JP2012507088A - 自律運転乗物用の制御及びシステム - Google Patents
自律運転乗物用の制御及びシステム Download PDFInfo
- Publication number
- JP2012507088A JP2012507088A JP2011533404A JP2011533404A JP2012507088A JP 2012507088 A JP2012507088 A JP 2012507088A JP 2011533404 A JP2011533404 A JP 2011533404A JP 2011533404 A JP2011533404 A JP 2011533404A JP 2012507088 A JP2012507088 A JP 2012507088A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- processor
- path
- travel
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000033001 locomotion Effects 0.000 claims abstract description 55
- 230000007246 mechanism Effects 0.000 claims abstract description 32
- 238000004422 calculation algorithm Methods 0.000 claims description 49
- 238000000034 method Methods 0.000 claims description 33
- 239000013598 vector Substances 0.000 claims description 22
- 238000001514 detection method Methods 0.000 claims description 12
- 238000012360 testing method Methods 0.000 claims description 7
- 230000008859 change Effects 0.000 claims description 5
- 230000009471 action Effects 0.000 claims description 4
- 238000004458 analytical method Methods 0.000 claims description 4
- 238000013459 approach Methods 0.000 claims description 4
- 230000004064 dysfunction Effects 0.000 claims description 3
- 238000005065 mining Methods 0.000 claims description 3
- 230000036962 time dependent Effects 0.000 claims 2
- 238000004891 communication Methods 0.000 abstract description 36
- 230000006870 function Effects 0.000 description 25
- 238000003384 imaging method Methods 0.000 description 24
- 230000008569 process Effects 0.000 description 16
- 238000004364 calculation method Methods 0.000 description 12
- 238000010586 diagram Methods 0.000 description 12
- 238000013461 design Methods 0.000 description 9
- 238000012545 processing Methods 0.000 description 9
- 238000013507 mapping Methods 0.000 description 8
- 238000011161 development Methods 0.000 description 7
- 238000001914 filtration Methods 0.000 description 7
- 230000014509 gene expression Effects 0.000 description 7
- 238000012546 transfer Methods 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 6
- 230000006399 behavior Effects 0.000 description 6
- 238000005516 engineering process Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 238000012937 correction Methods 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 238000009472 formulation Methods 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- 239000000203 mixture Substances 0.000 description 4
- 238000004088 simulation Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000002592 echocardiography Methods 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 3
- 238000012634 optical imaging Methods 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 238000012800 visualization Methods 0.000 description 3
- 241000271566 Aves Species 0.000 description 2
- 241000408659 Darpa Species 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 239000003795 chemical substances by application Substances 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 238000004870 electrical engineering Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000004927 fusion Effects 0.000 description 2
- 230000001771 impaired effect Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 238000013178 mathematical model Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000013307 optical fiber Substances 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- 239000011295 pitch Substances 0.000 description 2
- 238000010845 search algorithm Methods 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 238000007794 visualization technique Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000007635 classification algorithm Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 208000035475 disorder Diseases 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 244000144992 flock Species 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000010413 gardening Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000003306 harvesting Methods 0.000 description 1
- 231100001261 hazardous Toxicity 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 238000003032 molecular docking Methods 0.000 description 1
- 238000012806 monitoring device Methods 0.000 description 1
- 208000010125 myocardial infarction Diseases 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 231100000572 poisoning Toxicity 0.000 description 1
- 230000000607 poisoning effect Effects 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000035484 reaction time Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- 238000013515 script Methods 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000004800 variational method Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images
















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0248—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
- G05D1/024—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors in combination with a laser
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/86—Combinations of lidar systems with systems other than lidar, radar or sonar, e.g. with direction finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/027—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means comprising intertial navigation means, e.g. azimuth detector
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0278—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using satellite positioning signals, e.g. GPS
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Electromagnetism (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Optics & Photonics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Navigation (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
本出願は、代理人整理番号284361USの下で2006年3月16日に出願した「NAVIGATION AND CONTROL SYSTEM FOR AUTONOMOUS VEHICLES」と題した米国特許出願第11/376,160号に関連している。本出願の内容全体は、参照により本明細書に組み込まれる。
1)H. Wang、J. Kearney、J. Cremer、及びP. Willemsen、「Steering Autonomous Driving Agents Through Intersections in Virtual Urban Environments」、2004 International Conference on Modeling, Simulation, and Visualization Methods, (2004)
2)R. Frezza、G. Picci、及びS. Soatto、「A Lagrangian Formulation of Nonholonomic Path Following」、The Confluence of Vision and Control、(A. S. Morseら(編)、Springer Verlag、1998)
3)J. Shirazi、Java(登録商標) Performance Tuning、(OReilly & Associates、2000)
4)J. Witt、C. Crane III、及びD. Armstrong、「Autonomous Ground Vehicle Path Tracking」、Journal of Robotic Systems、(21(8), 2004)
5)C. Crane III、D. Armstrong Jr.、M. Torrie、及びS. Gray、「Autonomous Ground Vehicle Technologies Applied to the DARPA Grand Challenge」、International Conference on Control, Automation, and Systems、(2004)
6)T. Berglund、H. Jonsson、及びI. Soderkvist、「An Obstacle-Avoiding Minimum Variation B-spline Problem」、International Conference on Geometric Modeling and Graphics、(July, 2003)
7)D. Coombs、B. Yoshimi、T. Tsai、及びE. Kent、「Visualizing Terrain and Navigation Data」、NISTIR 6720、(2001年3月1日)
8)Jenkinsらの米国特許第5,644,386号
9)Andressenの米国特許第5,870,181号
10)Krasutskyらの米国特許第5,200,606号
11)Ruffらの米国特許第6,844,924号
N=サンプル数
N=1:合計S0
N>1:合計=S0*1/(21)+S1*1/(22)+...+SN-2*1/(2N-1)+SN-1*1(2N)・・・(1)

本発明は、本発明が一次モードまたは二次モードでそれぞれ働く、自律運転乗物と人が運転する乗物との両方に広範囲にわたる応用を有する。
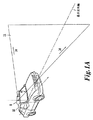
10 乗物、自律乗物
11 平面、垂直スキャン平面
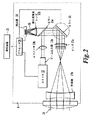
12 エミッタ
13a ビーム拡大器
13b コリメータ
14 レーザパルス(または光)
15a 固定ミラー15a
16 3Dスキャニング体積
18 検出器
20 エコー信号
22 物体
24 プロセッサ
25 リアルタイム測位装置
26 回転ミラー
27a レンズ
27b 望遠鏡
40 レーザスキャナシステム、スキャナシステム
42 光学画像化システム、画像化デバイス
50 AVSプリント配線板
52 ユーザまたはプログラムインタフェース
53 コンピュータ、車載コンピュータ
54 コンピュータ、車載コンピュータ
56 フィールドプログラマブルゲートアレイデバイス、FPGA
58 安全無線
60 ハードウェアウォッチドッグ
62 イーサネット(登録商標)リンク装置
64 配電コンポーネント
66 緊急停止(Eストップ)論理デバイス
68 内部及び外部のコントローラエリアネットワーク(CAN)
70 デジタル及びアナログの入出力装置
80 RS−232ポート及びRS−422ポート
82 一連の移動中の小さい長方形
82 移動障害物
84 トレーラ
1201 コンピュータシステム
1202 バス
1203 内部プロセッサ
1204 メモリ、メインメモリ
1205 リードオンリメモリ(ROM)
1207 ハードディスク、記憶装置
1208 リムーバブルメディアドライブ、記憶装置
1213 通信インタフェース
1214 ネットワークリンク
1215 ローカルエリアネットワーク(LAN)、ネットワーク
1216 通信ネットワーク、ネットワーク
1217 入力装置
Claims (36)
- ナビゲーション及び制御システムであって、
乗物の位置及び進行方向を示すポジション信号を生成するように構成される1つまたは複数のポジションセンサと、
入力を有し、前記乗物の動作を制御する出力を生成する1つまたは複数の動作制御機構と、
前記動作制御機構から遠隔配置される内蔵式自律型制御器とを備え、
前記内蔵式自律型制御器が、
前記ポジションセンサから前記ポジション信号を受信し、前記乗物の更新された移動経路を定める動作制御信号を生成するように構成されるプロセッサ、ならびに
前記ポジションセンサ、前記動作制御機構、及び前記プロセッサの間で通信を行い、前記ポジションセンサからの前記プロセッサへの入力を正規化し、前記動作制御機構への前記入力として加えられる適合する動作制御信号を生成するように構成されるプログラマブルインタフェースを備え、
それによって前記内蔵式自律型制御器が、様々な異なるセンサ及び異なる動作制御機構と共に動作するように構成可能である
ことを特徴とするシステム。 - 前記乗物の移動経路に関して物体を示す物体信号を生成するように構成される1つまたは複数の物体センサをさらに備え、
前記プロセッサが、前記物体センサから前記物体信号を受信し、前記乗物の前記移動経路に関して静止している物体及び移動している物体を、前記物体信号から識別し、識別された前記静止物体及び前記移動物体ならびに前記ポジション信号を考慮して前記更新された移動経路を定める動作制御信号を生成するように構成される
ことを特徴とする請求項1に記載のシステム。 - 前記プログラマブルインタフェースが、前記ポジションセンサ、前記物体センサ、前記動作制御機構、及び前記プロセッサの間で通信を行うように構成され、前記物体センサからの前記プロセッサへの入力を正規化するように構成される
ことを特徴とする請求項2に記載のシステム。 - 前記物体センサが、前記ビームを生成し、前記物体からの前記ビームの反射を検出するように構成される光検出測距装置を備える
ことを特徴とする請求項2に記載のシステム。 - 前記物体センサが、前記ビームを生成し、前記物体からの放出ビームの波長における反射を検出するように構成されるレーザレーダ装置を備える
ことを特徴とする請求項2に記載のシステム。 - 前記物体センサが、物体が識別される前記移動経路の画像を提供するように構成されるカメラを備える
ことを特徴とする請求項2に記載のシステム。 - プログラミング命令を前記プログラマブルインタフェースに入れるように構成されるプログラムインタフェースをさらに備える
ことを特徴とする請求項1に記載のシステム。 - 前記プロセッサが、方向制御命令及び速度制御命令のうちの少なくとも1つをドライブバイワイヤ形式で前記動作制御機構に供給し、それによって前記プロセッサが、エンジンのスロットリング、乗物のステアリング、及び乗物のブレーキングのうちの少なくとも1つを電気的に制御するように構成される
ことを特徴とする請求項1に記載のシステム。 - 前記移動経路に沿ったウェイポイントの論理マップを記憶するように構成されるマップ記憶エリアをさらに備え、
前記論理マップが、あるウェイポイントから別のウェイポイントへの方向、前記ウェイポイントの地理空間座標、前記乗物の移動経路に沿った道路の交差点、及び異なるウェイポイントの間の移動に関連した時間のうちの少なくとも1つを含む
ことを特徴とする請求項1に記載のシステム。 - 前記プロセッサが、物体ポジションと前記ウェイポイントの前記地理空間座標との比較によって前記乗物付近の物体が前記ウェイポイントであるかどうかを判定するための障害物識別アルゴリズムによってプログラムされる
ことを特徴とする請求項9に記載のシステム。 - 前記ポジションセンサが、全地球測位システム装置、または慣性航行システムのうちの少なくとも1つを備える
ことを特徴とする請求項1に記載のシステム。 - 前記プロセッサが、
前記乗物付近の物体のポジション、速度、及び幾何学的形状を識別し、時間内に前記識別された物体の前記ポジション及び前記速度を予測し、前記識別された物体の将来のポジションを推定するように構成される可変構造オブザーバを備える
ことを特徴とする請求項1に記載のシステム。 - 前記プロセッサが、
前記移動経路に関して、2つのウェイポイントの間の交通パターンの記録に基づいて、前記2つのウェイポイントの間の前記乗物のルートを決定するように構成されるルート発見アルゴリズムを含む
ことを特徴とする請求項1に記載のシステム。 - 前記ルート発見アルゴリズムが、前記2つのウェイポイントの間の移動時間の記録、前記2つのウェイポイントの間の渋滞エリアの履歴、及び渋滞のリアルタイム報告のうちの少なくとも1つに基づいて前記ルートを決定するように構成される
ことを特徴とする請求項13に記載のシステム。 - 前記ルート発見アルゴリズムが、前記2つのウェイポイントの間のいくつかの特定の移動ルートについての各重み付き平均に基づいて前記ルートを決定するように構成され、
各重み付き平均が、前記2つのウェイポイントの間の前記移動時間の記録、前記2つのウェイポイントの間の前記渋滞エリアの履歴、及び前記渋滞のリアルタイム報告のうちの前記少なくとも1つを含む
ことを特徴とする請求項14に記載のシステム。 - 前記移動経路の画像を提供するように構成されるカメラをさらに備え、
前記画像に基づいて、前記プロセッサが、自律乗物の前記移動経路のための車線を識別する
ことを特徴とする請求項1に記載のシステム。 - 前記プロセッサが、前記識別された車線に障害物があるかどうかを判定するように構成される
ことを特徴とする請求項16に記載のシステム。 - 前記プロセッサが、静止物体または移動物体のうちの少なくとも1つの周りに回避経路を決定するように構成される
ことを特徴とする請求項1に記載のシステム。 - 前記プロセッサが、前記静止物体または前記移動物体との衝突の見込みを予測することによって、前記回避経路を決定するように構成され、
第1の行動として、前記回避経路について第1の解決策が存在するかどうかを判定するために、乗物の速度が、前記移動経路に沿って修正され、
第2の行動として、前記第1の解決策が存在しなければ、前記回避経路について第2の解決策が存在するかどうかを判定するために、前記スライディングモードアルゴリズムにおける進路変更操縦が、前記移動経路に沿って実施され、
第3の行動として、前記第1の解決策または前記第2の解決策が存在しなければ、前記乗物が停止させられる
ことを特徴とする請求項18に記載のシステム。 - 前記プロセッサが、前記静止物体及び前記移動物体を回避するために最適軌跡を予測するためのスライディングモードプログラムを利用する仮想経路解析に基づいて前記回避経路を決定するように構成され、
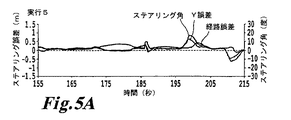
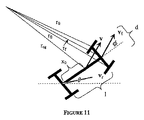
前記スライディングモード解析が、1)前記移動経路からの前記乗物の移動点(x*(s),y*(s))、2)前記移動経路からの前記乗物の距離s(t)、及び3)前記移動点(x*(s(t)),y*(s(t)))からの実際の乗物ポジション(x(t),y(t))の誤差ベクトルE(t)に基づいてステアリングコマンドを生成するようにプログラムされ、
前記誤差ベクトルE(t)が、前記乗物を、前記移動経路から逸脱させるか、または前記移動経路への進入路から逸脱させることができる時間に依存する非線形の要因に対応する
ことを特徴とする請求項18に記載のシステム。 - 乗物をナビゲーション及び制御する方法であって、
乗物の位置及び進行方向を示すポジション信号を生成する段階と、
プログラマブルインタフェースによって前記ポジション信号を正規化して、正規化されたポジション信号を生成する段階と、
前記正規化されたポジション信号から動作制御信号を生成する段階と、
前記プログラマブルインタフェースによって前記動作制御信号を正規化して、前記乗物の更新された移動経路に沿って前記乗物の動作を制御する正規化された動作制御信号を生成する段階と
を含むことを特徴とする方法。 - 乗物を含む運転可能な装置であって、
前記乗物が、
乗物の位置及び進行方向を示すポジション信号を生成するように構成される1つまたは複数のポジションセンサと、
入力を有し、前記乗物の動作を制御する出力を生成する1つまたは複数の動作制御機構と、
少なくとも1つの前記動作制御機構から遠隔配置される内蔵式自律型制御器とを備え、
前記内蔵式自律型制御器が、
前記ポジションセンサから前記ポジション信号を受信し、前記乗物の更新された移動経路を定める動作制御信号を生成するように構成されるプロセッサ、ならびに
前記ポジションセンサ、前記動作制御機構、及び前記プロセッサの間で通信を行い、前記ポジションセンサからの前記プロセッサへの入力を正規化し、前記動作制御機構への前記入力として加えられる適合する動作制御信号を生成するように構成されるプログラマブルインタフェースを備え、
それによって前記内蔵式自律型制御器が、様々な異なるセンサ及び異なる動作制御機構と共に動作するように構成可能である
ことを特徴とする装置。 - 前記乗物が、陸上乗物を含む
ことを特徴とする請求項22に記載の装置。 - 前記陸上乗物が、自動車、トラック、スポーツ汎用車、レスキュー乗物、農業乗物、採鉱乗物、伴走乗物、玩具乗物、偵察乗物、テストトラック乗物、及び装甲乗物のうちの少なくとも1つ含む
ことを特徴とする請求項23に記載の装置。 - 前記乗物が、船艇を含む
ことを特徴とする請求項22に記載の装置。 - 前記船艇が、ボート、船、バージ船、タンカ、水陸両用車、ホバークラフト、及び装甲船のうちの少なくとも1つを含む
ことを特徴とする請求項25に記載の装置。 - 前記乗物が、運転手に支援された制御のない自律乗物を含む
ことを特徴とする請求項22に記載の装置。 - 前記乗物が、コンピュータ支援制御を用いて運転手により制御された乗物を含む
ことを特徴とする請求項22に記載の装置。 - 前記プロセッサが、運転手の機能障害を認識するように構成される
ことを特徴とする請求項28に記載の装置。 - 前記プロセッサが、生体計測センサから、または前記乗物の運転手制御の解析から、運転手の機能障害を認識するように構成される
ことを特徴とする請求項29に記載の装置。 - 前記プロセッサが、入力コマンドがある場合に、前記乗物を制御するように構成される
ことを特徴とする請求項28に記載の装置。 - 乗物内のプロセッサ上で実行するためのプログラム命令を含むコンピュータ可読媒体であって、前記プログラム命令が、前記プロセッサによって実行されると、前記プロセッサに、
乗物の位置及び進行方向を示すポジション信号を受信し、プログラマブルインタフェースによって前記ポジション信号を正規化して、正規化されたポジション信号を生成し、
前記正規化されたポジション信号から動作制御信号を生成し、
前記動作制御信号を前記プログラマブルインタフェースに出力して、前記乗物の更新された移動経路に沿って前記乗物の動作を制御する正規化された動作制御信号を生成する
という機能を実行させることを特徴とするコンピュータ可読媒体。 - ナビゲーション及び制御システムであって、
入力を有し、乗物の動作を制御する出力を生成する1つまたは複数の動作制御機構と、
1)移動経路からの前記乗物の移動点(x*(s),y*(s))、2)前記移動経路からの前記乗物の距離s(t)、及び3)前記移動点(x*(s(t)),y*(s(t)))からの実際の乗物ポジション(x(t),y(t))の誤差ベクトルE(t)に基づいてステアリングコマンドを生成するように構成されるプロセッサと
を備え、
前記誤差ベクトルE(t)が、前記乗物を、前記移動経路から逸脱させるか、または前記移動経路への進入路から逸脱させることができる時間に依存する非線形の要因に対応する
ことを特徴とするシステム。 - 前記プロセッサが、形式“d/dtE(t)=−kE(t)”の微分方程式を満たし、最適移動方向についてゼロに収束する前記誤差ベクトルE(t)に基づいて、前記乗物の移動方向を決定するように構成される
ことを特徴とする請求項33に記載のシステム。 - 前記移動経路に沿った前記移動点(x*(s),y*(s))の決定における前記プロセッサが、前記決定において、前輪速度、後輪速度、中間の滑り度、及び乗物のスリップのうちの少なくとも1つを含む前記非線形の要因を含む
ことを特徴とする請求項33に記載のシステム。 - 前記移動経路に沿った前記移動点(x*(s),y*(s))の決定における前記プロセッサが、前記決定において、前記非線形の要因を説明するための前記移動経路に対するs(t)の時間微分を含む
ことを特徴とする請求項33に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/289,325 | 2008-10-24 | ||
| US12/289,325 US8126642B2 (en) | 2008-10-24 | 2008-10-24 | Control and systems for autonomously driven vehicles |
| PCT/US2009/062059 WO2010048611A1 (en) | 2008-10-24 | 2009-10-26 | Control and systems for autonomously driven vehicles |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015142892A Division JP2015205691A (ja) | 2008-10-24 | 2015-07-17 | 自律運転乗物用の制御及びシステム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012507088A true JP2012507088A (ja) | 2012-03-22 |
Family
ID=42118294
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011533404A Pending JP2012507088A (ja) | 2008-10-24 | 2009-10-26 | 自律運転乗物用の制御及びシステム |
| JP2015142892A Pending JP2015205691A (ja) | 2008-10-24 | 2015-07-17 | 自律運転乗物用の制御及びシステム |
| JP2018008831A Pending JP2018095254A (ja) | 2008-10-24 | 2018-01-23 | 自律運転乗物用の制御及びシステム |
| JP2019220458A Pending JP2020040659A (ja) | 2008-10-24 | 2019-12-05 | 自律運転乗物用の制御及びシステム |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015142892A Pending JP2015205691A (ja) | 2008-10-24 | 2015-07-17 | 自律運転乗物用の制御及びシステム |
| JP2018008831A Pending JP2018095254A (ja) | 2008-10-24 | 2018-01-23 | 自律運転乗物用の制御及びシステム |
| JP2019220458A Pending JP2020040659A (ja) | 2008-10-24 | 2019-12-05 | 自律運転乗物用の制御及びシステム |
Country Status (8)
| Country | Link |
|---|---|
| US (6) | US8126642B2 (ja) |
| EP (1) | EP2338029B1 (ja) |
| JP (4) | JP2012507088A (ja) |
| KR (1) | KR101736977B1 (ja) |
| CN (2) | CN102227612B (ja) |
| AU (1) | AU2009308192B2 (ja) |
| CA (1) | CA2739989C (ja) |
| WO (1) | WO2010048611A1 (ja) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101401399B1 (ko) * | 2012-10-12 | 2014-05-30 | 현대모비스 주식회사 | 주차 지원 장치 및 방법과 이를 이용한 주차 지원 시스템 |
| KR20150060301A (ko) * | 2013-11-26 | 2015-06-03 | 현대모비스 주식회사 | V2x 기반 안전운전지원서비스를 위한 운전자 맞춤형 다운 경고 중재 장치 및 방법 |
| JP2016509971A (ja) * | 2013-02-21 | 2016-04-04 | グーグル インコーポレイテッド | 運転モード調整 |
| WO2016063490A1 (ja) * | 2014-10-22 | 2016-04-28 | 株式会社デンソー | 車両用データ記録装置及び車両用事故通報装置 |
| US9352307B2 (en) | 2010-04-08 | 2016-05-31 | Basf Corporation | Cu-CHA/Fe-MFI mixed zeolite catalyst and process for the treatment of NOx in gas streams |
| WO2018073886A1 (ja) * | 2016-10-18 | 2018-04-26 | 本田技研工業株式会社 | 車両制御装置 |
| KR20180050707A (ko) * | 2016-09-28 | 2018-05-15 | 바이두 유에스에이 엘엘씨 | 자율 주행 차량을 위한 사이드슬립 보상 제어 방법 |
| CN108349501A (zh) * | 2015-11-03 | 2018-07-31 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 用于机动车辆驾驶员辅助系统的周围环境模型化的设备 |
| KR20190000843A (ko) * | 2017-06-23 | 2019-01-03 | 우버 테크놀로지스, 인크. | 자율 주행 가능 차량용 충돌-회피 시스템 |
| JP2019078732A (ja) * | 2017-10-19 | 2019-05-23 | 株式会社トリマティス | 水中地形測量複合lidar |
| JP2019532858A (ja) * | 2016-09-20 | 2019-11-14 | ウェイモ エルエルシー | 乗物のセンサ・プラットフォームのデバイスおよび方法 |
| WO2020044802A1 (ja) * | 2018-08-28 | 2020-03-05 | ヤンマー株式会社 | 障害物検知システム |
| JP2020045091A (ja) * | 2018-09-14 | 2020-03-26 | 株式会社デンソー | 予見安全性を備える車両制御システム、および予見安全性を備える車両制御方法 |
| JP2020115136A (ja) * | 2015-02-10 | 2020-07-30 | モービルアイ ビジョン テクノロジーズ リミテッド | 自律車両ナビゲーションのための疎な地図 |
| JP2021004028A (ja) * | 2015-03-25 | 2021-01-14 | ウェイモ エルエルシー | 複数の光検出及び測距装置(lidar)付きの車両 |
| JP2021007269A (ja) * | 2016-05-27 | 2021-01-21 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | ネットワークハブ、転送方法及び車載ネットワークシステム |
| JP2022058455A (ja) * | 2018-01-31 | 2022-04-12 | パイオニア株式会社 | 周辺情報処理方法 |
Families Citing this family (1063)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8944070B2 (en) | 1999-04-07 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Non-force reflecting method for providing tool force information to a user of a telesurgical system |
| US11835343B1 (en) * | 2004-08-06 | 2023-12-05 | AI Incorporated | Method for constructing a map while performing work |
| US9789608B2 (en) | 2006-06-29 | 2017-10-17 | Intuitive Surgical Operations, Inc. | Synthetic representation of a surgical robot |
| US8050863B2 (en) | 2006-03-16 | 2011-11-01 | Gray & Company, Inc. | Navigation and control system for autonomous vehicles |
| US8062211B2 (en) | 2006-06-13 | 2011-11-22 | Intuitive Surgical Operations, Inc. | Retrograde instrument |
| US9718190B2 (en) | 2006-06-29 | 2017-08-01 | Intuitive Surgical Operations, Inc. | Tool position and identification indicator displayed in a boundary area of a computer display screen |
| US10258425B2 (en) * | 2008-06-27 | 2019-04-16 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view of articulatable instruments extending out of a distal end of an entry guide |
| US10008017B2 (en) | 2006-06-29 | 2018-06-26 | Intuitive Surgical Operations, Inc. | Rendering tool information as graphic overlays on displayed images of tools |
| US20090192523A1 (en) | 2006-06-29 | 2009-07-30 | Intuitive Surgical, Inc. | Synthetic representation of a surgical instrument |
| JP4980076B2 (ja) * | 2007-01-11 | 2012-07-18 | 富士重工業株式会社 | 車両の運転支援装置 |
| US8903546B2 (en) | 2009-08-15 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Smooth control of an articulated instrument across areas with different work space conditions |
| US9084623B2 (en) * | 2009-08-15 | 2015-07-21 | Intuitive Surgical Operations, Inc. | Controller assisted reconfiguration of an articulated instrument during movement into and out of an entry guide |
| US9089256B2 (en) | 2008-06-27 | 2015-07-28 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view including range of motion limitations for articulatable instruments extending out of a distal end of an entry guide |
| US9138129B2 (en) | 2007-06-13 | 2015-09-22 | Intuitive Surgical Operations, Inc. | Method and system for moving a plurality of articulated instruments in tandem back towards an entry guide |
| US8620473B2 (en) | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US9469034B2 (en) | 2007-06-13 | 2016-10-18 | Intuitive Surgical Operations, Inc. | Method and system for switching modes of a robotic system |
| JP4744537B2 (ja) * | 2008-02-05 | 2011-08-10 | 日立オートモティブシステムズ株式会社 | 走行レーン検出装置 |
| CA2629445A1 (en) * | 2008-04-08 | 2009-10-08 | Jacob K. The | Third party speed control device |
| US8060280B2 (en) * | 2008-04-15 | 2011-11-15 | Autoliv Asp, Inc. | Vision system for deploying safety systems |
| US8917904B2 (en) * | 2008-04-24 | 2014-12-23 | GM Global Technology Operations LLC | Vehicle clear path detection |
| US8890951B2 (en) * | 2008-04-24 | 2014-11-18 | GM Global Technology Operations LLC | Clear path detection with patch smoothing approach |
| US8864652B2 (en) | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| US8755997B2 (en) * | 2008-07-30 | 2014-06-17 | Honeywell International Inc. | Laser ranging process for road and obstacle detection in navigating an autonomous vehicle |
| US8364334B2 (en) * | 2008-10-30 | 2013-01-29 | Honeywell International Inc. | System and method for navigating an autonomous vehicle using laser detection and ranging |
| AU2009327362A1 (en) * | 2008-12-19 | 2011-08-04 | Xollai, Llc | System and method for determining an orientation and position of an object |
| US9091755B2 (en) | 2009-01-19 | 2015-07-28 | Microsoft Technology Licensing, Llc | Three dimensional image capture system for imaging building facades using a digital camera, near-infrared camera, and laser range finder |
| JP4614005B2 (ja) | 2009-02-27 | 2011-01-19 | トヨタ自動車株式会社 | 移動軌跡生成装置 |
| WO2010124337A1 (en) | 2009-05-01 | 2010-11-04 | The University Of Sydney | Control system for autonomous operation |
| EA201171337A1 (ru) | 2009-05-01 | 2012-05-30 | Дзе Юниверсити Оф Сидней | Комплексная автоматизированная система |
| AP2011006008A0 (en) * | 2009-05-01 | 2011-12-31 | Univ Sydney | Integrated automation system with picture compilation system. |
| US8565977B2 (en) * | 2009-06-17 | 2013-10-22 | GM Global Technology Operations LLC | Vehicle configuration for improving low speed maneuverability |
| US8428776B2 (en) * | 2009-06-18 | 2013-04-23 | Michael Todd Letsky | Method for establishing a desired area of confinement for an autonomous robot and autonomous robot implementing a control system for executing the same |
| US8706297B2 (en) | 2009-06-18 | 2014-04-22 | Michael Todd Letsky | Method for establishing a desired area of confinement for an autonomous robot and autonomous robot implementing a control system for executing the same |
| US8918211B2 (en) | 2010-02-12 | 2014-12-23 | Intuitive Surgical Operations, Inc. | Medical robotic system providing sensory feedback indicating a difference between a commanded state and a preferred pose of an articulated instrument |
| US9492927B2 (en) | 2009-08-15 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Application of force feedback on an input device to urge its operator to command an articulated instrument to a preferred pose |
| US8310523B2 (en) * | 2009-08-27 | 2012-11-13 | Sony Corporation | Plug-in to enable CAD software not having greater than 180 degree capability to present image from camera of more than 180 degrees |
| JP5617083B2 (ja) * | 2009-09-03 | 2014-11-05 | 本田技研工業株式会社 | コマンド認識装置、コマンド認識方法、及びコマンド認識ロボット |
| US8744661B2 (en) * | 2009-10-21 | 2014-06-03 | Berthold K. P. Horn | Method and apparatus for reducing motor vehicle traffic flow instabilities and increasing vehicle throughput |
| US9457810B2 (en) * | 2009-10-21 | 2016-10-04 | Berthold K. P. Horn | Method and apparatus for reducing motor vehicle traffic flow instabilities and increasing vehicle throughput |
| JP5168421B2 (ja) * | 2009-12-28 | 2013-03-21 | トヨタ自動車株式会社 | 運転支援装置 |
| JP5312367B2 (ja) * | 2010-02-12 | 2013-10-09 | 村田機械株式会社 | 走行台車システム |
| US8508590B2 (en) * | 2010-03-02 | 2013-08-13 | Crown Equipment Limited | Method and apparatus for simulating a physical environment to facilitate vehicle operation and task completion |
| US8538577B2 (en) * | 2010-03-05 | 2013-09-17 | Crown Equipment Limited | Method and apparatus for sensing object load engagement, transportation and disengagement by automated vehicles |
| DE102010010875A1 (de) * | 2010-03-10 | 2011-09-15 | Siemens Aktiengesellschaft | Verfahren zum Überwachen der räumlichen Umgebung eines bewegbaren Geräts, insbesondere eines medizinischen Geräts |
| US8730818B2 (en) | 2010-04-16 | 2014-05-20 | The Morey Corporation | Converter/multiplexer for serial bus |
| US8346426B1 (en) | 2010-04-28 | 2013-01-01 | Google Inc. | User interface for displaying internal state of autonomous driving system |
| US8260482B1 (en) | 2010-04-28 | 2012-09-04 | Google Inc. | User interface for displaying internal state of autonomous driving system |
| FI122157B (fi) * | 2010-05-10 | 2011-09-15 | Sandvik Mining & Constr Oy | Menetelmä ja laitteisto kaivosajoneuvon turvajärjestelyitä varten |
| DE112010005666B4 (de) | 2010-06-16 | 2022-06-30 | Toyota Jidosha Kabushiki Kaisha | Fahrunterstützungsvorrichtung |
| JP5381923B2 (ja) * | 2010-07-23 | 2014-01-08 | 日産自動車株式会社 | 車両用制動支援装置及び車両用制動支援方法 |
| JP5062310B2 (ja) * | 2010-08-26 | 2012-10-31 | 村田機械株式会社 | 走行車 |
| US9797730B2 (en) * | 2010-08-27 | 2017-10-24 | Cellco Partnership | Detected arrival at navigated destination automatically triggers delivery of relevant local information to user |
| US9058247B2 (en) * | 2010-09-08 | 2015-06-16 | Toyota Jidosha Kabushiki Kaisha | Risk potential calculation apparatus |
| US8566011B2 (en) * | 2010-09-30 | 2013-10-22 | Siemens Corporation | Data collection and traffic control using multiple wireless receivers |
| US8509982B2 (en) | 2010-10-05 | 2013-08-13 | Google Inc. | Zone driving |
| KR101207903B1 (ko) | 2010-10-11 | 2012-12-04 | 국방과학연구소 | 자율 이동 차량용 장애물 정보 제공장치 및 그 방법 |
| DE102010051203B4 (de) * | 2010-11-12 | 2022-07-28 | Zf Active Safety Gmbh | Verfahren zur Erkennung von kritischen Fahrsituationen von Lastkraft- oder Personenkraftwagen, insbesondere zur Vermeidung von Kollisionen |
| CN102529962B (zh) * | 2010-12-08 | 2014-11-05 | 安尼株式会社 | 移动体防碰撞装置和移动体 |
| EP2484567B1 (en) * | 2011-02-08 | 2017-12-27 | Volvo Car Corporation | An onboard perception system |
| WO2012124250A1 (ja) * | 2011-03-15 | 2012-09-20 | パナソニック株式会社 | オブジェクト制御装置、オブジェクト制御方法、オブジェクト制御プログラム、及び集積回路 |
| WO2012141601A2 (en) | 2011-04-11 | 2012-10-18 | Crown Equipment Limited | Method and apparatus for efficient scheduling for multiple automated non-holonomic vehicles using a coordinated path planner |
| US20120271500A1 (en) * | 2011-04-20 | 2012-10-25 | GM Global Technology Operations LLC | System and method for enabling a driver to input a vehicle control instruction into an autonomous vehicle controller |
| US9410804B2 (en) * | 2011-04-21 | 2016-08-09 | Konecranes Global Corporation | Techniques for positioning a vehicle |
| US10572123B2 (en) | 2011-04-22 | 2020-02-25 | Emerging Automotive, Llc | Vehicle passenger controls via mobile devices |
| US9230440B1 (en) | 2011-04-22 | 2016-01-05 | Angel A. Penilla | Methods and systems for locating public parking and receiving security ratings for parking locations and generating notifications to vehicle user accounts regarding alerts and cloud access to security information |
| US10286919B2 (en) | 2011-04-22 | 2019-05-14 | Emerging Automotive, Llc | Valet mode for restricted operation of a vehicle and cloud access of a history of use made during valet mode use |
| US9648107B1 (en) | 2011-04-22 | 2017-05-09 | Angel A. Penilla | Methods and cloud systems for using connected object state data for informing and alerting connected vehicle drivers of state changes |
| US11203355B2 (en) | 2011-04-22 | 2021-12-21 | Emerging Automotive, Llc | Vehicle mode for restricted operation and cloud data monitoring |
| US11132650B2 (en) | 2011-04-22 | 2021-09-28 | Emerging Automotive, Llc | Communication APIs for remote monitoring and control of vehicle systems |
| US9215274B2 (en) | 2011-04-22 | 2015-12-15 | Angel A. Penilla | Methods and systems for generating recommendations to make settings at vehicles via cloud systems |
| US11270699B2 (en) | 2011-04-22 | 2022-03-08 | Emerging Automotive, Llc | Methods and vehicles for capturing emotion of a human driver and customizing vehicle response |
| US9697503B1 (en) | 2011-04-22 | 2017-07-04 | Angel A. Penilla | Methods and systems for providing recommendations to vehicle users to handle alerts associated with the vehicle and a bidding market place for handling alerts/service of the vehicle |
| US9285944B1 (en) | 2011-04-22 | 2016-03-15 | Angel A. Penilla | Methods and systems for defining custom vehicle user interface configurations and cloud services for managing applications for the user interface and learned setting functions |
| US11294551B2 (en) | 2011-04-22 | 2022-04-05 | Emerging Automotive, Llc | Vehicle passenger controls via mobile devices |
| US9104537B1 (en) | 2011-04-22 | 2015-08-11 | Angel A. Penilla | Methods and systems for generating setting recommendation to user accounts for registered vehicles via cloud systems and remotely applying settings |
| US9536197B1 (en) | 2011-04-22 | 2017-01-03 | Angel A. Penilla | Methods and systems for processing data streams from data producing objects of vehicle and home entities and generating recommendations and settings |
| US11370313B2 (en) | 2011-04-25 | 2022-06-28 | Emerging Automotive, Llc | Methods and systems for electric vehicle (EV) charge units and systems for processing connections to charge units |
| US10289288B2 (en) | 2011-04-22 | 2019-05-14 | Emerging Automotive, Llc | Vehicle systems for providing access to vehicle controls, functions, environment and applications to guests/passengers via mobile devices |
| US9346365B1 (en) | 2011-04-22 | 2016-05-24 | Angel A. Penilla | Methods and systems for electric vehicle (EV) charging, charging unit (CU) interfaces, auxiliary batteries, and remote access and user notifications |
| US9818088B2 (en) | 2011-04-22 | 2017-11-14 | Emerging Automotive, Llc | Vehicles and cloud systems for providing recommendations to vehicle users to handle alerts associated with the vehicle |
| US9371007B1 (en) | 2011-04-22 | 2016-06-21 | Angel A. Penilla | Methods and systems for automatic electric vehicle identification and charging via wireless charging pads |
| US9365188B1 (en) | 2011-04-22 | 2016-06-14 | Angel A. Penilla | Methods and systems for using cloud services to assign e-keys to access vehicles |
| US9581997B1 (en) | 2011-04-22 | 2017-02-28 | Angel A. Penilla | Method and system for cloud-based communication for automatic driverless movement |
| US9139091B1 (en) | 2011-04-22 | 2015-09-22 | Angel A. Penilla | Methods and systems for setting and/or assigning advisor accounts to entities for specific vehicle aspects and cloud management of advisor accounts |
| US9123035B2 (en) | 2011-04-22 | 2015-09-01 | Angel A. Penilla | Electric vehicle (EV) range extending charge systems, distributed networks of charge kiosks, and charge locating mobile apps |
| US9348492B1 (en) | 2011-04-22 | 2016-05-24 | Angel A. Penilla | Methods and systems for providing access to specific vehicle controls, functions, environment and applications to guests/passengers via personal mobile devices |
| US9493130B2 (en) | 2011-04-22 | 2016-11-15 | Angel A. Penilla | Methods and systems for communicating content to connected vehicle users based detected tone/mood in voice input |
| US9288270B1 (en) | 2011-04-22 | 2016-03-15 | Angel A. Penilla | Systems for learning user preferences and generating recommendations to make settings at connected vehicles and interfacing with cloud systems |
| US10824330B2 (en) | 2011-04-22 | 2020-11-03 | Emerging Automotive, Llc | Methods and systems for vehicle display data integration with mobile device data |
| US9189900B1 (en) | 2011-04-22 | 2015-11-17 | Angel A. Penilla | Methods and systems for assigning e-keys to users to access and drive vehicles |
| US9229905B1 (en) | 2011-04-22 | 2016-01-05 | Angel A. Penilla | Methods and systems for defining vehicle user profiles and managing user profiles via cloud systems and applying learned settings to user profiles |
| US9171268B1 (en) | 2011-04-22 | 2015-10-27 | Angel A. Penilla | Methods and systems for setting and transferring user profiles to vehicles and temporary sharing of user profiles to shared-use vehicles |
| US9809196B1 (en) | 2011-04-22 | 2017-11-07 | Emerging Automotive, Llc | Methods and systems for vehicle security and remote access and safety control interfaces and notifications |
| US9180783B1 (en) | 2011-04-22 | 2015-11-10 | Penilla Angel A | Methods and systems for electric vehicle (EV) charge location color-coded charge state indicators, cloud applications and user notifications |
| US9963145B2 (en) | 2012-04-22 | 2018-05-08 | Emerging Automotive, Llc | Connected vehicle communication with processing alerts related to traffic lights and cloud systems |
| US10217160B2 (en) * | 2012-04-22 | 2019-02-26 | Emerging Automotive, Llc | Methods and systems for processing charge availability and route paths for obtaining charge for electric vehicles |
| US8078349B1 (en) | 2011-05-11 | 2011-12-13 | Google Inc. | Transitioning a mixed-mode vehicle to autonomous mode |
| EP2527943A1 (en) * | 2011-05-24 | 2012-11-28 | BAE Systems Plc. | Vehicle navigation |
| EP2715470B1 (en) * | 2011-05-24 | 2018-07-11 | BAE Systems PLC | Vehicle navigation |
| US8655588B2 (en) | 2011-05-26 | 2014-02-18 | Crown Equipment Limited | Method and apparatus for providing accurate localization for an industrial vehicle |
| US8589014B2 (en) | 2011-06-01 | 2013-11-19 | Google Inc. | Sensor field selection |
| US8548671B2 (en) | 2011-06-06 | 2013-10-01 | Crown Equipment Limited | Method and apparatus for automatically calibrating vehicle parameters |
| US8594923B2 (en) | 2011-06-14 | 2013-11-26 | Crown Equipment Limited | Method and apparatus for sharing map data associated with automated industrial vehicles |
| US8589012B2 (en) | 2011-06-14 | 2013-11-19 | Crown Equipment Limited | Method and apparatus for facilitating map data processing for industrial vehicle navigation |
| FR2976700B1 (fr) * | 2011-06-17 | 2013-07-12 | Inst Nat Rech Inf Automat | Procede de generation d'ordres de commande de coordination d'organes de deplacement d'une plateforme animee et generateur correspondant. |
| CN102350990A (zh) * | 2011-06-29 | 2012-02-15 | 北京理工大学 | 有人驾驶与无人驾驶车辆避障行为的对照模型 |
| US20170242443A1 (en) | 2015-11-02 | 2017-08-24 | Peloton Technology, Inc. | Gap measurement for vehicle convoying |
| US8744666B2 (en) | 2011-07-06 | 2014-06-03 | Peloton Technology, Inc. | Systems and methods for semi-autonomous vehicular convoys |
| US10520581B2 (en) | 2011-07-06 | 2019-12-31 | Peloton Technology, Inc. | Sensor fusion for autonomous or partially autonomous vehicle control |
| US8825391B1 (en) | 2011-08-04 | 2014-09-02 | Google Inc. | Building elevation maps from laser data |
| US9151613B2 (en) * | 2011-08-12 | 2015-10-06 | Qualcomm Incorporated | Methods and apparatus for detecting, measuring, and mitigating effects of moving an inertial navigation device's cradle |
| US9823082B2 (en) * | 2011-08-24 | 2017-11-21 | Modular Mining Systems, Inc. | Driver guidance for guided maneuvering |
| US20140058634A1 (en) | 2012-08-24 | 2014-02-27 | Crown Equipment Limited | Method and apparatus for using unique landmarks to locate industrial vehicles at start-up |
| US8190345B1 (en) * | 2011-08-29 | 2012-05-29 | Panzarella Richard | Vehicle safety system |
| JP6178791B2 (ja) | 2011-09-02 | 2017-08-09 | ブルックス オートメーション インコーポレイテッド | ロボット移送装置の時間最適軌道 |
| US9056754B2 (en) | 2011-09-07 | 2015-06-16 | Crown Equipment Limited | Method and apparatus for using pre-positioned objects to localize an industrial vehicle |
| KR20140074343A (ko) * | 2011-09-12 | 2014-06-17 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 차량의 포지션 데이터의 결정 방법 |
| WO2013037855A1 (de) * | 2011-09-12 | 2013-03-21 | Continental Teves Ag & Co. Ohg | Sensorsystem mit einer fahrzeugmodelleinheit |
| EP2763120B1 (en) * | 2011-09-26 | 2017-12-27 | Toyota Jidosha Kabushiki Kaisha | Vehicle driving assistance system |
| GB201116961D0 (en) | 2011-09-30 | 2011-11-16 | Bae Systems Plc | Fast calibration for lidars |
| GB201116958D0 (en) | 2011-09-30 | 2011-11-16 | Bae Systems Plc | Use of synthetic overhead images for vehicle localisation |
| GB201116959D0 (en) * | 2011-09-30 | 2011-11-16 | Bae Systems Plc | Vehicle localisation with 2d laser scanner and 3d prior scans |
| GB201116960D0 (en) | 2011-09-30 | 2011-11-16 | Bae Systems Plc | Monocular camera localisation using prior point clouds |
| US8510029B2 (en) | 2011-10-07 | 2013-08-13 | Southwest Research Institute | Waypoint splining for autonomous vehicle following |
| US9495773B2 (en) * | 2011-10-24 | 2016-11-15 | Nokia Technologies Oy | Location map submission framework |
| DE102011117116B4 (de) | 2011-10-27 | 2014-02-13 | Diehl Bgt Defence Gmbh & Co. Kg | Steuereinrichtung zum wenigstens teilweise autonomen Betrieb eines Fahrzeugs und Fahrzeug mit solch einer Steuereinrichtung |
| WO2013060323A1 (de) * | 2011-10-28 | 2013-05-02 | Conti Temic Microelectronic Gmbh | Gitterbasiertes umfeldmodell für ein fahrzeug |
| US9453737B2 (en) * | 2011-10-28 | 2016-09-27 | GM Global Technology Operations LLC | Vehicle localization |
| SE537371C2 (sv) * | 2011-11-18 | 2015-04-14 | Atlas Copco Rock Drills Ab | Förfarande och anordning vid framförande av en gruv- och/eller anläggningsmaskin |
| US8868265B2 (en) | 2011-11-30 | 2014-10-21 | Honeywell International Inc. | System and method for aligning aircraft and runway headings during takeoff roll |
| US10169822B2 (en) * | 2011-12-02 | 2019-01-01 | Spireon, Inc. | Insurance rate optimization through driver behavior monitoring |
| US20130143181A1 (en) * | 2011-12-05 | 2013-06-06 | Ford Global Technologies, Llc | In-vehicle training system for teaching fuel economy |
| KR101294087B1 (ko) * | 2011-12-09 | 2013-08-08 | 기아자동차주식회사 | 전기 자동차용 친환경 드라이빙 운전자 지원 시스템 및 지원 방법 |
| US9187118B2 (en) * | 2011-12-30 | 2015-11-17 | C & P Technologies, Inc. | Method and apparatus for automobile accident reduction using localized dynamic swarming |
| US9165366B2 (en) | 2012-01-19 | 2015-10-20 | Honeywell International Inc. | System and method for detecting and displaying airport approach lights |
| US9381916B1 (en) | 2012-02-06 | 2016-07-05 | Google Inc. | System and method for predicting behaviors of detected objects through environment representation |
| DE102012202934A1 (de) * | 2012-02-27 | 2013-08-29 | Bayerische Motoren Werke Aktiengesellschaft | Funkfernbedienung zur Steuerung von Fahrzeugfunktionen eines Kraftfahrzeugs |
| US8788121B2 (en) | 2012-03-09 | 2014-07-22 | Proxy Technologies, Inc. | Autonomous vehicle and method for coordinating the paths of multiple autonomous vehicles |
| US8874360B2 (en) * | 2012-03-09 | 2014-10-28 | Proxy Technologies Inc. | Autonomous vehicle and method for coordinating the paths of multiple autonomous vehicles |
| US8457827B1 (en) | 2012-03-15 | 2013-06-04 | Google Inc. | Modifying behavior of autonomous vehicle based on predicted behavior of other vehicles |
| US8948954B1 (en) * | 2012-03-15 | 2015-02-03 | Google Inc. | Modifying vehicle behavior based on confidence in lane estimation |
| US9760092B2 (en) | 2012-03-16 | 2017-09-12 | Waymo Llc | Actively modifying a field of view of an autonomous vehicle in view of constraints |
| US8755966B2 (en) * | 2012-04-03 | 2014-06-17 | Caterpillar Inc. | System and method for controlling autonomous machine within lane boundaries during position uncertainty |
| US8712624B1 (en) * | 2012-04-06 | 2014-04-29 | Google Inc. | Positioning vehicles to improve quality of observations at intersections |
| US8761991B1 (en) * | 2012-04-09 | 2014-06-24 | Google Inc. | Use of uncertainty regarding observations of traffic intersections to modify behavior of a vehicle |
| US8718861B1 (en) | 2012-04-11 | 2014-05-06 | Google Inc. | Determining when to drive autonomously |
| US9315178B1 (en) | 2012-04-13 | 2016-04-19 | Google Inc. | Model checking for autonomous vehicles |
| US8700251B1 (en) | 2012-04-13 | 2014-04-15 | Google Inc. | System and method for automatically detecting key behaviors by vehicles |
| JP5901749B2 (ja) * | 2012-04-26 | 2016-04-13 | 株式会社日立製作所 | 自律移動装置 |
| DE102012207269A1 (de) * | 2012-05-02 | 2013-11-07 | Kuka Laboratories Gmbh | Fahrerloses Transportfahrzeug und Verfahren zum Betreiben eines fahrerlosen Transportfahrzeugs |
| US8595037B1 (en) * | 2012-05-08 | 2013-11-26 | Elwha Llc | Systems and methods for insurance based on monitored characteristics of an autonomous drive mode selection system |
| US9037411B2 (en) | 2012-05-11 | 2015-05-19 | Honeywell International Inc. | Systems and methods for landmark selection for navigation |
| US8781669B1 (en) | 2012-05-14 | 2014-07-15 | Google Inc. | Consideration of risks in active sensing for an autonomous vehicle |
| US9176500B1 (en) | 2012-05-14 | 2015-11-03 | Google Inc. | Consideration of risks in active sensing for an autonomous vehicle |
| US8527199B1 (en) * | 2012-05-17 | 2013-09-03 | Google Inc. | Automatic collection of quality control statistics for maps used in autonomous driving |
| US9014903B1 (en) * | 2012-05-22 | 2015-04-21 | Google Inc. | Determination of object heading based on point cloud |
| US8793046B2 (en) | 2012-06-01 | 2014-07-29 | Google Inc. | Inferring state of traffic signal and other aspects of a vehicle's environment based on surrogate data |
| AU2013277928B2 (en) | 2012-06-18 | 2017-06-15 | Technological Resources Pty. Limited | Systems and methods for processing geophysical data |
| US9165469B2 (en) | 2012-07-09 | 2015-10-20 | Elwha Llc | Systems and methods for coordinating sensor operation for collision detection |
| US9558667B2 (en) | 2012-07-09 | 2017-01-31 | Elwha Llc | Systems and methods for cooperative collision detection |
| US9000903B2 (en) | 2012-07-09 | 2015-04-07 | Elwha Llc | Systems and methods for vehicle monitoring |
| GB201212621D0 (en) | 2012-07-16 | 2012-08-29 | Aledain Fze | Method of marking a line |
| US9098086B2 (en) * | 2012-08-07 | 2015-08-04 | Caterpillar Inc. | Method and system for planning a turn path for a machine |
| DE102012215057A1 (de) * | 2012-08-24 | 2014-02-27 | Robert Bosch Gmbh | Fahrerassistenzsystem |
| US9195236B1 (en) | 2012-09-05 | 2015-11-24 | Google Inc. | Road flare detection |
| US20140082307A1 (en) * | 2012-09-17 | 2014-03-20 | Mobileye Technologies Limited | System and method to arbitrate access to memory |
| US9383753B1 (en) | 2012-09-26 | 2016-07-05 | Google Inc. | Wide-view LIDAR with areas of special attention |
| US9234618B1 (en) | 2012-09-27 | 2016-01-12 | Google Inc. | Characterizing optically reflective features via hyper-spectral sensor |
| US9633564B2 (en) | 2012-09-27 | 2017-04-25 | Google Inc. | Determining changes in a driving environment based on vehicle behavior |
| US9125779B2 (en) | 2012-09-28 | 2015-09-08 | Elwha Llc | Automated systems, devices, and methods for transporting and supporting patients |
| US8949016B1 (en) * | 2012-09-28 | 2015-02-03 | Google Inc. | Systems and methods for determining whether a driving environment has changed |
| US9665101B1 (en) * | 2012-09-28 | 2017-05-30 | Waymo Llc | Methods and systems for transportation to destinations by a self-driving vehicle |
| WO2014049987A1 (ja) * | 2012-09-28 | 2014-04-03 | パナソニック株式会社 | 通知装置およびそれを利用した車両 |
| US8965691B1 (en) * | 2012-10-05 | 2015-02-24 | Google Inc. | Position and direction determination using multiple single-channel encoders |
| US9097800B1 (en) | 2012-10-11 | 2015-08-04 | Google Inc. | Solid object detection system using laser and radar sensor fusion |
| JP6017260B2 (ja) * | 2012-10-17 | 2016-10-26 | ルネサスエレクトロニクス株式会社 | マルチスレッドプロセッサ |
| KR20140051615A (ko) * | 2012-10-23 | 2014-05-02 | 현대자동차주식회사 | 비주차구역의 주차 지원 장치 및 방법 |
| US9043069B1 (en) * | 2012-11-07 | 2015-05-26 | Google Inc. | Methods and systems for scan matching approaches for vehicle heading estimation |
| CN102929151B (zh) * | 2012-11-14 | 2016-01-20 | 北京理工大学 | 一种基于指数时变二阶滑模的再入飞行姿态控制方法 |
| CA2833985C (en) * | 2012-11-19 | 2020-07-07 | Rosemount Aerospace, Inc. | Collision avoidance system for aircraft ground operations |
| CN102944881A (zh) * | 2012-11-29 | 2013-02-27 | 阮于华 | 汽车防撞激光雷达系统和汽车安全制动方法 |
| US8825258B2 (en) | 2012-11-30 | 2014-09-02 | Google Inc. | Engaging and disengaging for autonomous driving |
| USD735214S1 (en) | 2012-11-30 | 2015-07-28 | Google Inc. | Display screen or portion thereof with graphical user interface |
| CN103901451B (zh) * | 2012-12-03 | 2016-04-27 | 杨益 | 一种定位系统中的轨迹监控方法 |
| US9415983B2 (en) * | 2012-12-17 | 2016-08-16 | Shamrock Foods Company | Crash prevention system for a storage and retrieval machine |
| EP2746833A1 (en) | 2012-12-18 | 2014-06-25 | Volvo Car Corporation | Vehicle adaptation to automatic driver independent control mode |
| US9063548B1 (en) | 2012-12-19 | 2015-06-23 | Google Inc. | Use of previous detections for lane marker detection |
| US9081385B1 (en) | 2012-12-21 | 2015-07-14 | Google Inc. | Lane boundary detection using images |
| US11190738B2 (en) | 2012-12-28 | 2021-11-30 | Robert Bosch Gmbh | Vehicle standstill recognition |
| CN105122249B (zh) * | 2012-12-31 | 2018-06-15 | 加里·斯蒂芬·舒斯特 | 使用算法或编程分析进行决策 |
| US8788146B1 (en) * | 2013-01-08 | 2014-07-22 | Ford Global Technologies, Llc | Adaptive active suspension system with road preview |
| US9367065B2 (en) | 2013-01-25 | 2016-06-14 | Google Inc. | Modifying behavior of autonomous vehicles based on sensor blind spots and limitations |
| US9446766B2 (en) * | 2013-02-01 | 2016-09-20 | Hitachi Automotive Systems, Ltd. | Travel control device and travel control system |
| US10507066B2 (en) | 2013-02-15 | 2019-12-17 | Intuitive Surgical Operations, Inc. | Providing information of tools by filtering image areas adjacent to or on displayed images of the tools |
| US9251627B2 (en) * | 2013-03-05 | 2016-02-02 | Sears Brands, L.L.C. | Removable dashboard instrument system |
| DE102013203707B4 (de) * | 2013-03-05 | 2024-03-07 | Robert Bosch Gmbh | Fahrzeugvorrichtung |
| WO2014137251A1 (en) * | 2013-03-06 | 2014-09-12 | Volvo Truck Corporation | Method for calculating a desired yaw rate for a vehicle |
| US8676431B1 (en) | 2013-03-12 | 2014-03-18 | Google Inc. | User interface for displaying object-based indications in an autonomous driving system |
| USD750663S1 (en) | 2013-03-12 | 2016-03-01 | Google Inc. | Display screen or a portion thereof with graphical user interface |
| USD754190S1 (en) | 2013-03-13 | 2016-04-19 | Google Inc. | Display screen or portion thereof with graphical user interface |
| USD754189S1 (en) | 2013-03-13 | 2016-04-19 | Google Inc. | Display screen or portion thereof with graphical user interface |
| US11294396B2 (en) | 2013-03-15 | 2022-04-05 | Peloton Technology, Inc. | System and method for implementing pre-cognition braking and/or avoiding or mitigation risks among platooning vehicles |
| US9333983B2 (en) * | 2013-03-15 | 2016-05-10 | Volkswagen Ag | Dual-state steering wheel/input device |
| US9008890B1 (en) | 2013-03-15 | 2015-04-14 | Google Inc. | Augmented trajectories for autonomous vehicles |
| US20180210463A1 (en) | 2013-03-15 | 2018-07-26 | Peloton Technology, Inc. | System and method for implementing pre-cognition braking and/or avoiding or mitigation risks among platooning vehicles |
| US9081382B2 (en) * | 2013-03-15 | 2015-07-14 | Fresenius Medical Care Holdings, Inc. | Autonomous vehicle comprising extracorporeal blood treatment machine |
| US8849494B1 (en) | 2013-03-15 | 2014-09-30 | Google Inc. | Data selection by an autonomous vehicle for trajectory modification |
| US8996224B1 (en) | 2013-03-15 | 2015-03-31 | Google Inc. | Detecting that an autonomous vehicle is in a stuck condition |
| JP6233706B2 (ja) * | 2013-04-02 | 2017-11-22 | パナソニックIpマネジメント株式会社 | 自律移動装置及び自律移動装置の自己位置推定方法 |
| US9733638B2 (en) | 2013-04-05 | 2017-08-15 | Symbotic, LLC | Automated storage and retrieval system and control system thereof |
| US9239959B1 (en) * | 2013-04-08 | 2016-01-19 | Lockheed Martin Corporation | Multi-resolution, wide field-of-view, unmanned ground vehicle navigation sensor |
| US9141107B2 (en) | 2013-04-10 | 2015-09-22 | Google Inc. | Mapping active and inactive construction zones for autonomous driving |
| US9327693B2 (en) | 2013-04-10 | 2016-05-03 | Magna Electronics Inc. | Rear collision avoidance system for vehicle |
| US9600768B1 (en) * | 2013-04-16 | 2017-03-21 | Google Inc. | Using behavior of objects to infer changes in a driving environment |
| DE102013206746B4 (de) | 2013-04-16 | 2016-08-11 | Ford Global Technologies, Llc | Verfahren und Vorrichtung zum Modifizieren der Konfiguration eines Fahrassistenzsystems eines Kraftfahrzeuges |
| DE102013207899A1 (de) * | 2013-04-30 | 2014-10-30 | Kuka Laboratories Gmbh | Fahrerloses Transportfahrzeug, System mit einem Rechner und einem fahrerlosen Transportfahrzeug, Verfahren zum Planen einer virtuellen Spur und Verfahren zum Betreiben eines fahrerlosen Transportfahrzeugs |
| US9139223B2 (en) * | 2013-05-23 | 2015-09-22 | Caterpillar Inc. | Managing steering with short from battery to ground |
| US8954205B2 (en) * | 2013-06-01 | 2015-02-10 | Savari, Inc. | System and method for road side equipment of interest selection for active safety applications |
| US9103694B2 (en) * | 2013-06-24 | 2015-08-11 | Here Global B.V. | Method and apparatus for conditional driving guidance |
| KR101470190B1 (ko) * | 2013-07-09 | 2014-12-05 | 현대자동차주식회사 | 자율주행 시스템의 고장 처리 장치 및 그 방법 |
| EP2827211A1 (en) * | 2013-07-15 | 2015-01-21 | BAE Systems PLC | Route planning |
| US8930060B1 (en) * | 2013-07-15 | 2015-01-06 | Ford Global Technologies | Post-impact path assist for vehicles |
| ES2646269T3 (es) * | 2013-07-15 | 2017-12-13 | Bae Systems Plc | Planificación de rutas |
| US9286520B1 (en) | 2013-07-16 | 2016-03-15 | Google Inc. | Real-time road flare detection using templates and appropriate color spaces |
| US9719801B1 (en) | 2013-07-23 | 2017-08-01 | Waymo Llc | Methods and systems for calibrating sensors using road map data |
| KR101491849B1 (ko) * | 2013-07-23 | 2015-02-06 | 현대오트론 주식회사 | 차간 거리용 센서 고장 보상 시스템 및 방법 |
| US9776632B2 (en) | 2013-07-31 | 2017-10-03 | Elwha Llc | Systems and methods for adaptive vehicle sensing systems |
| US9269268B2 (en) | 2013-07-31 | 2016-02-23 | Elwha Llc | Systems and methods for adaptive vehicle sensing systems |
| US9230442B2 (en) | 2013-07-31 | 2016-01-05 | Elwha Llc | Systems and methods for adaptive vehicle sensing systems |
| US9261881B1 (en) | 2013-08-01 | 2016-02-16 | Google Inc. | Filtering noisy/high-intensity regions in laser-based lane marker detection |
| US8930124B1 (en) | 2013-08-30 | 2015-01-06 | International Business Machines Corporation | Dynamic speed limit generation |
| US20150066282A1 (en) * | 2013-09-05 | 2015-03-05 | Ford Global Technologeis, Llc | Autonomous driving in areas for non-drivers |
| KR102263813B1 (ko) * | 2013-09-05 | 2021-06-14 | 크라운 이큅먼트 코포레이션 | 동적 오퍼레이터 거동 분석기 |
| JP2015072650A (ja) * | 2013-10-04 | 2015-04-16 | 株式会社デンソーアイティーラボラトリ | 経路算出装置、車両制御装置、車両運転支援装置、車両、経路算出プログラム、及び経路算出方法 |
| KR101892763B1 (ko) * | 2013-10-08 | 2018-08-28 | 주식회사 만도 | 장애물 위치를 판단하는 방법과 장애물 위치 판단장치 및 주차 보조 방법과 주차 보조 시스템 |
| US9174672B2 (en) * | 2013-10-28 | 2015-11-03 | GM Global Technology Operations LLC | Path planning for evasive steering maneuver in presence of target vehicle and surrounding objects |
| US10022114B2 (en) | 2013-10-30 | 2018-07-17 | 4Tech Inc. | Percutaneous tether locking |
| US9354070B2 (en) | 2013-10-31 | 2016-05-31 | Crown Equipment Corporation | Systems, methods, and industrial vehicles for determining the visibility of features |
| US10203399B2 (en) | 2013-11-12 | 2019-02-12 | Big Sky Financial Corporation | Methods and apparatus for array based LiDAR systems with reduced interference |
| KR101480647B1 (ko) * | 2013-11-15 | 2015-01-09 | 현대자동차주식회사 | 협로 주행을 위한 조향 위험도 판단 시스템 및 그 판단 방법 |
| US9998332B2 (en) | 2013-11-15 | 2018-06-12 | Massachusetts Institute Of Technology | Signal-flow architecture for cooperative control and resource allocation |
| TWI549104B (zh) * | 2013-11-21 | 2016-09-11 | yu-zhi Min | The instinct of the car reflects the way in which the throttle and the brake are controlled |
| US9212926B2 (en) | 2013-11-22 | 2015-12-15 | Ford Global Technologies, Llc | In-vehicle path verification |
| US9364178B2 (en) | 2013-11-26 | 2016-06-14 | Elwha Llc | Robotic vehicle control |
| GB2520694A (en) * | 2013-11-27 | 2015-06-03 | Airbus Operations Ltd | Aircraft electric braking system |
| JP5939238B2 (ja) * | 2013-11-29 | 2016-06-22 | トヨタ自動車株式会社 | 車両用操舵制御装置 |
| EP3092599B1 (en) * | 2013-12-04 | 2019-03-06 | Mobileye Vision Technologies Ltd. | Systems and methods for mimicking a leading vehicle |
| US9499139B2 (en) * | 2013-12-05 | 2016-11-22 | Magna Electronics Inc. | Vehicle monitoring system |
| KR101534958B1 (ko) * | 2013-12-09 | 2015-07-07 | 현대자동차주식회사 | 차량의 자동 조향 제어 장치 및 방법 |
| US20150168953A1 (en) * | 2013-12-13 | 2015-06-18 | Itrack Llc | Autonomous self-leveling vehicle |
| CN103679851B (zh) * | 2013-12-27 | 2016-08-24 | 李德毅 | 一种多传感器数据处理免同步方法及系统 |
| US9886036B2 (en) * | 2014-02-10 | 2018-02-06 | John Bean Technologies Corporation | Routing of automated guided vehicles |
| KR101491622B1 (ko) | 2014-02-17 | 2015-02-11 | 연세대학교 산학협력단 | 자율 주행형 차량의 주행 제어 장치 및 방법 |
| JP6340812B2 (ja) * | 2014-02-18 | 2018-06-13 | 村田機械株式会社 | 自律走行台車 |
| US10422649B2 (en) * | 2014-02-24 | 2019-09-24 | Ford Global Technologies, Llc | Autonomous driving sensing system and method |
| US9720410B2 (en) * | 2014-03-03 | 2017-08-01 | Waymo Llc | Remote assistance for autonomous vehicles in predetermined situations |
| US9465388B1 (en) | 2014-03-03 | 2016-10-11 | Google Inc. | Remote assistance for an autonomous vehicle in low confidence situations |
| EP2916190B1 (en) | 2014-03-04 | 2019-05-08 | Volvo Car Corporation | Apparatus and method for prediction of time available for autonomous driving, in a vehicle having autonomous driving cap |
| US9547989B2 (en) | 2014-03-04 | 2017-01-17 | Google Inc. | Reporting road event data and sharing with other vehicles |
| EP2915718B1 (en) * | 2014-03-04 | 2018-07-11 | Volvo Car Corporation | Apparatus and method for continuously establishing a boundary for autonomous driving availability and an automotive vehicle comprising such an apparatus |
| US10482658B2 (en) * | 2014-03-31 | 2019-11-19 | Gary Stephen Shuster | Visualization and control of remote objects |
| DE102014206086A1 (de) * | 2014-03-31 | 2015-10-01 | Robert Bosch Gmbh | Verfahren zum Betreiben einer selbstbeweglichen mobilen Plattform |
| CN103853155B (zh) * | 2014-03-31 | 2015-04-22 | 李德毅 | 智能车路口通行方法及系统 |
| CN103940434B (zh) * | 2014-04-01 | 2017-12-15 | 西安交通大学 | 基于单目视觉和惯性导航单元的实时车道线检测系统 |
| US9360554B2 (en) | 2014-04-11 | 2016-06-07 | Facet Technology Corp. | Methods and apparatus for object detection and identification in a multiple detector lidar array |
| WO2015156818A1 (en) * | 2014-04-11 | 2015-10-15 | Nissan North America, Inc. | Autonomous vehicle control system |
| US9681272B2 (en) | 2014-04-23 | 2017-06-13 | At&T Intellectual Property I, L.P. | Facilitating mesh networks of connected movable objects |
| US9304515B2 (en) * | 2014-04-24 | 2016-04-05 | Lenovo Enterprise Solutions (Singapore) Pte. Ltd. | Regional operation modes for autonomous vehicles |
| US9604642B2 (en) * | 2014-04-29 | 2017-03-28 | Lenovo Enterprise Solutions (Singapore) Pte. Ltd. | Positioning autonomous vehicles based on field of view |
| US9460624B2 (en) | 2014-05-06 | 2016-10-04 | Toyota Motor Engineering & Manufacturing North America, Inc. | Method and apparatus for determining lane identification in a roadway |
| US9792656B1 (en) * | 2014-05-20 | 2017-10-17 | State Farm Mutual Automobile Insurance Company | Fault determination with autonomous feature use monitoring |
| US9972054B1 (en) | 2014-05-20 | 2018-05-15 | State Farm Mutual Automobile Insurance Company | Accident fault determination for autonomous vehicles |
| US10599155B1 (en) | 2014-05-20 | 2020-03-24 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle operation feature monitoring and evaluation of effectiveness |
| US11669090B2 (en) | 2014-05-20 | 2023-06-06 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle operation feature monitoring and evaluation of effectiveness |
| US10373259B1 (en) | 2014-05-20 | 2019-08-06 | State Farm Mutual Automobile Insurance Company | Fully autonomous vehicle insurance pricing |
| US10319039B1 (en) | 2014-05-20 | 2019-06-11 | State Farm Mutual Automobile Insurance Company | Accident fault determination for autonomous vehicles |
| US10185999B1 (en) | 2014-05-20 | 2019-01-22 | State Farm Mutual Automobile Insurance Company | Autonomous feature use monitoring and telematics |
| WO2015180090A1 (en) * | 2014-05-29 | 2015-12-03 | Empire Technology Development Llc | Remote driving assistance |
| US9404761B2 (en) | 2014-05-30 | 2016-08-02 | Nissan North America, Inc. | Autonomous vehicle lane routing and navigation |
| US9457807B2 (en) * | 2014-06-05 | 2016-10-04 | GM Global Technology Operations LLC | Unified motion planning algorithm for autonomous driving vehicle in obstacle avoidance maneuver |
| US9409644B2 (en) * | 2014-07-16 | 2016-08-09 | Ford Global Technologies, Llc | Automotive drone deployment system |
| US10540723B1 (en) | 2014-07-21 | 2020-01-21 | State Farm Mutual Automobile Insurance Company | Methods of providing insurance savings based upon telematics and usage-based insurance |
| CN104670456A (zh) * | 2014-07-28 | 2015-06-03 | 白薇 | 一种船舶气体控制方法 |
| CN104132873B (zh) * | 2014-07-28 | 2016-08-24 | 泰州市宏祥动力机械有限公司 | 一种船舶气体控制方法 |
| US9428183B2 (en) | 2014-07-31 | 2016-08-30 | Toyota Motor Engineering & Manufacturing North America, Inc. | Self-explaining autonomous vehicle |
| US9707960B2 (en) | 2014-07-31 | 2017-07-18 | Waymo Llc | Traffic signal response for autonomous vehicles |
| US9791560B2 (en) * | 2014-08-13 | 2017-10-17 | Infineon Technologies Ag | Radar signal processor, radar system and method for monitoring a functional safety of a radar system |
| US9720072B2 (en) | 2014-08-28 | 2017-08-01 | Waymo Llc | Methods and systems for vehicle radar coordination and interference reduction |
| US9321461B1 (en) | 2014-08-29 | 2016-04-26 | Google Inc. | Change detection using curve alignment |
| AU2014312738B2 (en) * | 2014-09-01 | 2016-02-11 | Komatsu Ltd. | Transport vehicle, dump truck, and method for controlling transport vehicle |
| KR101610502B1 (ko) * | 2014-09-02 | 2016-04-07 | 현대자동차주식회사 | 자율주행차량의 주행환경 인식장치 및 방법 |
| DE102014217848A1 (de) * | 2014-09-08 | 2016-03-10 | Continental Automotive Gmbh | Fahrerassistenzsystem |
| US9440647B1 (en) | 2014-09-22 | 2016-09-13 | Google Inc. | Safely navigating crosswalks |
| CN104260725B (zh) * | 2014-09-23 | 2016-09-14 | 北京理工大学 | 一种含有驾驶员模型的智能驾驶系统 |
| JP5883489B1 (ja) * | 2014-09-30 | 2016-03-15 | 富士重工業株式会社 | 車両の制御装置及び車両の制御方法 |
| US9248834B1 (en) | 2014-10-02 | 2016-02-02 | Google Inc. | Predicting trajectories of objects based on contextual information |
| KR101683984B1 (ko) * | 2014-10-14 | 2016-12-07 | 현대자동차주식회사 | 라이더 데이터 필터링 시스템 및 그 방법 |
| DE102014220758A1 (de) | 2014-10-14 | 2016-04-14 | Robert Bosch Gmbh | Autonomes Fahrsystem für ein Fahrzeug bzw. Verfahren zur Durchführung des Betriebs |
| DE102014115292A1 (de) * | 2014-10-21 | 2016-04-21 | Connaught Electronics Ltd. | Verfahren zum Bereitstellen von Bilddateien von einem Kamerasystem, Kamerasystem und Kraftfahrzeug |
| DE102014221751A1 (de) * | 2014-10-27 | 2016-04-28 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Führen eines Fahrzeugs auf einem Parkplatz |
| CN104460667A (zh) * | 2014-10-31 | 2015-03-25 | 成都众易通科技有限公司 | 一种汽车自动驾驶系统 |
| KR20160054825A (ko) | 2014-11-07 | 2016-05-17 | 현대모비스 주식회사 | 주행 가능 공간 판단 장치 및 방법 |
| KR101664582B1 (ko) * | 2014-11-12 | 2016-10-10 | 현대자동차주식회사 | 자율주행차량의 주행경로 생성장치 및 방법 |
| JP6626248B2 (ja) * | 2014-11-12 | 2019-12-25 | 村田機械株式会社 | 移動量推定装置、自律移動体、及び移動量の推定方法 |
| US9946531B1 (en) | 2014-11-13 | 2018-04-17 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle software version assessment |
| KR101877553B1 (ko) * | 2014-11-14 | 2018-07-11 | 한국전자통신연구원 | 차량 자율주행 시스템 및 이를 이용한 차량 주행 방법 |
| JP6537251B2 (ja) * | 2014-11-14 | 2019-07-03 | シャープ株式会社 | 自律走行装置 |
| US10364042B2 (en) | 2014-11-24 | 2019-07-30 | Sikorsky Aircraft Corporation | Multispectral sensor fusion system for platform state estimation |
| US9387844B2 (en) | 2014-11-24 | 2016-07-12 | Toyota Motor Engineering & Manufacturing North America, Inc. | Environment-based anti-lock braking system |
| KR102219268B1 (ko) * | 2014-11-26 | 2021-02-24 | 한국전자통신연구원 | 탐험 경로 협력형 내비게이션 시스템 및 그 제어 방법 |
| CN113654561A (zh) * | 2014-12-05 | 2021-11-16 | 苹果公司 | 自主导航系统 |
| WO2016092591A1 (ja) * | 2014-12-09 | 2016-06-16 | 三菱電機株式会社 | 衝突リスク算出装置、衝突リスク表示装置、車体制御装置 |
| US9598843B2 (en) * | 2014-12-16 | 2017-03-21 | Caterpillar Inc. | Real-time route terrain validity checker |
| WO2016100088A1 (en) * | 2014-12-18 | 2016-06-23 | Agco Corporation | Method of path planning for autoguidance |
| CN104477113A (zh) * | 2014-12-22 | 2015-04-01 | 联想(北京)有限公司 | 控制方法、系统及汽车 |
| US9562779B2 (en) * | 2014-12-23 | 2017-02-07 | Here Global B.V. | Method and apparatus for providing a steering reliability map based on driven curvatures and geometry curvature |
| CN104590259B (zh) * | 2015-01-07 | 2015-08-26 | 福州华鹰重工机械有限公司 | 一种轨迹搜寻方法和系统 |
| US9448559B2 (en) * | 2015-01-15 | 2016-09-20 | Nissan North America, Inc. | Autonomous vehicle routing and navigation using passenger docking locations |
| JP6176263B2 (ja) * | 2015-01-19 | 2017-08-09 | トヨタ自動車株式会社 | 自動運転装置 |
| WO2016118499A1 (en) | 2015-01-19 | 2016-07-28 | The Regents Of The University Of Michigan | Visual localization within lidar maps |
| US20160210775A1 (en) * | 2015-01-21 | 2016-07-21 | Ford Global Technologies, Llc | Virtual sensor testbed |
| EP3251023A4 (en) * | 2015-01-26 | 2018-09-26 | TRW Automotive U.S. LLC | Vehicle driver assist system |
| DE102015101183A1 (de) * | 2015-01-28 | 2016-07-28 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Betreiben eines Fahrerassistenzsystems eines Kraftfahrzeugs mit Anzeige von Umgebungsdaten in einem autonomen Fahrmodus, Fahrerassistenzsystem sowie Kraftfahrzeug |
| US9493157B2 (en) | 2015-01-29 | 2016-11-15 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle operation in obstructed occupant view and sensor detection environments |
| US9649979B2 (en) | 2015-01-29 | 2017-05-16 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle operation in view-obstructed environments |
| US10168699B1 (en) * | 2015-01-30 | 2019-01-01 | Vecna Technologies, Inc. | Interactions between a vehicle and a being encountered by the vehicle |
| US9568335B2 (en) | 2015-01-30 | 2017-02-14 | Nissan North America, Inc. | Associating parking areas with destinations based on automatically identified associations between vehicle operating information and non-vehicle operating information |
| US10216196B2 (en) * | 2015-02-01 | 2019-02-26 | Prosper Technology, Llc | Methods to operate autonomous vehicles to pilot vehicles in groups or convoys |
| WO2016126316A1 (en) * | 2015-02-06 | 2016-08-11 | Delphi Technologies, Inc. | Autonomous guidance system |
| WO2016126317A1 (en) | 2015-02-06 | 2016-08-11 | Delphi Technologies, Inc. | Method of automatically controlling an autonomous vehicle based on electronic messages from roadside infrastructure of other vehicles |
| US10678261B2 (en) | 2015-02-06 | 2020-06-09 | Aptiv Technologies Limited | Method and apparatus for controlling an autonomous vehicle |
| JP6600001B2 (ja) * | 2015-02-26 | 2019-10-30 | ボルボトラックコーポレーション | 隊列の車間距離を制御する方法 |
| JP6082415B2 (ja) * | 2015-03-03 | 2017-02-15 | 富士重工業株式会社 | 車両の走行制御装置 |
| DE102015203864B4 (de) * | 2015-03-04 | 2018-05-03 | Ford Global Technologies, Llc | Lenksystem, Kraftfahrzeug mit einem solchen und Verfahren zum Betreiben eines Lenksystems |
| US10036801B2 (en) | 2015-03-05 | 2018-07-31 | Big Sky Financial Corporation | Methods and apparatus for increased precision and improved range in a multiple detector LiDAR array |
| US10175040B2 (en) * | 2015-03-20 | 2019-01-08 | Process Metrix | Characterization of refractory lining of metallurgical vessels using autonomous scanners |
| JP6087969B2 (ja) * | 2015-03-23 | 2017-03-01 | 富士重工業株式会社 | 車両の走行制御装置 |
| WO2016151750A1 (ja) | 2015-03-24 | 2016-09-29 | パイオニア株式会社 | 地図情報記憶装置、自動運転制御装置、制御方法、プログラム及び記憶媒体 |
| EP3281033B1 (en) | 2015-04-07 | 2022-01-12 | GM Global Technology Operations LLC | Compact lidar system |
| KR101714145B1 (ko) * | 2015-04-09 | 2017-03-08 | 현대자동차주식회사 | 주변차량 식별 장치 및 그 방법 |
| CN106062841B (zh) * | 2015-04-24 | 2018-07-31 | 深圳市大疆创新科技有限公司 | 用于呈现移动平台的操作信息的方法、设备和系统 |
| JP6193912B2 (ja) * | 2015-04-24 | 2017-09-06 | 株式会社パイ・アール | ドライブレコーダ |
| DE102015208058B4 (de) * | 2015-04-30 | 2017-06-29 | Robert Bosch Gmbh | Automatisiertes Parksystem |
| US9616773B2 (en) | 2015-05-11 | 2017-04-11 | Uber Technologies, Inc. | Detecting objects within a vehicle in connection with a service |
| AU2016262119A1 (en) * | 2015-05-12 | 2017-11-30 | Precision Autonomy Pty Ltd | Systems and methods of unmanned vehicle control and monitoring |
| US20160341555A1 (en) * | 2015-05-20 | 2016-11-24 | Delphi Technologies, Inc. | System for auto-updating route-data used by a plurality of automated vehicles |
| DE102016208217B4 (de) | 2015-05-22 | 2022-04-21 | Ford Global Technologies, Llc | Verfahren und Vorrichtung zum Betrieb eines zu autonomen Fahren fähigen Fahrzeugs |
| US9598078B2 (en) | 2015-05-27 | 2017-03-21 | Dov Moran | Alerting predicted accidents between driverless cars |
| US10031522B2 (en) | 2015-05-27 | 2018-07-24 | Dov Moran | Alerting predicted accidents between driverless cars |
| US20160349754A1 (en) | 2015-05-29 | 2016-12-01 | Clearpath Robotics, Inc. | Method, system and apparatus for controlling self-driving vehicles |
| US9914358B2 (en) | 2015-06-10 | 2018-03-13 | International Business Machines Corporation | Vehicle control system |
| CN104850134B (zh) * | 2015-06-12 | 2019-01-11 | 北京中飞艾维航空科技有限公司 | 一种无人机高精度自主避障飞行方法 |
| JP6657618B2 (ja) * | 2015-06-30 | 2020-03-04 | 株式会社デンソー | 逸脱回避装置 |
| US9511767B1 (en) | 2015-07-01 | 2016-12-06 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle action planning using behavior prediction |
| US9285805B1 (en) * | 2015-07-02 | 2016-03-15 | Geodigital International Inc. | Attributed roadway trajectories for self-driving vehicles |
| EP3115942B1 (en) * | 2015-07-10 | 2019-10-16 | Volvo Car Corporation | Method and system for smart use of in-car time with advanced pilot assist and autonomous drive |
| DE102015214968B4 (de) * | 2015-08-05 | 2022-10-06 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zur Anpassung mindestens eines Parameters eines Kommunikationssystems |
| US10284560B2 (en) | 2015-08-22 | 2019-05-07 | Just Innovation, Inc. | Secure unmanned vehicle operation and communication |
| US10102757B2 (en) | 2015-08-22 | 2018-10-16 | Just Innovation, Inc. | Secure unmanned vehicle operation and monitoring |
| US9805601B1 (en) | 2015-08-28 | 2017-10-31 | State Farm Mutual Automobile Insurance Company | Vehicular traffic alerts for avoidance of abnormal traffic conditions |
| US9843853B2 (en) | 2015-08-29 | 2017-12-12 | Bragi GmbH | Power control for battery powered personal area network device system and method |
| EP3136291A1 (de) * | 2015-08-31 | 2017-03-01 | Continental Automotive GmbH | Verfahren und vorrichtung zur erkennung von objekten bei dunkelheit mittels einer fahrzeugkamera und einer fahrzeugbeleuchtung |
| US9587952B1 (en) | 2015-09-09 | 2017-03-07 | Allstate Insurance Company | Altering autonomous or semi-autonomous vehicle operation based on route traversal values |
| US9952049B2 (en) * | 2015-09-10 | 2018-04-24 | GM Global Technology Operations LLC | Methods and apparatus for performance assessment of a vehicle onboard navigation system using adaptive stochastic filtering |
| JP6697702B2 (ja) * | 2015-09-10 | 2020-05-27 | パナソニックIpマネジメント株式会社 | 自動停止装置および自動停止方法 |
| US10061020B2 (en) * | 2015-09-20 | 2018-08-28 | Qualcomm Incorporated | Light detection and ranging (LIDAR) system with dual beam steering |
| US10462689B2 (en) * | 2015-09-22 | 2019-10-29 | Veniam, Inc. | Systems and methods for monitoring a network of moving things |
| CN107923757B (zh) | 2015-09-25 | 2022-05-13 | 苹果公司 | 非固态对象监测 |
| DE102015218809A1 (de) * | 2015-09-29 | 2017-03-30 | Continental Teves Ag & Co. Ohg | Verfahren zum Aktualisieren einer elektronischen Karte eines Fahrzeugs |
| EP3150465B1 (en) * | 2015-10-01 | 2018-12-12 | Volvo Car Corporation | Method and system for indicating a potential lane shift of a vehicle |
| US9881219B2 (en) | 2015-10-07 | 2018-01-30 | Ford Global Technologies, Llc | Self-recognition of autonomous vehicles in mirrored or reflective surfaces |
| CN105204510B (zh) * | 2015-10-09 | 2016-06-22 | 福州华鹰重工机械有限公司 | 一种用于精确定位的概率地图的生成方法及装置 |
| US9786192B2 (en) * | 2015-10-14 | 2017-10-10 | Toyota Motor Engineering & Manufacturing North America, Inc. | Assessing driver readiness for transition between operational modes of an autonomous vehicle |
| JP6657245B2 (ja) * | 2015-10-16 | 2020-03-04 | 日立オートモティブシステムズ株式会社 | 車両制御システム、車両制御装置 |
| US10557939B2 (en) | 2015-10-19 | 2020-02-11 | Luminar Technologies, Inc. | Lidar system with improved signal-to-noise ratio in the presence of solar background noise |
| US10104458B2 (en) | 2015-10-20 | 2018-10-16 | Bragi GmbH | Enhanced biometric control systems for detection of emergency events system and method |
| US9610810B1 (en) * | 2015-10-21 | 2017-04-04 | The Goodyear Tire & Rubber Company | Method of tire state estimation through wheel speed signal feature extraction |
| US10267908B2 (en) * | 2015-10-21 | 2019-04-23 | Waymo Llc | Methods and systems for clearing sensor occlusions |
| DE102015118080B4 (de) * | 2015-10-23 | 2017-11-23 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Erfassung einer Bewegung eines Landfahrzeugs und Landfahrzeug mit Bewegungserfassungsvorrichtung |
| GB201519082D0 (en) | 2015-10-28 | 2015-12-09 | Vlyte Innovations Ltd | An autonomous vehicle that minimizes human reactions |
| US10217363B2 (en) * | 2015-10-29 | 2019-02-26 | Faraday&Future Inc. | Methods and systems for electronically assisted lane entrance |
| US9507346B1 (en) | 2015-11-04 | 2016-11-29 | Zoox, Inc. | Teleoperation system and method for trajectory modification of autonomous vehicles |
| US9720415B2 (en) | 2015-11-04 | 2017-08-01 | Zoox, Inc. | Sensor-based object-detection optimization for autonomous vehicles |
| US11283877B2 (en) | 2015-11-04 | 2022-03-22 | Zoox, Inc. | Software application and logic to modify configuration of an autonomous vehicle |
| US9734455B2 (en) | 2015-11-04 | 2017-08-15 | Zoox, Inc. | Automated extraction of semantic information to enhance incremental mapping modifications for robotic vehicles |
| US9916703B2 (en) | 2015-11-04 | 2018-03-13 | Zoox, Inc. | Calibration for autonomous vehicle operation |
| US9612123B1 (en) | 2015-11-04 | 2017-04-04 | Zoox, Inc. | Adaptive mapping to navigate autonomous vehicles responsive to physical environment changes |
| US9802661B1 (en) | 2015-11-04 | 2017-10-31 | Zoox, Inc. | Quadrant configuration of robotic vehicles |
| US10745003B2 (en) | 2015-11-04 | 2020-08-18 | Zoox, Inc. | Resilient safety system for a robotic vehicle |
| US9878664B2 (en) | 2015-11-04 | 2018-01-30 | Zoox, Inc. | Method for robotic vehicle communication with an external environment via acoustic beam forming |
| US9632502B1 (en) | 2015-11-04 | 2017-04-25 | Zoox, Inc. | Machine-learning systems and techniques to optimize teleoperation and/or planner decisions |
| US10496766B2 (en) * | 2015-11-05 | 2019-12-03 | Zoox, Inc. | Simulation system and methods for autonomous vehicles |
| US9754490B2 (en) | 2015-11-04 | 2017-09-05 | Zoox, Inc. | Software application to request and control an autonomous vehicle service |
| US9910441B2 (en) | 2015-11-04 | 2018-03-06 | Zoox, Inc. | Adaptive autonomous vehicle planner logic |
| US10401852B2 (en) | 2015-11-04 | 2019-09-03 | Zoox, Inc. | Teleoperation system and method for trajectory modification of autonomous vehicles |
| US9606539B1 (en) | 2015-11-04 | 2017-03-28 | Zoox, Inc. | Autonomous vehicle fleet service and system |
| EP3371023A4 (en) * | 2015-11-04 | 2019-05-08 | Zoox, Inc. | SIMULATION SYSTEM AND METHOD FOR AUTONOMOUS VEHICLES |
| US9701239B2 (en) * | 2015-11-04 | 2017-07-11 | Zoox, Inc. | System of configuring active lighting to indicate directionality of an autonomous vehicle |
| US10334050B2 (en) * | 2015-11-04 | 2019-06-25 | Zoox, Inc. | Software application and logic to modify configuration of an autonomous vehicle |
| US9804599B2 (en) * | 2015-11-04 | 2017-10-31 | Zoox, Inc. | Active lighting control for communicating a state of an autonomous vehicle to entities in a surrounding environment |
| US9958864B2 (en) | 2015-11-04 | 2018-05-01 | Zoox, Inc. | Coordination of dispatching and maintaining fleet of autonomous vehicles |
| US10000124B2 (en) | 2015-11-04 | 2018-06-19 | Zoox, Inc. | Independent steering, power, torque control and transfer in vehicles |
| US9517767B1 (en) | 2015-11-04 | 2016-12-13 | Zoox, Inc. | Internal safety systems for robotic vehicles |
| US10248119B2 (en) | 2015-11-04 | 2019-04-02 | Zoox, Inc. | Interactive autonomous vehicle command controller |
| WO2017079341A2 (en) | 2015-11-04 | 2017-05-11 | Zoox, Inc. | Automated extraction of semantic information to enhance incremental mapping modifications for robotic vehicles |
| CN108369274B (zh) | 2015-11-05 | 2022-09-13 | 路明亮有限责任公司 | 用于高分辨率深度映射的具有经改进扫描速度的激光雷达系统 |
| FR3043777B1 (fr) * | 2015-11-12 | 2017-12-01 | Peugeot Citroen Automobiles Sa | Procede et dispositif de determination d’une cartographie de la qualite de l’air, par agregation de mesures d’origines differentes |
| DE102015222605A1 (de) | 2015-11-17 | 2017-05-18 | MAN Trucks & Bus AG | Verfahren und Vorrichtung zum assistierten, teilautomatisierten, hochautomatisierten, vollautomatisierten oder fahrerlosen Fahren eines Kraftfahrzeuges |
| US10331431B2 (en) * | 2015-11-17 | 2019-06-25 | Nlight, Inc. | Multiple laser module programming over internal communications bus of fiber laser |
| EP3171133B1 (en) * | 2015-11-19 | 2020-03-11 | Sikorsky Aircraft Corporation | Kinematic motion planning with regional planning constraints |
| CN107209520B (zh) * | 2015-11-20 | 2019-04-19 | 深圳市大疆创新科技有限公司 | 无人机的控制方法及相关装置 |
| JP6350492B2 (ja) * | 2015-11-26 | 2018-07-04 | トヨタ自動車株式会社 | 画像表示装置 |
| EP3411660A4 (en) | 2015-11-30 | 2019-11-27 | Luminar Technologies, Inc. | LIDAR SYSTEM WITH DISTRIBUTED LASER AND MULTIPLE SENSOR HEADS AND PULSED LASER FOR LIDAR SYSTEM |
| US10712160B2 (en) | 2015-12-10 | 2020-07-14 | Uatc, Llc | Vehicle traction map for autonomous vehicles |
| KR101714273B1 (ko) * | 2015-12-11 | 2017-03-08 | 현대자동차주식회사 | 자율 주행 시스템의 경로 제어 방법 및 그 장치 |
| US10338225B2 (en) | 2015-12-15 | 2019-07-02 | Uber Technologies, Inc. | Dynamic LIDAR sensor controller |
| US9840256B1 (en) | 2015-12-16 | 2017-12-12 | Uber Technologies, Inc. | Predictive sensor array configuration system for an autonomous vehicle |
| US9841763B1 (en) | 2015-12-16 | 2017-12-12 | Uber Technologies, Inc. | Predictive sensor array configuration system for an autonomous vehicle |
| TWI570674B (zh) * | 2015-12-17 | 2017-02-11 | 合盈光電科技股份有限公司 | 交通運輸工具之影像偵測系統 |
| US10048696B2 (en) | 2015-12-22 | 2018-08-14 | Uber Technologies, Inc. | Intelligent lens masking system for an autonomous vehicle |
| CN105630501A (zh) * | 2015-12-25 | 2016-06-01 | 深圳市航盛电子股份有限公司 | 一种基于QML+OpenGL的车载图形界面系统 |
| US9915951B2 (en) * | 2015-12-27 | 2018-03-13 | Toyota Motor Engineering & Manufacturing North America, Inc. | Detection of overhanging objects |
| WO2017118907A1 (en) * | 2016-01-05 | 2017-07-13 | Mobileye Vision Technologies Ltd. | Systems and methods for estimating future paths |
| EP3400419A2 (en) * | 2016-01-05 | 2018-11-14 | Mobileye Vision Technologies Ltd. | Trained navigational system with imposed constraints |
| US9776323B2 (en) * | 2016-01-06 | 2017-10-03 | Disney Enterprises, Inc. | Trained human-intention classifier for safe and efficient robot navigation |
| US9740202B2 (en) * | 2016-01-08 | 2017-08-22 | Waymo Llc | Fall back trajectory systems for autonomous vehicles |
| US9551992B1 (en) * | 2016-01-08 | 2017-01-24 | Google Inc. | Fall back trajectory systems for autonomous vehicles |
| WO2017127596A1 (en) * | 2016-01-22 | 2017-07-27 | Russell David Wayne | System and method for safe positive control electronic processing for autonomous vehicles |
| US10134278B1 (en) | 2016-01-22 | 2018-11-20 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle application |
| US10395332B1 (en) | 2016-01-22 | 2019-08-27 | State Farm Mutual Automobile Insurance Company | Coordinated autonomous vehicle automatic area scanning |
| US11242051B1 (en) | 2016-01-22 | 2022-02-08 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle action communications |
| US11719545B2 (en) | 2016-01-22 | 2023-08-08 | Hyundai Motor Company | Autonomous vehicle component damage and salvage assessment |
| US10308246B1 (en) | 2016-01-22 | 2019-06-04 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle signal control |
| US11441916B1 (en) | 2016-01-22 | 2022-09-13 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle trip routing |
| US9940834B1 (en) | 2016-01-22 | 2018-04-10 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle application |
| US10324463B1 (en) | 2016-01-22 | 2019-06-18 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle operation adjustment based upon route |
| US9707961B1 (en) * | 2016-01-29 | 2017-07-18 | Ford Global Technologies, Llc | Tracking objects within a dynamic environment for improved localization |
| KR102373926B1 (ko) | 2016-02-05 | 2022-03-14 | 삼성전자주식회사 | 이동체 및 이동체의 위치 인식 방법 |
| US9576490B1 (en) * | 2016-02-08 | 2017-02-21 | GM Global Technology Operations LLC | Personalized navigation route for transportation device |
| US10662045B2 (en) | 2016-02-11 | 2020-05-26 | Clearpath Robotics Inc. | Control augmentation apparatus and method for automated guided vehicles |
| US10752257B2 (en) * | 2016-02-19 | 2020-08-25 | A Truly Electric Car Company | Car operating system that controls the car's direction and speed |
| US10787176B2 (en) * | 2016-02-19 | 2020-09-29 | A Truly Electric Car Company | Plug-compatible interface between cars and their human and/or computer drivers |
| JP6975945B2 (ja) * | 2016-02-24 | 2021-12-01 | パナソニックIpマネジメント株式会社 | 判定装置、判定方法、プログラムおよびプログラムを記録した記録媒体 |
| CN105741635A (zh) * | 2016-03-01 | 2016-07-06 | 武汉理工大学 | 一种多功能道路实验车平台 |
| US10281923B2 (en) | 2016-03-03 | 2019-05-07 | Uber Technologies, Inc. | Planar-beam, light detection and ranging system |
| US9866816B2 (en) | 2016-03-03 | 2018-01-09 | 4D Intellectual Properties, Llc | Methods and apparatus for an active pulsed 4D camera for image acquisition and analysis |
| US9990548B2 (en) | 2016-03-09 | 2018-06-05 | Uber Technologies, Inc. | Traffic signal analysis system |
| US10085082B2 (en) | 2016-03-11 | 2018-09-25 | Bragi GmbH | Earpiece with GPS receiver |
| US9846050B2 (en) * | 2016-03-21 | 2017-12-19 | Ford Global Technologies, Llc | Systems, methods, and devices for communicating drive history path attributes |
| US9898008B2 (en) | 2016-03-22 | 2018-02-20 | Delphi Technologies, Inc. | Scenario aware perception system for an automated vehicle |
| US9645577B1 (en) * | 2016-03-23 | 2017-05-09 | nuTonomy Inc. | Facilitating vehicle driving and self-driving |
| US10052065B2 (en) | 2016-03-23 | 2018-08-21 | Bragi GmbH | Earpiece life monitor with capability of automatic notification system and method |
| EP3226031A1 (en) | 2016-03-29 | 2017-10-04 | Leica Geosystems AG | Laser scanner |
| US10145951B2 (en) | 2016-03-30 | 2018-12-04 | Aptiv Technologies Limited | Object detection using radar and vision defined image detection zone |
| CN105912749B (zh) * | 2016-03-31 | 2019-06-04 | 北京润科通用技术有限公司 | 仿真方法和装置 |
| US11300663B2 (en) * | 2016-03-31 | 2022-04-12 | Nec Corporation | Method for predicting a motion of an object |
| US9817403B2 (en) * | 2016-03-31 | 2017-11-14 | Intel Corporation | Enabling dynamic sensor discovery in autonomous devices |
| US9796421B1 (en) * | 2016-04-07 | 2017-10-24 | GM Global Technology Operations LLC | Autonomous vehicle lateral control for path tracking and stability |
| US9720416B1 (en) * | 2016-04-18 | 2017-08-01 | Ford Global Technologies, Llc | Vehicle security system |
| US9964948B2 (en) * | 2016-04-20 | 2018-05-08 | The Florida International University Board Of Trustees | Remote control and concierge service for an autonomous transit vehicle fleet |
| EP3236446B1 (en) * | 2016-04-22 | 2022-04-13 | Volvo Car Corporation | Arrangement and method for providing adaptation to queue length for traffic light assist-applications |
| US9776631B1 (en) * | 2016-04-27 | 2017-10-03 | Toyota Motor Engineering & Manufacturig North America, Inc. | Front vehicle stopping indicator |
| US10152891B2 (en) * | 2016-05-02 | 2018-12-11 | Cnh Industrial America Llc | System for avoiding collisions between autonomous vehicles conducting agricultural operations |
| US10188024B2 (en) * | 2016-05-02 | 2019-01-29 | Cnh Industrial America Llc | System for conducting an agricultural operation using an autonomous vehicle |
| CA3023107A1 (en) | 2016-05-06 | 2017-11-09 | Mtd Products Inc | Autonomous mower navigation system and method |
| US10296003B2 (en) | 2016-05-12 | 2019-05-21 | Georgia Tech Research Corporation | Autonomous vehicle research system |
| US9910440B2 (en) * | 2016-05-13 | 2018-03-06 | Delphi Technologies, Inc. | Escape-path-planning system for an automated vehicle |
| US10114373B2 (en) * | 2016-05-17 | 2018-10-30 | Telenav, Inc. | Navigation system with trajectory calculation mechanism and method of operation thereof |
| DE102016208675A1 (de) * | 2016-05-19 | 2017-11-23 | Lucas Automotive Gmbh | Verfahren zur Bestimmung einer sicheren Geschwindigkeit an einem zukünftigen Wegpunkt |
| JP6786264B2 (ja) | 2016-05-27 | 2020-11-18 | 株式会社東芝 | 情報処理装置、情報処理方法、および車両 |
| JP7005526B2 (ja) | 2016-05-31 | 2022-01-21 | ぺロトン テクノロジー インコーポレイテッド | 隊列走行コントローラの状態マシン |
| EP3465268B1 (en) * | 2016-05-31 | 2023-01-11 | ABB Schweiz AG | Loop powered distance transmitter |
| US10835769B2 (en) * | 2016-06-01 | 2020-11-17 | Michael Neal | Fire fighting system |
| US9731761B1 (en) * | 2016-06-07 | 2017-08-15 | Ford Global Technologies, Llc | Steering-wheel control |
| US11092446B2 (en) * | 2016-06-14 | 2021-08-17 | Motional Ad Llc | Route planning for an autonomous vehicle |
| US10309792B2 (en) | 2016-06-14 | 2019-06-04 | nuTonomy Inc. | Route planning for an autonomous vehicle |
| US10126136B2 (en) | 2016-06-14 | 2018-11-13 | nuTonomy Inc. | Route planning for an autonomous vehicle |
| CN109641589B (zh) * | 2016-06-14 | 2023-10-13 | 动态Ad有限责任公司 | 用于自主车辆的路线规划 |
| US10019009B2 (en) | 2016-06-15 | 2018-07-10 | Allstate Insurance Company | Vehicle control systems |
| US10037033B2 (en) * | 2016-06-15 | 2018-07-31 | Ford Global Technologies, Llc | Vehicle exterior surface object detection |
| US9898005B2 (en) * | 2016-06-24 | 2018-02-20 | Toyota Motor Engineering & Manufacturing North America, Inc. | Driving path determination for autonomous vehicles |
| US9953535B1 (en) | 2016-06-27 | 2018-04-24 | Amazon Technologies, Inc. | Annotated virtual track to inform autonomous vehicle control |
| US10137890B2 (en) | 2016-06-28 | 2018-11-27 | Toyota Motor Engineering & Manufacturing North America, Inc. | Occluded obstacle classification for vehicles |
| US10078335B2 (en) | 2016-06-28 | 2018-09-18 | Toyota Motor Engineering & Manufacturing North America, Inc. | Ray tracing for hidden obstacle detection |
| US9910442B2 (en) | 2016-06-28 | 2018-03-06 | Toyota Motor Engineering & Manufacturing North America, Inc. | Occluded area detection with static obstacle maps |
| JP6778872B2 (ja) * | 2016-06-28 | 2020-11-04 | パナソニックIpマネジメント株式会社 | 運転支援装置及び運転支援方法 |
| US10165231B2 (en) | 2016-06-29 | 2018-12-25 | International Business Machines Corporation | Visualization of navigation information for connected autonomous vehicles |
| KR101887436B1 (ko) * | 2016-06-29 | 2018-09-06 | 현대오트론 주식회사 | 물체 탐지 장치 및 방법 |
| US10739786B2 (en) | 2016-07-01 | 2020-08-11 | Uatc, Llc | System and method for managing submaps for controlling autonomous vehicles |
| US10829116B2 (en) | 2016-07-01 | 2020-11-10 | nuTonomy Inc. | Affecting functions of a vehicle based on function-related information about its environment |
| WO2018009189A1 (en) * | 2016-07-06 | 2018-01-11 | Beer Reginald N | Object sense and avoid system for autonomous vehicles |
| US10832331B1 (en) * | 2016-07-11 | 2020-11-10 | State Farm Mutual Automobile Insurance Company | Systems and methods for allocating fault to autonomous vehicles |
| US10162354B2 (en) * | 2016-07-21 | 2018-12-25 | Baidu Usa Llc | Controlling error corrected planning methods for operating autonomous vehicles |
| JP6597905B2 (ja) * | 2016-07-25 | 2019-10-30 | 日産自動車株式会社 | 車線変更支援方法および車線変更支援装置 |
| CN106257044B (zh) * | 2016-08-02 | 2018-08-07 | 武汉理工大学 | 一种基于交互思维的发动机自启停智能触发系统 |
| DE102016009763A1 (de) * | 2016-08-11 | 2018-02-15 | Trw Automotive Gmbh | Steuerungssystem und Steuerungsverfahren zum Bestimmen einer Trajektorie und zum Erzeugen von zugehörigen Signalen oder Steuerbefehlen |
| JP6831190B2 (ja) | 2016-08-15 | 2021-02-17 | トヨタ自動車株式会社 | 自動運転車両の制御システム及び制御方法 |
| US10369998B2 (en) | 2016-08-22 | 2019-08-06 | Peloton Technology, Inc. | Dynamic gap control for automated driving |
| EP3500940A4 (en) * | 2016-08-22 | 2020-03-18 | Peloton Technology, Inc. | AUTOMATED CONNECTED VEHICLE CONTROL SYSTEM ARCHITECTURE |
| JP6776058B2 (ja) * | 2016-08-26 | 2020-10-28 | シャープ株式会社 | 自律走行車両制御装置、自律走行車両制御システム及び自律走行車両制御方法 |
| US10127812B2 (en) | 2016-08-29 | 2018-11-13 | Allstate Insurance Company | Electrical data processing system for monitoring or affecting movement of a vehicle using a traffic device |
| WO2018044785A1 (en) * | 2016-08-29 | 2018-03-08 | Allstate Insurance Company | Electrical data processing system for determining a navigation route based on the location of a vehicle and generating a recommendation for a vehicle maneuver |
| US10515543B2 (en) | 2016-08-29 | 2019-12-24 | Allstate Insurance Company | Electrical data processing system for determining status of traffic device and vehicle movement |
| US10417904B2 (en) | 2016-08-29 | 2019-09-17 | Allstate Insurance Company | Electrical data processing system for determining a navigation route based on the location of a vehicle and generating a recommendation for a vehicle maneuver |
| US10640111B1 (en) | 2016-09-07 | 2020-05-05 | Waymo Llc | Speed planning for autonomous vehicles |
| DE102016116858A1 (de) * | 2016-09-08 | 2018-03-08 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | System und Verfahren zur Übergabe eines Nutzfahrzeuges |
| WO2018047117A1 (en) | 2016-09-09 | 2018-03-15 | Dematic Corp. | Free ranging automated guided vehicle and operational system |
| US10650621B1 (en) | 2016-09-13 | 2020-05-12 | Iocurrents, Inc. | Interfacing with a vehicular controller area network |
| US10131053B1 (en) | 2016-09-14 | 2018-11-20 | X Development Llc | Real time robot collision avoidance |
| US10346152B2 (en) | 2016-09-20 | 2019-07-09 | At&T Intellectual Property I, L.P. | Facilitating use of a universal integrated circuit card (UICC) for secure device updates |
| US10783430B2 (en) | 2016-09-26 | 2020-09-22 | The Boeing Company | Signal removal to examine a spectrum of another signal |
| US10191493B2 (en) * | 2016-09-27 | 2019-01-29 | Baidu Usa Llc | Vehicle position point forwarding method for autonomous vehicles |
| US10343685B2 (en) | 2016-09-28 | 2019-07-09 | Baidu Usa Llc | Physical model and machine learning combined method to simulate autonomous vehicle movement |
| US9905133B1 (en) | 2016-09-30 | 2018-02-27 | Allstate Insurance Company | Controlling autonomous vehicles to provide automated emergency response functions |
| KR20180037414A (ko) | 2016-10-04 | 2018-04-12 | 엘지전자 주식회사 | 자동주차 보조장치 및 이를 포함하는 차량 |
| CN109791739B (zh) * | 2016-10-11 | 2021-06-22 | 三菱电机株式会社 | 晕车估计装置、晕车防止装置和晕车估计方法 |
| US10202118B2 (en) | 2016-10-14 | 2019-02-12 | Waymo Llc | Planning stopping locations for autonomous vehicles |
| US10277084B1 (en) | 2016-10-19 | 2019-04-30 | Waymo Llc | Planar rotary transformer |
| US10473470B2 (en) | 2016-10-20 | 2019-11-12 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10857994B2 (en) | 2016-10-20 | 2020-12-08 | Motional Ad Llc | Identifying a stopping place for an autonomous vehicle |
| US10331129B2 (en) | 2016-10-20 | 2019-06-25 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10681513B2 (en) | 2016-10-20 | 2020-06-09 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10399564B2 (en) * | 2016-10-25 | 2019-09-03 | Ford Global Technologies, Llc | Vehicle roundabout management |
| KR101979269B1 (ko) * | 2016-10-28 | 2019-05-16 | 엘지전자 주식회사 | 자율 주행 차량 및 자율 주행 차량의 동작 방법 |
| IT201600109633A1 (it) * | 2016-10-31 | 2018-05-01 | Magneti Marelli Spa | Procedimento e sistema di controllo adattivo in un veicolo terrestre per l'inseguimento di un percorso, particolarmente in uno scenario di guida autonoma. |
| US10062373B2 (en) | 2016-11-03 | 2018-08-28 | Bragi GmbH | Selective audio isolation from body generated sound system and method |
| US10058282B2 (en) | 2016-11-04 | 2018-08-28 | Bragi GmbH | Manual operation assistance with earpiece with 3D sound cues |
| US10063957B2 (en) | 2016-11-04 | 2018-08-28 | Bragi GmbH | Earpiece with source selection within ambient environment |
| WO2018089514A1 (en) * | 2016-11-08 | 2018-05-17 | Digital Aerolus, Inc. | Real time effective mass and moment of inertia measurement |
| US10338556B2 (en) | 2016-11-08 | 2019-07-02 | Digital Aerolus, Inc. | System and method for describing and executing behaviors in autonomous and semi-autonomous devices |
| KR102518532B1 (ko) | 2016-11-11 | 2023-04-07 | 현대자동차주식회사 | 자율주행차량의 경로 결정장치 및 그 방법 |
| US10289121B2 (en) * | 2016-11-14 | 2019-05-14 | Qualcomm Incorporated | Vehicle collision avoidance |
| US11042161B2 (en) * | 2016-11-16 | 2021-06-22 | Symbol Technologies, Llc | Navigation control method and apparatus in a mobile automation system |
| KR102441054B1 (ko) * | 2016-11-23 | 2022-09-06 | 현대자동차주식회사 | 차량의 경로 제어 장치 및 방법 |
| US20180150083A1 (en) * | 2016-11-29 | 2018-05-31 | Waymo Llc | Pod connection for Autonomous Vehicle Sensors |
| WO2018106575A1 (en) | 2016-12-05 | 2018-06-14 | Cummins Inc. | Multi-vehicle load delivery management systems and methods |
| US10423156B2 (en) | 2016-12-11 | 2019-09-24 | Aatonomy, Inc. | Remotely-controlled device control system, device and method |
| US10442435B2 (en) * | 2016-12-14 | 2019-10-15 | Baidu Usa Llc | Speed control parameter estimation method for autonomous driving vehicles |
| US10308430B1 (en) | 2016-12-23 | 2019-06-04 | Amazon Technologies, Inc. | Distribution and retrieval of inventory and materials using autonomous vehicles |
| US10310500B1 (en) * | 2016-12-23 | 2019-06-04 | Amazon Technologies, Inc. | Automated access to secure facilities using autonomous vehicles |
| US10310499B1 (en) | 2016-12-23 | 2019-06-04 | Amazon Technologies, Inc. | Distributed production of items from locally sourced materials using autonomous vehicles |
| US11584372B2 (en) * | 2016-12-28 | 2023-02-21 | Baidu Usa Llc | Method to dynamically adjusting speed control rates of autonomous vehicles |
| US11157014B2 (en) | 2016-12-29 | 2021-10-26 | Tesla, Inc. | Multi-channel sensor simulation for autonomous control systems |
| US10474164B2 (en) * | 2016-12-30 | 2019-11-12 | DeepMap Inc. | Representing navigable surface boundaries of lanes in high definition maps for autonomous vehicles |
| US10942257B2 (en) | 2016-12-31 | 2021-03-09 | Innovusion Ireland Limited | 2D scanning high precision LiDAR using combination of rotating concave mirror and beam steering devices |
| MX2019008120A (es) * | 2017-01-05 | 2019-10-24 | Fraunhofer Ges Forschung | Generacion y uso de mapas de alta definicion (hd). |
| US10529147B2 (en) | 2017-01-05 | 2020-01-07 | International Business Machines Corporation | Self-driving vehicle road safety flare deploying system |
| US10139834B2 (en) * | 2017-01-12 | 2018-11-27 | GM Global Technology Operations LLC | Methods and systems for processing local and cloud data in a vehicle and a cloud server for transmitting cloud data to vehicles |
| US10246101B2 (en) * | 2017-01-12 | 2019-04-02 | Ford Global Technologies, Llc | Driver training system |
| CN106912141B (zh) * | 2017-01-17 | 2018-04-13 | 江苏德瑞博新能源汽车制造有限公司 | 安装太阳能光伏组件的电动汽车 |
| CN107682340B (zh) * | 2017-01-21 | 2020-07-28 | 凤阳聚梦信息科技有限责任公司 | 安装基于云计算信息的云端加密优盘装置的无人汽车 |
| WO2018139993A1 (en) * | 2017-01-24 | 2018-08-02 | Ford Global Technologies, Llc | Feedback for an autonomous vehicle |
| WO2018140748A1 (en) | 2017-01-26 | 2018-08-02 | The Regents Of The University Of Michigan | Localization using 2d maps which capture vertical structures in 3d point data |
| US11391579B2 (en) | 2017-01-27 | 2022-07-19 | Cpac Systems Ab | Method for forming a local navigation path for an autonomous vehicle |
| US11004000B1 (en) | 2017-01-30 | 2021-05-11 | Waymo Llc | Predicting trajectory intersection by another road user |
| DE102017201517A1 (de) * | 2017-01-31 | 2018-08-02 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Plausibilisieren einer Fahrzeugtrajektorie zum Steuern eines Fahrzeugs |
| US20180217603A1 (en) * | 2017-01-31 | 2018-08-02 | GM Global Technology Operations LLC | Efficient situational awareness from perception streams in autonomous driving systems |
| US10409279B2 (en) * | 2017-01-31 | 2019-09-10 | GM Global Technology Operations LLC | Efficient situational awareness by event generation and episodic memory recall for autonomous driving systems |
| CN106843212B (zh) * | 2017-02-08 | 2020-01-10 | 重庆长安汽车股份有限公司 | 自动驾驶基于偏航角修正的车辆应急辅助定向系统及方法 |
| EP3580104B1 (en) | 2017-02-10 | 2020-11-11 | Nissan North America, Inc. | Autonomous vehicle operational management blocking monitoring |
| US10654476B2 (en) | 2017-02-10 | 2020-05-19 | Nissan North America, Inc. | Autonomous vehicle operational management control |
| JP6890757B2 (ja) | 2017-02-10 | 2021-06-18 | ニッサン ノース アメリカ,インク | 部分観測マルコフ決定過程モデルインスタンスを動作させることを含む自律走行車動作管理 |
| US9947221B1 (en) | 2017-02-12 | 2018-04-17 | Robert Mazzola | Systems and methods of vehicular communication |
| KR20180094725A (ko) | 2017-02-16 | 2018-08-24 | 삼성전자주식회사 | 자율 주행을 위한 차량 제어 방법, 차량 제어 장치 및 자율 주행을 위한 학습 방법 |
| KR102406506B1 (ko) * | 2017-02-17 | 2022-06-10 | 현대자동차주식회사 | 자율주행 차량 경쟁 제어 장치, 그를 포함한 시스템 및 그 방법 |
| IL250762B (en) * | 2017-02-23 | 2020-09-30 | Appelman Dina | Method and system for unmanned vehicle navigation |
| CN108153297A (zh) * | 2017-03-01 | 2018-06-12 | 中国北方车辆研究所 | 一种地面无人平台车载的运动控制方法及车载系统 |
| US10146225B2 (en) * | 2017-03-02 | 2018-12-04 | GM Global Technology Operations LLC | Systems and methods for vehicle dimension prediction |
| CN107161141B (zh) * | 2017-03-08 | 2023-05-23 | 深圳市速腾聚创科技有限公司 | 无人驾驶汽车系统及汽车 |
| US10109198B2 (en) * | 2017-03-08 | 2018-10-23 | GM Global Technology Operations LLC | Method and apparatus of networked scene rendering and augmentation in vehicular environments in autonomous driving systems |
| DE102017203838B4 (de) | 2017-03-08 | 2022-03-17 | Audi Ag | Verfahren und System zur Umfelderfassung |
| US10147193B2 (en) | 2017-03-10 | 2018-12-04 | TuSimple | System and method for semantic segmentation using hybrid dilated convolution (HDC) |
| US11587304B2 (en) | 2017-03-10 | 2023-02-21 | Tusimple, Inc. | System and method for occluding contour detection |
| JP7089847B2 (ja) * | 2017-03-10 | 2022-06-23 | オムロン株式会社 | 応答器、質問機、応答器の制御方法、質問機の制御方法、情報処理プログラム、および記録媒体 |
| US9953236B1 (en) | 2017-03-10 | 2018-04-24 | TuSimple | System and method for semantic segmentation using dense upsampling convolution (DUC) |
| US10311312B2 (en) | 2017-08-31 | 2019-06-04 | TuSimple | System and method for vehicle occlusion detection |
| US10671873B2 (en) | 2017-03-10 | 2020-06-02 | Tusimple, Inc. | System and method for vehicle wheel detection |
| US10338594B2 (en) * | 2017-03-13 | 2019-07-02 | Nio Usa, Inc. | Navigation of autonomous vehicles to enhance safety under one or more fault conditions |
| US10209718B2 (en) | 2017-03-14 | 2019-02-19 | Starsky Robotics, Inc. | Vehicle sensor system and method of use |
| US9905992B1 (en) | 2017-03-16 | 2018-02-27 | Luminar Technologies, Inc. | Self-Raman laser for lidar system |
| US9810775B1 (en) | 2017-03-16 | 2017-11-07 | Luminar Technologies, Inc. | Q-switched laser for LIDAR system |
| US9810786B1 (en) | 2017-03-16 | 2017-11-07 | Luminar Technologies, Inc. | Optical parametric oscillator for lidar system |
| WO2018172849A1 (en) * | 2017-03-20 | 2018-09-27 | Mobileye Vision Technologies Ltd. | Trajectory selection for an autonomous vehicle |
| US9869754B1 (en) | 2017-03-22 | 2018-01-16 | Luminar Technologies, Inc. | Scan patterns for lidar systems |
| US10147249B1 (en) | 2017-03-22 | 2018-12-04 | Amazon Technologies, Inc. | Personal intermediary communication device |
| US10573106B1 (en) | 2017-03-22 | 2020-02-25 | Amazon Technologies, Inc. | Personal intermediary access device |
| WO2018176000A1 (en) | 2017-03-23 | 2018-09-27 | DeepScale, Inc. | Data synthesis for autonomous control systems |
| US10366294B2 (en) * | 2017-03-23 | 2019-07-30 | Aptiv Technologies Limited | Transparency-characteristic based object classification for automated vehicle |
| US10732281B2 (en) | 2017-03-28 | 2020-08-04 | Luminar Technologies, Inc. | Lidar detector system having range walk compensation |
| US10267899B2 (en) | 2017-03-28 | 2019-04-23 | Luminar Technologies, Inc. | Pulse timing based on angle of view |
| US10121813B2 (en) | 2017-03-28 | 2018-11-06 | Luminar Technologies, Inc. | Optical detector having a bandpass filter in a lidar system |
| US11119198B2 (en) | 2017-03-28 | 2021-09-14 | Luminar, Llc | Increasing operational safety of a lidar system |
| US10209359B2 (en) | 2017-03-28 | 2019-02-19 | Luminar Technologies, Inc. | Adaptive pulse rate in a lidar system |
| US10545240B2 (en) | 2017-03-28 | 2020-01-28 | Luminar Technologies, Inc. | LIDAR transmitter and detector system using pulse encoding to reduce range ambiguity |
| US10114111B2 (en) | 2017-03-28 | 2018-10-30 | Luminar Technologies, Inc. | Method for dynamically controlling laser power |
| US10139478B2 (en) | 2017-03-28 | 2018-11-27 | Luminar Technologies, Inc. | Time varying gain in an optical detector operating in a lidar system |
| US10254388B2 (en) | 2017-03-28 | 2019-04-09 | Luminar Technologies, Inc. | Dynamically varying laser output in a vehicle in view of weather conditions |
| US10061019B1 (en) | 2017-03-28 | 2018-08-28 | Luminar Technologies, Inc. | Diffractive optical element in a lidar system to correct for backscan |
| US10007001B1 (en) | 2017-03-28 | 2018-06-26 | Luminar Technologies, Inc. | Active short-wave infrared four-dimensional camera |
| KR101897992B1 (ko) * | 2017-03-28 | 2018-09-13 | 재단법인대구경북과학기술원 | 자율주행 자동차 설계를 위한 자율 주행 제어 개발 키트 |
| US10661764B1 (en) | 2017-03-28 | 2020-05-26 | Apple Inc. | Braking system control state transitions |
| US10969488B2 (en) | 2017-03-29 | 2021-04-06 | Luminar Holdco, Llc | Dynamically scanning a field of regard using a limited number of output beams |
| WO2018183715A1 (en) | 2017-03-29 | 2018-10-04 | Luminar Technologies, Inc. | Method for controlling peak and average power through laser receiver |
| US10191155B2 (en) | 2017-03-29 | 2019-01-29 | Luminar Technologies, Inc. | Optical resolution in front of a vehicle |
| US10641874B2 (en) | 2017-03-29 | 2020-05-05 | Luminar Technologies, Inc. | Sizing the field of view of a detector to improve operation of a lidar system |
| US10983213B2 (en) | 2017-03-29 | 2021-04-20 | Luminar Holdco, Llc | Non-uniform separation of detector array elements in a lidar system |
| US10088559B1 (en) | 2017-03-29 | 2018-10-02 | Luminar Technologies, Inc. | Controlling pulse timing to compensate for motor dynamics |
| US10254762B2 (en) | 2017-03-29 | 2019-04-09 | Luminar Technologies, Inc. | Compensating for the vibration of the vehicle |
| US10663595B2 (en) | 2017-03-29 | 2020-05-26 | Luminar Technologies, Inc. | Synchronized multiple sensor head system for a vehicle |
| US10976417B2 (en) | 2017-03-29 | 2021-04-13 | Luminar Holdco, Llc | Using detectors with different gains in a lidar system |
| US11002853B2 (en) | 2017-03-29 | 2021-05-11 | Luminar, Llc | Ultrasonic vibrations on a window in a lidar system |
| US10241198B2 (en) | 2017-03-30 | 2019-03-26 | Luminar Technologies, Inc. | Lidar receiver calibration |
| US10684360B2 (en) | 2017-03-30 | 2020-06-16 | Luminar Technologies, Inc. | Protecting detector in a lidar system using off-axis illumination |
| US9989629B1 (en) | 2017-03-30 | 2018-06-05 | Luminar Technologies, Inc. | Cross-talk mitigation using wavelength switching |
| US10401481B2 (en) | 2017-03-30 | 2019-09-03 | Luminar Technologies, Inc. | Non-uniform beam power distribution for a laser operating in a vehicle |
| US10295668B2 (en) | 2017-03-30 | 2019-05-21 | Luminar Technologies, Inc. | Reducing the number of false detections in a lidar system |
| JP6863011B2 (ja) * | 2017-03-31 | 2021-04-21 | トヨタ自動車株式会社 | 操舵制御装置 |
| US11022688B2 (en) | 2017-03-31 | 2021-06-01 | Luminar, Llc | Multi-eye lidar system |
| JP2018173729A (ja) * | 2017-03-31 | 2018-11-08 | パナソニックIpマネジメント株式会社 | 自動運転制御方法およびそれを利用した自動運転制御装置、プログラム |
| US10915112B2 (en) * | 2017-03-31 | 2021-02-09 | Uatc, Llc | Autonomous vehicle system for blending sensor data |
| US20180284246A1 (en) | 2017-03-31 | 2018-10-04 | Luminar Technologies, Inc. | Using Acoustic Signals to Modify Operation of a Lidar System |
| CN107168305B (zh) * | 2017-04-01 | 2020-03-17 | 西安交通大学 | 路口场景下基于Bezier和VFH的无人车轨迹规划方法 |
| US10471963B2 (en) | 2017-04-07 | 2019-11-12 | TuSimple | System and method for transitioning between an autonomous and manual driving mode based on detection of a drivers capacity to control a vehicle |
| US9952594B1 (en) | 2017-04-07 | 2018-04-24 | TuSimple | System and method for traffic data collection using unmanned aerial vehicles (UAVs) |
| US10710592B2 (en) | 2017-04-07 | 2020-07-14 | Tusimple, Inc. | System and method for path planning of autonomous vehicles based on gradient |
| JP2018176935A (ja) * | 2017-04-10 | 2018-11-15 | トヨタ自動車株式会社 | 自動運転装置 |
| US11573575B2 (en) | 2017-04-12 | 2023-02-07 | Lawrence Livermore National Security, Llc | Attract-repel path planner system for collision avoidance |
| US10677897B2 (en) | 2017-04-14 | 2020-06-09 | Luminar Technologies, Inc. | Combining lidar and camera data |
| WO2018191818A1 (en) * | 2017-04-18 | 2018-10-25 | Clearpath Robotics Inc. | Stand-alone self-driving material-transport vehicle |
| US10234858B2 (en) * | 2017-04-18 | 2019-03-19 | Aptiv Technologies Limited | Automated vehicle control system |
| US10942520B1 (en) | 2017-04-20 | 2021-03-09 | Wells Fargo Bank, N.A. | Creating trip routes for autonomous vehicles |
| US10552691B2 (en) | 2017-04-25 | 2020-02-04 | TuSimple | System and method for vehicle position and velocity estimation based on camera and lidar data |
| CN107063713B (zh) * | 2017-04-27 | 2020-03-10 | 百度在线网络技术(北京)有限公司 | 应用于无人驾驶汽车的测试方法和装置 |
| US10317907B2 (en) * | 2017-04-28 | 2019-06-11 | GM Global Technology Operations LLC | Systems and methods for obstacle avoidance and path planning in autonomous vehicles |
| US10649457B2 (en) * | 2017-05-02 | 2020-05-12 | Cnh Industrial America Llc | System and method for autonomous vehicle system planning |
| US10423162B2 (en) | 2017-05-08 | 2019-09-24 | Nio Usa, Inc. | Autonomous vehicle logic to identify permissioned parking relative to multiple classes of restricted parking |
| US20180328745A1 (en) * | 2017-05-09 | 2018-11-15 | Uber Technologies, Inc. | Coverage plan generation and implementation |
| US10942525B2 (en) | 2017-05-09 | 2021-03-09 | Uatc, Llc | Navigational constraints for autonomous vehicles |
| US20180326900A1 (en) * | 2017-05-10 | 2018-11-15 | Ford Global Technologies, Llc | Multifunction vehicle interior light with switchable beam pattern and changeable color |
| US10558864B2 (en) | 2017-05-18 | 2020-02-11 | TuSimple | System and method for image localization based on semantic segmentation |
| US10481044B2 (en) | 2017-05-18 | 2019-11-19 | TuSimple | Perception simulation for improved autonomous vehicle control |
| WO2018213931A1 (en) * | 2017-05-25 | 2018-11-29 | Clearpath Robotics Inc. | Systems and methods for process tending with a robot arm |
| US11113547B2 (en) | 2017-05-31 | 2021-09-07 | Baidu Usa Llc | Planning control in response to a driving obstruction during operation of an autonomous driving vehicle (ADV) |
| JP6666304B2 (ja) * | 2017-06-02 | 2020-03-13 | 本田技研工業株式会社 | 走行制御装置、走行制御方法、およびプログラム |
| US10474790B2 (en) | 2017-06-02 | 2019-11-12 | TuSimple | Large scale distributed simulation for realistic multiple-agent interactive environments |
| US10762635B2 (en) | 2017-06-14 | 2020-09-01 | Tusimple, Inc. | System and method for actively selecting and labeling images for semantic segmentation |
| US10595455B2 (en) * | 2017-06-19 | 2020-03-24 | Cnh Industrial America Llc | Planning system for an autonomous work vehicle system |
| US10492355B2 (en) | 2017-06-19 | 2019-12-03 | Cnh Industrial America Llc | Path planning system for a work vehicle |
| US10390474B2 (en) | 2017-06-19 | 2019-08-27 | Cnh Industrial America Llc. | Path planning system for a work vehicle |
| US10343698B2 (en) * | 2017-06-27 | 2019-07-09 | Uber Technologies, Inc. | Disabling onboard input devices in an autonomous vehicle |
| US10386856B2 (en) | 2017-06-29 | 2019-08-20 | Uber Technologies, Inc. | Autonomous vehicle collision mitigation systems and methods |
| US10562524B2 (en) * | 2017-06-29 | 2020-02-18 | Nio Usa, Inc. | Rollover control algorithm |
| US10737695B2 (en) | 2017-07-01 | 2020-08-11 | Tusimple, Inc. | System and method for adaptive cruise control for low speed following |
| US10752246B2 (en) | 2017-07-01 | 2020-08-25 | Tusimple, Inc. | System and method for adaptive cruise control with proximate vehicle detection |
| US10303522B2 (en) | 2017-07-01 | 2019-05-28 | TuSimple | System and method for distributed graphics processing unit (GPU) computation |
| US10493988B2 (en) | 2017-07-01 | 2019-12-03 | TuSimple | System and method for adaptive cruise control for defensive driving |
| US10308242B2 (en) | 2017-07-01 | 2019-06-04 | TuSimple | System and method for using human driving patterns to detect and correct abnormal driving behaviors of autonomous vehicles |
| US10747228B2 (en) | 2017-07-03 | 2020-08-18 | Baidu Usa Llc | Centralized scheduling system for operating autonomous driving vehicles |
| US10635108B2 (en) * | 2017-07-03 | 2020-04-28 | Baidu Usa Llc | Centralized scheduling system using global store for operating autonomous driving vehicles |
| US10732634B2 (en) | 2017-07-03 | 2020-08-04 | Baidu Us Llc | Centralized scheduling system using event loop for operating autonomous driving vehicles |
| US10576984B2 (en) | 2017-07-06 | 2020-03-03 | Toyota Research Institute, Inc. | Second stop position for intersection turn |
| US10710633B2 (en) | 2017-07-14 | 2020-07-14 | Nio Usa, Inc. | Control of complex parking maneuvers and autonomous fuel replenishment of driverless vehicles |
| US10369974B2 (en) | 2017-07-14 | 2019-08-06 | Nio Usa, Inc. | Control and coordination of driverless fuel replenishment for autonomous vehicles |
| CN116540739A (zh) | 2017-07-21 | 2023-08-04 | 北京图森智途科技有限公司 | 实现车辆自动装卸货的方法及系统、相关设备 |
| CN107393074B (zh) | 2017-07-21 | 2019-01-18 | 北京图森未来科技有限公司 | 实现车辆自动过卡的方法和系统、相关设备 |
| CN107369218B (zh) | 2017-07-21 | 2019-02-22 | 北京图森未来科技有限公司 | 实现车辆自动缴费的方法及系统、相关设备 |
| CN107416754B (zh) | 2017-07-21 | 2018-11-02 | 北京图森未来科技有限公司 | 一种长途运输车辆的自动加油方法、装置和系统 |
| CN107272657B (zh) | 2017-07-21 | 2020-03-10 | 北京图森未来科技有限公司 | 实现车辆自动检修的方法及系统、相关设备 |
| CN107381488B (zh) | 2017-07-21 | 2018-12-18 | 北京图森未来科技有限公司 | 一种车辆的自动加油方法、装置和系统 |
| CN107352497B (zh) | 2017-07-21 | 2018-10-12 | 北京图森未来科技有限公司 | 一种车辆的自动加油方法、装置和系统 |
| CN107421615A (zh) | 2017-07-21 | 2017-12-01 | 北京图森未来科技有限公司 | 实现车辆自动称重的方法及系统、相关设备 |
| US10809718B2 (en) | 2017-07-28 | 2020-10-20 | Loon Llc | Systems and methods for controlling aerial vehicles |
| US10437260B2 (en) | 2017-07-28 | 2019-10-08 | Loon Llc | Systems and methods for controlling aerial vehicles |
| CA3068329A1 (en) * | 2017-07-28 | 2019-01-31 | Loon Llc | Systems and methods for controlling aerial vehicles |
| CN110945448A (zh) * | 2017-07-28 | 2020-03-31 | 纽诺有限公司 | 自主和半自主载具上的灵活隔间设计 |
| US10437259B2 (en) | 2017-07-28 | 2019-10-08 | Loon Llc | Systems and methods for controlling aerial vehicles |
| US10065638B1 (en) | 2017-08-03 | 2018-09-04 | Uber Technologies, Inc. | Multi-model switching on a collision mitigation system |
| CN107462243B (zh) * | 2017-08-04 | 2019-09-20 | 浙江大学 | 一种基于高精度地图的云控自动驾驶任务生成方法 |
| US10360257B2 (en) | 2017-08-08 | 2019-07-23 | TuSimple | System and method for image annotation |
| US11029693B2 (en) | 2017-08-08 | 2021-06-08 | Tusimple, Inc. | Neural network based vehicle dynamics model |
| US10437247B2 (en) | 2017-08-10 | 2019-10-08 | Udelv Inc. | Multi-stage operation of autonomous vehicles |
| US10636298B2 (en) | 2017-08-11 | 2020-04-28 | Cubic Corporation | Adaptive traffic control using object tracking and identity details |
| US10803740B2 (en) | 2017-08-11 | 2020-10-13 | Cubic Corporation | System and method of navigating vehicles |
| US10636299B2 (en) | 2017-08-11 | 2020-04-28 | Cubic Corporation | System and method for controlling vehicular traffic |
| US10373489B2 (en) | 2017-08-11 | 2019-08-06 | Cubic Corporation | System and method of adaptive controlling of traffic using camera data |
| US10345110B2 (en) * | 2017-08-14 | 2019-07-09 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle routing based on chaos assessment |
| US11250699B2 (en) | 2017-08-14 | 2022-02-15 | Cubic Corporation | System and method of adaptive traffic management at an intersection |
| US10395522B2 (en) | 2017-08-14 | 2019-08-27 | Cubic Corporation | Adaptive traffic optimization using unmanned aerial vehicles |
| US10935388B2 (en) | 2017-08-14 | 2021-03-02 | Cubic Corporation | Adaptive optimization of navigational routes using traffic data |
| US11100336B2 (en) | 2017-08-14 | 2021-08-24 | Cubic Corporation | System and method of adaptive traffic management at an intersection |
| US10852438B2 (en) | 2017-08-21 | 2020-12-01 | Caterpillar Inc. | LIDAR waveform classification |
| US10816354B2 (en) | 2017-08-22 | 2020-10-27 | Tusimple, Inc. | Verification module system and method for motion-based lane detection with multiple sensors |
| US10565457B2 (en) | 2017-08-23 | 2020-02-18 | Tusimple, Inc. | Feature matching and correspondence refinement and 3D submap position refinement system and method for centimeter precision localization using camera-based submap and LiDAR-based global map |
| US10216189B1 (en) | 2017-08-23 | 2019-02-26 | Uber Technologies, Inc. | Systems and methods for prioritizing object prediction for autonomous vehicles |
| US10762673B2 (en) | 2017-08-23 | 2020-09-01 | Tusimple, Inc. | 3D submap reconstruction system and method for centimeter precision localization using camera-based submap and LiDAR-based global map |
| US10303956B2 (en) | 2017-08-23 | 2019-05-28 | TuSimple | System and method for using triplet loss for proposal free instance-wise semantic segmentation for lane detection |
| US10678234B2 (en) | 2017-08-24 | 2020-06-09 | Tusimple, Inc. | System and method for autonomous vehicle control to minimize energy cost |
| JP6574224B2 (ja) * | 2017-08-30 | 2019-09-11 | 本田技研工業株式会社 | 車両制御装置、車両、車両制御方法およびプログラム |
| US10783381B2 (en) | 2017-08-31 | 2020-09-22 | Tusimple, Inc. | System and method for vehicle occlusion detection |
| WO2019041043A1 (en) | 2017-08-31 | 2019-03-07 | Clearpath Robotics Inc. | SYSTEMS AND METHODS FOR GENERATING A MISSION FOR A SELF-CONTAINING MATERIAL TRANSPORT VEHICLE |
| WO2019041044A1 (en) | 2017-08-31 | 2019-03-07 | Clearpath Robotics Inc. | APPARATUS, SYSTEMS AND METHODS FOR SEIZING AND DEPOSITING A PAYLOAD USING A SELF-PROPELLED MATERIAL TRANSPORT VEHICLE |
| JP6766783B2 (ja) * | 2017-08-31 | 2020-10-14 | トヨタ自動車株式会社 | 車両制御装置 |
| US10656644B2 (en) | 2017-09-07 | 2020-05-19 | Tusimple, Inc. | System and method for using human driving patterns to manage speed control for autonomous vehicles |
| US10649458B2 (en) | 2017-09-07 | 2020-05-12 | Tusimple, Inc. | Data-driven prediction-based system and method for trajectory planning of autonomous vehicles |
| US10782694B2 (en) | 2017-09-07 | 2020-09-22 | Tusimple, Inc. | Prediction-based system and method for trajectory planning of autonomous vehicles |
| US10782693B2 (en) | 2017-09-07 | 2020-09-22 | Tusimple, Inc. | Prediction-based system and method for trajectory planning of autonomous vehicles |
| US10953881B2 (en) | 2017-09-07 | 2021-03-23 | Tusimple, Inc. | System and method for automated lane change control for autonomous vehicles |
| US10953880B2 (en) | 2017-09-07 | 2021-03-23 | Tusimple, Inc. | System and method for automated lane change control for autonomous vehicles |
| US20190079526A1 (en) * | 2017-09-08 | 2019-03-14 | Uber Technologies, Inc. | Orientation Determination in Object Detection and Tracking for Autonomous Vehicles |
| JP6723207B2 (ja) * | 2017-09-11 | 2020-07-15 | Kddi株式会社 | 飛行管理装置、飛行装置、及び飛行管理方法 |
| US10754339B2 (en) * | 2017-09-11 | 2020-08-25 | Baidu Usa Llc | Dynamic programming and quadratic programming based decision and planning for autonomous driving vehicles |
| US10948919B2 (en) * | 2017-09-11 | 2021-03-16 | Baidu Usa Llc | Dynamic programming and gradient descent based decision and planning for autonomous driving vehicles |
| US10671083B2 (en) | 2017-09-13 | 2020-06-02 | Tusimple, Inc. | Neural network architecture system for deep odometry assisted by static scene optical flow |
| US10552979B2 (en) | 2017-09-13 | 2020-02-04 | TuSimple | Output of a neural network method for deep odometry assisted by static scene optical flow |
| KR102355424B1 (ko) * | 2017-09-13 | 2022-01-26 | 현대자동차주식회사 | 차량용 중앙 처리 장치를 제어하는 워치독 회로의 신뢰성을 향상시키는 장치 및 방법 |
| US10344960B2 (en) | 2017-09-19 | 2019-07-09 | Bragi GmbH | Wireless earpiece controlled medical headlight |
| US10733465B2 (en) | 2017-09-20 | 2020-08-04 | Tusimple, Inc. | System and method for vehicle taillight state recognition |
| US11272367B2 (en) | 2017-09-20 | 2022-03-08 | Bragi GmbH | Wireless earpieces for hub communications |
| US10387736B2 (en) | 2017-09-20 | 2019-08-20 | TuSimple | System and method for detecting taillight signals of a vehicle |
| JP6583697B2 (ja) * | 2017-09-26 | 2019-10-02 | 本田技研工業株式会社 | 周辺監視装置、制御装置、周辺監視方法、およびプログラム |
| CN108733045B (zh) * | 2017-09-29 | 2022-01-04 | 北京猎户星空科技有限公司 | 机器人及其避障方法以及计算机可读存储介质 |
| CN107544514B (zh) * | 2017-09-29 | 2022-01-07 | 广州唯品会研究院有限公司 | 机器人障碍物避让方法、装置、存储介质及机器人 |
| US10768626B2 (en) | 2017-09-30 | 2020-09-08 | Tusimple, Inc. | System and method for providing multiple agents for decision making, trajectory planning, and control for autonomous vehicles |
| US10962979B2 (en) | 2017-09-30 | 2021-03-30 | Tusimple, Inc. | System and method for multitask processing for autonomous vehicle computation and control |
| US10970564B2 (en) | 2017-09-30 | 2021-04-06 | Tusimple, Inc. | System and method for instance-level lane detection for autonomous vehicle control |
| EP3700794B1 (en) * | 2017-10-03 | 2021-03-31 | Google LLC | Vehicle function control with sensor based validation |
| WO2019068175A1 (en) * | 2017-10-03 | 2019-04-11 | Xco Tech Inc. | SYSTEM AND METHOD FOR DETERMINING POSITION |
| US10410055B2 (en) | 2017-10-05 | 2019-09-10 | TuSimple | System and method for aerial video traffic analysis |
| US10739774B2 (en) * | 2017-10-06 | 2020-08-11 | Honda Motor Co., Ltd. | Keyframe based autonomous vehicle operation |
| US11029168B2 (en) * | 2017-10-10 | 2021-06-08 | The Government Of The United States Of America, As Represented By The Secretary Of The Navy | Method for identifying optimal vehicle paths when energy is a key metric or constraint |
| CN107792052B (zh) * | 2017-10-11 | 2019-11-08 | 武汉理工大学 | 有人或无人双模驾驶电动工程车 |
| US10003168B1 (en) | 2017-10-18 | 2018-06-19 | Luminar Technologies, Inc. | Fiber laser with free-space components |
| US10921422B2 (en) * | 2017-10-25 | 2021-02-16 | The Boeing Company | Below-noise after transmit (BAT) Chirp Radar |
| US10739775B2 (en) * | 2017-10-28 | 2020-08-11 | Tusimple, Inc. | System and method for real world autonomous vehicle trajectory simulation |
| US10666730B2 (en) | 2017-10-28 | 2020-05-26 | Tusimple, Inc. | Storage architecture for heterogeneous multimedia data |
| US10812589B2 (en) | 2017-10-28 | 2020-10-20 | Tusimple, Inc. | Storage architecture for heterogeneous multimedia data |
| US10836405B2 (en) | 2017-10-30 | 2020-11-17 | Nissan North America, Inc. | Continual planning and metareasoning for controlling an autonomous vehicle |
| US11392121B2 (en) | 2017-10-31 | 2022-07-19 | Clearpath Robotics Inc. | Systems and methods for operating robotic equipment in controlled zones |
| WO2019088989A1 (en) * | 2017-10-31 | 2019-05-09 | Nissan North America, Inc. | Reinforcement and model learning for vehicle operation |
| US10401862B2 (en) | 2017-10-31 | 2019-09-03 | Waymo Llc | Semantic object clustering for autonomous vehicle decision making |
| US10948911B2 (en) * | 2017-10-31 | 2021-03-16 | Denso International America, Inc. | Co-pilot |
| US11702070B2 (en) | 2017-10-31 | 2023-07-18 | Nissan North America, Inc. | Autonomous vehicle operation with explicit occlusion reasoning |
| WO2019089455A1 (en) * | 2017-10-31 | 2019-05-09 | Waymo Llc | Semantic object clustering for autonomous vehicle decision making |
| US10713940B2 (en) | 2017-10-31 | 2020-07-14 | Waymo Llc | Detecting and responding to traffic redirection for autonomous vehicles |
| CN107719356A (zh) * | 2017-11-03 | 2018-02-23 | 李青松 | 纯电动专用车用无人驾驶系统及方法 |
| JP6870584B2 (ja) * | 2017-11-13 | 2021-05-12 | トヨタ自動車株式会社 | 救援システムおよび救援方法、ならびにそれに使用されるサーバおよびプログラム |
| CN107745697A (zh) | 2017-11-16 | 2018-03-02 | 北京图森未来科技有限公司 | 一种自动清洁系统及方法 |
| CN111417871A (zh) * | 2017-11-17 | 2020-07-14 | 迪普迈普有限公司 | 基于激光雷达利用高清晰度地图的集成运动估计的迭代最近点处理 |
| US10967861B2 (en) | 2018-11-13 | 2021-04-06 | Waymo Llc | Using discomfort for speed planning in responding to tailgating vehicles for autonomous vehicles |
| US10627825B2 (en) | 2017-11-22 | 2020-04-21 | Waymo Llc | Using discomfort for speed planning in autonomous vehicles |
| US10324185B2 (en) * | 2017-11-22 | 2019-06-18 | Luminar Technologies, Inc. | Reducing audio noise in a lidar scanner with a polygon mirror |
| CN109816135B (zh) * | 2017-11-22 | 2023-09-26 | 博泰车联网科技(上海)股份有限公司 | 集群避险方法、系统、计算机可读存储介质及服务终端 |
| US10451716B2 (en) | 2017-11-22 | 2019-10-22 | Luminar Technologies, Inc. | Monitoring rotation of a mirror in a lidar system |
| US10528851B2 (en) | 2017-11-27 | 2020-01-07 | TuSimple | System and method for drivable road surface representation generation using multimodal sensor data |
| US10528823B2 (en) | 2017-11-27 | 2020-01-07 | TuSimple | System and method for large-scale lane marking detection using multimodal sensor data |
| US10657390B2 (en) | 2017-11-27 | 2020-05-19 | Tusimple, Inc. | System and method for large-scale lane marking detection using multimodal sensor data |
| US10877476B2 (en) | 2017-11-30 | 2020-12-29 | Tusimple, Inc. | Autonomous vehicle simulation system for analyzing motion planners |
| US10860018B2 (en) * | 2017-11-30 | 2020-12-08 | Tusimple, Inc. | System and method for generating simulated vehicles with configured behaviors for analyzing autonomous vehicle motion planners |
| WO2019108213A1 (en) | 2017-11-30 | 2019-06-06 | Nissan North America, Inc. | Autonomous vehicle operational management scenarios |
| EP3495218B1 (en) * | 2017-12-07 | 2020-06-24 | TTTech Auto AG | Fault-tolerant computer system for assisted and autonomous driving |
| US10156850B1 (en) | 2017-12-08 | 2018-12-18 | Uber Technologies, Inc. | Object motion prediction and vehicle control systems and methods for autonomous vehicles |
| US10688662B2 (en) * | 2017-12-13 | 2020-06-23 | Disney Enterprises, Inc. | Robot navigation in context of obstacle traffic including movement of groups |
| US10921142B2 (en) | 2017-12-14 | 2021-02-16 | Waymo Llc | Methods and systems for sun-aware vehicle routing |
| US10303178B1 (en) | 2017-12-15 | 2019-05-28 | Waymo Llc | Collision mitigation static occupancy grid |
| US20190188635A1 (en) * | 2017-12-15 | 2019-06-20 | Walmart Apollo, Llc | Automated vehicle and method for servicing disabled vehicles |
| US10850684B2 (en) * | 2017-12-19 | 2020-12-01 | Micron Technology, Inc. | Vehicle secure messages based on a vehicle private key |
| US11178133B2 (en) | 2017-12-19 | 2021-11-16 | Micron Technology, Inc. | Secure vehicle control unit update |
| US10594666B2 (en) | 2017-12-19 | 2020-03-17 | Micron Technology, Inc. | Secure message including a vehicle private key |
| US10836400B2 (en) | 2017-12-19 | 2020-11-17 | Micron Technology, Inc. | Implementing safety measures in applications |
| US10908614B2 (en) | 2017-12-19 | 2021-02-02 | Here Global B.V. | Method and apparatus for providing unknown moving object detection |
| US11874120B2 (en) | 2017-12-22 | 2024-01-16 | Nissan North America, Inc. | Shared autonomous vehicle operational management |
| US11493601B2 (en) | 2017-12-22 | 2022-11-08 | Innovusion, Inc. | High density LIDAR scanning |
| US11377123B2 (en) | 2017-12-22 | 2022-07-05 | Nissan North America, Inc. | Solution path overlay interfaces for autonomous vehicles |
| SE542531C2 (en) | 2017-12-22 | 2020-06-02 | Epiroc Rock Drills Ab | Controlling communication of a mining and / or construction machine |
| US11435456B2 (en) | 2017-12-28 | 2022-09-06 | Lyft, Inc. | Sensor calibration facility |
| US11415683B2 (en) * | 2017-12-28 | 2022-08-16 | Lyft, Inc. | Mobile sensor calibration |
| US10967875B2 (en) * | 2018-01-05 | 2021-04-06 | Honda Motor Co., Ltd. | Control system for autonomous all-terrain vehicle (ATV) |
| US10831636B2 (en) * | 2018-01-08 | 2020-11-10 | Waymo Llc | Software validation for autonomous vehicles |
| CN112004729B (zh) | 2018-01-09 | 2023-12-01 | 图森有限公司 | 具有高冗余的车辆的实时远程控制 |
| CN111989716B (zh) | 2018-01-11 | 2022-11-15 | 图森有限公司 | 用于自主车辆操作的监视系统 |
| US11022971B2 (en) | 2018-01-16 | 2021-06-01 | Nio Usa, Inc. | Event data recordation to identify and resolve anomalies associated with control of driverless vehicles |
| US10467581B2 (en) | 2018-01-19 | 2019-11-05 | Udelv Inc. | Delivery management system |
| CN108270970B (zh) | 2018-01-24 | 2020-08-25 | 北京图森智途科技有限公司 | 一种图像采集控制方法及装置、图像采集系统 |
| US10816977B2 (en) | 2018-01-26 | 2020-10-27 | Baidu Usa Llc | Path and speed optimization fallback mechanism for autonomous vehicles |
| US10914820B2 (en) | 2018-01-31 | 2021-02-09 | Uatc, Llc | Sensor assembly for vehicles |
| US20210072392A1 (en) * | 2018-01-31 | 2021-03-11 | Pioneer Corporation | Method for processing surrounding information |
| US11009356B2 (en) | 2018-02-14 | 2021-05-18 | Tusimple, Inc. | Lane marking localization and fusion |
| US11009365B2 (en) | 2018-02-14 | 2021-05-18 | Tusimple, Inc. | Lane marking localization |
| US10678248B2 (en) * | 2018-02-15 | 2020-06-09 | GM Global Technology Operations LLC | Fast trajectory planning via maneuver pattern selection |
| US11808888B2 (en) | 2018-02-23 | 2023-11-07 | Innovusion, Inc. | Multi-wavelength pulse steering in LiDAR systems |
| US11988773B2 (en) | 2018-02-23 | 2024-05-21 | Innovusion, Inc. | 2-dimensional steering system for lidar systems |
| CN111902782A (zh) | 2018-02-26 | 2020-11-06 | 北美日产公司 | 集中式共享自主运载工具操作管理 |
| US10685244B2 (en) | 2018-02-27 | 2020-06-16 | Tusimple, Inc. | System and method for online real-time multi-object tracking |
| WO2019167161A1 (ja) | 2018-02-28 | 2019-09-06 | 日本電気株式会社 | 領域評価システム、方法および記録媒体 |
| US10685239B2 (en) | 2018-03-18 | 2020-06-16 | Tusimple, Inc. | System and method for lateral vehicle detection |
| CN110316187B (zh) * | 2018-03-30 | 2022-01-07 | 比亚迪股份有限公司 | 汽车及其避障控制方法 |
| CN108382334A (zh) * | 2018-04-03 | 2018-08-10 | 湖北汽车工业学院 | 一种智能驾驶汽车控制器结构 |
| US11157003B1 (en) | 2018-04-05 | 2021-10-26 | Northrop Grumman Systems Corporation | Software framework for autonomous system |
| US10324170B1 (en) | 2018-04-05 | 2019-06-18 | Luminar Technologies, Inc. | Multi-beam lidar system with polygon mirror |
| WO2019195593A1 (en) * | 2018-04-05 | 2019-10-10 | Apex.AI, Inc. | Efficient and scalable three-dimensional point cloud segmentation for navigation in autonomous vehicles |
| US11029406B2 (en) | 2018-04-06 | 2021-06-08 | Luminar, Llc | Lidar system with AlInAsSb avalanche photodiode |
| US11561541B2 (en) * | 2018-04-09 | 2023-01-24 | SafeAI, Inc. | Dynamically controlling sensor behavior |
| US11625036B2 (en) | 2018-04-09 | 2023-04-11 | SafeAl, Inc. | User interface for presenting decisions |
| US11169536B2 (en) | 2018-04-09 | 2021-11-09 | SafeAI, Inc. | Analysis of scenarios for controlling vehicle operations |
| US10809735B2 (en) | 2018-04-09 | 2020-10-20 | SafeAI, Inc. | System and method for a framework of robust and safe reinforcement learning application in real world autonomous vehicle application |
| US11467590B2 (en) | 2018-04-09 | 2022-10-11 | SafeAI, Inc. | Techniques for considering uncertainty in use of artificial intelligence models |
| US20190317492A1 (en) * | 2018-04-11 | 2019-10-17 | Hyundai Motor Company | Apparatus and method for providing safety strategy in vehicle |
| CN110378185A (zh) | 2018-04-12 | 2019-10-25 | 北京图森未来科技有限公司 | 一种应用于自动驾驶车辆的图像处理方法、装置 |
| CN108388253A (zh) * | 2018-04-17 | 2018-08-10 | 伊金霍洛旗瑞隆机械工程有限公司 | 一种连采机快速准直控制系统 |
| US10990101B2 (en) * | 2018-04-18 | 2021-04-27 | Baidu Usa Llc | Method for drifting correction for planning a path for autonomous driving vehicles |
| DE112018007261B4 (de) * | 2018-04-20 | 2021-11-04 | Mitsubishi Electric Corporation | Fahrüberwachungsvorrichtung |
| US11002819B2 (en) | 2018-04-24 | 2021-05-11 | The Boeing Company | Angular resolution of targets using separate radar receivers |
| CN108873885B (zh) * | 2018-04-25 | 2021-12-10 | 珠海市杰理科技股份有限公司 | 车辆控制方法、装置和系统 |
| US10868612B2 (en) | 2018-04-25 | 2020-12-15 | Honeywell International Inc. | Sending environmental data on an uplink |
| JP7190261B2 (ja) * | 2018-04-27 | 2022-12-15 | 日立Astemo株式会社 | 位置推定装置 |
| US11334753B2 (en) | 2018-04-30 | 2022-05-17 | Uatc, Llc | Traffic signal state classification for autonomous vehicles |
| CN110458854B (zh) | 2018-05-02 | 2022-11-15 | 北京图森未来科技有限公司 | 一种道路边缘检测方法和装置 |
| CN108407696A (zh) * | 2018-05-08 | 2018-08-17 | 陕西同力重工股份有限公司 | 工程运输专用领域的无人驾驶矿车 |
| KR101943422B1 (ko) | 2018-05-11 | 2019-01-29 | 윤여표 | 자율주행차량 안전성 검사시스템 및 안전성 검사방법 |
| US10800403B2 (en) * | 2018-05-14 | 2020-10-13 | GM Global Technology Operations LLC | Autonomous ride dynamics comfort controller |
| US10676103B2 (en) * | 2018-05-17 | 2020-06-09 | Aptiv Technologies Limited | Object position history playback for automated vehicle transition from autonomous-mode to manual-mode |
| US10348051B1 (en) | 2018-05-18 | 2019-07-09 | Luminar Technologies, Inc. | Fiber-optic amplifier |
| US10953888B2 (en) | 2018-05-22 | 2021-03-23 | International Business Machines Corporation | Autonomous vehicle monitoring |
| US10921812B2 (en) | 2018-05-22 | 2021-02-16 | International Business Machines Corporation | System and method for rendezvous coordination of an autonomous automotive vehicle with an ambulance |
| US10688867B2 (en) | 2018-05-22 | 2020-06-23 | International Business Machines Corporation | Vehicular medical assistant |
| CN108710368B (zh) * | 2018-05-23 | 2021-07-23 | 北京新能源汽车股份有限公司 | 一种无人驾驶系统及电动汽车 |
| US11104334B2 (en) | 2018-05-31 | 2021-08-31 | Tusimple, Inc. | System and method for proximate vehicle intention prediction for autonomous vehicles |
| US10565728B2 (en) | 2018-06-01 | 2020-02-18 | Tusimple, Inc. | Smoothness constraint for camera pose estimation |
| US11287816B2 (en) | 2018-06-11 | 2022-03-29 | Uatc, Llc | Navigational constraints for autonomous vehicles |
| DE102018209607A1 (de) * | 2018-06-14 | 2019-12-19 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Bestimmen einer Position eines Kraftfahrzeugs |
| US12026171B2 (en) * | 2018-06-20 | 2024-07-02 | Tusimple, Inc. | Method and system of managing error data associated with a vehicle |
| CN109032129B (zh) * | 2018-06-21 | 2021-07-27 | 昆山华恒工程技术中心有限公司 | 路径纠偏方法及装置、路径导引方法、可读介质 |
| KR101972352B1 (ko) * | 2018-06-25 | 2019-04-25 | 엘지전자 주식회사 | 자동주차 보조장치 및 이를 포함하는 차량 |
| US11120688B2 (en) | 2018-06-29 | 2021-09-14 | Nissan North America, Inc. | Orientation-adjust actions for autonomous vehicle operational management |
| AU2018278849B2 (en) * | 2018-07-02 | 2020-11-05 | Beijing Didi Infinity Technology And Development Co., Ltd. | Vehicle navigation system using pose estimation based on point cloud |
| CN109101689B (zh) * | 2018-07-06 | 2023-01-31 | 同济大学 | 一种基于车辆行为调整模型的用于最佳跟驰车距计算的曲线拟合建模方法 |
| US10591601B2 (en) | 2018-07-10 | 2020-03-17 | Luminar Technologies, Inc. | Camera-gated lidar system |
| WO2020014683A1 (en) * | 2018-07-13 | 2020-01-16 | Kache.AI | Systems and methods for autonomous object detection and vehicle following |
| WO2020018527A1 (en) * | 2018-07-16 | 2020-01-23 | Brain Corporation | Systems and methods for optimizing route planning for tight turns for robotic apparatuses |
| US10627516B2 (en) * | 2018-07-19 | 2020-04-21 | Luminar Technologies, Inc. | Adjustable pulse characteristics for ground detection in lidar systems |
| KR102077201B1 (ko) | 2018-07-20 | 2020-02-13 | 현대모비스 주식회사 | 차량의 통합 제어 장치 및 방법 |
| CN108983777B (zh) * | 2018-07-23 | 2021-04-06 | 浙江工业大学 | 一种基于自适应前沿探索目标点选取的自主探索与避障方法 |
| CN109062201B (zh) * | 2018-07-23 | 2021-09-03 | 南京理工大学 | 基于ros的智能导航微系统及其控制方法 |
| US11326888B2 (en) * | 2018-07-25 | 2022-05-10 | Uatc, Llc | Generation of polar occlusion maps for autonomous vehicles |
| DE102018117940A1 (de) * | 2018-07-25 | 2020-01-30 | Valeo Schalter Und Sensoren Gmbh | Sendeeinheit für eine optische Objekterfassungseinrichtung und entsprechende optische Objekterfassungseinrichtung |
| US11186276B2 (en) * | 2018-07-27 | 2021-11-30 | Baidu Usa Llc | Adjusting speeds along a path for autonomous driving vehicles |
| US11157011B2 (en) | 2018-07-30 | 2021-10-26 | Fedex Corporate Services, Inc. | Enhanced systems, apparatus, and methods for improved automated and autonomous operation of logistics ground support equipment |
| US11603100B2 (en) * | 2018-08-03 | 2023-03-14 | Continental Autonomous Mobility US, LLC | Automated reversing by following user-selected trajectories and estimating vehicle motion |
| US11112795B1 (en) | 2018-08-07 | 2021-09-07 | GM Global Technology Operations LLC | Maneuver-based interaction system for an autonomous vehicle |
| US10559198B1 (en) | 2018-08-08 | 2020-02-11 | Cubic Corporation | System and method of adaptive controlling of traffic using zone based occupancy |
| US10551501B1 (en) | 2018-08-09 | 2020-02-04 | Luminar Technologies, Inc. | Dual-mode lidar system |
| US10974720B2 (en) | 2018-08-13 | 2021-04-13 | Kingman Ag, Llc | Vehicle sliding bumper and system for object contact detection and responsive control |
| US10340651B1 (en) | 2018-08-21 | 2019-07-02 | Luminar Technologies, Inc. | Lidar system with optical trigger |
| CN109164785B (zh) * | 2018-08-24 | 2019-08-30 | 百度在线网络技术(北京)有限公司 | 自动驾驶车辆的仿真测试方法、装置、设备及存储介质 |
| EP3642684B1 (en) * | 2018-08-24 | 2021-10-06 | Baidu.com Times Technology (Beijing) Co., Ltd. | Data transfer logic for transferring data between sensors and planning and control of autonomous driving vehicle |
| US10921819B2 (en) | 2018-08-28 | 2021-02-16 | Asi Technologies, Inc. | Automated guided vehicle system and automated guided vehicle for use therein |
| US10778241B2 (en) | 2018-08-29 | 2020-09-15 | Buffalo Automation Group Inc. | Optical encoder systems and methods |
| PL3799618T3 (pl) | 2018-08-30 | 2023-02-06 | Elta Systems Ltd. | Sposób nawigowania pojazdem i przewidziany dla niego system |
| JP7014106B2 (ja) * | 2018-09-04 | 2022-02-01 | トヨタ自動車株式会社 | 車両制御システム |
| US11023742B2 (en) | 2018-09-07 | 2021-06-01 | Tusimple, Inc. | Rear-facing perception system for vehicles |
| CN109215136B (zh) | 2018-09-07 | 2020-03-20 | 百度在线网络技术(北京)有限公司 | 一种真实数据增强方法、装置以及终端 |
| CN109143242B (zh) | 2018-09-07 | 2020-04-14 | 百度在线网络技术(北京)有限公司 | 障碍物绝对速度估计方法、系统、计算机设备和存储介质 |
| CN109146898B (zh) * | 2018-09-07 | 2020-07-24 | 百度在线网络技术(北京)有限公司 | 一种仿真数据量增强方法、装置以及终端 |
| US11019274B2 (en) | 2018-09-10 | 2021-05-25 | Tusimple, Inc. | Adaptive illumination for a time-of-flight camera on a vehicle |
| US10839234B2 (en) | 2018-09-12 | 2020-11-17 | Tusimple, Inc. | System and method for three-dimensional (3D) object detection |
| EP3849868A4 (en) | 2018-09-13 | 2022-10-12 | Tusimple, Inc. | REMOTE SAFE DRIVING PROCESSES AND SYSTEMS |
| CN112740005B (zh) * | 2018-09-21 | 2022-11-11 | 本田技研工业株式会社 | 车辆检查系统 |
| US10394243B1 (en) * | 2018-09-21 | 2019-08-27 | Luminar Technologies, Inc. | Autonomous vehicle technology for facilitating operation according to motion primitives |
| US10481605B1 (en) | 2018-09-21 | 2019-11-19 | Luminar Technologies, Inc. | Autonomous vehicle technology for facilitating safe stopping according to separate paths |
| US11079492B1 (en) * | 2018-09-28 | 2021-08-03 | Zoox, Inc. | Condition dependent parameters for large-scale localization and/or mapping |
| CN110968087B (zh) * | 2018-09-30 | 2023-05-23 | 百度(美国)有限责任公司 | 车辆控制参数的标定方法、装置、车载控制器和无人车 |
| JP7177387B2 (ja) * | 2018-10-11 | 2022-11-24 | トヨタ自動車株式会社 | 情報処理装置、プログラム及び小型車両 |
| US10796402B2 (en) | 2018-10-19 | 2020-10-06 | Tusimple, Inc. | System and method for fisheye image processing |
| US11092458B2 (en) * | 2018-10-30 | 2021-08-17 | Telenav, Inc. | Navigation system with operation obstacle alert mechanism and method of operation thereof |
| US10942271B2 (en) | 2018-10-30 | 2021-03-09 | Tusimple, Inc. | Determining an angle between a tow vehicle and a trailer |
| JP2020071182A (ja) * | 2018-11-01 | 2020-05-07 | パナソニックIpマネジメント株式会社 | 運転支援装置、車両および運転支援方法 |
| US11200430B2 (en) * | 2018-11-05 | 2021-12-14 | Tusimple, Inc. | Systems and methods for detecting trailer angle |
| CN109218449B (zh) * | 2018-11-07 | 2021-12-10 | 航天信息股份有限公司 | 一种基于物联网的机场车辆辅助管理系统及管理方法 |
| EP3650298B1 (en) | 2018-11-12 | 2024-03-27 | Infosys Limited | System for integrated auto-steering and auto-braking mechanism in autonomous vehicles as a retro fit |
| TWI674984B (zh) * | 2018-11-15 | 2019-10-21 | 財團法人車輛研究測試中心 | 自動駕駛車輛之行駛軌跡規劃系統及方法 |
| US11590815B2 (en) | 2018-11-20 | 2023-02-28 | Ford Global Technologies, Llc | Hitch assistance system with interface presenting simplified path image |
| US11131992B2 (en) | 2018-11-30 | 2021-09-28 | Denso International America, Inc. | Multi-level collaborative control system with dual neural network planning for autonomous vehicle control in a noisy environment |
| US11537811B2 (en) * | 2018-12-04 | 2022-12-27 | Tesla, Inc. | Enhanced object detection for autonomous vehicles based on field view |
| US11192545B1 (en) | 2018-12-05 | 2021-12-07 | Waymo Llc | Risk mitigation in speed planning |
| US11710422B2 (en) * | 2018-12-05 | 2023-07-25 | Garmin Switzerland Gmbh | Driving analysis and instruction device |
| US11460848B1 (en) * | 2018-12-06 | 2022-10-04 | Waymo Llc | Biased trajectory progress metric |
| CN116184417A (zh) | 2018-12-10 | 2023-05-30 | 北京图森智途科技有限公司 | 一种挂车夹角的测量方法、装置及车辆 |
| US11940559B2 (en) * | 2018-12-11 | 2024-03-26 | Baidu Usa Llc | Light detection and range (LIDAR) device with component stacking for coaxial readout without splitter mirror for autonomous driving vehicles |
| US10942516B2 (en) * | 2018-12-12 | 2021-03-09 | Valeo Schalter Und Sensoren Gmbh | Vehicle path updates via remote vehicle control |
| US10852746B2 (en) | 2018-12-12 | 2020-12-01 | Waymo Llc | Detecting general road weather conditions |
| US10940851B2 (en) | 2018-12-12 | 2021-03-09 | Waymo Llc | Determining wheel slippage on self driving vehicle |
| US11392130B1 (en) | 2018-12-12 | 2022-07-19 | Amazon Technologies, Inc. | Selecting delivery modes and delivery areas using autonomous ground vehicles |
| US11221399B2 (en) * | 2018-12-12 | 2022-01-11 | Waymo Llc | Detecting spurious objects for autonomous vehicles |
| CN111319629B (zh) | 2018-12-14 | 2021-07-16 | 北京图森智途科技有限公司 | 一种自动驾驶车队的组队方法、装置及系统 |
| US11536844B2 (en) * | 2018-12-14 | 2022-12-27 | Beijing Voyager Technology Co., Ltd. | Dynamic sensor range detection for vehicle navigation |
| CN109766793B (zh) * | 2018-12-25 | 2021-05-28 | 百度在线网络技术(北京)有限公司 | 数据处理方法和装置 |
| US11327498B2 (en) * | 2018-12-26 | 2022-05-10 | Baidu Usa Llc | Polynomial-fit based reference line smoothing method for high speed planning of autonomous driving vehicles |
| KR20200084446A (ko) * | 2018-12-26 | 2020-07-13 | 삼성전자주식회사 | 전자 장치 및 그의 제어 방법 |
| EP3698228B1 (en) * | 2018-12-26 | 2022-09-28 | Baidu.com Times Technology (Beijing) Co., Ltd. | Optimal planner switch method for three point turn of autonomous driving vehicles |
| CN109709961B (zh) * | 2018-12-28 | 2021-12-07 | 百度在线网络技术(北京)有限公司 | 道路障碍物检测方法、装置及自动驾驶汽车 |
| WO2020139714A1 (en) * | 2018-12-28 | 2020-07-02 | Didi Research America, Llc | System and method for updating vehicle operation based on remote intervention |
| WO2020139713A1 (en) | 2018-12-28 | 2020-07-02 | Didi Research America, Llc | System and method for remote intervention of vehicles |
| CN109633337B (zh) * | 2019-01-04 | 2024-01-12 | 中汽研汽车检验中心(天津)有限公司 | 一种智能驾驶汽车电磁兼容试验移动障碍物的拖动装置 |
| US10928827B2 (en) | 2019-01-07 | 2021-02-23 | Toyota Research Institute, Inc. | Systems and methods for generating a path for a vehicle |
| US10823562B1 (en) | 2019-01-10 | 2020-11-03 | State Farm Mutual Automobile Insurance Company | Systems and methods for enhanced base map generation |
| US11524695B2 (en) * | 2019-01-23 | 2022-12-13 | Motional Ad Llc | Interface for harmonizing performance of different autonomous vehicles in a fleet |
| US11635241B2 (en) | 2019-01-28 | 2023-04-25 | Emerson Climate Technologies, Inc. | Container refrigeration monitoring systems and methods |
| US11774561B2 (en) | 2019-02-08 | 2023-10-03 | Luminar Technologies, Inc. | Amplifier input protection circuits |
| EP3696786B1 (en) | 2019-02-13 | 2023-12-13 | Volkswagen Aktiengesellschaft | System, vehicle, network component, apparatuses, methods, and computer programs for a vehicle and a network component |
| US11285988B1 (en) | 2019-02-18 | 2022-03-29 | Apple Inc. | Passenger vehicle and retractable driver input devices thereof |
| CN109703568B (zh) | 2019-02-19 | 2020-08-18 | 百度在线网络技术(北京)有限公司 | 自动驾驶车辆行驶策略实时学习的方法、装置和服务器 |
| CN109712421B (zh) | 2019-02-22 | 2021-06-04 | 百度在线网络技术(北京)有限公司 | 自动驾驶车辆的速度规划方法、装置和存储介质 |
| US11333739B2 (en) * | 2019-02-26 | 2022-05-17 | Magna Electronics Inc. | Vehicular radar system with automatic sensor alignment |
| US12044794B2 (en) | 2019-02-26 | 2024-07-23 | Magna Electronics Inc. | Vehicular radar system with automatic sensor alignment |
| EP3705970A1 (en) * | 2019-03-06 | 2020-09-09 | Cargotec Patenter AB | A vehicle comprising a vehicle accessory arrangement |
| US11137766B2 (en) * | 2019-03-07 | 2021-10-05 | Zoox, Inc. | State machine for traversing junctions |
| US11560153B2 (en) | 2019-03-07 | 2023-01-24 | 6 River Systems, Llc | Systems and methods for collision avoidance by autonomous vehicles |
| US11420623B2 (en) * | 2019-03-20 | 2022-08-23 | Honda Motor Co., Ltd. | Systems for determining object importance in on-road driving scenarios and methods thereof |
| US11122062B2 (en) | 2019-03-26 | 2021-09-14 | International Business Machines Corporation | Remote interference assessment and response for autonomous vehicles |
| WO2020194650A1 (ja) * | 2019-03-28 | 2020-10-01 | 日本電気株式会社 | 異物検出装置、異物検出方法、およびプログラム |
| DE102019108142A1 (de) * | 2019-03-29 | 2020-10-01 | Bayerische Motoren Werke Aktiengesellschaft | Auswählen einer Handlungsoption für ein automatisiertes Kraftfahrzeug |
| CN109949545A (zh) * | 2019-04-01 | 2019-06-28 | 广东科学技术职业学院 | 一种基于避免驾驶员疲劳驾驶的智能驾驶系统和方法 |
| CN110040017A (zh) * | 2019-04-02 | 2019-07-23 | 远景能源(江苏)有限公司 | 一种用于控制移动充电装置的方法及系统 |
| CN111275661B (zh) * | 2019-04-09 | 2020-11-17 | 杨丽 | 数据自动化修正方法 |
| US11086996B2 (en) | 2019-04-12 | 2021-08-10 | International Business Machines Corporation | Automatic idle-state scanning for malicious code |
| CN113661112A (zh) | 2019-04-12 | 2021-11-16 | 沃尔沃卡车集团 | 确定铰接式车辆的可允许的车辆状态空间的方法 |
| CN114026458A (zh) * | 2019-04-17 | 2022-02-08 | 密歇根大学董事会 | 多维材料感测系统和方法 |
| US11105642B2 (en) | 2019-04-17 | 2021-08-31 | Waymo Llc | Stranding and scoping analysis for autonomous vehicle services |
| CN109917794B (zh) * | 2019-04-18 | 2022-02-18 | 北京智行者科技有限公司 | 全局路径规划方法及装置 |
| US11603110B2 (en) | 2019-04-18 | 2023-03-14 | Kyndryl, Inc. | Addressing vehicle sensor abnormalities |
| US11853068B1 (en) * | 2019-04-19 | 2023-12-26 | Zoox, Inc. | Vehicle trajectory controller safety margin |
| CN110007599B (zh) * | 2019-04-23 | 2023-08-29 | 中国科学技术大学 | 一种激光雷达扫描机构的自适应积分滑模控制方法及系统 |
| US11391587B1 (en) | 2019-04-24 | 2022-07-19 | Waymo Llc | Assessing the impact of blockages on autonomous vehicle services |
| CN110027018B (zh) * | 2019-04-28 | 2020-12-01 | 森思泰克河北科技有限公司 | 全向探测系统及方法 |
| KR102097715B1 (ko) * | 2019-04-29 | 2020-04-06 | 주식회사 트위니 | 실시간 웨이포인트 경로 개선 방법, 이를 구현하기 위한 프로그램이 저장된 기록매체 및 이를 구현하기 위해 매체에 저장된 컴퓨터프로그램 |
| CN110210305B (zh) * | 2019-04-30 | 2023-06-23 | 驭势(上海)汽车科技有限公司 | 行驶路径偏差确定方法及装置、存储介质及电子装置 |
| WO2020227486A1 (en) * | 2019-05-07 | 2020-11-12 | Optimus Ride, Inc. | Cost calculation system and method |
| WO2020224778A1 (en) * | 2019-05-08 | 2020-11-12 | Volvo Truck Corporation | A method for determining if a vehicle control command precludes a future vehicle safety maneuver |
| KR20200135886A (ko) | 2019-05-10 | 2020-12-04 | 현대자동차주식회사 | 자율주행차량을 지원하는 시스템 및 방법 |
| US11247695B2 (en) | 2019-05-14 | 2022-02-15 | Kyndryl, Inc. | Autonomous vehicle detection |
| KR102349159B1 (ko) * | 2019-05-21 | 2022-01-10 | 엘지전자 주식회사 | 경로 제공 장치 및 그것의 경로 제공 방법 |
| KR102168104B1 (ko) * | 2019-05-24 | 2020-10-21 | 장진만 | 농업용기계의 자율 주행 방법 |
| US11643115B2 (en) * | 2019-05-31 | 2023-05-09 | Waymo Llc | Tracking vanished objects for autonomous vehicles |
| US11823460B2 (en) | 2019-06-14 | 2023-11-21 | Tusimple, Inc. | Image fusion for autonomous vehicle operation |
| US20200402149A1 (en) | 2019-06-18 | 2020-12-24 | Toyota Motor North America, Inc. | Identifying changes in the condition of a transport |
| NL2023390B1 (en) * | 2019-06-26 | 2021-02-01 | Lely Patent Nv | Method of feeding a group of animals at a feeding location and system for performing the method |
| US11480962B1 (en) | 2019-06-28 | 2022-10-25 | Zoox, Inc. | Dynamic lane expansion |
| US10915766B2 (en) * | 2019-06-28 | 2021-02-09 | Baidu Usa Llc | Method for detecting closest in-path object (CIPO) for autonomous driving |
| US11299158B2 (en) | 2019-07-02 | 2022-04-12 | Ford Global Technologies, Llc | Unintended standstill response in an assisted hitching operation |
| WO2021002511A1 (ko) * | 2019-07-03 | 2021-01-07 | 엘지전자 주식회사 | 마커, 마커 추종 모드로 이동하는 방법 및 이를 구현하는 카트로봇 |
| US11378962B2 (en) | 2019-07-22 | 2022-07-05 | Zoox, Inc. | System and method for effecting a safety stop release in an autonomous vehicle |
| KR102230144B1 (ko) * | 2019-07-29 | 2021-03-22 | 군산대학교산학협력단 | 인공 지능 심층 학습 타겟 탐지 및 속도 퍼텐셜 필드 알고리즘 기반 장애물 회피 및 자율 주행 방법 및 장치 |
| WO2021021163A1 (en) * | 2019-07-31 | 2021-02-04 | Hewlett-Packard Development Company, L.P. | Positioning autonomous vehicles |
| CN110333728B (zh) * | 2019-08-02 | 2022-03-04 | 大连海事大学 | 一种基于变时间间距策略的异构车队容错控制方法 |
| US20220258729A1 (en) * | 2019-08-05 | 2022-08-18 | Lg Electronics Inc. | Method and device for sharing adjacent vehicle state information |
| WO2021025213A1 (ko) * | 2019-08-08 | 2021-02-11 | 엘지전자 주식회사 | 경로 제공 장치 및 그것의 경로 제공 방법 |
| US11383704B2 (en) | 2019-08-16 | 2022-07-12 | Ford Global Technologies, Llc | Enhanced vehicle operation |
| US11420652B2 (en) * | 2019-08-30 | 2022-08-23 | Deere & Company | System and method of control for autonomous or remote-controlled vehicle platform |
| EP3990862A4 (en) * | 2019-08-31 | 2023-07-05 | Cavh Llc | DISTRIBUTED DRIVING SYSTEMS AND METHODS FOR AUTOMATED VEHICLES |
| US11958183B2 (en) | 2019-09-19 | 2024-04-16 | The Research Foundation For The State University Of New York | Negotiation-based human-robot collaboration via augmented reality |
| CN110865394A (zh) * | 2019-09-24 | 2020-03-06 | 中国船舶重工集团公司第七0七研究所 | 一种基于激光雷达数据的目标分类系统及其数据处理方法 |
| US11260970B2 (en) | 2019-09-26 | 2022-03-01 | Amazon Technologies, Inc. | Autonomous home security devices |
| US10796562B1 (en) | 2019-09-26 | 2020-10-06 | Amazon Technologies, Inc. | Autonomous home security devices |
| EP3797939B1 (en) | 2019-09-27 | 2023-03-01 | Tata Consultancy Services Limited | Control command based adaptive system and method for estimating motion parameters of differential drive vehicles |
| CN112581790B (zh) * | 2019-09-30 | 2023-02-17 | 北京百度网讯科技有限公司 | 车辆避障的方法、装置、计算设备和存储介质 |
| CN110654381B (zh) * | 2019-10-09 | 2021-08-31 | 北京百度网讯科技有限公司 | 用于控制车辆的方法和装置 |
| WO2021074843A1 (en) * | 2019-10-18 | 2021-04-22 | Bluebotics Sa | Omnidirectional line following autonomous vehicle |
| US11532167B2 (en) | 2019-10-31 | 2022-12-20 | Zoox, Inc. | State machine for obstacle avoidance |
| US11427191B2 (en) | 2019-10-31 | 2022-08-30 | Zoox, Inc. | Obstacle avoidance action |
| CN110794839B (zh) * | 2019-11-07 | 2022-04-29 | 中国第一汽车股份有限公司 | 一种异形路口的自动驾驶控制方法及车辆 |
| JP2021081886A (ja) * | 2019-11-18 | 2021-05-27 | 株式会社デンソー | 車載用の計測装置ユニットおよび車載用の計測装置ユニットにおける統合データ生成方法 |
| US11635758B2 (en) | 2019-11-26 | 2023-04-25 | Nissan North America, Inc. | Risk aware executor with action set recommendations |
| US11899454B2 (en) | 2019-11-26 | 2024-02-13 | Nissan North America, Inc. | Objective-based reasoning in autonomous vehicle decision-making |
| US11880293B1 (en) * | 2019-11-26 | 2024-01-23 | Zoox, Inc. | Continuous tracing and metric collection system |
| FR3104107B1 (fr) * | 2019-12-06 | 2022-08-05 | Renault Sas | Procédé de pilotage d’un véhicule automobile |
| US11613269B2 (en) | 2019-12-23 | 2023-03-28 | Nissan North America, Inc. | Learning safety and human-centered constraints in autonomous vehicles |
| US11300957B2 (en) | 2019-12-26 | 2022-04-12 | Nissan North America, Inc. | Multiple objective explanation and control interface design |
| CN114489044A (zh) * | 2019-12-31 | 2022-05-13 | 华为技术有限公司 | 一种轨迹规划方法及装置 |
| CN111176285B (zh) * | 2020-01-02 | 2024-04-16 | 北京汽车集团有限公司 | 一种行进路径规划的方法及装置、车辆、可读存储介质 |
| US11525697B2 (en) * | 2020-01-13 | 2022-12-13 | Near Earth Autonomy, Inc. | Limited-sensor 3D localization system for mobile vehicle |
| CN111257895B (zh) * | 2020-01-17 | 2022-03-25 | 华南农业大学 | 非接触式农机具偏移误差自适应补偿方法、系统及拖拉机 |
| US11714971B2 (en) | 2020-01-31 | 2023-08-01 | Nissan North America, Inc. | Explainability of autonomous vehicle decision making |
| US11577746B2 (en) | 2020-01-31 | 2023-02-14 | Nissan North America, Inc. | Explainability of autonomous vehicle decision making |
| EP3862835B1 (en) * | 2020-02-10 | 2023-10-25 | Volocopter GmbH | Method and system for monitoring a condition of a vtol-aircraft |
| US11447132B2 (en) | 2020-02-20 | 2022-09-20 | Ford Global Technologies, Llc | Trailer hitching assistance system with dynamic vehicle control processing |
| MX2022010293A (es) * | 2020-02-21 | 2023-01-04 | Bluespace Ai Inc | Metodo para evitar objetos durante la navegacion autonoma. |
| US11522836B2 (en) * | 2020-02-25 | 2022-12-06 | Uatc, Llc | Deterministic container-based network configurations for autonomous vehicles |
| US11623624B2 (en) | 2020-02-28 | 2023-04-11 | Bendix Commercial Vehicle Systems Llc | System and method for brake signal detection |
| US11782438B2 (en) | 2020-03-17 | 2023-10-10 | Nissan North America, Inc. | Apparatus and method for post-processing a decision-making model of an autonomous vehicle using multivariate data |
| US11753070B2 (en) | 2020-03-18 | 2023-09-12 | Volvo Car Corporation | Predictive and real-time vehicle disturbance compensation methods and systems |
| US11538343B2 (en) | 2020-03-23 | 2022-12-27 | Toyota Motor North America, Inc. | Automatic warning of atypical audio indicating a transport event |
| US11443624B2 (en) | 2020-03-23 | 2022-09-13 | Toyota Motor North America, Inc. | Automatic warning of navigating towards a dangerous area or event |
| US11708071B2 (en) | 2020-03-30 | 2023-07-25 | Denso Corporation | Target-orientated navigation system for a vehicle using a generic navigation system and related method |
| US11720398B2 (en) | 2020-03-31 | 2023-08-08 | Ford Global Technologies, Llc | Harvesting vehicle hardware accelerators and GPU computing capabilities when idle |
| CN111442777A (zh) * | 2020-04-02 | 2020-07-24 | 东软睿驰汽车技术(沈阳)有限公司 | 路径规划方法、装置、电子设备及存储介质 |
| EP3893150A1 (en) | 2020-04-09 | 2021-10-13 | Tusimple, Inc. | Camera pose estimation techniques |
| US11180162B1 (en) | 2020-05-07 | 2021-11-23 | Argo AI, LLC | Systems and methods for controlling vehicles using an amodal cuboid based algorithm |
| CN111580522A (zh) * | 2020-05-15 | 2020-08-25 | 东风柳州汽车有限公司 | 无人驾驶汽车的控制方法、汽车和存储介质 |
| US11847919B2 (en) | 2020-05-19 | 2023-12-19 | Toyota Motor North America, Inc. | Control of transport en route |
| WO2021240742A1 (ja) * | 2020-05-28 | 2021-12-02 | カワサキモータース株式会社 | ユーティリティビークル |
| CN111578894B (zh) * | 2020-06-02 | 2021-10-15 | 北京经纬恒润科技股份有限公司 | 一种确定障碍物航向角的方法及装置 |
| AU2021203567A1 (en) | 2020-06-18 | 2022-01-20 | Tusimple, Inc. | Angle and orientation measurements for vehicles with multiple drivable sections |
| US11628856B2 (en) * | 2020-06-29 | 2023-04-18 | Argo AI, LLC | Systems and methods for estimating cuboids from LiDAR, map and image data |
| US11932238B2 (en) | 2020-06-29 | 2024-03-19 | Tusimple, Inc. | Automated parking technology |
| US11879745B2 (en) * | 2020-07-20 | 2024-01-23 | Ford Global Technologies, Llc | Systems and methods for facilitating a final leg of a journey |
| CN111897343B (zh) * | 2020-08-06 | 2021-05-28 | 上海联适导航技术股份有限公司 | 一种无人驾驶农机自动作业控制方法及装置 |
| US11367458B2 (en) | 2020-08-21 | 2022-06-21 | Waymo Llc | Accelerometer inside of a microphone unit |
| CN114312822A (zh) * | 2020-09-30 | 2022-04-12 | 奥迪股份公司 | 自动驾驶控制方法、自动驾驶控制系统、介质及车辆 |
| CN112257325A (zh) * | 2020-11-20 | 2021-01-22 | 中国民用航空飞行学院 | 单推出滑行道飞机推出轨迹仿真方法及系统 |
| US11927972B2 (en) | 2020-11-24 | 2024-03-12 | Lawrence Livermore National Security, Llc | Collision avoidance based on traffic management data |
| KR20220074494A (ko) * | 2020-11-27 | 2022-06-03 | 주식회사 넥스트칩 | 초음파 센서를 이용하여 다채널 영상들을 효율적으로 저장하는 전자 장치 및 그 동작방법 |
| CN112596547B (zh) * | 2020-12-22 | 2022-02-11 | 燕山大学 | 一种海上作业直升机快速回收的力觉引导遥操纵控制方法 |
| US12116018B2 (en) | 2020-12-28 | 2024-10-15 | Waymo Llc | Permeable speed constraints |
| US11776163B1 (en) | 2020-12-30 | 2023-10-03 | Waymo Llc | Systems, methods, and apparatus for correcting desaturation of images with transformed color values by appling a matrix |
| CN112965478B (zh) * | 2021-01-25 | 2021-12-17 | 湖南大学 | 考虑不匹配速度扰动的车辆队列稳定性控制方法和系统 |
| RU2764054C1 (ru) * | 2021-01-27 | 2022-01-13 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "спираль правая нисходящая" |
| RU2765532C1 (ru) * | 2021-01-27 | 2022-01-31 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "форсированный вираж" |
| RU2765536C1 (ru) * | 2021-01-27 | 2022-01-31 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "посадка с использованием курсо-глиссадных систем" |
| RU2765674C1 (ru) * | 2021-01-27 | 2022-02-01 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "комплекс фигур пилотажа" |
| RU2765535C1 (ru) * | 2021-01-27 | 2022-01-31 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "разгон скорости" |
| RU2765530C1 (ru) * | 2021-01-27 | 2022-01-31 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "горизонтальный полет" |
| RU2764053C1 (ru) * | 2021-01-27 | 2022-01-13 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "вираж" |
| RU2765537C1 (ru) * | 2021-01-27 | 2022-01-31 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "посадка с использованием радиокомплекса" |
| RU2765534C1 (ru) * | 2021-01-27 | 2022-01-31 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "горка" |
| RU2764052C1 (ru) * | 2021-01-27 | 2022-01-13 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "спираль левая восходящая" |
| RU2765531C1 (ru) * | 2021-01-27 | 2022-01-31 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "гашение скорости" |
| DE102021101718A1 (de) | 2021-01-27 | 2022-07-28 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum Vorhersagen eines Versagens einer automatisierten Fahrzeugführung, Assistenzsystem und Kraftfahrzeug |
| RU2765533C1 (ru) * | 2021-01-27 | 2022-01-31 | Федеральное государственное автономное образовательное учреждение высшего образования "Южно-Уральский государственный университет (национальный исследовательский университет)" ФГАОУ ВО "ЮУрГУ (НИУ)" | Способ нормирования лётной нагрузки лётчика вертолёта при выполнении упражнения "пикирование" |
| US11733369B2 (en) | 2021-02-11 | 2023-08-22 | Waymo Llc | Methods and systems for three dimensional object detection and localization |
| DE102021201410A1 (de) * | 2021-02-15 | 2022-08-18 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zu einer Ermittlung einer Fortbewegungsrichtung eines zumindest teil-autonomen oder autonomen bewegbaren Geräts und Vorrichtung oder System |
| CN112937486B (zh) * | 2021-03-16 | 2022-09-02 | 吉林大学 | 一种道路积水车载在线监测与驾驶辅助系统及方法 |
| US11783595B2 (en) * | 2021-05-17 | 2023-10-10 | Micron Technology, Inc. | Autonomous vehicle object detection |
| US11776278B2 (en) | 2021-05-17 | 2023-10-03 | Micron Technology, Inc. | Autonomous vehicle object detection |
| CN113341997B (zh) * | 2021-06-28 | 2022-04-05 | 湖南大学无锡智能控制研究院 | 一种基于多状态参数协同估计的横向控制方法及系统 |
| CN113433949A (zh) * | 2021-07-19 | 2021-09-24 | 北京云迹科技有限公司 | 一种可自动跟随的送物机器人及其送物方法 |
| US11875548B2 (en) * | 2021-07-22 | 2024-01-16 | GM Global Technology Operations LLC | System and method for region of interest window generation for attention based perception |
| CN113671961B (zh) * | 2021-08-20 | 2023-03-28 | 清华大学 | 多车协同制动有限时间容错控制方法、系统、介质及设备 |
| USD985607S1 (en) | 2021-08-23 | 2023-05-09 | Waymo Llc | Display screen or portion thereof with graphical user interface |
| US11548473B1 (en) | 2021-08-23 | 2023-01-10 | Micron Technology, Inc. | Vehicle operator authentication operations |
| JP7237121B1 (ja) * | 2021-08-26 | 2023-03-10 | 三菱電機株式会社 | 測位装置 |
| US20230071338A1 (en) * | 2021-09-08 | 2023-03-09 | Sea Machines Robotics, Inc. | Navigation by mimic autonomy |
| TWI834991B (zh) * | 2021-09-09 | 2024-03-11 | 中強光電股份有限公司 | 可控裝置的移動路徑的控制方法及其控制系統 |
| EP4164199A1 (en) * | 2021-10-06 | 2023-04-12 | Cetitec GmbH | Vehicle communication system |
| CN113859250B (zh) * | 2021-10-14 | 2023-10-10 | 泰安北航科技园信息科技有限公司 | 一种基于驾驶行为异常识别的智能网联汽车信息安全威胁检测系统 |
| EP4170389A1 (en) * | 2021-10-22 | 2023-04-26 | Aptiv Services Poland S.A. | Methods and apparatuses for supporting vehicle-to-infrastructure, v2i, communication |
| CN114001732A (zh) * | 2021-10-28 | 2022-02-01 | 山东大学 | 一种移动机器人仿形内壁行走导航方法及系统 |
| CN113766460B (zh) * | 2021-11-09 | 2022-01-25 | 北京安录国际技术有限公司 | 无人驾驶车辆的通信控制方法和系统 |
| US11972614B2 (en) * | 2021-11-09 | 2024-04-30 | Zoox, Inc. | Machine-learned architecture for efficient object attribute and/or intention classification |
| CN114228701B (zh) * | 2021-11-30 | 2023-10-20 | 岚图汽车科技有限公司 | 一种基于传感器数据融合的泊车控制方法和装置 |
| US12037011B2 (en) | 2021-12-16 | 2024-07-16 | Gatik Ai Inc. | Method and system for expanding the operational design domain of an autonomous agent |
| US11675362B1 (en) * | 2021-12-17 | 2023-06-13 | Motional Ad Llc | Methods and systems for agent prioritization |
| CN114363812B (zh) * | 2022-01-20 | 2024-07-16 | 南京恒星自动化设备有限公司 | 一种用于隧道作业的智能救援及应急运输系统 |
| CN114506212B (zh) * | 2022-02-15 | 2023-09-22 | 国能神东煤炭集团有限责任公司 | 梭车的空间定位辅助驾驶系统和方法 |
| CN114739381B (zh) * | 2022-03-01 | 2024-08-23 | 仓擎智能科技(上海)有限公司 | 一种机场车辆导航系统及方法 |
| US11827147B2 (en) * | 2022-03-03 | 2023-11-28 | Continental Autonomous Mobility US, LLC | Obstacle detection for trailer operation |
| TWI807771B (zh) * | 2022-04-11 | 2023-07-01 | 勤崴國際科技股份有限公司 | 適應性導航方法及利用其之雲端導航路徑暨地圖發布平台 |
| CN114690781A (zh) * | 2022-04-13 | 2022-07-01 | 北京京东乾石科技有限公司 | 控制无人车运行的方法及装置 |
| US20230419271A1 (en) * | 2022-06-24 | 2023-12-28 | Gm Cruise Holdings Llc | Routing field support to vehicles for maintenance |
| US20240025395A1 (en) * | 2022-07-22 | 2024-01-25 | Motional Ad Llc | Path generation based on predicted actions |
| WO2024118215A1 (en) * | 2022-12-01 | 2024-06-06 | Zimeno Inc. | Monocular depth estimation |
| CN116029040B (zh) * | 2023-03-10 | 2023-10-27 | 中国建筑设计研究院有限公司 | 一种用于分析雪车雪橇运动状态的方法和可读存储介质 |
| CN116839570B (zh) * | 2023-07-13 | 2023-12-01 | 安徽农业大学 | 一种基于传感器融合目标检测的作物行间作业导航方法 |
| CN117636270B (zh) * | 2024-01-23 | 2024-04-09 | 南京理工大学 | 基于单目摄像头的车辆抢道事件识别方法及设备 |
Citations (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0587608U (ja) * | 1992-04-17 | 1993-11-26 | 株式会社明電舎 | 無人搬送車 |
| JPH08136410A (ja) * | 1994-11-09 | 1996-05-31 | Fuji Heavy Ind Ltd | 故障診断装置 |
| JPH09292312A (ja) * | 1996-04-30 | 1997-11-11 | Fuji Heavy Ind Ltd | 故障診断装置 |
| JP2000180190A (ja) * | 1998-12-10 | 2000-06-30 | Toyota Motor Corp | 車両用走行制御装置 |
| JP2002140798A (ja) * | 2000-11-06 | 2002-05-17 | Masato Abe | 運転支援制御システム |
| JP2002178864A (ja) * | 2000-12-12 | 2002-06-26 | Japan Science & Technology Corp | 電気自動車の制御装置 |
| JP2002274305A (ja) * | 2001-03-22 | 2002-09-25 | Toshiba Corp | 車両のトラブル処理支援システムおよびその支援方法ならびに車両の運転支援システムおよびその支援方法 |
| JP2002331882A (ja) * | 2001-05-09 | 2002-11-19 | Hitachi Ltd | 車両データアクセス方法および車載端末 |
| JP2002341939A (ja) * | 2001-05-17 | 2002-11-29 | Tohoku Electric Power Co Inc | 車両自動搬送システム |
| JP2004078333A (ja) * | 2002-08-12 | 2004-03-11 | Nissan Motor Co Ltd | 走行経路生成装置 |
| JP2004171269A (ja) * | 2002-11-20 | 2004-06-17 | Enii Kk | 移動体衝突予測装置および移動体衝突予測方法 |
| JP2004342103A (ja) * | 2003-05-08 | 2004-12-02 | Harman Becker Automotive Systems Gmbh | 車両エンターテインメントおよび情報処理デバイスへのスケーラブルなサービス提供 |
| JP2004338640A (ja) * | 2003-05-16 | 2004-12-02 | Sumitomo Electric Ind Ltd | 車両用自動走行システム |
| JP2005236981A (ja) * | 2004-02-02 | 2005-09-02 | Sony Internatl Europ Gmbh | 複数の規格を含むネットワークにおけるデータ転送方法 |
| JP2006126980A (ja) * | 2004-10-27 | 2006-05-18 | Nissan Motor Co Ltd | 走行経路生成装置 |
| JP2007176265A (ja) * | 2005-12-27 | 2007-07-12 | Toyota Motor Corp | 車輌の走行制御装置 |
| US20070219720A1 (en) * | 2006-03-16 | 2007-09-20 | The Gray Insurance Company | Navigation and control system for autonomous vehicles |
| JP2007257519A (ja) * | 2006-03-24 | 2007-10-04 | Mazda Motor Corp | 車両用走行支援装置 |
| JP2008062832A (ja) * | 2006-09-08 | 2008-03-21 | Suzuki Motor Corp | 車両用操舵装置 |
| JP2008065380A (ja) * | 2006-09-04 | 2008-03-21 | Toyota Motor Corp | 運転支援装置 |
| JP2008114672A (ja) * | 2006-11-02 | 2008-05-22 | Aisin Aw Co Ltd | 運転支援装置および運転支援方法 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5610815A (en) * | 1989-12-11 | 1997-03-11 | Caterpillar Inc. | Integrated vehicle positioning and navigation system, apparatus and method |
| US5200606A (en) * | 1991-07-02 | 1993-04-06 | Ltv Missiles And Electronics Group | Laser radar scanning system |
| JPH073350B2 (ja) | 1991-09-25 | 1995-01-18 | 株式会社エヌケーエス | 流体速度測定方法およびその装置 |
| JP3198562B2 (ja) * | 1991-10-31 | 2001-08-13 | いすゞ自動車株式会社 | 運転警報装置 |
| JPH08122060A (ja) * | 1994-10-21 | 1996-05-17 | Mitsubishi Electric Corp | 車両周辺監視システム |
| US5644386A (en) * | 1995-01-11 | 1997-07-01 | Loral Vought Systems Corp. | Visual recognition system for LADAR sensors |
| JP3147742B2 (ja) * | 1995-10-24 | 2001-03-19 | 三菱自動車工業株式会社 | 車両用シートのサスペンション装置 |
| JP3748334B2 (ja) * | 1997-10-15 | 2006-02-22 | 日野自動車株式会社 | 車両の姿勢制御装置 |
| US7979173B2 (en) * | 1997-10-22 | 2011-07-12 | Intelligent Technologies International, Inc. | Autonomous vehicle travel control systems and methods |
| US5870181A (en) * | 1997-10-28 | 1999-02-09 | Alliant Defense Electronics Systems, Inc. | Acoustic optical scanning of linear detector array for laser radar |
| CN1218355A (zh) * | 1998-11-24 | 1999-06-02 | 杨更新 | 汽车自动驾驶系统 |
| JP3900778B2 (ja) * | 2000-02-22 | 2007-04-04 | アイシン・エィ・ダブリュ株式会社 | ナビゲーション装置 |
| JP4573287B2 (ja) * | 2001-02-14 | 2010-11-04 | 本田技研工業株式会社 | ナビゲーションシステム |
| US6844924B2 (en) * | 2001-06-29 | 2005-01-18 | The United States Of America As Represented By The Secretary Of The Army | Ladar system for detecting objects |
| JP2003157500A (ja) * | 2001-11-22 | 2003-05-30 | Fujitsu Ltd | 安全走行支援装置,安全走行支援プログラム,及び安全走行支援方法 |
| DE112005003266T5 (de) * | 2004-12-28 | 2008-09-04 | Kabushiki Kaisha Toyota Chuo Kenkyusho | Fahrzeugbewegungssteuerungsvorrichtung |
| DE602005001841T2 (de) * | 2005-01-14 | 2008-04-17 | Alcatel Lucent | Navigationsdienst |
| JP4333639B2 (ja) * | 2005-06-13 | 2009-09-16 | 株式会社豊田中央研究所 | 障害物回避制御装置及び障害物回避制御プログラム |
| JP4762610B2 (ja) * | 2005-06-14 | 2011-08-31 | 本田技研工業株式会社 | 車両の走行安全装置 |
| US7561846B2 (en) * | 2005-09-07 | 2009-07-14 | Gm Gobal Technology Operations, Inc. | Vehicle-to-vehicle communication |
| DE112006002892B4 (de) * | 2005-10-21 | 2022-01-27 | Deere & Company | Systeme und Verfahren zum Umschalten zwischen autonomer und manueller Bedienung eines Fahrzeugs |
| US7539557B2 (en) * | 2005-12-30 | 2009-05-26 | Irobot Corporation | Autonomous mobile robot |
| US7640104B2 (en) * | 2006-02-27 | 2009-12-29 | Xanavi Informatics Corporation | Vehicle navigation system and method for displaying waypoint information |
| JP4893118B2 (ja) * | 2006-06-13 | 2012-03-07 | 日産自動車株式会社 | 回避制御装置、この回避制御装置を備える車両および回避制御方法 |
| US8139109B2 (en) * | 2006-06-19 | 2012-03-20 | Oshkosh Corporation | Vision system for an autonomous vehicle |
| US7801644B2 (en) * | 2006-07-05 | 2010-09-21 | Battelle Energy Alliance, Llc | Generic robot architecture |
| US20080065328A1 (en) * | 2006-09-08 | 2008-03-13 | Andreas Eidehall | Method and system for collision avoidance |
| US20080262669A1 (en) * | 2006-09-22 | 2008-10-23 | Jadi, Inc. | Autonomous vehicle controller |
| JP4600391B2 (ja) * | 2006-12-19 | 2010-12-15 | 住友電気工業株式会社 | 表示装置、表示システム及び表示方法 |
| JP5064016B2 (ja) * | 2006-12-26 | 2012-10-31 | ローム株式会社 | 位置表示装置 |
| JP4576445B2 (ja) * | 2007-04-12 | 2010-11-10 | パナソニック株式会社 | 自律移動型装置および自律移動型装置用プログラム |
-
2008
- 2008-10-24 US US12/289,325 patent/US8126642B2/en active Active
-
2009
- 2009-10-26 AU AU2009308192A patent/AU2009308192B2/en active Active
- 2009-10-26 CN CN200980147195.XA patent/CN102227612B/zh active Active
- 2009-10-26 CA CA2739989A patent/CA2739989C/en active Active
- 2009-10-26 CN CN201410215842.9A patent/CN104133473B/zh active Active
- 2009-10-26 WO PCT/US2009/062059 patent/WO2010048611A1/en active Application Filing
- 2009-10-26 EP EP09822836.4A patent/EP2338029B1/en active Active
- 2009-10-26 KR KR1020117011845A patent/KR101736977B1/ko active IP Right Grant
- 2009-10-26 JP JP2011533404A patent/JP2012507088A/ja active Pending
-
2011
- 2011-12-28 US US13/339,061 patent/US8280623B2/en active Active
-
2012
- 2012-08-22 US US13/591,362 patent/US8412449B2/en active Active
-
2013
- 2013-04-01 US US13/854,630 patent/US8706394B2/en active Active
-
2014
- 2014-03-28 US US14/229,360 patent/US20140214259A1/en not_active Abandoned
- 2014-11-20 US US14/549,103 patent/US20150081156A1/en not_active Abandoned
-
2015
- 2015-07-17 JP JP2015142892A patent/JP2015205691A/ja active Pending
-
2018
- 2018-01-23 JP JP2018008831A patent/JP2018095254A/ja active Pending
-
2019
- 2019-12-05 JP JP2019220458A patent/JP2020040659A/ja active Pending
Patent Citations (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0587608U (ja) * | 1992-04-17 | 1993-11-26 | 株式会社明電舎 | 無人搬送車 |
| JPH08136410A (ja) * | 1994-11-09 | 1996-05-31 | Fuji Heavy Ind Ltd | 故障診断装置 |
| JPH09292312A (ja) * | 1996-04-30 | 1997-11-11 | Fuji Heavy Ind Ltd | 故障診断装置 |
| JP2000180190A (ja) * | 1998-12-10 | 2000-06-30 | Toyota Motor Corp | 車両用走行制御装置 |
| JP2002140798A (ja) * | 2000-11-06 | 2002-05-17 | Masato Abe | 運転支援制御システム |
| JP2002178864A (ja) * | 2000-12-12 | 2002-06-26 | Japan Science & Technology Corp | 電気自動車の制御装置 |
| JP2002274305A (ja) * | 2001-03-22 | 2002-09-25 | Toshiba Corp | 車両のトラブル処理支援システムおよびその支援方法ならびに車両の運転支援システムおよびその支援方法 |
| JP2002331882A (ja) * | 2001-05-09 | 2002-11-19 | Hitachi Ltd | 車両データアクセス方法および車載端末 |
| JP2002341939A (ja) * | 2001-05-17 | 2002-11-29 | Tohoku Electric Power Co Inc | 車両自動搬送システム |
| JP2004078333A (ja) * | 2002-08-12 | 2004-03-11 | Nissan Motor Co Ltd | 走行経路生成装置 |
| JP2004171269A (ja) * | 2002-11-20 | 2004-06-17 | Enii Kk | 移動体衝突予測装置および移動体衝突予測方法 |
| JP2004342103A (ja) * | 2003-05-08 | 2004-12-02 | Harman Becker Automotive Systems Gmbh | 車両エンターテインメントおよび情報処理デバイスへのスケーラブルなサービス提供 |
| JP2004338640A (ja) * | 2003-05-16 | 2004-12-02 | Sumitomo Electric Ind Ltd | 車両用自動走行システム |
| JP2005236981A (ja) * | 2004-02-02 | 2005-09-02 | Sony Internatl Europ Gmbh | 複数の規格を含むネットワークにおけるデータ転送方法 |
| JP2006126980A (ja) * | 2004-10-27 | 2006-05-18 | Nissan Motor Co Ltd | 走行経路生成装置 |
| JP2007176265A (ja) * | 2005-12-27 | 2007-07-12 | Toyota Motor Corp | 車輌の走行制御装置 |
| US20070219720A1 (en) * | 2006-03-16 | 2007-09-20 | The Gray Insurance Company | Navigation and control system for autonomous vehicles |
| JP2007257519A (ja) * | 2006-03-24 | 2007-10-04 | Mazda Motor Corp | 車両用走行支援装置 |
| JP2008065380A (ja) * | 2006-09-04 | 2008-03-21 | Toyota Motor Corp | 運転支援装置 |
| JP2008062832A (ja) * | 2006-09-08 | 2008-03-21 | Suzuki Motor Corp | 車両用操舵装置 |
| JP2008114672A (ja) * | 2006-11-02 | 2008-05-22 | Aisin Aw Co Ltd | 運転支援装置および運転支援方法 |
Cited By (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9352307B2 (en) | 2010-04-08 | 2016-05-31 | Basf Corporation | Cu-CHA/Fe-MFI mixed zeolite catalyst and process for the treatment of NOx in gas streams |
| KR101401399B1 (ko) * | 2012-10-12 | 2014-05-30 | 현대모비스 주식회사 | 주차 지원 장치 및 방법과 이를 이용한 주차 지원 시스템 |
| JP2016509971A (ja) * | 2013-02-21 | 2016-04-04 | グーグル インコーポレイテッド | 運転モード調整 |
| JP2017171296A (ja) * | 2013-02-21 | 2017-09-28 | グーグル インコーポレイテッド | 付近の強引な運転者を検出し、運転モードを調整する方法 |
| US10347127B2 (en) | 2013-02-21 | 2019-07-09 | Waymo Llc | Driving mode adjustment |
| KR102113769B1 (ko) | 2013-11-26 | 2020-05-21 | 현대모비스 주식회사 | V2x 기반 안전운전지원서비스를 위한 운전자 맞춤형 다운 경고 중재 장치 및 방법 |
| KR20150060301A (ko) * | 2013-11-26 | 2015-06-03 | 현대모비스 주식회사 | V2x 기반 안전운전지원서비스를 위한 운전자 맞춤형 다운 경고 중재 장치 및 방법 |
| WO2016063490A1 (ja) * | 2014-10-22 | 2016-04-28 | 株式会社デンソー | 車両用データ記録装置及び車両用事故通報装置 |
| US11422554B2 (en) | 2015-02-10 | 2022-08-23 | Mobile Vision Technologies Ltd. | Self-aware system for adaptive navigation |
| JP7176811B2 (ja) | 2015-02-10 | 2022-11-22 | モービルアイ ビジョン テクノロジーズ リミテッド | 自律車両ナビゲーションのための疎な地図 |
| JP2020115136A (ja) * | 2015-02-10 | 2020-07-30 | モービルアイ ビジョン テクノロジーズ リミテッド | 自律車両ナビゲーションのための疎な地図 |
| JP7204709B2 (ja) | 2015-03-25 | 2023-01-16 | ウェイモ エルエルシー | 複数の光検出及び測距装置(lidar)付きの車両 |
| JP2021004028A (ja) * | 2015-03-25 | 2021-01-14 | ウェイモ エルエルシー | 複数の光検出及び測距装置(lidar)付きの車両 |
| CN108349501A (zh) * | 2015-11-03 | 2018-07-31 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 用于机动车辆驾驶员辅助系统的周围环境模型化的设备 |
| CN108349501B (zh) * | 2015-11-03 | 2021-08-06 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 用于机动车辆驾驶员辅助系统的周围环境模型化的设备 |
| JP2019501811A (ja) * | 2015-11-03 | 2019-01-24 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 動力車両用のドライバー・アシスタント・システムのために周辺モデリングを実施するための装置 |
| JP7071259B2 (ja) | 2015-11-03 | 2022-05-18 | コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト | 自動車用のドライバー・アシスタント・システムのために周辺モデリングを実施するための装置 |
| JP2021007269A (ja) * | 2016-05-27 | 2021-01-21 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | ネットワークハブ、転送方法及び車載ネットワークシステム |
| US11209276B2 (en) | 2016-09-20 | 2021-12-28 | Waymo Llc | Devices and methods for a sensor platform of a vehicle |
| JP2019532858A (ja) * | 2016-09-20 | 2019-11-14 | ウェイモ エルエルシー | 乗物のセンサ・プラットフォームのデバイスおよび方法 |
| JP7097352B2 (ja) | 2016-09-20 | 2022-07-07 | ウェイモ エルエルシー | 乗物のセンサ・プラットフォームのデバイスおよび方法 |
| KR20180050707A (ko) * | 2016-09-28 | 2018-05-15 | 바이두 유에스에이 엘엘씨 | 자율 주행 차량을 위한 사이드슬립 보상 제어 방법 |
| JP2018535871A (ja) * | 2016-09-28 | 2018-12-06 | バイドゥ・ユーエスエイ・リミテッド・ライアビリティ・カンパニーBaidu USA LLC | 自律走行車のための横滑り補償制御方法 |
| KR101975728B1 (ko) | 2016-09-28 | 2019-08-28 | 바이두 유에스에이 엘엘씨 | 자율 주행 차량을 위한 사이드슬립 보상 제어 방법 |
| JPWO2018073886A1 (ja) * | 2016-10-18 | 2019-04-25 | 本田技研工業株式会社 | 車両制御装置 |
| WO2018073886A1 (ja) * | 2016-10-18 | 2018-04-26 | 本田技研工業株式会社 | 車両制御装置 |
| KR101963422B1 (ko) | 2017-06-23 | 2019-03-28 | 우버 테크놀로지스, 인크. | 자율 주행 가능 차량용 충돌-회피 시스템 |
| KR20190000843A (ko) * | 2017-06-23 | 2019-01-03 | 우버 테크놀로지스, 인크. | 자율 주행 가능 차량용 충돌-회피 시스템 |
| JP2019078732A (ja) * | 2017-10-19 | 2019-05-23 | 株式会社トリマティス | 水中地形測量複合lidar |
| JP2022058455A (ja) * | 2018-01-31 | 2022-04-12 | パイオニア株式会社 | 周辺情報処理方法 |
| WO2020044802A1 (ja) * | 2018-08-28 | 2020-03-05 | ヤンマー株式会社 | 障害物検知システム |
| JP2020035112A (ja) * | 2018-08-28 | 2020-03-05 | ヤンマー株式会社 | 障害物検知システム |
| JP2020045091A (ja) * | 2018-09-14 | 2020-03-26 | 株式会社デンソー | 予見安全性を備える車両制御システム、および予見安全性を備える車両制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8706394B2 (en) | 2014-04-22 |
| JP2018095254A (ja) | 2018-06-21 |
| CN102227612B (zh) | 2014-06-25 |
| KR20110074629A (ko) | 2011-06-30 |
| EP2338029B1 (en) | 2017-05-24 |
| CA2739989A1 (en) | 2010-04-29 |
| US20100106356A1 (en) | 2010-04-29 |
| US8412449B2 (en) | 2013-04-02 |
| EP2338029A4 (en) | 2012-07-04 |
| US8126642B2 (en) | 2012-02-28 |
| AU2009308192B2 (en) | 2014-10-09 |
| AU2009308192A1 (en) | 2010-04-29 |
| EP2338029A1 (en) | 2011-06-29 |
| CN104133473A (zh) | 2014-11-05 |
| JP2015205691A (ja) | 2015-11-19 |
| US20120101680A1 (en) | 2012-04-26 |
| WO2010048611A8 (en) | 2010-07-15 |
| US20150081156A1 (en) | 2015-03-19 |
| JP2020040659A (ja) | 2020-03-19 |
| US8280623B2 (en) | 2012-10-02 |
| US20140214259A1 (en) | 2014-07-31 |
| CN102227612A (zh) | 2011-10-26 |
| KR101736977B1 (ko) | 2017-05-17 |
| US20130274986A1 (en) | 2013-10-17 |
| WO2010048611A1 (en) | 2010-04-29 |
| US20120316725A1 (en) | 2012-12-13 |
| CA2739989C (en) | 2016-12-13 |
| CN104133473B (zh) | 2019-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018095254A (ja) | 自律運転乗物用の制御及びシステム | |
| EP3665061B1 (en) | Fault-tolerant control of an autonomous vehicle with multiple control lanes | |
| US11618444B2 (en) | Methods and systems for autonomous vehicle inference of routes for actors exhibiting unrecognized behavior | |
| US11880203B2 (en) | Methods and system for predicting trajectories of uncertain road users by semantic segmentation of drivable area boundaries | |
| US12049236B2 (en) | Complementary control system detecting imminent collision of autonomous vehicle in fallback monitoring region | |
| CN117836184A (zh) | 用于自主车辆的互补控制系统 | |
| US20230084313A1 (en) | Methods and systems for autonomous vehicle collision avoidance | |
| US20220091973A1 (en) | System for executing structured tests across a fleet of autonomous vehicles | |
| US20230391350A1 (en) | Systems and methods for hybrid open-loop and closed-loop path planning | |
| TR2022021363A2 (tr) | Otonom otopi̇lot bi̇lgi̇sayar mi̇mari̇si̇ si̇stemi̇ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121015 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131029 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140303 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140520 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140527 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140901 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20150119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20150119 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150317 |