近年の食肉処理場や食肉加工工場においてさえも、多くの処理が、部分的にまたは全体的に、人手で行われる。これは、少なくとも部分的には、処理対象をなす屠殺体またはその一部の形状やサイズや重量が互いに相違するからであり、過酷な環境が食肉処理場や食肉加工工場の処理領域内に存在するからである。このような手動でのまたは半自動的な処理により、労働者には過酷な労働環境がもたらされることとなり、人件費コストがかさむこととなる。
本明細書においては、豚という用語は、雌豚や、ギルトや、バローや、イノシシや、雄豚や、家畜豚、を含む。
本明細書においては、牛という用語は、畜牛や、去勢牛や、若い雄牛や、雌牛や、雄牛や、バッファロー、を含む。
本明細書においては、羊という用語は、ヒツジや、子羊、を含む。
本明細書においては、山羊という用語は、ゴートを含む。
これらのすべては、本明細書においては、赤身肉と見なされる。
本発明は、最も主要には、屠殺された豚の個々の部分を、特に豚の脚部分や豚の大腿部分や豚の肩部分を、処理および/または搬送することに関するものである。後述するように、本発明の様々な見地は、他の動物に対しても同様に適用することができる。
一般に、例えば豚といったような赤身肉動物が屠殺される際には、まず最初に、赤身肉動物が屠殺され、その後、内部の器官が除去される。その後、屠殺体は、背骨に沿って半身にカットされる。これにより形成された半身は、一般に、3つの部分へとカットされる。すなわち、前端と、中央部分と、大腿部分と、へとカットされる。前端は、その後、ピクニックショルダーおよびボストンバットへとカットすることができる。しかしながら、これは、本発明にとって必須ではない。例えば牛や羊や山羊といったような他の家畜動物に関しては、様々な部位に対して付与される名称は、異なるものとすることができる(例えば、前足および/または後足、前駆および/または後駆、前脚および/または後脚)。しかしながら、部位自体は、同様である。通常は、羊や山羊といったような動物は、長手方向の半身にはカットされない。しかしながら、そうすることもできる。動物が長手方向に分割されない場合には、前部および/または後部などを、豚に関して詳細に後述するように(片足がワークピースとされている)、片足または両足から吊り下げて、利用することができる。
本発明は、特に豚といったような、また牛や羊や山羊といったような、赤身家畜肉の処理に関するものである。
屠殺体を分割することによって形成された屠殺体の一部は、その後、1つまたは複数の追加的なプロセスを受ける。このさらなる処理は、例えば皮剥ぎや皮膚除去や解体や脂肪除去や膜または他の組織の除去やより小さな部分またはユニットへのカットといったような多様な操作とすることができる。また、スモーキングや硬化や乾燥やマリネ漬けや塩漬けやコーティングやボイリングやグリルといったような処理も可能である。1つまたは複数の操作の前にあるいは後にあるいは最中に、屠殺体の一部の冷却を行うことができる。
家畜動物は、カットすることができ、その後、多様な態様でもって処理することができる。真に無限数の最終製品の組合せを、単一の家畜動物から形成することができる。個々の家畜動物の各々に関して、どのような最終製品を形成するのかが、決定されなければならない。これにより、行うべき処理操作とそれらの順序とが、決定される。
個々の屠殺体の一部のカットに影響を与えるパラメータの1つは、屠殺場または食肉加工工場の所望出力である。所望出力は、時間的な特定のポイントにおいてどの程度の最終製品が利用可能であるかという点において、構成される。これは、屠殺場または食肉加工工場のクライアントの要求によって、決定される。屠殺場または食肉加工工場の所望出力に基づいて、および、利用可能な屠殺体の数に基づいて、個々の屠殺体の各々をどのようにカットするかを決定することができる。
個々の屠殺体の各々がどのようにカットされるかが決定された後に、そして、各部分に対してどのような操作を行うかが決定された後に、屠殺体およびそれから得られた屠殺体の一部に対しての経路を、決定することができる。この経路は、1つまたは複数の処理ステーションに沿って、屠殺体および/または屠殺体の一部を搬送する。各処理ステーションにおいては、1つまたは複数の処理またはその一部が行われる。
屠殺体の一部は、1つの処理ステーションから次なる処理ステーションへと搬送されなければならない。これは、多様な態様で行うことができる。例えば、レールから吊り下げられたフックを使用して、あるいは、コンベヤベルト上において、あるいは、容器内において、あるいは、移動可能なプラットホーム上において、あるいは他の態様で、行うことができる。搬送は、機械によって駆動することができる、あるいは、手動で行うことができる。
特定のタイプの屠殺体の一部に対して複数の順次的な操作を行い得るよう、複数の処理ステーションをグループ化することが公知である。公知のグループ化の一例は、豚の大腿部分を解体するための一群をなす複数の処理ステーションである。そのような公知のシステムにおいては、大腿部分は、グループ化されたうちの最初の処理ステーションへと搬送される。その最初の処理ステーションにおいては、皮膚除去が行われる。屠殺体の一部は、その後、例えばコンベヤベルトを使用して、次なる処理ステーションへと搬送される。この次なる処理ステーションにおいては、操作者は、コンベヤベルトから大腿部分を採取し、過剰な脂肪を除去する。その後、大腿部分は、コンベヤベルト上へと戻される。大腿部分は、コンベヤベルトによって、次なる処理ステーションへと搬送される。この次なる処理ステーションにおいては、大腿部分は、コンベヤベルトから、他の操作者によって採取される。この他の操作者は、骨に対してアクセス可能とするための予備的カットを行う。その後、再度、大腿部分は、コンベヤベルト上へと戻される。これにより、大腿部分は、次なる処理ステーションへと搬送される。ここでは、次なる操作者が、コンベヤベルトから大腿部分を採取し、大腿部分から骨を除去する。操作者は、その後、解体された大腿部分と骨とを、再度コンベヤベルト上へと戻す。骨および解体された大腿部分は、グループのうちの最後の処理ステーションへと搬送される。この最後の処理ステーションにおいては、次なる操作者が、解体された大腿部分と骨とを分別し、それぞれを、専用の容器内へとあるいは専用のコンベヤベルト上へと、配置する。
その最後の処理ステーションにおいては、例えば、ホイール付き容器が利用される。ホイール付き容器内には、除去された骨が収集され、他のホイール付き容器内には、解体された大腿部分が収集される。骨を収容した容器が満杯となったときには、その満杯となった容器は、最後の処理ステーションから取り出されて、廃棄場所へと、あるいは、例えばゼラチン製造工場や接着剤製造工場といったような場所への搬送のための貯蔵場所へと、搬送される。解体された大腿部分を収容した容器が満杯となったときには、その満杯となった容器は、例えば、例えばボイリングやグリルやスモーキングや乾燥やシーズニングといったような大腿肉のさらなる処理のための処理ステーションへと、搬送される。
屠殺プロセスおよびさらなる処理の最中においては、屠殺体の一部は、様々なキャリアによって、支持および/または搬送される。そのようなキャリアの例としては、移動可能なキャリア(移動可能なキャリアは、機械によってあるいは手動で駆動される)を備えたオーバーヘッドコンベヤや、コンベヤベルトや、固定テーブルや、屠殺体の一部の内部に侵入するフックや、ホイール付き容器や、ホイール無し容器、がある。キャリアは、単一の屠殺体の一部を、あるいは、同タイプの複数の屠殺体の一部を、あるいは、様々なタイプの複数の屠殺体の一部を、保持または支持することができる。
屠殺プロセス内における様々なステップに関しては、通常、様々なタイプのキャリアが使用される。1つのキャリアから他のキャリアへの搬送は、通常、手動で行われる。
上述した赤身家畜動物の屠殺およびさらなる処理のための公知のシステムおよび方法は、搬送という観点からは、あまり効率的ではない。また、多くの場合、屠殺体の一部は、最大の付加価値をもたらすような態様ではカットされない。また、公知のキャリアおよび搬送デバイスは、通常、屠殺体の一部の正確な処理を可能とするものではない。
公知のキャリアにおいては、屠殺体の一部は、通常、その端部が係合され、屠殺体の一部は、キャリアに対して、1つまたは複数の自由度でもって、自由に相対移動することができる。また、公知のシステムにおいては、キャリアが屠殺体の一部に対して係合する場所は、正確に規定されているわけではなく、再現可能でもない。キャリアは、解剖学的に規定された部分においてというよりもむしろ、ある種の領域において、屠殺体の一部に対して係合する。
通常、足は、大腿部分または前端が処理される際に、屠殺体の一部から既に除去されている。したがって、大腿部分および/または前端の処理に際して使用される公知のキャリアは、通常、膝の領域において、あるいは、肘の領域の前端において、大腿部分に対して係合する、あるいは、脚部分は、足ではなくて、「小さな骨」と称される部分によって係合される。
本発明の目標は、赤身肉家畜動物および/またはその一部の処理において使用される公知の設備および方法に関して、改良を提供することである、あるいは、少なくとも代替案を提供することである。
本発明の第1見地においては、屠殺された豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するためのシステムが提供される。主に想定される応用は、豚の屠殺体の一部の処理であり、例えば、豚の脚部分または肩部分の処理である。
屠殺体の一部は、保持領域を備えている。保持領域は、骨と、骨上の軟組織と、を備えている。システムは、屠殺体の一部を搬送するための少なくとも1つのキャリアを備えている。キャリアは、保持領域によって屠殺体の一部を保持するための保持アセンブリを具備しており、保持アセンブリは、軟組織の外面上において係合し得るよう構成されている。
本発明の第1見地は、また、屠殺された豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するための方法が提供される。本発明の第1見地による方法においては、豚や牛や羊や山羊といったような動物の屠殺体の一部を準備し、この場合、屠殺体の一部を、保持領域を備えたものとし、保持領域を、骨と、この骨上に位置した軟組織と、を備えたものとし、保持領域を認識し、保持領域によって屠殺体の一部を保持するための保持アセンブリを備えたキャリアを準備し、保持アセンブリを保持領域の軟組織に対して係合し、屠殺体の一部を処理する。
好ましくは、本発明の第1見地による保持アセンブリは、軟組織内へと侵入しない。
屠殺体の一部が脚部分である場合には、保持領域は、例えば、足や、膝や、脚部分の肘頭の近傍の領域、とすることができる(そのような解剖学的部分が存在する場合)。
好ましくは、保持領域は、屠殺体の一部の重心の近傍として選択される。
本発明の第2見地においては、豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するためのシステムであって、屠殺体の一部が、第1端部と、第2端部と、第1端部と第2端部との間に位置した参照部分と、を備え、システムが、屠殺体の一部を搬送するための少なくとも1つのキャリアを具備し、キャリアが、参照部分によって屠殺体の一部を保持するための保持アセンブリを備え、保持アセンブリが、好ましくは、参照部分の形状およびサイズに適合し得るよう構成された形状を有しているシステムが提供される。
好ましくは、参照部分は、屠殺体の一部の両端部の間に位置し、両端部から離間したところに位置する。
好ましくは、参照部分は、屠殺体の一部の重心の近傍として選択される。
例えば、豚といったような屠殺体の一部の脚部分においては、参照部分は、足(例えば、中足骨を有した領域)や膝や肘頭といったような解剖学的部分として選択することができる(そのような解剖学的部分が存在する場合)。
本発明の第2見地は、また、 豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するための方法であって、屠殺体の一部が、第1端部と、第2端部と、第1端部と第2端部との間に位置した参照部分と、を備え、
この方法においては、
−屠殺体の一部を準備し、
−参照部分を認識し、
−本発明の第2見地によるシステムを準備し、
−保持アセンブリを使用して、参照部分によって屠殺体の一部を保持し、
−キャリアによって屠殺体の一部を保持しつつ、屠殺体の一部を処理する、
という方法に関するものである。
本発明の第2見地は、また、個々の豚の肩部分を搬送するための、屠殺された豚の肩部分用のコンベヤデバイスであって、
個々の豚の肩部分が、
−上腕骨の少なくとも一部と、
−橈骨および尺骨の少なくとも一部と、
−肘頭と、
−上腕骨と橈骨と尺骨との上に天然に存在する肉の少なくとも一部と、
を備えている場合に、
コンベヤデバイスが、
−トラックと、
−トラックに沿って移動可能とされた豚の肩部分用の1つまたは複数のキャリアであるとともに、各キャリアが、個々の豚の肩部分を搬送し得るよう構成された、キャリアと、
を具備し、
各キャリアが、肩部分用の保持アセンブリを備え、
保持アセンブリが、単一の豚の肩部分上に係合し得るよう構成され、これにより、豚の肩部分を保持することができ、
保持アセンブリが、肘頭に対して係合し得るよう構成された肘頭保持アセンブリとされているコンベヤデバイスに関するものである。
本発明による第2見地は、また、屠殺された豚の大腿部分のためのコンベヤデバイスであって、
豚の大腿部分が、
−膝と、
−膝に隣接した大腿骨の少なくとも一部と、
−膝に隣接した頸骨および腓骨の少なくとも一部と、
−大腿骨と頸骨と腓骨との上に天然に存在する肉の少なくとも一部と、
を備えている場合に、
コンベヤデバイスが、
−トラックと、
−トラックに沿って移動可能とされた豚の大腿部分用の1つまたは複数のキャリアであるとともに、各キャリアが、個々の豚の大腿部分を搬送し得るよう構成された、キャリアと、
を具備し、
各キャリアが、1つの豚の大腿部分用の保持アセンブリを備え、
保持アセンブリが、単一の豚の大腿部分上に係合し得るよう構成され、これにより、豚の大腿部分を保持することができ、
保持アセンブリが、膝保持アセンブリとされ、この膝保持アセンブリが、豚の大腿部分の膝に対して係合し得るよう構成されているというコンベヤデバイスに関するものである。
本発明の第3見地は、個々の豚の脚部分を搬送するための、屠殺された豚の脚部分用のコンベヤデバイスであって、個々の豚の脚部分が、豚の脚の少なくとも一部と、豚の足と、を備えている場合に、
コンベヤデバイスが、
−トラックと、
−トラックに沿って移動可能とされた豚の脚部分用の1つまたは複数のキャリアであるとともに、各キャリアが、個々の豚の脚部分を搬送し得るよう構成された、キャリアと、を具備し、
各キャリアが、1つの豚足用の保持アセンブリを備え、
保持アセンブリが、単一の豚の足上に係合し得るよう構成され、これにより、キャリアから吊り下げられた状態で、豚の脚部分を保持することができ、
保持アセンブリが、豚の足を受領し得るよう構成された豚足用の開口を有しているコンベヤデバイスに関するものである。
特許請求の範囲と発明の詳細な説明と図面とによって説明されるように、本発明の第1見地と第2見地と第3見地との組合せが、可能であり、例えば、任意の付加的な特徴点を有した特徴点に関して、例えば保持アセンブリやキャリアやキャリアを支持する1つまたは複数のトロリーやトラックに関する任意の付加的な特徴点を有した特徴点に関して、および、任意の処理ステーションに関して、可能である。
本発明は、特に、新鮮な赤身肉の処理に関して応用することができる。本明細書においては、新鮮な赤身肉の処理とは、タンパク質構造の実質的な変化に基づく屠殺体の一部の軟組織の天然のフレキシブルさを不可逆的に低減する保存プロセスを受けていない肉処理を意味している。タンパク質構造におけるそのような実質的な変化は、例えば、例えばパルマハムまたはセラーノハムの製造時に、硬化時にまた熟成時に起こる。
キャリアは、好ましくは、個々の屠殺体の一部を搬送し得るよう構成されている。よって、1つのキャリアごとに、1つの屠殺体の一部が搬送される。
キャリアは、例えば豚といったような屠殺体の一部の個々の脚部分を搬送し得るよう構成することができる。よって、単一の脚(あるいは、少なくともその一部)と、可能であれば、例えば肩部分といったような、脚の頂部に取り付けられた部分と、を搬送することができる。
好ましくは、キャリアは、屠殺体の一部を搬送するための単一手段として機能するように構成される。このことは、単一のキャリアが、屠殺体の一部の重量を支持することができなければならないことを意味している。豚の大腿部分の肩部分の場合には、重量は、典型的には、約15kgである。
好ましくは、キャリアは、さらに、例えばカットや移送といったような処理時に屠殺体の一部に対して印加される外力の少なくとも一部を支持する。
本発明の第1見地においては、屠殺体の一部は、所定の保持領域において、すなわち、軟組織が上部に存在している骨のところにおいて、キャリアによって係合される。
軟組織は、例えば、皮膚や、皮や、腱や、靱帯や、肉や、脂肪、等とすることができる。軟組織は、フレキシブルなものであり、ある種の弾性を有している。「フレキシブル」という用語は、過度の力を使用することなく変形し得ることを意味している。そして、この弾性により、外力が解除されたときには、元々の形状へと少なくとも実質的に復帰することができる。
本発明の第1見地によるキャリアの保持アセンブリは、屠殺体の一部の搬送時には、好ましくは、屠殺体の一部が受けるすべてのプロセスステップ時には、軟組織の外面に対して係合する。保持アセンブリが軟組織上に係合したときには、軟組織のフレキシブルさにより、屠殺体の一部に対して案内力または配向力を印加することにより、屠殺体の一部を、保持アセンブリに対して、よってキャリアに対して、移動させることができる、例えば、回転させることができる。これにより、キャリアに対しておよび/または保持アセンブリに対して追加的な自由度を付与することなく、屠殺体の一部の位置決めに関して、いくらかの融通性を提供することができる。あるいは、保持アセンブリが所定の位置にロックされた際には、例えばインデックス機構等によって、いくらかの融通性を提供することができる。
保持領域のうちの、保持アセンブリが軟組織に対して係合している外面は、好ましくは、案内力または配向力が印加された際に、保持アセンブリに対して移動しない。その場合、案内力または配向力が屠殺体の一部から解除されたときには、屠殺体の一部は、屠殺体の一部がキャリア内に配置されていた際の向きへと、復帰する。初期向きへのこの復帰は、少なくとも部分的に、軟組織の弾性に由来するものである。
キャリアの保持アセンブリが屠殺体の一部に対して軟組織を介して係合することのさらなる利点は、屠殺体の一部に関しての、多種多様な解剖学的サイズおよび形状の保持領域を、保持アセンブリによって係合することができる。軟組織は、ある程度、変形することができる、例えば、圧縮されることができる。これにより、保持アセンブリが、保持領域を収容するための開口であって剛直な構成のすなわち一定寸法を有した開口を有している場合であってさえも、保持アセンブリは、様々な保持領域に対して係合することができる。
本発明の第1見地と第2見地との組合せにおいては、キャリアは、屠殺体の一部の参照部分上において、屠殺体の一部の軟組織の外面に対して係合し得るよう構成される。
保持領域が屠殺体の一部の参照部分であるならば、そして、保持領域のうちの、保持アセンブリが軟組織に対して係合している外表面が、好ましくは、案内力または配向力が印加されたにしても、保持アセンブリに対して移動することがないならば、保持領域は、案内力または配向力が屠殺体の一部から解除された後でも、なおも、参照部分として機能することができる。
軟組織保持領域の断面は、保持アセンブリが屠殺体の一部を保持しているときには、保持アセンブリによって変形することができる。保持領域における軟組織のフレキシブルさが、この変形を可能としている。しかしながら、この変形のために必要とされた力(および、軟組織の弾性に基づく反力)は、屠殺体の一部の保持領域と保持アセンブリとの間において、実質的に摩擦を提供する。したがって、この変形に基づき、屠殺体の一部は、保持アセンブリによって堅固に保持される。しかしながら、軟組織は、なおも、保持アセンブリに対しての屠殺体の一部の相対移動を可能とする。
有利な実施形態においては、保持アセンブリは、足の領域において、屠殺体の一部に対して係合し得るよう構成される。この実施形態は、豚の大腿部分または前端が搬送および/または処理される場合に、特に有利である。
有利な実施形態においては、保持アセンブリは、中足骨の領域において、豚の足に係合し得るよう構成される。この領域における屠殺体の一部の軟組織は、中央の中足骨に対して、側方の中足骨を相対移動させることができる。中立的な位置においては、側方の中足骨は、中央の中足骨よりも、少なくとも部分的に、背面側に配置されている。キャリアの保持アセンブリが、側方の中足骨を中央の中足骨に近接した位置へと移動させるように、足領域の断面を変形させることが特に有利である、ことが判明している。この変形は、比較的小さな力で行うことができ、これにより、足領域の断面のかなりの平坦化を引き起こすことができる。これは、有利である。その理由は、この天然の変形を引き起こすために移動可能な部材が使用されなかった場合であってさえも、すなわち、保持アセンブリが、足領域を受領するための一定の寸法を有した開口を有している場合であってさえも、例えば剛直な部材内のスロットとして開口が形成されている場合であってさえも、例えば金属プレート内に形成されたスロットとして開口が形成されている場合であってさえも、保持アセンブリが、様々な寸法の足領域を有した豚の脚部分を受領し得るからである。
有利な実施形態においては、保持アセンブリは、スロット付きプレートを有している。スロット付きプレートには、屠殺体の一部の保持領域を収容するためのスロットが設けられている。好ましくは、このスロットは、屠殺体の一部の保持領域のうちの、キャリアによって保持されるべき断面の最小寸法よりも小さな幅を有している。このようにして、スロットは、例えば足領域といったような保持領域において軟組織の変形を引き起こすことができ、これと同時に、堅固な把持を提供する。軟組織は、なおも、キャリアの保持アセンブリに対しての、屠殺体の一部のいくらかの移動を可能とする。
スロットには、スロットの保持部分と、スロットの入口部分と、の間に、突起を設けることができる。突起は、スロットを局所的に狭めるものであり、なおかつ、軟組織内へと侵入することがない。スロットは、例えば、丸められた隆起箇所として具現される。これにより、屠殺体の一部が偶発的に取り外れてしまう可能性を低減することができる。例えば板バネといったような弾性部材は、また、スロットの保持部分とスロットの入口部分との間におけるスロットの局所的な狭まりを提供するように、機能することができる。
可能な実施形態においては、保持アセンブリは、屠殺体の一部をクランプする2つのジョーを備えている。すなわち、2つのジョーの間に、屠殺体の一部の保持領域をクランプすることができる。ジョーは、例えば、回転可能に取り付けることができる、あるいは、スプリング的に取り付けることができる。あるいは、ジョーは、板バネから形成することができる。
一実施形態においては、保持アセンブリは、フォーク状部材を備えている。フォーク状部材は、保持領域内へと侵入することなく、屠殺体の一部の保持領域に対しての、受領空間を形成する。このキャリアが、トラックを有したコンベヤ内に設けられたときには、キャリアに対して連結されていないもののトラックのそばに配置されたガイドレールが設けられる。このガイドレールは、屠殺体の一部が、フォーク状部材から落下することを、防止する。例えば、屠殺体の一部が処理を受ける処理ステーションのところにおいて、フォーク状部材から落下することを、防止する。ガイドレールの機能は、ガイドプレートシステムによって代替することができる。ガイドレールやガイドプレートといったようなガイド手段は、代替的には、1つまたは複数の作業ステーションの少なくともいくらかの長さ部分においては、屠殺体の一部と一緒に移動し得るものとして構成することができる。
有利な実施形態においては、1つまたは複数の回転可能構造が設けられる。これにより、1つまたは複数の回転軸線まわりにおける移動可能性が得られる。このような回転は、保持アセンブリと一緒に屠殺体の一部を、キャリアのための搬送デバイスのあるいは固定支持体の例えばトラックに対して、移動させることができる。
回転は、例えば、全角度にわたっての回転とすることも、また、所定角度範囲に限っての回転とすることも、できる。
インデックス機構を、1つまたは複数の回転構造に対して関連づけることができる。回転構造は、少なくとも1つの、好ましくは複数の、所定の角度位置を決定する。
しかしながら、また、軟組織のフレキシブルさは、屠殺体の一部に対して、十分な移動自由度を付与することもできる。また、いくつかの移動方向においては、回転軸線または並進ガイド構成が、キャリア内に設けられる。一方、他の移動方向においては、軟組織のフレキシブルさが、十分な移動自由度を提供する。
また、キャリアに対しての保持アセンブリの1つまたは複数の移動方向に関しては、保持アセンブリは、複数の互いに離間した所定位置をとることができる。一方、軟組織のフレキシブルさにより、これら所定位置に対して、屠殺体の一部を移動させることができる。同じことは、トラック(設けられている場合)上にキャリアを支持している1つまたは複数のトロリーに対しての、または、固定支持構造に対しての、キャリアの移動可能性についても、当てはまる。
保持アセンブリは、屠殺体の一部の割り当てられた保持領域の外面上に係合し得るよう構成されたときには、好ましくは、保持領域および/または屠殺体の一部の参照部分の解剖学的構造を考慮する。これは、保持アセンブリのうちの、屠殺体の一部に対して係合している1つまたは複数の部分が、屠殺体の一部のうちの、係合対象をなす部分の幾何形状に適合した形状を有していることを、意味している。
可能な実施形態においては、キャリアによって保持された屠殺体の一部上において処理動作によってカットを行うべき正確な場所は、カメラ画像システムによって、あるいは、走査(例えば、画像やX線やCTスキャンを使用して)によって、あるいは、参照ポイント(例えば、屠殺体の一部の保持領域、あるいは、保持アセンブリ、あるいは、キャリアの他の部分)からの距離や方向を測定することによって、あるいは、例えば触診に基づいて(可能であれば触診センサによって)解剖学的に、決定することができる。
上述したように、可能な実施形態においては、例えばキャリアに対してあるいは固定支持構造に対してあるいは搬送デバイスのトラックに対して、屠殺体の一部と保持アセンブリとを一緒に移動させ得るような構成上の特徴点を、設けることができる。この移動は、並進移動、および/または、回転移動、および/または、これらの組合せ、とすることができ、1つまたは複数の平面内において引き起こすことができる。複数の異なる平面内における移動を、同時的にあるいは順次的に、引き起こすことができる。1つまたは複数のこれら移動の可能性により、例えばキャリアに対してのおよび/または固定支持構造に対してのおよび/または搬送デバイスのトラックに対しての、また、例えば1つまたは複数のナイフといったような処理設備に対しての、あるいは、そのような処理設備内の1つまたは複数の引っ張りロールに対しての、屠殺体の一部の位置および/または向きを操作することができる。
これらの移動は、制御および/または抑制することができる。これにより、屠殺体の一部を、処理ステップの実行前にあるいは実行最中に、所望の位置および/または向きとすることができる。好ましくは、屠殺体の一部は、処理ステップの実行前に、自動的に、所望の位置および/または向きとされる。そして、屠殺体の一部は、処理時には、所望の位置および/または向きに維持される。これにより、操作者が屠殺体の一部に対しての作業を開始する前に屠殺体の一部の位置および/または向きを処理に適したように調整する必要がないことのために、操作者にとっての時間の節約になる。これにより、そのような調整操作が屠殺体の一部の処理にとっては労力を要するものであることにより、操作者に関しての物理的ストレスが低減される。加えて、操作者は、屠殺体の一部を所望の位置および/または向きに維持するための労力を要することがない。いくつかの状況においては、これは、片方の手で屠殺体の一部を所定位置に保持しながら他方の手で処理を行うことに代えて、操作者が両手で処理を行い得ることさえをも、意味している。
本発明によるシステムには、処理ステップ時にキャリアおよび/または保持アセンブリの位置および/または向きを制御するための手段を設けることができる。これにより、例えば、屠殺体の一部の位置および/または向きを、例えばナイフやスクレイパーやロールといったような処理設備に対して、変更することができる。これにより、例えば関連する設備および/または操作者が同じ位置に留まったまま、例えば、屠殺体の一部の両サイドにおいて処理ステップを行うことができる。また、複数の複雑なプロセスを自動的に行うことができる。例えば、屠殺体の一部をキャリアによって移動させつつ、湾曲した切開口を形成することができる。
可能な実施形態においては、キャリアは、搬送デバイスの1つまたは複数のトロリーによって支持される。トロリーは、関連するトラックに沿って、例えば、オーバーヘッドレールといったようなレールに沿って、移動可能とされる。
好ましくは、キャリアは、搬送デバイスの1つまたは複数の支持トロリーに対して移動可能とされ、1つまたは複数の支持トロリーに対してのキャリアの移動を制御するための制御手段が設けられる。
例えば、キャリアは、鉛直方向の回転軸線を有した回転構造によって、1つまたは複数の支持トロリーに対して連結することができる。このようにして、操作を行うに際して、屠殺体の一部の異なる面を、操作者に対して、あるいは、自動化されたデバイスに対して、提示することができる。例えば、キャリアには、インデックス機構を設けることができる。インデックス機構は、鉛直方向軸線まわりにおいて、トロリーに対して、複数の、好ましくは4つの、向きを提供する。各向きは、例えば、互いに隣接するものに対して、例えば90°だけ離間する。その場合、キャリアは、ある好ましい向きから次なる好ましい向きへと、例えばカムトラック/カムフォロワ機構を使用することによって、移動することができる。
移動可能に支持されたキャリアには、カムフォロワを設けることができる。カムフォロワは、キャリアのアーム上に取り付けられる。屠殺体の一部の再配置を必要とする処理を行う処理ステーションにおいては、カムトラックが設けられる。この処理ステーションへと近づいたときには、カムフォロワは、カムトラック内へと持ってこられる。カムトラックは、その場合、カムフォロワを案内し、カムフォロワと協働して、キャリアに対して所望の移動をもたらす。
例えば、水平方向の回転軸線構造が設けられている場合には、屠殺体の一部を付帯したキャリアは、傾斜することができる、好ましくは、トラックに対して側方に傾斜することができる、例えば、トラックに沿って位置した操作者に向けて上向きに傾斜することができる。これにより、屠殺体の一部を操作者に対して人間工学的に良好な態様で供することができる。例えば、キャリアは、カムトラックと協働するカムフォロワを有することができる。これにより、カムトラックは、カムフォロワを、全体的に下向きにまたは上向きに移動させることができる。これにより、キャリアの傾斜を引き起こすことができる。
トラックに対してのおよび/または処理ステーションに対しての、屠殺体の一部の位置および/または向きを調節するための上記特徴点を使用することにより、また、ある種の処理ステーションをバイパスさせることができる。
保持領域が、処理されるべき屠殺体の一部の参照部分である場合には、保持アセンブリに対しての屠殺体の一部の様々な部分の位置が、少なくとも大まかには既知とされる。これにより、実施すべき操作に関しての適切な位置を見つけるに際して、屠殺体の一部の全体を走査および/または分析する必要がない。いくつかの状況においては、分析および/または測定を、それ以上に実行する必要がない。なぜなら、参照部分の場所が既知であることにより、操作を実行すべき場所が十分に正確に推定され得るからである。
保持アセンブリは、屠殺体の一部の端部ではなくむしろ中央部分とされた参照部分のところにおいて、処理対象をなす屠殺体の一部に対して係合することができる。保持アセンブリは、屠殺体の一部の参照部分に対して係合する。保持アセンブリは、参照部分を堅固に把持する。しかしながら、保持アセンブリに対しての屠殺体の一部のいくらかの移動は、屠殺体の一部が係合されているときでも、なおも可能である。
可能な実施形態においては、保持アセンブリは、2つのジョーを備えている。2つのジョーは、これらジョーどうしの間に、屠殺体の一部の参照部分をクランプする。
保持アセンブリは、屠殺体の一部内へと侵入するピンを備えることができる。突出ピンを有した保持アセンブリは、さらに、当接部材を備えることができる。当接部材は、突出ピンと協働することにより、屠殺体の一部の参照部分を所定位置に保持することができる。
屠殺体の一部の所定の参照部分上への保持アセンブリの係合は、屠殺体の一部を良好に保持し得るという利点を有しているだけでなく、保持アセンブリに対しての屠殺体の一部の様々な部分の位置が既知であるという利点をも有している。これは、1つまたは複数のプロセスステップが自動化された態様で実施される際に、有効なものとすることができる。例えば、解体プロセスは、多くの場合、特定の腱が切断されることを必要とする。処理対象をなす屠殺体の一部の解剖学的形状は、キャリアの保持アセンブリ内に保持された屠殺体の一部の参照部分に対しての、そのような腱の位置を決定する。当然のことながら、個々の屠殺体の一部に関しては、形状およびサイズには、いくらかの天然のばらつきが存在する。しかしながら、保持アセンブリが屠殺体の一部の参照部分を保持する際には、切断されるべき腱の位置は、極めて正確に既知である。
例えば骨からの肉の剥ぎ取りや処理対象をなす屠殺体の一部上における引っ張りやソーイングやカットや皮剥ぎや皮膚除去といったような処理ステップは、キャリアによって保持されつつ、処理対象をなす屠殺体の一部の特定部分上において、行うことができる。
保持アセンブリ内に屠殺体の一部の参照部分を保持することにより、そして、処理デバイスに対しての保持アセンブリの位置が既知であることにより、さらに、追加的な測定や分析を実施できることにより、処理対象をなす部分の位置が、同様に既知である。これにより、手動での操作を容易に実行することができる。なぜなら、操作者が、保持アセンブリに対しての、操作対象をなす部分の位置を、知っているからである。また、処理対象をなす屠殺体の一部の少なくとも一部に関しては、自動的な処理を行うことができる。
可能な実施形態においては、キャリアは、例えば豚といったような屠殺された動物の肩部分を備えた屠殺体の一部を保持し得るよう構成されている。この肩部分は、上腕骨の少なくとも一部と、橈骨の少なくとも一部と、尺骨の少なくとも一部と、肘頭と、上腕骨と橈骨と尺骨と肘頭との上に天然に存在する肉の少なくとも一部と、を備えている。そのような屠殺体の一部が処理される場合には、参照部分として肘頭が使用されることが有利である。
例えば肘頭が通常は処理対象をなす屠殺体の一部の重心の近くに位置していることのために、従来技術において公知であるように自由端やその近傍によって保持するのではなく、肘頭によって屠殺体の一部を保持することが有利である。肘頭によって屠殺体の一部を保持することにより、比較的重い屠殺体の一部を、容易に操作することができる。なぜなら、屠殺体の一部が自由端によって保持されている状況と比較して、屠殺体の一部が、保持ポイントからそれほど遠くにまで延出しないからである。屠殺体の一部の質量がおおよそ肘頭の近傍に集中していることのために、肘頭による屠殺体の一部の保持は、屠殺体の一部の回転に際してより小さな回転モーメントで済むことを意味している。これにより、システムに関する機械的負荷がより小さくなる。
さらに、肘頭保持アセンブリ内における肘頭による屠殺体の一部の保持は、キャリアに対しての肘頭の位置が明らかに既知であることを意味している。肘頭の位置が既知であることにより、他の部分の位置を、決定することができる。この決定の正確さは、通常、固定されたポイントから離れるにつれて、減少する。よって、肘頭によって屠殺体の一部が保持されている際には、処理対象をなす屠殺体の一部の他の部分の位置は、例えば足部分または肩甲骨といったような自由端によって屠殺体の一部が保持されている状況と比較して、より正確に決定することができる。
さらに、肘頭保持アセンブリは、橈骨や尺骨や肘頭に対しての上腕骨の移動を隠すこととなる。これは、肘頭保持アセンブリが、一方においては上腕骨と、他方においては橈骨や尺骨や肘頭と、の間の関節の近傍において、屠殺体の一部に対して係合するからである。これは、肘頭の既知の位置に基づいての、屠殺体の一部の他の部分の位置の決定を、より信頼性高く行うことができる。
可能な実施形態においては、肘頭上に天然に存在する肉の少なくとも一部が、肘頭から切り離される。肉は、屠殺体の一部から切り離すことができる。しかしながら、また、屠殺体の一部において、1つまたは複数のカットを行うこともできる。そのようなカットは、肘頭とその上に天然に存在する肉との間の1つまたは複数の天然の連結を切断するものであり、これにより、骨表面の一部を、露出することができる、あるいは、少なくともアクセス可能なものとすることができる。
他の可能な実施形態においては、ロックが肘頭に対して係合したときには、肘頭上には、肉または他の軟組織(皮膚、皮、腱、靱帯、肉、脂肪、等)が、なおも存在する。軟組織は、ある程度の弾性を有している。ロックが屠殺体の一部を保持したときには、この弾性により、屠殺体の一部に対して外力を印加することによって、屠殺体の一部を、ロックに対して移動させることができる、例えば、回転させることができる。そのような外力が屠殺体の一部から解除されたときには、屠殺体の一部は、元の状態へと復帰する。これにより、一方においては、屠殺体の一部の取扱い性に対して融通性を提供することができ、他方においては、参照部分を使用することによって、屠殺体の一部の他の部分の位置を決定することができる。
肘頭保持アセンブリは、好ましくは、肘頭の様々な面に対して係合するような好ましくは肘頭の両サイドに対して係合するような、第1ジョーおよび第2ジョーを備えている。このようにして、肘頭を、キャリアの肘頭保持アセンブリの第1ジョーと第2ジョーとの間にクランプすることができる。
可能な実施形態においては、肘頭保持アセンブリの両ジョーは、各ジョーと肘頭骨との間に全く肉が存在していない態様で、肘頭に対して直接的に係合する。このようにして、解体時にキャリア上において、屠殺体の一部の固定に基づく肉の損失を発生させることがない。なぜなら、屠殺体の一部の解体を行う操作者またはデバイスは、肉に対してアクセスする際に、ジョーによって隠されないからである。
他の可能な実施形態においては、肘頭保持アセンブリの両ジョーが肘頭に対して係合した際には、肘頭上には、なおも軟組織が存在する。その場合、この軟組織の弾性により、上述したように、外力を印加することによって、ロックに対しての屠殺体の一部の位置を、一時的に変更することができる。
肘頭保持アセンブリは、好ましくは、第1ジョーと第2ジョーとを互いに対して移動させるためのアクチュエータを備えている。これにより、肘頭保持アセンブリを、開閉することができる。
好ましさの程度の小さな他の実施形態においては、肘頭保持アセンブリは、ピンを備えている。このピンは、肘頭の近傍において、屠殺体の一部内へと侵入することができる。ピンは、肘頭保持アセンブリのジョーに対して、肘頭を押しつけることができ、これにより、肘頭を所定位置に保持することができる。これに代えて、ピンは、キャリアを移動させる搬送デバイスのトラックに沿って配置されたガイドレールまたはガイド表面に対して、肘頭を押圧することができる。
一実施形態においては、屠殺体の一部は、キャリアの肘頭保持アセンブリから吊り下げられた状態とすることができる。これは、ジョーの形状、および/または、肘頭上にジョーがもたらすクランプ力が、屠殺体の一部が肘頭保持アセンブリによって支持されていないときに、肘頭保持アセンブリから屠殺体の一部を落下させないようなものとしなければならないことを意味する。特に処理時には、重力とは別に、屠殺体の一部に対して作用する他の力が存在する。肘頭保持アセンブリは、そのような力の作用に対しても、屠殺体の一部を保持し得るものでなければならない。肘頭保持アセンブリが第1ジョーおよび第2ジョーを備えている場合には、キャリアは、好ましくは、アクチュエータを備えている。アクチュエータには、駆動力の供給源が設けられている。駆動力の供給源は、肘頭保持アセンブリのジョーに対して、十分なクランプ力を提供する。これにより、必要なクランプ力を供給することができる。
キャリアは、キャリアに対して保持アセンブリを連結する連結部分を備えることができる。このキャリアは、肘頭保持アセンブリを、固定支持体に対して、あるいは、搬送デバイスの1つまたは複数のトロリーに対して、連結することができる。
肘頭保持アセンブリの連結部分は、好ましくは、少なくとも1つの回転構造を備えている。回転構造は、固定支持体またはトロリーに対して、屠殺体の一部を回転させることができる(全回転、または、限られた角度範囲内での回転)。当業者であれば、この回転構造を、様々な態様のものや様々な形状のものや様々なサイズのものとし得ることは、理解されるであろう。例えば、ピンとブッシングとからなる構成を使用することができる。これにより、単一平面内における回転を可能とすることができる。しかしながら、例えば、ボールジョイントを使用することもできる。これにより、好ましさの度合いは小さいけれども、複数の平面内において回転させることができる。
肘頭保持アセンブリが、第1ジョーと第2ジョーとを備えている場合には、有利には、第1ジョーは、フォーク状とされる。フォーク状の第1ジョーは、2つの歯を有しており、それら歯の間にはスロットが形成されている。肘頭は、そのスロット内に収容されることができる。歯は、肘頭の両サイドに位置している。肘頭は、自由端のところに位置した広い部分と、他端のところに位置した狭い部分と、を有している。好ましくは、スロットの幅は、肘頭の狭い部分を受領し得るものとされ、なおかつ、肘頭の広い部分を通し得ないものとされている。これは、肘頭を所定位置にロックすることを補助する。このスロットは、V字形状を有することができる。あるいは、互いに平行な辺を有したものとすることができる。歯は、直線的なエッジを有することも、あるいは、湾曲したエッジを有することも、できる。歯の自由端は、尖鋭なものとも、また、鈍いものとも、することができる。
第2ジョーは、有利には、アンビル(あるいは、金床)として形成される。第2ジョーは、肘頭に対して押圧される。肘頭に係合するサイドは、フラットな表面または湾曲した表面とすることができる。アンビル状の第2ジョーは、有利には、フォーク状の第1ジョーと組み合わせることができる。
有利には、スロットの開口サイドは、第2ジョーを収容し得るよう十分に広いものとされる。このようにして、肘頭は、肘頭保持アセンブリの2つのジョーによって、囲まれる。
キャリアは、豚や牛や羊や山羊といったような動物の屠殺体の一部の大腿部分を支持し得るよう構成することができる。ここでは、想定される主要な応用は、豚の大腿部分である。
大腿部分が、膝と、膝に隣接した大腿骨の少なくとも一部と、膝に隣接した頸骨および腓骨の少なくとも一部と、大腿骨と頸骨と腓骨との上に天然に存在する肉の少なくとも一部と、を備えている。
例えば膝が処理対象をなす屠殺体の一部の重心の近くに位置していることのために、従来技術において公知であるように自由端やその近傍によって保持するのではなく、膝によって屠殺体の一部を保持することが有利である。膝によって屠殺体の一部を保持することにより、比較的重い屠殺体の一部を、容易に操作することができる。なぜなら、屠殺体の一部が自由端によって保持されている状況と比較して、屠殺体の一部が、保持ポイントからそれほど遠くにまで延出しないからである。屠殺体の一部の質量がおおよそ膝の近傍に集中していることのために、膝による屠殺体の一部の保持は、屠殺体の一部の回転に際してより小さな回転モーメントで済むことを意味している。これにより、システムに関する機械的負荷がより小さくなる。
さらに、膝保持アセンブリ内における膝による屠殺体の一部の保持は、キャリアに対しての膝の位置が明らかに既知であることを意味している。膝の位置が既知であることにより、他の部分の位置を、決定することができる。この決定の正確さは、通常、固定されたポイントから離れるにつれて、減少する。よって、膝によって屠殺体の一部が保持されている際には、処理対象をなす屠殺体の一部の他の部分の位置は、例えば足部分または骨盤といったような自由端によって屠殺体の一部が保持されている状況と比較して、より正確に決定することができる。
さらに、膝保持アセンブリは、頸骨や腓骨に対しての大腿骨の移動を隠すこととなる。これは、膝保持アセンブリが、一方においては大腿骨と、他方においては頸骨や腓骨と、の間の関節の近傍において、屠殺体の一部に対して係合するからである。これは、膝の既知の位置に基づいての、屠殺体の一部の他の部分の位置の決定を、より信頼性高く行うことができる。
可能な実施形態においては、膝上に天然に存在する肉の少なくとも一部が、膝から切り離される。肉は、屠殺体の一部から実際に切り離すことができる。しかしながら、また、屠殺体の一部において、1つまたは複数のカットを行うこともできる。そのようなカットは、膝とその上に天然に存在する肉との間の1つまたは複数の天然の連結を切断するものであり、これにより、骨表面の一部を、露出することができる、あるいは、少なくともアクセス可能なものとすることができる。
他の可能な実施形態においては、保持アセンブリが膝に対して係合したときには、膝上には、肉または他の軟組織(皮膚、皮、腱、靱帯、肉、脂肪、等)が、なおも存在する。軟組織は、ある程度の弾性を有している。保持アセンブリが屠殺体の一部を保持したときには、この弾性により、屠殺体の一部に対して外力を印加することによって、屠殺体の一部を、保持アセンブリに対して移動させることができる、例えば、回転させることができる。そのような外力が屠殺体の一部から解除されたときには、屠殺体の一部は、元の状態へと復帰する。これにより、一方においては、屠殺体の一部の取扱い性に対して融通性を提供することができ、他方においては、参照部分を使用することによって、屠殺体の一部の他の部分の位置を決定することができる。
膝保持アセンブリを有したキャリアは、膝の様々な面に対して係合するような好ましくは膝の両サイドに対して係合するような、第1ジョーおよび第2ジョーを備えている。このようにして、膝を、キャリアの膝保持アセンブリの第1ジョーと第2ジョーとの間にクランプすることができる。
可能な実施形態においては、膝保持アセンブリの両ジョーは、各ジョーと膝骨との間に全く肉が存在していない態様で、膝に対して直接的に係合する。このようにして、解体時にキャリア上において、屠殺体の一部の固定に基づく肉の損失を発生させることがない。なぜなら、屠殺体の一部の解体を行う操作者またはデバイスは、肉に対してアクセスする際に、ジョーによって隠されないからである。
膝保持アセンブリは、さらに、第1ジョーと第2ジョーとを互いに対して移動させるための、あるいは、第2ジョーとフックとを互いに対して移動させるための、アクチュエータを備えている。これにより、膝保持アセンブリを、開閉することができる。
好ましい実施形態においては、例えば最大で15kgといったような屠殺体の一部は、キャリアの膝保持アセンブリから吊り下げられた状態とすることができる。これは、膝保持アセンブリの形状、および/または、膝上にジョーがもたらす保持力が、屠殺体の一部が膝保持アセンブリによって支持されていないときに、膝保持アセンブリから屠殺体の一部を落下させないようなものとしなければならないことを意味する。特に処理時には、重力とは別に、屠殺体の一部に対して作用する他の力が存在する。膝保持アセンブリは、そのような力の作用に対しても、屠殺体の一部を保持し得るものでなければならない。膝保持アセンブリが第1ジョーおよび第2ジョーを備えている場合には、キャリアは、好ましくは、アクチュエータを備えている。アクチュエータには、駆動力の供給源が設けられている。駆動力の供給源は、膝保持アセンブリのジョーに対して、十分なクランプ力を提供する。これにより、必要なクランプ力を供給することができる。
一実施形態においては、膝保持アセンブリは、膝に対して係合するための第2ジョーと、例えば湾曲したピンやあるいは例えばフックのような形状のピンといったようなピンを有した第1ジョーと、を備えている。このピンまたはフックは、膝の近傍において屠殺体の一部内へと侵入するようにして、配置される。好ましくは、ピンは、頸骨と腓骨との間を通過するようにして、配置される。
第2ジョーと、ピンまたはフックを有した第1ジョーと、を備えた実施形態が使用される場合には、駆動力の供給源は、膝に隣接したところにおいて、頸骨と腓骨との間においてピンまたはフックを貫通させるだけの十分な力を供給する。
第2ジョーは、有利には、アンビル(あるいは、金床)として形成される。第2ジョーに対して、膝を押圧することができる。アンビルのうちの、膝に係合するサイドは、フラットな表面または湾曲した表面とすることができる。アンビル状の第2ジョーは、有利には、ピンまたはフックとされた第1ジョーと組み合わせることができる。
特に有利な実施形態においては、アンビル状の第2ジョーは、膝の背面において、屠殺体の一部に対して係合する。その場合、第1ジョーは、例えば、頸骨と腓骨との間において、膝の背面から膝の前面へとピンが肉を貫通するようにして、配置される。好ましくは、ピンは、湾曲したものとされる。これにより、ピンの先端が屠殺体の一部の肉を貫通した後には、この先端は、膝の前面に向けて湾曲し、第2ジョーのアンビル面に向けて膝を後方に押圧する。
本発明の第3見地においては、豚の個々の屠殺体の一部に対して足によって係合する保持アセンブリを備えたキャリアであって、豚とされた屠殺体の一部をキャリアから吊り下げられるような、キャリアが提供される。
豚とされた個々の屠殺体の一部をこのようにして搬送することが、豚とされた屠殺体の一部の処理に際して有利であることが、判明している。
可能な実施形態においては、保持アセンブリが、豚足を受領するための豚足用のスロットを備え、スロットが、端部が開口したものとされ、これにより、このスロット内へと側方から豚足を導入し得るとともに、このスロットから側方に豚足を取り出すことができる。これにより、豚足用スロットに対しての導出入を、容易なものとすることができ、また、機械的に行うことができる。これにより、キャリアの保持アセンブリ内への屠殺体の一部の配置、および/または、キャリアの保持アセンブリからの屠殺体の一部の取り出しを、容易に行うことができ、また、自動化することができる。
可能な実施形態においては、豚足用開口が、剛直な参照面を有し、保持アセンブリが、豚足の中央の中足骨を剛直な参照面に隣接させた状態で豚足を受領し得るよう構成され、保持アセンブリが、豚足の側方の中足骨を参照面に向けて押圧し得るよう構成されている。
好ましくは、この実施形態においては、開口が、一方の端部が開口した豚足用スロットとされ、これにより、豚足を、スロット内へと側方から導入し得るとともに、豚足を、スロットから側方へと取り出し得るものとされ、スロットが、スロットの保持部分に連接する開口端部のところに、狭められた入口部分を有し、保持部分が、参照面を有し、スロット内へと豚足を側方導入する際には、狭められた入口部分が、側方の中足骨の天然の状態から、参照面に接近した位置へと、側方の中足骨を押圧する。
豚足の領域を保持領域として使用することには、いくつかの利点がある。第1の利点は、この領域の直径が、前脚と後脚とに関してほぼ同じことである。これにより、多くの場合、同一のキャリアを使用して、個々の前脚部分とに対してもまた個々の後脚部分とに対しても係合することができる。また、この領域を、キャリアが屠殺体の一部に対して係合する領域として使用することは、キャリア内に豚の脚部分を配置する前に、豚の脚部分のプレカットが必要とされないことを意味している。
上述したすべてのキャリアに関する有利な実施形態においては、キャリアが移動可能とされ、さらに、ロック手段が設けられる。ロック手段は、例えば、係止体とされる。ロック手段は、固定支持構造に対しての、または、キャリアが取り付けられている1つまたは複数のトロリーに対しての、キャリアの向きをロックする。これにより、処理時には屠殺体の一部を所定位置に保持することができる。あるいは、少なくとも1つの自由度をロックすることができる。赤身肉の屠殺体の一部の処理に関する公知のシステムにおいては、多くの場合、操作者は、処理時に屠殺体の一部を所定位置に保持しなければならない。これは、重労働であり、不健康な作業である。さらに、処理に際して両手を使用することができない。
上述したすべてのキャリアに関する有利な実施形態においては、キャリアには、さらに、固定支持構造に対しての、または、キャリアが取り付けられているトロリーに対しての、保持アセンブリの向きを制御する制御手段が設けられる。制御手段は、固定支持構造に対しての、または、キャリアが取り付けられているトロリーに対しての、屠殺体の一部の向きを動的に変更することができる。例えば、屠殺体の一部の反対サイド上にカットを形成する場合に、屠殺体の一部の向きを動的に変更することができる。公知のシステムにおいては、多くの場合、操作者は、屠殺体の一部を様々な向きとしなければならない。これは、重労働であり、不健康な作業である。
上述したすべてのキャリアに関する有利な実施形態においては、保持アセンブリは、複数の平面内において回転可能とされる、あるいは、全回転可能とされる。好ましくは、これら平面の少なくとも2つは、互いに垂直とされる。これにより、屠殺体の一部を、複数の自由度にわたって操作することができる。
本発明によるシステムにおいては、好ましくは、複数のキャリアが設けられる。これらキャリアは、例えば、各々が単一の肩部分を搬送し得るよう構成されたキャリアとすることができる、あるいは、屠殺された豚の単一の大腿部分を搬送するためのキャリアとすることができる。
システムには、有利な実施形態においては、さらに、トラックに沿って複数のキャリアを搬送するためのコンベヤが設けられる。一般に、単一のコンベヤには、1つのタイプのキャリアが設けられる。しかしながら、ある種の状況においては、あるいは、屠殺体処理工場のある種の構成においては、単一のコンベヤ上において、様々なタイプのキャリアを使用することができる。
コンベヤは、好ましくは、複数のトロリーを備えており、その場合、キャリアは、1つまたは複数の、例えば2つの、トロリーによって支持される。
トラックに沿って、好ましくは1つまたは複数の処理ステーションが設けられる。これら処理ステーションは、操作者が屠殺体の一部に対して処理を行いつつ、例えばカットを行いつつあるいは解体処理を行いつつ、操作者が直立または着座するための場所を提供することができる。処理ステーションとトラックとは、互いに協働して、処理ラインを形成する。
処理ステーションには、例えばナイフや他のタイプのカッタや屠殺体の一部のための追加的な支持体(例えば、処理時に特定の位置および向きを保持するための支持体)といったような、操作者のためのツールを設けることができる。それらツールは、処理ステーションに対して連結することができる。例えば、フレキシブルなケーブルから吊り下げることができる。
また、処理ステーションにおいては、1つまたは複数の処理を、自動的にまたは半自動的に行うことができる。その場合、処理ステーションには、回転円形ナイフや、ウォータジェットカッタや、センサや、ガイドレールや、自動処理あるいは半自動処理を行い得る他の構成部材、を設けることができる。
すべての処理ステーションにおいては、様々なプロセスステップを行うことができる。しかしながら、また、いくつかの処理ステーションにおいては、同じプロセスステップを行うことができる。これにより、複数の屠殺体の一部が、同時に同じプロセスステップを受けることができる。
処理ステーションは、トラックの直線状部分に配置することができる。よって、処理ステーションによる屠殺体の一部の処理を、直線的なラインで行うことができる。しかしながら、また、処理ステーションを、トラックの湾曲したところに配置することもできる。
これは、処理ステーションにおいてプロセスを自動的に行う場合に、特に有利である。その場合、処理ステーションは、カルーセルを備えることができる。カルーセル内には、複数の処理ユニットが設けられる。トラックは、カルーセルの周縁の一部に沿って、キャリアを付帯したトロリーを案内する。使用時には、カルーセルは、トラックが追従するカルーセルの周縁の一部上にわたって、処理ユニットがキャリアと一緒に動くような速度で、回転する。互いに隣接する処理ユニットどうしの間の間隔は、各処理ユニットがキャリアと併走し得るように、選択される。この併走移動時には、処理ユニットは、キャリアによって保持された屠殺体の一部に対して、プロセスを行う。キャリアと処理ユニットとが、トラックがカルーセルの周縁から離間するポイントに到達した際には、処理ユニットは、処理の仕上げを行う。トラックは、処理ラインに沿ってさらに下流側へとキャリアを案内し、カルーセルの回転は、処理ユニットを、トラックがカルーセルの周縁と遭遇する上流側のポイントへと戻す。そして、処理ユニットは、他のキャリアと遭遇して併走する。よって、キャリアによって保持された屠殺体の一部に対して処理を行うことができる。
カルーセルの使用は、キャリアを付帯したトロリーが連続的に駆動される場合に、有利である。なぜなら、処理ユニットを、初期位置へと戻すための単純な手法を提供するからである。よって、処理ユニットは、次なる屠殺体の一部に対する処理を開始することができる。また、処理ラインによって使用される場所または空間を実質的に増大させることなくプロセスを行うための特別のトラック長さと特別の時間とを提供することができる。
カルーセルが、例えば1.2mといったような標準的な処理ステーションの幅であると、特に有利である。
コンベヤは、連続的にでも、また、ステップ的にでも、トロリー(キャリアを付帯したトロリー)を受領することができる。
有利な実施形態においては、複数のキャリアを付帯したコンベヤは、オーバーヘッドコンベヤとされる。その場合、キャリアの保持アセンブリは、キャリアが連結されたトロリーの下方において、屠殺体の一部をキャリアから吊り下げられた態様で、配置される。好ましくは、キャリアおよびコンベヤは、屠殺体の一部のうちの、処理されるべき部分を、キャリアの下方に吊り下げることができる。これにより、プロセスステップの実施を、キャリアの部材またはコンベヤの部材によって、隠されることがない。
有利な実施形態においては、屠殺体の一部は、皮膚除去または皮剥ぎまたは脂肪除去の少なくとも1つの際には、キャリアから吊り下げられる。これにより、操作者は、皮膚除去または皮剥ぎまたは脂肪除去の際に、皮膚除去または皮剥ぎまたは脂肪除去のためのツールを、下向きに移動させることができる。
皮膚除去または皮剥ぎまたは脂肪除去のための公知の方法においては、操作者は、プロセスの実行時に、ツールを操作者自身から離間する向きに移動させる。公知の方法においては、処理時には、屠殺体の一部を、積極的に所定位置に保持しなければならない。吊り下げられた屠殺体の一部に対して操作する場合には、皮膚除去または皮剥ぎまたは脂肪除去のためのツールを操作者が下向きに移動させるときに、屠殺体の一部に対して印加される処理力が、重力と同じ向きに作用する。よって、処理時に屠殺体の一部を所定位置に積極的に保持する必要はない。これは、操作者が、プロセスを実行するに際して両手を使用し得ることを意味する。あるいは、片手を自由なものとし得ることを意味する。
皮膚除去または皮剥ぎまたは脂肪除去におけるこの改良は、屠殺体の一部内に骨が存在していることのために処理対象をなす屠殺体の一部が安定しているという理由のために有利であり、および/または、水平方向に印加された処理力に抗して、例えば固定ガイドによる支持によって、屠殺体の一部を支持し得るという理由のために有利である。そのようなガイドを使用することにより、また、屠殺体の一部の処理時に人間工学的に検出可能な位置に維持しつつ、操作者にとって適切な角度で、屠殺体の一部を操作者に対して供することができる。
有利な実施形態においては、コンベヤは、さらに、キャリアに対してのあるいはキャリアに対して連結されたトロリーに対しての、キャリアおよび/または保持アセンブリの向きを制御するための制御手段を備えている。そのような制御手段は、トラックに沿って配置されている。この制御手段は、例えば、カムトラックレールとすることができ、キャリア上のレバー等を操作する。
有利な実施形態においては、コンベヤは、ロック手段を備えている。ロック手段は、キャリアが連結されたトロリーに対しての、キャリアの向きを、および/または、キャリアの保持アセンブリの向きを、ロックすることができる。このロック手段は、例えば、ガイドレールとすることができる。ロック手段は、キャリア上のレバー等を、例えば空気圧的なまたは電気的なまたは液圧的な駆動レールによって固定位置に保持する、あるいは、例えば空気圧シリンダによって駆動されるピンを固定位置に保持する。そのようなピンは、キャリアのある種の構成部材の移動を阻止する。
キャリアをトラックに沿って駆動するという可能な実施形態においては、ガイドが、トラックの少なくとも一部に沿って配置される。これらガイドは、キャリアによって搬送される屠殺体の一部に対して係合し、屠殺体の一部を、操作者が人間工学的に作業し得る位置へと、配置する。ガイドは、さらに、屠殺体の一部を処理しながら、屠殺体の一部を支持することができる。
トラックに沿って搬送される屠殺体の一部がガイドに対して当接したときには、ガイドと屠殺体の一部との間に、摩擦が発生することができる。この摩擦に基づき、キャリアと屠殺体の一部との間の相対的配置および/または相対的向きを、変更することができる。例えば、屠殺体の一部がキャリアから吊り下げられている場合、屠殺体の一部がガイドに対して接触していない場合には、屠殺体の一部が、キャリアから鉛直方向にまっすぐに下向きに配向していることが推定される。屠殺体の一部がガイドに対して接触している場合には、なおかつ、同時に、キャリアが屠殺体の一部をトラックに沿って搬送している場合には、屠殺体の一部とガイドとの摩擦により、屠殺体の一部は、もはやキャリアからまっすぐに下向きに配向するわけではなく、鉛直方向に対して相対的な角度を形成する。屠殺体の一部は、キャリアの後方向きに引きずられる。
これは、屠殺体の一部が処理時にトラックに沿って移動する際には、問題となる。特に、処理が自動的に行われている場合には、問題となる。処理が自動的に行われている場合には、屠殺体の一部の位置および向きが既知であることが重要である。なぜなら、そうでない場合には、屠殺体の一部の間違った位置においてカットを行ってしまいかねないからである。処理が手動で行われている場合には、キャリアに対しての、屠殺体の一部の位置および/または向きの変更のために、操作者は、処理を行う前に、屠殺体の一部を手動で再配置しなければならない。このことは、時間および効率において損失が発生することを意味する。加えて、操作者に対して、物理的ストレスが追加されてしまう。
有利な実施形態においては、この問題は、トラックの一部に沿って屠殺体の一部と一緒にガイドを移動させ得るようにして、ガイドを設けることにより、解決される。ガイドは、例えば、円形やループ形状のものとすることができ、中央軸線まわりに、トラックに沿って屠殺体の一部の移動と一緒に、回転させることができる。ピンのような突起は、屠殺体の一部がガイドに沿ってスライドすることを防止する。代替例においては、ガイドは、屠殺体の一部が追従する経路の向きに移動可能であるように、弾性的に取り付けることができる。
この問題を解決するための他のアプローチは、キャリアを見ることである。キャリアには、位置保持手段を設けることができる。位置保持手段は、屠殺体の一部が、ガイドに対しての摩擦に基づいて、キャリアに対して位置および/または向きを変更してしまうことを防止する。位置保持手段は、本発明による他のキャリアと組み合わせて、使用することができる。
可能な実施形態においては、キャリアは、トロリーに対して取り付けられる。トロリーは、トラックに沿って移動され、キャリアを付帯する。トロリーは、ホイールまたはスライドブロックを備えている。ホイールまたはスライドブロックは、使用時には、トラックに対して接触する。トラックに沿っての屠殺体の一部およびキャリアの移動時には、キャリア内において屠殺体の一部に対して外力が印加される。これは、例えば、屠殺体の一部に対して行われる処理のためである。あるいは、屠殺体の一部がキャリアに対して移動するからである。これにより、屠殺体の一部を、人間工学的な態様で処理を行い得る位置に配置することができる。このような外力は、トラックに対して垂直なものとすることができるあるいはトラックに対して傾斜したものとすることができる。これにより、トラックのホイールまたはスライドブロックは、および/または、トラックの構成部材は、好ましくない機械的負荷を受ける。
したがって、有利な実施形態においては、トロリーは、ローラまたはストッパブロックを備えている。ローラまたはストッパブロックは、それら機械的負荷を支持する。これにより、トロリー部材上にまたはトラック上に、望ましくない程度の摩耗を引き起こすことがない。
可能な実施形態においては、キャリアの保持アセンブリは、搬送デバイス内においてキャリアが連結されているトロリーの上方に、配置される。このシステムにおいては、トロリーは、フロアの上方において比較的小さな程度で配置される。好ましくは、屠殺体の一部は、人間工学的な作業高さのところにおいて操作者に対して供される。
本発明によるシステムは、屠殺場または食肉加工工場の一部において使用することができる。屠殺場または食肉加工工場の他の部分においては、公知のシステムを使用することができる。例えば、キャリアを有した公知のシステムを、屠殺体の一部を小さな部分へとカットするに際して使用することができ、なおかつ、上述したタイプのキャリアを有した本発明によるシステムを、解体プロセスにおいて使用することができる。
有利な実施形態においては、分級ステーションが存在する。分級ステーションは、例えば、解体ラインの上流側に配置される。解体ラインには、好ましくは、本発明によるキャリアが設けられる。分級ステーションにおいては、分級ステーションを通過する個々の屠殺体の一部に関して、個々の屠殺体の一部が受けるべき以降の処理を決定する。よって、例えば、本発明によるシステムが、解体プロセスと組み合わせて使用される場合には、分級ステーションによって、個々の屠殺体の一部のうちのどれが解体されるかどうかが決定される。洗練された実施形態においては、分級ステーションにおいて、解体に際してどのプロセスステップを使用するかさえもが決定される。分級ステーションは、例えば重量や骨と肉との比率や脂肪比率等といったような、個々の屠殺体の一部のパラメータに基づいて、決定することができる。各パラメータは、分級ステーションの上流側の1つまたは複数の測定箇所において、測定される。通常は、決定は、そのようなパラメータの組合せに基づいて、決定される。
例えば、有利な実施形態においては、脂肪層の厚さが、処理対象をなす各大腿部分または各前端または各肩部分に関して測定される。好ましくは、この測定は、屠殺体の一部の残部からの、大腿部分または前端または肩部分の分離後に、行われる。より好ましくは、屠殺体の一部の冷却後に、行われる。なおも好ましくは、脂肪層の厚さの測定は、皮膚除去または皮剥ぎまたは脂肪除去が行われる直前に、行われる。個々の大腿部分または前端または肩部分に関して行われた脂肪層の厚さに基づいて、それぞれの大腿部分または前端または肩部分に関してどの程度の脂肪を除去するかが決定され、また、どの製品を有利に形成し得るかが決定される。屠殺体の一部の他の部分から脚部分がカットされたカット表面は、脂肪の厚さを測定するのに理想的な位置とすることができる。
例えば、大腿部分または前端または肩部分が、薄い脂肪層しか有していない場合には、有利には、赤身製品が形成される。それは、少量の脂肪しか除去する必要がないからである。これは、労力を節約する。また、処理時の重量損失が少ない。
公知のシステムにおいては、皮剥ぎおよび脂肪除去の後に製品上に残存する脂肪の量は、個々の製品に関してではなく、複数の屠殺体の一部からなるバッチに関して、決定される。公知のシステムにおいては、操作者は、バッチごとに、そのバッチの製品上に残すべき脂肪の量が指示される。本発明においては、個々の屠殺体の一部のそれぞれに関して、各製品上に残すべき脂肪の量を決定することができる。
可能な実施形態においては、個々の屠殺体の一部の脂肪の厚さの測定は、制御システム内に格納される。制御システムは、独立型のものとすることができる、あるいは、食肉加工工場のまたはその中の処理ラインの全体的制御システムの一部とすることができる。その場合、制御システムは、個々の屠殺体の一部の各々(例えば、大腿部分または前端または肩部分)に関して、どの程度の量の脂肪を除去すべきであるかを決定する。一般に、グレードシステムが使用される。グレードシステムにおいては、例えば、1D,2D,3D,4D,5Dといったような5つのグレードが使用される。このシステムにおいては、5D製品は、脂肪除去プロセスの後には、脂肪をほぼ残さない。これに対し、1D製品は、脂肪除去プロセスの後に、比較的多くの脂肪層が残っている。屠殺体の一部の各々に関して、1D,2D,3D,4D,5Dのうちのどの製品を形成するかが決定される。これは、例えば、(過剰の)脂肪を除去している操作者に対して指示される。
この指示は、様々な方法で、提供することができる。例えば、各キャリアに対してディスプレイが設けられる。このディスプレイは、キャリア内において、1D,2D,3D,4D,5Dのうちのどの製品が形成されるかを表示する。この指示は、多様な方法で提供することができる。例えば、数字によって、あるいは、カラーコードによって、提供することができる。また、指示を提供するための特定の位置に、ピンやノブ等を設けることができる。
自動化された処理ステーションによって(部分的にまたは全体的に)脂肪除去が行われる場合には、測定データを格納した制御システムを使用することにより、処理ステーション内のツールの設定値を制御することができる。これにより、個々の屠殺体の一部の各々から適切な量の脂肪を除去することができる。
洗練された実施形態においては、個々の屠殺体の一部自体に関連しないさらなる情報が、次なるプロセスまたは次なるプロセスステップに関する決定の際に、考慮される。そのような情報は、例えば、特定の日(あるいは、他の関連期間)に関する製品のある種のタイプに関する要求や、その日のそれら製品に関する要求に関連してその日に既に製造された特定のタイプの製品の量や、分級システムの下流側の処理ステーションの1つまたは複数の処理ラインの利用度に関する情報、とすることができる。
屠殺体の一部は、多様な方法で、分級システムに対して供給することができる。例えば、手動で供給することができる。あるいは、オーバーヘッドコンベヤシステムによって供給することができる。あるいは、ベルトコンベヤによって供給することができる。あるいは、本発明によるシステムによって供給することができる。あるいは、これらの組合せによって供給することができる。
有利な実施形態においては、搬送ステーションが、分級ステーションからキャリアへと屠殺体の一部を搬送するために、設けられる。搬送ステーションには、自動的な搬送デバイスを設けることができる。搬送デバイスは、分級ステーションから屠殺体の一部を受領し、屠殺体の一部を、本発明によるシステムのキャリア内へと配置する。洗練された実施形態においては、搬送ステーションは、分級ステーションからの屠殺体の一部を、屠殺体の一部に対して様々な処理の各々を行う様々なシステムへと、分散させる。
洗練された実施形態においては、分級ステーションにおいて行われるべき決定の目的のために行われる測定結果を使用することにより、また、そのような測定を行う場所の上流側および/または下流側の処理ステーションを制御することができる。例えば、そのような測定によって、比較的軽量の製品が多いことが判明した場合には、測定場所の上流側のカッターの位置を調節することができる。これにより、上流側の屠殺体の一部に、より多くの肉または骨を、残すことができる。他方、測定場所よりも下流側の1つまたは複数のカッターの位置を調節することにより、カッターによって、より正確なカットを行うことができる。
複数の分級システムおよび/またはより多数の測定場所を、屠殺場または食肉加工工場内に設けることができる。
一実施形態においては、キャリアは、固定支持構造上に配置される。固定支持構造は、屠殺場または食肉加工工場内に固定位置を設けるために、配置される。通常は、キャリアは、固定支持構造に対して、固定位置を有することとなる。しかしながら、好ましくは、キャリアは、固定支持構造に対してのキャリアの向きを変更し得るようにして、配置される。これは、例えば、固定支持構造上にキャリアをヒンジ的に取り付けることにより、得ることができる。ヒンジにより、1つまたは複数の平面内において、キャリアを回転させることができる。
これに代えて、あるいは、これに加えて、キャリアを、固定支持構造上において移動可能に取り付けることができる。これにより、固定支持構造に対してのキャリアの位置を、変更することができる。この実施形態においては、キャリアは、例えば前後に移動することができる。これにより、処理対象をなす屠殺体の一部を、より多くの自由度でもって、操作することができる。
好ましくは、固定支持構造の近傍に、1つまたは複数の処理ステーションが配置される。そのような処理ステーションは、操作者が立ったり座ったりする場所を提供することができる。なおかつ、操作者は、屠殺体の一部に対して処理を行うことができる。例えば、カットや、解体プロセスの一部を、行うことができる。処理ステーションには、操作者のためのツールを設けることができる。例えば、ナイフや、他のタイプのカッターや、屠殺体の一部に対しての追加的な支持体(例えば、処理時に特定の位置または向きに屠殺体の一部を保持するための支持体)、を設けることができる。そのようなツールは、処理ステーションに対して連結することができる。例えば、フレキシブルなケーブルから吊り下げることができる。
また、処理ステーション内において、1つまたは複数の処理を、自動的にまたは半自動的に行うことができる。その場合、処理ステーションには、回転円形ナイフや、ウォータジェットカッターや、センサや、ガイドレールや、自動的な処理または半自動的な処理を行い得る他の構成部材、を設けることができる。
赤身肉処理工場は、各々が1つまたは複数のキャリアを有した複数の固定支持構造を備えることができる。
本発明のいくつかの見地によるキャリアにより、自動的に参照カットを形成することができる。参照カットは、皮膚除去や皮剥ぎや脂肪除去のための開始場所として使用することができる。
本発明のいくつかの見地によるキャリアにより、自動的に、足を、あるいは、足の下部の少なくとも一部を、除去することができる。
第4見地においては、本発明は、プロセスの物流に関するものである。
本発明の第4見地においては、豚や牛や羊や山羊といったような赤身肉動物の屠殺体の一部の処理の物流を、様々な態様で改良することができる。豚に関する応用が、主に想定される。
第4見地は、豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するためのシステムであって、
処理においては、複数のプロセスステップを行うものとされ、
システムが、搬送システムを具備し、
搬送システムが、
−オーバーヘッドコンベヤであるとともに、トラックと複数のトロリーとを備え、トロリーがトラックに沿って移動可能とされた、オーバーヘッドコンベヤと、
−屠殺体の一部を保持するための複数のキャリアであるとともに、各々のキャリアがトロリーに対して連結された、キャリアと、
−複数の処理ステーションであるとともに、トラックに沿って配置され、各々の処理ステーションが屠殺体の一部に対して1つまたは複数のプロセスステップを実行し得るよう構成された、複数の処理ステーションと、
−屠殺体の一部に対してどのような処理ステップを実行するかを決定するための選択デバイスと、
を備え、
選択デバイスが、
−処理対象をなす屠殺体の一部の少なくとも2つの特性を決定するための測定ユニットと、
−システムの所望の出力に関するデータに関し、測定ユニットから測定データを受領するためのデータ収集ユニットと、
−データ収集ユニットによって収集されたデータを処理するためのプロセッサであり、これにより、個々の屠殺体の一部に関し、屠殺体の一部に対してどのような処理ステップを実行するためのプロセッサと、
−割当制御デバイスを有したシステム制御デバイスと、
を備え、
割当制御デバイスが、
−屠殺体の一部に対してどのような処理ステップを実行するかに関して選択デバイスからの情報を受領するための入力ユニットと、
−各屠殺体の一部に対して割り当てられた処理ステップを行い得るよう、搬送システムおよび/または処理ステーションを制御するための出力ユニットと、
を備え、
割当制御デバイスの出力ユニットが、屠殺体の一部が受けるべきでない処理を行う処理ステーションをバイパスさせ得るように構成されていることを特徴とするシステムに関するものである。
第4見地は、また、処理方法に関するものであり、その場合、そのようなシステムが使用される。
第4見地は、また、豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するための方法であって、
処理においては、複数のプロセスステップを行うものとされ、
この方法においては、
−オーバーヘッドコンベヤとされた搬送システムのキャリア内に屠殺体の一部を配置し、この場合、キャリアを、オーバーヘッドコンベヤのトラックに沿って移動可能とされた1つまたは複数のトロリーに対して連結し、
−屠殺体の一部の少なくとも2つの特性を測定し、
−得られるべき最終製品の所望量およびタイプを決定し、
−屠殺体の一部に関して測定された特性に基づいて、および、得られるべき最終製品の所望量およびタイプに基づいて、屠殺体の一部を処理するための最も有利な手法を決定し、その後、屠殺体の一部を処理するためのその最も有利な手法のためのシーケンスのために行うべきプロセスステップを決定し、
−屠殺体の一部を処理するための最も有利な手法として決定された少なくとも1つのプロセスステップを行い得る複数の処理ステーションに沿って、屠殺体の一部を駆動するための経路を決定し、
−オーバーヘッドコンベヤによって経路に沿って屠殺体の一部を駆動し、
−経路に沿って位置する処理ステーションのうち、屠殺体の一部を処理するための最も有利な手法には該当しない1つまたは複数のプロセスステップを行うすべての処理ステーションを、バイパスさせる、ことを特徴とする方法に関するものである。
第4見地は、また、そのような方法において使用されるシステムに関するものである。
本発明の第4見地によるすべてのシステムにおいては、オーバーヘッドコンベヤを使用することによって、処理対象をなす屠殺体の一部を、処理ステーションを行う複数の処理ステーションに沿って、搬送することができる。オーバーヘッドコンベヤは、本発明の第4見地によるシステムにおける使用において、最も適切である。なぜなら、オーバーヘッドコンベヤは、処理対象をなす屠殺体の一部を、コンベヤに対して制御および操作することを可能とするからである。
物流を改良し得る第1態様は、個々の屠殺体の一部の各々をカットする経路の決定を最適化することによって、得られる。公知のシステムにおいては、この決定は、主に処理システムの要求された出力に応じて、行われる。特定の日または特定の週に関してのクライアントからの要求が、追加される。これにより、どれくらいの項目数の最終製品またはどれくらいの重量の最終製品を作製すべきであるかが確立される。時には、加えて、屠殺体の一部の各々に関して、測定結果が考慮される。これにより、屠殺体の一部の特定部位における重量または脂肪比率を決定することができる。この追加情報に基づき、屠殺体の一部をカットする態様が決定される。
公知のシステムにおいては、屠殺体の一部が受けるプロセスステップにおける変更可能性や融通性が少ない。屠殺体の一部は、複数の処理ステーションに沿った固定された経路に追従し、すべての処理ステーションにおいて、通過するすべての屠殺体の一部に関して、所定の操作が実行される。公知のシステムにおいては、通常は、2〜3の異なる経路が存在し、また、複数の処理ステップの組合せが利用可能である。
本発明の第4見地によるシステムは、屠殺体の一部の各々に関して行われる複数の処理ステップの組合せを最適化することを目的とする。これにより、屠殺体の一部ごとの収率を最適化することができ、および/または、最終製品の最適の組合せを屠殺体の一部の各々から作製することができる。これにより、屠殺体の一部ごとに使用されるコストを、最適化することができる。
この最適化には、いくつかの見地が存在する。一見地は、屠殺体の一部の各々に関して行い得る処理ステップの数やタイプや組合せに関して、より大きな融通性を提供することに関するものであり、特定の屠殺体の一部に関して、より多くの選択肢および処理方法を提供する。屠殺体の一部の各々に関して行い得る処理ステップの数やタイプや組合せに関して、より大きな融通性を提供することは、従来技術において公知なような複数の処理ステップの固定された組合せを提供する複数の製造ラインを提供することによって、行うことができる。
より有利には、それに代えてあるいはそれに加えて、製造の融通性は、個々の屠殺体の一部が処理ステーションをバイパスさせる可能性を提供することによって、得られる。このようにして、複数の処理ステーションは、トラックに沿って配置され、各々の処理ステーションは、1つまたは複数の処理ステップを行い得るように構成される。屠殺体の一部に関して実行すべきではない処理ステップを実行し得るよう構成された処理ステーションに関しては、屠殺体の一部をバイパスさせる。バイパスは、処理ステーションに届かない位置へと屠殺体の一部を移動させることにより(特に、処理ステーションのツールに届かない位置へと屠殺体の一部を移動させることにより)、あるいは、処理ステーションのツールを経路外へと移動させることにより、あるいは、処理ステーションの全体を経路外へと移動させることにより、得ることができる。これにより、処理ステーションのツールは、屠殺体の一部に対して係合することがない。当然のことながら、これらの組合せを使用することができる。
個々の屠殺体の一部の各々に関して行われる複数の処理ステップの組合せを最適化することに関する他の見地は、屠殺場または食肉加工工場内の少なくとも1箇所に、例えば分級ステーションといったような選択デバイスを設けることにより、具現される。選択デバイスは、利用可能なデータに基づいて、屠殺体の一部の各々に関しての複数の処理ステップの最適な組合せを決定する。データは、好ましくは、そのような決定を行うべき特定の個々の屠殺体の一部に関しての測定によって得られたデータを備えている、および/または、特定の屠殺体の一部よりも前に処理された複数の屠殺体の一部に関しての測定によって得られたデータを備えている、および/または、特定の屠殺体の一部よりも後に処理された複数の屠殺体の一部に関しての測定によって得られたデータを備えている、および/または、要求された需要に関するデータを備えている、あるいは、屠殺体の一部の処理によってどの程度の需要が既に満たされているかに関するデータを備えている。
好ましくは、各屠殺体の一部が処理ステーションを通過する経路に沿って、複数の選択デバイスを利用することができる。これにより、処理時における個々の屠殺体の一部に関しての経路選択を、微調整することができる。
特定の屠殺体の一部に関して行われるべきプロセスステップの決定は、個々の屠殺体の一部の各々に関してより多くの情報が得られた場合には、改良される。このようにして、複数の処理ステップの利用可能な組合せにおける改良された融通性を、良好に使用することができる。より多くの情報を得るために、個々の屠殺体の一部の各々に関して、様々な測定が行われる。これら測定は、例えば、様々な場所における脂肪比率の測定や、サイズおよび形状の測定や、例えばカメラや他の光学的センサやCTセンサやX線測定によるサイズおよび形状の測定、とすることができる。これにより、骨または他の部位の位置を決定することができる。
実行し得る測定の1つは、屠殺体の一部の重量の測定である。オーバーヘッドコンベヤから吊り下げられる屠殺体の一部の重量は、処理時において任意の関連タイミングで決定し得るだけでなく、これにより、屠殺体の一部から切り離された部分の重量を決定することもできる。好ましくは、重量の測定は、ライン内において行われる。例えば、計量ブリッジの上方にオーバーヘッドコンベヤのトロリーを配置することにより、キャリアから吊り下げられた状態で屠殺体の一部の重量を測定することにより、行われる。これに代えて、計量器を、ベルトコンベヤ内に組み込むことができる。
例えば、有利な実施形態においては、脂肪層の厚さが、処理対象をなす大腿部分または前端または肩部分に関して、測定される。好ましくは、この測定は、屠殺体の一部の残部から大腿部分または前端または肩部分を分離した後に、行われる。より好ましくは、屠殺体の一部の冷却後に行われる。さらに好ましくは、脂肪の厚さの測定は、皮膚除去および/または皮剥ぎおよび/または脂肪除去が行われる直前に、行われる。公知のシステムにおいては、脂肪比率または脂肪層厚さは、屠殺プロセス時にのみ行われる。測定は、通常、胸または腹の近傍において、屠殺体の一部の側部において行われる。得られる測定結果は、屠殺体の全体を代理しているものと考えられる。しかしながら、実際には、これは、常に成立するわけではない。例えば、全体的に赤身の豚は、脂肪のある肩領域または脚を有することができる。
脂肪測定は、測定対象をなす領域がある種の圧力を受ける際に、行うことができる。これにより、脂肪層を平坦化することができ、脂肪層の厚さの測定を正確なものとすることができる。測定は、また、プローブを使用して行うこともできる。
個々の大腿部分または前端または肩部分に関して測定された脂肪厚さに基づいて、その特定の大腿部分または前端または肩部分に関してどの程度の脂肪が除去されるかが決定され、その特定の大腿部分または前端または肩部分からどのような製品が形成されるのが有利であるかが決定される。
例えば、大腿部分または前端または肩部分が、薄い脂肪層しか有していない場合には、有利には、その大腿部分または前端または肩部分からは、赤身製品が形成される。なぜなら、その場合には、比較的少量の脂肪しか除去されないからである。これは、労力を節約する。また、処理時に、より少ない重量損失しか発生しない。これは、コスト的に有利である。
公知のシステムにおいては、皮剥ぎおよび脂肪除去の後に製品上に残る脂肪の量は、個々の製品に関してではなく、屠殺体の一部のバッチに関して、決定される。公知のシステムにおいては、操作者は、バッチごとに、そのバッチの製品に関してどの程度の脂肪を残すべきであるかが、指示される。本発明においては、屠殺体の一部の各々に関して、個別的にこれを決定することができる。
可能な実施形態においては、個々の屠殺体の一部の脂肪厚さの測定結果は、制御システム内に格納される。制御システムは、独立型のものとすることができる、あるいは、食肉加工工場のまたはその中の処理ラインの全体的制御システムの一部とすることができる。その場合、制御システムは、個々の屠殺体の一部の各々(例えば、大腿部分または前端または肩部分)に関して、どの程度の量の脂肪を除去すべきであるかを決定する。一般に、グレードシステムが使用される。グレードシステムにおいては、例えば、1D,2D,3D,4D,5Dといったような5つのグレードが使用される。このシステムにおいては、5D製品は、脂肪除去プロセスの後には、脂肪をほぼ残さない。これに対し、1D製品は、脂肪除去プロセスの後に、比較的多くの脂肪層が残っている。屠殺体の一部の各々に関して、1D,2D,3D,4D,5Dのうちのどの製品を形成するかが決定される。
そのような実施形態においては、例えば、脂肪除去に関して5つの処理ステーションを設けることができる。すなわち、1D製品を形成するための処理ステーションと、2D製品を形成するための処理ステーションと、3D製品を形成するための処理ステーションと、4D製品を形成するための処理ステーションと、5D製品を形成するための処理ステーションと、を設けることができる。脂肪層厚さの測定に基づいて、2D製品を形成すべき屠殺体の一部は、1D製品のための処理ステーションと、3D,4D,5D製品のための処理ステーションと、をバイパスする。この実施形態においては、各屠殺体の一部は、脂肪除去に関して、5つの処理ステーションの中の1つの処理ステーションによって処理される。
この実施形態の変形例においては、脂肪除去に関して複数の処理ステーションが設けられる。例えば、脂肪除去に関して3つの処理ステーションが設けられる。各処理ステーションにおいては、脂肪を除去することができる。屠殺体の一部から少量の脂肪が除去されるべきである場合には、そのことが、ただ1つの処理ステーションの操作者または自動脂肪除去装置に対して提示され、他の処理ステーションがバイパスされる。しかしながら、屠殺体の一部から大量の脂肪が除去されなければならない場合には、そのことが、脂肪除去に関するすべての処理ステーションの操作者または自動脂肪除去装置に対して提示され、すべての処理ステーションにおいて、脂肪が除去される。
有利には、処理の途中において、追加的な測定が行われる。これら追加的な測定は、プロセスの初期においては得ることができなかった情報を得るために、使用することができる(例えば、測定箇所がそれ以前にはアクセスできないことのために)。また、追加的な測定結果を使用することにより、個々のプロセスステップの1つまたは複数のものを制御することができる。
当然のことながら、測定は、屠殺体の一部が処理ラインに沿って移動する際に、屠殺体の一部に関して行うことができる。しかしながら、屠殺体の一部から切り離された部分に関して、例えば屠殺体の一部から切り離された肉片に関して、測定を行うことができる。
得られた測定データは、特定の屠殺体の一部のための複数の処理ステップの最適な組合せを選択するに際して、使用することができる。しかしながら、それに代えてあるいはそれに加えて、他の目的のために使用することができる。例えば、1つまたは複数の処理ステーションを制御するために使用することができる。例えば、測定データが、ある種の処理ステーションの上流側において、比較的多数の小さな屠殺体の一部が存在していることを示している場合には、その処理ステーションにおいて、カットツールの位置は、小さな屠殺体の一部を処理するのに適したものであるような位置とすることができる。他の例においては、測定データが、ある種の処理ステーションの下流側において、比較的多数の小さな屠殺体の一部が存在していることを示している場合には、その処理ステーションにおいて、カットツールの位置は、通過する屠殺体の一部をより小さくカットするのに適したものであるような位置とすることができる。
測定から得られたおよび/または選択デバイスから得られた情報を使用するための他の手法は、処理ステーション内の1人または複数の操作者に対して、情報を提供することである。例えば、操作者の前方のスクリーン上に表示される画像を使用することによって、操作者に対して、操作者の前方の特定の屠殺体の一部から、肉のどの部分をカットすべきかを提示することができる。
本発明の第4見地によるシステムおよび方法は、本発明の第1〜第3見地に関して上述したような付加的な特徴点も含めて、任意の特徴点と組み合わせることができる。
本発明の第5見地は、豚や牛や羊や山羊といったような動物の屠殺体の一部を処理に際しての物流を改良することに関するものである。
本発明の第5見地は、豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するためのシステムであって、
処理においては、複数のプロセスステップを行うものとされ、
システムが、
−一次的搬送システムであるとともに、
−オーバーヘッドコンベヤであるとともに、トラックと複数のトロリーとを備え、トロリーがトラックに沿って移動可能とされた、オーバーヘッドコンベヤと、
−屠殺体の一部を保持するための複数のキャリアであるとともに、各々のキャリアがトロリーに対して連結された、キャリアと、
を備えた一次的搬送システムと、
−複数の処理ステーションであるとともに、トラックに沿って配置され、各々の処理ステーションが屠殺体の一部に対して1つまたは複数のプロセスステップを実行し得るよう構成され、少なくとも1つの処理ステーションにおいては、屠殺体の一部から部分を切り離すというステップを行うものとされた、複数の処理ステーションと、
−処理ステーションに隣接して配置された二次的搬送システムであるとともに、屠殺体の一部から切り離された部分を受領し得るよう構成された二次的搬送システムと、
を具備していることを特徴とするシステムに関するものである。
本発明の第5見地は、また、処理に際してのそのようなシステムの使用に関するものである。
本発明の第5見地は、豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するための方法であって、
処理においては、複数のプロセスステップを行うものとされ、
この方法においては、
−オーバーヘッドコンベヤとされた搬送システムのキャリア内に屠殺体の一部を配置し、この場合、キャリアを、オーバーヘッドコンベヤのトラックに沿って移動可能とされた1つまたは複数のトロリーに対して連結し、
−処理ステーションに対して屠殺体の一部を搬送し、
−処理ステーションにおいては、屠殺体の一部から部分を切り離し、
−切り離された部分を、処理ステーションに対して隣接して配置された二次的コンベヤ内へとまたは処理ステーションに対して隣接して配置された二次的コンベヤ上へと配置し、
−屠殺体の一部の残部を、オーバーヘッドコンベヤを使用して、処理ステーションから離間させる向きに搬送し、
−切り離された部分を、二次的コンベヤを使用して、処理ステーションから離間させる向きに搬送する、
ことを特徴とする方法に関するものである。
本発明の第5見地によるシステムにおいては、複数の処理ステーションの少なくとも1つにおいて、屠殺体の一部は、屠殺体の一部の残部から切り離される。屠殺体の一部は、オーバーヘッドコンベヤによって処理ステーションを通過する。
本発明の第5見地においては、二次的コンベヤが、処理ステーションに隣接して配置される。この二次的コンベヤは、切り離された部分を受領し得るよう構成されている。屠殺体の一部の残部は、オーバーヘッドコンベヤによって、さらに搬送される。
公知のシステムにおいては、切り離された部分および屠殺体の一部の残部は、一連をなす複数の処理ステーションの端部に向けて、一緒に搬送される。この場合には、操作者は、様々な製品および/または様々な中間製品の組合せに直面する。様々なタイプの製品は、さらなる搬送の前に、並び替えられなければならない。通常は、製品は、操作者に対して、様々な不揃えな向きで提供される。このため、操作者は、向きを調節しなければならない。これにより、操作者に対して物理的な負担がかかり、時間を消費してしまう。
本発明の第5見地によるシステムにおいては、切り離された部分は、順序だった態様でもって、屠殺体の一部の残部から、離間される。物流に関するこの改良により、一連をなす複数の処理ステーションの端部における並べ替え操作は、もはや不要である。
可能な実施形態においては、二次的コンベヤは、例えば高付加価値部位といったようなただ1種類の切り離された部分を受領する、あるいは、テンダーロインのような例えば特定の筋肉部位といったようなただ1種類の最終製品または中間製品さえをも受領する。その後、二次的コンベヤは、切り離された部分を、貯蔵のためにパッケージングステーションへと搬送する、あるいは、その特定の切り離された部分を処理し得るよう構成された処理ステーションへと搬送する。
二次的コンベヤは、互いに並置された複数のコンベヤベルトを備えることができる。あるいは、二次的コンベヤは、複数のトラックを有した1つのコンベヤベルトを備えることができる。そのような実施形態においては、有利には、コンベヤベルトの各々は、あるいは、複数のトラックの各々は、同じ種類の製品を受領する。例えば、3つのコンベヤベルトが互いに並置されている場合には、コンベヤベルトが3つのトラックを有している場合には、1つめのコンベヤベルトあるいは1つめのトラックは、主要なカット部分を受領して搬送するために使用することができ、2つめのコンベヤベルトあるいは2つめのトラックは、スクラップおよび(使用可能な)肉の小さな部分を受領して搬送するために使用することができ、3つめのコンベヤベルトあるいは3つめのトラックは、廃棄物を受領して搬送するために使用することができる。
複数の処理ステーションには、二次的コンベヤを設けることができる。好ましくは、屠殺体の一部の残部から部分が切り離される各処理ステーションには、それぞれの二次的コンベヤが設けられる。また、処理ステーションにおいては、2つまたはそれ以上の部分を順次的に切り離すことができる。その場合、部分が切り離される処理ステーション内の各箇所には、有利には、専用の二次的コンベヤが設けられる。
処理ステーションは、例えば通常のナイフまたはウィザードナイフを使用して手動で所望のカットを行う操作者によって、操作することができる。その場合、操作者は、例えば、屠殺体の一部から部分を切り離し、その後、切り離された部分を、二次的コンベヤ上にあるいは二次的コンベヤ内に配置する。
また、切り離された部分は、屠殺体の一部の残部から切り離される際には、保持されない。その場合、切り離しの完了時には、切り離された部分は、屠殺体の一部の残部から落下する。二次的コンベヤは、好ましくは、切り離された部分が二次的コンベヤ上へとあるいは二次的コンベヤ内へと直接的に落下するように、配置される。これに代えて、シュート等を配置することができ、これにより、切り離された部分をキャッチして、二次的コンベヤへと搬送することができる。
好ましい実施形態においては、すべての切り離された部分は、二次的コンベヤ上においてあるいは二次的コンベヤ内において、同じ向きで配置することができる。このことは、以降の処理を容易なものとする。なぜなら、切り離された部分を二次的コンベヤから受領する操作者または機械が、すべての切り離された部分を、同じ向きで受領するからである。通常は、これは、比較的単純な態様で達成することができる。特に、処理ステーションが自動的に動作する場合には、比較的単純な態様で達成することができる。自動的に動作する処理ステーションは、屠殺体の一部の残部から、同一の態様で、常に部分を切り離すこととなる。部分が自動処理ステーションによって切り離される際に直接的に部分をキャッチすることによって、向きが揃えられることとなる。
好ましくは、二次的コンベヤは、移動表面上へと、あるいは、移動ホルダ内へと、あるいは、キャリア内へと、切り離された部分を受領する。好ましくは、受領表面またはホルダまたはキャリアの速度は、切り離された部分どうしが重なり合わないような速度とされる。このようにして、切り離された製品は、個々に存在する。これにより、二次的コンベヤからの切り離された製品の採取を容易なものとすることができる。採取は、自動的に行うことさえできる。
切り離された部分は、最終製品や、中間製品や、あるいは、廃棄物、とすることができる。
本発明の第5見地によるシステムにおいては、1つまたは複数の選択デバイスを設けることができ、選択デバイスは、個々の屠殺体の一部に関して行わなければならない処理ステップを決定する。選択ステーションは、好ましくは、個々の屠殺体の一部に関しての以降の適切な処理ステップを、特定の屠殺体の一部に関して測定されたデータに基づいて、および/または、特定の屠殺体の一部の上流側のまたは下流側の他の屠殺体の一部に関して測定されたデータに基づいて、および/または、例えば特定の日または特定の期間における特定の最終製品に対しての需要といったような一般的なデータに基づいて、選択する。
測定は、オーバーヘッドコンベヤに対して連結されたキャリア内に配置された屠殺体の一部に関して、行うことができる。しかしながら、測定は、また、二次的コンベヤ上に既に位置した屠殺体の一部に関して、行うこともできる。
得られた測定データは、特定の屠殺体の一部に関しての複数のプロセスステップの最適な組合せの選択に際して使用することができる。しかしながら、それに代えてあるいはそれに加えて、他の目的において使用することができる。例えば、得られた測定データを使用して、1つまたは複数の処理ステーションを制御することができる。例えば、測定データが、特定の処理ステーションの上流側のいくつかのポイントにおいて、比較的多数の小さな屠殺体の一部が存在していることを示している場合には、カットツールの位置を、処理ステーションにおいて、小さな屠殺体の一部の処理に適した位置とすることができる。他の例においては、測定データが、特定の処理ステーションの下流側のいくつかのポイントにおいて、比較的多数の小さな屠殺体の一部が存在していることを示している場合には、カットツールの位置を、処理ステーションにおいて、通過する屠殺体の一部から少量のカットを行うような位置とすることができる。
測定から得られたおよび/または選択デバイスから得られた情報を使用する他の態様は、処理ステーション内の1人または複数の操作者に情報を提供することである。例えば、操作者の前方のスクリーン上に表示される画像を使用することによって、操作者に対して、操作者の前方の特定の屠殺体の一部から、肉のどの部分をカットすべきかを提示することができる。
本発明の第5見地は、有利には、冷却プロセスを受けた屠殺体の一部を処理するために使用することができる。冷却プロセスの際には、屠殺体の一部は、皮膚によってなおも被覆されている。
有利には、本発明の第5見地が適用される際には、屠殺体の一部は、解体および/または一次的カットを行う前に、皮膚除去および/または皮剥ぎされる。これは、有利には、プロセスの物流に関するものとすることができる。解体および/または一次的カットの前に皮膚除去および/または皮剥ぎを行うことの結果として、切り離された部分(例えば、一次的カット)に関して皮膚除去および/または皮剥ぎを行う必要がない。よって、切り離された部分は、より適切な態様でもって、パッケージングしたり貯蔵したり処理したりすることができる。さらに、有利には、屠殺体の一部が内部に骨を有している場合には、屠殺体の一部をより安定させた状態で、皮膚除去および/または皮剥ぎを行うことができる。よって、屠殺体の一部は、皮膚除去および/または皮剥ぎの際に印加されるプロセス力の影響によって変形することがない。これにより、皮膚除去および皮剥ぎが容易なものとされる。また、屠殺体の一部の皮膚除去および/または皮剥ぎを個別的に行う場合と比較して、屠殺体の一部の皮膚除去および/または皮剥ぎを、効率的に行うことができる。
本発明の第5見地によるシステムおよび方法は、本発明の第1〜第3見地に関して上述したような付加的な特徴点も含めて、任意の特徴点と組み合わせることができる。
本発明は、添付図面を参照して、より詳細に後述される。添付図面においては、本発明の非限定的な実施形態が図示されている。
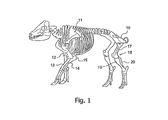
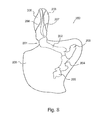
図1は、豚の骨格を示す図である。前方部分においては、肩甲骨11と、上腕骨12と、橈骨13と、尺骨14と、肘頭15と、が示されている。大腿領域においては、骨盤16と、大腿骨17と、膝18と、頸骨19と、腓骨20と、が示されている。
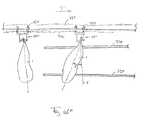
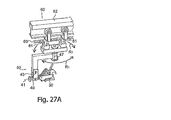
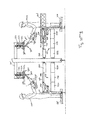
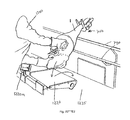
図2Aは、本発明によるキャリア50の第1実施形態を示す側面図である。
図2の実施形態においては、キャリア50は、屠殺された豚の肩部分を搬送し得るよう構成されている。肩部分は、上腕骨12の少なくとも一部と、橈骨13の少なくとも一部と、尺骨14の少なくとも一部と、肘頭15の少なくとも一部と、を備えている。肩部分は、上腕骨12と橈骨13と尺骨14との近くに天然に存在する肉21の少なくとも一部を備えている。
この例においては、好ましくはキャリア50と組み合わされたときには、肘頭15は、少なくとも部分的に、好ましくは完全に、肉21から切り離される。これにより、図2に示すように、肘頭15の骨構造が露出される。
キャリア50は、肘頭に対して係合し得るよう構成された肘頭保持アセンブリ30を備えている。好ましくは、この例に示すように、アセンブリ30は、アセンブリ30が肩部分に対しての何らの追加的な支持を必要とすることなく、豚の肩部分の全体を支持し得るようなものとされる。
図示の例においては、肘頭保持アセンブリは、第1ジョー31と、第2ジョー32と、を備えている。これらジョーは、互いに対して移動可能とされている。これらジョー31,32の開放状態においては、肘頭15を、ジョー31,32の間に配置することができる。これらジョー31,32の閉塞状態においては、肘頭15は、これらジョー31,32の間に固定的に保持される。
肘頭保持アセンブリ30は、第1ジョー31と第2ジョー32とを互いに対して相対移動させるためのアクチュエータ33を備えている。
この実施形態においては、第1ジョー31は、肘頭保持アセンブリ30の連結部分40に対して一体的なものとされている。連結部分40は、肘頭保持アセンブリ30をキャリア50に対して連結するように機能する。
第2ジョー32は、第1ジョー31に対しておよび連結部分40に対して、軸体34まわりに回転可能とされている。
この例においては、第1ジョー31は、上腕骨12のサイドにおいて、肘頭15に対して係合する。一方、第2ジョー32は、橈骨13および尺骨14のサイドにおいて、肘頭15に対して係合する。この例においては、第1ジョー31は、2つの歯39a,39bと、これら歯39a,39bの間に位置しなおかつ好ましくはV字形状とされたスロット38と、を有している。スロット38は、第1ジョー31の各歯が肘頭15の両端部に位置した状態で、肘頭15を内部に受領し得るような、形状とされている。
図2の例においては、第2ジョー32は、第1ジョー31のスロット内へと肘頭15を押し込み得るものとして、さらに、肘頭15をスロット38内に保持し得るものとして、構成されている。この例においては、第2ジョー32は、肘頭15がスロット38内に位置した際には、第1ジョー31の2つの歯の間に適合する。
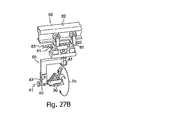
図2Bは、図2Aの実施形態を、斜視図によって示している。図2Bにおいては、肘頭15が、歯39a,39bの間において第1ジョー31のスロット38内に配置されていることが、明瞭に図示されている。
第2ジョー32は、ここでは金床(アンビル)として構成されているものであって、肘頭15に対して係合するとともに肘頭15をスロット38内へと押し込むための表面32*を有している。アクチュエータ33は、第2ジョー32に対して、閉塞力を提供する。これにより、肘頭15をスロット38内に安定的に保持することができる。
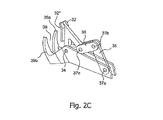
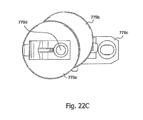
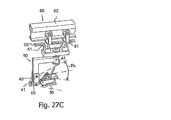
図2Cは、図2Aの実施形態における肘頭保持アセンブリ30を背面側から示している。図2Cにおいては、屠殺体の一部の図示は省略されている。第1ジョー31のスロット38と歯39a,39bとが明瞭に図示されており、第2ジョー32も図示されている。
一般に、ジョー31,32どうしをロック状態に維持し得るよう、ジョー31,32に関連して、ロック機構を設けることが好ましい。これにより、例えば移送時の肩部分の動きによっておよび/または肩部分の向きの変更によっておよび/または肩部分に対しての例えばカットといったような処理を行う際に印加される力によってといったような様々な要因に基づいて肩部分によってジョーに対して追加的な力が印加された場合であってさえも、肩部分に対しての保持アセンブリによる保持が、大いに信頼性の高いものとなる。
図2の例においては、アクチュエータ33は、トグルレバー機構を備えている。トグルレバー機構により、トグルレバー機構がオーバーセンター位置とされたときには、保持アセンブリをここでは両ジョー31,32を、閉塞状態にロックすることができる。このロック作用は、アクチュエータを操作することによってのみ、解除することができる。肩部分によって保持アセンブリに対して印加された力によっては、ロック解除を行うことができない。この例においては、トグルレバー機構は、第1アーム35と、第2アーム36と、を備えている。第1アーム35の一方の端部は、支点軸体37aを介して、連結部分40に対して回転可能に連結されている。第1アーム35の他方の端部は、支点軸体37bを介して、第2アーム36に対して回転可能に連結されている。第2アーム36の他端は、支点軸体37cを介して、第2ジョー32に対して回転可能に連結されている。支点軸体37cは、軸体34からは離間している。すべての軸体37a,37b,37c,34は、互いに平行とされている。
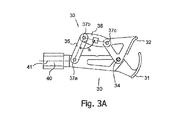
図3Aは、図2Aの肘頭保持アセンブリ30を、開放状態で示している。この状態においては、肘頭15を受領するための待ち受け状態とされている。この例においては、アクチュエータ33のトグルレバー機構の両アーム35,36は、180°よりも小さな相対角度αを形成している。
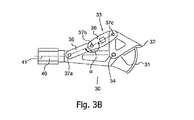
図3Bは、図2Aの肘頭保持アセンブリ30を、閉塞されたロック状態で示している。この状態においては、第2ジョー32が、肘頭15(図示せず)を、第1ジョー31のスロット内へと押し込んでおり、これにより、肘頭15(図示せず)を、両ジョー31,32の間にクランプしている。
図3Bにおいては、両アーム35,36の間の角度αは、180°よりも大きなものとされている。これは、両アーム35,36のオーバーセンター位置を提供する。このことは、両ジョー31,32の開放が、アクチュエータ33を駆動することによって両アームを180°未満の角度を形成する状態へと駆動することによってのみ、可能であることを意味している。
可能な実施形態においては、トグルレバー機構は、両アーム35,36のうちの一方に対して取り付けられたハンドルによって手動で操作される。操作者は、ハンドルを手動で操作することにより、肘頭保持アセンブリ30を開閉することができる。しかしながら、キャリアを、高度に自動化されたシステムの一部とすることもでき、その場合には、操作者が直接的にハンドルを操作するのではなく、ハンドルを制御システムによって操作することができる。また、トグルレバー機構は、キャリアを、例えばキャリアが走行するトラックに沿って配置されたガイドバーといったような外部操作部材に対して移動させることによって、操作することもできる。その場合、ガイドバーは、トグルレバー機構に対して係合し(直接的に、あるいは、例えばハンドルを介して)、トグルレバー機構の両アームの相対位置を変更する。
好ましくは、保持アセンブリ30の連結部分40は、キャリア50に対して回転可能とされる。図3,4,5,7の例においては、連結部分40は、キャリアのボディに対して、水平軸線41まわりにおいて、好ましくは360°にわたって、回転可能とされている。好ましくは、水平軸線41は、両ジョー31,32の間の、肘頭15が受領されているスペースを通って延在する。
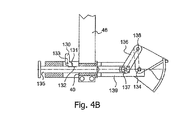
図4は、肘頭保持アセンブリ30のアクチュエータの代替可能な実施形態を示している。符号46は、キャリア50のボディの一部を示している。図4Aは、両ジョー31,32が開放状態とされている、肘頭保持アセンブリ30を示している。図4Bにおいては、肘頭保持アセンブリ30は、閉塞状態とされている。
好ましくは、保持アセンブリの連結部分40は、キャリア50のボディに対して、ここではボディ部分46に対して、水平軸線41まわりに回転可能とされる。
図4の実施形態においては、アクチュエータは、駆動ロッド135を備えている。駆動ロッド135は、アーム136を備えた機構によって、両ジョー31,32のうちの一方に対して、連結されている。図4の例においては、駆動ロッド135は、アーム136を介して、回転可能な第2ジョー32に対して連結されている。
第1ジョー31は、肘頭保持アセンブリ30の連結部分40に対して、固定的に連結されている。当業者であれば、これに代えて、駆動ロッド135を第1ジョー31に対して連結し得るとともに第2ジョー32を肘頭保持アセンブリ30の連結部分40に対して固定的に連結し得ることは、理解されるであろう。あるいはこれに代えて、第1ジョーと第2ジョーとの双方を、肘頭保持アセンブリ30の連結部分40に対して移動可能なものとすることができ、その場合、単一の駆動ロッド135を介して共有することも、あるいは、各ジョーが駆動ロッドをまたは他のタイプのアクチュエータを有することも、できる。
図4の実施形態は、以下のようにして動作する。すなわち、肘頭保持アセンブリ30の開放状態においては、駆動ロッド135が、退避位置とされる。この状況は、図4Aに図示されている。アーム136が、駆動ロッド135に対して、ピン137によって、回転可能に連結されている。ピン138は、アーム136を第2ジョー32に対して連結しており、第2ジョー32は、ピン134によって、連結部分40のボディ139に対して、回転可能に連結されている。これにより、第2ジョー32は、ボディ139に対して回転することができる。
図4Bは、前方位置とされた駆動ロッド135を示している。駆動ロッド135が前方位置とされたときには、肘頭保持アセンブリ30の両ジョー31,32は、閉塞状態とされている。ここで、リンク135およびピン137,138,134の位置および寸法は、駆動ロッド135が退避位置から前方位置へと駆動された際には、肘頭保持アセンブリ30の両ジョー31,32が開放状態から閉塞状態へと移行し得るような、ものとされる。同様に、駆動ロッド135が、前方位置から退避位置へと移動した際には、両ジョー31,32は、閉塞状態から開放状態へと移行する。駆動ロッド135自体は、例えば空気圧シリンダや油圧シリンダや電気モータといったような任意の適切なドライバによって、あるいは、手動によって、駆動することができる。ドライバは、屠殺体の一部の重量に対抗しつつ、また、屠殺体の一部の処理に際して印加される外力に対抗しつつ、肘頭保持アセンブリの中に屠殺体の一部を保持するのに必要な駆動力を供給し得るように、構成することができる。
図4の実施形態においては、駆動ロッド135のドライバによって供給される任意の連続的な駆動力に加えてあるいはそのような任意の連続的な駆動力に代えて、ラチェット130が設けられている。ラチェット130は、複数の歯131を有している。駆動ロッド135にも、好ましくは局所的に、複数の歯132が設けられている。ラチェット130の歯131と、駆動ロッド135の歯132とは、ラチェットによって駆動ロッド135を退避位置から前方位置へと移動させ得るとともに、前方位置から退避位置への駆動ロッド135の移動を阻止し得るような、ものとされている。これにより、ラチェット130は、肘頭保持アセンブリ30の開放を阻止することができる。肘頭保持アセンブリ30を再度開放することが要望された際には、例えば、保持されている屠殺体の一部の肘頭を解放するために肘頭保持アセンブリ30を再度開放することが要望された際には、ラチェットを、軸体133まわりに、戻る向きに回転させる。これにより、駆動ロッド135が解放され、肘頭保持アセンブリ30を開放することができる。
図4の例の有利な実施形態においては、駆動ロッド135は、バンドとして配置された複数の歯132を有している。複数の歯132は、周縁回りに延在している。バンドの幅は、ラチェットのサイズに適合したものとされ、一般に、駆動ロッドの長さよりも短いものとされている。この構成の利点は、駆動ロッドの、円滑な、歯が設けられていない部分を、ヒンジの一部として使用し得ることである。これにより、屠殺体の一部を、肘頭保持アセンブリが連結されている固定構造に対して、あるいは、肘頭保持アセンブリが連結されている搬送システムのトロリーに対して、回転させることができる。
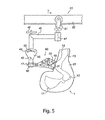
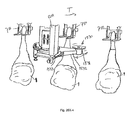
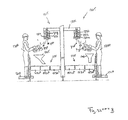
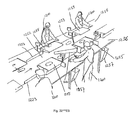
図5は、本発明による、豚の肩部分の各々に関する搬送デバイス(あるいは、コンベヤデバイス)の一例を示している。搬送デバイスは、トラック62を備えている。トラック62は、ここでは、オーバーヘッドレール(好ましい)として形成されている。1つまたは複数のトロリー61は、レール62に沿って移動可能とされている。1つまたは複数のトロリー61は、可能であれば、例えばケーブルまたはチェーンといったような部材によって、相互連結されている。可能であれば、駆動機構が、トラックに沿ってトロリーを駆動するために設けられている。キャリアアセンブリ50は、搬送デバイス60の1つまたは複数のトロリー61に対して、ここでは単一のトロリー61に対して、連結されている。キャリア50を2つのトロリーに対して連結する構成とすることもできる。図5の例におけるキャリアは、図2によるキャリアとされる。しかしながら、例えば本明細書内において詳細に説明するような他のキャリア構成を使用することもできる。
搬送デバイス60を使用することにより、トラックに沿って、キャリア50によって保持された屠殺体の一部を搬送することができる。トラックは、1つまたは複数の処理ステーションに沿って延在している。処理ステーションにおいては、例えば手動プロセスによってあるいは自動化されたプロセスによって、搬送されてきた屠殺体の一部を処理することができる。屠殺体の一部は、搬送方向Tにおいて、連続的に、あるいは、ステップ的な態様でもって、搬送することができる。
キャリア50は、肘頭保持アセンブリの支持体40を備えている。肘頭保持アセンブリの支持体40は、ヒンジ41を備えている。この例においては、ヒンジ41は、水平方向に延在した回転軸線を有している。この回転軸線は、搬送方向Tに対して平行とされている。付加的な特徴点においては、キャリア50は、さらに、保持アセンブリのための第2の水平方向回転軸線42を有している。第2の水平方向回転軸線42は、第1の水平方向回転軸線41に対して平行ではなく、ここでは垂直なものである。よって、保持アセンブリは、キャリアのボディ46に対して、2つの回転軸線41,42まわりに回転することができる。この例においては、連結部材40は、中間部材45上において、軸線41まわりに回転可能に取り付けられている。中間部材45は、キャリアのボディに対して、ここではキャリアのアーム46に対して、回転可能に取り付けられている。
この例においては、中間部材は、ガイドプレート45を有している。ガイドプレート45は、第2軸線42まわりにおける肘頭保持アセンブリ30の移動の自由度を制限する目的で、設けられている。ガイドプレート45は、スロット44を有している。スロット44を貫通して、アーム46上に設けられたピン43が突出している。
好ましい付加的な特徴点として、キャリア50は、垂直軸線47まわりにおいて、1つまたは複数のトロリー61に対して回転可能に取り付けられている。
保持アセンブリが2つの非平行な水平方向軸線を介してキャリアに対して連結されておりなおかつキャリアが第3の垂直軸線を介して1つまたは複数のトロリーに対して連結されている実施形態においては、屠殺体の一部は、基本的に、3つの回転自由度でもって、操作することができる。この操作は、屠殺体の一部に対して例えば切り離し処理といったような処理を行っている操作者によって、行うことができる。しかしながら、操作は、例えばある処理ステーションから次なる処理ステーションへの移送時に、自動的に行うこともできる。
図5の実施形態においては、ガイドディスクまたは他のフォロワ48が、例えばカムトラックと協働しているカムフォロワが、設けられている。これにより、軸線47まわりにおけるキャリアの自動的な回転を引き起こすことができる。
図5の実施形態の変形例においては、ガイドプレート54には、連続的なスロット44が設けられておらず、複数の個別の穴が設けられている。それら穴の中には、ピン43が装着されている。肘頭保持アセンブリが様々な向きを取らなければならない場合には、ピン43は、装着された穴から引き抜かれ、ガイドプレート45の他の穴内へと装着される。
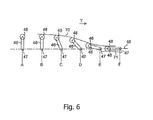
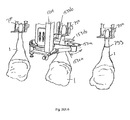
図6は、自動的な操作が得られる態様の一例を概略的に示している。一点鎖線65は、トロリーが追従するトラックを示している。トロリーが位置Aとされているときには、関連する支持アーム46は、搬送方向Tに対して実質的に直交して延在している。トロリーが位置Bに到達したときには、ガイドディスク48は、例えばガイドレールといったようなガイド70に対して、当接するようになる。トロリーが位置Fに向けて前進する際には、ガイド70は、一点鎖線65に向けて支持アーム46を押圧する。これにより、支持アーム46を、トラックに対して(一点鎖線65に対して)実質的に平行に延在するものとする。トロリーが位置Fに対して到着した際には、ガイドディスク48の反対側には、第2ガイド71が存在している。ガイド70,71は、一緒になって、トラックに対して平行な向きに、支持アーム46を保持する。
図6の例においては、搬送システムのトラックに沿って、肘頭保持アセンブリの向きを制御するための手段(ガイド70)と、少なくとも1つの自由度において肘頭保持アセンブリの向きを固定するための手段(ガイド70の後段部分、および、ガイド71)と、が設けられている。しかしながら、そのような手段をキャリアアセンブリ内に組み込むこともできる。例えば、この目的のために、サーボモータを使用することができる。
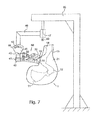
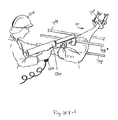
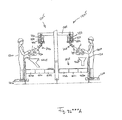
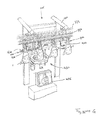
操作のための手段、および/または、キャリアアセンブリ内における向きを固定するための手段は、例えば図7に示すように、固定された支持構造80上にキャリアアセンブリが設けられている場合に、特に有効である。そのような場合においては、固定された支持構造80が、一般に、食肉処理場や食肉加工工場内において固定された位置を有していることのために、キャリアアセンブリとその周囲部材との相対移動を使用することができない。
図7は、キャビティアセンブリ内に組み込まれた3つのサーボモータ90を概略的に示している。3つのサーボモータは、3つの回転自由度の各々に対応して設けられている。当然のことながら、3つよりも少数のまたは3つよりも多数のモータを使用することもできる、および/または、並進移動を引き起こすためのモータを設けることもできる。
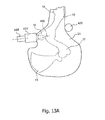
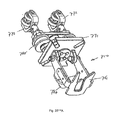
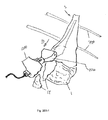
図8に示すように、本発明によるデバイスおよびシステムは、屠殺体の一部が、屠殺された豚の大腿である場合を開示している。その場合、大腿は、膝と、膝の近傍において大腿骨の少なくとも一部と、膝の近傍において頸骨および腓骨の少なくとも一部と、大腿骨や頸骨や腓骨上に天然に存在する肉の少なくとも一部と、を備えている。
豚の大腿部分200の一例は、図8に示されている。大腿部分は、膝201と、大腿骨202と、坐骨203と、恥骨204と、腸骨205と、頸骨206と、腓骨207と、を備えている。大腿部分は、さらに、それら骨上に天然に存在する肉208の少なくとも一部を備えている。膝領域内における肉の少なくともいくらかは、骨から除去されているあるいは緩められている。膝領域における骨は、好ましくは、完全にまたは部分的に露出されている、あるいは、それら骨に対して、緩められた肉の横を押すことにより、少なくとも部分的に到達することができる。しかしながら、本発明は、また、膝が肉によって完全に覆われている場合にも、適用することができる。
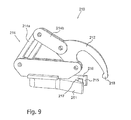
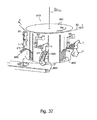
図9においては、膝保持アセンブリ210の好ましい実施形態が示されている。
豚の大腿部分を保持するための膝保持アセンブリは、好ましくは、例えば図2〜図7の1つまたは複数の図面を参照して説明された1つまたは複数の特徴点を有したキャリアといったような、また、搬送デバイスの一部をなすキャリアといったような、キャリア内に取り付けられている。
膝保持アセンブリは、第1ジョー212と、第2ジョー211と、を備えている。これらジョーは、これらジョーどうしの間に膝を配置し得る開放位置と、これらジョーどうしの間に膝をクランプし得る閉塞位置と、の間にわたって、互いに対して移動可能とされている。
この好ましい実施形態においては、膝保持アセンブリ210は、ここではフック212という態様とされた突出した肉貫通ピンを有した第1ジョーと、ここでは当接部材またはブロックとして形成された第2ジョー211と、を備えている。
膝保持アセンブリは、さらに、アクチュエータを備えている。アクチュエータは、第1ジョー212と第2ジョー211との相対移動を引き起こす。この例においては、アクチュエータは、リンク機構214を備えており、最も好ましくは、図3を参照して上述したようなトグルレバー機構を備えており、アーム214a,214bを有している。
使用時には、当接ブロック211は、膝関節のところにおいてまたは膝関節の近傍において、生体の豚に向けて面したサイドから骨に対して係合し得るように、構成される。当接ブロック211は、好ましくは、フロント面215を有している。フロント面215の形状は、フロント面215に対して係合することとなる骨の形状に適合したものとされる。
図9の例においては、第2ジョーのフロント面215は、1つまたは複数の凹所を有している、好ましくは、この例に示すように、2つの凹所216,217を有している。これら凹所216,217の各々は、頸骨19の一部を受領し得るように構成されている。一時的には、一方の凹所だけが使用される。2つの凹所216,217が設けられているとにより、第2ジョー211を有した保持アセンブリは、左右の脚の双方を処理するに際して使用することができる。
有利な実施形態においては、第2ジョー211は、2つの状態に適合することができる。1つの状態は、2つの凹所216,217のうちの一方が、左脚の頸骨19を受領し得る状態である。他の状態は、2つの凹所216,217のうちの他方が、右脚の頸骨19を受領し得る状態である。好ましくは、第2ジョー211は、右位置にはまることができる。
第1ジョーまたはフック212は、第2ジョーまたは当接ブロック211に対して、移動可能とされている、ここでは回転可能とされている。第2ジョーに対してのフック212の移動は、リンク機構214によって制御される。リンク機構214は、任意の適切な手段によって駆動することができる。
フック212は、好ましくは、屠殺体の一部を通して頸骨と腓骨との間を通過するような形状とされる。リンク機構214は、好ましくは、フック212を、フックの先端218が頸骨と腓骨との間を通過した後に第2ジョーに向けて移動するようにして、移動させる。これにより、フック212の先端218は、背面側から膝に対して係合することができ、第2ジョーをなす当接ブロックに向けて膝を押し込むことができる。
ドライバは、屠殺体の一部をキャリアによって搬送する際に、および/または、屠殺体の一部を処理する際に、膝保持アセンブリの中に屠殺体の一部を保持するのに必要な駆動力を供給し得るように、構成することができる。これに代えて、あるいは、これに加えて、リンク機構自体に駆動力を生成することができる。図9の例においては、リンク機構214は、例えば、ドライバによってオーバーセンターポイントを超えた位置とすることができる。これは、図10に示されている。図10においては、図9の膝保持アセンブリが、閉塞位置において示されている。閉塞位置においては、屠殺体の一部の膝をロックすることができる。フック212を上向きに移動させて屠殺体の一部を膝ロックから解放するためには、リンク機構214を、死点を通して戻す必要があり、追加的な力を必要とする。
肘頭保持アセンブリの場合と同様に、膝保持アセンブリにおけるアクチュエータは、多様な態様で具現することができる。例えば、膝保持アセンブリにおいては、図4の駆動ロッドを適用することができる。例えばスプリング式アクチュエータといったような、アクチュエータの他の実施形態を、双方の保持アセンブリに関して、使用することができる。
膝保持アセンブリ自体は、異なる態様のものとすることもできる。上述したような突出ピンを有した第1ジョーを使用することに代えて、摩擦によって、第1ジョーと第2ジョーとの間において、膝をクランプして保持することができる。他の実施形態においては、両ジョーのうちの一方は、肘頭保持アセンブリの場合と同様のV字形状スロットを有することができる。
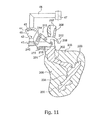
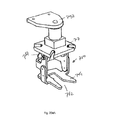
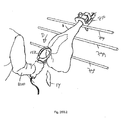
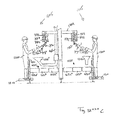
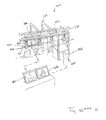
図11は、本発明によるキャリア内に保持された豚の大腿部分を示している。図11においては、膝保持アセンブリを備えたキャリアが、部分的な破断図によって示されている。
図11においては、膝保持アセンブリ210は、図5および図7に示すタイプのキャリア内に配置されている。同様に、図11のキャリアアセンブリは、搬送デバイスのトロリーに対して、あるいは、固定された支持構造に対して、連結することができる。図11において使用されているキャリアアセンブリの参照符号は、図5および図7における構成部材を示している。
図11においては、大腿部分を有した屠殺体の一部の膝は、当接ブロック211のフロント面215に対して押圧される。そうすることによって、フック212は、頸骨と腓骨との間にわたって屠殺体の一部を貫通している。屠殺体の一部は、操作者による手動力によって、あるいは、自動化された態様でもって、図11の位置とすることができる。
図12は、図11の実施形態を示しているものの、図12においては、膝保持アセンブリは、閉塞状態で示されている。リンク機構214は、フック212の先端218が膝201*の中空部分に対して係合するようにして、移動されている。フック212は、膝ロックの当接ブロック211のフロント面に対して、膝のフロント部分を押圧する。このようにして、屠殺体の一部は、膝ロック内にロックされる。
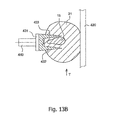
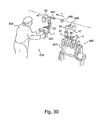
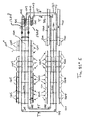
図13は、本発明による保持アセンブリの他の可能な実施形態を示している。この実施形態においては、保持アセンブリは、搬送デバイスのキャリアの一部を構成するものと考えることができる。その場合、キャリアは、搬送デバイスのトラックに沿って、例えば図13Bにおける搬送方向Tにおいて、移動可能とされている。図13Aは、この実施形態を、側面図で示している。図13Bは、この実施形態を、部分的な断面図を使用して、平面図によって示している。この例においては、豚の肩部分は、キャリア内に配置されている。しかしながら、システムのこの実施形態は、屠殺体の一部の大腿部分または他の部分と組み合わせて、使用することができる。
図13に示すように、豚の肩部分は、上腕骨12の少なくとも一部と、橈骨13の少なくとも一部と、尺骨14と、肘頭15と、を備えている。また、肩甲骨11の少なくとも一部が存在している。肩部分は、さらに、上腕骨12と橈骨13と尺骨14との近くに天然に存在する肉21の少なくとも一部を備えている。この実施形態においては、肘頭は、なおも肉によって覆われている。
図13の実施形態においては、保持アセンブリには、1つまたは複数の肉貫通歯が、ここでは2つの肉貫通歯432,433が、設けられている。肉貫通歯432,433は、ブロック431上に取り付けられている。ブロック431は、保持アセンブリの連結部分440に対して連結されている。
1つまたは複数の肉貫通歯を有したブロックを付帯した連結部分440は、キャリアに対して連結される。キャリアは、図示されていないものの、例えば、他の図面を参照して説明されている。
肉貫通歯432,433は、屠殺体の一部の参照部分の近傍においてあるいはその参照部分のところにおいて、屠殺体の一部の肉内へと貫通している。この場合、参照部分は、肘頭15とされ、肉貫通歯432,433は、肘頭15の両サイドにおいて、屠殺体の一部の肉内へと貫通している。2つの歯は、すべてのなおかつ1つの自由度へと、ベースブロック431に対しての屠殺体の一部の移動を、制限する。肉貫通歯432,433の長手方向における並進移動だけが、制限されていない。肉貫通歯432,433は、屠殺体の一部の重量を支持する。
搬送デバイスのトラックの少なくとも一部に沿って配置された1つまたは複数のガイドレール420は、1つまたは複数の肉貫通歯432,433の長手方向において、ベースブロックから離間する向きにおいて、ブロック431に対しての屠殺体の一部の移動を、制限するとともに、このベースブロック431に向けて屠殺体の一部を押しつける。このようにして、屠殺体の一部は、ベースブロック431と1つまたは複数のガイドレール420との間において、ロックされるようになる。
図13のタイプの保持アセンブリが適用されている本発明のシステムの有利な実施形態においては、肉貫通歯432,433とベースブロック431とベース部分440とが、搬送システムのキャリア上に設けられている。キャリアは、経路に沿って、屠殺体の一部を搬送する。そのようなシステムにおいては、ガイドレールは、経路に沿って、キャリア内における屠殺体の一部のロックが必要とされる場所において、例えば屠殺体の一部に対してプロセスステップが実行される場所において、固定的に配置することができる。よって、ガイドレール420は、処理ステーション内に、非常にうまく組み込むことができる。ガイドレールに代えて、あるいは、ガイドレールに加えて、例えばガイドプレートやガイドブロックといったようなものを、適用することができる。
本発明による、固定された支持構造に図13によるロックを有した1つまたは複数のキャリアが設けられたシステムにおいては、ガイドレールを、ベースブロック431に向けて移動可能なものとして形成することができる。ガイドレールに代えて、あるいは、ガイドレールに加えて、例えばガイドプレートやガイドブロックといったようなものを、適用することができる。
肉貫通歯432,433は、図13に示すものとは異なる形状のものとすることができる。例えば、長さの少なくとも一部にわたって一定の横断面積を有したピンを、使用することができる。図13に示す実施形態においては、肉貫通歯432,433は、屠殺体の一部を、肘頭15の両サイド(左右)において、導入することができる。また、肉貫通歯432,433は、例えば、肘頭15の前方および後方において、導入することもできる。このようにして、骨構造によって屠殺体の一部を支持している時の安定性を、有利なものとすることができる。その場合、屠殺体の一部の重量は、屠殺体の一部の肉部分上に印加されるだけではなく、骨構造上にも印加される。
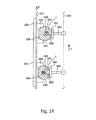
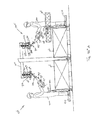
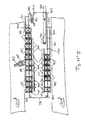
図14は、本発明によるシステムの他の実施形態を、部分的な断面図を使用して示す平面図である。
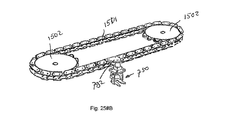
図14は、経路565に沿って搬送方向Tにおいて移動可能とされた搬送デバイスの複数のキャリア550を示している。複数のキャリアの各々に対して、ベースブロック531が連結されている。ベースブロック531は、少なくとも1つの突出した肉貫通ピン532を有している。このピン532は、尖鋭な先端、または、丸められた先端、または、鈍い先端、を有することができる。ピン532は、屠殺体の一部1の肉内へと導入される。屠殺体の一部1は、図14の例においては、大腿部分とされている。しかしながら、図14の実施形態は、また、他のタイプの屠殺体の一部に対しても、使用することができる。
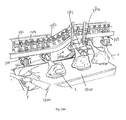
図14の例においては、ピン532は、頸骨506および腓骨507に隣接したところにおいて、肉508内へと導入される。しかしながら、ピン532は、頸骨と腓骨との間のところにおいて、肉内へと導入することもできる。経路565の少なくとも一部に沿って、第2コンベヤが延在している。第2コンベヤは、ここでは、ベルト521を有したものとされている。好ましくは、ベルト521は、無端ベルトとされる。ベルト521に代えて、あるいは、ベルト521に加えて、1つまたは複数のコードやケーブルやチェーン等を使用することができる。経路565に沿って延在するベルト521の少なくとも一部に関しては、ベルト521は、同じ方向において(矢印B)、同じ速度でもって、キャリアと一緒に、移動する。ベルト521上においては、規則的な間隔でもって、カウンタブロック520が設けられている。カウンタブロック520どうしの間のピッチは、キャリア550どうしの間のピッチと同じとされている。カウンタブロック520の各々には、屠殺体の一部を受領するための凹所523が設けられている。キャリアは、屠殺体の一部を凹所523内へと押圧する。これにより、屠殺体の一部を、キャリア内にロックすることができる。ベルト521の背面側には、ガイドプレート522を設けることができる。これにより、ベルト521を、カウンタブロック520の凹所523内へと屠殺体の一部が押し込まれる力に抗して、支持することができる。同様に、同様のガイドプレート(図示せず)を、そのような力に抗してキャリアを支持し得るために、設けることができる。
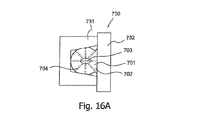
図15は、本発明によるキャリア750の一例を示している。この例においては、キャリア750は、トロリー61に対して連結される。トロリー61は、オーバーヘッド型の搬送デバイス60のオーバーヘッドトラック62に沿って走行する。キャリア750は、連結部材740を有した保持アセンブリ730を備えている。この例においては、保持アセンブリ730は、屠殺体の一部1に対して係合している。屠殺体の一部1は、この例においては、大腿部分とされている。屠殺体の一部1は、保持領域701(図15においては、ハッチングによって示されている)において保持されている。図15に示すキャリアは、さらに、キャリアおよび搬送デバイスに関して上述した1つまたは複数の特徴点を備えることができる。図16は、図15におけるA−A線に沿った矢視断面を概略的に示している。この断面図においては、保持アセンブリ730のジョー731,732が図示されている。両ジョーの間に、屠殺体の一部701をクランプすることができる。屠殺体の一部のうちの、保持アセンブリ730が係合している保持領域においては、屠殺体の一部701は、横断面において、骨703と軟組織702との双方を有している。両ジョー731,732は、軟組織に対して係合している。
図16Aは、保持アセンブリが屠殺体の一部に対して係合した際の、保持アセンブリ730に対しての骨703の空間的な向きを示している。
図16Bは、ガイド力または配向力が屠殺体の一部に対して印加された際の、骨703の状況を示している。軟組織の状況は、ジョー731,732に対して、なおも同じ位置を有している。しかしながら、骨703は、図16Aの初期位置に対して回転される。軟組織702のフレキシブルさが、これを可能としている。一連のストライプ704は、骨703のこの回転に基づく軟組織702の変形を可視化している。
軟組織の状況に対しての骨の回転は、軟組織内における機械的応力を引き起こす。ガイド力または配向力が、もはや印加されていないときには、軟組織の弾性に基づき、および、引き起こされた機械的応力に基づき、骨は、図16Aの初期的な向きへと復帰する。
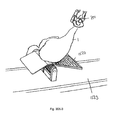
図17〜図26を参照して、屠殺された豚の脚部分に関しての、本発明による搬送デバイスおよびシステムの、好ましくは、本発明の第1,第2,第3見地による搬送デバイスおよびシステムの、いくつかの例示としての実施形態について説明する。
搬送デバイスおよびシステムは、特に、屠殺された豚の前脚部分または後脚部分の搬送および搬送時の処理を想定している。これらの例示においては、前脚部分または後脚部分は、少なくとも豚の足(後述するように、少なくとも、足に関連する領域)と、豚の脚の連結部分と、を備えている。例えば、公知なように、前脚部分は、前端である。例えば、後脚部分は、大腿部分を含んでいる。搬送デバイスは、有利には、搬送されてきた豚の脚部分の処理を行う1つまたは複数の処理ステーションと組み合わせて、使用することができる。例えば、処理に際しては、脚部分に対して1つまたは複数のカットを行うことができる。例えば、脚部分の一部をカットしたり、および/または、例えば切り離し処理といったような以降の処理のために、事前処理を行うことができる。1つまたは複数の処理を、自動化されたデバイスを使用して行うことを、想定することができる。また、1つまたは複数の処理を、例えばナイフのようなツールを使用しておよび/または手持ち式のパワーツールを使用して、手動で行うことを、想定することができる。
そのような搬送デバイスにおいては、好ましくはレールといったような、最も好ましくはオーバーヘッドレールといったような、トラックが設けられる。
好ましくは、トラックは、無端タイプのものとされる。トラックは、かなりの長さを有することができる。例えば、豚屠殺処理場内における複数の処理ステーションの間にわたっておよび/またはそれら複数の処理ステーションに沿って、延在している。トラックは、そのような処理場内において、単一の処理ステーションに関して、および/または、単一の処理機械に関して、専用のものとすることができ、例えば、無端の円形トラックとすることができる。1つまたは複数の、好ましくは多数の、例えば50以上の、豚の脚部分用のキャリアが、トラックに沿って移動可能とされる。各キャリアは、豚の個々の脚部分を搬送し得るよう構成されている。各キャリアは、単一の豚の足に対して係合し得るよう構成された1つの豚足保持アセンブリを備えている。これにより、キャリアから吊り下げられた状態で、豚の脚部分を保持することができる。保持アセンブリは、1つの豚の足を受領し得るよう構成された豚足開口を備えている。
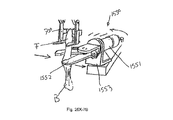
図21は、そのような搬送デバイスの一例の一部を示している。キャリア750は、豚足スロット762を有した保持アセンブリを備えている。豚足スロット762は、ここでは、剛直なスロットプレート761の中に形成されている。スロット762は、豚足をクランプ状態でもって受領し得るような寸法とされている。これにより、豚足を、保持アセンブリから吊り下げられた態様で、支持することができる。スロット762は、1つの端部が開放されており、これにより、スロット内へと豚足を側方から導入したり、スロット762から側方に豚足を取り出したり、することができる。キャリア750について詳述する前に、スロットプレート761の第1の好ましい実施形態について説明する。
一般に、プレート761内のスロット762は、豚足のうちの、中足骨が存在している領域を受領し得るよう構成されている。
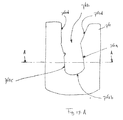
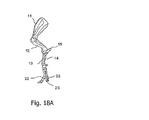
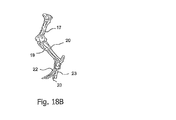
図18Aは、豚の前脚の骨構造を示しており、図18Bは、豚の後脚の骨構造を示している。図18Aは、肩甲骨11と、上腕骨12と、橈骨13と、尺骨14と、肘頭15と、を示している。図18Bは、大腿骨17と、頸骨19と、腓骨20と、を示している。図18Cは、豚の足の骨構造を示している。構造は、基本的には、前脚および後脚と同じである。公知なように、豚の足は、4つの指を備えている。MC3およびMC4によって示されている中央の指は、機能的に、豚の負荷を支持する。これに対して、側方の指MC2,MC5は、基本的に、無機能である。豚においては、側方の指は、偽蹄と称される。指MC2,MC3,MC4,MC5は、豚の足の中手骨または中足骨と称される。図18Cにおいては、P1,P2,P3は、豚の足の雄蘂束と称される。
図18Aおよび図18Bは、中央の中足骨22および側方の中足骨23を示している。同じ骨は、図19および図20にも示されている。図18Cにおいては、Hは、豚の足のうちの、保持領域として使用するのに有利であるような領域を示している。この領域は、足の中足骨22,23を備えている。保持領域として豚の足のこの領域を使用することには、いくつかの利点がある。第1の利点は、この領域の直径が前脚および後脚と同じであることである。これにより、豚の個々の前脚部分および個々の後脚部分に対しての係合のために、同じロックプレート761を使用することができる。このことは、大腿部分および前端を、同じロックプレート761によって保持し得ることを、意味している。よって、双方に関して、同一のキャリアを使用することができる。
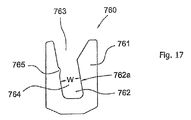
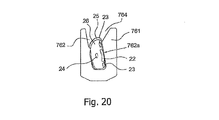
保持領域として足のその領域を使用することの第2の利点は、図19および図20に図示されている。図19は、中足骨22,23の領域において豚足を示す横断面図である。よって、図18Cにおける領域Hを横断しての横断面図である。図19に示す横断面は、一般に、前脚または後脚に関して同じである。図19は、天然の状態で、すなわち、スロットプレート761に対しての係合前における、豚の足を示している。図示のように、図19に示す天然の位置においては、側方の中足骨22は、主要な指23に対して隣接して配置されている。比較的大きな腱24が、横断面を通して延在している。横断面の外側層25は、皮膚と、外皮と、脂肪と、である。腱24と中足骨22,23の周囲には、主要な肉26が存在している。よって、図19に示す保持領域の横断面においては、中足骨22,23と、これら骨の周囲の軟組織とは、皮膚と外皮と脂肪25とを備えており、肉26が存在している。試験により、矢印Aで示す向きに圧力を印加することによって中足骨の領域において足を変形させるには、かなりの大きさの力が必要であることが、示された。これは、基本的には、圧力を足に対して側方に印加した時である。他方、圧力を、矢印Bの方向に対して印加したときには、すなわち、足の前後から圧力を印加したときには、足のこの領域は、ずっと容易に変形しやすい。すなわち、変形を引き起こすのに必要な力が小さくてよく、最終的に得られる変形が、より大きなものである。この知識は、例えば図17に示すようなスロットプレート761といったような豚足開口または豚足スロットを有した保持アセンブリから豚の脚を吊り下げる際に、利用することができる。
スロットプレート761は、豚足スロット762として具現された開口を有している。スロットプレート761は、一端が開口しており、これにより、スロット内へと側方から豚足を導入したり、また、スロットから側方に豚足を取り出したり、することができる。
スロットは、入口部分763を有している。ここでは、入口部分763は、好ましくは、スロットプレートのサイドにおいて、狭い入口部分とされている。入口部分は、スロットの主要軸線に対して傾斜して配置された1つまたは複数の入口面を有することができる。
入口部分763は、スロットの保持部分762へと連接されている。保持部分762の奥は、閉塞されている。適切に導入された豚足が保持部分内に受領されることが、意図されている。
好ましくは、スロット762は、スロットの保持部分内に剛直な参照面762aを有している。図20に示すように、豚足は、好ましくは、そのようなスロット内へと導入される。その際、中央の中足骨22は、一般に、剛直な参照面762aに対して隣接している。すなわち、豚足のフロント面は、剛直な参照面762aに対して対向している。
入口部分763内への豚足の導入は、豚足領域の漸次的な圧縮を引き起こす。スロット762の保持部分が、スロット内に受領される前の豚足領域の横断面よりも小さいことのために、側方の中足骨は、中央の中足骨に向けて、また、参照面762aに向けて、横圧される。このような豚足のクランプは、豚の脚部分の吊り下げの信頼性を高める。例えば、最大で15kgの重量を吊り下げることができる。上述したように、このような向きでのスロット内への豚足の側向き導入は、導入方向に対して直交した向きにおける豚足の圧縮と比較して、より小さな力で行うことができ、比較的容易に行うことができる。これにより、例えば、スロット762内への豚足の手動での導入を可能とする。
好ましくは、スロットプレート762は、さらに、豚足スロットの入口部分と保持部分との間に、突起765を有している。この突起は、一般に、スロットの最も狭い通路を形成する。これにより、豚足が適切に挿入された後には、豚足を保持部分内に維持することができる。
突起765に代えて、あるいは、突起765に加えて、保持アセンブリは、阻止部材を備えることができる(図示されていない)。阻止部材は、阻止位置と退避位置との間にわたって移動することができる。阻止位置においては、阻止部材は、スロット762の幅の少なくとも一部にわたって延在し、これにより、豚足スロットから豚足が抜け出すことを阻止することができる。退避位置においては、豚足を、スロットから取り出すことができる。例えば、阻止部材は、回転可能なレバーとされる。例えば、阻止部材は、手動で操作し得るよう構成される。あるいは、阻止部材の操作が要望されたトラックに沿って配置された専用のカムトラックと協働し得るカムフォロワを設けることができる。
スロットの幅は、実用的には、好ましくは、搬送されて処理されることとなる豚の脚部分のうちで最も小さな横断面寸法(図19においては、寸法Dによって示されている)を有した豚足がスロット内への導入時に(寸法Dよりも、スロットの幅Wの方が小さい)さらに圧縮されるように、選択される。豚足の軟組織のこの圧縮および/または他の変形は、豚足上におけるスロットプレートの緊密な適合および剛直なグリップに寄与する。
スロット762は、屠殺体の一部の保持領域に適合し得るよう構成されている。しかしながら、屠殺体の一部の保持領域は、屠殺体の一部の形状およびサイズにおける天然の変化に基づく直径の範囲内とされる。幅Wは、比較的小さな直径を有した保持領域を備えた屠殺体の一部がスロット762内に保持され得るように、選択されなければならない。好ましくは、スロット762のロック部分764の幅Wは、保持領域の予想される直径の範囲のうちの最も小さい寸法と比較して、より小さなものとされる。つまり、保持対象をなすもののうちの最も小さな直径よりも小さなものとされる。保持領域は、軟組織によって囲まれた骨を有している。軟組織は、ある程度は、圧縮されることができる、言い換えれば、変形することができる。これにより、屠殺体の一部の保持領域は、比較的狭いスロット762内に配置することができる。突起765は、スロット762のロック部分764からの保持領域の無用の抜け出しというリスクを低減する。
搬送デバイスの可能な実施形態においては、固定されたガイドが、キャリアが追従することとなるトラックに沿って配置されており、これらガイドは、人間工学的に有利な態様を操作者に対してもたらし得るような向きでもって、脚部分を案内して支持し得るように、構成することができる。例えば、ガイドは、操作者に向けて脚部分を回転させることができ、処理時の位置を保持することができる。軟組織のフレキシブルさにより、ロックプレート761に対して屠殺体の一部をスリップさせることなく、それを行うことができる。
ガイドが、屠殺体の一部を再度解放したときには、屠殺体の一部は、キャリアに対しての初期的な向きに復帰する。この復帰は、軟組織の弾性によって、および/または、例えば重力や他のガイド組といったような外部影響によって、引き起こしたり補助したりすることができる。
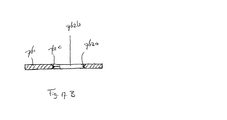
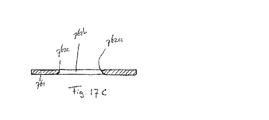
図17Aは、スロット762のロックプレート761の他の実施形態を示している。図17B,C,Dは、ロックプレート761の可能な横断面Aを示している。図17B,C,Dに示すロックプレートは、図17Aのロックプレートとすることができる、あるいは、他の任意のロックプレートとすることができる、特に、本明細書に示されたような他の任意のロックプレートとすることができる。図17Aは、参照面762aと、端面762bと、対向面762cと、を示している。また、入口面762dが示されている。
図17B,C,Dに示す実施形態においては、参照面762aおよび対向面762cには、傾斜エッジまたは丸められたエッジが設けられている。このような表面にこのような構成を付設することの目的は、屠殺体の一部に対して接触するような、2つのラインではなく、1つのラインを設けることである。それら表面が平面的であってロックプレートの上面および底面に対して垂直なものである場合には、ロックプレートに対しての屠殺体の一部の揺動が、ロックプレートに対して屠殺体の一部を下方移動させることとなる。屠殺体の一部の揺動は、ある場合には、屠殺体の一部を、参照面762aの上エッジに対しておよび対向面762cの下エッジに対して交互的に接触させ、他の場合には、屠殺体の一部を、参照面762aの下エッジに対しておよび対向面762cの上エッジに対して交互的に接触させる。これにより、重力と組み合わせて、屠殺体の一部は、ロックプレート761に対して、下向きに「歩行する」こととなる。これは、屠殺体の一部とロックプレートとの間の交互的な接触ポイントが揺動することを防止することによって、回避することができる。そのための1つの手法は、参照面762aおよび/または対向面762cに、傾斜エッジまたは丸められたエッジを設けることである。屠殺体の一部と接触することとなる丸められた面または傾斜面のエッジは、図17Bおよび図17Dに示すように、ロックプレート761の厚さの中間あたりに、位置することができる。これに代えて、図17Cに示すように、丸められた面または傾斜面のエッジは、ロックプレート761の上面寄りにまたは底面寄りに配置することもできる。
好ましくは、参照面762aと対向面762cとの双方の形状は、1つの接触ポイントまたは1つの接触ラインまたは1つの接触面を形成するように構成される。しかしながら、参照面762aと対向面762cとの一方のみに、そのような形状を設けることもできる。加えて、端面762bには、例えば丸められた面または傾斜面といったような形状の面を設けることができる。要望によっては、そのような構成は、入口面762dに対して設けることができる。それは、例えば、製造面から容易なものである場合がある。
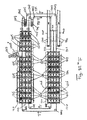
図21は、キャリア750において使用された場合の、図17および図20のロックプレート761を示している。キャリア750は、連結プレート775を介して、2つのトロリー772に対して連結されている。2つのトロリー772は、駆動チェーン774に対して連結されている。駆動チェーン774は、トラック773上にわたってトロリーを移動させる。トラックは、一連をなす複数の処理ステーションに沿った経路を構成する。図21においては、トロリー772の搬送方向は、および、キャリア750の搬送方向は、矢印Tによって示されている。
図21に示すキャリアにおいては、図17および図20に示すロックプレート761が示されている。ロックプレート761のスロット762は、搬送方向Tに対して角度を有して配置されている。好ましくは、屠殺体の一部は、図20に示す態様によって、ロックプレート761のスロット762内に配置されている。そのような場合、図17および図20に示すような角度で配置されたスロット762を使用することにより、屠殺体の一部は、操作者に対して人間工学的に検出可能であるような初期的な空間的向きを有することができる。処理が自動的にまたは半自動的に実行される場合には、初期的な向きにより、屠殺体の一部を、処理ツールによって容易にアクセスし得るような向きとすることができる。
この例においては、キャリア750は、2つのフランジ751と、ヒンジピン753と、ブラケット764と、を備えている。フランジ751どうしは、追加的な安定性のために、ストリップ752によって互いに連結されている。ブラケットは、ガイドブロック770に対して連結されている。ガイドブロック770の上部には、回転部材771が配置されている。回転部材771は、連結プレート775に対して、鉛直方向軸線まわりに回転可能とされている。回転部材771が連結プレート775に対して回転駆動されたときには、キャリアのうちの、回転部材771よりも下方に配置された各部材(ガイドブロック770、ブラケット754、ヒンジピン753、フランジ751、フランジとロックプレート761との間のストリップ752)は、回転部材771と一緒に回転する。
図21の実施形態においては、ヒンジピン753は、トロリー772が設置されているトラック773の一部に対して平行な軸線まわりに、ロックプレート761を回転させることができる。よって、トラック773が水平方向に延在している場合には、ヒンジピン753により、ロックプレート761を水平方向軸線まわりに回転させることができ、ロックプレート761と一緒に、ロックプレートに保持されている屠殺体の一部を水平方向軸線まわりに回転させることができる。
インデックス部材または回転部材771は、ロックプレート761に対して、トロリー772が設置されているトラック773の一部に対して垂直な軸線まわりにおける回転可能性を提供する。よって、トラック773が水平方向に延在している場合には、回転部材771により、ロックプレート761を鉛直方向軸線まわりに回転させることができ、ロックプレート761と一緒に、ロックプレートに保持されている屠殺体の一部を鉛直方向軸線まわりに回転させることができる。
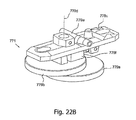
回転部材771を使用することにより、鉛直方向軸線(あるいは、鉛直方向平面内における軸線、あるいは、特定の部分においてトラック773が水平方向に延在していない場合には、トロリー772が設置されているトラック773の一部に対して垂直な軸線)まわりにおける回転に関して、キャリア750のロックプレート761の向きを制御することができる。これは、例えば、図22Aに示すタイプの形状を回転部材771に対して付与することにより、得ることができる。図22Aは、平面図を示している。
インデックス部材または回転部材は、回転中心Cと、4つの側面776と、回転中心Cを向く方向において側面どうしの間のコーナーから内向きに延在するスロット777と、を備えている。4つの側面は、図22Aにおいて矢印a,b,c,dによって示されているように、回転中心Cから互いに異なる距離のところに配置されている。
トラックに沿って、固定された位置のところに、1つまたは複数のピン778が配置されている。これら固定位置は、トラックに沿っての、回転部材771によってキャリアを回転させなければならない位置に対応している。トラックに対してのピンの距離は、搬送方向Tにおけるキャリアの移動時に、ピン778がいずれかのスロット777内に受領されるような、距離とされる。このピンが固定的なものであることのために、また、回転部材771が回転可能であることのために、搬送方向Tにおける回転部材771とピン778との間の相対移動によって、回転部材771は、矢印Rの向きにおいて、90°だけ回転する。
トラックから互いに異なる距離のところに配置された複数のピンの組合せを使用することにより、単独でもってあるいはシリーズでもって、回転部材771(および、回転部材771よりも下方に配置されていて回転部材771と一緒に回転駆動される各部材)は、90°ステップでもって、回転することができる。これにより、ロックプレートは、屠殺体の一部を保持し得る4つの回転位置(トラックに対して垂直な鉛直方向平面内における軸線まわりの回転に関して)を有することができる。軟組織のフレキシブルさにより、屠殺体の一部を、ロックプレートの4つの回転位置のいずれかのまわりにおいて回転させることができる。
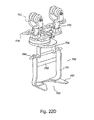
図22Bは、回転部材771の他の実施形態を示している。この実施形態においては、回転部材771は、2つの偏心ディスク779a,779bを備えている。2つの偏心ディスク779a,779bは、固定された位置を有しているとともに、互いに積み重ねられている。2つの偏心ディスク779a,779bは、ベース779cに対して軸線779dまわりに回転可能とされている。軸線779cは、各ディスクの中心からオフセットされている。2つの偏心ディスク779a,779bの相対位置は、図22Cに示されている。図22Cは、図22Bの回転部材を示す底面図である。ベース779cは、2つのトロリー772に対して連結されている。2つのトロリー772は、この例においては、図22Dに示すように、オーバーヘッドコンベヤの駆動チェーン774に対して連結されている。
ベース779cに対しての2つの偏心ディスク779a,779bの位置は、オーバーヘッドコンベヤによってキャリアに提供された経路に沿って配置されたガイドにより、制御される。図22Bの回転部材を使用することの利点は、この回転部材により、円滑な回転移動を可能とし得ることである。
図22Bの回転部材771は、さらに、ロック部材779eを備えている。ロック部材779eは、ブロック779fと協働することにより、ベース779cに対しての偏心ディスク779a,bの位置を、一時的にロックすることができる。ロック部材779eは、オーバーヘッドコンベヤによってキャリアに提供された経路に沿って配置された複数のガイドまたは他の部材により、駆動される。これにより、ベース779cに対しての偏心ディスク779a,bの位置をロックしたりあるいはロック解除したりすることができる。
図22Dは、図21に示すタイプのキャリアにおいて使用された際の、図22Bの回転部材を示している。図22Dには図示していないけれども、図21に示すガイドブロック770は、図22Dにおいても、使用することができる。当業者であれば、図22が、トラックに対して垂直な鉛直方向平面内における軸線まわりのキャリアの向きを制御するに際しての多数の可能な構成のうちのただ2つの構成を示しているに過ぎないことは、理解されるであろう。
ガイドブロック770の高さ位置には、支持ガイドを設けることができる。キャリアがトラックに沿って移動する際には、支持ガイドに当接しつつ、あるいは、支持ガイドどうしの間に案内されつつ、キャリアのガイドブロック770が案内される。支持ガイドは、ガイドブロック770を介してキャリアを支持する。これにより、処理時に印加される力の影響によっても、キャリアを、鉛直方向軸線まわりに(あるいは、特定の場所においてトラックが水平方向に延在していない場合には、鉛直方向平面内においてトラックに対して垂直な軸線まわりに)回転させることがない。
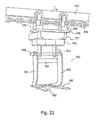
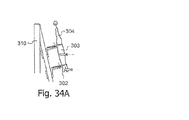
図23は、屠殺体の一部をキャリア内へと配置するための搬入ステーションを示している。この例においては、図21に示すようなキャリアが使用される。図23の搬入ステーションにおいては、キャリアの回転能力を使用して、ヒンジピン753まわりにロックプレート761を回転させることができる。当業者であれば、キャリアがトラックに対して平行な軸線まわりに回転可能である限りにおいては、また、ロックがロックの側面から屠殺体の一部へと適切にスライド可能である限りにおいては、この搬入ステーションを、他のキャリアと組み合わせて、使用し得ることは、理解されるであろう。
搬入ステーションは、トラックに沿って移動する複数のキャリア750と一緒に使用し得るように構成される。図示の明瞭化のために、図23においては、ただ1つのキャリアだけが図示されている。搬入ステーションは、コンベヤベルト780と、ガイド781と、を備えている。コンベヤベルトの移動表面の上面は、キャリアの搬送方向Tと同じ向きに移動し得るよう構成されている。初期的には、搬入ステーションに到達する直前には、キャリアは、重力の影響によって、あるいは、キャリアが動的に位置決めされていることのために、トラックから吊り下げられている。キャリアがコンベヤベルト780へと到達したときには、コンベヤベルトが、キャリアの底面をピックアップし、これにより、キャリアは、コンベヤベルトの移動する上面上へと載置される。
この状態においては、保持アセンブリは、上向きに回転され、これにより、ロックプレートのスロット762の開放端部は、上向きとされる。その後、操作者は、屠殺体の一部を、コンベヤベルト780上に配置する。屠殺体の一部の保持領域は、スロット762の入口部分内に軽く配置される。コンベヤベルトは、ガイド781に向けて屠殺体の一部を移動させる。キャリアは、コンベヤベルトに沿って、実質的に同じ速度で、移動する。屠殺体の一部は、ガイド781に対して係合するようになる。ガイド781は、保持領域を、ロックプレート761のスロット762の保持部分内へと、押圧する。このようにして、操作者は、屠殺体の一部1の保持領域を入口部分からロックプレート761のスロット762の保持開口内へと移動させるために力を印加する必要がない。足の軟組織の弾性を利用することにより、足をスロット内にクランプすることができる。付加的には、追加的な外部からのクランプ力を印加することができる。しかしながら、通常は、そのような追加的な外部からのクランプ力は、不要である。
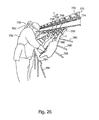
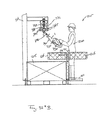
図23Aは、本発明による搬入ステーションのさらなる実施形態を示している。図23Aの実施形態においては、屠殺体の一部1は、供給コンベヤ1240上に受領される。屠殺体の一部1は、多かれ少なかれランダムな向きでもって、供給コンベヤ1240へと到達する。処理ステーションにおいて作業している操作者1200は、屠殺体の一部1を把持し、足1Xの下端を、キャリア750のスロット762の入口開口内へと配置する。操作者は、足1Xの全体をスロット762内へと配置する必要はなく、足1Xを、入口開口の広い部分内に配置するだけで十分である。供給コンベヤ1240は、トロリー772およびキャリア750と同じ速度で走行する。これにより、屠殺体の一部1は、キャリア750と一緒に移動する。
回転するベルトガイド781bは、屠殺体の一部1がガイド781に対して係合するようになる際に、屠殺体の一部1の足領域を支持する。ガイド781aは、さらなる支持と案内とを提供する。ガイド781,781a,781bは、互いに協働して、足1Xをキャリア750のスロット762内へと押し込む。屠殺体の一部1が供給コンベヤ1240の端部に到達するまでに、足1Xは、キャリア750のスロット762内に固定的に配置される。屠殺体の一部は、供給コンベヤ1240上に載置され、キャリアは、ヒンジピン753まわりに下方に回転する。屠殺体の一部1は、この時点では、キャリア750から吊り下げられており、トロリー772および駆動チェーン774によってトラック773に沿って駆動される待ち受け状態となっている。この実施形態の可能な変形例においては、例えば図32***E1に示すように、計量器が、供給コンベヤ1240の上流側に配置されている。
ガイドによってロックプレート761の内外にわたって屠殺体の一部を移動させるのと同じコンセプトは、また、第1搬送デバイスのキャリアから、第2搬送デバイスのキャリアへと、屠殺体の一部を移送するに際しても、適用することができる。あるいは、一般的に、第1キャリアから第2キャリアへと屠殺体の一部を移送するに際しても、適用することができる。
本発明は、豚の足部分または他の屠殺体の一部が第1コンベヤから第2コンベヤへと直接的に移送されるものとして移送ステーションを想定することができる。搬送デバイスは、移送ステーションにおいて、第1コンベヤおよび第2コンベヤの両キャリアの移動が互いに同期しているようにして、具現される。これにより、初期的には第1搬送デバイスのキャリアの保持アセンブリから吊り下げられている屠殺体の一部を、第2搬送デバイスのキャリアの保持アセンブリのスロット内へと、移送することができる。よって、屠殺体の一部は、移送プロセス時には、少なくとも一方の保持アセンブリによって吊り下げられたままである。
好ましくは、移送ステーションは、第1搬送デバイスのトラックに沿って、1つまたは複数の突き出しガイドを備えている。突き出しガイドは、屠殺体の一部に対して接触し得るようにして配置される。好ましくは、例えば5cm以内でもって、スロット部材の下方において屠殺体の一部に対して接触し得るようにして配置される。突き出しガイドは、この突き出しガイドに沿って屠殺体の一部が通過した際には、スロットから屠殺体の一部を押し出し、第2搬送デバイスのキャリアのスロット内へと押し込む。
好ましくは、移送ステーションにおいては、第1搬送デバイスおよび第2搬送デバイスの両保持アセンブリのそれぞれの経路は、互いに異なる高さ位置とされる。両アセンブリは、移送プロセス時には、平面視においてオーバーラップするものとされる。
これを行うために、両キャリアのそれぞれのロックプレートは、両ロックプレートのスロットどうしが多かれ少なかれ互いに位置合わせされるように、配置される。しかしながら、一般に、ロックプレートどうしは、互いに異なる高さ位置に配置される。図24は、この様子を、側面図(図24A)によって、および、平面図(図24B)によって、示している。
図24Aは、屠殺体の一部を示している。屠殺体の一部は、例えば豚の脚部分とされ、足と、豚の脚の少なくとも一部と、を備えている。屠殺体の一部は、第1キャリア750から、第2キャリア750*へと、移送される。移送ガイド795(横断面によってのみ示されている)は、屠殺体の一部1の保持領域を、第1キャリア750のロックプレートのスロットから、第2キャリア750*のロックプレートのスロット内へと、駆動する。
図24Bは、このプロセスを、平面図によって示している。図示の明瞭化のために、両キャリアのそれぞれのロックプレートだけが図示されている。
移送プロセスの開始時には、第1キャリアのロックプレート761が、保持領域によって屠殺体の一部1を保持している。第1キャリアのロックプレート761および第2キャリアのロックプレート761*は、互いに近接する向きに移動する。両プレート761,761*は、互いに部分的にオーバーラップした位置とされ、この位置においては、両プレート761,761*の各スロットは、互いに位置合わせされる。移送ガイド795が、屠殺体の一部1に対して当接する。移送ガイド795の形状は、図24Bに示すように両キャリアが搬送方向T,T*に移動された際には、屠殺体の一部1を、第1キャリアのロックプレート761から、第2キャリアのロックプレート761*内へと、移動させ得るようなものとされている。
屠殺体の一部1が第2キャリアのロックプレート761*内に配置された後には、両キャリアは、互いに離間する向きに駆動される。
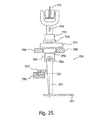
図25は、図21のキャリアの格別の実施形態を示す側面図である。図25において各部材に関して使用されている参照符号は、図21の参照符号に対応している。図25の実施形態においては、キャリアには、カムフォロワ787が設けられている。カムフォロワ787は、キャリア750が追従する経路の少なくとも一部に対して沿って配置されたカムトラック786内に、延在している。カムトラック786は、キャリア750がトラック773に沿って移動した際には、カムフォロワ787の位置を規定する。カムフォロワ787により、ヒンジピン753まわりにおけるロックプレート761の回転を制御することができる。
好ましくは、カムフォロワ787は、フランジ751が連結されているストリップ752上に設けられている。当業者であれば、カムフォロワを、これに代えて、1つまたは複数のフランジ上における、あるいは、キャリアの可動部材の他の位置における、様々な位置に配置し得ることは、理解されるであろう。
図25は、さらに、好ましい実施形態を示している。この好ましい実施形態においては、1つまたは一対の平行な支持ガイド785が、トラック773に沿った固定位置に配置されている。好ましくは、キャリアによって保持された屠殺体の一部が処理される処理ステーションのところに、配置されている。1つまたは複数のガイド785は、通過するキャリアに対して協働し得るよう構成されている。特に、キャリア750のガイドブロック770が、1つのガイド785に沿ってスライドし得るように、あるいは、互いに離間した一対の平行なガイド785の間においてスライドし得るように、構成されている。1つのガイド785または一対のガイド785は、鉛直方向軸線まわりにおけるキャリアの回転を阻止し得るよう構成されているとともに、ガイドブロック770上におけるキャリアの構成部材の側方移動を阻止し得るよう構成されている。単純な実施形態においては、各ガイド785は、小さな摩擦係数を有した材料からなる、例えばプラスチックからなる、直線形状のバーとされる。
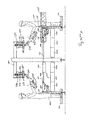
図25*は、本発明によるキャリア750を備えたトロリー772の他の実施形態を示している。図25*においては、本発明の第3見地によるキャリアが示されている。しかしながら、これに代えて、この実施形態においては、本発明の第1見地および第2見地によるキャリアを使用することもできる。
図25の実施形態と同様に、図25*の実施形態は、一対をなす互いに離間した互いに平行な支持ガイド785を備えている。支持ガイド785の間において、トロリーのガイドブロック770が延在している。図25*の実施形態においては、トロリー772には、ローラ788が設けられている。ローラ788は、ガイドブロック770の両サイドに設けられている。ローラ788も、また、支持ガイド785の間に延在している。ガイドブロック770が図25*に示す位置とされたときには、ローラは、好ましくは、支持ガイド785に対して接触していない。
図25の実施形態においては、キャリアによって保持された屠殺体の一部の処理時にトロリーに対して印加される力に基づき、ガイドブロック770を、支持ガイド785の一方に対して引っ張ることができる、あるいは、ガイドブロック770は、一方のサイドにおけるガイドブロック770の上エッジが一方の支持ガイド785に対して押しつけられなおかつ他方のサイドにおけるガイドブロック770の下エッジが他方の支持ガイドに対して押しつけられるようにして、傾斜することができる。これにより、ガイドブロック770と支持ガイド785との間において、無用の摩擦が発生し、これにより、過度の摩耗が引き起こされるとともに、トラックに沿ってトロリーを駆動する駆動システムに関してのパワー消費を増大させる。図25*の実施形態においては、そのような状況においても、ガイドブロック770は、支持ガイド785に対して直接的にスライド接触することがない。その代わりに、1つまたは複数のローラ788が、支持ガイド785の一方または双方に対して係合する。好ましくは、ローラ788は、球状のローラとされており、ローラの中心の直径は、ローラの端部における直径よりも、大きなものとされている。
ローラ788は、支持ガイド785上における過度の機械的負荷を防止する。ローラ付きのガイドブロック770が、支持ガイド785に対してスライド的な摩擦接触を行うことがないことのために、ガイドブロック770も、また、過度の機械的負荷を受けることがなく、その結果としての摩耗を受けることもない。
ローラ788が、回転軸線789まわりに回転可能であることのために、トロリーの各構成部材と支持ガイド785との間の過度の摩擦が防止される。これにより、トロリーと支持ガイド785との双方の摩耗が低減される。また、トロリーの駆動システムに関するパワー消費も低減される。
好ましくは、ガイドブロック770が、中立位置(すなわち、ガイドブロックが、トラック773の直下の位置からずれていない位置)とされたときには、ローラ788と支持ガイド785との間には、いくらかのクリアランスが存在する。このようにして、ガイドブロック770が中立位置とされたときには、トロリーと支持ガイドとの間には、摩擦が存在しない。これにより、無用の摩耗と、駆動システムの無用のパワー消費と、を防止することができる。しかしながら、ガイドブロックが中立位置とされたときには、ローラ788と支持ガイド785との間を接触させるように、システムを構成することも可能である。
図25*の実施形態の他の見地においては、カムフォロワ787とカムトラック786とが、図25の実施形態とは異なる態様で配置されている。当業者であれば、図25*に示す構成を、図25に示すカムフォロワおよびカムトラックの構成に対して、互換的なものとし得ることは、即座に理解されるであろう。カムフォロワおよびカムトラックの構成は、ガイドブロックおよび支持ガイドの構成とは独立に選択することができる。また、キャリアの向きを制御するに際して、カムトラックおよびカムフォロワを使用しない構成とすることもできる。
図25**は、本発明によるキャリア750を備えたトロリー772の他の実施形態を示している。図25**においては、本発明の第3見地によるキャリアが示されている。しかしながら、これに代えて、この実施形態においては、本発明の第1見地および第2見地によるキャリアを使用することもできる。図25の実施形態と同様に、図25**においては、一対をなす互いに平行な支持ガイド785を備えている。支持ガイド785の間において、トロリーのガイドブロック770が延在している。図25*の実施形態と同様に、図25**の実施形態においては、ローラ788が設けられている。しかしながら、図25**の実施形態においては、ローラ788は、トロリー上に取り付けられているのではなく、支持ガイド785上に取り付けられている。
図25**は、ガイドブロック770が中立位置から引っ張られた際の状況を示している。このような状況は、例えば、屠殺体の一部1が製品支持ガイド790によって処理位置へと傾斜され、さらに、ヒンジピン753によって形成されたヒンジが妨害された際に、起こる。図25**の状況においては、ガイドブロック770が、トロリーの残部に対して傾斜されている。これにより、ガイドブロック770は、ローラ788に対して接触するようになる。これにより、大きな機械的負荷の発生が防止されるとともに、過度の摩擦が防止される。
図25***は、ローラ788を有したトロリーの他の可能な実施形態を示している。この実施形態においては、ローラは、搬送方向に見たときに、互いに隣接して配置されているのではなく、互いに上下に配置されている。この実施形態においては、必要であれば、ガイドブロックを設けないことさえできる。ローラ788’は、ホイール支持体784上に取り付けられている。図示の明瞭化のために、支持ガイド785は、図25***には図示されていない。支持ガイド785は、詳細図Aにおいてのみ図示されている。図25***の詳細図Aは、異なる角度からローラ788’を示しており、両支持ガイド785に対してのローラ788’の配置を示している。
好ましくは、キャリアの上部が、中立位置(すなわち、トロリーの直下のキャリアの上部が、トラック773の直下の位置からずれていない位置)とされたときには、ローラ788と支持ガイド785との間には、いくらかのクリアランスが存在する。このようにして、キャリアの上部が中立位置とされたときには、トロリーと支持ガイドとの間には、摩擦が存在しない。これにより、無用の摩耗と、駆動システムの無用のパワー消費と、を防止することができる。この実施形態においては、ローラ788’の配置により、トラックの方向に対して平行な水平方向軸線まわりにおけるキャリアの傾斜を可能とするだけでなく、鉛直方向軸線まわりにおけるキャリアの回転をも可能とする。
図25***の実施形態においては、回転部材771が設けられている。この実施形態においては、回転部材は、ゼネバ駆動ホイールとされる。図25***に示す実施形態においては、ホイール支持体784は、トロリー772に対して固定された位置に取り付けられている。ゼネバ駆動ホイール771と、キャリア750とは、トロリー772に対して回転可能である。
図25***の実施形態には、トロリー772に対してのゼネバ駆動ホイール771の位置をロックするための手段が設けられている。これにより、ゼネバ駆動ホイール771によって、処理ステップが実施されることとなる処理ステーションへと到達する前に、処理ステップを実施するに際しての適切な向きで屠殺体の一部を保持したキャリアを、搬送することができる。キャリアが適切な向きとされたときには、ゼネバ駆動ホイールは、少なくとも処理ステップの実行時には、ロックすることができる。このようにして、処理のための力が、ゼネバ駆動ホイールを回転させてしまうことが防止される。これとともに、屠殺体の一部を、適切な向きに維持することができる。好ましくは、ゼネバ駆動ホイールの回転は、屠殺体の一部の向きをおよびキャリアの向きを変更することが要求されるまでは、ロックされたままとされる。
図25***に示す実施形態においては、ゼネバ駆動ホイール771には、4つのノッチ771bを有した突起771aが設けられている。ホイール支持体784のところには、片持ち支持体が設けられている。片持ち支持体は、第1アーム782aと、第2アーム782bと、回転軸線783と、を有している。ホイール支持体784は、ノッチ784aを有している。ノッチ784aは、ゼネバ駆動ホイール771の4つの位置のいずれにおいても、ゼネバ駆動ホイール771の突起771aの4つのノッチ771bのいずれかに対して位置合わせされている。
片持ち支持体782の第1アーム782aは、先端782cを有している。先端782cは、互いに位置合わせされたノッチ784a,771b内に適合している。先端782cが、互いに位置合わせされたノッチ784a,771b内にあるときには、ゼネバ駆動ホイール771は、ホイール支持体784に対して回転することができない。これにより、トロリー772に対してのキャリア750の回転が防止される。
キャリアを異なる向きとする必要が生じた場合には、第1アーム782aの先端782cを、互いに位置合わせされたノッチ784a,771b内から取り外す必要がある。これを行うためには、片持ち支持体782が駆動される。すなわち、片持ち支持体782が、軸線783まわりに回転駆動される。片持ち支持体の駆動は、片持ち支持体の第2アーム782bと係合することにより、実施することができる。第2アーム782bを内向きに(この場合には、ローラ788’に向けて)押すことにより、片持ち支持体の第1アーム782aの先端782cを、ノッチ784a,771bから取り外すことができる。その後、ゼネバ駆動ホイール771は、他の3つの配置のいずれかとすることができる。
ゼネバ駆動ホイール771(および、キャリア750)が所望の向きとされたときには、ゼネバ駆動ホイール771の突起771aのいずれか1つのノッチ771bが、ホイール支持体784のノッチ784aに対して位置合わせされる。そして、片持ち支持体782は、図25***に示す位置へと戻され、先端782cは、互いに位置合わせされたノッチ784a,771b内へと位置する。そして、トロリーに対してのゼネバ駆動ホイールの向きは、再度ロックされる。
片持ち支持体782は、多様な代替可能な態様でもって、駆動することができる。例えば、所望の時点において、あるいは、トラック773に沿った所望のポイントにおいて、トラック773に沿って固定的に配置されたガイド部材が、片持ち支持体の第1アームまたは第2アームに対して係合することができる。また、先端782cをノッチから取り外すに際して、そのようなガイド部材は、第2アームだけに対して係合することができ、さらに、スプリングが、片持ち支持体を、先端がノッチ内に位置した状態へと戻るように、回転させることができる。
図25***Aは、図25***の実施形態の変形例を示している。図25***Aの実施形態においては、キャリア750は、単一のトロリーに代えて、2つのトロリーに対して取り付けられている。
当業者であれば、2つのローラ788’やゼネバ駆動ホイールのためのロック機構といったような図25***および図25***Aの実施形態における様々な特徴点を、単独であるいは組み合わせて、他のキャリアにおいて、および/または、他のトロリーまたは他の搬送システムにおいて、適用し得ることは、理解されるであろう。
図25#Aは、本発明による他の実施形態を示している。この実施形態においては、キャリア750は、トロリーに対して連結されているのではなく、コネクタプレート792に対して連結されている。コネクタプレートは、キャリア750を、搬送システムに対して連結する。図25#Bは、チェーン式搬送システム1500と組み合わされた場合の、図25#Aの実施形態を示している。図25#Bにおける搬送システムは、チェーン1501を備えている。チェーン1501は、チェーンホイール1502上にわたって案内される。コネクタプレート792は、チェーン1501に対して連結される。図25#Bは、コンベヤの単純な構成を示している。しかしながら、当業者であれば、チェーンを、より複雑な経路を有した構成とし得ることは、理解されるであろう。図25#Cは、図25#Aの実施形態と組み合わせて使用し得る他のコンベヤを示している。この場合、コンベヤは、ガイド梁1510を備えている。ガイド梁1510は、上部にスロット1511を有している。ガイドホイール1512が、コネクタプレート792に対して取り付けられている。ガイドホイール1512を有したシャフトは、ガイド梁1510内のスロット1511を通して延在している。図25#Cにおいては、直線的なガイド梁が図示されている。しかしながら、当業者であれば、ガイド梁を湾曲したものとし得ることは、理解されるであろう。図25#Dは、処理ステーションに適用された図25#Dの実施形態を示している。処理ステーションにおいては、操作者1200が、屠殺体の一部1を処理している。当業者であれば、図25#A〜Dの実施形態においては、他のキャリアを使用し得ることは、理解されるであろう。
図26は、例えば大腿部分または前端といったような屠殺体の一部のためのシステムに対して適用された図21のキャリアを示している。当業者であれば、図26のシステムを、他の屠殺体の一部に対しても、使用し得ることは、理解されるであろう。
図26のシステムにおいては、トラック773は、トロリー772が延在している場所の上方に、設けられている。トロリー772は、駆動チェーン774によって駆動される。システムは、さらに、複数のキャリア750を備えている。各々のキャリア750は、1つまたは複数のトロリー772に対して連結されている。処理されるべき屠殺体の一部1の各々は、キャリア750内に配置されている。キャリア750は、様々な処理ステーションに向けて、様々な処理ステーションに沿って、搬送される。図26においては、Tが、搬送方向を示している。
図26においては、そのような処理ステーションが図示されている。処理ステーションにおいては、3人の操作者700が、流れてくる屠殺体の一部1に対して、手動での操作を行っている。例えば、操作者は、肉の一部をカットしている、あるいは、周囲組織から骨または骨の一部を切断している。
処理ステーションへの導入前には、キャリアの回転部材771(例えば、図21を参照)は、屠殺体の一部1を、鉛直方向軸線まわりにおける回転に関して適切な向きとする。
トラック772と操作者700との間には、製品支持ガイド790が設けられている。製品支持ガイド790は、処理ステーションへの導入時に屠殺体の一部1に対して係合し得るように、さらに、その後に、屠殺体の一部1を、ヒンジピン753まわりにおける回転に関して、操作者が行うべき操作に対して適切な向きへと、偏向させ得るように、配置されており、そのような形状とされている。
公知のシステムにおいては、操作者は、屠殺体の一部を採取して位置決めしなければならなかった。また、通常は比較的重い屠殺体の一部を取り扱うことは、操作者に対して、物理的な負担を与える。実行すべき処理に関して既に適切な位置とされた操作者に対して、屠殺体の一部1を提供することにより、時間が節約されるとともに、操作者700の作業を、人間工学的な観点から改良することができる。
加えて、図26のシステムにおいては、操作者は、屠殺体の一部に対する操作を行うに際して、両手を使用することができる。例えば、操作者は、片方の手で屠殺体の一部を把持して引き伸ばし、他方の手に持ったナイフでカットすることができる。これは、そのような操作を行うに際して、自然な態様である。そのため、操作者700に関する学習期間を短いものとする。
図26においては、操作者700と屠殺体の一部1との間には、フェンス791が設けられている。このフェンスの高さは、作業時に操作者がこのフェンスに対して寄りかかり得るような、ものとされている。これにより、操作者700は、カット操作に集中することができる。これにより、作業を容易なものとし得るとともに、作業の学習も容易なものとすることができる。
図26のシステムの格別の実施形態においては、処理システムを使用して、切り離しが行われる。その場合、製品支持ガイド790の少なくとも1つが、切除されるべき骨の関節の高さ位置に配置されていることが有利である。このようにして、操作者は、製品支持ガイド790上において、関節を曲げて開放することができる。製品支持ガイド790が、比較的小さな直径を有したものとして構成されていることにより、操作者は、かなりの角度でもって、関節を曲げて開放することができる。これにより、操作者は、例えばテーブルのエッジ上において関節を曲げた際に、関節の背後の組織へと、より良好に到達することができる。関節の背後において組織を切断することは、切り離しプロセスを容易なものとする。
製品支持ガイド790は、本発明による任意のキャリアと組み合わせて使用することができる。キャリア自体が回転可能であることは、必須ではない。屠殺体の一部が製品支持ガイド790に対して係合した際には、キャリアに対して、屠殺体の一部を回転させることもできる。
図26*は、2つのトロリー772を示している。2つのトロリー772に対して、1つのキャリア750が設けられている。双方のトロリーは、駆動チェーン774に対して連結されている。駆動チェーン774は、トラック773に沿って、トロリー772を移動させる。各キャリア750は、例えば豚の脚部分といったような屠殺体の一部1を付帯している。屠殺体の一部1は、豚の足と、豚の脚の少なくとも一部と、を備えている。トラックに沿ったいくつかのポイントに、製品支持ガイド790が配置されている。屠殺体の一部1が製品支持ガイドに対して係合する際には、操作者が人間工学的に処理を実行し得る位置(例えば、図26に示す位置)とされる、あるいは、自動化された処理ステーションがプロセスを実行し得る位置とされる。
屠殺体の一部1が、トラック773上におけるトロリー772の移動に基づき、製品支持ガイド790上において搬送方向Tに移動する際には、屠殺体の一部1と製品支持ガイド790との間に、摩擦が発生する。屠殺体の一部1が、製品支持ガイド790に対して係合する前には、屠殺体の一部1は、図26*において左側で示すように、キャリア750から鉛直方向下向きに吊り下げられている。屠殺体の一部1が、製品支持ガイド790に対して係合したときには、屠殺体の一部1は、製品支持ガイドに対して直交する方向において傾斜する(図26に示すように)だけでなく、製品支持ガイド790がなす平面内においても傾斜する。この様子は、図26*の右側において、屠殺体の一部1と鉛直方向平面V(製品支持ガイドに対して垂直に、鉛直方向に延在する)との間の角度γによって、図示されている。
多くの場合、このことは、問題とはならない。操作者が処理ステーション内において処理(プロセス)を行う際には、操作者は、おそらくその処理を行い得るであろう。しかしながら、操作者は、人間工学的に適切でない体勢でもって、その処理を行わなければならない。
しかしながら、いくつかの場合においては、キャリアに対して後方へと引きずられる屠殺体の一部とトロリーとは、屠殺体の一部と製品支持ガイドとの間の摩擦のために、問題点を引き起こす。これは、処理ステーション内におけるプロセスが自動的に実行される場合に、顕著である。そのような場合、処理ステーションのツールに対しての屠殺体の一部1の位置は、正確に既知でなければならない。そうでなければ、プロセスを、十分な精度で実行することができないからである。
この問題点は、様々な手法によって解決することができる。まず最初に、製品支持ガイド790を、キャリア750内の屠殺体の一部1と一緒に移動させることができる。これは、例えば、図26および図26*に示す固定された製品支持ガイドを、図28に示すような補助コンベヤ(図28における符号801)へと交換することにより、達成することができる。
屠殺体の一部と一緒に移動する製品支持ガイドを提供するための他の手法は、円形の(あるいは、少なくともループ形状の)製品支持ガイドを使用することであり、そのような製品支持ガイドを鉛直方向軸線上に取り付けて、そのような製品支持ガイドをその鉛直方向軸線まわりに回転可能とすることである。これは、図26**に図示されている。
図26**は、フレーム1101を示している。フレーム1101内においては、回転可能なシャフト1102が設けられている。この回転可能なシャフト1102に対して、円形の製品支持ガイド1103が取り付けられている。すべての円形の製品支持ガイドは、互いに同じ直径を有することができる。そのような場合、プロセスが実施される際には、屠殺体の一部に対して印加された力に抗して、鉛直方向における屠殺体の一部の位置が、維持される。しかしながら、また、複数の円形の製品支持ガイド1103は、互いに異なる直径を有したものとすることもできる。例えば、最上部の円形の製品支持ガイドは、比較的小さな直径を有することができ、中央の円形の製品支持ガイドは、いくらか大きな直径を有することができ、底部の円形の製品支持ガイドは、最も大きな直径を有することができる。このようにして、屠殺体の一部は、プロセスを実施している操作者に向けて、傾斜される。
図26**の実施形態においては、キャリア750は、トロリー772に対して取り付けられている。トロリーは、トラック773上を走行し、トロリーどうしは、駆動チェーン(図示せず)によって互いに連結されている。駆動チェーンは、コーナーホイール1110上を走行する。これにより、トロリーは、円形の製品支持ガイド1103の近傍においては湾曲したトラック773に追従する。コーナーホイール1110は、カルーセル機械が処理ライン内に適用されているのと同じようにして、動作する。
1つまたは複数の円形の製品支持ガイド1103には、係止部1104を設けることができる。これら係止部1104は、ピンや、ブロックや、他のタイプの突起、とすることができる。係止部により、屠殺体の一部1が円形の製品支持ガイド1103に対しての所望位置を維持することを、確実なものとすることができる。他の手法は、屠殺体の一部1が所望位置から傾斜してしまうことをキャリアが防止し得るように、キャリアを構成することである。これを得るための可能な態様が、図26***に示されている。
図26***は、図21のキャリアの修正されたバージョンを示している。当業者であれば、同じ修正または同様の修正を、本発明による他のキャリアに対しても行い得ることは、理解されるであろう。図26***は、ブレース1120を示している。ブレース1120は、キャリア750に対して取り付けられている。ブレース1120は、ロックプレート761よりも下方へと曲がっており、その後、戻っている。これにより、ブレース1120は、屠殺体の一部がキャリア内に配置された際には、屠殺体の一部の背後へと回り込むことができる。ブレース1120には、突起1121が設けられている。突起1121は、トラック773に対して垂直に配置されている、あるいは、トラック773に対して角度を形成して配置されている。キャリア内の屠殺体の一部が、搬送方向Tとは逆向きにある程度離間して傾斜した際には、突起1121が、屠殺体の一部に対して係合し、それ以上離間することを防止することができる。
当業者であれば、ブレース1120を、キャリアに対して、様々な態様でもって、また、様々な場所において、取り付け得ることは、理解されるであろう。ブレースは、キャリアの残部に対して移動可能なものとすることができる、あるいは、キャリアに対しての固定位置に維持することができる。ブレースが移動可能な場合には、ブレースの位置は、例えば、キャリアが追従しているトラックに隣接して配置された固定ガイドによって、制御することができる。
図26Xは、皮膚除去や皮剥ぎやおよび/または脂肪除去のために適用された図26の実施形態を示している。当業者であれば、後述のような皮膚や皮やおよび/または脂肪の除去方法を、これに代えて、本発明による他のタイプのキャリアを使用して行い得ることは、理解されるであろう。図26Xにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
操作者が皮膚や皮やおよび/または脂肪を除去する際には、操作者は、通常は、ウィザードナイフまたは他の専用ツールを使用する。操作者は、まず最初に、屠殺体の一部に対して、ウィザードナイフまたはツールを係合させる。従来技術においては、操作者は、足領域から離間した部分から操作を開始していた。その場合、図26Xの状況のように屠殺体の一部が足から取り下げられているならば、操作者は、従来技術に従い、底部から開始し、その後、矢印Pで示す向きに、ウィザードナイフまたは他のツールを上向きに移動させる。このような態様での皮膚除去や皮剥ぎやおよび/または脂肪除去の実施に際しては、操作者は、片手で屠殺体の一部を保持する必要がある。処理に際して印加される力が上向きであることのために、屠殺体の一部が傾斜することとなり、位置ズレが起こり、屠殺体の一部をキャリアに対して移動させる。
また、皮膚除去や皮剥ぎやおよび/または脂肪除去は、比較的ソフトでフレキシブルな領域から開始される。したがって、ウィザードナイフまたは他のツールが屠殺体の一部の外層内の組織に対して係合して把持する前に、屠殺体の一部の外層内の組織が、移動してしまうこととなる。これは、不便であり、精度を低減させ、安全上の問題点を引き起こす。
本発明による皮膚除去や皮剥ぎやおよび/または脂肪除去のためのプロセスにおいては、ウィザードナイフまたは他のツールは、まず最初に、キャリアの直下のところにおいて、屠殺体の一部に対して係合する。好ましくは、キャリアと、膝または肘と、の間の領域において、屠殺体の一部に対して係合する。この領域においては、屠殺体の一部は、肉と脂肪と皮とからなる薄い層だけしか存在していないことのために、むしろ剛直である。この領域においてウィザードナイフまたは他のツールを屠殺体の一部に対して係合させることにより、ウィザードナイフまたは他のツールは、ほぼ即座に、屠殺体の一部に対してグリップする。その後、本発明においては、操作者は、ウィザードナイフまたは他のツールを、図26Xにおいて矢印Dで示す向きに、下向きに移動させる。下向きの力を印加することのために、屠殺体の一部の位置は、キャリアに対して維持される。製品支持ガイド790(設けられている場合)は、また、屠殺体の一部を、処理力に抗して支持する。これにより、屠殺体の一部が、処理力によって押されてしまうことを防止することができる。
その結果、操作者は、もはや、皮膚除去や皮剥ぎやおよび/または脂肪除去に際して、屠殺体の一部を適切な位置に強く保持する必要がない。このことは、操作者に対しての物理的負担を低減する。
本発明による皮膚除去や皮剥ぎやおよび/または脂肪除去のための方法の有利な実施形態においては、参照カット799が、ウィザードナイフまたは他のツールを屠殺体の一部に対してまず最初に係合させるところにおいて、すなわち、キャリアの直下のところにおいて、好ましくは、キャリアと膝または肘との間の領域のところにおいて、屠殺体の一部に形成される。この参照カット799は、その後、皮膚除去や皮剥ぎやおよび/または脂肪除去のための開始ポイントとして、使用することができる。参照カット799は、係合時にウィザードナイフまたは他のツールによって屠殺体の一部をグリップすることをより容易なものとさえすることができ、また、すべての屠殺体の一部を、適切な領域から皮膚除去や皮剥ぎやおよび/または脂肪除去することを確実なものとすることができる。図26Xに示すシステムにおいては、参照カット799は、皮膚除去や皮剥ぎやおよび/または脂肪除去が行われる処理ステーションの上流側において、固定ナイフまたはロータリーカッターをトラック773に近接した適切な高さ位置のところに配置することによって、自動的に行うことができる。
図26X−1は、本発明による手動での皮膚除去プロセスを示している。図26X−1において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
皮膚除去処理ステーションにおいては、屠殺体の一部1は、好ましくは、製品支持ガイド790によって支持される。製品支持ガイド790は、屠殺体の一部1を、操作者1200が皮膚除去プロセスを容易に行い得る位置へと、持ってくる。また、製品支持ガイド790は、皮膚除去を行う処理力に抗して、屠殺体の一部1を支持する。手動での皮膚除去プロセスにおいては、操作者1200は、皮膚除去ツール1520を使用する。本発明による皮膚除去プロセスにおいては、操作者1200は、皮膚除去ツール1520を、キャリアの直下における領域Sにおいて屠殺体の一部1に対して接触させることによって、プロセスを開始する。そこから、皮膚除去ツールを、屠殺体の一部1の幅広部分に向けて、方向Dにおいて下向きに移動させる。皮膚部分1Yは、このプロセスによって除去され、好ましくは、皮膚部分1Yは、コンベヤ上にまたは容器内に落下する。
図26X−2は、本発明による脂肪除去プロセスを示している。図26X−2において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。この場合にも、屠殺体の一部1は、好ましくは、支持ガイド790によって支持される。製品支持ガイド790は、屠殺体の一部1を、操作者1200が脂肪除去プロセスを容易に行い得る位置へと、持ってくる。また、製品支持ガイド790は、脂肪除去を行う処理力に抗して、屠殺体の一部1を支持する。
手動での脂肪除去プロセスにおいては、操作者1200は、例えばウィザードナイフ1521といったような脂肪除去ツールを使用する。本発明による脂肪除去プロセスにおいては、操作者1200は、屠殺体の一部のうちの脂肪を除去すべき領域のうちの最も高い位置において、脂肪除去ツール1521を屠殺体の一部1に対して接触させることによって、プロセスを開始する。「最も高いポイント」という用語は、操作者に対して供されたときに処理対象をなす領域のうちで最も高くに位置したポイントとして理解されたい。屠殺体の一部1が通常は操作者に対して足を上に向けた状態で供されることにより、操作者に対して供された際に処理すべき領域のうちの最も高いポイントが、屠殺体の一部が天然の状態(足を下向きとした状態)とされた場合には、そのような領域のうちの最も低いポイントとなる。
脂肪除去の場合には、処理対象をなす領域は、屠殺体の一部のうちの膝または肘とキャリアとの間の部分にまでは及んでいないことが多い。その場合、本発明においては、好ましくは、脂肪除去ツールと屠殺体の一部との間の第1コンタクトは、単純に、操作者に対して供された際に屠殺体の一部を見たときに、処理対象をなす領域の最も高いポイントである。脂肪除去ツール1521を屠殺体の一部1に対して係合させる際には、脂肪除去ツールを、屠殺体の一部1の幅広部分に向けて、方向Dにおいて下向きに移動させる。脂肪1Yは、このプロセス時に除去され、好ましくは、脂肪1Yは、コンベヤ上にまたは容器内に落下する。
図26X−3は、半自動化された皮剥ぎツール1522を示している。皮剥ぎツール1522は、支持体1523上に配置されている。この実施形態においては、キャリア750は、皮剥ぎツール1522上へと屠殺体の一部1を持ってくる。好ましくは、操作者(図示せず)は、屠殺体の一部の適切な部分が、皮剥ぎツール1522に対して当接することを、および、適切な力が印加されることを、確実に行う。図26X−3において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
図26X−4は、参照カット799を形成するための処理ステーションの実施形態を示している。参照カットは、例えば、皮膚除去や皮剥ぎやおよび/または脂肪除去を行うための開始位置として使用することができる。図26X−4において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。この実施形態においては、参照カットを形成するためのデバイス1530は、可動アーム1532上に取り付けられた単一の回転ディスクナイフ1531を備えている。このデバイスは、処理ステーションのフレーム1201上に取り付けられる。屠殺体の一部1は、キャリア750によって処理ステーションを通して搬送される。キャリアが追従する経路は、屠殺体の一部1を、回転ナイフ1531に対して係合させる。スプリング1533は、カットを形成する際に、適切な力を印加する。
可動アーム1532は、鉛直方向軸線まわりに回転可能である。これにより、回転ディスクナイフ1531は、カットの長さの全体にわたって、適切なカット深さを維持することができる。図26X−4の実施形態においては、参照カットは、屠殺体の一部の1つの側面上において、形成される。
図26X−5は、屠殺体の一部の両側面上に参照カットを形成し得る処理ステーションの実施形態を示している。両側面上における参照カットは、互いに位置合わせされる。これにより、必須ではないけれども、実際、単一のカットが、屠殺体の一部の周囲に形成される。図26X−5の実施形態は、図26X−4の実施形態のダブルバージョンである。すなわち、図26X−5の実施形態は、2つの回転ディスクナイフ1531a,bを備えている。2つの回転ディスクナイフ1531a,bの各々は、可動の、スプリング付きの、アーム1532a,b上に設けられている。回転ディスクナイフは、屠殺体の一部が追従する経路の両サイドに設けられている。好ましくは、双方の回転ディスクナイフは、互いに同じ高さに位置に取り付けられる。
図26X−6は、屠殺体の一部1から肩甲骨Zを手動で取り外す(部分的に、あるいは、全体的に)ための処理ステーションを示している。図26X−6において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。肩甲骨Zの取り外しには、たとえ部分的な取り外しであったも、かなりの力を必要とする。したがって、手動プロセスにおいてさえも、肩甲骨取り外しツール1540を使用する。
キャリア750は、処理対象をなす屠殺体の一部1を、肩甲骨取り外し処理ステーションへと、持ってくる。この実施形態においては、好ましくは、製品支持ガイド790は、屠殺体の一部が適切な向きでもって操作者1200に対して供されることを、確保する。肩甲骨を完全にまたは部分的に取り外すには、操作者は、肩甲骨を操作者自身に向けて引っ張る必要がある。このことは、製品支持ガイド790が、この場合の処理力に抗して屠殺体の一部を支持できないことを、意味する。したがって、追加的な製品支持ガイド790*が設けられている。追加的な製品支持ガイド790*は、屠殺体の一部上に配置されている。よって、屠殺体の一部1は、製品支持ガイド790と、追加的な製品支持ガイド790*と、の間に保持される。
取り外しプロセスの開始時には、操作者は、肩甲骨の背後に、肩甲骨取り外しツール1540の引っ張りプレート1541を配置する。ツール1540のトリガー1542を引っ張ることにより、引っ張りプレート1541を、操作者に向けて移動させ、肩甲骨Zを引っ張って、屠殺体の一部1から少なくとも部分的に緩める。屠殺体の一部1は、追加的な製品支持ガイド790*によって、所定位置に保持される。
ツール1540は、屠殺体の一部から大いに自由とされた肩甲骨を引っ張る。肩甲骨と屠殺体の一部の残部との間におけるすべての残留の連結は、その後、ナイフによってカットすることができる。
本発明の他の実施形態においては、自動化された足カッターが、キャリアの直上または直下において、足または足の下部をカットするために、トラックに隣接して配置される。自動化された足カッターは、好ましくは、回転ディスクナイフまたは鋏状カッターを備えている。図26X−7は、そのような自動化された足カッター1550の実施形態を示している。図26X−7において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
図26X−7の実施形態においては、自動化された足カッターは、解体処理ラインの端部に配置される。よって、屠殺体の一部が自動化された足カッター1550へと到達した際には、大きなすべての肉が、屠殺体の一部から取り外される。この時点において、屠殺体の一部は、単に、足Fと、いくつかの骨Bと、を備えているだけである。キャリア750は、屠殺体の一部を搬送方向Tに移動させることにより、足カッター1550へと屠殺体の一部を持ってくる。足カッターは、アクチュエータ1551と、カッター1552と、を備えている。アクチュエータは、例えば、空気圧シリンダや油圧シリンダとすることができる。
図26X−7Aにおいては、屠殺体の一部1が足カッター1550に近づいている様子を示している。図26X−7Bは、足が、キャリア750によってカッター1552の2つのジョーの間へと持ってこられる様子を示している。足カッター1550は、軸線1553まわりに回転される。これにより、キャリア750が屠殺体の一部1に対して課す移動に追従させることができる。
図26X−7Cは、アクチュエータ1551がカッター1552を駆動して、カッター1552のジョー部分どうしが挟んでいる様子を示している。カッターは、足Fから骨Bを切り離している。足カッターは、例えば、キャリアから屠殺体の一部を取り外すために使用することができる。代替可能な実施形態においては、足カッターは、骨を貫通してではなく、足の軟組織だけを貫通してカットする。その後には、キャリアから足を容易に取り外すことができる。
図26X−1〜図26X−7の実施形態においては、本発明の第3見地によるキャリアが示されている。当業者であれば、それに代えて、他のキャリアを同様に使用し得ることは、理解されるであろう。
図27は、本発明の第1見地によるキャリア50を示している。図27は、ロック30に関しての、可能な自由度R1,R2,R3を示している。図27に示すように、これら自由度R1,R2,R3は、キャリア50の単一の実施形態において、すべて具現することができる。他方においては、また、これら自由度のうちの1つまたは2つだけを設けることができる。
図27Aは、方向R1における回転を、鉛直方向回転軸線47を設けることによって具現し得ることを示している。図27Bは、方向R2における回転を、搬送システム60のトラック62の方向とされた水平方向回転軸線41を設けることによって具現し得ることを示している。図27Cは、方向R3における回転を、搬送システム60のトラック62の方向に対して垂直とされた水平方向回転軸線43を設けることによって具現し得ることを示している。
図27の実施形態においては、各キャリア50は、コンベヤデバイスすなわち搬送システム60の2つのトロリー61によって支持されている。これにより、屠殺体の一部の重量を、1つのトロリーではなく、2つのトロリーによって、支持することができる。このことは、トロリーに関する機械的要求を低減する。
図27の実施形態においては、保持アセンブリは、屠殺体の一部が2つのトロリー61の間の中央平面内に吊り下げられているようにして、配置される。このようにして、機械的負荷を、2つのトロリーの間にわたって均等に分割され、キャリア上においてまた搬送システム上において、一切のモーメントが発生しない。一般に、屠殺体の一部の重心が、トロリーの中心線に対して、また、屠殺体の一部の重量を負担しているトロリーどうしの中心線に対して、位置合わせされていることが、有利である。
当業者であれば、自由度という特徴点が、また、各キャリアを複数のトロリーによって支持することが、また、トロリーの中心線に対して屠殺体の一部の重心を位置合わせすることが、単一の実施形態において組み合わされる必要がないことは、理解されるであろう。それらは、互いに独立に使用することができる。また、当業者であれば、図27の実施形態をあるいはその特徴点のいくつかを、本発明の他の見地によるキャリアと同様に組み合わせて使用し得ることは、理解されるであろう。
図28は、屠殺された豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するためのシステムにおいて使用される本発明によるキャリアを示している。当業者であれば、図28の実施形態においては、それに代えてあるいはそれに加えて、本発明の他の見地によるキャリアを同様に使用し得ることは、理解されるであろう。図28において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
図28〜図37によるシステムは、皮膚によってなおも覆われた屠殺体の一部を冷却する冷却プロセスを屠殺体の一部に対して実施しなければならない場合に、特に有利である。
図28の実施形態においては、各キャリア50は、搬送システム60の2つのトロリー61に対して連結されている。キャリア50どうしの間には、いくつかの空のトロリー61が存在している。これにより、その後のキャリア50の間のピッチを所望のものとすることができる。しかしながら、それら空のトロリーの存在は、必須ではない。搬送システム60は、トロリーと、トロリーに付帯されたキャリアとを、搬送方向Tにおいてトラック62に沿って移動させる。
操作者800は、トラック62に沿って、処理ステーション810内に位置している。この特定の処理ステーションにおいては、屠殺体の一部が、ナイフ804を使用してカットされる。屠殺体の一部は、廃棄される部分と、人間の消費のためにカットされた肉とされる部分と、を備えている。操作者の前方には、漏斗811が設けられている。漏斗811は、真空引き搬送システムに対して連結されている。真空引きシステムは、排気チューブ812を備えている。操作者800が、廃棄ピースをカットしている際には、廃棄ピースを漏斗811内へと落下させる。バルブ813が開放される。例えば、操作者の前方のスイッチ814を操作者が駆動することによって、バルブ813が開放される。これにより、真空吸引力が適用される。この真空吸引により、廃棄ピースが真空引きチューブ812内へと吸引され、廃棄場所へと移送される。
操作者の前方の適切な場所に漏斗811を配置することは、本発明の第4見地をなす。ここでは、真空引きシステムと一緒に使用される漏斗811は、処理ステーション810から離間した場所へと廃棄ピースを搬送するための二次的コンベヤを形成する。操作者800に隣接して、第2の二次的コンベヤ820が配置されている。操作者が、人間の消費のための肉をカットしたときには、操作者は、カットした肉を、第2の二次的コンベヤ820上へと載置する。このコンベヤ820は、カットされた肉を、処理ステーションから離間した場所へと搬送する。そして、貯蔵場所へと、あるいは、パッケージ場所へと、あるいは、さらなる処理を行う場所へと、搬送する。
この構成においては、カットされた肉は、屠殺体の一部の残部からカットされる処理ステーションのところにおいて、搬送システムから除去される。このことは、公知のシステムと比較して、有利である。公知のシステムにおいては、カットされた肉は、端部ステーションへと、屠殺体の一部の残部と一緒に搬送され、端部ステーションにおいては、様々なタイプの製品、および/または、残部材料が、貯蔵され、さらに分配される。図28によるシステムにおける輸送は、はるかに効率的である。なぜなら、並べ替え操作(ソーティング操作)を、それ以上行う必要がないからである。
メイン搬送システム60のトラック62の下方には、補助的コンベヤ801が配置されている。補助的コンベヤ801は、支持ブロック803を備えている。支持ブロック803どうしは、チェーン802によって連結されている。チェーンに代えて、ケーブルを使用することができる。矢印Taux は、支持ブロック803の搬送方向を示している。
処理ステーション810のいくらか上流側には、補助的コンベヤ801は、メイン搬送システム60のトラック62から下方に離間して配置されている。このため、キャリア50内の屠殺体の一部1は、補助的コンベヤ801に対して接触することがない。この様子は、図28に示されている。図28においては、屠殺体の一部1は、補助的コンベヤ801に対して干渉することなく、適切に吊り下げられている。
処理ステーション810に近づくと、補助的コンベヤ801は、上向きに傾斜する。これにより、支持ブロック803が、上方に位置する屠殺体の一部に対して接触するようになる。上向き移動が、さらに、継続される。これにより、補助的コンベヤ801の支持ブロック803は、屠殺体の一部1を傾斜させるとともに、キャリア50のロック30を回転軸線41まわりに回転させる。この様子は、図28において、中央に位置した屠殺体の一部1に関して図示されている。屠殺体の一部1は、処理ステーション810においては、人間工学的に操作しやすい高さ位置でもって、なおかつ、屠殺体の一部のうちのカット対象をなす面を操作者に向けた状態でもって、操作者800に対して供される。これにより、操作者800は、不自然な姿勢や複雑な姿勢や動きづらい姿勢をとる必要なく、カットを行うことができる。
図28には図示されていないものの、処理ステーション810の下流側においては、補助的コンベヤ801は、屠殺体の一部を、再度解放する。これにより、屠殺体の一部を、図28に示すように、初期位置へと復帰させる。必要であれば、その後に、屠殺体の一部を、鉛直方向軸線47まわりに回転させる。これにより、次なる処理ステーションのために、屠殺体の一部の他の面を正面に向けることができる。図29は、屠殺体の一部1を処理するためのシステムにおける本発明によるキャリアの他の使用を示している。当業者であれば、図29の実施形態においては、それに代えてあるいはそれに加えて、本発明の他の見地におけるキャリアの様々な特徴点を同様に使用し得ることは、理解されるであろう。
図29は、搬送システム60のトラック62に沿って、処理ステーション810内に位置した操作者800を示している。トロリー61は、キャリア50を有しつつ、トラック62に沿って延在している。キャリア50は、屠殺体の一部1を付帯している。操作者800は、屠殺体の一部1を手動でカットするためのナイフ804を有している。操作者が屠殺体の一部1から一部分をカットした後には、操作者は、カットした部分を、供給コンベヤ850上へと載置することができる。供給コンベヤ850は、操作者の前方に配置されている。供給コンベヤ850は、本発明の第4見地における二次的コンベヤを構成する。図29における屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
図29の実施形態においては、キャリア50には、アーム830が設けられている。アーム830には、カムフォロワ831が連結されている。キャリア50は、トロリー61に対して、軸線833まわりに回転可能とされている。処理ステーション810においては、カムトラック834付きのガイド832が配置されている。ガイド832とカムトラック834とは、処理ステーション810へと近づいてくるキャリア50のカムフォロワ831に対して係合することができる。
屠殺体の一部1は、実質的に鉛直方向を向いた長手方向軸線を有した状態で、処理ステーション810へと搬送される。これは、図29においては、仮想線で示されている。屠殺体の一部1が操作者800に対して近づいた際には、カムトラック834が、カムフォロワ831の下向き移動を引き起こすようにして、向きを変更させる。この場合、ロックがキャリアの残部に対して固定されていることにより、カムフォロワ831の下向き移動は、屠殺体の一部1を、操作者800に向けて傾斜させる。このようにして得られた屠殺体の一部の傾斜状態は、図29において実線で示されている。
傾斜状態は、好ましくは、屠殺体の一部1が、処理ステーション810において、人間工学的に操作しやすい高さ位置でもって、なおかつ、屠殺体の一部のうちのカット対象をなす面を操作者に向けた状態でもって、操作者800に対して供されるようなものとされる。これにより、操作者800は、不自然な姿勢や複雑な姿勢や動きづらい姿勢をとる必要なく、カットを行うことができる。操作者800が、屠殺体の一部1に対して、カットや他の操作を行った後には、カムトラック834は、再度上向きに傾斜する。これにより、屠殺体の一部1を、初期位置へと戻す。
図30は、屠殺体の一部1を処理するためのシステムにおける本発明の第1見地によるキャリアの他の使用を示している。当業者であれば、図30の実施形態においては、それに代えてあるいはそれに加えて、本発明の他の見地によるキャリアを同様に使用し得ることは、理解されるであろう。
図30においては、トラック62およびトロリー61を有した搬送システム60は、図示の明瞭化のために、図示されていない。しかしながら、図28および図29に示すものと同じシステムを使用することができる。Tは、この場合にも、搬送システム60によって課されたキャリア50の搬送方向を示している。図30においては、2つの処理ステーション840,810が示されている。第1処理ステーション840においては、自動化された操作が、屠殺体の一部1の第1面上において、デバイス841によって実行される。キャリア50は、処理対象をなす面が処理デバイス841に向けて回転するように、向きが調整される。
第2処理ステーション810においては、引き続く操作が、屠殺体の一部1の他の面上において、実行される。この例においては、第2操作において、屠殺体の一部1にカットが形成される。第1処理ステーション840と第2処理ステーション810との間においては、キャリアは、鉛直方向軸線47まわりに回転駆動される。このようにして、屠殺体の一部1は、操作者に対して、比較的好ましい態様でもって、供される。回転は、回転手段によって引き起こすことができる。回転手段は、キャリアまたはトロリーの一部と協働する搬送システムのトラックに対して隣接して配置される。例えば、キャリアには、例えばカムまたはアームといったような突出部分846が設けられている。突出部分846は、固定対象物845に対して係合する。固定対象物845は、例えばピンまたはブロックとされ、この固定対象物845を通過する際にトラックに隣接して配置される。搬送システムが前方移動を継続した際には、固定対象物845は、突出部分846を回転させる。これにより、突出部分846は、固定対象物845を通過することができる。突出部分846を回転させることにより、キャリアを一緒に回転させることができる。
図30の例においては、カットを形成するために屠殺体の一部を位置決めするためには、屠殺体の一部1を軸線41まわりにおいても回転(または傾斜)させる必要がある。この例においては、この回転を自動的に行うための構成は設けられていない。よって、この例においては、操作者は、屠殺体の一部1を把持して、手動でもって軸線41まわりに回転させる。この回転が手動操作であるかどうかにかかわらず、操作者800に要求される物理的負担は、公知の方法と比較して、はるかに小さい。なぜなら、キャリアが、屠殺体の一部の重量を支持しているからであり、また、屠殺体の一部のすべてに関して、操作者が1つの移動だけを課すだけでよいからである。このことは、操作者が、屠殺体の一部に対して複雑な経路を通ってアクセスする必要がないことを意味する。
図31は、屠殺体の一部1を処理するためのシステムにおける本発明によるキャリアの他の使用を示している。当業者であれば、図31の実施形態においては、それに代えてあるいはそれに加えて、本発明の他の見地によるキャリアの様々な特徴点を同様に使用し得ることは、理解されるであろう。図31において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。図31においては、屠殺体の一部1は、キャリア50によって、処理ステーション810へと搬送される。処理ステーション810においては、部分1*が、屠殺体の一部の残部からカットされなければならない。その後、部分1*は、処理ステーション810内においてさらに処理され、屠殺体の一部の残部は、キャリア50によって保持されたまま、この処理ステーションにおいては放置される。
図30の場合と同様に、レール62およびトロリー61を有した搬送システム60は、図示の明瞭化のために、示されていない。しかしながら、図28および図29に示すものと同じシステムを使用することができる。Tは、この場合にも、搬送システム60によって課されたキャリア50の搬送方向を示している。処理ステーション810においては、例示するならば、第1コンベヤベルト850が設けられている。第1コンベヤベルト850は、屠殺体の一部1に対して係合し得るようにして、さらに、屠殺体の一部を回転させ得るようにして、配置されている。屠殺体の一部を回転させることにより、屠殺体の一部を、第1コンベヤベルト850上に側面を下にして載置することができる。キャリア50の位置および向きは、屠殺体の一部の適切な側面が上向きとなるように、および、カットされるべき部分1*が第1コンベヤベルト850の側部に位置するように、選択される。
この例においては、第1コンベヤベルトには、付加的なガイド851が設けられている。
処理ステーション810は、さらに、一例として、回転カッター852を備えている。この回転カッター852は、第1コンベヤベルト850に隣接して配置されている。ここでは、ガイド851の領域において配置されている。屠殺体の一部1の通過時には、ガイド851は、部分1*を持ち上げ、部分1*を回転カッター852に対して係合させる。回転カッター852は、屠殺体の一部の残部から、部分1*をカットする。屠殺体の一部の残部は、第1コンベヤベルト850上を移動し、第1コンベヤベルト850の端部へと落下する。その場合、キャリア50は、屠殺体の一部の重量を支持し、屠殺体の一部をさらに搬送する。カットされた部分1*は、二次的コンベヤ853上へと落下する。本発明の第4見地においては、二次的コンベヤ853は、カッター852の直下に配置されている。二次的コンベヤは、切り離された部分1*を、カットデバイス854へと搬送する。カットデバイス854は、部分1*上に存在する皮膚内に、カットを形成する。
その後、第2コンベヤ853は、皮剥ぎ機855へと部分1*を搬送する。皮剥ぎ機855は、部分1*から皮膚を除去する。除去された皮膚は、皮剥ぎ機855から第3コンベヤ857上へと落下する。シュート856は、皮剥ぎされた部分1*を、この処理ステーション810から離間させる。
図32は、屠殺体の一部1を処理するためのシステムにおける本発明によるキャリアの他の使用を示している。当業者であれば、図32の実施形態においては、それに代えてあるいはそれに加えて、本発明の他の見地によるキャリアの様々な特徴点を同様に使用し得ることは、理解されるであろう。図32において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
図32においては、処理ステーションは、複数の処理デバイス860を備えている。複数の処理デバイスは、回転カルーセルまたはタレット機械861内に配置されている。回転カルーセルまたはタレット機械861は、好ましくは、鉛直方向の回転軸線を有している。この例においては、処理デバイス860は、解体デバイスとされている。しかしながら、当業者であれば、他の任意のタイプの処理デバイスをカルーセル内に配置し得ることは、理解されるであろう。カルーセルが、屠殺場内における操作者のための標準的な処理ステーションの幅に対応した、例えば1〜1.5mといったような例えば1.2mといったような、直径を有していることが、特に有利である。その場合、屠殺場内における他の公知の手動処理ステーションの場合と同様に、カルーセルを、処理ライン内に組み込むことができる。
図30および図31の場合と同様に、レール62およびトロリー61を有した搬送システム60は、図示の明瞭化のために、詳細には示されていない。しかしながら、図28および図29に示すものと同じシステムを使用することができる。Tは、この場合にも、搬送システム60によって課されたキャリア50の搬送方向を示している。Rcは、カルーセルの回転方向を示している。デバイス860の円形移動は、カルーセル860の周縁に沿ってのキャリア50の通過に対して同期される。
搬送システム60は、屠殺体の一部1を各々が保持しているキャリア50を、カルーセルタイプの処理ステーション810に対して順次的に搬送し得るよう構成されている。この例においては、屠殺体の一部1は、解体プロセスのために既に準備されている。カルーセルの円形回転の一部においては、屠殺体の一部1を付帯したキャリア50は、解体デバイス8601つと一緒に移動する。この同期された移動時には、解体デバイスは、屠殺体の一部1の骨1**から軟組織1*を除去する。デバイス860は、例えば、互いに離間した2つの部材を備えることができる。これら2つの部材は、ここで図示されているように、キャリア50によって保持された屠殺体の一部の骨1**の両サイドを通過する。除去された軟組織は、この例においては主に肉とされたものであり、二次的コンベヤ865上へと落下する。二次的コンベヤ865は、例えば、軟組織が落下する場所の直下に延在するベルトコンベヤとされる。このコンベヤ865は、除去された軟組織を、カルーセルから、次なる目的地へと、例えば貯蔵場所へとまたは他の処理場所へと、移動させる。これは、本発明の第4見地の実施である。屠殺体の一部1の残部は、骨1**を有するものであって、キャリア50によってなおも保持されている。屠殺体の一部の残部は、カルーセル861から離間した位置において、次なる処理ステーションへと搬送される。
単一のカルーセル860を、例えば図32において概略的に示すように、単一のフレーム内に保持することができる。しかしながら、単一のフレーム内に、2つまたはそれ以上のカルーセルを配置することもできる。
図32においては、カテーテルを使用して、単一の処理ステップを行うことが示されている。しかしながら、単一のカルーセル内において、複数の処理ステップを行うこともできる。
システム内に、および/または、屠殺場内に、および/または、食肉加工工場内に、1つまたは複数のカルーセルを備えることができる。単一のオーバーヘッドコンベヤのトラックに沿って、1つまたは複数のカルーセルを配置することができる。
図32*は、本発明によるシステムの他の実施形態を示すものであって、本発明の好ましい態様を詳細に示している。図32*において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
この実施形態においては、2つのトラック773は、トラックがグループをなす複数の処理ステーションを通過する際に、互いに平行なトラック部分を備えている。その場合、複数の操作者1200が、列状でもって、トラックの両サイドに位置している。より単純なバージョンにおいては、単一のトラック773が、1人または複数の操作者1200の列に沿って延在している。
好ましくは、トラック773は、屠殺場のフロア1203から1.5〜3.0m上方の高さのところにおいてフレーム1201によって保持されたオーバーヘッドトラック773とされる。好ましくは、フレーム1201は、安定性の増大化のために、フロアに対して取り付けられている。ここでは、フレーム1201は、鉛直方向ポスト1201aを備えている。鉛直方向ポスト1201aは、両トラック773の間において中央に配置されている。フレーム1201は、さらに、水平方向アーム1201bを備えている。水平方向アーム1201bの各々は、トラック773を支持している。好ましくは、複数のT字形状フレーム1201が、複数のトラック773を支持し得るよう、列状で配置されている。トラックは、複数の処理ステーションを通過する。
2つのトラック773が、グループをなす対向した手動の処理ステーション1205を通して延在している場合には、一方のトラック773上において、キャリア750が、左肩または左前端または左大腿部分を受領することができ、他方のトラック773上において、キャリア750が、右肩または右前端または右大腿部分を受領することができる。トロリー772は、各トラック773上を走行する。好ましくは、一対をなす平行な支持ガイド785が、各トラックに関して、フレーム1201によって支持されている。例えば、トロリーは、一対をなすガイド785の間を通過するガイドブロックを備えている。キャリア750は、1つまたは複数のトロリー772から吊り下げられている。
図32*においては、本発明の第3見地によるキャリア750が図示されている。しかしながら、当業者であれば、他のキャリアを同様に使用し得ることは、理解されるであろう。ここでは、各キャリアは、単一の屠殺体の一部1を保持し得るよう構成されている。
1つまたは複数の手動の処理ステーション1205は、各トラックに沿って配置されている。
各処理ステーション1205は、好ましくは、プラットホーム1210を備えている。プラットホーム1210は、操作者1200が立つ場所であり、好ましくは、プラットホームは、フロア上において隆起している。好ましくは、フェンス1211が、プラットホームの前方のところにおいて、処理ステーションに設けられている。フェンス1211は、操作者1200の安全性を高めるものであり、操作者1200のための格別の安定性のためのものである。例えば、フェンス1211は、操作者の腰領域のところにまで延出されている。例えば、1〜1.3mという高さのところにまで延出されている。付加的な特徴点として、例えばツールトレイといったようなトレイ1212が、操作者1200の前方に設けられている。トレイ1212は、例えば、操作者1200から離間する向きに、フェンス1211に取り付けられている。
好ましくは、手動の処理ステーション1200に関し、フレーム1201には、追加的に、1つまたは複数の製品支持ガイド790が設けられている。製品支持ガイド790は、処理対象をなす製品を、所定の向きでもって、好ましくはキャリアから吊り下げられておりなおかつ操作者1200に向けて傾斜した向きでもって、維持し得るよう構成されている。これにより、屠殺体の一部1を、手動で処理することができる。例えば、人間工学的な態様でもって、操作者1200によって、手動保持(電動)ツールを使用して、処理することができる。ここでは、可能な実施形態においては、各トラックに関して、1つまたは複数の水平方向製品支持ガイド790が、フレーム1201上に設けられている(ここでは、図示されていない)。これにより、キャリア750に対して係合した各ポイントに関する様々な位置において、屠殺体の一部を支持して案内することができる。
各操作者1200の前方には、一般的には屠殺体の一部1の経路の直下に、1つまたは複数の、可動の、上面が開口した、容器1215が設けられている。容器は、好ましくは、フロア1203上に、または、低い支持構造上に、設けられている。
好ましくは、各容器1215は、底部と、矩形周縁壁と、を備えている。好ましくは、各容器1215は、フォークリフトによって搬送し得るよう構成されている。例えば、容器は、フォークリフトの平行フォークを受領するためのポケットを有している。操作者は、屠殺体の一部1から除去した部分を容器1215内へと投げ入れる。あるいは、除去された部分が、重力の影響によって、容器内へと落下する。製品が容器1215内へと直線的に落下することは、操作者に対して無用の物理的負担が印加されることを、防止する。除去された部分は、廃棄物とすることができる、あるいは、最終製品とすることができる、あるいは、中間製品とすることができる。
有利な実施形態においては、単一の操作者によって手動で処理が行われる各処理ステーション1205は、2つの容器1215を受領し得るよう構成されている。好ましくは、トラック773の搬送方向において互いに並置された2つの容器1215を受領し得るよう構成されている。このようにして、1つの容器が満杯となったときには、処理ステーションにおいて実施されている作業を中断することなく、その満杯の容器を取り除くことができる。その満杯の容器が取り除かれたときには、空の容器へと交換され、操作者は、その空の容器を使用することができる。
可能な実施形態においては、プラットホーム1205および/またはフェンス1211は、動作位置と退避位置との間にわたって、移動可能なものとされる。例えば、揺動的な態様で移動可能なものとされる。これにより、容器1215を交換することができる。
図32*Aは、図32*の実施形態の可能な変形例を示している。図32*Aにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。図32*Aの実施形態においては、少なくともいくつかの処理ステーション1205には、1つまたは複数の追加的な、上面が開口した、箱1216が設けられている。箱は、処理ステーションにおいて、操作者の近くに配置されている。操作者は、肉屑または廃棄物を箱内に投げ入れることができる。例えば、血のついた肉や炎症を起こした肉を箱内に投げ入れることができる。好ましくは、1つまたは複数の箱1216は、容器1215よりも上方の高さ位置に配置されている。例えば、操作者1200の腰の高さ位置に配置されている。好ましくは、箱1216は、操作者のサイドにおいて、プラットホーム1205の上方に配置されている。これにより、箱を、操作者のサイドにまで延出させることができる。好ましくは、箱1216は、操作者から離間する向きにおいて、フェンス1211のサイドに配置される。例えば、ツールトレイ1212に隣接して配置される。箱1216を、上面が開口した容器1205に対してアクセスするための開口を有するような寸法のものとし得ることは、理解されるであろう。
図32*Bは、図32*および図32*Aの実施形態の変形例を示している。図32*Bにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
図32*Bの実施形態においては、単一のトラック773だけが設けられている。例えば、単一の列をなす手動の処理ステーションに沿って通過する。この構成は、容器が満杯となったときに、容器を取り除いたりおよび/または容器を交換したりすることを、容易なものとする。それは、フレーム1201が、プラットホーム1210から離間したサイドにおいて、例えばフォークトラックやフォークリフトといったような搬送機械によって容器1205に対してアクセスし得るように構成されているからであり、また、フレーム1201が、そのサイドから除去/交換が可能であるように構成されているからである。当業者であれば、この実施形態を、追加的な箱1216を設けることなく構成し得ることは、理解されるであろう。
図32*Cは、図32*Bの実施形態による、1つまたは複数の列をなす手動での処理ステーションを備えた単一トラックの屠殺体処理システムを示す平面図である。図32*Cにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。図32*Cにおいては、図示の明瞭化のために、容器1215は、詳細には図示されていない。図32*Cの平面図においては、トラック773が無端ループを形成していることは、明らかである。実用的には、これは、他の特徴点とは無関係に、多数の屠殺場における応用に際して好ましいものである。キャリアを付帯したトロリーは、搬送方向Tにおいて、トラック773に沿って駆動される。コーナーホイールまたはガイドホイール1207は、駆動チェーン774(図32*Cには図示されていない)を案内する。これにより、駆動チェーンは、トラック773のコースに追従することができる。トラック773は、ガイドホイール1207のところでターンする。好ましくは、ガイドホイール1207の1つには、チェーン張力付与ステーション1208が取り付けられている。このチェーン張力付与ステーション1208においては、ホイール1207は、移動可能に配置されている。これにより、駆動チェーン774を、張力を維持した状態とすることができる。
図32*Cに示す実施形態においては、互いに並置された1つまたは複数の列をなす複数の処理ステーションは、トラック773によって形成されたループの内部において、例えばプラットホーム1210上において、操作者が立っているように、配置されている。フレーム1201の構造梁またはポスト1201aは、トラック773によって形成されたループの外側に配置されている。このようにして、容器1215を容易に取り除いたりあるいは容易に交換したりすることができる。操作者は、容器1215内へと、処理時に屠殺体の一部から切り離された部材を落下させる。好ましくは、例えばフォークリフト1217といったような搬送器具のための経路1218(図32*Dを参照されたい)が、手動での処理ステーションがトラック773の内部に位置している各部分のところにおいて、トラック773の外部に沿って、設けられている。
代替可能な例においては、複数の処理ステーションを、トラック773によって形成されたループの外側に操作者が立っているように、配置することもできる。フレーム1201は、代替的には、トラック773によって形成されたループの内部に配置することもできる。組合せを使用することもできる。いくらかの操作者がループの内部に位置することができ、なおかつ、他の操作者がループの外部に位置することができる。および/または、フレーム1201のいくつかの部材が、ループの内部に位置することができ、なおかつ、フレーム1201の他の部材が、ループの外部に位置することができる。実用的には、システムの構成は、常に、肉処理設備の特定の状況に最適に適合したように、選択することができる。
図32*Cは、さらに、搬送方向Tに延在する例えばベルトコンベヤといったような供給コンベヤ1240を超えて屠殺体の一部を移動させることが示されている。供給コンベヤ1240は、処理されるべき屠殺体の一部を、ループ状トラックを有した処理システム内へと、供給する。ループ状トラックを有した処理システムは、例えば、図32*Cに示すように、単一トラックのループ状システムとされる。供給コンベヤ1240は、通常は、コンベヤベルトとされる。しかしながら、これに代えて、他のタイプのコンベヤを使用することもできる。例えば、ローラコンベヤや、個々のキャリアを備えたコンベヤ、を使用することもできる。これに代えて、供給コンベヤ1240に代えて、容器によってシステム内へと屠殺体の一部を搬入することができる。
ループ状処理システムは、1つまたは複数の搬入ステーション1241を備えている。搬入ステーションにおいては、屠殺体の一部は、キャリア750内へと、例えば手動で、あるいは、例えばロボットを使用したような自動化された態様で、1つずつ配置される。キャリア750は、屠殺体の一部を受領する。キャリア750は、トラック773に沿って移動することにより、処理ステーション1205に沿って受領される。実用的には、各キャリアは、好ましくは、単一の屠殺体の一部を保持することとなる。例えば、図23によるシステムを使用することにより、キャリア内に屠殺体の一部を自動的に配置することができる。
1つまたは複数の搬入ステーション1241への屠殺体の一部の供給は、コンベヤ1240によって行うことができる、あるいは、例えば容器を使用することによりバッチ的に行うことができる。
図32*Dは、図32*Cの実施形態を示している。しかしながら、図32*Dにおいては、切り離された部分を受領するための容器1215を示している。図32*Dにおいては、処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。図32*Dに示す状況においては、処理ステーション1205の大部分は、内部に配置された容器1215を備えている。しかしながら、すべての処理ステーションが容器を備えているわけではない。容器を備えていない処理ステーションは、先の容器が満杯となって除去された後に、空の容器を受領する待ち受け状態である。フォークリフト1217等を使用することにより、満杯の容器1215を除去し得るとともに、空の容器を持ってくることができる。容器が満杯となったために処理ステーションから容器が除去されたときに図32*Dのシステム全体における処理が滞ってしまうことを回避するために、いくつかの選択肢を利用することができる。
空の待機容器を、各処理ステーション1205の近傍に(あるいは、限られた数の処理ステーションの近傍に、例えば、2つまたは3つの処理ステーションの近傍に)、常に配置しておくことができる。これにより、満杯の容器と空の容器との交換を、非常に迅速に行うことができる。
また、各処理ステーションに関し、容器1215が満杯となるタイミングを予測することもできる。例えば、各処理ステーションにおいて実施される処理の経験則に基づいてあるいはそのような処理の観測結果に基づいて、予測することができる。処理ステーションにおいて容器が満杯になると予想される直前に、空の容器を、その処理ステーションの近傍に配置することができる。これにより、その処理ステーションにおける容器1215が実際に満杯となったときに、満杯の容器と空の容器との交換を、非常に迅速に行うことができる。
処理ステーションにおいて容器1215が満杯となる程度は、処理システムの制御システムによって観測することができる。例えば、ステーション内に存在する各容器1215の重量を連続的にまたは間欠的に観測することにより、あるいは、容器内に設けられたあるいは容器の関連部材に設けられたレベルゲージを使用することにより、あるいは、カメラを使用した自動撮影システムを使用することにより、観測することができる。
容器の満杯レベルを観測するための、そして、満杯の容器を空の容器によって交換するに際しての時間ロスを少なくするための、単純な態様により、処理ステーションにおける操作者1200に対して、容器がほぼ満杯となるおよび/または容器が完全に満杯となるタイミングで、信号を送ることができる。そのような信号により、操作者が位置する処理ステーションにおけるボタンまたは他のトリガーデバイスを操作者が押すことができる。このボタンを押すことにより、搬送クルー(満杯の容器を除去して空の容器へと交換する担当者)に対して信号を送ることができる。これにより、空の容器を、そのような信号が送出された処理ステーションへと、持ってくることができる。好ましくは、操作者は、処理ステーションにおける容器1215が完全に満杯となる前に、信号をトリガーする。これにより、自身の前方の容器1215が完全に満杯となったときに、待ち時間なく、処理ステーションに空の容器を準備することができる。
搬送クルーが受領する信号は、多様な態様とすることができる。処理システムの概略的な表示上に、インジケータライトを設けることができる。これにより、空の容器を必要としている(あるいは、すぐに空の容器が必要となるであろう)処理ステーションを示すことができる。また、処理システムの概略的な表示を示すスクリーン上において、空の容器を必要としている処理ステーションの色を変更することもできる。また、実際の処理ステーションのところに設けられたライトを点灯させることもできる。ライト信号または色信号に対して、音信号を付随させることができる。
異なるアプローチにおいては、すべての時間にわたって、人間の操作者をすべての処理ステーションに配置しない。例えば、複数の処理ステーションは、対をなす2つの隣接する処理ステーションへと、グループ分けされる。対をなす処理ステーションの一方にだけ、操作者が配置される。操作者が配置された処理ステーションの容器1215が満杯となったときに、操作者は、対をなす処理ステーションの他方へと移動し、そこで屠殺体の一部の処理を継続する。そして、対をなす処理ステーションの他方において行ったのと同じ操作を実行する。好ましくは、搬送クルーに対して、信号が送出される。これにより、搬送クルーは、その特定の処理ステーションにおいて容器が満杯であることを知ることができる。搬送クルーは、対をなす処理ステーションにおける容器が満杯となるまでに、空の容器と交換するのに、十分な時間を有することができる。
図32*Eは、図32*の実施形態の細部を備えた、本発明によるシステムを示す平面図である。図32*Eにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。図32*Eにおいては、図示の明瞭化のために、容器1215は、図示されていない。
図32*Cの平面図においては、2つのループ状処理システムをなす2つのトラック773は、2つの無端ループを形成していることは、明らかである。すなわち、外側ループと、内側ループと、を形成している。
各トラック構成は、図32*Cを参照して上述したループ状トラックと全体的に同様である。キャリアを付帯したトロリーは、搬送方向Tにおいて、トラック773に沿って駆動される。コーナーホイールまたはガイドホイール1207は、駆動チェーン774(図32*Eには図示されていない)を案内する。これにより、駆動チェーンは、トラック773のコースに追従することができる。トラック773は、ガイドホイール1207のところでターンする。各トラックのガイドホイール1207の1つには、チェーン張力付与ステーション1208が取り付けられている。このチェーン張力付与ステーション1208においては、ホイール1207は、移動可能に配置されている。これにより、駆動チェーン774を、張力を維持した状態とすることができる。
図32*Eの実施形態においては、処理ステーション1205は、あるいは、それら処理ステーションの1つまたは複数の部分(例えば、プラットホーム1210、フェンス1211、および存在する場合には、トレイ1212)は、移動可能とされる。これにより、例えばフォークリフトといったような搬送器具のための空間を形成することができる。これにより、満杯の容器を、空の容器と交換することができる。図32*Eおよび図32*Fにおいては、処理ステーション1205’におけるプラットホームおよびフェンスは、離間した位置とされる。図32*Fは、容器が図示された状態で、図32*(および図32*E)の実施形態を示している。
図32**は、図32*の実施形態のより複雑化されたバージョンの様々な特徴点を示している。この実施形態においては、容器1215は、一般に、1つまたは複数のコンベヤによって代替されている。図32**において処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
操作者1200の各々の前方には、好ましくは、フェンス1211のうちの、操作者1200に対向した面上に、付加的には、計量デバイス1220が設けられている。操作者1200が、この操作者に供された屠殺体の一部1から部分をカットした際には例えば一次的カットを行った際には、その操作者は、その一次的カットを、前方の計量デバイス1220上へと載置する。計量デバイスは、カットされた部分の重量を測定し、このデータを、処理システムの全体的制御システム内に格納する。
好ましい特徴点においては、バッファベルトコンベヤ1221が、各操作者の位置から、フレーム1201に向けて、ここでは操作者1200がなす2つの列の間の中央領域に向けて、(全体的に、トラック773の向きを横断する向きに)、フレームのポスト1201aに沿ってトラック773の方向に延在するメインコンベヤ1222へと、ここではベルトコンベヤへと、一次的カットが収集される例えば収集ステーションへと、例えば1つまたは複数の容器内へと、延在している。
ここでは、各バッファベルト1221は、計量デバイス1220とメインコンベヤ1222との間に、延在している。計量デバイス1220からは、カット部分(すなわち、屠殺体の一部から切り離された部分)が、例えば一次的カットが、バッファベルトコンベヤ1221上へと、移動される(操作者によって、あるいは、計量デバイス(例えば、計量デバイスのベルト)によって)。また、計量デバイスを、バッファベルト1221内に組み込むこともできる。
バッファベルト1221は、一次的カットを、一次的カット用コンベヤすなわちメインコンベヤ1222へと、移動させる。有利には、処理システムのコンピュータ化された全体的制御システムは、一次的カット用コンベヤ1222上に配置された各一次的カットを登録する。このようにして、システムは、一次的カット用コンベヤ1222の端部において一次的カットが到達するタイミングを知っている。複雑化された実施形態においては、バッファベルトは、切り離された部分のためのスペースがメインコンベヤ上に残っていることが制御システムに対して示されたときにのみ、切り離された部分を、メインコンベヤ1222上へと、載置する。
一次的カットは、例えばポークのテンダーロインといったような高価な肉部分である。所望によっては、容器1215は、ここでは、1つまたは複数の平行なコンベヤへと置き換えられる。平行コンベヤは、切り離された部分を搬送するためのものであり、各々が、吊り下げられた屠殺体の一部の経路よりも下方において、例えば操作者の膝の高さ位置において、例えばフロアよりも0.4〜0.9m上方において、トラック773の方向に延在している。
ここで図示した実施形態においては、一次的カット用コンベヤ1222よりも下方において、切り離された部分用のコンベヤ1235が設けられている。このさらなる切り離された部分用のコンベヤ1235は、複数の、ここでは3つの、平行なトラック1230,1231,1232を備えている。各トラックは、屠殺体の一部から除去された様々な種類の切り離された部分を搬送するために使用される。例えば、第1トラック1230は、二次的カット(より小さな肉片であって、人間の消費に関してより適したものである)を受領する。第2トラック1231は、廃棄物を受領し、第3トラック1232は、骨を受領する。
各トラック1230,1231,1232の端部においては、各トラック上に載置された部分は、各トラック上に載置された部分のタイプに関して特定の目的地へと移動される。図示の実施形態においては、3つのトラックが設けられている。しかしながら、これに代えて、異なる数のトラックを設けることができる。より少数の(1つまたは2つ)トラックとすることができる。しかしながら、3つよりも多数の、例えば5つの、あるいは10個さえの、トラックを設けることができる。
図32**Aは、図32**の実施形態の変形例を示している。図32**Aにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。図32**Aの実施形態においては、処理ステーションの少なくともいくつかには、1つまたは複数の追加的な箱1216が設けられている。1つまたは複数の追加的な箱1216は、存在する場合には、計量デバイス1220に隣接して配置されており、処理ステーションにおいて操作者の近傍に配置されている。操作者は、肉屑または廃棄物を1つまたは複数の追加的な箱内に投げ入れることができる。例えば、血のついた肉や炎症を起こした肉を1つまたは複数の追加的な箱内に投げ入れることができる。図32**Bは、図32**および図32**Aの実施形態のさらなる変形例を示している。図32**Bにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。図32**Bの実施形態においては、2つのメインカット用のすなわち一次的カット用のコンベヤ1222が、中央領域に設けられている。ここでは、鉛直方向ポスト1201aの両サイドに設けられている。各一次的カット用コンベヤ1222は、トラック773のいすれかに沿って搬送された屠殺体の一部からの一次的カットを受領する。
一次的カット用コンベヤ1222の各々は、それらコンベヤ上に載置された一次的カットを他の場所へと搬送することができる。代替例においては、一次的カット用コンベヤは、コンベヤ上に配置された一次的カットを、同じ場所へと搬送することもできる。変形例においては、一次的カット用コンベヤ1222は、同じポイントにおいて結合される。結合ポイントの後方においては、双方のコンベヤからの一次的カットは、さらに一緒に搬送され、さらなる処理や貯蔵やパッケージングのために一次的カットが収集されるポイントへと搬送される。
図32**、図32**A、図32**Bの実施形態においては、さらなる切り離された部分用のコンベヤ1235は、3つの互いに異なるトラック1230,1231,1232を備えている。各トラックは、屠殺体の一部から除去された様々な種類の切り離された部分を搬送するために使用される。代替可能な実施形態においては、さらなる切り離された部分用のコンベヤは、異なる数のトラックを備えている。
また、さらなる切り離された部分用のコンベヤ1235に複数のトラックを設けることに代えて、互いに並置された複数のコンベヤを使用することができる。一般に、各コンベヤは、コンベヤ上に配置された切り離された部分を、専用の端部ポイントへと搬送することができる。専用の端部ポイントにおいては、切り離された部分は、さらなる処理や貯蔵やおよび/またはパッケージングのために、受領される。各コンベヤまたは各コンベヤトラックが、特定の種類の切り離された部分を搬送することのために、各コンベヤまたは各コンベヤトラックの端部ポイントにおいては、特定の種類の切り離された部分が受領される。1つまたは双方のさらなる切り離された部分用のコンベヤが、複数の平行コンベヤの外部に形成されている場合には、すべてのコンベヤは、コンベヤ上に配置された切り離された部分を同じ場所へとは搬送しないことができる。
図32**Cは、図32**を参照して上述した様々な特徴点を備えた2つのループ状処理システムの付加的なおよび/または好ましい特徴点を示している。図32**Cにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
この実施形態においては、2つの全体的に平行なループ状トラック773を示している。すなわち、外側トラックと、内側トラックと、が示されている。トロリーは、トラック773に沿って、キャリア(図示せず)を搬送する。各キャリアは、好ましくは、処理対象をなす単一の屠殺体の一部を保持し得るよう構成されて使用されている。1つのトラック773上においては、例えば外側トラック上においては、キャリアは、左肩または左前端または左大腿部分を受領することができ、他方のトラック上においては、例えば内側トラック上においては、キャリアは、右肩または右前端または右大腿部分を受領することができる。処理されるべき屠殺体の一部は、供給コンベヤ1240によって、例えばシステムの各トラックによって、システムに対して供給することができる。ここでは供給コンベヤ1240の端部に配置された1つまたは複数の搬入ステーション1241においては、各屠殺体の一部は、キャリア内に配置されている。キャリアは、好ましくは駆動チェーンまたはケーブルによって駆動される複数のトロリーによって、複数のトラック773の1つに沿って、移動される。屠殺体の一部は、それぞれのキャリア内へと、手動であるいは自動で、配置することができる。
屠殺体の一部は、各々のループ状トラック773ごとに、列をなす処理ステーション1205に沿って、ここでは2つの列をなす複数の手動での処理ステーション1205に沿って、通過する。
例えば、処理時に屠殺体の一部から切り離された一次的カットは、一次的カット用のコンベヤすなわちメインコンベヤ1222上に配置される。他の切り離された部分は、さらなる切り離された部分用のコンベヤ1235の一部を形成する1つのコンベヤ上に配置される。一次的カットとされた切り離された部分は、あるいは、他の切り離された部分は、操作者によってあるいは自動化された処理ステーションによって、それぞれのコンベヤ上へと能動的に載置される。しかしながら、また、切り離された部分は、屠殺体の一部から、コンベヤ上へと落下させることもできる。
固定ガイド790を、屠殺体の一部を適切な向きに保持するために、例えば操作者1200に対して傾斜した状態に保持するために、設けることができる。これにより、切り離された部分は、適切なコンベヤ上へと落下することができる。
切り離された部分用のコンベヤ1235は、このコンベヤ上に配置された切り離された部分を、可動容器1218へと搬送する。可動容器は、好ましくは、直線状のものとして具現化されたコンベヤ1235の端部に配置されている。容器1218の各々は、特定の種類の切り離された部分を受領する。その特定の種類の切り離された部分は、コンベヤ上に配置されたものであり、コンベヤの端部に、容器1218が配置されている。
可動容器1219が、一次的カット用コンベヤまたはメインコンベヤ1222の各々から一次的カットまたは他の切り離された部分を受領するために、設けられている。一次的カット用コンベヤ1222の各々の端部の近傍には、コンピュータ制御されたフリッパー1223が設けられている。フリッパー1223は、コンピュータ化された全体的制御システムに対して連結されている。フリッパー1223は、各一次的カットを所望の容器1219内へと導入し得るように制御される。
処理システムのコンピュータ化された全体的制御システムは、一次的カット用コンベヤ1222上へと一次的カットが配置された場所と時間とを記録する。その場合、全体的制御システムは、一次的カット用コンベヤ1222の端部1224のところへと一次的カットが到達する順序を知っている。その情報に基づき、フリッパー1223を、適切なタイミングで適切に駆動することができ、これにより、一次的カットを適切な容器1219内へと集めることができる。これに代えてあるいはこれに加えて、カメラを、一次的カット用コンベヤ1222の上方に配置することができる。カメラは、一次的カットを認識するための映像システムへと連結されている。全体的制御システムに対して供給された情報に基づき、フリッパー1223を、適切なタイミングで適切に駆動することができ、これにより、一次的カットを適切な容器1219内へと集めることができる。また、カメラの画像は、操作者に対して提示することもできる。その場合、操作者は、直接的にまたは間接的に、フリッパー1223を制御する。容器1218,1219は、複数の処理ステーションを有したトラック773と同じ空間内に配置することができる、あるいは、他の空間内に配置することができる。
図32**Dは、図32**Cの実施形態の変形例を示している。図32**Dにおいては、単一のループ状トラック773だけが設けられている。図32**Dにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
図32***Aは、本発明によるさらなる可能な詳細を示している。図32***Aにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。この実施形態においては、切り離された部分は、切り離された部分用のコンベヤ1235によって、処理ステーションから離間する向きに搬送される。好ましくは、この切り離された部分用のコンベヤ1235は、複数のトラック1230,1231,1232を備えている。各トラックは、好ましくは、特定の種類の屠殺体の一部を受領する。例えば、一次的カットをトラック1230上へと配置することができ、二次的カット(使用可能な肉であって、より小さな肉)をトラック1231上へと配置することができ、廃棄物をトラック1232上へと配置することができる。
図示の実施形態においては、3つのトラックが設けられている。しかしながら、これに代えて、異なる数のトラックを設けることができる。より少数の(1つまたは2つ)トラックとすることができる。しかしながら、3つよりも多数の、例えば5つの、あるいは10個さえの、トラックを設けることができる。
1つまたは複数の漏斗1245を、プラットホーム1210上に位置した操作者の前方に、設けられている場合にはフェンス1211の内部に、設けることができる。これにより、操作者は、適切なトラック1230,1231,1232上へと、屠殺体の一部から切り離された部分を、より容易に落下させることができる。通常は、処理ステーション1205において、1つの部分だけが切り離される。これにより、処理ステーションにおいては、単一の漏斗を設けるだけで十分である。必要であれば、単一の漏斗1245は、選択されたコンベヤに対応した個別の位置どうしの間にわたって、移動可能とされる。これに代えて、複数の漏斗1245を、1つまたは複数の処理ステーションに設けることができる。
図32***Bは、図32***Aの実施形態の変形例を示している。図32***Bにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。図32***Bの実施形態においては、例えば互いに異なる速度で動作可能とされた3つのコンベヤ1230*,1231*,1232*が、複数のトラック1230,1231,1232を有した単一のコンベヤ1235に代えて、使用されている。図示の実施形態においては、3つのコンベヤが設けられている。しかしながら、これに代えて、異なる数のコンベヤを設けることができる。より少数の(1つまたは2つ)コンベヤとすることができる。しかしながら、3つよりも多数の、例えば5つの、あるいは10個さえの、コンベヤを設けることができる。
図32***Cは、図32***Aおよび図32***Bの実施形態の変形例を示している。図32***Cにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。図32***Cの実施形態においては、操作者1200の手が届く範囲内に、漏斗1245’が設けられている。漏斗1245’は、真空引き搬送システム1246に対して連結されている。真空引きシステムは、汚染された廃棄物(例えば、操作者の健康に関してリスクを有した材料、あるいは、例えば炎症を起こした部分といったような処理された肉の消費者に関してリスクを有した材料)を、処理ステーションから安全な態様で除去するに際して、特に好適である。危険な廃棄物は、処理ステーションから、閉塞システムを使用して除去される。閉塞システムは、他の処理ステーションの汚染というリスクを、および、1つまたは複数のコンベヤの汚染というリスクを、意義深く低減することができる。
各処理ステーション1205には、危険な廃棄物の除去のための真空システムに対して連結された漏斗1245’を設けることができる。これに代えて、危険な廃棄物が存在していそうな処理ステーションにだけ、そのような漏斗を設けることができる。
当業者であれば、図32***A,図32***B,図32***Cに示すような漏斗1245(あるいは、一般的には、シュート)を、本発明のすべての実施形態と組み合わせて、使用し得ることは、理解されるであろう。また、当業者であれば、図32***Cに示すような危険な廃棄物の除去のための真空システム1246に対して連結された漏斗またはシュート1245’を、本発明のすべての実施形態と組み合わせて、設け得ることは、理解されるであろう。
図32***Dは、本発明によるシステムの他の実施形態を示している。図32***Dにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。このシステムは、2つの全体的に平行なトラック773を備えている。各トラックに沿っては、2つの列状をなす複数の手動の処理ステーションが配置されている。内側トラックの列は、内側トラックの内部に配置され、外側トラックの列は、外側トラックの外部に配置されている。全体的に、内側の列と外側の列とは、互いに対向している。図32***Dの実施形態においては、処理ステーション内における処理は、人間の操作者1200によって実行される。好ましくは、操作者は、プラットホーム1210上に位置している。フロア上におけるプラットホームの高さは、好ましくは、処理ステーションが配置されている領域においては、フロアからのトラック773の距離に対して適合したものとされる。付加的には、フロア上におけるプラットホームの高さは、操作者のボディの長さに応じて調節することができる。
屠殺体の一部1は、この例においては、コンベヤ1238によってシステムに対して供給される。コンベヤ1238からは、屠殺体の一部1は、計量デバイス1239を超えて通過する。計量デバイス1239のところにおいては、屠殺体の一部1の重量を、個別的に測定することができる。屠殺体の一部1の各々の重量は、処理システムのコンピュータ化された全体的制御システム内に格納される。計量デバイス1239は、付加的な特徴点である。計量デバイス1239からは、屠殺体の一部が、供給コンベヤ1240に対して供給される。これにより、屠殺体の一部1を搬入ステーション1241へと持ってくることができる。搬入ステーションにおいては、屠殺体の一部1の各々は、キャリア750内に配置されている。この実施形態においては、これは、手動で行われる。搬入プロセスは、供給コンベヤ1240によって実施される。供給コンベヤ1240は、屠殺体の一部1を、キャリア750の高さ位置にまで、持ち上げる。このようにして、操作者は、供給コンベヤ1240から屠殺体の一部1を持ち上げる必要がない。これにより、屠殺体の一部をキャリア内に配置することができる。これにより、操作者に関する物理的負担を軽減することができる。
キャリアは、一連をなす複数の処理ステーションに沿って、トラック773に沿って、搬送される。好ましくは、第1シリーズをなす処理ステーションにおいて、皮膚や皮やおよび/または脂肪が、屠殺体の一部から除去される。その後、屠殺体の一部は、次なるシリーズの処理ステーションにおいて、解体される。しかしながら、また、処理ステーションにおいては解体だけを行って、その後に、屠殺体の一部から切り離された肉部分から、皮膚や皮やおよび/または脂肪を除去することができる。
この例においては、操作者1200は、屠殺体の一部1から切り離した部分を、切り離された部分用のコンベヤ1235上へと、落下させる。切り離された部分は、最終製品とすることも、中間製品とすることも、あるいは、廃棄物とすることも、できる。好ましくは、切り離された部分用のコンベヤ1235は、少なくとも2つの個別の、互いに平行な、トラックを備えている。いくつかの処理ステーションにおいては、1つまたは複数の漏斗1245を利用することができる。操作者が漏斗1245内へと切り離された部分を落下させる場合には、切り離された部分は、操作者が追加的な努力や注意を払う必要なく、コンベヤ1235の適切なトラック上へと落下する。
計量デバイス1220を、1つまたは複数の処理ステーションに配置することができる。そのような処理ステーションにおける操作者は、屠殺体の一部から部分を切り離し、切り離された部分を計量デバイス上へと配置する。計量デバイスは、個々の部分の重量を測定し、好ましくは、コンピュータ化された全体的制御システム内に重量を格納する。
切り離された部分用のコンベヤ1235は、切り離された部分を、排出コンベヤ1251,1252に対して供給する。操作者に対して最も近くのコンベヤ1235のトラック上の切り離された部分は、排出コンベヤ1251上に供給される。排出コンベヤ1251は、切り離された部分を、容器1218内へと落下させる。操作者から遠いコンベヤ1235のトラック上の切り離された部分は、排出コンベヤ1252上に供給される。この排出コンベヤ1252に沿って、3人の操作者が位置している。操作者は、排出コンベヤ1252から特定のタイプの切り離された部分を受領して、それらを、隣接して配置されたコンベヤ1253上へと配置する。コンベヤ1253は、容器1281に対して、切り離された部分を供給する。このようにして、すべての容器1218は、特定のタイプの切り離された部分を受領する。容器1218が満杯となったときには、満杯となった容器は、除去されて、空の容器と交換される。満杯となる容器1218の場所は、収容される切り離された部分の性状に依存する。
切り離された部分用のコンベヤ1235は、トラック773に沿って、キャリアを有したトロリーと同じ方向に延在することができる。しかしながら、1つまたは複数の切り離された部分用のコンベヤ1235は、逆向きに延在することもできる。これは、図32***Dに示されている。コンベヤ1235は、図示の前方においては、処理ステーション1205の近傍において、トラック773が追従するキャリアと同じ方向に延在している。図示の後方においては、処理ステーションの近傍には、コンベヤ1235とキャリアとが、逆向きに移動している。
図32***Eは、図32***Dの実施形態の変形例を示している。図32***Eにおいて処理される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。システムに対しての屠殺体の一部1の供給と、切り離された部分を受領するための、切り離された部分用のコンベヤ1235と、排出コンベヤと、容器1218とは、図32***Dと同じものとされる。しかしながら、異なる構成とすることもできる。
図32***Eの実施形態においては、多数の処理ステーションは、ここではすべての処理ステーションは、自動化された処理ステーションとされる。それでも、トラック773に沿って、数人の操作者が配置されている。しかしながら、操作者は、自動化された処理ステーションの動作をチェックするに過ぎない。操作者は、必要であれば、検査や、および/または、トリミングを行う。
自動化された処理ステーションは、好ましくは、カルーセルタイプのデバイス1260として具現される。
1つまたは複数のシュート1261が、カルーセル1260の各々の下方に配置される。これにより、自動化された処理ステーション1250によって切り離された部分を受領することができ、受領した部分を、切り離された部分用のコンベヤ1235上に配置することができる。
図32***E1は、計量デバイス1239による計量の様子を詳細に示している。屠殺体の一部1は、ベルトコンベヤ1238によって、システムに対して供給される。ベルトコンベヤ1238からは、屠殺体の一部は、計量デバイス1239を通して、供給コンベヤ1240へと、通過する。供給コンベヤ1240からは、屠殺体の一部は、キャリア内に配置される。
計量デバイス1239の操作者は、計量デバイス1239上に単一の屠殺体の一部が位置するものと、する。計量デバイス1239のエレクトロニクスが、計量デバイス上に屠殺体の一部が位置したことを検出した際には、屠殺体の一部の重量を計量する。重量データは、計量デバイスのエレクトロニクス1239a,1239bによって処理される。計量デバイスのエレクトロニクス1239からは、データを、スクリーン1239c上に表示することができる。および/または、データを、計量デバイスの下流側の処理ラインの全体的制御システムに対して、あるいは、肉処理設備全体の制御システムに対して、供給することができる。
図32***E2は、処理ステーションの様子をより詳細に示している。操作者1200は、手動で屠殺体の一部1をカットしている。屠殺体の一部1は、キャリア750によって吊り下げられた状態で、処理ステーションを移動する。製品支持ガイド790が設けられている。これにより、屠殺体の一部1は、操作者が人間工学的にカットしやすい位置および向きで、例えば操作者に向けて傾斜した状態で、提供される。
計量デバイス1220が、操作者1200の直接的に前方に設けられており、吊り下げられた屠殺体の一部1の下方に設けられている。屠殺体の一部から部分を切り離した後には、操作者1200は、操作者の前方の計量デバイス1220上に、切り離された部分を配置する。計量デバイス1220は、切り離された部分の重量を計測し、付加的には、(付加的な)ディスプレイ1220a上に、重量を表示する。重量の計測後には、計量デバイス1220または操作者1200は、切り離された部分を、切り離された部分用のコンベヤ1235(図示せず)上に、あるいは、バッファベルト(設けられている場合)上に、配置する。
この実施形態の変形例においては、切り離された部分の重量が計測されるだけでなく、キャリア750内に残った部分の重量も計測される。これは、例えば、キャリア750を保持したトロリーをトラック内の計量ブリッジ上上へと移動させることにより、あるいは、製品支持ガイド790に計量デバイスを固定することにより、行うことができる。キャリア内の屠殺体の一部が計量デバイスに対してもたれかかる力を使用することにより、屠殺体の一部の重量を計算することができる。他の代替例においては、屠殺体の一部を持ち上げることができ、水平方向平面内に配置された計量デバイス上に配置することができる。
図32***E3は、例えば図32***Dまたは図32***Eに図示された処理ラインの端部といったような処理ラインの端部を、より詳細に示している。切り離された部分1*は、コンベヤ1252によって、システムのこの部分へと到達する。可動のフリッパー1223は、切り離された部分1*の各々を、操作者1200のうちの1人に向けて、案内する。複雑化された実施形態においては、処理ラインの全体的制御システムは、切り離された部分の各々が到達するタイミングを知っており、好ましくは、さらに、切り離された部分の各々の性質をも知っている。そのような実施形態においては、フリッパー1223は、切り離された部分の各々を、所定の操作者の位置へと、案内する。操作者1200は、供された切り離された肉部分1Xを採取し、前方のワークベンチ1256上において処理(例えば、カット処理)を行う。少なくとも数人の操作者の位置には、計量デバイス1255が設けられている。これにより、切り離された部分1*は、操作者による処理の前においておよび/または後において、重量を計測することができる。操作者によってカットされた廃棄物は、箱1257を介して廃棄することができる。
図32***Eに示すカルーセル1260に代えてあるいは加えて、トラック773に沿って配置された自動化処理ステーションにおいては、ロボット1270を適用することができる。図32***Fに示すように、トラック773に沿ってロボット1400を設けることができる。図32***Fにおいては、ロボットは、フロア上に取り付けられている。しかしながら、これに代えて、ロボットを、天井に対して取り付けることができる、あるいは、トラック773を保持しているフレームに対して取り付けることができる。他の代替例においては、1つまたは複数のロボットを、カルーセル上に取り付けることができる。
図32***Fに対して示す実施形態においては、ロボットは、2つのアーム1402,1402と、3つの関節1403,1404,1405と、を備えている。ロボットの第2アーム402の端部のところには、ツール1410(例えば、ウィザードナイフあるいは他の種類のナイフ)が取り付けられている。関節により、図32***Fに示すように、方向R1,R2,R3,R4,R5における回転を可能とする。図32***Fに示すロボットは、行い得る移動において非常に多目的なものである。しかしながら、ロボットは、大いに複雑なものとすることができる。このようなロボットは、処理を行うことが必要とされた経路に追従する屠殺体の一部1に対して、ツールを、移動させることができる。これにより、同時的に、ツールを、トラック773に沿って移動する屠殺体の一部1に対して追従させることができる。
代替例においては、より単純なロボットを使用することができる。例えば、処理対象をなす屠殺体の一部1に対して移動し得るロボットを使用することができる。ロボット自体は、キャリッジまたはカルーセル上に取り付けることができる。キャリッジまたはカルーセルは、トラックに沿って移動している屠殺体の一部1に追従する。
特に、少なくともいくつかのカットを屠殺体の一部に形成するに際し、1つまたは複数の処理が、例えばキャリア750といったようなキャリアによって保持された屠殺体の一部に対して、操作者によってではなく機械を使用して自動的な態様で実施される場合には、屠殺体の一部の各々の1つまたは複数の部分の空間的位置および/または向きを知っていることが、および/または、その寸法を知っていることが、および/または、その形状を知っていることが、非常に有効である。動物における天然のばらつきのために、これらパラメータは、同じ農場からの同じ動物に由来する屠殺体の一部においてさえも、非常に大きなばらつきを示す。
図32***Gは、屠殺体の一部に対しての走査デバイス1430を備えた処理ステーション1205を示している。走査デバイス1430は、例えば、光学的な走査デバイスとされる、あるいは、他の、好ましくは非接触型の、走査デバイスとされる。例えば、レーザー技術を使用することができる。図32***Gにおいて走査される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。
走査デバイスは、ここでは、例えばCTスキャナーといったようなスキャナーを備えたリング1431を備えている。走査プロセスの最初には、リング1431が、走査対象をなす屠殺体の一部の部分まわりに、配置される。走査デバイス1430は、例えばフレーム1201に対して取り付けられたレールといったようなレール1432に沿って移動させることにより、トラック773に沿っての屠殺体の一部1の移動に追従する。
レール1432に沿った走査デバイス1430の移動時には、走査デバイスも、また、移動する。これにより、屠殺体の一部の長さに沿って走査を行うことができる。ここでは、リング1431を鉛直方向に移動させる。この鉛直方向移動時には、CTスキャナーは、リング内の屠殺体の一部1に関して、走査を行う。この走査は、リングの上向き移動時に、あるいは、リングの下向き移動時に、あるいは、双方において、行うことができる。
走査デバイス1430がレール1432の端部に到達するまでに、走査が完了する。ここでは、リング1431は、再度、屠殺体の一部1よりも下方における、最も下流側の位置にある。その後、走査デバイスは、レール1432の最も上流側の位置において、初期位置へと復帰する。走査された屠殺体の一部は、トラック773に沿った移動を継続する。
付加的な特徴点においては、図32***Gに示す処理ステーションは、補助的コンベヤ1420を備えている。補助的コンベヤ1420は、屠殺体の一部に関する1つまたは複数のクランプ1422を有している。クランプ1422は、コマンドによって、開閉することができる。クランプ1422は、クランプされた屠殺体の一部と一緒に移動する。ここでは、クランプ1422は、クランプ1422が取り付けられた駆動チェーン1421(例えば、ループ状)によって、駆動される。クランプ1422を動作させることにより、走査デバイスを有した処理ステーション1205にわたっての移動時に屠殺体の一部1を保持し得るとともに、クランプ1422を、処理ステーションにわたって、屠殺体の一部1と一緒に、移動させることができる。これは、屠殺体の一部に対して、追加的な安定性を付与し、屠殺体の一部の揺動を低減することができ、それにより、操作時に得られるデータの品質を改良することができる。
走査プロセス時に得られたデータは、好ましくは、画像へと変換され、操作者に対して表示することができる、および/または、コンピュータ化された全体的制御システム内に格納することができる。データは、これに代えてあるいはこれに加えて、走査デバイスを備えた処理ステーションよりも下流側に位置する処理ステーションの中の設備および/またはプロセスを制御するために、使用することができる。図32***Gは、収集されたデータを処理することによって画像を形成する変形例を示している。この画像は、処理システム内の任意の箇所において、操作者に対して表示することができる。走査デバイスによって収集されたデータは、個々の屠殺体の一部に対して結合することができる。しかしながら、組み合わされたデータを使用することにより、一連をなす複数の屠殺体の一部(例えば、同じ農場に由来するすべての屠殺体の一部)に関する傾向を見抜くことができる、あるいは、処理を最適化するための可能性を検出することができる。この実施形態の変形例においては、他のタイプの走査デバイスを使用することができる。
図32***Hは、また、処理対象をなす屠殺体の一部1に関してデータが収集される処理ステーション1205を示している。図32***Hにおいて検査される屠殺体の一部は、例えば、豚の脚部分とすることができ、豚の足と、豚の脚部分の少なくとも一部と、を備えている。図32***Hの処理ステーション1205においては、データが、映像システム1450によって収集される。図32***Hの映像システムは、複数の、ここでは2つの、カメラ1451を備えている。カメラ1451は、トラック773の両サイドに設けられている。このようにして、処理対象をなす屠殺体の一部の正面と背面との双方から、画像を得ることができる。これとともに、これは、屠殺体の一部に関する多くの情報をもたらす。代替可能な低コストバージョンにおいては、単一のカメラを使用することができる。
映像システムによって得られた1つまたは複数の画像は、操作者に対して表示することができる、および/または、全体的制御システム内に格納することができる。データは、それに代えてあるいはそれに加えて、走査デバイスを備えた処理ステーションよりも下流側に位置する処理ステーションの中の設備および/またはプロセスを制御するために、使用することができる。図32***Hは、収集されたデータが、それぞれスクリーン1460上に表示される2つの画像の組合せとして処理されるという変形例を示している。画像は、処理システムの任意の箇所において、操作者に対して表示することができる。映像システムを使用して得られたデータを使用することにより、脂肪の厚さや、肉の色や、および/または、肉内における血の存在等を、決定することができる。
映像システムの収集されたデータは、個々の屠殺体の一部に対して結合することができる。しかしながら、組み合わされたデータを使用することにより、一連をなす複数の屠殺体の一部(例えば、同じ農場に由来するすべての屠殺体の一部)に関する傾向を見抜くことができる、あるいは、処理を最適化するための可能性を検出することができる。例えば、画像を使用することにより、映像システムを備えた処理ステーションの上流側の自動化された処理デバイスの誤った設定または最適でない設定を検出することができる。処理ラインの初期のところにおいて映像システムを適切に配置することにより、映像システムによって、プロセスの初期において、屠殺体の一部のあるいはグループをなす屠殺体の一部の異常を検出することができる。このようにして、異常さがトラブルを引き起こす前に、修正を行うことができる。例えば、処理ラインから屠殺体の一部の全体を除去することによって、あるいは、屠殺体の一部のうちの、異常を引き起こした部分を除去することによって、修正を行うことができる。
図33は、本発明に基づいて、赤身肉家畜動物の屠殺体の一部を処理するためのシステムのの実施形態を示している。特に、図33のシステムは、例えば豚の前端といったような前脚を解体するために使用される。コンベヤベルト901は、解体対象をなす前端を、システムに対して導入する。コンベヤ901のところには、第1処理ステーション902が配置されている。この第1処理ステーションのところにおいては、2人の操作者が、前端のいくらかの予備処理を行う。特に、操作者は、カットを行って、骨を露出させる。この第1処理ステーション902の直後には、第2処理ステーション903が配置されている。第2処理ステーション903は、第1処理ステーション902から、骨が露出された前端を受領する。第2処理ステーション903においては、単一の操作者によって、前端が搬入装置904内に配置される。
第3処理ステーション905においては、搬入装置904から前端が受領され、オーバーヘッドコンベヤ951のキャリア950内に自動的に配置される。オーバーヘッドコンベヤ951は、その後、前端を、第4処理ステーション906へと搬送する。第4処理ステーション906においては、自動的に操作されるナイフによって、脚が、前端からカットされる。カットされた脚は、第4処理ステーション906のナイフの直下に配置されたホイール付き容器907内へと、落下する。ホイール付き容器907が満杯となったときには、満杯となった容器は、除去されて、空の容器へと交換される。第4処理ステーション906からは、オーバーヘッドコンベヤは、前端を、第5処理ステーション908へと搬送される。ここでは、顎のリップ部分は、自動的に操作されるナイフによって、除去される。除去されたリップ部分は、第5処理ステーション907のナイフの直下に配置されたホイール付き容器908内へと、落下する。ホイール付き容器908が満杯となったときには、満杯となった容器は、除去されて、空の容器へと交換される。
その後、オーバーヘッドコンベヤ951は、前端を、第6処理ステーション909へと搬送する。ここでは、顎が、自動的にカットされる。顎910は、第6処理ステーションから、二次的コンベヤ911上へと、落下する。二次的コンベヤ911は、顎を、さらなる処理ステーション912,913,914,916へと搬送する。第1のさらなる処理ステーション912においては、顎910内にプレカットが形成される。その後、第2のさらなる処理ステーション913においては、操作者が、例えば膿瘍といったような何らかの異常をチェックする。操作者は、そのような異常を有した顎を、容器918内へと配置する。異常を有した顎は、容器918と一緒に、処理ステーションから除去される。第3のさらなる処理ステーション914においては、顎から皮が除去される。除去された皮は、第3のさらなる処理ステーション914の排出箇所のところに配置されたホイール付き容器915へと移送される。
第4のさらなる処理ステーション916のところにおいては、最終的なチェックが行われ、その後、顎が、ホイール付き容器917内へと排出される。容器917が満杯となったときには、満杯の容器が貯蔵場所へと移動され、空の容器と交換される。一方、オーバーヘッドコンベヤ951は、前端を、第6処理ステーション919へと、さらに移動させる。第6処理ステーション919においては、2人の操作者が、首ストリップを開放する。オーバーヘッドコンベヤ951の下方に配置された補助的コンベヤ920が、前端に対して係合し、前端の底部を持ち上げる。このようにして、前端は、人間工学的に有利な態様でもって容易にカットを行い得るようにして、第6処理ステーション919の操作者に対して、提供される。
その後、前端は、第7処理ステーション921上へと移動される。これは、大きな処理ステーションであって、この処理ステーションにおいては、6人の操作者が、協働して、前端の首骨を移動させる。首骨を除去するためのプロセスにおいて生成される廃棄物に関しては、真空吸引システムに対して連結された漏斗922が、廃棄物が生成する場所に、設けられる。6人の最後の操作者924は、前端から首骨を実際に除去する。その操作者は、二次的コンベヤ923上に首骨を載置して、首骨を離間させる。
オーバーヘッドコンベヤ951は、その後、第8処理ステーション925に沿って、前端を移動させる。ここでは、操作者は、首骨が適切にかつ完全に除去されたかどうかをチェックする。そうでない場合には、操作者は、それを修正する。操作者は、前端から切り離したすべての廃棄物を、この場合にも真空吸引システムに対して連結された漏斗926内へと、排出する。漏斗926は、第8処理ステーション925の操作者に対して直接的に隣接して配置される。
オーバーヘッドコンベヤ951は、その後、前端を、第10処理ステーション927へと移動させる。そこでは、自動カッターによって、部位(but)がカットされる。部位は、前端から、二次的コンベヤ928上へと、落下する。この例においては、二次的コンベヤ928は、ベルトコンベヤとされ、複数のさらなる処理ステーションに沿って、部位を搬送する。
部位のための第1のさらなる処理ステーション929においては、操作者は、この処理のための望ましい位置および向きとする。部位のための第2のさらなる処理ステーション930においては、自動化された皮剥ぎ機によって、皮が除去される。除去された皮は、自動皮剥ぎ機の排出端部のところに配置されたホイール付き容器931内へと、排出される。部位のための第3のさらなる処理ステーション932においては、4人の操作者が、部位をトリミングし、パッケージングの準備をする。カットされた廃棄材料は、漏斗933内へと配置することができる。漏斗933は、部位のための第3のさらなる処理ステーション932の操作者の前方に適切に配置されている。漏斗933は、真空吸引システムに対して連結されている。部位のための第4のさらなる処理ステーション934においては、部位が自動的にパッケージングされる。部位のための第4のさらなる処理ステーション934からは、パッケージングされた部位が、貯蔵のために搬送される。
一方、オーバーヘッドコンベヤ951は、前端を、さらに、第11処理ステーション935へと移動させる。第11処理ステーション935においては、前端に対して、皮膚マッサージが行われる。ここからは、オーバーヘッドコンベヤ951によって、前端が、第12処理ステーション936へと搬送される。第12処理ステーション936においては、皮むきのためのプレカットが(自動的に)行われる。
オーバーヘッドコンベヤ951は、前端を、さらに、第13処理ステーション937へと搬送する。第13処理ステーションにおいては、1人の操作者が、皮むきの仕上げをする。その後、オーバーヘッドコンベヤ951は、前端を、さらに、第14処理ステーション938へと搬送する。第14処理ステーションにおいては、5人の操作者が、上腕骨を露出するための作業を行う。
その後、オーバーヘッドコンベヤ951は、前端を、さらに、第15処理ステーション939へと搬送する。第15処理ステーションにおいては、1人の操作者が、露出された上腕骨を除去するように作業する。操作者は、二次的コンベヤ940上へと、除去した上腕骨を配置する。二次的コンベヤ940は、除去された上腕骨を、ホイール付き容器941内へと排出する。その後、オーバーヘッドコンベヤ951は、前端を、さらに、第16処理ステーション942へと搬送する。第16処理ステーションにおいては、3人の操作者が、クッションをロールアウトするように作業する。このプロセスにおいてトリミングされた廃棄物は、二次的コンベヤ943上に配置することができる。二次的コンベヤ943は、ホイール付き容器944内へと廃棄物を排出する。
その後、オーバーヘッドコンベヤ951は、前端を、さらに、第17処理ステーション945へと搬送する。第17処理ステーションにおいては、2人の操作者が、クッションを除去するように作業する。操作者は、切り離されたクッションを、二次的コンベヤ946上へと配置する。二次的コンベヤは、操作者の前方に適切に配置されている。二次的コンベヤ946は、クッションを、ホイール付き容器947内へと排出する。
その後、オーバーヘッドコンベヤ951は、前端を、さらに、第18処理ステーション948へと搬送する。第18処理ステーションにおいては、肉が、橈骨から自動的に除去される。除去された肉は、二次的コンベヤ949上へと落下する。二次的コンベヤ949は、自動的皮剥ぎ機952に対して肉を搬入する。自動皮剥ぎ機は、除去された皮を、ホイール付き容器953内へと、排出する。ホイール付き容器は、皮剥ぎ機952の排出端部のところに配置されている。
皮剥ぎされた肉は、その後、さらなる処理ステーション954において、2人の操作者に対して提供される。操作者は、最終的な検査を行う。必要であれば、いくらかのトリミングを行う。第18処理ステーション948において肉が除去された後には、橈骨だけが、なおも、オーバーヘッドコンベヤ951のキャリア950によって、搬送される。最終処理ステーション955においては、橈骨が、キャリア950から除去される。橈骨は、ホイール付き容器956内へと直接的に排出される。
ここで空となったキャリア950は、オーバーヘッドコンベヤ951によって、第3処理ステーションへと戻される。第3処理ステーションにおいては、前端が、再度配置される。上記のタイプのプロセスにおいては、屠殺体の一部は、大部分の骨が除去されたときには、大部分の剛性を失う。しかしながら、出願人は、大部分の骨が除去される前に皮が除去されていなかった場合には、皮が、以降のプロセスに関しての十分な安定性を、屠殺体の一部に対して提供することを見出した。
したがって、キャリア内に配置された(特に、キャリアから吊り下げられた)屠殺体の一部の皮剥ぎが、大部分の骨が除去された後に、行われることが、有利である。この皮剥ぎは、屠殺体の一部がなおもキャリアから吊り下げられたままで、行うことができる。この態様のさらなる利点は、屠殺体の一部が、なおも、保持領域すなわち参照部分によって保持されることである。すなわち、プロセスの全部にわたって保持されることである。これは、屠殺体の一部の各部分の位置および向きが、皮剥ぎプロセスに関して、既知のままであることを意味する。
図33の実施形態の変形例においては、皮膚除去や皮剥ぎや脂肪除去は、システムのキャリア内に屠殺体の一部を配置した後に、行われる。その場合、処理(例えば、解体)は、一次的カットを除去する前に、行われる。例えば、顎を除去した後に、行われる。この変形例は、皮膚が冷却された屠殺体の一部を処理するに際して、特に好適である。
図34は、本発明によるシステムの他の実施形態を示している。
図34の例においては、第1オーバーヘッドコンベヤ350が、赤身肉の半身301を、システム内へと供給する。
第1処理ステーション310においては、屠殺体の一部の半身301が、3つの部分へとカットされる。すなわち、前端302と、中央部分303と、大腿部分304と、へとカットされる。図34Aは、半身を、より詳細に示している。
それらが屠殺体の一部の半身の残部から切り離される前に、前端は、既に、第1前端コンベヤ360によって係合されている。屠殺体の一部の半身の残部から前端を切り離した後に、第1前端コンベヤ360は、切り離された前端の重量を支持するとともに、前端処理システムに対して前端を搬送する。
前端処理システムは、選択ステーション321を備えている。この選択ステーションにおいては、前端に対していくらかの測定が行われる(例えば、重量の測定、および、様々な場所における脂肪率の測定)。さらに、自動的な視覚的検査が、画像解析システムを使用して行われる。測定結果に基づき、および、視覚的検査の結果に基づき、個々の前端の各々に関して、処理ステップを行うかどうかが決定される。
選択ステーション321の下流側においては、2つの処理ライン上にわたって、複数の前端を分散させる。いくつかの前端は、排出ステーション322によって、第1前端コンベヤ360から除去される。それら前端は、二次的コンベヤ323上へと落下する、二次的コンベヤは、それら前端を、第1前端処理ライン(図示せず)へと搬送する。第1前端コンベヤ内に留まっている前端は、搬送ステーション325によって第2前端処理ライン320へと搬送される前に、人間の検査者によって、最終チェックを受ける。第2前端処理ライン320は、第2前端コンベヤ361を備えている。第2前端コンベヤ361は、オーバーヘッドコンベヤとされる。第2前端処理ライン320は、さらに、第2前端コンベヤ361のトラックに沿って配置された複数の処理ステーション326を備えている。処理ステーションにおいては、通過する前端に対して、手動でもってあるいは自動でもってあるいは半自動でもって、様々なプロセスステップが行われる。
前端の処理を補助し得るよう、補助的コンベヤ326が、第2前端コンベヤ361の下方に設けられている。補助的コンベヤ362は、前端に対して係合して、前端の底部を持ち上げる。これにより、前端は、操作者に対して傾斜する、あるいは、処理ステーションのツールに向けて傾斜する。それは、また、追加的な支持を提供する。これにより、処理のために印加した力が、処理ステーションにおいて使用されるツールに対して、前端を大きく移動させてしまうことがない。
さらに、排出コンベヤ363が、処理ステーションにおいて生成されたすべての廃棄物を受領するために、さらに、前端処理システムから廃棄物を除去するために、設けられている。
好ましくは、少なくとも第2前端処理ライン320は、実施されるプロセスステップに対してフレキシブルなものとされる。例えば、1つまたは複数の処理ステップが手動で行われる処理ステーション326において作業する操作者は、処理ステーションを通して搬送される個々の前端の各々に関して、プロセスステップを行うかどうかについて、例えば所定位置にカットを形成するかどうかについて、個別的に指示を受ける(例えば、操作者の前方に位置したあるいは操作者に隣接して位置したスクリーンによって)。指示は、選択ステーション321に由来する。選択ステーション321からの情報は、好ましくは、第2前端処理ステーション320の自動化された処理ステーション326を制御するために使用される。この情報に基づき、処理ステーションを制御することにより、待機したり、あるいは、特定の前端が通過した際に1つまたは複数の処理ステップを行ったり、あるいは、所定位置にカットを形成したり、することができる。
屠殺体の一部の半身の残部から前端を切り離す前に、中央部分は、中央部分コンベヤ370に対して既に係合している。屠殺体の一部の半身の残部からの中央部分の切り離しが完了した後に、中央部分コンベヤ370は、切り離された中央部分の重量を支持する。その後、切り離された中央部分は、コンベヤ371上に配置され、中央部分処理システム(詳細には図示されていない)に対して中央部分を搬送する。
前端および中央部分が除去されたときには、第1オーバーヘッドコンベヤ350のキャリア内には、大腿部分だけが配置されている。この第1オーバーヘッドコンベヤは、大腿部分を、搬送ステーション381へと搬送する。搬送ステーション381には、大腿部分が、第1オーバーヘッドコンベヤ350のキャリアから取り出され、大腿部分コンベヤ380のキャリア内に配置される。大腿部分コンベヤ380も、また、オーバーヘッドコンベヤとされている。大腿部分コンベヤ380は、第1大腿部分処理ライン(図示せず)と、第2大腿部分処理ライン340と、のいずれかに対して、大腿部分を送出する。
大腿部分処理システムは、選択ステーション341を備えている。この選択ステーションにおいては、大腿部分に対していくらかの測定が行われる(例えば、重量の測定、および、様々な場所における脂肪率の測定)。さらに、自動的な視覚的検査が、画像解析システムを使用して行われる。測定結果に基づき、および、視覚的検査の結果に基づき、個々の大腿部分の各々に関して、処理ステップを行うかどうかが決定される。
選択ステーション341の下流側においては、2つの処理ライン上にわたって、複数の大腿部分を分散させる。いくつかの大腿部分は、排出ステーション342によって、第1大腿部分コンベヤ380から除去される。それら大腿部分は、二次的コンベヤ343上へと落下する、二次的コンベヤは、それら大腿部分を、第1大腿部分処理ライン(図示せず)へと搬送する。
第1大腿部分コンベヤ内に留まっている大腿部分は、搬送ステーション345によって第2大腿部分処理ライン340へと搬送される前に、人間の検査者によって、最終チェックを受ける。第2大腿部分処理ライン340は、第2大腿部分コンベヤ381を備えている。第2大腿部分コンベヤ381は、オーバーヘッドコンベヤとされる。第2大腿部分処理ライン340は、さらに、第2大腿部分コンベヤ381のトラックに沿って配置された複数の処理ステーション346を備えている。処理ステーションにおいては、通過する大腿部分に対して、手動でもってあるいは自動でもってあるいは半自動でもって、様々なプロセスステップが行われる。
大腿部分の処理を補助し得るよう、補助的コンベヤ346が、第2大腿部分コンベヤ381の下方に設けられている。補助的コンベヤ382は、大腿部分に対して係合して、大腿部分の底部を持ち上げる。これにより、大腿部分は、操作者に対して傾斜する、あるいは、処理ステーションのツールに向けて傾斜する。それは、また、追加的な支持を提供する。これにより、処理のために印加した力が、処理ステーションにおいて使用されるツールに対して、大腿部分を大きく移動させてしまうことがない。
さらに、排出コンベヤ383が、処理ステーションにおいて生成されたすべての廃棄物を受領するために、さらに、大腿部分処理システムから廃棄物を除去するために、設けられている。好ましくは、少なくとも第2大腿部分処理ライン340は、実施されるプロセスステップに対してフレキシブルなものとされる。例えば、1つまたは複数の処理ステップが手動で行われる処理ステーション346において作業する操作者は、処理ステーションを通して搬送される個々の大腿部分の各々に関して、プロセスステップを行うかどうかについて、例えば所定位置にカットを形成するかどうかについて、個別的に指示を受ける(例えば、操作者の前方に位置したあるいは操作者に隣接して位置したスクリーンによって)。指示は、選択ステーション341に由来する。選択ステーション341からの情報は、好ましくは、第2大腿部分処理ステーション340の自動化された処理ステーション346を制御するために使用される。この情報に基づき、処理ステーションを制御することにより、待機したり、あるいは、特定の大腿部分が通過した際に1つまたは複数の処理ステップを行ったり、あるいは、所定位置にカットを形成したり、することができる。
図35は、本発明によるシステムの他の実施形態を示している。この実施形態においては、オーバーヘッドコンベヤが設けられている(図示の明瞭化のために図示されていない)。このオーバーヘッドコンベヤは、トラック1051を備えている。キャリア1050は、搬送方向Tにおいて、トラック1051に沿って、複数のトロリーによって案内される。複数のトロリーは、好ましくは、チェーンまたはケーブルによって、隣接するトロリーに対して連結されている。
各々のキャリアは、処理対象をなす赤身肉の屠殺体の一部を搬送する。処理は、処理ステーション1020,1030,1040によって行われる。第1処理ステーション1020は、円形ナイフ1021を使用して第1カットを形成し得るよう構成されている。第2処理ステーション1030は、円形ナイフ1031を使用して第2カットを形成し得るよう構成されている。第3処理ユニット1040は、2つの皮剥ぎステップを行う。2つの皮剥ぎステップは、ローラ1041,1042のそれぞれによって行われる。
図35のシステムは、さらに、選択デバイス1010を備えている。この選択デバイス1010は、複数のセンサ1011,1012,1013を有した測定ユニットを備えている。センサ1011,1012,1013は、システムによって処理されることとなる屠殺体の一部の様々な特性を測定する。測定データは、データ収集ユニット1014によって収集され、その後、プロセッサ1015によって処理される。プロセッサは、また、データ入力部分1016からデータを受領し、どのような最終製品を製造すべきかに関して、および、各タイプの最終製品をどれくらいの数だけ製造すべきかに関して、システムの必要とされた出力を送出する。プロセッサ1015は、データ収集ユニット1014からの情報とデータ入力部分1016からの情報との組合せに基づいて、処理対象をなす個々の屠殺体の一部の各々に関してどの処理ステップを行うかを決定する。
この情報は、その後、システム制御デバイス1067に対して伝達される。システム制御デバイス1067は、割当制御デバイス1060を備えている。割当制御デバイス1060は、それの入力ユニット1065内において、個々の屠殺体の一部の各々の処理に関しての指示を受領する。割当制御デバイス1060の出力ユニット1066は、図35の例においては、カム1061,1062に対して連結されている。カム1061,1062は、オーバーヘッドコンベヤのトラック1051に沿った様々な場所に配置されている。
図35の実施形態においては、すべてのキャリアには、向き制御アーム1052,1053が設けられている。さらに、すべてのキャリアは、これらキャリアが連結されているトロリーに対して、鉛直方向軸線1054まわりに回転可能とされている。
すべてのカム1061,1062は、トラックの近傍の位置と、トラックから離間した位置と、の間にわたって、移動可能とされている。図35においては、それぞれの位置は、実線および破線によって示されている。カム1061,1062がトラックの近傍の位置とされたときには、カム1061,1062は、キャリアが通過するアーム1052,1053の一方に対して係合する。その係合が起こった際には、カムは、トロリーがキャリアを移動させている際に、アームを停止させる。これにより、軸線1054まわりにキャリアが回転駆動される。この回転により、キャリアは、屠殺体の一部を、処理ステーションのツールが届く位置または届かない位置のいずれかに、保持する。
図35の例においては、屠殺体の一部1002は、第1処理ステーション1020によって処理されなければならない。キャリアは、円形ナイフ1021が屠殺体の一部1002に対して係合し得るような位置とされる。
これに対し、屠殺体の一部1003は、第2処理ステーション1030によって処理されるべきではない。したがって、第2処理ステーション1030のすぐ上流側に位置したカム1062は、屠殺体の一部1003を保持したキャリアが通過する直前に、トラックの近傍の位置とされる。その結果、このカム1062は、屠殺体の一部1003を保持したキャリアのアーム1053に対して係合する。これにより、屠殺体の一部1003は、円形ナイフ1031から離間する向きに回転駆動される。
屠殺体の一部1003が、次なる処理ステーションにおいて処理されるべきである場合には、処理ステーション1030のすぐ下流側のカム1061が、トラック1051の近傍の位置に配置される。これにより、カム1061は、アーム1052に対して係合し、キャリアを、軸線1054まわりに回転させる。同じく、図35の例においては、屠殺体の一部1004は、離間する向きに回転駆動される。これは、ローラ1051によって処理されるべきではないからである。
図35の実施形態においては、さらに、測定デバイス1068が設けられている。測定デバイス1068は、第2処理ステーション1030の下流側の位置において、通過する屠殺体の一部の測定を行う。測定データは、システム制御デバイス1067に対して伝達される。システム制御デバイス1067は、測定デバイス1068からの情報を、処理ステーション1020,1030の制御のための入力として、使用する。測定デバイス1068は、例えば、カメラを備えることができる。カメラは、第1カットおよび第2カットが適切な位置において行われたかどうかをチェックする。そうでなければ、ナイフ1021,1031の位置を、測定デバイス1068によって提供された情報に基づいて、修正することができる。
図36は、本発明によるシステムの他の実施形態を示している。この実施形態においては、オーバーヘッドコンベヤが設けられている(図示の明瞭化のために図示されていない)。このオーバーヘッドコンベヤは、トラック1051を備えている。キャリア1050は、搬送方向Tにおいて、トラック1051に沿って、複数のトロリー(図示の明瞭化のために図示されていない)によって案内される。複数のトロリーは、好ましくは、チェーンまたはケーブルによって、隣接するトロリーに対して連結されている。
各々のキャリアは、処理対象をなす赤身肉の屠殺体の一部を搬送する。処理は、処理ステーション1020,1030,1040によって行われる。第1処理ステーション1020は、円形ナイフ1021を使用して第1カットを形成し得るよう構成されている。第2処理ステーション1030は、円形ナイフ1031を使用して第2カットを形成し得るよう構成されている。第3処理ユニット1040は、2つの皮剥ぎステップを行う。2つの皮剥ぎステップは、ローラ1041,1042のそれぞれによって行われる。
図36のシステムは、さらに、選択デバイス1010を備えている。この選択デバイス1010は、複数のセンサ1011,1012,1013を有した測定ユニットを備えている。センサ1011,1012,1013は、システムによって処理されることとなる屠殺体の一部の様々な特性を測定する。測定データは、データ収集ユニット1014によって収集され、その後、プロセッサ1015によって処理される。プロセッサは、また、データ入力部分1016からデータを受領し、どのような最終製品を製造すべきかに関して、および、各タイプの最終製品をどれくらいの数だけ製造すべきかに関して、システムの必要とされた出力を送出する。プロセッサ1015は、データ収集ユニット1014からの情報とデータ入力部分1016からの情報との組合せに基づいて、処理対象をなす個々の屠殺体の一部の各々に関してどの処理ステップを行うかを決定する。
この情報は、その後、システム制御デバイス1067に対して伝達される。システム制御デバイス1067は、割当制御デバイス1060を備えている。割当制御デバイス1060は、それの入力ユニット1065内において、個々の屠殺体の一部の各々の処理に関しての指示を受領する。割当制御デバイス1060の出力ユニット1066は、図36の例においては、カム1061,1062に対して連結されている。カム1061,1062は、オーバーヘッドコンベヤのトラック1051に沿った様々な場所に配置されている。図36の実施形態においては、処理ステーションのツールは、トラック1051に対して接近離間する方向において、移動可能とされている。処理されなければならない屠殺体の一部が通過した場合には、ツールまたは処理ステーションは、トラックの近傍の位置に位置することとなる。これにより、処理ステーションの1つまたは複数のツールは、処理対象をなす屠殺体の一部に対して係合することができる。処理ステーションによって処理してはいけない屠殺体の一部が通過した際には、処理ステーションまたはそれぞれのツールは、トラックから離間した位置となる。これにより、処理ステーションのツールは、屠殺体の一部に対して係合することがない。
図36の例においては、屠殺体の一部1002は、第1処理ステーション1020によって処理されなければならない。したがって、処理ステーション1020は、トラック1051の近傍の位置とされ、これにより、円形ナイフ1021は、屠殺体の一部1002に対して係合することができる。これにより、第1カットを形成することができる。
これに対し、屠殺体の一部1003は、第2処理ステーション1030によって処理されるべきではない。したがって、第2処理ステーション1030、および、円形ナイフ1031は、トラック1051から離間した位置へと退避される。この場合、屠殺体の一部1003は、円形ナイフ1031によってカットされることなく、処理ステーション1030を通過することができる。
同様に、屠殺体の一部1004は、第3処理ステーション1040の第1ローラ1041によって処理されるべきではない。第3処理ステーション1040は、トラック1051に対して固定された位置を有している。しかしながら、第3処理ステーションのローラ1041,1042は、トラックに対する接近離間方向に対して移動可能とされている。屠殺体の一部1004が、第3処理ステーション1040の第1ローラ1041によって処理されてはいけないことのために、第1ローラ1041は、トラック1051から離間した位置へと引っ込められる。これにより、屠殺体の一部1004は、ローラ1041によって処理されることなく、第3処理ステーション1040の第1ローラ1041を通過することができる。
屠殺体の一部1005は、第3処理ステーション1040の第2ローラ1042によって処理されるべきである。したがって、ローラ1042は、トラックの近傍の位置をとる。これにより、ローラ1042は、屠殺体の一部1005に対して係合することができる。
図示していないけれども、図36の実施形態には、図35の実施形態と同様に処理ステーションの制御のための測定デバイスを設けることができる。
図37は、本発明によるシステムの他の実施形態を示している。この実施形態においては、オーバーヘッドコンベヤが設けられている(図示の明瞭化のために図示されていない)。このオーバーヘッドコンベヤは、トラック1051を備えている。キャリア1050は、搬送方向Tにおいて、トラック1051に沿って、複数のトロリー(図示の明瞭化のために図示されていない)によって案内される。複数のトロリーは、好ましくは、チェーンまたはケーブルによって、隣接するトロリーに対して連結されている。各々のキャリアは、処理対象をなす赤身肉の屠殺体の一部を搬送する。処理は、処理ステーション1020,1030,1040によって行われる。第1処理ステーション1020は、円形ナイフ1021を使用して第1カットを形成し得るよう構成されている。第2処理ステーション1030は、円形ナイフ1031を使用して第2カットを形成し得るよう構成されている。第3処理ユニット1040は、2つの皮剥ぎステップを行う。2つの皮剥ぎステップは、ローラ1041,1042のそれぞれによって行われる。
図37のシステムは、さらに、選択デバイス1010を備えている。この選択デバイス1010は、複数のセンサ1011,1012,1013を有した測定ユニットを備えている。センサ1011,1012,1013は、システムによって処理されることとなる屠殺体の一部の様々な特性を測定する。測定データは、データ収集ユニット1014によって収集され、その後、プロセッサ1015によって処理される。プロセッサは、また、データ入力部分1016からデータを受領し、どのような最終製品を製造すべきかに関して、および、各タイプの最終製品をどれくらいの数だけ製造すべきかに関して、システムの必要とされた出力を送出する。プロセッサ1015は、データ収集ユニット1014からの情報とデータ入力部分1016からの情報との組合せに基づいて、処理対象をなす個々の屠殺体の一部の各々に関してどの処理ステップを行うかを決定する。
この情報は、その後、システム制御デバイス1067に対して伝達される。システム制御デバイス1067は、割当制御デバイス1060を備えている。割当制御デバイス1060は、それの入力ユニット1065内において、個々の屠殺体の一部の各々の処理に関しての指示を受領する。割当制御デバイス1060の出力ユニット1066は、図37の例においては、カム1061,1062に対して連結されている。カム1061,1062は、オーバーヘッドコンベヤのトラック1051に沿った様々な場所に配置されている。
図37の実施形態においては、移動可能なガイド1070が設けられている。移動可能なガイド1070は、通過する屠殺体の一部に対して係合することができる。ガイド1070は、トラック1051の近傍の位置と、トラック1051から離間した位置と、の間にわたって、移動可能とすることができる。ガイド1070がトラックの近傍の位置とされたときには、ガイド1070は、屠殺体の一部に対して係合し、屠殺体の一部を、ガイドが近傍位置とされた処理ステーションのツールの届かない位置へと、押し込む。
図37の例においては、屠殺体の一部1002は、第1処理ステーション1020によって処理されなければならない。したがって、ガイド1070は、トラック1051から離間した位置とされる。これにより、円形ナイフ1021は、屠殺体の一部1002に対して係合することができる。これにより、第1カットを形成することができる。
これに対し、屠殺体の一部1003は、第2処理ステーション1030によって処理されるべきではない。したがって、ガイド1070は、トラック1051の近傍の位置とされる。これにより、屠殺体の一部1003は、円形ナイフ1031の届かないところへと押し出される。これにより、屠殺体の一部1003は、円形ナイフ1031によってカットされることなく、処理ステーション1030を通過することができる。
同様に、屠殺体の一部1004は、第3処理ステーション1040の第1ローラ1041によって処理されるべきではない。したがって、ガイド1072は、トラック1051の近傍の位置とされる。これにより、屠殺体の一部1004は、第1ローラ1041の届かないところへと押し出される。これにより、屠殺体の一部1004は、ローラ1041によって処理されることなく、第3処理ステーション1040の第1ローラ1041を通過することができる。
屠殺体の一部1005は、第3処理ステーション1040の第2ローラ1042によって処理されるべきである。したがって、ガイド1073は、トラックから離間した位置とされる。これにより、第2ローラ1042は、屠殺体の一部1005に対して係合して処理することができる。
図示していないけれども、図37の実施形態には、図35の実施形態と同様に処理ステーションの制御のための測定デバイスを設けることができる。
図35,36,37の実施形態は、処理ライン内におけるいくつかの特定の処理ステーションをバイパスさせ得る手法を示している。これにより、例えば豚の脚といったような屠殺体の一部は、同じ処理ラインを通して搬送したとしても、様々に処理することができる。これは、肉処理システムに対してフレキシブルさ(すなわち、融通性)を追加する。
例えば図25,36,37に示す態様でもって、例えば図32〜34に示す実施形態といったような本発明の他の実施形態による処理システムに対して、バイパス手法を組み込むことができる。
本発明は、以下の様々な特徴点のいずれかによるシステム、方法、および、デバイスを含有するものである。
特徴点1.
屠殺された豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するためのシステムであって、例えば豚の屠殺体の一部を処理するためのシステムであって、例えば豚の脚部分または肩部分を処理するためのシステムであって、
屠殺体の一部が、保持領域を備え、この保持領域が、骨と、この骨上に位置した軟組織と、を備えている場合に、
前記システムが、前記屠殺体の一部を搬送するための少なくとも1つのキャリアを具備し、
前記キャリアが、前記保持領域によって前記屠殺体の一部を保持するための保持アセンブリを備え、
前記保持アセンブリが、前記軟組織の外部に対して係合し得るよう構成されていることを特徴とするシステム。
特徴点2.
特徴点1記載のシステムにおいて、
前記保持アセンブリが、前記屠殺体の一部の重量を支持し得るよう構成されていることを特徴とするシステム。
特徴点3.
特徴点1または2記載のシステムにおいて、
前記保持アセンブリが、スロット付きプレートを備え、
前記スロットが、前記保持領域を受領し得るよう構成されていることを特徴とするシステム。
特徴点4.
特徴点3記載のシステムにおいて、
前記スロットが、入口部分と、保持部分と、を有し、
前記入口部分が、前記保持部分よりも広いことを特徴とするシステム。
特徴点5.
特徴点3または4記載のシステムにおいて、
突起が、前記スロット内へと突出していることを特徴とするシステム。
特徴点6.
特徴点1〜5のいずれか1項に記載のシステムにおいて、
前記システムが、複数のキャリアを具備し、
前記システムが、さらに、コンベヤデバイスを具備し、
前記コンベヤデバイスが、
−トラックと;
−前記トラックに沿って移動可能とされた複数のトロリーと、
−可能であれば、前記トラックに沿って前記トロリーを駆動するための駆動システムと、
を備え、
前記キャリアの各々が、少なくとも1つのトロリーに対して連結されていることを特徴とするシステム。
特徴点7.
特徴点6記載のシステムにおいて、
前記キャリアが、前記1つまたは複数のトロリーに対して回転軸線まわりに回転可能とされ、例えば鉛直方向軸線まわりに回転可能とされ、
前記キャリアが、前記回転軸線まわりに前記キャリアを回転駆動するための回転部材を備えていることを特徴とするシステム。
特徴点8.
特徴点6または7記載のシステムにおいて、
前記回転軸線が、鉛直方向平面内において、なおかつ、前記トラックに対して垂直に、延在していることを特徴とするシステム。
特徴点9.
特徴点1〜8のいずれか1項に記載のシステムにおいて、
前記保持アセンブリが、前記キャリアに対して、少なくとも1つの軸線まわりに回転可能とされている、例えば水平方向軸線まわりに回転可能とされている、ことを特徴とするシステム。
特徴点10.
特徴点6および9記載のシステムにおいて、
前記保持アセンブリが、前記1つまたは複数のトロリーに対して、水平方向軸線まわりに回転可能とされ、
前記回転軸線が、前記トラックに対して平行とされている、あるいは、前記トラックに対して平行な向きとすることができる、ことを特徴とするシステム。
特徴点11.
特徴点6〜10のいずれか1項に記載のシステムにおいて、
前記システムが、さらに、カムトラックを具備し、
前記カムトラックが、前記コンベヤデバイスの前記トラックに沿って配置され、
少なくとも1つのキャリアには、カムフォロワが設けられ、
前記カムフォロワが、前記キャリアの少なくとも一部の位置および/または向きを制御し得るよう、前記カムトラックと協働し得るよう構成されていることを特徴とするシステム。
特徴点12.
特徴点6〜11のいずれか1項に記載のシステムにおいて、
少なくとも1つの処理ステーションが、前記トラックに沿って配置され、
前記処理ステーションが、処理時に前記屠殺体の一部を支持するための少なくとも1つの製品支持ガイドを備えていることを特徴とするシステム。
特徴点13.
特徴点12記載のシステムにおいて、
前記製品支持ガイドが、前記搬送システムの前記トラックに対しての前記屠殺体の一部の向きを変更し得るよう構成されていることを特徴とするシステム。
特徴点14.
特徴点6〜13のいずれか1項に記載のシステムにおいて、
前記少なくとも1つのキャリアが、肘頭保持アセンブリと、膝保持アセンブリと、好ましくは豚足用のスロットといったような豚足用の開口を有した保持アセンブリと、のいずれかを備えていることを特徴とするシステム。
特徴点15.
豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するための方法であって、
この方法においては、
−豚や牛や羊や山羊といったような動物の屠殺体の一部を準備し、この場合、屠殺体の一部を、保持領域を備えたものとし、前記保持領域を、骨と、この骨上に位置した軟組織と、を備えたものとし、
−前記保持領域を認識し、
−前記保持領域によって前記屠殺体の一部を保持するための保持アセンブリを備えたキャリアを準備し、
−前記保持アセンブリを前記保持領域の軟組織に対して係合し、
−前記屠殺体の一部を処理する、ことを特徴とする方法。
特徴点16.
特徴点15記載の方法において、
さらに、
前記キャリアによって、前記屠殺体の一部の重量を支持することを特徴とする方法。
特徴点17.
特徴点15または16記載の方法において、
さらに、案内力または配向力を、前記屠殺体の一部に対して印加し、これにより、前記保持アセンブリに対しての前記屠殺体の一部の位置および/または向きを、軟組織の変形によって変更することを特徴とする方法。
特徴点18.
特徴点17記載の方法において、
前記案内力または前記配向力が印加された際には、前記保持領域の表面のうちの、前記保持アセンブリが前記保持領域を係合している部分を、前記保持アセンブリに対して移動させないことを特徴とする方法。
特徴点19.
特徴点15〜18のいずれか1項に記載の方法において、
前記保持領域が、前記屠殺体の一部の参照部分とされ、
前記保持領域を、好ましくは、肘頭と、膝と、足と、肩甲骨と、骨盤と、のいずれかとすることを特徴とする方法。
特徴点20.
特徴点15〜19のいずれか1項に記載の方法において、
さらに、
1つまたは複数のキャリアを、コンベヤデバイスのトラックに沿って移動させることを特徴とする方法。
特徴点21.
特徴点20記載の方法において、
少なくとも1つのキャリアを、前記コンベヤデバイスの前記トラックに対して回転可能なものとし、例えば鉛直方向軸線まわりに回転可能なものとし、
前記キャリアを、前記トラックに対して回転させることを特徴とする方法。
特徴点22.
豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するためのシステムであって、
屠殺体の一部が、第1端部と、第2端部と、前記第1端部と前記第2端部との間に位置した参照部分と、を備え、
前記システムが、前記屠殺体の一部を搬送するための少なくとも1つのキャリアを具備し、
前記キャリアが、前記参照部分によって前記屠殺体の一部を保持するための保持アセンブリを備え、
前記保持アセンブリが、好ましくは、前記参照部分の形状およびサイズに適合し得るよう構成された形状を有していることを特徴とするシステム。
特徴点23.
特徴点22記載のシステムにおいて、
前記保持アセンブリが、前記屠殺体の一部の重量を支持し得るよう構成されていることを特徴とするシステム。
特徴点24.
特徴点22または23記載のシステムにおいて、
前記屠殺体の一部が、屠殺された動物の肩部分を備え、特に豚の肩部分を備え、
前記肩部分が、
−上腕骨の少なくとも一部と、
−橈骨および尺骨の少なくとも一部と、
−肘頭と、
−上腕骨と橈骨と尺骨と肘頭との上に天然に存在する肉の少なくとも一部と、
を備え、
前記屠殺体の一部の肘頭が、前記参照部分とされ、
前記システムの前記キャリアの前記保持アセンブリが、肘頭に対して係合する肘頭保持アセンブリとされ、好ましくは肘頭の骨構造に対して係合する肘頭保持アセンブリとされていることを特徴とするシステム。
特徴点25.
特徴点24記載のシステムにおいて、
前記肘頭保持アセンブリが、
−肘頭の第1サイドに対して係合するための第1ジョーと、
−肘頭の第2サイドに対して係合するための第2ジョーと、
−前記第1ジョーと前記第2ジョーとを互いに対して移動させるためのアクチュエータと、
を備え、
肘頭を、前記第1ジョーと前記第2ジョーとの間にクランプし得るものとされていることを特徴とするシステム。
特徴点26.
特徴点22または23記載のシステムにおいて、
前記屠殺体の一部が、屠殺された動物の大腿部分を備え、特に豚の大腿部分を備え、
前記大腿部分が、
−膝と、
−前記膝に隣接した大腿骨の少なくとも一部と、
−前記膝に隣接した頸骨および腓骨の少なくとも一部と、
−大腿骨と頸骨と腓骨との上に天然に存在する肉の少なくとも一部と、
を備え、
前記屠殺体の一部の膝が、前記参照部分とされ、
前記システムの前記保持アセンブリが、膝に対して係合する膝保持アセンブリとされていることを特徴とするシステム。
特徴点27.
特徴点26記載のシステムにおいて、
前記膝保持アセンブリが、
−第1ジョーであるとともに、膝に隣接して頸骨および腓骨の間において前記屠殺体の一部を貫通するための突出ピンが設けられた第1ジョーと、
−膝に対して係合するための第2ジョーと、
−前記突出ピンを有した前記第1ジョーと前記第2ジョーとを互いに対して移動させるためのアクチュエータと、
を備えていることを特徴とするシステム。
特徴点28.
特徴点22〜27のいずれか1項に記載のシステムにおいて、
前記保持アセンブリが、前記キャリアに対して、少なくとも1つの軸線まわりに、例えば水平方向軸線まわりに、回転可能とされていることを特徴とするシステム。
特徴点29.
特徴点22〜28のいずれか1項に記載のシステムにおいて、
前記保持アセンブリが、固定された支持構造に対してあるいはコンベヤデバイスの前記トラックに対して、複数の平面内において回転可能とされていることを特徴とするシステム。
特徴点30.
特徴点29記載のシステムにおいて、
内部において前記保持アセンブリが回転可能とされた少なくとも2つの平面が、互いに垂直とされていることを特徴とするシステム。
特徴点31.
特徴点22〜30のいずれか1項に記載のシステムにおいて、
前記保持アセンブリの向きが、ロックデバイスによってロックし得るものとされていることを特徴とするシステム。
特徴点32.
特徴点22〜31のいずれか1項に記載のシステムにおいて、
前記キャリアが、さらに、前記保持アセンブリの向きを制御するための制御手段を備えていることを特徴とするシステム。
特徴点33.
特徴点22〜32のいずれか1項に記載のシステムにおいて、
前記システムが、さらに、
−少なくとも1つの処理ステーションと、
−前記処理ステーションが前記トラックに沿って配置されている場合に、前記トラックに沿って前記キャリアを搬送するためのコンベヤデバイスと、
を具備し、
前記コンベヤデバイスが、少なくとも1つのトロリーを備え、
各キャリアが、1つまたは複数のトロリーに対して連結されていることを特徴とするシステム。
特徴点34.
特徴点33記載のシステムにおいて、
前記システムが、さらに、
前記キャリアが連結されている前記1つまたは複数のトロリーに対しての前記キャリアの向きを制御するための制御手段を具備し、
この制御手段が、前記トラックに沿って配置されていることを特徴とするシステム。
特徴点35.
特徴点33または34記載のシステムにおいて、
前記コンベヤデバイスが、オーバーヘッドコンベヤとされ、
前記保持アセンブリが、前記キャリアが連結されている前記1つまたは複数のトロリーの下方に配置されていることを特徴とするシステム。
特徴点36.
特徴点33または34記載のシステムにおいて、
前記保持アセンブリが、前記キャリアが連結されている前記1つまたは複数のトロリーの上方に配置されていることを特徴とするシステム。
特徴点37.
特徴点33〜36のいずれか1項に記載のシステムにおいて、
前記システムが、さらに、前記キャリアが連結されている前記1つまたは複数のトロリーに対して前記キャリアのロックの向きをロックするためのロック手段を具備していることを特徴とするシステム。
特徴点38.
特徴点22〜37のいずれか1項に記載のシステムにおいて、
前記システムが、さらに、
−固定された支持構造であるとともに、この固定された支持構造上に前記キャリアが配置されている、固定された支持構造と、
−前記固定された支持構造に関連した配置された処理ステーションと、
−可能であれば、前記キャリアに対して屠殺体の一部を供給するための供給手段と、
を具備していることを特徴とするシステム。
特徴点39.
特徴点38記載のシステムにおいて、
前記固定された支持構造が、前記固定された支持構造に対しての、前記キャリアおよび/または前記保持アセンブリの向きを制御するための制御手段を具備していることを特徴とするシステム。
特徴点40.
特徴点38または39記載のシステムにおいて、
前記固定された支持構造が、前記固定された支持構造に対しての、前記キャリアおよび/または前記保持アセンブリの向きをロックするためのロック手段を具備していることを特徴とするシステム。
特徴点41.
特徴点22〜40のいずれか1項に記載のシステムにおいて、
前記システムが、さらに、前記屠殺体の一部がさらなる処理を受けるかどうかを決定するための分級手段を具備していることを特徴とするシステム。
特徴点42.
特徴点41記載のシステムにおいて、
前記システムが、さらに、前記屠殺体の一部に対してさらなる処理ステップを実行するための複数のさらなる処理ラインを具備し、
前記複数の処理ラインが、並列して配置され、
前記処理ラインが、搬送ステーションを備え、
前記搬送ステーションが、前記分級手段からの入力を使用し得るよう構成され、
前記搬送ステーションが、さらなる処理ラインへと前記屠殺体の一部を搬送し得るよう構成され、
前記分級手段からの情報を使用して、前記搬送ステーションを制御することを特徴とするシステム。
特徴点43.
豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するための方法であって、
屠殺体の一部が、第1端部と、第2端部と、前記第1端部と前記第2端部との間に位置した参照部分と、を備え、
この方法においては、
−屠殺体の一部を準備し、
−前記参照部分を認識し、
−特徴点22に記載されたシステムを準備し、
−前記保持アセンブリを使用して、前記参照部分によって前記屠殺体の一部を保持し、
−前記キャリアによって前記屠殺体の一部を保持しつつ、前記屠殺体の一部を処理する、
ことを特徴とする方法。
特徴点44.
特徴点43記載の方法において、
さらに、
前記キャリアによって、前記屠殺体の一部の重量を支持することを特徴とする方法。
特徴点45.
特徴点43または44記載の方法において、
前記屠殺体の一部が、屠殺された動物の肩部分を備え、特に豚の肩部分を備え、
前記肩部分が、
−上腕骨の少なくとも一部と、
−橈骨および尺骨の少なくとも一部と、
−肘頭と、
−上腕骨と橈骨と尺骨と肘頭との上に天然に存在する肉の少なくとも一部と、
を備え、
前記肘頭を、前記参照部分とし、
肘頭に対する前記保持アセンブリを、肘頭に対して係合させることを特徴とする方法。
特徴点46.
特徴点43または44記載の方法において、
前記屠殺体の一部が、屠殺された動物の大腿部分を備え、特に豚の大腿部分を備え、
前記大腿部分が、
−膝と、
−前記膝に隣接した大腿骨の少なくとも一部と、
−前記膝に隣接した頸骨および腓骨の少なくとも一部と、
−大腿骨と頸骨と腓骨との上に天然に存在する肉の少なくとも一部と、
を備え、
前記膝を、前記参照部分とし、
膝に対する前記保持アセンブリを、膝に対して係合させることを特徴とする方法。
特徴点47.
特徴点45記載の方法において、
さらに、
肘頭に対する前記保持アセンブリ内へと肘頭を導入する前に、肘頭から肉を切り離し、この際、肘頭の骨の一部を、露出させる、あるいは少なくとも、前記屠殺体の一部の外部からアクセス可能なものとし、
肘頭に対する前記保持アセンブリを、少なくとも実質的に肉のない場所において肘頭に対して係合させることを特徴とする方法。
特徴点48.
特徴点45記載の方法において、
前記屠殺体の一部が、肘頭であって、軟組織によって少なくとも部分的に被覆された肘頭骨を備えている場合に、
前記保持アセンブリを、肘頭骨上の軟組織によって前記屠殺体の一部に対して係合させることを特徴とする方法。
特徴点49.
特徴点45記載の方法において、
肘頭に対して対する前記保持アセンブリを、第1ジョーと、第2ジョーと、を備えたものとし、
肘頭を、前記保持アセンブリ内において、肘頭を前記第1ジョーと前記第2ジョーとの間にクランプすることによって、保持することを特徴とする方法。
特徴点50.
特徴点46記載の方法において、
さらに、
膝に対する前記保持アセンブリ内において膝をロックする前に、膝から肉を切り離し、この際、膝の骨の一部をあるいは膝に隣接した骨の一部を、露出させる、あるいは少なくとも、前記屠殺体の一部の外部からアクセス可能なものとし、
膝に対する前記保持アセンブリを、少なくとも実質的に肉のない場所において膝に対して係合させることを特徴とする方法。
特徴点51.
特徴点50記載の方法において、
前記屠殺体の一部が、膝であって、軟組織によって少なくとも部分的に被覆された膝を備えている場合に、
前記保持アセンブリを、膝上の軟組織によって前記屠殺体の一部に対して係合させることを特徴とする方法。
特徴点52.
特徴点50記載の方法において、
膝に対する前記保持アセンブリを、フックを有したものとし、
膝を、前記保持アセンブリ内において、膝に隣接したところにおいて頸骨と腓骨との間において前記保持アセンブリの前記フックを前記屠殺体の一部を侵入させることにより、保持することを特徴とする方法。
特徴点53.
個々の豚の肩部分を搬送するための、屠殺された豚の肩部分用のコンベヤデバイスであって、
個々の豚の肩部分が、
−上腕骨の少なくとも一部と、
−橈骨および尺骨の少なくとも一部と、
−肘頭と、
−上腕骨と橈骨と尺骨との上に天然に存在する肉の少なくとも一部と、
を備えている場合に、
前記コンベヤデバイスが、
−トラックと、
−前記トラックに沿って移動可能とされた豚の肩部分用の1つまたは複数のキャリアであるとともに、各キャリアが、個々の豚の肩部分を搬送し得るよう構成された、キャリアと、
を具備し、
各キャリアが、肩部分用の保持アセンブリを備え、
前記保持アセンブリが、単一の豚の肩部分上に係合し得るよう構成され、これにより、豚の肩部分を保持することができ、
前記保持アセンブリが、肘頭に対して係合し得るよう構成された肘頭保持アセンブリとされていることを特徴とするコンベヤデバイス。
特徴点54.
特徴点53記載のコンベヤデバイスにおいて、
前記肘頭保持アセンブリが、
−肘頭の第1サイドに対して係合するための第1ジョーと、
−肘頭の第2サイドに対して係合するための第2ジョーと、
−前記第1ジョーと前記第2ジョーとを互いに対して移動させるためのアクチュエータと、
を備え、
前記第1ジョーと前記第2ジョーとが、前記第1ジョーと前記第2ジョーとの間に肘頭を導入し得るものとされた開放位置と、前記第1ジョーと前記第2ジョーとの間に肘頭を保持する閉塞位置と、の間にわたって、互いに対して移動可能とされていることを特徴とするコンベヤデバイス。
特徴点55.
特徴点54記載のコンベヤデバイスにおいて、
前記第1ジョーが、2つの歯と、これら歯の間に位置したスロットと、を有し、
前記スロットが、肘頭の一部を受領し得るよう構成され、
前記スロットが、好ましくは、V字形状スロットとされていることを特徴とするコンベヤデバイス。
特徴点56.
特徴点55記載のコンベヤデバイスにおいて、
前記第2ジョーが、前記第1ジョーの前記スロット内へと肘頭を押し込み得るよう構成されているとともに、前記スロット内に肘頭を保持し得るよう構成されていることを特徴とするコンベヤデバイス。
特徴点57.
個々の豚の肩部分のためのキャリアであって、
個々の豚の肩部分が、
−上腕骨の少なくとも一部と、
−橈骨および尺骨の少なくとも一部と、
−肘頭と、
−上腕骨と橈骨と尺骨との上に天然に存在する肉の少なくとも一部と、
を備えている場合に、
前記キャリアが、個々の豚の肩部分を搬送し得るよう構成されているとともに、1つの肩保持アセンブリを備え、
前記肩保持アセンブリが、単一の豚の肩部分上に係合し得るよう構成され、これにより、豚の肩部分を保持することができ、
前記保持アセンブリが、肘頭に対して係合し得るよう構成された肘頭保持アセンブリとされていることを特徴とするキャリア。
特徴点58.
豚の肩部分を搬送および/または処理するための方法であって、
特徴点53〜57のいずれか1項に記載のデバイスおよび/またはキャリアを使用することを特徴とする方法。
特徴点59.
屠殺された豚の大腿部分のためのコンベヤデバイスであって、
豚の大腿部分が、
−膝と、
−前記膝に隣接した大腿骨の少なくとも一部と、
−前記膝に隣接した頸骨および腓骨の少なくとも一部と、
−大腿骨と頸骨と腓骨との上に天然に存在する肉の少なくとも一部と、
を備えている場合に、
前記コンベヤデバイスが、
−トラックと、
−前記トラックに沿って移動可能とされた豚の大腿部分用の1つまたは複数のキャリアであるとともに、各キャリアが、個々の豚の大腿部分を搬送し得るよう構成された、キャリアと、
を具備し、
各キャリアが、1つの豚の大腿部分用の保持アセンブリを備え、
前記保持アセンブリが、単一の豚の大腿部分上に係合し得るよう構成され、これにより、豚の大腿部分を保持することができ、
前記保持アセンブリが、膝保持アセンブリとされ、この膝保持アセンブリが、豚の大腿部分の膝に対して係合し得るよう構成されていることを特徴とするコンベヤデバイス。
特徴点60.
特徴点59記載のコンベヤデバイスにおいて、
前記膝保持アセンブリが、
−第1ジョーであるとともに、膝に隣接して頸骨および腓骨の間において前記屠殺体の一部を貫通するための突出ピンが設けられた第1ジョーと、
−膝に対して係合するための第2ジョーと、
−前記突出ピンを有した前記第1ジョーと前記第2ジョーとを、前記第1ジョーと前記第2ジョーとの間に膝を導入し得るものとされた開放位置と、前記突出ピンが前記屠殺体の一部内へと侵入した状態で前記第1ジョーと前記第2ジョーとの間に膝を保持した閉塞位置と、の間にわたって、互いに対して移動させ得るよう構成されたアクチュエータと、を備えていることを特徴とするコンベヤデバイス。
特徴点61.
個々の豚の大腿部分のためのキャリアであって、
個々の豚の大腿部分が、
−上腕骨の少なくとも一部と、
−橈骨および尺骨の少なくとも一部と、
−肘頭と、
−上腕骨と橈骨と尺骨との上に天然に存在する肉の少なくとも一部と、
を備えている場合に、
前記キャリアが、個々の豚の大腿部分を搬送し得るよう構成されているとともに、1つの肩保持アセンブリを備え、
前記保持アセンブリが、単一の豚の大腿部分上に係合し得るよう構成され、これにより、豚の大腿部分を保持することができ、
前記保持アセンブリが、肘頭に対して係合し得るよう構成された肘頭保持アセンブリとされていることを特徴とするキャリア。
特徴点62.
豚の大腿部分を搬送および/または処理するための方法であって、
特徴点59〜61のいずれか1項に記載のデバイスおよび/またはキャリアを使用することを特徴とする方法。
特徴点63.
個々の豚の脚部分を搬送するための、屠殺された豚の脚部分用のコンベヤデバイスであって、
個々の豚の脚部分が、豚の脚の少なくとも一部と、豚の足と、を備えている場合に、
前記コンベヤデバイスが、
−トラックと、
−前記トラックに沿って移動可能とされた豚の脚部分用の1つまたは複数のキャリアであるとともに、各キャリアが、個々の豚の脚部分を搬送し得るよう構成された、キャリアと、
を具備し、
各キャリアが、1つの豚足用の保持アセンブリを備え、
前記保持アセンブリが、単一の豚の足上に係合し得るよう構成され、これにより、前記キャリアから吊り下げられた状態で、豚の脚部分を保持することができ、
前記保持アセンブリが、豚の足を受領し得るよう構成された豚足用の開口を有していることを特徴とするコンベヤデバイス。
特徴点64.
特徴点63記載のコンベヤデバイスにおいて、
前記保持アセンブリが、鉛直方向軸線まわりに回転可能とされ、
前記キャリアには、回転機構またはインデックス機構が設けられ、
前記回転機構またはインデックス機構が、前記鉛直方向軸線まわりにおける前記保持アセンブリの所定の複数の角度位置を提供することを特徴とするコンベヤデバイス。
特徴点65.
特徴点63または64記載のコンベヤデバイスにおいて、
前記保持アセンブリが、豚足を受領するための豚足用のスロットを備え、
前記スロットが、端部が開口したものとされ、これにより、このスロット内へと側方から豚足を導入し得るとともに、このスロットから側方に豚足を取り出し得ることを特徴とするコンベヤデバイス。
特徴点66.
特徴点63〜65のいずれか1項に記載のコンベヤデバイスにおいて、
前記保持アセンブリが、豚足を受領し得るよう構成された豚足用の開口を備え、
この開口が、剛直な参照面を有し、
前記保持アセンブリが、豚足の中央の中足骨を前記剛直な参照面に隣接させた状態で豚足を受領し得るよう構成され、
前記保持アセンブリが、豚足の側方の中足骨を前記参照面に向けて押圧し得るよう構成されていることを特徴とするコンベヤデバイス。
特徴点67.
特徴点66記載のコンベヤデバイスにおいて、
前記開口が、一方の端部が開口した豚足用スロットとされ、これにより、豚足を、前記スロット内へと側方から導入し得るとともに、豚足を、前記スロットから側方へと取り出し得るものとされ、
前記スロットが、前記スロットの保持部分に連接する開口端部のところに、狭められた入口部分を有し、
前記保持部分が、参照面を有し、
前記スロット内へと豚足を側方導入する際には、前記狭められた入口部分が、側方の中足骨の天然の状態から、前記参照面に接近した位置へと、側方の中足骨を押圧することを特徴とするコンベヤデバイス。
特徴点68.
特徴点67記載のコンベヤデバイスにおいて、
前記保持アセンブリが、前記入口部分と、前記豚足用スロットのうちの、前記スロットの最も狭い通路を規定する保持部分と、の間に、突起を備え、これにより、前記保持部分内に豚足を維持し得るようになっていることを特徴とするコンベヤデバイス。
特徴点69.
特徴点66,67,または,68記載のコンベヤデバイスにおいて、
前記保持アセンブリが、剛直なスロット部材を備え、
前記剛直なスロット部材が、前記豚足用スロットを形成し、
前記剛直なスロット部材が、例えば金属プレートから形成されていることを特徴とするコンベヤデバイス。
特徴点70.
特徴点65,67,68,または,69記載のコンベヤデバイスにおいて、
前記保持アセンブリが、阻止位置と退避位置との間にわたって移動可能とされた阻止部材を備え、
前記阻止位置においては、前記阻止部材が、前記スロットの幅の少なくとも一部を横断して延在しており、これにより、前記豚足用スロットからの豚足の抜け出しを阻止することができ、
前記退避位置においては、前記スロットから豚足を取り出し得るものとされていることを特徴とするコンベヤデバイス。
特徴点71.
特徴点63〜70のいずれか1項に記載のコンベヤデバイスにおいて、
前記保持アセンブリが、水平方向軸線まわりに回転可能とされ、好ましくは自由に回転可能とされていることを特徴とするコンベヤデバイス。
特徴点72.
特徴点63〜71のいずれか1項に記載のコンベヤデバイスにおいて、
前記保持アセンブリが、ブラケットを備え、
前記ブラケットが、内部に前記豚足受領スロットが形成されたスロット部材と、前記スロット部材よりも高い位置に配置された頂部部材と、前記頂部部材と前記スロット部材との間に配置された1つまたは複数のフランジと、を有し、
好ましくは、前記ブラケットが、前記スロット部材を支持するために、互いに離間した2つのフランジを有していることを特徴とするコンベヤデバイス。
特徴点73.
特徴点72記載のコンベヤデバイスにおいて、
前記スロット部材内の前記スロットが、前記ブラケットの1つまたは複数の脚から側方にオフセットして配置されていることを特徴とするコンベヤデバイス。
特徴点74.
特徴点71または72記載のコンベヤデバイスにおいて、
前記頂部部材が、水平方向の回転部材を有し、
この水平方向の回転部材により、前記ブラケットを、水平方向軸線まわりに回転させることができることを特徴とするコンベヤデバイス。
特徴点75.
特徴点71記載のコンベヤデバイスにおいて、
前記コンベヤデバイスが、カムトラックを具備し、
前記カムトラックが、前記トラックに沿った位置であって前記水平方向軸線まわりに前記保持アセンブリを回転させることが要望された位置に配置されていることを特徴とするコンベヤデバイス。
特徴点76.
特徴点65,67,68,68,70,または,71記載のコンベヤデバイスにおいて、
前記スロットが、メイン軸線を有し、
前記メイン軸線が、前記水平方向の回転軸線に対して垂直な平面に対して、5〜20°という角度とされていることを特徴とするコンベヤデバイス。
特徴点77.
特徴点64および71記載のコンベヤデバイスにおいて、
前記インデックス機構が、前記水平方向軸線が前記トラックに対して平行な所定位置を有していることを特徴とするコンベヤデバイス。
特徴点78.
特徴点64記載のコンベヤデバイスにおいて、
前記キャリアが、前記インデックス機構に関連したロック構成を備え、
前記ロック構成が、所定位置に前記保持アセンブリをロックするためのロック部材を備え、
可能であれば、前記ロック構成が、外部の操作者によって駆動される可動ロック部材を備えていることを特徴とするコンベヤデバイス。
特徴点79.
特徴点64記載のコンベヤデバイスにおいて、
前記インデックス機構が、鉛直方向回転軸線を有したゼネバ駆動ホイールボディと、このボディの複数の角度位置のところに配置されたスロットと、を備え、
各スロットが、前記トラックに沿って配置されたピンを内部に受領し得るよう構成され、これにより、前記鉛直方向回転軸線まわりに前記保持アセンブリを間欠的に回転移動させることができることを特徴とするコンベヤデバイス。
特徴点80.
特徴点79記載のコンベヤデバイスにおいて、
前記ボディが、矩形の外形形状を有しているとともに、前記ボディの中心からオフセットされた鉛直方向回転軸線を有し、
各スロットが、前記オフセットされた鉛直方向回転軸線に対して径方向をなすメイン軸線を有し、
好ましくは、各スロットが、前記ボディのコーナー領域に開口を有していることを特徴とするコンベヤデバイス。
特徴点81.
特徴点64記載のコンベヤデバイスにおいて、
前記インデックス機構が、互いに偏心した位置関係でもって積層された2つの円形ディスクボディ部分を備え、
前記ボディが、前記ディスクボディ部分のいずれの中心からもオフセットされた鉛直方向回転軸線を備え、
前記コンベヤデバイスが、1つまたは複数のガイド部材を具備し、
前記1つまたは複数のガイド部材が、前記トラックに沿った位置において、前記鉛直方向回転軸線まわりに前記保持アセンブリを回転させることが要望された位置に、配置され、
前記1つまたは複数のガイド部材が、前記回転をもたらし得るよう、前記ディスクボディ部分の円形周縁面に対して協働し得るように配置されていることを特徴とするコンベヤデバイス。
特徴点82.
特徴点63〜81のいずれか1項に記載のコンベヤデバイスにおいて、
各トラックが、レールを備え、好ましくは、オーバーヘッドレールを備え、
各キャリアが、1つまたは複数のトロリーを介して、前記レールに対して連結されていることを特徴とするコンベヤデバイス。
特徴点83.
特徴点82記載のコンベヤデバイスにおいて、
前記キャリアが、2つのトロリーを介して前記レールに対して連結され、
前記2つのトロリーが、前記トラックの方向において互いに離間しており、
各トロリーが、好ましくは、前記キャリアの共通連結部材に対して、鉛直方向軸線まわりに回転可能に連結されていることを特徴とするコンベヤデバイス。
特徴点84.
特徴点63〜83のいずれか1項に記載のコンベヤデバイスにおいて、
前記保持アセンブリが、豚足を受領し得るよう構成された豚足用スロットを備え、
このスロットが、一方の端部において開口しており、これにより、前記スロット内へと側方から豚足を導入し得るとともに、前記スロットから側方へと豚足を取り出し得るものとされ、
前記コンベヤデバイスが、1つまたは複数の突き出しガイドを具備し、
前記1つまたは複数の突き出しガイドが、前記トラックに沿った位置において、前記スロットからの豚足の取り出しが要望された位置に、配置され、
前記突き出しガイドが、豚の脚部分に対して接触し得るようにして配置され、好ましくは前記スロットの下方において豚の脚部分に対して接触し得るようにして配置され、例えば5cm以内でもって前記スロットの下方において豚の脚部分に対して接触し得るようにして配置され、
前記突き出しガイドが、前記突き出しガイドのところを豚の脚部分が通過した際には、前記スロットから豚足を押し出すものとされていることを特徴とするコンベヤデバイス。
特徴点85.
特徴点63〜84のいずれか1項に記載のコンベヤデバイスにおいて、
前記保持アセンブリが、水平方向軸線まわりに回転可能とされ、好ましくは回転自由とされ、
豚の脚部分が処理を受ける処理ステーションのところにおいては、例えば1つまたは複数のカットが脚部分において手動で行われるような手動カットプロセスを豚の脚部分が受ける処理ステーションのところにおいては、製品支持ガイドが、前記トラックに沿って配置され、
前記コンベヤデバイスが、好ましくは、前記トラックに対して平行な水平方向回転軸線を有した前記処理ステーションへと到達し得るよう構成され、
前記製品支持ガイドが、脚部分に対して係合し、これにより、脚部分および保持アセンブリを、前記トラックに対して側方に傾斜した位置へと、前記水平方向回転軸線まわりに傾斜させ、
例えば、前記処理ステーションを、脚部分に対して手動操作を行う操作者のための1つまたは複数の立ち位置を備えたものとし、例えば脚部分に対して手動操作を行う操作者のための1つまたは複数のプラットホームを備えたものとすることを特徴とするコンベヤデバイス。
特徴点86.
特徴点63〜84のいずれか1項に記載のコンベヤデバイスにおいて、
前記保持アセンブリが、水平方向軸線まわりに回転可能とされ、好ましくは回転自由とされ、
豚の脚部分が処理を受ける処理ステーションのところにおいては、例えば1つまたは複数のカットが脚部分において手動で行われるような手動カットプロセスを豚の脚部分が受ける処理ステーションのところにおいては、製品支持部材が、前記処理ステーション内において前記トラックに沿って移動可能に配置され、
各製品支持部材が、豚の脚部分と同期して移動するものとされ、
前記コンベヤデバイスが、好ましくは、前記トラックに対して平行な水平方向回転軸線を有した前記処理ステーションへと到達し得るよう構成され、
前記製品支持部材が、脚部分に対して係合し得るよう構成され、これにより、脚部分および保持アセンブリを、前記トラックに対して側方に傾斜した位置へと、前記水平方向回転軸線まわりに傾斜させ、
例えば、前記処理ステーションを、脚部分に対して手動操作を行う操作者のための1つまたは複数の立ち位置を備えたものとし、例えば脚部分に対して手動操作を行う操作者のための1つまたは複数のプラットホームを備えたものとすることを特徴とするコンベヤデバイス。
特徴点87.
特徴点63〜86のいずれか1項に記載のコンベヤデバイスにおいて、
豚の脚部分が処理を受ける処理ステーションのところにおいては、例えば1つまたは複数のカットが脚部分において手動で行われるような手動カットプロセスを豚の脚部分が受ける処理ステーションのところにおいては、1つまたは複数の製品支持ガイドが、前記トラックに沿って配置され、
前記製品支持ガイドが、前記キャリアのガイド面に対して協働し、例えば前記キャリアのガイドブロックのガイド面に対して協働し、さらに、鉛直方向軸線まわりにおける前記キャリアの無用の回転を防止しおよび/または前記キャリアの無用の側方移動を防止することを特徴とするコンベヤデバイス。
特徴点88.
屠殺された豚の脚部分のためのコンベヤシステムであって、
個々の豚の脚部分を搬送するための、屠殺された豚の脚部分用の第1および第2コンベヤデバイスを具備し、
個々の豚の脚部分が、豚の脚の少なくとも一部と、豚足と、を備えている場合に、
前記第1および第2コンベヤデバイスの各々が、好ましくは、特徴点63〜87のいずれか1項に記載されたシステムとされ、
前記第1および第2コンベヤデバイスの各々が、
−トラックと、
−前記トラックに沿って移動可能とされた豚の脚部分用の1つまたは複数のキャリアであるとともに、各キャリアが、個々の豚の脚部分を搬送し得るよう構成された、キャリアと、
を具備し、
各キャリアが、単一の豚足に対して係合し得るよう構成された1つの豚足用の保持アセンブリを備え、これにより、前記キャリアから吊り下げられた状態で豚の脚部分を保持し得るものとされ、
前記保持アセンブリが、豚足を受領し得るよう構成された豚足用の開口を備え、
前記保持アセンブリが、豚足を受領し得るよう構成されたスロットを備え、前記スロットが、一方の端部が開口したものとされ、これにより、豚足を、前記スロット内へと側方から導入し得るとともに、豚足を、前記スロットから側方へと取り出し得るものとされ、
前記システムが、前記第1コンベヤから前記第2コンベヤへと直接的に豚の脚部分が搬送される搬送ステーションを具備し、
前記コンベヤデバイスが、前記搬送ステーションにおいて前記第1コンベヤおよび前記第2コンベヤのキャリアの移動が同期しているように、具現され、これにより、前記第1コンベヤデバイスのキャリアの前記脚保持アセンブリから初期的には吊り下げられた脚部分が、前記第2コンベヤデバイスのキャリアの前記脚保持アセンブリのスロット内へと搬送され、その際、前記搬送ステーションにおいては、脚部分が、前記脚保持アセンブリの少なくとも一方によって吊り下げられたままとされることを特徴とするシステム。
特徴点89.
特徴点88記載のシステムにおいて、
前記搬送ステーションが、前記第1コンベヤデバイスの前記トラックに沿って配置された1つまたは複数の突き出しガイドを備え、
前記突き出しガイドが、豚の脚部分に対して接触し得るようにして配置され、好ましくは前記スロットの下方において豚の脚部分に対して接触し得るようにして配置され、例えば5cm以内でもって前記スロットの下方において豚の脚部分に対して接触し得るようにして配置され、
前記突き出しガイドが、前記突き出しガイドのところを豚の脚部分が通過した際には、前記スロットから豚足を押し出して前記第2コンベヤデバイスのキャリアの前記スロット内へと豚足を押し込むものとされていることを特徴とするシステム。
特徴点90.
特徴点88または89記載のシステムにおいて、
前記搬送ステーションにおいては、前記第1および第2コンベヤの脚保持アセンブリのそれぞれの経路が、互いに異なる高さ位置とされ、
前記脚保持アセンブリどうしが、平面視において、互いにオーバーラップした位置関係とされることを特徴とするシステム。
特徴点91.
特徴点90記載のシステムにおいて、
前記第1および第2コンベヤデバイスの脚保持アセンブリの各々が、ブラケットを備え、
前記ブラケットが、内部に前記豚足受領スロットが形成されたスロット部材と、前記スロット部材よりも高い位置に配置された頂部部材と、前記頂部部材と前記スロット部材との間に配置された1つまたは複数のフランジと、を有し、
前記スロット部材の前記スロットが、前記ブラケットの1つまたは複数の脚から側方にオフセットして配置されていることを特徴とするシステム。
特徴点92.
個々の豚の脚部分を搬送するための方法であって、
豚の脚部分の各々が、豚の脚の少なくとも一部と、豚足と、を備えている場合に、
特徴点63〜91のいずれか1項に記載のコンベヤデバイスまたはコンベヤシステムを使用することを特徴とする方法。
特徴点93.
特徴点92記載の方法において、
同じコンベヤデバイスを使用して、豚の脚部分の前方部分と背後部分とを搬送することを特徴とする方法。
特徴点94.
豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するためのシステムであって、
前記処理においては、複数のプロセスステップを行うものとされ、
前記システムが、搬送システムを具備し、
前記搬送システムが、
−オーバーヘッドコンベヤであるとともに、トラックと複数のトロリーとを備え、前記トロリーが前記トラックに沿って移動可能とされた、オーバーヘッドコンベヤと、
−屠殺体の一部を保持するための複数のキャリアであるとともに、各々のキャリアが前記トロリーに対して連結された、キャリアと、
−複数の処理ステーションであるとともに、前記トラックに沿って配置され、各々の処理ステーションが屠殺体の一部に対して1つまたは複数のプロセスステップを実行し得るよう構成された、複数の処理ステーションと、
−屠殺体の一部に対してどのような処理ステップを実行するかを決定するための選択デバイスと、
を備え、
前記選択デバイスが、
−処理対象をなす屠殺体の一部の少なくとも2つの特性を決定するための測定ユニットと、
−前記システムの所望の出力に関するデータに関し、前記測定ユニットから測定データを受領するためのデータ収集ユニットと、
−前記データ収集ユニットによって収集されたデータを処理するためのプロセッサであり、これにより、個々の屠殺体の一部に関し、屠殺体の一部に対してどのような処理ステップを実行するためのプロセッサと、
−割当制御デバイスを有したシステム制御デバイスと、
を備え、
前記割当制御デバイスが、
−屠殺体の一部に対してどのような処理ステップを実行するかに関して前記選択デバイスからの情報を受領するための入力ユニットと、
−各屠殺体の一部に対して割り当てられた処理ステップを行い得るよう、前記搬送システムおよび/または前記処理ステーションを制御するための出力ユニットと、
を備え、
前記割当制御デバイスの前記出力ユニットが、屠殺体の一部が受けるべきでない処理を行う処理ステーションをバイパスさせ得るように構成されていることを特徴とするシステム。
特徴点95.
特徴点94記載のシステムにおいて、
少なくとも1つの前記処理ステーションが、前記システム制御デバイスによって制御される処理ステーション制御ユニットを備え、
前記システム制御デバイスが、さらに、プロセス測定デバイスを備え、
前記プロセス測定デバイスが、前記処理ステーションの上流側および/または下流側において1つまたは複数のパラメータを測定し得るよう構成され、
測定結果が、前記処理ステーションによって実行される前記プロセスステップを制御するに際して、前記処理ステーション制御ユニットによって使用されることを特徴とするシステム。
特徴点96.
特徴点95記載のシステムにおいて、
前記プロセス測定デバイスが、前記処理ステーションによって処理された屠殺体の一部に関して測定を行い得るよう構成されていることを特徴とするシステム。
特徴点97.
特徴点94〜96のいずれか1項に記載のシステムにおいて、
少なくとも1つの処理ステーションが、1つまたは複数のプロセスステップを実行するツールを備え、
そのツールが、活性位置と、不活性位置と、を備え、
前記活性位置においては、前記ツールが、処理対象をなす屠殺体の一部に対して係合し、
前記不活性位置においては、前記ツールによって処理されない屠殺体の一部が、前記ツールをバイパスすることができることを特徴とするシステム。
特徴点98.
特徴点94〜97のいずれか1項に記載のシステムにおいて、
少なくとも1つの処理ステーションが、活性位置と不活性位置との間にわたって、前記搬送システムの前記トラックに対して移動可能とされ、
前記活性位置においては、前記ツールが、処理対象をなす屠殺体の一部に対して係合し、
前記不活性位置においては、前記ツールによって処理されない屠殺体の一部が、前記ツールをバイパスすることができ、
前記割当制御ユニットが、前記処理ステーションの位置を制御することを特徴とするシステム。
特徴点99.
特徴点94〜98のいずれか1項に記載のシステムにおいて、
少なくとも1つのキャリアが、前記搬送システムの前記トラックに対して移動可能とされ、
前記キャリアが、前記トラックに対しての活性位置および/または活性向きと、前記トラックに対しての不活性位置および/または不活性向きと、を備え、
前記活性位置および/または活性向きにおいては、前記キャリアが、このキャリアが保持している屠殺体の一部を処理ステーションのツールに対して係合させ、これにより、前記屠殺体の一部を前記処理ステーションによって処理することができ、
前記不活性位置および/または不活性向きにおいては、前記キャリアが保持している屠殺体の一部が前記ツールをバイパスすることができ、
前記割当制御ユニットが、前記キャリアの位置および/または向きを制御することを特徴とするシステム。
特徴点100.
特徴点94〜99のいずれか1項に記載のシステムにおいて、
前記搬送システムが、一次的オーバーヘッドコンベヤを備え、
この一次的オーバーヘッドコンベヤが、
−トラックと、
−このトラックに沿って移動可能とされた複数のトロリーと、
−屠殺体の一部を保持するための複数のキャリアであるとともに、各キャリアがトロリーに対して連結された、複数のキャリアと、
を備え、
前記システムが、さらに、
−複数の一次的処理ステーションであるとともに、前記一次的オーバーヘッドコンベヤの前記トラックに沿って配置され、複数の一次的処理ステーションの各々が、屠殺体の一部に対して1つまたは複数のプロセスステップを実行し得るよう構成された、複数の一次的処理ステーションと、
−二次的オーバーヘッドコンベヤと、
を具備し、
前記二次的オーバーヘッドコンベヤが、
−トラックと、
−このトラックに沿って移動可能とされた複数のトロリーと、
−屠殺体の一部を保持するための複数のキャリアであるとともに、各キャリアがトロリーに対して連結された、複数のキャリアと、
−複数の二次的処理ステーションであるとともに、前記二次的オーバーヘッドコンベヤの前記トラックに沿って配置され、複数の二次的処理ステーションの各々が、屠殺体の一部に対して1つまたは複数のプロセスステップを実行し得るよう構成された、複数の二次的処理ステーションと、
−三次的オーバーヘッドコンベヤと、
を備え、
前記三次的オーバーヘッドコンベヤが、
−トラックと、
−このトラックに沿って移動可能とされた複数のトロリーと、
−屠殺体の一部を保持するための複数のキャリアであるとともに、各キャリアがトロリーに対して連結された、複数のキャリアと、
−複数の三次的処理ステーションであるとともに、前記三次的オーバーヘッドコンベヤの前記トラックに沿って配置され、複数の三次的処理ステーションの各々が、屠殺体の一部に対して1つまたは複数のプロセスステップを実行し得るよう構成された、複数の三次的処理ステーションと、
−前記一次的オーバーヘッドコンベヤのキャリアから屠殺体の一部を採取して、その屠殺体の一部を、前記二次的オーバーヘッドコンベヤまたは前記三次的オーバーヘッドコンベヤのいずれかへと配置するための、リハンガーと、
を備え、
前記割当制御システムが、前記屠殺体の一部を前記二次的オーバーヘッドコンベヤまたは前記三次的オーバーヘッドコンベヤのキャリア内に配置するかどうかを決定することを特徴とするシステム。
特徴点101.
特徴点94〜100のいずれか1項に記載のシステムにおいて、
少なくとも1つの処理ステーションが、カルーセルを備えていることを特徴とするシステム。
特徴点102.
特徴点94〜101のいずれか1項に記載のシステムにおいて、
少なくとも1つの処理ステーションが、単一のフレーム内に配置された複数のカルーセルを備えていることを特徴とするシステム。
特徴点103.
特徴点94〜102のいずれか1項に記載のシステムにおいて、
前記キャリアが、特徴点94〜102のいずれか1項に基づくキャリアとされていることを特徴とするシステム。
特徴点104.
豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するための方法であって、
前記処理においては、複数のプロセスステップを行うものとされ、
この方法においては、
−オーバーヘッドコンベヤとされた搬送システムのキャリア内に屠殺体の一部を配置し、この場合、前記キャリアを、前記オーバーヘッドコンベヤのトラックに沿って移動可能とされた1つまたは複数のトロリーに対して連結し、
−前記屠殺体の一部の少なくとも2つの特性を測定し、
−得られるべき最終製品の所望量およびタイプを決定し、
−前記屠殺体の一部に関して測定された前記特性に基づいて、および、得られるべき最終製品の所望量およびタイプに基づいて、前記屠殺体の一部を処理するための最も有利な手法を決定し、その後、前記屠殺体の一部を処理するためのその最も有利な手法のためのシーケンスのために行うべきプロセスステップを決定し、
−前記屠殺体の一部を処理するための最も有利な手法として決定された少なくとも1つのプロセスステップを行い得る複数の処理ステーションに沿って、屠殺体の一部を駆動するための経路を決定し、
−前記オーバーヘッドコンベヤによって前記経路に沿って屠殺体の一部を駆動し、
−前記経路に沿って位置する処理ステーションのうち、前記屠殺体の一部を処理するための最も有利な手法には該当しない1つまたは複数のプロセスステップを行うすべての処理ステーションを、バイパスさせる、ことを特徴とする方法。
特徴点105.
特徴点104記載の方法において、
前記複数の処理ステーションの各々が、1つまたは複数のプロセスステップを行うための1つまたは複数のツールを備え、
前記バイパスさせるに際しては、屠殺体の一部を、前記屠殺体の一部を処理するための最も有利な手法には該当しないプロセスステップを行う処理ステーションの各ツールに対して届かない位置へと、駆動することを特徴とする方法。
特徴点106.
特徴点104または105記載の方法において、
前記複数の処理ステーションの各々が、1つまたは複数のプロセスステップを行うための1つまたは複数のツールを備え、
前記バイパスさせるに際しては、前記屠殺体の一部を処理するための最も有利な手法には該当しないプロセスステップを行う処理ステーションの各ツールを、屠殺体の一部に対して届かない位置へと、駆動することを特徴とする方法。
特徴点107.
特徴点104〜106のいずれか1項に記載の方法において、
前記複数の処理ステーションの各々が、1つまたは複数のプロセスステップを行うための1つまたは複数のツールを備え、
前記バイパスさせるに際しては、前記屠殺体の一部を処理するための最も有利な手法には該当しないプロセスステップを行う処理ステーションを、屠殺体の一部に対して届かない位置へと、駆動することを特徴とする方法。
特徴点108.
特徴点104〜107のいずれか1項に記載の方法において、
さらに、
−前記複数の処理ステーションに沿った経路に沿っての測定箇所において、屠殺体の一部に関しての測定および/または解析を行い、
−前記測定箇所の上流側または下流側の少なくとも1つの処理ステーションにおける制御に関して、前記測定および/または前記解析の結果を、使用することを特徴とする方法。
特徴点109.
特徴点104〜108のいずれか1項に記載の方法において、
前記システム内において使用するキャリアを、特徴点1〜108のいずれか1項に記載されたキャリアとすることを特徴とする方法。
特徴点110.
豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するためのシステムであって、
前記処理においては、複数のプロセスステップを行うものとされ、
前記システムが、
−一次的搬送システムであるとともに、
−オーバーヘッドコンベヤであるとともに、トラックと複数のトロリーとを備え、前記トロリーが前記トラックに沿って移動可能とされた、オーバーヘッドコンベヤと、
−屠殺体の一部を保持するための複数のキャリアであるとともに、各々のキャリアが前記トロリーに対して連結された、キャリアと、
を備えた一次的搬送システムと、
−複数の処理ステーションであるとともに、前記トラックに沿って配置され、各々の処理ステーションが屠殺体の一部に対して1つまたは複数のプロセスステップを実行し得るよう構成され、前記少なくとも1つの処理ステーションにおいては、屠殺体の一部から部分を切り離すというステップを行うものとされた、複数の処理ステーションと、
−前記処理ステーションに隣接して配置された二次的搬送システムであるとともに、前記屠殺体の一部から切り離された部分を受領し得るよう構成された二次的搬送システムと、
を具備していることを特徴とするシステム。
特徴点111.
特徴点110記載のシステムにおいて、
前記二次的搬送システムが、オーバーヘッドコンベヤと、ベルトコンベヤと、ホイール付き容器と、のうちの少なくとも1つを備えていることを特徴とするシステム。
特徴点112.
特徴点110または111記載のシステムにおいて、
複数の二次的コンベヤを具備し、
複数の二次的コンベヤの各々が、様々な箇所において、屠殺体の一部から切り離された各部分を搬送し得るよう構成されていることを特徴とするシステム。
特徴点113.
特徴点110〜112のいずれか1項に記載のシステムにおいて、
前記二次的コンベヤが、この二次的コンベヤに関連した処理ステーションから落下してくる切り離された部分を受領し得るように配置されていることを特徴とするシステム。
特徴点114.
特徴点110〜113のいずれか1項に記載のシステムにおいて、
前記二次的コンベヤが、前記切り離された部分を受領するための移動可能な表面を備えていることを特徴とするシステム。
特徴点115.
特徴点114記載のシステムにおいて、
前記二次的コンベヤの前記移動可能な表面が、前記切り離された部分どうしが互いに重なり合うことがなく前記切り離された部分が前記移動可能な表面上にわたって分散されるような速度でもって、移動し得るよう構成されていることを特徴とするシステム。
特徴点116.
特徴点110〜115のいずれか1項に記載のシステムにおいて、
前記少なくとも1つの処理ステーションが、カルーセルを備えていることを特徴とするシステム。
特徴点117.
特徴点110〜116のいずれか1項に記載のシステムにおいて、
前記少なくとも1つの処理ステーションが、単一のフレーム内に配置された複数のカルーセルを備えていることを特徴とするシステム。
特徴点118.
特徴点110〜117のいずれか1項に記載のシステムにおいて、
前記キャリアが、特徴点1〜117のいずれか1項に記載されたキャリアとされていることを特徴とするシステム。
特徴点119.
特徴点110〜118のいずれか1項に記載のシステムにおいて、
前記少なくとも1つの処理ステーションが、システム制御デバイスによって制御される処理ステーション制御ユニットを備え、
前記システム制御デバイスが、さらに、プロセス測定デバイスを備え、
このプロセス測定デバイスが、前記処理ステーションの上流側および/または下流側において1つまたは複数のプロセスパラメータを測定し得るよう構成され、
その測定結果が、前記処理ステーションでのプロセスステップを制御するに際して、前記処理ステーション制御ユニットによって、使用されることを特徴とするシステム。
特徴点120.
豚や牛や羊や山羊といったような動物の屠殺体の一部を処理するための方法であって、
前記処理においては、複数のプロセスステップを行うものとされ、
この方法においては、
−オーバーヘッドコンベヤとされた搬送システムのキャリア内に屠殺体の一部を配置し、この場合、前記キャリアを、前記オーバーヘッドコンベヤのトラックに沿って移動可能とされた1つまたは複数のトロリーに対して連結し、
−処理ステーションに対して前記屠殺体の一部を搬送し、
−前記処理ステーションにおいては、前記屠殺体の一部から部分を切り離し、
−前記切り離された部分を、前記処理ステーションに対して隣接して配置された二次的コンベヤ内へとまたは前記処理ステーションに対して隣接して配置された二次的コンベヤ上へと配置し、
−前記屠殺体の一部の残部を、前記オーバーヘッドコンベヤを使用して、前記処理ステーションから離間させる向きに搬送し、
−前記切り離された部分を、前記二次的コンベヤを使用して、前記処理ステーションから離間させる向きに搬送する、
ことを特徴とする方法。
特徴点121.
特徴点120記載の方法において、
前記切り離された部分を、前記処理ステーションから前記二次的コンベヤへと、重力によって移動させることを特徴とする方法。
特徴点122.
特徴点120または121記載の方法において、
前記二次的コンベヤ上におけるすべての前記切り離された部分を、前記二次的コンベヤに対して、同じ向きを有したものとすることを特徴とする方法。
特徴点123.
特徴点122記載の方法において、
前記二次的コンベヤから前記切り離された部分を取り出すに際しては、その特定の向きを利用することを特徴とする方法。
特徴点124.
特徴点120〜123のいずれか1項に記載の方法において、
前記システム内において使用するキャリアを、特徴点1〜123のいずれか1項に記載されたキャリアとすることを特徴とする方法。
特徴点125.
特徴点120〜124のいずれか1項に記載の方法において、
さらに、
−前記複数の処理ステーションに沿った経路に沿っての測定箇所において、屠殺体の一部に関しての測定および/または解析を行い、
−前記測定箇所の上流側または下流側の少なくとも1つの処理ステーションにおける制御に関して、前記測定および/または前記解析の結果を、使用することを特徴とする方法。