JP6340812B2 - 自律走行台車 - Google Patents
自律走行台車 Download PDFInfo
- Publication number
- JP6340812B2 JP6340812B2 JP2014028512A JP2014028512A JP6340812B2 JP 6340812 B2 JP6340812 B2 JP 6340812B2 JP 2014028512 A JP2014028512 A JP 2014028512A JP 2014028512 A JP2014028512 A JP 2014028512A JP 6340812 B2 JP6340812 B2 JP 6340812B2
- Authority
- JP
- Japan
- Prior art keywords
- travel
- unit
- traveling
- teaching
- elapsed time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 25
- 238000000034 method Methods 0.000 description 24
- 238000010586 diagram Methods 0.000 description 9
- 230000008569 process Effects 0.000 description 8
- 238000004140 cleaning Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0223—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving speed control of the vehicle
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0088—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0221—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving a learning process
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/02—Registering or indicating driving, working, idle, or waiting time only
- G07C5/04—Registering or indicating driving, working, idle, or waiting time only using counting means or digital clocks
Description
本発明の一見地に係る自律走行台車は、走行部と、記憶部と、自律走行経過時刻計数部と、再現走行指令算出部と、を備える。走行部は、走行制御指令に従って走行する。記憶部は、走行経路データを記憶する。走行経路データは、複数のサブゴール点と到達時刻とを関連づけて記憶する。サブゴール点は、走行予定の走行経路上に設定された目標点である。到達時刻は、複数のサブゴール点のそれぞれに到達する時刻である。
再現走行指令算出部は、再現走行モードの実行時に、走行経路データにおいて目標到達時刻に関連づけて記憶されているサブゴール点に基づいて、自律走行経過時刻における再現走行制御指令を走行制御指令として算出する。目標到達時刻は、走行経路データにおいて、自律走行経過時刻に対応する到達時刻の直後の到達時刻である。
また、自律走行経過時刻計数部は、再現走行速度調整部において調整された再現走行速度に基づいて、自律走行経過時刻の進行を調整する。
これにより、再現走行モードの実行時に、障害物が検出された場合に、自律走行台車は、速度を調整して走行経路を走行できる。また、再現走行速度に基づいて単位経過時間を調整することにより、自律走行台車の再現走行速度が、走行経路データに示されていない変化をした場合に、自律走行経過時刻の進行速度を再現走行速度に基づいて変更できる。
その結果、再現走行指令算出部は、計数された自律走行経過時刻と走行経路データ中の到達時刻とを比較して、適切なサブゴール点を次の到達目標点として選択できる。
教示データ作製部は、教示サブゴール点と、教示サブゴール点を取得した時の教示経過時刻と、を関連づけて記憶して走行経路データを作製する。教示サブゴール点は、操作者の操作により通過した走行経路上の位置を表す点である。
これにより、操作者の操作による自律走行台車の時間の概念を含む操作を、走行経路データとして記憶できる。
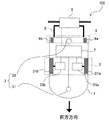
(1)自律走行台車の全体構成
まず、本実施形態に係る自律走行台車100の全体構成について、図1を用いて説明する。図1は、自律走行台車の全体構成を示す図である。自律走行台車100は、台車部1と、走行部2と、検出部3と、操作部5と、制御部7と、を備える。台車部1は、自律走行台車100の本体を構成する。走行部2は、台車部1に搭載されている。走行部2は、走行制御指令(後述)に従って走行することにより、台車部1を走行させる。検出部3は、制御部7(後述)に信号送受信可能に接続されている。そして、検出部3は、障害物(人や他の台車などの走行障害物、荷物などの仮置き障害物)及び走行経路にある壁などを検出し、障害物及び壁などの位置情報を制御部7に出力する。操作部5は、台車部1の上部後方側に取付部材9を介して固定されている。また、操作部5は、制御部7に信号送受信可能に接続されている。操作部5は、操作者が自律走行台車100を操作することにより移動平面を手動走行させながら走行経路を教示するとき(手動操作教示モードの実行時)、操作者により操作される。これにより、自律走行台車100の走行モードが手動操作教示モードの実行時に、自律走行台車100は、操作者による操作部5の操作に基づいて制御される。また、操作部5は、自律走行台車100の各種設定を行う。
一方、走行経路を自律的に走行する再現走行モードの実行時には、制御部7は、手動操作教示モードの実行時において教示された走行経路を表す走行経路データ500(後述)に基づいて、再現走行制御指令(後述)を走行制御指令として作成し、走行部2のモータ23a、23bを制御する。
なお、自律走行台車100の走行部2、検出部3、操作部5、及び制御部7の構成の詳細については、後述する。
次に、走行部2の構成について図1を用いて詳細に説明する。走行部2は、2つの主輪21a、21bと、2つのモータ23a、23bと、を有する。主輪21a、21bは、台車部1の略中央部の底部に設置されている。
また、主輪21a、21bは、それぞれ、モータ23a、23bの出力回転軸に接続されている。これにより、主輪21aはモータ23aの回転に従って回転し、主輪21bはモータ23bの回転に従って回転する。すなわち、主輪21a及び主輪21bは、お互いに独立に回転可能となっている。そのため、主輪21aの回転速度と主輪21bの回転速度に差を持たせることにより、台車部1(自律走行台車100)の進行方向(向き)を変更できる。
モータ23a、23bとしては、たとえば、サーボモータ及び/又はブラシレスモータなどの電動モータを用いることができる。
次に、検出部3の構成について、図1を用いて説明する。検出部3は、自律走行台車100の走行経路周辺の障害物(走行障害物など)及び壁などを検出し、障害物及び壁などの位置情報を出力する。そのため、検出部3は、前方検出器31と、後方検出器33と、を有する。前方検出器31は、自律走行台車100の前方にある障害物及び壁などを検出する。後方検出器33は、自律走行台車100の後方にある障害物及び壁などを検出する。また、前方検出器31と後方検出器33は、自律走行台車100と障害物及び壁などとの間の距離及び、自律走行台車100から見た障害物及び壁などが存在する方向に関する情報などを含む信号を出力する。これにより、検出部3は、自律走行台車100から見た障害物及び壁などの相対的な位置情報を、制御部7に出力できる。
検出部3の前方検出器31及び後方検出器33としては、例えば、その検出範囲として180°以上で射程距離4m以上のレーザレンジファインダ(Laser Range Finder、LRF)などを用いることができる。
なお、上記の射程距離は、4m以上に限られず、自律走行台車100の走行速度(最高速度)等により、適宜適切な射程距離を選択できる。
次に、操作部5の構成について、図2を用いて説明する。図2は、操作部の構成を示す図である。操作部5は、操作ハンドル51a、51bと、設定部53と、表示部55と、インターフェース57と、筐体59と、を備える。
操作ハンドル51a、51bは、それぞれ、筐体59の左右に回動可能に取り付けられている。また、操作ハンドル51a、51bは、インターフェース57と信号送受信可能に接続されている。これにより、操作ハンドル51a、51bの回動量(操作量)及び回動方向は、インターフェース57において電気信号に変換され、制御部7に入力される。そして、制御部7に入力された操作ハンドル51a、51bの回動量及び回動方向に基づき、操作走行制御指令が作成され、作成された操作走行制御指令を走行制御指令として、走行部2のモータ23a、23bが制御される。
また、操作ハンドル51aを進行方向への走行速度を指示するための入力インターフェースとし、操作ハンドル51bを操舵角を指示するための入力インターフェースとしてもよい。
設定部53は、例えば、自律走行台車100の走行モード及び各種設定などを行うためのスイッチ又は/及びキーボードなどにより構成できる。又は、設定部53は、タッチパネルとして構成され、表示部55と一体に形成されていてもよい。
従って、インターフェース57としては、マイコンボードを用いることができる。マイコンボードは、例えば、操作ハンドル51a、51bの回動量、回転方向、及び設定部53における設定状態を電気信号に変換する信号変換器と、表示部55に情報を表示するための表示部駆動回路と、制御部7と信号を送受信するための通信インターフェースと、を備えている。
I.制御部の全体構成
次に、制御部7の全体構成について図3を用いて説明する。図3は、制御部の全体構成を示す図である。
なお、制御部7は、CPU(Central Processing Unit)と、ハードディスク装置と、ROM(Read Only Memory)と、RAM(Random Access Memory)と、記憶媒体読み出し装置などにより構成される記憶装置と、信号変換を行うインターフェースなどと、を備えたマイコンシステムなどのコンピュータにより実現できる。
ここで、上記の位置に関する情報は、走行予定の走行経路上に設定された通過すべき目標点である。従って、上記の位置に関する情報のことを、「教示サブゴール点」又は「サブゴール点」と呼ぶことにする。
その結果、再現走行モードの実行時に、教示された走行経路を再現走行する際、再現走行指令算出部753(図5)は、自律走行経過時刻(後述)と走行経路データ500中の到達時刻とを比較しつつ、走行経路データ500中のどの教示サブゴール点(サブゴール点)を、次の走行目標のサブゴール点とするべきかを適切に選択できる。
なお、経過時刻計数部74の詳細な構成及び動作については、後述する。
モータ駆動部75は、操作部5と信号送受信可能に接続され、手動操作教示モードの実行時には、操作部5の操作ハンドル51a、51bの回動量及び/又は回動方向に基づき、操作走行制御指令を作成する。そして、モータ駆動部75は、操作走行制御指令を走行制御指令として、モータ23a、23bを制御する。
なお、モータ駆動部75の詳細な構成及び動作については、後述する。
次に、経過時刻計数部74の構成について図4を用いて説明する。図4は、経過時刻計数部の構成を示す図である。経過時刻計数部74は、自律走行経過時刻計数部741と、教示経過時刻計数部743と、を有する。
自律走行経過時刻計数部741は、再現走行モードの実行時に、自律走行経過時刻を計数する。自律走行経過時刻計数部741は、自律走行経過時間の進行を所定の条件に基づいて調整しながら自律走行経過時刻を計数する。
一方、再現走行モードの実行中に自律走行台車100が、走行経路データ500に示されていない停止を実行した場合には、自律走行経過時刻計数部741は、自律走行経過時刻の計数を停止する。
次に、モータ駆動部75の構成について、図5を用いて説明する。図5は、モータ駆動部の構成を示す図である。
モータ駆動部75は、駆動切替部751と、再現走行指令算出部753と、モータ制御部755と、操作走行制御指令算出部757と、再現走行速度調整部759と、を有する。
その結果、駆動切替部751は、手動操作教示モードの実行時には、操作走行制御指令をモータ制御部755(後述)へと入力する。一方、駆動切替部751は、再現走行モードの実行時には、再現走行指令算出部753(後述)において算出された再現走行制御指令(後述)をモータ制御部755へと入力する。
このため、モータ制御部755は、手動操作教示モードの実行時には、操作走行制御指令に基づいて、モータ23a、23bを制御する。一方、再現走行モードの実行時には、モータ制御部755は、再現走行制御指令に基づいて、モータ23a、23bを制御する。
そのため、モータ制御部755としては、フィードバック制御理論を用いたモータ制御装置などを用いることができる。
また、操作走行制御指令算出部757は、駆動切替部751の端子dと接続されている。そのため、操作走行制御指令算出部757は、手動操作教示モードの実行時(すなわち、端子dと端子eとが接続されたとき)、駆動切替部751を介して、操作走行制御指令をモータ制御部755に出力する。
本実施形態においては、操作走行制御指令は、操作ハンドル51a、51bの回動量及び/又は回動方向を数値化したものである。例えば、操作走行制御指令は、操作ハンドル51a、51bの回動量の最大の回動量に対する割合の数値に、操作ハンドル51a、51bの回動方向に従って決定される正負の符号を付した数値とすることができる。
この場合、モータ制御部755は、操作走行制御指令に示された数値と、モータ制御部755において予め決められているモータ23a、23bの最大回転速度との積により、モータ23a、23bの回転速度を決定できる。
一方、再現走行速度調整部759は、再現走行モードの実行時に自律走行台車100を停止させたい場合は、例えば、再現走行速度、又は、上記の調整係数を0とする信号をモータ制御部755に出力できる。
これにより、自律走行経過時刻計数部741は、再現走行速度が低下したときには、上記の調整係数を用いて、自律走行経過時刻に対して累積加算する単位経過時間の長さを調整できる。また、自律走行経過時刻計数部741は、自律走行台車100が停止したときには、自律走行経過時刻の計数を停止する指令を受信することにより、自律走行経過時刻計数部741の計数を停止できる。
I.自律走行台車の基本動作
次に、本実施形態に係る自律走行台車100の基本動作について、図6Aを用いて説明する。図6Aは、自律走行台車の基本動作を示すフローチャートである。ここでは、操作者が操作部5を操作して自律走行台車100を走行させて自律走行台車100に走行経路を教示させた上で、教示された走行経路を再現走行モードの実行時に再現走行する例を示す。
走行経路データ500の作成を開始すると、教示データ作製部71が、自律走行台車100を操作者が操作することにより自律走行台車100が通過した走行経路の走行経路データ500を取得し、記憶部73に記憶する(ステップS1)。
これにより、再現走行指令算出部753は、再現走行モードの実行時に、自律走行経過時刻と走行経路データ500中の到達時刻とを比較しつつ、どのサブゴール点を次の到達目標点とするかを適切に決定できる。その結果、自律走行台車100は、再現走行モードの実行時に、走行経路データ500に示された走行経路を忠実に再現走行できる。
なお、ステップS1における走行経路データ500の取得方法については、後ほど詳しく説明する。
自律走行台車100は、走行経路データ500に示された走行経路を自律的に再現走行するとき、検出部3により、走行経路上あるいは走行経路に侵入すると考えられる走行の障害となる走行障害物などの位置に関する情報を取得している。そして、自律走行台車100は、走行障害物の位置に関する情報に基づいて、再現走行中の速度(再現走行速度)を調整する。
一方、再現走行速度が0(すなわち、自律走行台車100が停止)となった場合には、自律走行経過時刻の計数(進行)を停止する。
なお、ステップS2における自律走行台車100の再現走行方法については、後ほど詳しく説明する。
まず、図6AのステップS1における、走行経路データ500の取得方法について、図6Bを用いて説明する。図6Bは、走行経路データの取得方法を示すフローチャートである。ここで示す例においては、上記のように、操作者が操作部5を操作して自律走行台車100を走行させて自律走行台車100に走行経路を教示させる方法にて走行経路データ500が取得される。
従って、まず、自律走行台車100の走行モードが手動操作教示モードに設定される(ステップS11)。走行モードの手動操作教示モードへの切替は、例えば、操作者が操作部5の設定部53を操作することにより、実行される。
これにより、操作者は、操作ハンドル51a、51bの回動量及び回動方向などを調整することにより、自律走行台車100を手動操作できる。
このとき、教示データ作製部71は、操作走行制御指令算出部757において算出された、操作者の操作による操作部5の回動量及び回動方向から算出される操作走行制御指令を、操作走行制御指令算出部757から受信する。そして、教示データ作製部71は、受信した操作走行制御指令を、教示速度として取得する。
これにより、再現走行指令算出部753は、後述するように、走行経路データ500に示された各サブゴール点に関連づけられた教示速度に基づいて、再現走行制御指令を算出できる。
サブゴール点を記憶部73に記憶する際、すでにいくつかの走行経路データ単位が記憶部73に記憶され走行経路データ500(図7B)が形成されている場合には、今回作製した走行経路データ単位500−kは、記憶されている走行経路データ500の末尾に追加される。
一方、操作者の手動操作による走行経路の教示が継続していると判断した場合(ステップS17において、「No」の場合)、ステップS12に戻り、上記の走行経路データ単位500−kの生成と記憶とを継続する。これにより、教示データ作製部71は、走行経路の教示が継続している限り(すなわち、手動操作教示モードが実行されている限り)、走行経路データ単位500−kの生成と記憶とを継続できる。
図7Bに示す走行経路データ500においては、n+1個の走行経路データ単位500−0、500−1、500−2、500−3、・・・、500−n−1、500−nが、紙面の上から下へ積み重なるように接続されている。すなわち、図7Bに示す走行経路データ500は、n+1個の走行経路データ単位により構成されている。
(i)再現走行の原理
次に、本実施形態の自律走行台車100における、走行経路データ500に示された再現走行の原理について説明する。ここでは、図8に示すような、走行経路データ500のk番目からk+3番目までの再現走行を例にとって説明する。図8は、走行経路データ500に示されたサブゴール点、及び、サブゴール点に関連づけられている速度及び到達時刻の関係を模式的に示した図である。
図8に示すように、走行経路データ500のk番目からk+3番目までのサブゴール点Pk、Pk+1、Pk+2、Pk+3のそれぞれをについて、到達時刻Tk、Tk+1、Tk+2、Tk+3と、教示速度vk、vk+1、vk+2、vk+3が関連づけられているとする。その結果、図8における位置と到達時刻の関係を示すグラフにおいて実線にて示された折れ線のような走行経路が教示されているとする。
なお、ここで、「実時間」及び「実時刻」とは、実際の時間及び時刻のことを言う。一方、自律走行経路時刻は、必ずしも実時刻と同一に進行ものではない、仮想的な時刻である。
走行経路データ500には、到達時刻Tk+2からTk+3の間は停止することが示されている。仮に走行経路データ500に示されている通りにTk+3から再び走行を開始するとした場合、自律走行台車100は、サブゴール点Pk+3(実際はPk+2に到達している)に到達した時刻t2からTk+3までの間は停止する。
そのため、実時間Tk+1よりも後の実時刻t1において、自律走行経過時刻は、走行経路データ500におけるk+1番目のサブゴール点Pk+1に関連づけられている到達時刻Tk+1となる。また、図9に示すように、自律走行台車100は自律走行経過時刻がTk+1(実時刻=t1)となった時に、サブゴール点Pk+1に到達する。
そのため、実時刻Tk+2よりも後の実時刻t2のときに自律走行経過時刻はTk+2となる。また、図9に示すように、自律走行台車100は自律走行経過時刻がTk+2(実時刻=t2)となった時に、サブゴール点Pk+2に到達する。
その結果、図9に示すように、自律走行台車100は、実時刻t2からt3までのTk+3−Tk+2の長さの時間停止している。すなわち、自律走行台車100は、再現走行中に、教示された位置に、教示された停止時間だけ停止できている。
次に、本実施形態の自律走行台車100における、走行経路の再現走行方法を、図6Cを用いて説明する。図6Cは、走行経路の再現走行方法を示すフローチャートである。
走行経路の再現走行を開始すると、まず、自律走行台車100の走行モードが再現走行モードに設定される(ステップS201)。走行モードの再現走行モードへの切替は、例えば、操作者が操作部5の設定部53を操作することにより、実行される。
一方、制御部7が、現在時刻が制御タイミングであると判断した場合(ステップS202において、「Yes」の場合)、ステップS203へ進む。
このように、ステップS202においては、制御部7は、現在時刻が制御タイミングであるかどうかを確認して、以後の処理を実行する。これにより、制御部7は、制御タイミング毎に走行部2を制御できる。制御タイミングとしては、例えば、モータ23a、23bの制御周期を用いることができる。
そして、再現走行速度調整部759が、障害物情報取得部76が取得した障害物の位置に関する情報に基づいて、走行経路上にあると思われる走行の障害となる障害物(走行障害物)、及び/又は、走行経路上に侵入すると予測される走行障害物などを検知する。
再現走行速度調整部759は、例えば、走行障害物などが自律走行台車100の近傍にあり、走行障害物などと自律走行台車100とが衝突する可能性が高いと判断した場合、自律走行台車100を停止するようモータ制御部755に指令する。すなわち、再現走行速度調整部759は、モータ制御部755に対して、モータ23a、23bの回転を停止するように指令する。
これにより、モータ制御部755は、予め決められている最大走行速度と上記の割合値との積を算出するという単純な演算により、モータ23a、23bの具体的な制限回転数を算出できる。
具体的には、自律走行経過時刻計数部741は、単位経過時間の大きさを、制御タイミングを決定する信号の周期(制御周期)よりも小さくする。そして、自律走行経過時刻計数部741は、再現走行速度を制限している間、上記の制御周期よりも小さい値の単位経過時間を制御周期毎に累積加算していく。
その他、再現走行速度が0になった場合、自律走行経過時刻計数部741は、単位経過時間の累積加算を停止することにより、自律走行経過時刻の計数を停止してもよい。これによっても、自律走行経過時刻の値を増加させないようにできる。
新たに計数した自律走行経過時刻が、走行経路データ500に示されている到達時刻と対応する値となっていない場合(ステップS209において、「No」の場合)、例えば、新たに計数した自律走行経過時刻が2つの到達時刻の間の時刻となっている場合には、ステップS202に戻る。そして、ステップS202〜S208までを再び実行する。
これにより、再現走行指令算出部753は、自律走行経過時刻が走行経路データ500に示された到達時刻に対応する時刻となったときに、再現走行制御指令を更新できる。
具体的には、上記のように、m+1番目の走行経路データ単位500−(m+1)に記憶されているサブゴール点を新たな到達目標点とした場合を例にとると、再現走行指令算出部753は、走行経路データ単位500−(m+1)に記憶されている教示速度vm+1にて自律走行台車100を走行させる走行制御指令を作成する。
一方、再現走行指令算出部753が全ての走行経路を走行していないと判断した場合(ステップS212において、「No」の場合)、ステップS202に戻り、再現走行モードの実行を継続する(すなわち、再現走行を継続する)。
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。特に、本明細書に書かれた複数の実施形態及び変形例は必要に応じて任意に組み合せ可能である。
上記の第1実施形態においては、操作者が実際に自律走行台車100を操作し、操作者の操作により自律走行台車100が通過した走行経路が、走行経路データ500として記憶されていた。しかし、走行経路データ500の作成方法は、上記の方法に限られない。実際に自律走行台車100を操作することなく走行経路データ500を作製してもよい。
1 台車部
2 走行部
21a、21b主輪
23、23b モータ
231a、231b エンコーダ
3 検出部
31 前方検出器
33 後方検出器
5 操作部
51a 操作ハンドル
51b 操作ハンドル
53 設定部
55 表示部
57 インターフェース
59 筐体
7 制御部
71 教示データ作製部
72 位置推定部
73 記憶部
74 経過時刻計数部
741 自律走行経過時刻計数部
743 教示経過時刻計数部
75 モータ駆動部
751 駆動切替部
753 再現走行指令算出部
755 モータ制御部
757 操作走行制御指令算出部
759 再現走行速度調整部
76 障害物情報取得部
77 切替部
8 補助輪部
8a 補助車輪
8b 補助車輪
9 取付部材
500 走行経路データ
500−0、500−1、500−2、500−3、500−k、500−m、500−n−1、500−n 走行経路データ単位
501−k 到達時刻記憶領域
503−k サブゴール点記憶領域
505−k 教示速度記憶領域
Pk、Pk+1、Pk+2、Pk+3、Pm+1 教示サブゴール点、サブゴール点
Tk、Tk+1、Tk+2、Tk+3、Tm、Tm+1 到達時刻、教示経過時刻
d、e、f 端子
t1、t2、t3 実時刻
vk、vk+1、vk+2、vk+3、vk+4 教示速度、速度
Claims (7)
- 走行制御指令に従って走行する走行部と、
走行予定の走行経路上に設定された複数のサブゴール点と、前記複数のサブゴール点のそれぞれに到達する到達時刻とを関連付けて記憶した走行経路データを記憶する記憶部と、
前記走行経路データに基づいて自律的に前記走行経路を走行する再現走行モードの実行時に、前記再現走行モードの開始時からの経過時刻である自律走行経過時刻を、前記自律走行経過時刻の進行を所定の条件に基づいて調整しながら計数する自律走行経過時刻計数部と、
前記再現走行モードの実行時に、前記走行経路データにおいて前記自律走行経過時刻に対応する前記到達時刻の直後の到達時刻である目標到達時刻に関連付けて記憶されているサブゴール点に基づいて、前記自律走行経過時刻における再現走行制御指令を前記走行制御指令として算出する再現走行指令算出部と、
走行の障害となる障害物の位置を検出する検出部と、
前記再現走行モードの実行時に、前記障害物の位置に基づいて前記走行部の再現走行速度を調整する再現走行速度調整部と、
を備え、
前記自律走行経過時刻計数部は、前記再現走行速度調整部において調整された前記再現走行速度に基づいて、前記自律走行経過時刻の進行を調整する、
自律走行台車。 - 前記走行経路データは、前記複数のサブゴール点のそれぞれを通過している際の速度である教示速度を記憶し、
前記自律走行経過時刻計数部は、前記再現走行速度と現在位置に対応する前記サブゴール点に関連付けられた前記教示速度との比(再現走行速度/教示速度)に基づいて、前記自律走行経過時刻の進行を調整する、
請求項1に記載の自律走行台車。 - 前記再現走行指令算出部は、前記自律走行経過時刻が前記走行経路データにおける前記到達時刻に到達したときに、前記再現走行制御指令を算出する請求項1に記載の自律走行台車。
- 前記再現走行速度調整部が前記再現走行速度を0とした場合、前記自律走行経過時刻計数部は、前記自律走行経過時刻の計数を停止する、請求項1に記載の自律走行台車。
- 前記走行経路データは、前記複数のサブゴール点のそれぞれにおける前記走行部の速度を、前記複数のサブゴール点のそれぞれに関連付けて記憶している、請求項1〜4のいずれかに記載の自律走行台車。
- 操作者の操作により前記走行経路データを教示する手動操作教示モードの実行時に、前記手動操作教示モードの開始時からの時刻である教示経過時刻を計数する教示経過時刻計数部と、
前記手動操作教示モードの実行時に、操作者の操作により通過した走行経路上の教示サブゴール点と、前記教示サブゴール点を取得した時の前記教示経過時刻と、を関連づけて記憶して前記走行経路データを作製する教示データ作製部と、
をさらに備える請求項1〜5のいずれかに記載の自律走行台車。 - 前記教示データ作製部は、前記教示サブゴール点における前記走行部の速度である教示速度を、前記教示サブゴール点と関連付けて前記走行経路データに記憶する、請求項6に記載の自律走行台車。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014028512A JP6340812B2 (ja) | 2014-02-18 | 2014-02-18 | 自律走行台車 |
| US15/118,129 US9846434B2 (en) | 2014-02-18 | 2015-02-06 | Autonomous travel vehicle and reproduction travel method |
| EP15752333.3A EP3109721B1 (en) | 2014-02-18 | 2015-02-06 | Autonomous travel carriage |
| PCT/JP2015/053331 WO2015125627A1 (ja) | 2014-02-18 | 2015-02-06 | 自律走行台車及び再現走行方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014028512A JP6340812B2 (ja) | 2014-02-18 | 2014-02-18 | 自律走行台車 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015153303A JP2015153303A (ja) | 2015-08-24 |
| JP2015153303A5 JP2015153303A5 (ja) | 2017-03-02 |
| JP6340812B2 true JP6340812B2 (ja) | 2018-06-13 |
Family
ID=53878136
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014028512A Active JP6340812B2 (ja) | 2014-02-18 | 2014-02-18 | 自律走行台車 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9846434B2 (ja) |
| EP (1) | EP3109721B1 (ja) |
| JP (1) | JP6340812B2 (ja) |
| WO (1) | WO2015125627A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9717387B1 (en) * | 2015-02-26 | 2017-08-01 | Brain Corporation | Apparatus and methods for programming and training of robotic household appliances |
| US11087291B2 (en) * | 2015-11-24 | 2021-08-10 | Honda Motor Co., Ltd.. | Action planning and execution support device |
| US9707961B1 (en) * | 2016-01-29 | 2017-07-18 | Ford Global Technologies, Llc | Tracking objects within a dynamic environment for improved localization |
| DE102016212009A1 (de) * | 2016-07-01 | 2018-01-04 | Ford Global Technologies, Llc | Verfahren zum Betrieb eines selbstfahrenden Kraftfahrzeugs und autonome Fahreinheit für ein selbstfahrendes Kraftfahrzeug |
| JP7019947B2 (ja) * | 2016-12-19 | 2022-02-16 | 富士フイルムビジネスイノベーション株式会社 | 移動装置 |
| CA3027627C (en) * | 2017-07-13 | 2021-08-10 | Beijing Didi Infinity Technology And Development Co., Ltd. | Systems and methods for trajectory determination |
| KR102335632B1 (ko) * | 2017-09-07 | 2021-12-07 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| JP6580656B2 (ja) * | 2017-11-02 | 2019-09-25 | 本田技研工業株式会社 | 車両制御装置 |
| JP6907896B2 (ja) * | 2017-11-17 | 2021-07-21 | トヨタ自動車株式会社 | 自動運転システム |
| CN111413957B (zh) | 2018-12-18 | 2021-11-02 | 北京航迹科技有限公司 | 用于确定自动驾驶中的驾驶动作的系统和方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08326025A (ja) | 1995-05-31 | 1996-12-10 | Tokico Ltd | 清掃ロボット |
| JP2000029517A (ja) * | 1998-07-10 | 2000-01-28 | Fuji Heavy Ind Ltd | 自律走行車の走行制御装置 |
| JP4433618B2 (ja) | 2001-01-30 | 2010-03-17 | 日本電気株式会社 | ロボット制御装置、ロボットの制御方法及びロボット |
| JP2004171453A (ja) * | 2002-11-22 | 2004-06-17 | Sanyo Electric Co Ltd | 搬送装置 |
| JP2004171430A (ja) * | 2002-11-22 | 2004-06-17 | Sanyo Electric Co Ltd | 搬送車 |
| JP2006155349A (ja) * | 2004-11-30 | 2006-06-15 | Sony Corp | 追尾方法、追尾装置、追尾システム及び追尾プログラム |
| US8577538B2 (en) * | 2006-07-14 | 2013-11-05 | Irobot Corporation | Method and system for controlling a remote vehicle |
| US20140277900A1 (en) * | 2006-03-17 | 2014-09-18 | Raj V. Abhyanker | Mapping search engine offering sidewalk maps |
| JP2008217741A (ja) * | 2007-03-08 | 2008-09-18 | Kenwood Corp | 移動機器の移動設定方法および移動設定システム |
| US8126642B2 (en) * | 2008-10-24 | 2012-02-28 | Gray & Company, Inc. | Control and systems for autonomously driven vehicles |
| JP5539596B2 (ja) * | 2011-09-29 | 2014-07-02 | パナソニック株式会社 | 自律移動装置、自律移動方法、及び、自律移動装置用のプログラム |
| JP6340824B2 (ja) * | 2014-02-25 | 2018-06-13 | 村田機械株式会社 | 自律走行台車 |
-
2014
- 2014-02-18 JP JP2014028512A patent/JP6340812B2/ja active Active
-
2015
- 2015-02-06 EP EP15752333.3A patent/EP3109721B1/en active Active
- 2015-02-06 US US15/118,129 patent/US9846434B2/en active Active
- 2015-02-06 WO PCT/JP2015/053331 patent/WO2015125627A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| US20170168492A1 (en) | 2017-06-15 |
| EP3109721B1 (en) | 2020-04-22 |
| EP3109721A1 (en) | 2016-12-28 |
| US9846434B2 (en) | 2017-12-19 |
| WO2015125627A1 (ja) | 2015-08-27 |
| EP3109721A4 (en) | 2017-09-20 |
| JP2015153303A (ja) | 2015-08-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6340812B2 (ja) | 自律走行台車 | |
| JP6340824B2 (ja) | 自律走行台車 | |
| JP6263970B2 (ja) | 自律走行台車、及び、予定走行経路データのデータ構造 | |
| EP3047782B1 (en) | Autonomously traveling floor washer, cleaning schedule data structure, storage medium, method for creating cleaning schedule, and program | |
| JP4467534B2 (ja) | 障害物のある環境下で自律移動する移動ロボットおよび移動ロボットの制御方法。 | |
| EP3705968B1 (en) | Robot path prediction and control method | |
| JP2017211825A (ja) | 自己位置推定装置、及び、自己位置推定方法 | |
| JP6402436B2 (ja) | 自律走行台車、予定走行経路データの加工方法、及びプログラム | |
| WO2014181647A1 (ja) | 自律移動体の移動制御装置、自律移動体、及び自律移動体の制御方法 | |
| JP2010160735A (ja) | 移動ロボット、走行計画マップ生成方法、管理システム | |
| JP2021503334A (ja) | 自律移動ロボットによる床の処理 | |
| JP4467533B2 (ja) | 折線追従移動ロボットおよび折線追従移動ロボットの制御方法 | |
| Zhang et al. | Obstacle avoidance of two-wheeled mobile robot based on DWA algorithm | |
| JP6171541B2 (ja) | 自律移動体の移動制御装置、自律移動体、及び自律移動体の制御方法 | |
| JP6540917B1 (ja) | 自走装置、自走装置の走行制御方法及び走行制御プログラム | |
| Zeng et al. | Collision avoidance for nonholonomic mobile robots among unpredictable dynamic obstacles including humans | |
| JP6801243B2 (ja) | 移動目標決定装置、及び、移動目標決定方法 | |
| JP2022013243A (ja) | 移動体制御装置、地図生成方法、及び地図生成プログラム | |
| Ranasinghe et al. | Development of a Lightweight, Low-cost, Self-balancing Personal Mobility Vehicle for Autonomous Indoor Navigation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170926 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180417 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180430 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6340812 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |