KR20140092375A - 원심분리기 시스템 및 작업 흐름 - Google Patents
원심분리기 시스템 및 작업 흐름 Download PDFInfo
- Publication number
- KR20140092375A KR20140092375A KR1020147014680A KR20147014680A KR20140092375A KR 20140092375 A KR20140092375 A KR 20140092375A KR 1020147014680 A KR1020147014680 A KR 1020147014680A KR 20147014680 A KR20147014680 A KR 20147014680A KR 20140092375 A KR20140092375 A KR 20140092375A
- Authority
- KR
- South Korea
- Prior art keywords
- centrifuge
- adapter
- sample
- sample container
- centrifuge adapter
- Prior art date
Links
- 238000000034 method Methods 0.000 claims abstract description 59
- 239000007788 liquid Substances 0.000 claims description 18
- 230000005291 magnetic effect Effects 0.000 claims description 8
- 230000004044 response Effects 0.000 claims description 4
- 238000013016 damping Methods 0.000 claims description 3
- 239000000463 material Substances 0.000 claims description 3
- 239000002184 metal Substances 0.000 claims description 3
- 238000010926 purge Methods 0.000 claims 1
- 238000005096 rolling process Methods 0.000 claims 1
- 238000012546 transfer Methods 0.000 abstract description 17
- 238000005119 centrifugation Methods 0.000 abstract description 12
- 239000000523 sample Substances 0.000 description 284
- 238000004458 analytical method Methods 0.000 description 27
- 230000008569 process Effects 0.000 description 21
- 238000012545 processing Methods 0.000 description 16
- 238000001514 detection method Methods 0.000 description 15
- 230000005855 radiation Effects 0.000 description 15
- 230000032258 transport Effects 0.000 description 15
- 238000005259 measurement Methods 0.000 description 8
- 238000009826 distribution Methods 0.000 description 7
- 210000002966 serum Anatomy 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 229910000831 Steel Inorganic materials 0.000 description 4
- 238000010521 absorption reaction Methods 0.000 description 4
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 238000011143 downstream manufacturing Methods 0.000 description 4
- 210000003743 erythrocyte Anatomy 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 239000013610 patient sample Substances 0.000 description 4
- 230000002265 prevention Effects 0.000 description 4
- 239000010959 steel Substances 0.000 description 4
- 238000012360 testing method Methods 0.000 description 4
- 239000012530 fluid Substances 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 238000007726 management method Methods 0.000 description 3
- 238000009987 spinning Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 235000003385 Diospyros ebenum Nutrition 0.000 description 1
- 241000792913 Ebenaceae Species 0.000 description 1
- 208000007536 Thrombosis Diseases 0.000 description 1
- 238000000862 absorption spectrum Methods 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005294 ferromagnetic effect Effects 0.000 description 1
- 229920002457 flexible plastic Polymers 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/0099—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor comprising robots or similar manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01D—SEPARATION
- B01D21/00—Separation of suspended solid particles from liquids by sedimentation
- B01D21/26—Separation of sediment aided by centrifugal force or centripetal force
- B01D21/262—Separation of sediment aided by centrifugal force or centripetal force by using a centrifuge
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B11/00—Feeding, charging, or discharging bowls
- B04B11/04—Periodical feeding or discharging; Control arrangements therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B13/00—Control arrangements specially designed for centrifuges; Programme control of centrifuges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B15/00—Other accessories for centrifuges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B7/00—Elements of centrifuges
- B04B7/02—Casings; Lids
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B7/00—Elements of centrifuges
- B04B7/08—Rotary bowls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B9/00—Drives specially designed for centrifuges; Arrangement or disposition of transmission gearing; Suspending or balancing rotary bowls
- B04B9/14—Balancing rotary bowls ; Schrappers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B9/00—Drives specially designed for centrifuges; Arrangement or disposition of transmission gearing; Suspending or balancing rotary bowls
- B04B9/14—Balancing rotary bowls ; Schrappers
- B04B9/146—Unbalance detection devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65D—CONTAINERS FOR STORAGE OR TRANSPORT OF ARTICLES OR MATERIALS, e.g. BAGS, BARRELS, BOTTLES, BOXES, CANS, CARTONS, CRATES, DRUMS, JARS, TANKS, HOPPERS, FORWARDING CONTAINERS; ACCESSORIES, CLOSURES, OR FITTINGS THEREFOR; PACKAGING ELEMENTS; PACKAGES
- B65D51/00—Closures not otherwise provided for
- B65D51/24—Closures not otherwise provided for combined or co-operating with auxiliary devices for non-closing purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/22—Devices influencing the relative position or the attitude of articles during transit by conveyors
- B65G47/26—Devices influencing the relative position or the attitude of articles during transit by conveyors arranging the articles, e.g. varying spacing between individual articles
- B65G47/28—Devices influencing the relative position or the attitude of articles during transit by conveyors arranging the articles, e.g. varying spacing between individual articles during transit by a single conveyor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/08—Measuring arrangements characterised by the use of optical techniques for measuring diameters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/08—Measuring arrangements characterised by the use of optical techniques for measuring diameters
- G01B11/10—Measuring arrangements characterised by the use of optical techniques for measuring diameters of objects while moving
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F23/00—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L19/00—Details of, or accessories for, apparatus for measuring steady or quasi-steady pressure of a fluent medium insofar as such details or accessories are not special to particular types of pressure gauges
- G01L19/08—Means for indicating or recording, e.g. for remote indication
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M1/00—Testing static or dynamic balance of machines or structures
- G01M1/14—Determining imbalance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/25—Colour; Spectral properties, i.e. comparison of effect of material on the light at two or more different wavelengths or wavelength bands
- G01N21/27—Colour; Spectral properties, i.e. comparison of effect of material on the light at two or more different wavelengths or wavelength bands using photo-electric detection ; circuits for computing concentration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00584—Control arrangements for automatic analysers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00584—Control arrangements for automatic analysers
- G01N35/00722—Communications; Identification
- G01N35/00732—Identification of carriers, materials or components in automatic analysers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N35/1009—Characterised by arrangements for controlling the aspiration or dispense of liquids
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L3/00—Containers or dishes for laboratory use, e.g. laboratory glassware; Droppers
- B01L3/50—Containers for the purpose of retaining a material to be analysed, e.g. test tubes
- B01L3/502—Containers for the purpose of retaining a material to be analysed, e.g. test tubes with fluid transport, e.g. in multi-compartment structures
- B01L3/5021—Test tubes specially adapted for centrifugation purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B9/00—Drives specially designed for centrifuges; Arrangement or disposition of transmission gearing; Suspending or balancing rotary bowls
- B04B9/14—Balancing rotary bowls ; Schrappers
- B04B2009/143—Balancing rotary bowls ; Schrappers by weight compensation with liquids
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B11/00—Feeding, charging, or discharging bowls
- B04B11/04—Periodical feeding or discharging; Control arrangements therefor
- B04B2011/046—Loading, unloading, manipulating sample containers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B13/00—Control arrangements specially designed for centrifuges; Programme control of centrifuges
- B04B2013/006—Interface detection or monitoring of separated components
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F23/00—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm
- G01F23/22—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm by measuring physical variables, other than linear dimensions, pressure or weight, dependent on the level to be measured, e.g. by difference of heat transfer of steam or water
- G01F23/28—Indicating or measuring liquid level or level of fluent solid material, e.g. indicating in terms of volume or indicating by means of an alarm by measuring physical variables, other than linear dimensions, pressure or weight, dependent on the level to be measured, e.g. by difference of heat transfer of steam or water by measuring the variations of parameters of electromagnetic or acoustic waves applied directly to the liquid or fluent solid material
- G01F23/284—Electromagnetic waves
- G01F23/292—Light, e.g. infrared or ultraviolet
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N2035/00465—Separating and mixing arrangements
- G01N2035/00495—Centrifuges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0403—Sample carriers with closing or sealing means
- G01N2035/0405—Sample carriers with closing or sealing means manipulating closing or opening means, e.g. stoppers, screw caps, lids or covers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0418—Plate elements with several rows of samples
- G01N2035/0422—Plate elements with several rows of samples carried on a linear conveyor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/046—General conveyor features
- G01N2035/0462—Buffers [FIFO] or stacks [LIFO] for holding carriers between operations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0474—Details of actuating means for conveyors or pipettes
- G01N2035/0491—Position sensing, encoding; closed-loop control
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N35/1009—Characterised by arrangements for controlling the aspiration or dispense of liquids
- G01N2035/1025—Fluid level sensing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N2035/1027—General features of the devices
- G01N2035/1032—Dilution or aliquotting
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49826—Assembling or joining
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Mathematical Physics (AREA)
- Theoretical Computer Science (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Fluid Mechanics (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Centrifugal Separators (AREA)
Abstract
본 발명의 시스템, 방법 및 장치는 실험용 분석 시스템인 원심분리기 모듈에 관한 것이다. 검체 컨테이너는 중량이 측정될 수 있고, 원심분리기 어댑터에 장착될 수 있으며, 어댑터 셔틀에 의해 원심분리기 모듈로 이송될 수 있다. 원심분리기 어댑터 파지기는 원심분리를 위해 원심분리기 어댑터를 원심분리기로 이송한다. 원심분리기 어댑터는 검체 컨테이너 파지기에 의해 수행될 수 있는 검체 컨테이너의 언로딩을 위해 원심분리기 어댑터 파지기에 의해 어댑터 셔틀로 이송될 수 있다. 원심분리기가 설치된 위치로부터 원심분리기의 연장을 허용하는 원심분리기 서랍이 또한 설명된다. 다른 실시예는 원심분리기에서 원심분리된 원심분리기 어댑터 세트를 원심분리되지 않은 원심분리기 어댑터 세트로 교체하기 위한 순서에 관한 것이다. 검체 컨테이너를 원심분리기 어댑터에 로딩하기 위한 순서가 또한 설명된다.
Description
관련 출원의 상호 참조
본 출원은 2011년 11월 7일자로 출원되고 발명의 명칭이 "샘플을 처리하기 위한 분석 시스템 및 방법(Analytical System and Method for Processing Samples)"인 미국 가특허 출원 제61/556,667호를 우선권 주장한다. 본 출원은 또한 2012년 3월 28일자로 출원되고 발명의 명칭이 "샘플을 처리하기 위한 분석 시스템 및 방법(Analytical System and Method for Processing Samples)"인 미국 가특허 출원 제61/616,994호를 우선권 주장한다. 본 출원은 또한 2012년 8월 6일자로 출원되고 발명의 명칭이 "샘플을 처리하기 위한 분석 시스템 및 방법(Analytical System and Method for Processing Samples)"인 미국 가특허 출원 제61/680,066호를 우선권 주장한다. 이들 출원의 모두는 모든 목적으로 그대로 본 명세서에 참조로서 합체되어 있다.
종래의 의료용 실험실 시스템은 의료용 검체(specimen)를 분석하기 위한 다양한 프로세스를 구현한다. 이들 시스템은 실험실 분석 프로세스가 자동화되는 정도의 증가에 기인하여 더 효율화 되고 있다. 그러나, 자동화될 수 있는 의료용 실험실의 다수의 구성 요소가 존재한다. 자동화는 샘플을 분석하는데 요구되는 시간을 유리하게 감소시키고, 시스템의 수동 작업을 위한 필요성을 감소시키고, 기계류에 의해 요구되는 공간을 감소시킬 수 있다.
의료용 검체는 분석을 실시하기 전에 원심분리될 필요가 있다. 원심분리기는 원심분리기 어댑터를 수용할 수 있는 하나 이상의 버켓을 구비할 수 있다. 원심분리기 어댑터는 다수개의 검체 컨테이너를 수용할 수 있는 트레이이다. 원심분리기의 불균형은 원심분리기 어댑터가 불균형하게 장착된 경우에 발생할 수 있다. 원심분리기 어댑터로 삽입되는 검체 컨테이너의 중량은 원심분리기 어댑터의 균형을 어떤 방식으로 잡을 지를 결정할 때 이용될 수 있다.
원심분리기는 원심분리기에 대한 접근성을 향상시키기 위해 서랍에 장착될 수 있다. 그러나, 서랍이 부분적으로 또는 완전히 전진된 상태에서 원심분리기가 작동되면, 원심분리기의 작동이 저해되거나 원심분리기가 파손될 수 있다. 또한, 원심분리기의 작동에 필요한 케이블이 서랍의 구성요소 내에서 엉키면 케이블이 서랍의 작동에 의해 손상될 수 있다.
본 발명의 실시예는 이들 및 다른 문제점들을 개별적으로 그리고 집합적으로 처리한다.
본 발명의 실시예는 환자 샘플을 효율적으로 처리하기 위한 시스템 및 방법에 관한 것이다.
제1 실시예는 검체 컨테이너를 원심분리기 어댑터로 로딩하는 방법에 관한 것이다. 제1 검체 컨테이너 파지기는 복수의 검체 컨테이너를 원심분리기 어댑터로 로딩한다. 제1 검체 컨테이너 파지기는 복수의 검체 컨테이너가 로딩될 때까지 복수의 검체 컨테이너 중 단일의 검체 컨테이너를 원심분리기 어댑터로 순차적으로 로딩한다. 원심분리기 어댑터는 어댑터 셔틀에 의해 원심분리 구역으로 이송된다. 원심분리기 어댑터 파지기는 원심분리기 어댑터를 원심분리기로 이송한다. 원심분리기는 원심분리기 어댑터를 원심분리한다. 원심분리기 어댑터 파지기는 원심분리기 어댑터를 원심분리기로부터 어댑터 셔틀로 이송한다. 제2 검체 컨테이너 파지기는 복수의 검체 컨테이너를 원심분리기 어댑터로부터 언로딩한다. 제2 검체 컨테이너 파지기는 복수의 검체 컨테이너가 언로딩될 때까지 복수의 검체 컨테이너의 단일의 검체 컨테이너를 순차적으로 언로딩한다.
다른 실시예에서, 원심분리된 어댑터 세트를 원심분리되지 않은 어댑터 세트로 교체하는 방법이 설명된다. 원심분리기 어댑터 파지기는 모든 검체 컨테이너가 제거되어 있는 제1 원심분리기 어댑터를 일시적 보유 구역으로 이송한다. 원심분리기 어댑터 파지기는 앞서 원심분리된 샘플 컨테이너를 수납한 제2 원심분리기 어댑터를 원심분리기로부터 제1 셔틀 위치로 이송한다. 원심분리기 어댑터 파지기는 원심분리되지 않은 샘플 컨테이너를 수납한 제3 원심분리기 어댑터를 제2 셔틀 위치로부터 원심분리기로 이송한다. 원심분리기 어댑터 파지기는 원심분리되지 않은 샘플 컨테이너를 수납한 제4 원심분리기 어댑터를 일시적 보유 구역으로부터 제2 셔틀 위치로 이송한다.
다른 실시예에서, 검체 컨테이너를 원심분리기 어댑터 세트에 로딩하는 방법이 설명된다. 검체 컨테이너 파지기는 순차적 순서에 따라 첫번째 순서의 제1 검체 컨테이너를 제1 원심분리기 어댑터의 제1 위치로 로딩한다. 제1 원심분리기 어댑터의 제1 위치는 제1 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 위치들 중 하나의 위치이다. 검체 컨테이너 파지기는 순차적 순서에 따라 두번째 순서의 제2 검체 컨테이너를 제2 원심분리기 어댑터의 제1 위치로 로딩한다. 제2 원심분리기 어댑터의 제1 위치는 제2 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 위치들 중 하나의 위치이다. 검체 컨테이너 파지기는 순차적 순서에 따라 세번째 순서의 제3 검체 컨테이너를 제3 원심분리기 어댑터의 제1 위치로 로딩한다. 제3 원심분리기 어댑터의 제1 위치는 제3 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 위치들 중 하나의 위치이다. 검체 컨테이너 파지기는 순차적 순서에 따라 네번째의 제4 검체 컨테이너를 제4 원심분리기 어댑터의 제1 위치로 로딩한다. 제4 원심분리기 어댑터의 제1 위치는 제4 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 위치들 중 하나의 위치이다. 제1 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 모든 위치들이 채워지고, 제2 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 모든 위치들이 채워지고, 제3 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 모든 위치들이 채워지고, 제4 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 모든 위치들이 채워지면, 검체 컨테이너 파지기는 제5 검체 컨테이너를 제1 원심분리기 어댑터의 제2 위치로 로딩한다. 제1 원심분리기 어댑터의 제2 위치는 제1 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있지 않은 제2 세트의 위치들 중 하나의 위치이다. 제5 검체 컨테이너는 순차적 순서에 따라 앞서 로딩된 검체 컨테이너에 후속한다. 검체 컨테이너 파지기는 제6 검체 컨테이너를 제2 원심분리기 어댑터의 제2 위치로 로딩한다. 제2 원심분리기 어댑터의 제2 위치는 제2 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있지 않은 제2 세트의 위치들 중 하나의 위치이다. 제6 검체 컨테이너는 순차적 순서에 따라 앞서 로딩된 검체 컨테이너에 후속한다. 검체 컨테이너 파지기는 제7 검체 컨테이너를 제3 원심분리기 어댑터의 제2 위치로 로딩한다. 제3 원심분리기 어댑터의 제2 위치는 제3 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있지 않은 제2 세트의 위치들 중 하나의 위치이며, 제7 검체 컨테이너는 순차적 순서에 따라 앞서 로딩된 검체 컨테이너에 후속한다. 검체 컨테이너 파지기는 제8 검체 컨테이너를 제4 원심분리기 어댑터의 제2 위치로 로딩한다. 제4 원심분리기 어댑터의 제2 위치는 제4 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있지 않은 제2 세트의 위치들 중 하나의 위치이다. 제8 검체 컨테이너는 순차적 순서에 따라 앞서 로딩된 검체 컨테이너에 후속한다.
다른 실시예는 원심분리기 서랍에 관한 것이다. 원심분리기 서랍은 텔레스코픽 레일을 거쳐 프레임에 결합되는 플랫폼을 포함한다. 플랫폼은 원심분리기를 지지지하도록 구성된다. 원심분리기 서랍은 또한 플랫폼에 결합되는 래치를 포함한다.
또 다른 실시예는 원심분리기 서랍에 원심분리기를 설치하는 방법에 관한 것이다. 상기 방법은 로딩 툴을 원심분리기에 적용하는 단계를 포함한다. 로딩 툴은 복수의 잭 및 복수의 휠을 포함한다. 복수의 잭을 연장시킴으로써 원심분리기를 상승시킨다. 복수의 휠을 이용하여 원심분리기 서랍 위의 위치에 원심분리기를 롤링한다. 원심분리기가 원심분리기 서랍에 의해 지지될 때까지 복수의 잭을 후퇴시킨다. 로딩 툴을 원심분리기로부터 제거한다.
원심분리기 어댑터의 튜브 홀더에 관한 제1 실시예에서, 튜브 홀더의 제1 단부는 원심분리기 어댑터에 결합되고 튜브 홀더의 제2 단부는 볼트를 수용하도록 구성된 개구를 갖는다. 튜브 홀더는 튜브 홀더의 내부에 제1 수직 홈을 포함한다. 제1 수직 홈은 튜브 홀더의 개구에서 종단된다. 튜브 홀더는 또한 튜브 홀더의 내부에 제2 수직 홈을 포함한다. 제2 수직 홈은 튜브 홀더의 개구에서 종단된다. 튜브 홀더는 또한 튜브 홀더의 제1 수평 홈을 포함한다. 제1 핀이 제1 수직 홈을 통해 튜브 홀더로 인입되어 제1 핀이 제1 수직 홈으로부터 제1 수평 홈으로 이동될 수 있도록 제1 수평 홈과 제1 수직 홈이 연결된다. 튜브 홀더는 또한 튜브 홀더의 제2 수평 홈을 포함한다. 제2 핀이 제2 수직 홈을 통해 인입되어 제2 핀이 제2 수직 홈으로부터 제2 수평 홈으로 이동될 수 있도록 제2 수평 홈과 제2 수직 홈이 연결된다. 제1 핀 및 제2 핀은 볼트에 결합되고 볼트는 로봇 아암에 결합된다.
원심분리기 어댑터의 튜브 홀더에 관한 제2 실시예에서, 튜브 홀더의 제1 단부는 원심분리기 어댑터에 결합되고 튜브 홀더의 제2 단부는 볼트를 수용하도록 구성된 개구를 갖는다. 제1 핀 및 제2 핀은 볼트에 결합된다. 개구는 제1 핀 및 제2 핀을 갖는 볼트의 단면 프로파일에 일치하도록 구성된 키홀 형상을 갖는다. 튜브 홀더는 튜브 홀더의 내부에 제1 수직 홈을 포함한다. 제1 수직 홈의 제1 단부는 튜브 홀더의 개구에서 종단되고 제1 수직 홈의 제2 단부는 셸프에서 종단된다. 제2 수직 홈의 제1 단부는 튜브 홀더의 개구에서 종단되고 제2 수직 홈의 제2 단부는 셸프에서 종단된다. 셸프는 제1 노치 및 제2 노치를 가진다. 볼트가 튜브 홀더의 개구를 통해 하강될 때 제1 수직 홈은 제1 핀을 수용하도록 구성되고 제2 수직 홈은 제2 핀을 수용하도록 구성된다. 제1 핀 및 제2 핀이 셸프 아래에 위치하도록 볼트가 하강된 후에, 그리고 제1 핀이 제1 노치에 정렬되고 제2 핀이 제2 노치에 정렬되도록 볼트가 회전된 후에, 제1 노치는 제1 핀을 수용하도록 구성되고 제2 노치는 제2 핀을 수용하도록 구성된다.
다른 실시예에서, 원심분리기 어댑터를 파지하는 방법이 설명된다. 로봇 아암에 결합된 볼트를 로봇 아암의 하방 이동에 의해 원심분리기 어댑터에 결합된 튜브 홀더에 삽입한다. 로봇 아암은 튜브 홀더에 대해 볼트를 회전시킨다. 다음, 볼트를 튜브 홀더 내 잠금 위치로 인입한다. 튜브 홀더의 상부 표면이 로봇 아암의 하우징의 하부 표면에 접촉될 때까지 로봇 아암이 원심분리기 어댑터를 상승시킨다. 튜브 홀더와 로봇 아암 사이의 접촉은 로봇 아암에 대한 원심분리기 어댑터의 이동을 감쇠시킨다.
다른 실시예에서, 원심분리기 어댑터 셔틀의 제1 실시예가 설명된다. 하나 이상의 후크가 원심분리기 어댑터 셔틀에 이동 가능하게 결합된다. 후크는 원심분리기 어댑터의 하나 이상의 개구에 정합하도록 구성된다. 원심분리기 어댑터가 원심분리기 어댑터 셔틀에 로딩된 후에, 후크가 개구의 렛지 위로 돌출되도록 측방향으로 이동된다. 이런 방식으로, 원심분리기 어댑터가 원심분리기 어댑터 셔틀로부터 상향 이탈되는 것이 방지된다.
또 다른 실시예에서, 원심분리기 어댑터 셔틀의 제2 실시예가 설명된다. 원심분리기 어댑터 셔틀은 제어기와, 제어기에 통신 결합된 전력 공급원과, 원심분리기 어댑터 셔틀에 기계적으로 결합된 전자석을 포함한다. 전자석은 전력 공급원으로부터 전력을 공급 받는다. 원심분리기 어댑터가 원심분리기 어댑터 셔틀상에 로딩된 후에, 전자석이 원심분리기 어댑터에 결합된 금속 막대기에 전자기적으로 결합되도록 전자석에 전력이 공급된다.
본 발명의 이들 및 다른 실시예가 이하 상세히 설명된다.
상이한 실시예의 성질 및 장점의 추가의 이해가 이하의 도면을 참조하여 실현될 수도 있다.
도 1은 실험실 자동화 시스템의 페이즈(phase)와 연계된 구성 요소의 블록 다이어그램을 도시한다.
도 2는 실험실 자동화 시스템의 분석-전 페이즈와 연계된 구성 요소의 블록 다이어그램을 도시한다.
도 3은 이중 원심 분리 유닛과 연계된 구성 요소의 블록 다이어그램을 도시한다.
도 4는 원심분리기 어댑터를 전달하기 위해 사용되는 셔틀을 도시한다.
도 5는 원심분리기 회전자를 도시한다.
도 6은 원심분리기 시스템의 작업 흐름의 예시적인 일례를 도시하는 흐름도이다.
도 7은 원심 분리기를 위한 예시적인 어댑터 스왑(swap) 순서를 도시한다.
도 8은 원심 분리기를 위한 예시적인 어댑터 로딩 순서를 도시한다.
도 9는 3개의 독립적으로 이동 가능한 방향 x-, y- 및 z-를 갖는 데카르트(Cartesian) 또는 갠트리(gantry) 로봇의 예를 도시한다.
도 10은 샘플 튜브 검출 및 분석을 위한 카메라 유닛의 예시적인 다이어그램을 도시한다.
도 11은 별개의 파장에서 흡수 및 투과 곡선의 분석을 이용하는 샘플 레벨 검출의 예를 도시한다.
도 12는 예시적인 원심 분리기 서랍을 도시한다.
도 13은 제1 실시예에 따른 원심 분리기 서랍을 위한 예시적인 케이블 관리 디바이스를 도시한다.
도 14a 및 도 14b는 제2 실시예에 따른 원심 분리기 서랍을 위한 예시적인 케이블 관리 디바이스를 도시한다.
도 15는 원심 분리기 서랍을 위한 예시적인 자기 래치를 도시한다.
도 16a 내지 도 16c는 원심 분리기 서랍을 위한 예시적인 기계적 래치를 도시한다.
도 17은 원심 분리기 서랍을 위한 예시적인 압축 댐퍼를 도시한다.
도 18은 원심 분리기 서랍을 위한 예시적인 커버를 도시한다.
도 19는 원심 분리기 서랍 상에 원심 분리기를 로딩하기 위한 예시적인 작업 흐름을 도시한다.
도 20a 및 도 20b는 제1 실시예에 따른 예시적인 원심 분리기 어댑터 파지기를 도시한다.
도 21a 및 도 21b는 제2 실시예에 따른 예시적인 원심 분리기 어댑터 파지기를 도시한다.
도 22a 내지 도 22c는 제1 실시예에 따른 예시적인 원심분리기 어댑터 들어올림(lift-up) 방지 디바이스를 도시한다.
도 23은 제2 실시예에 따른 예시적인 원심분리기 들어올림 방지 디바이스를 도시한다.
도 24는 예시적인 컴퓨터 장치의 블록 다이어그램을 도시한다.
도 1은 실험실 자동화 시스템의 페이즈(phase)와 연계된 구성 요소의 블록 다이어그램을 도시한다.
도 2는 실험실 자동화 시스템의 분석-전 페이즈와 연계된 구성 요소의 블록 다이어그램을 도시한다.
도 3은 이중 원심 분리 유닛과 연계된 구성 요소의 블록 다이어그램을 도시한다.
도 4는 원심분리기 어댑터를 전달하기 위해 사용되는 셔틀을 도시한다.
도 5는 원심분리기 회전자를 도시한다.
도 6은 원심분리기 시스템의 작업 흐름의 예시적인 일례를 도시하는 흐름도이다.
도 7은 원심 분리기를 위한 예시적인 어댑터 스왑(swap) 순서를 도시한다.
도 8은 원심 분리기를 위한 예시적인 어댑터 로딩 순서를 도시한다.
도 9는 3개의 독립적으로 이동 가능한 방향 x-, y- 및 z-를 갖는 데카르트(Cartesian) 또는 갠트리(gantry) 로봇의 예를 도시한다.
도 10은 샘플 튜브 검출 및 분석을 위한 카메라 유닛의 예시적인 다이어그램을 도시한다.
도 11은 별개의 파장에서 흡수 및 투과 곡선의 분석을 이용하는 샘플 레벨 검출의 예를 도시한다.
도 12는 예시적인 원심 분리기 서랍을 도시한다.
도 13은 제1 실시예에 따른 원심 분리기 서랍을 위한 예시적인 케이블 관리 디바이스를 도시한다.
도 14a 및 도 14b는 제2 실시예에 따른 원심 분리기 서랍을 위한 예시적인 케이블 관리 디바이스를 도시한다.
도 15는 원심 분리기 서랍을 위한 예시적인 자기 래치를 도시한다.
도 16a 내지 도 16c는 원심 분리기 서랍을 위한 예시적인 기계적 래치를 도시한다.
도 17은 원심 분리기 서랍을 위한 예시적인 압축 댐퍼를 도시한다.
도 18은 원심 분리기 서랍을 위한 예시적인 커버를 도시한다.
도 19는 원심 분리기 서랍 상에 원심 분리기를 로딩하기 위한 예시적인 작업 흐름을 도시한다.
도 20a 및 도 20b는 제1 실시예에 따른 예시적인 원심 분리기 어댑터 파지기를 도시한다.
도 21a 및 도 21b는 제2 실시예에 따른 예시적인 원심 분리기 어댑터 파지기를 도시한다.
도 22a 내지 도 22c는 제1 실시예에 따른 예시적인 원심분리기 어댑터 들어올림(lift-up) 방지 디바이스를 도시한다.
도 23은 제2 실시예에 따른 예시적인 원심분리기 들어올림 방지 디바이스를 도시한다.
도 24는 예시적인 컴퓨터 장치의 블록 다이어그램을 도시한다.
본 발명의 기술의 실시예는 의료용 검체를 처리하기 위한 분석 의료용 실험실 시스템 및 방법에 관한 것이다. 이들 실시예는, 더 상세히 후술되는 바와 같이, 이들 실시예가 다른 장점들 중에서도, 더 높은 속도, 정확성, 효율 및 오염의 방지를 제공하기 때문에 유리하다. 전술된 바와 같이, 다수의 종래의 실험실 시스템은 실험실 전체에 걸쳐 독립형 유닛을 사용하는 프로세스를 가질 수도 있어, 검체가 각각의 독립형 유닛 사이에 수동으로 수송되는 것을 필요로 하고, 반면에 다른 것들은 이송 시스템을 갖는 유닛들의 일부와 연결하여 검체를 유닛간에 이동시킬 수도 있다. 부가적으로, 전술된 바와 같이, 상이한 제조업자들로부터의 샘플 튜브 크기 및 장비는 종래의 실험실 시스템에서 제약일 수도 있다.
실험실 시스템은 중앙 제어기 또는 스케쥴러를 사용하여 제어된 프로세스를 작동할 수 있다. 지능형 스케쥴러의 제어 하에 샘플을 유지함으로써, 시스템은 모든 기구(instrument)의 효율적인 사용을 제공할 수도 있다. 시스템은 일관적인 최소 소요 시간(turnaround time)을 유지하고, 프로세스의 제어를 유지하고 단지 이들 기구가 준비되고 이용 가능할 때에만 기구에 샘플을 전달함으로써 전체 시스템의 처리량을 최대화할 수 있다.
본 발명의 실시예에서, 샘플은 검체 컨테이너 내에 수납되고 실험실 자동화 시스템에 의해 처리될 수 있다. "샘플 컨테이너", "샘플 튜브" 및 "튜브"라 또한 칭하는 "검체 컨테이너"는 임의의 적합한 형상 또는 형태를 가질 수도 있다. 몇몇 실시예에서, 검체 컨테이너는 샘플 튜브의 형태일 수도 있다. 예시적인 검체 컨테이너는 폐쇄 하단부 및 개방 상단부를 갖는 샘플 튜브일 수도 있다. 몇몇 샘플 튜브는 3:1 이상의 종횡비(aspect ratio)를 갖는다. 검체 컨테이너는 플라스틱, 글래스 등을 포함하는 임의의 적합한 재료로 제조될 수도 있다. 샘플 튜브 본체의 개방 단부를 덮어 부착하도록 구성된 캡이 샘플 튜브와 함께 사용될 수도 있다.
본 발명의 실시예에서, 하나 이상의 검체 컨테이너가 수송을 위해 "샘플 캐리어"(또한 "캐리어" 또는 "샘플 컨테이너 홀더"라 칭함) 내에 삽입될 수도 있다. 샘플 캐리어는 하나 이상의 검체 컨테이너를 직립 자세로 유지하고 캐리어가 이송 시스템을 따라 수송됨에 따라 안정성을 제공할 수도 있다. 몇몇 실시예에서, 샘플 캐리어는 단일 검체 컨테이너를 수용하도록 구성된 퍽 또는 원통형 리셉터클(receptacle)일 수도 있다. 샘플 캐리어는 검체 컨테이너의 내용물이 보여지고 분석되게 하기 위한 수직 슬릿을 가질 수도 있다. 몇몇 경우에, 샘플 캐리어는 검체 컨테이너를 수용하기 위한 리세스의 어레이를 갖는 샘플 튜브 래크의 형태일 수도 있다.
실험실 시스템은 로봇식 아암 상에 장착된 하나 이상의 로봇식 파지기 유닛을 또한 이용할 수도 있다. 각각의 로봇식 아암 유닛은 샘플 튜브를 파지하기 위한 로봇식 파지기를 가질 수 있고, 샘플 튜브에 대한 정보를 검출하기 위한 하나 이상의 수단을 구비할 수도 있다. 용어 "파지기" 및 "로봇식 파지기"는 본 명세서에서 상호 교환 가능하게 사용된다. 샘플 튜브에 대한 정보를 검출하기 위한 수단은 래크 내의 복수의 샘플 튜브들 중의 샘플 튜브를 식별하기 위한, 카메라와 같은 제1 촬영 디바이스를 포함할 수도 있다. 식별된 샘플 튜브는 파지기에 의해 파지된다. 샘플 튜브에 대한 정보를 검출하기 위한 수단은 파지된 샘플 튜브의 화상을 얻기 위한 제2 촬영 디바이스를 더 포함할 수도 있다. 샘플 튜브 내의 액체의 레벨은 제2 촬영 디바이스에 의해 얻어진 화상으로부터 또는 로봇식 아암 유닛에 결합된 이미터(emitter) 및 수신기 유닛을 사용하여 투과 측정으로부터 결정될 수도 있다. 트랙 상에 장착된 카메라를 갖고 따라서 튜브가 식별될 수 있기 전에 모든 샘플 튜브가 트랙 상에 있는 것을 필요로 하는 종래의 시스템에 비교하여, 본 명세서에 설명된 실험실 시스템은 컨베이어 트랙 상에 배치되기 전에 샘플 튜브를 식별할 수 있다. 그 결과, 컨베이어 상에서 수송될 필요가 없는 샘플은 단지 샘플 튜브 식별의 목적으로 컨베이어 상에 배치되지 않는다. 또한, 긴급 샘플은 컨베이어 트랙 상의 우선순위화된 배치를 가질 수 있다.
실험실 시스템 내의 복수의 로봇식 파지기 유닛의 사용은 또한 샘플 처리 효율을 증가시킬 수 있다. 입력 모듈 파지기는 전술된 바와 같이 샘플 튜브를 식별하고 데이터 측정을 행할 수 있다. 입력 모듈 파지기가 샘플 튜브를 분배 영역으로 전달한 후에, 분배 영역 파지기(예컨대, 제1 검체 컨테이너 파지기)는 샘플 튜브를 원심 분리기 모듈 또는 컨베이어와 같은 후속 모듈로 전달할 수 있다. 예를 들면, 분배 구역 파지기는 샘플 튜브를 원심분리기 어댑터로 로딩한다. 원심분리기 모듈에서, 원심분리기 튜브 파지기(예컨대, 제2 검체 컨테이너 파지기)는, 예컨대 샘플 튜브를 이송하기 위해, 샘플 튜브를 원심분리기 어댑터에 배치하기 위해, 및/또는 샘플 튜브를 원심분리기 어댑터로부터 언로딩하기 위해 사용될 수 있다. 원심분리기 어댑터 파지기는 원심분리기 어댑터를 이송하기 위해 사용될 수 있다. 다수의 파지기 사용은 샘플 튜브 및 원심분리기 어댑터를 이송하기 위해 단일의 파지기를 사용하는 종래의 시스템에 비해 프로세싱 효율을 증가시킬 수 있다.
도 1은 환자 샘플을 처리학기 위한 의료용 실험실 시스템의 일 실시예를 도시한다. 실험실 시스템은 연계 페이즈(102), 분석전 페이즈(104), 분석 페이즈(106) 및 분석후 페이즈(108)와 연계된 구성 요소들을 포함한다.
분석전 페이즈(104)는 분석을 위한 환자 샘플을 준비하는 것을 포함할 수 있다. 분석전 페이즈(104) 중에, 환자 및 시험 정보가 해독될 수 있고, 환자를 위한 프로세스가 계획될 수 있고, 품질 검사가 수행될 수도 있고, 샘플은 그 구성 성분으로 분리될 수도 있고(예를 들어, 원심 분리됨), 샘플은 다수의 검체 컨테이너 내에 분할될 수도 있고(예를 들어, 분취됨), 그리고/또는 샘플은 하나 이상의 분석기 및/또는 래크로 전달될 수 있다. 분석전 페이즈(104)는 연구실 시스템 내의 상이한 기구 및 상이한 분석기로의 샘플의 흐름을 관리할 수 있다. 이 프로세스 관리는 시스템이 효율적으로 그리고 최소의 기구에 의해 작동하는 것을 허용할 수도 있다. 부가적으로, 분석전 페이즈(104) 중에 발생하는 스케쥴링은 샘플의 효율적인 처리를 가능하게 한다.
시스템의 실시예는 환자 샘플을 가능한 한 신속하게 식별하고, 각각의 샘플의 최선의 스케쥴링을 결정하여 분석 프로세스의 일관적인 최소 소요 시간 및 최대 처리량을 제공할 수 있다. 프로세스의 단계들 및 이들 단계들의 편성은 시스템으로의 입력 또는 시스템의 다른 스테이션에서 검체 컨테이너의 누적을 회피하도록 설계된다. 실험실 시스템의 모듈은 상류측 프로세스의 최대 처리량에서 샘플의 처리를 허용하는 처리량 속도에서 작동할 수 있다. 그러나, 몇몇 실시예에서, 분취기 유닛에서, 처리량은 상류측의 샘플의 도입에 의해 그리고 각각의 분취 스테이션에서 작은 대기열에 의해 관리될 수도 있다.
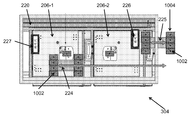
도 2는 분석전 페이즈(104)와 연계된 구성 요소들의 더 상세한 도면이다. 분석전 페이즈(104)와 연계된 구성 요소들은 입력 모듈(202), 분배 영역(204), 원심 분리기(206), 디캡퍼(decapper)(208), 혈청 인덱스 측정 디바이스(210), 분취기(212) 및 출력/분류기(214)와 같은 모듈을 포함할 수 있다.
입력 모듈
도 2에 도시된 입력 모듈(202)은 검체 컨테이너가 실험실 시스템에 도입되는 지점이다. 튜브의 래크 및/또는 개별 튜브가 수동 작동식 서랍 및/또는 자동화 디바이스일 수 있는 다수의 레인(216) 중 하나 상에 로딩될 수 있다. 도 2에서, 5개의 레인(216)이 도시되어 있다. 그러나, 실험실 시스템은 임의의 수의 레인(216)을 가질 수 있다. 레인(216)은 자동화된 또는 사용자-설정된 스케쥴링에 따라 우선순위화될 수 있다. 몇몇 실시예에서, 최고 우선순위 레인(짧은 소요 시간 또는 "STAT")은 사용자로부터 개별 튜브의 그룹을 수락하기 위한 고정된 위치를 가질 수도 있다. 일단 튜브들이 STAT 레인에 로딩되면, 이들 튜브는 처리될 다음의 튜브가 된다. 다른 레인들은 임의의 방식으로 상이한 우선순위 레벨이 할당될 수 있다. 예를 들어, 서랍이 수동으로 작동될 때, 서랍들 중 적어도 2개에 하나의 우선순위를 그리고 적어도 2개의 다른 서랍들에 다른 우선순위를 할당하는 것은, 동일한 우선순위의 다른 서랍이 사용자에게 이용 가능한 동안 하나의 서랍 상에서 시스템이 연속적으로 작동하게 할 수도 있다.
몇몇 실시예에서, 입력 모듈(202)이 샘플의 서랍을 처리하는 동안, 사용자는 서랍이 개방되지 않아야 한다는 것을 통지받을 수도 있다. 예를 들어, 서랍 상의 라이트 또는 서랍 상의 잠금장치(lock)와 같은 지시기가 사용자에게 경고하는데 사용될 수도 있다. 이는 프로세스 완전성을 유지하고 처리량을 최대화하는 것을 도울 수도 있다. 제1 서랍의 내용물의 처리가 완료될 때, 서랍은 이용 가능한 것으로서 사용자에게 식별될 수도 있고, 시스템은 자동으로 다른 서랍을 처리하기 시작할 수도 있다. 부가적으로, 샘플은 입력 모듈 파지기(228)를 사용하여 입력 모듈(202)의 서랍(216)으로 그리고 서랍으로부터 전달될 수 있다.
본 발명의 몇몇 실시예에서, "구역" 개념이 사용될 수 있다. "구역"은 서랍, 래크 홀더, 트레이 및 래크의 사용을 위한 기본적인 추상 개념일 수 있다. 예를 들어, 구역은 본 발명의 일 실시예에서 래크 내의 튜브 위치들의 세트일 수 있다. 구역은 튜브 특성(예를 들어, STAT, 샘플 유형, 사전-스핀, 캡 유형) 또는 단일 처리 인스트럭션이 할당될 수 있다. 본 발명의 실시예에서, 튜브 특성 또는 인스트럭션은 하나 이상의 구역에 할당될 수 있는데, 이는 더 강인한 경로설정 방안을 허용한다.
분배 영역 모듈
도 2를 재차 참조하면, 입력 모듈(202) 내의 레인(216)으로부터, 하나 이상의 분배 영역 파지기(218)는 최고 우선순위 튜브를 선택하고 이를 분배 영역(204)이라 칭하는 고정된 매트릭스에 수송한다. 분배 영역(204)은 실험실 자동화 시스템의 지정된 스테이션으로 샘플 컨테이너를 분배하는 것이 가능하다. 입력 모듈 파지기(228)가 검체를 분배 영역(204)으로 전달함에 따라, 파지기(228)는 검체에 대한 정보를 수집할 수 있다. 예를 들어, 검체 컨테이너 내의 유체의 하나 이상의 액체 레벨이 예를 들어 파지기(228)와 연계된 시스템에 의해 측정될 수도 있다. 몇몇 실시예에서, 샘플 튜브는 예를 들어, 파지기(228)와 연계된 시스템에 의해 촬영될 수도 있다. 이 방식으로 수집된 정보는 튜브의 제조업자, 직경, 높이, 캡 컬러 등을 결정하도록 분석될 수 있다. 샘플의 성분의 체적이 계산될 수 있고, 총 튜브 중량의 추정이 이루어질 수 있다. 이 중량은 이후에 더 상세히 후술되는 바와 같이, 원심 분리기 모듈(206) 내의 원심 분리기 어댑터를 균형화하는 것을 보조하는데 사용될 수 있다.
분배 영역(204)이 저 우선순위 튜브로 충전되게 되는 것을 방지하기 위해, 한도가 저 우선순위 입력 레인으로부터 이 영역 내로 로딩된 튜브의 수에 대해 설정될 수 있다. 더욱이, 분배 영역(204)은 STAT 샘플이 입력 모듈(202) 내의 STAT 서랍으로부터 분배 영역(204)으로의 연속적인 액세스를 갖는 것을 보장하기 위한 예비 영역(reserved area)을 가질 수도 있다.
분배 영역(204)은 시스템이 연계 페이즈(102) 내의 샘플 튜브와 연계된 시험 정보에 액세스하고 샘플을 위한 분석 프로세스를 계획하는 것을 허용하는 유지 영역일 수 있다. 이는 시스템이 시스템 상에서 현재 다른 샘플 튜브에 대해 샘플 튜브의 프로세스를 스케쥴링하는 것을 가능하게 한다. 스케쥴링은 전체 시스템 내의 임의의 단계를 오버로딩하지 않고 우선순위에 기초하여 샘플의 효율적인 처리를 가능하게 하여, 소요 시간 및 처리량의 최적화를 허용한다. 더욱이, 샘플의 스케쥴은 시스템의 활성도 또는 이용 가능성이 변화함에 따라 프로세스 전체에 걸쳐 업데이트될 수 있어, 샘플의 실시간 활성 제어를 제공한다.
일단 스케쥴이 분배 영역 모듈(204)에 의해 계획되면, 로봇식 파지기(218)는 이어서 분배 영역(204) 내의 튜브의 우선순위에 기초하여 다음의 모듈로 전달될 다음의 튜브인 샘플 튜브를 선택한다. 선택된 샘플 튜브는 분배 영역 모듈(204)에 의해 수행된 분석에 기초하여 분배 영역(204)으로부터 이송 영역(220)으로, 원심 분리기 모듈(206)로, 또는 에러 영역(222)으로 수송된다.
샘플 튜브가 원심 분리기 모듈(206)로 이동되고 있으면, 튜브는 원심 분리기 회전자의 적절한 균형을 보장하기 위해 조기의 중량 추정에 기초하여 적절한 원심 분리기 어댑터 내에 배치될 수 있다. 다른 실시예에서, 튜브는 이의 우선순위에 기초하여 원심분리기 어댑터 내에 배치될 수 있다. 원심 분리기 어댑터는 분배 영역(204)으로부터 원심 분리기로 셔틀 상에서 튜브를 운반하는 구성 요소이고, 여기서 로봇식 파지기가 원심 분리기의 버켓(bucket)으로 튜브와 함께 원심 분리기 어댑터를 전달한다.
분배 영역 모듈(204)이 샘플 튜브가 원심 분리를 필요로 하지 않는다고 결정하면, 분배 영역 로봇식 파지기(218)는 하류측 프로세스를 오버로드하지 않기 위해 스케쥴러의 방향에서 캐리어에 적절하게 정렬된 바코드 라벨을 갖는 이송 시스템(220) 상의 캐리어 내로 샘플을 배치한다.
원심 분리기 모듈
샘플 튜브는 분배 영역 모듈(204)이 샘플이 샘플의 분석 전에 원심 분리를 필요로 한다고 결정할 때, 도 2의 분배 영역(204)으로부터 원심 분리기 모듈(206)로 이동될 수도 있다. 원심 분리기 모듈(206)은 하나 이상의 자동화 원심 분리기[예를 들어, 원심 분리기(206-1) 및 원심 분리기(206-2)] 및 각각의 원심 분리기용 어댑터 셔틀[예를 들어, 어댑터 셔틀(224) 및 어댑터 셔틀(225)]을 포함할 수도 있다. 원심 분리기 모듈(206)은 하나 이상의 로봇식 파지기[예를 들어, 로봇식 파지기(226) 및 로봇식 파지기(227)]를 더 포함할 수도 있다. 몇몇 실시예에서, 로봇식 파지기(226)는 어댑터(224, 225)로부터 원심 분리된 샘플 튜브를 제거하고 샘플 튜브를 이송 시스템(220)에 수송하는데 사용된 원심 분리기 튜브 파지기일 수도 있다. 로봇식 파지기(227)는 원심 분리기(206-1, 206-2) 내외로 어댑터를 스왑(swap)하는데 사용된 원심 분리기 어댑터 파지기일 수도 있다.
샘플 튜브가 분배 영역(204)으로부터 원심 분리기 모듈(206)로 수송될 때, 샘플 튜브는 분배 영역(204)으로부터 원심 분리기 어댑터 내로 분배 영역 로봇 파지기(218)에 의해 로딩될 수 있다. 어댑터는 원심 분리를 위한 다수의 튜브 크기를 수용할 수도 있다. 어댑터는 분배 영역(204)과 원심 분리기 모듈(206) 사이로 이동하는 어댑터 셔틀(224, 225) 상에 장착될 수도 있다.
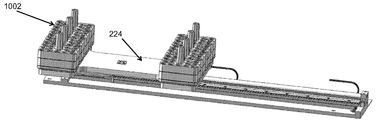
도 3에는 도 2를 참조하여 상세히 설명된 이중 원심분리기 유닛(304)의 확대도가 도시되어 있다. 원심분리기 유닛(304)은 2개의 단일 원심분리기(206-1 및 206-2)와, 어댑터 셔틀(224)과, 어댑터 셔틀(225)을 포함할 수 있다. 각각의 어댑터 셔틀은 원심분리기 어댑터(1002)를 보유할 수 있다. 원심분리기 유닛(304)은 로봇 파지기(226, 227)을 더 포함할 수 있다.
도 4에는 원심분리기 어댑터(1002)를 이송하기 위해 사용되는 예시적인 셔틀(224)이 도시되어 있다.
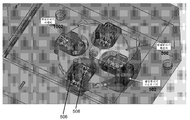
도 5에는 4개의 원심분리기 어댑터(1002)를 수용하도록 구성된 예시적인 원심분리기 로터(500)가 도시되어 있다. 원심분리기 어댑터(1002)는 원심분리기의 원심분리기 버켓(502)에 로딩될 수 있다. 원심분리기 어댑터는 하나 이상의 샘플 튜브(506)를 수용하도록 구성된다. 원심분리기 어댑터는 어댑터(1002)에서 보다 큰 샘플 튜브(506) 및 보다 작은 샘플 튜브(508)로 도시된 바와 같이, 상이한 형상 및 크기의 샘플 튜브를 수용하도록 구성될 수 있다.
샘플 튜브가 장착된 어댑터(1002)가 어댑터 셔틀(224, 225)을 통해 분배 영역(204)으로부터 원심 분리기 모듈(206)에 도달할 때, 어댑터(1002)는 이용 가능한 원심 분리기 버켓(502) 내에 로딩된다. 바람직한 실시예에서, 각각의 원심 분리기는 다수의 어댑터(1002), 예를 들어 4개의 어댑터를 수용할 수 있다. 몇몇 실시예에서, 각각의 어댑터(1002)는 복수의 샘플 튜브, 예를 들어 14개의 샘플 튜브를 유지할 수 있다.
원심 분리기(206-1, 206-2)와 연계된 어댑터들 중에서, 연계된 어댑터(예를 들어, 2개의 어댑터)의 서브세트가 각각의 어댑터 셔틀 상에 존재할 수도 있다. 몇몇 실시예에서, 이하의 프로세스가 동시에 발생할 수도 있는데, 분배 영역 파지기(218)가 어댑터 내에 튜브를 로딩하고, 원심 분리기 튜브 파지기(226)가 어댑터 셔틀 상의 다른 어댑터로부터 튜브를 언로딩하고 언로딩된 샘플 튜브를 이송 시스템(220) 상의 샘플 캐리어로 이동시키고, 원심 분리기 어댑터 파지기(227)가 원심 분리기(예를 들어, 206-1)용 어댑터들을 스왑하고, 다른 원심 분리기(예를 들어, 206-2)가 어댑터 세트를 스핀한다. 어댑터 셔틀은 이하의 동작, 즉 원심 분리기가 이용 가능한 것, 어댑터 충전 시간이 만료되어 있는 것(이는 원심 분리기를 위한 스케쥴링된 시작 시간에 의존할 수도 있음), 또는 언로딩을 위한 어댑터가 비어 있는 것 중 하나 이상이 발생할 때 어댑터를 원심 분리기에 전달할 수도 있다.
어댑터의 구성은 원심 분리기 버켓으로의 샘플 컨테이너의 간단한 전달 및 그로부터 샘플 컨테이너의 간단한 제거를 허용한다. 일단 원심 분리기 버켓 내에 로딩되면, 어댑터들은 원심 분리될 수 있다.
일단 원심 분리가 완료되면, 원심 분리기 어댑터 파지기(227)는 원심 분리 버켓으로부터 어댑터를 제거할 수 있다. 어댑터 셔틀은 이어서 튜브 로딩/언로딩 위치로 재차 이동할 수 있다. 어댑터 셔틀이 로딩/언로딩 위치에 있는 상태로, 원심 분리기 튜브 파지기(226)는 어댑터로부터 샘플 튜브를 제거하고 다음의 모듈로의 수송을 위해 이송 시스템(220) 상의 캐리어 내에 튜브를 배치할 수도 있다. 샘플 튜브는 어댑터로부터 제거되고 일시적 버퍼 내에 배치될 수도 있다. 예를 들어, 하류측 모듈이 일시적으로 비작동되거나 다른 방식으로 이용 불가능할 때, 샘플 튜브는 일시적 버퍼 내에 잔류할 수도 있다. 하류측 모듈이 이용 가능해질 때, 샘플은 버퍼로부터 제거되어 이송 시스템(220) 상에 배치될 수도 있다. 하류측 모듈이 연장된 시간 기간 동안 이용 불가능할 것이면, 샘플은 에러 영역(222)으로 수송되도록 이송 시스템(220) 상에 배치될 수 있다.
분배 모듈(204)에서 어댑터 내에 튜브를 로딩하고, 어댑터 셔틀(224)을 통해 원심 분리기 모듈(206)에 어댑터 내의 튜브를 송출하고, 원심 분리기 버켓 내에 어댑터를 로딩하고, 샘플을 원심 분리하고, 원심 분리기 버켓으로부터 어댑터를 언로딩하고, 어댑터로부터 튜브를 언로딩하기 위한 타이밍은 프로세스가 연속적이 되어, 샘플들이 분배 영역(204)으로부터 원심 분리기 모듈(206)에 도달함에 따라 샘플들의 연속적인 원심 분리를 허용하도록 설정될 수 있다. 원심 분리기가 스핀 사이클을 완료함에 따라, 분배 영역(204) 내의 마지막 튜브는 분배 영역 파지기(218)에 의해 어댑터 내로 로딩될 수 있고, 셔틀(224)은 원심 분리기 모듈(206) 내의 원심 분리기로 어댑터를 이동시킬 수 있다. 동시에, 원심 분리기 상의 자동화 도어가 개방하여 회전자가 도어웨이에서 위치로 인덱싱함에 따라 버켓으로의 액세스를 제공한다.
일 실시예에서, 원심 분리기 모듈(206) 내의 원심 분리기 어댑터 파지기(227)는 어댑터 셔틀로부터 비어 있는 어댑터를 제거하고, 비어 있는 어댑터를 원심 분리기 모듈(206)의 데크 상에 배치할 수 있다. 이어서, 원심 분리기 어댑터 파지기(227)는 원심 분리기 버켓 내에 있는 어댑터를 제거할 수 있다. 원심 분리기 파지기(227)는 원심 분리기 버켓으로부터 비어 있는 어댑터가 제거되어 있는 어댑터 셔틀의 영역으로 제거되었던 어댑터를 이동할 수 있다. 다음에, 원심 분리기 어댑터 파지기(227)는 분배 영역(204)으로부터 튜브로 최근에 로딩되어 있는 어댑터를 선택하여 이를 비어 있는 버켓 내로 적층한다. 원심 분리기 회전자가 다음의 버켓을 인덱싱할 때, 미리 비어 있는 어댑터는 셔틀(224)이 분배 영역(204)으로 복귀할 때 분배 영역(204)으로부터 튜브로 로딩하기 위한 셔틀(224) 상의 개방 위치로 이동된다.
최종 어댑터가 원심 분리기 내로 로딩된 후에, 자동화 도어일 수도 있는 원심 분리기 도어는 원심 분리 사이클이 시작하게 하도록 폐쇄될 수도 있다. 원심 분리기 모듈 데크 상에 있던 비어 있는 어댑터는 어댑터 셔틀 상에 배치될 수 있다. 어댑터 셔틀은 분배 영역(204)으로 재차 이동할 수도 있고, 원심 분리기 튜브 파지기(226)는 버켓으로부터 제거된 어댑터로부터 이송 시스템(220) 상의 캐리어 내로 튜브를 언로딩하기 시작한다. 튜브가 어댑터로부터 캐리어로 이동함에 따라, 액체 레벨 검출이 원심 분리기 튜브 파지기(226)로 수행될 수 있다. 예를 들어, 액체 레벨 측정은 더 상세히 후술되는 바와 같이 수행될 수 있다. 몇몇 실시예에서, 침전층의 높이가 측정되고, 샘플 컨테이너 상의 바코드가 판독되고 그리고/또는 캐리어에 대해 정렬된다. 불충분한 혈청 또는 혈장이 원심 분리된 샘플 컨테이너 내에 존재하면, 샘플 컨테이너는 출력 모듈(214) 내에 위치된 에러 영역으로 송출될 수도 있다.
대안적인 실시예에서, 셔틀은 하나 이상의 어댑터를 위한 부가의 공간을 가질 수 있다. 예를 들어, 셔틀은 어댑터 세트 내의 어댑터의 개수를 1개 초과하는 다수의 어댑터 위치를 가질 수 있다. 부가의 공간은 셔틀의 로딩측에 위치될 수도 있다. 전술된 바와 같이 원심 분리기 모듈 데크와 같은 일시적인 위치에 비어 있는 어댑터를 이동시키는 대신에, 어댑터는 셔틀 상의 부가의 공간에 배치될 수도 있다.
스케쥴링 알고리즘이 원심 분리기 모듈(206)로부터 샘플이 분석기에 오버로딩되는 것을 예측하면, 원심 분리기 모듈 파지기(226)는 샘플을 언로딩하고 어댑터로부터 이송 시스템으로 샘플을 분배할 수 있다. 몇몇 실시예에서, 원심 분리기의 전체 사이클 시간은 예를 들어 360초 이상일 수 있다. 최적 소요 시간 및 처리량을 보장하기 위해, 원심 분리기는 예를 들어 360초 원심 분리 사이클 동안 180초 어긋난 위상(out of phase)으로 유지된다. 몇몇 실시예에서, 하류측 프로세스는 원심 분리기 어댑터로부터 샘플의 언로딩을 금하지 않는다. 어댑터 내의 모든 잔여 샘플이 이용 불가능한 프로세스(들)로 가야한다면 그 이용 불가능한 프로세스에 따라, 샘플 튜브는 원심 분리기 기구 내의 버퍼로 이동되거나 시스템 내의 다른 위치의 다른 버퍼 영역으로 이동될 수 있다.
원심 분리기 모듈(206)은 원심 분리기 제어기에 의해 제어되는 자동화된 원심 분리기를 포함할 수도 있다. 자동화된 원심 분리기는 다수의 원심 분리기 어댑터 또는 리셉터클이 로딩될 수 있고, 각각의 어댑터는 다수의 샘플 튜브를 수용한다. 원심 분리기는 스핀들에 결합된 모터, 회전자 조립체, 제어기, 덮개 및 선택적으로 덮개 구동부를 포함한다. 원심 분리기 제어기는 튜브, 어댑터 또는 버켓의 자동화된 배치 및 제거를 위해 선택된 위치에서 스핀들을 인덱싱하거나 정지한다. 덮개는 폐쇄 위치 및 개방 위치를 갖고, 덮개는 원심 분리기 제어기로부터의 인스트럭션에 응답하여 개방 및 폐쇄한다.
다양한 기술이 원심 분리기 내로 로딩될 어댑터들 사이의 중량 분포를 균형화하는데 사용될 수도 있다. 몇몇 실시예에서, 튜브의 중량은 튜브 중량의 데이터베이스 내에 저장된 정보에 기초하여 결정될 수도 있다. 튜브 내에 포함된 샘플 재료의 중량은 샘플 튜브 내의 측정된 액체 레벨 또는 액체 레벨들 및 액체 또는 액체들의 공지의 밀도에 기초하여 결정될 수도 있다. 다른 실시예에서, 샘플 튜브는 원심 분리기 어댑터 내로 로딩되기 전에 입력 모듈 파지기(228)에 의해 계량될 수도 있다.
다른 실시예에서, 검체 중량은 하나 이상의 저울, 예를 들어, 분배 영역 내에 위치된 저울 또는 컨베이어 트랙의 저울에 의해 결정될 수도 있다. 저울은 샘플 튜브 및 튜브 내에 포함된 샘플의 조합된 중량을 측정할 수 있다. 이는 샘플 튜브가 컨베이어 트랙에 의해 지지될 때 발생할 수도 있다. 샘플의 중량을 얻기 위해, 샘플 튜브의 공지의 중량은 조합된 중량으로부터 감산될 수 있다. 공지의 중량은 공지의 튜브 중량의 데이터베이스 내에 저장될 수 있다. 샘플 중량은 실험실 시스템과 연계된 중앙 제어기를 사용하여 또는 시스템의 다른 제어기에 의해 결정될 수도 있다. 제어기는 데이터베이스에 통신적으로 결합될 수도 있다.
대안적으로, 원심 분리기 모듈(206)은 복수의 어댑터를 수용하고 유지하기 위한 사이트를 갖는 스케일(scale)과, 어댑터의 쌍 내의 중량을 평형화하기 위한 각각의 적층물의 위치와 증분 중량 변화를 상관하면서 어댑터의 캐비티 내에 샘플 튜브를 선택적으로 적층하기 위한 균형 제어기를 포함할 수도 있다.
균형 제어기는 중앙 제어기 내의 균형 프로그램으로서 구현될 수 있다. 균형 프로그램은 샘플 컨테이너 중량의 데이터베이스를 유지한다. 컨테이너의 중량이 샘플의 중량과 조합될 때, 균형 프로그램은 배치해야 하는 최적의 어댑터 캐비티를 결정할 수 있어 이에 의해 균형화된 회전자를 공차 내에서 유지한다. 샘플 중량은 밀도 추정치와 입력으로부터 초기 취출 중에 얻어진 컨테이너 기하학적 형상 및 액체 레벨 측정치로부터 계산된 샘플 체적의 적이다. 몇몇 실시예에서, 균형 시스템은 버켓들 사이의 중량 편차를 제한하기 위해 버켓 내의 더미 로드(dummy load)의 공급을 또한 포함할 수도 있다. 더미 로드는 버켓의 각각의 쌍의 부재들 사이에서 예를 들어 10 그램 이하로 중량 편차를 제한하기 위해 계량될 수도 있다.
원심 분리기 제어기는 회전자 스핀들 속도 및 기간을 포함하는 원심 분리기 스핀 프로파일을 수용하여 저장하는 것과, 액세스 위치 내로 회전자의 샘플 스테이션을 인덱싱하는 것과, 사이클 프로파일에 따라 회전자를 스핀하는 것과, 미리 정해진 샘플 스테이션이 액세스 위치에 있는 상태로 회전자를 정지하는 것 등과 같은 다수의 기능을 수행하도록 작동할 수도 있다.
2개 이상의 원심 분리기가 분석전 시스템에 사용되면, 원심 분리기는 동기화되고 그리고/또는 어긋난 위상으로 유지될 수도 있다. 예를 들어, 원심 분리기(206-1)를 위한 스피닝 사이클의 시작 시간은 원심 분리기(206-2)를 위한 스피닝 사이클과는 상이한 시간에 스케쥴링될 수도 있다. 원심 분리기(206-1, 206-2)가 동시에 스피닝을 시작하지 않기 때문에, 고 우선순위 샘플 튜브가 신속하게 처리될 수 있다. 몇몇 실시예에서, 원심 분리기의 스핀 사이클은 적어도 하나의 원심 분리기가 언제든지 고 우선순위 샘플 튜브를 처리하기 위해 이용 가능하도록 스케쥴링된다.
예시적인 실시예에서, 원심 분리기는 원심 분리기가 미리 정해진 간격에 이용 가능하도록 고정된 타임테이블 상에서 동기화되고 어긋난 위상으로 운전될 수도 있다. 예를 들어, 원심 분리 사이클은 원심 분리기 내외로 어댑터를 스왑하는데 요구되는 시간을 포함할 수 있는 6분의 기간을 가질 수 있다. 2개의 원심 분리기를 갖는 시스템에서, 원심 분리 사이클은 원심 분리기들 중 하나가 매 3분마다 이용 가능하도록 위상이 어긋날 수 있다(예를 들어, 2개의 원심 분리기 중 하나가 매 3분마다 이용 가능함).
원심분리 작업 흐름
도 6은 원심분리기 시스템 작업 흐름의 예시적인 일례를 도시하는 흐름도이다. 스케쥴러가 원심 분리를 위한 샘플 컨테이너를 선택할 때, 튜브는 균형화된 원심 분리기 회전자를 보장하기 위해 원심 분리기 로딩 위치(1004)에서 적절한 원심 분리기 어댑터(1002) 내로 분배 영역 파지기(218)에 의해 로딩될 수도 있다. 동작 1424에서, 샘플 컨테이너(506)가 원심 분리를 위해 선택되면, 샘플 컨테이너(506)는 분배 영역(204)으로부터 원심 분리기 어댑터(1002)로 분배 영역 파지기(218)에 의해 수송된다.
원심 분리기(206-1 또는 206-2) 내로 미리 로딩된 어댑터에 대한 원심 분리 사이클이 종료함에 따라, 새롭게 로딩된 원심 분리기 어댑터(1002)가 적절한 원심 분리기(206-1 또는 206-2)로 이동된다. 어댑터는 동작 1426에 지시된 바와 같이, 관리기 유닛(700)과 원심 분리기 유닛(304) 사이의 원심 분리기 로딩 위치(1004)로부터 적절한 원심 분리기(206-1 또는 206-2)로 이동하는 어댑터 셔틀(예를 들어, 224 또는 225) 상에 배치된다. 어댑터는 동작 1428에 지시된 바와 같이, 원심 분리기 어댑터 파지기(227)와 같은 로봇 파지기에 의해 원심 분리기 버켓(502) 내로 로딩될 수도 있다. 샘플은 동작 1430에 지시된 바와 같이 원심 분리될 수 있다. 미리 비워진 어댑터는 셔틀 내에 비어 있는 공간을 생성하기 위해 셔틀(예를 들어, 224, 225)로부터 일시적 위치로 이동될 수도 있다. 일시적 위치는 예를 들어 원심 분리 영역의 일시 유지 영역 또는 전용 버퍼 영역일 수도 있다. 어댑터는 동작 1432에 지시된 바와 같이, 원심 분리기로부터 제거될 수도 있고(예를 들어, 원심 분리기 버켓으로부터 제거됨), 동작 1434에 지시된 바와 같이 셔틀 내의 비어 있는 공간으로 전달될 수도 있다. 모든 어댑터가 스왑되어 있고 셔틀이 언로딩 위치로 이동될 때, 샘플 튜브는 동작 1436에 지시된 바와 같이, 원심 분리기 튜브 파지기(226)와 같은 로봇 파지기에 의해 원심분리기 어댑터(1002)로부터 제거될 수도 있다. 샘플 튜브는 동작 1438에 지시된 바와 같이, 이송 시스템(220) 상의 캐리어 내로 원심 튜브 파지기(226)에 의해 배치될 수도 있다.
샘플 튜브가 로딩된 원심 분리기 어댑터(1002)는 원심 분리기 어댑터 파지기(227)에 의해 원심 분리기 유닛(206-1 또는 206-2) 내의 어댑터와 스왑핑될 수도 있다. 원심 분리된 어댑터는 이어서 원심 분리기 유닛(206-1 또는 206-2)으로부터 제거되고 1432에 지시된 바와 같이 셔틀 내의 비어 있는 공간 내에 배치될 수 있다. 예를 들어, 원심 분리된 어댑터는 셔틀이 관리기 유닛(700)으로 복귀할 때, 튜브가 어댑터로부터 원심 분리기 튜브 파지기(226)에 의해 언로딩되고 이송 시스템(220) 상에 배치될 수 있도록 셔틀 상의 특정 스폿에 배치될 수도 있다. 관리기 유닛(700)으로부터 새롭게 로딩된 어댑터(1002)는 원심 분리기(206-1 또는 206-2) 내부에 배치된다. 원심 분리기 어댑터가 원심 분리기 회전자 내에 로딩된 후에, 원심 분리기 회전자는 후속 원심 분리되지 않은 원심 분리기 어댑터의 로딩을 허용하도록 인덱싱할 수도 있다. 그 샘플 튜브가 미리 비워져 있는 어댑터는 셔틀 상의 언로딩 스폿으로부터 셔틀 상의 비어 있는 스폿으로 원심 분리기 어댑터 파지기(227)에 의해 제거될 수도 있다. 예를 들어, 도 11(b)의 예시적인 셔틀과 같은 셔틀에 대해, 셔틀(230)의 제1 단부는 언로딩 스폿일 수도 있고, 셔틀의 제2 단부(232)는 비어 있는 스폿일 수도 있다. 셔틀 상의 비어 있는 스폿으로 어댑터를 이동하는 것은 원심 분리기 회전자의 인덱싱과 동시에 발생할 수도 있다. 비어 있는 어댑터는 이어서 관리기 유닛(700) 내의 새로운 샘플 튜브로 로딩될 수 있다. 어댑터의 스왑핑은 원심 분리기 회전자의 모든 어댑터가 교환될 때까지 계속될 수도 있어, 일시적 위치에 배치되었던 어댑터가 비워진 어댑터에 대한 셔틀 내의 마지막 비어 있는 스폿으로 이동되게 한다. 예시적인 원심 분리기 어댑터 스왑핑 시퀀스는 도 7을 참조하여 더 설명된다.
셔틀은 어댑터가 분배 파지기(218)에 의해 샘플 튜브로 로딩되고 그리고/또는 원심 분리기 튜브 파지기(226)에 의해 언로딩될 수 있는 그 홈 위치로 복귀할 수도 있다. 샘플이 어댑터로부터 언로딩되고 원심 분리기 튜브 파지기에 의한 수송시에 캐리어로 전달될 때, 샘플 튜브 상의 바코드 라벨은 캐리어에 정렬될 수도 있고, 샘플을 위해 요구된 시험이 완료될 수 있는 것을 보장하기 위해 액체 레벨 측정이 행해질 수도 있다. 따라서, 원심 분리기 튜브 파지기(226)는 입력 모듈 파지기(228)를 참조하여 설명된 바와 같은 액체 레벨 검출 기능성을 가질 수도 있다. 불충분한 샘플 재료가 샘플의 추가의 처리를 위해 존재하면, 튜브는 불충분한 샘플 재료 조건을 위해 설정된 절차에 따라 처리될 수 있다. 예를 들어, 샘플 튜브는 테스트가 완료하는 것을 지시하는 미리 규정된 규칙에 따라 처리될 수도 있고 또는 샘플은 출력 모듈(214) 내의 당해의 샘플(Sample in Question: SIQ) 래크로 송출될 수도 있다.
어댑터가 원심 분리기 유닛(304) 내에서 스왑되는 동안, 스케쥴러는 동작 1440에 지시된 바와 같이 분배 영역(204)으로부터 이송 시스템(220)으로 분배 영역 파지기(218)에 의해 이동되도록 원심 분리를 필요로 하지 않는 튜브를 유도할 수도 있어, 원심 분리기 유닛(304)을 바이패스한다.
원심 분리기 어댑터 스왑
시퀀스
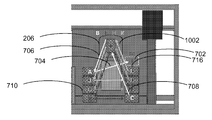
도 7은 제1 실시예에 따른 원심 분리기를 위한 예시적인 어댑터 스왑 시퀀스를 도시한다. 단일의 원심 분리기 어댑터(1002)는 원심 분리기(206) 내에 도시되어 있지만, 원심 분리기(206)의 위치 B, E, H 및 K는 원심 분리기 어댑터(1002)를 수용할 수 있는 4개의 원심 분리기 버켓에 대응한다. 4개의 원심 분리기 버켓을 갖는 원심 분리기가 도 5에 도시되어 있다. 미리 언로딩된 원심 분리기 어댑터[예를 들어, 원심 분리기 어댑터(1002)]는 704에 도시된 바와 같이, 셔틀 위치 A로부터 일시적 유지 영역 M(702)으로 원심 분리기 어댑터 파지기(227)에 의해 이동된다. 언로딩된 원심 분리기 어댑터는 모든 샘플 튜브가 제거되어 있는 원심 분리기 어댑터이다. 다음에, 미리 원심 분리된("스핀된") 원심 분리기 어댑터는, 동작 706에 지시된 바와 같이, 원심 분리기(206)의 영역 B로부터 셔틀 위치 A 상의 비어 있는 공간으로 원심 분리기 어댑터 파지기(227)에 의해 이동된다. 셔틀 위치 A, J, G 및 D는 집합적으로 제1 셔틀 위치(710)라 칭할 수 있다. 동작 706에서, 원심 분리기 어댑터(1002)는 원심 분리기(206)의 원심 분리기 버켓(502)으로부터 제거된다. 원심 분리되어 있지 않은 샘플로 로딩된 어댑터(1002)가 이어서 동작 708에 지시된 바와 같이, 원심 분리기의 셔틀 위치 C로부터 영역 B로 원심 분리기 어댑터 파지기(227)에 의해 이동된다. 셔틀 위치 L, I, F 및 C는 집합적으로 제2 셔틀 위치(712)라 칭할 수 있다.
이후에, 미리 비어 있는 원심 분리기 어댑터가 셔틀 위치 D로부터 셔틀 위치 C로 원심 분리기 어댑터 파지기(227)에 의해 이동된다. 미리 스핀된 원심 분리기 어댑터는 원심 분리기(206)의 영역 E로부터 셔틀 위치 D 상의 비어 있는 공간으로 원심 분리기 어댑터 파지기(227)에 의해 이동된다. 원심 분리되어 있지 않은 샘플로 로딩된 어댑터가 원심 분리기(206)의 셔틀 F로부터 영역 E로 원심 분리기 어댑터 파지기(227)에 의해 이동된다.
시퀀스는 셔틀 위치 G로부터 셔틀 위치 F로 원심 분리기 어댑터 파지기(227)에 의해 이동된 미리 비어 있는 원심 분리기 어댑터로 계속된다. 미리 스핀된 원심 분리기 어댑터가 원심 분리기(206)의 영역 H로부터 셔틀 위치 G 상의 비어 있는 공간으로 원심 분리기 어댑터 파지기(227)에 의해 이동된다. 원심 분리되어 있지 않은 샘플로 로딩된 어댑터가 원심 분리기(1680)의 셔틀 I로부터 영역 H로 원심 분리기 어댑터 파지기(227)에 의해 이동된다.
다음에, 미리 비어 있는 원심 분리기 어댑터가 셔틀 위치 J로부터 셔틀 위치 I로 원심 분리기 어댑터 파지기(227)에 의해 이동된다. 미리 스핀된 원심 분리기 어댑터가 원심 분리기(206)의 영역 K로부터 셔틀 위치 J 상의 비어 있는 공간으로 원심 분리기 어댑터 파지기(227)에 의해 이동된다. 원심 분리되어 있지 않은 샘플로 로딩된 어댑터가 원심 분리기(206)의 셔틀 위치 L로부터 K로 지시된 영역 K로 원심 분리기 어댑터 파지기(227)에 의해 이동된다. 일시적 유지 영역 M으로 이동되었던 어댑터는 동작 716으로 지시된 바와 같이 셔틀 위치 L 내의 비어 있는 공간으로 이동된다.
이 방식으로, 스핀된 어댑터는 원심 분리기 외로 스왑되고 스핀되지 않은 어댑터는 원심 분리기 내로 스왑된다.
스케쥴러는 샘플이 어댑터로부터 제거되고 스핀되지 않은 샘플이 분배 영역으로부터 제거되는 순서를 결정한다. 고 우선순위 샘플(STAT)이 먼저 제거될 수도 있다. 분취기 유닛(212) 내의 분취와 같은 하류측 프로세스가 샘플의 흐름을 취급하는 것이 불가능하고 다음의 원심 분리 사이클이 시작 준비가 되면, 샘플은 어댑터로부터 제거되고 원심 분리기(206)의 후방에서 버퍼 내에 배치될 수 있다. 몇몇 실시예에서, 최저 우선순위 샘플이 먼저 제거되어 더 높은 우선순위 샘플이 전진하기 위한 더 많은 시간을 허용한다. 스케쥴러는 하류측 프로세스가 이용 가능해질 때 그리고 설정된 우선순위에 따라 버퍼로부터 샘플을 전진시킬 수도 있다. 샘플이 다른 스핀 사이클을 필요로 하면, 샘플은 재차 스핀되도록 어댑터 내에 잔류할 수도 있다.
원심 분리기 어댑터 로딩
시퀀스
도 8은 원심 분리기를 위한 예시적인 어댑터 로딩 시퀀스를 도시한다. 원심 분리기 회전자의 불균형을 방지하기 위해, 원심 분리기 어댑터(1002)는 균형화된 원심 분리기 회전자를 생성하는 방식으로 로딩될 수도 있다. 각각의 샘플 튜브의 중량이 측정되고 그리고/또는 측정된 샘플 체적에 샘플 재료에 대한 공지의 밀도를 곱한 적으로부터 추정될 수 있다. 몇몇 실시예에서, 샘플 튜브 중량은 하나 이상의 저울(예를 들어, 분배 영역에 위치된 저울 또는 샘플 튜브가 컨베이어 트랙에 의해 지지됨에 따라 샘플 튜브 중량을 측정하는 컨베이어 트랙의 저울)에 의해 결정될 수 있다.
원심 분리기는 이하의 시퀀스에 따라 로딩될 수 있다. 최고 원심 분리기 우선순위를 갖는 제1 샘플 튜브가 분배 영역(204) 내의 스케쥴러에 의해 식별될 수 있다. 어댑터 A1(1708)은 어댑터 A1(1708)의 중심 위치에 가장 근접한 위치에서 분배 영역(204)으로부터 제1 샘플 튜브로 로딩될 수 있다. 제1 샘플 튜브에 상응하는 중량을 갖는 제2 샘플 튜브가 분배 영역(204)으로부터 스케쥴러에 의해 선택되고 A1(1708) 내의 제1 샘플 튜브에 의해 점유된 동일한 위치인 A3(1712)의 위치 내에 로딩될 수 있다. 제2 최고 원심 분리기 우선순위를 갖는 샘플 튜브가 제3 샘플 튜브인 것으로 분배 영역(204) 내의 스케쥴러에 의해 식별된다. 제3 샘플 튜브는 A2(1710)의 중심에 가장 근접한 어댑터 A2(1710) 내의 위치로 로딩된다. 제3 샘플 튜브에 상응하는 중량을 갖는 제4 샘플 튜브가 분배 영역(204)으로부터 스케쥴러에 의해 선택되고 A2(1710) 내의 제3 샘플 튜브에 의해 점유된 동일한 위치인 A4(1714)의 위치 내에 로딩될 수 있다. 프로세스는 전술된 바와 같이, 제1 샘플 튜브, 제2 샘플 튜브, 제3 샘플 튜브 및 제4 샘플 튜브로 어댑터 A1 내지 A4(1708 내지 1714) 내의 개방 위치를 계속 충전하여, 모든 어댑터가 충전될 때까지 시작 로딩 패턴(1700) 내에 위치된 위치, 이어서 제2 로딩 패턴(1702) 내에 지시된 위치, 이어서 제3 로딩 패턴(1704) 내에 지시된 위치 및 이어서 최종 로딩 패턴(1706) 내에 지시된 위치를 충전한다. 몇몇 실시예에서, 원심 분리 사이클이 거의 완료되면(예를 들어, 완료의 30초 이내), 어댑터의 로딩은 모든 어댑터가 충전되기 전에 정지할 수도 있고 원심 분리기는 용량으로 충전되지 않은 어댑터로 로딩될 수도 있다.
몇몇 실시예에서, 샘플 튜브는 그 중량이 이용 가능한 경우에만 어댑터 내에 로딩된다. 샘플 튜브 중량은 실험실 정보 시스템(LIS)의 메모리 내에 저장된 테이블을 교차 참조하여 입력 모듈 파지기(228)에 의해 수행된 액체 레벨 검출에 기초하여 결정될 수도 있다. 샘플 튜브의 중량이 이용 가능하지 않으면, 원심 분리는 샘플 튜브에 대해 수행되지 않을 수도 있다. 예를 들어, 샘플 튜브는 어댑터 내에 로딩되기보다는 에러 래크 내에 배치될 수도 있다.
대안적인 실시예에서, 샘플 튜브는 우선순위 순서에 따라 어댑터 내에 로딩될 수도 있다. 샘플 튜브는 도 8을 참조하여 전술된 순서에 따라 로딩될 수도 있다. 불균형을 회피하기 위해, 더 높은 우선순위 튜브가 불균형을 발생할 것이면, 더 낮은 우선순위 샘플 튜브가 더 높은 우선순위 샘플 튜브 대신에 로딩될 수도 있다. 예를 들어, 제1(예를 들어, 최고 우선순위) 튜브가 무겁고 제2 및 제3 튜브(예를 들어, 우선순위 순서에서 다음 것)가 제1 튜브의 중량과 동일하면, 제2 및 제3 튜브는 제1 튜브의 힘에 대향하도록 로딩될 수도 있다.
몇몇 실시예에서, 즉각적인 원심 분리를 위한 요청이 스케쥴러에 의해 발행될 수도 있고, 이 경우에 완전히 충전되지 않은 어댑터가 원심 분리될 수도 있다. 예를 들어, 로딩된 샘플 튜브가 STAT 튜브이거나 원심 분리기를 위한 어댑터 충전 시간이 만료되면, 어댑터는 즉시 원심 분리될 수도 있다.
로봇식 파지기
전술된 바와 같이, 로봇식 아암은 실험실 시스템 내의 다수의 상이한 위치[예를 들어, 입력 로봇(228), 분배 로봇(218), 원심 분리기 로봇(226) 등]로부터 샘플 튜브 또는 임의의 다른 물체(예를 들어, 원심 분리기 어댑터)를 이동시키는데 사용될 수 있다.
로봇식 아암 아키텍처는 소정의 작업에 따라 복잡성이 상이할 수 있다. 도 9는 3개의 독립적으로 이동 가능한 방향 x-, y- 및 z-를 갖는 데카르트 또는 갠트리 로봇(1970)의 예를 도시한다. x-축은 x-축 레일(1972)에 의해 규정될 수도 있고, y-축은 y-축 레일(1974)에 의해 규정될 수도 있다. z-축은 z-방향으로 연장하는 로봇식 아암(1976)의 배향에 의해 규정될 수도 있다. 갠트리 로봇(1970)은 로봇식 아암(1976) 및 로봇식 아암(1976)에 작동적으로 그리고 물리적으로 결합된 파지기 유닛(1980)을 포함한다. 더 복잡한 로봇식 아암은 예를 들어 선택적 순응성 조립체 로봇 아암(SCARA) 또는 다수의 조인트 아암을 갖는 관절형 로봇식 아암을 포함할 수도 있다. 파지기 유닛(1980)은 파지기 하우징(1982) 및 파지기 하우징(1986)으로부터 하향으로 연장하는 파지기 핑거(1984)를 포함한다. 파지기 핑거(1984)는 샘플 튜브(1982)를 파지하도록 서로를 향해 내향으로 그리고 샘플 튜브(1982)를 해제하도록 외향으로 이동할 수 있다.
파지기 유닛을 포함하는 로봇식 아암은 부가적으로 이동된 물체의 물리적 특성의 식별 및 결정을 위해 채용될 수도 있다. 따라서, 로봇식 아암은 적절한 식별 및 결정 수단(예를 들어, 카메라, 바코드 판독기 또는 흡수 및 투과 측정 유닛)을 구비할 수 있다. 튜브 식별, 레벨 검출 및 튜브 존재 검출 유닛이 더 상세히 후술된다.
샘플 레벨 검출
본 발명의 실시예에서, 카메라 유닛 및 분석 도구는 샘플 튜브 내의 샘플에 대한 샘플 체적 및 샘플 레벨을 결정하기 위해 시스템에 의해 캡처된 2-D 화상을 사용할 수 있다.
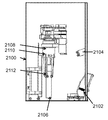
샘플 레벨 검출 유닛(또는 조립체) 및 샘플 튜브가 도 10에 도시되어 있다. 샘플 레벨 검출 유닛은 챔버(2100)를 포함한다. 적은 광학 반사를 갖는, 가능하게는 광학 반사를 전혀 갖지 않는 카메라 유닛(2102)이 챔버(2100) 내에 수용된다. 카메라 유닛(2102)은 체액을 수납하는 샘플 튜브(2106)와 정렬되어 그 위에 포커싱될 수 있다. 조명원(2104)이 샘플 튜브(2106)에 광을 제공할 수도 있어 카메라 유닛(2102)이 샘플 튜브(2106)의 사진을 촬영할 수 있게 된다.
카메라 유닛(2102)은 스틸 카메라(still camera), 컬러 화상 카메라, 비디오 카메라, 스펙트럼 카메라 등일 수 있다. 컬러 화상 카메라, 예를 들어 3CCD 비디오 카메라가 사용될 수도 있다. 포커싱, 화이트 밸런스(white balance), 다이어프램 세팅, 필링-인(filling-in)과 같은 컬러 카메라의 세팅은 영구적으로 미리 설정되거나 조정 가능할 수 있다. 예를 들어, 이들 세팅은 화상 평가 소프트웨어에 의해 제어 소프트웨어에 보고된 데이터가 기준 데이터를 저장하기 위해 기준을 갖고 감소된 품질을 가질 때에서와 같이, 화상 평가 소프트웨어의 보조에 의해 조정될 수 있다. 알고리즘이 사용된 샘플 튜브의 유형, 샘플의 유형 등과 같은 공지의 데이터를 사용하여 샘플 레벨 및/또는 체적을 계산하는데 사용될 수 있다
도 10에 도시된 바와 같이, 카메라 유닛(2102)은 샘플 튜브(2106)의 그 조망을 최적화하기 위해 경사질 수 있다. 샘플 튜브(2106)의 정보가 이 수단의 보조에 의해 비교적 적은 광학 반사를 갖고 기록될 수 있다.
샘플 튜브의 분석 위치에 대해 상부에 그리고 중간에 배열된 것은 컴퓨터에 의해 제어되는 파지기 유닛(2108)이다. 파지기 유닛(2108)은 입력 섹션의 래크 내에 위치된 샘플 튜브(2106)를 파지하고, 이를 분석 위치로 들어올린다. 파지기 유닛(2108)은 파지기 하우징(2110)을 포함할 수 있다. 파지기 유닛(2108)은 또한 샘플 튜브(2106)를 파지하는데 사용될 수 있는 복수의 파지기 핑거(2112)를 가질 수 있다.
카메라 유닛을 사용하는 액체 레벨 검출 디바이스의 대안으로서, 액체 레벨 검출은 또한 흡수 스펙트럼을 평가하기 위해 규정된 파장 및 분석 알고리즘을 갖는 레이저 다이오드를 갖는 디바이스와 같은 다른 유형의 화상 취득 디바이스의 사용에 의해 성취될 수도 있다. 레이저 다이오드빔은 샘플 튜브의 섹션 상에 포커싱될 수 있고, 포커싱된 빔의 상이한 파장의 흡수 및 투과 측정이 측정될 수 있다. 분석 알고리즘은 이어서 액체 레벨 및 체적을 제공하기 위한 수단을 사용할 수 있다.
도 11은 별개의 파장에서 흡수 및 투과 곡선의 분석을 이용하는 샘플 레벨 검출의 예를 도시한다. 혈액 샘플이 샘플 튜브 컨테이너를 구비하는 경우에, 시스템은 부가적으로 총 액체 레벨 내의 혈청, 혈장 또는 혈전의 별개의 레벨을 검출하는 것이 가능할 수도 있다.
도 11에서, 작동 가능한 유체 샘플 인터로게이션 시스템의 부분이 일반적으로 2256에 도시되어 있다. 제1 방사선 소스(2258)[제2 방사선 소스(2272)는 턴오프되어 있음]가 제1 특성 파장(예를 들어, 980 nm)을 갖는 제1 방사선을 빔 결합기(2260)에 인가하도록 배열되고, 이 빔 결합기는 샘플 튜브(2200) 상의 위치를 향해 제1 방출된 방사선(2262)을 유도한다. 제1 투과된 방사선(2264)은 도시된 포토다이오드 및 증폭기 장치(2266)와 같은 검출기에 의해 검출된다. 제1 투과된 방사선(2264)의 강도에 대응하는 신호(2268)가 이어서 프로그램 가능 집적 회로(2270) 또는 컴퓨터와 같은 비교 구조체에 저장되고 그리고/또는 조작될 수 있다. 제2 방사선 소스(2272)[제1 방사선 소스(2258)는 턴오프되어 있음]가 제2 특성 파장(예를 들어, 1050 nm)을 갖는 제2 방사선을 제1 방출된 방사선(2262)으로서 약간 시프트된 위치에서 빔 결합기(2260)로 인가하도록 배열되고, 이 빔 결합기는 샘플 튜브(2200) 상의 약간 상이한 위치를 향해 제1 방출된 방사선(2262)의 빔 경로에 평행한 제2 방출된 방사선(2274)을 유도한다. 제2 투과된 방사선(2276)은 도시된 포토다이오드 및 증폭기 장치(2266)와 같은 동일한 검출기에 의해 검출된다. 제2 투과된 방사선(2276)의 강도에 대응하는 신호(2268)가 이어서 프로그램 가능 집적 회로(2270) 또는 컴퓨터와 같은 비교 구조체 내에 저장되고 그리고/또는 조작될 수 있다.
도 11은 또한 파장 프로세스를 사용하여 측정되고 분석되는 샘플 튜브를 도시한다. 도시된 바와 같이, 혈청(2215) 및 겔(2217)은 대부분 가시광에 투명하고, 반면에 적혈구(2219)는 실질적으로 불투명하다. 또한, 겔(2217)은 적외광에 투명하고, 반면에 적혈구(2219) 및 혈청(2215)은 실질적으로 불투명하다. 이에 따라, 샘플 튜브(2200)가 혈청(2215)과 적혈구(2219)를 분리하기 위한 겔(2217)을 가질 때, 상이한 섹션을 "투시(see through)"하기 위해 단지 적외광을 사용하는 것이 가능하다. 적외광 판독은 적외광빔이 공기(2213)를 통해 통과할 때 강하고, 적외광빔이 혈청을 향해 유도될 때 강하하고, 겔(2217)을 향해 유도될 때 비교적 강하고, 적혈구(2219)를 향해 유도될 때 재차 강하한다. 분석 도구에 의해 수행된 이 분석은 샘플의 샘플 레벨/체적의 측정을 허용한다.
액체 레벨 검출 유닛은 튜브 식별 유닛을 갖거나 갖지 않고 그리고 튜브 또는 래크 존재 검출 유닛을 갖거나 갖지 않고 임의의 전술된 로봇식 아암과 조합될 수 있다. 튜브 식별 유닛 및 튜브 또는 래크 존재 검출 유닛에 관한 추가의 상세는 미국 가특허 출원 제61/556,667호, 제61/616,994호 및 61/680,066호에서 발견될 수 있다.
원심 분리기 서랍
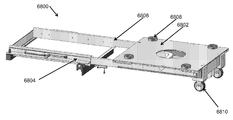
도 12 내지 도 19는 원심 분리기 서랍(6800)과 연계된 다양한 시스템을 도시한다. 원심 분리기 서랍 상에 원심 분리기를 장착하는 것은 서비스 액세스를 위한 원심 분리기의 이동을 용이하게 할 수 있고, 원심 분리기의 재설치를 간단화할 수 있다. 도 12에 도시된 바와 같이, 원심 분리기 서랍은 신축식 레일(6806)을 통해 프레임(6804)에 결합된 장착 플랫폼(6802)을 포함한다. 원심 분리기(도시 생략)는 장착 플랫폼(6802) 상에 장착될 수도 있다. 신축식 레일(6806)은 원심 분리기가 그 설치된 위치로부터 후퇴되게 하도록 연장될 수 있다. 신축식 레일(6806)은 원심 분리기가 그 설치된 위치(수축된 위치)에 잠금되거나 원심 분리기가 그 설치된 위치로부터 이격하여 신장되는 완전 신장된 위치에 잠금될 수 있도록 하는 잠금 레일일 수도 있다. 이 방식으로, 원심 분리기는 원심 분리 사이클이 진행되는 동안 서랍에 의한 이동이 방지된다. 몇몇 실시예에서, 원심 분리기 서랍(6800)은 프레임(6804)에 대한 원심 분리기의 위치를 기계적으로 유지하기 위한 정렬 퍽(6808)을 포함한다. 원심 분리기 서랍(6800)은 프레임(6804)에 결합된 2개 이상의 휠(6810)을 더 포함할 수도 있다.
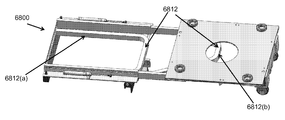
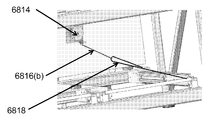
원심 분리기는 통상적으로 원심 분리기 모듈 전원을 접속하는 케이블을 통해 전력 및 통신 능력을 수신한다. 원심 분리기 서랍(6800)은 서랍이 신장되고 수축될 때 케이블을 관리하기 위한 특징부를 포함할 수도 있다. 몇몇 실시예에서, 원심 분리기 서랍(6800)은 도 13의 수축된 위치[6812(a)] 및 신장된 위치[6812(b)]에 도시된 바와 같이 이-체인(e-chain)(6812)과 같은 가요성 케이블 컨테이너를 포함한다. 이-체인(6812)은 예시의 목적으로 수축된 위치 및 신장된 위치의 모두에 도시되어 있지만, 통상적으로 원심 분리기 서랍(6800)은 서랍이 작동됨에 따라 위치[6812(a), 6812(b)] 사이로 이동하게 될 단일의 이-체인(6812)을 가질 것이다. 이-체인(6812)은 전력 및 통신 케이블과 같은 케이블을 포함할 수도 있다. 이-체인(6812)은 이-체인(6812) 내에 수용된 케이블이 원심 분리기 서랍(6800)의 작동과 간섭하지 않도록 신장하고 수축하도록 구성된 가요성 플라스틱과 같은 가요성 재료로부터 구성될 수도 있다.
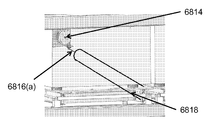
다른 실시예에서, 케이블 수축기(6814)는 도 14a 및 도 14b에 도시된 바와 같이 케이블을 관리하는데 사용될 수 있다. 케이블 수축기(6814)는 하나 이상의 케이블(6818)이 원심 분리기 서랍(6800)의 작동과 간섭하지 않게 하기 위해 프레임(6804)에 결합된 스프링 장전된 케이블 수축기(6816)를 사용할 수도 있다. 스프링 장전된 케이블 수축기(6816)는 수축된 위치[6816(a)] 및 신장된 위치[6816(b)]에 도시되어 있다. 스프링 장착 케이블 리트렉터(6816)는 원심분리기와 관련된 케이블에 결합된 스프링[6816(a), 6816(b)]을 포함한다. 서랍이 연장될 때, 스프링[6816(a), 6816(b)]이 연장되어 서랍과의 접촉 없이 케이블의 연장을 허용한다. 서랍이 후퇴할 때, 스프링이 압축되어 케이블을 프레임(6804)으로부터 멀어지는 방향으로 견인한다.
몇몇 실시예에서, 원심 분리기 서랍(6800)은 이동 방지 수단을 포함한다. 원심 분리기가 작동 중일 때 서랍의 이동은 회전자 불균형 및/또는 회전자 버켓과 격납 캔 사이의 충돌을 유발할 수 있다. 원심 분리기 서랍(6800)은 원심 분리기를 적소에 유지하기 위해 전기 오버라이드를 갖는 영구 자석을 포함할 수도 있다. 서랍을 작동시키기 위해(예컨대, 서랍을 신장시키기 위해), 영구 자석의 자력은 전자석으로의 전류의 인가에 의해 제압된다(overpowered). 예를 들어, 전자석 전류는 영구 자석의 자기장을 상쇄하기 위해 분극을 갖고 활성화될 수도 있다.
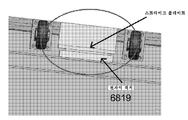
원심 분리기 서랍(6800)은 도 15에 도시된 바와 같이 전자석 오버라이드 래치(6819)를 갖는 영구 자석을 포함할 수도 있다. 영구 자석 래치는 원심 분리기 서랍(6800)의 휠(6810) 사이에 설치될 수도 있다. 영구 자석은 서랍이 수축될 때 완전 수축된 상태로 서랍을 유지할 수도 있다. 예를 들어, 전자석 전류는 영구 자석의 자기장을 보강하기 위해 분극을 갖고 활성화될 수도 있다. 영구 자석의 힘은 원심 분리기가 운전하지 않는 동안 원심 분리기 서랍을 적소에 유지하기에 충분할 수도 있다. 몇몇 실시예에서, 전자석(6819)은 원심 분리기가 운전할 때 완전 수축된 상태로 서랍을 유지하도록 결합된다.
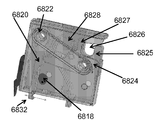
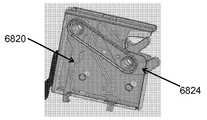
원심 분리기 서랍(6800)은 전기 회전형 기계적 래치를 포함할 수도 있다. 도 16a는 기계적 래치의 사시도를 도시하고, 도 16b는 기계적 래치의 단면도를 도시한다. 서랍을 신장하기 위해, 전기 신호가 제어기로부터 래치에 송신되고, 이에 응답하여 전기 모터가 캠(6818)을 회전시킨다. 제어기는 래치 제어기, 원심 분리기 서랍 제어기, 원심 분리기 제어기 또는 다른 제어기일 수도 있다. 캠(6818)의 회전은 래치 요소(6820)가 피벗(6822) 둘레로 회전하게 한다. 래치 요소(6820)는 래치 요소(6824)와 간섭하도록 형성된 바아일 수도 있다. 래치 요소(6820)는 전력이 전력 고장의 경우에 손실될 때 서랍이 신장되게 할 케이블 오버라이드 요소(6832)를 또한 가질 수도 있다. 래치 요소(6824)는 제1 가지(tine)(6825) 및 제2 가지(6827)를 가질 수도 있다. 가지(6825, 6827)는 스트라이커 볼트가 개구(6826) 내에 있을 때 스트라이커 볼트(6830)의 이동을 구속할 수 있다. 스트라이커 볼트(6830)는 서랍 프레임(6804)에 부착된다. 피벗(6822) 주위의 래치 요소(6820)의 회전은 래치 요소(6824)가 해제되게 한다. 취약성 비틀림 스프링과 같은 비틀림 스프링일 수도 있는 스프링(도시 생략)은, 래치 요소(6824)가 래치 요소(6820)에 의해 구속되지 않을 때 래치 요소(6825)가 시계방향으로 회전하게 할 수 있다. 서랍을 수축시키기 위한 서랍(6800)의 작동은 또한 래치 요소(6824)가 시계방향으로 회전하게 할 수 있다. 래치 요소(6824)가 회전되어 개구(6826)가 더 이상 래치 요소의 가지(6825)에 의해 차단되지 않을 때, 스트라이커 볼트(6830)는 더 이상 구속되지 않고 서랍이 신장될 수 있다. 도 16c는 래치가 개방 위치에 있어 스트라이커 볼트(6830)가 더 이상 구속되지 않게 될 때 래치 요소(6820, 6824)의 구성을 도시한다.
래치 센서(6828)는 서랍의 위치를 검출하는 것이 가능할 수도 있다. 서랍이 수축된 위치에 있을 때, 래치 센서(6828)는 래치 요소(6820)가 도 16b에 도시된 위치로 복귀되도록 캠(6818)을 회전시키기 위해 신호를 송신할 수 있다. 가지(6827)에 대해 스트라이커 볼트(6830)를 압박함으로써 가지(6825)의 반시계방향 회전은 래치 요소(6824)를 도 16b에 도시된 위치로 복귀시킨다. 이 방식으로, 서랍(6800)은 일단 수축되면 기계적으로 잠금될 수 있다.
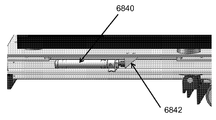
몇몇 실시예에서, 원심 분리기 서랍(6800)은 서랍이 수축되어 원심 분리기 모듈이 샘플을 계속 처리하게 할 때 프레임(6804)의 진동을 완화하기 위한 감쇠 메커니즘을 포함한다. 도 17에 도시된 압축 댐퍼(6840)와 같은 감쇠 메커니즘이 서랍을 수축하기 위해 인가된 힘이 속도 제어형 압축 댐퍼(6840)이도록 댐퍼 콘트랙터(contractor)(6842)를 통해 플랫폼(6802)에 프레임(6804)을 결합하는데 사용될 수 있다. 압축 댐퍼는 가스 또는 유체 댐퍼일 수도 있다. 몇몇 실시예에서, 가스 댐퍼는 제어를 필요로 하는 상태가 도달될 때까지 원심 분리기가 자유롭게 수축하게 한다.
도 18은 원심 분리기 서랍용 커버를 도시한다. 커버(6850)는 플랫폼(6802) 상에 원심 분리기를 로딩하기 위한 서랍 프레임(6804)에 액세스하기 위해 원심 분리기 서랍(6800)으로부터 제거될 수 있다. 커버(6850)는 원심 분리기를 신장하기 위해 파지점을 사용자에게 제공하기 위한 핸들(6852)을 포함할 수도 있다.
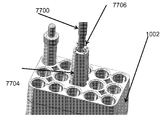
도 19는 서랍(6800) 상에 원심 분리기를 로딩하기 위한 작업 흐름을 도시한다. 7500에서, 원심 분리기(7502)는 크레이트(crate)(7504) 내에 있다. 예를 들어, 원심 분리기는 실험실로 최근에 배송되어 있을 수도 있다. 7508에서, 로딩 도구(7510)는 원심 분리기(7502)에 적용될 수도 있다. 로딩 도구(7510)는 복수의 휠(7520) 및 복수의 잭(7522)을 가질 수도 있다. 7512에서, 원심 분리기는 로딩 도구(7510)의 잭을 신장함으로써 잭업된다(jacked up). 이 시점에, 크레이트(7504)는 제거될 수 있다. 7514에서, 원심 분리기(7502)는 로딩 도구(7510)를 사용하여 서랍(6800) 상에서 롤링될 수 있다. 잭들은 원심 분리기(7502)가 원심 분리기 서랍(6800)에 의해 지지되도록 수축될 수 있다. 7516에서, 로딩 도구(7510)는 제거된다. 7518에서, 커버(6852)가 서랍(6800)에 부착될 수 있다.
원심 분리기 어댑터 파지기
로봇식 아암은 원심 분리기 어댑터를 취출하여 수송하는 것이 가능할 수도 있다. 예를 들어, 원심 분리될 준비가 된 샘플 튜브가 로딩되어 있는 원심 분리기 어댑터는 분배 영역(204)으로부터 셔틀(224)을 통해 원심 분리기 모듈(206)로 수송될 수도 있다. 원심 분리기 어댑터는 원심 분리기 내로 로딩되고, 그 후에 샘플이 원심 분리될 수 있다.
도 20a는 원심 분리기 어댑터 파지기의 예시적인 파지기 요소를 도시한다. 원심 분리기 어댑터 파지기(227)(도시 생략)는 로봇식 아암에 결합된 파지기 요소(7600)를 포함할 수도 있다. 파지기 요소(7600)는 볼트일 수도 있다. 볼트(7600)는 볼트(7600)가 원심 분리기 어댑터 관형 홀더(7604) 내의 전용 후크 결합 요소 내에 삽입되게 하도록 팁(7602)에서 라운딩될 수도 있다. 볼트(7600)는 볼트(7600)의 대향 측면들에 결합된 측방향 핀(7606)을 포함할 수도 있다. 볼트(7600)가 관형 홀더(7604) 내의 잠금 위치로 회전될 때, 파지기는 원심 분리기 어댑터(1002)를 들어올릴 수 있다.
도 20b는 제1 실시예에 따른 관형 홀더(7604)를 도시한다. 관형 홀더(7604)는 볼트(7600)의 핀(7606)을 수용하도록 구성된 수직 홈(7608)을 포함할 수도 있다. 관형 홀더(7604)는 수평 홈(7610)을 또한 포함할 수도 있다. 각각의 수평 홈(7610)은 수직 홈(7608)에 연결될 수도 있다. 몇몇 실시예에서, 수평 홈(7610)은 관형 홀더(7604) 내의 슬롯일 수도 있다. 볼트(7600)가 관형 홀더(7604) 내에 삽입될 때, 파지기 핀(7606)은 수직 홈(7608)에 의해 하향으로 안내될 수도 있다. 파지기(227)는 핀(7606)이 노치(7612)에 의해 지시된 파지 위치에 도달할 때까지 핀(7606)이 관형 홀더(7604) 내의 수평 홈(7610)을 따르도록 볼트(7600)를 회전시킬 수도 있다(예를 들어, 90도만큼). 이 방식으로, 파지기는 원심 분리기 어댑터(1002)를 상승시켜 수송할 수 있다. 원심 분리기 어댑터 관형 홀더(7604)로부터 볼트(7600)를 해제하기 위해, 볼트는 반대 방향으로 회전된다.
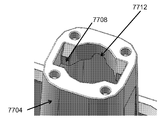
도 21a 및 도 21b는 제2 실시예에 따른 관형 홀더(7704)를 도시한다. 관형 홀더(7704)는 핀(7706)과 볼트(7700)의 단면 프로파일을 정합하도록 구성된 키홀 개구(7712)를 가질 수도 있다. 볼트(7700)가 관형 홀더(7704) 내에 삽입될 때, 파지기 핀(7606)은 키홀 개구(7712)를 통해 끼워지고, 셸프(7708) 아래로 하강된다. 핀(7706)이 셸프(7708) 아래에 있을 때, 파지기(227)는 핀(7706)이 노치(7712) 내에 장착되도록 볼트(7700)를 회전시킬 수도 있다(예를 들어, 90도만큼). 이 방식으로, 파지기는 원심 분리기 어댑터(1002)를 상승시켜 수송할 수 있다. 원심 분리기 어댑터 관형 홀더(7704)로부터 볼트(7700)를 해제하기 위해, 볼트는 반대 방향으로 회전된다.
다양한 수단이 원심 분리기 어댑터 파지기(227)의 x- 및 y-축 이동 중에 원심 분리기 어댑터가 요동하는 것을 방지하도록 구현될 수도 있다. 예를 들어, 파지기(227)는 어댑터의 상부가 파지기(227)의 하우징의 하면에 대해 가압되도록 z-축 범위의 정도에서 작동될 수도 있다. 이 방식으로, 파지기에 대한 원심 분리기 어댑터(1002)의 임의의 운동이 감쇠될 수도 있다. 몇몇 실시예에서, 하나 이상의 스트링이 파지기 하우징으로부터의 진동이 원심 분리기 어댑터의 요동을 발생하는 것을 방지하는데 사용될 수도 있다.
몇몇 실시예에서, 로봇식 아암은 샘플 튜브 뿐만 아니라 원심 분리기 모듈(206) 내에 사용된 어댑터(1002)를 파지하는 것이 가능한 조합형 파지기일 수도 있다. 하나 이상의 원심 분리기 영역 파지기는 입력 영역(202)에서 샘플 튜브를 취출하는 것과, 비어 있는 원심 분리기 버켓용 로딩 위치(1004)로 샘플 튜브를 수송하는 것과, 원심 분리기 어댑터의 자유 위치에 샘플 튜브를 배치하는 것과, 완전히 충전된(또는 부분 충전된) 원심 분리기 어댑터를 선택하는 것과, 이용 가능한 원심 분리기에 원심 분리기 어댑터를 수송하는 것과, 원심 분리기 회전자의 자유 위치에 원심 분리기 어댑터를 배치하는 것과, 원심 분리된 어댑터를 선택하는 것과, 원심 분리된 어댑터를 원심 분리된 어댑터를 위한 언로딩 위치로 수송하는 것과, 원심 분리된 어댑터 내의 원심 분리된 샘플 튜브를 취출하는 것을 포함하는, 다수의 기능을 수행할 수도 있다.
다른 실시예에서, 단일 샘플 튜브 파지기가 신축형 로봇식 아암에 적용될 수 있다. 샘플 튜브 파지기 유닛은 신축형 로봇식 아암을 사용하여 원심 분리기 본체 내로 하강 이동될 수도 있다. 샘플 튜브 파지기 로봇은 이어서 그 표준 파지기 유닛으로 원심 분리기 버켓을 파지할 수도 있다.
다른 실시예에서, 원심 분리기 버켓 파지기 유닛은 표준 샘플 튜브 파지기에 부가하여 신축형 로봇식 아암에 적용될 수 있다.
원심 분리기 어댑터 들어올림 방지
점착성 라벨 또는 고착된 검체 튜브는 원심 분리기 파지기(226)가 어댑터로부터 샘플 튜브를 제거할 때 원심 분리기 어댑터(1002)가 부유하게 할 수도 있다. 어댑터(1002)가 부유하게 되는 것을 방지하기 위한 다양한 들어올림 방지 디바이스가 후술된다. 통상적으로, 들어올림 방지 디바이스는 단지 샘플 튜브가 어댑터 내로 로딩되고 어댑터로부터 언로딩될 때에만 활성화되어, 어댑터가 이동될 때 어댑터들이 자유롭게 이동하게 한다.
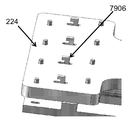
도 22a 내지 도 22c는 예시적인 후크 들어올림 방지 디바이스를 도시한다. 몇몇 실시예에서, 어댑터는 기계적 잠금 특징부를 갖는다. 예를 들어, 도 22a에 도시된 어댑터(1002)는 개구(7902)를 포함할 수도 있다. 도 22b에 도시된 셔틀(224)은 개구(7902) 내에 삽입되도록 구성된 후크(7906)를 가질 수도 있다. 후크는 개구(7902) 내에 삽입되고 후크(7906)가 어댑터(1002)의 개구(7902) 내에 삽입될 때 셔틀(224)에 어댑터(1002)를 유지하도록 구성된다.
셔틀이 튜브가 어댑터(1002)로부터 언로딩될 수 있는 위치로 이동될 때, 후크(7906)는 개구(7902)를 통해 삽입되고, 이후에 어댑터(1002)는 후크(7906)가 개구(7902) 내에 렛지를 현수하여 도 22c에 도시된 바와 같이 어댑터(1002)가 셔틀(224)로부터 상승되는 것을 방지하도록 시프트된다. 어댑터(1002)가 어댑터 스왑핑 위치로 시프트될 때, 후크 메커니즘은 분리될 수도 있다.
도 23은 예시적인 자기 들어올림 방지 디바이스를 도시한다. 몇몇 실시예에서, 금속 물체(8000)(예를 들어, 강철 바아)와 같은 강자성 물체가 어댑터(1002)에 결합될 수도 있다. 예를 들어, 강철 바아(8000)는 셔틀(224) 상에 놓인 어댑터(1002)의 하면에 결합될 수도 있다. 셔틀이 언로딩 위치에 있을 때, 강철 바아(8000) 아래의 고정 전자석(도시 생략)은 강철 바아(8000)를 고정 전자석에 끌어당기기 위한 자기장을 생성하기 위해 전력 공급될 수도 있다. 전자석은 제어기로부터 전원에 송신된 신호에 응답하여 제어기에 결합된 전원으로부터 전력을 수신할 수도 있다. 제어기는 원심 분리기 어댑터 셔틀 제어기 또는 다른 제어기일 수도 있다. 이 방식으로, 어댑터(1002)는 언로딩 중에 적소에 유지될 수 있다. 어댑터(1002)의 언로딩이 완료될 때, 고정 전자석으로의 전력은 어댑터(1002)가 이동되게 하도록 중단될 수 있다. 자기 들어올림 방지 접근법은 유리하게는 어떠한 기계적 부품도 필요로 하지 않고, 신속하게 활성화되고 비활성화될 수 있다.
컴퓨터 장치
도면을 참조하여 본 명세서에 설명된 다양한 관여자 및 요소는 본 명세서에 설명된 기능을 용이하게 하기 위해 하나 이상의 컴퓨터 장치를 작동할 수도 있다. 임의의 서버, 프로세서 또는 데이터베이스를 포함하는 상기 설명에서의 임의의 요소는 예를 들어 실험실 자동화 시스템, 수송 시스템, 스케쥴러, 중앙 제어기, 원심기 제어기, 균형 제어기 등의 기능 유닛 및 모듈을 작동하고 그리고/또는 제어하기 위한 기능과 같은 본 명세서에 설명된 기능을 용이하게 하기 위해 임의의 적합한 수의 서브시스템을 사용할 수도 있다.
이러한 서브시스템 또는 구성 요소의 예가 도 24에 도시된다. 도 24에 도시된 서브시스템은 시스템 버스(8405)를 통해 상호 접속된다. 프린터(8404), 키보드(8408), 고정식 디스크(8409)(또는 컴퓨터 판독 가능 매체를 포함하는 다른 메모리), 디스플레이 어댑터(8412)에 결합된 모니터(8406) 등이 도시되어 있다. I/O 제어기(8401)(프로세서 또는 다른 적합한 제어기일 수 있음)에 결합하는 주변 장치 및 입출력(I/O) 디바이스는 직렬 포트(8414)와 같은 당 기술 분야에 공지된 임의의 수의 수단에 의해 컴퓨터 시스템에 접속될 수 있다. 예를 들어, 직렬 포트(8414) 또는 외부 인터페이스(8411)는 인터넷, 마우스 입력 디바이스 또는 스캐너와 같은 원거리 네트워크에 컴퓨터 장치를 접속하는데 사용될 수 있다. 시스템 버스를 통한 상호 접속은 중앙 프로세서(8403)가 각각의 서브시스템과 통신하여 시스템 메모리(8402) 또는 고정 디스크(8409)로부터 인스트럭션의 실행, 뿐만 아니라 서브시스템들 사이의 정보의 교환을 제어하게 한다. 시스템 메모리(8402) 및/또는 고정 디스크(8409)는 컴퓨터 판독 가능 매체를 구체화할 수도 있다.
기술의 실시예들은 전술된 실시예들에 한정되지 않는다. 전술된 태양들의 일부에 관한 특정 상세가 상기에 제공되어 있다. 특정 태양들의 특정 상세들은 기술의 실시예의 사상 및 범주로부터 벗어나지 않고 임의의 적합한 방식으로 조합될 수도 있다. 예를 들어, 전술된 바와 같은 임의의 2개 이상의 특정 실시예의 임의의 특징들은 본 발명의 범주 및 사상으로부터 벗어나지 않고 임의의 적합한 방식으로 조합될 수 있다.
전술된 바와 같은 본 발명의 기술은 모듈형 또는 통합 방식으로 컴퓨터 소프트웨어(탠저블 물리적 매체 내에 저장됨)를 사용하여 제어 로직의 형태로 구현될 수 있다는 것이 이해되어야 한다. 더욱이, 본 발명의 기술은 임의의 형태로 그리고/또는 임의의 화상 처리의 조합으로 구현될 수도 있다. 본 명세서에 제공된 개시 내용 및 교시에 기초하여, 당 기술 분야의 숙련자는 하드웨어 및 하드웨어와 소프트웨어의 조합을 사용하여 본 발명의 기술을 구현하기 위한 다른 방식 및/또는 방법을 인지하고 이해할 수 있을 것이다.
본 출원에 설명된 임의의 소프트웨어 구성 요소 또는 기능은 예를 들어 통상의 또는 객체 지향 기술을 사용하여, 예를 들어 자바(Java), C++ 또는 펄(Perl)과 같은 임의의 적합한 컴퓨터 언어를 사용하여 프로세서에 의해 실행되도록 소프트웨어 코드로서 구현될 수도 있다. 소프트웨어 코드는 랜덤 액세스 메모리(RAM), 판독 전용 메모리(ROM), 하드 드라이브 또는 플로피 디스크와 같은 자기 매체 또는 CD-ROM과 같은 광학 매체와 같은 컴퓨터 판독 가능 매체 상에 일련의 인스트럭션 또는 명령으로서 저장될 수도 있다. 임의의 이러한 컴퓨터 판독 가능 매체는 단일 연산 장치 상에 또는 내에 상주할 수도 있고, 시스템 또는 네트워크 내의 상이한 연산 장치 상에 또는 내에 존재할 수도 있다.
상기 설명은 예시적이고, 한정적인 것이 아니다. 기술의 다수의 변형예들이 개시 내용의 고려시에 당 기술 분야의 숙련자들에게 명백할 것이다. 따라서, 기술의 범주는 상기 설명을 참조하여 결정되지 않고, 대신에 그 전체 범주 또는 등가물과 함께 계류중인 청구범위를 참조하여 결정되어야 한다.
임의의 실시예로부터의 하나 이상의 특징들은 기술의 범주로부터 벗어나지 않고 임의의 다른 실시예의 하나 이상의 특징들과 조합될 수도 있다.
단수 표현의 언급은 구체적으로 반대로 지시되지 않으면 "하나 이상"을 의미하도록 의도된다.
전술된 모든 특허, 특허 출원, 공개 및 설명은 모든 목적으로 그대로 본 명세서에 참조로서 합체되어 있다. 어느 것도 종래 기술인 것으로 용인되지는 않는다.
Claims (27)
- 제1 검체 컨테이너 파지기에 의해 복수의 검체 컨테이너를 원심분리기 어댑터로 로딩하는 단계로서, 복수의 검체 컨테이너가 로딩될 때까지 제1 검체 컨테이너 파지기가 복수의 검체 컨테이너 중 단일의 검체 컨테이너를 원심분리기 어댑터로 순차적으로 로딩하는 단계와,
어댑터 셔틀에 의해 원심분리기 어댑터를 원심분리 구역으로 이송하는 단계와,
원심분리기 어댑터 파지기에 의해 원심분리기 어댑터를 원심분리기로 이송하는 단계와,
원심분리기에 의해 원심분리기 어댑터를 원심분리하는 단계와,
원심분리기 어댑터 파지기에 의해 원심분리기 어댑터를 원심분리기로부터 어댑터 셔틀로 이송하는 단계와,
제2 검체 컨테이너 파지기에 의해 복수의 검체 컨테이너를 원심분리기 어댑터로부터 언로딩하는 단계로서, 복수의 검체 컨테이너가 언로딩될 때까지 제2 검체 컨테이너 파지기가 복수의 검체 컨테이너 중 단일의 검체 컨테이너를 순차적으로 언로딩하는 단계를 포함하는 방법. - 제1항에 있어서, 제1 검체 컨테이너 파지기에 의해 복수의 검체 컨테이너를 원심분리기 어댑터로 로딩하는 단계 이전에, 복수의 검체 컨테이너 중 하나 이상의 검체 컨테이너의 중량을 결정하는 방법.
- 제2항에 있어서, 제1 검체 컨테이너 파지기가 복수의 검체 컨테이너를 파지하는 구역으로 검체 컨테이너를 이송하도록 구성된 파지기에 의해 하나 이상의 검체 컨테이너의 중량을 결정하는 방법.
- 제2항에 있어서, 컨베이어 트랙의 균형에 의해 하나 이상의 검체 컨테이너의 중량을 결정하는 방법.
- 제1항에 있어서, 복수의 검체 컨테이너의 우선 순위 레벨에 기초하여 순차적 순서에 따라 제1 검체 컨테이너 파지기에 의해 복수의 검체 컨테이너를 원심분리기 어댑터로 로딩하는 방법.
- 제1항에 있어서, 복수의 검체 컨테이너의 중량에 기초하여 순차적 순서에 따라 제1 검체 컨테이너 파지기에 의해 복수의 검체 컨테이너를 원심분리기 어댑터로 로딩하는 방법.
- 제1항에 있어서, 검체 컨테이너 내 하나 이상의 액체의 양을 결정하기 위해 제2 검체 컨테이너 파지기를 이용하는 방법.
- 제1항에 있어서, 제2 원심분리기를 더 포함하며, 2개의 원심분리기는 상호 어긋난 위상으로 작동하는 방법.
- 시스템이며,
검체 컨테이너를 원심분리기 어댑터로 로딩하도록 구성된 제1 검체 컨테이너 파지기와,
원심분리기 어댑터를 원심분리 구역으로 이송하도록 구성된 어댑터 셔틀과,
원심분리기 어댑터를 원심분리기에 로딩하도록 구성된 원심분리기 어댑터 파지기와,
검체 컨테이너를 원심분리기 어댑터로부터 언로딩하도록 구성된 제2 검체 컨테이너 파지기를 포함하는 시스템. - 원심분리된 어댑터 세트를 원심분리되지 않은 어댑터 세트로 교체하는 방법이며,
원심분리기 어댑터 파지기에 의해, 모든 검체 컨테이너가 제거되어 있는 원심분리기 어댑터를 일시적 보유 구역으로 이송하는 단계와,
원심분리기 어댑터 파지기에 의해, 앞서 원심분리된 샘플 컨테이너를 수납한 제2 원심분리기 어댑터를 원심분리기로부터 제1 셔틀 위치로 이송하는 단계와,
원심분리기 어댑터 파지기에 의해, 원심분리되지 않은 샘플 컨테이너를 수납한 제3 원심분리기 어댑터를 제2 셔틀 위치로부터 원심분리기로 이송하는 단계와,
원심분리기 파지기에 의해, 원심분리되지 않은 샘플 컨테이너를 수납한 제4 원심분리기 어댑터를 일시적 보유 구역으로부터 제2 셔틀 위치로 이송하는 단계를 포함하는 방법. - 검체 컨테이너를 원심분리기 어댑터 세트 내로 로딩하는 방법이며,
검체 컨테이너 파지기에 의해 순차적 순서에 따라 첫번째 순서의 제1 검체 컨테이너를 제1 원심분리기 어댑터의 제1 위치로 로딩하는 단계로서, 제1 원심분리기 어댑터의 제1 위치는 제1 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 위치들 중 하나의 위치인 로딩 단계와,
검체 컨테이너 파지기에 의해 순차적 순서에 따라 두번째 순서의 제2 검체 컨테이너를 제2 원심분리기 어댑터의 제1 위치로 로딩하는 단계로서, 제2 원심분리기 어댑터의 제1 위치는 제2 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 위치들에 있는 로딩 단계와,
검체 컨테이너 파지기에 의해 순차적 순서에 따라 세번째 순서의 제3 검체 컨테이너를 제3 원심분리기 어댑터의 제1 위치로 로딩하는 단계로서, 제3 원심분리기 어댑터의 제1 위치는 제3 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 위치들에 있는 로딩 단계와,
검체 컨테이너 파지기에 의해 순차적 순서에 따라 네번째 순서의 제4 검체 컨테이너를 제4 원심분리기 어댑터의 제1 위치로 로딩하는 단계로서, 제4 원심분리기 어댑터의 제1 위치는 제4 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 위치들에 있는 로딩 단계와,
제1 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 모든 위치들이 채워지고, 제2 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 모든 위치들이 채워지고, 제3 원심분리기 어댑터로부터 제1 거리 내에 있는 제1 세트의 모든 위치들이 채워지고, 제4 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있는 제1 세트의 모든 위치들이 채워지면,
검체 컨테이너 파지기에 의해 제5 검체 컨테이너를 제1 원심분리기 어댑터의 제2 위치로 로딩하는 단계로서, 제1 원심분리기 어댑터의 제2 위치는 제1 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있지 않은 제2 세트의 위치들 중 하나의 위치이고, 제5 검체 컨테이너는 순차적 순서에서 앞서 로딩된 검체 컨테이너에 후속하는 로딩 단계와,
검체 컨테이너 파지기에 의해 제6 검체 컨테이너를 제2 원심분리기 어댑터의 제2 위치로 로딩하는 단계로서, 제2 원심분리기 어댑터의 제2 위치는 제2 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있지 않은 제2 세트의 위치들 중 하나의 위치이고, 제6 검체 컨테이너는 순차적 순서에서 앞서 로딩된 검체 컨테이너에 후속하는 로딩 단계와,
검체 컨테이너 파지기에 의해 제7 검체 컨테이너를 제3 원심분리기 어댑터의 제2 위치로 로딩하는 단계로서, 제3 원심분리기 어댑터의 제2 위치는 제3 원심분리기 어댑터의 중앙으로부터 제1 거리 내에 있지 않은 제2 세트의 위치들 중 하나의 위치이고, 제7 검체 컨테이너는 순차적 순서에서 앞서 로딩된 검체 컨테이너에 후속하는 로딩 단계와,
검체 컨테이너 파지기에 의해 제8 검체 컨테이너를 제4 원심분리기 어댑터의 제2 위치로 로딩하는 단계로서, 제4 원심분리기 어댑터의 제2 위치는 제4 원심분리기의 어댑터의 중앙으로부터 제1 거리 내에 있지 않은 제2 세트의 위치들 중 하나의 위치이고, 제8 검체 컨테이너는 순차적 순서에서 앞서 로딩된 검체 컨테이너에 후속하는 로딩 단계를 포함하는 방법. - 제11항에 있어서, 순차적 순서는 복수의 검체 컨테이너의 우선 순위 레벨에 기초하는 방법.
- 제12항에 있어서, 상위 우선 순위 튜브의 중량이 미리 정해진 양만큼 하위 우선 순위 튜브의 중량을 초과하면, 상위 우선 순위 샘플 튜브를 대신하여 하위 우선 순위 샘플 튜브를 로딩할 수 있는 방법.
- 제11항에 있어서, 순차적 순서는 복수의 검체 컨테이너의 중량에 기초하는 방법.
- 제14항에 있어서, 검체 컨테이너 파지기에 의해 중량을 결정하는 방법.
- 제11항에 있어서, 원심분리기에 대한 사이클이 완료 시점으로부터 미리 정해진 시간의 주기 내에 있으면, 로딩을 중지하는 방법.
- 원심분리기 서랍이며,
텔레스코픽 레일을 거쳐 프레임에 결합되고 원심분리기를 지지하도록 구성되는 플랫폼과,
상기 플랫폼에 결합되는 래치를 포함하는, 원심분리기 서랍. - 제17항에 있어서, 상기 래치는,
영구 자석과,
전자석을 포함하며,
상기 영구 자석은 원심분리기가 회전하지 않을 때 서랍을 전진 위치 또는 후퇴 위치에 고정하도록 구성되고,
원심분리기가 회전할 때 영구 자석의 자기장을 강화하기 위해 전류가 제1 방향으로 전자석에 인가되며,
서랍이 작동될 때 영구 자석의 자기장에 반작용하기 위해 전류가 제2 방향으로 전자석에 인가되는, 원심분리기 서랍. - 제17항에 있어서, 상기 래치는,
제어기와 통신 결합된 전기 모터와,
상기 전기 모터에 기계적으로 결합되고 제어기로부터의 신호 수신에 응답하여 전기 모터에 의해 회전하도록 구성되는 캠과,
상기 캠과 접촉하며 캠의 회전에 의해 피벗되는 레버와,
래치 요소를 포함하며,
상기 래치 요소는 래치 요소의 타인(tine)이 해제 위치로 회전되도록 레버의 회전에 의해 피벗되고, 원심분리기 서랍의 스트라이커 볼트는 래치 요소가 해제 위치에 있을 때 래치로부터 제거될 수 있는, 원심분리기 서랍. - 제17항에 있어서, 프레임에 결합된 케이블 컨테이너를 더 포함하며,
상기 케이블 컨테이너는 원심분리기의 하나 이상의 케이블을 내장하도록 구성되고, 상기 케이블 컨테이너는 서랍이 전진하면 연장되도록 구성되고 서랍이 후퇴하면 압축되도록 구성된 가요성 재료를 포함하는, 원심분리기 서랍. - 제17항에 있어서, 프레임에 결합된 스프링 장착 케이블 리트렉터를 더 포함하며,
상기 스프링 장착 케이블 리트렉터는 원심분리기의 하나 이상의 케이블에 결합되는 스프링을 포함하고, 상기 스프링은 서랍이 전진하면 연장되도록 구성되고 서랍이 후퇴하면 압축되도록 구성되는, 원심분리기 서랍. - 원심분리기 서랍에 원심분리기를 설치하는 방법이며,
로딩 툴을 원심분리기에 적용하는 단계로서, 상기 로딩 툴은 복수의 잭과 복수의 휠을 포함하는 단계와,
복수의 잭을 연장시켜 원심분리기를 상승시키는 단계와,
복수의 휠을 이용하여 원심분리기 서랍 위의 위치에 원심분리기를 롤링하는 단계와,
원심분리기가 원심분리기 서랍에 의해 지지될 때까지 복수의 잭을 후퇴시키는 단계와,
로딩 툴을 원심분리기로부터 제거하는 단계를 포함하는 방법. - 원심분리기 어댑터이며,
제1 단부가 원심분리기 어댑터에 결합되고 제2 단부가 볼트를 수용하도록 구성된 개구를 갖는 튜브 홀더를 포함하며,
상기 튜브 홀더는,
튜브 홀더 내부의 제1 수직 홈과,
튜브 홀더 내부의 제2 수직 홈과,
튜브 홀더의 제1 수평 홈과,
튜브 홀더의 제2 수평 홈을 포함하고,
상기 제1 수직 홈은 튜브 홀더의 개구에서 종단되고,
상기 제2 수직홈은 튜브 홀더의 개구에서 종단되며,
상기 제1 수평 홈은 제1 핀이 제1 수직 홈을 통해 튜브 홀더에 인입될 수 있도록 그리고 제1 핀이 제1 수직 홈으로부터 제1 수평 홈으로 이동될 수 있도록 제1 수직 홈에 연결되고,
상기 제2 수평 홈은 제2 핀이 제2 수직 홈을 통해 튜브 홀더에 인입될 수 있도록 그리고 제2 핀이 제2 수직 홈으로부터 제2 수평 홈으로 이동될 수 있도록 제2 수직 홈에 연결되며,
상기 제1 핀 및 제2 핀은 볼트에 결합되고,
상기 볼트는 로봇 아암에 결합되는, 원심분리기 어댑터. - 원심분리기 어댑터이며,
제1 단부가 원심분리기 어댑터에 결합되고 제2 단부가 볼트를 수용하도록 구성된 개구를 갖는 튜브 홀더로서, 상기 볼트에 제1 핀 및 제2 핀이 결합되고, 개구는 제1 핀 및 제2 핀을 갖는 볼트의 단면 프로파일에 일치하도록 구성된 키홀 형상을 가지는, 튜브 홀더를 포함하며,
상기 튜브 홀더는,
튜브 홀더 내부의 제1 수직 홈과,
튜브 홀더 내부의 제2 수직 홈을 포함하고,
상기 제1 수직 홈의 제1 단부는 튜브 홀더의 개구에서 종단되고 제1 수직 홈의 제2 단부는 셸프에서 종단되며,
상기 제2 수직 홈의 제1 단부는 튜브 홀더의 개구에서 종단되고 제2 수직 홈의 제2 단부는 셸프에서 종단되며,
셸프는 제1 노치 및 제2 노치를 가지고,
볼트가 튜브 홀더의 개구를 통해 하강할 때 제1 수직 홈은 제1 핀을 수용하도록 구성되고 제2 수직 홈은 제2 핀을 수용하도록 구성되며,
제1 핀 및 제2 핀이 셸프 아래에 위치되도록 볼트가 하강한 후에, 그리고 제1 핀이 제1 노치에 정렬되고 제2 핀이 제2 노치에 정렬되도록 볼트가 회전한 후에, 제1 노치는 제1 핀을 수용하도록 구성되고 제2 노치는 제2 핀을 수용하도록 구성되는, 원심분리기 어댑터. - 원심분리기 어댑터를 파지하는 방법이며,
로봇 아암의 하방 이동에 의해 로봇 아암에 결합된 볼트를 원심분리기 어댑터에 결합된 튜브 홀더 내로 삽입하는 단계와,
로봇 아암에 의해 튜브 홀더에 대해 볼트를 회전시키는 단계로서, 볼트가 튜브 홀더 내 잠금 위치로 인입되는 회전 단계와,
로봇 아암의 상방 이동에 의해 원심분리기 어댑터를 상승시키는 단계로서, 상승 단계는 튜브 홀더의 상부 표면이 로봇 아암의 하우징의 하부 표면과 접촉될 때까지 지속되고, 튜브 홀더와 로봇 아암 간의 접촉은 로봇 아암에 대한 원심분리기 어댑터의 이동을 감쇠시키는, 상승 단계를 포함하는 방법. - 원심분리기 어댑터 셔틀이며,
원심분리기 어댑터 셔틀에 이동 가능하게 결합되는 하나 이상의 후크를 포함하며,
상기 후크는 원심분리기 어댑터의 하나 이상의 개구와 정합하도록 구성되고,
원심분리기 어댑터가 원심분리기 어댑터 셔틀상에 로딩된 후에, 후크가 개구의 렛지 위로 돌출되도록 후크가 측방향으로 이동되어 원심분리기 어댑터가 원심분리기 어댑터 셔틀로부터 상향 이탈되는 것을 방지하는, 원심분리기 어댑터 셔틀. - 원심분리기 어댑터 셔틀이며,
제어기와,
상기 제어기에 통신 결합된 전력 공급원과,
원심분리기 어댑터 셔틀에 기계적으로 결합되고 전력 공급원으로부터 전력을 공급 받는 전자석을 포함하며,
원심분리기 어댑터가 원심분리기 어댑터 셔틀상에 로딩된 후에, 전자석이 원심분리기 어댑터에 결합된 금속 막대기에 전자기적으로 결합되도록 전력이 전자석에 공급되는, 원심분리기 어댑터 셔틀.
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161556667P | 2011-11-07 | 2011-11-07 | |
| US61/556,667 | 2011-11-07 | ||
| US201261616994P | 2012-03-28 | 2012-03-28 | |
| US61/616,994 | 2012-03-28 | ||
| US201261680066P | 2012-08-06 | 2012-08-06 | |
| US61/680,066 | 2012-08-06 | ||
| PCT/US2012/063930 WO2013070755A2 (en) | 2011-11-07 | 2012-11-07 | Centrifuge system and workflow |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20140092375A true KR20140092375A (ko) | 2014-07-23 |
Family
ID=70282602
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020147014680A KR20140092375A (ko) | 2011-11-07 | 2012-11-07 | 원심분리기 시스템 및 작업 흐름 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US9482684B2 (ko) |
| EP (1) | EP2776843B1 (ko) |
| JP (1) | JP6320926B2 (ko) |
| KR (1) | KR20140092375A (ko) |
| CN (1) | CN104105969B (ko) |
| BR (1) | BR112014011046A2 (ko) |
| ES (1) | ES2729283T3 (ko) |
| WO (1) | WO2013070755A2 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102168826B1 (ko) * | 2019-11-29 | 2020-10-22 | 주식회사 한국바이오 셀프 | 검체 분리 장치 및 방법 |
Families Citing this family (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8491454B2 (en) | 2008-12-02 | 2013-07-23 | President And Fellows Of Harvard College | Spinning force apparatus |
| CN103299196B (zh) * | 2010-12-28 | 2015-06-24 | 株式会社日立高新技术 | 离心分离装置、具备离心分离装置的前处理系统以及该系统的控制方法 |
| EP2776844B1 (en) | 2011-11-07 | 2020-09-30 | Beckman Coulter, Inc. | Specimen container detection |
| EP2776845B1 (en) | 2011-11-07 | 2020-11-04 | Beckman Coulter, Inc. | Robotic arm |
| BR112014011035A2 (pt) | 2011-11-07 | 2017-06-13 | Beckman Coulter, Inc. | sistema de aliquotagem e fluxo de trabalho |
| BR112014011044A2 (pt) | 2011-11-07 | 2017-04-25 | Beckman Coulter Inc | amortecimento magnético para sistema de transporte de espécime |
| JP6082018B2 (ja) | 2011-11-07 | 2017-02-15 | ベックマン コールター, インコーポレイテッド | サンプルを処理するためのシステムおよび方法 |
| WO2013099538A1 (ja) * | 2011-12-28 | 2013-07-04 | 株式会社 日立ハイテクノロジーズ | 検体移戴装置及びシステム |
| WO2013180017A1 (ja) * | 2012-05-28 | 2013-12-05 | 株式会社 日立ハイテクノロジーズ | 遠心分離装置、遠心分離装置を備えた前処理システムおよび当該システムの制御方法 |
| WO2014144627A1 (en) | 2013-03-15 | 2014-09-18 | Abbott Laboratories | Automated diagnostic analyzers having rear accessible track systems and related methods |
| US10247743B2 (en) * | 2013-11-12 | 2019-04-02 | Hitachi High-Technologies Corporation | Analyte testing automation system, biological sample check module, and biological sample check method |
| CN107076732B (zh) * | 2014-07-21 | 2020-02-28 | 贝克曼考尔特公司 | 用于管检查和液位检测的方法及系统 |
| CN107076770B (zh) * | 2014-07-28 | 2019-07-12 | 道格拉斯科学有限责任公司 | 用于分析生物样本和试剂的仪器 |
| CN104407160B (zh) * | 2014-10-29 | 2016-03-30 | 东软安德医疗科技有限公司 | 一种全自动离心装置 |
| JP6504900B2 (ja) * | 2015-04-22 | 2019-04-24 | 株式会社日立製作所 | 試料搬送装置 |
| EP3085453A1 (en) * | 2015-04-24 | 2016-10-26 | Roche Diagniostics GmbH | Method of loading sample containers into a centrifuge and laboratory automation system |
| CN108027379B (zh) | 2015-06-26 | 2021-07-23 | 雅培实验室 | 用于诊断分析设备的反应容器交换装置 |
| DK3167962T3 (da) | 2015-11-16 | 2022-06-07 | Beckman Coulter Inc | Prøveglasstativ og prøveglasanalysesystem |
| US20180364225A1 (en) * | 2015-12-07 | 2018-12-20 | President And Fellows Of Harvard College | High throughput screening of small molecules |
| JP6919139B2 (ja) | 2016-01-28 | 2021-08-18 | シーメンス・ヘルスケア・ダイアグノスティックス・インコーポレーテッドSiemens Healthcare Diagnostics Inc. | 複数の側面図から試料容器を識別するように構成された方法および装置 |
| JP2019512722A (ja) | 2016-02-25 | 2019-05-16 | ザ チルドレンズ メディカル センター コーポレーション | 分子に関連した特徴の測定のためのスピン装置 |
| US11977088B2 (en) | 2016-06-27 | 2024-05-07 | Beckman Coulter, Inc. | History logging for samples of biological material |
| WO2018013345A1 (en) * | 2016-07-14 | 2018-01-18 | Siemens Healthcare Diagnostics Inc. | Methods and apparatus for dynamic position adjustments of a robot gripper based on sample rack imaging data |
| CH712734A1 (de) * | 2016-07-22 | 2018-01-31 | Tecan Trading Ag | Erkennungsvorrichtung und -verfahren zum Erkennen von Kennzeichen an und/oder Merkmalen von Laborobjekten. |
| USD808540S1 (en) | 2016-07-28 | 2018-01-23 | Beckman Coulter, Inc. | Sample tube rack |
| USD812243S1 (en) | 2016-07-28 | 2018-03-06 | Beckman Coulter, Inc. | Sample tube rack |
| EP3459007B1 (en) | 2016-08-31 | 2024-05-08 | Abbott Laboratories | Systems, apparatus, and related methods for evaluating biological sample integrity |
| JP2018096740A (ja) * | 2016-12-09 | 2018-06-21 | 株式会社日立ハイテクノロジーズ | 生体試料分析装置 |
| WO2018206842A1 (en) * | 2017-05-12 | 2018-11-15 | Thermo Fisher Scientific Oy | Receptacle terminal |
| USD938612S1 (en) | 2017-06-16 | 2021-12-14 | Beckman Coulter, Inc. | Sample rack |
| EP3639025A1 (en) * | 2017-06-16 | 2020-04-22 | DRK Blutspendedienst Baden-Württemberg-Hessen gGmbH | Method and apparatus for single tube blood donor screening |
| CN107470038B (zh) * | 2017-09-07 | 2019-07-26 | 前海瑞智捷自动化科技(深圳)有限公司 | 一种血样自动离心处理流水线及方法 |
| IT201700116211A1 (it) | 2017-10-16 | 2019-04-16 | Inpeco Holding Ltd | Sistema di tracciabilità del trasporto di contenitori di campioni biologici |
| EP3474018B1 (en) * | 2017-10-18 | 2020-07-22 | Roche Diagnostics GmbH | A method to store sample tubes in a laboratory storage and retrieval system |
| SE541776C2 (en) * | 2017-11-10 | 2019-12-10 | Il Granito Ab | Identifying, sorting and manipulating test tubes |
| CN111656160B (zh) | 2018-01-29 | 2023-06-16 | 微型仪器公司 | 用于测量系统的锁定组件 |
| WO2019152655A1 (en) | 2018-01-31 | 2019-08-08 | Laboratory Corporation Of America Holdings | Sample supply system and methods of supplying samples |
| EP3746224A4 (en) * | 2018-02-02 | 2021-10-27 | Micronic Holding B.V. | INFORMATION MARKING SYSTEMS AND METHODS FOR LABORATORY NEEDS |
| CN110683327B (zh) * | 2018-07-04 | 2022-08-05 | 深圳迈瑞生物医疗电子股份有限公司 | 一种样本架调度机构及方法 |
| CN108970816A (zh) * | 2018-09-03 | 2018-12-11 | 前海瑞智捷自动化科技(深圳)有限公司 | 一种自动化血样离心的方法、装置及系统 |
| CN112577791A (zh) * | 2019-09-27 | 2021-03-30 | 深圳迈瑞生物医疗电子股份有限公司 | 样本分析系统及控制样本分析系统的方法 |
| WO2021212384A1 (zh) * | 2020-04-22 | 2021-10-28 | 深圳华大智造科技股份有限公司 | 样本前处理系统 |
| EP3901621B1 (de) * | 2020-04-22 | 2022-05-04 | Safechem Europe GmbH | Vorrichtung und verfahren zur bestimmung von flüssigkeitsspezifischen parametern und/oder bestandteilen |
| CN111983246B (zh) * | 2020-07-06 | 2024-04-09 | 湖南索莱智能科技有限公司 | 试管转管器、试管扫码装置及试管扫码方法 |
| CN112379112A (zh) * | 2020-12-08 | 2021-02-19 | 深圳市爱康生物科技有限公司 | 一种离心杯载架装置及其使用方法 |
| CN113218868B (zh) * | 2021-05-19 | 2022-07-29 | 东营晨丰电子科技有限公司 | 原油中含水及沉淀物的测定方法 |
| EP4137820A1 (en) * | 2021-08-19 | 2023-02-22 | F. Hoffmann-La Roche AG | Masking of laboratory devices and routing of test sample containers in a aboratory system |
| CN118679013A (zh) * | 2021-12-31 | 2024-09-20 | 贝克曼库尔特有限公司 | 用于平衡离心机的系统、计算设备和方法 |
| CN114344951A (zh) * | 2022-01-13 | 2022-04-15 | 武汉朗克医疗器械有限公司 | 一种全自动prp分离机总装体 |
Family Cites Families (348)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB867045A (en) | 1958-08-27 | 1961-05-03 | Gen Electric Co Ltd | Improvements in or relating to systems of transportation |
| US4052161A (en) | 1974-08-22 | 1977-10-04 | The Perkin-Elmer Corporation | Kinetic analyzer |
| GB1557231A (en) | 1976-02-07 | 1979-12-05 | Fisons Ltd | Mounting of a centrifuge rotor |
| US4119381A (en) | 1976-12-17 | 1978-10-10 | Eastman Kodak Company | Incubator and radiometric scanner |
| US4250266A (en) | 1979-12-19 | 1981-02-10 | Honeywell Inc. | Automated micro-organism culture growth and detection instrument |
| GB2101514B (en) * | 1981-06-02 | 1984-11-14 | Jeremy Macauley Cox | Work bench with centrifuge |
| US4501495A (en) | 1981-06-17 | 1985-02-26 | Smithkline Beckman Corporation | Slide carrier |
| FI63596C (fi) | 1981-10-16 | 1983-07-11 | Orion Yhtymae Oy | Mikrobdiagnostiskt foerfarande som grundar sig pao skiktshybridisering av nukleinsyror och vid foerfarandet anvaenda kombinationer av reagenser |
| US4401189A (en) | 1981-11-23 | 1983-08-30 | St. Charles Manufacturing Co. | Start/stop control system for conveyor means |
| US5482834A (en) | 1982-05-17 | 1996-01-09 | Hahnemann University | Evaluation of nucleic acids in a biological sample hybridization in a solution of chaotrophic salt solubilized cells |
| US4530056A (en) | 1982-10-28 | 1985-07-16 | Modular Automation Corp. | Automated guided vehicle system |
| JPS60501339A (ja) | 1983-01-10 | 1985-08-22 | ジエン−プロ−ブ インコ−ポレィテッド | 生物を検出、同定又は定量する方法およびキット |
| DE3314961A1 (de) | 1983-04-25 | 1984-10-25 | Boehringer Mannheim Gmbh, 6800 Mannheim | Analysegeraet zur photometrischen bestimmung eines parameters einer fluessigkeit |
| US4673657A (en) | 1983-08-26 | 1987-06-16 | The Regents Of The University Of California | Multiple assay card and system |
| JPS6063617A (ja) | 1983-09-17 | 1985-04-12 | Tsubakimoto Chain Co | 無人走行車の走行制御方法 |
| JPS6063618A (ja) | 1983-09-17 | 1985-04-12 | Tsubakimoto Chain Co | 無人走行車の走行制御方法 |
| JPS60111786U (ja) | 1983-12-29 | 1985-07-29 | 株式会社シマノ | 自転車用制動操作装置 |
| JPS60204250A (ja) | 1984-03-26 | 1985-10-15 | Toshiba Corp | 搬送装置 |
| US4683202A (en) | 1985-03-28 | 1987-07-28 | Cetus Corporation | Process for amplifying nucleic acid sequences |
| US4683195A (en) | 1986-01-30 | 1987-07-28 | Cetus Corporation | Process for amplifying, detecting, and/or-cloning nucleic acid sequences |
| US5656493A (en) | 1985-03-28 | 1997-08-12 | The Perkin-Elmer Corporation | System for automated performance of the polymerase chain reaction |
| US4751177A (en) | 1985-06-13 | 1988-06-14 | Amgen | Methods and kits for performing nucleic acid hybridization assays |
| JPH0785205B2 (ja) | 1985-08-30 | 1995-09-13 | テキサス インスツルメンツインコ−ポレイテツド | モ−タで操向を制御される多重ホイ−ル車両用のフエイルセ−フ制動装置 |
| AU596987B2 (en) | 1985-08-30 | 1990-05-24 | Tosoh Corporation | Automated immunoassay analyser |
| JPH07119765B2 (ja) | 1985-08-30 | 1995-12-20 | 東ソー株式会社 | 自動免疫測定装置 |
| US4800159A (en) | 1986-02-07 | 1989-01-24 | Cetus Corporation | Process for amplifying, detecting, and/or cloning nucleic acid sequences |
| US4674640A (en) | 1986-03-24 | 1987-06-23 | Maurice Asa | Cap structure for a centrifuge tube |
| JPH07107999B2 (ja) | 1986-07-04 | 1995-11-15 | 富士通株式会社 | 4相位相復調器 |
| JP2641880B2 (ja) | 1986-08-11 | 1997-08-20 | シスカ・ダイアグノスティックス・インコーポレーテッド | 核酸プローブアッセイ法および組成物 |
| US4780817A (en) | 1986-09-19 | 1988-10-25 | Ndc Technologies, Inc. | Method and apparatus for providing destination and vehicle function information to an automatic guided vehicle |
| CH669266A5 (fr) | 1986-10-14 | 1989-02-28 | Serono Diagnostics Ltd | Appareil d'analyse automatique pour le dosage d'anticorps ou d'antigenes dans un liquide biologique. |
| US5714380A (en) | 1986-10-23 | 1998-02-03 | Amoco Corporation | Closed vessel for isolating target molecules and for performing amplification |
| US5750338A (en) | 1986-10-23 | 1998-05-12 | Amoco Corporation | Target and background capture methods with amplification for affinity assays |
| DE3710713A1 (de) | 1987-03-31 | 1988-10-20 | Wiederaufarbeitung Von Kernbre | Vorrichtung zum entnehmen von proben radioaktiver und/oder toxischer substanzen aus verfahrenskomponenten |
| IL86724A (en) | 1987-06-19 | 1995-01-24 | Siska Diagnostics Inc | Methods and kits for amplification and testing of nucleic acid sequences |
| US4947094A (en) | 1987-07-23 | 1990-08-07 | Battelle Memorial Institute | Optical guidance system for industrial vehicles |
| CA1340843C (en) | 1987-07-31 | 1999-12-07 | J. Lawrence Burg | Selective amplification of target polynucleotide sequences |
| US5283174A (en) | 1987-09-21 | 1994-02-01 | Gen-Probe, Incorporated | Homogenous protection assay |
| US5585481A (en) | 1987-09-21 | 1996-12-17 | Gen-Probe Incorporated | Linking reagents for nucleotide probes |
| EP0309230B1 (en) | 1987-09-21 | 1995-06-21 | Gen-Probe Incorporated | Homogeneous protection assay |
| US5639604A (en) | 1987-09-21 | 1997-06-17 | Gen-Probe Incorporated | Homogeneous protection assay |
| US5185439A (en) | 1987-10-05 | 1993-02-09 | Gen-Probe Incorporated | Acridinium ester labelling and purification of nucleotide probes |
| US5403711A (en) | 1987-11-30 | 1995-04-04 | University Of Iowa Research Foundation | Nucleic acid hybridization and amplification method for detection of specific sequences in which a complementary labeled nucleic acid probe is cleaved |
| AU2735988A (en) | 1987-12-21 | 1989-07-13 | Amoco Corporation | Target and background capture methods with amplification for affinity assays |
| US5449602A (en) | 1988-01-13 | 1995-09-12 | Amoco Corporation | Template-directed photoligation |
| US4950613A (en) | 1988-02-26 | 1990-08-21 | Gen-Probe Incorporated | Proteted chemiluminescent labels |
| US5147529A (en) | 1988-08-10 | 1992-09-15 | E. I. Du Pont De Nemours And Company | Method for automatically processing magnetic solid phase reagents |
| US4865986A (en) | 1988-10-06 | 1989-09-12 | Coy Corporation | Temperature control apparatus |
| GB8827160D0 (en) | 1988-11-21 | 1988-12-29 | Apothekernes Lab | Detection & quantitative determination of rna & dna |
| US5229297A (en) | 1989-02-03 | 1993-07-20 | Eastman Kodak Company | Containment cuvette for PCR and method of use |
| EP0408738B1 (en) | 1989-02-03 | 1994-01-19 | Eastman Kodak Company | Nucleic acid test article and its use to detect a predetermined nucleic acid |
| US5514550A (en) | 1989-02-03 | 1996-05-07 | Johnson & Johnson Clinical Diagnostics, Inc. | Nucleic acid test article and its use to detect a predetermined nucleic acid |
| US5075853A (en) | 1989-02-17 | 1991-12-24 | Whs Robotics, Inc. | Replaceable vehicle control prom |
| US5179329A (en) | 1989-04-25 | 1993-01-12 | Shinko Electric Co., Ltd. | Travel control method, travel control device, and mobile robot for mobile robot systems |
| EP0402703B1 (de) | 1989-06-10 | 1995-02-15 | W. SCHLAFHORST AG & CO. | Textilmaschine mit einem automatischen Transportsystem zum Transport von Textilspulen beziehungsweise Hülsen |
| US5055393A (en) | 1989-06-13 | 1991-10-08 | Salk Institute Biotechnology/Industrial Associates, Inc. | Prenatal sex determination of bovine cells using male-specific oligonucleotides |
| CA2020958C (en) | 1989-07-11 | 2005-01-11 | Daniel L. Kacian | Nucleic acid sequence amplification methods |
| DE69028257T2 (de) | 1989-07-11 | 1997-01-09 | Gen Probe Inc | Verfahren zur Vervielfältigung von Nukleinsäuresequenzen |
| US4943415A (en) | 1989-07-14 | 1990-07-24 | Eastman Kodak Company | Grooved cover for test elements |
| IL94212A0 (en) | 1989-07-24 | 1991-01-31 | Tri Tech Partners And Triton B | Automated analytical apparatus and method |
| US5427930A (en) | 1990-01-26 | 1995-06-27 | Abbott Laboratories | Amplification of target nucleic acids using gap filling ligase chain reaction |
| FR2659142B1 (fr) | 1990-03-02 | 1992-06-05 | Gespac Instr Sa | Automate analyseur pour le groupage sanguin. |
| TW199858B (ko) | 1990-03-30 | 1993-02-11 | Fujirebio Kk | |
| DE69126690T2 (de) | 1990-04-06 | 1998-01-02 | Perkin Elmer Corp | Automatisiertes labor für molekularbiologie |
| WO1991015768A1 (en) | 1990-04-06 | 1991-10-17 | Syngene, Inc. | Process and composition for performing dna assays |
| WO1991017446A1 (en) | 1990-05-01 | 1991-11-14 | Autogen Instruments, Inc. | Integral biomolecule preparation device |
| JPH0678978B2 (ja) | 1990-05-25 | 1994-10-05 | スズキ株式会社 | 凝集パターン検出装置 |
| US5118191A (en) | 1990-05-29 | 1992-06-02 | The United States Of America As Represented By The Secretary Of The Air Force | High contrast switchable target discriminator |
| US7273749B1 (en) | 1990-06-04 | 2007-09-25 | University Of Utah Research Foundation | Container for carrying out and monitoring biological processes |
| US5114858A (en) | 1990-06-26 | 1992-05-19 | E. I. Du Pont De Nemours And Company | Cellular component extraction process in a disposable filtration vessel |
| DE4022163A1 (de) | 1990-07-12 | 1992-01-16 | Licentia Gmbh | Vorrichtung zum aus- u. einschleusen von kleingut aus einem transportband |
| EP0479448A3 (en) | 1990-10-02 | 1992-12-23 | Beckman Instruments, Inc. | Magnetic separation device |
| US5154888A (en) | 1990-10-25 | 1992-10-13 | Eastman Kodak Company | Automatic sealing closure means for closing off a passage in a flexible cuvette |
| JPH04223505A (ja) | 1990-12-25 | 1992-08-13 | Makome Kenkyusho:Kk | 磁気誘導装置 |
| US6436349B1 (en) | 1991-03-04 | 2002-08-20 | Bayer Corporation | Fluid handling apparatus for an automated analyzer |
| CA2050121C (en) | 1991-03-04 | 2005-04-19 | Glen A. Carey | Automated analyzer |
| US5186827A (en) | 1991-03-25 | 1993-02-16 | Immunicon Corporation | Apparatus for magnetic separation featuring external magnetic means |
| US5466574A (en) | 1991-03-25 | 1995-11-14 | Immunivest Corporation | Apparatus and methods for magnetic separation featuring external magnetic means |
| US5994056A (en) | 1991-05-02 | 1999-11-30 | Roche Molecular Systems, Inc. | Homogeneous methods for nucleic acid amplification and detection |
| US5366896A (en) | 1991-07-30 | 1994-11-22 | University Of Virginia Alumni Patents Foundation | Robotically operated laboratory system |
| JPH0528437U (ja) * | 1991-09-20 | 1993-04-16 | 株式会社ニツテク | 遠心分離装置 |
| IL102486A (en) | 1991-10-04 | 1997-11-20 | Orgenics Ltd | Method and apparatus for detection of nucleic acid sequences with a nucleic acid probe |
| US5632957A (en) | 1993-11-01 | 1997-05-27 | Nanogen | Molecular biological diagnostic systems including electrodes |
| EP0542422A1 (en) | 1991-11-12 | 1993-05-19 | General Atomics | Multi-well microtiter plate |
| US5196168A (en) | 1991-12-19 | 1993-03-23 | Eastman Kodak Company | Incubator with positioning device for slide elements |
| EP0572623A1 (en) | 1991-12-23 | 1993-12-08 | Baxter International Inc. | Centrifugal processing system with direct access drawer |
| US5589333A (en) | 1992-02-03 | 1996-12-31 | Thomas Jefferson University | In situ polymerase chain reaction |
| JPH05219933A (ja) | 1992-02-12 | 1993-08-31 | Shimadzu Corp | Dna検出装置 |
| ES2168275T3 (es) | 1992-04-06 | 2002-06-16 | Abbott Lab | Metodo y dispositivo de deteccion de acido nucleico o de analito por medio de una tecnica de reflexion interna total. |
| US5587128A (en) | 1992-05-01 | 1996-12-24 | The Trustees Of The University Of Pennsylvania | Mesoscale polynucleotide amplification devices |
| US5380487A (en) | 1992-05-05 | 1995-01-10 | Pasteur Sanofi Diagnostics | Device for automatic chemical analysis |
| AU681082B2 (en) | 1992-05-06 | 1997-08-21 | Gen-Probe Incorporated | Nucleic acid sequence amplification method, composition and kit |
| EP0642592A4 (en) | 1992-05-29 | 1997-01-02 | Abbott Lab | LIGASE CHAIN REACTION STARTING WITH RNA SEQUENCES. |
| US5612525A (en) | 1992-06-02 | 1997-03-18 | Elpatronic Ag | Apparatus for marking refillable containers, more especially plastic bottles |
| DK74692D0 (da) | 1992-06-03 | 1992-06-03 | Foss Electric As | Apparat |
| KR950701979A (ko) | 1992-06-08 | 1995-05-17 | 다니엘 엘. 캐시앙 | 단핵 세포로부터 핵산의 조제 방법(Preparation of Nucleic Acid from Mononuclear Cells) |
| GB9212164D0 (en) | 1992-06-09 | 1992-07-22 | Medical Res Council | Preparation of nucleic acids |
| JPH08501208A (ja) | 1992-06-12 | 1996-02-13 | ジェン−プローブ・インコーポレイテッド | 血液から核酸の製造 |
| US5612200A (en) | 1992-06-24 | 1997-03-18 | Gen-Probe Incorporated | Method and kit for destroying ability of nucleic acid to be amplified |
| JP3315439B2 (ja) | 1992-07-21 | 2002-08-19 | 住友電気工業株式会社 | 細胞特異的cDNAの分離法及びライブラリー作製法 |
| DE4229067A1 (de) | 1992-09-01 | 1994-03-03 | Bosch Gmbh Robert | Flexibles Transportsystem |
| US5897783A (en) | 1992-09-24 | 1999-04-27 | Amersham International Plc | Magnetic separation method |
| US5422271A (en) | 1992-11-20 | 1995-06-06 | Eastman Kodak Company | Nucleic acid material amplification and detection without washing |
| TW313588B (ko) | 1992-10-23 | 1997-08-21 | Eastman Kodak Co | |
| US5288463A (en) | 1992-10-23 | 1994-02-22 | Eastman Kodak Company | Positive flow control in an unvented container |
| JP2576417Y2 (ja) | 1992-10-27 | 1998-07-09 | 花王株式会社 | 物品保持具 |
| US5538849A (en) | 1992-12-29 | 1996-07-23 | Toyo Boseki Kabushiki Kaisha | Apparatus for automated assay of DNA probe and method for assaying nucleic acid in sample |
| AU687363B2 (en) | 1993-03-19 | 1998-02-26 | Ciba Corning Diagnostics Corp. | Luminometer |
| CA2122203C (en) | 1993-05-11 | 2001-12-18 | Melinda S. Fraiser | Decontamination of nucleic acid amplification reactions |
| JPH06327476A (ja) | 1993-05-21 | 1994-11-29 | Hitachi Ltd | 遺伝子解析装置 |
| US5351801A (en) | 1993-06-07 | 1994-10-04 | Board Of Regents - Univ. Of Nebraska | Automated laboratory conveyor system |
| US5350564A (en) | 1993-06-28 | 1994-09-27 | Baxter Diagnostics Inc. | Automated chemical analyzer with apparatus and method for conveying and temporary storage of sample tubes |
| EP0636413B1 (en) | 1993-07-28 | 2001-11-14 | PE Corporation (NY) | Nucleic acid amplification reaction apparatus and method |
| US5462881A (en) | 1993-08-23 | 1995-10-31 | Brandeis University | Temporary liquid storage cavities in a centrifuge tube |
| CA2129787A1 (en) | 1993-08-27 | 1995-02-28 | Russell G. Higuchi | Monitoring multiple amplification reactions simultaneously and analyzing same |
| US5397709A (en) | 1993-08-27 | 1995-03-14 | Becton Dickinson And Company | System for detecting bacterial growth in a plurality of culture vials |
| CA2130013C (en) | 1993-09-10 | 1999-03-30 | Rolf Moser | Apparatus for automatic performance of temperature cycles |
| ES2170083T3 (es) | 1993-09-17 | 2002-08-01 | Hoffmann La Roche | Analizador con un dispositivo para la separacion de microparticulas magneticas. |
| US5827653A (en) | 1993-09-23 | 1998-10-27 | Zeneca Limited | Nucleic acid detection with energy transfer |
| CA2650259C (en) | 1993-09-24 | 2010-01-12 | Abbott Laboratories | Capped-closure for a container |
| US5374395A (en) | 1993-10-14 | 1994-12-20 | Amoco Corporation | Diagnostics instrument |
| JPH0725953U (ja) * | 1993-10-20 | 1995-05-16 | 株式会社ニッテク | 遠心分離装置の搬送路 |
| US5525300A (en) | 1993-10-20 | 1996-06-11 | Stratagene | Thermal cycler including a temperature gradient block |
| ES2196034T3 (es) | 1993-10-21 | 2003-12-16 | Abbott Lab | Aparato y procedimiento de deteccion de un ligando blanco. |
| US5415839A (en) | 1993-10-21 | 1995-05-16 | Abbott Laboratories | Apparatus and method for amplifying and detecting target nucleic acids |
| DE69412632T2 (de) | 1993-10-21 | 1999-01-14 | Abbott Laboratories, Abbott Park, Ill. | Vorrichtung und verfahren zur überführung einer probe eines fluids |
| US6165778A (en) | 1993-11-02 | 2000-12-26 | Affymax Technologies N.V. | Reaction vessel agitation apparatus |
| US5925517A (en) | 1993-11-12 | 1999-07-20 | The Public Health Research Institute Of The City Of New York, Inc. | Detectably labeled dual conformation oligonucleotide probes, assays and kits |
| US5538848A (en) | 1994-11-16 | 1996-07-23 | Applied Biosystems Division, Perkin-Elmer Corp. | Method for detecting nucleic acid amplification using self-quenching fluorescence probe |
| JP2565653B2 (ja) | 1994-01-31 | 1996-12-18 | 照明 伊藤 | 分注用試験管供給装置 |
| DE69532953T8 (de) | 1994-02-01 | 2005-10-06 | IGENE, Inc. (n.d.Ges.d.Staates Delaware), Menlo Park | Molekularanalysator und verfahren zu seiner verwendung |
| US5388682A (en) | 1994-02-23 | 1995-02-14 | Peco Controls Corporation | Diverter for diverting articles transported along a conveyor belt |
| DE4412286A1 (de) | 1994-04-09 | 1995-10-12 | Boehringer Mannheim Gmbh | System zur kontaminationsfreien Bearbeitung von Reaktionsabläufen |
| US5504345A (en) | 1994-04-14 | 1996-04-02 | Hama Laboratories, Inc. | Dual beam sensor and edge detection system and method |
| US5602042A (en) | 1994-04-14 | 1997-02-11 | Cytyc Corporation | Method and apparatus for magnetically separating biological particles from a mixture |
| CA2148140C (en) | 1994-04-29 | 2010-08-10 | John W. Sutherland | Homogeneous method for assay of double-stranded nucleic acids using fluorescent dyes and kit useful therein |
| ATE198511T1 (de) | 1994-04-29 | 2001-01-15 | Perkin Elmer Corp | Verfahren und vorrichtung zur echtzeiterfassung der produkte von nukleinsäureamplifikation |
| JPH07301637A (ja) | 1994-04-29 | 1995-11-14 | Syst Sutatsuku:Kk | 検体搬送装置 |
| DE4415561A1 (de) | 1994-05-03 | 1995-11-09 | Piepenbrock Verpackungstech | Zuführ- und Verteilsystem für Gegenstände |
| JPH07333230A (ja) | 1994-06-06 | 1995-12-22 | Hitachi Ltd | 液体分注装置及びこれを用いた自動分析装置 |
| GB9411572D0 (en) | 1994-06-09 | 1994-08-03 | Amersham Int Plc | Magnetic bead precipitation method |
| DE4420732A1 (de) | 1994-06-15 | 1995-12-21 | Boehringer Mannheim Gmbh | Vorrichtung zur Behandlung von Nukleinsäuren aus einer Probe |
| JP3115501B2 (ja) | 1994-06-15 | 2000-12-11 | プレシジョン・システム・サイエンス株式会社 | 分注機を利用した磁性体の脱着制御方法及びこの方法によって処理される各種装置 |
| WO1995035390A1 (en) | 1994-06-22 | 1995-12-28 | Mount Sinai School Of Medicine Of The City University Of New York | Ligation-dependent amplification for the detection of infectious pathogens and abnormal genes |
| US5641658A (en) | 1994-08-03 | 1997-06-24 | Mosaic Technologies, Inc. | Method for performing amplification of nucleic acid with two primers bound to a single solid support |
| DE4429155A1 (de) | 1994-08-17 | 1996-02-22 | Hans Schiesl | Meßanordnung und Verfahren zur Durchführung luminometrischer Reihenanalysen sowie Mehrfachküvette zur Aufnahme von Flüssigkeitsproben hierfür |
| ZA956776B (en) | 1994-08-25 | 1996-03-20 | Akzo Nobel Nv | A process for making the product of a nucleic acid amplification reaction incapable of being a target for further amplification a diagnostic assay employing said process a kit and a container suitable for carrying out said process for assay |
| JP3296105B2 (ja) | 1994-08-26 | 2002-06-24 | ミノルタ株式会社 | 自律移動ロボット |
| JP3612092B2 (ja) | 1994-09-07 | 2005-01-19 | 株式会社日立製作所 | Dnaの分離・分取法及びその解析法 |
| JP2955613B2 (ja) | 1994-09-21 | 1999-10-04 | 株式会社日立製作所 | 分析装置 |
| JP3652424B2 (ja) | 1994-10-27 | 2005-05-25 | 日本政策投資銀行 | 自動分析装置及びその方法 |
| US5773268A (en) | 1994-11-09 | 1998-06-30 | Cedars-Sinai Medical Center | Chromosome 21 gene marker, compositions and methods using same |
| US5735587A (en) | 1995-02-06 | 1998-04-07 | Liconic Ag | Climatic cabinet, turntable and use of the turntable |
| DE19504457A1 (de) | 1995-02-10 | 1996-08-14 | Bosch Gmbh Robert | Modulare Fließfertigungsanlage |
| US5623415A (en) | 1995-02-16 | 1997-04-22 | Smithkline Beecham Corporation | Automated sampling and testing of biological materials |
| JP2899535B2 (ja) | 1995-02-20 | 1999-06-02 | 照明 伊藤 | 検体容器ホルダーおよびホルダー搬送装置 |
| ATE172890T1 (de) | 1995-02-21 | 1998-11-15 | Iqbal W Dr Siddiqi | Apparat und verfahren zum mischen und trennen durch verwendung von magnetischen teilchen |
| JP3630493B2 (ja) | 1995-03-20 | 2005-03-16 | プレシジョン・システム・サイエンス株式会社 | 分注機を利用した液体処理方法およびその装置 |
| US5578270A (en) | 1995-03-24 | 1996-11-26 | Becton Dickinson And Company | System for nucleic acid based diagnostic assay |
| US6919175B1 (en) | 1995-04-01 | 2005-07-19 | Roche Diagnostics Gmbh | System for releasing and isolating nucleic acids |
| DE19512368A1 (de) | 1995-04-01 | 1996-10-02 | Boehringer Mannheim Gmbh | System zur Freisetzung und Isolierung von Nukleinsäuren |
| JPH08286749A (ja) | 1995-04-12 | 1996-11-01 | Oki Electric Ind Co Ltd | 搬送経路自動変更型無人搬送車誘導システム |
| JP3519163B2 (ja) | 1995-04-13 | 2004-04-12 | 株式会社東芝 | 化学分析システム |
| DE19518343C2 (de) | 1995-05-18 | 1997-08-21 | Tech Resources Pty Ltd | Schmelzreduktionsverfahren mit erhöhter Effektivität |
| US5604130A (en) | 1995-05-31 | 1997-02-18 | Chiron Corporation | Releasable multiwell plate cover |
| AU709292B2 (en) | 1995-06-07 | 1999-08-26 | Gen-Probe Incorporated | Methods and kits for determining pre-amplification levels of a nucleic acid target sequence from post-amplification levels of product |
| DE19520398B4 (de) | 1995-06-08 | 2009-04-16 | Roche Diagnostics Gmbh | Magnetisches Pigment |
| US5856174A (en) | 1995-06-29 | 1999-01-05 | Affymetrix, Inc. | Integrated nucleic acid diagnostic device |
| JPH0921805A (ja) | 1995-07-06 | 1997-01-21 | Olympus Optical Co Ltd | 血液検査装置 |
| WO1997003348A1 (en) | 1995-07-13 | 1997-01-30 | Immunological Associates Of Denver | Self-contained device integrating nucleic acid extraction, amplification and detection |
| US5720377A (en) | 1995-07-14 | 1998-02-24 | Chiron Diagnostics Corporation | Magnetic conveyor system |
| EP2259070A3 (en) | 1995-07-31 | 2011-03-30 | Precision System Science Co., Ltd. | Container |
| US5730938A (en) | 1995-08-09 | 1998-03-24 | Bio-Chem Laboratory Systems, Inc. | Chemistry analyzer |
| CA2205057C (en) | 1995-09-12 | 2001-12-11 | Hugh V. Cottingham | Device and method for dna amplification and assay |
| JP3813648B2 (ja) | 1995-09-12 | 2006-08-23 | 高電工業株式会社 | 粒子反応パターン判定装置 |
| DE19534632A1 (de) | 1995-09-19 | 1997-03-20 | Boehringer Mannheim Gmbh | System zur Temperaturwechselbehandlung von Probenflüssigkeiten |
| JP3624199B2 (ja) | 1995-09-21 | 2005-03-02 | アークレイ株式会社 | 血液自動分析装置 |
| JP3574939B2 (ja) | 1995-09-21 | 2004-10-06 | アークレイ株式会社 | 血液自動分析装置 |
| KR19990067304A (ko) | 1995-11-03 | 1999-08-16 | 윌리암 제이. 버크 | 검정을 수행하기 위한 검정 시스템 및 방법 |
| US6277332B1 (en) | 1995-12-18 | 2001-08-21 | Solid Phase Sciences Corporation | Reaction plenum with magnetic separation and/or ultrasonic agitation |
| EP0876510B1 (en) | 1995-12-22 | 2008-05-07 | Dade Behring Marburg GmbH | Homogeneous amplification and detection of nucleic acids |
| WO1997027327A2 (en) | 1996-01-23 | 1997-07-31 | Rapigene, Inc. | Methods and compositions for detecting binding of ligand pair using non-fluorescent label |
| ATE191750T1 (de) | 1996-01-23 | 2000-04-15 | Rapigene Inc | Verfahren und zusammenstellungen zur sequenzbestimmung von nukleinsäuremolekulen |
| US5697409A (en) | 1996-02-21 | 1997-12-16 | Biomerieux Vitek, Inc. | Diluting and pipetting stations for sample testing machine |
| AU1811197A (en) | 1996-02-25 | 1997-09-10 | Precision System Science Co., Ltd. | Method for treating biopolymers, microorganisms or materials by using more than one type of magnetic particles |
| DE19610354C1 (de) | 1996-03-15 | 1997-11-20 | Innova Gmbh | Vorrichtung, Verfahren und Einrichtung zur Isolierung von Nukleinsäuren |
| US5857955A (en) | 1996-03-27 | 1999-01-12 | M-I Drilling Fluids L.L.C. | Centrifuge control system |
| DE69738687D1 (de) | 1996-04-12 | 2008-06-26 | Phri Properties Inc | Sonden, kits und assays |
| US5814276A (en) | 1996-04-25 | 1998-09-29 | Riggs; Robert C. | Automated blood sample processing system |
| ES2354902T3 (es) | 1996-06-04 | 2011-03-21 | University Of Utah Research Foundation | Aparato para llevar a cabo la pcr y monitorización de la reacción en tiempo real durante ciclos de temperatura. |
| JP3825501B2 (ja) | 1996-06-10 | 2006-09-27 | 吉郎 岡見 | 微小物質保持担体、その懸濁系、微小物質操作装置及び微小物質位置制御方法 |
| US7141213B1 (en) | 1996-07-05 | 2006-11-28 | Beckman Coulter, Inc. | Automated sample processing system |
| JP2001505648A (ja) * | 1996-07-05 | 2001-04-24 | ベックマン コールター インコーポレイテッド | 自動試料処理システム |
| US5866336A (en) | 1996-07-16 | 1999-02-02 | Oncor, Inc. | Nucleic acid amplification oligonucleotides with molecular energy transfer labels and methods based thereon |
| US5814008A (en) | 1996-07-29 | 1998-09-29 | Light Sciences Limited Partnership | Method and device for applying hyperthermia to enhance drug perfusion and efficacy of subsequent light therapy |
| DE59712905D1 (de) | 1996-08-05 | 2008-02-07 | Thermo Electron Led Gmbh | Objekt-lagervorrichtung, lagerstation und klimaschrank |
| JP3493910B2 (ja) | 1996-08-23 | 2004-02-03 | 株式会社日立製作所 | 自動化処理システム |
| JP2895000B2 (ja) | 1996-09-03 | 1999-05-24 | 山口日本電気株式会社 | 無人搬送車の誘導制御装置 |
| US5798263A (en) | 1996-09-05 | 1998-08-25 | Promega Corporation | Apparatus for quantifying dual-luminescent reporter assays |
| JPH10123136A (ja) | 1996-10-24 | 1998-05-15 | Nippon Tectron Co Ltd | 自動免疫分析装置 |
| US5882903A (en) | 1996-11-01 | 1999-03-16 | Sarnoff Corporation | Assay system and method for conducting assays |
| US6110676A (en) | 1996-12-04 | 2000-08-29 | Boston Probes, Inc. | Methods for suppressing the binding of detectable probes to non-target sequences in hybridization assays |
| US6049745A (en) | 1997-02-10 | 2000-04-11 | Fmc Corporation | Navigation system for automatic guided vehicle |
| US6558901B1 (en) | 1997-05-02 | 2003-05-06 | Biomerieux Vitek | Nucleic acid assays |
| US5786182A (en) | 1997-05-02 | 1998-07-28 | Biomerieux Vitek, Inc. | Dual chamber disposable reaction vessel for amplification reactions, reaction processing station therefor, and methods of use |
| AU738708B2 (en) | 1997-05-02 | 2001-09-27 | Gen-Probe Incorporated | Two-step hybridization and capture of a polynucleotide |
| US5846726A (en) | 1997-05-13 | 1998-12-08 | Becton, Dickinson And Company | Detection of nucleic acids by fluorescence quenching |
| US6171780B1 (en) | 1997-06-02 | 2001-01-09 | Aurora Biosciences Corporation | Low fluorescence assay platforms and related methods for drug discovery |
| US6586255B1 (en) | 1997-07-21 | 2003-07-01 | Quest Diagnostics Incorporated | Automated centrifuge loading device |
| US6300138B1 (en) | 1997-08-01 | 2001-10-09 | Qualigen, Inc. | Methods for conducting tests |
| US6597450B1 (en) | 1997-09-15 | 2003-07-22 | Becton, Dickinson And Company | Automated Optical Reader for Nucleic Acid Assays |
| US6043880A (en) | 1997-09-15 | 2000-03-28 | Becton Dickinson And Company | Automated optical reader for nucleic acid assays |
| JPH1194840A (ja) * | 1997-09-22 | 1999-04-09 | Hitachi Ltd | 搬送装置 |
| US6011508A (en) | 1997-10-31 | 2000-01-04 | Magnemotion, Inc. | Accurate position-sensing and communications for guideway operated vehicles |
| US5897090A (en) | 1997-11-13 | 1999-04-27 | Bayer Corporation | Puck for a sample tube |
| US6024204A (en) | 1997-11-14 | 2000-02-15 | Bayer Corporation | Conveyor system for clinical test apparatus |
| ATE250978T1 (de) | 1997-11-14 | 2003-10-15 | Gen Probe Inc | Arbeitsgerät zur analyse |
| US6374989B1 (en) | 1997-11-14 | 2002-04-23 | Bayer Corporation | Conveyor system for clinical test apparatus |
| AUPP058197A0 (en) | 1997-11-27 | 1997-12-18 | A.I. Scientific Pty Ltd | Pathology sample tube distributor |
| DE69839133T2 (de) | 1997-12-06 | 2009-02-05 | Invitrogen Corp., Carlsbad | Isolierung von Nukleinsäuren |
| DE69940490D1 (de) | 1998-05-01 | 2009-04-09 | Gen Probe Inc | Automatisches Isolierungs- und Amplifizierungsverfahren für eine Zielnukleinsäuresequenz |
| EP0953838A1 (en) | 1998-05-01 | 1999-11-03 | F. Hoffmann-La Roche Ag | Apparatus for simultaneously monitoring reactions taking place in a plurality of reaction vessels |
| US8337753B2 (en) | 1998-05-01 | 2012-12-25 | Gen-Probe Incorporated | Temperature-controlled incubator having a receptacle mixing mechanism |
| US6780617B2 (en) | 2000-12-29 | 2004-08-24 | Chen & Chen, Llc | Sample processing device and method |
| JP3930977B2 (ja) | 1998-07-31 | 2007-06-13 | 株式会社日立製作所 | 検体処理システム |
| US20100267771A1 (en) | 1998-08-04 | 2010-10-21 | Smithkline Beecham P.L.C. | Automated immunossay apparatus with flexible pick-up arm |
| US6528026B2 (en) | 1998-08-13 | 2003-03-04 | Symyx Technologies, Inc. | Multi-temperature modular reactor and method of using same |
| US6787112B1 (en) | 1998-08-13 | 2004-09-07 | Symyx Technologies, Inc. | Parallel reactor with internal sensing and method of using same |
| US6548026B1 (en) | 1998-08-13 | 2003-04-15 | Symyx Technologies, Inc. | Parallel reactor with internal sensing and method of using same |
| US6306658B1 (en) | 1998-08-13 | 2001-10-23 | Symyx Technologies | Parallel reactor with internal sensing |
| CN1245218A (zh) | 1998-08-19 | 2000-02-23 | 中国人民解放军军事医学科学院放射医学研究所 | 一种固相逐个碱基核酸分析方法和仪器 |
| AR020419A1 (es) | 1998-09-14 | 2002-05-08 | Webb Int Co Jerwis B | Sistema transportador impulsado magneticamente y metodo para hacerlo. |
| US6212448B1 (en) | 1998-11-13 | 2001-04-03 | Paul G. Angott | RF only guidance system |
| CH698240B1 (de) | 1998-11-17 | 2009-06-30 | Tecan Trading Ag | Verfahren zum Wägen von Proberöhren, Zuführeinrichtung sowie Arbeitsstation. |
| CA2356270A1 (en) * | 1998-12-22 | 2000-06-29 | Ronald M. Hubert | Automated centrifuge loading device |
| JP3855517B2 (ja) | 1999-01-27 | 2006-12-13 | 東ソー株式会社 | 多サンプル対応のスキャナー型蛍光検出装置 |
| US6633785B1 (en) | 1999-08-31 | 2003-10-14 | Kabushiki Kaisha Toshiba | Thermal cycler and DNA amplifier method |
| DE29917313U1 (de) | 1999-10-01 | 2001-02-15 | MWG-BIOTECH AG, 85560 Ebersberg | Vorrichtung zur Durchführung chemischer oder biologischer Reaktionen |
| US6429016B1 (en) | 1999-10-01 | 2002-08-06 | Isis Pharmaceuticals, Inc. | System and method for sample positioning in a robotic system |
| US6368872B1 (en) | 1999-10-22 | 2002-04-09 | Tecan Trading Ag | Apparatus and method for chemical processing |
| FI116487B (fi) | 1999-11-15 | 2005-11-30 | Thermo Electron Oy | Sovitelma ja menetelmä näyteputkien käsittelemiseksi laboratoriossa |
| US6370452B1 (en) | 1999-12-08 | 2002-04-09 | Samuel T. Pfister | Autonomous vehicle transit system |
| EP1242633B1 (en) | 1999-12-17 | 2011-01-12 | Gen-Probe Incorporated | Nucleic acid amplification and detection of mycobacterium species |
| CH695000A5 (de) | 2000-01-31 | 2005-10-31 | Swan Analytische Instr Ag | Verfahren zur Detektion von Serum und zur Erfassung seiner Qualitaet und Anordnungen hierzu. |
| JP2001221746A (ja) | 2000-02-03 | 2001-08-17 | Suntory Ltd | 液体充填用容器の撮像方法および装置 |
| ES2166310B1 (es) | 2000-02-08 | 2003-10-16 | Univ Valencia Politecnica | Dipositivo automatico y metodo de test catalitico multiple |
| DE10045521A1 (de) | 2000-03-31 | 2001-10-04 | Roche Diagnostics Gmbh | Nukleinsäureamplifikationen |
| US6377888B1 (en) | 2000-04-03 | 2002-04-23 | Disney Enterprises, Inc. | System for controlling movement of a vehicle |
| US6783934B1 (en) | 2000-05-01 | 2004-08-31 | Cepheid, Inc. | Methods for quantitative analysis of nucleic acid amplification reaction |
| JP2002005942A (ja) | 2000-06-23 | 2002-01-09 | Teruaki Ito | 検体処理ユニット及び検体処理システム |
| US6629028B2 (en) | 2000-06-29 | 2003-09-30 | Riken | Method and system of optical guidance of mobile body |
| US6635007B2 (en) | 2000-07-17 | 2003-10-21 | Thermo Iec, Inc. | Method and apparatus for detecting and controlling imbalance conditions in a centrifuge system |
| JP4873823B2 (ja) * | 2000-07-21 | 2012-02-08 | ベックマン コールター, インコーポレイテッド | 自動化学アナライザを統合するためのワークステーション |
| US6353774B1 (en) | 2000-09-22 | 2002-03-05 | Virtek Engineering Sciences Inc. | High precision vision guided positioning device |
| US7727479B2 (en) | 2000-09-29 | 2010-06-01 | Applied Biosystems, Llc | Device for the carrying out of chemical or biological reactions |
| JP2004512587A (ja) | 2000-10-16 | 2004-04-22 | 松下電器産業株式会社 | 無人搬送車、その運行制御システムおよび方法、および自走車 |
| US7352889B2 (en) | 2000-10-30 | 2008-04-01 | Ganz Brian L | Automated storage and retrieval device and method |
| GB0029617D0 (en) | 2000-12-05 | 2001-01-17 | Norchip As | Ligand detection method |
| JP3907959B2 (ja) | 2001-03-29 | 2007-04-18 | 日本電子株式会社 | 搬送ラックの停止機構 |
| ES2333697T3 (es) | 2001-04-05 | 2010-02-26 | Inpeco Ip Ltd. | Metodo para la gestion de sistemas de celula de trabajo basado en un sistema de gestion de la automatizacion. |
| US6692708B2 (en) | 2001-04-05 | 2004-02-17 | Symyx Technologies, Inc. | Parallel reactor for sampling and conducting in situ flow-through reactions and a method of using same |
| EP1270078B1 (en) | 2001-06-22 | 2004-09-15 | Jouan Italia S.R.L. | Apparatus and method for automatic loading and unloading of centrifuge buckets |
| US7217513B2 (en) | 2001-07-10 | 2007-05-15 | Massachusetts Institute Of Technology | Apparatus and method for isolating a nucleic acid from a sample |
| US6836692B2 (en) | 2001-08-09 | 2004-12-28 | Johnson & Johnson Vision Care, Inc. | System and method for intelligent lens transfer |
| US6919058B2 (en) | 2001-08-28 | 2005-07-19 | Gyros Ab | Retaining microfluidic microcavity and other microfluidic structures |
| US7473897B2 (en) | 2001-09-12 | 2009-01-06 | Tecan Trading Ag | System, method, and computer program for conducting optical transmission measurements and evaluating determined measuring variables |
| JP2005510676A (ja) | 2001-11-27 | 2005-04-21 | レニショウ パブリック リミテッド カンパニー | 可動サンプルホルダ |
| US7771659B2 (en) | 2002-01-19 | 2010-08-10 | Pvt Probenverteiltechnik Gmbh | Arrangement and method for the analysis of body fluids |
| US6770883B2 (en) | 2002-01-30 | 2004-08-03 | Beckman Coulter, Inc. | Sample level detection system |
| US9144583B2 (en) | 2002-03-29 | 2015-09-29 | Tissue Genesis, Inc. | Cell separation apparatus and methods of use |
| JP3740428B2 (ja) | 2002-03-29 | 2006-02-01 | アロカ株式会社 | 検体前処理システム |
| US7174836B2 (en) | 2002-04-05 | 2007-02-13 | Jervis B. Webb Company | Station control system for a driverless vehicle |
| ES2594333T3 (es) | 2002-05-17 | 2016-12-19 | Becton, Dickinson And Company | Sistema automatizado para aislar, amplificar y detectar una secuencia blanco de ácidos nucleicos |
| US7867444B2 (en) | 2002-05-30 | 2011-01-11 | Siemens Healthcare Diagnostics, Inc. | Lab cell centrifuging module |
| US7380654B2 (en) | 2002-07-26 | 2008-06-03 | Abbott Laboratories | Conveyor track drive |
| DE10242695A1 (de) | 2002-09-13 | 2004-03-18 | Sick Ag | Detektionssystem und Detektionsverfahren |
| US7850912B2 (en) | 2003-05-14 | 2010-12-14 | Dako Denmark A/S | Method and apparatus for automated pre-treatment and processing of biological samples |
| US8676383B2 (en) | 2002-12-23 | 2014-03-18 | Applied Biosystems, Llc | Device for carrying out chemical or biological reactions |
| US20070184548A1 (en) | 2002-12-23 | 2007-08-09 | Lim Hi Tan | Device for carrying out chemical or biological reactions |
| JP2004212216A (ja) | 2002-12-27 | 2004-07-29 | Teruaki Ito | 検体検知装置 |
| SE526913C2 (sv) | 2003-01-02 | 2005-11-15 | Arnex Navigation Systems Ab | Förfarande i form av intelligenta funktioner för fordon och automatiska lastmaskiner gällande kartläggning av terräng och materialvolymer, hinderdetektering och styrning av fordon och arbetsredskap |
| EP1441026B1 (de) | 2003-01-10 | 2012-10-17 | Liconic Ag | Automatisches Lagersystem und Klimaschrank mit automatischem Lagersystem |
| JP3675799B2 (ja) | 2003-01-31 | 2005-07-27 | 照明 伊藤 | 検体遠心分離システム |
| US20050158212A1 (en) * | 2004-01-15 | 2005-07-21 | Michael Yavilevich | Automated laboratory system and analytical module |
| FR2865330A1 (fr) | 2004-01-20 | 2005-07-22 | Ass Pour La Promotion Et Le De | Dispositif et procede de guidage dynamique par radiofrequence |
| US7028831B2 (en) | 2004-03-05 | 2006-04-18 | Beckman Coulter, Inc. | Magnetic specimen-transport system for automated clinical instrument |
| JP3839441B2 (ja) | 2004-03-22 | 2006-11-01 | 株式会社アイディエス | 試験管搬送路の搬送方向変換装置 |
| US20050220670A1 (en) | 2004-03-31 | 2005-10-06 | Thomas Palmieri | Multipath access system for use in an automated immunoassay analyzer |
| US7362258B2 (en) | 2004-03-31 | 2008-04-22 | Honda Motor Co., Ltd. | Transponder detection system using radio and light wave signals |
| JP3905094B2 (ja) | 2004-04-07 | 2007-04-18 | 株式会社アイディエス | 自走式検体ホルダの搬送システム |
| US20060020370A1 (en) | 2004-07-22 | 2006-01-26 | Shai Abramson | System and method for confining a robot |
| BRPI0515052A (pt) | 2004-08-27 | 2008-07-01 | Hatch Associates Pty Ltd | sistema de controle de uma instalação de tratamento de material |
| DE102004056655B4 (de) | 2004-11-23 | 2007-03-29 | Sarstedt Ag & Co. | Probenröhrchen zur Aufnahme von Körperflüssigkeit, insbesondere Blut |
| NL1027879C2 (nl) | 2004-12-24 | 2006-06-27 | Vanderlande Ind Nederland | Inrichting voor het selectief zijwaarts van een transporteur af geleiden van producten. |
| US7499581B2 (en) | 2005-02-10 | 2009-03-03 | Forhealth Technologies, Inc. | Vision system to calculate a fluid volume in a container |
| JP2008533989A (ja) | 2005-03-22 | 2008-08-28 | アイアールエム・リミテッド・ライアビリティ・カンパニー | 化合物をプロファイル解析するデバイス、システムおよび関連方法 |
| JP4281067B2 (ja) | 2005-04-11 | 2009-06-17 | 村田機械株式会社 | 搬送車システム |
| JP4490328B2 (ja) | 2005-05-13 | 2010-06-23 | アロカ株式会社 | 自動分注装置 |
| JP4621073B2 (ja) | 2005-05-23 | 2011-01-26 | 本田技研工業株式会社 | ロボット制御装置 |
| EP1907257A2 (en) | 2005-07-22 | 2008-04-09 | Magnemotion, Inc. | Guideway activated magnetic switching of vehicles |
| AU2006298739B2 (en) | 2005-09-26 | 2012-03-08 | Qiagen Gmbh | Apparatus for processing biological material |
| JP4375320B2 (ja) | 2005-10-27 | 2009-12-02 | 株式会社日立製作所 | 移動ロボット |
| JP4751192B2 (ja) | 2005-12-12 | 2011-08-17 | 本田技研工業株式会社 | 移動ロボット |
| US7991521B2 (en) | 2006-02-01 | 2011-08-02 | Jervis B. Webb Company | Variable path automated guided vehicle |
| US8124033B2 (en) | 2006-02-17 | 2012-02-28 | Agency, Science, Technology and Research | Apparatus for regulating the temperature of a biological and/or chemical sample and method of using the same |
| JP5168794B2 (ja) | 2006-02-21 | 2013-03-27 | 村田機械株式会社 | 搬送装置 |
| US7860589B2 (en) | 2006-03-02 | 2010-12-28 | Rockwell Automation Technologies, Inc. | Programmatic access to controller construct and variable names |
| JP4467534B2 (ja) | 2006-03-16 | 2010-05-26 | 富士通株式会社 | 障害物のある環境下で自律移動する移動ロボットおよび移動ロボットの制御方法。 |
| JP4635930B2 (ja) | 2006-03-27 | 2011-02-23 | 株式会社豊田自動織機 | 走行車の走行制御システム及び走行車 |
| JP4475247B2 (ja) | 2006-03-27 | 2010-06-09 | 株式会社豊田自動織機 | 走行車の走行制御システム |
| US8074578B2 (en) | 2006-07-05 | 2011-12-13 | Magnemotion, Inc. | Linear synchronous motor power control system and methods |
| JP2008032652A (ja) | 2006-07-31 | 2008-02-14 | Olympus Corp | 自動分析装置 |
| US7988933B2 (en) | 2006-09-01 | 2011-08-02 | Siemens Healthcare Diagnostics Inc. | Identification system for a clinical sample container |
| JP4336360B2 (ja) | 2006-09-20 | 2009-09-30 | 株式会社アイディエス | 検体前処理搬送装置 |
| WO2008043393A1 (en) | 2006-10-10 | 2008-04-17 | Inpeco Ip Ltd. | Conveyor of specimen containers with spur units in laboratory automation systems |
| EP3604553A3 (en) | 2006-11-03 | 2020-04-29 | Siemens Healthcare Diagnostics Inc. | Random access system for polymerase chain reaction testing |
| US8132837B2 (en) | 2006-12-04 | 2012-03-13 | Inpeco Ip Ltd. | Container transfer apparatus with automatic positioning compensation |
| JP4231522B2 (ja) | 2006-12-07 | 2009-03-04 | 株式会社アイディエス | 回転式分取分注装置 |
| US20080167817A1 (en) | 2007-01-06 | 2008-07-10 | Transbotics Corporation | Automated cargo loading systems and methods |
| US8357538B2 (en) | 2007-04-06 | 2013-01-22 | Qiagen Gaithersburg, Inc. | Automated assay and system |
| JP4553266B2 (ja) | 2007-04-13 | 2010-09-29 | 東京エレクトロン株式会社 | 熱処理装置、制御定数の自動調整方法及び記憶媒体 |
| DE102007025524B4 (de) | 2007-05-31 | 2010-07-29 | Khs Ag | Opto-elektrisches Erfassungssystem |
| US7688448B2 (en) | 2007-06-01 | 2010-03-30 | University Of Utah Research Foundation | Through-container optical evaluation system |
| US8874261B2 (en) | 2007-07-25 | 2014-10-28 | Deere & Company | Method and system for controlling a mobile robot |
| JP2009036511A (ja) | 2007-07-31 | 2009-02-19 | Hitachi High-Technologies Corp | 検体前処理システム |
| US8222048B2 (en) | 2007-11-05 | 2012-07-17 | Abbott Laboratories | Automated analyzer for clinical laboratory |
| ITMI20072254A1 (it) | 2007-11-30 | 2009-06-01 | Dachi S R L | "impianto di identificazione, trasporto ed indirizzamento automatico di campioni di materiale biologico" |
| JP5049769B2 (ja) * | 2007-12-25 | 2012-10-17 | 株式会社日立ハイテクノロジーズ | 自動分析装置および検体処理システム |
| EP2238560B1 (en) | 2008-01-28 | 2019-11-20 | Siemens Healthcare Diagnostics Inc. | Method and apparatus for auxiliary illumination for detecting an object |
| SM200800035B (it) | 2008-06-13 | 2011-01-19 | H T A S R L | Apparato preparatore di quantità controllate di liquido per la citometria |
| US7963900B2 (en) * | 2008-06-19 | 2011-06-21 | Siemens Healthcare Diagnostics Inc. | Centrifuge loading process within an automated laboratory system |
| US8170271B2 (en) | 2008-06-25 | 2012-05-01 | Jadak Llc | System and method for test tube and cap identification |
| EP2148205B1 (en) | 2008-07-25 | 2013-01-02 | F. Hoffmann-La Roche AG | A method and laboratory system for handling sample tubes and an image analysing unit |
| CN106408237A (zh) | 2008-08-08 | 2017-02-15 | 实耐宝公司 | 基于图像的库存控制系统 |
| US7832181B2 (en) | 2008-11-07 | 2010-11-16 | Delkor Systems, Inc. | Detection system |
| US9002096B2 (en) | 2009-01-06 | 2015-04-07 | Siemens Healthcare Diagnostics Inc. | Method and apparatus for determining a liquid level in a container using imaging |
| DE102009005252A1 (de) | 2009-01-14 | 2010-07-15 | Pvt Probenverteiltechnik Gmbh | Verfahren und Vorrichtung zur Bestimmung der Position einer Grenzfläche |
| WO2010132780A2 (en) | 2009-05-15 | 2010-11-18 | Biomerieux. Inc. | System and method for agitation of multiple specimen containers |
| JP5481122B2 (ja) | 2009-07-28 | 2014-04-23 | 株式会社日立ハイテクノロジーズ | 遠心分離装置 |
| SE534735C2 (sv) | 2009-09-04 | 2011-12-06 | Flexlink Components Ab | Bärarpuck |
| JP2011064537A (ja) | 2009-09-16 | 2011-03-31 | Sysmex Corp | 検体処理装置 |
| US8607961B2 (en) | 2010-03-17 | 2013-12-17 | Flexlink Components Ab | Locating station |
| CN103299196B (zh) | 2010-12-28 | 2015-06-24 | 株式会社日立高新技术 | 离心分离装置、具备离心分离装置的前处理系统以及该系统的控制方法 |
| EP2707726B1 (en) | 2011-05-13 | 2018-07-18 | Beckman Coulter, Inc. | System and method including laboratory product transport element |
| BR112014011035A2 (pt) | 2011-11-07 | 2017-06-13 | Beckman Coulter, Inc. | sistema de aliquotagem e fluxo de trabalho |
| BR112014011044A2 (pt) | 2011-11-07 | 2017-04-25 | Beckman Coulter Inc | amortecimento magnético para sistema de transporte de espécime |
| EP2776845B1 (en) | 2011-11-07 | 2020-11-04 | Beckman Coulter, Inc. | Robotic arm |
| EP2776844B1 (en) | 2011-11-07 | 2020-09-30 | Beckman Coulter, Inc. | Specimen container detection |
-
2012
- 2012-11-07 KR KR1020147014680A patent/KR20140092375A/ko not_active Application Discontinuation
- 2012-11-07 WO PCT/US2012/063930 patent/WO2013070755A2/en active Application Filing
- 2012-11-07 JP JP2014540219A patent/JP6320926B2/ja active Active
- 2012-11-07 ES ES12791363T patent/ES2729283T3/es active Active
- 2012-11-07 EP EP12791363.0A patent/EP2776843B1/en active Active
- 2012-11-07 US US13/671,361 patent/US9482684B2/en active Active
- 2012-11-07 BR BR112014011046-8A patent/BR112014011046A2/pt not_active IP Right Cessation
- 2012-11-07 CN CN201280066155.4A patent/CN104105969B/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102168826B1 (ko) * | 2019-11-29 | 2020-10-22 | 주식회사 한국바이오 셀프 | 검체 분리 장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013070755A9 (en) | 2013-09-26 |
| CN104105969A (zh) | 2014-10-15 |
| CN104105969B (zh) | 2016-10-12 |
| EP2776843A2 (en) | 2014-09-17 |
| US20130123089A1 (en) | 2013-05-16 |
| JP6320926B2 (ja) | 2018-05-09 |
| BR112014011046A2 (pt) | 2017-06-13 |
| ES2729283T3 (es) | 2019-10-31 |
| EP2776843B1 (en) | 2019-03-27 |
| WO2013070755A2 (en) | 2013-05-16 |
| US9482684B2 (en) | 2016-11-01 |
| WO2013070755A3 (en) | 2013-11-21 |
| JP2015502841A (ja) | 2015-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20140092375A (ko) | 원심분리기 시스템 및 작업 흐름 | |
| KR102040996B1 (ko) | 로봇식 아암 | |
| EP2776848B1 (en) | System and method for transporting sample containers | |
| EP2776846B1 (en) | Aliquotter system and workflow | |
| JP5654048B2 (ja) | 検体前処理システムおよび遠心分離装置 | |
| US10048284B2 (en) | Sample container cap with centrifugation status indicator device | |
| JP7221997B2 (ja) | 自動分析器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Withdrawal due to no request for examination |