JP6841769B2 - 少なくとも1個の物体を光学的に検出する検出器 - Google Patents
少なくとも1個の物体を光学的に検出する検出器 Download PDFInfo
- Publication number
- JP6841769B2 JP6841769B2 JP2017558775A JP2017558775A JP6841769B2 JP 6841769 B2 JP6841769 B2 JP 6841769B2 JP 2017558775 A JP2017558775 A JP 2017558775A JP 2017558775 A JP2017558775 A JP 2017558775A JP 6841769 B2 JP6841769 B2 JP 6841769B2
- Authority
- JP
- Japan
- Prior art keywords
- detector
- sensor
- longitudinal
- light beam
- illumination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 claims description 661
- 239000000463 material Substances 0.000 claims description 454
- 238000005286 illumination Methods 0.000 claims description 221
- 239000004065 semiconductor Substances 0.000 claims description 139
- 238000000034 method Methods 0.000 claims description 96
- 238000011156 evaluation Methods 0.000 claims description 87
- 150000001875 compounds Chemical class 0.000 claims description 81
- 229910021417 amorphous silicon Inorganic materials 0.000 claims description 78
- 229920000642 polymer Polymers 0.000 claims description 57
- 238000005259 measurement Methods 0.000 claims description 56
- 239000000758 substrate Substances 0.000 claims description 55
- 238000003384 imaging method Methods 0.000 claims description 54
- -1 4-n-octyl Chemical group 0.000 claims description 52
- 239000002096 quantum dot Substances 0.000 claims description 46
- 239000000203 mixture Substances 0.000 claims description 41
- XCAUINMIESBTBL-UHFFFAOYSA-N lead(ii) sulfide Chemical compound [Pb]=S XCAUINMIESBTBL-UHFFFAOYSA-N 0.000 claims description 40
- MARUHZGHZWCEQU-UHFFFAOYSA-N 5-phenyl-2h-tetrazole Chemical compound C1=CC=CC=C1C1=NNN=N1 MARUHZGHZWCEQU-UHFFFAOYSA-N 0.000 claims description 38
- 229910021424 microcrystalline silicon Inorganic materials 0.000 claims description 38
- 230000036961 partial effect Effects 0.000 claims description 37
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 claims description 35
- 239000010703 silicon Substances 0.000 claims description 35
- 229910052710 silicon Inorganic materials 0.000 claims description 34
- 229910000661 Mercury cadmium telluride Inorganic materials 0.000 claims description 31
- IEQIEDJGQAUEQZ-UHFFFAOYSA-N phthalocyanine Chemical compound N1C(N=C2C3=CC=CC=C3C(N=C3C4=CC=CC=C4C(=N4)N3)=N2)=C(C=CC=C2)C2=C1N=C1C2=CC=CC=C2C4=N1 IEQIEDJGQAUEQZ-UHFFFAOYSA-N 0.000 claims description 31
- 239000002250 absorbent Substances 0.000 claims description 29
- 230000002745 absorbent Effects 0.000 claims description 29
- HVMJUDPAXRRVQO-UHFFFAOYSA-N copper indium Chemical compound [Cu].[In] HVMJUDPAXRRVQO-UHFFFAOYSA-N 0.000 claims description 28
- 238000005516 engineering process Methods 0.000 claims description 28
- XMWRBQBLMFGWIX-UHFFFAOYSA-N C60 fullerene Chemical compound C12=C3C(C4=C56)=C7C8=C5C5=C9C%10=C6C6=C4C1=C1C4=C6C6=C%10C%10=C9C9=C%11C5=C8C5=C8C7=C3C3=C7C2=C1C1=C2C4=C6C4=C%10C6=C9C9=C%11C5=C5C8=C3C3=C7C1=C1C2=C4C6=C2C9=C5C3=C12 XMWRBQBLMFGWIX-UHFFFAOYSA-N 0.000 claims description 26
- WPYVAWXEWQSOGY-UHFFFAOYSA-N indium antimonide Chemical compound [Sb]#[In] WPYVAWXEWQSOGY-UHFFFAOYSA-N 0.000 claims description 25
- 229910052733 gallium Inorganic materials 0.000 claims description 24
- HZXMRANICFIONG-UHFFFAOYSA-N gallium phosphide Chemical compound [Ga]#P HZXMRANICFIONG-UHFFFAOYSA-N 0.000 claims description 24
- 239000006104 solid solution Substances 0.000 claims description 24
- GYHNNYVSQQEPJS-UHFFFAOYSA-N Gallium Chemical compound [Ga] GYHNNYVSQQEPJS-UHFFFAOYSA-N 0.000 claims description 23
- 229910003472 fullerene Inorganic materials 0.000 claims description 23
- 229910052738 indium Inorganic materials 0.000 claims description 22
- 230000001419 dependent effect Effects 0.000 claims description 20
- APFVFJFRJDLVQX-UHFFFAOYSA-N indium atom Chemical compound [In] APFVFJFRJDLVQX-UHFFFAOYSA-N 0.000 claims description 20
- GGYFMLJDMAMTAB-UHFFFAOYSA-N selanylidenelead Chemical compound [Pb]=[Se] GGYFMLJDMAMTAB-UHFFFAOYSA-N 0.000 claims description 20
- QNWMNMIVDYETIG-UHFFFAOYSA-N gallium(ii) selenide Chemical compound [Se]=[Ga] QNWMNMIVDYETIG-UHFFFAOYSA-N 0.000 claims description 17
- 239000000049 pigment Substances 0.000 claims description 17
- 229910000530 Gallium indium arsenide Inorganic materials 0.000 claims description 16
- KXNLCSXBJCPWGL-UHFFFAOYSA-N [Ga].[As].[In] Chemical compound [Ga].[As].[In] KXNLCSXBJCPWGL-UHFFFAOYSA-N 0.000 claims description 16
- 229920000553 poly(phenylenevinylene) Polymers 0.000 claims description 16
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 claims description 15
- RPQDHPTXJYYUPQ-UHFFFAOYSA-N indium arsenide Chemical compound [In]#[As] RPQDHPTXJYYUPQ-UHFFFAOYSA-N 0.000 claims description 15
- GPXJNWSHGFTCBW-UHFFFAOYSA-N Indium phosphide Chemical compound [In]#P GPXJNWSHGFTCBW-UHFFFAOYSA-N 0.000 claims description 14
- 230000004888 barrier function Effects 0.000 claims description 14
- 239000002019 doping agent Substances 0.000 claims description 14
- 229910045601 alloy Inorganic materials 0.000 claims description 13
- 239000000956 alloy Substances 0.000 claims description 13
- 239000004020 conductor Substances 0.000 claims description 13
- 229910052732 germanium Inorganic materials 0.000 claims description 13
- GNPVGFCGXDBREM-UHFFFAOYSA-N germanium atom Chemical compound [Ge] GNPVGFCGXDBREM-UHFFFAOYSA-N 0.000 claims description 13
- 238000013507 mapping Methods 0.000 claims description 13
- 230000007423 decrease Effects 0.000 claims description 11
- 125000002080 perylenyl group Chemical group C1(=CC=C2C=CC=C3C4=CC=CC5=CC=CC(C1=C23)=C45)* 0.000 claims description 11
- JBRZTFJDHDCESZ-UHFFFAOYSA-N AsGa Chemical compound [As]#[Ga] JBRZTFJDHDCESZ-UHFFFAOYSA-N 0.000 claims description 10
- 229910000673 Indium arsenide Inorganic materials 0.000 claims description 10
- 230000008859 change Effects 0.000 claims description 10
- 239000011159 matrix material Substances 0.000 claims description 10
- 229920000301 poly(3-hexylthiophene-2,5-diyl) polymer Polymers 0.000 claims description 10
- JMASRVWKEDWRBT-UHFFFAOYSA-N Gallium nitride Chemical compound [Ga]#N JMASRVWKEDWRBT-UHFFFAOYSA-N 0.000 claims description 9
- 239000005964 Acibenzolar-S-methyl Substances 0.000 claims description 8
- 230000000007 visual effect Effects 0.000 claims description 8
- PDQRQJVPEFGVRK-UHFFFAOYSA-N 2,1,3-benzothiadiazole Chemical compound C1=CC=CC2=NSN=C21 PDQRQJVPEFGVRK-UHFFFAOYSA-N 0.000 claims description 7
- 125000003118 aryl group Chemical group 0.000 claims description 7
- 229910000154 gallium phosphate Inorganic materials 0.000 claims description 7
- CSHWQDPOILHKBI-UHFFFAOYSA-N peryrene Natural products C1=CC(C2=CC=CC=3C2=C2C=CC=3)=C3C2=CC=CC3=C1 CSHWQDPOILHKBI-UHFFFAOYSA-N 0.000 claims description 7
- MWPLVEDNUUSJAV-UHFFFAOYSA-N anthracene Chemical compound C1=CC=CC2=CC3=CC=CC=C3C=C21 MWPLVEDNUUSJAV-UHFFFAOYSA-N 0.000 claims description 6
- LCUOIYYHNRBAFS-UHFFFAOYSA-N copper;sulfanylideneindium Chemical compound [Cu].[In]=S LCUOIYYHNRBAFS-UHFFFAOYSA-N 0.000 claims description 6
- 229910052757 nitrogen Inorganic materials 0.000 claims description 6
- BBEAQIROQSPTKN-UHFFFAOYSA-N pyrene Chemical compound C1=CC=C2C=CC3=CC=CC4=CC=C1C2=C43 BBEAQIROQSPTKN-UHFFFAOYSA-N 0.000 claims description 6
- 230000002441 reversible effect Effects 0.000 claims description 6
- RNQKDQAVIXDKAG-UHFFFAOYSA-N aluminum gallium Chemical compound [Al].[Ga] RNQKDQAVIXDKAG-UHFFFAOYSA-N 0.000 claims description 5
- 239000000919 ceramic Substances 0.000 claims description 5
- 229910001502 inorganic halide Inorganic materials 0.000 claims description 5
- 229920003227 poly(N-vinyl carbazole) Polymers 0.000 claims description 5
- 230000002829 reductive effect Effects 0.000 claims description 5
- SBIBMFFZSBJNJF-UHFFFAOYSA-N selenium;zinc Chemical compound [Se]=[Zn] SBIBMFFZSBJNJF-UHFFFAOYSA-N 0.000 claims description 5
- 229910052718 tin Inorganic materials 0.000 claims description 5
- 229910005542 GaSb Inorganic materials 0.000 claims description 4
- NRCMAYZCPIVABH-UHFFFAOYSA-N Quinacridone Chemical compound N1C2=CC=CC=C2C(=O)C2=C1C=C1C(=O)C3=CC=CC=C3NC1=C2 NRCMAYZCPIVABH-UHFFFAOYSA-N 0.000 claims description 4
- 230000001464 adherent effect Effects 0.000 claims description 4
- 125000000664 diazo group Chemical group [N-]=[N+]=[*] 0.000 claims description 4
- 238000012986 modification Methods 0.000 claims description 4
- 230000004048 modification Effects 0.000 claims description 4
- ATJFFYVFTNAWJD-UHFFFAOYSA-N Tin Chemical compound [Sn] ATJFFYVFTNAWJD-UHFFFAOYSA-N 0.000 claims description 3
- 229920000109 alkoxy-substituted poly(p-phenylene vinylene) Polymers 0.000 claims description 3
- 125000005605 benzo group Chemical group 0.000 claims description 3
- 125000002915 carbonyl group Chemical group [*:2]C([*:1])=O 0.000 claims description 3
- 238000006073 displacement reaction Methods 0.000 claims description 3
- 125000005678 ethenylene group Chemical group [H]C([*:1])=C([H])[*:2] 0.000 claims description 3
- GVEPBJHOBDJJJI-UHFFFAOYSA-N fluoranthrene Natural products C1=CC(C2=CC=CC=C22)=C3C2=CC=CC3=C1 GVEPBJHOBDJJJI-UHFFFAOYSA-N 0.000 claims description 3
- ATGUVEKSASEFFO-UHFFFAOYSA-N p-aminodiphenylamine Chemical compound C1=CC(N)=CC=C1NC1=CC=CC=C1 ATGUVEKSASEFFO-UHFFFAOYSA-N 0.000 claims description 3
- 229920000264 poly(3',7'-dimethyloctyloxy phenylene vinylene) Polymers 0.000 claims description 3
- 229920000123 polythiophene Polymers 0.000 claims description 3
- 239000004783 Serene Substances 0.000 claims description 2
- DSSYDPGRYHVFLK-UHFFFAOYSA-N [S--].[S--].[Zn++].[Zn++] Chemical compound [S--].[S--].[Zn++].[Zn++] DSSYDPGRYHVFLK-UHFFFAOYSA-N 0.000 claims description 2
- PIJPYDMVFNTHIP-UHFFFAOYSA-L lead sulfate Chemical compound [PbH4+2].[O-]S([O-])(=O)=O PIJPYDMVFNTHIP-UHFFFAOYSA-L 0.000 claims description 2
- LKKPNUDVOYAOBB-UHFFFAOYSA-N naphthalocyanine Chemical compound N1C(N=C2C3=CC4=CC=CC=C4C=C3C(N=C3C4=CC5=CC=CC=C5C=C4C(=N4)N3)=N2)=C(C=C2C(C=CC=C2)=C2)C2=C1N=C1C2=CC3=CC=CC=C3C=C2C4=N1 LKKPNUDVOYAOBB-UHFFFAOYSA-N 0.000 claims description 2
- PMJMHCXAGMRGBZ-UHFFFAOYSA-N subphthalocyanine Chemical compound N1C(N=C2C3=CC=CC=C3C(=N3)N2)=C(C=CC=C2)C2=C1N=C1C2=CC=CC=C2C3=N1 PMJMHCXAGMRGBZ-UHFFFAOYSA-N 0.000 claims description 2
- YBNMDCCMCLUHBL-UHFFFAOYSA-N (2,5-dioxopyrrolidin-1-yl) 4-pyren-1-ylbutanoate Chemical compound C=1C=C(C2=C34)C=CC3=CC=CC4=CC=C2C=1CCCC(=O)ON1C(=O)CCC1=O YBNMDCCMCLUHBL-UHFFFAOYSA-N 0.000 claims 1
- 125000000950 dibromo group Chemical group Br* 0.000 claims 1
- MTCFGRXMJLQNBG-UHFFFAOYSA-N serine Chemical compound OCC(N)C(O)=O MTCFGRXMJLQNBG-UHFFFAOYSA-N 0.000 claims 1
- 239000010410 layer Substances 0.000 description 353
- 230000000694 effects Effects 0.000 description 91
- 210000004027 cell Anatomy 0.000 description 61
- 229910052751 metal Inorganic materials 0.000 description 60
- 239000002184 metal Substances 0.000 description 60
- 239000010409 thin film Substances 0.000 description 58
- 230000003595 spectral effect Effects 0.000 description 55
- 239000010408 film Substances 0.000 description 49
- 238000001514 detection method Methods 0.000 description 37
- 150000004770 chalcogenides Chemical class 0.000 description 36
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 32
- 239000011669 selenium Substances 0.000 description 32
- WUPHOULIZUERAE-UHFFFAOYSA-N 3-(oxolan-2-yl)propanoic acid Chemical compound OC(=O)CCC1CCCO1 WUPHOULIZUERAE-UHFFFAOYSA-N 0.000 description 30
- 229910052980 cadmium sulfide Inorganic materials 0.000 description 30
- XLOMVQKBTHCTTD-UHFFFAOYSA-N zinc oxide Inorganic materials [Zn]=O XLOMVQKBTHCTTD-UHFFFAOYSA-N 0.000 description 30
- 238000004519 manufacturing process Methods 0.000 description 27
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 26
- 229910052709 silver Inorganic materials 0.000 description 26
- 238000012546 transfer Methods 0.000 description 26
- 239000004332 silver Substances 0.000 description 24
- 239000002800 charge carrier Substances 0.000 description 23
- XOLBLPGZBRYERU-UHFFFAOYSA-N tin dioxide Chemical compound O=[Sn]=O XOLBLPGZBRYERU-UHFFFAOYSA-N 0.000 description 23
- 230000000903 blocking effect Effects 0.000 description 22
- 229910052782 aluminium Inorganic materials 0.000 description 21
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 21
- 239000010931 gold Substances 0.000 description 21
- 230000033001 locomotion Effects 0.000 description 21
- 238000012544 monitoring process Methods 0.000 description 21
- 230000008569 process Effects 0.000 description 21
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 20
- 238000006243 chemical reaction Methods 0.000 description 20
- 229910005540 GaP Inorganic materials 0.000 description 18
- 239000005083 Zinc sulfide Substances 0.000 description 18
- 238000002474 experimental method Methods 0.000 description 18
- 239000000126 substance Substances 0.000 description 18
- 229910001887 tin oxide Inorganic materials 0.000 description 18
- 229910052984 zinc sulfide Inorganic materials 0.000 description 18
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 17
- 229910052737 gold Inorganic materials 0.000 description 17
- 229910052711 selenium Inorganic materials 0.000 description 17
- GWEVSGVZZGPLCZ-UHFFFAOYSA-N titanium dioxide Inorganic materials O=[Ti]=O GWEVSGVZZGPLCZ-UHFFFAOYSA-N 0.000 description 17
- 229920001609 Poly(3,4-ethylenedioxythiophene) Polymers 0.000 description 16
- 230000008901 benefit Effects 0.000 description 15
- 230000006870 function Effects 0.000 description 15
- AMGQUBHHOARCQH-UHFFFAOYSA-N indium;oxotin Chemical compound [In].[Sn]=O AMGQUBHHOARCQH-UHFFFAOYSA-N 0.000 description 15
- 238000007689 inspection Methods 0.000 description 15
- 230000004044 response Effects 0.000 description 15
- QPLDLSVMHZLSFG-UHFFFAOYSA-N Copper oxide Chemical compound [Cu]=O QPLDLSVMHZLSFG-UHFFFAOYSA-N 0.000 description 14
- BUGBHKTXTAQXES-UHFFFAOYSA-N Selenium Chemical compound [Se] BUGBHKTXTAQXES-UHFFFAOYSA-N 0.000 description 14
- 229940007424 antimony trisulfide Drugs 0.000 description 14
- NVWBARWTDVQPJD-UHFFFAOYSA-N antimony(3+);trisulfide Chemical compound [S-2].[S-2].[S-2].[Sb+3].[Sb+3] NVWBARWTDVQPJD-UHFFFAOYSA-N 0.000 description 14
- 125000004429 atom Chemical group 0.000 description 14
- 230000007547 defect Effects 0.000 description 14
- 230000009021 linear effect Effects 0.000 description 14
- CPLXHLVBOLITMK-UHFFFAOYSA-N magnesium oxide Inorganic materials [Mg]=O CPLXHLVBOLITMK-UHFFFAOYSA-N 0.000 description 14
- 239000000395 magnesium oxide Substances 0.000 description 14
- AXZKOIWUVFPNLO-UHFFFAOYSA-N magnesium;oxygen(2-) Chemical compound [O-2].[Mg+2] AXZKOIWUVFPNLO-UHFFFAOYSA-N 0.000 description 14
- 229910052697 platinum Inorganic materials 0.000 description 14
- 239000000523 sample Substances 0.000 description 14
- 238000001228 spectrum Methods 0.000 description 14
- 239000010949 copper Substances 0.000 description 13
- 229910021389 graphene Inorganic materials 0.000 description 13
- 238000012545 processing Methods 0.000 description 13
- ZMXDDKWLCZADIW-UHFFFAOYSA-N N,N-Dimethylformamide Chemical compound CN(C)C=O ZMXDDKWLCZADIW-UHFFFAOYSA-N 0.000 description 12
- AQCDIIAORKRFCD-UHFFFAOYSA-N cadmium selenide Chemical compound [Cd]=[Se] AQCDIIAORKRFCD-UHFFFAOYSA-N 0.000 description 12
- 229920001940 conductive polymer Polymers 0.000 description 12
- 230000001747 exhibiting effect Effects 0.000 description 12
- 229910044991 metal oxide Inorganic materials 0.000 description 12
- 150000004706 metal oxides Chemical class 0.000 description 12
- 239000002245 particle Substances 0.000 description 12
- XSOKHXFFCGXDJZ-UHFFFAOYSA-N telluride(2-) Chemical compound [Te-2] XSOKHXFFCGXDJZ-UHFFFAOYSA-N 0.000 description 12
- 229910052804 chromium Inorganic materials 0.000 description 11
- 239000011651 chromium Substances 0.000 description 11
- 239000000975 dye Substances 0.000 description 11
- 230000005670 electromagnetic radiation Effects 0.000 description 11
- 239000011521 glass Substances 0.000 description 11
- 239000011787 zinc oxide Substances 0.000 description 11
- 239000006096 absorbing agent Substances 0.000 description 10
- 238000000151 deposition Methods 0.000 description 10
- 239000012528 membrane Substances 0.000 description 10
- 239000002070 nanowire Substances 0.000 description 10
- 230000035945 sensitivity Effects 0.000 description 10
- 239000000243 solution Substances 0.000 description 10
- FENQZYRPJMQVRW-UHFFFAOYSA-N [Cu]S[Zn] Chemical compound [Cu]S[Zn] FENQZYRPJMQVRW-UHFFFAOYSA-N 0.000 description 9
- 229910052793 cadmium Inorganic materials 0.000 description 9
- BDOSMKKIYDKNTQ-UHFFFAOYSA-N cadmium atom Chemical compound [Cd] BDOSMKKIYDKNTQ-UHFFFAOYSA-N 0.000 description 9
- 238000000576 coating method Methods 0.000 description 9
- 229910021419 crystalline silicon Inorganic materials 0.000 description 9
- 229910052714 tellurium Inorganic materials 0.000 description 9
- PORWMNRCUJJQNO-UHFFFAOYSA-N tellurium atom Chemical compound [Te] PORWMNRCUJJQNO-UHFFFAOYSA-N 0.000 description 9
- 229910052719 titanium Inorganic materials 0.000 description 9
- 239000010936 titanium Substances 0.000 description 9
- 239000011701 zinc Substances 0.000 description 9
- DRDVZXDWVBGGMH-UHFFFAOYSA-N zinc;sulfide Chemical compound [S-2].[Zn+2] DRDVZXDWVBGGMH-UHFFFAOYSA-N 0.000 description 9
- 241001465754 Metazoa Species 0.000 description 8
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 8
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 8
- HCHKCACWOHOZIP-UHFFFAOYSA-N Zinc Chemical compound [Zn] HCHKCACWOHOZIP-UHFFFAOYSA-N 0.000 description 8
- WATWJIUSRGPENY-UHFFFAOYSA-N antimony atom Chemical compound [Sb] WATWJIUSRGPENY-UHFFFAOYSA-N 0.000 description 8
- 230000015572 biosynthetic process Effects 0.000 description 8
- 229910052802 copper Inorganic materials 0.000 description 8
- AMWRITDGCCNYAT-UHFFFAOYSA-L hydroxy(oxo)manganese;manganese Chemical compound [Mn].O[Mn]=O.O[Mn]=O AMWRITDGCCNYAT-UHFFFAOYSA-L 0.000 description 8
- 239000012071 phase Substances 0.000 description 8
- 230000005855 radiation Effects 0.000 description 8
- 230000006798 recombination Effects 0.000 description 8
- 238000005215 recombination Methods 0.000 description 8
- 229910052725 zinc Inorganic materials 0.000 description 8
- GQLBMRKEAODAKR-UHFFFAOYSA-L zinc;selenate Chemical compound [Zn+2].[O-][Se]([O-])(=O)=O GQLBMRKEAODAKR-UHFFFAOYSA-L 0.000 description 8
- SKJCKYVIQGBWTN-UHFFFAOYSA-N (4-hydroxyphenyl) methanesulfonate Chemical compound CS(=O)(=O)OC1=CC=C(O)C=C1 SKJCKYVIQGBWTN-UHFFFAOYSA-N 0.000 description 7
- 229910001339 C alloy Inorganic materials 0.000 description 7
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 7
- 229910000676 Si alloy Inorganic materials 0.000 description 7
- 229910006404 SnO 2 Inorganic materials 0.000 description 7
- 239000011358 absorbing material Substances 0.000 description 7
- 230000006399 behavior Effects 0.000 description 7
- QWUZMTJBRUASOW-UHFFFAOYSA-N cadmium tellanylidenezinc Chemical compound [Zn].[Cd].[Te] QWUZMTJBRUASOW-UHFFFAOYSA-N 0.000 description 7
- VTFKXHQTGNWIJW-UHFFFAOYSA-L cadmium(2+);selenate Chemical compound [Cd+2].[O-][Se]([O-])(=O)=O VTFKXHQTGNWIJW-UHFFFAOYSA-L 0.000 description 7
- MCMSPRNYOJJPIZ-UHFFFAOYSA-N cadmium;mercury;tellurium Chemical compound [Cd]=[Te]=[Hg] MCMSPRNYOJJPIZ-UHFFFAOYSA-N 0.000 description 7
- 238000010276 construction Methods 0.000 description 7
- 239000013078 crystal Substances 0.000 description 7
- 239000007772 electrode material Substances 0.000 description 7
- 230000004438 eyesight Effects 0.000 description 7
- 230000005693 optoelectronics Effects 0.000 description 7
- 238000004088 simulation Methods 0.000 description 7
- OGIDPMRJRNCKJF-UHFFFAOYSA-N titanium oxide Inorganic materials [Ti]=O OGIDPMRJRNCKJF-UHFFFAOYSA-N 0.000 description 7
- WEVYAHXRMPXWCK-UHFFFAOYSA-N Acetonitrile Chemical compound CC#N WEVYAHXRMPXWCK-UHFFFAOYSA-N 0.000 description 6
- UHOVQNZJYSORNB-UHFFFAOYSA-N Benzene Chemical compound C1=CC=CC=C1 UHOVQNZJYSORNB-UHFFFAOYSA-N 0.000 description 6
- 229910001218 Gallium arsenide Inorganic materials 0.000 description 6
- KDLHZDBZIXYQEI-UHFFFAOYSA-N Palladium Chemical compound [Pd] KDLHZDBZIXYQEI-UHFFFAOYSA-N 0.000 description 6
- 229910000577 Silicon-germanium Inorganic materials 0.000 description 6
- UCKMPCXJQFINFW-UHFFFAOYSA-N Sulphide Chemical compound [S-2] UCKMPCXJQFINFW-UHFFFAOYSA-N 0.000 description 6
- YXFVVABEGXRONW-UHFFFAOYSA-N Toluene Chemical compound CC1=CC=CC=C1 YXFVVABEGXRONW-UHFFFAOYSA-N 0.000 description 6
- LEVVHYCKPQWKOP-UHFFFAOYSA-N [Si].[Ge] Chemical compound [Si].[Ge] LEVVHYCKPQWKOP-UHFFFAOYSA-N 0.000 description 6
- HQABUPZFAYXKJW-UHFFFAOYSA-N butan-1-amine Chemical compound CCCCN HQABUPZFAYXKJW-UHFFFAOYSA-N 0.000 description 6
- MVPPADPHJFYWMZ-UHFFFAOYSA-N chlorobenzene Chemical compound ClC1=CC=CC=C1 MVPPADPHJFYWMZ-UHFFFAOYSA-N 0.000 description 6
- 230000006378 damage Effects 0.000 description 6
- 239000007789 gas Substances 0.000 description 6
- 229910052736 halogen Inorganic materials 0.000 description 6
- 150000002367 halogens Chemical class 0.000 description 6
- 150000004678 hydrides Chemical class 0.000 description 6
- 239000011777 magnesium Substances 0.000 description 6
- 239000011368 organic material Substances 0.000 description 6
- YEXPOXQUZXUXJW-UHFFFAOYSA-N oxolead Chemical compound [Pb]=O YEXPOXQUZXUXJW-UHFFFAOYSA-N 0.000 description 6
- 230000000737 periodic effect Effects 0.000 description 6
- 230000001902 propagating effect Effects 0.000 description 6
- HBMJWWWQQXIZIP-UHFFFAOYSA-N silicon carbide Chemical compound [Si+]#[C-] HBMJWWWQQXIZIP-UHFFFAOYSA-N 0.000 description 6
- 238000004544 sputter deposition Methods 0.000 description 6
- FKNIDKXOANSRCS-UHFFFAOYSA-N 2,3,4-trinitrofluoren-1-one Chemical compound C1=CC=C2C3=C([N+](=O)[O-])C([N+]([O-])=O)=C([N+]([O-])=O)C(=O)C3=CC2=C1 FKNIDKXOANSRCS-UHFFFAOYSA-N 0.000 description 5
- 229910002601 GaN Inorganic materials 0.000 description 5
- FYYHWMGAXLPEAU-UHFFFAOYSA-N Magnesium Chemical compound [Mg] FYYHWMGAXLPEAU-UHFFFAOYSA-N 0.000 description 5
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 5
- 229910001215 Te alloy Inorganic materials 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 5
- 238000011088 calibration curve Methods 0.000 description 5
- 229910052729 chemical element Inorganic materials 0.000 description 5
- 238000004140 cleaning Methods 0.000 description 5
- 239000003086 colorant Substances 0.000 description 5
- 229910003460 diamond Inorganic materials 0.000 description 5
- 239000010432 diamond Substances 0.000 description 5
- 238000001704 evaporation Methods 0.000 description 5
- 230000008020 evaporation Effects 0.000 description 5
- VTGARNNDLOTBET-UHFFFAOYSA-N gallium antimonide Chemical compound [Sb]#[Ga] VTGARNNDLOTBET-UHFFFAOYSA-N 0.000 description 5
- 229910021480 group 4 element Inorganic materials 0.000 description 5
- PKMXSWXQNCMWNG-UHFFFAOYSA-L lead(2+);selenate Chemical compound [Pb+2].[O-][Se]([O-])(=O)=O PKMXSWXQNCMWNG-UHFFFAOYSA-L 0.000 description 5
- 229910052749 magnesium Inorganic materials 0.000 description 5
- 229910052750 molybdenum Inorganic materials 0.000 description 5
- 239000011733 molybdenum Substances 0.000 description 5
- 239000011241 protective layer Substances 0.000 description 5
- 238000004528 spin coating Methods 0.000 description 5
- QXKXDIKCIPXUPL-UHFFFAOYSA-N sulfanylidenemercury Chemical compound [Hg]=S QXKXDIKCIPXUPL-UHFFFAOYSA-N 0.000 description 5
- OCGWQDWYSQAFTO-UHFFFAOYSA-N tellanylidenelead Chemical compound [Pb]=[Te] OCGWQDWYSQAFTO-UHFFFAOYSA-N 0.000 description 5
- PCCVSPMFGIFTHU-UHFFFAOYSA-N tetracyanoquinodimethane Chemical compound N#CC(C#N)=C1C=CC(=C(C#N)C#N)C=C1 PCCVSPMFGIFTHU-UHFFFAOYSA-N 0.000 description 5
- 235000012431 wafers Nutrition 0.000 description 5
- 229910000497 Amalgam Inorganic materials 0.000 description 4
- HEDRZPFGACZZDS-UHFFFAOYSA-N Chloroform Chemical compound ClC(Cl)Cl HEDRZPFGACZZDS-UHFFFAOYSA-N 0.000 description 4
- YLQBMQCUIZJEEH-UHFFFAOYSA-N Furan Chemical compound C=1C=COC=1 YLQBMQCUIZJEEH-UHFFFAOYSA-N 0.000 description 4
- 229920000144 PEDOT:PSS Polymers 0.000 description 4
- DBKNIEBLJMAJHX-UHFFFAOYSA-N [As]#B Chemical compound [As]#B DBKNIEBLJMAJHX-UHFFFAOYSA-N 0.000 description 4
- HMDDXIMCDZRSNE-UHFFFAOYSA-N [C].[Si] Chemical compound [C].[Si] HMDDXIMCDZRSNE-UHFFFAOYSA-N 0.000 description 4
- 238000010521 absorption reaction Methods 0.000 description 4
- 229910000808 amorphous metal alloy Inorganic materials 0.000 description 4
- 239000002585 base Substances 0.000 description 4
- CXKCTMHTOKXKQT-UHFFFAOYSA-N cadmium oxide Inorganic materials [Cd]=O CXKCTMHTOKXKQT-UHFFFAOYSA-N 0.000 description 4
- CFEAAQFZALKQPA-UHFFFAOYSA-N cadmium(2+);oxygen(2-) Chemical compound [O-2].[Cd+2] CFEAAQFZALKQPA-UHFFFAOYSA-N 0.000 description 4
- INPLXZPZQSLHBR-UHFFFAOYSA-N cobalt(2+);sulfide Chemical compound [S-2].[Co+2] INPLXZPZQSLHBR-UHFFFAOYSA-N 0.000 description 4
- OMZSGWSJDCOLKM-UHFFFAOYSA-N copper(II) sulfide Chemical compound [S-2].[Cu+2] OMZSGWSJDCOLKM-UHFFFAOYSA-N 0.000 description 4
- BERDEBHAJNAUOM-UHFFFAOYSA-N copper(i) oxide Chemical compound [Cu]O[Cu] BERDEBHAJNAUOM-UHFFFAOYSA-N 0.000 description 4
- 239000006185 dispersion Substances 0.000 description 4
- 238000009826 distribution Methods 0.000 description 4
- 238000001035 drying Methods 0.000 description 4
- 230000007613 environmental effect Effects 0.000 description 4
- 230000014509 gene expression Effects 0.000 description 4
- 150000004820 halides Chemical class 0.000 description 4
- 230000003993 interaction Effects 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 4
- 150000002739 metals Chemical class 0.000 description 4
- LLWRXQXPJMPHLR-UHFFFAOYSA-N methylazanium;iodide Chemical compound [I-].[NH3+]C LLWRXQXPJMPHLR-UHFFFAOYSA-N 0.000 description 4
- 229910000480 nickel oxide Inorganic materials 0.000 description 4
- 230000004297 night vision Effects 0.000 description 4
- 238000005457 optimization Methods 0.000 description 4
- 238000004806 packaging method and process Methods 0.000 description 4
- 239000011295 pitch Substances 0.000 description 4
- 229920000172 poly(styrenesulfonic acid) Polymers 0.000 description 4
- 229940005642 polystyrene sulfonic acid Drugs 0.000 description 4
- 238000003908 quality control method Methods 0.000 description 4
- 239000010453 quartz Substances 0.000 description 4
- YQMLDSWXEQOSPP-UHFFFAOYSA-N selanylidenemercury Chemical compound [Hg]=[Se] YQMLDSWXEQOSPP-UHFFFAOYSA-N 0.000 description 4
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 4
- 239000000779 smoke Substances 0.000 description 4
- 239000007787 solid Substances 0.000 description 4
- 239000002904 solvent Substances 0.000 description 4
- 238000003786 synthesis reaction Methods 0.000 description 4
- XHGGEBRKUWZHEK-UHFFFAOYSA-L tellurate Chemical compound [O-][Te]([O-])(=O)=O XHGGEBRKUWZHEK-UHFFFAOYSA-L 0.000 description 4
- 238000012549 training Methods 0.000 description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 4
- VYMPLPIFKRHAAC-UHFFFAOYSA-N 1,2-ethanedithiol Chemical compound SCCS VYMPLPIFKRHAAC-UHFFFAOYSA-N 0.000 description 3
- 241000196324 Embryophyta Species 0.000 description 3
- 229910004262 HgTe Inorganic materials 0.000 description 3
- 241000282412 Homo Species 0.000 description 3
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 3
- IMNFDUFMRHMDMM-UHFFFAOYSA-N N-Heptane Chemical compound CCCCCCC IMNFDUFMRHMDMM-UHFFFAOYSA-N 0.000 description 3
- 229910003114 SrVO Inorganic materials 0.000 description 3
- 208000027418 Wounds and injury Diseases 0.000 description 3
- KTSFMFGEAAANTF-UHFFFAOYSA-N [Cu].[Se].[Se].[In] Chemical compound [Cu].[Se].[Se].[In] KTSFMFGEAAANTF-UHFFFAOYSA-N 0.000 description 3
- FQGMPQGXUXIOKI-UHFFFAOYSA-N [S--].[S--].[Cu++].[Zn++] Chemical compound [S--].[S--].[Cu++].[Zn++] FQGMPQGXUXIOKI-UHFFFAOYSA-N 0.000 description 3
- 230000003044 adaptive effect Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 229910052785 arsenic Inorganic materials 0.000 description 3
- RQNWIZPPADIBDY-UHFFFAOYSA-N arsenic atom Chemical compound [As] RQNWIZPPADIBDY-UHFFFAOYSA-N 0.000 description 3
- 230000003190 augmentative effect Effects 0.000 description 3
- NWAIGJYBQQYSPW-UHFFFAOYSA-N azanylidyneindigane Chemical compound [In]#N NWAIGJYBQQYSPW-UHFFFAOYSA-N 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 229910052797 bismuth Inorganic materials 0.000 description 3
- JCXGWMGPZLAOME-UHFFFAOYSA-N bismuth atom Chemical compound [Bi] JCXGWMGPZLAOME-UHFFFAOYSA-N 0.000 description 3
- 229910052794 bromium Inorganic materials 0.000 description 3
- DGJPPCSCQOIWCP-UHFFFAOYSA-N cadmium mercury Chemical compound [Cd].[Hg] DGJPPCSCQOIWCP-UHFFFAOYSA-N 0.000 description 3
- 150000001768 cations Chemical class 0.000 description 3
- 239000000460 chlorine Substances 0.000 description 3
- 229910052801 chlorine Inorganic materials 0.000 description 3
- 229920001577 copolymer Polymers 0.000 description 3
- 238000013500 data storage Methods 0.000 description 3
- 230000008021 deposition Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000036541 health Effects 0.000 description 3
- 229910052739 hydrogen Inorganic materials 0.000 description 3
- 239000001257 hydrogen Substances 0.000 description 3
- 208000014674 injury Diseases 0.000 description 3
- 150000002500 ions Chemical class 0.000 description 3
- 230000000670 limiting effect Effects 0.000 description 3
- YVUZUKYBUMROPQ-UHFFFAOYSA-N mercury zinc Chemical compound [Zn].[Hg] YVUZUKYBUMROPQ-UHFFFAOYSA-N 0.000 description 3
- CWQXQMHSOZUFJS-UHFFFAOYSA-N molybdenum disulfide Chemical compound S=[Mo]=S CWQXQMHSOZUFJS-UHFFFAOYSA-N 0.000 description 3
- 229910052759 nickel Inorganic materials 0.000 description 3
- 150000004767 nitrides Chemical group 0.000 description 3
- NOUWNNABOUGTDQ-UHFFFAOYSA-N octane Chemical compound CCCCCCC[CH2+] NOUWNNABOUGTDQ-UHFFFAOYSA-N 0.000 description 3
- 150000002894 organic compounds Chemical class 0.000 description 3
- 229910052763 palladium Inorganic materials 0.000 description 3
- 230000037361 pathway Effects 0.000 description 3
- 238000013082 photovoltaic technology Methods 0.000 description 3
- 239000003495 polar organic solvent Substances 0.000 description 3
- FYNROBRQIVCIQF-UHFFFAOYSA-N pyrrolo[3,2-b]pyrrole-5,6-dione Chemical compound C1=CN=C2C(=O)C(=O)N=C21 FYNROBRQIVCIQF-UHFFFAOYSA-N 0.000 description 3
- 150000003346 selenoethers Chemical class 0.000 description 3
- 239000002356 single layer Substances 0.000 description 3
- CADICXFYUNYKGD-UHFFFAOYSA-N sulfanylidenemanganese Chemical compound [Mn]=S CADICXFYUNYKGD-UHFFFAOYSA-N 0.000 description 3
- 239000004094 surface-active agent Substances 0.000 description 3
- 238000001356 surgical procedure Methods 0.000 description 3
- UGZADUVQMDAIAO-UHFFFAOYSA-L zinc hydroxide Chemical compound [OH-].[OH-].[Zn+2] UGZADUVQMDAIAO-UHFFFAOYSA-L 0.000 description 3
- 229940007718 zinc hydroxide Drugs 0.000 description 3
- 229910021511 zinc hydroxide Inorganic materials 0.000 description 3
- UQMZPFKLYHOJDL-UHFFFAOYSA-N zinc;cadmium(2+);disulfide Chemical compound [S-2].[S-2].[Zn+2].[Cd+2] UQMZPFKLYHOJDL-UHFFFAOYSA-N 0.000 description 3
- PFNQVRZLDWYSCW-UHFFFAOYSA-N (fluoren-9-ylideneamino) n-naphthalen-1-ylcarbamate Chemical compound C12=CC=CC=C2C2=CC=CC=C2C1=NOC(=O)NC1=CC=CC2=CC=CC=C12 PFNQVRZLDWYSCW-UHFFFAOYSA-N 0.000 description 2
- FNQJDLTXOVEEFB-UHFFFAOYSA-N 1,2,3-benzothiadiazole Chemical compound C1=CC=C2SN=NC2=C1 FNQJDLTXOVEEFB-UHFFFAOYSA-N 0.000 description 2
- FCEHBMOGCRZNNI-UHFFFAOYSA-N 1-benzothiophene Chemical compound C1=CC=C2SC=CC2=C1 FCEHBMOGCRZNNI-UHFFFAOYSA-N 0.000 description 2
- UKUVVAMSXXBMRX-UHFFFAOYSA-N 2,4,5-trithia-1,3-diarsabicyclo[1.1.1]pentane Chemical compound S1[As]2S[As]1S2 UKUVVAMSXXBMRX-UHFFFAOYSA-N 0.000 description 2
- HPJFXFRNEJHDFR-UHFFFAOYSA-N 22291-04-9 Chemical compound C1=CC(C(N(CCN(C)C)C2=O)=O)=C3C2=CC=C2C(=O)N(CCN(C)C)C(=O)C1=C32 HPJFXFRNEJHDFR-UHFFFAOYSA-N 0.000 description 2
- ZCYVEMRRCGMTRW-UHFFFAOYSA-N 7553-56-2 Chemical compound [I] ZCYVEMRRCGMTRW-UHFFFAOYSA-N 0.000 description 2
- PIGFYZPCRLYGLF-UHFFFAOYSA-N Aluminum nitride Chemical compound [Al]#N PIGFYZPCRLYGLF-UHFFFAOYSA-N 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 2
- PZNSFCLAULLKQX-UHFFFAOYSA-N Boron nitride Chemical compound N#B PZNSFCLAULLKQX-UHFFFAOYSA-N 0.000 description 2
- WKBOTKDWSSQWDR-UHFFFAOYSA-N Bromine atom Chemical compound [Br] WKBOTKDWSSQWDR-UHFFFAOYSA-N 0.000 description 2
- ZAMOUSCENKQFHK-UHFFFAOYSA-N Chlorine atom Chemical compound [Cl] ZAMOUSCENKQFHK-UHFFFAOYSA-N 0.000 description 2
- 229910002531 CuTe Inorganic materials 0.000 description 2
- BWGNESOTFCXPMA-UHFFFAOYSA-N Dihydrogen disulfide Chemical compound SS BWGNESOTFCXPMA-UHFFFAOYSA-N 0.000 description 2
- PXGOKWXKJXAPGV-UHFFFAOYSA-N Fluorine Chemical compound FF PXGOKWXKJXAPGV-UHFFFAOYSA-N 0.000 description 2
- 229910016001 MoSe Inorganic materials 0.000 description 2
- 229910005913 NiTe Inorganic materials 0.000 description 2
- 241000233805 Phoenix Species 0.000 description 2
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 2
- FOIXSVOLVBLSDH-UHFFFAOYSA-N Silver ion Chemical compound [Ag+] FOIXSVOLVBLSDH-UHFFFAOYSA-N 0.000 description 2
- 239000002042 Silver nanowire Substances 0.000 description 2
- YTPLMLYBLZKORZ-UHFFFAOYSA-N Thiophene Chemical compound C=1C=CSC=1 YTPLMLYBLZKORZ-UHFFFAOYSA-N 0.000 description 2
- 241000607479 Yersinia pestis Species 0.000 description 2
- ASMQPJTXPYCZBL-UHFFFAOYSA-N [O-2].[Cd+2].[Ag+] Chemical compound [O-2].[Cd+2].[Ag+] ASMQPJTXPYCZBL-UHFFFAOYSA-N 0.000 description 2
- 125000002015 acyclic group Chemical group 0.000 description 2
- 238000004378 air conditioning Methods 0.000 description 2
- LVQULNGDVIKLPK-UHFFFAOYSA-N aluminium antimonide Chemical compound [Sb]#[Al] LVQULNGDVIKLPK-UHFFFAOYSA-N 0.000 description 2
- MDPILPRLPQYEEN-UHFFFAOYSA-N aluminium arsenide Chemical compound [As]#[Al] MDPILPRLPQYEEN-UHFFFAOYSA-N 0.000 description 2
- JYMITAMFTJDTAE-UHFFFAOYSA-N aluminum zinc oxygen(2-) Chemical compound [O-2].[Al+3].[Zn+2] JYMITAMFTJDTAE-UHFFFAOYSA-N 0.000 description 2
- 150000001412 amines Chemical class 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 229910052787 antimony Inorganic materials 0.000 description 2
- QVQLCTNNEUAWMS-UHFFFAOYSA-N barium oxide Chemical compound [Ba]=O QVQLCTNNEUAWMS-UHFFFAOYSA-N 0.000 description 2
- ZWOASCVFHSYHOB-UHFFFAOYSA-N benzene-1,3-dithiol Chemical compound SC1=CC=CC(S)=C1 ZWOASCVFHSYHOB-UHFFFAOYSA-N 0.000 description 2
- NFMAZVUSKIJEIH-UHFFFAOYSA-N bis(sulfanylidene)iron Chemical compound S=[Fe]=S NFMAZVUSKIJEIH-UHFFFAOYSA-N 0.000 description 2
- YZYDPPZYDIRSJT-UHFFFAOYSA-K boron phosphate Chemical compound [B+3].[O-]P([O-])([O-])=O YZYDPPZYDIRSJT-UHFFFAOYSA-K 0.000 description 2
- 229910000149 boron phosphate Inorganic materials 0.000 description 2
- GDTBXPJZTBHREO-UHFFFAOYSA-N bromine Substances BrBr GDTBXPJZTBHREO-UHFFFAOYSA-N 0.000 description 2
- HTUDBOWEKWIOCZ-UHFFFAOYSA-N cadmium(2+) mercury(1+) sulfide Chemical compound [S-2].[Cd+2].[Hg+] HTUDBOWEKWIOCZ-UHFFFAOYSA-N 0.000 description 2
- 238000004422 calculation algorithm Methods 0.000 description 2
- 229910052799 carbon Inorganic materials 0.000 description 2
- 229910000420 cerium oxide Inorganic materials 0.000 description 2
- 238000005234 chemical deposition Methods 0.000 description 2
- 238000000224 chemical solution deposition Methods 0.000 description 2
- 238000005229 chemical vapour deposition Methods 0.000 description 2
- CEYNXXRGMKQAGT-UHFFFAOYSA-N chromium sulfanylidenecopper Chemical compound [Cu]=S.[Cr] CEYNXXRGMKQAGT-UHFFFAOYSA-N 0.000 description 2
- 239000011248 coating agent Substances 0.000 description 2
- ATORBMMJNYFMAK-UHFFFAOYSA-L cobalt(2+);selenate Chemical compound [Co+2].[O-][Se]([O-])(=O)=O ATORBMMJNYFMAK-UHFFFAOYSA-L 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 239000012141 concentrate Substances 0.000 description 2
- 229920000547 conjugated polymer Polymers 0.000 description 2
- 238000001816 cooling Methods 0.000 description 2
- 238000002316 cosmetic surgery Methods 0.000 description 2
- 125000004122 cyclic group Chemical group 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 238000000113 differential scanning calorimetry Methods 0.000 description 2
- 239000000539 dimer Substances 0.000 description 2
- 238000004070 electrodeposition Methods 0.000 description 2
- 238000011049 filling Methods 0.000 description 2
- 229910052731 fluorine Inorganic materials 0.000 description 2
- 239000011737 fluorine Substances 0.000 description 2
- 235000013305 food Nutrition 0.000 description 2
- 239000003517 fume Substances 0.000 description 2
- LWFNJDOYCSNXDO-UHFFFAOYSA-K gallium;phosphate Chemical compound [Ga+3].[O-]P([O-])([O-])=O LWFNJDOYCSNXDO-UHFFFAOYSA-K 0.000 description 2
- 230000012010 growth Effects 0.000 description 2
- 238000003306 harvesting Methods 0.000 description 2
- 231100001261 hazardous Toxicity 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 238000007654 immersion Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 208000015181 infectious disease Diseases 0.000 description 2
- 229910010272 inorganic material Inorganic materials 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 229910052740 iodine Inorganic materials 0.000 description 2
- 239000011630 iodine Substances 0.000 description 2
- 229910000339 iron disulfide Inorganic materials 0.000 description 2
- OVMJVEMNBCGDGM-UHFFFAOYSA-N iron silver Chemical compound [Fe].[Ag] OVMJVEMNBCGDGM-UHFFFAOYSA-N 0.000 description 2
- 229910052745 lead Inorganic materials 0.000 description 2
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 2
- 230000005291 magnetic effect Effects 0.000 description 2
- 238000007726 management method Methods 0.000 description 2
- 238000000691 measurement method Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000015654 memory Effects 0.000 description 2
- QSHDDOUJBYECFT-UHFFFAOYSA-N mercury Chemical compound [Hg] QSHDDOUJBYECFT-UHFFFAOYSA-N 0.000 description 2
- 229910052753 mercury Inorganic materials 0.000 description 2
- VCEXCCILEWFFBG-UHFFFAOYSA-N mercury telluride Chemical compound [Hg]=[Te] VCEXCCILEWFFBG-UHFFFAOYSA-N 0.000 description 2
- 238000005065 mining Methods 0.000 description 2
- MHWZQNGIEIYAQJ-UHFFFAOYSA-N molybdenum diselenide Chemical compound [Se]=[Mo]=[Se] MHWZQNGIEIYAQJ-UHFFFAOYSA-N 0.000 description 2
- 229910052982 molybdenum disulfide Inorganic materials 0.000 description 2
- JKQOBWVOAYFWKG-UHFFFAOYSA-N molybdenum trioxide Chemical compound O=[Mo](=O)=O JKQOBWVOAYFWKG-UHFFFAOYSA-N 0.000 description 2
- 239000000178 monomer Substances 0.000 description 2
- 239000002105 nanoparticle Substances 0.000 description 2
- 229930014626 natural product Natural products 0.000 description 2
- MOFOBJHOKRNACT-UHFFFAOYSA-N nickel silver Chemical compound [Ni].[Ag] MOFOBJHOKRNACT-UHFFFAOYSA-N 0.000 description 2
- 238000010606 normalization Methods 0.000 description 2
- 229920000620 organic polymer Polymers 0.000 description 2
- 239000003960 organic solvent Substances 0.000 description 2
- 230000003647 oxidation Effects 0.000 description 2
- 238000007254 oxidation reaction Methods 0.000 description 2
- BMMGVYCKOGBVEV-UHFFFAOYSA-N oxo(oxoceriooxy)cerium Chemical compound [Ce]=O.O=[Ce]=O BMMGVYCKOGBVEV-UHFFFAOYSA-N 0.000 description 2
- GNRSAWUEBMWBQH-UHFFFAOYSA-N oxonickel Chemical compound [Ni]=O GNRSAWUEBMWBQH-UHFFFAOYSA-N 0.000 description 2
- IVQODXYTQYNJFI-UHFFFAOYSA-N oxotin;silver Chemical compound [Ag].[Sn]=O IVQODXYTQYNJFI-UHFFFAOYSA-N 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 238000005325 percolation Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 229910052698 phosphorus Inorganic materials 0.000 description 2
- 239000011574 phosphorus Substances 0.000 description 2
- 230000000704 physical effect Effects 0.000 description 2
- 238000000554 physical therapy Methods 0.000 description 2
- 238000007639 printing Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000004171 remote diagnosis Methods 0.000 description 2
- 238000012552 review Methods 0.000 description 2
- IRPLSAGFWHCJIQ-UHFFFAOYSA-N selanylidenecopper Chemical compound [Se]=[Cu] IRPLSAGFWHCJIQ-UHFFFAOYSA-N 0.000 description 2
- VFWRGKJLLYDFBY-UHFFFAOYSA-N silver;hydrate Chemical compound O.[Ag].[Ag] VFWRGKJLLYDFBY-UHFFFAOYSA-N 0.000 description 2
- FSJWWSXPIWGYKC-UHFFFAOYSA-M silver;silver;sulfanide Chemical compound [SH-].[Ag].[Ag+] FSJWWSXPIWGYKC-UHFFFAOYSA-M 0.000 description 2
- 238000001179 sorption measurement Methods 0.000 description 2
- 238000005118 spray pyrolysis Methods 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- WWNBZGLDODTKEM-UHFFFAOYSA-N sulfanylidenenickel Chemical compound [Ni]=S WWNBZGLDODTKEM-UHFFFAOYSA-N 0.000 description 2
- 229910052717 sulfur Inorganic materials 0.000 description 2
- JOUDBUYBGJYFFP-FOCLMDBBSA-N thioindigo Chemical compound S\1C2=CC=CC=C2C(=O)C/1=C1/C(=O)C2=CC=CC=C2S1 JOUDBUYBGJYFFP-FOCLMDBBSA-N 0.000 description 2
- 150000003573 thiols Chemical class 0.000 description 2
- ALRFTTOJSPMYSY-UHFFFAOYSA-N tin disulfide Chemical compound S=[Sn]=S ALRFTTOJSPMYSY-UHFFFAOYSA-N 0.000 description 2
- AFNRRBXCCXDRPS-UHFFFAOYSA-N tin(ii) sulfide Chemical compound [Sn]=S AFNRRBXCCXDRPS-UHFFFAOYSA-N 0.000 description 2
- 231100000331 toxic Toxicity 0.000 description 2
- 230000002588 toxic effect Effects 0.000 description 2
- 238000002834 transmittance Methods 0.000 description 2
- 239000012780 transparent material Substances 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- 238000007740 vapor deposition Methods 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- 239000002023 wood Substances 0.000 description 2
- KZFMOINJHMONLW-FOCLMDBBSA-N (2e)-4,7-dichloro-2-(4,7-dichloro-3-oxo-1-benzothiophen-2-ylidene)-1-benzothiophen-3-one Chemical compound S\1C(C(=CC=C2Cl)Cl)=C2C(=O)C/1=C1/C(=O)C(C(Cl)=CC=C2Cl)=C2S1 KZFMOINJHMONLW-FOCLMDBBSA-N 0.000 description 1
- WRIDQFICGBMAFQ-UHFFFAOYSA-N (E)-8-Octadecenoic acid Natural products CCCCCCCCCC=CCCCCCCC(O)=O WRIDQFICGBMAFQ-UHFFFAOYSA-N 0.000 description 1
- DHBXNPKRAUYBTH-UHFFFAOYSA-N 1,1-ethanedithiol Chemical compound CC(S)S DHBXNPKRAUYBTH-UHFFFAOYSA-N 0.000 description 1
- JRNVQLOKVMWBFR-UHFFFAOYSA-N 1,2-benzenedithiol Chemical compound SC1=CC=CC=C1S JRNVQLOKVMWBFR-UHFFFAOYSA-N 0.000 description 1
- IHGSAQHSAGRWNI-UHFFFAOYSA-N 1-(4-bromophenyl)-2,2,2-trifluoroethanone Chemical compound FC(F)(F)C(=O)C1=CC=C(Br)C=C1 IHGSAQHSAGRWNI-UHFFFAOYSA-N 0.000 description 1
- XZXYQEHISUMZAT-UHFFFAOYSA-N 2-[(2-hydroxy-5-methylphenyl)methyl]-4-methylphenol Chemical compound CC1=CC=C(O)C(CC=2C(=CC=C(C)C=2)O)=C1 XZXYQEHISUMZAT-UHFFFAOYSA-N 0.000 description 1
- LQJBNNIYVWPHFW-UHFFFAOYSA-N 20:1omega9c fatty acid Natural products CCCCCCCCCCC=CCCCCCCCC(O)=O LQJBNNIYVWPHFW-UHFFFAOYSA-N 0.000 description 1
- 238000010146 3D printing Methods 0.000 description 1
- QSBYPNXLFMSGKH-UHFFFAOYSA-N 9-Heptadecensaeure Natural products CCCCCCCC=CCCCCCCCC(O)=O QSBYPNXLFMSGKH-UHFFFAOYSA-N 0.000 description 1
- 241000894006 Bacteria Species 0.000 description 1
- 241000538562 Banjos Species 0.000 description 1
- 208000023514 Barrett esophagus Diseases 0.000 description 1
- 229910015902 Bi 2 O 3 Inorganic materials 0.000 description 1
- ZOXJGFHDIHLPTG-UHFFFAOYSA-N Boron Chemical compound [B] ZOXJGFHDIHLPTG-UHFFFAOYSA-N 0.000 description 1
- 101100069231 Caenorhabditis elegans gkow-1 gene Proteins 0.000 description 1
- 241000282994 Cervidae Species 0.000 description 1
- 241000288673 Chiroptera Species 0.000 description 1
- 241001077262 Conga Species 0.000 description 1
- 206010061619 Deformity Diseases 0.000 description 1
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 1
- 241000282326 Felis catus Species 0.000 description 1
- 241000233866 Fungi Species 0.000 description 1
- 241000238631 Hexapoda Species 0.000 description 1
- DGAQECJNVWCQMB-PUAWFVPOSA-M Ilexoside XXIX Chemical compound C[C@@H]1CC[C@@]2(CC[C@@]3(C(=CC[C@H]4[C@]3(CC[C@@H]5[C@@]4(CC[C@@H](C5(C)C)OS(=O)(=O)[O-])C)C)[C@@H]2[C@]1(C)O)C)C(=O)O[C@H]6[C@@H]([C@H]([C@@H]([C@H](O6)CO)O)O)O.[Na+] DGAQECJNVWCQMB-PUAWFVPOSA-M 0.000 description 1
- 241000699670 Mus sp. Species 0.000 description 1
- 208000030858 Myofascial Pain Syndromes Diseases 0.000 description 1
- 206010028980 Neoplasm Diseases 0.000 description 1
- SOFQISBOCOYCHN-UHFFFAOYSA-N O[Se](O)(=O)=O.O[Se](O)(=O)=O.O[Se](O)(=O)=O.[AsH3].[AsH3] Chemical compound O[Se](O)(=O)=O.O[Se](O)(=O)=O.O[Se](O)(=O)=O.[AsH3].[AsH3] SOFQISBOCOYCHN-UHFFFAOYSA-N 0.000 description 1
- 208000008589 Obesity Diseases 0.000 description 1
- ZQPPMHVWECSIRJ-UHFFFAOYSA-N Oleic acid Natural products CCCCCCCCC=CCCCCCCCC(O)=O ZQPPMHVWECSIRJ-UHFFFAOYSA-N 0.000 description 1
- 239000005642 Oleic acid Substances 0.000 description 1
- 241000238814 Orthoptera Species 0.000 description 1
- 239000004642 Polyimide Substances 0.000 description 1
- GTEKSTCUDTWNPS-UHFFFAOYSA-N S.[Se-2].[SeH2].[Cd+2] Chemical compound S.[Se-2].[SeH2].[Cd+2] GTEKSTCUDTWNPS-UHFFFAOYSA-N 0.000 description 1
- 206010041349 Somnolence Diseases 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- NINIDFKCEFEMDL-UHFFFAOYSA-N Sulfur Chemical compound [S] NINIDFKCEFEMDL-UHFFFAOYSA-N 0.000 description 1
- 241000982634 Tragelaphus eurycerus Species 0.000 description 1
- 241000700605 Viruses Species 0.000 description 1
- YRXWPCFZBSHSAU-UHFFFAOYSA-N [Ag].[Ag].[Te] Chemical compound [Ag].[Ag].[Te] YRXWPCFZBSHSAU-UHFFFAOYSA-N 0.000 description 1
- JBTFGQBMTQVQAA-UHFFFAOYSA-N [As].[Se].[Se].[Se] Chemical compound [As].[Se].[Se].[Se] JBTFGQBMTQVQAA-UHFFFAOYSA-N 0.000 description 1
- RQFBBPNVEJATBH-UHFFFAOYSA-N [Cr].[Cd] Chemical compound [Cr].[Cd] RQFBBPNVEJATBH-UHFFFAOYSA-N 0.000 description 1
- SEUJAMVVGAETFN-UHFFFAOYSA-N [Cu].[Zn].S=[Sn]=[Se] Chemical compound [Cu].[Zn].S=[Sn]=[Se] SEUJAMVVGAETFN-UHFFFAOYSA-N 0.000 description 1
- VSKWIQRKBCVBAG-UHFFFAOYSA-N [Cu].[Zn].[Se] Chemical compound [Cu].[Zn].[Se] VSKWIQRKBCVBAG-UHFFFAOYSA-N 0.000 description 1
- XHCLAFWTIXFWPH-UHFFFAOYSA-N [O-2].[O-2].[O-2].[O-2].[O-2].[V+5].[V+5] Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[V+5].[V+5] XHCLAFWTIXFWPH-UHFFFAOYSA-N 0.000 description 1
- SGLAVFLVUVHRHP-UHFFFAOYSA-N [S--].[S--].[S--].[Zn++].[Sn+4] Chemical compound [S--].[S--].[S--].[Zn++].[Sn+4] SGLAVFLVUVHRHP-UHFFFAOYSA-N 0.000 description 1
- WVDXMQBKAGTWKI-UHFFFAOYSA-N [S-2].[S-2].[S-2].[Cr+6] Chemical compound [S-2].[S-2].[S-2].[Cr+6] WVDXMQBKAGTWKI-UHFFFAOYSA-N 0.000 description 1
- QGEWEQHJOVTHTM-UHFFFAOYSA-H [Se](=O)(=O)([O-])[O-].[Sb+3].[Se](=O)(=O)([O-])[O-].[Se](=O)(=O)([O-])[O-].[Sb+3] Chemical compound [Se](=O)(=O)([O-])[O-].[Sb+3].[Se](=O)(=O)([O-])[O-].[Se](=O)(=O)([O-])[O-].[Sb+3] QGEWEQHJOVTHTM-UHFFFAOYSA-H 0.000 description 1
- XRZCZVQJHOCRCR-UHFFFAOYSA-N [Si].[Pt] Chemical compound [Si].[Pt] XRZCZVQJHOCRCR-UHFFFAOYSA-N 0.000 description 1
- ROCBQULSWDJKML-UHFFFAOYSA-N [Zn+2].[Zn+2].[Se-2].[Se-2] Chemical compound [Zn+2].[Zn+2].[Se-2].[Se-2] ROCBQULSWDJKML-UHFFFAOYSA-N 0.000 description 1
- XNVJGKKANSYGKB-UHFFFAOYSA-N [Zn].[Se].[Cd] Chemical compound [Zn].[Se].[Cd] XNVJGKKANSYGKB-UHFFFAOYSA-N 0.000 description 1
- 238000000862 absorption spectrum Methods 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 238000012271 agricultural production Methods 0.000 description 1
- 239000003513 alkali Substances 0.000 description 1
- 229910052783 alkali metal Inorganic materials 0.000 description 1
- 150000001340 alkali metals Chemical group 0.000 description 1
- 125000000217 alkyl group Chemical group 0.000 description 1
- 229940107816 ammonium iodide Drugs 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 150000001450 anions Chemical class 0.000 description 1
- 238000002048 anodisation reaction Methods 0.000 description 1
- APAWRDGVSNYWSL-UHFFFAOYSA-N arsenic cadmium Chemical compound [As].[Cd] APAWRDGVSNYWSL-UHFFFAOYSA-N 0.000 description 1
- WBFMCDAQUDITAS-UHFFFAOYSA-N arsenic triselenide Chemical compound [Se]=[As][Se][As]=[Se] WBFMCDAQUDITAS-UHFFFAOYSA-N 0.000 description 1
- 230000000386 athletic effect Effects 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 210000002457 barrier cell Anatomy 0.000 description 1
- 238000003339 best practice Methods 0.000 description 1
- 239000012472 biological sample Substances 0.000 description 1
- 229910000416 bismuth oxide Inorganic materials 0.000 description 1
- FFBGYFUYJVKRNV-UHFFFAOYSA-N boranylidynephosphane Chemical compound P#B FFBGYFUYJVKRNV-UHFFFAOYSA-N 0.000 description 1
- 229910052796 boron Inorganic materials 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 210000005252 bulbus oculi Anatomy 0.000 description 1
- FHRLWXIYCJRXMZ-UHFFFAOYSA-N cadmium selanylidenelead Chemical compound [Cd].[Pb]=[Se] FHRLWXIYCJRXMZ-UHFFFAOYSA-N 0.000 description 1
- CJOBVZJTOIVNNF-UHFFFAOYSA-N cadmium sulfide Chemical compound [Cd]=S CJOBVZJTOIVNNF-UHFFFAOYSA-N 0.000 description 1
- CEKJAYFBQARQNG-UHFFFAOYSA-N cadmium zinc Chemical compound [Zn].[Cd] CEKJAYFBQARQNG-UHFFFAOYSA-N 0.000 description 1
- GAPHXYXXRMXDTK-UHFFFAOYSA-N cadmium;sulfanylidenelead Chemical compound [Cd].[Pb]=S GAPHXYXXRMXDTK-UHFFFAOYSA-N 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 201000011510 cancer Diseases 0.000 description 1
- 230000000739 chaotic effect Effects 0.000 description 1
- 238000012512 characterization method Methods 0.000 description 1
- 230000002925 chemical effect Effects 0.000 description 1
- 231100000481 chemical toxicant Toxicity 0.000 description 1
- 229910017052 cobalt Inorganic materials 0.000 description 1
- 239000010941 cobalt Substances 0.000 description 1
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 1
- QVYIMIJFGKEJDW-UHFFFAOYSA-N cobalt(ii) selenide Chemical compound [Se]=[Co] QVYIMIJFGKEJDW-UHFFFAOYSA-N 0.000 description 1
- 238000004737 colorimetric analysis Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000002860 competitive effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000004624 confocal microscopy Methods 0.000 description 1
- WILFBXOGIULNAF-UHFFFAOYSA-N copper sulfanylidenetin zinc Chemical compound [Sn]=S.[Zn].[Cu] WILFBXOGIULNAF-UHFFFAOYSA-N 0.000 description 1
- IREJEFWTIMXXMK-UHFFFAOYSA-N copper zinc tin(4+) tetrasulfide Chemical compound [S--].[S--].[S--].[S--].[Cu++].[Zn++].[Sn+4] IREJEFWTIMXXMK-UHFFFAOYSA-N 0.000 description 1
- QMULOZLYOQCZOH-UHFFFAOYSA-N copper;selenium(2-) Chemical compound [Cu+2].[Se-2] QMULOZLYOQCZOH-UHFFFAOYSA-N 0.000 description 1
- DCLHJMYSBFUUQV-UHFFFAOYSA-J copper;zinc;disulfate Chemical compound [Cu+2].[Zn+2].[O-]S([O-])(=O)=O.[O-]S([O-])(=O)=O DCLHJMYSBFUUQV-UHFFFAOYSA-J 0.000 description 1
- 239000011258 core-shell material Substances 0.000 description 1
- 244000038559 crop plants Species 0.000 description 1
- 230000001351 cycling effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000002059 diagnostic imaging Methods 0.000 description 1
- VUBXTPLRARJMJK-UHFFFAOYSA-H dibismuth triselenate Chemical compound [Se](=O)(=O)([O-])[O-].[Bi+3].[Se](=O)(=O)([O-])[O-].[Se](=O)(=O)([O-])[O-].[Bi+3] VUBXTPLRARJMJK-UHFFFAOYSA-H 0.000 description 1
- TYIXMATWDRGMPF-UHFFFAOYSA-N dibismuth;oxygen(2-) Chemical compound [O-2].[O-2].[O-2].[Bi+3].[Bi+3] TYIXMATWDRGMPF-UHFFFAOYSA-N 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 238000000804 electron spin resonance spectroscopy Methods 0.000 description 1
- 239000003344 environmental pollutant Substances 0.000 description 1
- 230000003203 everyday effect Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000001815 facial effect Effects 0.000 description 1
- 239000003337 fertilizer Substances 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 238000009472 formulation Methods 0.000 description 1
- BVSHTEBQPBBCFT-UHFFFAOYSA-N gallium(iii) sulfide Chemical compound [S-2].[S-2].[S-2].[Ga+3].[Ga+3] BVSHTEBQPBBCFT-UHFFFAOYSA-N 0.000 description 1
- 230000004313 glare Effects 0.000 description 1
- 229910001849 group 12 element Inorganic materials 0.000 description 1
- 229910021478 group 5 element Inorganic materials 0.000 description 1
- 229910021476 group 6 element Inorganic materials 0.000 description 1
- 150000002431 hydrogen Chemical class 0.000 description 1
- 230000002209 hydrophobic effect Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000011065 in-situ storage Methods 0.000 description 1
- UJXZVRRCKFUQKG-UHFFFAOYSA-K indium(3+);phosphate Chemical compound [In+3].[O-]P([O-])([O-])=O UJXZVRRCKFUQKG-UHFFFAOYSA-K 0.000 description 1
- AKUCEXGLFUSJCD-UHFFFAOYSA-N indium(3+);selenium(2-) Chemical compound [Se-2].[Se-2].[Se-2].[In+3].[In+3] AKUCEXGLFUSJCD-UHFFFAOYSA-N 0.000 description 1
- DONSDNATLFRYPO-UHFFFAOYSA-H indium(3+);triselenate Chemical compound [In+3].[In+3].[O-][Se]([O-])(=O)=O.[O-][Se]([O-])(=O)=O.[O-][Se]([O-])(=O)=O DONSDNATLFRYPO-UHFFFAOYSA-H 0.000 description 1
- SIXIBASSFIFHDK-UHFFFAOYSA-N indium(3+);trisulfide Chemical compound [S-2].[S-2].[S-2].[In+3].[In+3] SIXIBASSFIFHDK-UHFFFAOYSA-N 0.000 description 1
- 230000002458 infectious effect Effects 0.000 description 1
- 238000002329 infrared spectrum Methods 0.000 description 1
- 238000007641 inkjet printing Methods 0.000 description 1
- 150000002484 inorganic compounds Chemical class 0.000 description 1
- 239000011147 inorganic material Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- XEEYBQQBJWHFJM-UHFFFAOYSA-N iron Substances [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 1
- 238000010409 ironing Methods 0.000 description 1
- QXJSBBXBKPUZAA-UHFFFAOYSA-N isooleic acid Natural products CCCCCCCC=CCCCCCCCCC(O)=O QXJSBBXBKPUZAA-UHFFFAOYSA-N 0.000 description 1
- 229910000340 lead(II) sulfide Inorganic materials 0.000 description 1
- 239000003446 ligand Substances 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000007791 liquid phase Substances 0.000 description 1
- 238000011068 loading method Methods 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000002595 magnetic resonance imaging Methods 0.000 description 1
- 235000013372 meat Nutrition 0.000 description 1
- VPCVQOUFBWWQSL-UHFFFAOYSA-L mercury(2+);selenate Chemical compound [Hg+2].[O-][Se]([O-])(=O)=O VPCVQOUFBWWQSL-UHFFFAOYSA-L 0.000 description 1
- 229910001507 metal halide Inorganic materials 0.000 description 1
- 125000002496 methyl group Chemical group [H]C([H])([H])* 0.000 description 1
- 230000000813 microbial effect Effects 0.000 description 1
- 239000013081 microcrystal Substances 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- HWJHZLJIIWOTGZ-UHFFFAOYSA-N n-(hydroxymethyl)acetamide Chemical compound CC(=O)NCO HWJHZLJIIWOTGZ-UHFFFAOYSA-N 0.000 description 1
- 239000002159 nanocrystal Substances 0.000 description 1
- 229910052754 neon Inorganic materials 0.000 description 1
- GKAOGPIIYCISHV-UHFFFAOYSA-N neon atom Chemical compound [Ne] GKAOGPIIYCISHV-UHFFFAOYSA-N 0.000 description 1
- 230000009022 nonlinear effect Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 235000020824 obesity Nutrition 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- ZQPPMHVWECSIRJ-KTKRTIGZSA-N oleic acid Chemical compound CCCCCCCC\C=C/CCCCCCCC(O)=O ZQPPMHVWECSIRJ-KTKRTIGZSA-N 0.000 description 1
- 238000000399 optical microscopy Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 150000002892 organic cations Chemical group 0.000 description 1
- TWNQGVIAIRXVLR-UHFFFAOYSA-N oxo(oxoalumanyloxy)alumane Chemical compound O=[Al]O[Al]=O TWNQGVIAIRXVLR-UHFFFAOYSA-N 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 238000012856 packing Methods 0.000 description 1
- 238000002161 passivation Methods 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 238000009527 percussion Methods 0.000 description 1
- 230000008635 plant growth Effects 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 231100000719 pollutant Toxicity 0.000 description 1
- 229920001721 polyimide Polymers 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 238000001556 precipitation Methods 0.000 description 1
- 239000002243 precursor Substances 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000002285 radioactive effect Effects 0.000 description 1
- 239000012857 radioactive material Substances 0.000 description 1
- 230000011514 reflex Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 150000003839 salts Chemical class 0.000 description 1
- OMEPJWROJCQMMU-UHFFFAOYSA-N selanylidenebismuth;selenium Chemical compound [Se].[Bi]=[Se].[Bi]=[Se] OMEPJWROJCQMMU-UHFFFAOYSA-N 0.000 description 1
- QHASIAZYSXZCGO-UHFFFAOYSA-N selanylidenenickel Chemical compound [Se]=[Ni] QHASIAZYSXZCGO-UHFFFAOYSA-N 0.000 description 1
- JNMWHTHYDQTDQZ-UHFFFAOYSA-N selenium sulfide Chemical compound S=[Se]=S JNMWHTHYDQTDQZ-UHFFFAOYSA-N 0.000 description 1
- MFIWAIVSOUGHLI-UHFFFAOYSA-N selenium;tin Chemical compound [Sn]=[Se] MFIWAIVSOUGHLI-UHFFFAOYSA-N 0.000 description 1
- 229910021427 silicon allotrope Inorganic materials 0.000 description 1
- 229910010271 silicon carbide Inorganic materials 0.000 description 1
- 229910021483 silicon-carbon alloy Inorganic materials 0.000 description 1
- 238000005245 sintering Methods 0.000 description 1
- 150000003384 small molecules Chemical class 0.000 description 1
- 239000005361 soda-lime glass Substances 0.000 description 1
- 239000011734 sodium Substances 0.000 description 1
- 229910052708 sodium Inorganic materials 0.000 description 1
- 239000007790 solid phase Substances 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
- 241000894007 species Species 0.000 description 1
- 238000002798 spectrophotometry method Methods 0.000 description 1
- 238000004611 spectroscopical analysis Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- GKCNVZWZCYIBPR-UHFFFAOYSA-N sulfanylideneindium Chemical compound [In]=S GKCNVZWZCYIBPR-UHFFFAOYSA-N 0.000 description 1
- 239000011593 sulfur Substances 0.000 description 1
- 230000001502 supplementing effect Effects 0.000 description 1
- 230000009182 swimming Effects 0.000 description 1
- 238000001308 synthesis method Methods 0.000 description 1
- 229920005613 synthetic organic polymer Polymers 0.000 description 1
- CXXKWLMXEDWEJW-UHFFFAOYSA-N tellanylidenecobalt Chemical compound [Te]=[Co] CXXKWLMXEDWEJW-UHFFFAOYSA-N 0.000 description 1
- JBQYATWDVHIOAR-UHFFFAOYSA-N tellanylidenegermanium Chemical compound [Te]=[Ge] JBQYATWDVHIOAR-UHFFFAOYSA-N 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 229910002058 ternary alloy Inorganic materials 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 229910052716 thallium Inorganic materials 0.000 description 1
- BKVIYDNLLOSFOA-UHFFFAOYSA-N thallium Chemical compound [Tl] BKVIYDNLLOSFOA-UHFFFAOYSA-N 0.000 description 1
- 238000007751 thermal spraying Methods 0.000 description 1
- CRUIOQJBPNKOJG-UHFFFAOYSA-N thieno[3,2-e][1]benzothiole Chemical compound C1=C2SC=CC2=C2C=CSC2=C1 CRUIOQJBPNKOJG-UHFFFAOYSA-N 0.000 description 1
- 238000007736 thin film deposition technique Methods 0.000 description 1
- 229930192474 thiophene Natural products 0.000 description 1
- QHGNHLZPVBIIPX-UHFFFAOYSA-N tin(ii) oxide Chemical class [Sn]=O QHGNHLZPVBIIPX-UHFFFAOYSA-N 0.000 description 1
- TUTLDIXHQPSHHQ-UHFFFAOYSA-N tin(iv) sulfide Chemical compound [S-2].[S-2].[Sn+4] TUTLDIXHQPSHHQ-UHFFFAOYSA-N 0.000 description 1
- 239000004408 titanium dioxide Substances 0.000 description 1
- 239000003440 toxic substance Substances 0.000 description 1
- 238000002211 ultraviolet spectrum Methods 0.000 description 1
- 238000001771 vacuum deposition Methods 0.000 description 1
- 229910001935 vanadium oxide Inorganic materials 0.000 description 1
- 238000005019 vapor deposition process Methods 0.000 description 1
- 235000013311 vegetables Nutrition 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- 238000001429 visible spectrum Methods 0.000 description 1
- 238000005406 washing Methods 0.000 description 1
- NWJUKFMMXJODIL-UHFFFAOYSA-N zinc cadmium(2+) selenium(2-) Chemical compound [Zn+2].[Se-2].[Se-2].[Cd+2] NWJUKFMMXJODIL-UHFFFAOYSA-N 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images




































Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L27/00—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate
- H01L27/14—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate including semiconductor components sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation
- H01L27/144—Devices controlled by radiation
- H01L27/146—Imager structures
- H01L27/14665—Imagers using a photoconductor layer
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/66—Tracking systems using electromagnetic waves other than radio waves
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/20—Input arrangements for video game devices
- A63F13/21—Input arrangements for video game devices characterised by their sensors, purposes or types
- A63F13/213—Input arrangements for video game devices characterised by their sensors, purposes or types comprising photodetecting means, e.g. cameras, photodiodes or infrared cells
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/30—Interconnection arrangements between game servers and game devices; Interconnection arrangements between game devices; Interconnection arrangements between game servers
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/60—Generating or modifying game content before or while executing the game program, e.g. authoring tools specially adapted for game development or game-integrated level editor
- A63F13/65—Generating or modifying game content before or while executing the game program, e.g. authoring tools specially adapted for game development or game-integrated level editor automatically by game devices or servers from real world data, e.g. measurement in live racing competition
- A63F13/655—Generating or modifying game content before or while executing the game program, e.g. authoring tools specially adapted for game development or game-integrated level editor automatically by game devices or servers from real world data, e.g. measurement in live racing competition by importing photos, e.g. of the player
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4816—Constructional features, e.g. arrangements of optical elements of receivers alone
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L27/00—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate
- H01L27/14—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate including semiconductor components sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation
- H01L27/144—Devices controlled by radiation
- H01L27/146—Imager structures
- H01L27/14601—Structural or functional details thereof
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L31/00—Semiconductor devices sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation; Processes or apparatus specially adapted for the manufacture or treatment thereof or of parts thereof; Details thereof
- H01L31/02—Details
- H01L31/0224—Electrodes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L31/00—Semiconductor devices sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation; Processes or apparatus specially adapted for the manufacture or treatment thereof or of parts thereof; Details thereof
- H01L31/08—Semiconductor devices sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation; Processes or apparatus specially adapted for the manufacture or treatment thereof or of parts thereof; Details thereof in which radiation controls flow of current through the device, e.g. photoresistors
- H01L31/09—Devices sensitive to infrared, visible or ultraviolet radiation
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K30/00—Organic devices sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation
- H10K30/30—Organic devices sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation comprising bulk heterojunctions, e.g. interpenetrating networks of donor and acceptor material domains
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K39/00—Integrated devices, or assemblies of multiple devices, comprising at least one organic radiation-sensitive element covered by group H10K30/00
- H10K39/30—Devices controlled by radiation
- H10K39/32—Organic image sensors
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K39/00—Integrated devices, or assemblies of multiple devices, comprising at least one organic radiation-sensitive element covered by group H10K30/00
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K85/00—Organic materials used in the body or electrodes of devices covered by this subclass
- H10K85/10—Organic polymers or oligomers
- H10K85/111—Organic polymers or oligomers comprising aromatic, heteroaromatic, or aryl chains, e.g. polyaniline, polyphenylene or polyphenylene vinylene
- H10K85/113—Heteroaromatic compounds comprising sulfur or selene, e.g. polythiophene
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
- Y02E10/549—Organic PV cells
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- General Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Multimedia (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Human Computer Interaction (AREA)
- Photometry And Measurement Of Optical Pulse Characteristics (AREA)
- Light Receiving Elements (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Solid State Image Pick-Up Elements (AREA)
Description
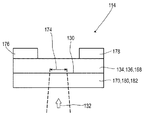
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、センサ領域は、少なくとも1つの光導電性材料を備え、光導電性材料の電気導電率は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向センサ信号は導電率に依存する、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する情報の少なくとも1つの項目を生成するよう設計される、評価装置と
を含む。
−ドーパント材料の原子における1013cm−3、1012cm−3、1011cm−3またはもっと低いドーパント濃度と、
−5・102・Ωcm、好ましくは5・103・Ωcm、より好ましくは104・Ω・cm、またはもっと高い電気抵抗と、
−500μm、より好ましくは300μmから1μm、より好ましくは10μmの範囲の厚さとを、一方では所望の長い電荷担体寿命を提供するために、他方では目標波長において有意な量の光を吸収する上で十分な量の材料を提供するために
示し得る。

−ポリ[3−(4−n−オクチル)−フェニルチオフェン](POPT)、
−ポリ[3−10−n−オクチル−3−フェノチアジン−ビニレンチオフェン−コ−2,5−チオフェン](PTZV−PT)、
−ポリ[4,8−ビス[(2−エチルヘキシル)オキシ]ベンゾ[1,2−b:4,5−b’]ジチオフェン−2,6−ジイル][3−フルオロ−2−[(2−エチルヘキシル)カルボニル]チエノ[3,4−b]チオフェンジイル](PTB7)、
−ポリ[チオフェン−2,5−ジイル−オルト−[5,6−ビス(ドデシルオキシ)ベンゾ[c][1,2,5]チアジアゾール]−4,7−ジイル](PBT−T1)、
−ポリ[2,6−(4,4−ビス−(2−エチルヘキシル)−4H−シクロペンタ[2,1−b;3,4−b’]ジチオフェン)−オルト−4,7(2,1,3−ベンゾチアジアゾール)](PCPDTBT)、
−ポリ[5,7−ビス(4−デカニル−2−チエニル)−チエノ(3,4−b)ジアチアゾールチオフェン−2,5](PDDTT)、
−ポリ[N−9’−ヘプタデカニル−2,7−カルバゾール−オルト−5,5−(4’,7’−ジ−2−チエニル−2’,1’,3’−ベンゾチアジアゾール)](PCDTBT)、または
−ポリ[(4,4’−ビス(2−エチルヘキシル)ジチエノ[3,2−b;2’,3’−d]シロール)−2,6−ジイル−オルト−(2,1,3−ベンゾチアジアゾール)−4,7−ジイル](PSBTBT)、
−ポリ[3−フェニルヒドラゾンチオフェン](PPHT)、
−ポリ[2−メトキシ−5−(2−エチルヘキシルオキシ)−1,4−フェニレンビニレン](MEH−PPV)、
−ポリ[2−メトキシ−5−(2’−エチルヘキシルオキシ)−1,4−フェニレン−1,2−エテニレン−2,5−ジメトキシ−1,4−フェニレン−1,2−エテニレン](M3EH−PPV)、
−ポリ[2−メトキシ−5−(3’,7’−ジメチルオクチルオキシ)−1,4−フェニレンビニレン](MDMO−PPV)、
−ポリ[9,9−ジ−オクチルフルオレン−コ−ビス−N,N−4−ブチルフェニル−ビス−N,N−フェニル−1,4−フェニレンジアミン](PFB)、
またはこれらの誘導体、修飾体もしくは混合物。
−[6,6]−フェニル−C61−酪酸メチルエステル(PC60BM)、
−[6,6]−フェニル−C71−酪酸メチルエステル(PC70BM)、
−[6,6]−フェニル−C84−酪酸メチルエステル(PC84BM)、または
−インデン−C60ビス付加体(ICBA),
のほか、C60またはC70の成分を1種または複数含む二量体、特に
−1つの付着オリゴエーテル(OE)鎖(C70−DPM−OE)を含むジフェニルメタノフラーレン(DPM)成分、または
−2つの付着オリゴエーテル(OE)鎖(C70−DPM−OE)を含むジフェニルメタノフラーレン(DPM)成分、
またはこれらの誘導体、修飾体もしくは混合物
のうち1種または複数である。ただし、TCNQまたはペリレン誘導体も適切となり得る。
−ポリ[5−(2−(エチルヘキシルオキシ)−2−メトキシシアノテレフタルイリデン](MEH−CN−PPV)、
−ポリ[オキサ−1,4−フェニレン−1,2−(1−シアノ)−エチレン−2,5−ジオクチルオキシ−1,4−フェニレン−1,2−(2−シアノ)−エチレン−1,4−フェニレン](CN−エーテル−PPV)、
−ポリ[1,4−ジオクチルオキシ−p−2,5−ジシアノフェニレンビニレン](DOCN−PPV)、
−ポリ[9,9’−ジオクチルフルオレン−コ−ベンゾチアジアゾール](PF8BT)、
またはこれらの誘導体、修飾体もしくは混合物。ただし、他の種類のアクセプタポリマーも適切となり得る。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、センサ領域は電流を持続する能力のある少なくとも1種の材料を含み、少なくとも1種の材料の特性は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向センサ信号は少なくとも1つの特性に依存する、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向光学センサは、照明の総出力が同じである場合にセンサ領域内の光ビームのビーム断面積に依存する少なくとも1つの縦方向センサ信号を生成することが可能であり、その結果、縦方向センサ信号の振幅はセンサ領域内で光ビームによって生成される光点の断面積の減少に伴って減少する、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向光学センサは、照明の総出力が同じである場合にセンサ領域内の光ビームのビーム断面積に依存する少なくとも1つの縦方向センサ信号を生成することが可能であり、縦方向センサ信号の最小値はセンサ領域に衝突する光ビームの断面積が最小となる条件下で発生する、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向センサは実質的に、0Hzから500Hzの光ビームの変調周波数範囲では非周波数依存である、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向光学センサは光導電性モードで駆動される少なくとも1個の光ダイオードを含み、センサ領域の導電性は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向センサ信号は導電性に依存する、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む。
−第3族−第5族化合物、特にアンチモン化インジウム(InSb)、窒化ガリウム(GaN)、ヒ化ガリウム(GaAs)、ヒ化インジウムガリウム(InGaAs)、またはリン化アルミニウムガリウム(AlGaP)、
−第2族−第6族化合物、特にテルル化カドミウム(CdTe)、またはテルル化水銀カドミウム(HgCdTe、略して「MCT」)(CdTeおよびHgTeの第2族−第6族三元合金と捉えることができる)、
−第1族−第3族−第6族2化合物、特に硫化銅インジウム(CuInS2、CIS)、およびより好ましくはセレン化銅インジウムガリウム(CIGS)(セレン化銅インジウム(CIS)およびセレン化銅ガリウム(CuGaSe2)の固溶体と捉えることができ、したがってCuInxGa(1−x)Se2の化学式を含む(式中、xは0、すなわち純粋なCuGaSe2から1、すなわち純粋なCISの範囲で変動し得る))、
−第1族2−第2族−第4族−第6族4化合物、特に硫化銅亜鉛スズ(CZTS)、セレン化銅亜鉛スズ(CZTSe)、または銅−亜鉛−スズ−硫黄−セレンカルコゲニド(CZTSSe)、および
−ハロゲン化物ペロブスカイト化合物、特にアルカリ陽イオンを含む化合物、または特に有機−無機ハロゲン化物ペロブスカイト(メチルアンモニウム金属ハロゲン化物(CH3NH3MX3、MはPbまたはSnなど二価金属、XはCl、Br、またはIである)、好ましくはメチルアンモニウムヨウ化鉛(CH3NH3PbI3)
から成る群から選択され得る。
−少なくとも1個の縦方向光学センサによって少なくとも1つの縦方向センサ信号を生成するステップであって、縦方向センサ信号は光ビームによる縦方向光学センサのセンサ領域の照明に依存し、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、センサ領域は少なくとも1個の光導電性材料を含み、センサ領域の導電性は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向センサ信号は導電性に依存する、ステップと、
−縦方向光学センサの縦方向センサ信号を評価することによって物体の縦方向位置に関する少なくとも1項目の情報を生成するステップと
を含む。
−シリコン(Si)、ヒ化ガリウム(GaAs)、硫化カドミウム(CdS)、テルル化カドミウム(CdTe)、硫化銅インジウム(CuInS2、CIS)、セレン化銅インジウムガリウム(CIGS)、硫化銅亜鉛スズ(CZTS)、硫化鉛(PbS)を含む量子ドット、リン化インジウム(InP)、または可視光スペクトル範囲について前述の有機光導電体
−ヒ化インジウムガリウム(InGaAs)、シリコン(Si)、ゲルマニウム(Ge)、テルル化カドミウム(CdTe)、硫酸銅インジウム(CuInS2、CIS)、セレン化銅インジウムガリウム(CIGS)、硫化銅亜鉛スズ(CZTS)、または硫化鉛(PbS)を含む量子ドット(NIRスペクトル範囲の場合)(CdTe、CIS、CIGSおよびCZTSは850nm超の波長に特に好適である)
−硫酸鉛(PbS)(IRスペクトル範囲の場合)
−セレン化鉛(PbSe)、テルル化水銀カドミウム(HgCdTe、MCT)またはアンチモン化インジウム(InSb)(FIRスペクトル範囲の場合)
これに関して、前述の光導電性材料の多くが費用効率的で長期安定性と信頼性のある材料として十分に知られ、長年にわたり、特に所定のスペクトル範囲でのセンシングの最適化に向けて開発されてきたという点を、特に強調することができる。したがって、本発明によって提案される拡大的目的に対し、既に商業的に入手可能な材料を適応させることが可能であることを、本発明の特に有利な点として捉えることができる。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、センサ領域は少なくとも1種の光導電性材料を含み、センサ領域の導電性は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向センサ信号は導電性に依存する、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む検出器。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、センサ領域は電流を持続する能力のある少なくとも1種の材料を含み、その材料の少なくとも1つの特性は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向センサ信号はその少なくとも1つの特性に依存する、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む検出器。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向光学センサは、照明の総出力が同じである場合に、センサ領域内で光ビームによって生成される光点の断面積の減少に伴って縦方向センサ信号の振幅が減少するように、センサ領域内の光ビームのビーム断面積に依存する少なくとも1つの縦方向センサ信号を生成することが可能である、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む検出器。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向光学センサは、照明の総出力が同じである場合にセンサ領域内の光ビームのビーム断面積に依存する少なくとも1つの縦方向センサ信号を生成することが可能であり、縦方向センサ信号の最小値は、最小限のビーム断面積を伴う光ビームによって衝突されるセンサ領域内の条件下で発生する、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む検出器。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向センサは実質的に、0Hzから500Hzの光ビームの変調周波数範囲では非周波数依存である、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む検出器。
−少なくとも1個の縦方向光学センサであって、少なくとも1つのセンサ領域を有し、光ビームによるセンサ領域の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向光学センサは光導電性モードで駆動される少なくとも1個の光ダイオードを含み、センサ領域の導電性は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向センサ信号は導電性に依存する、縦方向光学センサと、
−少なくとも1個の評価装置であって、縦方向光学センサの縦方向センサ信号を評価することによって、物体の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置と
を含む検出器。
−少なくとも1個の縦方向光学センサの使用によって少なくとも1つの縦方向センサ信号を生成する工程であって、縦方向センサ信号は光ビームによる縦方向光学センサのセンサ領域の照明に依存し、縦方向センサ信号は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、センサ領域は少なくとも1個の光導電性材料を含み、センサ領域における光導電性材料の導電性は、照明の総出力が同じである場合、センサ領域内の光ビームのビーム断面積に依存し、縦方向センサ信号は導電性に依存する、工程と、
−縦方向光学センサの縦方向センサ信号を評価することによって物体の縦方向位置に関する少なくとも1項目の情報を生成する工程と
を含む方法。
−530nmの波長を放出する発光ダイオード158で照らされる場合は「被照明」とし、
−照明がない場合は「暗い」とし、
第3の曲線は「差」として示され、被照明曲線の値から暗い曲線の値を差し引いた差を表わす。図6Dの3種類の曲線の比較から導き出すことができるとおり、測定信号は、約1kHzを超える周波数で構成のノイズレベルと区別が付かないことが判明した。他方、約50Hz以下の周波数では約100の信号対ノイズ比が観察され得る。周波数50Hzのときに得られるピークは主電源の周波数に起因すると考えられる。このように、センサ領域130内の層168が前述のP3HT:PC60BMの混合物を有機光導電性材料134として含む場合の縦方向光学センサ114は特に、100Hz以下、好ましくは50Hz以下の周波数でのFiPの判定に使用することができる。この周波数帯ではノイズが大幅に少ないと見られ、これは特に、この種の材料における漏洩電流が事実上ゼロであるからである。
112 物体
114 縦方向光学センサ
116 光軸
118 ハウジング
120 転送装置
122 屈折レンズ
124 開口
126 視野方向
128 座標系
130 センサ領域
132 光ビーム
134 光導電性材料
136 カルコゲニド
138 信号リード線
140 評価装置
142 焦点
144 アクチュエータ
146 アクチュエータ制御ユニット
148 縦方向評価ユニット
150 バイアス電圧源
152 グラウンド
154 増幅器
156 照明源
158 発光ダイオード
160 変調照明源
162 変調装置
164 ロックイン増幅器
166 データ処理装置
168 光導電性材料層
170 基板
172 セラミック基板
174 ビーム断面積
176 第1電極
178 第2電極
180 透明基板
182 透光性基板
184 横方向光学センサ
186 透明導電性酸化物層
188 透明導電性酸化物
190 第1電極
192 第2電極
194 第1分割電極
196 第2分割電極
198 センサエリア
200 検出器システム
202 カメラ
204 ヒューマンマシンインターフェース
206 娯楽装置
208 追跡システム
210 横方向評価ユニット
212 位置情報
214 撮像装置
216 制御要素
218 使用者
220 ビーコン装置
222 マシン
224 進路制御装置
226 電流を持続する能力のある材料層
228 第1電極
230 第2電極
232 ビーム経路
234 PINダイオード
236 i型半導体層
238 n型半導体層
240 p型半導体層
242 薄膜太陽電池
244 p型吸収材料
246 バック接点層
248 境界層
250 緩衝層
252 保護層
254 電荷担体収集層
256 透明導電性酸化物層
258 光ダイオード
260 切り替え装置
262 コロイド膜
264 量子ドット
266 ショットキーダイオード
268 第1電極
270 第2電極
272 光学的に透明な電極
274 インジウムドープスズ酸化物(ITO)電極
276 金属電極
278 アルミニウム(Al)電極
280 ショットキーバリア
282 阻止層
284 二酸化チタン(TiO2)層
286 フッ素ドープスズ酸化物(SnO2:F、FTO)電極
288 導電性ポリマー
290 PEDOT層
292 分割電極
294 銀(Ag)電極
296 メソ多孔質酸化チタン(TiO2)層
Claims (54)
- 少なくとも1個の物体(112)を光学的に検出する検出器(110)であって、
少なくとも1個の縦方向光学センサ(114)であって、少なくとも1つのセンサ領域(130)を有し、光ビーム(132)による前記センサ領域(130)の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、前記縦方向センサ信号は、前記照明の総出力が同じである場合、前記センサ領域(130)内の光ビーム(132)のビーム断面積(174)に依存し、前記センサ領域(130)は電流持続能力のある少なくとも1種の材料を含み、前記材料の少なくとも1つの特性は、前記照明の総出力が同じである場合、前記センサ領域(130)内の前記光ビーム(132)の前記ビーム断面積に依存し、前記縦方向センサ信号は前記少なくとも1つの特性に依存する、縦方向光学センサ(114)と、
少なくとも1個の評価装置(140)であって。前記縦方向光学センサ(114)の縦方向センサ信号を評価することによって、前記物体(112)の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置(140)と、を含み、
前記センサ領域(130)は少なくとも1種の光伝導性材料(134)を含み、前記光伝導性材料(134)の導電率は、前記照明の総出力が同じである場合、センサ領域(130)内の光ビーム(132)の前記ビーム断面積(174)に依存し、前記縦方向センサ信号は前記導電率に依存する、検出器(110)。 - 前記光導電性材料(134)が硫化鉛(PbS)、硫化銅インジウム(CIS)、セレン化銅インジウムガリウム(CIGS)、硫化銅亜鉛スズ(CZTS)、セレン化鉛(PbSe)、セレン化銅亜鉛スズ(CZTSe)、テルル化カドミウム(CdTe)、テルル化水銀カドミウム(HgCdTe)、テルル化水銀亜鉛(HgZnTe)、硫セレン化鉛(PbSSe)、銅−亜鉛−スズ−硫黄−セレンカルコゲニド(CZTSSe)、非晶質シリコン(a−Si)、非晶質シリコン(a−Si)を含む合金、微結晶シリコン(μc−Si)、ゲルマニウム(Ge)、ヒ化インジウム(InAs)、ヒ化インジウムガリウム(InGaAs)、アンチモン化インジウム(InSb)からなる群から選択され、前記プニクトゲニドが窒化インジウム(InN)、窒化ガリウム(GaN)、窒化インジウムガリウム(InGaN)、リン化インジウム(InP)、リン化ガリウム(GaP)、リン化インジウムガリウム(InGaP)、ヒ化インジウム(InAs)、ヒ化ガリウム(GaAs)、ヒ化インジウムガリウム(InGaAs)、アンチモン化インジウム(InSb)、アンチモン化ガリウム(GaSb)、アンチモン化インジウムガリウム(InGaSb)、リン化インジウムガリウム(InGaP)、ヒ化リン化ガリウム(GaAsP)、およびリン化アルミニウムガリウム(AlGaP)、ならびにこれらの固溶体および/またはドープ変形から成るから成る群から選択される請求項1に記載の検出器(110)。
- 前記光伝導性材料(134)がドープシリコンを、特にシリコンフロートゾーンウェハーとして含み、ドープシリコンが好ましくは1013cm−3以下のドーパント濃度、5・102・Ωcm以上の導電性、および/または500μm以下の厚さを示す請求項1または2に記載の検出器(110)。
- 前記光伝導性材料(134)がコロイド膜(262)として提供され、前記コロイド膜(262)が量子ドット(264)を含む請求項1から3のいずれか一項に記載の検出器(110)。
- 前記光伝導性材料(134)が有機光伝導性材料であり、前記有機光伝導性材料が少なくとも1個の共役芳香族分子、特に色素または顔料、および/または電子ドナー材料と電子アクセプタ材料の混合物を含む請求項1から4のいずれか一項に記載の検出器(110)。
- 有機光伝導性材料がフタロシアニン、ナフタロシアニン、サブフタロシアニン、ペリレン、アントラセン、ピレン、オリゴチオフェン、ポリチオフェン、フラーレン、インジゴイド色素、ビスアゾ顔料、スクアリリウム色素、チアピリリウム色素、アズレニウム色素、ジチオケトピロロピロール、キナクリドン、ジブロモアンタンスロン、ポリビニルカルバゾール、これらの誘導体または組み合わせから成る群から選択される化合物を含む請求項5に記載の検出器(110)。
- 電子ドナー材料が有機ドナーポリマー、特にポリ[3−ヘキシルチオフェン−2,5.ジイル](P3HT)、ポリ[3−(4−n−オクチル)−フェニルチオフェン](POPT)、ポリ[3−10−n−オクチル−3−フェノチアジン−ビニレンチオフェン−コ−2,5−チオフェン](PTZV−PT)、ポリ[4,8−ビス[(2−エチルヘキシル)オキシ]ベンゾ[1,2−b:4,5−b’]ジチオフェン−2,6−ジイル][3−フルオロ−2−[(2−エチルヘキシル)カルボニル]チエノ[3,4−b]チオフェンジイル](PTB7)、ポリ[チオフェン−2,5−ジイル−オルト−[5,6−ビス(ドデシルオキシ)ベンゾ[c][1,2,5]チアジアゾール]−4,7−ジイル](PBT−T1)、ポリ[2,6−(4,4−ビス−(2−エチルヘキシル)−4H−シクロペンタ[2,1−b;3,4−b’]ジチオフェン)−オルト−4,7(2,1,3−ベンゾチアジアゾール)](PCPDTBT)、ポリ[5,7−ビス(4−デカニル−2−チエニル)−チエノ(3,4−b)ジアチアゾールチオフェン−2,5](PDDTT)、ポリ[N−9’−ヘプタデカニル−2,7−カルバゾール−オルト−5,5−(4’,7’−ジ−2−チエニル−2’,1’,3’−ベンゾチアジアゾール)](PCDTBT)、ポリ[(4,4’−ビス(2−エチルヘキシル)ジチエノ[3,2−b;2’,3’−d]シロール)−2,6−ジイル−オルト−(2,1,3−ベンゾチアジアゾール)−4,7−ジイル](PSBTBT)、ポリ[3−フェニルヒドラゾンチオフェン](PPHT)、ポリ[2−メトキシ−5−(2−エチルヘキシルオキシ)−1,4−フェニレンビニレン](MEH−PPV)、ポリ[2−メトキシ−5−(2’−エチルヘキシルオキシ)−1,4−フェニレン−1,2−エテニレン−2,5−ジメトキシ−1,4−フェニレン−1,2−エテニレン](M3EH−PPV)、ポリ[2−メトキシ−5−(3’,7’−ジメチルオクチルオキシ)−1,4−フェニレンビニレン](MDMO−PPV)、ポリ[9,9−ジ−オクチルフルオレン−コ−ビス−N,N−4−ブチルフェニル−ビス−N,N−フェニル−1,4−フェニレンジアミン](PFB)、またはこれらの誘導体、修飾体もしくは混合物のうち1種を含む請求項5または6に記載の検出器(110)。
- 電子アクセプタ材料がフラーレンベースの電子アクセプタ材料、特に[6,6]−フェニル−C61−酪酸メチルエステル(PC60BM)、[6,6]−フェニル−C71−酪酸メチルエステル(PC70BM)、[6,6]−フェニル−C84−酪酸メチルエステル(PC84BM)、インデン−C60ビス付加体(ICBA)、1つまたは2つの付着オリゴエーテル(OE)鎖(それぞれC70−DPM−OEまたはC70−DPM−OE2)を含むジフェニルメタノフラーレン(DPM)成分、またはこれらの誘導体、修飾体もしくは混合物のうち1種を含む請求項5から7のいずれか一項に記載の検出器(110)。
- 電子アクセプタ材料が有機アクセプタポリマー、特にシアノ−ポリ[フェニレンビニレン](CN−PPV)、ポリ[5−(2−(エチルヘキシルオキシ)−2−メトキシシアノテレフタルイデン](MEH−CN−PPV)、ポリ[オキサ−1,4−フェニレン−1,2−(1−シアノ)−エチレン−2,5−ジオクチルオキシ−1,4−フェニレン−1,2−(2−シアノ)−エチレン−1,4−フェニレン](CN−エーテル−PPV)、ポリ[1,4−ジオクチルオキシ−p−2,5−ジシアノフェニレンビニレン](DOCN−PPV)、ポリ[9,9’−ジオクチルフルオレン−コ−ベンゾチアジアゾール](PF8BT)、またはこれらの誘導体、修飾体もしくは混合物のうち1種を含む請求項5から8のいずれか一項に記載の検出器(110)。
- 前記光学検出器が前記センサ領域(130)の少なくとも一部の電気抵抗または導電性の少なくとも1回または複数回の測定によって、具体的には少なくとも1回の電流−電圧測定および/または少なくとも1回の電圧−電流測定の実施によって、前記縦方向センサ信号を生成するよう適応された請求項1から9のいずれか一項に記載の検出器(110)。
- 材料全体にわたりバイアス電圧が印加される請求項10に記載の検出器(110)。
- バイアス電圧源(150)および負荷抵抗器が前記縦方向光学センサ(114)と直列に配列される請求項11に記載の検出器(110)。
- 前記センサ領域(130)の導電性が、前記照明の総出力が同じである場合、前記センサ領域(130)内で前記光ビーム(132)によって生成される光点のビーム幅の減少に伴って減少する請求項1から12のいずれか一項に記載の検出器(110)。
- 前記縦方向光学センサ(114)が少なくとも1つの光伝導性材料(134)の層(168)およびこの層(168)と接触する少なくとも2個の電極(176、178)とを含み、前記少なくとも2個の電極(176、178)が前記光伝導性材料(134)の層(168)において別々の位置に適用される請求項1から13のいずれか一項に記載の検出器(110)。
- 前記少なくとも2個の電極(176、178)が層(168)の同じ側に適用される請求項14に記載の検出器(110)。
- 前記光伝導性材料(134)の層(168)とこの層(168)と接触する前記電極(176、178)のうち少なくとも1個との間の境界にショットキーバリアが形成される請求項14または15に記載の検出器(110)。
- 少なくとも1つの前記光伝導性材料(134)の層(168)が少なくとも1個の基板(170)へ直接または間接的に適用される請求項14から16のいずれか一項に記載の検出器(110)。
- 前記基板(170)が絶縁性基板、好ましくはセラミック基板(172)である請求項17に記載の検出器(110)。
- 前記基板(170)が少なくとも部分的に透明または透光性である請求項17または18に記載の検出器(110)。
- 前記少なくとも1個の縦方向光学センサ(114)が少なくとも1個の透明な縦方向光学センサを含む請求項1から19のいずれか一項に記載の検出器(110)。
- 前記検出器(110)が少なくとも2個の縦方向光学センサ(114)から成る少なくとも1つのスタックを含む請求項1から20のいずれか一項に記載の検出器(110)。
- 前記検出器(110)が少なくとも2個の縦方向光学センサ(114)から成る少なくとも1つの配列を含み、配列が光軸(116)に対して直角に配列される請求項1から21のいずれか一項に記載の検出器(110)。
- 配列内の複数の前記縦方向光学センサ(114)が複数の個別の抵抗器から成る1つのマトリクス内に配列され、前記マトリクス内の個々の抵抗器の合計抵抗が前記配列内で入射光ビーム(132)によって照らされる前記縦方向光学センサ(114)の数、Nに依存し、前記光ビーム(132)によって照らされる前記縦方向光学センサ(114)の数Nを判定するよう前記評価装置(140)が適応され、評価装置がさらに、前記光ビーム(132)によって照らされるN個の前記縦方向光学センサ(114)の使用によって物体(112)の少なくとも1つの縦座標を判定するように適用された請求項22に記載の検出器(110)。
- 前記縦方向光学センサ(114)がさらに、前記光ビーム(132)による前記センサ領域(130)の照明が付加的に前記センサ領域(130)内の温度上昇を引き起こし、前記センサ領域(130)の導電性が、照明の総出力が同じである場合、前記センサ領域(130)内の温度のさらに依存し、前記縦方向センサ信号が、総出力が同じである場合、前記センサ領域(130)内の温度にさらに依存するように設計された請求項1から23のいずれか一項に記載の検出器(110)。
- 評価装置(140)が照明の幾何形状と、検出器(110)を基準とする物体(112)の相対位置との間における少なくとも1つの所定の関係から、物体(112)の縦方向位置に関する情報のうち少なくとも1つの項目を生成するように設計される、請求項1から24のいずれか一項に記載の検出器(110)。
- 評価装置(140)が少なくとも1個の縦方向センサ信号からの光ビーム(132)のビーム断面(174)の判定によって、物体(112)の縦方向位置に関する情報のうち少なくとも1つの項目を生成するように適合される、請求項25に記載の検出器(110)。
- 前記物体(112)の縦方向位置に関する前記少なくとも1項目の情報を判定するため、前記光ビーム(132)の前記ビーム断面積(174)を前記光ビーム(132)の既知のビーム特性と比較するよう、前記評価装置(140)が適応される請求項26に記載の検出器(110)。
- 前記光ビーム(132)が非変調連続波光ビームである請求項1から27のいずれか一項に記載の検出器(110)。
- さらに、
少なくとも1個の横方向光学センサ(184)を含み、前記横方向光学センサ(184)が前記物体(112)から前記検出器(110)へと移動中の前記光ビーム(132)の横方向位置を判定するよう適応されており、前記横方向位置が前記検出器の光軸(116)に対して垂直な少なくとも1つの次元での位置であり、横方向光学センサ(184)が少なくとも1個の横方向センサ信号を生成するよう適応され、
前記評価装置(140)がさらに、前記横方向センサ信号の評価によって前記物体(112)の横方向位置に関する少なくとも1項目の情報を生成するよう設計されている、
請求項1から28のいずれか一項に記載の検出器(110)。 - 前記横方向光学センサ(184)が、少なくとも1個の第1電極(190)、少なくとも1個の第2の電極(192)および2つの別個の透明伝導性酸化物(188)層(186)の間に埋め込まれた少なくとも1種の光伝導性材料(134)層(168)を有する光検出器であり、前記横方向光学センサ(184)がセンサエリア(198)を有し、前記第1電極および前記第2電極が前記透明伝導性酸化物(188)層(186)のうち1つにおいて別々の位置に適用され、少なくとも1個の横方向光学センサ信号が前記センサエリア(198)内での前記光ビーム(132)の位置を示す請求項29に記載の検出器(110)。
- 少なくとも1個の電極(190、192)が少なくとも2個の部分電極(194、196)を有する分割電極であり、前記部分電極(194、196)を通る電流は、前記センサエリア(198)内での前記光ビーム(132)の位置に依存し、部分電極(194、196)を通る前記電流に従って前記横方向センサ信号を生成するよう前記横方向光学センサ(184)が適応される請求項30に記載の検出器(110)。
- 前記検出器(110)が、前記物体(112)の前記横方向位置に関する情報を、前記部分電極(194、196)を通る複数の電流の少なくとも1つの比率から導き出すよう適応される請求項31に記載の検出器(110)。
- 前記少なくとも1個の横方向光学センサ(184)が少なくとも1個の透明な横方向光学センサを含む請求項29から32のいずれか一項に記載の検出器(110)。
- さらに少なくとも1個の照明源(156)を含む請求項1から33のいずれか一項に記載の検出器(110)。
- 前記検出器(110)がさらに少なくとも1個の撮像装置(214)を含む請求項1から34のいずれか一項に記載の検出器(110)。
- 前記撮像装置(214)が、無機カメラ;モノクロムカメラ;マルチクロムカメラ;フルカラーカメラ;ピクセル化無機チップ;ピクセル化有機カメラ;CCDチップ、好ましくは多色CCDチップまたはフルカラーCCDチップ;CMOSチップ;IRカメラ;RGBカメラから成る群から選択されたカメラを含む請求項35に記載の検出器(110)。
- 前記縦方向光学センサ(114)が少なくとも1個の第1電極(228)、少なくとも1個の第2電極(230)、および前記第1電極(228)と前記第2電極(230)との間に位置する電流持続能力のある材料の層(226)を有する光検出器であり、前記第1電極(228)および前記第2電極(230)のうち少なくとも1個が透明な電極である請求項1から36のいずれか一項に記載の検出器(110)。
- 電流持続能力のある前記材料が前記第1電極(228)と前記第2電極(230)との間に配置され、PINダイオード(234)として配列され、前記PINダイオード(234)がn型半導体層(238)とp型半導体層(240)との間に位置するi型半導体層(236)を含み、前記i型半導体層(236)がn型半導体層(238)およびp型半導体層(240)それぞれの厚さを超える厚さを示す請求項1から37のいずれか一項に記載の検出器(110)。
- 少なくとも1個の物体(112)を光学的に検出する検出器(110)であって、
少なくとも1個の縦方向光学センサ(114)であって、少なくとも1つのセンサ領域(130)を有し、前記光ビーム(132)による前記センサ領域(130)の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、前記縦方向センサ信号は、照明の総出力が同じである場合、前記センサ領域(130)内の前記光ビーム(132)のビーム断面積(174)に依存し、前記縦方向光学センサ(114)は、前記照明の総出力が同じである場合に前記センサ領域(130)内の前記光ビーム(132)の前記ビーム断面積(174)に依存する少なくとも1つの縦方向センサ信号を生成することが可能であり、その結果、前記縦方向センサ信号の振幅は前記センサ領域(130)内で前記光ビーム(132)によって生成される光点の断面積の減少に伴って減少する、縦方向光学センサ(114)と、
少なくとも1個の評価装置(140)であって、前記縦方向光学センサ(114)の前記縦方向センサ信号を評価することによって、前記物体(112)の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置(140)と、を含む、請求項1から38のいずれか一項に記載の検出器(110)。 - 少なくとも1個の物体(112)を光学的に検出する検出器(110)であって、
少なくとも1個の縦方向光学センサ(114)であって、少なくとも1つのセンサ領域(130)を有し、前記光ビーム(132)による前記センサ領域(130)の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、前記縦方向センサ信号は、前記照明の総出力が同じである場合、前記センサ領域(130)内の前記光ビーム(132)のビーム断面積(174)に依存し、前記縦方向光学センサ(114)は、前記照明の総出力が同じである場合に前記センサ領域(130)内の前記光ビーム(132)の前記ビーム断面積(174)に依存する少なくとも1つの縦方向センサ信号を生成することが可能であり、前記縦方向センサ信号の最小値は前記センサ領域(130)に衝突する前記光ビーム(132)の断面積が最小となる条件下で発生する、縦方向光学センサ(114)と、
少なくとも1個の評価装置(140)であって、前記縦方向光学センサ(114)の前記縦方向センサ信号を評価することによって、前記物体(112)の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置(140)と、を含む、請求項1から39のいずれか一項に記載の検出器(110)。 - 少なくとも1個の物体(112)を光学的に検出する検出器(110)であって、
少なくとも1個の縦方向光学センサ(114)であって、少なくとも1つのセンサ領域(130)を有し、光ビーム(132)による前記センサ領域(130)の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、前記縦方向センサ信号は、照明の総出力が同じである場合、前記センサ領域(130)内の前記光ビーム(132)のビーム断面積(174)に依存し、前記縦方向センサ(114)は実質的に、0Hzから500Hzの前記光ビームの変調周波数範囲では非周波数依存である、縦方向光学センサ(114)と、
少なくとも1個の評価装置(140)であって、前記縦方向光学センサ(114)の前記縦方向センサ信号を評価することによって、前記物体(112)の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置(140)と、を含む、請求項1から40のいずれか一項に記載の検出器(110)。 - 少なくとも1個の物体(112)を光学的に検出する検出器(110)であって、
少なくとも1個の縦方向光学センサ(114)であって、少なくとも1つのセンサ領域(130)を有し、光ビーム(132)による前記センサ領域(130)の照明に依存する形で少なくとも1つの縦方向センサ信号を生成するよう設計され、前記縦方向センサ信号は、前記照明の総出力が同じである場合、前記センサ領域(130)内の前記光ビーム(132)のビーム断面積(174)に依存し、前記縦方向光学センサ(114)は光伝導性モードで駆動される少なくとも1個の光ダイオード(258)を含み、前記センサ領域(130)の導電性は、前記照明の総出力が同じである場合、前記センサ領域内の前記光ビームの前記ビーム断面積に依存し、前記縦方向センサ信号は前記導電性に依存する、縦方向光学センサ(114)と、
少なくとも1個の評価装置(140)であって、前記縦方向光学センサの前記縦方向センサ信号を評価することによって、前記物体(112)の縦方向位置に関する少なくとも1項目の情報を生成するよう設計される、評価装置(140)と、を含む、請求項1から41のいずれか一項に記載の検出器(110)。 - 光ダイオード(258)が少なくとも1種のp型吸収材料(244)、少なくとも1つのn型半導体層(238)、および少なくとも一対の電極(176、178)を含む請求項42に記載の検出器(110)。
- p型吸収材料(244)が第3族−第5族化合物、第2族−第6族化合物、第1族−第3族−第6族2化合物、および第1族2−第2族−第4族−第6族4化合物から成る群から選択される請求項43に記載の検出器(110)。
- p型吸収材料(244)が非晶質シリコン(a−Si)、非晶質シリコンを含む合金、微結晶シリコン(μc−Si)、ゲルマニウム(Ge)、硫化銅インジウム(CIS)、セレン化銅インジウムガリウム(CIGS)、硫化銅亜鉛スズ(CZTS)、セレン化銅亜鉛スズ(CZTSe)、銅−亜鉛−スズ−硫黄−セレンカルコゲニド(CZTSSe)、テルル化カドミウム(CdTe)、テルル化水銀カドミウム(HgCdTe)、ヒ化インジウム(InAs)、ヒ化インジウムガリウム(InGaAs)、アンチモン化インジウム(InSb)、有機−無機ハロゲン化物ペロブスカイト、ならびにこれらの固溶体および/またはドープ変形から成る群から選択される請求項44に記載の検出器(110)。
- バイアス電圧が前記光ダイオード(258)全体にわたり逆バイアスモードで印加される請求項42から45のいずれか一項に記載の検出器(110)。
- 少なくとも1個の物体(112)の撮像のためのカメラ(202)であって、検出器(110)に関する請求項1から46のいずれか一項に記載の検出器(110)を少なくとも1個含むカメラ(202)。
- 使用者(218)とマシン(222)との間で情報のうち少なくとも1つの項目を交換するためのヒューマンマシンインターフェース(204)であって、検出器(110)に関連する請求項1から46のいずれか一項に記載の少なくとも1個の検出器(110)を含み、使用者(218)の幾何学的情報のうち少なくとも1つの項目を検出器(110)によって生成するように設計され、幾何学情報に対し、情報のうち少なくとも1つの項目を割り当てるように設計されるヒューマンマシンインターフェース(204)。
- 少なくとも1つの娯楽機能を実行するための娯楽装置(206)であって、ヒューマンマシンインターフェース(204)に関する請求項48に記載のヒューマンマシンインターフェース(204)を少なくとも1つを含み、ヒューマンマシンインターフェース(204)を手段として情報のうち少なくとも1つの項目をプレーヤ(218)により入力可能となるように設計され、娯楽機能を情報に従って変えるように設計される娯楽装置(206)。
- 少なくとも1個の可動物体(112)の位置を追跡する追跡システム(208)であって、検出器(110)に関する請求項1から46のいずれか一項に記載の検出器(110)を少なくとも1個含み、さらに少なくとも1個の、物体(112)の一連の位置を追跡するように適合される進路制御装置(224)を含み、各位置が特定の時点における物体(112)の少なくとも1つの縦方向位置に関する情報のうち少なくとも1つの項目を含む追跡システム(208)。
- 少なくとも1個の物体(112)の少なくとも1つの位置を判定する走査システムであって、検出器(110)に関する請求項1から46のいずれか一項に記載の検出器(110)を少なくとも1個含み、さらに少なくとも1個の物体(112)の少なくとも1つの表面に位置する少なくとも1個の点の照明を目的に構成される少なくとも1本の光ビーム(132)を放出するように適合される少なくとも1個の照明源を含み、少なくとも1個の点と走査システムとの間の距離に関する情報のうち少なくとも1つの項目を少なくとも1個の検出器(110)の使用によって生成するように設計される走査システム。
- 請求項50に記載の少なくとも1つの追跡システム(208)と、請求項51に記載の少なくとも1つの走査システムとを含む立体視装置であって、前記追跡システム(208)および前記走査システムがそれぞれ少なくとも1個の縦方向光学センサ(114)を含み、これらが立体視装置の光軸(116)と平行な配向で整列されると同時に、個々の変位が前記立体視装置の前記光軸(116)に対して直角な配向を示す立体視装置。
- 少なくとも1個の物体(112)を光学的に検出する方法であって、
少なくとも1個の縦方向光学センサ(114)の使用によって少なくとも1つの縦方向センサ信号を生成する工程であって、前記縦方向センサ信号は光ビーム(132)による前記縦方向光学センサ(114)のセンサ領域(130)の照明に依存し、前記縦方向センサ信号は、照明の総出力が同じである場合、前記センサ領域(130)内の前記光ビーム(132)のビーム断面積(174)に依存し、前記センサ領域(130)は電流持続能力のある少なくとも1種の材料を含み、材料の少なくとも1つの特性は、前記照明の総出力が同じである場合、前記センサ領域(130)内の前記光ビーム(132)の前記ビーム断面積に依存し、前記縦方向センサ信号は前記少なくとも1つの特性に依存する、工程と、
前記縦方向光学センサ(114)の前記縦方向センサ信号を評価することによって前記物体(112)の縦方向位置に関する少なくとも1項目の情報を生成する工程と、を含み、
前記センサ領域(130)は少なくとも1種の光伝導性材料(134)を含み、前記光伝導性材料(134)の導電率は、前記照明の総出力が同じである場合、センサ領域(130)内の光ビーム(132)の前記ビーム断面積(174)に依存し、前記縦方向センサ信号は前記導電率に依存する、方法。 - 検出器(110)に言及している請求項1から46のいずれか一項に記載の検出器(110)の、交通技術における測距;交通技術における位置測定;娯楽用途;セキュリティ用途;ヒューマンマシンインターフェース用途;追跡用途;走査用途;立体視用途;写真撮影用途;撮像用途またはカメラ用途;少なくとも1つの空間のマップ生成用のマッピング用途;車両向けのホーミングビーコンまたは追跡ビーコン検出器;熱シグネチャによる物体の距離および/または位置の測定;機械視覚用途;ロボット工学用途;物流用途から成る群から選択される用途を目的とする使用。
Applications Claiming Priority (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15153215.7 | 2015-01-30 | ||
| EP15153215 | 2015-01-30 | ||
| EP15157363 | 2015-03-03 | ||
| EP15157363.1 | 2015-03-03 | ||
| EP15178493.1 | 2015-07-27 | ||
| EP15178493 | 2015-07-27 | ||
| EP15191960 | 2015-10-28 | ||
| EP15191960.2 | 2015-10-28 | ||
| EP15197728 | 2015-12-03 | ||
| EP15197728.7 | 2015-12-03 | ||
| PCT/EP2016/051817 WO2016120392A1 (en) | 2015-01-30 | 2016-01-28 | Detector for an optical detection of at least one object |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018513980A JP2018513980A (ja) | 2018-05-31 |
| JP2018513980A5 JP2018513980A5 (ja) | 2020-04-16 |
| JP6841769B2 true JP6841769B2 (ja) | 2021-03-10 |
Family
ID=55398254
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017558775A Active JP6841769B2 (ja) | 2015-01-30 | 2016-01-28 | 少なくとも1個の物体を光学的に検出する検出器 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10775505B2 (ja) |
| EP (1) | EP3251152B1 (ja) |
| JP (1) | JP6841769B2 (ja) |
| KR (1) | KR102496245B1 (ja) |
| CN (1) | CN107438775B (ja) |
| WO (1) | WO2016120392A1 (ja) |
Families Citing this family (119)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6415447B2 (ja) | 2012-12-19 | 2018-10-31 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 1つ以上の物体を光学的に検出するための検出器 |
| JP2016529474A (ja) | 2013-06-13 | 2016-09-23 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 少なくとも1つの物体を光学的に検出する検出器 |
| JP6440696B2 (ja) | 2013-06-13 | 2018-12-19 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 少なくとも1つの物体の方位を光学的に検出する検出器 |
| CN105637320B (zh) | 2013-08-19 | 2018-12-14 | 巴斯夫欧洲公司 | 光学检测器 |
| JP6570542B2 (ja) | 2014-01-16 | 2019-09-04 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー.Hewlett‐Packard Development Company, L.P. | 三次元物体の生成 |
| BR112016016401B1 (pt) | 2014-01-16 | 2021-02-23 | Hewlett-Packard Development Company, L.P | aparelho e método de controle de um sistema para a geração de um objeto tridimensional |
| US10220564B2 (en) | 2014-01-16 | 2019-03-05 | Hewlett-Packard Development Company, L.P. | Generating three-dimensional objects |
| CN106061714B (zh) * | 2014-01-16 | 2019-07-12 | 惠普发展公司,有限责任合伙企业 | 基于辐射率的温度确定 |
| KR102397527B1 (ko) | 2014-07-08 | 2022-05-13 | 바스프 에스이 | 하나 이상의 물체의 위치를 결정하기 위한 검출기 |
| WO2016051323A1 (en) | 2014-09-29 | 2016-04-07 | Basf Se | Detector for optically determining a position of at least one object |
| EP3230841B1 (en) | 2014-12-09 | 2019-07-03 | Basf Se | Optical detector |
| KR102496245B1 (ko) | 2015-01-30 | 2023-02-06 | 트리나미엑스 게엠베하 | 하나 이상의 물체의 광학적 검출을 위한 검출기 |
| DE102015004272B4 (de) * | 2015-04-07 | 2019-05-29 | Metek Meteorologische Messtechnik Gmbh | Störlicht-tolerantes Lidar-Messsystem und Störlicht-tolerantes Lidar-Messverfahren |
| KR101697857B1 (ko) * | 2015-04-08 | 2017-01-18 | 엘지전자 주식회사 | 이동 로봇 및 그의 위치인식방법 |
| US10955936B2 (en) | 2015-07-17 | 2021-03-23 | Trinamix Gmbh | Detector for optically detecting at least one object |
| KR102539263B1 (ko) | 2015-09-14 | 2023-06-05 | 트리나미엑스 게엠베하 | 적어도 하나의 물체의 적어도 하나의 이미지를 기록하는 카메라 |
| AU2017218461B2 (en) | 2016-02-11 | 2022-01-20 | Somark Group Limited | A radio device for implantation in an animal, a method for making a radio device for implantation in an animal, a method for providing electrical power to a radio device attached to an animal, a method for implanting a radio device into an animal, an animal having implanted therein a radio device, and a radio device implanted in an animal |
| CN109564952A (zh) | 2016-04-06 | 2019-04-02 | 特里纳米克斯股份有限公司 | 用于至少一个对象的光学检测的检测器 |
| US9880561B2 (en) * | 2016-06-09 | 2018-01-30 | X Development Llc | Sensor trajectory planning for a vehicle |
| EP3491418A1 (en) | 2016-07-29 | 2019-06-05 | trinamiX GmbH | Detector for an optical detection of at least one object |
| US11211513B2 (en) | 2016-07-29 | 2021-12-28 | Trinamix Gmbh | Optical sensor and detector for an optical detection |
| CN106289657A (zh) * | 2016-08-28 | 2017-01-04 | 成都润博科技有限公司 | 一种气泡检测装置用智能控制系统 |
| US20180113022A1 (en) * | 2016-10-20 | 2018-04-26 | Osram Opto Semiconductors Gmbh | Integrated circuit for sensor applications |
| EP3312576A1 (en) | 2016-10-20 | 2018-04-25 | trinamiX GmbH | A photodetector compensating circuit |
| WO2018077870A1 (en) | 2016-10-25 | 2018-05-03 | Trinamix Gmbh | Nfrared optical detector with integrated filter |
| US11428787B2 (en) | 2016-10-25 | 2022-08-30 | Trinamix Gmbh | Detector for an optical detection of at least one object |
| US11860292B2 (en) | 2016-11-17 | 2024-01-02 | Trinamix Gmbh | Detector and methods for authenticating at least one object |
| KR102502094B1 (ko) | 2016-11-17 | 2023-02-21 | 트리나미엑스 게엠베하 | 적어도 하나의 피사체를 광학적으로 검출하기 위한 검출기 |
| WO2018096083A1 (en) | 2016-11-25 | 2018-05-31 | Trinamix Gmbh | Optical detector comprising at least one optical waveguide |
| JP6690517B2 (ja) * | 2016-12-13 | 2020-04-28 | 株式会社デンソー | 運転支援装置、及び運転支援方法 |
| WO2018115073A1 (en) | 2016-12-21 | 2018-06-28 | Trinamix Gmbh | Detector for an optical detection |
| CN106876588B (zh) * | 2017-01-13 | 2020-02-18 | 电子科技大学 | 一种增强型热稳定性光敏传感器及其制备方法 |
| US20190386064A1 (en) | 2017-02-08 | 2019-12-19 | Trinamix Gmbh | Detector for an optical detection of at least one object |
| CN110291418B (zh) * | 2017-02-08 | 2024-01-26 | 特里纳米克斯股份有限公司 | 用于至少一个对象的光学检测的检测器 |
| CN110392844B (zh) | 2017-03-16 | 2024-03-12 | 特里纳米克斯股份有限公司 | 用于光学检测至少一个对象的检测器 |
| JP7204667B2 (ja) * | 2017-04-20 | 2023-01-16 | トリナミクス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 光検出器 |
| CN110998223B (zh) | 2017-06-26 | 2021-10-29 | 特里纳米克斯股份有限公司 | 用于确定至少一个对像的位置的检测器 |
| JP2020531848A (ja) | 2017-08-28 | 2020-11-05 | トリナミクス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 少なくとも一つの幾何学情報を決定するためのレンジファインダ |
| JP7179051B2 (ja) | 2017-08-28 | 2022-11-28 | トリナミクス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 少なくとも1つの物体の位置を決定するための検出器 |
| US11330798B2 (en) | 2017-10-12 | 2022-05-17 | Somark Group Limited | RFID tag insertion cartridge and an RFID tag insertion tool |
| US11143736B2 (en) | 2017-11-17 | 2021-10-12 | Trinamix Gmbh | Detector for determining a position of at least one object comprising at least one device to determine relative spatial constellation from a longitudinal coordinate of the object and the positions of reflection image and reference image |
| US11202062B2 (en) * | 2017-11-21 | 2021-12-14 | University Of New Hampshire | Methods and systems of determining quantum efficiency of a camera |
| US20190269999A1 (en) * | 2017-11-24 | 2019-09-05 | John A. Anderson | Systems and methods for projection of one or more safe visible laser lines for delineation in variable ambient lighting |
| CN107968135B (zh) * | 2017-11-24 | 2019-10-11 | 深圳先进技术研究院 | 非制冷型红外光探测器及其制备方法 |
| CN107831142B (zh) * | 2017-12-07 | 2024-01-02 | 黄保坤 | 光散射共焦激发收集系统 |
| CN111465827B (zh) | 2017-12-13 | 2023-06-23 | 特里纳米克斯股份有限公司 | 光谱仪设备及系统 |
| US11162843B2 (en) | 2017-12-13 | 2021-11-02 | Trinamix Gmbh | Spectrometer device and system |
| EP3724620B1 (en) | 2017-12-13 | 2024-02-28 | trinamiX GmbH | Spectrometer device and system |
| CN108111784B (zh) * | 2017-12-22 | 2020-06-26 | 成都先锋材料有限公司 | 一种生物活体影像监控系统 |
| US11458981B2 (en) * | 2018-01-09 | 2022-10-04 | Motherson Innovations Company Limited | Autonomous vehicles and methods of using same |
| CN108398682B (zh) * | 2018-01-18 | 2022-02-11 | 深圳市路畅科技股份有限公司 | 一种雷达图像显示的方法、装置以及倒车雷达系统 |
| EP3528004A1 (en) | 2018-02-14 | 2019-08-21 | trinamiX GmbH | Detector for an optical detection of at least one object |
| EP3790918A4 (en) | 2018-05-05 | 2022-03-16 | Jason D. Azoulay | OPEN SHELL CONJUGATED POLYMER CONDUCTORS, COMPOSITES AND COMPOSITIONS |
| US11875522B2 (en) * | 2018-05-09 | 2024-01-16 | Trinamix Gmbh | Method and devices for determining a filling level in at least one storage unit |
| JP7325500B2 (ja) | 2018-05-11 | 2023-08-14 | トリナミクス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 分光計装置 |
| DE102018208897A1 (de) * | 2018-06-06 | 2019-12-12 | Robert Bosch Gmbh | Empfangseinrichtung für ein Lidar-System |
| CN110735283B (zh) * | 2018-07-18 | 2023-06-23 | 青岛海尔智能技术研发有限公司 | 洗衣机及其衣物洗涤控制方法 |
| US11001979B2 (en) | 2018-08-13 | 2021-05-11 | Vergence Automation, Inc. | Methods and apparatus for ultrawide entrance angle reflective articles for use with autonomous vehicle machine vision systems |
| US20210314477A1 (en) * | 2018-08-17 | 2021-10-07 | Hewlett-Packard Development Company, L.P. | Exposure control of captured images |
| US10948571B1 (en) * | 2018-08-28 | 2021-03-16 | Rockwell Collins, Inc. | Long wave infrared emitter systems |
| US11762133B1 (en) | 2018-09-13 | 2023-09-19 | Vergence Automation, Inc. | Retroreflective materials and articles incorporating near-ideal total internal retroreflective elements |
| CN110910888B (zh) * | 2018-09-17 | 2022-06-14 | 中国移动通信集团设计院有限公司 | 语音识别装置及方法 |
| EP3624332B1 (en) * | 2018-09-17 | 2021-05-12 | IMEC vzw | Operational lifetime prediction of photovoltaic devices |
| CN110927128B (zh) * | 2018-09-20 | 2021-08-06 | Tcl科技集团股份有限公司 | 游离锌离子的检测方法 |
| WO2020106361A2 (en) | 2018-09-21 | 2020-05-28 | Joshua Tropp | Thiol-based post-modification of conjugated polymers |
| US11436753B2 (en) | 2018-10-30 | 2022-09-06 | Liberty Reach, Inc. | Machine vision-based method and system to facilitate the unloading of a pile of cartons in a carton handling system |
| CN111244317B (zh) * | 2018-11-27 | 2022-06-07 | 海思光电子有限公司 | 一种光发射器件、终端设备 |
| US11097796B2 (en) * | 2018-11-29 | 2021-08-24 | Saudi Arabian Oil Company | Articulated magnet-bearing legs for UAV landing on curved surfaces |
| KR20210113637A (ko) * | 2019-01-09 | 2021-09-16 | 트리나미엑스 게엠베하 | 적어도 하나의 대상체의 위치를 결정하기 위한 검출기 |
| US20220093811A1 (en) | 2019-01-18 | 2022-03-24 | Trinamix Gmbh | Optical sensor and detector for an optical detection |
| WO2020157029A1 (en) | 2019-01-29 | 2020-08-06 | Trinamix Gmbh | Optical detector |
| CN113874173A (zh) | 2019-02-08 | 2021-12-31 | 安川美国有限公司 | 对射式自动示教 |
| US11908956B2 (en) | 2019-02-27 | 2024-02-20 | Trinamix Gmbh | Optical sensor and detector for an optical detection |
| US20220131021A1 (en) | 2019-03-15 | 2022-04-28 | Trinamix Gmbh | Optical sensor, method for selecting an optical sensor and detector for optical detection |
| US11117325B2 (en) * | 2019-03-29 | 2021-09-14 | Xerox Corporation | Composite-based additive manufacturing (CBAM) augmented reality assisted sand blasting |
| JP7249193B2 (ja) * | 2019-04-03 | 2023-03-30 | 株式会社東芝 | 発電素子、発電モジュール、発電装置、発電システム、及び、発電素子の製造方法 |
| US10791324B1 (en) * | 2019-04-17 | 2020-09-29 | Waymo Llc | On-car stray-light testing cart |
| US11322125B2 (en) * | 2019-04-25 | 2022-05-03 | Gary Joseph Howe | Vibraphone pickup |
| CN110146159B (zh) * | 2019-05-05 | 2024-03-29 | 深圳市锐伺科技有限公司 | 一种tof光投射模块的光功率检测装置和方法 |
| US20220268627A1 (en) | 2019-07-17 | 2022-08-25 | Trinamix Gmbh | Spectrometer device |
| USD981057S1 (en) | 2019-08-15 | 2023-03-14 | Somark Group Pty Ltd. | RFID tag insertion cartridge |
| CN110556478B (zh) * | 2019-08-30 | 2023-04-07 | 桂林医学院 | 一种基于等离激元效应的钙钛矿弱光探测器 |
| US10837795B1 (en) * | 2019-09-16 | 2020-11-17 | Tusimple, Inc. | Vehicle camera calibration system |
| EP4042117A1 (en) | 2019-10-09 | 2022-08-17 | trinamiX GmbH | Photoconductor readout circuit |
| JP2022551698A (ja) | 2019-10-09 | 2022-12-13 | トリナミクス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 光導電体読み出し回路 |
| EP4042119A1 (en) | 2019-10-09 | 2022-08-17 | trinamiX GmbH | Photoconductor readout circuit |
| KR102348967B1 (ko) * | 2019-12-10 | 2022-01-10 | 고려대학교 산학협력단 | 페로브스카이트 광검출 소자 및 이의 제조방법 |
| US11781986B2 (en) | 2019-12-31 | 2023-10-10 | University Of Southern Mississippi | Methods for detecting analytes using conjugated polymers and the inner filter effect |
| TWI762855B (zh) * | 2020-01-10 | 2022-05-01 | 國立陽明交通大學 | 氣體感測器 |
| CN111211228A (zh) * | 2020-01-14 | 2020-05-29 | 天津大学 | 一种宽光谱探测器以及制备方法 |
| CN111146343B (zh) * | 2020-01-16 | 2022-05-17 | 吉林大学 | 基于二硫化钼/碳量子点界面层的钙钛矿太阳能电池及制备方法 |
| EP4097770A1 (en) | 2020-01-30 | 2022-12-07 | trinamiX GmbH | Photoconductor readout circuit |
| WO2021156428A1 (en) | 2020-02-06 | 2021-08-12 | Trinamix Gmbh | Temperature detection through differential dual detectors |
| CN115769362A (zh) * | 2020-05-22 | 2023-03-07 | 朗姆研究公司 | 介电表面的湿式官能化 |
| US20230088061A1 (en) * | 2020-06-23 | 2023-03-23 | Amkor Technology Singapore Holding Pte. Ltd. | Laser bonded devices, laser bonding tools, and related methods |
| CN112098498B (zh) * | 2020-06-29 | 2024-05-03 | 平高集团有限公司 | 绝缘材料表面缺陷检测方法及装置 |
| IL275896B (en) * | 2020-07-07 | 2022-07-01 | Frank Amit | Imaging device and method |
| WO2022018252A1 (en) | 2020-07-24 | 2022-01-27 | Trinamix Gmbh | Spectrometer device and method for measuring optical radiation |
| CN112083470B (zh) * | 2020-09-02 | 2023-11-24 | 重庆中易智芯科技有限责任公司 | 一种阻态敏感CdZnTe辐射探测器及其制造方法 |
| KR20230097023A (ko) | 2020-10-26 | 2023-06-30 | 트리나미엑스 게엠베하 | 적어도 하나의 물질의 적어도 하나의 특성을 결정하는 광학 검출기 및 방법 |
| CN112437213A (zh) * | 2020-10-28 | 2021-03-02 | 青岛小鸟看看科技有限公司 | 图像采集方法、手柄设备、头戴设备及头戴系统 |
| TWI726827B (zh) * | 2020-10-29 | 2021-05-01 | 李秉家 | 使用擴增實境的互動復健系統 |
| CN112527102B (zh) * | 2020-11-16 | 2022-11-08 | 青岛小鸟看看科技有限公司 | 头戴式一体机系统及其6DoF追踪方法和装置 |
| KR20230112641A (ko) | 2020-12-02 | 2023-07-27 | 트리나미엑스 게엠베하 | 스펙트럼 감지 디바이스 및 광학 방사선을 측정하기 위한 방법 |
| US11679875B2 (en) * | 2020-12-03 | 2023-06-20 | Saudi Arabian Oil Company | Mechanism for docking a magnetic crawler into a UAV |
| CN112617824B (zh) * | 2020-12-09 | 2021-10-01 | 南京睿蜂健康医疗科技有限公司 | 一种基于多通道fNIRS信号的冰毒成瘾者检测系统 |
| WO2022150280A1 (en) * | 2021-01-05 | 2022-07-14 | Liberty Reach, Inc. | Machine vision-based method and system to facilitate the unloading of a pile of cartons in a carton handling system |
| CN112799266A (zh) * | 2021-01-11 | 2021-05-14 | 深圳波导智慧科技有限公司 | 基于人脸识别技术的医用信息采集设备及其使用方法 |
| US11253768B1 (en) * | 2021-01-30 | 2022-02-22 | Q Experience LLC | Combination systems and methods of safe laser lines for delineation detection, reporting and AR viewing |
| CN113193061B (zh) * | 2021-03-24 | 2022-08-23 | 河北大学 | 基于PbSe薄膜的自供电光位置灵敏探测器 |
| US11893668B2 (en) | 2021-03-31 | 2024-02-06 | Leica Camera Ag | Imaging system and method for generating a final digital image via applying a profile to image information |
| CN113186600A (zh) * | 2021-04-27 | 2021-07-30 | 上海大学 | 基于高通量钙钛矿微单晶阵列的全光子密码原语制备方法 |
| CA3217335A1 (en) * | 2021-05-19 | 2022-11-24 | The Research Foundation For The State University Of New York | Solid-state amorphous selenium avalanche detector with hole blocking layer |
| EP4101367A1 (en) | 2021-06-09 | 2022-12-14 | Carl Zeiss Vision International GmbH | Method and device for determining a visual performance |
| DE102021118816A1 (de) * | 2021-07-21 | 2023-01-26 | Universität Siegen, Körperschaft des öffentlichen Rechts | Optisches Bauelement |
| CN113659080B (zh) * | 2021-08-13 | 2023-07-25 | 江苏盛开高新材料有限公司 | 一种钙钛矿叠层电池及其制备方法 |
| CN114136981A (zh) * | 2021-11-26 | 2022-03-04 | 广东速美达自动化股份有限公司 | 一种锂电池包Mylar膜检测方法及检测系统 |
| WO2023170190A1 (en) | 2022-03-10 | 2023-09-14 | Trinamix Gmbh | Readout-circuit |
| CN115998254B (zh) * | 2022-12-26 | 2024-08-06 | 复旦大学 | 基于micro-LED的肤色检测装置及其制备方法 |
Family Cites Families (361)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| LU35237A1 (ja) | 1956-06-27 | |||
| US3035176A (en) | 1959-11-23 | 1962-05-15 | Packard Bell Electronics Corp | Monoscopic range finder |
| CH388657A (fr) | 1963-04-17 | 1965-02-28 | Paillard Sa | Dispositif pour détecter le maximum de netteté d'une image |
| US3562785A (en) | 1968-11-20 | 1971-02-09 | Logetronics Inc | Image adjusting method |
| US3564268A (en) | 1969-06-27 | 1971-02-16 | Standard Change Makers Inc | Document verifier using photovoltaic cell with light sensitive bars |
| SE407976B (sv) | 1973-03-13 | 1979-04-30 | Bofors Ab | Forfarande och anordning for malfoljning |
| JPS5625648B2 (ja) | 1973-04-11 | 1981-06-13 | ||
| JPS5634842B2 (ja) | 1973-10-26 | 1981-08-13 | ||
| FR2271590B1 (ja) | 1974-01-15 | 1978-12-01 | Thomson Brandt | |
| US4079247A (en) | 1975-05-16 | 1978-03-14 | Claude Bricot | Optical focussing device |
| US4256513A (en) | 1978-10-19 | 1981-03-17 | Matsushita Electric Industrial Co., Ltd. | Photoelectric conversion device |
| JPS55159445A (en) | 1979-05-31 | 1980-12-11 | Ricoh Co Ltd | Electrophotographic receptor |
| EP0020879A1 (en) | 1979-06-06 | 1981-01-07 | Erwin Sick GmbH Optik-Elektronik | Optical electronic distance sensor |
| NL187374C (nl) | 1981-07-10 | 1991-09-02 | Philips Nv | Inrichting voor het detecteren van straling. |
| JPS58175091A (ja) | 1982-04-06 | 1983-10-14 | 株式会社東芝 | セキユリテイ・ストレツド検出装置 |
| US4548886A (en) | 1982-06-08 | 1985-10-22 | Canon Kabushiki Kaisha | Radiation sensitive organic thin film comprising an azulenium salt |
| JPS5950579A (ja) | 1982-09-16 | 1984-03-23 | Komatsu Ltd | 半導体光位置検出器 |
| JPS5979805A (ja) | 1982-10-29 | 1984-05-09 | Matsushita Electric Works Ltd | 距離センサ |
| US4593187A (en) | 1982-10-29 | 1986-06-03 | The Perkin-Elmer Corporation | Non-imaging illumination incidence angle detection system |
| AU2239683A (en) | 1982-12-16 | 1984-06-21 | Vickers Plc | Photoconductive compositions |
| JPS61245579A (ja) * | 1984-02-17 | 1986-10-31 | アメリカン サイアナミド カンパニ− | 半導体装置と製法 |
| US4584704A (en) | 1984-03-01 | 1986-04-22 | Bran Ferren | Spatial imaging system |
| US4773751A (en) | 1984-03-09 | 1988-09-27 | Minolta Camera Kabushiki Kaisha | Infinite level setting device for a distance measuring device |
| JPS6189501A (ja) | 1984-10-08 | 1986-05-07 | Hitachi Ltd | 境界面測定装置 |
| GB2165641B (en) | 1984-10-13 | 1988-01-13 | Graviner Ltd | Measuring distance to a fire |
| US4602158A (en) | 1984-10-26 | 1986-07-22 | Itek Corporation | PbS-PbSe IR detector arrays |
| US4603258A (en) | 1984-11-16 | 1986-07-29 | Sri International | Photocapacitive detector array |
| JPS61135280A (ja) | 1984-12-06 | 1986-06-23 | Toshiba Corp | 三次元撮像素子 |
| DE3582576D1 (de) | 1985-01-03 | 1991-05-23 | Ciba Geigy Ag | Dithioketo-pyrrolo-pyrrole, verfahren zu deren herstellung und verwendung. |
| JPS61186804A (ja) | 1985-02-11 | 1986-08-20 | ゼロツクス コーポレーシヨン | 光検出装置 |
| US4647193A (en) | 1985-06-10 | 1987-03-03 | Rca Corporation | Optical target ranging apparatus |
| US4760004A (en) | 1986-11-10 | 1988-07-26 | Ciba-Geigy Corporation | Thioquinacridones and isothioquinacridones, preparation and use thereof |
| JPS6417485A (en) | 1987-07-10 | 1989-01-20 | Mitsubishi Electric Corp | Image sensing element |
| EP0309631B1 (en) | 1987-09-28 | 1994-03-30 | KABUSHIKI KAISHA KOBE SEIKO SHO also known as Kobe Steel Ltd. | Method and apparatus for detecting position/variance of input light |
| CH674596A5 (ja) | 1988-02-12 | 1990-06-15 | Sulzer Ag | |
| US5082363A (en) | 1988-02-12 | 1992-01-21 | Omron Tateisi Electronics Co. | Optical distance measuring apparatus and method using light projection pulses |
| US4952472A (en) | 1988-07-01 | 1990-08-28 | Xerox Corporation | Indigoid photoconductor imaging members |
| JP2687154B2 (ja) | 1988-12-23 | 1997-12-08 | 株式会社小松製作所 | 三次元位置計測装置 |
| JPH04240817A (ja) | 1991-01-25 | 1992-08-28 | Seiko Epson Corp | 光学素子 |
| AU650878B2 (en) | 1990-04-17 | 1994-07-07 | Ecole Polytechnique Federale De Lausanne | Photovoltaic cells |
| DE4211875A1 (de) | 1990-10-09 | 1993-10-14 | Zeiss Carl Fa | Optischer Abstandssensor |
| JP3187897B2 (ja) | 1991-02-26 | 2001-07-16 | オリンパス光学工業株式会社 | 測距装置 |
| US5375008A (en) | 1991-07-17 | 1994-12-20 | Electronic Warfare Associates, Inc. | Systems for distinguishing between friendly ground targets and those of a foe |
| JPH0548833A (ja) | 1991-08-07 | 1993-02-26 | Asahi Optical Co Ltd | 色収差補正構造 |
| US5227985A (en) | 1991-08-19 | 1993-07-13 | University Of Maryland | Computer vision system for position monitoring in three dimensions using non-coplanar light sources attached to a monitored object |
| JP3110095B2 (ja) | 1991-09-20 | 2000-11-20 | 富士通株式会社 | 測距方法及び測距装置 |
| US5216476A (en) | 1991-10-15 | 1993-06-01 | Synectics Corporation | Photogrammetric laser system |
| US5291066A (en) | 1991-11-14 | 1994-03-01 | General Electric Company | Moisture-proof electrical circuit high density interconnect module and method for making same |
| US5355241A (en) | 1991-12-09 | 1994-10-11 | Kelley Clifford W | Identification friend or foe discriminator |
| AT401829B (de) | 1992-02-25 | 1996-12-27 | Oesterr Nationalbank | Verfahren zur zustands-, qualitäts- bzw. passerkontrolle von optischen sicherheitsmerkmalenauf wertpapieren, insbesondere banknoten, und vorrichtung zur durchführung des verfahrens |
| JPH05240640A (ja) | 1992-02-26 | 1993-09-17 | Omron Corp | 光学式距離測定装置 |
| JPH06133321A (ja) | 1992-10-15 | 1994-05-13 | Sony Corp | Ccd撮像装置 |
| JP3406656B2 (ja) | 1992-12-19 | 2003-05-12 | ペンタックス株式会社 | 測距装置 |
| JPH07146113A (ja) | 1993-11-25 | 1995-06-06 | Hitachi Zosen Corp | レーザ変位計 |
| JP3143319B2 (ja) | 1994-05-26 | 2001-03-07 | 防衛庁技術研究本部長 | 電子光学機器 |
| US5589928A (en) | 1994-09-01 | 1996-12-31 | The Boeing Company | Method and apparatus for measuring distance to a target |
| JPH08159714A (ja) | 1994-11-30 | 1996-06-21 | Omron Corp | 位置検出センサ |
| JPH08292586A (ja) | 1995-04-21 | 1996-11-05 | Hodogaya Chem Co Ltd | 電子写真用感光体 |
| US6363164B1 (en) | 1996-05-13 | 2002-03-26 | Cummins-Allison Corp. | Automated document processing system using full image scanning |
| JP3481631B2 (ja) | 1995-06-07 | 2003-12-22 | ザ トラスティース オブ コロンビア ユニヴァーシティー イン ザ シティー オブ ニューヨーク | 能動型照明及びデフォーカスに起因する画像中の相対的なぼけを用いる物体の3次元形状を決定する装置及び方法 |
| CA2196563A1 (en) | 1995-06-07 | 1996-12-19 | Shree K. Nayar | Apparatus and methods for determining the three-dimensional shape of an object using active illumination and relative blurring in two images due to defocus |
| DE19526526A1 (de) | 1995-07-20 | 1997-01-23 | Bayerische Motoren Werke Ag | Vorrichtung zum optischen Abtasten von Meßflächen |
| JPH11513483A (ja) | 1995-09-21 | 1999-11-16 | オムニプラナー,インコーポレーテッド | 位置及び方位を決定する方法及び装置 |
| JP3364382B2 (ja) | 1996-07-12 | 2003-01-08 | 株式会社東芝 | 試料面位置測定装置及び測定方法 |
| JPH10221064A (ja) | 1997-02-07 | 1998-08-21 | Nippon Soken Inc | 光学式測距装置 |
| DE69832574T2 (de) | 1997-07-29 | 2006-06-14 | Nhk Spring Co Ltd | Optisches Identifizierungssystem mit cholesterischen Flüssigkristallen |
| EP1027741A4 (en) | 1997-08-15 | 2005-10-12 | Dupont Displays Inc | ORGANIC DIODES WITH SWITCHABLE PHOTO SENSITIVITY |
| JPH11230860A (ja) | 1998-02-12 | 1999-08-27 | Fujitsu Ltd | 光学的薄膜計測方法及び装置並びにこの装置に用いられる光学的薄膜計測妨害光除去装置 |
| JPH11257917A (ja) | 1998-03-12 | 1999-09-24 | Omron Corp | 反射型光式センサ |
| JPH11325825A (ja) | 1998-05-13 | 1999-11-26 | Olympus Optical Co Ltd | 距離測定装置 |
| US6191881B1 (en) | 1998-06-22 | 2001-02-20 | Citizen Watch Co., Ltd. | Variable focal length lens panel and fabricating the same |
| US6266142B1 (en) | 1998-09-21 | 2001-07-24 | The Texas A&M University System | Noncontact position and orientation measurement system and method |
| JP3219387B2 (ja) | 1999-01-08 | 2001-10-15 | ミノルタ株式会社 | 撮像装置および該撮像装置を用いた測距装置 |
| US6359211B1 (en) | 1999-06-17 | 2002-03-19 | Chemmotif, Inc. | Spectral sensitization of nanocrystalline solar cells |
| US6417836B1 (en) | 1999-08-02 | 2002-07-09 | Lucent Technologies Inc. | Computer input device having six degrees of freedom for controlling movement of a three-dimensional object |
| WO2001029576A1 (en) | 1999-10-21 | 2001-04-26 | Psc Scanning, Inc. | Rangefinder using collected spot spread and insert shadowing |
| US6785028B1 (en) * | 1999-11-24 | 2004-08-31 | Ricoh Company, Ltd. | Optical scanning device having a temperature compensation unit |
| EP1849620B1 (en) | 2000-01-21 | 2016-03-23 | Viavi Solutions Inc. | Optically variable security devices |
| JP4547760B2 (ja) | 2000-02-28 | 2010-09-22 | 株式会社島津製作所 | 放射線検出器および放射線撮像装置 |
| US6590224B2 (en) | 2000-03-22 | 2003-07-08 | Fuji Photo Film Co., Ltd. | Image storage medium and method of manufacturing the same |
| JP3554929B2 (ja) | 2000-05-09 | 2004-08-18 | 韓国科学技術院 | 多方向反射体を用いたハードディスクドライブスライダーの6自由度運動の測定のためのスイングアーム光学系 |
| EP1176646A1 (en) | 2000-07-28 | 2002-01-30 | Ecole Polytechnique Féderale de Lausanne (EPFL) | Solid state heterojunction and solid state sensitized photovoltaic cell |
| US6699728B2 (en) | 2000-09-06 | 2004-03-02 | Osram Opto Semiconductors Gmbh | Patterning of electrodes in oled devices |
| AU2000274683A1 (en) | 2000-09-06 | 2002-03-22 | Osram Opto Semicunductors Gmbh | Patterning of electrodes in oled devices |
| DE10146752B4 (de) | 2000-09-25 | 2006-03-23 | Leuze Electronic Gmbh & Co Kg | Optoelektronische Vorrichtung |
| JP2002100469A (ja) | 2000-09-25 | 2002-04-05 | Pioneer Electronic Corp | 有機エレクトロルミネッセンス表示パネル |
| JP4278080B2 (ja) | 2000-09-27 | 2009-06-10 | 富士フイルム株式会社 | 高感度受光素子及びイメージセンサー |
| DK1373272T3 (da) | 2001-03-23 | 2005-09-05 | Basf Ag | Ter-alkylphenoxysubstituerede polycykliske forbindelser |
| EP3118907A1 (en) | 2001-06-11 | 2017-01-18 | The Trustees of Princeton University | Organic photovoltaic devices |
| DE10130763A1 (de) | 2001-06-26 | 2003-01-02 | Bosch Gmbh Robert | Vorrichtung zur optischen Distanzmessung über einen grossen Messbereich |
| DE10134132A1 (de) | 2001-07-13 | 2003-01-30 | Siemens Ag | Vorrichtung und Verfahren zum kontinuierlichen Drucken von organischen Leuchtdioden |
| US6656611B2 (en) | 2001-07-20 | 2003-12-02 | Osram Opto Semiconductors Gmbh | Structure-defining material for OLEDs |
| EP1412697A1 (en) | 2001-08-01 | 2004-04-28 | National Research Council Of Canada | System and method of light spot position and color detection |
| NO316632B1 (no) | 2001-11-16 | 2004-03-15 | Thin Film Electronics Asa | Matriseadresserbart optoelektronisk apparat og elektrodeanordning i samme |
| JP2003209665A (ja) | 2002-01-16 | 2003-07-25 | Fuji Photo Film Co Ltd | 画像読取方法および画像記録読取装置 |
| US20030147002A1 (en) | 2002-02-06 | 2003-08-07 | Eastman Kodak Company | Method and apparatus for a color sequential scannerless range imaging system |
| JP2003333757A (ja) | 2002-05-14 | 2003-11-21 | Sony Corp | 電源装置 |
| JP2005525956A (ja) | 2002-05-17 | 2005-09-02 | チバ スペシャルティ ケミカルズ ホールディング インコーポレーテッド | 五環式キサンチリウム染料を含む光学記憶媒体 |
| CH695914A5 (de) | 2002-05-17 | 2006-10-13 | Hera Rotterdam Bv | Vorrichtung und Verfahren zur optischen Erfassung von Gegenständen. |
| US20050122308A1 (en) | 2002-05-28 | 2005-06-09 | Matthew Bell | Self-contained interactive video display system |
| EP1376205A1 (fr) | 2002-06-21 | 2004-01-02 | Asulab S.A. | Moyens de connexion destinés à établir une liaison électrique entre une cellule, notamment à cristaux liquides, et un circuit d'alimentation ou de commande |
| US20040031519A1 (en) | 2002-08-13 | 2004-02-19 | Agfa-Gevaert | Nano-porous metal oxide semiconductor spectrally sensitized with metal oxide chalcogenide nano-particles |
| DE10238994A1 (de) | 2002-08-20 | 2004-02-26 | Basf Ag | Rylenfarbstoffe |
| GB2395261A (en) | 2002-11-11 | 2004-05-19 | Qinetiq Ltd | Ranging apparatus |
| US9177387B2 (en) | 2003-02-11 | 2015-11-03 | Sony Computer Entertainment Inc. | Method and apparatus for real time motion capture |
| JP2006523869A (ja) | 2003-03-12 | 2006-10-19 | オー−プン・アンパルトセルスカブ | 放射線を放射する要素の位置を測定するシステム及び方法 |
| US6995445B2 (en) | 2003-03-14 | 2006-02-07 | The Trustees Of Princeton University | Thin film organic position sensitive detectors |
| EP1464990B8 (de) | 2003-03-31 | 2019-11-13 | RUAG Schweiz AG | Modulierbarer reflektor |
| SG115546A1 (en) | 2003-06-23 | 2005-10-28 | Affineon Technologies Pte Ltd | Computer input device tracking six degrees of freedom |
| US7132788B2 (en) | 2003-09-09 | 2006-11-07 | Osram Opto Semiconductors Gmbh | Optimal bank shapes for inkjet printing |
| JP2005091286A (ja) | 2003-09-19 | 2005-04-07 | Nec Corp | レーザ測距装置 |
| JP4262566B2 (ja) | 2003-10-16 | 2009-05-13 | 株式会社日立製作所 | 車載用撮像装置及びカメラ |
| JP4578797B2 (ja) | 2003-11-10 | 2010-11-10 | パナソニック株式会社 | 撮像装置 |
| DE10358967B4 (de) | 2003-12-15 | 2006-11-16 | Universität Kassel | Mikrospiegelarray |
| DE10359403B4 (de) | 2003-12-18 | 2005-12-15 | Seereal Technologies Gmbh | Autostereoskopisches Multi-User-Display |
| JP2005189087A (ja) | 2003-12-25 | 2005-07-14 | Casio Comput Co Ltd | 距離測定装置およびプログラム |
| JP2005241340A (ja) | 2004-02-25 | 2005-09-08 | Sharp Corp | マルチ測距装置 |
| US7720554B2 (en) | 2004-03-29 | 2010-05-18 | Evolution Robotics, Inc. | Methods and apparatus for position estimation using reflected light sources |
| JP4360967B2 (ja) | 2004-04-09 | 2009-11-11 | サミー株式会社 | 操作スイッチ装置および遊技機 |
| WO2005106965A1 (en) | 2004-05-04 | 2005-11-10 | The University Of Newcastle Research Associates Limited | Multicomponent organic solar cells |
| US7773070B2 (en) | 2004-05-21 | 2010-08-10 | Cypress Semiconductor Corporation | Optical positioning device using telecentric imaging |
| GB0415102D0 (en) | 2004-07-06 | 2004-08-11 | Koninkl Philips Electronics Nv | Display devices and driving method therefor |
| US7540978B2 (en) | 2004-08-05 | 2009-06-02 | Novaled Ag | Use of an organic matrix material for producing an organic semiconductor material, organic semiconductor material and electronic component |
| EP1784796A1 (en) | 2004-08-23 | 2007-05-16 | Koninklijke Philips Electronics N.V. | Position and orientation detection for an optical identifier |
| US7180065B2 (en) | 2004-09-30 | 2007-02-20 | Battelle Memorial Institute | Infra-red detector and method of making and using same |
| US7626569B2 (en) | 2004-10-25 | 2009-12-01 | Graphics Properties Holdings, Inc. | Movable audio/video communication interface system |
| EP1667246A1 (en) | 2004-12-03 | 2006-06-07 | ETeCH AG | A multi-colour sensitive device for colour image sensing |
| US7301608B1 (en) | 2005-01-11 | 2007-11-27 | Itt Manufacturing Enterprises, Inc. | Photon-counting, non-imaging, direct-detect LADAR |
| US8228299B1 (en) | 2005-01-27 | 2012-07-24 | Singleton Technology, Llc | Transaction automation and archival system using electronic contract and disclosure units |
| JP3110095U (ja) | 2005-01-28 | 2005-06-16 | 心源工業股▲分▼有限公司 | 刃先の加熱位置決め装置 |
| DE102005010250B4 (de) | 2005-02-25 | 2007-02-01 | Seereal Technologies Gmbh | Verfahren und Einrichtung zum Nachführen von Sweet-Spots |
| EP1703300A1 (de) | 2005-03-17 | 2006-09-20 | Leica Geosystems AG | Verfahren und System zur Bestimmung von Position und Orientierung eines Objekts |
| US7196317B1 (en) | 2005-03-25 | 2007-03-27 | Virginia Tech Intellectual Properties, Inc. | System, device, and method for detecting perturbations |
| GB0512743D0 (en) | 2005-06-17 | 2005-10-26 | Mbda Uk Ltd | Range detection |
| DE102005032583A1 (de) | 2005-07-11 | 2007-01-25 | Basf Ag | Substituierte Rylenderivate |
| US7933001B2 (en) | 2005-07-11 | 2011-04-26 | Kabushiki Kaisha Topcon | Geographic data collecting system |
| JP4977339B2 (ja) | 2005-07-11 | 2012-07-18 | 株式会社トプコン | 地理データ収集装置 |
| US7911444B2 (en) | 2005-08-31 | 2011-03-22 | Microsoft Corporation | Input method for surface of interactive display |
| DE102005043627B4 (de) | 2005-09-13 | 2012-06-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Optischer Sensor und Verfahren zur optischen Abstands- und/oder Farbmessung |
| US20070080925A1 (en) | 2005-10-11 | 2007-04-12 | Nokia Corporation | Power generating display device |
| DE102005053995A1 (de) | 2005-11-10 | 2007-05-24 | Basf Ag | Verwendung von Rylenderivaten als Photosensibilisatoren in Solarzellen |
| WO2007054884A2 (en) | 2005-11-11 | 2007-05-18 | Koninklijke Philips Electronics N.V. | System and method for positioning an information carrier in a scanning apparatus |
| US7489408B2 (en) | 2005-11-15 | 2009-02-10 | General Electric Company | Optical edge break gage |
| GB2432723B (en) | 2005-11-25 | 2010-12-08 | Seiko Epson Corp | Electrochemical cell and method of manufacture |
| JP2009526370A (ja) | 2006-02-09 | 2009-07-16 | キユーデイー・ビジヨン・インコーポレーテツド | 半導体ナノ結晶およびドープされた有機材料を含む層を含むデバイスおよび方法 |
| US7672527B2 (en) | 2006-03-06 | 2010-03-02 | Northrop Grumman Corporation | Method and apparatus for chromatic correction of Fresnel lenses |
| US7839547B2 (en) | 2006-03-08 | 2010-11-23 | Kabushiki Kaisha Toshiba | Optical fiber illumination device and inspection apparatus |
| DE102006013292A1 (de) | 2006-03-23 | 2007-09-27 | Robert Bosch Gmbh | Vorrichtung zur optischen Distanzmessung |
| DE102006013290A1 (de) | 2006-03-23 | 2007-09-27 | Robert Bosch Gmbh | Vorrichtung zur optischen Distanzmessung sowie Verfahren zum Betrieb einer solchen Vorrichtung |
| EP1860462A1 (de) | 2006-05-23 | 2007-11-28 | Leica Geosystems AG | Distanzmessverfahren und Distanzmesser zur Erfassung der räumlichen Abmessung eines Zieles |
| US8144271B2 (en) | 2006-08-03 | 2012-03-27 | Perceptive Pixel Inc. | Multi-touch sensing through frustrated total internal reflection |
| US8754852B2 (en) | 2006-08-10 | 2014-06-17 | Lg Chem, Ltd. | Light guide plate for system inputting coordinate contactlessly, a system comprising the same and a method for inputting coordinate contactlessly using the same |
| US8781151B2 (en) | 2006-09-28 | 2014-07-15 | Sony Computer Entertainment Inc. | Object detection using video input combined with tilt angle information |
| CN101154291B (zh) | 2006-09-29 | 2010-05-12 | 国际商业机器公司 | 图像数据压缩方法、图像显示方法及其相应装置 |
| US20080170750A1 (en) | 2006-11-01 | 2008-07-17 | Demian Gordon | Segment tracking in motion picture |
| JP5270835B2 (ja) | 2006-12-29 | 2013-08-21 | パナソニック株式会社 | 光検出素子、空間情報の検出装置 |
| US7511615B2 (en) | 2007-01-01 | 2009-03-31 | Intelguard Ltd. | Self-operated perimeter intrusion detection system |
| US20080297487A1 (en) | 2007-01-03 | 2008-12-04 | Apple Inc. | Display integrated photodiode matrix |
| DE102007003024A1 (de) | 2007-01-20 | 2008-07-31 | Sick Ag | Triangulationssensor mit Entfernungsbestimmung aus Lichtfleckposition und -form |
| WO2008122531A2 (de) | 2007-04-05 | 2008-10-16 | Basf Se | Herstellung von silicium- und germaniumphthalocyaninen und verwandten substanzen |
| JP2008267898A (ja) | 2007-04-18 | 2008-11-06 | Sharp Corp | 光位置検出装置および電子機器 |
| WO2008145172A1 (en) | 2007-05-25 | 2008-12-04 | Universidad Autónoma de Madrid | Tri-tert-butylcarboxyphthalocyanines, uses thereof and a process for their preparation |
| US7939932B2 (en) | 2007-06-20 | 2011-05-10 | Analog Devices, Inc. | Packaged chip devices with atomic layer deposition protective films |
| EP2174329B1 (de) | 2007-07-23 | 2011-02-09 | Basf Se | Photovoltaische tandem-zelle |
| DE102007037875A1 (de) | 2007-08-10 | 2009-02-12 | Osram Gesellschaft mit beschränkter Haftung | Strahlungsemittierende Vorrichtung |
| JP2009097872A (ja) | 2007-10-12 | 2009-05-07 | Sharp Corp | 光学式測距センサ、物体検出装置、洗浄便座、および光学式測距センサの製造方法 |
| CN101835821B (zh) | 2007-10-25 | 2013-05-01 | 巴斯夫欧洲公司 | 作为有机半导体的酮基吡咯 |
| WO2009058115A1 (en) | 2007-10-29 | 2009-05-07 | Rieke Metals Inc. | Process for preparation of conducting polymers |
| JP2009182095A (ja) * | 2008-01-30 | 2009-08-13 | Fujifilm Corp | 光電変換素子及び固体撮像素子 |
| AT506617B1 (de) | 2008-02-27 | 2011-03-15 | Isiqiri Interface Tech Gmbh | Anzeigefläche und damit kombinierte steuervorrichtung |
| WO2009111577A1 (en) | 2008-03-04 | 2009-09-11 | California Institute Of Technology | Methods of using optofluidic microscope devices |
| JP5493287B2 (ja) | 2008-04-15 | 2014-05-14 | 株式会社リコー | 検出装置および位置情報管理システム |
| US20110284756A1 (en) * | 2008-07-21 | 2011-11-24 | United States of America as repersented by the Administrator of the National Aeronautics and Spac | Detector for dual band ultraviolet detection |
| JP5178393B2 (ja) | 2008-08-20 | 2013-04-10 | シャープ株式会社 | 光学式測距センサおよび電子機器 |
| US8107056B1 (en) | 2008-09-17 | 2012-01-31 | University Of Central Florida Research Foundation, Inc. | Hybrid optical distance sensor |
| JP2010081002A (ja) | 2008-09-24 | 2010-04-08 | Sanyo Electric Co Ltd | 撮像装置 |
| KR101484111B1 (ko) | 2008-09-25 | 2015-01-19 | 삼성전자주식회사 | 입체 이미지 센서 |
| US8217261B2 (en) | 2008-09-30 | 2012-07-10 | Stion Corporation | Thin film sodium species barrier method and structure for cigs based thin film photovoltaic cell |
| JP5469843B2 (ja) | 2008-10-09 | 2014-04-16 | 株式会社トプコン | レーザ測量装置及び距離測定方法 |
| US9746544B2 (en) | 2008-12-03 | 2017-08-29 | Analog Devices, Inc. | Position measurement systems using position sensitive detectors |
| DE102008061218B3 (de) | 2008-12-09 | 2010-06-24 | Sick Ag | Optoelektronische Sensoreinrichtung |
| JP4818351B2 (ja) | 2008-12-25 | 2011-11-16 | 株式会社東芝 | 画像処理装置及び画像表示装置 |
| US8267781B2 (en) | 2009-01-30 | 2012-09-18 | Microsoft Corporation | Visual target tracking |
| JP4846811B2 (ja) | 2009-02-03 | 2011-12-28 | シャープ株式会社 | 光スポット位置検出装置およびそれを含む光デバイス、並びに、その光デバイスを含む電子機器 |
| CN102326271A (zh) | 2009-02-23 | 2012-01-18 | 巴斯夫欧洲公司 | 三芳基胺衍生物在有机太阳能电池中作为空穴传导材料的用途和含有所述三芳基衍生物的有机太阳能电池 |
| CN102341186B (zh) * | 2009-03-04 | 2017-09-29 | 施乐公司 | 复合结构化有机膜 |
| JP5406570B2 (ja) | 2009-03-13 | 2014-02-05 | アイシン精機株式会社 | 色素増感型太陽電池及びその製造方法 |
| US8399819B2 (en) | 2009-03-31 | 2013-03-19 | Osram Sylvania Inc. | Current source to drive a light source in an optical sensor system |
| CA2758298A1 (en) | 2009-04-10 | 2010-10-14 | Ls9, Inc. | Production of commercial biodiesel from genetically modified microorganisms |
| AT508438B1 (de) | 2009-04-16 | 2013-10-15 | Isiqiri Interface Tech Gmbh | Anzeigefläche und eine damit kombinierte steuervorrichtung für eine datenverarbeitungsanlage |
| US9071834B2 (en) | 2009-04-25 | 2015-06-30 | James Yett | Array of individually angled mirrors reflecting disparate color sources toward one or more viewing positions to construct images and visual effects |
| US20100279458A1 (en) | 2009-04-29 | 2010-11-04 | Du Pont Apollo Ltd. | Process for making partially transparent photovoltaic modules |
| JP2011027707A (ja) | 2009-06-25 | 2011-02-10 | Sharp Corp | 人物動作検出装置、遊具装置、人物動作検出方法、ゲーム方法、制御プログラムおよび可読記録媒体 |
| US9141193B2 (en) | 2009-08-31 | 2015-09-22 | Microsoft Technology Licensing, Llc | Techniques for using human gestures to control gesture unaware programs |
| CN101650173A (zh) | 2009-09-11 | 2010-02-17 | 武汉理工大学 | 太阳位置光电传感器 |
| DE102009029372A1 (de) | 2009-09-11 | 2011-03-24 | Robert Bosch Gmbh | Messvorrichtung zur Messung einer Entfernung zwischen der Messvorrichtung und einem Zielobjekt mit Hilfe optischer Messstrahlung |
| DE102009029364A1 (de) | 2009-09-11 | 2011-03-24 | Robert Bosch Gmbh | Messvorrichtung zur Messung einer Entfernung zwischen der Messvorrichtung und einem Zielobjekt mit Hilfe optischer Messstrahlung |
| JP2011096329A (ja) | 2009-10-30 | 2011-05-12 | Sanyo Electric Co Ltd | 光ピックアップ装置 |
| US8287195B2 (en) | 2009-11-10 | 2012-10-16 | Dezeeuw Paul | Motor controlled macro rail for close-up focus-stacking photography |
| JP5478215B2 (ja) | 2009-11-25 | 2014-04-23 | オリンパスイメージング株式会社 | 撮影装置および撮影装置の制御方法 |
| JP5549204B2 (ja) | 2009-12-01 | 2014-07-16 | セイコーエプソン株式会社 | 光学式位置検出装置、ハンド装置およびタッチパネル |
| CN102639591B (zh) | 2009-12-02 | 2015-05-13 | 巴斯夫欧洲公司 | 二噻吩并苯并噻吩并[3,2-b]噻吩共聚物及其作为高性能可溶液加工半导体聚合物的用途 |
| US8491135B2 (en) | 2010-01-04 | 2013-07-23 | Microvision, Inc. | Interactive projection with gesture recognition |
| JP5685898B2 (ja) | 2010-01-08 | 2015-03-18 | ソニー株式会社 | 半導体装置、固体撮像装置、およびカメラシステム |
| DE102010006314A1 (de) | 2010-01-29 | 2011-08-04 | EWE-Forschungszentrum für Energietechnologie e. V., 26129 | Photovoltaische Mehrfach-Dünnschichtsolarzelle |
| JP5079826B2 (ja) | 2010-02-09 | 2012-11-21 | シャープ株式会社 | 光学式測距センサおよび電子機器 |
| EP2537332A1 (en) | 2010-02-19 | 2012-12-26 | Dual Aperture, Inc. | Processing multi-aperture image data |
| KR101251020B1 (ko) | 2010-03-09 | 2013-04-03 | 국립대학법인 울산과학기술대학교 산학협력단 | 그라펜의 제조 방법, 이를 포함하는 투명 전극, 활성층, 이를 구비한 표시소자, 전자소자, 광전소자, 태양전지 및 염료감응 태양전지 |
| JP5343896B2 (ja) | 2010-03-10 | 2013-11-13 | セイコーエプソン株式会社 | 光学式位置検出装置 |
| US20100283868A1 (en) | 2010-03-27 | 2010-11-11 | Lloyd Douglas Clark | Apparatus and Method for Application of Selective Digital Photomontage to Motion Pictures |
| CN101859439A (zh) | 2010-05-12 | 2010-10-13 | 合肥寰景信息技术有限公司 | 一种用于人机交互的运动追踪装置及其追踪方法 |
| KR101665567B1 (ko) | 2010-05-20 | 2016-10-12 | 삼성전자주식회사 | 3차원 뎁스 영상 시간 보간 방법 및 장치 |
| GB2481366B (en) | 2010-06-03 | 2014-05-28 | Sony Comp Entertainment Europe | Entertainment device and entertainment methods |
| JP5984803B2 (ja) | 2010-06-29 | 2016-09-06 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | ヒドロキサム酸誘導体又はその塩を添加剤として含む光電変換装置及びその製造方法 |
| TWI431252B (zh) | 2010-07-14 | 2014-03-21 | Pixart Imaging Inc | 測距裝置及測距方法 |
| CN102985788B (zh) | 2010-07-23 | 2015-02-11 | 丰田自动车株式会社 | 距离测定装置以及距离测定方法 |
| US8743348B2 (en) | 2010-09-03 | 2014-06-03 | Pixart Imaging Inc. | Optical distance detection system |
| WO2012033957A2 (en) | 2010-09-09 | 2012-03-15 | California Institute Of Technology | Delayed emission detection devices and methods |
| TW201211860A (en) | 2010-09-13 | 2012-03-16 | Pixart Imaging Inc | Optical touch control apparatus and touch sensing method thereof |
| JP5541023B2 (ja) | 2010-09-13 | 2014-07-09 | ソニー株式会社 | 対物レンズ、光学ピックアップ、光学ドライブ装置 |
| IL208568B (en) | 2010-10-07 | 2018-06-28 | Elbit Systems Ltd | Mapping, discovering and tracking objects in an external arena by using active vision |
| DE102010042278A1 (de) | 2010-10-11 | 2012-04-12 | Siemens Aktiengesellschaft | Operationsnavigationssystem mit strukturiertem Licht |
| US8542288B2 (en) | 2010-11-03 | 2013-09-24 | Sony Corporation | Camera system and imaging method using multiple lens and aperture units |
| CN201897828U (zh) | 2010-11-30 | 2011-07-13 | 深圳市中钞信达金融科技有限公司 | 一种票币光谱检测和安全线检测的集成装置 |
| KR101823719B1 (ko) | 2010-12-22 | 2018-01-30 | 바스프 에스이 | 나프탈렌 모노이미드 유도체 및 태양전지 및 광검출기에서 감광제로서 이의 용도 |
| FR2969819A1 (fr) | 2010-12-22 | 2012-06-29 | St Microelectronics Grenoble 2 | Capteur d'image tridimensionnel |
| CN102096962A (zh) | 2010-12-23 | 2011-06-15 | 北京新岸线软件科技有限公司 | 一种纸币检测方法及装置 |
| JP5550624B2 (ja) | 2010-12-24 | 2014-07-16 | 三菱電機株式会社 | 光電変換装置とその製造方法、および光電変換モジュール |
| US8705805B2 (en) | 2011-01-10 | 2014-04-22 | Peter Alexander Forrest | Secure portable token and systems and methods for identification and authentication of the same |
| US9001029B2 (en) | 2011-02-15 | 2015-04-07 | Basf Se | Detector for optically detecting at least one object |
| CN106019305B (zh) | 2011-02-15 | 2019-10-11 | 巴斯夫欧洲公司 | 用于光学检测至少一种物体的检测器 |
| SG192884A1 (en) | 2011-02-21 | 2013-09-30 | Univ Singapore | Apparatus, system, and method for annotation of media files with sensor data |
| US9182602B2 (en) | 2011-03-07 | 2015-11-10 | Panasonic Intellectual Property Management Co., Ltd. | Image pickup device and rangefinder device |
| US8593565B2 (en) | 2011-03-25 | 2013-11-26 | Gary S. Shuster | Simulated large aperture lens |
| US8384984B2 (en) | 2011-03-28 | 2013-02-26 | Lighting Science Group Corporation | MEMS wavelength converting lighting device and associated methods |
| CN102737435A (zh) | 2011-04-11 | 2012-10-17 | 北京新岸线数字图像技术有限公司 | 一种纸币鉴伪方法和装置 |
| US8791901B2 (en) | 2011-04-12 | 2014-07-29 | Sony Computer Entertainment, Inc. | Object tracking with projected reference patterns |
| JP5445509B2 (ja) | 2011-04-26 | 2014-03-19 | パナソニック株式会社 | 画像形成装置および画像形成方法ならびに部品実装装置 |
| CN103517964B (zh) | 2011-05-10 | 2018-05-18 | 巴斯夫欧洲公司 | 新型颜色转换器 |
| DE102011076493A1 (de) | 2011-05-26 | 2012-11-29 | Hilti Aktiengesellschaft | Messeinrichtung zur Distanzmessung |
| JP6092198B2 (ja) | 2011-06-10 | 2017-03-08 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 新規カラーコンバーター |
| EP2535681B1 (en) | 2011-06-17 | 2016-01-06 | Thomson Licensing | Device for estimating the depth of elements of a 3D scene |
| RU2014102182A (ru) | 2011-06-24 | 2015-07-27 | Боли Медиа Коммуникейшнз (Шэньчжэнь) Ко., Лтд | Группа смешанных многоспектральных светочувствительных пикселей, светочувствительное устройство и светочувствительная система |
| GB2507020A (en) | 2011-07-13 | 2014-04-16 | Faro Tech Inc | Device and method using a spatial light modulator to find 3D coordinates of an object |
| CN104245575A (zh) | 2011-07-22 | 2014-12-24 | 国立大学法人蔚山科学技术大学校产学协力团 | 石墨烯片,包含该石墨烯片的透明电极、有源层、包含该电极或有源层的显示器、电子装置、光电子装置、电池、太阳能电池和染料敏化的太阳能电池 |
| JP5791571B2 (ja) | 2011-08-02 | 2015-10-07 | キヤノン株式会社 | 撮像素子及び撮像装置 |
| CN104094435B (zh) | 2011-09-02 | 2017-02-22 | 巴斯夫欧洲公司 | 二酮基吡咯并吡咯低聚物和包含二酮基吡咯并吡咯低聚物的组合物 |
| CN102435136A (zh) | 2011-09-20 | 2012-05-02 | 浙江师范大学 | 空间相移装置及应用该装置的干涉测量装置、相位校正装置 |
| FR2980599B1 (fr) | 2011-09-27 | 2014-05-09 | Isorg | Surface imprimee interactive |
| CN102506754B (zh) | 2011-11-09 | 2013-11-06 | 西安工业大学 | 物体表面形貌与颜色同时测量的共聚焦测量装置及其使用方法 |
| JP5681954B2 (ja) | 2011-11-30 | 2015-03-11 | パナソニックIpマネジメント株式会社 | 撮像装置及び撮像システム |
| AT512350B1 (de) | 2011-12-20 | 2017-06-15 | Isiqiri Interface Tech Gmbh | Computeranlage und steuerungsverfahren dafür |
| AU2011265572A1 (en) | 2011-12-23 | 2013-07-11 | Canon Kabushiki Kaisha | Structured light system for robust geometry acquisition |
| WO2013118037A1 (en) | 2012-02-10 | 2013-08-15 | Koninklijke Philips N.V. | A lighting assembly, a color conversion element, a lamp and a luminaire |
| AT512461B1 (de) | 2012-02-10 | 2018-02-15 | Isiqiri Interface Tech Gmbh | Vorrichtung für die eingabe von informationen an eine datenverarbeitungsanlage |
| DE102012204572A1 (de) | 2012-03-22 | 2013-09-26 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung und Anordnung mit einer derartigen Positionsmesseinrichtung |
| KR20140145180A (ko) | 2012-03-30 | 2014-12-22 | 바스프 에스이 | 염료 감응 태양 전지용 플루오린화 반대 음이온을 갖는 퀴놀리늄 염료 |
| JP6419065B2 (ja) | 2012-04-02 | 2018-11-07 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 電子工学用途のためのフェナントロ[9,10−b]フランポリマーおよび小分子化合物 |
| US9117277B2 (en) | 2012-04-04 | 2015-08-25 | Canon Kabushiki Kaisha | Determining a depth map from images of a scene |
| US9639947B2 (en) | 2012-04-18 | 2017-05-02 | Sony Corporation | Method and optical system for determining a depth map of an image |
| DE102012208308A1 (de) | 2012-05-18 | 2013-11-21 | Robert Bosch Gmbh | Optisches Entfernungsmessgerät mit Kalibriereinrichtung zum Berücksichtigen von Übersprechen |
| WO2013181215A1 (en) | 2012-05-30 | 2013-12-05 | Massachusetts Institute Of Technology | Devices comprising graphene and a conductive polymer and related systems and methods |
| EP2875028A1 (en) | 2012-07-23 | 2015-05-27 | Basf Se | Dithienobenzofuran polymers and small molecules for electronic application |
| US20140043610A1 (en) | 2012-08-07 | 2014-02-13 | Carl Zeiss Industrielle Messtechnik Gmbh | Apparatus for inspecting a measurement object with triangulation sensor |
| US20140066656A1 (en) | 2012-09-04 | 2014-03-06 | Basf Se | Spiro compounds and their use in organic electronics applications and devices |
| DE202012009070U1 (de) | 2012-09-21 | 2012-11-12 | Balluff Gmbh | Optoelektronischer Sensor und Empfangselement |
| KR20140058208A (ko) | 2012-11-06 | 2014-05-14 | 삼성전자주식회사 | 이미지 센서 |
| US9212948B2 (en) | 2012-11-07 | 2015-12-15 | The Trustees Of Columbia University In The City Of New York | Lossless hyperspectral imaging |
| KR101984701B1 (ko) | 2012-11-13 | 2019-05-31 | 삼성전자주식회사 | 전기습윤 렌즈 어레이를 포함하는 3차원 영상 디스플레이 장치 및 3차원 영상 획득 장치 |
| US9550791B2 (en) | 2012-12-04 | 2017-01-24 | Basf Se | Functionnalized benzodithiophene polymers for electronic application |
| TWI456430B (zh) | 2012-12-07 | 2014-10-11 | Pixart Imaging Inc | 手勢判斷裝置、其操作方法與手勢判斷方法 |
| CN103106411A (zh) | 2012-12-13 | 2013-05-15 | 徐玉文 | 一种网球动作捕捉和解析方法 |
| JP6415447B2 (ja) * | 2012-12-19 | 2018-10-31 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 1つ以上の物体を光学的に検出するための検出器 |
| WO2014097489A1 (ja) | 2012-12-21 | 2014-06-26 | グローリー株式会社 | スペクトルセンサ |
| AU2014206925A1 (en) | 2013-01-15 | 2015-07-16 | Basf Se | Triangulene oligomers and polymers and their use as hole conducting material |
| KR20150109450A (ko) * | 2013-01-25 | 2015-10-01 | 유니버시티 오브 플로리다 리서치 파운데이션, 아이엔씨. | 용액 처리된 pbs 광검출기를 이용한 신규 ir 이미지 센서 |
| US20150369663A1 (en) | 2013-02-06 | 2015-12-24 | Empire Technology Development Llc. | Thermo-optic tunable spectrometer |
| US20140347442A1 (en) | 2013-05-23 | 2014-11-27 | Yibing M. WANG | Rgbz pixel arrays, imaging devices, controllers & methods |
| AU2014233849A1 (en) | 2013-03-18 | 2015-08-27 | Basf Se | Perylenemonoimide and naphthalenemonoimide derivatives and their use in dye-sensitized solar cells |
| EP2813324B1 (en) | 2013-06-13 | 2016-04-06 | Stanley Works (Europe) GmbH | Hand tool having an electronic identification device |
| KR102252336B1 (ko) | 2013-06-13 | 2021-05-14 | 바스프 에스이 | 광학 검출기 및 그의 제조 방법 |
| JP6440696B2 (ja) | 2013-06-13 | 2018-12-19 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 少なくとも1つの物体の方位を光学的に検出する検出器 |
| DE102014108353A1 (de) | 2013-06-13 | 2014-12-18 | Werth Messtechnik Gmbh | Verfahren und Vorrichtung zur Bestimmung von Geometrien an Messobjekten mittels eines kombinierten Sensorsystems |
| US9143674B2 (en) | 2013-06-13 | 2015-09-22 | Mitutoyo Corporation | Machine vision inspection system and method for performing high-speed focus height measurement operations |
| JP2016529474A (ja) | 2013-06-13 | 2016-09-23 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 少なくとも1つの物体を光学的に検出する検出器 |
| EP2818493A1 (en) | 2013-06-25 | 2014-12-31 | Basf Se | Near infrared absorbing polymers for electronic applications |
| US9830501B2 (en) | 2013-07-23 | 2017-11-28 | Northwestern University | High throughput partial wave spectroscopic microscopy and associated systems and methods |
| US20160155575A1 (en) | 2013-07-25 | 2016-06-02 | Basf Se | Methine dyes with large organic counter anion for dye sensitized solar cells |
| WO2015014835A1 (en) | 2013-07-31 | 2015-02-05 | Basf Se | Luminescent diazabenzimidazole carbene metal complexes |
| JP6548648B2 (ja) | 2013-08-05 | 2019-07-24 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | シアノ化されたナフタレンベンゾイミダゾール化合物 |
| JP6483127B2 (ja) | 2013-08-19 | 2019-03-13 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 少なくとも1つの対象物の位置を求めるための検出器 |
| CN105637320B (zh) | 2013-08-19 | 2018-12-14 | 巴斯夫欧洲公司 | 光学检测器 |
| AU2014310684B2 (en) | 2013-08-23 | 2019-11-14 | Basf Se | New absorber for organic heterojunction solar cells |
| KR102251681B1 (ko) | 2013-08-23 | 2021-05-14 | 바스프 에스이 | 말단 헤테로아릴시아노비닐렌 기를 갖는 화합물 및 이의 유기 태양 전지에서의 용도 |
| CN105492448A (zh) | 2013-09-03 | 2016-04-13 | 巴斯夫欧洲公司 | 无定形材料及其用途 |
| FR3011952B1 (fr) | 2013-10-14 | 2017-01-27 | Suricog | Procede d'interaction par le regard et dispositif associe |
| AT515132A1 (de) | 2013-12-04 | 2015-06-15 | Isiqiri Interface Tech Gmbh | Optische Eingabefläche |
| JP6315964B2 (ja) | 2013-12-10 | 2018-04-25 | オプテックス株式会社 | 能動型物体検出センサ |
| US9087405B2 (en) | 2013-12-16 | 2015-07-21 | Google Inc. | Depth map generation using bokeh detection |
| JP2017504796A (ja) | 2013-12-18 | 2017-02-09 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 対象物の光学的検出に使用するターゲットデバイス |
| KR20160138427A (ko) | 2014-03-31 | 2016-12-05 | 바스프 에스이 | 데이터 캐리어로부터 데이터를 판독하기 위한 데이터 판독 장치 |
| WO2015159192A1 (en) | 2014-04-15 | 2015-10-22 | Basf Se | Process for the production of a solid dye-sensitized solar cell or a perovskite solar cell |
| KR20160144387A (ko) | 2014-04-17 | 2016-12-16 | 바스프 에스이 | 제품의 정체를 검증하기 위한 검증 장치, 검증 시스템 및 방법 |
| KR20160146718A (ko) | 2014-04-22 | 2016-12-21 | 바스프 에스이 | 적어도 하나의 물체를 광학적으로 검출하기 위한 검출기 |
| EP2937399A1 (en) | 2014-04-22 | 2015-10-28 | Basf Se | Hole-transport materials for organic solar cells or organic optical sensors |
| EP3140268B1 (de) | 2014-05-09 | 2018-07-18 | Basf Se | Cyanierte perylen-verbindungen |
| US10054429B2 (en) | 2014-05-18 | 2018-08-21 | Adom, Advanced Optical Technologies Ltd. | System for tomography and/or topography measurements of a layered objects |
| EP3145928B1 (en) | 2014-05-19 | 2019-12-04 | UDC Ireland Limited | Fluorescent organic light emitting elements having high efficiency |
| US9864470B2 (en) | 2014-05-30 | 2018-01-09 | Flatfrog Laboratories Ab | Enhanced interaction touch system |
| CN106461388A (zh) | 2014-06-16 | 2017-02-22 | 巴斯夫欧洲公司 | 用于确定至少一个对象的位置的探测器 |
| KR102397527B1 (ko) | 2014-07-08 | 2022-05-13 | 바스프 에스이 | 하나 이상의 물체의 위치를 결정하기 위한 검출기 |
| WO2016012274A1 (en) | 2014-07-21 | 2016-01-28 | Basf Se | Organic-inorganic tandem solar cell |
| US9787899B1 (en) | 2014-08-12 | 2017-10-10 | Amazon Technologies, Inc. | Multiple captures with a variable aperture |
| US9646365B1 (en) | 2014-08-12 | 2017-05-09 | Amazon Technologies, Inc. | Variable temporal aperture |
| JP2017535939A (ja) | 2014-09-18 | 2017-11-30 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 熱電材料の熱圧着 |
| US10074805B2 (en) | 2014-09-22 | 2018-09-11 | Udc Ireland Limited | Fluorescent organic light emitting elements having high efficiency |
| CN113793905A (zh) | 2014-09-26 | 2021-12-14 | Udc 爱尔兰有限责任公司 | 具有高效率的荧光有机发光元件 |
| WO2016051323A1 (en) | 2014-09-29 | 2016-04-07 | Basf Se | Detector for optically determining a position of at least one object |
| WO2016066494A1 (en) | 2014-10-31 | 2016-05-06 | Basf Se | Hole-transport materials for organic solar cells or organic optical sensors |
| CN105678123B (zh) | 2014-11-18 | 2019-03-08 | 联发科技(新加坡)私人有限公司 | 一种设备解锁方法及装置 |
| EP3224246B1 (en) | 2014-11-26 | 2022-01-12 | Basf Se | 4-oxoquinoline compounds |
| KR20170092574A (ko) | 2014-12-09 | 2017-08-11 | 바스프 에스이 | 적어도 하나의 객체의 광학적 검출을 위한 검출기 |
| EP3230691A4 (en) | 2014-12-09 | 2018-08-15 | Basf Se | Optical detector |
| JP2018510320A (ja) | 2014-12-09 | 2018-04-12 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 光学検出器 |
| EP3230841B1 (en) | 2014-12-09 | 2019-07-03 | Basf Se | Optical detector |
| EP3230689A4 (en) | 2014-12-09 | 2018-08-15 | Basf Se | Optical detector |
| KR102496245B1 (ko) | 2015-01-30 | 2023-02-06 | 트리나미엑스 게엠베하 | 하나 이상의 물체의 광학적 검출을 위한 검출기 |
| WO2016137238A1 (en) | 2015-02-26 | 2016-09-01 | Dual Aperture International Co., Ltd. | Processing multi-aperture image data |
| US20160255323A1 (en) | 2015-02-26 | 2016-09-01 | Dual Aperture International Co. Ltd. | Multi-Aperture Depth Map Using Blur Kernels and Down-Sampling |
| JP2018511793A (ja) | 2015-03-05 | 2018-04-26 | ビーエーエスエフ ソシエタス・ヨーロピアBasf Se | 少なくとも1つの対象物の光学的検出のための検出器 |
| KR20170126457A (ko) | 2015-03-12 | 2017-11-17 | 바스프 에스이 | 얇은 무기 필름의 제조 방법 |
| WO2016146725A1 (en) | 2015-03-17 | 2016-09-22 | Basf Se | Optical data reader |
| KR20170139626A (ko) | 2015-04-22 | 2017-12-19 | 트리나미엑스 게엠베하 | 하나 이상의 물체의 광학적 검출을 위한 검출기 |
| WO2016193243A1 (en) | 2015-06-03 | 2016-12-08 | Udc Ireland Limited | Highly efficient oled devices with very short decay times |
| US10955936B2 (en) | 2015-07-17 | 2021-03-23 | Trinamix Gmbh | Detector for optically detecting at least one object |
| WO2017025567A1 (en) | 2015-08-10 | 2017-02-16 | Trinamix Gmbh | Organic detector for an optical detection of at least one object |
| KR102539263B1 (ko) | 2015-09-14 | 2023-06-05 | 트리나미엑스 게엠베하 | 적어도 하나의 물체의 적어도 하나의 이미지를 기록하는 카메라 |
| WO2017089553A1 (en) | 2015-11-25 | 2017-06-01 | Trinamix Gmbh | Detector for optically detecting at least one object |
| JP2019502905A (ja) | 2015-11-25 | 2019-01-31 | トリナミクス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 少なくとも1個の物体を光学的に検出する検出器 |
| KR20180088820A (ko) | 2015-12-03 | 2018-08-07 | 트리나미엑스 게엠베하 | 적어도 하나의 물체를 광학적으로 검출하기 위한 검출기 |
| WO2017144401A1 (en) | 2016-02-23 | 2017-08-31 | Basf Se | Luminescent particles |
| KR20180132809A (ko) | 2016-04-06 | 2018-12-12 | 트리나미엑스 게엠베하 | 하나 이상의 물체를 광학적으로 검출하기 위한 검출기 |
| CN109564952A (zh) | 2016-04-06 | 2019-04-02 | 特里纳米克斯股份有限公司 | 用于至少一个对象的光学检测的检测器 |
| CN109328310A (zh) | 2016-04-19 | 2019-02-12 | 特里纳米克斯股份有限公司 | 用于对至少一个对象进行光学检测的检测器 |
| KR20190002488A (ko) | 2016-04-28 | 2019-01-08 | 트리나미엑스 게엠베하 | 적어도 하나의 물체를 광학적으로 검출하기 위한 검출기 |
| US11211513B2 (en) | 2016-07-29 | 2021-12-28 | Trinamix Gmbh | Optical sensor and detector for an optical detection |
| EP3491418A1 (en) | 2016-07-29 | 2019-06-05 | trinamiX GmbH | Detector for an optical detection of at least one object |
| CN109791825A (zh) | 2016-08-31 | 2019-05-21 | 巴斯夫欧洲公司 | 磁热材料参数的受控变化 |
| WO2018077870A1 (en) | 2016-10-25 | 2018-05-03 | Trinamix Gmbh | Nfrared optical detector with integrated filter |
| WO2018096083A1 (en) | 2016-11-25 | 2018-05-31 | Trinamix Gmbh | Optical detector comprising at least one optical waveguide |
| WO2018100414A1 (en) | 2016-12-01 | 2018-06-07 | Synaptive Medical (Barbados) Inc. | A camera system for providing images with simultaneous high resolution and large depth of field |
| WO2018115073A1 (en) | 2016-12-21 | 2018-06-28 | Trinamix Gmbh | Detector for an optical detection |
| CN110291418B (zh) | 2017-02-08 | 2024-01-26 | 特里纳米克斯股份有限公司 | 用于至少一个对象的光学检测的检测器 |
| US20190386064A1 (en) | 2017-02-08 | 2019-12-19 | Trinamix Gmbh | Detector for an optical detection of at least one object |
| CN110392844B (zh) | 2017-03-16 | 2024-03-12 | 特里纳米克斯股份有限公司 | 用于光学检测至少一个对象的检测器 |
| JP7204667B2 (ja) | 2017-04-20 | 2023-01-16 | トリナミクス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 光検出器 |
| CN110998223B (zh) | 2017-06-26 | 2021-10-29 | 特里纳米克斯股份有限公司 | 用于确定至少一个对像的位置的检测器 |
| WO2019011803A1 (en) | 2017-07-10 | 2019-01-17 | Trinamix Gmbh | DETECTOR FOR OPTICALLY DETECTING AT LEAST ONE OBJECT |
| TWI806892B (zh) | 2017-08-24 | 2023-07-01 | 德商巴地斯顏料化工廠 | 用於傳輸資料及在可見光譜範圍內發射電磁輻射的傳輸器及資料傳輸系統 |
| JP2020531848A (ja) | 2017-08-28 | 2020-11-05 | トリナミクス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 少なくとも一つの幾何学情報を決定するためのレンジファインダ |
| JP7179051B2 (ja) | 2017-08-28 | 2022-11-28 | トリナミクス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 少なくとも1つの物体の位置を決定するための検出器 |
-
2016
- 2016-01-28 KR KR1020177024337A patent/KR102496245B1/ko active IP Right Grant
- 2016-01-28 EP EP16705042.6A patent/EP3251152B1/en active Active
- 2016-01-28 CN CN201680019688.5A patent/CN107438775B/zh active Active
- 2016-01-28 WO PCT/EP2016/051817 patent/WO2016120392A1/en active Application Filing
- 2016-01-28 US US15/547,664 patent/US10775505B2/en active Active
- 2016-01-28 JP JP2017558775A patent/JP6841769B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3251152A1 (en) | 2017-12-06 |
| KR20170136502A (ko) | 2017-12-11 |
| KR102496245B1 (ko) | 2023-02-06 |
| JP2018513980A (ja) | 2018-05-31 |
| EP3251152B1 (en) | 2023-08-16 |
| CN107438775A (zh) | 2017-12-05 |
| WO2016120392A1 (en) | 2016-08-04 |
| US10775505B2 (en) | 2020-09-15 |
| US20180017679A1 (en) | 2018-01-18 |
| CN107438775B (zh) | 2022-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6841769B2 (ja) | 少なくとも1個の物体を光学的に検出する検出器 | |
| US20190140129A1 (en) | Detector for an optical detection of at least one object | |
| US20180356501A1 (en) | Detector for optically detecting at least one object | |
| US20190129036A1 (en) | Detector for an optical detection of at least one object | |
| US20190157470A1 (en) | Detector for optically detecting at least one object | |
| US20180136319A1 (en) | Detector for an optical detection of at least one object | |
| KR20170092577A (ko) | 광 검출기 | |
| US20170074652A1 (en) | Detector for optically detecting at least one object | |
| CN109564927A (zh) | 光学传感器和用于光学检测的检测器 | |
| CN105637382A (zh) | 用于确定至少一种物体的位置的检测器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191105 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200131 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20200304 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200407 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200703 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201020 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210218 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6841769 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |