)をチェックする。前方の視野に多数の光源が存在する場合、ハイビームはONにならない。また、交流電源である光源数を考慮することもできる。
【0124】
ステップ2004、ステップ2006、及びステップ2007の判定基準を満足している場合、ステップ2008において、現在の制御状態は1つの状態だけ増分する。このアクションによって、ステップ2009において判定されるように、現在の制御状態が状態12を超える場合、ステップ2010において、現在の制御状態が15に設定され、ビームを再度減光する前に、強制的に数回の確認状態にする。
【0125】
ステップ2003において、マイクロコントローラ1105が前照灯又はテールライトを検出した場合、マイクロコントローラは、ステップ2011において高輝度前照灯が検出されたか否かを判定する。検出されない場合、ステップ2012において、各状態の間の急激な継続的変動を回避するために、増分と減分と間の急激な変動を防ぐよう前回サイクルのアクションを考慮する。前回サイクルのアクションが増分でなかった場合、ステップ2014において、現在の制御状態を1つの状態だけ減分する。ステップ2015において判定されるように、新しい制御状態が状態3以下の場合、ステップ2016において現在の制御状態を0に設定する。
【0126】
最後に、ステップ2011において、高輝度前照灯が検出された場合、ステップ2017において前回のアクションが増分ではない場合、ステップ2018において2つの状態だけ減分することによって、ハイビームを更に急激にフェードOFFすることが望ましいが、ステップ2017において前回のアクションが増分の場合は現在の状態は1つの状態だけ減分される。
【0127】
前述の方法には多数の変形例が可能である。例えば、多数の状態を追加して、ハイビームをフェードON及びOFFするのに要する時間を増減できる。状態の所要数は、画像取得及び分析サイクル時間に依存する。フェードON及びOFFは、約1秒から2秒が理想的である。別の変形例では、全てのサイクルに対して単一の状態を減分するのではなく、光源リスト内で検出される最も輝度の高い光源の関数として状態が減分される。このようにして、ハイビーム輝度は、単にフェードON及びOFFを行うのではなく、対向車両又は前方車両の距離の関数として調節される。このことは、制御機構がビーム強度ではなくハイビームのビーム角度を変えるようになっている場合には特に有利である。別の変形例では、制御車両の現在の速度の関数として状態が減分される。接近車両は、高い速度で制御車両を追い越すものであり、状態を減分する速度は、高い車両速度では大きくなるであろう。更に別の変形例では、車両減速時に状態が減分される。これによって、車両停止時にハイビームをフェードOFFすることが可能になり、これは一部のドライバには望ましい機能であろう。最後に、離散的な状態の使用は例示的であることに留意されたい。ハイビーム前照灯の強度/照準は、完全ONから完全OFFまでの連続値によって制御することができる。
【0128】
前記は前照灯減光制御シーケンスの1つのサイクルの作動を詳細に説明するものである。このシーケンスは、装置がONである限り無限に繰り返される。1サイクルを完了する時間に応じて、前述の手順は割り込みが可能であり、エレクトロクロミックミラーのための後側眩輝センサ測定値を取得することができる。更に、ドライバは、入力信号1123(図11)を生成する手動ハイビームスイッチを作動することによって前述の手順に割り込みをかけることができる。この機能は、ドライバが制御システムの不適切な挙動を無効にする上で、又はハイビームを使用してハイビームの点滅によって他のドライバに注意を喚起する上で必要である。
【0129】
幾つかの追加機能を前述のハードウェア及びソフトウェア・コンフィギュレーションに付加することができる。このような機能の1つは昼間走行灯(DRL)である。一部の車両では、DRLはハイビームを低輝度で作動させることで得られる。PWM駆動回路を利用して、昼間状態時に低輝度に設定することができる。周辺光センサ1107を使用して、昼間状態を判定し黄昏時に前照灯を通常のロービーム動作に切換えることができる。特に、周辺光レベルは、それらに関連する1つ又はそれ以上の光レベル閾値を有することができる。昼間走行灯は、周辺光レベルが1つの昼間閾値である場合にONになる。その閾値以下であるが他の低い閾値以上の場合に、ロービームをONとすることができる。その低輝度作動光レベル閾値以下では、ハイビームは、ドライバが手動でハイビーム操作を無効にしない場合は自動的に作動することができる。
【0130】
DRLを使用していなくても、黄昏時にロービーム前照灯の自動作動を行うことが望ましい。この制御は、周辺光センサ1107の使用によって行うことができる。更に良好な性能を得るために、周辺光センサ1107のように前方の直線方向を見るのではなくて、上方からの光を感知する追加の光センサを設けることができる。このようなスカイセンサの配置については、Jon H.Bechtel他の2000年1月25日に出願された米国特許出願番号09/491,192「半導体光センサ付き車両機器制御」に開示されている。もしくは、画像センサ内の数行の画素を使用して、地平線上の空の領域を撮像することができる。このような配置を開示する撮像システムについては、米国特許番号第6,130,421号に説明されている。赤色及びシアンフィルタの両方を介して撮像する能力は、晴天状態と曇天状態との区別及び日没の検出を助けることができる。
【0131】
本システムでは、画像センサ及びスカイセンサを使用してトンネルを検出することが想定されている。特に、昼間周辺光状態で、サイズ閾値レベルを満足すると共に画像の中心に位置する、隣接する暗い画素の広い領域を検出した場合に、潜在的なトンネル状態は検出される。周辺光状態が昼間周辺光状態を継続的に感知すると同時に暗い領域が成長する場合は、潜在的なトンネル状態が続くことになる。昼間周辺光状況がもはや検出されない場合に画像センサが車両の前方に広い暗い領域を検出し続けると、車両はトンネルの中にいると判定されて前照灯がONになる。前照灯は、昼間周辺光状態が検出されるまでONのままであり、昼間周辺光状態が検出された時点で、前照灯はOFFになり、制御車両が昼間走行灯を備えている場合には昼間走行灯がONになる。
【0132】
速度変更閾値
マイクロコントローラ1115は、速度入力117を別の用途に使用できる。例えば、高速道路を走行中に、通常、中央分離帯によって分離されている反対車線の対向車両を検出する必要がある。従って、マイクロコントローラは、対向車線を分離する中央分離帯がない田舎道の場合よりも、対向車両の前照灯に対する高角度での感度が高いことが必要である。田舎道での運転のための広い視野の組み込むと、画像センサが一般的に白熱灯である家の照明を検出する可能性が高くなるという欠点がある。白熱光源は、AC除去アルゴリズムでは濾過されない。このような家の照明は、一般的に、高速道路の脇には存在しない。車両が50mphから60mphを超える速度といった高速で走行している場合に高角度での物体に対する装置の感度を高くすることによって、本システムは、田舎道の家の照明に対する感度を高くすることなく、高速道路で中央分離帯の反対側を走行している車両を感知することができる。視野は、車両速度が65mphを超える場合に広くして、車両速度が60mph以下の場合に狭くすることが想定されている。
【0133】
特に、ステップ1601の前に追加のステップを設けて視野を速度感応にすることができる。これらのステップを図21に示す。ステップ2101において、車両速度を入力する。ステップ2103において、マイクロコントローラは、現在の状態が高速道路運転用の広い視界になっているか否かを判定する。広い視界になっていない場合、マイクロコントローラ1105は、速度が55mphよりも大きいか否かを判定する。55mphよりも大きくない場合、状態は変化しない。ステップ2105において、車両速度が55mphよりも大きいた場合、ステップ2107に示すように、画像センサ201の視野を広くする。水平方向での視野は、低速時の狭い視野に対して30パーセントから150パーセント、好ましくは60パーセントから125パーセントだけ広くすることができる。ステップ2101において、制御車両100は高速道路状態にあると判定された場合、ステップ2109においてマイクロコントローラ1105は、車両速度が45mph以下になったか否かを判定する。45mph以下になった場合、マイクロコントローラは、画像センサ201の視野を狭い高速道路のものではない視野に縮小する。1つの有利な実施形態において、視野は全ての速度で同じままであるが、速度が増すにつれて高角度の光への応答閾値を下げる。このことは、車両が低速走行時に高角度の高輝度物体を検出できるが、低速走行時に家の照明又は街路標識等の低輝度物体に対して低感度なので好都合である。特に、高速時には、閾値を下げて中央分離帯の対向車両に対する感度を高くする。中央分離帯の対向車両は左側通行なので、右よりも左に対してかなり閾値を下げる。この特性は、左側通行の国々では逆にすることができる。
【0134】
視野は、ハイビームがON又はOFFの場合に、前述の方法で画像センサによって使用される画素幅を増減することによって変更することが想定されている。
【0135】
本発明の別の態様によれば、画像アレイセンサの画素の統合時間は、高速時に上げることができる。統合時間を上げることによって画像アレイセンサの感度が高くなる。従って、本システムでは対向車両を早期に検出できる。このことは、制御車両が高速走行中には対向車両も同様に高速走行中なので特に好都合であろう。従って、高感度の光制御システムを設けて反応時間を短くすると、所望の車間距離で前照灯を減光ことによる前照灯の所望の減光特性を良好に模倣することになる。この機能を得るために、マイクロコントローラ1105は、ステップ2107において、感度を上げ、及び/又は水平視角を広げるが、一方でステップ2111において、感度を下げ、及び/又は水平視角を狭める。
【0136】
更に、ステップ1707において、速度の関数として閾値を調節できることが想定されている。このようなシステムは、読み出し専用メモリ(ROM)に格納された参照テーブルを使用して実行することができる。図22は、中心から外方に延びる画像センサアレイ301の領域を示す。右側走行の国々では、対向車両は通常左側走行であり、標識及び迷惑光源は右側にある可能性が高いのでこれらの領域は対称形ではない。参照テーブルは、領域1から領域6の各々に対してそれぞれの閾値を設定し、これらの領域の閾値は、中心から外方に移動するにつれて漸進的に順次大きくなる。従って、中心領域1は、最低閾値を有し、外周部6は最高閾値を有することになる。更に、種々の角度に対する閾値は、速度の関数として変更でき、高速時には、閾値は領域3から領域5は高速時よりも低い。例えば、2つの視野を設ける場合、一方のテーブルは、低速用領域の画素のそれぞれの閾値を含み、他方のテーブルは、高速用領域の画素のそれぞれの閾値を含む。各々のテーブルには、視野の異なる部分を分析する際に使用する統合時間及び/又は閾値が割り当てられる。中心からの距離が大きくなるほど情景画像の視角が大きくなるので、外側領域の閾値を下げると制御車両に対して大きな角度をなす光源に対するシステムの応答性が高くなる。
【0137】
画像アレイの画像センサの閾値又は統合時間のいずれか一方、又は閾値及び統合時間の両方は、種々の速度でのセンサの感度を上げるように変更できる。従って、視野は、高速及び低速の両方で同一にできることが想定されている。しかし、低速時に、広い角度で検査された画像が減光に関する判定にほとんど影響を与えないが、高速時に、広い角度で検査された画像が減光に関する判定にかなりの影響を与えるように、閾値又は感度(即ち、統合時間又は増幅器利得)を変更できる。更に、参照テーブルを使用せず、アルゴリズムを使用して検査される画像の角度の関数として光センサの感度を変更できることが想定されている。このようなアルゴリズムは、この機能を実行するためには大きな処理能力が必要であるが、システムのメモリ所要量を少なくするために使用できる。
【0138】
旋回
前述のように、田舎道の走行時にみられるような低速走行時に広い視野をもつことは不利である。しかし、旋回時には、制御車両の前照灯が他の車両に当たる前に画像センサが制御車両の前に現れる他の車両を検出することができるように、広い視野を有することが必要である。また、旋回方向における感知された画像の領域に対して閾値を下げることが望ましいであろう。マイクロコントローラ1105が画像センサの視角の変更に使用するサブルーチンを図23に開示する。旋回条件を初期化する度にサブルーチンを実行することが想定されている。例えば、マイクロコントローラは、単独での又は制動と組み合わせた車両方向指示器の作動、コンパスによって検出された車両進行方向の変化、衛星利用測位情報、車両ハンドル又は前輪の方向の変化のいずれか1つ又はそれ以上を検出することができる。このような事象に応答して、マイクロコントローラ1105は、視野を変更する必要があるか否かに関する判定に使用する判定基準を入力する。例えば、コンパス入力、方向指示器からの入力、衛星利用測位システム(GPS)受信器情報、車両ハンドルシステムからの車輪旋回指示、車両速度、ジァイロスコープ出力、アンチロックブレーキシステム(ABS)の車輪速度センサ、又はこれらの入力の組み合わせをステップ2301において入力することができる。更に、運動分析(以下に説明する)を使用して、車両の旋回状態を感知することができる。
【0139】
ステップ2303において、マイクロコントローラ1105は、ステップ2301において入力された判定基準入力が視野を変更する必要があることを示しているか否かを判定する。例えば、車両方向指示器がONで車両が減速中の場合は、視角感度を方向受信器の方向に変更できる。もしくは、変化角度閾値よりも大きい車両進行方向の変化と組み合わせた車両ブレーキシステムの作動によって、センサ視角を変更することができる。特に、コンパス情報を旋回閾値と比較して、制御車両100が旋回しているか否かを判定することができ、それに応じて、マイクロコントローラ1105は、車両の旋回方向の光源に対して、画像センサ201及び関連の回路の感度を上げることができる。このような旋回制御を実現するために、コンパスは、マイクロコントローラが使用できる車両進行方向情報を生成する必要がある。車両に使用されている形式の市販のコンパスは出力を生成し、この出力は、車両が旋回すると2°から3°以内の精度で作動する。その結果、車両進行方向の変化率及び車両の旋回方向をコンパス出力又はGPS情報から判定することができる。1つの実施形態において、コンパスは、自動前照灯減光器を備えるエレクトロクロミックミラーに組み込まれ、コンパスセンサ信号は、自動前照灯減光器の性能を高めるために利用できる。
【0140】
ステップ2303において、感度パターンのシフトが必要なことが判定された場合、ステップ2305に示すように、画像センサは感度をシフトする。例えば、画像センサの高感度領域1は、一般的に車両の前方の光が光制御プロセスに最も大きな影響を与えるようにアレイの中心にある。このことは、制御車両によって生成される最大輝度光が真っ直ぐに制御車両の前に照射される場合に特に有利である。制御車両が旋回すると、ステップ2305に示すように、領域1から領域5の各々の中心軸はシフトする。その結果、これらの領域は、Y軸(図22)上に集まるのでなはなく右寄り又は左寄りに集まるように、車両の旋回方向にシフトする。従って、アレイ301内の画素の感度は、車両が右に旋回した時には右にシフトし、車両が左に旋回した時には左にシフトする。感度フィールドがシフトする程度は、車両の変化率並びに車両速度によって様々である。
【0141】
感度は、参照テーブルを使用して変更できることが想定されている。特に、参照テーブルは、車両の直進時に感度が図22に示すようになるように、画素位置に応じてそれぞれの統合期間及び閾値を含むことができる。車両旋回時に、画素列の統合期間及び閾値が左又は右にシフトされるように、画素列に関連するアドレスを変更できる。
ステップ2303において判定されるように、その変更が感度を変更するほど十分ではない場合、ステップ2307において、マイクロコントローラは、車両が直進しているか否かを判定する。ステップ2307に示すように、マイクロコントローラは、車両がほぼ直進するまで車両進行方向の変化率の監視を続ける。サブルーチンは、他のサブルーチンをルーチン2300の各実行の間に実行可能なように、割り込みルーチンとして1回だけ実行できることを理解されたい。
【0142】
更に、水平方向に加えて、例えば、車両傾斜の変化が検出された場合には、垂直方向でも調整できることが想定されている。
【0143】
光源リスト履歴
以前のフレームからの光の情報は、現在のフレームを評価する際に有用である。しかし、一般に、低価格のマイクロコントローラでは、各々のフレームの内容の完全な履歴を保持するように以前のフレームを格納するにはメモリ不足である。特定の有用な履歴情報を保持しながらシステムを実行するのに必要なメモリ量を最小限に抑えるために、1つ又はそれ以上の以前のフレーム内で検出された最大輝度光の1つ又はそれ以上の輝度及び位置を、その後のフレーム処理時に使用するために格納する。以前のフレームからの光源リスト全体は、十分なメモリが用意されていない場合は格納する必要はない。また、1つ又はそれ以上の以前のフレーム内で検出された最大輝度光のみの輝度及び位置を格納することは有用である。この情報を利用して、ハイビームへ迅速に復帰できる。対向車両105が制御車両100を通り過ぎた後に、なるべく早くハイビーム状態に復帰することは有用である。制御車両のドライバの夜間視力は、一時的に対向車両のライトによって低下する場合がある。この夜間視力の低下の影響は、車両通過後になるべく早く、可能なだけ多くの情景照明を行うことによって最小限に抑えることができる。マイクロコントローラは、光源リスト履歴情報を使用して、迅速なハイビームへの復帰を実行する。特に、図20のステップ2007の後に、マイクロコントローラは、高輝度前照灯が存在する先のフレームに続いて、現在のフレームには突然高輝度光源がなくなっているか否かを判定することができる。このような場合、高輝度前照灯が制御車両を通過した直後である可能性がある。このような状況が発生すると、通常の漸進的なフェードイン期間を全て又は部分的にバイパスすることができ、迅速に高輝度ハイビーム状態に復帰できるようにハイビームを8の状態(図19)等、2つの状態だけ増分することができる。
【0144】
制御車両が前方の車両110に追いついた場合には、逆の結果が望ましい別のシナリオが生じる。制御車両100が前方の車両110に接近すると、画像センサは、前方車両のテールライトを検出し、それに応じて制御車両のハイビームを減光する。制御車両が低速の前方車両を迂回するために側方に移動する場合、前方車両のテールライトが移動して画像センサの視野から外れる場合がある。しかし、制御車両の高輝度ライトが作動する場合には、フェンダーミラーを介して追い越された車両のドライバの目にライトが入ることになる。このことは、制御車両がトラックを追い越す場合には特に問題であるが、その理由は、トラックを追い越すには時間を要する場合が多いからである。このような状況では、マイクロコントローラは、ステップ2007に続いて判定ステップを含むことができ、以前のフレームがテールライトを含むか否かを判定し、含む場合には、ハイビーム前照灯を作動する前に所定の遅延時間を設定することができる。前方のテールライトに応じてハイビーム灯を減光する場合、ハイビームを再度ONする前に長い遅延時間を導入することができる。例えば、ハイビームは、テールライトが移動して撮像情景から外れて数秒後にONになることができる。運動分析(以下に説明する)を用いて、前方車両を追い越す速度、又は前方車両が走行範囲から外れる速度を判定することができ、それによって追加的な前照灯の制御が可能になる。
【0145】
また、光源履歴は、画像アレイセンサ画素の統合期間を選択するのに利用できる。特に、画素用増幅器利得303は、光センサの動的範囲を変更するために異なる利得又は異なる統合期間をもつことができると想定されている。例えば、3つの異なる利得又は統合期間をサポートすることができる。高輝度光は、最も低い利得以外の全てを飽和させ、一方、テールライト等の低輝度光は、低利得では検出することができない。光源履歴は、センサが低利得でも機能しなかったことを記憶して、超低感度を使用してライトを検出できるように利用できる。
【0146】
光源リスト履歴の別の利用は、交通量を判定することである。特に、交通量は、対向車両の前照灯の検出期間をカウントすることで確認できる。従って、交通量が多い市街地又は市街地近郊では、本システムは、比較的に長い遅延時間をもつことでその状況に対応することができる。一方、交通量が少ない場合、即ち対向車線の車両が少ないと思われる場合、高輝度ライトONにするための遅延時間を短くすることができる。交通量が多くなるにつれてハイビームへの復帰期間が長くなり、交通量が少なくなるにつれてハイビームへの復帰期間が短くなるように想定されている。更に、前回車両を検出した以降のフレーム数、又は所定のサンプリング期間において高輝度ライトがONであった時間の割合等、幾つかの異なる判定基準を使用できることが想定されている。これらの方法では、経時的に検出した物体数を、前照灯の制御、及び特に少なくとも部分的にハイビームONを禁止するのに利用することができる。
【0147】
車両が、車両の後方からの光を検出するエレクトロクロミックミラー眩輝センサ、又は後方可視システム等の後方光センサを有する他の装置を含む場合、ハイビームへの復帰の間隔の制御に有用な追加情報にアクセスできることが想定されている。特に、前方車両のテールライトに起因して高輝度前照灯を減光する場合、テールライトが車両の前から消失した後に、又はバックミラー内の後方眩輝センサによって前照灯を検出した場合に、いずれが先に発生しても、所定期間の経過後に前照灯はハイビームに復帰することができる。前方車両のテールライトが消失する直前に後続車両からの前照灯を検出した場合には、ハイビームへの復帰状態を検出する後方センサを使用できない。ハイビームへの復帰に関する決定を行うのに別の検討材料を用いることができる。例えば、ハイビームへ復帰する前に最小及び最大間隔を必要とすることができる。
【0148】
本システムでは、特定の条件下でのみ可変ハイビームへの復帰間隔を備えることが想定されており、通常はハイビームへの復帰間隔はデフォルト時間間隔である。しかし、実際に高輝度前照灯が検出された後に消えて、高輝度ライトがドライバの夜間視力を低下させるような状況に続いて、迅速なハイビームへの復帰が起こる。もしくは、前方のテールライトが消えた後は、ドライバの視力は低下しないであろうから緩慢なハイビーム状態への復帰を利用できるが、追い越されている車両のドライバの目にハイビーム光が入らないようにすることが望ましい。
【0149】
更に、現在のフレーム内の統合期間は、以前のフレームで行われた測定結果に基づいて調節できることが想定されている。特に、以前のフレームでの最低感度での測定の結果として、光センサの飽和が発生した場合、画像アレイ301には、非常に短い統合期間を用いることができる。他の極端な例としては、以前のフレームでの最高感度での測定の結果としてテールライトが検出された場合、現在のフレーム内でテールライトを調べるための非常に長い統合間隔を用いることができる。従って、一般に3つの統合期間を用いる場合、状況的に非常に短い又は長い統合期間を必要とする場合は2つの追加の統合期間を選択的に用いることができる。
【0150】
光源リスト履歴の別の利用は、画像内の物体の経時的な動きに基づいて標識及び反射体を区別することである。一連のフレームでは、反射体や標識であれば、一般に、車両が制御車両とほぼ平行して走行する場合よりも素早く画像の脇の方へ移動することになる。前述のように、及びJoseph S. Stamの2001年3月5日に出願され本出願人に譲渡されている米国特許出願番号( )「前照灯及び他の車両機器を制御する画像処理システム」(代理人整理番号GEN10P380)に開示されているように、画像の捕捉時に物体リストを作成することができる。作成した物体リストは、画像内の特定の物体の経時的な挙動を判定するために、フレーム単位でメモリ内に格納することができる。例えば、標識又は他の静止物体からの反射光は、その後のフレーム内での物体の動きによって識別することができる。点滅する頭上の停止灯又は警告灯は、点滅速度によって識別することができる。各々のフレームを分析した後に、少なくともこのフレームから作成された物体をメモリに保存し、新しいフレームからの光源リストを異なる場所に格納する。米国特許出願番号( )(代理人整理番号GEN10P380)に開示されている方法により、フレーム全体を格納する必要がないので画像分析に必要なメモリ量を大幅に低減できる。従って、一般に低コストの制御装置が備えるメモリでは、その後の幾つかのフレームからの物体リストを格納することが実用的である。以前のフレームから格納される物体リストの数は、利用可能なメモリに依存する。わずか1つの以前の物体リストでも、物体の動きの識別に大いに効果を発揮することができる。
【0151】
経時的な物体の追跡を助長するために、物体リストへの記載内容として物体の別の特性を追加することができる。前照灯制御の用途に対しては、物体リストの項目には、以下のものを含むことができる。
【0152】
格納することができる物体の総数は、利用可能なメモリに依存する。例えば、前述のリストであれば、9バイト/項目が必要であろう。例えば、500バイトのメモリが利用可能な場合には、50個の物体を追跡することができるであろう。物体リストメモリは、物体項目の隣接するアレイとして割り当てることができる。ポインタは、現在のフレームと以前のフレームに関する物体リストの始まりを示す。識別された最新の物体は、リスト内の最も古い物体と入れ替わる。
【0154】
次に、新しい物体リスト内の物体を以前の物体リスト内の物体と比較して、新しい物体の中に以前の物体と同じものがないか判定する。現在のリスト内の物体のX及びY中心が、以前のリスト内の物体からの特定番号の画素の所定半径内にあるか否かを判定することによって比較を行う。半径閾値は、フレームからフレームへ物体が合理的に移動できる最大量を算出することによって判定する。この数字は、センサ解像度の関数であり、また、車両速度及び旋回速度の関数でもある。現在のリスト内の2つの光源は、以前のリスト内の同一光源の派生である可能性がある。このことは、車両が離れたところから接近して、以前は1つの斑点として撮像された2つの前照灯が画像内で分離するときに起こるであろう。
【0155】
以前の光源リスト内の物体が現在の光源リスト内のものと同じ物体であると判定すると、運動ベクトルを計算して、物体の運動の速度及び方向を定量化できる。運動検出は、標識、反射体、街路灯、及び車両を区別するのに利用できる。図39に示すように、対向車両の前照灯3901は、連続するフレーム上で画像の左下に移動する傾向があり、一方、標識及び反射体3903は、右下に移動する傾向がある。頭上の街路灯3905は、上方に移動する傾向がある。本明細書では、これらの物体を区別するための別の方法を開示するが、運動検出は、更に、本システムがこのような区別を行うことができと更に高精度になる。
【0156】
更に、このような運動検出は、そうでなければ色分析に基づくことになるが、車両の前照灯及びテールライトを区別して更に区別を高精度に行うために利用できる。
【0157】
図40は、本発明の1つの実施形態の機能ブロック図を示す。図示するように、システム4000は、画像センサ201、レンズ202、以前の光源リスト4001、及び画像センサ201からデータを受信し、以前の光源リスト4001にアクセスして、新しい光源リスト4005を生成する画像処理ルーチン(シードフィル)4003を含む。新しい光源リスト4005は、輝度4007、位置4009、サイズ4011、色4013、AC成分4015、及び各々の物体の運動4017を含むパラメータに由来する情報を含むことができる。更に、本システム4000は、ロービーム前照灯4021及びハイビーム前照灯4023を含む車両外部ライトを、作動状態、輝度、照準、及び/又は焦点を調整して、生成される照明パターンを変えることによって制御する判定ルール4020を含む。判定ルール4020は、パラメータ4007から4017、並びに、周辺光レベル4025、車両旋回速度4027、車両速度4029、及びユーザ作動スイッチ4031(以下に説明する)状態の1つ又はそれらの組み合わせの関数として外部ライトを制御することができる。判定ルール4020は、論理回路(即ち、マイクロコンピュータ)、ファジー論理回路、又はニューラル・ネットワークで実現できる。
【0158】
判定ルール4020が2つ以上のパラメータを使用して外部ライトを制御する方法の一例は、近くの前照灯を検出した場合に知覚輝度を低減するか、又は他の方法で現在のビーム照明パターンの眩輝領域を変更することである。判定ルール4020は、検出された前照灯が高輝度及び相対的に高い運動量を有する場合に近くに前照灯があると判定する。一方、遠くの前照灯は、低輝度及び相対的に低い運動量を有する。標識は、低レベルの輝度を有するが相対的に高い運動量を有する。
【0159】
自動照準較正
フロントガラス角度に対する画像アレイセンサの方位の変動の結果として、センサの照準の変動が生じる場合があり、センサの照準の変動は、減光器の性能に悪影響を与える場合がある。これらの変動は予想、取付け変動に対して設けられた最大範囲を用いて経時的に較正することができる。一般に、直線道路では、遠くの対向車両の前照灯は、光学センサシステム102の前方より直接到来することになる。較正システムは、画像の中心近傍で検出した弱い前照灯、好ましくは、予想取付け変動に対応する中心ウインドウ内のものだけを用いる。特定の判定基準を満足するそのような前照灯は、同じ判定基準を満足する他の弱い前照灯と共に平均化された位置を有する。時間の経過と共に、これらの光源の平均値は、視野の中心に対応する必要がある。この平均値を用いて、図22のX及びY軸に対して画像をオフセットできる。
【0160】
更に詳細には、光学センサシステムの照準ミスを検出できる、平坦な直線道路を検出するために、多様な方位入力を用いることができる。車両速度は、35mphから50mphの間の特定の範囲にあることが必要である。コンパス、GPSを利用して、又は車両ハンドルシステムの作動を監視して車両が直進中であるか否かを判定することができる。検査中に進行方向が変化した場合は、測定内容が間違っていると判断されることになる。車両が仰角測定を行う機器を有する場合、較正時に車両の仰角が変動すると、結果的にエラーが発生することになる。従って、仰角測定は、視野の調節する必要があるか否かを判定するのに利用できる。
【0161】
遠くの車両は、最初は画像の中心近傍で白色光を感知することで検出されるが、これは、画像センサの最大感度(最長統合期間)であっても弱いものである。この光が明るくなるにつれて、本システムは、方位入力を監視して平坦な直線道路が続くか否かを検出する。車両100、105が通り過ぎるのに必要な期間の少なくとも2倍の時間だけ平坦かつ直線状態が続く場合には、その測定値は有効である。次に、最初に検出した中心点を以前の有効な測定結果を用いて平均化し、その平均測定結果を画像の中心とみなすことになる。これは、平均X及びY軸座標であり、これらは画像センサの中心を示す。この位置は、EEPROM又はフラッシュROMに保存することができる。
【0162】
照準較正の別の方法は、非常に高い利得の画像を取得して道路の反射光を調べることである。この反射光が発生する平均地点を用いて、照準を較正することができる。
【0163】
液晶フィルタ
他の光学系には、液晶フィルタを挙げることができ、これを使用して赤色フィルタ及び青色フィルタの両方を選択的に設けることができるので、赤色及び青色画像を単一のレンズ構造体2403を介して画像センサ2401によって検査することができる。このような構造において、画像センサ2401は、1つの撮像領域(例えば、2つのレンズの場合に必要なアレイ領域702及び703ではなく、アレイ領域702)のみを必要とする。フィルタ2405は、コネクタ2413及び2411を介してマイクロコントローラ1105に電気的に接続される液晶着色光スイッチ2503(図25)を使用して実現できる。フィルタは、無色偏向器2501、液晶シャッタ2503、赤色偏向器2505、及び青色偏向器2507を含む。無色偏向器2501及び2505は、1つの方向に位置合わせされた偏光軸に対して方向調整され、青色偏向器2507は、赤色及び無色偏向器に対して直交方向に方向調整された偏光軸に対して方向調整される。液晶シャッタ2503は、マイクロコントローラ1105の制御下で選択的に通電される捻れネマスチック(TN)液晶シャッタを使用して実現する。特に、シャッタの非通電状態では、液晶素子は赤色光を伝達する。シャッタの通電状態では、液晶素子は青色光を伝達する。
【0164】
従って、単一の光センサ又は画像領域を使用して、2色の光の相対強度を測定することが可能である。非通電状態において、全ての可視光線は、水平方向で水平な無色偏向器によって偏向され、非通電状態のTN液晶セルによって垂直方向に90°回転して、その後、赤色光以外の全ての光は、水平な赤色偏向器によって吸収される。その後、赤色光は、垂直な青色偏向器を通過する。通電状態において、全ての可視光線は、水平方向で水平な無色偏向器によって偏向されるが、通電状態のTN液晶セルによって回転されずに、全ての可視光線は、水平な赤色偏向器によって伝達され、青色光以外の全ての光は、垂直な青色偏向器によって吸収される。赤色光の伝達及び青色光の伝達との間で交番するように液晶素子を高速光スイッチとして使用することができる。従って、物体又は光源の赤色成分と青色光成分との相対強度を測定できる。もしくは、赤色又は青色偏向器の代わりに緑色偏向器を使用して、それぞれ、青色光の伝達と緑色光の伝達との間、又は赤色光の伝達と緑色光の伝達との間で切り替わるようにできる。更に、青色偏向器の代わりに透明偏向器を使用して、赤色と透明との間で切り替わるようにできる。
【0165】
ウインドシールドワイパ
雨天時の減光器の性能を向上させるために、画像の取得をウインドシールドワイパと同期させることが有用である。例えば、ワイパの位置を示すためにワイパモータから信号を得ることができる。ワイパがセンサ上を通過した直後に、車両を調べるために画像を取得することができる。最も重要なことは、ワイパが画像アレイ301上にあるときは画像を取得しないようにすることである。
【0166】
制御車両100が湿度センサを含む場合、湿度センサは、ウインドシールドワイパを監視することができる。このような情報をもたらす湿度センサは、1999年7月13日にJoseph Stam他に付与された、米国特許第5,923,027号「湿度センサ及びウィンドシールドフォグ検出器」に開示されている。
【0167】
また、ウインドシールドワイパのON/OFF状態に関する情報を使用して、車両前照灯を制御することができる。前照灯制御装置がウインドシールドワイパがONになっていると判定すると、前照灯制御装置は、車両のロービーム前照灯が既にONではないとすれば、車両のロービーム前照灯をONにすることができる。更に、前照灯制御装置は、車両ウインドシールドワイパが作動された場合に前照灯のハイビーム状態での作動を無効にすることができる。このことは、単に自動制御状態にある場合に前照灯をロービーム状態に維持するか、又は、ワイパ作動中にハイビームが自動的にONにならないように自動制御状態の作動を解除することによって達成することができる。更に、前照灯制御装置は、ウインドシールドワイパがONになっている限り、ハイビームの手動作動を無効にすることができる。また、ワイパON時に悪天候灯、特にフォグライトを自動作動することができる。
【0168】
前照灯制御装置は、車両バスを介してウインドシールドワイパから、ウインドシールドワイパ作動中を示す信号を受信することができる。もしくは、前照灯制御装置は、画像システムによって撮像された情景内でワイパを検出した場合にワイパが作動中と判定することができる。更に別の変形例として、前照灯制御装置は、ウインドシールドワイパの制御に使用され、ウインドシールドワイパを作動するための制御信号が伝達されたことを示す、降雨センサからの信号を受信することができる。
【0169】
減速
車両速度による画像センサの作動の変更に加えて、他の速度判定基準を使用して、車両前照灯の作動を制御することができる。車両減速時、ブレーキ使用時、又は車両低速走行時にハイビームONを禁止することができる。これによって、停止前の徐行時又は交差点接近時にハイビームがONになるのが防止される。減速は、マイクロコントローラ1105(図11)への速度入力から検出することができる。
【0170】
不良画素較正
画像センサは、1つ又はそれ以上の不良画素を含む場合がある。これらの不良画素は、画像内に「白点」を引き起す場合がある、非常に高感度の画素として現れる。このような「白点」は、センサが白点を計算結果から除外するように較正されていない場合、画像内の誤光源検出の原因となる。生産試験中に、これらの白点の位置を測定して、マイクロコントローラ1105のプログラマブルメモリに格納することができる。画像アレイセンサの通常の作動時にこのような不良画素を補償するために、画像を取得した後に、白点位置の画素値を隣接画素の平均値と置き換えることができる。
【0171】
画像センサ使用中に白点が形成される場合があり、この白点は生産試験中には検出されない。このような状況が発生すれば、装置は作動不能になる。この問題を解決するために、不良画素を認識した後に較正して白点を画像から排除することが望ましい。白点を検出するためには、幾つかの画像において、好ましくは長時間にわたって、画素が「点灯中」のままであることを検出する必要がある。不良画素は、隣接画素が暗いときに繰り返し点灯する場合は顕著になる。このような画素を検出したときは、不良画素リストに追加することができる。
【0172】
不良画素を定期的に検査して、その性能が改善されたか否かを判定できることが想定されている。これは、連続画像を監視して、中心画素は暗いが隣接画素が暗くないか否かを判定することによって実現できる。
【0173】
「ピケットフェンス」
車両前照灯を制御する際には、前照灯ハイビームが比較的高速に瞬時ON及びOFFする状態を回避することが望ましい。これは、特に非可変式2状態前照灯を使用する場合に重要である。例えば、道路沿いの標識は、ブライトと通常レベルとの間で前照灯の点滅の原因になることがある。これは、標識からの高輝度ハイビームの反射光が、ハイビームの減光を引き起すほどの明るさであり、更に前照灯ロービームの反射光が高輝度ハイビームをONにするほど低い場合に発生する。この状態は、本システムにより、ハイビームがOFFになる原因となる物体を調べることで回避できる。この状態になると、その位置での光レベルは無視されるが、その物体の周りの画素は所定数のサイクル、例えば10サイクル分は無視されない。物体を無視する時間の長さは、車両速度の関数として可変にすることができる。車両速度が大きいほど、物体を無視する時間は短くなる。この時間中に、無視する物体に関連した画素以外の画素を使用してライトを制御することになる。
【0174】
反射体は、車両前照灯を瞬時OFFにすることによってアクティブな光源と区別することができる。前照灯がOFFである時間は非常に短いので、画像センサは、人間の目には知覚できないか又は辛うじて知覚できる場合でも、ライトがOFFであったという光の低下を感知することができる。以下で説明する発光ダイオード(LED)は、このような短い時間の間だけOFFになるように、非常に高速でOFF及びONすることができる。作動時に、マイクロコントローラ1105は、前照灯ハイ又はロービームがOFFになるように制御すると共に、画像センサが、前照灯がOFFの前記短い時間の間に情景を撮像するように制御する。OFF時間は、例えば10msすることができる。
【0175】
霧検出器
車両は濃霧状態を確実に検出し、それに応じて前側及び後側フォグライトを自動的にON又はOFFすることが望ましい。効果的なフォグデテクタはこれまでは市販されていない。霧は、前照灯ON/OFF及び前照灯減光器制御用の画像センサ及び光学系を使用して検出することができる。情景周辺光レベル判定結果と共に情景コントラストの低減によって検出できる。周辺光は、前方の情景を撮像する画素の平均グレイスケール値から、又はエレクトロクロミックミラーに使用される周囲光センサ等の別途の周囲光センサによって検出できる。平均値は、クリップ平均値であることが想定されている。画素のグレイスケール値の変動が画像内のコントラストの尺度となる。もしくは、その変動は、画素の標準偏差から判定してもよく、特に、標準偏差が標準偏差閾値以下の場合に、霧の存在を識別し、それに応じてフォグライトをONにすることができる。もしくは、画像センサ全体について、平均画素レベルと各々の個々の画素レベルとの個々の差異を追加することができ、この総変動が変動閾値レベルを超える場合に霧の存在を検知する。霧判定基準のこれらの例のいずれかをコントラストの尺度として使用することができる。
【0176】
また、幾つかの別の要因を検討することができる。コントラスト値は、幾つかの画像での平均コントラスト値とすることができる。コントラスト値は、行単位で判定して霧のレベルを判定することができる。画像の様々な領域を独立して検討することができる。前照灯減光器のように2色レンズが存在する場合、色情報を使用することができる。輝度/コントラスト比の実際値及び適正な画像センサ露光時間は、経験的に決定する必要がある。装置は、所定範囲の輝度レベル間でのみ作動するように設定されるので、周辺光レベルが高すぎるか又は低すぎる場合には霧検出器は作動せず、手動オーバーライドが必要となる。霧に関する周辺光条件は、例えば、1ルックスから100ルックスの間とすることができる。画像センサ及び周囲光センサの両方を使用して霧を検出することができる。周囲光センサによって検出された周辺光レベルが適当な範囲内にある場合、前方の情景の画像は、画素の平均グレイスケール値(例えば、128ルックス)に設定された感度で取得される。所定の輝度レベルのコントラストが予め定められた閾値レベル以下の場合、霧が存在すると判定される。
【0177】
雪及び霧検出器
また、車両は、降雪時を検出することが望ましい。一般に、豪雪状態においては、ハイビームを作動させることは望ましくない。更に、豪雪ではなくても、雪は、前照灯制御装置が制御車両自体の前照灯からの反射光に応じて誤って対向車両を知覚してしまうように、ハイビームからの光を反射する場合がある。
【0178】
降雪を検出するには、車両の前方及び車両の上方の光レベルを感知する感知システムを設けることが好ましい。車両の上方の光レベルを取得するために、別途の光センサを配置して、車両の上方の空からの光を感知することができる。このようなスカイセンサは、車両前方の光の感知に使用されるセンサに対して45°の角度に配置された単一の画像センサを含むことができる。車両前方の光の感知に使用されるセンサは、単一の画像センサ、又は前照灯制御用の車両前方の情景を撮像するのに使用される画像アレイセンサとすることができる。前方及びスカイセンサによって感知された値は、経時的に平均化することができる。これらのセンサは、Robert H. Nixon他の1999年5月7日に出願された米国特許出願番号09/307,191「フォトダイオード光センサ」、及びJon H. Bechtel他の2000年1月25日に出願された米国特許出願番号09/491,192「半導体光センサによる車両機器制御」の教示に従って作ることができる。
【0179】
制御装置は、前方センサ及びスカイセンサの両方の出力を受信するように接続され、車両前方の相対輝度と車両上方の相対輝度とを比較する。特定の状態では、車両前照灯の輝度が高くなる時に相対強度を比較することが望ましいであろう。前照灯制御装置は、前方の情景内の雪からの前照灯の光の反射に起因して、車両前照灯の輝度が高くなる時に、車両上方の相対輝度に対する車両の前方の相対輝度の比率が閾値に達した場合に、降雪中又は霧発生中と判定する。
【0180】
制御装置が降雪中と判定した場合、ロービーム前照灯が既に作動していない場合には、ロービーム前照灯を作動させることができ、また、自動制御又は手動のいずれかによってハイビームの作動を無効にすることができる。更に、自動制御を無効することができ、悪天候灯を作動させることができる。更に、車両のテールライト及び/又はブレーキライトの輝度を上げて、他の後方の車両に対する視界を広げることができる。
【0181】
また、前照灯制御装置は、ドライバが前側フロントガラスデフロスタを最高速度にした場合に車両外側の状態が降雪又は霧発生中と推測することができる。また、このような場合、制御装置は、ハイビーム状態での前照灯の作動を無効することができ、更なる自動制御を無効することができる。
【0182】
前記の「雪及び霧検出器」で説明した方法は、特に、夜間の霧の検出に適しているが、前記の「霧検出器」で説明した方法は、昼間の霧の検出に適している。
【0183】
昼間走行灯及びテールライト制御
前述のように、一部の車両には昼間走行灯(DRL)が設けられている。また、前述のように、DRLは、昼間状態ではハイビームに送出されるPWM駆動信号を変更することで、低輝度でもってハイビームを作動させることによって得られる。この目的のために、周辺光センサ1107は、昼間を検出された場合に昼間状態を判定して前照灯をDRL作動に切換えるために利用できる。
【0184】
また、制御装置は、感知された周辺光レベルを利用して、十分に暗い場合にロービームをONにすることができる。更に、DRLは、昼間状態での輝度を変えるように制御することができる。周辺光レベルは、黄昏時には、昼間状態の最も明るいレベルから、ロービーム前照灯が作動する直前のレベルまで大きく変動する。周辺光レベルが比較的に暗い場合のDRL輝度に対する苦情がこれまであった。しかしながら、最も明るい状態においては、DRLは、車両周辺の周辺光レベルに対して輝度が低いように思われるので厄介ではない。従って、前照灯制御回路は、周囲光センサによって感知された周辺光レベルに応じてDRLの輝度を変更するように構成することができる。特に、制御回路は、周辺輝度の増加に応じてDRLの輝度を高くすることができる。
【0185】
車両のテールライト及びブレーキライトに関しても同様の問題がある。テールライト及びブレーキライトは、制御車両の後側のドライバが周辺光レベルに関係なくテールライト及びブレーキライトがONかOFFかを容易に判定できる程度の輝度レベルをもつことが好ましい。一方、夜間では、テールライト及びブレーキライトは、明る過ぎると車両の後側のドライバの夜間視力に影響を及ぼす場合もある。従って、周辺光レベルの低下に伴ってテールライト及びブレーキライトの輝度を下げることが好ましい。このような輝度変化は、連続的に又は不連続の段階的に行うことができる。更に、雨、霧、又は雪といった悪天候が検出された場合には、テールライト及び/又はブレーキライトの輝度を下げることが望ましいであろう。
【0186】
ユーザ制御及びフィードバック
本発明の別の実施形態を図34に示す。同じ参照番号は、図11に示す実施形態と同様の共通の構成部品を示すのに使用される。図11に示す実施形態と同様に、図34に示す本実施形態は、画像センサチップ201及び好ましくはバックミラーマウント1003内に取付けられたレンズ202を含む。また、コンパスセンサ1135は、バックミラーマウント1003内に取付けることが好ましい。もしくは、コンパスセンサは、ミラー本体1000に取付けることが好ましい。マイクロコントローラ1105は、ミラー本体1000に取付けられ、画像センサチップ201及びコンパスセンサ1135に接続されることが好ましい。更に、ミラー本体1000は、エレクトロクロミックミラー要素1102及びコンパス表示装置3404を含むことができ、いずれもマイクロコントローラ1105によって制御することができる。
【0187】
また、前方に向いた周辺光センサ1107及び後方に向いた眩輝光センサ1109は、ミラー本体1000内に設けることが好ましい。更に、スカイセンサ3402は、ミラー本体1000内に設けることができ、スカイセンサは、車両の上方及び若干の車両前方の情景を検査できるように傾斜して配置される。このようなスカイセンサ3402は、雪又は他の周辺光状態の検出に使用することができる。スカイセンサ3402は、単一の画像センサであってもよく、又は随意的に空の景色を画像センサチップの所定の領域上に撮像する光学素子としてミラーマウントに組み込むことができる。このような構成は、本出願人に譲渡されている米国特許第6,130,421号に開示されている。
【0188】
マイクロコントローラ1105は、種々の情報及び制御信号を交換するための車両バス3406に接続されている。図示するように、スイッチ制御モジュール3408は、バスに接続されており、ユーザが操作できる種々のスイッチの状態をマイクロコントローラ1105へ供給するようになっている。例えば、ハイ/ロービームスイッチ3410は、前照灯ON/OFFスイッチ3412と同様にスイッチ制御モジュール3408に接続されている。このようなスイッチは、車両で共通であり、一般にハイ/ロービームスイッチはハンドルコラムに取付けら、前照灯ON/OFFスイッチは車両計器板に配置される。
【0189】
また、本発明は、ユーザが前照灯制御システムの感度を調節できるように、スイッチ制御モジュール3408に接続されたユーザ感度選択スイッチ3414を備える。マイクロコントローラ1105は、ユーザが設定した感度設定値の変化に応答でき、マイクロコントローラは、この感度設定値を検出光源と比較してハイビームをON又はOFF又はフェードON又はOFFする時期を判定するのに利用する。もしくは、マイクロコントローラ1105は、感度設定値を利用して、前照灯輝度状態を変える割合を変更すること、又はこれらの状態の関連した負荷サイクルを変更することができる。更に、マイクロコントローラ1105は、CMOS画像アレイセンサ内の画素の一部又は全ての統合時間を変更することによって感度を調節してもよい。また、車両の前方の情景の種々の部分における光に対する感度は、前方の情景の周辺領域を撮像する画像アレイセンサ内の画素の閾値/統合時間を変えることによって調節できる。また、他の調節は、マイクロコントローラ1105にプログラムして、ユーザ感度スイッチ3414の調節に応答する方法を決定してもよい。
【0190】
また、以下に詳細に説明するように、本発明は、ユーザが車両前照灯の自動制御を無効することができる自動前照灯制御ON/OFFスイッチ3415を含むことができる。
【0191】
また、車両バス3406には、照明制御モジュール(又は車体制御装置)3416が接続されており、照明制御モジュールは、ロービーム前照灯3418、ハイビーム前照灯3420の状態及び場合によれば知覚輝度、及びテールライト3422の輝度を制御する。また、前側制御モジュール3416は、フォグライトのON/OFF状態又は知覚輝度を制御するのに使用できる。前述したように、昼間走行灯の輝度は、ハイビーム3420の知覚輝度を制御することによって調節できる。
【0192】
図35は、スイッチ制御モジュール3408に接続されたスイッチの種々の状態に対応した、マイクロコントローラ1105の作動の状態図を示す。図に示すように、マイクロコントローラ1105は、自動前照灯制御ON/OFFスイッチ3415の作動に応じて、自動モード又は手動モードで作動することができる。このようなスイッチは、ハンドルコラム上に配置することができ、更にハイビームの手動作動に利用する同じコラムスイッチ内に組み込むことができる。例えば、このようなコラムスイッチが中央位置にある場合、マイクロコントローラ1105は、手動モードで作動することになる。例えば、このコラムスイッチを前方位置に動かす場合、マイクロコントローラ1105は、自動制御モードに入ることになる。前述のように、自動制御モード時には、マイクロコントローラ1105は、画像センサによって検出された光又は他の事象に応じて、ハイビームON状態3502とハイビームOFF状態3504との間で前照灯状態を変更する。しかしながら、手動モードにおいて、前照灯は、従来通り手動で操作される。例えば、ハイビームは、最初はOFF状態であり、ハイビームがON状態になるように(3510)、コラムスイッチの手動切換え又は他の機構によってONにするとすることができる。スイッチを元の位置に切換えるとハイビームはOFFになる。コラムスイッチはパッシング機能を含む場合、コラムスイッチをフラッシングさせると、一時的にハイビームになり(ON状態3512)、ユーザがコラムスイッチを解除すると、ハイビームはOFFになり状態3508に戻る。
【0193】
図36は、更に複雑な制御方法を示す状態図である。図35に示す制御方法と同様に、マイクロコントローラ1105は、自動モードか手動モードのいずれかで作動することができる。一般的に、自動モード又は手動モードの間の移行は、例えば、ハンドルコラム上又は車両計器板上に配置できるスイッチ3415を使用して選択する。手動モードにおいて、マイクロコントローラ1105は、図35に関して説明したように作動する。しかし、自動モードにおいては、マイクロコントローラ1105は、最初は自動ハイビーム制御状態3602で作動し、それによって、ハイビームは、ON及びOFF状態の間、並びに前照灯が可能になっている場合は更に中間輝度状態の間で移行するように自動制御される。図36に示すスキームによる自動モードで作動する場合、ユーザが手動でコラムスイッチ3410を切換えハイビームをONにすると、マイクロコントローラ1105は、ユーザが再度コラムスイッチを切換えるまで手動オーバーライド状態3604でハイビームをONにし、再度コラムスイッチを切換えた時点でマイクロコントローラ1105は、自動ハイビーム制御状態3602に戻る。ユーザが手動でパッシングコラムスイッチを作動させると、マイクロコントローラ1105は、ハイビームONパッシング状態3606に入り、フラッシュコラムスイッチがパッシング位置にある限りこの状態に留まる。ユーザがパッシングコラムスイッチを解除すると、マイクロコントローラ1105は、自動ハイビーム制御状態3602に戻る。
【0194】
ハイビームは、パッシング状態時には最大輝度状態で作動することができるが、本発明の1つの実施形態によれば、パッシング状態時の前照灯の輝度は、最大輝度以下の場合があることを理解されたい。特に、パッシング状態時の前照灯の輝度は、感知周辺光レベルの関数として、又は現在の前照灯輝度レベルの関数として変更することができる。このように、パッシングスイッチが作動されると随時、前照灯の知覚輝度は、任意の前方車両に対して前照灯輝度を知覚可能に高めるが、前方車両のドライバの目に突発的で過度の眩輝をもたらさないように、現在の輝度レベルの輝度以上に所定の増分だけ上げることになる。
【0195】
図37は、更に複雑な制御方法の別の状態図である。この場合も同様に、マイクロコントローラ1105は、自動モード又は手動モードのいずれかで作動する。手動モードにおいて、マイクロコントローラ1105は、図35及び図36に関して説明したように前照灯を制御する。この場合も同様に、自動モード又は手動モードのいずれかでの作動は、スイッチ3415の操作によってユーザが手動で選択することができる。
【0196】
自動モードの場合、マイクロコントローラ1105は、自動ハイビーム制御状態で作動し、これによって、制御状態は、ハイビームON状態3702とハイビームOFF状態3704との間で変わる。マイクロコントローラ1105は、画像センサによって検出された光源に応じて前述の方法で状態3702と3704との間を移動する。マイクロコントローラ1105がハイビームON(状態3702)の自動モードで作動中であり、その後にコラムスイッチ3410を切換えると、マイクロコントローラ1105は、ハイビームをOFFにする要求としてのコラムスイッチの切換えを妨害する。従って、マイクロコントローラ1105は、ハイビームOFF手動オーバーライド状態3708に入る。マイクロコントローラ1105は、30秒といった所定時間だけ、又はコラムスイッチが再度切換えられるまでハイビームをOFF手動オーバーライド状態3708に留まる。その時間が終了すると、マイクロコントローラ1105は、最初はハイビームOFF状態に留まるが、状態3704に移動して、ハイビームは、画像センサによって検出された光源に対応する自動前照灯制御アルゴリズムに基づいて自動的にONに戻される。マイクロコントローラ1105がハイビームOFF手動オーバーライド状態3708にあり、コラムスイッチが再度切換えられた場合は、マイクロコントローラ1105は、ハイビームON手動オーバーライド状態3706に移動するユーザによる要求としてのアクションを妨害する。マイクロコントローラ1105は、15秒といった所定時間だけ、又はコラムスイッチが再度切換えられるまでこのON手動オーバーライド状態3706に留まる。コラムスイッチが再度切換えられた場合、マイクロコントローラ1105は、ハイビームOFF手動オーバーライド状態3708に移動する。マイクロコントローラ1105は、タイマが終了すると、最初はハイビームをON状態に留まるが、画像センサによって検出された光源に応じて前照灯を減光又はOFFにする自動制御アルゴリズムが可能になるように、状態3706を出て状態3702に入る。
【0197】
マイクロコントローラ1105がハイビームOFF(状態3704)でもって自動制御状態で作動中であり、コラムスイッチが切換えられた場合、マイクロコントローラ1105は、ハイビームONオーバーライド状態3706に入る命令としての、このことを妨害する。その後、マイクロコントローラ1105は、前述の判定基準に基づいてハイビームON手動オーバーライド状態3706から出る。
【0198】
マイクロコントローラ1105がハイビームOFF(状態3704)でもって自動制御状態で作動中であり、ユーザが手動でパッシングコラムスイッチを作動した場合、マイクロコントローラ1105は、状態3710に移動し、これによって、ハイビームはパッシング状態でONになる。ハイビームは、ユーザがコラムスイッチをパッシング位置に保持している限りONを維持する。ユーザがパッシングコラムスイッチを解除すると、マイクロコントローラ1105は、ハイビームOFF(状態3704)でもって自動モードに戻る。マイクロコントローラが既にハイビームON(状態3702)でもって自動制御状態で作動している場合、ユーザがパッシングコラムスイッチを作動した時点で、ハイビームは、ユーザがコラムスイッチをパッシング位置に保持している限り状態3710にてONを維持する。しかしながら、一旦ユーザがコラムスイッチを解除した場合、マイクロコントローラ1105は、ハイビームをOFFにするために状態3702ではなく状態3704に戻る。条件を満たす場合、前照灯制御装置1105は、自動制御の下でハイビームをONに戻す。
【0199】
実施可能な他の機能によって、自動前照灯制御装置は、前照灯スイッチ3412がOFF位置なった時点で又は車両の点火装置がOFFになった場合に、前照灯輝度を漸進的にフェードしてもよい。もしくは、前照灯制御装置は、全ての乗員(又はドライバのみ)が降車したことを検出して所定時間後に前照灯をフェードしてもよい。このようなフェード処理には、車両乗員が降車する領域を照明するという利点がある。一定の時間にわたって最大輝度状態でライトをONのままにするのではなくライトをフェードすることによって、第3者はフェード時間の間に前照灯のフェードを見ることができるので、ドライバ又は他の乗員が車両ライトの消し忘れを第3者から示唆される可能性が低くなる。
【0200】
図34を参照すると、計器板制御モジュール3424は、車両バス3402に接続することができる。インジケータ3426は、計器盤制御モジュール3424に接続され、車両バス3406を介してマイクロコントローラ1105から制御信号を受信するようになっている。一般に、車両は、ハイビームON状態で点灯する単一のインジケータ(青色ライトの場合が多い)を有していた。しかしながら、このような単一のインジケータは、ハイビームが種々の中間輝度レベルを有するように前照灯制御装置によって自動制御される場合は、ユーザに対してハイビームの相対輝度に関するフィードバックは行わない。このようなフィードバックを行うために、本システムは、インジケータ3426が前照灯の輝度レベルに比例して変わる輝度を有するように構成される。このような変化は、連続的であってもよく、又は、目に見える増分ステップで変化するものであってもよい。また、インジケータ3426の輝度は、ハイビームの手動作動の結果として、前照灯がハイビーム状態にあるときに、本システムが手動作動に適切に応答したことをユーザに明らかにするために2倍又はそれ以上に大きくしてもよい。別の表示方法は、前照灯輝度の関数としてインジケータの色を変えることである。更に別の表示方法は、前照灯の相対輝度を表示する目盛りを含むようにインジケータ3426を構成することである。このような目盛りは、図38に示す例示的な表示装置等の照明セグメント数が前照灯の相対輝度に対応する複数のセグメントを有する表示装置として設けることができる。従って、例えば、前照灯アイコンセグメント3802は、前照灯がONのときは常時照明することができ、種々のセグメント3804から3812は、前照灯の輝度レベルの増大に応じて独立して点灯される。更に、図38に示すインジケータの色は、手動又は自動モードのいずれかの手動作動又は操作を示すように、又はロービーム、DRL、フォグライト等の作動を示すように変化してもよい。前照灯制御装置が自動制御モードで作動中であることをドライバに知らせる別の方法としては、ユーザが自動/手動選択スイッチ3415を押した際にスイッチ内又はその近傍のライトが点灯するように、自動/手動選択スイッチ3415内にインジケータライトを設けることができる。本技術分野で公知の他の表示技術も同様に利用できる。
【0201】
前述のように、車両前照灯は、車両を使用する国々の法律に基づいてスーパーハイビーム状態で作動することができる。このようなスーパーハイビームは、垂直及び水平0°にて75,000cdよりも大きな輝度をもつことが提案されている。このようなスーパーハイビームは、ヨーロッパでの使用が認められており、有用であることが分かっている。車両がこの性能及び適切な前照灯を備える場合、制御回路は、車両が所定の速度レベルを超える場合にスーパーハイビームを作動できる。このように、スーパーハイビームは、一般に車両が高速道路を走行中にのみ作動可能になっている。
【0202】
更に、このようなスーパーハイビームが設けられる場合、本システムは、車両の前方で検出された光源に対して高い感度をもつようにプログラムできる。また、スーパーハイビームは、光源が車両に接近中であることが検出されるとフェードすることができる。
【0203】
図34に示すように、マイクロコントローラ1105は、車両バス3406を介してGPS受信器3450に接続することができる。マイクロコントローラ1105は、GPS受信器3450から車両の位置及び場合によっては走行方向を示す情報を受信することができる。GPS受信器3450は、ナビゲーションシステムの一部であってもよく、又は車両内の他のシステムの一部であってもよい。GPS受信器及びアンテナは、本出願人に譲渡されている米国特許第6,166,698号に開示されているルームミラー組立体に取付けることができる。
【0204】
GPS受信器3450から受信した情報は、車両の位置及び方向が割り出された形態であってもよく、又は位置をマイクロコントローラ1105によって計算する必要がある直接衛星から受信する情報の形態であってもよい。GPS受信器3450がナビゲーションシステムの一部である場合、ナビゲーションシステムは、GPS受信器3450からの情報を処理して、マイクロコントローラ1105が必要する情報だけを供給することができる。このような情報には、例えば、現在車両が走行中の道路が住宅街の道路か、中央分離帯のある高速道路か、又は有料高速道路か否かの表示を挙げることができる。次に、マイクロコントローラ1105は、この情報を利用して車両の外部ライトを制御することができる。特に、マイクロコントローラ1105は、車両が住宅街の道路を走行時に車両ハイビーム又はスーパーハイビームが作動するのを防止できる。また、マイクロコントローラ1105は、車両が中央分離帯のある高速道路又は有料高速道路の走行時以外にはスーパーハイビームを無効することができる。また、車両の位置を利用して、このようなスーパーハイビームの使用を許可(又は禁止)している国、州、又は市町村に車両が位置するか否かの判定結果に基づいて、スーパーハイビームを自動的に有効又は無効にすることができる。更に、車両の位置を利用して、現在車両が左側通行の地域を走行しているのか又は右側通行の地域を走行しているのかを判定することができる。
【0205】
前照灯方向変更及び前照灯点滅のためのLED前照灯
車両の旋回方向に向きを変更できる前照灯は、望ましいと考えられてきた。また、ドライバがライトのOFFを知覚できないような短時間だけOFF又は実質的に減光を行うことが可能な前照灯を提供することが望ましい。このようにすれば、画像取得中に反射が起こらない。発光ダイオード(LED)ランプを利用してコスト効率の高い方法でこれらの機能を得ることができるが、車両前照灯を実現できる程度の光を発生するLEDランプは市販されていない。LEDには、車両前照灯での用途を制限する幾つかの欠点があり、その多くはLEDが発生する光量が比較的少ないこと、及び特殊な構造を有するLEDを組み込む場合の製造可能性上の制限である。これらの欠点に起因して、LEDランプ、他の照明技術よりも頑丈でエネルギー効率が高く、相当長寿命であるにも拘わらず、車両前照灯を実現するのにこれまで使用されていない。更に、LEDから白色光を発生させる方法は、1998年9月8日にJohn K.Roberts他に付与された米国特許第5,803,579号「光ダイオードを組み込んだ照明器組立体」に開示されているように最近ようやく実現可能になってきた。
【0206】
LED前照灯2600は、図26a及び図26bに開示されている。LED前照灯は、画像サンプリング間隔に前照灯を非常に短時間に瞬時OFF又は減光するのに利用できる。LED前照灯2600は、半導体光学的放射発光体2603、2605を取付けるための支持体として機能する冷却部材2601を含む。半導体光学的放射発光体2603、2605が冷却部材に電気的に接続されている場合、冷却部材は、作動中に半導体光学的放射発光体内に発生する熱を取り除くための熱経路をもたらすかりでなく、半導体光学的放射発光体との電気的な接続を行う。発光体2603、2605は、冷却部材のみが熱経路をもたらすように、冷却部材から電気的に絶縁できることが想定されている。発光体2603の各々は、ワイヤボンド2609及びレジスタ2611を介して導体片2607に接続される。発光体2605の各々は、ワイヤボンド2615及びレジスタ2617を介して導体片2613に接続される。
【0207】
冷却部材2601は、任意の適切な材料で作ることができ、任意の所望の構造に形成することができる。図示の冷却部材の前面は、略矩形形状であり、33個のウェルを含み、各々のウェルは、半導体光学的放射発光体2603、2605を収容する。半導体光学的放射発光体の裏面は、周囲空気への放熱のための大きな表面を有するフィン2621を含む。もしくは、冷却部材は、略凸形、シリンダ側壁の一部のような形状、車両の前部を横切る細長いバー、又は複数の異なる角度にて延びる結合平面等の、光の向きの変更を可能にする他の構造をもつことができると想定されている。
【0208】
冷却部材は、丸溝が彫られており、又は別の方法で延長部、スロット、孔、溝等を含むことができ、光学性能を高めるために、照射カップ又は他の形態の窪みを組み込むことができる。図示の冷却部材は、楕円形カップを含んでいる。冷却部材は、銅、ベリリウム銅合金、アルミニウム、アルミニウム合金、鋼、又は他の金属、又はセラミック等の別の高熱伝導率材料で作ることができる。冷却部材は、導電性及び熱伝導性金属で作ることが好ましい。このような材料は、種々の供給元から入手可能である。
【0209】
カップ2602は、半導体光学的放射発光体を収容するために、冷却部材の表面に形成されている。図示のカップ2602は、2つの発光体チップ2603、2605を並列に収容するように楕円形である。しかしながら、カップは、円形、楕円形、矩形、正方形、五角形、八角形、六角形等の任意の適切な形状とすることができる。楕円形のカップは、2つ以上の発光体を収容するが、所望の放射パターンで外方に光を放射するための効率的な反射体をもたらすという利点がある。半導体光学的放射発光体の取付け部の真下にある冷却部材の領域は、ダイス取付け特性及び信頼性を高めるためにニッケル、パラジュウム、金、銀、又は合金を含む他の金属で被覆できることが想定されている。本発明の思想及び範囲から逸脱することなく、種々の所望の効果を得るために他の薄層材料を随意的に発光体と冷却部材との間に挿入することができる。材料は、発光体と冷却部材との間の電気接続を可能にして、冷却部材が、例えば接地電位である基準電位をもたらすことが好ましい。材料は、粘着性、電気絶縁性、及び、電気的絶縁性及び導電性材料の導電又はパターン複合材料のいずれかであり、熱伝導性を大幅に損なうことなく、発光体を冷却部材に支持、接着、電気接続、又は他の方法で取付けるために使用できることが好ましい。光学性能向上のためのカップ特徴部内の冷却部材の領域は、銀、アルミニウム、金又は他の適切な金属で被覆して、反射率を高めて、装置の光学的効率を向上させることができる。カプセル材料の外側の領域は、ニクロム、黒色酸化、又は他の高放射性処理で被覆して放射冷却を改善することができる。
【0210】
半導体光学的放射発光体の接続は、特殊な導電性粘着式ダイス取付け用エポキシを使用することが好ましい。これらの接着剤は、通常、接着剤内の銀等の含有金属フィラーによって良好な導電性を実現している。適切なダイス取付け用接着剤は、本技術ではよく知られており、カリフォルニア州サンディエゴのQuantum Materials、National Starch and ChemicalのAblestik事業部、及びマサチューセッツ州ビルリカのEpo Tekから入手可能である。もしくは、特定の実施形態において、LEDチップを冷却部材に取付ける手段として半田を使用することができる。導電性接着剤又は半田のいずれで取付けても、接合により、発光体と却部材との間で良好な導電性及び熱伝導性が得られる。導電性パッドとして現れる電極を有する発光体をLEDチップの基部ではなく表面に使用する場合、冷却部材に対する全ての電極の取付けは、ダイス取付けではなくワイヤボンドにより行う。
【0211】
半導体光学的放射発光体は、電流がその材料又は構成要素を通過する際に電界発光という物理的メカニズムによって、100nmから2000nmの波長をもつ電磁放射線を発生する任意の構成要素又は材料を備える。前照灯照明を引き起こすために、種々の発光体をウェル内に使用して光を発生させることができるが、この例としては、各ウェルに全て琥珀色の発光体を配置;各々のウェルにシアン及び琥珀色の発光体を配置;各々のウェルに赤橙色及びシアンの発光体を配置;一部のウェルにシアン及び琥珀色の発光体を、他のウェルに赤橙色及びシアンの発光体を配置;ウェルの各々に燐発光体を配置することを挙げることができる。5つのウェルのうち4つは青緑色及びシアンの発光体を有することができ、5つのウェルのうち1つは赤橙色及びシアンの発光体を有することができると想定されている。このような配置であれば、車両の通路を照明するための白色光を生成することが可能である。
【0212】
半導体光学的発光体は、本技術では公知の発光ダイオード(LED)チップ又はダイス、発光ポリマ(LEP)、ポリマ発光ダイオード(PLED)、有機発光ダイオード(OLED)を含むことができる。このような材料及びそれらから作られる光電構造体は、当業者には公知の従来の無機材料と電気的に類似しており、種々の供給元から入手可能である。半導体光学的放射発光体又は発光体とは、本明細書で使用する場合は、それらの各々及びその均等物を呼ぶ。前照灯に適した発光体の例としては、AlGaAs、AllnGaP、GaAs、GaP、InGaN、SiC等を挙げることができ、有機又は無機ダイス又は燐光体を使用した蛍光という物理的メカニズムによって機能強化された発光体を含むことができる。本発明の使用に適するLEDチップは、Hewlett-Packard、Nichia Chemical、Siemans Optoelectroics、Sharp、Stanley、Toshiba、Lite−On、Cree Research、Toyoda Gosei、Showa Denko、Tyntec等で製造されている。典型的に、このようなチップは、ほぼ長さ各辺が約0.008インチから0.016インチの長さで約0.008インチから0.020インチの高さの、正方形基部で作られている。前照灯を実現するために、0.020インチよりも大きな正方形基部を有する大型チップを使用することができ、特に、光を発生するには、0.025インチから0.035インチよりも大きな寸法を有することは好都合である。しっかりした放熱板に取付けたこのような発光体アレイによって、LED灯は、車両前照灯として機能するのに十分な光を発生することができる。使用可能な発光体の詳細は、John K.Roberts他の1999年10月22日に出願された米国特許出願番号09/426,795「半導体放射発光体パッケージ」に見出すことができる。制御信号を発光体に供給する電気経路は、導体によってもたらされる。導体は、絶縁層の表面に付加される電気的ストリップである。絶縁層は、放熱板の表面に取付けられる。絶縁層は、カップ上に開口部を含む回路基板とすることができ、又はエポキシ又はプラスチック層を含むことができる。導体は、銅、アルミニウム、合金等の任意の適切な導電性材料とすることができ、従来の手段によって絶縁材に付加される回路トレースを含むことが好都合である。図26aに開示した回路トレースは、別個の発光体に別々の電源が供給される場合に使用できるパターンを示す。
【0213】
カプセル材料は、主として半導体光学的放射発光体及びワイヤボンドを覆って保護する機能を果たす材料又は各材料を組み合わせたものである。カプセル材料は、種々の波長の放射光を通す。本発明の目的のために、実質的に透明なカプセル材料は、平坦部の厚さは0.5mmであり、380nmから800nmまでの範囲の可視光線の任意の波長にて20パーセント以上の総透光率を示す材料を指す。典型的に、カプセル材料としては、透明なエポキシ又は他の熱硬化材料、シリコン又はアクリレートを挙げることができる。もしくは、カプセル材料としては、考えられる限りでは、ガラスや、又はアクリル系、ポリカーボネート、COC等の熱可塑性樹脂を挙げることができる。カプセル材料としては、室温で固体、液体、又はゲルの材料を挙げることができる。カプセル材料としては、Nitto Denkoから入手可能なNT300H等のトランスファー成型化合物又はポッティング材料、カプセル成型材料、又は単一部分又は複数の部分として始まり、高温硬化、2部硬化、紫外線硬化、マイクロ波硬化等で処理される材料を挙げることができる。適切な透明カプセル材料は、マサチューセッツ州ビルリカのEpoxy Technology、カリフォルニア州フリーモントのNitto Denki America,Inc、又は、カリフォルニア州インダストリーのDexter Electronic Materialから入手可能である。
【0214】
カプセル材料は、発光体が放出する、及び/又は冷却部材の表面が反射する電磁エネルギーの部分的な光学的視準又は他のビーム形成を可能にする。また、カプセル材料は、化学的シュラウド、シーラント、及び物理的シュラウドとしての機能を果たし、発光体、結合剤等の内部接着剤、結合パッド、導体電線、酸素接触に起因するワイヤボンド及び冷却部材内面及び電気リード線の環境被害、湿気及び他の腐食性蒸気接触、溶剤接触、機械的摩耗又は外傷などから保護する。また、カプセル材料は、二次的な光学系、支持部材、二次的な冷却部材等の隣接する構成部品を取付けること又は型合わせを可能にする。
カプセル材料は、2つ以上の材料からなる異質質量を含むことができ、各々の材料は、カプセル材料の全容積の一部を占め、特別の機能又は特性をもたらす。例えば、シリコン「グローブトップ」等の応力除去ゲルは、発光体及びワイヤボンド上に置くことができる。このような応力除去ゲルは、柔軟で変形可能なままであり、構成部品のその後の処理の間に、又は内部歪みを生じさせる熱膨張に起因して発光体及びワイヤボンドが応力を受けるのを保護する機能を果たす。その後、エポキシ等の硬質成形化合物を応力除去ゲル上に形成し、構成部品の種々の特徴部を構造的に一体化し、電気的リード線を保持し、構成部品の内部的メカニズムを環境的影響から保護し、半導体放射発光体を電気的に絶縁し、所望であれば、発光体から発生した放射エネルギーの種々の光学的な適正化を行う。
【0215】
更に、応力除去ゲル内で使用するフィラーは、ダイヤモンド紛体等の高熱伝導率材料を含むことが好都合である。ダイヤモンドは、極めて高い熱伝導率を有する化学的に不活性な物質である。このような材料の存在は、ゲルの熱伝導率を著しく高くして、発光体チップ内に発生した熱が冷却部材及び周囲環境に伝達する追加の経路をもたらすことができ、熱はそこで放熱される。このような追加の熱冷却経路が存在すると発光体の効率、結果的にランプの照明出力が高くなる。カプセル材料、及びこのようなカプセル材料を使用する装置の製造方法は、米国特許出願番号09/426,795に詳細に説明されている。
【0216】
図27は、向きを変更可能な発光ダイオード前照灯2700を示す。前照灯は、2つのライトセクション2703及び2705を有する冷却部材2701を含む。冷却部材2701は、2つのライトセクション2703及び2705を含むように構成され、その各々は、実質的にライト2601と同一であり、2つの前面は5°から45°の角度を成し、好ましくは、約15°の角度を成す。
【0217】
ロー又はハイビームをもたらす前照灯の別の変形例を図28に示す。前照灯2800は、2つのライトセクション2803及び2805を有する冷却部材2801を含む。冷却部材2801は、2つのライトセクション2803及び2805を有するように構成され、その各々は、実質的にライト2601と同一である。冷却部材は、1°から2°の角度の2つの前面を形成し、好ましくは約1.5°の角度を成す。図28では、角度を成す表面が容易に明らかになるように角度は誇張されている。
【0218】
照明されたLEDの選択部を制御することによって、前照灯は、照準を定めることができる。また、車両の前部には、フロントグリルに沿って走るバー内に配置されるLEDチップを配置できることが想定されている。
【0219】
前述の実施形態は、共通の放熱板上に幾つかのチップを直接取付けることを上手く利用するものであるが、離散的なLED前照灯アレイを使用してLED前照灯2650(図26c及び図26d)を実現できることが想定されている。各々の離散的なLED前照灯は、LED構成部品にダメージを与えることなく最大輝度の光レベルを得るために、発光体が発生する出力を分散する冷却部材を含むことが好ましい。従来の製造方法に独自に適合する特に好都合な高出力LED灯は、John K.Roberts他の1999年10月22日に出願された、米国特許出願番号09/426,795「半導体放射発光体パッケージ」に開示されている。使用可能な他のLED灯は、Hewlett Packard Company等のLEDメーカーから入手可能である。
【0220】
LED灯2650(幾つかの符号を付してある)は、回路基板2652及び放熱板2654(図26d)に取付けられている。回路基板は、第2の放熱板を備えることができ、回路基板の導電性層2660は、各々のLEDランプの冷却部材2664を回路基板の導電性層2662に熱結合することによって、外気に晒されている。また、LEDランプの冷却部材は、放熱板2654に熱結合されている。図26c及び図26dの示す実施形態において、熱伝導部材2670は、冷却部材の下にある回路基板を貫通する孔の中に配置される。熱伝導部材は、回路基板よりも厚く弾力性がある。例えば、熱伝導部材は、Bertquistから市販され、Silipad 600で識別される、シリコンベースの切断抵抗性材料等の予備成形熱結合材を使用して得ることができる。冷却部材を使用するLEDランプ・パッケージについては、John K.Roberts他の1999年10月22日に出願された米国特許出願番号09/425,792「半導体放射発光体パッケージを使用するインジケータ及び照明器」に開示されている。
【0221】
赤色−緑色−青色、又はバイナリ相補型照明を使用する場合、ランプと反射物体とを区別しようとする場合、選択されたチップのみが瞬時OFFされることが想定されている。従って、バイナリ相補型発光体については、琥珀色発光体の輝度だけを瞬時に低減する必要がある。更に、前照灯をOFFにする代わりに、光レベルは、反射光が画素閾値以下であるレベルまで下げることができ、この画素閾値では画像センサ組立体は物体を検出できることを理解されたい。
【0222】
使用可能な他のLED素子/構成部品の構造は、John K.Roberts他の2001年2月1日に出願され、本出願人に譲渡されている米国仮特許出願番号( )「電子構成部品用高出力放射発光体装置及び放熱パッケージ」(代理人整理番号GEN10PP375)、及びJohn K.Roberts他の2001年1月22日に出願され、本出願人に譲渡されている米国特許仮出願番号( )「放射発光体装置及びその製造方法」(代理人整理番号GEN10PP391)に開示されている。
【0223】
センサ用表面取付け式フィルタ
以下にフィルタを直接半導体光センサ201上に配置できる方法について、図29aから図29dを参照して説明する。第1の段階にて、フォトレジスタ2877を全ウエハ2972上に置く。フォトレジスタは、任意の適切な市販のフォトレジスタ材料とすることができる。図29bに示すように、フォトレジスタの一部を取り除くことができ、残りのフォトレジスタ2877は、ボンディングパッド2975等の光学的被覆堆積を必要するウエハ表面領域のみを覆うようにパターン化される。次に、図29cに示すように、光学的薄膜被覆2979をダイス2972の表面に施す。
【0224】
薄膜2979は、多層でもって光センサ2932上に直接堆積させる。赤色及びシアンフィルタが必要な場合は、赤色及びシアンフィルタを個別に付加する。以下にシアンフィルタの一例を説明する。シアンフィルタを作るためには、表1に示す二酸化チタン(TiO2)及び二酸化珪素(SiO2)の層を使用することができる。赤色フィルタを作るためには、表2に示す層を使用することができる。層の番号は、材料をウエハ表面に付加する順番である。
【0225】
表1
表2
全ての層を堆積した後、従来のリフトオフ法を利用してフォトレジスタをリフトオフし、フィルムが感光領域上に堆積した状態にするが、図29dに示すようにボンディングパッド上ではない。得られたダイスをカプセル化して従来のパッケージングの形態で画像アレイセンサを得ることができる。
【0228】
表1及び表2に基づいて作ったフィルタの特性は、図30及び図31に示す。特に、赤色フィルタは625nm未満の光を減衰するが、青色フィルタは約400nmから625nmの光を透過する。両フィルタは、800nm以上の光を透過する。赤外フィルタを利用して、前照灯減光器の性能に対する赤外光の影響を少なくすることができる。
【0229】
当業者であれば、本明細書で説明したフィルタは例示的なものであり、他のフィルタ、材料、又は材料の厚さを用いてフィルタ機能を実現できることを理解できるであろう。他の材料を類似の方法で適用して、前述及び他のフィルタ特性を得ることができる。
【0230】
また、当業者であれば、層の厚さは、最も近いナノメートルに切り上げされていることを理解できるであろう。多少の許容公差はあるが、積層構造における高い精度が必要とされる。また、層の厚さは例示的であることを理解できるであろう。フィルタを表面に取付けることによって、構成部品の数が少なくなり製造上の複雑性が低減されるので、画像センサを作るコストが著しく下がる。更に、赤外フィルタは、画素と赤色フィルタ及び青色フィルタとの間の被覆として付加することが可能である。
【0231】
パッケージ
図32には、光学センサ組立体3200の変形例を示す。光学センサ組立体3200は、透明ベース基板3202を含む。基板は、透明ポリマ、ガラス等の任意の適切な材料で製造できる。もしくは、ベース基板は、前述したような市販の赤外干渉フィルタで製造できることが想定されている。もしくは、ベース基板3202を作るために、薄膜フィルタを透明ガラス素子に取付けてもよい。
【0232】
ベース基板の下面は、画像アレイセンサ3212に接続される導電性ストリップ3210を有する。ベース基板は電気絶縁体であることが好ましく、ストリップは、従来の製造方法によってベース基板の下面に直接付加される任意の適切な導電性材料とすることができる。もしくは、ベース基板が導電体である場合、ストリップは電気絶縁体に付加することができ、電気絶縁体はベース基板に付加される。
【0233】
画像アレイセンサ3212は、半田パッド3211によってベース基板3202の下面にフリップ・チップ・ボンディングされる。エポキシ等の誘電材料3214は、画像アレイセンサを取り囲んでいる。誘電材料は、導電性ストリップ3210及び透明素子3202と接合することが好ましい。クリップ3204及び3206は、ベース基板の縁部をクリップ留めし、各々の導電性ストリップ3210と電気接続する。それぞれのクリップは、各々の導電性ストリップ3210に対応して設けられている。リード線3213、3215は、クリップから延びており、支持基板3201に挿入され、支持基板はプリント基板やハウジングであってもよい。支持基板は、ルームミラーマウント組立体ハウジング等のハウジング内に支持されたプリント基板であることが好ましい。止め具3205、3207は、支持基板に挿入されるリード線の長さを制限する。もしくは、クリップは、表面に取付けることができるように構成することができる。表面取付け可能なクリップの例としては、アメリカ合衆国ニューヨーク州フラッシングのInterplex Industries Companyの、NAS Interplex Edge Clipsを挙げることができる。
【0234】
画像アレイセンサ取付け用パッケージについては、Fred Bauer他の1998年8月21日に出願された米国特許第6,130,448号「光学センサパッケージ及びその製造方法」に開示されている。
【0235】
ベース基板へのレンズの組み付けは、前述のものと同じ方法で行うことができる。特に、レンズ構造体は、ベース基板3202上に支持される。レンズ構造体は、レンズ構造体202と同一のものであり、従って、図29aから図29dに関連した説明したように、画像センサの表面に直接付加する場合、色フィルタを半分が透明で半分が赤色、又は半分がシアンで半分が赤色、又は全て透明とすることができる。レンズ組立体を作るために、透明部材及び紫外線硬化型接着剤を使用することができる。透明部材は、部材230、802と同様のエポキシ部材とすることができる。紫外線硬化型接着剤は、接着剤232と同一とすることができる。
【0236】
レーダ
ウェーブトランシーバ(図1)は、制御車両100の作動を制御するのに有用な追加情報の取得に使用することができる。ウェーブトランシーバは、画像アレイセンサ102なしで使用することができ、又は画像アレイセンサと一緒に使用することができる。ウェーブトランシーバ101は、車両100上に取付けられ、ほぼ前方の方向に方向調整される。ウェーブトランシーバ101は、トランシーバから発信された波が車両100の前方の物体から反射した後に、その反射波を受信するように配置される。ウェーブ発生装置は、例えば、1GHz(77GHzは多くのヨーロッパ諸国で車両用レーダに指定されている)を超える周波数範囲で作動するレーダシステム、又はウェーブ発生装置用レーザダイオードを利用する光レーダであってもよい。もしくは、ウェーブ発生装置101は、超音波を発生する超音波変換器であってもよい。ウェーブ発生装置は、種々の角度をカバーするように前方視野にわたって走査することができる。本発明の目的のために、「レーダ」という用語は、これらの概念の全てを包含するように使用される。ウェーブトランシーバは、ウェーブ送信器又はウェーブ受信器の任意の特定の形式又は構成に限定されるものではない。送信器及び受信器の各々は、異なる別個のハウジング内に取付けてもよく、又は両者を共通ハウジング内に取付けてもよい。
【0237】
レーダ処理システム3300(図33)は、ウェーブ送信部3301、3302を制御して、ウェーブ受信部3304、3305で受信した信号を判断して物体の存在、並びにこのような物体の速度及び方向を判定する。前照灯制御装置3303は、目標情報をレーダ処理システムから受信し、更に随意的に車両速度センサ(例えば速度計)及び車両方位センサ(コンパスなど)から信号を受信して車両前照灯111の状態を決定する制御信号を生成する。レーダ処理システム、車両速度センサ、車両方位システム、及び車両前照灯との間の通信は、配線ハーネスによる直接的な配線によるか、又はCANバス等の車両通信バスによるかを含む多数の機構の中の1つによって行うことができる。更に、レーダ処理システム及び前照灯制御装置等のシステムは、単一の統合プロセッサ、多重プロセッサ、デジタル信号プロセッサ、マイクロコントローラ、マイクロプロセッサ、プログラマブル論理演算装置、又はその組み合わせによって実現できる。
【0238】
更に詳細には、本システムは、ウェーブ送信部及びウェーブ受信部を含むレーダシステムを含む。ウェーブトランシーバ101は、発信器3301及び受信器3304を含む。送信器は、従来のレーダ用アンテナ、光レーダ用光源、超音波発信器、ドップラレーダシステム用アンテナシステム等を利用して実現することができる。受信器3304は、従来のレーダシステムのアンテナ、光レーダシステムの受光素子、超音波受信器、ドップラレーダシステムの導波アンテナ等を利用して実現することができる。駆動回路3302は、発信器3301が、その反射波を受信器3304で検出できる信号を生成するように、制御装置3303からの信号を調整するために発信器3301に接続されている。駆動回路3302は、パルス変調器、パルス整形器等を利用して実現することができる。受信器3304は、制御装置3303によって更に処理するために、受信器によって検出した信号を調整する調整回路に接続されている。調整回路は、復調器、フィルタ、増幅器、アナログ/デジタル変換器(ADC)、及びその組み合わせを含むことができる。制御装置3303は、マイクロプロセッサ、デジタル信号プロセッサ、マイクロコントローラ、プログラマブル論理演算装置、又はその組み合わせよって実現することができる。
【0239】
車両に関連する物体の存在を判定するためのレーダの作動はよく知られており、本明細書では詳細に説明しない。例えば、送信波の検出と反射波の検出との間の時間を使用して、物体の距離を判定することができる。連続的な送信/受信サイクルにわたる物体の動きは、物体の相対速度及び方向を判定するのに利用できる。また、ドップラレーダは、物体の速度を判定するのに利用できる。反射波の大きさは、検出物体の寸法又は密度を判定するのに利用できる。レーダの作動はよく知られており、本明細書では詳細に説明しない。
【0240】
制御車両100のハイビーム状態を適正に制御するために、レーダによって検出された物体は車両か又は静止物体か、車両は対向車両105か又は前方の車両110か判定することが必要である。このことは、物体の速度及び方向を制御車両100の速度及び方向と比較することによって判定することができる。物体の移動の速度及び方向は、前述のレーダの原理を使用して取得する。制御車両100の速度は、車両上の速度センサ、衛星利用測位システム(GPS)等から取得することができる。制御車両100の方向は、コンパスセンサ、ハンドルホイール旋回インジケータ、GPS等から取得することができる。
【0241】
この情報を取得すると、単純セットの判定基準を適用して、物体が車両か又は静止物体か判定する。物体が静止物体の場合、静止物体は制御車両100と同じ速度で反対方向に移動する。物体が対向車両105の場合、対向車両105は制御車両の速度よりも実質的に大きな速度で制御車両100とほぼ反対の方向に走行する。最後に、物体が制御車両に対して移動していないか、又は物体が制御車両よりも実質的に遅い速度で移動している場合、その物体は、前方の車両110であろう。ハイビームが減光される距離は、制御車両の速度の関数とすることができ、また、制御車両100前方の直線の軸と対向車両105又は前方の車両110との間の角度の関数とすることができる。
【0242】
更に高度のシステムにおいて、前照灯制御システムは、1つ又はそれ以上の車両の存在に基づいて前照灯3311、3312及びハイビーム灯3314、3315のハイ又はロービーム状態を制御するだけでなく、ハイビーム前照灯及びロービーム前照灯の輝度を変更して2つのビーム間の連続的な切換えを行い、結果的に他のドライバに対して精神錯乱を起こさせることなく、制御車両のドライバにもたらされる有効輝度を最大限にすることができる。連続可変式前照灯システムについては、Joseph Stam他の1998年9月18日に出願された米国特許第6,049,171「連続可変式前照灯制御」に開示されている。また、本システムは、制御車両の前照灯の照準を垂直方向で変更することができる。本システムは、3つ以上のビーム間で切り替わるように構成することもでき、また、照準決定及び1つ又はそれ以上のライトの輝度の変更の組み合わせを実行するように構成することができる。また、前照灯処理システムは、車両方位入力を用いて、カーブ走行時に良好な照明が得られるように前照灯の適正な水平照準を判定することができる。照準決定を助けるLED前照灯については上記に説明されている。
【0243】
光センサ3320は、周辺光レベルを検出するのに利用でき、更に随意的に他の光の状態を与えてもよい。光センサは、シリコンフォトダイオード、Robert H. Nixon他の米国特許出願番号09/237,107「フォトダイオード光センサ」に開示されている特に有利なフォトダイオード等の非画像センサを利用して実現できるが、硫化カドミウム(CdS)セル等の他の非画像フォトダイオードを利用することができる。もしくは、光センサ3320は、非画像光センサに加えて、又は非画像光センサの代わりに光画像センサ102を使用して実現することができる。
【0244】
光学系は、フィルタを含み、光源の色を判定することができる。光学系とレーダシステムとの組み合わせは、1つのシステムのみ、又は本システムが独立して使用される場合に存在する制限を効果的に解消することができる。例えば、レーダシステムが画像システムと独立して使用される場合、交差点で待っている対向車両又は前方の車両は、静止物体としてレーダシステムによって知覚されるであろう。しかしながら、光センサをレーダシステムと組み合わせると、待っている車両のライトは、車両が存在していることを示すことができ、レーダは、車両までの実際の距離を判定することができる。一般的に、光学系が使用されている場合、光学系を使用して、対向車両又は前方の車両の存在を判定することができ、また、レーダシステムを使用して、この対向車両又は前方車両までの実際の距離、並びにその車両の速度を判定することができる。このように、レーダ検出器及び画像センサを使用して、他の物体の存在を確認することができる。更に、光センサを使用して、周辺光レベル等の光の状態を判定することができる。
【0245】
車両上のレーダシステムの存在によって、前照灯レーダシステムと同じ構成部品を使用して、前照灯制御以外の別の機能を実行して、結果的に、組み合わせる2つのシステムのコストを低減することができるであろう。このようなシステムとしては、例えば、適応型低速走行制御装置、障害物警報システム、衝突回避システム、自動運転システム等を含むことができる。この場合、ウェーブ送信部、ウェーブ受信部、及びレーダ処理システムは、全ての機能によって共有されることができるが、各々の機能は、レーダ処理システムから得られる情報に基づいて行動計画を決定するためのそれぞれの処理システムを有する。また、機能単位の車両システムを単一のプロセッサに統合することも可能である。
【0246】
レーダシステムについては、米国特許出願番号09/531,211「自動前照灯制御システム」に説明されている。
【0247】
ミラーマウント付属品ハウジング
本発明の前照灯減光システムの好適な取付け構造を図41から図49に示す。図示すように、この構造は、車両フロントガラスに接着剤にて固定された取付けパック(図示せず)を収容するスロット4103を有するマウント4101を含む。開口4105は、マウント4101内に形成され、スロット4103内に開口しており、マウント4101をパックに即ち車両フロントガラス上にしっかりと保持するように、マウントネジ4107は開口4105を貫通して延びて、マウント取付けパックの表面と係合するようになっている。マウント4101は、ミラーマウント脚部(図示せず)のソケットを従来方法で固定できるボール4109を含む。マウント脚部は、ルームミラーハウジングから延びる同様のソケット用ボールに固定してよく、又はミラーハウジング本体内に形成されたソケットと係合するボールを含んでもよい。
【0248】
以下で詳細に説明するように、ミラーマウント付属品ハウジング4111は、マウント4101に固定され、右半分部4113a及び左半分部4113bから成るハウジングカバー4113を含む。図44に最良に示すように、マウント4101は、複数の側面に沿って延びるペグを含み、ペグは、ハウジングカバー部4113a及び4113b内に設けられた対応する孔4117に挿入される。更に、ハウジングカバー部4113a及び4113bは、弾性タブ4119を含み、弾性タブは、マウント4101上にハウジングカバーをしっかりと保持するように、マウント4101上の一対のスロット4121を通って延びる。ハウジングカバー部4113a及び4113bは、複数のタブ4123及び複数のスロット付き舌部4125を更に含み、複数のスロット付き舌部は、共にスナップ留めされてハウジングカバー部4113a及び4113bを結合する。ハウジング部4113aは、ガラスフィルタ4129を取付けることができる前方に向かう開口4127を含む。以下で更に説明するように、開口4127及びガラスフィルタ4129によって、本発明のカメラが画像を感知するウインドウが得られる。
【0249】
本発明のミラーマウント付属品ハウジングは、ミラーマウント4101に調整可能に取付けられハウジングカバー4113に収容される、バッフル/プリント基板(PCB)ホルダ4130(本明細書では一般に支持構造体ともいう)を更に含む。図44に示すように、バッフル/プリント基板4130は、ミラーマウント4101の側面に沿って延びるピン4132と係合するための一対のスロット4133を含む。バッフル/プリント基板4130は、一対の細長いスロット4137を更に含み、これを貫通してネジ4139が挿入される。ネジ4139は、スロット4137を貫通して延び、マウント4101に形成された孔4141に螺合可能に係合される。スロット4137を細長い開口として形成することによって、バッフル/プリント基板4130の傾斜角をマウント4101に対して選択的に調節することができる。このような傾斜角調節機能によって、種々の車両モデル間でのフロントガラスの傾斜角の差異に対応することが望ましい。以下に更に説明するように、画像センサ及び関連の回路基板は、バッフル/プリント基板4130にしっかりと取付けられるので、車両フロントガラスに対する画像センサの傾斜角は、バッフル/プリント基板4130の傾斜角を変更することによって調節できる。
【0250】
図44に示すように、バッフル/プリント基板4130は、前述のバッフルと同様のバッフル4143を含む。バッフル4143の前端は、開口4127及びガラスフィルタ4129近傍に配置され、画像201、カプセル化ブロック230、紫外線硬化型エポキシ232、レンズ202、及び開口絞り203を含む画像センサ4145は、バッフル4143の反対側で後側の端部に延びる。画像センサ4145は、コネクタ4149が載置されているPCB4147に取付けられている。また、PCB4147上には、画像センサ・ダイス(図示せず)が取付けられており、画像センサ・ダイスは、前述の方法でスカイセンサとして機能する。車両に対して空の方向の視界からの光が得られるように、光導体4151は、光導体マウント4153においてPCB4147上のダイスの上部に取付けられ、光導体マウントは、バッフル/PCBホルダ4130上で、対応する光導体支持部4155と係合する。光導体4151は、光導体フィラー4161内で対応する開口4159と係合する、一対の横方向に延びる突出部4157を含み、光導体フィラーは、光導体4151の遠位端が延びる開口4163を有する。光導体フィラー4161は、ハウジングカバー4113の上面に形成された開口4165内に取付けられる。当業者であれば理解できるように、光導体4151は、光導体フィラー4161を貫通して空に向かって延びる遠位端において空の方向の光を捕捉し、結果的に空の方向の光は光導体4151を介してPCB4147のダイスに案内される。
【0251】
前述のように、プロセッサは、PCB4147に取付けて、画像センサ4145から取得した特定の画像データを事前処理することができる。
【0252】
コンパスPCB4171は、随意的に本発明のハウジング構造体4111内に取付けることができる。コンパスPCB4171は、一対のコンパスセンサ4173を含み、コンパスセンサは、磁気抵抗センサ、磁気誘導センサ、フラックスゲートセンサ等であってもよい。コンパスPCB4171をバッフル/PCBホルダ4130に取付けることによって、確実に正確な感知を行うようにセンサ4173の相対傾斜角を調節することができる。コンパスPCB4171は、対応するコネクタ4175を接続可能なコネクタ(図示せず)を含む。コネクタ4175は、ケーブル4177を介してコンパスPCB4171をミラー本体内のプロセッサ(図示せず)に接続する。また、ケーブル4177は、カプラ4179及びカプラ4149を介してミラー本体内の同じ又は異なるプロセッサをPCB4147に接続する。クリップ構造体4183の一対の弾性突起部4181は、PCB4147の後側に配置され、バッフル/PCBホルダ4130に固定される。バッフル/PCBホルダ4130は、側方延長部4187を含み、側方延長部は、コネクタ4149及び4179の周りに延び、クリップ4183及びPCB4147をバッフル/PCBホルダ4130に固定すると共にカプラ4149及び4179の結合を確実に行うのを助けるよう、弾性突出部4181をラッチ留めできる棚部をもたらす。
【0253】
前述の取付け構造体は、幾つかの利点をもたらす。特に、画像センサの傾斜角は、ミラーマウントに対してハウジングカバーを動かすことなく選択的に調節することができる。これによって、ハウジングの外部からアクセスできる取付けネジを設ける必要がないので、メーカーによる最終調整後に何者かが無断で調整する可能性が少なくなる。更に、図46から図49に示す内部構成部品は、ミラーマウント4101を車両フロントガラスに固定した後にミラーマウント4101に固定することができ、最終調整に続いて、ハウジングカバーを所定位置にスナップ留めする。
【0254】
更なる利点は、光導体4151の使用によって得られる。光導体4151が存在しないと、車両上方の空に向かって傾斜したPCB上に取付けられたダイスの照準を合わせるために、PCB4147に対して所定角度でもって別の回路基板を取付けることが必要になる。
【0255】
画像センサ、スカイセンサ、コンパスセンサを取付けるためのミラーマウント付属品ハウジングを説明してきたが、これらの構成部品のいずれか1つ又はその組み合わせをハウジング内に配置することができることを理解されたい。更に、前述の構成部品のいずれか又は全てに加えて、又はその代わりに、他の構成部品を配置することができる。
【0256】
本発明は、全体的に、外部ライトの全ての能力を利用して離散的に又は連続的に変えることができる多数の潜在的なビームパターンを生成することが好ましいとして説明されているが、本システムを利用して、例えば、Jon H.Bechtel他の2000年1月25日に出願された米国特許出願番号09/491,192「半導体光センサによる車両機器制御」で開示されているように、単に前照灯をON及びOFFすることも可能である。
【0257】
本発明は、特定の実施形態に基づいて詳細に説明したが、当業者であれば、本発明の技術的な思想から逸脱することなく、多くの修正及び変更を行うことができる。従って、特許請求の範囲は、本明細書で説明した実施形態によって限定されるものではない。
【図面の簡単な説明】
【図1】 一般道路を走行中の車両を示す。
【図2a】 図2bの平面2a−2aに沿って切り取った光学センサシステムの断面図である。
【図2b】 光学センサシステムの斜視図である。
【図3】 図2a及び図2bによる光学センサシステムで使用される画像センサを示す平面図である。
【図4】 図2a及び図2bによる光学センサシステムで使用されるレンズ構造体を示す平面図である。
【図5】 図4によるレンズ構造体を示す側面図である。
【図6】 レンズに関する波長の関数としての波の透過率を示すグラフである。
【図7】 画像センサの感光面を示し、各々のレンズからの光によって影響を受ける画像アレイの領域を示す図である。
【図8】 図2aと同じ平面に沿って切り取った別の画像センサ組立体を示す断面図である。
【図9】 図2aと同じ平面に沿って切り取った別の画像センサ組立体を示す断面図である。
【図10】 光学センサシステムを示すルームミラー組立体の部分断面図である。
【図11】 光学センサシステム及びエレクトロクロミックミラーの回路を示す回路図である。
【図12】 図11による回路の前照灯駆動回路を示す回路図である。
【図13】 図11による回路のマイクロコントローラを示す回路図である。
【図14】 エレクトロクロミックミラー及び前照灯制御装置の作動を示すフローチャートである。
【図15】 画像を取得して分析する作動を示すフローチャートである。
【図16】 画像を分析して光源を見つけるための作動を示すフローチャートである。
【図17a−1】 シードフィル・アルゴリズムを示すフローチャートである。
【図17a−2】 シードフィル・アルゴリズムを示すフローチャートである。
【図17b】 光源によって影響を受ける画素アレイを示す図である。
【図18】 光源が対向車両か又は前方車両であるか判定するための作動を示すフローチャートである。
【図19】 可変ハイビーム灯の状態に関連した負荷サイクルを示す状態図である。
【図20−1】 図19の状態の変化の作動ルールを示す図である。
【図20−2】 図19の状態の変化の作動ルールを示す図である。
【図21】 速度により閾値を変更する作動を示すフローチャートである。
【図22】 異なる画像アレイ領域を示す図である。
【図23】 図22の領域をシフトするためのマイクロコントローラの作動を示すフローチャートである。
【図24】 電子的に変更可能なフィルタを含む画像センサ組立体を示す正側斜視図である。
【図25】 図24による画像センサ組立体内の液晶フィルタの側面図である。
【図26a】 LED前照灯の別の実施形態を示す分解斜視図である。
【図26b】 図26の平面26b−26bに沿って切り取った部分断面図である。
【図26c】 LED灯の別の実施形態を示す正面図である。
【図26d】 図26cの平面26d−26dに沿って切り取った部分断面図である。
【図27】 2つ以上の水平方向で投光するLED前照灯の斜視図である。
【図28】 2つ以上の垂直方向で投光するLED前照灯の斜視図である。
【図29a】 画像センサの表面取付け式フィルタを製造する方法を示す。
【図29b】 画像センサの表面取付け式フィルタを製造する方法を示す。
【図29c】 画像センサの表面取付け式フィルタを製造する方法を示す。
【図29d】 画像センサの表面取付け式フィルタを製造する方法を示す。
【図30】 画像センサに取付けられた赤色表面取付け式フィルタが透過する波長を示すグラフである。
【図31】 画像センサに取付けられたシアン表面取付け式フィルタが透過する波長を示すグラフである。
【図32】 別の画像センサ組立体を示す。
【図33】 ウェーブ感応型前照灯制御装置を含む電気系統を示す。
【図34】 光学センサシステム及びエレクトロクロミックミラーの別の回路を示す回路図である。
【図35】 様々な手動スイッチの作動に応じて車両前照灯を手動又は自動制御する第1の制御方法を示す状態図である。
【図36】 様々な手動スイッチの作動に応じて車両前照灯を手動又は自動制御する第2の制御方法を示す状態図である。
【図37】 様々な手動スイッチの作動に応じて車両前照灯を手動又は自動制御する第3の制御方法を示す状態図である。
【図38】 本発明の前照灯制御システムと共に使用される例示的なインジケータを示す図である。
【図39】 幾つかの重ね合わされたフレームで取得した画像化された情景の図である。
【図40】 本発明の1つの実施形態の機能ブロック図である。
【図41】 本発明の別の実施形態によるミラーマウント組立体ハウジングの正面図である。
【図42】 図41に示したミラーマウント組立体ハウジングの平面図である。
【図43】 図41に示し、図42で線43−43’に沿って切り取ったミラーマウント組立体ハウジングの断面図である。
【図44】 ミラーマウント組立体ハウジングの分解斜視図である。
【図45】 ミラーマウント組立体ハウジングの後部立面図である。
【図46】 ハウジングカバーを取り外したミラーマウント組立体ハウジングの側面図である。
【図47】 ハウジングカバーを取り外したミラーマウント組立体ハウジングの平面図である。
【図48】 ハウジングカバーを取り外したミラーマウント組立体ハウジングの正面図である。
【図49】 ハウジングカバーを取り外したミラーマウント組立体ハウジングの後部正面図である。
【図50A】 車両の外部ライトによって形成される種々の照明パターンの図である。
【図50B】 車両の外部ライトによって形成される種々の照明パターンの図である。
【図50C】 車両の外部ライトによって形成される種々の照明パターンの図である。
【図50D】 車両の外部ライトによって形成される種々の照明パターンの図である。
Claims (9)
- 制御車両の少なくとも一つの外部ライトを制御する制御システムであって、
ユーザ入力信号、前記制御車両の速度を表す速度入力及び制御車両前方の情景の少なくとも一つの画像を受け取るよう構成され、さらに、前記少なくとも一つの画像の中の少なくとも一つの光源の輝度レベルを検出し、そして、前記少なくとも一つの画像の中の少なくとも一つの光源の輝度レベルの関数として少なくとも一つの外部ライトのビームパターンを変えるための外部ライト制御信号を生成する制御回路を有し、
ここで、前記制御回路は、前記少なくとも一つの画像の中の少なくとも一つの光源の輝度レベルを検出する際に、前記ユーザ入力信号及び前記速度入力に応じて感度を変えることを特徴とする制御システム。 - さらに、前記制御車両の前方の情景を撮像するよう構成された撮像システムを有し、当該撮像システムは、統合期間中に感知された光レベルを統合する複数のセンサを含み、前記制御回路はさらに前記ユーザ入力信号及び前記速度入力に応じて前記統合期間を調整することにより前記感度を変えるよう構成されている、請求項1に記載の制御システム。
- 前記制御回路はさらに、輝度レベルが閾値を越えたときに外部ライト制御信号を変化させるよう構成され、前記制御回路はさらに、前記ユーザ入力信号及び前記速度入力に応じて前記閾値を変えることにより前記感度を変えるよう構成されている、請求項1に記載の制御システム。
- 前記制御回路はさらに、前記輝度レベルの関数として前記外部ライト制御信号を連続的に変えるよう構成され、前記制御回路はさらに、前記ユーザ入力信号の関数として前記外部ライト制御信号が変化する割合を変えるよう構成されている、請求項1に記載の制御システム。
- さらに、制御車両の前方の情景を撮像するよう構成された撮像システムを有し、前記撮像システムは画素センサのアレイを含み、前記制御回路はさらに前記画素センサのアレイの区域内で検出された少なくとも一つの光源に対する感度がより高く構成されており、前記制御回路はさらに前記ユーザ入力信号に応じて前記区域の境界を変えるよう構成されている、請求項1に記載の制御システム。
- 前記制御回路は、前記感度を、前記ユーザ入力信号に応じて変えるか又は前記速度入力に応じて変えるかを前記ユーザ入力信号により決定するよう構成されている、請求項1に記載の制御システム。
- 前記ユーザ入力信号はパッシングスイッチ(flash-to-pass switch)から受け取られ、前記制御回路は、ハイビーム前照灯を作動させることにより前記スイッチの手動作動に応答する、請求項1に記載の制御システム。
- さらに撮像システムを有し、前記撮像システムはルームミラー(rearview mirror)組立体に配置されている、請求項1に記載の制御システム。
- 前記制御回路はルームミラー組立体に配置されている、請求項1に記載の制御システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/528,389 US6611610B1 (en) | 1997-04-02 | 2000-03-20 | Vehicle lamp control |
| US09/800,460 US6587573B1 (en) | 2000-03-20 | 2001-03-05 | System for controlling exterior vehicle lights |
| PCT/US2001/008912 WO2001070538A2 (en) | 2000-03-20 | 2001-03-20 | System for controlling exterior vehicle lights |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006254664A Division JP2007045407A (ja) | 2000-03-20 | 2006-09-20 | 車両外部ライトを制御するシステム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004500279A JP2004500279A (ja) | 2004-01-08 |
| JP2004500279A5 JP2004500279A5 (ja) | 2005-04-14 |
| JP4034565B2 true JP4034565B2 (ja) | 2008-01-16 |
Family
ID=27062715
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001568762A Expired - Lifetime JP4034565B2 (ja) | 2000-03-20 | 2001-03-20 | 車両外部ライトを制御するシステム |
| JP2006254664A Pending JP2007045407A (ja) | 2000-03-20 | 2006-09-20 | 車両外部ライトを制御するシステム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006254664A Pending JP2007045407A (ja) | 2000-03-20 | 2006-09-20 | 車両外部ライトを制御するシステム |
Country Status (9)
| Country | Link |
|---|---|
| US (5) | US6587573B1 (ja) |
| EP (2) | EP1282916B1 (ja) |
| JP (2) | JP4034565B2 (ja) |
| KR (3) | KR100666454B1 (ja) |
| AT (1) | ATE533665T1 (ja) |
| AU (2) | AU2001247611B2 (ja) |
| CA (1) | CA2402406C (ja) |
| MX (1) | MXPA02009052A (ja) |
| WO (1) | WO2001070538A2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011253222A (ja) * | 2010-05-31 | 2011-12-15 | Denso Corp | 前方領域検出装置及び車両制御装置 |
| US9626570B2 (en) | 2013-09-26 | 2017-04-18 | Denso Corporation | Vehicle control system and image sensor |
| US9690997B2 (en) | 2011-06-06 | 2017-06-27 | Denso Corporation | Recognition object detecting apparatus |
| US10046716B2 (en) | 2011-02-10 | 2018-08-14 | Denso Corporation | In-vehicle camera and vehicle control system |
Families Citing this family (636)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7339149B1 (en) * | 1993-02-26 | 2008-03-04 | Donnelly Corporation | Vehicle headlight control using imaging sensor |
| US6822563B2 (en) | 1997-09-22 | 2004-11-23 | Donnelly Corporation | Vehicle imaging system with accessory control |
| US5910854A (en) | 1993-02-26 | 1999-06-08 | Donnelly Corporation | Electrochromic polymeric solid films, manufacturing electrochromic devices using such solid films, and processes for making such solid films and devices |
| US5670935A (en) * | 1993-02-26 | 1997-09-23 | Donnelly Corporation | Rearview vision system for vehicle including panoramic view |
| US5877897A (en) | 1993-02-26 | 1999-03-02 | Donnelly Corporation | Automatic rearview mirror, vehicle lighting control and vehicle interior monitoring system using a photosensor array |
| US5668663A (en) | 1994-05-05 | 1997-09-16 | Donnelly Corporation | Electrochromic mirrors and devices |
| US6891563B2 (en) | 1996-05-22 | 2005-05-10 | Donnelly Corporation | Vehicular vision system |
| US7655894B2 (en) | 1996-03-25 | 2010-02-02 | Donnelly Corporation | Vehicular image sensing system |
| US6861809B2 (en) | 1998-09-18 | 2005-03-01 | Gentex Corporation | Headlamp control to prevent glare |
| US6587573B1 (en) * | 2000-03-20 | 2003-07-01 | Gentex Corporation | System for controlling exterior vehicle lights |
| US6681163B2 (en) | 2001-10-04 | 2004-01-20 | Gentex Corporation | Moisture sensor and windshield fog detector |
| US6774988B2 (en) * | 2002-07-30 | 2004-08-10 | Gentex Corporation | Light source detection and categorization system for automatic vehicle exterior light control and method of manufacturing |
| US8120652B2 (en) * | 1997-04-02 | 2012-02-21 | Gentex Corporation | System for controlling vehicle equipment |
| US20120116632A1 (en) * | 1997-04-02 | 2012-05-10 | Bechtel Jon H | System for controlling vehicle equipment |
| US6326613B1 (en) | 1998-01-07 | 2001-12-04 | Donnelly Corporation | Vehicle interior mirror assembly adapted for containing a rain sensor |
| US6172613B1 (en) | 1998-02-18 | 2001-01-09 | Donnelly Corporation | Rearview mirror assembly incorporating vehicle information display |
| US8294975B2 (en) | 1997-08-25 | 2012-10-23 | Donnelly Corporation | Automotive rearview mirror assembly |
| US6124886A (en) | 1997-08-25 | 2000-09-26 | Donnelly Corporation | Modular rearview mirror assembly |
| US6278377B1 (en) | 1999-08-25 | 2001-08-21 | Donnelly Corporation | Indicator for vehicle accessory |
| US6445287B1 (en) | 2000-02-28 | 2002-09-03 | Donnelly Corporation | Tire inflation assistance monitoring system |
| US8288711B2 (en) | 1998-01-07 | 2012-10-16 | Donnelly Corporation | Interior rearview mirror system with forwardly-viewing camera and a control |
| US6477464B2 (en) | 2000-03-09 | 2002-11-05 | Donnelly Corporation | Complete mirror-based global-positioning system (GPS) navigation solution |
| US6420975B1 (en) | 1999-08-25 | 2002-07-16 | Donnelly Corporation | Interior rearview mirror sound processing system |
| US6693517B2 (en) | 2000-04-21 | 2004-02-17 | Donnelly Corporation | Vehicle mirror assembly communicating wirelessly with vehicle accessories and occupants |
| US6329925B1 (en) | 1999-11-24 | 2001-12-11 | Donnelly Corporation | Rearview mirror assembly with added feature modular display |
| US6301794B1 (en) * | 1999-05-27 | 2001-10-16 | Johnson Controls, Inc. | Vehicle compass system with continuous automatic calibration |
| US8788092B2 (en) | 2000-01-24 | 2014-07-22 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8412377B2 (en) | 2000-01-24 | 2013-04-02 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| WO2001064481A2 (en) | 2000-03-02 | 2001-09-07 | Donnelly Corporation | Video mirror systems incorporating an accessory module |
| US7004593B2 (en) | 2002-06-06 | 2006-02-28 | Donnelly Corporation | Interior rearview mirror system with compass |
| US7167796B2 (en) | 2000-03-09 | 2007-01-23 | Donnelly Corporation | Vehicle navigation system for use with a telematics system |
| US7370983B2 (en) | 2000-03-02 | 2008-05-13 | Donnelly Corporation | Interior mirror assembly with display |
| US7480149B2 (en) * | 2004-08-18 | 2009-01-20 | Donnelly Corporation | Accessory module for vehicle |
| US6396408B2 (en) | 2000-03-31 | 2002-05-28 | Donnelly Corporation | Digital electrochromic circuit with a vehicle network |
| US6956348B2 (en) | 2004-01-28 | 2005-10-18 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US7365769B1 (en) * | 2000-07-06 | 2008-04-29 | Donald Mager | Activating a vehicle's own brake lights and/or brakes when brake lights are sensed in front of the vehicle, including responsively to the proximity of, and/or rate of closure with, a forward vehicle |
| JP4953498B2 (ja) * | 2000-07-12 | 2012-06-13 | 富士重工業株式会社 | フェールセーフ機能を有する車外監視装置 |
| US6897892B2 (en) * | 2000-10-13 | 2005-05-24 | Alexander L. Kormos | System and method for forming images for display in a vehicle |
| US7255451B2 (en) | 2002-09-20 | 2007-08-14 | Donnelly Corporation | Electro-optic mirror cell |
| WO2002062623A2 (en) | 2001-01-23 | 2002-08-15 | Donnelly Corporation | Improved vehicular lighting system for a mirror assembly |
| US7581859B2 (en) | 2005-09-14 | 2009-09-01 | Donnelly Corp. | Display device for exterior rearview mirror |
| US6690134B1 (en) | 2001-01-24 | 2004-02-10 | Irobot Corporation | Method and system for robot localization and confinement |
| US7571511B2 (en) | 2002-01-03 | 2009-08-11 | Irobot Corporation | Autonomous floor-cleaning robot |
| US7663333B2 (en) | 2001-06-12 | 2010-02-16 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US8396592B2 (en) | 2001-06-12 | 2013-03-12 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| DE10129743C2 (de) * | 2001-06-20 | 2003-05-08 | Daimler Chrysler Ag | Fahrzeugscheinwerfer, mit einer Anzahl von elektronischen Leuchtelementen als Lichtquelle |
| US7697027B2 (en) | 2001-07-31 | 2010-04-13 | Donnelly Corporation | Vehicular video system |
| US6882287B2 (en) | 2001-07-31 | 2005-04-19 | Donnelly Corporation | Automotive lane change aid |
| US6648478B2 (en) * | 2001-08-29 | 2003-11-18 | Donnelly Corporation | Vehicle mirror system with vehicle heading sensor assembly |
| DE10156649B4 (de) * | 2001-11-17 | 2015-09-17 | Volkswagen Ag | Verfahren und Einrichtung zur automatischen Erfassung leuchtender Objekte im Straßenverkehr |
| US9128486B2 (en) | 2002-01-24 | 2015-09-08 | Irobot Corporation | Navigational control system for a robotic device |
| WO2003065084A1 (en) | 2002-01-31 | 2003-08-07 | Donnelly Corporation | Vehicle accessory module |
| US7149627B2 (en) * | 2002-03-01 | 2006-12-12 | Gentex Corporation | Electronic compass system |
| US7103457B2 (en) * | 2002-03-28 | 2006-09-05 | Dean Technologies, Inc. | Programmable lawn mower |
| AU2003228377A1 (en) * | 2002-03-28 | 2003-10-13 | Jason Dean | Programmable lawn mower |
| EP1504276B1 (en) | 2002-05-03 | 2012-08-08 | Donnelly Corporation | Object detection system for vehicle |
| US6918674B2 (en) | 2002-05-03 | 2005-07-19 | Donnelly Corporation | Vehicle rearview mirror system |
| US7329013B2 (en) | 2002-06-06 | 2008-02-12 | Donnelly Corporation | Interior rearview mirror system with compass |
| US20060061008A1 (en) | 2004-09-14 | 2006-03-23 | Lee Karner | Mounting assembly for vehicle interior mirror |
| DE10225992A1 (de) * | 2002-06-12 | 2003-12-24 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Steuerung von Betriebsparametern des Beleuchtungssystems eines Fahrzeugs |
| US9955551B2 (en) * | 2002-07-12 | 2018-04-24 | Yechezkal Evan Spero | Detector controlled illuminating system |
| US11208029B2 (en) | 2002-07-12 | 2021-12-28 | Yechezkal Evan Spero | Adaptive headlight system |
| US7161579B2 (en) | 2002-07-18 | 2007-01-09 | Sony Computer Entertainment Inc. | Hand-held computer interactive device |
| US7646372B2 (en) * | 2003-09-15 | 2010-01-12 | Sony Computer Entertainment Inc. | Methods and systems for enabling direction detection when interfacing with a computer program |
| US8797260B2 (en) | 2002-07-27 | 2014-08-05 | Sony Computer Entertainment Inc. | Inertially trackable hand-held controller |
| US7623115B2 (en) * | 2002-07-27 | 2009-11-24 | Sony Computer Entertainment Inc. | Method and apparatus for light input device |
| US8570378B2 (en) | 2002-07-27 | 2013-10-29 | Sony Computer Entertainment Inc. | Method and apparatus for tracking three-dimensional movements of an object using a depth sensing camera |
| US7391409B2 (en) * | 2002-07-27 | 2008-06-24 | Sony Computer Entertainment America Inc. | Method and system for applying gearing effects to multi-channel mixed input |
| US8686939B2 (en) | 2002-07-27 | 2014-04-01 | Sony Computer Entertainment Inc. | System, method, and apparatus for three-dimensional input control |
| US7627139B2 (en) * | 2002-07-27 | 2009-12-01 | Sony Computer Entertainment Inc. | Computer image and audio processing of intensity and input devices for interfacing with a computer program |
| US9474968B2 (en) | 2002-07-27 | 2016-10-25 | Sony Interactive Entertainment America Llc | Method and system for applying gearing effects to visual tracking |
| US9393487B2 (en) | 2002-07-27 | 2016-07-19 | Sony Interactive Entertainment Inc. | Method for mapping movements of a hand-held controller to game commands |
| US8313380B2 (en) | 2002-07-27 | 2012-11-20 | Sony Computer Entertainment America Llc | Scheme for translating movements of a hand-held controller into inputs for a system |
| US8019121B2 (en) * | 2002-07-27 | 2011-09-13 | Sony Computer Entertainment Inc. | Method and system for processing intensity from input devices for interfacing with a computer program |
| US7760248B2 (en) | 2002-07-27 | 2010-07-20 | Sony Computer Entertainment Inc. | Selective sound source listening in conjunction with computer interactive processing |
| US9682319B2 (en) | 2002-07-31 | 2017-06-20 | Sony Interactive Entertainment Inc. | Combiner method for altering game gearing |
| CN101023407A (zh) * | 2002-08-21 | 2007-08-22 | 金泰克斯公司 | 自动车辆外部照明控制的图像采集和处理方法 |
| US8386081B2 (en) | 2002-09-13 | 2013-02-26 | Irobot Corporation | Navigational control system for a robotic device |
| US8428778B2 (en) | 2002-09-13 | 2013-04-23 | Irobot Corporation | Navigational control system for a robotic device |
| US7310177B2 (en) | 2002-09-20 | 2007-12-18 | Donnelly Corporation | Electro-optic reflective element assembly |
| EP1543358A2 (en) | 2002-09-20 | 2005-06-22 | Donnelly Corporation | Mirror reflective element assembly |
| ITTO20020950A1 (it) * | 2002-11-05 | 2004-05-06 | Fiat Ricerche | Sistema di visione integrato multifunzionale, con matrice |
| US7163327B2 (en) * | 2002-12-02 | 2007-01-16 | 3M Innovative Properties Company | Illumination system using a plurality of light sources |
| US7541743B2 (en) * | 2002-12-13 | 2009-06-02 | Ford Global Technologies, Llc | Adaptive vehicle communication controlled lighting system |
| FR2848935B1 (fr) * | 2002-12-20 | 2005-04-29 | Valeo Vision | Procede de detection de virages sur une route et systeme de mise en oeuvre |
| DE10260796B3 (de) * | 2002-12-23 | 2004-09-02 | Daimlerchrysler Ag | Steuerschaltung für Signalleuchten eines Fahrzeuges |
| US9177387B2 (en) | 2003-02-11 | 2015-11-03 | Sony Computer Entertainment Inc. | Method and apparatus for real time motion capture |
| CN100420592C (zh) * | 2003-02-21 | 2008-09-24 | 金泰克斯公司 | 自动汽车外部灯光控制系统 |
| DE602004017138D1 (de) * | 2003-02-21 | 2008-11-27 | Gentex Corp | Automatische fahrzeugaussenlicht-überwachungssystem-konstruktionen |
| US8045760B2 (en) | 2003-02-21 | 2011-10-25 | Gentex Corporation | Automatic vehicle exterior light control systems |
| JP2004276739A (ja) * | 2003-03-14 | 2004-10-07 | Koito Mfg Co Ltd | 車両用灯具 |
| JP2004276740A (ja) * | 2003-03-14 | 2004-10-07 | Koito Mfg Co Ltd | 車両用灯具 |
| PL3722533T3 (pl) | 2003-04-21 | 2023-03-06 | Signify North America Corporation | Sposoby i systemy oświetlenia płytowego |
| JP4979376B2 (ja) | 2003-05-06 | 2012-07-18 | ジェンテックス コーポレイション | 車両用バックミラー要素及びこれらの要素を組み込むアセンブリ |
| EP1638810B1 (en) | 2003-05-19 | 2017-11-01 | Gentex Corporation | Rearview mirror assemblies incorporating hands-free telephone components |
| US8072470B2 (en) * | 2003-05-29 | 2011-12-06 | Sony Computer Entertainment Inc. | System and method for providing a real-time three-dimensional interactive environment |
| US6841888B2 (en) * | 2003-06-04 | 2005-01-11 | Yazaki Corporation | Encapsulant for opto-electronic devices and method for making it |
| JP4402909B2 (ja) * | 2003-06-25 | 2010-01-20 | 日立オートモティブシステムズ株式会社 | オートライト装置 |
| EP1498721A1 (de) * | 2003-07-15 | 2005-01-19 | ELMOS Semiconductor AG | Vorrichtung zur Erkennung von Nebel, insbesondere für ein Fahrzeug |
| US7302339B2 (en) * | 2003-07-21 | 2007-11-27 | Justin Gray | Hazard countermeasure system and method for vehicles |
| DE10335189A1 (de) * | 2003-07-30 | 2005-03-03 | Daimlerchrysler Ag | Vorrichtung zur Sichtverbesserung bei Kraftfahrzeugen |
| US7874917B2 (en) | 2003-09-15 | 2011-01-25 | Sony Computer Entertainment Inc. | Methods and systems for enabling depth and direction detection when interfacing with a computer program |
| US8287373B2 (en) * | 2008-12-05 | 2012-10-16 | Sony Computer Entertainment Inc. | Control device for communicating visual information |
| US10279254B2 (en) | 2005-10-26 | 2019-05-07 | Sony Interactive Entertainment Inc. | Controller having visually trackable object for interfacing with a gaming system |
| US8323106B2 (en) | 2008-05-30 | 2012-12-04 | Sony Computer Entertainment America Llc | Determination of controller three-dimensional location using image analysis and ultrasonic communication |
| US9573056B2 (en) | 2005-10-26 | 2017-02-21 | Sony Interactive Entertainment Inc. | Expandable control device via hardware attachment |
| US7446924B2 (en) | 2003-10-02 | 2008-11-04 | Donnelly Corporation | Mirror reflective element assembly including electronic component |
| US7308341B2 (en) | 2003-10-14 | 2007-12-11 | Donnelly Corporation | Vehicle communication system |
| US20050116635A1 (en) * | 2003-12-02 | 2005-06-02 | Walson James E. | Multiple LED source and method for assembling same |
| US7329887B2 (en) * | 2003-12-02 | 2008-02-12 | 3M Innovative Properties Company | Solid state light device |
| US7403680B2 (en) * | 2003-12-02 | 2008-07-22 | 3M Innovative Properties Company | Reflective light coupler |
| US7250611B2 (en) * | 2003-12-02 | 2007-07-31 | 3M Innovative Properties Company | LED curing apparatus and method |
| JP4262072B2 (ja) * | 2003-12-05 | 2009-05-13 | 株式会社日立製作所 | 自動車用補助機器制御装置 |
| JP2005182306A (ja) * | 2003-12-17 | 2005-07-07 | Denso Corp | 車両用表示装置 |
| US7456805B2 (en) * | 2003-12-18 | 2008-11-25 | 3M Innovative Properties Company | Display including a solid state light device and method using same |
| US7663689B2 (en) * | 2004-01-16 | 2010-02-16 | Sony Computer Entertainment Inc. | Method and apparatus for optimizing capture device settings through depth information |
| US7332890B2 (en) | 2004-01-21 | 2008-02-19 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| US7482916B2 (en) | 2004-03-15 | 2009-01-27 | Anita Au | Automatic signaling systems for vehicles |
| US7535071B2 (en) * | 2004-03-29 | 2009-05-19 | Evolution Robotics, Inc. | System and method of integrating optics into an IC package |
| JP4464181B2 (ja) * | 2004-04-06 | 2010-05-19 | 株式会社小糸製作所 | 車両用灯具 |
| US7526103B2 (en) | 2004-04-15 | 2009-04-28 | Donnelly Corporation | Imaging system for vehicle |
| US9524439B2 (en) | 2004-05-25 | 2016-12-20 | Continental Automotive Gmbh | Monitoring unit and assistance system for motor vehicles |
| DE102004027611B4 (de) * | 2004-06-05 | 2011-06-30 | SMR Patents S.à.r.l. | Schalteinrichtung zum Abblenden eines EC-Spiegelglases eines Rückblickspiegels eines Kraftfahrzeuges |
| JP2005353477A (ja) * | 2004-06-11 | 2005-12-22 | Koito Mfg Co Ltd | 車両用照明システム |
| TWI227095B (en) * | 2004-06-17 | 2005-01-21 | Au Optronics Corp | Organic light emitting diode (OLED) display and fabrication method thereof |
| KR101142564B1 (ko) | 2004-06-24 | 2012-05-24 | 아이로보트 코퍼레이션 | 자동 로봇 장치용의 원격 제어 스케줄러 및 방법 |
| US7745340B2 (en) * | 2004-06-26 | 2010-06-29 | Emagin Corporation | Method of clearing electrical contact pads in thin film sealed OLED devices |
| US8972052B2 (en) | 2004-07-07 | 2015-03-03 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| US7706917B1 (en) | 2004-07-07 | 2010-04-27 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US7095567B2 (en) * | 2004-08-16 | 2006-08-22 | Delphi Technologies, Inc. | Refractive block and imaging systems for use in automobiles |
| US8547401B2 (en) | 2004-08-19 | 2013-10-01 | Sony Computer Entertainment Inc. | Portable augmented reality device and method |
| US7454273B2 (en) | 2004-08-20 | 2008-11-18 | Harman International Industries, Incorporated | Informed memory access for vehicle electronic modules |
| JP4351132B2 (ja) * | 2004-09-17 | 2009-10-28 | 本田技研工業株式会社 | 車載用暗視装置 |
| JP3936713B2 (ja) * | 2004-09-24 | 2007-06-27 | 三菱電機株式会社 | 車両用後側方警報装置 |
| US7881496B2 (en) | 2004-09-30 | 2011-02-01 | Donnelly Corporation | Vision system for vehicle |
| JP4838261B2 (ja) * | 2004-11-18 | 2011-12-14 | ジェンテックス コーポレイション | 車両機器制御用の画像収集及び処理システム |
| US8924078B2 (en) | 2004-11-18 | 2014-12-30 | Gentex Corporation | Image acquisition and processing system for vehicle equipment control |
| DE102004059706B4 (de) * | 2004-12-07 | 2012-07-26 | Volkswagen Ag | Verfahren und Vorrichtung zum Austauschen von Informationen eines Sichtsystems in einem Fahrzeug |
| US8256821B2 (en) | 2004-12-15 | 2012-09-04 | Magna Donnelly Engineering Gmbh | Accessory module system for a vehicle window |
| US7720580B2 (en) | 2004-12-23 | 2010-05-18 | Donnelly Corporation | Object detection system for vehicle |
| DE102004062275A1 (de) * | 2004-12-23 | 2006-07-13 | Aglaia Gmbh | Verfahren und Vorrichtung zum Ermitteln eines Kalibrierparameters einer Stereokamera |
| JP2005225483A (ja) * | 2005-01-06 | 2005-08-25 | Jirou Collection:Kk | 車輌用ウインカーランプシステム、車輌用ブレーキランプシステム並びに車輌用ヘッドライトシステム |
| JP2006194639A (ja) * | 2005-01-11 | 2006-07-27 | Denso Corp | レーダ装置 |
| DE102005006288A1 (de) * | 2005-02-11 | 2006-09-07 | Bayerische Motoren Werke Ag | Verfahren zur Betätigung von Schweinwerfern eines Kraftfahrzeugs |
| US8392021B2 (en) | 2005-02-18 | 2013-03-05 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| US7620476B2 (en) | 2005-02-18 | 2009-11-17 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| KR101240732B1 (ko) | 2005-02-18 | 2013-03-07 | 아이로보트 코퍼레이션 | 습식 및 건식 청소를 위한 자동 표면 청소 로봇 |
| US7050908B1 (en) * | 2005-03-22 | 2006-05-23 | Delphi Technologies, Inc. | Lane marker projection method for a motor vehicle vision system |
| US8930023B2 (en) | 2009-11-06 | 2015-01-06 | Irobot Corporation | Localization by learning of wave-signal distributions |
| ATE517368T1 (de) | 2005-05-16 | 2011-08-15 | Donnelly Corp | Fahrzeugspiegelanordnung mit zeichen am reflektierenden teil |
| DE102005026502A1 (de) * | 2005-06-09 | 2007-01-04 | GM Global Technology Operations, Inc., Detroit | Beleuchtungseinrichtung für ein Personenbeförderungsmittel |
| JP4776295B2 (ja) * | 2005-07-28 | 2011-09-21 | 富士通株式会社 | 走行路判定方法 |
| SE529304C2 (sv) * | 2005-09-06 | 2007-06-26 | Gm Global Tech Operations Inc | Metod och system för förbättrande av trafiksäkerhet |
| US20070052555A1 (en) * | 2005-09-08 | 2007-03-08 | Visteon Global Technologies, Inc. | Predictive adaptive front lighting integrated system |
| US7417221B2 (en) | 2005-09-08 | 2008-08-26 | Gentex Corporation | Automotive vehicle image sensor |
| DE102005050841B4 (de) * | 2005-10-24 | 2021-11-04 | Volkswagen Ag | Verfahren und Vorrichtung zur selbsttätigen Schaltung eines Fernlichts eines Kraftfahrzeugs |
| KR100722614B1 (ko) * | 2005-10-28 | 2007-05-28 | 삼성전기주식회사 | 카메라모듈 및 그 제조방법 |
| EP1949666B1 (en) | 2005-11-01 | 2013-07-17 | Magna Mirrors of America, Inc. | Interior rearview mirror with display |
| ATE534941T1 (de) | 2005-12-02 | 2011-12-15 | Irobot Corp | Abdeckungsrobotermobilität |
| ES2522926T3 (es) | 2005-12-02 | 2014-11-19 | Irobot Corporation | Robot Autónomo de Cubrimiento |
| EP2544065B1 (en) | 2005-12-02 | 2017-02-08 | iRobot Corporation | Robot system |
| EP2816434A3 (en) | 2005-12-02 | 2015-01-28 | iRobot Corporation | Autonomous coverage robot |
| ES2334064T3 (es) | 2005-12-02 | 2010-03-04 | Irobot Corporation | Robot modular. |
| US8634988B2 (en) * | 2006-01-10 | 2014-01-21 | Guardian Industries Corp. | Time, space, and/or wavelength multiplexed capacitive light sensor, and related methods |
| US7504957B2 (en) * | 2006-01-10 | 2009-03-17 | Guardian Industries Corp. | Light sensor embedded on printed circuit board |
| US9371032B2 (en) | 2006-01-10 | 2016-06-21 | Guardian Industries Corp. | Moisture sensor and/or defogger with Bayesian improvements, and related methods |
| US10173579B2 (en) | 2006-01-10 | 2019-01-08 | Guardian Glass, LLC | Multi-mode moisture sensor and/or defogger, and related methods |
| US8698894B2 (en) | 2006-02-07 | 2014-04-15 | Magna Electronics Inc. | Camera mounted at rear of vehicle |
| EP2426552A1 (en) | 2006-03-03 | 2012-03-07 | Gentex Corporation | Electro-optic elements incorporating improved thin-film coatings |
| DE102006022022A1 (de) * | 2006-03-03 | 2007-09-06 | Daimlerchrysler Ag | Verfahren und Vorrichtung zur Steuerung der Lichtfunktionen bei Frontscheinwerfern für Straßenfahrzeuge |
| WO2007103573A2 (en) | 2006-03-09 | 2007-09-13 | Gentex Corporation | Vehicle rearview assembly including a high intensity display |
| EP1837803A3 (en) * | 2006-03-24 | 2008-05-14 | MobilEye Technologies, Ltd. | Headlight, taillight and streetlight detection |
| US7423821B2 (en) * | 2006-03-24 | 2008-09-09 | Gentex Corporation | Vision system |
| US9022586B2 (en) * | 2006-03-28 | 2015-05-05 | Rosco, Inc. | Vehicular mirror having a camera for enhanced vision |
| JP4466604B2 (ja) * | 2006-04-26 | 2010-05-26 | 株式会社デンソー | 車両用前照灯装置 |
| TWI302879B (en) * | 2006-05-12 | 2008-11-11 | Univ Nat Chiao Tung | Real-time nighttime vehicle detection and recognition system based on computer vision |
| DE102006022878B3 (de) * | 2006-05-15 | 2007-09-06 | Sartorius Biotech Gmbh | Verfahren und Detektionsvorrichtung zur bildgebenden Erfassung einer Probe |
| EP2394553B1 (en) | 2006-05-19 | 2016-04-20 | iRobot Corporation | Removing debris from cleaning robots |
| US8417383B2 (en) | 2006-05-31 | 2013-04-09 | Irobot Corporation | Detecting robot stasis |
| US8596845B2 (en) * | 2006-06-30 | 2013-12-03 | Dialight Corporation | Apparatus for using heat pipes in controlling temperature of an LED light unit |
| JP4743037B2 (ja) * | 2006-07-28 | 2011-08-10 | 株式会社デンソー | 車両検出装置 |
| JP4853160B2 (ja) * | 2006-08-02 | 2012-01-11 | 株式会社デンソー | 車両検出装置及びヘッドランプ制御装置 |
| DE102006036358A1 (de) * | 2006-08-02 | 2008-02-07 | GM Global Technology Operations, Inc., Detroit | Scheinwerfer in einem Kraftfahrzeug |
| EP1887492A1 (en) * | 2006-08-10 | 2008-02-13 | MobilEye Technologies, Ltd. | Symmetric filter patterns for enhanced performance of single and concurrent driver assistance applications |
| US20080043099A1 (en) * | 2006-08-10 | 2008-02-21 | Mobileye Technologies Ltd. | Symmetric filter patterns for enhanced performance of single and concurrent driver assistance applications |
| WO2008024639A2 (en) | 2006-08-11 | 2008-02-28 | Donnelly Corporation | Automatic headlamp control system |
| US8781151B2 (en) | 2006-09-28 | 2014-07-15 | Sony Computer Entertainment Inc. | Object detection using video input combined with tilt angle information |
| USRE48417E1 (en) | 2006-09-28 | 2021-02-02 | Sony Interactive Entertainment Inc. | Object direction using video input combined with tilt angle information |
| US8310656B2 (en) | 2006-09-28 | 2012-11-13 | Sony Computer Entertainment America Llc | Mapping movements of a hand-held controller to the two-dimensional image plane of a display screen |
| JP4544233B2 (ja) * | 2006-10-11 | 2010-09-15 | 株式会社デンソー | 車両検出装置及びヘッドランプ制御装置 |
| DE102006050236A1 (de) * | 2006-10-18 | 2008-04-24 | Schefenacker Vision Systems Germany Gmbh | Scheinwerfersystem für Fahrzeuge, vorzugsweise für Kraftfahrzeuge |
| JP4321591B2 (ja) * | 2007-01-11 | 2009-08-26 | 株式会社デンソー | 車載霧判定装置 |
| EP3624086A1 (en) | 2007-01-25 | 2020-03-18 | Magna Electronics Inc. | Radar sensing system for vehicle |
| ITPR20070006A1 (it) * | 2007-02-08 | 2008-08-09 | Techimp S P A | Procedimento per elaborare dati relativi a un'attivita di scariche elettriche parziali |
| DE102008012327A1 (de) | 2007-03-01 | 2008-09-04 | Denso Corp., Kariya | System zum Einstellen einer Richtung einer optischen Achse eines Scheinwerfers |
| JP4305548B2 (ja) | 2007-03-01 | 2009-07-29 | 株式会社デンソー | ライト制御装置 |
| US8166021B1 (en) | 2007-03-30 | 2012-04-24 | Google Inc. | Query phrasification |
| US7925655B1 (en) | 2007-03-30 | 2011-04-12 | Google Inc. | Query scheduling using hierarchical tiers of index servers |
| US8166045B1 (en) | 2007-03-30 | 2012-04-24 | Google Inc. | Phrase extraction using subphrase scoring |
| US8086594B1 (en) | 2007-03-30 | 2011-12-27 | Google Inc. | Bifurcated document relevance scoring |
| US7702614B1 (en) | 2007-03-30 | 2010-04-20 | Google Inc. | Index updating using segment swapping |
| US7693813B1 (en) | 2007-03-30 | 2010-04-06 | Google Inc. | Index server architecture using tiered and sharded phrase posting lists |
| GB2448181B (en) | 2007-04-05 | 2011-11-09 | Ford Global Tech Llc | Vehicle headlight beam controls |
| KR100824066B1 (ko) * | 2007-04-13 | 2008-04-22 | 한국광기술원 | 차량 간의 통신 장치 및 이를 이용한 차량의 원격 제어방법 |
| KR101301834B1 (ko) | 2007-05-09 | 2013-08-29 | 아이로보트 코퍼레이션 | 소형 자율 커버리지 로봇 |
| JP4917961B2 (ja) * | 2007-05-22 | 2012-04-18 | 株式会社日本自動車部品総合研究所 | 車載用車両灯検出装置および車両用照明装置 |
| US8538625B1 (en) | 2007-06-11 | 2013-09-17 | Phahol Lowchareonkul | Display system for use in a vehicle |
| US7914187B2 (en) | 2007-07-12 | 2011-03-29 | Magna Electronics Inc. | Automatic lighting system with adaptive alignment function |
| JP5144160B2 (ja) * | 2007-07-26 | 2013-02-13 | パナソニック株式会社 | 車載用負荷制御装置、車載用前照灯装置、および車載用尾灯装置 |
| US8017898B2 (en) * | 2007-08-17 | 2011-09-13 | Magna Electronics Inc. | Vehicular imaging system in an automatic headlamp control system |
| DE102007040042B4 (de) * | 2007-08-24 | 2019-02-21 | HELLA GmbH & Co. KGaA | System zum Erzeugen eines Lichtbündels im Vorfeld eines Kraftfahrzeuges |
| WO2009030419A2 (de) | 2007-08-28 | 2009-03-12 | Valeo Schalter Und Sensoren Gmbh | Verfahren und anordnung zur auswertung von helligkeitswerten in sensorbildern bei bildauswertenden umfelderkennungssystemen, insbesondere hinsichtlich einer tag-/nachtunterscheidung |
| DE102007040810A1 (de) * | 2007-08-29 | 2009-03-05 | Continental Automotive Gmbh | Verfahren zum Betreiben von Scheinwerfern in einem Kraftfahrzeug |
| US7446488B1 (en) * | 2007-08-29 | 2008-11-04 | Osram Sylvania | Metal halide lamp ballast controlled by remote enable switched bias supply |
| JP4466701B2 (ja) | 2007-09-10 | 2010-05-26 | 株式会社デンソー | ライト制御装置 |
| EP2191457B1 (en) | 2007-09-11 | 2014-12-10 | Magna Electronics | Imaging system for vehicle |
| EP2037407B1 (de) * | 2007-09-13 | 2014-07-23 | Delphi Technologies, Inc. | Verfahren zur Objekterfassung |
| US8446470B2 (en) | 2007-10-04 | 2013-05-21 | Magna Electronics, Inc. | Combined RGB and IR imaging sensor |
| JP2011505284A (ja) * | 2007-10-25 | 2011-02-24 | アーデーツエー・オートモテイブ・デイスタンス・コントロール・システムズ・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 暗がりにおいて車道縁反射体と車両電灯とを区別する方法 |
| DE102007051272B4 (de) | 2007-10-26 | 2024-07-25 | HELLA GmbH & Co. KGaA | Vorrichtung zum Steuern und/oder Regeln der Aktivierung oder Deaktivierung des automatischen Einstellens der Hell-Dunkel-Grenze eines Kraftfahrzeugscheinwerfers oder des Ein- oder Ausschaltens des Fernlichts bei Kraftfahrzeugscheinwerfern |
| DE102007051269A1 (de) | 2007-10-26 | 2009-05-07 | Hella Kgaa Hueck & Co. | Vorrichtung für Kraftfahrzeuge zur Klassifizierung von Lichtquellen im Verkehrsraum |
| FR2923016B1 (fr) * | 2007-10-31 | 2009-11-20 | Valeo Vision | Procede de detection d'un phenomene perturbateur de visibilite pour un vehicule. |
| US20090122565A1 (en) * | 2007-11-13 | 2009-05-14 | Lear Corporation | Vehicle exterior lighting system |
| US20090134320A1 (en) * | 2007-11-27 | 2009-05-28 | Richard Charles Flaherty | Filtered photosensors and photo control devices including the same and methods for forming the same |
| JP2009132230A (ja) * | 2007-11-29 | 2009-06-18 | Omron Corp | 前照灯配光制御装置 |
| US8542907B2 (en) | 2007-12-17 | 2013-09-24 | Sony Computer Entertainment America Llc | Dynamic three-dimensional object mapping for user-defined control device |
| US7970178B2 (en) * | 2007-12-21 | 2011-06-28 | Caterpillar Inc. | Visibility range estimation method and system |
| KR101335346B1 (ko) | 2008-02-27 | 2013-12-05 | 소니 컴퓨터 엔터테인먼트 유럽 리미티드 | 장면의 심도 데이터를 포착하고, 컴퓨터 액션을 적용하기 위한 방법들 |
| US8368753B2 (en) * | 2008-03-17 | 2013-02-05 | Sony Computer Entertainment America Llc | Controller with an integrated depth camera |
| US8154418B2 (en) | 2008-03-31 | 2012-04-10 | Magna Mirrors Of America, Inc. | Interior rearview mirror system |
| US8610376B2 (en) | 2008-04-14 | 2013-12-17 | Digital Lumens Incorporated | LED lighting methods, apparatus, and systems including historic sensor data logging |
| EP3576501A3 (en) * | 2008-04-14 | 2020-01-08 | Digital Lumens Incorporated | Modular lighting systems |
| US8610377B2 (en) | 2008-04-14 | 2013-12-17 | Digital Lumens, Incorporated | Methods, apparatus, and systems for prediction of lighting module performance |
| US8543249B2 (en) | 2008-04-14 | 2013-09-24 | Digital Lumens Incorporated | Power management unit with modular sensor bus |
| US8339069B2 (en) * | 2008-04-14 | 2012-12-25 | Digital Lumens Incorporated | Power management unit with power metering |
| US8805550B2 (en) | 2008-04-14 | 2014-08-12 | Digital Lumens Incorporated | Power management unit with power source arbitration |
| US8823277B2 (en) | 2008-04-14 | 2014-09-02 | Digital Lumens Incorporated | Methods, systems, and apparatus for mapping a network of lighting fixtures with light module identification |
| US8531134B2 (en) | 2008-04-14 | 2013-09-10 | Digital Lumens Incorporated | LED-based lighting methods, apparatus, and systems employing LED light bars, occupancy sensing, local state machine, and time-based tracking of operational modes |
| US8373362B2 (en) | 2008-04-14 | 2013-02-12 | Digital Lumens Incorporated | Methods, systems, and apparatus for commissioning an LED lighting fixture with remote reporting |
| US8368321B2 (en) | 2008-04-14 | 2013-02-05 | Digital Lumens Incorporated | Power management unit with rules-based power consumption management |
| US8552664B2 (en) | 2008-04-14 | 2013-10-08 | Digital Lumens Incorporated | Power management unit with ballast interface |
| US8754589B2 (en) | 2008-04-14 | 2014-06-17 | Digtial Lumens Incorporated | Power management unit with temperature protection |
| US8138690B2 (en) * | 2008-04-14 | 2012-03-20 | Digital Lumens Incorporated | LED-based lighting methods, apparatus, and systems employing LED light bars, occupancy sensing, local state machine, and meter circuit |
| US10539311B2 (en) | 2008-04-14 | 2020-01-21 | Digital Lumens Incorporated | Sensor-based lighting methods, apparatus, and systems |
| US8866408B2 (en) | 2008-04-14 | 2014-10-21 | Digital Lumens Incorporated | Methods, apparatus, and systems for automatic power adjustment based on energy demand information |
| US8841859B2 (en) | 2008-04-14 | 2014-09-23 | Digital Lumens Incorporated | LED lighting methods, apparatus, and systems including rules-based sensor data logging |
| EP2119596B1 (en) * | 2008-05-16 | 2012-01-04 | SMR Patents S.à.r.l. | Imaging system for a vehicle and mirror assembly comprising such an imaging system |
| JP4937199B2 (ja) * | 2008-06-25 | 2012-05-23 | 日立オートモティブシステムズ株式会社 | オートライト装置 |
| DE102008032345A1 (de) * | 2008-07-09 | 2010-01-14 | Hella Kgaa Hueck & Co. | Scheinwerfer für Kraftfahrzeuge |
| US20100020170A1 (en) | 2008-07-24 | 2010-01-28 | Higgins-Luthman Michael J | Vehicle Imaging System |
| JP5206205B2 (ja) * | 2008-08-01 | 2013-06-12 | 株式会社デンソー | 情報処理装置 |
| US7924371B1 (en) * | 2008-08-29 | 2011-04-12 | Rockwell Collins, Inc. | Multimode display for NVIS compatible operation |
| DE102008051591A1 (de) * | 2008-10-14 | 2010-04-15 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Steuerung der Sichtbarkeit eines Fahrzeugs |
| US9487144B2 (en) | 2008-10-16 | 2016-11-08 | Magna Mirrors Of America, Inc. | Interior mirror assembly with display |
| EP2179892A1 (de) | 2008-10-24 | 2010-04-28 | Magna Electronics Europe GmbH & Co. KG | Verfahren zum automatischen Kalibrieren einer virtuellen Kamera |
| US8570374B2 (en) | 2008-11-13 | 2013-10-29 | Magna Electronics Inc. | Camera for vehicle |
| JP5363085B2 (ja) * | 2008-12-03 | 2013-12-11 | 株式会社小糸製作所 | 前照灯制御装置 |
| JP5195390B2 (ja) * | 2008-12-17 | 2013-05-08 | トヨタ自動車株式会社 | 前方照射自動制御装置 |
| CN101772232A (zh) * | 2008-12-27 | 2010-07-07 | 富准精密工业(深圳)有限公司 | 发光二极管灯具电路 |
| US8935055B2 (en) * | 2009-01-23 | 2015-01-13 | Robert Bosch Gmbh | Method and apparatus for vehicle with adaptive lighting system |
| US8964032B2 (en) | 2009-01-30 | 2015-02-24 | Magna Electronics Inc. | Rear illumination system |
| US8164045B2 (en) * | 2009-02-09 | 2012-04-24 | Delphi Technologies, Inc. | Optical system for controlling light propagation along a light path |
| US8358074B2 (en) * | 2009-02-26 | 2013-01-22 | GM Global Technology Operations LLC | Daytime running lamp activation control methods and apparatus |
| EP2401176B1 (en) | 2009-02-27 | 2019-05-08 | Magna Electronics | Alert system for vehicle |
| US8527657B2 (en) | 2009-03-20 | 2013-09-03 | Sony Computer Entertainment America Llc | Methods and systems for dynamically adjusting update rates in multi-player network gaming |
| US8342963B2 (en) | 2009-04-10 | 2013-01-01 | Sony Computer Entertainment America Inc. | Methods and systems for enabling control of artificial intelligence game characters |
| US8954170B2 (en) | 2009-04-14 | 2015-02-10 | Digital Lumens Incorporated | Power management unit with multi-input arbitration |
| US8536802B2 (en) | 2009-04-14 | 2013-09-17 | Digital Lumens Incorporated | LED-based lighting methods, apparatus, and systems employing LED light bars, occupancy sensing, and local state machine |
| US8593135B2 (en) | 2009-04-14 | 2013-11-26 | Digital Lumens Incorporated | Low-cost power measurement circuit |
| JP2010263272A (ja) * | 2009-04-30 | 2010-11-18 | Koito Mfg Co Ltd | 車両用監視カメラ及び車両用監視カメラシステム |
| US8142288B2 (en) * | 2009-05-08 | 2012-03-27 | Sony Computer Entertainment America Llc | Base station movement detection and compensation |
| US8393964B2 (en) * | 2009-05-08 | 2013-03-12 | Sony Computer Entertainment America Llc | Base station for position location |
| US8376595B2 (en) | 2009-05-15 | 2013-02-19 | Magna Electronics, Inc. | Automatic headlamp control |
| JP5362460B2 (ja) * | 2009-06-26 | 2013-12-11 | 株式会社小糸製作所 | 車両用前照灯装置 |
| WO2011014482A1 (en) | 2009-07-27 | 2011-02-03 | Magna Electronics Inc. | Parking assist system |
| WO2011014497A1 (en) | 2009-07-27 | 2011-02-03 | Magna Electronics Inc. | Vehicular camera with on-board microcontroller |
| US8200390B2 (en) * | 2009-07-30 | 2012-06-12 | Control Solutions LLC | Securable cover for vehicle lights |
| KR101043278B1 (ko) | 2009-08-26 | 2011-06-21 | 현대모비스 주식회사 | 차량용 헤드램프 |
| EP2289737B1 (fr) * | 2009-08-26 | 2018-04-25 | Valeo Vision | Dispositif et procédé de commande de l'alimentation d'un projecteur |
| WO2011028686A1 (en) | 2009-09-01 | 2011-03-10 | Magna Mirrors Of America, Inc. | Imaging and display system for vehicle |
| AT509035B1 (de) * | 2009-11-11 | 2013-07-15 | Illumination Network Systems Gmbh | Beleuchtungsvorrichtung und beleuchtungssystem |
| DE102009054227A1 (de) | 2009-11-21 | 2011-05-26 | Volkswagen Ag | Verfahren zum Steuern einer Scheinwerferanordnung für ein Fahrzeug und Scheinwerferanordnung |
| CN102083252A (zh) * | 2009-11-26 | 2011-06-01 | 富准精密工业(深圳)有限公司 | 发光二极管灯具及其控制电路 |
| KR20110063211A (ko) * | 2009-12-04 | 2011-06-10 | 현대자동차주식회사 | Led 헤드램프의 하이 빔 구현방법 및 장치 |
| US20110169409A1 (en) * | 2010-01-11 | 2011-07-14 | Stasky Glenn A | Led motorcycle lighting system |
| EP2523831B2 (en) | 2010-01-13 | 2024-05-29 | Magna Electronics Inc. | Vehicular camera and method for periodic calibration of vehicular camera |
| JP2011157022A (ja) * | 2010-02-03 | 2011-08-18 | Sharp Corp | 前照灯および移動体 |
| US20110186639A1 (en) * | 2010-02-04 | 2011-08-04 | Metrologic Instruments, Inc. | Contact aperture for imaging apparatus |
| US8890955B2 (en) | 2010-02-10 | 2014-11-18 | Magna Mirrors Of America, Inc. | Adaptable wireless vehicle vision system based on wireless communication error |
| EP3192419B1 (en) | 2010-02-16 | 2021-04-07 | iRobot Corporation | Vacuum brush |
| CN102834309B (zh) | 2010-02-26 | 2016-12-21 | 金泰克斯公司 | 自动车辆设备监控、报警和控制系统 |
| DE102010002488A1 (de) * | 2010-03-02 | 2011-09-08 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Nebelerkennung mittels Spektroskopie |
| US9205810B2 (en) * | 2010-03-04 | 2015-12-08 | Valeo Schalter Und Sensoren Gmbh | Method of fog and raindrop detection on a windscreen and driving assistance device |
| US9114755B2 (en) * | 2010-05-22 | 2015-08-25 | Hella Kgaa Hueck & Co. | Control device and method for dimming lights for vehicles during turning maneuvers |
| US9090207B2 (en) * | 2010-05-27 | 2015-07-28 | Boxx Corp. | Two wheeled vehicle with lighting system that generates defined image on riding surface |
| US9117123B2 (en) | 2010-07-05 | 2015-08-25 | Magna Electronics Inc. | Vehicular rear view camera display system with lifecheck function |
| US9056584B2 (en) | 2010-07-08 | 2015-06-16 | Gentex Corporation | Rearview assembly for a vehicle |
| EP2407345A1 (en) * | 2010-07-16 | 2012-01-18 | Long Jing International Technology Enterprise Co., Ltd. | Adjustable headlight assembly |
| US20120019377A1 (en) * | 2010-07-20 | 2012-01-26 | Ching-Tsung Lai | Adjustable headlight assembly |
| KR101230335B1 (ko) | 2010-07-21 | 2013-02-06 | (주)지맥스 | 전조등 조사각 자동 조절장치 및 그 방법 |
| WO2012017559A1 (ja) * | 2010-08-06 | 2012-02-09 | トヨタ自動車株式会社 | 車両配光制御装置及び方法 |
| US8536997B2 (en) * | 2010-08-12 | 2013-09-17 | General Electric Company | Vehicle lighting control apparatus and method |
| JP5348100B2 (ja) * | 2010-09-17 | 2013-11-20 | トヨタ自動車株式会社 | 前照灯装置、輝度制御方法 |
| JP5549741B2 (ja) * | 2010-10-18 | 2014-07-16 | トヨタ自動車株式会社 | 車両用配光制御システム |
| EP2636560A4 (en) | 2010-11-01 | 2015-07-08 | Adc Technology Inc | SPOTLIGHT CONTROL DEVICE |
| CA2816978C (en) | 2010-11-04 | 2020-07-28 | Digital Lumens Incorporated | Method, apparatus, and system for occupancy sensing |
| US9180908B2 (en) | 2010-11-19 | 2015-11-10 | Magna Electronics Inc. | Lane keeping system and lane centering system |
| US9900522B2 (en) | 2010-12-01 | 2018-02-20 | Magna Electronics Inc. | System and method of establishing a multi-camera image using pixel remapping |
| JP2012121521A (ja) | 2010-12-10 | 2012-06-28 | Denso Corp | 光量制御装置および光量制御プログラム |
| US9264672B2 (en) | 2010-12-22 | 2016-02-16 | Magna Mirrors Of America, Inc. | Vision display system for vehicle |
| US20120185130A1 (en) * | 2011-01-18 | 2012-07-19 | Ekchian Gregory J | Vehicle lighting |
| WO2012102065A1 (ja) * | 2011-01-24 | 2012-08-02 | 本田技研工業株式会社 | 車両用ヘッドライトの配光制御装置 |
| US9085261B2 (en) | 2011-01-26 | 2015-07-21 | Magna Electronics Inc. | Rear vision system with trailer angle detection |
| US8433479B2 (en) * | 2011-02-09 | 2013-04-30 | Ford Global Technologies, Llc | Adaptive front-lighting system with fuzzy logic control |
| DE102011003881A1 (de) * | 2011-02-09 | 2012-08-09 | Robert Bosch Gmbh | Verfahren zur Unterstützung eines Fahrers eines Kraftfahrzeugs |
| US8498779B2 (en) * | 2011-03-02 | 2013-07-30 | Stanley Electric Co., Ltd. | Headlight control apparatus for vehicles, and headlight system for vehicles |
| EP2498583B1 (fr) * | 2011-03-07 | 2017-05-03 | Zedel | Lampe LED dotée d' un dispositif de sécurité |
| AU2012230991A1 (en) | 2011-03-21 | 2013-10-10 | Digital Lumens Incorporated | Methods, apparatus and systems for providing occupancy-based variable lighting |
| WO2012129521A1 (en) | 2011-03-23 | 2012-09-27 | Gentex Corporation | Lens cleaning apparatus |
| DE102011006554A1 (de) * | 2011-03-31 | 2012-10-04 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Bereitstellung eines Signals für eine Lichtsteuerungseinheit |
| US9194943B2 (en) | 2011-04-12 | 2015-11-24 | Magna Electronics Inc. | Step filter for estimating distance in a time-of-flight ranging system |
| US9547795B2 (en) | 2011-04-25 | 2017-01-17 | Magna Electronics Inc. | Image processing method for detecting objects using relative motion |
| US9357208B2 (en) | 2011-04-25 | 2016-05-31 | Magna Electronics Inc. | Method and system for dynamically calibrating vehicular cameras |
| US9834153B2 (en) | 2011-04-25 | 2017-12-05 | Magna Electronics Inc. | Method and system for dynamically calibrating vehicular cameras |
| DE102011017649B3 (de) * | 2011-04-28 | 2012-10-11 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Erkennung einer Intensität eines Aerosols in einem Sichtfeld einer Kamera eines Fahrzeugs |
| KR101356151B1 (ko) * | 2011-05-23 | 2014-01-24 | 에스엘 주식회사 | 차량용 헤드램프 및 그 제어 방법 |
| JP5953658B2 (ja) | 2011-05-25 | 2016-07-20 | ソニー株式会社 | ロボット制御装置及びロボット装置の制御方法、コンピューター・プログラム、プログラム記憶媒体、並びにロボット装置 |
| US9505339B2 (en) * | 2011-06-16 | 2016-11-29 | Robert Bosch Gmbh | Method and control unit for activating at least one headlight of a vehicle using a traffic density |
| TWI439387B (zh) * | 2011-06-17 | 2014-06-01 | Kwang Yang Motor Co | Through the detection of wheel speed to adjust the lamp power control system |
| WO2013016409A1 (en) | 2011-07-26 | 2013-01-31 | Magna Electronics Inc. | Vision system for vehicle |
| WO2013019707A1 (en) | 2011-08-01 | 2013-02-07 | Magna Electronics Inc. | Vehicle camera alignment system |
| DE102011081432A1 (de) * | 2011-08-23 | 2013-02-28 | Robert Bosch Gmbh | Verfahren und Steuergerät zum Anpassen einer Leuchtstärke zumindest eines Scheinwerfers eines Fahrzeugs |
| US8796930B2 (en) * | 2011-09-07 | 2014-08-05 | JST Performance, Inc. | LED device with power removal detection and method for using the same |
| US20140218535A1 (en) | 2011-09-21 | 2014-08-07 | Magna Electronics Inc. | Vehicle vision system using image data transmission and power supply via a coaxial cable |
| WO2013048994A1 (en) | 2011-09-26 | 2013-04-04 | Magna Electronics, Inc. | Vehicle camera image quality improvement in poor visibility conditions by contrast amplification |
| CN103029621B (zh) * | 2011-09-30 | 2016-04-06 | 株式会社理光 | 检测前方车辆的方法及设备 |
| US9146898B2 (en) | 2011-10-27 | 2015-09-29 | Magna Electronics Inc. | Driver assist system with algorithm switching |
| CA3045805A1 (en) | 2011-11-03 | 2013-05-10 | Digital Lumens Incorporated | Methods, systems, and apparatus for intelligent lighting |
| US9669755B2 (en) * | 2011-11-08 | 2017-06-06 | GM Global Technology Operations LLC | Active vision system with subliminally steered and modulated lighting |
| WO2013074604A2 (en) | 2011-11-15 | 2013-05-23 | Magna Electronics, Inc. | Calibration system and method for vehicular surround vision system |
| KR101344424B1 (ko) * | 2011-11-18 | 2013-12-23 | 에스엘 주식회사 | 차량의 헤드 램프 제어 장치 및 방법 |
| WO2013081985A1 (en) | 2011-11-28 | 2013-06-06 | Magna Electronics, Inc. | Vision system for vehicle |
| US9762880B2 (en) | 2011-12-09 | 2017-09-12 | Magna Electronics Inc. | Vehicle vision system with customized display |
| US8853946B2 (en) | 2011-12-16 | 2014-10-07 | Ford Global Technologies | Method for event-based override strategy for automatic high-beam control |
| DE102012200048A1 (de) * | 2012-01-03 | 2013-07-04 | Robert Bosch Gmbh | Verfahren und Steuergerät zum Anpassen einer oberen Scheinwerferstrahlgrenze eines Scheinwerferkegels |
| TWI479680B (zh) * | 2012-01-04 | 2015-04-01 | Kingway Electronic Co Ltd | Vehicle light emitting diode lamps and their luminous methods |
| US9316347B2 (en) | 2012-01-24 | 2016-04-19 | Gentex Corporation | Rearview assembly with interchangeable rearward viewing device |
| KR101360344B1 (ko) | 2012-02-17 | 2014-02-10 | 현대모비스 주식회사 | 차량용 램프 제어장치 및 제어방법 |
| WO2013126715A2 (en) | 2012-02-22 | 2013-08-29 | Magna Electronics, Inc. | Vehicle camera system with image manipulation |
| US10457209B2 (en) | 2012-02-22 | 2019-10-29 | Magna Electronics Inc. | Vehicle vision system with multi-paned view |
| US8694224B2 (en) | 2012-03-01 | 2014-04-08 | Magna Electronics Inc. | Vehicle yaw rate correction |
| US8933627B2 (en) * | 2012-03-08 | 2015-01-13 | GM Global Technology Operations LLC | Systems and methods for controlling vehicle lighting |
| ITFI20120054A1 (it) * | 2012-03-14 | 2013-09-15 | Restauri S A S | Dispositivo accessorio per automatizzare l'accensione e lo spegnimento dei proiettori abbaglianti dei veicoli. |
| CA2867898C (en) | 2012-03-19 | 2023-02-14 | Digital Lumens Incorporated | Methods, systems, and apparatus for providing variable illumination |
| US10609335B2 (en) | 2012-03-23 | 2020-03-31 | Magna Electronics Inc. | Vehicle vision system with accelerated object confirmation |
| FR2988333B1 (fr) * | 2012-03-26 | 2015-07-10 | Valeo Vision | Procede et dispositif d'aide a la conduite nocturne des vehicules automobiles |
| US9319637B2 (en) | 2012-03-27 | 2016-04-19 | Magna Electronics Inc. | Vehicle vision system with lens pollution detection |
| JP5928077B2 (ja) * | 2012-03-28 | 2016-06-01 | 株式会社デンソー | ライト制御装置、およびライト制御プログラム |
| JP5873372B2 (ja) * | 2012-03-30 | 2016-03-01 | クラリオン株式会社 | ヘッドライトの配光制御装置 |
| KR101348068B1 (ko) * | 2012-04-03 | 2014-01-09 | 주식회사 만도 | 차량용 헤드램프 제어 시스템 및 그 제어방법 |
| US8879139B2 (en) | 2012-04-24 | 2014-11-04 | Gentex Corporation | Display mirror assembly |
| US10089537B2 (en) | 2012-05-18 | 2018-10-02 | Magna Electronics Inc. | Vehicle vision system with front and rear camera integration |
| JP5942598B2 (ja) * | 2012-05-28 | 2016-06-29 | 株式会社デンソー | ライト制御装置 |
| US8983135B2 (en) | 2012-06-01 | 2015-03-17 | Gentex Corporation | System and method for controlling vehicle equipment responsive to a multi-stage village detection |
| KR101460722B1 (ko) * | 2012-06-04 | 2014-11-13 | 현대모비스 주식회사 | 자동차의 조명 장치 |
| EP2859436B1 (en) | 2012-06-12 | 2020-06-03 | Gentex Corporation | Vehicle imaging system providing multi-stage aiming stability indication |
| RU2505567C1 (ru) * | 2012-06-14 | 2014-01-27 | Российская Федерация в лице Министерства промышленности и торговли Российской Федерации (Минпромторг России) | Пресс-материал для герметизации интегральных микросхем |
| DE102012013783C5 (de) * | 2012-07-11 | 2017-11-02 | Trw Automotive Electronics & Components Gmbh | Verfahren zur Steuerung einer Innenraumbeleuchtung in einem Fahrzeug sowie Innenraumbeleuchtung |
| EP2879912B1 (en) | 2012-08-02 | 2021-11-10 | Gentex Corporation | System and method for controlling exterior vehicle lights responsive to detection of a semi-truck |
| US9436005B2 (en) | 2012-08-02 | 2016-09-06 | Gentex Corporation | Amplified piezoelectric camera lens cleaner |
| US9340227B2 (en) | 2012-08-14 | 2016-05-17 | Magna Electronics Inc. | Vehicle lane keep assist system |
| US9511708B2 (en) | 2012-08-16 | 2016-12-06 | Gentex Corporation | Method and system for imaging an external scene by employing a custom image sensor |
| WO2014032042A1 (en) | 2012-08-24 | 2014-02-27 | Gentex Corporation | Shaped rearview mirror assembly |
| DE102013217430A1 (de) | 2012-09-04 | 2014-03-06 | Magna Electronics, Inc. | Fahrerassistenzsystem für ein Kraftfahrzeug |
| JP5941800B2 (ja) * | 2012-09-07 | 2016-06-29 | 株式会社デンソー | 車両用前照灯装置 |
| JP5966783B2 (ja) * | 2012-09-07 | 2016-08-10 | 株式会社デンソー | 車両用前照灯の制御装置及びその制御方法 |
| US9199574B2 (en) | 2012-09-11 | 2015-12-01 | Gentex Corporation | System and method for detecting a blocked imager |
| CN102837636A (zh) * | 2012-09-25 | 2012-12-26 | 南京理工大学常熟研究院有限公司 | 一种车灯控制装置 |
| US9558409B2 (en) * | 2012-09-26 | 2017-01-31 | Magna Electronics Inc. | Vehicle vision system with trailer angle detection |
| US9446713B2 (en) | 2012-09-26 | 2016-09-20 | Magna Electronics Inc. | Trailer angle detection system |
| US9723272B2 (en) | 2012-10-05 | 2017-08-01 | Magna Electronics Inc. | Multi-camera image stitching calibration system |
| US9707896B2 (en) | 2012-10-15 | 2017-07-18 | Magna Electronics Inc. | Vehicle camera lens dirt protection via air flow |
| JP6018875B2 (ja) * | 2012-10-18 | 2016-11-02 | 株式会社小糸製作所 | 車両用ランプの点灯制御システム |
| CN102951069B (zh) * | 2012-11-16 | 2015-02-18 | 郑州宇通客车股份有限公司 | 汽车前照灯智能控制方法与系统 |
| US9743002B2 (en) | 2012-11-19 | 2017-08-22 | Magna Electronics Inc. | Vehicle vision system with enhanced display functions |
| US9090234B2 (en) | 2012-11-19 | 2015-07-28 | Magna Electronics Inc. | Braking control system for vehicle |
| US9168863B2 (en) * | 2012-12-03 | 2015-10-27 | Upfitters, L.L.C. | Flasher vehicle interface module |
| WO2014089050A1 (en) | 2012-12-04 | 2014-06-12 | Gentex Corporation | Imaging system and method for detecting a bright city condition |
| US10025994B2 (en) | 2012-12-04 | 2018-07-17 | Magna Electronics Inc. | Vehicle vision system utilizing corner detection |
| US9481301B2 (en) | 2012-12-05 | 2016-11-01 | Magna Electronics Inc. | Vehicle vision system utilizing camera synchronization |
| DE102012112478A1 (de) * | 2012-12-18 | 2014-06-18 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren zum Ermitteln einer Leuchtweite eines Scheinwerfers |
| US20140184068A1 (en) * | 2012-12-27 | 2014-07-03 | Young Chul Kwon | Bi-color Illuminated Emblem |
| US9327648B2 (en) | 2013-01-04 | 2016-05-03 | Gentex Corporation | Rearview assembly with exposed carrier plate |
| WO2014110124A1 (en) | 2013-01-09 | 2014-07-17 | Gentex Corporation | Printed appliqué and method thereof |
| DE102013001086A1 (de) * | 2013-01-23 | 2014-07-24 | Audi Ag | Kraftfahrzeug, umfassend mehrere der Beleuchtung des seitlichen oder rückwärtigen Fahrzeugumfelds dienende Leuchtmittel |
| CN103101475B (zh) * | 2013-01-25 | 2014-10-15 | 深圳市保千里电子有限公司 | 基于汽车照明系统视角与车速同步变化的控制方法及系统 |
| CN103112392B (zh) * | 2013-02-01 | 2014-08-27 | 深圳市保千里电子有限公司 | 汽车照明系统视角与转弯角度同步变化的控制方法及系统 |
| US9092986B2 (en) | 2013-02-04 | 2015-07-28 | Magna Electronics Inc. | Vehicular vision system |
| US20140218529A1 (en) | 2013-02-04 | 2014-08-07 | Magna Electronics Inc. | Vehicle data recording system |
| US9445057B2 (en) | 2013-02-20 | 2016-09-13 | Magna Electronics Inc. | Vehicle vision system with dirt detection |
| US10179543B2 (en) | 2013-02-27 | 2019-01-15 | Magna Electronics Inc. | Multi-camera dynamic top view vision system |
| US9185363B2 (en) | 2013-03-01 | 2015-11-10 | Gentex Corporation | Vehicle imaging system and method for categorizing objects using relative motion analysis |
| US9688200B2 (en) | 2013-03-04 | 2017-06-27 | Magna Electronics Inc. | Calibration system and method for multi-camera vision system |
| US10479262B2 (en) | 2013-03-14 | 2019-11-19 | International Research Institute iRI | Systems and methods for replicating vehicular illumination |
| CN111314632B (zh) * | 2013-03-14 | 2023-04-21 | 株式会社尼康 | 摄像单元及摄像装置 |
| US10012530B2 (en) | 2013-03-14 | 2018-07-03 | Gentex Corporation | Light sensing device |
| US9501506B1 (en) | 2013-03-15 | 2016-11-22 | Google Inc. | Indexing system |
| US10027930B2 (en) | 2013-03-29 | 2018-07-17 | Magna Electronics Inc. | Spectral filtering for vehicular driver assistance systems |
| US9327693B2 (en) | 2013-04-10 | 2016-05-03 | Magna Electronics Inc. | Rear collision avoidance system for vehicle |
| EP2797050B1 (en) * | 2013-04-26 | 2019-07-10 | Veoneer Sweden AB | A safety system and method for a motor vehicle |
| US10232797B2 (en) | 2013-04-29 | 2019-03-19 | Magna Electronics Inc. | Rear vision system for vehicle with dual purpose signal lines |
| EP2992395B1 (en) | 2013-04-30 | 2018-03-07 | Digital Lumens Incorporated | Operating light emitting diodes at low temperature |
| US9508014B2 (en) | 2013-05-06 | 2016-11-29 | Magna Electronics Inc. | Vehicular multi-camera vision system |
| ITPI20130040A1 (it) * | 2013-05-10 | 2014-11-11 | Esastudio Srl | Sistema automatico di gestione dei dispositivi di illuminazione in campo automotive |
| US9563951B2 (en) | 2013-05-21 | 2017-02-07 | Magna Electronics Inc. | Vehicle vision system with targetless camera calibration |
| US9205776B2 (en) | 2013-05-21 | 2015-12-08 | Magna Electronics Inc. | Vehicle vision system using kinematic model of vehicle motion |
| US9069080B2 (en) | 2013-05-24 | 2015-06-30 | Advanced Scientific Concepts, Inc. | Automotive auxiliary ladar sensor |
| US9483568B1 (en) | 2013-06-05 | 2016-11-01 | Google Inc. | Indexing system |
| US10567705B2 (en) | 2013-06-10 | 2020-02-18 | Magna Electronics Inc. | Coaxial cable with bidirectional data transmission |
| US20140368113A1 (en) * | 2013-06-17 | 2014-12-18 | B/E Aerospace, Inc. | Twin Aisle Light Architecture |
| US9260095B2 (en) | 2013-06-19 | 2016-02-16 | Magna Electronics Inc. | Vehicle vision system with collision mitigation |
| KR102089106B1 (ko) * | 2013-06-19 | 2020-03-16 | 현대모비스 주식회사 | 안개 발생 여부 판단 방법 및 이를 위한 장치 |
| US20140375476A1 (en) | 2013-06-24 | 2014-12-25 | Magna Electronics Inc. | Vehicle alert system |
| US10326969B2 (en) | 2013-08-12 | 2019-06-18 | Magna Electronics Inc. | Vehicle vision system with reduction of temporal noise in images |
| DE102013013564A1 (de) * | 2013-08-14 | 2015-02-19 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Kraftfahrzeugscheinwerfer |
| DE102013216225A1 (de) * | 2013-08-15 | 2015-02-19 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Steuern zumindest eines Scheinwerfers eines Fahrzeugs |
| WO2015026810A1 (en) | 2013-08-19 | 2015-02-26 | Gentex Corporation | Vehicle imaging system and method for distinguishing reflective objects from lights of another vehicle |
| KR101848451B1 (ko) | 2013-08-19 | 2018-04-12 | 젠텍스 코포레이션 | 차량 후미등과 점멸 적색 정지등을 구별하기 위한 차량 촬상 시스템 및 방법 |
| US9721172B2 (en) | 2013-08-19 | 2017-08-01 | Gentex Corporation | Imaging system and method with ego motion detection |
| JP6191330B2 (ja) * | 2013-08-20 | 2017-09-06 | 日産自動車株式会社 | 車両用照明制御装置 |
| EP3041712B1 (en) | 2013-09-04 | 2018-11-28 | Gentex Corporation | A rearview assembly of a vehicle for displaying images |
| CN105555612B (zh) | 2013-09-24 | 2018-06-01 | 金泰克斯公司 | 显示镜组件 |
| FR3010938B1 (fr) | 2013-09-26 | 2015-10-30 | Valeo Vision | Dispositif et procede d'aide a la conduite |
| FR3011096B1 (fr) | 2013-09-26 | 2015-10-16 | Valeo Vision | Lunettes anti-eblouissement et de vision a trois dimensions |
| FR3011090B1 (fr) | 2013-09-26 | 2016-12-23 | Valeo Vision | Lunettes a affichage de donnees munies d'un ecran anti-eblouissement |
| FR3011095B1 (fr) | 2013-09-26 | 2016-12-23 | Valeo Vision | Filtre optique adaptatif pour verre de lunettes |
| FR3011091A1 (fr) | 2013-09-26 | 2015-03-27 | Valeo Vision | Lunettes a affichage de donnees munies d'un ecran anti-eblouissement |
| CN105593061B (zh) | 2013-10-01 | 2018-03-27 | 金泰克斯公司 | 用于在快车道上控制外部车灯的系统和方法 |
| CA2926260C (en) | 2013-10-10 | 2023-01-24 | Digital Lumens Incorporated | Methods, systems, and apparatus for intelligent lighting |
| KR101511853B1 (ko) | 2013-10-14 | 2015-04-13 | 영남대학교 산학협력단 | 단일 다중 노출 카메라를 이용한 야간 전방 차량 검출 및 위치 측정 시스템 및 방법 |
| KR101794821B1 (ko) | 2013-11-15 | 2017-11-07 | 젠텍스 코포레이션 | 차량 앞유리에 대한 컬러 감쇠를 위한 동적 보상을 포함하는 촬상 시스템 |
| US9796325B2 (en) | 2013-11-21 | 2017-10-24 | Ford Global Technologies, Llc | Exterior light system for a vehicle |
| US9499139B2 (en) | 2013-12-05 | 2016-11-22 | Magna Electronics Inc. | Vehicle monitoring system |
| DE102013225156A1 (de) * | 2013-12-06 | 2015-06-11 | Conti Temic Microelectronic Gmbh | Beleuchtung zur Detektion von Regentropfen auf einer Scheibe mittels einer Kamera |
| DE102013225155A1 (de) | 2013-12-06 | 2015-06-11 | Conti Temic Microelectronic Gmbh | Beleuchtung zur Detektion von Regentropfen auf einer Scheibe mittels einer Kamera |
| US9988047B2 (en) | 2013-12-12 | 2018-06-05 | Magna Electronics Inc. | Vehicle control system with traffic driving control |
| WO2015104624A1 (en) | 2014-01-08 | 2015-07-16 | Koninklijke Philips N.V. | Methods and apparatus for lighting control based on detected lighting change |
| US9511715B2 (en) | 2014-01-31 | 2016-12-06 | Gentex Corporation | Backlighting assembly for display for reducing cross-hatching |
| DE102014204770A1 (de) * | 2014-02-06 | 2015-08-06 | Conti Temic Microelectronic Gmbh | Fahrerassistenzsystem |
| CN106061794B (zh) | 2014-03-21 | 2019-06-07 | 金泰克斯公司 | 三态显示镜组件 |
| EP3126195B1 (en) | 2014-04-01 | 2019-06-05 | Gentex Corporation | Automatic display mirror assembly |
| US9623878B2 (en) | 2014-04-02 | 2017-04-18 | Magna Electronics Inc. | Personalized driver assistance system for vehicle |
| US9487235B2 (en) | 2014-04-10 | 2016-11-08 | Magna Electronics Inc. | Vehicle control system with adaptive wheel angle correction |
| JP6031468B2 (ja) * | 2014-04-15 | 2016-11-24 | 株式会社豊田中央研究所 | 照射装置 |
| CN104065930B (zh) * | 2014-06-30 | 2017-07-07 | 青岛歌尔声学科技有限公司 | 集成摄像头模组和光传感器的视觉辅助方法及装置 |
| WO2016014933A1 (en) * | 2014-07-24 | 2016-01-28 | Gentex Corporation | Forward viewing camera configured to control outside electro-optic mirror |
| US9725098B2 (en) * | 2014-08-11 | 2017-08-08 | Ford Global Technologies, Llc | Vehicle driver identification |
| US9925980B2 (en) | 2014-09-17 | 2018-03-27 | Magna Electronics Inc. | Vehicle collision avoidance system with enhanced pedestrian avoidance |
| WO2016044746A1 (en) | 2014-09-19 | 2016-03-24 | Gentex Corporation | Rearview assembly |
| DE102014014938A1 (de) * | 2014-10-07 | 2016-04-07 | Audi Ag | Verfahren zum Betrieb eines Kraftfahrzeugs mit einem optischen Sensor und Kraftfahrzeug |
| JP6606181B2 (ja) | 2014-11-06 | 2019-11-13 | ジェンテックス コーポレイション | 視程検出のためのシステムおよび方法 |
| CN107000642B (zh) | 2014-11-07 | 2020-03-27 | 金泰克斯公司 | 全显示镜致动器 |
| KR101977685B1 (ko) | 2014-11-13 | 2019-05-13 | 젠텍스 코포레이션 | 디스플레이를 갖춘 후방 미러 시스템 |
| GB2532742B (en) * | 2014-11-25 | 2018-07-18 | Jaguar Land Rover Ltd | Apparatus and method for controlling a vehicle system |
| CN104442546A (zh) * | 2014-11-28 | 2015-03-25 | 长安大学 | 一种基于can总线的汽车灯光自适应控制装置及其控制方法 |
| KR101997815B1 (ko) | 2014-12-03 | 2019-07-08 | 젠텍스 코포레이션 | 디스플레이 미러 어셈블리 |
| USD746744S1 (en) | 2014-12-05 | 2016-01-05 | Gentex Corporation | Rearview device |
| US9744907B2 (en) | 2014-12-29 | 2017-08-29 | Gentex Corporation | Vehicle vision system having adjustable displayed field of view |
| DE102015200583B4 (de) * | 2015-01-15 | 2016-09-15 | Continental Automotive Gmbh | Verfahren zur kamerabasierten Umgebungslichterkennung eines Fahrzeugs und Sensoreinheit zur Durchführung des Verfahrens |
| US9916660B2 (en) | 2015-01-16 | 2018-03-13 | Magna Electronics Inc. | Vehicle vision system with calibration algorithm |
| US9720278B2 (en) | 2015-01-22 | 2017-08-01 | Gentex Corporation | Low cost optical film stack |
| US10414359B2 (en) | 2015-02-16 | 2019-09-17 | Tyri International, Inc. | System for providing wireless operation of powered device(s) on a vehicle |
| US10680678B2 (en) | 2015-02-16 | 2020-06-09 | Tyri International, Inc. | System for providing wireless operation of powered device(s) on a vehicle with direct charging |
| US9764744B2 (en) | 2015-02-25 | 2017-09-19 | Magna Electronics Inc. | Vehicle yaw rate estimation system |
| US9688281B2 (en) * | 2015-03-23 | 2017-06-27 | Toyota Jidosha Kabushiki Kaisha | Proactive autocomplete of a user's in-vehicle operations |
| US10286855B2 (en) | 2015-03-23 | 2019-05-14 | Magna Electronics Inc. | Vehicle vision system with video compression |
| JP6473032B2 (ja) * | 2015-04-03 | 2019-02-20 | 株式会社小糸製作所 | 車両用灯具 |
| WO2016172096A1 (en) | 2015-04-20 | 2016-10-27 | Gentex Corporation | Rearview assembly with applique |
| US10946799B2 (en) | 2015-04-21 | 2021-03-16 | Magna Electronics Inc. | Vehicle vision system with overlay calibration |
| US9975472B2 (en) * | 2015-04-30 | 2018-05-22 | Tyri International, Inc. | Controllable lighting arrangement for a vehicle |
| US20160318437A1 (en) * | 2015-05-02 | 2016-11-03 | Nxp B.V. | Adaptive lighting apparatus |
| US10819943B2 (en) | 2015-05-07 | 2020-10-27 | Magna Electronics Inc. | Vehicle vision system with incident recording function |
| US10112540B2 (en) | 2015-05-18 | 2018-10-30 | Gentex Corporation | Full display rearview device |
| JP7060958B2 (ja) | 2015-06-22 | 2022-04-27 | ジェンテックス コーポレイション | 振幅変調光のフリッカ補正のためのビデオストリーム画像処理システムおよび方法 |
| US9821712B2 (en) * | 2015-06-26 | 2017-11-21 | Toshiba Lighting & Technology Corporation | Vehicle interior lighting device |
| US10078789B2 (en) | 2015-07-17 | 2018-09-18 | Magna Electronics Inc. | Vehicle parking assist system with vision-based parking space detection |
| DE102015112103A1 (de) * | 2015-07-24 | 2017-01-26 | Preh Gmbh | Detektionsvorrichtung zur Nebelerkennung für ein Kraftfahrzeug |
| US10331956B2 (en) | 2015-09-23 | 2019-06-25 | Magna Electronics Inc. | Vehicle vision system with detection enhancement using light control |
| US11131756B2 (en) * | 2015-09-29 | 2021-09-28 | Qualcomm Incorporated | LIDAR system with reflected signal strength measurement |
| JP6389158B2 (ja) | 2015-09-29 | 2018-09-12 | 矢崎総業株式会社 | 車両用ワイヤハーネス |
| US10299345B2 (en) * | 2015-10-02 | 2019-05-21 | Ford Global Technologies, Llc | Illuminated badge system for a motor vehicle |
| US11228700B2 (en) | 2015-10-07 | 2022-01-18 | Magna Electronics Inc. | Vehicle vision system camera with adaptive field of view |
| DE102015013271B4 (de) | 2015-10-13 | 2024-10-10 | Mercedes-Benz Group AG | Vorrichtung und Verfahren zur Steuerung eines Scheinwerfers |
| US10187590B2 (en) | 2015-10-27 | 2019-01-22 | Magna Electronics Inc. | Multi-camera vehicle vision system with image gap fill |
| US10875403B2 (en) | 2015-10-27 | 2020-12-29 | Magna Electronics Inc. | Vehicle vision system with enhanced night vision |
| USD797627S1 (en) | 2015-10-30 | 2017-09-19 | Gentex Corporation | Rearview mirror device |
| CN108349436B (zh) | 2015-10-30 | 2019-12-20 | 金泰克斯公司 | 后视装置 |
| EP3368374B1 (en) | 2015-10-30 | 2023-12-27 | Gentex Corporation | Toggle paddle |
| USD798207S1 (en) | 2015-10-30 | 2017-09-26 | Gentex Corporation | Rearview mirror assembly |
| USD800618S1 (en) | 2015-11-02 | 2017-10-24 | Gentex Corporation | Toggle paddle for a rear view device |
| US9821707B2 (en) * | 2015-11-04 | 2017-11-21 | GM Global Technology Operations LLC | User-following vehicle illumination system |
| KR20170057056A (ko) * | 2015-11-16 | 2017-05-24 | 삼성전자주식회사 | 원격제어장치, 원격제어장치의 구동방법, 영상표시장치, 영상표시장치의 구동방법 및 컴퓨터 판독가능 기록매체 |
| US10144419B2 (en) | 2015-11-23 | 2018-12-04 | Magna Electronics Inc. | Vehicle dynamic control system for emergency handling |
| JP6310899B2 (ja) | 2015-11-25 | 2018-04-11 | 株式会社Subaru | 車外環境認識装置 |
| JP6200481B2 (ja) * | 2015-11-25 | 2017-09-20 | 株式会社Subaru | 車外環境認識装置 |
| US11285878B2 (en) | 2015-12-17 | 2022-03-29 | Magna Electronics Inc. | Vehicle vision system with camera line power filter |
| US10155478B2 (en) * | 2015-12-17 | 2018-12-18 | Ford Global Technologies, Llc | Centerline method for trailer hitch angle detection |
| EP3184362B1 (en) * | 2015-12-23 | 2021-12-08 | Veoneer Sweden AB | Driver assistance system and method for a motor vehicle |
| US10906463B2 (en) | 2016-02-01 | 2021-02-02 | Magna Electronics Inc. | Vehicle adaptive lighting system |
| US11277558B2 (en) | 2016-02-01 | 2022-03-15 | Magna Electronics Inc. | Vehicle vision system with master-slave camera configuration |
| US11433809B2 (en) | 2016-02-02 | 2022-09-06 | Magna Electronics Inc. | Vehicle vision system with smart camera video output |
| US10298570B2 (en) * | 2016-03-03 | 2019-05-21 | Ams Sensors Singapore Pte. Ltd. | Optoelectronic systems and method for operating the same |
| US10132971B2 (en) | 2016-03-04 | 2018-11-20 | Magna Electronics Inc. | Vehicle camera with multiple spectral filters |
| US10055651B2 (en) | 2016-03-08 | 2018-08-21 | Magna Electronics Inc. | Vehicle vision system with enhanced lane tracking |
| JP6648564B2 (ja) * | 2016-03-11 | 2020-02-14 | 株式会社デンソー | 車両用光照射システム |
| US20170274832A1 (en) * | 2016-03-24 | 2017-09-28 | Nidec Elesys Corporation | Windshield including vehicle-mounted radar |
| USD845851S1 (en) | 2016-03-31 | 2019-04-16 | Gentex Corporation | Rearview device |
| USD817238S1 (en) | 2016-04-29 | 2018-05-08 | Gentex Corporation | Rearview device |
| DE102016207759A1 (de) * | 2016-05-04 | 2017-11-09 | Osram Gmbh | Detektieren einer Beschädigung einer Konvertereinrichtung |
| JP6368958B2 (ja) * | 2016-05-12 | 2018-08-08 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| US10025138B2 (en) | 2016-06-06 | 2018-07-17 | Gentex Corporation | Illuminating display with light gathering structure |
| CN109311416B (zh) * | 2016-06-24 | 2021-11-26 | 金泰克斯公司 | 具有自适应远光控制的成像系统 |
| US10071675B2 (en) | 2016-08-03 | 2018-09-11 | Ford Global Technologies, Llc | Autonomous vehicle headlight deactivation |
| CN109496187B (zh) | 2016-08-08 | 2022-07-26 | 金泰克斯公司 | 用于处理视频数据以通过动态曝光控制来检测和消除闪变光源的系统和方法 |
| JP6913687B2 (ja) * | 2016-09-15 | 2021-08-04 | 株式会社小糸製作所 | 照明システム |
| CA3038796A1 (en) * | 2016-09-29 | 2018-04-05 | Ess-Help, Inc. | Enhanced communication system for vehicle hazard lights |
| WO2018065579A1 (en) * | 2016-10-07 | 2018-04-12 | Jaguar Land Rover Limited | Sun visor for a vehicle |
| US10017107B2 (en) | 2016-11-15 | 2018-07-10 | Ford Global Technologies, Llc | Light activation sequence of a vehicle |
| USD809984S1 (en) | 2016-12-07 | 2018-02-13 | Gentex Corporation | Rearview assembly |
| USD854473S1 (en) | 2016-12-16 | 2019-07-23 | Gentex Corporation | Rearview assembly |
| US20180191966A1 (en) | 2016-12-30 | 2018-07-05 | Gentex Corporation | Full display mirror with on-demand spotter view |
| JP6946352B2 (ja) * | 2017-01-20 | 2021-10-06 | 株式会社小糸製作所 | 車両用灯具システム、車両用灯具の制御装置及び車両用灯具の制御方法 |
| CN110087951B (zh) * | 2017-01-27 | 2023-01-03 | 金泰克斯公司 | 用于机车倾斜的图像补偿 |
| US10290158B2 (en) * | 2017-02-03 | 2019-05-14 | Ford Global Technologies, Llc | System and method for assessing the interior of an autonomous vehicle |
| US9849829B1 (en) | 2017-03-02 | 2017-12-26 | Ford Global Technologies, Llc | Vehicle light system |
| WO2018170353A1 (en) | 2017-03-17 | 2018-09-20 | Gentex Corporation | Dual display reverse camera system |
| US10246003B2 (en) | 2017-03-22 | 2019-04-02 | International Business Machines Corporation | Determination and setting of optimal intensity |
| WO2018176000A1 (en) | 2017-03-23 | 2018-09-27 | DeepScale, Inc. | Data synthesis for autonomous control systems |
| KR101908308B1 (ko) * | 2017-04-12 | 2018-10-16 | 엘지전자 주식회사 | 차량용 램프 |
| US10544916B2 (en) * | 2017-04-21 | 2020-01-28 | Ford Global Technologies, Llc | Vehicular headlamp system with a photochromic lens |
| DE102017207435A1 (de) * | 2017-05-03 | 2018-11-08 | Volkswagen Aktiengesellschaft | Verfahren zum Betreiben einer von außen sichtbaren Beleuchtung eines Kraftfahrzeugs sowie Kraftfahrzeug zur Durchführung des Verfahrens |
| KR102202125B1 (ko) * | 2017-06-02 | 2021-01-13 | 현대모비스 주식회사 | 조향 정보를 이용한 배광 제어 장치 및 방법 |
| US11893393B2 (en) | 2017-07-24 | 2024-02-06 | Tesla, Inc. | Computational array microprocessor system with hardware arbiter managing memory requests |
| US11409692B2 (en) | 2017-07-24 | 2022-08-09 | Tesla, Inc. | Vector computational unit |
| US10671349B2 (en) | 2017-07-24 | 2020-06-02 | Tesla, Inc. | Accelerated mathematical engine |
| US11157441B2 (en) | 2017-07-24 | 2021-10-26 | Tesla, Inc. | Computational array microprocessor system using non-consecutive data formatting |
| WO2019032091A1 (en) * | 2017-08-07 | 2019-02-14 | Ford Global Technologies, Llc | LOCATING A VEHICLE USING A DRONE |
| WO2019035108A1 (en) * | 2017-08-17 | 2019-02-21 | Mohan Lalit | VEHICLE BEAM BEAM CONTROL SYSTEM AND METHOD THEREOF |
| US10183614B1 (en) * | 2017-08-17 | 2019-01-22 | Harman International Industries, Incorporated | System and method for vehicle headlight control |
| DE102017119795A1 (de) * | 2017-08-29 | 2019-02-28 | HELLA GmbH & Co. KGaA | Verfahren zur Ansteuerung mindestens eines Hauptscheinwerfers einer Beleuchtungseinheit für ein Kraftfahrzeug, Beleuchtungseinheit, Computerprogrammprodukt und computerlesbares Medium |
| WO2019073994A1 (ja) | 2017-10-13 | 2019-04-18 | 株式会社小糸製作所 | 車両用灯具 |
| EP3474404B1 (en) * | 2017-10-23 | 2023-08-23 | Goodrich Lighting Systems GmbH | Exterior aircraft light unit and aircraft comprising the same |
| US11052913B2 (en) * | 2017-10-23 | 2021-07-06 | Uatc, Llc | Cargo trailer sensor assembly |
| US10427592B2 (en) * | 2017-10-24 | 2019-10-01 | Robert Bosch Gmbh | Car light sensor warning for headlights |
| JP6991040B2 (ja) * | 2017-11-13 | 2022-01-12 | スタンレー電気株式会社 | 車両用前照灯の制御装置、車両用前照灯、及び車両用前照灯の制御方法 |
| JP6627127B2 (ja) * | 2017-11-27 | 2020-01-08 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| US11282303B2 (en) | 2017-12-01 | 2022-03-22 | Gentex Corporation | System and method for identifying vehicle operation mode |
| US20190176684A1 (en) * | 2017-12-07 | 2019-06-13 | Uber Technologies, Inc. | Location Based Vehicle Headlight Control |
| US10696214B2 (en) | 2018-01-10 | 2020-06-30 | Toyota Motor Engineering & Manufacturing North America, Inc. | Automatic brake light activation system |
| US11561791B2 (en) | 2018-02-01 | 2023-01-24 | Tesla, Inc. | Vector computational unit receiving data elements in parallel from a last row of a computational array |
| US10627092B2 (en) | 2018-03-05 | 2020-04-21 | Ford Global Technologies, Llc | Vehicle grille assembly |
| KR102100088B1 (ko) | 2018-03-14 | 2020-04-13 | 현대모비스 주식회사 | 차량용 램프 장치의 이종 광원 구동 회로 |
| US10493900B2 (en) | 2018-05-04 | 2019-12-03 | International Business Machines Corporation | Adaptive headlights for the trajectory of a vehicle |
| US10924685B2 (en) * | 2018-05-07 | 2021-02-16 | Rubicon Products, LLC | Night vision apparatus |
| JP7302596B2 (ja) * | 2018-05-15 | 2023-07-04 | ソニーグループ株式会社 | 画像処理装置、および画像処理方法、並びにプログラム |
| US11215999B2 (en) | 2018-06-20 | 2022-01-04 | Tesla, Inc. | Data pipeline and deep learning system for autonomous driving |
| CN109017541A (zh) * | 2018-06-29 | 2018-12-18 | 深圳市鹏巨术信息技术有限公司 | 一种光束切线的调节方法及相关设备 |
| US11361457B2 (en) | 2018-07-20 | 2022-06-14 | Tesla, Inc. | Annotation cross-labeling for autonomous control systems |
| US11636333B2 (en) | 2018-07-26 | 2023-04-25 | Tesla, Inc. | Optimizing neural network structures for embedded systems |
| CN110805876B (zh) * | 2018-08-03 | 2022-03-15 | 株式会社小糸制作所 | 车辆用前照灯 |
| EP3617048A1 (fr) | 2018-08-28 | 2020-03-04 | The Swatch Group Research and Development Ltd | Dispositif d'éclairage actif portable ou placé sur un véhicule |
| EP3616989A1 (fr) * | 2018-08-28 | 2020-03-04 | The Swatch Group Research and Development Ltd | Dispositif d'éclairage actif portable ou placé sur un véhicule |
| US11562231B2 (en) | 2018-09-03 | 2023-01-24 | Tesla, Inc. | Neural networks for embedded devices |
| US10932336B2 (en) | 2018-09-10 | 2021-02-23 | Lumileds Llc | High speed image refresh system |
| US11164287B2 (en) | 2018-09-10 | 2021-11-02 | Lumileds Llc | Large LED array with reduced data management |
| US11091087B2 (en) | 2018-09-10 | 2021-08-17 | Lumileds Llc | Adaptive headlamp system for vehicles |
| US11107386B2 (en) | 2018-09-10 | 2021-08-31 | Lumileds Llc | Pixel diagnostics with a bypass mode |
| KR102664913B1 (ko) * | 2018-09-11 | 2024-05-14 | 엘지이노텍 주식회사 | 조명 모듈 및 이를 구비한 조명 어셈블리 |
| US10614752B1 (en) | 2018-09-27 | 2020-04-07 | Apple Inc. | Electronic device with polarized ambient light sensor |
| US11205093B2 (en) | 2018-10-11 | 2021-12-21 | Tesla, Inc. | Systems and methods for training machine models with augmented data |
| TWI826530B (zh) | 2018-10-19 | 2023-12-21 | 荷蘭商露明控股公司 | 驅動發射器陣列之方法及發射器陣列裝置 |
| US11196678B2 (en) | 2018-10-25 | 2021-12-07 | Tesla, Inc. | QOS manager for system on a chip communications |
| CN109334557B (zh) * | 2018-10-26 | 2020-04-17 | 厦门理工学院 | 一种基于车载视觉的车辆大灯调节控制方法及控制系统 |
| JP7052684B2 (ja) * | 2018-11-14 | 2022-04-12 | トヨタ自動車株式会社 | 車両制御システム |
| JP7139901B2 (ja) | 2018-11-14 | 2022-09-21 | トヨタ自動車株式会社 | 車両制御システム |
| US11282276B2 (en) | 2018-11-16 | 2022-03-22 | Contraventum, Llc | Collaborative light show authoring for tessellated geometries |
| JP2020083050A (ja) * | 2018-11-26 | 2020-06-04 | 株式会社小糸製作所 | 車両用照明システム |
| US11816585B2 (en) | 2018-12-03 | 2023-11-14 | Tesla, Inc. | Machine learning models operating at different frequencies for autonomous vehicles |
| US11537811B2 (en) | 2018-12-04 | 2022-12-27 | Tesla, Inc. | Enhanced object detection for autonomous vehicles based on field view |
| US20200180503A1 (en) * | 2018-12-06 | 2020-06-11 | Flex-N-Gate Advanced Product Development, Llc | Energy-efficient lighting system for autonomous vehicles |
| CN109671032B (zh) * | 2018-12-18 | 2023-04-07 | 桂林理工大学 | 一种根据影像亮度特征的补偿因子均衡模型的构建方法 |
| DE102018222701A1 (de) * | 2018-12-21 | 2020-06-25 | Robert Bosch Gmbh | Sensoreinrichtung und Verfahren zum Betreiben einer Sensoreinrichtung für ein Fahrzeug |
| JP7242292B2 (ja) * | 2018-12-26 | 2023-03-20 | 株式会社クボタ | 作業車両 |
| US11610117B2 (en) | 2018-12-27 | 2023-03-21 | Tesla, Inc. | System and method for adapting a neural network model on a hardware platform |
| JP7237607B2 (ja) * | 2019-01-25 | 2023-03-13 | 株式会社小糸製作所 | 車両用灯具システム、車両用灯具の制御装置および車両用灯具の制御方法 |
| JP7259369B2 (ja) * | 2019-02-01 | 2023-04-18 | トヨタ自動車株式会社 | 車両の制御装置及び情報処理システム |
| US10997461B2 (en) | 2019-02-01 | 2021-05-04 | Tesla, Inc. | Generating ground truth for machine learning from time series elements |
| US11150664B2 (en) | 2019-02-01 | 2021-10-19 | Tesla, Inc. | Predicting three-dimensional features for autonomous driving |
| DE102019201666A1 (de) | 2019-02-08 | 2020-08-13 | Ford Global Technologies, Llc | Verfahren zum Betrieb eines selbstfahrenden Kraftfahrzeugs |
| US11567514B2 (en) | 2019-02-11 | 2023-01-31 | Tesla, Inc. | Autonomous and user controlled vehicle summon to a target |
| US10956755B2 (en) | 2019-02-19 | 2021-03-23 | Tesla, Inc. | Estimating object properties using visual image data |
| US10907794B2 (en) * | 2019-02-27 | 2021-02-02 | Magna Closures Inc. | Headlight assembly with lens heater |
| EP3708427B1 (en) * | 2019-03-12 | 2024-10-02 | Arriver Software AB | A headlight control system for a motor vehicle and a method of training a machine learning model for a headlight control system |
| US11325523B2 (en) * | 2019-04-02 | 2022-05-10 | Pony Ai Inc. | Lighting element control for an autonomous vehicle |
| JP7207113B2 (ja) * | 2019-04-08 | 2023-01-18 | トヨタ自動車株式会社 | 車両の前照灯制御装置 |
| CN110097502B (zh) * | 2019-04-16 | 2022-03-15 | 深圳市莫廷影像技术有限公司 | 眼底无灌注区的测量方法及装置及图像处理方法 |
| US20220196221A1 (en) * | 2019-05-13 | 2022-06-23 | Magna Closures Inc. | Solid state beamforming headlamps |
| US11198386B2 (en) | 2019-07-08 | 2021-12-14 | Lear Corporation | System and method for controlling operation of headlights in a host vehicle |
| CN110329143A (zh) * | 2019-07-30 | 2019-10-15 | 火丁智能照明(广东)有限公司 | 自动控制车前灯照射范围的方法和装置 |
| US11530936B2 (en) * | 2019-08-01 | 2022-12-20 | Denso International America, Inc. | Plug-and-play stepper motor for a pointer display assembly |
| US11480431B1 (en) * | 2019-08-27 | 2022-10-25 | Alarm.Com Incorporated | Lighting adaptive navigation |
| CN110531318B (zh) * | 2019-09-03 | 2021-04-30 | 北京理工大学 | 一种用于可见光成像室内定位扩展发光单元id的方法 |
| US11144769B2 (en) | 2019-09-30 | 2021-10-12 | Pony Ai Inc. | Variable resolution sensors |
| FR3101691B1 (fr) | 2019-10-04 | 2022-07-08 | Valeo Vision | Procede de contrôle d’un dispositif lumineux pour l’emission d’un faisceau lumineux pixelise |
| US11872929B2 (en) * | 2020-01-14 | 2024-01-16 | Qualcomm Incorporated | Collaborative vehicle headlight directing |
| US11976799B2 (en) | 2020-01-17 | 2024-05-07 | Magna Closures Inc. | Anti-glare vehicle headlights |
| US11565624B2 (en) | 2020-01-23 | 2023-01-31 | Ford Global Technologies, Llc | Dimmable external vehicle lighting and methods of use |
| US11485197B2 (en) | 2020-03-13 | 2022-11-01 | Lear Corporation | System and method for providing an air quality alert to an occupant of a host vehicle |
| US11597370B2 (en) * | 2020-03-26 | 2023-03-07 | Toyota Jidosha Kabushiki Kaisha | Electrical control device for headlight of wiper of autonomous vehicle based on driving state |
| CN113709938B (zh) * | 2020-05-22 | 2024-07-19 | 米沃奇电动工具公司 | 具有自动调光功能的便携式照明装置 |
| US11117570B1 (en) * | 2020-06-04 | 2021-09-14 | Ambarella International Lp | Parking assistance using a stereo camera and an added light source |
| EP3944140A1 (en) * | 2020-07-20 | 2022-01-26 | Valeo Vision | Method for operating an automotive lighting device and automotive lighting device |
| FR3112515B1 (fr) * | 2020-07-20 | 2022-12-16 | Valeo Vision | Procédé de fonctionnement d'un dispositif d'éclairage automobile et dispositif d'éclairage automobile |
| US11315429B1 (en) | 2020-10-27 | 2022-04-26 | Lear Corporation | System and method for providing an alert to a driver of a host vehicle |
| US11872988B2 (en) * | 2020-11-10 | 2024-01-16 | GM Global Technology Operations LLC | Method and system to adapt overtake decision and scheduling based on driver assertions |
| JP7435411B2 (ja) | 2020-11-10 | 2024-02-21 | トヨタ自動車株式会社 | 前照灯制御装置 |
| US11968639B2 (en) | 2020-11-11 | 2024-04-23 | Magna Electronics Inc. | Vehicular control system with synchronized communication between control units |
| JP2022083788A (ja) * | 2020-11-25 | 2022-06-06 | セイコーエプソン株式会社 | 表示モジュール、虚像表示装置、および導光光学装置の製造方法 |
| JP7124147B1 (ja) * | 2021-02-22 | 2022-08-23 | 本田技研工業株式会社 | レーダ搭載構造 |
| CN117859029A (zh) | 2021-08-20 | 2024-04-09 | 金泰克斯公司 | 灯光组合件和具有灯光组合件的照明系统 |
| US11975759B2 (en) * | 2021-09-28 | 2024-05-07 | Aptiv Technologies Limited | Self-learning-based interpretation of driver's intent for evasive steering |
| EP4169772A1 (de) * | 2021-10-19 | 2023-04-26 | Volkswagen Ag | Verfahren und vorrichtung zum steuern einer nebellichtanlage |
| AT525768B1 (de) * | 2021-12-20 | 2023-12-15 | Avl List Gmbh | Verfahren zur erkennung von einer umgebungslichtbedingung |
| CN114428488B (zh) * | 2022-01-27 | 2024-06-18 | 重庆允丰科技有限公司 | 基于工业互联网平台的设备状态监控方法及系统 |
| EP4311978A1 (en) * | 2022-07-28 | 2024-01-31 | Valeo Comfort and Driving Assistance | Display |
| KR20240016749A (ko) * | 2022-07-29 | 2024-02-06 | 현대자동차주식회사 | 차량의 실내 조명 장치 및 이를 포함한 조명 제어 시스템 |
Family Cites Families (115)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2632040A (en) | 1952-05-01 | 1953-03-17 | Rabinow Jacob | Automatic headlight dimmer |
| US2827594A (en) | 1954-09-02 | 1958-03-18 | Rabinow Jacob | Color discriminating headlight dimmer |
| US3188519A (en) * | 1958-11-11 | 1965-06-08 | Tokuji Kikuyama | Automatic control system for headlights of motor vehicles comprising a supplementarylight with filter |
| DE2025302C3 (de) * | 1970-05-23 | 1979-11-29 | Daimler-Benz Ag, 7000 Stuttgart | Nebelschlußleuchte, insbesondere für Kraftfahrzeuge |
| DE2514611A1 (de) * | 1975-04-03 | 1976-10-14 | Faller Ohg | Helligkeitsabhaengige einrichtung fuer fahrzeuge |
| US4139801A (en) | 1977-01-26 | 1979-02-13 | Linares Raul F | Automatic automobile light control system |
| US4258979A (en) * | 1978-12-08 | 1981-03-31 | Mahin William E | Rear view mirror assembly |
| US4236099A (en) | 1979-03-05 | 1980-11-25 | Irving Rosenblum | Automatic headlight system |
| US4376909A (en) | 1979-04-13 | 1983-03-15 | Honda Giken Kogyo Kabushiki Kaisha | Automatic light control for automotive vehicles |
| FR2492748A2 (fr) | 1979-11-07 | 1982-04-30 | Massoni Francois | Dispositif de commande automatique de l'allumage et de l'extinction des feux d'un vehicule |
| DE2946561A1 (de) | 1979-11-17 | 1981-05-27 | Bosch Gmbh Robert | Einrichtung zur automatischen pruefung der lichtverteilung eines kraftfahrzeugscheinwerfers |
| US4424631A (en) | 1982-03-02 | 1984-01-10 | Prince Corporation | Electrical compass |
| US6442465B2 (en) * | 1992-05-05 | 2002-08-27 | Automotive Technologies International, Inc. | Vehicular component control systems and methods |
| US4425717A (en) | 1982-06-24 | 1984-01-17 | Prince Corporation | Vehicle magnetic sensor |
| US4546551A (en) | 1983-03-24 | 1985-10-15 | Prince Corporation | Electrical control system |
| US4692798A (en) | 1984-01-09 | 1987-09-08 | Nissan Motor Company, Limited | Apparatus and process for improving visibility of object within visual field |
| US4599544A (en) | 1984-05-24 | 1986-07-08 | General Motors Corporation | Vehicle headlamp beam control |
| US4677381A (en) | 1984-10-19 | 1987-06-30 | Prince Corporation | Flux-gate sensor electrical drive method and circuit |
| NO850900L (no) | 1985-03-06 | 1986-09-08 | Hans Christian Flaaten | Anordning for automatisk, selektiv lyskontroll for kjoeretoeyer. |
| US4891559A (en) | 1985-06-13 | 1990-01-02 | Nippondenso Soken, Inc. | Apparatus for controlling a headlight of a vehicle |
| US4665321A (en) | 1985-08-14 | 1987-05-12 | Kwangling Chang | Automatic control system for automobile lights |
| DE3601388A1 (de) | 1986-01-18 | 1987-07-23 | Bosch Gmbh Robert | Scheinwerferanlage fuer fahrzeuge, insbesondere fuer kraftfahrzeuge |
| US4902108A (en) | 1986-03-31 | 1990-02-20 | Gentex Corporation | Single-compartment, self-erasing, solution-phase electrochromic devices, solutions for use therein, and uses thereof |
| US4917477A (en) | 1987-04-06 | 1990-04-17 | Gentex Corporation | Automatic rearview mirror system for automotive vehicles |
| US4953305A (en) | 1987-05-27 | 1990-09-04 | Prince Corporation | Vehicle compass with automatic continuous calibration |
| US4727290A (en) | 1987-05-29 | 1988-02-23 | General Motors Corporation | Automatic vehicle headlamp dimming control |
| US4851775A (en) | 1987-07-02 | 1989-07-25 | Precision Navigation, Incorporated | Digital compass and magnetometer having a sensor coil wound on a high permeability isotropic core |
| JPH01158579A (ja) * | 1987-09-09 | 1989-06-21 | Aisin Seiki Co Ltd | 像認識装置 |
| US4862037A (en) | 1987-12-24 | 1989-08-29 | Ford Motor Company | Automatic headlamp dimming system |
| US4930742A (en) | 1988-03-25 | 1990-06-05 | Donnelly Corporation | Rearview mirror and accessory mount for vehicles |
| JPH01278848A (ja) | 1988-05-02 | 1989-11-09 | Nissan Motor Co Ltd | 車両用前照灯装置 |
| DE3844364C2 (de) | 1988-12-30 | 1996-07-25 | Bosch Gmbh Robert | Verfahren zur Steuerung der Lichtemission einer Scheinwerferanordnung eines Fahrzeugs und Scheinwerferanordnung zur Durchführung des Verfahrens |
| US5072154A (en) | 1990-03-13 | 1991-12-10 | Chen Min Hsiung | Automatic luminosity control device for car and motor bicycle headlamps |
| US5280380A (en) | 1990-04-30 | 1994-01-18 | Gentex Corporation | UV-stabilized compositions and methods |
| US5036437A (en) | 1990-09-04 | 1991-07-30 | Lectron Products, Inc. | Vehicle lamp control sensor |
| US5124549A (en) | 1990-10-15 | 1992-06-23 | Lectron Products, Inc. | Automatic headlamp dimmer with optical baffle |
| US5086253A (en) | 1990-10-15 | 1992-02-04 | Lawler Louis N | Automatic headlight dimmer apparatus |
| US5187383A (en) | 1990-11-06 | 1993-02-16 | Alfonse Taccetta | Headlight actuator associated with windsheild wiper actuation having delay circuits and daylight detection |
| US5164785A (en) * | 1991-02-08 | 1992-11-17 | Hopkins Manufacturing Corporation | Headlight aiming apparatus and display |
| US5451822A (en) | 1991-03-15 | 1995-09-19 | Gentex Corporation | Electronic control system |
| US5182502A (en) | 1991-05-06 | 1993-01-26 | Lectron Products, Inc. | Automatic headlamp dimmer |
| US5336448A (en) | 1991-06-25 | 1994-08-09 | Gentex Corporation | Electrochromic devices with bipyridinium salt solutions |
| US5235178A (en) | 1991-10-03 | 1993-08-10 | Hegyi Dennis J | Light sensor with diffuser and eye-like response |
| US5416318A (en) | 1991-10-03 | 1995-05-16 | Hegyi; Dennis J. | Combined headlamp and climate control sensor having a light diffuser and a light modulator |
| US5239264A (en) | 1991-11-14 | 1993-08-24 | Precision Navigation, Inc. | Zero-offset magnetometer having coil and core sensor controlling period of an oscillator circuit |
| EP0631683B1 (en) * | 1992-03-20 | 2001-08-01 | Commonwealth Scientific And Industrial Research Organisation | An object monitoring system |
| US5204778A (en) | 1992-04-06 | 1993-04-20 | Gentex Corporation | Control system for automatic rearview mirrors |
| US5835613A (en) * | 1992-05-05 | 1998-11-10 | Automotive Technologies International, Inc. | Optical identification and monitoring system using pattern recognition for use with vehicles |
| GB2267341B (en) | 1992-05-27 | 1996-02-21 | Koito Mfg Co Ltd | Glare sensor for a vehicle |
| CA2096390C (en) | 1992-07-01 | 1998-01-27 | William L. Tonar | Outside automatic rearview mirror for automotive vehicles |
| JP2783079B2 (ja) | 1992-08-28 | 1998-08-06 | トヨタ自動車株式会社 | ヘッドランプの配光制御装置 |
| US5347261A (en) * | 1993-01-21 | 1994-09-13 | Robert Adell | "Hands free" vehicle bright light signal system |
| US5298732A (en) * | 1993-02-18 | 1994-03-29 | Emee, Inc. | Automatic visor for continuously repositioning a shading object to shade a designated location from a direct radiation source |
| US6498620B2 (en) * | 1993-02-26 | 2002-12-24 | Donnelly Corporation | Vision system for a vehicle including an image capture device and a display system having a long focal length |
| US5550677A (en) | 1993-02-26 | 1996-08-27 | Donnelly Corporation | Automatic rearview mirror system using a photosensor array |
| US5877897A (en) * | 1993-02-26 | 1999-03-02 | Donnelly Corporation | Automatic rearview mirror, vehicle lighting control and vehicle interior monitoring system using a photosensor array |
| US6396397B1 (en) * | 1993-02-26 | 2002-05-28 | Donnelly Corporation | Vehicle imaging system with stereo imaging |
| US5796094A (en) | 1993-02-26 | 1998-08-18 | Donnelly Corporation | Vehicle headlight control using imaging sensor |
| US5347459A (en) * | 1993-03-17 | 1994-09-13 | National Research Council Of Canada | Real time collision detection |
| US5983161A (en) * | 1993-08-11 | 1999-11-09 | Lemelson; Jerome H. | GPS vehicle collision avoidance warning and control system and method |
| US6553130B1 (en) * | 1993-08-11 | 2003-04-22 | Jerome H. Lemelson | Motor vehicle warning and control system and method |
| US5434407A (en) | 1993-08-23 | 1995-07-18 | Gentex Corporation | Automatic rearview mirror incorporating light pipe |
| US5504478A (en) | 1994-01-12 | 1996-04-02 | Gentex Corporation | Radio frequency control system |
| US5471515A (en) | 1994-01-28 | 1995-11-28 | California Institute Of Technology | Active pixel sensor with intra-pixel charge transfer |
| US5841126A (en) | 1994-01-28 | 1998-11-24 | California Institute Of Technology | CMOS active pixel sensor type imaging system on a chip |
| US5666028A (en) | 1994-04-06 | 1997-09-09 | Gentex Corporation | Automobile headlamp and running light control system |
| US5537003A (en) * | 1994-04-08 | 1996-07-16 | Gentex Corporation | Control system for automotive vehicle headlamps and other vehicle equipment |
| US5812321A (en) | 1994-07-19 | 1998-09-22 | Donnelly Corporation | Automatic sensitivity adjustment for electro-optic mirror and headlight activation control |
| EP0693397B1 (en) | 1994-07-19 | 2002-09-11 | Donnelly Corporation | Automatic rearview mirror system with automatic headlight activation |
| US5679283A (en) | 1994-07-22 | 1997-10-21 | Gentex Corporation | Electrochromic layer and devices comprising same |
| US5587929A (en) * | 1994-09-02 | 1996-12-24 | Caterpillar Inc. | System and method for tracking objects using a detection system |
| US5659423A (en) * | 1994-09-30 | 1997-08-19 | Donnelly Corporation | Modular variable reflectance mirror assembly |
| FR2726144B1 (fr) | 1994-10-24 | 1996-11-29 | Valeo Vision | Procede et dispositif d'amelioration de la vision nocturne, notamment pour vehicule automobile |
| JP3503230B2 (ja) | 1994-12-15 | 2004-03-02 | 株式会社デンソー | 夜間用車両認識装置 |
| US5508592A (en) | 1994-12-21 | 1996-04-16 | Osram Sylvania Inc. | Method for deflecting the arc of an electrodeless hid lamp |
| US5614788A (en) | 1995-01-31 | 1997-03-25 | Autosmart Light Switches, Inc. | Automated ambient condition responsive daytime running light system |
| US5664335A (en) | 1995-06-06 | 1997-09-09 | Prince Corporation | Vehicle compass circuit |
| JPH0934867A (ja) * | 1995-07-24 | 1997-02-07 | Mitsubishi Electric Corp | マイクロコンピュータ |
| US5689370A (en) | 1995-08-30 | 1997-11-18 | Gentex Corporation | Image/information displays on electro-optic devices |
| US5682267A (en) | 1995-08-30 | 1997-10-28 | Gentex Corporation | Image/information displays on electrochromic mirrors for motor vehicles |
| US5711889A (en) | 1995-09-15 | 1998-01-27 | Buchsbaum; Philip E. | Method for making dichroic filter array |
| US5751832A (en) * | 1996-09-04 | 1998-05-12 | Progressive Tool & Industries Co. | Headlight aiming apparatus |
| DE19543764A1 (de) * | 1995-11-24 | 1997-05-28 | Asea Brown Boveri | Berührungsdichtung für Strömungsmaschinen |
| US5878370A (en) | 1995-12-01 | 1999-03-02 | Prince Corporation | Vehicle compass system with variable resolution |
| US5761094A (en) | 1996-01-18 | 1998-06-02 | Prince Corporation | Vehicle compass system |
| DE19603529A1 (de) | 1996-02-01 | 1997-08-07 | Bosch Gmbh Robert | Fernlichtscheinwerfer für Fahrzeuge |
| US5912534A (en) | 1996-03-18 | 1999-06-15 | Autosmart Light Switches, Inc. | Double relay light switching system for providing daytime running lights for vehicles |
| US5803579A (en) | 1996-06-13 | 1998-09-08 | Gentex Corporation | Illuminator assembly incorporating light emitting diodes |
| US5798575A (en) * | 1996-07-11 | 1998-08-25 | Donnelly Corporation | Vehicle mirror digital network and dynamically interactive mirror system |
| US6144158A (en) | 1996-11-07 | 2000-11-07 | Sensci Corporation | Adaptive/anti-blinding headlights |
| US5811888A (en) | 1996-11-12 | 1998-09-22 | Hsieh; Cheng-Tien | Automatic vehicle power and headlight controlling device with detecting function of a generator and delayed effect |
| US6049171A (en) * | 1998-09-18 | 2000-04-11 | Gentex Corporation | Continuously variable headlamp control |
| US5990469A (en) | 1997-04-02 | 1999-11-23 | Gentex Corporation | Control circuit for image array sensors |
| US5923027A (en) * | 1997-09-16 | 1999-07-13 | Gentex Corporation | Moisture sensor and windshield fog detector using an image sensor |
| US6587573B1 (en) * | 2000-03-20 | 2003-07-01 | Gentex Corporation | System for controlling exterior vehicle lights |
| US5956012A (en) | 1997-04-02 | 1999-09-21 | Gentex Corporation | Series drive circuit |
| US5837994C1 (en) | 1997-04-02 | 2001-10-16 | Gentex Corp | Control system to automatically dim vehicle head lamps |
| US6130421A (en) | 1998-06-09 | 2000-10-10 | Gentex Corporation | Imaging system for vehicle headlamp control |
| DE19714849A1 (de) * | 1997-04-10 | 1998-10-15 | Reitter & Schefenacker Gmbh | Leuchte, vorzugsweise Heckleuchte, eines Fahrzeuges, vorzugsweise eines Kraftfahrzeuges |
| DE19727701A1 (de) * | 1997-06-30 | 1999-01-07 | Bosch Gmbh Robert | Lichtquellenanordnung |
| WO1999014619A1 (en) | 1997-09-16 | 1999-03-25 | Gentex Corporation | Individual mirror control system |
| US5857594A (en) * | 1997-10-23 | 1999-01-12 | Ozturk; Ahmet | Liquid soap faucet dispenser |
| EP1025702B9 (en) * | 1997-10-30 | 2007-10-03 | Donnelly Corporation | Rain sensor with fog discrimination |
| SG81950A1 (en) * | 1997-12-25 | 2001-07-24 | Canon Kk | Contact type image sensor and information processing apparatus |
| US6008486A (en) | 1997-12-31 | 1999-12-28 | Gentex Corporation | Wide dynamic range optical sensor |
| DE19861428B4 (de) | 1998-03-17 | 2008-01-10 | Robert Bosch Gmbh | Optischer Sensor |
| US6329925B1 (en) * | 1999-11-24 | 2001-12-11 | Donnelly Corporation | Rearview mirror assembly with added feature modular display |
| JP3527101B2 (ja) * | 1998-07-07 | 2004-05-17 | 株式会社リコー | ネットワークファクシミリ通信システムの制御方法 |
| US6130448A (en) | 1998-08-21 | 2000-10-10 | Gentex Corporation | Optical sensor package and method of making same |
| AU1110200A (en) | 1998-10-12 | 2000-05-01 | Control Devices, Inc. | Ambient light sensor |
| US6184781B1 (en) * | 1999-02-02 | 2001-02-06 | Intel Corporation | Rear looking vision system |
| US6166698A (en) * | 1999-02-16 | 2000-12-26 | Gentex Corporation | Rearview mirror with integrated microwave receiver |
| US6023229A (en) * | 1999-03-02 | 2000-02-08 | Gentex Corp | Rearview mirror with internally-mounted compass sensor |
| US6617564B2 (en) * | 2001-10-04 | 2003-09-09 | Gentex Corporation | Moisture sensor utilizing stereo imaging with an image sensor |
| US9716946B2 (en) | 2014-06-01 | 2017-07-25 | Insoundz Ltd. | System and method thereof for determining of an optimal deployment of microphones to achieve optimal coverage in a three-dimensional space |
-
2001
- 2001-03-05 US US09/800,460 patent/US6587573B1/en not_active Expired - Lifetime
- 2001-03-20 CA CA002402406A patent/CA2402406C/en not_active Expired - Lifetime
- 2001-03-20 KR KR1020027012560A patent/KR100666454B1/ko active IP Right Grant
- 2001-03-20 MX MXPA02009052A patent/MXPA02009052A/es active IP Right Grant
- 2001-03-20 EP EP01920575A patent/EP1282916B1/en not_active Expired - Lifetime
- 2001-03-20 JP JP2001568762A patent/JP4034565B2/ja not_active Expired - Lifetime
- 2001-03-20 AU AU2001247611A patent/AU2001247611B2/en not_active Expired
- 2001-03-20 AT AT01920575T patent/ATE533665T1/de active
- 2001-03-20 WO PCT/US2001/008912 patent/WO2001070538A2/en not_active Application Discontinuation
- 2001-03-20 EP EP11009059.4A patent/EP2420408B1/en not_active Expired - Lifetime
- 2001-03-20 AU AU4761101A patent/AU4761101A/xx active Pending
-
2002
- 2002-12-11 US US10/316,687 patent/US6947576B2/en not_active Expired - Fee Related
- 2002-12-11 US US10/316,511 patent/US6928180B2/en not_active Expired - Lifetime
-
2005
- 2005-09-20 US US11/231,230 patent/US20060018511A1/en not_active Abandoned
-
2006
- 2006-03-14 KR KR1020060023751A patent/KR100693312B1/ko active IP Right Grant
- 2006-09-20 JP JP2006254664A patent/JP2007045407A/ja active Pending
- 2006-09-20 KR KR1020060091078A patent/KR100710837B1/ko active IP Right Grant
-
2007
- 2007-10-29 US US11/926,162 patent/US7825600B2/en not_active Expired - Fee Related
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011253222A (ja) * | 2010-05-31 | 2011-12-15 | Denso Corp | 前方領域検出装置及び車両制御装置 |
| US10046716B2 (en) | 2011-02-10 | 2018-08-14 | Denso Corporation | In-vehicle camera and vehicle control system |
| US10377322B2 (en) | 2011-02-10 | 2019-08-13 | Denso Corporation | In-vehicle camera and vehicle control system |
| US10406994B2 (en) | 2011-02-10 | 2019-09-10 | Denso Corporation | In-vehicle camera and vehicle control system |
| US9690997B2 (en) | 2011-06-06 | 2017-06-27 | Denso Corporation | Recognition object detecting apparatus |
| US9626570B2 (en) | 2013-09-26 | 2017-04-18 | Denso Corporation | Vehicle control system and image sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20060107466A (ko) | 2006-10-13 |
| US6928180B2 (en) | 2005-08-09 |
| JP2004500279A (ja) | 2004-01-08 |
| US20030123706A1 (en) | 2003-07-03 |
| CA2402406A1 (en) | 2001-09-27 |
| CA2402406C (en) | 2009-12-22 |
| KR20030047879A (ko) | 2003-06-18 |
| KR100710837B1 (ko) | 2007-04-24 |
| US7825600B2 (en) | 2010-11-02 |
| EP2420408B1 (en) | 2013-05-08 |
| KR20060028735A (ko) | 2006-03-31 |
| EP2420408A1 (en) | 2012-02-22 |
| KR100693312B1 (ko) | 2007-03-14 |
| US20080129206A1 (en) | 2008-06-05 |
| US6587573B1 (en) | 2003-07-01 |
| AU4761101A (en) | 2001-10-03 |
| US20030123705A1 (en) | 2003-07-03 |
| US6947576B2 (en) | 2005-09-20 |
| KR100666454B1 (ko) | 2007-01-09 |
| EP1282916B1 (en) | 2011-11-16 |
| WO2001070538A2 (en) | 2001-09-27 |
| WO2001070538A3 (en) | 2001-12-13 |
| EP1282916A2 (en) | 2003-02-12 |
| EP1282916A4 (en) | 2009-10-21 |
| JP2007045407A (ja) | 2007-02-22 |
| ATE533665T1 (de) | 2011-12-15 |
| MXPA02009052A (es) | 2004-09-09 |
| US20060018511A1 (en) | 2006-01-26 |
| AU2001247611B2 (en) | 2004-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4034565B2 (ja) | 車両外部ライトを制御するシステム | |
| US7653215B2 (en) | System for controlling exterior vehicle lights | |
| US8120652B2 (en) | System for controlling vehicle equipment | |
| US6947577B2 (en) | Vehicle lamp control | |
| US20120116632A1 (en) | System for controlling vehicle equipment | |
| AU2001247611A1 (en) | System for Controlling Exterior Vehicle Lights | |
| US6919548B2 (en) | control system to automatically control vehicle headlamps | |
| US20060203505A1 (en) | Wideband illumination device | |
| AU2005200407B2 (en) | System for controlling exterior vehicle lights |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060320 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20060620 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20060705 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060920 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070702 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20070803 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071015 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071025 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101102 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4034565 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111102 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121102 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121102 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131102 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |