JP2019189221A - 自動運転制御装置 - Google Patents
自動運転制御装置 Download PDFInfo
- Publication number
- JP2019189221A JP2019189221A JP2019114304A JP2019114304A JP2019189221A JP 2019189221 A JP2019189221 A JP 2019189221A JP 2019114304 A JP2019114304 A JP 2019114304A JP 2019114304 A JP2019114304 A JP 2019114304A JP 2019189221 A JP2019189221 A JP 2019189221A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- mode
- automatic
- driver
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims description 24
- 238000000034 method Methods 0.000 description 186
- 230000008569 process Effects 0.000 description 164
- 230000006870 function Effects 0.000 description 111
- 238000004891 communication Methods 0.000 description 84
- 238000012790 confirmation Methods 0.000 description 66
- 238000012545 processing Methods 0.000 description 25
- 238000012423 maintenance Methods 0.000 description 19
- 230000008859 change Effects 0.000 description 16
- 230000000994 depressogenic effect Effects 0.000 description 14
- 238000010276 construction Methods 0.000 description 13
- 230000007704 transition Effects 0.000 description 9
- 230000033228 biological regulation Effects 0.000 description 7
- 230000005855 radiation Effects 0.000 description 7
- 230000002159 abnormal effect Effects 0.000 description 6
- 230000005856 abnormality Effects 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 230000006399 behavior Effects 0.000 description 4
- 230000001276 controlling effect Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000001629 suppression Effects 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 230000004913 activation Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 241000700605 Viruses Species 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000009191 jumping Effects 0.000 description 2
- 230000000737 periodic effect Effects 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 210000004243 sweat Anatomy 0.000 description 2
- 230000035900 sweating Effects 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 206010039203 Road traffic accident Diseases 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000008921 facial expression Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000006996 mental state Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/182—Selecting between different operative modes, e.g. comfort and performance modes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
Abstract
Description
(1)車両1の構成
図1Aに本実施形態の車両1の側面図、図1Bにその車両1の上面図を示す。ただし、図1A及び図1Bは、主に車両1における各種カメラ、レーダ、センサ等の配置状態を明示することを目的として、それらの配置状態を簡潔に図示している。
報を検出可能なレーダである。各レーダ装置11〜14で検出可能な物標情報としては、検出方向における物標の有無、物標までの距離、車両1を基準とした物標の方向、物標の移動速度(車両1に対する相対速度)などがある。
車両1の電気的構成について、図2を用いて具体的に説明する。図2に示すように、車両1は、自動運転制御部30を備えている。自動運転制御部30は、主として、モード切替機能と、自動運転機能とを有する。モード切替機能は、車両1の運転モードを高度自動化モード及び基本モードの何れかに設定する機能である。自動運転機能は、設定されている運転モードの自動運転レベル(図3A参照。詳細は後述。)に応じた自動運転を実行する機能である。自動運転制御部30は、後述するように、車両1の運転モードを、車両1の走行状態、車両1の周囲状況、車両1のドライバーの状態などの種々の要因に応じて適宜切り替える。
において自動化される運転動作の種類や数の度合いを示すパラメータを、以下、自動運転レベルと言う。完全自動運転は、一部自動運転よりも自動運転レベルは高い。また、一部自動運転にも、自動化される運転動作の種類や数に応じて様々なレベルがある。
自動運転レベルは、上記7種類の自動制御機能のうち実行させる機能が多いほど高いレベルとなる。具体的には、上記7種類の自動制御機能のいずれも実行されない場合の自動運転レベルはレベル0である。上記7種類の自動制御機能のうちn種類が実行される場合の自動運転レベルはレベルnである。したがって、レベル0の運転モードでは、7種類の自動制御機能に対応した制御動作をドライバー自らが判断し操作して行うことが必要となる。一方、レベル1〜レベル6の運転モードは、一部自動運転が行われる運転モードである。レベル7の運転モードは、完全自動運転が行われる運転モードである。
動させないようにする処理も含まれる。その他、不正対応処理の具体的内容は種々考えられ、例えば、ドライバーに対して音声等による警告を出力するようにしてもよいし、車両1を強制的に減速或いは停止させるようにしてもよい。また、自動運転制御部30と各通信部31〜35との接続を物理的に遮断して、外部から自動運転制御部30への無線通信を介したアクセスができなくなるようにしてもよい。
を装着しているか否かを検出するためのセンサである。ベルトセンサ26は、図2では図示の簡略化のために1つのみ図示しているが、実際には、各座席のシートベルトごとに個別に設けられている。具体的に、乗車定員がN人の車両1の場合、N箇所の座席ごとに個別にシートベルトが設けられており、それら各シートベルトに対して個別にベルトセンサ26が設けられている。
通信エリア内を走行中の車両の進行方向に関する各種の道路交通情報である。各路上通信機81は、サーバから送信されてきた個別道路情報を所定の通信エリア内に無線送信する。
)することで、種々の入力操作を行うことができる。
れるアクセルペダル27aの踏み込み量、シフトレバー(不図示)の操作位置、車速、エンジン回転数などの各種情報に基づいて、不図示のエンジンや変速装置を制御することにより、車両1の走行を制御する。一方、運転モードが高度自動化モードに設定されている場合(詳しくは上記7種類の自動制御機能の何れかが実行される場合)は、自動運転制御部30は、その実行対象の自動制御機能を実現するために必要な制御情報を走行駆動制御部27に出力する。この場合、走行駆動制御部27は、アクセルペダル27aが踏み込まれていなくても、自動運転制御部30からの制御情報に応じてエンジンや変速装置を制御する。なお、本実施形態の車両1は、走行用の駆動源としてエンジンを備えているが、本開示の自動運転制御装置は、エンジン以外の走行用駆動源を備えた車両に対しても適用できる。その場合、図2に示した走行駆動制御部27は、その車両の走行用駆動源を制御する機能を担う。
本実施形態の車両1において、自動運転制御部30は、上述した自動運転機能を実現するために必要な各種情報を取得、検出することができる。
、衝突抑止制御、及び駐車制御である。
られる周囲移動物体に関する情報、車車間通信により得られる他車両の情報、歩車間通信により得られる歩行者等の情報などを用いて行われる。
自動運転制御部30は、自動運転起動SW42が押された場合、必ずしも、自動運転停止SW43が押されるまで(或いは目的地に到達するまで)常に高度自動化モードで動作するわけではない。自動運転制御部30の演算部30aは、自動運転起動SW42が押されると、図5に示すメイン処理を実行することで、高度自動化モードと基本モードの切り替えを行う。つまり、演算部30aが図5のメイン処理を実行することで、モード切替機能が実現される。
NO)、S130に進んで初期自動切替確認処理を実行する。メイン処理の開始後すでに初期自動切替確認処理を実行済みの場合は(S120:YES)、S140で、起動後に走行を実施したか否か判断する。運転モード如何にかかわらず起動後に少しでも走行した場合は(S140:YES)、S150に進んで通常時自動切替確認処理を実行する。起動後まだ少しも走行していない場合は(S140:NO)、S160に進む。通常時自動切替確認処理は、車両1の運転モードを基本モードから高度自動化モードに切り替え可能か否かを判断するための自動切替確認処理の1つであって、すでに初期自動切替確認処理が実行済みの場合に実行される自動切替確認処理である。
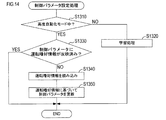
S320では、S310の確認結果に基づいて、高度自動化モードへの切り替えの可否を判断する。例えば、S310で第1の判断方法を用いた場合に、ハンドル20を握っていて且つブレーキペダル28aを踏んでいると判断した場合は、高度自動化モードへの切り替えが可能と判断するようにしてもよい。その際、着座センサ25からの検出信号に基づいてドライバーが運転席に着座しているか否かの判断も併せて行い、ドライバーが運転席に着座している場合に、高度自動化モードへの切り替えが可能と判断するようにしてもよい。また例えば、S310で第2の判断方法を用いた場合に、走行時の運転操作が正常と判断した場合は、高度自動化モードへの切り替えが可能と判断するようにしてもよい。その際も、着座センサ25からの検出信号に基づいてドライバーが運転席に着座しているか否かの判断も併せて行い、ドライバーが運転席に着座している場合に、高度自動化モードへの切り替えが可能と判断するようにしてもよい。なお、S310で確認した操作状態が、S320において高度自動化モードへ切り替え可能と判断されるような状態であることは、基本モード切替条件の一例である。
か否か判断する。S320で高度自動化モードへの切り替えが可能と判断された場合は(S330:YES)、S335に進む。
車両1が安定した状態であることを確認した上で行うようにするのだが、一方で、ドライバーが車両1を正常に運転できない(或いはしていない)状態の場合には、その状態によっては、むしろ強制的に高度自動化モードに切り替えて車両1を適切に走行させる必要がある。そこで、S420以下では、ドライバーが車両1を正常に運転できない状況にある場合には高度自動化切替フラグをセットするようにしている。
切替フラグがセットされていない(クリアされている)場合は(S160:NO)、S200に進む。高度自動化切替フラグがセットされている場合は(S160:YES)、S170で、運転モードを高度自動化モードに設定して、目的地への自動運転を開始する。S170では、より具体的には、運転モードを高度自動化モードに設定すると共に、高度自動化モードとして設定されている自動運転レベルに基づく自動制御機能を実行する。例えば、高度自動化モードとしてレベル6が設定されている場合は、制御A〜Fの6種類の自動制御機能(図3A参照)を実行する。また例えば、高度自動化モードとしてレベル7が設定されている場合は、制御A〜Gの7種類の自動制御機能を全て実行することで、完全自動運転を実現する。なお、自動制御機能の実行は、前述の周囲情報を含む各種情報を必要に応じて取得しながら、それら取得した各種情報に基づいて行われる。
S35では、自動運転停止SW43がオンされたか否か判断する。自動運転停止SW43がオンされた場合は(S35:YES)、S40で上記各フラグ(後述する強制停止フラグも含む)を全てクリアし、S45で運転モードを基本モードに設定して、S15に戻る。S45では、S10と同様、運転モードを基本モードに設定し、基本モードとして設定されている自動運転レベルに基づく自動制御機能を実行する。
(S60:NO)、S30に戻る。緊急停止SW44がオンされたか又は強制停止フラグがセットされている場合は(S60:YES)、S65で、S40と同様に既述の全てのフラグをクリアする。そして、S70で、強制停止処理を実行して、車両1を強制停止させ、メイン処理を終了する。以後、次にまたメイン処理を実行させるためには、少なくとも、起動スイッチを再投入(例えばイグニションスイッチを一旦オフして再びオン)する必要がある。なお、S70の強制停止処理は、車両1を自動で強制的に停車させる処理である。具体的にどのように停車させるかについては適宜決めてもよい。例えば、走行中の道路上ですぐに減速させて停車させるようにしてもよい。また例えば、道路上に停車させるのではなく、道路以外で車両1を停車させることが可能な場所(例えば車両近傍の駐車場)までは自動で走行させて停車させるようにしてもよい。
以上説明した本実施形態の車両1によれば、運転モードとして高度自動化モードと基本モードを有し、高度自動化モード中、基本モードに移行すべき(或いは移行してもよい)条件が成立した場合は基本モードに切り替わる。そのため、高度自動化モードから基本モードへの切り替えを適切なタイミングで行うことが可能となる。逆に、基本モード中、高度自動化モードに移行すべき(或いは移行してもよい)条件が成立した場合は高度自動化モードに切り替わる。そのため、基本モードから高度自動化モードへの切り替えを適切なタイミングで行うことが可能となる。
(1)図6のS200の基本モード切替確認処理として、図10に示した処理とは別に、或いは図10に示した処理に加えて、他の種々の内容を採用することができる。
った場合に幅寄せしてきたと判断してもよい。
に基づいて行うことができる。この判断の具体的方法は適宜決めてもよい。例えば、自車両が走行している車線内における自車両前方に他の車両が進入してきた場合に、割り込みありと判断してもよい。その際、単に進入してきただけでなく、進入した状態が規定時間以上継続している場合に割り込みありと判断してもよい。
つである車速を現在の値よりも高い値に変更するようにしてもよい。
30bに記憶する処理である。
る場合は、制御パラメータとして、例えば予め設定されたデフォルト値を用いるようにしてもよい。また、既に記憶されている運転嗜好情報をドライバーが任意に消去できるようにしてもよい。また、高度自動化モードから基本モードに切り替わった場合には各制御パラメータがデフォルト値にリセットされるようにしてもよい。
(11)その他、上記実施形態における1つの構成要素が有する機能を複数の構成要素として分散させたり、複数の構成要素が有する機能を1つの構成要素に統合したりしてもよい。また、上記実施形態の構成の少なくとも一部を、同様の機能を有する公知の構成に置き換えてもよい。また、上記実施形態の構成の一部を、課題を解決できる限りにおいて省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加、置換等してもよい。なお、特許請求の範囲に記載の文言から特定される技術思想に含まれるあらゆる態様が本開示の実施形態である。
以上詳述した種々の実施形態から、少なくとも以下の技術思想が把握される。
具体的に、次の(A)のように構成された本開示の自動運転制御装置を、更に、次の(B)〜(E)のように構成してもよい。
(A)車両に搭載される自動運転制御装置であって、
前記車両の周囲の情報である周囲情報を取得するように構成された周囲情報取得部と、
前記車両の運転モードを、前記車両の走行に必要な複数種類の運転動作の一部又は全てを前記周囲情報に基づいて自動で実行する高度自動化モード、及び、前記自動で実行する前記運転動作の種類が前記高度自動化モードよりも少ないか若しくはゼロである基本モード、の何れか一方に設定するように構成された運転モード設定部と、
前記運転モード設定部により設定された前記運転モードに基づき、その運転モードにおいて前記自動で実行するように設定されている前記運転動作を実行するように構成された自動制御部と、
を備え、
前記運転モード設定部は、前記運転モードが前記高度自動化モードに設定されている場合に、予め設定した基本モード切替条件が成立した場合、前記運転モードを前記基本モードに切り替えるように構成されている、
自動運転制御装置。
(B)上記(A)において、
前記運転モードが前記高度自動化モードに設定されている場合に、予め設定した基本モード切替条件が成立した場合、前記車両の運転者に対して、前記運転モードが前記基本モ
ードに切り替わることを知らせるための特定の報知を行うように構成された切替報知部を備える、自動運転制御装置。
(C)上記(A)又は(B)において、
前記運転モードが前記高度自動化モードに設定されている場合に、予め設定した基本モード切替条件が成立した場合、前記車両の運転者が規定動作を行っているか否か判断するように構成された規定動作判断部を備え、
前記運転モード設定部は、前記運転モードが前記高度自動化モードに設定されている場合に、予め設定した基本モード切替条件が成立した場合、前記規定動作判断部によって前記運転者が前記規定動作を行っていると判断された場合に、前記運転モードを前記基本モードに切り替えるように構成されている、
自動運転制御装置。
(D)上記(A)〜(C)の何れか1つにおいて、
前記運転モードが前記高度自動化モードに設定されている間、前記車両の運転者に対する特定の確認動作の要求を特定のタイミングで繰り返し行うように構成された確認動作要求部と、
前記確認動作要求部により前記確認動作の要求が行われる度に、前記運転者により前記確認動作が行われたか否か判断するように構成された確認動作判断部と、
前記確認動作判断部により前記確認動作が行われたと判断されなかった場合に、前記車両を停車させるように構成された停車部と、
を備える、自動運転制御装置。
(E)上記(A)〜(D)の何れか1つにおいて、
前記運転モードが前記高度自動化モードに設定されている場合にその旨を前記車両の外部に報知するように構成された車外報知部を備える、自動運転制御装置。
Claims (3)
- 車両に搭載される自動運転制御装置であって、
前記車両の周囲の情報である周囲情報を取得するように構成された周囲情報取得部と、
前記車両の運転モードを、前記車両の走行に必要な複数種類の運転動作の一部又は全てを前記周囲情報に基づいて自動で実行する高度自動化モード、及び、前記自動で実行する前記運転動作の種類が前記高度自動化モードよりも少ないか若しくはゼロである基本モード、の何れか一方に設定するように構成された運転モード設定部と、
前記運転モード設定部により設定された前記運転モードに基づき、その運転モードにおいて前記自動で実行するように設定されている前記運転動作を実行するように構成された自動制御部と、
を備え、
前記運転モード設定部は、前記車両の乗員がシートベルトを装着しているか否かを判断するように構成され、
前記運転モード設定部は、前記運転モードが前記高度自動化モードに設定されていると
きに、前記乗員が前記シートベルトを装着していないと前記運転モード設定部が判断すると、前記運転モードを前記基本モードに切り替えるように構成されている、
自動運転制御装置。 - 請求項1に記載の自動運転制御装置であって、
前記運転モード設定部は、特定の座席の乗員が前記シートベルトを装着しているか否かを判断するように構成されている、
自動運転制御装置。 - 請求項1または2に記載の自動運転制御装置であって、
前記運転モード設定部は、前記車両の座席に前記乗員が座っているか否かを検出するための着座センサからの検出信号と、前記座席に座っている前記乗員が前記シートベルトを装着しているか否かを検出するためのベルトセンサからの検出信号とに基づいて、前記乗員が前記シートベルトを装着しているか否かを判断するように構成されている、
自動運転制御装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014201407 | 2014-09-30 | ||
| JP2014201407 | 2014-09-30 | ||
| JP2018203031A JP2019050005A (ja) | 2014-09-30 | 2018-10-29 | 自動運転制御装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018203031A Division JP2019050005A (ja) | 2014-09-30 | 2018-10-29 | 自動運転制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019189221A true JP2019189221A (ja) | 2019-10-31 |
| JP6951612B2 JP6951612B2 (ja) | 2021-10-20 |
Family
ID=55630534
Family Applications (27)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016552064A Active JP6432948B2 (ja) | 2014-09-30 | 2015-09-29 | 自動運転制御装置 |
| JP2018203031A Pending JP2019050005A (ja) | 2014-09-30 | 2018-10-29 | 自動運転制御装置 |
| JP2018203030A Active JP6593730B2 (ja) | 2014-09-30 | 2018-10-29 | 自動運転制御装置 |
| JP2019114307A Active JP6807496B2 (ja) | 2014-09-30 | 2019-06-20 | 自動運転制御装置及び車両 |
| JP2019114305A Active JP6893611B2 (ja) | 2014-09-30 | 2019-06-20 | 自動運転制御装置及び車両 |
| JP2019114304A Active JP6951612B2 (ja) | 2014-09-30 | 2019-06-20 | 自動運転制御装置及び車両 |
| JP2019114306A Active JP6893602B2 (ja) | 2014-09-30 | 2019-06-20 | 自動運転制御装置及び車両 |
| JP2019114303A Pending JP2019189220A (ja) | 2014-09-30 | 2019-06-20 | 自動運転制御装置 |
| JP2019169945A Active JP6976592B2 (ja) | 2014-09-30 | 2019-09-19 | 自動運転制御装置及び車両 |
| JP2019201651A Active JP6857418B2 (ja) | 2014-09-30 | 2019-11-06 | 自動運転制御装置及び車両 |
| JP2019201645A Active JP6851645B2 (ja) | 2014-09-30 | 2019-11-06 | 自動運転制御装置及び車両 |
| JP2020006735A Active JP6948728B2 (ja) | 2014-09-30 | 2020-01-20 | 自動運転制御装置及び車両 |
| JP2020010760A Active JP6998073B2 (ja) | 2014-09-30 | 2020-01-27 | 自動運転制御装置及び車両 |
| JP2020018016A Active JP6940188B2 (ja) | 2014-09-30 | 2020-02-05 | 自動運転制御装置及び車両 |
| JP2020109888A Active JP7093909B2 (ja) | 2014-09-30 | 2020-06-25 | 自動運転制御装置及び車両 |
| JP2021037384A Active JP7082265B2 (ja) | 2014-09-30 | 2021-03-09 | 自動運転制御装置及び車両 |
| JP2021041580A Active JP7049011B2 (ja) | 2014-09-30 | 2021-03-15 | 自動運転制御装置及び車両 |
| JP2021081757A Active JP7203448B2 (ja) | 2014-09-30 | 2021-05-13 | 自動運転制御装置及び車両 |
| JP2021142996A Active JP7345894B2 (ja) | 2014-09-30 | 2021-09-02 | 自動運転制御装置及び車両 |
| JP2021170296A Active JP7253840B2 (ja) | 2014-09-30 | 2021-10-18 | 自動運転制御装置及び車両 |
| JP2022004466A Pending JP2022058625A (ja) | 2014-09-30 | 2022-01-14 | 自動運転制御装置及び車両 |
| JP2022004459A Pending JP2022058624A (ja) | 2014-09-30 | 2022-01-14 | 自動運転制御装置及び車両 |
| JP2022005635A Active JP7270307B2 (ja) | 2014-09-30 | 2022-01-18 | 自動運転制御装置及び車両 |
| JP2023007403A Pending JP2023052552A (ja) | 2014-09-30 | 2023-01-20 | 自動運転制御装置及び車両 |
| JP2023117492A Pending JP2023156310A (ja) | 2014-09-30 | 2023-07-19 | 自動運転制御装置及び車両 |
| JP2023117491A Active JP7470275B2 (ja) | 2014-09-30 | 2023-07-19 | 自動運転制御装置 |
| JP2023134596A Active JP7565110B2 (ja) | 2014-09-30 | 2023-08-22 | 車両 |
Family Applications Before (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016552064A Active JP6432948B2 (ja) | 2014-09-30 | 2015-09-29 | 自動運転制御装置 |
| JP2018203031A Pending JP2019050005A (ja) | 2014-09-30 | 2018-10-29 | 自動運転制御装置 |
| JP2018203030A Active JP6593730B2 (ja) | 2014-09-30 | 2018-10-29 | 自動運転制御装置 |
| JP2019114307A Active JP6807496B2 (ja) | 2014-09-30 | 2019-06-20 | 自動運転制御装置及び車両 |
| JP2019114305A Active JP6893611B2 (ja) | 2014-09-30 | 2019-06-20 | 自動運転制御装置及び車両 |
Family Applications After (21)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019114306A Active JP6893602B2 (ja) | 2014-09-30 | 2019-06-20 | 自動運転制御装置及び車両 |
| JP2019114303A Pending JP2019189220A (ja) | 2014-09-30 | 2019-06-20 | 自動運転制御装置 |
| JP2019169945A Active JP6976592B2 (ja) | 2014-09-30 | 2019-09-19 | 自動運転制御装置及び車両 |
| JP2019201651A Active JP6857418B2 (ja) | 2014-09-30 | 2019-11-06 | 自動運転制御装置及び車両 |
| JP2019201645A Active JP6851645B2 (ja) | 2014-09-30 | 2019-11-06 | 自動運転制御装置及び車両 |
| JP2020006735A Active JP6948728B2 (ja) | 2014-09-30 | 2020-01-20 | 自動運転制御装置及び車両 |
| JP2020010760A Active JP6998073B2 (ja) | 2014-09-30 | 2020-01-27 | 自動運転制御装置及び車両 |
| JP2020018016A Active JP6940188B2 (ja) | 2014-09-30 | 2020-02-05 | 自動運転制御装置及び車両 |
| JP2020109888A Active JP7093909B2 (ja) | 2014-09-30 | 2020-06-25 | 自動運転制御装置及び車両 |
| JP2021037384A Active JP7082265B2 (ja) | 2014-09-30 | 2021-03-09 | 自動運転制御装置及び車両 |
| JP2021041580A Active JP7049011B2 (ja) | 2014-09-30 | 2021-03-15 | 自動運転制御装置及び車両 |
| JP2021081757A Active JP7203448B2 (ja) | 2014-09-30 | 2021-05-13 | 自動運転制御装置及び車両 |
| JP2021142996A Active JP7345894B2 (ja) | 2014-09-30 | 2021-09-02 | 自動運転制御装置及び車両 |
| JP2021170296A Active JP7253840B2 (ja) | 2014-09-30 | 2021-10-18 | 自動運転制御装置及び車両 |
| JP2022004466A Pending JP2022058625A (ja) | 2014-09-30 | 2022-01-14 | 自動運転制御装置及び車両 |
| JP2022004459A Pending JP2022058624A (ja) | 2014-09-30 | 2022-01-14 | 自動運転制御装置及び車両 |
| JP2022005635A Active JP7270307B2 (ja) | 2014-09-30 | 2022-01-18 | 自動運転制御装置及び車両 |
| JP2023007403A Pending JP2023052552A (ja) | 2014-09-30 | 2023-01-20 | 自動運転制御装置及び車両 |
| JP2023117492A Pending JP2023156310A (ja) | 2014-09-30 | 2023-07-19 | 自動運転制御装置及び車両 |
| JP2023117491A Active JP7470275B2 (ja) | 2014-09-30 | 2023-07-19 | 自動運転制御装置 |
| JP2023134596A Active JP7565110B2 (ja) | 2014-09-30 | 2023-08-22 | 車両 |
Country Status (2)
| Country | Link |
|---|---|
| JP (27) | JP6432948B2 (ja) |
| WO (1) | WO2016052507A1 (ja) |
Families Citing this family (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017175377A1 (ja) * | 2016-04-08 | 2017-10-12 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| CN109074730B (zh) * | 2016-04-13 | 2022-03-11 | 本田技研工业株式会社 | 车辆控制系统、车辆控制方法及存储介质 |
| CN108885828B (zh) * | 2016-04-15 | 2021-08-17 | 本田技研工业株式会社 | 车辆控制系统、车辆控制方法及存储介质 |
| JPWO2017179193A1 (ja) * | 2016-04-15 | 2018-10-18 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| JP6772527B2 (ja) * | 2016-04-27 | 2020-10-21 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6497353B2 (ja) * | 2016-04-28 | 2019-04-10 | トヨタ自動車株式会社 | 自動運転制御装置 |
| JP6358585B2 (ja) * | 2016-04-28 | 2018-07-18 | 本田技研工業株式会社 | 車両制御システム、交通制御システム、車両制御方法、および車両制御プログラム |
| US10909631B2 (en) | 2016-05-06 | 2021-02-02 | Sony Corporation | Information processing apparatus and method |
| JP6569596B2 (ja) * | 2016-05-20 | 2019-09-04 | トヨタ自動車株式会社 | 車両 |
| JP2018052445A (ja) * | 2016-09-30 | 2018-04-05 | 株式会社Subaru | 車両の衝突入力低減装置 |
| US10241511B2 (en) * | 2016-11-03 | 2019-03-26 | Ford Global Technologies, Llc | Emergency evacuation using autonomous driving |
| JP6428746B2 (ja) * | 2016-11-07 | 2018-11-28 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| US11235782B2 (en) | 2016-11-10 | 2022-02-01 | Honda Motor Co., Ltd. | Vehicle control system, vehicle control method, and vehicle control program |
| CN109982908B (zh) * | 2016-11-21 | 2022-03-29 | 本田技研工业株式会社 | 车辆控制装置和车辆控制方法 |
| JP6686869B2 (ja) * | 2016-12-22 | 2020-04-22 | 株式会社デンソー | 運転交代制御装置、及び運転交代制御方法 |
| JP6705388B2 (ja) | 2017-01-25 | 2020-06-03 | トヨタ自動車株式会社 | 自動運転システム |
| KR101995892B1 (ko) * | 2017-02-10 | 2019-07-04 | 주식회사 더로카 | 맞춤형 ui 제공 자율 주행 차량의 주행 정보를 표시하는 방법, 이를 위한 차량용 단말 및 관리자 단말 |
| JP2018151902A (ja) * | 2017-03-14 | 2018-09-27 | オムロン株式会社 | 集中度判定装置、集中度判定方法及び集中度判定のためのプログラム |
| JP6441399B2 (ja) * | 2017-03-17 | 2018-12-19 | 本田技研工業株式会社 | 運転支援装置、運転支援方法及びプログラム |
| JP6509940B2 (ja) * | 2017-05-10 | 2019-05-08 | 本田技研工業株式会社 | 運転支援装置および運転支援方法 |
| JP6760221B2 (ja) * | 2017-07-04 | 2020-09-23 | 株式会社デンソー | 制御装置 |
| KR101794310B1 (ko) | 2017-08-28 | 2017-11-07 | 공간정보기술 주식회사 | 스테레오 카메라를 이용한 교차로 이동 객체 충돌 방지시스템 |
| EP3700794B1 (en) * | 2017-10-03 | 2021-03-31 | Google LLC | Vehicle function control with sensor based validation |
| JP2019073069A (ja) * | 2017-10-12 | 2019-05-16 | 京セラ株式会社 | 車両、判定方法及び判定プログラム |
| JP6903381B2 (ja) * | 2017-12-18 | 2021-07-14 | ジヤトコ株式会社 | 自動運転車両 |
| CN111587198A (zh) | 2018-01-17 | 2020-08-25 | 三菱电机株式会社 | 驾驶控制装置、驾驶控制方法及驾驶控制程序 |
| WO2019150525A1 (ja) | 2018-02-01 | 2019-08-08 | 本田技研工業株式会社 | 車両制御装置、車両、および車両制御方法 |
| JP6947099B2 (ja) | 2018-03-27 | 2021-10-13 | 日本電気株式会社 | 余所見判定装置、余所見判定システム、余所見判定方法、プログラム |
| JP6844568B2 (ja) | 2018-03-27 | 2021-03-17 | 日本電気株式会社 | 余所見判定装置、余所見判定システム、余所見判定方法、プログラム |
| WO2020003788A1 (ja) * | 2018-06-25 | 2020-01-02 | パナソニックIpマネジメント株式会社 | 運転支援装置 |
| JP7182113B2 (ja) * | 2018-10-09 | 2022-12-02 | パナソニックIpマネジメント株式会社 | 車両および停止スイッチ装置 |
| JP7054667B2 (ja) * | 2018-10-23 | 2022-04-14 | 株式会社京三製作所 | 道路交通制御システム |
| JP6603781B2 (ja) * | 2018-11-16 | 2019-11-06 | 本田技研工業株式会社 | 運転支援装置 |
| US10824148B2 (en) * | 2018-12-14 | 2020-11-03 | Waymo Llc | Operating an autonomous vehicle according to road user reaction modeling with occlusions |
| JP7151566B2 (ja) * | 2019-03-14 | 2022-10-12 | トヨタ自動車株式会社 | 車両走行制御装置 |
| CN112055327B (zh) * | 2019-06-05 | 2022-09-16 | 华为技术有限公司 | 自动驾驶信息指示方法、自动驾驶信息获取方法、自动驾驶信息发送方法及装置 |
| JP6990687B2 (ja) * | 2019-06-24 | 2022-01-12 | 本田技研工業株式会社 | 駐車支援システム |
| WO2021181855A1 (ja) | 2020-03-12 | 2021-09-16 | 株式会社ワコム | 位置検出センサ及び位置検出センサの製法 |
| CN113492828A (zh) * | 2020-03-20 | 2021-10-12 | 罗伯特·博世有限公司 | 车辆控制方法及设备 |
| CN115443495A (zh) * | 2020-04-01 | 2022-12-06 | 株式会社电装 | 提示控制装置以及提示控制程序 |
| JP7338653B2 (ja) * | 2020-04-01 | 2023-09-05 | 株式会社デンソー | 提示制御装置及び提示制御プログラム |
| CN114194207B (zh) * | 2020-09-17 | 2024-03-15 | 华为技术有限公司 | 一种自动驾驶方法、ads及自动驾驶车辆 |
| JP7471184B2 (ja) * | 2020-09-23 | 2024-04-19 | 株式会社日本総合研究所 | プログラム、情報処理方法および情報処理装置 |
| JP7008785B1 (ja) * | 2020-12-28 | 2022-01-25 | 昂志 坂本 | 衝突防止システム |
| JP2022134915A (ja) * | 2021-03-04 | 2022-09-15 | 株式会社Jvcケンウッド | 検知機能制御装置、検知機能制御方法、及びプログラム |
| JPWO2022249469A1 (ja) * | 2021-05-28 | 2022-12-01 | ||
| JP7528142B2 (ja) * | 2022-03-22 | 2024-08-05 | 本田技研工業株式会社 | 制御装置、制御方法、及び制御プログラム |
| JP7433354B2 (ja) * | 2022-03-23 | 2024-02-19 | 本田技研工業株式会社 | 制御装置、制御方法、およびプログラム |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060244632A1 (en) * | 2005-05-02 | 2006-11-02 | Mr. James Corcoran | Automatic Vehicle Collison Avoidance and Warning System |
| DE102006036458A1 (de) * | 2006-08-04 | 2008-02-07 | GM Global Technology Operations, Inc., Detroit | Sicherheitseinrichtung für ein Fahrzeug und Verfahren zum Betrieb eines Kraftfahrzeuges mit einer solchen Sicherheitseinrichtung |
| JP2008084004A (ja) * | 2006-09-27 | 2008-04-10 | Mazda Motor Corp | 車両用運転支援システム |
| JP2008162553A (ja) * | 2007-01-04 | 2008-07-17 | Toyota Motor Corp | 車両用制御装置 |
| JP2008290680A (ja) * | 2007-05-28 | 2008-12-04 | Toyota Motor Corp | 車両の自動運転装置 |
| JP2009157466A (ja) * | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | 近傍車両監視装置 |
| JP2014091380A (ja) * | 2012-11-01 | 2014-05-19 | Toyota Motor Corp | 運転走行支援装置 |
| JP2014106854A (ja) * | 2012-11-29 | 2014-06-09 | Toyota Infotechnology Center Co Ltd | 自動運転車両制御装置および方法 |
| JP2014154128A (ja) * | 2013-02-14 | 2014-08-25 | Mitsubishi Motors Corp | 緊急車両通行支援システム |
| WO2018163549A1 (ja) * | 2017-03-10 | 2018-09-13 | オムロン株式会社 | 運転制御動作支援装置、運転制御動作支援方法及び運転制御動作支援プログラム |
Family Cites Families (90)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0285634U (ja) * | 1988-12-22 | 1990-07-05 | ||
| JPH02120259U (ja) * | 1989-03-15 | 1990-09-27 | ||
| JPH07108849A (ja) * | 1993-10-13 | 1995-04-25 | Hitachi Ltd | 車の自動走行制御装置 |
| JP3708180B2 (ja) * | 1995-09-14 | 2005-10-19 | 富士重工業株式会社 | 自動ブレーキ制御装置 |
| JPH10962A (ja) * | 1996-06-13 | 1998-01-06 | Toyota Motor Corp | 追従走行制御装置 |
| JP3800719B2 (ja) * | 1997-05-06 | 2006-07-26 | 日本精工株式会社 | 電動式リニアアクチュエータ |
| JPH10309960A (ja) * | 1997-05-12 | 1998-11-24 | Toyota Motor Corp | 自動走行車両制御装置 |
| JPH1191397A (ja) * | 1997-09-22 | 1999-04-06 | Toyota Motor Corp | 自動走行車両制御装置 |
| JPH11321380A (ja) * | 1998-05-15 | 1999-11-24 | Fujitsu Ten Ltd | 車両群形成制御装置および方法 |
| JP3668829B2 (ja) * | 1998-06-03 | 2005-07-06 | トヨタ自動車株式会社 | ナビゲーション装置及び記録媒体 |
| JP2000113384A (ja) * | 1998-09-30 | 2000-04-21 | Honda Motor Co Ltd | 共用車両 |
| JP3094100B1 (ja) * | 1999-03-26 | 2000-10-03 | 建設省土木研究所長 | 自動運転制御装置 |
| JP3833845B2 (ja) * | 1999-04-21 | 2006-10-18 | 株式会社東芝 | 自動走行支援システム |
| JP3675235B2 (ja) | 1999-06-30 | 2005-07-27 | 日産自動車株式会社 | 車両用走行制御装置 |
| JP2001187175A (ja) * | 1999-12-28 | 2001-07-10 | Sanyo Electric Co Ltd | ゴルフカート |
| JP3758443B2 (ja) * | 2000-01-19 | 2006-03-22 | 日産自動車株式会社 | 走行状態提示装置 |
| JP2001249719A (ja) * | 2000-03-07 | 2001-09-14 | Atex Co Ltd | 作業車の走行制御装置 |
| JP4742451B2 (ja) * | 2000-07-11 | 2011-08-10 | トヨタ自動車株式会社 | 走行制御装置 |
| JP2002144912A (ja) * | 2000-11-13 | 2002-05-22 | Daihatsu Motor Co Ltd | 車間距離制御装置及び制御方法 |
| JP2002145020A (ja) | 2000-11-15 | 2002-05-22 | Teruya:Kk | 自動車盗難防止システム |
| JP3603018B2 (ja) | 2000-12-12 | 2004-12-15 | 独立行政法人科学技術振興機構 | 電気自動車の制御装置 |
| JP2002236993A (ja) * | 2001-02-09 | 2002-08-23 | Kddi Research & Development Laboratories Inc | 走行制御システム |
| JP2002251690A (ja) * | 2001-02-23 | 2002-09-06 | Toshiba Corp | 自動誘導制御システム |
| JP2002264826A (ja) * | 2001-03-09 | 2002-09-18 | Toyota Motor Corp | 移動体の自動運転装置 |
| JP4066609B2 (ja) * | 2001-03-19 | 2008-03-26 | 日産自動車株式会社 | 車両用走行制御装置の状態表示装置 |
| JP2003040132A (ja) * | 2001-07-27 | 2003-02-13 | Mitsubishi Motors Corp | 走行レーン逸脱防止装置 |
| JP2003067896A (ja) * | 2001-08-28 | 2003-03-07 | Hitachi Ltd | 車両制御装置 |
| JP2003123186A (ja) * | 2001-10-16 | 2003-04-25 | Toshiba Corp | 路車間通信を利用した配光制御システム |
| DE10218017A1 (de) * | 2002-04-23 | 2003-11-06 | Bosch Gmbh Robert | Verfahren zur Geschwindigkeits- und Abstandsregelung bei Kraftfahrzeugen |
| KR20040091788A (ko) * | 2003-04-22 | 2004-11-02 | 현대자동차주식회사 | 고속도로 자율주행 시스템 및 그의 제어방법 |
| JP4476575B2 (ja) | 2003-06-06 | 2010-06-09 | 富士通テン株式会社 | 車両状況判定装置 |
| US7561966B2 (en) * | 2003-12-17 | 2009-07-14 | Denso Corporation | Vehicle information display system |
| JP4305318B2 (ja) * | 2003-12-17 | 2009-07-29 | 株式会社デンソー | 車両情報表示システム |
| JP4203857B2 (ja) | 2004-03-01 | 2009-01-07 | 株式会社デンソー | 安全運転支援システム |
| JP4033153B2 (ja) | 2004-03-12 | 2008-01-16 | 株式会社日立製作所 | 車両走行制御装置 |
| JP2005271721A (ja) * | 2004-03-24 | 2005-10-06 | Denso Corp | 車両制御装置及びプログラム |
| JP2006064164A (ja) * | 2004-08-30 | 2006-03-09 | Calsonic Kansei Corp | 自動変速機のセレクトアシスト装置 |
| JP2005289357A (ja) | 2005-03-07 | 2005-10-20 | Equos Research Co Ltd | 車両用安全運転支援装置 |
| JP2006282073A (ja) * | 2005-04-01 | 2006-10-19 | Fujitsu Ten Ltd | 車両制御装置,車両制御システム及び車両制御方法 |
| JP2006347508A (ja) | 2005-06-20 | 2006-12-28 | Mazda Motor Corp | 車両の走行補助装置 |
| US7686119B2 (en) | 2006-06-13 | 2010-03-30 | Greene Robert A | Apparatus for reinforcing seatbelt usage in automobiles |
| JP4835291B2 (ja) * | 2006-07-12 | 2011-12-14 | トヨタ自動車株式会社 | 車両用走行制御装置 |
| JP2007098567A (ja) * | 2006-09-25 | 2007-04-19 | Hitachi Ltd | 自律制御型ロボットおよびその制御装置 |
| DE102006056094A1 (de) * | 2006-11-28 | 2008-05-29 | Robert Bosch Gmbh | Fahrerassistenzsystem mit Anwesenheitsüberwachung |
| JP4941059B2 (ja) | 2007-04-02 | 2012-05-30 | 株式会社豊田中央研究所 | 運転支援装置 |
| JP2008261703A (ja) | 2007-04-11 | 2008-10-30 | Toyota Motor Corp | 車載機器機能説明装置 |
| JP4996979B2 (ja) | 2007-05-29 | 2012-08-08 | 日立オートモティブシステムズ株式会社 | ナビ協調走行制御システム、および、ナビ協調走行制御方法 |
| US20090140887A1 (en) * | 2007-11-29 | 2009-06-04 | Breed David S | Mapping Techniques Using Probe Vehicles |
| JP2009133779A (ja) * | 2007-11-30 | 2009-06-18 | Toyota Motor Corp | 運転支援装置 |
| JP2009184464A (ja) | 2008-02-05 | 2009-08-20 | Daihatsu Motor Co Ltd | 追従走行制御装置 |
| JP5019467B2 (ja) | 2008-02-25 | 2012-09-05 | 矢崎総業株式会社 | コネクタ支持構造 |
| JP2009274594A (ja) * | 2008-05-15 | 2009-11-26 | Hitachi Ltd | 車線変更支援装置 |
| JP4737239B2 (ja) * | 2008-06-20 | 2011-07-27 | トヨタ自動車株式会社 | 運転支援装置 |
| JP4737238B2 (ja) * | 2008-06-20 | 2011-07-27 | トヨタ自動車株式会社 | 運転支援装置 |
| JP2010067234A (ja) * | 2008-09-12 | 2010-03-25 | Fujitsu Ten Ltd | 運転支援装置および運転支援プログラム |
| JP5115458B2 (ja) | 2008-11-26 | 2013-01-09 | トヨタ自動車株式会社 | 運転支援装置 |
| JP2010173601A (ja) * | 2009-02-02 | 2010-08-12 | Toyota Motor Corp | 運転支援装置 |
| JP2010215081A (ja) | 2009-03-16 | 2010-09-30 | Toyota Motor Corp | 運転支援装置 |
| JP4973687B2 (ja) * | 2009-05-13 | 2012-07-11 | トヨタ自動車株式会社 | 走行支援装置 |
| CN102076538B (zh) * | 2009-06-19 | 2014-03-12 | 丰田自动车株式会社 | 车辆行驶控制装置 |
| JP2011020666A (ja) * | 2009-06-19 | 2011-02-03 | Honda Motor Co Ltd | 車両制御システム |
| JP4970504B2 (ja) * | 2009-07-29 | 2012-07-11 | 日立オートモティブシステムズ株式会社 | 駐車支援装置 |
| JP2011118603A (ja) * | 2009-12-02 | 2011-06-16 | Clarion Co Ltd | 車両制御装置 |
| JP5500963B2 (ja) * | 2009-12-11 | 2014-05-21 | Udトラックス株式会社 | 衝突被害軽減装置 |
| JP5454179B2 (ja) | 2010-02-02 | 2014-03-26 | トヨタ自動車株式会社 | 運転支援装置 |
| DE112010005666B4 (de) * | 2010-06-16 | 2022-06-30 | Toyota Jidosha Kabushiki Kaisha | Fahrunterstützungsvorrichtung |
| JP2012051441A (ja) * | 2010-08-31 | 2012-03-15 | Toyota Motor Corp | 自動運転車両制御装置 |
| JP5838547B2 (ja) | 2010-12-02 | 2016-01-06 | トヨタ自動車株式会社 | 運転支援装置 |
| JP2012126193A (ja) * | 2010-12-14 | 2012-07-05 | Denso Corp | 駐車場の自動駐車システム |
| JP5804725B2 (ja) * | 2011-02-24 | 2015-11-04 | ダイハツ工業株式会社 | アイドルストップ車の制御装置 |
| JP5494560B2 (ja) * | 2011-04-21 | 2014-05-14 | 三菱自動車工業株式会社 | 先行車両発進報知装置 |
| US9478135B2 (en) * | 2011-04-26 | 2016-10-25 | Toyota Jidosha Kabushiki Kaisha | Drive support apparatus |
| JP2013084147A (ja) * | 2011-10-11 | 2013-05-09 | National Institute Of Advanced Industrial & Technology | 前方情報と走行情報の後方車両への伝達方法およびその伝達装置 |
| JP2013116698A (ja) * | 2011-12-05 | 2013-06-13 | Denso Corp | 制御システム |
| JP2013123993A (ja) * | 2011-12-14 | 2013-06-24 | Toyota Motor Corp | 先行車両発進報知装置 |
| KR101703144B1 (ko) | 2012-02-09 | 2017-02-06 | 한국전자통신연구원 | 차량의 자율주행 장치 및 그 방법 |
| JP2013196040A (ja) * | 2012-03-15 | 2013-09-30 | Toshiba Corp | 車両および通信ユニット |
| JP5906895B2 (ja) | 2012-03-29 | 2016-04-20 | トヨタ自動車株式会社 | 追従制御装置 |
| US8700251B1 (en) * | 2012-04-13 | 2014-04-15 | Google Inc. | System and method for automatically detecting key behaviors by vehicles |
| JP6000658B2 (ja) * | 2012-06-01 | 2016-10-05 | 日野自動車株式会社 | 障害物回避支援装置及び障害物回避支援方法 |
| RU2015105174A (ru) * | 2012-07-17 | 2016-09-10 | Ниссан Мотор Ко., Лтд. | Система помощи при вождении и способ помощи при вождении |
| CN202806543U (zh) * | 2012-09-04 | 2013-03-20 | 蒋雲霄 | 车速指示灯控制器 |
| JP2014067165A (ja) * | 2012-09-25 | 2014-04-17 | Mitsubishi Motors Corp | 運転支援装置 |
| JP5825239B2 (ja) * | 2012-10-09 | 2015-12-02 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2014102673A (ja) * | 2012-11-20 | 2014-06-05 | Nissan Motor Co Ltd | 車載機及びセキュリティシステム |
| US8825258B2 (en) | 2012-11-30 | 2014-09-02 | Google Inc. | Engaging and disengaging for autonomous driving |
| JP2014181020A (ja) * | 2013-03-21 | 2014-09-29 | Denso Corp | 走行制御装置 |
| US8874301B1 (en) * | 2013-07-09 | 2014-10-28 | Ford Global Technologies, Llc | Autonomous vehicle with driver presence and physiological monitoring |
| SE540270C2 (sv) * | 2014-04-01 | 2018-05-22 | Scania Cv Ab | Förfarande och system för att riskbedöma körfältsbyte vid framförande av ett ledande fordon på en vägbana med åtminstonetvå angränsande körfält |
| JP2015230573A (ja) * | 2014-06-05 | 2015-12-21 | アルパイン株式会社 | 車両運転支援装置、方法およびプログラム |
-
2015
- 2015-09-29 JP JP2016552064A patent/JP6432948B2/ja active Active
- 2015-09-29 WO PCT/JP2015/077519 patent/WO2016052507A1/ja active Application Filing
-
2018
- 2018-10-29 JP JP2018203031A patent/JP2019050005A/ja active Pending
- 2018-10-29 JP JP2018203030A patent/JP6593730B2/ja active Active
-
2019
- 2019-06-20 JP JP2019114307A patent/JP6807496B2/ja active Active
- 2019-06-20 JP JP2019114305A patent/JP6893611B2/ja active Active
- 2019-06-20 JP JP2019114304A patent/JP6951612B2/ja active Active
- 2019-06-20 JP JP2019114306A patent/JP6893602B2/ja active Active
- 2019-06-20 JP JP2019114303A patent/JP2019189220A/ja active Pending
- 2019-09-19 JP JP2019169945A patent/JP6976592B2/ja active Active
- 2019-11-06 JP JP2019201651A patent/JP6857418B2/ja active Active
- 2019-11-06 JP JP2019201645A patent/JP6851645B2/ja active Active
-
2020
- 2020-01-20 JP JP2020006735A patent/JP6948728B2/ja active Active
- 2020-01-27 JP JP2020010760A patent/JP6998073B2/ja active Active
- 2020-02-05 JP JP2020018016A patent/JP6940188B2/ja active Active
- 2020-06-25 JP JP2020109888A patent/JP7093909B2/ja active Active
-
2021
- 2021-03-09 JP JP2021037384A patent/JP7082265B2/ja active Active
- 2021-03-15 JP JP2021041580A patent/JP7049011B2/ja active Active
- 2021-05-13 JP JP2021081757A patent/JP7203448B2/ja active Active
- 2021-09-02 JP JP2021142996A patent/JP7345894B2/ja active Active
- 2021-10-18 JP JP2021170296A patent/JP7253840B2/ja active Active
-
2022
- 2022-01-14 JP JP2022004466A patent/JP2022058625A/ja active Pending
- 2022-01-14 JP JP2022004459A patent/JP2022058624A/ja active Pending
- 2022-01-18 JP JP2022005635A patent/JP7270307B2/ja active Active
-
2023
- 2023-01-20 JP JP2023007403A patent/JP2023052552A/ja active Pending
- 2023-07-19 JP JP2023117492A patent/JP2023156310A/ja active Pending
- 2023-07-19 JP JP2023117491A patent/JP7470275B2/ja active Active
- 2023-08-22 JP JP2023134596A patent/JP7565110B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060244632A1 (en) * | 2005-05-02 | 2006-11-02 | Mr. James Corcoran | Automatic Vehicle Collison Avoidance and Warning System |
| DE102006036458A1 (de) * | 2006-08-04 | 2008-02-07 | GM Global Technology Operations, Inc., Detroit | Sicherheitseinrichtung für ein Fahrzeug und Verfahren zum Betrieb eines Kraftfahrzeuges mit einer solchen Sicherheitseinrichtung |
| JP2008084004A (ja) * | 2006-09-27 | 2008-04-10 | Mazda Motor Corp | 車両用運転支援システム |
| JP2008162553A (ja) * | 2007-01-04 | 2008-07-17 | Toyota Motor Corp | 車両用制御装置 |
| JP2008290680A (ja) * | 2007-05-28 | 2008-12-04 | Toyota Motor Corp | 車両の自動運転装置 |
| JP2009157466A (ja) * | 2007-12-25 | 2009-07-16 | Toyota Motor Corp | 近傍車両監視装置 |
| JP2014091380A (ja) * | 2012-11-01 | 2014-05-19 | Toyota Motor Corp | 運転走行支援装置 |
| JP2014106854A (ja) * | 2012-11-29 | 2014-06-09 | Toyota Infotechnology Center Co Ltd | 自動運転車両制御装置および方法 |
| JP2014154128A (ja) * | 2013-02-14 | 2014-08-25 | Mitsubishi Motors Corp | 緊急車両通行支援システム |
| WO2018163549A1 (ja) * | 2017-03-10 | 2018-09-13 | オムロン株式会社 | 運転制御動作支援装置、運転制御動作支援方法及び運転制御動作支援プログラム |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6593730B2 (ja) | 自動運転制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190830 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20191219 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20191220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200722 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200825 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200917 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210803 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20210811 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210812 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20210811 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6951612 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R157 | Certificate of patent or utility model (correction) |
Free format text: JAPANESE INTERMEDIATE CODE: R157 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |