JP2017501472A - 周縁記録機能を備えるロボット掃除機 - Google Patents
周縁記録機能を備えるロボット掃除機 Download PDFInfo
- Publication number
- JP2017501472A JP2017501472A JP2016526759A JP2016526759A JP2017501472A JP 2017501472 A JP2017501472 A JP 2017501472A JP 2016526759 A JP2016526759 A JP 2016526759A JP 2016526759 A JP2016526759 A JP 2016526759A JP 2017501472 A JP2017501472 A JP 2017501472A
- Authority
- JP
- Japan
- Prior art keywords
- robot cleaner
- periphery
- detection device
- obstacle detection
- processing unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000002093 peripheral effect Effects 0.000 title claims abstract description 18
- 238000012545 processing Methods 0.000 claims abstract description 35
- 238000004140 cleaning Methods 0.000 claims abstract description 32
- 238000001514 detection method Methods 0.000 claims abstract description 32
- 238000000034 method Methods 0.000 claims description 32
- 238000004590 computer program Methods 0.000 claims description 17
- 239000003550 marker Substances 0.000 claims description 5
- 238000001454 recorded image Methods 0.000 claims description 2
- 238000012790 confirmation Methods 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 238000013507 mapping Methods 0.000 description 4
- 239000000428 dust Substances 0.000 description 3
- 230000009286 beneficial effect Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0221—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving a learning process
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0248—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0251—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means extracting 3D information from a plurality of images taken from different locations, e.g. stereo vision
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Automation & Control Theory (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Electromagnetism (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Optics & Photonics (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Vacuum Cleaner (AREA)
- Image Analysis (AREA)
Abstract
Description
Claims (17)
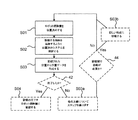
- ロボット掃除機に、関心対象領域の周縁を教示する方法において、
前記ロボット掃除機を、前記ロボット掃除機)の障害物検出装置が前記領域の少なくとも一部をモニタできるように位置決めするステップと、
前記ロボット掃除機の前記障害物検出装置を、物体の位置を、前記物体が前記領域の前記周縁に沿って移動している間に追跡し、継続的に記録するように制御するステップと、
前記物体の前記位置の前記継続的な記録から前記周縁の位置データを作成するステップと、
を含む方法。 - ユーザインタフェースを介して、前記ロボット掃除機に対し、前記周縁の前記記録が完了したことを示す信号を送信することによって前記教示を完了するステップをさらに含む、請求項1に記載の方法。
- 前記ユーザインタフェースを介して前記ロボット掃除機を掃除モードに切り替えるステップをさらに含む、請求項1または2に記載の方法。
- 請求項1に記載の前記ステップを他の周縁について実行するステップと、前記記録された周縁を合体させるステップと、前記位置の前記継続的な記録から合体された前記記録された周縁の位置データを作成するステップと、をさらに含む、請求項1〜3のいずれか1項に記載の方法。
- 請求項4に記載の前記ステップは、前記領域全体をカバーするのに必要な回数だけ繰り返される、請求項4に記載の方法。
- 前記ユーザインタフェースを介して前記周縁の前記位置データを識別するステップを含む、請求項1〜5のいずれか1項に記載の方法。
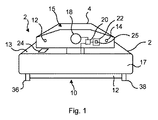
- ロボット掃除機において、
本体と、
関心対象領域の床を掃除するように構成された掃除部分と、
前記領域の前記表面上で前記ロボット掃除機を移動させるように構成された推進システムと、
前記推進システムを制御するように構成された処理ユニットを含む障害物検出装置と、
を含み、
前記障害物検出装置は、前記領域の周縁をモニタし、物体の位置を、前記物体が前記周縁に沿って移動する間に追跡し、継続的に記録するように構成され、前記処理ユニットは、前記継続的に記録された位置から前記周縁の位置データを作成するように構成されるロボット掃除機。 - 前記障害物検出装置は3Dセンサシステムを含む、請求項7に記載のロボット掃除機。
- 前記3Dセンサシステムは、
前記ロボット掃除機の付近の画像を記録するように構成されたカメラ装置と、
前記ロボット掃除機の前記付近を照明するように構成された第一および第二の垂直ラインレーザと、
を含み、
前記処理ユニットは、前記記録された画像から前記位置データを導き出すようにさらに構成される、請求項8に記載のロボット掃除機。 - 前記処理ユニットは、前記周縁の位置データを作成するために、前記画像から特徴を導き出す、請求項9に記載のロボット掃除機。
- 前記処理ユニットは、前記推進システムを、前記障害物検出装置が前記周縁に沿って移動する前記物体を観察する間に、前記ロボット掃除機がほぼその場で旋回するような方法で制御するように構成される、請求項7〜10のいずれか1項に記載のロボット掃除機。
- 前記障害物検出装置は、前記ロボット掃除機の前記本体に回転可能に接続され、それによって、前記ロボット掃除機が静止している間に回転によって前記周縁に沿って移動する前記物体を観察できる、請求項7〜10のいずれか1項に記載のロボット掃除機。
- 使用者と通信するためのユーザインタフェースを含む、請求項7〜12のいずれか1項に記載のロボット掃除機。
- 前記移動する物体は使用者である、請求項7〜13のいずれか1項に記載のロボット掃除機。
- 前記移動する物体は、反射板または送信機等のマーカであり、前記マーカまたは送信機は、使用者が前記周縁を追跡している間、使用者により携帯される、請求項7〜13のいずれか1項に記載のロボット掃除機。
- コンピュータ実行可能命令であって、ロボット掃除機に、前記コンピュータ実行可能命令が前記掃除機に含まれる処理ユニット上で実行されたときに請求項1〜6のいずれか1項に記載の前記ステップを実行させるコンピュータ実行可能命令を含むコンピュータプログラム。
- コンピュータ読取可能記憶媒体を含むコンピュータプログラム製品において、
前記コンピュータ読取可能記憶媒体はその中に具現化された請求項16に記載の前記コンピュータプログラムを含むコンピュータプログラム製品。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/EP2013/077384 WO2015090402A1 (en) | 2013-12-19 | 2013-12-19 | Robotic cleaning device with perimeter recording function |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017501472A true JP2017501472A (ja) | 2017-01-12 |
| JP6455737B2 JP6455737B2 (ja) | 2019-01-23 |
Family
ID=49880768
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016526759A Active JP6455737B2 (ja) | 2013-12-19 | 2013-12-19 | 方法、ロボット掃除機、コンピュータプログラムおよびコンピュータプログラム製品 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9811089B2 (ja) |
| EP (1) | EP3084538B1 (ja) |
| JP (1) | JP6455737B2 (ja) |
| KR (1) | KR102124235B1 (ja) |
| CN (1) | CN105829985B (ja) |
| ES (1) | ES2656664T3 (ja) |
| WO (1) | WO2015090402A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107272708A (zh) * | 2017-08-03 | 2017-10-20 | 佛山市盈智轩科技有限公司 | 家庭用的地面清洁系统以及地面清洁方法 |
| JPWO2022070302A1 (ja) * | 2020-09-30 | 2022-04-07 |
Families Citing this family (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3104194B1 (en) | 2012-08-27 | 2019-02-06 | Aktiebolaget Electrolux | Robot positioning system |
| CN110448222A (zh) | 2013-04-15 | 2019-11-15 | 伊莱克斯公司 | 机器人真空吸尘器 |
| JP6198234B2 (ja) | 2013-04-15 | 2017-09-20 | アクティエボラゲット エレクトロラックス | 突出サイドブラシを備えたロボット真空掃除機 |
| JP6035209B2 (ja) * | 2013-07-11 | 2016-11-30 | ヤマハ発動機株式会社 | ナビゲーション装置、シミュレーション装置、移動装置およびナビゲーション方法 |
| KR102099495B1 (ko) | 2013-12-19 | 2020-04-09 | 에이비 엘렉트로룩스 | 로봇 청소 장치가 장애물에 올라가는 것의 감지 |
| WO2015090398A1 (en) | 2013-12-19 | 2015-06-25 | Aktiebolaget Electrolux | Robotic vacuum cleaner with side brush moving in spiral pattern |
| EP3084538B1 (en) * | 2013-12-19 | 2017-11-01 | Aktiebolaget Electrolux | Robotic cleaning device with perimeter recording function |
| CN105793790B (zh) | 2013-12-19 | 2022-03-04 | 伊莱克斯公司 | 优先化清洁区域 |
| KR102130190B1 (ko) | 2013-12-19 | 2020-07-03 | 에이비 엘렉트로룩스 | 로봇 청소 장치 |
| US10433697B2 (en) | 2013-12-19 | 2019-10-08 | Aktiebolaget Electrolux | Adaptive speed control of rotating side brush |
| CN105813526B (zh) * | 2013-12-19 | 2021-08-24 | 伊莱克斯公司 | 机器人清扫装置以及用于地标识别的方法 |
| EP3082539B1 (en) | 2013-12-20 | 2019-02-20 | Aktiebolaget Electrolux | Dust container |
| JP6513709B2 (ja) | 2014-07-10 | 2019-05-15 | アクチエボラゲット エレクトロルックス | ロボット型清掃装置における計測誤差を検出する方法、ロボット型清掃装置、コンピュータプログラムおよびコンピュータプログラムプロダクト |
| JP6443897B2 (ja) | 2014-09-08 | 2018-12-26 | アクチエボラゲット エレクトロルックス | ロボット真空掃除機 |
| KR102271782B1 (ko) | 2014-09-08 | 2021-06-30 | 에이비 엘렉트로룩스 | 로봇 진공 청소기 |
| US10877484B2 (en) | 2014-12-10 | 2020-12-29 | Aktiebolaget Electrolux | Using laser sensor for floor type detection |
| CN114668335A (zh) | 2014-12-12 | 2022-06-28 | 伊莱克斯公司 | 侧刷和机器人吸尘器 |
| US10534367B2 (en) | 2014-12-16 | 2020-01-14 | Aktiebolaget Electrolux | Experience-based roadmap for a robotic cleaning device |
| WO2016095966A1 (en) * | 2014-12-16 | 2016-06-23 | Aktiebolaget Electrolux | Cleaning method for a robotic cleaning device |
| US11400595B2 (en) * | 2015-01-06 | 2022-08-02 | Nexus Robotics Llc | Robotic platform with area cleaning mode |
| KR102328252B1 (ko) * | 2015-02-13 | 2021-11-19 | 삼성전자주식회사 | 청소 로봇 및 그 제어방법 |
| KR101697857B1 (ko) * | 2015-04-08 | 2017-01-18 | 엘지전자 주식회사 | 이동 로봇 및 그의 위치인식방법 |
| CN107405034B (zh) | 2015-04-17 | 2022-09-13 | 伊莱克斯公司 | 机器人清洁设备以及控制所述机器人清洁设备的方法 |
| WO2017036532A1 (en) | 2015-09-03 | 2017-03-09 | Aktiebolaget Electrolux | System of robotic cleaning devices |
| KR101778500B1 (ko) * | 2015-12-07 | 2017-09-14 | (주)새온 | 반사판을 구비한 이동로봇 |
| WO2017157421A1 (en) | 2016-03-15 | 2017-09-21 | Aktiebolaget Electrolux | Robotic cleaning device and a method at the robotic cleaning device of performing cliff detection |
| US11122953B2 (en) | 2016-05-11 | 2021-09-21 | Aktiebolaget Electrolux | Robotic cleaning device |
| WO2018054451A1 (en) * | 2016-09-20 | 2018-03-29 | Aktiebolaget Electrolux | Robotic cleaning device and a method of controlling movement of the robotic cleaning device |
| CN106647774A (zh) * | 2017-02-14 | 2017-05-10 | 南京罗普森智能科技有限公司 | 实现室内扫地机器人自主探索建图及自主路径覆盖的方法 |
| US11474533B2 (en) | 2017-06-02 | 2022-10-18 | Aktiebolaget Electrolux | Method of detecting a difference in level of a surface in front of a robotic cleaning device |
| EP3413155B1 (de) * | 2017-06-09 | 2020-02-26 | Andreas Stihl AG & Co. KG | Verfahren zum erfassen mindestens eines abschnitts eines begrenzungsrands einer zu bearbeitenden fläche, verfahren zum betreiben eines autonomen mobilen grünflächenbearbeitungsroboters, erfassungssystem und grünflächenbearbeitungssystem |
| EP3687357B1 (en) | 2017-09-26 | 2024-07-10 | Aktiebolaget Electrolux | Controlling movement of a robotic cleaning device |
| CN108062098B (zh) * | 2017-12-11 | 2020-12-11 | 子歌教育机器人(深圳)有限公司 | 智能机器人的地图构建方法和系统 |
| CN108158505A (zh) * | 2017-12-26 | 2018-06-15 | 佛山市道静科技有限公司 | 一种配合扫地机器人的智能控制系统 |
| CN108514380A (zh) * | 2018-03-07 | 2018-09-11 | 袁静 | 一种清洁机器人 |
| US11278176B2 (en) * | 2018-09-06 | 2022-03-22 | Irobot Corporation | Scheduling system for autonomous robots |
| DE102018125266B3 (de) * | 2018-10-12 | 2019-11-28 | Fachhochschule Bielefeld | Verfahren und Robotersystem zur Eingabe eines Arbeitsbereichs |
| ES2951735T3 (es) | 2018-11-06 | 2023-10-24 | Nihon Business Data Proc Center Co Ltd | Robot de limpieza autopropulsado |
| CN111166238A (zh) * | 2018-11-09 | 2020-05-19 | 北京奇虎科技有限公司 | 清洁禁区的处理方法、装置、设备及存储介质 |
| SE2051496A1 (en) * | 2020-12-18 | 2022-06-19 | Husqvarna Ab | Concrete surface processing machines, systems, and methods for processing concrete surfaces |
| US20240061439A1 (en) * | 2020-12-18 | 2024-02-22 | Husqvarna Ab | Concrete surface mapping robots, systems, and methods for processing concrete surfaces |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001347478A (ja) * | 2000-04-06 | 2001-12-18 | Casio Comput Co Ltd | ロボットに対する操作対象の教示方法およびその装置ならびにロボット |
| JP2002182742A (ja) * | 2000-11-17 | 2002-06-26 | Samsung Kwangju Electronics Co Ltd | モービルロボット及びその経路補正方法 |
| JP2002287824A (ja) * | 2001-03-26 | 2002-10-04 | Toshiba Tec Corp | 自律走行ロボット |
| JP2005052961A (ja) * | 2003-08-01 | 2005-03-03 | Samsung Electronics Co Ltd | ロボットシステム及びその制御方法 |
| JP2005349497A (ja) * | 2004-06-08 | 2005-12-22 | Sharp Corp | 自走式ロボット |
| JP2006185438A (ja) * | 2004-12-03 | 2006-07-13 | Matsushita Electric Ind Co Ltd | ロボット制御装置 |
| JP2007226322A (ja) * | 2006-02-21 | 2007-09-06 | Sharp Corp | ロボットコントロールシステム |
| JP2010507169A (ja) * | 2006-10-18 | 2010-03-04 | ユタカ・ジェイ・カナヤマ | 移動ロボットによる地図作成方法 |
Family Cites Families (673)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1286321A (en) | 1916-10-09 | 1918-12-03 | Hoover Suction Sweeper Co | Brush. |
| US1401007A (en) | 1918-04-22 | 1921-12-20 | Hoover Suction Sweeper Co | Suction-sweeper |
| US3010129A (en) | 1957-11-04 | 1961-11-28 | Whirlpool Co | Perambulating kitchen appliances and control means therefor |
| US3233274A (en) | 1963-01-28 | 1966-02-08 | Tennant Co G H | Sweeping machine dust separator apparatus |
| US3550714A (en) | 1964-10-20 | 1970-12-29 | Mowbot Inc | Lawn mower |
| US3570227A (en) | 1969-01-16 | 1971-03-16 | Mowbot Inc | Self-propelled random motion lawnmower |
| DE2020220A1 (de) | 1970-04-25 | 1971-11-11 | Bosch Gmbh Robert | Fahrzeug |
| GB1360261A (en) | 1971-09-23 | 1974-07-17 | Dixon Co Ltd R G | Floor treating machines |
| CH566763A5 (ja) | 1973-07-03 | 1975-09-30 | Leifheit International | |
| US4119900A (en) | 1973-12-21 | 1978-10-10 | Ito Patent-Ag | Method and system for the automatic orientation and control of a robot |
| GB1500311A (en) | 1975-01-10 | 1978-02-08 | Dixon & Co Ltd R D | Floor treating machines |
| US4036147A (en) | 1975-03-28 | 1977-07-19 | Westling Wayne A | Rapid transit system |
| DE2533071C3 (de) | 1975-07-24 | 1979-07-12 | Leifheit International Guenter Leifheit Gmbh, 5408 Nassau | Bodenkehrmaschine |
| JPS586886B2 (ja) | 1978-09-18 | 1983-02-07 | 株式会社トキメック | 距離測定装置 |
| FR2445611A1 (fr) | 1978-12-29 | 1980-07-25 | Thomson Csf | Generateur d'ondes radioelectriques pour hyperfrequence |
| GB2038615B (en) | 1978-12-31 | 1983-04-13 | Nintendo Co Ltd | Self-moving type vacuum cleaner |
| US4369543A (en) | 1980-04-14 | 1983-01-25 | Jen Chen | Remote-control radio vacuum cleaner |
| DE3100497A1 (de) | 1981-01-09 | 1982-08-26 | Leifheit International Günter Leifheit GmbH, 5408 Nassau | "bodenkehrmaschine" |
| US4674048A (en) | 1983-10-26 | 1987-06-16 | Automax Kabushiki-Kaisha | Multiple robot control system using grid coordinate system for tracking and completing travel over a mapped region containing obstructions |
| CH661981A5 (de) | 1984-02-13 | 1987-08-31 | Haenni & Cie Ag | Optisches messgeraet zur beruehrungslosen abstandsmessung. |
| JPS6197711A (ja) | 1984-10-18 | 1986-05-16 | Casio Comput Co Ltd | 赤外線追尾ロボツトシステム |
| US4800978A (en) | 1984-11-09 | 1989-01-31 | Nec Corporation | Magnetic object detecting system for automated guided vehicle system |
| JPS6286414A (ja) | 1985-10-12 | 1987-04-20 | Daifuku Co Ltd | 移動車の障害物検出装置 |
| WO1987002483A1 (en) | 1985-10-15 | 1987-04-23 | Knepper Hans Reinhard | Process and installation for the automatic control of a utility vehicle |
| JPH078271B2 (ja) | 1985-11-08 | 1995-02-01 | 松下電器産業株式会社 | 自走式掃除機 |
| JPS62120510A (ja) | 1985-11-21 | 1987-06-01 | Hitachi Ltd | 自動掃除機の制御方法 |
| JPS62152421A (ja) | 1985-12-25 | 1987-07-07 | 松下電器産業株式会社 | 自走式掃除機 |
| JPS62152424A (ja) | 1985-12-25 | 1987-07-07 | 松下電器産業株式会社 | 自走式掃除機 |
| AU7484287A (en) | 1986-11-28 | 1988-06-16 | Denning Mobile Robotics Inc. | Node map system and method for vehicle |
| FR2620070A2 (fr) | 1986-12-11 | 1989-03-10 | Jonas Andre | Unite mobile autoguidee et appareil de nettoyage tel qu'un aspirateur comportant une telle unite |
| JPH0824648B2 (ja) | 1987-01-20 | 1996-03-13 | 松下電器産業株式会社 | 自走式掃除機 |
| US4864511A (en) | 1987-01-27 | 1989-09-05 | Storage Technology Corporation | Automated cartridge system |
| DE3703422A1 (de) | 1987-02-05 | 1988-08-18 | Zeiss Carl Fa | Optoelektronischer abstandssensor |
| DE3704375A1 (de) | 1987-02-12 | 1988-08-25 | Wall Verkehrswerbung Gmbh | Sanitaerzelle fuer oeffentliche zwecke |
| US5377106A (en) | 1987-03-24 | 1994-12-27 | Fraunhofer Gesellschaft Zur Foerderung Der Angewandten Forschung E.V. | Process for navigating an unmanned vehicle and a vehicle for the same |
| JPH0786767B2 (ja) | 1987-03-30 | 1995-09-20 | 株式会社日立製作所 | 自走ロボツトの走行制御方法 |
| US4849067A (en) | 1987-07-16 | 1989-07-18 | Texas Instruments Incorporated | Method for etching tungsten |
| US4886570A (en) | 1987-07-16 | 1989-12-12 | Texas Instruments Incorporated | Processing apparatus and method |
| US4836905A (en) | 1987-07-16 | 1989-06-06 | Texas Instruments Incorporated | Processing apparatus |
| US4872938A (en) | 1987-07-16 | 1989-10-10 | Texas Instruments Incorporated | Processing apparatus |
| US4838990A (en) | 1987-07-16 | 1989-06-13 | Texas Instruments Incorporated | Method for plasma etching tungsten |
| US4822450A (en) | 1987-07-16 | 1989-04-18 | Texas Instruments Incorporated | Processing apparatus and method |
| US4842686A (en) | 1987-07-17 | 1989-06-27 | Texas Instruments Incorporated | Wafer processing apparatus and method |
| JPH01180010A (ja) | 1988-01-08 | 1989-07-18 | Sanyo Electric Co Ltd | 移動車 |
| US4919224A (en) | 1988-05-16 | 1990-04-24 | Industrial Technology Research Institute | Automatic working vehicular system |
| JPH01175669U (ja) | 1988-05-23 | 1989-12-14 | ||
| US4954962A (en) | 1988-09-06 | 1990-09-04 | Transitions Research Corporation | Visual navigation and obstacle avoidance structured light system |
| US4962453A (en) | 1989-02-07 | 1990-10-09 | Transitions Research Corporation | Autonomous vehicle for working on a surface and method of controlling same |
| FR2648071B1 (fr) | 1989-06-07 | 1995-05-19 | Onet | Procede et appareil autonomes de nettoyage automatique de sol par execution de missions programmees |
| JPH0313611A (ja) | 1989-06-07 | 1991-01-22 | Toshiba Corp | 自動清掃装置 |
| US4959192A (en) | 1989-06-13 | 1990-09-25 | Tennesse Valley Authority | Nozzle dam translocating system |
| US5006302A (en) | 1989-06-13 | 1991-04-09 | Tennessee Valley Authority | Nozzle dam remote installation system and technique |
| US4989818A (en) | 1989-06-13 | 1991-02-05 | Tennessee Valley Authority | Nozzle dam remote installation system and technique |
| US5042861A (en) | 1989-06-13 | 1991-08-27 | Tennessee Valley Authority | Nozzle dam remote installation system and technique |
| US5107946A (en) | 1989-07-26 | 1992-04-28 | Honda Giken Kogyo Kabushiki Kaisha | Steering control system for moving vehicle |
| JP2652573B2 (ja) | 1989-08-25 | 1997-09-10 | 博夫 庄司 | ゴルフカート走行誘導法 |
| JPH03166074A (ja) | 1989-11-27 | 1991-07-18 | Sony Corp | 自走ロボット |
| US5023444A (en) | 1989-12-28 | 1991-06-11 | Aktiebolaget Electrolux | Machine proximity sensor |
| US5045118A (en) | 1990-05-04 | 1991-09-03 | Tennant Company | Method of removing debris and dust from a carpet |
| US5307273A (en) | 1990-08-29 | 1994-04-26 | Goldstar Co., Ltd. | Apparatus and method for recognizing carpets and stairs by cleaning robot |
| KR100189345B1 (ko) | 1990-09-24 | 1999-06-01 | 앙드레 코렌스 | 연속적 자율적인 초삭(草削)기 |
| EP0479609A3 (en) | 1990-10-05 | 1993-01-20 | Hitachi, Ltd. | Vacuum cleaner and control method thereof |
| US5086535A (en) * | 1990-10-22 | 1992-02-11 | Racine Industries, Inc. | Machine and method using graphic data for treating a surface |
| KR930000081B1 (ko) | 1990-12-07 | 1993-01-08 | 주식회사 금성사 | 청소기의 자동 청소방법 |
| JP3135587B2 (ja) | 1991-01-28 | 2001-02-19 | 富士重工業株式会社 | 壁際清掃装置 |
| US5155683A (en) | 1991-04-11 | 1992-10-13 | Wadiatur Rahim | Vehicle remote guidance with path control |
| WO1993003399A1 (en) | 1991-08-07 | 1993-02-18 | Aktiebolaget Electrolux | Obstacle detecting assembly |
| JP3094547B2 (ja) | 1991-09-25 | 2000-10-03 | 松下電器産業株式会社 | 自走式電気掃除機の段差検知装置 |
| JP3146563B2 (ja) | 1991-09-26 | 2001-03-19 | 豊和工業株式会社 | 床面清掃ロボット |
| NL9200258A (nl) | 1991-10-04 | 1993-05-03 | Lely Nv C Van Der | Werkwijze voor het reinigen van melkbekers en/of het nabehandelen van de spenen van een gemolken dier, inrichting voor het melken van dieren voor het toepassen van deze werkwijze(n), en spoelwerktuig toegepast in een dergelijke inrichting. |
| US5245177A (en) | 1991-10-24 | 1993-09-14 | Schiller Norman H | Electro-optical system for detecting the presence of an object within a predetermined detection system |
| KR940006561B1 (ko) | 1991-12-30 | 1994-07-22 | 주식회사 금성사 | 자동주행 청소용 로버트의 장애물 감지장치 |
| JP3282206B2 (ja) | 1992-01-14 | 2002-05-13 | 松下電器産業株式会社 | 移動作業ロボットの障害物検知装置 |
| JPH05224745A (ja) | 1992-02-07 | 1993-09-03 | Matsushita Electric Ind Co Ltd | 移動作業ロボット |
| JPH05228090A (ja) | 1992-02-20 | 1993-09-07 | Matsushita Electric Ind Co Ltd | 自走式掃除機 |
| US5568589A (en) | 1992-03-09 | 1996-10-22 | Hwang; Jin S. | Self-propelled cleaning machine with fuzzy logic control |
| DK36192D0 (da) | 1992-03-18 | 1992-03-18 | Ole Nygaard Andersen | Gulvrengoeringsmaskine |
| JPH0680203A (ja) | 1992-03-24 | 1994-03-22 | East Japan Railway Co | 床面洗浄ロボットの制御方法 |
| KR940004375B1 (ko) | 1992-03-25 | 1994-05-23 | 삼성전자 주식회사 | 자주식 청소기의 구동방법 |
| DE4211789C2 (de) | 1992-04-08 | 1996-07-25 | Kaercher Gmbh & Co Alfred | Bodenkehrmaschine |
| DE69312565T2 (de) | 1992-05-15 | 1998-01-02 | Toshiba Kawasaki Kk | Roboter zum Reinigen eines Reisezugwagens |
| US5345639A (en) | 1992-05-28 | 1994-09-13 | Tokyo Electron Limited | Device and method for scrubbing and cleaning substrate |
| JP2627472B2 (ja) | 1992-06-23 | 1997-07-09 | 株式会社椿本チエイン | 移動体の障害物回避方法 |
| JPH064130A (ja) | 1992-06-23 | 1994-01-14 | Sanyo Electric Co Ltd | 掃除ロボット |
| US5279672A (en) | 1992-06-29 | 1994-01-18 | Windsor Industries, Inc. | Automatic controlled cleaning machine |
| US5276933A (en) | 1992-07-02 | 1994-01-11 | Tennant Company | Damage resistant recirculation flap |
| JPH0683442A (ja) | 1992-09-04 | 1994-03-25 | Sanyo Electric Co Ltd | 走行ロボット |
| JP3196355B2 (ja) | 1992-10-20 | 2001-08-06 | 松下電器産業株式会社 | 自走式掃除機 |
| US5548511A (en) | 1992-10-29 | 1996-08-20 | White Consolidated Industries, Inc. | Method for controlling self-running cleaning apparatus |
| JPH06144215A (ja) | 1992-10-30 | 1994-05-24 | Meidensha Corp | 無人搬送車 |
| JPH06179145A (ja) | 1992-12-10 | 1994-06-28 | Toyoda Mach Works Ltd | 搬送台車 |
| US5349378A (en) | 1992-12-21 | 1994-09-20 | Robotic Vision Systems, Inc. | Context independent fusion of range and intensity imagery |
| FR2700213B1 (fr) | 1993-01-05 | 1995-03-24 | Sfim | Ensemble de guidage. |
| US5398632A (en) | 1993-03-08 | 1995-03-21 | Mmc Compliance Engineering, Inc. | Apparatus and method for performing external surface work on ship hulls |
| DE9307500U1 (de) | 1993-05-18 | 1993-07-22 | Bernstein Senso-Plus, 32457 Porta Westfalica | Reflexionslichttaster |
| US5440216A (en) | 1993-06-08 | 1995-08-08 | Samsung Electronics Co., Ltd. | Robot cleaner |
| JP3025604B2 (ja) | 1993-06-15 | 2000-03-27 | 日本輸送機株式会社 | 無人作業車の操舵制御方法 |
| KR0140499B1 (ko) | 1993-08-07 | 1998-07-01 | 김광호 | 청소기와 그 제어방법 |
| JPH0759695A (ja) | 1993-08-24 | 1995-03-07 | Matsushita Electric Ind Co Ltd | 自走式掃除機 |
| KR0161031B1 (ko) | 1993-09-09 | 1998-12-15 | 김광호 | 로보트의 위치오차보정장치 |
| KR100197676B1 (ko) | 1993-09-27 | 1999-06-15 | 윤종용 | 로보트 청소기 |
| JP3319093B2 (ja) | 1993-11-08 | 2002-08-26 | 松下電器産業株式会社 | 移動作業ロボット |
| DE4340367C2 (de) | 1993-11-26 | 2003-12-11 | Vorwerk Co Interholding | Gerät zur Bodenpflege |
| DE4408982C1 (de) | 1994-03-16 | 1995-05-18 | Deutsche Forsch Luft Raumfahrt | Autonomes Navigationssystem für einen mobilen Roboter oder Manipulator |
| US5646494A (en) | 1994-03-29 | 1997-07-08 | Samsung Electronics Co., Ltd. | Charge induction apparatus of robot cleaner and method thereof |
| SE502834C2 (sv) | 1994-03-29 | 1996-01-29 | Electrolux Ab | Förfarande och anordning för avkänning av hinder vid självgående anordning |
| KR970000582B1 (ko) | 1994-03-31 | 1997-01-14 | 삼성전자 주식회사 | 로보트청소기의 주행제어방법 |
| KR970000328Y1 (ko) | 1994-03-31 | 1997-01-16 | 삼성전자 주식회사 | 자동청소기의 전원공급장치 |
| JPH07281742A (ja) | 1994-04-04 | 1995-10-27 | Kubota Corp | ビーム光誘導式作業車用の走行制御装置 |
| SE514791C2 (sv) | 1994-06-06 | 2001-04-23 | Electrolux Ab | Förbättrat förfarande för lokalisering av fyrar vid självgående anordning |
| KR0161042B1 (ko) | 1994-06-07 | 1999-01-15 | 김광호 | 로보트의 주행제어장치 및 그 방법 |
| BE1008470A3 (fr) | 1994-07-04 | 1996-05-07 | Colens Andre | Dispositif et systeme automatique de depoussierage de sol et engin y adapte. |
| US5745946A (en) | 1994-07-15 | 1998-05-05 | Ontrak Systems, Inc. | Substrate processing system |
| US5454129A (en) | 1994-09-01 | 1995-10-03 | Kell; Richard T. | Self-powered pool vacuum with remote controlled capabilities |
| JP3204857B2 (ja) | 1994-09-22 | 2001-09-04 | 日本輸送機株式会社 | 自動掃除機 |
| US5560077A (en) | 1994-11-25 | 1996-10-01 | Crotchett; Diane L. | Vacuum dustpan apparatus |
| JPH08178651A (ja) * | 1994-12-26 | 1996-07-12 | Kubota Corp | 移動体の方位検出装置 |
| US5698957A (en) | 1995-04-24 | 1997-12-16 | Advance Machine Company | Over current protective circuit with time delay for a floor cleaning machine |
| IL113913A (en) | 1995-05-30 | 2000-02-29 | Friendly Machines Ltd | Navigation method and system |
| JPH08326025A (ja) | 1995-05-31 | 1996-12-10 | Tokico Ltd | 清掃ロボット |
| JPH08335112A (ja) | 1995-06-08 | 1996-12-17 | Minolta Co Ltd | 移動作業ロボットシステム |
| JPH0944240A (ja) | 1995-08-01 | 1997-02-14 | Kubota Corp | 移動車の誘導装置 |
| JPH0947413A (ja) | 1995-08-08 | 1997-02-18 | Minolta Co Ltd | 清掃ロボット |
| JPH09150741A (ja) | 1995-11-29 | 1997-06-10 | Toyota Auto Body Co Ltd | 重量物運搬用の電動台車 |
| KR0168189B1 (ko) | 1995-12-01 | 1999-02-01 | 김광호 | 로보트의 환경인식장치 및 그 제어방법 |
| JPH09185410A (ja) | 1996-01-08 | 1997-07-15 | Hitachi Electric Syst:Kk | 自律走行車の走行制御方法及び走行制御装置 |
| US5852984A (en) | 1996-01-31 | 1998-12-29 | Ishikawajimi-Harima Heavy Industries Co., Ltd. | Underwater vehicle and method of positioning same |
| US5890250A (en) | 1996-02-02 | 1999-04-06 | Sky Robitics, Inc. | Robotic washing apparatus |
| NL1002487C2 (nl) | 1996-02-29 | 1997-09-01 | Maasland Nv | Constructie met een stalinrichting voor dieren. |
| SE509317C2 (sv) | 1996-04-25 | 1999-01-11 | Electrolux Ab | Munstycksarrangemang för en självgående dammsugare |
| US5935179A (en) | 1996-04-30 | 1999-08-10 | Aktiebolaget Electrolux | System and device for a self orienting device |
| SE506372C2 (sv) | 1996-04-30 | 1997-12-08 | Electrolux Ab | Självgående anordning |
| JP3493539B2 (ja) | 1996-06-03 | 2004-02-03 | ミノルタ株式会社 | 走行作業ロボット |
| US6142252A (en) | 1996-07-11 | 2000-11-07 | Minolta Co., Ltd. | Autonomous vehicle that runs while recognizing work area configuration, and method of selecting route |
| US5778554A (en) | 1996-07-15 | 1998-07-14 | Oliver Design, Inc. | Wafer spin dryer and method of drying a wafer |
| US5926909A (en) | 1996-08-28 | 1999-07-27 | Mcgee; Daniel | Remote control vacuum cleaner and charging system |
| JPH10105236A (ja) | 1996-09-30 | 1998-04-24 | Minolta Co Ltd | 移動体の位置決め装置および移動体の位置決め方法 |
| ES2143825T3 (es) | 1996-10-17 | 2000-05-16 | Daimler Chrysler Ag | Procedimiento para la aplicacion de una lamina protectora autoadhesiva sobre carrocerias y dispositivo para la realizacion del mismo. |
| EP0837493B8 (en) | 1996-10-21 | 2007-11-07 | Ebara Corporation | Cleaning apparatus |
| US5987696A (en) | 1996-12-24 | 1999-11-23 | Wang; Kevin W. | Carpet cleaning machine |
| US5858111A (en) | 1997-01-21 | 1999-01-12 | Marrero; Lou | Aircraft maintenance apparatus and method of maintaining same |
| WO1998033103A1 (de) | 1997-01-22 | 1998-07-30 | Siemens Aktiengesellschaft | Verfahren und anordnung zur andockpositionierung einer autonomen mobilen einheit |
| US6076226A (en) | 1997-01-27 | 2000-06-20 | Robert J. Schaap | Controlled self operated vacuum cleaning system |
| US5942869A (en) | 1997-02-13 | 1999-08-24 | Honda Giken Kogyo Kabushiki Kaisha | Mobile robot control device |
| US5995884A (en) | 1997-03-07 | 1999-11-30 | Allen; Timothy P. | Computer peripheral floor cleaning system and navigation method |
| EP0870461A1 (de) | 1997-04-11 | 1998-10-14 | Fraunhofer-Gesellschaft Zur Förderung Der Angewandten Forschung E.V. | Antriebsvorrichtung zum Bewegen eines Roboters oder Fahrzeugs auf flachen, geneigten oder gewölbten Flächen, insbesondere einer Glaskonstruktion |
| US5947051A (en) | 1997-06-04 | 1999-09-07 | Geiger; Michael B. | Underwater self-propelled surface adhering robotically operated vehicle |
| US6251551B1 (en) | 1997-07-17 | 2001-06-26 | Horst Kunze-Concewitz | Method and device for treating two-dimensional substrates, especially silicon slices (wafers), for producing microelectronic components |
| US6226830B1 (en) | 1997-08-20 | 2001-05-08 | Philips Electronics North America Corp. | Vacuum cleaner with obstacle avoidance |
| US6358325B1 (en) | 1997-08-22 | 2002-03-19 | Micron Technology, Inc. | Polysilicon-silicon dioxide cleaning process performed in an integrated cleaner with scrubber |
| SE510524C2 (sv) | 1997-09-19 | 1999-05-31 | Electrolux Ab | Elektroniskt avgränsningssystem |
| US5933902A (en) | 1997-11-18 | 1999-08-10 | Frey; Bernhard M. | Wafer cleaning system |
| US6532404B2 (en) | 1997-11-27 | 2003-03-11 | Colens Andre | Mobile robots and their control system |
| KR20010032583A (ko) | 1997-11-27 | 2001-04-25 | 콜렌스 안드레 | 이동 로봇과 그 조종장치 개선 |
| US6064926A (en) | 1997-12-08 | 2000-05-16 | Caterpillar Inc. | Method and apparatus for determining an alternate path in response to detection of an obstacle |
| SE523080C2 (sv) | 1998-01-08 | 2004-03-23 | Electrolux Ab | Dockningssystem för självgående arbetsredskap |
| SE511254C2 (sv) | 1998-01-08 | 1999-09-06 | Electrolux Ab | Elektroniskt söksystem för arbetsredskap |
| JPH11267074A (ja) | 1998-03-25 | 1999-10-05 | Sharp Corp | 掃除ロボット |
| US6263989B1 (en) | 1998-03-27 | 2001-07-24 | Irobot Corporation | Robotic platform |
| US6413149B1 (en) | 1998-04-28 | 2002-07-02 | Ebara Corporation | Abrading plate and polishing method using the same |
| US6176067B1 (en) | 1998-03-27 | 2001-01-23 | Rippey Corporation | Method for packaging sponge or porous polymeric products |
| IL124413A (en) | 1998-05-11 | 2001-05-20 | Friendly Robotics Ltd | System and method for area coverage with an autonomous robot |
| US6941199B1 (en) | 1998-07-20 | 2005-09-06 | The Procter & Gamble Company | Robotic system |
| DE69913150T2 (de) | 1998-07-20 | 2004-08-26 | The Procter & Gamble Company, Cincinnati | Robotersystem |
| WO2000007492A1 (de) | 1998-07-31 | 2000-02-17 | Volker Sommer | Haushaltsroboter zum automatischen staubsaugen von bodenflächen |
| US6230360B1 (en) | 1998-09-02 | 2001-05-15 | Scott Singleton | Baked good pan cleaner |
| DE19849978C2 (de) | 1998-10-29 | 2001-02-08 | Erwin Prasler | Selbstfahrendes Reinigungsgerät |
| CA2289808A1 (en) | 1998-11-18 | 2000-05-18 | Arnold L. Sepke | Battery power combination vacuum cleaner |
| US6726823B1 (en) | 1998-11-28 | 2004-04-27 | Acm Research, Inc. | Methods and apparatus for holding and positioning semiconductor workpieces during electropolishing and/or electroplating of the workpieces |
| GB2344752A (en) | 1998-12-18 | 2000-06-21 | Notetry Ltd | Handle for a portable appliance e.g. a vacuum cleaner |
| GB2344751B (en) | 1998-12-18 | 2002-01-09 | Notetry Ltd | Vacuum cleaner |
| GB9827779D0 (en) | 1998-12-18 | 1999-02-10 | Notetry Ltd | Improvements in or relating to appliances |
| GB2344900A (en) | 1998-12-18 | 2000-06-21 | Notetry Ltd | Robotic floor cleaning device with obstacle detection |
| GB2344888A (en) | 1998-12-18 | 2000-06-21 | Notetry Ltd | Obstacle detection system |
| GB2344746A (en) | 1998-12-18 | 2000-06-21 | Notetry Ltd | Vacuum cleaner wherein an alternative air inlet is selected by moving the separating apparatus |
| GB2344750B (en) | 1998-12-18 | 2002-06-26 | Notetry Ltd | Vacuum cleaner |
| US6339735B1 (en) | 1998-12-29 | 2002-01-15 | Friendly Robotics Ltd. | Method for operating a robot |
| US6124694A (en) | 1999-03-18 | 2000-09-26 | Bancroft; Allen J. | Wide area navigation for a robot scrubber |
| US6076662A (en) | 1999-03-24 | 2000-06-20 | Rippey Corporation | Packaged sponge or porous polymeric products |
| JP4030247B2 (ja) | 1999-05-17 | 2008-01-09 | 株式会社荏原製作所 | ドレッシング装置及びポリッシング装置 |
| GB2350696A (en) | 1999-05-28 | 2000-12-06 | Notetry Ltd | Visual status indicator for a robotic machine, eg a vacuum cleaner |
| KR100342029B1 (ko) | 1999-06-07 | 2002-06-27 | 탁승호 | 표면 주행체 및 그를 이용한 청소기 |
| BR0011415A (pt) | 1999-06-08 | 2002-09-24 | Johnson S C Comm Markets Inc | Aparelho para a limpeza de piso |
| JP4165965B2 (ja) | 1999-07-09 | 2008-10-15 | フィグラ株式会社 | 自律走行作業車 |
| GB9917232D0 (en) | 1999-07-23 | 1999-09-22 | Notetry Ltd | Method of operating a floor cleaning device |
| GB2355523B (en) | 1999-10-21 | 2004-03-10 | Notetry Ltd | Detection system |
| US6459955B1 (en) | 1999-11-18 | 2002-10-01 | The Procter & Gamble Company | Home cleaning robot |
| US6370452B1 (en) | 1999-12-08 | 2002-04-09 | Samuel T. Pfister | Autonomous vehicle transit system |
| US6882334B1 (en) | 1999-12-14 | 2005-04-19 | Gateway, Inc. | Apparatus and method for detection of communication signal loss |
| JP2001187009A (ja) | 1999-12-28 | 2001-07-10 | Matsushita Electric Ind Co Ltd | 電気掃除機用吸込具及び電気掃除機 |
| US8788092B2 (en) | 2000-01-24 | 2014-07-22 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8412377B2 (en) | 2000-01-24 | 2013-04-02 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US7155308B2 (en) | 2000-01-24 | 2006-12-26 | Irobot Corporation | Robot obstacle detection system |
| US6594844B2 (en) | 2000-01-24 | 2003-07-22 | Irobot Corporation | Robot obstacle detection system |
| US7039453B2 (en) | 2000-02-08 | 2006-05-02 | Tarun Mullick | Miniature ingestible capsule |
| US6443509B1 (en) | 2000-03-21 | 2002-09-03 | Friendly Robotics Ltd. | Tactile sensor |
| US6482678B1 (en) | 2000-03-31 | 2002-11-19 | Lam Research Corporation | Wafer preparation systems and methods for preparing wafers |
| US6457199B1 (en) | 2000-10-12 | 2002-10-01 | Lam Research Corporation | Substrate processing in an immersion, scrub and dry system |
| US6662889B2 (en) | 2000-04-04 | 2003-12-16 | Irobot Corporation | Wheeled platforms |
| US6870792B2 (en) | 2000-04-04 | 2005-03-22 | Irobot Corporation | Sonar Scanner |
| US6956348B2 (en) | 2004-01-28 | 2005-10-18 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US6769004B2 (en) | 2000-04-27 | 2004-07-27 | Irobot Corporation | Method and system for incremental stack scanning |
| US6845297B2 (en) | 2000-05-01 | 2005-01-18 | Irobot Corporation | Method and system for remote control of mobile robot |
| CA2407992C (en) | 2000-05-01 | 2010-07-20 | Irobot Corporation | Method and system for remote control of mobile robot |
| US6633150B1 (en) | 2000-05-02 | 2003-10-14 | Personal Robotics, Inc. | Apparatus and method for improving traction for a mobile robot |
| US6381801B1 (en) | 2000-05-10 | 2002-05-07 | Clean Up America, Inc. | Self-propelled brushless surface cleaner with reclamation |
| US6481515B1 (en) | 2000-05-30 | 2002-11-19 | The Procter & Gamble Company | Autonomous mobile surface treating apparatus |
| US6457206B1 (en) | 2000-10-20 | 2002-10-01 | Scott H. Judson | Remote-controlled vacuum cleaner |
| TW495416B (en) | 2000-10-24 | 2002-07-21 | Ebara Corp | Polishing apparatus |
| NO313533B1 (no) | 2000-10-30 | 2002-10-21 | Torbjoern Aasen | Mobil robot |
| US6615885B1 (en) | 2000-10-31 | 2003-09-09 | Irobot Corporation | Resilient wheel structure |
| GB2382251B (en) | 2000-11-17 | 2004-01-07 | Samsung Kwangju Electronics Co | Mobile robot |
| KR100642072B1 (ko) | 2000-11-22 | 2006-11-10 | 삼성광주전자 주식회사 | 알에프모듈을 이용한 모빌로봇 시스템 |
| US6571415B2 (en) | 2000-12-01 | 2003-06-03 | The Hoover Company | Random motion cleaner |
| SE0004466D0 (sv) | 2000-12-04 | 2000-12-04 | Abb Ab | Mobile Robot |
| US6661239B1 (en) | 2001-01-02 | 2003-12-09 | Irobot Corporation | Capacitive sensor systems and methods with increased resolution and automatic calibration |
| US6658325B2 (en) | 2001-01-16 | 2003-12-02 | Stephen Eliot Zweig | Mobile robotic with web server and digital radio links |
| US6690134B1 (en) | 2001-01-24 | 2004-02-10 | Irobot Corporation | Method and system for robot localization and confinement |
| US6809490B2 (en) | 2001-06-12 | 2004-10-26 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US7571511B2 (en) | 2002-01-03 | 2009-08-11 | Irobot Corporation | Autonomous floor-cleaning robot |
| US6883201B2 (en) | 2002-01-03 | 2005-04-26 | Irobot Corporation | Autonomous floor-cleaning robot |
| DE60219137T2 (de) | 2001-01-25 | 2008-01-03 | Koninklijke Philips Electronics N.V. | Roboter zum staubsaugen von flächen mittels einer kreisförmigen bewegung |
| JP2004192017A (ja) | 2001-02-06 | 2004-07-08 | Dainippon Printing Co Ltd | Icカードを装着した移動体通信端末を利用した情報家電端末の遠隔制御システムとそれに使用する移動体通信端末とicカード |
| USD471243S1 (en) | 2001-02-09 | 2003-03-04 | Irobot Corporation | Robot |
| US6810305B2 (en) | 2001-02-16 | 2004-10-26 | The Procter & Gamble Company | Obstruction management system for robots |
| SE518483C2 (sv) | 2001-02-28 | 2002-10-15 | Electrolux Ab | Hjulupphängning för en självgående städapparat |
| SE518482C2 (sv) | 2001-02-28 | 2002-10-15 | Electrolux Ab | Hinderavkänningssystem för en självgående städapparat |
| SE0100924D0 (sv) | 2001-03-15 | 2001-03-15 | Electrolux Ab | Energy-efficient navigation of an autonomous surface treatment apparatus |
| SE518683C2 (sv) | 2001-03-15 | 2002-11-05 | Electrolux Ab | Förfarande och anordning för positionsbestämning av en autonom apparat |
| EP1379155B1 (en) | 2001-03-16 | 2013-09-25 | Vision Robotics Corporation | Autonomous mobile canister vacuum cleaner |
| US6611318B2 (en) | 2001-03-23 | 2003-08-26 | Automatic Timing & Controls, Inc. | Adjustable mirror for collimated beam laser sensor |
| AU767561B2 (en) | 2001-04-18 | 2003-11-13 | Samsung Kwangju Electronics Co., Ltd. | Robot cleaner, system employing the same and method for reconnecting to external recharging device |
| KR100437372B1 (ko) | 2001-04-18 | 2004-06-25 | 삼성광주전자 주식회사 | 이동통신망을 이용한 로봇 청소 시스템 |
| RU2220643C2 (ru) | 2001-04-18 | 2004-01-10 | Самсунг Гванджу Электроникс Ко., Лтд. | Автоматическое чистящее устройство, автоматическая чистящая система и способ управления этой системой (варианты) |
| US6438456B1 (en) | 2001-04-24 | 2002-08-20 | Sandia Corporation | Portable control device for networked mobile robots |
| WO2002095809A2 (en) | 2001-05-18 | 2002-11-28 | Lam Research Corporation | Apparatus and method for substrate preparation implementing a surface tension reducing process |
| JP2002355204A (ja) | 2001-05-31 | 2002-12-10 | Matsushita Electric Ind Co Ltd | 自走式電気掃除機 |
| US6901624B2 (en) | 2001-06-05 | 2005-06-07 | Matsushita Electric Industrial Co., Ltd. | Self-moving cleaner |
| JP3346417B1 (ja) | 2001-06-05 | 2002-11-18 | 松下電器産業株式会社 | 移動装置 |
| US20020185071A1 (en) | 2001-06-08 | 2002-12-12 | Fangjiang Guo | Apparatus for cleaning a teat of a dairy animal |
| US7429843B2 (en) | 2001-06-12 | 2008-09-30 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US8396592B2 (en) | 2001-06-12 | 2013-03-12 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| KR100420171B1 (ko) | 2001-08-07 | 2004-03-02 | 삼성광주전자 주식회사 | 로봇 청소기와 그 시스템 및 제어방법 |
| US6580246B2 (en) | 2001-08-13 | 2003-06-17 | Steven Jacobs | Robot touch shield |
| US6667592B2 (en) | 2001-08-13 | 2003-12-23 | Intellibot, L.L.C. | Mapped robot system |
| SE519967C2 (sv) | 2001-09-11 | 2003-05-06 | Electrolux Ab | Dammbehållare för en dammsugare |
| ATE309736T1 (de) | 2001-09-14 | 2005-12-15 | Vorwerk Co Interholding | Selbsttätig verfahrbares bodenstaub- aufsammelgerät, sowie kombination eines derartigen aufsammelgerätes und einer basisstaton |
| IL145680A0 (en) | 2001-09-26 | 2002-06-30 | Friendly Robotics Ltd | Robotic vacuum cleaner |
| WO2003026474A2 (en) | 2001-09-26 | 2003-04-03 | Friendly Robotics Ltd. | Robotic vacuum cleaner |
| GB0126497D0 (en) | 2001-11-03 | 2002-01-02 | Dyson Ltd | An autonomous machine |
| GB0126499D0 (en) | 2001-11-03 | 2002-01-02 | Dyson Ltd | An autonomous machine |
| US6775871B1 (en) | 2001-11-28 | 2004-08-17 | Edward Finch | Automatic floor cleaner |
| JP2003172578A (ja) | 2001-12-07 | 2003-06-20 | Hitachi Ltd | ネットワーク対応家電機器、家電機器点検システム及び家電機器点検サービス |
| US7559269B2 (en) | 2001-12-14 | 2009-07-14 | Irobot Corporation | Remote digital firing system |
| US8375838B2 (en) | 2001-12-14 | 2013-02-19 | Irobot Corporation | Remote digital firing system |
| US6860206B1 (en) | 2001-12-14 | 2005-03-01 | Irobot Corporation | Remote digital firing system |
| US9128486B2 (en) | 2002-01-24 | 2015-09-08 | Irobot Corporation | Navigational control system for a robotic device |
| EP1331537B1 (en) | 2002-01-24 | 2005-08-03 | iRobot Corporation | Method and system for robot localization and confinement of workspace |
| US8073439B2 (en) | 2002-02-18 | 2011-12-06 | Infineon Technologies Ag | Control system and method for operating a transceiver |
| US6859976B2 (en) | 2002-02-22 | 2005-03-01 | S.C. Johnson & Son, Inc. | Cleaning apparatus with continuous action wiping and sweeping |
| SE0202988D0 (sv) | 2002-03-15 | 2002-10-10 | Delaval Holding Ab | A method and an arrangement at a dairy farm |
| JP2003280740A (ja) | 2002-03-25 | 2003-10-02 | Matsushita Electric Ind Co Ltd | 移動装置 |
| US7844364B2 (en) | 2002-04-16 | 2010-11-30 | Irobot Corporation | Systems and methods for dispersing and clustering a plurality of robotic devices |
| KR20030082040A (ko) | 2002-04-16 | 2003-10-22 | 삼성광주전자 주식회사 | 로봇 청소기 |
| US7117067B2 (en) | 2002-04-16 | 2006-10-03 | Irobot Corporation | System and methods for adaptive control of robotic devices |
| EP2060215A1 (en) | 2002-04-22 | 2009-05-20 | Restaurant Technology , Inc. | Automated food processing system and method |
| US20030205028A1 (en) | 2002-04-22 | 2003-11-06 | Sus Gerald A. | Automated food processing system and method |
| US6869633B2 (en) | 2002-04-22 | 2005-03-22 | Restaurant Technology, Inc. | Automated food frying device and method |
| US7113847B2 (en) | 2002-05-07 | 2006-09-26 | Royal Appliance Mfg. Co. | Robotic vacuum with removable portable vacuum and semi-automated environment mapping |
| JP3902551B2 (ja) | 2002-05-17 | 2007-04-11 | 日本ビクター株式会社 | 移動ロボット |
| SE0201740D0 (sv) | 2002-06-07 | 2002-06-07 | Electrolux Ab | Electroniskt diregeringssystem |
| SE0201739D0 (sv) | 2002-06-07 | 2002-06-07 | Electrolux Ab | Elektroniskt avgränsningssystem |
| CN1662309A (zh) | 2002-06-14 | 2005-08-31 | 关西涂料株式会社 | 涂布用压力供给辊、辊涂装置、曲面可操作辊涂装置、采用那些装置的自动涂布设备及涂布方法 |
| US6967275B2 (en) | 2002-06-25 | 2005-11-22 | Irobot Corporation | Song-matching system and method |
| KR100483548B1 (ko) | 2002-07-26 | 2005-04-15 | 삼성광주전자 주식회사 | 로봇 청소기와 그 시스템 및 제어 방법 |
| DE10231386B4 (de) | 2002-07-08 | 2004-05-06 | Alfred Kärcher Gmbh & Co. Kg | Sensorvorrichtung sowie selbstfahrendes Bodenreinigungsgerät mit einer Sensorvorrichtung |
| US7150068B1 (en) | 2002-08-12 | 2006-12-19 | Gary Dean Ragner | Light-weight self-propelled vacuum cleaner |
| US20040031121A1 (en) | 2002-08-14 | 2004-02-19 | Martin Frederick H. | Disposable dust collectors for use with cleaning machines |
| US20040031111A1 (en) | 2002-08-14 | 2004-02-19 | Jose Porchia | Disposable dust receptacle |
| KR20040018603A (ko) | 2002-08-23 | 2004-03-04 | 삼성전자주식회사 | 청소장치 |
| JP2004096253A (ja) | 2002-08-29 | 2004-03-25 | Sharp Corp | 画像形成方法及び画像形成装置 |
| US7054716B2 (en) | 2002-09-06 | 2006-05-30 | Royal Appliance Mfg. Co. | Sentry robot system |
| AU2003270581A1 (en) | 2002-09-13 | 2004-04-30 | Mark J. Chiappetta | A navigational control system for a robotic device |
| US8428778B2 (en) | 2002-09-13 | 2013-04-23 | Irobot Corporation | Navigational control system for a robotic device |
| US8386081B2 (en) | 2002-09-13 | 2013-02-26 | Irobot Corporation | Navigational control system for a robotic device |
| KR101812021B1 (ko) | 2011-09-30 | 2017-12-27 | 삼성전자주식회사 | 로봇청소기 |
| KR100459465B1 (ko) | 2002-10-22 | 2004-12-03 | 엘지전자 주식회사 | 로봇 청소기의 먼지흡입구조 |
| KR100492577B1 (ko) | 2002-10-22 | 2005-06-03 | 엘지전자 주식회사 | 로봇 청소기의 흡입헤드 |
| US6946013B2 (en) | 2002-10-28 | 2005-09-20 | Geo2 Technologies, Inc. | Ceramic exhaust filter |
| KR100500842B1 (ko) | 2002-10-31 | 2005-07-12 | 삼성광주전자 주식회사 | 로봇청소기와, 그 시스템 및 제어방법 |
| KR100468107B1 (ko) | 2002-10-31 | 2005-01-26 | 삼성광주전자 주식회사 | 외부충전장치를 갖는 로봇청소기 시스템 및 로봇청소기의외부충전장치 접속방법 |
| KR100542340B1 (ko) | 2002-11-18 | 2006-01-11 | 삼성전자주식회사 | 홈네트워크 시스템 및 그 제어방법 |
| JP2004166968A (ja) | 2002-11-20 | 2004-06-17 | Zojirushi Corp | 自走式掃除ロボット |
| US7346428B1 (en) | 2002-11-22 | 2008-03-18 | Bissell Homecare, Inc. | Robotic sweeper cleaner with dusting pad |
| KR100492582B1 (ko) | 2002-12-13 | 2005-06-03 | 엘지전자 주식회사 | 청소기용 브러시 구조 |
| KR100480036B1 (ko) | 2002-12-17 | 2005-03-31 | 엘지전자 주식회사 | 자동 주행 청소기의 자동 충전 장치 및 방법 |
| US7135992B2 (en) | 2002-12-17 | 2006-11-14 | Evolution Robotics, Inc. | Systems and methods for using multiple hypotheses in a visual simultaneous localization and mapping system |
| JP2004198212A (ja) | 2002-12-18 | 2004-07-15 | Aisin Seiki Co Ltd | 移動体周辺監視装置 |
| KR100486505B1 (ko) | 2002-12-31 | 2005-04-29 | 엘지전자 주식회사 | 로봇 청소기의 자이로 오프셋 보정방법 |
| US7043794B2 (en) | 2003-01-09 | 2006-05-16 | Royal Appliance Mfg. Co. | Self-propelled vacuum cleaner with a neutral return spring |
| US7222390B2 (en) | 2003-01-09 | 2007-05-29 | Royal Appliance Mfg. Co. | Clutchless self-propelled vacuum cleaner and nozzle height adjustment mechanism therefor |
| KR100492588B1 (ko) | 2003-01-23 | 2005-06-03 | 엘지전자 주식회사 | 자동 주행 청소기의 위치정보 인식장치 |
| NZ523946A (en) | 2003-01-31 | 2004-06-25 | Carl Ernest Alexander | Portable hygiene compositions comprising a semi-solid gel and active ingredients in bead form for use in personal oral, dental or skin care |
| CN1748387B (zh) | 2003-02-06 | 2010-12-08 | 松下电器产业株式会社 | 信息传输系统及方法、电器或信息通信装置、电器或通信控制方法 |
| JP2004237075A (ja) | 2003-02-06 | 2004-08-26 | Samsung Kwangju Electronics Co Ltd | 外部充電装置を有するロボット掃除機システム及びロボット掃除機の外部充電装置の接続方法。 |
| KR100485696B1 (ko) | 2003-02-07 | 2005-04-28 | 삼성광주전자 주식회사 | 로봇청소기의 위치인식표지 검출방법 및 이 검출방법을적용한 로봇청소기 |
| GB2398394B (en) | 2003-02-14 | 2006-05-17 | Dyson Ltd | An autonomous machine |
| JP2004267236A (ja) | 2003-03-05 | 2004-09-30 | Hitachi Ltd | 自走式掃除機およびそれに用いる充電装置 |
| US7801645B2 (en) | 2003-03-14 | 2010-09-21 | Sharper Image Acquisition Llc | Robotic vacuum cleaner with edge and object detection system |
| KR100492590B1 (ko) | 2003-03-14 | 2005-06-03 | 엘지전자 주식회사 | 로봇의 자동충전 시스템 및 복귀방법 |
| US7805220B2 (en) | 2003-03-14 | 2010-09-28 | Sharper Image Acquisition Llc | Robot vacuum with internal mapping system |
| US20040244138A1 (en) | 2003-03-14 | 2004-12-09 | Taylor Charles E. | Robot vacuum |
| US20050010331A1 (en) | 2003-03-14 | 2005-01-13 | Taylor Charles E. | Robot vacuum with floor type modes |
| JP2004275468A (ja) | 2003-03-17 | 2004-10-07 | Hitachi Home & Life Solutions Inc | 自走式掃除機およびその運転方法 |
| US7038166B2 (en) | 2003-03-18 | 2006-05-02 | Loma Linda University Medical Center | Containment plenum for laser irradiation and removal of material from a surface of a structure |
| US7060932B2 (en) | 2003-03-18 | 2006-06-13 | Loma Linda University Medical Center | Method and apparatus for material processing |
| US7835529B2 (en) | 2003-03-19 | 2010-11-16 | Irobot Corporation | Sound canceling systems and methods |
| DE10313360A1 (de) | 2003-03-25 | 2004-10-21 | BSH Bosch und Siemens Hausgeräte GmbH | Verfahren und Vorrichtung zum Erfassen der Registrierung des Anschlusses eines Hausgerätes an einer Busleitungsanordnung |
| US7331436B1 (en) | 2003-03-26 | 2008-02-19 | Irobot Corporation | Communications spooler for a mobile robot |
| JP2004303134A (ja) | 2003-04-01 | 2004-10-28 | Matsushita Electric Ind Co Ltd | 走行装置 |
| KR20040086940A (ko) | 2003-04-03 | 2004-10-13 | 엘지전자 주식회사 | 이미지센서를 채용한 이동로봇 및 그의 이동거리 측정방법 |
| KR100538949B1 (ko) | 2003-04-04 | 2005-12-27 | 삼성광주전자 주식회사 | 로봇청소기의 구동장치 |
| KR100486737B1 (ko) | 2003-04-08 | 2005-05-03 | 삼성전자주식회사 | 청소로봇의 청소궤적 생성·추종방법 및 장치 |
| US20040220707A1 (en) | 2003-05-02 | 2004-11-04 | Kim Pallister | Method, apparatus and system for remote navigation of robotic devices |
| KR100963387B1 (ko) | 2003-05-07 | 2010-06-14 | 엘지전자 주식회사 | 로봇 진공청소기의 휠어셈블리 |
| US7208892B2 (en) | 2003-05-23 | 2007-04-24 | The Hoover Company | Power management system for a floor care appliance |
| KR100507926B1 (ko) | 2003-06-30 | 2005-08-17 | 삼성광주전자 주식회사 | 로봇청소기의 구동장치 |
| KR100507928B1 (ko) | 2003-07-24 | 2005-08-17 | 삼성광주전자 주식회사 | 로봇청소기 |
| AU2004202834B2 (en) | 2003-07-24 | 2006-02-23 | Samsung Gwangju Electronics Co., Ltd. | Robot Cleaner |
| KR100478681B1 (ko) | 2003-07-29 | 2005-03-25 | 삼성광주전자 주식회사 | 바닥살균기능을 구비한 로봇청소기 |
| KR100528297B1 (ko) | 2003-07-31 | 2005-11-15 | 삼성전자주식회사 | 로봇 청소기의 제어시스템 |
| US7174238B1 (en) | 2003-09-02 | 2007-02-06 | Stephen Eliot Zweig | Mobile robotic system with web server and digital radio links |
| US7916898B2 (en) | 2003-09-15 | 2011-03-29 | Deere & Company | Method and system for identifying an edge of a crop |
| US7237298B2 (en) | 2003-09-19 | 2007-07-03 | Royal Appliance Mfg. Co. | Sensors and associated methods for controlling a vacuum cleaner |
| US7424766B2 (en) | 2003-09-19 | 2008-09-16 | Royal Appliance Mfg. Co. | Sensors and associated methods for controlling a vacuum cleaner |
| US6964312B2 (en) | 2003-10-07 | 2005-11-15 | International Climbing Machines, Inc. | Surface traversing apparatus and method |
| EP1672455A4 (en) | 2003-10-08 | 2007-12-05 | Figla Co Ltd | SELF-RIBBED WORKING ROBOT |
| TWM247170U (en) | 2003-10-09 | 2004-10-21 | Cheng-Shiang Yan | Self-moving vacuum floor cleaning device |
| EP1524494A1 (en) | 2003-10-17 | 2005-04-20 | inos Automationssoftware GmbH | Method for calibrating a camera-laser-unit in respect to a calibration-object |
| JP4181477B2 (ja) | 2003-10-22 | 2008-11-12 | シャープ株式会社 | 自走式掃除機 |
| FR2861856B1 (fr) * | 2003-11-03 | 2006-04-07 | Wany Sa | Procede et dispositif pour balayer une surface de maniere automatique |
| JP2005141636A (ja) | 2003-11-10 | 2005-06-02 | Matsushita Electric Ind Co Ltd | 自律走行装置 |
| US7269877B2 (en) | 2003-12-04 | 2007-09-18 | The Hoover Company | Floor care appliance with network connectivity |
| KR20050063547A (ko) | 2003-12-22 | 2005-06-28 | 엘지전자 주식회사 | 로봇 청소기 및 그 운전방법 |
| KR20050063546A (ko) | 2003-12-22 | 2005-06-28 | 엘지전자 주식회사 | 로봇 청소기 및 그 운전방법 |
| KR20050072300A (ko) | 2004-01-06 | 2005-07-11 | 삼성전자주식회사 | 청소로봇 및 그 제어방법 |
| US7332890B2 (en) | 2004-01-21 | 2008-02-19 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| JP2005211364A (ja) | 2004-01-30 | 2005-08-11 | Funai Electric Co Ltd | 自走式掃除機 |
| US20110039690A1 (en) | 2004-02-02 | 2011-02-17 | Nanosys, Inc. | Porous substrates, articles, systems and compositions comprising nanofibers and methods of their use and production |
| EP1721279B1 (en) | 2004-02-03 | 2009-11-18 | F. Robotics Aquisitions Ltd. | Robot docking station and robot for use therewith |
| DE602005006526D1 (de) | 2004-02-04 | 2008-06-19 | Johnson & Son Inc S C | Oberflächenbehandlungsvorrichtung mit reinigungssystem auf patronengrundlage |
| KR100571834B1 (ko) | 2004-02-27 | 2006-04-17 | 삼성전자주식회사 | 청소 로봇의 바닥 먼지 검출 방법 및 장치 |
| US20060020369A1 (en) * | 2004-03-11 | 2006-01-26 | Taylor Charles E | Robot vacuum cleaner |
| WO2005090354A1 (en) | 2004-03-16 | 2005-09-29 | Glaxo Group Limited | PYRAZOLO[3,4-b] PYRIDINE COMPOUNDS, AND THEIR USE AS PDE4 INHIBITORS |
| DE112005000738T5 (de) * | 2004-03-29 | 2007-04-26 | Evolution Robotics, Inc., Pasadena | Verfahren und Vorrichtung zur Positionsbestimmung unter Verwendung von reflektierten Lichtquellen |
| CN1937948A (zh) | 2004-03-29 | 2007-03-28 | 三洋电机株式会社 | 集尘装置 |
| US7603744B2 (en) | 2004-04-02 | 2009-10-20 | Royal Appliance Mfg. Co. | Robotic appliance with on-board joystick sensor and associated methods of operation |
| US7617557B2 (en) | 2004-04-02 | 2009-11-17 | Royal Appliance Mfg. Co. | Powered cleaning appliance |
| US7185397B2 (en) | 2004-04-09 | 2007-03-06 | Alto U.S. Inc. | Floor cleaning machine |
| JP2005296512A (ja) | 2004-04-15 | 2005-10-27 | Funai Electric Co Ltd | 自走式掃除機 |
| JP2005296511A (ja) | 2004-04-15 | 2005-10-27 | Funai Electric Co Ltd | 自走式掃除機 |
| TWI262777B (en) | 2004-04-21 | 2006-10-01 | Jason Yan | Robotic vacuum cleaner |
| USD510066S1 (en) | 2004-05-05 | 2005-09-27 | Irobot Corporation | Base station for robot |
| US6856113B1 (en) | 2004-05-12 | 2005-02-15 | Cube Investments Limited | Central vacuum cleaning system motor control circuit mounting post, mounting configuration, and mounting methods |
| KR100544480B1 (ko) | 2004-05-12 | 2006-01-24 | 삼성광주전자 주식회사 | 로봇 청소기 |
| US8112942B2 (en) | 2004-05-13 | 2012-02-14 | Nbbj Design Llp | Operating room/intervention room |
| KR100548895B1 (ko) | 2004-05-17 | 2006-02-02 | 삼성광주전자 주식회사 | 로봇 진공청소기의 충전장치 |
| JP4255452B2 (ja) | 2004-05-28 | 2009-04-15 | フクバデンタル株式会社 | イオン歯ブラシ |
| US7042342B2 (en) | 2004-06-09 | 2006-05-09 | Lear Corporation | Remote keyless entry transmitter fob with RF analyzer |
| US9008835B2 (en) | 2004-06-24 | 2015-04-14 | Irobot Corporation | Remote control scheduler and method for autonomous robotic device |
| US7706917B1 (en) | 2004-07-07 | 2010-04-27 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US8972052B2 (en) | 2004-07-07 | 2015-03-03 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| KR20060015082A (ko) | 2004-08-13 | 2006-02-16 | 엘지전자 주식회사 | 로봇 청소기의 브러시 동력전달장치 |
| US20080184518A1 (en) | 2004-08-27 | 2008-08-07 | Sharper Image Corporation | Robot Cleaner With Improved Vacuum Unit |
| KR100595571B1 (ko) | 2004-09-13 | 2006-07-03 | 엘지전자 주식회사 | 로봇 청소기 |
| US7271983B2 (en) | 2004-09-16 | 2007-09-18 | Quantum Corporation | Magnetic head with mini-outriggers and method of manufacture |
| JP2006087507A (ja) | 2004-09-21 | 2006-04-06 | Sanyo Electric Co Ltd | 自走式掃除機 |
| KR100664053B1 (ko) | 2004-09-23 | 2007-01-03 | 엘지전자 주식회사 | 로봇청소기의 청소툴 자동 교환 시스템 및 방법 |
| KR100600487B1 (ko) | 2004-10-12 | 2006-07-13 | 삼성광주전자 주식회사 | 로봇 청소기의 좌표보정방법 및 이를 이용한 로봇 청소기시스템 |
| US7499775B2 (en) | 2004-10-22 | 2009-03-03 | Irobot Corporation | System and method for terrain feature tracking |
| US7499774B2 (en) | 2004-10-22 | 2009-03-03 | Irobot Corporation | System and method for processing safety signals in an autonomous vehicle |
| US8007221B1 (en) | 2004-10-22 | 2011-08-30 | Irobot Corporation | Lifting apparatus for remote controlled robotic device |
| US7499776B2 (en) | 2004-10-22 | 2009-03-03 | Irobot Corporation | Systems and methods for control of an unmanned ground vehicle |
| US7499804B2 (en) | 2004-10-22 | 2009-03-03 | Irobot Corporation | System and method for multi-modal control of an autonomous vehicle |
| US8078338B2 (en) | 2004-10-22 | 2011-12-13 | Irobot Corporation | System and method for behavior based control of an autonomous vehicle |
| USD526753S1 (en) | 2004-10-26 | 2006-08-15 | Funai Electric Company Limited | Electric vacuum cleaner |
| KR100656701B1 (ko) | 2004-10-27 | 2006-12-13 | 삼성광주전자 주식회사 | 로봇청소기 시스템 및 외부충전장치 복귀 방법 |
| KR100645379B1 (ko) | 2004-10-29 | 2006-11-15 | 삼성광주전자 주식회사 | 로봇 제어 시스템 및 로봇 제어방법 |
| KR100575708B1 (ko) | 2004-11-11 | 2006-05-03 | 엘지전자 주식회사 | 로봇청소기의 거리감지장치 및 방법 |
| US7199711B2 (en) | 2004-11-12 | 2007-04-03 | Tennant Company | Mobile floor cleaner data communication |
| US7697141B2 (en) | 2004-12-09 | 2010-04-13 | Halliburton Energy Services, Inc. | In situ optical computation fluid analysis system and method |
| KR100654447B1 (ko) | 2004-12-15 | 2006-12-06 | 삼성전자주식회사 | 지역별로 존재하는 컨텐츠를 글로벌로 공유하고 거래하는방법 및 시스템 |
| US8347088B2 (en) | 2005-02-01 | 2013-01-01 | Newsilike Media Group, Inc | Security systems and methods for use with structured and unstructured data |
| US8200700B2 (en) | 2005-02-01 | 2012-06-12 | Newsilike Media Group, Inc | Systems and methods for use of structured and unstructured distributed data |
| KR100636270B1 (ko) | 2005-02-04 | 2006-10-19 | 삼성전자주식회사 | 홈 네트워크 시스템 및 그 제어방법 |
| US7620476B2 (en) | 2005-02-18 | 2009-11-17 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| US20060200281A1 (en) | 2005-02-18 | 2006-09-07 | Andrew Ziegler | Autonomous surface cleaning robot for wet and dry cleaning |
| US8392021B2 (en) | 2005-02-18 | 2013-03-05 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| US7389156B2 (en) | 2005-02-18 | 2008-06-17 | Irobot Corporation | Autonomous surface cleaning robot for wet and dry cleaning |
| EP1850725B1 (en) | 2005-02-18 | 2010-05-19 | iRobot Corporation | Autonomous surface cleaning robot for wet and dry cleaning |
| JP2006231477A (ja) | 2005-02-25 | 2006-09-07 | Mitsubishi Heavy Ind Ltd | 移動体における距離検出手段の校正方法 |
| US7757340B2 (en) | 2005-03-25 | 2010-07-20 | S.C. Johnson & Son, Inc. | Soft-surface remediation device and method of using same |
| KR20060108848A (ko) | 2005-04-14 | 2006-10-18 | 엘지전자 주식회사 | 무선 제어가 가능한 청소로봇과 그를 이용한 원격 제어시스템 |
| US20060235585A1 (en) | 2005-04-18 | 2006-10-19 | Funai Electric Co., Ltd. | Self-guided cleaning robot |
| JP2006296684A (ja) | 2005-04-19 | 2006-11-02 | Funai Electric Co Ltd | 自走式電気掃除機および電気掃除機 |
| KR20060112312A (ko) | 2005-04-25 | 2006-11-01 | 엘지전자 주식회사 | 로봇청소기의 절전제어장치 및 방법 |
| KR100704483B1 (ko) | 2005-04-25 | 2007-04-09 | 엘지전자 주식회사 | 로봇청소기의 구석 청소 장치 |
| JP2006314669A (ja) | 2005-05-16 | 2006-11-24 | Funai Electric Co Ltd | 自走式掃除機 |
| KR100677279B1 (ko) | 2005-05-17 | 2007-02-02 | 엘지전자 주식회사 | 로봇 청소기의 범퍼 장치 |
| KR100690669B1 (ko) | 2005-05-17 | 2007-03-09 | 엘지전자 주식회사 | 자율 주행 로봇의 위치인식 시스템 |
| KR100594165B1 (ko) | 2005-05-24 | 2006-06-28 | 삼성전자주식회사 | 네트워크 기반 로봇 제어 시스템 및 네트워크 기반 로봇제어 시스템에서 로봇 속도 제어 방법 |
| US20060293788A1 (en) | 2005-06-26 | 2006-12-28 | Pavel Pogodin | Robotic floor care appliance with improved remote management |
| US7389166B2 (en) | 2005-06-28 | 2008-06-17 | S.C. Johnson & Son, Inc. | Methods to prevent wheel slip in an autonomous floor cleaner |
| US7578020B2 (en) | 2005-06-28 | 2009-08-25 | S.C. Johnson & Son, Inc. | Surface treating device with top load cartridge-based cleaning system |
| US7877166B2 (en) | 2005-06-28 | 2011-01-25 | S.C. Johnson & Son, Inc. | RFID navigational system for robotic floor treater |
| ATE542459T1 (de) | 2005-07-08 | 2012-02-15 | Electrolux Ab | Reinigungsroboter |
| US8127396B2 (en) | 2005-07-20 | 2012-03-06 | Optimus Services Ag | Robotic floor cleaning with sterile, disposable cartridges |
| KR100738890B1 (ko) | 2005-07-22 | 2007-07-12 | 엘지전자 주식회사 | 이동로봇을 이용한 홈 네트워킹 시스템 |
| KR100700544B1 (ko) | 2005-08-09 | 2007-03-28 | 엘지전자 주식회사 | 알에프 안테나를 구비한 로봇청소기 |
| KR101223478B1 (ko) | 2005-08-10 | 2013-01-17 | 엘지전자 주식회사 | 로봇청소기의 먼지통 착탈 감지 장치 |
| AU2006284577B2 (en) | 2005-09-02 | 2012-09-13 | Neato Robotics, Inc. | Multi-function robotic device |
| JP4691421B2 (ja) | 2005-09-05 | 2011-06-01 | 三菱レイヨン株式会社 | ニッケルめっき金型の製造方法および製造装置 |
| US8317956B2 (en) | 2005-09-14 | 2012-11-27 | Greer Robert W | System, method, and composition for adhering preformed thermoplastic traffic control signage to pavement |
| US8935006B2 (en) | 2005-09-30 | 2015-01-13 | Irobot Corporation | Companion robot for personal interaction |
| US8732895B2 (en) | 2005-10-07 | 2014-05-27 | Cube Investments Limited | Central vacuum cleaner multiple vacuum source control |
| AU2006306522B9 (en) | 2005-10-21 | 2011-12-08 | Deere & Company | Networked multi-role robotic vehicle |
| KR100738888B1 (ko) | 2005-10-27 | 2007-07-12 | 엘지전자 주식회사 | 로봇 청소기에 장착된 카메라의 제어 장치 및 방법 |
| WO2007051972A1 (en) | 2005-10-31 | 2007-05-10 | Qinetiq Limited | Navigation system |
| US7693654B1 (en) * | 2005-11-23 | 2010-04-06 | ActivMedia Robotics/MobileRobots | Method for mapping spaces with respect to a universal uniform spatial reference |
| US7721829B2 (en) | 2005-11-29 | 2010-05-25 | Samsung Electronics Co., Ltd. | Traveling robot |
| ES2706729T3 (es) | 2005-12-02 | 2019-04-01 | Irobot Corp | Sistema de robot |
| EP2816434A3 (en) | 2005-12-02 | 2015-01-28 | iRobot Corporation | Autonomous coverage robot |
| EP2466411B1 (en) | 2005-12-02 | 2018-10-17 | iRobot Corporation | Robot system |
| KR101074937B1 (ko) | 2005-12-02 | 2011-10-19 | 아이로보트 코퍼레이션 | 모듈형 로봇 |
| ES2378138T3 (es) | 2005-12-02 | 2012-04-09 | Irobot Corporation | Movilidad de robot de cubrimiento |
| US20070124890A1 (en) | 2005-12-02 | 2007-06-07 | Tennant Company | Remote configuration of mobile surface maintenance machine settings |
| US7568259B2 (en) | 2005-12-13 | 2009-08-04 | Jason Yan | Robotic floor cleaner |
| KR100778125B1 (ko) | 2005-12-19 | 2007-11-21 | 삼성광주전자 주식회사 | 콤팩트한 로봇청소기 |
| EP1800588B1 (de) | 2005-12-20 | 2010-02-24 | Wessel-Werk Gmbh | Selbstfahrende Saugreinigungsvorrichtung |
| KR100683074B1 (ko) | 2005-12-22 | 2007-02-15 | (주)경민메카트로닉스 | 로봇청소기 |
| TWM294301U (en) | 2005-12-27 | 2006-07-21 | Supply Internat Co Ltd E | Self-propelled vacuum cleaner with dust collecting structure |
| KR100761997B1 (ko) | 2005-12-29 | 2007-09-28 | 에이스로봇 주식회사 | 청소로봇용 휠 어셈블리 |
| US7539557B2 (en) | 2005-12-30 | 2009-05-26 | Irobot Corporation | Autonomous mobile robot |
| KR20070074146A (ko) | 2006-01-06 | 2007-07-12 | 삼성전자주식회사 | 청소기 시스템 |
| KR20070074147A (ko) | 2006-01-06 | 2007-07-12 | 삼성전자주식회사 | 청소기 시스템 |
| JP5132108B2 (ja) | 2006-02-02 | 2013-01-30 | 株式会社Sokudo | 基板処理装置 |
| JP2007213236A (ja) | 2006-02-08 | 2007-08-23 | Sharp Corp | 自律走行ロボットの経路計画方法及び自律走行ロボット |
| WO2007093926A1 (en) | 2006-02-13 | 2007-08-23 | Koninklijke Philips Electronics N.V. | Robotic vacuum cleaning |
| KR100704487B1 (ko) | 2006-03-15 | 2007-04-09 | 엘지전자 주식회사 | 이동로봇의 흡입헤드 |
| EP3067771B1 (en) | 2006-03-17 | 2017-11-08 | iRobot Corporation | Robot confinement |
| JP2007272665A (ja) | 2006-03-31 | 2007-10-18 | Matsushita Electric Ind Co Ltd | 自走式掃除機およびそのプログラム |
| US7861366B2 (en) | 2006-04-04 | 2011-01-04 | Samsung Electronics Co., Ltd. | Robot cleaner system having robot cleaner and docking station |
| KR20070104989A (ko) | 2006-04-24 | 2007-10-30 | 삼성전자주식회사 | 로봇청소기 시스템 및 그 먼지제거 방법 |
| US8108092B2 (en) | 2006-07-14 | 2012-01-31 | Irobot Corporation | Autonomous behaviors for a remote vehicle |
| EP2018721A4 (en) | 2006-05-12 | 2012-08-08 | Irobot Corp | METHOD AND DEVICE FOR CONTROLLING A REMOTE VEHICLE |
| US8326469B2 (en) | 2006-07-14 | 2012-12-04 | Irobot Corporation | Autonomous behaviors for a remote vehicle |
| KR100735565B1 (ko) | 2006-05-17 | 2007-07-04 | 삼성전자주식회사 | 구조광을 이용한 물체 검출 방법 및 이를 이용한 로봇 |
| EP3031377B1 (en) | 2006-05-19 | 2018-08-01 | iRobot Corporation | Removing debris from cleaning robots |
| KR101245832B1 (ko) | 2006-05-23 | 2013-03-21 | 삼성전자주식회사 | 장애물을 감지하는 장치 및 방법 |
| TWI293555B (en) | 2006-05-23 | 2008-02-21 | Ind Tech Res Inst | Omni-directional robot cleaner |
| JP2007316966A (ja) | 2006-05-26 | 2007-12-06 | Fujitsu Ltd | 移動ロボット、その制御方法及びプログラム |
| US8417383B2 (en) | 2006-05-31 | 2013-04-09 | Irobot Corporation | Detecting robot stasis |
| US7604675B2 (en) | 2006-06-16 | 2009-10-20 | Royal Appliance Mfg. Co. | Separately opening dust containers |
| KR100791384B1 (ko) | 2006-07-05 | 2008-01-07 | 삼성전자주식회사 | 특징점을 이용한 영역 구분 방법 및 장치와 이를 이용한이동 청소 로봇 |
| US8843244B2 (en) | 2006-10-06 | 2014-09-23 | Irobot Corporation | Autonomous behaviors for a remove vehicle |
| US20080105445A1 (en) | 2006-08-15 | 2008-05-08 | Dayton Douglas C | Modular landscaper |
| US7979945B2 (en) | 2006-08-15 | 2011-07-19 | Umagination Labs, L.P. | Systems and methods for robotic gutter cleaning |
| US7886399B2 (en) | 2006-08-15 | 2011-02-15 | Umagination Labs, L.P. | Systems and methods for robotic gutter cleaning along an axis of rotation |
| DE602007007026D1 (de) | 2006-09-05 | 2010-07-22 | Lg Electronics Inc | Reinigungsroboter |
| TWI312279B (en) | 2006-09-19 | 2009-07-21 | Ind Tech Res Inst | Robotic vacuum cleaner |
| KR100755611B1 (ko) | 2006-09-22 | 2007-09-06 | 삼성전기주식회사 | 기울어짐 감지형 자동 운전 청소기 및 그 동작 제어 방법 |
| US20080077193A1 (en) | 2006-09-26 | 2008-03-27 | Jennifer Bow | Scavenged energy for electric field generation to prevent bone loss and encourage bone growth for orthopedic applications |
| US8046103B2 (en) | 2006-09-29 | 2011-10-25 | F Robotics Acquisitions Ltd. | System and method for determining the location of a machine |
| US8413752B2 (en) | 2006-10-06 | 2013-04-09 | Irobot Corporation | Robotic vehicle |
| US8327960B2 (en) | 2006-10-06 | 2012-12-11 | Irobot Corporation | Robotic vehicle |
| US7654348B2 (en) | 2006-10-06 | 2010-02-02 | Irobot Corporation | Maneuvering robotic vehicles having a positionable sensor head |
| US20120183382A1 (en) | 2006-10-06 | 2012-07-19 | Irobot Corporation | Robotic Vehicle |
| US7600593B2 (en) | 2007-01-05 | 2009-10-13 | Irobot Corporation | Robotic vehicle with dynamic range actuators |
| US8644991B2 (en) | 2006-10-06 | 2014-02-04 | Irobot Corporation | Maneuvering robotic vehicles |
| US7891446B2 (en) | 2006-10-06 | 2011-02-22 | Irobot Corporation | Robotic vehicle deck adjustment |
| US7843431B2 (en) | 2007-04-24 | 2010-11-30 | Irobot Corporation | Control system for a remote vehicle |
| US7784570B2 (en) | 2006-10-06 | 2010-08-31 | Irobot Corporation | Robotic vehicle |
| US20120137464A1 (en) | 2006-10-11 | 2012-06-07 | David K. Thatcher, Owner | Mopping Machine |
| KR100818740B1 (ko) | 2006-10-13 | 2008-04-01 | 엘지전자 주식회사 | 로봇청소기 및 그에 따른 제어방법 |
| USD556961S1 (en) | 2006-10-31 | 2007-12-04 | Irobot Corporation | Robot |
| US20100286791A1 (en) | 2006-11-21 | 2010-11-11 | Goldsmith David S | Integrated system for the ballistic and nonballistic infixion and retrieval of implants |
| KR100759919B1 (ko) | 2006-11-28 | 2007-09-18 | 삼성광주전자 주식회사 | 로봇청소기 및 그 제어방법 |
| US8095238B2 (en) | 2006-11-29 | 2012-01-10 | Irobot Corporation | Robot development platform |
| US8010229B2 (en) | 2006-12-05 | 2011-08-30 | Electronics And Telecommunications Research Institute | Method and apparatus for returning cleaning robot to charge station |
| KR100815570B1 (ko) | 2006-12-06 | 2008-03-20 | 삼성광주전자 주식회사 | 로봇청소기시스템 및 그 제어방법 |
| KR101211498B1 (ko) | 2006-12-18 | 2012-12-12 | 삼성전자주식회사 | 청소로봇 |
| WO2008078238A1 (en) | 2006-12-21 | 2008-07-03 | Koninklijke Philips Electronics N.V. | Cleaning nozzle and method for vacuum cleaning |
| US7753616B2 (en) | 2006-12-21 | 2010-07-13 | Greer Robert F | System, method and composition for adhering preformed thermoplastic traffic control signage to pavement |
| RU2443388C2 (ru) | 2007-01-22 | 2012-02-27 | Конинклейке Филипс Электроникс Н.В. | Роботизированная головка пылесоса |
| KR101204440B1 (ko) | 2007-02-26 | 2012-11-26 | 삼성전자주식회사 | 로봇청소기와 도킹스테이션을 구비한 로봇청소기 시스템 |
| US8265793B2 (en) | 2007-03-20 | 2012-09-11 | Irobot Corporation | Mobile robot for telecommunication |
| US8200600B2 (en) | 2007-03-20 | 2012-06-12 | Irobot Corporation | Electronic system condition monitoring and prognostics |
| EP2380475B1 (en) | 2007-03-27 | 2015-04-08 | Samsung Electronics Co., Ltd. | Robot cleaner with improved dust collector |
| AU2008239477B2 (en) | 2007-03-29 | 2010-08-05 | Irobot Corporation | Robot operator control unit configuration system and method |
| US7878105B2 (en) | 2007-04-02 | 2011-02-01 | Grinnell More | Mitigating recoil in a ballistic robot |
| US20090180668A1 (en) | 2007-04-11 | 2009-07-16 | Irobot Corporation | System and method for cooperative remote vehicle behavior |
| US8196251B2 (en) | 2007-04-26 | 2012-06-12 | Irobot Corporation | Gutter cleaning robot |
| ES2562824T3 (es) | 2007-05-09 | 2016-03-08 | Irobot Corporation | Robot autónomo de cubrimiento compacto |
| US8255092B2 (en) | 2007-05-14 | 2012-08-28 | Irobot Corporation | Autonomous behaviors for a remote vehicle |
| JP4811347B2 (ja) | 2007-05-24 | 2011-11-09 | 富士通株式会社 | 校正ロボットシステム及び距離センサの校正方法 |
| JP5039468B2 (ja) | 2007-07-26 | 2012-10-03 | 株式会社Sokudo | 基板洗浄装置およびそれを備えた基板処理装置 |
| KR20090028359A (ko) | 2007-09-14 | 2009-03-18 | 삼성광주전자 주식회사 | 이동체의 휠구동장치 |
| JP2009071235A (ja) | 2007-09-18 | 2009-04-02 | Sokudo:Kk | 基板処理装置 |
| US7997118B2 (en) | 2007-09-26 | 2011-08-16 | Dow Global Technologies Llc | Scrub testing devices and methods |
| KR101330735B1 (ko) | 2007-10-17 | 2013-11-20 | 삼성전자주식회사 | 로봇청소기 |
| US8798792B2 (en) | 2007-10-30 | 2014-08-05 | Lg Electronics Inc. | Detecting apparatus of robot cleaner and controlling method of robot cleaner |
| KR101461185B1 (ko) | 2007-11-09 | 2014-11-14 | 삼성전자 주식회사 | 스트럭쳐드 라이트를 이용한 3차원 맵 생성 장치 및 방법 |
| US20120312221A1 (en) | 2007-12-07 | 2012-12-13 | iRobot Corpoartion | Submersible vehicles and methods for propelling and/or powering the same in an underwater environment |
| US8166904B2 (en) | 2007-12-12 | 2012-05-01 | Irobot Corporation | Delivery systems for pressure protecting and delivering a submerged payload and methods for using the same |
| US7942107B2 (en) | 2007-12-12 | 2011-05-17 | Irobot Corporation | Delivery systems for pressure protecting and delivering a submerged payload and methods for using the same |
| US8336479B2 (en) | 2008-01-22 | 2012-12-25 | Irobot Corporation | Systems and methods of use for submerged deployment of objects |
| US8433442B2 (en) | 2008-01-28 | 2013-04-30 | Seegrid Corporation | Methods for repurposing temporal-spatial information collected by service robots |
| US8755936B2 (en) | 2008-01-28 | 2014-06-17 | Seegrid Corporation | Distributed multi-robot system |
| JP2009193240A (ja) | 2008-02-13 | 2009-08-27 | Toyota Motor Corp | 移動ロボット及び環境地図の生成方法 |
| JP4999734B2 (ja) | 2008-03-07 | 2012-08-15 | 株式会社日立製作所 | 環境地図生成装置、方法及びプログラム |
| US8244469B2 (en) | 2008-03-16 | 2012-08-14 | Irobot Corporation | Collaborative engagement for target identification and tracking |
| US8534983B2 (en) | 2008-03-17 | 2013-09-17 | Irobot Corporation | Door breaching robotic manipulator |
| US8127704B2 (en) | 2008-03-26 | 2012-03-06 | Irobot Corporation | Submersible vehicles and methods for transiting the same in a body of liquid |
| KR101358477B1 (ko) | 2008-04-02 | 2014-02-05 | 아이로보트 코퍼레이션 | 로보틱스 시스템 |
| US8961695B2 (en) * | 2008-04-24 | 2015-02-24 | Irobot Corporation | Mobile robot for cleaning |
| EP2303085B1 (en) | 2008-04-24 | 2017-07-26 | iRobot Corporation | Application of localization, positioning & navigation systems for robotic enabled mobile products |
| CN101990703B (zh) | 2008-04-25 | 2012-11-21 | 应用材料公司 | 高产量化学机械抛光系统 |
| US8447613B2 (en) | 2008-04-28 | 2013-05-21 | Irobot Corporation | Robot and server with optimized message decoding |
| USD586959S1 (en) | 2008-05-09 | 2009-02-17 | Irobot Corporation | Autonomous coverage robot |
| US8418642B2 (en) | 2008-05-09 | 2013-04-16 | Irobot Corporation | Unmanned submersible vehicles and methods for operating the same in a body of liquid |
| CN101587447B (zh) | 2008-05-23 | 2013-03-27 | 国际商业机器公司 | 基于预测的事务执行系统和方法 |
| US8001651B2 (en) | 2008-06-19 | 2011-08-23 | National Taipei University Of Technology | Floor washing robot |
| US8408956B1 (en) | 2008-07-08 | 2013-04-02 | Irobot Corporation | Payload delivery units for pressure protecting and delivering a submerged payload and methods for using the same |
| JP5141507B2 (ja) | 2008-08-25 | 2013-02-13 | 村田機械株式会社 | 自律移動装置 |
| US8237389B2 (en) | 2008-11-12 | 2012-08-07 | Irobot Corporation | Multi mode safety control module |
| FR2938578B1 (fr) | 2008-11-14 | 2016-02-26 | Pmps Tech | Robot motorise nettoyeur de piscine ou analogue en fonctionnement immerge dans un fluide |
| US20100125968A1 (en) | 2008-11-26 | 2010-05-27 | Howard Ho | Automated apparatus and equipped trashcan |
| USD593265S1 (en) | 2008-12-02 | 2009-05-26 | Bissell Homecare, Inc. | Robotic vacuum cleaner |
| US7926598B2 (en) | 2008-12-09 | 2011-04-19 | Irobot Corporation | Mobile robotic vehicle |
| KR20100066622A (ko) | 2008-12-10 | 2010-06-18 | 삼성전자주식회사 | 바퀴조립체 및 이를 가지는 로봇 청소기 |
| US8417188B1 (en) | 2009-02-03 | 2013-04-09 | Irobot Corporation | Systems and methods for inspection and communication in liquid petroleum product |
| US20100206336A1 (en) | 2009-02-18 | 2010-08-19 | Sami Souid | Extendable vacuum cleaner |
| US8727410B2 (en) | 2009-02-24 | 2014-05-20 | Irobot Corporation | Method and device for manipulating an object |
| US20100292884A1 (en) | 2009-05-12 | 2010-11-18 | Rogelio Manfred Neumann | Device for Influencing Navigation of an Autonomous Vehicle |
| KR101484940B1 (ko) | 2009-05-14 | 2015-01-22 | 삼성전자 주식회사 | 로봇청소기 및 그 제어방법 |
| GB0909148D0 (en) | 2009-05-28 | 2009-07-01 | F Robotics Acquisitions Ltd | Localisation system |
| KR20100132891A (ko) | 2009-06-10 | 2010-12-20 | 삼성광주전자 주식회사 | 청소장치 및 이를 이용한 먼지 포집 방법 |
| US8774970B2 (en) | 2009-06-11 | 2014-07-08 | S.C. Johnson & Son, Inc. | Trainable multi-mode floor cleaning device |
| EP2260750A3 (en) | 2009-06-12 | 2014-04-23 | Samsung Electronics Co., Ltd. | Robot cleaner and method of controlling traveling thereof |
| US8318499B2 (en) | 2009-06-17 | 2012-11-27 | Abbott Laboratories | System for managing inventories of reagents |
| US8706297B2 (en) | 2009-06-18 | 2014-04-22 | Michael Todd Letsky | Method for establishing a desired area of confinement for an autonomous robot and autonomous robot implementing a control system for executing the same |
| US8438694B2 (en) | 2009-06-19 | 2013-05-14 | Samsung Electronics Co., Ltd. | Cleaning apparatus |
| WO2011002113A1 (ko) | 2009-06-30 | 2011-01-06 | 엘지전자 주식회사 | 로봇청소기 |
| US8874268B2 (en) | 2009-07-06 | 2014-10-28 | Lg Electronics Inc. | Robot cleaner |
| US8364309B1 (en) | 2009-07-14 | 2013-01-29 | Bailey Bendrix L | User-assisted robot navigation system |
| JP5512225B2 (ja) | 2009-07-31 | 2014-06-04 | Cyberdyne株式会社 | サイドブラシ装置を備えた自走式清掃ロボット |
| US8527113B2 (en) | 2009-08-07 | 2013-09-03 | Irobot Corporation | Remote vehicle |
| TWI419671B (zh) | 2009-08-25 | 2013-12-21 | Ind Tech Res Inst | 具有掃地與吸塵功能的清潔裝置 |
| US8548626B2 (en) | 2009-09-03 | 2013-10-01 | Irobot Corporation | Method and device for manipulating an object |
| US7934571B2 (en) | 2009-09-04 | 2011-05-03 | Jane-Ferng Chiu | Moving base for robotic vacuum cleaner |
| RU2012117821A (ru) | 2009-09-29 | 2013-11-10 | Шарп Кабусики Кайся | Система управления периферийным оборудованием, устройство отображения и периферийное оборудование |
| US20110082668A1 (en) * | 2009-10-06 | 2011-04-07 | Escrig M Teresa | Systems and methods for establishing an environmental representation |
| EP2316322A3 (en) | 2009-11-02 | 2011-06-29 | LG Electronics Inc. | Robot cleaner |
| DE102010000174B4 (de) | 2010-01-22 | 2022-09-01 | Vorwerk & Co. Interholding Gesellschaft mit beschränkter Haftung | Verfahren zur Reinigung eines Raumes mittels eines selbsttätig verfahrbaren Reinigungsgerätes |
| CN105147193B (zh) | 2010-02-16 | 2018-06-12 | 艾罗伯特公司 | 真空吸尘器毛刷 |
| DE102010000573B4 (de) | 2010-02-26 | 2022-06-23 | Vorwerk & Co. Interholding Gmbh | Verfahren zur Leistungssteuerung eines Saug-/Kehrgeräts |
| US20130239870A1 (en) | 2010-03-01 | 2013-09-19 | Irobot Corporation | Underwater Vehicle Bouyancy System |
| KR20110119118A (ko) | 2010-04-26 | 2011-11-02 | 엘지전자 주식회사 | 로봇 청소기, 및 이를 이용한 원격 감시 시스템 |
| US9104202B2 (en) | 2010-05-11 | 2015-08-11 | Irobot Corporation | Remote vehicle missions and systems for supporting remote vehicle missions |
| US9014848B2 (en) | 2010-05-20 | 2015-04-21 | Irobot Corporation | Mobile robot system |
| US8935005B2 (en) | 2010-05-20 | 2015-01-13 | Irobot Corporation | Operating a mobile robot |
| PL2388561T3 (pl) | 2010-05-20 | 2016-05-31 | Mettler Toledo Gmbh | Urządzenie laboratoryjne do przygotowywania próbek |
| US8918209B2 (en) | 2010-05-20 | 2014-12-23 | Irobot Corporation | Mobile human interface robot |
| US8918213B2 (en) | 2010-05-20 | 2014-12-23 | Irobot Corporation | Mobile human interface robot |
| JP5510081B2 (ja) | 2010-06-02 | 2014-06-04 | 日本精工株式会社 | 障害物回避支援装置、障害物回避支援方法及び移動体 |
| JP5540959B2 (ja) | 2010-07-15 | 2014-07-02 | 横河電機株式会社 | 波形測定装置 |
| KR101483541B1 (ko) | 2010-07-15 | 2015-01-19 | 삼성전자주식회사 | 로봇청소기, 메인터넌스 스테이션 그리고 이들을 가지는 청소시스템 |
| KR101484942B1 (ko) | 2010-08-26 | 2015-01-22 | 삼성전자 주식회사 | 청소기 및 그 제어방법 |
| DE102010037672B4 (de) | 2010-09-21 | 2023-03-23 | Vorwerk & Co. Interholding Gmbh | Rotierbare Kehrbürste sowie selbsttätig verfahrbares Bodengerät mit einer derartigen Kehrbürste |
| KR20120035519A (ko) | 2010-10-05 | 2012-04-16 | 삼성전자주식회사 | 먼지 유입 감지 유닛 및 이를 구비하는 로봇 청소기 |
| CN201840418U (zh) | 2010-10-11 | 2011-05-25 | 洋通工业股份有限公司 | 自走吸尘器的可拆式滚刷装置 |
| CN201840416U (zh) | 2010-10-11 | 2011-05-25 | 洋通工业股份有限公司 | 自走吸尘器的集尘装置 |
| KR101573742B1 (ko) | 2010-10-25 | 2015-12-07 | 삼성전자주식회사 | 로봇청소기 |
| KR20120044768A (ko) | 2010-10-28 | 2012-05-08 | 엘지전자 주식회사 | 로봇 청소기 및 이의 제어 방법 |
| KR101496913B1 (ko) | 2010-11-03 | 2015-03-02 | 삼성전자 주식회사 | 로봇청소기와 자동배출 스테이션 및 이를 가지는 로봇청소기 시스템 |
| TWI435702B (zh) | 2010-11-09 | 2014-05-01 | Ind Tech Res Inst | 自捲式靜電除塵裝置 |
| US8543562B2 (en) | 2010-11-18 | 2013-09-24 | Sling Media Pvt Ltd | Automated searching for solutions to support self-diagnostic operations of web-enabled devices |
| KR101752190B1 (ko) | 2010-11-24 | 2017-06-30 | 삼성전자주식회사 | 로봇청소기 및 그 제어방법 |
| US9146558B2 (en) | 2010-11-30 | 2015-09-29 | Irobot Corporation | Mobile robot and method of operating thereof |
| EP2460624A1 (de) | 2010-12-06 | 2012-06-06 | Jöst GmbH | Schleifvorrichtung zum maschinellen Schleifen von Rotorblättern für Windkraftanlagen |
| US9020636B2 (en) | 2010-12-16 | 2015-04-28 | Saied Tadayon | Robot for solar farms |
| US20120152280A1 (en) | 2010-12-18 | 2012-06-21 | Zenith Technologies, Llc | Touch Sensitive Display For Surface Cleaner |
| TWM407725U (en) | 2010-12-20 | 2011-07-21 | Micro Star Internat Corp Ltd | Dust collecting container and vacuum cleaner applying the same |
| TW201227190A (en) | 2010-12-28 | 2012-07-01 | Hon Hai Prec Ind Co Ltd | System and method for controlling robots via cloud computing |
| CN103443612B (zh) | 2010-12-30 | 2016-04-20 | 美国iRobot公司 | 碎屑监视 |
| JP5832553B2 (ja) | 2010-12-30 | 2015-12-16 | アイロボット コーポレイション | カバレッジロボットナビゲーション |
| USD659311S1 (en) | 2010-12-30 | 2012-05-08 | Irobot Corporation | Robot vacuum cleaner |
| USD670877S1 (en) | 2010-12-30 | 2012-11-13 | Irobot Corporation | Robot vacuum cleaner |
| USD672928S1 (en) | 2010-12-30 | 2012-12-18 | Irobot Corporation | Air filter for a robotic vacuum |
| US8741013B2 (en) | 2010-12-30 | 2014-06-03 | Irobot Corporation | Dust bin for a robotic vacuum |
| US8930019B2 (en) | 2010-12-30 | 2015-01-06 | Irobot Corporation | Mobile human interface robot |
| US20120167917A1 (en) | 2011-01-03 | 2012-07-05 | Gilbert Jr Duane L | Autonomous coverage robot |
| US8878734B2 (en) | 2011-01-13 | 2014-11-04 | Irobot Corporation | Antenna support structures |
| KR101523980B1 (ko) | 2011-01-18 | 2015-06-01 | 삼성전자 주식회사 | 로봇 청소기 |
| US9346499B2 (en) | 2011-01-27 | 2016-05-24 | Irobot Corporation | Resilient wheel assemblies |
| KR20140040094A (ko) | 2011-01-28 | 2014-04-02 | 인터치 테크놀로지스 인코퍼레이티드 | 이동형 원격현전 로봇과의 인터페이싱 |
| EP2494900B1 (en) | 2011-03-04 | 2014-04-09 | Samsung Electronics Co., Ltd. | Debris detecting unit and robot cleaning device having the same |
| JP5222971B2 (ja) | 2011-03-31 | 2013-06-26 | 富士ソフト株式会社 | 歩行ロボット装置及びその制御プログラム |
| KR101842460B1 (ko) | 2011-04-12 | 2018-03-27 | 엘지전자 주식회사 | 로봇 청소기, 이의 원격 감시 시스템 및 방법 |
| US20120260443A1 (en) | 2011-04-13 | 2012-10-18 | Lindgren Peter B | Aquaculture cage screen and cleaning apparatus |
| US8881683B2 (en) | 2011-04-13 | 2014-11-11 | Peter B. Lindgren | Fish cage screen and cleaning apparatus |
| WO2012142587A1 (en) | 2011-04-15 | 2012-10-18 | Irobot Corporation | Method for path generation for an end effector of a robot |
| JP2013006269A (ja) | 2011-06-23 | 2013-01-10 | Raytheon Bbn Technologies Corp | ロボット加工装置 |
| KR101311295B1 (ko) | 2011-07-13 | 2013-09-25 | 주식회사 유진로봇 | 이동 로봇의 휠 조립체 |
| US20130032078A1 (en) | 2011-07-15 | 2013-02-07 | Irobot Corporation | Sea Glider |
| US8800101B2 (en) | 2011-07-25 | 2014-08-12 | Lg Electronics Inc. | Robot cleaner and self testing method of the same |
| US20130145572A1 (en) | 2011-07-27 | 2013-06-13 | Irobot Corporation | Surface Cleaning Robot |
| IL214419A0 (en) | 2011-08-02 | 2011-11-30 | Josef Porat | Pool cleaner with brush |
| KR101931365B1 (ko) | 2011-08-22 | 2018-12-24 | 삼성전자주식회사 | 로봇청소기 및 그 제어방법 |
| US8631541B2 (en) | 2011-08-23 | 2014-01-21 | Bissell Homecare, Inc. | Auxiliary brush for vacuum cleaner |
| US20130054129A1 (en) | 2011-08-26 | 2013-02-28 | INRO Technologies Limited | Method and apparatus for using unique landmarks to locate industrial vehicles at start-up |
| USD682362S1 (en) | 2011-09-01 | 2013-05-14 | Irobot Corporation | Remote controlled vehicle |
| US20130060357A1 (en) | 2011-09-01 | 2013-03-07 | Sony Corporation, A Japanese Corporation | Facilitated use of heterogeneous home-automation edge components via a common application programming interface |
| US9037296B2 (en) | 2011-09-07 | 2015-05-19 | Lg Electronics Inc. | Robot cleaner, and system and method for remotely controlling the same |
| GB2494446B (en) | 2011-09-09 | 2013-12-18 | Dyson Technology Ltd | Autonomous cleaning appliance |
| KR101907161B1 (ko) | 2011-10-06 | 2018-10-15 | 삼성전자주식회사 | 로봇청소기 |
| US20130092190A1 (en) | 2011-10-18 | 2013-04-18 | Samsung Electronics Co., Ltd. | Robot cleaner and control method for the same |
| US9596971B2 (en) | 2011-10-21 | 2017-03-21 | Samsung Electronics Co., Ltd. | Robot cleaner and control method for the same |
| US8903644B2 (en) | 2011-11-29 | 2014-12-02 | Irobot Corporation | Digest for localization or fingerprinted overlay |
| KR101857295B1 (ko) | 2011-12-16 | 2018-05-14 | 엘지전자 주식회사 | 이동형 로봇 청소기 |
| US9427876B2 (en) | 2011-12-19 | 2016-08-30 | Irobot Corporation | Inflatable robots, robotic components and assemblies and methods including same |
| KR101960816B1 (ko) | 2011-12-22 | 2019-03-22 | 삼성전자주식회사 | 로봇청소기 |
| WO2013105431A1 (ja) | 2012-01-13 | 2013-07-18 | シャープ株式会社 | 集塵装置 |
| KR20130090438A (ko) | 2012-02-04 | 2013-08-14 | 엘지전자 주식회사 | 로봇 청소기 |
| EP2624180A1 (en) | 2012-02-06 | 2013-08-07 | Xabier Uribe-Etxebarria Jimenez | System of integrating remote third party services |
| KR101984214B1 (ko) | 2012-02-09 | 2019-05-30 | 삼성전자주식회사 | 로봇 청소기의 청소 작업을 제어하기 위한 장치 및 방법 |
| US8958911B2 (en) | 2012-02-29 | 2015-02-17 | Irobot Corporation | Mobile robot |
| US9463574B2 (en) | 2012-03-01 | 2016-10-11 | Irobot Corporation | Mobile inspection robot |
| CN103284653B (zh) | 2012-03-02 | 2017-07-14 | 恩斯迈电子(深圳)有限公司 | 清洁机器人及其控制方法 |
| CN103284665A (zh) | 2012-03-02 | 2013-09-11 | 恩斯迈电子(深圳)有限公司 | 清洁机器人及其控制方法 |
| CN103284662B (zh) | 2012-03-02 | 2016-09-21 | 恩斯迈电子(深圳)有限公司 | 清扫系统及其控制方法 |
| KR101901930B1 (ko) | 2012-03-04 | 2018-09-27 | 엘지전자 주식회사 | 홈 디바이스의 제어 장치, 제어 방법 및 제어를 위한 타임라인 ui |
| KR101932080B1 (ko) | 2012-03-08 | 2018-12-24 | 엘지전자 주식회사 | 아지테이터 및 이를 포함하는 청소기 |
| EP2825925B1 (en) | 2012-03-15 | 2022-04-27 | iRobot Corporation | Bumper for robot comprising sensor arrays |
| US9211648B2 (en) | 2012-04-05 | 2015-12-15 | Irobot Corporation | Operating a mobile robot |
| CN103371770B (zh) | 2012-04-12 | 2017-06-23 | 中弘智能高科技(深圳)有限公司 | 自走及手提两用式吸尘器 |
| JP2013220422A (ja) | 2012-04-17 | 2013-10-28 | Tokyo Ohka Kogyo Co Ltd | 塗布装置及び塗布方法 |
| JP5937877B2 (ja) | 2012-04-19 | 2016-06-22 | シャープ株式会社 | 自走式掃除機 |
| KR101231932B1 (ko) | 2012-04-24 | 2013-03-07 | 주식회사 모뉴엘 | 로봇 청소기 |
| US20130338525A1 (en) | 2012-04-24 | 2013-12-19 | Irobot Corporation | Mobile Human Interface Robot |
| JP6104519B2 (ja) | 2012-05-07 | 2017-03-29 | シャープ株式会社 | 自走式電子機器 |
| KR101949277B1 (ko) | 2012-06-18 | 2019-04-25 | 엘지전자 주식회사 | 이동 로봇 |
| US9699104B2 (en) | 2012-07-16 | 2017-07-04 | Code On Network Coding, Llc | Deterministic distributed network coding |
| EP3104194B1 (en) | 2012-08-27 | 2019-02-06 | Aktiebolaget Electrolux | Robot positioning system |
| US8855914B1 (en) | 2012-08-31 | 2014-10-07 | Neato Robotics, Inc. | Method and apparatus for traversing corners of a floored area with a robotic surface treatment apparatus |
| US10216957B2 (en) | 2012-11-26 | 2019-02-26 | Elwha Llc | Methods and systems for managing data and/or services for devices |
| US8533144B1 (en) | 2012-11-12 | 2013-09-10 | State Farm Mutual Automobile Insurance Company | Automation and security application store suggestions based on usage data |
| DE102013113426A1 (de) | 2012-12-05 | 2014-06-05 | Vorwerk & Co. Interholding Gmbh | Verfahrbares Reinigungsgerät sowie Verfahren zum Betreiben eines solchen Gerätes |
| CN104885406B (zh) | 2012-12-18 | 2019-06-21 | 三星电子株式会社 | 用于在家庭网络系统中远程控制家庭设备的方法和设备 |
| KR20140079274A (ko) | 2012-12-18 | 2014-06-26 | 삼성전자주식회사 | 홈 네트워크 시스템에서 에너지 소비를 관리하는 방법 및 장치 |
| FR2999416A1 (fr) | 2012-12-19 | 2014-06-20 | Benoit Vogt | Sonde endo-ureterale amelioree |
| US9233472B2 (en) | 2013-01-18 | 2016-01-12 | Irobot Corporation | Mobile robot providing environmental mapping for household environmental control |
| CA2886451C (en) | 2013-01-18 | 2024-01-02 | Irobot Corporation | Environmental management systems including mobile robots and methods using same |
| US9375847B2 (en) | 2013-01-18 | 2016-06-28 | Irobot Corporation | Environmental management systems including mobile robots and methods using same |
| KR20140108821A (ko) | 2013-02-28 | 2014-09-15 | 삼성전자주식회사 | 이동 로봇 및 이동 로봇의 위치 추정 및 맵핑 방법 |
| KR102020215B1 (ko) | 2013-03-23 | 2019-09-10 | 삼성전자주식회사 | 로봇 청소기 및 로봇 청소기의 제어방법 |
| US9037396B2 (en) | 2013-05-23 | 2015-05-19 | Irobot Corporation | Simultaneous localization and mapping for a mobile robot |
| US20150005937A1 (en) | 2013-06-27 | 2015-01-01 | Brain Corporation | Action selection apparatus and methods |
| KR102094347B1 (ko) | 2013-07-29 | 2020-03-30 | 삼성전자주식회사 | 자동 청소 시스템, 청소 로봇 및 그 제어 방법 |
| KR102083188B1 (ko) | 2013-07-29 | 2020-03-02 | 삼성전자주식회사 | 청소 로봇 및 그 제어 방법 |
| EP3084538B1 (en) * | 2013-12-19 | 2017-11-01 | Aktiebolaget Electrolux | Robotic cleaning device with perimeter recording function |
| EP3091887A4 (en) | 2014-01-10 | 2017-09-13 | iRobot Corporation | Autonomous mobile robot |
| US9305219B2 (en) | 2014-01-23 | 2016-04-05 | Mitsubishi Electric Research Laboratories, Inc. | Method for estimating free space using a camera system |
-
2013
- 2013-12-19 EP EP13811937.5A patent/EP3084538B1/en active Active
- 2013-12-19 US US15/101,257 patent/US9811089B2/en active Active
- 2013-12-19 WO PCT/EP2013/077384 patent/WO2015090402A1/en active Application Filing
- 2013-12-19 KR KR1020167017564A patent/KR102124235B1/ko active IP Right Grant
- 2013-12-19 ES ES13811937.5T patent/ES2656664T3/es active Active
- 2013-12-19 JP JP2016526759A patent/JP6455737B2/ja active Active
- 2013-12-19 CN CN201380081329.9A patent/CN105829985B/zh active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001347478A (ja) * | 2000-04-06 | 2001-12-18 | Casio Comput Co Ltd | ロボットに対する操作対象の教示方法およびその装置ならびにロボット |
| JP2002182742A (ja) * | 2000-11-17 | 2002-06-26 | Samsung Kwangju Electronics Co Ltd | モービルロボット及びその経路補正方法 |
| JP2002287824A (ja) * | 2001-03-26 | 2002-10-04 | Toshiba Tec Corp | 自律走行ロボット |
| JP2005052961A (ja) * | 2003-08-01 | 2005-03-03 | Samsung Electronics Co Ltd | ロボットシステム及びその制御方法 |
| JP2005349497A (ja) * | 2004-06-08 | 2005-12-22 | Sharp Corp | 自走式ロボット |
| JP2006185438A (ja) * | 2004-12-03 | 2006-07-13 | Matsushita Electric Ind Co Ltd | ロボット制御装置 |
| JP2007226322A (ja) * | 2006-02-21 | 2007-09-06 | Sharp Corp | ロボットコントロールシステム |
| JP2010507169A (ja) * | 2006-10-18 | 2010-03-04 | ユタカ・ジェイ・カナヤマ | 移動ロボットによる地図作成方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107272708A (zh) * | 2017-08-03 | 2017-10-20 | 佛山市盈智轩科技有限公司 | 家庭用的地面清洁系统以及地面清洁方法 |
| JPWO2022070302A1 (ja) * | 2020-09-30 | 2022-04-07 | ||
| WO2022070302A1 (ja) * | 2020-09-30 | 2022-04-07 | Dmg森精機株式会社 | 自走装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN105829985B (zh) | 2020-04-07 |
| US20160306359A1 (en) | 2016-10-20 |
| EP3084538A1 (en) | 2016-10-26 |
| CN105829985A (zh) | 2016-08-03 |
| KR20160100315A (ko) | 2016-08-23 |
| JP6455737B2 (ja) | 2019-01-23 |
| ES2656664T3 (es) | 2018-02-28 |
| KR102124235B1 (ko) | 2020-06-24 |
| WO2015090402A1 (en) | 2015-06-25 |
| EP3084538B1 (en) | 2017-11-01 |
| US9811089B2 (en) | 2017-11-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6455737B2 (ja) | 方法、ロボット掃除機、コンピュータプログラムおよびコンピュータプログラム製品 | |
| US11712142B2 (en) | System of robotic cleaning devices | |
| KR102393550B1 (ko) | 청소 영역의 우선순위를 정하는 방법 | |
| KR102099495B1 (ko) | 로봇 청소 장치가 장애물에 올라가는 것의 감지 | |
| JP6532530B2 (ja) | ロボット掃除機の掃除方法 | |
| JP7528404B2 (ja) | ラインアレイを用いた物体の検出 | |
| US20190246852A1 (en) | Robotic cleaning device and a method of controlling movement of the robotic cleaning device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161020 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170823 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170829 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180410 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180612 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181120 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6455737 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |