BR112014032693B1 - Conjunto de cartucho de grampos para uso com um grampeador cirúrgico - Google Patents
Conjunto de cartucho de grampos para uso com um grampeador cirúrgico Download PDFInfo
- Publication number
- BR112014032693B1 BR112014032693B1 BR112014032693-2A BR112014032693A BR112014032693B1 BR 112014032693 B1 BR112014032693 B1 BR 112014032693B1 BR 112014032693 A BR112014032693 A BR 112014032693A BR 112014032693 B1 BR112014032693 B1 BR 112014032693B1
- Authority
- BR
- Brazil
- Prior art keywords
- staple cartridge
- view
- staple
- staples
- thickness compensator
- Prior art date
Links
Images

















































































































































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/10—Surgical instruments, devices or methods, e.g. tourniquets for applying or removing wound clamps, e.g. containing only one clamp or staple; Wound clamp magazines
- A61B17/105—Wound clamp magazines
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00491—Surgical glue applicators
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/064—Surgical staples, i.e. penetrating the tissue
- A61B17/0643—Surgical staples, i.e. penetrating the tissue with separate closing member, e.g. for interlocking with staple
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/064—Surgical staples, i.e. penetrating the tissue
- A61B17/0644—Surgical staples, i.e. penetrating the tissue penetrating the tissue, deformable to closed position
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B17/07207—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously the staples being applied sequentially
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B17/07292—Reinforcements for staple line, e.g. pledgets
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B17/115—Staplers for performing anastomosis in a single operation
- A61B17/1155—Circular staplers comprising a plurality of staples
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/0682—Surgical staplers, e.g. containing multiple staples or clamps for applying U-shaped staples or clamps, e.g. without a forming anvil
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00004—(bio)absorbable, (bio)resorbable, resorptive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00305—Constructional details of the flexible means
- A61B2017/00314—Separate linked members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00323—Cables or rods
- A61B2017/00327—Cables or rods with actuating members moving in opposite directions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00526—Methods of manufacturing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00526—Methods of manufacturing
- A61B2017/0053—Loading magazines or sutures into applying tools
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00535—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated
- A61B2017/00561—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated creating a vacuum
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00743—Type of operation; Specification of treatment sites
- A61B2017/00818—Treatment of the gastro-intestinal system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00862—Material properties elastic or resilient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00884—Material properties enhancing wound closure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00889—Material properties antimicrobial, disinfectant
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00893—Material properties pharmaceutically effective
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00898—Material properties expandable upon contact with fluid
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00938—Material properties hydrophobic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00942—Material properties hydrophilic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/064—Surgical staples, i.e. penetrating the tissue
- A61B2017/0641—Surgical staples, i.e. penetrating the tissue having at least three legs as part of one single body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07228—Arrangement of the staples
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07235—Stapler heads containing different staples, e.g. staples of different shapes, sizes or materials
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07242—Stapler heads achieving different staple heights during the same shot, e.g. using an anvil anvil having different heights or staples of different sizes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07257—Stapler heads characterised by its anvil
- A61B2017/07264—Stapler heads characterised by its anvil characterised by its staple forming cavities, e.g. geometry or material
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07271—Stapler heads characterised by its cartridge
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07278—Stapler heads characterised by its sled or its staple holder
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
- A61B2017/07285—Stapler heads characterised by its cutter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2908—Multiple segments connected by articulations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
- A61B2017/2919—Handles transmission of forces to actuating rod or piston details of linkages or pivot points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
- A61B2017/2923—Toothed members, e.g. rack and pinion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2933—Transmission of forces to jaw members camming or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2933—Transmission of forces to jaw members camming or guiding means
- A61B2017/2936—Pins in guiding slots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2933—Transmission of forces to jaw members camming or guiding means
- A61B2017/2937—Transmission of forces to jaw members camming or guiding means with flexible part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320052—Guides for cutting instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Engineering & Computer Science (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
- Materials For Medical Uses (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Prostheses (AREA)
- Manufacture Of Porous Articles, And Recovery And Treatment Of Waste Products (AREA)
- Medicinal Preparation (AREA)
Abstract
GRAMPEADOR DE TECIDO TENDO UM COMPENSADOR DE ESPESSURA QUE INCORPORA UM AGENTE HIDROFÍLICO. A presente invenção refere-se a um conjunto de cartucho de grampos para uso com um grampeador cirúrgico. O conjunto tem um corpo do cartucho que tem uma porção de suporte com uma pluralidade de cavidades de grampo com aberturas. Há também uma pluralidade de grampos, sendo que ao menos uma porção de cada grampo é armazenada de modo removível dentro de uma cavidade de grampo. Cada um dos grampos é móvel entre uma posição não disparada e uma posição disparada e é deformável entre uma configuração não disparada e uma configuração disparada. O conjunto inclui também um compensador de espessura de tecido compressível configurado para ser capturado pelos grampos. O compensador de espessura de tecido compressível cobre ao menos parcialmente as aberturas das cavidades de grampo. O compensador de espessura de tecido compressível é configurado para assumir diferentes alturas comprimidas em diferentes grampos. O compensador de espessura de tecido compressível compreende uma espuma liofilizada que tem um agente hidrofílico embutido nela.
Description
[1] Esta é a continuação-em-parte do pedido de acordo com 35 U.S.C. §120 do pedido de patente US (END7100USNP) n°. de série 13/433.115, intitulado "Compensador de espessura de tecido que compreende cápsulas definindo um ambiente de baixa pressão"depositado em 28 de março de 2012, toda a revelação do qual está aqui incorporada, por referência.
[2] A presente invenção refere-se a instrumentos cirúrgicos e, em várias modalidades, a instrumentos de corte e grampeamento cirúrgicos e cartuchos de grampos portanto que são projetados para corte e grampo de tecido.
[3] As características e vantagens desta invenção, e a maneira de alcançá-las, se tornarão mais aparentes e a invenção em si será melhor compreendida por referência à seguinte descrição de modalidades da invenção, obtidas em conjunto com os desenhos em anexo, sendo que:
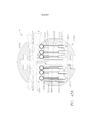
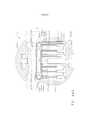
[4] A FIGURA 1 é uma vista em seção transversal de uma mo dalidade de instrumento cirúrgico;
[5] A FIGURA 1A é uma vista em perspectiva de uma modali dade de um cartucho de grampos implantável;
[6] As FIGURAS 1B a 1E ilustram porções de um atuador de extremidade que prende e grampeia o tecido com um cartucho de grampos implantável;
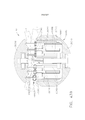
[7] a FIGURA 2 é uma vista lateral em seção transversal parcial de outro atuador de extremidade acoplado a uma porção de um instrumento cirúrgico com o atuador de extremidade suportando um cartucho de grampos cirúrgicos e com sua bigorna em uma posição aberta;
[8] a FIGURA 3 é uma outra vista lateral em seção transversal parcial do atuador de extremidade da FIGURA 2 em uma posição fechada;
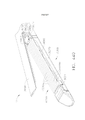
[9] a FIGURA 4 é uma outra vista lateral em seção transversal parcial do atuador de extremidade das FIGURAS 2 e 3 quando a barra de faca começa a avançar através do atuador de extremidade;
[10] a FIGURA 5 é uma outra vista lateral em seção transversal parcial do atuador de extremidade das FIGURAS 2 a 4 com a barra de faca parcialmente avançada através do mesmo;
[11] a FIGURA 6 é uma vista em perspectiva de uma modalida de de cartucho de grampos alternativo instalado em um dispositivo de corte e grampeamento cirúrgico;
[12] a FIGURA 7 é uma vista superior do cartucho de grampos cirúrgicos e de uma canaleta alongada do dispositivo mostrado na FIGURA 6;
[13] a FIGURA 8 é uma vista superior de outra modalidade de cartucho de grampos cirúrgicos instalado em uma canaleta alongada de um atuador de extremidade;
[14] a FIGURA 9 é uma vista inferior de uma bigorna;
[15] a FIGURA 10 é uma vista em perspectiva parcial de uma pluralidade de grampos formando uma porção de uma linha de grampos;
[16] a FIGURA 11 é uma outra vista em perspectiva parcial da linha de grampos da FIGURA 10 com os grampos da mesma depois de serem formados pelo contato com a bigorna do dispositivo cirúrgico de corte e grampeamento;
[17] a FIGURA 12 é uma vista em perspectiva parcial de gram pos alternativos formando uma porção de outra linha de grampos;
[18] a FIGURA 13 é uma vista em perspectiva parcial de gram pos alternativos formando uma porção de outra linha de grampos;
[19] a FIGURA 14 é uma vista em perspectiva parcial de gram pos alternativos formando uma porção de outra modalidade de linha de grampos;
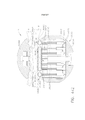
[20] a FIGURA 15 é uma vista em seção transversal de um atuador de extremidade que suporta um cartucho de grampos;
[21] a FIGURA 16 é uma vista em seção transversal da porção de canaleta alongada do atuador de extremidade da FIGURA 15 depois que a porção de corpo do cartucho de grampos implantável e os grampos foram removidos da mesma;
[22] a FIGURA 17 é uma vista em seção transversal de um atuador de extremidade suportando outro cartucho de grampos;
[23] as FIGURAS 18A a 18D mostram um diagrama da defor mação de um grampo cirúrgico posicionado no corpo de um cartucho de grampos retrátil de acordo com ao menos uma modalidade;
[24] a FIGURA 19A é um diagrama ilustrando um grampo posi cionado no corpo de um cartucho de grampos deformável;
[25] a FIGURA 19B é um diagrama ilustrando o corpo do cartu cho de grampos deformável da FIGURA 19A sendo deformado por uma bigorna;
[26] a FIGURA 19C é um diagrama ilustrando o corpo do cartu cho de grampos deformável da FIGURA 19A sendo deformado adicio-nalmente pela bigorna;
[27] a FIGURA 19D é um diagrama ilustrando o grampo da FI GURA 19A em uma configuração completamente formada e o cartucho de grampos deformável da FIGURA 19A em uma condição completamente deformada;
[28] a FIGURA 20 é um diagrama representando um grampo posicionado contra uma superfície do suporte do cartucho de grampos e ilustrando o movimento relativo potencial entre o grampo e a superfície;
[29] a FIGURA 21 é uma vista em seção transversal de uma su perfície do suporte do cartucho de grampos que compreende uma fenda, ou rebaixo, configurada para estabilizar a base do grampo da FIGURA 20;
[30] a FIGURA 22 é uma vista em seção transversal de um grampo que compreende uma coroa sobremoldada e uma fenda, ou rebaixo, configurada para receber uma porção da coroa de acordo com ao menos uma modalidade alternativa;
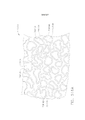
[31] a FIGURA 23 é uma vista superior de um cartucho de grampos de acordo com ao menos uma modalidade que compreende grampos inseridos no corpo do cartucho de grampos retrátil;
[32] a FIGURA 24 é uma vista em elevação do cartucho de grampos da FIGURA 23;
[33] a FIGURA 25 é uma vista em elevação de um cartucho de grampos de acordo com ao menos uma modalidade que compreende uma camada protetora ao redor dos grampos posicionados no corpo de um cartucho de grampos retrátil;
[34] a FIGURA 26 é uma vista em seção transversal do cartucho de grampos da FIGURA 25 ao longo da linha 26-26 na FIGURA 25;
[35] a FIGURA 27 é uma vista em elevação de um cartucho de grampos de acordo com ao menos uma modalidade que compreende grampos que se estendem ao menos parcialmente para fora do corpo de um cartucho de grampos retrátil e uma camada protetora ao redor do corpo do cartucho de grampos;
[36] a FIGURA 28 é uma vista em seção transversal do cartucho de grampos da FIGURA 27 ao longo da linha 28-28 na FIGURA 27;
[37] a FIGURA 29 é uma vista parcial separada de um cartucho de grampos de acordo com ao menos uma modalidade que compreende grampos ao menos parcialmente inseridos em um corpo de cartucho de grampos retrátil, sendo os grampos ao menos parcialmente posicionados em um espaço vazio da cavidade de grampos no corpo do cartucho de grampos;
[38] a FIGURA 30 é uma vista em seção transversal do cartucho de grampos da FIGURA 29 ao longo da linha 30-30 na FIGURA 29;
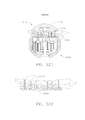
[39] a FIGURA 31 é uma vista em separação parcial de um car tucho de grampos de acordo com pelo menos uma modalidade;
[40] a FIGURA 32 é uma vista em separação parcial de um car tucho de grampos de acordo com ao menos uma modalidade que compreende grampos ao menos parcialmente inseridos em um corpo de cartucho de grampos retrátil e uma matriz de alinhamento conectando e alinhando os grampos uns em relação aos outros;
[41] a FIGURA 33 é uma vista em seção transversal do cartucho de grampos da FIGURA 32 ao longo da linha 33-33 na FIGURA 32;
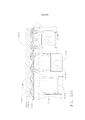
[42] a FIGURA 34 é uma vista em recorte parcial de uma cama da interna de um corpo de cartucho de grampo compressível;
[43] a FIGURA 35 é um diagrama ilustrando a camada interna da FIGURA 34 comprimida entre uma placa de transferência e uma placa de suporte;
[44] a FIGURA 36 é um diagrama ilustrando grampos sendo in seridos na camada interna comprimida da FIGURA 35;
[45] a FIGURA 37 é um diagrama da placa de suporte da FI GURA 35 sendo removida da camada interna;
[46] a FIGURA 38 é um diagrama de um subconjunto que com preende a camada interna da FIGURA 34 e os grampos da FIGURA 36 sendo inseridos em uma camada externa;
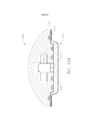
[47] a FIGURA 39 é um diagrama ilustrando a camada externa da FIGURA 38 sendo vedada para formar um cartucho de grampos selado;
[48] a FIGURA 40 é uma vista em seção transversal do cartucho de grampos selado da FIGURA 39;
[49] a FIGURA 41 é uma vista em seção transversal de um car tucho de grampos e uma canaleta de cartucho de grampos de acordo com ao menos uma modalidade;
[50] a FIGURA 42 é um diagrama ilustrando uma porção do car tucho de grampos da FIGURA 41 em um estado deformado;
[51] a FIGURA 43 é uma vista em elevação de um atuador de extremidade de um grampeador cirúrgico que compreende uma bigorna em uma posição aberta e um cartucho de grampos posicionado em uma canaleta de cartucho de grampos;
[52] a FIGURA 44 é uma vista em elevação do atuador de ex tremidade da FIGURA 43 ilustrando a bigorna em uma posição fechada e o cartucho de grampos comprimido entre a bigorna e a canaleta do cartucho de grampos;
[53] a FIGURA 45 é uma vista em elevação do atuador de ex tremidade da FIGURA 43 ilustrando o cartucho de grampos da FIGURA 43 posicionado na canaleta de cartucho de grampos em uma maneira alternativa;
[54] a FIGURA 46 é uma vista em seção transversal de um atuador de extremidade de um grampeador cirúrgico que compreende um cartucho de grampos compressível posicionado em uma canaleta de cartucho de grampos e um pedaço de material de reforço fixado a uma bigorna;
[55] a FIGURA 47 é uma vista em seção transversal do atuador de extremidade da FIGURA 46 ilustrando a bigorna em uma posição fechada;
[56] a FIGURA 48 é uma vista em seção transversal de uma modalidade alternativa de um atuador de extremidade de um grampe-adorcirúrgico que compreende um cartucho de grampos que compreende uma camada impermeável à água;
[57] a FIGURA 49 é uma vista em seção transversal de outra modalidade alternativa de um atuador de extremidade de um grampe-adorcirúrgico;
[58] a FIGURA 50 é uma vista em seção transversal de uma modalidade alternativa de um atuador de extremidade de um grampe-adorcirúrgico que compreende uma bigorna em degrau e um cartucho de grampos que compreende um corpo de cartucho em degrau;
[59] a FIGURA 51 é uma vista em seção transversal de outra modalidade alternativa de um atuador de extremidade de um grampe-adorcirúrgico;
[60] a FIGURA 52 é uma vista em seção transversal de uma modalidade alternativa de um atuador de extremidade de um grampe-adorcirúrgico que compreende superfícies inclinadas de corte de tecido;
[61] a FIGURA 53 é uma vista em seção transversal de uma ou tra modalidade alternativa de um atuador de extremidade de um gram-peadorcirúrgico que compreende superfícies inclinadas de corte de tecido;
[62] a FIGURA 54 é uma vista em seção transversal de uma modalidade alternativa de um atuador de extremidade de um grampe-adorcirúrgico que compreende um inserto de suporte configurado para suportar um cartucho de grampos;
[63] a FIGURA 55 é uma vista em seção transversal de uma modalidade alternativa de um atuador de extremidade de um grampe-adorcirúrgico que compreende um cartucho de grampos que compreende uma pluralidade de camadas compressíveis;
[64] a FIGURA 56 é uma vista em seção transversal de uma modalidade alternativa de um atuador de extremidade de um grampe-adorcirúrgico que compreende um cartucho de grampos que compre ende um corpo de cartucho compressível em degrau;
[65] a FIGURA 57 é uma vista em seção transversal de uma ou tra modalidade alternativa de um atuador de extremidade de um gram-peadorcirúrgico que compreende um cartucho de grampos que compreende um corpo de cartucho compressível em degrau;
[66] a FIGURA 58 é uma vista em seção transversal de uma modalidade alternativa de um atuador de extremidade de um grampe-adorcirúrgico que compreende um cartucho de grampos que compreende uma superfície curva de contato com o tecido;
[67] a FIGURA 59 é uma vista em seção transversal de uma modalidade alternativa de um atuador de extremidade de um grampe-adorcirúrgico que compreende um cartucho de grampos que tem uma superfície inclinada de contato com o tecido;
[68] a FIGURA 60 é uma vista em seção transversal de um car tucho de grampos compressível que compreende grampos e ao menos um medicamento armazenado em seu interior;
[69] a FIGURA 61 é um diagrama ilustrando o cartucho de grampos compressível da FIGURA 60 depois de ser comprimido e os grampos ali contidos serem deformados;
[70] a FIGURA 62 é uma vista em recorte de um cartucho de grampos de acordo com pelo menos uma modalidade;
[71] a FIGURA 63 é uma vista em seção transversal do cartucho de grampos da FIGURA 62.
[72] a FIGURA 64 é uma vista em perspectiva de um cartucho de grampos implantado de acordo com ao menos uma modalidade al-ternativa;
[73] a FIGURA 65 é uma vista em seção transversal do cartucho de grampos implantado da FIGURA 64;
[74] a FIGURA 66 é uma vista em perspectiva de uma modali dade alternativa de um cartucho de grampos que compreende elementos deformáveis estendendo-se a partir de uma camada externa do cartucho de grampos;
[75] a FIGURA 67 é uma vista em perspectiva de uma modali dade alternativa de um cartucho de grampos que compreende uma camada externa do cartucho de grampos sendo montado em uma camada interna;
[76] a FIGURA 68 é uma vista em seção transversal de uma modalidade alternativa de um cartucho de grampos que compreende uma pluralidade de grampos, uma camada compressível e uma camada de ataduras;
[77] a FIGURA 69 é uma vista em perspectiva da camada de ataduras da FIGURA 68;
[78] a FIGURA 70 é uma vista em perspectiva de uma atadura separada da camada de ataduras da FIGURA 68 e um grampo alinhado com um sulco na atadura;
[79] a FIGURA 71 é uma vista em perspectiva de duas ataduras conectadas da camada de ataduras da FIGURA 68;
[80] a FIGURA 72 é uma vista em perspectiva de uma armação de suporte de atadura da camada de ataduras da FIGURA 68 sendo removida das ataduras separadas;
[81] a FIGURA 73 é uma vista em perspectiva explodida de uma modalidade alternativa de um cartucho de grampos compressível que compreende grampos em seu interior e um sistema para impulsionar os grampos contra uma bigorna;
[82] a FIGURA 73A é uma vista em recorte parcial de uma mo dalidade alternativa do cartucho de grampos da FIGURA 73;
[83] a FIGURA 74 é uma vista em seção transversal do cartucho de grampos da FIGURA 73.
[84] a FIGURA 75 é uma vista em elevação de um deslizador configurado para atravessar o cartucho de grampos da FIGURA 73 e mover os grampos na direção da bigorna;
[85] a FIGURA 76 é um diagrama de um acionador de grampos que pode ser levantado na direção da bigorna pelo deslizador da FIGURA 75;
[86] a FIGURA 77 é uma vista separada de um cartucho de grampos, de acordo com ao menos uma modalidade alternativa, que compreende grampos posicionados nos acionadores de grampos;
[87] a FIGURA 78 é uma vista em seção transversal do cartucho de grampos da FIGURA 77 posicionado em uma canaleta de cartucho de grampos;
[88] a FIGURA 79 é uma vista em seção transversal do cartucho de grampos da FIGURA 77 ilustrando uma bigorna movida para uma posição fechada e grampos contidos no cartucho de grampos deformados pela bigorna;
[89] a FIGURA 80 é uma vista em seção transversal do cartucho de grampos da FIGURA 77 ilustrando os grampos movidos para cima na direção da bigorna;
[90] a FIGURA 81 é uma vista em perspectiva de uma modali dade alternativa de um cartucho de grampos que compreende correias conectando os lados flexíveis do cartucho de grampos;
[91] a FIGURA 82 é uma vista em perspectiva de um deslizador e conjunto de elementos de corte;
[92] a FIGURA 83 é um diagrama do deslizador e conjunto de elementos de corte da FIGURA 82 sendo utilizado para levantar os grampos do cartucho de grampos da FIGURA 77;
[93] a FIGURA 84 é um diagrama ilustrando um deslizador con figurado para engatar e levantar grampos na direção de uma bigorna e um sistema de bloqueio configurado para permitir seletivamente que o deslizador se mova em posição distal;
[94] as FIGURAS 85A a 85C ilustram o avanço de um grampo sendo inserido em uma coroa de grampos;
[95] a FIGURA 86 é uma vista em seção transversal de um car tucho de grampos que compreende um compartimento de suporte ou retentor;
[96] a FIGURA 87 é uma vista em seção transversal parcial de um cartucho de grampos compressível de acordo com ao menos uma modalidade alternativa;
[97] a FIGURA 88 é um diagrama ilustrando o cartucho de grampos da FIGURA 87 em uma condição implantada;
[98] a FIGURA 89 é uma vista em recorte parcial de um cartu cho de grampos compressível de acordo com ao menos uma modalidade alternativa;
[99] a FIGURA 90 é uma vista em seção transversal parcial do cartucho de grampos da FIGURA 89;
[100] a FIGURA 91 é um diagrama ilustrando o cartucho de grampos da FIGURA 89 em uma condição implantada;
[101] a FIGURA 92 é uma vista em seção transversal parcial de um cartucho de grampos deformável de acordo com ao menos uma modalidade alternativa;
[102] a FIGURA 93 é uma vista em recorte parcial de um cartu cho de grampos retrátil de acordo com ao menos uma modalidade que compreende uma pluralidade de elementos retráteis;
[103] a FIGURA 94 é uma vista em perspectiva de um elemento retrátil da FIGURA 93 em um estado não retrátil;
[104] a FIGURA 95 é uma vista em perspectiva do elemento re trátil da FIGURA 94 em um estado retrátil;
[105] a FIGURA 96A é uma vista em seção transversal parcial de um atuador de extremidade de um instrumento de grampeamento cirúrgico que compreende uma garra, uma canaleta de cartucho de grampos em posição oposta à garra e um cartucho de grampos posicionado na canaleta de cartucho de grampos, sendo que a garra compreende uma matriz de retenção a ela fixada;
[106] a FIGURA 96B é uma vista em seção transversal parcial do atuador de extremidade da FIGURA 96A ilustrando a garra sendo movida na direção da canaleta de cartucho de grampos, sendo que o cartucho de grampos é comprimido pela bigorna e a matriz de retenção, e um grampo que se estende ao menos parcialmente através do tecido em posição intermediária à matriz de retenção e ao cartucho de grampos;
[107] a FIGURA 96C é uma vista em seção transversal parcial do atuador de extremidade da FIGURA 96A ilustrando a garra em uma posição final e a matriz de retenção engatada com o grampo da FIGURA 96B;
[108] a FIGURA 96D é uma vista em seção transversal parcial do atuador de extremidade da FIGURA 96A ilustrando a garra e a canaleta de cartucho de grampos sendo afastadas do cartucho de grampos implantado e da matriz de retenção;
[109] a FIGURA 97 é uma vista em perspectiva de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa que compreende uma pluralidade de elementos de retenção configurados para engatar uma perna do prendedor que se estende através da abertura;
[110] a FIGURA 98 é uma vista em perspectiva de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa que compreende seis elementos de retenção;
[111] a FIGURA 99 é uma vista em perspectiva de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa que compreende oito elementos de retenção;
[112] a FIGURA 100 é uma vista em perspectiva de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa que compreende uma pluralidade de elementos de retenção configurados para engatar uma perna do prendedor que se estende através da abertura;
[113] a FIGURA 101 é uma vista em perspectiva de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa que compreende seis elementos de retenção;
[114] a FIGURA 102 é uma vista em perspectiva de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa que compreende oito elementos de retenção;
[115] a FIGURA 103 é uma vista em perspectiva de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa que compreende uma pluralidade de elementos de retenção que foram estampados a partir de uma folha de metal;
[116] a FIGURA 104 é uma vista em perspectiva de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa que compreende uma pluralidade de aberturas estendendo-se ao redor do perímetro das abertura de retenção;
[117] a FIGURA 105 é uma vista superior de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa;
[118] a FIGURA 106 é uma vista superior de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa;
[119] a FIGURA 107 é uma vista superior de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa;
[120] a FIGURA 108 é uma vista superior de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa;
[121] a FIGURA 109 é uma vista superior de uma abertura de retenção de uma matriz de retenção de acordo com ao menos uma modalidade alternativa;
[122] a FIGURA 110 é uma vista superior de uma abertura de retenção de uma matriz de retenção que compreende uma aba de retenção estendendo-se para dentro da abertura de retenção de acordo com ao menos uma modalidade;
[123] a FIGURA 111 é uma vista superior de uma abertura de retenção de uma matriz de retenção que compreende uma aba de retenção estendendo-se para dentro da abertura de retenção de acordo com ao menos uma modalidade alternativa;
[124] a FIGURA 112 é uma vista em perspectiva de um sistema de fixação que compreende uma pluralidade de grampos, uma matriz de retenção engatada com os grampos e uma matriz de alinhamento configurada para alinhar os grampos;
[125] a FIGURA 113 é uma vista em perspectiva da matriz de re tenção da FIGURA 112;
[126] a FIGURA 114 é uma vista em perspectiva da matriz de ali nhamento da FIGURA 112;
[127] a FIGURA 115 é uma vista superior parcial da matriz de retenção da FIGURA 112 engatada com os grampos da FIGURA 112;
[128] a FIGURA 116 é uma vista inferior parcial da matriz de re tenção da FIGURA 112 engatada com os grampos da FIGURA 112;
[129] a FIGURA 117 é uma vista em elevação parcial do sistema de fixação da FIGURA 112;
[130] a FIGURA 118 é uma vista em perspectiva parcial do sis tema de fixação da FIGURA 112;
[131] a FIGURA 119 é uma vista em seção transversal parcial da matriz de retenção da FIGURA 112 engatada com os grampos da FIGURA 112;
[132] a FIGURA 120 é uma vista em seção transversal parcial do sistema de fixação da FIGURA 112;
[133] a FIGURA 121 é uma vista em perspectiva do sistema de fixação da FIGURA 112 que compreende, ainda, tampas protetoras montadas nas pernas dos grampos;
[134] a FIGURA 122 é uma vista em perspectiva inferior da dis posição do sistema de fixação da FIGURA 121;
[135] a FIGURA 123 é uma vista em perspectiva parcial da dis posição do sistema de fixação da FIGURA 121;
[136] a FIGURA 124 é uma vista em seção transversal parcial da disposição do sistema de fixação da FIGURA 121;
[137] a FIGURA 125 é uma vista em elevação de um atuador de extremidade de acordo com ao menos uma modalidade que compreende uma garra em uma posição aberta, uma matriz de retenção e uma pluralidade de tampas protetoras posicionadas na garra, e um cartucho de grampos posicionado em uma canaleta de cartucho de grampos;
[138] a FIGURA 126 é uma vista em elevação do atuador de ex tremidade da FIGURA 125 em uma posição fechada;
[139] a FIGURA 127 é uma vista em elevação do atuador de ex tremidade da FIGURA 125 em uma posição de disparo;
[140] a FIGURA 128 é uma vista em elevação da matriz de re tenção e das tampas protetoras da FIGURA 125 montadas no cartucho de grampos da FIGURA 125;
[141] a FIGURA 129 é uma vista em detalhe da disposição da FIGURA 128;
[142] a FIGURA 130 é uma vista em elevação do atuador de ex tremidade da FIGURA 125 ilustrando a garra em uma posição aberta com tecido mais delgado posicionado entre a matriz de retenção e o cartucho de grampos;
[143] a FIGURA 131 é uma vista em elevação do atuador de extremidade da FIGURA 125 ilustrando a garra em uma posição fechada contra o tecido mais delgado da FIGURA 130;
[144] a FIGURA 132 é uma vista em elevação do atuador de ex tremidade da FIGURA 125 ilustrando a garra em uma posição de disparo para capturar o tecido mais delgado da FIGURA 130 entre a matriz de retenção e o cartucho de grampos;
[145] a FIGURA 133 é uma vista em elevação da matriz de re tenção e das tampas protetoras da FIGURA 125 montadas no cartucho de grampos da FIGURA 125 com o tecido delgado da FIGURA 130 posicionado entre as mesmas;
[146] a FIGURA 134 é uma vista em detalhe da disposição da FIGURA 133;
[147] a FIGURA 135 é uma vista em seção transversal de uma tampa protetora posicionada sobre a ponta de uma perna do grampo de acordo com ao menos uma modalidade alternativa;
[148] a FIGURA 136 é uma vista em perspectiva de uma plurali dade de tampas protetoras inseridas em uma folha de material;
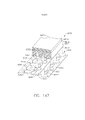
[149] a FIGURA 137 é uma vista em perspectiva de uma garra que compreende uma pluralidade de reentrâncias configurada para receber uma pluralidade de tampas protetoras;
[150] a FIGURA 138 é uma vista em detalhe de uma porção de uma garra que compreende uma lâmina cobrindo as tampas protetoras posicionada na garra da FIGURA 137;
[151] a FIGURA 139 uma vista em seção transversal de uma tampa protetora posicionada sobre uma ponta de uma perna de grampo de acordo com ao menos uma modalidade alternativa, sendo que a tampa protetora compreende uma superfície de formação interior;
[152] a FIGURA 140 é uma outra vista em seção transversal da tampa protetora da FIGURA 139 ilustrando a perna do grampo sendo deformada contra a superfície de formação;
[153] a FIGURA 141 é uma vista superior de uma modalidade alternativa de uma matriz de retenção que compreende uma pluralidade de elementos de matriz conectados;
[154] a FIGURA 142 é uma vista superior de uma modalidade alternativa de uma matriz de retenção que compreende uma pluralidade de elementos de matriz conectados;
[155] a FIGURA 143 é uma vista superior de uma modalidade alternativa de uma matriz de retenção que compreende uma pluralidade de elementos de matriz conectados;
[156] a FIGURA 144 é uma vista superior de uma modalidade alternativa de um conjunto de matrizes de retenção que compreende uma pluralidade de elementos de matriz conectados;
[157] a FIGURA 145 é uma vista superior de uma modalidade alternativa de uma matriz de retenção que compreende uma pluralida de de elementos de matriz conectados;
[158] a FIGURA 146 é uma vista explodida parcial de uma garra que compreende uma matriz de retenção que inclui uma tampa compressível;
[159] a FIGURA 147 é uma vista em detalhe da matriz de reten ção da FIGURA 146;
[160] a FIGURA 148 é uma vista em seção transversal parcial de um sistema de fixação que compreende uma matriz de retenção que inclui uma camada compressível e uma pluralidade de células encapsulando um ou mais medicamentos;
[161] a FIGURA 149 é um diagrama ilustrando pernas de grampo que perfuram as células da FIGURA 148 à medida que são engatadas com a matriz de retenção;
[162] a FIGURA 150 é uma vista em seção transversal parcial de um sistema de fixação que compreende uma matriz de retenção que inclui uma camada compressível;
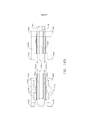
[163] a FIGURA 151 é uma vista em elevação de um conjunto de inserção do cartucho de prendedores que compreende um compartimento, um primeiro cartucho de prendedores e um segundo cartucho de prendedores;
[164] a FIGURA 152 é uma vista em elevação de um atuador de extremidade de um grampeador cirúrgico que compreende uma primeira garra e uma segunda garra, sendo a segunda garra ilustrada em uma configuração aberta;
[165] a FIGURA 153 é uma vista em elevação do atuador de ex tremidade da FIGURA 152 ilustrando a segunda garra em uma configuração fechada e o conjunto de inserção do cartucho de prendedores da FIGURA 151 sendo usado para carregar a primeira garra com o primeiro cartucho e a segunda garra com o segundo cartucho;
[166] a FIGURA 154 é uma vista em elevação do atuador de ex tremidade carregado da FIGURA 153 ilustrando o conjunto de inserção do cartucho removido do atuador de extremidade, a segunda garra em uma configuração aberta mais uma vez, e o tecido em uma posição intermediária entre a primeira garra e a segunda garra;
[167] a FIGURA 155 é uma vista em elevação do atuador de ex tremidade carregado da FIGURA 154 em uma configuração de disparo;
[168] a FIGURA 156 é uma vista em elevação do primeiro cartu cho e do segundo cartucho em uma condição implantada;
[169] a FIGURA 157 é uma vista em elevação do atuador de ex tremidade da FIGURA 152 ilustrando uma porção do primeiro cartucho ainda engatado com a primeira garra de acordo com ao menos uma modalidade;
[170] a FIGURA 158 é uma vista em elevação de uma modalida de alternativa de um conjunto de inserção do cartucho de prendedores que compreende um compartimento, um primeiro cartucho de prende dores e um segundo cartucho de prendedores;
[171] a FIGURA 159 é uma vista em elevação do conjunto de in serção do cartucho de prendedores da FIGURA 158 sendo usado para carregar uma primeira garra de um atuador de extremidade com o primeiro cartucho e uma segunda garra com o segundo cartucho;
[172] a FIGURA 160 é uma vista em seção transversal do atuador de extremidade carregado da FIGURA 159;
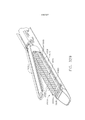
[173] a FIGURA 161 é uma vista em perspectiva de um grampe adorcirúrgico que compreende uma garra inferior e uma garra superior de acordo com ao menos uma modalidade ilustrada com porções do grampeador cirúrgico removidas;
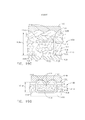
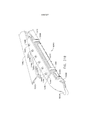
[174] a FIGURA 162 é uma vista em perspectiva do grampeador cirúrgico da FIGURA 161 com a garra superior removida;
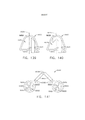
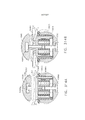
[175] a FIGURA 163 é uma vista em perspectiva de um sistema de bigornas deslizantes da garra superior do grampeador cirúrgico da FIGURA 161 que compreende uma primeira bigorna deslizante e uma segunda bigorna deslizante;
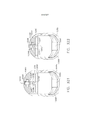
[176] a FIGURA 164 é uma vista da extremidade do sistema de bigornas deslizantes da FIGURA 163;
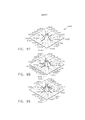
[177] a FIGURA 165 é uma vista superior do sistema de bigornas deslizantes da FIGURA 163;
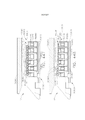
[178] a FIGURA 166 é um diagrama ilustrando o sistema de bi gornas deslizantes da FIGURA 163 em uma condição não disparada;
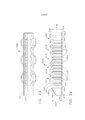
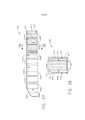
[179] a FIGURA 167 é um diagrama ilustrando a primeira bigorna deslizante do sistema de bigornas deslizantes da FIGURA 163 em uma posição de não disparo e grampos posicionados na mandíbula inferior em uma posição não disparada;
[180] a FIGURA 168 é um diagrama ilustrando os grampos na mandíbula inferior em uma configuração disparada e a primeira bigorna deslizante da FIGURA 167 sendo puxada de maneira proximal para deformar um primeiro grupo de pernas dos grampos;
[181] a FIGURA 169 é um diagrama ilustrando o primeiro grupo de grampos da FIGURA 168 deformados completamente;
[182] a FIGURA 170 é um diagrama ilustrando a segunda bigorna deslizante do sistema de bigornas deslizantes da FIGURA 163, sendo empurrada em posição distal para deformar um segundo grupo de pernas dos grampos;
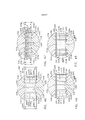
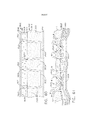
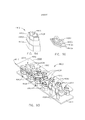
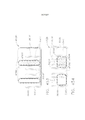
[183] a FIGURA 171 é uma vista em perspectiva parcial de uma bigorna que compreende uma pluralidade de bolsos de formação em ao menos uma modalidade;
[184] a FIGURA 172 é uma vista de extremidade em seção transversal da bigorna da FIGURA 171;
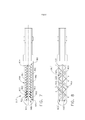
[185] a FIGURA 173 é um diagrama ilustrando uma primeira eta pa na fabricação dos bolsos de formação da FIGURA 171;
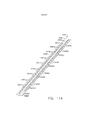
[186] a FIGURA 174 é um diagrama ilustrando uma segunda eta pa na fabricação dos bolsos de formação da FIGURA 171;
[187] a FIGURA 175 é uma vista superior da disposição dos bol sos de formação da bigorna da FIGURA 171;
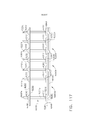
[188] a FIGURA 176 é um diagrama ilustrando uma primeira eta pa de um processo de fabricação para produzir uma bigorna;
[189] a FIGURA 177 é um diagrama ilustrando uma segunda eta pa no processo de fabricação da FIGURA 176;
[190] a FIGURA 178 é um diagrama ilustrando uma terceira eta pa no processo de fabricação da FIGURA 176.
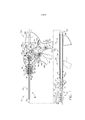
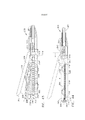
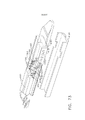
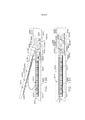
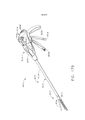
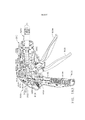
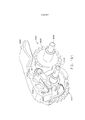
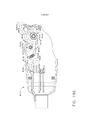
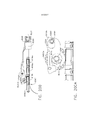
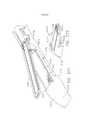
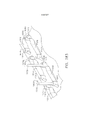
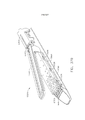
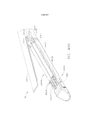
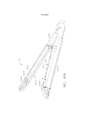
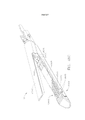
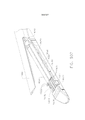
[191] a FIGURA 179 é uma vista em perspectiva esquerda ante rior de um instrumento de grampeamento e corte cirúrgico com uma porção de cabo que inclui um mecanismo de retração automática acionado por elo e um mecanismo de retração manual acionado por catraca;
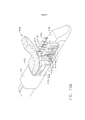
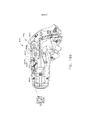
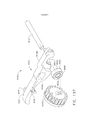
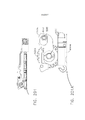
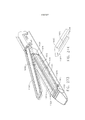
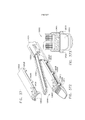
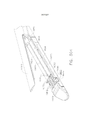
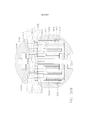
[192] a FIGURA 180 é uma vista em perspectiva direita posterior do instrumento de grampeamento e corte cirúrgico da FIGURA 179 com uma porção da haste alongada recortada e a metade direita da carcaça do compartimento do cabo removida para expor um mecanismo de retração de movimento automático de fim de disparo e um mecanismo de retração de disparo manual;
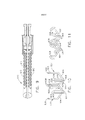
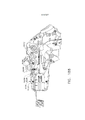
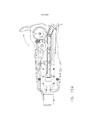
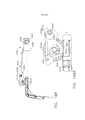
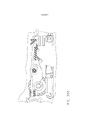
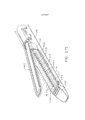
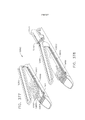
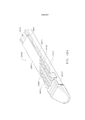
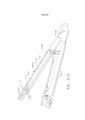
[193] a FIGURA 181 é uma vista desmontada em perspectiva di reita posterior da porção de cabo e uma haste alongada do instrumento de grampeamento e corte cirúrgico da FIGURA 179;
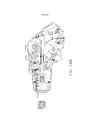
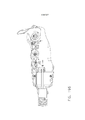
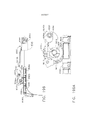
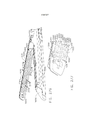
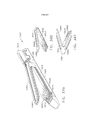
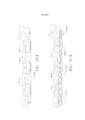
[194] a FIGURA 182 é uma vista em perspectiva posterior direita do instrumento de grampeamento e corte cirúrgico da FIGURA 31 com a metade direita da carcaça e as porções externas da porção implementada removidas para expor os mecanismos de fechamento e disparo em um estado inicial;
[195] a FIGURA 183 é uma vista do lado direito em elevação do instrumento de grampeamento e corte cirúrgico parcialmente desmontado da FIGURA 182;
[196] a FIGURA 184 é uma vista em perspectiva posterior direita do instrumento de grampeamento e corte cirúrgico parcialmente desmontado da FIGURA 182 com um mecanismo de fechamento fechado e fixado e o mecanismo de disparo de lingueta lateral completando um primeiro curso e com um mecanismo de retração manual removido para expor uma conexão distal da cremalheira conectada que desencadeia a retração automática do mecanismo de disparo;
[197] a FIGURA 185 é uma vista em perspectiva posterior direita do instrumento de grampeamento e corte cirúrgico parcialmente desmontado da FIGURA 183 com o mecanismo de disparo de lingueta lateral desengatado e a conexão distal se aproximando da retração automática;
[198] a FIGURA 186 e uma vista do lado esquerdo em elevação do instrumento de grampeamento e corte cirúrgico parcialmente desmontado da FIGURA 183 em um estado inicial do mecanismo do atuador de extremidade aberto e anti-backup engatado;
[199] a FIGURA 187 é uma vista detalhada pelo lado esquerdo da metade direita da carcaça e uma alavanca de liberação anti-retorno da porção de cabo da FIGURA 186;
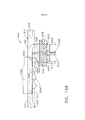
[200] a FIGURA 188 é uma vista em detalhe em elevação do lado esquerdo do instrumento de grampeamento e corte cirúrgico desmontado da FIGURA 179 com o disparador de fechamento fixado, o acionador de disparo realizando um curso final e a conexão distal posicionada para desencadear retração automática;
[201] a FIGURA 189 é um detalhe do lado esquerdo em elevação do instrumento de grampeamento e corte cirúrgico desmontado da FIGURA 188 imediatamente após a conexão distal ter sido acionada e travado a alavanca de liberação anti-backup para frente, permitindo a retração da cremalheira conectada;
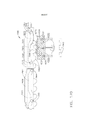
[202] a FIGURA 190 é uma vista em perspectiva à direita des montada das engrenagens intermediária e posterior e da alavanca de retração manual e da lingueta de catraca de um mecanismo de retração manual do instrumento de grampeamento e corte cirúrgico da FIGURA 179;
[203] a FIGURA 191 é uma vista em perspectiva direita do meca nismo de retração manual da FIGURA 190 com a alavanca de retração manual parcialmente recortada para expor uma engrenagem de catraca de diâmetro menor na engrenagem posterior que engata a lingueta de catraca;
[204] a FIGURA 192 é uma vista do lado esquerdo em elevação parcialmente desmontada de um instrumento de grampeamento e corte cirúrgico da FIGURA 179 com o mecanismo anti-backup engatado a uma cremalheira conectada completamente disparada que está desconectada de uma mola de tensão/compressão de combinação antes da ativação da alavanca de retração manual da FIGURA 190;
[205] a FIGURA 193 é uma vista do lado esquerdo em elevação parcialmente desmontada do instrumento de grampeamento e corte cirúrgico da FIGURA 192 com porções escondidas da alavanca de liberação anti-backup, engrenagem posterior, e alavanca de liberação de disparo manual mostrada em linha tracejada;
[206] a FIGURA 194 é uma vista do lado esquerdo em elevação parcialmente desmontado do instrumento de grampeamento e corte cirúrgico da FIGURA 193 após a ativação da alavanca de liberação de disparo manual ter retraído manualmente a cremalheira de conexão;
[207] a FIGURA 195 é uma vista do lado esquerdo em elevação parcialmente desmontada do instrumento de grampeamento e corte cirúrgico da FIGURA 194 com a cremalheira conectada omitida, representando a alavanca de liberação de disparo manual desengatando o mecanismo anti-backup;
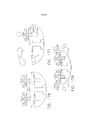
[208] a FIGURA 196 é uma vista em detalhe do lado esquerdo de uma alavanca de liberação anti-retorno alternativa e de um compartimento do cabo para o instrumento de grampeamento e corte cirúrgico da FIGURA 179;
[209] a FIGURA 197 é uma vista desmontada em perspectiva es querda da alavanca de liberação anti-backup alternativa, do eixo de engrenagem posterior e da roda excêntrica de retração automática da FIGURA 196;
[210] A FIGURA 198 é uma vista do lado direito em elevação do mecanismo de liberação anti-backup alternativo da FIGURA 196 com a cremalheira conectada em uma posição retraída e a alavanca de liberação anti-backup situada em posição proximal com a placa antibackup engatada à haste de descarga de prendedores;
[211] A FIGURA 198A é uma vista lateral direita em detalhe em elevação da engrenagem posterior, da roda excêntrica de retração automática e da conexão mais distal da FIGURA 198;
[212] A FIGURA 199 é uma vista do lado direito em elevação do mecanismo de liberação anti-backup da FIGURA 198 após um primeiro curso de disparo;
[213] A FIGURA 199A é uma vista do lado direito em detalhe em elevação da engrenagem posterior, da roda excêntrica de retração au-tomática e da segunda conexão da FIGURA 199;
[214] A FIGURA 200 é uma vista do lado direito em elevação do mecanismo de liberação anti-backup da FIGURA 199 após um segundo curso de disparo;
[215] A FIGURA 200A é uma vista do lado direito em detalhe em elevação da engrenagem posterior, da roda excêntrica de retração au-tomática e da terceira conexão da FIGURA 200;
[216] A FIGURA 201 é uma vista do lado direito em detalhe em elevação do mecanismo de liberação anti-backup da FIGURA 200 após um terceiro e último curso de disparo;
[217] A FIGURA 201A é uma vista do lado direito em detalhe em elevação da engrenagem posterior, da roda excêntrica de retração au-tomática e da quarta conexão mais proximal da FIGURA 201;
[218] A FIGURA 202 é uma vista do lado direito em elevação do mecanismo de liberação automático da FIGURA 201 após um curso de disparo adicional fazer com que a roda de came de retração automática deslize distalmente e trave a alavanca de liberação anti-retorno, desengatando o mecanismo anti-retorno;
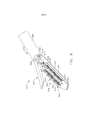
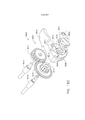
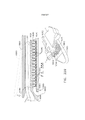
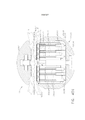
[219] A FIGURA 203 é uma vista em perspectiva anterior esquer da de um conjunto de aplicação de grampos aberto com uma meia porção direita de um cartucho de grampos substituível incluído em uma canaleta de grampos;
[220] A FIGURA 204 é uma vista em perspectiva explodida do conjunto de aplicação de grampos da FIGURA 203 com um cartucho de grampos substituível completo e uma configuração de haste não articulada;
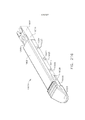
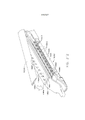
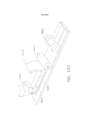
[221] A FIGURA 205 é uma vista em perspectiva de uma barra de disparo e corte em duas peças (feixe eletrônico ("E-beam")) do conjunto de aplicação de grampos da FIGURA 203;
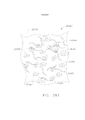
[222] A FIGURA 206 é uma vista em perspectiva de um trenó de corpo triangular de um cartucho de grampos de um conjunto de aplicação de grampos;
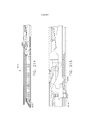
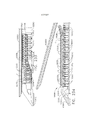
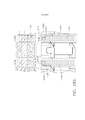
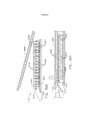
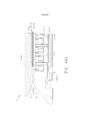
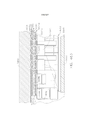
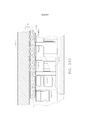
[223] A FIGURA 207 é uma vista do lado esquerdo em elevação tirada em seção transversal longitudinal ao longo de uma linha central 207-207 da estrutura de aplicação de grampos da FIGURA 203;
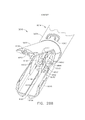
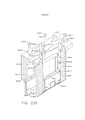
[224] A FIGURA 208 é uma vista em perspectiva da estrutura de aplicação de grampos aberta da FIGURA 203 sem o cartucho de grampos substituível, uma porção da canaleta de grampos próximo a um pino intermediário da barra de disparo e corte em duas peças, e sem uma porção distal de uma canaleta de grampos;
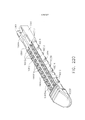
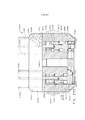
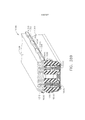
[225] A FIGURA 209 é uma vista frontal em elevação tirada em seção transversal ao longo da linha 209-209 do conjunto de aplicação de grampos da FIGURA 203 representando os acionadores de grampos internos do cartucho de grampos e porções da barra de disparo e corte em duas peças;
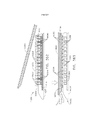
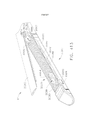
[226] A FIGURA 210 é uma vista do lado esquerdo em elevação tirada geralmente ao longo do eixo longitudinal da linha 207-207 de um conjunto de aplicação de grampos fechado da FIGURA 203 para incluir pontos de contato centrais entre o deslizador de corpo triangular e faca em duas peças, mas também deslocada lateralmente para mostrar grampos e acionadores de grampos dentro do cartucho de grampos;
[227] A FIGURA 211 é uma vista em detalhe do lado esquerdo em elevação do conjunto de aplicação de grampos da FIGURA 210 com a faca em duas peças ligeiramente mais retraída que o típico para substituição do cartucho de grampos;
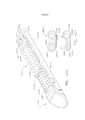
[228] A FIGURA 212 é uma vista em detalhe do lado esquerdo em elevação do conjunto de aplicação de grampos da FIGURA 211 com a faca em duas peças começando a disparar, correspondendo à configuração representada na FIGURA 210;
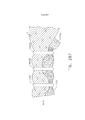
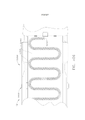
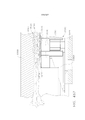
[229] A FIGURA 213 é uma vista em seção transversal do lado esquerdo em elevação do conjunto de aplicação de grampos fechada da FIGURA 210 após a barra de disparo e corte em duas peças ter disparado em posição distal;
[230] A FIGURA 214 é uma vista em seção transversal do lado esquerdo em elevação do conjunto de aplicação de grampos fechado da FIGURA 213 após o descarregamento do cartucho de grampos e retração da faca em duas peças;
[231] A FIGURA 215 é uma vista em detalhe em seção transver sal do lado esquerdo em elevação do conjunto de aplicação de grampos da FIGURA 214 com a faca em duas peças deixada cair em uma posição de travamento;
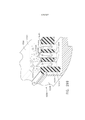
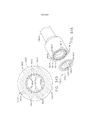
[232] A FIGURA 216 é uma vista em perspectiva de um cartucho de grampos compreendendo uma porção de suporte rígido e um com-pensador de espessura de tecido compressível para uso com um ins-trumento de grampeamento cirúrgico de acordo com pelo menos uma modalidade da invenção;
[233] A FIGURA 217 é uma vista parcialmente explodida do car tucho de grampos da FIGURA 216;
[234] A FIGURA 218 é uma vista completamente explodida do cartucho de grampos da FIGURA 216;
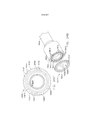
[235] A FIGURA 219 é outra vista explodida do cartucho de grampos da FIGURA 216 sem uma urdidura cobrindo o compensador de espessura de tecido;
[236] A FIGURA 220 é uma vista em perspectiva de um corpo do cartucho, ou porção de suporte, do cartucho de grampos da FIGURA 216;
[237] A FIGURA 221 é uma vista em perspectiva superior de um trenó móvel dentro do cartucho de grampos da FIGURA 216 para posicionar grampos do cartucho de grampos;
[238] A FIGURA 222 é uma vista em perspectiva inferior do trenó da FIGURA 221;
[239] A FIGURA 223 é uma vista em elevação do trenó da FI GURA 221;
[240] A FIGURA 224 é uma vista em perspectiva superior de um acionador configurado para suportar um ou mais grampos e para ser levantado para cima pelo trenó da FIGURA 221 para ejetar os grampos do cartucho de grampos;
[241] A FIGURA 225 é uma vista em perspectiva inferior do acionador da FIGURA 224;
[242] A FIGURA 226 é um invólucro configurado para circundar ao menos parcialmente um compensador de espessura de tecido compressível de um cartucho de grampos;
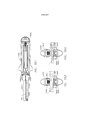
[243] A FIGURA 227 é uma vista em recorte parcial de um cartu cho de grampos compreendendo uma porção de suporte rígido e um compensador de espessura de tecido compressível ilustrado com grampos sendo movidos de uma posição não disparada para uma posição disparada durante uma primeira sequência;
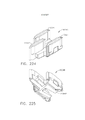
[244] A FIGURA 228 é uma vista em elevação do cartucho de grampos da FIGURA 227;
[245] A FIGURA 229 é uma vista em elevação em detalhe do car tucho de grampos da FIGURA 227;
[246] A FIGURA 230 é uma vista de extremidade em seção transversal do cartucho de grampos da FIGURA 227;
[247] A FIGURA 231 é uma vista inferior do cartucho de grampos da FIGURA 227;
[248] A FIGURA 232 é uma vista inferior em detalhe do cartucho de grampos da FIGURA 227;
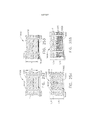
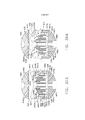
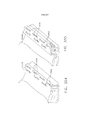
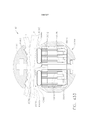
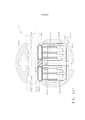
[249] A FIGURA 233 é uma vista em seção transversal longitudi nal de uma bigorna em uma posição fechada e um cartucho de grampos compreendendo uma porção de suporte rígido e um compensador de espessura de tecido compressível ilustrado com grampos sendo movidos de uma posição não disparada para uma posição disparada durante uma primeira sequência;
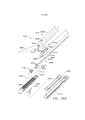
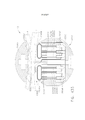
[250] A FIGURA 234 é outra vista em seção transversal da bigor na e do cartucho de grampos da FIGURA 233 ilustrando a bigorna em uma posição aberta após a sequência de disparo ter sido completada;
[251] A FIGURA 235 é uma vista em detalhe parcial do cartucho de grampos da FIGURA 233 ilustrando os grampos em uma posição não disparada;
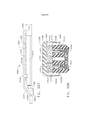
[252] A FIGURA 236 é uma vista em elevação em seção trans versal de um cartucho de grampos compreendendo uma porção de suporte rígido e um compensador de espessura de tecido compressível ilustrando os grampos em uma posição não disparada;
[253] A FIGURA 237 é uma vista em detalhe do cartucho de grampos da FIGURA 236;
[254] A FIGURA 238 é uma vista em elevação de uma bigorna em uma posição aberta e um cartucho de grampos compreendendo uma porção de suporte rígido e um compensador de espessura de te-cidocompressível ilustrando os grampos em uma posição não disparada;
[255] A FIGURA 239 é uma vista em elevação de uma bigorna em uma posição fechada e um cartucho de grampos compreendendo uma porção de suporte rígido e um compensador de espessura de tecido compressível ilustrando os grampos em uma posição não disparada e tecido capturado entre a bigorna e o compensador de espessura de tecido;
[256] A FIGURA 240 é uma vista em detalhe da bigorna e do car tucho de grampos da FIGURA 239;
[257] A FIGURA 241 é uma vista em elevação de uma bigorna em uma posição fechada e um cartucho de grampos compreendendo uma porção de suporte rígido e um compensador de espessura de te-cidocompressível ilustrando os grampos em uma posição não disparada ilustrando o tecido mais espesso posicionado entre a bigorna e o cartucho de grampos;
[258] A FIGURA 242 é uma vista em detalhe da bigorna e do car tucho de grampos da FIGURA 241;
[259] A FIGURA 243 é uma vista em elevação da bigorna e do cartucho de grampos da FIGURA 241 ilustrando tecido tendo diferentes espessuras posicionado entre a bigorna e o cartucho de grampos;
[260] A FIGURA 244 é uma vista em detalhe da bigorna e do car tucho de grampos da FIGURA 241, conforme ilustrado na FIGURA 243;
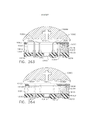
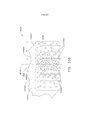
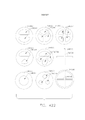
[261] A FIGURA 245 é um diagrama ilustrando um compensador de espessura de tecido que está compensando as diferentes espessuras de tecido capturadas dentro de diferentes grampos;
[262] A FIGURA 246 é um diagrama ilustrando um compensador de espessura de tecido aplicando uma pressão compressiva a um ou mais vasos que foram transectados por uma linha de grampos;
[263] A FIGURA 247 é um diagrama ilustrando uma circunstância na qual um ou mais grampos foram formados de forma inadequada
[264] A FIGURA 248 é um diagrama ilustrando um compensador de espessura de tecido que poderia compensar grampos formados de forma inadequada;
[265] A FIGURA 249 é um diagrama ilustrando um compensador de espessura de tecido posicionado em uma região de tecido cortada por múltiplas linhas de grampos;
[266] A FIGURA 250 é um diagrama ilustrando tecido capturado dentro de um grampo;
[267] A FIGURA 251 é um diagrama ilustrando tecido e um com pensador de espessura de tecido capturado dentro de um grampo;
[268] A FIGURA 252 é um diagrama ilustrando tecido capturado dentro de um grampo;
[269] A FIGURA 253 é um diagrama ilustrando tecido espesso e um compensador de espessura de tecido capturado dentro de um grampo;
[270] A FIGURA 254 é um diagrama ilustrando tecido delgado e um compensador de espessura de tecido capturado dentro de um grampo;
[271] A FIGURA 255 é um diagrama ilustrando tecido que tem uma espessura intermediária e um compensador de espessura de tecido capturado dentro de um grampo;
[272] A FIGURA 256 é um diagrama ilustrando tecido que tem uma outra espessura intermediária e um compensador de espessura de tecido capturado dentro de um grampo;
[273] A FIGURA 257 é um diagrama ilustrando tecido espesso e um compensador de espessura de tecido capturado dentro de um grampo;
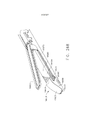
[274] A FIGURA 258 é uma vista em seção transversal parcial de um atuador de extremidade de um instrumento de grampeamento cirúrgico ilustrando uma barra de disparo e um trenó de disparo de grampos em uma posição retraída e não disparada;
[275] A FIGURA 259 é outra vista em seção transversal parcial do atuador de extremidade da FIGURA 258 ilustrando a barra de disparo e o trenó de disparo de grampos em uma posição parcialmente avançada;
[276] A FIGURA 260 uma vista em seção transversal do atuador de extremidade da FIGURA 258 ilustrando a barra de disparo em uma posição completamente avançada ou disparada;
[277] A FIGURA 261 uma vista em seção transversal do atuador de extremidade da FIGURA 258 ilustrando a barra de disparo em uma posição retraída após ser disparada e o trenó de disparo de grampos deixado na sua posição completamente disparada;
[278] A FIGURA 262 é uma vista em detalhe da barra de disparo na posição retraída da FIGURA 261;
[279] A FIGURA 263 é uma vista em seção transversal parcial de um atuador de extremidade de um instrumento de grampeamento cirúrgico que inclui um cartucho de grampos que compreende um compensador de espessura de tecido e grampos ao menos parcialmente posicionados nele;
[280] A FIGURA 264 é outra vista em seção transversal parcial do atuador de extremidade da FIGURA 263 ilustrando os grampos ao menos parcialmente movidos e/ou girados em relação a uma bigorna posicionada em lado oposto ao cartucho de grampos;
[281] A FIGURA 265 é uma vista em seção transversal parcial de um atuador de extremidade de um instrumento de grampeamento cirúrgico de acordo com pelo menos uma modalidade;
[282] A FIGURA 266 é uma vista em seção transversal parcial de um atuador de extremidade de acordo com pelo menos uma modalidade alternativa;
[283] A FIGURA 267 é uma vista em seção transversal parcial de um atuador de extremidade de acordo com outra modalidade alternativa;
[284] A FIGURA 268 é uma vista em perspectiva de um atuador de extremidade de um instrumento de grampeamento cirúrgico de acordo com pelo menos uma modalidade;
[285] A FIGURA 269 é uma vista em seção transversal parcial do atuador de extremidade da FIGURA 268 ilustrado em uma condição flexionada;
[286] A FIGURA 270 é uma vista em seção transversal parcial do atuador de extremidade da FIGURA 269 em uma condição liberada;
[287] A FIGURA 271 é uma vista em perspectiva de um atuador de extremidade que compreende uma meia compensadora da espessura do tecido;
[288] A FIGURA 272 é uma perspectiva posterior da meia com pensadora da espessura do tecido na FIGURA 271;
[289] A FIGURA 273 é uma vista em perspectiva de um atuador de extremidade compreendendo uma pluralidade de trilhos estendendo-se a partir de uma porção de suporte e um compensador de espessura de tecido que tem uma cavidade longitudinal definida nele;
[290] A FIGURA 274 é uma vista em perspectiva do compensa dor de espessura de tecido da FIGURA 273;
[291] A FIGURA 275 é uma vista em perspectiva de um atuador de extremidade que compreende uma pluralidade de dentes estendendo-se a partir de uma porção de suporte e um compensador de espessura de tecido engatado com isso;
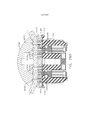
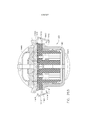
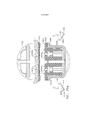
[292] A FIGURA 276 é uma vista em perspectiva de uma bigorna que compreende um arranjo de bolso de acordo com pelo menos uma modalidade;
[293] A FIGURA 277 é uma vista em detalhe parcial da bigorna da FIGURA 276;
[294] A FIGURA 278 é uma vista em seção transversal longitudi nal parcial da bigorna da FIGURA 276;
[295] A FIGURA 279 é uma vista em seção transversal da bigor na da FIGURA 276;
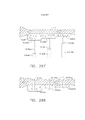
[296] A FIGURA 280 é uma vista em elevação de um grampo disparado que compreende uma configuração substancialmente com formato de B;
[297] A FIGURA 281 é uma vista em elevação de um grampo disparado compreendendo uma perna deformada para dentro e uma perna deformada para fora;
[298] A FIGURA 282 é uma vista em elevação de um grampo disparado compreendendo ambas as pernas formadas para fora;
[299] A FIGURA 283 é uma vista em perspectiva parcial de uma porção de suporte de um cartucho de grampos compreendendo guias de perna de grampo removíveis e/ou deslocáveis;
[300] A FIGURA 284 é uma vista em seção transversal parcial do cartucho de grampos da FIGURA 283 ilustrando grampos sendo dis-pensados do cartucho de grampos;
[301] A FIGURA 285 é uma vista em detalhe da vista em seção transversal da FIGURA 284 após o cartucho de grampos ter sido disparado;
[302] A FIGURA 286 é uma vista explodida de um cartucho de grampos que inclui um compensador de espessura de tecido compre-endendoespaços vazios definidos nele;
[303] A FIGURA 287 é um diagrama ilustrando o compensador de espessura de tecido da FIGURA 286 implantado contra o tecido;
[304] A FIGURA 288 é outro diagrama ilustrando o compensador de espessura de tecido da FIGURA 286 implantado contra o tecido;
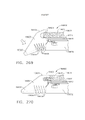
[305] A FIGURA 289 é uma vista em perspectiva em seção transversal de um cartucho de grampos compreendendo elementos de retenção laterais estendendo-se a partir de uma porção de suporte do mesmo, configurados para prender um compensador de espessura de tecido na posição;
[306] A FIGURA 290 uma vista em seção transversal do cartucho de grampos da FIGURA 289 sendo utilizado para grampear tecido;
[307] A FIGURA 291 é outra vista em seção transversal do cartu cho de grampos da FIGURA 289 ilustrando a porção de suporte sendo afastada do compensador de espessura de tecido implantado;
[308] A FIGURA 292 é uma vista em perspectiva em seção transversal de um cartucho de grampos compreendendo elementos de retenção laterais configurados para prender um compensador de espessura de tecido a uma porção de suporte;
[309] A FIGURA 293 uma vista em seção transversal do cartucho de grampos da FIGURA 292 sendo utilizado para grampear o tecido;
[310] A FIGURA 294 é outra vista em seção transversal do cartu cho de grampos da FIGURA 292 ilustrando a porção de suporte sendo afastada do compensador de espessura de tecido implantado;
[311] A FIGURA 295 é uma vista em detalhe em seção transver sal de um retentor prendendo um compensador de espessura de tecido a uma porção de suporte de um cartucho de grampos de acordo com pelo menos uma modalidade;
[312] A FIGURA 296 é uma vista em recorte parcial de um cartu cho de grampos compreendendo acionadores de grampos que têm diferentes alturas de acordo com pelo menos uma modalidade;
[313] A FIGURA 296A é um diagrama ilustrando os acionadores de grampos da FIGURA 296 e os grampos que têm diferentes alturas não disparadas, sendo suportados neles;
[314] A FIGURA 297 é um diagrama ilustrando um compensador de espessura de tecido compreendendo uma espessura diferente, acionadores de grampos que têm diferentes alturas, e grampos tendo di-ferentes alturas não formadas;
[315] A FIGURA 298 é um diagrama ilustrando os grampos e o compensador de espessura de tecido da FIGURA 297 implantado em um tecido;
[316] A FIGURA 299 é uma vista em seção transversal parcial de um cartucho de grampos compreendendo um compensador de espessura de tecido compreendendo uma espessura diferente de acordo com pelo menos uma modalidade;
[317] A FIGURA 300 uma vista em seção transversal de um atuador de extremidade de um instrumento de grampeamento cirúrgico em uma configuração aberta;
[318] A FIGURA 301 é uma vista em seção transversal do atuador de extremidade da FIGURA 300 ilustrado em uma configuração parcialmente disparada;
[319] A FIGURA 302 uma vista em seção transversal do atuador de extremidade da FIGURA 300 ilustrado em uma configuração reaberta;
[320] A FIGURA 303 uma vista em seção transversal de um atuador de extremidade de um instrumento de grampeamento cirúrgico compreendendo acionadores de grampos que têm diferentes alturas e uma superfície do plano de apoio contornada, de acordo com pelo menos uma modalidade;
[321] A FIGURA 304 uma vista em seção transversal de um atuador de extremidade de um instrumento de grampeamento cirúrgico compreendendo acionadores de grampos que têm diferentes alturas e uma superfície de suporte em degraus de acordo com pelo menos uma modalidade;
[322] A FIGURA 305 é uma vista em perspectiva de um cartucho de grampos sendo carregado em um efetor de um instrumento de grampeamento cirúrgico que usa um aplicador de cartucho de grampos;
[323] A FIGURA 306 é uma vista em perspectiva inferior do aplicador de cartucho de grampos da FIGURA 305;
[324] A FIGURA 307 é uma vista lateral do aplicador de cartucho de grampos da FIGURA 305 montado em um cartucho de grampos;
[325] A FIGURA 308 é uma vista em seção transversal do con junto da FIGURA 307;
[326] A FIGURA 309 é uma vista em perspectiva de uma estrutu ra do aplicador de cartucho de grampos que inclui ainda um compensador de espessura de tecido superior posicionado sobre a superfície de topo do aplicador de cartucho de grampos de acordo com pelo menos uma modalidade;
[327] A FIGURA 310 é uma vista explodida do compensador de espessura de tecido superior e do aplicador de cartucho de grampos da FIGURA 309;
[328] A FIGURA 310A é uma vista explodida de uma estrutura do aplicador de cartucho de grampos que compreende um elemento de tração configurado para remover um compensador de espessura de tecido superior aderido ao aplicador do cartucho de grampos;
[329] A FIGURA 311 é uma vista explodida parcial de uma estru tura do aplicador de cartucho de grampos de acordo com pelo menos uma modalidade alternativa;
[330] A FIGURA 312 é uma vista em perspectiva de uma estrutu ra do aplicador de cartucho de grampos compreendendo um compensador de espessura de tecido superior que inclui uma pluralidade de elementos de retenção estendendo-se a partir do mesmo e um cartucho de grampos compreendendo um compensador de espessura de tecido inferior;
[331] A FIGURA 313 é uma vista em elevação da estrutura do aplicador de cartucho de grampos da FIGURA 312 posicionada dentro de uma canaleta de cartucho de grampos e uma bigorna sendo fechada sobre a estrutura do aplicador de cartucho de grampos;
[332] A FIGURA 314 é uma vista em elevação da bigorna da FI GURA 313 em uma posição reaberta e o aplicador de cartucho de grampos da FIGURA 312 sendo removido do atuador de extremidade;
[333] A FIGURA 314A uma vista em seção transversal do tecido posicionado entre o compensador de espessura de tecido superior e o compensador de espessura de tecido inferior da FIGURA 312;
[334] A FIGURA 314B uma vista em seção transversal ilustrando o compensador de espessura de tecido superior e o compensador de espessura de tecido inferior grampeados ao tecido e cortados por um elemento de corte;
[335] A FIGURA 315 é um diagrama ilustrando um compensador de espessura de tecido sendo inserido em uma bigorna de acordo com pelo menos uma modalidade;
[336] A FIGURA 316 uma vista em seção transversal do com pensador de espessura de tecido da FIGURA 315;
[337] A FIGURA 317 é uma vista explodida de um compensador de espessura de tecido e uma bigorna de acordo com pelo menos uma modalidade alternativa;
[338] A FIGURA 318 é uma vista em perspectiva da estrutura do aplicador de cartucho de grampos compreendendo um compensador de espessura de tecido superior configurado para ser fixado a uma bigorna de acordo com pelo menos uma modalidade;
[339] A FIGURA 319 é uma vista em elevação da estrutura do aplicador de cartucho de grampos da FIGURA 318 posicionada dentro de uma canaleta de cartucho de grampos e uma bigorna sendo movida em direção ao compensador de espessura de tecido superior;
[340] A FIGURA 320 ilustra o aplicador de cartucho de grampos da FIGURA 318 sendo removido do atuador de extremidade após o compensador de espessura de tecido superior ter sido engatado com a bigorna;
[341] A FIGURA 321 é uma vista de extremidade em seção transversal da bigorna sendo movida em direção ao compensador de espessura de tecido superior da FIGURA 318;
[342] A FIGURA 322 é uma vista de extremidade em seção transversal da bigorna engatada com o compensador de espessura de tecido superior;
[343] A FIGURA 323 é uma vista em seção transversal de um atuador de extremidade de um instrumento de grampeamento cirúrgico compreendendo um cartucho de grampos que inclui um compensador de espessura de tecido segmentável fixado a uma porção de suporte do cartucho de grampos por meio de uma pluralidade de prendedores;
[344] A FIGURA 324 uma vista em seção transversal do atuador de extremidade da FIGURA 323 ilustrando um elemento de disparo em uma posição parcialmente disparada;
[345] A FIGURA 325 uma vista em seção transversal do atuador de extremidade da FIGURA 323 ilustrando a porção de suporte sendo afastada do compensador de espessura de tecido parcialmente implantado;
[346] A FIGURA 326 é uma vista em perspectiva parcial da por ção de suporte da FIGURA 323;
[347] A FIGURA 327 é uma vista em perspectiva de um trenó que dispensa grampos de acordo com pelo menos uma modalidade;
[348] A FIGURA 328 é uma vista em elevação do trenó da FI GURA 327;
[349] A FIGURA 329 é uma vista em perspectiva de um atuador de extremidade de um instrumento de grampeamento cirúrgico com-preendendo um cartucho de grampos que inclui um compensador de espessura de tecido e uma pluralidade de guias de grampo posicionadas no compensador de espessura de tecido;
[350] A FIGURA 330 é uma vista em seção transversal parcial do compensador de espessura de tecido e das guias de grampo da FI GURA 329 em uma configuração não disparada;
[351] A FIGURA 331 é uma vista em seção transversal parcial do compensador de espessura de tecido e das guias de grampo da FIGURA 329 em uma configuração disparada;
[352] A FIGURA 332 uma vista em seção transversal de um car tucho de grampos que compreende um compensador de espessura de tecido e uma porção de suporte de acordo com pelo menos uma mo-dalidade;
[353] A FIGURA 333 é uma vista em seção transversal parcial de um compensador de espessura de tecido, uma camada da guia de grampos, e um grampo em uma posição não disparada;
[354] A FIGURA 334 é uma vista em seção transversal parcial de um compensador de espessura de tecido, uma camada da guia de grampos, e um grampo em uma posição não disparada de acordo com pelo menos uma modalidade alternativa;
[355] A FIGURA 335 é uma vista em seção transversal parcial de um compensador de espessura de tecido, uma camada da guia de grampos, e um grampo em uma posição não disparada de acordo com pelo menos uma modalidade alternativa;
[356] A FIGURA 336 é uma vista em seção transversal parcial de um compensador de espessura de tecido, uma camada da guia de grampos, e um grampo em uma posição não disparada de acordo com pelo menos uma modalidade alternativa;
[357] A FIGURA 337 é uma vista em seção transversal parcial de um compensador de espessura de tecido, uma camada da guia de grampos, e um grampo em uma posição não disparada de acordo com pelo menos uma modalidade alternativa;
[358] A FIGURA 338 é uma vista em seção transversal parcial de um compensador de espessura de tecido, uma camada da guia de grampos, e um grampo em uma posição não disparada de acordo com pelo menos uma modalidade alternativa;
[359] A FIGURA 339 é uma vista em seção transversal parcial de um compensador de espessura de tecido, uma camada da guia de grampos, e um grampo em uma posição não disparada de acordo com pelo menos uma modalidade alternativa;
[360] A FIGURA 340 é uma vista em detalhe de uma região cir cundando uma ponta do grampo da FIGURA 339;
[361] A FIGURA 341 é uma vista em seção transversal parcial de um compensador de espessura de tecido, uma camada da guia de grampos, e um grampo em uma posição não disparada de acordo com pelo menos uma modalidade alternativa;
[362] A FIGURA 342 é uma vista em detalhe de uma região cir cundando uma ponta do grampo da FIGURA 341;
[363] A FIGURA 343 é uma vista em seção transversal parcial de um compensador de espessura de tecido, uma camada da guia de grampos, e um grampo em uma posição não disparada de acordo com pelo menos uma modalidade alternativa;
[364] A FIGURA 344 é uma vista em perspectiva de uma camada da guia de grampos e uma pluralidade de grampos em uma posição não disparada de acordo com pelo menos uma modalidade alternativa;
[365] A FIGURA 345 é uma vista de extremidade de um compen sador de espessura de tecido configurado para ser usado com um grampeador cirúrgico circular;
[366] A FIGURA 346 é uma vista em perspectiva do compensa dor de espessura de tecido e do grampeador cirúrgico circular da FIGURA 345;
[367] A FIGURA 347 é uma vista de extremidade de um compen sador de espessura de tecido configurado para ser usado com um grampeador cirúrgico circular de acordo com pelo menos uma modalidade alternativa;
[368] A FIGURA 348 é uma vista em perspectiva do compensa dor de espessura de tecido e do grampeador cirúrgico circular da FIGURA 347;
[369] A FIGURA 349 é uma vista de extremidade de um compen sador de espessura de tecido configurado para ser usado com um grampeador cirúrgico circular;
[370] A FIGURA 350 é uma vista de extremidade do compensa dor de espessura de tecido da FIGURA 349 em uma configuração par-cialmente expandida;
[371] A FIGURA 351 é uma vista em elevação de um instrumento de grampeamento cirúrgico compreendendo um cartucho de grampos de acordo com pelo menos uma modalidade;
[372] A FIGURA 352 é uma vista de extremidade do instrumento de grampeamento cirúrgico da FIGURA 351 posicionado em relação ao tecido;
[373] A FIGURA 353 é uma vista de extremidade do instrumento de grampeamento cirúrgico da FIGURA 351 compreendendo, ainda, um compensador de espessura de tecido posicionado entre o cartucho de grampos e o tecido;
[374] A FIGURA 354 é uma vista em perspectiva parcial de grampos implantados no tecido a partir do instrumento de grampeamento cirúrgico da FIGURA 351 sem um compensador de espessura de tecido;
[375] A FIGURA 355 é uma vista em perspectiva parcial de grampos implantados no tecido a partir do instrumento de grampeamento cirúrgico da FIGURA 351 com um compensador de espessura de tecido;
[376] A FIGURA 356 é uma vista em seção transversal parcial do atuador de extremidade do instrumento de grampeamento cirúrgico da FIGURA 351 compreendendo uma placa da bigorna em uma primeira posição;
[377] A FIGURA 357 é uma vista em seção transversal parcial do atuador de extremidade do instrumento de grampeamento cirúrgico da FIGURA 351 ilustrando a placa da bigorna da FIGURA 356 em uma segunda posição;
[378] A FIGURA 358 uma vista em seção transversal de um atuador de extremidade de um instrumento de grampeamento cirúrgico compreendendo uma cartucho de grampos que inclui um elemento de regulagem de vão;
[379] A FIGURA 359 é uma vista em perspectiva ilustrando um elemento de disparo cortando o elemento de regulagem de vão da FIGURA 358 no final do curso de disparo do elemento de disparo;
[380] A FIGURA 360 é uma vista em seção transversal de um atuador de extremidade de um instrumento de grampeamento cirúrgico compreendendo um cartucho de grampos que inclui uma ponta flexível;
[381] A FIGURA 361 uma vista em seção transversal do atuador de extremidade da FIGURA 360 ilustrando a ponta em uma configuração flexionada;
[382] A FIGURA 362 uma vista em seção transversal de um atuador de extremidade de um instrumento de grampeamento cirúrgico que compreende um cartucho de grampos que inclui uma porção deslizante;
[383] A FIGURA 363 uma vista em seção transversal do atuador de extremidade da FIGURA 362 ilustrando a porção deslizante deslizada em posição distal;
[384] A FIGURA 364 uma vista em seção transversal de um atuador de extremidade de um instrumento de grampeamento cirúrgico que compreende uma porção de suporte compreendendo uma superfície de suporte inclinada e um compensador de espessura de tecido compreendendo uma espessura diferente;
[385] A FIGURA 365 uma vista em seção transversal de um atuador de extremidade de um instrumento de grampeamento cirúrgico que compreende uma porção de suporte compreendendo uma superfície de suporte inclinada e um compensador de espessura de tecido compreendendo uma espessura uniforme;
[386] A FIGURA 366 é uma vista em perspectiva de um cartucho de grampos compreendendo um compensador de espessura de tecido que tem uma espessura diferente;
[387] A FIGURA 367 é uma vista de extremidade do cartucho de grampos da FIGURA 366;
[388] A FIGURA 368 é uma vista em perspectiva em seção transversal de um compensador de espessura de tecido compreendendo camadas longitudinais;
[389] A FIGURA 369 é uma vista em perspectiva em seção transversal de um compensador de espessura de tecido compreendendo uma pluralidade de camadas de acordo com pelo menos uma modalidade alternativa;
[390] A FIGURA 370 é uma vista em perspectiva de uma unidade de carregamento descartável compreendendo elementos de retenção configurados para prender de modo liberável um compensador de espessura de tecido a eles;
[391] A FIGURA 371 é uma vista em perspectiva de um compen sador de espessura de tecido que inclui elementos de retenção configurados para prender de modo liberável o compensador de espessura de tecido a uma unidade de carregamento descartável;
[392] A FIGURA 372 é uma vista em perspectiva do compensa dor de espessura de tecido da FIGURA 371 fixado a uma unidade de carregamento descartável;
[393] A FIGURA 373 é uma vista de extremidade da unidade de carregamento descartável da FIGURA 372;
[394] A FIGURA 374 é uma vista em perspectiva de um compen sador de espessura de tecido que inclui elementos de retenção configurados para prender de modo liberável o compensador de espessura de tecido a uma unidade de carregamento descartável;
[395] A FIGURA 375 é uma vista em perspectiva do compensa dor de espessura de tecido da FIGURA 374 fixado a uma unidade de carregamento descartável;
[396] A FIGURA 376 é uma vista de extremidade da unidade de carregamento descartável da FIGURA 375;
[397] A FIGURA 377 é uma vista em perspectiva de um compen sador de espessura de tecido que inclui um elemento de retenção con-figurado para prender de modo liberável o compensador de espessura de tecido a uma unidade de carregamento descartável;
[398] A FIGURA 378 é uma vista em perspectiva do compensa dor de espessura de tecido da FIGURA 377 fixado a uma unidade de carregamento descartável;
[399] A FIGURA 379 é uma vista em perspectiva de um aplicador do compensador de espessura de tecido posicionado dentro de um efetor de uma unidade de carregamento descartável;
[400] A FIGURA 380 é uma vista em perspectiva superior do aplicador do compensador de espessura de tecido da FIGURA 379;
[401] A FIGURA 381 é uma vista em perspectiva inferior do aplicador do compensador de espessura de tecido da FIGURA 379;
[402] A FIGURA 382 é uma vista em perspectiva de um aplicador do compensador de espessura de tecido posicionado dentro de um efetor de uma unidade de carregamento descartável de acordo com pelo menos uma modalidade alternativa;
[403] A FIGURA 383 é uma vista em perspectiva superior do aplicador do compensador de espessura de tecido da FIGURA 382;
[404] A FIGURA 384 é uma vista em perspectiva inferior do aplicador do compensador de espessura de tecido da FIGURA 382;
[405] A FIGURA 385 é uma vista em elevação de uma unidade de carregamento descartável que inclui uma garra pivotante configurada para suportar um cartucho de grampos;
[406] A FIGURA 386 uma vista em seção transversal de um car tucho de grampos compreendendo uma compensador de espessura de tecido fixado a uma porção de suporte do cartucho de grampos de acordo com pelo menos uma modalidade;
[407] A FIGURA 387 é uma vista em seção transversal de um cartucho de grampos compreendendo uma compensador de espessura de tecido fixado a uma porção de suporte do cartucho de grampos de acordo com pelo menos uma modalidade;
[408] A FIGURA 388 é uma vista em seção transversal de um cartucho de grampos compreendendo uma compensador de espessura de tecido fixado a uma porção de suporte do cartucho de grampos de acordo com pelo menos uma modalidade;
[409] A FIGURA 389 é uma vista em perspectiva do compensa dor de espessura de tecido da FIGURA 387;
[410] A FIGURA 390 é uma vista em perspectiva de um compen sador de espessura de tecido em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[411] A FIGURA 391 é uma vista em detalhe de material não te cido do compensador de espessura de tecido da FIGURA 390;
[412] A FIGURA 392 é uma vista em elevação representando o compensador de espessura de tecido da FIGURA 390 implantado contra o tecido e liberado do atuador de extremidade;
[413] A FIGURA 393 é uma vista em detalhe de um material não tecido de um compensador de espessura de tecido de acordo com ao menos uma modalidade;
[414] A FIGURA 394 é um esquemático representando aglome rações de fibras crimpadas aleatoriamente orientadas de acordo com ao menos uma modalidade;
[415] A FIGURA 395 é um esquemático representando uma aglomeração de fibras crimpadas aleatoriamente orientadas de acordo com ao menos uma modalidade;
[416] A FIGURA 396 é um esquemático representando uma dis posição de fibras crimpadas aleatoriamente orientadas de acordo com ao menos uma modalidade;
[417] A FIGURA 397 é um esquemático representando uma dis posição de fibras crimpadas aleatoriamente orientadas de acordo com ao menos uma modalidade;
[418] A FIGURA 398 é um esquemático representando uma dis posição de fibras crimpadas aleatoriamente orientadas de acordo com ao menos uma modalidade;
[419] A FIGURA 399 é uma vista em seção transversal plana de fibras enroladas em espiral em um compensador de espessura de tecido de acordo com ao menos uma modalidade;
[420] A FIGURA 399A é uma vista em seção transversal plana das fibras enroladas em espiral da FIGURA 399;
[421] A FIGURA 399B é uma vista em seção transversal detalha da do compensador de espessura de tecido da FIGURA 399;
[422] A FIGURA 400 é uma vista em perspectiva de um compen sador de espessura de tecido em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[423] A FIGURA 401 é um diagrama representando a deforma ção do compensador de espessura de tecido da FIGURA 400;
[424] A FIGURA 402 é um esquemático e uma sutura tecida para um compensador de espessura de tecido representando a sutura tecida em uma configuração carregada de acordo com ao menos uma modalidade;
[425] A FIGURA 403 é um esquemático da sutura tecida da FI GURA 402 representando a sutura tecida em uma configuração liberada;
[426] A FIGURA 404 é uma vista em planta de uma compensador de espessura de tecido que tem a sutura tecida da FIGURA 402 em um atuador de extremidade de um instrumento cirúrgico;
[427] A FIGURA 405 é uma vista em perspectiva de um compen sador de espessura de tecido em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[428] A FIGURA 406 é uma vista em planta parcial do compen sador de espessura de tecido da FIGURA 405;
[429] A FIGURA 407 é uma vista explodida do conjunto de cartu cho de prendedores do atuador de extremidade e do compensador de espessura de tecido da FIGURA 390;
[430] A FIGURA 408 é uma vista em seção transversal parcial do conjunto de cartucho de prendedores da FIGURA 407 representando prendedores não disparados, parcialmente disparados e disparados;
[431] A FIGURA 409 é uma vista em elevação do conjunto de cartucho de prendedores da FIGURA 407 representando um acionador disparando prendedores a partir das cavidades de grampo do conjunto de cartucho de prendedores para dentro do compensador de espessura de tecido;
[432] A FIGURA 410 é uma vista em detalhe do Conjunto de car tucho de prendedores da FIGURA 409;
[433] A FIGURA 411 é uma vista em elevação do compensador de espessura de tecido da FIGURA 390 e do tecido capturado pelos prendedores disparados;
[434] A FIGURA 412 é uma vista em elevação do compensador de espessura de tecido da FIGURA 390 e do tecido capturado pelos prendedores disparados;
[435] A FIGURA 413 é uma vista em perspectiva de um compen sador de espessura de tecido em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[436] A FIGURA 414 é um diagrama representando a deforma ção de um tubo deformável do compensador de espessura de tecido da FIGURA 413;
[437] A FIGURA 415 é uma vista em detalhe do tubo deformável do compensador de espessura de tecido da FIGURA 413;
[438] A FIGURA 416 é um diagrama representando a deforma ção de um tubo deformável de um compensador de espessura de tecido de acordo com ao menos uma modalidade;
[439] A FIGURA 417 é uma vista em elevação de um compensa dor de espessura de tecido compreendendo um elemento tubular implantado contra o tecido de acordo com ao menos uma modalidade;
[440] A FIGURA 418 é uma vista em elevação de um compensa dor de espessura de tecido compreendendo elementos tubulares im-plantados contra o tecido de acordo com ao menos uma modalidade;
[441] A FIGURA 419 é uma vista em perspectiva parcial de um tubo deformável compreendendo uma retícula tubular de acordo com ao menos uma modalidade;
[442] A FIGURA 420 é uma vista em elevação de um cordão tu bular do tubo deformável da FIGURA 419.
[443] A FIGURA 421 é uma vista em elevação do tubo deformável da FIGURA 419;
[444] A FIGURA 422 é uma vista em elevação de múltiplos cor dões tubulares do tubo deformável da FIGURA 419 de acordo com várias modalidades;
[445] A FIGURA 423 é uma vista em elevação da retícula da FI GURA 419 implantada contra o tecido;
[446] A FIGURA 424 é uma vista em perspectiva parcial de um tubo deformável de acordo com ao menos uma modalidade;
[447] A FIGURA 425 é uma vista em perspectiva parcial de um tubo deformável de acordo com ao menos uma modalidade;
[448] A FIGURA 426 é uma vista em perspectiva parcial de um tubo deformável de acordo com ao menos uma modalidade;
[449] A FIGURA 427 é uma vista em elevação do tubo deformável da FIGURA 426;
[450] A FIGURA 428 é uma vista em perspectiva parcial de um tubo deformável de acordo com ao menos uma modalidade;
[451] A FIGURA 429 é uma vista em perspectiva parcial de um tubo deformável de acordo com ao menos uma modalidade;
[452] A FIGURA 430 é uma vista em perspectiva parcial de um tubo deformável de acordo com ao menos uma modalidade;
[453] A FIGURA 431 é uma vista em perspectiva de um compen sador de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[454] A FIGURA 432 é uma vista em elevação de um elemento tubular do compensador de espessura de tecido da FIGURA 431;
[455] A FIGURA 433 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 431 representando o atuador de extremidade em uma configuração não apertada;
[456] A FIGURA 434 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 431 representando o atuador de extremidade em uma configuração apertada e disparada;
[457] A FIGURA 435 é uma vista em seção transversal elevacional de um compensador de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[458] A FIGURA 436 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 435 representando o atuador de extremidade em uma configuração apertada e disparada;
[459] A FIGURA 437 é uma vista em seção transversal elevacional de um compensador de espessura de tecido no atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[460] A FIGURA 438 é uma vista em seção transversal elevacional de um compensador de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[461] A FIGURA 439 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 438 representando o atuador de extremidade em uma configuração apertada e disparada;
[462] A FIGURA 440 é uma vista em perspectiva de um compen sador de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[463] A FIGURA 441 é uma vista em seção transversal elevacional de um compensador de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[464] A FIGURA 442 é uma vista em seção transversal elevacional de um compensador de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[465] A FIGURA 443 é uma vista em seção transversal elevacional de um compensador de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[466] A FIGURA 444 é uma vista em seção transversal elevacional de um compensador de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[467] A FIGURA 445 é uma vista plana parcial de um compensa dor de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[468] A FIGURA 446 é uma vista plana parcial de um compensa dor de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[469] A FIGURA 447 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 445 representando o atuador de extremidade em uma configuração não apertada;
[470] A FIGURA 448 é uma vista em seção transversal elevacional parcial do compensador de espessura de tecido e do atuador de extremidade da FIGURA 445 representando o atuador de extremidade em uma configuração apertada;
[471] A FIGURA 449 é uma vista em perspectiva de um compen sador de espessura de tecido em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[472] A FIGURA 450 é uma vista em elevação do compensador de espessura de tecido e do atuador de extremidade da FIGURA 449;
[473] A FIGURA 451 é uma vista em perspectiva do compensador de espessura de tecido e do atuador de extremidade da FIGURA 449 representando a bigorna do atuador de extremidade se movendo em direção a uma configuração apertada;
[474] A FIGURA 452 é uma vista elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 449 re-presentando o atuador de extremidade em uma configuração apertada;
[475] A FIGURA 453 e uma vista em seção transversal elevacional de elementos tubulares do compensador de espessura de tecido da FIGURA 449 em uma configuração não deformada;
[476] A FIGURA 454 e uma vista em seção transversal elevacional de elementos tubulares do compensador de espessura de tecido da FIGURA 449 em uma configuração deformada;
[477] A FIGURA 455 é uma vista em perspectiva de um compen sador de espessura de tecido em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[478] A FIGURA 456 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 455 representando o atuador de extremidade em uma configuração apertada;
[479] A FIGURA 457 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 455 representando o atuador de extremidade em uma configuração disparada e parcialmente não apertada;
[480] A FIGURA 458 é uma vista em perspectiva de um compen sador de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[481] A FIGURA 459 é uma vista em seção transversal elevacional de um compensador de espessura de tecido preso a uma bigorna de um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[482] A FIGURA 460 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 459 representando o atuador de extremidade em uma configuração apertada;
[483] A FIGURA 461 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 459 representando o atuador de extremidade em uma configuração disparada e parcialmente não apertada;
[484] A FIGURA 462 é uma vista detalhada do compensador de espessura de tecido e do atuador de extremidade da FIGURA 461;
[485] A FIGURA 463 é uma vista em seção transversal elevada de um compensador de espessura de tecido prensado em um atuador de extremidade de um instrumento cirúrgico representando o posicionamento de grampos por um deslizador disparador de grampos de acordo com ao menos uma modalidade;
[486] A FIGURA 464 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 463 representando o atuador de extremidade em uma configuração apertada;
[487] A FIGURA 465 é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 463 representando o atuador de extremidade em uma configuração disparada;
[488] A FIGURA 466 é uma vista em perspectiva de um compen sador de espessura de tecido em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[489] A FIGURA 467 é uma vista em perspectiva de um elemento tubular do compensador de espessura de tecido da FIGURA 466;
[490] A FIGURA 468 é uma vista em perspectiva do elemento tubular da FIGURA 467 separado entre uma primeira e uma segunda extremidade;
[491] A FIGURA 469 é uma vista em perspectiva do compensa dor de espessura de tecido da FIGURA 466 representando um elemento de corte separando o compensador de espessura de tecido e os grampos engatando o compensador de espessura de tecido;
[492] A FIGURA 470 é uma vista em perspectiva de uma arma ção configurada para fazer o compensador de espessura de tecido da FIGURA 466 de acordo com ao menos uma modalidade;
[493] A FIGURA 471 é uma vista em seção transversal elevada da armação da FIGURA 470 representando o compensador de espessura de tecido da FIGURA 466 curando na armação;
[494] A FIGURA 472 é uma vista em seção transversal elevada do compensador de espessura de tecido removido da armação da FIGURA 471 e preparado para aparamento por ao menos um instrumento de corte;
[495] A FIGURA 473 é uma vista em seção transversal elevada do compensador de espessura de tecido da FIGURA 472 após ao menos um instrumento de corte ter aparado o compensador de espessura de tecido;
[496] A FIGURA 474 é uma vista em seção transversal elevada do compensador de espessura de tecido formado na armação da FIGURA 471 representando tubos separáveis que têm várias geometrias de seção transversal;
[497] A FIGURA 475 é uma vista em perspectiva de um compen sador de espessura de tecido em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[498] A FIGURA 476 é uma vista em detalhe do compensador de espessura de tecido da FIGURA 475 de acordo com ao menos uma modalidade;
[499] A FIGURA 477 é uma vista em perspectiva parcial de um compensador de espessura de tecido de acordo com pelo menos uma modalidade;
[500] A FIGURA 478 é uma vista em perspectiva parcial de um compensador de espessura de tecido de acordo com pelo menos uma modalidade;
[501] A FIGURA 479A é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 475 representando o atuador de extremidade em uma configuração não apertada;
[502] A FIGURA 479B é uma vista em seção transversal elevacional do compensador de espessura de tecido e do atuador de extremidade da FIGURA 475 representando o atuador de extremidade em uma configuração apertada;
[503] A FIGURA 479C é uma vista em seção transversal em ele vação do compensador de espessura de tecido e do atuador de extremidade da FIGURA 475 que representa o atuador de extremidade em uma configuração pinçada e disparada;
[504] A FIGURA 479D é uma vista em seção transversal elevada do compensador de espessura de tecido da FIGURA 475 capturado em grampos disparados;
[505] A FIGURA 479E é u ma vista em seção transversal elevada do compensador de espessura de tecido da FIGURA 475 capturado em grampos disparados representando uma expansão adicional do compensador de espessura de tecido;
[506] A FIGURA 480 é uma vista em perspectiva da seção trans versal de um compensador de espessura de tecido em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[507] A FIGURA 481 é uma vista em elevação parcial do com pensador de espessura de tecido da FIGURA 480 capturado em um grampo disparado;
[508] A FIGURA 482 é uma vista em elevação de um tubo deformável do compensador de espessura de tecido da FIGURA 480;
[509] A FIGURA 483 é uma vista em elevação de um tubo deformável de acordo com ao menos uma modalidade;
[510] A FIGURA 484 é uma vista em perspectiva de seção trans versal do compensador de espessura de tecido da FIGURA 480;
[511] A FIGURA 485 é uma vista em perspectiva da seção trans versal de um compensador de espessura de tecido em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[512] A FIGURA 486 é uma vista em perspectiva de um compen sador de espessura de tecido de acordo com pelo menos uma modalidade;
[513] A FIGURA 487 é uma vista em seção transversal elevacional do compensador de espessura de tecido da FIGURA 486 representando um prendedor engatado com o tecido e com o compensador de espessura de tecido;
[514] A FIGURA 488 é uma vista em perspectiva de seção trans versal de um compensador de espessura de tecido de acordo com ao menos uma modalidade;
[515] A FIGURA 489 é uma vista em elevação de um compensa dor de espessura de tecido de acordo com pelo menos uma modalidade;
[516] A FIGURA 490 é uma vista em elevação de um compensa dor de espessura de tecido de acordo com pelo menos uma modalidade;
[517] A FIGURA 491 é uma vista em elevação de um compensador de espessura de tecido posicionado em um atuador de extremidade circular de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[518] A FIGURA 492 é uma vista em elevação de um compensa dor de espessura de tecido de acordo com pelo menos uma modalidade;
[519] A FIGURA 493 é uma vista em elevação de um compensa dor de espessura de tecido de acordo com pelo menos uma modalidade;
[520] A FIGURA 494 é uma vista em elevação de um compensa dor de espessura de tecido de acordo com pelo menos uma modalidade;
[521] A FIGURA 495 é uma vista em elevação de um compensa dor de espessura de tecido de acordo com pelo menos uma modalidade;
[522] A FIGURA 496 é uma vista em elevação de um compensa dor de espessura de tecido de acordo com pelo menos uma modalidade;
[523] A FIGURA 497 é uma vista em perspectiva parcial de um compensador de espessura de tecido de acordo com pelo menos uma modalidade;
[524] A FIGURA 498 é uma vista em perspectiva parcial de um compensador de espessura de tecido posicionado em um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade;
[525] A FIGURA 499 é uma vista em perspectiva parcial de um compensador de espessura de tecido com um prendedor posicionado nas aberturas ali presentes, de acordo com ao menos uma modalidade;
[526] A FIGURA 500 é uma vista em perspectiva parcial do compensador de espessura de tecido da FIGURA 498 representando o compensador de espessura de tecido em uma configuração não deformada;
[527] A FIGURA 501 é uma vista em perspectiva parcial do com pensador de espessura de tecido da FIGURA 498 representando o compensador de espessura de tecido em uma configuração parcialmente deformada;
[528] A FIGURA 502 é uma vista em perspectiva parcial do com pensador de espessura de tecido da FIGURA 498 representando o compensador de espessura de tecido em uma configuração deformada;
[529] A FIGURA 503 é uma vista em perspectiva de um compen sador de espessura de tecido de acordo com pelo menos uma modalidade;
[530] A FIGURA 504 é uma vista em perspectiva de um atuador de extremidade de um instrumento de grampeamento que compreende uma bigorna e um cartucho de grampos de acordo com ao menos uma modalidade;
[531] A FIGURA 505 é uma vista em seção transversal do atuador de extremidade da FIGURA 504 ilustrando grampos posicionados no cartucho de grampos em um estado não disparado e um compensador de espessura de tecido compreendendo um vaso vedado em um estado não perfurado, sendo que o vaso é mostrado com porções removidas para fins de ilustração;
[532] A FIGURA 506 uma vista em seção transversal do atuador de extremidade da FIGURA 504 ilustrando os grampos da FIGURA 505 em um estado ao menos parcialmente disparado e do vaso em um estado ao menos parcialmente perfurado;
[533] A FIGURA 507 é uma vista em perspectiva de um atuador de extremidade de um instrumento de grampeamento que compreende uma bigorna e um cartucho de grampos de acordo com ao menos uma modalidade;
[534] A FIGURA 508 é uma vista em seção transversal do atuador de extremidade da FIGURA 507 ilustrando grampos posicionados no cartucho de grampos em um estado não disparado e vasos vedados posicionados em um compensador de espessura de tecido do cartucho de grampos em um estado não perfurado, sendo que os vasos são mostrados com porções removidas para fins de ilustração;
[535] A FIGURA 509 uma vista em seção transversal do atuador de extremidade da FIGURA 507 ilustrando os grampos da FIGURA 508 em um estado ao menos parcialmente disparado e os vasos do cartucho de grampos em um estado ao menos parcialmente perfurado;
[536] A FIGURA 510 é uma vista em perspectiva de um atuador de extremidade de um instrumento de grampeamento que compreende uma bigorna e um vaso selado fixado à bigorna de acordo com ao menos uma modalidade alternativa, sendo que o vaso é mostrado com porções removidas para fins de ilustração;
[537] A FIGURA 511 uma vista em seção transversal do atuador de extremidade da FIGURA 510 ilustrando os grampos ao menos par-cialmente disparados de um cartucho de grampos e os vasos fixados à bigorna em um estado ao menos parcialmente perfurado;
[538] A FIGURA 512 uma vista em seção transversal do vaso fi xadoà bigorna da FIGURA 510 ilustrado em um estado expandido;
[539] A FIGURA 513 uma vista detalhada do vaso fixado à bigor na da FIGURA 512 ilustrado em um estado expandido;
[540] A FIGURA 514 ilustra um vaso estendendo-se em uma di reção transversal à fileira de grampos;
[541] A FIGURA 515 ilustra uma pluralidade de vasos estenden do-se em direções transversais à fileira de grampos;
[542] A FIGURA 516 uma vista em seção transversal de um cartucho de grampos de acordo com várias modalidades;
[543] A FIGURA 517 é uma vista em seção transversal parcial da FIGURA 516 em uma condição implantada;
[544] A FIGURA 518A é uma vista em perspectiva parcial de um compensador de espessura de tecido antes da expansão;
[545] A FIGURA 518B é uma vista em perspectiva parcial de um compensador de espessura da FIGURA 518 durante a expansão;
[546] A FIGURA 519 é uma vista em perspectiva parcial de um compensador de espessura de tecido que compreende uma composição dilatável por fluido de acordo com várias modalidades;
[547] A FIGURA 520 uma vista em seção transversal do tecido posicionado adjacente a um compensador de espessura de tecido de acordo com várias modalidades;
[548] A FIGURA 521 é uma vista em seção transversal parcial da FIGURA 520 após o cartucho de grampos ter sido disparado;
[549] A FIGURA 522 é um diagrama ilustrando o compensador de espessura de tecido da FIGURA 520 implantado em posição adjacente ao tecido;
[550] A FIGURA 523 é uma vista em perspectiva parcial de um compensador de espessura de tecido de acordo com várias modalidades;
[551] A FIGURA 524 é uma vista em perspectiva de uma mandí bula configurada para receber o compensador de espessura de tecido da FIGURA 523;
[552] A FIGURA 525 é uma vista em seção transversal parcial de um cartucho de grampos ilustrando grampos sendo dispensados do cartucho de grampos;
[553] A FIGURA 526 é uma vista em perspectiva de um compen sador de espessura de tecido superior e de um compensador de espessura de tecido inferior posicionados dentro de um efetor de uma unidade de carregamento descartável;
[554] A FIGURA 527A uma vista em seção transversal do com pensador inferior de espessura de tecido da FIGURA 526 sendo fabricado em um molde de acordo com várias modalidades;
[555] A FIGURA 527B uma vista em seção transversal de um compensador de espessura de tecido em três camadas sendo fabricado em um molde de acordo com várias modalidades;
[556] A FIGURA 528 uma vista em seção transversal de uma bi gorna que compreende um compensador de espessura de tecido que compreende um material de reforço de acordo com várias modalidades;
[557] A FIGURA 529 é uma vista em seção transversal de um tecido o compensador superior de espessura de tecido e o compensador inferior de espessura de tecido de acordo com várias modalidades;
[558] A FIGURA 530 é uma vista em seção transversal da FIGU RA 529 ilustrando grampos sendo dispensados do cartucho de grampos;
[559] A FIGURA 531 é uma vista em seção transversal da FIGU RA 529 após o cartucho de grampos ter sido disparado;
[560] A FIGURA 532A ilustra uma agulha configurada para forne cer um fluido para um compensador de espessura de tecido fixado a um cartucho de grampos de acordo com várias modalidades;
[561] A FIGURA 532B é uma vista em seção transversal de um cartucho de grampos que compreende um compensador de espessura de tecido configurado para receber a agulha da FIGURA 532A;
[562] A FIGURA 533 ilustra um método de fabricação de um compensador de espessura de tecido de acordo com várias modalidades;
[563] A FIGURA 534 é um diagrama e um método de formação de um compensador de espessura em expansão de acordo com várias modalidades;
[564] A FIGURA 535 ilustra uma micela que compreende um pre cursor de hidrogel; e
[565] A FIGURA 536 é um diagrama de um instrumento cirúrgico que compreende um compensador de espessura de tecido e fluidos que podem ser fornecidos para o compensador de espessura de tecido de acordo com várias modalidades.
[566] A FIGURA 537 é uma vista em perspectiva parcial de um compensador de espessura de tecido preso a uma bigorna de um atuador de extremidade de um instrumento cirúrgico de acordo com pelo menos uma modalidade.
[567] A FIGURA 538 é uma vista em perspectiva de um elemento tubular do compensador de espessura de tecido da FIGURA 537.
[568] A FIGURA 539 é uma vista em perspectiva do elemento tubular da FIGURA 538 que representa o elemento tubular separado em duas metades e em contato fluido com a substância hidrofílica no interior de cada metade.
[569] A FIGURA 540 é uma vista em perspectiva de uma metade do elemento tubular separado da FIGURA 539 que representa a expansão do elemento tubular separado.
[570] Caracteres de referência correspondentes indicam partes correspondentes em todas as várias vistas. As exemplificações aqui descritas ilustram certas modalidades da invenção, em uma forma, e tais exemplificações são não devem ser consideradas como limitadoras do escopo da invenção de qualquer maneira.
[571] O requerente do presente pedido também detém os direitos dos pedidos de patente US identificados abaixo que são aqui incorporados, cada um, por referência em suas respectivas totalidades: Pedido de patente US n° de série 12/894.311, intitulada SURGICAL INSTRUMENTS WITH CONFIGURABLE SHAFT SEGMENTS (n° do documento do procurador END6734USNP/100058); Pedido de patente US n° de série 12/894.340, intitulado SURGICAL STAPLE CARTRIDGES SUPPORTING NON-LINEARLY ARRANGED STAPLES AND SURGICAL STAPLING INSTRUMENTS WITH COMMON STAPLE-FORMING POCKETS (n° do documento do procurador END6735USNP/100059); Pedido de patente US n° de série 12/894.327, intitulado JAW CLOSURE ARRANGEMENTS FOR SURGICAL INSTRUMENTS (n° do documento do procurador END6736USNP/100060); Pedido de patente US n° de série 12/894.351, intitulado SURGICAL CUTTING AND FASTENING INSTRUMENTS WITH SE-PARATE AND DISTINCT FASTENER DEPLOYMENT AND TISSUE CUTTING SYSTEMS (n° do documento do procurador END6839 USNP/100524); Pedido de patente US n° de série 12/894.338, intitulado IMPLANTABLE FASTENER CARTRIDGE HAVING A NON-UNIFORM ARRANGEMENT (n° do documento do procurador END6840USNP/ 100525); Pedido de patente US n° de série 12/894.369, intitulado IMPLANTABLE FASTENER CARTRIDGE COMPRISING A SUPPORT RETAINER (n° do documento do procurador END6841USNP/100526); Pedido de patente US n° de série 12/894.312, intitulado IMPLANTABLE FASTENER CARTRIDGE COMPRISING MULTIPLE LAYERS (n° do documento do procurador END6842USNP/100527); Pedido de patente US n° de série 12/894.377, intitulado SELECTIVELY ORIENTABLE IMPLANTABLE FASTENER CARTRIDGE (n° do documento do procurador END6843USNP/100528); Pedido de patente US n° de série 12/894.339, intitulado SURGICAL STAPLING INSTRUMENT WITH COMPACT ARTICULA TION CONTROL ARRANGEMENT (n° do documento do procurador END6847USNP/100532); Pedido de patente US n° de série 12/894.360, intitulado SURGICAL STAPLING INSTRUMENT WITH A VARIABLE STAPLE FORMING SYSTEM (n° do documento do procurador END6848USNP/100533); Pedido de patente US n° de série 12/894.322, intitulado SURGICAL STAPLING INSTRUMENT WITH INTERCHANGEABLE STAPLE CARTRIDGE ARRANGEMENTS (n° do documento do procurador END6849USNP/100534); Pedido de patente US n° de série 12/894.350, intitulado SURGICAL STAPLE CARTRIDGES WITH DETACHABLE SUPPORT STRUCTURES AND SURGICAL STAPLING INSTRUMENTS WITH SYSTEMS FOR PREVENTING ACTUATION MOTIONS WHEN A CARTRIDGE IS NOT PRESENT (n° do documento do procurador END6855USNP/100540); Pedido de patente US n° de série 12/894.383, intitulado IMPLANTABLE FASTENER CARTRIDGE COMPRISING BIOABSORBABLE LAYERS (n° do documento do procurador END6856USNP/100541); Pedido de patente US n° de série 12/894.389, intitulado COMPRESSIBLE FASTENER CARTRIDGE (n° do documento do pro-curador END6857USNP/100542); Pedido de patente US n° de série 12/894.345, intitulado FASTENERS SUPPORTED BY A FASTENER CARTRIDGE SUPPORT (n° do documento do procurador END6858USNP/100543); Pedido de patente US n° de série 12/894.306, intitulado COLLAPSIBLE FASTENER CARTRIDGE (n° do documento do procurador END6859USNP/100544); Pedido de patente US n° de série 12/894.318, intitulado FASTENER SYSTEM COMPRISING A PLURALITY OF CONNECTED RETENTION MATRIX ELEMENTS (n° do documento do procurador END6860USNP/100546); Pedido de patente US n° de série 12/894.330, intitulado FASTENER SYSTEM COMPRISING A RETENTION MATRIX AND AN ALIGNMENT MATRIX (n° do documento do procurador END6861USNP/100547); Pedido de patente US n° de série 12/894.361, intitulado FASTENER SYSTEM COMPRISING A RETENTION MATRIX (n° do documento do procurador END6862USNP/100548); Pedido de patente US n° de série 12/894.367, intitulado FASTENING INSTRUMENT FOR DEPLOYING A FASTENER SYSTEM COMPRISING A RETENTION MATRIX (n° do documento do procurador END6863USNP/100549); Pedido de patente US n° de série 12/894.388, intitulado FASTENER SYSTEM COMPRISING A RETENTION MATRIX AND A COVER (n° do documento do procurador END6864USNP/100550); Pedido de patente US n° de série 12/894.376, intitulado FASTENER SYSTEM COMPRISING A PLURALITY OF FASTENER CARTRIDGES (n° do documento do procurador END6865USNP/ 100551); Pedido de patente US n° de série 13/097.865, intitulado SURGICAL STAPLER ANVIL COMPRISING A PLURALITY OF FORMING POCKETS (n° do documento do procurador END6735USCIP1/ 100059CIP1); Pedido de patente US n° de série 13/097.936, intitulado TISSUE THICKNESS COMPENSATOR FOR A SURGICAL STAPLER (n° do documento do procurador END6736USCIP1/100060CIP1); Pedido de patente US n° de série 13/097.954, intitulado STAPLE CARTRIDGE COMPRISING A VARIABLE THICKNESS COMPRESSIBLE PORTION (n° do documento do procurador END6840USCIP1/100525CIP1); Pedido de patente US n° de série 13/097.856, intitulado STAPLE CARTRIDGE COMPRISING STAPLES POSITIONED WITHIN A COMPRESSIBLE PORTION THEREOF (n° do documento do procurador END6841USCIP1/100526CIP1); Pedido de patente US n° de série 13/097.928, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING DETACHABLE PORTIONS (n° do documento do procurador END6842USCIP1/100527CIP1); Pedido de patente US n° de série 13/097.891, intitulado TISSUE THICKNESS COMPENSATOR FOR A SURGICAL STAPLER COMPRISING AN ADJUSTABLE ANVIL (n° do documento do procurador END6843USCIP1/100528CIP1); Pedido de patente US n° de série 13/097.948, intitulado STAPLE CARTRIDGE COMPRISING AN ADJUSTABLE DISTAL PORTION (n° do documento do procurador END6847USCIP1/ 100532CIP1); Pedido de patente US n° de série 13/097.907, intitulado COMPRESSIBLE STAPLE CARTRIDGE ASSEMBLY (n° do documento do procurador END6848USCIP1/100533CIP1); Pedido de patente US n° de série 13/097.861, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING PORTIONS HAVING DIFFERENT PROPERTIES (n° do documento do procurador END6849USCIP1/100534CIP1); Pedido de patente US n° de série 13/097.869, intitulado STAPLE CARTRIDGE LOADING ASSEMBLY (n° do documento do procurador END6855USCIP1/100540CIP1); Pedido de patente US n° de série 13/097.917, intitulado COMPRESSIBLE STAPLE CARTRIDGE COMPRISING ALIGNMENT MEMBERS (n° do documento do procurador END6856USCIP1/ 100541CIP1); Pedido de patente US n° de série 13/097.873, intitulado STAPLE CARTRIDGE COMPRISING A RELEASABLE PORTION (n° do documento do procurador END6857USCIP1/100542CIP1); Pedido de patente US n° de série 13/097.938, intitulado STAPLE CARTRIDGE COMPRISING COMPRESSIBLE DISTORTION RESISTANT COMPONENTS (n° do documento do procurador END6858USCIP1/100543CIP1); Pedido de patente US n° de série 13/097.924, intitulado STAPLE CARTRIDGE COMPRISING A TISSUE THICKNESS COMPENSATOR (n° do documento do procurador END6859USCIP1/ 100544CIP1); Pedido de patente US n° de série 13/242.029, intitulado SURGICAL STAPLER WITH FLOATING ANVIL (n° do documento do procurador END6841USCIP2/100526CIP2); Pedido de patente US n° de série 13/242.066, intitulado CURVED END EFFECTOR FOR A STAPLING INSTRUMENT (n° do documento do procurador END6841USCIP3/100526CIP3); Pedido de patente US n° de série 13/242.086, intitulado STAPLE CARTRIDGE INCLUDING COLLAPSIBLE DECK (n° do documento do procurador END7020USNP/110374); Pedido de patente US n° de série 13/241.912, intitulado STAPLE CARTRIDGE INCLUDING COLLAPSIBLE DECK ARRANGEMENT (n° do documento do procurador END7019USNP/110375); Pedido de patente US n° de série 13/241.922, intitulado SURGICAL STAPLER WITH STATIONARY STAPLE DRIVERS (n° do documento do procurador END7013USNP/110377); Pedido de patente US n° de série 13/241.637, intitulado SURGICAL INSTRUMENT WITH TRIGGER ASSEMBLY FOR GENE RATING MULTIPLE ACTUATION MOTIONS (n° do documento do procurador END6888USNP3/110378); e Pedido de patente US n° de série 13/241.629, intitulado SURGICAL INSTRUMENT WITH SELECTIVELY ARTICULATABLE END EFFECTOR (n° do documento do procurador END6888USNP2/ 110379).
[572] O Requerente do presente pedido também detém os pedi dos de patente US identificados abaixo que foram depositados na mesma data do presente pedido e que são, cada um, aqui incorporado por referência por inteiro, respectivamente: pedido de patente US n° de série 13/433.096, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING A PLURALITY OF CAPSULES, (n° do documento do procurador END6864USCIP1/ 100550CIP1); pedido de patente US n° de série 13/433.103, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING A PLURALITY OF LAYERS, (n° do documento do procurador END6864USCIP2/ 100550CIP2); pedido de patente US n° de série 13/433.098, intitulada EXPANDABLE TISSUE THICKNESS COMPENSATOR, (n° do documento do procurador END6843USCIP2/100528CIP2). pedido de patente US n° de série 13/433.102, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING A RESERVOIR (n° do documento do procurador END6843USCIP3/100528CIP3); pedido de patente US n° de série 13/433.114, intitulado RETAINER ASSEMBLY INCLUDING A TISSUE THICKNESS COM-PENSATOR, (n° do documento do procurador END6843USCIP4/ 100528CIP4); pedido de patente US n° de série 13/433.136, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING AT LEAST ONE MEDICAMENT, (n° do documento do procurador END6843US CIP5/100528CIP5); pedido de patente US n° de série 13/433.141, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING CONTROLLED RELEASE AND EXPANSION, (n° do documento do procurador END6843USCIP6/100528CIP6); pedido de patente US n° de série 13/433.144, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING FIBERS TO PRODUCE A RESILIENT LOAD, (n° do documento do procurador END6843USCIP7/100528CIP7); pedido de patente US n° de série 13/433.148, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING STRUCTURE TO PRODUCE A RESILIENT LOAD, (n° do documento do procurador END6843USCIP8/100528CIP8); pedido de patente US n° de série 13/433.155 intitulado TISSUE THICKNESS COMPENSATOR COMPRISING RESILIENT MEMBERS, (n° do documento do procurador END6843USCIP9/ 100528CIP9); pedido de patente US n° de série 13/433.163, intitulado METHODS FOR FORMING TISSUE THICKNESS COMPENSATOR ARRANGEMENTS FOR SURGICAL STAPLERS, (n° do documento do procurador END6843USCIP10/100528CP10); pedido de patente US n° de série 13/433.167, intitulado TISSUE THICKNESS COMPENSATORS, (n° do documento do procurador END6843USCIP11/100528CP11); pedido de patente US n° de série 13/433.175, intitulado LAYERED TISSUE THICKNESS COMPENSATOR, (n° do documento do procurador END6843USCIP12/100528CP12); pedido de patente US n° de série 13/433.179, intitulado TISSUE THICKNESS COMPENSATORS FOR CIRCULAR SURGICAL STAPLERS, (n° do documento do procurador END6843USCIP13/ 100528CP13); pedido de patente US n° de série 13/433.118, intitulado TISSUE THICKNESS COMPENSATOR COMPRISED OF A PLURALITY OF materiais, (n° do documento do procurador END7101USNP/ 110602); pedido de patente US n° de série 13/433.135 intitulado MOVABLE MEMBER FOR USE WITH A TISSUE THICKNESS COM-PENSATOR, (n° do documento do procurador END7107USNP/ 110603); pedido de patente US n° de série 13/433.129, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING A PLURALITY OF MEDICAMENTS, (n° do documento do procurador END7102US NP/110604); pedido de patente US n° de série 13/433.140 intitulado TISSUE THICKNESS COMPENSATOR AND METHOD FOR MAKING THE SAME, (n° do documento do procurador END7103USNP/ 110605); pedido de patente US n° de série 13/433.147, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING CHANNELS, (n° do documento do procurador END7104USNP/110606); pedido de patente US n° de série 13/433.126, intitulado TISSUE THICKNESS COMPENSATOR COMPRISING TISSUE IN-GROWTH FEATURES, (n° do documento do procurador END7105USNP/110607); e pedido de patente US n° de série 13/433.132, intitulado DEVICES AND METHODS FOR ATTACHING TISSUE THICKNESS COMPENSATING materiais TO SURGICAL STAPLING INSTRUMENTS, (n° do documento do procurador END7106USNP/110608).
[573] Certas modalidades exemplificadoras serão descritas agora para fornecer uma compreensão geral dos princípios da estrutura, função, fabricação e uso dos dispositivos e métodos da presente invenção apresentados. Um ou mais exemplos destas modalidades estão ilustrados nos desenhos em anexo. Os elementos versados na técnica entenderão que os dispositivos e os métodos especificamente aqui descritos e ilustrados nos desenhos em anexo são modalidades exemplares não-limitadoras, e que o escopo das várias modalidades da presente invenção é definido somente pelas reivindicações. As características ilustradas ou descritas em conjunto com uma modalidade exemplificadora podem ser combinadas com as características de outras modalidades. Tais modificações e variações são concebidas para serem incluídas dentro do escopo da presente invenção.
[574] A referência do início ao fim do relatório descritivo de "vá rias modalidades", "algumas modalidades", "uma modalidade", ou "a modalidade", ou similares, significa que um atributo, estrutura, ou ca-racterísticas descrita em conjunto com a modalidade é incluída em pelo menos uma modalidade. dessa forma, o aparecimento das frases "em várias modalidades", "em algumas modalidades", "em uma modalidade", ou "na modalidade", ou similares, em lugares do início ao fim do relatório descritivo não indica necessariamente que tais frases se referem à mesma modalidade. Além disso, os atributos, estruturas, ou características particulares podem ser combinados em qualquer maneira adequada em uma ou mais modalidades. Portanto, os atributos, estruturas, ou características particulares ilustrados ou descritos em conjunto com uma modalidade podem ser combinados, no todo ou em parte, com as estruturas dos atributos, ou características de uma ou mais outras modalidades sem limitação. Tais modificações e variações são concebidas para serem incluídas dentro do escopo da presente invenção.
[575] Os termos "proximal" e "distal"são usados na presente invenção com referência à manipulação que um clínico faz da porção de cabo do instrumento cirúrgico. O termo "proximal" refere-se à porção mais próxima ao clínico, e o termo "distal" refere-se à porção situada mais distante do clínico. Será também entendido que, por uma questão de conveniência e clareza, termos espaciais como "vertical", "horizontal", "para cima" e "para baixo" podem ser usados na presente invenção com relação aos desenhos. Entretanto, podem ser usados em muitas orientações e posições, e não se pretende que esses termos sejam limitadores e/ou absolutos.
[576] Vários dispositivos e métodos exemplificadores são forne cidos para a realização de procedimentos cirúrgicos laparoscópicos e minimamente invasivos. Entretanto, aqueles de habilidade comum na técnica apreciarão prontamente que os vários métodos e dispositivos aqui apresentados podem ser usados em numerosos procedimentos cirúrgicos e aplicações incluindo, por exemplo, aqueles em conjunto com procedimentos cirúrgicos abertos. Com o avanço da presente DESCRIÇÃO DETALHADA, aqueles de habilidade comum na técnica apreciarão adicionalmente que os vários instrumentos aqui apresentados podem ser inseridos em um corpo de qualquer maneira, como através de um orifício natural, através de uma incisão ou perfuração formada em tecido, etc. As porções funcionais ou porções do atuador de extremidade dos instrumentos podem ser inseridas diretamente no corpo de um paciente ou podem ser inseridas por meio de um dispositivo de acesso que tenha uma canaleta de trabalho através da qual o atuador de extremidade e a haste alongada de um instrumento cirúrgi-co podem ser avançados.
[577] Passando para os desenhos em que números indicam componentes semelhantes ao longo das várias vistas, a FIGURA 1 mostra um instrumento cirúrgico 10 que é capaz de praticar vários benefícios exclusivos. O instrumento de grampeamento cirúrgico 10 é projetado para manipular e/ou atuar atuadores de extremidade 12 de várias formas e tamanhos que são fixados operacionalmente ao instrumento. Na modalidade mostrada nas FIGURAS 1 a 1E, por exemplo, o atuador de extremidade 12 inclui uma canaleta alongada 14 que forma uma mandíbula inferior 13 do atuador de extremidade 12. A canaleta alongada 14 é configurada para suportar um cartucho de grampo"implantável"30 e também suportar de maneira móvel uma bigorna 20 que atua como uma garra superior 15 do atuador de extremidade 12.
[578] Em várias modalidades, a canaleta alongada 14 pode ser fabricada a partir de, por exemplo, 300 &Série 400, 17-4 & 17-7 aço inoxidável, titânio, etc. e ser formado com paredes laterais espaçadas 16. A bigorna 20 pode ser fabricada a partir de, por exemplo, 300 &Série 400, 17-4 & 17-7 titânio, etc. e pode ter uma superfície inferior de formação de grampos geralmente identificada como 22 que tem uma pluralidade de bolsos formadores de grampos 23 formados nela. Consulte as FIGURAS 1B a 1E. Além disso, a bigorna 20 tem um conjunto de rampa bifurcada 24 que se projetam de maneira proximal da bigorna. Um pino da bigorna 26 projeta-se de cada lado lateral do conjunto de rampa 24 para ser recebido em uma fenda ou abertura 18 correspondente nas paredes laterais 16 da canaleta alongada 14 para facilitar sua fixação móvel ou pivotante à mesma.
[579] Podem ser empregadas várias formas de cartuchos de grampos implantáveis com as várias modalidades dos aqui apresenta-dos.Configurações e construções específicas de cartuchos de gram-posserão discutidas em mais detalhes abaixo. Entretanto, na modalidade mostrada na FIGURA 1A, é mostrado um cartucho de grampos implantável 30. Em ao menos uma modalidade, o cartucho de grampos 30 tem uma porção de corpo 31 que consiste em um material hemostático compressível como, por exemplo, celulose regenerada oxidada ("ORC") ou uma espuma bioabsorvível na qual são apoiadas linhas de grampos de metal não formados 32. Em ao menos algumas modalidades, a fim de impedir que o grampo seja afetado e o material hemostático seja ativado durante o processo de introdução e posicionamento, todo o cartucho pode ser revestido ou enrolado em um filme biodegradável 38, como um filme de polidioxanona vendido sob a marca registrada PDS®, ou com um filme de poliglicerol sebacato (PGS) ou outros filmes biodegradáveis formados a partir de PGA (ácido poliglicólico, comercializado sob a marca registrada Vicryl), PCL (policaprolactona), PLA ou PLLA (ácido polilático), PHA (polihidroxialcanoato), PGCL (poliglecaprona 25, vendida sob a marca registrada Monocryl) ou um composto de PGA, PCL, PLA, PDS que se-riaimpermeável até ser rompido. O corpo 31 do cartucho de grampos 30 é dimensionado para ser apoiado de maneira removível na canaleta alongada 14, conforme mostrado, de modo que cada grampo 32 em seu interior fique alinhado com os correspondentes bolsos de formação de grampos 23 na bigorna quando a bigorna 20 é acionada para formar o contato com o cartucho de grampos 30.
[580] Em uso, depois de o atuador de extremidade 12 ser posici onado adjacente ao tecido-alvo, o atuador de extremidade 12 é manipulado para capturar ou prender o tecido-alvo entre uma face superior 36 do cartucho de grampos 30 e a superfície de formação de grampos 22 da bigorna 20. Os grampos 32 são formados movendo-se a bigorna 20 em uma trajetória que é substancialmente paralela à canaleta alongada 14 para trazer a superfície de formação de grampos 22 e, mais particularmente, os bolsos de formação de grampos 23 em seu interior em contato substancialmente simultâneo com a face superior 36 do cartucho de grampos 30. À medida que a bigorna 20 continua a se mover para dentro do cartucho de grampos 30, as pernas 34 dos grampos 32 fazem contato com um bolso de formação de grampos correspondente 23 na bigorna 20 que serve para flexionar as pernas de grampo 34 para formar os grampos 32 em um "formato de B". O movimento adicional da bigorna 20 na direção da canaleta alongada 14 comprime ainda mais e forma os grampos 32 com uma altura formada final "FF" desejada.
[581] O processo de formação de grampos descrito acima é re presentado genericamente nas FIGURAS 1B a 1E. Por exemplo, a FIGURA 1B ilustra o atuador de extremidade 12 com o tecido-alvo "T" entre a bigorna 20 e a face superior 36 do cartucho de grampos implantável 30. A FIGURA 1C ilustra a posição inicial de aperto da bigorna 20 em que a bigorna 20 foi fechada sobre o tecido-alvo "T" para prender o tecido-alvo "T" entre a bigorna 20 e a face superior 36 do cartucho de grampos 30. A FIGURA 1D ilustra a formação inicial do grampo em que a bigorna 20 começou a comprimir o cartucho de grampos 30 de modo que as pernas 34 dos grampos 32 estão começando a ser formadas pelos bolsos de formação de grampos 23 na bigorna 20. A FIGURA 1E ilustra o grampo 32 em seu estado final formadoatravés do tecido-alvo "T" com a bigorna 20 removida para maior clareza. depois que os grampos 32 são formados e presos ao tecidoalvo "T", o cirurgião move a bigorna 20 para a posição aberta para permitir que o corpo do cartucho 31 e os grampos 32 permaneçam fixos ao tecido-alvo enquanto o atuador de extremidade 12 é retirado do paciente. O atuador de extremidade 12 forma todos os grampos simultaneamenteà medida que as duas garras 13 e 15 são pressionadas. Os demais materiais do corpo "amassado" 31 agem como um imaterial hemostático(a ORC) e um reforço da linha de grampos (PGA, PDS ou qualquer uma das outras composições de filme mencionadas acima 38). Além disso, como os grampos 32 não precisam nunca deixar o corpo do cartucho 31 durante a formação, a probabilidade de formação defeituosa dos grampos 32 durante esse processo é minimizada. Para uso na presente invenção, o termo "implantável"significa que, em adição aos grampos, os materiais do corpo do cartucho que suportam os grampos também permanecerão no paciente e podem ser eventualmente absorvidos pelo corpo do paciente. Tais cartuchos de grampo implantáveis são distinguíveis dos arranjos de cartucho anteriores que permanecem posicionados dentro do atuador de extremidade na sua totalidade após eles terem sido disparados.
[582] Em várias implementações, o atuador de extremidade 12 é configurado para ser acoplado a um conjunto de haste alongada 40 que se projeta de um conjunto de cabo 100. O atuador de extremidade 12 (quando fechado) e o conjunto de haste alongada 40 podem ter formatos em seção transversal similares e serem dimensionados para passar operacionalmente através de um tubo trocarte ou canaleta de trabalho em outra forma de instrumento de acesso. Para uso na presente invenção, o termo "passar operacionalmente" significa que o atuador de extremidade e ao menos uma porção do conjunto de haste alongada podem ser introduzidos através ou passados através da abertura da canaleta ou do tubo e podem ser manipulados em seu interior conforme necessário para completar o procedimento cirúrgico de grampeamento. Em algumas modalidades, quando em uma posição fechada, as mandíbulas 13 e 15 do atuador de extremidade 12 podem fornecer ao atuador de extremidade um formato em seção transversal aproximadamente circular que facilita sua passagem através de uma passagem/abertura circular. Entretanto, os atuadores de extremidade de várias modalidades da presente invenção, bem como as modalidades de conjunto de haste alongada, poderiam ser concebivelmente dotados de outros formatos em seção transversal que poderiam de outro modo passar através de passagens e aberturas de acesso que não têm formatos em seção transversal não circulares. dessa forma, um tamanho geral de uma seção transversal de atuador de extremidade fechado será relacionado ao tamanho da passagem ou abertura através da qual se destina a passar. dessa forma, um atuador de extremidade por exemplo, pode ser chamado de um "atuador de extremidade de 5 mm", o que significa que pode passar de forma operacionalatravés de uma abertura que tem pelo menos aproximadamente 5 mm de diâmetro.
[583] Em várias modalidades, o conjunto de haste alongada 40 pode ter um diâmetro externo que é substancialmente igual ao diâmetro externo do atuador de extremidade 12 quando em uma posição fechada. Por exemplo, um atuador de extremidade de 5 mm pode ser acoplado a um conjunto de haste alongada 40 cujo diâmetro da seção transversal é de 5 mm. Entretanto, com o avanço da presente DESCRIÇÃO DETALHADA, ficará aparente que várias modalidades da presente invenção podem ser utilizadas de maneira eficaz em conjunto com tamanhos diferentes de atuadores de extremidade. Por exemplo, um atuador de extremidade de 10 mm pode ser fixado a uma haste alongada que tem um diâmetro transversal de 5 mm. Ao contrário, para aplicações em que é fornecida uma abertura ou passagem de acesso de 10 mm ou maior, o conjunto de haste alongada 40 pode ter um diâmetro transversal de 10 mm (ou maior), mas pode também ser capaz de atuar um atuador de extremidade de 5 mm ou 10 mm. Conse-quentemente, a haste externa 40 pode ter um diâmetro externo que é igual ou diferente do diâmetro externo de um atuador de extremidade fechado 12 fixado à mesma.
[584] Conforme mostrado, o conjunto de haste alongada 40 es tende-se distalmente do conjunto de cabo 100 em uma linha genericamente reta para definir um eixo longitudinal A-A. Em várias modalidades, por exemplo, o conjunto de haste alongada 40 pode ter um comprimento de aproximadamente 229 a 406 mm (9 a 16 polegadas). Todavia, o conjunto de haste alongada 40 pode ser fornecido em outros comprimentos e, em outras modalidades, pode conter uniões ou ser configurado de outro modo para facilitar a articulação do atuador de extremidade 12 em relação a outras porções da haste ou conjunto de cabo conforme será discutido em mais detalhes abaixo. Em várias modalidades, o conjunto de haste alongada 40 inclui um elemento de dorso 50 que se estende a partir do conjunto do cabo 100 até o atuador de extremidade 12. A extremidade proximal da canaleta alongada 14 do atuador de extremidade 12 tem um par de pinos giratórios de retenção 17 que se projetam do mesmo, os quais são dimensionados para serem recebidos dentro de aberturas ou berços de pinos giratórios correspondentes 52 que são fornecidas em uma extremidade distal do elemento de dorso 50 para permitir ao atuador de extremidade 12 ser acoplado de modo removível ao conjunto de haste alongada 40. O elemento de dorso 50 pode ser fabricado de, por exemplo, alumínio 6061 ou 7075, aço inoxidável, titânio, etc.
[585] Em várias modalidades, o conjunto de cabo 100 compreen de uma carcaça tipo pistola de empunhamento que pode ser fabricada em duas ou mais peças para fins de montagem. Por exemplo, o conjunto de cabo 100, conforme mostrado, compreende um elemento de carcaça direito 102 e um elemento de carcaça esquerdo (não ilustrado) que são moldados ou fabricados de outro modo a partir de um polímero ou material plástico e são projetados para se encaixar. Esses elementos de carcaça podem ser fixados um ao outro por recursos de pressão, cavilhas e soquetes moldados ou de outro modo formados no interior dos elementos e/ou por meio de adesivo, parafusos, etc. O elemento de dorso 50 tem uma extremidade proximal 54 que tem um flange 56 formado sobre a mesma. O flange 56 é configurado para ser apoiado de modo giratório em um sulco 106 formado por nervuras pareadas 108 que se projetam para dentro a partir de cada um dos elementos de carcaça 102, 104. Tal disposição facilita a fixação do elemento de dorso 50 ao conjunto de cabo 100 e permite, ainda, que o elemento de dorso 50 seja girado em relação ao conjunto de cabo 100 em torno do eixo longitudinal A-A em uma trajetória de 360°.
[586] Como pode ser visto na FIGURA 1, o elemento de dorso 50 passa através e é apoiado por um coxim de montagem 60 que é fixado de modo giratório ao conjunto de cabo 100. O coxim de montagem 60 tem um flange proximal 62 e um flange distal 64 que definem um sulco rotacional 65 que é configurado para receber de modo giratório uma porção de ponta 101 do conjunto de cabo 100. Tal disposição permite que o coxim de montagem 60 gire em torno do eixo longitudinal A-A em relação ao conjunto de cabo 100. O elemento de dorso 50 é fixado por pino de modo não giratório ao coxim de montagem 60 por um pino de dorso 66. Além disso, um botão giratório 70 é fixado ao coxim de montagem 60. Em uma modalidade, por exemplo, o botão giratório 70 tem uma porção oca do flange de montagem 72 que é dimensionada para receber uma porção do coxim de montagem 60 em seu interior. Em várias modalidades, o botão giratório 70 pode ser fabricado de, por exemplo, vidro ou náilon preenchido com carbono, policarbonato, Ultem®, etc., e é fixado ao coxim de montagem 60 pelo pino de dorso 66 também. Além disso, um flange de retenção que se projeta para dentro 74 é formado sobre a porção do flange de montagem 72 e é configu-rado para se estender para o interior de um sulco radial 68 formado no coxim de montagem 60. dessa forma, o cirurgião pode girar o elemento de dorso 50 (e o atuador de extremidade 12 fixado ao mesmo) em torno do eixo longitudinal A-A em uma trajetória de 360° segurando o botão giratório 70 e girando-o em relação ao conjunto de cabo 100.
[587] Em várias modalidades, a bigorna 20 é retida em uma posi ção aberta por uma mola da bigorna 21 e/ou outra disposição limitadora. A bigorna 20 é móvel de modo seletivo da posição aberta para váriasposições fechadas ou de aperto e disparo por um sistema de disparo, genericamente designado como 109. O sistema de disparo 109 inclui um "elemento de disparo" 110 que, em várias modalidades, compreende um tubo oco de disparo 110. O tubo oco de disparo 110 é móvel axialmente sobre o elemento de dorso 50 e, dessa maneira, forma a porção externa do conjunto de haste alongada 40. O tubo de disparo 110 pode ser fabricado de um polímero ou outro material adequado e ter uma extremidade proximal que é fixada a uma forquilha de disparo 114 do sistema de disparo 109. Em várias modalidades, por exemplo, a forquilha de disparo 114 pode ser sobremoldada na extremidade proximal do tubo de disparo 110. Entretanto, outras disposições de prendedores podem ser empregadas.
[588] Como pode ser visto na FIGURA 1, a forquilha de disparo 114 pode ser apoiada de modo giratório em um colar de suporte 120 que é configurado para se mover axialmente no conjunto de cabo 100. Em várias modalidades, o colar de suporte 120 tem um par de aletas estendendo-se lateralmente que são dimensionadas para serem recebidas de modo deslizante nas fendas de aletas formadas nos elementos de carcaça direito e esquerdo. dessa forma, o colar de suporte 120 pode deslizar axialmente no compartimento do cabo 100 e ainda permitir que a forquilha de disparo 114 e o tubo de disparo 110 girem em relação ao mesmo em torno do eixo longitudinal A-A. Em várias modalidades, uma fenda longitudinal é fornecida através do tubo de disparo 110 para permitir que o pino de dorso 66 se estenda através do mesmo para o interior do elemento de dorso 50 enquanto facilita o deslocamento axial do tubo de disparo 110 sobre o elemento de dorso 50.
[589] O sistema de disparo 109 compreende adicionalmente um acionador de disparo 130 que serve para controlar o deslocamento axial do tubo de disparo 110 sobre o elemento de dorso 50. Vide FIGURA 1. Esse movimento axial na direção distal do tubo de disparo 110 para a condição interação de disparo com a bigorna 20 é mencionado neste documento como "movimento de disparo". Como pode ser visto na FIGURA 1, o gatilho de disparo 130 é acoplado de modo móvel ou pivotante ao conjunto de cabo 100 por um pino de pivô 132. Uma mola de torção 135 é empregada para afastar o acionador de disparo 130 da porção de empunhamento da pistola 107 do conjunto de cabo 100 para uma posição "aberta"não atuada ou inicial. Como pode ser visto na FIGURA 1, o gatilho de disparo 130 tem uma porção superior 134 que é fixada de maneira móvel (por pino) a elos de disparo 136 que são fixados de maneira móvel (por pino) ao colar de suporte 120. dessa forma, o movimento do acionador de disparo 130 da posição inicial (FIGURA 1) em direção a um posição final adjacente à porção da empunhadura de pistola 107 do conjunto do cabo 100 fará a forquilha de disparo 114 e o tubo de disparo 110 para mover para uma direção distal "DD". O movimento do gatilho de disparo 130 na direção contrária da porção da empunhadura de pistola 107 do conjunto do cabo 100 (sob a inclinação da mola de torção 135) fará a forquilha de disparo 114 e o tubo de disparo 110 moverem-se na direção proximal "PD" no membro do dorso 50.
[590] Várias modalidades da presente invenção podem ser em pregadas com tamanhos e configurações diferentes de cartuchos de grampos implantáveis. Por exemplo, o instrumento cirúrgico 10, quando usado em conjunto com um primeiro adaptador de disparo 140, pode ser usado com um atuador de extremidade de 5 mm 12 que tem um comprimento de aproximadamente 20 mm (ou de outros comprimentos) que suporta um cartucho de grampos implantável 30. Esse tamanho de atuador de extremidade pode ser particularmente bem adequado, por exemplo, para completar dissecação e transações vasculares relativamente finas. Entretanto, conforme será discutido em mais detalhes abaixo, o instrumento cirúrgico 10 pode também ser empregado, por exemplo, em conjunto com outros tamanhos de atuadores de extremidade e cartuchos de grampos substituindo-se o primeiro adaptador de disparo 140 por um segundo adaptador de disparo. Em ainda outras modalidades, o conjunto de haste alongada 40 pode ser configurado para ser fixado a apenas uma forma ou tamanho de atuador de extremidade.
[591] Um método de acoplar de modo removível o atuador de ex tremidade 12 no elemento de dorso 50 será explicado a seguir. O processo de acoplamento é iniciado inserindo-se os pinos giratórios de retenção 17 na canaleta alongada 14 para o interior dos berços de pinos giratórios 52 no elemento de dorso 50. depois disso, o cirurgião avança o acionador de disparo 130 na direção da empunhadura da pistola 107 do conjunto da carcaça 100 para avançar distalmente o tubo de disparo 110 e o primeiro adaptador de disparo 140 sobre uma porção da extremidade proximal 47 da canaleta alongada 14 para reter, assim, os munhões 17 em seus respectivos berços 52. Essa posição do primeiro adaptador de disparo 140 sobre os pinos giratórios 17 é mencionada neste documento como a "posição acoplada". Várias modalidades da presente invenção podem ter, também, um conjunto de travamento do atuador de extremidade para travar o acionador de disparo 130 em posição depois de um atuador de extremidade 12 ser fixado ao elemento de dorso 50.
[592] Mais especificamente, uma modalidade do conjunto de travamento do atuador de extremidade 160 inclui um pino de retenção 162 que é apoiado de maneira móvel na porção superior 134 do acionador de disparo 130. Conforme discutido anteriormente, o tubo de disparo 110 deve ser inicialmente avançado distalmente para a posição acoplada em que o primeiro adaptador de disparo 140 retém os pinos giratórios de retenção 17 do atuador de extremidade 12 nos berços de pinos giratórios 52 no elemento de dorso 50. O cirurgião avança o adaptador de disparo 140 distalmente para a posição acoplada puxando o acionador de disparo 130 da posição inicial para a direção de empunhamento da pistola 107. À medida que o acionador de disparo 130 é atuado inicialmente, o pino de retenção 162 é movido distalmente até que o tubo de disparo 110 tenha avançado o primeiro adaptador de disparo 140 até a posição acoplada, ponto em que o pino de retenção 162 é forçado em uma cavidade de trava 164 formada no elemento de carcaça. Em várias modalidades, quando o pino de retenção 162 entra na cavidade de trava 164, o pino 162 pode produzir um som de trava ou outro som, bem como fornecer uma indicação tátil para o cirurgião de que o atuador de extremidade 12 foi "travado" no elemento de dorso 50. Além disso, o cirurgião não pode inadvertidamente continuar a atuar o acionador de disparo 130 para começar a formar os grampos 32 no atuador de extremidade 12 sem intencionalmenteforçar o pino de retenção 162 para fora da cavidade de trava 164. de modo similar, se o cirurgião liberar o acionador de disparo 130 quando estiver na posição acoplada, o mesmo será retido nessa posição pelo pino de retenção 162 para impedir que o acionador de disparo 130 retorne à posição inicial e com isso liberar o atuador de extre-midade 12 do elemento de dorso 50.
[593] Várias modalidades da presente invenção podem incluir, também, um botão de trava do sistema de disparo 137 que é fixado de forma articulada no conjunto de cabo 100. Em uma forma, o botão de trava do sistema de disparo 137 tem uma trava 138 formada sobre uma extremidade distal do mesmo que é orientada para engatar a forquilha de disparo 114 quando o botão de liberação de disparo está em uma primeira posição de trava. Como pode ser visto na FIGURA 1, a mola de trava 139 serve para forçar o botão de trava do sistema de disparo 137 para a primeira posição de travamento. Em várias circunstâncias, a trava 138 serve para engatar a forquilha de disparo 114 em um ponto onde a posição da forquilha de disparo 114 sobre o elemento de dorso 50 corresponde a um ponto no qual o primeiro adaptador de disparo 140 está prestes a avançar distalmente para cima na rampa de aperto 28 sobre a bigorna 20. O versado na técnica compreenderá que, à medida que o primeiro adaptador de disparo 140 avança axialmente para cima na rampa de aperto 28, a bigorna 20 se moverá em uma trajetória de modo que sua porção de superfície de formação de grampos 22 será substancialmente paralela à face superior 36 do cartucho de grampos 30.
[594] Depois que o atuador de extremidade 12 é acoplado ao elemento de dorso 50, o processo de formação de grampos é iniciado primeiro pressionando-se o botão de trava do sistema de disparo 137 para permitir que a forquilha de disparo 114 possa ser movida adicionalmente em posição distal sobre o elemento de dorso 50 e, por fim, comprimir a bigorna 20 para dentro do cartucho de grampos 30. depois de pressionar o botão de trava do sistema de disparo 137, o cirurgião continua a atuar o acionador de disparo 130 na direção de empunhamento da pistola 107 acionando, assim, o primeiro colar de grampo 140 para cima na rampa formadora de grampos correspondente 29 para forçar a bigorna 20 em contato de formação com os grampos 32 no cartucho de grampos 30. O botão de trava do sistema de disparo 137 impede a formação acidental dos grampos 32 até o cirurgião estar pronto para iniciar esse processo. Nessa modalidade, o cirurgião deve pressionar o botão de trava do sistema de disparo 137 antes que o acionador de disparo 130 possa ser adicionalmente atuado para co-meçar o processo de formação de grampos.
[595] O instrumento cirúrgico 10 pode ser usado exclusivamente como um dispositivo de grampeamento de tecido, se for desejado. To-davia,várias modalidades da presente invenção podem também incluir um sistema de corte de tecido, genericamente designado como 170. Em ao menos uma forma, o sistema de corte de tecido 170 compreende um elemento de faca 172 que pode ser avançado seletivamente de uma posição não acionada adjacente à extremidade proximal do atuador de extremidade 12 para uma posição acionada pelo acionamento de um acionador de avanço de faca 200. O elemento de faca 172 é apoiado de maneira móvel no elemento de dorso 50 e é fixado ou de outro modo projeta-se a partir de uma haste de faca 180. O membro de faca 172 pode ser fabricado a partir de, por exemplo, aço inoxidável 420 ou 440 com uma dureza maior que 38HRC (escala C de Dureza Rockwell) e ter um gume cortante de tecido 176 formado sobre a extremidade distal 174 do mesmo e ser configurado para se estender de modo deslizante através de uma fenda na bigorna 20 e uma fenda disposta centralizadamente 33 no cartucho de grampos 30 para cortar através de tecido que é apertado no atuador de extremidade 12. Em várias modalidades, a haste de faca 180 se estende através do elemento de dorso 50 e tem uma porção de extremidade proximal que faz interface de modo acionável com uma transmissão de faca que é fixada funcionalmente ao acionador de avanço de faca 200. Em várias modalidades, o acionador de avanço de faca 200 é fixado ao pino de pivô 132 de modo que pode ser articulado ou de outro modo atuado sem atuar o acionador de disparo 130. Em várias modalidades, uma primeira engrenagem de faca 192 é também fixada ao pino de pivô 132 de modo que a atuação do acionador de avanço de faca 200 também articula a primeira engrenagem de faca 192. Uma mola de retorno de disparo 202 é fixada entre a primeira engrenagem de faca 192 e o compartimento do cabo 100 para forçar o acionador de avanço de faca 200 para uma posição inicial ou não atuada.
[596] Várias modalidades da transmissão de faca incluem, tam bém, uma segunda engrenagem de faca 194 que é apoiada de modo giratório sobre um segundo fuso de engrenagem e em engate engrenado com a primeira engrenagem de faca 192. A segunda engrenagem de faca 194 está em engate engrenado com uma terceira engrenagem de faca 196 que é apoiada sobre um terceiro fuso de engrenagem.Também apoiada sobre o terceiro fuso de engrenagem 195 está uma quarta engrenagem de faca 198. A quarta engrenagem de faca 198 é adaptada para engatar de modo acionado uma série de dentes de engrenagem anulares ou anéis sobre uma extremidade proximal da haste de faca 180. dessa forma, tal disposição permite que a quarta engrenagem de faca 198 acione axialmente a haste de faca 180 na direção distal "DD" ou direção proximal "PD" e permite, ainda, que a haste de disparo 180 gire em torno do eixo longitudinal A-A em relação à quarta engrenagem de faca 198. Consequentemente, o cirurgião podeavançar axialmente a haste de disparo 180 e, por fim, o elemento de faca 172 em posição distal puxando o acionador de avanço de faca 200 na direção de empunhamento da pistola 107 do conjunto de cabo 100.
[597] Várias modalidades da presente invenção incluem, ainda, um sistema de bloqueio de faca 210 que impede o avanço do elemento de faca 172 a menos que o acionador de disparo 130 tenha sido puxado para a posição de completamente disparada. Esse recurso impedirá, portanto a ativação do sistema de avanço de faca 170 a menos que tenham sido primeiro disparados ou formados no tecido. Como pode ser visto na FIGURA 1, várias implementações do sistema de bloqueio de faca 210 compreendem uma barra de bloqueio de faca 211 que é apoiada de maneira articulada na porção de empunhamento da pistola 107 do conjunto de cabo 100. A barra de bloqueio de faca 211 tem uma extremidade de ativação 212 que é adaptada para ser engatada pelo acionador de disparo 130 quando o acionador de disparo 130 está na posição de disparo total. Além disso, a barra de bloqueio de faca 211 tem um gancho de retenção 214 em sua outra extremidade que é adaptado para engatar fixamente uma haste de trava 216 sobre a primeira engrenagem de corte 192. Uma mola de trava de faca 218 é empregada para forçar a barra de bloqueio de faca 211 para uma posição "travada" em que o gancho de retenção 214 é retido em engate com a haste de trava 216 para impedir, assim, a atuação do acionador de avanço de faca 200 a menos que o acionador de disparo 130 esteja na posição de disparo total.
[598] Depois que os grampos são "disparados" (formados) no tecido-alvo, o cirurgião pode pressionar o botão de liberação do acionador de disparo 167 para que o acionador de disparo 130 retorne à posição inicial sob a tração da mola de torção 135 que, por sua vez, que a bigorna 20 seja forçada para uma posição aberta sob a ação da mola 21. Quando na posição aberta, o cirurgião pode retirar o atuador de extremidade 12 deixando o cartucho de grampos implantável 30 e os grampos 32 no local. Em aplicações em que o atuador de extremidadeé inserido através de uma passagem, canaleta de trabalho, etc., o cirurgião retorna a bigorna 20 para a posição fechada ativando o acionador de disparo 130 para permitir que o atuador de extremidade 12 seja removido através da passagem ou canaleta de trabalho. Se, entretanto, o cirurgião desejar cortar o tecido-alvo depois de disparar os grampos, o cirurgião deverá ativar o acionador de avanço de faca 200 da maneira descrita acima para acionar a barra de faca 172 através do tecido-alvo até a extremidade do atuador de extremidade. depois disso, o cirurgião pode liberar o acionador de avanço de faca 200 para permitir que a mola de retorno de disparo 202 faça com que a transmissão de disparo retorne a barra de faca 172 para a posição inicial(não atuada). depois que a barra de faca 172 retornar para a posição inicial, o cirurgião poderá abrir as garras do atuador de extremidade 13 e 15 para liberar o cartucho implantável 30 no paciente e, então, retirar o atuador de extremidade 12 do paciente. dessa forma, os facilitam o uso de pequenos cartuchos de grampos implantáveis que podem ser inseridos através de canaletas de trabalho e passagens relati-vamente pequenas, e ao mesmo tempo fornecer ao cirurgião a opção de disparar os grampos sem cortar o tecido ou, se for desejado, também cortar o tecido após o disparo dos grampos.
[599] Várias modalidades exclusivas e inovadoras da presente invenção empregam um cartucho de grampos compressível que suporta grampos em uma posição substancialmente estacionária para a formação de contato pela bigorna. Em várias modalidades, a bigorna é direcionada para os grampos não formados em que, em pelo menos uma tal modalidade, o grau de formação do grampo atingido depende de até aonde a bigorna é direcionada para dentro dos grampos. Tal disposição fornece ao cirurgião a capacidade de ajustar a quantidade de pressão de formação ou de disparo aplicada aos grampos e, dessa forma, alterar a altura formada final dos grampos. Em várias outras modalidades da presente invenção, arranjos de grampeamento cirúrgico podem empregar elementos de acionamento de grampo que podem levantar os grampos em direção à bigorna. Tais modalidades são descritas com mais detalhes abaixo.
[600] Em várias modalidades, com relação às modalidades des critas em detalhes acima, a quantidade de movimento de disparo que é aplicada à bigorna móvel depende do grau de acionamento do acionador de disparo. Por exemplo, se o cirurgião desejar obter grampos apenas parcialmente formados, então o acionador de disparo é pressionado apenas parcialmente para dentro na direção de empunhadura da pistola 107. Para obter mais formação de grampos, o cirurgião simplesmente comprime adicionalmente o acionador de disparo, o que resulta na bigorna sendo acionada adicionalmente em contato de formação com os grampos. Como usado aqui, o termo "contato de formação"significa que a superfície de formação de grampos ou os bolsos de formação de grampos entram em contato com as extremidades das pernas dos grampos e começam a formar ou flexionar as pernas em uma posição formada. O grau de formação de grampos refere-se à quantidade de flexão sofrida pelas pernas dos grampos e, por fim, refere-seà altura de formação do grampo conforme mencionado anteriormente. Aqueles de habilidade comum na técnica compreenderão adicionalmente que, pelo fato de a bigorna 20 mover-se em uma relação substancialmente paralela em relação ao cartucho de grampos à medida que os movimentos de disparo são aplicados aos mesmos, os grampos são formados de maneira substancialmente simultânea com alturas formadas substancialmente iguais.
[601] As FIGURAS 2 e 3 ilustram um atuador de extremidade al ternativo 12” que é similar ao atuador de extremidade 12’ descrito acima, com exceção das seguintes diferenças que são configuradas para acomodar uma barra de faca 172’. A barra de faca 172’ é acoplada a ou projeta-se a partir de uma haste de faca 180 e é de outro modo operada da maneira descrita acima em relação à barra de faca 172. Entretanto, nessa modalidade, a barra de faca 172’ é longa o suficiente para atravessar todo o comprimento do atuador de extremidade 12” e, deste modo, um elemento de faca distal separado não é empregado no atuador de extremidade 12”. A barra de faca 172’ tem um elemento transversal superior 173’ e um elemento transversal inferior 175’ formado na mesma. O elemento transversal superior 173’ é orientado para atravessar de maneira deslizante uma fenda alongada correspondente 250 na bigorna 20” e o elemento transversal inferior 175’ é orientado para atravessar uma fenda alongada 252 na canaleta alongada 14” do atuador de extremidade 12”. Uma fenda de desengate (não mostrada) também é fornecida na bigorna 20” de modo que quando a barra de faca 172’ é acionada até uma posição final com o atuador de extremidade delgado 12”, o elemento transversal superior 173’ cai através da fenda correspondente para permitir que a bigorna 20” se mova para a posição aberta para desengatar o tecido grampeado e cortado. A bigorna 20” pode ser de outro modo idêntica à bigorna 20 descrita acima e a canaleta alongada 14” pode ser de outro modo idêntica à canaleta alongada 14 descrita acima.
[602] Nessas modalidades, a bigorna 20” é forçada para uma po sição completamente aberta (FIGURA 2) por uma mola ou outra disposição de abertura (não mostrada). A bigorna 20” é movida entre as posições aberta e completamente apertada pelo deslocamento axial do adaptador de disparo 150 da maneira descrita acima. Quando o adaptador de disparo 150 é avançado para a posição completamente apertada (FIGURA 3), o cirurgião pode, então, avançar a barra de faca 172” distalmente, conforme a maneira descrita acima. Se o cirurgião desejar usar o atuador de extremidade como um dispositivo de pega para manipular o tecido, o adaptador de disparo pode ser movido proximalmente para permitir que a bigorna 20” se afaste da canaleta alongada 14”, conforme representado na FIGURA 4 em linhas tracejadas. Nesta modalidade, quando a barra de faca 172” se move em po-sição distal, o elemento transversal superior 173’ e o elemento transversal inferior 175’ puxam a bigorna 20” e a canaleta alongada 14” juntos para obter a formação de grampo desejada quando a barra de faca 172” é avançada em posição distal através do atuador de extremidade 12”. Consulte a FIGURA 5. dessa forma, nessa modalidade, a formação de grampos ocorre simultaneamente com o corte do tecido, mas os grampos podem ser formados sequencialmente à medida que a barra de faca 172” é acionada distalmente.
[603] As características exclusivas e inovadoras dos vários cartu chos de grampos cirúrgicos e os da presente invenção permitem que os grampos nesses cartuchos sejam dispostos em uma ou mais linhas de grampos lineares ou não lineares. Uma pluralidade de tais linhas de grampos pode ser fornecida em cada lado de uma fenda alongada que é disposta centralizadamente no cartucho de grampos para receber o elemento de corte do tecido através da mesma. Em uma disposição, por exemplo, os grampos em uma linha podem ser substancialmente paralelos aos grampos em linhas adjacentes de grampos, mas deslocados dos mesmos. Em ainda outras modalidades, uma ou mais linhas de grampos podem ser de natureza não linear. Ou seja, a base de ao menos um grampo em uma linha de grampos pode se estender ao longo de um eixo que é substancialmente transversal às bases de outros grampos na mesma linha de grampos. Por exemplo, conforme será discutido em mais detalhes abaixo, em modalidades alternativas, as linhas de grampos em cada lado da fenda alongada podem ter uma aparência de ziguezague. Essas disposições de grampos não lineares podem alcançar melhores resultados de fixação de tecidos com menos grampos do que várias disposições de grampos lineares empregadas em cartuchos de grampos anteriores.
[604] A FIGURA 6 ilustra o uso de uma modalidade de cartucho de grampos cirúrgicos 900 em uma modalidade de atuador de extremidade 612’. Como pode ser visto nas FIGURAS 6 e 7, uma modalidade do cartucho de grampos cirúrgicos 900 tem um corpo do cartucho 902 que tem uma fenda alongada disposta centralizadamente 904 estendendo-se através de uma extremidade proximal 903 para uma área adjacente à extremidade distal 905. A fenda alongada 904 é configurada para permitir que um corpo de faca se mova axialmente através do mesmo durante uma operação de corte do tecido da maneira descrita acima. Em ao menos uma modalidade, o corpo do cartucho 902 consiste em um material hemostático compressível como, por exemplo, celulose regenerada oxidada ("ORC") ou uma espuma bioabsorvível fabricada a partir de, por exemplo, PGA (poli(ácido glicólico), vendido sob a marca registrada Vicryl), PCL (policaprolactona), PLA ou PLLA (ácido poliláctico), PDS (polidioxanona), PHA (po li(hidroxialcanoato)), PGCL (poliglecaprona 25, vendido sob a marca registrada Monocryl) ou um compósito de PGA, PCL, PLA e PDS em que as linhas 920, 930 de grampos não formados 922 são apoiados. Entretanto, o corpo do cartucho 902 pode ser fabricado a partir de outros materiais que servem para suportar os grampos não formados 922 em uma orientação desejada de modo que os grampos possam ser comprimidos à medida que a bigorna 910’ é colocada em contato com os mesmos. Assim como ocorre com várias outras modalidades descritas acima, o cartucho de grampos 900 é implantável e é deixado fixado ao tecido grampeado após a conclusão do procedimento de grampeamento. Em ao menos algumas modalidades, para evitar que os grampos 922 sejam afetados e o material hemostático seja ativado durante o processo de introdução e posicionamento, todo o cartucho 900 pode ser revestido ou enrolado em um filme biodegradável 906 como um filme de polidioxanona, vendido sob a marca registrada PDS®, ou com um filme de sebacato de poliglicerol (PGS) ou outros filmes biodegradáveis fabricados a partir de, por exemplo, PGA (ácido poliglicólico, comercializado sob a marca registrada Vicryl), PCL (policaprolactona), PLA ou PLLA (ácido polilático), PHA (polihidroxialcanoato), PGCL (poliglecaprona 25, vendida sob a marca registrada Monocryl), ou um composto de PGA, PCL, PLA, PDS que seriaimpermeável até que fosse rompido. O corpo do cartucho 902 do cartucho de grampos 900 é dimensionado para ser apoiado de maneiraremovível na canaleta alongada do atuador de extremidade 612’.
[605] Na modalidade mostrada nas FIGURAS 6, 10, e 11, o car tucho de grampos cirúrgicos 900 suporta operacionalmente uma primeira linha 920 de grampos 922 em um lado lateral 907 da fenda alongada 904 e uma segunda linha 930 de grampos 922 no outro lado lateral 909 da fenda alongada 904. Em várias modalidades, os grampos 922 pode ser fabricados a partir de um material metálico como, por exemplo, titânio, ligas de titânio (por exemplo, titânio 6AI-4V, titânio 3al-2.5V), aço inoxidável, etc., e ter uma base de grampo 924 e duas pernas de grampo em posição vertical 926 projetando-se da base. Cada perna de grampo 926 pode ter uma ponta perfuradora de tecido 928 formada na mesma. Na primeira linha 920 de grampos 922, a base 924 de ao menos um grampo 922 sobrepõe-se à base de outro grampo 922. Em uma modalidade preferencial, a base de grampo 924 de cada grampo 922 sobrepõe-se às bases de grampo 924 de dois grampos adjacentes 922, com exceção da base 924 do último grampo 922 em cada extremidade da primeira linha de grampos 920. Consulte a FIGURA 10. dessa forma, a primeira linha de grampos 920 tem um formato substancialmente não linear. Mais particularmente, quando vista de cima, a primeira linha de grampos 920 tem uma aparência substancial de ziguezague.
[606] Como pode ser visto na FIGURA 9, a bigorna 90 tem dois bolsos de formação de grampos longitudinais sequenciais 912, sendo que cada um tem um formato substancial de ziguezague que corresponde ao formato da primeira linha 920 de grampos 922 de modo que, quando a bigorna 910 é colocada em contato de formação com os grampos 922, as pernas 926 dos mesmos são formadas conforme mostrado na FIGURA 11. dessa forma, a perna distal de um grampo compartilha o mesmo bolso que a perna proximal do próximo grampo longitudinalmente. Tal disposição permite um padrão de bolsos mais denso, até mesmo a um ponto em que os próprios grampos interagem (por exemplo, são dobrados uns sobre os outros). Em disposições de bolsos de grampos anteriores, em geral, deve haver entre 0,13 e 0,38 mm (entre 0,005 e 0,015 polegada) de metal/espaço entre um conjunto de bolsos e o próximo. Esta modalidade da presente invenção, entretanto, tem uma disposição de espaçamento de 0 a 0,5 mm (de 0 a 0,02 polegada) de interferência/sobreposição (essencialmente -0,51 mm (-0,020”)) porque um grampo combina com o próximo grampo, por exemplo. Tais disposições permitem de 15 a 30% mais grampos no mesmo espaço. Além disso, após o intertravamento dos grampos, é menor a necessidade de múltiplas fileiras laterais de grampos. As disposições anteriores comumente empregam três fileiras em cada lado da linha de corte do tecido para evitar a existência de uma trajetória aberta através da qual o sangue poderá passar. As linhas de grampos de intertravamento têm menos probabilidade de deixar trajetórias através da qual o sangue pode passar. Uma outra vantagem distinta fornecida pelas várias disposições de grampos de intertravamento da presente invenção refere-se à "força de ruptura" aprimorada que é a quantidade de força necessária para romper e abrir uma linha de grampos.
[607] Uma outra disposição de bolsos de formação de grampos pode compreender um bolso de formação de grampos comum. Para uso na presente invenção, o termo "bolso de formação de grampos comum" significa que um bolso de formação pode formar todos os grampos em uma única linha de grampos, ao contrário dos modelos anteriores de bigornas nos quais é fornecida um bolso de formação distinto para cada perna de cada grampo ser formada.
[608] A FIGURA 12 ilustra ainda outra modalidade de grampo 922’ em que a base 924’ tem uma porção deslocada 929 para facilitar uma sobreposição mais justa das bases 924’. Conforme indicado acima, o cartucho de grampos 900 tem uma segunda linha 930 de grampos 922 apoiada em um segundo lado lateral 909 da fenda alongada 904. A segunda linha 930 de grampos 922 é substancialmente idêntica à primeira linha 920 de grampos 922. dessa forma, a bigorna 910 tem um segundo bolso de formação de grampos comum 912 que correspondeà segunda linha de grampos 930 para a formação de contato com a mesma. Em modalidades alternativas, entretanto, a segunda linha 930 de grampos 922 pode ser diferente da primeira linha 920 de grampos em formato e, talvez, número de grampos.
[609] A FIGURA 8 ilustra um cartucho de grampos cirúrgicos 900’ que é substancialmente idêntico ao cartucho de grampos 900 descrito acima, com exceção das linhas 920’, 930’ de grampos 922 apoiadas em seu interior. Por exemplo, nessa modalidade, a linha 920’ de grampos 922 é disposta em relação às outras de modo que um eixo de base S-S de ao menos uma base do grampo 924 é substancialmente transversal ao eixo de base S-S da base do grampo 924 de ao menos um outro grampo adjacente 922. Esse padrão predeterminado de grampos, quando visto de cima, compreende uma disposição substancial de ziguezague. Na modalidade mostrada na FIGURA 13, as respectivas bases 924 de grampos 922 podem adicionalmente ter um elemento de suporte de base 927 sobremoldado sobre as mesmas, conforme mostrado. Em várias modalidades, o membro de suporte base 927 pode ser fabricado a partir de, Por exemplo, plástico não absorvíveiscomo poli(éter-éter-cetona) "PEEK" ou plástico absorvível como, por exemplo, poli(ácido glicólico) "PGA", poli(ácido láctico) "PLA" ou "PLLA", polidioxanona "PDS", PCL (policaprolactona), PHA (poli(hidroxialcanoato)), poli(sebacato de glicerol) (PGS), PGCL (poliglecaprona 25, vendido sob a marca registrada Monocryl) ou vários misturas de compósitos mixes de PGS, PDS, PLA, PGA e PCL. Os elementos de suporte de base 927 facilitam o intertravamento entre os grampos sem fazer com que os próprios grampos se sobreponham. dessa forma, tais disposições poderiam formar grampos com formatos "B" ou formatos "W" invertidos sem a sobreposição das pernas dos grampos. Entretanto, as coroas são conectadas pelos elementos de suporte de base de modo que atuam como grampos sobrepostos. Tais disposições permitem que os bolsos combinados tenham duas trajetórias discretas para cada perna.
[610] A modalidade mostrada na FIGURA 14 emprega uma linha de grampos 920” em que as pernas 926 de grampos adjacentes 922 são acopladas juntas por uma porção acopladora 929 moldada ou de outro modo fixadas nessa porção. Cada porção acopladora 929 pode ser fabricada a partir de, por exemplo, poliéter éter cetona "PEEK" ou plástico absorvível como, por exemplo, ácido poliglicólico "PGA", ácido polilático "PLA" ou "PLLA", polidioxanona "PDS", PCL (policaprolactona), PHA (poli-hidroxialcanoato), PGCL (poliglecaprona 25, vendida sob a marca registrada Monocryl) ou várias misturas de compostos de PGS, PDS, PLA, PGA e PCL. Tal linha de grampos 920” tem uma aparência substancial de ziguezague quando vista de cima. Embora as várias modalidades de cartuchos de grampos cirúrgicos 900, 900’ tenham sido explicadas com referência ao uso com o atuador de extremidade 612’, deve-se compreender que os cartuchos de grampos 900, 900’ podem ser empregados efetivamente com os vários outros atuadores de extremidade e descritos anteriormente neste documento, com disposições de bolsos de formação de grampos adequadas sendo fornecidas nas bigornas desses instrumentos para se obter a quantidade desejada de formação de grampos com o movimento das bigornas em contato de formação com os grampos.
[611] As FIGURAS 15 e 16 ilustram uma outra modalidade de cartucho de grampos cirúrgicos 940 apoiado em uma canaleta alongada 14 de um instrumento cirúrgico 10. Em ao menos uma modalidade, o cartucho de grampos cirúrgicos 940 inclui um corpo do cartucho 942 que tem uma fenda alongada disposta centralizadamente 944 estendendo-se ao menos parcialmente através do mesmo. A fenda alongada 944 é configurada para permitir que um corpo de faca do instrumentocirúrgico 10 se mova axialmente através do mesmo durante uma operação de corte do tecido da maneira descrita acima. Em várias modalidades, o corpo do cartucho 942 consiste em um material hemostático compressível como, por exemplo, celulose regenerada oxidada ("ORC") ou uma espuma bioabsorvível dos tipos descritos acima ou abaixo, no qual são apoiadas as linhas 946, 948, 950, 952 de grampos não formados 922. Em ao menos algumas modalidades, para evitar que os grampos 922 sejam afetados e o material hemostático seja ativado durante o processo de introdução e posicionamento, todo o cartucho 940 pode ser revestido ou enrolado em um filme biodegradável 954 como um filme de polidioxanona, vendido sob a marca registrada PDS®, ou com um filme de sebacato de poliglicerol (PGS) ou outros filmes biodegradáveis fabricados a partir de, por exemplo, PGA (ácido poliglicólico, comercializado sob a marca registrada Vicryl), PCL (policaprolactona), PLA ou PLLA (ácido polilático), PHA (polihidroxialcanoato), PGCL (poliglecaprona 25, vendida sob a marca registrada Monocryl) ou um composto de PGA, PCL, PLA, PDS que se-riaimpermeável até que fosse rompido.
[612] Na modalidade mostrada na FIGURA 15, o cartucho 940 inclui adicionalmente um elemento de suporte do cartucho 960 que é acoplado ao corpo do cartucho 942. Em várias modalidades, o elemento de suporte do cartucho 960 pode ser fabricado a partir de um material rígido como, por exemplo, titânio, aço inoxidável, alumínio, qualquer liga dos anteriormente mencionados, etc., e pode ser parcialmente incorporado no corpo do cartucho 942. Em várias modalidades, o elemento de suporte do cartucho 960 pode ser mantido no lugar por, por exemplo, um filme 954. Em ainda outras modalidades em que uma ligação limitada é desejada, o uso esporádico de cianoacilato poderia ser feito para "colar" os dois componentes juntos. Em ainda outras modalidades, o corpo do cartucho 942 pode ser aquecido e "soldado" ou "fundido" no elemento de suporte do cartucho 960. Em várias modalidades, o elemento de suporte do cartucho 960 forma ao menos uma porção da superfície de fundo do corpo do cartucho 942 para encaixe na canaleta alongada 14. Em pelo menos uma modalidade, o elemento de suporte do cartucho 960 tem um ou mais recursos de encaixe por pressão 962 que se projetam do mesmo para acoplar de modo liberável o elemento de suporte do cartucho 960 à canaleta alongada 14. Outras formas de recursos de encaixe por pressão/disposições de prendedores podem ser empregadas para acoplar de modo liberável o elemento de suporte do cartucho 960 à canaleta alongada 14.
[613] Em várias modalidades, o elemento de suporte do cartucho 960 tem uma série de cristas de suporte 964, 966, 968, 970, 972, 974, 976 formadas sobre o mesmo para fornecer algum suporte lateral às bases 924 dos grampos 922 nas linhas de grampos 946, 948, 950, 952, conforme mostrado na FIGURA 15. dessa forma, em ao menos algumas modalidades, as cristas de suporte são substancialmente coextensivas com as linhas de grampos. A FIGURA 17 ilustra uma modalidade alternativa de cartucho de grampos 940’ que é substancialmenteidêntica a do cartucho 940, exceto pela inclusão de porções de aletas em posição vertical 978, 979, 980, 981, 982, 983 que se projetam a partir das cristas de suporte 964, 966, 968, 970, 972, 976, respectivamente, para fornecer suporte lateral adicional aos grampos 922. Em várias modalidades, as porções de aletas pode ser formadas integralmente com o elemento de suporte do cartucho 960 e ter uma altura que é cerca de % ou menos da altura do cartucho. dessa forma, em várias modalidades, por exemplo, quaisquer recursos em posição ver-tical que suportar a espuma não pode se estender acima da altura de máxima compressão da espuma. dessa forma, se o cartucho for projetado, por exemplo, para ser comprimido a 1/3 de sua altura original quando disparado, as aletas teriam entre 66% da altura não comprimida a 10% da altura não comprimida.
[614] Em uso, depois que os grampos 922 são formados através do contato com a bigorna 20 da maneira descrita acima, a bigorna 20 é aberta e o atuador de extremidade 12 é afastado do tecido grampeado.À medida que o atuador de extremidade 12 é afastado do tecido grampeado, o corpo do cartucho 942 permanece preso ao tecido grampeado e é então separado do elemento de suporte do cartucho 960 que permanece acoplado à canaleta alongada 14. Em várias modalidades, o elemento de suporte do cartucho 960 é dotado de uma cor que difere da cor do material que compreende o corpo do cartucho 942, bem como da cor da canaleta alongada 14. Tal disposição fornece ao cirurgião uma indicação facilmente reconhecível de que não há cartuchos de grampos presentes no atuador de extremidade. dessa forma, o cirurgião não tentará inadvertidamente reinserir/usar o atuador de extremidade sem primeiro instalar um novo cartucho de grampos em seu interior. Para isso, o cirurgião simplesmente desconecta os recursos de encaixe por pressão do elemento de suporte do cartucho 960 da canaleta alongada 14 para permitir que o elemento de suporte do cartucho 960 de um novo cartucho de grampos 940 seja colocado em seu interior. Embora os cartuchos de grampos 940, 940’ tenham sido explicados com referência ao instrumento cirúrgico 10, deve-se compreender que esses cartuchos podem ser empregados efetivamente com muitas das outras modalidades de instrumento cirúrgico aqui apresentadas sem que se desvie do caráter e âmbito da presente invenção.
[615] Em várias modalidades, um cartucho de grampos pode compreender um corpo do cartucho e uma pluralidade de grampos armazenados no corpo do cartucho. Em uso, o cartucho de grampos pode ser introduzido em um local cirúrgico e posicionado em um lado do tecido sendo tratado. Além disso, a bigorna de formação de grampos pode ser posicionada no lado oposto do tecido. Em várias modalidades, a bigorna pode ser transportada por uma primeira mandíbula e o cartucho de grampos pode ser transportado por uma segunda man-díbula,sendo que a primeira mandíbula e/ou a segunda mandíbula pode ser movida uma na direção da outra. depois que o cartucho de grampos e a bigorna são posicionados em relação ao tecido, os grampos podem ser ejetados do corpo do cartucho de grampos de modo que os grampos possam perfurar o tecido e entrar em contato com a bigorna de formação de grampos. depois que os grampos forem aplicados do corpo do cartucho de grampos, o corpo do cartucho de grampos poderá ser, então, removido do local cirúrgico. Em várias modalidades aqui apresentadas, um cartucho de grampos, ou ao menos uma porção de um cartucho de grampos, pode ser implantado com os grampos. Em ao menos uma dessas modalidades, conforme descrito em mais detalhes a seguir, um cartucho de grampos pode compreender um corpo do cartucho que pode ser comprimido, esmagado e/ou achatado pela bigorna quando a bigorna é movida de uma posição aberta para uma posição fechada. Quando o corpo do cartuchoé comprimido, esmagado e/ou achatado, os grampos posicionados no corpo do cartucho podem ser deformados pela bigorna. Alternativamente, a garra que suporta o cartucho de grampos pode ser movida na direção da bigorna para uma posição fechada. Em qualquer desses casos, em várias modalidades, os grampos podem ser deformados enquanto ainda estão, ao menos parcialmente, posicionados no corpo do cartucho. Em certas modalidades, os grampos podem não ser ejetados do cartucho de grampos enquanto, em algumas modalidades, os grampos podem ser ejetados do cartucho de grampos juntamente com uma porção do corpo do cartucho.
[616] Agora com referência às FIGURAS 18A a 18D, um cartucho de grampos compressível, como o cartucho de grampos 1000, por exemplo, pode compreender um corpo de cartucho implantável compressível 1010 e, além disso, uma pluralidade de grampos 1020 posicionados no corpo do cartucho compressível 1010, embora apenas um grampo 1020 seja mostrado nas FIGURAS 18A a 18D. A FIGURA 18A ilustra o cartucho de grampos 1000 apoiado por um suporte do cartucho de grampos, ou canaleta de cartucho de grampos, 1030, sendo que o cartucho de grampos 1000 é ilustrado em uma condição não comprimida. Em tal condição não comprimida, a bigorna 1040 pode ou não estar em contato com o tecido T. Em uso, a bigorna 1040 pode ser movida de uma posição aberta em contato com o tecido T, conforme ilustrado na FIGURA 18B, e posicionar o tecido T contra o corpo do cartucho 1010. Embora a bigorna 1040 possa posicionar o tecido T contra uma superfície de contato com o tecido 1019 do corpo do cartucho de grampos 1010, novamente com referência à FIGURA 18B, o corpo do cartucho de grampos 1010 pode ser submetido a uma pequena, ou nenhuma, força ou pressão de compressão em tal ponto e os grampos 1020 podem permanecer em uma condição não formada ou não disparada. Conforme ilustrado nas FIGURAS 18A e 18B, o corpo do cartucho de grampos 1010 pode compreender uma ou mais camadas e as pernas de grampo 1021 dos grampos 1020 podem se estender para cima através dessas camadas. Em várias modalidades, o corpo do cartucho 1010 pode compreender uma primeira camada 1011, uma segunda camada 1012, uma terceira camada 1013, sendo que a segunda camada 1012 pode ser disposta em uma posição intermediária entre a primeira camada 1011 e a terceira camada 1013, e uma quarta camada 1014, sendo que a terceira camada 1013 pode ser disposta em uma posição intermediária entre a segunda camada 1012 e a quarta camada 1014. Em ao menos uma modalidade, as bases 1022 dos grampos 1020 podem ser posicionadas em cavidades 1015 na quarta camada 1014 e as pernas dos grampos 1021 podem se estender para cima a partir das bases 1022 e através da quarta camada 1014, da terceira camada 1013 e da segunda camada 1012, por exemplo. Em várias modalidades, cada perna deformável 1021 pode compreender um ponta, como a ponta aguda 1023, por exemplo, que pode ser posicionada na segunda camada 1012, por exemplo, quando o cartucho de grampos 1000 encontra-se em uma condição não comprimida. Em ao menos uma dessas modalidades, as pontas 1023 podemnão se estender para e/ou através da primeira camada 1011, sendo que, em ao menos uma modalidade, as pontas 1023 podem não se projetar através da superfície de contato com o tecido 1019 quando o cartucho de grampos 1000 encontra-se em uma condição não comprimida. Em certas outras modalidades, as pontas agudas 1023 podem ser posicionadas na terceira camada 1013, e/ou em qualquer outra camada adequada, quando o cartucho de grampos encontra-se em uma condição não comprimida. Em várias modalidades al-ternativas, o corpo de um cartucho de grampos pode ter qualquer número adequado de camadas como menos de quatro camadas ou mais de quatro camadas, por exemplo.
[617] Em várias modalidades, conforme descrito em mais deta lhes abaixo, a primeira camada 1011 pode ser compreendida de um material de reforço e/ou material plástico, como polidioxanona (PDS) e/ou poli(ácido glicólico) (PGA), por exemplo, e a segunda camada 1012 pode ser compreendida de um material de espuma bioabsorvível e/ou um material hemostático compressível, como celulose regenerada oxidada (ORC), por exemplo. Em várias modalidades, uma ou mais dentre a primeira camada 1011, a segunda camada 1012, a terceira camada 1013 e a quarta camada 1014 podem manter os grampos 1020 no corpo do cartucho de grampos 1010 e, além disso, manter os grampos 1020 em alinhamento uns com os outros. Em várias modalidades, a terceira camada 1013 pode consistir em um material de reforço, ou um material razoavelmente incompressível ou inelástico, que pode ser configurado para manter as pernas de grampo 1021 dos grampos 1020 em uma posição relativa umas com as outras. Além disso, a segunda camada 1012 e a quarta camada 1014, que são posicionadas em lados opostos da terceira camada 1013, podem estabilizar, ou reduzir o movimento dos grampos 1020 embora a segunda camada 1012 e a quarta camada 1014 possam ser compreendidas de um material de espuma compressível ou elástico. Em certas modalidades, as pontas 1023 das pernas dos grampos 1021 podem ser, ao menos parcialmente, incorporadas na primeira camada 1011. Em ao menos uma dessas modalidades, a primeira camada 1011 e a terceira camada 1013 podem ser configuradas para manter cooperativa e firmemente as pernas dos grampos 1021 em posição. Em ao menos uma modalidade, a primeira camada 1011 e a terceira camada 1013 pode cada um ser compreendido de uma folha de plástico bioabsorvível, como poli(ácido glicólico) (PGA) que está disponível sob o nome comercial Vicryl, poli(ácido láctico) (PLA ou PLLA), polidioxanona (PDS), poli-hidroxialcanoato (PHA), poliglecaprona 25 (PGCL) que está disponível sob o nome comercial Monocryl, poli(carbonato de trimetileno) (TMC) e/ou um compósito de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo, e a segunda camada 1012 e a quarta camada 1014 pode cada uma ser compreendido de ao menos um material hemostático ou agente.
[618] Embora a primeira camada 1011 possa ser compressível, a segunda camada 1012 pode ser substancialmente mais compressível que a primeira camada 1011. Por exemplo, a segunda camada 1012 pode ser cerca de duas vezes tão compressível, cerca de três vezes tão compressível, cerca de quatro vezes tão compressível, cerca de cinco vezes tão compressível, e/ou cerca de dez vezes tão compressível, por exemplo, quanto a primeira camada 1011. Dito de outra maneira, a segunda camada 1012 pode comprimir cerca de duas vezes, cerca de três vezes, cerca de quatro vezes, cerca de cinco vezes, e/ou cerca de dez vezes mais que a primeira camada 1011, para uma dada força aplicada. Em certas modalidades, a segunda camada 1012 pode ser cerca de duas vezes tão compressível e cerca de dez vezes tão compressível, por exemplo, quanto a primeira camada 1011. Em ao menos uma modalidade, a segunda camada 1012 pode compreender uma pluralidade de espaços vazios de ar definidos em seu interior, sendo que a quantidade e/ou o tamanho dos espaços vazios de ar na segunda camada 1012 podem ser controlados para fornecer uma compressibilidade desejada da segunda camada 1012. de forma similar à modalidade acima, embora a terceira camada 1013 possa ser compressível, a quarta camada 1014 pode ser substancialmente mais compressível que a terceira camada 1013. Por exemplo, a quarta camada 1014 pode ser cerca de duas vezes tão compressível, cerca de três vezes tão compressível, cerca de quatro vezes tão compressível, cerca de cinco vezes tão compressível, e/ou cerca de dez vezes tão compressível, por exemplo, quanto a terceira camada 1013. Dito de outra maneira, a quarta camada 1014 pode comprimir cerca de duas vezes, cerca de três vezes, cerca de quatro vezes, cerca de cinco vezes, e/ou cerca de dez vezes mais que a terceira camada 1013, para uma dada força aplicada. Em certas modalidades, a quarta camada 1014 pode ser cerca de duas vezes tão compressível e cerca de dez vezes tão compressível, por exemplo, quanto a terceira camada 1013. Em ao menos uma modalidade, a quarta camada 1014 pode compreender uma pluralidade de espaços vazios de ar definidos em seu interior, sendo que a quantidade e/ou o tamanho dos espaços vazios de ar na quarta camada 1014 podem ser controlados para fornecer uma compressibilidade desejada da quarta camada 1014. Em várias circunstâncias, a compressibilidade de um corpo do cartucho, ou da camada do corpo do cartucho, pode ser expressa em termos de uma taxa de compressão, isto é, uma distância na qual uma camada é comprimida para uma dada quantidade de força. Por exemplo, uma camada que tem uma alta taxa de compressão irá comprimir uma distância maior para uma dada quantidade de força de compressão aplicada à camada em comparação com uma camada que tem uma taxa de compressão mais baixa. Dito isso, a segunda camada 1012 pode ter uma taxa de compressão mais alta que a primeira camada 1011 e, de modo similar, a quarta camada 1014 pode ter uma taxa de compressão mais alta que a terceira camada 1013. Em várias modalidades, a segunda camada 1012 e a quarta camada 1014 podem consistir no mesmo material e podem compreender a mesma taxa de compressão. Em várias modalidades, a segunda camada 1012 e a quarta camada 1014 podem consistir em materiais que têm taxas de compressão diferentes. de modo similar, a primeira camada 1011 e a terceira camada 1013 podem ser compreendidas do mesmo material e podem compreender a mesma taxa de compressão. Em certas modalidades, a primeira camada 1011 e a terceira camada 1013 podem consistir em ma-teriais que têm taxas de compressão diferentes.
[619] À medida que a bigorna 1040 é movida na direção de sua posição fechada, a bigorna 1040 pode entrar em contato com o tecido T e aplicar uma força de compressão ao tecido T e ao cartucho de grampos 1000, conforme ilustrado na FIGURA 18C. Em tais circunstâncias, a bigorna 1040 pode forçar a superfície de topo, ou a superfície de contato com o tecido 1019, do corpo do cartucho 1010 para baixo na direção do suporte do cartucho de grampos 1030. Em várias modalidades, o suporte do cartucho de grampos 1030 pode compreender uma superfície de suporte do cartucho 1031 que pode ser configurada para suportar o cartucho de grampos 1000 à medida que o cartucho de grampos 1000 é comprimido entre a superfície de suporte do cartucho 1031 e a superfície de contato com o tecido 1041 da bigorna 1040. devido à pressão aplicada pela bigorna 1040, o corpo do cartucho 1010 pode ser comprimido e a bigorna 1040 pode entrar em contato com os grampos 1020. Mais particularmente, em várias modalidades, a compressão do corpo do cartucho 1010 e o movimento descendente da superfície de contato com o tecido 1019 podem fazer com que as pontas 1023 das pernas dos grampos 1021 perfurem a primeira camada 1011 do corpo do cartucho 1010, perfurem o tecido T, e entrem nos bolsos de formação 1042 na bigorna 1040. À medida que o corpo do cartucho 1010 é adicionalmente comprimido pela bigorna 1040, as pontas 1023 podem entrar em contato com as paredes definindo os bolsos de formação 1042 e, como resultado, as pernas 1021 podem ser deformadas ou curvadas para dentro, por exemplo, conforme ilustrado na FIGURA 18C. À medida que as pernas dos grampos 1021 são deformadas, conforme também ilustrado na FIGURA 18C, as bases 1022 dos grampos 1020 podem entrar em contato com ou ser apoiadas pelo suporte do cartucho de grampos 1030. Em várias modalidades, conforme descrito em mais detalhes a seguir, o suporte do cartucho de grampos 1030 pode compreender uma pluralidade de recursos de suporte, como sulcos, fendas ou rebaixos de suporte de grampos 1032, por exemplo, que podem ser configurados para suportar os grampos 1020, ou ao menos as bases 1022 dos grampos 1020, à medida que os grampos 1020 são deformados. Conforme também ilustrado na FIGURA 18C, as cavidades 1015 na quarta camada 1014 podem se achatar como resultado da força de compressão aplicada ao corpo do cartucho de grampos 1010. Em adição às cavidades 1015, o corpo do cartucho de grampos 1010 pode compreender, adicionalmente, um ou mais espaços vazios, como os espaços vazios 1016, por exemplo, que podem ou não compreender uma porção de um grampo posicionada nos mesmos, que podem ser configuradas para permitir que o corpo do cartucho 1010 seja achatado. Em várias modalidades, as cavidades 1015 e/ou os espaços vazios 1016 podem ser configurados para achatar de modo que as paredes definindo as cavidades e/ou as paredes sejam defletidas para baixo e entrem em contato com a superfície de suporte do cartucho 1031 e/ou em contato com uma camada do corpo do cartucho 1010 posicionada sob as cavidades e/ou os espaços vazios.
[620] Comparando-se A FIGURA 18B e A FIGURA 18C, fica evi dente que a segunda camada 1012 e a quarta camada 1014 foram substancialmente comprimidas pela pressão de compressão aplicada pela bigorna 1040. Pode-se observar, ainda, que a primeira camada 1011 e a terceira camada 1013 também foram comprimidas. À medida que a bigorna 1040 é movida para sua posição fechada, a bigorna 1040 pode continuar a comprimir adicionalmente o corpo do cartucho 1010 forçando a superfície de contato com o tecido 1019 para baixo na direção do suporte do cartucho de grampos 1030. À medida que o corpo do cartucho 1010 é comprimido adicionalmente, a bigorna 1040 pode deformar os grampos 1020 em seu formato completamente formado, conforme ilustrado na FIGURA 18D. Com referência à FIGURA 18D, as pernas 1021 de cada grampo 1020 podem ser deformadas para baixo na direção da base 1022 de cada grampo 1020 para capturar ao menos uma porção do tecido T, da primeira camada 1011, da segunda camada 1012, da terceira camada 1013, e da quarta camada 1014 entre as pernas deformáveis 1021 e a base 1022. Comparandose As FIGURAS 18C e 18D, fica adicionalmente evidente que a segunda camada 1012 e a quarta camada 1014 foram substancialmente ainda mais comprimidas pela pressão de compressão aplicada pela bigorna 1040. Pode-se observar, também, após a comparação das FIGURAS 18C e 18D que a primeira camada 1011 e a terceira camada 1013 foram, também, ainda mais comprimidas. depois que os grampos 1020 são completamente, ou ao menos suficientemente, formados, a bigorna 1040 pode ser levantada e afastada do tecido T e o suporte do cartucho de grampos 1030 pode ser afastado, e/ou separado, do cartucho de grampos 1000. Conforme mostrado na FIGURA 18D, e como resultado do exposto acima, o corpo do cartucho 1010 pode ser implantado com os grampos 1020. Em várias circunstâncias, o corpo do cartucho implantado 1010 pode suportar o tecido ao longo da linha de grampos. Em algumas circunstâncias, um agente hemostático e/ou qualquer outro medicamento terapêutico adequado, contido no corpo do cartucho implantado 1010 pode tratar o tecido ao longo do tempo. Um agente hemostático, conforme mencionado acima, pode reduzir o sangramento do tecido grampeado e/ou cortado enquanto um agente de ligação ou adesivo de tecido pode proporcionar força ao tecido ao longo do tempo. O corpo de cartucho implantado 1010 pode ser compreendido de materiais como ORC (celulose regenerada oxidada),proteínas extracelulares como colágeno, poli(ácido glicólico) (PGA) que está disponível sob o nome comercial Vicryl, poli(ácido láctico) (PLA ou PLLA), polidioxanona (PDS), poli(hidroxialcanoato) (PHA), poliglecaprona 25 (PGCL) que está disponível sob o nome comercial Monocryl, policaprolactona (PCL) e/ou um compósito de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo. Em determinadas circunstâncias, o corpo do cartucho 1010 pode compreender um antibiótico e/ou material antimicrobiano, como prata coloidal e/ou triclosan, por exemplo, que podem reduzir a possibilidade de infecção no local cirúrgico.
[621] Em várias modalidades, as camadas do corpo do cartucho 1010 podem ser conectadas umas às outras. Em ao menos uma mo-dalidade, a segunda camada 1012 pode ser aderida à primeira camada 1011, a terceira camada 1013 pode ser aderida à segunda camada 1012 e a quarta camada 1014 pode ser aderida à terceira camada 1013 com o uso de ao menos um adesivo, como fibrinaa e/ou hidrogel de proteína, por exemplo. Em certas modalidades, embora não ilustrado, as camadas do corpo do cartucho 1010 podem ser conectadas juntas mediante o intertravamento de recursos mecânicos. Em ao menos uma dessas modalidades, a primeira camada 1011 e a segunda camada 1012 podem compreender, cada uma, recursos de intertravamento correspondentes, como uma disposição de lingueta e sulco e/ou uma disposição de junta de encaixe, por exemplo. de modo similar, a segunda camada 1012 e a terceira camada 1013 podem compreender, cada uma, recursos de intertravamento correspondentes, enquanto a terceira camada 1013 e a quarta camada 1014 podem compreender, cada uma, recursos de intertravamento correspondentes. Em certas modalidades, embora isso não esteja ilustrado, o cartucho de grampos 1000 pode compreender um ou mais rebites, por exemplo, que podem se estender através de uma ou mais camadas do corpo do cartucho 1010. Em ao menos uma dessas modalidades, cada rebite pode compreender uma primeira extremidade, ou cabeça, posicionada adjacente à primeira camada 1011 e uma segunda cabeça posicionada adjacenteà quarta camada 1014 que pode ser montada em ou formada por uma segunda extremidade do rebite. devido à natureza compressível do corpo do cartucho 1010, em ao menos uma modalidade, os rebites podem comprimir o corpo do cartucho 1010 de modo que as cabeças dos rebites possam ser rebaixadas em relação à superfície de contato com o tecido 1019 e/ou à superfície de fundo 1018 do corpo do cartucho 1010, por exemplo. Em ao menos uma dessas modalidades, os rebites podem consistir em um material bioabsorvível, como ácido poliglicólico (PGA), disponível sob o nome comercial Vicryl, ácido polilático (PLA ou PLLA), polidioxanona (PDS), poli-hidroxialcanoato (PHA), poliglecaprona 25 (PGCL), disponível sob o nome comercial Monocryl, policaprolactona (PCL), e/ou um composto de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo. Em certas modalidades, as camadas do corpo do cartucho 1010 podem não ser conectadas umas às outras, além de pelos grampos 1020 contidos em seu interior. Em ao menos uma dessas modalidades, o engate por atrito entre as pernas dos grampos 1021 e o corpo do cartucho 1010, por exemplo, pode manter as camadas do corpo do cartucho 1010 juntas e, depois que os grampossão formados, as camadas podem ser capturadas nos grampos 1020. Em certas modalidades, ao menos uma porção das pernas dos grampos 1021 pode compreender uma superfície tornada áspera ou um revestimento áspero que pode aumentar as forças de atrito entre os grampos 1020 e o corpo do cartucho 1010.
[622] Conforme descrito anteriormente, um instrumento cirúrgico pode compreender uma primeira garra que inclui o suporte do cartucho de grampos 1030 e uma segunda garra que inclui a bigorna 1040. Em várias modalidades, conforme descrito em mais detalhes a seguir, o cartucho de grampos 1000 pode compreender um ou mais recursos de retenção que podem ser configurados para engatar o suporte do cartucho de grampos 1030 e, como resultado, reter de maneira liberável o cartucho de grampos 1000 no suporte do cartucho de grampos 1030. Em certas modalidades, o cartucho de grampos 1000 pode ser preso ao suporte do cartucho de grampos 1030 por ao menos um adesivo, como fibrinaa e/ou hidrogel de proteína, por exemplo. Em uso, em ao menos uma circunstância, especificamente em cirurgias laparoscópica e/ou endoscópicas, a segunda garra pode ser movida para uma posição fechada oposta à primeira garra, por exemplo, de modo que a primeira e a segunda garras possam ser inseridas através de um trocarte em um local cirúrgico. Em ao menos uma dessas modalidades, o trocarte pode definir uma abertura, ou cânula, de aproximadamente 5 mm, através da qual a primeira e a segunda mandíbulas podem ser inseridas. Em certas modalidades, a segunda mandíbula pode ser movida em uma posição parcialmente fechada intermediária entre a posição aberta e a posição fechada que pode permitir que a primeira e a segunda mandíbulas sejam inseridas através do trocarte sem deformar os grampos 1020 contidos no corpo do cartucho de grampos 1010. Em ao menos uma dessas modalidades, a bigorna 1040 pode não aplicar uma força de compressão ao corpo do cartucho de grampos 1010 quando a segunda mandíbula encontra-se em sua posição intermediária parcialmente fechada enquanto que, em algumas outras modalidades, a bigorna 1040 pode comprimir o corpo do cartucho de grampos 1010 quando a segunda mandíbula encontra-se em sua posição intermediária parcialmente fechada. Embora a bigorna 1040 possa comprimir o corpo do cartucho de grampos 1010 quando se encontra em tal posição intermediária, a bigorna 1040 pode não comprimir suficientemente o corpo do cartucho de grampos 1010 de modo que a bigorna 1040 entre em contato com os grampos 1020 e/ou de modo que os grampos 1020 sejam deformados pela bigorna 1040. depois que a primeira e a segunda garras forem inseridas através do trocarte no lo-cal cirúrgico, a segunda garra poderá ser aberta novamente e a bigorna 1040 e o cartucho de grampos 1000 poderão ser posicionados em relação ao tecido-alvo, conforme descrito acima.
[623] Em várias modalidades, agora com referência às FIGURAS 19A a 19D, um atuador de extremidade de um grampeador cirúrgico pode compreender um cartucho de grampos implantável 1100 colocado em uma posição intermediária entre uma bigorna 1140 e um suporte do cartucho de grampos 1130. de forma similar à modalidade acima, a bigorna 1140 pode compreender uma superfície de contato com o tecido 1141, o cartucho de grampos 1100 pode compreender uma superfície de contato com o tecido 1119, e o suporte do cartucho de grampos 1130 pode compreender uma superfície de plataforma 1131 que pode ser configurada para suportar o cartucho de grampos 1100. Com referência à FIGURA 19A, a bigorna 1140 pode ser utilizada para posicionar o tecido T contra a superfície de contato com o tecido 1119 do cartucho de grampos 1100 sem deformar o cartucho de grampos 1100 e, quando a bigorna 1140 estiver em tal posição, a superfície de contato com o tecido 1141 poderá ser posicionada uma distância 1101a da superfície de plataforma do cartucho de grampos 1131 e a superfície de contato com o tecido 1119 pode ser posicionada uma distância 1102a da superfície de plataforma do cartucho de grampos 1131. depois disso, à medida que a bigorna 1140 é movida na direção do suporte do cartucho de grampos 1130, agora com referência à FIGURA 19B, a bigorna 1140 pode forçar a superfície de topo, ou a superfície de contato com o tecido 1119, do cartucho de grampos 1100 para baixo e comprimir a primeira camada 1111 e a segunda camada 1112 do corpo do cartucho 1110. À medida que as camadas 1111 e 1112 são comprimidas, novamente com referência à FIGURA 19B, a segunda camada 1112 pode ser esmagada e as pernas 1121 dos grampos 1120 podem perfurar a primeira camada 1111 e entrar no tecido T. Em ao menos uma dessas modalidades, os grampos 1120 podem ser, ao menos parcialmente, posicionados nas cavidades de grampos, ou espaços vazios, 1115 na segunda camada 1112 e, quando a segunda camada 1112 for comprimida, as cavidades de grampos 1115 podem se achatar e, como resultado, permitir que a segunda camada 1112 seja achatada ao redor dos grampos 1120. Em várias modalidades, a segunda camada 1112 pode compreender porções de cobertura 1116 que podem se estender sobre as cavidades de grampos 1115 e encerrar, ou ao menos encerrar parcialmente, as cavidades de grampos 1115. A FIGURA 19B ilustra as porções de cobertura 1116 sendo esmagadas para baixo para dentro das cavidades de grampos 1115. Em certas modalidades, a segunda camada 1112 pode compreender uma ou mais porções enfraquecidas que podem facilitar o achatamento da segunda camada 1112. Em várias modalidades, essasporções enfraquecidas podem compreender marcações, perfurações e/ou seções transversais delgadas, por exemplo, que podem facilitar um achatamento controlado do corpo do cartucho 1110. Em ao menos uma modalidade, a primeira camada 1111 pode compreender uma ou mais porções enfraquecidas que podem facilitar a penetração das pernas dos grampos 1121 através da primeira camada 1111. Em várias modalidades, essas porções enfraquecidas podem compreendermarcações, perfurações e/ou seções transversais delgadas, por exemplo, que podem ser alinhadas, ou ao menos substancialmente alinhadas, com as pernas dos grampos 1121.
[624] Quando a bigorna 1140 está em uma posição não dispara da parcialmente fechada, novamente com referência à FIGURA 19A, a bigorna 1140 pode ser posicionada uma distância 1101a da superfície de plataforma do cartucho 1131 de modo que um vão seja definido nessa região. Esse vão pode ser preenchido pelo cartucho de grampos 1100, que tem uma altura do cartucho de grampos 1102a, e o tecido T. À medida que a bigorna 1140 é movida para baixo para comprimir o cartucho de grampos 1100, novamente com referência à FIGURA 19B, a distância entre a superfície de contato com o tecido 1141 e a superfície de plataforma do cartucho 1131 pode ser definida por uma distância 1101b que é mais curta que a distância 1101a. Em várias circunstâncias, o vão entre a superfície de contato com o tecido 1141 da bigorna 1140 e a superfície de plataforma do cartucho 1131, definido pela distância 1101b, pode ser maior que a altura original, não deformada do cartucho de grampos 1102a. À medida que a bigorna 1140 é movida para mais perto da superfície de plataforma do cartu-cho 1131, agora com referência à FIGURA 19C, a segunda camada 1112 pode continuar a ser achatada e a distância entre as pernas dos grampos 1121 e os bolsos de formação 1142 pode diminuir. de modo similar, a distância entre a superfície de contato com o tecido 1141 e a superfície de suporte do cartucho 1131 pode diminuir até uma distância 1101c que, em várias modalidades, pode ser maior que, igual a, ou menor que a altura original, não deformada do cartucho 1102a. Agora com referência à FIGURA 19D, a bigorna 1140 pode ser movida para uma posição de disparo final na qual os grampos 1120 foram formados completamente, ou ao menos formado até uma altura desejada. Nessa posição, a superfície de contato com o tecido 1141 da bigorna 1140 pode ser uma distância 1101d da superfície de plataforma do cartucho 1131, sendo que a distância 1101d pode ser mais curta que a altura original, não deformada do cartucho 1102a. Conforme também ilustrado na FIGURA 19D, as cavidades de grampos 1115 podem ser completamente, ou ao menos substancialmente, achatadas e os grampos 1120 podem ser completamente, ou ao menos substancialmente, circundados pela segunda camada achatada 1112. Em várias circunstâncias, a bigorna 1140 pode ser depois disso afastada do cartucho de grampos 1100. depois que a bigorna 1140 é desengatada do cartucho de grampos 1100, o corpo do cartucho 1110 pode, ao menos parcialmente, re-expandir em vários locais, isto é, locais intermediários de grampos adjacentes 1120, por exemplo. Em ao menos uma modalidade, o corpo do cartucho esmagado 1110 pode não re-expandir resilientemente. Em várias modalidades, os grampos formados 1120 e, adicionalmente, os grampos do corpo do cartucho 1110 colocados em uma posição intermediária adjacente 1120 podem aplicar pressão, ou forças de compressão, ao tecido T, podendo proporcionar vários benefí-ciosterapêuticos.
[625] Conforme discutido anteriormente, novamente com referên ciaà modalidade ilustrada na FIGURA 19A, cada grampo 1120 pode compreender pernas de grampos 1121 que se estendem a partir do mesmo. Embora os grampos 1120 sejam mostrados como compreendendo duas pernas de grampos 1121, podem ser utilizados vários grampos que podem compreender uma perna de grampo ou, alternativamente, mais de duas pernas de grampo, como três pernas de grampo ou quatro pernas de grampo, por exemplo. Conforme ilustrado na FIGURA 19A, cada perna de grampo 1121 pode ser incorporada na segunda camada 1112 do corpo do cartucho 1110 de modo que os grampos 1120 fiquem fixados na segunda camada 1112. Em várias modalidades, os grampos 1120 podem ser inseridos nas cavidades de grampos 1115 no corpo do cartucho 1110 de modo que as pontas 1123 das pernas dos grampos 1121 entrem nas cavidades 1115 antes das bases 1122. depois que as pontas 1123 são inseridas nas cavidades 1115, em várias modalidades, as pontas 1123 podem ser pressionadas contra as porções de cobertura 1116 e cortar a segunda camada 1112. Em várias modalidades, os grampos 1120 podem ser assentados a uma profundidade suficiente na segunda camada 1112 de modo que os grampos 1120 não se movam, ou se movam ao menos substancialmente, em relação à segunda camada 1112. Em certas modalidades, os grampos 1120 podem ser assentados a uma profundidade suficiente na segunda camada 1112 de modo que as bases 1122 sejam posicionadas ou incorporadas nas cavidades de grampos 1115. Em várias outras modalidades, as bases 1122 podem não ser posicionadas ou incorporadas na segunda camada 1112. Em certas modalidades, novamente com referência à FIGURA 19A, as bases 1122 podem se estender abaixo da superfície de fundo 1118 do corpo do cartucho 1110. Em certas modalidades, as bases 1122 podem repousar sobre, ou podem ser posicionadas diretamente contra, a superfície de suporte do cartucho 1130. Em várias modalidades, a superfície de suporte do cartucho 1130 pode compreender recursos de suporte que se estendem a partir da mesma e/ou que estão nela definidos sendo que, em ao menos uma de tais modalidades, as bases 1122 dos grampos 1120 podem ser posicionadas em e ser apoiadas por um ou mais sulcos, fendas ou rebaixos de suporte 1132, por exemplo, no suporte do cartucho de grampos 1130, conforme descrito em mais detalhes a seguir.
[626] Adicionalmente ao exposto acima, agora com referência à FIGURA 20, as bases 1122 dos grampos 1120 podem ser posicionadas diretamente contra a superfície de plataforma 1131 do suporte do cartucho de grampos 1130. Em várias modalidades, incluindo modalidades em que as bases dos grampos 1122 compreendem superfícies de fundo circulares ou arqueadas 1124, por exemplo, as bases dos grampos 1122 podem se mover ou deslizar ao longo da superfície de suporte do cartucho de grampos 1131. Tal deslizamento pode ocorrer quando a bigorna 1140 é pressionada contra as pontas 1123 das pernas dos grampos 1121 durante o processo de formação de grampos. Em certas modalidades, conforme descrito acima e agora com referência à FIGURA 21, o suporte do cartucho de grampos 1130 pode compreender uma ou mais fendas de suporte 1132 que pode ser con-figurada para eliminar, ou ao menos reduzir, o movimento relativo entre a bases dos grampos 1122 e a superfície de suporte do cartucho 1131. Em ao menos uma dessas modalidades, cada fenda de suporte 1132 pode ser definida por um contorno de superfície que corresponde, ou ao menos corresponde substancialmente, ao contorno da superfície de fundo do grampo posicionado em seu interior. Por exemplo, a superfície de fundo 1124 da base 1122 mostrada na FIGURA 21 pode compreender uma superfície circular, ou ao menos substancialmente circular, e a fenda de suporte 1132 pode compreender, também, uma superfície circular, ou ao menos substancialmente circular. Em ao menos uma dessas modalidades, a superfície que define a fenda 1132 pode ser definida por um raio de curvatura que é maior que ou igual a um raio de curvatura que define a superfície de fundo 1124. Embora as fendas 1132 possam auxiliar na prevenção ou redução do movimento deslizante relativo entre os grampos 1120 e o suporte do cartucho de grampos 1130, as fendas 1132 podem também ser configuradas para evitar ou reduzir o movimento rotacional relativo entre os grampos 1120 e o suporte do cartucho de grampos 1130. Mais particularmente, em ao menos uma modalidade, as fendas 1132 podem ser configuradas para receber estreitamente as bases 1122 para evitar ou reduzir a rotação dos grampos 1120 em torno dos eixos 1129, por exemplo, de modo que os grampos 1120 não girem ou torçam quando estiverem sendo deformados.
[627] Em várias modalidades, além do exposto acima, cada grampo 1120 pode ser formado a partir de um fio redondo, ou ao menos substancialmente redondo. Em certas modalidades, as pernas e a base de cada grampo podem ser formadas a partir de um fio que tem uma seção transversal não circular, como uma seção transversal retangular, por exemplo. Em ao menos uma dessas modalidades, o suporte do cartucho de grampos 1130 pode compreender fendas não circulares correspondentes, como fendas retangulares, por exemplo, configuradas para receber as bases de tais grampos. Em várias modalidades, agora com referência à FIGURA 22, cada grampo 1120 pode compreender uma coroa, como uma coroa 1125, por exemplo, sobremoldada sobre uma base 1122, sendo que cada coroa 1125 pode ser posicionada em uma fenda de suporte no suporte do cartucho de grampos 1130. Em ao menos uma dessas modalidades, cada coroa 1125 pode compreender uma seção transversal quadrada e/ou retan-gular, por exemplo, que pode ser configurada para ser recebida em fendas quadradas e/ou retangulares 1134, por exemplo, no suporte do cartucho de grampos 1130. Em várias modalidades, as coroas 1125 podem consistir em um plástico bioabsorvível, como ácido poliglicólico (PGA), disponível sob o nome comercial Vicryl, ácido polilático (PLA ou PLLA), polidioxanona (PDS), poli-hidroxialcanoato (PHA), poliglecaprona 25 (PGCL), disponível sob o nome comercial Monocryl, policaprolactona (PCL), e/ou um composto de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo, e podem ser formadas ao redor das bases 1122 dos grampos 1120 por um processo de modelagem por injeção, por exemplo. Várias coroas e métodos de formação de várias coroas são apresentados no pedido de patente US n° de série 11/541.123, intitulado "SURGICAL STAPLES HAVING COMPRESSIBLE OR CRUSHABLE MEMBERS FOR SECURING TISSUE THEREIN AND STAPLING INSTRUMENTS FOR DEPLOYING THE SAME", depositado em 29 de setembro de 2006, cuja descrição integral está aqui incorporada a título de referência. Novamente com referência à FIGURA 22, as fendas 1134 podem compreender, adicionalmente, áreas de entrada, ou chanfros 1135 que podem ser configurados para facilitar a inserção das coroas 1125 nas fendas 1134. Em várias modalidades, as bases e/ou coroas dos grampos 1120 podem ser posicionadas nas fendas 1134 quando o cartucho de grampos 1100 é montado no suporte do cartucho de grampos 1130. Em certas modalidades, as coroas 1125 dos grampos 1120 podem ser alinhadas com as fendas 1134 quando o cartucho de grampos 1100 é montado no suporte do cartucho de grampos 1130. Em ao menos uma dessas modalidades, as coroas 1125 podem não entrar nas fendas 1134 até que uma força de compressão seja aplicada às pernas dos grampos 1121 e as bases e/ou coroas dos grampos 1120 sejam forçadas para baixo para o interior das fendas 1134.
[628] Em várias modalidades, agora com referência às FIGURAS 23 e 24, um cartucho de grampos, como o cartucho de grampos 1200, por exemplo, pode compreender um corpo de cartucho implantável compressível 1210 que compreende uma camada externa 1211 e uma camada interna 1212. de forma similar à modalidade acima, o cartucho de grampos 1200 pode compreender uma pluralidade de grampos 1220 posicionados no corpo do cartucho 1210. Em várias modalidades, cada grampo 1220 pode compreender uma base 1222 e uma ou mais pernas de grampo 1221 que se estendem a partir da mesma. Em ao menos uma dessas modalidades, as pernas dos grampos 1221 podem ser inseridas na camada interna 1212 e assentadas a uma profundidade na qual as bases 1222 dos grampos 1220 ficam em posição limítrofe e/ou são dispostas em posição adjacente com a superfície de fundo 1218 da camada interna 1212, por exemplo. Na modalidade mostrada nas FIGURAS 23 e 24, a camada interna 1212 não compreende cavidades de grampos configuradas para receber uma porção dos grampos 1220 enquanto, em outras modalidades, a camada interna 1212 pode compreender tais cavidades de grampos. Em várias modalidades, além do exposto acima, a camada interna 1212 pode consistir em um material compressível, como espuma bioabsorvível e/ou celulose regenerada oxidada (ORC), por exemplo, que pode ser configurado para permitir que o corpo do cartucho 1210 seja achatado quando uma carga de compressão é aplicada ao mesmo. Em várias modalidades, a camada interna 1212 pode consistir em uma espuma liofilizada que compreende ácido polilático (PLA) e/ou ácido poliglicólico (PGA), por exemplo. A ORC pode ser disponível para comercialização sob o nome comercial de Surgicel e pode compreender um pano tecido solto (como uma esponja cirúrgica), fibras soltas (como uma bola de algodão), e/ou uma espuma. Em ao menos uma modalidade, a camada interna 1212 pode consistir em um material que inclui medicamentos, como trombina secada por congelamento e/ou fibrinaa, por exemplo, ali contidos e/ou revestidos sobre a camada, que podem ser ativados por água e/ou ativados por fluidos no corpo do paciente, por exemplo. Em ao menos uma dessas modalidades, a trombina secada por congelamento e/ou a fibrinaa podem ser mantidas em uma matriz de Vicryl (PGA), por exemplo. Em determinadas circunstâncias, entretanto, os medicamentos ativáveis podem ser ativados não intencionalmente quando o cartucho de grampos 1200 é inserido em um local cirúrgico no paciente, por exemplo. Em várias modalidades, novamente com referência às FIGURAS 23 e 24, a camada externa 1211 pode consistir em um material impermeável, ou ao menos substancialmente impermeável, à água à água, de modo que líquidos não entrem em contato com, ou ao menos substancialmente em contato com, a camada interna 1212 até que o corpo do cartucho 1210 tenha sido comprimido e as pernas dos grampos tenham penetrado na camada externa 1211 e/ou até que a camada externa 1211 tenha sido cortada de alguma maneira. Em várias modalidades, a camada externa 1211 pode consistir em um material de reforço e/ou material plástico, como polidioxanona (PDS) e/ou ácido poliglicólico (PGA), por exemplo. Em certas modalidades, a camada externa 1211 pode compreender um envoltório que circunda a camada interna 1212 e os grampos 1220. Mais particularmente, em ao menos uma modalidade, os grampos 1220 podem ser inseridos na camada interna 1212 e a camada externa 1211 pode ser enrolada em torno do subconjunto que compreende a camada interna 1212 e os grampos 1220 e, então, selada.
[629] Em várias modalidades, agora com referência às FIGURAS 25 e 26, um cartucho de grampos, como o cartucho de grampos 1300, por exemplo, pode compreender um corpo de cartucho implantável compressível 1310 que inclui uma camada externa 1311 e uma camada interna 1312. de forma similar à modalidade acima, o cartucho de grampos 1300 pode compreender, adicionalmente, grampos 1320 posicionados no corpo do cartucho 1310 sendo que cada grampo 1320 pode compreender uma base 1322 e uma ou mais pernas 1321 que se estendem a partir do mesmo. de forma similar ao cartucho de grampos 1200, as bases 1322 de grampos 1320 podem se estender abaixo da superfície de fundo 1318 da camada interna 1312 e a camada externa 1311 pode circundar as bases 1322. Em ao menos uma dessas modalidades, a camada externa 1311 pode ser suficientemente flexível de modo a envolver cada base de grampo 1322 de modo que a camada externa 1311 se conforma ao contorno das bases 1322. Em ao menos uma modalidade alternativa, novamente com referência à FIGURA 24, a camada externa 1211 pode ser suficientemente rígida de modo a se estender ao redor das bases 1222 sem se conformar a cada base 1222. Em qualquer caso, em várias modalidades, a camada externa 1311 pode ser disposta em uma posição intermediária entre as bases 1322 dos grampos 1320 e uma superfície de suporte do cartucho de grampos, como as superfícies de suporte 1031 ou 1131, por exemplo, que suportam o cartucho de grampos 1300. Em ao menos uma dessas modalidades, a camada externa 1311 pode ser disposta em uma posição intermediária entre as bases 1322 e fendas de suporte, como as fendas 1032 ou 1132, por exemplo, definida na superfície de suporte do cartucho de grampos. Em ao menos uma dessas modalidades, além do exposto acima, a camada externa 1311 pode ser configurada para limitar o movimento das bases 1322 e/ou aumentar o coeficiente de atrito entre as bases 1322 e a superfície de suporte do cartucho de grampos e/ou fendas de suporte para reduzir o movimento relativo nessa região. Em várias modalidades alternativas, agora com referênciaàs FIGURAS 27 e 28, a camada externa de um cartucho de gram-pos, como o cartucho de grampos 1400, por exemplo, pode não circundar completamente os grampos posicionados em seu interior. Em ao menos uma dessas modalidades, uma camada externa 1411 de um corpo de cartucho implantável compressível 1410 pode ser montada na camada interna 1412 antes de as pernas de grampo 1421 dos grampos 1420 serem inseridas no corpo do cartucho 1410. Como resultado do exposto acima, as bases 1422 dos grampos 1420 podem se estender para fora da camada externa 1411 e, em ao menos uma de tais modalidades, as bases 1422 podem ser posicionadas diretamente nas fendas de suporte 1032 ou 1132 nas superfícies de suporte do cartucho de grampos 1031 ou 1131, por exemplo. Em várias modalidades, as pernas dos grampos 1421 podem cortar a camada externa 1411 quando são inseridas através da mesma. Em várias circunstâncias, os orifícios criados pelas pernas dos grampos 1421 podem circundar estreitamente as pernas dos grampos 1421 de modo que muito pouco, ou nenhum, fluido pode vazar entre as pernas dos grampos 1421 e a camada externa 1411, o que pode reduzir, ou evitar, a possibilidade de que o medicamento contido no corpo do cartucho de grampos 1410 seja ativado e/ou vaze para fora do corpo do cartucho 1410 prematuramente.
[630] Conforme discutido anteriormente, novamente com referên ciaàs FIGURAS 23 e 24, as pernas 1221 dos grampos 1220 podem ser incorporadas no corpo do cartucho 1210 e as bases 1222 dos grampos 1220 podem se estender para fora a partir da superfície de fundo 1218 da camada interna 1212. Em várias modalidades, além do exposto acima, a camada interna 1212 pode não compreender cavidades de grampos configuradas para receber os grampos 1220. Em várias outras modalidades, agora com referência às FIGURAS 29 e 30, um cartucho de grampos, como o cartucho de grampos 1500, por exemplo, pode compreender um corpo de cartucho implantável compressível 1510 que compreende cavidades dos grampos 1515 que podem ser configuradas para receber ao menos uma porção dos grampos 1520 em seu interior. Em ao menos uma dessas modalidades, uma porção superior das pernas de grampo 1521 dos grampos 1520 podem ser incorporadas na camada interna 1512 enquanto uma porção de fundo das pernas dos grampos 1521 e as bases 1522 podem ser posicionadas nas cavidades dos grampos 1515. Em certas modalidades, as bases 1522 podem ser posicionadas completamente nas cavidades dos grampos 1515 enquanto, em algumas modalidades, as bases 1522 podem se estender, ao menos parcialmente, abaixo da superfície de fundo 1518 da camada interna 1512. de forma similar à modalidade acima, a camada externa 1511 pode encerrar a camada interna 1512 e os grampos 1520 posicionados em seu interior. Em certas outras modalidades, agora com referência à FIGURA 31, um cartucho de grampos 1600 pode compreender grampos 1620 posicionados nas cavidades de grampos 1615 em um corpo de cartucho implantável compressível 1610 sendo que ao menos uma porção dos grampos 1620 não é encerrada pela camada externa 1611. Em ao menos uma dessas modalidades, cada grampo 1620 pode compreender pernas de grampos 1621 que são ao menos parcialmente incorporadas na camada interna 1612 e, adicionalmente, as bases 1622 que se estendem para fora ao redor da camada externa 1611.
[631] Em várias modalidades, agora com referência às FIGURAS 32 e 33, um cartucho de grampos, como o cartucho de grampos 1700, por exemplo, pode compreender um corpo de cartucho implantável compressível 1710 e uma pluralidade de grampos 1720 ao menos parcialmente posicionada no corpo do cartucho 1710. O corpo do cartucho 1710 pode compreender uma camada externa 1711, uma camada interna 1712, e, adicionalmente, uma matriz de alinhamento 1740 que podem ser configuradas para alinhar e/ou prender os grampos 1720 em posição no corpo do cartucho 1710. Em ao menos uma modalidade, a camada interna 1712 pode compreender uma reentrância 1741 que pode ser configurada para receber a matriz de alinhamento 1740 em seu interior. Em várias modalidades, a matriz de alinhamento 1140 pode ser encaixada por pressão na reentrância 1741 e/ou, de outro modo, ser fixada adequadamente à camada interna 1712 utilizando-se ao menos um adesivo, como fibrinaa e/ou hidrogel de proteína, por exemplo. Em ao menos uma modalidade, a reentrância 1741 pode ser configurada de modo que a superfície de fundo 1742 da matriz de alinhamento 1740 seja alinhada, ou ao menos substancialmente alinhada, com a superfície de fundo 1718 da camada interna 1712. Em certas modalidades, a superfície de fundo 1742 da matriz de alinhamento pode ser rebaixada em relação a e/ou se estender da superfície de fundo 1718 da segunda camada 1712. Em várias modalidades, cada grampo 1720 pode compreender uma base 1722 e uma ou mais pernas 1721 estendendo-se a partir da base 1722, sendo que ao menos uma porção das pernas dos grampos 1721 pode se estender através da matriz de alinhamento 1740. A matriz de alinhamento 1740 pode compreender, adicionalmente, uma pluralidade de aberturas e/ou fendas, por exemplo, que se estendem através da mesma que podem ser configuradas para receber as pernas dos grampos 1721 em seu interior. Em ao menos uma dessas modalidades, cada abertura pode ser configurada para receber estreitamente uma perna de grampo 1721 de modo que haja pouco ou nenhum, movimento relativo entre a perna de grampo 1721 e as paredes laterais da abertura. Em certas modalidades, as aberturas da matriz de alinhamento podem não se estender completamente através da matriz de alinhamento 1740 e as pernas dos grampos 1721 podem ser necessárias para cortar a matriz de alinhamento 1740 à medida que as pernas dos grampos 1721 são forçadasatravés da mesma.
[632] Em várias modalidades, a matriz de alinhamento 1740 pode consistir em um corpo de plástico moldado que, em ao menos uma modalidade, pode ser mais rígida ou menos compressível que a camada interna 1712 e/ou a camada externa 1711. Em ao menos uma dessas modalidades, a matriz de alinhamento 1740 pode consistir em um material plástico e/ou qualquer outro material adequado, como polidioxanona (PDS) e/ou ácido poliglicólico (PGA), por exemplo. Em certas modalidades, a matriz de alinhamento 1740 pode ser montada na camada interna 1712 e as pernas dos grampos 1721 podem, depois disso, ser inseridas através da matriz de alinhamento 1740 e incorporadas na camada interna 1712. Em várias modalidades, a superfície de fundo 1742 da matriz de alinhamento 1740 pode compreender um ou mais sulcos, fendas ou rebaixos, por exemplo, que podem ser configurados para receber, ao menos parcialmente, as bases 1722 dos grampos 1720. de forma similar à modalidade acima, a camada externa 1711 pode, então, ser disposta ao redor do subconjunto que compreende a camada interna 1712, a matriz de alinhamento 1740 e os grampos 1720. Alternativamente, a camada externa 1711 pode ser disposta ao redor de um subconjunto que compreende a camada interna 1712 e a matriz de alinhamento 1740, sendo que os grampos 1720 podem ser, depois disso, inseridos através da camada externa 1711, da matriz de alinhamento 1740 e da camada interna 1712. Em qualquer caso, como resultado do exposto acima, a camada interna 1712, a matriz de alinhamento 1740 e/ou a camada externa 1711 podem ser configuradas para prender os grampos 1720 em posição até e/u depois que os mesmos forem deformados por uma bigorna, conforme descrito anteriormente. Em ao menos uma dessas modalidades, a matriz de alinhamento 1740 pode servir para manter os grampos 1720 no lugar antes de o cartucho de grampos 1700 ser implantado em um paciente e, adicionalmente, prender o tecido ao longo da linha de grampos depois que o cartucho de grampos 1700 for implantado. Em ao menos uma modalidade, os grampos 1720 podem ser presos na matriz de alinhamento 1740 sem ser incorporados na camada interna 1712 e/ou na camada externa 1711, por exemplo.
[633] Em várias modalidades, agora com referência às FIGURAS 34 a 40, um cartucho de grampos, como o cartucho de grampos 1800, por exemplo, pode ser montado comprimindo-se uma camada interna 1812, inserindo-se grampos, como os grampos 1820, por exemplo, na camada interna 1812, e envolvendo a camada interna 1812 com uma camada externa 1811. Com referência especial à FIGURA 34, é mostrada uma camada interna compressível 1812 que compreende uma pluralidade de cavidades de grampos 1815 definidas na mesma, embora possam ser previstas outras modalidades nas quais a camada interna 1812 não compreende cavidades de grampos, conforme descrito acima. Agora com referência à FIGURA 35, a camada interna compressível 1812 pode ser disposta em uma posição intermediária entre uma placa de transferência 1850 e uma placa de suporte 1860 e comprimida entre as superfícies de compressão 1852 e 1862, respectivamente, dessas placas. Conforme ilustrado na FIGURA 35, as superfícies de topo e de fundo da camada interna 1812 podem ser comprimidas uma na direção da outra e, em resposta a isso, a camada interna 1812 pode inchar para fora nas direções laterais. Em certas modalidades, a camada interna 1812 pode ser compactada para uma altura que é aproximadamente um terço de sua altura original, por exemplo, e pode ter uma altura ou espessura entre aproximadamente 1,5 mm (0,06”) e aproximadamente 2,0 mm (0,08”) em seu estado comprimido, por exemplo. Conforme também ilustrado na FIGURA 35, a placa de transferência 1850 pode compreender, adicionalmente, uma pluralidade de grampos, como os grampos 1820, por exemplo, posicionada em uma pluralidade de cavidades de grampos 1853. Além disso, a placa de transferência 1850 pode compreender, adicionalmen-te, uma pluralidade de acionadores 1851 que podem ser configurados para forçar os grampos 1820 para cima e para fora das cavidades de grampos 1853. Agora com referência à FIGURA 36, os acionadores 1851 podem ser utilizados para empurrar as pernas de grampo 1821 dos grampos 1820 para dentro e através da camada interna comprimida 1812. Em várias modalidades, os acionadores 1851 podem ser configurados de modo que as superfícies de topo dos mesmos sejam posicionadas niveladas, ou ao menos quase niveladas, com a superfície de compressão 1852 da placa de transferência 1850 depois que os grampos 1820 tiverem sido totalmente ejetados das cavidades de grampos 1853 da placa de transferência 1850. Em certas modalidades, conforme também ilustrado na FIGURA 36, a placa de suporte 1860 pode compreender uma pluralidade de aberturas receptoras 1861 que podem ser configuradas para receber as pernas de grampos 1821, ou ao menos as pontas das pernas de grampos 1821, depois de elas serem forçadas através da camada interna 1812. As aberturas receptoras 1861, ou similares, podem ser necessárias em modalidades onde a camada interna 1812 foi comprimida a uma altura que é menor que a altura dos grampos 1820 e, dessa forma, depois que os grampos 1820 forem completamente ejetados das cavidades de grampos 1853, as pernas dos grampos 1821 poderão se projetar a partir da superfície de topo da camada interna comprimida 1812. Em certas outras modalidades, a camada interna 1812 pode ser comprimida a uma altura que é maior que a altura dos grampos 1820 e, como resultado, as aberturas receptoras 1861 na placa de suporte 1860 podem ser desnecessárias.
[634] Depois que os grampos 1820 são inseridos na camada in terna 1812, agora com referência à FIGURA 37, a placa de suporte 1860 pode ser afastada da placa de transferência 1850 para permitir a descompressão da camada interna 1812. Em tais circunstâncias, a camada interna 1812 pode se re-expandir resilientemente até sua altura original não comprimida, ou ao menos próxima da original. À medida que a camada interna 1812 é re-expandida, a altura da camada interna 1812 pode aumentar até exceder a altura dos grampos 1820, de modo que as pernas de grampo 1821 dos grampos 1820 não mais se projetem a partir da superfície de topo da camada interna 1812. Em várias circunstâncias, as aberturas receptoras 1861 podem ser configuradas para manter as pernas dos grampos 1821 em posição ao me nos até que a placa de suporte 1860 tenha sido suficientemente afastada para que as pernas 1821 não fiquem mais nas aberturas receptoras 1861. Em tais circunstâncias, as aberturas receptoras 1861 podem ajudar a manter o alinhamento relativo entre os grampos 1820 da camada interna 1812 à medida que a mesma é re-expandida. Em várias circunstâncias, a camada interna 1812 e os grampos 1820 posicionados na mesma podem compreender um subconjunto 1801 que, agora com referência à FIGURA 38, pode ser inserido em uma camada externa 1811, por exemplo. Em ao menos uma dessas modalidades, a camada externa 1811 pode compreender uma cavidade 1802 que pode ser configurada para receber o subconjunto 1801. Em várias circunstâncias, uma ferramenta, como um alicate 1855 por exemplo, pode ser utilizada para empurrar a camada externa 1811 sobre o subconjunto 1801. Quando o subconjunto 1801 estiver suficientemente posi-cionado na camada externa 1811, agora com referência à FIGURA 39, a camada externa 1811 pode ser selada. Em várias modalidades, a camada externa 1811 pode ser selada utilizando-se a aplicação de calor a uma porção da mesma. Mais particularmente, em ao menos uma modalidade, a camada externa 1811 pode consistir em um material plástico, sendo que a extremidade aberta da camada externa 1811 pode ser estaqueada termicamente por um ou mais elementos, ou ferros, aquecidos 1856 para ligar e/ou selar o perímetro da extremidade aberta da camada externa 1811. Em ao menos uma dessas modalidades, agora com referência à FIGURA 40, uma porção de excesso 1857 da camada externa 1811 pode ser removida e o cartucho de grampos 1800 pode, então, ser usado conforme descrito aqui.
[635] Conforme descrito anteriormente, um cartucho de grampos pode ser posicionado dentro de e/ou fixado a uma porção de fixação do cartucho de grampos. Em várias modalidades, agora com referênciaàs FIGURAS 41 e 42, uma porção de fixação do cartucho de grampos pode compreender uma canaleta de cartucho de grampos, como a canaleta de cartucho de grampos 1930, por exemplo, que pode ser configurada para receber ao menos uma porção de um cartucho de grampos, como o cartucho de grampos 1900, por exemplo. Em ao menos uma modalidade, a canaleta de cartucho de grampos 1930 pode compreender uma superfície de suporte de fundo 1931, uma primeira parede lateral de suporte 1940, e uma segunda parede lateral de suporte 1941. Em uso, o cartucho de grampos 1900 pode ser posicionado na canaleta de cartucho de grampos 1930 de modo que o cartucho de grampos 1900 seja posicionado contra e/ou em posição adjacenteà superfície de suporte de fundo 1931 e disposto em uma posição intermediária entre a primeira parede lateral de suporte 1940 e a segunda parede lateral de suporte 1941. Em certas modalidades, a primeira parede lateral de suporte 1940 e a segunda parede lateral de suporte 1941 pode definir um vão lateral entre si. Em ao menos uma dessas modalidades, o cartucho de grampos 1900 pode compreender uma largura lateral 1903 que é igual e/ou maior que o vão lateral definido entre as paredes de suporte 1940 e 1941 de modo que um corpo de cartucho implantável compressível 1910 do cartucho de grampos 1900 possa ser encaixado firmemente entre as paredes 1940 e 1941. Em certas outras modalidades, a largura lateral 1903 do cartucho de grampos 1900 pode ser menor que o vão definido entre a primeira e a segunda paredes laterais 1940 e 1941. Em várias modalidades, ao menos uma porção das paredes 1940 e 1941 e a superfície de suporte de fundo 1931 podem ser definidas por uma canaleta de metal estampado enquanto, em ao menos uma modalidade, ao menos uma porção da parede lateral de suporte 1940 e/ou da parede lateral de suporte 1941 pode consistir em um material flexível, como um material elastomérico, por exemplo. Com referência principalmente à FIGURA 41, a primeira parede lateral 1940 e a segunda parede lateral 1941 da canaleta de cartucho de grampos 1930 podem, cada uma, consistir em uma porção rígida 1933 estendendo-se para cima a partir da superfície de suporte de fundo 1931 e uma porção flexível 1934 estendendo-se para cima a partir da porção rígidas 1933.
[636] Em várias modalidades, além do exposto acima, o corpo de cartucho 1910 do cartucho de grampos 1900 pode consistir em uma ou mais camadas compressíveis, como a primeira camada 1911 e a segunda camada 1912, por exemplo. Quando o corpo do cartucho 1910 é comprimido contra a superfície de suporte de fundo 1931 por uma bigorna, conforme descrito acima, as porções laterais do corpo do cartucho 1910 podem expandir lateralmente. Em modalidades onde o cartucho de grampos 1930 consiste em paredes laterais rígidas, a expansão lateral do corpo do cartucho 1910 pode ser evitada, ou ao menos limitada, pelas paredes laterais rígidas e, como resultado, uma quantidade significativa de pressão interna, ou esforço, pode ser desenvolvida no corpo do cartucho 1910. Em modalidades onde ao menos uma porção do cartucho de grampos 1930 consiste em paredes laterais flexíveis, as paredes laterais flexíveis podem ser configuradas para flexionar lateralmente e permitir que as porções laterais do corpo do cartucho 1910 se expandam lateralmente, reduzindo assim a pressão interna, ou esforço, gerado no corpo do cartucho 1910. Em modalidades onde a canaleta do cartucho não compreende paredes laterais, ou compreendem paredes laterais que são relativamente mais curtas que o cartucho de grampos, as porções laterais do cartucho de grampos podem ser expandir lateralmente sem limitação, ou ao menos substancialmente sem limitação. Em todo caso, agora com referência à FIGURA 42, uma canaleta de cartucho de grampos 2030 pode compreender paredes laterais 2040 e 2041 que podem consistir inteiramente em um material flexível, como um material elastomérico, por exemplo. A canaleta de cartucho de grampos 2030 pode compreender adicionalmente fendas laterais 2033 que se estendem ao longo dos lados da superfície de suporte de fundo 2031 da canaleta de cartucho de grampos 2030 que podem ser configuradas para receber e prender ao menos uma porção das paredes laterais 2040 e 2041 em seu interior. Em certas modalidades, as paredes laterais 2040 e 2041 podem ser fixadas nas fendas 2033 por encaixe e/ou por pressão enquanto que, em ao menos algumas modalidades, as paredes laterais 2040 e 2041 podem ser fixadas nas fendas 2033 por um ou mais adesivos. Em ao menos uma modalidade, as paredes laterais 2040 e 2041 podem ser separáveis da superfície de suporte de fundo 2031 durante o uso. Em todo caso, um corpo de cartucho implantável compressível 2010 pode ser separado e/ou desengatado das paredes laterais 2040 e 2041 quando o corpo do cartucho 2010 é implantado com os grampos 2020.
[637] Em várias modalidades, agora com referência à FIGURA 43, um instrumento cirúrgico pode compreender uma haste 2150 e um atuador de extremidade estendendo-se a partir da extremidade distal da haste 2150. O atuador de extremidade pode compreender, de forma similar à modalidade acima, uma canaleta de cartucho de grampos 2130, uma bigorna 2140 móvel entre uma posição aberta e uma posição fechada, e um cartucho de grampos 2100 disposto em uma posição intermediária entre a canaleta de cartucho de grampos 2130 e a bigorna 2140. Também de forma similar à modalidade acima, o cartucho de grampos 2100 pode compreender um corpo de cartucho implantável compressível 2110 e uma pluralidade de grampos 2120 posicionada no corpo do cartucho 2110. Em várias modalidades, a canaleta de cartucho de grampos 2130 pode compreender, um, uma superfície de suporte de fundo 2131 contra a qual o cartucho de grampos 2100 pode ser posicionado, dois, uma extremidade distal 2135 e, três, uma extremidade proximal 2136. Em ao menos uma modalidade, conforme ilustrado na FIGURA 43, o cartucho de grampos 2100 pode compreender uma primeira extremidade 2105 que pode ser posicionável na extremidade distal 2135 da canaleta de cartucho de grampos 2130 e uma segunda extremidade 2106 que pode ser posicionável na extremidade proximal 2136 da canaleta de cartucho de grampos 2130. Em várias modalidades, a extremidade distal 2135 da canaleta de cartucho de grampos 2130 pode compreender ao menos um recurso de retenção distal, como uma parede de retenção 2137, por exemplo, e, de modo similar, a extremidade proximal 2136 pode compreender ao menos um recurso de retenção proximal, como uma parede de retenção 2138, por exemplo. Em ao menos uma dessas modalidades, a parede de retenção distal 2137 e a parede de retenção proximal 2138 podem definir um vão nessa região que pode ser igual a ou menor que o comprimento do cartucho de grampos 2100 de modo que o cartucho de grampos 2100 possa se encaixar firmemente na canaleta de cartucho de grampos 2130 quando o cartucho de grampos 2100 é inserido na mesma.
[638] Em várias modalidades, novamente com referência às FI GURAS 23 e 24, um cartucho de grampos, como o cartucho de grampos 1200, por exemplo, pode compreender uma superfície de contato com o tecido plana, ou ao menos substancialmente plana 1219. Em ao menos uma dessas modalidades, o corpo de cartucho de grampos 1210 do cartucho de grampos 1200 pode compreender uma primeira extremidade 1205 que pode ser definida por uma primeira altura, ou espessura, 1207 e uma segunda extremidade 1206 que pode ser definida por uma segunda altura, ou espessura, 1208, sendo que a primeira altura 1207 pode ser igual, ou ao menos substancialmente igual à segunda altura 1208. Em certas modalidades, o corpo do cartucho 1210 pode compreender uma altura, ou espessura, constante, ou ao menos substancialmente constante, entre a primeira extremidade 1205 e a segunda extremidade 1206. Em ao menos uma dessas modalidades, a superfície de contato com o tecido 1219 pode ser paralela, ou ao menos substancialmente paralela, à superfície de fundo 1218 do corpo do cartucho 1210. Em várias modalidades, novamente com referência à FIGURA 43, a primeira extremidade 2105 do corpo de cartucho 2110 do cartucho de grampos 2100 pode ser definida por uma primeira altura 2107 que é diferente de uma segunda altura 2108 da segunda extremidade 2106. Na modalidade ilustrada, a primeira altura 2107 é maior que a segunda altura 2108, embora a segunda altura 2108 pudesse ser maior que a primeira altura 2107 em modalidades alternativas. Em várias modalidades, a altura do corpo do cartucho 2110 pode diminuir linearmente e/ou geometricamente entre a primeira extremidade 2105 e a segunda extremidade 2106. Em ao menos uma dessas modalidades, a superfície de contato com o tecido 2119, que se estende entre a primeira extremidade 2105 e a segunda extremidade 2106, pode ser orientada ao longo de um ângulo definido nessa região. Em ao menos uma dessas modalidades, a superfície de contato com o tecido 2119 pode não ser paralela à superfície de fundo 2118 do corpo do cartucho 2110 e/ou paralela à superfície de suporte 2131 da canaleta de cartucho de grampos 2130.
[639] Em várias modalidades, novamente com referência às FI GURAS 43 e 44, a bigorna 2140 pode compreender uma superfície de contato com o tecido 2141 que pode ser paralela, ou ao menos subs-tancialmente paralela, à superfície de suporte 2131 da canaleta de cartucho de grampos 2130 quando a bigorna 2140 encontra-se em uma posição fechada, conforme ilustrado na FIGURA 44. Quando a bigorna 2140 encontra-se em uma posição fechada, a bigorna 2140 pode ser configurada para comprimir a primeira extremidade 2105 do cartucho de grampos 2100 mais que a segunda extremidade 2106 devido à altura maior da primeira extremidade 2105 e à altura menor da segunda extremidade 2106. Em algumas circunstâncias, incluindo as circunstância onde o tecido T, disposto em uma posição intermediária entre as superfícies de contato do tecido 2119 e 2141, tem uma espessura constante, ou ao menos substancialmente constante, a pressão gerada no tecido T e no cartucho 2100 pode ser maior na extremidade distal do atuador de extremidade do que na extremidade proximal do atuador de extremidade. Mais particularmente, quando o tecido T entre a bigorna 2140 e o cartucho de grampos 2100 tem uma espessura substancialmente constante, o tecido T, disposto em uma posição intermediária entre a extremidade distal 2145 da bigorna 2140 e a primeira extremidade 2105 do cartucho de grampos 2100, pode ser mais comprimido que o tecido T, disposto em uma posição intermediária entre a extremidade proximal 2146 da bigorna 2140 e a segunda extremidade 2106 do cartucho de grampos 2100. Em várias modalidades, pode ser gerado um gradiente de pressão no tecido T entre a extremidade proximal e a extremidade distal do atuador de extremidade. Mais particularmente, em ao menos uma modalidade, quando o tecido T entre a bigorna 2140 e o cartucho de grampos 2100 tem uma espessura substancialmente constante e a altura do cartucho de grampos 2100 diminui linearmente entre a extremidade distal e a extremidade proximal do atuador de extremidade, a pressão no tecido T pode diminuir linearmente entre a extremidade distal do atuador de extremidade e a extremidade proximal do atuador de extremidade. de modo similar, em ao menos uma modalidade, quando o tecido T entre a bigorna 2140 e o cartucho de grampos 2100 tem uma espessura substancialmente constante e a altura do cartucho de grampos 2100 diminui geometricamente entre a extremidade distal e a extremidade proximal do atuador de extremidade, a pressão no tecido T pode diminuir geometricamente entre a extremidade distal do atuador de extremidade e a extremidade proximal do atuador de extremidade.
[640] Em várias modalidades, novamente com referência à FI GURA 43, o tecido T, disposto em uma posição intermediária entre o cartucho de grampos 2100 e a bigorna 2140, pode não ter uma espessura constante em toda a sua extensão. Em ao menos uma dessas circunstâncias, o tecido T posicionado entre a extremidade proximal 2146 da bigorna 2140 e a segunda extremidade 2106 do cartucho de grampos 2100 pode ser mais espesso que o tecido T posicionado entre a extremidade distal 2145 da bigorna 2140 e a primeira extremidade 2105 do cartucho de grampos 2100. Em tais circunstâncias, como resultado, o tecido mais espesso T pode ser genericamente posicionado acima da extremidade proximal mais curta 2106 do cartucho de grampos 2100 e o tecido mais delgado T pode ser genericamente posicionado acima da extremidade distal mais alta 2105. Em uso, o colar de disparo 2152 da haste 2150 pode ser avançado distalmente ao longo da dorso da haste 2151 de modo que o colar de disparo 2152 engata a porção de came 2143 da bigorna 2140 e gira a bigorna 2140 na direção do cartucho de grampos 2100, conforme ilustrado na FIGURA 44. Uma vez que a bigorna 2140 tenha sido girada para uma posição completamente fechada, o tecido T pode ser comprimido entre as superfícies de contato com o tecido 2119 e 2141 e, embora a altura do cartucho de grampos 2100 possa não ser constante entre as extremidades proximal e distal do atuador de extremidade, a pressão ou as forças de compressão aplicadas ao tecido T podem ser constantes, ou ao menos substancialmente constantes, através do mesmo. Mais particularmente, como o tecido mais delgado T pode estar associado à altura maior do cartucho de grampos 2100 e o tecido mais espesso T pode estar associado à altura menor do cartucho de grampos 2100, a altura acumulada, ou somada, do tecido T e do cartucho de grampos 2100 pode ser constante, ou ao menos substancialmente constante, entre as extremidades proximal e distal do atuador de extremidade e, como resultado, a compressão dessa altura acumulada pela bigorna 2140 pode ser constante, ou ao menos substancialmente constante, entre as extremidades.
[641] Em várias modalidades, novamente com referência às FI GURAS 43 e 44, o cartucho de grampos 2100 pode compreender uma configuração assimétrica. Em ao menos uma dessas modalidades, por exemplo, a altura do cartucho de grampos 2100 na primeira extremidade 2105 do mesmo pode ser maior que a altura do cartucho de grampos 2100 na segunda extremidade 2106 do mesmo. Em certas modalidades, o cartucho de grampos 2100 e/ou a canaleta de cartucho de grampos 2130 pode compreender um ou mais recursos de alinhamento e/ou de retenção que podem ser configurados para assegurar que o cartucho de grampos 2100 possa ser posicionado na canaleta de cartucho de grampos 2130 apenas em uma orientação, isto é, uma orientação na qual a primeira extremidade 2105 é posicionada na extremidade distal 2135 da canaleta de cartucho de grampos 2130 e a segunda extremidade 2106 é posicionada na extremidade proximal 2136. Em várias modalidades alternativas, o cartucho de grampos 2100 e/ou a canaleta de cartucho de grampos 2130 pode compreender um ou mais recursos de alinhamento e/ou de retenção que podem ser configurados para permitir que o cartucho de grampos 2100 seja posicionado na canaleta de cartucho de grampos 2130 em mais de uma orientação. Agora com referência à FIGURA 45, por exemplo, o cartucho de grampos 2100 pode ser posicionado na canaleta de cartucho de grampos 2130 de modo que a primeira extremidade 2105 do cartucho de grampos 2100 possa ser posicionada na extremidade proximal 2136 da canaleta de cartucho de grampos 2130 e a segunda extremidade 2106 possa ser posicionada na extremidade distal 2135. Em várias modalidades, como resultado, a altura menor do cartucho de grampos 2100 pode ser posicionada adjacente à parede de retenção distal 2137 e a altura maior do cartucho de grampos 2100 pode ser posicionada adjacente à parede de retenção proximal 2138. Em ao menos uma dessas modalidades, o cartucho de grampos 2100 pode ser disposto adequadamente para aplicar uma pressão de aperto constante, ou ao menos substancialmente constante, ao tecido T que tem uma porção mais espessa na extremidade distal do atuador de extremidade e uma porção mais delgada na extremidade proximal do atuador de extremidade. Em várias modalidades, o cartucho de grampos 2100, por exemplo, pode ser orientado seletivamente na canaleta de cartucho de grampos 2130. Em ao menos uma dessas modalidades, os recursos de alinhamento e/ou de retenção do cartucho de grampos 2100 podem ser simétricos e um cirurgião pode colocar seletivamente o cartucho de grampos 2100 na canaleta de cartucho de grampos 2130 nas orientações mostradas na FIGURA 43 e na FIGURA 45, por exemplo.
[642] Adicionalmente às modalidades acima, o corpo do cartucho implantável 2110 pode compreender um eixo longitudinal 2109 que, quando o cartucho de grampos 2100 é posicionado na canaleta de cartucho de grampos 2130, pode se estender entre as extremidades proximal e distal do atuador de extremidade. Em várias modalidades, a espessura do corpo do cartucho 2110 pode genericamente diminuir e/ou genericamente aumentar entre a primeira extremidade 2105 e a segunda extremidade 2106 ao longo do eixo longitudinal 2109. Em ao menos uma dessas modalidades, a distância, ou altura, entre a superfície de fundo 2118 e a superfície de contato com o tecido 2119 pode genericamente diminuir e/ou genericamente aumentar entre a primeira extremidade 2105 e a segunda extremidade 2106. Em certas modalidades, a espessura do corpo do cartucho 2110 pode aumentar e diminuir ao longo do eixo longitudinal 2109. Em ao menos uma dessas modalidades, a espessura do corpo do cartucho 2110 pode compreender uma ou mais porções cuja espessura aumenta e uma ou mais porções cuja espessura pode diminuir. Em várias modalidades, o cartucho de grampos 2100 pode compreender uma pluralidade de grampos 2120 posicionada em seu interior. Em uso, conforme descrito acima, os grampos 2120 podem ser deformados quando a bigorna 2140 é movida para uma posição fechada. Em certas modalidades, cada grampo 2120 pode ter a mesma, ou ao menos substancialmente a mesma, altura. Em ao menos uma dessas modalidades, a altura de um grampo pode ser medida entre o fundo da base do grampo e o topo, ou ponta, da perna mais longa do grampo, por exemplo.
[643] Em várias modalidades, os grampos de um cartucho de grampos podem ter alturas diferentes. Em ao menos uma dessas mo-dalidades, um cartucho de grampos pode compreender um primeiro grupo de grampos, que tem uma primeira altura de grampo, que são posicionados em uma primeira porção de um corpo compressível, e um segundo grupo de grampos, que tem uma segunda altura de grampo, que são posicionados em uma segunda porção do corpo compressível. Em ao menos uma modalidade, a primeira altura de grampo pode ser maior que a segunda altura de grampo, e o primeiro grupo de grampos pode ser posicionado na primeira extremidade 2105 do cartucho de grampos 2100 enquanto o segundo grupo de grampos pode ser posicionado na segunda extremidade 2106. Alternativamente, o primeiro grupo de grampos mais altos pode ser posicionado na segunda extremidade 2106 do cartucho de grampos 2100 enquanto o segundo grupo de grampos mais curtos pode ser posicionado na primeira extremidade 2105. Em certas modalidades, pode ser utilizada uma pluralidade de grupos de grampos, na qual cada grupo tem uma altura de grampo diferente. Em ao menos uma dessas modalidades, um terceiro grupo que tem uma altura de grampo intermediária pode ser posicionado no corpo do cartucho 2110 em uma posição intermediária entre o primeiro grupo de grampos e o segundo grupo de grampos. Em várias modalidades, cada grampo de uma fileira de grampos no cartucho de grampos pode compreender uma altura de grampo diferente. Em ao menos uma modalidade, o grampo mais alto de uma fileira de grampos pode ser posicionado em uma primeira extremidade de uma fileira de grampos e o grampo mais curto pode ser posicionado em uma extremidade oposta da fileira de grampos. Em ao menos uma dessas modalidades, os grampos dispostos em uma posição intermediária entre o grampo mais alto e o grampo mais curto podem ser dispostos de modo que as alturas dos grampos diminuam entre o grampo mais alto e o grampo mais curto, por exemplo.
[644] Em várias modalidades, agora com referência à FIGURA 46, um atuador de extremidade de um grampeador cirúrgico pode compreender uma bigorna 2240, uma canaleta de cartucho de grampos 2230 e um cartucho de grampos 2200 apoiado pela canaleta de cartucho de grampos 2230. O cartucho de grampos 2200 pode compreender um corpo de cartucho implantável compressível 2210 e uma pluralidade de grampos, como os grampos 2220a e os grampos 2220b, por exemplo, posicionados em seu interior. Em várias modalidades, a canaleta de cartucho de grampos 2230 pode compreender uma superfície de suporte do cartucho 2231 e uma pluralidade de fendas de suporte de grampos, como as fendas de suporte 2232a e 2232b, por exemplo, definidas em seu interior. Em ao menos uma dessas modalidades, o cartucho de grampos 2200 pode compreender duas fileiras de grampos externos 2220a e duas fileiras de grampos internos 2220b, sendo que as fendas de suporte 2232a podem ser configuradas para suportar os grampos 2220a, e as fendas de suporte 2232b podem ser configuradas para suportar os grampos 2220b. Com referência às FIGURAS 46 e 47, a bigorna 2240 pode compreender uma pluralidade de bolsos de formação de grampos 2242 definida em seu interior que pode ser configurada para receber e deformar os grampos 2220a e 2220b quando a bigorna 2240 é movida na direção do cartucho de grampos 2200. Em ao menos uma dessas modalidades, as superfícies de fundo das fendas de suporte 2232a podem ser uma primeira distância 2201a afastada das superfícies de topo dos bolsos de formação de grampos 2242, enquanto as superfícies de fundo das fendas de suporte 2232b podem ser uma segunda distância 2201b afastada das superfícies de topo dos bolsos de formação de grampos 2242. Em ao menos uma dessas modalidades, as fendas de suporte 2232b são posicionadas mais próximas da bigorna 2240 devido ao degrau elevado na superfície de suporte 2231 na qual elas são definidas. devido às diferentes distâncias 2201a e 2201b, em várias modalidades as fileiras de grampos externos 2220a e as fileiras de grampos internos 2220b podem ser deformadas em diferentes alturas formadas. Em várias circunstâncias, os grampos deformados em diferentes alturas formadas podem aplicar diferentes forças ou pressões de aperto ao tecido T que está sendo grampeado. Em adição ao exposto acima, os grampos podem começar com diferentes alturas de grampo não formado. Em ao menos uma dessas modalidades, novamente com referência à FIGURA 46, os grampos externos 2220a podem ter uma altura inicial não formada que é maior que a altura inicial não formada dos grampos internos 2220b. Conforme ilustrado nas FIGURAS 46 e 47, os grampos internos 2220b, que têm uma altura não formada menor que os grampos externos 2220a, podem também ter uma altura formada menor que os grampos externos 2220b. Em várias modalidades alternativas, os grampos internos 2220b podem ter uma altura não formada maior que os grampos externos 2220a e mesmo assim ter uma altura de grampo deformado menor que os grampos externos 2220a.
[645] Em várias modalidades, além do exposto acima, a bigorna 2240 pode ser movida para uma posição fechada, conforme ilustrado na FIGURA 47, para comprimir o corpo do cartucho 2210 e deformar os grampos 2220a e 2220b. Em certas modalidades, um grampeador cirúrgico compreendendo o atuador de extremidade mostrado nas FIGURAS 46 e 47, por exemplo, pode compreender, adicionalmente, um elemento de corte que pode ser configurado para cortar o tecido T disposto em uma posição intermediária entre a bigorna 2240 e o cartucho de grampos 2200. Em ao menos uma dessas modalidades, a bigorna 2240, a canaleta de cartucho de grampos 2230 e/ou o cartucho de grampos 2200 podem definir uma fenda configurada para receber de maneira deslizante um elemento de corte em seu interior. Mais particularmente, a bigorna 2240 pode compreender uma porção de fenda 2249, a canaleta de cartucho de grampos 2230 pode compreender uma porção de fenda 2239, e o cartucho de grampos 2200 pode compreender uma porção de fenda 2203 que podem ser alinhadas, ou ao menos substancialmente alinhadas, umas com as outras quando a bigorna 2240 encontra-se em uma posição fechada, ou ao menos subs-tancialmente fechada. Em várias modalidades, o elemento de corte pode ser movido da extremidade proximal do atuador de extremidade na direção da extremidade distal do atuador de extremidade depois que a bigorna 2240 é fechada e os grampos 2220a e 2220b são deformados. Em ao menos uma modalidade, o elemento de corte pode ser movido independentemente do processo de deformação dos grampos. Em certas modalidades, o elemento de corte pode ser avançado ao mesmo tempo em que os grampos estão sendo deformados. Em todo caso, em ao menos uma modalidade, o elemento de corte pode ser configurado para cortar o tecido ao longo de um caminho disposto em uma posição intermediária entre as fileiras de grampos internos 2220b.
[646] Em várias modalidades, conforme ilustrado na FIGURA 47, os grampos internos 2220b podem ser formados com uma altura menor que os grampos externos 2220a, sendo que os grampos internos 2220b podem aplicar uma força ou pressão de aperto maior ao tecido adjacente à linha de corte criada pelo elemento de corte. Em ao menos uma dessas modalidades, a força ou pressão de aperto maior criada pelos grampos internos 2220b pode fornecer vários benefícios terapêuticos como reduzir o sangramento do tecido cortado T, enquanto a pressão de aperto menor criada pelos grampos externos 2220a pode proporcionar flexibilidade no tecido grampeado. Em várias modalidades, novamente com referência às FIGURAS 46 e 47, a bigorna 2240 pode compreender, adicionalmente, ao menos um pedaço de material de reforço, como o material de reforço 2260, por exemplo, fixado à mesma. Em ao menos uma dessas modalidades, as pernas dos grampos 2220a e 2220b podem ser configuradas para cortar o material de reforço 2260 e/ou passar através das aberturas no material de reforço 2260 quando o cartucho de grampos 2200 é comprimido pela bigorna 2240 e depois disso entra em contato com os bolsos de formação de grampos 2242 na bigorna 2240. À medida que as pernas 2220a e 2220b dos grampos são deformadas, elas podem entrar em contato com e/ou cortar o material de reforço 2260 mais uma vez. Em várias modalidades, o material de reforço 2260 pode otimizar a hemóstase de e/ou fornecer resistência ao tecido sendo grampeado.
[647] Em várias modalidades, novamente com referência às FI GURAS 46 e 47, a superfície de fundo do corpo do cartucho 2210 pode compreender um contorno em degrau que se adapta, ou ao menos substancialmente se adapta, ao contorno em degrau da superfície de suporte do cartucho 2231. Em certas modalidades, a superfície de fundo do corpo do cartucho 2210 pode se deformar para se igualar, ou ao menos substancialmente se igualar, ao contorno da superfície de suporte do cartucho 2231. Em várias modalidades, agora com referência à FIGURA 48, um atuador de extremidade, similar ao atuador de extremidade mostrado na FIGURA 46, por exemplo, pode compreender um cartucho de grampos 2300 posicionado em seu interior. O cartucho de grampos 2300 pode compreender um corpo compressível implantável 2310 que compreende uma camada interna 2312 e uma camada externa 2311 sendo que, além do exposto acima, a camada externa 2311 pode consistir em um material impermeável à água em ao menos uma modalidade. Em várias modalidades, a camada externa 2311 pode se estender ao redor dos grampos 2220a, 2220b e pode ser disposta em uma posição intermediária entre os grampos 2220a, 2220b e as fendas de suporte 2232a, 2232b, respectivamente. Em várias modalidades, agora com referência à FIGURA 49, um atuador de extremidade, similar ao atuador de extremidade mostrado na FIGURA 46, por exemplo, pode compreender um cartucho de grampos 2400 posicionado em seu interior. De forma similar ao cartucho de grampos 2300, o corpo de cartucho implantável compressível 2410 do cartucho de grampos 2400 pode compreender uma camada interna 2412 e uma camada externa 2411; entretanto, em ao menos uma modalidade, o corpo do cartucho 2410 pode não compreender uma fenda de elemento de corte. Em ao menos uma dessas modalidades, o elemento de corte pode ser necessário para cortar a camada interna 2412 e/ou a camada externa 2411, por exemplo, à medida que é avançado através do cartucho de grampos.
[648] Em várias modalidades, agora com referência à FIGURA 50, um atuador de extremidade de um grampeador cirúrgico pode compreender uma bigorna 2540, uma canaleta de cartucho de grampos 2530 e um cartucho de grampos 2500 posicionado na canaleta de cartucho de grampos 2530. de forma similar à modalidade acima, o cartucho de grampos 2500 pode compreender um corpo de cartucho implantável compressível 2510, fileiras de grampos externos 2220a e fileiras de grampos internos 2220b. A canaleta de cartucho de grampos 2530 pode compreender uma superfície de suporte do cartucho 2531 plana, ou um pelo menos substancialmente plana, e fendas de suporte de grampos 2532 definidas nela. A bigorna 2540 pode compreender uma superfície em degrau 2541 e uma pluralidade de bolsos de formação de grampos, como os bolsos de formação 2542a e 2542b, por exemplo, definidos nela. de forma similar à modalidade acima, os bolsos de formação 2542a e as fendas de suporte 2532 podem definir uma distância entre si que é maior que a distância entre os bolsos de formação 2452b e as fendas de suporte 2532. Em várias modalidades, a bigorna 2540 pode compreender, adicionalmente, um pedaço de material de reforço 2560 fixado à superfície em degrau 2541 da bigorna 2540. Em ao menos uma dessas modalidades, o material de reforço 2560 pode se conformar, ou ao menos substancialmente se conformar, à superfície em degrau 2541. Em várias modalidades, o material de reforço 2560 pode ser fixado de maneira removívelà superfície 2541 por ao menos um adesivo, como fibrinaa e/ou hidrogel de proteína, por exemplo. Em certas modalidades, o corpo do cartucho 2510 pode compreender, também, um perfil em degrau que, em ao menos uma modalidade, é paralelo, ou ao menos substancialmente paralelo, à superfície em degrau 2541 da bigorna 2540. Mais particularmente, em ao menos uma modalidade, a bigorna 2540 pode compreender degraus 2548 estendendo-se na direção do cartucho de grampos 2500, sendo que os degrau 2548 podem compreender uma altura de degrau que é igual, ou ao menos substancialmente igual, à altura de degrau dos degraus 2508 que se estendem a partir do corpo do cartucho 2510. Em ao menos uma dessas modalidades, como resultado do exposto acima, a quantidade do corpo compressível 2510 que pode ser capturada nos primeiros grampos 2220a pode ser diferente da quantidade do corpo compressível 2510 que pode ser captu rada nos segundos grampos 2220b, por exemplo.
[649] Em várias modalidades, agora com referência à FIGURA 51, um atuador de extremidade pode compreender uma bigorna 2640, uma canaleta de cartucho de grampos 2530 e um cartucho de grampos 2600 posicionado entre elas. O cartucho de grampos 2600 pode compreender um corpo de cartucho implantável compressível 2610 que inclui uma camada interna 2612, uma camada externa 2611 e uma pluralidade de grampos, como os grampos 2220a e 2200b, por exemplo, posicionados em seu interior. Em várias modalidades, a bigorna 2640 pode compreender uma pluralidade de bolsos de formação de grampos 2642 na superfície 2641 e a canaleta de cartucho de grampos 2530 pode compreender uma pluralidade de fendas formadoras de grampos 2532 definidas na superfície de suporte 2531. Conforme ilustrado na FIGURA 51, a superfície da bigorna 2641 pode ser paralela, ou ao menos substancialmente paralela, à superfície de suporte do cartucho 2531, sendo que cada bolso de formação 2642 pode ser posicionado em uma distância igual, ou ao menos substancialmente igual, afastada de uma fenda de suporte de grampo oposta e correspondente 2532. Em várias modalidades, o cartucho de grampos 2600 pode compreender grampos que têm a mesma, ou ao menos substancialmente a mesma, altura de grampo inicial não formado e, adicionalmente, a mesma, ou ao menos substancialmente a mesma, altura de grampo formado. Em certas outras modalidades, as fileiras de grampos externos podem compreender os grampos 2220a e as fileiras de grampos internos podem compreender os grampos 2220b, sendo que, conforme discutido anteriormente, os grampos 2220a e 2220b podem ter alturas de grampo não formado diferentes. Quando a bigorna 2640 é movida na direção do cartucho de grampos 2600 para uma posição fechada, os grampos 2220a e 2220b podem ser formados de modo que tenham a mesma, ou ao menos substancialmente a mesma, altura de grampo formado. Em ao menos uma dessas modalidades, como resultado do exposto acima, os grampos externos formados 2220a e os grampos internos 2220b podem ter a mesma, ou ao menos substancialmente a mesma, quantidade do corpo compressível 2610 neles contida; entretanto, como os grampos externos 2220a têm uma altura de grampo não formado maior que os grampos internos 2220b e podem ter, não obstante, a mesma altura de grampo formado, pode ser gerada nos grampos externos 2220a uma pressão de aperto maior que nos grampos internos 2220b, por exemplo.
[650] Em várias modalidades, agora com referência à FIGURA 52, um atuador de extremidade de um grampeador cirúrgico pode compreender uma bigorna 2740, uma canaleta de cartucho de grampos 2530 e um cartucho de grampos 2700 posicionado na canaleta de cartucho de grampos 2530. de forma similar à modalidade acima, o cartucho de grampos 2700 pode compreender um corpo de cartucho implantável compressível 2710 compreendendo uma camada interna 2712, uma camada externa 2711 e uma pluralidade de grampos, como os grampos 2220a e 2220b, por exemplo, posicionados em seu interior. Em ao menos uma modalidade, a espessura do corpo do cartucho 2710 pode variar ao longo de sua largura. Em ao menos uma dessas modalidades, o corpo do cartucho 2710 pode compreender uma porção de centro 2708 e porções laterais 2709, sendo que a porção de centro 2708 pode compreender uma espessura que é maior que a espessura das porções laterais 2709. Em várias modalidades, a porção mais espessa do corpo do cartucho 2710 pode estar situada na porção de centro 2708, enquanto a porção mais delgada do corpo do cartucho 2710 pode estar situada nas porções laterais 2709. Em ao menos uma dessas modalidades, a espessura do corpo do cartucho 2710 pode diminuir gradualmente entre a porção de centro 2708 e as porções la-terais 2709. Em certas modalidades, a espessura do corpo do cartucho 2710 pode diminuir linearmente e/ou geometricamente entre a porção de centro 2708 e as porções laterais 2709. Em ao menos uma dessas modalidades, a superfície de contato com o tecido 2719 do corpo do cartucho 2710 pode compreender duas superfícies inclinadas, ou em ângulo, que se inclinam para baixo a partir da porção de centro 2708 na direção da porções laterais 2709. Em várias modalidades, a bigorna 2740 pode compreender duas superfícies inclinadas, ou em ângulo, que são paralelas, ou ao menos substancialmente paralelas,às superfícies inclinadas de contato com o tecido 2719. Em ao menos uma modalidade, a bigorna 2740 pode compreender, adicionalmente, ao menos um pedaço de material de reforço 2760 fixado às superfícies inclinadas da bigorna 2740.
[651] Em várias modalidades, além do exposto acima, as fileiras de grampos internos no cartucho de grampos 2700 podem compreender os grampos mais altos 2220a e as fileiras de grampos externos podem compreender os grampos mais curtos 2220b. Em ao menos uma modalidade, os grampos mais altos 2220a podem ser posicionados na e/ou em posição adjacente à porção de centro mais espessa 2708 enquanto os grampos mais curtos 2220b podem ser posicionados nas e/ou em posição adjacente às porções laterais 2709. Em ao menos uma dessas modalidades, como resultado do exposto acima, os grampos mais altos 2220a podem capturar mais material do corpo do cartucho implantável 2710 que os grampos mais curtos 2220b. Tais circunstâncias poderiam resultar em uma situação na qual os grampos 2220a aplicam uma pressão de aperto maior ao tecido T que os grampos 2220b. Em certas modalidades, embora os grampos mais altos 2220a possam capturar mais material do corpo do cartucho 2710 que os grampos mais curtos 2220b, os grampos mais altos 2220a podem ter uma altura de grampo formado maior que os grampos mais curtos 2220b devido à disposição inclinada dos bolsos de formação de grampos 2742a e 2742b. Essas considerações podem ser utilizadas para se obter uma pressão de aperto desejada no tecido capturado pelos grampos 2220a e 2220b sendo que, como resultado, a pressão de aperto nos grampos 2220a pode ser maior que, menor que, ou igual à pressão de aperto aplicada ao tecido pelos grampos 2220b, por exemplo. Em várias modalidades alternativas do atuador de extremidade ilustrado na FIGURA 52, os grampos mais curtos 2220b podem ser posicionados na e/ou em posição adjacente à porção de centro mais espessa 2708 do corpo do cartucho 2710, e os grampos mais altos 2220a podem ser posicionados nas e/ou em posição adjacente às porções laterais mais delgadas 2709. Além disso, embora o cartucho de grampos 2700 seja mostrado como compreendendo fileiras de grampos internos e externos, o cartucho de grampos 2700 pode compreender fileiras de grampos adicionais, como fileiras de grampos dispostas em uma posição intermediária entre as fileiras de grampos internos e de grampos externos, por exemplo. Em ao menos uma dessas modalidades, as fileiras de grampos intermediários podem compreender grampos que têm uma altura de grampo não formado que é intermediária entre as alturas de grampo não formado dos grampos 2220a e 2220b, e uma altura de grampo formado que é intermediária entre as alturas dos grampos formados 2220a e 2220b, por exemplo.
[652] Em várias modalidades, agora com referência à FIGURA 53, um atuador de extremidade de um grampeador cirúrgico pode compreender uma bigorna 2840, uma canaleta de cartucho de grampos 2530 e um cartucho de grampos 2800 posicionado na canaleta de cartucho de grampos 2530. de forma similar à modalidade acima, o cartucho de grampos 2800 pode compreender um corpo de cartucho implantável compressível 2810 que compreende uma camada interna 2812, uma camada externa 2811 e uma pluralidade de grampos, como os grampos 2220a e 2220b, por exemplo, posicionados em seu interi or. Em ao menos uma modalidade, a espessura do corpo do cartucho 2810 pode variar ao longo de sua largura. Em ao menos uma dessas modalidades, o corpo do cartucho 2810 pode compreender uma porção de centro 2808 e porções laterais 2809, sendo que a porção de centro 2808 pode compreender uma espessura que é menor que a espessura das porções laterais 2809. Em várias modalidades, a porção mais delgada do corpo do cartucho 2810 pode estar situada na porção de centro 2808 enquanto a porção mais espessa do corpo do cartucho 2810 pode estar situada nas porções laterais 2809. Em ao menos uma dessas modalidades, a espessura do corpo do cartucho 2810 pode aumentar gradualmente entre a porção de centro 2808 e as porções laterais 2809. Em certas modalidades, a espessura do corpo do cartucho 2810 pode aumentar linearmente e/ou geometricamente entre a porção de centro 2808 e as porções laterais 2809. Em ao menos uma dessas modalidades, a superfície de contato com o tecido 2819 do corpo do cartucho 2810 pode compreender duas superfícies inclinadas, ou em ângulo, que se inclinam para cima a partir da porção de centro 2808 na direção da porções laterais 2809. Em várias modalidades, a bigorna 2840 pode compreender duas superfícies inclinadas, ou em ângulo, que são paralelas, ou ao menos substancialmente paralelas, às superfícies inclinadas de contato com o tecido 2819. Em ao menos uma modalidade, a bigorna 2840 pode compreender, adicionalmente, ao menos um pedaço de material de reforço 2860 fixado às superfícies inclinadas da bigorna 2840. Em várias modalidades, além do exposto acima, as fileiras de grampos externos no cartucho de grampos 2800 podem compreender os grampos mais altos 2220a e as fileiras de grampos internos podem compreender os grampos mais curtos 2220b. Em ao menos uma modalidade, os grampos mais altos 2220a podem ser posicionados nas e/ou em posição adjacente às porções laterais mais espessas 2809 enquanto os grampos mais curtos 2220b podem ser posicionados na e/ou em posição adjacente à porção de centro 2808. Em ao menos uma dessas modalidades, como resultado do exposto acima, os grampos mais altos 2220a podem capturar mais material do corpo do cartucho implantável 2810 que os grampos mais curtos 2220b.
[653] Conforme descrito anteriormente em relação à modalidade da FIGURA 46, por exemplo, a canaleta de cartucho de grampos 2230 pode compreender uma superfície de suporte em degrau 2231 que pode ser configurada para suportar os grampos 2220a e 2220b a diferentes alturas em relação à bigorna 2240. Em várias modalidades, a canaleta de cartucho de grampos 2230 pode consistir em metal e os degraus na superfície de suporte 2231 podem ser formados na superfície de suporte 2231 por uma operação de trituração, por exemplo. Em várias modalidades, agora com referência à FIGURA 54, um atuador de extremidade de um instrumento cirúrgico pode compreender uma canaleta de cartucho de grampos 2930 que compreende um elemento de inserção de suporte 2935 posicionado em seu interior. Mais particularmente, em ao menos uma modalidade, a canaleta de cartucho de grampos 2930 pode ser formada de modo que tenha uma su-perfície de suporte 2931 plana, ou ao menos substancialmente plana, por exemplo, que pode ser configurada para suportar o elemento de inserção 2935 que compreende as superfícies em degrau para suportar os grampos 2220a e 2220b do cartucho de grampos 2200 a diferentes alturas. Em ao menos uma dessas modalidades, o elemento de inserção 2935 pode compreender uma superfície de fundo plana, ou ao menos substancialmente plana, que pode ser posicionada contra a superfície de suporte 2931. O elemento de inserção 2935 pode compreender, adicionalmente, fendas, sulcos ou rebaixos de suporte 2932a e 2932b que podem ser configurados para suportar os grampos 2220a e 2220b, respectivamente, em diferentes alturas. de forma simi lar à modalidade acima, o elemento de inserção 2935 pode compreender uma fenda para faca 2939 que pode ser configurada para permitir que um elemento de corte passe através da mesma. Em várias modalidades, a canaleta de cartucho de grampos 2930 pode consistir no mesmo material ou em um material diferente do elemento de inserção de suporte 2935. Em ao menos uma modalidade, a canaleta de cartucho de grampos 2930 e o elemento de inserção de suporte 2935 podem consistir em metal, por exemplo, enquanto, em outras modalidades, a canaleta de cartucho de grampos 2930 pode consistir em metal, por exemplo, e o elemento de inserção de suporte 2935 pode consistir em plástico, por exemplo. Em várias modalidades, o elemento de inserção de suporte 2935 pode ser fixado e/ou soldado na canaleta de cartucho de grampos 2930. Em certas modalidades, o elemento de inserção de suporte 2935 pode ser preso por encaixe e/ou por pressão na canaleta de cartucho de grampos 2930. Em ao menos uma modalidade, o elemento de inserção de suporte 2935 pode ser fixado na canaleta de cartucho de grampos 2930 com o uso de um adesivo.
[654] Em várias modalidades, agora com referência à FIGURA 55, um atuador de extremidade de um grampeador cirúrgico pode compreender uma bigorna 3040, uma canaleta de cartucho de grampos 3030 e um cartucho de grampos implantável compressível 3000 posicionado na canaleta de cartucho de grampos 3030. de forma similar à modalidade acima, a bigorna 3040 pode compreender uma pluralidade de bolsos de formação de grampos 3042 e uma fenda para faca 3049 que pode ser configurada para receber de maneira deslizante um elemento de corte em seu interior. Também de forma similar à modalidade acima, a canaleta de cartucho de grampos 3030 pode compreender uma pluralidade de fendas de suporte de grampos 3032 e uma fenda para faca 3039 que pode também ser configurada para receber de maneira deslizante um elemento de corte. Em várias modalidades, o cartucho de grampos 3000 pode compreender uma primeira camada 3011, uma segunda camada 3012 e uma pluralidade de grampos, como os grampos 3020a e 3020b, por exemplo, posicionados nas mesmas. Em ao menos uma modalidade, os grampos 3020a podem compreender uma altura de grampo não formado que é maior que a altura de grampo não formado dos grampos 3020b. Em várias modalidades, a primeira camada 3011 pode consistir em um primeiro material compressível e a segunda camada 3012 pode consistir em um segundo material compressível. Em certas modalidades, o primeiro material compressível pode ser comprimido a uma taxa mais alta que o segundo material compressível, enquanto, em algumas outras modalidades, o primeiro material compressível pode ser comprimido a uma taxa mais baixa que o segundo material compressível. Em ao menos uma modalidade, o primeiro material compressível pode consistir em um material resiliente que pode compreender uma primeira taxa de mola e o segundo material compressível pode consistir em um material resiliente que pode compreender uma segunda taxa de mola que é diferente da primeira taxa de mola. Em várias modalidades, o primeiro material compressível pode compreender uma taxa de mola que é maior que a taxa de mola do segundo material compressível. Em certas outras modalidades, o primeiro material compressível pode compreender uma taxa de mola que é menor que a taxa de mola do segundo material compressível. Em várias modalidades, a primeira camada compressível pode compreender uma primeira rigidez e a segunda camadacompressível pode compreender uma segunda rigidez, sendo que a primeira rigidez é diferente da segunda rigidez. Em várias modalidades, a primeira camada compressível pode compreender uma rigidez que é maior que a rigidez da segunda camada compressível. Em certas outras modalidades, a primeira camada compressível pode compreender uma rigidez que é menor que a rigidez da segunda camada compressível.
[655] Em várias modalidades, novamente com referência à FI GURA 55, a segunda camada 3012 do cartucho de grampos 3000 pode compreender uma espessura constante, ou ao menos substancialmente constante, ao longo de sua largura. Em ao menos uma modalidade, a primeira camada 3011 pode compreender uma espessura que varia ao longo de sua largura. Em ao menos uma dessas modalidades, a primeira camada 3011 pode compreender um ou mais degraus 3008 que podem aumentar a espessura do corpo do cartucho 3010 em certasporções do corpo do cartucho 3010, como a porção de centro, por exemplo. Novamente com referência à FIGURA 55, os grampos mais curtos 3020b podem ser posicionados em ou alinhados com os degraus 3008, isto é, a porção mais espessas do corpo do cartucho 3010, e os grampos mais altos 3020a podem ser posicionados em ou alinhados com a porção mais delgadas do corpo do cartucho 3010. Em várias modalidades, como resultado das porções mais espessas e mais delgadas do corpo do cartucho 3010, a rigidez do corpo do cartucho 3010 pode ser maior ao longo das fileiras de grampos internos 3020b que ao longo das fileiras de grampos externos 3020a. Em várias modalidades, a primeira camada 3011 pode ser conectada a uma segunda camada 3012. Em ao menos uma dessas modalidades, a primeira camada 3011 e a segunda camada 3012 podem compreender recursos de interligação que podem reter as camadas 3011 e 3012 juntas. Em certas modalidades, a primeira camada 3011 pode compreender um primeiro laminado e a segunda camada 3012 pode compreender um segundo laminado, sendo que o primeiro laminado pode ser preso ao segundo laminado por um ou mais adesivos. Em várias modalidades, o cartucho de grampos 3000 pode compreender uma fenda para faca 3003 que pode ser configurada para receber de maneira deslizante um elemento de corte.
[656] Em várias modalidades, agora com referência à FIGURA 56, um cartucho de grampos 3100 pode compreender um corpo de cartucho implantável compressível 3110 que compreende uma única camada de material compressível e, adicionalmente, uma pluralidade de grampos, como os grampos 3020b, por exemplo, posicionados em seu interior. Em ao menos uma modalidade, a espessura do corpo do cartucho 3110 pode variar ao longo de sua largura. Em ao menos uma dessas modalidades, o corpo do cartucho 3110 pode compreender degraus 3108 que se estendem ao longo de suas porções laterais. Em várias modalidades, agora com referência à FIGURA 57, um cartucho de grampos 3200 pode compreender um corpo de cartucho implantável compressível 3210 que compreende uma única camada de material compressível e, adicionalmente, uma pluralidade de grampos, como os grampos 3020b, por exemplo, posicionados em seu interior. Em ao menos uma modalidade, a espessura do corpo do cartucho 3210 pode variar ao longo de sua largura. Em ao menos uma dessas modalidades, o corpo do cartucho 3210 pode compreender degraus 3208 que se estendem ao longo da porção de centro do mesmo. Em várias mo-dalidades, agora com referência à FIGURA 58, um cartucho de grampos 3300 pode compreender um corpo de cartucho implantável compressível 3310 sendo que, de forma similar à modalidade acima, a espessura do corpo do cartucho 3310 pode variar ao longo de sua largura. Em ao menos uma modalidade, a espessura do corpo do cartucho 3310 pode aumentar geometricamente entre as porções laterais e a porção de centro do corpo do cartucho 3310. Em ao menos uma dessas modalidades, a espessura do corpo do cartucho 3310 pode ser definida por um perfil arqueado ou curvo e pode compreender uma superfície de contato com o tecido arqueada ou curva 3319. Em certas modalidades, a espessura do corpo do cartucho 3310 e o contorno da superfície de contato com o tecido 3319 podem ser definidos por um raio de curvatura ou, alternativamente, por vários raios de curvatura, por exemplo. Em várias modalidades, agora com referência à FIGURA 59, um cartucho de grampos 3400 pode compreender um corpo de cartucho implantável compressível 3410, sendo que a espessura do corpo do cartucho 3410 pode aumentar linearmente, ou ao menos substancialmente linearmente, entre as porções laterais e a porção de centro do corpo do cartucho 3410.
[657] Em várias modalidades, agora com referência à FIGURA 60, um cartucho de grampos 3500 pode compreender um corpo de cartucho implantável compressível 3510 e uma pluralidade de grampos 3520 posicionados em seu interior. O corpo do cartucho implantável 3510 pode compreender uma primeira camada interna 3512, uma segunda camada interna 3513 e uma camada externa 3511. Em ao menos uma modalidade, a primeira camada interna 3512 pode compreender uma primeira espessura e a segunda camada interna 3513 pode compreender uma segunda espessura, sendo que a segunda camada interna 3513 pode ser mais espessa que a primeira camada interna 3512. Em ao menos uma modalidade alternativa, a primeira camada interna 3512 pode ser mais espessa que a segunda camada interna 3513. Em uma outra modalidade alternativa, a primeira camada interna 3512 pode ter a mesma, ou ao menos substancialmente a mesma, espessura que a segunda camada interna 3513. Em certas modalidades, cada grampo 3520 pode compreender uma base 3522 e uma ou mais pernas deformáveis 3521 estendendo-se a partir da base 3522. Em várias modalidades, cada perna 3521 pode compreender uma ponta 3523 que fica imersa na primeira camada interna 3511 e, adicionalmente, cada base 3522 dos grampos 3520 pode ficar imersa na segunda camada interna 3512. Em ao menos uma modalidade, a primeira camada interna 3512 e/ou a segunda camada interna 3513 podem compreender ao menos um medicamento armazenado em seu interior e, em várias modalidades, a camada externa 3511 pode encapsular e selar a primeira camada interna 3512 e a segunda camada interna 3513 de modo que o medicamento não flua para fora do corpo do cartucho de grampos 3510 até que a camada externa 3511 seja perfurada pelos grampos 3520. Mais particularmente, além do exposto acima, uma bigorna pode ser forçada para baixo contra o tecido posicionado contra a superfície de contato com o tecido 3519 do cartucho de grampos 3500, de modo que o corpo do cartucho 3510 seja comprimido e a superfície 3519 seja movida para baixo na direção, e ao menos parcialmente abaixo, das pontas dos grampos 3523 de modo que as pontas 3523 rompam ou perfurem a camada externa 3511. depois que a camada externa 3511 é rompida pelas pernas dos grampos 3521, o ao menos um medicamento M pode fluir para fora do corpo do cartucho 3510 e ao redor das pernas dos grampos 3521. Em várias circunstâncias, a compressão adicional do corpo do cartucho 3510 pode pressionar medicamento adicional M para fora do corpo do cartucho 3510, conforme ilustrado na FIGURA 61.
[658] Em várias modalidades, novamente com referência à FI GURA 60, a camada externa 3511 pode compreender um envoltório impermeável, ou ao menos substancialmente impermeável, à água, que pode ser configurado para, um, evitar que o medicamento flua prematuramente para fora do cartucho de grampos 3500 e, dois, evitar que os fluidos de um local cirúrgico, por exemplo, entrem prematuramente no cartucho de grampos 3500. Em certas modalidades, a primeira camada interna 3512 pode compreender um primeiro medicamento armazenado, ou absorvido, em seu interior, e a segunda camada interna 3513 pode compreender um segundo medicamento armazenado, ou absorvido, em seu interior, sendo que o segundo medicamento pode ser diferente do primeiro medicamento. Em ao menos uma modalidade, uma compressão inicial do corpo do cartucho 3510, que causa a ruptura da camada externa 3511, pode geralmente espremer o primeiro medicamento para fora da primeira camada interna 3512 e uma compressão subsequente do corpo do cartucho 3510 pode geralmente espremer o segundo medicamento para fora da segunda camada interna 3513. Em tais modalidades, entretanto, porções do primeiro medicamento e do segundo medicamento podem ser espremidas simultaneamente, embora a maioria do medicamento que é espremido inicialmente pode consistir no primeiro medicamento e a maioria do medicamento espremido subsequentemente pode consistir no segundo medicamento. Em certas modalidades, além do exposto acima, a primeira camada interna 3512 pode consistir em um material mais compressível que a segunda camada interna 3513, de modo que as forças ou pressões de compressão inicial, que podem ser menores que as forças ou pressões de compressão subsequente, possam causar uma deflexão inicial maior na primeira camada interna 3512 que na segunda camada interna 3513. Essa deflexão inicial maior na primeira camada interna 3512 pode fazer com que uma porção do primeiro medicamento espremida a partir da primeira camada interna 3512 seja maior que o segundo medicamento espremido da segunda camada interna 3513. Em ao menos uma modalidade, a primeira camada interna 3512 pode ser mais porosa e/ou mais flexível que a segunda camada interna 3513. Em ao menos uma dessas modalidades, a primeira camada interna 3512 pode compreender uma pluralidade de poros, ou espaços vazios, 3508 definidos em seu interior, e a segunda camada interna 3513 pode compreender uma pluralidade de poros, ou espaços vazios, 3509 definidos em seu interior, sendo que, em várias modalidades, os poros 3508 podem ser configurados para armazenar o primeiro medicamento na primeira camada interna 3512 e os poros 3509 podem ser configurados para armazenar o segundo medicamento na segunda camada interna 3513. Em certas modalidades, o tamanho e a densidade dos poros 3508 na primeira camada interna 3512 e dos poros 3509 na segunda camada interna 3513 podem ser selecionados de modo a fornecer um resultado desejado aqui descrito.
[659] Em várias modalidades, novamente com referência às FI GURAS 60 e 61, a camada externa 3511, a primeira camada interna 3512 e/ou a segunda camada interna 3513 podem consistir em um material bioabsorvível. Em ao menos uma modalidade, a primeira camada interna 3512 pode consistir em um primeiro material bioabsorvível, a segunda camada interna 3513 pode consistir em um segundo material bioabsorvível e a camada externa 3511 pode consistir em um terceiro material bioabsorvível, sendo que o primeiro material bioabsorvível, o segundo material bioabsorvível e/ou o terceiro material bioabsorvível podem consistir em materiais diferentes. Em certas modalidades, o primeiro material bioabsorvível pode ser bioabsorvido a uma primeira taxa, o segundo material bioabsorvível pode ser bioabsorvido a uma segunda taxa e o terceiro material bioabsorvível pode ser bioabsorvido a uma terceira taxa, sendo que a primeira taxa, a segunda taxa e/ou a terceira taxa podem ser diferentes. Em ao menos uma dessas modalidades, quando um material é bioabsorvido a uma taxa particular, essa taxa pode ser definida como a quantidade de massa do material que é absorvida pelo corpo do paciente por unidade de tempo. Conforme é conhecido na técnica, corpos de pacientes diferentes podem absorver materiais diferentes a taxas diferentes e, dessa forma, essas podem ser expressas como taxas médias para levar em conta tal variabilidade. Em todo caso, uma taxa maior pode ser uma taxa na qual uma quantidade maior de massa é bioabsorvida durante uma unidade de tempo do que uma taxa menor. Em várias modalidades, novamente com referência às FIGURAS 60 e 61, a primeira camada interna 3512 e/ou a segunda camada interna 3513 podem consistir em um material que é bioabsorvido mais rapidamente que o ma terial que compreende a camada externa 3511. Em ao menos uma tal modalidade, a primeira camada interna 3512 e/ou a segunda camada interna 3513 pode ser compreendida de uma espuma bioabsorvível, selante de tecido e/ou material hemostático, como celulose regenerada oxidada (ORC), por exemplo, e a camada externa 3511 pode ser compreendida de um material de reforço e/ou material plástico, como poli(ácido glicólico) (PGA) que está disponível sob o nome comercial Vicryl, poli(ácido láctico) (PLA ou PLLA), polidioxanona (PDS), polihidroxialcanoato (PHA), poliglecaprona 25 (PGCL) que está disponível sob o nome comercial Monocryl, poli(carbonato de trimetileno) (TMC) e/ou um compósito de PGA, PLA, PDS, PHA, PGCL e/ou PCL, Por exemplo. Em tais modalidades, a primeira camada interna 3512 e/ou a segunda camada interna 3513 podem tratar o tecido imediatamente e podem reduzir o sangramento do tecido, por exemplo, sendo que a camada externa 3514 pode proporcionar suporte estrutural mais duradouro e pode ser bioabsorvida a uma taxa menor.
[660] Devido à taxa menor de capacidade de bioabsorção da ca mada externa 3511, além do exposto acima, a camada externa 3511 pode reforçar estruturalmente o tecido na linha de grampos durante a cura. Em certas modalidades, uma dentre a primeira camada interna 3512 e a segunda camada interna 3513 pode consistir em um material que pode ser bioabsorvido mais rapidamente que o material da outra de modo que, em ao menos uma modalidade, uma das camadas pode fornecer uma liberação inicial de um material terapêutico e a outra camada pode fornecer uma liberação sustentada do mesmo material terapêutico e/ou de um material terapêutico diferente. Em ao menos uma dessas modalidades, a taxa na qual um material terapêutico pode ser liberado de uma camada 3512 ou 3513 pode ser função da capacidade de bioabsorção da camada de substrato na qual o medicamento é absorvido ou disperso. Por exemplo, em ao menos uma modalidade, o substrato que compreende a primeira camada interna 3512 pode ser bioabsorvido mais rapidamente que o substrato que compreende a segunda camada interna 3513 e, como resultado, um medicamento pode ser liberado da primeira camada interna 3512 mais rapidamente que da segunda camada interna 3513, por exemplo. Em várias modalidades, conforme descrito aqui, uma ou mais das camadas 3511, 3512 e 3513 do corpo do cartucho 3510 podem ser presas umas às outras por ao menos um adesivo, como fibrinaa e/ou hidrogel de proteína, por exemplo. Em certas modalidades, o adesivo pode ser solúvel em água e pode ser configurado para desfazer a conexão entre as camadas quando o cartucho de grampos 3500 é implantado e/ou algum tempo depois disso. Em ao menos uma dessas modalidades, o adesivo pode ser configurado para ser bioabsorvido mais rapidamente que a camada externa 3511, a primeira camada interna 3512 e/ou a segunda ca-mada interna 3513.
[661] Em várias modalidades, agora com referência às FIGURAS 62 e 63, um cartucho de grampos, como o cartucho de grampos 3600, por exemplo, pode compreender um corpo do cartucho 3610 que inclui uma primeira camada compressível 3611, uma segunda camada 3612 fixada à primeira camada 3611, e uma camada compressível removível 3613 fixada à segunda camada 3612. Em ao menos uma dessas modalidades, a primeira camada 3611 pode consistir em um material de espuma compressível, a segunda camada 3612 pode compreender um material laminado preso à primeira camada 3611 com o uso de um ou mais adesivos, e a terceira camada 3613 pode compreender um material de espuma compressível preso de maneira removível à segunda camada 3612 com o uso de um ou mais adesivos, por exemplo. Em várias modalidades, o cartucho de grampos 3600 pode compreender, adicionalmente, uma pluralidade de grampos, como os grampos 3620, por exemplo, posicionados no corpo do cartucho 3610. Em ao menos uma dessas modalidades, cada grampo 3620 pode compreender uma base 3622 posicionada na terceira camada 3613 e uma ou mais pernas deformáveis 3621 estendendo-se para cima a partir da base 3622 através da segunda camada 3612 e para dentro da primeira camada 3611, por exemplo. Em uso, além do exposto acima, a superfície de topo 3619 do corpo do cartucho de grampos 3610 pode ser forçada para baixo por uma bigorna até que as pernas dos grampos 3621 penetrem através da superfície de topo 3619 e do tecido-alvo e entrem em contato com a bigorna. Após as pernas dos grampos 3621 terem sido suficientemente deformadas, a bigorna poderá ser afastada do cartucho de grampos 3600, de modo que suas camadas compressíveis possam expandir novamente, ao menos parcialmente. Em váriascircunstâncias, a inserção dos grampos através do tecido pode causar o sangramento do tecido. Em ao menos uma modalidade, a terceira camada 3613 pode consistir em um material absorvente, como hidrogel de proteína, por exemplo, que pode remover o sangue do tecido grampeado. Em adição a ou em vez do exposto acima, a terceira camada 3613 pode consistir em um material hemostático e/ou um selante de tecido, como trombina e/ou fibrinaa secada por congelamento, por exemplo, que pode ser configurado para reduzir o sangramento do tecido. Em certas modalidades, a terceira camada 3613 pode proporcionar um suporte estrutural à primeira camada 3611 e à segunda camada 3612, e a terceira camada 3613 pode consistir em um material bioabsorvível e/ou um material não bioabsorvível. Em todo caso, em várias modalidades, a terceira camada 3613 pode ser separada da segunda camada 3612 após a implantação do cartucho de grampos 3610. Em modalidades onde a terceira camada 3613 compreende um material de qualidade implantável, o cirurgião pode optar por remover a terceira camada 3613 do corpo do cartucho 3610. Em ao menos uma modalidade, a terceira camada 3613 pode ser configurada para ser removida inteira da segunda camada 3612.
[662] Em várias modalidades, a primeira camada 3611 pode con sistir em um primeiro material de espuma e a terceira camada 3613 pode consistir em um segundo material de espuma que pode ser diferente do primeiro material de espuma. Em ao menos uma modalidade, o primeiro material de espuma pode ter uma primeira densidade e o segundo material de espuma pode ter uma segunda densidade, sendo que a primeira densidade pode ser diferente da segunda densidade. Em ao menos uma dessas modalidades, a segunda densidade pode ser maior que a primeira densidade e, como resultado, uma terceira camada 3613 pode ser menos compressível, ou ter uma taxa de compressão mais baixa, que a primeira camada 3611. Em ao menos uma modalidade alternativa, a primeira densidade pode ser maior que a segunda densidade e, como resultado, a primeira camada 3611 pode ser menos compressível, ou ter uma taxa de compressão mais baixa, que a terceira camada 3613. Em várias modalidades, agora com referência às FIGURAS 64 e 65, um cartucho de grampos 3700, similar ao cartucho de grampos 3600, pode compreender um corpo do cartucho 3710 que compreende uma primeira camada de espuma compressível 3711, uma segunda camada 3712 fixada à primeira camada 3711, e uma terceira camada de espuma compressível separável 3713 fixada de maneira removível à segunda camada 3712. Em ao menos uma dessas modalidades, a terceira camada 3713 pode compreender uma pluralidade de fendas ou recortes receptores de grampos 3709 que podem, cada um, ser configurados para receber ao menos uma porção de um grampo 3620, como uma base de grampo 3622, por exemplo. Em certas modalidades, os grampos 3620 podem ser configurados para deslizar nas fendas receptoras de grampos 3709 ou, dito de outra forma, a terceira camada 3713 pode ser configurada para deslizar em relação aos grampos 3620 quando o cartucho de grampos 3700 é po sicionado contra o tecido-alvo e comprimido por uma bigorna, por exemplo. Em ao menos uma modalidade, as fendas receptoras 3709 podem ser configuradas de modo que haja folga entre os grampos 3620 e as paredes laterais das fendas receptoras 3709. Em ao menos uma dessas modalidades, como resultado do exposto acima, os grampos 3620 podem não capturar uma porção da terceira camada 3713 quando os grampos 3620 são deformados, conforme ilustrado nas FIGURAS 64 e 65. Em certas outras modalidades, as extremidades das fendas receptoras de grampos 3709 em posição adjacente à segunda camada 3712 podem ser fechadas por uma porção da terceira camada 3713 e, como resultado, ao menos uma porção da terceira camada 3713 pode ser capturada pelos grampos 3620 quando os mesmos são deformados. Em todo caso, a terceira camada 3713 pode compreender uma ou mais perfurações e/ou picotes 3708, por exemplo, que podem ser configuradas para permitir que a terceira camada 3713 seja removida da segunda camada 3712 em dois ou mais pedaços, conforme ilustrado na FIGURA 64. Na FIGURA 64, um dos pedaços da terceira camada 3713 é mostrado sendo removido por uma ferramenta 3755. Em várias modalidades, as perfurações 3708 podem ser colocadas ao longo de uma linha disposta em uma posição intermediária entre uma primeira fileira de grampos e uma segunda fileira de grampos.
[663] Em várias modalidades, novamente com referência às FI GURAS 64 e 65, as bases 3622 dos grampos 3620 podem ser posicionadas nas fendas receptoras 3709 sendo que, em ao menos uma modalidade, as paredes laterais das fendas receptoras 3709 podem ser configuradas para entrar em contato e prender de modo removível as pernas dos grampos 3621 em posição. Em certas modalidades, não ilustradas, a terceira camada 3713 pode compreender uma fenda alongada circundando todos os grampos da linha de grampos. Em ao menos uma dessas modalidades, um cartucho de grampos que compreende quatro fileiras de grampos, por exemplo, pode compreender uma fenda alongada alinhada com cada fileira de grampos em uma camada de base do cartucho de grampos. Adicionalmente às modalidades acima, ao menos uma porção do cartucho de grampos 3600 e/ou do cartucho de grampos 3700 pode ser implantada em um paciente, e ao menos uma porção do cartucho de grampos pode ser removível do paciente. Em ao menos uma modalidade, novamente com referência às FIGURAS 64 e 65, a primeira camada 3711 e a segunda camada 3712 podem ser capturadas pelos grampos 3620 e podem ser implantadas com os grampos 3620, enquanto a terceira camada 3713 pode ser opcionalmente removida ou separada do cartucho de grampos 3700. Em várias circunstâncias, a remoção de uma porção do cartucho de grampos implantado pode reduzir a quantidade de material que corpo do paciente precisa reabsorver, podendo proporcionar váriosbenefícios terapêuticos. No caso de uma porção de um cartucho de grampos ser separada e removida, como por uma ferramenta laparoscópica 3755, por exemplo, a porção do cartucho de grampos sepa-rada pode ser removida do local cirúrgico através de um trocarte, como um trocarte que tem uma abertura de 5 mm, por exemplo. Em certas modalidades, uma corpo de cartucho pode compreender mais de uma camada que pode ser removida. Por exemplo, o corpo do cartucho 3710 pode compreender uma quarta camada sendo que a terceira camada 3713 do corpo do cartucho 3710 pode consistir em um material hemostático e a quarta camada pode consistir em uma camada de suporte. Em ao menos uma tal modalidade, um cirurgião pode remover a camada de suporte e, então, optar se remove a ca, camada hemostática, por exemplo.
[664] Em várias modalidades, agora com referência à FIGURA 66, um cartucho de grampos, como o cartucho de grampos 3800, por exemplo, pode compreender um corpo de cartucho 3810 que inclui uma camada externa 3811 e uma camada interna 3812. A camada interna 3812 pode consistir em um material de espuma compressível e a camada externa 3811 pode ser ao menos parcialmente aplicada como envoltório da camada interna 3812. Em ao menos uma modalidade, a camada externa 3811 pode compreender uma primeira porção 3811a configurada para ser posicionada sobre um primeiro lado da camada interna 3812, e uma segunda porção 3811b configurada para ser posicionada sobre um segundo lado da camada interna 3812, sendo que a primeira porção 3811a e a segunda porção 3811b podem ser conectadas por uma articulação flexível, como a articulação 3809, por exemplo. Em ao menos uma dessas modalidades, ao menos um adesivo, como fibrinaa e/ou hidrogel de proteína, por exemplo, pode ser aplicado ao primeiro lado e/ou ao segundo lado da camada interna 3812 para prender as porções da camada externa 3811 aos mesmos. Em várias modalidades, a camada externa 3811 pode compreender um ou mais elementos de fixação que se estendem a partir da mesma. Em ao menos uma dessas modalidades, a camada externa 3811 pode compreender uma pluralidade de pernas deformáveis 3821 estendendo-se a partir de um lado da camada externa 3811 que podem ser assentadas na camada interna compressível 3812. Em ao menos uma dessas modalidades, as pernas 3821 podem não se projetar do segundo lado da camada interna 3812 enquanto que, em ao menos uma modalidade alternativa, as pernas 3821 podem, ao menos parcialmente, se projetar da camada interna 3812. Quando o corpo compressível 3810 é comprimido, em uso, as pernas 3821 podem ser configuradas para perfurar a camada interna 3812 e a segunda porção 3811b da camada externa 3811. Em certas modalidades, a segunda porção 3811b da camada externa 3811 pode compreender aberturas, como as aberturas 3808, por exemplo, definidas em seu interior que podem ser configuradas para receber as pernas dos grampos 3821. Em certas modalidades, ao menos porções do cartucho de grampos 3800 podem com-preender uma fenda para faca 3803 que pode ser configurada para receber de maneira deslizante um elemento de corte em seu interior. Em ao menos uma dessas modalidades, a fenda para faca 3803 pode não se estender completamente através da espessura do corpo do cartucho 3810 e, como resultado, o elemento de corte pode cortar o corpo do cartucho 3810 à medida que o elemento é movido em relação ao cartucho.
[665] Em várias modalidades, agora com referência à FIGURA 67, um cartucho de grampos 3900 pode compreender, de modo similar ao cartucho de grampos 3800, um corpo do cartucho 3910 que inclui uma camada interna 3812 e uma camada externa 3811, sendo que a camada externa 3811 pode compreender uma primeira porção 3811a posicionada adjacente ao primeiro lado da camada interna 3812 e uma segunda porção 3811b posicionada adjacente ao segundo lado da camada interna 3812. Em ao menos uma modalidade, de forma similar à modalidade acima, a camada externa 3811 pode compreender um ou mais elementos de fixação que se estendem a partir da mesma. Em ao menos uma dessas modalidades, a camada externa 3811 pode compreender uma pluralidade de pernas deformáveis 3921 estendendo-se a partir de um lado da camada externa 3811 que podem ser assentadas na camada interna compressível 3812. Em certas modalidades, cada perna deformável 3921 pode compreender ao menos um gancho ou farpa 3923 que se projetam da mesma que pode ser configurada para engatar a segunda porção 3811b da camada externa 3811 e, como resultado, reter a camada externa 3811 na camada interna 3812. Em ao menos uma dessas modalidades, as farpas 3923 podem ser configuradas para se projetar do segundo lado da camada interna 3812 e se estender através das aberturas 3808 na segunda porção 3811b da camada externa 3811, de modo que as farpas 3923 possam engatar a superfície externa da camada externa 3811 e travar a camada externa 3811 na camada interna 3812. Para construir o cartucho de grampos 3900, a camada interna 3812 pode ser, ao menos parcialmente, comprimida para fazer com que as farpas se projetem da mesma e entrem nas aberturas 3808. Em ao menos uma dessas modalidades, o cartucho de grampos 3900 pode ser, ao menos parcialmente,pré-comprimido quando é inserido em um cartucho de grampos, por exemplo. Em certas modalidades, além do exposto acima, ao menos uma porção das pernas 3921 pode estar imersa na primeira porção 3811a da camada externa 3811 sendo que, em ao menos uma modalidade, a camada externa 3811 pode consistir em um material plástico, como polidioxanona (PDS POLIDIOXANONA) e/ou ácido poliglicólico (PGA polyglycolic acid), por exemplo, e o material plástico pode ser sobremoldado ao redor de ao menos uma porção das pernas 3921.
[666] Em várias modalidades, agora com referência às FIGURAS 68 a 72, um cartucho de grampos, como o cartucho de grampos 4000, por exemplo, pode compreender um corpo do cartucho 4010 que inclui uma primeira camada compressível 4011 e uma segunda camada 4012 e, adicionalmente, uma pluralidade de grampos 4020 posicionada no corpo do cartucho 4010. Em certas modalidades, com referência à FIGURA 70, cada grampo 4020 pode compreender uma base 4022 e ao menos uma perna deformável 4023 estendendo-se a partir da base 4022. Em ao menos uma modalidade, com referência à FIGURA 68, o cartucho de grampos 4000 pode ser posicionado entre uma canaleta de cartucho de grampos 4030 e uma bigorna 4040 de um atuador de extremidade de um grampeador cirúrgico, sendo que a segunda camada 4012 do corpo do cartucho 4010 e/ou as bases 4022 dos grampos 4020 podem ser posicionadas contra a canaleta de cartucho de grampos 4030. Em várias modalidades, agora com referência à FIGURA 69, a segunda camada 4012 pode compreender uma camada de ataduras 4060 interconectadas umas às outras por uma estrutura de suporte de ataduras 4061. Em ao menos uma dessas modalidades, as ataduras 4060 e a estrutura de suporte de ataduras 4061 podem consistir em um material plástico moldado, como ácido poliglicólico (PGA), por exemplo. Cada atadura 4060 pode compreender uma ou mais aberturas ou fendas 4062 que podem ser configuradas para receber uma perna de grampo 4021 que se estende através das mesmas, conforme ilustrado nas FIGURAS 70 e 71. Cada atadura 4060 pode compreender, adicionalmente, uma fenda receptora 4063, que pode ser configurada para receber uma base 4022 de um grampo 4020. Em várias modalidades, novamente com referência à FIGURA 69, as ataduras 4060 e/ou a estrutura de suporte de ataduras 4061 podem compreender uma pluralidade de marcações, perfurações, ou similares, que podem ser configuradas para permitir que as ataduras 4060 possam ser separadas da estrutura de suporte de ataduras 4061 em um local desejado. de modo similar, com referência à FIGURA 71, uma ou mais ataduras 4060 podem ser conectadas umas às outras ao longo de uma linha que compreende perfurações e/ou marcações 4064, por exemplo. Em uso, a camada de espuma compressível 4011 pode ser posicionada contra o tecido-alvo T, e o corpo do cartucho 4010 pode ser comprimido pela bigorna 4040 de modo que a bigorna 4040 pode deformar os grampos 4020. Quando os grampos 4020 são deformados, as pernas 4021 de cada grampo 4020 podem capturar o tecido T, uma porção da primeira camada 4011 e uma atadura 4060 no grampo deformado. Quando a canaleta de cartucho de grampos 4030 é afastada do cartucho de grampos implantado 4060, por exemplo, a estrutura de suporte de ataduras 4061 pode ser separada das ataduras 4060 e/ou as ataduras 4060 podem ser separadas umas das outras. Em certas circunstâncias, as ataduras 4060 podem ser separadas da estrutura 4061 e/ou umas das outras quando os grampos 4020 são de-formados pela bigorna 4040, conforme descrito acima.
[667] Em várias modalidades aqui descritas, os grampos de um cartucho de grampos podem ser formados completamente por uma bigorna quando a bigorna é movida para uma posição fechada. Em várias outras modalidades, agora com referência às FIGURAS 73 a 76, os grampos de um cartucho de grampos, como o cartucho de grampos 4100, por exemplo, podem ser deformados por uma bigorna quando a bigorna é movida para uma posição fechada e, adicionalmente, por um sistema de acionamento de grampos que move os grampos na direção da bigorna fechada. O cartucho de grampos 4100 pode compreender um corpo compressível 4110 que pode consistir em um material de espuma, por exemplo, e uma pluralidade de grampos 4120 posicionados, ao menos parcialmente, no corpo compressível 4110. Em várias modalidades, o sistema de acionamento de grampos pode compreender um suporte de acionadores 4160, uma pluralidade de acionadores de grampos 4162 posicionados no suporte de acionadores 4160, e um compartimento de cartucho de grampos 4180 que pode ser configurado para reter os acionadores de grampos 4162 no suporte de acionadores 4160. Em ao menos uma dessas modalidades, os acionadores de grampos 4162 podem ser posicionados em uma ou mais fendas 4163 no suporte de acionadores 4160, de modo que as paredes laterais das fendas 4163 podem ajudar a orientar os acionadores de grampos 4162 para cima na direção da bigorna. Em várias modalidades, os grampos 4120 podem ser mantidos nas fendas 4163 pelos acionadores de grampos 4162, sendo que, em ao menos uma modalidade, os grampos 4120 podem ser posicionados completamente nas fendas 4163 quando os grampos 4120 e os acionadores de grampos 4162 estiverem na posição não disparada. Em certas outras modalidades, ao menos uma porção dos grampos 4120 pode se estender para cima através das extremidades abertas 4161 das fendas 4163 quando os grampos 4120 e os acionadores de grampos 4162 estiverem na posição não disparada. Em ao menos uma dessas modalidades, agora com referência principalmente à FIGURA 74, as bases dos grampos 4120 podem estar posicionadas no suporte de acionadores 4160 e as pontas dos grampos 4120 podem estar imersas no corpocompressível 4110. Em certas modalidades, aproximadamente um terço da altura dos grampos 4120 pode ser posicionado no suporte de acionadores 4160 e aproximadamente dois terços da altura dos grampos 4120 podem ser posicionados no corpo do cartucho 4110. Em ao menos uma modalidade, com referência à FIGURA 73A, o cartucho de grampos 4100 pode compreender, adicionalmente, um envoltório ou uma membrana impermeável à água 4111 circundando o corpo do cartucho 4110 e o suporte de acionadores 4160, por exemplo.
[668] Em uso, o cartucho de grampos 4100 pode ser colocado em uma canaleta de cartucho de grampos, por exemplo, e a bigorna pode ser movida na direção do cartucho de grampos 4100 para uma posição fechada. Em várias modalidades, a bigorna pode entrar em contato com e comprimir o corpo compressível 4110 quando a bigorna é movida para sua posição fechada. Em certas modalidades, a bigorna pode não entrar em contato com os grampos 4120 quando ela se encontra na posição fechada. Em certas outras modalidades, a bigorna pode entrar em contato com as pernas dos grampos 4120 e deformar, ao menos parcialmente, os grampos 4120 quando a bigorna é movida para a posição fechada. Em qualquer um desses casos, o cartucho de grampos 4100 pode compreender, adicionalmente, um ou mais deslizadores 4170 que podem ser avançados longitudinalmente no cartucho de grampos 4100 de modo que os deslizadores 4170 possam engatar sequencialmente os acionadores de grampos 4162 e mover os acionadores de grampos 4162 e os grampos 4120 na direção da bigorna. Em várias modalidades, os deslizadores 4170 podem deslizar entre o compartimento de cartucho de grampos 4180 e os acionadores de grampos 4162. Em modalidades onde o fechamento da bigorna iniciou o processo de formação dos grampos 4120, o movimento para cima dos grampos 4120 na direção da bigorna pode completar o processo de formação e deformar os grampos 4120 até sua altura completamente formada, ou ao menos desejada. Em modalidades onde o fechamento da bigorna não deformou os grampos 4120, o movimento para cima dos grampos 4120 na direção da bigorna pode iniciar e completar o processo de formação e deformar os grampos 4120 até sua altura completamente formada, ou ao menos desejada. Em várias modalidades, os deslizadores 4170 podem ser avançados a partir de uma extremidade proximal do cartucho de grampos 4100 para uma extremidade distal do cartucho de grampos 4100 de modo que os grampos 4120 posicionados na extremidade proximal do cartucho de grampos 4100 são formados completamente antes de os grampos 4120 posicionados na extremidade distal do cartucho de grampos 4100 serem formados completamente. Em ao menos uma modalidade, com referência à FIGURA 75, os deslizadores 4170 podem compreender, cada um, ao menos uma superfície em ângulo ou inclinada 4711 que pode ser configurada para deslizar sob os acionadores de grampos 4162 e levantar os acionadores de grampos 4162 conforme ilustrado na FIGURA 76.
[669] Em várias modalidades, além das descritas acima, os grampos 4120 podem ser formados para capturar ao menos uma porção do tecido T e ao menos uma porção do corpo compressível 4110 do cartucho de grampos 4100. depois que os grampos 4120 são formados, a bigorna e a canaleta de cartucho de grampos 4130 do grampeadorcirúrgico podem ser afastadas do cartucho de grampos implantado 4100. Em várias circunstâncias, o compartimento de cartucho 4180 pode ser engatado de maneira fixa com a canaleta de cartucho de grampos 4130 de modo que, como resultado, o compartimento de cartucho 4180 pode ser separado do corpo compressível 4110 à medida que a canaleta de cartucho de grampos 4130 é afastada do corpo 4110 do cartucho implantado. Em várias modalidades, novamente com referência à FIGURA 73, o compartimento de cartucho 4180 pode compreender paredes laterais opostas 4181 entre as quais o corpo do cartucho 4110 pode ser posicionado de maneira removível. Em ao menos uma dessas modalidades, o corpo compressível do cartucho 4110 pode ser comprimido entre as paredes laterais 4181 de modo que o corpo do cartucho 4110 possa ser retido de maneira removível nessa região durante o uso e desengatado de modo liberável do compartimento de cartucho 4180 à medida que o compartimento de cartucho 4180 é afastado. Em ao menos uma dessas modalidades, o suporte de acionadores 4160 pode ser conectado ao compartimento de cartucho 4180 de modo que o suporte de acionadores 4160, os acionadores 4162 e/ou os deslizadores 4170 possam permanecer no compartimento de cartucho 4180 quando o compartimento de cartucho 4180 é removido do local cirúrgico. Em certas outras modalidades, os acionadores 4162 podem ser ejetados do suporte de acionadores 4160 e deixados no local cirúrgico. Em ao menos uma dessas modalidades, os acionadores 4162 podem consistir em um material bioabsorvível, como ácido poliglicólico (PGA), disponível sob o nome comercial Vicryl, ácido polilático (PLA ou PLLA), polidioxanona (PDS), poli-hidroxialcanoato (PHA), poliglecaprona 25 (PGCL), disponível sob o nome comercial Monocryl, policaprolactona (PCL), e/ou um composto de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo. Em várias modalidades, os acionadores 4162 podem ser fixados aos grampos 4120 de modo que os acionadores 4162 são implantados com os grampos 4120. Em ao menos uma dessas modalidades, cada acionador 4162 pode compreender um rebaixo configurado para receber as bases dos grampos 4120, por exemplo, sendo que, em ao menos uma modalidade, os rebaixos podem ser configurados para prender as bases dos grampos por pressão e/ou por encaixe.
[670] Em certas modalidades, além das descritas acima, o supor te de acionadores 4160 e/ou os deslizadores 4170 podem ser ejetados do compartimento de cartucho 4180. Em ao menos uma dessas modalidades, os deslizadores 4170 podem deslizar entre o compartimento de cartucho 4180 e o suporte de acionadores 4160 de modo que, à medida que os deslizadores 4170 são avançados para dirigir os acionadores de grampos 4162 e os grampos 4120 para cima, os deslizadores 4170 podem mover também o suporte de acionadores 4160 para cima e para fora do compartimento de cartucho 4180. Em ao menos uma dessas modalidades, o suporte de acionadores 4160 e/ou os deslizadores 4170 podem consistir em um material bioabsorvível, como ácido poliglicólico (PGA), disponível sob o nome comercial Vicryl, ácidopolilático (PLA ou PLLA), polidioxanona (PDS), polihidroxialcanoato (PHA), poliglecaprona 25 (PGCL), disponível sob o nome comercial Monocryl, policaprolactona (PCL), e/ou um composto de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo. Em várias modalidades, os deslizadores 4170 pode ser formados integralmente e/ou fixados a uma barra acionadora, ou elemento de corte, que empurra os deslizadores 4170 através do cartucho de grampos 4100. Em tais modalidades, os deslizadores 4170 podem não ser ejetados do compartimento de cartucho 4180 e podem permanecer com o gram-peadorcirúrgico enquanto que, em outras modalidades nas quais os deslizadores 4170 não são fixados à barra acionadora, os deslizadores 4170 podem ser deixados no local cirúrgico. Em todo caso, além do exposto acima, a compressibilidade do corpo de cartucho 4110 pode permitir o uso de cartuchos de grampos mais grossos no atuador de extremidade de um grampeador cirúrgico, uma vez que o corpo de cartucho 4110 pode se comprimir, ou se retrair, quando a bigorna do grampeador é fechada. Em certas modalidades, como resultado da deformação, ao menos parcial, dos grampos no fechamento da bigorna, grampos, como grampos tendo uma altura de grampo de aproximadamente 4,6 mm (0,18”), por exemplo, poderia ser usado, sendo que aproximadamente 3,1 mm (0,12”) da altura do grampo pode ser posicionada dentro da camada compressível 4110 e em que a camada compressível 4110 pode ter uma altura não-comprimida de aproximadamente 3,6 mm (0,14”), por exemplo.
[671] Em várias modalidades, agora com referência às FIGURAS 77 a 80, um cartucho de grampos, como o cartucho de grampos 4200, por exemplo, pode compreender um corpo compressível 4210, uma pluralidade de grampos 4220 posicionada em seu interior e uma pluralidade de elementos de suporte lateral flexíveis 4234. Em várias modalidades, agora com referência à FIGURA 78, o cartucho de grampos 4200 pode ser disposto em uma posição intermediária entre uma bigorna 4240 e uma canaleta de cartucho de grampos 4230 sendo que, em ao menos uma modalidade, os elementos de suporte lateral 4234 podem ser fixados à canaleta de cartucho de grampos 4230. Quando a bigorna 4240 é movida para baixo para comprimir o corpo do cartucho 4210 e deformar, ao menos parcialmente, os grampos 4220, conforme ilustrado na FIGURA 79, as porções laterais do corpo do cartucho 4210 podem inchar lateralmente e forçar os elementos de suporte lateral 4234 para fora. Em ao menos uma dessas modalidades, os elementos de suporte lateral 4234 podem ser fixados ao corpo do cartucho 4210 e, quando o corpo do cartucho 4210 inchar lateralmente conforme descrito acima, os elementos de suporte lateral 4234 poderão se separar do corpo do cartucho 4210 conforme ilustrado na FIGURA 79. Em ao menos uma modalidade, os elementos de suporte lateral 4234 podem ser presos ao corpo do cartucho 4210 com o uso de ao menos um adesivo, como fibrinaa e/ou hidrogel de proteína, por exemplo. de forma similar à modalidade acima, o fechamento da bigorna 4240 pode deformar apenas parcialmente os grampos 4220, sendo que a formação dos grampos 4220 pode ser completada pelo avanço de um ou mais deslizadores 4270 através do cartucho de grampos 4200, conforme ilustrado na FIGURA 80. Em várias modalidades, agora com referência às FIGURAS 82 e 83, os deslizadores 4270 podem ser avançados de uma extremidade proximal do cartucho de grampos 4200 para uma extremidade distal do cartucho de grampos 4200 por um elemento de corte 4280. Em ao menos uma dessas modalidades, o membro de corte 4280 pode compreender um elemento de corte, ou faca, 4283, que pode ser avançado através do tecido T e/ou do corpo compressível 4210. Em certas modalidades, o elemento de corte 4280 pode compreender elementos de came 4282 que podem se deslocar ao longo das superfícies externas das mandíbulas 4230 e 4240 e mover ou manter as mandíbulas em posição. Em várias modalidades, como resultado do exposto acima, os grampos 4220 podem ser moldados em seus formatos finais ao mesmo tempo, ou ao menos substancialmente ao mesmo tempo, em que o tecido T é cortado. Em ao menos uma dessas modalidades, os deslizadores 4270 podem ser posicionados distalmente em relação à faca 4283 de modo que o tecido T é cortado apenas depois que a porção precedente do tecido é completamente grampeada, por exemplo.
[672] Em várias modalidades, novamente com referência às FI GURAS 82 e 83, os deslizadores 4270 podem compreender elementos deslizantes separados que são avançados juntos pelo elemento de corte 4280. Em ao menos uma dessas modalidades, os deslizadores 4270 podem ser contidos no cartucho de grampos 4200 e o elemento de corte 4280 pode ser avançado para dentro do cartucho de grampos 4200 por uma barra de disparo 4281 de modo que o elemento de corte 4280 engata os deslizadores 4270 e empurra os deslizadores 4270 distalmente. Em certas modalidades, os deslizadores 4270 podem ser conectados uns aos outros. de qualquer modo, cada deslizador 4270 pode compreender uma superfície em ângulo, ou came, 4271 que pode ser configurada para levantar os grampos 4220 alinhados em uma fileira de grampos. Em certas modalidades, as superfícies em ângulo 4271 podem ser formadas integralmente com o elemento de corte 4280. Em ao menos uma modalidade, novamente com referência às FIGURAS 82 e 83, cada grampo 4200 pode compreender uma base, ao menos um elemento deformável estendendo-se a partir da base, e uma coroa 4229 sobremoldada sobre e/ou posicionada ao redor de ao menos uma porção da base e/ou dos elementos deformáveis do grampo 4200. Em várias modalidades, essas coroas 4229 podem ser configuradas para ser acionadas diretamente por um deslizador 4270, por exemplo. Mais particularmente, em ao menos uma modalidade, as coroas 4229 de grampos 4220 podem ser configuradas de modo que as superfícies em ângulo 4271 dos deslizadores 4270 podem deslizar sob e entrar diretamente em contato com as coroas 4229 sem um acionador de grampos posicionado entre elas. Em tais modalidades, cada coroa 4229 pode compreender ao menos uma superfície em ângulo ou inclinada que é cooperacional e que pode ser engatada por uma superfície em ângulo 4271 dos deslizadores 4270 de modo que as superfícies cooperacionais em ângulo possam acionar os grampos 4220 para cima quando os deslizadores 4270 são deslizados sob os grampos 4220.
[673] Em várias modalidades, agora com referência à FIGURA 81, um cartucho de grampos, como o cartucho de grampos 4300, por exemplo, pode compreender uma estrutura compressível 4310 e uma pluralidade de grampos 4320 posicionados na estrutura compressível 4310. de forma similar à modalidade acima, o cartucho de grampos 4300 pode compreender suportes laterais flexíveis 4334 que podem ser fixados a uma canaleta de cartucho de grampos e/ou presos à estruturacompressível 4310. Em adição ao exposto acima, os suportes laterais flexíveis 4334 podem ser conectados juntas por uma ou mais escoras, ou elementos de conexão, 4335 que podem ser configurados para manter os suportes laterais 4334 juntos. Em uso, os elementos de conexão 4335 podem ser configurados para evitar, ou ao menos inibir, que os suportes laterais 4334 se separem prematuramente do corpo do cartucho 4310. Em certas modalidades, os elementos de conexão 4335 podem ser configurados para manter os suportes laterais 4334 juntos depois que o cartucho de grampos 4300 é comprimido por uma bigorna. Em tais modalidades, os suportes laterais 4334 podem resistir à dilatação, ou deslocamento, lateral das porções laterais do corpo do cartucho 4310. Em certas modalidades, um elemento de corte, como o elemento de corte 4280, por exemplo, pode ser configurado para transeccionar os elementos de conexão 4335 à medida que o elemento de corte 4280 é movido distalmente no corpo do cartucho 4310. Em ao menos uma dessas modalidades, o elemento de corte 4280 pode ser configurado para empurrar um ou mais deslizadores, como os deslizadores 4270, por exemplo, distalmente para formar os grampos 4320 contra uma bigorna. Os deslizadores 4270 podem conduzir o gume cortante 4283 de modo que o elemento de corte 4280 não transeccione um elemento de conexão 4335 até que os grampos 4320 adjacentes ao elemento de conexão 4335 sejam formados completamente, ou ao menos formados até uma altura desejada. Em váriascircunstâncias, os elementos de conexão 4335, que são cooperacionais com os suportes laterais 4334, podem evitar, ou ao menos reduzir, o movimento lateral do corpo compressível 4310 e, ao mesmo tempo, evitar, ou ao menos reduzir, o movimento lateral dos grampos 4320 posicionados no corpo do cartucho 4310. Em tais circunstâncias, os elementos de conexão 4335 podem manter os grampos 4320 em posição até depois de os mesmos serem deformados e os elementos de conexão 4335 podem ser, depois disso, cortados para liberar as porções laterais do corpo do cartucho 4310. Conforme mencionado anteriormente, os suportes laterais 4334 podem ser conectados à canaleta de cartucho de grampos e, como resultado, podem ser removidos do local cirúrgico com a canaleta de cartucho de grampos depois da implantação do cartucho de grampos 4300. Em certas modalidades, os suportes laterais 4334 podem consistir em um material implantável e podem ser deixados em um local cirúrgico. Em ao menos uma modalidade, os elementos de conexão 4335 podem ser dispostos em uma posição intermediária entre o corpo do cartucho 4310 e o tecido T e, após a separação dos elementos de conexão 4335 dos suportes laterais 4334, os elementos de conexão 4335 podem permanecer im-plantados no paciente. Em ao menos uma dessas modalidades, os elementos de conexão 4335 podem consistir em um material implantável e, em certas modalidades, os elementos de conexão 4335 podem consistir no mesmo material que os suportes laterais 4334, por exemplo. Em várias modalidades, os elementos de conexão 4335 e/ou os suportes laterais 4334 podem consistir em um material flexível bioabsorvível como ácido poliglicólico (PGA), disponível sob o nome comercial Vicryl, ácido polilático (PLA ou PLLA), polidioxanona (PDS), polihidroxialcanoato (PHA), poliglecaprona 25 (PGCL), disponível sob o nome comercial Monocryl, policaprolactona (PCL), e/ou um composto de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo. Em várias modalidades, um elemento de conexão pode compreender uma folha de material que liga os suportes laterais 4334. Em certas modalidades, um cartucho de grampos pode compreender elementos de conexão estendendo-se pela superfície de topo do corpo do cartucho 4310 e, adicionalmente, elementos de conexão estendendo-se ao redor da su-perfície de fundo do corpo do cartucho 4310.
[674] Em várias modalidades, agora com referência à FIGURA 84, um cartucho de grampos pode compreender grampos, como os grampos 4420, por exemplo, que podem compreender uma porção de fio inserida em uma porção de coroa. Em ao menos uma modalidade, a porção de fio pode consistir em metal, como titânio e/ou aço inoxidável, por exemplo, e/ou plástico, como polidioxanona (PDS) e/ou ácido poliglicólico (PGA), por exemplo. Em ao menos uma modalidade, a porção de coroa pode consistir em metal, como titânio e/ou aço inoxidável, por exemplo, e/ou plástico, como polidioxanona (PDS) e/ou ácidopoliglicólico (PGA), por exemplo. Em certas modalidades, a porção de fio de cada grampo 4420 pode compreender uma base 4422 e pernas deformáveis 4421 estendendo-se a partir da base 4422, sendo que a porção de coroa de cada grampo 4420 pode compreender uma coroa 4429 que pode ser configurada para receber ao menos uma porção da base 4422. Para montar as porções de cada grampo 4420, agora com referência às FIGURAS 85A a 85C, as pernas 4421 da porção de fio podem ser inseridas em uma abertura 4426 na coroa 4429, sendo que a abertura 4426 pode ser configurada para guiar as pernas 4421 para uma câmara da base 4427. A porção de fio pode ser inserida adicionalmente na coroa 4429 de modo que as pernas 4421 saiam da câmara da base 4427 e a base 4422 da porção de fio entre na câmara da base 4427. Em ao menos uma dessas modalidades, a câmara da base 4427 pode ser configurada de modo que a porção de fio seja girada na coroa 4429 à medida que a base 4422 entra na câmara da base 4427 de modo que as pernas dos grampos 4421 fiquem apontadas em uma direção para cima, ou ao menos substancialmente para cima. Em várias modalidades, novamente com referência à FIGURA 84, a coroa 4429 pode compreender orifícios de saída 4425 que podem ser configurados para receber as pernas dos grampos 4421 em seu interior.
[675] Em várias modalidades, além do exposto acima, um gram peadorcirúrgico pode compreender um deslizador 4470 configurado para atravessar o cartucho de grampos 4400 e a canaleta de cartucho de grampos 4430 e mover os grampos 4420 contidos no corpo do cartucho 4410 na direção de uma bigorna. Em várias circunstâncias, o deslizador 4470 pode ser movido de uma extremidade proximal da canaleta de cartucho de grampos 4430 para uma extremidade distal da canaleta do cartucho 4430 para implantar o corpo do cartucho 4410 e os grampos 4420. Em determinadas circunstâncias, o deslizador 4470 pode ser retraído ou retornado à extremidade proximal da canaleta do cartucho 4430 e um outro cartucho de grampos 4400 pode ser inserido na canaleta do cartucho 4430. depois que o novo cartucho de grampos 4400 é posicionado na canaleta de cartucho 4430, o deslizador 4470 pode ser avançado distalmente mais uma vez. Em várias modalidades, o grampeador cirúrgico pode compreender um ou mais recursos de travamento que podem evitar que o deslizador 4470 seja avançado distalmente mais uma vez sem um novo cartucho de grampos 4400 colocado na canaleta do cartucho 4430. Em ao menos uma dessas modalidades, novamente com referência à FIGURA 84, a canaleta de cartucho de grampos 4430 pode compreender um anteparo de travamento 4439 que pode ser configurado para evitar, ou ao menos limitar, o movimento distal do deslizador 4470. Mais particularmente, o deslizador 4470 pode ser configurado para ficar lado a lado com o anteparo 4439 a menos que o deslizador 4470 seja levantado, ao menos parcialmente, para cima sobre o anteparo 4439 por um recurso de levantamento 4428, por exemplo, estendendo-se entre os grampos mais proximais 4420 de um cartucho de grampos 4400. Dito de outra forma, sem a presença dos grampos mais proximais 4420 em um novo cartucho de grampos 4400, o deslizador 4470 não pode ser avançado. dessa forma, quando um cartucho de grampos expandido 4400 está presente na canaleta de cartucho 4430, ou não há nenhum cartucho de grampos 4400 presente na canaleta de cartucho 4430, o deslizador 4470 não pode ser avançado na canaleta de cartucho 4430.
[676] Adicionalmente às modalidades acima, agora com referên ciaà FIGURA 86, um cartucho de grampos, como o cartucho de grampos 4500, por exemplo, pode ser posicionado em uma canaleta de cartucho de grampos 4530 e pode compreender um corpo compressível 4510, uma pluralidade de grampos 4520 posicionada no corpo do cartucho 4510 e um compartimento de cartucho, ou retentor, 4580. Em várias modalidades, o corpo compressível 4510 pode compreender uma camada externa 4511 e uma camada interna 4512 sendo que, em ao menos uma modalidade, a camada externa 4511 pode encerrar de modo vedante a camada interna 4512. Em ao menos uma dessas modalidades, a camada externa 4511 pode se estender entre a camada interna 4512 e o compartimento de cartucho 4580. Em certas outras modalidades, a camada externa 4511 pode circundar apenas parcialmente a camada interna 4512 e, em ao menos uma de tais modalidades, a camada externa 4511 e o compartimento de cartucho 4580 podem cooperar para abranger, ou ao menos substancialmente abranger, a camada interna 4512. Em várias modalidades, além do exposto acima, os grampos 4520 podem ser apoiados pelo compartimento de cartucho 4580, sendo que o compartimento de cartucho 4580 pode compreender uma ou mais canaletas de suporte de grampos configuradas para suportar os grampos 4520. Em certas modalidades, o compartimento de cartucho 4580 pode ser fixado ao corpo do cartucho 4510, sendo que, em ao menos uma de tais modalidades, o corpo de cartucho 4510 pode ser comprimido lateralmente entre paredes laterais opostas do compartimento de cartucho 4580. Em várias modalidades, as paredes laterais do compartimento de cartucho 4580 podem suportar o corpo do cartucho 4510 lateralmente e, em ao menos uma de tais modalidades, o compartimento de cartucho 4580 pode compreender uma ou mais paredes, ou aletas, 4582 estendendo-se para cima a partir do suporte de fundo 4583 para o interior do corpo do cartucho 4510. Em ao menos uma dessas modalidades, o corpo do cartucho 4510 pode compreender uma ou mais fendas, ou canaletas, que podem ser configuradas para receber e/ou se entrelaçar com as paredes 4582. Em várias modalidades, as paredes 4582 podem se estender parcialmente, ou quase inteiramente, através do corpo do cartucho 4510. Em ao menos uma dessas modalidades, as paredes 4582 podem se estender longitudinalmente através do cartucho de grampos 4500 entre uma primeira fileira de grampos 4520 e uma segunda fileira de grampos 4520.
[677] Em várias modalidades, o corpo do cartucho 4510 e/ou o compartimento de cartucho 4580 podem compreender recursos cooperacionais de retenção que podem proporcionar um encaixe entre o compartimento de cartucho 4580 e o corpo do cartucho 4510. Em certas modalidades, o cartucho de grampos 4500 pode ser posicionado na canaleta do cartucho 4530 de modo que o compartimento de cartucho 4580 seja posicionado contra e/ou fixado à canaleta do cartucho 4530. Em ao menos uma modalidade, o compartimento de cartucho 4580 pode ser acoplado de maneira separável à canaleta do cartucho 4530 de modo que, após a compressão do cartucho de grampos 4500 pela bigorna 4540 e depois que os grampos 4520 forem deformados, o compartimento de cartucho 4580 poderá se separar da canaleta do cartucho 4530 e ser implantado com o corpo do cartucho 4510. Em ao menos uma dessas modalidades, o compartimento de cartucho 4580 pode consistir em um material bioabsorvível como ácido poliglicólico (PGA), disponível sob o nome comercial Vicryl, ácido polilático (PLA ou PLLA), polidioxanona (PDS), poli-hidroxialcanoato (PHA), poliglecaprona 25 (PGCL), disponível sob o nome comercial Monocryl, policaprolactona (PCL), e/ou um composto de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo. Em certas modalidades, um grampeadorcirúrgico pode compreender, adicionalmente, um mecanismo e/ou acionador de disparo que podem ser deslizados para uma posição intermediária entre a canaleta de cartucho de grampos 4530 e uma superfície de acionamento de fundo no compartimento de cartucho 4580 que pode ser configurada para levantar ou ejetar o compartimento de cartucho 4580 da canaleta do cartucho 4530. Em certas modalidades, o corpo do cartucho 4510 pode ser acoplado de modo separável ao compartimento de cartucho 4580 de modo que, após a compressão do cartucho de grampos 4500 pela bigorna 4540 e depois que os grampos 4520 forem deformados, o corpo do cartucho 4510 poderá se separar do compartimento de cartucho 4580. Em ao menos uma dessas modalidades, o compartimento de cartucho 4580 pode permanecer engatado de maneira fixa à canaleta do cartucho 4530 de modo que o compartimento de cartucho 4580 seja removido do local cirúrgico com a canaleta do cartucho 4530. Em certas modalidades, um grampeador cirúrgico pode compreender, adicionalmente, um mecanismo e/ou acionador de disparo que podem ser deslizados para uma posição inter-mediária entre o compartimento de cartucho de grampos 4580 e uma superfície de acionamento de fundo no corpo do cartucho 4510 que pode ser configurada para levantar ou ejetar o corpo do cartucho 4510 do compartimento de cartucho 4580. Em ao menos uma dessas modalidades, o cartucho de grampos 4500 pode compreender, adicionalmente, acionadores de grampos dispostos em uma posição intermediária entre o compartimento de cartucho 4580 e os grampos 4520 de modo que, à medida que o mecanismo de disparo é deslizado distalmente, os acionadores de grampos e os grampos 4520 podem ser acionados para cima na direção da bigorna. Em ao menos uma dessas modalidades, os acionadores de grampos podem estar, ao menos par-cialmente, imersos no corpo compressível 4510.
[678] Em várias modalidades, de forma similar à modalidade acima, o cartucho de grampos 4500 pode compreender um recurso de travamento que pode ser configurado para evitar, ou ao menos limitar, o movimento distal de um elemento de corte a menos que um cartucho de grampos não disparados 4500 esteja posicionado na canaleta de cartucho de grampos 4530. Em certas modalidades, o compartimento de cartucho de grampos 4580 pode compreender uma superfície que move o elemento de corte para cima e acima de uma superfície de travamento da canaleta de cartucho de grampos 4530, por exemplo. Se não houver um cartucho de grampos 4500 que compreende um compartimento de cartucho 4580 presente na canaleta do cartucho 4530, o elemento de corte não poderá ser avançado. Em ao menos uma modalidade, os grampos mais proximais, e/ou quaisquer outros grampos adequados, em um cartucho de grampos 4500 podem compreender uma superfície de levantamento que pode levantar suficientemente o elemento de corte acima da superfície de travamento. Além do ou em vez do exposto acima, várias porções do cartucho de grampos 4500 podem consistir em materiais que têm cores diferentes. Em tais modalidades, o cirurgião pode detectar visualmente que um cartucho de grampos não disparados e/ou disparados está presente na canaleta de cartucho de grampos 4530. Em ao menos uma dessas modalidades, a camada externa 4511 do corpo do cartucho 4510 pode ter uma primeira cor, o compartimento de cartucho 4580 pode ter uma segunda cor, e a canaleta de cartucho de grampos 4530 pode ter uma terceira cor. Se o cirurgião vir a primeira cor, ele saberá que um cartucho não disparado 4500 está presente na canaleta de cartucho de grampos 4530; se ele vir a segunda cor, o cirurgião poderá saber que um cartucho disparado 4500 está presente na canaleta de cartucho de grampos 4530 e que o restante do compartimento de cartucho 4580 precisa ser removido; e se ele vir a terceira cor, o cirurgião poderá saber que não há nenhuma porção de um cartucho de grampos 4500 na canaleta do cartucho 4530.
[679] Em várias modalidades, agora com referência à FIGURA 87, um cartucho de grampos, como o cartucho de grampos 4600, por exemplo, pode compreender um corpo de cartucho implantável compressível 4610 e uma pluralidade de grampos 4620 posicionada em seu interior. O corpo do cartucho 4610 pode compreender uma camada externa 4611 e uma camada interna 4612. Em certas modalidades, a camada interna 4612 pode compreender uma pluralidade de bolsos, como os bolsos, ou cavidades, 4615, por exemplo, definidos em seu interior que podem facilitar o achatamento do corpo do cartucho 4610. Em ao menos uma dessas modalidades, a camada interna 4612 pode compreender uma retícula corrugada, ou em forma de colmeia, que pode ser configurada para suportar uma força, ou pressão, de compressão desde que a força, ou pressão, de compressão não exceda um certo valor-limite. Enquanto o valor-limite não é excedido, a camada interna 4612 pode deformar a uma taxa linear, ou ao menos substancialmente linear, em relação à força, ou pressão, de compressão sendo aplicada. Quando a força, ou pressão, de compressão excede o valor-limite, a camada interna 4612 pode ceder repentinamente a grandes deflexões e achatar, ou entortar, como resultado da carga de compressão. Em várias modalidades, a retícula da camada interna 4612 pode consistir em uma pluralidade de subcamadas 4612a que podem ser conectadas uma às outras. Em ao menos uma modalidade, cada subcamada 4612a pode compreender uma pluralidade de entalhes e cristas alternados, ou ondas, que podem ser alinhados com os entalhes e cristas alternados de uma subcamada adjacente 4612a. Em ao menos uma dessas modalidades, os entalhes de uma primeira subcamada 4612a podem ser dispostos em posição adjacente às cristas de uma segunda subcamada 4612a e, de modo similar, as cristas da primeira subcamada 4612a podem ser dispostas em posição adjacente aos entalhes da segunda subcamada 4612a. Em várias modalidades, as subcamadas adjacentes 4612a podem ser presas umas às outras e/ou à camada externa 4611 por ao menos um adesivo, como fibrinaa e/ou hidrogel de proteína, por exemplo. A FIGURA 88 ilustra o cartucho de grampos 4600 depois que o corpo do cartucho 4610 é achatado e os grampos 4620 são deformados para capturar e manter o tecido T contra o corpo do cartucho 4610.
[680] Em várias modalidades, agora com referência às FIGURAS 89 a 91, um cartucho de grampos, como o cartucho de grampos 4700, por exemplo, pode compreender um corpo de cartucho implantável compressível 4710 e uma pluralidade de grampos 4720 posicionada no corpo do cartucho 4710. de forma similar à modalidade acima, o corpo do cartucho 4710 pode compreender uma camada externa 4711 e uma camada interna 4712, sendo que a camada interna 4712 pode compreender uma pluralidade de subcamadas 4712a. Também de forma similar à modalidade acima, cada subcamada 4712a pode compreender entalhes 4717 e cristas 4718 alternados que podem ser alinhados uns com os outros para definir bolsos, ou cavidades, 4715 entre si. Em ao menos uma dessas modalidades, os entalhes 4717 e/ou as cristas 4718 podem se estender ao longo de eixos que são paralelos uns aos outros e/ou paralelos a um eixo longitudinal 4709. Em várias modalidades, os grampos 4720 podem ser alinhados em uma plu-ralidade de fileiras de grampos que podem se estender ao longo de eixos paralelos uns aos outros e/ou paralelos ao eixo longitudinal 4709. Em várias modalidades alternativas, novamente com referência às FIGURAS 87 e 88, os grampos 4620 contidos no corpo do cartucho 4600 podem se estender ao longo de eixos que são transversais ou perpendiculares aos eixos definidos pelos entalhes e cristas das subcamadas 4612a. Novamente com referência às FIGURAS 89 a 91, os grampos 4720 podem se estender através dos entalhes 4717 e das cristas 4718, sendo que as forças de atrito entre os grampos 4720 e as subcamadas 4712a podem manter os grampos 4720 no corpo do cartucho 4710. Em certas modalidades, a pluralidade de subcamadas 4712a pode consistir em um material de reforço e/ou material plástico, como polidioxanona (PDS) e/ou ácido poliglicólico (PGA), por exemplo, que pode ser configurado para manter os grampos 4720 em uma orientação vertical, por exemplo, e/ou manter os grampos 4720 em alinhamento uns em relação aos outros, conforme ilustrado nas FIGURAS 89 e 90. A FIGURA 91 ilustra o cartucho de grampos 4700 depois de o corpo do cartucho 4710 ter sido achatado e os grampos 4720 terem sido deformados para capturar e manter o tecido T contra o corpo do cartucho 4710.
[681] Em várias modalidades, novamente com referência às FI GURAS 89 a 91, o corpo do cartucho 4710 pode achatar resiliente ou elasticamente quando é comprimido. Em ao menos uma dessas moda-lidades, as ondas formadas em cada subcamada 4712a pelos entalhes 4717 e pelas cristas 4718 podem ser achatadas, ou ao menos substancialmente achatadas, quando o corpo do cartucho 4710 é comprimido, o que pode achatar, ou ao menos substancialmente achatar, as cavidades 4715 definidas nessa região. Em várias circunstâncias, o corpo do cartucho 4710, ou ao menos porções do corpo do cartucho 4710, pode resiliente ou elasticamente se re-expandir depois que a força, ou pressão, de compressão é removida do corpo do cartucho 4710. Em ao menos uma dessas modalidades, as conexões entre os entalhes 4717 e as cristas 4718 de subcamadas adjacentes 4712a podem permanecer intactas, ou ao menos substancialmente intactas, quando o corpo do cartucho 4710 é comprimido de modo que, depois de removida a força de compressão do corpo do cartucho 4710, as subcamadas 4712a podem se afastar umas das outras e, como resultado, ao menos parcialmente re-expandir o corpo do cartucho 4710. Em certas modalidades, o corpo do cartucho 4710 pode ser plasticamente deformado, ou esmagado, quando é comprimido e, como resultado, o corpo do cartucho 4710 pode não re-expandir após a remoção da força, ou pressão, de compressão do corpo do cartucho 4710. Em certas modalidades, agora com referência à FIGURA 92, um cartucho de grampos, como o cartucho de grampos 4800, por exemplo, pode compreender um corpo do cartucho contraível 4810 que compreende uma camada externa 4811 e uma camada interna 4812, sendo que a camada interna 4812 pode compreender uma retícula corrugada, configurada como uma colmeia, que tem uma pluralidade de bolsos, ou cavidades, 4815 definidas em seu interior. Em várias modalidades, as paredes que definem a retícula da camada interna 4812 podem compreender uma ou mais seções transversais enfraquecidas, ou delgadas, 4819 que podem ser configuradas para permitir que as paredes definindo a retícula se rompam quando o corpo do cartucho 4810 é comprimido. Em tais circunstâncias, o corpo do cartucho 4810 pode ser esmagado quando o cartucho de grampos 4800 é implantado.
[682] Em várias modalidades, agora com referência às FIGURAS 93 a 95, um cartucho de grampos, como o cartucho de grampos 4900, por exemplo, pode compreender um corpo do cartucho 4910 que compreende uma camada externa 4911 e uma pluralidade de elementos retráteis 4912 dispostos em uma posição intermediária entre as porções de topo e de fundo da camada externa 4911, por exemplo. Com referência principalmente às FIGURAS 93 e 94, o cartucho de grampos 4900 pode compreender, adicionalmente, uma pluralidade de grampos 4920, em que cada grampo 4920 pode ser posicionado em um elemento retrátil 4912. Mais particularmente, cada elemento retrátil 4912 pode compreender uma primeira porção 4912a, uma segunda porção 4012b, e uma terceira porção 4012c que podem ser cooperacionais para definir uma cavidade 4915 que é configurada para receber um grampo 4920. Em uso, além do exposto acima, o cartucho de grampos 4900 pode ser posicionado em uma canaleta de cartucho de grampos e uma força de compressão pode ser aplicada à superfície de contato com o tecido 4919 para comprimir o corpo do cartucho 4910. À medida que a superfície de contato com o tecido 4919 é movida para baixo, os elementos retráteis 4912 podem se achatar. Em tais circunstâncias, a segunda porção 4912b de cada elemento retrátil 4912 pode se achatar em uma primeira porção correspondente 4912a e, de modo similar, a terceira porção 4912c de cada elemento retrátil 4912 pode se achatar em uma segunda porção correspondente 4912b. À medida que o corpo do cartucho 4910 é comprimido e os elementos retráteis 4912 são achatado, os grampos 4920 posicionados nos elementos retráteis 4912 podem ser deformados, conforme ilustrado na FIGURA 95. Em várias modalidades, a segunda porção 4912b de cada elementoretrátil 4912 pode ser engatada por atrito e/ou encaixada por pressão em uma primeira porção correspondente 4912a de modo que, quando a força de compressão aplicada ao elemento retrátil 4912 exceder a força de retenção que retém a primeira porção 4912a e a se-gundaporção 4912b em sua posição estendida (FIGURA 94), a pri-meiraporção 4912a e a segunda porção 4912b poderão começar a deslizar uma em relação à outra. de modo similar, a terceira porção 4912c de cada elemento retrátil 4912 pode ser engatada por atrito e/ou encaixada por pressão em uma segunda porção correspondente 4912b de modo que, quando a força de compressão aplicada ao elementoretrátil 4912 exceder a força de retenção que retém a segunda porção 4912b e a terceira porção 4912c em sua posição estendida (FIGURA 94), a terceira porção 4912b e a terceira porção 4912c poderão começar a deslizar uma em relação à outra.
[683] Em muitas modalidades aqui descritas, um cartucho de grampos pode compreender uma pluralidade de grampos em seu interior. Em várias modalidades, tais grampos podem consistir em um fio metálico deformado em uma configuração substancialmente em formato de U que tem duas pernas de grampo. São previstas outras modalidades nas quais os grampos podem compreender configurações diferentes como dois ou mais fios que foram unidos um ao outro e tendo três ou mais pernas de grampo. Em várias modalidades, o fio, ou fios, usado para formar os grampos pode compreender uma seção transversal redonda, ou ao menos substancialmente redonda. Em ao menos uma modalidade, os fios de grampo podem compreender qualquer outra seção transversal adequada, como seções transversais quadradas e/ou retangulares, por exemplo. Em certas modalidades, os grampos podem consistir em fios plásticos. Em ao menos uma modalidade, os grampos podem consistir em fios metálicos revestidos com plástico. Em várias modalidades, um cartucho pode compreender qualquer tipo adequado de prendedor em adição a ou em vez de grampos. Em ao menos uma dessas modalidades, tal prendedor pode compreender braços pivotantes que são dobrados quando engatados por uma bigorna. Em certas modalidades, poderiam ser utilizados prendedores de duas peças. Em ao menos uma dessas modalidades, um cartucho de grampos pode compreender uma pluralidade de primeiras porções de prendedores e uma bigorna pode compreender uma pluralidade de segundas porções de prendedores que são conectadas às primeiras porções de prendedores quando a bigorna é comprimida contra o cartucho de grampos. Em certas modalidades, conforme descrito acima, um deslizador ou acionador pode ser avançado em um cartucho de grampos para completar o processo de formação dos grampos. Em certas modalidades, um deslizador ou acionador pode ser avançado no interior de uma bigorna para mover para baixo um ou mais elementos formadores em engate com o cartucho de grampos e os grampos, ou prendedores, opostos posicionados em seu interior.
[684] Em várias modalidades aqui descritas, um cartucho de grampos pode compreender quatro fileiras de grampos. Em ao menos uma modalidade, as quatro fileiras de grampos podem ser dispostas em duas fileiras de grampos internas e duas fileiras de grampos externas. Em ao menos uma dessas modalidades, uma fileira de grampos interna e uma fileira de grampos externa podem ser posicionadas em um primeiro lado de uma fenda de elemento de corte, ou faca, no cartucho de grampos e, de modo similar, uma fileira de grampos interna e uma fileira de grampos externa podem ser posicionadas em um segundo lado da fenda de elemento de corte, ou faca. Em certas modalidades, um cartucho de grampos pode não compreender nenhuma fenda de elemento de corte; entretanto, tal cartucho de grampos pode compreender uma porção designada configurada para ser cortada por um elemento de corte em vez de uma fenda de cartucho de grampos. Em várias modalidades, as fileiras de grampos internas podem ser dispostas no cartucho de grampos de modo que sejam igualmente, ou ao menos substancialmente igualmente, espaçadas da fenda de elemento de corte. de modo similar, as fileiras de grampos externas po-dem ser dispostas no cartucho de grampos de modo que sejam igualmente, ou ao menos substancialmente igualmente, espaçadas da fenda de elemento de corte. Em várias modalidades, um cartucho de grampos pode compreender mais ou menos que quatro fileiras de grampos. Em ao menos uma modalidade, um cartucho de grampos pode compreender seis fileiras de grampos. Em ao menos uma dessas modalidades, o cartucho de grampos pode compreender três fileiras de grampos em um primeiro lado de uma fenda de elemento de corte e três fileiras de grampos em um segundo lado da fenda de elemento de corte. Em certas modalidades, um cartucho de grampos pode compreender um número ímpar de fileiras de grampos. Por exemplo, um cartucho de grampos pode compreender duas fileiras de grampos em um primeiro lado de uma fenda de elemento de corte e três fileiras de grampos em um segundo lado da fenda de elemento de corte. Em várias modalidades, as fileiras de grampos podem compreender grampos que têm a mesma, ou ao menos substancialmente a mesma, altura de grampo não formado. Em certas outras modalidades, uma ou mais das fileiras de grampos podem compreender grampos que têm uma altura de grampo não formado diferente da altura de outros grampos. Em ao menos uma dessas modalidades, os grampos em um primeiro lado de uma fenda de elemento de corte podem ter uma primeira altura não formada e os grampos em um segundo lado de uma fenda de elemento de corte podem ter uma segunda altura não formada que é diferente da primeira altura, por exemplo.
[685] Em várias modalidades, agora com referência às FIGURAS 96A a 96D, um atuador de extremidade de um grampeador cirúrgico pode compreender uma porção de fixação de cartucho, como a canaleta de cartucho de grampos 5030, por exemplo, um cartucho de prendedores posicionado de maneira removível na canaleta de cartucho de grampos 5030, como o cartucho de grampos 5000, por exemplo, e uma mandíbula 5040 em posição oposta ao cartucho de grampos 5000 e à canaleta de cartucho de grampos 5030. O cartucho de grampos 5000 pode compreender uma estrutura compressível 5010 e uma pluralidade de grampos 5020, e/ou quaisquer outros prendedores adequados, ao menos parcialmente posicionados na estrutura compressível 5010. Em ao menos uma dessas modalidades, cada grampo 5020 pode compreender uma base 5022 e, adicionalmente, pernas 5021 estendendo-se para cima a partir da base 5022, sendo que ao menos uma porção das pernas 5021 pode estar imersa no corpo do cartucho 5010. Em várias modalidades, a estrutura compressível 5010 pode compreender uma superfície de topo, ou de contato com o tecido, 5019 e uma superfície de fundo 5018, sendo que a superfície de fundo 5018 pode ser posicionada contra e apoiada por uma superfície de suporte 5031 da canaleta de cartucho de grampos 5030. de forma similar à modalidade acima, a superfície de suporte 5031 pode compreender uma pluralidade de fendas de suporte 5032 (FIGURA 96D), por exemplo, definida na superfície que pode ser configurada para receber e suportar as bases 5022 dos grampos 5020. Em várias modalidades, o atuador de extremidade do grampeador cirúrgico pode compreender, adicionalmente, uma matriz de retenção, como a matriz de retenção 5050, por exemplo, que pode ser configurada para engatar os grampos 5020 e capturar o tecido. Em ao menos uma dessas modalidades, a matriz de retenção 5050 pode ser montada de forma removível na mandíbula 5040. Em uso, depois que o cartucho de grampos 5000 é posicionado na canaleta de cartucho de grampos 5030, a mandíbula 5040 e a matriz de retenção 5050 fixada à mesma podem ser movidas na direção do cartucho de grampos 5000 e da canaleta de cartucho de grampos 5030. Em ao menos uma modalidade, a mandíbula 5040 pode ser movida para baixo ao longo de um eixo 5099 de modo que a mandíbula 5040 e a canaleta de cartucho de grampos 5030 permaneçam paralelas, ou ao menos substancialmente paralelas, uma em relação à outra à medida que a mandíbula 5040 é fechada. Mais particularmente, em ao menos uma de tais modalidades, a mandíbula 5040 pode ser fechada de uma maneira tal que uma superfície de contato com o tecido 5051 da matriz de retenção 5050 fique paralela, ou ao menos substancialmente paralela, à superfície de contato com o tecido 5019 do cartucho de grampos 5000 à medida que a mandíbula 5040 é movida na direção do cartucho de grampos 5000.
[686] Em várias modalidades, agora com referência à FIGURA 96A, a matriz de retenção 5050 pode ser fixada de maneira separável à mandíbula 5040 de modo que haja pouco ou nenhum, movimento relativo entre a matriz de retenção 5050 e a mandíbula 5040 quando a matriz de retenção 5050 é fixada à mandíbula 5040. Em ao menos uma modalidade, a mandíbula 5040 pode compreender um ou mais recursos de retenção que podem ser configurados para manter a matriz de retenção 5050 em posição. Em ao menos uma dessas modalidades, a matriz de retenção 5050 pode ser presa por encaixe e/ou por pressão na mandíbula 5040. Em certas modalidades, a matriz de retenção 5050 pode ser presa à mandíbula 5040 com o uso de ao menos um adesivo. Em todo caso, a mandíbula 5040 pode ser movida para uma posição na qual a matriz de retenção 5050 é colocada em contato com o tecido T e o tecido T é posicionado contra a superfície de contato com o tecido 5019 do cartucho de grampos 5000. Quando o tecido T é posicionado contra o cartucho de grampos 5000 pela mandíbula 5040, a estrutura compressível 5010 do cartucho de grampos 5000 pode ou não ser comprimida pela mandíbula 5040. Em qualquercircunstância, em várias modalidades, as pernas 5021 dos grampos 5200 podem não se projetar através da superfície de contato com o tecido 5019 do cartucho de grampos 5000, conforme ilustrado na FIGURA 96A. Além disso, conforme também ilustrado na FIGURA 96A, a mandíbula 5040 pode manter o tecido T contra a estrutura compressível 5010 sem interconectar a matriz de retenção 5050 com os grampos 5020. Tais modalidades podem permitir que um cirurgião abra e feche a mandíbula 5040 várias vezes para obter o posicionamento desejado do atuador de extremidade no local cirúrgico, por exemplo, sem danificar o tecido T. São previstas outras modalidades, entretanto, onde as pontas dos grampos 5023 podem se projetar da superfície de contato com o tecido 5019 antes de o corpo do cartucho 5010 ser comprimido pela bigorna 5040. depois que o atuador de ex-tremidadeé adequadamente posicionado, agora com referência à FIGURA 96B, a mandíbula 5040 pode ser movida para baixo na direção da canaleta de cartucho de grampos 5030 de modo que a estrutura compressível 5010 seja comprimida pela bigorna 5040 e de modo que a superfície de contato com o tecido 5019 seja forçada para baixo em relação aos grampos 5020. À medida que a superfície de contato com o tecido 5019 é pressionada para baixo, as pontas 5023 das pernas dos grampos 5021 podem perfurar a superfície de contato com o tecido 5019 e perfurar ao menos uma porção do tecido T. Em tais circunstâncias, a matriz de retenção 5050 pode ser posicionada acima dos grampos 5020 de modo que as aberturas de retenção 5052 da matriz de retenção 5050 fiquem alinhadas, ou ao menos substancialmente alinhadas, com as pontas 5023 das pernas dos grampos 5021.
[687] À medida que a matriz de retenção 5050 é forçada para baixo ao longo do eixo 5099, agora com referência à FIGURA 96C, as pernas de grampo 5021 dos grampos 5020 podem entrar nas aberturas de retenção 5052. Em várias modalidades, as pernas dos grampos 5021 podem engatar as paredes laterais das aberturas de retenção 5052. Em certas modalidades, conforme descrito em mais detalhes a seguir, a matriz de retenção 5050 pode compreender um ou mais elementos de retenção que se estendem para dentro e/ou ao redor das aberturas de retenção 5052, podendo engatar as pernas dos grampos 5021. Em qualquer desses casos, as pernas dos grampos 5021 podem ser retidas nas aberturas de retenção 5052. Em várias circunstâncias, as pontas 5023 das pernas dos grampos 5021 podem entrar nas aberturas de retenção 5052 e podem engatar por atrito os elementos de retenção e/ou as paredes laterais das aberturas 5052. À medida que a matriz de retenção 5050 é empurrada na direção das bases 5022 dos grampos 5020, as pernas dos grampos 5021 podem deslizar em relação às paredes laterais e/ou aos elementos de retenção. Como resultado do exposto acima, podem ser criadas forças de atrito deslizante entre as pernas dos grampos 5021 e a matriz de retenção 5050, sendo que tais forças de atrito deslizante podem resistir à inserção da matriz de retenção 5050 sobre os grampos 5020. Em várias modalidades, as forças de atrito deslizante entre a matriz de retenção 5050 e os grampos 5020 podem ser constantes, ou ao menos substancialmente constantes, à medida que a matriz de retenção 5050 é deslizada para baixo ao longo das pernas de grampo 5021 dos grampos 5020. Em certas modalidades, as forças de atrito deslizante podem aumentar e/ou diminuir à medida que a matriz de retenção 5050 é deslizada para baixo ao longo das pernas dos grampos 5021 devido às variações na geometria das pernas dos grampos 5021, às aberturas de retenção 5052, e/ou aos elementos de retenção que se estendem para dentro e/ou ao redor das aberturas de retenção 5052, por exemplo. Em várias modalidades, a inserção da matriz de retenção 5050 sobre os grampos 5020 pode, também, ter resistência da estrutura compressível 5010 do cartucho de grampos 5000. Mais particularmente, a estrutura compressível 5010 pode consistir em um material elástico, por exemplo, que pode aplicar uma força de resistência à matriz de retenção 5050 que aumenta com o aumento da distância na qual a estrutura compressível 5010 é comprimida. Em ao menos uma dessas modalidades, o aumento na força de resistência gerada pelo corpo do cartucho 5010 pode ser linearmente proporcional, ou ao menos substancialmente linearmente proporcional, em relação à distância na qual o corpo do cartucho 5010 é comprimido. Em certas modalidades, o aumento na força de resistência gerada pelo corpo do cartucho 5010 pode ser geometricamente proporcional em relação à distância na qual o corpo do cartucho 5010 é comprimido.
[688] Em várias modalidades, além do exposto acima, uma força de disparo suficiente pode ser aplicada à mandíbula 5040 e à matriz de retenção 5050 para superar as forças de resistência e de atrito descritas acima. Em uso, a matriz de retenção 5050 pode ser assentada a qualquer profundidade adequada em relação aos grampos 5020. Em ao menos uma modalidade, a matriz de retenção 5050 pode ser assentada a uma profundidade em relação às bases 5022 dos grampos 5020 para prender duas ou mais camadas de tecido juntas e gerar forças, ou pressões, de compressão no tecido. Em várias circunstâncias, o sistema que compreende a matriz de retenção 5050 e os grampos 5020 pode permitir a um cirurgião selecionar uma quantidade de forças, ou pressões, de compressão que são aplicadas ao tecido selecionando a profundidade na qual a matriz de retenção 5050 é assentada. Por exemplo, a matriz de retenção 5050 pode ser forçada para baixo na direção das bases de grampo 5022 dos grampos 5020 até que matriz de retenção 5050 seja assentada a uma certa profundidade 5011 afastada da base das fendas de suporte 5032, sendo que uma profundidade menor 5011 pode resultar em forças, ou pressões, de compressão mais altas sendo aplicadas ao tecido T que uma profundidade maior 5011 que pode resultar em forças, ou pressões, de compressão menores sendo aplicadas ao tecido T. Em várias modalidades, as forças, ou pressões, de compressão aplicadas ao tecido T podem ser linearmente proporcionais, ou ao menos substancialmente linearmente proporcionais, à profundidade 5011 na qual a matriz de retenção 5050 é assentada. Em várias circunstâncias, as forças, ou pressões, de compressão aplicadas ao tecido T podem depender da espessura do tecido T posicionado entre a matriz de retenção 5050 e o cartucho de grampos 5020. Mais particularmente, para uma dada distância 5011, a presença de um tecido T mais grosso pode resultar em forças, ou pressões, de compressão maiores que a presença de tecido mais fino T.
[689] Em várias circunstâncias, além do exposto acima, um cirur gião pode ajustar a profundidade na qual a matriz de retenção 5050 é assentada para levar em conta o tecido mais espesso e/ou mais delgado posicionado no atuador de extremidade e para aplicar uma certa pressão ou uma pressão predeterminada ao tecido T independentemente da espessura do tecido. Por exemplo, o cirurgião pode assentar a matriz de retenção 5050 a uma profundidade menor 5011 quando prender o tecido mais delgado T, ou a uma profundidade maior 5011 quando prender o tecido mais espesso T para atingir uma mesma pressão de compressão, ou ao menos substancialmente a mesma, no tecido. Em certas modalidades, além do exposto acima, um cirurgião pode seletivamente determinar a quantidade de pressão de compressão a ser aplicada ao tecido T posicionado entre a matriz de retenção 5050 e o cartucho de grampos 5010. Em várias circunstâncias, um cirurgião pode engatar a matriz de retenção 5050 com os grampos 5020 e posicionar a matriz de retenção 5050 em uma primeira distância das bases 5022 dos grampos 5020 para aplicar uma primeira pressão de compressão ao tecido. O cirurgião pode, alternativamente, posicionar a matriz de retenção 5050 em uma segunda distância afastada das bases 5022, distância essa que é menos que a primeira distância, para aplicar uma segunda pressão de compressão ao tecido que é maior que a primeira pressão. O cirurgião pode, alternativamente, posicionar a matriz de retenção 5050 em uma terceira distância afastada das bases 5022, distância essa que é menor que a segunda distância, para aplicar uma terceira pressão de compressão ao tecido que é maior que a segunda pressão. Em várias modalidades, o sistema de fixação que compreende a matriz de retenção 5050 e os grampos 5020 pode ser configurado para permitir que um cirurgião aplique uma ampla gama de pressões de compressão ao tecido-alvo.
[690] Em várias modalidades, agora com referência à FIGURA 96D, as pernas dos grampos 5021 podem ser inseridas através da matriz de retenção 5050 de modo que as pontas das pernas dos grampos 5023 se estendam acima da superfície de topo da matriz de retenção 5050. Em ao menos uma modalidade, novamente com referência à FIGURA 96C, a mandíbula 5040 pode compreender, adicionalmente, aberturas de folga 5042 definidas na mandíbula que podem ser configuradas para receber as pontas das pernas dos grampos 5023 à medida que passarem através das aberturas de retenção 5052 na matriz de retenção 5050. Em ao menos uma dessas modalidades, as aberturas de folga 5042 podem ser alinhadas com as aberturas de retenção 5052 de modo que as pernas 5021 não entrem em contato com a mandíbula 5040. Em várias modalidades, as aberturas de folga 5042 podem ter uma profundidade suficiente de modo que as pernas dos grampos 5021 não entrem em contato com a mandíbula 5040, inde-pendentemente da distância na qual a matriz de retenção 5050 é assentada. depois que a matriz de retenção 5050 é engatada com os grampos 5020 e assentada na posição desejada, agora com referência à FIGURA 96D, a canaleta de cartucho de grampos 5030 e a mandíbula 5040 podem ser afastadas do tecido T. Mais particularmente, a canaleta de cartucho de grampos 5030 pode ser separada do cartucho de grampos implantado 5000 e a bigorna 5040 pode ser separada da matriz de retenção implantada 5050. À medida que a mandíbula 5040 é afastada da matriz de retenção 5050 e os suportes de grampos 5032 são afastados das bases dos grampos 5022, a distância 5011 entre a matriz de retenção 5050 e o fundo das bases 5022 pode ser mantida, embora a mandíbula 5040 e a canaleta de cartucho de grampos 5030 não estejam mais fornecendo suporte às mesmas. Em várias modalidades, as forças de atrito estáticas entre as pernas dos grampos 5021 e a matriz de retenção 5050 podem ser suficientes para manter a matriz de retenção 5050 em posição apesar da força de alteração que é aplicada à matriz de retenção 5050 pelo corpo do cartucho comprimido 5010 e/ou o tecido comprimido T. Em ao menos uma dessas modalidades, o corpo do cartucho 5010 pode consistir em um material resiliente que, quando comprimido, pode aplicar uma força de alteração elástica à matriz de retenção 5050 e aos grampos 5020 de modo que tende a empurrar a matriz de retenção 5050 e os grampos 5020 separando-os, embora esse movimento seja contraposto pelo engate por atrito entre as pernas dos grampos 5021 e a matriz de retenção 5050.
[691] Em várias modalidades, conforme descrito acima, a matriz de retenção pode compreender uma pluralidade de aberturas de retenção, sendo que cada abertura de retenção possa ser configurada para receber uma perna de um prendedor em seu interior. Em ao menos uma modalidade, agora com referência à FIGURA 97, é ilustrada uma porção de uma matriz de retenção 5150 que pode compreender uma abertura de retenção 5152 definida por um perímetro 5156. Em várias modalidades, o perímetro 5156 da abertura 5152 pode compreender um perfil circular, ou ao menos substancialmente circular, e/ou qualquer outro perfil adequado. Em certas modalidades, a matriz de retenção 5150 pode compreender um ou mais elementos de retenção, como os elementos de retenção 5153, por exemplo, que se estendem até a abertura 5152 e podem ser configurados para engatar uma perna de prendedor quando a perna de prendedor é inserida através dos mesmos. Em ao menos uma dessas modalidades, cada elemento de retenção 5153 pode compreender um cantiléver que se estende para dentro na direção de um eixo central 5159, isto é, na direção do centro da abertura 5152. Em várias modalidades, cada cantiléver pode com-preender uma primeira extremidade que é fixada à estrutura da matriz de retenção 5158 e uma segunda extremidade que forma o perímetro 5156 da abertura de retenção 5152. Em certas modalidades, o perímetro 5156 de uma abertura de retenção 5152 pode ser definido por um primeiro diâmetro, ou largura, e uma perna de prendedor pode ser definida por um segundo diâmetro, ou largura, sendo que o segundo diâmetro pode ser maior que o primeiro diâmetro. Em ao menos uma dessas modalidades, a perna de prendedor pode ser configurada para entrar em contato com e defletir um ou mais dos elementos de retenção 5153 para aumentar o diâmetro da abertura de retenção 5152 à medida que a perna de prendedor é inserida através dos mesmos. Em certas modalidades, além do exposto acima, a perna de prendedor pode definir um perímetro que é maior que o perímetro 5156 da abertura de retenção 5152 de modo que a perna de prendedor pode expandir o perímetro 5156 quando a perna de prendedor é inserida na abertura.
[692] Em várias modalidades, novamente com referência à FI GURA 97, a abertura 5152 pode ser definida pelos elementos defor-máveis5153, sendo que cada elemento deformável 5153 pode ser configurado para defletir em relação a, ou independentemente de, os outros elementos deformáveis 5153. Em ao menos uma dessas modalidades, elementos deformáveis adjacentes 5153 podem ser separados por fendas 5154 que podem ser configuradas para permitir que cada elemento deformável 5153 seja flexionado um em relação aos outros. Em certas modalidades, cada fenda 5154 pode compreender uma primeira extremidade 5155 na estrutura da matriz de retenção 5158, uma segunda abertura de extremidade na abertura de retenção 5152, e uma largura constante, ou ao menos substancialmente constante, estendendo-se entre a primeira extremidade 5155 e a segunda extremidade. Em várias outras modalidades, a largura de cada fenda 5154 pode não ser constante e cada fenda 5154 pode aumentar e/ou diminuir a largura entre a primeiras e as segundas extremidades da mesma. Em certas modalidades, as primeiras extremidades 5155 das fendas 5154 podem compreender uma porção ampliada, como uma porção circular, que pode proporcionar, um, alívio de esforço para as bases dos elementos deformáveis 5153 fixados à estrutura da matriz de retenção 5158 e, dois, meios para aumentar a flexibilidade dos elementos deformáveis 5153. Em várias modalidades, a geometria dos elementos deformáveis 5153, e/ou fendas 5154, pode ser selecionada de modo a dotar os elementos deformáveis 5153 com uma flexibilidade desejada. Em certas modalidades, por exemplo, as fendas 5154 podem ser prolongadas para criar elementos deformáveis mais longos 5153 que podem ser mais flexíveis que os elementos deformáveis 5153 que têm um comprimento mais curto. Em ao menos uma modalidade, a largura de cada elemento deformável 5153 pode ser selecionada de modo a fornecer uma flexibilidade desejada ao mesmo. Mais particularmente, elementos deformáveis que têm uma largura mais delgada podem ser mais flexíveis que elementos deformáveis que têm uma largura mais espessa. Em certas modalidades, novamente com referência à FIGURA 97, as primeiras extremidades dos cantiléveres dos elementos deformáveis 5153 fixados à estrutura da matriz de retenção 5158 podem ser mais largas que as segundas extremidades dos cantiléveres. Em ao menos uma dessas modalidades, os cantiléveres pode ser afunilados de uma maneira linear, ou ao menos substancialmente linear, entre as primeiras e as segundas extremidades dos mesmos.
[693] Em várias modalidades, novamente com referência à FI GURA 97, a estrutura da matriz de retenção 5158 pode compreender uma folha de material plana, ou ao menos substancialmente plana, que tem uma superfície de contato com o tecido 5151 e uma superfície de topo 5157. Em ao menos uma dessas modalidades, a superfície de contato com o tecido 5151 e a superfície de topo 5157 podem ser paralelas, ou ao menos substancialmente paralelas, uma em relação à outra. Em várias modalidades, cada elemento deformável 5153 pode compreender uma primeira porção 5153a e uma segunda porção 5153b, sendo que a primeira porção 5153a pode se estender em uma primeira direção e a segunda porção 5153b pode se estender em uma outra, ou segunda, direção. Em ao menos uma dessas modalidades, a estrutura da matriz de retenção 5158 pode definir um plano e as primeirasporções 5153a dos elementos deformáveis 5153 podem estar situadas em tal plano. Em várias modalidades, as segundas porções 5153b dos elementos deformáveis 5153 podem se estender em um ângulo em relação às primeiras porções 5153a. Em ao menos uma dessas modalidades, as segundas porções 5153b podem se estender em direções que se afastam da superfície de topo 5157 da estrutura da matriz de retenção 5158 e, em certas modalidades, as segundas porções 5153b podem convergir na direção do eixo central 5159 da abertura de retenção 5152. Em todo caso, em várias modalidades, as segundas porções 5153b podem ser configuradas para defletir afastando-se do eixo central 5159 quando a perna de prendedor é inserida através das mesmas. Em modalidades onde uma perna de grampo 5021 de um grampo 5020 é inserida em uma abertura de retenção 5152, os elementos deformáveis 5153 pode deformar em uma direção que é genericamente afastada das bases 5122 dos grampos 5120. Em certas modalidades, como resultado, os elementos deformáveis 5153 podem defletir em uma direção geral que é a mesma, ou ao menos substancialmente a mesma, que a direção na qual as pernas dos grampos 5021 são inseridas.
[694] Em várias modalidades, novamente com referência à FI GURA BD, as segundas porções 5153b dos elementos deformáveis 5153 podem compreender, cada uma, uma ponta aguda, por exemplo, que pode ser configurada para deslizar contra uma perna de grampo 5021 à medida que a perna de grampo 5021 é inserido em seu interior. As pontas agudas das segundas porções 5153b podem também ser configuradas para "morder" a perna de grampo 5021 no caso de a perna de grampo 5021 ser puxada na direção oposta, isto é, em uma direção que removeria a perna de grampo 5021 da abertura de retenção 5052. Em determinadas circunstâncias, as segundas porções 5153b podem ser inclinadas em um ângulo em relação ao lado da perna de grampo 5021 que é maior que 90 graus e, como resultado, as segundas porções 5153b podem perfurar, ou penetrar, no lado da perna de grampo 5021 quando a perna de grampo 5021 é submetida a uma força que tende a remover a perna de grampo 5021 da abertura de retenção 5052. Em certas modalidades, as pernas dos grampos 5021 podem compreender reentrâncias e/ou concavidades, como micro-reentrâncias,por exemplo, nas superfícies das mesmas que podem ser configuradas para receber as pontas dos elementos deformáveis 5053, por exemplo, em seu interior. Em ao menos uma dessas modalidades, as pontas dos elementos deformáveis 5053 podem se prender e penetrar nas reentrâncias nas pernas dos grampos 5021 quando uma força de remoção é aplicada às pernas dos grampos 5021. Em várias modalidades, como resultado da penetração das segundasporções 5153b nas pernas dos grampos 5021, as forças que atuam para remover as pernas dos grampos 5021 das aberturas de retenção 5022 podem assentar apenas as segundas porções 5153b mais profundamente nas pernas dos grampos 5021 e aumentar a força necessária para remover as pernas dos grampos 5021. Além disso, devido à inclinação ascendente das segundas porções 5153b, em ao menos uma modalidade, as segundas porções 5153b podem ser mais permissíveis à inserção de uma perna de grampo 5021 em uma abertura de retenção 5152 e mais resistentes à remoção da perna de grampo 5021. Em ao menos uma modalidade, como resultado, a força necessária para inserir uma perna de grampo 5021 em uma abertura de retenção 5022 pode ser menor que a força necessária para remo ver a perna de grampo 5021 da abertura de retenção 5022. Em várias modalidades, a força necessária para remover a perna de grampo 5021 da abertura de retenção 5022 pode ser aproximadamente 50 por cento maior que a força necessária para inserir a perna de grampo 5021 na abertura de retenção 5022, por exemplo. Em várias outras modalidades, a força necessária para remover a perna de grampo 5021 pode ser de aproximadamente 10 por cento a aproximadamente 100 por cento maior que a força necessária para inserir a perna de grampo 5021, por exemplo. Em certas modalidades, a força necessária para remover a perna de grampo 5021 pode ser aproximadamente 100 por cento, aproximadamente 150 por cento, aproximadamente 200 por cento, e/ou mais de aproximadamente 200 por cento maior que a força necessária para inserir a perna de grampo 5021, por exemplo.
[695] Em certas modalidades, novamente com referência à FI GURA 97, as segundas porções 5153b podem ser dispostas circunferencialmente ao redor da abertura 5152 e podem definir um bolso nes-saregião. Mais particularmente, as segundas porções 5153b podem definir um bolso 5160 que pode ser configurado para receber a ponta da perna de prendedor quando a mesma é inserida na abertura de retenção 5152. Em várias modalidades, as segundas porções 5153b dos elementos deformáveis 5153 podem compreender um contorno anular, ou ao menos substancialmente anular, que pode definir cooperacionalmente um perfil anular, ou ao menos substancialmente anular, do bolso 1560, por exemplo. Em ao menos uma dessas modalidades, as segundas porções 5153b podem definir um bolso cônico ou frustocônico. Em várias modalidades, o bolso pode ser definido por um número adequado de elementos deformáveis, como quatro elementos deformáveis 5153 (FIGURA 97), seis elementos deformáveis 5153 (FIGURA 98), ou oito elementos deformáveis 5153 (FIGURA 99), por exemplo. Em certas modalidades, agora com referência à FIGURA 100, os elementos deformáveis de uma matriz de retenção, como a matriz de retenção 5250, por exemplo, podem formar um formato piramidal, ou um formato ao menos substancialmente piramidal, por exemplo. Em várias modalidades, uma matriz de retenção 5250 pode compreender uma pluralidade de aberturas de retenção, como a abertura de retenção 5252, por exemplo, que pode ser definida por um perímetro 5256. Em várias modalidades, o perímetro 5256 pode compreender um perfil poligonal, ou ao menos substancialmente poligonal, e/ou qualquer outro perfil adequado. Em certas modalidades, a matriz de retenção 5250 pode compreender um ou mais elementos de retenção, como os elementos de retenção 5253, por exemplo, que se estendematé a abertura 5252 e podem ser configurados para engatar uma perna de prendedor quando a perna de prendedor é inserida através dos mesmos. Em ao menos uma dessas modalidades, cada elemento de retenção 5253 pode compreender um cantiléver que se estende para dentro na direção de um eixo central 5259, isto é, na direção do centro da abertura 5252. Em várias modalidades, cada cantiléver pode compreender uma primeira extremidade que é fixada à estrutura da matriz de retenção 5258 e uma segunda extremidade que forma o perímetro 5256 da abertura de retenção 5252. Em certas modalidades, o perímetro 5256 de uma abertura de retenção 5252 pode ser definido por um primeiro diâmetro, ou largura, e uma perna de prendedor pode ser definida por um segundo diâmetro, ou largura, sendo que o segundo diâmetro pode ser maior que o primeiro diâmetro. Em ao menos uma dessas modalidades, a perna de prendedor pode ser configurada para entrar em contato com e defletir um ou mais dos elementos de retenção 5253 para aumentar o diâmetro da abertura de retenção 5252 à medida que a perna de prendedor é inserida através dos mesmos. Em certas modalidades, além do exposto acima, a perna de prendedor pode definir um perímetro que é maior que o perímetro 5256 da abertura de retenção 5252 de modo que a perna de prendedor pode expandir o perímetro 5256 quando a perna de prendedoré inserida em seu interior.
[696] Em várias modalidades, novamente com referência à FI GURA 100, a abertura 5252 pode ser definida pelos elementos defor-máveis5253, sendo que cada elemento deformável 5253 pode ser configurado para defletir em relação a, ou independentemente de, os outros elementos deformáveis 5253. Em ao menos uma dessas modalidades, os elementos deformáveis adjacentes 5253 podem ser separados por fendas 5254 que podem ser configuradas para permitir que cada elemento deformável 5253 seja flexionado um em relação aos outros. Em várias modalidades, a estrutura da matriz de retenção 5258 pode compreender uma folha de material plana, ou ao menos substancialmente plana, que tem uma superfície de contato com o tecido 5251 e uma superfície de topo 5257. Em ao menos uma dessas modalidades, a superfície de contato com o tecido 5251 e a superfície de topo 5257 podem ser paralelas, ou ao menos substancialmente paralelas, entre si. Em várias modalidades, cada elemento deformável 5253 pode compreender uma primeira porção 5253a e uma segunda porção 5253b, sendo que a primeira porção 5253a pode se estender em uma primeira direção e a segunda porção 5253b pode se estender em uma outra, ou segunda, direção. Em ao menos uma dessas modalidades, a estrutura da matriz de retenção 5258 pode definir um plano e as primeirasporções 5253a dos elementos deformáveis 5253 podem estar situadas em tal plano. Em várias modalidades, as segundas porções 5253b dos elementos deformáveis 5253 podem se estender em um ângulo em relação às primeiras porções 5253a. Em ao menos uma dessas modalidades, as segundas porções 5253b podem se estender em direções que se afastam da superfície de topo 5257 da estrutura da matriz de retenção 5258 e, em certas modalidades, as segundas porções 5253b podem convergir na direção do eixo central 5259 da abertura de retenção 5252. Em todo caso, em várias modalidades, as segundas porções 5253b podem ser configuradas para defletir afastando-se do eixo central 5259 quando a perna de prendedor é inserida através das mesmas. Em certas modalidades, novamente com referência à FIGURA 100, as segundas porções 5253b podem ser dispostas circunferencialmente ao redor da abertura 5252 e podem definir um bolso nessa região. Mais particularmente, as segundas porções 5253b podem definir um bolso que pode ser configurado para receber a ponta da perna de prendedor quando a mesma é inserida na abertura de retenção 5252. Em várias modalidades, as segundas porções 5253b dos elementos deformáveis 5253 podem definir um bolso poligonal, ou ao menos substancialmente poligonal, por exemplo. Em várias modalidades, o bolso pode ser definido por um número adequado de elementos deformáveis, como quatro elementos deformáveis 5253 (FIGURA 100) que podem definir um quadrado, seis elementos deformáveis 5253 (FIGURA 101) que podem definir um hexágono, ou oito elementos de-formáveis5253 (FIGURA 102) que podem definir um octógono, por exemplo.
[697] Em várias modalidades, agora com referência à FIGURA 103, a matriz de retenção, como a matriz de retenção 5350, por exemplo, pode ser formada a partir de uma folha de material plana, ou um pelo menos substancialmente plana, como titânio e/ou aço inoxidável, por exemplo. Em ao menos uma dessas modalidades, uma pluralidade de aberturas 5352 pode ser formada na estrutura 5358 da matriz de retenção 5350 por meio de uma ou mais processos de estampagem. A folha de material pode ser posicionada em uma matriz de estampagem que, quando atuada, pode perfurar e remover certas porções do material para formar fendas 5354, aberturas 5355 de fendas 5354, e/ou o perímetro 5356 da abertura de retenção 5352, por exemplo. A matriz de estampagem pode, também, ser configurada para inclinar os ele-mentosdeformáveis 5353 em uma configuração adequada. Em ao menos uma dessas modalidades, a matriz de estampagem pode deformar as segundas porções 5353b para cima em relação às primeiras porções 5353a ao longo de uma linha de dobra 5353c. Em várias modalidades, agora com referência à FIGURA 104, a matriz de retenção, como a matriz de retenção 5450, por exemplo, pode compreender uma pluralidade de aberturas de retenção 5452. de forma similar à modalidade acima, o perímetro 5456 de cada abertura de retenção 5452 pode ser definido por uma pluralidade de elementos deformáveis 5453 separados por fendas 5454. Em ao menos uma dessas modalidades, a totalidade de cada elemento deformável 5453 pode ser inclinada para cima, sendo que as extremidades livres dos cantiléveres que compreendem os elementos deformáveis 5453 podem definir o perímetro 5456. Em várias modalidades, a matriz de retenção 5450 pode compreender uma pluralidade de aberturas 5455 circundantes, ou ao menos substancialmente circundantes, à abertura de retenção 5452. Em ao menos uma dessas modalidades, as aberturas 5455 podem ser dispostas em uma matriz circular circundando ou formando um perímetro fechado definido pelas extremidades fixas dos cantiléveres dos elementos deformáveis 5453. Em certas modalidades, cada abertura 5455 pode compreender um perímetro circular, ou ao menos substancialmente circular, e/ou qualquer outro perímetro adequado. Em uso, as aberturas 5455 podem proporcionar, um, alívio de esforço para as bases dos elementos deformáveis 5453 fixados à estrutura da matriz de retenção 5458 e, dois, meios para aumentar a flexibilidade dos elementos deformáveis 5453. Em várias modalidades, aberturas maiores 5455 podem fornecer mais flexibilidade aos elementos deformáveis 5453 em comparação com aberturas menores 5455. Além disso, as aberturas 5455 que estão mais próximas dos elementos deformáveis 5453 podem fornecer mais flexibilidade em comparação com as aberturas 5455 que estão mais afastadas.
[698] Em várias modalidades, agora com referência à FIGURA 105, a matriz de retenção, como a matriz de retenção 5550, por exemplo, pode compreender uma pluralidade de aberturas de retenção 5552. Cada abertura de retenção 5552 pode compreender uma fenda alongada 5554 que tem extremidades ampliadas circulares, ou ao menos substancialmente circulares, 5555. Em ao menos uma dessas modalidades, as extremidades 5555 podem ser definidas por um diâmetro que é mais largo que a fenda 5554. Em certas modalidades, a fenda alongada 5554 e as extremidades 5555 podem ser posicionadas ao longo, e/ou centralizadas ao longo, de um eixo longitudinal 5559. Em várias modalidades, a fenda 5554 e as extremidades 5555 podem definir duas abas opostas 5553 que podem ser configuradas para engatar uma perna de um prendedor e defletir à medida que a perna de prendedor é inserida através das abas. Em ao menos uma modalidade, as extremidades 5555 que têm um perímetro, ou diâmetro, maior podem definir abas mais longas 5553 que podem ser mais flexíveis que as abas 5553 definidas pelas extremidades 5555 com perímetro, ou diâmetro, menor. Em várias modalidades, as extremidades 5555 podem ter o mesmo perímetro e diâmetro e, em ao menos uma de tais modalidades, cada aba 5553 pode ser simétrica em torno de um eixo que é perpendicular, ou ao menos substancialmente perpendicular, ao eixo longitudinal 5559. Alternativamente, as extremidades 5555 podem ter perímetros e/ou diâmetros diferentes sendo que, em ao menos uma modalidade, cada aba 5553 pode não ser simétrica em torno de seu eixo. Em ao menos uma dessas modalidades alternativas, as abas 5553 podem torcer em torno de seus eixos à medida que a perna de prendedor é inserida através da abertura de retenção 5552. Em várias modalidades, agora com referência à FIGURA 106, a matriz de retenção, como a matriz de retenção 5650, por exemplo, pode compreender uma pluralidade de aberturas de retenção 5652. Cada abertura de retenção 5652 pode compreender uma fenda alongada 5654 que compreende extremidades circulares, ou ao menos substancialmente circulares, 5655. Em ao menos uma dessas modalidades, a fenda alongada 5654 e as extremidades 5655 podem ser posicionadas ao longo, e/ou centralizadas ao longo, de um eixo longitudinal 5659. Em várias modalidades, cada extremidade 5655 pode ser definida por um diâmetro que é igual, ou ao menos substancialmente igual, à largura da fenda 5654.
[699] Em várias modalidades, agora com referência à FIGURA 107, a matriz de retenção, como a matriz de retenção 5750, por exemplo, pode compreender uma pluralidade de aberturas de retenção 5752. Cada abertura de retenção 5752 pode compreender uma pluralidade de fendas, como as fendas 5754, por exemplo, que têm extremidades ampliadas 5755. Em ao menos uma dessas modalidades, as fendas 5754 e as extremidades 5755 podem ser posicionadas ao longo e/ou centralizadas ao longo de eixos longitudinais 5759. Em várias modalidades, os eixos 5759 podem se estender em direções que são perpendiculares ou transversais entre si. Em certas modalidades, as fendas 5754 e as extremidades 5755 podem definir quatro abas 5753, por exemplo, que podem ser configuradas para engatar uma perna de prendedor e defletir quando a perna de prendedor é inserida através da abertura de retenção 5752. Em ao menos uma modalidade, cada aba 5753 pode compreender uma configuração triangular, ou ao menos substancialmente triangular, como um triângulo equilátero, por exemplo. Em várias outras modalidades, agora com referência à FIGURA 108, a matriz de retenção, como a matriz de retenção 5850, por exemplo, pode compreender uma pluralidade de aberturas de retenção 5852. Cada abertura de retenção 5852 pode compreender uma pluralidade de fendas, como as fendas 5854, por exemplo, que têm extremidades 5855, sendo que as fendas 5854 e as extremidades 5855 podem ser posicionadas ao longo e/ou centralizadas ao longo de eixos longitudinais 5859. Em várias modalidades, os eixos 5859 podem se estender em direções que são perpendiculares ou transversais entre si. Em certas modalidades, as fendas 5854 e as extremidades 5855 podem definir abas 5853 que podem ser configuradas para engatar uma perna de prendedor e defletir quando a perna de prendedor é inseridaatravés da abertura de retenção 5852. Em ao menos uma modalidade, cada aba 5853 pode compreender um perfil arqueado. Mais particularmente, cada aba 5853 pode compreender uma extremidade curva, em vez de uma extremidade pontuda mostrada na FIGURA 105, que pode ser configurada para entrar em contato com a perna de prendedor.
[700] Em várias modalidades, agora com referência à FIGURA 109, a matriz de retenção, como a matriz de retenção 5950, por exemplo, pode compreender uma pluralidade de aberturas de retenção 5952. Cada abertura de retenção 5952 pode compreender uma pluralidade de fendas, como as fendas 5954, por exemplo, sendo que cada fenda 5954 pode se estender ao longo, e/ou pode ser centralizada ao longo, de um eixo 5959. Em várias modalidades, os eixos 5959 podem ser transversais entre si e, em ao menos uma de tais modalidades, os eixos 5959 podem ser dispostos de modo que todos os eixos 5959 se estendem através de um centro da abertura de retenção 5952 e são espaçados de maneira equidistante, ou ao menos substancialmente equidistante, uns dos outros. Em ao menos uma modalidade, cada fenda 5954 pode compreender uma extremidade aberta voltada para o centro da abertura de retenção 5952 e uma segunda extremidade, ou extremidade fechada, 5955 na extremidade oposta da fenda 5954. de forma similar à modalidade acima, as fendas 5954 e as extremidades 5955 pode definir três abas 5953, por exemplo, que podem ser configuradas para engatar uma perna de prendedor e defletir quando a perna de prendedor é inserida na abertura de retenção 5952. Em várias modalidades, cada aba 5953 pode compreender uma configuração arqueada estendendo-se entre extremidades adjacentes 5955 das fendas 5954. Em várias modalidades, agora com referência à FIGURA 110, a matriz de retenção, como a matriz de retenção 6050, por exemplo, pode compreender uma pluralidade de aberturas de retenção 6052. Cada abertura de retenção 6052 pode compreender uma aba 6053 que pode ser configurada para engatar uma perna de prendedor e para defletir quando a perna de prendedor é inserida na abertura de retenção 6052. Em ao menos uma dessas modalidades, a aba 6053 pode compreender uma base fixa à estrutura da matriz de retenção 6058 e uma extremidade livre que compreende um perfil arqueado ou curvo 6056 que pode ser configurado para entrar em contato com a perna de prendedor. Em certas modalidades, a perna de prendedor pode ser uma perna de grampo que compreende um fio redondo, sendo que o perfil curvo 6056 pode ser configurado para igualar, ou ao menos substancialmente igualar, uma superfície externa curva do fio redondo.
[701] Em várias modalidades, novamente com referência à FI GURA 110, a estrutura da matriz de retenção 6058 pode compreender uma pluralidade de fendas 6054 e aberturas 6055 que podem ser configuradas para definir a aba 6053 e várias porções da abertura de retenção 6052. Em ao menos uma modalidade, a aba 6053 pode compreender uma configuração retangular que compreende lados paralelos, ou ao menos substancialmente paralelos. Em certas modalidades, agora com referência à FIGURA 111, a matriz de retenção, como a matriz de retenção 6150, por exemplo, pode compreender uma pluralidade de aberturas de retenção 6152. Cada abertura de retenção 6152 pode compreender uma aba 6153 que pode ser configurada para engatar uma perna de prendedor e para defletir quando a perna de prendedoré inserida na abertura de retenção 6152. Em ao menos uma dessas modalidades, a aba 6153 pode compreender uma base fixa à estrutura da matriz de retenção 6158 e uma extremidade livre que compreende um perfil arqueado ou curvo 6156 que pode ser configurado para entrar em contato com a perna de prendedor. Em várias modalidades, a estrutura da matriz de retenção 6158 pode compreender uma pluralidade de fendas 6154 e aberturas 6155 que podem ser configuradas para definir a aba 6153 e várias porções da abertura de retenção 6152. Em ao menos uma modalidade, a aba 6153 pode compreender uma configuração afunilada que compreende lados arqueados. Em ao menos uma dessas modalidades, a aba 6153 pode afunilar geometricamente, com a base sendo mais larga que a extremidade livre, por exemplo.
[702] Em várias modalidades, conforme descrito acima, a sistema de fixação pode compreender uma pluralidade de grampos que com-preendem pernas de grampos que são inseridas através de uma pluralidade de aberturas de retenção em uma matriz de retenção. Em certas modalidades, conforme descrito em mais detalhes a seguir, os grampos podem ser mantidos em uma primeira mandíbula e a matriz de retenção pode ser mantida em uma segunda mandíbula, sendo que ao menos uma dentre a primeira mandíbula e a segunda mandíbula pode ser movida uma na direção da outra. Em várias circunstâncias, os grampos posicionados na primeira mandíbula podem ser fixados na mesma de modo que as pernas dos grampos fiquem alinhadas com as aberturas de retenção quando a matriz de retenção é engatada com as pernas dos grampos. Em certas modalidades, com referência às FIGURAS 112 e 113, um sistema de prendedores pode compreender um cartucho de grampos 6200, por exemplo, posicionado em uma primeira mandíbula de um grampeador cirúrgico e uma matriz de retenção 6250, por exemplo, posicionada em uma segunda mandíbula do grampeador cirúrgico. Agora com referência às FIGURAS 119 e 120, além do exposto acima, a matriz de retenção 6250 pode compreender uma pluralidade de aberturas de retenção 6252, sendo que cada abertura de retenção 6252 pode compreender um perímetro 6256 definido por um ou mais elementos defletíveis 6253. Em ao menos uma dessas modalidades, além do exposto acima, os elementos defletíveis 6253 que definem cada abertura 6252 podem definir um bolso 6201. Em várias modalidades, cada bolso 6201 pode compreender uma superfície curva e/ou côncava, por exemplo, que pode ser configurada para guiar uma ponta de uma perna de grampo para o interior de uma abertura 6252 no caso de a perna de grampo estar desalinhada com a abertura de retenção 6252 e entrar inicialmente em contato com os elementos defletíveis 6253 e/ou a superfície de contato com o tecido 6251, por exemplo.
[703] Em várias modalidades, além do exposto acima, o sistema de fixação pode compreender, adicionalmente, uma pluralidade de grampos 6220 que compreende pernas de grampos 6221 que podem ser inseridas através das aberturas de retenção 6252 na matriz de retenção 6250. Em ao menos uma dessas modalidades, cada grampo 6220 pode compreender uma configuração substancialmente em formato de U, por exemplo, que compreende uma base 6222 a partir da qual as pernas dos grampos 6221 podem se estender para cima. Em várias modalidades, agora com referência às FIGURAS 115 e 116, as aberturas de retenção 6252 na matriz de retenção 6250 podem ser dispostas em duas fileiras longitudinais paralelas, ou ao menos substancialmente paralelas, por exemplo, que podem se estender ao longo, ou paralelamente, a um eixo longitudinal da matriz de retenção. Em certas modalidades, as aberturas de retenção 6252 em uma primeira fileira podem ser deslocadas, ou desalinhadas, em relação às aberturas de retenção 6252 em uma segunda fileira. Em ao menos uma dessas modalidades, cada grampo 6220 pode compreender uma primeira perna de grampo 6221 posicionada em uma abertura de retenção 6252 na primeira fileira e uma segunda perna de grampo 6221 posicionada em uma abertura de retenção 6252 na segunda fileira sendo que, como resultado, as bases 6222 podem se estender em uma direção que é transversal ao eixo longitudinal da matriz de retenção 6250. Em ao menos uma dessas modalidades, os grampos 6220 podem ser paralelos, ou ao menos substancialmente paralelos, entre si. Mais particularmente, uma base 6222a de um grampo 6220a pode ser paralela, ou ao menos substancialmente paralela, a uma base 6222b de um grampo 6220b que pode ser paralela, ou ao menos substancialmente paralela, a uma base 6222c de um grampo 6220c, por exemplo. Em ao menos uma modalidade, as pernas de grampo 6221a do grampo 6220a podem definir um plano que é paralelo, ou ao menos substancialmente paralelo, a um plano definido pelas pernas de grampo 6221b do grampo 6220b que pode ser paralelo, ou ao menos substancialmente paralelo, a um plane definido pelas pernas de grampo 6221 do grampo 6220c, por exemplo.
[704] Em várias modalidades, agora com referência às FIGURAS 112 e 114, o cartucho de grampos 6200 pode compreender uma pluralidade de grampos 6220 e, adicionalmente, uma matriz de alinhamento 6260 que compreende uma pluralidade de guias de alinhamento, como fendas, sulcos e/ou aberturas, por exemplo, que podem ser configuradas para alinhar os grampos 6220. Em várias circunstâncias, a matriz de alinhamento 6260 pode ser configurada de modo que as pernas de grampo 6221 dos grampos 6220 fiquem alinhadas com as aberturas de retenção 6252 na matriz de retenção 6250 antes do engate da matriz de retenção 6250 com as pernas de grampo 6221. Em várias modalidades, agora com referência às FIGURAS 117 e 118, a matriz de alinhamento 6260 pode compreender uma pluralidade de aberturas de alinhamento 6262 que podem ser configuradas para receber estreitamente as pernas de grampo 6221 dos grampos 6220. Em ao menos uma dessas modalidades, cada grampo 6220 pode compreender uma base 6222 e duas pernas de grampo 6221 estendendo-se a partir da base 6222 sendo que as bases 6222 dos grampos 6220 podem se estender ao redor de uma superfície de fundo 6264 da matriz de retenção 6260 e as pernas dos grampos 6221 podem se estender para cimaatravés das aberturas de alinhamento 6262. Em certas modalidades, cada abertura de alinhamento 6262 pode ser circular, ou ao menos substancialmente circular, e pode ser definida por um diâmetro que é igual a ou ligeiramente maior que o diâmetro da perna de grampo 6221 que se estende através da abertura. Em várias modalidades, a matriz de alinhamento 6260 pode compreender, adicionalmente, uma pluralidade de elementos elevados 6263 que podem se estender para cima a partir da superfície de topo 6261 da matriz de alinhamento 6260 e circundar, ou ao menos parcialmente circundar, as aberturas de alinhamento 6262. Em certas modalidades, os elementos elevados 6263 podem fornecer aberturas de alinhamento mais longas 6262 sendo que, em várias circunstâncias, aberturas mais longas 6262 podem proporcionar mais controle sobre o alinhamento das pernas dos grampos 6221 que aberturas mais curtas 6262.
[705] Em uso, em várias modalidades, uma primeira mandíbula suportando o cartucho de grampos 6200 pode ser posicionada sobre um lado do tecido que deve ser grampeado e uma segunda mandíbula suportando a matriz de retenção 6250 pode ser posicionada sobre o outro lado do tecido. Quando as mandíbulas estiverem adequadamente posicionadas em relação ao tecido, em certas modalidades, a se-gundamandíbula e a matriz de retenção 6250 poderão ser movidas na direção do cartucho de grampos 6200. À medida que as pernas dos grampos 6221 são inseridas através das aberturas de retenção 6252 da matriz de retenção 6250, em várias modalidades, uma superfície de contato com o tecido, ou superfície de fundo, 6251 da matriz de retenção 6250 pode entrar em contato com o tecido e pressionar o tecido contra a superfície de contato com o tecido, ou superfície de topo, 6261 da matriz de alinhamento 6260. Em várias outras modalidades, conforme descrito em mais detalhes a seguir, o cartucho de grampos 6200 pode compreender, adicionalmente, um corpo compressível posicionado acima da superfície de topo 6261 da matriz de alinhamento 6260, por exemplo, que pode entrar em contato com o tecido. Em certas modalidades, novamente com referência às FIGURAS 114 e 118, a matriz de alinhamento 6260 pode compreender, adicionalmente, uma ou mais aberturas 6203 definidas na matriz que, quando a matriz de alinhamento 6260 é posicionada contra o tecido, podem ser configuradas para receber uma porção do tecido em seu interior. Em modalidades onde um corpo compressível é posicionado acima e/ou contra a matriz de alinhamento 6260, uma porção do corpo compressível pode entrar nas aberturas 6203 quando o corpo do cartucho é comprimido. de modo similar, a matriz de retenção 6250 pode compreender uma pluralidade de aberturas 6202 que podem ser configuradas para receber ao menos uma porção do tecido quando a matriz de retenção 6250 é posicionada contra o tecido.
[706] À medida que as pernas de grampo 6221 dos grampos 6220 são inseridas através das aberturas de retenção 6252 da matriz de retenção 6250, além do exposto acima, as pontas das pernas dos grampos 6221 poderão se projetar para cima a partir da superfície de topo 6257 da matriz de retenção 6250. Em várias circunstâncias, conforme descrito acima, as pontas das pernas dos grampos 6221 podem permanecer não inclinadas depois de serem inseridas através das aberturas de retenção 6252. Em certas modalidades, agora com referência às FIGURAS 121 a 124, um sistema de fixação que compreende o cartucho de grampos 6200 e a matriz de retenção 6250 pode compreender, ainda, uma pluralidade de tampas ou coberturas protetoras, como as tampas 6270, por exemplo, que podem ser montadas nas pernas dos grampos 6221 projetando-se acima da matriz de retenção 6250. Em várias modalidades, cada tampa 6270 pode cobrir inteiramente, ou ao menos parcialmente, a extremidade aguda de uma perna de grampo 6221 de modo que a extremidade aguda não entre em contato com o tecido posicionado adjacente à mesma. Em ao menos uma modalidade, agora com referência à FIGURA 124, cada tampa 6270 pode compreender uma abertura 6271 definida em seu interior que pode ser configurada para receber estreitamente uma ponta de uma perna de grampo 6221 em seu interior. Em várias modalidades, as tampas 6270 podem consistir em um material elastomérico, como silicone, POLI-ISOPRENO, sanoprene e/ou borracha natural, por exemplo. Em ao menos uma modalidade, a abertura 6271 pode compreender um perímetro ou diâmetro que é menor que o perímetro ou diâmetro da perna de grampo 6221 inserida em seu interior. Em ao menos uma dessas modalidades, a abertura 6271 na tampa protetora 6270 pode expandir para receber a perna de grampo 6221 em seu interior. Em várias modalidades alternativas, as tampas 6270 podem não compreender aberturas e as pontas das pernas dos grampos 6221 podem ser configuradas para cortar as tampas 6270 à medida que as pernas 6221 são inseridas em seu interior. Em todo caso, em várias modalidades, cada tampa 6270 pode ser assentada sobre uma perna de grampo 6221 até que a base 6272 da tampa 6270 fique em contiguidade com a, ou seja posicionada adjacente à, superfície de topo 6257 da matriz de retenção 6250. Em várias circunstâncias, as tampas 6270 podem ser configuradas de modo que sejam assentadas firmemente sobre as pontas das pernas dos grampos 6221 de modo que não sejam facilmente removidas das mesmas. Em certas modalidades, cada tampa 6270 pode compreender uma superfície externa cônica, ou ao menos substancialmente cônica, por exemplo. Em várias modalidades, as tampas 6270 podem compreender qualquer formato adequado, como formatos que compreendem uma superfície externa parabólica, ou ao menos substancialmente parabólica, por exemplo.
[707] Em várias modalidades, o sistema de prendedores descrito acima, por exemplo, poderia ser implantado com o uso do grampeador cirúrgico mostrado nas FIGURAS 125 a 127, por exemplo. Em várias modalidades, o atuador de extremidade pode compreender uma pri-meiramandíbula, ou canaleta de cartucho de grampos, 6230 que pode ser configurada para suportar o cartucho de grampos 6200 em seu interior, e uma segunda mandíbula 6240 que pode ser configurada para suportar a matriz de retenção 6250 e uma pluralidade de tampas protetoras 6270. Com referência especial à FIGURA 125, que ilustra a segunda mandíbula 6240 em uma configuração aberta, as mandíbulas 6230 e 6240 podem ser posicionadas em relação ao tecido T de modo que o tecido T seja disposto em uma posição intermediária entre a matriz de retenção 6250 e o cartucho de grampos 6200. Em várias modalidades, conforme discutido anteriormente, o cartucho de grampos 6200 pode compreender, adicionalmente, um corpo compressível, como o corpo do cartucho 6210, por exemplo, no qual os grampos 6220 e a matriz de alinhamento 6260 podem ser posicionados. Em ao menos uma dessas modalidades, o tecido T pode ser posicionado contra uma superfície de topo do corpo do cartucho 6210. Em certas modalidades, a segunda mandíbula 6240 pode compreender uma pluralidade de reentrâncias, ou aberturas, 6245 configuradas para receber uma pluralidade de tampas protetoras 6270 e, adicionalmente, um ou mais recursos de retenção, ou retentores, que podem ser configurados para manter a matriz de retenção 6250 em posição sobre as tampas 6270. Em ao menos uma dessas modalidades, a matriz de retenção 6250 pode ser configurada para reter as tampas 6270 nas aberturas 6245. Em várias modalidades, agora com referência à FIGURA 137, cada abertura 6245 pode ser configurada para receber uma porção, ou a totalidade, de uma tampa 6270 em seu interior. Em certas modalidades, as aberturas 6245 podem ser suficientemente dimensionadas e configuradas de modo que as tampas 6270 possam ser fixadas em seu interior por ao menos uma dentre uma disposição de encaixe por pressão e/ou encaixe por ajuste, por exemplo. Em algumas modalidades, ao menos um adesivo poderia ser utilizado para fixar as tampas 6270 nas aberturas 6245. Em ao menos uma dessas modalidades, tal adesivo pode ser selecionado de modo que as tampas 6270 possam se separar da segunda mandíbula 6240 depois que as tampas 6270 forem engatadas com as pernas dos grampos 6221 e uma segunda mandíbula 6240 for afastada do conjunto de prendedores implantado. Em certas modalidades, agora com referência à FIGURA 138, a segundamandíbula 6240 pode compreender, adicionalmente, ao menos uma folha de cobertura 6246 que pode ser montada na segunda mandíbula6240 e pode se estender sobre e prender as tampas 6270 nas aberturas 6245. Em ao menos uma dessas modalidades, ao menos uma porção da folha de cobertura 6246 pode ser fixada à mandíbula 6240 com o uso de ao menos um adesivo, por exemplo. Em uso, em ao menos uma modalidade, a folha de cobertura 6246 pode ser, ao menos parcialmente, separada da mandíbula 6240 antes de o atuador de extremidade ser inserido em um local cirúrgico. Em certas modalidades, a folha de cobertura 6246 pode consistir em um material implantável, como PDS e/ou PGA, por exemplo, que pode ser cortado pelas pernas dos grampos 6221 à medida que as pernas dos grampos 6221 emergem da matriz de retenção 6250. Em ao menos uma dessas modalidades, a folha de cobertura 6246 pode ser fixada no sistema de fixação em uma posição intermediária entre as coberturas 6270 e a matriz de retenção 6250.
[708] Adicionalmente às modalidades acima, agora com referên ciaà FIGURA 126, a mandíbula 6240 pode ser movida de uma posição aberta para uma posição fechada na qual o tecido T é posicionado contra a matriz de retenção 6250 e o corpo do cartucho 6210. Nessa posição, a matriz de retenção 6250 pode não estar ainda engatada com os grampos 6220. Em várias modalidades, a mandíbula 6240 pode ser movida entre sua posição aberta e sua posição fechada por um atuador 6235. Em ao menos uma dessas modalidades, a mandíbula 6240 pode compreender um pino distal 6243 e um pino proximal 6244 que se estendem a partir da mesma, sendo que o pino distal 6243 pode deslizar verticalmente, ou ao menos substancialmente verticalmente, em uma fenda distal 6233 definida na canaleta do cartucho 6230, e sendo que o pino proximal 6244 podem deslizar verticalmente, ou ao menos substancialmente verticalmente, em uma fenda proximal 6234 que também é definida na canaleta de cartucho de grampos 6230. Em uso, o atuador 6235 pode ser retraído de maneira proximal para acionar os pinos 6243 e 6244 para o interior das extremidades superiores de suas respectivas fendas 6233 e 6234, conforme ilustrado na FIGURA 126. Em ao menos uma dessas modalidades, o atuador 6235 pode compreender uma fenda de acionamento distal 6236 e uma fenda de acionamento proximal 6237, sendo que as paredes laterais das fendas de acionamento 6236 e 6237 podem ser configuradas para entrar em contato com o pino distal 6243 e o pino proximal 6244, respectivamente, e acionar os pinos 6243 e 6244 para cima à medida que o atuador 6235 é movido de maneira proximal. Mais particularmente, à medida que o atuador 6235 é movido de maneira proximal, o pino distal 6243 pode deslizar para cima uma primeira porção inclinada 6236a da fenda de acionamento distal 6236 para uma porção intermediária, ou segun-daporção, 6236b e, de modo similar, o pino proximal 6244 pode deslizar para cima uma primeira porção inclinada 6237a da fenda de acionamento distal 6237 para uma porção intermediária, ou segunda porção, 6237b. À medida que os pinos 6243 e 6244 são ambos movidos para cima a mandíbula 6240 pode ser girada para baixo na direção do tecido T para uma posição fechada.
[709] Adicionalmente às modalidades acima, agora com referên ciaà FIGURA 127, o atuador 6235 pode ser puxado adicionalmente de maneira proximal para forçar a segunda mandíbula 6240 para baixo na direção da primeira mandíbula 6230, comprimir o corpo do cartucho 6210 e engatar a matriz de retenção 6250 e uma pluralidade de tampas protetoras 6270 com as pernas dos grampos 6220. Em ao menos uma dessas modalidades, o movimento proximal adicional do atuador 6235 pode fazer com que as paredes laterais das fendas de acionamento 6236 e 6237 entrem em contato com os pinos 6243 e 6244, respectivamente, e acionem os pinos 6243 e 6244 para baixo na direção das extremidades de fundo das fendas 6233 e 6234, respectivamente. Em tais circunstâncias, o atuador 6235 pode ser puxado de maneira proximal de modo que, um, o pino distal 6243 saia da segundaporção 6236b da fenda de acionamento 6236 e entre em uma terceiraporção inclinada 6236c e, de modo similar, o pino proximal 6244 saia da segunda porção 6237b da fenda de acionamento 6237 e entre em uma terceira porção inclinada 6237c. À medida que os pinos 6243 e 6244 são ambos movidos para baixo, a segunda mandíbula 6240 pode se mover para baixo na direção da primeira mandíbula 6230 para uma posição disparada. Em ao menos uma dessas modalidades, a segunda mandíbula 6240 pode ser movida para baixo de modo que a matriz de retenção 6250 permaneça paralela, ou ao menos substancialmente paralela, à superfície de topo do corpo do cartucho 6210 e/ou paralela, ou ao menos substancialmente paralela, à matriz de alinhamento 6260. Em todo caso, após o engate da matriz de retenção 6250 e das tampas protetoras 6270 com as pernas de grampo 6221 dos grampos 6220, conforme ilustrado na FIGURA 129, a segunda mandíbula 6240 pode ser retornada para uma posição aberta, ou ao menos substancialmente aberta. Em ao menos uma dessas modalidades, o atuador 6235 pode ser empurrado distalmente para acionar os pinos 6243 e 6244 até as extremidades de topo das fendas 6233 e 6234, respectivamente, e, então, acionar para baixo na direção das extremidades de fundo das fendas 6233 e 6234 depois que os pinos passarematravés das porções intermediárias 6236b e 6237b das respectivas fendas de acionamento 6236 e 6237. Após a abertura da segunda mandíbula 6240, a primeira mandíbula 6230 pode ser separada do cartucho de grampos implantado 6200 e a primeira e a segunda mandíbulas6230, 6240 podem ser removidas do conjunto de prendedores implantado, conforme ilustrado na FIGURA 128.
[710] Com referência à FIGURA 127 mais uma vez, o leitor ob servará que os pinos 6243 e 6244 não são ilustrados sendo assentados nas porções de fundo de suas respectivas fendas 6233 e 6234, embora a matriz de retenção 6250 e as tampas 6270 tenham sido engatadas com as pernas dos grampos 6221. Tais circunstâncias podem ocorrer quando tecido espesso T é posicionado entre a matriz de retenção 6250 e o corpo do cartucho 6210. Em circunstâncias nas quais tecido mais delgado T é posicionado entre a matriz de retenção 6250 e o corpo do cartucho 6210, agora com referência à FIGURA 130, os pinos 6243 e 6244 pode ser acionados adicionalmente para baixo em suas respectivas fendas 6233 e 6234, conforme ilustrado na FIGURA 132. Em geral, em ao menos uma de tais modalidades, o atuador 6235 pode ser puxado de maneira proximal para acionar os pinos 6243 e 6244 para cima e para baixo através dos avanços descritos acima e ilustrados nas FIGURAS 130 a 132 e, devido ao tecido mais delgado T, a matriz de retenção 6250 e as tampas protetoras 6270 podem ser acionadas adicionalmente sobre as pernas de grampo 6221 dos grampos 6220, conforme ilustrado nas FIGURAS 133 e 134. Em várias modalidades, como resultado da ajustabilidade permitida pela matriz de retenção 6250, a mesma pressão de compressão, ou ao menos substancialmente a mesma, pode ser obtida no tecido preso independentemente de o tecido capturado no atuador de extremidade ser espesso ou delgado. Em certas modalidades, a ajustabilidade permitida pela matriz de retenção 6250 pode permitir que um cirurgião possa selecionar entre aplicar uma pressão de compressão maior ou uma pressão de compressão menor ao o tecido selecionando a profundidade na qual a matriz de retenção 6250 é assentada. Em ao menos uma dessas modalidades, a faixa na qual a matriz de retenção 6250 pode ser assentada sobre as pernas dos grampos 6221 pode ser determinada pelos comprimentos, ou faixas, das fendas 6233 e 6234, por exemplo.
[711] Em várias modalidades, conforme descrito acima, as tam pas protetoras 6270 podem consistir em um material macio ou flexível, por exemplo, que pode ser configurado para prender as extremidades das pernas dos grampos 6221. Em certas modalidades, as tampas protetoras 6270 podem consistir em um plástico bioabsorvível, ácido poliglicólico (PGA), disponível sob o nome comercial Vicryl, ácido polilático (PLA ou PLLA), polidioxanona (PDS), poli-hidroxialcanoato (PHA), poliglecaprona 25 (PGCL), disponível sob o nome comercial Monocryl, policaprolactona (PCL), e/ou um composto de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo, e/ou um metal biocompatível, como titânio e/ou aço inoxidável, por exemplo. Conforme ilustrado na FIGURA 124, em ao menos uma modalidade, cada tampa 6270 pode estar desconectada das outras tampas 6270. Em certas outras modalidades, uma ou mais tampas 6270 podem ser montadas na matriz de retenção 6250. Em ao menos uma dessas modalidades, as tampas 6270 podem ser conectadas à matriz de retenção 6250 por ao menos um adesivo, por exemplo, sendo que as aberturas 6271 nas tampas 6270 podem ser alinhadas, ou ao menos substancialmente alinhadas, com as aberturas de retenção 6252 na matriz de retenção 6270. Em várias modalidades, agora com referência à FIGURA 135, uma tampa protetora, como a tampa 6370, por exemplo, pode definir uma cavidade interna, ou redoma, 6374 que pode ser configurada para receber uma ponta de uma perna de grampo 6221, por exemplo, em seu interior. Em ao menos uma dessas modalidades, a tampa 6370 pode compreender um fundo 6372 e uma abertura 6371 estendendose através do fundo 6372. Em várias modalidades, a abertura 6371 pode ser definida por uma ou mais elementos defletíveis 6373 que podem ser configurados para defletir quando a perna de grampo 6221 é inserida através dos mesmos. Em certas modalidades, dois ou mais tampas 6370, por exemplo, podem ser conectadas juntas para formar uma matriz de tampas 6370. Em ao menos uma dessas modalidades, agora com referência à FIGURA 136, uma pluralidade de tampas 6370 pode ter tampas conectadas juntas por uma folha de material 6375. Em certas modalidades, a folha 6375 pode ser suficientemente rígida para manter uma disposição e/ou alinhamento desejado das tampas 6370. Em ao menos uma modalidade, as tampas 6370 podem consistir em um metal biocompatível, como titânio e/ou aço inoxidável, por exemplo, e a folha 6375 pode consistir em um plástico bioabsorvível, ácido poliglicólico (PGA), disponível sob o nome comercial Vicryl, ácidopolilático (PLA ou PLLA), polidioxanona (PDS), polihidroxialcanoato (PHA), poliglecaprona 25 (PGCL), disponível sob o nome comercial Monocryl, policaprolactona (PCL), e/ou um composto de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo. Em várias modalidades, uma folha 6375 pode consistir em um material bioabsorvível que inclui um agente antimicrobiano, como prata coloidal e/ou triclosan, por exemplo, armazenado e/ou disperso no material que pode ser liberado à medida que a folha 6375 é bioabsorvida, por exemplo.
[712] Em várias modalidades, além do exposto acima, a folha 6375 pode ser moldada por injeção ao redor das tampas 6370 com o uso de um processo de modelagem por injeção, por exemplo, de modo que as tampas 6370 fiquem incorporadas na folha 6375. Em certas outras modalidades, a folha 6375 pode ser moldada por um processo de modelagem por injeção, por exemplo, no qual aberturas 6376 podem ser formadas na folha 6375 durante o processo de modelagem por injeção e/ou após o processo de modelagem por injeção com o uso de um processo de estampagem, por exemplo. Em qualquer desses casos, as tampas 6370 podem ser inseridas e fixadas nas aberturas 6376 com o uso de uma interconexão de encaixe por pressão e/ou ajuste por pressão e/ou ao menos um adesivo. Em certas modalidades, cada tampa 6370 pode compreender um sulco anular circundante, ou ao menos parcialmente circundante, ao perímetro da tampa 6370 que pode ser configurado para receber o perímetro de uma abertura 6376 em seu interior. Em certas modalidades, a folha 6375 pode consistir em um material flexível e/ou maleável que pode permitir o movimento relativo entre as tampas 6370. Em ao menos uma dessas modalidades, a folha flexível 6375 pode consistir em um material de borracha, plástico e/ou silicone, por exemplo, e as tampas 6370 podem consistir em um material rígido, como metal, por exemplo. Em ao menos uma dessas modalidades, de forma similar à modalidade acima, o material flexível pode ser moldado ao redor das tampas 6370. Em certas modalidades, as tampas 6370 podem ser pressionadas em uma folha pré-moldada 6375, por exemplo. Em várias modalidades, o durômetro do material flexível pode ser selecionado para fornecer uma rigidez desejada da folha 6375. Em certas modalidades, a folha 6375 pode ser configurada de modo que compreende uma banda flexível. Em todo caso, a folha 6375 pode facilitar a montagem das tampas 6370 em um atuador de extremidade enquanto uma pluralidade das tampas 6370 pode ser posicionada e/ou alinhada simultaneamente no atuador de extremidade. Além disso, a folha 6375 conectando as tampas 6370, depois de implantada, pode fortalecer ou suportar o tecido ao longo da linha de grampos, por exemplo. Em adição a ou em vez de uma folha conectando as tampas 6370, as tampas 6370 podem ser conectadas juntas por uma pluralidade de elos. Em ao menos uma dessas modalidades, esses elos podem ser flexíveis e podem permitir o movimento relativo entre as tampas 6370.
[713] Em várias modalidades, agora com referência às FIGURAS 139 e 140, a tampa protetora, como a tampa 6470, por exemplo, pode compreender uma superfície de formação que pode ser configurada para deformar uma ponta de uma perna de grampo. Em ao menos uma dessas modalidades, a tampa 6470 pode compreender uma base 6472 que pode incluir uma abertura 6471 que se estende através da base. Em várias modalidades, a abertura 6471 pode ser configurada para receber estreitamente uma perna de grampo, como uma perna de grampo 6221, por exemplo, em seu interior. Em ao menos uma modalidade, a abertura 6471 pode ser definida por um diâmetro ou perímetro que pode ser igual a ou maior que o diâmetro ou perímetro da perna de grampo 6221. Em várias modalidades, a tampa 6470 pode compreender, adicionalmente, uma cavidade, ou redoma, 6474 que pode ser configurada para receber a ponta da perna de grampo 6221 à medida que é inserida na tampa 6470. Com referência especial à FIGURA 140, a tampa 6470 pode compreender, adicionalmente, uma bigorna, ou superfície de formação, 6473 que pode ser configurada para defletir e deformar a perna de grampo 6221. Em várias circunstâncias, a superfície de formação 6473 pode ser curva e/ou côncava, por exemplo, e pode ser configurada para encaracolar a perna de grampo 6221 à medida que a mesma é inserida na tampa 6470. Em certas modalidades, a perna de grampo 6221 pode ser suficientemente deformada de modo que não pode ser removida através da abertura 6471 e, como resultado, a tampa 6470 pode ficar travada na perna de grampo 6221. Em ao menos uma dessas modalidades, a base 6472 da tampa 6470 pode definir um rebordo estendendo-se ao redor da abertura 6471, o que pode evitar que a perna de grampo deformada 6221 seja removida da cavidade 6474. Em várias circunstâncias, como resultado do exposto acima, uma ou mais tampas 6470 podem evitar, ou inibir, que uma matriz de retenção, como a matriz de retenção 6250, por exemplo, recue ou seja desengatada dos grampos 6220. Em várias modalidades, embora não ilustrado, a tampa 6470 pode ser formada simetricamente, ou ao menos substancialmente simetricamente, e a abertura 6471 pode estar situada ao longo de um eixo central 6479 estendendo-se através da tampa 6470. Em várias modalidades alternativas, novamente com referência à FIGURA 139, a abertura 6471 pode ser deslocada em relação ao eixo central 6479. Em ao menos uma dessas modalidades, a abertura deslocada 6471 pode permitir que a perna de grampo 6221 entre em contato com um lado da superfície de formação 6473 e seja curvada sobre o outro lado da superfície de formação 6473 em vez de entrar em contato com o centro da superfície de formação 6473, como pode ocorrer em modalidades que compreendem uma abertura centralizada 6471, mencionada anteriormente.
[714] Em várias modalidades, conforme discutido anteriormente, uma matriz de retenção, como a matriz de retenção 6250, por exemplo, pode consistir em uma folha de material e uma pluralidade de aberturas de retenção 6252 que se estendem através da mesma. Em ao menos algumas modalidades, a folha de material que compreende a matriz de retenção 6250 pode ser rígida ou substancialmente inflexível. Em certas outras modalidades, uma matriz de retenção pode consistir em uma disposição de elementos da matriz de retenção e uma pluralidade de conectores flexíveis, ou elos, conectando os elementos da matriz de retenção. Em várias modalidades, agora com referência à FIGURA 141, uma matriz de retenção, ou uma porção de matriz de retenção, 6550 pode compreender uma pluralidade de estruturas de elementos 6505 que podem ser conectadas juntas por um ou mais elos de conexão 6507. Em ao menos uma modalidade, cada estrutura de elemento 6505 pode compreender uma pluralidade de elementos deformáveis 6553 que definem uma abertura de retenção 6552 em seu interior. Em certas modalidades, as estruturas de elementos 6505 e os elos de conexão 6507 de uma matriz de retenção 6550 podem ser formadas integralmente e podem compreender uma peça unitária de material. Em várias modalidades, a matriz de retenção 6550 pode ser estampada ou moldada, por exemplo, a partir de um material metálico, como titânio e/ou aço inoxidável, por exemplo. Em ao menos uma modalidade, a matriz de retenção 6550 pode consistir em plástico, como poliéter éter cetona (peek), polipropileno, disponível sob o nome comercial Prolene, poliéster, politereftalato de etileno, disponível sob os nomes comerciais Ethibond e Mersilene, fluoreto de polivinilideno, fluoreto de polivinilideno-co-hexafluoropropileno, poli hexafluoropropilenoVDF, disponível sob o nome comercial Pronova, e/ou polímeros alifáticos de cadeia longa Náilon 6 e Náilon 6,6 que são comercializados sob os nomes comerciais Ethilon & Nurolon, por exemplo, e pode ser formada por um processo de modelagem por injeção, por exemplo. Em certas modalidades, as estruturas de elementos 6505 podem não ser formadas integralmente com os elos de conexão 6507. Em várias modalidades, uma pluralidade de estruturas de elementos singulares 6505 pode ser produzida, sendo que as estruturas de elementos são subsequentemente conectadas umas às outras e imersas em uma matriz de retenção. Em ao menos uma dessas modalidades, as estruturas de elementos 6505 podem ser estampadas partir de um material metálico, como titânio e/ou aço inoxidável, por exemplo, e colocadas em um molde para injeção de plástico, sendo que um material plástico pode ser injetado no molde para formar, um, uma borda 6506 de material circundante, ou ao menos parcialmente circundante, as estruturas de elementos 6505 e, dois, elos de conexão 6507 estendendo-se a partir das bordas 6506. Em certas outras modalidades, podem ser formadas uma ou mais retículas conectoras que compreendem aberturas definidas em uma pluralidade de bordas 6506, sendo que cada uma de tais aberturas pode ser configurada para receber uma estrutura de elemento 6505 em seu interior. Em ao menos uma modalidade, cada estrutura de elemento 6505 pode compreender um perímetro externo circular, ou ao menos substancialmente circular, e, de modo similar, cada borda 6506 pode definir uma abertura circular, ou ao menos substancialmente circular, em seu interior, sendo que o diâmetro da abertura pode ser igual a ou menor que o diâmetro da estrutura de elemento 6505. Em ao menos uma dessas modalidades, as estruturas de elementos 6505 podem ser encaixadas por pressão ou incorporadas nas aberturas das bordas 6505. Em certas modalidades, as estruturas de elementos 6505 podem ser fixadas nas aberturas com o uso de ao menos um adesivo.
[715] Em várias modalidades, além do exposto acima, uma ma triz de retenção pode compreender uma pluralidade de estruturas de elementos 6505 e uma pluralidade de elos de conexão 6507 que podem conectar as estruturas de elementos 6505 em qualquer disposição adequada, como aquelas ilustradas nas FIGURAS 142 a 145, por exemplo. Independentemente do padrão da disposição, em várias modalidades, os elos de conexão 6507 podem ser configurados para permitir que as estruturas de elementos 6505 e as aberturas de retenção 6552 se movam umas em relação à outras. Em ao menos uma dessas modalidades, a retícula de estruturas de elementos 6505 e os elos de conexão 6507 que compreendem a matriz de retenção 6550, depois de engatados com o tecido, podem ser configurados para esticar, torcer, contrair e/ou de outro modo flexionar para permitir ao menos algum movimento no tecido e, ainda, ao mesmo tempo, resistir a movimentos maiores dos mesmos. Em várias modalidades, cada elo de conexão 6507 pode compreender um elemento flexível configurado para esticar, torcer e/ou contrair para permitir que a matriz de retenção 6550 flexione em uma posição intermediária entre os elementos de retenção da matriz 6505, por exemplo. Novamente com referência à FIGURA 141, cada elo 6507 estendendo-se a partir de a borda 6506 pode ser definido por uma largura que é mais estreita que a largura da estrutura de elemento 6505 e/ou da borda 6506. Em certas modalidades, com referência às FIGURAS 142 a 145, um ou mais elos 6507 podem compreender porções retas que se estendem ao longo de uma linha entre estruturas de elementos adjacentes 6506, por exemplo. Em ao menos uma dessas modalidades, cada elo 6507 pode compreender uma primeira extremidade fixada a uma primeira borda 6506 e uma segunda extremidade fixada a uma segunda borda 6506. Em certas modalidades, novamente com referência à FIGURA 141, dois ou mais elos 6507 podem ser conectados uns aos outros. Em ao menos uma dessas modalidades, dois ou mais elos 6507 podem ser conectados a uma articulação intermediária 6509, por exemplo. Em várias modalidades, a articulação 6509 pode compreender uma redução na espessura em seção transversal em uma ou mais direções em comparação com a espessura em seção transversal dos elos 6507 que pode permitir que os elos conectados 6507 se movam um em relação a cada outro, por exemplo. Em certas modalidades, a matriz de retenção 6550 pode compreender, adicionalmente, articulações 6508 que podem conectar os elos 6507 às bordas 6506 e permitir o movimento relativo entre os elos 6507 e as bordas 6506. de forma similar às articulações 6509, as articulações 6508 podem compreender uma redução na espessura em seção transversal em uma ou mais direções em comparação com a espessura em seção transversal dos elos 6507, por exemplo.
[716] Em várias modalidades, além do exposto acima, os elos conectados 6507 podem se estender em direções diferentes. Em ao menos uma dessas modalidades, um primeiro elo 6507 pode se estender em uma primeira direção e um segundo elo 6507 pode se estender em uma segunda direção, sendo que a primeira direção pode ser diferente da segunda direção. Em certas modalidades, o primeiro elo 6507 pode se estender ao longo de uma primeira linha e o segundo elo 6507 pode se estender ao longo de uma segunda linha, sendo que a primeira linha e a segunda linhas podem se cruzar uma com a outra em um ângulo, como aproximadamente 30 graus, aproximadamente 45 graus, aproximadamente 60 graus, e/ou aproximadamente 90 graus, por exemplo. Em várias modalidades, as articulações 6508 e/ou as articulações 6509 podem compreender articulações incorporadas que podem permitir que os elos 6507 se movam um em relação a cada outro várias vezes sem se romper Em certas modalidades, as articulações 6508 e/ou as articulações 6509 podem compreender porções frangíveis, ou facilmente rompíveis, que podem se romper quando flexionadas além do limite de flexão ou um número excessivo de vezes. Em ao menos uma dessas modalidades, essas porções frangíveis podem permitir que uma ou mais porções da matriz de retenção 6550 se separem de outra porção da matriz de retenção 6550. Em várias modalidades, as articulações 6508 e/ou as articulações 6509, por exemplo, podem compreender seções da matriz de retenção 6550 que são mais fáceis de cortar que as outras porções da matriz de retenção 6550. Mais particularmente, uma matriz de retenção implantada e o tecido preso pela matriz de retenção implantada podem frequentemente ser cortados por um elemento de corte por várias razões e, para facilitar esse corte transversal, as articulações 6508 e/ou as articulações 6509 podem fornecer caminhos, ou seções delgadas, através dos quais um elemento de corte pode passar mais facilmente pela matriz de retenção 6550, por exemplo. Em várias modalidades, além do exposto acima, os elos de conexão 6507 podem compreender um ou mais recursos perfurados ou deformações materiais, por exemplo, definidos nos mesmos que podem facilitar a flexão, a ruptura e/ou o corte dos elos de conexão 6507.
[717] Em várias modalidades, uma matriz de retenção pode com preender uma pluralidade de elementos da matriz de retenção, como estruturas de elementos de matriz 6505, por exemplo, que podem ser incorporados em uma folha ou faixa flexível de material. Em ao menos uma modalidade, uma folha de material flexível pode ser formada a partir de um material elastomérico bioabsorvível, como silicone, por exemplo, sendo que a folha flexível pode ser produzida com uma pluralidade de aberturas definidas na mesma. Em ao menos uma dessas modalidades, uma folha flexível sólida pode ser moldada e uma pluralidade de aberturas pode ser perfurada e removida da folha flexível. Em várias modalidades alternativas, a folha flexível pode ser moldada e as aberturas definidas na mesma podem ser formadas durante o processo de moldagem. Em qualquer desses casos, os elementos da matriz de retenção 6505, por exemplo, podem ser inseridos e mantidos na folha flexível. Em certas outras modalidades, de forma similar à modalidade acima, a folha flexível pode ser formada ao redor dos ele-mentos da matriz 6505. Em ao menos uma modalidade, a folha flexível pode consistir em uma rede tecida, por exemplo, e/ou qualquer outro material adequado. Essa rede tecida, além do exposto acima, pode ser facilmente cortada transversalmente.
[718] Em várias modalidades, agora com referência às FIGURAS 146 e 147, um sistema de prendedores que compreende uma matriz de retenção, como a matriz de retenção 6250, por exemplo, pode compreender, adicionalmente, uma cobertura, como a cobertura 6670, por exemplo, que pode cobrir as pontas das pernas dos grampos 6221 quando as mesmas se estendem acima da superfície de topo 6257 da matriz de retenção 6250. Em várias modalidades, a cobertura 6670 pode ser fixada à matriz de retenção 6250. Em certas modalidades, a cobertura 6670 e/ou a matriz de retenção 6250 podem compreender recursos de retenção que podem ser configurados para reter a cobertura 6670 na matriz de retenção 6250. Em ao menos uma modalidade, ao menos um adesivo pode ser utilizado para prender a cobertura 6670 à matriz de retenção 6250. Em ao menos uma modalidade, a cobertura 6670 pode consistir em a única camada, embora a cobertura 6670 seja ilustrada como compreendendo duas camadas, conforme descrito em mais detalhes a seguir. Em várias modalidades, com referência principalmente à FIGURA 147, as pontas das pernas dos gram-pos 6221 podem se estender através de uma superfície de fundo 6673 da cobertura 6670; entretanto, a cobertura 6670 pode compreender uma espessura suficiente de modo que as pontas dos grampos não se estendam através da superfície de topo 6675 da cobertura 6670. Em ao menos uma dessas modalidades, como resultado, as pontas das pernas dos grampos 6221 podem não se projetar da cobertura 6670. Em várias modalidades, a cobertura 6670 pode compreender uma pluralidade de camadas. Em ao menos uma dessas modalidades, a cobertura 6670 pode compreender uma primeira camada 6671 e uma segunda camada 6672. Em ao menos uma modalidade, a primeira camada 6671 e a segunda camada 6672 podem ser fixadas uma à outra, sendo que, em ao menos uma modalidade, a segunda camada 6672 pode compreender uma superfície de fundo 6676 que é presa à primeira camada 6671. Em várias modalidades, a primeira camada 6671 e a segunda camada 6672 podem ter espessuras diferentes enquanto, em certas modalidades, elas podem ter a mesma espessura. Em ao menos uma modalidade, a primeira camada 6671 e a segunda camada 6672 podem ter larguras e/ou comprimentos substancialmente iguais. Em modalidades alternativas, as camadas 6671 e 6672 podem compreender larguras e/ou comprimentos diferentes.
[719] Em várias modalidades, além do exposto acima, a primeira camada 6671 pode consistir em uma espuma compressível, material de rede e/ou hidrogel, por exemplo, que podem ser cortados pelas pernas dos grampos 6211. Em ao menos uma modalidade, a segunda camada 6672 pode consistir em um material mais rígido, ou película, como PGA e/ou PDS, por exemplo, e/ou qualquer material de reforço adequado. Em ao menos uma dessas modalidades, as pernas dos grampos 6221 podem ser configuradas para penetrar na primeira camada 6671; entretanto, em várias modalidades, as pernas dos grampos 6221 podem ser incapazes de penetrar na segunda camada 6672. Em certas modalidades, a segunda camada 6672 pode consistir em um material que tem uma resiliência e/ou robustez suficientes que pode permitir o contato com a segunda camada 6672 e que a mesma seja deslocada pela perna de grampo 6221, mas não cortada, ou apenas marginalmente cortada, pela ponta de grampo da perna do grampo 6221. Embora não ilustrado, uma cobertura pode compreender mais de duas camadas, sendo que uma ou mais dessas camadas podem ser resistentes à penetração. Em uso, em ao menos uma de tais modalidades, a matriz de retenção 6250 pode ser posicionada contra o tecido a ser preso e forçada para baixo de modo que as pernas de grampo 6221 dos grampos 6220 sejam forçadas através do tecido T e as aberturas de retenção 6252 na matriz de retenção 6250 entrem na primeira camada 6271 da cobertura 6270. Em várias modalidades, as pontas das pernas dos grampos 6221 podem não entrar, ou ao menos substancialmente entrar, na segunda camada 6272 da cobertura 6270. depois que a matriz de retenção 6250 é posicionada adequadamente, a mandíbula 6240 pode ser aberta e a cobertura 6670 e a matriz de retenção 6250 podem ser separadas da mandíbula 6240, conforme ilustrado na FIGURA 146. Conforme ilustrado na FIGURA 146, uma mandíbula 6640 pode ser configurada para conter mais de uma matriz de retenção 6250 e a cobertura 6670. Em ao menos uma dessas modalidades, a mandíbula 6640 pode compreender duas canaletas 6679, sendo que cada uma pode ser configurada para receber uma cobertura 6670 em seu interior, e uma matriz de retenção 6250 posicionada de modo que a superfície de contato com o tecido 6251 de cada matriz de retenção 6250 pende para baixo a partir da base da mandíbula 6240. Em ao menos uma dessas modalidades, uma matriz de retenção 6250 e uma cobertura 6270 podem ser acomodadas na mandíbula 6640 em cada lado de uma fenda para faca 6678. Em uso, tanto as matrizes de retenção 6250 como as coberturas 6670 podem ser im-plantadas simultaneamente e/ou à mesma profundidade em relação a cartuchos de grampos opostos, como os cartuchos 6200, por exemplo, posicionados transversalmente às mesmas. depois disso, em várias modalidades, o tecido preso pode ser cortado ao longo de uma linha de corte por um elemento de corte que atravessa a fenda para faca 6678, sendo que a mandíbula 6640 pode, então, ser reaberta. Em certas modalidades, as coberturas 6670 podem não ser fixadas à matriz de retenção 6250. Em ao menos uma dessas modalidades, as coberturas 6670 podem ser posicionadas nas canaletas 6679 e podem ser retidas nas canaletas 6679 pelas matrizes de retenção 6250 que podem ser fixadas à mandíbula 6640. Em várias modalidades, cada matriz de retenção 6250 pode ser mais larga e/ou mais longa que suas respectivas coberturas 6670, de modo que as matrizes de retenção 6250 possam reter a totalidade de suas coberturas 6670 em posição. Em certas modalidades, cada matriz de retenção 6250 pode compreender a mesma largura e/ou comprimento que suas respectivas coberturas 6670, por exemplo.
[720] Em várias modalidades, conforme descrito acima, um sis tema de prendedores pode compreender uma camada de material que pode ser fixada a uma matriz de retenção, como a matriz de retenção 6250, por exemplo. Em ao menos uma modalidade, agora com referência à FIGURA 150, uma camada de material 6870 pode ser fixada à superfície de fundo 6251 da matriz de retenção 6250. Em certas modalidades, a camada 6870 e/ou a matriz de retenção 6250 podem compreender recursos de retenção que podem ser configurados para reter a camada 6870 na matriz de retenção 6250. Em ao menos uma modalidade, ao menos um adesivo pode ser utilizado para prender a camada 6870 na matriz de retenção 6250. Em todo caso, a camada 6870 pode compreender uma superfície de fundo, ou de contato com o tecido, 6873 que pode ser configurada para entrar em contato com o tecido T quando a matriz de retenção 6250 é movida para baixo na direção dos grampos 6220 para engatar as aberturas de retenção 6252 com as pernas dos grampos 6221. Em ao menos uma dessas modalidades, a camada 6870 pode consistir em um material compressível, como uma espuma bioabsorvível, por exemplo, que pode ser comprimido entre a superfície de fundo 6251 da matriz de retenção 6250 e o tecido T. Em várias modalidades, a camada 6870 pode compreender, adicionalmente, ao menos um medicamento armazenado e/ou absorvido na mesma que pode ser espremido da camada 6870 à medida que a camada 6870 é comprimida. Em ao menos uma modalidade, o medicamento pode compreender ao menos um selante de tecido, agente hemostático e/ou material microbicida, como prata ionizada e/ou triclosan, por exemplo. Em várias modalidades, a compressão da camada 6870 pode pressionar o medicamento da camada 6870 de modo que a totalidade, ou ao menos uma porção significativa, da superfície do tecido T seja coberta com o medicamento. Além disso, à medida que a camada 6870 é comprimida e as pernas dos grampos 6221 penetram no tecido T e na camada 6870, o medicamento pode fluir abaixo das pernas dos grampos 6221 e tratar o tecido recémcortado pelas pernas dos grampos 6221, por exemplo. Em várias modalidades, a estrutura da matriz de retenção 6250 pode compreender uma primeira camada que consiste em um material biocompatível, como titânio e/ou aço inoxidável, por exemplo, e a camada de base 6870 pode compreender uma segunda camada que consiste em um material bioabsorvível, como celulose regenerada oxidada (ORC), agentes biologicamente ativos, como fibrinaa e/ou trombina (tanto seu estado líquido ou secado por congelamento), glicerina, gelatina de porcino absorvível nas configurações de gás ou espuma, e/ou microbicidas, como prata ionizada e/ou triclosan, por exemplo. Materiais bioabsorvíveis adicionais podem compreender Surgicel Nu-Knit, Surgicel Fibrillar, colágeno/ORC, que é um híbrido com uma matriz de colágeno incorporada e está disponível sob o nome comercial Promogran, ácido poliglicólico (PGA), disponível sob o nome comercial Vicryl, ácido polilático (PLA ou PLLA), polidioxanona (PDS), poli-hidroxialcanoato (PHA), poliglecaprona 25 (PGCL), disponível sob o nome comercial Monocryl, policaprolactona (PCL), e/ou um composto de PGA, PLA, PDS, PHA, PGCL e/ou PCL, por exemplo. Embora apenas uma camada 6870 seja ilustrado na FIGURA 150, qualquer número de camadas poderia ser usado. Em ao menos uma modalidade, uma primeira camada que compreende um primeiro medicamento poderia ser fixada à matriz de retenção 6250 e uma segunda camada que compreende um segundo medicamento, ou um medicamento diferente, poderia ser fixadaà primeira camada. Em ao menos uma dessas modalidades, uma pluralidade de camadas poderia ser usada, sendo que cada camada pode compreender um medicamento diferente e/ou uma combinação diferente de medicamentos contidos em seu interior.
[721] Em várias modalidades, agora com referência à FIGURA 148, um sistema de prendedores pode compreender uma camada de material 6770 fixada à superfície de fundo 6251 da matriz de retenção 6250. Em certas modalidades, a camada 6770 e/ou a matriz de retenção 6250 pode compreender recursos de retenção que podem ser configurados para reter a camada 6770 na matriz de retenção 6250. Em ao menos uma modalidade, ao menos um adesivo pode ser utilizado para prender a camada 6770 à matriz de retenção 6250. Em todo caso, a camada 6770 pode compreender a superfície de fundo, ou de contato com o tecido, 6773 que pode ser configurada para entrar em contato com o tecido T quando a matriz de retenção 6250 é movida para baixo na direção dos grampos 6220 para engatar as aberturas de retenção 6252 com as pernas dos grampos 6221. Em ao menos uma dessas modalidades, a camada 6770 pode consistir em um material compressível, como uma espuma bioabsorvível, por exemplo, que pode ser comprimido entre a superfície 6251 da matriz de retenção 6250 e o tecido T. Em várias modalidades, a camada 6770 pode compreender, adicionalmente, uma ou mais encapsulações, ou células, 6774 que podem ser configuradas para armazenar ao menos um medica-mento em seu interior. Em certas modalidades, com referência à FIGURA 149, as encapsulações 6774 podem ser alinhadas, ou ao menos substancialmente alinhadas, com as aberturas de retenção 6252 de modo que, quando as pernas dos grampos 6221 são forçadas através do tecido T e a camada 6770, as pernas dos grampos 6221 podem perfurar e/ou de outro modo romper as encapsulações 6774. depois que as encapsulações 6774 são rompidas, o ao menos um medi-camento M armazenado nas encapsulações 6774 pode fluir para fora sobre o tecido T. Em ao menos uma dessas modalidades, o medicamento M pode compreender um fluido que pode fluir ou ser transportado por capilaridade para baixo das pernas dos grampos 6221 e tratar o tecido T recém-cortado pelas pernas dos grampos. Como resultado do exposto acima, o medicamento armazenado nas encapsulações 6774 pode proporcionar um tratamento localizado para o tecido. Em certas modalidades, as encapsulações 6774 na folha 6770 podem compreender componentes diferentes armazenados em seu interior. Por exemplo, um primeiro grupo de encapsulações 6774 pode compreender um primeiro medicamento, ou uma primeira combinação de medicamentos, armazenado em seu interior, e um segundo grupo de encapsulações pode compreender um medicamento diferente, ou uma combinação diferente de medicamentos, armazenada em seu interior. Em várias modalidades, a camada 6770 pode consistir em uma folha de silicone flexível e as encapsulações 6774 podem representar espa-ços vazios na folha de silicone. Em ao menos uma dessas modalidades, a folha de silicone pode compreender duas camadas que podem ser fixadas uma à outra, sendo que as encapsulações 6774 podem ser definidas entre as duas camadas. Em várias modalidades, a camada 6770 pode compreender uma ou mais seções delgadas ou porções enfraquecidas, como perfurações parciais, por exemplo, que podem facilitar o corte da camada 6770 e a ruptura das encapsulações 6774 pelas pernas 6221. Em certas modalidades, ao menos uma porção das encapsulações 6774 pode ser posicionada em redomas 6777, sendo que as redomas 6777 podem se estender para cima a partir da folha 6770. Em ao menos uma dessas modalidades, as redomas 6777 e/ou ao menos uma porção das encapsulações 6774 podem ser posicionadas dentro dos bolsos 6201 formados na matriz de retenção 6250. Em certas modalidades, as encapsulações 6774 podem com-preendercélulas distintas que são desconectadas umas das outras. Em certas outras modalidades, uma ou mais das encapsulações 6774 podem estar em comunicação fluida umas com as outras através de uma ou mais passagens, condutos e/ou canaletas, por exemplo, estendendo-seatravés da camada 6770. A descrição da patente US n° 7.780.685, intitulada "ADHESIVE AND MECHANICAL FASTENER", concedida em 24 de 2010, está aqui incorporada, por referência em sua totalidade.
[722] Em várias modalidades, além do exposto acima, um cartu cho de grampos que compreende um corpo do cartucho, grampos e/ou uma matriz de alinhamento em seu interior podem ser carregados em uma primeira mandíbula de um atuador de extremidade e, de modo similar, uma matriz de retenção e/ou uma ou mais coberturas podem ser carregadas em uma segunda mandíbula do atuador de extremidade. Em certas modalidades, agora com referência à FIGURA 151, um instrumento, como o carregador de cartucho 6990, por exemplo, pode ser usado para inserir dois ou mais cartuchos de prendedores em um atuador de extremidade ao mesmo tempo. Em ao menos uma modalidade, o carregador de cartucho 6990 pode compreender um cabo 6991 e um carreador de cartucho 6992, sendo que o carreador de cartucho 6992 pode compreender uma primeira porção de retenção configurada para reter o corpo de cartucho 6210 do cartucho de grampos 6200 nessa porção e, adicionalmente, uma segunda porção de retenção configurada para reter um corpo do cartucho 6980 que suporta, um, uma pluralidade de tampas protetoras 6270 em seu interior e, dois, uma matriz de retenção 6250 ao longo da superfície de fundo do mesmo, por exemplo. Em várias modalidades, a primeira e a segunda porções de retenção podem compreender, cada uma, um ou mais elementos de retenção configurados para engatar de modo liberável os corpos de cartucho 6210 e 6980. Em uso, agora com referência às FIGURAS 152 e 153, um atuador de extremidade pode compreender uma primeira mandíbula, ou de fundo, 6230 e uma segunda mandíbula, ou de topo, 6940, sendo que o cartucho de grampos 6200 pode ser carregado na primeira mandíbula 6230 e o corpo do cartucho 6980 pode ser carregado na segunda mandíbula 6940. Em várias circunstâncias, a mandíbula de topo 6940 pode ser girada de uma posição aberta (FIGURA 152) para uma posição fechada (FIGURA 153) por um atuador 6235, sendo que a operação do atuador 6235 é descrita acima e não é repetida na presente invenção para fins de brevidade. Quando a mandíbula de topo 6940 estiver em sua posição fechada, agora com referência à FIGURA 153, a extremidade distal 6993 do carreador de cartucho 6992 pode ser inserida no atuador de extremidade de modo que o cartucho de grampos 6200 seja deslizado através da extremidade distal 6938 da primeira mandíbula 6930 e para dentro de uma primeira porção de fixação, ou canaleta, 6939 na primeira mandíbula 6230. de modo similar, a extremidade distal 6993 do carreador de cartucho 6992 pode ser inserida no atuador de extremidade de modo que o corpo do cartucho 6980 seja deslizado através da extremidade distal 6948 da segunda mandíbula 6940 e para uma segunda porção de fixação, ou canaleta, 6949 na segunda mandíbula 6940. Um cirurgião, ou outro médico, segurando o cabo 6991 do carregador de cartucho 6990 pode empurrar o cartucho de grampos 6200 e o corpo do cartucho 6980 através das canaletas 6939 e 6949, respectivamente,até que o cartucho de grampos 6200 e o corpo do cartucho 6980 estejam completamente assentados em seu interior.
[723] À medida que o cartucho de grampos 6200 e o corpo do cartucho 6980 são assentados, o cartucho de grampos 6200 e o corpo do cartucho 6980 podem, cada um, engatar uma ou mais porções de retenção em suas respectivas mandíbulas 6230 e 6940, conforme descrito em mais detalhes a seguir. Em todo caso, após o assentamento do cartucho de grampos 6200 e do corpo do cartucho 6980, agora com referência à FIGURA 154, o carregador de cartucho 6990 pode ser separado do cartucho de grampos 6200 e do corpo do cartucho 6980 e removido do atuador de extremidade. Em ao menos uma dessas modalidades, a força de retenção que mantém o cartucho de grampos 6200 na primeira mandíbula 6230 pode ser maior que a força de retenção que mantém o cartucho de grampos 6200 no carreador de cartucho 6992 de modo que, à medida que o carreador de cartucho 6992 é puxado distalmente para fora do atuador de extremidade, o cartucho de grampos 6200 pode permanecer atrás na primeira mandíbula 6230. de modo similar, a força de retenção que mantém o corpo do cartucho 6980 na segunda mandíbula 6940 pode ser maior que a força de retenção que mantém o corpo do cartucho 6940 no carreador de cartucho 6992 de modo que, à medida que o carreador de cartucho 6992 é puxado distalmente para fora do atuador de extremidade, o corpo do cartucho 6940 pode permanecer atrás na segunda mandíbula 6940. depois que o carregador de cartucho 6990 é removido do atuador de extremidade, a primeira garra carregada 6230 e a segunda garra carregada 6940 podem ser posicionadas em relação ao tecido T que deve ser grampeado. Agora com referência à FIGURA 155, a segunda garra 6940 pode ser movida de uma posição aberta (FIGURA 154) para uma posição disparada (FIGURA 155) para engatar a matriz de retenção 6250 e a pluralidade de tampas protetoras 6270 carreadas pelo corpo do cartucho 6980 com os grampos 6220 posicionados no cartucho de grampos 6200.
[724] Agora com referência às FIGURAS 156 e 157, a segunda garra 6940 pode ser reaberta e a pluralidade de tampas protetoras 6270 e a matriz de retenção 6250 podem ser separadas do corpo do cartucho 6980 de modo que as tampas 6270 e a matriz de retenção 6250 possam permanecer engatadas com o tecido T e o cartucho de grampos 6200. Em ao menos uma modalidade, o corpo do cartucho 6980 pode compreender uma pluralidade de bolsos, na qual a pluralidade de tampas 6270 pode ser posicionada de maneira removível, e uma ou mais fendas de retenção configuradas para reter de maneira removível a matriz de retenção 6250 nas mesmas. Em várias modalidades, os elementos de retenção da segunda mandíbula 6940 engatados com o corpo do cartucho 6980 podem reter o corpo do cartucho 6980 na segunda mandíbula 6940 após a abertura da segunda mandíbula 6940. Em certas modalidades, o corpo do cartucho 6980 pode ser configurado para rasgar à medida que a segunda mandíbula 6940 é aberta de modo que uma porção do corpo do cartucho 6980 é implantada com as tampas 6270 e a matriz de retenção 6250, e uma porção do corpo do cartucho 6980 permanece na segunda mandíbula 6940. de modo similar, novamente com referência às FIGURAS 156 e 157, os elementos de retenção da primeira mandíbula 6230 engatados com o corpo do cartucho 6210 podem reter o corpo do cartucho 6210 na primeira mandíbula 6230 após a abertura da segunda mandíbula 6940. Em certas modalidades, o corpo do cartucho 6210 pode ser configurado para rasgar à medida que a primeira mandíbula 6230 é afastada do cartucho implantado 6200 de modo que uma porção do corpo do cartucho 6210 seja implantada com os grampos 6220 e a matriz de alinhamento 6260, e uma porção do corpo do cartucho 6210 permaneça na primeira mandíbula 6230. Em várias modalidades, agora com referência às FIGURAS 158 a 160, um cartucho de grampos, como o cartucho de grampos 6900, por exemplo, pode compreender uma ou mais fendas de retenção longitudinais 6913 que se estendem ao longo do comprimento do corpo do cartucho 6910 as quais, quando o cartucho de grampos 6900 é inserido em uma mandíbula 6930, por exemplo, podem ser configuradas para receber em seu interior um ou mais trilhos de retenção longitudinais 6916 que se estendem a partir da man-díbula6930. Em uso, em ao menos uma modalidade, uma extremidade das fendas de retenção 6913 pode ser alinhada com as extremidades distais dos trilhos de retenção 6916 antes de o cartucho de grampos 6900 ser deslizado através da extremidade distal 6938 da canaleta de retenção 6939, por exemplo.
[725] Em várias modalidades, novamente com referência à FI GURA 160, a mandíbula 6940 pode compreender duas canaletas de retenção 6949, sendo que cada canaleta de retenção 6949 pode ser configurada para receber em seu interior um corpo do cartucho 6980 que compreende uma pluralidade de tampas 6270 e uma matriz de retenção 6250. Em certas modalidades, cada corpo do cartucho 6980 pode compreender uma ou mais anteparos de retenção longitudinais 6917 que podem ser configurados para ser deslizados ao longo de um ou mais trilhos de retenção longitudinais 6918 da segunda mandíbula 6940 à medida que os corpos de cartucho 6980 são inseridos em suas respectivas canaletas de retenção 6949 na mandíbula 6940. Em várias modalidades, os trilhos de retenção 6918 e os anteparos de retenção 6917 podem ser cooperacionais para reter o corpo do cartucho 6980 na segunda mandíbula 6940 à medida que os corpos de cartucho 6980 são separados das tampas 6270 e da matriz de retenção 6250 armazenada em seu interior. Em várias modalidades, agora com referência à FIGURA 159, a segunda mandíbula 6940 pode compreender, adicionalmente, uma ou mais protuberâncias distais, ou elementos de retenção, 6915 que se estendem a partir da mesma, que podem ser configuradas para travar de maneira removível os corpos de cartucho 6980 em suas respectivas canaletas de retenção. Em ao menos uma dessas modalidades, a segunda mandíbula 6940 pode compreender uma protuberância distal 6915 configurada e posicionada em relação a cada canaleta de retenção 6949 de modo que cada corpo de cartucho 6980 possa flexionar ao redor das protuberâncias 6915 à medida que os corpos de cartucho 6980 são inseridos nas canaletas 6949, sendo que, assim que os corpos de cartucho 6915 estiverem completamente assentados nas canaletas 6949, as extremidades distais dos corpos de cartucho 6980 possam se afastar e se encaixar sobre as protube-râncias6915. Para remover os corpos de cartucho 6980 depois de serem expandidos, conforme descrito acima, os corpos de cartucho 6980 podem ser puxados de volta sobre as protuberâncias 6915 e removidos das canaletas de retenção 6949. de forma similar à modalidade acima, a primeira mandíbula 6930 pode compreender uma ou mais protuberância de retenção distais 6914 que se estendem a partir da mesma, que podem ser configuradas para ser recebidas em um ou mais sulcos, ou fendas, de retenção 6912 (FIGURA 158) no corpo do cartucho 6910 quando o cartucho de grampos 6900 estiver completamente assentado.
[726] Em várias modalidades, além do exposto acima, um primei ro cartucho de prendedores que compreende uma pluralidade de primeiros prendedores posicionados no mesmo podem ser posicionados em uma primeira mandíbula de um dispositivo cirúrgico de fixação, e um segundo cartucho de prendedores que compreende uma pluralidade de segundos prendedores posicionados no mesmo podem ser posicionados em uma segunda mandíbula do dispositivo cirúrgico de fixação. Em uso, a primeira mandíbula e/ou a segunda mandíbula pode ser movida uma na direção da outra para engatar os primeiros prendedores com os segundos prendedores e prender o tecido entre elas. Em certas modalidades, o primeiro cartucho de prendedores e o segundo cartucho de prendedores podem ser engatados um com o outro quando os primeiros prendedores são engatados com os segundos prendedores. Em ao menos uma modalidade, o corpo do primeiro cartucho de prendedores pode consistir em um primeiro material compressível e o corpo do segundo cartucho de prendedores pode consistir em um segundo material compressível, sendo que o primeiro corpo e/ou o segundo corpo podem ser comprimidos contra o tecido sendo grampeado. depois que o tecido grampeado, a primeira mandíbula pode ser afastada do primeiro cartucho de prendedores implantado e a segunda mandíbula pode ser afastada do segundo cartucho de prendedores implantado. depois disso, a primeira mandíbula pode ser recarregada com um outro primeiro cartucho de prendedores, ou similar, e a segunda mandíbula pode ser recarregada com um outro segundo cartucho de prendedores, ou similar, e o instrumento cirúrgico de fixação pode ser reutilizado. Embora em algumas modalidades possam ser utilizados grampos, são previstas outras modalidades que compreendem outros tipos de prendedores, como prendedores de duas peças que são travados juntos quando são engatados um ao outro, por exemplo. Em ao menos uma dessas modalidades, o primeiro cartucho de prendedores pode compreender uma primeira porção de armazenamento para armazenar as primeiras porções de prendedores e o segundo cartucho de prendedores pode compreender uma segunda porção de armazenamento para armazenar as segundas porções de prendedores. Em várias modalidades, os sistemas de fixação aqui descritos podem utilizar prendedores que compreendem qualquer tipo adequado de material e/ou forma. Em certas modalidades, os prendedores podem compreender elementos penetrantes. Tais elementos penetrantes poderiam consistir em um polímero, um compósito e/ou um substrato em múltiplas camadas, por exemplo. Um exemplo de um substrato em múltiplas camadas poderia ser um fio ou um substrato de lâmina com um revestimento elastomérico ou polimérico. Poderia ser uma lâmina delgada formada de modo que os elementos penetrantes sejam orientados perpendicularmente, ou ao menos substancialmente perpendicularmente, ao elemento de conexão. Os elementos penetrantes poderiam compreender um perfil retangular, um perfil semicircular e/ou qualquer perfil de viga. Em várias modalidades, os prendedores aqui descritos podem ser fabricado com o uso de qualquer processo adequado, como um processo de extrusão de fios, por exemplo. Outra possibilidade é o uso de microfabricação para criar elementos penetrantes ocos. Esses elementos penetrantes poderiam ser fabricados com um processo diferente do processo de extrusão de fios e poderia usar uma combinação de materiais.
[727] Conforme descrito anteriormente, as pontas das pernas dos grampos que se projetam através de uma matriz de retenção podem ser cobertas por uma ou mais tampas e/ou coberturas. Em certas modalidades, as pontas das pernas dos grampos podem ser deformadas depois de inseridos através da matriz de retenção. Em ao menos uma modalidade, uma mandíbula que suporta a matriz de retenção pode compreender, adicionalmente, bolsos de bigorna posicionados acima e/ou alinhados com as aberturas de retenção, que podem ser configurados para deformar as pernas dos grampos à medida que as mesmas se projetam acima da matriz de retenção. Em várias modalidades, as pernas dos grampos de cada grampo podem ser curvadas para dentro umas na direção das outras e/ou na direção do centro do grampo, por exemplo. Em certas outras modalidades, uma ou mais pernas de um grampo podem ser curvadas para fora, afastadas das outras pernas dos grampos e/ou afastadas do centro do grampo. Em várias modalidades, independentemente da direção na qual as pernas dos grampos são curvadas, as pontas das pernas dos grampos podem entrar em contato com a estrutura da matriz de retenção e podem não reentrar o tecido que foi fixado pelos grampos. Em ao menos uma modalidade, a deformação das pernas dos grampos depois de passarem através da matriz de retenção pode travar a matriz de retenção em posição.
[728] Em várias modalidades, agora com referência às FIGURAS 161 e 162, um instrumento de grampeamento cirúrgico, como o gram-peadorcirúrgico 7000, por exemplo, pode compreender uma primeira mandíbula 7030 e uma segunda mandíbula 7040, sendo que a segundamandíbula 7040 pode ser movida na direção e afastada da primeira mandíbula 7030 pelo movimento do atuador 6235. A operação do atuador 6235 é descrita acima e não é repetida na presente descrição para fins de brevidade. Em várias modalidades, a primeira mandíbula 7030 pode compreender uma extremidade distal 7031 e uma extremidade proximal 7032, sendo que a primeira mandíbula 7030 pode defi-nir uma canaleta estendendo-se entre a extremidade distal 7031 e a extremidade proximal 7032 que é configurada para receber um cartucho de grampos. Para fins de ilustração, o corpo de tal cartucho de grampos não é mostrado na FIGURA 161, embora esse cartucho de grampos possa compreender um corpo do cartucho, grampos 6220 posicionados no corpo do cartucho e acionadores de grampos 7012 posicionados sob os grampos 6220. Em certas modalidades, embora não ilustrado na FIGURA 161 para propósitos de clareza, a segunda mandíbula 7040 pode ser configurada para suportar uma matriz de retenção, como a matriz de retenção 6250, por exemplo, acima dos grampos 6220 e/ou mover a matriz de retenção em engate com as pernas dos grampos 6220, conforme descrito acima. Em ao menos uma modalidade, o grampeador cirúrgico 7000 pode compreender, adicionalmente, um deslizador 7010 posicionado na primeira garra 7030 que pode ser deslizado a partir da extremidade distal 7031 da primeira garra 7030 na direção da extremidade proximal 7032, por exemplo, e levantar os acionadores de grampos 7012, e o grampo 6220 apoiado no mesmo, na direção da matriz de retenção e da segunda garra 7040. Em várias outras modalidades, o deslizador 7010 pode ser movido da extremidade proximal 7032 na direção da extremidade distal 7031 para implantar os grampos 6020, por exemplo. Em ao menos uma modalidade, o deslizador 7010 pode compreender uma ou mais rampas inclinadas, ou cames, 7011 que podem ser configuradas para deslizar sob os acionadores de grampos 7012 e levantar os acionadores de grampos 7012. Em várias modalidades, o grampeador cirúrgico 7000 pode compreender, adicionalmente, uma haste de acionamento ou vareta impulsora acoplada operacionalmente ao deslizador 7010 que pode ser movida proximal e/ou distalmente por um atuador localizado em um cabo e/ou haste do grampeador cirúrgico 7000, por exemplo.
[729] Em várias modalidades, novamente com referência à FI GURA 161, a segunda mandíbula 7040 do grampeador cirúrgico 7000 pode compreender uma estrutura 7041, uma extremidade distal 7048 e uma extremidade proximal 7049 em posição oposta à extremidade distal 7048. Em certas modalidades, a segunda mandíbula 7040 pode compreender, adicionalmente, um sistema de guias que compreende uma ou mais trilhos de guia, como os trilhos de guia 7045 e 7046, por exemplo, que se estendem ao longo do eixo longitudinal da estrutura 7041 que, conforme descrito em mais detalhes a seguir, podem ser configurados para guiar uma ou mais bigornas, ou cames, que podem engatar e deformar as pernas dos grampos 6220 depois que as pernas de grampo 6221 dos grampos 6220 passarem através da matriz de retenção. Em ao menos uma dessas modalidades, os trilhos de guia 7045 e 7046 podem compreender um fio ou cabo de guia que se estende ao longo de uma porção ou superfície superior da estrutura 7041, ao redor de uma coluna distal 7047, e de volta ao longo da porção ou superfície superior da estrutura 7041, por exemplo. Em várias modalidades, conforme mencionado acima e agora com referência às FIGURAS 163 e 165, a segunda mandíbula 7040 pode compreender, adicionalmente, uma ou mais bigornas, ou cames, como a primeira bigorna 7050 e a segunda bigorna 7060, por exemplo, que podem ser movidas longitudinalmente ao longo da segunda mandíbula 7040 para deformar as pernas dos grampos 6220 depois de passarem através da matriz de retenção. Em ao menos uma modalidade, o grampeador cirúrgico 7000 pode compreender, adicionalmente, um primeiro acionador de bigorna, ou atuador, 7051 conectado e/ou acoplado operacionalmenteà primeira bigorna 7050 que pode ser configurado para puxar a primeira bigorna 7050 de maneira proximal e/ou empurrar a primeira bigorna 7050 distalmente. de modo similar, em ao menos uma modalidade, o grampeador cirúrgico 7000 pode compreender, adicionalmente, um segundo acionador de bigorna, ou atuador, conectado e/ou acoplado operacionalmente à segunda bigorna 7060 que pode ser configurado para empurrar a segunda bigorna 7060 distalmente e/ou puxar a segunda bigorna 7060 de maneira proximal. Em várias modalidades, a primeira bigorna 7050 pode compreender fendas de guia 7052 e a segunda bigorna 7060 pode compreender fendas de guia 7062 que podem, cada uma, ser configuradas para receber de maneira deslizante o trilho de guia 7045 ou o trilho de guia 7046 em seu interior. Em ao menos uma dessas modalidades, os trilhos de guia 7045 e 7046 podem ser recebidos estreitamente nas fendas de guia 7052 e 7062 de modo a evitar, ou ao menos limitar, o movimento lateral relativo, ou de um lado ao outro, entre os mesmos.
[730] Em certas modalidades, além do exposto acima, a primeira bigorna 7050 pode ser puxada de maneira proximal e a segunda bigorna 7060 pode ser puxada distalmente. Em ao menos uma modalidade, com referência à FIGURA 161, os trilhos de guia 7045 e 7046 e a coluna distal 7047 podem compreender um sistema de polia configurado para puxar a segunda bigorna 7060 distalmente e/ou puxar a segunda bigorna 7060 de maneira proximal. Em ao menos uma dessas modalidades, o trilho de guia 7045 e o trilho de guia 7046 podem compreender um fio ou cabo contínuo estendendo-se ao redor da coluna distal 7047, sendo que uma porção do fio contínuo pode ser puxada para ciclar o fio ao redor da coluna distal 7047. Em várias modalidades, o trilho de guia 7046, por exemplo, pode ser montado na segunda bigorna 7060 de modo que, quando o cabo contínuo é ciclado em uma primeira direção, a segunda bigorna 7060 pode ser puxada distalmente na direção da extremidade distal 7048 da mandíbula 7040 e, quando o cabo contínuo é ciclado em uma segunda direção, ou direção oposta, a segunda bigorna 7060 pode ser puxada de maneira proximal na direção da extremidade proximal 7049. Em ao menos uma modalidade, agora com referência à FIGURA 163, o trilho de guia 7046 pode ser fixado em uma fenda de guia 7062 de modo que uma força de tração possa ser transmitida entre os mesmos. Em ao menos uma dessas modalidades, o trilho de guia 7045 pode ser configurado para deslizar no interior da outra fenda de guia 7062. Em várias modalidades, a primeira bigorna 7050 pode operar independentemente da segunda bigorna 7060 e o sistema de polia e as fendas de guia 7052 definidas na primeira bigorna 7050 podem ser configurados para receber de maneira deslizante os trilhos de guia 7045 e 7046 de modo que o movimento relativo seja permitido entre os mesmos. Em várias modalidades, o cabo contínuo que compreende os trilhos de guia 7045 e 7046 pode ser suficientemente flexível para acomodar a abertura e fechamento da mandíbula de topo 7040. O cabo contínuo pode ser também suficientemente flexível para acomodar o movimento vertical da segunda bigorna 7060 na direção e afastado da garra de fundo 7030, que é descrito em mais detalhes a seguir.
[731] Em várias modalidades, com referência novamente às FI GURAS 163 e 165, a primeira bigorna 7050 pode compreender seguidores de came 7055 estendendo-se dela que podem ser configurados para correrem em uma ou mais fendas de came ou fenda-guia, à medida que a fenda de came 7070 (FIGURA 166), por exemplo, definidas na estrutura 7041 da segunda garra 7040. Mais particularmente, em ao menos uma modalidade, a estrutura 7041 pode compreender uma primeira fenda de came 7070 estendendo-se longitudinalmente ao longo de um primeiro lado da estrutura 7041 e um segundo came 7070 estendendo-se longitudinalmente ao longo de um segundo lado, ou lado oposto, da estrutura 7041, sendo que os seguidores de came 7055 estendendo-se a partir de um primeiro lado da primeira bigorna 7050 podem se movimentar na primeira fenda de came 7070 e os seguidores de came 7055 estendendo-se a partir de um segundo lado da primeira bigorna 7050 podem se movimentar na segunda fenda de came 7070. Em ao menos uma dessas modalidades, os contornos de cada fenda de came 7070 podem ser idênticos, ou ao menos substancialmenteidênticos, e podem ser alinhados, ou ao menos substancialmente alinhados, uns com os outros. de modo similar, em várias modalidades, a segunda bigorna 7060 pode compreender seguidores de came 7065 que se estendem a partir da mesma, que podem ser configurados para se movimentar nas fendas de came 7070 (FIGURA 166) definidas na estrutura 7041 da segunda garra 7040. Mais particular-mente, em ao menos uma modalidade, os seguidores de came 7065 estendendo-se a partir de um primeiro lado da segunda bigorna 7060 podem se movimentar na primeira fenda de came 7070 e os seguidores de came 7065 estendendo-se a partir de um segundo lado da segunda bigorna 7060 podem se movimentar na segunda fenda de came 7070. Em uso, os seguidores de came 7055 da primeira bigorna 7050 e os seguidores de came 7065 da segunda bigorna 7060 podem deslizar no interior das fendas de came 7070 de modo que a primeira bigorna 7050 e a segunda bigorna 7060 sigam os contornos das fendas de came 7070 à medida que a primeira bigorna 7050 e a segunda bigorna 7060 são puxadas de maneira proximal e/ou empurradas distalmente. Em várias modalidades, cada fenda de came 7070 pode compreender uma pluralidade de porções de came, ou superiores, 7071 e uma pluralidade de porções de acionador, ou inferiores, 7072 que podem ser configuradas para mover as bigornas 7050 e 7060 verticalmente, isto é, na direção e afastadas da mandíbula de fundo 7030, ao mesmo tempo em que as bigornas 7050 e 7060 são movidas longitudinalmente, isto é, entre a extremidade distal 7048 e a extremidade proximal 7049 da estrutura 7041, conforme descrito em mais detalhes a seguir.
[732] Quando o grampeador cirúrgico 7000 encontra-se em uma condição não disparada, com referência à FIGURA 166, a primeira bigorna 7050 pode ser posicionada na extremidade distal 7048 da estrutura 7041 e a segunda bigorna 7060 pode ser posicionada na extremidade proximal 7049 da estrutura 7041; além disso, agora com referênciaà FIGURA 167, os grampos 6220 posicionados na primeira garra 7030 podem ainda não estar inseridos no tecido T e/ou na matriz de retenção posicionada acima do mesmo quando o grampeador cirúrgico 7000 encontra-se em uma condição não disparada. Durante o uso, agora com referência à FIGURA 168, os grampos 6220 podem ser empurrados para cima e para o interior das cavidades de grampos 7033 de um cartucho de grampos pelos acionadores de grampos 7012 e, adicionalmente, a primeira bigorna 7050 pode ser movida de maneira proximal a partir da extremidade distal 7048 da estrutura 7041 na direção da extremidade distal 7049 para engatar as pernas de grampo 6221 dos grampos 6220. Em ao menos uma modalidade, os grampos 6220 podem ser acionados para cima antes de a primeira bigorna 7050 ser engatada com as pernas dos grampos 6221 da mesma. Em várias modalidades, todos os grampos 6220 podem ser implantados para cima pelo deslizador 7010 antes de a primeira bigorna 7050 ser avançada em contato com as pernas dos grampos 6221 ou, alternativamente, o deslizador 7010 pode ser movido de maneira proximal ao mesmo tempo em que a primeira bigorna 7050 é movida de maneira proximal, embora o deslizador 7010 possa conduzir de maneira suficiente a primeira bigorna 7050 para implantar os grampos 6220 à frente da primeira bigorna 7050. Em várias modalidades, conforme ilustrado na FIGURA 168, as fendas de came 7070 podem ser configuradas e dispostas de modo que as superfícies de formação, como as superfícies de formação, ou de atuação como cames, 7053 e 7054, por exemplo, do primeiro came 7050 possam entrar em contato com ao menos algumas das pernas dos grampos 6221 quando o primeiro came 7050 estiver passando através de uma posição de came, ou posição superior. Em várias circunstâncias, os seguidores de came 7055 da primeira bigorna 7050 podem, cada um, ser posicionados em uma porção de came 7071 das fendas de came 7070 de modo que as su-perfícies de formação 7053 e 7054 fiquem em uma posição elevada e de modo que as pernas dos grampos 6221 sejam deformadas apenas parcialmente quando a bigorna 7050 passar pelas mesmas na posição de came. Quando o primeiro came 7050 é adicionalmente movido ao longo das fendas de came 7070, conforme ilustrado na FIGURA 169, os seguidores de came 7055 da primeira bigorna 7050 podem ser conduzidos para o interior de porções acionadas, ou inferiores, 7072 das fendas de came 7070, de modo que as superfícies de formação 7053 e 7054 sejam movidas verticalmente para baixo na direção das pernas dos grampos 6021 para acionar as pernas dos grampos 6021 em suas configurações finalmente formadas. depois disso, quando a primeira bigorna 7050 é avançada adicionalmente ao longo das fendas de came 7070, a primeira bigorna 7050 pode ser acionada verticalmente para cima para um outro conjunto de porções de came 7071 das fendas de came 7070. Conforme ilustrado nas FIGURAS 168 e 169, o leitor observará que a primeira bigorna 7050 pode engatar apenas algumas das pernas dos grampos e não outras. Em ao menos uma dessas modalidades, a primeira bigorna 7050 pode ser configurada para deformar apenas um grupo de pernas dos grampos que compreende as pernas de grampo distais 6221 dos grampos 6220, por exemplo. Em ao menos uma dessas modalidades, a primeira bigorna 7050 pode ser configurada para deformar as pernas de grampo distais 6221 na direção do centro dos grampos 6220. Em várias modalidades, cada perna de grampo proximal 6221 pode ser colocada em contato duas vezes pela primeira bigorna 7050, isto é, por uma primeira superfície de formação 7053 e por uma segunda superfície de formação 7054 alinhada com a primeira superfície de formação 7053. Em ao menos uma dessas modalidades, as primeiras superfícies de formação 7053 podem deformar as pernas de grampo distais 6221 em uma configuração parcialmente deformada quando a primeira bigorna 7050 encontra-se em uma posição de came, ou superior, e as segundas superfícies de formação 7054 podem deformar as pernas de grampo distais 6221 em uma configuração completamente formada quando a primeira bigorna 7050 é movida para uma posição acionada, ou inferior. Em várias modalidades, agora com referência às FIGURAS 163 e 164, a primeira bigorna 7050 pode compreender uma pluralidade de primeiras superfícies de formação 7053 e uma pluralidade de segundassuperfícies de formação 7054 para deformar as pernas de grampo distais 6221 dos grampos 6220 quando as pernas dos grampos 6221 são dispostas em mais de uma fileira ou linha. Em várias modalidades, conforme descrito em mais detalhes a seguir, as pernas de grampo proximais 6221 dos grampos 6020 podem ser deformadas pela segunda bigorna 7060, por exemplo.
[733] Em várias modalidades, além do exposto acima, a primeira bigorna 7050 pode ser movida da extremidade distal 7048 da estrutura 7041 para a extremidade proximal 7049 para deformar todas as pernas de grampo distais 6221 dos grampos 6220. Conforme será observado pelo leitor, a primeira bigorna 7050 pode ser movida para cima e para baixo em relação às pernas de grampo proximais formadas in-completamente 6221 e, para acomodar esse movimento relativo, em várias modalidades, a primeira bigorna 7050 pode compreender uma ou mais fendas de folga 7057 (FIGURA 165) que pode ser configurada para receber as pernas de grampo proximais não inclinadas 6221 à medida que a primeira bigorna 7050 inclina as pernas de grampo distais 6221. de modo similar, novamente com referência à FIGURA 163, a segunda bigorna 7060 pode compreender uma fenda de folga 7067 que pode ser configurada para acomodar o movimento vertical do primeiro atuador de came 7051 que se move para cima e para baixo à medida que a primeira bigorna 7050 é movida entre suas posições de came e acionada, conforme descrito acima. depois que todas as pernas de grampo distais 6221 forem inclinadas, em ao menos uma modalidade, a segunda bigorna 7060 pode ser movida da extremidade proximal 7049 da estrutura 7041 para a extremidade distal 7048 pelo atuador da bigorna 7061. de forma similar à modalidade acima, agora com referência à FIGURA 170, os seguidores de came 7065 da segunda bigorna 7060 podem deslizar no interior das fendas de came 7070 de modo que a segunda bigorna 7060 é movida entre as posições de came, ou superiores, e as posições acionadas, ou inferiores, para deformar as pernas de grampo proximais 6221 para dentro na direção dos centros dos grampos 6220, por exemplo. de forma similar à modalidade acima, a segunda bigorna 7060 pode compreender uma pluralidade de primeiras superfícies de formação, ou de atuação como cames, 7063 e uma pluralidade de segundas superfícies de formação, ou de atuação como cames, 7064 que podem, cada uma, ser configuradas para deformar ao menos parcialmente e/ou deformar completamente uma ou mais pernas de grampo proximais 6021. Novamente com referência à FIGURA 164, a segunda bigorna 7060 pode compreender uma pluralidade de primeiras superfícies de formação 7063 e uma pluralidade de segundas superfícies de formação 7064 que podem ser configuradas para deformar as pernas de grampo proximais 6221 dos grampos 6220 dispostos em uma pluralidade de fileiras, ou linhas, por exemplo. Conforme também ilustrado na FIGURA 164, as primeiras superfícies de formação 7063 e as segundas superfícies de formação 7064 da segunda bigorna 7060 podem não ser alinhadas com as primeiras superfícies de formação 7053 e as segundas superfícies de formação 7054 da primeira bigorna 7050 sendo que, como resultado, as pernas proximais 6221 dos grampos 6220 podem ser posicionadas em fileiras, ou linhas, diferentes das pernas distais 6221 dos grampos 6220. Conforme será também observado pelo leitor, a segunda bigorna 7060 pode empurrar a primeira bigorna 7050 à medida que a segunda bigorna 7060 é movida distalmente. Em ao menos uma dessas modalidades, a segunda bigorna 7060 pode empurrar a primeira bigorna 7050 de volta à extremidade distal 7048 da estrutura 7041 de modo que a primeira bigorna 7050 pode ser retornada à sua posição inicial, ou não disparada. depois que todas as pernas de grampo proximais 6221 dos grampos 6220 forem deformadas, a segunda bigorna 7060 poderá ser retraída de maneira proximal e retornadaà sua posição inicial, ou não disparada. dessa maneira, o grampeadorcirúrgico 7000 pode ser reinicializado de modo que um novo cartucho de grampos pode ser posicionado na primeira garra 7030 e uma nova matriz de retenção pode ser posicionada na segunda garra 7040 para utilizar o grampeador cirúrgico 7000 mais uma vez.
[734] Em várias modalidades, conforme descrito acima, um grampeador cirúrgico pode compreender dois ou mais bigornas que podem se movimentar longitudinalmente em uma direção transversal para engatar as pernas de uma pluralidade de grampos. Em certas modalidades, um grampeador cirúrgico pode compreender uma bigorna que é movida de maneira proximal, por exemplo, para deformar um primeiro grupo de pernas dos grampos, e distalmente, por exemplo, para deformar um segundo grupo de pernas dos grampos. Em ao menos uma dessas modalidades, tal bigorna pode compreender superfícies de formação voltadas de maneira proximal e superfícies de formação voltadas distalmente, por exemplo.
[735] Em várias modalidades, agora com referência à FIGURA 171, uma bigorna, como a bigorna 7140, por exemplo, pode compreender uma superfície de fundo, ou de contato com o tecido, 7141 e uma pluralidade de bolsos de formação 7142 definidas em seu interior. Em ao menos uma modalidade, a bigorna 7140 pode compreender mais de uma placa, como as placas de bolso 7143, por exemplo, que podem ser soldadas em uma estrutura 7144. Em ao menos uma dessas modalidades, cada placa de bolso 7143 pode ser posicionada em uma canaleta de placa 7145 na estrutura 7144 e soldada na estrutura 7144 através de uma fenda de solda 7146 estendendo-se através de a estrutura 7144 para formar uma solda longitudinal 7147. Em várias circunstâncias, a solda longitudinal 7147 pode compreender uma solda contínua estendendo-se ao longo de todo o comprimento da fenda de solda 7146 ou uma série de pontos de solda espaçados uns dos outros que se estendem ao longo do comprimento da mesma, por exemplo. Em várias modalidades, cada placa de bolso 7143 pode compreender dois ou mais porções de placa que foram soldadas juntas. Em ao menos uma dessas modalidades, cada placa de bolso 7143 pode compreender uma primeira porção de placa 7143a e uma segunda porção de placa 7143b que podem ser soldadas juntas ao longo de uma junção 7148. Em várias modalidades, a primeira porção de placa 7143a e a segunda porção de placa 7143b de cada placa 7143 podem ser soldadas juntas antes de as placas 7143 serem soldadas na canaleta de placas 7145 na estrutura 7144. Em ao menos uma dessas modalidades, a primeira porção de placa 7143a e a segunda porção de placa 7143b podem compreender perfis cooperacionais, como os perfis dentados mostrados na FIGURA 171, por exemplo, que podem ser encaixados uns nos outros para formar uma junção justa 7148. Em ao menos uma modalidade, cada placa 7143 pode compreender uma altura de aproximadamente 0,51 mm (0,02 polegada), por exemplo, que pode ser maior que a profundidade da canaleta de placas 7145 de modo que as superfícies de contato com o tecido 7141 da mesma se estendem a partir da estrutura 7044 da bigorna 7040. Em certas modalidades, agora com referência à FIGURA 172, as placas 7143 podem ser conectadas juntas por ao menos uma solda 7149 nas extremidades distais das placas 7143, por exemplo.
[736] Conforme ilustrado nas FIGURAS 171 e 172, cada placa de bolso 7143 pode compreender uma pluralidade de bolsos de formação 7142 definidos em seu interior. Em várias modalidades, os bolsos de formação 7142 podem ser formados nas placas 7143 com o uso de qualquer processo de fabricação adequado, como um processo de trituraçãoe/ou processo de queima de eletrodos, por exemplo. Em ao menos uma dessas modalidades, agora com referência às FIGURAS 173 e 174, cada bolso de formação 7142 pode ser produzido primeiro pela formação de uma cavidade profunda 7150, e, então, pela formação de uma superfície arqueada ou curva 7151 ao redor da cavidade profunda 7150, e, então, pela formação de um sulco-guia de perna de grampo 7152 na superfície curva 7151, por exemplo. Em várias outras modalidades, essas etapas podem ser realizadas em qualquer ordem adequada. Em várias modalidades, agora com referência à FIGURA 175, os bolsos de formação de grampos 7142 podem ser formados de modo que as bordas internas 7153 dos bolsos de formação são separadas por um vão consistente, ou ao menos substancialmente consistente, 7154. Em ao menos uma dessas modalidades, o vão 7154 pode ser de aproximadamente 0,20 mm (0,008 polegada), por exemplo. Além disso, em ao menos uma de tais modalidades, os bolsos de formação 7142 podem ser posicionados ao longo de dois ou mais fileiras, ou linhas, cujas linhas de centro podem ser separadas por um espaçamento consistente, ou ao menos substancialmente consistente, 7155. Em ao menos uma dessas modalidades, o espaçamento 7155 entre as linhas de centro pode ser de aproximadamente 0,89 mm (0,035 polegada), por exemplo. Em várias modalidades, novamente com referência à FIGURA 175, cada bolso de formação 7142 pode afunilar entre uma largura estreita 7156 e uma largura larga 7157. Em ao menos uma tal modalidade, a largura estreita 7156 pode ser aproximadamente 1,1 mm (0,045”) e a largura larga 7157 pode ser aproximadamente 1,9 mm (0,075”), por exemplo. Em várias modalidades, as placas 7143 podem consistir no mesmo material que a estrutura 7144. Em ao menos uma dessas modalidades, as placas 7143 e a estrutura 7144 podem ambas consistir em aço inoxidável, como aço inoxidável série 300 ou série 400, por exemplo, e/ou titânio, por exemplo. Em várias outras modalidades, as placas 7143 e a estrutura 7144 podem consistir em materiais diferentes. Em ao menos uma dessas modalidades, as placas 7143 podem consistir em um material cerâmico, por exemplo, e a estrutura 7144 pode consistir em aço inoxidável e/ou titânio, por exemplo. Em várias circunstâncias, dependendo dos materiais utilizados, ao menos um processo de brasagem poderia ser usado para fixar as placas 7143 na estrutura 7144 em adição ou em vez dos processos de soldagem descritos acima, por exemplo.
[737] Em várias modalidades, agora com referência às FIGURAS 176 a 178, uma bigorna 7240 pode compreender uma estrutura 7244 e uma pluralidade de placas de bolso 7243 que podem ser inseridas na estrutura 7244. de forma similar à modalidade acima, cada placa de bolso 7243 pode compreender uma pluralidade de bolsos de formação 7242 definidos em seu interior. Em ao menos uma modalidade, a estrutura da bigorna 7244 pode compreender fendas de retenção 7246 definidas na mesma que podem, cada uma, ser configuradas para receber um trilho de retenção 7247 estendendo-se a partir da placa de bolso 7243. Para montar as placas de bolso 7243 na estrutura da bigorna 7244, as paredes laterais 7245 da estrutura da bigorna 7244 podem ser flexionadas ou inclinadas para baixo, conforme ilustrado na FIGURA 177, para alargar as fendas de retenção 7246 de modo que cada fenda de retenção 7246 possa receber em seu interior um trilho de retenção 7247 de uma placa de bolso 7243. Uma vez que os trilhos de retenção 7247 tenham sido posicionados nas fendas de retenção 7246, as paredes laterais 7245 podem ser liberadas, conforme ilustrado na FIGURA 178, permitindo assim que a estrutura 7244 se contraia resilientemente e/ou retorne ao seu estado não flexionado. Em tais cir-cunstâncias, as fendas de retenção 7246 podem se contrair e assim capturar os trilhos de retenção 7247 em seu interior. Em certas modalidades, os trilhos de retenção 7247 e/ou as fendas de retenção 7246 podem compreender uma ou mais superfícies afuniladas e cooperacionais que, depois que as fendas de retenção flexionadas 7246 são liberadas, podem formar um engate de trava afunilado que pode reter os trilhos de retenção 7247 nas fendas de retenção 7246. de forma similar à modalidade acima, as placas de bolso 7243 podem consistir no mesmo material ou em um material diferente que a estrutura 7244. Em ao menos uma dessas modalidades, as placas 7243 podem consistir em a material cerâmico, por exemplo, e a estrutura 7244 pode consistir em aço inoxidável e/ou titânio, por exemplo. Em várias circunstâncias, dependendo dos materiais utilizados, ao menos um processo brasagem e/ou ao menos um processo de soldagem, por exemplo, poderiam ser usados para fixar as placas 7243 na estrutura 7244.
[738] Nas FIGURAS 179 e 180, um instrumento de grampeamento e corte cirúrgico 8010 pode compreender uma bigorna 8014 que pode ser aberto e fechado repetidamente em torno de sua fixação pivotante para uma canaleta de grampos alongada 8016. Um estrutura de aplicação de grampos 8012 pode compreender a bigorna 8014 e a canaleta 8016, sendo que a estrutura 8012 pode ser fixada proximalmente na haste alongada 8018 formando uma porção de implementação 8022. Quando a estrutura de aplicação de grampos 8012 é fechado, ou ao menos substancialmente fechado, a porção de implementação 8022 pode apresentar uma seção transversal suficientemente pequena adequada para inserir a estrutura de aplicação de grampos 8012 através de um trocarte. Em várias modalidades, a estrutura 8012 pode ser manipulada por um cabo 8020 conectado à haste 8018. O cabo 8020 pode compreender controles de usuário como um botão de rotação 8030 que gira a haste alongada 8018 e a estrutura de aplicação de grampos 8012 em torno de um eixo longitudinal da haste 8018. Um gatilho de fechamento 8026, que pode girar na frente de uma pega de pistola 8036 cerca de um pino de gatilho de fechamento 8152 (FIGURA 181) engatado lateralmente através do alojamento do cabo 8154, pode ser pressionado para fechar o conjunto de aplicação de grampos 8012. Em várias modalidades, um botão de liberação de fechamento 8038 pode ser apresentado para fora sobre o cabo 8020 quando o acionador de fechamento 8026 é fixado de modo que o botão de liberação 8038 pode ser deprimido para soltar o acionador de fechamento 8026 e abrir a estrutura de aplicação de grampos 8012, conforme descrito em mais detalhes abaixo. Um acionador de disparo 8034, que pode girar em frente ao acionador de fechamento 8026, pode fazer com que a estrutura de aplicação de grampos 8012 corte e grampeie simultaneamente o tecido ali fixado. Em várias circunstâncias, conforme descrito em mais detalhes abaixo, múltiplos cursos de disparo podem ser empregados usando o acionador de disparo 8034 para reduzir a quantidade de força necessária para ser aplicada pela mão do cirurgião por curso. Em certas modalidades, o cabo 8020 pode compreender rodas indicadoras direitas e/ou esquerdas giratórias 8040, 8041 (FIGURA 181) que pode indicar o progresso do disparo. Por exemplo, o movimento completo de disparo pode exigir três cursos de disparo completos do acionador de disparo 8034 e, desta forma, as rodas indicadoras 8040, 8041 podem girar até um terço de uma revolução por curso do acionador de disparo 8034. Conforme descrito em mais detalhes abaixo, uma alavanca de liberação de disparo manual 8042 pode permitir ao sistema de disparo ser retraído antes do movimento de disparo completo ter sido terminado, se for desejado, e, além disso, a alavanca de liberação de disparo 8042 pode permitir a um cirurgião, ou outro médico, retrair o sistema de disparo no caso em que o sistema de disparo se liga e/ou falha.
[739] Com referência às FIGURAS 179 e 181, a haste alongada 8018 pode compreender uma estrutura externa que inclui um tubo de fechamento longitudinalmente reciprocante 8024 que gira a bigorna 8014 em direção a sua posição fechada em resposta à depressão proximal do acionador de fechamento 8026 do cabo 8020. A canaleta alongada 8018 pode ser conectada ao cabo 8020 por uma estrutura 8028 (FIGURA 181) que está na parte interna do tubo de fechamento 8024. A estrutura 8028 pode ser engatada de forma giratória ao cabo 8020 de modo que a rotação do botão giratório 8030 (FIGURA 179) pode girar a porção de implementação 8022. Com referência particular à FIGURA 181, o botão de rotação 8030 pode ser compreendido de dois meios-envoltórios que podem incluir uma ou mais projeções para dentro 8031 que podem se estender através de uma ou mais aberturas laterais alongadas 8070 no tubo de fechamento 8024 e engatar a armação 8028. Como resultado do acima, o botão de rotação 8030 e a armação 8028 podem ser giradas juntos ou de forma sincronizada, de modo que a posição girada do botão 8030 determine a posição girada da porção de implementação 8022. Em várias modalidades, o comprimento longitudinal da abertura mais longa 8070 é suficientemente longo para permitir o movimento de fechamento longitudinal, e um movimento de abertura, do tubo de fechamento 8024. Com relação à geração do movimento de fechamento do tubo de fechamento 8024, com referência principalmente às FIGURAS 181 e 183, uma porção superior 8160 do acionador de fechamento 8026 pode empurrar um forquilha de fechamento 8162 através de um elo de fechamento 8164. O elo de fechamento 8164 é fixado de forma articulada na sua extremidade distal por um pino da forquilha de fechamento 8166 à forquilha de fechamento 8162 e é fixado de forma articulada na sua extremidade proximal por um pino do elo de fechamento 8168. Em várias modalidades, o acionador de fechamento 8026 pode ser impulsionado para uma posição aberta por uma mola de tensão do acionador de fechamento 8246 que é conectada proximalmente à porção superior 8160 do acionador de fechamento 8026 e um compartimento do cabo 8154 formado pelas metades direita e esquerda do envoltório 8156, 8158. A força de tensão aplicada pela mola de tensão 8246 pode ser vencida por uma força de fechamento aplicada ao acionador de fechamento 8026 de modo a avançar a forquilha 8162, o elo de fechamento 8164, e o tubo de fechamento 8024 distalmente.
[740] Quando o acionador de fechamento 8026 é acionado, ou deprimido, conforme descrito acima, o botão de liberação de fechamento 8038 pode ser posicionado de modo que o cirurgião, ou outro médico, pode empurrar o botão de liberação de fechamento 8038, se for desejado, e permitir que o acionador de fechamento 8026, e o resto do instrumento cirúrgico, voltem para um estado não acionado. Em várias modalidades, o botão de liberação de fechamento 8038 pode ser conectado a um braço de travamento pivotante 8172 por um pivô lateral central 8173 de modo que o movimento pode ser transferido entre o botão de liberação 8038 e o braço de travamento 8172. Novamente com referência à FIGURA 181, uma mola de compressão 8174 pode tracionar o botão de liberação de fechamento 8038 proximalmente, isto é, em sentido horário em torno do pivô lateral central 8173 conforme visto na porção direita e superior 8160 do acionador de fechamento 8026 pode incluir uma crista proximal 8170 com um entalhe posterior 8171. Quando o acionador de fechamento 8026 é pressionado, o braço de travamento pivotante 8172 pode deslizar sobre a crista proximal 8170 e quando o acionador de fechamento 8026 alcança sua posição completamente pressionada, deve-se apreciar que o entalhe posterior 8171 é apresentado abaixo do braço de travamento pivotante 8172 que cai no e se prende ao entalhe posterior 8171 sob a impulsão da mola de compressão 8174. Neste ponto, a depressão manual do botão de liberação de fechamento 8038 gira o braço de travamento pivotante 8172 para cima e para fora do entalhe posterior 8171 destravando assim o acionador de fechamento 8026 e permitindo ao acionador de fechamento 8026 ser colocado de volta em sua posição destravada.
[741] Quando o acionador de fechamento 8026 é preso proximalmente, conforme discutido acima, o acionador de disparo 8034 pode ser puxado na direção do empunhadura da pistola 8036 de modo a avançar uma haste de disparo de prendedores 8032 distalmente a partir do cabo 8020. Em várias modalidades, o acionador de disparo 8034 pode girar em torno de um pino do acionador de disparo 8202 que atravessa lateralmente e é engatado com as metades direita e esquerda do envoltório 8156, 8158 do cabo 8020. O acionador de disparo 8034, quando acionado, pode avançar um mecanismo de disparo de transmissão ligada 8150. O mecanismo de disparo de transmissão ligada 8150 pode ser colocado em uma posição retraída e não disparada por uma mola 8184 ou seja, uma, fixada ao empunhadura da pistola 8036 do cabo 8020 e, duas, fixadas a um dos elos, por exemplo, do mecanismo de disparo de transmissão ligada 8150 conforme descrito em mais detalhes abaixo. A mola 8184 pode compreender uma extremidadenão móvel 8186 conectada ao envoltório 8154 e uma extremidademóvel 8188 conectada a uma extremidade proximal 8190 de uma banda de aço 8192. Uma extremidade disposta distalmente 8194 da banda de aço 8192 pode ser fixada a um elemento de fixação 8195 em um elo frontal 8196a de uma pluralidade de elos 8196a -8196d que formam uma cremalheira encadeada 8200. A cremalheira encadeada 8200 pode ser flexível, de modo que ela possa retrair facilmente para o empunhadura da pistola 8036 e reduzir o comprimento do cabo 8020 e ainda assim formar uma estrutura de cremalheira reta e rígida que pode transferir uma força de disparo significativa a e/ou através da haste de disparo de prendedores 8032. Conforme descrito em mais detalhes abaixo, o acionador de disparo 8034 pode ser engatado com um primeiro elo 8196a durante uma primeira ativação do acionador de disparo 8034, engatado com um segundo elo 8196b durante uma segunda ativação do acionador de disparo 8034, engatado com um terceiro elo 8196c durante uma terceira ativação do acionador de disparo 8034, e engatado com um quarto elo 8196d durante uma quarta ativação do acionador de disparo 8034, sendo que cada ativação do acionador de disparo 8034 pode avançar a cremalheira encadeada 8200 distalmente por uma distância cada vez maior. Em várias modalidades, além do exposto acima, os múltiplos cursos do acionador de disparo 1034 podem girar as rodas indicadoras de medida direita e esquerda 1040, 1041 para indicar a distância na qual a cremalheira encadeada 8200 foi deslocada.
[742] Agora com referência às FIGURAS 181 e 183, um meca nismo anti retorno 8250 pode evitar que a mola de combinação tensão/compressão 8184 retraia a cremalheira encadeada 8200 entre cursos de disparo. Em várias modalidades, um tubo deslizante de acoplamento 8131 está em contiguidade ao primeiro elo 8196a e conecta a haste de descarga de prendedores 8032 para transmitir o movimento de disparo. A haste de disparo de prendedores 8032 se estende proximalmente para fora de uma extremidade proximal da armação 8028 e através de um furo passante 8408 de uma placa anti retorno 8266. O furo passante 8408 é dimensionado para receber de forma deslizante a haste de disparo de prendedores 8032 quando alinhado perpendicularmente mas para se ligar quando revestido. Uma fixação de aba inferior 8271 se estende proximalmente a partir de um rebordo inferior da extremidade proximal da armação 8028, estendendo-se através de uma abertura 8269 sobre uma borda inferior da placa anti retorno 8266. Esta fixação de aba inferior 8271 puxa a porção inferior da placa anti retorno 8266 próximo à armação 8028 para que a placa anti retorno 8266 esteja perpendicular quando a haste de disparo de prendedores 8032 é deslocada distalmente e deixada inclinar o topo para trás para um estado de ligação quando a haste de disparo de prendedores 8032 tenta retrair. Uma mola de compressão anti retorno 8264 é forçada distalmente pela extremidade proximal da armação 8028 e está em contiguidade proximal a uma porção superior da placa anti retorno 8266, tracionando a placa anti retorno 8266 para um estado de travamento. Em oposição à tração da mola, um tubo de came anti retorno 8268 abrange de modo deslizante o tubo deslizante de acoplamento 8131 e está em contiguidade com a placa anti retorno 8266. Uma forquilha anti retorno, que se projeta de maneira proximal 8256, fixada ao tubo de came anti retorno 8268 se estende sobre a forquilha de fechamento 8162.
[743] Com referência à FIGURA 181, um mecanismo de retração automática acionado por elo 8289 é incorporado no instrumento de grampeamento e corte cirúrgico 8010 para causar retração da faca na extremidade do percurso de disparo completo. Para isto, um elo distal 8196d inclui um terminal de conexão 8290 que se projeta para cima quando o elo distal 8196d é deslocado para dentro da canaleta da cremalheira 8291 (FIGURA 181) formado na forquilha de fechamento 8162. Este terminal de conexão 8290 é alinhado para ativar um came proximal de fundo 8292 em uma alavanca de liberação antirretorno 8248 (FIGURA 186). Com referência particular às FIGURAS 186 e 187, as estruturas formadas nas metades direita e esquerda dos envoltórios 8156, 8158 constringem o movimento da alavanca de liberação anti retorno 8248. Um receptáculo de pino 8296 e um pino circular 8293 formados, respectivamente, entre as metades direita e esquerda dos envoltórios 8156, 8158, são recebidos através de uma abertura alongada longitudinalmente 8294 formada na alavanca de liberação anti retorno 8248 em posição distal ao came proximal inferior 8292, permitindo assim a translação longitudinal, bem como a rotação em torno do pino circular 8293. Na metade direita da carcaça 8156, uma canaleta aberta de maneira proximal 8295 inclui uma porção horizontal proximal 8295a que se comunica com uma porção angulada, ascendente e distalmente 8295b, que recebe um pino posterior à direita 8297 (FIGURA 187) próximo à extremidade proximal da alavanca de liberação antirretorno 8248, conferindo, dessa forma, uma rotação para cima à medida que a alavanca de liberação antirretorno 8248 atinge a porção mais distal de sua translação. Uma estrutura de bloqueio formada na metade direita do envoltório 8156 em posição proximal à alavanca de liberação anti retorno 8248 evita o seu movimento proximal quando montado para manter o pino posterior à direita 8297 na canaleta aberta proximalmente 8295.
[744] Além do exposto acima, conforme mostrado nas FIGURAS 187 e 188, uma extremidade distal 8254 da alavanca de liberação anti backup 8248 que é impulsionada distalmente e para baixo, fazendo com que um pino frontal à direta 8298 caia na estrutura em degrau aberta distalmente 8299 formada na metade direita do envoltório 8156, que é impulsionada para este engate por uma mola de compressão 8300 (FIGURA 188) presa com gancho a um gancho à esquerda 8301 na alavanca de liberação anti-backup 8248 entre o pino frontal à direita 8298 e a abertura alongada longitudinalmente 8294. A outra extremidade da mola de compressão 8300 é fixada a um gancho 8302 (FIGURAS 186, 188, 189) formado na metade direita do envoltório 8156 em uma posição mais proximal e inferior logo acima da forquilha de fechamento 8266. A mola de compressão 8300 então empurra a extremidade distal 8254 da alavanca de liberação anti-backup 8248 para baixo e para trás, o que resulta no travamento do pino frontal à direita 8298 na estrutura em degrau distalmente aberta 8299 quando avançada distalmente. Desta forma, uma vez ativada, com referência à FIGURA 189, a alavanca de liberação antirretorno 8248 permanece para frente segurando a placa antirretorno 8266 perpendicularmente e permitindo, desta forma, que a cremalheira encadeada 8200 seja retraída. Quando a forquilha de fechamento 8266 é subsequentemente retraída ao destravar o atuador de extremidade 8012, um terminal de conexão de reinicialização que se projeta para cima 8303 na forquilha de fechamento 8266 entra em contato com um came distal inferior 8305 da alavanca de liberação antirretorno 8248, levantando o pino frontal à direita 8298 para fora da estrutura em degrau distalmente aberta 8299 para que a mola de compressão antirretorno 8264 possa empurrar proximalmente o tubo de came antirretorno 8268 e a alavanca de liberação antirretorno 8248 para suas posições retraídas (FIGURA 186).
[745] Em várias modalidades, referindo-se às FIGURAS 179 e 189, o acionador de disparo 8034 pode ser engatado operacionalmenteà cremalheira encadeada 8200 de qualquer forma adequada. Com referência particular às FIGURAS 180 e 185, o acionador de disparo 8034 gira ao redor de um pino do acionador de disparo 8202 que é conectado ao envoltório 8154. Uma porção superior 8204 do acionador de disparo 8034 se move distalmente em torno do pino do acionador de disparo 8202 quando o acionador de disparo 8034 é pressionado na direção do empunhamento da pistola 8036, estirando uma mola de tensão do acionador de disparo colocada proximalmente 8206 (FIGURA 181) conectada proximalmente entre a porção superior 8204 do acionador de disparo 8034 e o envoltório 8154. A porção superior 8204 do acionador de disparo 8034 engata a cremalheira encadeada 8200 durante cada depressão do acionador de disparo através de um mecanismo de lingueta lateral tracionado por mola 8210. Quando o acionador de disparo é liberado, o mecanismo de lingueta lateral é desengatado da cremalheira encadeada 8200 e o acionador de disparo pode ser voltado para uma posição não pressionada ou não disparada. Em uso, um trilho lateral direito inclinado formado por uma superfície chanfrada proximalmente e voltada para a direita 8284 em cada um dos elos 8196a-8196d é engatado por uma estrutura de lingueta lateral 8285. Em particular, uma peça deslizante de lingueta 8270 (FIGURAS 181 e 183) tem guias inferiores direita e esquerda 8272 que deslizam respectivamente em um trilho à esquerda 8274 (FIGURA 181) formado na forquilha de fechamento 8266 abaixo da canaleta da cremalheira 8291 e um trilho à direita 8275 em um trilho da forquilha de fechamento 8276 que está paralelo a uma canaleta da cremalheira 8291 e é fixado a uma cobertura da canaleta da cremalheira 8277 que fecha uma porção aberta à direita da canaleta da cremalheira 8291 na forquilha de fechamento 8266 que está distal à passagem da peça deslizante de lingueta 8270. Nas FIGURAS 181, 182 e 185, uma mola de compressão 8278 é fixada entre um gancho 8279 sobre uma posição proximal de topo no trilho da forquilha de fechamento 8276 e um gancho 8280 em um lado direito distal da peça deslizante de lingueta 8270, o que mantém a peça deslizante de lingueta 8270 puxada proximalmente para contato com a porção superior 8204 do acionador de disparo 8034.
[746] Com referência particular à FIGURA 181, um bloco da lingueta 8318 repousa sobre a peça deslizante de lingueta 8270 girando em torno de um pino posterior vertical 8320 que passagens através de um canto proximal esquerdo do bloco de lingueta 8318 e da peça deslizante de lingueta 8270. Uma reentrância do bloco de separação 8322 é formada em uma porção distal de uma superfície de topo do bloco 8318 para receber um bloco de separação 8324 preso de forma articulada nele por um pino vertical 8326 cuja ponta inferior se estende para dentro de uma reentrância da mola da lingueta 8328 em uma superfície de topo da peça deslizante de lingueta 8270. Uma mola da lingueta 8330 na reentrância da mola da lingueta 8328 se estende para a direita do pino frontal vertical 8326 impulsionando o bloco da lingueta 8318 a girar em sentido anti-horário quando visto de cima para engate com o trilho inclinado do lado direito 8282. Uma pequena mola em espiral 8332 na reentrância do bloco de separação 8322 impulsiona o bloco de separação 8324 a girar em sentido horário quando visto de cima, sua extremidade proximal impulsionada para entrar em contato com o rebordo curvo 8334 formado na forquilha de fechamento 8266 acima da canaleta da cremalheira 8291. Conforme mostrado na FIGURA 184, a vantagem mecânica mais forte da mola da lingueta 8330 em relação à pequena mola em espiral 8332 significa que o bloco da lingueta 8318 tende em direção ao engate com o bloco de separação 8324 girado em sentido horário. Na FIGURA 185, quando o acionador de disparo 8034 é completamente pressionado e começa a ser liberado, o bloco de separação 8324 encontra uma crista 8336 no rebordo curvo 8334 quando a peça deslizante de lingueta 8270 retrai, forçando o bloco de separação 8324 a girar em sentido horário quando visto de cima e assim separando o bloco da lingueta 8318 do engate com a cremalheira encadeada 8200. O formato da reentrância do bloco de separação 8322 para a rotação em sentido horário do bloco de separação 8324 para uma orientação perpendicular ao rebordo curvo 8334 mantendo este desengate durante a retração completa e assim eliminando o ruído da catraca.
[747] Nas FIGURAS 181, 183, 190 e 195, o instrumento de grampeamento e corte cirúrgico 8010 pode incluir um mecanismo de retração manual 8500 que proporciona liberação manual do mecanismo de disparo, retração manual e em uma versão (FIGURAS 196 a 202) realiza ainda a retração automática no final do percurso de disparo completo. Agora com referência às FIGURAS 181, 190, e 191, em particular, uma engrenagem intermediária anterior 8220 é engatada com uma superfície superior dentada à esquerda 8222 da cremalheira encadeada 8200 sendo que a engrenagem intermediária anterior 8220 também engata uma engrenagem intermediária posterior 8230 que tem uma engrenagem de catraca menor do lado direito 8231. Tanto a engrenagem intermediária anterior 8220 quando a engrenagem intermediária posterior 8230 são conectadas de forma giratória ao compartimento do cabo 8154, respectivamente, no eixo da polia anterior 8232 e no eixo da polia posterior 8234. Cada extremidade do eixo posterior 8232 se estende através das respectivas metades direita e esquerda do envoltório 8156, 8158 e são fixadas às rodas indicadoras de medida esquerda e direita 8040, 8041 e, desde que o eixo posterior 8234 esteja rodando livremente no compartimento do cabo 8154 e tenha um engate vinculado à engrenagem posterior 8230, as rodas indicadoras de medida 8040, 8041 giram com a engrenagem posterior 8230. A relação de engrenagem entre a cremalheira encadeada 8200, a engrenagemintermediária 8220 e a engrenagem posterior 8230 pode ser vantajosamente selecionada de modo que a superfície superior dentada 8222 tenha dimensões de dente que são adequadamente fortes e que a engrenagem posterior 8230 não faça mais que uma revolução durante todo o percurso de disparo do mecanismo de disparo de transmissão ligado 8150. Além do mecanismo de engrenagem 8502 indicando visualmente o percurso ou progresso disparo, o mecanismo de engrenagem 8502 também pode ser usado para retrair manualmente a faca. Em várias modalidades, a engrenagem de catraca do lado direito menor 8231 da engrenagem intermediária posterior 8230 estende-se para uma parte central 8506 da alavanca de retração manual 8042, especificamente alinhada com uma fenda alinhada longitudinalmente vertical 8508 (FIGURA 190) que divide a parte central 8506. Um furo passante lateral 8510 da parte central 8506 se comunica com uma reentrância superior 8512. Uma porção anterior 8514 é formatada para receber uma lingueta de travamento direcionada proximalmente 8516 que gira ao redor de um pino lateral à direta 8518 formado em uma extremidade distal da reentrância superior 8512. Uma porção posterior 8520 é formatada para receber uma aba de mola forma de L 8522 que impulsiona a lingueta de travamento 8516 para baixo em engate com a engrenagem de catraca menor do lado direito 8231. Uma estrutura de apoio 8524 (FIGURAS 186 e 193) se projeta a partir da metade direita da carcaça 8156 para dentro da reentrância superior 8512 sustentando a lingueta de travamento 8516 do engate com a engrenagem de catraca menor do lado direito 8231 quando a alavanca de retração manual 8042 está abaixada (FIGURA 193). Uma mola em espiral 8525 (FIGURA 181) impulsiona a alavanca de retração manual 8042 para baixo.
[748] Em uso, conforme mostrado nas FIGURAS 192 e 193, a combinação de mola de tensão/compressão 8184 pode se desconectar da cremalheira encadeada posicionada distalmente. Nas FIGURAS 194 e 195, quando a alavanca de retração manual 8042 é levantada, a lingueta de travamento 8516 gira em sentido horário e não é mais sus-tentada pela estrutura de apoio 8524 e engata a engrenagem de catraca menor do lado direito 8231, girando a engrenagem intermediária posterior 8230 em sentido horário quando vista da esquerda. Desta forma, a engrenagem intermediária posterior 8220 responde em sentidoanti-horário retraindo a cremalheira encadeada 8200. Além disso, uma crista curva para a direta 8510 se projeta da parte central 8506, dimensionada para entrar em contato e mover em posição distal a alavanca de liberação anti-backup 8248 para liberar o mecanismo antibackup 8250 quando a alavanca de retração manual 8042 é girada.
[749] Nas FIGURAS 196 a 202, um mecanismo de retração au tomática 8600 para um instrumento de grampeamento e corte cirúrgico 8010a pode incorporar retração automática no final do percurso de disparo completo para uma engrenagem intermediária anterior 8220a que tem um dente 8602 que se move dentro de um sulco circular 8604 em uma roda de came 8606 até encontrar um bloqueio 8608 após uma rotação quase completa correspondente a três cursos de disparo. Nestascircunstâncias, a crista à direita 8610 é girada para cima para entrar em contato com uma reentrância de came inferior 8612 para mover distalmente uma alavanca de liberação anti-backup 8248a. Com referência particular à FIGURA 197, a alavanca de liberação antibackup 8248a inclui uma extremidade distal 8254 que funciona conforme anteriormente descrito. O pino circular 8293 e o receptáculo do pino 8296 formado entre as metades direita e esquerda dos envoltórios 8156, 8158 são recebidos através de uma abertura genericamente retangular 8294a formada na alavanca de liberação anti-backup 8248a atrás do came inferior 8192, permitindo assim a translação longitudinal assim como movimento de travamento para baixo da extremidade distal 8254 da alavanca de liberação anti-backup 8248a. Na metade direita do envoltório 8156, uma canaleta aberta proximalmente horizontal 8295a recebe o pino posterior à direita 8297 próximo da extremidade proximal da alavanca de liberação anti-backup 8248a.
[750] Em funcionamento, antes do disparo nas FIGURAS 198, 198A, a cremalheira encadeada 8200 e o tubo de came anti-backup 8268 estão em uma posição retraída, travando o mecanismo antibackup 8250 quando a mola de compressão anti-backup 8264 inclina proximalmente a placa anti-backup 8266. O mecanismo de retração automática 8600 está em um estado inicial com a alavanca de liberação anti-backup 8248a retraída com o elo 8196a em contato com a engrenagem intermediária anterior 8220a. O dente 8602 está em na posição de seis horas com deslocamento completo do sulco circular 8604 progredindo no seu sentido anti-horário com a crista à direita 8610 imediatamente proximal ao dente 8602. Nas FIGURAS 199, 199A, um curso de disparo ocorreu movendo um elo distal 8196b para cima para contato com a engrenagem intermediária anterior 8220a. O dente 8602 progrediu um terço de uma volta através do sulco circular 8604 da roda de came imóvel 8606. Nas FIGURAS 200, 200A, um segundo curso de disparo ocorreu, movendo para cima mais um elo 8196c para entrar em contato com a engrenagem intermediária anterior 8220a. O dente 8602 progrediu dois terços de uma volta através do sulco circular 8604 da roda de came imóvel 8606. Nas FIGURAS 201, 201A, um terceiro curso de disparo ocorreu movendo um elo distal 8196d para cima para contato com a engrenagem intermediária anterior 8220a. O dente 8602 progrediu completamente em torno do sulco circular 8604 para contato com o bloqueio 8608 que inicia rotação em sentido anti-horário (quando visto da direita) da roda de came 8606 levando a crista à direta 8608 para entrar em contato com a alavanca de liberação anti-backup 8248a. Na FIGURA 202, a alavanca de liberação anti-backup 8248a se moveu em posição distal em resposta a isto, travando o pino frontal à direita 8298 na estrutura em degrau distalmente aberta 8299 e liberando o mecanismo anti-backup 8250. Ins-trumentos de grampeamento cirúrgico similares são apresentados na patente US n° 7.083.075, que foi concedida em 1 de agosto de 2006, cuja descrição está aqui incorporada a título de referência.
[751] Com referência à FIGURA 203, a estrutura de aplicação de grampos 9012 de um instrumento de grampeamento cirúrgico 9010 executa as funções de grampear o tecido, direcionar grampos e cortar tecido por dois movimentos distintos transferidos longitudinalmente para baixo na haste 9016 em relação à estrutura da haste 9070. Esta estrutura da haste 9070 é fixada proximalmente a um cabo de um instrumento de grampeamento cirúrgico e é acoplada a ele para rotação em torno de um eixo longitudinal. Um cabo multicurso ilustrativo para o instrumento de grampeamento e corte cirúrgico é descrito em maiores detalhes no pedido de patente US copendente e do mesmo titular intitulado SURGICAL STAPLING INSTRUMENT INCORPORATING A MULTISTROKE FIRING POSITION INDICATOR AND RETRACTION MECHANISM, n° de série 10/374.026), cujo conteúdo está aqui incorporado a título de referência, em sua totalidade. Outras aplicações compatíveis com a presente invenção podem incorporar um único curso de disparo, tal como descrito no pedido de patente US copendente e do mesmo titular SURGICAL STAPLING INSTRUMENT HAVING SEPARATE DISTINCT CLOSING AND FIRING SYSTEMS, n° de série 10/441.632), cujo conteúdo está aqui incorporado a título de referência, em sua totalidade.
[752] Com referência particular à FIGURA 204, a extremidade distal da estrutura da haste 9070 é fixada à canaleta de grampos 9018. A bigorna 9022 tem uma extremidade pivotante proximal 9072 que é recebida de forma articulada dentro de uma extremidade proximal 9074 da canaleta de grampos 9018, em posição imediatamente distal ao seu engate à estrutura da haste 9070. Quando a bigorna 9022 é girada para baixo, a bigorna 9022 move uma superfície de contato com o tecido 9028 e bolsos de formação 9026 em direção a um cartucho de grampos oposto, descrito em mais detalhes abaixo. A extremidade pivotante 9072 da bigorna 9022 inclui um elemento de fechamento 9076 próximo, mas distal a sua fixação pivotante com a canaleta de grampos 9018. Desta forma, um tubo de fechamento 9078, cuja extremidade distal inclui uma abertura de ferradura 9080 que engata este elemento de fechamento 9076, confere seletivamente um movimento de abertura à bigorna 9022 durante o movimento longitudinal proximal e um movimento de fechamento à bigorna 9022 durante o movimento longitudinal distal do tubo de fechamento 9078 deslizando sobre a estrutura da haste 9070 em resposta a um acionador de fechamento, de modo semelhante ao exposto acima. A estrutura da haste 9070 inclui e guia um movimento de disparo do cabo através de uma barra de disparo e corte em duas peças longitudinalmente reciprocante 9090. Em particular, a estrutura da haste 9070 inclui uma fenda da barra de disparo longitudinal 9092 que recebe uma porção proximal da barra de disparo e corte em duas peças 9090, especificamente, uma barra de disparo afunilada e laminada 9094. Seve ser entendido que a barra de disparo afunilada e laminada 9094 pode ser substituída por uma barra de disparo sólida e/ou por quaisquer outros materiais adequados.
[753] Um feixe eletrônico (E-beam) 9102 é a porção distal da bar ra de disparo e corte em duas peças 9090, que facilita o fechamento separado e o disparo assim como o espaçamento da bigorna 9022 da canaleta de grampos alongada 9018 durante o disparo. Com referência particular às FIGURAS 204 e 205, em adição a qualquer tratamento de fixação, como solda ou um adesivo, a barra de disparo e corte 9090 é formada por uma abertura de fixação vertical fêmea 9104 formada proximalmente no feixe eletrônico 9102 que recebe um elemento de fixação macho correspondente 9106 apresentado em posição distal pela barra de disparo afunilada e laminada 9094, permitindo a cada porção ser formada por um material selecionado e por um processo adequado para suas diferentes funções (por exemplo, resistência, flexibilidade, atrito). O feixe eletrônico 9102 pode ser vantajosamente formado por um material que tem propriedades de material adequadas para formar um par de pinos de topo 9110, um par de pinos intermediários 9112 e um pino inferior ou pé 9114, assim como ser capaz de adquirir um gume cortante afiado 9116. Além disso, a guia de topo formada integralmente e que se projeta de maneira proximal 9118 e a guia intermediária 9120 que inclui cada extremidade vertical do gume cortante 9116, definem, ainda uma área de preparação de tecido 9122 que ajuda a guiar o tecido para o gume cortante afiado 9116 antes do corte. A guia intermediária 9120 também serve para engatar e disparar o aparelho de aplicação de grampo 9012 por colocar em contiguidade um membro central em degraus 9124 de um suporte deslizante de corpo triangular 9126 (FIGURA 206) que faz a formação do grampo pelo conjunto de aplicação de grampos 9012, conforme descrito em mais detalhes abaixo. A formação destes elementos (por exemplo, pinos de topo 9110, pinos intermediários 9112, e pé inferior 9114) integralmente com o feixe eletrônico 9102 facilita a fabricação em tolerâncias mais estreitas em relação aos outros em comparação com a montagem a partir de uma pluralidade de partes, garantindo o funcionamento desejado durante o disparo e/ou interação eficaz com vários elementos de travamento da estrutura de aplicação de grampos 9012.
[754] Nas FIGURAS 207 e 208, a estrutura de aplicação de grampos 9012 é mostrada aberta com o feixe eletrônico 9102 comple-tamenteretraído. Durante a montagem, o pé inferior 9114 do feixe eletrônico 9102 é soltado através de um orifício alargado 9130 da canaleta de grampos 9018 e o feixe eletrônico 9102 é então avançado de modo que o feixe eletrônico 9102 desliza distalmente ao longo de um trilho inferior 9132 formado na canaleta de grampos 9018. Em particular, o trilho inferior 9132 inclui uma fenda estreita 9133 que se abre como uma fenda alargada 9134 sobre uma superfície inferior da canaleta de grampos 9018 para formar um formato de T invertido na seção transversal lateral conforme mostrado particularmente nas FIGURAS 208 e 209, que se comunica com o orifício alargado 9130. Uma vez montados, os componentes acoplados proximalmente à barra de disparo laminada e afunilada 9094 não permitem que o pé menor 9114 se desloque proximalmente novamente para o orifício alargado 9130 para permitir o desengate. Com referência à FIGURA 210, a barra de disparo laminada e afunilada 9094 facilita a inserção da estrutura de aplicação de grampos 9012 através de um trocarte. Em particular, uma projeção descendente mais distal 9136 eleva o feixe eletrônico 9102 quando completamente retraído. Isto é feito pela colocação da projeção descendente 9136 em um ponto no qual ele cameia para cima sobre uma borda proximal do orifício alargado 9130 na canaleta de grampos 9018. Agora com referência à FIGURA 211, a barra de disparo laminada e afunilada 9094 também intensifica a operação de certos elementos de travamento que podem ser incorporados na canaleta de grampos 9018 pela inclusão de uma projeção ascendente mais proximal 9138 que é impulsionada para baixo pela estrutura da haste 9070 durante uma porção inicial do percurso de disparo. Em particular, uma barra lateral 9140 é definida entre um par de aberturas quadradas 9142 na estrutura da haste 9070 (FIGURA 204). Uma mola de presilha 9144 que abrange a barra lateral 9140 empurra para baixo uma porção da barra de disparo laminada e afunilada 9094 que se projeta distalmente para fora da fenda longitudinal da barra de disparo 9092, o que garante que certos elementos de travamento vantajosos sejam engatados quando adequado. Esta impulsão é mais pronunciada ou confinada apenas àquela porção do percurso de disparo quando a projeção ascendente 9138 entra em contato com a mola da presilha 9144.
[755] Nas FIGURAS 207 e 208, o feixe eletrônico 9102 é retraído com os seus pinos de topo 9110 contidos no interior de um bolso de bigorna 9150 próximo da extremidade proximal pivotante da bigorna 9022. Uma fenda vertical da bigorna aberta para baixo 9152 (FIGURA 203) se alarga lateralmente na bigorna 9022 para o interior de um trilho interno da bigorna 9154 que captura os pinos de topo 9110 da viga "E" 9102 à medida que avançam distalmente durante o disparo, conforme mostrado nas FIGURAS 210 e 211, espaçando positivamente a bigorna 9022 da canaleta de grampos 9018. Desta forma, com o feixe eletrônico 9102 retraído, o cirurgião é capaz de abrir e fechar repetidamente a estrutura de aplicação de grampos 9012 até estar satisfeito com a colocação e orientação do tecido ali capturado para grampeamento e corte, além disso, o feixe eletrônico 9102 ajuda no posicionamento adequado do tecido mesmo para uma estrutura de aplicação de grampos 9012 com diâmetro reduzido e rigidez reduzida de modo correspondente. Nas FIGURAS 203, 204, 206, 207, 209 e 215, a estrutura de aplicação de grampos 9012 é mostrada com o cartucho de grampossubstituível 9020 que inclui o deslizador de corpo triangular 9126. Uma pluralidade de fendas de corpo triangular abertas para baixo alinhadas longitudinalmente e paralelas 9202 (FIGURA 209) recebem as respectivas cunhas 9204 integrais com o trenó de corpo triangular 9126. Nas FIGURAS 209 a 211, o suporte deslizante de corpo triangular 9126 então cameia para cima uma pluralidade de acionadores de grampos 9206 que são deslizantes verticalmente dentro das reentrâncias do acionador de grampos 9208. Nesta versão ilustrativa, cada acionador de grampos 9206 inclui dois prolongamentos verticais, cada um transladando para cima para dentro de um respectivo orifício de grampo 9210, ou cavidade 9024, para forçar para cima e deformar um grampo 9023 que repousa contra uma superfície de formação de grampos 9214 (FIGURA 211) da bigorna 9022. Uma reentrância de disparo central 9216 (FIGURA 204) definida dentro do cartucho de grampos 9020 próximo à canaleta de grampos 9018 permite a passagem da porção de fundo horizontal 9218 (FIGURA 206) do deslizador de corpo triangular 9126 bem como os pinos intermediários 9112 da viga "E" 9102. Especificamente, uma bandeja do cartucho de grampos 9220 (FIGURAS 204, 209) se fixa a e fica sob um corpo do cartucho de grampos polimérico 9222 que tem as reentrâncias do acionador de grampos 9208, os orifícios do grampo 9210 e a reentrância de disparo central 9216 formados nele. Quando os grampos 9023 são então formados para qualquer lado, o gume cortante afiado 9116 entra em uma fenda passante vertical 9230 que passa através do eixo longitudinal do cartucho de grampos 9020, exceto apenas por uma extremidade mais distal do mesmo.
[756] O disparo da estrutura de aplicação de grampos 9012 co meça como representado na FIGURA 211 com a barra de disparo e corte em duas peças 9090 puxada proximalmente até a projeção descendente 9136 camear a guia intermediária 9120 no feixe eletrônico 9102 para cima e para trás, permitindo que um novo cartucho de grampos 9020 seja inserido na canaleta de grampos 9018 quando a bigorna 9022 está aberta, conforme mostrado nas FIGURAS 203 e 207. Na FIGURA 212, a barra de disparo e corte em duas peças 9090 foi avançada distalmente por uma pequena distância, permitindo à projeção descendente 9136 cair dentro do orifício alargado 9130 do trilho inferior 9132 sob a impulsão da mola de presilha 9144 contra a projeção ascendente 9138 da barra de disparo laminada e afunilada 9094. A guia intermediária 9120 impede rotação para baixo adicional por repousar sobre o elemento central em degraus 9124 do trenó de corpo triangular 9126, mantendo assim o pino intermediário 9112 do feixe eletrônico dentro da reentrância de disparo central 9216. Na FIGURA 213, a barra de disparo e corte em duas peças 9090 foi disparada em posição distal, avançando o trenó de corpo triangular 9126 para causar a formação dos grampos 9023 enquanto corta o tecido 9242 preso entre a bigorna 9022 e o cartucho de grampos 9020 com o gume cortante afiado 9116. Posteriormente, na FIGURA 214, a barra de disparo e corte em duas peças 9090 é retraída, deixando o trenó de corpo triangular 9126 posicionado em posição distal. Na FIGURA 215, o pino intermediário 9112 é deixado transladar para baixo para dentro de uma reentrância de travamento 9240 formada na canaleta de grampos 9018 (vide também FIGURAS 208, 211). Desta forma, o operador recebe uma indicação tátil quando o pino intermediário 9112 encontra a borda distal da reentrância de travamento 9240 quando o trenó de corpo triangular 9126 (não mostrado na FIGURA 215) não está situado em posição proximal (isto é, cartucho de grampos 9020 ausente ou cartucho de grampos 9020 gasto). Instrumentos de grampeamento cirúrgico similares são apresentados na patente US n° 7.380.696, que foi concedida em 3 de junho de 2008, cuja descrição está aqui incorporada a título de referência.
[757] Em várias modalidades, conforme descrito acima, um car tucho de grampos pode compreender um corpo do cartucho que inclui uma pluralidade de cavidades para grampos ali definidas. O corpo do cartucho pode compreender um suporte e uma superfície de suporte superior, em que cada cavidade para grampos pode definir uma abertura na superfície de suporte. Conforme também descrito acima, um grampo pode ser posicionado dentro de cada cavidade para grampos de modo que os grampos são armazenados dentro do corpo do cartuchoaté eles serem ejetados. Antes de serem ejetados do corpo do cartucho, em várias modalidades, os grampos podem estar contidos com o corpo do cartucho de modo que os grampos não se projetam acima superfície de suporte. Quando os grampos estão posicionados abaixo da superfície de suporte, em tais modalidades, a possibilidade de os grampos ficarem danificados e/ou entrarem em contato prematuramente com o tecido alvo pode ser reduzida. Em várias circunstâncias, os grampos podem ser movidos entre uma posição não disparada na qual eles não se projetam do corpo do cartucho e uma posição disparada na qual eles emergiram do corpo do cartucho e podem entrar em contato com uma bigorna posicionada em lado oposto ao cartucho de grampos. Em várias modalidades, a bigorna e/ou os bolsos de formação definidos dentro da bigorna, pode ser posicionada a uma distância predeterminada acima da superfície de suporte de modo que, quando os grampos estão sendo dispensados do corpo do cartucho, eles são deformados para uma altura formada predeterminada. Em alguns casos, a espessura do tecido capturado entre a bigorna e o cartucho de grampos pode variar e, como resultado, um tecido mais espesso pode ser capturado dentro de certos grampos enquanto um tecido mais delgado pode ser capturado dentro de certos outros gram-pos. Em todo caso, a pressão, ou força, de pinçamento aplicada ao tecido pelos grampos pode variar de grampo para grampo ou pode variar entre um grampo em uma extremidade de uma fileira de grampos e um grampo na outra extremidade da fileira de grampos, por exemplo. Em determinadas circunstâncias, o vão entre a bigorna e o suporte do cartucho de grampos pode ser controlado de modo que os grampos aplicam uma certa pressão de pinçamento mínima dentro de cada grampo. Em algumas de tais circunstâncias, entretanto, pode ainda existir uma variação significativa da pressão de pinçamento dentro de diferentes grampos.
[758] Em várias modalidades aqui descritas, um cartucho de grampos pode compreender meios para compensar a espessura do tecido capturado dentro dos grampos dispensados a partir do cartucho de grampos. Em várias modalidades, com referência à FIGURA 216, um cartucho de grampos, como o cartucho de grampos 10000, por exemplo, pode incluir uma primeira porção rígida, como a porção de suporte 10010, por exemplo, e uma segunda porção compressível, como o compensador de espessura de tecido 10020, por exemplo. Em pelo menos uma modalidade, com relação principalmente à FIGURA 218, a porção de suporte 10010 pode compreender um corpo do cartucho, uma superfície de suporte superior 10011, e uma pluralidade de cavidades para grampos 10012 sendo que, de modo semelhante ao exposto acima, cada cavidade para grampos 10012 pode definir uma abertura na superfície de suporte 10011. Um grampo 10030, por exemplo, pode ser posicionado de modo removível em cada cavidade para grampos 10012. Em pelo menos uma tal modalidade, com relação principalmente à FIGURA 245 e conforme descrito em mais detalhes abaixo, cada grampo 10030 pode compreender uma base 10031 e uma ou mais pernas 10032 estendendo-se a partir da base 10031. Antes de os grampos 10030 serem dispensados, conforme também descrito com mais detalhes abaixo, as bases 10031 dos grampos 10030 podem ser apoiadas pelo acionadores de grampos posicionados dentro da porção de suporte 10010 e, simultaneamente, as pernas 10032 dos grampos 10030 podem ser ao menos parcialmente contidas dentro das cavidades para grampos 10012. Em várias modalidades, os grampos 10030 podem ser dispensados entre uma posição não disparada e uma posição disparada, de modo que as pernas 10032 se movamatravés do compensador de espessura de tecido 10020, penetrematravés de uma superfície de topo do compensador de espessura de tecido 10020, penetrem o tecido T, e entrem em contato com uma bigorna posicionada do lado oposto ao cartucho de grampos 10000. Quando as pernas 10032 são deformadas contra a bigorna, as pernas 10032 de cada grampo 10030 podem capturar uma porção do compensador de espessura de tecido 10020 e uma porção do tecido T dentro de cada grampo 10030 e aplicar uma força de compressão ao tecido. Além do exposto acima, as pernas 10032 de cada grampo 10030 podem ser deformadas para baixo em direção à base 10031 do grampo para formar uma área de aprisionamento de grampo 10039 na qual o tecido T e o compensador de espessura de tecido 10020 podem ser capturados. Em várias circunstâncias, a área de aprisionamento de grampo 10039 pode ser definida entre as superfícies internas das pernas deformadas 10032 e a superfície interna da base 10031. O tamanho da área de aprisionamento para um grampo pode depender de vários fatores, como o comprimento das pernas, o diâmetro das pernas, a largura da base, e/ou a extensão na qual as pernas são deformadas, por exemplo.
[759] Em modalidades anteriores, era frequentemente necessário que o cirurgião selecionasse os grampos adequados com a altura de grampo adequada para o tecido sendo grampeado. Por exemplo, um cirurgião poderia selecionar grampos altos para uso com tecido espesso e grampos curtos para uso com tecido delgado. Em algumas circunstâncias, entretanto, o tecido sendo grampeado não tinha uma espessura consistente e, desta forma, alguns grampos eram incapazes de alcançar a configuração disparada desejada. Por exemplo, a FIGURA 250 ilustra um grampo alto usado em tecido delgado. Agora com referência à FIGURA 251, quando um compensador de espessura de tecido, como o compensador de espessura de tecido 10020, por exemplo, é usado com tecido delgado, por exemplo, o grampo maior pode ser formado para uma configuração disparada desejada.
[760] Devido à compressibilidade do compensador de espessura de tecido, o compensador de espessura de tecido pode compensar a espessura do tecido capturado dentro de cada grampo. Mais particu-larmente, agora com referência às FIGURAS 245 e 246, um compen sador de espessura de tecido, como o compensador de espessura de tecido 10020, por exemplo, pode consumir porções maiores e/ou menores da área de aprisionamento de grampo 10039 de cada grampo 10030 dependendo da espessura e/ou do tipo de tecido contido dentro da área de aprisionamento de grampo 10039. Por exemplo, se tecido mais delgado T for capturado dentro de um grampo 10030, o compensador de espessura de tecido 10020 pode consumir uma porção maior da área de aprisionamento de grampo 10039 em comparação aos casos em que tecido mais espesso T é capturado dentro do grampo 10030. de modo correspondente, se tecido mais espesso T for capturado dentro de um grampo 10030, o compensador de espessura de tecido 10020 pode consumir uma porção menor da área de aprisionamento de grampo 10039 em comparação aos casos em que tecido mais delgado T é capturado dentro do grampo 10030. desta forma, o compensador de espessura de tecido pode compensar o tecido mais delgado e/ou tecido mais espesso e garantir que uma pressão de compressão seja aplicada ao tecido de forma independente, ou de forma ao menos substancialmente independente, da espessura do tecido capturado dentro dos grampos. Além do exposto acima, o compensador de espessura de tecido 10020 pode compensar diferentes tipos, ou compressibilidades de tecidos capturados dentro de diferentes grampos 10030. Agora, com referência à FIGURA 246, o compensador de espessura de tecido 10020 pode aplicar uma força de compressão ao tecido vascular T o qual pode incluir vasos V e, como resultado, restringir o fluxo de sangue através de vasos menos compressíveis V, ao mesmo tempo em que também aplica uma pressão de compressão desejada ao tecido circundante T. Em várias circunstâncias,além das expostas acima, o compensador de espessura de tecido 10020 também pode compensar grampos malformados. Com refe-rência à FIGURA 247, a malformação de vários grampos 10030 pode resultar em áreas de aprisionamento de grampo maiores 10039 sendo definidas dentro de tais grampos. devido à resiliência do compensador de espessura de tecido 10020, agora com referência à FIGURA 248, o compensador de espessura de tecido 10020 posicionado dentro de grampos malformados 10030 pode ainda aplicar uma pressão de compressão suficiente ao tecido T embora as áreas de aprisionamento de grampo 10039 definidas dentro de tais grampos malformados 10030 possam ser ampliadas. Em várias circunstâncias, o compensador de espessura de tecido 10020 localizado entre grampos adjacentes 10030 pode ser tracionado contra o tecido T por grampos formados apropriadamente 10030 circundando um grampo malformado 10030 e, como resultado, aplicam uma pressão de compressão ao tecido circundante e/ou capturado dentro do grampo malformado 10030, por exemplo. Em várias circunstâncias, um compensador de espessura de tecido pode compensar diferentes densidades de tecido que podem surgir devido a calcificações, áreas fibrosas, e/ou tecido que foi anteriormente grampeado ou tratado, por exemplo.
[761] Em várias modalidades, um vão de tecido fixo, ou imutável, pode ser definido entre a porção de suporte e a bigorna e, como resultado, os grampos podem ser deformados para uma altura predeterminada independentemente da espessura do tecido capturado dentro dos grampos. Quando um compensador de espessura de tecido é usado com estas modalidades, o compensador de espessura de tecido pode se adaptar ao tecido capturado entre a bigorna e o cartucho de grampos da porção de suporte e, devido à resiliência do compensador de espessura de tecido, o compensador de espessura de tecido pode aplicar uma pressão de compressão adicional ao tecido. Agora com referência às FIGURAS 252-257, um grampo 10030 foi formado para uma altura pré-definida H. Com relação à FIGURA 252, um compensador de espessura de tecido não foi utilizado e o tecido T consome toda a área de aprisionamento de grampo 10039. Com relação à FIGURA 259, uma porção de um compensador de espessura de tecido 10020 foi capturado dentro de um grampo 10030, comprimiu o tecido T, e consumiu pelo menos uma porção da área de aprisionamento de grampo 10039. Agora com referência à FIGURA 254, tecido delgado T foi capturado dentro do grampo 10030. Nesta modalidade, o tecido comprimido T tem uma altura de aproximadamente 2/9H e o compensador de espessura do tecido comprimido 10020 tem uma altura de aproximadamente 7/9H, por exemplo. Agora com referência à FIGURA 255, o tecido T com uma espessura intermediária foi capturado dentro do grampo 10030. Nesta modalidade, o tecido comprimido T tem uma altura de aproximadamente 4/9H e o compensador de espessura do tecido comprimido 10020 tem uma altura de aproximadamente 5/9H, por exemplo. Agora com referência à FIGURA 256, o tecido T com uma espessura intermediária foi capturado dentro do grampo 10030. Nesta modalidade, o tecido comprimido T tem uma altura de aproxi-madamente 2/3H e o compensador de espessura do tecido comprimido 10020 tem uma altura de aproximadamente 1/3H, por exemplo. Agora com referência à FIGURA 255, tecido espesso T foi capturado dentro do grampo 10030. Nesta modalidade, o tecido comprimido T tem uma altura de aproximadamente 8/9H e o compensador de espessura do tecido comprimido 10020 tem uma altura de aproximadamente 1/9H, por exemplo. Em várias circunstâncias, o compensador de espessura de tecido pode compreender uma altura comprimida que compreende aproximadamente 10% da altura de aprisionamento de grampo, aproximadamente 20% da altura de aprisionamento de grampo, aproximadamente 30% da altura de aprisionamento de grampo, aproximadamente 40% da altura de aprisionamento de grampo, aproximadamente 50% da altura de aprisionamento de grampo, aproximadamente 60% da altura de aprisionamento de grampo, aproximadamente 70% da altura de aprisionamento de grampo, aproximadamente 80% da altura de aprisionamento de grampo, e/ou aproximadamente 90% da altura de aprisionamento de grampo, por exemplo.
[762] Em várias modalidades, os grampos 10030 podem com preender qualquer altura não formada adequada. Em certas modalidades, os grampos 10030 podem compreender uma altura não formada entre aproximadamente 2 mm e aproximadamente 4,8 mm, por exemplo. Os grampos 10030 podem compreender uma altura não formada de aproximadamente 2,0 mm, aproximadamente 2,5 mm, aproximadamente 3,0 mm, aproximadamente 3,4 mm, aproximadamente 3,5 mm, aproximadamente 3,8 mm, aproximadamente 4,0 mm, aproximadamente 4,1 mm, e/ou aproximadamente 4,8 mm, por exemplo. Em várias modalidades, a altura H na qual os grampos podem ser deformados pode ser determinada pela distância entre a superfície de suporte 10011 da porção de suporte 10010 e a bigorna oposta. Em ao menos uma modalidade, a distância entre a superfície de plataforma 10011 e a superfície de contato com o tecido da bigorna pode ser de aproximadamente 2,5 mm (0,097”), por exemplo. A altura H também pode ser determinada pela profundidade dos bolsos de formação definidos dentro da bigorna. Em pelo menos uma modalidade, os bolsos de formação podem ter uma profundidade medida a partir da superfí-cie de contato com o tecido, por exemplo. Em várias modalidades, conforme descrito em mais detalhes abaixo, o cartucho de grampos 10000 pode compreender adicionalmente acionadores de grampos que podem levantar os grampos 10030 em direção à bigorna e, em pelo menos uma modalidade, levantar ou "direcionar excessivamente", os grampos acima da superfície de suporte 10011. Em tais modalidades, a altura H na qual os grampos 10030 são formados também pode ser determinada pela distância na qual os grampos 10030 são excessivamente direcionados. Em ao MENOS uma de tal modalidade, os grampos 10030 podem ser direcionados excessivamente por aproxi-madamente 0,71 mm (0,028”), por exemplo, e podem resultar nos grampos 10030 sendo formados a uma altura de aproximadamente 4,8 mm (0,189”), por exemplo. Em várias modalidades, os grampos 10030 podem ser formados para uma altura de aproximadamente 0,8 mm, aproximadamente 1,0 mm, aproximadamente 1,5 mm, aproximadamente 1,8 mm, aproximadamente 2,0 mm, e/ou aproximadamente 2,25 mm, por exemplo. Em certas modalidades, os grampos podem ser formados para uma altura entre aproximadamente 2,25 mm e aproximadamente 3,0 mm, por exemplo. Além do exposto acima, a altura da área de aprisionamento de grampo de um grampo pode ser determinada pela altura formada do grampo e pela largura, ou diâmetro, do fio que compreende o grampo. Em várias modalidades, a altura da área de aprisionamento de grampo 10039 de um grampo 10030 pode compreender a altura formada H do grampo menos duas larguras de diâmetro do fio. Em certas modalidades, o fio do grampo pode compreender um diâmetro de aproximadamente 0,23 mm (0,0089”), por exemplo. Em várias modalidades, o fio do grampo pode compreender um diâmetro entre aproximadamente 0,18 mm (0,0069”) e aproximadamente 0,302 mm (0,0119”), por exemplo. Em ao MENOS uma modalidade exemplificadora, a altura formada H de um grampo 10030 pode ser de aproximadamente 4,80 mm (0,189”) e o diâmetro do fio do grampo pode ser aproximadamente 0,23 mm (0,0089”) resultando em uma latura de aprisionamento do grampo de aproximadamente 4,34 mm (0,171”), por exemplo.
[763] Em várias modalidades, além do exposto acima, o compen sador de espessura de tecido pode compreender uma altura não com-primida, ou pré-dispensada, e pode ser configurado para se deformar para uma dentre uma pluralidade de alturas comprimidas. Em certas modalidades, o compensador de espessura de tecido pode compreender uma altura não-comprimida de aproximadamente 3,18 (0,125”), por exemplo. Em várias modalidades, o compensador de espessura de tecido pode compreender uma altura não-comprimida maior que ou igual a aproximadamente 2,0 mm (0,080”), por exemplo. Em pelo menos uma modalidade, o compensador de espessura de tecido pode compreender uma altura não comprimida, ou pré-dispensada, que é maior que a altura não disparada dos grampos. Em pelo menos uma modalidade, a altura não comprimida, ou pré-dispensada, do compensador de espessura de tecido pode ser aproximadamente 10% mais alta, aproximadamente 20% mais alta, aproximadamente 40% mais alta, aproximadamente 60% mais alta, aproximadamente 80% mais alta, e/ou aproximadamente 100% alta, aproximadamente 30% mais alta, aproximadamente 50% mais alta, aproximadamente 70% mais alta, aproximadamente 90% mais mais alta que a altura não disparada dos grampos, por exemplo. Em pelo menos uma modalidade, a al-tura não comprimida, ou pré-dispensada, do compensador de espes-sura de tecido pode ser até aproximadamente 100% mais alta que a altura não disparada dos grampos, por exemplo. Em certas modalida-des, a altura não comprimida, ou pré-dispensada do compensador de espessura de tecido pode ser mais que 100% mais alta que a altura não disparada dos grampos, por exemplo. Em pelo menos uma moda-lidade, o compensador de espessura de tecido pode compreender uma altura não comprimida que é igual à altura não disparada dos grampos. Em pelo menos uma modalidade, o compensador de espessura de tecido pode compreender uma altura não comprimida que é menor que a altura não disparada dos grampos. Em pelo menos uma modalidade, a altura não comprimida, ou pré-dispensada do compensador de espessura pode ser aproximadamente 10% mais curta, apro-ximadamente 20% mais curta, aproximadamente 30% mais curta, aproximadamente 40% mais curta, aproximadamente 50% mais curta, aproximadamente 60% mais curta, aproximadamente 70% mais curta, aproximadamente 80% mais curta, e/ou aproximadamente 90% mais curta que a altura não disparada dos grampos, por exemplo. Em várias modalidades, a segunda porção compressível pode compreender uma altura não comprimida que é mais alta que uma altura não comprimida do tecido T sendo grampeado. Em certas modalidades, o compensador de espessura de tecido pode compreender uma altura não comprimida que é igual a uma altura não comprimida do tecido T sendo grampeado. Em várias modalidades, o compensador de espessura de tecido pode compreender uma altura não comprimida que é mais curta que uma altura não comprimida do tecido T sendo grampeado.
[764] Conforme descrito acima, um compensador de espessura de tecido pode ser comprimido dentro de uma pluralidade de grampos formados, independentemente de se tecido espesso ou tecido delgado é capturado dentro dos grampos. Em pelo menos uma modalidade exemplificadora, os grampos dentro de uma linha, ou fileira, de gram-pos podem ser deformados de modo que a área de aprisionamento de grampo de cada grampo compreenda uma altura de aproximadamente 2,0 mm, por exemplo, em que o tecido T e o compensador de espes-sura de tecido podem ser comprimidos dentro desta altura. Em deter-minadascircunstâncias, o tecido T pode compreender uma altura comprimida de aproximadamente 1,75 mm dentro da área de aprisio-namento de grampo enquanto o compensador de espessura de tecido pode compreender uma altura comprimida de aproximadamente 0,25 mm dentro da área de aprisionamento de grampo, totalizando assim a altura da área de aprisionamento de grampo de aproximadamente 2,0 mm, por exemplo. Em determinadas circunstâncias, o tecido T pode compreender uma altura comprimida de aproximadamente 1,50 mm dentro da área de aprisionamento de grampo enquanto o compensador de espessura de tecido pode compreender uma altura comprimida de aproximadamente 0,50 mm dentro da área de aprisionamento de grampo, totalizando assim a altura da área de aprisionamento de grampo de aproximadamente 2,0 mm, por exemplo. Em determinadas circunstâncias, o tecido T pode compreender uma altura comprimida de aproximadamente 1,25 mm dentro da área de aprisionamento de grampo enquanto o compensador de espessura de tecido pode com-preender uma altura comprimida de aproximadamente 0,75 mm dentro da área de aprisionamento de grampo, totalizando assim a altura da área de aprisionamento de grampo de aproximadamente 2,0 mm, por exemplo. Em determinadas circunstâncias, o tecido T pode compreen-der uma altura comprimida de aproximadamente 1,0 mm dentro da área de aprisionamento de grampo enquanto o compensador de espessura de tecido pode compreender uma altura comprimida de apro-ximadamente 1,0 mm dentro da área de aprisionamento de grampo, totalizando assim a altura da área de aprisionamento de grampo de aproximadamente 2,0 mm, por exemplo. Em determinadas circunstân-cias, o tecido T pode compreender uma altura comprimida de aproxi-madamente 0,75 mm dentro da área de aprisionamento de grampo enquanto o compensador de espessura de tecido pode compreender uma altura comprimida de aproximadamente 1,25 mm dentro da área de aprisionamento de grampo, totalizando assim a altura da área de aprisionamento de grampo de aproximadamente 2,0 mm, por exemplo. Em determinadas circunstâncias, o tecido T pode compreender uma altura comprimida de aproximadamente 1,50 mm dentro da área de aprisionamento de grampo enquanto o compensador de espessura de tecido pode compreender uma altura comprimida de aproximadamente 0,50 mm dentro da área de aprisionamento de grampo, totalizando as-sim a altura da área de aprisionamento de grampo de aproximadamen-te 2,0 mm, por exemplo. Em determinadas circunstâncias, o tecido T pode compreender uma altura comprimida de aproximadamente 0,25 mm dentro da área de aprisionamento de grampo enquanto o com-pensador de espessura de tecido pode compreender uma altura com-primida de aproximadamente 1,75 mm dentro da área de aprisiona-mento de grampo, totalizando assim a altura da área de aprisionamento de grampo de aproximadamente 2,0 mm, por exemplo.
[765] Em várias modalidades, além do exposto acima, o compen sador de espessura de tecido pode compreender uma altura não com-primida que é menor que a altura disparada dos grampos. Em certas modalidades, o compensador de espessura de tecido pode compreen-der uma altura não comprimida que é igual à altura disparada dos grampos. Em certas outras modalidades, o compensador de espessura de tecido pode compreender uma altura não comprimida que é mais alta que a altura disparada dos grampos. Em pelo menos uma tal mo-dalidade, a altura não comprimida de um compensador de espessura de tecido pode compreender uma espessura que é aproximadamente 110% da altura do grampo formado, aproximadamente 120% da altura do grampo formado, aproximadamente 130% da altura do grampo formado, aproximadamente 140% da altura do grampo formado, apro-ximadamente 150% da altura do grampo formado, aproximadamente 160% da altura do grampo formado, aproximadamente 170% da altura grampo formado, aproximadamente 180% da altura do grampo forma-do, aproximadamente 190% da altura do grampo formado, e/ou apro-ximadamente 200% da altura do grampo formado, por exemplo. Em certas modalidades, o compensador de espessura de tecido pode compreender uma altura não comprimida que é mais de duas vezes a altura disparada dos grampos. Em várias modalidades, o compensador de espessura de tecido pode compreender uma altura comprimida que é de aproximadamente 85% a aproximadamente 150% da altura do grampo formado, por exemplo. Em várias modalidades, conforme descrito acima, o compensador de espessura de tecido pode ser comprimido entre uma espessura não comprimida e uma espessura com-primida. Em certas modalidades, a espessura comprimida de um com-pensador de espessura de tecido pode ser aproximadamente 10% de sua espessura não comprimida, aproximadamente 20% de sua espes-suranão comprimida, aproximadamente 30% de sua espessura não comprimida, aproximadamente 40% de sua espessura não comprimida, aproximadamente 50% de sua espessura não comprimida, apro-ximadamente 60% de sua espessura não comprimida, aproximada-mente 70% de sua espessura não comprimida, aproximadamente 80% de sua espessura não comprimida, e/ou aproximadamente 90% de sua espessura não comprimida, por exemplo. Em várias modalidades, a espessura não comprimida do compensador de espessura de tecido pode ser aproximadamente duas vezes, aproximadamente dez vezes, aproximadamente cinquenta vezes, e/ou aproximadamente cem vezes mais espessa que sua espessura comprimida, por exemplo. Em pelo menos uma modalidade, a espessura comprimida do compensador de espessura de tecido pode ser entre aproximadamente 60% e aproxi-madamente 99% de sua espessura não comprimida. Em pelo menos uma modalidade, a espessura não comprimida do compensador de espessura de tecido pode ser pelo menos 50% mais espessa que sua espessura comprimida. Em pelo menos uma modalidade, a espessura não comprimida do compensador de espessura de tecido pode ser até cem vezes mais espessa que sua espessura comprimida. Em várias modalidades, a segunda porção compressível pode ser elástica, ou ao menos parcialmente elástica, e pode tracionar o tecido T contra as pernas deformadas dos grampos. Em pelo menos uma tal modalidade, a segunda porção compressível pode se expandir resilientemente entre o tecido T e a base do grampo de modo a empurrar o tecido T contra as pernas de grampo. Em certas modalidades, discutidas em mais detalhes abaixo, o compensador de espessura de tecido pode ser posicionado entre o tecido T e as pernas de grampo deformadas. Em vá-riascircunstâncias, como resultado do acima, o compensador de es-pessura de tecido pode ser configurado para consumir quaisquer vãos dentro da área de aprisionamento de grampo.
[766] Em várias modalidades, o compensador de espessura de tecido pode compreender materiais caracterizados por uma ou mais das seguintes propriedades: biocompatível, bioabsorvível, biorreabsorvível, biodurável, biodegradável, compressível, fluido absorvível, dilatável, autoexpansível, bioativa, medicamento, farmaceuticamente ati-vo,antiadesão, hemostático, antibiótico, antimicrobiano, antiviral, nutri-cional, adesivo, permeável, hidrofílico e/ou hidrofóbico, por exemplo. Em várias modalidades, um instrumento cirúrgico que compreende uma bigorna e um cartucho de grampos pode compreender um com-pensador de espessura de tecido associado à bigorna e/ou cartucho de grampos que compreende ao menos um dentre um agente hemostático, como fibrinaa e trombina, um antibiótico, como doxicpl e medi-camento, como metaloproteinases de matriz (MMPs). Em várias moda-lidades, o compensador de espessura de tecido pode compreender materiais sintético e/ou não-sintético. O compensador de espessura de tecido pode compreender uma composição polimérica que compreende um ou mais polímeros sintéticos e/ou um ou mais polímeros não sintéticos. O polímero sintético pode compreender um polímero sintéti-coabsorvível e/ou um polímero sintético não absorvível. Em várias modalidades, a composição polimérica pode compreender uma espu-mabiocompatível, por exemplo. A espuma biocompatível pode com-preender uma espuma de células abertas porosa e/ou uma espuma de célula fechada porosa, por exemplo. A espuma biocompatível pode ter uma morfologia de poro uniforme ou pode ter uma morfologia de poro gradiente (isto é, pequenos poros que aumentam gradualmente de ta-manho para poros grandes ao longo da espessura da espuma em uma direção). Em várias modalidades, a composição polimérica pode com-preender um ou mais de um arcabouço poroso, uma matriz porosa, uma matriz de gel, uma matriz de hidrogel, uma matriz de solução, uma matriz filamentosa, uma matriz tubular, uma matriz compósita, uma matriz membranosa, um polímero bioestável, e um polímero bio-degradável, e combinações dos mesmos. Por exemplo, o compensador de espessura de tecido pode compreender uma espuma reforçada por uma matriz filamentosa ou pode compreender uma espuma que tem uma camada de hidrogel adicional que se expande na presença de fluidos corporais para fornecer ainda mais compressão sobre o tecido. Em várias modalidades, um compensador de espessura de teci-dotambém poderia ser compreendido de um revestimento sobre um material e/ou uma segunda ou terceira camada que se expande na presença de fluidos corporais para fornecer ainda mais compressão sobre o tecido. Tal camada poderia ser um hidrogel que poderia ser um material sintético e/ou de derivação natural e poderia ser biodurável e/ou biodegradável, por exemplo. Em várias modalidades, o com-pensador de espessura de tecido pode compreender um microgel ou um nanogel. O hidrogel pode compreender microgéis e/ou nanogéis derivados de carboidrato. Em certas modalidades, um compensador de espessura de tecido pode ser reforçado com materiais não tecidos firbrosos ou elementos do tipo malha fibrosa, por exemplo, que podem fornecer flexibilidade, dureza e/ou resistência adicionais. Em várias modalidades, um compensador de espessura de tecido que tem uma morfologia porosa que exibe uma estrutura gradiente como, por exem-plo, pequenos poros sobre uma superfície e poros maiores sobre a outra superfície. Tal morfologia poderia ser melhor para crescimento interno do tecido ou comportamento hemostático. Adicionalmente, o gradiente também poderia ser composicional com um perfil de bioabsorção diferente. Um perfil de absorção de curto prazo pode ser preferencial para lidar com hemostase enquanto um perfil de absorção de longo prazo pode lidar melhor com cura de tecido sem vazamentos.
[767] Exemplos de materiais não sintéticos incluem, mas não se limitam a, polissacarídeo liofilizado, glicoproteína, pericárdio bovino, colágeno, gelatina, fibrinaa, fibrinogênio, elastina, proteoglicano, queratina, albumina, hidroxietilcelulose, celulose, celulose oxidada, celulo-se regenerada oxidada (ORC), hidroxipropilcelulose, carboxietilcelulose, carboximetilcelulose, quitana, quitosano, caseína, alginato e com-binações dos mesmos.
[768] Exemplos de materiais absorvíveis sintéticos incluem, mas não se limitam a, poli(ácido láctico) (PLA), poli(L-ácido lático) (PLLA), policaprolactona (PCL), poli(ácido glicólico) (PGA), poli(carbonato de trimetileno) (TMC), poli(tereftalato de etileno) (PET), poli(hidroxialcanoato) (PHA), um copolímero de glicolídeo e εcaprolactona (PGCL), um copolímero de glicolídeo e carbonato de trimetileno, poli(sebacato de glicerol) (PGS), poli(dioxanona) (PDS), poliésteres, poli(ortoésteres), poli(oxaésteres), poli(éter-ésteres), policar-bonatos,ésteres de poliamida, polianidridas, polissacarídeos, poli(éster-amidas), poliarilatos à base de tirosina, poliaminas, poli(iminocarbonatos) à base de tirosina, policarbonatos à base de tirosina, poli(D,L-lactídeo-uretano), poli(hidroxibutirato), poli(Bhidroxibutirato), poli(E-caprolactona), poli(etilenoglicol) (PEG), poli[bis(carboxilatofenoxi) fosfazeno
[769] Em várias modalidades, o polímero absorvível sintético po de compreender um ou mais dente copolímero 90/10 poli(glicolídeo-Llactídeo), disponível comercialmente junto à Ethicon, Inc. sob a desig-nação comercial VICRYL (polyglactic 910), poliglicolido, disponível comercialmente junto à American Cyanamid Co. sob a designação comercial DEXON, polidioxanona, disponível comercialmente junto à Ethicon, Inc. sob a designação comercial PDS, copolímero em bloco aleatório poli(glicolídeo-carbonato de trimetileno), disponível comerci-almente junto à American Cyanamid Co. sob a designação comercial MAXON, copolímero 75/25 poli(glicolideo-ε-caprolactonapoliglecaprolactona 25), disponível comercialmente junto à Ethicon sob a designação comercial MONOCRYL, por exemplo.
[770] Exemplos de materiais não absorvíveis sintéticos incluem, mas não se limitam a, poliuretano espumado, polipropileno (PP), polietileno (PE), policarbonato, poliamidas, como náilon, poli(cloreto de vinila) (PVC), poli(metacrilato de metila) (PMMA), poliestireno (PS), poliéster, poli(éter-éter-cetona) (PEEK), poli(tetrafluoroetileno) (PTFE), poli(trifluorocloroetileno) (PTFCE), poli(fluoreto de vinila) (PVF), etilenopropileno fluorado (FEP), poliacetal, polissulfona, silicones e combina-ções dos mesmos. Os polímeros não absorvíveis sintéticos podem in-cluir, mas não se limitam a, elastômeros espumados e elastômeros porosos, como, por exemplo, silicone, poli-isopreno, e borracha. Em várias modalidades, os polímeros sintéticos podem compreender politetrafluoroetileno expandido (ePTFE), disponível comercialmente junto à W. L. Gore & Associates, Inc. sob o nome comercial GORE-TEX Soft Tissue Patch e espuma de co-poliéter éster uretano disponível comer-cialmente junto à Polyganics sob o nome comercial NASOPORE.
[771] Em várias modalidades, a composição polimérica pode compreender de aproximadamente 50% a aproximadamente 90%, em peso, da composição polimérica de PLLA e aproximadamente 50% a aproximadamente 10%, em peso, da composição polimérica de PCL, por exemplo. Em pelo menos uma modalidade, a composição polimérica pode compreender aproximadamente 70%, em peso, de PLLA e aproximadamente 30%, em peso, de PCL, por exemplo. Em várias modalidades, a composição polimérica pode compreender de aproxi-madamente 55% a aproximadamente 85%, em peso, da composição polimérica de PGA e 15% a 45%, em peso, da composição polimérica de PCL, por exemplo. Em pelo menos uma modalidade, a composição polimérica pode compreender aproximadamente 65%, em peso, de PGA e aproximadamente 35%, em peso, de PCL, por exemplo. Em várias modalidades, a composição polimérica pode compreender de aproximadamente 90% a aproximadamente 95%, em peso, da compo-sição polimérica de PGA e aproximadamente 5% a aproximadamente 10%, em peso, da composição polimérica de PLA, por exemplo.
[772] Em várias modalidades, o polímero absorvível sintético po de compreender um copolímero elastomérico biocompatível bioabsorvível. Copolímeros elastoméricos bioabsorvíveis e biocompatíveis adequados incluem, mas não se limitam a, copolímeros de εcaprolactona e glicolídeo (de preferência, tendo uma razão molar entre ε-caprolactona e glicolídeo de cerca de 30:70 a cerca de 70:30, de pre-ferência 35:65 a cerca de 65:35, e com mais preferência 45:55 a 35:65); copolímeros elastoméricos de ε-caprolactona e lactídeo, inclu-indoL-lactídeo, blendas de D-lactídeo dos mesmos ou copolímeros de ácido láctico (de preferência, tendo uma razão molar entre εcaprolactona e lactídeo de cerca de 35:65 a cerca de 65:35 e com mais preferência 45:55 a 30:70) copolímeros elastoméricos de pdioxanona (1,4-dioxan-2-ona) e lactídeo incluindo L-lactídeo, Dlactídeo e ácido lático (de preferência, tendo uma razão molar entre pdioxanona e lactídeo de cerca de 40:60 a cerca de 60:40); copolímeros elastoméricos de ε-caprolactona e p-dioxanona (de preferência com uma razão molar entre ε-caprolactona e p-dioxanona de cerca de 30:70 a cerca de 70:30); copolímeros elastoméricos de p-dioxanona e trimetileno carbonato (de preferência com uma razão molar entre pdioxanona e trimetileno carbonato de cerca de 30:70 a cerca de 70:30); copolímeros elastoméricos de trimetileno carbonato e glicolídeo (de preferência com uma razão molar entre trimetileno carbonato e glicolídeo de cerca de 30:70 a cerca de 70:30); copolímero elastomérico de trimetileno carbonato e lactídeo, inclusive L-lactídeo, Dlactídeo, blendas dos mesmos ou copolímeros de ácido láctico (de pre-ferência com uma razão molar entre trimetileno carbonato e lactídeo de cerca de 30:70 a cerca de 70:30) e blendas dos mesmos. Em uma modalidade, o copolímero elastomérico é um copolímero de glicolídeo e ε-caprolactona. em uma outra modalidade, o copolímero elastomérico é um copolímero de lactídeo e ε-caprolactona.
[773] As descrições da patente US n° 5.468.253, intitulada ELASTOMERIC MEDICAL DEVICE, que foi concedida em 21 de no-vembro de 1995, e da patente US n° 6.325.810, intitulada FOAM BUT-TRESS FOR STAPLING APPARATUS, que foi concedida em 4 de de-zembro de 2001, estão aqui incorporadas, por referência nas suas respectivas totalidades.
[774] Em várias modalidades, o compensador de espessura de tecido pode compreender um emulsificante. Exemplos de emulsificantes podem incluir, mas não se limitam a, polímeros solúveis em água como, poli(álcool vinílico) (PVA), polivinilpirrolidona (PVP), poli(etilenoglicol) (PEG), poli(glicol propilênico) (PPG), PLURONICS, TWEENS, polissacarídeos e combinações dos mesmos.
[775] Em várias modalidades, o compensador de espessura de tecido pode compreender um tensoativo. Exemplos de tensoativos po-dem incluir, mas não se limitam a, poli(ácido acrílico), metalose, metilcelulose, etilcelulose, propilcelulose, hidroxietilcelulose, carboximetilcelulose, éter cetílico de polioxietileno, éter laurílico de polioxietileno, éter octílico de polioxietileno, éter octilfenílico de polioxietileno, éter oleílico de polioxietileno, monolaurato de polioxietileno de sorbitano, éter estearílico de polioxietileno, éter nonilfenílico de polioxietileno, dialquilfenoxi poli(etilenoxi) etanol e poloxâmeros.
[776] Em várias modalidades, a composição polimérica pode compreender um agente farmaceuticamente ativo. A composição polimérica pode liberar uma quantidade terapeuticamente eficaz do agente farmaceuticamente ativo. Em várias modalidades, o agente farmaceuticamente ativo pode ser liberado quando a composição polimérica é dessorvida/absorvida. Em várias modalidades, o agente farmaceuticamente ativo pode ser liberado no fluido, como, por exemplo, sangue, que passa sobre ou através da composição polimérica. Exemplos de agentes farmaceuticamente ativos podem incluir, mas não se limitam a, agentes hemostáticos e fármacos, como, por exemplo, fibrinaa, trombina, e celulose regenerada oxidada (ORC); medicamentos antiinflamatórios, como, por exemplo, diclofenaco, aspirina, naproxeno, sulindaco, e hidrocortisona; fármacos ou agentes antibióticos e antimicrobianos, como, por exemplo, triclosano, prata iônica, ampicilina, gentamicina, polimixina B, cloranfenicol; e agentes anticâncer, como, por exemplo, cisplatina, mitomicina, adriamicina.
[777] Em várias modalidades, a composição polimérica pode compreender um material hemostático. O compensador de espessura de tecido pode compreender materiais hemostáticos que compreen-dempoli(ácido láctico), poli(ácido glicólico), poli(hidroxibutirato), poli(caprolactona), poli(dioxanona), poli(óxidos de alquileno), co-poli(éterésteres), colágeno, gelatina, trombina, fibrinaa, fibrinaogênio, fibronectina, elastina, albumina, hemoglobina, ovalbumina, polissacarídeos, ácido hialurônico, sulfato de condroitina, amido de hidroxietila, hidroxietilcelulose, celulose, celulose oxidada, hidroxipropilcelulose, carboxietilcelulose, carboximetilcelulose, quitana, quitosano, agarose, maltose, maltodextrina, alginato, fatores de coagulação, metacrilato, poliureta-nos, cianoacrilatos, agonistas de plaqueta, vasoconstritores, alume, cálcio, peptídeos de RGD, proteínas, sulfato de protamina, ácido εamino caproico, sulfato férrico, subsulfatos férricos, cloreto férrico, zin-co, cloreto de zinco, cloreto de alumínio, sulfatos de alumínio, acetatos de alumínio, permanganatos, taninas, cera de osso, poli(glicóis etilênicos), fucanos e combinações dos mesmos. O compensador de espes-sura de tecido pode ser caracterizado por propriedades hemostáticas.
[778] A composição polimérica de um compensador de espessu ra de tecido pode ser caracterizada pelo percentual de porosidade, pelo tamanho dos poros, e/ou pela dureza, por exemplo. Em várias mo-dalidades, a composição polimérica pode ter um percentual de porosi-dade de aproximadamente 30%, em volume, a aproximadamente 99%, em volume, por exemplo. Em certas modalidades, a composição polimérica pode ter um percentual de porosidade de aproximadamente 60%, em volume, a aproximadamente 98%, em volume, por exemplo. Em várias modalidades, a composição polimérica pode ter um percen-tual de porosidade de aproximadamente 85%, em volume, a aproxi-madamente 97%, em volume, por exemplo. Em pelo menos uma mo-dalidade, a composição polimérica pode compreender aproximada-mente 70%, em peso de PLLA e aproximadamente 30%, em peso, de PCL, por exemplo, e pode compreender aproximadamente 90% de porosidade por volume, por exemplo. Em pelo menos uma tal modali-dade, como resultado, a composição polimérica compreenderia apro-ximadamente 10% de copolímero por volume. Em pelo menos uma modalidade, a composição polimérica pode compreender aproximadamente 65%, em peso, de PGA e aproximadamente 35%, em peso, de PCL, por exemplo, e pode ter um percentual de porosidade de aproximadamente 93%, em volume, a aproximadamente 95%, em vo-lume, por exemplo. Em várias modalidades, a composição polimérica pode compreender mais de 85% de porosidade por volume. A compo-sição polimérica pode ter um tamanho de poro de aproximadamente 5 micrômetros a aproximadamente 2000 micrômetros, por exemplo. Em várias modalidades, a composição polimérica pode ter um tamanho de poro entre aproximadamente 10 micrômetros a aproximadamente 100 micrômetros, por exemplo. Em pelo menos uma tal modalidade, a composição polimérica pode compreender um copolímero de PGA e PCL, por exemplo. Em certas modalidades, a composição polimérica pode ter um tamanho de poro entre aproximadamente 100 micrômetros a aproximadamente 1000 micrômetros, por exemplo. Em pelo me-nos uma tal modalidade, a composição polimérica pode compreender um copolímero de PLLA e PCL, por exemplo.
[779] De acordo com determinados aspectos, a dureza de uma composição polimérica pode ser expressa em termos da dureza Shore, que pode ser definida como a resistência à indentação permanente de um material, conforme determinado com um durômetro, como um durômetro Shore. de modo a avaliar o valor do durômetro para um dado material, uma pressão é aplicada ao material com um pé indentador de durômetro de acordo com o procedimento ASTM D2240-00, intitu-lado,"Standard Test Method for Rubber Property-Durometer Hardness", que está totalmente incorporado aqui, por referência. O pé indentador do durômetro pode ser aplicado ao material por um período de tempo suficiente, como 15 segundos, por exemplo, em que uma leitura é então feita na escala adequada. dependendo do tipo de escala usada, uma leitura de 0 pode ser obtida quando o pé indentador penetra completamente no material, e uma leitura de 100 pode ser obtida quando não ocorre qualquer penetração no material. Esta leitura é adimensional. Em várias modalidades, o durômetro pode ser determi-nado de acordo com qualquer escala adequada, como escalas tipo A e/ou tipo OO, por exemplo, de acordo com ASTM D2240-00. Em várias modalidades, a composição polimérica de um compensador de espessura de tecido pode ter um valor de dureza Shore A de aproxi-madamente 4 A a aproximadamente 16 A, por exemplo, que é aproxi-madamente 45 OO a aproximadamente 65 OO na faixa Shore OO. Em pelo menos uma tal modalidade, a composição polimérica pode com-preender um copolímero de PLLA/PCL ou um copolímero de PGA/PCL, por exemplo. Em várias modalidades, a composição polimérica de um compensador de espessura de tecido pode ter um valor de dureza Shore A menor que 15 A. Em várias modalidades, a composição polimérica de um compensador de espessura de tecido pode ter um valor de dureza Shore A menor que 10 A. Em várias modalidades, a composição polimérica de um compensador de espessura de tecido pode ter um valor de dureza Shore A menor que 5 A. Em certas moda-lidades, o material polimérico pode ter um valor da composição Shore OO de aproximadamente 35 OO a aproximadamente 75 OO, por exemplo.
[780] Em várias modalidades, a composição polimérica pode ter pelo menos duas das propriedades identificadas acima. Em várias modalidades, a composição polimérica pode ter pelo menos três das propriedades identificadas acima. A composição polimérica pode ter uma porosidade de 85% a 97%, em volume, um tamanho de poro de 5 micrômetros a 2000 micrômetros, e um valor de dureza Shore A de 4 A a 16 A e um valor de dureza Shore OO de 45 OO a 65 OO, por exemplo. Em pelo menos uma modalidade, a composição polimérica pode compreender 70%, em peso, da composição polimérica de PLLA e 30%, em peso, da composição polimérica de PCL tendo uma porosidade de 90%, em volume, um tamanho de poro de 100 micrômetros a 1000 micrômetros, e um valor de dureza Shore A de 4 A a 16 A e um valor de dureza Shore OO de 45 OO a 65 OO, por exemplo. Em pelo menos uma modalidade, a composição polimérica pode compreender 65%, em peso, da composição polimérica de PGA e 35%, em peso, da composição polimérica de PCL tendo uma porosidade de 93% a 95%, em volume, um tamanho de poro de 10 micrômetros a 100 micrômetros, e um valor de dureza Shore A de 4 A a 16 A e um valor de dureza Shore OO de 45 OO a 65 OO, por exemplo.
[781] Em várias modalidades, o compensador de espessura de tecido pode compreender um material que expande. Conforme discuti-do acima, o compensador de espessura de tecido pode compreender um material compactado que se expande quando não compactado ou instalado, por exemplo. Em várias modalidades, o compensador de espessura de tecido pode compreender um material autoexpansível formado in situ. Em várias modalidades, o compensador de espessura de tecido pode compreender ao menos um precursor selecionado para reticular espontaneamente quando colocado em contato com ao menos um dentre outro(s) precursor(es), água e/ou fluidos corporais. Com referência à FIGURA 534, em várias modalidades, um primeiro precur-sor podem entrar em contato com um ou mais outros precursores para formar um compensador de espessura de tecido expansível e/ou dilatável Em várias modalidades, o compensador de espessura de tecido pode compreender uma composição dilatável por fluido, como uma composição dilatável em água, por exemplo. Em várias modalidades, o compensador de espessura de tecido pode compreender uma água que compreende gel.
[782] Com referência às FIGURAS 518A e B, por exemplo, um compensador de espessura de tecido 70000 pode compreender pelo menos um precursor de hidrogel 70010 selecionado para formar um hidrogel in situ e/ou in vivo para expandir o compensador de espessura de tecido 70000. A FIGURA 518A ilustra um compensador de es-pessura de tecido 70000 que compreende uma encapsulação que compreende um primeiro precursor de hidrogel 70010A e um segundo precursor de hidrogel 70010B antes da expansão. Em certas modali-dades, conforme mostrado na FIGURA 518A, o primeiro precursor de hidrogel 70010A e o segundo precursor de hidrogel 70010B podem estar fisicamente separados um do outro na mesma encapsulação. Em certas modalidades, uma primeira encapsulação pode compreender o primeiro precursor de hidrogel 70010A e uma segunda encapsulação pode compreender o segundo precursor de hidrogel 70010B. A FIGU-RA 518B ilustra a expansão do compensador de espessura de tecido 70000 quando o hidrogel é formado in situ e/ou in vivo. Conforme mos-trado na FIGURA 518B, a encapsulação pode ser rompida e o primeiro precursor de hidrogel 70010A pode entrar em contato com o segundo precursor de hidrogel 70010B para formar o hidrogel 70020. Em certas modalidades, o hidrogel pode compreender um material expansível. Em certas modalidades, o hidrogel pode expandir-se por até 72 horas, por exemplo.
[783] Em várias modalidades, o compensador de espessura de tecido pode compreender uma espuma biodegradável tendo uma encapsulação que compreende partículas ou grânulos de hidrogel seco embutidos. Sem ater-se a nenhuma teoria, as encapsulações na es-puma podem ser formadas ao entrar em contato com uma solução aquosa de um precursor de hidrogel e uma solução orgânica de mate-riaisbiocompatíveis para formar a espuma. Conforme mostrado na FIGURA 535, a solução aquosa e a solução orgânica podem formar micelas. A solução aquosa e a solução orgânica podem ser secas para encapsular partículas ou grânulos de hidrogel seco na espuma. Por exemplo, um precursor de hidrogel, como um polímero hidrofílico, pode ser dissolvido em água para formar uma dispersão de micelas. A solução aquosa pode entrar em contato uma solução orgânica de dioxano que compreende poli(ácido glicólico) e policaprolactona. As soluções aquosa e orgânica podem ser liofilizadas para formar uma espuma biodegradável que tem partículas ou grânulos de hidrogel seco dispersos na mesma. Sem ater-se a nenhuma teoria, acredita-se que as micelas formam a encapsulação que tem as partículas ou grânulos de hidrogel seco dispersos na estrutura de espuma. Em certas modalidades, a encapsulação pode ser rompida, e as partículas ou grânulos de hidrogel seco podem entrar em contato com um fluido, como um fluido corporal, e expandir.
[784] Em várias modalidades, o compensador de espessura de tecido pode expandir-se quando colocado em contato com um ativador, como um fluido, por exemplo. Com referência à FIGURA 519, por exemplo, um compensador de espessura de tecido 70050 pode com-preender um material dilatável, como um hidrogel, que se expande quando entra em contato com um fluido 70055, como fluidos corporais, solução salina, água e/ou um ativador, por exemplo. Exemplos de flui-dos corporais podem incluir, mas não se limitam a, sangue, plasma, fluido peritoneal, líquido cefalorraquidinano, urina, fluido linfático, fluido sinovial, fluido vítreo, saliva, conteúdo luminal gastrointestinal, bile e/ou gás (por exemplo, CO2). Em certas modalidades, o compensador de espessura de tecido 70050 pode expandir-se quando a compensador de espessura de tecido 70050 absorve o fluido. Em outro exemplo, o compensador de espessura de tecido 70050 pode compreender um hidrogel não reticulado que se expande quando entra em contato com um ativador 70055 que compreende um agente de reticulação para formar um hidrogel reticulado. Em várias modalidades, o compensador de espessura de tecido pode expandir-se quando colocado em contato com um ativador. Em várias modalidades, o compensador de espessura de tecido pode expandir-se ou inchar a partir do contato por até 72 horas, como de 24 a 72 horas, até 24 horas, até 48 horas e até 72 ho-ras, por exemplo, para fornecer aumento de pressão contínuo e/ou compactação ao tecido. Conforme mostrado na FIGURA 519, a es-pessura inicial do compensador de espessura de tecido 70050 pode ser menor do que uma espessura expandida após o contato do fluido 70055 com o compensador de espessura de tecido 70050.
[785] Com referência às FIGURAS 516 e 517, em várias modali dades, um cartucho de grampos 70100 pode compreender um com-pensador de espessura de tecido 70105 e uma pluralidade de grampos 70110 cada um que compreende pernas de grampo 70112. Conforme mostrado na FIGURA 516, o compensador de espessura de tecido 70105 pode ter uma espessura inicial ou altura compactada que é menor do que a altura disparada dos grampos 70110. O compensador de espessura de tecido 70100 pode ser configurado para expandir-se in situ e/ou in vivo quando entrar em contato com um fluido 70102, como fluidos corporais, solução salina e/ou um ativador, por exemplo, para empurrar o tecido T contra as pernas 70112 do grampo 70110. Conforme mostrado na FIGURA 517, o compensador de espessura de tecido 70100 pode se expandir e/ou se dilatar quando entrar em contato com um fluido 70102. O compensador de espessura de tecido 70105 pode compensar a espessura do tecido T capturado por cada grampo 70110. Conforme mostrado na FIGURA 517, o compensador de espessura de tecido 70105 pode ter uma espessura expandida ou uma altura não compactada que é menor do que a altura disparada dos grampos 70110.
[786] Em várias modalidades, conforme descrito acima, o com pensador de espessura de tecido pode compreender uma espessura inicial e um espessura expandida. Em certas modalidades, a espessura inicial de um compensador de espessura de tecido pode ser aproximadamente 0,001% de sua espessura expandida, aproximadamente 0,01% de sua espessura expandida, aproximadamente 0,1% de sua espessura expandida, aproximadamente 1% de sua espessura expan-dida, aproximadamente 10% de sua espessura expandida, aproxima-damente 20% de sua espessura expandida, aproximadamente 30% de sua espessura expandida, aproximadamente 40% de sua espessura expandida, aproximadamente 50% de sua espessura expandida, apro-ximadamente 60% de sua espessura expandida, aproximadamente 70% de sua espessura expandida, aproximadamente 80% de sua es-pessura expandida, e/ou aproximadamente 90% de sua espessura ex-pandida, por exemplo. Em várias modalidades, a espessura expandida do compensador de espessura de tecido pode ser aproximadamente duas vezes, aproximadamente cinco vezes, aproximadamente dez ve-zes, aproximadamente cinquenta vezes, aproximadamente cem vezes, aproximadamente duzentas vezes, aproximadamente trezentas vezes, aproximadamente quatrocentas vezes, aproximadamente quinhentas vezes, aproximadamente seiscentas vezes, aproximadamente sete-centas vezes, aproximadamente oitocentas vezes, aproximadamente novecentas vezes e/ou aproximadamente mil vezes mais espessa do que sua espessura inicial, por exemplo. Em várias modalidades, a es-pessura inicial do compensador de espessura de tecido pode ser de até 1% sua espessura expandida, até 5% sua espessura expandida, até 10% sua espessura expandida e até 50% da espessura expandida. Em várias modalidades, a espessura expandida do compensador de espessura de tecido pode ser ao menos 50% mais espessa do que sua espessura inicial, pelo menos 100% mais espessa do que sua es-pessura inicial, ao menos 300% mais espessa do que sua espessura inicial e pelo menos 500% mais espessa do que sua espessura inicial. Conforme descrito acima, em várias circunstâncias, como resultado do que foi disposto acima, o compensador de espessura de tecido pode ser configurado para consumir qualquer vão dentro da área de aprisio-namento de grampo.
[787] Como discutido acima, em várias modalidades, o compen sador de espessura de tecido pode compreender um hidrogel. Em vá-rias modalidades, o hidrogel pode compreender hidrogéis de homopolímero, hidrogéis de copolímero, hidrogéis de multipolímeros, hidrogéis de polímeros interpenetrantes e combinações dos mesmos. Em várias modalidades, o hidrogel pode compreender microgéis, nanogéis, e combinações dos mesmos. O hidrogel pode compreender, em geral, uma rede de polímero hidrofílico que tem a capacidade de absorver e/ou reter fluidos. Em várias modalidades, o hidrogel pode compreen-der um hidrogel não reticulado, um hidrogel reticulado, e combinações dos mesmos. O hidrogel pode compreender reticulações químicas, reticulações físicas, segmentos hidrofóbicos e/ou segmentos insolúveis em água. O hidrogel pode ser quimicamente reticulado por meio de polimerização, reticulação de pequena molécula e/ou reticulação de polímero-polímero. O hidrogel pode ser fisicamente reticulado por meio de interações iônicas, interações hidrofóbicas, interações de ligação ao hidrogênio, esterocomplexação e/ou química supramolecular. O hidrogel pode ser substancialmente insolúvel devido às reticulações, aos segmentos hidrofóbicos e/ou segmentos insolúveis em água, mas pode ser expansível e/ou dilatável devido à absorção e/ou retenção de fluidos. Em certas modalidades, o precursor pode reticular-se com ma-teriais e/ou tecidos endógenos.
[788] Em várias modalidades, o hidrogel pode compreender um hidrogel ambientalmente sensível (ESH). O ESH pode compreender materiais que têm propriedades de dilatação de fluido relacionadas a condições ambientais. As condições ambientais podem incluir, mas não se limitam a, as condições físicas, condições biológicas e/ou con-dições químicas no sítio cirúrgico. Em várias modalidades, o hidrogel pode inchaço ou encolher em resposta à temperatura, pH, campos elé-tricos,força iônica, reações enzimática e/ou química, estímulos elétricos e/ou magnéticos e outro variáveis fisiológicas e ambientais, por exemplo. Em várias modalidades, o ESH pode compreender acrilatos, metacrilato de hidróxi-etila (HEMA), acrilatos elastoméricos multifunci-onais e monômeros relacionados. Em uma modalidade, o compensador de espessura compressível compreende uma espuma bioabsorvível que tem um agente hidrofílico ou hidrofóbico disperso nela ou um agente hidrofílico ou hidrofóbico revestido em uma ou mais de suas superfícies ou através da alteração do copolímero do compensador para um copolímero hidrofílico ou hidrofóbico. Incluir um agente hidrofílico fará que o compensador de espessura de um tecido absorvível absorva a uma velocidade mais rápida e liberará quaisquer agentes dentro do compensador (como fármacos) de forma mais rápida. Exemplos de tais agentes incluem uma ampla variedade de tensoativos como: ésteres de ácido graxo, triglicerídeos; colesterol, colesterol aniônico; carboxilatos (como carboxilatos de éster e carboxilatos de éter). Outros hidrofílicos incluem; hidrofílicos à base de ácido láctico (LACTEM), à base de ácido ascórbico.
[789] Incluir um agente hidrofóbico fará um compensador de es pessura de tecido absorvível absorver a uma velocidade mais baixa e liberará quaisquer agentes dentro do compensador (como fármacos) de forma mais lenta. Tais agentes hidrofílicos são bem conhecidos e incluem silicone e compostos à base de silicone e plásticos.
[790] Em várias modalidades, o compensador de espessura de tecido que compreende um hidrogel pode compreender ao menos um dentre os materiais e os materiais sintéticos descritos acima. O hidrogel pode compreender um hidrogel sintético e/ou um hidrogel não sin-tético. Em várias modalidades, o compensador de espessura de tecido pode compreender uma pluralidade de camadas. A pluralidade das camadas pode compreender camadas porosas e/ou camadas não po-rosas. Por exemplo, o compensador de espessura de tecido pode compreender uma camada não porosa e uma camada porosa. Em ou-tro exemplo, o compensador de espessura de tecido pode compreender uma camada porosa intermediária a uma primeira camada não porosa e uma segunda camada não porosa. Em outro exemplo, o com-pensador de espessura de tecido pode compreender uma camada não porosa intermediária a uma primeira camada porosa e uma segunda camada porosa. As camadas não porosas e as camadas porosas po-dem ser posicionadas em qualquer ordem em relação às superfícies do cartucho de grampos e/ou à bigorna.
[791] Exemplos do material não sintético podem incluir, mas não se limitam a, albumina, alginato, carboidrato, caseína, celulose, quitina, quitosano, colágeno, sangue, dextrano, elastina, fibrinaa, fibrinaogênio, gelatina, heparina, ácido hialurônico, queratina, proteína, soro e amido. A celulose pode compreender hidroxietilcelulose, celulose oxi-dada, celulose regenerada oxidada (ORC), hidroxipropilcelulose, carboxietilcelulose, carboximetilcelulose e combinações dos mesmos. O colágeno pode compreender pericárdio bovino. O carboidrato pode compreender um polissacarídeo, como polissacarídeo liofilizado. A proteína pode compreender glicoproteína, proteoglicano e combinações dos mesmos.
[792] Exemplos do material sintético podem incluir, mas não se limitam a, poli(ácido láctico), poli(ácido glicólico), poli(hidroxibutirato), poli(fosfazina), poliésteres, poli(glicóis etilênicos), poli(óxido de etileno), poli(óxido de etileno)-co-poli(óxido de propileno), co-poli(óxido de etileno), poli(óxidos de alquileno), poliacrilamidas, poli(metacrilato de hidroxietila), polivinilpirrolidona, poli(álcoois vinílicos), poli(caprolactona), poli(dioxanona), poli(ácido acrílico), poliacetato, polipropileno, poliésteres alifáticos, gliceróis, poli(aminoácidos), copoli(éter-ésteres), poli(oxalatos de alquileno), poliamidas, poli(iminocarbonatos), poli(oxaésteres), poli(ortoésteres), polifosfazenos e combinações dos mesmos. Em certas modalidades, os materiais não-sintéticos acima podem ser sinteticamente preparados, por exem-plo,ácido hialurônico sintético, utilizando os métodos convencionais.
[793] Em várias modalidades, o hidrogel pode ser produzido a partir de um ou mais precursores de hidrogel. O precursor pode com-preender um monômero e/ou um macrômero. O precursor de hidrogel pode compreender um grupo funcional eletrófilo e/ou um grupo funcio-naleletrófilo nucleófilo. Em geral, os eletrófilos podem reagir com nucleófilos para formar uma ligação. O termo "grupo funcional" como usado aqui, se refere a grupos eletrofílicos ou nucleofílcios que têm a capacidade de reagir entre si para formar uma ligação. Exemplos de grupos funcionais eletrofílicos podem incluir, mas não se limitam a, Nhidroxisuccinimidas ("NHS"), sulfosuccinimidas, carbonildi-imidazol, cloreto de sulfonila, haletos de arila, sulfosuccinimidil-ésteres, Nhidroxisuccinimidil-ésteres, succinimidil-ésteres como succinatos de succinimidila e/ou propionatos de succinimidila, isocianatos, tiocianatos, carbodi-imidas, carbonatos de benzotriazol, epóxidos, aldeídos, maleimidas, imidoésteres, combinações dos mesmos e similares. Em ao menos uma modalidade, o grupo funcional eletrofílico pode com-preender um éster succinimidil. Exemplos de grupos funcionais nucleófilos podem incluir, mas não se limitam a, -NH2, -SH, -OH, -PH2 e -CONH-NH2.
[794] Em várias modalidades, o hidrogel pode ser formado a par tir de um precursor único ou precursores múltiplos. Em certas modali-dades, o hidrogel pode ser formado a partir de um primeiro precursor e um segundo precursor. O primeiro precursor de hidrogel e o segundo precursor de hidrogel podem formar um hidrogel in situ e/ou in vivo mediante contato. O precursor de hidrogel pode se referir, em geral, a um polímero, um grupo funcional, uma macromolécula, uma molécula pequena e/ou um reticulador que pode fazer parte de uma reação para formar um hidrogel. O precursor pode compreender uma solução ho-mogênea, heterogênea ou uma solução de fase separada em um sol-vente adequado, como água ou um tampão, por exemplo. O tampão pode ter um pH de cerca de 8 a cerca de 12 como, cerca de 8,2 a cerca de 9, por exemplo. Exemplos de tampões podem incluir, mas não se limitam a, tampões de borato. Em certas modalidades, o(s) precursor(es) pode estar em uma emulsão. Em várias modalidades, um pri-meiro precursor pode reagir com um segundo precursor para formar um hidrogel. Em várias modalidades, o primeiro precursor pode espon-taneamente reticular-se quando colocado em contato com o segundo precursor. Em várias modalidades, um primeiro conjunto de grupos funcionais eletrofílicos em um primeiro precursor pode reagir com um segundo conjunto de grupos funcionais nucleofílicos em um segundo precursor. Quando os precursores são misturados em um ambiente que permite a reação (por exemplo, em relação ao pH, à temperatura e/ou ao solvente), os grupos funcionais podem reagir entre si para formar ligações covalentes. Os precursores podem se tornar reticulados quando pelo menos alguns dos precursores reagirem com mais de um outro precursor.
[795] Em várias modalidades, o compensador de espessura de tecido pode compreender e ao menos um monômero selecionado do grupo que consiste em sal de potássio de acrilato de 3-sulfopropila ("KSPA"), acrilato de sódio ("NaA"), N-(tris(hidróxi metil)metil)acrilamida ("tris acrila") e 2-acrilamido-2-metil-1-propano ácido sulfônico (AMPS). O compensador de espessura de tecido pode com-preender um copolímero que compreende dois ou mais monômeros selecionados a partir do grupo que consiste em KSPA, NaA, tris acril, AMPS. O compensador de espessura de tecido pode compreender homopolímeros derivados de KSPA, NaA, trisacril e AMPS. O com-pensador de espessura de tecido pode compreender monômeros mo-dificadores de capacidade hidrofílica copolimerizáveis com o mesmo. Os monômeros modificadores de capacidade hidrofílica podem com-preender metacrilato de metila, acrilato de butila, acrilato de ciclohexila, estireno, ácido estirenossulfônico.
[796] Em várias modalidades, o compensador de espessura de tecido pode compreender um reticulador. O reticulador pode compre-ender um agente de reticulação di ou polivinílico de baixo peso mole-cular, como diacrilato ou dimetacrilato de etilenoglicol, diacrilato ou dimetacrilato de di-, triou tetra(etilenoglicol), (met)acrilato de alila, um diacrilato ou dimetacrilato C2-C8-alquileno, éter divinílico, sulfona divinílica, die trivinilbenzeno, triacrilato ou trimetacrilato de trimetilolpropano, tetra-acrilato ou tetrametacrilato pentaeritritol, diacrilato ou dimetacrilato bisfenol A, metileno-bis-acrilamida ou bis-metacrilamida, etilenobis-acrilamida ou etileno-bis-metacrilamida, ftalato de trialila ou ftalato de dialila. Em ao menos uma modalidade, o reticulador pode compre-ender N,N'-metileno-bis-acrilamida ("MBAA").
[797] Em várias modalidades, o compensador de espessura de tecido pode compreender ao menos um dentre hidrogéis funcionais de acrilato e/ou metacrilato, fotoiniciador biocompatível, alquilacianoacrilatos, macrômeros funcionais de isocianato, opcionalmente compreendendo macrômeros funcionais de amina, macrômeros funci-onais de éster de succinimidila, opcionalmente compreendendo macrômeros funcionais de amina e/ou sulfidrila, macrômeros funcionais de epóxi, opcionalmente comprendendo macrômeros funcionais de amina, misturas de proteínas e/ou polipeptídeos e reticuladores de al-deído,Genipin e carbodi-iminas solúveis em água, polissacarídeos aniônicos e cátions polivalentes.
[798] Em várias modalidades, o compensador de espessura de tecido pode compreender monômeros de ácido insaturado orgânico, álcoois substituídos por acrílico e/ou acrilamidas. Em várias modalida-des, o compensador de espessura de tecido pode compreender ácidos metacrílicos, ácidos acrílicos, glicerolacrilato, glicerolmetacrilato, 2metacrilato de hidróxi-etila, 2-hidroxietilacrilato, metacrilato de 2(dimetilaminoetila), N-vinil pirrolidona, metacrilamida e/ou N, Ndimetilacrilamida poli(ácido metacrílico).
[799] Em várias modalidades, o compensador de espessura de tecido pode compreender um material de reforço. Em várias modalida-des, o material de reforço pode compreender ao menos um dentre ma-teriaisnão sintéticos e materiais sintéticos descritos acima. Em várias modalidades, o material de reforço pode compreender colágeno, gela-tina, fibrina, fibrinogênio, elastina, queratina, albumina, hidróxi etil celu-lose, celulose, celulose oxidada, hidroxipropil celulose, carboxietil celu-lose, carboximetilcelulose, quitana, quitosano, alginato, poli(ácido lácti-co),poli(ácido glicólico), poli(hidroxibutirato), poli(fosfazina), poliésteres, polietileno glicóis, poli(óxidos de alquileno), poliacrilamidas, polihidroxietilmetilacrilato, polivinilpirrolidona, poli(álcoois vinílicos), poli(caprolactona), poli(dioxanona), ácido poliacrílico, poliacetato, policaprolactona, polipropileno, poliésteres alifáticos, gliceróis, poli(aminoácidos), copoli(éter-ésteres), poli(oxalatos de alquileno), poliamidas, poli(iminocarbonatos, poli(oxalatos de alquileno), polioxaésteres, poliortoésteres, polifosfazenas e combinações dos mesmos.
[800] Em várias modalidades, o compensador de espessura de tecido pode compreender uma camada que compreende o material de reforço. Em certas modalidades, uma camada porosa e/ou uma cama-danão-porosa de um compensador de espessura de tecido pode compreender o material de reforço. Por exemplo, a camada porosa pode compreender o material de reforço e a camada não porosa pode não compreender o material de reforço. Em várias modalidades, a ca mada de reforço pode compreender uma camada interna intermediário a uma primeira camada não porosa e uma segunda camada não poro-sa. Em certas modalidades, a camada de reforço pode compreender uma camada externa do compensador de espessura de tecido. Em certas modalidades, a camada de reforço pode compreender uma su-perfície exterior do compensador de espessura de tecido.
[801] Em várias modalidades, o material de reforço pode com preender redes, monofilamentos, tranças de multifilamentos, fibras, esteiras, feltros, partículas e/ou pós. Em certas modalidades, o material de reforço pode ser incorporado em uma camada do compensador de espessura de tecido. O material de reforço pode ser incorporado a pelo menos uma dentre uma camada não porosa e uma camada porosa. Uma malha que compreende o material de reforço pode ser formada com o uso de técnicas convencionais como, por exemplo, tricotagem, tecelagem, crochê e/ou fabricação de rendas.
[802] Em várias modalidades, uma pluralidade de materiais de reforço pode ser orientado em uma direção aleatória e/ou uma direção comum. Em certas modalidades, a direção comum pode ser uma para-lelaà linha de grampos e perpendicular à linha de grampos, por exem-plo. Por exemplo, as tranças monofilamentosas e/ou multifilamentosas podem ser orientadas em uma direção aleatória e/ou em uma direção comum. As tranças monofilamentosas e multifilamentosas podem ser associadas à camada não porosa e/ou à camada porosa. Em várias modalidades, o compensador de espessura de tecido pode compreen-der uma pluralidade de fibras de reforço orientadas em uma direção aleatória dentro de uma camada não porosa. Em várias modalidades, o compensador de espessura de tecido pode compreender uma plura-lidade de fibras de reforço orientadas em uma direção comum dentro de uma camada não porosa.
[803] Em várias modalidades, com referência à FIGURA 528, uma bigorna 70300 pode compreender um compensador de espessura de tecido 70305 que compreende uma primeira camada não porosa 70307 e uma segunda camada não porosa 70309 encerra de modo vedante uma camada de reforço 70310. Em várias modalidades, a camada de reforço 70310 pode compreender um hidrogel que com-preendepartículas ou fibras ORC nele embutidas, e a camada não po-rosas pode compreender ORC. Conforme mostrado na FIGURA 528, o compensador de espessura de tecido 70305 pode ser configurado para conformar-se ao contorno da bigorna 70300. A camada interna do compensador de espessura de tecido 70305 pode se conformar à su-perfície interna da bigorna 70300, que inclui os bolsos de formação 70301.
[804] As fibras podem formar um material não tecido como, por exemplo, uma manta e um feltro. As fibras podem ter qualquer com-primento adequado como, por exemplo, de 0,1 mm a 100 mm e 0,4 mm a 50 mm. O material de reforço pode ser triturado até formar um pó. O pó pode ter um tamanho de partícula de 10 micrômetros a 1 cm, por exemplo. O pó pode ser incorporado ao compensador de espessura de tecido.
[805] Em várias modalidades, o compensador de espessura de tecido pode ser formado in situ. Em várias modalidades, o hidrogel po-de ser formado in situ. O compensador de espessura de tecido pode ser formado in situ por meio de ligações covalentes, iônicas e/ou hidrofóbicas. As reticulações físicas (não covalentes) podem resultar de complexação, ligação ao hidrogênio, dessolvatação, interações de Van der Waals, ligação iônica e combinações dos mesmos. A reticulação química (covalente) pode ser realizada por meio de qualquer número de mecanismos, incluindo: polimerização de radical livre, polimerização por condensação, polimerização aniônica ou catiônica, polimerização de crescimento gradual, reações de eletrófilo-nucleófilo e combinações dos mesmos.
[806] Em várias modalidades, a formação in situ do compensador de espessura de tecido pode compreender a reação de dois ou mais precursores que são fisicamente separados até entrarem em contato in situ e/ou a reação a uma condição ambiental para reagir um com o outro para formar o hidrogel. Os polímeros polimerizáveis in situpodem ser preparados a partir de precursor(es) que podem reagir para formar um polímero no sítio cirúrgico. O compensador de espessura de tecido pode ser formado por meio de reações de reticulação do(s) precursor(es) in situ. Em certas modalidades, o precursor pode com-preender um iniciador capaz de iniciar uma reação de polimerização para a formação in situ do compensador de espessura de tecido. O compensador de espessura de tecido pode compreender um precursor que pode ser ativado no momento da aplicação para criar, em várias modalidades, um hidrogel reticulado. A formaçãon situ do compensador de espessura de tecido pode compreender a ativação de pelo menos um precursor para formar ligações para formar o compensador de espessura de tecido. Em várias modalidades, a ativação pode ser atingida por alterações nas condições físicas, condições biológicas e/ou condições químicas no sítio cirúrgico, incluindo, mas não se limi-tando a, temperatura, pH, campos elétricos, força iônica, reações enzimáticas e/ou químicas, estímulos elétrico e/ou magnético e outras variedades fisiológicas e ambientais. Em várias modalidades, os pre-cursores podem entrar em contato fora do corpo e introduzido no sítio cirúrgico.
[807] Em várias modalidades, o compensador de espessura de tecido pode compreender uma ou mais encapsulações ou células, que podem ser configuradas para armazenar ao menos um componente nelas. Em certas modalidades, a encapsulação pode ser configurada para armazenar um precursor de hidrogel nela. Em certas modalidades, a encapsulação pode ser configurada para armazenar dois com-ponentes nela, por exemplo. Em certas modalidades, a encapsulação pode ser configurada para armazenar um primeiro precursor de hidrogel e um segundo precursor de hidrogel nela. Em certas modalidades, uma primeira encapsulação pode ser configurada para armazenar um primeiro precursor de hidrogel nela e uma segunda encapsulação pode ser configurada para armazenar uma segundo precursor de hidrogel nela. Conforme descrito acima, as encapsulações podem ser ali-nhadas, ou pelo menos substancialmente alinhadas, às pernas de grampo para perfurar e/ou romper de outra forma as encapsulações quando as pernas de grampo entrarem em contato com a encapsulação. Em certas modalidades, as encapsulações podem ser compacta-das, esmagadas, achatadas e/ou de outro modo rompidas quando os grampos são instalados. Após as encapsulações terem sido rompidas, o(s) componente(s) armazenado(s) nas mesmas podem fluir para fora da encapsulação. O componente armazenado na mesma pode entrar em contato com outros componentes, camadas do compensador de espessura de tecido e/ou o tecido. Em várias modalidades, os outros componentes podem estar fluindo da mesma ou diferentes encapsulações, fornecidas nas camadas do compensador de espessura de tecido e/ou fornecidas ao sítio cirúrgico pelo clínico. Como resultado do que foi disposto acima, o(s) componente(s) armazenado(s) nas encapsulações podem fornecer expansão e/ou dilatação do compensador de espessura de tecido.
[808] Em várias modalidades, o compensador de espessura de tecido pode compreender uma camada que compreende as encapsulações. Em várias modalidades, a encapsulação pode compreender um espaço vazio, um bolso, uma redoma, um tubo e combinações dos mesmos associados à camada. Em certas modalidades, as encapsulações podem compreender espaços vazios na camada. Em ao menos uma modalidade, a camada pode compreender duas camadas que podem ser fixadas uma a outra em que as encapsulações podem ser definidas entre as duas camadas. Em certas modalidades, as encapsulações podem compreender redomas sobre a superfície da camada. Por exemplo, pelo menos uma porção das encapsulações pode ser posicionada dentro de redomas estendendo-se para cima da camada. Em certas modalidades, as encapsulações podem compreender bolsos formados dentro da camada. Em certas modalidades, uma primei-raporção das encapsulações pode compreender uma redoma e uma segunda porção das encapsulações pode compreender um bolso. Em certas modalidades, as encapsulações podem compreender um tubo embutido dentro da camada. Em certas modalidades, o tubo pode compreender os materiais não sintéticos e/ou materiais sintéticos aqui descritos, como PLA. Em ao menos uma modalidade, o compensador de espessura de tecido pode compreender uma espuma bioabsorvível, como ORC, que compreende tubos de PLA embutidos nela e o tubo pode encapsulado um hidrogel, por exemplo. Em certas modalidades, as encapsulações podem compreender células distintas que são desconectadas umas das outras. Em certas modalidades, uma ou mais das encapsulações pode estar em comunicação fluida uma com a ou-traatravés de uma ou mais passagens, condutos e/ou canaletas, por exemplo, estendendo-se através da camada.
[809] A taxa de liberação de um componente da encapsulação pode ser controlada pela espessura do compensador de espessura de tecido, pela composição de compensador de espessura de tecido, pelo tamanho do componente, pela capacidade hidrofílica do componente e/ou pelas interações físicas e/ou químicas entre o componente, a composição do compensador de espessura de tecido e/ou o instru-mentocirúrgico, por exemplo. Em várias modalidades, a camada pode compreender uma ou mais seções delgadas ou porções enfraquecidas, como perfurações parciais, por exemplo, que podem facilitar a incisão da camada e a ruptura das encapsulações. Em várias modali-dades, as perfurações parciais podem não se estender completamente através de uma camada enquanto, em certas modalidades, as perfu-rações podem completamente se estender através da camada.
[810] Com referência às FIGURAS 523 e 524, em várias modali dades, um compensador de espessura de tecido 70150 pode compre-ender uma camada externa 70152A e uma camada interna 70152B que compreende encapsulações 70154. Em certas modalidades, a encapsulação pode compreender um primeiro componente encapsulado e um segundo componente encapsulado. Em certas modalidades, as encapsulações podem independentemente compreender um de um primeiro componente encapsulado e um segundo componente encap-sulado. O primeiro componente encapsulado pode ser separado do segundo componente encapsulado. A camada externa 70152A pode compreender uma superfície de contato com o tecido. A camada inter-na 70152B pode compreender uma superfície de contato com o ins-trumento. A superfície de contato com o instrumento 70152B pode ser fixada de modo liberável à bigorna 70156. A camada externa 70152A pode ser fixada à camada interna 70152B para definir um a espaço vazio entre a camada externa 70152A e a camada interna 70152B. Conforme mostrado na FIGURA 523, cada encapsulação 70154 pode compreender uma redoma sobre a superfície de contato com o instru-mento da camada interna 70152B. A redoma pode compreender perfu-rações parcial para facilitar a incisão da camada pelas pernas de grampo e a ruptura da encapsulação. Conforme mostrado na FIGURA 524, a bigorna 70156 pode compreender uma pluralidade de fileiras de bolso de formação 70158, em que as redomas das encapsulações 70154 podem ser alinhadas ao bolso de formação 70158. A superfície de contato com o tecido pode compreender uma superfície plana que carece de redomas. Em certas modalidades, a superfície de contato com o tecido pode compreender uma ou mais encapsulações, como as encapsulações 70154, por exemplo, estendendo-se desse.
[811] Em várias modalidades, uma bigorna pode compreender um compensador de espessura de tecido que compreende um com-ponente encapsulado que compreende ao menos uma partícula de microesfera. Em certas modalidades, o compensador de espessura de tecido pode compreender uma encapsulação que compreende um primeiro componente encapsulado e um segundo componente encap-sulado. Em certas modalidades, o compensador de espessura de teci-do pode compreender uma encapsulação que compreende uma pri-meirapartícula de microesfera e uma segunda partícula de microesfera.
[812] Em várias modalidades, Com referência à FIGURA 525, uma aparelho de grampeamento pode compreender uma bigorna 70180 e um cartucho de grampos (ilustrado em outras FIGURAS). Os grampos 70190 de um cartucho de grampos podem ser deformados por uma bigorna 70180 quando a bigorna 70180 for movida para uma posição fechada e/ou por um sistema acionador de grampos 70192 que move os grampos 70190 na direção da bigorna fechada 70180. As pernas 70194 dos grampos podem entrar em contato com a bigorna 70180 de modo que os grampos 70190 sejam pelo menos parcialmente deformados. A bigorna 70180 pode compreender um compensador de espessura de tecido 70182 que compreende uma camada externa 70183A e uma camada interna 70183B. O compensador de espessura de tecido 70182 pode compreender um primeiro componente encapsu-lado e um segundo componente encapsulado. Em certas modalidades, as encapsulações 210185 podem ser alinhadas ou ao menos substan-cialmente alinhadas, de modo que, quando as pernas de grampo 70194 são empurradas através do tecido T e a camada externa 70183A, as pernas de grampo 70194 podem perfure e/ou de outro modo romper as encapsulações 70185. Conforme mostrado na FIGU-RA 525, o grampo 70190C está em sua posição totalmente disparada, o grampo 70190B está no processo de ser disparado e o grampo 70190A está em sua posição não disparada. As pernas de grampos 70190C e 70190B se moveram através do tecido T, da camada externa 70183A e da camada interna 70183B do compensador de espessura de tecido 70182 e entraram em contato com uma bigorna 70180 po-sicionada em oposição ao cartucho de grampos. Após as encapsulações 70185 terem sido rompidas, os componentes encapsulados po-dem fluir para fora e entrarem em contato entre si, com fluidos corpo-rais e/ou com o tecido T, por exemplo. Os componentes encapsulados podem reagir para formar um produto de reação como um hidrogel, por exemplo, para se expandir entre o tecido T e a base do grampo e empurrar o tecido T contra as pernas do grampo. Em várias circuns-tâncias, como resultado do acima, o compensador de espessura de tecido pode ser configurado para consumir quaisquer vãos dentro da área de aprisionamento de grampo.
[813] Em várias modalidades, o compensador de espessura de tecido pode ser adequado para uso com um instrumento cirúrgico. Conforme descrito acima, o compensador de espessura de tecido pode ser associado ao cartucho de grampos e/ou à bigorna. O compensador de espessura de tecido pode ser configurado em qualquer formato, tamanho e/ou dimensão adequados para encaixar-se no cartucho de grampos e/ou na bigorna. Conforme aqui descrito, o compensador de espessura de tecido pode ser fixado de modo liberável ao cartucho de grampos e/ou à bigorna. O compensador de espessura de tecido pode ser fixado ao cartucho de grampos e/ou à bigorna de qualquer maneira mecânica e/ou química capaz de reter o compensador de espessura de tecido em contato com o cartucho de grampos e/ou a bigorna, antes ou durante o processo de grampeamento. O compensador de espessura de tecido pode ser removido ou liberado do cartucho de grampos e/ou da bigorna após o grampo penetrar no compensador de espessura de tecido. O compensador de espessura de tecido pode ser removido ou liberado do cartucho de grampos e/ou da bigorna conforme o cartucho de grampos e/ou a bigorna se move na direção contrária ao compensador de espessura de tecido.
[814] Com referência às FIGURAS 520 a 522, o aparelho de grampeamento 70118 pode compreender uma bigorna 70120 e um cartucho de grampos 70122 que compreende um membro de disparo 70124, uma pluralidade de grampos 70128, uma borda de faca 70129 e um compensador de espessura de tecido 70130. O compensador de espessura de tecido 70130 pode compreender pelo menos um com-ponente encapsulado. O componente encapsulado pode ser rompido quando o compensador de espessura de tecido for compactado, grampeado e/ou cortado. Com referência à FIGURA 521, por exemplo, os grampos 70128 podem ser movidos entre uma posição não dispa-rada e uma posição disparada de modo que as pernas de grampo se movam através do compensador de espessura de tecido 70130, pene-trematravés de uma superfície de base e uma superfície de topo do compensador de espessura de tecido 70130, penetrem no tecido T e entrem em contato com uma bigorna 70120 posicionada em oposição ao cartucho de grampos 70118. Os componentes encapsulados podem reagir um com o outro, com um pó hidrofílico incorporado ou disperso no compensador de espessura de tecido e/ou com fluidos corporais para expandir ou dilatar o compensador de espessura de tecido 70130. Conforme as pernas são deformadas contra a bigorna, as pernas de cada grampo podem capturar uma porção do compensador de espessura de tecido 70130 e uma porção do tecido T no interior de cada grampo 70128 e aplicar uma força de compressão ao tecido T. Conforme mostrado nas FIGURAS 521 e 522, o compensador de es-pessura de tecido 70130 pode compensar a espessura do tecido T capturado no interior de cada grampo 70128.
[815] Com referência à FIGURA 526, um instrumento cirúrgico 70200 pode compreender uma bigorna 70205 que compreende um compensador de espessura de tecido superior 70210 e um cartucho de grampos 70215 que compreende um compensador de espessura de tecido inferior que compreende uma camada externa 70220 e uma camada interna 70225. O compensador de espessura de tecido supe-rior 70210 pode ser posicionado em um primeiro lado do tecido alvo e o compensador de espessura de tecido inferior pode ser posicionado em um segundo lado do tecido. Em certas modalidades, o compensador de espessura de tecido superior 70210 pode compreender ORC, a camada externa do compensador de espessura de tecido inferior pode compreender um hidrogel tendo partículas de ORC embutidas nela, e a camada interna do compensador de espessura de tecido inferior pode compreender ORC, por exemplo.
[816] Com referência às FIGURAS 529 a 531, em várias modali dades, um instrumento cirúrgico 70400 pode compreender um cartucho de grampos 70405 e uma bigorna 70410. O cartucho de grampos 70405 pode compreender um compensador de espessura de tecido 70415 incluindo espuma bioabsorvível. Em várias modalidades, a es-pumabioabsorvível pode compreender uma encapsulação que com-preende um componente encapsulado 70420. A espuma bioabsorvível pode compreender ORC e o componente encapsulado pode compre-ender um medicamento, por exemplo. O compensador de espessura de tecido 70415 da bigorna 70410 pode compreender uma camada interna 70425 e uma camada externa 70430. A camada interna 70425 pode compreender uma espuma bioabsorvível e a camada externa 70430 pode compreender um hidrogel, que compreende opcionalmente materiais de reforço, por exemplo. Durante uma sequência de dispa-ro exemplificadora, com relação principalmente à FIGURA 530, o deslizador 70435 pode primeiro entrar em contato com o grampo 70440A e começar a levantar o grampo. Conforme o suporte deslizante 70435 avança adicionalmente em posição distal, a suporte deslizante 70435 pode começar a erguer os grampos 70440B-D e qualquer outro grampo subsequente, em uma ordem sequencial. O suporte deslizante 70435 pode acionar os grampos 70440 para cima de modo que as pernas dos grampos entrem em contato com a bigorna oposta 70410 e sejam deformadas para um formato desejado. Em relação à sequência de disparo ilustrada na FIGURA 530, os grampos 70440A-C foram movidos para suas posições totalmente disparadas, o grampo 70440D está no processo de ser disparado e o grampo 70420E ainda está em sua posição não disparada. O componente encapsulado 70470 pode ser rompido pelas pernas de grampo durante a sequência de disparo exemplificadora. O componente encapsulado 70420 pode fluir da encapsulação ao redor das pernas de grampo para entrar em contato com o tecido T. Sob várias circunstâncias, a compressão adicional do compensador de espessura de tecido pode remover por compressão o medicamento adicional da encapsulação. Em várias modalidades, o medicamento pode tratar imediatamente o tecido e pode reduzir o sangramento do tecido.
[817] Sob várias circunstâncias, um cirurgião, ou outro clínico, pode fornecer um fluido para o compensador de espessura de tecido para a fabricação de um compensador de espessura de tecido que compreende pelo menos um medicamento armazenado e/ou absorvido no mesmo. Em várias modalidades, um cartucho de grampos e/ou bigorna pode compreender uma porta configurada para fornecer acesso ao compensador de espessura de tecido. Com referência à FIGURA 532B, um cartucho de grampos 70500 pode compreender uma porta 70505 em uma extremidade distal do mesmo, por exemplo. A porta 70505 pode ser configurada para receber uma agulha 70510, como uma agulha fenestrada, como mostrado na FIGURA 532A. Em ao menos uma modalidade, o clínico pode inserir uma agulha 70510 através da porta 70505 no compensador de espessura de tecido 70515 para distribuir o fluido ao compensador de espessura de tecido 70515. Em várias modalidades, o fluido pode compreender um medicamento e precursor de hidrogel, por exemplo. Conforme descrito acima, o fluido pode ser liberado do compensador de espessura de tecido para o tecido quando o compensador de espessura de tecido for rompido e/ou compactado. Por exemplo, o medicamento pode ser liberado do compensador de espessura de tecido 70515 conforme o compensador de espessura de tecido 70515 biodegrada.
[818] Em várias modalidades, agora com referência à FIGURA 216, um cartucho de grampos, como o cartucho de grampos 10000, por exemplo, pode compreender uma porção de suporte 10010 e um compensador da espessura do tecido compressível 10020. Agora com referência às FIGURAS 218-220, a porção de suporte 10010 pode compreender uma superfície de suporte 10011 e uma pluralidade de cavidades para grampos 10012 definidas no interior da porção de su-porte 10010. Cada cavidade para grampos 10012 pode ser dimensio-nada e configurada para armazenar de modo removível um grampo, como um grampo 10030, por exemplo. O cartucho de grampos 10000 pode compreender adicionalmente uma pluralidade de acionadores de grampos 10040 que podem, cada um, ser configurados para suportar um ou mais grampos 10030 dentro das cavidades para grampos 10012 quando os grampos 10030 e os acionadores de grampos 10040 estão nas suas posições não disparadas. Em pelo menos uma tal mo-dalidade, com relação principalmente às FIGURAS 224 e 225, cada acionador de grampos 10040 pode compreender um ou mais berços, ou canais, 10041, por exemplo, que podem ser configurados para su-portar os grampos e limitar o movimento relativo entre os grampos 10030 e os acionadores de grampos 10040. Em várias modalidades, novamente com referência à FIGURA 218, o cartucho de grampos 10000 pode compreender adicionalmente um trenó de disparo de grampos 10050 que pode ser movido de uma extremidade proximal 10001 para uma extremidade distal 10002 do cartucho de grampos de modo a levantar sequencialmente os acionadores de grampos 10040 e os grampos 10030 das suas posições não disparadas para uma bigor-na posicionada do lado oposto ao cartucho de grampos 10000. Em certas modalidades, com relação principalmente às FIGURAS 218 e 220, cada grampo 10030 pode compreender uma base 10031 e uma ou mais pernas 10032 estendendo-se a partir da base 10031 em que cada grampo pode ser ao menos um dentre substancialmente em formato de U e substancialmente em formato de V, por exemplo. Em pelo menos uma modalidade, os grampos 10030 podem ser configurados de modo que as pontas das pernas de grampo 10032 sejam rebaixadas com relação à superfície de suporte 10011 da porção de suporte 10010 quando os grampos 10030 estão nas suas posições não disparadas. Em pelo menos uma modalidade, os grampos 10030 podem ser configurados de modo que as pontas das pernas de grampo 10032 fiquem niveladas à superfície de suporte 10011 da porção de suporte 10010 quando os grampos 10030 estão nas suas posições não dispa-radas. Em pelo menos uma modalidade, os grampos 10030 podem ser configurados de modo que as pontas das pernas de grampo 10032, ou ao menos alguma porção das pernas de grampo 10032, se estendam acima da superfície de suporte 10011 da porção de suporte 10010 quando os grampos 10030 estão nas suas posições não disparadas. Em tais modalidades, as pernas de grampo 10032 podem estender-se para dentro e podem ser encaixadas dentro do compensador de espessura de tecido 10020 quando os grampos 10030 estão nas suas posições não disparadas. Em ao menos uma tal modalidade, as pernas de grampo 10032 podem se estender acima da superfície de pla-taforma 10011 por aproximadamente 1,9 mm (0,075”), por exemplo. Em várias modalidades, as pernas de grampo 10032 podem se estender acima da superfície de plataforma 10011 por uma distância entre aproximadamente 0,64 mm (0,025”) e aproximadamente 3,18 mm (0,125”), por exemplo. Em certas modalidades, adicionalmente ao acima, o compensador de espessura de tecido 10020 pode compreen-der uma espessura não-comprimida entre aproximadamente 2 mm (0,08”) e aproximadamente 3,18 mm (0,125”), por exemplo.
[819] Em uso, além do exposto acima e com relação principal menteà FIGURA 233, uma bigorna, como a bigorna, 10060, por exemplo, pode ser movida para uma posição fechada oposta ao cartu-cho de grampos 10000. Conforme descrito em mais detalhes abaixo, a bigorna 10060 pode posicionar o tecido contra o compensador de es-pessura de tecido 10020 e, em várias modalidades, comprimir o com-pensador de espessura de tecido 10020 contra a superfície de suporte 10011 da porção de suporte 10010, por exemplo. Quando a bigorna 10060 tiver sido posicionada adequadamente, os grampos 10030 po-dem ser dispensados, como também ilustrado na FIGURA 233. Em várias modalidades, conforme mencionado acima, o trenó de disparo de grampos 10050 pode ser movido da extremidade proximal 10001 do cartucho de grampos 10000 para a extremidade distal 10002, conforme ilustrado na FIGURA 234. Quando o trenó 10050 é avançado, o trenó 10050 pode entrar em contato com os acionadores de grampos 10040 e levantar os acionadores de grampos 10040 dentro das cavidades para grampos 10012. Em pelo menos uma modalidade, o trenó 10050 e os acionadores de grampos 10040 podem compreender, cada um, um ou mais declives, ou superfícies inclinadas, que podem cooperar para mover os acionadores de grampos 10040 para cima a partir das suas posições não disparadas. Em pelo menos uma tal modalida-de, com referência às FIGURAS 221 a 225, cada acionador de gram-pos 10040 pode compreender pelo menos uma superfície inclinada 10042 e o trenó 10050 pode compreender uma ou mais superfícies inclinadas 10052 que podem ser configuradas de modo que as super-fícies inclinadas 10052 possam deslizar sob a superfície inclinada 10042 quando o trenó 10050 é avançado em posição distal dentro do cartucho de grampos. Quando os acionadores de grampos 10040 são levantados dentro das suas respectivas cavidades para grampos 10012, os acionadores de grampos 10040 podem levantar os grampos 10030 de modo que os grampos 10030 possam surgir a partir das suas cavidades para grampos 10012 através de aberturas no suporte de grampo 10011. Durante uma sequência de disparo exemplificadora, com relação principalmente às FIGURAS 227 a 229, o trenó 10050 pode primeiro entrar em contato com o grampo 10030a e começar a levantar o grampo 10030a. Quando o trenó 10050 é avançado adicio-nalmente em posição distal, o trenó 10050 pode começar a levantar os grampos 10030b, 10030c, 10030d, 10030e, e 10030f, e quaisquer ou-tros grampos subsequentes, em uma ordem sequencial. Conforme ilustrado na FIGURA 229, o trenó 10050 pode direcionar os grampos 10030 para cima de modo que as pernas 10032 dos grampos entrem em contato com a bigorna oposta, sejam deformadas para um formato desejado, e ejetadas da porção de suporte 10010. Em várias circuns-tâncias, o trenó 10030 pode mover vários grampos para cima simulta-neamente como parte de uma sequência de disparo. Com relação à sequência de disparo ilustrada na FIGURA 229, os grampos 10030a e 10030b foram movidos para suas posições completamente disparadas e ejetados da porção de suporte 10010, os grampos 10030c e 10030d estão no processo de serem disparados e estão ao menos parcialmente contidos dentro da porção de suporte 10010, e os grampos 10030e e 10030f ainda estão nas suas posições não disparadas.
[820] Conforme discutido acima, e com referência à FIGURA 235, as pernas de grampo 10032 dos grampos 10030 podem se estender acima da superfície de suporte 10011 da porção de suporte 10010 quando os grampos 10030 estão nas suas posições não disparadas. Com relação ainda a esta sequência de disparo ilustrada na FIGURA 229, os grampos 10030e e 10030f são ilustrados na sua posição não disparada e suas pernas de grampo 10032 se estendem acima da su-perfície de suporte 10011 e dentro do compensador de espessura de tecido 10020. Em várias modalidades, as pontas das pernas de grampo 10032, ou qualquer outra porção das pernas de grampo 10032, po-demnão se projetar através de uma superfície de contato com o tecido de topo 10021 do compensador de espessura de tecido 10020 quando os grampos 10030 estão nas suas posições não disparadas. Quando os grampos 10030 são movidos das suas posições não disparadas para suas posições disparadas, conforme ilustrado na FIGURA 229, as pontas das pernas de grampo podem se projetar através da superfície de contato com o tecido 10032. Em várias modalidades, as pontas das pernas de grampo 10032 podem compreender pontas afiadas que po-dem cortar e penetrar o compensador de espessura de tecido 10020. Em certas modalidades, o compensador de espessura de tecido 10020 pode compreender uma pluralidade de aberturas que podem ser confi-guradas para receber as pernas de grampo 10032 e permitir às pernas de grampo 10032 deslizar em relação ao compensador de espessura de tecido 10020. Em certas modalidades, a porção de suporte 10010 pode compreender adicionalmente uma pluralidade de guias 10013 estendendo-se a partir da superfície de suporte 10011. As guias 10013 podem ser posicionadas em posição adjacente às aberturas da cavi-dade para grampos na superfície de suporte 10011 de modo que as pernas de grampo 10032 possam ser ao menos parcialmente apoiadas pelas guias 10013. Em certas modalidades, uma guia 10013 pode ser posicionada em uma extremidade proximal e/ou uma extremidade distal de uma abertura da cavidade para grampos. Em várias modalidades, uma primeira guia 10013 pode ser posicionada em uma primeira extremidade de cada abertura da cavidade para grampos e uma se-gunda guia 10013 pode ser posicionada em uma segunda extremidade de cada abertura da cavidade para grampos de modo que cada primei-ra guia 10013 pode suportar uma primeira perna de grampo 10032 de um grampo 10030 e cada segunda guia 10013 pode suportar uma se-gunda perna de grampo 10032 do grampo. Em pelo menos uma mo-dalidade, com referência à FIGURA 235, cada guia 10013 pode com-preender um sulco ou fenda, como o sulco 10016, por exemplo, dentro do qual uma perna de grampo 10032 pode ser recebida por desliza-mento. Em várias modalidades, cada guia 10013 pode compreender uma alça, protuberância, e/ou estaca que pode se estender da super-fície de suporte 10011 e pode se estender para dentro do compensador de espessura de tecido 10020. Em pelo menos uma modalidade, conforme discutido em mais detalhes abaixo, as alças, protuberâncias, e/ou estacas podem reduzir o movimento relativo entre o compensador de espessura de tecido 10020 e a porção de suporte 10010. Em certas modalidades, as pontas as pernas de grampo 10032 podem ser posi-cionadas dentro das guias 10013 e pode não se estendem acima das superfícies de topo das guias 10013 quando os grampos 10030 estão na sua posição não disparada. Em pelo menos tal modalidade, as guias 10013 podem definir uma altura de guia e os grampos 10030 podem não se estender acima desta altura de guia quando elas estão nas suas posições não disparadas.
[821] Em várias modalidades, um compensador de espessura de tecido, como o compensador de espessura de tecido 10020, por exemplo, pode ser compreendido de uma única folha de material. Em pelo menos uma modalidade, um compensador de espessura de tecido pode compreender uma folha contínua de material que pode cobrir toda a superfície de suporte superior 10011 da porção de suporte 10010 ou, alternativamente, cobrir menos do que toda a superfície de suporte 10011. Em certas modalidades, a folha de material pode cobrir as aberturas da cavidade para grampos na porção de suporte 10010 enquanto, em outras modalidades, a folha de material pode compre-ender aberturas que podem ser alinhadas, ou ao menos parcialmente alinhadas, com as aberturas da cavidade para grampos. Em várias modalidades, um compensador de espessura de tecido pode ser com-preendido de múltiplas camadas de material. Em algumas modalida-des, agora com referência à FIGURA 217, um compensador de espes-sura de tecido pode compreender um núcleo compressível e um invó-lucro circundando o núcleo compressível. Em certas modalidades, um invólucro 10022 pode ser configurado para prender de modo liberável o núcleo compressível à porção de suporte 10010. Em ao menos uma tal modalidade, a porção de suporte 10010 pode compreender uma ou mais projeções, como projeções 10014 (FIGURA 220), por exemplo, que se estendem a partir da mesma e que podem ser recebidas dentro de uma ou mais aberturas e/ou fendas, como as aberturas 10024, por exemplo, definidas no invólucro 10022. As projeções 10014 e as aber-turas 10024 podem ser configuradas de modo que as projeções 10014 possam prender o invólucro 10022 à porção de suporte 10010. Em pelo menos uma modalidade, as extremidades das projeções 10014 podem ser deformadas, como por um processo de montagem a quente, por exemplo, de modo a alargar as extremidades das projeções 10014 e, como resultado, limitar o movimento relativo entre o invólucro 10022 e a porção de suporte 10010. Em pelo menos uma modalidade, o invó-lucro 10022 pode compreender uma ou mais perfurações 10025 que podem facilitar a liberação do invólucro 10022 da porção de suporte 10010, conforme ilustrado na FIGURA 217. Agora com referência à FIGURA 226, um compensador de espessura de tecido pode compre-ender um invólucro 10222 que inclui uma pluralidade de aberturas 10223, em que as aberturas 10223 podem ser alinhadas, ou ao menos parcialmente alinhadas, com as aberturas da cavidade para grampos na porção de suporte 10010. Em certas modalidades, o núcleo do compensador de espessura de tecido também pode compreender aberturas que são alinhadas, ou ao menos parcialmente alinhadas, com as aberturas 10223 no invólucro 10222. Em outras modalidades, o núcleo do compensador de espessura de tecido pode compreender um corpo contínuo e pode se estender debaixo das aberturas 10223 de modo que o corpo contínuo cubra as aberturas da cavidade para grampos na superfície de suporte 10011.
[822] Em várias modalidades, conforme descrito acima, um com pensador de espessura de tecido pode compreender um invólucro para prender de modo liberável um núcleo compressível à porção de suporte 10010. Em pelo menos uma tal modalidade, com referência à FIGURA 218, um cartucho de grampos pode compreender adicionalmente presilhas retentoras 10026 que podem ser configuradas para inibir o invólucro, e o núcleo compressível, de se soltar prematuramente da porção de suporte 10010. Em várias modalidades, cada presilha retentora 10026 pode compreender aberturas 10028 que podem ser configuradas para receber as projeções 10014 que se estendem a par-tir da porção de suporte 10010 de modo que as presilhas retentoras 10026 possam ser retidas na porção de suporte 10010. Em certas mo-dalidades, as presilhas retentoras 10026 podem compreender, cada uma, pelo menos uma porção de reservatório 10027 que pode se es-tender debaixo da porção de suporte 10010 e pode suportar e reter os acionadores de grampos 10040 dentro da porção de suporte 10010. Em certas modalidades, conforme descrito acima, um compensador de espessura de tecido pode ser fixado de modo removível à porção de suporte 10010 pelos grampos 10030. Mais particularmente, conforme também descrito acima, as pernas dos grampos 10030 podem esten-der-se para dentro do compensador de espessura de tecido 10020 quando os grampos 10030 estão na posição não disparada e, como resultado, prender de modo liberável o compensador de espessura de tecido 10020 à porção de suporte 10010. Em pelo menos uma modali-dade, as pernas dos grampos 10030 podem estar em contato com as paredes laterais das suas respectivas cavidades para grampos 10012 em que, devido à atrito entre as pernas de grampo 10032 e as paredes laterais, os grampos 10030 e o compensador de espessura de tecido 10020 podem ser retidos na posição até os grampos 10030 serem dis-pensados do cartucho de grampos 10000. Quando os grampos 10030 são dispensados, o compensador de espessura de tecido 10020 pode ser capturado dentro dos grampos 10030 e mantidos contra o tecido grampeado T. Quando a bigorna é posteriormente movida para uma posição aberta para liberar o tecido T, a porção de suporte 10010 pode ser afastada do compensador de espessura de tecido 10020 que foi preso ao tecido. Em certas modalidades, um adesivo pode ser utilizado para prender de modo removível o compensador de espessura de tecido 10020 à porção de suporte 10010. Em pelo menos uma modali-dade, um adesivo em duas partes podem ser utilizado em que, em pelo menos uma modalidade, uma primeira parte do adesivo pode ser colocada sobre a superfície de suporte 10011 e uma segunda parte do adesivo pode ser colocada sobre o compensador de espessura de te-cido 10020 de modo que, quando o compensador de espessura de tecido 10020 é colocado contra a superfície de suporte 10011, a pri-meira parte pode entrar em contato com a segunda parte para ativar o adesivo e prender de forma separável o compensador de espessura de tecido 10020 à porção de suporte 10010. Em várias modalidades, quaisquer outros meios adequados poderiam ser usados para prender de forma separável o compensador de espessura de tecido à porção de suporte de um cartucho de grampos.
[823] Em várias modalidades, além do exposto acima, o trenó 10050 pode ser avançado da extremidade proximal 10001 para a ex-tremidade distal 10002 para dispensar completamente todos os gram-pos 10030 contidos dentro do cartucho de grampos 10000. Em pelo menos uma modalidade, agora com referência às FIGURAS 258 a 262, o trenó 10050 pode ser avançado em posição distal dentro de uma cavidade longitudinal 10016 dentro da porção de suporte 10010 por um elemento de disparo, ou barra de corte, 10052 de um grampe-adorcirúrgico. Em uso, o cartucho de grampos 10000 pode ser inserido em uma canaleta de cartucho de grampos em uma mandíbula do grampeador cirúrgico, como a canaleta de cartucho de grampos 10070, por exemplo, e o elemento de disparo 10052 pode ser avançado para entrar em contato com o trenó 10050, conforme ilustrado na FIGURA 258. Quando o trenó 10050 é avançado em posição distal pelo elemento de disparo 10052, o trenó 10050 pode entrar em contato com o acionador, ou acionadores, de grampos mais proximal, 10040 e disparar ou ejetar os grampos 10030 do corpo do cartucho 10010, conforme descrito acima. Conforme ilustrado na FIGURA 258, o ele-mento de disparo 10052 pode compreender adicionalmente um gume cortante 10053 que pode ser avançado em posição distal através de uma fenda de faca na porção de suporte 10010 quando os grampos 10030 estão sendo disparados. Em várias modalidades, uma fenda de faca correspondente pode se estender através da bigorna posicionada no lado oposto ao cartucho de grampos 10000 de modo que, em pelo menos uma modalidade, o gume cortante 10053 possa se estender entre a bigorna e a porção de suporte 10010 e cortar o tecido e o compensador de espessura de tecido posicionado entre eles. Em vá-riascircunstâncias, o trenó 10050 pode ser avançado em posição distal pelo elemento de disparo 10052 até o trenó 10050 alcançar a ex-tremidade distal 10002 do cartucho de grampos 10000, conforme ilus-trado na FIGURA 260. Neste ponto, o elemento de disparo 10052 pode ser retraído proximalmente. Em algumas modalidades, o trenó 10050 pode ser retraído proximalmente com o elemento de disparo 10052 mas, em várias modalidades, agora com referência à FIGURA 261, o trenó 10050 pode ser deixado para atrás na extremidade distal 10002 do cartucho de grampos 10000 quando o elemento de disparo 10052 é retraído. Quando o elemento de disparo 10052 tiver sido sufi-cientementeretraído, a bigorna pode ser reaberta, o compensador de espessura de tecido 10020 pode ser desprendido da porção de suporte 10010, e a porção não-implantada remanescente do cartucho de grampos usado 10000, inclusive a porção de suporte 10010, pode ser removida da canaleta de cartucho de grampos 10070.
[824] Após o cartucho de grampos usado 10000 ter sido removi do da canaleta de cartucho de grampos, além do exposto acima, um novo cartucho de grampos 10000, ou qualquer outro cartucho de grampos adequado, pode ser inserido na canaleta de cartucho de grampos 10070. Em várias modalidades, além do exposto acima, a canaleta de cartucho de grampos 10070, o elemento de disparo 10052, e/ou o cartucho de grampos 10000 podem compreender elementos cooperantes que podem evitar que o elemento de disparo 10052 seja avançado distalmente uma segunda vez, ou uma vez subsequente, sem um novo, ou não disparado, cartucho de grampos 10000 posicionado na canaleta de cartucho de grampos 10070. Mais particularmente, novamente com referência à FIGURA 258, quando o membro de disparo 10052 é avançado para contato com o deslizador 10050 e, quando o deslizador 10050 está na sua posição não disparada proximal, uma ponta de suporte 10055 do membro de disparo 10052 pode ser posicionada sobre e/ou ao longo de uma saliência de suporte 10056 no deslizador 10050 de modo que o membro de disparo 10052 seja mantido em uma posição vertical suficiente para evitar que uma trava, ou viga, 10054 que se estende a partir do membro de disparo 10052 caia em uma reentrância de travamento definida dentro da canaleta de cartucho de grampos. Como a trava 10054 não cairá na reentrância de travamento, em tais circunstâncias, a trava 10054 pode não estar em posição limítrofe a uma parede lateral distal 10057 da reentrância de travamento quando o elemento de disparo 10052 é avançado. Quando o elemento de disparo 10052 empurra o trenó 10050 distalmente, o elemento de disparo 10052 pode ser suportado na sua posição de tiro para cima devido à ponta de suporte 10055 que repousa sobre a saliência de suporte 10056. Quando o elemento de disparo 10052 é retraído em relação ao trenó 10050, conforme discuti-do acima e ilustrado na FIGURA 261, o elemento de disparo 10052 pode se desprender para baixo da sua posição para cima quando a ponta de suporte 10055 não está mais repousando na saliência de su-porte 10056 do trenó 10050. Em pelo menos uma tal modalidade, o grampo cirúrgico pode compreender uma mola 10058, e/ou qualquer outro elemento de tracionamento adequado, que pode ser configurado para tracionar o elemento de disparo 10052 para sua posição para baixo. Quando o elemento de disparo 10052 tiver retraído completa-mente, conforme ilustrado na FIGURA 262, o elemento de disparo 10052 não pode ser avançado distalmente através do cartucho de grampos usado 10000. Mais particularmente, o elemento de disparo 10052 não pode ser mantido na sua posição superior pelo trenó 10050 quando o trenó 10050, neste ponto na sequência de operação, tiver sido deixado para trás na extremidade distal 10002 do cartucho de grampos 10000. Desta forma, conforme mencionado acima, no caso em que o membro de disparo 10052 é avançado novamente sem re-posição do cartucho de grampos, a viga de travamento 10054 irá entrar em contato com a parede lateral 10057 da reentrância de travamento que irá evitar que o membro de disparo 10052 seja avançado distalmente para o cartucho de grampos 10000 novamente. Em outras palavras, uma vez que o cartucho de grampos usado 10000 tiver sido substituído por um novo cartucho de grampos, o novo cartucho de grampos terá um trenó posicionado proximalmente 10050 que pode prender o elemento de disparo 10052 na sua posição superior e permi-tir ao elemento de disparo 10052 ser avançado novamente em posição distal.
[825] Conforme descrito acima, o trenó 10050 pode ser configu rado para mover os acionadores de grampos 10040 entre uma primei-raposição não disparada e uma segunda posição disparada de modo a ejetar os grampos 10030 da porção de suporte 10010. Em várias modalidades, os acionadores de grampos 10040 pode ser contidos dentro das cavidades para grampos 10012 após os grampos 10030 terem sido ejetados da porção de suporte 10010. Em certas modalida-des, a porção de suporte 10010 pode compreender um ou mais ele-mentos de retenção que podem ser configurados para impedir que os acionadores de grampos 10040 sejam ejetados ou caiam das cavida-des para grampos 10012. Em várias outras modalidades, o trenó 10050 pode ser configurado para ejetar os acionadores de grampos 10040 da porção de suporte 10010 com os grampos 10030. Em pelo menos uma tal modalidade, os acionadores de grampos 10040 podem ser compreendidos de um material bioabsorvível e/ou biocompatível, como Ultem, por exemplo. Em certas modalidades, os acionadores de grampos podem ser fixados aos grampos 10030. Em pelo menos uma tal modalidade, um acionador de grampos pode ser moldado sobre e/ou em torno da base de cada grampo 10030 de modo que o acionados seja formado integralmente com o grampo. O pedido de patente US n° de série 11/541.123, intitulado SURGICAL STAPLES HAVING COMPRESSIBLE OR CRUSHABLE MEMBERS FOR SECURING TISSUE THEREIN AND STAPLING INSTRUMENTS FOR DE-PLOYING THE SAME, depositado em 29 de setembro de 2006, está aqui incorporada a titulo de referência, em sua totalidade.
[826] Em várias circunstâncias, além do exposto acima, um com pensador da espessura do tecido compressível pode mover, torcer, e/ou defletir em relação à porção de suporte rígido subjacente de um cartucho de grampos. Em várias modalidades, a porção de suporte, e/ou qualquer outro porção adequada do cartucho de grampos, pode compreender um ou mais elementos configurados para limitar o movi-mento relativo entre o compensador de espessura de tecido e a porção de suporte. Conforme descrito acima, pelo menos uma porção dos grampos 10030 pode se estender acima da superfície do plano de apoio 10011 da porção de suporte 10010 sendo que, em determinadas circunstâncias, agora com referência às FIGURAS 263 e 264, as forças laterais aplicadas a um compensador de espessura de tecido 10120, por exemplo, podem encontrar resistência dos grampos 10030 e/ou alças 10013 que se estendem a partir da porção de suporte 10010, por exemplo. Em várias circunstâncias, os grampos 10030 podem inclinar e/ou flexionar dentro das cavidades para grampos 10012 enquanto resistem ao movimento lateral do compensador de espessura de tecido 10120 em que, em várias modalidades, as cavidades para grampos 10012 e os grampos 10030 podem ser dimensionados e configurados para manter o alinhamento relativo entre as pernas 10032 dos grampos 10030 e os bolsos de formação 10062 na bigorna oposta 10060 de modo que os grampos 10000 sejam formados apropriadamente durante o processo de formação do grampo. Em várias modalidades, os grampos 10030 e/ou as alças 10013 podem ser configuradas para evitar ou ao menos limitar a distorção lateral dentro do com-pensador de espessura de tecido 10020, conforme ilustrado na FIGU-RA 264. Em pelo menos uma tal modalidade, os grampos 10030 e/ou alças 10013, por exemplo, podem ser configuradas para enrijecer, ou limitar o movimento lateral e/ou longitudinal de uma primeira superfície ou superfície de contato com o tecido 10021 do compensador de es-pessura de tecido em relação a uma segunda superfície ou superfície de fundo 10029. Em várias modalidades, um cartucho de grampos, e/ou uma canaleta de cartucho de grampos na qual o cartucho de grampos é posicionado, pode compreender pelo menos um elemento redutor de distorção que pode se estender para cima para limitar o movimento lateral e/ou longitudinal, ou distorção, de um compensador de espessura de tecido. Um invólucro circundando ao menos parcial-mente um compensador de espessura de tecido, conforme discutido acima, pode, também, evitar, ou ao menos limitar, o movimento lateral e/ou longitudinal, ou distorção, do compensador de espessura de teci-do.
[827] Em várias modalidades, novamente com relação às FIGU RAS 263 e 264, um compensador de espessura de tecido, como o compensador de espessura de tecido 10120, por exemplo, pode com-preender um núcleo 10128 e uma cobertura 10122. A cobertura 10122 e o núcleo compressível 10128 podem ser compreendidos de diferen-tes materiais ou, alternativamente, do mesmo material. Em todo caso, a cobertura 10122 pode ter uma densidade mais alta que o núcleo 10128. Em circunstâncias nas quais a cobertura 10122 compreende o topo do compensador de espessura de tecido 10120, as pontas das pernas de grampo 10032 podem ser encaixadas na cobertura 10122. Em modalidades nas quais uma cobertura compreende o fundo do compensador de espessura de tecido 10120, as pernas de grampo 10032 podem se estender através da cobertura e para dentro do núcleo. Em todo caso, a cobertura do compensador de espessura de te-cido pode ajudar a prender as pernas de grampo 10032 em alinha-mento com os bolsos de formação 10062 da bigorna 10060. Em várias modalidades, a cobertura 10122 pode compreender uma densidade que é aproximadamente 10% maior que a densidade do núcleo 10128, aproximadamente 20% maior que a densidade do núcleo 10128, apro-ximadamente 30% maior que a densidade do núcleo 10128, aproxi-madamente 40% maior que a densidade do núcleo 10128, aproxima-damente 50% mais que a densidade do núcleo 10128, aproximada-mente 60% maior que a densidade do núcleo 10128, aproximadamente 70% maior que a densidade do núcleo 10128, aproximadamente 80% maior que a densidade do núcleo 10128, aproximadamente 90% maior que a densidade do núcleo 10128, e/ou aproximadamente 100% maior que a densidade do núcleo 10128, por exemplo. Em várias mo-dalidades, a cobertura 10122 pode compreender uma densidade que é maior que a densidade do núcleo 10128 e menor que duas vezes a densidade do núcleo 10128, por exemplo. Em várias modalidades, a cobertura 10122 pode compreender uma densidade que é mais que duas vezes a densidade do núcleo 10128, por exemplo. Em várias modalidades, além do exposto acima, a cobertura 10122 e o núcleo 10128 podem ser formados, ou fabricados, simultaneamente. Em pelo menos uma tal modalidade, um fluido que compreende qualquer mate-rial adequado aqui apresentado pode ser derramado sobre um prato ou molde e, enquanto o fluido solidifica, o fluido pode formar uma co-bertura, ou camada, que tem uma densidade mais alta que o restante do material. Em várias modalidades, múltiplas camadas dentro de um material podem ser formadas por usar um processo no qual uma ou mais camadas subsequentes de material são derramadas sobre uma camada anteriormente curada. Em certas modalidades, duas ou mais camadas podem ser ligadas umas as outras com um adesivo, por exemplo. Em algumas modalidades, duas ou mais camadas podem ser fixadas umas as outras por um ou mais prendedores e/ou um ou mais elementos de encaixe mecânico, por exemplo. Em pelo menos uma tal modalidade, camadas adjacentes podem ser conectadas juntos por uma ou mais juntas de encaixe, por exemplo. Em certas modalidades, a cobertura pode compreender uma superfície lacrada que pode evitar, ou ao menos limitar, o fluxo de fluido através da mesma. Em certas outras modalidades, a cobertura pode compreender uma estrutura porosa de célula aberta, por exemplo.
[828] Em várias modalidades, além do exposto acima, a cobertu ra pode ser cortada do compensador de espessura de tecido. Em pelo menos uma modalidade, o compensador de espessura de tecido pode ser cortado de um bloco de material maior de modo que o compensa-dor de espessura de tecido não compreenda uma cobertura. Em pelo menos uma tal modalidade, o compensador de espessura de tecido pode ser compreendido de um material homogêneo, ou ao menos substancialmente homogêneo, que compreende poros grandes, por exemplo.
[829] Em várias modalidades, um cartucho de grampos pode compreender uma pluralidade de cavidades para grampos, cada uma contendo um grampo posicionado nela, em que as cavidades para grampos podem ser dispostas em uma pluralidade de fileiras, e em que uma bigorna posicionada em lado oposto ao cartucho de grampos pode compreender uma pluralidade de bolsos de formação que cor-respondemàs cavidades para grampos no cartucho de grampos. Em outras palavras, a bigorna pode compreender uma pluralidade de filei-ras de bolso de formação sendo que cada bolso de formação pode ser posicionado em oposição a uma cavidade para grampos no cartucho de grampos. Em várias modalidades, cada bolso de formação pode compreender dois recipientes de formação configurados para receber as pernas de grampo 10032 de um grampo 10030 em que cada recipi-ente de formação é configurado para receber uma perna de grampo 10032 e formar ou enrolar uma perna de grampo 10032 em direção a outra perna de grampo 10032, por exemplo. Em várias circunstâncias, as pernas 10032 podem perder ou não entrar apropriadamente nos recipientes de formação e, como resultado, as pernas de grampo 10032 podem se tornar malformadas durante a sequência de disparo. Em várias modalidades aqui descritas, uma bigorna pode compreender um arranjo, ou grade, de bolsos de formação que são, cada um, configurados para receber e formar uma perna de grampo. Em pelo menos uma tal modalidade, o arranjo de bolsos de formação pode compreender uma quantidade de bolsos de formação que ultrapassa a quantidade de grampos contidos dentro do cartucho de grampos. Em pelo menos uma modalidade, um cartucho de grampos pode compre-ender seis fileiras longitudinais de cavidades para grampos, por exem-plo, em que a bigorna pode compreender seis fileiras de bolsos de formação alinhados com as seis fileiras de cavidades para grampos e, além disso, bolsos de formação posicionados entre as fileiras de bolsos de formação. Por exemplo, de um lado da bigorna, a bigorna pode compreender uma primeira fileira de bolsos de formação que pode ser posicionada sobre uma primeira fileira de cavidades para grampos, uma segunda fileira de bolsos de formação que pode ser posicionada sobre uma segunda fileira de cavidades para grampos que é adjacente à primeira fileira de cavidades para grampos, e, além disso, uma fileira de bolsos de formação posicionada entre a primeira fileira de bolsos de formação e a segunda fileira de bolsos de formação. Em várias modalidades, agora com referência às FIGURAS 276 a 279, uma bi-gorna 10260 pode compreender seis fileiras de bolsos de formação 10261 que podem ser configuradas para serem colocadas sobre seis fileiras correspondentes de cavidades para grampos no cartucho de grampos 10200. Em pelo menos uma tal modalidade, fileiras de bolsos de formação intermediários 10262 podem ser posicionados entre e/ou ao lado das fileiras dos bolsos de formação 10261. Em certas modali-dades, agora com referência às FIGURAS 277, 278, e 280, cada bolso de formação 10261 e 10262 pode compreender dois recipientes de formação, em que cada recipiente de formação pode compreender uma porção distal 10263 que pode ser configurada para formar ou curvar uma perna de grampo 10032 proximalmente e uma porção proximal 10264 que pode ser configurada para formar ou curvar uma perna de grampo 10032 em posição distal. Em várias outras circunstâncias, os grampos 10030 podem ser formados em uma variedade outras formas. Por exemplo, um grampo 10030 pode ser formado de modo que uma perna 10032 seja formada para fora e a outra perna 10032 seja formada para dentro (FIGURA 281), ou de modo que ambas as pernas 10032 sejam formadas para fora (FIGURA 282) dependendo de, um, em quais recipientes de formação as pernas de grampo 10032 entram e/ou, dois, se as pernas 10032 entram na porção proximal 10263 ou na porção distal 10064 de cada recipiente de formação, por exemplo.
[830] Em várias modalidades, além do exposto acima, cada bolso de formação 10261 e/ou bolso de formação 10262 pode compreender um formato triangular ou semelhante à diamante, por exemplo. Em pelo menos uma modalidade, cada porção distal 10263 e/ou cada porção proximal 10264 dos bolsos de formação podem compreender um for-mato triangular em que, em pelo menos uma tal modalidade, os forma-tos triangulares das porções distais 10263 e das porções proximais 10264 podem ser dispostos de modo que eles tenham vértices apon-tando em direções opostas. Em certas modalidades, uma bigorna pode compreender um arranjo de bolsos de formação substancialmente quadrados, por exemplo. Em pelo menos uma tal modalidade, a superfície de formação de cada bolso de formação quadrado pode compre-ender uma superfície arqueada que se estende entre os lados do qua-drado. Em algumas modalidades, uma bigorna pode compreender um arranjo de cavidades circulares ou esféricas, por exemplo. Em várias modalidades, além do exposto acima, os bolsos de formação 10261 podem ser posicionados ao longo de uma ou mais linhas e, de maneira similar, os bolsos de formação 10262 também podem ser posicionados ao longo de uma ou mais linhas. Em várias outras modalidades, os bolsos de formação 10261 e/ou os bolsos de formação 10262 podem ser dispostos em uma ou mais fileiras circulares. Em pelo menos uma tal modalidade, os bolsos de formação 10261 podem ser dispostos ao longo de uma circunferência primária e os bolsos de formação 10262 podem ser dispostos ao longo de uma circunferência diferente. Em várias modalidades, a circunferência primária e a circunferência diferente podem ser concêntricas, ou ao menos substancialmente con-cêntricas. Em certas modalidades, os bolsos de formação 10262 po-dem ser dispostos ao longo de uma circunferência interna posicionada radialmente para dentro com relação à circunferência primária e/ou uma circunferência externa posicionada radialmente para fora com re-lação à circunferência primária, por exemplo. Em várias modalidades, a circunferência primária pode ser definida por um diâmetro primário, a circunferência interna pode ser definida por um diâmetro interno, e a circunferência externa pode ser definida por um diâmetro externo. Em pelo menos uma tal modalidade, o diâmetro interno pode ser mais curto que o diâmetro primário e o diâmetro externo pode ser mais longo que o diâmetro primário.
[831] Em várias modalidades, conforme descrito acima, uma bi gorna pode ser movida de uma posição aberta para uma posição fe-chada de modo a comprimir tecido contra o compensador de espessura de tecido de um cartucho de grampos, como o compensador de espessura de tecido 10020, por exemplo. Em várias circunstâncias, o compensador de espessura de tecido pode ser posicionado ao lado da porção de suporte do cartucho de grampos antes de o compensador de espessura de tecido ser posicionado em relação ao tecido. Em certas modalidades, o compensador de espessura de tecido 10020 pode estar em uma posição na qual ele está em contiguidade à porção de suporte 10018 antes de a bigorna ser movida para sua posição fechada. Em certas outras modalidades, o compensador de espessura de tecido 10020 pode estar em uma posição na qual um vão está presente entre o compensador de espessura de tecido 10020 e a porção de suporte 10018. Em pelo menos uma tal modalidade, a bigorna pode deslocar o tecido e o compensador de espessura de tecido 10020 para baixo até o compensador de espessura de tecido 10020 está em contiguidadeà porção de suporte 10018 em que, neste ponto, a bigorna pode ser movida para sua posição fechada e gerar compressão dentro do tecido. No caso em que um cirurgião não está satisfeito com o posicionamento do tecido entre a bigorna e o cartucho de grampos, o cirurgião pode abrir a bigorna, ajustar a posição da bigorna e do cartucho de grampos, e fechar a bigorna novamente. Devido a tal posicionamento e re-posicionamento do cartucho de grampos em relação ao tecido, em várias circunstâncias, a extremidade distal do compensador de espessura de tecido 10020 pode se desalojar da porção de suporte 10010, por exemplo. Em algumas de tais circunstâncias, a extremidade distal do compensador de espessura de tecido 10020 pode entrar em contato com o tecido e descascar ou enrolar em relação à porção de suporte 10010. Em várias modalidades, conforme descrito em mais detalhes abaixo, um cartucho de grampos pode compreender um ou mais elementos configurados para reter de maneira liberável um com-pensador de espessura de tecido a uma porção de suporte subjacente do cartucho de grampos.
[832] Em várias modalidades, agora com referência à FIGURA 265, um cartucho de grampos 10300 pode compreender uma porção de suporte 10310, um compensador de espessura de tecido 10320 apoiado pela porção de suporte 10310, e uma extremidade distal 10302 que inclui uma ponta 10303 configurada para prender de modo liberável uma extremidade distal 10325 do compensador de espessura de tecido 10320 na posição. Em pelo menos uma modalidade, a ponta 10303 pode compreender uma fenda 10305 configurada para receber a extremidade distal 10325 do compensador de espessura de tecido 10320. Em várias modalidades, a extremidade distal 10325 pode ser compactada, ou encravada, dentro da fenda 10305 de modo que a ex-tremidade distal 10325 possa ser mantida no lugar quando o cartucho de grampos 10300 é posicionado em relação ao tecido. Em pelo menos uma tal modalidade, a fenda 10305 pode ser orientada em uma direção que é paralela, ou ao menos substancialmente paralela, à superfície de suporte 10311 da porção de suporte 10310. Em várias modalidades, a fenda 10305 pode ser horizontal com relação à superfície de suporte 10311. Em várias outras modalidades, agora com referênciaà FIGURA 266, um cartucho de grampos 10400 pode compreender uma porção de suporte, um compensador de espessura de tecido 10420 apoiado pela porção de suporte, e uma extremidade distal 10402 que inclui uma ponta 10403 configurada para prender de modo liberável a extremidade distal 10425 do compensador de espessura de tecido 10420 na posição. Em pelo menos uma modalidade, a extremidade distal 10425 pode compreender uma projeção que se estende a partir da mesma e a ponta 10403 pode compreender uma fenda vertical 10405 configurada para receber a projeção da extremidade distal 10425. Em várias modalidades, a extremidade distal 10425, e/ou a projeção que se estende dela, pode ser compactada, ou encravada, dentro da fenda 10405 de modo que a extremidade distal 10425 possa ser mantida no lugar quando o cartucho de grampos 10400 é posicio-nado em relação ao tecido. Em certas modalidades, o compensador de espessura de tecido 10420 pode compreender uma fenda, como a fenda 10429, por exemplo, que pode ser configurada para receber pelo menos uma porção do ponta 10403. Em pelo menos uma modalidade, a fenda 10405 pode ser orientada em uma direção que é perpendicular, ou ao menos substancialmente perpendicular, à superfície de suporte 10411 da porção de suporte. Em várias modalidades, agora com referência à FIGURA 267, um cartucho de grampos 10500 pode compreender uma porção de suporte, um compensador de espessura de tecido 10520 apoiado pela porção de suporte, e uma extremidade distal 10502 que inclui uma ponta configurada para prender de modo liberável a extremidade distal 10525 do compensador de espessura de tecido 10520 na posição. Em pelo menos uma modalidade, a ponta pode compreender uma fenda vertical 10505 configurada para receber a extremidade distal 10525 do compensador de espessura de tecido 10520. Em várias modalidades, a extremidade distal 10525 pode ser compactada, ou encravada, dentro da fenda 10505 de modo que a ex-tremidade distal 10525 possa ser mantida no lugar quando o cartucho de grampos 10500 é posicionado em relação ao tecido.
[833] Em várias modalidades, novamente com referência à FI GURA 265, o compensador de espessura de tecido 10320 pode com-preender uma superfície de topo 10324 que pode ser posicionada acima da superfície de topo 10304 da ponta 10303. Uma outra modali-dade exemplificadora na qual a superfície de topo de um compensador de espessura de tecido é posicionado acima da ponta do cartucho de grampos é ilustrada na FIGURA 238, em que a superfície de topo 10721 do compensador de espessura de tecido 10720 é posicionado acima da superfície de topo 10004 da ponta 10003, por exemplo. Em uso, novamente fazendo referência à FIGURA 265, o tecido pode deslizar sobre a superfície de topo 10304 da ponta 10303 e, em algumas circunstâncias, o tecido pode entrar em contato com a extremidade distal 10325 do compensador de espessura de tecido 10320 e pode aplicar uma força ao compensador de espessura de tecido 10320 ten-dendo a descolar o compensador de espessura de tecido 10320 da porção de suporte 10310. Nas modalidades aqui descritas, esta força de descolamento pode ser oposta pela porção da extremidade distal 10325 encravada dentro da ponta 10303. Em todo caso, quando o te-cido tiver sido posicionado adequadamente em relação ao cartucho de grampos 13000, uma bigorna pode ser girada para uma posição fe-chada para comprimir o tecido e o compensador de espessura de teci-do 10320 contra a porção de suporte 10310. Em pelo menos uma tal modalidade, a bigorna pode ser girada para uma posição na qual a bigorna entra em contato com a superfície de topo 10304 da ponta 10303 e, como resultado, a bigorna pode ser impedida de girar ainda mais. Em várias circunstâncias, devido à superfície de topo 10324 do compensador de espessura de tecido 10320 estar posicionada acima da superfície de topo 10304 da ponta 10303, a superfície de topo 10324 pode ser empurrada para baixo em direção à porção de suporte 10310 quando a bigorna está sendo fechada e, em alguns casos, a superfície de topo 10324 pode ser empurrada abaixo da superfície de topo 10304 da ponta 10303, por exemplo. Após os grampos contidos dentro do cartucho de grampos 10300 terem sido dispensados e o compensador de espessura de tecido 10320 ter sido cortado, conforme descrito aqui, a porção de suporte 10310 e a ponta 10303 podem ser afastadas do compensador de espessura de tecido 10320 de modo que a extremidade distal 10325 do compensador de espessura de tecido 10320 possa deslizar para fora da fenda 10305.
[834] Conforme descrito acima, uma bigorna, como a bigorna 10060, por exemplo, pode ser girada para uma posição fechada na qual a bigorna 10060 entra em contato com a superfície de ponta su-perior 10004 de um cartucho de grampos, como o cartucho de grampos 10000, por exemplo. Quando a bigorna tiver alcançado sua posição fechada, a quantidade na qual um compensador de espessura de tecido, como o compensador de espessura de tecido 10020, por exemplo, é compactado dependerá, dentre outras coisas, da espessu-ranão comprimida, ou da altura, do compensador de espessura de tecido e da espessura do tecido. Agora com referência às FIGURAS 236 e 237, um compensador de espessura de tecido 10920 pode compreender uma superfície de topo que é nivelada, ou ao menos substancialmente nivelada, com a superfície de topo 10004 da ponta 10003. Em tais modalidades, a superfície de topo do compensador de espessura de tecido 10920 pode ser empurrada abaixo da superfície de topo 10004 da ponta 10003. Agora com referência às FIGURAS 241 e 242, um compensador de espessura de tecido, como o compensador de espessura de tecido 10820, por exemplo, pode compreender uma superfície de topo 10821 que está posicionada abaixo da superfície de ponta superior 10004 antes de o compensador de espessura de tecido 10820 ser comprimido pelo tecido T e pela bigorna 10060. Nas circunstâncias em que o tecido T é relativamente delgado, conforme ilustrado nas FIGURAS 239 e 240, o compensador de espessura de tecido 10920 pode ser submetido a relativamente pouca compressão. Agora com referência às FIGURAS 241 e 242, o compensador de es-pessura de tecido 10820 pode ser submetido a uma compressão maior quando o tecido T é relativamente mais espesso. Nas circunstâncias nas quais o tecido T tem ambas as seções delgadas e seções mais espessas, conforme ilustrado nas FIGURAS 243 e 244, o compensador de espessura de tecido 10820 pode ser compactado uma quantidade maior quando ele está posicionado sob o tecido mais espesso T e uma quantidade menor quando ele está posicionado sob o tecido mais delgado T, por exemplo. desta forma, conforme descrito acima, o compensador de espessura de tecido pode compensar as diferentes espessuras de tecido.
[835] Em várias modalidades, agora com referência às FIGURAS 268 a 270, um instrumento de grampeamento cirúrgico pode compre-ender, um, uma canaleta do cartucho 16670 configurado para receber um cartucho de grampos 16600 e, dois, uma bigorna 16660 acoplada articuladamente à canaleta do cartucho 16670. O cartucho de grampos 16600 pode compreender uma porção de suporte 16610 e um com-pensador de espessura de tecido 16620 em que uma extremidade dis-tal 16625 do compensador de espessura de tecido 16620 pode ser mantido de modo liberável à porção de suporte 16610 por uma ponta 16603 na extremidade distal 16602 do cartucho de grampos 16600. Em pelo menos uma modalidade, a ponta 16603 pode compreender uma fenda 16605 e pode ser compreendida de um material flexível. Em uso, com relação principalmente à FIGURA 269, a ponta 16603 pode ser flexionada para baixo de modo a expandir a abertura da fenda 16605. Em certas modalidades, a ponta 16603 pode compreender entalhes ou recortes 16606 que podem ser configurados para permitir que a ponta 16603 flexione para baixo. Em todo caso, em várias circunstâncias, a abertura expandida da fenda 16605 pode facilitar a inserção da extremidade distal 16625 do compensador de espessura de tecido 16620 na fenda 16605. Quando o compensador de espessura de tecido 16620 tiver sido posicionado adequadamente, a ponta 16603 pode ser liberada e, devido à resiliência do material que compreende a ponta 16603, a ponta 16603 pode voltar, ou ao menos substancialmente voltar, para sua condição não flexionada e aprisionar a extremidade distal 16625 do compensador de espessura de tecido 16620 contra a superfície de suporte 16611, conforme ilustrado na FIGURA 270. Em uso, de modo semelhante ao exposto acima, a extremidade distal 16625 pode ser puxada para fora da fenda 16605 quando a porção de suporte 16610 é afastada do tecido grampeado. Em várias circunstân-cias, a ponta flexível 16603 pode ser configurada para defletir quando o compensador de espessura de tecido 16620 é desprendido da porção de suporte 16610. Em várias modalidades, novamente com referência à FIGURA 270, o compensador de espessura de tecido 16620 pode compreender uma superfície de topo 16621 que é alinhada, ou ao menos substancialmente alinhada, com uma superfície de topo 16604 da ponta 16603.
[836] Em várias modalidades, com referência à FIGURA 271, um instrumento de grampeamento cirúrgico pode compreender, um, uma canaleta 10770 configurada para receber um cartucho de grampos 10700 e, dois, uma bigorna 10760 acoplada rotacionalmente à canaleta 10770. O cartucho de grampos 10700 pode compreender uma por-ção de suporte 10710 e um compensador de espessura de tecido 10720. Em várias modalidades, o compensador de espessura de tecido 10720 pode ser mantido na posição por uma ponteira 10703 que pode ser deslizada sobre a porção de suporte 10710. Em pelo menos uma modalidade, com relação principalmente à FIGURA 272, a ponteira 10703 pode compreender uma ou mais fendas laterais 10707 que podem ser configuradas para receber de modo removível um ou mais trilhos de anexação que se estendem ao longo da porção de suporte 10710, por exemplo. Em várias modalidades, o compensador de es-pessura de tecido 10720 pode ser posicionado entre as fendas laterais 10707. Em certas modalidades, a ponteira 10703 pode compreender adicionalmente uma extremidade distal 10702 e uma cavidade 10706 definida na extremidade distal 10702 em que a cavidade 10706 tam-bém pode ser configurada para receber nela pelo menos uma porção da porção de suporte 10710, por exemplo. Em uso, a ponteira 10703 pode ser deslizada sobre a porção de suporte 10710 em uma direção distal para proximal. Em várias modalidades, o compensador de es-pessura de tecido 10720 pode ser montado de modo removível à pon-teira 10703 de modo que, após os grampos terem sido disparados através do compensador de espessura de tecido 10720, o compensa-dor de espessura de tecido 10720 pode se desprender da ponteira 10703 quando a porção de suporte 10710 e a ponteira 10703 são afastadas do compensador de espessura de tecido 10720. Em várias modalidades, a superfície de topo 10721 do compensador de espessu-ra de tecido 10720 pode ser posicionada abaixo da superfície de topo 10704 da ponta 10703.
[837] Em várias modalidades, agora com referência às FIGURAS 273 e 274, um instrumento de grampeamento cirúrgico pode compre-ender, um, uma canaleta de cartucho de grampos 11070 configurada para receber um cartucho de grampos 11000 e, dois, uma bigorna 11060 acoplada rotacionalmente à canaleta 11070. O cartucho de grampos 11000 pode compreender uma porção de suporte 11010 e um compensador de espessura de tecido 11020. Em várias modalidades, o compensador de espessura de tecido 11020 pode ser mantido na posição por um ou mais trilhos longitudinais 11019 que se estendem a partir do suporte 11011 da porção de suporte 11010. Em pelo menos uma modalidade, os trilhos longitudinais 11019 podem ser encaixados dentro do compensador de espessura de tecido 11020. Em certas modalidades, com relação principalmente à FIGURA 274, o compensador de espessura de tecido 11020 pode compreender uma reentrância longitudinal 11029 que pode ser configurada para receber os trilhos longitudinais 11019. Em pelo menos uma tal modalidade, a reentrância 11029 pode ser dimensionada e configurada para receber os trilhos 11019 em uma disposição de encaixe por pressão, por exemplo. Tais elementos, além do exposto acima, podem ser configu-rados para evitar, ou ao menos limitar, o movimento lateral relativo entre o compensador de espessura de tecido 11020 e a porção de supor-te 11010 e, além disso, limitar a liberação prematura do compensador de espessura de tecido 11020 da porção de suporte 11010, por exem-plo. Em várias modalidades, agora com referência à FIGURA 275, um instrumento de grampeamento cirúrgico pode compreender, um, uma canaleta de cartucho de grampos 11170 configurada para receber um cartucho de grampos 11100 e, dois, uma bigorna 11160 acoplada rotacionalmente à canaleta 11170. O cartucho de grampos 11100 pode compreender uma porção de suporte 11110 e um compensador de espessura de tecido 11120. Em várias modalidades, o compensador de espessura de tecido 11120 pode ser mantido na posição por uma ou mais fileiras longitudinais de estacas ou dentes 11119 que se es-tendem a partir do suporte 11111 da porção de suporte 11110. Em pelo menos uma modalidade, as fileiras longitudinais de estacas 11119 podem ser encaixadas dentro do compensador de espessura de tecido 11120.
[838] Com relação à modalidade ilustrada na FIGURA 273, além do exposto acima, o compensador de espessura de tecido 11020 do cartucho de grampos 11000 pode ser liberado progressivamente da porção de suporte 11010 quando os grampos são ejetados das cavi-dades para grampos 10012 ali definidas. Mais particularmente, além do exposto acima, os grampos posicionados nas cavidades para grampos 10012 podem ser ejetados sequencialmente entre a extremidade proximal 11001 do cartucho de grampos 11000 e a extremidade distal 11002 do cartucho de grampos 11000 de modo que, quando os grampos estão sendo ejetados, os grampos podem aplicar uma força de alteração para cima ao compensador de espessura de tecido 11020 a qual age empurrando o compensador de espessura de tecido 11020 para fora dos trilhos 11019. Em tais circunstâncias, a extremidade pro-ximal 11006 do compensador de espessura de tecido 11020 pode ser liberado da porção de suporte 11010 quando os grampos são ejetados das cavidades para grampos mais proximais 10012. O compensador de espessura de tecido 11020 pode ser então liberado progressivamente da porção de suporte 11010 quando os grampos são progressivamente ejetados da porção de suporte 11010 entre a extremidade proximal 11001 e a extremidade distal 11002 do cartucho de grampos 11000. Quando os grampos posicionados dentro das cavidades de grampo mais distais 10012 são ejetados da porção de suporte 11010, a extremidade distal 11007 do compensador de espessura de tecido 11020 pode ser liberada da porção de suporte 11010. Com relação à modalidade ilustrada na FIGURA 275, o compensador de espessura de tecido 11120 pode ser liberado progressivamente das estacas 1119 que se estendem a partir da porção de suporte 11110 quando os grampos são ejetados progressivamente do cartucho de grampos entre a extremidade proximal 11101 e a extremidade distal 11102.
[839] Conforme discutido acima, um compensador de espessura de tecido pode ser liberado progressivamente da porção de suporte de um cartucho de grampos quando os grampos são ejetados progressi-vamente da porção de suporte e entram em contato com o compensa-dor de espessura de tecido. Em várias modalidades, as pernas do grampo, como as pernas de grampo 10032, por exemplo, podem ser capazes de passar através do compensador de espessura de tecido sem liberar o compensador de espessura de tecido da porção de su-porte. Em tais modalidades, o compensador de espessura de tecido pode permanecer engatado com a porção de suporte até as bases dos grampos, como as bases 10031, entrarem em contato com o compen-sador de espessura de tecido e o empurrarem para cima. Em várias modalidades, entretanto, alças e/ou outros elementos de retenção que se estendem a partir da porção de suporte, por exemplo, podem se opor à liberação do compensador de espessura de tecido a partir da porção de suporte. Em certas modalidades, conforme descrito em mais detalhes abaixo, uma porção de suporte pode compreender elementos de retenção que podem ser configurados para liberar progressivamente um compensador de espessura de tecido da porção de suporte quando os grampos são disparados progressivamente do cartucho de grampos. Agora com referência à FIGURA 283, um cartucho de grampos, como o cartucho de grampos 11200, por exemplo, pode compreender uma porção de suporte 11210 que inclui elementos de retenção 11213 que podem ser configurados para prender de modo liberável um compensador de espessura de tecido 11220 (FIGURA 284) à porção de suporte 11210. Em várias modalidades, os elementos de retenção 11213 podem ser posicionados nas extremidades de cada cavidade para grampos 11212, por exemplo, em que cada elemento de retenção 11213 pode compreender um sulco-guia 11216 ali definido, o qual é configurado para receber de maneira deslizante uma perna de grampo 10032 de um grampo 10030. Em tais modalidades, ambas as pernas de grampo 10032 e os elementos de retenção 11213 podem ser configurados para reter de maneira liberável o compensador de espessura de tecido 11220 à porção de suporte 11210. Em uso, agora com referência à FIGURA 284, os acionadores de grampos 10040 contidos dentro da porção de suporte 11210 podem ser direcionados para cima por um trenó 10050, conforme descrito acima, em que os acionadores de grampos 10040 podem ser configurados para entrar em contato com os elementos de retenção 11213, desprender ao menos parcialmente os elementos de retenção 11213 da porção de suporte 11210, e deslocar os elementos de retenção 11213 para fora e para longe dos grampos 10030 e das cavidades para grampos 11212. Quando os elementos de retenção 11213 são desprendidos da porção de suporte 11210 e/ou deslocadas para fora, conforme ilustrado na FIGURA 284, os elementos de retenção 11213 podem não ser mais capazes de reter o compensador de espessura de tecido 11220 à por-ção de suporte 11210 e, como resultado, o compensador de espessura de tecido 11220 pode ser liberado da porção de suporte 11210. de modo semelhante ao exposto acima, o compensador de espessura de tecido 11220 pode ser liberado progressivamente da porção de suporte 11210 quando os grampos 10030 são ejetados progressivamente do cartucho de grampos em direção a uma bigorna, como a bigorna 11260, por exemplo. Em várias modalidades, os acionadores de grampos 10040 podem entrar em contato com os elementos de reten-ção 11213 quando as superfícies de topo dos acionadores de grampos 10040 ficam co-planares, ou ao menos substancialmente co-planares, com a superfície de suporte 11211 da porção de suporte 11210, por exemplo. Em tais modalidades, o compensador de espessura de tecido 11220 pode ser liberado da porção de suporte 11210 simultaneamente e/ou imediatamente antes de os grampos 10030 serem formados para sua configuração completamente formada, ou completamente disparada. Em pelo menos uma tal modalidade, com relação princi-palmenteà FIGURA 285, os acionadores 10040 podem ser excessi-vamente direcionados de modo que eles sejam empurrados acima da superfície de suporte 11211 para formar completamente os grampos 10030 e, durante o processo de serem direcionados excessivamente, desprendem os elementos de retenção 11213 da porção de suporte 11210. Em várias modalidades, novamente com referência à FIGURA 284, os elementos de retenção 11213 podem se estender sobre, ou se projetar, para dentro das cavidades para grampos 11212 antes de se-rem desprendidos ou deslocados para fora de modo que os acionadores 10040 possam entrar em contato com os elementos de retenção 11213 assim que os acionadores 10040 alcançam a superfície de su-porte 11211. Em todo caso, quando o compensador de espessura de tecido 11220 tiver sido liberado da porção de suporte 11210, agora com referência à FIGURA 285, a porção de suporte 11210 pode ser afastada do compensador de espessura de tecido implantado 11220.
[840] Conforme descrito acima, um compensador da espessura do tecido compressível de um cartucho de grampos pode ser liberado progressivamente de uma porção de suporte, ou corpo do cartucho, do cartucho de grampos quando os grampos são disparados, ou dispen-sados, do cartucho de grampos. Em várias circunstâncias, essa libera-ção pode compreender um afrouxamento progressivo do compensador de espessura de tecido da porção de suporte em que, em algumas cir-cunstâncias, um desprendimento completo do compensador de espes-sura de tecido da porção de suporte pode não ocorrer até a bigorna ser aberta e a porção de suporte ser afastada do compensador de es-pessura de tecido implantado. Em várias modalidades, agora com re-ferência à FIGURA 289, um cartucho de grampos, como o cartucho de grampos 11300, por exemplo, pode compreender um compensador de espessura de tecido 11320 que é retido de modo liberável a uma por-ção de suporte 11310. Em pelo menos uma modalidade, a porção de suporte 11310 pode compreender uma pluralidade de elementos de retenção 11313 que se estendem a partir da mesma, os quais são configurados para comprimir de modo liberável e prender os lados lon-gitudinais do compensador de espessura de tecido 11320 à porção de suporte 11310. Em pelo menos uma tal modalidade, cada elemento de retenção 11313 pode compreender uma canaleta ou fenda voltada para dentro 11316 que pode ser configurada para receber os lados longi-tudinais do compensador de espessura de tecido 11320. Em várias circunstâncias, uma pluralidade de elementos de retenção 11313 pode se estender ao longo de um primeiro lado longitudinal da porção de suporte 11310 e uma pluralidade de elementos de retenção 11313 po-de se estender ao longo de um segundo lado longitudinal da porção de suporte 11310 em que, em determinadas circunstâncias, os elementos de retenção 11313 podem ser configurados para evitar, ou ao menos limitar, o movimento lateral relativo entre o compensador de espessura de tecido 11320 e a porção de suporte 11310 e, além disso, evitar, ou ao menos limitar, a liberação prematura do compensador de espessura de tecido 11320 da porção de suporte 11310. Em várias modalidades, os elementos de retenção 11313 podem ser formados integralmente com a porção de suporte 11310 e, em pelo menos uma modalidade, com referência à FIGURA 290, os elementos de retenção 11313 podem ser configurados para se soltarem, ou se soltarem ao menos parcialmente, da porção de suporte 11310 de modo a permitir ao com-pensador de espessura de tecido 11320 se soltar da porção de suporte 11310, conforme ilustrado na FIGURA 291, por exemplo. Em certas modalidades, uma bigorna, como a bigorna 11360, por exemplo, pode ser configurada para comprimir o compensador de espessura de tecido 11320 e, em resposta à pressão gerada dentro do compensador de espessura de tecido 11320, o compensador de espessura de tecido 11320 pode se expandir lateralmente para soltar ao menos parcial-mente, ou desengatar, os elementos de retenção 11313 do compen-sador de espessura de tecido 11320. Em várias modalidades, o avanço de um elemento de faca, discutido acima, através da bigorna 11360 e do cartucho de grampos 11300 pode dispensar os grampos ali contidos e, simultaneamente, espremer a bigorna 11360 e o cartucho de grampos 11300 mais perto um do outro, o que pode aplicar uma pres-são de compressão adicionada ao compensador de espessura de te-cido 11320 e assim fazer com que os elementos de retenção 11313 se soltem sequencialmente quando o elemento de faca passa através do cartucho de grampos 11300.
[841] Em várias modalidades, agora com referência às FIGURAS 292 a 294, um cartucho de grampos, como o cartucho de grampos 11400, por exemplo, pode compreender um compensador de espessura de tecido 11420 fixado de modo removível a uma porção de suporte 11410. Em pelo menos uma modalidade, o cartucho de grampos 11400 pode compreender uma ou mais barras retentoras 11413 que podem ser configuradas para prender os lados longitudinais do compensador de espessura de tecido 11420 à superfície de suporte 11411. Em pelo menos uma tal modalidade, cada barra retentora 11413 pode compreender braços opostos 11418 que podem definir uma canaleta 11416 entre si. Em tais modalidades, um dos braços 11418 pode ser configurado para se estender sobre o compensador de espessura de tecido 11420 e o outro braço 11418 pode ser configurado para se estender sob um rebordo 11419 que se estende a partir da porção de suporte 11410. Com relação principalmente à FIGURA 292, a canaleta 11416 de cada barra retentora 11413 pode ser dimensionada e configurada para aplicar uma força de compressão aos lados lon-gitudinais do compensador de espessura de tecido 11420 antes de o cartucho de grampos 11400 ser usado. Durante o uso, com relação principalmente à FIGURA 293, o cartucho de grampos 11400 pode ser posicionado dentro de uma canaleta de cartucho de grampos e, uma vez que o cartucho de grampos 11400 tenha sido posicionado ade-quadamente, uma bigorna, como a bigorna 11460, por exemplo, pode ser movida para uma posição na qual ela pode comprimir o compen-sador de espessura de tecido 11420. de modo semelhante ao exposto acima, o compensador de espessura de tecido 11420, quando com-pactado, pode se expandir lateralmente, ou para fora, e, como resulta-do, soltar as barras retentoras 11413 do cartucho de grampos 11400. Em certas outras modalidades, o fechamento da bigorna 11460 pode não soltar, ou pode não soltar completamente, as barras retentoras 11413 do cartucho de grampos. Em pelo menos uma tal modalidade, o avanço de uma barra de disparo, descrita acima, através do cartucho de grampos 11400 pode dispensar os grampos 10030 a partir da porção de suporte 11410 e, simultaneamente, pressionar a bigorna 11460 e o cartucho de grampos 11400 mais perto um do outro para aplicar uma força de compressão ao compensador de espessura de tecido 11420 que seja suficiente para fazer com que o compensador de es-pessura de tecido 11420 se expanda lateralmente e solte as barras retentoras 11413 do cartucho de grampos 11400. Quando as barras retentoras 11413 tiverem se soltado do cartucho de grampos 11400, com referência à FIGURA 294, o porção de suporte 11410 pode ser afastada do compensador de espessura de tecido implantado 11420 e removido do sítio cirúrgico. Em certas modalidades alternativas, agora com referência à FIGURA 295, um cartucho de grampos 11400’ pode compreender barras retentoras 11413’ que, de modo semelhante ao exposto acima, podem compreender braços 11418’ que se estendem a partir dela. Em pelo menos uma tal modalidade, cada um dos braços 11418’ pode compreender um corte de travamento com formato trian-gular 11417’ que pode ser configurado para travar de modo liberável as barras retentoras 11413’ ao cartucho de grampos 11400’. Mais par-ticularmente, em pelo menos uma modalidade, a porção de suporte 11410’ do cartucho de grampos 11400’ pode compreender cortes infe-riores 11419’ que, em cooperação com os cortes de travamento com formato triangular 11417’, podem ser configurados para reter de ma-neiraliberável as barras retentoras 11413’ ao cartucho de grampos 11400 e impedir que o compensador de espessura de tecido 11420 seja desprendido prematuramente da porção de suporte 11410’. Du-rante o uso, de modo semelhante ao exposto acima, a barras retento-ras 11413’ podem ser desprendidas do cartucho de grampos 11400’ quando uma força de compressão suficiente é aplicada ao compensa-dor de espessura de tecido 11420, por exemplo.
[842] Em várias circunstâncias, conforme descrito acima e nova mente com referência às FIGURAS 259 e 260, o deslizador 10050 do cartucho de grampos 10000 e o membro de disparo 10052 de um ins-trumento de grampeamento cirúrgico pode ser movido da extremidade proximal 10001 do cartucho de grampos 10000 para a extremidade distal 10002 (FIGURA 219) do cartucho de grampos 10000 para dis-pensar os grampos 10030 da porção de suporte 10010. Em pelo menos uma tal circunstância, cada grampo 10030 pode ser movido de uma posição não disparada para uma posição disparada e ejetado da porção de suporte 10010 para capturar a totalidade do compensador de espessura de tecido 10020 contra o tecido posicionado entre a bigorna 10060 e o cartucho de grampos 10000. Em determinadas cir-cunstâncias, um cirurgião pode não precisar disparar todos os grampos 10030 do cartucho de grampos 10000 e o cirurgião pode interromper a progressão do trenó 10050 e da barra de disparo 10052 em um ponto localizado entre a extremidade proximal 10001 e a extremidade distal 10002 do cartucho de grampos 10000. Em tais circunstâncias, o compensador de espessura de tecido 10020 pode ser apenas parcial-mente implantado ao tecido T e, de modo a soltar a porção não im-plantada do compensador de espessura de tecido 10020 da porção de suporte 10010, o cirurgião pode puxar a porção de suporte 10010 na direção contrária do compensador de espessura de tecido parcialmente implantado 10020 de modo que a porção não implantada seja separada ou removida da porção de suporte 10010. Embora tais modalidades sejam adequadas em várias circunstâncias, um aprimoramento é ilustrado nas FIGURAS 300-302 em que um compensador de espes-sura de tecido, como o compensador de espessura de tecido 11520 do cartucho de grampos 11500, por exemplo, pode compreender uma pluralidade de segmentos conectados que podem ser configurados para se soltar uns dos outros. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 11520 pode compreender um primeiro segmento, ou mais proximal, 11520a, um segundo segmento 11520b conectado de modo removível ao primeiro segmento 11520a, um terceiro segmento 11520c conectado de modo removível ao se-gundo segmento 11520b, um quarto segmento 11520d conectado de modo removível ao terceiro segmento 11520c, e um quinto segmento 11520e conectado de modo removível ao quarto segmento 11520d, por exemplo. Em várias modalidades, o compensador de espessura de tecido 11520 pode compreender pelo menos uma seção delgada 11529 posicionada entre quaisquer dois segmentos adjacentes 11520a a 11520e que podem ser configurados para definir uma ruptura predeterminada ou ponto de separação no qual os segmentos do compensador de espessura de tecido podem se separar uns dos ou-tros. Em certas modalidades, um compensador de espessura de tecido pode incluir qualquer disposição adequada de perfurações, seções delgadas, e/ou quaisquer outros meios para criar um ponto de separa-ção dentro do compensador de espessura de tecido. Com relação principalmente à FIGURA 301, uma bigorna 11560 é ilustrada em uma posição fechada e o elemento de disparo 10052 é ilustrado como tendo sido parcialmente avançado através do cartucho de grampos 11500 de modo que os grampos 10030 subjacentes ao primeiro segmento 11520a, ao segundo segmento 11520b, e ao terceiro segmento 11520c tenham sido disparados para capturar o compensador de espessura de tecido 11520 contra o tecido T. Em tal posição, o elemento de disparo 10052 ainda não foi avançado para dispensar os grampos 10030 subjacentes ao quarto segmento 11520d e ao quinto segmento 11520e, por exemplo. Agora com referência à FIGURA 302, a bigorna 11560 foi movida para uma posição aberta e a porção de suporte 11510 do cartucho de grampos 11500 foi afastada da porção do compensador de espessura de tecido 11520 que foi implantada. Como ilustrado na FIGURA 302, a seção delgada 11529 (FIGURA 300) localizada entre o terceiro segmento 11520c e o quarto segmento 11520d permite que a porção não implantada do compensador de espessura de tecido 11520 se separe da porção implantada.
[843] Em várias modalidades, além do exposto acima, um cartu cho de grampos pode compreender uma pluralidade de prendedores configurados para prender de modo liberável um compensador de es-pessura de tecido a uma porção de suporte do cartucho de grampos. Em certas modalidades, a porção de suporte pode compreender uma pluralidade de aberturas definidas na superfície de suporte, por exem-plo, em que os prendedores podem se estender através do compen-sador de espessura de tecido e podem ser retidos de modo liberável nas aberturas da porção de suporte. Em uso, os prendedores podem ser liberados progressivamente da porção de suporte quando os grampos são ejetados progressivamente da porção de suporte. Em pelo menos uma tal modalidade, os prendedores podem ser implanta-dos com o compensador de espessura de tecido e, em pelo menos uma modalidade, os prendedores podem ser compreendidos de pelo menos um material bioabsorvível, por exemplo. Em certas modalida-des, os prendedores podem se soltar da porção de suporte após o compensador de espessura de tecido ter sido implantado ao menos parcialmente e quando a porção de suporte é afastada do compensa-dor de espessura de tecido implantado. Em várias modalidades, agora com referência às FIGURAS 323 a 325, um cartucho de grampos, co-mo o cartucho de grampos 11600, por exemplo, pode compreender um compensador de espessura de tecido 11620 montado de modo liberável a uma porção de suporte 11610 por uma pluralidade de pren-dedores 11613. Cada prendedor 11613 pode compreender uma pri-meira extremidade 11618 encaixada dentro e/ou engatada de outro modo com o compensador de espessura de tecido 11620, uma segun-da extremidade 11618 engatada com a porção de suporte 11610, e um conector 11616 que conecta a primeira extremidade 11618 à segunda extremidade 11618. Em várias modalidades, os prendedores 11613 podem se estender através de uma fenda de faca 11615 definida na porção de suporte 11610. Em uso, o elemento de disparo 10052, des-crito acima, pode mover uma ponta de faca através da fenda de faca 11615 na porção de suporte 11610 e cortar os prendedores 11613 de modo a liberar o compensador de espessura de tecido 11620 da porção de suporte 11610. Em pelo menos uma tal modalidade, a barra de disparo 10052 pode ser avançada de uma extremidade proximal 11601 do cartucho de grampos 11600 para uma extremidade distal 11602 do cartucho de grampos 11600 de modo a, um, avançar o trenó 10050 em posição distal e disparar progressivamente os grampos 10030, conforme discutido acima, e, dois, cortar e/ou romper progressivamente os prendedores 11613 para liberar progressivamente o compensador de espessura de tecido 11620 da porção de suporte 11610. Em certas modalidades, de modo semelhante ao exposto acima, o compensador de espessura de tecido 11620 pode compreender uma pluralidade de segmentos removíveis 11620a a 11620e que podem ser, cada um, presos à porção de suporte 11610 por um ou mais prendedores 11613, por exemplo. No caso em que o elemento de disparo 10052 é parado entre a extremidade proximal 11601 e a extremidade distal 11602 do cartucho de grampos 11600, conforme ilustrado na FIGURA 324, os prendedores 11613 podem ajudar a prender a porção não implantada do compensador de espessura de tecido 11620 à porção de suporte 11610 após a bigorna 11660 ser aberta e a porção de suporte 11610 ser afastada do tecido T, conforme ilustrado na FIGURA 325. Em várias modalidades, além do exposto acima, o gume cortante 10053 do elemento de disparo 10052 pode ser configurado para cortar e/ou romper os prendedores 11613. Em certas modalidades alternativas, agora com referência às FIGURAS 327 e 328, um deslizador que dispensa grampos, como o deslizador 11650, por exemplo, pode compreender um gume de faca 11653 que pode ser configurado para cortar os conectores 11616 dos prendedores 11613 conforme o deslizador 11650 atravessa o cartucho de grampos 11600. Em pelo menos uma tal modalidade, cada conector 11616 pode com-preender um elemento cilíndrico que se estende entre as extremidades em forma de T 11618 dos prendedores 11613 em que a ponta de faca 11653 pode compreender um perfil côncavo 11653 que pode ser con-figurado para receber o conector cilíndrico 11616, por exemplo.
[844] Conforme discutido acima, um cartucho de grampos pode ser carregado em uma canaleta de cartucho de grampos de um ins-trumento de grampeamento cirúrgico. Em várias circunstâncias, um cirurgião, ou outro médico, pode inserir o cartucho de grampos na canaleta de cartucho de grampos por aplicar uma força para baixo sobre o cartucho de grampos para prender o cartucho de grampos no lugar. Em algumas de tais circunstâncias, o médico pode colocar seu dedo polegar, por exemplo, sobre a superfície de topo do cartucho de gram-pos para aplicar tal força para baixo. Em várias modalidades, a super-fície de topo do cartucho de grampos pode compreender a superfície de topo de um compensador de espessura de tecido em que, conforme descrito acima, o compensador de espessura de tecido pode ser compressível e, em certas modalidades, a força para baixo aplicada ao compensador de espessura de tecido pode fazer com que o compen-sador de espessura de tecido comprima o ponto no qual o dedo polegar do médico entra em contato com as pontas dos grampos armazenados dentro da porção de suporte. Em várias modalidades, um aplicador de cartucho de grampos pode ser utilizado para inserir um cartucho de grampos em uma canaleta de cartucho de grampos que pode ser configurada para impedir, ou ao menos limitar, a possibilidade de o médico tocar os grampos no cartucho de grampos. Após o cartucho de grampos ter sido posicionado adequadamente dentro da canaleta de cartucho de grampos, conforme descrito em mais detalhes abaixo, o aplicador pode ser desprendido do cartucho de grampos.
[845] Em certas modalidades, agora com referência às FIGURAS 305 e 306, um aplicador de cartucho de grampos pode compreender uma tampa rígida, como a tampa 10080, por exemplo, que pode ser fixada a um cartucho de grampos 10000. Além do exposto acima, a tampa 10080 pode ser configurada para evitar, ou ao menos inibir, que o dedo polegar de um médico, por exemplo, entre em contato com as pontas dos grampos 10030 posicionados dentro do cartucho de gram-pos 10000 quando o cartucho de grampos 10000 é inserido em uma canaleta de cartucho de grampos. Agora com referência às FIGURAS 307 e 308, a tampa 10080 pode se estender sobre a superfície de topo 10021, ou ao menos uma porção da superfície de topo 10021, do compensador de espessura de tecido 10020 e pode incluir, um, uma superfície de fundo 10081 que pode se estender sobre e/ou pode estar em posição limítrofe ao compensador de espessura de tecido 10020 e, dois, uma superfície de topo 10082 que pode fornecer uma superfície de propulsão para o médico aplicar uma força para baixo e ela, por exemplo. Em uso, o médico pode pegar uma porção de cabo 10084 da tampa 10080, alinhar a porção de suporte 10010 do cartucho de grampos 10000 com a canaleta de cartucho de grampos, e inserir pelo menos parcialmente o cartucho de grampos 10000 dentro da canaleta de cartucho de grampos. Posteriormente, o médico pode assentar completamente o cartucho de grampos 10000 na canaleta de cartucho de grampos por aplicar a força para baixo à superfície de topo 10082 da tampa 10880 que pode, em várias modalidades, transmitir a força para baixo diretamente à porção de suporte 10010. Em pelo menos uma tal modalidade, a tampa 10080 pode compreender suportes proximais 10087 que podem se estender para baixo e entrar em contato com a superfície de suporte 10011 da porção de suporte. Em certas modalidades, a tampa 10080 pode compreender adicionalmente uma porção de suporte distal 10083 que pode ser configurada para estar em posição limítrofe à ponta 10003. Quando uma força para baixo é aplicada à tampa 10080, a força para baixo pode ser transmitida atra-vés dos suportes proximais 10087 e/ou da porção de suporte distal 10083 sem transmitir, ou ao menos sem transmitir substancialmente, a força para baixo à porção de suporte 10010 através do compensador de espessura de tecido 10020. Em várias circunstâncias, como resul-tado do exposto acima, o médico pode não entrar em contato direta-mente com o compensador de espessura de tecido 10020. Também como um resultado do exposto acima, a tampa 10080 pode não com-primir, ou ao menos comprimir substancialmente, o compensador de espessura de tecido 10020 quando o cartucho de grampos 10000 está sendo inserido na canaleta de cartucho de grampos. Em várias moda-lidades, uma tampa pode compreender qualquer número adequada de suportes, que são configurados para transmitir uma força para baixo à porção de suporte sem transmitir, ou ao menos transmitir substancial-mente, a força para baixo através do compensador de espessura de tecido. Em certas modalidades, os suportes podem se estender em torno da extremidade distal, da extremidade proximal, e/ou dos lados longitudinais do compensador de espessura de tecido. Em algumas modalidades, os suportes podem se estender através do compensador de espessura de tecido. Em pelo menos uma tal modalidade, os supor-tes podem se estender através de aberturas dentro do compensador de espessura de tecido e podem estar em posição limítrofe ao suporte da porção de suporte. Em certas modalidades, pelo menos alguns dos suportes podem não estar em contato com o suporte antes da força para baixo ser aplicada à tampa; entretanto, em várias modalidades, a tampa pode ser configurada para ser flexionada, ou movida, para bai-xoaté os suportes entrarem em contato com o suporte da porção de suporte. Neste ponto, a flexão ou movimento descendente da tampa pode ser impedido, ou ao menos substancialmente impedido.
[846] Conforme descrito acima, a tampa 10080 pode ser fixada ao cartucho de grampos 10000 e pode ser usada para manipular a po-sição do cartucho de grampos 10000. Em várias modalidades, a tampa 10080 pode compreender qualquer quantidade adequada de membros de preensão que podem ser configurados para prender de modo liberável a tampa 10080 à porção de suporte 10010 do cartucho de gram-pos 10000, por exemplo. Em pelo menos uma tal modalidade, a tampa 10080 pode compreender adicionalmente um ou mais elementos de retenção, como os braços de travamento 10088 e/ou 10089, por exemplo. Em várias modalidades, os braços de travamento 10089 po-dem ser configurados para estenderem-se ao redor dos lados da ponta 10003 e engatar na superfície de fundo 10009 (FIGURA 306) da ponta 10003. de maneira similar, os braços de travamento 10088 podem se estender em torno dos lados das projeções de trava 10008 estendendo-se a partir da porção de suporte 10010 e engatar as superfícies de fundo das projeções de trava 10008. Estes braços de travamento, em várias modalidades, podem ser configurados para posicionar a tampa 10080 sobre a zona ou região na qual os grampos são armazenados dentro da porção de suporte 10010. Em todo caso, quando o cartucho de grampos 10000 tiver sido posicionado adequadamente, a tampa 10080 pode ser desprendida do cartucho de grampos 10000. Em pelo menos uma modalidade, o médico pode aplicar uma força de levanta-mento para cima ao cabo 10084 de modo a soltar a extremidade distal da tampa 10080 da extremidade distal 10002 do cartucho de grampos 10000. Em pelo menos uma tal modalidade, os braços de travamento 10088 e 10089 podem flexionar para fora quando o cabo 10084 é le-vantado de modo que os braços de travamento 10088 e 10089 podem fletir em torno das projeções de trava 10008 e da ponta 10003, respectivamente. Posteriormente, a extremidade proximal da tampa 10080 pode ser levantada na direção contrária da extremidade proximal 10001 do cartucho de grampos e a tampa 10080 pode ser afastada do cartucho de grampos 10000.
[847] Em certas modalidades, agora com referência às FIGURAS 309 e 310, um aplicador de cartucho de grampos, como o aplicador de cartucho de grampos 10680, por exemplo, pode ser configurado para posicionar um compensador de espessura de tecido superior, como o compensador de espessura de tecido 10690, por exemplo, em relação a uma bigorna além de posicionar um cartucho de grampos, como o cartucho de grampos 10600, por exemplo, dentro de uma canaleta de cartucho de grampos. de modo semelhante ao exposto acima, o aplicador 10680 pode compreender braços de travamento 10688 que po-dem ser engatados de modo liberável com projeções de trava 10608 que se estendem a partir de uma porção de suporte 10610 do cartucho de grampos 10600 de modo que o aplicador 10680 possa ser mantido na posição sobre um compensador de espessura de tecido 10620 do cartucho de grampos 10600. Em várias modalidades, o compensador de espessura de tecido superior 10690 pode ser fixado de modo re-movível ao aplicador de cartucho de grampos 10680 de modo que a bigorna de um instrumento cirúrgico, como a bigorna 10060, por exemplo, possa ser fechada sobre o aplicador 10680, engate o com-pensador de espessura de tecido 10690, e solte o compensador de espessura de tecido 10690 do aplicador 10680. Em várias modalida-des, o compensador de espessura de tecido 10690 e/ou a bigorna 10060 podem compreender um ou mais elementos de retenção que podem ser configurados para prender de modo liberável o compensa-dor de espessura de tecido 10690 à bigorna 10060. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 10690 pode compreender um trilho longitudinal 10695, por exemplo, que se estende a partir da superfície de topo 10691 do compensador de es-pessura de tecido 10690 que pode ser recebida dentro de uma fenda de faca longitudinal 10065 definida dentro da bigorna 10060. Em várias modalidades, o compensador de espessura de tecido 10690 e o trilho longitudinal 10695 podem ser compreendidos de qualquer material compressível adequado, como aqueles descritos neste pedido de patente, por exemplo, em que o trilho longitudinal 10695 pode ser compactado e/ou encravado na fenda de faca 10065, por exemplo. Quando a bigorna 10060 tiver sido engatada com o compensador de espessura de tecido 10690, a bigorna 10060 pode ser retornada para uma posição aberta e, em tais circunstâncias, o compensador de es-pessura de tecido 10690 pode se soltar do aplicador 10680. Posteri-ormente, o aplicador 10680 pode ser desprendido do cartucho de grampos 10600 de modo que a bigorna 10060 e o cartucho de grampos 10600 possam ser posicionados em relação ao tecido que será grampeado e/ou cortado. Durante o uso, um deslizador dispensador de grampos, como o deslizador 10050 (FIGURA 236), por exemplo, pode ser avançado distalmente através do cartucho de grampos 10600 por um membro de disparo 10052 (FIGURA 236), por exemplo, a fim de ejetar os grampos do cartucho de grampos 10060, conforme men-cionado acima. Quando os grampos são deformados, cada grampo pode capturar uma porção do compensador de espessura de tecido 10690 contra a superfície de topo do tecido e uma porção do compen-sador de espessura de tecido 10620 contra a superfície de fundo do tecido. Ao mesmo tempo, o membro de disparo 10052 pode avançar um gume de faca 10053 (FIGURA 236) através do compensador de espessura de tecido 10620 e/ou o compensador de espessura de teci-do 10690 em que, em ao menos uma modalidade, o gume de faca 10053 pode ser avançado através do trilho longitudinal 10695 para en-talhar o trilho 10695 e destacar progressivamente o compensador de espessura de tecido 10690 da bigorna 10060. Após os grampos terem sido dispensados, a bigorna 10060 pode ser aberta novamente e afas-tada do compensador de espessura de tecido implantado 10690 e, de maneira similar, a porção de suporte 10610 do cartucho de grampos 10600 pode ser afastada do compensador de espessura de tecido im-plantado 10620. Em várias modalidades, além do exposto acima, o compensador de espessura de tecido 10620 e/ou o compensador de espessura de tecido 10690 pode compreender uma pluralidade de segmentos removíveis que podem ser configurados para se separar um do outro no caso em que apenas porções dos compensadores da espessura de tecido 10620 e 10690 são implantadas pelos grampos.
[848] Em várias modalidades, além do exposto acima, o aplicador 10680 pode compreender um ou mais elementos de retenção que po-dem ser configurados para prender de modo liberável o compensador de espessura de tecido 10690 ao aplicador 10680. Em pelo menos uma tal modalidade, com relação principalmente à FIGURA 310, o aplicador 10680 pode compreender um trilho de retenção longitudinal 10685 que pode ser configurado para ser recebido em uma fenda de retenção longitudinal 10694 definida na superfície de fundo 10692 do compensador de espessura de tecido 10690 de uma forma de encaixe por pressão, por exemplo. Em várias circunstâncias, o trilho de reten-ção 10685 e a fenda de retenção 10694 podem ser configurados para reter o compensador de espessura de tecido 10690 ao aplicador 10680 até uma força levantamento suficiente ser aplicada ao compensador de espessura de tecido 10690 pela bigorna 10060, conforme descrito acima. Em pelo menos uma tal modalidade, o trilho de retenção 10685 que se estende a partir do aplicador 10680 pode compreender adicionalmente batentes de extremidade 10686 posicionados na extremidades proximal e distal do trilho de retenção 10685 que podem ser configurados para evitar, ou ao menos limitar, o movimento longi tudinal relativo entre o compensador de espessura de tecido 10690 e o aplicador 10680. Em certas modalidades, novamente com referência à FIGURA 310, um ou mais adesivos, como as tiras adesivas longitudi-nais 10693, por exemplo, pode ser colocados na superfície de contato 10691 do compensador de espessura de tecido 10690 de modo que, quando a bigorna 10060 entra em contato com o compensador de es-pessura de tecido 10690, conforme descrito acima, o adesivo pode fixar de modo liberável o compensador de espessura de tecido 10690 à bigorna 10060. Em várias modalidades, um ou mais adesivos podem ser utilizados em adição a ou ao invés dos elementos de retenção compressíveis descritos acima, por exemplo. Em certas modalidades, um ou mais adesivos podem ser utilizados para prender de modo liberável um compensador de espessura de tecido a um aplicador de car-tucho de grampos. Em pelo menos uma modalidade, agora com refe-rência à FIGURA 310A, a tampa 10080, por exemplo, pode incluir um ou mais blocos adesivos 12185 que podem ser configurados para reter de maneira liberável um compensador de espessura de tecido superior, como o compensador de espessura de tecido 12190, por exemplo, à superfície de topo 10082 da tampa 10080. Em pelo menos uma tal modalidade, de modo similar às modalidades descritas acima, uma bigorna pode ser fechada sobre o compensador de espessura de tecido 12190 para engatar o trilho de retenção longitudinal 12195 do com-pensador de espessura de tecido 12190. Em certas modalidades, um mecanismo de liberação pode ser posicionado entre o compensador de espessura de tecido 12190 e a tampa 10080, o qual pode ser utilizado para romper as uniões adesivas que prendem o compensador de espessura de tecido 12190 à tampa 10080 e soltar o compensador de espessura de tecido 12190 da tampa 10080. Em pelo menos uma mo-dalidade, o mecanismo de liberação pode compreender um aba para puxar 12196 e uma laçada 12197 sendo que a laçada 12197 pode compreender a primeira e a segunda extremidades que são fixadas à aba para puxar 12196. A laçada 12197 pode compreender uma sutura, por exemplo, que pode definir um perímetro que circunscreve os blocos adesivos 12185 de modo que, quando a aba para puxar 12196 é puxada em posição distal, a sutura pode deslizar entre o compensador de espessura de tecido 12190 e a tampa 10080 e entra em contato com os blocos de tecido 12185. Em tais circunstâncias, a sutura pode ao menos um dentre separar os blocos adesivos 12185 do compensador de espessura de tecido 12190, separar os blocos adesivos 12185 da tampa 10080, e/ou cortar os blocos adesivos 12185, por exemplo.
[849] Em várias modalidades, agora com referência à FIGURA 311, um cartucho de grampos pode compreender uma porção de su-porte 10710, por exemplo, que, de modo semelhante ao exposto acima, pode compreender uma fenda de faca longitudinal 10715 que se estende através do mesmo. Em pelo menos uma tal modalidade, um aplicador de cartucho de grampos, como o aplicador 10780, por exemplo, pode compreender uma elemento de retenção e alinhamento longitudinal 10786 que pode se estender para dentro da fenda de faca 10715 na porção de suporte 10710. Em certas modalidades, o elemen-to de retenção 10786 pode ser configurado para engatar as paredes laterais da fenda de faca 10715 de uma forma de encaixe por pressão, por exemplo, de modo que o aplicador 10780 possa ser retido de mo-doliberável à porção de suporte 10710. Em várias modalidades, em-boranão seja ilustrado, uma primeira porção de um compensador de espessura de tecido pode ser posicionado em um primeiro lado do elemento de retenção 10786 e uma segunda porção do compensador de espessura de tecido pode ser posicionado de um lado oposto, ou segundo lado, do elemento de retenção 10786. de modo semelhante ao exposto acima, a primeira e a segunda porções do compensador de espessura de tecido podem ser montadas à porção de suporte 10710 do cartucho de grampos através dos elementos de retenção 10013, por exemplo. Também de modo semelhante ao exposto acima, um compensador de espessura de tecido superior 10790 pode ser montado de modo removível ao aplicador 10780 através de um elemento de retenção longitudinal 10785 que se estende a partir da superfície de carregamento 10782 do aplicador 10780 em que o elemento de reten-ção 10785 pode ser encaixado por pressão de modo liberável a uma fenda longitudinal 10794 definida na superfície de fundo 10792 do compensador de espessura de tecido 10790, por exemplo. Em várias modalidades, também de modo semelhante ao exposto acima, o com-pensador de espessura de tecido 10790 pode compreender adicional-mente um elemento de retenção longitudinal 10795 que se estende a partir da superfície de topo 10791 do compensador de espessura de tecido 10790 que pode ser retido de modo liberável na fenda de faca longitudinal 10065 definida na bigorna 10060, por exemplo. Em pelo menos uma tal modalidade, o elemento de retenção longitudinal 10795 pode compreender uma seção transversal com formato de cunha compreendendo uma porção superior que é maior que uma porção inferior, em que a porção inferior pode fixar o elemento de retenção 10795 ao compensador de espessura de tecido 10790, por exemplo.
[850] Em várias modalidades, agora com referência às FIGURAS 312 e 313, um cartucho de grampos 10800 que compreende uma por-ção de suporte 10810 e um compensador de espessura de tecido 10820 pode ser carregado em uma canaleta de cartucho de grampos com um aplicador de cartucho de grampos 10880, por exemplo. de modo semelhante ao exposto acima, o aplicador de cartucho de gram-pos 10880 também pode ser configurado para posicionar um compen-sador de espessura de tecido superior 10890, por exemplo, em relação a uma bigorna, como a bigorna 10060, por exemplo, de modo que, quando a bigorna 10060 é fechada, a bigorna 10060 pode entrar em contato com e engatar o compensador de espessura de tecido 10890. Em pelo menos uma modalidade, o compensador de espessura de tecido 10890 pode compreender uma pluralidade de pernas de reten-ção 10895 estendendo-se a partir da superfície de topo 10891 do compensador de espessura de tecido 10890 que pode ser configurado para engatar a bigorna 10060 e reter de maneira liberável o compen-sador de espessura de tecido 10890 à bigorna 10060. Em pelo menos uma tal modalidade, as pernas 10895 podem ser dispostas em uma fileira longitudinal sendo que cada perna 10895 pode compreender pelo menos um pé configurado para entrar e engatar na fenda de faca 10065 definida na bigorna 10060. Em certas modalidades, alguns dos pés das pernas 10895 podem se estender em uma direção enquanto outros pés podem se estender em uma outra direção. Em pelo menos uma modalidade, alguns dos pés podem se estender em direções opostas. Em todo caso, quando a bigorna 10060 tiver sido engatada com o compensador de espessura de tecido 10890, agora com referência às FIGURAS 313 e 314, a bigorna 10060 pode ser reaberta e o médico pode mover o aplicador de cartucho de grampos 10880 na direção contrária dos compensadores de espessura de tecido 10820 e 10890. Posteriormente, com referência à FIGURA 314A, o compensador de espessura de tecido superior 10890 pode ser posicionado de um primeiro lado de um tecido alvo e o compensador de espessura de tecido 10820, que pode compreender um compensador de espessura de tecido inferior, pode ser posicionado de um segundo lado do tecido. Após os compensadores de espessura de tecido 10820 e 10890 terem sido adequadamente posicionados, agora com referência à FIGURA 314B, um gume de faca de um elemento de disparo, como o gume de faca 10053, por exemplo, pode ser deslocada através do tecido e dos compensadores de espessura de tecido. Em várias modalidades, agora com referência à FIGURA 318, um aplicador de cartucho de grampos, como o aplicador 12280, por exemplo, pode compreender um compensador de espessura de tecido 12290 montado de forma sepa-rável a ele, o qual pode ser, de modo semelhante ao exposto acima, inserido em uma canaleta de cartucho de grampos, conforme ilustrado na FIGURA 319, e engatado pela bigorna 10060 quando a bigorna 10060 é movida para uma posição fechada. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 12290 pode com-preender uma pluralidade de elementos de retenção 12295 que se es-tendem para cima a partir da superfície de topo 12291 do compensador de espessura de tecido 12290 sendo que cada elemento de retenção 12295 pode compreender uma pluralidade de pernas flexíveis 12296 que podem ser configuradas para serem inseridas na fenda de faca 10065 na bigorna 10060. Com relação principalmente às FIGURAS 321 e 322, as pernas flexíveis 12296 de cada elemento de retenção 12295 podem ser separadas por um vão 12298 de modo que, quando as pernas 12296 são inseridas na fenda de faca 10065, as pernas 12296 podem flexionar para dentro e então retornar resilientemente para fora quando os pés alargados das pernas flexíveis 12296 tiverem passado através da fenda de faca 10065. Em várias modalidades, os pés alargados das pernas flexíveis 12296 podem flexionar atrás de rebordos de retenção opostos 12297 definidos na bigorna 10060 e, como resultado da interação das pernas 12296 e dos rebordos 12297, o compensador de espessura de tecido 12290 pode ser retido à bigorna 10060. Posteriormente, o aplicador de cartucho de grampos 12280 pode ser afastado do compensador de espessura de tecido 12290, conforme ilustrado na FIGURA 320. Em uso, quando o compensador de espessura de tecido 12290 tiver sido implantado contra o tecido por grampos dispensados pelo cartucho de grampos 10000, por exemplo, a bigorna 10060 pode ser reaberta e, quando a bigorna 10060 é afastada do compensador de espessura de tecido implantado 12290, as pernas 12296 dos elementos de retenção 12995 podem flexionar para dentro de modo que elas possam ser puxadas da fenda de faca 10065.
[851] Em várias modalidades, agora com referência às FIGURAS 315 e 316, um compensador de espessura de tecido, como o compen-sador de espessura de tecido 11990, por exemplo, pode ser carregado longitudinalmente para dentro de uma bigorna, como a bigorna 11960, por exemplo. Mais particularmente, em pelo menos uma modalidade, o compensador de espessura de tecido 11990 pode compreender um ou mais trilhos longitudinais 11995 que podem ser inseridos em uma abertura distal em uma fenda de faca 11965 da bigorna 11960 e, então, empurrado proximalmente até o compensador de espessura de tecido 11990 ter sido apropriadamente assentado na bigorna 11960. Em pelo menos uma tal modalidade, cada trilho 11995 pode compreender um pé de retenção longitudinal 11996 que pode ser posicionado atrás de um rebordo de retenção longitudinal 11997 que define ao menos parcialmente a fenda de faca 11965, por exemplo. Conforme ilustrado na FIGURA 316, os pés 11996 podem se estender em direções opostas de modo a serem posicionados atrás dos rebordos de retenção 11997 posicionados em lados opostos da fenda de faca 11965. Em várias modalidades, um vão longitudinal 11998 pode ser definido entre os trilhos 11995, o qual pode ser configurado para permitir aos trilhos 11995 flexionarem para dentro um em direção ao outro quando o compensador de espessura de tecido 11990 é desprendido da bigorna 11960. Em certas modalidades, agora com referência à FIGURA 317, um compensador de espessura de tecido, como o compensador de espessura de tecido 12090, por exemplo, pode compreender um ou mais braços de travamento 12098 que podem se estender em volta dos lados de uma bigorna, como a bigorna 12060, por exemplo. Em uso, os braços de travamento 12098 podem engatar a bigorna 12060 e reter de maneira liberável o compensador de espessura de tecido 12090 à bigorna 12060. Em pelo menos uma tal modalidade, a bigorna 12060 pode compreender um ou mais entalhes, ou anteparos de travamento, 12097, por exemplo, que podem ser configurados, cada um, para receber um pé que se estende a partir de um braço de travamento 12098. Em uso, os braços 12098 podem flexionar para fora e se desprender da bigorna 12060 quando a bigorna 12060 é afastada do compensador de espessura de tecido 12090 após o compensador de espessura de tecido 12090 ter sido implantado ao menos parcialmente.
[852] Conforme descrito acima, um instrumento de grampeamento cirúrgico pode compreender uma canaleta de cartucho de grampos configurada para receber um cartucho de grampos, uma bigorna aco-plada rotacionalmente à canaleta de cartucho de grampos, e um ele-mento de disparo que compreende uma ponta de faca que é móvel em relação à bigorna e à canaleta de cartucho de grampos. Em uso, um cartucho de grampos pode ser posicionado dentro da canaleta de car-tucho de grampos e, após o cartucho de grampos ter sido ao menos parcialmente usado, o cartucho de grampos pode ser removido da canaleta de cartucho de grampos e substituído por um novo cartucho de grampos. Em algumas destas modalidades, a canaleta de cartucho de grampos, a bigorna, e/ou o elemento de disparo do instrumento de grampeamento cirúrgico podem ser reutilizados com o cartucho de grampos de substituição. Em certas outras modalidades, um cartucho de grampos pode compreender uma parte de um conjunto da unidade de carregamento descartável que pode incluir uma canaleta de cartu-cho de grampos, uma bigorna, e/ou um elemento de disparo, por exemplo, que podem ser substituídos junto com o cartucho de grampos como parte da reposição do conjunto da unidade de carregamento descartável. determinados conjuntos da unidade de carregamento descartável são apresentados no pedido de patente US n° de série 12/031.817, intitulado END EFECTOR COUPLING ARRANGMENTS FOR A SURGICAL CUTTING AND STAPLING INSTRUMENT, que foi depositado em 15 de fevereiro de 2008, cuja descrição está aqui in-corporada a título de referência. Agora com referência à FIGURA 370, uma unidade de carregamento descartável, como a unidade de carre-gamentodescartável 12500, por exemplo, pode compreender uma porção de suporte 12510, uma bigorna 12560 acoplada rotacionalmente à porção de suporte 12510, e uma haste alongada 12570 estenden-do-se a partir da porção de suporte 12510. de modo similar aos cartu-chos de grampo aqui descritos, a porção de suporte 12510 pode com-preender uma pluralidade de cavidades para grampos 10012 e um grampo, como um grampo 10030, por exemplo, posicionado em cada cavidade para grampos 10012, por exemplo. A unidade de carrega-mentodescartável 12500 pode compreender adicionalmente um ele-mento de disparo 12552 que pode ser avançado distalmente de modo a mover a bigorna 12560 de uma posição aberta, conforme ilustrado na FIGURA 370, a uma posição fechada. Em várias modalidades, a unidade de carregamento descartável 12500 pode compreender adici-onalmente um compensador de espessura de tecido 12520 posiciona-do em e/ou fixado à porção de suporte 12510 sendo que, quando a bigorna 12560 está na sua posição fechada, a bigorna 12560 pode ser posicionada em lado oposto ao compensador de espessura de tecido 12520 e, em algumas modalidades, a bigorna 12560 pode comprimir ao menos parcialmente o compensador de espessura de tecido 12520 quando a bigorna 12560 está na sua posição fechada. Em todo caso, o elemento de disparo 12552 pode ser avançado adicionalmente de modo a ejetar os grampos da porção de suporte 12510. Quando os grampos são ejetados, os grampos podem ser deformados pela bigorna 12560 e aprisionar pelo menos uma porção do compensador de espessura de tecido 12520 neles. Posteriormente, o elemento de dis-paro 12552 pode ser retraído proximalmente, a bigorna 12560 pode ser reaberta e a porção de suporte 12510 pode ser afastada do com-pensador de espessura de tecido implantado 12520.
[853] Em várias modalidades, além do exposto acima, o compen sador de espessura de tecido 12520 pode ser montado de forma sepa-rável à porção de suporte 12510. Em pelo menos uma tal modalidade, a porção de suporte 12510 pode compreender um trilho de retenção longitudinal 12526 montado em um dos seus lados, sendo que cada trilho 12526 pode compreender uma ou mais aberturas 12528 que po-dem ser configuradas para receber pelo menos uma porção do com-pensador de espessura de tecido 12520. Quando o compensador de espessura de tecido 12520 tiver sido ao menos parcialmente implanta-do, o compensador de espessura de tecido 12520 pode sair das aber-turas 12528 quando a porção de suporte 12510 é afastada. Em várias modalidades, agora com referência às FIGURAS 371 a 373, uma uni-dade de carregamento descartável 12600 pode compreender uma porção de suporte 12610, um compensador de espessura de tecido 12620 montado de forma separável à porção de suporte 12610, e um ou mais trilhos de retenção 12626 que podem ser configurados para se estender sob o compensador de espessura de tecido 12620 e montar o compensador de espessura de tecido 12620 à porção de suporte 12610. Cada trilho de retenção 12626 pode compreender uma plurali-dade de ganchos de retenção 12628, por exemplo, que podem ser en-gatadosà porção de suporte 12610 através de fendas de retenção 12614, por exemplo, definidas na porção de suporte 12610. Em uso, em pelo menos uma tal modalidade, o compensador de espessura de tecido 12620 pode ser configurado para se desprender dos trilhos de retenção 12626 após o compensador de espessura de tecido 12620 ter sido ao menos parcialmente implantado e a porção de suporte 12610 ser afastada do compensador de espessura de tecido 12620. Em várias modalidades, agora com referência às FIGURAS 374 a 376, uma unidade de carregamento descartável 12700 pode compreender um ou mais trilhos de retenção 12726 que podem compreender, cada um, uma barra inferior 12725 que pode se estender sob o compensador de espessura de tecido 12720 e uma barra superior 12727 que pode se estender sobre a superfície de topo 12621 do compensador de espessura de tecido 12620. Em certas modalidades, o compensador de espessura de tecido 12620 pode ser ao menos parcialmente comprimido entre as barras superiores 12727 e as barras inferiores 12725 de modo que os trilhos de retenção 12726 possam prender de modo liberável o compensador de espessura de tecido 12620 em rela-ção à porção de suporte 12610. Em pelo menos uma tal modalidade, cada trilho de retenção 12726 pode compreender um ou mais ganchos de retenção 12728 que podem ser engatados com a porção de suporte 12610 para reter os trilhos de retenção 12726 à porção de suporte 12610.
[854] Em várias modalidades, agora com referência às FIGURAS 377 e 378, uma unidade de carregamento descartável 12800 pode compreender um elemento de retenção 12822 que pode ser configu-rado para montar um compensador de espessura de tecido 12620 à porção de suporte 12610. Em pelo menos uma tal modalidade, o ele-mento de retenção 12822 pode compreender uma folha de material posicionada contra a superfície de suporte 12611 da porção de suporte, em que o compensador de espessura de tecido 12620 pode ser fixado à folha de material por pelo menos um adesivo, por exemplo. O elemento de retenção 12822 pode compreender adicionalmente um trilho de retenção longitudinal 12825 configurado para se estender para baixo para dentro de uma fenda de faca 12615 definida na porção de suporte 12610. Em pelo menos uma tal modalidade, o trilho de retenção 12825 pode ser dimensionado e configurado de modo a ser comprimido entre as paredes laterais da fenda de faca 12615. Em uso, o elemento de disparo 12552 pode compreender um ponta de faca que pode passar através da fenda de facas 12615 quando o elemento de disparo 12552 é deslocado distalmente e cruza o compensador de es-pessura de tecido 12620 e o trilho de retenção 12825 longitudinalmen-te.Além disso, em uso, os grampos ejetados da porção de suporte 12610 podem penetrar no elemento de retenção 12822, no compen-sador de espessura de tecido 12820, e no tecido posicionado entre o compensador de espessura de tecido 12820 e a bigorna 12560. Em várias modalidades, o elemento de retenção 12822 pode ser compre-endido de um material biocompatível e/ou bioabsorvível. Em certas modalidades, o elemento de retenção 12822 pode ser compreendido de um material suficientemente compressível para compreender um compensador de espessura de tecido subjacente ao compensador de espessura de tecido 12620. Em várias modalidades, agora com refe-rência às FIGURAS 379 a 381, uma unidade de carregamento descar-tável 12900 pode compreender um conjunto de carregamento que inclui uma porção inferior 12922 que pode ser fixada de modo removível à porção de suporte 12610, uma porção superior 12990 que pode ser fixada de modo removível à bigorna 12560, e uma articulação flexível 12991 que conecta a porção inferior 12922 e a porção superior 12990. de modo semelhante ao exposto acima, um trilho de retenção longitu-dinal 12825 pode se estender para baixo a partir da porção inferior 12922 e para dentro da fenda de faca 12615 definida na porção de su-porte 12610 de modo que a porção inferior 12922 possa ser retida de modo liberável à porção de suporte 12610. de maneira similar, um trilho de retenção longitudinal 12995 pode se estender para cima a partir da porção superior 12990 para dentro de uma fenda de faca definida na bigorna 12560 de modo que a porção superior 12990 possa ser retida de modo liberável à bigorna 12560. Conforme ilustrado nas FIGU-RAS 380 e 381, um compensador de espessura de tecido 12620 pode ser montado à porção inferior 12922 do conjunto de carregamento sendo que, de modo a posicionar o compensador de espessura de te-cido 12620 em relação à porção de suporte 12610, um médico poderia flexionar a porção superior 12990 e a porção inferior 12922 uma em direção a outra, posicionar o conjunto de carregamento entre a bigorna 12560 e a porção de suporte 12610, e liberar o conjunto de carrega-mento flexionado de modo que ele possa se expandir resilientemente e tracionar a porção superior 12990 contra a bigorna 12560 e a porção inferior 12922 contra a porção de suporte 12610. Em pelo menos uma modalidade, agora com referência às FIGURAS 382 a 384, o conjunto de carregamento pode compreender adicionalmente um ou mais gan-chos de travamento, como os ganchos de travamento 12994, por exemplo, que se estendem dele, os quais podem ser configurados para conectar de modo liberável a porção superior 12990 à bigorna 12560 e/ou conectar de modo liberável a porção inferior 12922 à porção de suporte 12610.
[855] Em várias modalidades, agora com referência à FIGURA 385, uma unidade de carregamento descartável 15900, por exemplo, pode compreender uma bigorna 15960 e uma canaleta de cartucho de grampos 15970 sendo que a canaleta de cartucho de grampos 15970 pode girar em relação à bigorna 15960. Em pelo menos uma tal moda-lidade, a bigorna 15960 pode não ser capaz de girar. Em certas moda-lidades, o tecido pode ser posicionado entre a bigorna 15960 e a canaleta de cartucho de grampos 15970 e, posteriormente, a canaleta de cartucho de grampos 15970 pode ser girada em direção ao tecido para prender o tecido contra a bigorna. Em pelo menos uma tal modalidade, a unidade de carregamento descartável 15900 pode compreender adi-cionalmente um compensador de espessura de tecido 15920 que pode ser configurado para contatar o tecido.
[856] Conforme discutido acima e com referência à FIGURA 332, um cartucho de grampos, como o cartucho de grampos 10000, por exemplo, pode compreender uma porção de suporte 10010 e um com-pensador de espessura de tecido 10020 sendo que uma pluralidade de grampos 10030 podem ser ao menos parcialmente armazenados na porção de suporte 10010 e podem estender-se para dentro do com-pensador de espessura de tecido 10020 quando os grampos 10030 são na sua posição não disparada. Em várias modalidades, as pontas dos grampos 10030 não se projetam do compensador de espessura de tecido 10020 quando os grampos 10030 estão nas suas posições não disparadas. Quando os grampos 10030 são movidos das suas po-sições não disparadas para suas posições disparadas pelos acionadores de grampos 10040, conforme discutido acima, as pontas dos grampos 10030 podem penetrar através do compensador de espessura de tecido 10020 e/ou penetrar através da camada superior, ou co-bertura, 10022. Em determinadas modalidades alternativas, as pontas dos grampos 10030 podem se projetar através da superfície de topo do compensador de espessura de tecido 10020 e/ou da cobertura 10022 quando os grampos 10030 estão na sua posição não disparada. Em todo caso, os grampos 10030, quando eles se estendem para cima da porção de suporte 10010 antes de serem dispensados, podem inclinar e/ou defletir em relação à porção de suporte, como também discutido acima. Em várias modalidades, agora com referência à FIGURA 329, um cartucho de grampos, como o cartucho de grampos 13000, por exemplo, pode compreender uma pluralidade de elementos de guia, ou retentores, que podem ser configurados para limitar o movimento relativo entre a porção de suporte 13010 do cartucho de grampos 13000 e as pontas dos grampos ali posicionados. Com relação principalmente à FIGURA 330, o cartucho de grampos 13000 pode compreender um compensador de espessura de tecido 13020 montado a uma porção de suporte 13010 e, além disso, uma pluralidade de ataduras 13022 fixadas à superfície de topo 13021 do compensador de espessura de tecido 13020. Em várias modalidades, cada compressa 13022 pode compreender uma pluralidade de aberturas 13029 ali definidas que podem ser configuradas para receber de maneira deslizante e/ou guiar as pernas 13022 de um grampo 13030. Em adi-ção a ou ao invés das aberturas, uma atadura pode compreender qualquer abertura adequada como uma fenda, guia, e/ou sulco, por exemplo, que pode ser configurada para receber de maneira deslizante e/ou guiar as pernas 13022. Em certas modalidades, conforme ilus-trado na FIGURA 330, as pontas das pernas de grampo 13032 podem ser posicionadas dentro de aberturas 13029 quando os grampos 13030 estão nas suas posições não disparadas. Em pelo menos uma tal modalidade, as pontas das pernas de grampo 13032 podem se projetar acima das compressas 13022 quando os grampos estão na sua posição não disparada. Em certas outras modalidades, as pontas das pernas de grampo 13032 podem ser posicionadas logo abaixo das compressas 13022 quando os grampos 13030 estão nas suas posições não disparadas de modo que quando os grampos 13030 são movidos para cima através do compensador de espessura de tecido 13020, as pernas de grampo 13032 podem entrar nas aberturas 13029 das compressas 13022 e deslizar através delas. Em todo caso, quando as pernas 13032 dos grampos 13030 são posicionadas dentro das compressas, o movimento lateral e/ou longitudinal das pernas de grampo 13032 pode ser limitado sem impedir o movimento para cima das pernas de grampo 13032 quando os grampos 13030 são dispen-sados. Quando os grampos 13030 são dispensados, agora com refe-rência à FIGURA 331, as pernas de grampo 13032 podem deslizar pa-ra cima através das compressas 13022 para penetrar no tecido T, en trar em contato com uma bigorna posicionada do lado oposto ao cartu-cho de grampos 13030, e deformar para baixo para capturar ali o tecido T e o compensador de espessura de tecido 13030.
[857] Em várias modalidades, além do exposto acima, as com pressas 13022 podem ser fixadas ao compensador de espessura de tecido 13020 usando pelo menos um adesivo biocompatível e/ou bioabsorvível, por exemplo. Em certas modalidades, as compressas 13022, e/ou um elemento de retenção que se estende a partir de cada compressa, podem ser ao menos parcialmente encaixadas dentro do compensador de espessura de tecido 13020. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 13020 pode com-preender bolsos definidos ali, que são configurados para receber ao menos parcialmente uma compressa 13022. Em certas modalidades, o compensador de espessura de tecido 13020 pode ser moldado inte-gralmente, ou formado em torno das compressas 13022 durante um processo de fabricação de moldagem. Em várias modalidades, as compressas 13022 podem compreender retentores distintos que podem se mover independentemente um do outro. Em pelo menos uma modalidade, com relação principalmente à FIGURA 330, cada com-pressa 13022 pode compreender elementos de encaixe e/ou vincula-dos que podem ser configurados para permitir e, até certo ponto, limitar o movimento lateral relativo e longitudinal entre as compressas 13022. Em pelo menos uma tal modalidade, cada compressa 13022 pode compreender uma projeção 13026 e uma ou mais reentrâncias 13027, por exemplo, sendo que a projeção 13026 de uma primeira compressa 13022 pode ser posicionada dentro e/ou alinhada com relação às reentrâncias de 13027 da segunda e da terceira compressas adjacentes 13022. Em várias modalidades, vãos podem estar presen-tes entre compressas adjacentes 13022 o que pode permitir às com-pressas 13022 se moverem ou deslizarem uma em relação a outra até elas entrarem em contato com uma compressa adjacente 13022. Em certas modalidades, as compressas 13022 podem ser interconectadas de maneira frouxa. Em várias modalidades, as compressas 13022 po-dem ser conectadas de forma separável uma a outra. Em pelo menos uma tal modalidade, as compressas 13022 podem ser fabricadas como uma folha de compressas interconectadas em que, quando uma força suficiente é aplicada à folha, uma ou mais das compressas 13022 podem se separar das outras. Em certas modalidades, novamente com referência à FIGURA 329, uma primeira folha 13024 de compressas 13022 pode ser posicionada de um primeiro lado de uma fenda longitudinal 13025 e uma segunda folha 13024 de compressas 13022 pode ser posicionada de um segundo lado da fenda 13025. Em pelo menos uma modalidade, além do exposto acima, a fenda longitudinal 13025 que se estende através do compensador de espessura de tecido 13020 pode ser configurada para facilitar a passagem de uma ponta de faca de um elemento de disparo através do compensador de espessura de tecido 13020 e, quando o elemento de disparo passa por ali, o elemento de disparo pode aplicar uma força de compressão às folhas 13024 e separar ou individualizar pelo menos algumas das compressas 13022.
[858] Em várias modalidades, as compressas 13022 podem ser compreendidas de um plástico biocompatível e/ou bioabsorvível, por exemplo. Em certas modalidades, as compressas 13022 podem ser compreendidas de um material sólido, um material semissólido, e/ou um material flexível, por exemplo. Em certas modalidades, as com-pressas 13022 podem ser encaixadas dentro de um compensador de espessura de tecido de modo que as compressas 13022 se movam com o compensador de espessura de tecido. Em pelo menos uma tal modalidade, as compressas 13022 podem ser suficientemente flexíveis de modo a flexionarem com a superfície de topo do compensador de espessura de tecido. Em certas modalidades, as compressas 13022 podem ser configuradas para permanecerem encaixadas no compensador de espessura de tecido enquanto, em certas outras mo-dalidades, as compressas 13022 podem ser configuradas para surgir ou se desprender do compensador de espessura de tecido. Em várias modalidades, as compressas 13022 podem compreender uma superfí-cie de topo que é nivelada à superfície de topo do compensador de espessura de tecido. Em certas modalidades, as superfícies de topo das compressas 13022 podem ser posicionadas acima e/ou abaixo da superfície de topo do compensador de espessura de tecido. Em várias modalidades, as superfícies de topo das compressas 13022 podem estar dispostas de modo a serem visíveis quando se visualiza a super-fície de topo do compensador de espessura de tecido enquanto, em outras modalidades, as superfícies de topo das compressas 13022 podem ser posicionadas abaixo de uma camada do compensador de espessura de tecido, por exemplo. Em certas modalidades, elementos guia podem ser moldados na superfície de topo de um compensador de espessura de tecido, por exemplo. Em pelo menos uma tal modalidade, o compensador de espessura de tecido pode não compreender um material composto e pode compreender uma peça unitária de material, por exemplo.
[859] Em várias modalidades, agora com referência à FIGURA 338, um cartucho de grampos pode compreender um compensador de espessura de tecido 13620 e uma cobertura, ou camada superior, 13621, por exemplo. Em pelo menos uma tal modalidade, uma ou mais compressas, ou retentores, 13622, por exemplo, podem ser encaixadas na cobertura 13621. Em certas modalidades, cada retentor 13622 pode compreender uma ou mais aberturas 13629 definidas nele, as quais podem ser configuradas para receber as pernas de grampo 13032 dos grampos 13030 quando os grampos 13030 estão na sua posição não disparada, conforme ilustrado na FIGURA 338. Em uso, além do exposto acima, as pernas de grampo 10032 podem deslizar através das aberturas 13629 quando os grampos 13030 são movidos da sua posição não disparada para sua posição disparada até as bases 13031 dos grampos 13030 entrarem em contato com o compensador de espessura de tecido 13620 e comprimirem pelo menos uma porção do compensador de espessura de tecido 13620 contra as superfícies de fundo das compressas 13622, por exemplo. Em várias modalidades, agora com referência à FIGURA 333, um cartucho de grampos pode compreender um compensador de espessura de tecido 13120 e uma cobertura, ou camada superior 13122, por exemplo. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 13120 pode compreender batentes, projeções, e/ou protuberânciascônicas 13128, por exemplo, que podem se estender para cima a partir da superfície de topo 13121 do compensador de espessura de tecido 13120. As projeções 13128 podem ser configuradas para receber e envelopar as pontas das pernas de grampo 13032 dos grampos 13030 quando os grampos 13030 estão na sua posição não disparada, conforme ilustrado na FIGURA 333. A camada superior 13122 também pode compreender batentes, projeções, e/ou protuberâncias cônicas 13129 que podem ser alinhadas, ou ao menos substancialmente ali-nhadas, com as projeções 13128. Em uso, as pernas de grampo 10032 podem penetrar nas projeções 13128 e 13129 e surgir do compensador de espessura de tecido 13120. Em várias modalidades, agora com referência à FIGURA 337, um cartucho de grampos pode compreender um compensador de espessura de tecido 13520 e uma cobertura, ou camada superior, 13522, por exemplo. Em pelo menos uma tal modalidade, a cobertura 13522 pode compreender batentes, projeções, e/ou protuberâncias cônicas 13529, por exemplo, que podem se estender para cima a partir da superfície de topo 13521 do compensador de espessura de tecido 13520. de modo semelhante ao exposto acima, as projeções 13529 podem ser configuradas para re-ceber e envelopar as pontas das pernas de grampo 13032 dos gram-pos 13030 quando os grampos 13030 estão na posição não disparada, conforme ilustrado na FIGURA 337. Em uso, as pernas de grampo 10032 podem penetrar nas projeções 13529 e emergir a partir da co-bertura 13522.
[860] Em várias modalidades, agora com referência à FIGURA 334, um cartucho de grampos pode compreender um compensador de espessura de tecido 13220 e uma cobertura, ou camada superior, 13222, por exemplo. Em pelo menos uma tal modalidade, o compen-sador de espessura de tecido 13220 pode compreender cavidades cô-nicas e/ou reentrâncias 13128, por exemplo, que podem se estender para baixo para a superfície de topo 13221 do compensador de es-pessura de tecido 13220. Em várias modalidades, as pontas das per-nas de grampo 13032 podem se estender através das reentrâncias 13128 quando os grampos 13030 estão na posição não disparada, conforme ilustrado na FIGURA 334. Em pelo menos uma modalidade, a camada superior 13222 também pode compreender cavidades côni-cas e/ou reentrâncias 13229 que podem ser alinhadas, ou ao menos substancialmente alinhadas, com as reentrâncias 13228. Em várias modalidades, agora com referência à FIGURA 335, um cartucho de grampos pode compreender um compensador de espessura de tecido 13320 e uma cobertura, ou camada superior, 13322, por exemplo. Em pelo menos uma tal modalidade, a cobertura 13320 pode compreender porções espessas 13329 que podem se estender para baixo para den-tro da superfície de topo 13321 do compensador de espessura de te-cido 13320. Em várias circunstâncias, as porções espessas 13329 po-dem ser configuradas para receber nelas pelo menos uma porção das pernas de grampo 13032 dos grampos 13030 quando os grampos 13030 estão na posição não disparada, conforme ilustrado na FIGURA 335. Em tais modalidades, as porções espessas 13329 podem prender as pernas de grampo 13032 na posição de modo que as pernas 13032 sejam alinhadas, ou ao menos substancialmente alinhadas, com os bolsos formadores de grampos de uma bigorna posicionada do lado oposto do compensador de espessura de tecido 13320. Em várias modalidades, agora com referência à FIGURA 336, um cartucho de grampos pode compreender um compensador de espessura de tecido 13420 e uma cobertura, ou camada superior, 13422, por exemplo. Em pelo menos uma tal modalidade, a cobertura 13422 pode compreender porções espessas 13429 que podem se estender para cima a partir das superfície de topo 13421 do compensador de espessura de tecido 13420. Em várias circunstâncias, as porções espessas 13429 podem ser configuradas para receber nelas pelo menos uma porção das per-nas de grampo 13032 dos grampos 13030 quando os grampos 13030 estão na posição não disparada, conforme ilustrado na FIGURA 336. Em tais modalidades, as porções espessas 13429 podem prender as pernas de grampo 13032 na posição de modo que as pernas 13032 sejam alinhadas, ou ao menos substancialmente alinhadas, com os bolsos formadores de grampos de uma bigorna posicionada do lado oposto do compensador de espessura de tecido 13420.
[861] Em várias modalidades, agora com referência às FIGURAS 339 e 340, um cartucho de grampos pode compreender um compen-sador de espessura de tecido 13720 e uma cobertura, ou camada su-perior, 13721, por exemplo. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 13720 pode compreender baten-tes,projeções, e/ou protuberâncias piramidais e/ou em degraus 13728, por exemplo, que podem se estender para cima a partir da superfície de topo 13721 do compensador de espessura de tecido 13720. As pro-jeções 13728 podem ser configuradas para receber e envelopar as pontas das pernas de grampo 13032 dos grampos 13030 quando os grampos 13030 estão na sua posição não disparada, conforme ilustra-do na FIGURA 340. de maneira similar, a camada superior 13721 também pode compreender batentes, projeções, e/ou protuberâncias piramidais e/ou em degraus 13729 que podem ser alinhadas, ou ao menos substancialmente alinhadas, com as projeções 13728. Em vá-rias modalidades, a cobertura 13721 pode compreender adicionalmente um ou mais dentes 13727 que se estendem para cima a partir das projeções 13729 que podem ser configuradas para engatar o tecido posicionado contra a camada superior 13721 e evitar, ou ao menos limitar, o movimento lateral e/ou longitudinal relativo entre o tecido, a camada superior 13721, e/ou as pontas das pernas de grampo 13032. Em uso, as pernas de grampo 13032 podem penetrar as projeções 13728 e 13729 e emergir do compensador de espessura de tecido 13720 quando os grampos 13030 são movidos das suas posições não disparadas para suas posições disparadas. Em várias modalidades, agora com referência às FIGURAS 341 e 342, um cartucho de grampos pode compreender um compensador de espessura de tecido 13820 e uma cobertura, ou camada superior, 13821, por exemplo. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 13820 pode compreender batentes, projeções, e/ou protuberâncias piramidais e/ou em degraus 13828, por exemplo, que podem se estender para cima a partir da superfície de topo 13821 do compensa-dor de espessura de tecido 13820. As projeções 13828 podem ser configuradas para receber e envelopar as pontas das pernas de gram-po 13032 dos grampos 13030 quando os grampos 13030 estão na sua posição não disparada, conforme ilustrado na FIGURA 342. de maneira similar, a camada superior 13821 também pode compreender ba-tentes,projeções, e/ou protuberâncias piramidais e/ou em degraus 13829 que podem ser alinhadas, ou ao menos substancialmente alinhadas, com as projeções 13828. Em várias modalidades, a camada superior 13821 pode compreender adicionalmente um ou mais dentes 13827 que se estendem para baixo para dentro do compensador de espessura de tecido 13820 que pode ser configurado para evitar ou pelo menos limitar o movimento lateral e/ou longitudinal relativo entre a camada superior 13821 e o compensador de espessura de tecido 13820, por exemplo. Em uso, as pernas de grampo 10032 podem pe-netrar as projeções 13828 e 13829 e emergir do compensador de es-pessura de tecido 13820 quando os grampos 13030 são movidos das suas posições não disparadas e suas posições disparadas.
[862] Em várias modalidades, agora com referência à FIGURA 343, um cartucho de grampos pode compreender um compensador de espessura de tecido, como o compensador de espessura de tecido 13920, por exemplo, que pode incluir cristas 13923 e vales 13924 de-finidos nele, sendo que em pelo menos uma modalidade, os vales 13924 podem ser definidos entre as cristas 13923. Em várias modali-dades, cada crista 13923 pode compreender a mesma altura, substan-cialmente a mesma altura, ou alturas diferentes. de maneira similar, cada vale 13924 pode compreender a mesma profundidade, substan-cialmente a mesma profundidade, ou profundidades diferentes. Em várias modalidades, uma pluralidade de grampos 13030 podem ser ao menos parcialmente armazenados dentro do compensador de espes-sura de tecido 13920 de modo que as pontas dos grampos 13030 pos-sam ser posicionadas dentro das cristas 13923. Em pelo menos uma tal modalidade, as pernas de grampo 13032 dos grampos 13030 não podem se projetar do compensador de espessura de tecido 13920 e/ou de uma cobertura, ou camada superior, 13921 fixada ao compensador de espessura de tecido 13920, por exemplo, quando os grampos 13030 são armazenados na sua posição não disparada. Em várias modalidades, as cristas 13923 e/ou os vales 13924 podem se estender lateralmente através do cartucho de grampos. Em pelo menos uma tal modalidade, o cartucho de grampos pode compreender um fenda de faca longitudinal em que as cristas 13923 e os vales 13924 podem se estender em uma direção que é transversal e/ou perpendicular à fenda de faca. Em várias circunstâncias, as cristas 13923 podem ser configu-radas para prender as pontas das pernas de grampo 13032 na posição até os grampos 13030 serem movidos da sua posição não disparada para sua posição disparada. Em várias modalidades, agora com refe-rência à FIGURA 344, um compensador de espessura de tecido, e/ou uma cobertura que cobre um compensador de espessura de tecido, pode compreender cristas e/ou vales longitudinais. Em pelo menos uma tal modalidade, um compensador de espessura de tecido pode compreender uma superfície de topo definida por cristas 14023 e vales 14024, em que os vales 14024 podem ser definidos entre as cristas 14023, por exemplo. Em várias modalidades, o compensador de es-pessura de tecido pode compreender uma cobertura 14021 que pode incluir uma pluralidade de aberturas 14029 ali definidas, que podem ser configuradas, cada uma, para receber uma perna de grampo 13032. Em certas modalidades, as aberturas 14029 podem ser definidas nas cristas 14023, em que as pontas das pernas de grampo 13032 podem ser posicionadas abaixo dos picos 14028 das cristas 14029, posicionadas niveladas com os picos 14028, e/ou posicionadas acima dos picos 14028. Em certas modalidades, em adição a ou ao invés do exposto acima, a aberturas 14029 podem ser definidas nos vales 14024, por exemplo. Em certas modalidades, cada abertura pode ser circundada, ou ao menos parcialmente circundada, por um relevo, por exemplo, que pode fortalecer a cobertura e/ou o compensador de es-pessura de tecido que circunda as aberturas. Em todo caso, além do exposto acima, a cobertura 14021 pode ser fixada a um compensador de espessura de tecido de qualquer maneira adequada, inclusive usando pelo menos um adesivo, por exemplo.
[863] Conforme descrito acima e novamente com referência à FIGURA 233, um instrumento de grampeamento cirúrgico pode com-preender uma bigorna, como a bigorna 10060, por exemplo, que pode ser movida entre uma posição aberta e uma posição fechada de modo a comprimir o tecido T contra o compensador de espessura de tecido 10020 de um cartucho de grampos 10000, por exemplo. Em várias cir-cunstâncias, a bigorna 10060 pode ser girada em direção ao cartucho de grampos 10000 até seu movimento descendente ser parado por alguma porção do cartucho de grampos 10000 e/ou alguma porção do canal no qual o cartucho de grampos 10000 está posicionado. Em pelo menos uma destas circunstâncias, a bigorna 10060 pode ser girada para baixo até seu movimento descendente ser oposto pela ponta 10003 do cartucho de grampos 10000 e/ou pelo tecido T posicionado entre a ponta 10003 e o cartucho de grampos 10000. Em algumas cir-cunstâncias, a bigorna 10060 pode comprimir suficientemente o com-pensador de espessura de tecido 10020 para permitir ao tecido T entrar em contato com as pontas dos grampos 10030. Em determinadas circunstâncias, dependendo da espessura do tecido T, a bigorna 10060 pode comprimir suficientemente o compensador de espessura de tecido 10020 de modo que a bigorna 10060 entre em contato com os grampos 10030 no momento em que a bigorna 10060 tiver alcançado sua posição completamente fechada. Em outras palavras, em tais circunstâncias, a bigorna 10060 pode deformar os grampos 10030 antes de o elemento de disparo 10052 ser avançado para dentro do cartucho de grampos 10000 para disparar os grampos 10030. Tais cir-cunstâncias podem ser aceitáveis em certas modalidades; entretanto, agora com referência às FIGURAS 358 e 359, outras modalidades são previstas, nas quais um elemento de regulagem de vão distal, como o elemento 10059, por exemplo, pode ser utilizado para limitar a distância na qual a bigorna 10060 pode ser fechada antes de a barra de dis-paro 10052 ser avançada para o cartucho de grampos 10000. Em vá-rias modalidades, o elemento 10059 pode se estender para cima a partir da superfície de topo 10021 do compensador de espessura de tecido 10020 de modo que o movimento descendente da bigorna 10060 possa ser interrompido quando o tecido T for comprimido contra o elemento 10059 e uma força de resistência for gerada entre eles. Em uso, conforme descrito acima, o elemento de disparo 10052 pode ser avançado distalmente para dentro do cartucho de grampos 10000 em direção à extremidade distal 10002 do cartucho de grampos 10000 de modo a ejetar os grampos 10030 da porção de suporte 10010. Simul-taneamente, o membro de disparo 10052 pode engatar a bigorna 10060 e posicionar a bigorna 10060 a uma distância desejada da superfície de plano de apoio 10011 (FIGURA 218) da porção de suporte 10010 sobre os grampos 10030 que estão sendo formados. desta forma, o elemento de disparo 10052 pode controlar a distância, ou vão, entre a superfície de contato com o tecido da bigorna 10060 e a superfície de suporte 10011 em um local específico, sendo que este local específico pode ser avançado distalmente conforme o elemento de disparo 10052 é avançado distalmente. Em várias circunstâncias, esta distância de vão pode ser mais curta que o vão entre a bigorna 10060 e a superfície de suporte 10011 que está sendo controlada ou ditada pelo elemento de regulagem de vão distal 10059 na extremidade distal do compensador de espessura de tecido 10020. Em várias modalidades, agora com referência à FIGURA 359, a ponta de faca 10053 do elemento de disparo 10052 pode ser configurada para cortar o elemento de regulagem de vão distal 10059 quando o elemento de disparo 10052 alcançar a extremidade distal do compensador de espessura de tecido 10020 de modo que, após o elemento 10059 ter sido cortado, o elemento de disparo 10052 pode puxar a bigorna 10060 para baixo em direção à porção de suporte 10010 e fechar o vão até a altura de vão desejada ao disparar os grampos 10030 na extremidade distal do cartucho de grampos 10000. Em determinadas modalidades al-ternativas, um elemento de regulagem de vão distal pode ser configu-rado para se achatar quando o elemento de disparo alcançar a extre-midade distal do cartucho de grampos. Em pelo menos uma tal moda-lidade, o elemento de regulagem de vão distal pode compreender uma coluna que pode fornecer resistência à bigorna, conforme descrito acima e, então, se curvar repentinamente quando a resistência ao encurvamento do elemento de regulagem de vão tiver sido alcançada quando o elemento de disparo atinge a extremidade distal do cartucho de grampos. Em ao menos uma modalidade, esta resistência ao encurvamento pode ser de aproximadamente 44 N (10 lbf), por exemplo. Em certas modalidades, um elemento de regulagem de vão pode ser configurado para ser movido para baixo sobre o suporte da porção de suporte quando uma força que supera uma quantidade predetermina-daé aplicada ao elemento de regulagem de vão, por exemplo. Em cer-tas outras modalidades, o vão distal pode ser controlado pela ponta do cartucho de grampos. Em pelo menos uma tal modalidade, o movi-mento descendente da bigorna 10060 pode ser limitado pela ponta até que o elemento de disparo tenha alcançado a extremidade distal do cartucho em que, neste ponto, a força de compressão aplicada à ponta pode fazer com que a ponta se achate. Em certas modalidades, a pon-ta pode compreender uma cavidade definida por paredes da cavidade que podem permitir à cavidade se achatar quando a força de com-pressão aplicada a ela tiver superado uma força predeterminada. Em pelo menos uma tal modalidade, a cavidade pode ser definida por pa-redes retráteis.
[864] Em várias modalidades, conforme descrito acima, uma bi gorna, como a bigorna 10060, por exemplo, pode ser movida entre uma posição aberta e uma posição fechada de modo a comprimir um compensador de espessura de tecido entre a bigorna e a porção de suporte de um cartucho de grampos. Em determinadas circunstâncias, agora com referência às FIGURAS 360 e 361, o compensador de es-pessura de tecido de um cartucho de grampos, como o compensador de espessura de tecido 14120 do cartucho de grampos 14100, por exemplo, pode se expandir lateralmente e/ou longitudinalmente quando o compensador de espessura de tecido 14120 é comprimido contra uma porção de suporte 14110 do cartucho de grampos 14100. Em cer-tas modalidades, as extremidades e/ou lados do compensador de es-pessura de tecido 14120 podem não ser forçadas pela porção de su-porte 14110 e/ou pela bigorna 10060 e, como resultado, o compensa-dor de espessura de tecido 14120 pode se expandir nestas direções sem gerar uma pressão de compressão, ou ao menos uma pressão de compressão indesejável, dentro do compensador de espessura de te-cido 14120. Em tais modalidades, um membro de disparo, como membro de disparo 10052 (FIGURA 236), por exemplo, que passa através do compensador de espessura de tecido 14120 pode não ser indevidamente impedido por uma pressão de compressão indesejável dentro do compensador de espessura de tecido 14120, por exemplo. Em certas outras modalidades, novamente com referência à FIGURA 360, a extremidade distal 14125 do compensador de espessura de te-cido 14120 pode ser forçada pela ponta 14103 do cartucho de grampos 14100, por exemplo. Nesta modalidade específica, de modo se-melhante ao exposto acima, a extremidade distal 14125 do compen-sador de espessura de tecido 14120 pode ser forçada pela ponta 14103 de modo a reduzir a possibilidade de o compensador de espessura de tecido 14120 se desprender prematuramente da porção de suporte 14110. Em todo caso, como resultado do acima, uma grande pressão interna pode ser gerada dentro da extremidade distal 14125 a qual pode impedir o avanço do elemento de disparo 10052, especial-mente quando o elemento de disparo 10052 alcançar a extremidade distal 14125. Mais particularmente, em determinadas circunstâncias, o elemento de disparo 10052 pode empurrar, arar e/ou deslocar o com-pensador de espessura de tecido 14120 distalmente quando ele corta o compensador de espessura de tecido 14120 e, como resultado, uma pressão interna ainda maior pode ser criada dentro da extremidade distal 14125 do compensador de espessura de tecido 14120. de modo a dissipar ao menos parcialmente esta pressão dentro do compensador de espessura de tecido 14120, a ponta 14103 pode ser compreendida de um material flexível que pode permitir à ponta 14103 flexionar distalmente, por exemplo, e criar um espaço adicional para o compen-sador de espessura de tecido 14120. Em certas modalidades, agora com referência às FIGURAS 362 e 363, a ponta de um cartucho de grampos pode compreender uma porção que pode deslizar distalmente. Mais particularmente, a ponta 14203 do cartucho de grampos 14200 pode compreender uma porção deslizante 14204 que pode ser conectada de maneira deslizante à ponta 14203 de modo que, quando a bigorna 10060 é fechada e/ou o elemento de disparo 10052 é avan-çado para a extremidade distal do cartucho de grampos 14200, a por-ção deslizante 14204 pode deslizar distalmente e criar um espaço adi-cional para o compensador de espessura de tecido 14200 e aliviar pelo menos parcialmente a pressão interna dali. Em pelo menos uma modalidade, um dentre a ponta 14203 e a porção deslizante 14204 pode compreender um ou mais trilhos e o outro dentre a ponta 14203 e a porção deslizante 14204 pode compreender uma ou mais canaletas configuradas para receber os trilhos de maneira deslizante. Em pelo menos uma tal modalidade, as canaletas e trilhos podem ser confi-gurados para limitar cooperativamente o movimento da porção desli-zante 14204 a uma trajetória distal longitudinal, por exemplo.
[865] Em várias circunstâncias, além do exposto acima, certos grampos, como os grampos mais distais dentro de um cartucho de grampos, por exemplo, podem capturar uma porção maior de um compensador de espessura de tecido do que os grampos proximais dentro do cartucho de grampos. Em tais circunstâncias, como resulta-do, uma pressão de aperto maior pode ser aplicada ao tecido capturado dentro dos grampos distais em comparação aos grampos proximais. Estas circunstâncias podem surgir quando pelo menos uma porção do compensador de espessura de tecido é deslocado para e/ou agrupada na extremidade distal do cartucho de grampos durante o uso, conforme descrito acima, ainda que o compensador de espessura de tecido possa ser compreendido de um material substancialmente homogêneo que tem uma espessura substancialmente constante. Em várias circunstâncias, pode ser desejável que determinados grampos apliquem uma pressão de pinçamento maior ao tecido do que outros grampos sendo que, em várias modalidades, uma porção de suporte e/ou um compensador de espessura de tecido pode ser construído e disposto para controlar quais grampos podem aplicar uma maior pres-são de pinçamento ao tecido e quais grampos podem aplicar uma pressão de pinçamento menor ao tecido. Agora com referência à FI-GURA 364, um cartucho de grampos 14300 pode compreender uma porção de suporte 14310 e, além disso, um compensador de espessura de tecido 14320 posicionado sobre a superfície de plataforma 14311 da porção de suporte 14310. Em comparação a outras modalidades reveladas neste pedido que compreendem uma porção de suporte 14310 que tem uma superfície de plataforma plana, ou ao menos substancialmente plana, a superfície de plataforma 14311 pode ser inclinada e/ou declinada entre a extremidade distal 14305 e a extremi-dade proximal 14306 da porção de suporte 14310. Em pelo menos uma modalidade, a superfície de suporte 14311 da porção de suporte 14310 pode compreender uma altura de suporte na sua extremidade distal 14305 que é mais curta que a altura de suporte na sua extremi-dade proximal 14306. Em pelo menos uma tal modalidade, os grampos 10030 na extremidade distal do cartucho de grampos 14300 podem se estender acima da superfície de suporte 14311 uma distância maior que os grampos 10030 na extremidade proximal. Em várias mo-dalidades alternativas, a superfície de suporte de uma porção de su-porte pode compreender uma altura na sua extremidade distal que é mais alta que sua altura na sua extremidade proximal. Novamente com referência à FIGURA 364, o compensador de espessura de tecido 14320 pode compreender uma espessura que é diferente ao longo do seu comprimento longitudinal. Em várias modalidades, o compensador de espessura de tecido 14320 pode compreender uma espessura na sua extremidade distal 14325 que é mais espessa que sua extremidade proximal 14326, por exemplo. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 14322 pode compreender uma superfície de fundo 14322 que pode ser inclinada ou declinada para coincidir, ou coincidir ao menos substancialmente, com a superfície de suporte inclinada ou declinada 14311 da porção de suporte 14310. Como resultado, a superfície de topo, ou de contato com o tecido, 14321 do compensador de espessura de tecido 14320 pode compre-ender uma superfície plana, ou ao menos substancialmente plana, so-bre a qual o tecido T pode ser posicionado. Em todo caso, quando o compensador de espessura de tecido 14320 é mais espesso na sua extremidade distal 14325, os grampos distais 10030 podem capturar uma porção maior do compensador de espessura de tecido 14320 do que os grampos proximais 10030 e, como resultado, os grampos distais 10030 podem aplicar uma força de compressão maior ao tecido T, especialmente quando a distância de vão entre a bigorna 10060 e a superfície de plano de apoio 14311 for constante, ou ao menos substancialmente constante, nas extremidades proximal e distal do cartucho de grampos. Em determinadas circunstâncias, entretanto, a bigorna 10060 pode não atingir uma posição completamente fechada e, como resultado, a distância de vão entre a bigorna 10060 e a superfície de plataforma 14311 pode ser maior na extremidade distal do cartucho de grampos 14300 do que a extremidade proximal. Em várias circunstâncias, os grampos distais 10030 podem não ser completa-mente formados e, como resultado, os grampos distais 10030 podem não aplicar a pressão de pinçamento desejada ao tecido T. Nas moda-lidades em que o compensador de espessura de tecido é mais espesso na extremidade distal do cartucho de grampos, o compensador de espessura de tecido pode compensar pela sub-formação dos grampos e aplicar uma pressão suficiente ao tecido T.
[866] Em várias modalidades, agora com referência à FIGURA 365, um cartucho de grampos, como o cartucho de grampos 14400, por exemplo, pode compreender uma porção de suporte 14410 e, além disso, um compensador de espessura de tecido 14420 posicionado na superfície de suporte 14411 da porção de suporte 14410. de modo semelhante ao exposto acima, a superfície de suporte 14411 pode ser inclinada e/ou declinada de modo que, em pelo menos uma modalidade, a extremidade distal 14405 da porção de suporte 14410 possa ter uma altura de suporte que é mais curta que a altura de su-porte na extremidade proximal 14406, por exemplo. Em certas modali-dades, o compensador de espessura de tecido 14420 pode compre-ender uma espessura constante, ou ao menos substancialmente cons-tante, ao longo do seu comprimento e, como resultado, a superfície de topo, ou de contato com o tecido 14421 do compensador de espessura de tecido 14420 pode ser paralelo, ou ao menos substancialmente pa-ralela, ao contorno da superfície de suporte 14411. Em várias modali-dades, os grampos 10030 do cartucho de grampos 14400 podem estar completamente encaixados dentro do compensador de espessura de tecido 14420 e da porção de suporte 14410 quando os grampos 10030 estão na sua posição não disparada. Em certas modalidades, os grampos 10030 posicionados na extremidade proximal do cartucho de grampos 14400 podem estar completamente encaixados dentro do compensador de espessura de tecido 14420 e da porção de suporte 14410 quando os grampos 10030 estão na posição não disparada en-quanto que, devido à inclinação declinada do suporte 14411 e da su-perfície de topo 14421, as pontas de certos grampos 10030, incluindo os grampos 10030 posicionados na extremidade distal do cartucho de grampos 14400, podem se projetar através da superfície de topo 14421 do compensador de espessura de tecido 14420 quando os grampos 10030 estão na sua posição não disparada.
[867] Em várias modalidades, conforme descrito acima, um com pensador de espessura de tecido pode ser compreendido de um único material sendo que a totalidade do compensador de espessura de te-cido pode ter propriedades de material iguais, ou ao menos substanci-almente iguais, como densidade, rigidez, taxa de elasticidade, durômetro, e/ou elasticidade, por exemplo, do início ao fim. Em várias outras modalidades, agora com referência à FIGURA 368, um compensador de espessura de tecido, como o compensador de espessura de tecido 14520, por exemplo, pode compreender uma pluralidade de materiais ou camadas de materiais. Em pelo menos uma modalidade, o com-pensador de espessura de tecido 14520 pode compreender uma pri-meira camada, ou central, 14520a, segundas camadas, ou camadas intermediárias, 14520b presas à primeira camada 14520a em lados opostos da mesma, e uma terceira camada, ou camada externa 14520c fixada a cada uma das segundas camadas 14520b. Em certas modalidades, as camadas intermediárias 14520b podem ser fixadas à camada central 14520a utilizando pelo menos um adesivo e, de maneira similar, as camadas externas 14520c podem ser fixadas às se-gundas camadas 14520 utilizando pelo menos um adesivo. Em adição a ou ao invés de um adesivo, as camadas 14520a a 14520c podem ser mantidas juntas por um ou mais elementos de encaixe e/ou pren-dedores, por exemplo. Em todo caso, a camada interna 14520a pode ser compreendida de um primeiro material que tem um primeiro con-junto de propriedades de material, as camadas intermediárias 14520b podem ser compreendidas de um segundo material que tem um se-gundo conjunto de propriedades de material, e as camadas externas 14520c podem ser compreendidas de um terceiro material que tem um terceiro conjunto de propriedades de material, por exemplo. Estes con-juntos de propriedades de material podem incluir densidade, rigidez, taxa de elasticidade, durômetro, e/ou elasticidade, por exemplo. Em certas modalidades, um cartucho de grampos pode compreender seis fileiras de grampos 10030, por exemplo, sendo que uma fileira de grampos 10030 pode ser posicionada ao menos parcialmente em cada uma das camadas externas 14520c e cada uma das camadas internas 14520b, por exemplo, e sendo que duas fileiras de grampos 10030 podem ser posicionadas ao menos parcialmente com a camada interna 14520a. Em uso, de modo semelhante ao exposto acima, os grampos 10030 podem ser ejetados do cartucho de grampos de modo que as pernas de grampo 10032 dos grampos 10030 penetrem na superfície de topo 14521 do compensador de espessura de tecido 14520, pe-netrem no tecido posicionado contra a superfície de topo 14521 por uma bigorna, e, então, entrem em contato com a bigorna de modo que as pernas 10032 sejam deformadas para capturar o compensador de espessura de tecido 14520 e o tecido dentro dos grampos 10030. Além disso, de modo semelhante ao exposto acima, o compensador de espessura de tecido 14520 pode ser cortado por um elemento de disparo quando o elemento de disparo é avançado através do cartucho de grampos. Em pelo menos uma tal modalidade, o elemento de dis-paro pode cortar a camada interna 14520a, e o tecido, ao longo de uma trajetória definida por um eixo 14529, por exemplo.
[868] Em várias modalidades, além do exposto acima, as fileiras de grampos 10030 posicionadas dentro da camada interna 14520a podem compreender as fileiras de grampo que estão mais próximas das bordas do tecido cortado. de modo correspondente, as fileiras de grampos 10030 posicionadas dentro das camadas externas 14520c podem compreender as fileiras de grampo que estão mais afastadas das bordas do tecido cortado. Em certas modalidades, o primeiro ma-terial que compreende a camada interna 14520a pode compreender uma densidade que é maior que a densidade do segundo material que compreende as camadas intermediárias 14520b e, de maneira similar, a densidade do segundo material pode ser maior que a densidade do terceiro material que compreende as camadas externas 14520c, por exemplo. Em várias circunstâncias, como resultado, forças de com-pressão maiores podem ser criadas dentro dos grampos 10030 posici-onados dentro da camada interna 14520a em comparação às forças de compressão geradas dentro dos grampos 10030 posicionados dentro das camadas intermediárias 14520b e das camadas externas 14520c. de maneira similar, forças de compressão maiores podem ser criadas dentro dos grampos 10030 posicionados dentro das camadas intermediárias 14520b em comparação às forças de compressão cria-das dentro dos grampos 10030 posicionados dentro das camadas ex-ternas 14520c, por exemplo. Em várias modalidades alternativas, o primeiro material que compreende a camada interna 14520a pode compreender uma densidade que é menor que a densidade do segun-do material que compreende as camadas intermediárias 14520b e, de maneira similar, a densidade do segundo material pode ser menor que a densidade do terceiro material que compreende as camadas externas 14520c, por exemplo. Em várias circunstâncias, como resultado, forças de compressão maiores podem ser criadas dentro dos grampos 10030 posicionados dentro das camadas externas 14520c em compa-ração às forças de compressão criadas dentro dos grampos 10030 po-sicionados dentro das camadas intermediárias 14520b e da camada interna 14520a. de maneira similar, forças de compressão maiores po-dem ser criadas dentro dos grampos 10030 posicionados dentro das camadas intermediárias 14520b em comparação às forças de com-pressão criadas dentro dos grampos 10030 posicionados dentro da camada interna 14520a, por exemplo. Em várias outras modalidades, qualquer outra disposição adequada de camadas, materiais, e/ou pro-priedades de material adequadas poderiam ser utilizadas. Em todo ca-so, em várias modalidades, as camadas 14520a a 14520c do compen-sador de espessura de tecido 14520 podem ser configuradas para permanecerem fixadas umas as outras após elas terem sido implanta-das. Em certas outras modalidades, a camadas 14520a a 14520c do compensador de espessura de tecido 14520 podem ser configuradas para se desprender umas das outras após terem sido implantadas. Em pelo menos uma tal modalidade, as camadas 14520a a 14520c podem ser ligadas uma as outras utilizando um ou mais adesivos bioabsorvíveis que podem inicialmente prender as camadas juntas e então per-mitir que as camadas sejam liberadas uma das outras ao longo do tempo.
[869] Conforme descrito acima, um compensador de espessura de tecido de um cartucho de grampos, como o compensador de es-pessura de tecido 14520, por exemplo, pode compreender uma plura-lidade de camadas longitudinais. Em várias outras modalidades, agora com referência à FIGURA 369, um cartucho de grampos pode com-preender um compensador de espessura de tecido, como o compen-sador de espessura de tecido 14620, por exemplo, que pode compreender uma pluralidade de camadas horizontais. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 14620 pode compreender uma primeira camada, ou de fundo, 14620a, uma se-gunda camada, ou intermediária, 14620b fixada à camada de fundo 14620a, e uma terceira camada, ou de topo, 14620c fixada à camada intermediária 14620b. Em várias modalidades, a primeira camada 14620a pode compreender uma superfície de fundo plana, ou subs-tancialmente plana, 14626a e uma superfície de topo triangular, ou pi-ramidal, 14625a, por exemplo. Em pelo menos uma tal modalidade, a segunda camada 14620b pode compreender uma superfície de fundo triangular, ou piramidal, 14626b que pode ser configurada para estar paralela e em posição limítrofe à superfície de topo 14625a da primeira camada 14620a. de modo semelhante ao exposto acima, a segunda camada 14620b pode compreender uma superfície de topo triangular, ou piramidal, 14625b que pode ser paralelo e estar em posição limítrofe a uma superfície de fundo triangular, ou piramidal, 14626c da terceira camada 14620c, por exemplo. Em várias modalidades, a superfície de topo da terceira camada 14626c pode compreender uma superfície de contato com o tecido plana, ou ao menos substancialmente plana 14621. Também de modo semelhante ao exposto acima, o compensa-dor de espessura de tecido 14620 pode ser configurado para armaze-nar ao menos parcialmente seis fileiras de grampos, como os grampos 10030, por exemplo, sendo que um elemento de disparo pode cortar p compensador de espessura de tecido 14620 entre as duas fileiras de grampo mais internas ao longo de uma trajetória que se estende atra-vés do eixo 14629, por exemplo. de modo semelhante ao exposto acima, cada camada 14620a, 14620b, e 14620c pode ser compreen-dida de um material diferente que pode compreender diferentes pro-priedades de material e, como resultado da configuração triangular, ou piramidal, das camadas 14620a a 14620c, o compensador de espessura de tecido 14620 pode ter diferentes propriedades gerais em vários locais no seu interior. Por exemplo, as fileiras mais externas de grampos 10030 podem capturar nela mais da terceira camada 14620c do que a primeira camada 14620a enquanto as fileiras mais internas de grampos 10030 podem capturar menos da terceira camada 14620c do que a primeira camada 14620a e, como resultado, o compensador de espessura de tecido 14620 pode comprimir o tecido capturado dentro dos grampos mais externos 10030 diferentemente do tecido capturado dentro dos grampos mais internos 10030, por exemplo, embora o compensador de espessura de tecido 14620 possa ter a mesma, ou ao menos substancialmente a mesma, espessura geral através do mesmo.
[870] Em várias modalidades, agora com referência à FIGURA 286, um compensador de espessura de tecido de um cartucho de grampos, como o compensador de espessura de tecido 14720 do car-tucho de grampos 14700, por exemplo, pode compreender espaços vazios, bolsos, canaletas, e/ou sulcos, por exemplo, ali definidos que podem variar a espessura do compensador de espessura de tecido 14720. Em pelo menos uma tal modalidade, o compensador de espes-sura de tecido 14720 pode ser posicionado contra a superfície de su-porte 14711 de uma porção de suporte 14710 do cartucho de grampos 14700 de modo que os espaços vazios 14723 definidos na superfície de fundo 14722 do compensador de espessura de tecido 14720 possa cobrir certas cavidades para grampos 10012, mas não outras. Em vá-rias modalidades, os espaços vazios 14723 podem se estender trans-versalmenteaté a fenda de faca 14715 da porção de suporte 14710, perpendicular à fenda de faca 14715, e/ou paralelos à fenda de faca 14715, por exemplo. Em certas modalidades, os espaços vazios 14723 podem definir um padrão de superfície de rolamento na superfície de fundo 14722 do compensador de espessura de tecido 14720. Em todo caso, quando os grampos, como os grampos 10030, por exemplo, são dispensados da porção de suporte 14710, agora com referência às FIGURAS 287 e 288, certos grampos 10030 podem cap-turar o compensador de espessura de tecido 14720 dentro de uma re-gião que contém um espaço vazio 14723 enquanto outros grampos 10030 podem capturar o compensador de espessura de tecido 14720 dentro de uma região posicionada entre os espaços vazios 14723. Em adição a ou ao invés do exposto acima, o compensador de espessura de tecido 14720 pode compreender espaços vazios, bolsos, canais, e/ou sulcos, por exemplo, definidos na superfície de topo, ou de contato com o tecido 14721. Em certas modalidades, agora com referência às FIGURAS 366 e 367, um cartucho de grampos 14800 pode com-preender um compensador de espessura de tecido 14820 que pode incluir uma pluralidade de superfícies de rolamento 14823 estendendose ao menos um dentre para cima a partir de uma superfície de topo 14821 do compensador de espessura de tecido 14820, para dentro em direção a um sulco central 14825, e/ou distalmente em direção à ex-tremidade distal do cartucho de grampos 14800, por exemplo. Em pelo menos uma tal modalidade, quando as superfícies de rolamento 14823 podem ser separadas por canaletas, fendas, e/ou sulcos, como canaletas 14824, por exemplo. Em várias circunstâncias, como resultado do acima, a espessura total do compensador de espessura de tecido pode variar entre fileiras de grampo e/ou variar entre os grampos dentro de uma fileira de grampo. Em determinadas circunstâncias, as superfícies de rolamento, ou porções espessas, podem ser construídas e dispostas de modo que elas possam fluir em uma direção desejada, como para dentro, por exemplo, quando o compensador de espessura de tecido é comprimido.
[871] Em várias modalidades, agora com referência à FIGURA 303, um cartucho de grampos, como o cartucho de grampos 14900, por exemplo, pode compreender uma porção de suporte 14910 e, além disso, um compensador de espessura de tecido 14920 posicionado contra a porção de suporte 14910. de modo semelhante ao exposto acima, a porção de suporte 14910 pode compreender acionadores de grampos que podem ser levantados por um trenó que dispensa grampos de modo a levantar grampos, como os grampos 10030, por exemplo, posicionados ao menos parcialmente dentro da porção de suporte 14910 em direção a uma bigorna, como a bigorna 10060, por exemplo, posicionada do lado oposto ao cartucho de grampos 14900. Em certas modalidades, a porção de suporte 14910 pode compreender seis fileiras de cavidades para grampos, como as duas fileiras externas das cavidades para grampos, duas fileiras internas das cavidades para grampos, e duas fileiras intermediárias de cavidades para grampos posicionadas entre as fileiras internas e as fileiras externas, por exemplo, sendo que a bigorna 10060 pode compreender seis fileiras de bolsos de formação 10062 alinhadas, ou ao menos substancialmente alinhadas, com as cavidades para grampos. Em várias modalidades, as fileiras internas das cavidades para grampos podem incluir os acionadores de grampos 14940a ali posicionados, as fileiras inter-mediárias das cavidades para grampos podem incluir os acionadores de grampos 14940b ali posicionados, e as fileiras externas das cavi-dades para grampos podem incluir os acionadores de grampos 14940c ali posicionados, sendo que cada um dos acionadores de grampos 14940a pode incluir um berço 14949a configurado para apoiar um grampo 10030, sendo que cada um dos acionadores de grampos 14940b pode incluir um berço 14949b configurado para apoiar um grampo 10030, e em que cada um dos acionadores de grampos 14940c pode incluir um berço 14949c configurado para suportar um grampo 10030. Nas suas posições não disparadas, isto é, quando os acionadores de grampos 14940a a 14940c estão repousando sobre os suportes acionadores 14926 que se estendem debaixo da porção de suporte 14910, os berços 14949a dos acionadores de grampos 14940a podem estar posicionados mais perto da bigorna 10060 do que os berços 14949b dos acionadores de grampos 14940b e os berços 14949c dos acionadores de grampos 14940c. Nesta posição, uma primeira distância de formação pode ser definida entre os berços 14949a e os bolsos de formação 10062 posicionados sobre os berços 14949a, uma segunda distância de formação pode ser definida entre os berços 14949b e os bolsos de formação 10062 posicionados sobre os berços 14949b, e uma terceira distância de formação pode ser definida entre os berços 14949c e os bolsos de formação 10062 posicionados sobre os berços 14949c, em que, em várias modalidades, a primeira distância de formação pode ser mais curta que a segunda distância de formação e a segunda distância de formação pode ser mais curta que a terceira distância de formação, por exemplo. Quando os acionadores de grampo 14940a a 14940c são movidos de suas posições não disparadas (FIGURA 303) para suas posições disparadas, cada acionador de grampos 14940a a 14940c pode ser movido para cima em uma distância igual, ou pelo menos substancialmente igual, em direção à bigorna 10060 pelo deslizador que dispensa grampos, de modo que os primeiros acionadores 14940a direcionam seus respectivos grampos 10030 para uma primeira altura formada, os segundos acionadores 14940b direcionam seus respectivos grampos 10030 para uma segunda altura formada, e os terceiros acionadores 14940c direcionam seus respectivos grampos 10030 para uma terceira altura formada, sendo que a primeira altura formada pode ser menor que a segunda altura formada e a segunda altura formada pode ser menor que a terceira altura formada, por exemplo. Várias outras modalidades são previstas, nas quais os primeiros acionadores de grampos 14940a são deslocados para cima uma primeira distância, os segundos acionadores de grampos 14940b são deslocados para cima uma segunda dis-tância, e os terceiros acionadores de grampos 14940c são deslocados para cima uma terceira distância, sendo que uma ou mais dentre a primeira distância, a segunda distância, e a terceira distância podem ser diferentes.
[872] Em várias modalidades, novamente com referência à FI GURA 303, a superfície de suporte 14911 da porção de suporte 14910 pode variar em altura com relação à superfície de contato com o tecido 10061 da bigorna 10060. Em certas modalidades, esta variação de altura pode ocorrer lateralmente e, em pelo menos uma modalidade, a altura da superfície de suporte 14911 que circunda das fileiras internas de cavidades para grampos pode ser maior que a superfície de suporte 14911 que circunda das fileiras externas de cavidades para grampos, por exemplo. Em várias modalidades, a superfície de fundo 14922 do compensador de espessura de tecido 14920 pode ser configurada para estar paralelo, ou ao menos substancialmente paralela, à superfície de suporte 14911 da porção de suporte 14910. Além do exposto acima, o compensador de espessura de tecido 14920 também pode ter espessura diferente, sendo que, em pelo menos uma modalidade, a superfície de topo, ou de contato com o tecido 14921 do compensador de espessura de tecido 14920 pode inclinar para dentro a partir do seu lado de fora ou bordas laterais. Em pelo menos uma tal modalidade, como resultado do acima, o compensador de espessura de tecido 14920 pode ser mais delgado em uma região posicionada sobre as fileiras internas de cavidades para grampos e mais espessa em uma região posicionada sobre as fileiras externas de cavidades para gram-pos, por exemplo. Em várias modalidades, agora com referência à FI-GURA 304, a superfície de suporte de uma porção de suporte 15010 pode compreender uma superfície de suporte em degraus, por exem-plo, em que os degraus mais elevados da superfície em degraus podem cercar as fileiras internas de cavidades para grampos e os de-graus mais baixos da superfície em degraus podem cercar as fileiras externas de cavidades para grampos, por exemplo. Em pelo menos uma tal modalidade, degraus que têm uma altura intermediária podem cercar as fileiras intermediárias de cavidades para grampos. Em certas modalidades, um compensador de espessura de tecido, como o com-pensador de espessura de tecido 15020, por exemplo, pode compre-ender uma superfície de fundo que pode ser paralelo e estar em posi-ção limítrofe à superfície de suporte da porção de suporte 15010. Em pelo menos uma modalidade, a superfície de topo, ou de contato com o tecido 15021 do compensador de espessura de tecido pode compre-ender uma superfície arqueada, parabólica, e/ou curva, por exemplo, que, em pelo menos uma tal modalidade, pode se estender de um primeiro lado lateral do compensador de espessura de tecido 15020 para um segundo lado lateral do compensador de espessura de tecido 15020 com um ápice alinhado, ou ao menos substancialmente alinha-do, com o centro do cartucho de grampos 15000, por exemplo. Em vá-rias modalidades, agora com referência à FIGURA 299, um cartucho de grampos 15300, por exemplo, pode compreender uma porção de suporte 15310, uma pluralidade de acionadores de grampos 15340 posicionados de forma móvel dentro das cavidades para grampos de-finidas na porção de suporte 15310, e um compensador de espessura de tecido 15320 posicionado acima da superfície de suporte 15311 da porção de suporte 15310. O cartucho de grampos 15300 pode com-preender adicionalmente uma ou mais porções de recipiente de apoio 15326 que podem ser fixadas à porção de suporte 15310 e se esten-dem em torno do fundo da porção de suporte 15310 e suportam os acionadores 15340, e os grampos 15330, nas suas posições não dis-paradas. Quando um trenó que dispensa grampos é avançado através do cartucho de grampos, o trenó também pode ser apoiado pelas porções de recipiente de apoio 15326 quando o trenó levanta os acionadores de grampos 15340 e os grampos 15330 através do compensador de espessura de tecido 15320. Em pelo menos uma modalidade, o compensador de espessura de tecido 15320 pode compreender uma primeira porção, ou interna 15322a posicionada sobre uma fileira in-terna de cavidades para grampos, uma segunda porção, ou intermedi-ária 15322b posicionada sobre uma fileira intermediária de cavidades para grampos, e uma terceira porção, ou externa 15322c posicionada sobre uma fileira de cavidades para grampos, sendo que a porção in-terna 15322a pode ser mais espessa que a porção intermediária 15322b e a porção intermediária 15322b pode ser mais espessa que a porção externa 15322c, por exemplo. Em pelo menos uma modalidade, o compensador de espessura de tecido 15320 pode compreender canaletas longitudinais, por exemplo, ali definidas que podem criar porções mais delgadas 15322b e 15322c do compensador de espes-sura de tecido 15320. Em várias modalidades alternativas, as canaletas longitudinais podem ser definidas na superfície de topo e/ou na su-perfície de fundo de um compensador de espessura de tecido. Em pelo menos uma modalidade, a superfície de topo 15321 do compensador de espessura de tecido 15320 pode compreender uma superfície plana, ou ao menos substancialmente plana, por exemplo.
[873] Em várias modalidades, agora com referência à FIGURA 296, um cartucho de grampos pode compreender um compensador de espessura de tecido, como o compensador de espessura de tecido 15120, por exemplo, que pode compreender uma pluralidade de por-ções que têm diferentes espessuras. Em pelo menos uma modalidade, o compensador de espessura de tecido 15120 pode compreender uma primeira porção, ou interna 15122a que pode ter uma primeira espes-sura, segundas porções, ou intermediárias 15122b que se estendem a partir da primeira porção 15122b, que pode, cada uma, ter uma segunda espessura, e terceiras porções, ou externas 15122c que se es-tendem a partir das segundas porções 15122b e que podem ter, cada uma, uma terceira espessura. Em pelo menos uma tal modalidade, a terceira espessura pode ser mais espessa que a segunda espessura e a segunda espessura pode ser mais espessa que a primeira espessu-ra, por exemplo, embora quaisquer espessuras adequadas possam ser utilizadas em várias outras modalidades. Em várias modalidades, as porções 15122a a 15122c do compensador de espessura de tecido 15120 podem compreender degraus tendo diferentes espessura. Em pelo menos uma modalidade, de modo semelhante ao exposto acima, um cartucho de grampos pode compreender várias fileiras de grampos 10030 e uma pluralidade de acionadores de grampos tendo diferentes alturas que podem deformar os grampos 10030 para diferentes alturas formadas. Também de modo semelhante ao exposto acima, o cartucho de grampos pode compreender os primeiros acionadores de grampos 15140a que podem direcionar os grampos 10030 suportados sobre eles para uma primeira altura formada, os segundos acionadores de grampos 15140b que podem direcionar os grampos 10030 suportados sobre eles para uma segunda altura formada, e os terceiros acionadores de grampos que podem direcionar os grampos 10030 su-portados sobre eles para uma terceira altura formada, sendo que a primeira altura formada pode ser mais curta que a segunda altura for-mada e a segunda altura formada pode ser mais curta que a terceira altura formada, por exemplo. Em várias modalidades, conforme ilus-trado na FIGURA 296, cada grampo 10030 pode compreender a mesma, ou substancialmente a mesma altura não formada, ou não disparada. Em certas outras modalidades, agora com referência à FI-GURA 296A, os primeiros acionadores 15140a, os segundos acionadores 15140b, e/ou os terceiros acionadores 15140c podem suportar grampos tendo diferentes alturas não formadas. Em pelo menos uma tal modalidade, os primeiros acionadores de grampos 15140a podem suportar grampos 15130a tendo uma primeira altura não formada, os segundos acionadores de grampos 15140b podem suportar grampos 15130b que têm uma segunda altura não formada, e os terceiros acionadores de grampos 15140c podem suportar grampos 15130c que têm uma terceira altura não formada, sendo que a primeira altura não formada pode ser mais curta que a segunda altura não formada e a segunda altura não formada pode ser mais curta que a terceira altura não formada, por exemplo. Em várias modalidades, novamente com referência à FIGURA 296A, as pontas dos grampos 15130a, 15130b, e/ou 15130c podem estar situadas, ou ao menos substancialmente situadas, no mesmo plano enquanto que, em outras modalidades, as pontas dos grampos 15130a, 15130b, e/ou 15130c podem não estar situadas no mesmo plano. Em certas modalidades, agora com refe-rência à FIGURA 297, um cartucho de grampos pode incluir um com-pensador de espessura de tecido 15220 que tem uma pluralidade de porções que têm diferentes espessura, que podem ser implantadas contra o tecido T pelos grampos 15130a, 15130b, e 15130c, conforme descrito acima. Em pelo menos uma modalidade, agora com referên-ciaà FIGURA 298, os grampos 15130a, 15130b, e/ou 15130c podem ser deformados para diferentes alturas formadas, sendo que os primei-ros grampos 15130a podem ser formados para uma primeira altura formada, os segundos grampos 15130b podem ser formados para uma segunda altura formada, e os terceiros grampos 15130c podem ser formados para uma terceira altura formada, e sendo que a primeira altura formada pode ser mais curta que a segunda altura formada e a segunda altura formada pode ser mais curta que a terceira altura for-mada, por exemplo. Outras modalidades são previstas, nas quais os grampos 15130a, 15130b, e 15130c podem ser formados para qualquer altura formada adequada e/ou para qualquer altura formada relativa.
[874] Em várias modalidades, conforme descrito acima, a bigorna de um instrumento de grampeamento cirúrgico pode ser movida entre uma posição aberta e uma posição fechada. Em tais circunstâncias, a superfície de contato com o tecido da bigorna pode ser movida para sua posição final, ou de formação, quando a bigorna é movida para sua posição fechada. Quando a bigorna está na sua posição fechada, em certas modalidades, a superfície de contato com o tecido pode não ser mais ajustável. Em certas outras modalidades, agora com referênciaà FIGURA 351, um grampeador cirúrgico, como o grampeador cirúrgico 15500, por exemplo, pode compreender uma canaleta da bigorna 15560 e uma placa de ajuste da bigorna em contato com o teci-doajustável 15561 posicionada no interior da canaleta da bigorna 15560. Em tais modalidades, a placa da bigorna 15561 pode ser le-vantada e/ou abaixada dentro da canaleta da bigorna 15560 de modo a ajustar a posição da superfície de contato com o tecido da placa da bigorna 15561 em relação a um cartucho de grampos posicionado do lado oposto da placa da bigorna 15561. Em várias modalidades, o grampeador cirúrgico 15500 pode compreender uma corrediça de ajuste 15564 que, referindo-se às FIGURAS 356 e 357, pode ser des-lizada entre a canaleta da bigorna 15560 e a placa da bigorna 15561 de modo a controlar a distância entre a placa da bigorna 15561 e o cartucho de grampos. Em certas modalidades, referindo-se novamente às FIGURAS 351 e 352, o grampeador cirúrgico 15500 pode compre-ender adicionalmente um atuador 15562 acoplado à corrediça de ajuste 15564, o qual pode ser deslizado proximalmente de modo a deslizar a corrediça de ajuste 15564 proximalmente e/ou deslizar distalmente de modo a deslizar a corrediça de ajuste 15564 distalmente. Em várias modalidades, referindo-se novamente às FIGURAS 356 e 357, o atuador 15562 pode ser deslizado entre duas ou mais posições predefinidas de modo a ajustar a placa da bigorna 15561 entre duas ou mais posições, respectivamente. Em ao menos uma modalidade, tais posi-ções predefinidas podem ser desmarcadas no grampeador cirúrgico 15500 como desmarcações 15563 (FIGURA 351), por exemplo. Em certas modalidades, com referência à FIGURA 357, a corrediça de ajuste 15564 pode compreender uma pluralidade de superfícies de su-porte, como a primeira superfície de suporte 15565a, segunda superfí-cie de suporte 15565b, e terceira superfície de suporte 15565c, por exemplo, que podem ser alinhadas com uma pluralidade de superfícies de posicionamento de placa, como a primeira superfície de posi-cionamento 15569a, a segunda superfície de posicionamento 15569b, e a terceira superfície de posicionamento 15569c, respectivamente, na parte posterior da placa da bigorna 15561 de modo a posicionar a placa da bigorna 15561 em uma primeira posição. de modo a posicionar a placa da bigorna 15561 em uma segunda posição, o atuador 15562 e a corrediça 15564 podem ser deslizar proximalmente, por exemplo, de modo a realinhar as superfícies de suporte 15565a a 15565c da corre-diça15564 em relação às superfícies de posicionamento 15569a a 15569c da placa da bigorna 15561. Mais particularmente, com refe-rência à FIGURA 356, a corrediça 15564 pode ser deslizada em posi-ção distal de modo que a primeira superfície de suporte 15565a da corrediça 15564 possa ser posicionada atrás da segunda superfície de posicionamento 15569b da placa da bigorna 15561 a de modo que a segunda superfície de suporte 15565b da corrediça 15564 possa ser posicionada atrás da terceira superfície de posicionamento 15569c da placa da bigorna 15561 de modo a mover a placa da bigorna 15561 mais perto do cartucho de grampos. Quando a placa da bigorna 15561 é movida de sua primeira posição para sua segunda posição, em tais circunstâncias, a placa da bigorna ajustável 15561 pode comprimir ainda mais o tecido T posicionado entre a placa da bigorna 15561 e o cartucho de grampos. Além disso, a altura formada dos grampos pode ser controlada pela posição da placa da bigorna 15561 em relação ao cartucho de grampos já que os bolsos de formação definidos na placa da bigorna 15561 irão se mover se aproximando e/ou se afastando do cartucho de grampos quando a placa da bigorna 15561 for ajustada. Embora apenas duas posições sejam discutidas acima, a corrediça 15564 pode ser deslizada em um número adequado de posições para mover a placa da bigorna 15561 para perto e/ou longe do cartucho de grampos. Em todo caso, quando a placa da bigorna 15561 tiver sido adequadamente posicionada, um trenó que dispensa grampos 15550 pode ser deslizado em posição distal dentro do cartucho de grampos de modo a levantar os acionadores de grampos 15540 e os grampos 15530 em direção à placa da bigorna 15561 e grampear o tecido T, conforme ilustrado na FIGURA 354. Grampeadores cirúrgicos simila-ressão revelados no pedido de patente US n° de série 13/036.647, intitulado SURGICAL STAPLING INSTRUMENT, que foi depositado em 28 de fevereiro de 2011, cuja descrição completa está aqui incor-porada a título de referência.
[875] Em várias modalidades, agora com referência à FIGURA 353, um cartucho de grampos pode ser posicionado dentro de uma canaleta de cartucho de grampos 15570 do grampeador cirúrgico 15500 que pode compreender um compensador de espessura de teci-do, como o compensador de espessura de tecido 15520, por exemplo. Quando a placa da bigorna 15561 é movida em direção ao cartucho de grampos, conforme descrito acima, a placa da bigorna 15561 pode comprimir o compensador de espessura de tecido 15520 e/ou o tecido T posicionado entre a placa da bigorna 15561 e o compensador de espessura de tecido 15520. Quando os grampos 15530 são dispensa-dos do cartucho de grampos, com referência à FIGURA 355, os gram-pos 15530 podem comprimir e implantar o compensador de espessura de tecido 15520 contra o tecido T. Em várias modalidades, quando a placa da bigorna 15561 é posicionada contra a corrediça 15564 e o tecido ainda não tiver sido colocado entre a placa da bigorna 15561 e o compensador de espessura de tecido 15520, um vão pode ser definido entre a placa da bigorna 15561 e a superfície de topo 15521 do compensador de espessura de tecido 15520 quando a placa da bigorna 15561 está em uma primeira posição. Quando a placa da bigorna 15561 é movida para uma segunda posição, a placa da bigorna 15561 pode entrar em contato com o compensador de espessura de tecido 15520. Em várias modalidades alternativas, quando a placa da bigorna 15561 for posicionada contra a corrediça 15564 e o tecido ainda não tiver sido colocado entre a placa da bigorna 15561 e o compensador de espessura de tecido 15520, um vão pode ser definido entre a placa da bigorna 15561 e a superfície de topo 15521 do compensador de espessura de tecido 15520 quando a placa da bigorna 15561 estiver em uma primeira posição e/ou uma segunda posição. Em pelo menos uma tal modalidade, a placa da bigorna 15561 não pode entrar em contato com o compensador de espessura de tecido 15520. Em moda-lidades alternativas adicionais, quando a placa da bigorna 15561 for posicionada contra a corrediça 15564 e o tecido ainda não tiver sido colocado entre a placa da bigorna 15561 e o compensador de espes-sura de tecido 15520, a placa da bigorna 15561 pode estar em contato com a superfície de topo 15521 do compensador de espessura de te-cido 15520 independentemente de se a placa da bigorna 15561 está em uma primeira posição e/ou uma segunda posição, por exemplo. Embora apenas duas posições para a placa da bigorna 15611 sejam aqui descritas, a placa da bigorna 15611 pode ser posicionada, ou ali-nhada, em qualquer quantidade adequada de posições.
[876] Em várias modalidades, como um resultado do acima, um instrumento de grampeamento cirúrgico pode compreender meios para ajustar a altura formada dos grampos que pode, em várias circunstân-cias, compensar as diferentes espessuras de tecido. Além disso, o ins-trumento de grampeamento cirúrgico pode compreender outros meios para compensar as diferentes espessuras de tecido e/ou variações de espessura dentro do tecido, por exemplo. Em pelo menos uma tal mo-dalidade, a placa da bigorna 15561 pode ser ajustada para cima, ou na direção contrária, do cartucho de grampos oposto para aumentar a al-tura formada, ou disparada, dos grampos. de modo correspondente, a placa da bigorna 15561 pode ser ajustada para baixo, ou na direção do cartucho de grampos oposto para reduzir a altura formada, ou dis-parada, dos grampos. Em várias modalidades, o ajuste da placa da bigorna 15561, por exemplo, pode ajustar o vão entre os bolsos de formação definidos na placa da bigorna 15561 e a altura disparada dos acionadores de grampos ou, mais especificamente, a altura disparada dos berços do acionador de grampos, por exemplo. Mesmo com tal capacidade de ajustar a altura formada dos grampos para levar em conta um tecido mais espesso e/ou mais delgado, por exemplo, um compensador de espessura de tecido também pode compensar um tecido mais espesso e/ou mais delgado e/ou compensar variações de espessura dentro do tecido, conforme descrito acima. Em tais modali-dades, pode-se fornecer a um cirurgião vários meios de compensação dentro do mesmo instrumento de grampeamento cirúrgico.
[877] Conforme descrito acima e ilustrado em várias modalida des, um instrumento de grampeamento cirúrgico pode utilizar um car-tucho de grampos que tem uma disposição linear de cavidades para grampos e grampos, em que um elemento de disparo pode ser avan-çado em posição distal através do cartucho de grampos para dispensar os grampos a partir das cavidades para grampos. Em certas moda-lidades, um cartucho de grampos pode compreender fileiras de cavi-dades para grampos e grampos que são curvos. Em pelo menos uma modalidade, agora com referência às FIGURAS 345 e 346, um instru-mento de grampeamento cirúrgico, como o grampeador 15600, por exemplo, pode compreender uma ou mais fileiras circulares ou anula-res de cavidades para grampos definidas em uma porção de suporte circular ou anular 15610. Tais fileiras de grampo circulares podem compreender uma fileira circular de cavidades para grampos internas 15612 e uma fileira circular de cavidades para grampos externas 15613, por exemplo. Em pelo menos uma tal modalidade, as fileiras circulares de cavidades para grampos podem cercar uma abertura cir-cular ou anular 15615 definida no grampeador 15600 que pode alojar uma faca circular ou anular posicionada de forma móvel ali. Em uso, o tecido pode ser posicionado contra a superfície de suporte 15611 da porção de suporte 15610 e uma bigorna (não ilustrada) pode ser mon-tada ao grampeador cirúrgico 15600 através de um atuador que se es-tendeatravés e/ou é posicionado dentro da abertura 15615 de modo que, quando o atuador é acionado, a bigorna pode ser grampeada em direção à porção de suporte 15610 e comprime o tecido contra a su-perfície de suporte 15611. Quando o tecido tiver sido suficientemente comprimido, os grampos posicionados dentro das cavidades para grampos 15612 e 15613 podem ser ejetados da porção de suporte 15610 e através do tecido, de modo que os grampos possam entrar em contato com a bigorna e ser suficientemente deformados para captura o tecido ali. Quando os grampos estão sendo disparados e/ou após os grampos terem sido disparados, a faca circular pode ser avançada para cortar o tecido. Posteriormente, a bigorna pode ser afastada da porção de suporte 15610 e/ou desprendida do grampeadorcirúrgico 15600 de modo que a bigorna e o grampeador cirúrgico 15600 possam ser removidos do sítio cirúrgico. Tais grampeadores cirúrgicos 15600 e tais técnicas cirúrgicas, em várias modalidades, podem ser utilizadas para unir duas porções de um intestino grosso, por exemplo. Em várias circunstâncias, as linhas de grampo circulares po-dem ser configuradas para prender as porções do intestino grosso jun-tas enquanto o tecido cura e, simultaneamente, permitir que as porções do intestino grosso se expandam resilientemente. Instrumentos de grampeamento cirúrgico e técnicas cirúrgicas similares são apre-sentados na patente US n° 5.285.945, intitulada SURGICAL ANAS-TOMOSIS STAPLING INSTRUMENT, que foi concedida em 15 de fe-vereiro de 1994, cuja descrição completa está aqui incorporada a título de referência.
[878] Em várias modalidades, além do exposto acima, um com pensador de espessura de tecido pode ser posicionado contra e/ou fixado à porção de suporte 15610 do grampeador cirúrgico 15600, por exemplo. Em pelo menos uma modalidade, o compensador de espes-sura de tecido pode ser compreendido de um anel circular ou anular de material que compreende um raio interno e um raio externo, por exemplo. Em determinadas circunstâncias, o tecido pode ser posicio-nado contra este anel de material e, quando a bigorna é usada para mover o tecido em direção à porção de suporte 15610, o compensador de espessura de tecido pode ser comprimido entre o tecido e a super-fície de suporte 15611. Durante o uso, os grampos podem ser dispa-radosatravés do compensador de espessura de tecido e o tecido, de modo que os grampos possam entrar em contato com a bigorna e de-formar para sua posição disparada para capturar porções do tecido e do compensador de espessura de tecido dentro dos grampos. Em vá-riascircunstâncias, além do exposto acima, o anel de material que compreende o compensador de espessura de tecido deve ser suficien-temente resiliente para permitir que as porções do intestino grosso que cercam as linhas de grampo se expandam. Em várias modalidades, referindo-se novamente às FIGURAS 345 e 346, um compensador de espessura de tecido flexível 15620 pode compreender um anel interno flexível circular ou anular 15624, por exemplo, que, em pelo menos uma modalidade, pode definir uma abertura circular ou anular 15625. Em certas modalidades, o anel interno 15624 pode ser configurado de modo a não ser capturado dentro dos grampos dispensados pelo grampeador cirúrgico 15600; em vez disso, em pelo menos uma mo-dalidade, o anel interno 15624 pode ser posicionado radialmente para dentro com relação à fileira interna de cavidades para grampos 15612. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 15620 pode compreender uma pluralidade de etiquetas, como as etiquetas internas 15622 e as etiquetas externas 15623, por exemplo, estendendo-se a partir dele de modo que as etiquetas possam ser ao menos parcialmente capturadas dentro dos grampos quando eles estão sendo deformados. Mais particularmente, referindo-se principalmenteà FIGURA 345, cada etiqueta interna 15622 pode compreender uma cabeça que é posicionada sobre uma cavidade para grampos 15612 definida no grampeador cirúrgico 15600 em que a cabeça pode ser fixada ao anel interno 15624 por um pescoço 15626, por exemplo, e, de maneira similar, cada etiqueta externa 15623 pode compreender uma cabeça que é posicionada sobre uma cavidade para grampos 15613 definida no grampeador cirúrgico 15600 em que a cabeça pode ser fixada ao anel interno 15624 por um pescoço 15627, por exemplo. Em várias modalidades, as cabeças das etiquetas internas 15622 e das etiquetas externas 15623 podem compreender qualquer formato adequado, como circular, oval, e/ou elíptico, por exemplo. Os pescoços 15626 e/ou 15627 também podem compreender qualquer formato adequado em que, em pelo menos uma modalidade, os pescoços 15627 que conectam as cabeças das etiquetas externas 15623 ao anel interno 15624 podem ser configurados para se estenderem entre cavidades para grampos internas adjacentes 15612 na porção de su-porte 15610 de modo que os pescoços 15627 não sejam capturados dentro dos grampos dispensados pelas cavidades para grampos inter-nas 15612.
[879] Em várias modalidades, agora com referência às FIGURAS 347 e 348, um compensador de espessura de tecido flexível 15720 pode compreender um anel externo flexível circular ou anular 15724, por exemplo. Em certas modalidades, o anel externo 15724 pode ser configurado de modo a não ser capturado dentro dos grampos dispen-sados pelo grampeador cirúrgico 15600; em vez disso, em pelo menos uma modalidade, o anel externo 15724 pode ser posicionado radial-mente para fora com relação à fileira externa de cavidades para gram-pos 15613. Em pelo menos uma tal modalidade, o compensador de espessura de tecido 15720 pode compreender uma pluralidade de eti-quetas, como as etiquetas internas 15622 e as etiquetas externas 15623, por exemplo, estendendo-se a partir dele de modo que as eti-quetas possam ser ao menos parcialmente capturadas dentro dos grampos quando eles estão sendo deformados. Mais particularmente, referindo-se principalmente à FIGURA 347, cada etiqueta interna 15622 pode compreender uma cabeça que é posicionada sobre uma cavidade para grampos 15612 definida no grampeador cirúrgico 15600 em que a cabeça pode ser fixada ao anel externo 15724 por um pescoço 15726, por exemplo, e, de maneira similar, cada etiqueta externa 15623 pode compreender uma cabeça que é posicionada sobre uma cavidade para grampos 15613 definida no grampeador cirúrgico 15600 em que a cabeça pode ser fixada ao anel externo 15724 por um pescoço 15727, por exemplo. Em várias modalidades, as cabeças das etiquetas internas 15622 e das etiquetas externas 15623 podem compreender qualquer formato adequado, como circular, oval, e/ou elíptico, por exemplo. Os pescoços 15726 e/ou 15727 também podem compreender qualquer formato adequado em que, em pelo menos uma modalidade, os pescoços 15726 que conectam as cabeças das etiquetas internas 15622 ao anel externo 15724 podem ser configura-dos para se estenderem entre cavidades para grampos externas adja-centes 15613 de modo que os pescoços 15726 não sejam capturados dentro dos grampos dispensados pelas cavidades para grampos inter-nas 15613. Em certas modalidades alternativas, um compensador de espessura de tecido pode compreender um anel interno flexível circular ou anular, um anel externo flexível circular ou anular, e, além disso, uma pluralidade de etiquetas que podem ser conectadas ao anel inter-no e/ou ao anel externo. Em pelo menos uma modalidade, certas eti-quetas podem ser conectadas ao anel interno e certas outras etiquetas podem ser conectadas ao anel externo. Em certas modalidades, pelo menos algumas das etiquetas podem ser conectadas ao anel interno e ao anel externo. Em todo caso, além do exposto acima, o anel interno 15624 do compensador de espessura de tecido 15620, o anel externo 15724 do compensador de espessura de tecido 15720, e/ou qualquer outro compensador de espessura de tecido adequado, pode ser confi-gurado para expandir e/ou contrair de modo a acomodar a expansão e/ou contração do tecido contra o qual ele foi implantado. Além disso, embora várias modalidades sejam descritas aqui como compreenden-doanéis de suporte circulares ou anulares, um compensador de es-pessura de tecido pode compreender qualquer estrutura de suporte formatada adequadamente para conectar as etiquetas a ele. Em várias modalidades, além do exposto acima, a faca circular avançada pelo grampeador cirúrgico para cortar o tecido capturado entre a bigorna e a porção de suporte também pode cortar o material de reforço. Em pelo menos uma tal modalidade, a faca pode separar o anel de suporte interno das etiquetas por cortar seus pescoços, por exemplo.
[880] Em várias modalidades, além do exposto acima, um com pensador de espessura de tecido pode compreender posições removí-veis e/ou relativamente móveis que podem ser configuradas para permitir ao compensador de espessura de tecido se expandir e/ou contrair de modo a acomodar o movimento do tecido contra o qual ele foi im-plantado. Agora com referência às FIGURAS 349 e 350, um compen-sador de espessura de tecido circular ou anular 15820 pode ser posi-cionado contra e/ou apoiado pela superfície de suporte 15611 do grampeador cirúrgico 15600 que pode ser mantido em uma posição não-expandida (FIGURA 349) enquanto ele está sendo implantado contra o tecido e, após o compensador de espessura de tecido 15820 ter sido implantado, o compensador de espessura de tecido 15820 po-de ser configurado para se expandir para fora, conforme ilustrado na FIGURA 350. Em várias modalidades, o compensador de espessura de tecido 15820 pode compreender uma pluralidade de porções ar-queadas 15822 que podem ser conectadas juntos por um anel interno 15824, por exemplo. Em pelo menos uma modalidade, as porções ar-queadas 15822 podem ser separadas uma das outras por junções 15828. Em pelo menos uma outra modalidade, as porções arqueadas 15822 podem ser conectadas umas as outras, em que, em pelo menos uma tal modalidade, um arranjo de perfurações pode permitir às por-ções arqueadas 15822 se separarem umas das outras. Em todo caso, em várias modalidades, as porções arqueadas 15822 podem compre-ender, cada uma, elementos de encaixe, como projeções 15826 e en-talhes 15823, por exemplo, que podem cooperar para limitar o movi-mento relativo entre as porções arqueadas 15822 antes de o compen-sador de espessura de tecido 15820 ser implantado. Além do exposto acima, cada porção arqueada 15822 pode ser conectada ao anel in-terno 15824 por um ou mais conectores 15827, por exemplo, que po-dem ser configurados para prender de modo liberável as porções ar-queadas 15822 na posição. Após os grampos, como os grampos 10030, por exemplo, armazenados dentro da porção de suporte 15610 terem sido utilizados para implantar o compensador de espessura de tecido 15620 contra o tecido, com relação principalmente à FIGURA 350, os conectores 15827 podem se desprender do anel interno 15824 e permitir ao compensador de espessura de tecido 15820 se expandir ao menos parcialmente para acomodar o movimento dentro do tecido subjacente. Em várias circunstâncias, todas as porções arqueadas 15822 podem se desprender do anel interno 15824 enquanto, em ou-trascircunstâncias, apenas algumas das porções arqueadas 15822 podem se desprender do anel interno 15824. Em certas modalidades alternativas, as porções arqueadas 15822 podem ser conectadas por seções flexíveis, o que pode permitir que as porções arqueadas 15822 se movam uma em relação à outra, mas não se desprendam uma da outra. Em pelo menos uma tal modalidade, as seções flexíveis podem não receber grampos e podem ser configuradas para estirar e/ou con-trair para acomodar o movimento relativo das porções arqueadas 15822. Na modalidade ilustrada nas FIGURAS 349 e 350, o compen-sador de espessura de tecido 15820 pode compreender oito porções arqueadas 15822, por exemplo. Em certas outras modalidades, um compensador de espessura de tecido pode compreender qualquer quantidade adequada de porções arqueadas, como duas ou mais por-ções arqueadas, por exemplo.
[881] Além do exposto acima, um compensador de espessura de tecido 15620, 15720, e/ou 15820, por exemplo, pode ser configurado para compensar um tecido mais espesso e/ou mais delgado capturado entre a bigorna e a porção de suporte 15610 do instrumento cirúrgico 15600. Em várias modalidades, de modo semelhante ao exposto aci-ma, a altura formada, ou disparada, dos grampos pode ser ajustada por mover a bigorna em direção e/ou na direção contrária da porção de suporte 15610. Mais particularmente, a bigorna pode ser movida mais perto da porção de suporte 15610 para reduzir a altura formada dos grampos enquanto, de modo correspondente, a bigorna pode ser afastada ainda mais da porção de suporte 15610 para aumentar a altu-ra formada dos grampos. Em tais modalidades, como resultado, um cirurgião pode ajustar a bigorna na direção contrária da porção de su-porte 15610 para levar em conta um tecido espesso e em direção à porção de suporte 15610 para levar em conta um tecido delgado. Em várias outras circunstâncias, o cirurgião pode decidir não ajustar a bi-gorna e depender do compensador de espessura de tecido para levar em conta o tecido mais delgado e/ou mais espesso. Em várias modali-dades, como um resultado o instrumento cirúrgico 15600 pode com-preender pelo menos dois meios para compensar diferentes espessu-ras de tecido e/ou variações nas espessuras do tecido.
[882] Em várias modalidades, conforme descrito acima, um com pensador de espessura de tecido pode ser fixado a uma porção de su-porte de um cartucho de grampos. Em certas modalidades, a superfície de fundo do compensador de espessura de tecido pode compreender um dentre uma camada de ganchos ou uma camada de laços enquanto uma superfície de suporte na porção de suporte pode compreender a outra da camada de ganchos e camada de laços. Em pelo menos uma tal modalidade, os ganchos e os laços podem ser configurados para engatar um ao outro e reter de maneira liberável o compensador de espessura de tecido à porção de suporte. Em várias modalidades, cada gancho pode compreender uma cabeça alargada estendendo-se a partir de um pescoço, por exemplo. Em certas modalidades, uma pluralidade de blocos compreendendo os laços, por exemplo, podem ser ligados à superfície de fundo do compensador de espessura de tecido enquanto uma pluralidade de blocos compreendendo os ganchos podem ser ligados à superfície de suporte da porção de suporte. Em pelo menos uma modalidade, a porção de suporte pode compreender uma ou mais aberturas e/ou reentrâncias, por exemplo, que podem ser configuradas para receber um elemento de inserção compreendendo ganchos e/ou laços. Em adição a ou ao invés do acima, um compensador de espessura de tecido pode ser montado de modo removível a uma bigorna que usa tais arranjos de gancho e laço, por exemplo. Em várias modalidades, os ganchos e laços podem compreender superfícies fibrosas, por exemplo.
[883] Em várias modalidades, conforme descrito acima, um car tucho de grampos pode compreender uma porção de suporte e um compensador de espessura de tecido fixado à porção de suporte. Em certas modalidades, conforme também descrito acima, a porção de suporte pode compreender uma fenda longitudinal configurada para receber nele um elemento de corte e o compensador de espessura de tecido pode compreender um elemento de retenção que pode ser retido na fenda longitudinal. Em pelo menos uma modalidade, agora com referência à FIGURA 386, um cartucho de grampos 16000 pode com-preender uma porção de suporte 16010 que inclui uma superfície de suporte 16011 e uma fenda longitudinal 16015. O cartucho de grampos 16000 pode compreender adicionalmente um compensador de espessura de tecido 16020 posicionado acima da superfície de suporte 16011. Em várias modalidades, o compensador de espessura de tecido 16020 pode incluir um elemento de retenção longitudinal 16025 que se estende para baixo na fenda longitudinal 16015. Em pelo menos uma tal modalidade, o elemento de retenção 16025 pode ser pressionado para dentro da fenda 16015 de modo que a interação entre o elemento de retenção 16025 e a fenda 16015 possa resistir ao movimento relativo entre a porção de suporte 16010 e o compensador de espessura de tecido 16020. Em várias modalidades, o corpo do com-pensador de espessura de tecido 16020 pode ser compreendido de um primeiro material e o elemento de retenção 16025 pode ser com-preendido de um segundo material, ou um material diferente. Em certas modalidades, o corpo do compensador de espessura de tecido 16020 pode ser compreendido de um material que tem um primeiro durômetro e o elemento de retenção 16025 pode ser compreendido de um material que tem um segundo durômetro, em que o segundo durômetro pode ser maior que o primeiro durômetro, por exemplo. Em uso, em pelo menos uma modalidade, os grampos 10030 podem ser empurrados para cima pelos acionadores de grampos 10040 de modo que as pontas dos grampos 10030 possam empurrar através do corpo do compensador de espessura de tecido 16020 e emergir pela super-fície de contato com o tecido 16021 e capturar pelo menos uma porção do compensador de espessura de tecido 16020 contra o tecido alvo. Em várias modalidades, um elemento de corte que passa através da fenda 16015 pode cortar o elemento de retenção 16025 quando os grampos 10030 estão sendo dispensados. Quando o compensador de espessura de tecido 16020 tiver sido implantado, em várias modalida-des, o elemento de retenção 16025 pode ser retirado da fenda 16015. Em certas outras modalidades, o corpo do compensador de espessura de tecido 16020 pode ser configurado para se soltar do elemento de retenção 16025.
[884] Agora com referência às FIGURAS 387 e 389, um cartucho de grampos 17000 pode compreender uma porção de suporte 17010 que inclui uma superfície de suporte 17011 e uma fenda longitudinal 17015. O cartucho de grampos 17000 pode compreender adicional-mente um compensador de espessura de tecido 17020 posicionado acima da superfície de suporte 17011. Em várias modalidades, o com-pensador de espessura de tecido 17020 pode incluir um elemento de retenção longitudinal 17025 que se estende para baixo na fenda longi-tudinal 17015. Em pelo menos uma tal modalidade, o elemento de re-tenção 17025 pode ser pressionado para dentro da fenda 17015 de modo que a interação entre o elemento de retenção 17025 e a fenda 17015 possa resistir ao movimento relativo entre a porção de suporte 17010 e o compensador de espessura de tecido 17020. Em várias modalidades, o elemento de retenção 17025 pode se estender através da totalidade do compensador de espessura de tecido 17020 até a sua superfície de topo 17021 em que as porções do corpo 17024 do com-pensador de espessura de tecido 17020 podem ser fixadas a lados opostos do elemento de retenção 17025. Em pelo menos uma tal mo-dalidade, o elemento de retenção 17025 também pode ser configurado para resistir à deflexão lateral, por exemplo, do compensador de es-pessura de tecido 17020. Em várias modalidades, porções do corpo 17024 podem ser compreendidas de um primeiro material e o elemento de retenção 17025 pode ser compreendido de um segundo material, ou diferente. Em certas modalidades, as porções do corpo 17024 podem ser compreendidas de um material que tem um primeiro durômetro e o elemento de retenção 17025 pode ser compreendido de um material que tem um segundo durômetro, em que o segundo durômetro pode ser maior que o primeiro durômetro, por exemplo. Em várias modalidades, além do exposto acima, um elemento de corte que pas-saatravés da fenda 17015 pode cortar o elemento de retenção 17025 enquanto os grampos 10030 estão sendo dispensados. Quando o compensador de espessura de tecido 17020 tiver sido implantado, em várias modalidades, o elemento de retenção 17025 pode ser retirado da fenda 17015. Em certas outras modalidades, as porções do corpo 17024 podem ser configuradas para se desprenderem do elemento de retenção 17025.
[885] Agora com referência à FIGURA 388, um cartucho de grampos 18000 pode compreender uma porção de suporte 18010 que inclui uma superfície de suporte 18011 e uma fenda longitudinal 18015. O cartucho de grampos 18000 pode compreender adicionalmente um compensador de espessura de tecido 18020 posicionado acima da superfície de suporte 18011. Em várias modalidades, o compensador de espessura de tecido 18020 pode incluir um elemento de retenção longitudinal 18025 que se estende para baixo na fenda longi-tudinal 18015. Em pelo menos uma tal modalidade, o elemento de re-tenção 18025 pode ser pressionado para dentro da fenda 18015 de modo que a interação entre o elemento de retenção 18025 e a fenda 18015 possa resistir ao movimento relativo entre a porção de suporte 18010 e o compensador de espessura de tecido 18020. Em várias modalidades, o elemento de retenção 18025 pode se estender através da totalidade do compensador de espessura de tecido 18020 até a sua superfície de topo 18021 em que as porções do corpo 18024 do com-pensador de espessura de tecido 18020 podem ser fixadas a lados opostos do elemento de retenção 18025. Em pelo menos uma modali-dade, o elemento de retenção 18025 pode compreender uma porção ampliada 18026 que pode ser recebida em uma cavidade 18016 defi-nida na fenda 18015. Em pelo menos uma tal modalidade, a porção ampliada 18026 pode resistir à remoção do elemento de retenção 18025 da fenda 18015.
[886] Em várias modalidades, o compensador de espessura de tecido pode compreender uma composição extrusável, fusível e/ou moldável que compreende ao menos um dentre os materiais sintéticos e/ou não sintéticos aqui descritos. Em várias modalidades, o compen-sador de espessura de tecido pode compreender um filme ou folha que compreende duas ou mais camadas. O compensador de espessura de tecido pode ser obtido com o uso de métodos convencionais como, por exemplo, mistura, blenda, formulação, aspersão, absorção por efeito capilar, evaporação de solvente, imersão, escovação, deposição de vapor, extrusão, calandragem, fundição, moldagem e similares. Na extrusão, uma abertura pode estar sob a forma de uma matriz que compreende pelo menos um abertura para conferir um formato ao extrudado emergente. Na calandragem, uma abertura pode compreender um estrangulamento entre dois roletes. Os métodos de moldagem convencional podem incluir, mas não se limitam a, modelagem por so-pro, modelagem por injeção, injeção de espuma, modelagem por com-pactação, termoformação, extrusão, extrusão de espuma, formação de filme por sopro, calandragem, fiação, soldagem por solvente, métodos de revestimento, como revestimento por imersão e revestimento por rotação, fundição de solução e moldagem de filme, processamento de plastisol (incluindo revestimento com facas, revestimento com roletes e fundição) e combinações dos mesmos. Na modelagem por injeção, uma abertura pode compreender um bocal e/ou canaletas/calhas e/ou recursos e cavidades de molde. Na modelagem por compactação, a composição pode ser posicionada em uma cavidade de molde, aque-cida a uma temperatura adequada e conformada mediante a exposição à compactação sobre pressão relativamente alta. Na fundição, a composição pode compreender um líquido ou pasta aquosa que pode ser vertida ou fornecida de outro modo para o interior, sobre e/ou ao redor de um molde ou objeto para replicar recursos do molde ou obje-to.Após a fundição, a composição pode ser seca, resfriada e/ou curada para formar um sólido.
[887] Em várias modalidades, um método de fabricação de um compensador de espessura de tecido pode de modo geral compreen-der o fornecimento de uma composição de compensador de espessura de tecido, liquificando a composição para torná-la fluxível, e formando a composição no estado fundido, semifundido ou plástico em uma ca-mada e/ou filme tendo a espessura desejada. Com referência à FIGU-RA 527A, um compensador de espessura de tecido pode ser fabricado dissolvendo-se um precursor de hidrogel em uma solução aquosa, dispersando-se partículas e/ou fibras biocompatíveis no mesmo, for-necendo-se um molde que tem partículas biocompatíveis no mesmo, fornecendo-se a solução no molde, colocando-se um ativador e a solução em contato e curando-se a solução para formar o compensador de espessura de tecido que compreende uma camada externa que compreende partículas biocompatíveis e uma camada interna que compreende partículas biocompatíveis incorporadas à mesma. Con-forme mostrado na FIGURA 527A, uma camada biocompatível 70250 pode ser fornecida no fundo de um molde 70260 e uma solução aquosa de um precursor de hidrogel 70255 que tem partículas biocompatíveis 70257 dispostas no mesmo pode ser fornecida ao molde 70260 e a solução aquosa pode ser curada para formar um compensador de espessura de tecido que tem uma primeira camada que compreende um material biocompatível, como ORC, por exemplo, e uma segunda camada que compreende um hidrogel que tem fibras biocompatíveis, como fibras de ORC, dispostas no mesmo. O compensador de espes-sura de tecido pode compreender uma espuma que compreende uma camada externa que compreende partículas biocompatíveis e uma camada interna que compreende partículas biocompatíveis incorpora-dasà mesma. Em ao menos uma modalidade, um compensador de espessura de tecido pode ser produzido pela dissolução de um alginater de sódio em água, dispersante partículas de ORC nele, fornecendo um molde tendo partículas de ORC nele, vertendo a solução no molde, aspergindo ou infundindo cloreto de cálcio para entrar em contato com a solução para iniciar a reticulação do alginater de sódio, secar por congelamento o hidrogel para formar o compensador de espessura de tecido que compreende uma camada externa que compreende ORC e uma camada interna que compreende um hidrogel e partículas de ORC embutidas nelas.
[888] Com referência à FIGURA 527B, e várias modalidades, um método de fabricação de um compensador de espessura de três ca-madas pode de modo geral compreender dissolver um primeiro pre-cursor de hidrogel em uma primeira solução aquosa, dispersando partículas biocompatíveis e/ou fibras na primeira solução aquosa, forne-cendo um molde 70260 que tem uma primeira camada 70250 de partí-culasbiocompatíveis nele, fornecendo a primeira solução aquosa no molde, entrando em contato com um ativador e a primeira solução aquosa, fazendo a cura da primeira solução aquosa para formar uma segunda camada 70255, dissolvendo um segundo precursor de hidrogel em uma segunda solução aquosa, fornecendo a segunda solução aquosa no molde, fazendo a cura da segunda solução aquosa para formar uma terceira camada 70265. Em ao menos uma modalidade, um compensador de espessura de tecido de três camadas pode ser produzido pela dissolução de um alginater de sódio em água para for-mar uma primeira solução aquosa, dispersando partículas de ORC na primeira solução aquosa, fornecendo um molde que tem uma primeira camada de partículas de ORC nele, vertendo a primeira solução aquo-sa no molde, aspergindo ou infundindo cloreto de cálcio para entrar em contato com a primeira solução aquosa para iniciar a reticulação do alginater de sódio, secando por congelamento a primeira solução aquosa para formar uma segunda camada que compreende um hidrogel que tem partículas de ORC embutidas nele, dissolvendo um alginater de sódio em água para formar uma segunda solução aquosa, ver-tendo a segunda solução aquosa no molde, aspergindo ou infundindo cloreto de cálcio para entrar em contato com a segunda solução aquo-sa para iniciar a reticulação do alginater de sódio, secando por conge-lamento a segunda solução aquosa para formar uma terceira camada que compreende um hidrogel.
[889] Em várias modalidades, um método de fabricação de um compensador de espessura de tecido que compreende ao menos um medicamento armazenado e/ou absorvido nele pode de modo geral compreender o fornecimento de um compensador de espessura de tecido e colocando em contato o compensador de espessura de tecido e o medicamento para reter o medicamento no compensador de es-pessura de tecido. Em ao menos uma modalidade, um método de fa-bricação de um compensador de espessura de tecido que compreende um material antimicrobiano pode compreender o fornecimento de um hidrogel, secar o hidrogel, inchar o hidrogel em uma solução aquosa de nitrato de prata, colocar em contato o hidrogel e uma solução de cloreto de sódio para formar o compensador de espessura de tecido que tem propriedades antibacterianas. O compensador de espessura de tecido pode compreender prata dispersa no mesmo.
[890] Com referência à FIGURA 533, em várias modalidades, um método para fabricar um compensador de espessura de tecido pode compreender coextrusão e/ou ligação. Em várias modalidades, o com-pensador de espessura de tecido 70550 pode compreender um lami-nado compreendendo uma primeira camada 70555 e uma segunda camada 70560 que encerra de modo vedande uma camada interna 70565 que compreende um hidrogel, por exemplo. O hidrogel pode compreender um filme seco, uma espuma seca, um pó e/ou grânulos, por exemplo. O hidrogel pode compreender materiais superabsorventes como, por exemplo, polivinilpirrolidona, carboximetilcelulose, poli(acrilato de sulfopropila). A primeira e/ou a segunda camadas pode ser produzida alinhada alimentando-se matérias primas da primeira e da segunda camadas, respectivamente, em uma extrusora de um depósito alimentador e, depois disso, abastecendo-se a primeira e a segunda camadas. As matérias primas da camada interna 70565 podem ser adicionadas a um depósito alimentador de uma extrusora. As matérias primas podem ser dispersadas e formuladas de modo dispersivo a uma temperatura elevada no interior da extrusora. Conforme as matérias primas saem da matriz 70570 em uma entrada, a camada interna 70565 pode ser depositada sobre uma superfície da primeira camada 70555. Em várias modalidades, o compensador de espessura de tecido pode compreender uma espuma, filme, pó e/ou grânulos A primeira e a segunda camadas 70555 e 70560 podem ser posicionadas na relação face-a-face. A segunda camada 70560 pode ser alinhadaà primeira camada 70555 em uma relação face-a-face por um cilindro 70575. A primeira camada 70555 pode aderir-se à segunda camada 70560, em que a primeira e a segunda camadas 70555, 70560 podem aprisionar fisicamente a camada interna 70565. As camadas podem ser unidas sobre pressão leve, sob processos de ligação por calandragem convencional e/ou através do uso de adesivos, por exemplo, para formar o compensador de espessura de tecido 70550. Em ao menos uma modalidade, conforme mostrado na FIGURA 407, a primeira e a segunda camadas 70555 e 70560 podem ser unidas através de um processo de cilindragem utilizando um cilindro sulcado 70580, por exemplo. Em várias modalidades, como resultado do acima mencionado, a camada interna 70565 pode estar contida e/ou vedada pela primeira e segunda camadas 70555 e 70560 que podem formar coletivamente uma camada externa ou barreira. A camada externa pode evitar ou reduzir a umidade proveniente do contato com a camada interna 70565 até que a camada externa seja rompida.
[891] Com referência à FIGURA 390, um atuador de extremidade 12 para um instrumento cirúrgico 10 (FIGURA 1) pode ser configurado para receber um conjunto de cartucho de prendedores, como o cartu-cho de grampos 20000, por exemplo. Conforme ilustrado na FIGURA 390, o cartucho de grampos 20000 pode ser configurado para encaixar-se em um canal de cartucho 20072 de uma garra 20070 do atuador de extremidade 12. Em outras modalidades, o cartucho de grampos 20000 pode ser integral com o atuador de extremidade 12 de modo que o cartucho de grampos 20000 e o atuador de extremidade 12 sejam formados como uma construção unitária. O cartucho de grampos 20000 pode compreender uma primeira porção de corpo, como uma porção de suporte rígido 20010, por exemplo. O cartucho de grampos 20000 também pode compreender uma segunda porção de corpo, como uma porção compressível ou um compensador de espes-sura de tecido 20020, por exemplo. Em outras modalidades, o com-pensador de espessura de tecido 20020 pode não compreender uma parte integrante do cartucho de grampos 20000, mas pode estar de outro modo posicionado em relação ao atuador de extremidade 12. Por exemplo, o compensador de espessura de tecido 20020 pode ser preso a uma bigorna 20060 do atuador de extremidade 12 ou pode ser retido de outro modo ao atuador de extremidade 12. Em ao menos uma modalidade, com relação à FIGURA 407, o cartucho de grampos pode compreender adicionalmente presilhas retentoras 20126 que podem ser configuradas para inibir o compensador de espessura de tecido 20020 de separar-se prematuramente da porção de suporte 20010. O leitor irá observar que os compensadores de espessura de tecido aqui descritos podem ser instalados ou engatados de outro modo a uma variedade de atuadores de extremidade e que tais modalidades estão no escopo da presente revelação.
[892] De modo similar aos compensadores de espessura de teci do aqui descritos, agora com referência à FIGURA 407, o compensador de espessura de tecido 20020 pode ser liberado ou desengatado do atuador de extremidade cirúrgico 12. Por exemplo, em algumas modalidades, a porção de suporte rígido 20010 do cartucho de gram-pos 20000 pode permanecer engatada com a canaleta do cartucho de prendedores 20072 da garra do atuador de extremidade 20070 en-quanto que o compensador de espessura de tecido 20020 desengatase da porção de suporte rígido 20010. Em várias modalidades, o com-pensador de espessura de tecido 20020 pode liberar-se do atuador de extremidade 12 após os grampos 20030 (FIGURAS 407 a 412) serem instalados a partir das cavidades de grampo 20012 na porção de suporte rígido 2010, similar a várias modalidades aqui descritas. Os grampos 20030 podem ser disparados das cavidades de grampo 20012 de modo que os grampos 20030 se engatem ao compensador de espessura de tecido 20020. Também similar a várias modalidades aqui descritas, com referência genérica às FIGURAS 392, 411 e 412, um grampo 20030 pode capturar uma porção do compensador de es-pessura de tecido 20020 juntamente com o tecido grampeado T. Em algumas modalidades, o compensador de espessura de tecido 20020 pode ser deformável e a porção do compensador de espessura de te-cido 20020 que é capturada dentro de um grampo disparado 20030 pode ser compactada. de modo similar aos compensadores de espes-sura de tecido aqui descritos, o compensador de espessura de tecido 20020 pode compensar diferentes espessuras, compressibilidades e/ou densidades de tecido T capturado por cada grampo 20030. Adici-onalmente, conforme também descrito no presente documento, o compensador de espessura de tecido 20020 pode compensar interva-los criados por grampos mal formados 20030.
[893] O compensador de espessura de tecido 20020 pode ser compressível entre altura(s) não compactada(s) e altura(s) compactada(s). Com referência à FIGURA 407, o compensador de espessura de tecido 20020 pode ter uma superfície de topo 20021 e uma superfície de base 20022. A altura do compensador de espessura de tecido pode ser a distância entre a superfície de topo 20021 e a superfície de base 20022. Em várias modalidades, a altura não compactada do compensador de espessura de tecido 20020 pode ser a distância entre a superfície de topo 20021 e a superfície de fundo 20022 quando força mínima ou nenhuma é aplicada ao compensador de espessura de te-cido 20020, isto é, quando o compensador de espessura de tecido 20020 não está compactado. A altura compactada do compensador de espessura de tecido 20020 pode ser a distância entre a superfície de topo 20021 e a superfície de base 20022 quando uma força for aplicada ao compensador de espessura de tecido 20020, como quando um grampo disparado 20030 capturar uma porção do compensador de espessura de tecido 20020, por exemplo. O compensador de espessu-ra de tecido 20020 pode ter uma extremidade distal 20025 e uma ex-tremidade proximal 20026. Conforme ilustrado na FIGURA 407, a altura não compactada do compensador de espessura de tecido 20020 pode ser uniforme entre a extremidade distal 20025 e a extremidade proximal 20026 do compensador de espessura de tecido 20020. Em outras modalidades, a altura não compactada pode variar entre a extremidade distal 20025 e a extremidade proximal 20026. Por exemplo, a superfície de topo 20021 e/ou a superfície de base 20022 do compensador de espessura de tecido 20020 pode ser angulada e/ou escalonada em relação à outra de modo que a altura não compactada varie entre a extremidade proximal 20026 e a extremidade distal 20025. Em algumas modalidades, altura não compactada do compensador de espessura de tecido 20020 pode ser de aproximadamente 2,0 mm (0,08 polegada), por exemplo. Em outras modalidades, a altura não compactada do compensador de espessura de tecido 20020 pode variar entre aproximadamente 0,64 mm (0,025 polegada) e aproximadamente 2,5 mm (0,10 polegada), por exemplo.
[894] Conforme descrito com mais detalhes neste documento, o compensador de espessura de tecido 20020 pode ser compactado a diferentes alturas compactadas entre a extremidade proximal 20026 e a extremidade distal 20025 do mesmo. Em outras modalidades, o compensador de espessura de tecido 20020 pode ser uniformemente compactado por todo o seu comprimento. A(s) altura(s) compactada(s) do compensador de espessura de tecido 20020 pode depender da ge-ometria do atuador de extremidade 12, de características do compen-sador de espessura de tecido 20020, do tecido engatado T e/ou dos grampos 20030, por exemplo. Em várias modalidades, a altura com-pactada do compensador de espessura de tecido 20020 pode relacio-nar-se ao vão do tecido no atuador de extremidade 12. Em várias mo-dalidades, quando a bigorna 20060 é presa em direção ao cartucho de grampos 20000, o vão do tecido pode ser definido entre uma superfície de plataforma superior 20011 (FIGURA 407) do cartucho de grampos 20000 e uma superfície de contato do tecido 20061 (FIGURA 390) da bigorna 20060, por exemplo. O vão de tecido pode ter aproxima-damente 0,64 mm ou aproximadamente 0,25 cm (aproximadamente 2,5 polegada ou aproximadamente 0,100 polegada, por exemplo). Em algumas modalidades, o vão do tecido pode ter aproximadamente 0,750 mm ou aproximadamente 3,500 mm, por exemplo. Em várias modalidades, a altura compactada do compensador de espessura de tecido 20020 pode ser igual ou substancialmente igual ao vão do teci-do, por exemplo. Quando o tecido T for posicionado no interior do vão de tecido do atuador de extremidade 12, a altura compactada do com-pensador de espessura de tecido pode ser menor afim de acomodar o tecido T. Por exemplo, onde o vão de tecido tem aproximadamente 0,750 mm, a altura compactada do compensador de espessura de te-cido pode ter aproximadamente 0,500 mm. Em modalidades onde o vão do tecido é de aproximadamente 3,500 mm, a altura compactada do compensador de espessura de tecido 20020 pode ser de aproxi-madamente 2,5 mm, por exemplo. Ademais, o compensador de es-pessura de tecido 20020 pode compreender uma altura compactada mínima. Por exemplo, a altura compactada mínima do compensador de espessura de tecido 20020 pode ter aproximadamente 0,250 mm. Em várias modalidades, o vão do tecido definido entre a superfície de plataforma do cartucho de grampos e a superfície para contato com o tecido da bigorna pode ser igual ou ao menos substancialmente igual à altura não compactada do compensador de espessura de tecido, por exemplo.
[895] Com referência principalmente à FIGURA 391, o compen sador de espessura de tecido 20020 pode compreender um material não tecido fibroso 20080 incluindo as fibras 20082. Em algumas moda-lidades, o compensador de espessura de tecido 20020 pode compre-ender feltro ou um material semelhante a feltro. As fibras 20082 no material não tecido 20080 podem ser unidas por quaisquer meios co-nhecidos na técnica incluindo, mas não se limitando a, perfuração por agulha, termossolda, hidroentrelaçamento, ligação por padronagem ultrassônica, ligação química e ligação por sopro em fusão. Adicional-mente, em várias modalidades, as camadas de material não tecido 20080 podem ser mecânica, térmica ou quimicamente unidas para formar o compensador de espessura de tecido 20020. Conforme des-crito com maiores detalhes neste documento, o material não tecido fibroso 20080 pode ser compressível, o que pode permitir a compacta-ção do compensador de espessura de tecido 20020. Em várias moda-lidades, o compensador de espessura de tecido 20020 pode compre-endertambém uma porção não compressível. Por exemplo, o com-pensador de espessura de tecido 20020 pode compreender um mate-rial não tecido compressível 20080 e uma porção não compressível.
[896] Ainda com referência principalmente à FIGURA 391, o ma terial não tecido 20080 pode compreender uma pluralidade de fibras 20082. Pelo menos algumas das fibras 20082 no material não tecido 20080 podem ser fibras crimpadas 20086. As fibras crimpadas 20086 podem ser, por exemplo, crimpadas, torcidas, enroladas em espiral, dobradas, vergadas, espiraladas, encaracoladas e/ou arcadas no ma-terial não tecido 20080. Conforme descrito com maiores detalhesneste documento, as fibras crimpadas 20086 podem ter qualquer formato adequado de modo que a deformação das fibras crimpadas 20086 gere uma ação por mola ou uma força de restauração. Em algumas modalidades, as fibras crimpadas 20086 podem ser conformadas por calor para formar um formato enrolado em espiral ou substancialmente semelhante a uma espiral. As fibras crimpadas 20086 podem ser for-madas a partir de fibras não crimpadas 20084. Por exemplo, as fibras não crimpadas 20084 podem ser enroladas ao redor de um mandril aquecido para formar um formato substancialmente semelhante a uma espiral.
[897] Em várias modalidades, o compensador de espessura de tecido 20020 pode compreender uma matriz polimérica absorvível ho-mogênea. A matriz polimérica absorvível homogênea pode compreen-der uma espuma, gel e/ou filme, por exemplo. Adicionalmente, a plura-lidade de fibras 20082 pode ser dispersa ao longo da matriz polimérica absorvível homogênea. Pelo menos parte das fibras 20082 na matriz polimérica absorvível homogênea pode ser composta por fibras crimpadas 20086, por exemplo. Conforme descrito com mais detalhes neste documento, a matriz polimérica absorvível homogênea do compen-sador de espessura de tecido 2002 pode ser compressível.
[898] Em várias modalidades, com referência às FIGURAS 394 e 395, as fibras crimpadas 20086 podem ser aleatoriamente dispersas ao longo de ao menos uma porção do material não tecido 20080. Por exemplo, as fibras crimpadas 20086 podem ser aleatoriamente disper-sas ao longo do material não tecido 20080 de modo que uma porção do material não tecido 20080 compreenda mais fibras crimpadas 20086 do que outras porções do material não tecido 20080. Adicionalmente, as fibras crimpadas 20086 podem unir-se em agrupamentos de fibra 20085a, 20085b, 20085c, 20085d e 20085e, por exemplo, no material não tecido 20080. O formato das fibras crimpadas 20086 pode causar entrelaçamento das fibras 20086 durante a fabricação do material não tecido 20080; o entrelaçamento das fibras crimpadas 20086 pode, por sua vez, causar a formação de aglomerados de fibra 20085a, 20085b, 20085c, 20085d e 20085e. Adicional ou alternativa-mente, as fibras crimpadas 20086 podem ser aleatoriamente orientadas ao longo do material não tecido 20080. Por exemplo, com referênciaà FIGURA 391, uma primeira fibra crimpada 20086a pode ser orientada em uma primeira direção, uma segunda fibra crimpada 20086b pode ser orientada em uma segunda direção e uma terceira fibra crimpada 20086c pode ser orientada em uma terceira direção.
[899] Em algumas modalidades, as fibras crimpadas 20086 po dem ser sistematicamente distribuídas e/ou dispostas ao longo de ao menos uma porção do material não tecido 20080. Por exemplo, agora com referência à FIGURA 396, as fibras crimpadas 20186 podem ser posicionadas em uma disposição 20185, na qual uma pluralidade de fibras crimpadas 20186a é disposta em uma primeira direção e outra pluralidade de fibras crimpadas 20186b é disposta em uma segunda direção. As fibras crimpadas 20186 podem se sobrepor de modo que as mesmas sejam entrelaçadas ou interconectadas entre si. Em várias modalidades, as fibras crimpadas 20186 podem ser sistematicamente dispostas de modo que uma fibra crimpada 20186a seja substancial-mente paralela a uma outra fibra crimpada 20186a. Mais uma outra fibra crimpada 20186b pode ser substancialmente transversal a algu-mas fibras crimpadas 20186a. Em várias modalidades, as fibras crimpadas 20186a podem ser substancialmente alinhadas com um primeiro eixo Y e as fibras crimpadas 20186b podem ser substancialmente alinhadas com um segundo eixo X. Em algumas modalidades, o pri-meiro eixo Y pode ser perpendicular ou substancialmente perpendicular ao segundo eixo X, por exemplo.
[900] Com referência principalmente à FIGURA 397, em várias modalidades, as fibras crimpadas 20286 podem ser dispostas em uma disposição 20285. Em algumas modalidades, cada uma das fibras crimpadas 20286 pode compreender um eixo longitudinal definido entre uma primeira extremidade 20287 e uma segunda extremidade 20289 da fibra crimpada 20286. Em algumas modalidades, as fibras crimpadas 20286 podem ser sistematicamente distribuídas no material não tecido 20080 de modo que uma primeira extremidade 20287 de uma fibra crimpada 20286 seja posicionada adjacente a uma segunda extremidade 20289 de uma outra fibra crimpada 20286. Em uma outra modalidade, agora com referência à FIGURA 398, uma disposição de fibra 20385 pode compreender uma primeira fibra crimpada 20386a orientada em uma primeira direção, uma segunda fibra crimpada 20386b orientada em uma segunda direção e uma terceira fibra crimpada 20386c orientada em uma terceira direção, por exemplo. Em vá-rias modalidades, um único padrão ou disposição de fibras crimpadas 20286 pode ser repetido por todo o material não tecido 20080. Em ao menos uma modalidade, as fibras crimpadas podem ser dispostas em diferentes padrões por todo o material não tecido 20080. Em ainda ou-tras modalidades, o material não tecido 20080 pode compreender ao menos um padrão de fibras crimpadas, bem como uma pluralidade de fibras crimpadas aleatoriamente orientada e/ou distribuídas de modo aleatório.
[901] Novamente com referência à FIGURA 391, a pluralidade de fibras 20082 no material não tecido 20080 pode compreender pelo menos algumas fibras não crimpadas 20084. As fibras não crimpadas 20084 e as fibras crimpadas 20086 no material não tecido 20080 po-dem ser entrelaçadas ou interconectadas. Em uma modalidade, a ra-zão entre as fibras crimpadas 20086 e as fibras não crimpadas 20084 pode ser de aproximadamente 25:1, por exemplo. em uma outra mo-dalidade, a razão entre as fibras crimpadas 20086 e as fibras não crimpadas 20084 pode ser de aproximadamente 1:25, por exemplo. Em outras modalidades, a razão entre as fibras crimpadas 20086 e as fibras não crimpadas 20084 pode ser de aproximadamente 1:1, por exemplo. Conforme descrito com maiores detalhesneste documento, o número de fibras crimpadas 20086 por volume unitário de material não tecido 20080 pode afetar a força de restauração gerada pelo material não tecido 20080 quando o material não tecido 20080 tiver sido defor-mado. Conforme também descrito com mais detalhes neste documen-to, a força de restauração gerada pelo material não tecido 20080 tam-bém pode depender, por exemplo, do material, do formato, do tamanho, da posição e/ou da orientação de fibras crimpadas e não crimpadas 20086, 20084 no material não tecido 20080.
[902] Em várias modalidades, as fibras 20082 do material não tecido 20080 podem compreender uma composição polimérica. A composição polimérica das fibras 20082 pode compreender polímeros não absorvíveis, polímeros absorvíveis ou suas combinações. Em al-gumas modalidades, os polímeros absorvíveis podem incluir polímeros elastoméricos bioabsorvíveis biocompatíveis. Ademais, a composição polimérica das fibras 20082 pode compreender polímeros sintéticos, polímeros não sintéticos ou combinações dos mesmos. Exemplos de polímeros sintéticos incluem, mas não se limitam a, poli(ácido glicólico) (PGA), poli(ácido láctico) (PLA), policaprolactona (PCL), polidioxanona (PDO) e copolímeros dos mesmos. Por exemplo, as fibras 20082 po-dem compreender um copolímero de poli(glicolídeo-L-lactídeo) 90/10, como, por exemplo, o copolímero disponível comercialmente junto à Ethicon, Inc. sob a designação comercial "VICRYL (polyglactic 910)", Exemplos de polímeros não sintéticos incluem, mas não se limitam a, polissacarídeo liofilizado, glicoproteína, elastina, proteoglicano, gelati-na,colágeno e celulose regenerada oxidada (ORC). Em várias moda-lidades, similar ás composições poliméricas nos compensadores de espessura de tecido aqui descritos, a composição polimérica das fibras 20082 podem incluir quantidades variadas de polímeros absorvíveis, polímeros não absorvíveis, polímeros sintéticos e/ou polímeros não sintéticos, por exemplo, por porcentagem em peso.
[903] Em algumas modalidades, as fibras crimpadas 20086 do material não tecido 20080 podem compreender uma primeira compo-sição polimérica e as fibras não crimpadas 20084 do material não teci-do 20080 podem compreender uma composição polimérica diferente. Por exemplo, as fibras crimpadas 20086 podem compreender polímero(s) sintético(s), como, por exemplo, poli(glicolídeo-L-lactídeo) 90/10, enquanto as fibras não crimpadas 20084 podem compreender polímero(s) não sintético(s) como, por exemplo, celulose regenerada oxidada. Em outras modalidades, as fibras crimpadas 20086 e as fibras não crimpadas 20084 podem compreender a mesma composição polimérica.
[904] Conforme descrito no presente documento, as fibras crimpadas 20086 e as fibras não crimpadas 20084 podem ser unidas por preensão, por exemplo, por meio de perfuração por agulha, termossolda, hidroentrelaçamento, ligação por padrão ultrassônico, ligação quí-mica e ligação por sopro em fusão. Em algumas modalidades, as fibras crimpadas 20086 que compreendem polímeros sintéticos como, por exemplo, "VICRYL (polyglactic 910)" e fibras não crimpadas 20084 que compreendem celulose regenerada oxidada podem ser perfuradas por agulhagem em conjunto para formar o material não tecido 20080. Em várias modalidades, o material não tecido 20080 pode compreender aproximadamente 5% a 50% de fibras crimpadas "VICRYL (polyglactic 910)" 20086, em peso, e aproximadamente 5% a 50% de fibras não crimpadas de celulose regenerada oxidada (ORC) 20084, em peso, por exemplo. Quando o material não tecido 20080 entrar em contato com o tecido T, as fibras de ORC não crimpadas 20084 podem reagir rapidamente com o plasma no tecido para formar uma massa gelatinosa, por exemplo. Em várias modalidades, a formação da massa de ORC gelatinosa pode ser instantânea ou quase instantânea com o contato com o tecido. Adicionalmente, após a formação da massa de ORC gelatinosa, as fibras de "VICRYL (polyglactic 910)" crimpadas 20086 podem permanecer dispersas ao longo do material não tecido 20080. Por exemplo, as fibras crimpadas 20086 podem ser suspensas na massa de ORC gelatinosa. Conforme a massa de ORC gelatinosa é bioabsorvidas, as fibras de "VICRYL (polyglactic 910)" crimpadas 20086 podem exercer uma força de flexibilização sobre o tecido adja-cente, conforme descrito com mais detalhes neste documento. Adicio-nalmente, o tecido pode começar a curar ao redor das fibras de "VI-CRYL (polyglactic 910)" e/ou dos grampos formados 30030, também conforme descrito com maiores detalhes neste documento.
[905] Em ao menos uma modalidade, com referência principal menteàs FIGURAS 407 a 410, a porção de suporte 20010 do cartucho de grampos 20000 pode compreender um corpo do cartucho 20017, uma superfície de plataforma superior 20011 e uma pluralidade de cavidades de grampo 20012. Similar às modalidades aqui descritas, cada cavidade de grampo 20012 pode definir uma abertura na su-perfície de plataforma 20011. Um grampo 20030 pode ser posicionado de modo removível em uma cavidade de grampo 20012. Em várias modalidades, um grampo único 20030 está disposta em cada cavidade de grampo 20012. Em ao menos uma modalidade, com referência principalmente às FIGURAS 411 e 412 e similar aos grampos aqui descritos, cada grampo 20030 pode compreender uma base 20031 tendo uma primeira extremidade 20035 e uma segunda extremidade 20036. Uma perna de grampo 20032 pode se estender da primeira ex-tremidade 20035 da base 20031 e outra perna de grampo 20032 pode se estender da segunda extremidade 20036 da base 20031. Nova-mente com referência às FIGURAS 407 a 410, antes do posiciona-mento dos grampos 20030, a base 20031 de cada grampo 20030 pode ser suportada por um acionador de grampo 20040 posicionado no inte rior da porção de suporte rígido 20010 do cartucho de grampos 20000. Também antes do posicionamento dos grampos 20030, as pernas 20032 de cada grampo 20030 podem ser pelo menos parcialmente contidas no interior de uma cavidade de grampo 20012.
[906] Em várias modalidades, os grampos 20030 podem ser ins talados entre uma posição inicial e uma posição disparada. Por exem-plo, com referência principalmente à FIGURA 410, os grampos 20030 podem estar em uma posição inicial (grampos 20030e, 20030f), uma posição parcialmente disparada ou intermediária (grampos 20030c, 20030d) ou uma posição disparada (grampos 20030a, 20030b). Um acionador 20040 pode induzir os grampos entre a posição inicial e a posição disparada. Por exemplo, a base 20031 de cada grampo 20030 pode ser suportada por um acionador 20040. As pernas 20032 de um grampo (grampos 20030e, 20030f na FIGURA 409, por exemplo) po-dem ser posicionadas no interior de uma cavidade de grampo 20012. Conforme o elemento de disparo ou o suporte deslizante de disparo de grampo 20050 translada da extremidade proximal 20001 para a extre-midade distal 20002 do cartucho de grampos 20000, uma superfície inclinada 20051 no suporte deslizante 20050 pode entrar em contato com uma superfície inclinada 20042 em um acionador 20040 para po-sicionar o grampo 20030 posicionado acima do acionador em contato 20040. Em várias modalidades, os grampos 20030 podem ser instala-dos entre uma posição inicial e uma posição disparada de modo que as pernas 20032 se movam ao longo do material não tecido 20080 do compensador de espessura de tecido 20020, penetrem na superfície de topo 20021 do compensador de espessura de tecido 20020, penetrem no tecido T e entrem em contato com uma bigorna 20060 (FIGURA 390) posicionada oposta ao cartucho de grampos 20000 no atuador de extremidade 12. As pernas de grampo 20032 podem ser defor-madas contra a bigorna 20060 e as pernas 20032 de cada grampo 20030 podem capturar uma porção do material não tecido 20080 e uma porção do tecido T.
[907] Na configuração disparada (FIGURAS 411 e 412), cada grampo 20030 pode aplicar uma força de compressão ao tecido T e ao compensador de espessura de tecido 20020 capturado no interior do grampo 20030. Com referência principalmente às FIGURAS 409 e 410, as pernas 20032 de cada grampo 20030 podem ser deformadas para baixo na direção da base 20031 do grampo 20030 para formar uma área de aprisionamento de grampo 20039. A área de aprisionamento de grampo 20039 pode ser a área na qual o tecido T e o compensador de espessura de tecido 20020 podem ser capturados por um grampo disparado 20030. Em várias circunstâncias, a área de aprisionamento de grampo 20039 pode ser definida entre as superfícies internas das pernas deformadas 20032 e a superfície interna da base 20031 de um grampo 20030. O tamanho da área de aprisionamento 20039 para um grampo 20030 pode depender de vários fatores, como o comprimento das pernas, o diâmetro das pernas, a largura da base, e/ou a extensão na qual as pernas são deformadas, por exemplo.
[908] Em várias modalidades, quando um material não tecido 20080 é capturado em uma área de aprisionamento de grampo 20039, a porção capturada do material não tecido 20080 pode ser compactada. A altura compactada do material não tecido 20080 capturado em uma área de aprisionamento de grampo 20039 pode variar no interior do cartucho de grampos 20000 dependendo do tecido T naquela mesma área de aprisionamento de grampo 20039. Por exemplo, onde o tecido T for mais delgado, a área de aprisionamento de grampo 20039 pode ter mais espaço para o material não tecido 20080 e, como um resultado, o material não tecido 20080 pode não ser tão compactado como seria se o tecido T fosse mais espesso. Onde o tecido T for mais espesso, o material não tecido 20080 pode ser compactado mais para acomodar o tecido mais espesso T, por exemplo. Por exemplo, com referência à FIGURA 411, o material não tecido 20080 pode ser comprimido a uma primeira altura em uma primeira área de aprisiona-mento de grampo 20039a, uma segunda altura em uma segunda área de aprisionamento de grampo 20039b, uma terceira altura em uma terceira área de aprisionamento de grampo 20039c, uma quarta altura em uma quarta área de aprisionamento de grampo 20039d e uma quinta altura em uma quinta área de aprisionamento de grampo 20039e, por exemplo. de modo similar, conforme ilustrado na FIGURA 412, o material não tecido 20080 pode ser comprimido a uma primeira altura na primeira área de aprisionamento de grampo 20039a, uma segunda altura na segunda área de aprisionamento de grampo 20039b, uma terceira altura na terceira área de aprisionamento de grampo 20039c e uma quarta altura na quarta área de aprisionamento de grampo 20039d. Em outras modalidades, a altura compactada do material não tecido 20080 pode ser uniforme ao longo do cartucho de grampos 20010.
[909] Em várias modalidades, uma força aplicada pode mover o material não tecido 20080 de uma configuração não compactada inicial para uma configuração compactado. Adicionalmente, o material não tecido 20080 pode ser resiliente de modo que, quando compactado, o material não tecido 20080 possa gerar um força de flexibilização ou de restauração. Quando deformado, o material não tecido 20080 pode buscar se recuperar da configuração compactada ou deformada. Con-forme o material não tecido 20080 busca se recuperar, o mesmo pode exercer uma força de flexibilização ou de restauração no tecido tam-bém capturado na área de aprisionamento de grampo 30039, conforme descrito com mais detalhes neste documento. Quando a força aplicada for subsequentemente removida, a força de restauração pode fazer com que o material não tecido se recupere da configuração compactada. Em várias modalidades, o material não tecido 20080 pode se recuperar para uma configuração não-comprimida inicial ou pode se recuperar para uma configuração substancialmente similar à configu-ração não comprimida inicial. Em várias modalidades, a deformação do material não tecido 20080 pode ser elástica. Em algumas modalidades, a deformação do material não tecido pode ser parcialmente elástica e parcialmente plástica.
[910] Quando uma porção do material não tecido 20080 for com pactada em uma área de aprisionamento de grampo 20039, as fibras crimpadas 20086 naquela porção do compensador não tecido 20039 também pode ser compactadas ou deformadas de outro modo. A quantidade de fibra crimpada 20086 deformada pode corresponder à quantidade na qual a porção capturada do material não tecido 20080 é compactada. Por exemplo, com referência à FIGURA 392, o material não tecido 20080 pode ser capturado por meio de grampos instalados 20030. Onde o material não tecido 20080 for mais compactado por um grampo instalado 20030, a deformação média de fibras crimpadas 20086 pode ser maior. Adicionalmente, onde o material não tecido 20080 for menos compactado por um grampo instalado, a deformação média de fibras crimpadas 20086 pode ser menor. de modo similar, com referência às FIGURAS 411 e 412, em uma área de aprisiona-mento de grampo 20039d na qual o material não tecido 20080 é mais comprimido, as fibras crimpadas 20086 naquela área de aprisionamen-to de grampo 20039d podem ser, em média, mais deformadas. Adicio-nalmente, em uma área de aprisionamento de grampo 20039a na qual o material não tecido 20080 é menos compactado, as fibras crimpadas 20086 naquela área de aprisionamento de grampo 20039a podem ser, em média, menos deformadas.
[911] A capacidade de o material não tecido 20080 se recuperar da configuração deformada, isto é, a resiliência do material não tecido 20080, pode ser uma função da resiliência das fibras crimpadas 20086 no material não tecido 20080. Em várias modalidades, as fibras crimpadas 20086 podem deformar elasticamente. Em algumas modalida-des, a deformação das fibras crimpadas 20086 pode ser parcialmente elástica e parcialmente plástica. Em várias modalidades, a compacta-ção de cada fibra crimpada 20086 pode fazer com que as fibras crimpadas compactadas 20086 gerem uma força de flexibilização ou de restauração. Por exemplo, as fibras crimpadas compactadas 20086 podem gerar uma força de restauração conforme as fibras 20086 bus-cam se recuperar de sua configuração compactada. Em várias modali-dades, as fibras 20086 podem buscar retornar para sua configuração não-comprimida inicial ou para uma configuração substancialmente similar à mesma. Em algumas modalidades, as fibras crimpadas 20086 podem buscar parcialmente retornar a sua configuração inicial. Em várias modalidades, apenas uma porção das fibras crimpadas 20086 no material não tecido 20080 pode ser resiliente. Quando uma fibra crimpada 20086 for compreendida de um material elástico linear, a força de restauração da fibra crimpada compactada 20086 pode ser uma função da quantidade na qual a fibra crimpada 20086 é compac-tada e o coeficiente da mola da fibra crimpada 20086, por exemplo. O coeficiente da mola da fibra crimpada 20086 pode depender pelo me-nos da orientação, do material, do formato e/ou do tamanho da fibra crimpada 20086, por exemplo.
[912] Em várias modalidades, as fibras crimpadas 20086 no ma terial não tecido 20080 podem compreender um coeficiente da mola uniforme. Em outras modalidades, o coeficiente da mola das fibras crimpadas 20086 no material não tecido 20080 pode variar. Quando uma fibra crimpada 20086 que tem um grande coeficiente da mola for compactada em grandes medidas, a fibra crimpada 20086 pode gerar uma grande força de restauração. Quando uma fibra crimpada 20086 que tem o mesmo grande coeficiente da mola for menos compactada, a fibra crimpada 20086 pode gerar uma força de restauração menor. O agregado de forças de restauração geradas por fibras crimpadas com-pactadas 20086 no material não tecido 20080 pode gerar uma força de restauração combinada ao longo do material não tecido 20080 do compensador de espessura de tecido 20020. Em várias modalidades, o material não tecido 20080 lata exercer a força de restauração com-binada no tecido T capturada dentro de um grampo disparado 20030 com o material não tecido 20080 comprimido.
[913] Ademais, o número de fibras crimpadas 20086 por volume unitário de material não tecido 20080 pode afetar o coeficiente da mola do material não tecido 20080. Por exemplo, a resiliência em um mate-rial não tecido 20080 pode ser baixa quando o número de fibras crimpadas 20086 por volume de unidade de material não tecido 20080 é baixo, por exemplo; a resiliência do material não tecido 20080 pode ser maior quando o número de fibras crimpadas 20086 por volume de unidade de material não tecido 20080 é mais alto, por exemplo; e a resiliência do material não tecido 20080 pode ser maior ainda quando o número de fibras crimpadas 20086 por volume de unidade de material não tecido 20080 é até mais alto, por exemplo. Quando a resiliência do material não tecido 20080 for baixa, como quando o número de fibras crimpadas 20086 por volume unitário de material não tecido 20080 é baixo, a força de restauração combinada exercida pelo com-pensador de espessura de tecido 20020 sobre o tecido capturado T também pode ser baixa. Quando a resiliência do material não tecido 20080 for mais alta, como quando o número de fibras crimpadas 20086 por volume unitário de material não tecido 20080 é mais alta, a força de restauração agregada exercida pelo compensador de espessura de tecido 20020 sobre o tecido capturado T também pode ser mais alta.
[914] Em várias modalidades, Com referência principalmente à FIGURA 393, um material não tecido 20080’ de um compensador de espessura de tecido 20020’ pode compreender um agente terapêutico 20088, como um medicamento e/ou um agente farmaceuticamente ativo, por exemplo. Em várias modalidades, o material não tecido 20080’ pode liberar uma quantidade terapeuticamente eficaz do agen-teterapêutico 20088. Por exemplo, o agente terapêutico 20088 pode ser liberado conforme o material não tecido 20080’ é absorvido. Em várias modalidades, o agente terapêutico 20088 pode ser liberado em fluido, como sangue, por exemplo, passando sobre ou através do material não tecido 20080’. Exemplos de agentes terapêuticos 20088 podem incluir, mas não se limitam a, agentes hemostáticos e fármacos, por exemplo fibrinaa, trombina e/ou celulose regenerada oxidada (ORC); medicamentos anti-inflamatórios, por exemplo diclofenaco, aspirina, naproxeno, sulindaco e/ou hidrocortisona; fármacos ou agentes antibióticos e antimicrobianos, como, por exemplo, triclosano, prata iônica, ampicilina, gentamicina, polimixina B e/ou cloranfenicol; e me-dicamentosanticâncer, por exemplo cisplatina, mitomicina e/ou adriamicina. Em várias modalidades, o agente terapêutico 20088 pode compreender um agente biológico, como uma célula-tronco, por exemplo. Em algumas modalidades, as fibras 20082 do material não tecido 20080’ pode compreender o agente terapêutico 20088. Em ou-tras modalidades, o agente terapêutico 20088 pode ser adicionado ao material não tecido 20080’ ou de outro modo integrado no compensa-dor de espessura de tecido 20020’.
[915] Em algumas modalidades, principalmente referindo-se às FIGURAS 399 a 399B, um compensador de espessura de tecido 20520 para um atuador de extremidade 12 (FIGURA 390) pode compreender uma pluralidade de molas ou fibras enroladas em espiral 20586. de modo similar às fibras crimpadas 20086 aqui descritas, as fibras enroladas em espiral 20586 podem ser, por exemplo, crimpadas, torcidas, enroladas em espiral, inclinadas, vergadas, espiraladas, en-caracoladas e/ou arcadas no interior do compensador de espessura de tecido 20520. Em algumas modalidades, as fibras enroladas em espiral 20586 podem ser enroladas ao redor de um mandril para formar um formato em espiral ou substancialmente semelhante a uma espiral. Similar às modalidades aqui descritas, as fibras enroladas em espiral 20586 podem ser aleatoriamente orientadas e/ou distribuídas de modo aleatório por todo o compensador de espessura de tecido 20520. Em outras modalidades, as fibras enroladas em espiral 20586 podem ser sistematicamente dispostas e/ou uniformemente distribuídas por todo o compensador de espessura de tecido 20520. Por exemplo, com refe-rência à FIGURA 399, as fibras enroladas em espiral 20586 podem compreender um eixo longitudinal entre uma primeira extremidade 20587 e uma segunda extremidade 20589 da fibra enrolada em espiral 20586. Os eixos longitudinais das fibras enroladas em espiral 20520 no compensador de espessura de tecido 20520 podem ser paralelos ou substancialmente paralelos. Em algumas modalidades, a primeira extremidade 20587 de cada fibra enrolada em espiral 20520 pode ser posicionada ao longo de um primeiro lado longitudinal 20523 do com-pensador de espessura de tecido 20520 e a segunda extremidade 20589 de cada fibra enrolada em espiral 20586 pode ser posicionada ao longo de um segundo lado longitudinal 20524 do compensador de espessura de tecido 20520. Em tal disposição, as fibras enroladas em espiral 20586 podem atravessar lateralmente o compensador de es-pessura de tecido. Em outras modalidades, as fibras enroladas em es-piral 20586 podem atravessar longitudinal ou diagonalmente o com-pensador de espessura de tecido 20520.
[916] Em várias modalidades, similar às fibras crimpadas 20086 aqui descritas, as fibras enroladas em espiral 20586 podem compreender uma composição polimérica. As fibras crimpadas 20586 podem ser pelo menos parcialmente elásticas de modo que a deformação das fibras crimpadas 20586 gere uma força de restauração. Em algumas modalidades, a composição polimérica das fibras enroladas em espiral 20586 pode compreender poli(carbonato de trimetileno) (TMC), por exemplo, de modo que as fibras enroladas em espiral 20586 não são solúveis em um solvente de clorofila. Com referência à FIGURA 399A, as molas ou fibras enroladas em espiral 20520 podem ser retidas em um material de compensação 20580. Em várias modalidades, o mate-rial de compensação 20580 pode manter as fibras enroladas em espiral 20586 em uma posição carregada de modo que as fibras enroladas em espiral 20586 exerçam uma carga de flexibilização sobre ou dentro do material de compensação 20580. Em certas modalidades, o material de compensação 20580 pode manter as fibras enroladas em espiral 20586 em uma posição neutra onde as fibras enroladas em espiral 20586 não estão exercendo uma carga de flexibilização sobre ou dentro do material de compensação 20580. O material de compensação 20580 pode ser bioabsorvível e, em algumas modalidades, pode compreender uma espuma, como, por exemplo, espuma de poli(ácido glicólico) (PGA). Ademais, o material de compensação 20580 pode ser solúvel em um solvente de clorofila, por exemplo. Em algumas modalidades, o compensador de espessura de tecido pode compreender fibras enroladas em espiral 20586 que compreendem poli(carbonato de trimetileno) (TMC) e material de compensação 20580 que compreende espuma de poli(ácido glicólico) (PGA), por exemplo, de modo que as fibras enroladas em espiral 20520 não sejam solúveis em um solvente de clorofila enquanto que o material de compensação 20580 é solúvel em solvente de clorofila. Em várias modalidades, o material de com-pensação 20580 pode ser ao menos parcialmente elástico, de modo que a compactação do material de compensação 20580 gere uma força de restauração. Adicionalmente, similar às modalidades aqui descri-tas, com referência à FIGURA 399B, o material de compensação 20580 do compensador de espessura de tecido 20520 pode compre-ender um agente terapêutico 20588, como células-tronco, por exemplo. O material de compensação 20580 pode liberar uma quantidade terapeuticamente eficaz do agente terapêutico 20588 conforme o ma-terial de compensação 20580 é absorvido.
[917] De modo similar ao compensador de espessura de tecido 20020 aqui descrito, o compensador de espessura de tecido 20520 pode ser compressível. Por exemplo, conforme os grampos 20030 (FIGURAS 407 a 410) são instalados de uma posição inicial para uma posição disparada, os grampos 20030 podem se engatar a uma porção de compensador de espessura de tecido 20520. Em várias moda-lidades, um grampo 20030 pode capturar uma porção do compensador de espessura de tecido 20520 e do tecido adjacente T. O grampo 20030 pode aplicar uma força de compressão à porção capturada do compensador de espessura de tecido 20520 e tecido T de modo que o compensador de espessura de tecido 20520 é compactado a partir de uma altura não compactada para uma altura compactada. Similar às modalidades aqui descritas, a compressão do compensador de espes-sura de tecido 20520 pode resultar em uma deformação correspon-dente das fibras enroladas em espiral 20586 nela. Conforme descrito com mais detalhes neste documento, a deformação de cada fibra en-rolada em espiral 20586 pode gerar uma força de restauração que pode depender da resiliência da fibra enrolada em espiral, por exemplo, da quantidade na qual a fibra enrolada em espiral 20586 é deformada e/ou do coeficiente da mola da fibra enrolada em espiral 20586. O coe-ficiente da mola da fibra enrolada em espiral 20586 pode depender pelo menos da orientação, do material, do formato e/ou do tamanho da fibra enrolada em espiral 20586, por exemplo. A deformação das fibras enroladas em espiral 20586 no compensador de espessura de tecido 20520 pode gerar forças de restauração ao longo do compensador de espessura de tecido 20520. Similar às modalidades aqui descritas, o compensador de espessura de tecido 20520 pode exercer a força de restauração agregada gerada pelas fibras enroladas em espiral 20586 deformadas e/ou o material de compensação resiliente 20586 no tecido T capturado no grampos disparados 20030.
[918] Em algumas modalidades, principalmente com referência às FIGURAS 400 e 401, um compensador de espessura de tecido 20620 para um atuador de extremidade 12 pode compreender uma pluralidade de espirais de mola 20686. de modo similar às fibras crimpadas 20086 e às fibras enroladas em espiral 20586 aqui descritas, as espirais de mola 20686 podem ser, por exemplo, crimpadas, torcidas, enroladas em espiral, dobradas, vergadas, espiraladas, encaracoladas e/ou arcadas no compensador de espessura de tecido 20620. Em vá-rias modalidades, similar às fibras e as espirais aqui descritas, as espi-rais de mola 20686 podem compreender uma composição polimérica. Adicionalmente, as espirais de mola 20686 podem ser pelo menos parcialmente elásticas de modo que a deformação das espirais de mola 20686 gere uma força de restauração. As espirais de mola 20686 podem compreender uma primeira extremidade 20687, uma segunda extremidade 20689 e um eixo longitudinal entre as mesmas. Com refe-rência à FIGURA 400, a primeira extremidade 20686 de uma espiral de mola 20686 pode ser posicionada sobre ou próxima a uma extremidade proximal 20626 do compensador de espessura de tecido e a segunda extremidade 20689 da mesma espiral de mola 20686 pode ser posicionada sobre ou próxima a uma extremidade distal 20625 do compensador de espessura de tecido 20620 de modo que a espiral de mola 20686 atravesse longitudinalmente o compensador de espessura de tecido 20620, por exemplo. Em outras modalidades, as fibras enroladas em espiral 20686 podem atravessar lateral ou diagonalmente o compensador de espessura de tecido 20620.
[919] O compensador de espessura de tecido 20620 pode com preender um filme externo 20680 que circunda pelo menos parcial-mente pelo menos uma espiral de mola 20686. Em várias modalidades, com referência à FIGURA 400, o filme externo 20680 pode se estender-se ao redor do perímetro de múltiplas espirais de mola 20686 no compensador de espessura de tecido 20620. Em outras modalidades, o filme externo 20680 pode encapsulado completamente as espirais de mola 20686 ou ao menos uma espiral de mola 20686 no compensador de espessura de tecido 20620. O filme externo 20680 pode reter as espirais de mola 20686 no atuador de extremidade 12. Em várias modalidades, o filme externo 20680 pode reter as espirais de mola 20686 em uma posição carregada de modo que as espirais de mola 20686 gerem uma carga de flexibilização e exerçam uma força de mola sobre o filme externo 20680. Em outras modalidades, o filme externo 20680 pode reter as espirais de mola 20686 em uma posição neutra. O compensador de espessura de tecido 20620 também pode compreender um material de preenchimento 20624. Em algumas mo-dalidades, o material de preenchimento 20624 pode ser retido dentro e/ou ao redor das espirais de mola 20686 pelo filme externo 20680. Em algumas modalidades, o material de preenchimento 20624 pode compreender um agente terapêutico 20688, similar aos agentes tera-pêuticos aqui descritos. Adicionalmente, o material de preenchimento 20624 pode suportar as espirais de mola 20686 no compensador de espessura de tecido 20620. O material de preenchimento 20624 pode ser compressível e pelo menos parcialmente resiliente de modo que o material de preenchimento 20624 contribua para a força de flexibiliza-ção ou de restauração gerada pelo compensador de espessura de te-cido 20620, conforme descrito com maiores detalhesneste documento.
[920] De modo similar aos compensadores de espessura de teci do aqui descritos, o compensador de espessura de tecido 20620 pode ser compressível. À medida que os grampos 20030 (FIGURAS 407 a 410) são instaladosd a partir de uma posição inicial para uma posição disparada, em várias modalidades, os grampos 20030 podem engatar uma porção do compensador de espessura de tecido 20620. Em várias modalidades, cada grampo 20030 pode capturar uma porção do compensador de espessura de tecido 20620 juntamente com o tecido adjacente T. O grampo 20030 pode aplicar uma força de compressão à porção capturada do compensador de espessura de tecido 20620 e o tecido T capturado de modo que o compensador de espessura de tecido 20620 é compactado entre uma altura não compactada e uma altura compactada. Similar às modalidades aqui descritas, a compres-são do compensador de espessura de tecido 20620 pode resultar em uma deformação correspondente das espirais de mola 20686 nele re-tidas (FIGURA 401). Conforme descrito com mais detalhes neste do-cumento, a deformação de cada uma das espirais de mola 20686 pode gerar uma força de restauração que depende da resiliência da espiral de mola 20686, por exemplo, da quantidade na qual a espiral de mola 20686 é deformada e/ou do coeficiente da mola da espiral de mola 20686. O coeficiente da mola de uma espiral de mola 20686 pode de-pender pelo menos do material, do formato e/ou das dimensões da espiral de mola 20686, por exemplo. Ademais, dependendo da resiliência do material de preenchimento 20624 e do filme externo 20680, a compactação do material de preenchimento 20624 e/ou do filme exter-no 20680 também pode gerar forças de restauração. O agregado de forças de restauração geradas pelo menos pelas espirais de mola de-formadas 20686, pelo material de preenchimento 20624 e/ou pelo filme externo 20680 no compensador de espessura de tecido 20620 pode gerar forças de restauração ao longo do compensador de espessura de tecido 20620. Similar às modalidades aqui descritas, o compen-sador de espessura de tecido 20620 pode exercer uma força de res-tauração agregada gerada pelas espirais de mola deformadas 20686 no tecido T capturado em um grampo disparado 20030.
[921] Em várias modalidades, principalmente referindo-se às FI GURAS 402 a 404, um compensador de espessura de tecido 20720 para um atuador de extremidade 12 pode compreender uma pluralidade de espirais de mola 20786. de modo similar às fibras enroladas em espiral e molas aqui descritas, as espirais de mola 20786 podem ser, por exemplo, crimpadas, torcidas, enroladas em espiral, dobradas, vergadas, espiraladas, encaracoladas e/ou arcadas no compensador de espessura de tecido 20720. As espirais de mola 20786 podem ser pelo menos parcialmente elásticas de modo que a deformação das espirais de mola 20786 gere uma força de restauração. Adicionalmen-te, as espirais de mola 20786 podem compreender uma primeira ex-tremidade 20787, uma segunda extremidade 20789 e um eixo longitu-dinal entre as mesmas. Com referência principalmente à FIGURA 404, a primeira extremidade 20787 do espiral de mola 20786 pode ser posi-cionada sobre ou próxima à extremidade proximal 20726 do compen-sador de espessura de tecido 20720 e a segunda extremidade 20789 da espiral de mola 20786 pode ser posicionada sobre ou próxima à extremidade distal 20725 do compensador de espessura de tecido 20720 de modo que a espiral de mola 20786 atravesse longitudinal-mente o compensador de espessura de tecido 20720. Em algumas modalidades, a espiral de mola 20786 pode estender-se longitudinal-mente em duas fileiras paralelas no compensador de espessura de tecido 20720. O compensador de espessura de tecido 20720 pode ser posicionado em um atuador de extremidade 12 de modo que um su-porte deslizante 20050 (FIGURA 390) ou o elemento de corte 20052 possa trasladar ao longo de uma fenda 20015 entre as fileiras paralelas de espirais de mola 20786. Em outras modalidades, similar às vá-rias modalidades aqui descritas, as espirais de mola 20786 podem atravessar lateral ou diagonalmente o compensador de espessura de tecido 20720.
[922] Novamente com referência à FIGURA 404, as espirais de mola 20786 podem ser retidas ou incorporadas a um material de com-pensação 20780. O material de compensação 20780 pode ser bioabsorvível e, em algumas modalidades, pode compreender espuma, co-mo, por exemplo, poli(ácido glicólico) (PGA). Em várias modalidades, o material de compensação 20780 pode ser resiliente de modo que a deformação do material de compensação 20780 gera uma força de mola. O material de compensação 20780 pode ser solúvel em um sol-vente de clorofila, por exemplo. Em algumas modalidades, por exem-plo, o compensador de espessura de tecido pode compreender espirais de mola 20786 que compreendem poli(carbonato de trimetileno) (TMC) e material de compensação 20780 que compreende espuma de poli(ácido glicólico) (PGA) de modo que as espirais de mola 20786 não são solúveis em um solvente de clorofila enquanto o material de com-pensação 20780 é solúvel em um solvente de clorofila, por exemplo. O material de compensação 20780 pode ser pelo menos parcialmente resiliente de modo que a deformação do material de compensação 20780 gere uma carga de flexibilização ou força de restauração.
[923] Em várias modalidades, o compensador de espessura de tecido 20720 pode compreender fios entrelaçados 20790, que podem se estender entre fileiras paralelas de espirais de mola 20786. Por exemplo, com referência à FIGURA 404, um primeiro fio entrelaçado 20790 pode atravessar diagonalmente as duas fileiras paralelas de espirais de mola 20786 e um segundo fio entrelaçado 20790 também pode atravessar diagonalmente as duas fileiras paralelas de espirais de mola 20786. Em algumas modalidades, o primeiro e o segundo fios entrelaçados 20790 podem entrecortar-se. Em várias modalidades, os fios entrelaçados 20790 podem entrecortar-se múltiplas vezes ao longo do comprimento do compensador de espessura de tecido 20720. Os cordões entrelaçados 20790 podem reter os espirais de mola 20786 em uma configuração carregada de modo que as espirais de mola 20786 sejam retidas em uma posição substancialmente plana no compensador de espessura de tecido 20720. Em algumas modalida-des, os fios entrelaçados 20790 que atravessam o compensador de espessura de tecido 20720 pode, ser diretamente fixados os espirais de mola 20786. Em outras modalidades, os fios entrelaçados 20790 podem ser acoplados às espirais de mola 20786 através de um suporte 20792 que se estende através de cada espiral de mola 20786 ao longo do eixo longitudinal do mesmo.
[924] Conforme descrito com mais detalhes neste documento, em várias modalidades, um cartucho de grampos 20000 pode compreender uma fenda 20015 configurado para receber um suporte deslizante em translação 20050 que compreende um elemento de corte 20052 (FIGURA 390). Conforme o suporte 20050 translada ao longo da fenda 20015, o suporte deslizante 20050 pode ejetar grampos 20030 das cavidades de prendedor 20012 no cartucho de grampos 20000 e o elemento de corte 20052 pode simultaneamente ou quase simultane-amente afastar o tecido T. Em várias modalidades, novamente com referência à FIGURA 404, à medida que o elemento de corte 20052 translada, também pode separar os fios entrelaçados 20790 que en-trecorta entre as fileiras paralelas das espirais de mola 20786 no com-pensador de espessura de tecido 20720. Conforme os cordões entre-laçados 20790 são separados, cada espiral de mola 20786 pode ser liberada de sua configuração carregada de modo que cada espiral de mola 20786 retorne da posição substancialmente plana carregada para uma posição expandida no compensador de espessura de tecido 20720. Em várias modalidades, quando uma espiral de mola 20786 é expandida, o material de compensação 20780 circundando a espiral de mola 20786 também pode expandir.
[925] Em várias modalidades, à medida que os grampos 20030 (FIGURAS 407 a 410) são instalados a partir de uma posição inicial para uma posição disparada, os grampos 20030 podem engatar uma porção do compensador de espessura de tecido 20720 e o compensa-dor de espessura de tecido 20720 pode expandir ou tentar expandir, dentro dos grampos 20030 e pode aplicar uma força de compressão ao tecido T. Em várias modalidades, ao menos um grampo 20030 pode capturar uma porção do compensador de espessura de tecido 20720, juntamente com o tecido adjacente T. O grampo 20030 pode aplicar uma força de compressão à porção capturada do compensador de espessura de tecido 20720 e o tecido T capturado, de modo que o compensador de espessura de tecido 20720 é compactado entre a al-tura não compactada e a altura compactada. Similar às modalidades aqui descritas, a compressão do compensador de espessura de tecido 20720 pode resultar em uma deformação correspondente das espirais de mola 20786 e material de compensação 20780 nele retidos. con-forme descrito com mais detalhes neste documento, a deformação de cada uma das espirais de mola 20786 pode gerar uma força de restau-ração que pode depender da resiliência da espiral de mola, por exem-plo, da quantidade na qual a espiral de mola 20786 é deformada e/ou do coeficiente da mola da espiral de mola 20786. O coeficiente da mola de uma espiral de mola 20786 pode depender pelo menos da orien-tação, do material, do formato e/ou do tamanho da espiral de mola 20786, por exemplo. O agregado de forças de restauração geradas pelo menos pelas espirais de mola deformadas 20786 e/ou pelo mate-rial de compensação 30380 no compensador de espessura de tecido 20720 pode gerar forças de restauração ao longo do compensador de espessura de tecido 20720. Similar às modalidades aqui descritas, o compensador de espessura de tecido 20720 pode exercer a força de restauração agregada gerada pelas espirais de mola deformadas 20786 no compensador de espessura de tecido 20720 no tecido T capturado e grampos disparados 20030.
[926] Em várias modalidades, principalmente com referência às FIGURAS 405 e 406, um compensador de espessura de tecido 20820 para um atuador de extremidade cirúrgico 12 pode compreender uma espiral de mola 20886. de modo similar às fibras e espirais aqui descri-tas, a espiral de mola 20886 pode ser, por exemplo, crimpada, torcida, enrolada em espiral, dobrada, vergada, espiralada, encaracolada e/ou arcada no compensador de espessura de tecido 20820. A espiral de mola 20886 pode compreender uma composição polimérica e pode ser pelo menos parcialmente elástica, de modo que a deformação da espi-ral de mola 20886 gere uma força de flexibilização. Adicionalmente, a espiral de mola 20886 pode compreender uma primeira extremidade 20887 e uma segunda extremidade 20889. Com referência à FIGURA 405, a primeira extremidade 20887 pode ser posicionada sobre ou próxima à extremidade proximal 20826 do compensador de espessura de tecido 20820 e a segunda extremidade 20889 pode ser posicionada sobre ou próximo à extremidade distal 20825 do compensador de es-pessura de tecido 20820. A espiral de mola 20886 pode enrolar-se ou serpentear-se da extremidade proximal 20825 para a extremidade distal 20826 do compensador de espessura de tecido 20820.
[927] Novamente com referência à FIGURA 405, a espiral de mo la 20886 pode ser retida ou incorporada a um material de compensação 20880. O material de compensação 20880 pode ser bioabsorvível e, em algumas modalidades, pode compreender uma espuma, como, por exemplo, espuma de poli(ácido glicólico) (PGA). O material de compensação 20880 pode ser solúvel em um solvente de clorofila, por exemplo. Em algumas modalidades, o compensador de espessura de tecido pode compreender espirais de mola 20886 que compreendem poli(carbonato de trimetileno) (TMC) e material de compensação 20880 que compreendem espuma de poli(ácido glicólico) (PGA, por exemplo, de modo que a espiral de mola 20886 não seja solúvel em um solvente de clorofila enquanto o material de compensação 20880 é solúvel em um solvente de clorofila. O material de compensação 20880 pode ser pelo menos parcialmente resiliente de modo que a deformação do material de compensação 20880 gere uma carga de flexibilização ou força de restauração.
[928] De modo similar aos compensadores de espessura de teci do aqui descritos, por exemplo, o compensador de espessura de tecido 20820 pode ser compressível. A compactação do compensador de espessura de tecido 20820 pode resultar em uma deformação de pelo menos uma porção da espiral de mola 20886 retida ou incorporada ao material de compensação 20880 do compensador de espessura de tecido 20820. Conforme descrito com mais detalhes neste documento, a deformação da espiral de mola 20886 pode gerar forças de restaura-ção que podem depender da resiliência da espiral de mola 20886, da quantidade na qual a espiral de mola 20886 é deformada e/ou do coe-ficiente da mola da espiral de mola 20886, por exemplo. O agregado de forças de restauração geradas pela espiral de mola deformada 20886 e/ou pelo material de compensação deformado 20880 pode gerarforças de restauração ao longo do compensador de espessura de tecido 20820. O compensador de espessura de tecido 20820 pode exercer a força de restauração agregada sobre o tecido capturado T nos grampos disparados 20030.
[929] Agora com referência à FIGURA 413, um atuador de ex tremidadecirúrgico 12 pode compreender um compensador de espes-sura de tecido 30020 que tem pelo menos um elemento tubular 30080. O compensador de espessura de tecido 30020 pode ser retido no atuador de extremidade cirúrgico 12. Conforme descrito com maiores detalhesneste documento, um prendedor no atuador de extremidade 12 pode ser instalado de modo que o prendedor se mova para uma posi-ção disparada e deforme pelo menos uma porção do elemento tubular 30080 no compensador de espessura de tecido 30020. O leitor irá re-conhecer que os compensadores de espessura de tecido que compre-endem pelo menos um elemento tubular conforme aqui descrito podem ser instalados ou engatados de outro modo a uma variedade de atuadores de extremidade cirúrgicos e que tais modalidades estão no escopo da presente revelação.
[930] Em várias modalidades, ainda com referência à FIGURA 413, o compensador de espessura de tecido 30020 pode ser posicio-nado em relação à bigorna 30060 do atuador de extremidade 12. Em outras modalidades, o compensador de espessura de tecido 30020 pode ser posicionado em relação a um conjunto de cartucho de pren-dedores, como cartucho de grampos 30000 do atuador de extremidade 12. Em várias modalidades, o cartucho de grampos 30000 pode ser configurado para encaixar-se em uma canaleta de cartucho 30072 de uma garra 30070 do atuador de extremidade 12. Por exemplo, o com-pensador de espessura de tecido 30020 pode ser preso de modo liberável ao cartucho de grampos 30000. Em ao menos uma modalidade, o elemento tubular 30080 do compensador de espessura de tecido 30020 pode ser posicionado adjacente a uma superfície de plataforma superior 30011 de uma porção de suporte rígido 30010 do cartucho de grampos 30000. Em várias modalidades, o elemento tubular 30080 pode ser preso à superfície de plataforma superior 30011 por um ade-sivo ou por invólucro, similar a ao menos um dentre os invólucros aqui descritos (por exemplo, FIGURA 218). Em várias modalidades, o com-pensador de espessura de tecido 30020 pode formar uma peça única com um conjunto compreende o cartucho de grampos 30000 de modo que o cartucho de grampos 30000 e o compensador de espessura de tecido 30020 são formados como uma construção unitária. Por exem-plo, o cartucho de grampos 30000 pode compreender uma primeira porção de corpo, como a porção de suporte rígido 30010 e uma se-gundaporção de corpo, como o compensador de espessura de tecido 30020, por exemplo.
[931] Com referência às FIGURAS 413 a 415, o elemento tubular 30080 no compensador de espessura de tecido 30020 pode compre-ender uma porção alongada 30082 que tem pelo menos um lúmen 30084 que se estende pelo menos parcialmente através do mesmo. Com referência principalmente à FIGURA 415, a porção alongada 30082 do elemento tubular 30080 pode compreender cordões tecidos ou trançados 30090, conforme descrito com maiores detalhes neste documento. Em outras modalidades, a porção alongada 30082 pode compreender uma estrutura sólida, como uma extrusão de polímero, ao invés de cordões tecidos 30090. A porção alongada 30082 do elemento tubular 30080 pode compreender uma espessura. Em várias modalidades, a espessura da porção alongada 30082 pode ser subs-tancialmente uniforme ao longo do comprimento e ao redor do diâmetro da mesma; Em outras modalidades, a espessura pode variar. A porção alongada 30082 pode ser alongada de modo que o comprimento da porção alongada 30082 seja maior que o diâmetro da porção alongada 30082, por exemplo. Em várias modalidades, a porção alongada pode compreender um comprimento de aproximadamente 30,5 mm (1,20 polegada) a aproximadamente 66,0 mm (2,60 polegadas) e um diâmetro de aproximadamente 2,5 mm (0,10 polegada) a aproxi-madamente 3,8 mm (0,15 polegada), por exemplo. Em algumas moda-lidades, o comprimento do elemento tubular 20080 pode ser aproxi-madamente 35,6 mm (1,40 polegada), por exemplo, e o diâmetro do elemento tubular 20080 pode ser de aproximadamente 3,18 mm (0,125 polegada), por exemplo. Ademais, a porção alongada 30082 pode definir um formato em seção transversal substancialmente circular ou elíptico, por exemplo. Em outras modalidades, o formato em seção transversal pode compreender um formato poligonal, como, por exemplo, um triângulo, um hexágono e/ou um octógono. Novamente com referência à FIGURA 413, o elemento tubular 30080 pode com-preender uma primeira extremidade distal 30083 e uma segunda ex-tremidade proximal 30085. Em várias modalidades, o formato em seção transversal da porção alongada 30082 pode estreitar na primeira e/ou segunda extremidade 30083, 30085 em que ao menos uma ex-tremidade 30083, 30085 do elemento tubular 30080 pode ser fechado e/ou vedado. Em outras modalidades, um lúmen 30084 pode continuar permeável das extremidades distais 30083, 30085 de o elemento tubu-lar 30080 de modo que as extremidades 30083, 30085 sejam abertas.
[932] Em várias modalidades, o elemento tubular 30080 pode compreender um lúmen central único 30084 que se estende ao menos parcialmente através da porção alongada 30084. Em algumas modali-dades, o lúmen 30084 pode se estender através de todo o comprimento da porção alongada 30084. Em ainda outras modalidades, o elemento tubular 30080 pode compreender múltiplos lúmens 30084 estendendo-seatravés do mesmo. Os lúmens 30084 estendendo-se através do elemento tubular 30080 podem ser circulares, semicirculares, com formato de cunha e/ou combinações dos mesmos. Em várias modalidades, um elemento tubular 30080 pode também compreender as mantas de suporte que podem formar um formato em "T" ou "X" modificado, por exemplo, dentro do lúmen 30084. Em várias modali-dades, as dimensões, lúmen(s) e/ou a(s) manta(s) de suporte(s) dentro do elemento tubular 30080 podem definir formato em seção transversal do elemento tubular 30080. O formato em seção transversal do elemento tubular 30080 pode ser consistente ao longo do comprimento do mesmo ou, em outras modalidades, o formato em seção transversal do elemento tubular 30080 pode variar ao longo do comprimento do mesmo. Conforme descrito com maiores detalhesneste documento, o formato em seção transversal do elemento tubular 30080 pode afetar a compressibilidade e a resiliência do elemento tubular 30080.
[933] Em várias modalidades, o elemento tubular 30080 pode compreender um diâmetro vertical e um diâmetro horizontal; as dimen-sões do mesmo podem ser selecionadas dependendo da disposição do elemento tubular 30080 no atuador de extremidade 12, as dimensões do atuador de extremidade 12, incluindo o vão do tecido do atuador de extremidade 12 e a geometria esperada da área de aprisionamento de grampos 30039. Por exemplo, o diâmetro vertical do elemento tubular 30080 pode estar relacionado à provável altura de um grampo formado. Em tais modalidades, o diâmetro vertical do elemento tubular 30080 pode ser selecionado de modo que o diâmetro vertical pode ser reduzido aproximadamente 5% a aproximadamente 20% quando o elemento tubular 30080 é capturado dentro de um grampo formado 30030. Por exemplo, um elemento tubular 30080 tendo um diâmetro vertical de aproximadamente 2,54 mm (0,100 polegada) pode ser usado para grampos tendo uma altura formada esperada de aproxi-madamente 2,0 mm (0,080 polegada) a aproximadamente 2,4 mm (0,095 polegada). Como resultado, o diâmetro vertical do elemento tu-bular 30080 pode ser reduzido aproximadamente 5% a aproximada-mente 20% quando capturado pelo grampo formado 30030 mesmo quando nenhum tecido T for capturado no mesmo. Quando o tecido T for capturado pelo grampo formado 30030, a compactação do elemento tubular 30080 pode ser ainda maior. Em algumas modalidades, o diâmetro vertical pode ser uniforme ao longo do comprimento do ele-mento tubular 30080 ou, em outras modalidades, o diâmetro vertical pode variar ao longo do comprimento do mesmo.
[934] Em algumas modalidades, o diâmetro horizontal do elemen to tubular 30080 pode ser maior que, igual a ou menor que o diâmetro vertical do elemento tubular 30080 quando o elemento tubular 30080 está em uma configuração não-deformada ou recuperada. Por exem-plo, com referência à FIGURA 414, o diâmetro horizontal pode ter aproximadamente três vezes maior do que o diâmetro vertical, por exemplo. Em algumas modalidades, o diâmetro horizontal pode ser de aproximadamente 10,2 mm (0,400 polegada) e o diâmetro vertical pode ser de aproximadamente 3,18 mm (0,125 polegada), por exemplo. Em outras modalidades, agora referindo-se à FIGURA 416, o diâmetro horizontal de um elemento tubular 31080 pode ser igual ou substanci-almente igual ao diâmetro vertical do elemento tubular 31080 quando o elemento tubular 31080 está em uma configuração não-deformado ou recuperada. Em algumas modalidades, o diâmetro horizontal pode ser de aproximadamente 3,18 mm (0,125 polegada) e o diâmetro vertical também pode ser de aproximadamente 3,18 mm (0,125 polegada), por exemplo. Em várias modalidades, o elemento tubular 30080 pode compreender um diâmetro vertical de aproximadamente 3,18 mm (0,125 polegada), um diâmetro horizontal de aproximadamente 10,2 mm (0,400 polegada) e um comprimento de aproximadamente 35,56 mm (1,400 polegada). Conforme descrito com maiores detalhesneste documento, quando é aplicada uma força A ao elemento tubular 30080 e/ou 31080, o elemento tubular pode deformar-se de modo que a ge-ometria em seção transversal, incluindo os diâmetros horizontal e ver-tical, possa mudar.
[935] Novamente com referência às FIGURAS 413 a 415, o ele mento tubular 30080 no compensador de espessura de tecido 30020 pode ser deformável. Em várias modalidades, todo o elemento tubular 30080 pode ser deformável. Por exemplo, o elemento tubular 30080 pode ser deformável da extremidade proximal 30083 até a extremidade distal 30085 da porção alongada 30082 e ao redor da totalidade da circunferência da mesma. Em outras modalidades, apenas uma porção do elemento tubular 30080 pode ser deformável. Por exemplo, em várias modalidades, apenas um comprimento intermediário da porção alongada 30082 e/ou apenas uma porção da circunferência do ele-mento tubular 30080 pode ser deformável.
[936] Quando é aplicada uma força de compressão a um ponto de contato a porção alongada 30082 do elemento tubular 30080, o ponto de contato pode se deslocar, o que pode alterar as dimensões em seção transversal do elemento tubular 30080. Por exemplo, nova-mente com referência à FIGURA 414, o elemento tubular 30080 pode compreender um ápice de topo 30086 e um ápice de base 30088 na porção alongada 30082. Na configuração não deformada inicial, o elemento tubular 30080 pode compreender dimensões em seção transversal não deformadas, incluindo um diâmetro vertical não defor-mado entre o ápice de topo 30086 e o ápice de base 30088. Quando é aplicada uma força de compressão A ao ápice de topo 30086, o ele-mento tubular 30080 pode se mover para uma configuração deformada. Na configuração deformada, as dimensões em seção transversal do tubo 30080 pode ser alteradas. Por exemplo, o tubo 30086 pode compreender um diâmetro vertical deformado entre o ápice de topo 30086 e o ápice de base 30088, que pode ser menor do que o diâmetro vertical não deformado. Em algumas modalidades, com referência à FIGURA 416, o diâmetro horizontal do tubo deformado 30080 pode ser alongado, por exemplo, quando o elemento tubular 30080 se move de uma configuração não deformada para uma confirguração deformada. As dimensões em seção transversal deformadas do tubo deformado 30080 podem depender pelo menos da posição, da orientação angular e/ou da magnitude da força aplicada A. Conforme descrito com maiores detalhesneste documento, a deformação de um tubo deformável 30080 pode gerar uma força de flexibilização ou de restaura-ção que pode depender da resiliência do elemento tubular 30080.
[937] Ainda com referência à FIGURA 414, o elemento tubular 30080 pode gerar uma força de mola contrária ou de restauração quando comprimido. Em tais modalidades, conforme descrito aqui, o elemento tubular 30080 pode mover-se de uma configuração não de-formada inicial para uma confirguração deformada quando uma força A é aplicado a um ponto de contato na porção alongada 30082 do elemento tubular 30080. Quando a força aplicada A é removida, o tubo deformado 30080 pode recuperar-se da configuração deformada. O tubo deformado 30080 pode se recuperar para a configuração não de-formada inicial ou pode se recuperar para uma configuração substan-cialmente similar à configuração não deformada inicial. A capacidade de o elemento tubular 30080 se recuperar de uma configuração de-formadaestá relacionada à resiliência do elemento tubular 30080.
[938] Novamente com referência à FIGURA 414, um elemento tubular 30080 pode exercer uma força de mola contrária ou de restau-ração. A força de restauração pode ser gerada pelo elemento tubular 30080 quando for exercida uma força aplicada A no elemento tubular 30080, por exemplo, por um grampo 30030 (FIGURAS 417 e 418), conforme descrito com maiores detalhesneste documento. Uma força aplicada A pode alterar as dimensões em seção transversal do ele-mento tubular 30080. Ademais, em materiais elásticos lineares, a força de restauração de cada porção deformada do elemento tubular 30080 pode ser uma função das dimensões deformadas do elemento tubular 30080 e do coeficiente da mola daquela porção do elemento tubular 30080. O coeficiente da mola de um tubo deformável 30080 pode de-pender pelo menos da orientação, do material, da geometria em seção transversal e/ou das dimensões do elemento tubular 30080, por exemplo. Em várias modalidades, o elemento tubular 30080 em um com-pensador de espessura de tecido 30020 pode compreender um coefi-ciente da mola uniforme. Em outras modalidades, o coeficiente da mola pode variar ao longo do comprimento e/ou ao redor do diâmetro do elemento tubular 30080. Quando uma porção de um tubo deformável 30080 que tem um primeiro coeficiente da mola for compactada em grandes medidas, o elemento tubular 30080 pode gerar uma grande força de restauração. Quando uma porção do elemento tubular 30080 que tem o mesmo primeiro coeficiente da mola for compactado em uma medida menor, o elemento tubular 30080 pode gerar uma força de restauração menor.
[939] Novamente com referência à FIGURA 413, o elemento tu bular 30080 no compensador de espessura de tecido 30020 pode compreender uma composição polimérica. Em algumas modalidades, a porção alongada 30082 dp elemento tubular 30080 pode compreender a composição polimérica. Adicionalmente, em várias modalidades, a composição polimérica pode compreender um material ao menos parcialmente elástico de modo que a deformação do elemento tubular 30080 gera uma força de restauração. A composição polimérica pode compreender polímeros não absorvíveis, polímeros absorvíveis ou combinações dos mesmos, por exemplo. Exemplos de polímeros sin-téticos incluem, mas não se limitam a, poli(ácido glicólico) (PGA), poli(ácido láctico) (PLA), policaprolactona (PCL), polidioxanona (PDO) e copolímeros dos mesmos. Em algumas modalidades, os polímeros absorvíveis podem incluir polímeros elastoméricos bioabsorvíveis biocompatíveis, por exemplo. Ademais, a composição polimérica do ele-mento tubular 30080 pode compreender polímeros sintéticos, políme-rosnão sintéticos ou combinações dos mesmos, por exemplo. Em vá-rias modalidades, similar às composições poliméricas nas modalidades aqui descrita, a composição polimérica do elemento tubular 30080 pode incluir quantidades variadas de polímeros absorvíveis, polímeros não absorvíveis, polímeros sintéticos e/ou polímeros não sintéticos, por exemplo, por porcentagem em peso.
[940] Com referência às FIGURAS 413 e 414, o elemento tubular 30080 pode compreender um agente terapêutico 30098 como um agente farmaceuticamente ativo ou medicamento, por exemplo. Em várias modalidades, o agente terapêutico 30098 pode ser retido no lúmen 30084 do elemento tubular 30080. A porção alongada 30082 pode encapsular ou parcialmente encapsular o agente terapêutico 30098. Adicional ou alternativamente, a composição polimérica da porção alongada 30082 pode compreender o agente terapêutico 30098. O elemento tubular 30080 pode liberar uma quantidade terapeuticamente eficaz do agente terapêutico 30098. Em várias modalidades, o agente terapêutico 30098 pode ser liberado como elemento tubular 30080 é absorvido. Por exemplo, o agente terapêutico 30098 pode ser liberado no fluido (como sangue) que passa sobre ou através do elemento tu-bular 30080. Em ainda outras modalidades, o agente terapêutico 30098 pode ser liberado quando um grampo 30030 (FIGURA 417 e 418) perfura o elemento tubular 30080 e/ou quando o elemento de corte 30052 no suporte deslizante de disparo do grampo 30050 (FIGURA 413) corta uma porção do elemento tubular 30080, por exemplo. Exemplos de agentes terapêuticos 30098 podem incluir, mas não se limitam a, agentes e fármacos hemostáticos como, por exemplo, fibrinaa, trombina e/ou celulose regenerada oxidada (ORC), medicamen-tosanti-inflamatórios como, por exemplo, diclofenac, aspirina, naproxen, sulindac e/ou hidrocortisona, fármacos ou agentes antibióticos e antimicrobianos como, por exemplo, triclosan, prata iônica, ampicilina, gentamicina, polimixina B e/ou cloranfenicol, agentes anticâncer como, por exemplo, cisplatina, mitomicina e/ou adriamicina, e/ou agentes bio-lógicos como, por exemplo, células-tronco.
[941] Em várias modalidades, novamente com referência às FI GURAS 413, 417 e 418, os prendedores como os grampos 30030, por exemplo, podem ser instalados de um cartucho de grampos 30000 de modo que os grampos 30030 se engatam a um compensador de es-pessura de tecido 30020 e apliquem uma força A a um elemento tubu-lar 32080 no mesmo. Conforme descrito no presente documento, a aplicação de uma força A ao elemento tubular 30080 pode ocasionar a deformação do elemento tubular 30080. de modo similar aos atuadores de extremidade 12 aqui descritos, a porção de suporte rígido 30010 do cartucho de grampos 30000 pode compreender um corpo de cartucho 30017, uma superfície de plataforma 30011 e uma pluralidade de cavidades de grampo 30012 no mesmo. Cada cavidade de grampo 30012 pode definir uma entrada na superfície de plataforma 30011 e um grampo 30030 pode ser posicionado de modo removível em uma cavidade de grampo 30012 (FIGURA 433). Em ao menos uma modalidade, com referência principalmente às FIGURAS 417 e 418, cada grampo 30030 pode compreender uma base 30031 e duas pernas de grampo 30032 estendendo-se a partir da base 30031. Antes do posicionamento dos grampos 30030, a base 30031 de cada grampo 30030 pode ser suportada por um acionador de grampo 30040 (FI-GURA 433) posicionado no interior da porção de suporte rígido 30010 do cartucho de grampos 30000. Também antes do posicionamento dos grampos 30030, as pernas 30032 de cada grampo 30030 podem ser pelo menos parcialmente contidas no interior da cavidade de grampo 30012 (FIGURA 433).
[942] Em várias modalidades, conforme descrito com mais deta lhes neste documento, os grampos 30030 podem ser instalados entre uma posição inicial e uma posição disparada. Por exemplo, um suporte deslizante de disparo de grampo 30050 pode engatar-se a um acionador 30040 (FIGURA 433) para mover pelo menos um grampo 30030 entre a posição inicial e a posição disparada. Em várias modalidades, com referência principalmente à FIGURA 417, o grampo 30030 pode ser movido para uma posição disparada, em que as pernas 30032 do grampo 30030 engata-se a um elemento tubular 32080 de um com-pensador de espessura de tecido 32020, penetram o tecido T e entre em contato com uma bigorna 30060 (FIGURA 433) posicionada oposta ao cartucho de grampos 30000 no atuador de extremidade cirúrgico 12. Os bolsos de formação de grampo 30062 na bigorna 30060 podem dobrar as pernas de grampo 30032 de modo que o grampo disparado 30030 capture uma porção do elemento tubular 32080 e uma porção do tecido T em uma área de aprisionamento de grampo 30039. Conforme descrito com maiores detalhesneste documento, pelo menos um perna de grampo 30032 pode perfurar o elemento tubular 32080 do compensador de espessura de tecido 32020 quando o grampo 30030 se mover entre a posição inicial e a posição disparada. Em outras mo-dalidades, as pernas de grampo 30032 podem mover-se ao redor do perímetro do elemento tubular 32080 de modo que as pernas de grampo 30032 evitem a perfuração do elemento tubular 32080. de modo similar aos prendedores aqui descritos, as pernas 30032 de cada grampo 30030 podem ser deformadas para baixo na direção da base 30031 do grampo 30030 para formar uma área de aprisionamento de grampo 30039 entre isso. A área de aprisionamento de grampo 30039 pode ser a área na qual o tecido T e uma porção do compensador de espessura de tecido 32020 podem ser capturados por um grampo disparado 30030. Na posição disparada, cada grampo 30030 pode aplicar uma força de compressão ao tecido T e ao compensador de espessura de tecido 32020 capturado na área de aprisionamento de grampo 30039 do grampo 30030.
[943] Em várias modalidades, ainda com referência à FIGURA 417, quando o elemento tubular 32080 é capturado em uma área de aprisionamento de grampo 30039, a porção capturada do elemento tubular 32080 pode ser deformado, conforme descrito aqui. Ademais, o elemento tubular 32080 pode ser deformado para diferentes configura-ções deformadas em diferentes áreas de aprisionamento de grampo 30039 dependendo, por exemplo, da espessura, da compressibilidade e/ou da densidade do tecido T capturado naquela mesma área de aprisionamento de grampo 30039. Em várias modalidades, o elemento tubular 32080 no compensador de espessura de tecido 32080 pode se estender longitudinalmente permeável da sucessivas áreas de aprisio-namento de grampos 30039. Em tal disposição, o elemento tubular 32080 pode ser deformado para diferentes configurações deformadas em cada área de aprisionamento de grampo 30039 ao longo de uma fileira de grampos disparados 30030. Agora com referência à FIGURA 418, os elementos tubulares 33080 em um compensador de espessura de tecido 33020 podem ser lateralmente dispostos nas áreas de apri-sionamento de grampo 30039 ao longo de uma fileira de grampos dis-parados 30030. Em várias modalidades, os elementos tubulares 33080 podem ser retidos por uma carcaça flexível 33210. Em tais disposições, os elementos tubulares 33080 e a carcaça flexível 33210 podem ser deformados para diferentes configurações deformadas em cada área de aprisionamento de grampo 30039. Por exemplo, onde o tecido T é mais delgada, os elementos tubulares 33080 podem ser menos compactados e onde o tecido T é mais espessa, os elementos tubula-res 33080 podem ser mais compactados para acomodar o tecido T mais espesso. Em outras modalidades, as dimensões deformadas dos elementos tubulares 33080 podem ser uniformes ao longo de todo o comprimento e/ou largura do compensador de espessura de tecido 33020.
[944] Com referência às FIGURAS 419 a 421, em várias modali dades, um elemento tubular 34080 em um compensador de espessura de tecido 34020 pode compreender uma pluralidade de cordões 34090. Com referência principalmente à FIGURA 419, em algumas modalidades, os cordões 34090 podem ser tecidos ou trançados em uma retícula tubular 34092 formando o elemento tubular 34080. A retícula tubular 34092 formada pelos cordões 34090 pode ser substanci-almente oca. Os cordões 34090 do elemento tubular 34080 podem ser cordões sólidos, cordões tubulares e/ou outro formato adequado. Por exemplo, com referência à FIGURA 420, um único cordão 34090 da retícula tubular 34092 pode ser um tubo. Em várias modalidades, com referência à FIGURA 422, um cordão 34090 pode compreender ao menos um lúmen 34094 estendendo-se através do mesmo. O número, a geometria e/ou as dimensões dos lúmens 34094 podem determinar o formato em seção transversal do fio 34090. Por exemplo, um fio 34090 pode compreender lúmen(s) circular(es), lúmen(s) semicircular(es), lúmen(s) com formato de cunha e/ou combinações dos mesmos. Em várias modalidades, um cordão 34090 também podem compreender mantas de suporte 34096 que podem formar um formato "T" ou "X" modificado, por exemplo. Pelo menos o diâmetro do fio 34090, do(s) lúmen(s) estendendo-se através do mesmo e da(s) manta(s) de suporte pode caracterizar o formato em seção transversal de um fio 34090. O formato em seção transversal de cada fio 34090, conforme discutido com mais detalhes neste documento, pode afetar a força de flexibilização ou de restauração gerada pelo fio 34090 e a força de fle-xibilização ou de restauração correspondente gerada pelo elemento tubular 34080.
[945] Com referência à FIGURA 423, uma retícula tubular 34092 de cordões 34090 pode ser deformável. Em várias modalidades, a retícula tubular 34092 pode produzir ou contribuir para a deformabilidade e/ou a resiliência do elemento tubular 34080. Por exemplo, os cordões 34090 da retícula tubular 34092 podem ser tecidos juntos de modo que os cordões 34090 sejam configurados para deslizar e/ou dobrarse em relação um ao outro. Quando uma força for aplicada à porção alongada 34082 do elemento tubular 34080, os cordões 34090 na mesma podem deslizar e/ou dobrar-se de modo que a retícula tubular 34092 se mova a uma configuração deformada. Por exemplo, ainda com referência à FIGURA 423, um grampo 30030 pode compactar a retícula tubular 34092 e o tecido T capturado em uma área de aprisio-namento de grampo 34039 que pode fazer com que os cordões 34090 da retícula tubular 34092 deslizem e/ou se dobrem em relação um ao outro. Um ápice de topo 34086 da retícula tubular 34092 pode se mover na direção de um ápice de base 34088 da retícula tubular 34092 quando a retícula tubular 34092 for compactada para a configuração deformada a fim de acomodar o tecido capturado T em uma área de aprisionamento de grampo 30039. Sob várias circunstâncias, a retícula tubular 34092 capturada em um grampo disparado 30030 irá buscar retomar sua configuração não deformada e pode aplicar uma força de restauração ao tecido capturado T. Adicionalmente, as porções da retícula tubular 34092 posicionada entre as áreas de aprisionamento de grampo 30039, isto é, não capturada por um grampo disparado 30030, também podem ser deformadas devido à deformação de porções ad-jacentes da retícula tubular 34092 que estão no interior das áreas de aprisionamento de grampo 30039. Onde a retícula tubular 34092 estiver deformada, a retícula tubular 34092 pode buscar se recuperar ou se recuperar parcialmente da configuração deformada. Em várias mo-dalidades, as porções da retícula tubular 34092 pode recuperar para suas configurações iniciais e outras porções da retícula tubular 34092 podem se recuperar apenas parcialmente e/ou permanecer completa-mente compactadas.
[946] De modo similar à descrição dos elementos tubulares neste documento, cada fio 34090 também pode ser deformável. Adicionalmente, a deformação de um fio 34090 pode gerar uma força de restau-ração que depende da resiliência de cada fio 34090. Em algumas mo-dalidades, com referência principalmente às FIGURAS 420 e 421, ca-dacordão 34090 de uma retícula tubular 34092 pode ser tubular. Em outras modalidades, cada cordão 34090 de uma retícula tubular 34092 pode ser sólido. Em ainda outras modalidades, a retícula tubular 30092 pode compreender ao menos um cordão tubular 34090, ao menos um cordão sólido 34090, ao menos um cordão em formato "X" ou "T" 34090 e/ou uma combinação dos mesmos.
[947] Em várias modalidades, os cordões 34090 no elemento tu bular 34080 podem compreender uma composição polimérica. A com-posição polimérica de um fio 34090 pode compreender polímeros não absorvíveis, polímeros absorvíveis ou combinações dos mesmos. Exemplos de polímeros sintéticos incluem, mas não se limitam a, poli(ácido glicólico) (PGA), poli(ácido láctico) (PLA), policaprolactona (PCL), polidioxanona (PDO) e copolímeros dos mesmos. Em algumas modalidades, os polímeros absorvíveis podem incluir polímeros elastoméricos bioabsorvíveis biocompatíveis, por exemplo. Ademais, a composição polimérica do fio 34090 pode compreender polímeros sin-téticos, polímeros não sintéticos e/ou combinações dos mesmos. Em várias modalidades, similar às composições poliméricas nas modali-dades aqui descritas, a composição polimérica do cordão 34090 pode incluir quantidades variadas de polímeros absorvíveis, polímeros não absorvíveis, polímeros sintéticos e/ou polímeros não sintéticos, por exemplo, por porcentagem de peso.
[948] Os cordões 34090 no elemento tubular 34080 podem com preender adicionalmente um agente terapêutico 34098 (FIGURA 420) como um agente farmaceuticamente ativo ou medicamento, por exem-plo. Em algumas modalidades, o cordão 34090 pode liberar uma quan-tidade terapeuticamente eficaz do agente terapêutico 34098. Em várias modalidades, o agente terapêutico 34098 pode ser liberado como cordão tubular 34090 é absorvido. Por exemplo, o agente terapêutico 30098 pode ser liberado no fluido, como sangue, por exemplo, que passa sobre ou através do fio 34090. Em ainda outras modalidades, o agente terapêutico 34098 pode ser liberado quando um grampo 30030 perfura o cordão 34090 e/ou quando o elemento de corte 30052 no suporte deslizante de disparo de grampo 30050 (FIGURA 413) corta uma porção da retícula tubular 34092, por exemplo. Exemplos de agentes terapêutico 34098 podem incluir, mas não se limitam a, agen-teshemostáticos e os fármacos como, por exemplo, fibrina, trombina e/ou celulose regenerada oxidada (ORC), medicamentos antiinflamatórios como, por exemplo, diclofenac, aspirina, naxopreno, sulindac e/ou hidrocortisona, fármacos ou agentes antibióticos e antimicrobianos como, por exemplo, triclosan, prata iônica, ampicilina, gentamicina, polimixina B e/ou cloranfenicol, agentes anticâncer como, por exemplo, cisplatina, mitomicina e/ou adriamicina; e/ou biológicos como, por exemplo, células-tronco.
[949] Com referência às FIGURAS 424 e 425, um elemento tubu lar 35080 pode compreender múltiplas camadas 35100 de cordões 35090. Em algumas modalidades, o elemento tubular 35080 pode compreender múltiplas camadas 35100 de retículas tubulares 35092. Com referência à FIGURA 424, o elemento tubular 35080 pode com-preender uma primeira camada 35100a e uma segunda camada 35100b de cordões 35090, por exemplo. Agora com referência à FI-GURA 425, um elemento tubular 35180 de um compensador de es-pessura de tecido 35120 pode compreender uma terceira camada 35100c de cordões 35090, por exemplo. Ademais, diferentes camadas 35100 no elemento tubular 35180 podem compreender diferentes ma-teriais. Em algumas modalidades, cada camada 35100a, 35100b, 35100c pode ser bioabsorvível, sendo que, em ao menos uma modalidade, cada camada 35100a, 35100b, 35100c pode compreender uma composição polimérica diferente. Por exemplo, a primeira camada 35100a pode compreender uma primeira composição polimérica; a se-gunda camada 35100b pode compreender uma segunda composição polimérica; e a terceira camada 35100c pode compreender uma tercei-racomposição polimérica. Em tais modalidades, as camadas 35100a, 35100b, 35100c do elemento tubular 35180 podem ser bioabsorvidas a diferentes taxas. Por exemplo, a primeira camada 35100a pode ab-sorver rapidamente, a segunda camada 35100b pode absorver mais lentamente do que a primeira camada 35100a e a terceira camada 35100c pode absorver mais lentamente do que a primeira camada 35100a e/ou a segunda camada 35100b. Em outras modalidades, a primeira camada 35100a pode absorver lentamente, a segunda cama-da 35100b pode absorver mais rapidamente que a primeira camada 35100a, e a terceira camada 35100c pode absorver mais rapidamente do que a primeira camada 35100a e/ou a segunda camada 35100b.
[950] De modo similar aos cordões 34090 aqui descritos, os cor dões 35090 no elemento tubular 35180 podem compreender um medi-camento 35098. Em várias modalidades, novamente com referência à FIGURA 424, para controlar a evasão ou liberação do medicamento(s) 35098, a primeira camada 35100a dos cordões 35090 que compreende um medicamento 35098a pode ser bioabsorvida a uma primeira taxa e a segunda camada 35100b de cordões 35090 que compreende um medicamento 30098b pode ser bioabsorvida em uma segunda taxa. Por exemplo, a primeira camada 35100a pode absorver rapidamente para permitir uma rápida liberação inicial do medicamento 35098a e a segunda camada 35100b pode absorver mais lentamente para permitir uma liberação controlada do medicamento 30098b. O medicamento 35098a nos cordões 35090 da primeira camada 30100a pode ser diferente do medicamento 35098b nos cordões 35090 da segunda camada 35100b. Por exemplo, os cordões 35090 na primeira camada 35100a podem compreender celulose regenerada oxidada (ORC) e os cordões 35090 na segunda camada 35100b podem com-preender uma solução que compreende ácido hialurônico. Em tais modalidades, a absorção inicial da primeira camada 35100a pode libe-rar celulose regenerada oxidada para ajudar a controlar o sangramento enquanto a absorção subsequente da segunda camada 35100b pode liberar uma solução que compreende ácido hialurônico para poder ajudar a impedir a adesão de tecido. Em outras modalidades, as ca-madas 35100a, 35100b podem compreender o mesmo medicamento 35098a, 35098b. Por exemplo, novamente com referência à FIGURA 425, os cordões 35090 nas camadas 35100a, 35100b e 35100c podem compreender um agente anticâncer, como, por exemplo, cisplatina. Ademais, a primeira camada 35100a pode absorver rapidamente para permitir uma rápida liberação inicial de cisplatina, a segunda camada 35100b pode absorver mais lentamente para permitir uma liberação controlada de cisplatina e a terceira camada 35100c pode absorver mais lentamente para permitir uma liberação controlada mais prolongada de cisplatina.
[951] Em várias modalidades, com referência às FIGURAS 426 e 427, um compensador de espessura de tecido 36020 pode compreen-der um material de sobremoldagem 36024. O material de sobremoldagem 36024 pode ser formado fora de um elemento tubular 36080, den-tro de um elemento tubular 36080 ou dentro e fora de elemento tubular 36080. Em algumas modalidades, com referência à FIGURA 426, o material de sobremoldagem 36024 pode ser coextrudado tanto dentro como fora do elemento tubular 36080 e, em ao menos uma modalida-de, o elemento tubular 36080 pode compreender uma retícula tubular 36092 de cordões 36090. de modo similar à composição polimérica aqui descrita, o material de sobremoldagem 36024 pode compreender poli(ácido glicólico) (PGA), poli(ácido láctico) (PLA) e/ou qualquer outro polímero elastomérico bioabsorvível e biocompatível, por exemplo. Adicionalmente, o material de sobremoldagem 36024 pode ser não poroso de modo que o material de sobremoldagem 36024 forme uma camada impermeável a fluidos no elemento tubular 36080. Em várias modalidades, o material de sobremoldagem 36024 pode definir um lúmen 36084 através do mesmo.
[952] Além do que foi discutido acima, o elemento tubular 36080 e/ou os cordões 36090 em uma retícula tubular 36092 podem compre-ender um agente terapêutico 36098. Em algumas modalidades, ainda com referência às FIGURAS 426 e 427, um material de sobremoldagem não poroso 36024 pode conter o medicamento 36098 dentro de um lúmen interno 36084a. Alternativa ou adicionalmente, o material de sobremoldagem não poroso 36024 pode conter o medicamento 36098 no interior de um lúmen intermediário 36084b como, por exemplo, o lúmen intermediário 36084b que contém a retícula tubular 36092 de cordões que compreendem medicamento 36090. de modo similar ao que foi descrito acima, o elemento tubular 36080 pode ser posicionado em relação às cavidades de grampo 30012 e a um elemento de corte 30052 no cartucho de grampos 30000 (FIGURA 413). Em várias de tais modalidades, o posicionamento dos grampos 30030 e/ou a tradução do elemento de corte 30052 podem ser configurados para perfurar ou romper o material de sobremoldagem não poroso 36024 de modo que o medicamento 36098 contido em ao menos um lúmen 36084 do elemento tubular 30080 possa ser liberado da lumen 30084. Em várias modalidades, com referência à FIGURA 428, um elemento tubular 37080 pode compreender um filme não poroso 37110. O filme não po-roso 37110 pode circundar pelo menos parcialmente uma retícula tu-bular 37092 ou uma primeira camada 37100a e uma segunda camada 37100b de retículas tubulares 30092 para fornecer uma cobertura impermeável a fluidos similar ao material de sobremoldagem 36024 aqui descrito.
[953] Conforme descrito no presente documento, um elemento tubular pode compreender pelo menos um dentre um material bioabsorvível, um agente terapêutico, uma pluralidade de cordões, uma retícula tubular, camadas de retículas tubulares, um material de sobremoldagem, um filme não poroso ou combinações dos mesmos. Por exemplo, com referência à FIGURA 429, um elemento tubular 38080 pode compreender um material de moldagem por sobreposição 38024 e uma pluralidade de cordões 38090 posicionados através de um lúmen central 38084 do elemento tubular 38080. Em algumas modalida-des, os cordões 38090 podem compreender um agente terapêutico 38098. Em outras modalidades, por exemplo, com referência à FIGU-RA 430, um elemento tubular 39080 pode compreender um material de sobremoldagem 39024 e um agente terapêutico 39098 posicionada em um lúmen central 39084 do elemento tubular 39080, por exemplo. Em várias modalidades, ao menos um dentre o elemento tubular 39080 e o material de sobremoldagem 39024 pode compreender um agente terapêutico fluido 39098.
[954] Em várias modalidades, novamente com referência princi palmenteà FIGURA 413, o elemento tubular 30080 pode ser posicio-nado em relação à porção de suporte rígido 30010 do cartucho de grampos 30000. O elemento tubular 30080 pode ser longitudinalmente posicionado adjacente à porção de suporte rígido 30010. Em algumas modalidades, o elemento tubular 30080 pode ser substancialmente paralelo ou alinhado a uma fenda ou cavidade longitudinal 30015 na porção de suporte rígido 30010. O elemento tubular 30080 pode ser alinhado à fenda longitudinal 30015 de modo que uma porção do ele-mento tubular 30080 se sobreponha a uma porção da fenda longitudinal 30015. Em tais modalidades, um elemento de corte 30052 no suporte deslizante de disparo de grampo 30050 pode separar uma porção do elemento tubular 30080 conforme a gume cortante 30052 translada ao longo da fenda longitudinal 30015. Em outras modalidades, o elemento tubular 30080 pode ser longitudinalmente posicionado em uma primeira ou segundo lado da fenda longitudinal 30015. Em ainda outras modalidades, o elemento tubular 30080 pode ser posicionado em relação à porção de suporte rígido 30010 do cartucho de grampos 30000 de modo que o elemento tubular 30080 atravessa lateral ou diagonalmente ao menos uma porção da porção de suporte rígido 30010.
[955] Em várias modalidades, com referência à FIGURA 431 por exemplo, um compensador de espessura de tecido 40020 pode com-preendermúltiplos elementos tubulares 40080. Em algumas modalida-des, os elementos tubulares 40080 pode compreender diferentes comprimentos, formatos em seção transversal e/ou materiais, por exemplo. Adicionalmente, os elementos tubulares 40080 podem ser posicionados em relação à porção de suporte rígido 40010 do cartucho de grampos 30000 de modo que os eixos tubulares dos elementos tu-bulares 40080 sejam paralelos um ao outro. Em algumas modalidades, os eixos tubulares dos elementos tubulares 40080 podem ser longitu-dinalmente alinhados de modo que um primeira elemento tubular 40080 é posicionada dentro de um outro elemento tubular 40080. Em outras modalidades, os elementos tubulares paralelos 40080 podem atravessar longitudinalmente o cartucho de grampos 30000, por exemplo. Em ainda outras modalidades, os elementos tubulares para-lelos 40080 podem atravessar lateral ou diagonalmente o cartucho de grampos 30000. Em várias outras modalidades, os elementos tubula-resnão paralelos 40080 podem ser angularmente orientados em rela-ção um ao outro de modo que seus eixos tubulares se cruzem e/ou não são paralelas uma à outra.
[956] Com referência às FIGURAS 431 a 434, um compensador de espessura de tecido 40020 pode ter dois elementos tubulares 40080; um primeiro elemento tubular 40080a pode ser longitudinal-mente posicionado sobre um primeiro lado da fenda longitudinal 30015 na porção de suporte rígido 30010 e um segundo elemento tubular 40080b pode ser longitudinalmente posicionado sobre um segundo lado da fenda longitudinal 30015. Cada elemento tubular 40080 pode compreender uma retícula tubular 40092 de cordões 40090. Em várias modalidades, o cartucho de grampos 30000 pode compreender um total de seis fileiras de cavidades de grampo 30012, em que três fileiras das cavidades de grampo 30012 são posicionadas em cada lado à fenda longitudinal 30015, por exemplo. Em tais modalidades, o gume cortante 30052 no suporte deslizante em translação de disparo de grampo 30050 pode não ser necessário para separar uma porção do elemento tubular 40080.
[957] De modo similar, agora com referência às FIGURAS 435 e 436, um compensador de espessura de tecido 41020 pode compreen-der dois elementos tubulares 41080a, 41080b longitudinalmente dis-postos no cartucho de grampos 30000. de modo similar ao que foi dis-posto acima, os grampos 30030 de três fileiras de cavidades de gram-po 30012 podem engatar-se em um elemento tubular 41080a e os grampos 30030 de três fileiras diferentes de cavidades de grampo 30012 podem engatar-se em outro elemento tubular 41080b. Em várias modalidades, ainda com referência às FIGURAS 435 a 436, os grampos instalados 30030 podem engatar-se ao elemento tubular 40080 em locais diferentes por toda sua seção transversal do elemento tubular 40080. Conforme discutido no presente documento, a resiliência de flexibilização e a força de restauração correspondente exerci-da pelo elemento tubular 41080 podem depender do formato em seção transversal do elemento tubular 41080, dentre outras coisas. Em algumas modalidades, um grampo 30030 posicionado em uma área de aprisionamento de grampo 30039 localizada em ou perto de uma por-ção arqueada do elemento tubular 41080 por experimentar uma força de restauração maior do que um grampo 30030 em uma área de apri-sionamento de grampo 30039 posicionada perto de uma porção não arqueada. de modo similar, um grampo 30030 posicionado na área de aprisionamento de grampo 30039 na porção não arqueada do elemento tubular 41080 pode experimentar um força de restauração menor do que a força de restauração experimentada por um grampo 30030 posi-cionado sobre ou mais próximo à porção arqueada do elemento tubular 30080. Em outras palavras, as porções arqueadas de um tubo deformável 41080 podem ter um maior coeficiente da mola do que a por-ção não arqueada do elemento tubular 41080 devido à possibilidade de que uma maior quantidade de material elástico pode ser capturada pelos grampos 30030 ao longo de tais porções. Em várias modalida-des, como resultado, com referência principalmente à FIGURA 436, a força de restauração gerada pelo compensador de espessura de tecido 41020 pode ser maior próximo aos grampos 30030a e 30030c e menor próximo ao grampo 30030b no elemento tubular 30080a. de modo correspondente, a força de restauração gerada pelo compensador de espessura de tecido 41020 pode ser maior próximo aos grampos 30030d e 30030f do que próximo ao grampo 30030e no elemento tubular 30080b.
[958] Novamente com referência às FIGURAS 431 a 434, em vá rias modalidades, as geometrias em seção transversal dos cordões 40090 que compreendem a retícula tubular 40092 podem ser selecio-nadas para fornecer uma resiliência de flexibilização e desejada e uma força de restauração correspondente exercida pela retícula tubular 40092. Por exemplo, novamente com referência à FIGURA 432, os cordões 40090a posicionados nas porções arqueadas do elemento tubular 40080 podem compreender seções transversais com formato em X, enquanto os cordões 40090b posicionados em porções não ar-queadas do elemento tubular 40080 podem compreender seções transversais tubulares. Em algumas modalidades, os cordões 40090a e 40090b que compreendem diferentes geometrias em seção transversal podem ser tecido juntos para formar a retícula tubular 40092. Em outras modalidades, os cordões 40090a e 40090b podem ser fixados um ao outro com um adesivo, por exemplo. Com referência às FIGURAS 433 e 434, as diferentes geometrias em seção transversal de cordões 40090 no elemento tubular 40080 podem otimizar a força de restauração experimentada em áreas de aprisionamento de grampo 30039 por todo o cartucho de grampos 30000. Em algumas modalida-des, as geometrias em seção transversal específicas podem ser sele-cionadas de modo que a constante de flexibilização na área de aprisi-onamento de grampos 30039 por todo o cartucho de grampos é subs-tancialmente equilibrado ou igual.
[959] Em algumas modalidades, com referência à FIGURA 437, os elementos tubulares 41080a, 41080b de um compensador de es-pessura de tecido 41120 podem ser unidos por uma porção de união 41126. Embora o elemento de corte em translação 30052 possa ser configurado para passar entre os elementos tubulares 41080a e 41080b, pode ser necessário que o elemento de corte 30052 separe pelo menos uma porção da porção de união 41126. Em algumas mo-dalidades, a porção de união 41126 pode compreender um material macio, como, por exemplo, uma espuma ou gel, que é facilmente se-parado pelo elemento de corte em translação 30052. Em várias moda-lidades, a porção de união 41026 pode de modo liberável prender o compensador de espessura de tecido 41120 ao atuador de extremida-decirúrgico 12. Em ao menos uma modalidade, a porção de união 41126 pode ser fixa à superfície de plataforma superior 30011 da porção de suporte rígido 30010 de modo que a porção de união 41126 permanece retida no atuador de extremidade cirúrgico 12 após os elementos tubulares 41080a, 41080b serem liberados dele.
[960] Em várias modalidades, com referência às FIGURAS 438 a 439, um compensador de espessura de tecido 42020 pode compreen-dermúltiplos elementos tubulares 42080 de modo que o número de elementos tubulares 42080 é o mesmo do número de fileiras de cavi-dades de grampo 30012 no cartucho de grampos 30000, por exemplo. Em ao menos uma modalidade, o cartucho de grampos 30000 pode compreender seis fileiras de cavidades de grampo 30012 e o compen-sador de espessura de tecido 42020 pode compreender seis elementos tubulares 42080. Cada elemento tubular 42080 pode ser substan-cialmente alinhado a uma fileira de cavidades de grampo 30012. Quando os grampos 30030 são ejetados de uma fileira de cavidades de grampo 30012, cada grampo 30030 daquela fileira pode perfurar o mesmo elemento tubular 42080 (FIGURA 439). Em várias modalida-des, a deformação de um tubo 42080 pode ter pouco ou nenhum im-pacto sobre a deformação de um tubo adjacente 42080. Consequen-temente, os elementos tubulares 42080 podem exercer uma força de flexibilização substancialmente descontínua e personalizada em áreas de aprisionamento de grampo 30039 ao longo de toda a largura do cartucho de grampos 30030. Em algumas modalidades, onde os grampos 30030 disparados de múltiplas fileiras de cavidades de gram-po 30012 engatam no mesmo elemento tubular 35080 (FIGURA 436), a deformação do elemento tubular 35080 pode ser MENOS personali-zada. Por exemplo, a deformação de um tubo deformável 35080 em uma área de aprisionamento de grampo 30039 em uma primeira fileira pode impactar a deformação daquele elemento tubular 35080 na área de aprisionamento de grampo 30039 em outra fileira. Em ao menos uma modalidade, o gume cortante em translação 30052 pode evitar a separação dos elementos tubulares 42080. Em outras modalidades, com referência à FIGURA 440, um compensador de espessura de te-cido 43020 pode compreender mais de seis elementos tubulares 43080, como, por exemplo, sete elementos tubulares 44080. Adicio-nalmente, os elementos tubulares 43080 podem ser simétrica ou não simetricamente dispostos no atuador de extremidade 12. Quando um número ímpar de elementos tubulares 43080 é disposto longitudinal e simetricamente no atuador de extremidade 12, o elemento de corte em translação 30052 pode ser configurado para separar o elemento tubular intermediário que sobrepõe a canaleta longitudinal 30015.
[961] Em várias modalidades, com referência à FIGURA 441, um compensador de espessura de tecido 44020 pode compreender um elemento tubular central 44080b que é ao menos parcialmente alinhado com a fenda longitudinal 30015 na porção de suporte rígido 33010 do cartucho de grampos 30000. O compensador de espessura de tecido 44020 pode compreender adicionalmente pelo menos um elemento tubular periférico 44080a, 44080c situado em um lado da fenda longi-tudinal 30015. Por exemplo, o compensador de espessura de tecido 44020 pode compreender três elementos tubulares 44080:. um primeiro elemento tubular periférico 44080a pode ser longitudinalmente posi-cionado em um primeiro lado da fenda longitudinal 30015 do cartucho de grampos 30000, um elemento tubular central 44080b pode ser substancialmente posicionado sobre e/ou alinhado à fenda longitudinal 30015 e um segundo elemento tubular periférico 44080c pode ser lon-gitudinalmente posicionado em um segundo lado da fenda longitudinal 30015. Em algumas modalidades, o elemento tubular central 44080b pode compreender um diâmetro horizontal que é substancialmente alongado em relação ao diâmetro vertical. Em várias modalidades, o elemento tubular central 44080b, e/ou qualquer outro elemento tubular, pode sobrepor múltiplas fileiras de cavidades de grampo 30012. Ainda com referência à FIGURA 441, o elemento tubular central 44080b pode sobrepor quatro fileiras de cavidades de grampo 30012 e cada elemento tubular periférico 44080a e 44080c pode sobrepor uma única fileira de cavidades de grampo 30012, por exemplo. Em outras moda-lidades, o elemento tubular central 44080b pode sobrepor menos de quatro fileiras de cavidades de grampo 30012, como, por exemplo, du-as fileiras de cavidades de grampo 30012, por exemplo. Adicionalmen-te, os elementos tubulares periféricos 44080a, 44080c podem sobrepor mais de uma fileira de cavidades de grampo 30012 como, por exemplo, duas fileiras de cavidades de grampo 30012. Agora com referência à FIGURA 442, um elemento tubular central 44180b de um compensador de espessura de tecido 44120 pode compreender um agente terapêutico 44198 em um lúmen 44184 do elemento tubular central 44180b. Em várias modalidades, o elemento tubular central 44180b e/ou ao menos um elemento tubular periférico 44080a, 44080c pode compreender o agente terapêutico 44198 e/ou qualquer outro agente terapêutico adequado.
[962] Em várias modalidades, com referência à FIGURA 443, o compensador de espessura de tecido 44220 pode compreender uma carcaça 44224, que pode ser similar ao material de sobremoldagem 32024 aqui descrito. Em várias modalidades, a carcaça 44224 retém múltiplos elementos tubulares 44080 em posição no atuador de extre-midade 12. A carcaça 44224 pode ser coextrudada com os elementos tubulares 44080. Em algumas modalidades, os elementos tubulares 44080 pode compreender uma retícula tubular 44092 de cordões 44090. Similar às composições poliméricas descritas nas modalidades da presente invenção, a carcaça 44224 pode compreender poli(ácido glicólico) (PGA), poli(ácido láctico) (PLA) e/ou quaisquer outros polí-meroselastoméricos bioabsorvível biocompatível adequados, por exemplo. Adicionalmente, a carcaça 44224 pode ser não porosa de modo que a carcaça 44224 forme uma camada impermeável a fluidos no compensador de espessura de tecido 44220, por exemplo. Além da discussão deste documento, o elemento tubular 44080 e/ou os cordões 44090 na retícula tubular 44092 podem compreender um agente terapêutico 44098. Em algumas modalidades, a carcaça não porosa 44224 pode conter o agente terapêutico 44098 dentro do compensador de espessura de tecido. Conforme descrito no presente documento, o elemento tubular 44080 pode ser posicionado em relação às cavidades de grampo 30012 e a um elemento de corte 30052 no cartucho de grampos 30000. Em várias de tais modalidades, o posicionamento dos grampos 30030 e/ou translação do elemento de corte 30052 podem ser configurados para perfurar ou romper a carcaça não porosa 44224 de modo que o agente terapêutico 44198 ali contido possa ser liberado do compensador de espessura de tecido 44020.
[963] Com referência à FIGURA 444, um compensador de es pessura de tecido 44320 pode compreender um elemento tubular cen-tral 44380b que compreende uma retícula tubular 44392. A retícula tubular 44392 pode ter uma porção não tecida ou um vão 44381 que é substancialmente alinhado à fenda longitudinal 30015 da porção de suporte rígido 30010. Em tais modalidades, uma porção tecida da retícula tubular 44092 do elemento tubular 44380b não se sobrepõe à fenda longitudinal 30015. Consequentemente, o elemento de corte 30052 no suporte deslizante de disparo de grampo em translação 30052 pode trasladar ao longo da fenda longitudinal 30015 sem separar uma porção tecida sobreposta da retícula tubular 44392. Embora os grampos 30030c e 30030d posicionados adjacentes ao vão 44381 no elemento tubular 44380b possam receber menos suporte da estrutura de retícula tubular 44392, em algumas modalidades, recursos adi-cionais podem fornecer sustenta para aqueles grampos 30030 e/ou força de restauração adicional na área de aprisionamento de grampos 30039 dos mesmos. Por exemplo, conforme descrito com maiores detalhesneste documento, os elementos tubulares adicionais, o material de suporte por manta, molas e/ou escoramento pode ser posicionado pelo menos dentro ou pelo menos fora do elemento tubular 44380b próximo ao vão 44381, por exemplo.
[964] Agora, com referência às FIGURAS 445 a 448, em várias modalidades, um compensador de espessura de tecido 45020 pode compreender múltiplos elementos tubulares 45080 que atravessam lateralmente o cartucho de grampos 30000. Os elementos tubulares 45080 podem ser posicionados perpendiculares às fileiras de cavida-des de grampo 30012 e/ou ao eixo longitudinal da porção de suporte rígido 30010 do cartucho de grampos 30000. Em algumas modalida-des, com referência à FIGURA 445, os elementos tubulares 45080 po-dem atravessar a fenda longitudinal 30015 no cartucho de grampos 30000 de modo que o elemento de corte 30052 no suporte deslizante de disparo de grampo 30050 seja configurado para separar os elemen-tos tubulares 45080 à medida que o suporte deslizante de disparo de grampo 30050 translada ao longo da fenda longitudinal 30015. Em ou-tras modalidades, agora com referência à FIGURA 446, o compensador de espessura de tecido 46020 pode compreender dois conjuntos de elementos tubulares de travessia lateral 46080. O primeiro conjunto de elementos tubulares de travessia lateral 46080a pode ser posicionado em um primeiro lado da fenda longitudinal 30015 e o segundo conjunto de elementos tubulares de travessia lateral 46080b pode ser posicionado em um segundo lado da fenda longitudinal 30015. Em tal disposição, o elemento de corte 30052 pode ser configurado para pas-sar entre os dois conjuntos de elementos tubulares 46080 sem separar uma porção dos elementos tubulares 46080. Em outras modalidades, o elemento de corte 30052 pode separar ao menos um elemento tubular 46080 que atravessa a fenda longitudinal 30015 enquanto ao menos um outro elemento tubular 46080 não atravessa a fenda longitudi-nal 30015 e não é separado pelo elemento de corte 30052.
[965] Conforme os elementos tubulares 45080 atravessam late ralmente o cartucho de grampos 30000, com referência às FIGURAS 447 e 448, um grampo 30030 pode engatar-se a pelo menos um ele-mento tubular 45080 em cada área de aprisionamento de grampo 30039. Em tal disposição, cada elemento tubular 45080 pode fornecer uma força de restauração descontínua ao longo do comprimento do cartucho de grampos 30000. Por exemplo, com referência principal-menteà FIGURA 448, os elementos tubulares 45080 posicionados próximos à extremidade proximal do compensador de espessura de tecido 45020, onde o tecido é mais espesso, podem ser comprimidos em grandes medidas em comparação aos elementos tubulares 45080 posicionados próximos à extremidade distal do compensador de es-pessura de tecido 45020 onde o tecido é mais delgado. Como resulta-do, os elementos tubulares 45080 posicionados mais próximos à ex-tremidade proximal do compensador de espessura de tecido 45020 podem fornecer uma força de restauração maior do que a força de res-tauração que poderia ser gerada pelos elementos tubulares 46080 po-sicionados mais próximos à extremidade distal do compensador de espessura de tecido 45020. Adicionalmente, ainda com referência à FIGURA 448, a deformação de um tubo 45080 pode ter pouco ou ne-nhum impacto sobre a deformação de um tubo adjacente 45080. Con-sequentemente, os elementos tubulares 45080 podem exercer uma força de flexibilização substancialmente descontínua e personalizada nas áreas de aprisionamento de grampo 30039 ao longo do compri-mento do cartucho de grampos 30030. Em algumas modalidades, on-demúltiplos grampos 30030 disparados de uma única fileira de cavi-dades de grampo 30012 engatam no mesmo elemento tubular 35080, a deformação do elemento tubular 35080 pode ser menos personalizada. Por exemplo, a deformação de um tubo deformável 35080 em uma área de aprisionamento de grampo 30039 pode impactar a de-formação daquele elemento tubular 35080 em outra área de aprisio-namento de grampo 30039.
[966] Em ainda outras modalidades, com referência às FIGURAS 449 a 454, os elementos tubulares 47080 do compensador de espes-sura de tecido 47020 podem atravessar diagonalmente o cartucho de grampos 30000. Os elementos tubulares 47080 podem atravessar a fenda longitudinal 30015 do cartucho de grampos 30000 de modo que o elemento de corte 30052 no suporte deslizante de disparo de grampo 30050 seja configurado para separar os elementos tubulares de travessia diagonal 47080 conforme o suporte deslizante de disparo de grampo 30052 translada ao longo da fenda longitudinal 30015. Em ou-tras modalidades, o compensador de espessura de tecido 47020 pode compreender dois conjuntos de elementos tubulares que atravessam diagonalmente 47080. Um primeiro conjunto de elementos tubulares de travessia diagonal 47080 pode ser posicionado em um primeiro lado da fenda longitudinal 30015 e um segundo conjunto de elementos tubulares de travessia diagonal 47080 pode ser posicionado em um segundo lado da fenda longitudinal 30015. Em tal disposição, o ele-mento de corte 30052 pode passar entre os dois conjuntos de elemen-tos tubulares 47080 e pode não separar nenhum elemento tubular 47080.
[967] Ainda com referência às FIGURAS 449 a 452, os elemen tos tubulares de travessia diagonal 47080 podem ser posicionados no cartucho de grampos 30000 de modo que um vão seja definido entre os elementos tubulares 47080. Um vão entre elementos tubulares ad-jacentes 47080 pode fornecer espaço para uma expansão horizontal dos elementos tubulares 47080 quando uma força de compressão for aplicada aos mesmos como, por exemplo, pelo tecido T capturado na área de aprisionamento de grampo 30039 do grampo formado 30030. Os elementos tubulares 47080 podem ser conectados ao longo de um vão por um filme ou folha de material 47024. A folha de material pode ser posicionada em pelo menos uma dentre a superfície de plataforma 30011 da porção de suporte rígido 30010 e/ou o lado de contato com o tecido dos elementos tubulares 47080.
[968] Em várias modalidades, com referência às FIGURAS 453 e 454, ao menos um elemento tubular atravessando diagonalmente 47080 pode ser posicionado em relação às cavidades de grampo 30012 no cartucho de grampos 30000 de modo que o elemento tubular 47080 é posicionado entre as pernas 30032 dos grampos 30030 insta-lados a partir de múltiplas fileiras de cavidades de grampo 30012. Con-forme os grampos 30030 são movidos da posição inicial para a posição disparada, conforme descrito com maiores detalhesneste documento, as pernas de grampo 30032 podem permanecer posicionadas ao redor dos elemento tubular 47080. Adicionalmente, os grampos podem ser deformados de modo que as pernas de grampo 30032 se enrolem ao redor do perímetro do elemento tubular 47080, por exemplo. Em tal disposição, os grampos 30030 podem ser configurados para mover-se para a posição disparada ou formada sem perfurar o elemento tubular 47080. O movimento das pernas de grampo 30032 ao redor do elemento tubular 47080 poderia, em algumas modalidades, impedir a liberação inadvertida de um agente terapêutico 47098 ali retido. A orientação angular selecionada de cada elemento tubular 47080 em relação à fenda longitudinal 30015 do cartucho de grampos 30000 pode depender da posição das cavidades de grampo 30012 no cartucho de grampos 30000. Por exemplo, em algumas modalidades, os elementos tubulares 47080 podem ser posicionados em um ângulo de aproximadamente quarenta e cinco (45) graus em relação à fenda longitudinal 30015 do cartucho de grampos 30000. Em outras modalidades, os elementos tubulares 47080 podem ser posicionados a um ângulo entre quinze (15) e setenta e cinco (75) graus em relação à fenda longitudinal 30015 do cartucho de grampos 30000, por exemplo.
[969] De modo similar às descrições ao longo da presente reve lação, múltiplos elementos tubulares em um compensador de espessu-ra de tecido podem ser conectados por um agente de ligação, invólu-cro, tecido, sobremoldagem, material de compensação, e/ou qualquer outro adesivo ou estrutura de conexão adequada, por exemplo. Em várias modalidades, com referência às FIGURAS 455 a 457, uma car-caça flexível 48024 pode circundar ou encapsular os elementos tubula-res 48080 em um compensador de espessura de tecido 48020. Em várias modalidades, a carcaça flexível 48024 pode imobilizar os ele-mentos tubulares 48080 no atuador de extremidade 12 e pode manter cada elemento tubular 48080 em posição, como, por exemplo, em ali-nhamento longitudinal com uma fileira de cavidades de grampo 30012. Em ao menos uma modalidade, o compensador de espessura de tecido 48020 pode compreender seis elementos tubulares 48080, por exemplo. Em várias modalidades, a carcaça flexível 48024 pode ser suficientemente deformável e resiliente para imobilizar os elementos tubulares 48020 nela envolvidos ao mesmo tempo que permite a de-formação e a recuperação dos elementos tubulares 48080. Adicional-mente, em algumas modalidades, a carcaça flexível 48024 pode cir-cundar com tensão os elementos tubulares 48080 e pode permanecer engatada com tensão aos elementos tubulares 48080 conforme os mesmos se deformam e/ou recuperam.
[970] Com referência à FIGURA 456, antes do posicionamento de grampos 30030, a bigorna 30060 pode ser pivotada ou girada para baixo para compactar o compensador de espessura de tecido 48020 e o tecido T entre a bigorna 30060 e o cartucho de grampos 30000. A compactação do compensador de espessura de tecido 48020 pode incluir uma compactação correspondente da carcaça flexível 48024 e dos elementos tubulares 48020 na mesma. Conforme os elementos tubulares 48020 se deformam, a carcaça flexível 48024 pode se de-formar de modo similar. Em várias modalidades, os elementos tubula-res 48020 podem ser uniformemente compactados através da largura do cartucho de grampos 30000 e a carcaça flexível 48024 pode expe-rimentar uma compactação similarmente uniforme através dos elemen-tos tubulares 48080. Com referência à FIGURA 457, quando a bigorna 30060 é aberta após os grampos 30030 terem sido instalados do car-tucho de grampos 30000, os elementos tubulares 48080 podem se re-cuperar ou se recuperar parcialmente das configurações comprimidas (FIGURA 456). Em várias modalidades, um elemento tubular 48080 pode se recuperar de modo que o elemento tubular 48080 volte para sua configuração não deformada inicial. Em algumas modalidades, um elemento tubular 48080 pode parcialmente se recuperar de modo que o elemento tubular 48080 parcialmente se recupera para sua configu-ração não deformada inicial. Por exemplo, a deformação do elemento tubular 48080 pode ser parcialmente elástica e parcialmente plástica. Conforme os elementos tubulares 48080 se recuperam, a carcaça fle-xível 48024 pode permanecer engatada com tensão a cada elemento tubular 48080. Os elementos tubulares 48080 e a carcaça flexível 48024 podem se recuperar em tal medida que os elementos tubulares 48080 e o tecido T preencham as áreas de aprisionamento de grampo 30039 enquanto os elementos tubulares 48080 exercem uma força de restauração adequada no tecido T nos mesmos. Com referência à FI-GURA 458, em outras modalidades, um compensador de espessura de tecido 48120 que compreende seis elementos tubulares 48180 retidos em uma carcaça flexível 48124 podem ser posicionados na bigorna 30060 do atuador de extremidade 12, por exemplo.
[971] Com referência às FIGURAS 459 a 462, um compensador de espessura de tecido 49020 pode compreender um elemento tubular 49080 longitudinalmente posicionado ao longo do eixo longitudinal da bigorna 30060. Em várias modalidades, o compensador de espessura de tecido 49020 pode ser preso à bigorna 30060 do atuador de extre-midade 12 por um material de compensação compressível 49024. Adi-cionalmente, o material de compensação compressível 49024 pode circundar ou encapsular o elemento tubular 49080. de modo similar às descrições na presente invenção, o elemento tubular 49080 pode compreender pelo menos um agente terapêutico 49098 que pode ser liberado pela absorção de vários componentes do compensador de espessura de tecido 49020, da perfuração do elemento tubular 49080 por grampos 30030 disparados do cartucho de grampos 30000 e/ou pelo elemento de corte 30052.
[972] Com referência à FIGURA 460, um cartucho de grampos 30000 pode compreender grampos 30030 posicionado em cavidades de grampo 30012, em que, antes do posicionamento dos grampos 30030, a bigorna 30060 e o compensador de espessura de tecido 49020 fixado à mesma podem pivotar na direção do cartucho de grampos 30000 e compactar o tecido T capturado entre os mesmos. Em algumas modalidades, o elemento tubular 49080 do compensador de espessura de tecido 49020 pode ser uniformemente deformado ao longo do comprimento do cartucho de grampos 30000 pela rotação da bigorna 30060 (FIGURA 460). Com referência às FIGURAS 461 e 462, o suporte deslizante de disparo de grampo 30050 pode trasladar ao longo da fenda longitudinal 30015 no cartucho de grampos 30000 e engatar-se a cada acionador 30040 posicionado abaixo de um grampo 30030 em uma cavidade de grampo 30010, em que cada acionador engatado 30040 pode disparar ou ejetar o grampo 30030 da cavidade de grampo 30012. Quando a bigorna 30060 liberar a pressão no tecido T e no compensador de espessura de tecido 49020, o compensador de espessura de tecido 49020, incluindo o elemento tubular 49080 e o material de compensação compressível 49024, pode se recuperar ou se recuperar parcialmente das configurações comprimidas (FIGURA 460) para uma configuração original recuperada (FIGURAS 461 e 462). O elemento tubular 49080 e o material de compensação compressível 49024 podem se recuperar a tal medida que o compensador de espessura de tecido 49020 e o tecido T preencham as áreas de aprisionamento de grampo 30039 enquanto o compensador de espes-sura de tecido 49020 exerce uma força de restauração no tecido cap-turado T.
[973] Em várias modalidades, com referência às FIGURAS 463 465, dois compensadores de espessura de tecido 50020a, 50020b po-dem ser posicionados no atuador de extremidade 12 de um instrumen-tocirúrgico. Por exemplo, um primeiro compensador de espessura de tecido 50020a pode ser fixado ao cartucho de grampos 30000 na garra inferior 30070 e um segundo compensador de espessura de tecido 50020b pode ser fixado à bigorna 30060. Em ao menos uma modali-dade, o primeiro compensador de espessura de tecido 50020a pode compreender uma pluralidade de elementos tubulares 50080 longitudi-nalmente dispostos e retidos em um primeiro material de compensação 50024a. Pelo menos um elemento tubular 50080 pode compreender um agente terapêutico 50098, similar aos agentes terapêuticos aqui descritos. O primeiro material de compensação 50024a pode ser deformável ou substancialmente rígido. Adicionalmente, em algumas modalidades, o primeiro material de compensação 50024a pode manter os elementos tubulares 50080 em posição em relação à canaleta de grampo 30000. Por exemplo, o primeiro material de compensação 50024a pode reter cada elemento tubular 50080 em alinhamento longi-tudinal a uma fileira de cavidades de grampo 30012. Em ao menos uma modalidade, o segundo compensador de espessura de tecido 50020b pode compreender o primeiro material de compensação 50024a, um segundo material de compensação 50024b e/ou um ter-ceiro material de compensação 50024c. O segundo e o terceiro mate-riais de compensação 50024b, 50024c podem ser deformáveis ou substancialmente rígidos.
[974] Similar a ao menos uma modalidade aqui descrita, a bigor na 30060 pode girar e aplicar uma força de compressão ao compen-sadores de espessura de tecido 50020a, 50020b e o tecido T entre a bigorna 30060 e o cartucho de grampos 30000. Em algumas modali-dades, nem o primeiro compensadores de espessura de tecido 50020a nem o segundo compensador de espessura de tecido 50020b podem ser compressíveis Em outras modalidades, ao menos um componente do primeiro compensador de espessura de tecido 50020a e/ou o se-gundo compensador de espessura de tecido 50020b podem ser compressíveis. Quando os grampos 30030 forem disparados do cartucho de grampos 30000, agora com referência às FIGURAS 464 e 465, cada grampo 30030 pode perfurar um elemento tubular 50080 retido no primeiro compensador de espessura de tecido 50020a. Conforme mostrado na FIGURA 464, o agente terapêutico 50098 retido no ele-mento tubular 50080 pode ser liberado quando um grampo 30030 per-furar o elemento tubular 50080. Quando liberado, o agente terapêutico 50098 pode revestir as pernas de grampo 30032 e o tecido T que cir-cunda o grampo disparado 30030. Em várias modalidades, os grampos 30030 também podem perfurar o segundo compensador de espessura de tecido 50020b quando os grampos 30030 são disparados do cartucho de grampos 30000.
[975] Com referência às FIGURAS 466 a 469, um compensador de espessura de tecido 51020 pode compreender pelo menos um elemento tubular 51080 que atravessa lateralmente o compensador de espessura de tecido 51020. Por exemplo, com referência à FIGURA 466, o compensador de espessura de tecido 51020 pode ser posicio-nado em relação ao cartucho de grampos 30000 de modo que a pri-meira extremidade 51083 do elemento tubular de travessia lateral 51080 possa ser posicionada próximo a um primeiro lado longitudinal do cartucho de grampos 30000 e uma segunda extremidade 51085 do elemento tubular de travessia lateral 51080 possa ser posicionada próximo a um segundo lado longitudinal do cartucho de grampos 30000. Em várias modalidades, o elemento tubular 51080 pode com-preender um formato tipo cápsula, por exemplo. Como ilustrado na FIGURA 467, o elemento tubular 51080 pode ser perfurado entre a primeira extremidade 51083 e a segunda extremidade 51085 e, em algumas modalidades, o elemento tubular 51080 pode ser perfurado no ou próximo ao centro 51087 do elemento tubular 51080. O elemento tubular 51080 pode compreender uma composição polimérica, como um polímero elastomérico bioabsorvível biocompatível, por exemplo. Adicionalmente, novamente com referência à FIGURA 466, o compen-sador de espessura de tecido 51020 pode compreender uma plurali-dade de elementos tubulares de travessia lateral 51080. Em ao menos uma modalidade, treze elementos tubulares 51080 podem ser lateral-mente dispostos no compensador de espessura de tecido 51020, por exemplo.
[976] Novamente com referência à FIGURA 466, o compensador de espessura de tecido 51020 pode compreender adicionalmente um material de compensação 51024 que circunda pelo menos parcialmen-te os elementos tubulares 51080. Em várias modalidades, o material de compensação 51024 pode compreender um polímero bioabsorvível, como, por exemplo, polissacarídeo liofilizado, glicoproteína, elastina, proteoglicano, gelatina, colágeno e/ou celulose regenerada oxidada (ORC). O material de compensação 51024 pode reter os elementos tubulares 51080 na posição no compensador de espessura de tecido 51020. Adicionalmente, o material de compensação 51024 pode ser preso à superfície de plataforma de topo 30011 da porção de suporte rígido 30010 do cartucho de grampos 30000 de modo que o material de compensação 51020 seja posicionado de modo seguro no atuador de extremidade 12. Em algumas modalidades, o material de compensação 51024 pode compreender ao menos um medicamento 51098.
[977] Ainda com referência à FIGURA 466, os elementos tubula res lateralmente posicionados 51080 podem ser posicionados em rela-ção ao elemento de corte em translação 30052 de modo que o ele-mento de corte 30052 seja configurado para separar os elementos tu-bulares 51080. Em várias modalidades, o elemento de corte 30052 pode separar os elementos tubulares 51080 na ou próximo à perfura-ção nele. Quando os elementos tubulares 51080 forem separados em duas metades, as porções separadas dos elementos tubulares 51080 podem ser configuradas para dilatar-se ou expandir-se, conforme ilus-trado na FIGURA 468. Por exemplo, em várias modalidades, o ele-mento tubular 51080 pode compreender uma substância hidrofílica 51099 que pode ser liberada e/ou exposta quando o elemento tubular 51080 é separado. Ademais, quando a substância hidrofílica 51099 entrar em contato com fluidos corporais no tecido T, a substância hidrofílica 51099 pode atrair o fluido, o que pode fazer com que o ele-mento tubular 51080 se dilate ou expanda. Conforme o elemento tubu-lar 51080 se expande, o material de compensação 51024 que circunda o elemento tubular 51080 pode deslocar-se ou ajustar-se a fim de acomodar o elemento tubular dilatado 51080. Por exemplo, quando o material de compensação 51024 compreender gelatina, a gelatina pode se deslocar para acomodar os elementos tubulares dilatados 51080. Agora com referência à FIGURA 469, a expansão dos elementos tubulares 51080 e o deslocamento do material de compensação 51024 podem ocasionar uma expansão correspondente do compensador de espessura de tecido 51020.
[978] De modo similar a outros compensadores de espessura de tecido discutidos ao longo da presente revelação, o compensador de espessura de tecido 51020 pode ser deformado ou compactado por meio de uma força aplicada. Adicionalmente, o compensador de es-pessura de tecido 51020 pode ser suficientemente resiliente de modo que o mesmo produza uma força de flexibilização quando deformado pela força aplicada e possa, subsequentemente, se recuperar ou se recuperar parcialmente quando a força aplicada for removida. Em vá-rias modalidades, quando o compensador de espessura de tecido 51020 é capturado em uma área de aprisionamento de grampo 30039, o grampo 30030 pode deformar o compensador de espessura de tecido 51020. Por exemplo, o grampo 30030 pode deformar os elementos tubulares 51080 e/ou o material de compensação 51024 do compen-sador de espessura de tecido 51020 que são capturados pelos gram-pos disparado 30030. Em várias modalidades, as porções não captu-radas do compensador de espessura de tecido 51020 também podem ser deformadas devido à deformação na área de aprisionamento de grampos 30039. Quando deformado, o compensador de espessura de tecido 51020 pode buscar se recuperar da configuração deformada. Em várias modalidades, tal recuperação pode ocorrer antes da expansão hidrofílica do elemento tubular 51080, simultaneamente com a ex-pansão hidrofílica do elemento tubular 51080, e/ou após a expansão hidrofílica do elemento tubular 51080. Conforme o compensador de espessura de tecido 51020 busca se recuperar, o mesmo pode exercer uma força de restauração sobre o tecido também capturado na área de aprisionamento de grampo 30039, conforme descrito com maiores detalhes neste documento.
[979] Em várias modalidades, ao menos um dentre os elementos tubulares 51080 e/ou o material de compensação 51024 no compensador de espessura de tecido 51020 pode compreender um agente terapêutico 51098. Quando o elemento tubular 51080 que contém um agente terapêutico 51098 for separado, o agente terapêutico 51098 contido nos elementos tubulares 51080 pode ser liberado. Ademais, quando o material de compensação 51024 compreender o agente te-rapêutico 51098, o agente terapêutico 51098 pode ser liberado con-forme o material de compensaçãobioabsorvível 51024 for absorvido. Em várias modalidades, o compensador de espessura de tecido 51020 pode fornecer uma liberação inicial rápida do agente terapêutico 51098 seguida de uma liberação controlada do agente terapêutico 51098. Por exemplo, o compensador de espessura de tecido 51020 pode fornecer uma liberação inicial rápida do agente terapêutico 51098 dos elementos tubulares 51080 para o tecido T ao longo da linha de corte quando os elementos tubulares 51080 que compreendem o agente terapêutico 51098 forem separados. Adicionalmente, conforme o material de com-pensação bioabsorvível 51024 que compreende o agente terapêutico 51098 é absorvido, o compensador de espessura de tecido 51020 pode fornecer uma liberação controlada prolongada do agente terapêutico 51098. Em algumas modalidades, ao menos algum agente terapêutico 51098 pode permanecer no elemento tubular 51080 durante um curto período de tempo antes de o agente terapêutico 51098 fluir no material de compensação 51024. Em outras modalidades, ao menos algum agente terapêutico 51098 pode permanecer no elemento tubular 51080 até o elemento tubular 51080 ser absorvido. Em várias modalidades, o agente terapêutico 51098 liberado do elemento tubular 51080 e o material de compensação 51024 podem ser iguais. Em outras mo-dalidades, o elemento tubular 51080 e o material de compensação 51024 podem compreender diferentes agentes terapêuticos ou diferen-tescombinações de agentes terapêuticos, por exemplo.
[980] Ainda com referência à FIGURA 469, em várias modalidades, o atuador de extremidade 12 pode cortar o tecido T e disparar grampos 30030 no tecido T separado quase simultaneamente ou em rápida sucessão. Em tais modalidades, um grampo 30030 pode ser instalado no tecido T imediatamente após o elemento de corte 30052 ter separado o elemento tubular 51080 adjacente ao tecido T. Em ou-tras palavras, os grampos 30030 podem engatar o compensador de espessura de tecido 51020 imediatamente em seguida ou simultane-amenteà dilatação do elemento tubular 51080 e a expansão do com-pensador de espessura de tecido 51020. Em várias modalidades, o compensador de espessura de tecido 51020 pode continuar a crescer ou expandir ápós ps grampos 30030 terem sido disparados no tecido T. Em várias modalidades, os staples 30030 podem ser configurados para perfurar os elementos tubulares 51080 quando os grampos 30030 são instalados. Em tais modalidades, os agentes terapêuticos 51098 ainda retidos nesses elementos tubulares separados 51080 podem ser liberados dos elementos tubulares 51080 e, em algumas modalidades, podem cobrir as pernas 30031 dos grampos disparados 30030.
[981] Com referência à FIGURA 470, o compensador de espes sura de tecido 51020 pode ser fabricador por meio de uma técnica de moldagem, por exemplo. Em várias modalidades, uma armação ou um molde 51120 pode compreender um primeiro lado longitudinal 51122 e um segundo lado longitudinal 51124. Cada lado longitudinal 51124 po-de compreender um ou mais entalhes 51130, que podem ser, cada um configurados para receber a primeira ou a segunda extremidade 50183, 50185 de um tubo deformável 51080. Em algumas modalidades, a primeira extremidade 50183 do elemento tubular 51080 pode ser posicionado em um primeiro entalhe 51130a no primeiro lado longi-tudinal 51122 e a segunda extremidade 50183 do elemento tubular 51080 pode ser posicionada em um segundo entalhe 51130b no se gundo lado longitudinal 51124 de modo que o elemento tubular 51080 atravessa lateralmente a armação 51120. Em várias modalidades, o entalhe 51180 pode compreender um sulco semicircular, que pode en-caixar de forma segura a primeira ou segunda extremidade 50183, 50185 do elemento tubular 51080 no mesmo. Em várias modalidades, o primeiro entalhe 51130a pode ser posicionado diretamente ao longo do segundo entalhe 51130b e o elemento tubular 51080 pode ser po-sicionado perpendicular, ou ao menos substancialmente perpendicular, ao eixo longitudinal da armação 51120. Em outras modalidades, o pri-meiro entalhe 51130a pode ser deslocado a partir do segundo entalhe 51130b de modo que o elemento tubular 51080 seja angularmente po-sicionado em relação ao eixo longitudinal da armação 51120. Em ainda outras modalidades, ao menos um elemento tubular 51080 pode ser longitudinalmente posicionado dentro da armação 51120 de modo que o elemento tubular estenda-se entre os lados laterais 51126, 51128 da armação 51120. Adicionalmente, pelo menos um elemento tubular pode ser angularmente posicionado na armação entre dois entalhes nos lados laterais 51126, 51128 da armação e/ou entre um entalhe em um lado lateral 51126 e um entalhe em um lado longitudinal 51124, por exemplo. Em várias modalidades, a armação 51120 pode compreender uma saliência de suporte 51136, que pode suportar os elementos tubulares 51080 posicionados dentro da armação 51120.
[982] Em várias modalidades, a armação 51120 pode compreen der entalhes 51130 para acomodar doze elementos tubulares 51080, por exemplo. Em algumas modalidades, os entalhes da armação 51130 podem ser preenchidos com elementos tubulares 51080 enquanto que, em outras modalidades, menos que todos os entalhes 51130 podem ser preenchidos. Em várias modalidades, ao menos um elemento tubular 51080 pode ser posicionado na armação 51120. Em algumas modalidades, ao menos metade dos entalhes 51130 pode receber elementos tubulares 51080. Em ao menos uma modalidade, assim que os elementos tubulares 51080 são posicionados na armação 51120, o material de compensação 51024 pode ser adicionado à armação 51120. O material de compensação 51024 pode ser fluido quando adicionado à armação 51120. Por exemplo, em várias modali-dades, o material de compensação 51024 pode ser despejado na ar-mação 51120 e pode fluir ao redor dos elementos tubulares 51080 po-sicionados ali. Com referência à FIGURA 471, o material de compen-sação fluídico 51024 pode fluir ao redor do elemento tubular 51080 suportado pelos entalhes 51130 na armação 51120. Após o material de compensação 51024 curar, ou pelo menos curar suficientemente, agora com referência à FIGURA 472, o compensador de espessura de tecido 51020 que compreende o material de compensação 51024 e os elementos tubulares 51080 podem ser removidos da armação 51120. Em ao menos uma modalidade, o compensador de espessura de tecido 51020 pode ser aparado. Por exemplo, o excesso de material de compensação 51024 pode ser removido do compensador de espessura de tecido 51020 de modo que os lados longitudinais do material de compensação sejam substancialmente planos. Ademais, em algumas modalidades, com referência à FIGURA 473, a primeira e segunda ex-tremidades 50183, 50185 dos elementos tubulares 51080 podem ser juntamente compactadas ou fechadas para vedar os elemento tubular 51080. Em algumas modalidades, as extremidades podem ser fecha-das antes que os elementos tubulares 51080 sejam colocados na ar-mação 51120. Em outras modalidades, o processo de aparamento po-de fazer a transeção das extremidades 51083, 51085 e um processo de empilhamento térmico pode ser usado para vedar e/ou fechar as extremidades 51083, 51085 dos elementos tubulares 51080.
[983] Em várias modalidades, novamente com referência à FI GURA 470, um pino de reforço 51127 pode ser posicionado dentro de cada elemento tubular 51080. Por exemplo, o pino de reforço 51127 pode se estender através de um lúmen longitudinal do elemento tubular 51080. Em algumas modalidades, o pino de reforço 51127 pode se estender além de cada elemento tubular 51080 de modo que o pino de reforço 51127 pode ser posicionado em entalhes 51130 na armação 51120. Em modalidades que têm pinos de reforço 51127, os pinos de reforço 51127 podem suportar os elementos tubulares 51080 quando o material de compensação 51204 for derramado na armação 51120 e conforme o material de compensação fluídico 51024 flui ao redor dos elementos tubulares 51080, por exemplo. Uma vez que o material de compensação 51024 cura, solidifica e/ou liofiliza ou cura, solidifica e/ou liofiliza suficientemente, o compensador de espessura de tecido 51020 pode ser removido da armação 51120 e os pinos de reforço 51127 podem ser removidos dos lúmens longitudinais dos elementos tubulares 51080. Em algumas modalidades, os elementos tubulares 51080 podem então ser preenchidos com medicamentos, por exemplo. Similar a ao menos uma modalidade aqui descrita, após os elementos tubulares 51080 serem preenchidos com medicamentos, o compensa-dor de espessura de tecido 51020, incluindo as extremidades 51083, 51085 dos elementos tubulares 51080, por exemplo, podem ser apa-rados. Em várias modalidades, o compensador de espessura de tecido 51020 pode ser corte por matriz, por exemplo, e/ou vedado por meio de calor e/ou pressão, por exemplo.
[984] Conforme discutido no presente documento, o compensa dor de espessura de tecido 52020 pode compreender múltiplos ele-mentos tubulares 51080. Agora com referência à FIGURA 474, os elementos tubulares 51080 pode compreender diferentes propriedades de material, dimensões e geometrias. Por exemplo, um primeiro ele-mento tubular 51080a pode compreender uma primeira espessura e um primeiro material e um segundo elemento tubular 51080b pode compreender uma segunda espessura e um segundo material. Em vá-rias modalidades, ao menos dois elementos tubulares 51080 no com-pensador de espessura de tecido 52020 podem compreender o mesmo material. Em outras modalidades, cada elemento tubular 51080 no compensador de espessura de tecido 5202 pode compreender diferen-tes materiais. De modo similar, em várias modalidades, ao menos dois elementos tubulares 51080 no compensador de espessura de tecido 52020 podem compreender a mesma geometria. Em outras modalida-des, cada elemento tubular 51080 no compensador de espessura de tecido 52020 pode compreender diferentes geometrias.
[985] Agora com referência às FIGURAS 537 a 540, um compen sador de espessura de tecido 51220 pode compreender pelo menos um elemento tubular 51280 que atravessa lateralmente o compensador de espessura de tecido 51220. Em várias modalidades, com referência à FIGURA 537, o compensador de espessura de tecido 51220 pode ser posicionado em relação à bigorna 30060 do atuador de extremidade 12. O compensador de espessura de tecido 51220 pode ser preso a uma superfície de preensão 30061 da bigorna 30060 do atuador de extremidade 12, por exemplo. Em várias modalidades, com referência principalmente à FIGURA 538, o elemento tubular 51280 pode compreender um formato tipo cápsula, por exemplo. O elemento tubular 51280 pode compreender uma composição polimérica, como um polímero elastomérico bioabsorvível biocompatível, por exemplo.
[986] Novamente com referência à FIGURA 537, o compensador de espessura de tecido 51220 pode compreender adicionalmente um material de compensação 51224 que circunda pelo menos parcialmen-te os elementos tubulares 51280. Em várias modalidades, o material de compensação 51224 pode compreender um polímero bioabsorvível, como, por exemplo, polissacarídeo liofilizado, glicoproteína, elastina, proteoglicano, gelatina, colágeno e/ou celulose regenerada oxidada (ORC), por exemplo. de modo similar ao que foi disposto acima, o material de compensação 51024 pode reter os elementos tubulares 51280 na posição no compensador de espessura de tecido 51220. Adicionalmente, o material de compensação 51224 pode ser preso à superfície de preensão 30061 da bigorna 30060 de modo que o mate-rial de compensação 51220 seja posicionado de modo seguro no atuador de extremidade 12. Em algumas modalidades, o material de compensação 51224 pode compreender ao menos um medicamento.
[987] Ainda com referência à FIGURA 537, os elementos tubula res lateralmente posicionados 51280 podem ser posicionados em rela-ção ao elemento de corte 30252 em um suporte deslizante em transla-ção30250 de modo que o elemento de corte passível de translação 30252 seja configurado para separar os elementos tubulares 51280. Em várias modalidades, o elemento de corte 30252 pode separar os elementos tubulares 51280 no ou perto do centro de cada elemento tubular 51280, por exemplo. Quando os elementos tubulares 51280 forem separados em duas metades, as porções separadas dos ele-mentos tubulares 51280 podem ser configuradas para dilatar-se ou expandir-se, conforme ilustrado na FIGURA 537. Com referência prin-cipalmenteà FIGURA 539, em várias modalidades, um elemento tubular 51280 pode compreender uma substância hidrofílica 51099 que pode ser liberada e/ou exposta quando o elemento tubular 51280 é separado. Ademais, agora com referência à FIGURA 540, quando a substância hidrofílica 51099 entrar em contato com fluidos corporais no tecido T, a substância hidrofílica 51099 pode atrair o fluido, o que pode fazer com que o elemento tubular 51280 se dilate ou expanda. Conforme o elemento tubular 51280 se expande, o material de com-pensação 51224 que circunda o elemento tubular 51280 pode deslocar-se ou ajustar-se a fim de acomodar o elemento tubular dilatado 51280. Por exemplo, quando o material de compensação 51224 compreender gelatina, a gelatina pode se deslocar para acomodar o ele-mento tubular dilatado 51280. Novamente com referência à FIGURA 537, a expansão dos elementos tubulares 51280 e o deslocamento do material de compensação 51224 podem ocasionar uma expansão cor-respondente do compensador de espessura de tecido 51220.
[988] De modo similar a outros compensadores de espessura de tecido discutidos ao longo da presente revelação, o compensador de espessura de tecido 51220 pode ser deformado ou compactado por meio de uma força aplicada. Adicionalmente, o compensador de es-pessura de tecido 51220 pode ser suficientemente resiliente de modo que o mesmo produza uma força de flexibilização quando deformado pela força aplicada e possa, subsequentemente, se recuperar ou se recuperar parcialmente quando a força aplicada for removida. Em vá-rias modalidades, quando o compensador de espessura de tecido 51220 é capturado em uma área de aprisionamento de grampo 30039 (FIGURA 417), o grampo 30030 pode deformar o compensador de es-pessura de tecido 51220. Por exemplo, o grampo 30030 pode deformar os elementos tubulares 51280 e/ou o material de compensação 51224 do compensador de espessura de tecido 51220 capturados pelo grampo disparado 30030. Em várias modalidades, as porções não capturadas do compensador de espessura de tecido 51220 também podem ser deformadas devido à deformação na área de aprisionamen-to de grampos 30039. Quando deformado, o compensador de espes-sura de tecido 51220 pode buscar se recuperar da configuração de-formada. Em várias modalidades, tal recuperação pode ocorrer antes da expansão hidrofílica do elemento tubular 51280, simultaneamente com a expansão hidrofílica do elemento tubular 51280 e/ou após a ex-pansão hidrofílica do elemento tubular 51280. Conforme o compensa-dor de espessura de tecido 51220 busca se recuperar, o mesmo pode exercer uma força de restauração sobre o tecido também capturado na área de aprisionamento de grampo 30039, conforme descrito com maiores detalhes neste documento.
[989] Com referência às FIGURAS 475 a 478, um compensador de espessura de tecido 52020 pode compreender um ou mais elemen-tos tubulares 52080 que atravessam lateralmente o compensador de espessura de tecido 52020, similar a pelo menos um compensador de espessura de tecido aqui descrito. Em várias modalidades, o compen-sador de espessura de tecido 52020 pode compreender múltiplos ele-mentos tubulares 52080 atravessando lateralmente. O compensador de espessura de tecido 52020 pode compreender adicionalmente uma ou mais folhas de material 52024 que seguram ou retêm pelo menos um elemento tubular 52080 no compensador de espessura de tecido 52020. Em várias modalidades, a uma ou mais folhas de material 52024 podem ser posicionadas acima e/ou abaixo dos elementos tu-bulares 52080 e podem reter de forma segura cada elemento tubular 52080 no compensador de espessura de tecido 52020. Com referência principalmente à FIGURA 475, o compensador de espessura de tecido pode compreender uma primeira folha de material 52024a e uma se-gunda folha de material 52024b. Em várias modalidades, os elementos tubulares 52080 podem ser posicionados entre a primeira e a segunda folhas de material 52024a, 52024b. Adicionalmente, ainda com refe-rência à FIGURA 475, a folha de material 52024b pode ser presa à superfície de plataforma de topo 30011 da porção de suporte rígido do cartucho de grampos 30000 de modo que o compensador de espessu-ra de tecido 52020 seja posicionado de modo seguro no atuador de extremidade 12. Em outras modalidades, uma ou mais das folhas de material 52024 podem ser presas à bigorna 30060 ou de outro modo retidas no atuador de extremidade 12.
[990] Em várias modalidades, com referência principalmente à FIGURA 476, o compensador de espessura de tecido 52020 pode ser poroso e/ou permeável. Por exemplo, a folha de material 52024 pode compreender uma pluralidade de aberturas 52026. Em várias modali-dades, as aberturas 52026 podem ser substancialmente circulares. Em ao menos uma modalidade, as aberturas 52036 podem ser visíveis na folha de material 52024. Em outras modalidades, as aberturas 52036 podem ser microscópicas. Ainda com referência à FIGURA 476, os elementos tubulares 52080 também podem compreender uma plurali-dade de aberturas 52026. Em várias modalidades, com referência à FIGURA 477, um compensador de espessura de tecido 52120 pode compreender uma folha de material 52124 que compreende uma plu-ralidade de aberturas não circulares 52126. Por exemplo, as aberturas 52126 podem compreender um formato de diamante e/ou dotado de fendas. Em várias outras modalidades, com referência à FIGURA 478, um compensador de espessura de tecido 52220 pode compreender um elemento tubular 52280 que compreende uma retícula tubular permeável 52292. Em várias modalidades, a folha de material 52224 pode compreender um polímero elastomérico bioabsorvível biocompatível e pode compreender um medicamento, por exemplo.
[991] Similar a ao menos uma modalidade aqui descrita, ao me nos um elemento tubular 52080 pode ser configurado para dilatar ou expandir, como ilustrado nas FIGURAS 479A a 479D. Por exemplo, com referência à FIGURA 479A, os elementos tubulares 52080 podem ser posicionados intermediário à primeira e à segunda folha de material 52024a, 52024b no compensador de espessura de tecido 52020. Quando o compensador de espessura de tecido 52020 entrar em con-tato com o tecido T, conforme ilustrado na FIGURA 479B, o compen-sador de espessura de tecido 52020 pode expandir-se. Em várias mo-dalidades, por exemplo, os elementos tubulares 52080 podem com-preender uma substância hidrofílica 52099 que se expande quando exposta a fluido e/ou no tecido T. Adicionalmente, a folha de material 52024 e os elementos tubulares 52080 podem ser permeáveis, con-forme descrito aqui, de modo que o fluido do tecido T pode permear o compensador de espessura de tecido 52020 assim permitindoo que o fluido entre em contato com a substância hidrofílica 52099 dentro dos elementos tubulares 52080. Conforme os elementos tubulares 52080 se expandem, a folha de material 52024 que circunda os elementos tubulares 52080 podem deslocar-se ou ajustar-se a fim de acomodar os elementos tubulares dilatados 52080. Similar a vários compensadores de espessura de tecido discutidos ao longo da presente descrição, o compensador de espessura de tecido expandido 52020 pode ser de-formado ou compactado por uma força aplicada como, por exemplo, uma força de compressão aplicada por grampos disparados, conforme ilustrado na FIGURA 479C. Adicionalmente, o compensador de es-pessura de tecido 52020 pode ser suficientemente resiliente de modo que o mesmo produza uma força de flexibilização quando deformado pela força aplicada e possa, subsequentemente, se recuperar quando a força aplicada for removida. Agora com referência às FIGURAS 479D e 479E, o compensador de espessura de tecido 52020 pode se recuperar para diferentes configurações em diferentes áreas de aprisionamento de grampo 30039 para acomodar adequadamente o tecido capturado T.
[992] Com referência às FIGURAS 480 a 485, um compensador de espessura de tecido 53020 pode compreender uma pluralidade de elementos tubulares verticalmente posicionados 53080. Em várias modalidades, cada elemento tubular 53080 pode compreender um eixo tubular que é substancialmente perpendicular à superfície de plata-forma superior 30011 da porção de suporte rígido 30010 do cartucho de grampos 30000. Adicionalmente, a primeira extremidade de cada elemento tubular 53080 pode ser posicionada adjacente à superfície de plataforma de topo 30011, por exemplo. Similar a ao menos uma modalidade aqui descrita, os elementos tubulares 53080 podem ser deformáveis e podem compreender um polímero elastomérico, por exemplo. Em várias modalidades, como ilustrado na FIGURA 481, os elementos tubulares 53080 podem ser compactados quando captura-dos em uma área de aprisionamento de grampo 30039 com tecido T grampeado. Um elemento tubular 53080 pode compreender um mate-rial elástico de modo que a deformação do elemento tubular 53080 gere uma força de restauração à medida que o elemento tubular 53080 busca a recuperação a partir da configuração deformada. Em algumas modalidades, a deformação do elemento tubular 53080 pode ser ao menos parcialmente elástica e pelo menos parcialmente plástica. O elemento tubular 53080 pode ser configurado para atuar como uma mola sob uma força aplicada e, em várias modalidades, pode ser con-figurado para não se torcer. Em várias modalidades, com referência à FIGURA 482, os elementos tubulares 53080 podem ser substancial-mentecilíndricos. Em algumas modalidades, com referência à FIGURA 483, um elemento tubular 53180 pode compreender uma região de torção 53112. O elemento tubular 53180 pode ser configurado para se torcer ou se deformar na região de torção 53112 quando uma força de compressão for aplicada ao mesmo. O elemento tubular 53180 pode deformar elasticamente e/ou plasticamente e, então, ser projetado para se torcer repentinamente na região de torção 53112 sob uma força de torção selecionada previamente.
[993] Com referência principalmente à FIGURA 484, um primeiro elemento tubular 53080 pode ser posicionado em uma primeira extre-midade de uma cavidade de grampo 30012 e outro elemento tubular 53080 pode ser posicionado em uma a segunda extremidade da cavi-dade de grampo 30012. Conforme ilustrado na FIGURA 482, o ele-mento tubular 53080 pode compreender um lúmen 53084 estendendose através do mesmo. Novamente com referência à FIGURA 481, quando o grampo 30030 for movido da posição inicial para a posição disparada, cada perna de grampo 30032 pode ser configurada para atravessar um lúmen 53084 de cada elemento tubular 53080. Em vá-rias outras modalidades, com referência principalmente à FIGURA 485, elementos tubulares 54080 verticalmente posicionados podem ser dispostos em um compensador de espessura de tecido 54020 de modo que os elementos tubulares 54080 estejam em posição limítrofe ou entrem em contato entre si. Em outras palavras, os elementos tubu-lares 54080 podem ser agrupados ou unidos. Em algumas modalida-des, os elementos tubulares 54080 podem ser sistematicamente dis-postos no compensador de espessura de tecido 54020; entretanto, em outras modalidades, os elementos tubulares 54080 podem ser aleato-riamente dispostos.
[994] Novamente com referência às FIGURAS 480, 484 e 485, o compensador de espessura de tecido 53020 também pode compreen-der uma folha de material 53024 que segura ou retém os elementos tubulares 53080 no compensador de espessura de tecido 53020. Em várias modalidades, a folha de material 53024 pode ser posicionada acima e/ou abaixo dos elementos tubulares 53080 e podem reter de forma segura cada elemento tubular 53080 no compensador de es-pessura de tecido 53020. Em várias modalidades, o compensador de espessura de tecido 53020 pode compreender uma primeira e uma segunda folha de material 53024. Em várias modalidades, os elemen-tos tubulares 53080 podem ser posicionados entre a primeira e a se-gunda folhas de material 53024. Adicionalmente, a folha de material 53024 pode ser presa à superfície de plataforma de topo 30011 da porção de suporte rígido do cartucho de grampos 30000 de modo que o compensador de espessura de tecido 53020 seja posicionado de modo seguro no atuador de extremidade 12. Em outras modalidades, uma folha de material 53024 pode ser presa à bigorna 30060 ou de outro modo retida no atuador de extremidade 12. Similar a ao menos uma modalidade aqui descrita, a folha de material 53024 pode ser su-ficientementedeformável de modo que a folha de material 53024 de-forma-se como molas 55080 dentro do compensador de espessura de tecido.
[995] Com referência às FIGURAS 486 e 487, um compensador de espessura de tecido 55020 pode compreender pelo menos um mola 55080 que é suficientemente resiliente de modo que tenha a capa-cidade de produzir uma força de mola contrária quando deformada. Com referência principalmente à FIGURA 486, o compensador de es-pessura de tecido 55020 pode compreender uma pluralidade de molas 55080 como, por exemplo, três fileiras de molas 55080. As molas 55080 podem ser sistemática e/ou aleatoriamente dispostas no com-pensador de espessura de tecido 55020. Em várias modalidades, as molas 55080 podem compreender um polímero elastomérico, por exemplo. Em algumas modalidades, o formato das molas 55080 pode permitir a deformação das mesmas. Em várias modalidades, as molas 55080 podem ser deformadas a partir de uma configuração inicial para uma configuração deformada. Por exemplo, quando uma porção do compensador de espessura de tecido 55020 for capturada em uma área de aprisionamento de grampo 30039, as molas 55080 no interior e/ou ao redor da área de aprisionamento de grampo 30039 podem ser deformadas. Em várias modalidades, as molas 55080 podem se torcer ou achatar sob uma força de compressão aplicada a um grampo dis-parado 30030 e as molas 55080 podem gerar uma força de restauração que é uma Função do coeficiente da mola da mola deformada 55080 e/ou da quantidade de molas 55080 é deformada, por exemplo. Em algumas modalidades, a mola 55080 pode agir como uma esponja sob uma força de compressão aplicada por um grampo disparado 30030. Adicionalmente, a mola 55080 pode compreender um material de compensação, conforme descrito com maiores detalhes ao longo da presente revelação.
[996] O compensador de espessura de tecido 55020 pode com preender adicionalmente uma ou mais folhas de material 55024 que seguram ou retêm pelo menos uma mola 55080 no compensador de espessura de tecido 55020. Em várias modalidades, as folhas de ma-terial 55024 podem ser posicionadas acima e/ou abaixo das molas 55080 e podem reter de forma segura as molas 55080 no compensador de espessura de tecido 55020. Em ao menos uma modalidade, o compensador de espessura de tecido 55020 pode compreender uma primeira folha de material 55024a e uma segunda folha de material 55024b. Em várias modalidades, os elementos tubulares 52080 podem ser posicionados entre a primeira e a segunda folhas de material 55024a, 55024b. Com referência principalmente à FIGURA 487, em várias modalidades, o compensador de espessura de tecido 55020 pode compreender adicionalmente uma terceira folha de material 55024c posicionada adjacente à primeira ou segunda folha de material 55024a, 55024b. Em várias modalidades, ao menos uma folha de ma-terial 55024 pode ser presa à superfície de plataforma superior 30011 da porção de suporte rígido do cartucho de grampos 30000, de modo que o compensador de espessura de tecido 55020 é posicionado de forma segura no atuador de extremidade 12. Em outras modalidades, ao menos uma folha de material 55024 pode ser presa à bigorna 30060 ou de outro modo retida no atuador de extremidade 12.
[997] Agora com referência à FIGURA 487, quando um grampo 30030 for disparado do cartucho de grampos 30000 (FIGURA 485), o grampo 30030 pode engatar-se ao compensador de espessura de te-cido 55020. Em várias modalidades, o grampo disparado 30030 pode capturar o tecido T e uma porção do compensador de espessura de tecido 55020 na área de aprisionamento de grampo 30039. As molas 55080 podem ser deformáveis de modo que o compensador de es-pessura de tecido 55020 se compacte quando capturado por um grampo disparado 30030. Em algumas modalidades, as molas 55080 podem ser posicionadas entre os grampos disparados 30030 no com-pensador de espessura de tecido 55020. Em outras modalidades, ao menos uma mola 55080 pode ser capturada dentro da área de aprisio-namento de grampo 30039.
[998] Com referência à FIGURA 488, um compensador de es pessura de tecido 60020 pode compreender pelo menos duas camadas de compensação 60022. Em várias modalidades, o compensador de espessura de tecido 60020 pode compreender uma pluralidade de camadas de compensação 60022 que podem ser empilhadas no topo uma da outra, posicionadas lado a lado ou uma combinação dos mesmos. Conforme descrito com maiores detalhesneste documento, as camadas de compensação 60022 do compensador de espessura de tecido 60020 podem compreender diferentes propriedades geométricas e/ou de material, por exemplo. Ademais, conforme descrito com maiores detalhesneste documento, podem existir bolsos e/ou canaletas entre camadas de compensação adjacentemente empilhadas 60022. Por exemplo, um compensador de espessura de tecido 62020 pode compreender seis camadas de compensação 62022a, 62022b, 62022c, 62022d, 62022e, 62022f, que podem ser adjacentemente em-pilhadas no topo uma das outras (FIGURA 503).
[999] Com referência às FIGURAS 489, 490 e 492 a 497, um compensador de espessura de tecido pode compreender uma primeira camada de compensação 60122a e uma segunda camada de com-pensação 60122b. Em várias modalidades, a primeira camada de compensação 60122a pode ser empilhada de forma adjacente no topo da segunda camada de compensação 60122b. Em ao menos uma modalidade, as camadas de compensação empilhadas de forma adja cente 60122 podem ser separadas por um vão de separação ou bolso 60132. Com referência principalmente à FIGURA 489, um compensa-dor de espessura de tecido 60120 também pode compreender pelo menos um suporte ou viga de suporte 60124 posicionada entre a pri-meira e a segunda camadas de compensação 60122a, 60122b. Em várias modalidades, o suporte 60124 podem ser configurado para po-sicionar a primeira camada de compensação 60122a em relação à se-gunda camada de compensação 60122b de modo que as camadas de compensação 60122 sejam separadas por um vão de separação 60132. Conforme descrito com maiores detalhesneste documento, a deformação do suporte 60124 e/ou das camadas de compensação 60122a, 60122b, por exemplo, pode reduzir o vão de separação 60132.
[1000] A viga de suporte de um compensador de espessura de tecido pode compreender várias geometrias e dimensões. Por exemplo, a viga de suporte pode ser uma viga de suporte de flexão única centralizada de feixe i simples 60124 (FIGURA 489), uma viga de su-porte de flexão única descentralizada 60224 (FIGURA 490), uma viga de suporte elíptica 60324 (FIGURA 492), uma viga de suporte de múl-tiplasflexões 60424 (FIGURA 493) e/ou uma viga de suporte fixa em cantiléver duplo simétrica 60524 (FIGURA 494). Ademais, novamente com referência às FIGURAS 489, 495 e 496, uma viga de suporte 60624 pode ser mais delgada que ao menos uma camada de compen-sação 60122 (FIGURA 495), uma viga de suporte 60724 pode ser mais espessa que ao menos uma camada de compensação 60122 (FIGURA 496), e/ou uma viga de suporte 60124 pode ter substancialmente a mesma espessura que ao menos uma camada de compensação 60122 (FIGURA 489), Por exemplo. O material, geometria e/ou dimensões da viga de suporte 60124, por exemplo, pode afetar a deformabilidade e a resiliência de retorno elástico do compensador de espessura de tecido 60120.
[1001] Ainda com referência à FIGURA 489, as camadas de com pensação 60122 e a viga de suporte 60124 do compensador de es-pessura de tecido 60120 podem compreender diferentes materiais como, por exemplo, material estrutural, material biológico e/ou material elétrico, por exemplo. Por exemplo, em várias modalidades, ao menos uma camada de compensação 60122 pode compreender uma compo-sição polimérica. A composição polimérica pode compreender um ma-terial pelo menos parcialmente elástico de modo que a deformação da camada de compensação 60122 e/ou da viga de suporte 60124 possa gerar uma força de flexibilização. A composição polimérica da camada de compensação 60122 pode compreender polímeros não absorvíveis, polímeros absorvíveis ou combinações dos mesmos. Em algumas mo-dalidades, os polímeros absorvíveis podem incluir polímeros elastoméricos bioabsorvíveis biocompatíveis, por exemplo. Ademais, a compo-sição polimérica da camada de compensação 60122 pode compreen-derpolímeros sintéticos, polímeros não sintéticos ou combinações dos mesmos. Exemplos de polímeros sintéticos incluem, mas não se limi-tam a, poli(ácido glicólico) (PGA), poli(ácido láctico) (PLA), policaprolactona (PCL), polidioxanona (PDO) e copolímeros dos mesmos. Exemplos de polímeros não sintéticos incluem, mas não se limitam a, polissacarídeos, glicoproteína, elastina, proteoglicano, gelatina, colágeno e celulose regenerada oxidada (ORC). Em várias modalidades, similar às composições poliméricas nas modalidades aqui descritas, a composição polimérica das camadas de compensação 60122 pode incluir quantidades variadas de polímeros absorvíveis, polímeros não absorvíveis, polímeros sintéticos e polímeros não sintéticos, por exemplo, por porcentagem de peso. Em várias modalidades, cada ca-mada de compensação 60022 no compensador de espessura de tecido 60120 pode compreender uma composição polimérica diferente ou, em várias outras modalidades, ao menos duas camadas de compen-sação 60122 podem compreender a mesma composição polimérica.
[1002] Novamente com referência à FIGURA 488, em várias mo dalidades, ao menos uma camada de compensação 60022 pode com-preender um agente terapêutico 60098 como um medicamento ou agente farmaceuticamente ativo, por exemplo. A camada de compen-sação 60022 pode liberar uma quantidade terapeuticamente eficaz do agente terapêutico 60098. Em várias modalidades, o agente terapêuti-co 60098 pode ser liberado como camada de compensação 60022 é absorvido. Exemplos de agentes terapêuticos 60098 podem incluir, mas não se limitam a, agentes e fármacos hemostáticos como, por exemplo, fibrinaa, trombina e/ou celulose regenerada oxidada (ORC), medicamentos anti-inflamatórios como, por exemplo, diclofenac, aspi-rina, naproxen, sulindac e/ou hidrocortisona, fármacos ou agentes an-tibióticos e antimicrobianos como, por exemplo, triclosan, prata iônica, ampicilina, gentamicina, polimixina B e/ou cloranfenicol e/ou agentes anticâncer como, por exemplo, cisplatina, mitomicina e/ou adriamicina. Em algumas modalidades, o agente terapêutico 60098 pode compre-ender um agente biológico, como uma células-tronco, por exemplo. Em várias modalidades, cada camada de compensação 60022 em um compensador de espessura de tecido 60020 pode compreender um agente terapêutico diferente 60098 ou, em várias outras modalidades, ao menos duas camadas de compensação 60022 podem compreender o mesmo agente terapêutico 60098. Em ao menos uma modalidade, uma camada de compensação 60022 que compreende um agente terapêutico 60098, como um agente biológico, por exemplo, pode ser disposto entre duas camadas de compensação estruturais 60022 que compreendem uma composição polimérica, como, por exemplo, es-puma de poli(ácido glicólico) (PGA), por exemplo. Em várias modali-dades, uma camada de compensação 60022 também pode compre ender um material eletricamente condutivo, como, por exemplo, cobre.
[1003] Em várias modalidades, novamente com referência à FI GURA 503, as camadas de compensação 62022 no compensador de espessura de tecido 62020 podem ter geometrias diferentes. Quando as camadas 62022 estiverem adjacentemente posicionadas no com-pensador de espessura de tecido 62020, as camadas de compensação 62022 podem formar pelo menos um conduto tridimensional 62032 entre as camadas 62022. Por exemplo, quando uma segunda camada de compensação 62022b que compreende uma canaleta for posicionada acima de uma terceira camada de compensação substan-cialmente plana 62022c, a canaleta e a superfície plana da terceira camada de compensação 62022c podem definir um conduto tridimen-sional 62032a entre as mesmas. De modo similar, por exemplo, quando uma quinta camada de compensação 62022e que compreende uma canaleta for posicionada abaixo de uma quarta camada de com-pensação 62022d que compreende uma canaleta correspondente, as canaletas podem formar um conduto tridimensional 62032b definido pelas canaletas nas camadas de compensação adjacentemente empi-lhadas 62022d, 62022e. Em várias modalidades, os condutos 62032 podem direcionar os agentes terapêuticos e/ou fluidos corporais à me-dida que os fluidos fluem através do compensador de espessura de tecido 62020.
[1004] Em várias modalidades, com referência à FIGURA 499, um compensador de espessura de tecido 61020 pode compreender ca-madas de compensação 61022, como camadas 60122a e 21022b con-figuradas para receber grampos 30030 instalados a partir do cartucho de grampos 20000 (FIGURA 498). Conforme um grampo 30030 é mo-vido de uma posição inicial para uma posição disparada, a geometria de pelo menos uma camada de compensação 61022 pode guiar as pernas de grampo 30032 para a posição disparada. Em várias modalidades, ao menos uma camada de compensação 61022 pode compre-ender aberturas 61030 estendendo-se através da mesma, em que as aberturas 61030 podem ser dispostas para receber as pernas de grampo 30032 dos grampos instalados 30030 quando os grampos 30030 são disparados a partir do cartucho de grampos 20000 (FIGURA 498), como descrito em maiores detalhes aqui. Em várias outras modalidades, novamente com referência à FIGURA 503, as pernas de grampo 30032 podem perfurar através de ao menos uma camada de compensação, como a camada de compensação 62022f, por exemplo, e podem ser recebidas permeável das aberturas 62030 em ao menos uma camada de compensação, como, por exemplo, camada de com-pensação 62022a.
[1005] Com referência principalmente à FIGURA 499, o compen sador de espessura de tecido 60120 pode compreender pelo menos uma aba de suporte 61026 em uma das camadas de compensação 61022a, 61022b. A aba de suporte 61026 pode se projetar para o inte-rior do vão de separação 61032 definido entre camadas de compensa-ção adjacentes, como o vão 61032 entre a primeira camada de com-pensação 61020a e a segunda camada de compensação 61020b. Em várias modalidades, a aba de suporte 61026 pode se projetar de um lado longitudinal de uma primeira camada de compensação 61022a. Adicionalmente, a aba de suporte 61026 pode se estender ao longo do comprimento do lado longitudinal ou apenas ao longo de uma porção da mesma. Em várias modalidades, ao menos uma aba de suporte 61026 pode se projetar dos dois lados longitudinais da camada de compensação 61022a, 61022b. Adicionalmente, as camadas de com-pensação adjacentemente posicionadas 61022a, 61022b podem com-preender abas de suporte correspondentes 60126, de modo que a aba de suporte 60126 que se estende da primeira camada de compensação 60122a possa alinhar-se pelo menos parcialmente à aba de suporte 60126 que se estende da segunda camada de compensação 60122b. Em ao menos uma modalidade, novamente com referência à FIGURA 497, um compensador de espessura de tecido 60820 pode compreender uma placa limitadora 60828 entre as camadas de com-pensação adjacentes 60122a, 60122b. A placa limitadora 60828 pode ser posicionada no vão 60132 definido entre a primeira camada de compensação 60122a e a segunda camada de compensação 60122b, por exemplo. Conforme descrito com maiores detalhesneste documen-to, a(s) aba(s) de suporte 61026 e/ou a(s) placa(s) limitadora(s) 60828 podem controlar a deformação e/ou a deflexão de um suporte 60124 e/ou das camadas de compensação 60122a, 60122b.
[1006] Conforme descrito aqui, em várias modalidades, as cama das de compensação 60022 do compensador de espessura de tecido 60020 podem compreender diferentes materiais, geometrias e/ou di-mensões. Tais compensadores de espessura de tecido 60020 podem ser montados por meio de uma variedade de técnicas de fabricação. Com referência principalmente à FIGURA 488, o compensador de es-pessura de tecido 60022 pode ser fabricado por meio de processos litográficos, estereolitográficos (SLA) ou de serigrafia. Por exemplo, um processo de fabricação estereolitográfico pode criar um compensador de espessura de tecido 60020 no qual cada camada de compensação 60022 compreende diferentes materiais e/ou características geométri-cas. Por exemplo, uma luz ultravioleta em uma máquina de estereolitografia pode desenhar a geometria de uma primeira camada de com-pensação 60022, de modo que a primeira camada de compensação 60022 que compreende um primeiro material, geometria e/ou dimen-sões seja curada pela luz ultravioleta. A luz ultravioleta pode desenhar subsequentemente a geometria de uma segunda camada de compen-sação 60022, de modo que a segunda camada de compensação 60022 que compreende um segundo material, geometria e/ou dimensões seja curada pela luz ultravioleta. Em várias modalidades, uma máquina de estereolitografia pode desenhar camadas de compensação 60022 no topo umas das outras, lado a lado ou uma combinação dos mesmos. Adicionalmente, as camadas de compensação 60022 podem ser desenhadas de modo que existam bolsos 60132 entre camadas de compensação adjacentes 60022. Devido ao fato de que uma máquina de estereolitografia pode criar camadas muito delgadas que têm geometrias exclusivas, um compensador de espessura de tecido 60020 fabricado por meio de um processo estereolitográfico pode compreender uma geometria tridimensional muito complexa.
[1007] Em várias modalidades, com referência à FIGURA 498, o compensador de espessura de tecido 60920 pode ser posicionado no atuador de extremidade 12 de um instrumento cirúrgico 10 (FIGURA 1). O compensador de espessura de tecido 60920 pode ser posicionado em relação ao cartucho de grampos 20000 do atuador de extremidade 12. Por exemplo, o compensador de espessura de tecido 60920 pode ser preso de modo liberável ao cartucho de grampos 20000. Em ao menos uma modalidade, ao menos uma camada de compensação 60922 do compensador de espessura de tecido 60920 pode ser posi-cionado adjacente à superfície de plataforma superior 20011 (FIGURA 408) do cartucho de grampos 20000. Por exemplo, uma segunda ca-mada de compensação 60922b pode ser presa à superfície de plata-forma de topo 20011 por meio de um adesivo ou por meio de um invó-lucro, similar a pelo menos um dos invólucros aqui descritos (FIGURA 218). Em várias modalidades, o compensador de espessura de tecido 60920 pode formar uma peça única com o cartucho de grampos 20000 de modo que o cartucho de grampos 20000 e o compensador de es-pessura de tecido 60920 sejam formados como uma construção unitá-ria. Por exemplo, o cartucho de grampos 20000 pode compreender uma primeira parte estrutural, como a porção de suporte rígido 20010 (FIGURA 408), e uma segunda parte estrutural, como o compensador de espessura de tecido 60920.
[1008] Ainda com referência à FIGURA 498, o compensador de espessura de tecido 60920 pode compreender uma primeira porção de compensador 60920a e uma segunda porção de compensador 60920b. A primeira porção de compensador 60920a pode ser posicionada em um primeiro lado longitudinal do cartucho de grampos 20000 e a segunda porção de compensador 60920b pode ser posicionada em um segundo lado longitudinal do cartucho de grampos 20000. Em várias modalidades, quando o compensador de espessura de tecido 60920 é posicionado em relação ao cartucho de grampos 20000, a fenda longitudinal 20015 (FIGURA 407) na porção de suporte rígido 20010 (FIGURA 407) pode se estender entre a primeira porção do compensador 60920a e uma segunda porção do compensador 60920b. Quando o elemento de corte 20052 no suporte deslizante de disparo de grampo 20050 (FIGURA 407) transladar através do atuador de extremidade 12, o elemento de corte 20052 pode atravessar a fenda longitudinal 20015 entre a primeira porção de compensador 60920a e a segunda porção de compensador 60920b sem separar uma porção do compensador de espessura de tecido 60920, por exemplo. Em outras modalidades, o elemento de corte 20052 podem ser configurados para separar uma porção do compensador de espessura de tecido 60920.
[1009] Em várias modalidades, agora com referência à FIGURA 491, um compensador de espessura de tecido 63020 podem ser confi-gurados para encaixar-se no atuador de extremidade 12’ de um ins-trumentocirúrgico ciruclar. Em várias modalidades, o compensador de espessura de tecido 62030 pode compreender uma primeira camada de compensação circular 63022a e uma segundo camada de compen-sação circular 63022b. A segunda camada de compensação 63022b pode ser posicionada em uma superfície de plataforma de topo circular 20011’ de um cartucho de grampos circular 20000’, em que a segunda camada de compensação 63022b pode compreender uma geometria que corresponde à geometria da superfície de plataforma 20011’. Por exemplo, a superfície de plataforma 20011’ pode compreender uma porção escalonada e a segunda camada de compensação 63022b po-de compreender uma porção escalonada correspondente. Similar a várias modalidades aqui descritas, o compensador de espessura de tecido pode compreender adicionalmente ao menos um suporte 63024 e/ou aba de suportes 63026, por exemplo, estendendo-se ao redor do compensador de espessura de tecido 63020.
[1010] Novamente com referência à FIGURA 499, os grampos disparados 30030 podem ser configurados para engatar-se ao com-pensador de espessura de tecido 60920. Conforme descrito ao longo da presente revelação um grampo disparado 30030 pode capturar uma porção do compensador de espessura de tecido 60920 e o tecido T e aplicar uma força de compressão ao compensador de espessura de tecido 60920. Adicionalmente, com referência principalmente às FIGURAS 500 a 502, o compensador de espessura de tecido 60920 pode ser deformável. Em várias modalidades, conforme descritas aqui, uma primeira camada de compensação 60920a pode ser separada de uma segunda camada de compensação 60920b por um vão de sepa-ração 60932. Com referência à FIGURA 500, antes da compressão do compensador de espessura de tecido 60920, o vão 60932 pode com-preender uma primeira distância. Quando uma força de compressão A é aplicada ao compensador de espessura de tecido 60920 e ao tecido T, por exemplo por um grampo disparado 30030 (FIGURA 499), o su-porte 60924 pode ser configurado para deformar-se. Agora com refe-rência à FIGURA 501, a viga de suporte de flexão única 60924 pode flexionar-se sob a força de compressão A de modo que o vão de separação 60932 entre a primeira camada de compensação 60920a e a segunda camada de compensação 60920b seja reduzido a uma se-gundadistância. Com referência principalmente à FIGURA 502, a pri-meira e a segunda camadas de compensação 60922a, 60922b também podem deformar-se sob a força de compressão A. Em várias mo-dalidades, as abas de suporte 60926 podem controlar a deformação das camadas de compensação 60920. Por exemplo, as abas de su-porte 60926 podem evitar a flexão excessiva das camadas de com-pensação 60920 suportando-se os lados longitudinais da camada de compensação 60920 quando os mesmos entram em contato entre si. As abas de suporte 60926 também podem ser configuradas para flexi-onar-se ou curva-se sob a força de compressão A. adicional ou alter-nativamente, a placa limitadora 60128 (FIGURA 497) descrita com maiores detalhesneste documento, pode limitar a deformação das ca-madas de compensação 60920 quando as camadas de compensação 60920 e/ou as abas de suporte 60926 entrarem em contato com a pla-ca limitadora 60128.
[1011] Ademais, similar a vários compensadores de espessura de tecido aqui descritos, o compensador de espessura de tecido 60920 pode gerar uma força de flexibilização ou de restauração quando de-formado. A força de restauração gerada pelo compensador de espes-sura de tecido deformado pode depender pelo menos da orientação, das dimensões, do material e/ou da geometria do compensador de es-pessura de tecido 60920, bem como da quantidade na qual o compen-sador de espessura de tecido 60920 é deformado pela força aplicada. Ademais, em várias modalidades, ao menos uma porção do compen-sador de espessura de tecido 60920 pode ser resiliente de modo que o compensador de espessura de tecido 60920 gere uma carga de flexibi-lização ou força de restauração quando deformado por um grampo disparado 30030. Em ao menos uma modalidade, o suporte 60924 pode compreender um material elástico e/ou ao menos uma camada de compensação 60922 pode compreender um material elástico de modo que o compensador de espessura de tecido 60920 seja resiliente.
[1012] Em várias modalidades, agora com referência à FIGURA 504, um atuador de extremidade de uma instrumento de grampeamento cirúrgico pode compreender uma primeira garra e uma segunda gar-ra, em que ao menos uma dentre a primeira garra e a segunda garra possa ser configurada para mover-se em relação a à outro. Em certas modalidades, o atuador de extremidade pode compreender uma pri-meira garra incluindo uma canaleta de cartucho de grampo 19070 e uma segundo garra incluindo uma bigorna 19060, em que a bigorna 19060 pode ser girada em direção a e/ou na direção contrária da canaleta de cartucho de grampo 19070, por exemplo. A canaleta de cartu-cho de grampo 19070 pode ser configurada para receber um cartucho de grampos 19000, por exemplo, que, em ao menos uma modalidade, pode ser retido modo removível dentro da canaleta de cartucho de grampo 19070. Em várias modalidades, o cartucho de grampos 19000 pode compreender um corpo do cartucho 19010 e um compensador de espessura de tecido 19020 sendo que, em ao menos uma modalidade, o compensador de espessura de tecido 19020 pode ser fixado modo removível ao corpo do cartucho 19010. Similar a outras modalidades aqui descritas, agora com referência à FIGURA 505, o corpo do cartucho 19010 pode compreender uma pluralidade de cavidades de grampo 19012 e um grampo 19030 posicionado dentro de cada cavi-dade de grampo 19012. Também similar a outras modalidades aqui descritas, os grampos 19030 podem ser suportados por acionadores de grampo 19040 posicionados dentro do corpo do cartucho 19010 em que um suporte deslizante e/ou um membro de disparo, por exemplo, pode ser avançado através do cartucho de grampos 19000 para levan-tar os acionadores de grampo 19040 para cima dentro das cavidades de grampo 19012, como ilustrado na FIGURA 506, e ejetar os grampos 19030 a partir das cavidades de grampo 19012.
[1013] Em várias modalidades, com referência principalmente às FIGURAS 504 e 505, o compensador de espessura de tecido 19020 pode compreender membros resilientes 19022 e um vaso 19024 que encapsula os membros resilientes 19022. Em ao menos uma modali-dade, o vaso 19024 pode ser vedado e pode definir uma cavidade con-tendo um atmosfera interna que tem uma pressão que é diferente da pressão atmosférica circundante. Em certas modalidades, uma pressão de da atmosfera interna pode ser maior que uma pressão da atmosfera circundante enquanto que, em outras modalidades, uma pressão da atmosfera interna pode ser menor que uma pressão da atmosfera circundante. Nas modalidades nas quais o vaso 19024 contém uma pressão menor do que uma pressão da atmosfera circundante, a parede lateral do vaso 19024 pode confinar um vácuo. Em tais modalidades, o vácuo pode fazer com que o vaso 19024 se distorça, achate e/ou alise em que os membros resilientes 19022 posicionados dentro do vaso 19024 possam ser resilientemente compactados dentro do vaso 19024. Quando um vácuo é criado por sucção no vaso 19024, os elementos resilientes 19022 podem defletir-se ou deformar-se para baixo e podem ser mantidos na posição pelas paredes laterais do vaso 19024 em um estado embalado a vácuo compactado.
[1014] O elemento resiliente 19022 e o vaso 19024 são compre endidos de materiais biocompatíveis. Em várias modalidades, o mem-bro resiliente 19022 e/ou vaso 19024 pode ser compreendido de mate-riaisbioabsorvíveis materiais como PLLA, PGA e/ou PCL, por exemplo. Em certas modalidades, o membro resiliente 19022 pode ser compreendido de um material resiliente. O elemento resiliente 19022 também pode compreender resiliência estrutural. Por exemplo, o ele-mento resiliente 19022 pode estar sob a forma de um tubo oco.
[1015] Além do que foi disposto acima, o compensador de espes sura de tecido 19020 pode ser posicionado contra ou adjacente à su-perfície de plataforma 19011 do corpo de cartucho 19010. Quando os grampos 19030 forem pelo menos parcialmente disparados, agora com referência à FIGURA 506, as pernas dos grampos 19030 podem perfurar ou romper o vaso 19024. Em certas modalidades, o vaso 19024 pode compreender uma porção central 19026 que pode ser po-sicionada sobre uma fenda corte 19016 do corpo do cartucho 19010 de modo que, quando um membro de corte 19080 é avançado para fazer a incisão no tecido T posicionado entre o cartucho de grampos 19000 e a bigorna 19060, o membro de corte 19080 também pode fazer a incisão na porção central 19026 do vaso 19024 assim perfurando ou rompendo o vaso 19024. Em qualquer caso, uma vez que o vaso 19024 foi rompido, a atmosfera interna no vaso 19024 pode equalizarse à atmosfera que circunda o compensador de espessura de tecido 19020 e permitir que os elementos resilientes 19022 se expandam re-silientemente para ganhar novamente, ou ganhar novamente pelo me-nos parcialmente, sua configuração não distorcida e/ou não aplanada. Em tais circunstâncias, os elementos resilientes 19022 podem aplicar uma força de alteração ao tecido T capturado pelos grampos deforma-dos 19020. Mais especificamente, após serem deformadas pelas su-perfícies de formaçãode bolsos 19062 definidos na bigorna 19060, as pernas dos grampos 19030 podem capturar o tecido T e pelo menos uma porção de um elemento resiliente 19022 no interior dos grampos 19030 de modo que, quando o vaso 19024 romper, o compensador de espessura de tecido 19020 possa compensar a espessura do tecido T capturado pelos grampos 19030. Por exemplo, quando o tecido T cap-turado por um grampo 19030 é mais delgado, um elemento resiliente 19022 capturado por aquele grampo 19030 pode se expandir para preencher vãos no interior do grampo 19030 e aplicar uma força de compactação suficiente ao tecido T. De modo correspondente, quando o tecido T capturado por um grampo 19030 é mais espesso, um ele-mento resiliente 19022 capturado por aquele grampo 19030 pode permanecer compactado para dar espaço para o tecido mais espesso no interior do grampo 19030 e, de modo semelhante, para aplicar uma força de compactação suficiente ao tecido T.
[1016] Quando o vaso 19024 é perfurado, conforme esquematiza do acima, os elementos resilientes 19022 podem se expandir em uma tentativa de retornar resilientemente para sua configuração original. Em determinadas circunstâncias, a porção de elementos resilientes 19022 que foram capturados pelos grampos 19030 pode não ter a capacidade de retornar para seu formato não distorcido original. Em tais circunstâncias, os elementos resilientes 19022 podem compreender uma mola que pode aplicar uma força de compactação ao tecido T capturado pelos grampos 19030. Em várias modalidades, um membro resiliente 19022 pode emular uma mola linear em que a força de com-pactação aplicada pelo membro resiliente 19022 é linearmente propor-cionalà quantidade ou distância, em que o membro resiliente 19022 permanece defletido dentro do grampo 19030. Em certas outras moda-lidades, um membro resiliente 19022 pode emular um mola não linear em que a força de compactação aplicada pelo membro resiliente 19022 não é linearmente proporcional à quantidade ou distância em que o membro resiliente 19022 permanece defletido dentro do grampo 19030.
[1017] Em várias modalidades, com referência principalmente às FIGURAS 507 e 508, um cartucho de grampos 19200 pode compre-ender um compensador de espessura de tecido 19220 que pode com-preender um ou mais vasos vedados 19222 no mesmo. Em ao menos uma modalidade, cada um dos vasos 19222 pode ser vedado e pode conter uma atmosfera interna. Em certas modalidades, uma pressão da atmosfera interna dentro de um vaso vedado 19222 pode exceder a pressão atmosférica ao mesmo tempo que, em certas outras modali-dades, a pressão da atmosfera interna dentro de um vaso vedado 19222 pode estar abaixo da pressão atmosférica. Nas modalidades onde a pressão da atmosfera interna dentro de um vaso 19222 está abaixo da pressão atmosférica, o vaso 19222 pode ser descrita como contendo vácuo. Em várias modalidades, um ou mais dos vasos 19222 podem ser envolvidos ou contidos em uma coberta, recipiente, invólu-cro e/ou filme externos 19224, por exemplo, em que o compensador de espessura de tecido 19220 pode ser posicionado acima de uma superfície de plataforma 19011 do corpo do cartucho 19010. Em certas modalidades, cada vaso 19222 pode ser fabricado a partir de um tubo que tem uma seção transversal circular ou ao menos substancialmente circular, por exemplo, que tem uma extremidade fechada e uma ex-tremidade aberta. Um vácuo pode ser extraído da extremidade aberta do tubo e, quando um vácuo suficiente for alcançado no interior do tu-bo, a extremidade aberta pode ser fechada e vedada. Em ao menos uma de tal modalidade, o tubo pode ser compreendido de um material polimérico, por exemplo, em que a extremidade aberta do tubo pode ser empilhada termicamente a fim de fechar e vedar a mesma. Em qualquer caso, o vácuo no interior de cada vaso 19222 pode puxar as paredes laterais do tubo para dentro e resilientemente distorcer e/ou achatar o tubo. Os vasos 19222 são ilustrados em um estado pelo menos parcialmente achatado na FIGURA 508.
[1018] Quando os grampos 19030 estiverem em sua posição não disparada, conforme ilustrado na FIGURA 508, as pontas dos grampos 19030 podem ser posicionadas abaixo do compensador de espessura de tecido 19220. Em ao menos uma de tal modalidade, os grampos 19030 podem ser posicionados no interior de suas respectivas cavida-des de grampo 19012 de modo que os grampos 19030 não entrem em contato com os vasos 19222 até que os grampos 19030 sejam movidos das posições não disparadas, ilustrado na FIGURA 508, para suas posições disparadas, ilustradas na FIGURA 509. Em certas modalida-des, o invólucro 19224 do compensador de espessura de tecido 19220 pode impedir que os vasos 19220 sejam prematuramente perfurados pelos grampos 19030. Quando os grampos 19030 forem pelo menos parcialmente disparados, agora com referência à FIGURA 509, as pernas dos grampos 19030 podem perfurar ou romper os vasos 19222. Em tais circunstâncias, as atmosferas internas no interior dos vasos 19222 podem equalizar com a atmosfera que circunda os vasos 19222 e se expanda resilientemente para ganhar novamente, ou ganhar novamente pelo menos parcialmente, sua configuração não distorcida e/ou não achatada. Em tais circunstâncias, os vasos perfurados 19222 podem aplicar uma força de alteração ao tecido capturado pelos grampos deformados 19030. Mais especificamente, após serem deformadas pelas superfícies de formação de bolsos 19062 definidos na bigorna 19060, as pernas dos grampos 19030 podem capturar o tecido T e pelo menos uma porção de um vaso 19222 no interior dos grampos 19030 de modo que, quando os vasos 19222 se romperem, os vasos 19222 possam compensar a espessura do tecido T capturado pelos grampos 19030. Por exemplo, quando o tecido T capturado por um grampo 19030 é mais delgado, um vaso 19222 capturado por aquele grampo 19030 pode expandir-se para preencher os vãos no interior do grampo 19030 e, ao mesmo tempo, para aplicar uma força de compactação suficiente ao tecido T. De modo correspondente, quando o tecido T capturado por um grampo 19030 é mais espesso, um vaso 19222 capturado por aquele grampo 19030 possa permanecer compactado para dar espaço para o tecido mais espesso no interior do grampo 19030 e, ao mesmo tempo, para aplicar uma força de compactação suficiente ao tecido T.
[1019] Quando os vasos 19222 são perfurados, conforme esque matizado acima, os vasos 19222 podem se expandir em uma tentativa de retornar resilientemente para sua configuração original. A porção dos vasos 19222 que foi capturada pelos grampos 19030 pode não ter a capacidade de retornar para seu formato não distorcido original. Em tais circunstâncias, o vaso 19222 pode compreender uma mola que pode aplicar uma força de compactação ao tecido T capturado pelos grampos 19030. Em várias modalidades, um vaso 19222 pode emular uma mola não linear, em que a força de compactação aplicada pelo vaso 19222 não é linearmente proporcional à quantidade, ou distância, na qual o vaso 19222 permanece defletido no interior do grampo 19030. Em certas outras modalidades, um vaso 19222 pode emular uma mola não linear, em que a força de compactação aplicada pelo vaso 19222 não é linearmente proporcional à quantidade, ou distância, na qual o vaso 19222 permanece defletido no interior do grampo 19030. Em várias modalidades, os vasos 19222 podem ser ocos e, em ao menos uma modalidade, podem estar vazios quando estão em sua configuração vedada. Em certas outras modalidades, cada um dos va-sos 19222 pode definir uma cavidade e pode incluir, ainda, pelo menos um medicamento contido na mesma. Em pelo menos algumas modali-dades, os vasos 19222 podem ser compreendidos de ao menos um medicamento que pode ser liberado e/ou bioabsorvido, por exemplo.
[1020] Em várias modalidades, os vasos 19222 do compensador de espessura de tecido 19220 podem ser dispostos de qualquer ma-neira adequada. Conforme ilustrado na FIGURA 507, as cavidades de grampo 19012 definidas no corpo de cartucho 19010 e os grampos 19030 posicionados nas cavidades de grampo 19012 podem ser dis-postos em fileiras. Em pelo menos na modalidade ilustrada, as cavida-des de grampo 19012 podem ser dispostas em seis fileiras lineares longitudinais, por exemplo; Entretanto, qualquer disposição adequada das cavidades de grampo 19012 poderia ser utilizada. Também con-forme ilustrado na FIGURA 507, o compensador de espessura de teci-do 19220 pode compreender seis vasos 19222, em que cada um dos vasos 19222 pode ser alinhado ou posicionado sobre uma fileira de cavidades de grampo 19012. Em ao menos uma modalidade, cada um dos grampos 19030 dentro de uma fileira de cavidades de grampo 19012 pode ser configurado para perfurar o mesmo vaso 19222. Em certas situações, algumas pernas de grampo dos grampos 19030 po-demnão perfurar o vaso 19222 posicionada sobre os mesmos; entre-tanto, em modalidades onde o vaso 19222 definir uma cavidade interna contínua, por exemplo a cavidade pode ser suficientemente perfurada por pelo menos um dos grampos 19030 a fim de permitir que a pressão da atmosfera de cavidade interna se equalize à pressão atmosférica que circunda o vaso 19222. Em várias modalidades, agora com referência à FIGURA 514, um compensador de espessura de tecido pode compreender um vaso, como o vaso 19222’, por exemplo, que pode se estender em uma direção que é transversal a uma linha de grampos 19030. Em ao menos uma de tal modalidade, um vaso 19222’ pode se estender através de múltiplas fileiras de grampos. Em certas modalidades, agora com referência à FIGURA 515, um compensador de espessura de tecido 19220” pode compreender uma pluralidade de vasos 19222” que se estendem em uma direção que é perpendicular, ou pelo menos substancialmente perpendicular, a uma linha de grampos 19030. Em pelo menos uma de tal modalidade, alguns dos vasos 19222” podem ser perfurados pelos grampos 19030 enquanto outros podem não ser perfurados pelos grampos 19030. Em ao menos uma modalidade, os vasos 19222” vasos 19222” podem se estender ao longo ou através de uma trajetória de corte na qual um elemento de corte poderia fazer transeção e romper os vasos 19222”, por exemplo.
[1021] Em várias modalidades, conforme descrito acima, um com pensador de espessura de tecido, como o compensador de espessura de tecido 19220, por exemplo, pode compreender uma pluralidade de vasos vedados, como os vasos 19222, por exemplo. Também confor-me descrito acima, cada um dos vasos vedados 19222 pode compre-ender uma atmosfera interna separada. Em certas modalidades, os vasos 19222 podem ter pressões internas diferentes. Em ao menos uma modalidade, por exemplo, um primeiro vaso 19222 pode compre-ender um vácuo interno que tem uma primeira pressão e um segundo vaso 19222 pode compreender um vácuo interno que tem uma segun-dapressão diferente, por exemplo. Em pelo menos uma de tal modali-dade, a quantidade de distorção ou achatamento de um vaso 19222 pode ser uma função da pressão de vácuo da atmosfera interna contida no mesmo. Por exemplo, um vaso 19222 que tem um vácuo maior pode ser distorcido ou achatado uma quantidade maior em comparação a um vaso 19222 que tem um vácuo menor. Em certas modalidades, a cavidade de um vaso pode ser segmentada formando duas ou mais cavidades vedadas separadas, em que cada cavidade vedada separada pode compreender uma atmosfera interna separada. Em pelo menos uma de tal modalidade, alguns dos grampos no interior de uma fileira de grampos podem ser configurados e dispostos para perfurar uma primeira cavidade definida no vaso enquanto outros grampos no interior da fileira de grampos podem ser configurados e dispostos para perfurar uma segunda cavidade definida no vaso, por exemplo. Em tais modalidades, especificamente em modalidades nas quais os grampos em uma fileira de grampos são sequencialmente disparados de uma extremidade da fileira de grampos para a outra, conforme descrito acima, uma das cavidades pode permanecer intacta e pode manter sua atmosfera interna quando outra cavidade for rompida. Em certas modalidades, a primeira cavidade pode ter uma atmosfera in terna que tem uma primeira pressão de vácuo e a segunda cavidade pode ter uma atmosfera interna que tem uma segunda pressão de vá-cuo diferente, por exemplo. Em várias modalidades, uma cavidade que permanece intacta pode manter sua pressão interna até que o vaso seja bioabsorvido criando assim uma liberação de pressão temporiza-da.
[1022] Em várias modalidades, agora com referência às FIGURAS 510 e 511, um compensador de espessura de tecido, como o compen-sador de espessura de tecido 19120, por exemplo, pode ser fixado a uma bigorna, como a bigorna 19160. de modo similar ao que foi dis-posto acima, o compensador de espessura de tecido 19120 pode compreender um vaso 19124 e uma pluralidade de elementos resilien-tes 19122 posicionados no mesmo. Também similar ao que foi disposto acima, o vaso 19124 pode definir uma cavidade contendo uma at-mosfera interna que tem uma pressão que é menor ou maior que a pressão da atmosfera que circunda o compensador de espessura de tecido 19120. Em modalidades onde a atmosfera interna no interior do vaso 19124 compreender um vácuo, o vaso 19124 e os elementos re-silientes 19122 posicionados no mesmo podem ser distorcidos, acha-tados e/ou aplanados pela diferença na pressão entre o vácuo no vaso 19124 e a pressão atmosférica fora do vaso 19124. Em uso, a bigorna 19160 pode ser movida para uma posição fechada na qual é posicio-nada em oposição a um cartucho de grampos 19100 e na qual uma superfície de engate em tecido 19121 no vaso 19124 pode engatar-se ao tecido T posicionado intermediário ao compensador de espessura de tecido 19120 e um cartucho de grampos 19100. Em uso, o elemento de disparo 19080 pode ser avançado distalmente para disparar os grampos 19030, conforme descrito acima, e, ao mesmo tempo, fazer a incisão do tecido T. Em pelo menos uma modalidade, o compensador de espessura de tecido 19120 pode compreender adicionalmente uma porção intermediária 19126 que pode ser alinhada a uma fenda de cor-te definida na bigorna 19160 na qual, quando o elemento de disparo 19080 avança distalmente através do compensador de espessura de tecido 19120, o elemento de disparo 19080 pode perfurar ou romper o vaso 19124. Além disso, similar ao que foi disposto acima, o membro de disparo 19080 pode erguer os acionadores de grampo 19040 e dis-parar os grampos 19030 de modo que os grampos 19030 possam en-trar em contato com a bigorna 19160 e possam ser deformados para sua configuração deformada, conforme ilustrado na FIGURA 512. Quando os grampos 19030 são disparados, os grampos 19030 podem perfurar o tecido T e, então, perfurar ou romper o vaso 19124 de modo que os elementos resilientes 19122 posicionados no interior do vaso 19124 possam expandir-se pelo menos parcialmente, conforme es-quematizado acima.
[1023] Em várias modalidades, adicionalmente ao acima, um com pensador de espessura de tecido pode ser compreendido de um mate-rial biocompatível. O material biocompatível, como uma espuma, pode compreender agentes de pegajosidade, tensoativos, cargas, reticuladores, pigmentos, corantes, antioxidantes e outros estabilizantes e/ou combinações dos mesmos para fornecer as propriedades desejadas ao material. Em certas modalidades, uma espuma biocompatível pode compreender um tensoativo. O tensoativo pode ser aplicado à superfí-cie do material e/ou disperso no material. Sem se ater a nenhuma teo-ria particular, o tensoativo aplicado ao material biocompatível pode re-duzir a tensão superficial dos fluidos em contato com o material. Por exemplo, o tensoativo pode reduzir a tensão superficial da água em contato com o material a fim de acelerar a penetração de água no ma-terial. Em várias modalidades, a água pode agir como um catalisador. O tensoativo pode aumentar a capacidade hidrofílica do material.
[1024] Em várias modalidades, o tensoativo pode compreender um tensoativo aniônico, um tensoativo catiônico e/ou um tensoativo não iônico. Exemplos de tensoativos incluem, mas não se limitam a, ácido poliacrílico, metalose, metil celulose, etila celulose, propila celulose, hidroxietilcelulose, carboximetilcelulose, cetil éter de polioxietileno, lauril éter de polioxietileno, octil éter de polioxietileno, fenil éter de polioxietileno, oleil éter de polioxietileno, polioxietileno monolaurato de sorbitano, estearil éter de polióxietileno, nonilfenil éter de polioxietileno, dialquilfenóxi poli(etileno-oxi) etanol e polioxâmeros e combinações dos mesmos. Em ao menos uma modalidade, o tensoativo pode compre-ender um copolímero de poli(etilenoglicol) e poli(glicol propilênico). Em ao menos uma modalidade, o tensoativo pode compreender um tensoativo de fosfolipídeo. O tensoativo de fosfolipídeo pode proporcionar propriedades estabilizantes antibacterianas e/ou dispersar outros ma-teriais no material biocompatível.
[1025] Em várias modalidades, o compensador de espessura de tecido pode compreender ao menos um medicamento. O compensador de espessura de tecido pode compreender um ou mais materiais naturais, materiais não sintéticos e/ou materiais sintéticos descritos no presente documento. Em certas modalidades, o compensador de es-pessura de tecido pode compreender uma espuma biocompatível que compreende gelatina, colágeno, ácido hialurônico, celulose regenerada oxidada, ácido poliglicólico, policaprolactona, ácido polilático, polidioxanona, poli-hidroxialcanoato, poliglecaprona e combinações dos mesmos. Em certas modalidades, o compensador de espessura de tecido pode compreender um filme que compreende o pelo menos um medicamento. Em certas modalidades, o compensador de espessura de tecido pode compreender um filme biodegradável que compreende o pelo menos um medicamento. Em certas modalidades, o medicamento pode compreender um líquido, gel e/ou pó. Em várias modalidades, os medicamentos podem compreender agentes anticâncer, como, por exemplo, cisplatina, mitomicina e/ou adriamicina.
[1026] Em várias modalidades, o compensador de espessura de tecido pode compreender um material biodegradável para fornecer eluição controlada do pelo menos um medicamento conforme o mate-rial biodegradável se degrada. Em várias modalidades, material biode-gradável pode degradar-se, pode decompor-se ou perder sua integri-dade estrutural quando o mesmo entrar em contato com um ativador, por exemplo, um fluido ativador. Em várias modalidades, o fluido ativador pode compreender solução salina ou qualquer outra solução eletrolítica, por exemplo. O material biodegradável podem entrar em con-tato com o fluido ativador por meio de técnicas convencionais, incluin-do, mas não se limitando a, aspersão, imersão e/ou escovação. Em uso, por exemplo, um cirurgião pode imergir um atuador de extremida-de e/ou um cartucho de grampos que compreende o compensador de espessura de tecido que compreende o pelo menos um medicamento em um fluido ativador que compreende uma solução salina, como clo-reto de sódio, cloreto de cálcio e/ou cloreto de potássio. O compensa-dor de espessura de tecido pode liberar o medicamento conforme o compensador de espessura de tecido se degrada. Em certas modali-dades, a eluição do medicamento do compensador de espessura de tecido pode ser caracterizada por uma taxa de eluição inicial rápida e uma taxa de eluição prolongada mais lenta.
[1027] Em várias modalidades, um compensador de espessura de tecido, por exemplo, pode ser compreendido de um material biocompatível que pode compreender um agente oxidante. Em várias modali-dades, o agente oxidante pode ser um peróxido orgânico e/ou um peróxido inorgânico. Exemplos de agentes oxidantes podem incluir, mas não se limitam a, peróxido de hidrogênio, peróxido de ureia, peróxido de cálcio e peróxido de magnésio e percarbonato de sódio. Em várias modalidades, o agente oxidante pode compreender agentes oxidantes à base de peroxigênio e agentes oxidantes à base de hipoalito, por exemplo peróxido de hidrogênio, ácido hipocloroso, hipocloritos, hipocoditas e percarbonatos. Em várias modalidades, o agente oxidante pode compreender cloritos, hipocloritos e perboratos de metal alcalino, por exemplo, clorito de sódio, hipoclorito de sódio e perborato de sódio. Em certas modalidades, o agente oxidante pode compreender vanadato. Em certas modalidades, o agente oxidante pode compreender ácido ascórbico. Em certas modalidades, o agente oxidante pode compreender um gerador de oxigênio ativo. Em várias modalidades, uma armação de tecido pode compreender o material biocompatível que compreende um agente oxidante.
[1028] Em várias modalidades, o material biocompatível pode compreender um líquido, gel e/ou pó. Em certas modalidades, o agente oxidante pode compreender micropartículas e/ou nanopartículas, por exemplo. Por exemplo, o agente oxidante pode ser triturado formando micropartículas e/ou nanopartículas. Em certas modalidades, o agente oxidante pode ser incorporado ao material biocompatível pela suspensão do agente oxidante em uma solução de polímero. Em certas modalidades, o agente oxidante pode ser incorporado no material biocompatível durante o processo de liofilização. Após a liofilização, o agente oxidante pode ser fixado às paredes celulares do material biocompatível para interagir com o tecido mediante contato com ele. Em várias modalidades, o agente oxidante pode não ser quimicamente ligado ao material biocompatível. Em ao menos uma modalidade, um pó seco de percarbonato pode ser incorporado dentro de uma espuma biocompatível para fornecer um efeito biológico prolongado pela libe-ração lenta de oxigênio. Em ao menos uma modalidade, um pó seco de percarbonato pode ser incorporado a uma fibra polimérica em uma estrutura não tecida para fornecer um efeito biológico prolongado por meio da liberação lenta de oxigênio. Em várias modalidades, o materi al biocompatível pode compreender um agente oxidante e um medi-camento, por exemplo, doxiciclina e ácido ascórbico.
[1029] Em várias modalidades, o material biocompatível pode compreender um agente oxidante de rápida liberação e/ou um agente oxidante de liberação prolongada mais lenta. Em certas modalidades, a eluição do agente oxidante do material biocompatível pode ser ca-racterizada por uma taxa de eluição inicial rápida e uma taxa de eluição prolongada mais lenta. Em várias modalidades, o agente oxidante pode gerar oxigênio quando o agente oxidante entrar em contato com o fluido corporal, por exemplo, água. Exemplos de fluidos corporais podem incluir, mas não se limitam a, sangue, plasma, fluido peritoneal, líquido cefalorraquidiano, urina, fluido linfático, fluido sinovial, fluido vítreo, saliva, conteúdo luminal gastrointestinal e/ou bile. Sem se ater a nenhuma teoria particular, o agente oxidante pode reduzir a morte ce-lular, melhorar a viabilidade de tecido e/ou manter a resistência mecâ-nica do tecido que pode ser danificado durante o corte e/ou o grampeamento.
[1030] Em várias modalidades, o material biocompatível pode compreender ao menos uma micropartícula e/ou nanopartícula. O ma-terial biocompatível pode compreender um ou mais dos materiais natu-rais, dos materiais não sintéticos e dos materiais sintéticos descritos no presente documento. Em várias modalidades, o material biocompatível pode compreender partículas tendo um diâmetro médio de cerca de 10 nm a cerca de 100 nm e/ou ao redor do 10 μm a cerca de 100 μm, como, por exemplo, 45 a 50 nm e/ou 45 a 50 μm. Em várias mo-dalidades, o material biocompatível pode compreender espuma biocompatível que compreende pelo menos uma micropartícula e/ou nanopartícula incorporada ao mesmo. A micropartícula e/ou a nanopartícula pode não estar quimicamente ligado ao material biocompatível. A micropartícula e/ou a nanopartícula pode proporcionar liberação controlada do medicamento. Em certas modalidades, a micropartícula e/ou nanopartícula pode compreender ao menos um medicamento. Em certas modalidades, a micropartícula e/ou a nanopartícula pode compreender um agente hemostático, um agente antimicrobiano e/ou um agente oxidante, por exemplo. Em certas modalidades, o compen-sador de espessura de tecido pode compreender uma espuma biocompatível que compreende um agente hemostático que compreende celulose regenerada oxidada, um agente antimicrobiano que compre-ende doxiciclina e/ou gentamicina e/ou um agente oxidante que com-preende um percarbant. Em várias modalidades, a micropartícula e/ou a nanopartícula pode fornecer liberação controlada do medicamento até três dias, por exemplo.
[1031] Em várias modalidades, a micropartícula e/ou a nanopartícula pode ser incorporada ao material biocompatível durante um pro-cesso de fabricação. Por exemplo, um polímero biocompatível, por exemplo um PGA/PCL, podem entrar em contato um solvente, por exemplo dioxano para formar uma mistura. O polímero biocompatível pode ser triturado para formar partículas. As partículas secas, com ou sem partículas de ORC, podem ser colocadas em contato com a mis-tura para formar uma suspensão. A suspensão pode ser liofilizada para formar uma espuma biocompatível que compreende PGA/PCL que tem partículas secas e/ou partículas de ORC incorporadas à mesma.
[1032] Em várias modalidades, os compensadores de espessura de tecido, ou camadas, revelados no presente documento podem ser compreendidos de um polímero absorvível, por exemplo. Em certas modalidades, um compensador de espessura de tecido pode ser com-preendido de espuma, filme, tecido fibroso, PGA não tecido fibroso, PGA/PCL (poli(ácido glicólico-cocaprolactona)), PLA/PCL (poli(ácido láctico-copolicaprolactona)), PLLA/PCL, PGA/TMC (poli(ácido glicólicococarbonato de trimetileno)), PDS, PEPBO ou outro poliuretano, poliéster, policarbonato, poliortoésteres, polianidridas, poliesteramidas e/ou polioxaésteres absorvíveis, por exemplo. Em várias modalidades, uma um compensador de espessura de tecido pode ser compreendido de PGA/PLA (poli(ácido glicólico-co-ácido láctico)) e/ou PDS/PLA (poli(p-dioxanona-co-ácido láctico)), por exemplo. Em várias modalidades, um compensador de espessura de tecido pode ser compreendido de um material orgânico, por exemplo. Em certas modalidades, um com-pensador de espessura de tecido pode ser compreendido de carboximetilcelulose, alginato de sódio, ácido hialurônico reticulado e/ou celu-lose regenerada oxidada, por exemplo. Em várias modalidades, um compensador de espessura de tecido pode compreender um durômetro nas faixas 3 a 7 Shore A (30 a 50 Shore OO) com uma dureza má-xima de 15 Shore A (65 Shore OO), por exemplo. Em certas modali-dades, um compensador de espessura de tecido pode ser submetido a uma compressão de 40% sob uma carga de 13 N (3 lbf), compressão de 60% sob uma carga de 27 N (6 lbf) e/ou compressão de 80% sob uma carga de 89 N (20 lbf), por exemplo. Em certas modalidades, um ou mais gases, como ar, nitrogênio, dióxido de carbono e/ou oxigênio, por exemplo, podem ser borbulhados através de e/ou contidos no inte-rior do compensador de espessura de tecido. Em ao menos uma mo-dalidade, um compensador de espessura de tecido pode compreender microesferas no mesmo que compreendem entre aproximadamente 50% e aproximadamente 75% da dureza de material que compreende o compensador de espessura de tecido.
[1033] Em várias modalidades, um compensador de espessura de tecido pode compreender ácido hialurônico, nutrientes, fibrina, trombina, plasma rico em plaquetas, sulfassalazina (Azulfidine® ligação 5ASA+Sulfapiridina diazo))pro-medicamento bactérias de colônia (Azoreductase), mesalamina (5-ASA com diferentes configurações de pro-medicamento para liberação retardada), Asacol® (5-ASA + Eudra git-S revestido pH > 7 (dissolução de revestimento)), Pentasa® (5ASA + etilcelulose revestido liberação lenta dependendo de tempo/pH), Mesasal® (5-ASA + Eudragit-L revestido pH > 6), olsalazina (5-ASA + 5-ASA bactérias de colônia (Azoreductase)), Balsalazida (5-ASA + 4Aminobenzoil-B-alanina) bactérias de colônia (Azoreduc-tase)), mesalamina granulada, Lialda (retardo e formulação RE de me-salamina), HMPL-004 (mistura herbal que pode inibir TNF-alfa, interleucina-1 beta, e ativação de kappa B nuclear), CCX282-B (antagonista de receptor de quimioquina oral que interfere com o tráfego de linfócitos T na mucosa intestinal), Rifaximina (antibiótico de amplo espectro não absorvível), infliximab, murino quimérico (anticorpo monoclonal dirigido contra TNF-alfa aprovado para redução de sinais/sintomas e manutenção de remissão clínica em pacientes adultos/pediátricos com doença de Crohn luminal e fistulizante moderada/grave que apresenta-ram resposta inadequada para a terapia convencional), Adalimumab, IgG1 humano total (anticorpo monoclonal anti-TNF-alfa aprovado para reduzir sinais/sintomas da doença de Crohn e para a indução e ma-nutenção da remissão clínica em pacientes adultos com doença de Crohn ativa moderada/grave com resposta inadequadaàs terapias convencionais ou que ficaram intolerantes a infliximab), Certolizumab pegoll, anti-TNF FAB’ humanizado (fragmento de anticorpo monoclonal ligado a poli(etilenoglicol) aprovado para a redução de sinais/sintomas da doença de Crohn e para a indução e manutenção da resposta em pacientes adultos com doença moderada/grave com res-posta inadequada para as terapias convencionais), Natalizumab, pri-meira inibidor não-TNF-alfa (composto biológico aprovado para doença de Crohn), anticopro monoclonal IgG4 humanizado (dirigido contra alfa-4 integrina aprovado pela FDA para induzir e manter a resposta clínica e remissão em pacientes com doença moderada/grave com evidência de inflamação e que apresentou resposta inadequada para ou não toleram as terapias convencionais para Crohn e inibidores de TNF-alfa), imunomoduladores concomitantes potencialmente dados com infliximab, azatioprina 6-Mercaptopurina (inibidor de síntese de purina pro-medicamento), metotrexato (liga-se com a enzima dihidrofolato redutase (DHFR) que participa na síntense de tetrahidrofolato, inibe toda a síntese de purina), alopurinol e terapia com tioprina, PPI, H2 para supressão de ácido para proteger a linha de cura, C-Diff Flagil, vancomicina (tratamento de translocação fecal; probióticos; repopulação da flora endoluminal normal) e/ou Rifaximina (tratamento de supercrescimento bacteriano (notadamente encefalopaia hepática); não observado no trato GI com ação na bactéria in-traluminal), por exemplo.
[1034] Conforme descrito aqui, um compensador de espessura de tecido pode compensar as variações de espessura do tecido que é capturado nos grampos ejetados de um cartucho de grampos e/ou contidos em uma linha de grampos, por exemplo. Dito de outra forma, certos grampos de uma linha de grampos podem capturar porções es-pessas de tecido, enquanto outros grampos da linha de grampos po-dem capturar porções delgadas de tecido. Sob tais circunstâncias, o compensador de espessura de tecido pode assumir diferentes alturas ou espessuras nos grampos e aplicar uma força de compressão ao tecido capturado pelos grampos independentemente de o tecido captu-rado ser espesso ou delgado. Em várias modalidades, um compensa-dor de espessura de tecido pode compensar as variações na dureza do tecido. Por exemplo, certos grampos de uma linha de grampos podem capturar porções altamente compressíveis de tecido, enquanto outros grampos da linha de grampos podem capturar porções de tecido que são menos compressíveis. Sob tais circunstâncias, o compensador de espessura de tecido pode ser configurado para assumir uma altura menor nos grampos que capturaram um tecido que tem uma compressibilidade mais baixa ou uma dureza mais alta e, de modo cor-respondente, uma altura maior nos grampos que capturaram um tecido que tem uma compressibilidade mais alta ou dureza mais baixa, por exemplo. Em qualquer evento, um compensador de espessura de te-cido, independentemente do fato de ele compensar variações na es-pessura de tecido e/ou variações na dureza de tecido, por exemplo, pode ser chamado de 'compensador de tecido' e/ou 'compensador', por exemplo.
[1035] Os dispositivos aqui descritos podem ser projetados para serem descartados após único uso, ou os mesmos podem ser projeta-dos para uso múltiplas vezes. Em qualquer dos casos, entretanto, o dispositivo pode ser recondicionado para reuso após pelo menos um uso. O recondicionamento pode incluir qualquer combinação das eta-pas de desmontagem do dispositivo, seguido de limpeza ou substitui-ção de peças particulares, e remontagem subsequente. Em particular, o dispositivo pode ser desmontado, e qualquer número de peças ou partes particulares do dispositivo podem ser seletivamente trocadas ou removidas, em qualquer combinação. Após a limpeza e/ou a troca de peças particulares, o dispositivo pode ser remontado para uso subse-quente em uma instalação de recondicionamento ou por uma equipe cirúrgica imediatamente antes de um procedimento cirúrgico. Os ver-sados na técnica apreciarão que o recondicionamento de um dispositi-vo pode usar uma variedade de técnicas para desmontagem, limpeza/troca, e remontagem. O uso de tais técnicas, e o dispositivo recon-dicionado resultante estão todos dentro do escopo do presente pedido.
[1036] De preferência, a invenção aqui descrita será processada antes da cirurgia. Primeiro, um instrumento novo ou usado é obtido e, se necessário, limpo. O instrumento pode ser então esterilizado. Em uma técnica de esterilização, o instrumento é colocado em um recipi-ente fechado e selado, como uma bolsa plástica ou de TYVEK. O recipiente e o instrumento são então colocados no campo de uma radiação que pode penetrar no recipiente, como radiação gama, raios X ou elétrons de alta energia. A radiação extermina bactérias no instrumento e no recipiente. O instrumento esterilizado pode então ser armazenado em um recipiente estéril. O recipiente estéril mantém o instru-mentoestéril até que ele seja aberto na instalação médica.
[1037] Qualquer patente, publicação ou outro material de descri ção, no todo ou em parte, que diz-se ser incorporado à presente in-venção a título de referência, é incorporado à presente invenção so-menteaté o ponto em que os materiais incorporados não entrem em conflito com definições, declarações ou outro material de descrição existentes apresentados nesta descrição. desse modo, e até onde for necessário, a descrição como explicitamente aqui determinada substitui qualquer material conflitante incorporado aqui a título de referência. Qualquer material, ou porção do mesmo, que são tidos como incorpo-rados a título de referência na presente invenção, mas que entra em conflito com definições, declarações, ou outros materiais de descrição existentes aqui determinados serão aqui incorporados apenas até o ponto em que nenhum conflito surgirá entre o material incorporado e o material de descrição existente.
[1038] Embora esta invenção tenha sido descrita como tendo pro jetos exemplificadores, a presente invenção pode ser modificada adi-cionalmente dentro do espírito e escopo da descrição. Este pedido destina-se, portanto, a abranger quaisquer variações, usos, ou adap-tações da invenção com o uso de seus princípios gerais. Adicional-mente, este pedido tem por objetivo abranger desvios da presente descrição que possam ocorrer com a prática conhecida ou costumeira na técnica à qual esta invenção está relacionada.
Claims (6)
1. Conjunto de cartucho de grampos para uso com gram-peadorcirúrgico (7000, 15500, 15600), em que o conjunto de cartucho de grampos é adaptado para ser usado com tecido que tem uma es-pessura, em que o conjunto de cartucho de grampos compreende: um corpo de cartucho (1010, 1210, 1310, 1410, 1510, 1610, 1710, 1910, 2010, 2110, 2210, 2410, 2510, 2610, 2710, 2810, 3110, 3210, 3310, 3410, 3510, 3810, 4110, 4510, 4610, 4710, 6210, 6980, 30017, 19010) que compreende uma porção de suporte (10010, 16610, 10710, 11010, 11110, 11210, 11310, 11410, 11410’, 10610, 11610, 10710, 10810, 12510, 12610, 14110, 14310, 14410, 14710, 14910, 15010, 15310, 15610, 16010, 17010, 18010, 20010, 30010, 40010, 33010), em que que a porção de suporte (10010, 16610, 10710, 11010, 11110, 11210, 11310, 11410, 11410’, 10610, 11610, 10710, 10810, 12510, 12610, 14110, 14310, 14410, 14710, 14910, 15010, 15310, 15610, 16010, 17010, 18010, 20010, 30010, 40010, 33010) compreende uma pluralidade de cavidades de grampo (1115, 1615, 1815, 1853, 7033, 10012, 20012, 30012, 19012), e em que cada uma das cavidades de grampo (1115, 1615, 1815, 1853, 7033, 10012, 20012, 30012, 19012) compreende uma abertura; uma pluralidade de grampos (1020, 1220, 1720, 1820, 2120, 2220a, 2220b, 3020a, 3020b, 3520, 3620, 4020, 4120, 4220, 4320, 4520, 4620, 4720, 4920, 5020, 6220, 70110, 70128, 10030, 13030), em que ao menos uma porção de cada grampo é armazenada de modo removível dentro de uma cavidade de grampo (1115, 1615, 1815, 1853, 7033, 10012, 20012, 30012, 19012), em que cada grampo é móvel entre uma posição não disparada e uma posição disparada, e em que cada grampo é deformável entre uma configuração não dispa-rada e uma configuração disparada quando cada grampo é movido entre uma posição não disparada e uma posição disparada; e um compensador de espessura de tecido (70000, 70050, 70105, 70150, 70182, 70305) compressível configurado para ser cap-turado dentro dos grampos, em que o compensador de espessura de tecido (70000, 70050, 70105, 70150, 70182, 70305) compressível co-bre ao menos parcialmente as aberturas da cavidade de grampo, em que a porção de suporte (10010, 16610, 10710, 11010, 11110, 11210, 11310, 11410, 11410’, 10610, 11610, 10710, 10810, 12510, 12610, 14110, 14310, 14410, 14710, 14910, 15010, 15310, 15610, 16010, 17010, 18010, 20010, 30010, 40010, 33010) é configurada para supor-tar o compensador de espessura de tecido (70000, 70050, 70105, 70150, 70182, 70305) compressível, e em que o compensador de es pessura de tecido (70000, 70050, 70105, 70150, 70182, 70305) compressível é configurado para assumir diferentes alturas comprimidas em diferentes grampos, em que o compensador de espessura compressível compreende um agente hidrofílico bioabsorvível incorporado nele, caracterizado pelo fato de que o compensador de espes-sura de tecido (70000, 70050, 70105, 70150, 70182, 70305) compressível compreende uma densidade de agente hidrofílico bioabsorvível dinâmico configurado para responder adaptativamente a tecidos com diferentes espessuras, em que a densidade de agente hidrofílico bioabsorvível dinâmico compreende uma densidade de agente hidrofílico não comprimido quando o compensador de espessura de tecido (70000, 70050, 70105, 70150, 70182, 70305) está em um estado não comprimido, em que o dinâmico a densidade do agente hidrofílico bioabsorvível compreende uma primeira densidade do agente hidrofílico comprimida em um primeiro grampo em resposta ao tecido com uma primeira espessura no primeiro grampo, em que a densidade dinâmica do agente hidrofílico bioabsorvível compreende uma segunda densi-dade do agente hidrofílico comprimido em um segundo segundo grampo em resposta ao tecido com uma segunda espessura no se-gundo grampo, em que a primeira espessura é diferente da segunda espessura, e em que a primeira densidade é diferente da segunda densidade.
2. Conjunto de cartucho de grampos, de acordo com a rei-vindicação 1, caracterizado pelo fato de que o agente hidrofílico bioabsorvível compreende ao menos um dentre: ésteres de ácido graxo, triglicerídeos; colesterol, colesterol aniônico, carboxilatos, tensoativos anfotéricos, ácidos amino propiônicos, ácidos imido propiônicos e compostos quaternizados.
3. Conjunto de cartucho de grampos, de acordo com a rei-vindicação 1, caracterizado pelo fato de que o compensador de es-pessura de tecido (70000, 70050, 70105, 70150, 70182, 70305) compressível compreende uma espessura não-comprimida que é mais grossa do que a espessura do tecido.
4. Conjunto de cartucho de grampos, de acordo com a rei-vindicação 1, caracterizado pelo fato de que o agente hidrofílico bioabsorvível compreende uma espuma compreendendo um tensoativo.
5. Conjunto de cartucho de grampos, de acordo com a rei-vindicação 1, caracterizado pelo fato de que o agente hidrofílico bioabsorvível compreende pelo menos um dentre: ésteres de ácidos graxos, triglicerídeos; colesterol, colesterol aniônico, carboxilatos, surfactantes anfotéricos, ácidos amino propiônicos, ácidos imido propiônicos e compostos quaterizados.
6. Conjunto de cartucho de grampos, de acordo com a rei-vindicação 1, caracterizado pelo fato de que a primeira espessura é maior que a segunda espessura, e em que a primeira densidade é maior que a segunda densidade.
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/433,115 US9204880B2 (en) | 2012-03-28 | 2012-03-28 | Tissue thickness compensator comprising capsules defining a low pressure environment |
| US13/433,098 US9301753B2 (en) | 2010-09-30 | 2012-03-28 | Expandable tissue thickness compensator |
| US13/532,824 US9307989B2 (en) | 2012-03-28 | 2012-06-26 | Tissue stapler having a thickness compensator incorportating a hydrophobic agent |
| US13/532,820 US9314247B2 (en) | 2012-03-28 | 2012-06-26 | Tissue stapler having a thickness compensator incorporating a hydrophilic agent |
| US13/532,820 | 2012-06-26 | ||
| PCT/US2013/046540 WO2014004205A1 (en) | 2012-03-28 | 2013-06-19 | Tissue stapler having a thickness compensator incorporating a hydrophilic agent |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112014032693A2 BR112014032693A2 (pt) | 2017-06-27 |
| BR112014032693B1 true BR112014032693B1 (pt) | 2022-07-12 |
Family
ID=50732696
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112014032693-2A BR112014032693B1 (pt) | 2012-03-28 | 2013-06-19 | Conjunto de cartucho de grampos para uso com um grampeador cirúrgico |
Country Status (7)
| Country | Link |
|---|---|
| US (4) | US9301753B2 (pt) |
| EP (4) | EP2644124B1 (pt) |
| JP (2) | JP6309515B2 (pt) |
| CN (2) | CN104582592B (pt) |
| BR (1) | BR112014032693B1 (pt) |
| RU (2) | RU2649960C9 (pt) |
| WO (5) | WO2013148762A2 (pt) |
Families Citing this family (936)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5865361A (en) | 1997-09-23 | 1999-02-02 | United States Surgical Corporation | Surgical stapling apparatus |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US11896225B2 (en) | 2004-07-28 | 2024-02-13 | Cilag Gmbh International | Staple cartridge comprising a pan |
| US8905977B2 (en) | 2004-07-28 | 2014-12-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated medical substance dispenser |
| US8215531B2 (en) | 2004-07-28 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a medical substance dispenser |
| US7845536B2 (en) | 2004-10-18 | 2010-12-07 | Tyco Healthcare Group Lp | Annular adhesive structure |
| US7938307B2 (en) | 2004-10-18 | 2011-05-10 | Tyco Healthcare Group Lp | Support structures and methods of using the same |
| US9364229B2 (en) | 2005-03-15 | 2016-06-14 | Covidien Lp | Circular anastomosis structures |
| US9237891B2 (en) | 2005-08-31 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical stapling devices that produce formed staples having different lengths |
| US20070194082A1 (en) | 2005-08-31 | 2007-08-23 | Morgan Jerome R | Surgical stapling device with anvil having staple forming pockets of varying depths |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US8800838B2 (en) | 2005-08-31 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Robotically-controlled cable-based surgical end effectors |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US11484312B2 (en) | 2005-08-31 | 2022-11-01 | Cilag Gmbh International | Staple cartridge comprising a staple driver arrangement |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US8161977B2 (en) | 2006-01-31 | 2012-04-24 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US8763879B2 (en) | 2006-01-31 | 2014-07-01 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of surgical instrument |
| US9861359B2 (en) | 2006-01-31 | 2018-01-09 | Ethicon Llc | Powered surgical instruments with firing system lockout arrangements |
| US20110024477A1 (en) | 2009-02-06 | 2011-02-03 | Hall Steven G | Driven Surgical Stapler Improvements |
| US20110290856A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument with force-feedback capabilities |
| US20110006101A1 (en) | 2009-02-06 | 2011-01-13 | EthiconEndo-Surgery, Inc. | Motor driven surgical fastener device with cutting member lockout arrangements |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US11224427B2 (en) | 2006-01-31 | 2022-01-18 | Cilag Gmbh International | Surgical stapling system including a console and retraction assembly |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US11278279B2 (en) | 2006-01-31 | 2022-03-22 | Cilag Gmbh International | Surgical instrument assembly |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US20070225562A1 (en) | 2006-03-23 | 2007-09-27 | Ethicon Endo-Surgery, Inc. | Articulating endoscopic accessory channel |
| US8322455B2 (en) | 2006-06-27 | 2012-12-04 | Ethicon Endo-Surgery, Inc. | Manually driven surgical cutting and fastening instrument |
| US8720766B2 (en) | 2006-09-29 | 2014-05-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments and staples |
| US10130359B2 (en) | 2006-09-29 | 2018-11-20 | Ethicon Llc | Method for forming a staple |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US11980366B2 (en) | 2006-10-03 | 2024-05-14 | Cilag Gmbh International | Surgical instrument |
| US7637410B2 (en) | 2006-10-06 | 2009-12-29 | Tyco Healthcare Group Lp | Surgical instrument including a locking assembly |
| US11291441B2 (en) | 2007-01-10 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with wireless communication between control unit and remote sensor |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US8459520B2 (en) | 2007-01-10 | 2013-06-11 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and remote sensor |
| US7434717B2 (en) | 2007-01-11 | 2008-10-14 | Ethicon Endo-Surgery, Inc. | Apparatus for closing a curved anvil of a surgical stapling device |
| US11039836B2 (en) | 2007-01-11 | 2021-06-22 | Cilag Gmbh International | Staple cartridge for use with a surgical stapling instrument |
| EP3431016B1 (en) | 2007-03-06 | 2023-07-12 | Covidien LP | Surgical stapling apparatus |
| US7673782B2 (en) | 2007-03-15 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a releasable buttress material |
| US8893946B2 (en) | 2007-03-28 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Laparoscopic tissue thickness and clamp load measuring devices |
| US11672531B2 (en) | 2007-06-04 | 2023-06-13 | Cilag Gmbh International | Rotary drive systems for surgical instruments |
| US7832408B2 (en) | 2007-06-04 | 2010-11-16 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a directional switching mechanism |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US8534528B2 (en) | 2007-06-04 | 2013-09-17 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a multiple rate directional switching mechanism |
| US7665646B2 (en) | 2007-06-18 | 2010-02-23 | Tyco Healthcare Group Lp | Interlocking buttress material retention system |
| US8308040B2 (en) | 2007-06-22 | 2012-11-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an articulatable end effector |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US8062330B2 (en) | 2007-06-27 | 2011-11-22 | Tyco Healthcare Group Lp | Buttress and surgical stapling apparatus |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| US8061576B2 (en) | 2007-08-31 | 2011-11-22 | Tyco Healthcare Group Lp | Surgical instrument |
| US7766209B2 (en) | 2008-02-13 | 2010-08-03 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with improved firing trigger arrangement |
| US8540133B2 (en) | 2008-09-19 | 2013-09-24 | Ethicon Endo-Surgery, Inc. | Staple cartridge |
| US8453908B2 (en) | 2008-02-13 | 2013-06-04 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with improved firing trigger arrangement |
| US7905381B2 (en) | 2008-09-19 | 2011-03-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with cutting member arrangement |
| US8561870B2 (en) | 2008-02-13 | 2013-10-22 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument |
| US8584919B2 (en) | 2008-02-14 | 2013-11-19 | Ethicon Endo-Sugery, Inc. | Surgical stapling apparatus with load-sensitive firing mechanism |
| US8622274B2 (en) | 2008-02-14 | 2014-01-07 | Ethicon Endo-Surgery, Inc. | Motorized cutting and fastening instrument having control circuit for optimizing battery usage |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| US8752749B2 (en) | 2008-02-14 | 2014-06-17 | Ethicon Endo-Surgery, Inc. | Robotically-controlled disposable motor-driven loading unit |
| US7793812B2 (en) | 2008-02-14 | 2010-09-14 | Ethicon Endo-Surgery, Inc. | Disposable motor-driven loading unit for use with a surgical cutting and stapling apparatus |
| JP5410110B2 (ja) | 2008-02-14 | 2014-02-05 | エシコン・エンド−サージェリィ・インコーポレイテッド | Rf電極を有する外科用切断・固定器具 |
| US8459525B2 (en) | 2008-02-14 | 2013-06-11 | Ethicon Endo-Sugery, Inc. | Motorized surgical cutting and fastening instrument having a magnetic drive train torque limiting device |
| US8657174B2 (en) | 2008-02-14 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument having handle based power source |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US11986183B2 (en) | 2008-02-14 | 2024-05-21 | Cilag Gmbh International | Surgical cutting and fastening instrument comprising a plurality of sensors to measure an electrical parameter |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| US11272927B2 (en) | 2008-02-15 | 2022-03-15 | Cilag Gmbh International | Layer arrangements for surgical staple cartridges |
| US9770245B2 (en) | 2008-02-15 | 2017-09-26 | Ethicon Llc | Layer arrangements for surgical staple cartridges |
| US8608044B2 (en) | 2008-02-15 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Feedback and lockout mechanism for surgical instrument |
| US20090206131A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | End effector coupling arrangements for a surgical cutting and stapling instrument |
| PL3476312T3 (pl) | 2008-09-19 | 2024-03-11 | Ethicon Llc | Stapler chirurgiczny z urządzeniem do dopasowania wysokości zszywek |
| US7988028B2 (en) | 2008-09-23 | 2011-08-02 | Tyco Healthcare Group Lp | Surgical instrument having an asymmetric dynamic clamping member |
| US9050083B2 (en) | 2008-09-23 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US8628544B2 (en) | 2008-09-23 | 2014-01-14 | Covidien Lp | Knife bar for surgical instrument |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US20100147921A1 (en) | 2008-12-16 | 2010-06-17 | Lee Olson | Surgical Apparatus Including Surgical Buttress |
| US8414577B2 (en) | 2009-02-05 | 2013-04-09 | Ethicon Endo-Surgery, Inc. | Surgical instruments and components for use in sterile environments |
| US8397971B2 (en) | 2009-02-05 | 2013-03-19 | Ethicon Endo-Surgery, Inc. | Sterilizable surgical instrument |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| US8444036B2 (en) | 2009-02-06 | 2013-05-21 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with mechanisms for adjusting a tissue gap within the end effector |
| RU2525225C2 (ru) | 2009-02-06 | 2014-08-10 | Этикон Эндо-Серджери, Инк. | Усовершенствование приводного хирургического сшивающего инструмента |
| US8113409B2 (en) | 2009-03-31 | 2012-02-14 | Tyco Healthcare Group Lp | Surgical stapling apparatus with clamping assembly |
| US7967179B2 (en) | 2009-03-31 | 2011-06-28 | Tyco Healthcare Group Lp | Center cinch and release of buttress material |
| US9486215B2 (en) | 2009-03-31 | 2016-11-08 | Covidien Lp | Surgical stapling apparatus |
| US20150231409A1 (en) | 2009-10-15 | 2015-08-20 | Covidien Lp | Buttress brachytherapy and integrated staple line markers for margin identification |
| US9693772B2 (en) | 2009-10-15 | 2017-07-04 | Covidien Lp | Staple line reinforcement for anvil and cartridge |
| US8353438B2 (en) | 2009-11-19 | 2013-01-15 | Ethicon Endo-Surgery, Inc. | Circular stapler introducer with rigid cap assembly configured for easy removal |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US8851354B2 (en) | 2009-12-24 | 2014-10-07 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument that analyzes tissue thickness |
| US8608046B2 (en) | 2010-01-07 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Test device for a surgical tool |
| US20120029272A1 (en) | 2010-07-30 | 2012-02-02 | Shelton Iv Frederick E | Apparatus and methods for protecting adjacent structures during the insertion of a surgical instrument into a tubular organ |
| US8783543B2 (en) | 2010-07-30 | 2014-07-22 | Ethicon Endo-Surgery, Inc. | Tissue acquisition arrangements and methods for surgical stapling devices |
| US8360296B2 (en) | 2010-09-09 | 2013-01-29 | Ethicon Endo-Surgery, Inc. | Surgical stapling head assembly with firing lockout for a surgical stapler |
| US8632525B2 (en) | 2010-09-17 | 2014-01-21 | Ethicon Endo-Surgery, Inc. | Power control arrangements for surgical instruments and batteries |
| US9289212B2 (en) | 2010-09-17 | 2016-03-22 | Ethicon Endo-Surgery, Inc. | Surgical instruments and batteries for surgical instruments |
| US9877720B2 (en) | 2010-09-24 | 2018-01-30 | Ethicon Llc | Control features for articulating surgical device |
| US8733613B2 (en) | 2010-09-29 | 2014-05-27 | Ethicon Endo-Surgery, Inc. | Staple cartridge |
| US9301753B2 (en) | 2010-09-30 | 2016-04-05 | Ethicon Endo-Surgery, Llc | Expandable tissue thickness compensator |
| US9364233B2 (en) | 2010-09-30 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Tissue thickness compensators for circular surgical staplers |
| US9839420B2 (en) | 2010-09-30 | 2017-12-12 | Ethicon Llc | Tissue thickness compensator comprising at least one medicament |
| US9220501B2 (en) | 2010-09-30 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensators |
| US9301752B2 (en) | 2010-09-30 | 2016-04-05 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising a plurality of capsules |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9216019B2 (en) | 2011-09-23 | 2015-12-22 | Ethicon Endo-Surgery, Inc. | Surgical stapler with stationary staple drivers |
| US9386988B2 (en) | 2010-09-30 | 2016-07-12 | Ethicon End-Surgery, LLC | Retainer assembly including a tissue thickness compensator |
| US9314246B2 (en) | 2010-09-30 | 2016-04-19 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorporating an anti-inflammatory agent |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US10123798B2 (en) | 2010-09-30 | 2018-11-13 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US8893949B2 (en) | 2010-09-30 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Surgical stapler with floating anvil |
| US9332974B2 (en) | 2010-09-30 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Layered tissue thickness compensator |
| US9307989B2 (en) | 2012-03-28 | 2016-04-12 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorportating a hydrophobic agent |
| CA2812553C (en) | 2010-09-30 | 2019-02-12 | Ethicon Endo-Surgery, Inc. | Fastener system comprising a retention matrix and an alignment matrix |
| US8978954B2 (en) | 2010-09-30 | 2015-03-17 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising an adjustable distal portion |
| US10405854B2 (en) | 2010-09-30 | 2019-09-10 | Ethicon Llc | Surgical stapling cartridge with layer retention features |
| US11298125B2 (en) | 2010-09-30 | 2022-04-12 | Cilag Gmbh International | Tissue stapler having a thickness compensator |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US20120080344A1 (en) | 2010-09-30 | 2012-04-05 | Ethicon Endo-Surgery, Inc. | Implantable fastener cartridge comprising a support retainer |
| US9232941B2 (en) | 2010-09-30 | 2016-01-12 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a reservoir |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| US9211122B2 (en) | 2011-03-14 | 2015-12-15 | Ethicon Endo-Surgery, Inc. | Surgical access devices with anvil introduction and specimen retrieval structures |
| US9044229B2 (en) | 2011-03-15 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical fastener instruments |
| US8926598B2 (en) | 2011-03-15 | 2015-01-06 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulatable and rotatable end effector |
| US8800841B2 (en) | 2011-03-15 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Surgical staple cartridges |
| US8789737B2 (en) | 2011-04-27 | 2014-07-29 | Covidien Lp | Circular stapler and staple line reinforcement material |
| RU2606493C2 (ru) | 2011-04-29 | 2017-01-10 | Этикон Эндо-Серджери, Инк. | Кассета со скобками, содержащая скобки, расположенные внутри ее сжимаемой части |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US11207064B2 (en) | 2011-05-27 | 2021-12-28 | Cilag Gmbh International | Automated end effector component reloading system for use with a robotic system |
| US8789739B2 (en) | 2011-09-06 | 2014-07-29 | Ethicon Endo-Surgery, Inc. | Continuous stapling instrument |
| US9050084B2 (en) | 2011-09-23 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Staple cartridge including collapsible deck arrangement |
| US9675351B2 (en) * | 2011-10-26 | 2017-06-13 | Covidien Lp | Buttress release from surgical stapler by knife pushing |
| US8740036B2 (en) | 2011-12-01 | 2014-06-03 | Covidien Lp | Surgical instrument with actuator spring arm |
| US9237892B2 (en) | 2011-12-14 | 2016-01-19 | Covidien Lp | Buttress attachment to the cartridge surface |
| US9113885B2 (en) | 2011-12-14 | 2015-08-25 | Covidien Lp | Buttress assembly for use with surgical stapling device |
| US9351731B2 (en) | 2011-12-14 | 2016-05-31 | Covidien Lp | Surgical stapling apparatus including releasable surgical buttress |
| US9326773B2 (en) | 2012-01-26 | 2016-05-03 | Covidien Lp | Surgical device including buttress material |
| US9044230B2 (en) | 2012-02-13 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical cutting and fastening instrument with apparatus for determining cartridge and firing motion status |
| US9078653B2 (en) | 2012-03-26 | 2015-07-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with lockout system for preventing actuation in the absence of an installed staple cartridge |
| JP6224070B2 (ja) | 2012-03-28 | 2017-11-01 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 組織厚さコンペンセータを含む保持具アセンブリ |
| BR112014024098B1 (pt) | 2012-03-28 | 2021-05-25 | Ethicon Endo-Surgery, Inc. | cartucho de grampos |
| US9198662B2 (en) | 2012-03-28 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator having improved visibility |
| MX358135B (es) | 2012-03-28 | 2018-08-06 | Ethicon Endo Surgery Inc | Compensador de grosor de tejido que comprende una pluralidad de capas. |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| BR112014032703B1 (pt) * | 2012-06-26 | 2022-04-26 | Ethicon Endo-Surgery, Inc | Conjunto de cartucho de grampos para uso com um grampeador cirúrgico |
| US9125662B2 (en) | 2012-06-28 | 2015-09-08 | Ethicon Endo-Surgery, Inc. | Multi-axis articulating and rotating surgical tools |
| US8747238B2 (en) | 2012-06-28 | 2014-06-10 | Ethicon Endo-Surgery, Inc. | Rotary drive shaft assemblies for surgical instruments with articulatable end effectors |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9101385B2 (en) | 2012-06-28 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Electrode connections for rotary driven surgical tools |
| US9649111B2 (en) | 2012-06-28 | 2017-05-16 | Ethicon Endo-Surgery, Llc | Replaceable clip cartridge for a clip applier |
| US20140001234A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Coupling arrangements for attaching surgical end effectors to drive systems therefor |
| US9072536B2 (en) | 2012-06-28 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Differential locking arrangements for rotary powered surgical instruments |
| US9561038B2 (en) | 2012-06-28 | 2017-02-07 | Ethicon Endo-Surgery, Llc | Interchangeable clip applier |
| US9028494B2 (en) | 2012-06-28 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Interchangeable end effector coupling arrangement |
| BR112014032776B1 (pt) | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| CN104487005B (zh) | 2012-06-28 | 2017-09-08 | 伊西康内外科公司 | 空夹仓闭锁件 |
| US11202631B2 (en) | 2012-06-28 | 2021-12-21 | Cilag Gmbh International | Stapling assembly comprising a firing lockout |
| US20140005718A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Multi-functional powered surgical device with external dissection features |
| US9119657B2 (en) | 2012-06-28 | 2015-09-01 | Ethicon Endo-Surgery, Inc. | Rotary actuatable closure arrangement for surgical end effector |
| US9572576B2 (en) | 2012-07-18 | 2017-02-21 | Covidien Lp | Surgical apparatus including surgical buttress |
| US20140048580A1 (en) | 2012-08-20 | 2014-02-20 | Covidien Lp | Buttress attachment features for surgical stapling apparatus |
| US9700310B2 (en) | 2013-08-23 | 2017-07-11 | Ethicon Llc | Firing member retraction devices for powered surgical instruments |
| US9161753B2 (en) | 2012-10-10 | 2015-10-20 | Covidien Lp | Buttress fixation for a circular stapler |
| US9386985B2 (en) | 2012-10-15 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Surgical cutting instrument |
| US9295466B2 (en) * | 2012-11-30 | 2016-03-29 | Covidien Lp | Surgical apparatus including surgical buttress |
| US9402627B2 (en) | 2012-12-13 | 2016-08-02 | Covidien Lp | Folded buttress for use with a surgical apparatus |
| US9414839B2 (en) | 2013-02-04 | 2016-08-16 | Covidien Lp | Buttress attachment for circular stapling device |
| RU2661140C2 (ru) * | 2013-02-08 | 2018-07-11 | Этикон Эндо-Серджери, Инк. | Кассета с хирургическими скобами и удерживающими слой элементами |
| US20140224857A1 (en) * | 2013-02-08 | 2014-08-14 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising a compressible portion |
| US9386984B2 (en) | 2013-02-08 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Staple cartridge comprising a releasable cover |
| BR112015018796B8 (pt) | 2013-02-08 | 2022-10-18 | Ethicon Endo Surgery Inc | Cartucho de grampos para uso com um grampeador cirúrgico que compreende uma bigorna |
| US9504470B2 (en) | 2013-02-25 | 2016-11-29 | Covidien Lp | Circular stapling device with buttress |
| US20140239047A1 (en) | 2013-02-28 | 2014-08-28 | Covidien Lp | Adherence concepts for non-woven absorbable felt buttresses |
| US10092292B2 (en) | 2013-02-28 | 2018-10-09 | Ethicon Llc | Staple forming features for surgical stapling instrument |
| US9468438B2 (en) | 2013-03-01 | 2016-10-18 | Eticon Endo-Surgery, LLC | Sensor straightened end effector during removal through trocar |
| BR112015021082B1 (pt) | 2013-03-01 | 2022-05-10 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| MX368026B (es) | 2013-03-01 | 2019-09-12 | Ethicon Endo Surgery Inc | Instrumento quirúrgico articulable con vías conductoras para la comunicación de la señal. |
| US9814463B2 (en) | 2013-03-13 | 2017-11-14 | Covidien Lp | Surgical stapling apparatus |
| US9345481B2 (en) | 2013-03-13 | 2016-05-24 | Ethicon Endo-Surgery, Llc | Staple cartridge tissue thickness sensor system |
| US9629628B2 (en) | 2013-03-13 | 2017-04-25 | Covidien Lp | Surgical stapling apparatus |
| US9717498B2 (en) | 2013-03-13 | 2017-08-01 | Covidien Lp | Surgical stapling apparatus |
| US9566064B2 (en) | 2013-03-13 | 2017-02-14 | Covidien Lp | Surgical stapling apparatus |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| US9351726B2 (en) | 2013-03-14 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Articulation control system for articulatable surgical instruments |
| KR102526549B1 (ko) * | 2013-03-15 | 2023-04-27 | 어플라이드 메디컬 리소시스 코포레이션 | 회전가능 샤프트를 구비한 구동 메커니즘을 갖는 수술용 스테이플러 |
| US9332984B2 (en) | 2013-03-27 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Fastener cartridge assemblies |
| US20140291379A1 (en) * | 2013-03-27 | 2014-10-02 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a cutting member path |
| US9795384B2 (en) | 2013-03-27 | 2017-10-24 | Ethicon Llc | Fastener cartridge comprising a tissue thickness compensator and a gap setting element |
| US9572577B2 (en) | 2013-03-27 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Fastener cartridge comprising a tissue thickness compensator including openings therein |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US9801626B2 (en) | 2013-04-16 | 2017-10-31 | Ethicon Llc | Modular motor driven surgical instruments with alignment features for aligning rotary drive shafts with surgical end effector shafts |
| US9574644B2 (en) | 2013-05-30 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Power module for use with a surgical instrument |
| CN105849191A (zh) * | 2013-08-08 | 2016-08-10 | 阿斯彭研究公司 | 促进和控制聚合物的降解的方法和系统 |
| JP6416260B2 (ja) | 2013-08-23 | 2018-10-31 | エシコン エルエルシー | 動力付き外科用器具のための発射部材後退装置 |
| US9662108B2 (en) | 2013-08-30 | 2017-05-30 | Covidien Lp | Surgical stapling apparatus |
| US20140171986A1 (en) | 2013-09-13 | 2014-06-19 | Ethicon Endo-Surgery, Inc. | Surgical Clip Having Comliant Portion |
| US9655620B2 (en) | 2013-10-28 | 2017-05-23 | Covidien Lp | Circular surgical stapling device including buttress material |
| CN105682568B (zh) | 2013-11-04 | 2018-10-23 | 柯惠Lp公司 | 手术紧固件施加装置 |
| US11033264B2 (en) | 2013-11-04 | 2021-06-15 | Covidien Lp | Surgical fastener applying apparatus |
| EP3065648A1 (en) | 2013-11-04 | 2016-09-14 | Covidien LP | Surgical fastener applying apparatus |
| US9936950B2 (en) | 2013-11-08 | 2018-04-10 | Ethicon Llc | Hybrid adjunct materials for use in surgical stapling |
| US10456129B2 (en) | 2013-11-08 | 2019-10-29 | Ethicon Llc | Positively charged implantable materials and method of forming the same |
| US9700311B2 (en) | 2013-11-08 | 2017-07-11 | Ethicon Llc | Tissue ingrowth materials and method of using the same |
| US10278707B2 (en) | 2013-12-17 | 2019-05-07 | Standard Bariatrics, Inc. | Resection line guide for a medical procedure and method of using same |
| US9867613B2 (en) | 2013-12-19 | 2018-01-16 | Covidien Lp | Surgical staples and end effectors for deploying the same |
| US9839428B2 (en) | 2013-12-23 | 2017-12-12 | Ethicon Llc | Surgical cutting and stapling instruments with independent jaw control features |
| US9681870B2 (en) | 2013-12-23 | 2017-06-20 | Ethicon Llc | Articulatable surgical instruments with separate and distinct closing and firing systems |
| US9642620B2 (en) | 2013-12-23 | 2017-05-09 | Ethicon Endo-Surgery, Llc | Surgical cutting and stapling instruments with articulatable end effectors |
| US9724092B2 (en) | 2013-12-23 | 2017-08-08 | Ethicon Llc | Modular surgical instruments |
| US20150173756A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical cutting and stapling methods |
| US20150173749A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical staples and staple cartridges |
| US9962161B2 (en) | 2014-02-12 | 2018-05-08 | Ethicon Llc | Deliverable surgical instrument |
| US9848874B2 (en) | 2014-02-14 | 2017-12-26 | Covidien Lp | Small diameter endoscopic stapler |
| JP6462004B2 (ja) | 2014-02-24 | 2019-01-30 | エシコン エルエルシー | 発射部材ロックアウトを備える締結システム |
| US20140166725A1 (en) | 2014-02-24 | 2014-06-19 | Ethicon Endo-Surgery, Inc. | Staple cartridge including a barbed staple. |
| US9690362B2 (en) | 2014-03-26 | 2017-06-27 | Ethicon Llc | Surgical instrument control circuit having a safety processor |
| US10004497B2 (en) | 2014-03-26 | 2018-06-26 | Ethicon Llc | Interface systems for use with surgical instruments |
| BR112016021943B1 (pt) | 2014-03-26 | 2022-06-14 | Ethicon Endo-Surgery, Llc | Instrumento cirúrgico para uso por um operador em um procedimento cirúrgico |
| US10028761B2 (en) | 2014-03-26 | 2018-07-24 | Ethicon Llc | Feedback algorithms for manual bailout systems for surgical instruments |
| US9913642B2 (en) | 2014-03-26 | 2018-03-13 | Ethicon Llc | Surgical instrument comprising a sensor system |
| CA2944383C (en) * | 2014-03-29 | 2019-09-17 | Standard Bariatrics, Inc. | End effectors, surgical stapling devices, and methods of using same |
| US9936953B2 (en) | 2014-03-29 | 2018-04-10 | Standard Bariatrics, Inc. | End effectors, surgical stapling devices, and methods of using same |
| US9757126B2 (en) | 2014-03-31 | 2017-09-12 | Covidien Lp | Surgical stapling apparatus with firing lockout mechanism |
| CN106456158B (zh) | 2014-04-16 | 2019-02-05 | 伊西康内外科有限责任公司 | 包括非一致紧固件的紧固件仓 |
| US20150297222A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| US10426476B2 (en) | 2014-09-26 | 2019-10-01 | Ethicon Llc | Circular fastener cartridges for applying radially expandable fastener lines |
| CN106456176B (zh) | 2014-04-16 | 2019-06-28 | 伊西康内外科有限责任公司 | 包括具有不同构型的延伸部的紧固件仓 |
| US9844369B2 (en) | 2014-04-16 | 2017-12-19 | Ethicon Llc | Surgical end effectors with firing element monitoring arrangements |
| BR112016023807B1 (pt) | 2014-04-16 | 2022-07-12 | Ethicon Endo-Surgery, Llc | Conjunto de cartucho de prendedores para uso com um instrumento cirúrgico |
| US9668733B2 (en) | 2014-04-21 | 2017-06-06 | Covidien Lp | Stapling device with features to prevent inadvertent firing of staples |
| US9861366B2 (en) | 2014-05-06 | 2018-01-09 | Covidien Lp | Ejecting assembly for a surgical stapler |
| WO2015174985A1 (en) | 2014-05-15 | 2015-11-19 | Lp Covidien | Surgical fastener applying apparatus |
| US9848871B2 (en) | 2014-06-10 | 2017-12-26 | Ethicon Llc | Woven and fibrous materials for reinforcing a staple line |
| US9826965B2 (en) | 2014-06-10 | 2017-11-28 | Ethicon Llc | Devices for sealing a body lumen |
| US10610226B2 (en) | 2014-06-10 | 2020-04-07 | Ethicon Endo-Surgery, Inc. | Methods and devices for sealing stapled tissue |
| US9936954B2 (en) | 2014-06-10 | 2018-04-10 | Ethicon Llc | Devices and methods for sealing staples in tissue |
| US10206686B2 (en) | 2014-06-10 | 2019-02-19 | Ethicon Llc | Bronchus sealants and methods of sealing bronchial tubes |
| US9801630B2 (en) | 2014-06-10 | 2017-10-31 | Ethicon Llc | Methods and devices for reinforcing a staple line |
| US10172611B2 (en) | 2014-06-10 | 2019-01-08 | Ethicon Llc | Adjunct materials and methods of using same in surgical methods for tissue sealing |
| BR112016028736B1 (pt) * | 2014-06-10 | 2022-09-13 | Ethicon Endo-Surgery, Llc | Cartucho de grampos para uso com um grampeador cirúrgico |
| BR112016028790B1 (pt) * | 2014-06-10 | 2022-11-08 | Ethicon Endo-Surgery, Llc | Conjunto de cartucho de grampos para uso com um grampeador cirúrgico |
| US10045781B2 (en) | 2014-06-13 | 2018-08-14 | Ethicon Llc | Closure lockout systems for surgical instruments |
| US9730694B2 (en) * | 2014-07-01 | 2017-08-15 | Covidien Lp | Loading unit including shipping assembly |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US20160066913A1 (en) | 2014-09-05 | 2016-03-10 | Ethicon Endo-Surgery, Inc. | Local display of tissue parameter stabilization |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| JP6608449B2 (ja) * | 2014-09-05 | 2019-11-20 | エシコン エルエルシー | 組織圧縮を定量化するための一体化センサを有する付加物 |
| US10105142B2 (en) | 2014-09-18 | 2018-10-23 | Ethicon Llc | Surgical stapler with plurality of cutting elements |
| RU2705907C2 (ru) * | 2014-09-26 | 2019-11-12 | ЭТИКОН ЭлЭлСи | Круговые кассеты с крепежными элементами для применения расширяющихся в радиальном направлении линий крепежных элементов |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| MX2017003960A (es) | 2014-09-26 | 2017-12-04 | Ethicon Llc | Refuerzos de grapas quirúrgicas y materiales auxiliares. |
| WO2016054535A1 (en) * | 2014-10-03 | 2016-04-07 | Robert Bosch Gmbh | Inductive charging holster for power tool |
| US10076325B2 (en) | 2014-10-13 | 2018-09-18 | Ethicon Llc | Surgical stapling apparatus comprising a tissue stop |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US11504192B2 (en) | 2014-10-30 | 2022-11-22 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| RU2703684C2 (ru) | 2014-12-18 | 2019-10-21 | ЭТИКОН ЭНДО-СЕРДЖЕРИ, ЭлЭлСи | Хирургический инструмент с упором, который выполнен с возможностью избирательного перемещения относительно кассеты со скобами вокруг дискретной неподвижной оси |
| US10188385B2 (en) | 2014-12-18 | 2019-01-29 | Ethicon Llc | Surgical instrument system comprising lockable systems |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10117649B2 (en) | 2014-12-18 | 2018-11-06 | Ethicon Llc | Surgical instrument assembly comprising a lockable articulation system |
| US10004501B2 (en) | 2014-12-18 | 2018-06-26 | Ethicon Llc | Surgical instruments with improved closure arrangements |
| US9775611B2 (en) * | 2015-01-06 | 2017-10-03 | Covidien Lp | Clam shell surgical stapling loading unit |
| US10039545B2 (en) | 2015-02-23 | 2018-08-07 | Covidien Lp | Double fire stapling |
| US10085749B2 (en) | 2015-02-26 | 2018-10-02 | Covidien Lp | Surgical apparatus with conductor strain relief |
| US10285698B2 (en) | 2015-02-26 | 2019-05-14 | Covidien Lp | Surgical apparatus |
| US10182816B2 (en) | 2015-02-27 | 2019-01-22 | Ethicon Llc | Charging system that enables emergency resolutions for charging a battery |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US10226250B2 (en) | 2015-02-27 | 2019-03-12 | Ethicon Llc | Modular stapling assembly |
| US10180463B2 (en) | 2015-02-27 | 2019-01-15 | Ethicon Llc | Surgical apparatus configured to assess whether a performance parameter of the surgical apparatus is within an acceptable performance band |
| US10245033B2 (en) | 2015-03-06 | 2019-04-02 | Ethicon Llc | Surgical instrument comprising a lockable battery housing |
| US9895148B2 (en) | 2015-03-06 | 2018-02-20 | Ethicon Endo-Surgery, Llc | Monitoring speed control and precision incrementing of motor for powered surgical instruments |
| US10052044B2 (en) | 2015-03-06 | 2018-08-21 | Ethicon Llc | Time dependent evaluation of sensor data to determine stability, creep, and viscoelastic elements of measures |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US10045776B2 (en) | 2015-03-06 | 2018-08-14 | Ethicon Llc | Control techniques and sub-processor contained within modular shaft with select control processing from handle |
| US10617412B2 (en) | 2015-03-06 | 2020-04-14 | Ethicon Llc | System for detecting the mis-insertion of a staple cartridge into a surgical stapler |
| US9808246B2 (en) | 2015-03-06 | 2017-11-07 | Ethicon Endo-Surgery, Llc | Method of operating a powered surgical instrument |
| US10687806B2 (en) | 2015-03-06 | 2020-06-23 | Ethicon Llc | Adaptive tissue compression techniques to adjust closure rates for multiple tissue types |
| US9924961B2 (en) | 2015-03-06 | 2018-03-27 | Ethicon Endo-Surgery, Llc | Interactive feedback system for powered surgical instruments |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| US9901342B2 (en) | 2015-03-06 | 2018-02-27 | Ethicon Endo-Surgery, Llc | Signal and power communication system positioned on a rotatable shaft |
| US9918717B2 (en) | 2015-03-18 | 2018-03-20 | Covidien Lp | Pivot mechanism for surgical device |
| US10548593B2 (en) * | 2015-03-25 | 2020-02-04 | Ethicon Llc | Flowable bioabsorbable polymer adhesive for releasably attaching a staple buttress to a surgical stapler |
| US10863984B2 (en) * | 2015-03-25 | 2020-12-15 | Ethicon Llc | Low inherent viscosity bioabsorbable polymer adhesive for releasably attaching a staple buttress to a surgical stapler |
| US10390825B2 (en) | 2015-03-31 | 2019-08-27 | Ethicon Llc | Surgical instrument with progressive rotary drive systems |
| US10463368B2 (en) | 2015-04-10 | 2019-11-05 | Covidien Lp | Endoscopic stapler |
| US10117650B2 (en) | 2015-05-05 | 2018-11-06 | Covidien Lp | Adapter assembly and loading units for surgical stapling devices |
| US10299789B2 (en) | 2015-05-05 | 2019-05-28 | Covidie LP | Adapter assembly for surgical stapling devices |
| US10039532B2 (en) | 2015-05-06 | 2018-08-07 | Covidien Lp | Surgical instrument with articulation assembly |
| US10172615B2 (en) | 2015-05-27 | 2019-01-08 | Covidien Lp | Multi-fire push rod stapling device |
| US10349941B2 (en) | 2015-05-27 | 2019-07-16 | Covidien Lp | Multi-fire lead screw stapling device |
| US10154841B2 (en) | 2015-06-18 | 2018-12-18 | Ethicon Llc | Surgical stapling instruments with lockout arrangements for preventing firing system actuation when a cartridge is spent or missing |
| US10548599B2 (en) | 2015-07-20 | 2020-02-04 | Covidien Lp | Endoscopic stapler and staple |
| US9987012B2 (en) | 2015-07-21 | 2018-06-05 | Covidien Lp | Small diameter cartridge design for a surgical stapling instrument |
| US10064622B2 (en) | 2015-07-29 | 2018-09-04 | Covidien Lp | Surgical stapling loading unit with stroke counter and lockout |
| US10420558B2 (en) | 2015-07-30 | 2019-09-24 | Ethicon Llc | Surgical instrument comprising a system for bypassing an operational step of the surgical instrument |
| JP6858746B2 (ja) * | 2015-07-30 | 2021-04-14 | エシコン エルエルシーEthicon LLC | 外科用器具の動作工程をバイパスするためのシステムを備える外科用器具 |
| US11154300B2 (en) | 2015-07-30 | 2021-10-26 | Cilag Gmbh International | Surgical instrument comprising separate tissue securing and tissue cutting systems |
| US10045782B2 (en) | 2015-07-30 | 2018-08-14 | Covidien Lp | Surgical stapling loading unit with stroke counter and lockout |
| BR112018001852B1 (pt) * | 2015-07-30 | 2023-03-14 | Ethicon Llc | Grampeador cirúrgico para o tratamento do tecido de um paciente |
| US10835249B2 (en) | 2015-08-17 | 2020-11-17 | Ethicon Llc | Implantable layers for a surgical instrument |
| MX2022009705A (es) | 2015-08-26 | 2022-11-07 | Ethicon Llc | Metodo para formar una grapa contra un yunque de un instrumento de engrapado quirurgico. |
| BR112018003693B1 (pt) | 2015-08-26 | 2022-11-22 | Ethicon Llc | Cartucho de grampos cirúrgicos para uso com um instrumento de grampeamento cirúrgico |
| US10390829B2 (en) | 2015-08-26 | 2019-08-27 | Ethicon Llc | Staples comprising a cover |
| US11020116B2 (en) | 2015-08-31 | 2021-06-01 | Ethicon Llc | Surgical adjuncts with medicants affected by activators |
| US10188390B2 (en) * | 2015-08-31 | 2019-01-29 | Ethicon Llc | Adjunct material to provide heterogeneous drug elution |
| US10463366B2 (en) * | 2015-08-31 | 2019-11-05 | Ethicon Llc | Adjunct materials for delivery to liver tissue |
| US10213520B2 (en) * | 2015-08-31 | 2019-02-26 | Ethicon Llc | Surgical adjuncts having medicants controllably releasable therefrom |
| US10245034B2 (en) | 2015-08-31 | 2019-04-02 | Ethicon Llc | Inducing tissue adhesions using surgical adjuncts and medicants |
| US10130738B2 (en) * | 2015-08-31 | 2018-11-20 | Ethicon Llc | Adjunct material to promote tissue growth |
| US10349938B2 (en) | 2015-08-31 | 2019-07-16 | Ethicon Llc | Surgical adjuncts with medicants affected by activator materials |
| US10076329B2 (en) * | 2015-08-31 | 2018-09-18 | Ethicon Llc | Adjunct material to promote tissue growth in a colon |
| US10569071B2 (en) | 2015-08-31 | 2020-02-25 | Ethicon Llc | Medicant eluting adjuncts and methods of using medicant eluting adjuncts |
| US9937283B2 (en) * | 2015-08-31 | 2018-04-10 | Ethicon Endo-Surgery, Llc | Adjunct material to provide drug elution from vessels |
| US10357252B2 (en) * | 2015-09-02 | 2019-07-23 | Ethicon Llc | Surgical staple configurations with camming surfaces located between portions supporting surgical staples |
| MX2022006189A (es) | 2015-09-02 | 2022-06-16 | Ethicon Llc | Configuraciones de grapas quirurgicas con superficies de leva situadas entre porciones que soportan grapas quirurgicas. |
| US10285837B1 (en) | 2015-09-16 | 2019-05-14 | Standard Bariatrics, Inc. | Systems and methods for measuring volume of potential sleeve in a sleeve gastrectomy |
| US10085751B2 (en) | 2015-09-23 | 2018-10-02 | Ethicon Llc | Surgical stapler having temperature-based motor control |
| US10076326B2 (en) | 2015-09-23 | 2018-09-18 | Ethicon Llc | Surgical stapler having current mirror-based motor control |
| US10327769B2 (en) | 2015-09-23 | 2019-06-25 | Ethicon Llc | Surgical stapler having motor control based on a drive system component |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US10363036B2 (en) | 2015-09-23 | 2019-07-30 | Ethicon Llc | Surgical stapler having force-based motor control |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10299878B2 (en) | 2015-09-25 | 2019-05-28 | Ethicon Llc | Implantable adjunct systems for determining adjunct skew |
| US10980539B2 (en) | 2015-09-30 | 2021-04-20 | Ethicon Llc | Implantable adjunct comprising bonded layers |
| US10561420B2 (en) | 2015-09-30 | 2020-02-18 | Ethicon Llc | Tubular absorbable constructs |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10285699B2 (en) * | 2015-09-30 | 2019-05-14 | Ethicon Llc | Compressible adjunct |
| US10213204B2 (en) | 2015-10-02 | 2019-02-26 | Covidien Lp | Micro surgical instrument and loading unit for use therewith |
| US10772632B2 (en) | 2015-10-28 | 2020-09-15 | Covidien Lp | Surgical stapling device with triple leg staples |
| US10441286B2 (en) * | 2015-10-29 | 2019-10-15 | Ethicon Llc | Multi-layer surgical stapler buttress assembly |
| US10499918B2 (en) * | 2015-10-29 | 2019-12-10 | Ethicon Llc | Surgical stapler buttress assembly with features to interact with movable end effector components |
| US10595864B2 (en) | 2015-11-24 | 2020-03-24 | Covidien Lp | Adapter assembly for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| US10111660B2 (en) | 2015-12-03 | 2018-10-30 | Covidien Lp | Surgical stapler flexible distal tip |
| US10265068B2 (en) | 2015-12-30 | 2019-04-23 | Ethicon Llc | Surgical instruments with separable motors and motor control circuits |
| US10368865B2 (en) | 2015-12-30 | 2019-08-06 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US10966717B2 (en) | 2016-01-07 | 2021-04-06 | Covidien Lp | Surgical fastener apparatus |
| US10660623B2 (en) | 2016-01-15 | 2020-05-26 | Covidien Lp | Centering mechanism for articulation joint |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| US10245030B2 (en) | 2016-02-09 | 2019-04-02 | Ethicon Llc | Surgical instruments with tensioning arrangements for cable driven articulation systems |
| BR112018016098B1 (pt) | 2016-02-09 | 2023-02-23 | Ethicon Llc | Instrumento cirúrgico |
| US10349937B2 (en) | 2016-02-10 | 2019-07-16 | Covidien Lp | Surgical stapler with articulation locking mechanism |
| US10420559B2 (en) | 2016-02-11 | 2019-09-24 | Covidien Lp | Surgical stapler with small diameter endoscopic portion |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10258331B2 (en) | 2016-02-12 | 2019-04-16 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US11224426B2 (en) | 2016-02-12 | 2022-01-18 | Cilag Gmbh International | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US11284890B2 (en) | 2016-04-01 | 2022-03-29 | Cilag Gmbh International | Circular stapling system comprising an incisable tissue support |
| US10485542B2 (en) | 2016-04-01 | 2019-11-26 | Ethicon Llc | Surgical stapling instrument comprising multiple lockouts |
| US11045191B2 (en) | 2016-04-01 | 2021-06-29 | Cilag Gmbh International | Method for operating a surgical stapling system |
| US10617413B2 (en) | 2016-04-01 | 2020-04-14 | Ethicon Llc | Closure system arrangements for surgical cutting and stapling devices with separate and distinct firing shafts |
| US10307159B2 (en) | 2016-04-01 | 2019-06-04 | Ethicon Llc | Surgical instrument handle assembly with reconfigurable grip portion |
| US10335145B2 (en) | 2016-04-15 | 2019-07-02 | Ethicon Llc | Modular surgical instrument with configurable operating mode |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10492783B2 (en) | 2016-04-15 | 2019-12-03 | Ethicon, Llc | Surgical instrument with improved stop/start control during a firing motion |
| US11179150B2 (en) | 2016-04-15 | 2021-11-23 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10456137B2 (en) | 2016-04-15 | 2019-10-29 | Ethicon Llc | Staple formation detection mechanisms |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10405859B2 (en) | 2016-04-15 | 2019-09-10 | Ethicon Llc | Surgical instrument with adjustable stop/start control during a firing motion |
| US11317917B2 (en) | 2016-04-18 | 2022-05-03 | Cilag Gmbh International | Surgical stapling system comprising a lockable firing assembly |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US10426469B2 (en) | 2016-04-18 | 2019-10-01 | Ethicon Llc | Surgical instrument comprising a primary firing lockout and a secondary firing lockout |
| US10363032B2 (en) * | 2016-04-20 | 2019-07-30 | Ethicon Llc | Surgical stapler with hydraulic deck control |
| US10561419B2 (en) | 2016-05-04 | 2020-02-18 | Covidien Lp | Powered end effector assembly with pivotable channel |
| WO2017195920A1 (ko) * | 2016-05-13 | 2017-11-16 | 주식회사 제노스 | 혈관의 맥동 시뮬레이션 장치 |
| US11065022B2 (en) | 2016-05-17 | 2021-07-20 | Covidien Lp | Cutting member for a surgical instrument |
| US10959731B2 (en) | 2016-06-14 | 2021-03-30 | Covidien Lp | Buttress attachment for surgical stapling instrument |
| USD822206S1 (en) | 2016-06-24 | 2018-07-03 | Ethicon Llc | Surgical fastener |
| US10702270B2 (en) | 2016-06-24 | 2020-07-07 | Ethicon Llc | Stapling system for use with wire staples and stamped staples |
| JP6957532B2 (ja) | 2016-06-24 | 2021-11-02 | エシコン エルエルシーEthicon LLC | ワイヤステープル及び打ち抜き加工ステープルを含むステープルカートリッジ |
| USD850617S1 (en) | 2016-06-24 | 2019-06-04 | Ethicon Llc | Surgical fastener cartridge |
| USD826405S1 (en) | 2016-06-24 | 2018-08-21 | Ethicon Llc | Surgical fastener |
| USD847989S1 (en) | 2016-06-24 | 2019-05-07 | Ethicon Llc | Surgical fastener cartridge |
| US10707531B1 (en) | 2016-09-27 | 2020-07-07 | New Dominion Enterprises Inc. | All-inorganic solvents for electrolytes |
| CN106618230B (zh) * | 2016-10-26 | 2019-06-21 | 海门黄海创业园服务有限公司 | 给水设备 |
| US11642126B2 (en) | 2016-11-04 | 2023-05-09 | Covidien Lp | Surgical stapling apparatus with tissue pockets |
| US10631857B2 (en) | 2016-11-04 | 2020-04-28 | Covidien Lp | Loading unit for surgical instruments with low profile pushers |
| US10492784B2 (en) | 2016-11-08 | 2019-12-03 | Covidien Lp | Surgical tool assembly with compact firing assembly |
| US11026686B2 (en) | 2016-11-08 | 2021-06-08 | Covidien Lp | Structure for attaching buttress to anvil and/or cartridge of surgical stapling instrument |
| US10603041B2 (en) * | 2016-11-14 | 2020-03-31 | Ethicon Llc | Circular surgical stapler with angularly asymmetric deck features |
| US10463371B2 (en) | 2016-11-29 | 2019-11-05 | Covidien Lp | Reload assembly with spent reload indicator |
| US10687810B2 (en) | 2016-12-21 | 2020-06-23 | Ethicon Llc | Stepped staple cartridge with tissue retention and gap setting features |
| MX2019007309A (es) * | 2016-12-21 | 2019-11-18 | Ethicon Llc | Unidad de vástago que comprende sistemas separadamente accionables y retráctiles. |
| US10426471B2 (en) | 2016-12-21 | 2019-10-01 | Ethicon Llc | Surgical instrument with multiple failure response modes |
| US10588631B2 (en) | 2016-12-21 | 2020-03-17 | Ethicon Llc | Surgical instruments with positive jaw opening features |
| JP6983893B2 (ja) | 2016-12-21 | 2021-12-17 | エシコン エルエルシーEthicon LLC | 外科用エンドエフェクタ及び交換式ツールアセンブリのためのロックアウト構成 |
| US10537325B2 (en) | 2016-12-21 | 2020-01-21 | Ethicon Llc | Staple forming pocket arrangement to accommodate different types of staples |
| US11684367B2 (en) | 2016-12-21 | 2023-06-27 | Cilag Gmbh International | Stepped assembly having and end-of-life indicator |
| US10888322B2 (en) | 2016-12-21 | 2021-01-12 | Ethicon Llc | Surgical instrument comprising a cutting member |
| US10779823B2 (en) | 2016-12-21 | 2020-09-22 | Ethicon Llc | Firing member pin angle |
| US10973516B2 (en) | 2016-12-21 | 2021-04-13 | Ethicon Llc | Surgical end effectors and adaptable firing members therefor |
| US10980536B2 (en) | 2016-12-21 | 2021-04-20 | Ethicon Llc | No-cartridge and spent cartridge lockout arrangements for surgical staplers |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| US10675025B2 (en) | 2016-12-21 | 2020-06-09 | Ethicon Llc | Shaft assembly comprising separately actuatable and retractable systems |
| US20180168625A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with smart staple cartridges |
| US11134942B2 (en) | 2016-12-21 | 2021-10-05 | Cilag Gmbh International | Surgical stapling instruments and staple-forming anvils |
| US10682138B2 (en) | 2016-12-21 | 2020-06-16 | Ethicon Llc | Bilaterally asymmetric staple forming pocket pairs |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US10537324B2 (en) | 2016-12-21 | 2020-01-21 | Ethicon Llc | Stepped staple cartridge with asymmetrical staples |
| US11419606B2 (en) | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| US10945727B2 (en) | 2016-12-21 | 2021-03-16 | Ethicon Llc | Staple cartridge with deformable driver retention features |
| US20180168633A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments and staple-forming anvils |
| US20180168575A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling systems |
| CN110087565A (zh) | 2016-12-21 | 2019-08-02 | 爱惜康有限责任公司 | 外科缝合系统 |
| US10993715B2 (en) | 2016-12-21 | 2021-05-04 | Ethicon Llc | Staple cartridge comprising staples with different clamping breadths |
| US20180168608A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical instrument system comprising an end effector lockout and a firing assembly lockout |
| US10709901B2 (en) | 2017-01-05 | 2020-07-14 | Covidien Lp | Implantable fasteners, applicators, and methods for brachytherapy |
| US10874768B2 (en) | 2017-01-20 | 2020-12-29 | Covidien Lp | Drug eluting medical device |
| US10952767B2 (en) | 2017-02-06 | 2021-03-23 | Covidien Lp | Connector clip for securing an introducer to a surgical fastener applying apparatus |
| US10806451B2 (en) * | 2017-02-17 | 2020-10-20 | Ethicon Llc | Surgical stapler with cooperating distal tip features on anvil and staple cartridge |
| US20180235618A1 (en) | 2017-02-22 | 2018-08-23 | Covidien Lp | Loading unit for surgical instruments with low profile pushers |
| US11350915B2 (en) | 2017-02-23 | 2022-06-07 | Covidien Lp | Surgical stapler with small diameter endoscopic portion |
| US10849621B2 (en) | 2017-02-23 | 2020-12-01 | Covidien Lp | Surgical stapler with small diameter endoscopic portion |
| US10925607B2 (en) | 2017-02-28 | 2021-02-23 | Covidien Lp | Surgical stapling apparatus with staple sheath |
| US10299790B2 (en) | 2017-03-03 | 2019-05-28 | Covidien Lp | Adapter with centering mechanism for articulation joint |
| US10368868B2 (en) | 2017-03-09 | 2019-08-06 | Covidien Lp | Structure for attaching buttress material to anvil and cartridge of surgical stapling instrument |
| US10660641B2 (en) | 2017-03-16 | 2020-05-26 | Covidien Lp | Adapter with centering mechanism for articulation joint |
| US11096610B2 (en) | 2017-03-28 | 2021-08-24 | Covidien Lp | Surgical implants including sensing fibers |
| US11324502B2 (en) | 2017-05-02 | 2022-05-10 | Covidien Lp | Surgical loading unit including an articulating end effector |
| US10603035B2 (en) | 2017-05-02 | 2020-03-31 | Covidien Lp | Surgical loading unit including an articulating end effector |
| US10524784B2 (en) | 2017-05-05 | 2020-01-07 | Covidien Lp | Surgical staples with expandable backspan |
| US10390826B2 (en) | 2017-05-08 | 2019-08-27 | Covidien Lp | Surgical stapling device with elongated tool assembly and methods of use |
| US10420551B2 (en) | 2017-05-30 | 2019-09-24 | Covidien Lp | Authentication and information system for reusable surgical instruments |
| US10478185B2 (en) | 2017-06-02 | 2019-11-19 | Covidien Lp | Tool assembly with minimal dead space |
| US10813639B2 (en) | 2017-06-20 | 2020-10-27 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on system conditions |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US10327767B2 (en) | 2017-06-20 | 2019-06-25 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| US11090046B2 (en) | 2017-06-20 | 2021-08-17 | Cilag Gmbh International | Systems and methods for controlling displacement member motion of a surgical stapling and cutting instrument |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US10980537B2 (en) | 2017-06-20 | 2021-04-20 | Ethicon Llc | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified number of shaft rotations |
| USD879808S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with graphical user interface |
| US10888321B2 (en) | 2017-06-20 | 2021-01-12 | Ethicon Llc | Systems and methods for controlling velocity of a displacement member of a surgical stapling and cutting instrument |
| US10368864B2 (en) | 2017-06-20 | 2019-08-06 | Ethicon Llc | Systems and methods for controlling displaying motor velocity for a surgical instrument |
| US10646220B2 (en) | 2017-06-20 | 2020-05-12 | Ethicon Llc | Systems and methods for controlling displacement member velocity for a surgical instrument |
| US11071554B2 (en) | 2017-06-20 | 2021-07-27 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on magnitude of velocity error measurements |
| US10390841B2 (en) | 2017-06-20 | 2019-08-27 | Ethicon Llc | Control of motor velocity of a surgical stapling and cutting instrument based on angle of articulation |
| USD890784S1 (en) | 2017-06-20 | 2020-07-21 | Ethicon Llc | Display panel with changeable graphical user interface |
| US10881396B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Surgical instrument with variable duration trigger arrangement |
| USD879809S1 (en) | 2017-06-20 | 2020-03-31 | Ethicon Llc | Display panel with changeable graphical user interface |
| US11382638B2 (en) | 2017-06-20 | 2022-07-12 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified displacement distance |
| US10624633B2 (en) | 2017-06-20 | 2020-04-21 | Ethicon Llc | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument |
| US11324503B2 (en) | 2017-06-27 | 2022-05-10 | Cilag Gmbh International | Surgical firing member arrangements |
| US11266405B2 (en) | 2017-06-27 | 2022-03-08 | Cilag Gmbh International | Surgical anvil manufacturing methods |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| US10772629B2 (en) | 2017-06-27 | 2020-09-15 | Ethicon Llc | Surgical anvil arrangements |
| US10856869B2 (en) | 2017-06-27 | 2020-12-08 | Ethicon Llc | Surgical anvil arrangements |
| US11090049B2 (en) | 2017-06-27 | 2021-08-17 | Cilag Gmbh International | Staple forming pocket arrangements |
| US10716614B2 (en) | 2017-06-28 | 2020-07-21 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies with increased contact pressure |
| US11259805B2 (en) | 2017-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical instrument comprising firing member supports |
| US10903685B2 (en) | 2017-06-28 | 2021-01-26 | Ethicon Llc | Surgical shaft assemblies with slip ring assemblies forming capacitive channels |
| USD869655S1 (en) | 2017-06-28 | 2019-12-10 | Ethicon Llc | Surgical fastener cartridge |
| US11246592B2 (en) | 2017-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical instrument comprising an articulation system lockable to a frame |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| US10211586B2 (en) | 2017-06-28 | 2019-02-19 | Ethicon Llc | Surgical shaft assemblies with watertight housings |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| US10588633B2 (en) | 2017-06-28 | 2020-03-17 | Ethicon Llc | Surgical instruments with open and closable jaws and axially movable firing member that is initially parked in close proximity to the jaws prior to firing |
| EP4070740A1 (en) | 2017-06-28 | 2022-10-12 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| USD854151S1 (en) | 2017-06-28 | 2019-07-16 | Ethicon Llc | Surgical instrument shaft |
| USD851762S1 (en) | 2017-06-28 | 2019-06-18 | Ethicon Llc | Anvil |
| US11484310B2 (en) | 2017-06-28 | 2022-11-01 | Cilag Gmbh International | Surgical instrument comprising a shaft including a closure tube profile |
| US10398434B2 (en) | 2017-06-29 | 2019-09-03 | Ethicon Llc | Closed loop velocity control of closure member for robotic surgical instrument |
| US10258418B2 (en) | 2017-06-29 | 2019-04-16 | Ethicon Llc | System for controlling articulation forces |
| US11007022B2 (en) | 2017-06-29 | 2021-05-18 | Ethicon Llc | Closed loop velocity control techniques based on sensed tissue parameters for robotic surgical instrument |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US10898183B2 (en) | 2017-06-29 | 2021-01-26 | Ethicon Llc | Robotic surgical instrument with closed loop feedback techniques for advancement of closure member during firing |
| US10588634B2 (en) * | 2017-07-11 | 2020-03-17 | Aesculap Ag | Surgical stapler cartridge loading and unloading |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US11304695B2 (en) | 2017-08-03 | 2022-04-19 | Cilag Gmbh International | Surgical system shaft interconnection |
| US11974742B2 (en) | 2017-08-03 | 2024-05-07 | Cilag Gmbh International | Surgical system comprising an articulation bailout |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US10849625B2 (en) | 2017-08-07 | 2020-12-01 | Covidien Lp | Surgical buttress retention systems for surgical stapling apparatus |
| WO2019036490A1 (en) | 2017-08-14 | 2019-02-21 | Standard Bariatrics, Inc. | END EFFECTORS, SURGICAL STAPLING DEVICES, AND METHODS OF USE THEREOF |
| US10945733B2 (en) | 2017-08-23 | 2021-03-16 | Covidien Lp | Surgical buttress reload and tip attachment assemblies for surgical stapling apparatus |
| US10624636B2 (en) | 2017-08-23 | 2020-04-21 | Covidien Lp | Surgical stapling device with floating staple cartridge |
| US10806452B2 (en) | 2017-08-24 | 2020-10-20 | Covidien Lp | Loading unit for a surgical stapling instrument |
| USD907647S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| USD907648S1 (en) | 2017-09-29 | 2021-01-12 | Ethicon Llc | Display screen or portion thereof with animated graphical user interface |
| US10765429B2 (en) | 2017-09-29 | 2020-09-08 | Ethicon Llc | Systems and methods for providing alerts according to the operational state of a surgical instrument |
| US10796471B2 (en) | 2017-09-29 | 2020-10-06 | Ethicon Llc | Systems and methods of displaying a knife position for a surgical instrument |
| US11399829B2 (en) | 2017-09-29 | 2022-08-02 | Cilag Gmbh International | Systems and methods of initiating a power shutdown mode for a surgical instrument |
| US10743872B2 (en) | 2017-09-29 | 2020-08-18 | Ethicon Llc | System and methods for controlling a display of a surgical instrument |
| USD917500S1 (en) | 2017-09-29 | 2021-04-27 | Ethicon Llc | Display screen or portion thereof with graphical user interface |
| US10729501B2 (en) | 2017-09-29 | 2020-08-04 | Ethicon Llc | Systems and methods for language selection of a surgical instrument |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11071560B2 (en) | 2017-10-30 | 2021-07-27 | Cilag Gmbh International | Surgical clip applier comprising adaptive control in response to a strain gauge circuit |
| US11090075B2 (en) | 2017-10-30 | 2021-08-17 | Cilag Gmbh International | Articulation features for surgical end effector |
| US11229436B2 (en) | 2017-10-30 | 2022-01-25 | Cilag Gmbh International | Surgical system comprising a surgical tool and a surgical hub |
| US11311342B2 (en) | 2017-10-30 | 2022-04-26 | Cilag Gmbh International | Method for communicating with surgical instrument systems |
| US11317919B2 (en) | 2017-10-30 | 2022-05-03 | Cilag Gmbh International | Clip applier comprising a clip crimping system |
| US11291510B2 (en) | 2017-10-30 | 2022-04-05 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11134944B2 (en) | 2017-10-30 | 2021-10-05 | Cilag Gmbh International | Surgical stapler knife motion controls |
| US11564756B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11510741B2 (en) | 2017-10-30 | 2022-11-29 | Cilag Gmbh International | Method for producing a surgical instrument comprising a smart electrical system |
| US11045197B2 (en) | 2017-10-30 | 2021-06-29 | Cilag Gmbh International | Clip applier comprising a movable clip magazine |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US10779903B2 (en) | 2017-10-31 | 2020-09-22 | Ethicon Llc | Positive shaft rotation lock activated by jaw closure |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| US20190133578A1 (en) * | 2017-11-06 | 2019-05-09 | Ethicon Llc | Multi-Layer Tissue Thickness Compensator Comprising Resilient and Sacrificial Collapsible Layers |
| US10925603B2 (en) | 2017-11-14 | 2021-02-23 | Covidien Lp | Reload with articulation stabilization system |
| US10863987B2 (en) | 2017-11-16 | 2020-12-15 | Covidien Lp | Surgical instrument with imaging device |
| US11141151B2 (en) | 2017-12-08 | 2021-10-12 | Covidien Lp | Surgical buttress for circular stapling |
| US11006955B2 (en) | 2017-12-15 | 2021-05-18 | Ethicon Llc | End effectors with positive jaw opening features for use with adapters for electromechanical surgical instruments |
| US10687813B2 (en) | 2017-12-15 | 2020-06-23 | Ethicon Llc | Adapters with firing stroke sensing arrangements for use in connection with electromechanical surgical instruments |
| US10869666B2 (en) | 2017-12-15 | 2020-12-22 | Ethicon Llc | Adapters with control systems for controlling multiple motors of an electromechanical surgical instrument |
| US10966718B2 (en) | 2017-12-15 | 2021-04-06 | Ethicon Llc | Dynamic clamping assemblies with improved wear characteristics for use in connection with electromechanical surgical instruments |
| US11197670B2 (en) | 2017-12-15 | 2021-12-14 | Cilag Gmbh International | Surgical end effectors with pivotal jaws configured to touch at their respective distal ends when fully closed |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US10743875B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Surgical end effectors with jaw stiffener arrangements configured to permit monitoring of firing member |
| US10828033B2 (en) | 2017-12-15 | 2020-11-10 | Ethicon Llc | Handheld electromechanical surgical instruments with improved motor control arrangements for positioning components of an adapter coupled thereto |
| US11071543B2 (en) | 2017-12-15 | 2021-07-27 | Cilag Gmbh International | Surgical end effectors with clamping assemblies configured to increase jaw aperture ranges |
| US11033267B2 (en) | 2017-12-15 | 2021-06-15 | Ethicon Llc | Systems and methods of controlling a clamping member firing rate of a surgical instrument |
| US10743874B2 (en) | 2017-12-15 | 2020-08-18 | Ethicon Llc | Sealed adapters for use with electromechanical surgical instruments |
| US10779825B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Adapters with end effector position sensing and control arrangements for use in connection with electromechanical surgical instruments |
| US11045270B2 (en) | 2017-12-19 | 2021-06-29 | Cilag Gmbh International | Robotic attachment comprising exterior drive actuator |
| US10729509B2 (en) | 2017-12-19 | 2020-08-04 | Ethicon Llc | Surgical instrument comprising closure and firing locking mechanism |
| US10716565B2 (en) | 2017-12-19 | 2020-07-21 | Ethicon Llc | Surgical instruments with dual articulation drivers |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| US11020112B2 (en) | 2017-12-19 | 2021-06-01 | Ethicon Llc | Surgical tools configured for interchangeable use with different controller interfaces |
| USD910847S1 (en) | 2017-12-19 | 2021-02-16 | Ethicon Llc | Surgical instrument assembly |
| US11076853B2 (en) | 2017-12-21 | 2021-08-03 | Cilag Gmbh International | Systems and methods of displaying a knife position during transection for a surgical instrument |
| US11129680B2 (en) | 2017-12-21 | 2021-09-28 | Cilag Gmbh International | Surgical instrument comprising a projector |
| US11311290B2 (en) | 2017-12-21 | 2022-04-26 | Cilag Gmbh International | Surgical instrument comprising an end effector dampener |
| US20190192151A1 (en) | 2017-12-21 | 2019-06-27 | Ethicon Llc | Surgical instrument having a display comprising image layers |
| US11589888B2 (en) | 2017-12-28 | 2023-02-28 | Cilag Gmbh International | Method for controlling smart energy devices |
| US11051876B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Surgical evacuation flow paths |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US11659023B2 (en) | 2017-12-28 | 2023-05-23 | Cilag Gmbh International | Method of hub communication |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11678881B2 (en) | 2017-12-28 | 2023-06-20 | Cilag Gmbh International | Spatial awareness of surgical hubs in operating rooms |
| US11317937B2 (en) | 2018-03-08 | 2022-05-03 | Cilag Gmbh International | Determining the state of an ultrasonic end effector |
| US11013563B2 (en) | 2017-12-28 | 2021-05-25 | Ethicon Llc | Drive arrangements for robot-assisted surgical platforms |
| US10966791B2 (en) | 2017-12-28 | 2021-04-06 | Ethicon Llc | Cloud-based medical analytics for medical facility segmented individualization of instrument function |
| US10755813B2 (en) | 2017-12-28 | 2020-08-25 | Ethicon Llc | Communication of smoke evacuation system parameters to hub or cloud in smoke evacuation module for interactive surgical platform |
| US11786245B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Surgical systems with prioritized data transmission capabilities |
| US11364075B2 (en) | 2017-12-28 | 2022-06-21 | Cilag Gmbh International | Radio frequency energy device for delivering combined electrical signals |
| US11147607B2 (en) | 2017-12-28 | 2021-10-19 | Cilag Gmbh International | Bipolar combination device that automatically adjusts pressure based on energy modality |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11026751B2 (en) | 2017-12-28 | 2021-06-08 | Cilag Gmbh International | Display of alignment of staple cartridge to prior linear staple line |
| US11056244B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Automated data scaling, alignment, and organizing based on predefined parameters within surgical networks |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11576677B2 (en) | 2017-12-28 | 2023-02-14 | Cilag Gmbh International | Method of hub communication, processing, display, and cloud analytics |
| US11160605B2 (en) | 2017-12-28 | 2021-11-02 | Cilag Gmbh International | Surgical evacuation sensing and motor control |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US10892995B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11464535B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Detection of end effector emersion in liquid |
| US11266468B2 (en) | 2017-12-28 | 2022-03-08 | Cilag Gmbh International | Cooperative utilization of data derived from secondary sources by intelligent surgical hubs |
| US11696760B2 (en) | 2017-12-28 | 2023-07-11 | Cilag Gmbh International | Safety systems for smart powered surgical stapling |
| US11612444B2 (en) | 2017-12-28 | 2023-03-28 | Cilag Gmbh International | Adjustment of a surgical device function based on situational awareness |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11969142B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
| US11069012B2 (en) | 2017-12-28 | 2021-07-20 | Cilag Gmbh International | Interactive surgical systems with condition handling of devices and data capabilities |
| US11278281B2 (en) | 2017-12-28 | 2022-03-22 | Cilag Gmbh International | Interactive surgical system |
| US11419630B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Surgical system distributed processing |
| US11446052B2 (en) | 2017-12-28 | 2022-09-20 | Cilag Gmbh International | Variation of radio frequency and ultrasonic power level in cooperation with varying clamp arm pressure to achieve predefined heat flux or power applied to tissue |
| US11376002B2 (en) | 2017-12-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument cartridge sensor assemblies |
| US10932872B2 (en) | 2017-12-28 | 2021-03-02 | Ethicon Llc | Cloud-based medical analytics for linking of local usage trends with the resource acquisition behaviors of larger data set |
| US11559308B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method for smart energy device infrastructure |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11311306B2 (en) | 2017-12-28 | 2022-04-26 | Cilag Gmbh International | Surgical systems for detecting end effector tissue distribution irregularities |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11100631B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Use of laser light and red-green-blue coloration to determine properties of back scattered light |
| US11304763B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Image capturing of the areas outside the abdomen to improve placement and control of a surgical device in use |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11559307B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method of robotic hub communication, detection, and control |
| US11937769B2 (en) | 2017-12-28 | 2024-03-26 | Cilag Gmbh International | Method of hub communication, processing, storage and display |
| US11633237B2 (en) | 2017-12-28 | 2023-04-25 | Cilag Gmbh International | Usage and technique analysis of surgeon / staff performance against a baseline to optimize device utilization and performance for both current and future procedures |
| US11284936B2 (en) | 2017-12-28 | 2022-03-29 | Cilag Gmbh International | Surgical instrument having a flexible electrode |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11076921B2 (en) | 2017-12-28 | 2021-08-03 | Cilag Gmbh International | Adaptive control program updates for surgical hubs |
| US11273001B2 (en) | 2017-12-28 | 2022-03-15 | Cilag Gmbh International | Surgical hub and modular device response adjustment based on situational awareness |
| US11291495B2 (en) | 2017-12-28 | 2022-04-05 | Cilag Gmbh International | Interruption of energy due to inadvertent capacitive coupling |
| US11969216B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Surgical network recommendations from real time analysis of procedure variables against a baseline highlighting differences from the optimal solution |
| US11666331B2 (en) | 2017-12-28 | 2023-06-06 | Cilag Gmbh International | Systems for detecting proximity of surgical end effector to cancerous tissue |
| US11304699B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11179208B2 (en) | 2017-12-28 | 2021-11-23 | Cilag Gmbh International | Cloud-based medical analytics for security and authentication trends and reactive measures |
| US11410259B2 (en) | 2017-12-28 | 2022-08-09 | Cilag Gmbh International | Adaptive control program updates for surgical devices |
| US11096693B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Adjustment of staple height of at least one row of staples based on the sensed tissue thickness or force in closing |
| US10892899B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Self describing data packets generated at an issuing instrument |
| US11464559B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Estimating state of ultrasonic end effector and control system therefor |
| US11432885B2 (en) | 2017-12-28 | 2022-09-06 | Cilag Gmbh International | Sensing arrangements for robot-assisted surgical platforms |
| US11612408B2 (en) | 2017-12-28 | 2023-03-28 | Cilag Gmbh International | Determining tissue composition via an ultrasonic system |
| US11540855B2 (en) | 2017-12-28 | 2023-01-03 | Cilag Gmbh International | Controlling activation of an ultrasonic surgical instrument according to the presence of tissue |
| US11903601B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Surgical instrument comprising a plurality of drive systems |
| US11529187B2 (en) | 2017-12-28 | 2022-12-20 | Cilag Gmbh International | Surgical evacuation sensor arrangements |
| US11308075B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical network, instrument, and cloud responses based on validation of received dataset and authentication of its source and integrity |
| US10943454B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Detection and escalation of security responses of surgical instruments to increasing severity threats |
| US11424027B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11253315B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Increasing radio frequency to create pad-less monopolar loop |
| US11832840B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical instrument having a flexible circuit |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11202570B2 (en) | 2017-12-28 | 2021-12-21 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US11419667B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Ultrasonic energy device which varies pressure applied by clamp arm to provide threshold control pressure at a cut progression location |
| US11234756B2 (en) | 2017-12-28 | 2022-02-01 | Cilag Gmbh International | Powered surgical tool with predefined adjustable control algorithm for controlling end effector parameter |
| US20190201039A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Situational awareness of electrosurgical systems |
| US10849697B2 (en) | 2017-12-28 | 2020-12-01 | Ethicon Llc | Cloud interface for coupled surgical devices |
| US11423007B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Adjustment of device control programs based on stratified contextual data in addition to the data |
| US10695081B2 (en) | 2017-12-28 | 2020-06-30 | Ethicon Llc | Controlling a surgical instrument according to sensed closure parameters |
| US11324557B2 (en) | 2017-12-28 | 2022-05-10 | Cilag Gmbh International | Surgical instrument with a sensing array |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US10944728B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Interactive surgical systems with encrypted communication capabilities |
| US11304745B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical evacuation sensing and display |
| US11304720B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Activation of energy devices |
| US11571234B2 (en) | 2017-12-28 | 2023-02-07 | Cilag Gmbh International | Temperature control of ultrasonic end effector and control system therefor |
| US11257589B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Real-time analysis of comprehensive cost of all instrumentation used in surgery utilizing data fluidity to track instruments through stocking and in-house processes |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US11045591B2 (en) | 2017-12-28 | 2021-06-29 | Cilag Gmbh International | Dual in-series large and small droplet filters |
| US11213359B2 (en) | 2017-12-28 | 2022-01-04 | Cilag Gmbh International | Controllers for robot-assisted surgical platforms |
| US11602393B2 (en) | 2017-12-28 | 2023-03-14 | Cilag Gmbh International | Surgical evacuation sensing and generator control |
| US10987178B2 (en) | 2017-12-28 | 2021-04-27 | Ethicon Llc | Surgical hub control arrangements |
| US10945732B2 (en) | 2018-01-17 | 2021-03-16 | Covidien Lp | Surgical stapler with self-returning assembly |
| MX2020008740A (es) * | 2018-02-21 | 2020-12-07 | Ethicon Llc | Auxiliares tridimensionales. |
| MX2020008731A (es) * | 2018-02-21 | 2020-12-07 | Ethicon Llc | Auxiliares tridimensionales. |
| CN111954498A (zh) * | 2018-02-21 | 2020-11-17 | 爱惜康有限责任公司 | 三维附属物 |
| CN112004486A (zh) * | 2018-02-21 | 2020-11-27 | 爱惜康有限责任公司 | 具有三维附属物的缝合组件 |
| US10966713B2 (en) * | 2018-02-21 | 2021-04-06 | Ethicon Llc | Three dimensional adjuncts |
| BR112020016895A2 (pt) | 2018-02-21 | 2020-12-15 | Ethicon Llc | Arcabouços entrelaçados para tecido |
| MX2020008733A (es) * | 2018-02-21 | 2020-12-07 | Ethicon Llc | Auxiliares tridimensionales. |
| BR112020016870A2 (pt) * | 2018-02-21 | 2020-12-15 | Ethicon Llc | Acessórios tridimensionais |
| USD885574S1 (en) | 2018-02-21 | 2020-05-26 | Ethicon Llc | Knitted tissue scaffold |
| USD882782S1 (en) | 2018-02-21 | 2020-04-28 | Ethicon Llc | Three dimensional adjunct |
| US10813637B2 (en) | 2018-02-21 | 2020-10-27 | Ethicon Llc | Three dimensional adjuncts |
| US20190254667A1 (en) | 2018-02-21 | 2019-08-22 | Ethicon Llc | Knitted tissue scaffolds |
| MX2020008737A (es) * | 2018-02-21 | 2020-12-07 | Ethicon Llc | Auxiliares tridimensionales. |
| CN111970979B (zh) * | 2018-02-21 | 2024-05-07 | 爱惜康有限责任公司 | 具有三维附属物的缝合组件 |
| CN112004485A (zh) * | 2018-02-21 | 2020-11-27 | 爱惜康有限责任公司 | 三维附属物 |
| US11065000B2 (en) | 2018-02-22 | 2021-07-20 | Covidien Lp | Surgical buttresses for surgical stapling apparatus |
| JP7134243B2 (ja) | 2018-03-02 | 2022-09-09 | コヴィディエン リミテッド パートナーシップ | 外科用ステープル留め器具 |
| US11259830B2 (en) | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| US11589915B2 (en) | 2018-03-08 | 2023-02-28 | Cilag Gmbh International | In-the-jaw classifier based on a model |
| US11707293B2 (en) | 2018-03-08 | 2023-07-25 | Cilag Gmbh International | Ultrasonic sealing algorithm with temperature control |
| US11471156B2 (en) | 2018-03-28 | 2022-10-18 | Cilag Gmbh International | Surgical stapling devices with improved rotary driven closure systems |
| US11259806B2 (en) | 2018-03-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling devices with features for blocking advancement of a camming assembly of an incompatible cartridge installed therein |
| US11207067B2 (en) | 2018-03-28 | 2021-12-28 | Cilag Gmbh International | Surgical stapling device with separate rotary driven closure and firing systems and firing member that engages both jaws while firing |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| US11219453B2 (en) | 2018-03-28 | 2022-01-11 | Cilag Gmbh International | Surgical stapling devices with cartridge compatible closure and firing lockout arrangements |
| US11096688B2 (en) | 2018-03-28 | 2021-08-24 | Cilag Gmbh International | Rotary driven firing members with different anvil and channel engagement features |
| US11278280B2 (en) | 2018-03-28 | 2022-03-22 | Cilag Gmbh International | Surgical instrument comprising a jaw closure lockout |
| US11197668B2 (en) | 2018-03-28 | 2021-12-14 | Cilag Gmbh International | Surgical stapling assembly comprising a lockout and an exterior access orifice to permit artificial unlocking of the lockout |
| US10973520B2 (en) | 2018-03-28 | 2021-04-13 | Ethicon Llc | Surgical staple cartridge with firing member driven camming assembly that has an onboard tissue cutting feature |
| US10758237B2 (en) | 2018-04-30 | 2020-09-01 | Covidien Lp | Circular stapling apparatus with pinned buttress |
| US11426163B2 (en) | 2018-05-09 | 2022-08-30 | Covidien Lp | Universal linear surgical stapling buttress |
| US11284896B2 (en) | 2018-05-09 | 2022-03-29 | Covidien Lp | Surgical buttress loading and attaching/detaching assemblies |
| US11432818B2 (en) | 2018-05-09 | 2022-09-06 | Covidien Lp | Surgical buttress assemblies |
| US10849622B2 (en) | 2018-06-21 | 2020-12-01 | Covidien Lp | Articulated stapling with fire lock |
| US11219460B2 (en) | 2018-07-02 | 2022-01-11 | Covidien Lp | Surgical stapling apparatus with anvil buttress |
| US10736631B2 (en) | 2018-08-07 | 2020-08-11 | Covidien Lp | End effector with staple cartridge ejector |
| US10842492B2 (en) | 2018-08-20 | 2020-11-24 | Ethicon Llc | Powered articulatable surgical instruments with clutching and locking arrangements for linking an articulation drive system to a firing drive system |
| US10779821B2 (en) | 2018-08-20 | 2020-09-22 | Ethicon Llc | Surgical stapler anvils with tissue stop features configured to avoid tissue pinch |
| USD914878S1 (en) | 2018-08-20 | 2021-03-30 | Ethicon Llc | Surgical instrument anvil |
| US11039834B2 (en) | 2018-08-20 | 2021-06-22 | Cilag Gmbh International | Surgical stapler anvils with staple directing protrusions and tissue stability features |
| US11324501B2 (en) | 2018-08-20 | 2022-05-10 | Cilag Gmbh International | Surgical stapling devices with improved closure members |
| US10856870B2 (en) | 2018-08-20 | 2020-12-08 | Ethicon Llc | Switching arrangements for motor powered articulatable surgical instruments |
| US11291440B2 (en) | 2018-08-20 | 2022-04-05 | Cilag Gmbh International | Method for operating a powered articulatable surgical instrument |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| US11253256B2 (en) | 2018-08-20 | 2022-02-22 | Cilag Gmbh International | Articulatable motor powered surgical instruments with dedicated articulation motor arrangements |
| US11045192B2 (en) | 2018-08-20 | 2021-06-29 | Cilag Gmbh International | Fabricating techniques for surgical stapler anvils |
| US11083458B2 (en) | 2018-08-20 | 2021-08-10 | Cilag Gmbh International | Powered surgical instruments with clutching arrangements to convert linear drive motions to rotary drive motions |
| US10912559B2 (en) | 2018-08-20 | 2021-02-09 | Ethicon Llc | Reinforced deformable anvil tip for surgical stapler anvil |
| US10849620B2 (en) | 2018-09-14 | 2020-12-01 | Covidien Lp | Connector mechanisms for surgical stapling instruments |
| US10806459B2 (en) * | 2018-09-14 | 2020-10-20 | Covidien Lp | Drug patterned reinforcement material for circular anastomosis |
| US11510669B2 (en) | 2020-09-29 | 2022-11-29 | Covidien Lp | Hand-held surgical instruments |
| US10952729B2 (en) | 2018-10-03 | 2021-03-23 | Covidien Lp | Universal linear buttress retention/release assemblies and methods |
| US11090051B2 (en) | 2018-10-23 | 2021-08-17 | Covidien Lp | Surgical stapling device with floating staple cartridge |
| US11197673B2 (en) | 2018-10-30 | 2021-12-14 | Covidien Lp | Surgical stapling instruments and end effector assemblies thereof |
| US10912563B2 (en) | 2019-01-02 | 2021-02-09 | Covidien Lp | Stapling device including tool assembly stabilizing member |
| US11751872B2 (en) | 2019-02-19 | 2023-09-12 | Cilag Gmbh International | Insertable deactivator element for surgical stapler lockouts |
| US11291444B2 (en) | 2019-02-19 | 2022-04-05 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a closure lockout |
| US11369377B2 (en) | 2019-02-19 | 2022-06-28 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a firing lockout |
| US11357503B2 (en) | 2019-02-19 | 2022-06-14 | Cilag Gmbh International | Staple cartridge retainers with frangible retention features and methods of using same |
| US11317915B2 (en) | 2019-02-19 | 2022-05-03 | Cilag Gmbh International | Universal cartridge based key feature that unlocks multiple lockout arrangements in different surgical staplers |
| US11344297B2 (en) | 2019-02-28 | 2022-05-31 | Covidien Lp | Surgical stapling device with independently movable jaws |
| US11259808B2 (en) | 2019-03-13 | 2022-03-01 | Covidien Lp | Tool assemblies with a gap locking member |
| US11172929B2 (en) | 2019-03-25 | 2021-11-16 | Cilag Gmbh International | Articulation drive arrangements for surgical systems |
| US11147553B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11147551B2 (en) | 2019-03-25 | 2021-10-19 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| AU2020253285A1 (en) | 2019-03-29 | 2021-09-30 | Applied Medical Resources Corporation | Reload cover for surgical stapling system |
| US11284892B2 (en) | 2019-04-01 | 2022-03-29 | Covidien Lp | Loading unit and adapter with modified coupling assembly |
| US11284893B2 (en) | 2019-04-02 | 2022-03-29 | Covidien Lp | Stapling device with articulating tool assembly |
| US11241228B2 (en) | 2019-04-05 | 2022-02-08 | Covidien Lp | Surgical instrument including an adapter assembly and an articulating surgical loading unit |
| US11730472B2 (en) | 2019-04-25 | 2023-08-22 | Covidien Lp | Surgical system and surgical loading units thereof |
| CN111859599A (zh) * | 2019-04-29 | 2020-10-30 | 王玉漫 | 一种层叠参杂或复合的材料的叠层方案的设计方法 |
| US11253254B2 (en) | 2019-04-30 | 2022-02-22 | Cilag Gmbh International | Shaft rotation actuator on a surgical instrument |
| US11432816B2 (en) | 2019-04-30 | 2022-09-06 | Cilag Gmbh International | Articulation pin for a surgical instrument |
| US11471157B2 (en) | 2019-04-30 | 2022-10-18 | Cilag Gmbh International | Articulation control mapping for a surgical instrument |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11426251B2 (en) | 2019-04-30 | 2022-08-30 | Cilag Gmbh International | Articulation directional lights on a surgical instrument |
| US11452528B2 (en) | 2019-04-30 | 2022-09-27 | Cilag Gmbh International | Articulation actuators for a surgical instrument |
| US11596403B2 (en) | 2019-05-08 | 2023-03-07 | Covidien Lp | Surgical stapling device |
| US11478245B2 (en) | 2019-05-08 | 2022-10-25 | Covidien Lp | Surgical stapling device |
| USD952144S1 (en) | 2019-06-25 | 2022-05-17 | Cilag Gmbh International | Surgical staple cartridge retainer with firing system authentication key |
| USD964564S1 (en) | 2019-06-25 | 2022-09-20 | Cilag Gmbh International | Surgical staple cartridge retainer with a closure system authentication key |
| USD950728S1 (en) | 2019-06-25 | 2022-05-03 | Cilag Gmbh International | Surgical staple cartridge |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11298127B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Interational | Surgical stapling system having a lockout mechanism for an incompatible cartridge |
| US11376098B2 (en) | 2019-06-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument system comprising an RFID system |
| US11350938B2 (en) | 2019-06-28 | 2022-06-07 | Cilag Gmbh International | Surgical instrument comprising an aligned rfid sensor |
| US11399837B2 (en) | 2019-06-28 | 2022-08-02 | Cilag Gmbh International | Mechanisms for motor control adjustments of a motorized surgical instrument |
| US11259803B2 (en) | 2019-06-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling system having an information encryption protocol |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11426167B2 (en) | 2019-06-28 | 2022-08-30 | Cilag Gmbh International | Mechanisms for proper anvil attachment surgical stapling head assembly |
| US11291451B2 (en) | 2019-06-28 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with battery compatibility verification functionality |
| US11361176B2 (en) | 2019-06-28 | 2022-06-14 | Cilag Gmbh International | Surgical RFID assemblies for compatibility detection |
| US11219455B2 (en) | 2019-06-28 | 2022-01-11 | Cilag Gmbh International | Surgical instrument including a lockout key |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US11298132B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Inlernational | Staple cartridge including a honeycomb extension |
| US11246678B2 (en) | 2019-06-28 | 2022-02-15 | Cilag Gmbh International | Surgical stapling system having a frangible RFID tag |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11051807B2 (en) | 2019-06-28 | 2021-07-06 | Cilag Gmbh International | Packaging assembly including a particulate trap |
| US11224497B2 (en) | 2019-06-28 | 2022-01-18 | Cilag Gmbh International | Surgical systems with multiple RFID tags |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11853835B2 (en) | 2019-06-28 | 2023-12-26 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11224424B2 (en) | 2019-08-02 | 2022-01-18 | Covidien Lp | Linear stapling device with vertically movable knife |
| US11969169B2 (en) | 2019-09-10 | 2024-04-30 | Covidien Lp | Anvil buttress loading unit for a surgical stapling apparatus |
| US11540833B2 (en) | 2019-09-16 | 2023-01-03 | Cilag Gmbh International | Compressible non-fibrous adjuncts |
| US11490890B2 (en) | 2019-09-16 | 2022-11-08 | Cilag Gmbh International | Compressible non-fibrous adjuncts |
| US11571208B2 (en) | 2019-10-11 | 2023-02-07 | Covidien Lp | Surgical buttress loading units |
| US11406385B2 (en) | 2019-10-11 | 2022-08-09 | Covidien Lp | Stapling device with a gap locking member |
| EP4054492A4 (en) | 2019-11-04 | 2023-11-01 | Standard Bariatrics, Inc. | SYSTEMS AND METHODS FOR PERFORMING SURGICAL PROCEDURES USING TENSION RETRACTION ACCORDING TO LAPLACE'S LAW DURING OPERATION |
| US11123068B2 (en) | 2019-11-08 | 2021-09-21 | Covidien Lp | Surgical staple cartridge |
| US11974743B2 (en) | 2019-12-02 | 2024-05-07 | Covidien Lp | Linear stapling device with a gap locking member |
| US11707274B2 (en) | 2019-12-06 | 2023-07-25 | Covidien Lp | Articulating mechanism for surgical instrument |
| US11109862B2 (en) | 2019-12-12 | 2021-09-07 | Covidien Lp | Surgical stapling device with flexible shaft |
| US11523824B2 (en) | 2019-12-12 | 2022-12-13 | Covidien Lp | Anvil buttress loading for a surgical stapling apparatus |
| JP7397646B2 (ja) * | 2019-12-12 | 2023-12-13 | グンゼ株式会社 | 自動縫合器用縫合補強材 |
| US11737747B2 (en) | 2019-12-17 | 2023-08-29 | Covidien Lp | Hand-held surgical instruments |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11234698B2 (en) | 2019-12-19 | 2022-02-01 | Cilag Gmbh International | Stapling system comprising a clamp lockout and a firing lockout |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11304696B2 (en) | 2019-12-19 | 2022-04-19 | Cilag Gmbh International | Surgical instrument comprising a powered articulation system |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US11931033B2 (en) | 2019-12-19 | 2024-03-19 | Cilag Gmbh International | Staple cartridge comprising a latch lockout |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11291447B2 (en) | 2019-12-19 | 2022-04-05 | Cilag Gmbh International | Stapling instrument comprising independent jaw closing and staple firing systems |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| US11278282B2 (en) | 2020-01-31 | 2022-03-22 | Covidien Lp | Stapling device with selective cutting |
| US11452524B2 (en) | 2020-01-31 | 2022-09-27 | Covidien Lp | Surgical stapling device with lockout |
| JP2023523507A (ja) | 2020-02-14 | 2023-06-06 | コヴィディエン リミテッド パートナーシップ | 外科用ステープルのための、かつ周壁に組織を把持するための隆起を有する、カートリッジホルダ |
| US11344301B2 (en) | 2020-03-02 | 2022-05-31 | Covidien Lp | Surgical stapling device with replaceable reload assembly |
| US11344302B2 (en) | 2020-03-05 | 2022-05-31 | Covidien Lp | Articulation mechanism for surgical stapling device |
| US11246593B2 (en) | 2020-03-06 | 2022-02-15 | Covidien Lp | Staple cartridge |
| US11707278B2 (en) | 2020-03-06 | 2023-07-25 | Covidien Lp | Surgical stapler tool assembly to minimize bleeding |
| US11357505B2 (en) | 2020-03-10 | 2022-06-14 | Covidien Lp | Surgical stapling apparatus with firing lockout mechanism |
| US11317911B2 (en) | 2020-03-10 | 2022-05-03 | Covidien Lp | Tool assembly with replaceable cartridge assembly |
| US11406383B2 (en) | 2020-03-17 | 2022-08-09 | Covidien Lp | Fire assisted powered EGIA handle |
| US11547407B2 (en) | 2020-03-19 | 2023-01-10 | Covidien Lp | Staple line reinforcement for surgical stapling apparatus |
| US11426159B2 (en) | 2020-04-01 | 2022-08-30 | Covidien Lp | Sled detection device |
| US11331098B2 (en) | 2020-04-01 | 2022-05-17 | Covidien Lp | Sled detection device |
| US11504117B2 (en) | 2020-04-02 | 2022-11-22 | Covidien Lp | Hand-held surgical instruments |
| US11337699B2 (en) | 2020-04-28 | 2022-05-24 | Covidien Lp | Magnesium infused surgical buttress for surgical stapler |
| US11937794B2 (en) | 2020-05-11 | 2024-03-26 | Covidien Lp | Powered handle assembly for surgical devices |
| US11191537B1 (en) | 2020-05-12 | 2021-12-07 | Covidien Lp | Stapling device with continuously parallel jaws |
| US11406387B2 (en) | 2020-05-12 | 2022-08-09 | Covidien Lp | Surgical stapling device with replaceable staple cartridge |
| US11534167B2 (en) | 2020-05-28 | 2022-12-27 | Covidien Lp | Electrotaxis-conducive stapling |
| USD966512S1 (en) | 2020-06-02 | 2022-10-11 | Cilag Gmbh International | Staple cartridge |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD975278S1 (en) | 2020-06-02 | 2023-01-10 | Cilag Gmbh International | Staple cartridge |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD967421S1 (en) | 2020-06-02 | 2022-10-18 | Cilag Gmbh International | Staple cartridge |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| US11191538B1 (en) | 2020-06-08 | 2021-12-07 | Covidien Lp | Surgical stapling device with parallel jaw closure |
| US11844517B2 (en) | 2020-06-25 | 2023-12-19 | Covidien Lp | Linear stapling device with continuously parallel jaws |
| US11324500B2 (en) | 2020-06-30 | 2022-05-10 | Covidien Lp | Surgical stapling device |
| US11446028B2 (en) | 2020-07-09 | 2022-09-20 | Covidien Lp | Tool assembly with pivotable clamping beam |
| US11517305B2 (en) | 2020-07-09 | 2022-12-06 | Covidien Lp | Contoured staple pusher |
| US20220031346A1 (en) | 2020-07-28 | 2022-02-03 | Cilag Gmbh International | Articulatable surgical instruments with articulation joints comprising flexible exoskeleton arrangements |
| US11266402B2 (en) | 2020-07-30 | 2022-03-08 | Covidien Lp | Sensing curved tip for surgical stapling instruments |
| US11439392B2 (en) | 2020-08-03 | 2022-09-13 | Covidien Lp | Surgical stapling device and fastener for pathological exam |
| US11395654B2 (en) | 2020-08-07 | 2022-07-26 | Covidien Lp | Surgical stapling device with articulation braking assembly |
| US11602342B2 (en) | 2020-08-27 | 2023-03-14 | Covidien Lp | Surgical stapling device with laser probe |
| US11707276B2 (en) | 2020-09-08 | 2023-07-25 | Covidien Lp | Surgical buttress assemblies and techniques for surgical stapling |
| US11678878B2 (en) | 2020-09-16 | 2023-06-20 | Covidien Lp | Articulation mechanism for surgical stapling device |
| US11660092B2 (en) | 2020-09-29 | 2023-05-30 | Covidien Lp | Adapter for securing loading units to handle assemblies of surgical stapling instruments |
| US11406384B2 (en) | 2020-10-05 | 2022-08-09 | Covidien Lp | Stapling device with drive assembly stop member |
| US11576674B2 (en) | 2020-10-06 | 2023-02-14 | Covidien Lp | Surgical stapling device with articulation lock assembly |
| US11399833B2 (en) | 2020-10-19 | 2022-08-02 | Covidien Lp | Anvil buttress attachment for surgical stapling apparatus |
| US11452526B2 (en) | 2020-10-29 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising a staged voltage regulation start-up system |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| US11890007B2 (en) | 2020-11-18 | 2024-02-06 | Covidien Lp | Stapling device with flex cable and tensioning mechanism |
| US11648007B2 (en) | 2020-11-25 | 2023-05-16 | Cilag Gmbh International | Compressible knitted adjuncts with varying fiber features |
| US11678883B2 (en) | 2020-11-25 | 2023-06-20 | Cilag Gmbh International | Compressible knitted adjuncts with varying interconnections |
| US11446027B2 (en) | 2020-11-25 | 2022-09-20 | Cilag Gmbh International | Compressible knitted adjuncts with surface features |
| US11707279B2 (en) | 2020-11-25 | 2023-07-25 | Cilag Gmbh International | Compressible knitted adjuncts with finished edges |
| US11690617B2 (en) | 2020-11-25 | 2023-07-04 | Cilag Gmbh International | Compressible knitted adjuncts with finished edges |
| CN112635022B (zh) * | 2020-11-27 | 2023-07-25 | 易波 | 用于吸持生物组织的亲水界面的评价方法及系统 |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| US11737774B2 (en) | 2020-12-04 | 2023-08-29 | Covidien Lp | Surgical instrument with articulation assembly |
| US11819200B2 (en) | 2020-12-15 | 2023-11-21 | Covidien Lp | Surgical instrument with articulation assembly |
| US11553914B2 (en) | 2020-12-22 | 2023-01-17 | Covidien Lp | Surgical stapling device with parallel jaw closure |
| US11534170B2 (en) | 2021-01-04 | 2022-12-27 | Covidien Lp | Anvil buttress attachment for surgical stapling apparatus |
| US11744582B2 (en) | 2021-01-05 | 2023-09-05 | Covidien Lp | Surgical stapling device with firing lockout mechanism |
| US11759206B2 (en) | 2021-01-05 | 2023-09-19 | Covidien Lp | Surgical stapling device with firing lockout mechanism |
| US11517313B2 (en) | 2021-01-27 | 2022-12-06 | Covidien Lp | Surgical stapling device with laminated drive member |
| US11759207B2 (en) | 2021-01-27 | 2023-09-19 | Covidien Lp | Surgical stapling apparatus with adjustable height clamping member |
| US11980362B2 (en) | 2021-02-26 | 2024-05-14 | Cilag Gmbh International | Surgical instrument system comprising a power transfer coil |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11717300B2 (en) | 2021-03-11 | 2023-08-08 | Covidien Lp | Surgical stapling apparatus with integrated visualization |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| CA3212625A1 (en) | 2021-03-23 | 2022-09-29 | Adam R. Dunki-Jacobs | Systems and methods for preventing tissue migration in surgical staplers |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US11944336B2 (en) | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11974750B2 (en) | 2021-03-26 | 2024-05-07 | Covidien Lp | Surgical staple cartridge |
| US11896226B2 (en) | 2021-03-30 | 2024-02-13 | Cilag Gmbh International | Compressible adjuncts with healing-dependent degradation profile |
| US11850332B2 (en) | 2021-03-30 | 2023-12-26 | Cilag Gmbh International | Method for treating tissue |
| US11839374B2 (en) * | 2021-03-30 | 2023-12-12 | Cilag Gmbh International | Compressible adjuncts with drug release features |
| US11786240B2 (en) | 2021-03-30 | 2023-10-17 | Cilag Gmbh International | Using smart packaging in adjusting use of tissue adjuncts |
| US11864765B2 (en) * | 2021-03-30 | 2024-01-09 | Cilag Gmbh International | Compressible adjuncts with fluid control features |
| US11602341B2 (en) | 2021-03-30 | 2023-03-14 | Cilag Gmbh International | Compressible adjuncts with drug release features |
| US11849950B2 (en) | 2021-03-30 | 2023-12-26 | Cilag Gmbh International | Compressible adjuncts with drug dosage control features |
| US11627961B2 (en) | 2021-03-30 | 2023-04-18 | Cilag Gmbh International | Compressible adjuncts with different behavioral zones |
| US11497495B2 (en) | 2021-03-31 | 2022-11-15 | Covidien Lp | Continuous stapler strip for use with a surgical stapling device |
| US11666330B2 (en) | 2021-04-05 | 2023-06-06 | Covidien Lp | Surgical stapling device with lockout mechanism |
| US11576670B2 (en) | 2021-05-06 | 2023-02-14 | Covidien Lp | Surgical stapling device with optimized drive assembly |
| WO2022238847A1 (en) * | 2021-05-10 | 2022-11-17 | Cilag Gmbh International | Adaptive control of surgical stapling instrument based on staple cartridge type |
| US11812956B2 (en) | 2021-05-18 | 2023-11-14 | Covidien Lp | Dual firing radial stapling device |
| US11696755B2 (en) | 2021-05-19 | 2023-07-11 | Covidien Lp | Surgical stapling device with reload assembly removal lockout |
| US11771423B2 (en) | 2021-05-25 | 2023-10-03 | Covidien Lp | Powered stapling device with manual retraction |
| US11510673B1 (en) | 2021-05-25 | 2022-11-29 | Covidien Lp | Powered stapling device with manual retraction |
| CN113288268B (zh) * | 2021-05-25 | 2022-05-27 | 常州安康医疗器械有限公司 | 一种可交错缝合的腔镜吻合器 |
| US11701119B2 (en) | 2021-05-26 | 2023-07-18 | Covidien Lp | Powered stapling device with rack release |
| US11918217B2 (en) | 2021-05-28 | 2024-03-05 | Cilag Gmbh International | Stapling instrument comprising a staple cartridge insertion stop |
| US11576675B2 (en) | 2021-06-07 | 2023-02-14 | Covidien Lp | Staple cartridge with knife |
| US11510670B1 (en) | 2021-06-23 | 2022-11-29 | Covidien Lp | Buttress attachment for surgical stapling apparatus |
| US11596399B2 (en) | 2021-06-23 | 2023-03-07 | Covidien Lp | Anvil buttress attachment for surgical stapling apparatus |
| US11672538B2 (en) | 2021-06-24 | 2023-06-13 | Covidien Lp | Surgical stapling device including a buttress retention assembly |
| US11707275B2 (en) | 2021-06-29 | 2023-07-25 | Covidien Lp | Asymmetrical surgical stapling device |
| US11617579B2 (en) | 2021-06-29 | 2023-04-04 | Covidien Lp | Ultra low profile surgical stapling instrument for tissue resections |
| US11602344B2 (en) | 2021-06-30 | 2023-03-14 | Covidien Lp | Surgical stapling apparatus with firing lockout assembly |
| US11678879B2 (en) | 2021-07-01 | 2023-06-20 | Covidien Lp | Buttress attachment for surgical stapling apparatus |
| US11684368B2 (en) | 2021-07-14 | 2023-06-27 | Covidien Lp | Surgical stapling device including a buttress retention assembly |
| US11540831B1 (en) | 2021-08-12 | 2023-01-03 | Covidien Lp | Staple cartridge with actuation sled detection |
| US11779334B2 (en) | 2021-08-19 | 2023-10-10 | Covidien Lp | Surgical stapling device including a manual retraction assembly |
| US11707277B2 (en) | 2021-08-20 | 2023-07-25 | Covidien Lp | Articulating surgical stapling apparatus with pivotable knife bar guide assembly |
| US11576671B1 (en) | 2021-08-20 | 2023-02-14 | Covidien Lp | Small diameter linear surgical stapling apparatus |
| US11801052B2 (en) | 2021-08-30 | 2023-10-31 | Covidien Lp | Assemblies for surgical stapling instruments |
| US11832817B2 (en) * | 2021-09-03 | 2023-12-05 | Lexington Medical, Inc. | Staple line surgical buttress |
| US11864761B2 (en) | 2021-09-14 | 2024-01-09 | Covidien Lp | Surgical instrument with illumination mechanism |
| US11660094B2 (en) | 2021-09-29 | 2023-05-30 | Covidien Lp | Surgical fastening instrument with two-part surgical fasteners |
| US11653922B2 (en) | 2021-09-29 | 2023-05-23 | Covidien Lp | Surgical stapling device with firing lockout mechanism |
| US11849949B2 (en) | 2021-09-30 | 2023-12-26 | Covidien Lp | Surgical stapling device with firing lockout member |
| US11717299B2 (en) * | 2021-10-12 | 2023-08-08 | Covidien Lp | Surgical stapling device with probiotics |
| US11751875B2 (en) | 2021-10-13 | 2023-09-12 | Coviden Lp | Surgical buttress attachment assemblies for surgical stapling apparatus |
| US11957337B2 (en) | 2021-10-18 | 2024-04-16 | Cilag Gmbh International | Surgical stapling assembly with offset ramped drive surfaces |
| US11877745B2 (en) | 2021-10-18 | 2024-01-23 | Cilag Gmbh International | Surgical stapling assembly having longitudinally-repeating staple leg clusters |
| US11980363B2 (en) | 2021-10-18 | 2024-05-14 | Cilag Gmbh International | Row-to-row staple array variations |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| US20230140285A1 (en) * | 2021-10-29 | 2023-05-04 | Cilag Gmbh International | Compressible adjunct for surgical stapler |
| US11950781B2 (en) | 2021-10-29 | 2024-04-09 | Cilag Gmbh International | Discrete adjunct attachment features for surgical stapler |
| US11806017B2 (en) | 2021-11-23 | 2023-11-07 | Covidien Lp | Anvil buttress loading system for surgical stapling apparatus |
Family Cites Families (3088)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1306107A (en) | 1919-06-10 | Assigotob to amebxcak | ||
| US66052A (en) | 1867-06-25 | smith | ||
| US1314601A (en) | 1919-09-02 | Flexible shaft | ||
| DE273689C (pt) | 1913-08-07 | 1914-05-08 | ||
| US662587A (en) | 1900-05-18 | 1900-11-27 | Charles Chandler Blake | Insulated support for electric conductors. |
| US670748A (en) | 1900-10-25 | 1901-03-26 | Paul Weddeler | Flexible shafting. |
| US951393A (en) | 1909-04-06 | 1910-03-08 | John N Hahn | Staple. |
| FR459743A (fr) | 1912-09-14 | 1913-11-12 | Bariquant Et Marre Des Atel | Transmission flexible |
| US1677337A (en) | 1924-09-27 | 1928-07-17 | Thomas E Grove | Antrum drill |
| US1794907A (en) | 1929-07-19 | 1931-03-03 | Joseph N Kelly | Worm and gear |
| US2037727A (en) | 1934-12-27 | 1936-04-21 | United Shoe Machinery Corp | Fastening |
| US2132295A (en) | 1937-05-05 | 1938-10-04 | Hawkins Earl | Stapling device |
| US2211117A (en) | 1937-09-06 | 1940-08-13 | Rieter Joh Jacob & Cie Ag | Device for drawing rovings in speeders and spinning machines |
| US2161632A (en) | 1937-12-20 | 1939-06-06 | Martin L Nattenheimer | Fastening device |
| US2214870A (en) | 1938-08-10 | 1940-09-17 | William J West | Siding cutter |
| US2329440A (en) | 1941-04-02 | 1943-09-14 | Bocjl Corp | Fastener |
| US2318379A (en) | 1941-04-17 | 1943-05-04 | Walter S Davis | Suture package |
| US2441096A (en) | 1944-09-04 | 1948-05-04 | Singer Mfg Co | Control means for portable electric tools |
| US2448741A (en) | 1945-04-25 | 1948-09-07 | American Cystoscope Makers Inc | Endoscopic surgical instrument |
| US2578686A (en) | 1945-04-27 | 1951-12-18 | Tubing Appliance Co Inc | Open-sided-socket ratchet wrench |
| US2450527A (en) | 1945-10-27 | 1948-10-05 | P & V Quicklocking Co | Semiautomatic coupling |
| US2526902A (en) | 1947-07-31 | 1950-10-24 | Norman C Rublee | Insulating staple |
| US2527256A (en) | 1947-11-07 | 1950-10-24 | Earle R Jackson | Connector for brushes, brooms, and the like |
| FR999646A (fr) | 1949-11-16 | 1952-02-04 | Dispositif serre-câble | |
| US2711761A (en) | 1952-01-09 | 1955-06-28 | Paul R Grants | Power-driven endless saw |
| US2674149A (en) | 1952-03-01 | 1954-04-06 | Jerry S Benson | Multiple pronged fastener device with spreading means |
| US2711461A (en) | 1953-12-24 | 1955-06-21 | Singer Mfg Co | Portable electric tool handle assemblies |
| US2804848A (en) | 1954-09-30 | 1957-09-03 | Chicago Pneumatic Tool Co | Drilling apparatus |
| FR1112936A (fr) | 1954-10-20 | 1956-03-20 | Moteur électrique et commande à trois vitesses enfermés dans une gaine | |
| US2887004A (en) | 1954-11-04 | 1959-05-19 | William H Stewart | Staple having flat depressed head with reinforcing ridge |
| US2808482A (en) | 1956-04-12 | 1957-10-01 | Miniature Switch Corp | Toggle switch construction |
| US2853074A (en) | 1956-06-15 | 1958-09-23 | Edward A Olson | Stapling instrument for surgical purposes |
| US2959974A (en) | 1958-05-28 | 1960-11-15 | Melvin H Emrick | Forward and reverse friction drive tapping attachment |
| DE1775926U (de) | 1958-06-11 | 1958-10-16 | Rudolf W Dipl Ing Ihmig | Kugelschreibermine. |
| US3032769A (en) | 1959-08-18 | 1962-05-08 | John R Palmer | Method of making a bracket |
| US3078465A (en) | 1959-09-09 | 1963-02-26 | Bobrov Boris Sergueevitch | Instrument for stitching gastric stump |
| GB939929A (en) | 1959-10-30 | 1963-10-16 | Vasilii Fedotovich Goodov | Instrument for stitching blood vessels, intestines, bronchi and other soft tissues |
| US3079606A (en) | 1960-01-04 | 1963-03-05 | Bobrov Boris Sergeevich | Instrument for placing lateral gastrointestinal anastomoses |
| US3075062A (en) | 1960-02-02 | 1963-01-22 | J B T Instr Inc | Toggle switch |
| SU143738A1 (ru) | 1960-06-15 | 1960-11-30 | А.А. Стрекопытов | Способ ушивани ткани легкого двухр дными погружными швами |
| US3204731A (en) | 1961-05-26 | 1965-09-07 | Gardner Denver Co | Positive engaging jaw clutch or brake |
| US3196869A (en) | 1962-06-13 | 1965-07-27 | William M Scholl | Buttress pad and method of making the same |
| US3166072A (en) | 1962-10-22 | 1965-01-19 | Jr John T Sullivan | Barbed clips |
| US3181708A (en) | 1963-05-27 | 1965-05-04 | Symington Wayne Corp | Automatic coupler |
| US3266494A (en) | 1963-08-26 | 1966-08-16 | Possis Machine Corp | Powered forceps |
| US3317105A (en) | 1964-03-25 | 1967-05-02 | Niiex Khirurgicheskoi Apparatu | Instrument for placing lateral intestinal anastomoses |
| US3269630A (en) | 1964-04-30 | 1966-08-30 | Fleischer Harry | Stapling instrument |
| US3317103A (en) | 1965-05-03 | 1967-05-02 | Cullen | Apparatus for handling hose or similar elongate members |
| US3275211A (en) | 1965-05-10 | 1966-09-27 | United States Surgical Corp | Surgical stapler with replaceable cartridge |
| US3357296A (en) | 1965-05-14 | 1967-12-12 | Keuneth W Lefever | Staple fastener |
| US3494533A (en) | 1966-10-10 | 1970-02-10 | United States Surgical Corp | Surgical stapler for stitching body organs |
| GB1210522A (en) | 1966-10-10 | 1970-10-28 | United States Surgical Corp | Instrument for placing lateral gastro-intestinal anastomoses |
| US3490675A (en) | 1966-10-10 | 1970-01-20 | United States Surgical Corp | Instrument for placing lateral gastrointestinal anastomoses |
| US3499591A (en) | 1967-06-23 | 1970-03-10 | United States Surgical Corp | Instrument for placing lateral gastro-intestinal anastomoses |
| US3503396A (en) | 1967-09-21 | 1970-03-31 | American Hospital Supply Corp | Atraumatic surgical clamp |
| GB1217159A (en) | 1967-12-05 | 1970-12-31 | Coventry Gauge & Tool Co Ltd | Torque limiting device |
| US3583393A (en) | 1967-12-26 | 1971-06-08 | Olympus Optical Co | Bendable tube assembly |
| JPS4711908Y1 (pt) | 1968-01-18 | 1972-05-02 | ||
| US3551913A (en) | 1968-04-02 | 1971-01-05 | Donald P Shiley | Heart valve prosthesis with guard structure |
| DE1775926A1 (de) | 1968-08-28 | 1972-01-27 | Ver Deutsche Metallwerke Ag | Versfaerkungen fuer Kunststoff-Bowdenzugfuehrungsschlaeuche ohne Drahtverstaerkung |
| US3568675A (en) | 1968-08-30 | 1971-03-09 | Clyde B Harvey | Fistula and penetrating wound dressing |
| US3551987A (en) | 1968-09-12 | 1971-01-05 | Jack E Wilkinson | Stapling clamp for gastrointestinal surgery |
| US3640317A (en) | 1969-03-21 | 1972-02-08 | Jack Panfili | Clip for closing fragile stuffed casings |
| US3572159A (en) | 1969-06-12 | 1971-03-23 | Teleflex Inc | Motion transmitting remote control assembly |
| US3643851A (en) | 1969-08-25 | 1972-02-22 | United States Surgical Corp | Skin stapler |
| US3709221A (en) | 1969-11-21 | 1973-01-09 | Pall Corp | Microporous nonadherent surgical dressing |
| US3598943A (en) | 1969-12-01 | 1971-08-10 | Illinois Tool Works | Actuator assembly for toggle switch |
| US3744495A (en) | 1970-01-02 | 1973-07-10 | M Johnson | Method of securing prolapsed vagina in cattle |
| US3608549A (en) | 1970-01-15 | 1971-09-28 | Merrill Edward Wilson | Method of administering drugs and capsule therefor |
| US3662939A (en) | 1970-02-26 | 1972-05-16 | United States Surgical Corp | Surgical stapler for skin and fascia |
| FR2084475A5 (pt) | 1970-03-16 | 1971-12-17 | Brumlik George | |
| US3695646A (en) | 1970-06-18 | 1972-10-03 | Metal Matic Inc | Ball and socket pipe joint with clip spring |
| US3661666A (en) | 1970-08-06 | 1972-05-09 | Philip Morris Inc | Method for making swab applicators |
| US3740994A (en) | 1970-10-13 | 1973-06-26 | Surgical Corp | Three stage medical instrument |
| US3717294A (en) | 1970-12-14 | 1973-02-20 | Surgical Corp | Cartridge and powering instrument for stapling skin and fascia |
| US3799151A (en) | 1970-12-21 | 1974-03-26 | Olympus Optical Co | Controllably bendable tube of an endoscope |
| US3746002A (en) | 1971-04-29 | 1973-07-17 | J Haller | Atraumatic surgical clamp |
| CA960189A (en) | 1971-07-12 | 1974-12-31 | Hilti Aktiengesellschaft | Nail holder assembly |
| US3851196A (en) | 1971-09-08 | 1974-11-26 | Xynetics Inc | Plural axis linear motor structure |
| US3734207A (en) | 1971-12-27 | 1973-05-22 | M Fishbein | Battery powered orthopedic cutting tool |
| US3940844A (en) | 1972-02-22 | 1976-03-02 | Pci Group, Inc. | Method of installing an insulating sleeve on a staple |
| US3751902A (en) | 1972-02-22 | 1973-08-14 | Emhart Corp | Apparatus for installing insulation on a staple |
| US4198734A (en) | 1972-04-04 | 1980-04-22 | Brumlik George C | Self-gripping devices with flexible self-gripping means and method |
| GB1339394A (en) | 1972-04-06 | 1973-12-05 | Vnii Khirurgicheskoi Apparatur | Dies for surgical stapling instruments |
| USRE28932E (en) | 1972-09-29 | 1976-08-17 | United States Surgical Corporation | Surgical stapling instrument |
| US3819100A (en) | 1972-09-29 | 1974-06-25 | United States Surgical Corp | Surgical stapling instrument |
| US3892228A (en) | 1972-10-06 | 1975-07-01 | Olympus Optical Co | Apparatus for adjusting the flexing of the bending section of an endoscope |
| US3821919A (en) | 1972-11-10 | 1974-07-02 | Illinois Tool Works | Staple |
| SU511939A1 (ru) | 1973-07-13 | 1976-04-30 | Центральная Научно-Исследовательская Лаборатория При 4-М Главном Управлении | Аппарат дл наложени дугообразного шва на большую кривизну желудка |
| JPS5033988U (pt) | 1973-07-21 | 1975-04-11 | ||
| YU195874A (en) | 1973-08-17 | 1982-05-31 | Degussa | Catalyst for the oxidation of ammonia |
| US3885491A (en) | 1973-12-21 | 1975-05-27 | Illinois Tool Works | Locking staple |
| JPS543B2 (pt) | 1974-02-28 | 1979-01-05 | ||
| US4169990A (en) | 1974-06-24 | 1979-10-02 | General Electric Company | Electronically commutated motor |
| US3894174A (en) | 1974-07-03 | 1975-07-08 | Emhart Corp | Insulated staple and method of making the same |
| US3955581A (en) | 1974-10-18 | 1976-05-11 | United States Surgical Corporation | Three-stage surgical instrument |
| US4129059A (en) | 1974-11-07 | 1978-12-12 | Eck William F Van | Staple-type fastener |
| US3950686A (en) | 1974-12-11 | 1976-04-13 | Trw Inc. | Series redundant drive system |
| SU566574A1 (ru) | 1975-05-04 | 1977-07-30 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Аппарат дл наложени линейного скобочного шва на органы и ткани |
| US4060089A (en) | 1975-09-03 | 1977-11-29 | United States Surgical Corporation | Surgical fastening method and device therefor |
| US4054108A (en) | 1976-08-02 | 1977-10-18 | General Motors Corporation | Internal combustion engine |
| US4226242A (en) | 1977-09-13 | 1980-10-07 | United States Surgical Corporation | Repeating hemostatic clip applying instruments and multi-clip cartridges therefor |
| SU674747A1 (ru) | 1976-11-24 | 1979-07-25 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Аппарат дл механического сшивани тканей |
| FR2446509A1 (fr) | 1977-04-29 | 1980-08-08 | Garret Roger | Programmateur |
| US4304236A (en) | 1977-05-26 | 1981-12-08 | United States Surgical Corporation | Stapling instrument having an anvil-carrying part of particular geometric shape |
| US4573468A (en) | 1977-05-26 | 1986-03-04 | United States Surgical Corporation | Hollow body organ stapling instrument and disposable cartridge employing relief vents |
| CA1124605A (en) | 1977-08-05 | 1982-06-01 | Charles H. Klieman | Surgical stapler |
| US4900303A (en) | 1978-03-10 | 1990-02-13 | Lemelson Jerome H | Dispensing catheter and method |
| US4321002A (en) | 1978-03-27 | 1982-03-23 | Minnesota Mining And Manufacturing Company | Medical stapling device |
| US4207898A (en) | 1978-03-27 | 1980-06-17 | Senco Products, Inc. | Intralumenal anastomosis surgical stapling instrument |
| US4274304A (en) | 1978-03-29 | 1981-06-23 | Cooper Industries, Inc. | In-line reversing mechanism |
| US4198982A (en) | 1978-03-31 | 1980-04-22 | Memorial Hospital For Cancer And Allied Diseases | Surgical stapling instrument and method |
| SU1036324A1 (ru) | 1978-03-31 | 1983-08-23 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический сшивающий аппарат |
| GB2024012B (en) | 1978-04-10 | 1982-07-28 | Johnson & Johnson | Oxygen-generating surgical dressing |
| US4180285A (en) | 1978-05-11 | 1979-12-25 | Reneau Bobby J | Articulated ball connector for use with pipeline |
| DE2839990C2 (de) | 1978-09-14 | 1980-05-14 | Audi Nsu Auto Union Ag, 7107 Neckarsulm | Verfahren zum Umschmelzhärten der Oberfläche eines um seine Drehachse rotierenden Werkstücks, welche Oberfläche unterschiedlichen Abstand von der Drehachse hat |
| SE419421B (sv) | 1979-03-16 | 1981-08-03 | Ove Larson | Bojlig arm i synnerhet robotarm |
| US4340331A (en) | 1979-03-26 | 1982-07-20 | Savino Dominick J | Staple and anviless stapling apparatus therefor |
| SU886900A1 (ru) | 1979-03-26 | 1981-12-07 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический сшивающий аппарат дл наложени линейных швов |
| US4512038A (en) | 1979-04-27 | 1985-04-23 | University Of Medicine And Dentistry Of New Jersey | Bio-absorbable composite tissue scaffold |
| US4261244A (en) | 1979-05-14 | 1981-04-14 | Senco Products, Inc. | Surgical staple |
| US4272662A (en) | 1979-05-21 | 1981-06-09 | C & K Components, Inc. | Toggle switch with shaped wire spring contact |
| US4275813A (en) | 1979-06-04 | 1981-06-30 | United States Surgical Corporation | Coherent surgical staple array |
| US4272002A (en) | 1979-07-23 | 1981-06-09 | Lawrence M. Smith | Internal surgical stapler |
| US4296654A (en) | 1979-08-20 | 1981-10-27 | Mercer Albert E | Adjustable angled socket wrench extension |
| US4250436A (en) | 1979-09-24 | 1981-02-10 | The Singer Company | Motor braking arrangement and method |
| SU1022703A1 (ru) | 1979-12-20 | 1983-06-15 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический аппарат дл наложени компрессионных швов |
| US4429695A (en) | 1980-02-05 | 1984-02-07 | United States Surgical Corporation | Surgical instruments |
| AU534210B2 (en) | 1980-02-05 | 1984-01-12 | United States Surgical Corporation | Surgical staples |
| JPS56112235A (en) | 1980-02-07 | 1981-09-04 | Vnii Ispytatel Med Tech | Surgical suturing implement for suturing staple |
| US4396139A (en) | 1980-02-15 | 1983-08-02 | Technalytics, Inc. | Surgical stapling system, apparatus and staple |
| US4317451A (en) | 1980-02-19 | 1982-03-02 | Ethicon, Inc. | Plastic surgical staple |
| US4289133A (en) | 1980-02-28 | 1981-09-15 | Senco Products, Inc. | Cut-through backup washer for the scalpel of an intraluminal surgical stapling instrument |
| US4428376A (en) | 1980-05-02 | 1984-01-31 | Ethicon Inc. | Plastic surgical staple |
| US4331277A (en) | 1980-05-23 | 1982-05-25 | United States Surgical Corporation | Self-contained gas powered surgical stapler |
| US4380312A (en) | 1980-07-17 | 1983-04-19 | Minnesota Mining And Manufacturing Company | Stapling tool |
| US4606343A (en) | 1980-08-18 | 1986-08-19 | United States Surgical Corporation | Self-powered surgical fastening instrument |
| US4328839A (en) | 1980-09-19 | 1982-05-11 | Drilling Development, Inc. | Flexible drill pipe |
| US4353371A (en) | 1980-09-24 | 1982-10-12 | Cosman Eric R | Longitudinally, side-biting, bipolar coagulating, surgical instrument |
| DE3036217C2 (de) | 1980-09-25 | 1986-12-18 | Siemens AG, 1000 Berlin und 8000 München | Fernbedienbares medizinisches Gerät |
| US4349028A (en) | 1980-10-03 | 1982-09-14 | United States Surgical Corporation | Surgical stapling apparatus having self-contained pneumatic system for completing manually initiated motion sequence |
| AU542936B2 (en) | 1980-10-17 | 1985-03-28 | United States Surgical Corporation | Self centering staple |
| JPS5778844A (en) | 1980-11-04 | 1982-05-17 | Kogyo Gijutsuin | Lasre knife |
| US4500024A (en) | 1980-11-19 | 1985-02-19 | Ethicon, Inc. | Multiple clip applier |
| US4347450A (en) | 1980-12-10 | 1982-08-31 | Colligan Wallace M | Portable power tool |
| US4451743A (en) | 1980-12-29 | 1984-05-29 | Citizen Watch Company Limited | DC-to-DC Voltage converter |
| US4382326A (en) | 1981-01-19 | 1983-05-10 | Minnesota Mining & Manufacturing Company | Staple supporting and staple removing strip |
| US4409057A (en) | 1981-01-19 | 1983-10-11 | Minnesota Mining & Manufacturing Company | Staple supporting and removing strip |
| US4379457A (en) | 1981-02-17 | 1983-04-12 | United States Surgical Corporation | Indicator for surgical stapler |
| SU1009439A1 (ru) | 1981-03-24 | 1983-04-07 | Предприятие П/Я Р-6094 | Хирургический сшивающий аппарат дл наложени анастомозов на пищеварительном тракте |
| US4526174A (en) | 1981-03-27 | 1985-07-02 | Minnesota Mining And Manufacturing Company | Staple and cartridge for use in a tissue stapling device and a tissue closing method |
| SU982676A1 (ru) | 1981-04-07 | 1982-12-23 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургическа скобка |
| DE3115192C2 (de) | 1981-04-15 | 1983-05-19 | Christian Prof. Dr.med. 2400 Lübeck Krüger | Medizinisches Instrument |
| US4383634A (en) | 1981-05-26 | 1983-05-17 | United States Surgical Corporation | Surgical stapler apparatus with pivotally mounted actuator assemblies |
| US4485816A (en) | 1981-06-25 | 1984-12-04 | Alchemia | Shape-memory surgical staple apparatus and method for use in surgical suturing |
| US4486928A (en) | 1981-07-09 | 1984-12-11 | Magnavox Government And Industrial Electronics Company | Apparatus for tool storage and selection |
| FR2509490B1 (fr) | 1981-07-09 | 1985-02-22 | Tractel Sa | Mecanisme de debrayage pour appareil de traction agissant sur un cable qui le traverse |
| US4373147A (en) | 1981-07-23 | 1983-02-08 | General Signal Corporation | Torque compensated electric motor |
| US4475679A (en) | 1981-08-07 | 1984-10-09 | Fleury Jr George J | Multi-staple cartridge for surgical staplers |
| US4632290A (en) | 1981-08-17 | 1986-12-30 | United States Surgical Corporation | Surgical stapler apparatus |
| US4576167A (en) | 1981-09-03 | 1986-03-18 | United States Surgical Corporation | Surgical stapler apparatus with curved shaft |
| JPS5844033A (ja) | 1981-09-11 | 1983-03-14 | 富士写真光機株式会社 | 内視鏡用アダプタ−型処置具導入装置 |
| AU548370B2 (en) | 1981-10-08 | 1985-12-05 | United States Surgical Corporation | Surgical fastener |
| JPS5861747A (ja) | 1981-10-08 | 1983-04-12 | 馬渕 健一 | 美容具 |
| EP0077526B1 (en) | 1981-10-15 | 1987-09-16 | Olympus Optical Co., Ltd. | Endoscope system with an electric bending mechanism |
| US4809695A (en) | 1981-10-21 | 1989-03-07 | Owen M. Gwathmey | Suturing assembly and method |
| US4416276A (en) | 1981-10-26 | 1983-11-22 | Valleylab, Inc. | Adaptive, return electrode monitoring system |
| US4415112A (en) | 1981-10-27 | 1983-11-15 | United States Surgical Corporation | Surgical stapling assembly having resiliently mounted anvil |
| US4442964A (en) | 1981-12-07 | 1984-04-17 | Senco Products, Inc. | Pressure sensitive and working-gap controlled surgical stapling instrument |
| US4448194A (en) | 1982-02-03 | 1984-05-15 | Ethicon, Inc. | Full stroke compelling mechanism for surgical instrument with drum drive |
| DE3204532C2 (de) | 1982-02-10 | 1983-12-08 | B. Braun Melsungen Ag, 3508 Melsungen | Chirurgische Hautklammer |
| SU1114405A1 (ru) | 1982-02-23 | 1984-09-23 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический сшивающий аппарат дл наложени компрессионных анастомозов на органы пищеварительного тракта |
| DE3210466A1 (de) | 1982-03-22 | 1983-09-29 | Peter Dipl.-Kfm. Dr. 6230 Frankfurt Gschaider | Verfahren und vorrichtung zur durchfuehrung von handhabungsprozessen |
| US4408692A (en) | 1982-04-12 | 1983-10-11 | The Kendall Company | Sterile cover for instrument |
| US4664305A (en) | 1982-05-04 | 1987-05-12 | Blake Joseph W Iii | Surgical stapler |
| US4473077A (en) | 1982-05-28 | 1984-09-25 | United States Surgical Corporation | Surgical stapler apparatus with flexible shaft |
| US4485817A (en) | 1982-05-28 | 1984-12-04 | United States Surgical Corporation | Surgical stapler apparatus with flexible shaft |
| NL8203275A (nl) | 1982-08-20 | 1984-03-16 | Naarden International Nv | Werkwijze ter bereiding van luchtverfrissingsgelen, alsmede de aldus verkregen gelen. |
| US4467805A (en) | 1982-08-25 | 1984-08-28 | Mamoru Fukuda | Skin closure stapling device for surgical procedures |
| US4488523A (en) | 1982-09-24 | 1984-12-18 | United States Surgical Corporation | Flexible, hydraulically actuated device for applying surgical fasteners |
| US4604786A (en) | 1982-11-05 | 1986-08-12 | The Grigoleit Company | Method of making a composite article including a body having a decorative metal plate attached thereto |
| US4790225A (en) | 1982-11-24 | 1988-12-13 | Panduit Corp. | Dispenser of discrete cable ties provided on a continuous ribbon of cable ties |
| US4676245A (en) | 1983-02-09 | 1987-06-30 | Mamoru Fukuda | Interlocking surgical staple assembly |
| JPS59163608A (ja) | 1983-03-08 | 1984-09-14 | Hitachi Koki Co Ltd | ジグソ− |
| JPS59168848A (ja) | 1983-03-11 | 1984-09-22 | エチコン・インコ−ポレ−テツド | 非金属製の生物に適合性の無菌の外科装置 |
| US4652820A (en) | 1983-03-23 | 1987-03-24 | North American Philips Corporation | Combined position sensor and magnetic motor or bearing |
| US4506671A (en) | 1983-03-30 | 1985-03-26 | United States Surgical Corporation | Apparatus for applying two-part surgical fasteners |
| GB2138298B (en) | 1983-04-21 | 1986-11-05 | Hundon Forge Ltd | Pellet implanter |
| US4522327A (en) | 1983-05-18 | 1985-06-11 | United States Surgical Corporation | Surgical fastener applying apparatus |
| JPS59226738A (ja) | 1983-06-03 | 1984-12-19 | Toyota Motor Corp | 副変速機のギア比切替駆動制御装置 |
| US4527724A (en) | 1983-06-10 | 1985-07-09 | Senmed, Inc. | Disposable linear surgical stapling instrument |
| US4531522A (en) | 1983-06-20 | 1985-07-30 | Ethicon, Inc. | Two-piece tissue fastener with locking top and method for applying same |
| US4548202A (en) | 1983-06-20 | 1985-10-22 | Ethicon, Inc. | Mesh tissue fasteners |
| US4532927A (en) | 1983-06-20 | 1985-08-06 | Ethicon, Inc. | Two-piece tissue fastener with non-reentry bent leg staple and retaining receiver |
| GR81919B (pt) | 1983-06-20 | 1984-12-12 | Ethicon Inc | |
| US4573469A (en) | 1983-06-20 | 1986-03-04 | Ethicon, Inc. | Two-piece tissue fastener with coinable leg staple and retaining receiver and method and instrument for applying same |
| US4693248A (en) | 1983-06-20 | 1987-09-15 | Ethicon, Inc. | Two-piece tissue fastener with deformable retaining receiver |
| SU1175891A1 (ru) | 1983-08-16 | 1985-08-30 | Предприятие П/Я А-7840 | Устройство дл формовани изделий |
| US4944443A (en) | 1988-04-22 | 1990-07-31 | Innovative Surgical Devices, Inc. | Surgical suturing instrument and method |
| US4669647A (en) | 1983-08-26 | 1987-06-02 | Technalytics, Inc. | Surgical stapler |
| US4530453A (en) | 1983-10-04 | 1985-07-23 | United States Surgical Corporation | Surgical fastener applying apparatus |
| US4589416A (en) | 1983-10-04 | 1986-05-20 | United States Surgical Corporation | Surgical fastener retainer member assembly |
| US4667674A (en) | 1983-10-04 | 1987-05-26 | United States Surgical Corporation | Surgical fastener exhibiting improved hemostasis |
| US4505414A (en) | 1983-10-12 | 1985-03-19 | Filipi Charles J | Expandable anvil surgical stapler |
| US4610383A (en) | 1983-10-14 | 1986-09-09 | Senmed, Inc. | Disposable linear surgical stapler |
| US4571213A (en) | 1983-11-17 | 1986-02-18 | Nikko Co., Ltd. | Direction-converting device for a toy car |
| US4565109A (en) | 1983-12-27 | 1986-01-21 | Tsay Chi Chour | Instantaneous direction changing rotation mechanism |
| JPS60137406U (ja) | 1984-02-24 | 1985-09-11 | シ−アイ化成株式会社 | マグネツトシ−ト |
| US4600037A (en) | 1984-03-19 | 1986-07-15 | Texas Eastern Drilling Systems, Inc. | Flexible drill pipe |
| US4612933A (en) | 1984-03-30 | 1986-09-23 | Senmed, Inc. | Multiple-load cartridge assembly for a linear surgical stapling instrument |
| US4619391A (en) | 1984-04-18 | 1986-10-28 | Acme United Corporation | Surgical stapling instrument |
| US4607638A (en) | 1984-04-20 | 1986-08-26 | Design Standards Corporation | Surgical staples |
| US5002553A (en) | 1984-05-14 | 1991-03-26 | Surgical Systems & Instruments, Inc. | Atherectomy system with a clutch |
| US5464013A (en) | 1984-05-25 | 1995-11-07 | Lemelson; Jerome H. | Medical scanning and treatment system and method |
| GB8417562D0 (en) | 1984-07-10 | 1984-08-15 | Surgical Design Services | Fasteners |
| US4605004A (en) | 1984-07-16 | 1986-08-12 | Ethicon, Inc. | Surgical instrument for applying fasteners said instrument including force supporting means (case IV) |
| US4741336A (en) | 1984-07-16 | 1988-05-03 | Ethicon, Inc. | Shaped staples and slotted receivers (case VII) |
| US4585153A (en) | 1984-07-16 | 1986-04-29 | Ethicon, Inc. | Surgical instrument for applying two-piece fasteners comprising frictionally held U-shaped staples and receivers (Case III) |
| IN165375B (pt) | 1984-07-16 | 1989-10-07 | Ethicon Inc | |
| US4591085A (en) | 1984-07-16 | 1986-05-27 | Ethicon, Inc. | Surgical instrument for applying fasteners, said instrument having an improved trigger interlocking mechanism (Case VI) |
| US4655222A (en) | 1984-07-30 | 1987-04-07 | Ethicon, Inc. | Coated surgical staple |
| US4754909A (en) | 1984-08-09 | 1988-07-05 | Barker John M | Flexible stapler |
| US4671445A (en) | 1984-08-09 | 1987-06-09 | Baxter Travenol Laboratories, Inc. | Flexible surgical stapler assembly |
| IL73079A (en) | 1984-09-26 | 1989-01-31 | Porat Michael | Gripper means for medical instruments |
| US4580712A (en) | 1984-10-19 | 1986-04-08 | United States Surgical Corporation | Surgical fastener applying apparatus with progressive application of fastener |
| US4566620A (en) | 1984-10-19 | 1986-01-28 | United States Surgical Corporation | Articulated surgical fastener applying apparatus |
| US4608981A (en) | 1984-10-19 | 1986-09-02 | Senmed, Inc. | Surgical stapling instrument with staple height adjusting mechanism |
| US4767044A (en) | 1984-10-19 | 1988-08-30 | United States Surgical Corporation | Surgical fastener applying apparatus |
| US4573622A (en) | 1984-10-19 | 1986-03-04 | United States Surgical Corporation | Surgical fastener applying apparatus with variable fastener arrays |
| US4633874A (en) | 1984-10-19 | 1987-01-06 | Senmed, Inc. | Surgical stapling instrument with jaw latching mechanism and disposable staple cartridge |
| US4605001A (en) | 1984-10-19 | 1986-08-12 | Senmed, Inc. | Surgical stapling instrument with dual staple height mechanism |
| US4787387A (en) | 1984-11-08 | 1988-11-29 | American Cyanamid Company | Surgical closure element |
| US4646722A (en) | 1984-12-10 | 1987-03-03 | Opielab, Inc. | Protective endoscope sheath and method of installing same |
| SU1271497A1 (ru) | 1985-01-07 | 1986-11-23 | Научно-производственное объединение "Мединструмент" | Устройство дл сведени краев раны |
| US4705038A (en) | 1985-01-23 | 1987-11-10 | Dyonics, Inc. | Surgical system for powered instruments |
| US4641076A (en) | 1985-01-23 | 1987-02-03 | Hall Surgical-Division Of Zimmer, Inc. | Method and apparatus for sterilizing and charging batteries |
| US4569469A (en) | 1985-02-15 | 1986-02-11 | Minnesota Mining And Manufacturing Company | Bone stapler cartridge |
| JPS635697Y2 (pt) | 1985-04-04 | 1988-02-17 | ||
| SU1377052A1 (ru) * | 1985-04-17 | 1988-02-28 | Всесоюзный онкологический научный центр | Устройство дл соединени полых органов |
| US5012411A (en) | 1985-07-23 | 1991-04-30 | Charles J. Policastro | Apparatus for monitoring, storing and transmitting detected physiological information |
| US4665916A (en) | 1985-08-09 | 1987-05-19 | United States Surgical Corporation | Surgical stapler apparatus |
| US4643731A (en) | 1985-08-16 | 1987-02-17 | Alza Corporation | Means for providing instant agent from agent dispensing system |
| US4750902A (en) | 1985-08-28 | 1988-06-14 | Sonomed Technology, Inc. | Endoscopic ultrasonic aspirators |
| US4750488A (en) | 1986-05-19 | 1988-06-14 | Sonomed Technology, Inc. | Vibration apparatus preferably for endoscopic ultrasonic aspirator |
| US4728020A (en) | 1985-08-30 | 1988-03-01 | United States Surgical Corporation | Articulated surgical fastener applying apparatus |
| CH670753A5 (pt) | 1985-09-10 | 1989-07-14 | Vnii Ispytatel Med Tech | |
| SU1377053A1 (ru) | 1985-10-02 | 1988-02-28 | В. Г. Сахаутдинов, Р. А. Талипов, Р. М. Халиков и 3. X. Гарифуллин | Хирургический сшивающий аппарат |
| US4610250A (en) | 1985-10-08 | 1986-09-09 | United States Surgical Corporation | Two-part surgical fastener for fascia wound approximation |
| US4715520A (en) | 1985-10-10 | 1987-12-29 | United States Surgical Corporation | Surgical fastener applying apparatus with tissue edge control |
| US4729260A (en) | 1985-12-06 | 1988-03-08 | Desoutter Limited | Two speed gearbox |
| SU1333319A2 (ru) | 1985-12-10 | 1987-08-30 | Петрозаводский государственный университет им.О.В.Куусинена | Ушиватель полых органов |
| US4634419A (en) | 1985-12-13 | 1987-01-06 | Cooper Lasersonics, Inc. | Angulated ultrasonic surgical handpieces and method for their production |
| US4728876A (en) | 1986-02-19 | 1988-03-01 | Minnesota Mining And Manufacturing Company | Orthopedic drive assembly |
| US4662555A (en) | 1986-03-11 | 1987-05-05 | Edward Weck & Company, Inc. | Surgical stapler |
| US4903697A (en) | 1986-03-27 | 1990-02-27 | Semion Resnick | Cartridge assembly for a surgical stapling instrument |
| US4700703A (en) | 1986-03-27 | 1987-10-20 | Semion Resnick | Cartridge assembly for a surgical stapling instrument |
| US4827911A (en) | 1986-04-02 | 1989-05-09 | Cooper Lasersonics, Inc. | Method and apparatus for ultrasonic surgical fragmentation and removal of tissue |
| US4747820A (en) | 1986-04-09 | 1988-05-31 | Cooper Lasersonics, Inc. | Irrigation/aspiration manifold and fittings for ultrasonic surgical aspiration system |
| US4988334A (en) | 1986-04-09 | 1991-01-29 | Valleylab, Inc. | Ultrasonic surgical system with aspiration tubulation connector |
| JPS62170011U (pt) | 1986-04-16 | 1987-10-28 | ||
| ATE96633T1 (de) | 1986-04-21 | 1993-11-15 | Globe Control Finanz Aktienges | Vorrichtung zur herstellung einer anastomose. |
| SU1561964A1 (ru) | 1986-04-24 | 1990-05-07 | Благовещенский государственный медицинский институт | Хирургический сшивающий аппарат |
| US4691703A (en) | 1986-04-25 | 1987-09-08 | Board Of Regents, University Of Washington | Thermal cautery system |
| GB8612267D0 (en) | 1986-05-20 | 1986-06-25 | Mixalloy Ltd | Flat products |
| FR2598905B1 (fr) | 1986-05-22 | 1993-08-13 | Chevalier Jean Michel | Dispositif d'interruption de la circulation d'un fluide dans un conduit a paroi souple, notamment un viscere creux et ensemble de pince comportant ce dispositif |
| US4709120A (en) | 1986-06-06 | 1987-11-24 | Pearson Dean C | Underground utility equipment vault |
| US5190544A (en) | 1986-06-23 | 1993-03-02 | Pfizer Hospital Products Group, Inc. | Modular femoral fixation system |
| DE8620714U1 (pt) | 1986-08-01 | 1986-11-20 | C. & E. Fein Gmbh & Co, 7000 Stuttgart, De | |
| US4727308A (en) | 1986-08-28 | 1988-02-23 | International Business Machines Corporation | FET power converter with reduced switching loss |
| US4743214A (en) | 1986-09-03 | 1988-05-10 | Tai Cheng Yang | Steering control for toy electric vehicles |
| US4875486A (en) | 1986-09-04 | 1989-10-24 | Advanced Techtronics, Inc. | Instrument and method for non-invasive in vivo testing for body fluid constituents |
| US4890613A (en) | 1986-09-19 | 1990-01-02 | Ethicon, Inc. | Two piece internal organ fastener |
| US4752024A (en) | 1986-10-17 | 1988-06-21 | Green David T | Surgical fastener and surgical stapling apparatus |
| US4893622A (en) | 1986-10-17 | 1990-01-16 | United States Surgical Corporation | Method of stapling tubular body organs |
| US4933843A (en) | 1986-11-06 | 1990-06-12 | Storz Instrument Company | Control system for ophthalmic surgical instruments |
| JPH0755222B2 (ja) | 1986-12-12 | 1995-06-14 | オリンパス光学工業株式会社 | 処置具 |
| SE457680B (sv) | 1987-01-15 | 1989-01-16 | Toecksfors Verkstads Ab | Elektronisk brytare innefattande en i ett hoelje roerlig manoeverdel |
| US4865030A (en) | 1987-01-21 | 1989-09-12 | American Medical Systems, Inc. | Apparatus for removal of objects from body passages |
| WO1988006021A1 (en) | 1987-02-10 | 1988-08-25 | Vaso Products Australia Pty. Limited | Venous cuff applicator, cartridge and cuff |
| US4873977A (en) | 1987-02-11 | 1989-10-17 | Odis L. Avant | Stapling method and apparatus for vesicle-urethral re-anastomosis following retropubic prostatectomy and other tubular anastomosis |
| US4719917A (en) | 1987-02-17 | 1988-01-19 | Minnesota Mining And Manufacturing Company | Surgical staple |
| US5217478A (en) | 1987-02-18 | 1993-06-08 | Linvatec Corporation | Arthroscopic surgical instrument drive system |
| DE3709067A1 (de) | 1987-03-19 | 1988-09-29 | Ewald Hensler | Medizinisches, insbesondere chirurgisches instrument |
| US4777780A (en) | 1987-04-21 | 1988-10-18 | United States Surgical Corporation | Method for forming a sealed sterile package |
| US4730726A (en) | 1987-04-21 | 1988-03-15 | United States Surgical Corporation | Sealed sterile package |
| SU1443874A1 (ru) | 1987-04-23 | 1988-12-15 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический аппарат дл наложени компрессионных анастомозов |
| US4941623A (en) | 1987-05-12 | 1990-07-17 | United States Surgical Corporation | Stapling process and device for use on the mesentery of the abdomen |
| US5542949A (en) | 1987-05-14 | 1996-08-06 | Yoon; Inbae | Multifunctional clip applier instrument |
| US5285944A (en) | 1987-05-26 | 1994-02-15 | United States Surgical Corporation | Surgical stapler apparatus |
| US4844068A (en) | 1987-06-05 | 1989-07-04 | Ethicon, Inc. | Bariatric surgical instrument |
| US4930503A (en) | 1987-06-11 | 1990-06-05 | Pruitt J Crayton | Stapling process and device for use on the mesenteries of the abdomen |
| US5027834A (en) | 1987-06-11 | 1991-07-02 | United States Surgical Corporation | Stapling process for use on the mesenteries of the abdomen |
| US4848637A (en) | 1987-06-11 | 1989-07-18 | Pruitt J Crayton | Staple device for use on the mesenteries of the abdomen |
| US4773420A (en) | 1987-06-22 | 1988-09-27 | U.S. Surgical Corporation | Purse string applicator |
| DE3723310A1 (de) | 1987-07-15 | 1989-01-26 | John Urquhart | Pharmazeutisches praeparat und verfahren zu seiner herstellung |
| US5158567A (en) | 1987-09-02 | 1992-10-27 | United States Surgical Corporation | One-piece surgical staple |
| US4821939A (en) | 1987-09-02 | 1989-04-18 | United States Surgical Corporation | Staple cartridge and an anvilless surgical stapler |
| SU1509051A1 (ru) | 1987-09-14 | 1989-09-23 | Институт прикладной физики АН СССР | Ушиватель органов |
| US5015227A (en) | 1987-09-30 | 1991-05-14 | Valleylab Inc. | Apparatus for providing enhanced tissue fragmentation and/or hemostasis |
| US4931047A (en) | 1987-09-30 | 1990-06-05 | Cavitron, Inc. | Method and apparatus for providing enhanced tissue fragmentation and/or hemostasis |
| US4805617A (en) | 1987-11-05 | 1989-02-21 | Ethicon, Inc. | Surgical fastening systems made from polymeric materials |
| US4830855A (en) | 1987-11-13 | 1989-05-16 | Landec Labs, Inc. | Temperature-controlled active agent dispenser |
| US5106627A (en) | 1987-11-17 | 1992-04-21 | Brown University Research Foundation | Neurological therapy devices |
| US5018515A (en) | 1987-12-14 | 1991-05-28 | The Kendall Company | See through absorbent dressing |
| US4834720A (en) | 1987-12-24 | 1989-05-30 | Becton, Dickinson And Company | Implantable port septum |
| US4951860A (en) | 1987-12-28 | 1990-08-28 | Edward Weck & Co. | Method and apparatus for storing, dispensing and applying surgical staples |
| US4819853A (en) | 1987-12-31 | 1989-04-11 | United States Surgical Corporation | Surgical fastener cartridge |
| US5100420A (en) | 1989-07-18 | 1992-03-31 | United States Surgical Corporation | Apparatus and method for applying surgical clips in laparoscopic or endoscopic procedures |
| US5084057A (en) | 1989-07-18 | 1992-01-28 | United States Surgical Corporation | Apparatus and method for applying surgical clips in laparoscopic or endoscopic procedures |
| US5383881A (en) | 1989-07-18 | 1995-01-24 | United States Surgical Corporation | Safety device for use with endoscopic instrumentation |
| GB8800909D0 (en) | 1988-01-15 | 1988-02-17 | Ethicon Inc | Gas powered surgical stapler |
| JPH01182196A (ja) | 1988-01-18 | 1989-07-20 | Sanshin Ind Co Ltd | シフト補助装置 |
| FR2628488B1 (fr) | 1988-03-14 | 1990-12-28 | Ecia Equip Composants Ind Auto | Attache rapide du type a baionnette perfectionnee |
| US4805823A (en) | 1988-03-18 | 1989-02-21 | Ethicon, Inc. | Pocket configuration for internal organ staplers |
| US4856078A (en) | 1988-03-23 | 1989-08-08 | Zenith Electronics Corporation | DC fan speed control |
| US4880015A (en) | 1988-06-03 | 1989-11-14 | Nierman David M | Biopsy forceps |
| US5185717A (en) | 1988-08-05 | 1993-02-09 | Ryoichi Mori | Tamper resistant module having logical elements arranged in multiple layers on the outer surface of a substrate to protect stored information |
| US5444113A (en) | 1988-08-08 | 1995-08-22 | Ecopol, Llc | End use applications of biodegradable polymers |
| US5024671A (en) | 1988-09-19 | 1991-06-18 | Baxter International Inc. | Microporous vascular graft |
| US5071052A (en) | 1988-09-22 | 1991-12-10 | United States Surgical Corporation | Surgical fastening apparatus with activation lockout |
| US4869415A (en) | 1988-09-26 | 1989-09-26 | Ethicon, Inc. | Energy storage means for a surgical stapler |
| CA1308782C (en) | 1988-10-13 | 1992-10-13 | Gyrus Medical Limited | Screening and monitoring instrument |
| US4892244A (en) | 1988-11-07 | 1990-01-09 | Ethicon, Inc. | Surgical stapler cartridge lockout device |
| ATE129622T1 (de) | 1988-11-11 | 1995-11-15 | United States Surgical Corp | Chirurgisches instrument. |
| US5197648A (en) | 1988-11-29 | 1993-03-30 | Gingold Bruce S | Surgical stapling apparatus |
| US4915100A (en) | 1988-12-19 | 1990-04-10 | United States Surgical Corporation | Surgical stapler apparatus with tissue shield |
| US4986808A (en) | 1988-12-20 | 1991-01-22 | Valleylab, Inc. | Magnetostrictive transducer |
| US4978333A (en) | 1988-12-20 | 1990-12-18 | Valleylab, Inc. | Resonator for surgical handpiece |
| US5098360A (en) | 1988-12-26 | 1992-03-24 | Tochigifujisangyo Kabushiki Kaisha | Differential gear with limited slip and locking mechanism |
| US5108368A (en) | 1990-01-04 | 1992-04-28 | Pilot Cardiovascular System, Inc. | Steerable medical device |
| US5111987A (en) | 1989-01-23 | 1992-05-12 | Moeinzadeh Manssour H | Semi-disposable surgical stapler |
| US5061269A (en) | 1989-02-07 | 1991-10-29 | Joseph J. Berke | Surgical rongeur power grip structure and method |
| EP0389102B1 (en) | 1989-02-22 | 1995-05-10 | United States Surgical Corporation | Skin fastener |
| US4930674A (en) | 1989-02-24 | 1990-06-05 | Abiomed, Inc. | Surgical stapler |
| US5186711A (en) | 1989-03-07 | 1993-02-16 | Albert Einstein College Of Medicine Of Yeshiva University | Hemostasis apparatus and method |
| US5522817A (en) | 1989-03-31 | 1996-06-04 | United States Surgical Corporation | Absorbable surgical fastener with bone penetrating elements |
| US5062563A (en) | 1989-04-10 | 1991-11-05 | United States Surgical Corporation | Fascia stapler |
| US5104397A (en) | 1989-04-14 | 1992-04-14 | Codman & Shurtleff, Inc. | Multi-position latching mechanism for forceps |
| US5009661A (en) | 1989-04-24 | 1991-04-23 | Michelson Gary K | Protective mechanism for surgical rongeurs |
| US5129441A (en) | 1989-05-01 | 1992-07-14 | Clopay Corporation | Sectional doors and compressible flexible hinge assemblies |
| SU1708312A1 (ru) | 1989-05-16 | 1992-01-30 | Всесоюзный научно-исследовательский и испытательный институт медицинской техники | Хирургический аппарат дл сшивани костной ткани |
| US5222976A (en) | 1989-05-16 | 1993-06-29 | Inbae Yoon | Suture devices particularly useful in endoscopic surgery |
| US4955959A (en) | 1989-05-26 | 1990-09-11 | United States Surgical Corporation | Locking mechanism for a surgical fastening apparatus |
| US5318221A (en) | 1989-05-26 | 1994-06-07 | United States Surgical Corporation | Apparatus and method for placing staples in laparoscopic or endoscopic procedures |
| US5106008A (en) | 1989-05-26 | 1992-04-21 | United States Surgical Corporation | Locking mechanism for a surgical fastening apparatus |
| US5040715B1 (en) | 1989-05-26 | 1994-04-05 | United States Surgical Corp | Apparatus and method for placing staples in laparoscopic or endoscopic procedures |
| US5031814A (en) | 1989-05-26 | 1991-07-16 | United States Surgical Corporation | Locking mechanism for surgical fastening apparatus |
| US4978049A (en) | 1989-05-26 | 1990-12-18 | United States Surgical Corporation | Three staple drive member |
| US5505363A (en) | 1989-05-26 | 1996-04-09 | United States Surgical Corporation | Surgical staples with plated anvils |
| US5413268A (en) | 1989-05-26 | 1995-05-09 | United States Surgical Corporation | Apparatus and method for placing stables in laparoscopic or endoscopic procedures |
| US5035040A (en) | 1989-05-30 | 1991-07-30 | Duo-Fast Corporation | Hog ring fastener, tool and methods |
| US4932960A (en) | 1989-09-01 | 1990-06-12 | United States Surgical Corporation | Absorbable surgical fastener |
| US5155941A (en) | 1989-09-18 | 1992-10-20 | Olympus Optical Co., Ltd. | Industrial endoscope system having a rotary treatment member |
| US4965709A (en) | 1989-09-25 | 1990-10-23 | General Electric Company | Switching converter with pseudo-resonant DC link |
| CH677728A5 (pt) | 1989-10-17 | 1991-06-28 | Bieffe Medital Sa | |
| US5264218A (en) | 1989-10-25 | 1993-11-23 | C. R. Bard, Inc. | Modifiable, semi-permeable, wound dressing |
| US5239981A (en) | 1989-11-16 | 1993-08-31 | Effner Biomet Gmbh | Film covering to protect a surgical instrument and an endoscope to be used with the film covering |
| JPH0737603Y2 (ja) | 1989-11-30 | 1995-08-30 | 晴夫 高瀬 | 外科手術用縫合器 |
| JPH0527929Y2 (pt) | 1989-12-19 | 1993-07-16 | ||
| US5156609A (en) | 1989-12-26 | 1992-10-20 | Nakao Naomi L | Endoscopic stapling device and method |
| US6033378A (en) | 1990-02-02 | 2000-03-07 | Ep Technologies, Inc. | Catheter steering mechanism |
| US5195968A (en) | 1990-02-02 | 1993-03-23 | Ingemar Lundquist | Catheter steering mechanism |
| AU7082091A (en) | 1990-02-13 | 1991-08-15 | Ethicon Inc. | Rotating head skin stapler |
| US5100042A (en) | 1990-03-05 | 1992-03-31 | United States Surgical Corporation | Surgical fastener apparatus |
| US5217457A (en) | 1990-03-15 | 1993-06-08 | Valleylab Inc. | Enhanced electrosurgical apparatus |
| US5088997A (en) | 1990-03-15 | 1992-02-18 | Valleylab, Inc. | Gas coagulation device |
| US5244462A (en) | 1990-03-15 | 1993-09-14 | Valleylab Inc. | Electrosurgical apparatus |
| US5014899A (en) | 1990-03-30 | 1991-05-14 | United States Surgical Corporation | Surgical stapling apparatus |
| SU1722476A1 (ru) | 1990-04-02 | 1992-03-30 | Свердловский Филиал Научно-Производственного Объединения "Фтизиопульмонология" | Устройство дл временной окклюзии трубчатых органов |
| US5005754A (en) | 1990-04-04 | 1991-04-09 | Ethicon, Inc. | Bladder and mandrel for use with surgical stapler |
| US5002543A (en) | 1990-04-09 | 1991-03-26 | Bradshaw Anthony J | Steerable intramedullary fracture reduction device |
| US5343391A (en) | 1990-04-10 | 1994-08-30 | Mushabac David R | Device for obtaining three dimensional contour data and for operating on a patient and related method |
| US5124990A (en) | 1990-05-08 | 1992-06-23 | Caterpillar Inc. | Diagnostic hardware for serial datalink |
| US5454378A (en) | 1993-02-11 | 1995-10-03 | Symbiosis Corporation | Biopsy forceps having a detachable proximal handle and distal jaws |
| US5086401A (en) | 1990-05-11 | 1992-02-04 | International Business Machines Corporation | Image-directed robotic system for precise robotic surgery including redundant consistency checking |
| US5290271A (en) | 1990-05-14 | 1994-03-01 | Jernberg Gary R | Surgical implant and method for controlled release of chemotherapeutic agents |
| US5116349A (en) | 1990-05-23 | 1992-05-26 | United States Surgical Corporation | Surgical fastener apparatus |
| US5074454A (en) | 1990-06-04 | 1991-12-24 | Peters Ronald L | Surgical stapler |
| US5342395A (en) | 1990-07-06 | 1994-08-30 | American Cyanamid Co. | Absorbable surgical repair devices |
| SU1752361A1 (ru) | 1990-07-10 | 1992-08-07 | Производственное Объединение "Челябинский Тракторный Завод Им.В.И.Ленина" | Хирургический сшивающий аппарат |
| RU2008830C1 (ru) | 1990-07-13 | 1994-03-15 | Константин Алексеевич Додонов | Электрохирургический аппарат |
| US5163598A (en) | 1990-07-23 | 1992-11-17 | Rudolph Peters | Sternum stapling apparatus |
| US5234447A (en) | 1990-08-28 | 1993-08-10 | Robert L. Kaster | Side-to-end vascular anastomotic staple apparatus |
| US5094247A (en) | 1990-08-31 | 1992-03-10 | Cordis Corporation | Biopsy forceps with handle having a flexible coupling |
| US5389102A (en) | 1990-09-13 | 1995-02-14 | United States Surgical Corporation | Apparatus and method for subcuticular stapling of body tissue |
| US5253793A (en) | 1990-09-17 | 1993-10-19 | United States Surgical Corporation | Apparatus for applying two-part surgical fasteners |
| US5156614A (en) | 1990-09-17 | 1992-10-20 | United States Surgical Corporation | Apparatus for applying two-part surgical fasteners |
| US5156315A (en) | 1990-09-17 | 1992-10-20 | United States Surgical Corporation | Arcuate apparatus for applying two-part surgical fasteners |
| US5653373A (en) | 1990-09-17 | 1997-08-05 | United States Surgical Corporation | Arcuate apparatus for applying two-part surgical fasteners |
| US5104025A (en) | 1990-09-28 | 1992-04-14 | Ethicon, Inc. | Intraluminal anastomotic surgical stapler with detached anvil |
| US5080556A (en) | 1990-09-28 | 1992-01-14 | General Electric Company | Thermal seal for a gas turbine spacer disc |
| EP0484677B2 (en) | 1990-10-05 | 2000-07-05 | United States Surgical Corporation | Apparatus for placing staples in laparoscopic or endoscopic procedures |
| US5088979A (en) | 1990-10-11 | 1992-02-18 | Wilson-Cook Medical Inc. | Method for esophageal invagination and devices useful therein |
| US5042707A (en) | 1990-10-16 | 1991-08-27 | Taheri Syde A | Intravascular stapler, and method of operating same |
| USD330699S (en) | 1990-10-19 | 1992-11-03 | W. W. Cross, Inc. | Insulated staple |
| FR2668361A1 (fr) | 1990-10-30 | 1992-04-30 | Mai Christian | Agrafe et plaque d'osteosynthese a compression dynamique auto-retentive. |
| US5344454A (en) | 1991-07-24 | 1994-09-06 | Baxter International Inc. | Closed porous chambers for implanting tissue in a host |
| US5658307A (en) | 1990-11-07 | 1997-08-19 | Exconde; Primo D. | Method of using a surgical dissector instrument |
| US5129570A (en) | 1990-11-30 | 1992-07-14 | Ethicon, Inc. | Surgical stapler |
| US5470009A (en) | 1990-12-06 | 1995-11-28 | United States Surgical Corporation | Surgical fastening apparatus with locking mechanism |
| CA2055943C (en) | 1990-12-06 | 2003-09-23 | Daniel P. Rodak | Surgical fastening apparatus with locking mechanism |
| USRE36720E (en) | 1990-12-13 | 2000-05-30 | United States Surgical Corporation | Apparatus and method for applying latchless surgical clips |
| US5209747A (en) | 1990-12-13 | 1993-05-11 | Knoepfler Dennis J | Adjustable angle medical forceps |
| US5122156A (en) | 1990-12-14 | 1992-06-16 | United States Surgical Corporation | Apparatus for securement and attachment of body organs |
| US7384417B2 (en) | 1990-12-14 | 2008-06-10 | Cucin Robert L | Air-powered tissue-aspiration instrument system employing curved bipolar-type electro-cauterizing dual cannula assembly |
| BR9107241A (pt) | 1990-12-18 | 1994-02-16 | Minnesota Mining & Mfg | Conjunto de cartucho para grampos adaptado para uso em um grampeador cirurgico |
| US5141144A (en) | 1990-12-18 | 1992-08-25 | Minnesota Mining And Manufacturing Company | Stapler and firing device |
| US5083695A (en) | 1990-12-18 | 1992-01-28 | Minnesota Mining And Manufacturing Company | Stapler and firing device |
| CA2055985A1 (en) | 1990-12-20 | 1992-06-21 | Daniel Shichman | Fascia clip |
| US5354303A (en) | 1991-01-09 | 1994-10-11 | Endomedix Corporation | Devices for enclosing, manipulating, debulking and removing tissue through minimal incisions |
| US5222963A (en) | 1991-01-17 | 1993-06-29 | Ethicon, Inc. | Pull-through circular anastomosic intraluminal stapler with absorbable fastener means |
| US5188111A (en) | 1991-01-18 | 1993-02-23 | Catheter Research, Inc. | Device for seeking an area of interest within a body |
| CA2060635A1 (en) | 1991-02-12 | 1992-08-13 | Keith D'alessio | Bioabsorbable medical implants |
| DE4104755A1 (de) | 1991-02-15 | 1992-08-20 | Heidmueller Harald | Chirurgisches instrument |
| US5571285A (en) | 1991-02-19 | 1996-11-05 | Ethicon, Inc. | Surgical staple for insertion into tissue |
| CA2061319A1 (en) | 1991-02-19 | 1992-08-20 | Hector Chow | Surgical staple for insertion into tissue |
| US5219111A (en) | 1991-03-11 | 1993-06-15 | Ethicon, Inc. | Pneumatically actuated linear stapling device |
| US5445155A (en) | 1991-03-13 | 1995-08-29 | Scimed Life Systems Incorporated | Intravascular imaging apparatus and methods for use and manufacture |
| US5336232A (en) | 1991-03-14 | 1994-08-09 | United States Surgical Corporation | Approximating apparatus for surgical jaw structure and method of using the same |
| CA2061885A1 (en) | 1991-03-14 | 1992-09-15 | David T. Green | Approximating apparatus for surgical jaw structure |
| US5170925A (en) | 1991-03-18 | 1992-12-15 | Ethicon, Inc. | Laparoscopic stapler with knife means |
| US5217453A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| SU1814161A1 (en) | 1991-03-19 | 1993-05-07 | Penzen Nii Elektronno Mekh Pri | Electric motor |
| US5171253A (en) | 1991-03-22 | 1992-12-15 | Klieman Charles H | Velcro-like closure system with absorbable suture materials for absorbable hemostatic clips and surgical strips |
| US5065929A (en) | 1991-04-01 | 1991-11-19 | Ethicon, Inc. | Surgical stapler with locking means |
| US5470010A (en) | 1991-04-04 | 1995-11-28 | Ethicon, Inc. | Multiple fire endoscopic stapling mechanism |
| US5171247A (en) | 1991-04-04 | 1992-12-15 | Ethicon, Inc. | Endoscopic multiple ligating clip applier with rotating shaft |
| US5246156A (en) | 1991-09-12 | 1993-09-21 | Ethicon, Inc. | Multiple fire endoscopic stapling mechanism |
| US5171249A (en) | 1991-04-04 | 1992-12-15 | Ethicon, Inc. | Endoscopic multiple ligating clip applier |
| JPH05208014A (ja) | 1991-04-10 | 1993-08-20 | Olympus Optical Co Ltd | 処置具 |
| US5297714A (en) | 1991-04-17 | 1994-03-29 | Ethicon, Inc. | Surgical staple with modified "B" shaped configuration |
| US5339799A (en) | 1991-04-23 | 1994-08-23 | Olympus Optical Co., Ltd. | Medical system for reproducing a state of contact of the treatment section in the operation unit |
| US5257713A (en) | 1991-05-07 | 1993-11-02 | United States Surgical Corporation | Surgical fastening device |
| US5413267A (en) | 1991-05-14 | 1995-05-09 | United States Surgical Corporation | Surgical stapler with spent cartridge sensing and lockout means |
| US5137198A (en) | 1991-05-16 | 1992-08-11 | Ethicon, Inc. | Fast closure device for linear surgical stapling instrument |
| DE4116343A1 (de) | 1991-05-18 | 1992-11-19 | Bosch Gmbh Robert | Handgefuehrtes elektrowerkzeug, insbesondere bohrmaschine |
| JP2581082Y2 (ja) | 1991-05-24 | 1998-09-17 | 三洋電機株式会社 | 電池装置 |
| FI93607C (fi) | 1991-05-24 | 1995-05-10 | John Koivukangas | Leikkaustoimenpidelaite |
| US5190517A (en) | 1991-06-06 | 1993-03-02 | Valleylab Inc. | Electrosurgical and ultrasonic surgical system |
| US5221036A (en) | 1991-06-11 | 1993-06-22 | Haruo Takase | Surgical stapler |
| US5190560A (en) | 1991-06-20 | 1993-03-02 | Woods John B | Instrument for ligation and castration |
| US5262678A (en) | 1991-06-21 | 1993-11-16 | Lutron Electronics Co., Inc. | Wallbox-mountable switch and dimmer |
| US5268622A (en) | 1991-06-27 | 1993-12-07 | Stryker Corporation | DC powered surgical handpiece having a motor control circuit |
| US5207697A (en) | 1991-06-27 | 1993-05-04 | Stryker Corporation | Battery powered surgical handpiece |
| US5735290A (en) | 1993-02-22 | 1998-04-07 | Heartport, Inc. | Methods and systems for performing thoracoscopic coronary bypass and other procedures |
| US5383888A (en) | 1992-02-12 | 1995-01-24 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| US5391180A (en) | 1991-08-05 | 1995-02-21 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| AU2063592A (en) | 1991-08-09 | 1993-02-11 | Emerson Electric Co. | Cordless power tool |
| US5282829A (en) | 1991-08-15 | 1994-02-01 | United States Surgical Corporation | Hollow body implants |
| US5350104A (en) | 1991-08-23 | 1994-09-27 | Ethicon, Inc. | Sealing means for endoscopic surgical anastomosis stapling instrument |
| US5333773A (en) | 1991-08-23 | 1994-08-02 | Ethicon, Inc. | Sealing means for endoscopic surgical anastomosis stapling instrument |
| GR920100358A (el) | 1991-08-23 | 1993-06-07 | Ethicon Inc | Οργανο συρραφής χειρουργικής αναστομώσεως. |
| US5259835A (en) | 1991-08-29 | 1993-11-09 | Tri-Point Medical L.P. | Wound closure means and method using flowable adhesive |
| US5263973A (en) | 1991-08-30 | 1993-11-23 | Cook Melvin S | Surgical stapling method |
| US5142932A (en) | 1991-09-04 | 1992-09-01 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Flexible robotic arm |
| US5200280A (en) | 1991-09-05 | 1993-04-06 | Black & Decker Inc. | Terminal cover for a battery pack |
| IT1251206B (it) | 1991-09-18 | 1995-05-04 | Magneti Marelli Spa | Impianto elettrico di un autoveicolo, comprendente almeno un supercondensatore. |
| US5476479A (en) | 1991-09-26 | 1995-12-19 | United States Surgical Corporation | Handle for endoscopic surgical instruments and jaw structure |
| US5431654A (en) | 1991-09-30 | 1995-07-11 | Stryker Corporation | Bone cement injector |
| US5697909A (en) | 1992-01-07 | 1997-12-16 | Arthrocare Corporation | Methods and apparatus for surgical cutting |
| US5275608A (en) | 1991-10-16 | 1994-01-04 | Implemed, Inc. | Generic endoscopic instrument |
| CA2075141C (en) | 1991-10-17 | 1998-06-30 | Donald A. Morin | Anvil for surgical staplers |
| CA2078794C (en) | 1991-10-18 | 1998-10-06 | Frank J. Viola | Locking device for an apparatus for applying surgical fasteners |
| US5397046A (en) | 1991-10-18 | 1995-03-14 | United States Surgical Corporation | Lockout mechanism for surgical apparatus |
| US5711472A (en) | 1991-10-18 | 1998-01-27 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5332142A (en) | 1991-10-18 | 1994-07-26 | Ethicon, Inc. | Linear stapling mechanism with cutting means |
| AU657364B2 (en) | 1991-10-18 | 1995-03-09 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5474223A (en) | 1991-10-18 | 1995-12-12 | United States Surgical Corporation | Surgical fastener applying apparatus |
| US5497933A (en) | 1991-10-18 | 1996-03-12 | United States Surgical Corporation | Apparatus and method for applying surgical staples to attach an object to body tissue |
| US5326013A (en) | 1991-10-18 | 1994-07-05 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5289963A (en) | 1991-10-18 | 1994-03-01 | United States Surgical Corporation | Apparatus and method for applying surgical staples to attach an object to body tissue |
| US5431322A (en) | 1991-10-18 | 1995-07-11 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5364001A (en) | 1991-10-18 | 1994-11-15 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| AU660712B2 (en) | 1991-10-18 | 1995-07-06 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US5395312A (en) | 1991-10-18 | 1995-03-07 | Desai; Ashvin | Surgical tool |
| US5307976A (en) | 1991-10-18 | 1994-05-03 | Ethicon, Inc. | Linear stapling mechanism with cutting means |
| US5312023A (en) | 1991-10-18 | 1994-05-17 | United States Surgical Corporation | Self contained gas powered surgical apparatus |
| US5478003A (en) | 1991-10-18 | 1995-12-26 | United States Surgical Corporation | Surgical apparatus |
| US5366134A (en) | 1991-10-18 | 1994-11-22 | United States Surgical Corporation | Surgical fastening apparatus |
| US6250532B1 (en) | 1991-10-18 | 2001-06-26 | United States Surgical Corporation | Surgical stapling apparatus |
| ES2041610T3 (es) | 1991-10-18 | 1997-05-16 | United States Surgical Corp | Aparato para aplicar broches de sujecion quirurgicos. |
| US5443198A (en) | 1991-10-18 | 1995-08-22 | United States Surgical Corporation | Surgical fastener applying apparatus |
| US5579978A (en) | 1991-10-18 | 1996-12-03 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| CA2075227C (en) | 1991-10-18 | 2004-02-10 | Robert J. Geiste | Surgical fastening apparatus with shipping interlock |
| EP0540461A1 (de) | 1991-10-29 | 1993-05-05 | SULZER Medizinaltechnik AG | Steriles Punktiergerät für Blutgefässe mit nichtsteriler Ultraschallsonde und Vorrichtung zum Vorbereiten des Geräts |
| US5197649A (en) | 1991-10-29 | 1993-03-30 | The Trustees Of Columbia University In The City Of New York | Gastrointestinal endoscoptic stapler |
| US5240163A (en) | 1991-10-30 | 1993-08-31 | American Cyanamid Company | Linear surgical stapling instrument |
| US5350400A (en) | 1991-10-30 | 1994-09-27 | American Cyanamid Company | Malleable, bioabsorbable, plastic staple; and method and apparatus for deforming such staple |
| US5665085A (en) | 1991-11-01 | 1997-09-09 | Medical Scientific, Inc. | Electrosurgical cutting tool |
| JPH05123325A (ja) | 1991-11-01 | 1993-05-21 | Olympus Optical Co Ltd | 処置具 |
| US5713896A (en) | 1991-11-01 | 1998-02-03 | Medical Scientific, Inc. | Impedance feedback electrosurgical system |
| US5531744A (en) | 1991-11-01 | 1996-07-02 | Medical Scientific, Inc. | Alternative current pathways for bipolar surgical cutting tool |
| US5395034A (en) | 1991-11-07 | 1995-03-07 | American Cyanamid Co. | Linear surgical stapling instrument |
| AU3067292A (en) | 1991-11-08 | 1993-06-07 | Ep Technologies Inc | Ablation electrode with insulated temperature sensing elements |
| JPH05140421A (ja) | 1991-11-25 | 1993-06-08 | Toray Ind Inc | 難燃液晶ポリエステル組成物 |
| US5439467A (en) | 1991-12-03 | 1995-08-08 | Vesica Medical, Inc. | Suture passer |
| US5458579A (en) | 1991-12-31 | 1995-10-17 | Technalytics, Inc. | Mechanical trocar insertion apparatus |
| WO1993013704A1 (en) | 1992-01-09 | 1993-07-22 | Endomedix Corporation | Bi-directional miniscope |
| US5433721A (en) | 1992-01-17 | 1995-07-18 | Ethicon, Inc. | Endoscopic instrument having a torsionally stiff drive shaft for applying fasteners to tissue |
| US5383880A (en) | 1992-01-17 | 1995-01-24 | Ethicon, Inc. | Endoscopic surgical system with sensing means |
| DE69331789T2 (de) | 1992-01-21 | 2003-03-13 | Stanford Res Inst Int | Endoskopisches chirurgisches Instrument |
| US6963792B1 (en) | 1992-01-21 | 2005-11-08 | Sri International | Surgical method |
| DE9290164U1 (de) | 1992-01-21 | 1994-09-15 | Valleylab Inc | Elektrochirurgische Steuerung für einen Trokar |
| US5284128A (en) | 1992-01-24 | 1994-02-08 | Applied Medical Resources Corporation | Surgical manipulator |
| WO1993014629A1 (en) | 1992-01-27 | 1993-08-05 | North Carolina State University | Gene transfer in birds by introduction of dna into muscle in ovo |
| EP0625077B1 (en) | 1992-02-07 | 1997-07-09 | Valleylab, Inc. | Ultrasonic surgical apparatus |
| US5271543A (en) | 1992-02-07 | 1993-12-21 | Ethicon, Inc. | Surgical anastomosis stapling instrument with flexible support shaft and anvil adjusting mechanism |
| WO1993015648A1 (en) | 1992-02-07 | 1993-08-19 | Wilk Peter J | Endoscope with disposable insertion member |
| US5348259A (en) | 1992-02-10 | 1994-09-20 | Massachusetts Institute Of Technology | Flexible, articulable column |
| US5514157A (en) | 1992-02-12 | 1996-05-07 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| GB2264242A (en) | 1992-02-12 | 1993-08-25 | Johnson Matthey Plc | Heating catalytic converters |
| US5626595A (en) | 1992-02-14 | 1997-05-06 | Automated Medical Instruments, Inc. | Automated surgical instrument |
| US5282806A (en) | 1992-08-21 | 1994-02-01 | Habley Medical Technology Corporation | Endoscopic surgical instrument having a removable, rotatable, end effector assembly |
| CA2089999A1 (en) | 1992-02-24 | 1993-08-25 | H. Jonathan Tovey | Resilient arm mesh deployer |
| US5658238A (en) | 1992-02-25 | 1997-08-19 | Olympus Optical Co., Ltd. | Endoscope apparatus capable of being switched to a mode in which a curvature operating lever is returned and to a mode in which the curvature operating lever is not returned |
| US5352235A (en) | 1992-03-16 | 1994-10-04 | Tibor Koros | Laparoscopic grasper and cutter |
| GR1002537B (el) | 1992-03-30 | 1997-01-27 | Ethicon Inc. | Χειρουργικος συνδετηρας για εισαγωγη εντος ιστου. |
| US5281216A (en) | 1992-03-31 | 1994-01-25 | Valleylab, Inc. | Electrosurgical bipolar treating apparatus |
| US5484095A (en) | 1992-03-31 | 1996-01-16 | United States Surgical Corporation | Apparatus for endoscopically applying staples individually to body tissue |
| US5223675A (en) | 1992-04-02 | 1993-06-29 | Taft Anthony W | Cable fastener |
| US5314424A (en) | 1992-04-06 | 1994-05-24 | United States Surgical Corporation | Surgical instrument locking mechanism |
| US5411481A (en) | 1992-04-08 | 1995-05-02 | American Cyanamid Co. | Surgical purse string suturing instrument and method |
| US5563481A (en) | 1992-04-13 | 1996-10-08 | Smith & Nephew Endoscopy, Inc. | Brushless motor |
| FR2689749B1 (fr) | 1992-04-13 | 1994-07-22 | Toledano Haviv | Instrument d'agrafage chirurgical flexible pour anastomoses circulaires. |
| WO1993020886A1 (en) | 1992-04-13 | 1993-10-28 | Ep Technologies, Inc. | Articulated systems for cardiac ablation |
| US5314466A (en) | 1992-04-13 | 1994-05-24 | Ep Technologies, Inc. | Articulated unidirectional microwave antenna systems for cardiac ablation |
| US5236440A (en) | 1992-04-14 | 1993-08-17 | American Cyanamid Company | Surgical fastener |
| US5355897A (en) | 1992-04-16 | 1994-10-18 | Ethicon, Inc. | Method of performing a pyloroplasty/pylorectomy using a stapler having a shield |
| US5417203A (en) | 1992-04-23 | 1995-05-23 | United States Surgical Corporation | Articulating endoscopic surgical apparatus |
| GR1002336B (el) | 1992-05-06 | 1996-05-21 | Ethicon Inc. | Οργανον ενδοσκοπικης απολινωσεως και κοψιματος. |
| US5211655A (en) | 1992-05-08 | 1993-05-18 | Hasson Harrith M | Multiple use forceps for endoscopy |
| US5484451A (en) | 1992-05-08 | 1996-01-16 | Ethicon, Inc. | Endoscopic surgical instrument and staples for applying purse string sutures |
| US5242457A (en) | 1992-05-08 | 1993-09-07 | Ethicon, Inc. | Surgical instrument and staples for applying purse string sutures |
| JPH0630945A (ja) | 1992-05-19 | 1994-02-08 | Olympus Optical Co Ltd | 縫合器 |
| US5344059A (en) | 1992-05-19 | 1994-09-06 | United States Surgical Corporation | Surgical apparatus and anvil delivery system therefor |
| US5389098A (en) | 1992-05-19 | 1995-02-14 | Olympus Optical Co., Ltd. | Surgical device for stapling and/or fastening body tissues |
| US5197966A (en) | 1992-05-22 | 1993-03-30 | Sommerkamp T Greg | Radiodorsal buttress blade plate implant for repairing distal radius fractures |
| US5192288A (en) | 1992-05-26 | 1993-03-09 | Origin Medsystems, Inc. | Surgical clip applier |
| US5658300A (en) | 1992-06-04 | 1997-08-19 | Olympus Optical Co., Ltd. | Tissue fixing surgical instrument, tissue-fixing device, and method of fixing tissues |
| US5906625A (en) | 1992-06-04 | 1999-05-25 | Olympus Optical Co., Ltd. | Tissue-fixing surgical instrument, tissue-fixing device, and method of fixing tissue |
| JPH0647050A (ja) | 1992-06-04 | 1994-02-22 | Olympus Optical Co Ltd | 組織縫合結紮器 |
| US5279416A (en) | 1992-06-05 | 1994-01-18 | Edward Weck Incorporated | Ligating device cartridge with separable retainer |
| JP3442423B2 (ja) | 1992-06-05 | 2003-09-02 | 積水化学工業株式会社 | 簡易コルセット及び簡易コルセット貼付体 |
| US7928281B2 (en) | 1992-06-19 | 2011-04-19 | Arizant Technologies Llc | Wound covering |
| US5263629A (en) | 1992-06-29 | 1993-11-23 | Ethicon, Inc. | Method and apparatus for achieving hemostasis along a staple line |
| US5258009A (en) | 1992-06-30 | 1993-11-02 | American Cyanamid Company | Malleable, bioabsorbable,plastic staple having a knotted configuration; and method and apparatus for deforming such staple |
| US5221281A (en) | 1992-06-30 | 1993-06-22 | Valleylab Inc. | Electrosurgical tubular trocar |
| US5258012A (en) | 1992-06-30 | 1993-11-02 | Ethicon, Inc. | Surgical fasteners |
| US5368606A (en) | 1992-07-02 | 1994-11-29 | Marlow Surgical Technologies, Inc. | Endoscopic instrument system |
| US5222975A (en) | 1992-07-13 | 1993-06-29 | Lawrence Crainich | Surgical staples |
| US5360428A (en) | 1992-07-22 | 1994-11-01 | Hutchinson Jr William B | Laparoscopic instrument with electrical cutting wires |
| US5511564A (en) | 1992-07-29 | 1996-04-30 | Valleylab Inc. | Laparoscopic stretching instrument and associated method |
| US5657429A (en) | 1992-08-10 | 1997-08-12 | Computer Motion, Inc. | Automated endoscope system optimal positioning |
| US5762458A (en) | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| DE4228909C2 (de) | 1992-08-28 | 1994-06-09 | Ethicon Gmbh | Endoskopisches Instrument zur Applizierung von Ligaturbindern und Ligaturbinder |
| CA2143639C (en) | 1992-09-01 | 2004-07-20 | Edwin L. Adair | Sterilizable endoscope with separable disposable tube assembly |
| US5630782A (en) | 1992-09-01 | 1997-05-20 | Adair; Edwin L. | Sterilizable endoscope with separable auxiliary assembly |
| CA2104345A1 (en) | 1992-09-02 | 1994-03-03 | David T. Green | Surgical clamp apparatus |
| US5368215A (en) | 1992-09-08 | 1994-11-29 | United States Surgical Corporation | Surgical apparatus and detachable anvil rod therefor |
| US5285381A (en) | 1992-09-09 | 1994-02-08 | Vanderbilt University | Multiple control-point control system and method of use |
| US5485952A (en) | 1992-09-23 | 1996-01-23 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US5465819A (en) | 1992-09-29 | 1995-11-14 | Borg-Warner Automotive, Inc. | Power transmitting assembly |
| US5423471A (en) | 1992-10-02 | 1995-06-13 | United States Surgical Corporation | Apparatus for applying two-part surgical fasteners in laparoscopic or endoscopic procedures |
| US5569161A (en) | 1992-10-08 | 1996-10-29 | Wendell V. Ebling | Endoscope with sterile sleeve |
| US5374277A (en) | 1992-10-09 | 1994-12-20 | Ethicon, Inc. | Surgical instrument |
| US5601224A (en) | 1992-10-09 | 1997-02-11 | Ethicon, Inc. | Surgical instrument |
| US5662662A (en) | 1992-10-09 | 1997-09-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument and method |
| US5431323A (en) | 1992-10-09 | 1995-07-11 | Ethicon, Inc. | Endoscopic surgical instrument with pivotable and rotatable staple cartridge |
| US5381943A (en) | 1992-10-09 | 1995-01-17 | Ethicon, Inc. | Endoscopic surgical stapling instrument with pivotable and rotatable staple cartridge |
| US5330502A (en) | 1992-10-09 | 1994-07-19 | Ethicon, Inc. | Rotational endoscopic mechanism with jointed drive mechanism |
| US5626587A (en) | 1992-10-09 | 1997-05-06 | Ethicon Endo-Surgery, Inc. | Method for operating a surgical instrument |
| US5350391A (en) | 1992-10-19 | 1994-09-27 | Benedetto Iacovelli | Laparoscopic instruments |
| US5718548A (en) | 1992-10-20 | 1998-02-17 | Clipmaster Corporation Pty Ltd | Staple assembly |
| CA2108605A1 (en) | 1992-10-21 | 1994-04-22 | Nagabhushanam Totakura | Bioabsorbable foam pledget |
| US5309927A (en) | 1992-10-22 | 1994-05-10 | Ethicon, Inc. | Circular stapler tissue retention spring method |
| US5259366A (en) | 1992-11-03 | 1993-11-09 | Boris Reydel | Method of using a catheter-sleeve assembly for an endoscope |
| US5409498A (en) | 1992-11-05 | 1995-04-25 | Ethicon, Inc. | Rotatable articulating endoscopic fastening instrument |
| GB2272159A (en) | 1992-11-10 | 1994-05-11 | Andreas G Constantinides | Surgical/diagnostic aid |
| IL103737A (en) | 1992-11-13 | 1997-02-18 | Technion Res & Dev Foundation | Stapler device particularly useful in medical suturing |
| US5441483A (en) | 1992-11-16 | 1995-08-15 | Avitall; Boaz | Catheter deflection control |
| US5389104A (en) | 1992-11-18 | 1995-02-14 | Symbiosis Corporation | Arthroscopic surgical instruments |
| US5346504A (en) | 1992-11-19 | 1994-09-13 | Ethicon, Inc. | Intraluminal manipulator with a head having articulating links |
| DE69331343T2 (de) | 1992-11-30 | 2002-08-22 | Sherwood Serv Ag | Schaltung für ein ultraschallchirurgisches instrument mit einem energieinitiator zur aufrechterhaltung der vibrationen und der lineardynamik |
| US5372602A (en) | 1992-11-30 | 1994-12-13 | Device For Vascular Intervention, Inc. | Method of removing plaque using catheter cutter with torque control |
| US5333422A (en) | 1992-12-02 | 1994-08-02 | The United States Of America As Represented By The United States Department Of Energy | Lightweight extendable and retractable pole |
| US5356006A (en) | 1992-12-16 | 1994-10-18 | Ethicon, Inc. | Sterile package for surgical devices |
| US5330487A (en) | 1992-12-17 | 1994-07-19 | Tfi Acquistion Corp. | Drive mechanism for surgical instruments |
| US5558671A (en) | 1993-07-22 | 1996-09-24 | Yates; David C. | Impedance feedback monitor for electrosurgical instrument |
| US5807393A (en) | 1992-12-22 | 1998-09-15 | Ethicon Endo-Surgery, Inc. | Surgical tissue treating device with locking mechanism |
| US5403312A (en) | 1993-07-22 | 1995-04-04 | Ethicon, Inc. | Electrosurgical hemostatic device |
| FR2699806B1 (fr) | 1992-12-30 | 1995-03-24 | Duthoit Francois | Instrument, destiné notamment à permettre l'extraction de tronçons veineux pathologiques tels que des varices. |
| US5468253A (en) | 1993-01-21 | 1995-11-21 | Ethicon, Inc. | Elastomeric medical device |
| US5358510A (en) | 1993-01-26 | 1994-10-25 | Ethicon, Inc. | Two part surgical fastener |
| CA2114282A1 (en) | 1993-01-28 | 1994-07-29 | Lothar Schilder | Multi-layered implant |
| US5336229A (en) | 1993-02-09 | 1994-08-09 | Laparomed Corporation | Dual ligating and dividing apparatus |
| US5304204A (en) | 1993-02-09 | 1994-04-19 | Ethicon, Inc. | Receiverless surgical fasteners |
| US5383895A (en) | 1993-02-10 | 1995-01-24 | Unisurge, Inc. | Endoscopic surgical grasper and method |
| US5342381A (en) | 1993-02-11 | 1994-08-30 | Everest Medical Corporation | Combination bipolar scissors and forceps instrument |
| JPH06237937A (ja) | 1993-02-12 | 1994-08-30 | Olympus Optical Co Ltd | 外科用縫合器 |
| KR960700656A (ko) | 1993-02-22 | 1996-02-24 | 알렌 제이. 스피겔 | 복강경 절개 인장 견인기 장치 및 방법(a laparoscopic dissection tension retractor device and method) |
| US5342396A (en) | 1993-03-02 | 1994-08-30 | Cook Melvin S | Staples |
| EP0689400A4 (en) | 1993-03-02 | 1996-08-28 | Melvin S Cook | IMPROVED STAPLES |
| DE4306786C1 (de) | 1993-03-04 | 1994-02-10 | Wolfgang Daum | Chirurgischer Manipulator |
| US5397324A (en) | 1993-03-10 | 1995-03-14 | Carroll; Brendan J. | Surgical stapler instrument and method for vascular hemostasis |
| US5360305A (en) | 1993-03-19 | 1994-11-01 | Duo-Fast Corporation | Clinch staples and method of manufacturing and applying clinch staples |
| US5312329A (en) | 1993-04-07 | 1994-05-17 | Valleylab Inc. | Piezo ultrasonic and electrosurgical handpiece |
| USD352780S (en) | 1993-04-19 | 1994-11-22 | Valleylab Inc. | Combined suction, irrigation and electrosurgical handle |
| US5370645A (en) | 1993-04-19 | 1994-12-06 | Valleylab Inc. | Electrosurgical processor and method of use |
| EP0625335B1 (en) | 1993-04-20 | 1997-11-19 | United States Surgical Corporation | Surgical stapler |
| US5540375A (en) | 1993-04-20 | 1996-07-30 | United States Surgical Corporation | Endoscopic stapler |
| ATE153231T1 (de) | 1993-04-27 | 1997-06-15 | American Cyanamid Co | Automatischer, laparoskopischer applikator für abbindeklammern |
| US5467911A (en) | 1993-04-27 | 1995-11-21 | Olympus Optical Co., Ltd. | Surgical device for stapling and fastening body tissues |
| US5431668A (en) | 1993-04-29 | 1995-07-11 | Ethicon, Inc. | Ligating clip applier |
| US5464300A (en) | 1993-04-29 | 1995-11-07 | Crainich; Lawrence | Medical instrument and coupling apparatus for same |
| US5407293A (en) | 1993-04-29 | 1995-04-18 | Crainich; Lawrence | Coupling apparatus for medical instrument |
| DE69414244T2 (de) | 1993-04-30 | 1999-04-22 | United States Surgical Corp | Chirurgisches instrument mit einer schwenkbaren backenstruktur |
| US6716232B1 (en) | 1993-04-30 | 2004-04-06 | United States Surgical Corporation | Surgical instrument having an articulated jaw structure and a detachable knife |
| US5447265A (en) | 1993-04-30 | 1995-09-05 | Minnesota Mining And Manufacturing Company | Laparoscopic surgical instrument with a mechanism for preventing its entry into the abdominal cavity once it is depleted and removed from the abdominal cavity |
| GB9309142D0 (en) | 1993-05-04 | 1993-06-16 | Gyrus Medical Ltd | Laparoscopic instrument |
| US5415334A (en) | 1993-05-05 | 1995-05-16 | Ethicon Endo-Surgery | Surgical stapler and staple cartridge |
| US5364003A (en) | 1993-05-05 | 1994-11-15 | Ethicon Endo-Surgery | Staple cartridge for a surgical stapler |
| US5352229A (en) | 1993-05-12 | 1994-10-04 | Marlowe Goble E | Arbor press staple and washer and method for its use |
| US5449370A (en) | 1993-05-12 | 1995-09-12 | Ethicon, Inc. | Blunt tipped ultrasonic trocar |
| US6406472B1 (en) | 1993-05-14 | 2002-06-18 | Sri International, Inc. | Remote center positioner |
| US5549621A (en) | 1993-05-14 | 1996-08-27 | Byron C. Sutherland | Apparatus and method for performing vertical banded gastroplasty |
| EP0699053B1 (en) | 1993-05-14 | 1999-03-17 | Sri International | Surgical apparatus |
| JPH06327684A (ja) | 1993-05-19 | 1994-11-29 | Olympus Optical Co Ltd | 外科用縫合具 |
| CA2124109A1 (en) | 1993-05-24 | 1994-11-25 | Mark T. Byrne | Endoscopic surgical instrument with electromagnetic sensor |
| US5381649A (en) | 1993-06-04 | 1995-01-17 | Webb; Stephen A. | Medical staple forming die and punch |
| US5341724A (en) | 1993-06-28 | 1994-08-30 | Bronislav Vatel | Pneumatic telescoping cylinder and method |
| GB9314391D0 (en) | 1993-07-12 | 1993-08-25 | Gyrus Medical Ltd | A radio frequency oscillator and an electrosurgical generator incorporating such an oscillator |
| US5478354A (en) | 1993-07-14 | 1995-12-26 | United States Surgical Corporation | Wound closing apparatus and method |
| US5501654A (en) | 1993-07-15 | 1996-03-26 | Ethicon, Inc. | Endoscopic instrument having articulating element |
| DE9310601U1 (de) | 1993-07-15 | 1993-09-02 | Siemens Ag | Kassette zur Aufnahme ärztlicher, insbesondere zahnärztlicher Instrumente |
| US5805140A (en) | 1993-07-16 | 1998-09-08 | Immersion Corporation | High bandwidth force feedback interface using voice coils and flexures |
| US5582617A (en) | 1993-07-21 | 1996-12-10 | Charles H. Klieman | Surgical instrument for endoscopic and general surgery |
| US5792165A (en) | 1993-07-21 | 1998-08-11 | Charles H. Klieman | Endoscopic instrument with detachable end effector |
| ATE209875T1 (de) | 1993-07-21 | 2001-12-15 | Charles H Klieman | Chirurgisches instrument für endoskopische und generelle operationen |
| US5817093A (en) | 1993-07-22 | 1998-10-06 | Ethicon Endo-Surgery, Inc. | Impedance feedback monitor with query electrode for electrosurgical instrument |
| GR940100335A (el) | 1993-07-22 | 1996-05-22 | Ethicon Inc. | Ηλεκτροχειρουργικη συσκευη τοποθετησης συρραπτικων αγκυλων. |
| US5709680A (en) | 1993-07-22 | 1998-01-20 | Ethicon Endo-Surgery, Inc. | Electrosurgical hemostatic device |
| US5688270A (en) | 1993-07-22 | 1997-11-18 | Ethicon Endo-Surgery,Inc. | Electrosurgical hemostatic device with recessed and/or offset electrodes |
| US5810811A (en) | 1993-07-22 | 1998-09-22 | Ethicon Endo-Surgery, Inc. | Electrosurgical hemostatic device |
| US5693051A (en) | 1993-07-22 | 1997-12-02 | Ethicon Endo-Surgery, Inc. | Electrosurgical hemostatic device with adaptive electrodes |
| JPH079622U (ja) | 1993-07-27 | 1995-02-10 | 和光化成工業株式会社 | 車両用サンバイザのホルダー構造 |
| US5372596A (en) | 1993-07-27 | 1994-12-13 | Valleylab Inc. | Apparatus for leakage control and method for its use |
| US5441494A (en) | 1993-07-29 | 1995-08-15 | Ethicon, Inc. | Manipulable hand for laparoscopy |
| US5503320A (en) | 1993-08-19 | 1996-04-02 | United States Surgical Corporation | Surgical apparatus with indicator |
| US5447417A (en) | 1993-08-31 | 1995-09-05 | Valleylab Inc. | Self-adjusting pump head and safety manifold cartridge for a peristaltic pump |
| US5441193A (en) | 1993-09-23 | 1995-08-15 | United States Surgical Corporation | Surgical fastener applying apparatus with resilient film |
| CA2133159A1 (en) | 1993-09-30 | 1995-03-31 | Eric J. Butterfield | Surgical instrument having improved manipulating means |
| US5405344A (en) | 1993-09-30 | 1995-04-11 | Ethicon, Inc. | Articulable socket joint assembly for an endoscopic instrument for surgical fastner track therefor |
| US5542594A (en) | 1993-10-06 | 1996-08-06 | United States Surgical Corporation | Surgical stapling apparatus with biocompatible surgical fabric |
| US5496312A (en) | 1993-10-07 | 1996-03-05 | Valleylab Inc. | Impedance and temperature generator control |
| CA2132917C (en) | 1993-10-07 | 2004-12-14 | John Charles Robertson | Circular anastomosis device |
| US6210403B1 (en) | 1993-10-07 | 2001-04-03 | Sherwood Services Ag | Automatic control for energy from an electrosurgical generator |
| US5439155A (en) | 1993-10-07 | 1995-08-08 | United States Surgical Corporation | Cartridge for surgical fastener applying apparatus |
| US5560532A (en) | 1993-10-08 | 1996-10-01 | United States Surgical Corporation | Apparatus and method for applying surgical staples to body tissue |
| US5725554A (en) | 1993-10-08 | 1998-03-10 | Richard-Allan Medical Industries, Inc. | Surgical staple and stapler |
| US5487499A (en) | 1993-10-08 | 1996-01-30 | United States Surgical Corporation | Surgical apparatus for applying surgical fasteners including a counter |
| US5562682A (en) | 1993-10-08 | 1996-10-08 | Richard-Allan Medical Industries, Inc. | Surgical Instrument with adjustable arms |
| RU2098025C1 (ru) | 1993-10-11 | 1997-12-10 | Аркадий Вениаминович Дубровский | Поворотное устройство |
| US5556416A (en) | 1993-10-12 | 1996-09-17 | Valleylab, Inc. | Endoscopic instrument |
| GB9322464D0 (en) | 1993-11-01 | 1993-12-22 | Gyrus Medical Ltd | Electrosurgical apparatus |
| US5571100B1 (en) | 1993-11-01 | 1998-01-06 | Gyrus Medical Ltd | Electrosurgical apparatus |
| JP3414455B2 (ja) | 1993-11-02 | 2003-06-09 | オリンパス光学工業株式会社 | 縫合装置 |
| US5376095A (en) | 1993-11-04 | 1994-12-27 | Ethicon Endo-Surgery | Endoscopic multi-fire flat stapler with low profile |
| US5531305A (en) | 1993-11-05 | 1996-07-02 | Borg-Warner Automotive, Inc. | Synchronizer clutch assembly for multiple ratio gearing |
| US5503635A (en) | 1993-11-12 | 1996-04-02 | United States Surgical Corporation | Apparatus and method for performing compressional anastomoses |
| US5562690A (en) | 1993-11-12 | 1996-10-08 | United States Surgical Corporation | Apparatus and method for performing compressional anastomoses |
| US5449355A (en) | 1993-11-24 | 1995-09-12 | Valleylab Inc. | Retrograde tissue splitter and method |
| DE4340707C2 (de) | 1993-11-30 | 1997-03-27 | Wolf Gmbh Richard | Manipulator |
| US5514129A (en) | 1993-12-03 | 1996-05-07 | Valleylab Inc. | Automatic bipolar control for an electrosurgical generator |
| US5405073A (en) | 1993-12-06 | 1995-04-11 | Ethicon, Inc. | Flexible support shaft assembly |
| US5465894A (en) | 1993-12-06 | 1995-11-14 | Ethicon, Inc. | Surgical stapling instrument with articulated stapling head assembly on rotatable and flexible support shaft |
| US5743456A (en) | 1993-12-16 | 1998-04-28 | Stryker Corporation | Hand actuable surgical handpiece |
| US5422567A (en) | 1993-12-27 | 1995-06-06 | Valleylab Inc. | High frequency power measurement |
| CA2176754A1 (en) | 1993-12-30 | 1995-07-06 | Michael Steve Klicek | Bipolar ultrasonic surgery |
| US5441191A (en) | 1993-12-30 | 1995-08-15 | Linden; Gerald E. | Indicating "staples low" in a paper stapler |
| WO1995018572A1 (en) | 1994-01-04 | 1995-07-13 | Alpha Surgical Technologies, Inc. | Stapling device |
| US5437681A (en) | 1994-01-13 | 1995-08-01 | Suturtek Inc. | Suturing instrument with thread management |
| US5452837A (en) | 1994-01-21 | 1995-09-26 | Ethicon Endo-Surgery, Inc. | Surgical stapler with tissue gripping ridge |
| US5382247A (en) | 1994-01-21 | 1995-01-17 | Valleylab Inc. | Technique for electrosurgical tips and method of manufacture and use |
| DE9490471U1 (de) | 1994-01-31 | 1996-09-26 | Valleylab Inc | Teleskopierbare bipolare Elektrode für nicht-invasive medizinische Verfahren |
| US5487500A (en) | 1994-02-03 | 1996-01-30 | Ethicon Endo-Surgery, Inc. | Surgical stapler instrument |
| US5465895A (en) | 1994-02-03 | 1995-11-14 | Ethicon Endo-Surgery, Inc. | Surgical stapler instrument |
| US5597107A (en) | 1994-02-03 | 1997-01-28 | Ethicon Endo-Surgery, Inc. | Surgical stapler instrument |
| US5452836A (en) | 1994-02-07 | 1995-09-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with improved jaw closure and staple firing actuator mechanism |
| US5503638A (en) | 1994-02-10 | 1996-04-02 | Bio-Vascular, Inc. | Soft tissue stapling buttress |
| US5527320A (en) | 1994-02-10 | 1996-06-18 | Pilling Weck Inc. | Surgical clip applying instrument |
| US5413107A (en) | 1994-02-16 | 1995-05-09 | Tetrad Corporation | Ultrasonic probe having articulated structure and rotatable transducer head |
| US5507773A (en) | 1994-02-18 | 1996-04-16 | Ethicon Endo-Surgery | Cable-actuated jaw assembly for surgical instruments |
| JPH0833642A (ja) | 1994-02-25 | 1996-02-06 | Ethicon Endo Surgery Inc | 外科用ステープラのための改良アンビル承口 |
| WO1995023557A1 (en) | 1994-03-01 | 1995-09-08 | United States Surgical Corporation | Surgical stapler with anvil sensor and lockout |
| CA2143560C (en) | 1994-03-02 | 2007-01-16 | Mark Fogelberg | Sterile occlusion fasteners and instrument and method for their placement |
| DE9404459U1 (de) | 1994-03-16 | 1994-07-14 | Renz Chr Gmbh & Co | Vorrichtung zum Verpacken von Bindeelementen |
| CA2144211C (en) | 1994-03-16 | 2005-05-24 | David T. Green | Surgical instruments useful for endoscopic spinal procedures |
| JP3421117B2 (ja) | 1994-03-17 | 2003-06-30 | テルモ株式会社 | 外科用器具 |
| US5484398A (en) | 1994-03-17 | 1996-01-16 | Valleylab Inc. | Methods of making and using ultrasonic handpiece |
| RU2052979C1 (ru) | 1994-03-22 | 1996-01-27 | Товарищество с ограниченной ответственностью "Дипы" ЛТД | Аппарат для наложения зажимающих скрепок и магазин для прошивающих скобок или зажимающих скрепок |
| US5472442A (en) | 1994-03-23 | 1995-12-05 | Valleylab Inc. | Moveable switchable electrosurgical handpiece |
| US5860581A (en) | 1994-03-24 | 1999-01-19 | United States Surgical Corporation | Anvil for circular stapler |
| US5541376A (en) | 1994-03-28 | 1996-07-30 | Valleylab Inc | Switch and connector |
| CA2145723A1 (en) | 1994-03-30 | 1995-10-01 | Steven W. Hamblin | Surgical stapling instrument with remotely articulated stapling head assembly on rotatable support shaft |
| US5715987A (en) | 1994-04-05 | 1998-02-10 | Tracor Incorporated | Constant width, adjustable grip, staple apparatus and method |
| US5695524A (en) | 1994-04-05 | 1997-12-09 | Tracor Aerospace, Inc. | Constant width, adjustable grip, staple apparatus and method |
| CA2144818C (en) | 1994-04-07 | 2006-07-11 | Henry Bolanos | Graduated anvil for surgical stapling instruments |
| US5415335A (en) | 1994-04-07 | 1995-05-16 | Ethicon Endo-Surgery | Surgical stapler cartridge containing lockout mechanism |
| US5653677A (en) | 1994-04-12 | 1997-08-05 | Fuji Photo Optical Co. Ltd | Electronic endoscope apparatus with imaging unit separable therefrom |
| JPH07285089A (ja) | 1994-04-14 | 1995-10-31 | Mitsubishi Heavy Ind Ltd | 5指手腕機構 |
| US5529235A (en) | 1994-04-28 | 1996-06-25 | Ethicon Endo-Surgery, Inc. | Identification device for surgical instrument |
| US5470007A (en) | 1994-05-02 | 1995-11-28 | Minnesota Mining And Manufacturing Company | Laparoscopic stapler with overload sensor and interlock |
| US5489058A (en) | 1994-05-02 | 1996-02-06 | Minnesota Mining And Manufacturing Company | Surgical stapler with mechanisms for reducing the firing force |
| US5474566A (en) | 1994-05-05 | 1995-12-12 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| US5628446A (en) | 1994-05-05 | 1997-05-13 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| CA2148667A1 (en) | 1994-05-05 | 1995-11-06 | Carlo A. Mililli | Self-contained powered surgical apparatus |
| US5843021A (en) | 1994-05-09 | 1998-12-01 | Somnus Medical Technologies, Inc. | Cell necrosis apparatus |
| US5480409A (en) | 1994-05-10 | 1996-01-02 | Riza; Erol D. | Laparoscopic surgical instrument |
| US5782749A (en) | 1994-05-10 | 1998-07-21 | Riza; Erol D. | Laparoscopic surgical instrument with adjustable grip |
| US6704210B1 (en) | 1994-05-20 | 2004-03-09 | Medtronic, Inc. | Bioprothesis film strip for surgical stapler and method of attaching the same |
| USRE38335E1 (en) | 1994-05-24 | 2003-11-25 | Endius Incorporated | Surgical instrument |
| US5454827A (en) | 1994-05-24 | 1995-10-03 | Aust; Gilbert M. | Surgical instrument |
| US5520673A (en) | 1994-05-24 | 1996-05-28 | Kimberly-Clark Corporation | Absorbent article incorporating high porosity tissue with superabsorbent containment capabilities |
| US6596432B2 (en) | 1994-05-30 | 2003-07-22 | Canon Kabushiki Kaisha | Rechargeable batteries |
| US5814057A (en) | 1994-06-03 | 1998-09-29 | Gunze Limited | Supporting element for staple region |
| GB9411429D0 (en) | 1994-06-08 | 1994-07-27 | Seton Healthcare Group Plc | Wound dressings |
| US5553675A (en) | 1994-06-10 | 1996-09-10 | Minnesota Mining And Manufacturing Company | Orthopedic surgical device |
| US5522831A (en) | 1994-06-13 | 1996-06-04 | Dennis R. Sleister | Incising trocar and cannula assembly |
| US5473204A (en) | 1994-06-16 | 1995-12-05 | Temple; Thomas D. | Time delay switch |
| US5732872A (en) | 1994-06-17 | 1998-03-31 | Heartport, Inc. | Surgical stapling instrument |
| US5807376A (en) | 1994-06-24 | 1998-09-15 | United States Surgical Corporation | Apparatus and method for performing surgical tasks during laparoscopic procedures |
| US5800429A (en) | 1994-06-24 | 1998-09-01 | Somnus Medical Technologies, Inc. | Noninvasive apparatus for ablating turbinates |
| US5558665A (en) | 1994-06-24 | 1996-09-24 | Archimedes Surgical, Inc. | Surgical instrument and method for intraluminal retraction of an anatomic structure |
| DE4422621C1 (de) | 1994-06-28 | 1995-08-31 | Aesculap Ag | Chirurgisches Instrument |
| GB9413070D0 (en) | 1994-06-29 | 1994-08-17 | Gyrus Medical Ltd | Electrosurgical apparatus |
| US5551622A (en) | 1994-07-13 | 1996-09-03 | Yoon; Inbae | Surgical stapler |
| US5833695A (en) | 1994-07-13 | 1998-11-10 | Yoon; Inbae | Surgical stapling system and method of applying staples from multiple staple cartridges |
| US5623582A (en) | 1994-07-14 | 1997-04-22 | Immersion Human Interface Corporation | Computer interface or control input device for laparoscopic surgical instrument and other elongated mechanical objects |
| US5629577A (en) | 1994-07-15 | 1997-05-13 | Micro Medical Devices | Miniature linear motion actuator |
| US5533521A (en) | 1994-07-15 | 1996-07-09 | United States Surgical Corporation | Interchangeable tissue measuring device |
| US5712460A (en) | 1994-07-19 | 1998-01-27 | Linvatec Corporation | Multi-function surgical device control system |
| DE9412228U1 (de) | 1994-07-28 | 1994-09-22 | Loctite Europa Eeig | Schlauchpumpe zur genauen Dosierung kleiner Flüssigkeitsmengen |
| AU694225B2 (en) | 1994-08-02 | 1998-07-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic hemostatic and cutting instrument |
| US5779130A (en) | 1994-08-05 | 1998-07-14 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| EP0699418A1 (en) | 1994-08-05 | 1996-03-06 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| US5507426A (en) | 1994-08-05 | 1996-04-16 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US5509916A (en) | 1994-08-12 | 1996-04-23 | Valleylab Inc. | Laser-assisted electrosurgery system |
| US5480089A (en) | 1994-08-19 | 1996-01-02 | United States Surgical Corporation | Surgical stapler apparatus with improved staple pockets |
| CA2146508C (en) | 1994-08-25 | 2006-11-14 | Robert H. Schnut | Anvil for circular stapler |
| US6120433A (en) | 1994-09-01 | 2000-09-19 | Olympus Optical Co., Ltd. | Surgical manipulator system |
| US5569284A (en) | 1994-09-23 | 1996-10-29 | United States Surgical Corporation | Morcellator |
| US5609601A (en) | 1994-09-23 | 1997-03-11 | United States Surgical Corporation | Endoscopic surgical apparatus with rotation lock |
| DE4434864C2 (de) | 1994-09-29 | 1997-06-19 | United States Surgical Corp | Chirurgischer Klammerapplikator mit auswechselbarem Klammermagazin |
| US5916225A (en) | 1994-09-29 | 1999-06-29 | Surgical Sense, Inc. | Hernia mesh patch |
| US5571116A (en) | 1994-10-02 | 1996-11-05 | United States Surgical Corporation | Non-invasive treatment of gastroesophageal reflux disease |
| US5685474A (en) | 1994-10-04 | 1997-11-11 | United States Surgical Corporation | Tactile indicator for surgical instrument |
| US5901895A (en) | 1994-10-05 | 1999-05-11 | United States Surgical Corporation | Articulating apparatus for applying surgical fasteners to body tissue |
| US5797538A (en) | 1994-10-05 | 1998-08-25 | United States Surgical Corporation | Articulating apparatus for applying surgical fasteners to body tissue |
| US5540374A (en) | 1994-10-06 | 1996-07-30 | Minnesota Mining And Manufacturing Company | Bone stapler cartridge |
| US5571090A (en) | 1994-10-07 | 1996-11-05 | United States Surgical Corporation | Vascular suturing apparatus |
| EP0705571A1 (en) | 1994-10-07 | 1996-04-10 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| US5575805A (en) | 1994-10-07 | 1996-11-19 | Li Medical Technologies, Inc. | Variable tip-pressure surgical grasper |
| US5718714A (en) | 1994-10-11 | 1998-02-17 | Circon Corporation | Surgical instrument with removable shaft assembly |
| CN1163558A (zh) | 1994-10-11 | 1997-10-29 | 查尔斯·H·克利曼 | 具有可拆卸的端部操作装置的内窥镜仪器 |
| US5591170A (en) | 1994-10-14 | 1997-01-07 | Genesis Orthopedics | Intramedullary bone cutting saw |
| AU706434B2 (en) | 1994-10-18 | 1999-06-17 | Ethicon Inc. | Injectable liquid copolymers for soft tissue repair and augmentation |
| US5599852A (en) | 1994-10-18 | 1997-02-04 | Ethicon, Inc. | Injectable microdispersions for soft tissue repair and augmentation |
| US5549627A (en) | 1994-10-21 | 1996-08-27 | Kieturakis; Maciej J. | Surgical instruments and method for applying progressive intracorporeal traction |
| US5575789A (en) | 1994-10-27 | 1996-11-19 | Valleylab Inc. | Energizable surgical tool safety device and method |
| US5549637A (en) | 1994-11-10 | 1996-08-27 | Crainich; Lawrence | Articulated medical instrument |
| US5891558A (en) | 1994-11-22 | 1999-04-06 | Tissue Engineering, Inc. | Biopolymer foams for use in tissue repair and reconstruction |
| US6206897B1 (en) | 1994-12-02 | 2001-03-27 | Ethicon, Inc. | Enhanced visualization of the latching mechanism of latching surgical devices |
| US7235089B1 (en) | 1994-12-07 | 2007-06-26 | Boston Scientific Corporation | Surgical apparatus and method |
| US5868760A (en) | 1994-12-07 | 1999-02-09 | Mcguckin, Jr.; James F. | Method and apparatus for endolumenally resectioning tissue |
| JPH08164141A (ja) | 1994-12-13 | 1996-06-25 | Olympus Optical Co Ltd | 処置具 |
| US5636779A (en) | 1994-12-13 | 1997-06-10 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US5988479A (en) | 1994-12-13 | 1999-11-23 | United States Surgical Corporation | Apparatus for applying surgical fasteners |
| US5569270A (en) | 1994-12-13 | 1996-10-29 | Weng; Edward E. | Laparoscopic surgical instrument |
| US5704534A (en) | 1994-12-19 | 1998-01-06 | Ethicon Endo-Surgery, Inc. | Articulation assembly for surgical instruments |
| US5713505A (en) | 1996-05-13 | 1998-02-03 | Ethicon Endo-Surgery, Inc. | Articulation transmission mechanism for surgical instruments |
| US5632432A (en) | 1994-12-19 | 1997-05-27 | Ethicon Endo-Surgery, Inc. | Surgical instrument |
| US5628743A (en) | 1994-12-21 | 1997-05-13 | Valleylab Inc. | Dual mode ultrasonic surgical apparatus |
| GB9425781D0 (en) | 1994-12-21 | 1995-02-22 | Gyrus Medical Ltd | Electrosurgical instrument |
| US5613966A (en) | 1994-12-21 | 1997-03-25 | Valleylab Inc | System and method for accessory rate control |
| US5695494A (en) | 1994-12-22 | 1997-12-09 | Valleylab Inc | Rem output stage topology |
| AU701320B2 (en) | 1994-12-22 | 1999-01-28 | Ethicon Endo-Surgery, Inc. | Impedance feedback monitor with query electrode for electrosurgical instrument |
| US5620452A (en) | 1994-12-22 | 1997-04-15 | Yoon; Inbae | Surgical clip with ductile tissue penetrating members |
| US5466020A (en) | 1994-12-30 | 1995-11-14 | Valleylab Inc. | Bayonet connector for surgical handpiece |
| US5713895A (en) | 1994-12-30 | 1998-02-03 | Valleylab Inc | Partially coated electrodes |
| US6430298B1 (en) | 1995-01-13 | 2002-08-06 | Lonnie Joe Kettl | Microphone mounting structure for a sound amplifying respirator and/or bubble suit |
| DE69615343T2 (de) | 1995-02-03 | 2002-05-16 | Sherwood Serv Ag | Elektrochirurgischer absauger kombiniert mit einem handstück |
| USD372086S (en) | 1995-02-03 | 1996-07-23 | Valleylab Inc. | Aspirator attachment for a surgical device |
| US5669907A (en) | 1995-02-10 | 1997-09-23 | Valleylab Inc. | Plasma enhanced bipolar electrosurgical system |
| US5695504A (en) | 1995-02-24 | 1997-12-09 | Heartport, Inc. | Devices and methods for performing a vascular anastomosis |
| US5669904A (en) | 1995-03-07 | 1997-09-23 | Valleylab Inc. | Surgical gas plasma ignition apparatus and method |
| US6213999B1 (en) | 1995-03-07 | 2001-04-10 | Sherwood Services Ag | Surgical gas plasma ignition apparatus and method |
| US5735445A (en) | 1995-03-07 | 1998-04-07 | United States Surgical Corporation | Surgical stapler |
| DE19509116C2 (de) | 1995-03-16 | 2000-01-05 | Deutsch Zentr Luft & Raumfahrt | Flexible Struktur |
| DE19509115C2 (de) | 1995-03-16 | 1997-11-27 | Deutsche Forsch Luft Raumfahrt | Chirurgisches Gerät zum Vorbereiten einer Anastomose in minimal invasiver Operationstechnik |
| US5575799A (en) | 1995-03-30 | 1996-11-19 | United States Surgical Corporation | Articulating surgical apparatus |
| US5599350A (en) | 1995-04-03 | 1997-02-04 | Ethicon Endo-Surgery, Inc. | Electrosurgical clamping device with coagulation feedback |
| US5618307A (en) | 1995-04-03 | 1997-04-08 | Heartport, Inc. | Clamp assembly and method of use |
| US5619992A (en) | 1995-04-06 | 1997-04-15 | Guthrie; Robert B. | Methods and apparatus for inhibiting contamination of reusable pulse oximetry sensors |
| US6056735A (en) | 1996-04-04 | 2000-05-02 | Olympus Optical Co., Ltd. | Ultrasound treatment system |
| US5624452A (en) | 1995-04-07 | 1997-04-29 | Ethicon Endo-Surgery, Inc. | Hemostatic surgical cutting or stapling instrument |
| JPH08289895A (ja) | 1995-04-21 | 1996-11-05 | Olympus Optical Co Ltd | 縫合器 |
| JPH10513390A (ja) | 1995-04-21 | 1998-12-22 | ダブリュ.エル.ゴア アンド アソシエイツ,インコーポレイティド | 外科用プレジット分配供給システム |
| US5553765A (en) | 1995-04-28 | 1996-09-10 | Ethicon Endo-Surgery, Inc. | Surgical stapler with improved operating lever mounting arrangement |
| JP3526487B2 (ja) | 1995-05-08 | 2004-05-17 | 株式会社伊垣医療設計 | 医療用縫合材 |
| JP3795100B2 (ja) | 1995-05-08 | 2006-07-12 | 株式会社伊垣医療設計 | 医療用縫合材 |
| AU5741296A (en) | 1995-05-12 | 1996-11-29 | Rodney C. Perkins | Translumenal circumferential injector |
| US6123241A (en) | 1995-05-23 | 2000-09-26 | Applied Tool Development Corporation | Internal combustion powered tool |
| US5678748A (en) | 1995-05-24 | 1997-10-21 | Vir Engineering | Surgical stapler with improved safety mechanism |
| US5630540A (en) | 1995-05-24 | 1997-05-20 | United States Surgical Corporation | Surgical staple and staple drive member |
| US5720744A (en) | 1995-06-06 | 1998-02-24 | Valleylab Inc | Control system for neurosurgery |
| AU5700796A (en) | 1995-06-06 | 1996-12-24 | Valleylab, Inc. | Power control for an electrosurgical generator |
| US5628745A (en) | 1995-06-06 | 1997-05-13 | Bek; Robin B. | Exit spark control for an electrosurgical generator |
| AU710400B2 (en) | 1995-06-06 | 1999-09-16 | Sherwood Services Ag | Digital waveform generation for electrosurgical generators |
| US5599344A (en) | 1995-06-06 | 1997-02-04 | Valleylab Inc. | Control apparatus for electrosurgical generator power output |
| US5814038A (en) | 1995-06-07 | 1998-09-29 | Sri International | Surgical manipulator for a telerobotic system |
| US5649956A (en) | 1995-06-07 | 1997-07-22 | Sri International | System and method for releasably holding a surgical instrument |
| FR2735350B1 (fr) | 1995-06-15 | 1997-12-26 | Maurice Lanzoni | Dispositif developpeur d'efforts d'une pince coupante |
| US5849011A (en) | 1995-06-19 | 1998-12-15 | Vidamed, Inc. | Medical device with trigger actuation assembly |
| BR9609421A (pt) | 1995-06-23 | 1999-05-18 | Gyrus Medical Ltd | Instrumento eletrocirúrgico |
| GB9600377D0 (en) | 1996-01-09 | 1996-03-13 | Gyrus Medical Ltd | Electrosurgical instrument |
| US6015406A (en) | 1996-01-09 | 2000-01-18 | Gyrus Medical Limited | Electrosurgical instrument |
| US6780180B1 (en) | 1995-06-23 | 2004-08-24 | Gyrus Medical Limited | Electrosurgical instrument |
| GB9604770D0 (en) | 1995-06-23 | 1996-05-08 | Gyrus Medical Ltd | An electrosurgical generator and system |
| JPH11507856A (ja) | 1995-06-23 | 1999-07-13 | ガイラス・メディカル・リミテッド | 電気外科器具 |
| US6293942B1 (en) | 1995-06-23 | 2001-09-25 | Gyrus Medical Limited | Electrosurgical generator method |
| GB9526627D0 (en) | 1995-12-29 | 1996-02-28 | Gyrus Medical Ltd | An electrosurgical instrument and an electrosurgical electrode assembly |
| WO1997001989A1 (en) | 1995-07-03 | 1997-01-23 | Frater Dirk A | System for mounting bolster material on tissue staplers |
| US5878607A (en) | 1995-07-06 | 1999-03-09 | Johnson & Johnson Professional, Inc. | Surgical cast cutter |
| US5752644A (en) | 1995-07-11 | 1998-05-19 | United States Surgical Corporation | Disposable loading unit for surgical stapler |
| USRE38708E1 (en) | 1995-07-11 | 2005-03-01 | United States Surgical Corporation | Disposable loading unit for surgical stapler |
| US5591187A (en) | 1995-07-14 | 1997-01-07 | Dekel; Moshe | Laparoscopic tissue retrieval device and method |
| US5706998A (en) | 1995-07-17 | 1998-01-13 | United States Surgical Corporation | Surgical stapler with alignment pin locking mechanism |
| US6447518B1 (en) | 1995-07-18 | 2002-09-10 | William R. Krause | Flexible shaft components |
| EP0840572B1 (en) | 1995-07-18 | 2004-10-27 | Garland U. Edwards | Flexible shaft |
| US5702409A (en) | 1995-07-21 | 1997-12-30 | W. L. Gore & Associates, Inc. | Device and method for reinforcing surgical staples |
| US5810855A (en) | 1995-07-21 | 1998-09-22 | Gore Enterprise Holdings, Inc. | Endoscopic device and method for reinforcing surgical staples |
| US6023638A (en) | 1995-07-28 | 2000-02-08 | Scimed Life Systems, Inc. | System and method for conducting electrophysiological testing using high-voltage energy pulses to stun tissue |
| US5810846A (en) | 1995-08-03 | 1998-09-22 | United States Surgical Corporation | Vascular hole closure |
| US5549583A (en) | 1995-08-04 | 1996-08-27 | Adam Spence Corporation | Surgical connector |
| US5611709A (en) | 1995-08-10 | 1997-03-18 | Valleylab Inc | Method and assembly of member and terminal |
| US5718359A (en) | 1995-08-14 | 1998-02-17 | United States Of America Surgical Corporation | Surgical stapler with lockout mechanism |
| US5715988A (en) | 1995-08-14 | 1998-02-10 | United States Surgical Corporation | Surgical stapler with lockout mechanism |
| US5839639A (en) | 1995-08-17 | 1998-11-24 | Lasersurge, Inc. | Collapsible anvil assembly and applicator instrument |
| US5931853A (en) | 1995-08-25 | 1999-08-03 | Mcewen; James A. | Physiologic tourniquet with safety circuit |
| US5782396A (en) | 1995-08-28 | 1998-07-21 | United States Surgical Corporation | Surgical stapler |
| US5762256A (en) | 1995-08-28 | 1998-06-09 | United States Surgical Corporation | Surgical stapler |
| US6032849A (en) | 1995-08-28 | 2000-03-07 | United States Surgical | Surgical stapler |
| US5574431A (en) | 1995-08-29 | 1996-11-12 | Checkpoint Systems, Inc. | Deactivateable security tag |
| US5667526A (en) | 1995-09-07 | 1997-09-16 | Levin; John M. | Tissue retaining clamp |
| DE19534112A1 (de) | 1995-09-14 | 1997-03-20 | Wolf Gmbh Richard | Endoskopisches Instrument |
| DE19534043A1 (de) | 1995-09-14 | 1997-03-20 | Carisius Christensen Gmbh Dr | Chirurgische Arbeitsmaschine |
| US5704087A (en) | 1995-09-19 | 1998-01-06 | Strub; Richard | Dental care apparatus and technique |
| US5814055A (en) | 1995-09-19 | 1998-09-29 | Ethicon Endo-Surgery, Inc. | Surgical clamping mechanism |
| US5776130A (en) | 1995-09-19 | 1998-07-07 | Valleylab, Inc. | Vascular tissue sealing pressure control |
| US5827271A (en) | 1995-09-19 | 1998-10-27 | Valleylab | Energy delivery system for vessel sealing |
| US5797959A (en) | 1995-09-21 | 1998-08-25 | United States Surgical Corporation | Surgical apparatus with articulating jaw structure |
| US5772659A (en) | 1995-09-26 | 1998-06-30 | Valleylab Inc. | Electrosurgical generator power control circuit and method |
| US5702387A (en) | 1995-09-27 | 1997-12-30 | Valleylab Inc | Coated electrosurgical electrode |
| US5732821A (en) | 1995-09-28 | 1998-03-31 | Biomet, Inc. | System for sterilizing medical devices |
| US5707392A (en) | 1995-09-29 | 1998-01-13 | Symbiosis Corporation | Hermaphroditic stamped forceps jaw for disposable endoscopic biopsy forceps and method of making the same |
| US5796188A (en) | 1995-10-05 | 1998-08-18 | Xomed Surgical Products, Inc. | Battery-powered medical instrument with power booster |
| US5697542A (en) | 1995-10-19 | 1997-12-16 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical stapler with compact profile |
| US5653721A (en) | 1995-10-19 | 1997-08-05 | Ethicon Endo-Surgery, Inc. | Override mechanism for an actuator on a surgical instrument |
| US5809441A (en) | 1995-10-19 | 1998-09-15 | Case Corporation | Apparatus and method of neutral start control of a power transmission |
| US5997552A (en) | 1995-10-20 | 1999-12-07 | United States Surgical Corporation | Meniscal fastener applying device |
| US5700270A (en) | 1995-10-20 | 1997-12-23 | United States Surgical Corporation | Surgical clip applier |
| GB9521772D0 (en) | 1995-10-24 | 1996-01-03 | Gyrus Medical Ltd | An electrosurgical instrument |
| US5941442A (en) | 1995-10-27 | 1999-08-24 | United States Surgical | Surgical stapler |
| CA2188738A1 (en) | 1995-10-27 | 1997-04-28 | Lisa W. Heaton | Surgical stapler having interchangeable loading units |
| US5651491A (en) | 1995-10-27 | 1997-07-29 | United States Surgical Corporation | Surgical stapler having interchangeable loading units |
| US5827298A (en) | 1995-11-17 | 1998-10-27 | Innovasive Devices, Inc. | Surgical fastening system and method for using the same |
| US5860953A (en) | 1995-11-21 | 1999-01-19 | Catheter Imaging Systems, Inc. | Steerable catheter having disposable module and sterilizable handle and method of connecting same |
| US5658281A (en) | 1995-12-04 | 1997-08-19 | Valleylab Inc | Bipolar electrosurgical scissors and method of manufacture |
| US5971916A (en) | 1995-12-27 | 1999-10-26 | Koren; Arie | Video camera cover |
| BR9612395A (pt) | 1995-12-29 | 1999-07-13 | Gyrus Medical Ltd | Instrumento eletrocirúrgico e um conjunto de eltrodo eletrocirúrgico |
| US6013076A (en) | 1996-01-09 | 2000-01-11 | Gyrus Medical Limited | Electrosurgical instrument |
| US6090106A (en) | 1996-01-09 | 2000-07-18 | Gyrus Medical Limited | Electrosurgical instrument |
| GB9600354D0 (en) | 1996-01-09 | 1996-03-13 | Gyrus Medical Ltd | Electrosurgical instrument |
| US5755717A (en) | 1996-01-16 | 1998-05-26 | Ethicon Endo-Surgery, Inc. | Electrosurgical clamping device with improved coagulation feedback |
| US5738648A (en) | 1996-01-23 | 1998-04-14 | Valleylab Inc | Method and apparatus for a valve and irrigator |
| US6015417A (en) | 1996-01-25 | 2000-01-18 | Reynolds, Jr.; Walker | Surgical fastener |
| DE19603889C2 (de) | 1996-02-03 | 1999-05-06 | Aesculap Ag & Co Kg | Chirurgisches Anlegegerät |
| US5624398A (en) | 1996-02-08 | 1997-04-29 | Symbiosis Corporation | Endoscopic robotic surgical tools and methods |
| GB9602580D0 (en) | 1996-02-08 | 1996-04-10 | Dual Voltage Ltd | Plastics flexible core |
| US5620289A (en) | 1996-02-09 | 1997-04-15 | Curry; Rinda M. | Colored staples |
| EP0880338B1 (en) | 1996-02-13 | 2005-10-26 | ConMed Corporation | Surgical access device |
| US5749889A (en) | 1996-02-13 | 1998-05-12 | Imagyn Medical, Inc. | Method and apparatus for performing biopsy |
| US5713128A (en) | 1996-02-16 | 1998-02-03 | Valleylab Inc | Electrosurgical pad apparatus and method of manufacture |
| US6010054A (en) | 1996-02-20 | 2000-01-04 | Imagyn Medical Technologies | Linear stapling instrument with improved staple cartridge |
| US6436107B1 (en) | 1996-02-20 | 2002-08-20 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US6063095A (en) | 1996-02-20 | 2000-05-16 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US5797537A (en) | 1996-02-20 | 1998-08-25 | Richard-Allan Medical Industries, Inc. | Articulated surgical instrument with improved firing mechanism |
| US5894843A (en) | 1996-02-20 | 1999-04-20 | Cardiothoracic Systems, Inc. | Surgical method for stabilizing the beating heart during coronary artery bypass graft surgery |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US5820009A (en) | 1996-02-20 | 1998-10-13 | Richard-Allan Medical Industries, Inc. | Articulated surgical instrument with improved jaw closure mechanism |
| US5725536A (en) | 1996-02-20 | 1998-03-10 | Richard-Allen Medical Industries, Inc. | Articulated surgical instrument with improved articulation control mechanism |
| US5762255A (en) | 1996-02-20 | 1998-06-09 | Richard-Allan Medical Industries, Inc. | Surgical instrument with improvement safety lockout mechanisms |
| US5716370A (en) | 1996-02-23 | 1998-02-10 | Williamson, Iv; Warren | Means for replacing a heart valve in a minimally invasive manner |
| US5800379A (en) | 1996-02-23 | 1998-09-01 | Sommus Medical Technologies, Inc. | Method for ablating interior sections of the tongue |
| US5891160A (en) | 1996-02-23 | 1999-04-06 | Cardiovascular Technologies, Llc | Fastener delivery and deployment mechanism and method for placing the fastener in minimally invasive surgery |
| US6099537A (en) | 1996-02-26 | 2000-08-08 | Olympus Optical Co., Ltd. | Medical treatment instrument |
| US5810721A (en) | 1996-03-04 | 1998-09-22 | Heartport, Inc. | Soft tissue retractor and method for providing surgical access |
| US5673842A (en) | 1996-03-05 | 1997-10-07 | Ethicon Endo-Surgery | Surgical stapler with locking mechanism |
| US5605272A (en) | 1996-03-12 | 1997-02-25 | Ethicon Endo-Surgery, Inc. | Trigger mechanism for surgical instruments |
| US5697543A (en) | 1996-03-12 | 1997-12-16 | Ethicon Endo-Surgery, Inc. | Linear stapler with improved firing stroke |
| US5810240A (en) | 1996-03-15 | 1998-09-22 | United States Surgical Corporation | Surgical fastener applying device |
| IL117607A0 (en) | 1996-03-21 | 1996-07-23 | Dev Of Advanced Medical Produc | Surgical stapler and method of surgical fastening |
| WO1997035533A1 (en) | 1996-03-25 | 1997-10-02 | Enrico Nicolo | Surgical mesh prosthetic material and methods of use |
| US5747953A (en) | 1996-03-29 | 1998-05-05 | Stryker Corporation | Cordless, battery operated surical tool |
| US5728121A (en) | 1996-04-17 | 1998-03-17 | Teleflex Medical, Inc. | Surgical grasper devices |
| US5785232A (en) | 1996-04-17 | 1998-07-28 | Vir Engineering | Surgical stapler |
| US6149660A (en) | 1996-04-22 | 2000-11-21 | Vnus Medical Technologies, Inc. | Method and apparatus for delivery of an appliance in a vessel |
| US5836503A (en) | 1996-04-22 | 1998-11-17 | United States Surgical Corporation | Insertion device for surgical apparatus |
| JP3791856B2 (ja) | 1996-04-26 | 2006-06-28 | オリンパス株式会社 | 医療用縫合器 |
| US6050472A (en) | 1996-04-26 | 2000-04-18 | Olympus Optical Co., Ltd. | Surgical anastomosis stapler |
| US5928137A (en) | 1996-05-03 | 1999-07-27 | Green; Philip S. | System and method for endoscopic imaging and endosurgery |
| US5741305A (en) | 1996-05-06 | 1998-04-21 | Physio-Control Corporation | Keyed self-latching battery pack for a portable defibrillator |
| DE19618291A1 (de) | 1996-05-07 | 1998-01-29 | Storz Karl Gmbh & Co | Instrument mit einem abwinkelbaren Handgriff |
| US5823066A (en) | 1996-05-13 | 1998-10-20 | Ethicon Endo-Surgery, Inc. | Articulation transmission mechanism for surgical instruments |
| US5792135A (en) | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5772379A (en) | 1996-05-24 | 1998-06-30 | Evensen; Kenneth | Self-filling staple fastener |
| US6119913A (en) | 1996-06-14 | 2000-09-19 | Boston Scientific Corporation | Endoscopic stapler |
| GB2314274A (en) | 1996-06-20 | 1997-12-24 | Gyrus Medical Ltd | Electrode construction for an electrosurgical instrument |
| US5735874A (en) | 1996-06-21 | 1998-04-07 | Ethicon Endo-Surgery, Inc. | Variable position handle locking mechanism |
| US6911916B1 (en) | 1996-06-24 | 2005-06-28 | The Cleveland Clinic Foundation | Method and apparatus for accessing medical data over a network |
| US5782748A (en) | 1996-07-10 | 1998-07-21 | Symbiosis Corporation | Endoscopic surgical instruments having detachable proximal and distal portions |
| US5702408A (en) | 1996-07-17 | 1997-12-30 | Ethicon Endo-Surgery, Inc. | Articulating surgical instrument |
| US6024748A (en) | 1996-07-23 | 2000-02-15 | United States Surgical Corporation | Singleshot anastomosis instrument with detachable loading unit and method |
| US6440146B2 (en) | 1996-07-23 | 2002-08-27 | United States Surgical Corporation | Anastomosis instrument and method |
| US6083234A (en) | 1996-07-23 | 2000-07-04 | Surgical Dynamics, Inc. | Anastomosis instrument and method |
| US5785647A (en) | 1996-07-31 | 1998-07-28 | United States Surgical Corporation | Surgical instruments useful for spinal surgery |
| US5830598A (en) | 1996-08-15 | 1998-11-03 | Ericsson Inc. | Battery pack incorporating battery pack contact assembly and method |
| US6017354A (en) | 1996-08-15 | 2000-01-25 | Stryker Corporation | Integrated system for powered surgical tools |
| USD393067S (en) | 1996-08-27 | 1998-03-31 | Valleylab Inc. | Electrosurgical pencil |
| US5997528A (en) | 1996-08-29 | 1999-12-07 | Bausch & Lomb Surgical, Inc. | Surgical system providing automatic reconfiguration |
| US5873885A (en) | 1996-08-29 | 1999-02-23 | Storz Instrument Company | Surgical handpiece |
| US6065679A (en) | 1996-09-06 | 2000-05-23 | Ivi Checkmate Inc. | Modular transaction terminal |
| US6364888B1 (en) | 1996-09-09 | 2002-04-02 | Intuitive Surgical, Inc. | Alignment of master and slave in a minimally invasive surgical apparatus |
| US5730758A (en) | 1996-09-12 | 1998-03-24 | Allgeyer; Dean O. | Staple and staple applicator for use in skin fixation of catheters |
| US20050143769A1 (en) | 2002-08-19 | 2005-06-30 | White Jeffrey S. | Ultrasonic dissector |
| US5833696A (en) | 1996-10-03 | 1998-11-10 | United States Surgical Corporation | Apparatus for applying surgical clips |
| US6109500A (en) | 1996-10-04 | 2000-08-29 | United States Surgical Corporation | Lockout mechanism for a surgical stapler |
| US5843132A (en) | 1996-10-07 | 1998-12-01 | Ilvento; Joseph P. | Self-contained, self-powered temporary intravenous pacing catheter assembly |
| US5904647A (en) | 1996-10-08 | 1999-05-18 | Asahi Kogyo Kabushiki Kaisha | Treatment accessories for an endoscope |
| JP3091420B2 (ja) | 1996-10-18 | 2000-09-25 | 株式会社貝印刃物開発センター | 内視鏡用処置具 |
| US5752965A (en) | 1996-10-21 | 1998-05-19 | Bio-Vascular, Inc. | Apparatus and method for producing a reinforced surgical fastener suture line |
| US5769892A (en) | 1996-10-22 | 1998-06-23 | Mitroflow International Inc. | Surgical stapler sleeve for reinforcing staple lines |
| US6162537A (en) | 1996-11-12 | 2000-12-19 | Solutia Inc. | Implantable fibers and medical articles |
| DE69735501T2 (de) | 1996-11-18 | 2006-12-14 | The University Of Massachusetts, Boston | Systeme und instrumente zur minimal invasiven chirurgie |
| US6165184A (en) | 1996-11-18 | 2000-12-26 | Smith & Nephew, Inc. | Systems methods and instruments for minimally invasive surgery |
| US6159224A (en) | 1996-11-27 | 2000-12-12 | Yoon; Inbae | Multiple needle suturing instrument and method |
| US6165188A (en) | 1996-12-02 | 2000-12-26 | Angiotrax, Inc. | Apparatus for percutaneously performing myocardial revascularization having controlled cutting depth and methods of use |
| US5899915A (en) | 1996-12-02 | 1999-05-04 | Angiotrax, Inc. | Apparatus and method for intraoperatively performing surgery |
| US6050990A (en) | 1996-12-05 | 2000-04-18 | Thermolase Corporation | Methods and devices for inhibiting hair growth and related skin treatments |
| CA2224366C (en) | 1996-12-11 | 2006-10-31 | Ethicon, Inc. | Meniscal repair device |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| GB9626512D0 (en) | 1996-12-20 | 1997-02-05 | Gyrus Medical Ltd | An improved electrosurgical generator and system |
| US6063098A (en) | 1996-12-23 | 2000-05-16 | Houser; Kevin | Articulable ultrasonic surgical apparatus |
| US5849023A (en) | 1996-12-27 | 1998-12-15 | Mericle; Robert William | Disposable remote flexible drive cutting apparatus |
| US5931847A (en) | 1997-01-09 | 1999-08-03 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument with improved cutting edge |
| US6074401A (en) | 1997-01-09 | 2000-06-13 | Coalescent Surgical, Inc. | Pinned retainer surgical fasteners, instruments and methods for minimally invasive vascular and endoscopic surgery |
| US5769748A (en) | 1997-01-16 | 1998-06-23 | Hughes Electronics Corporation | Gimbal employing differential combination of offset drives |
| US6485667B1 (en) | 1997-01-17 | 2002-11-26 | Rayonier Products And Financial Services Company | Process for making a soft, strong, absorbent material for use in absorbent articles |
| US5784934A (en) | 1997-01-30 | 1998-07-28 | Shinano Pneumatic Industries, Inc. | Ratchet wrench with pivotable head |
| US5908402A (en) | 1997-02-03 | 1999-06-01 | Valleylab | Method and apparatus for detecting tube occlusion in argon electrosurgery system |
| DE19704234B4 (de) | 1997-02-05 | 2006-05-11 | Pfeiffer Vacuum Gmbh | Verfahren und Vorrichtung zur Regelung des Saugvermögens von Vakuumpumpen |
| US6376971B1 (en) | 1997-02-07 | 2002-04-23 | Sri International | Electroactive polymer electrodes |
| US6545384B1 (en) | 1997-02-07 | 2003-04-08 | Sri International | Electroactive polymer devices |
| DE19707373C1 (de) | 1997-02-25 | 1998-02-05 | Storz Karl Gmbh & Co | Bajonettkupplung zum lösbaren Verbinden zweier Rohrschaftinstrumente oder -instrumententeile |
| WO1998038935A1 (en) | 1997-03-05 | 1998-09-11 | The Trustees Of Columbia University In The City Of New York | Electrothermal device for sealing and joining or cutting tissue |
| US5810821A (en) | 1997-03-28 | 1998-09-22 | Biomet Inc. | Bone fixation screw system |
| ATE375755T1 (de) | 1997-03-31 | 2007-11-15 | Igaki Iryo Sekkei Kk | Nähfadenhaltevorrichtung für ärztliche behandlung |
| US6050172A (en) | 1997-04-04 | 2000-04-18 | Emhart Glass S.A. | Pneumatically operated mechanism |
| US5846254A (en) | 1997-04-08 | 1998-12-08 | Ethicon Endo-Surgery, Inc. | Surgical instrument for forming a knot |
| US5843169A (en) | 1997-04-08 | 1998-12-01 | Taheri; Syde A. | Apparatus and method for stapling graft material to a blood vessel wall while preserving the patency of orifices |
| US6033399A (en) | 1997-04-09 | 2000-03-07 | Valleylab, Inc. | Electrosurgical generator with adaptive power control |
| RU2144791C1 (ru) | 1997-04-14 | 2000-01-27 | Дубровский Аркадий Вениаминович | Пологое поворотное устройство |
| TW473600B (en) | 1997-04-15 | 2002-01-21 | Swagelok Co | Tube fitting, rear ferrule for a two ferrule tube fitting and ferrule for a tube fitting and a non-flared tube fitting |
| US5919198A (en) | 1997-04-17 | 1999-07-06 | Ethicon Endo-Surgery, Inc. | Disposable cartridge with drivers |
| GB9708268D0 (en) | 1997-04-24 | 1997-06-18 | Gyrus Medical Ltd | An electrosurgical instrument |
| US5893878A (en) | 1997-04-24 | 1999-04-13 | Pierce; Javin | Micro traumatic tissue manipulator apparatus |
| JPH10296660A (ja) | 1997-04-25 | 1998-11-10 | Hitachi Koki Co Ltd | 電池式携帯用工具 |
| US6017358A (en) | 1997-05-01 | 2000-01-25 | Inbae Yoon | Surgical instrument with multiple rotatably mounted offset end effectors |
| US6037724A (en) | 1997-05-01 | 2000-03-14 | Osteomed Corporation | Electronic controlled surgical power tool |
| US6867248B1 (en) | 1997-05-12 | 2005-03-15 | Metabolix, Inc. | Polyhydroxyalkanoate compositions having controlled degradation rates |
| USH1904H (en) | 1997-05-14 | 2000-10-03 | Ethicon Endo-Surgery, Inc. | Electrosurgical hemostatic method and device |
| USH2037H1 (en) | 1997-05-14 | 2002-07-02 | David C. Yates | Electrosurgical hemostatic device including an anvil |
| DE19720482C5 (de) | 1997-05-16 | 2006-01-26 | INSTITUT FüR MIKROTECHNIK MAINZ GMBH | Mikromembranpumpe |
| US5817091A (en) | 1997-05-20 | 1998-10-06 | Medical Scientific, Inc. | Electrosurgical device having a visible indicator |
| DE19721076A1 (de) | 1997-05-20 | 1998-11-26 | Trw Repa Gmbh | Verfahren zum Herstellen eines Seilabschnittes mit einem Befestigungselement für ein Fahrzeuginsassen-Rückhaltesystem sowie mit diesem Verfahren hergestellter Seilabschnitt |
| JPH10326138A (ja) | 1997-05-26 | 1998-12-08 | Toshiba Corp | キー入力装置 |
| US5899914A (en) | 1997-06-11 | 1999-05-04 | Endius Incorporated | Surgical instrument |
| US6231565B1 (en) | 1997-06-18 | 2001-05-15 | United States Surgical Corporation | Robotic arm DLUs for performing surgical tasks |
| US5947996A (en) | 1997-06-23 | 1999-09-07 | Medicor Corporation | Yoke for surgical instrument |
| US5951552A (en) | 1997-06-30 | 1999-09-14 | Ethicon Endo-Surgery, Inc. | Capacitively coupled cordless electrosurgical instrument |
| US7021878B1 (en) | 1997-07-03 | 2006-04-04 | Trackers Company | Categorizing fasteners and construction connectors using visual identifiers |
| US6049145A (en) | 1997-07-07 | 2000-04-11 | Motorola, Inc. | Tamper proof safety circuit |
| FR2765794B1 (fr) | 1997-07-11 | 1999-09-03 | Joel Bardeau | Dispositif d'eveinage notamment pour endoeveinage |
| US6338737B1 (en) | 1997-07-17 | 2002-01-15 | Haviv Toledano | Flexible annular stapler for closed surgery of hollow organs |
| US7278994B2 (en) | 1997-07-18 | 2007-10-09 | Gyrus Medical Limited | Electrosurgical instrument |
| JP2001510068A (ja) | 1997-07-18 | 2001-07-31 | ガイラス・メディカル・リミテッド | 電気外科用器具 |
| US5937951A (en) | 1997-07-18 | 1999-08-17 | Ethicon Endo-Surgery, Inc. | Skin stapler with rack and pinion staple feed mechanism |
| US6923803B2 (en) | 1999-01-15 | 2005-08-02 | Gyrus Medical Limited | Electrosurgical system and method |
| CA2297081A1 (en) | 1997-07-18 | 1999-01-28 | Alan Nigel Syrop | An electrosurgical instrument |
| GB2327352A (en) | 1997-07-18 | 1999-01-27 | Gyrus Medical Ltd | Electrosurgical instrument |
| GB9900964D0 (en) | 1999-01-15 | 1999-03-10 | Gyrus Medical Ltd | An electrosurgical system |
| AU733337B2 (en) | 1997-07-18 | 2001-05-10 | Gyrus Medical Limited | An electrosurgical instrument |
| WO1999005167A1 (en) | 1997-07-25 | 1999-02-04 | University Of Massachusetts | Designed protein pores as components for biosensors |
| US5948030A (en) | 1997-07-25 | 1999-09-07 | General Motors Corporation | Steering angle determaination method and apparatus |
| WO1999006309A2 (en) | 1997-07-29 | 1999-02-11 | Thomas & Betts International, Inc. | Improved cable tie dispensing apparatus |
| JP3811291B2 (ja) | 1998-07-02 | 2006-08-16 | オリンパス株式会社 | 内視鏡システム |
| US5878938A (en) | 1997-08-11 | 1999-03-09 | Ethicon Endo-Surgery, Inc. | Surgical stapler with improved locking mechanism |
| US5904702A (en) | 1997-08-14 | 1999-05-18 | University Of Massachusetts | Instrument for thoracic surgical procedures |
| US6024764A (en) | 1997-08-19 | 2000-02-15 | Intermedics, Inc. | Apparatus for imparting physician-determined shapes to implantable tubular devices |
| AUPO889497A0 (en) | 1997-09-01 | 1997-09-25 | N.J. Phillips Pty. Limited | An applicator |
| US6267761B1 (en) | 1997-09-09 | 2001-07-31 | Sherwood Services Ag | Apparatus and method for sealing and cutting tissue |
| AU739648B2 (en) | 1997-09-10 | 2001-10-18 | Covidien Ag | Bipolar instrument for vessel fusion |
| AU9478498A (en) | 1997-09-11 | 1999-03-29 | Genzyme Corporation | Articulating endoscopic implant rotator surgical apparatus and method for using same |
| EP2362284B1 (en) | 1997-09-19 | 2015-05-20 | Massachusetts Institute Of Technology | Robotic apparatus |
| US6017356A (en) | 1997-09-19 | 2000-01-25 | Ethicon Endo-Surgery Inc. | Method for using a trocar for penetration and skin incision |
| US20040236352A1 (en) | 1997-09-22 | 2004-11-25 | Yulun Wang | Method and apparatus for performing minimally invasive cardiac procedures |
| US5865361A (en) | 1997-09-23 | 1999-02-02 | United States Surgical Corporation | Surgical stapling apparatus |
| US5921956A (en) | 1997-09-24 | 1999-07-13 | Smith & Nephew, Inc. | Surgical instrument |
| GB2329840C (en) | 1997-10-03 | 2007-10-05 | Johnson & Johnson Medical | Biopolymer sponge tubes |
| US5984949A (en) | 1997-10-06 | 1999-11-16 | Levin; John M. | Tissue hooks and tools for applying same |
| US6228079B1 (en) | 1997-10-06 | 2001-05-08 | Somnus Medical Technology, Inc. | Method and apparatus for power measurement in radio frequency electro-surgical generators |
| US5944172A (en) | 1997-10-06 | 1999-08-31 | Allen-Bradley Company, Llc | Biasing assembly for a switching device |
| US5893835A (en) | 1997-10-10 | 1999-04-13 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having dual rotational positioning |
| US6171316B1 (en) | 1997-10-10 | 2001-01-09 | Origin Medsystems, Inc. | Endoscopic surgical instrument for rotational manipulation |
| US5947984A (en) | 1997-10-10 | 1999-09-07 | Ethicon Endo-Surger, Inc. | Ultrasonic clamp coagulator apparatus having force limiting clamping mechanism |
| US6241723B1 (en) | 1997-10-15 | 2001-06-05 | Team Medical Llc | Electrosurgical system |
| US6117148A (en) | 1997-10-17 | 2000-09-12 | Ravo; Biagio | Intraluminal anastomotic device |
| US6224617B1 (en) | 1997-10-17 | 2001-05-01 | Angiotrax, Inc. | Methods and apparatus for defibrillating a heart refractory to electrical stimuli |
| US6511468B1 (en) | 1997-10-17 | 2003-01-28 | Micro Therapeutics, Inc. | Device and method for controlling injection of liquid embolic composition |
| US5903117A (en) | 1997-10-28 | 1999-05-11 | Xomed Surgical Products, Inc. | Method and adaptor for connecting a powered surgical instrument to a medical console |
| JP4121615B2 (ja) | 1997-10-31 | 2008-07-23 | オリンパス株式会社 | 内視鏡 |
| US6086600A (en) | 1997-11-03 | 2000-07-11 | Symbiosis Corporation | Flexible endoscopic surgical instrument for invagination and fundoplication |
| US6050996A (en) | 1997-11-12 | 2000-04-18 | Sherwood Services Ag | Bipolar electrosurgical instrument with replaceable electrodes |
| US6187003B1 (en) | 1997-11-12 | 2001-02-13 | Sherwood Services Ag | Bipolar electrosurgical instrument for sealing vessels |
| US6228083B1 (en) | 1997-11-14 | 2001-05-08 | Sherwood Services Ag | Laparoscopic bipolar electrosurgical instrument |
| US6010513A (en) | 1997-11-26 | 2000-01-04 | Bionx Implants Oy | Device for installing a tissue fastener |
| US6273876B1 (en) | 1997-12-05 | 2001-08-14 | Intratherapeutics, Inc. | Catheter segments having circumferential supports with axial projection |
| US6068627A (en) | 1997-12-10 | 2000-05-30 | Valleylab, Inc. | Smart recognition apparatus and method |
| US6171330B1 (en) | 1997-12-15 | 2001-01-09 | Sofradim Production | Pneumatic surgical instrument for the distribution and placement of connecting or fastening means |
| US6472784B2 (en) | 1997-12-16 | 2002-10-29 | Fred N. Miekka | Methods and apparatus for increasing power of permanent magnet motors |
| EP0961598B1 (fr) | 1997-12-16 | 2004-09-08 | B. Braun Celsa | Ensemble medicale pour le traitement d'une affection de conduit anatomique |
| EP0923907A1 (en) | 1997-12-19 | 1999-06-23 | Gyrus Medical Limited | An electrosurgical instrument |
| US6033427A (en) | 1998-01-07 | 2000-03-07 | Lee; Benjamin I. | Method and device for percutaneous sealing of internal puncture sites |
| US6245081B1 (en) | 1998-01-09 | 2001-06-12 | Steven M. Bowman | Suture buttress |
| US6620166B1 (en) | 1998-01-09 | 2003-09-16 | Ethicon, Inc. | Suture buttress system |
| US6156056A (en) | 1998-01-09 | 2000-12-05 | Ethicon, Inc. | Suture buttress |
| GB2336214A (en) | 1998-01-16 | 1999-10-13 | David William Taylor | Preventionof multiple use of limited use devices |
| US6096074A (en) | 1998-01-27 | 2000-08-01 | United States Surgical | Stapling apparatus and method for heart valve replacement |
| US6228454B1 (en) | 1998-02-02 | 2001-05-08 | Fort James Corporation | Sheet material having weakness zones and a system for dispensing the material |
| US6296640B1 (en) | 1998-02-06 | 2001-10-02 | Ethicon Endo-Surgery, Inc. | RF bipolar end effector for use in electrosurgical instruments |
| US6165175A (en) | 1999-02-02 | 2000-12-26 | Ethicon Endo-Surgery, Inc. | RF bipolar mesentery takedown device including improved bipolar end effector |
| US7052499B2 (en) | 1998-02-18 | 2006-05-30 | Walter Lorenz Surgical, Inc. | Method and apparatus for bone fracture fixation |
| US6645201B1 (en) | 1998-02-19 | 2003-11-11 | Curon Medical, Inc. | Systems and methods for treating dysfunctions in the intestines and rectum |
| US7090683B2 (en) | 1998-02-24 | 2006-08-15 | Hansen Medical, Inc. | Flexible instrument |
| US7789875B2 (en) | 1998-02-24 | 2010-09-07 | Hansen Medical, Inc. | Surgical instruments |
| US7214230B2 (en) | 1998-02-24 | 2007-05-08 | Hansen Medical, Inc. | Flexible instrument |
| US20020138082A1 (en) | 1998-02-24 | 2002-09-26 | Brock David L. | Surgical instrument |
| RU2141279C1 (ru) | 1998-03-11 | 1999-11-20 | Кондратюк Георгий Константинович | Универсальная насадка |
| US6099551A (en) | 1998-03-12 | 2000-08-08 | Shelhigh, Inc. | Pericardial strip and stapler assembly for dividing and sealing visceral tissues and method of use thereof |
| US6042601A (en) | 1998-03-18 | 2000-03-28 | United States Surgical Corporation | Apparatus for vascular hole closure |
| US6592538B1 (en) | 1998-03-20 | 2003-07-15 | New York Society For The Ruptured And Crippled Maintaining The Hospital For Special Surgery | Dynamic orthopedic braces |
| GB9807303D0 (en) | 1998-04-03 | 1998-06-03 | Gyrus Medical Ltd | An electrode assembly for an electrosurgical instrument |
| WO1999048430A1 (en) | 1998-03-26 | 1999-09-30 | Gyrus Medical Limited | An electrosurgical instrument |
| GB2335858A (en) | 1998-04-03 | 1999-10-06 | Gyrus Medical Ltd | Resectoscope having pivoting electrode assembly |
| US6249076B1 (en) | 1998-04-14 | 2001-06-19 | Massachusetts Institute Of Technology | Conducting polymer actuator |
| US6047861A (en) | 1998-04-15 | 2000-04-11 | Vir Engineering, Inc. | Two component fluid dispenser |
| US6450989B2 (en) | 1998-04-27 | 2002-09-17 | Artemis Medical, Inc. | Dilating and support apparatus with disease inhibitors and methods for use |
| US6003517A (en) | 1998-04-30 | 1999-12-21 | Ethicon Endo-Surgery, Inc. | Method for using an electrosurgical device on lung tissue |
| US6558378B2 (en) | 1998-05-05 | 2003-05-06 | Cardiac Pacemakers, Inc. | RF ablation system and method having automatic temperature control |
| US6171305B1 (en) | 1998-05-05 | 2001-01-09 | Cardiac Pacemakers, Inc. | RF ablation apparatus and method having high output impedance drivers |
| US6517566B1 (en) | 1998-05-11 | 2003-02-11 | Surgical Connections, Inc. | Devices and methods for treating e.g. urinary stress incontinence |
| US6062360A (en) | 1998-05-13 | 2000-05-16 | Brunswick Corporation | Synchronizer for a gear shift mechanism for a marine propulsion system |
| US6165929A (en) | 1998-05-18 | 2000-12-26 | Phillips Petroleum Company | Compositions that can produce polymers |
| US20050283188A1 (en) | 1998-05-29 | 2005-12-22 | By-Pass, Inc. | Vascular closure device |
| US6309403B1 (en) | 1998-06-01 | 2001-10-30 | Board Of Trustees Operating Michigan State University | Dexterous articulated linkage for surgical applications |
| JP3331172B2 (ja) | 1998-06-12 | 2002-10-07 | 旭光学工業株式会社 | 内視鏡用異物回収具 |
| US6126058A (en) | 1998-06-19 | 2000-10-03 | Scimed Life Systems, Inc. | Method and device for full thickness resectioning of an organ |
| US6601749B2 (en) | 1998-06-19 | 2003-08-05 | Scimed Life Systems, Inc. | Multi fire full thickness resectioning device |
| US6629630B2 (en) | 1998-06-19 | 2003-10-07 | Scimed Life Systems, Inc. | Non-circular resection device and endoscope |
| US6478210B2 (en) | 2000-10-25 | 2002-11-12 | Scimed Life Systems, Inc. | Method and device for full thickness resectioning of an organ |
| US6585144B2 (en) | 1998-06-19 | 2003-07-01 | Acimed Life Systems, Inc. | Integrated surgical staple retainer for a full thickness resectioning device |
| US6018227A (en) | 1998-06-22 | 2000-01-25 | Stryker Corporation | Battery charger especially useful with sterilizable, rechargeable battery packs |
| US5941890A (en) | 1998-06-26 | 1999-08-24 | Ethicon Endo-Surgery, Inc. | Implantable surgical marker |
| US6066132A (en) | 1998-06-30 | 2000-05-23 | Ethicon, Inc. | Articulating endometrial ablation device |
| US6228098B1 (en) | 1998-07-10 | 2001-05-08 | General Surgical Innovations, Inc. | Apparatus and method for surgical fastening |
| US6352503B1 (en) | 1998-07-17 | 2002-03-05 | Olympus Optical Co., Ltd. | Endoscopic surgery apparatus |
| JP3806518B2 (ja) | 1998-07-17 | 2006-08-09 | オリンパス株式会社 | 内視鏡治療装置 |
| US5977746A (en) | 1998-07-21 | 1999-11-02 | Stryker Corporation | Rechargeable battery pack and method for manufacturing same |
| JP2000055752A (ja) | 1998-08-03 | 2000-02-25 | Kayaba Ind Co Ltd | トルク検出装置 |
| AU5391999A (en) | 1998-08-04 | 2000-02-28 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| US6818018B1 (en) | 1998-08-14 | 2004-11-16 | Incept Llc | In situ polymerizable hydrogels |
| DE19836950B4 (de) | 1998-08-17 | 2004-09-02 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Chirurgisches Instrument in Form eines Nahtklammergerätes |
| US6554798B1 (en) | 1998-08-18 | 2003-04-29 | Medtronic Minimed, Inc. | External infusion device with remote programming, bolus estimator and/or vibration alarm capabilities |
| US6131790A (en) | 1998-09-02 | 2000-10-17 | Piraka; Hadi A. | Surgical stapler and cartridge |
| FR2783429B1 (fr) | 1998-09-18 | 2002-04-12 | Imedex Biomateriaux | Materiau collagenique bicomposite,son procede d'obtention et ses applications therapeutiques |
| JP3766552B2 (ja) | 1998-10-01 | 2006-04-12 | 富士写真フイルム株式会社 | データ写し込み装置付きレンズ付きフイルムユニット |
| US6245084B1 (en) | 1998-10-20 | 2001-06-12 | Promex, Inc. | System for controlling a motor driven surgical cutting instrument |
| US7137980B2 (en) | 1998-10-23 | 2006-11-21 | Sherwood Services Ag | Method and system for controlling output of RF medical generator |
| US5951574A (en) | 1998-10-23 | 1999-09-14 | Ethicon Endo-Surgery, Inc. | Multiple clip applier having a split feeding mechanism |
| CA2347014C (en) | 1998-10-23 | 2011-01-04 | Sherwood Services Ag | Open vessel sealing forceps with disposable electrodes |
| WO2000024322A1 (en) | 1998-10-23 | 2000-05-04 | Applied Medical Resources Corporation | Surgical grasper with inserts and method of using same |
| WO2000024331A1 (en) | 1998-10-23 | 2000-05-04 | Sherwood Services Ag | Endoscopic bipolar electrosurgical forceps |
| US6270508B1 (en) | 1998-10-26 | 2001-08-07 | Charles H. Klieman | End effector and instrument for endoscopic and general surgery needle control |
| DE19851291A1 (de) | 1998-11-06 | 2000-01-05 | Siemens Ag | Operationsarbeitsplatztaugliches Dateneingabegerät |
| US6249105B1 (en) | 1998-11-13 | 2001-06-19 | Neal Andrews | System and method for detecting performance components of a battery pack |
| US6459926B1 (en) | 1998-11-20 | 2002-10-01 | Intuitive Surgical, Inc. | Repositioning and reorientation of master/slave relationship in minimally invasive telesurgery |
| US6659939B2 (en) | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| US6398726B1 (en) | 1998-11-20 | 2002-06-04 | Intuitive Surgical, Inc. | Stabilizer for robotic beating-heart surgery |
| US6200330B1 (en) | 1998-11-23 | 2001-03-13 | Theodore V. Benderev | Systems for securing sutures, grafts and soft tissue to bone and periosteum |
| US6102271A (en) | 1998-11-23 | 2000-08-15 | Ethicon Endo-Surgery, Inc. | Circular stapler for hemorrhoidal surgery |
| JP2000171730A (ja) | 1998-12-08 | 2000-06-23 | Olympus Optical Co Ltd | バッテリ式携帯内視鏡装置 |
| JP4233656B2 (ja) | 1998-12-11 | 2009-03-04 | ジョンソン・エンド・ジョンソン株式会社 | 自動吻合器及び該吻合器に装着可能な案内バルーン |
| US6828902B2 (en) | 1998-12-14 | 2004-12-07 | Soundcraft, Inc. | Wireless data input to RFID reader |
| US6126670A (en) | 1998-12-16 | 2000-10-03 | Medtronic, Inc. | Cordless surgical handpiece with disposable battery; and method |
| DE19858512C1 (de) | 1998-12-18 | 2000-05-25 | Storz Karl Gmbh & Co Kg | Bipolares medizinisches Instrument |
| US7001380B2 (en) | 1999-01-15 | 2006-02-21 | Gyrus Medical Limited | Electrosurgical system and method |
| US20040030333A1 (en) | 1999-01-15 | 2004-02-12 | Gyrus Medical Ltd. | Electrosurgical system and method |
| CN2368212Y (zh) | 1999-01-15 | 2000-03-08 | 徐仁强 | 电机定子 |
| US6554861B2 (en) | 1999-01-19 | 2003-04-29 | Gyrus Ent L.L.C. | Otologic prosthesis |
| US6394998B1 (en) | 1999-01-22 | 2002-05-28 | Intuitive Surgical, Inc. | Surgical tools for use in minimally invasive telesurgical applications |
| US8529588B2 (en) | 1999-01-25 | 2013-09-10 | Applied Medical Resources Corporation | Multiple clip applier apparatus and method |
| DE19905085A1 (de) | 1999-01-29 | 2000-08-03 | Black & Decker Inc N D Ges D S | Batteriegetriebenes, handgeführtes Elektrowerkzeug |
| US6387113B1 (en) | 1999-02-02 | 2002-05-14 | Biomet, Inc. | Method and apparatus for repairing a torn meniscus |
| US6174309B1 (en) | 1999-02-11 | 2001-01-16 | Medical Scientific, Inc. | Seal & cut electrosurgical instrument |
| DE19906191A1 (de) | 1999-02-15 | 2000-08-17 | Ingo F Herrmann | Endoskop |
| US6295888B1 (en) | 1999-02-16 | 2001-10-02 | Shimano Inc. | Gear indicator for a bicycle |
| US6083242A (en) | 1999-02-17 | 2000-07-04 | Holobeam, Inc. | Surgical staples with deformation zones of non-uniform cross section |
| US6065919A (en) | 1999-02-18 | 2000-05-23 | Peck; Philip D. | Self-tapping screw with an improved thread design |
| US6806808B1 (en) | 1999-02-26 | 2004-10-19 | Sri International | Wireless event-recording device with identification codes |
| US6666875B1 (en) | 1999-03-05 | 2003-12-23 | Olympus Optical Co., Ltd. | Surgical apparatus permitting recharge of battery-driven surgical instrument in noncontact state |
| GB9905211D0 (en) | 1999-03-05 | 1999-04-28 | Gyrus Medical Ltd | Electrosurgery system and instrument |
| GB9905210D0 (en) | 1999-03-05 | 1999-04-28 | Gyrus Medical Ltd | Electrosurgical system |
| US6582427B1 (en) | 1999-03-05 | 2003-06-24 | Gyrus Medical Limited | Electrosurgery system |
| US20020022836A1 (en) | 1999-03-05 | 2002-02-21 | Gyrus Medical Limited | Electrosurgery system |
| GB9905209D0 (en) | 1999-03-05 | 1999-04-28 | Gyrus Medical Ltd | Electrosurgery system |
| US6398781B1 (en) | 1999-03-05 | 2002-06-04 | Gyrus Medical Limited | Electrosurgery system |
| US6190386B1 (en) | 1999-03-09 | 2001-02-20 | Everest Medical Corporation | Electrosurgical forceps with needle electrodes |
| US6159146A (en) | 1999-03-12 | 2000-12-12 | El Gazayerli; Mohamed Mounir | Method and apparatus for minimally-invasive fundoplication |
| US6179776B1 (en) | 1999-03-12 | 2001-01-30 | Scimed Life Systems, Inc. | Controllable endoscopic sheath apparatus and related method of use |
| US6512360B1 (en) | 1999-03-15 | 2003-01-28 | Amiteq Co., Ltd | Self-induction-type stroke sensor |
| DE19912038C1 (de) | 1999-03-17 | 2001-01-25 | Storz Karl Gmbh & Co Kg | Handgriff für ein medizinisches Instrument |
| EP1163019B1 (en) | 1999-03-25 | 2007-10-24 | Metabolix, Inc. | Medical devices and applications of polyhydroxyalkanoate polymers |
| US6120462A (en) | 1999-03-31 | 2000-09-19 | Ethicon Endo-Surgery, Inc. | Control method for an automated surgical biopsy device |
| US6416486B1 (en) | 1999-03-31 | 2002-07-09 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical device having an embedding surface and a coagulating surface |
| WO2000057796A1 (en) | 1999-03-31 | 2000-10-05 | Rosenblatt Peter L | Systems and methods for soft tissue reconstruction |
| US6086544A (en) | 1999-03-31 | 2000-07-11 | Ethicon Endo-Surgery, Inc. | Control apparatus for an automated surgical biopsy device |
| JP2000287987A (ja) | 1999-04-01 | 2000-10-17 | Olympus Optical Co Ltd | 充電式医療装置 |
| DE19915291A1 (de) | 1999-04-03 | 2000-10-05 | Gardena Kress & Kastner Gmbh | Fluid-Kupplungsanordnung |
| US6228084B1 (en) | 1999-04-06 | 2001-05-08 | Kirwan Surgical Products, Inc. | Electro-surgical forceps having recessed irrigation channel |
| US6182673B1 (en) | 1999-04-12 | 2001-02-06 | Mike Kindermann Marketing/Vertriebs Gmbh | Dump facility for cassette sewage tanks |
| US6308089B1 (en) | 1999-04-14 | 2001-10-23 | O.B. Scientific, Inc. | Limited use medical probe |
| US6248117B1 (en) | 1999-04-16 | 2001-06-19 | Vital Access Corp | Anastomosis apparatus for use in intraluminally directed vascular anastomosis |
| US6689153B1 (en) | 1999-04-16 | 2004-02-10 | Orthopaedic Biosystems Ltd, Inc. | Methods and apparatus for a coated anchoring device and/or suture |
| US6319510B1 (en) | 1999-04-20 | 2001-11-20 | Alayne Yates | Gum pad for delivery of medication to mucosal tissues |
| US6325805B1 (en) | 1999-04-23 | 2001-12-04 | Sdgi Holdings, Inc. | Shape memory alloy staple |
| US6181105B1 (en) | 1999-04-26 | 2001-01-30 | Exonix Corporation | Self contained transportable power source maintenance and charge |
| US6383201B1 (en) | 1999-05-14 | 2002-05-07 | Tennison S. Dong | Surgical prosthesis for repairing a hernia |
| JP4503725B2 (ja) | 1999-05-17 | 2010-07-14 | オリンパス株式会社 | 内視鏡治療装置 |
| US6921412B1 (en) | 1999-05-18 | 2005-07-26 | Cryolife, Inc. | Self-supporting, shaped, three-dimensional biopolymeric materials and methods |
| GB9911954D0 (en) | 1999-05-21 | 1999-07-21 | Gyrus Medical Ltd | Electrosurgery system and instrument |
| US6547786B1 (en) | 1999-05-21 | 2003-04-15 | Gyrus Medical | Electrosurgery system and instrument |
| US6762339B1 (en) | 1999-05-21 | 2004-07-13 | 3M Innovative Properties Company | Hydrophilic polypropylene fibers having antimicrobial activity |
| GB9911956D0 (en) | 1999-05-21 | 1999-07-21 | Gyrus Medical Ltd | Electrosurgery system and method |
| US6454781B1 (en) | 1999-05-26 | 2002-09-24 | Ethicon Endo-Surgery, Inc. | Feedback control in an ultrasonic surgical instrument for improved tissue effects |
| DE19924311A1 (de) | 1999-05-27 | 2000-11-30 | Walter A Rau | Klammerschneidegerät und Zusatzvorrichtung für ein solches |
| GB9912625D0 (en) | 1999-05-28 | 1999-07-28 | Gyrus Medical Ltd | An electrosurgical generator and system |
| US6409724B1 (en) | 1999-05-28 | 2002-06-25 | Gyrus Medical Limited | Electrosurgical instrument |
| GB9912627D0 (en) | 1999-05-28 | 1999-07-28 | Gyrus Medical Ltd | An electrosurgical instrument |
| US6793652B1 (en) | 1999-06-02 | 2004-09-21 | Power Medical Interventions, Inc. | Electro-mechanical surgical device |
| US7695485B2 (en) | 2001-11-30 | 2010-04-13 | Power Medical Interventions, Llc | Surgical device |
| US8292888B2 (en) | 2001-04-20 | 2012-10-23 | Tyco Healthcare Group Lp | Bipolar or ultrasonic surgical device |
| US7032798B2 (en) | 1999-06-02 | 2006-04-25 | Power Medical Interventions, Inc. | Electro-mechanical surgical device |
| US6315184B1 (en) | 1999-06-02 | 2001-11-13 | Powermed, Inc. | Stapling device for use with an electromechanical driver device for use with anastomosing, stapling, and resecting instruments |
| US6981941B2 (en) | 1999-06-02 | 2006-01-03 | Power Medical Interventions | Electro-mechanical surgical device |
| US6491201B1 (en) | 2000-02-22 | 2002-12-10 | Power Medical Interventions, Inc. | Fluid delivery mechanism for use with anastomosing, stapling, and resecting instruments |
| US7951071B2 (en) | 1999-06-02 | 2011-05-31 | Tyco Healthcare Group Lp | Moisture-detecting shaft for use with an electro-mechanical surgical device |
| US8025199B2 (en) | 2004-02-23 | 2011-09-27 | Tyco Healthcare Group Lp | Surgical cutting and stapling device |
| US7751870B2 (en) | 2002-01-30 | 2010-07-06 | Power Medical Interventions, Llc | Surgical imaging device |
| US6443973B1 (en) | 1999-06-02 | 2002-09-03 | Power Medical Interventions, Inc. | Electromechanical driver device for use with anastomosing, stapling, and resecting instruments |
| US6264087B1 (en) | 1999-07-12 | 2001-07-24 | Powermed, Inc. | Expanding parallel jaw device for use with an electromechanical driver device |
| US6716233B1 (en) | 1999-06-02 | 2004-04-06 | Power Medical Interventions, Inc. | Electromechanical driver and remote surgical instrument attachment having computer assisted control capabilities |
| US8241322B2 (en) | 2005-07-27 | 2012-08-14 | Tyco Healthcare Group Lp | Surgical device |
| US6517565B1 (en) | 1999-06-02 | 2003-02-11 | Power Medical Interventions, Inc. | Carriage assembly for controlling a steering wire steering mechanism within a flexible shaft |
| US6223833B1 (en) | 1999-06-03 | 2001-05-01 | One World Technologies, Inc. | Spindle lock and chipping mechanism for hammer drill |
| EP1058177A1 (en) | 1999-06-04 | 2000-12-06 | Alps Electric Co., Ltd. | Input device for game machine |
| GB9913652D0 (en) | 1999-06-11 | 1999-08-11 | Gyrus Medical Ltd | An electrosurgical generator |
| SE519023C2 (sv) | 1999-06-21 | 2002-12-23 | Micromuscle Ab | Kateterburna mikrokirurgiska verktygsset |
| FR2795301B1 (fr) | 1999-06-25 | 2001-08-31 | Prec | Instrument de chirurgie endoscopique |
| US7637905B2 (en) | 2003-01-15 | 2009-12-29 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| US6257351B1 (en) | 1999-06-29 | 2001-07-10 | Microaire Surgical Instruments, Inc. | Powered surgical instrument having locking systems and a clutch mechanism |
| US6325810B1 (en) | 1999-06-30 | 2001-12-04 | Ethicon, Inc. | Foam buttress for stapling apparatus |
| US6355699B1 (en) | 1999-06-30 | 2002-03-12 | Ethicon, Inc. | Process for manufacturing biomedical foams |
| US6175290B1 (en) | 1999-06-30 | 2001-01-16 | Gt Development Corporation | Contactless stalk mounted control switch |
| US6488196B1 (en) | 1999-06-30 | 2002-12-03 | Axya Medical, Inc. | Surgical stapler and method of applying plastic staples to body tissue |
| US6333029B1 (en) | 1999-06-30 | 2001-12-25 | Ethicon, Inc. | Porous tissue scaffoldings for the repair of regeneration of tissue |
| US6104304A (en) | 1999-07-06 | 2000-08-15 | Conexant Systems, Inc. | Self-test and status reporting system for microcontroller-controlled devices |
| US6117158A (en) | 1999-07-07 | 2000-09-12 | Ethicon Endo-Surgery, Inc. | Ratchet release mechanism for hand held instruments |
| JP3293802B2 (ja) | 1999-07-07 | 2002-06-17 | エスエムシー株式会社 | 位置検出機能付きチャック |
| US6168605B1 (en) | 1999-07-08 | 2001-01-02 | Ethicon Endo-Surgery, Inc. | Curved laparoscopic scissor having arcs of curvature |
| JP2001035827A (ja) | 1999-07-16 | 2001-02-09 | Memc Kk | 高濃度オゾン水、同オゾン水の調製方法、および同オゾン水を使用した洗浄方法 |
| US6402766B2 (en) | 1999-07-23 | 2002-06-11 | Ethicon, Inc. | Graft fixation device combination |
| US6436110B2 (en) | 1999-07-23 | 2002-08-20 | Ethicon, Inc. | Method of securing a graft using a graft fixation device |
| US6391038B2 (en) | 1999-07-28 | 2002-05-21 | Cardica, Inc. | Anastomosis system and method for controlling a tissue site |
| US7682368B1 (en) | 1999-07-28 | 2010-03-23 | Cardica, Inc. | Anastomosis tool actuated with stored energy |
| US7766924B1 (en) | 1999-07-28 | 2010-08-03 | Cardica, Inc. | System for performing anastomosis |
| US7303570B2 (en) | 1999-07-28 | 2007-12-04 | Cardica, Inc. | Anastomosis tool having a connector holder |
| US7063712B2 (en) | 2001-04-27 | 2006-06-20 | Cardica, Inc. | Anastomosis method |
| US7285131B1 (en) | 1999-07-28 | 2007-10-23 | Cardica, Inc. | System for performing anastomosis |
| DE19935904C1 (de) | 1999-07-30 | 2001-07-12 | Karlsruhe Forschzent | Applikatorspitze eines chirurgischen Applikators zum Setzen von Clips/Klammern für die Verbindung von Gewebe |
| EP1200140A1 (en) | 1999-08-03 | 2002-05-02 | Smith & Nephew, Inc. | Controlled release implantable devices |
| US6788018B1 (en) | 1999-08-03 | 2004-09-07 | Intuitive Surgical, Inc. | Ceiling and floor mounted surgical robot set-up arms |
| US6527785B2 (en) | 1999-08-03 | 2003-03-04 | Onux Medical, Inc. | Surgical suturing instrument and method of use |
| IT1307263B1 (it) | 1999-08-05 | 2001-10-30 | Sorin Biomedica Cardio Spa | Stent per angioplastica con azione antagonista della restenosi,relativo corredo e componenti. |
| US6488659B1 (en) | 1999-08-05 | 2002-12-03 | Biocardia, Inc. | System and method for delivering thermally sensitive and reverse-thermal gelation materials |
| CA2379909C (en) | 1999-08-06 | 2011-01-04 | Board Of Regents, The University Of Texas System | Drug releasing biodegradable fiber implant |
| US6611793B1 (en) | 1999-09-07 | 2003-08-26 | Scimed Life Systems, Inc. | Systems and methods to identify and disable re-use single use devices based on detecting environmental changes |
| EP1235522B1 (de) | 1999-09-09 | 2007-05-30 | Tuebingen Scientific Medical GmbH | Chirurgisches instrument für minimal invasive eingriffe |
| US7267679B2 (en) | 1999-09-13 | 2007-09-11 | Rex Medical, L.P | Vascular hole closure device |
| US7662161B2 (en) | 1999-09-13 | 2010-02-16 | Rex Medical, L.P | Vascular hole closure device |
| US7075770B1 (en) | 1999-09-17 | 2006-07-11 | Taser International, Inc. | Less lethal weapons and methods for halting locomotion |
| US6636412B2 (en) | 1999-09-17 | 2003-10-21 | Taser International, Inc. | Hand-held stun gun for incapacitating a human target |
| US6356072B1 (en) | 1999-09-24 | 2002-03-12 | Jacob Chass | Hall effect sensor of displacement of magnetic core |
| US6358224B1 (en) | 1999-09-24 | 2002-03-19 | Tyco Healthcare Group Lp | Irrigation system for endoscopic surgery |
| JP2001087272A (ja) | 1999-09-24 | 2001-04-03 | Motoko Iwabuchi | 生体組織切除用自動縫合器 |
| JP3538574B2 (ja) | 1999-09-27 | 2004-06-14 | 株式会社リンレイ | 可剥離性被覆組成物 |
| CA2322061A1 (en) | 1999-10-05 | 2001-04-05 | Anil K. Nalagatla | Stapling instrument having two staple forming surfaces |
| US7887535B2 (en) | 1999-10-18 | 2011-02-15 | Covidien Ag | Vessel sealing wave jaw |
| US6320123B1 (en) | 1999-10-20 | 2001-11-20 | Steven S. Reimers | System and method for shielding electrical components from electromagnetic waves |
| US6780151B2 (en) | 1999-10-26 | 2004-08-24 | Acmi Corporation | Flexible ureteropyeloscope |
| US6749560B1 (en) | 1999-10-26 | 2004-06-15 | Circon Corporation | Endoscope shaft with slotted tube |
| US6471659B2 (en) | 1999-12-27 | 2002-10-29 | Neothermia Corporation | Minimally invasive intact recovery of tissue |
| EP1095627A1 (en) | 1999-10-27 | 2001-05-02 | Everest Medical Corporation | Electrosurgical probe for surface treatment |
| ATE312820T1 (de) | 1999-10-28 | 2005-12-15 | Trine Pharmaceuticals Inc | Pumpeninhibitoren zur freisetzung von medikamenten |
| DE19951940C2 (de) | 1999-10-28 | 2001-11-29 | Karlsruhe Forschzent | Endoskopisch einsetzbares Klammernahtgerät |
| DE19954497C1 (de) | 1999-11-11 | 2001-04-19 | Norbert Lemke | Vorrichtung zum Ansteuern eines elektrischen Gerätes für den Einsatz im Sterilbereich bei medizinischen Operationen |
| US6666846B1 (en) | 1999-11-12 | 2003-12-23 | Edwards Lifesciences Corporation | Medical device introducer and obturator and methods of use |
| GB9927338D0 (en) | 1999-11-18 | 2000-01-12 | Gyrus Medical Ltd | Electrosurgical system |
| US6324339B1 (en) | 1999-11-29 | 2001-11-27 | Eveready Battery Company, Inc. | Battery pack including input and output waveform modification capability |
| US7347849B2 (en) | 2001-05-24 | 2008-03-25 | Nxstage Medical, Inc. | Modular medical treatment replaceable component |
| US6494896B1 (en) | 1999-11-30 | 2002-12-17 | Closure Medical Corporation | Applicator for laparoscopic or endoscopic surgery |
| US6184655B1 (en) | 1999-12-10 | 2001-02-06 | Stryker Corporation | Battery charging system with internal power manager |
| US6736825B2 (en) | 1999-12-14 | 2004-05-18 | Integrated Vascular Interventional Technologies, L C (Ivit Lc) | Paired expandable anastomosis devices and related methods |
| US6352532B1 (en) | 1999-12-14 | 2002-03-05 | Ethicon Endo-Surgery, Inc. | Active load control of ultrasonic surgical instruments |
| US6428487B1 (en) | 1999-12-17 | 2002-08-06 | Ethicon Endo-Surgery, Inc. | Surgical biopsy system with remote control for selecting an operational mode |
| TW429637B (en) | 1999-12-17 | 2001-04-11 | Synergy Scientech Corp | Electrical energy storage device |
| US6432065B1 (en) | 1999-12-17 | 2002-08-13 | Ethicon Endo-Surgery, Inc. | Method for using a surgical biopsy system with remote control for selecting and operational mode |
| EP1244476B1 (en) | 1999-12-30 | 2006-05-31 | Acrymed | Methods and compositions for improved delivery devices |
| US6942674B2 (en) | 2000-01-05 | 2005-09-13 | Integrated Vascular Systems, Inc. | Apparatus and methods for delivering a closure device |
| US6197042B1 (en) | 2000-01-05 | 2001-03-06 | Medical Technology Group, Inc. | Vascular sheath with puncture site closure apparatus and methods of use |
| RU2181566C2 (ru) | 2000-01-10 | 2002-04-27 | Дубровский Аркадий Вениаминович | Управляемый поворотный механизм |
| WO2001053154A1 (en) | 2000-01-20 | 2001-07-26 | Bioaccess, Inc. | A method and apparatus for introducing a non-sterile component into a sterile device |
| HU225908B1 (en) | 2000-01-24 | 2007-12-28 | Ethicon Endo Surgery Europe | Surgical circular stapling head |
| US6193129B1 (en) | 2000-01-24 | 2001-02-27 | Ethicon Endo-Surgery, Inc. | Cutting blade for a surgical anastomosis stapling instrument |
| DE10003020C2 (de) | 2000-01-25 | 2001-12-06 | Aesculap Ag & Co Kg | Bipolares Faßinstrument |
| US6429611B1 (en) | 2000-01-28 | 2002-08-06 | Hui Li | Rotary and linear motor |
| DE10004264C2 (de) | 2000-02-01 | 2002-06-13 | Storz Karl Gmbh & Co Kg | Vorrichtung zur intrakorporalen, minimal-invasiven Behandlung eines Patienten |
| AU783228B2 (en) | 2000-02-04 | 2005-10-06 | Conmed Corporation | Surgical clip applier |
| US6758846B2 (en) | 2000-02-08 | 2004-07-06 | Gyrus Medical Limited | Electrosurgical instrument and an electrosurgery system including such an instrument |
| US20040068307A1 (en) | 2000-02-08 | 2004-04-08 | Gyrus Medical Limited | Surgical instrument |
| US20040181219A1 (en) | 2000-02-08 | 2004-09-16 | Gyrus Medical Limited | Electrosurgical instrument and an electrosugery system including such an instrument |
| GB0002849D0 (en) | 2000-02-08 | 2000-03-29 | Gyrus Medical Ltd | An electrosurgical instrument and an electosurgery system including such an instrument |
| GB0223348D0 (en) | 2002-10-08 | 2002-11-13 | Gyrus Medical Ltd | A surgical instrument |
| US7963964B2 (en) | 2000-02-10 | 2011-06-21 | Santilli Albert N | Surgical clamp assembly with electrodes |
| US6569171B2 (en) | 2001-02-28 | 2003-05-27 | Microline, Inc. | Safety locking mechanism for a medical clip device |
| US6589164B1 (en) | 2000-02-15 | 2003-07-08 | Transvascular, Inc. | Sterility barriers for insertion of non-sterile apparatus into catheters or other medical devices |
| US6911033B2 (en) | 2001-08-21 | 2005-06-28 | Microline Pentax Inc. | Medical clip applying device |
| US6306149B1 (en) | 2000-02-15 | 2001-10-23 | Microline, Inc. | Medical clip device with cyclical pusher mechanism |
| DE10007919C2 (de) | 2000-02-21 | 2003-07-17 | Wolf Gmbh Richard | Zange zum Freipräparieren von Gewebe in einer Körperhöhle |
| US7335199B2 (en) | 2000-02-22 | 2008-02-26 | Rhytec Limited | Tissue resurfacing |
| US6629974B2 (en) | 2000-02-22 | 2003-10-07 | Gyrus Medical Limited | Tissue treatment method |
| US6723091B2 (en) | 2000-02-22 | 2004-04-20 | Gyrus Medical Limited | Tissue resurfacing |
| GB0004179D0 (en) | 2000-02-22 | 2000-04-12 | Gyrus Medical Ltd | Tissue resurfacing |
| US6533157B1 (en) | 2000-02-22 | 2003-03-18 | Power Medical Interventions, Inc. | Tissue stapling attachment for use with an electromechanical driver device |
| US8016855B2 (en) | 2002-01-08 | 2011-09-13 | Tyco Healthcare Group Lp | Surgical device |
| US6488197B1 (en) | 2000-02-22 | 2002-12-03 | Power Medical Interventions, Inc. | Fluid delivery device for use with anastomosing resecting and stapling instruments |
| EP1259173B1 (en) | 2000-02-22 | 2011-08-31 | Tyco Healthcare Group LP | An electromechanical driver and remote surgical instrument attachment having computer assisted control capabilities |
| US7770773B2 (en) | 2005-07-27 | 2010-08-10 | Power Medical Interventions, Llc | Surgical device |
| US6582441B1 (en) | 2000-02-24 | 2003-06-24 | Advanced Bionics Corporation | Surgical insertion tool |
| AU2001243237A1 (en) | 2000-02-25 | 2001-09-03 | The Board Of Trustees Of The Leland Stanford Junior University | Methods and apparatuses for maintaining a trajectory in sterotaxi for tracking a target inside a body |
| US6273897B1 (en) | 2000-02-29 | 2001-08-14 | Ethicon, Inc. | Surgical bettress and surgical stapling apparatus |
| WO2001066020A2 (en) | 2000-03-06 | 2001-09-13 | United States Surgical | Apparatus and method for performing a bypass procedure in a digestive system |
| US6423079B1 (en) | 2000-03-07 | 2002-07-23 | Blake, Iii Joseph W | Repeating multi-clip applier |
| US6663623B1 (en) | 2000-03-13 | 2003-12-16 | Olympus Optical Co., Ltd. | Electric surgical operation apparatus |
| AU3952501A (en) | 2000-03-16 | 2001-09-24 | Medigus Ltd | Fundoplication apparatus and method |
| US6510854B2 (en) | 2000-03-16 | 2003-01-28 | Gyrus Medical Limited | Method of treatment of prostatic adenoma |
| IL139788A (en) | 2000-11-20 | 2006-10-05 | Minelu Zonnenschein | Stapler for endoscopes |
| US7819799B2 (en) | 2000-03-16 | 2010-10-26 | Immersion Medical, Inc. | System and method for controlling force applied to and manipulation of medical instruments |
| US6770070B1 (en) | 2000-03-17 | 2004-08-03 | Rita Medical Systems, Inc. | Lung treatment apparatus and method |
| JP2001276091A (ja) | 2000-03-29 | 2001-10-09 | Toshiba Corp | 医療用マニピュレータ |
| AU5113401A (en) | 2000-03-31 | 2001-10-15 | Rita Medical Systems Inc | Tissue biopsy and treatment apparatus and method |
| US20050085693A1 (en) | 2000-04-03 | 2005-04-21 | Amir Belson | Activated polymer articulated instruments and methods of insertion |
| US6837846B2 (en) | 2000-04-03 | 2005-01-04 | Neo Guide Systems, Inc. | Endoscope having a guide tube |
| US6858005B2 (en) | 2000-04-03 | 2005-02-22 | Neo Guide Systems, Inc. | Tendon-driven endoscope and methods of insertion |
| US8888688B2 (en) | 2000-04-03 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Connector device for a controllable instrument |
| US6984203B2 (en) | 2000-04-03 | 2006-01-10 | Neoguide Systems, Inc. | Endoscope with adjacently positioned guiding apparatus |
| US6517528B1 (en) | 2000-04-13 | 2003-02-11 | Scimed Life Systems, Inc. | Magnetic catheter drive shaft clutch |
| RU2187249C2 (ru) | 2000-04-27 | 2002-08-20 | Общество с ограниченной ответственностью "ЭНДОМЕДИУМ+" | Хирургический инструмент |
| DE60111517T2 (de) | 2000-04-27 | 2006-05-11 | Medtronic, Inc., Minneapolis | Vibrationsempfindliche ablationsvorrichtung |
| US6905498B2 (en) | 2000-04-27 | 2005-06-14 | Atricure Inc. | Transmural ablation device with EKG sensor and pacing electrode |
| US6387114B2 (en) | 2000-04-28 | 2002-05-14 | Scimed Life Systems, Inc. | Gastrointestinal compression clips |
| DE10058796A1 (de) | 2000-05-09 | 2001-11-15 | Heidelberger Druckmasch Ag | Sammelhefter mit getrennten Antrieben |
| US6305891B1 (en) | 2000-05-15 | 2001-10-23 | Mark S. Burlingame | Fastening device and a spacer, and a method of using the same |
| US6485503B2 (en) | 2000-05-19 | 2002-11-26 | Coapt Systems, Inc. | Multi-point tissue tension distribution device, a brow and face lift variation, and a method of tissue approximation using the device |
| US7510566B2 (en) | 2000-05-19 | 2009-03-31 | Coapt Systems, Inc. | Multi-point tissue tension distribution device and method, a chin lift variation |
| US6419695B1 (en) | 2000-05-22 | 2002-07-16 | Shlomo Gabbay | Cardiac prosthesis for helping improve operation of a heart valve |
| DE10026683C2 (de) | 2000-05-30 | 2003-07-10 | Ethicon Endo Surgery Europe | Chirurgisches Klammersetzgerät |
| US6805273B2 (en) | 2002-11-04 | 2004-10-19 | Federico Bilotti | Surgical stapling instrument |
| US6602262B2 (en) | 2000-06-02 | 2003-08-05 | Scimed Life Systems, Inc. | Medical device having linear to rotation control |
| AU2001275511A1 (en) | 2000-06-07 | 2001-12-17 | Stereotaxis, Inc. | Guide for medical devices |
| US6492785B1 (en) | 2000-06-27 | 2002-12-10 | Deere & Company | Variable current limit control for vehicle electric drive system |
| DE10031436A1 (de) | 2000-06-28 | 2002-01-10 | Alexander Von Fuchs | Gleitschutz für einen Gehäusekopf medizinischer Instrumente |
| US6863694B1 (en) | 2000-07-03 | 2005-03-08 | Osteotech, Inc. | Osteogenic implants derived from bone |
| JP3789733B2 (ja) | 2000-07-06 | 2006-06-28 | アルプス電気株式会社 | 複合操作スイッチ |
| JP3897962B2 (ja) | 2000-07-19 | 2007-03-28 | 株式会社モリタ製作所 | 識別型のインスツルメント体、識別型のアダプタ、識別型のチューブ、これらを用いた診療装置 |
| AU2001280635B2 (en) | 2000-07-20 | 2006-09-21 | Kinetic Surgical Llc | Hand-actuated articulating surgical tool |
| EP1303222A1 (en) | 2000-07-21 | 2003-04-23 | Atropos Limited | A cannula |
| US6494882B1 (en) | 2000-07-25 | 2002-12-17 | Verimetra, Inc. | Cutting instrument having integrated sensors |
| WO2002032335A1 (en) | 2000-07-25 | 2002-04-25 | Rita Medical Systems Inc. | Apparatus for detecting and treating tumors using localized impedance measurement |
| US6392854B1 (en) | 2000-07-27 | 2002-05-21 | Motorola, Inc. | Method and system for testing continuity of a motor and associated drive circuitry |
| US6585664B2 (en) | 2000-08-02 | 2003-07-01 | Ethicon Endo-Surgery, Inc. | Calibration method for an automated surgical biopsy device |
| US8366787B2 (en) | 2000-08-04 | 2013-02-05 | Depuy Products, Inc. | Hybrid biologic-synthetic bioabsorbable scaffolds |
| JP2002051974A (ja) | 2000-08-14 | 2002-02-19 | Fuji Photo Optical Co Ltd | 内視鏡処置具 |
| EP1313401A4 (en) | 2000-08-30 | 2006-09-20 | Cerebral Vascular Applic Inc | MEDICAL INSTRUMENT |
| US20040093024A1 (en) | 2000-09-01 | 2004-05-13 | James Lousararian | Advanced wound site management systems and methods |
| US6767356B2 (en) | 2000-09-01 | 2004-07-27 | Angiolink Corporation | Advanced wound site management systems and methods |
| GB0021799D0 (en) | 2000-09-05 | 2000-10-18 | Gyrus Medical Ltd | Electrosurgery system |
| US20020029032A1 (en) | 2000-09-07 | 2002-03-07 | Eva Arkin | Fluorescent surgical hardware and surgical supplies for improved visualization |
| JP2002078674A (ja) | 2000-09-08 | 2002-03-19 | Fuji Photo Optical Co Ltd | 内視鏡の湾曲部構造 |
| CA2421856A1 (en) | 2000-09-08 | 2002-03-14 | James E. Coleman | Surgical staple |
| US6712773B1 (en) | 2000-09-11 | 2004-03-30 | Tyco Healthcare Group Lp | Biopsy system |
| JP4297603B2 (ja) | 2000-09-19 | 2009-07-15 | 株式会社トップ | 外科用ステープラ |
| WO2002026143A1 (en) | 2000-09-27 | 2002-04-04 | Applied Medical Resources | Surgical apparatus with detachable handle assembly |
| JP4014792B2 (ja) | 2000-09-29 | 2007-11-28 | 株式会社東芝 | マニピュレータ |
| MXPA03003003A (es) | 2000-10-04 | 2003-07-14 | Synthes Ag | Dispositivo para suministrar energia electrica a una pluma electrica. |
| US6817508B1 (en) | 2000-10-13 | 2004-11-16 | Tyco Healthcare Group, Lp | Surgical stapling device |
| US7334717B2 (en) | 2001-10-05 | 2008-02-26 | Tyco Healthcare Group Lp | Surgical fastener applying apparatus |
| WO2003079909A2 (en) | 2002-03-19 | 2003-10-02 | Tyco Healthcare Group, Lp | Surgical fastener applying apparatus |
| US7032799B2 (en) | 2001-10-05 | 2006-04-25 | Tyco Healthcare Group Lp | Surgical stapling apparatus and method |
| US7407076B2 (en) | 2000-10-13 | 2008-08-05 | Tyco Healthcare Group Lp | Surgical stapling device |
| DE60135920D1 (de) | 2000-10-13 | 2008-11-06 | Tyco Healthcare | Chirurgisches instrument zum anlegen von klammern |
| US7485124B2 (en) | 2000-10-19 | 2009-02-03 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a fastener delivery mechanism |
| US6773438B1 (en) | 2000-10-19 | 2004-08-10 | Ethicon Endo-Surgery | Surgical instrument having a rotary lockout mechanism |
| US6551333B2 (en) | 2000-10-19 | 2003-04-22 | Ethicon Endo-Surgery, Inc. | Method for attaching hernia mesh |
| US7273483B2 (en) | 2000-10-20 | 2007-09-25 | Ethicon Endo-Surgery, Inc. | Apparatus and method for alerting generator functions in an ultrasonic surgical system |
| US20040267310A1 (en) | 2000-10-20 | 2004-12-30 | Racenet David C | Directionally biased staple and anvil assembly for forming the staple |
| US6908472B2 (en) | 2000-10-20 | 2005-06-21 | Ethicon Endo-Surgery, Inc. | Apparatus and method for altering generator functions in an ultrasonic surgical system |
| AU2002234140A1 (en) | 2000-10-20 | 2002-05-06 | Onux Medical, Inc. | Surgical suturing instrument and method of use |
| US6945981B2 (en) | 2000-10-20 | 2005-09-20 | Ethicon-Endo Surgery, Inc. | Finger operated switch for controlling a surgical handpiece |
| US6500176B1 (en) | 2000-10-23 | 2002-12-31 | Csaba Truckai | Electrosurgical systems and techniques for sealing tissue |
| US6913608B2 (en) | 2000-10-23 | 2005-07-05 | Viacor, Inc. | Automated annular plication for mitral valve repair |
| US6656177B2 (en) | 2000-10-23 | 2003-12-02 | Csaba Truckai | Electrosurgical systems and techniques for sealing tissue |
| US6605090B1 (en) | 2000-10-25 | 2003-08-12 | Sdgi Holdings, Inc. | Non-metallic implant devices and intra-operative methods for assembly and fixation |
| US6793661B2 (en) | 2000-10-30 | 2004-09-21 | Vision Sciences, Inc. | Endoscopic sheath assemblies having longitudinal expansion inhibiting mechanisms |
| US6843789B2 (en) | 2000-10-31 | 2005-01-18 | Gyrus Medical Limited | Electrosurgical system |
| GB0026586D0 (en) | 2000-10-31 | 2000-12-13 | Gyrus Medical Ltd | An electrosurgical system |
| FR2815842B1 (fr) | 2000-10-31 | 2003-05-09 | Assist Publ Hopitaux De Paris | Pince-agrafeuse mecanique pour chirurgie du rectum |
| US20030139741A1 (en) | 2000-10-31 | 2003-07-24 | Gyrus Medical Limited | Surgical instrument |
| US6893435B2 (en) | 2000-10-31 | 2005-05-17 | Gyrus Medical Limited | Electrosurgical system |
| JP2002143078A (ja) | 2000-11-08 | 2002-05-21 | Olympus Optical Co Ltd | 内視鏡用外付チューブ |
| US6498480B1 (en) | 2000-11-22 | 2002-12-24 | Wabash Technologies, Inc. | Magnetic non-contacting rotary transducer |
| US8286845B2 (en) | 2000-11-27 | 2012-10-16 | Boston Scientific Scimed, Inc. | Full thickness resection device control handle |
| US6821282B2 (en) | 2000-11-27 | 2004-11-23 | Scimed Life Systems, Inc. | Full thickness resection device control handle |
| JP2002159500A (ja) | 2000-11-28 | 2002-06-04 | Koseki Ika Kk | 靭帯固定システム |
| US7081114B2 (en) | 2000-11-29 | 2006-07-25 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Electrophysiology/ablation catheter having lariat configuration of variable radius |
| JP2002170622A (ja) | 2000-11-30 | 2002-06-14 | Sumitomo Wiring Syst Ltd | コネクタ |
| US6398795B1 (en) | 2000-11-30 | 2002-06-04 | Scimed Life Systems, Inc. | Stapling and cutting in resectioning for full thickness resection devices |
| US6439446B1 (en) | 2000-12-01 | 2002-08-27 | Stephen J. Perry | Safety lockout for actuator shaft |
| US6569085B2 (en) | 2001-08-16 | 2003-05-27 | Syntheon, Llc | Methods and apparatus for delivering a medical instrument over an endoscope while the endoscope is in a body lumen |
| US7129242B2 (en) | 2000-12-06 | 2006-10-31 | Signal Pharmaceuticals, Llc | Anilinopyrimidine derivatives as JNK pathway inhibitors and compositions and methods related thereto |
| US6588931B2 (en) | 2000-12-07 | 2003-07-08 | Delphi Technologies, Inc. | Temperature sensor with flexible circuit substrate |
| WO2002056800A2 (en) | 2000-12-08 | 2002-07-25 | Osteotech, Inc. | Implant for orthopedic applications |
| US6406440B1 (en) | 2000-12-21 | 2002-06-18 | Ethicon Endo-Surgery, Inc. | Specimen retrieval bag |
| US20020127265A1 (en) | 2000-12-21 | 2002-09-12 | Bowman Steven M. | Use of reinforced foam implants with enhanced integrity for soft tissue repair and regeneration |
| US6503259B2 (en) | 2000-12-27 | 2003-01-07 | Ethicon, Inc. | Expandable anastomotic device |
| US7041868B2 (en) | 2000-12-29 | 2006-05-09 | Kimberly-Clark Worldwide, Inc. | Bioabsorbable wound dressing |
| US6840938B1 (en) | 2000-12-29 | 2005-01-11 | Intuitive Surgical, Inc. | Bipolar cauterizing instrument |
| WO2002053808A1 (en) | 2001-01-03 | 2002-07-11 | Wen Lu | Stable conjugated polymer electrochromic devices incorporating ionic liquids |
| US6482200B2 (en) | 2001-01-03 | 2002-11-19 | Ronald D. Shippert | Cautery apparatus and method |
| US20020133131A1 (en) | 2001-01-09 | 2002-09-19 | Krishnakumar Rangachari | Absorbent material incorporating synthetic fibers and process for making the material |
| JP2004524076A (ja) | 2001-01-11 | 2004-08-12 | ギブン・イメージング・リミテツド | 生体内処置のための装置およびシステム |
| US6439439B1 (en) | 2001-01-12 | 2002-08-27 | Telios Orthopedic Systems, Inc. | Bone cement delivery apparatus and hand-held fluent material dispensing apparatus |
| JP4121730B2 (ja) | 2001-01-19 | 2008-07-23 | 富士通コンポーネント株式会社 | ポインティングデバイス及び携帯型情報機器 |
| US6695774B2 (en) | 2001-01-19 | 2004-02-24 | Endactive, Inc. | Apparatus and method for controlling endoscopic instruments |
| CA2435209C (en) | 2001-01-24 | 2009-08-25 | Tyco Healthcare Group Lp | Anastomosis instrument and method for performing same |
| US6626834B2 (en) | 2001-01-25 | 2003-09-30 | Shane Dunne | Spiral scanner with electronic control |
| US20020134811A1 (en) | 2001-01-29 | 2002-09-26 | Senco Products, Inc. | Multi-mode power tool utilizing attachment |
| WO2002060328A1 (en) | 2001-01-31 | 2002-08-08 | Rex Medical, Inc. | Apparatus and method for stapling and resectioning gastro-esophageal tissue |
| US20020103494A1 (en) | 2001-01-31 | 2002-08-01 | Pacey John Allen | Percutaneous cannula delvery system for hernia patch |
| US8313496B2 (en) | 2001-02-02 | 2012-11-20 | Lsi Solutions, Inc. | System for endoscopic suturing |
| US6997931B2 (en) | 2001-02-02 | 2006-02-14 | Lsi Solutions, Inc. | System for endoscopic suturing |
| JP3939158B2 (ja) | 2001-02-06 | 2007-07-04 | オリンパス株式会社 | 内視鏡装置 |
| US6723109B2 (en) | 2001-02-07 | 2004-04-20 | Karl Storz Endoscopy-America, Inc. | Deployable surgical clamp with delivery/retrieval device and actuator |
| US20030135204A1 (en) | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| US7699835B2 (en) | 2001-02-15 | 2010-04-20 | Hansen Medical, Inc. | Robotically controlled surgical instruments |
| US7766894B2 (en) | 2001-02-15 | 2010-08-03 | Hansen Medical, Inc. | Coaxial catheter system |
| AU2002251958A1 (en) | 2001-02-15 | 2002-09-04 | Brock Rogers Surgical, Inc. | Surgical master/slave system |
| DE10108732A1 (de) | 2001-02-23 | 2002-09-05 | Philips Corp Intellectual Pty | Vorrichtung mit einem magnetischen Positionssensor |
| US6533784B2 (en) | 2001-02-24 | 2003-03-18 | Csaba Truckai | Electrosurgical working end for transecting and sealing tissue |
| US6775575B2 (en) | 2001-02-26 | 2004-08-10 | D. Bommi Bommannan | System and method for reducing post-surgical complications |
| DE60224990T2 (de) | 2001-02-27 | 2009-02-05 | Tyco Healthcare Group Lp, Norwalk | Externe mischanordnung |
| US7139016B2 (en) | 2001-02-28 | 2006-11-21 | Eastman Kodak Company | Intra-oral camera system with chair-mounted display |
| US6682527B2 (en) | 2001-03-13 | 2004-01-27 | Perfect Surgical Techniques, Inc. | Method and system for heating tissue with a bipolar instrument |
| US20020135474A1 (en) | 2001-03-21 | 2002-09-26 | Sylliassen Douglas G. | Method and device for sensor-based power management of a consumer electronic device |
| JP2002282269A (ja) | 2001-03-28 | 2002-10-02 | Gc Corp | 歯科用組織再生膜固定用ピン |
| US7097644B2 (en) | 2001-03-30 | 2006-08-29 | Ethicon Endo-Surgery, Inc. | Medical device with improved wall construction |
| US20030181900A1 (en) | 2002-03-25 | 2003-09-25 | Long Gary L. | Endoscopic ablation system with a plurality of electrodes |
| US6769590B2 (en) | 2001-04-02 | 2004-08-03 | Susan E. Vresh | Luminal anastomotic device and method |
| US6605669B2 (en) | 2001-04-03 | 2003-08-12 | E. I. Du Pont De Nemours And Company | Radiation-curable coating compounds |
| CA2662551C (en) | 2001-04-03 | 2011-02-08 | Tyco Healthcare Group Lp | Surgical stapling device |
| ES2364666T3 (es) | 2001-04-06 | 2011-09-12 | Covidien Ag | Obturador y divisor de vasos con miembros de tope no conductivos. |
| US7090673B2 (en) | 2001-04-06 | 2006-08-15 | Sherwood Services Ag | Vessel sealer and divider |
| DE10117597C1 (de) | 2001-04-07 | 2002-11-28 | Itt Mfg Enterprises Inc | Wippschalter |
| US6818246B2 (en) | 2001-04-09 | 2004-11-16 | Solae, Llc | Soy protein concentrate having high isoflavone content and process for its manufacture |
| US6638285B2 (en) | 2001-04-16 | 2003-10-28 | Shlomo Gabbay | Biological tissue strip and system and method to seal tissue |
| JP2002314298A (ja) | 2001-04-18 | 2002-10-25 | Matsushita Electric Ind Co Ltd | 電子部品実装装置 |
| US7824401B2 (en) | 2004-10-08 | 2010-11-02 | Intuitive Surgical Operations, Inc. | Robotic tool with wristed monopolar electrosurgical end effectors |
| US6994708B2 (en) | 2001-04-19 | 2006-02-07 | Intuitive Surgical | Robotic tool with monopolar electro-surgical scissors |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| WO2002085254A1 (en) | 2001-04-20 | 2002-10-31 | The Research Foundation Of State University Of Newyork | Apparatus and method for fixation of vascular grafts |
| US20040110439A1 (en) | 2001-04-20 | 2004-06-10 | Chaikof Elliot L | Native protein mimetic fibers, fiber networks and fabrics for medical use |
| WO2002087586A1 (en) | 2001-04-26 | 2002-11-07 | Control Delivery Systems, Inc. | Sustained release drug delivery system containing codrugs |
| US20020188170A1 (en) | 2001-04-27 | 2002-12-12 | Santamore William P. | Prevention of myocardial infarction induced ventricular expansion and remodeling |
| US6913579B2 (en) | 2001-05-01 | 2005-07-05 | Surgrx, Inc. | Electrosurgical working end and method for obtaining tissue samples for biopsy |
| US6535764B2 (en) | 2001-05-01 | 2003-03-18 | Intrapace, Inc. | Gastric treatment and diagnosis device and method |
| DE10121305A1 (de) | 2001-05-02 | 2002-12-12 | Ethicon Endo Surgery Europe | Chirurgisches Instrument |
| BR0205147A (pt) | 2001-05-04 | 2003-06-24 | Abb Research Ltd | Dispositivo para coalescer um fluido |
| US6503257B2 (en) | 2001-05-07 | 2003-01-07 | Ethicon Endo-Surgery, Inc. | Method for releasing buttress material attached to a surgical fastening device |
| US6656193B2 (en) | 2001-05-07 | 2003-12-02 | Ethicon Endo-Surgery, Inc. | Device for attachment of buttress material to a surgical fastening device |
| US7160296B2 (en) | 2001-05-10 | 2007-01-09 | Rita Medical Systems, Inc. | Tissue ablation apparatus and method |
| US6827725B2 (en) | 2001-05-10 | 2004-12-07 | Gyrus Medical Limited | Surgical instrument |
| US6630047B2 (en) | 2001-05-21 | 2003-10-07 | 3M Innovative Properties Company | Fluoropolymer bonding composition and method |
| EP1392193B1 (de) | 2001-06-07 | 2009-12-09 | Kaltenbach & Voigt GmbH | Medizinisches oder dentalmedizinisches instrument und/oder versorgungsgerät und/oder pflegegerät für das medizinische oder dentalmedizinische instrument |
| IES20010547A2 (en) | 2001-06-07 | 2002-12-11 | Christy Cummins | Surgical Staple |
| US7371403B2 (en) | 2002-06-14 | 2008-05-13 | Providence Health System-Oregon | Wound dressing and method for controlling severe, life-threatening bleeding |
| US7533063B2 (en) | 2001-06-14 | 2009-05-12 | Silicon Storage Technology, Inc. | Smart memory card wallet |
| DE20121753U1 (de) | 2001-06-15 | 2003-04-17 | Bema Gmbh & Co Kg Endochirurgi | Griff für ein chirurgisches Instrument |
| CN1554061A (zh) | 2001-06-20 | 2004-12-08 | ͨ��ҽ�ƹ�˾ | 用于集成医疗跟踪的方法和系统 |
| CA2814279C (en) | 2001-06-22 | 2015-12-29 | Tyco Healthcare Group Lp | Electro-mechanical surgical device with data memory unit |
| US6726706B2 (en) | 2001-06-26 | 2004-04-27 | Steven Dominguez | Suture tape and method for use |
| JP4347043B2 (ja) | 2001-06-29 | 2009-10-21 | イントゥイティブ・サージカル・インコーポレーテッド | プラットフォーム関節手首 |
| US20050182298A1 (en) | 2002-12-06 | 2005-08-18 | Intuitive Surgical Inc. | Cardiac tissue ablation instrument with flexible wrist |
| US20060178556A1 (en) | 2001-06-29 | 2006-08-10 | Intuitive Surgical, Inc. | Articulate and swapable endoscope for a surgical robot |
| US6817974B2 (en) | 2001-06-29 | 2004-11-16 | Intuitive Surgical, Inc. | Surgical tool having positively positionable tendon-actuated multi-disk wrist joint |
| US20040243147A1 (en) | 2001-07-03 | 2004-12-02 | Lipow Kenneth I. | Surgical robot and robotic controller |
| CN2488482Y (zh) | 2001-07-05 | 2002-05-01 | 天津市华志计算机应用有限公司 | 机械臂的关节锁紧机构 |
| WO2003005911A1 (en) | 2001-07-09 | 2003-01-23 | Tyco Healthcare Group Lp | Right angle clip applier apparatus and method |
| ATE499908T1 (de) | 2001-07-16 | 2011-03-15 | Depuy Products Inc | Gerät zur reparatur von knorpelmaterial |
| IL144446A0 (en) | 2001-07-19 | 2002-05-23 | Prochon Biotech Ltd | Plasma protein matrices and methods for their preparation |
| DE50109817D1 (de) | 2001-07-19 | 2006-06-22 | Hilti Ag | Bolzensetzgerät mit Setztiefenregelung |
| DE20112837U1 (de) | 2001-08-02 | 2001-10-04 | Aesculap Ag & Co Kg | Zangen- oder pinzettenförmiges chirurgisches Instrument |
| US7208005B2 (en) | 2001-08-06 | 2007-04-24 | The Penn State Research Foundation | Multifunctional tool and method for minimally invasive surgery |
| EP1285633B1 (en) | 2001-08-07 | 2006-12-13 | Universitair Medisch Centrum Utrecht | Device for connecting a surgical instrument to a stable basis |
| WO2003016829A1 (fr) | 2001-08-07 | 2003-02-27 | Namiki Seimitsu Houseki Kabushiki Kaisha | Micro-codeur et micro-moteur magnetiques |
| DE60239812D1 (de) | 2001-08-08 | 2011-06-01 | Stryker Corp | Chirurgisches werkzeugsystem mit komponenten, die einen induktiven datentransfer durchführen |
| IES20010748A2 (en) | 2001-08-09 | 2003-02-19 | Christy Cummins | Surgical Stapling Device and Method |
| US6592608B2 (en) | 2001-12-07 | 2003-07-15 | Biopsy Sciences, Llc | Bioabsorbable sealant |
| DE10139153A1 (de) | 2001-08-09 | 2003-02-27 | Ingo F Herrmann | Einweg-Endoskopmantel |
| JP3926119B2 (ja) | 2001-08-10 | 2007-06-06 | 株式会社東芝 | 医療用マニピュレータ |
| US6705503B1 (en) | 2001-08-20 | 2004-03-16 | Tricord Solutions, Inc. | Electrical motor driven nail gun |
| US6692507B2 (en) | 2001-08-23 | 2004-02-17 | Scimed Life Systems, Inc. | Impermanent biocompatible fastener |
| US7563862B2 (en) | 2001-08-24 | 2009-07-21 | Neuren Pharmaceuticals Limited | Neural regeneration peptides and methods for their use in treatment of brain damage |
| WO2004078051A2 (en) | 2001-08-27 | 2004-09-16 | Gyrus Medial Limited | Electrosurgical system |
| US7282048B2 (en) | 2001-08-27 | 2007-10-16 | Gyrus Medical Limited | Electrosurgical generator and system |
| GB0425051D0 (en) | 2004-11-12 | 2004-12-15 | Gyrus Medical Ltd | Electrosurgical generator and system |
| US7344532B2 (en) | 2001-08-27 | 2008-03-18 | Gyrus Medical Limited | Electrosurgical generator and system |
| DE60239778D1 (de) | 2001-08-27 | 2011-06-01 | Gyrus Medical Ltd | Elektrochirurgische Vorrichtung |
| US6808525B2 (en) | 2001-08-27 | 2004-10-26 | Gyrus Medical, Inc. | Bipolar electrosurgical hook probe for cutting and coagulating tissue |
| US6929641B2 (en) | 2001-08-27 | 2005-08-16 | Gyrus Medical Limited | Electrosurgical system |
| US6966907B2 (en) | 2001-08-27 | 2005-11-22 | Gyrus Medical Limited | Electrosurgical generator and system |
| US6629988B2 (en) | 2001-08-28 | 2003-10-07 | Ethicon, Inc. | Composite staple for completing an anastomosis |
| US6755338B2 (en) | 2001-08-29 | 2004-06-29 | Cerebral Vascular Applications, Inc. | Medical instrument |
| NL1018874C2 (nl) | 2001-09-03 | 2003-03-05 | Michel Petronella Hub Vleugels | Chirurgisch instrument. |
| DE10143222C1 (de) | 2001-09-04 | 2003-04-17 | Siemens Linear Motor Systems G | Temperaturmeßvorrichtung für einen Elektromotor |
| US6747121B2 (en) | 2001-09-05 | 2004-06-08 | Synthes (Usa) | Poly(L-lactide-co-glycolide) copolymers, methods for making and using same, and devices containing same |
| JP2003070804A (ja) | 2001-09-05 | 2003-03-11 | Olympus Optical Co Ltd | 遠隔医療支援システム |
| US6802843B2 (en) | 2001-09-13 | 2004-10-12 | Csaba Truckai | Electrosurgical working end with resistive gradient electrodes |
| US6773409B2 (en) | 2001-09-19 | 2004-08-10 | Surgrx Llc | Surgical system for applying ultrasonic energy to tissue |
| FR2829796B1 (fr) | 2001-09-20 | 2003-12-12 | Snecma Moteurs | Dispositif de maintien des joints de plates-formes de secteurs de distributeur de turbomachine a lamelles d'etancheite |
| GB2379878B (en) | 2001-09-21 | 2004-11-10 | Gyrus Medical Ltd | Electrosurgical system and method |
| US6587750B2 (en) | 2001-09-25 | 2003-07-01 | Intuitive Surgical, Inc. | Removable infinite roll master grip handle and touch sensor for robotic surgery |
| DE10147145C2 (de) | 2001-09-25 | 2003-12-18 | Kunz Reiner | Multifunktionsinstrument für die mikroinvasive Chirurgie |
| US6578751B2 (en) | 2001-09-26 | 2003-06-17 | Scimed Life Systems, Inc. | Method of sequentially firing staples using springs and a rotary or linear shutter |
| JP3557186B2 (ja) | 2001-09-26 | 2004-08-25 | 三洋電機株式会社 | Dc−dcコンバータ |
| US7108701B2 (en) | 2001-09-28 | 2006-09-19 | Ethicon, Inc. | Drug releasing anastomosis devices and methods for treating anastomotic sites |
| WO2003026525A1 (en) | 2001-09-28 | 2003-04-03 | Rita Medical Systems, Inc. | Impedance controlled tissue ablation apparatus and method |
| SE523684C2 (sv) | 2001-10-04 | 2004-05-11 | Isaberg Rapid Ab | Styranordning för en drivmotor i en häftapparat |
| US6835173B2 (en) | 2001-10-05 | 2004-12-28 | Scimed Life Systems, Inc. | Robotic endoscope |
| JP2005518827A (ja) | 2001-10-05 | 2005-06-30 | サーモディクス,インコーポレイテッド | 粒子固定化コーティングおよびその使用 |
| US6770027B2 (en) | 2001-10-05 | 2004-08-03 | Scimed Life Systems, Inc. | Robotic endoscope with wireless interface |
| EP2962645B1 (en) | 2001-10-05 | 2020-08-12 | Covidien LP | Surgical stapling device |
| US6929644B2 (en) | 2001-10-22 | 2005-08-16 | Surgrx Inc. | Electrosurgical jaw structure for controlled energy delivery |
| US7070597B2 (en) | 2001-10-18 | 2006-07-04 | Surgrx, Inc. | Electrosurgical working end for controlled energy delivery |
| US10285694B2 (en) | 2001-10-20 | 2019-05-14 | Covidien Lp | Surgical stapler with timer and feedback display |
| US7464847B2 (en) | 2005-06-03 | 2008-12-16 | Tyco Healthcare Group Lp | Surgical stapler with timer and feedback display |
| US7083619B2 (en) | 2001-10-22 | 2006-08-01 | Surgrx, Inc. | Electrosurgical instrument and method of use |
| US6770072B1 (en) | 2001-10-22 | 2004-08-03 | Surgrx, Inc. | Electrosurgical jaw structure for controlled energy delivery |
| US6905497B2 (en) | 2001-10-22 | 2005-06-14 | Surgrx, Inc. | Jaw structure for electrosurgical instrument |
| US20030216732A1 (en) | 2002-05-20 | 2003-11-20 | Csaba Truckai | Medical instrument with thermochromic or piezochromic surface indicators |
| US6926716B2 (en) | 2001-11-09 | 2005-08-09 | Surgrx Inc. | Electrosurgical instrument |
| US7011657B2 (en) | 2001-10-22 | 2006-03-14 | Surgrx, Inc. | Jaw structure for electrosurgical instrument and method of use |
| US7041102B2 (en) | 2001-10-22 | 2006-05-09 | Surgrx, Inc. | Electrosurgical working end with replaceable cartridges |
| US7125409B2 (en) | 2001-10-22 | 2006-10-24 | Surgrx, Inc. | Electrosurgical working end for controlled energy delivery |
| KR20090082519A (ko) | 2001-10-23 | 2009-07-30 | 임머숀 코퍼레이션 | 감촉 피드백을 사용하여 전자 디바이스의 사용자에게 사일런트 상태 정보를 전달하는 방법 |
| US20060020336A1 (en) | 2001-10-23 | 2006-01-26 | Liddicoat John R | Automated annular plication for mitral valve repair |
| FR2831417B1 (fr) | 2001-10-30 | 2004-08-06 | Eurosurgical | Instrument chirurgical |
| JP2003135473A (ja) | 2001-11-01 | 2003-05-13 | Mizuho Co Ltd | 内視鏡手術用能動鉗子 |
| US6716223B2 (en) | 2001-11-09 | 2004-04-06 | Micrus Corporation | Reloadable sheath for catheter system for deploying vasoocclusive devices |
| US8089509B2 (en) | 2001-11-09 | 2012-01-03 | Karl Storz Imaging, Inc. | Programmable camera control unit with updatable program |
| US6471106B1 (en) | 2001-11-15 | 2002-10-29 | Intellectual Property Llc | Apparatus and method for restricting the discharge of fasteners from a tool |
| WO2003044514A1 (en) | 2001-11-20 | 2003-05-30 | Arkray, Inc. | Fail judging method for analysis and analyzer |
| JP2003164066A (ja) | 2001-11-21 | 2003-06-06 | Hitachi Koki Co Ltd | 電池パック |
| US6605078B2 (en) | 2001-11-26 | 2003-08-12 | Scimed Life Systems, Inc. | Full thickness resection device |
| DE10158246C1 (de) | 2001-11-28 | 2003-08-21 | Ethicon Endo Surgery Europe | Chirurgisches Klammersetzinstrument |
| US6671185B2 (en) | 2001-11-28 | 2003-12-30 | Landon Duval | Intelligent fasteners |
| EP2116345B1 (en) | 2001-11-29 | 2010-09-01 | Max Co., Ltd. | Electric stapler |
| US7542807B2 (en) | 2001-12-04 | 2009-06-02 | Endoscopic Technologies, Inc. | Conduction block verification probe and method of use |
| US7591818B2 (en) | 2001-12-04 | 2009-09-22 | Endoscopic Technologies, Inc. | Cardiac ablation devices and methods |
| WO2003047450A2 (en) | 2001-12-04 | 2003-06-12 | Power Medical Interventions Inc. | System and method for calibrating a surgical instrument |
| US7223272B2 (en) | 2004-06-14 | 2007-05-29 | Ethicon Endo-Surgery, Inc. | Endoscopic clip applier with hermaphroditic jaws mounted on non-collinear axes |
| US7918867B2 (en) | 2001-12-07 | 2011-04-05 | Abbott Laboratories | Suture trimmer |
| US6839612B2 (en) | 2001-12-07 | 2005-01-04 | Institute Surgical, Inc. | Microwrist system for surgical procedures |
| US20030114851A1 (en) | 2001-12-13 | 2003-06-19 | Csaba Truckai | Electrosurgical jaws for controlled application of clamping pressure |
| GB2383006A (en) | 2001-12-13 | 2003-06-18 | Black & Decker Inc | Mechanism for use in a power tool and a power tool including such a mechanism |
| US6723087B2 (en) | 2001-12-14 | 2004-04-20 | Medtronic, Inc. | Apparatus and method for performing surgery on a patient |
| US7122028B2 (en) | 2001-12-19 | 2006-10-17 | Allegiance Corporation | Reconfiguration surgical apparatus |
| US6974462B2 (en) | 2001-12-19 | 2005-12-13 | Boston Scientific Scimed, Inc. | Surgical anchor implantation device |
| US6939358B2 (en) | 2001-12-20 | 2005-09-06 | Gore Enterprise Holdings, Inc. | Apparatus and method for applying reinforcement material to a surgical stapler |
| EP1465555B1 (en) | 2001-12-21 | 2015-05-06 | QuickRing Medical Technologies Ltd. | Implantation system for annuloplasty rings |
| US7729742B2 (en) | 2001-12-21 | 2010-06-01 | Biosense, Inc. | Wireless position sensor |
| RU2225170C2 (ru) | 2001-12-25 | 2004-03-10 | Дубровский Аркадий Вениаминович | Инструмент с поворотным устройством |
| GB0130975D0 (en) | 2001-12-27 | 2002-02-13 | Gyrus Group Plc | A surgical instrument |
| US20060264929A1 (en) | 2001-12-27 | 2006-11-23 | Gyrus Group Plc | Surgical system |
| US6942662B2 (en) | 2001-12-27 | 2005-09-13 | Gyrus Group Plc | Surgical Instrument |
| AU2002358220B2 (en) | 2001-12-27 | 2008-09-25 | Gyrus Medical Limited | A surgical instrument |
| GB0425842D0 (en) | 2004-11-24 | 2004-12-29 | Gyrus Group Plc | An electrosurgical instrument |
| US6729119B2 (en) | 2001-12-28 | 2004-05-04 | The Schnipke Family Limited Liability Company | Robotic loader for surgical stapling cartridge |
| US6913594B2 (en) | 2001-12-31 | 2005-07-05 | Biosense Webster, Inc. | Dual-function catheter handle |
| US6602252B2 (en) | 2002-01-03 | 2003-08-05 | Starion Instruments Corporation | Combined dissecting, cauterizing, and stapling device |
| US6740030B2 (en) | 2002-01-04 | 2004-05-25 | Vision Sciences, Inc. | Endoscope assemblies having working channels with reduced bending and stretching resistance |
| US20030163085A1 (en) | 2002-01-16 | 2003-08-28 | Tanner Howard M. | Catheter hand-piece apparatus and method of using the same |
| JP3906843B2 (ja) | 2002-01-16 | 2007-04-18 | トヨタ自動車株式会社 | 電圧変換装置の制御装置および電圧変換方法並びに記憶媒体,プログラム,駆動システムおよび駆動システムを搭載する車輌 |
| US6869435B2 (en) | 2002-01-17 | 2005-03-22 | Blake, Iii John W | Repeating multi-clip applier |
| US6676660B2 (en) | 2002-01-23 | 2004-01-13 | Ethicon Endo-Surgery, Inc. | Feedback light apparatus and method for use with an electrosurgical instrument |
| DE10203282A1 (de) | 2002-01-29 | 2003-08-21 | Behrens Ag Friedrich Joh | Befestigungsmittel und Verfahren zu seiner Herstellung |
| US7530985B2 (en) | 2002-01-30 | 2009-05-12 | Olympus Corporation | Endoscopic suturing system |
| US7501198B2 (en) | 2002-02-07 | 2009-03-10 | Linvatec Corporation | Sterile transfer battery container |
| WO2003068046A2 (en) | 2002-02-13 | 2003-08-21 | Applied Medical Resources Corporation | Tissue fusion/welder apparatus corporation |
| EP1336392A1 (de) | 2002-02-14 | 2003-08-20 | John S. Geis | Gefässstütze und Kathetersystem |
| US7494499B2 (en) | 2002-02-15 | 2009-02-24 | Olympus Corporation | Surgical therapeutic instrument |
| AU2003211376A1 (en) | 2002-02-20 | 2003-09-09 | New X-National Technology K.K. | Drug administration method |
| US6646307B1 (en) | 2002-02-21 | 2003-11-11 | Advanced Micro Devices, Inc. | MOSFET having a double gate |
| US7400752B2 (en) | 2002-02-21 | 2008-07-15 | Alcon Manufacturing, Ltd. | Video overlay system for surgical apparatus |
| US7831292B2 (en) | 2002-03-06 | 2010-11-09 | Mako Surgical Corp. | Guidance system and method for surgical procedures with improved feedback |
| US7289139B2 (en) | 2002-03-12 | 2007-10-30 | Karl Storz Imaging, Inc. | Endoscope reader |
| GB0206208D0 (en) | 2002-03-15 | 2002-05-01 | Gyrus Medical Ltd | A surgical instrument |
| USD484977S1 (en) | 2002-03-22 | 2004-01-06 | Gyrus Ent L.L.C. | Surgical tool blade holder |
| USD478986S1 (en) | 2002-03-22 | 2003-08-26 | Gyrus Ent L.L.C. | Surgical tool |
| US7247161B2 (en) | 2002-03-22 | 2007-07-24 | Gyrus Ent L.L.C. | Powered surgical apparatus, method of manufacturing powered surgical apparatus, and method of using powered surgical apparatus |
| USD484596S1 (en) | 2002-03-22 | 2003-12-30 | Gyrus Ent L.L.C. | Surgical tool blade holder |
| USD484243S1 (en) | 2002-03-22 | 2003-12-23 | Gyrus Ent L.L.C. | Surgical tool blade holder |
| USD478665S1 (en) | 2002-03-22 | 2003-08-19 | Gyrus Ent L.L.C. | Disposable trigger |
| USD484595S1 (en) | 2002-03-22 | 2003-12-30 | Gyrus Ent L.L.C. | Surgical tool blade holder |
| US7137981B2 (en) | 2002-03-25 | 2006-11-21 | Ethicon Endo-Surgery, Inc. | Endoscopic ablation system with a distally mounted image sensor |
| JP4071642B2 (ja) | 2002-03-25 | 2008-04-02 | 株式会社リコー | 用紙処理装置及び画像形成システム |
| US7128748B2 (en) | 2002-03-26 | 2006-10-31 | Synovis Life Technologies, Inc. | Circular stapler buttress combination |
| JP2003300416A (ja) | 2002-04-10 | 2003-10-21 | Kyowa Sangyo Kk | 車両用サンバイザ |
| AU2003226050A1 (en) | 2002-04-11 | 2003-10-27 | Tyco Healthcare Group, Lp | Surgical stapling apparatus including an anvil and cartridge each having cooperating mating surfaces |
| WO2003088854A1 (en) | 2002-04-15 | 2003-10-30 | Tyco Healthcare Group, Lp | Instrument introducer |
| AU2003230933B2 (en) | 2002-04-15 | 2008-01-10 | Cook Biotech Incorporated | Apparatus and method for producing a reinforced surgical staple line |
| EP2298187B1 (en) | 2002-04-16 | 2017-06-07 | Covidien LP | Surgical stapler and method |
| US8241308B2 (en) | 2002-04-24 | 2012-08-14 | Boston Scientific Scimed, Inc. | Tissue fastening devices and processes that promote tissue adhesion |
| CA2483094C (en) | 2002-04-25 | 2011-03-15 | Tyco Healthcare Group, Lp | Surgical instruments including mems devices |
| US7101394B2 (en) | 2002-05-02 | 2006-09-05 | Boston Scientific Scimed, Inc. | Energetically-controlled delivery of biologically active material from an implanted medical device |
| US7674270B2 (en) | 2002-05-02 | 2010-03-09 | Laparocision, Inc | Apparatus for positioning a medical instrument |
| US7215517B2 (en) | 2002-05-08 | 2007-05-08 | Seiko Epson Corporation | Constant-voltage switching power supply provided with overvoltage output protecting circuit, and electronic apparatus provided with overvoltage protecting circuit |
| ATE339918T1 (de) | 2002-05-08 | 2006-10-15 | Radi Medical Systems | Lösliche medizinische dichtungsvorrichtung |
| CN1625457A (zh) | 2002-05-09 | 2005-06-08 | 龟山俊之 | 订书器用盒及订书器 |
| US7238195B2 (en) | 2002-05-10 | 2007-07-03 | Tyco Healthcare Group Lp | Wound closure material applicator and stapler |
| DE60307820T2 (de) | 2002-05-10 | 2007-03-29 | Tyco Healthcare Group Lp, Norwalk | Elektrochirurgisches klammergerät |
| US6736854B2 (en) | 2002-05-10 | 2004-05-18 | C. R. Bard, Inc. | Prosthetic repair fabric with erosion resistant edge |
| ES2503550T3 (es) | 2002-05-10 | 2014-10-07 | Covidien Lp | Aparato grapador quirúrgico que tiene un conjunto aplicador de material para cierre de heridas |
| WO2003094747A1 (en) | 2002-05-13 | 2003-11-20 | Tyco Healthcare Group, Lp | Surgical stapler and disposable loading unit having different size staples |
| US20040254455A1 (en) | 2002-05-15 | 2004-12-16 | Iddan Gavriel J. | Magneic switch for use in a system that includes an in-vivo device, and method of use thereof |
| US7967839B2 (en) | 2002-05-20 | 2011-06-28 | Rocky Mountain Biosystems, Inc. | Electromagnetic treatment of tissues and cells |
| US6638297B1 (en) | 2002-05-30 | 2003-10-28 | Ethicon Endo-Surgery, Inc. | Surgical staple |
| US6769594B2 (en) | 2002-05-31 | 2004-08-03 | Tyco Healthcare Group, Lp | End-to-end anastomosis instrument and method for performing same |
| US7056330B2 (en) | 2002-05-31 | 2006-06-06 | Ethicon Endo-Surgery, Inc. | Method for applying tissue fastener |
| US6543456B1 (en) | 2002-05-31 | 2003-04-08 | Ethicon Endo-Surgery, Inc. | Method for minimally invasive surgery in the digestive system |
| US7004174B2 (en) | 2002-05-31 | 2006-02-28 | Neothermia Corporation | Electrosurgery with infiltration anesthesia |
| US6861142B1 (en) | 2002-06-06 | 2005-03-01 | Hills, Inc. | Controlling the dissolution of dissolvable polymer components in plural component fibers |
| US20050137454A1 (en) | 2002-06-13 | 2005-06-23 | Usgi Medical Corp. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| US7166133B2 (en) | 2002-06-13 | 2007-01-23 | Kensey Nash Corporation | Devices and methods for treating defects in the tissue of a living being |
| US6837847B2 (en) | 2002-06-13 | 2005-01-04 | Usgi Medical, Inc. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| EP1515651B1 (en) | 2002-06-14 | 2006-12-06 | Power Medical Interventions, Inc. | Device for clamping, cutting, and stapling tissue |
| EP1719461B1 (en) | 2002-06-17 | 2009-06-03 | Tyco Healthcare Group Lp | Annular support structures |
| EP2228019B1 (en) | 2002-06-17 | 2013-08-14 | Covidien LP | Annular support structures |
| US7063671B2 (en) | 2002-06-21 | 2006-06-20 | Boston Scientific Scimed, Inc. | Electronically activated capture device |
| US6635838B1 (en) | 2002-06-24 | 2003-10-21 | Brent A. Kornelson | Switch actuating device and method of mounting same |
| US7112214B2 (en) | 2002-06-25 | 2006-09-26 | Incisive Surgical, Inc. | Dynamic bioabsorbable fastener for use in wound closure |
| US7699856B2 (en) | 2002-06-27 | 2010-04-20 | Van Wyk Robert A | Method, apparatus, and kit for thermal suture cutting |
| GB2390024B (en) | 2002-06-27 | 2005-09-21 | Gyrus Medical Ltd | Electrosurgical system |
| US7220260B2 (en) | 2002-06-27 | 2007-05-22 | Gyrus Medical Limited | Electrosurgical system |
| AUPS322702A0 (en) | 2002-06-28 | 2002-07-18 | Cochlear Limited | Cochlear implant electrode array |
| US8287561B2 (en) | 2002-06-28 | 2012-10-16 | Boston Scientific Scimed, Inc. | Balloon-type actuator for surgical applications |
| US7033356B2 (en) | 2002-07-02 | 2006-04-25 | Gyrus Medical, Inc. | Bipolar electrosurgical instrument for cutting desiccating and sealing tissue |
| US20040006340A1 (en) | 2002-07-02 | 2004-01-08 | Gyrus Medical, Inc. | Bipolar electrosurgical instrument for cutting, desiccating and sealing tissue |
| US6932218B2 (en) | 2002-07-03 | 2005-08-23 | Monica Rich Kosann Photography Llc | Folding photo case |
| EP2055242B1 (en) | 2002-07-03 | 2012-01-18 | Abbott Vascular Inc. | Surgical staple |
| US20040006335A1 (en) | 2002-07-08 | 2004-01-08 | Garrison Lawrence L. | Cauterizing surgical saw |
| US7029439B2 (en) | 2002-07-09 | 2006-04-18 | Welch Allyn, Inc. | Medical diagnostic instrument |
| WO2004006980A2 (en) | 2002-07-11 | 2004-01-22 | Sightline Technologies Ltd. | Piston-actuated endoscopic steering system |
| US20040006860A1 (en) | 2002-07-15 | 2004-01-15 | Haytayan Harry M. | Method and apparatus for attaching structural components with fasteners |
| US7769427B2 (en) | 2002-07-16 | 2010-08-03 | Magnetics, Inc. | Apparatus and method for catheter guidance control and imaging |
| EP1523512B1 (en) | 2002-07-22 | 2019-12-25 | Aspen Aerogels Inc. | Polyimide aerogels, carbon aerogels, and metal carbide aerogels and methods of making same |
| IL150853A0 (en) | 2002-07-22 | 2003-02-12 | Niti Medical Technologies Ltd | Imppoved intussusception and anastomosis apparatus |
| JP4046569B2 (ja) | 2002-07-30 | 2008-02-13 | オリンパス株式会社 | 外科用処置具 |
| US8579937B2 (en) | 2002-07-31 | 2013-11-12 | Covidien Lp | Tool member cover and cover deployment device |
| US8016881B2 (en) | 2002-07-31 | 2011-09-13 | Icon Interventional Systems, Inc. | Sutures and surgical staples for anastamoses, wound closures, and surgical closures |
| US7179223B2 (en) | 2002-08-06 | 2007-02-20 | Olympus Optical Co., Ltd. | Endoscope apparatus having an internal channel |
| US6969395B2 (en) | 2002-08-07 | 2005-11-29 | Boston Scientific Scimed, Inc. | Electroactive polymer actuated medical devices |
| US9271753B2 (en) | 2002-08-08 | 2016-03-01 | Atropos Limited | Surgical device |
| AU2003257309A1 (en) | 2002-08-13 | 2004-02-25 | Microbotics Corporation | Microsurgical robot system |
| WO2004019803A1 (de) | 2002-08-28 | 2004-03-11 | Heribert Schmid | Zahnmedizinisches behandlungssystem |
| US20040044364A1 (en) | 2002-08-29 | 2004-03-04 | Devries Robert | Tissue fasteners and related deployment systems and methods |
| US6981978B2 (en) | 2002-08-30 | 2006-01-03 | Satiety, Inc. | Methods and devices for maintaining a space occupying device in a relatively fixed location within a stomach |
| ES2383523T3 (es) | 2002-09-06 | 2012-06-21 | C.R. Bard, Inc. | Sistema de control para accesorio endoscópico externo |
| US8298161B2 (en) | 2002-09-12 | 2012-10-30 | Intuitive Surgical Operations, Inc. | Shape-transferring cannula system and method of use |
| GB0221707D0 (en) | 2002-09-18 | 2002-10-30 | Gyrus Medical Ltd | Electrical system |
| US20040059362A1 (en) | 2002-09-20 | 2004-03-25 | Knodel Bryan D. | Method of performing surgery using surgical device with expandable member |
| US8454628B2 (en) | 2002-09-20 | 2013-06-04 | Syntheon, Llc | Surgical fastener aligning instrument particularly for transoral treatment of gastroesophageal reflux disease |
| US7256695B2 (en) | 2002-09-23 | 2007-08-14 | Microstrain, Inc. | Remotely powered and remotely interrogated wireless digital sensor telemetry system |
| WO2004028402A2 (en) | 2002-09-26 | 2004-04-08 | Bioaccess, Inc. | Orthopedic medical device with unitary components |
| WO2004032783A1 (de) | 2002-09-27 | 2004-04-22 | Aesculap Ag & Co. Kg | Instrumentenset für eine chirurgische operation |
| US7326203B2 (en) | 2002-09-30 | 2008-02-05 | Depuy Acromed, Inc. | Device for advancing a functional element through tissue |
| EP1549200A4 (en) | 2002-09-30 | 2008-05-07 | Sightline Techn Ltd | PISTONED ENDOSCOPIC INSTRUMENT |
| US7087054B2 (en) | 2002-10-01 | 2006-08-08 | Surgrx, Inc. | Electrosurgical instrument and method of use |
| US20040068161A1 (en) | 2002-10-02 | 2004-04-08 | Couvillon Lucien Alfred | Thrombolysis catheter |
| US20040068224A1 (en) | 2002-10-02 | 2004-04-08 | Couvillon Lucien Alfred | Electroactive polymer actuated medication infusion pumps |
| JP4049217B2 (ja) | 2002-10-02 | 2008-02-20 | イーメックス株式会社 | 導電性高分子成形品及び積層体を用いた装置 |
| CA2500832C (en) | 2002-10-04 | 2011-03-22 | Tyco Healthcare Group, Lp | Tool assembly for a surgical stapling device |
| AU2003282721B2 (en) | 2002-10-04 | 2008-10-23 | Covidien Lp | Surgical stapler with universal articulation and tissue pre-clamp |
| EP1671593B1 (en) | 2002-10-04 | 2008-02-27 | Tyco Healthcare Group Lp | Tool assembly for surgical stapling device |
| EP1545338B1 (en) | 2002-10-04 | 2009-04-15 | Tyco Healthcare Group Lp | Surgical stapling device |
| EP2430985B1 (en) | 2002-10-04 | 2017-06-14 | Covidien LP | Pneumatic powered surgical stapling device |
| US20040070369A1 (en) | 2002-10-11 | 2004-04-15 | Makita Corporation | Adapters for battery chargers |
| US6958035B2 (en) | 2002-10-15 | 2005-10-25 | Dusa Pharmaceuticals, Inc | Medical device sheath apparatus and method of making and using same |
| US7023159B2 (en) | 2002-10-18 | 2006-04-04 | Black & Decker Inc. | Method and device for braking a motor |
| US8100872B2 (en) | 2002-10-23 | 2012-01-24 | Tyco Healthcare Group Lp | Medical dressing containing antimicrobial agent |
| JP4086621B2 (ja) | 2002-10-28 | 2008-05-14 | 株式会社トップ | 外科用器具のハンドル構造 |
| US6923093B2 (en) | 2002-10-29 | 2005-08-02 | Rizwan Ullah | Tool drive system |
| US7083620B2 (en) | 2002-10-30 | 2006-08-01 | Medtronic, Inc. | Electrosurgical hemostat |
| US20090149871A9 (en) | 2002-11-01 | 2009-06-11 | Jonathan Kagan | Devices and methods for treating morbid obesity |
| US7037344B2 (en) | 2002-11-01 | 2006-05-02 | Valentx, Inc. | Apparatus and methods for treatment of morbid obesity |
| US8070743B2 (en) | 2002-11-01 | 2011-12-06 | Valentx, Inc. | Devices and methods for attaching an endolumenal gastrointestinal implant |
| JP2006509537A (ja) | 2002-11-14 | 2006-03-23 | エシコン・エンド−サージェリィ・インコーポレイテッド | 組織細胞を検出するための方法および機器 |
| DE10253572A1 (de) | 2002-11-15 | 2004-07-29 | Vega Grieshaber Kg | Drahtlose Kommunikation |
| US20050256452A1 (en) | 2002-11-15 | 2005-11-17 | Demarchi Thomas | Steerable vascular sheath |
| US7211092B2 (en) | 2002-11-19 | 2007-05-01 | Pilling Weck Incorporated | Automated-feed surgical clip applier and related methods |
| CN1486667A (zh) | 2002-11-22 | 2004-04-07 | 带有一次性鞘套的内窥镜系统 | |
| US20040101822A1 (en) | 2002-11-26 | 2004-05-27 | Ulrich Wiesner | Fluorescent silica-based nanoparticles |
| DE10257760A1 (de) | 2002-11-26 | 2004-06-17 | Stefan Koscher | Chirurgisches Instrument |
| US20040102783A1 (en) | 2002-11-27 | 2004-05-27 | Sutterlin Chester E. | Powered Kerrison-like Rongeur system |
| AU2003293191B2 (en) | 2002-11-29 | 2008-08-07 | William E. Cohn | Apparatus and method for manipulating tissue |
| JP2004182840A (ja) | 2002-12-03 | 2004-07-02 | Idemitsu Petrochem Co Ltd | ポリアリーレンスルフィド樹脂及びその組成物、並びにこれらの製造方法 |
| US7386365B2 (en) | 2004-05-04 | 2008-06-10 | Intuitive Surgical, Inc. | Tool grip calibration for robotic surgery |
| CA2509622C (en) | 2002-12-16 | 2012-02-21 | Gunze Limited | Medical film comprising gelatin and reinforcing material |
| WO2004058079A2 (en) | 2002-12-17 | 2004-07-15 | Applied Medical Resources Corporation | Surgical staple-clip and applier |
| AU2003302983A1 (en) | 2002-12-18 | 2004-07-09 | Koninklijke Philips Electronics N.V. | Magnetic position sensor |
| US7348763B1 (en) | 2002-12-20 | 2008-03-25 | Linvatec Corporation | Method for utilizing temperature to determine a battery state |
| US7343920B2 (en) | 2002-12-20 | 2008-03-18 | Toby E Bruce | Connective tissue repair system |
| US20040147909A1 (en) | 2002-12-20 | 2004-07-29 | Gyrus Ent L.L.C. | Surgical instrument |
| US7249267B2 (en) | 2002-12-21 | 2007-07-24 | Power-One, Inc. | Method and system for communicating filter compensation coefficients for a digital power control system |
| US6931830B2 (en) | 2002-12-23 | 2005-08-23 | Chase Liao | Method of forming a wire package |
| US7131445B2 (en) | 2002-12-23 | 2006-11-07 | Gyrus Medical Limited | Electrosurgical method and apparatus |
| GB0230055D0 (en) | 2002-12-23 | 2003-01-29 | Gyrus Medical Ltd | Electrosurgical method and apparatus |
| US7195627B2 (en) | 2003-01-09 | 2007-03-27 | Gyrus Medical Limited | Electrosurgical generator |
| EP1782741A3 (en) | 2003-01-09 | 2008-11-05 | Gyrus Medical Limited | An electrosurgical generator |
| GB0426648D0 (en) | 2004-12-03 | 2005-01-05 | Gyrus Medical Ltd | An electrosurgical generator |
| US7287682B1 (en) | 2003-01-20 | 2007-10-30 | Hazem Ezzat | Surgical device and method |
| US20040143297A1 (en) | 2003-01-21 | 2004-07-22 | Maynard Ramsey | Advanced automatic external defibrillator powered by alternative and optionally multiple electrical power sources and a new business method for single use AED distribution and refurbishment |
| US6960220B2 (en) | 2003-01-22 | 2005-11-01 | Cardia, Inc. | Hoop design for occlusion device |
| US6821284B2 (en) | 2003-01-22 | 2004-11-23 | Novare Surgical Systems, Inc. | Surgical clamp inserts with micro-tractive surfaces |
| US20040225186A1 (en) | 2003-01-29 | 2004-11-11 | Horne Guy E. | Composite flexible endoscope insertion shaft with tubular substructure |
| US7341591B2 (en) | 2003-01-30 | 2008-03-11 | Depuy Spine, Inc. | Anterior buttress staple |
| JP2004229976A (ja) | 2003-01-31 | 2004-08-19 | Nippon Zeon Co Ltd | 鉗子型電気処置器具 |
| EP1442720A1 (en) | 2003-01-31 | 2004-08-04 | Tre Esse Progettazione Biomedica S.r.l | Apparatus for the maneuvering of flexible catheters in the human cardiovascular system |
| US7354502B2 (en) | 2003-02-06 | 2008-04-08 | The Procter & Gamble Company | Method for making a fibrous structure comprising cellulosic and synthetic fibers |
| US7067038B2 (en) | 2003-02-06 | 2006-06-27 | The Procter & Gamble Company | Process for making unitary fibrous structure comprising randomly distributed cellulosic fibers and non-randomly distributed synthetic fibers |
| ATE522327T1 (de) | 2003-02-07 | 2011-09-15 | Max Co Ltd | Klammernachfüllvorrichtung, heftvorrichtung, kassette |
| JP4481247B2 (ja) | 2003-02-11 | 2010-06-16 | オリンパス株式会社 | オーバーチューブおよびオーバーチューブの製造方法 |
| CN100442622C (zh) | 2003-02-18 | 2008-12-10 | 美商波特-凯博公司 | 电动工具中电池过电流的保护的安培数控制 |
| US7097039B2 (en) | 2003-02-20 | 2006-08-29 | Robert Chris Muis | Single taco trap and holder |
| US20040167572A1 (en) | 2003-02-20 | 2004-08-26 | Roth Noah M. | Coated medical devices |
| US7083615B2 (en) | 2003-02-24 | 2006-08-01 | Intuitive Surgical Inc | Surgical tool having electrocautery energy supply conductor with inhibited current leakage |
| JP4231707B2 (ja) | 2003-02-25 | 2009-03-04 | オリンパス株式会社 | カプセル型医療装置 |
| EP2604216B1 (en) | 2003-02-25 | 2018-08-22 | Tria Beauty, Inc. | Self-contained, diode-laser-based dermatologic treatment apparatus |
| US7476237B2 (en) | 2003-02-27 | 2009-01-13 | Olympus Corporation | Surgical instrument |
| JP4805814B2 (ja) | 2003-03-04 | 2011-11-02 | ノートン・ヘルスケアー リミテッド | 内部医薬リザーバの状態を表すディスプレイを有する医薬分与装置 |
| EP1599146B1 (en) | 2003-03-05 | 2007-10-03 | Gyrus Medical Limited | Electrosurgical generator and system |
| IL154814A0 (en) | 2003-03-09 | 2003-10-31 | Edward G Shifrin | Sternal closure system, method and apparatus therefor |
| US7126879B2 (en) | 2003-03-10 | 2006-10-24 | Healthtrac Systems, Inc. | Medication package and method |
| US20060064086A1 (en) | 2003-03-13 | 2006-03-23 | Darren Odom | Bipolar forceps with multiple electrode array end effector assembly |
| CA2519445C (en) | 2003-03-17 | 2012-06-12 | Tyco Healthcare Group, Lp | Endoscopic tissue removal apparatus and method |
| US20040193189A1 (en) | 2003-03-25 | 2004-09-30 | Kortenbach Juergen A. | Passive surgical clip |
| US20060041188A1 (en) | 2003-03-25 | 2006-02-23 | Dirusso Carlo A | Flexible endoscope |
| WO2004086987A1 (en) | 2003-03-26 | 2004-10-14 | Tyco Healthcare Group, Lp | Energy stored in spring with controlled release |
| DE10314072B4 (de) | 2003-03-28 | 2009-01-15 | Aesculap Ag | Chirurgisches Instrument |
| US7295893B2 (en) | 2003-03-31 | 2007-11-13 | Kabushiki Kaisha Toshiba | Manipulator and its control apparatus and method |
| JP3752494B2 (ja) | 2003-03-31 | 2006-03-08 | 株式会社東芝 | マスタスレーブマニピュレータ、その制御装置及び制御方法 |
| JP3944108B2 (ja) | 2003-03-31 | 2007-07-11 | 株式会社東芝 | 医療用マニピュレータの動力伝達機構およびマニピュレータ |
| DE10330604A1 (de) | 2003-04-01 | 2004-10-28 | Tuebingen Scientific Surgical Products Gmbh | Chirurgisches Instrument |
| DE10324844A1 (de) | 2003-04-01 | 2004-12-23 | Tuebingen Scientific Surgical Products Gmbh | Chirurgisches Instrument mit Instrumentengriff und Nullpunkteinstellung |
| DE10314827B3 (de) | 2003-04-01 | 2004-04-22 | Tuebingen Scientific Surgical Products Gmbh | Chirurgisches Instrument |
| US7591783B2 (en) | 2003-04-01 | 2009-09-22 | Boston Scientific Scimed, Inc. | Articulation joint for video endoscope |
| US20040199181A1 (en) | 2003-04-02 | 2004-10-07 | Knodel Bryan D. | Surgical device for anastomosis |
| US20040243163A1 (en) | 2003-04-02 | 2004-12-02 | Gyrus Ent L.L.C | Surgical instrument |
| US20070010702A1 (en) | 2003-04-08 | 2007-01-11 | Xingwu Wang | Medical device with low magnetic susceptibility |
| US20050116673A1 (en) | 2003-04-18 | 2005-06-02 | Rensselaer Polytechnic Institute | Methods and systems for controlling the operation of a tool |
| US8377029B2 (en) | 2003-04-23 | 2013-02-19 | Otsuka Pharmaceutical Factory, Inc. | Drug solution filling plastic ampoule and process for producing the same |
| CA2523270A1 (en) | 2003-04-25 | 2004-11-11 | Applied Medical Resources Corporation | Steerable kink-resistant sheath |
| US20040243151A1 (en) | 2003-04-29 | 2004-12-02 | Demmy Todd L. | Surgical stapling device with dissecting tip |
| US8714429B2 (en) | 2003-04-29 | 2014-05-06 | Covidien Lp | Dissecting tip for surgical stapler |
| RU32984U1 (ru) | 2003-04-30 | 2003-10-10 | Институт экспериментальной ветеринарии Сибири и Дальнего Востока СО РАСХН | Кутиметр |
| US7160299B2 (en) | 2003-05-01 | 2007-01-09 | Sherwood Services Ag | Method of fusing biomaterials with radiofrequency energy |
| US8128624B2 (en) | 2003-05-01 | 2012-03-06 | Covidien Ag | Electrosurgical instrument that directs energy delivery and protects adjacent tissue |
| JP4391762B2 (ja) | 2003-05-08 | 2009-12-24 | オリンパス株式会社 | 外科用処置具 |
| WO2004105621A1 (en) | 2003-05-09 | 2004-12-09 | Tyco Healthcare Group, Lp | Anastomotic staple with fluid dispensing capillary |
| US7615003B2 (en) | 2005-05-13 | 2009-11-10 | Ethicon Endo-Surgery, Inc. | Track for medical devices |
| US7431694B2 (en) | 2003-05-16 | 2008-10-07 | Ethicon Endo-Surgery, Inc. | Method of guiding medical devices |
| US7815565B2 (en) | 2003-05-16 | 2010-10-19 | Ethicon Endo-Surgery, Inc. | Endcap for use with an endoscope |
| US7143923B2 (en) | 2003-05-20 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a firing lockout for an unclosed anvil |
| US7000818B2 (en) | 2003-05-20 | 2006-02-21 | Ethicon, Endo-Surger, Inc. | Surgical stapling instrument having separate distinct closing and firing systems |
| US7140528B2 (en) | 2003-05-20 | 2006-11-28 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated single lockout mechanism for prevention of firing |
| US6988649B2 (en) | 2003-05-20 | 2006-01-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a spent cartridge lockout |
| US7044352B2 (en) | 2003-05-20 | 2006-05-16 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a single lockout mechanism for prevention of firing |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US7380696B2 (en) | 2003-05-20 | 2008-06-03 | Ethicon Endo-Surgery, Inc. | Articulating surgical stapling instrument incorporating a two-piece E-beam firing mechanism |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US20070010838A1 (en) | 2003-05-20 | 2007-01-11 | Shelton Frederick E Iv | Surgical stapling instrument having a firing lockout for an unclosed anvil |
| US7286850B2 (en) | 2003-05-20 | 2007-10-23 | Agere Systems Inc. | Wireless communication module system and method for performing a wireless communication |
| US7380695B2 (en) | 2003-05-20 | 2008-06-03 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a single lockout mechanism for prevention of firing |
| US7090637B2 (en) | 2003-05-23 | 2006-08-15 | Novare Surgical Systems, Inc. | Articulating mechanism for remote manipulation of a surgical or diagnostic tool |
| US8100824B2 (en) | 2003-05-23 | 2012-01-24 | Intuitive Surgical Operations, Inc. | Tool with articulation lock |
| US7413563B2 (en) | 2003-05-27 | 2008-08-19 | Cardia, Inc. | Flexible medical device |
| US6965183B2 (en) | 2003-05-27 | 2005-11-15 | Pratt & Whitney Canada Corp. | Architecture for electric machine |
| US6921397B2 (en) | 2003-05-27 | 2005-07-26 | Cardia, Inc. | Flexible delivery device |
| DE10325393B3 (de) | 2003-05-28 | 2005-01-05 | Karl Storz Gmbh & Co. Kg | Retraktor |
| JP3521910B1 (ja) | 2003-05-29 | 2004-04-26 | 清輝 司馬 | 内視鏡の外部鉗子チャンネル装置 |
| US7346344B2 (en) | 2003-05-30 | 2008-03-18 | Aol Llc, A Delaware Limited Liability Company | Identity-based wireless device configuration |
| US20040247415A1 (en) | 2003-06-04 | 2004-12-09 | Mangone Peter G. | Slotted fastener and fastening method |
| US8007511B2 (en) | 2003-06-06 | 2011-08-30 | Hansen Medical, Inc. | Surgical instrument design |
| CN100365375C (zh) | 2003-06-09 | 2008-01-30 | 三丰株式会社 | 测量器 |
| US7597693B2 (en) | 2003-06-13 | 2009-10-06 | Covidien Ag | Vessel sealer and divider for use with small trocars and cannulas |
| DE10326677A1 (de) | 2003-06-13 | 2005-01-20 | Zf Friedrichshafen Ag | Planetengetriebe |
| US7905902B2 (en) | 2003-06-16 | 2011-03-15 | Ethicon Endo-Surgery, Inc. | Surgical implant with preferential corrosion zone |
| US20040254590A1 (en) | 2003-06-16 | 2004-12-16 | Hoffman Gary H. | Method and instrument for the performance of stapled anastamoses |
| US20060052825A1 (en) | 2003-06-16 | 2006-03-09 | Ransick Mark H | Surgical implant alloy |
| CA2724284C (en) | 2003-06-17 | 2013-02-26 | Tyco Healthcare Group Lp | Surgical stapling device |
| US7494039B2 (en) | 2003-06-17 | 2009-02-24 | Tyco Healthcare Group Lp | Surgical stapling device |
| US20040260315A1 (en) | 2003-06-17 | 2004-12-23 | Dell Jeffrey R. | Expandable tissue support member and method of forming the support member |
| AU2004249287B2 (en) | 2003-06-20 | 2009-12-24 | Covidien Lp | Surgical stapling device |
| US20070093869A1 (en) | 2003-06-20 | 2007-04-26 | Medtronic Vascular, Inc. | Device, system, and method for contracting tissue in a mammalian body |
| SE526852C2 (sv) | 2003-06-26 | 2005-11-08 | Kongsberg Automotive Ab | Metod och arrangemang för styrning av likströmsmotor |
| JP2005013573A (ja) | 2003-06-27 | 2005-01-20 | Olympus Corp | 電子内視鏡システム |
| DE10328934B4 (de) | 2003-06-27 | 2005-06-02 | Christoph Zepf | Motorischer Antrieb für chirurgische Instrumente |
| US6998816B2 (en) | 2003-06-30 | 2006-02-14 | Sony Electronics Inc. | System and method for reducing external battery capacity requirement for a wireless card |
| US8226715B2 (en) | 2003-06-30 | 2012-07-24 | Depuy Mitek, Inc. | Scaffold for connective tissue repair |
| US20050010213A1 (en) | 2003-07-08 | 2005-01-13 | Depuy Spine, Inc. | Attachment mechanism for surgical instrument |
| US7126303B2 (en) | 2003-07-08 | 2006-10-24 | Board Of Regents Of The University Of Nebraska | Robot for surgical applications |
| US6786382B1 (en) | 2003-07-09 | 2004-09-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an articulation joint for a firing bar track |
| US7055731B2 (en) | 2003-07-09 | 2006-06-06 | Ethicon Endo-Surgery Inc. | Surgical stapling instrument incorporating a tapered firing bar for increased flexibility around the articulation joint |
| US7111769B2 (en) | 2003-07-09 | 2006-09-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an articulation mechanism having rotation about the longitudinal axis |
| US7213736B2 (en) | 2003-07-09 | 2007-05-08 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an electroactive polymer actuated firing bar track through an articulation joint |
| US6981628B2 (en) | 2003-07-09 | 2006-01-03 | Ethicon Endo-Surgery, Inc. | Surgical instrument with a lateral-moving articulation control |
| US6964363B2 (en) | 2003-07-09 | 2005-11-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having articulation joint support plates for supporting a firing bar |
| US7931695B2 (en) | 2003-07-15 | 2011-04-26 | Kensey Nash Corporation | Compliant osteosynthesis fixation plate |
| US7066879B2 (en) | 2003-07-15 | 2006-06-27 | The Trustees Of Columbia University In The City Of New York | Insertable device and system for minimal access procedure |
| US6959851B2 (en) | 2003-07-16 | 2005-11-01 | Tyco Healthcare Group Lp | Surgical stapling device with tissue tensioner |
| US7183737B2 (en) | 2003-07-17 | 2007-02-27 | Asmo Co., Ltd. | Motor control device and motor control method |
| EP1647286B1 (en) | 2003-07-17 | 2010-09-29 | Gunze Limited | Stitching reinforcement material for automatic stitching device |
| US7712182B2 (en) | 2003-07-25 | 2010-05-11 | Milwaukee Electric Tool Corporation | Air flow-producing device, such as a vacuum cleaner or a blower |
| US20050032511A1 (en) | 2003-08-07 | 2005-02-10 | Cardiac Pacemakers, Inc. | Wireless firmware download to an external device |
| FI120333B (fi) | 2003-08-20 | 2009-09-30 | Bioretec Oy | Huokoinen lääketieteellinen väline ja menetelmä sen valmistamiseksi |
| US7686201B2 (en) | 2003-09-01 | 2010-03-30 | Tyco Healthcare Group Lp | Circular stapler for hemorrhoid operations |
| CA2439536A1 (en) | 2003-09-04 | 2005-03-04 | Jacek Krzyzanowski | Variations of biopsy jaw and clevis and method of manufacture |
| JP4190983B2 (ja) | 2003-09-04 | 2008-12-03 | ジョンソン・エンド・ジョンソン株式会社 | ステープル装置 |
| US20050058890A1 (en) | 2003-09-15 | 2005-03-17 | Kenneth Brazell | Removable battery pack for a portable electric power tool |
| US20050059997A1 (en) | 2003-09-17 | 2005-03-17 | Bauman Ann M. | Circular stapler buttress |
| US7547312B2 (en) | 2003-09-17 | 2009-06-16 | Gore Enterprise Holdings, Inc. | Circular stapler buttress |
| US7303108B2 (en) | 2003-09-29 | 2007-12-04 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multi-stroke firing mechanism with a flexible rack |
| US6905057B2 (en) | 2003-09-29 | 2005-06-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a firing mechanism having a linked rack transmission |
| US7000819B2 (en) | 2003-09-29 | 2006-02-21 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having multistroke firing incorporating a traction-biased ratcheting mechanism |
| US7083075B2 (en) | 2003-09-29 | 2006-08-01 | Ethicon Endo-Surgery, Inc. | Multi-stroke mechanism with automatic end of stroke retraction |
| US7434715B2 (en) | 2003-09-29 | 2008-10-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having multistroke firing with opening lockout |
| US7094202B2 (en) | 2003-09-29 | 2006-08-22 | Ethicon Endo-Surgery, Inc. | Method of operating an endoscopic device with one hand |
| US6959852B2 (en) | 2003-09-29 | 2005-11-01 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with multistroke firing incorporating an anti-backup mechanism |
| US7364061B2 (en) | 2003-09-29 | 2008-04-29 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multistroke firing position indicator and retraction mechanism |
| US20050070929A1 (en) | 2003-09-30 | 2005-03-31 | Dalessandro David A. | Apparatus and method for attaching a surgical buttress to a stapling apparatus |
| US20050075561A1 (en) | 2003-10-01 | 2005-04-07 | Lucent Medical Systems, Inc. | Method and apparatus for indicating an encountered obstacle during insertion of a medical device |
| US7090664B2 (en) | 2003-10-02 | 2006-08-15 | Dwight Jerome Holter | Ostomy tools, and systems and processes for their use |
| US7556647B2 (en) | 2003-10-08 | 2009-07-07 | Arbor Surgical Technologies, Inc. | Attachment device and methods of using the same |
| US7914543B2 (en) | 2003-10-14 | 2011-03-29 | Satiety, Inc. | Single fold device for tissue fixation |
| US7533906B2 (en) | 2003-10-14 | 2009-05-19 | Water Pik, Inc. | Rotatable and pivotable connector |
| US7097650B2 (en) | 2003-10-14 | 2006-08-29 | Satiety, Inc. | System for tissue approximation and fixation |
| US7029435B2 (en) | 2003-10-16 | 2006-04-18 | Granit Medical Innovation, Llc | Endoscope having multiple working segments |
| US8968276B2 (en) | 2007-09-21 | 2015-03-03 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US9113880B2 (en) | 2007-10-05 | 2015-08-25 | Covidien Lp | Internal backbone structural chassis for a surgical device |
| US9055943B2 (en) | 2007-09-21 | 2015-06-16 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US7296722B2 (en) | 2003-10-17 | 2007-11-20 | Tyco Healthcare Group Lp | Surgical fastener applying apparatus with controlled beam deflection |
| US8806973B2 (en) | 2009-12-02 | 2014-08-19 | Covidien Lp | Adapters for use between surgical handle assembly and surgical end effector |
| EP2298181B1 (en) | 2003-10-17 | 2017-04-12 | Covidien LP | Tilt anvil assembly for a surgical stapling device |
| US10588629B2 (en) | 2009-11-20 | 2020-03-17 | Covidien Lp | Surgical console and hand-held surgical device |
| CA2542532C (en) | 2003-10-17 | 2012-08-14 | Tyco Healthcare Group, Lp | Surgical stapling device with independent tip rotation |
| US10105140B2 (en) | 2009-11-20 | 2018-10-23 | Covidien Lp | Surgical console and hand-held surgical device |
| US20090090763A1 (en) | 2007-10-05 | 2009-04-09 | Tyco Healthcare Group Lp | Powered surgical stapling device |
| US20050090817A1 (en) | 2003-10-22 | 2005-04-28 | Scimed Life Systems, Inc. | Bendable endoscopic bipolar device |
| WO2005048809A1 (en) | 2003-10-23 | 2005-06-02 | Sherwood Services Ag | Redundant temperature monitoring in electrosurgical systems for safety mitigation |
| US7556814B2 (en) | 2003-10-23 | 2009-07-07 | Karp Nelson M | Immunogenic compositions comprising UV-irradiated, psoralen-inactivated, desialated human immunodeficiency virus (HIV) devoid of CD55 and CD59 in the viral membrane |
| US7147650B2 (en) | 2003-10-30 | 2006-12-12 | Woojin Lee | Surgical instrument |
| US7842028B2 (en) | 2005-04-14 | 2010-11-30 | Cambridge Endoscopic Devices, Inc. | Surgical instrument guide device |
| DE602004016022D1 (de) | 2003-10-30 | 2008-10-02 | Mcneil Ppc Inc | Zusammengesetzte materialien aus metall beladenen abgeblätterten nanoteilchen |
| US7338513B2 (en) | 2003-10-30 | 2008-03-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7686826B2 (en) | 2003-10-30 | 2010-03-30 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| JP2005131212A (ja) | 2003-10-31 | 2005-05-26 | Olympus Corp | 内視鏡用の外付けチャンネル及び内視鏡装置 |
| JP2005131173A (ja) | 2003-10-31 | 2005-05-26 | Olympus Corp | 内視鏡用外付けチャンネル |
| JP2005131163A (ja) | 2003-10-31 | 2005-05-26 | Olympus Corp | 内視鏡用の外付けチャンネル |
| JP2005131164A (ja) | 2003-10-31 | 2005-05-26 | Olympus Corp | 内視鏡用の外付けチャンネル |
| JP2005131211A (ja) | 2003-10-31 | 2005-05-26 | Olympus Corp | 内視鏡用の外付けチャンネル |
| US20050096683A1 (en) | 2003-11-01 | 2005-05-05 | Medtronic, Inc. | Using thinner laminations to reduce operating temperature in a high speed hand-held surgical power tool |
| JP2005137423A (ja) | 2003-11-04 | 2005-06-02 | Olympus Corp | 内視鏡用の外付けチャンネルおよび外付けチャンネル用分岐部材 |
| US7397364B2 (en) | 2003-11-11 | 2008-07-08 | Biosense Webster, Inc. | Digital wireless position sensor |
| EP2269520B1 (en) | 2003-11-12 | 2011-11-09 | Applied Medical Resources Corporation | Surgical grasping instrument |
| DE10353846A1 (de) | 2003-11-18 | 2005-06-16 | Maquet Gmbh & Co. Kg | Verfahren zur Vorbereitung von für die Durchführung von medizinischen oder chirurgischen Eingriffen bestimmten Geräten |
| EP1695229A4 (en) | 2003-11-18 | 2007-05-09 | Robert M Ii Burke | SYSTEM FOR REGULATING ACCESS TO AND DISTRIBUTING CONTENT IN A NETWORK |
| JP4594612B2 (ja) | 2003-11-27 | 2010-12-08 | オリンパス株式会社 | 挿入補助具 |
| GB0327904D0 (en) | 2003-12-02 | 2004-01-07 | Qinetiq Ltd | Gear change mechanism |
| US8389588B2 (en) | 2003-12-04 | 2013-03-05 | Kensey Nash Corporation | Bi-phasic compressed porous reinforcement materials suitable for implant |
| GB2408936B (en) | 2003-12-09 | 2007-07-18 | Gyrus Group Plc | A surgical instrument |
| US7439354B2 (en) | 2003-12-11 | 2008-10-21 | E.I. Du Pont De Nemours And Company | Process for preparing amide acetals |
| CA2548335A1 (en) | 2003-12-12 | 2005-06-30 | Automated Merchandising Systems Inc. | Adjustable storage rack for a vending machine |
| US20050131457A1 (en) | 2003-12-15 | 2005-06-16 | Ethicon, Inc. | Variable stiffness shaft |
| US8221424B2 (en) | 2004-12-20 | 2012-07-17 | Spinascope, Inc. | Surgical instrument for orthopedic surgery |
| CA2550431A1 (en) | 2003-12-19 | 2005-07-14 | Osteotech, Inc. | Tissue-derived mesh for orthopedic regeneration |
| US7742036B2 (en) | 2003-12-22 | 2010-06-22 | Immersion Corporation | System and method for controlling haptic devices having multiple operational modes |
| JP4552435B2 (ja) | 2003-12-22 | 2010-09-29 | 住友化学株式会社 | オキシムの製造方法 |
| US8590764B2 (en) | 2003-12-24 | 2013-11-26 | Boston Scientific Scimed, Inc. | Circumferential full thickness resectioning device |
| JP4398716B2 (ja) | 2003-12-24 | 2010-01-13 | 呉羽テック株式会社 | 鮮明なエンボス模様が施された高伸縮性不織布、及びその製造方法 |
| CN1634601A (zh) | 2003-12-26 | 2005-07-06 | 吉林省中立实业有限公司 | 一种用于医疗器械灭菌的方法 |
| US20050143759A1 (en) | 2003-12-30 | 2005-06-30 | Kelly William D. | Curved cutter stapler shaped for male pelvis |
| US7207472B2 (en) | 2003-12-30 | 2007-04-24 | Ethicon Endo-Surgery, Inc. | Cartridge with locking knife for a curved cutter stapler |
| US7147140B2 (en) | 2003-12-30 | 2006-12-12 | Ethicon Endo - Surgery, Inc. | Cartridge retainer for a curved cutter stapler |
| US7134587B2 (en) | 2003-12-30 | 2006-11-14 | Ethicon Endo-Surgery, Inc. | Knife retraction arm for a curved cutter stapler |
| US7549563B2 (en) | 2003-12-30 | 2009-06-23 | Ethicon Endo-Surgery, Inc. | Rotating curved cutter stapler |
| US7147139B2 (en) | 2003-12-30 | 2006-12-12 | Ethicon Endo-Surgery, Inc | Closure plate lockout for a curved cutter stapler |
| US6988650B2 (en) | 2003-12-30 | 2006-01-24 | Ethicon Endo-Surgery, Inc. | Retaining pin lever advancement mechanism for a curved cutter stapler |
| US7766207B2 (en) | 2003-12-30 | 2010-08-03 | Ethicon Endo-Surgery, Inc. | Articulating curved cutter stapler |
| US7204404B2 (en) | 2003-12-30 | 2007-04-17 | Ethicon Endo-Surgery, Inc. | Slotted pins guiding knife in a curved cutter stapler |
| US20050139636A1 (en) | 2003-12-30 | 2005-06-30 | Schwemberger Richard F. | Replaceable cartridge module for a surgical stapling and cutting instrument |
| US6995729B2 (en) | 2004-01-09 | 2006-02-07 | Biosense Webster, Inc. | Transponder with overlapping coil antennas on a common core |
| TWI228850B (en) | 2004-01-14 | 2005-03-01 | Asia Optical Co Inc | Laser driver circuit for burst mode and making method thereof |
| GB2410161B (en) | 2004-01-16 | 2008-09-03 | Btg Int Ltd | Method and system for calculating and verifying the integrity of data in data transmission system |
| WO2005076640A1 (en) | 2004-01-16 | 2005-08-18 | U.S. Thermoelectric Consortium | Wireless communications apparatus and method |
| US7219980B2 (en) | 2004-01-21 | 2007-05-22 | Silverbrook Research Pty Ltd | Printhead assembly with removable cover |
| US7030283B2 (en) | 2004-01-23 | 2006-04-18 | Air Products And Chemicals, Inc. | Process for producing 1,1-difluorovinyl cycloaliphatic compounds |
| US20050171522A1 (en) | 2004-01-30 | 2005-08-04 | Christopherson Mark A. | Transurethral needle ablation system with needle position indicator |
| US7204835B2 (en) | 2004-02-02 | 2007-04-17 | Gyrus Medical, Inc. | Surgical instrument |
| US20050177176A1 (en) * | 2004-02-05 | 2005-08-11 | Craig Gerbi | Single-fold system for tissue approximation and fixation |
| DE102004005709A1 (de) | 2004-02-05 | 2005-08-25 | Polydiagnost Gmbh | Endoskop mit einer flexiblen Sonde |
| GB0403020D0 (en) | 2004-02-11 | 2004-03-17 | Pa Consulting Services | Portable charging device |
| GB2451777B (en) | 2004-02-17 | 2009-04-08 | Cook Biotech Inc | Medical devices and methods useful for applying bolster material |
| ES2377496T3 (es) | 2004-02-17 | 2012-03-28 | Tyco Healthcare Group Lp | Aparato quirúrgico de grapado con un mecanismo de bloqueo |
| DE602005000891T2 (de) | 2004-02-17 | 2008-01-17 | Tyco Healthcare Group Lp, Norwalk | Chirurgisches Klammernahtgerät mit Verriegelungsmechanismus |
| US20100191292A1 (en) | 2004-02-17 | 2010-07-29 | Demeo Joseph | Oriented polymer implantable device and process for making same |
| US7886952B2 (en) | 2004-02-17 | 2011-02-15 | Tyco Healthcare Group Lp | Surgical stapling apparatus with locking mechanism |
| ES2282940T3 (es) | 2004-02-17 | 2007-10-16 | Tyco Healthcare Group Lp | Aparato para la aplicacion de grapas quirurgicas con mecanismo de bloqueo. |
| ES2286725T3 (es) | 2004-02-17 | 2007-12-01 | Tyco Healthcare Group Lp | Aparato de grapado quirurgico. |
| US6953138B1 (en) | 2004-02-18 | 2005-10-11 | Frank W. Dworak | Surgical stapler anvil with nested staple forming pockets |
| US20050187545A1 (en) | 2004-02-20 | 2005-08-25 | Hooven Michael D. | Magnetic catheter ablation device and method |
| US8046049B2 (en) | 2004-02-23 | 2011-10-25 | Biosense Webster, Inc. | Robotically guided catheter |
| GB2411527B (en) | 2004-02-26 | 2006-06-28 | Itt Mfg Enterprises Inc | Electrical connector |
| JP2005279253A (ja) | 2004-03-02 | 2005-10-13 | Olympus Corp | 内視鏡 |
| US20060100610A1 (en) | 2004-03-05 | 2006-05-11 | Wallace Daniel T | Methods using a robotic catheter system |
| JP4755638B2 (ja) | 2004-03-05 | 2011-08-24 | ハンセン メディカル,インク. | ロボットガイドカテーテルシステム |
| EP1723913A1 (en) | 2004-03-10 | 2006-11-22 | Olympus Corporation | Treatment tool for surgery |
| JP4610934B2 (ja) | 2004-06-03 | 2011-01-12 | オリンパス株式会社 | 外科用処置具 |
| US7066944B2 (en) | 2004-03-11 | 2006-06-27 | Laufer Michael D | Surgical fastening system |
| GB2412232A (en) | 2004-03-15 | 2005-09-21 | Ims Nanofabrication Gmbh | Particle-optical projection system |
| US8181840B2 (en) | 2004-03-19 | 2012-05-22 | Tyco Healthcare Group Lp | Tissue tensioner assembly and approximation mechanism for surgical stapling device |
| CN100475161C (zh) | 2004-03-19 | 2009-04-08 | Tyco医疗健康集团 | 带有改进的切割环的砧座组件 |
| JP4727158B2 (ja) | 2004-03-23 | 2011-07-20 | オリンパス株式会社 | 内視鏡システム |
| TWI234339B (en) | 2004-03-25 | 2005-06-11 | Richtek Techohnology Corp | High-efficiency voltage transformer |
| US7036680B1 (en) | 2004-04-07 | 2006-05-02 | Avery Dennison Corporation | Device for dispensing plastic fasteners |
| JP2005296412A (ja) | 2004-04-13 | 2005-10-27 | Olympus Corp | 内視鏡治療装置 |
| US7566300B2 (en) | 2004-04-15 | 2009-07-28 | Wilson-Cook Medical, Inc. | Endoscopic surgical access devices and methods of articulating an external accessory channel |
| US6960107B1 (en) | 2004-04-16 | 2005-11-01 | Brunswick Corporation | Marine transmission with a cone clutch used for direct transfer of torque |
| US7758612B2 (en) | 2004-04-27 | 2010-07-20 | Tyco Healthcare Group Lp | Surgery delivery device and mesh anchor |
| US7377918B2 (en) | 2004-04-28 | 2008-05-27 | Gyrus Medical Limited | Electrosurgical method and apparatus |
| US7098794B2 (en) | 2004-04-30 | 2006-08-29 | Kimberly-Clark Worldwide, Inc. | Deactivating a data tag for user privacy or tamper-evident packaging |
| AU2005244221B2 (en) | 2004-05-03 | 2011-02-10 | Ams Research Corporation | Surgical implants and related methods |
| JP5227588B2 (ja) | 2004-05-05 | 2013-07-03 | ダイレクト フロウ メディカル、 インク. | 現場形成支持構造を備えたステントレス心臓弁 |
| US7736374B2 (en) | 2004-05-07 | 2010-06-15 | Usgi Medical, Inc. | Tissue manipulation and securement system |
| US8333764B2 (en) | 2004-05-12 | 2012-12-18 | Medtronic, Inc. | Device and method for determining tissue thickness and creating cardiac ablation lesions |
| JP2005328882A (ja) | 2004-05-18 | 2005-12-02 | Olympus Corp | 内視鏡用処置具及び内視鏡システム |
| US7260431B2 (en) | 2004-05-20 | 2007-08-21 | Cardiac Pacemakers, Inc. | Combined remodeling control therapy and anti-remodeling therapy by implantable cardiac device |
| GB2414185A (en) | 2004-05-20 | 2005-11-23 | Gyrus Medical Ltd | Morcellating device using cutting electrodes on end-face of tube |
| JP2005335432A (ja) | 2004-05-24 | 2005-12-08 | Nissan Motor Co Ltd | 後輪転舵制御装置 |
| IES20040368A2 (en) | 2004-05-25 | 2005-11-30 | James E Coleman | Surgical stapler |
| KR20070026558A (ko) | 2004-06-03 | 2007-03-08 | 위데피, 인코포레이티드 | 저가의 고성능 국부 발진기 구조를 갖는 주파수 변환반복기 |
| US7828808B2 (en) | 2004-06-07 | 2010-11-09 | Novare Surgical Systems, Inc. | Link systems and articulation mechanisms for remote manipulation of surgical or diagnostic tools |
| DE102004027850A1 (de) | 2004-06-08 | 2006-01-05 | Henke-Sass Wolf Gmbh | Biegbarer Abschnitt eines Einführtubus eines Endoskopes und Verfahren zu dessen Herstellung |
| GB2415140A (en) | 2004-06-18 | 2005-12-21 | Gyrus Medical Ltd | A surgical instrument |
| US7059508B2 (en) | 2004-06-30 | 2006-06-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an uneven multistroke firing mechanism having a rotary transmission |
| EP3730088B1 (en) | 2004-07-02 | 2022-08-10 | Discus Dental, LLC | Illumination system for dentistry applications |
| US7443547B2 (en) | 2004-07-03 | 2008-10-28 | Science Forge, Inc. | Portable electronic faxing, scanning, copying, and printing device |
| US7485133B2 (en) | 2004-07-14 | 2009-02-03 | Warsaw Orthopedic, Inc. | Force diffusion spinal hook |
| CN2718900Y (zh) | 2004-07-14 | 2005-08-17 | 博威科技(深圳)有限公司 | 一种射频大功率功放旁路开关 |
| US20060020258A1 (en) | 2004-07-20 | 2006-01-26 | Medtronic, Inc. | Surgical apparatus with a manually actuatable assembly and a method of operating same |
| JP4613541B2 (ja) | 2004-07-22 | 2011-01-19 | 横河電機株式会社 | リニアアクチュエータ |
| WO2006014881A2 (en) | 2004-07-26 | 2006-02-09 | Van Lue Stephen J | Surgical stapler with magnetically secured components |
| RU42750U1 (ru) | 2004-07-26 | 2004-12-20 | Альбертин Сергей Викторович | Устройство для дозированной подачи веществ |
| US7862579B2 (en) | 2004-07-28 | 2011-01-04 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based articulation mechanism for grasper |
| US7143926B2 (en) | 2005-02-07 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multi-stroke firing mechanism with return spring rotary manual retraction system |
| US8317074B2 (en) | 2004-07-28 | 2012-11-27 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based articulation mechanism for circular stapler |
| US8057508B2 (en) | 2004-07-28 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an electrically actuated articulation locking mechanism |
| US7487899B2 (en) | 2004-07-28 | 2009-02-10 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating EAP complete firing system lockout mechanism |
| US7506790B2 (en) | 2004-07-28 | 2009-03-24 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an electrically actuated articulation mechanism |
| US8905977B2 (en) | 2004-07-28 | 2014-12-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated medical substance dispenser |
| US7407074B2 (en) | 2004-07-28 | 2008-08-05 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based actuation mechanism for multi-fire surgical fastening instrument |
| US7354447B2 (en) | 2005-11-10 | 2008-04-08 | Ethicon Endo-Surgery, Inc. | Disposable loading unit and surgical instruments including same |
| CA2512948C (en) | 2004-07-28 | 2013-10-01 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated medical substance dispenser |
| US8215531B2 (en) | 2004-07-28 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a medical substance dispenser |
| US20060025812A1 (en) | 2004-07-28 | 2006-02-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an electrically actuated pivoting articulation mechanism |
| US7407077B2 (en) | 2004-07-28 | 2008-08-05 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based actuation mechanism for linear surgical stapler |
| US7143925B2 (en) | 2004-07-28 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating EAP blocking lockout mechanism |
| US7513408B2 (en) | 2004-07-28 | 2009-04-07 | Ethicon Endo-Surgery, Inc. | Multiple firing stroke surgical instrument incorporating electroactive polymer anti-backup mechanism |
| AU2005203215B2 (en) | 2004-07-28 | 2011-06-09 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an electrically actuated pivoting articulation mechanism |
| US7857183B2 (en) | 2004-07-28 | 2010-12-28 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating an electrically actuated articulation mechanism |
| US7147138B2 (en) | 2004-07-28 | 2006-12-12 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having an electroactive polymer actuated buttress deployment mechanism |
| DE202004012389U1 (de) | 2004-07-30 | 2004-09-30 | Aesculap Ag & Co. Kg | Chirurgische Maschine |
| US7210609B2 (en) | 2004-07-30 | 2007-05-01 | Tools For Surgery, Llc | Stapling apparatus having a curved anvil and driver |
| WO2006017859A2 (en) | 2004-08-06 | 2006-02-16 | Genentech, Inc. | Assays and methods using biomarkers |
| CN2716900Y (zh) | 2004-08-09 | 2005-08-10 | 陈永 | 新感觉鼠标 |
| AU2005277448B2 (en) | 2004-08-17 | 2011-04-21 | Covidien Lp | Stapling support structures |
| EP2143740B1 (en) | 2004-08-19 | 2013-06-19 | Covidien LP | Water-swellable copolymers and articles and coating made therefrom |
| US7182239B1 (en) | 2004-08-27 | 2007-02-27 | Myers Stephan R | Segmented introducer device for a circular surgical stapler |
| US8657808B2 (en) | 2004-08-31 | 2014-02-25 | Medtronic, Inc. | Surgical apparatus including a hand-activated, cable assembly and method of using same |
| DE102004042886A1 (de) | 2004-09-04 | 2006-03-30 | Roche Diagnostics Gmbh | Lanzettenvorrichtung zum Erzeugen einer Einstichwunde |
| US7128254B2 (en) | 2004-09-07 | 2006-10-31 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multistroke firing mechanism having a rotary slip-clutch transmission |
| MX2007002841A (es) | 2004-09-10 | 2007-04-30 | Ethicon Endo Surgery Inc | Instrumento de engrapado quirurgico. |
| KR100646762B1 (ko) | 2004-09-10 | 2006-11-23 | 인하대학교 산학협력단 | 수술용 스테이플 및 이를 구비한 수술용 자동 문합기 |
| US7391164B2 (en) | 2004-09-15 | 2008-06-24 | Research In Motion Limited | Visual notification methods for candy-bar type cellphones |
| JP2006081687A (ja) | 2004-09-15 | 2006-03-30 | Max Co Ltd | 医療用ステープラ |
| GB0519252D0 (en) | 2005-09-21 | 2005-10-26 | Dezac Ltd | Laser hair removal device |
| EP1791467B1 (en) | 2004-09-21 | 2013-03-27 | Adidas AG | Improved sensors for inductive plethysmographic monitoring applications and apparel using same |
| US7336184B2 (en) | 2004-09-24 | 2008-02-26 | Intel Corporation | Inertially controlled switch and RFID tag |
| EA016776B9 (ru) | 2004-09-30 | 2012-11-30 | Ковалон Текнолоджиз Инк. | Неадгезивные эластичные желатиновые матрицы |
| US20120046547A1 (en) | 2004-10-06 | 2012-02-23 | Guided Therapy Systems, Llc | System and method for cosmetic treatment |
| FR2876020B1 (fr) | 2004-10-06 | 2007-03-09 | Sofradim Production Sa | Appareil de stockage, distribution et pose d'attaches chirurgicales |
| US7819886B2 (en) | 2004-10-08 | 2010-10-26 | Tyco Healthcare Group Lp | Endoscopic surgical clip applier |
| EP2875786B1 (en) | 2004-10-08 | 2017-02-01 | Covidien LP | Apparatus for applying surgical clips |
| US8409222B2 (en) | 2004-10-08 | 2013-04-02 | Covidien Lp | Endoscopic surgical clip applier |
| WO2006044581A2 (en) | 2004-10-13 | 2006-04-27 | Medtronic, Inc. | Single-use transurethral needle ablation device |
| US7857813B2 (en) | 2006-08-29 | 2010-12-28 | Baxano, Inc. | Tissue access guidewire system and method |
| US8372094B2 (en) | 2004-10-15 | 2013-02-12 | Covidien Lp | Seal element for anastomosis |
| US8257356B2 (en) | 2004-10-15 | 2012-09-04 | Baxano, Inc. | Guidewire exchange systems to treat spinal stenosis |
| JP4801083B2 (ja) | 2004-10-18 | 2011-10-26 | タイコ ヘルスケア グループ エルピー | スプレー可能な創傷処置材料を付与するための構造物 |
| ES2530775T3 (es) | 2004-10-18 | 2015-03-05 | Covidien Lp | Estructura adhesiva anular |
| US7717313B2 (en) | 2004-10-18 | 2010-05-18 | Tyco Healthcare Group Lp | Surgical apparatus and structure for applying sprayable wound treatment material |
| US7688028B2 (en) | 2004-10-18 | 2010-03-30 | Black & Decker Inc. | Cordless power system |
| JP4783373B2 (ja) | 2004-10-18 | 2011-09-28 | タイコ ヘルスケア グループ エルピー | 組織穿通針を使用して創傷治療物質を適用するための装置 |
| US7455682B2 (en) | 2004-10-18 | 2008-11-25 | Tyco Healthcare Group Lp | Structure containing wound treatment material |
| US8097017B2 (en) | 2004-10-18 | 2012-01-17 | Tyco Healthcare Group Lp | Surgical fasteners coated with wound treatment materials |
| US7938307B2 (en) | 2004-10-18 | 2011-05-10 | Tyco Healthcare Group Lp | Support structures and methods of using the same |
| ES2587354T3 (es) | 2004-10-18 | 2016-10-24 | Covidien Lp | Aplicador y método de sellador extraluminal |
| US7845536B2 (en) | 2004-10-18 | 2010-12-07 | Tyco Healthcare Group Lp | Annular adhesive structure |
| PL1802358T3 (pl) | 2004-10-20 | 2015-07-31 | Ethicon Inc | Wzmocniony, ulegający absorpcji, wielowarstwowy materiał do zastosowania w wyrobach medycznych oraz sposób jego wytwarzania |
| US20060087746A1 (en) | 2004-10-22 | 2006-04-27 | Kenneth Lipow | Remote augmented motor-sensory interface for surgery |
| US7086879B2 (en) | 2004-10-27 | 2006-08-08 | Hewlett-Packard Development Company, L.P. | Dual connector assembly with sliding keep-out member |
| US20060086032A1 (en) | 2004-10-27 | 2006-04-27 | Joseph Valencic | Weapon and input device to record information |
| ATE479387T1 (de) | 2004-11-02 | 2010-09-15 | Medtronic Inc | Techniken für die anwenderaktivierte datenretention in einem implantierbaren medizinprodukt |
| KR20060046933A (ko) | 2004-11-12 | 2006-05-18 | 노틸러스효성 주식회사 | 핀패드 모듈의 보호장치 |
| CN2738962Y (zh) | 2004-11-15 | 2005-11-09 | 胡建坤 | 电动剃须刀及带有充电器的电动剃须刀 |
| US7182763B2 (en) | 2004-11-23 | 2007-02-27 | Instrasurgical, Llc | Wound closure device |
| GB0425843D0 (en) | 2004-11-24 | 2004-12-29 | Gyrus Group Plc | An electrosurgical instrument |
| CA2526541C (en) | 2004-12-01 | 2013-09-03 | Tyco Healthcare Group Lp | Novel biomaterial drug delivery and surface modification compositions |
| US7121446B2 (en) | 2004-12-13 | 2006-10-17 | Niti Medical Technologies Ltd. | Palm-size surgical stapler for single hand operation |
| US7328829B2 (en) | 2004-12-13 | 2008-02-12 | Niti Medical Technologies Ltd. | Palm size surgical stapler for single hand operation |
| US7568619B2 (en) | 2004-12-15 | 2009-08-04 | Alcon, Inc. | System and method for identifying and controlling ophthalmic surgical devices and components |
| US7896869B2 (en) | 2004-12-29 | 2011-03-01 | Depuy Products, Inc. | System and method for ensuring proper medical instrument use in an operating room |
| US7611474B2 (en) | 2004-12-29 | 2009-11-03 | Ethicon Endo-Surgery, Inc. | Core sampling biopsy device with short coupled MRI-compatible driver |
| US20060142772A1 (en) | 2004-12-29 | 2006-06-29 | Ralph James D | Surgical fasteners and related implant devices having bioabsorbable components |
| US7419321B2 (en) | 2005-01-05 | 2008-09-02 | Misha Tereschouk | Hand applicator of encapsulated liquids |
| US20060161185A1 (en) | 2005-01-14 | 2006-07-20 | Usgi Medical Inc. | Methods and apparatus for transmitting force to an end effector over an elongate member |
| US7686804B2 (en) | 2005-01-14 | 2010-03-30 | Covidien Ag | Vessel sealer and divider with rotating sealer and cutter |
| JP4847475B2 (ja) | 2005-01-26 | 2011-12-28 | ▲蘇▼州天臣国▲際▼医▲療▼科技有限公司 | 外科手術用ステープラーの回転刃付ステープリングヘッド |
| WO2006081491A2 (en) | 2005-01-27 | 2006-08-03 | Vector Surgical | Surgical marker |
| US20060173470A1 (en) * | 2005-01-31 | 2006-08-03 | Oray B N | Surgical fastener buttress material |
| WO2006085389A1 (en) | 2005-02-09 | 2006-08-17 | Johnson & Johnson Kabushiki Kaisha | Stapling instrument |
| EP1690638A1 (en) | 2005-02-09 | 2006-08-16 | BLACK & DECKER INC. | Power tool gear-train and torque overload clutch therefor |
| JP2006218129A (ja) | 2005-02-10 | 2006-08-24 | Olympus Corp | 手術支援システム |
| GB2423199B (en) | 2005-02-11 | 2009-05-13 | Pa Consulting Services | Power supply systems for electrical devices |
| JP2006218228A (ja) | 2005-02-14 | 2006-08-24 | Olympus Corp | バッテリユニット、そのバッテリユニットを有するバッテリ装置、医療機器および内視鏡 |
| US7780054B2 (en) | 2005-02-18 | 2010-08-24 | Ethicon Endo-Surgery, Inc. | Surgical instrument with laterally moved shaft actuator coupled to pivoting articulation joint |
| US7559452B2 (en) | 2005-02-18 | 2009-07-14 | Ethicon Endo-Surgery, Inc. | Surgical instrument having fluid actuated opposing jaws |
| US20060289602A1 (en) | 2005-06-23 | 2006-12-28 | Ethicon Endo-Surgery, Inc. | Surgical instrument with articulating shaft with double pivot closure and single pivot frame ground |
| US7654431B2 (en) | 2005-02-18 | 2010-02-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument with guided laterally moving articulation member |
| US7559450B2 (en) | 2005-02-18 | 2009-07-14 | Ethicon Endo-Surgery, Inc. | Surgical instrument incorporating a fluid transfer controlled articulation mechanism |
| US7784662B2 (en) | 2005-02-18 | 2010-08-31 | Ethicon Endo-Surgery, Inc. | Surgical instrument with articulating shaft with single pivot closure and double pivot frame ground |
| US7674263B2 (en) | 2005-03-04 | 2010-03-09 | Gyrus Ent, L.L.C. | Surgical instrument and method |
| US7699846B2 (en) | 2005-03-04 | 2010-04-20 | Gyrus Ent L.L.C. | Surgical instrument and method |
| US20060206100A1 (en) | 2005-03-09 | 2006-09-14 | Brasseler Usa Medical Llc | Surgical apparatus and power module for same, and a method of preparing a surgical apparatus |
| US20060217729A1 (en) | 2005-03-09 | 2006-09-28 | Brasseler Usa Medical Llc | Surgical apparatus and tools for same |
| US20060201989A1 (en) | 2005-03-11 | 2006-09-14 | Ojeda Herminio F | Surgical anvil and system for deploying the same |
| US9364229B2 (en) | 2005-03-15 | 2016-06-14 | Covidien Lp | Circular anastomosis structures |
| US7942890B2 (en) | 2005-03-15 | 2011-05-17 | Tyco Healthcare Group Lp | Anastomosis composite gasket |
| US20070203510A1 (en) | 2006-02-28 | 2007-08-30 | Bettuchi Michael J | Annular disk for reduction of anastomotic tension and methods of using the same |
| AU2012200178B2 (en) | 2005-03-15 | 2013-07-11 | Covidien Lp | Anastomosis composite gasket |
| US8734404B2 (en) | 2005-03-17 | 2014-05-27 | Patented Medical Solutions, Llc | Lay flat tubing |
| US7784663B2 (en) | 2005-03-17 | 2010-08-31 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having load sensing control circuitry |
| JP2006262421A (ja) | 2005-03-18 | 2006-09-28 | Fujitsu Ltd | 半導体集積回路及びそのノイズ低減方法 |
| EP1861022A2 (en) | 2005-03-22 | 2007-12-05 | Atropos Limited | A surgical instrument |
| US20060252993A1 (en) | 2005-03-23 | 2006-11-09 | Freed David I | Medical devices and systems |
| US7918848B2 (en) | 2005-03-25 | 2011-04-05 | Maquet Cardiovascular, Llc | Tissue welding and cutting apparatus and method |
| ATE543455T1 (de) | 2005-03-29 | 2012-02-15 | Toshiba Kk | Manipulator |
| US9138226B2 (en) | 2005-03-30 | 2015-09-22 | Covidien Lp | Cartridge assembly for a surgical stapling device |
| JP4857585B2 (ja) | 2005-04-04 | 2012-01-18 | 日立工機株式会社 | コードレス電動工具 |
| US7780055B2 (en) | 2005-04-06 | 2010-08-24 | Tyco Healthcare Group Lp | Loading unit having drive assembly locking mechanism |
| US7211979B2 (en) | 2005-04-13 | 2007-05-01 | The Broad Of Trustees Of The Leland Stanford Junior University | Torque-position transformer for task control of position controlled robots |
| US7699860B2 (en) | 2005-04-14 | 2010-04-20 | Ethicon Endo-Surgery, Inc. | Surgical clip |
| US8038686B2 (en) | 2005-04-14 | 2011-10-18 | Ethicon Endo-Surgery, Inc. | Clip applier configured to prevent clip fallout |
| US7731724B2 (en) | 2005-04-14 | 2010-06-08 | Ethicon Endo-Surgery, Inc. | Surgical clip advancement and alignment mechanism |
| US7297149B2 (en) | 2005-04-14 | 2007-11-20 | Ethicon Endo-Surgery, Inc. | Surgical clip applier methods |
| CA2604563C (en) | 2005-04-15 | 2020-07-28 | Surgisense Corporation | Surgical instruments with sensors for detecting tissue properties, and systems using such instruments |
| US7837694B2 (en) | 2005-04-28 | 2010-11-23 | Warsaw Orthopedic, Inc. | Method and apparatus for surgical instrument identification |
| US20060244460A1 (en) | 2005-04-29 | 2006-11-02 | Weaver Jeffrey S | System and method for battery management |
| US8084001B2 (en) | 2005-05-02 | 2011-12-27 | Cornell Research Foundation, Inc. | Photoluminescent silica-based sensors and methods of use |
| DE102005020377B4 (de) | 2005-05-02 | 2021-08-12 | Robert Bosch Gmbh | Verfahren zum Betreiben einer Elektrowerkzeugmaschine |
| US20100100124A1 (en) | 2005-05-05 | 2010-04-22 | Tyco Healthcare Group Lp | Bioabsorbable surgical composition |
| US20090177226A1 (en) | 2005-05-05 | 2009-07-09 | Jon Reinprecht | Bioabsorbable Surgical Compositions |
| US20100016888A1 (en) | 2005-05-05 | 2010-01-21 | Allison Calabrese | Surgical Gasket |
| US7418078B2 (en) | 2005-05-06 | 2008-08-26 | Siemens Medical Solutions Usa, Inc. | Spot-size effect reduction |
| US7806871B2 (en) | 2005-05-09 | 2010-10-05 | Boston Scientific Scimed, Inc. | Method and device for tissue removal and for delivery of a therapeutic agent or bulking agent |
| US7648457B2 (en) | 2005-05-13 | 2010-01-19 | Ethicon Endo-Surgery, Inc. | Method of positioning a device on an endoscope |
| US20060258904A1 (en) | 2005-05-13 | 2006-11-16 | David Stefanchik | Feeding tube and track |
| US8108072B2 (en) | 2007-09-30 | 2012-01-31 | Intuitive Surgical Operations, Inc. | Methods and systems for robotic instrument tool tracking with adaptive fusion of kinematics information and image information |
| SG127833A1 (en) | 2005-05-17 | 2006-12-29 | Ethicon Endo Surgery Inc | Surgical stapler having an aluminum head |
| US8157815B2 (en) | 2005-05-20 | 2012-04-17 | Neotract, Inc. | Integrated handle assembly for anchor delivery system |
| US20060270916A1 (en) | 2005-05-20 | 2006-11-30 | Medtronic, Inc. | Portable therapy delivery device with a removable connector board |
| US7695435B2 (en) | 2005-05-25 | 2010-04-13 | Randall J Benson | System and method for tagging and detecting surgical implements |
| AU2006251051B2 (en) | 2005-05-25 | 2009-07-16 | Gyrus Medical, Inc. | A surgical instrument |
| US20060271042A1 (en) | 2005-05-26 | 2006-11-30 | Gyrus Medical, Inc. | Cutting and coagulating electrosurgical forceps having cam controlled jaw closure |
| JP2006334029A (ja) | 2005-05-31 | 2006-12-14 | Olympus Medical Systems Corp | 外科用手術装置 |
| CA2549224A1 (en) | 2005-06-02 | 2006-12-02 | Tyco Healthcare Group Lp | Expandable backspan staple |
| US7722610B2 (en) | 2005-06-02 | 2010-05-25 | Tyco Healthcare Group Lp | Multiple coil staple and staple applier |
| US7909191B2 (en) | 2005-06-03 | 2011-03-22 | Greatbatch Ltd. | Connectable instrument trays for creating a modular case |
| WO2006132992A2 (en) | 2005-06-03 | 2006-12-14 | Tyco Healthcare Group Lp | Battery powered surgical instrument |
| US7717312B2 (en) | 2005-06-03 | 2010-05-18 | Tyco Healthcare Group Lp | Surgical instruments employing sensors |
| BRPI0613240A2 (pt) | 2005-06-06 | 2012-12-04 | Lutron Electronics Co | aparelho e método e apararelho para controlar a velocidade de um motor variável silencioso |
| US7265374B2 (en) | 2005-06-10 | 2007-09-04 | Arima Computer Corporation | Light emitting semiconductor device |
| US7295907B2 (en) | 2005-06-14 | 2007-11-13 | Trw Automotive U.S. Llc | Recovery of calibrated center steering position after loss of battery power |
| EP1736112B1 (en) | 2005-06-20 | 2011-08-17 | Heribert Schmid | Medical device |
| US7638958B2 (en) | 2005-06-28 | 2009-12-29 | Stryker Corporation | Powered surgical tool with control module that contains a sensor for remotely monitoring the tool power generating unit |
| US20070005002A1 (en) | 2005-06-30 | 2007-01-04 | Intuitive Surgical Inc. | Robotic surgical instruments for irrigation, aspiration, and blowing |
| US8679154B2 (en) | 2007-01-12 | 2014-03-25 | Ethicon Endo-Surgery, Inc. | Adjustable compression staple and method for stapling with adjustable compression |
| US8573462B2 (en) | 2006-05-19 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Electrical surgical instrument with optimized power supply and drive |
| JP4336386B2 (ja) | 2005-07-26 | 2009-09-30 | エシコン エンド−サージェリー,インク. | 外科用ステープリング及び切断デバイスおよびこのデバイスの使用方法 |
| US7959050B2 (en) | 2005-07-26 | 2011-06-14 | Ethicon Endo-Surgery, Inc | Electrically self-powered surgical instrument with manual release |
| US8627995B2 (en) | 2006-05-19 | 2014-01-14 | Ethicon Endo-Sugery, Inc. | Electrically self-powered surgical instrument with cryptographic identification of interchangeable part |
| US8627993B2 (en) | 2007-02-12 | 2014-01-14 | Ethicon Endo-Surgery, Inc. | Active braking electrical surgical instrument and method for braking such an instrument |
| US7479608B2 (en) | 2006-05-19 | 2009-01-20 | Ethicon Endo-Surgery, Inc. | Force switch |
| US8579176B2 (en) | 2005-07-26 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting device and method for using the device |
| CN102988087B (zh) | 2005-07-27 | 2015-09-09 | 柯惠Lp公司 | 例如用于机电手术设备的轴 |
| EP1917125B1 (en) | 2005-07-27 | 2011-09-07 | Tyco Healthcare Group LP | Staple pocket arrangement for surgical stapler |
| US20070026039A1 (en) | 2005-07-29 | 2007-02-01 | Drumheller Paul D | Composite self-cohered web materials |
| US7655584B2 (en) | 2005-07-29 | 2010-02-02 | Gore Enterprise Holdings, Inc. | Highly porous self-cohered web materials |
| US20070026040A1 (en) | 2005-07-29 | 2007-02-01 | Crawley Jerald M | Composite self-cohered web materials |
| US20070027551A1 (en) | 2005-07-29 | 2007-02-01 | Farnsworth Ted R | Composite self-cohered web materials |
| US20070155010A1 (en) | 2005-07-29 | 2007-07-05 | Farnsworth Ted R | Highly porous self-cohered fibrous tissue engineering scaffold |
| US7655288B2 (en) | 2005-07-29 | 2010-02-02 | Gore Enterprise Holdings, Inc. | Composite self-cohered web materials |
| US8048503B2 (en) | 2005-07-29 | 2011-11-01 | Gore Enterprise Holdings, Inc. | Highly porous self-cohered web materials |
| US20070027468A1 (en) | 2005-08-01 | 2007-02-01 | Wales Kenneth S | Surgical instrument with an articulating shaft locking mechanism |
| US7641092B2 (en) | 2005-08-05 | 2010-01-05 | Ethicon Endo - Surgery, Inc. | Swing gate for device lockout in a curved cutter stapler |
| US7559937B2 (en) | 2005-08-09 | 2009-07-14 | Towertech Research Group | Surgical fastener apparatus and reinforcing material |
| DE202005012657U1 (de) | 2005-08-11 | 2006-12-21 | Evac Gmbh | Zwischenbehälter für Vakuumtoilette |
| US7407075B2 (en) | 2005-08-15 | 2008-08-05 | Tyco Healthcare Group Lp | Staple cartridge having multiple staple sizes for a surgical stapling instrument |
| US8579178B2 (en) | 2005-08-15 | 2013-11-12 | Covidien Lp | Surgical stapling instruments including a cartridge having multiple staples sizes |
| US7398908B2 (en) | 2005-08-15 | 2008-07-15 | Tyco Healthcare Group Lp | Surgical stapling instruments including a cartridge having multiple staple sizes |
| US7401721B2 (en) | 2005-08-15 | 2008-07-22 | Tyco Healthcare Group Lp | Surgical stapling instruments including a cartridge having multiple staple sizes |
| US7388484B2 (en) | 2005-08-16 | 2008-06-17 | Honeywell International Inc. | Conductive tamper switch for security devices |
| DE102005038919A1 (de) | 2005-08-17 | 2007-03-15 | BSH Bosch und Siemens Hausgeräte GmbH | Elektromotorisches Küchengerät mit elektrischer oder elektronischer Verriegelung |
| US8657814B2 (en) | 2005-08-22 | 2014-02-25 | Medtronic Ablation Frontiers Llc | User interface for tissue ablation system |
| US7828794B2 (en) | 2005-08-25 | 2010-11-09 | Covidien Ag | Handheld electrosurgical apparatus for controlling operating room equipment |
| US20070191868A1 (en) | 2005-08-25 | 2007-08-16 | Microline Pentax Inc. | Indicating system for clip applying device |
| US9237891B2 (en) | 2005-08-31 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical stapling devices that produce formed staples having different lengths |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US8800838B2 (en) | 2005-08-31 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Robotically-controlled cable-based surgical end effectors |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US7500979B2 (en) | 2005-08-31 | 2009-03-10 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with multiple stacked actuator wedge cams for driving staple drivers |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US20070194082A1 (en) | 2005-08-31 | 2007-08-23 | Morgan Jerome R | Surgical stapling device with anvil having staple forming pockets of varying depths |
| US20070051375A1 (en) | 2005-09-06 | 2007-03-08 | Milliman Keith L | Instrument introducer |
| US7778004B2 (en) | 2005-09-13 | 2010-08-17 | Taser International, Inc. | Systems and methods for modular electronic weaponry |
| WO2007033379A2 (en) | 2005-09-14 | 2007-03-22 | Neoguide Systems, Inc. | Methods and apparatus for performing transluminal and other procedures |
| US7467740B2 (en) | 2005-09-21 | 2008-12-23 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments having flexible channel and anvil features for adjustable staple heights |
| US7407078B2 (en) | 2005-09-21 | 2008-08-05 | Ehthicon Endo-Surgery, Inc. | Surgical stapling instrument having force controlled spacing end effector |
| EP1767163A1 (en) | 2005-09-22 | 2007-03-28 | Sherwood Services AG | Bipolar forceps with multiple electrode array end effector assembly |
| US7691106B2 (en) | 2005-09-23 | 2010-04-06 | Synvasive Technology, Inc. | Transverse acting surgical saw blade |
| US7451904B2 (en) | 2005-09-26 | 2008-11-18 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having end effector gripping surfaces |
| US8079950B2 (en) | 2005-09-29 | 2011-12-20 | Intuitive Surgical Operations, Inc. | Autofocus and/or autoscaling in telesurgery |
| US7357287B2 (en) | 2005-09-29 | 2008-04-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having preloaded firing assistance mechanism |
| US7722607B2 (en) | 2005-09-30 | 2010-05-25 | Covidien Ag | In-line vessel sealer and divider |
| CA2561653C (en) | 2005-09-30 | 2014-07-08 | Ethicon Endo-Surgery, Inc. | Electroactive polymer-based articulation mechanism for linear surgical stapler |
| US20070078484A1 (en) | 2005-10-03 | 2007-04-05 | Joseph Talarico | Gentle touch surgical instrument and method of using same |
| US20080190989A1 (en) | 2005-10-03 | 2008-08-14 | Crews Samuel T | Endoscopic plication device and method |
| US9055942B2 (en) | 2005-10-03 | 2015-06-16 | Boston Scienctific Scimed, Inc. | Endoscopic plication devices and methods |
| US7641091B2 (en) | 2005-10-04 | 2010-01-05 | Tyco Healthcare Group Lp | Staple drive assembly |
| US7635074B2 (en) | 2005-10-04 | 2009-12-22 | Tyco Healthcare Group Lp | Staple drive assembly |
| CA2563147C (en) | 2005-10-14 | 2014-09-23 | Tyco Healthcare Group Lp | Surgical stapling device |
| CN101341643B (zh) | 2005-10-21 | 2012-04-18 | 史赛克公司 | 给暴露在恶劣环境中的电池再充电的充电器 |
| US20070244471A1 (en) | 2005-10-21 | 2007-10-18 | Don Malackowski | System and method for managing the operation of a battery powered surgical tool and the battery used to power the tool |
| EP2919295B1 (en) | 2005-10-31 | 2018-08-29 | Black & Decker, Inc. | Method of arranging the components of a battery pack |
| US7656131B2 (en) | 2005-10-31 | 2010-02-02 | Black & Decker Inc. | Methods of charging battery packs for cordless power tool systems |
| CN101030709A (zh) | 2005-11-01 | 2007-09-05 | 布莱克和戴克公司 | 可再充电电池组和操作系统 |
| US20070102472A1 (en) | 2005-11-04 | 2007-05-10 | Ethicon Endo-Surgery, Inc. | Electrosurgical stapling instrument with disposable severing / stapling unit |
| US7673783B2 (en) | 2005-11-04 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments structured for delivery of medical agents |
| US7607557B2 (en) | 2005-11-04 | 2009-10-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments structured for pump-assisted delivery of medical agents |
| US7328828B2 (en) | 2005-11-04 | 2008-02-12 | Ethicon Endo-Surgery, Inc, | Lockout mechanisms and surgical instruments including same |
| US20070106113A1 (en) | 2005-11-07 | 2007-05-10 | Biagio Ravo | Combination endoscopic operative delivery system |
| US7673780B2 (en) | 2005-11-09 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Articulation joint with improved moment arm extension for articulating an end effector of a surgical instrument |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US7799039B2 (en) | 2005-11-09 | 2010-09-21 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a hydraulically actuated end effector |
| CN2868212Y (zh) | 2005-11-11 | 2007-02-14 | 钟李宽 | 随换式腹腔镜手术钳 |
| CA2630061C (en) | 2005-11-15 | 2015-03-17 | Johns Hopkins University | An active cannula for bio-sensing and surgical intervention |
| US7651017B2 (en) | 2005-11-23 | 2010-01-26 | Ethicon Endo-Surgery, Inc. | Surgical stapler with a bendable end effector |
| US7896895B2 (en) | 2005-11-23 | 2011-03-01 | Ethicon Endo-Surgery, Inc. | Surgical clip and applier device and method of use |
| US7246734B2 (en) | 2005-12-05 | 2007-07-24 | Ethicon Endo-Surgery, Inc. | Rotary hydraulic pump actuated multi-stroke surgical instrument |
| US8030004B2 (en) | 2005-12-06 | 2011-10-04 | Oregon Health & Science University | Cell free screening assay and methods of use |
| US20070135686A1 (en) | 2005-12-14 | 2007-06-14 | Pruitt John C Jr | Tools and methods for epicardial access |
| US7955322B2 (en) | 2005-12-20 | 2011-06-07 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| RU61114U1 (ru) | 2005-12-23 | 2007-02-27 | Мирзакарим Санакулович Норбеков | Аппарат для развития мозговой деятельности |
| US20100145146A1 (en) | 2005-12-28 | 2010-06-10 | Envisionier Medical Technologies, Inc. | Endoscopic digital recording system with removable screen and storage device |
| WO2007074430A1 (en) | 2005-12-28 | 2007-07-05 | Given Imaging Ltd. | Device, system and method for activation of an in vivo device |
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| US7553173B2 (en) | 2005-12-30 | 2009-06-30 | Click, Inc. | Vehicle connector lockout apparatus and method of using same |
| US7481824B2 (en) | 2005-12-30 | 2009-01-27 | Ethicon Endo-Surgery, Inc. | Surgical instrument with bending articulation controlled articulation pivot joint |
| US8628518B2 (en) | 2005-12-30 | 2014-01-14 | Intuitive Surgical Operations, Inc. | Wireless force sensor on a distal portion of a surgical instrument and method |
| US7955257B2 (en) | 2006-01-05 | 2011-06-07 | Depuy Spine, Inc. | Non-rigid surgical retractor |
| US7670334B2 (en) | 2006-01-10 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Surgical instrument having an articulating end effector |
| US20120064483A1 (en) | 2010-09-13 | 2012-03-15 | Kevin Lint | Hard-wired and wireless system with footswitch for operating a dental or medical treatment apparatus |
| US20070173813A1 (en) | 2006-01-24 | 2007-07-26 | Sherwood Services Ag | System and method for tissue sealing |
| US8147485B2 (en) | 2006-01-24 | 2012-04-03 | Covidien Ag | System and method for tissue sealing |
| CA2574934C (en) | 2006-01-24 | 2015-12-29 | Sherwood Services Ag | System and method for closed loop monitoring of monopolar electrosurgical apparatus |
| US20070198039A1 (en) | 2006-01-27 | 2007-08-23 | Wilson-Cook Medical, Inc. | Intragastric device for treating obesity |
| CA2640148C (en) | 2006-01-27 | 2014-09-09 | Suturtek Incorporated | Apparatus and method for tissue closure |
| US20070175950A1 (en) | 2006-01-31 | 2007-08-02 | Shelton Frederick E Iv | Disposable staple cartridge having an anvil with tissue locator for use with a surgical cutting and fastening instrument and modular end effector system therefor |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US7464846B2 (en) | 2006-01-31 | 2008-12-16 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a removable battery |
| US7770775B2 (en) | 2006-01-31 | 2010-08-10 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with adaptive user feedback |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US7416101B2 (en) | 2006-01-31 | 2008-08-26 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with loading force feedback |
| US9861359B2 (en) | 2006-01-31 | 2018-01-09 | Ethicon Llc | Powered surgical instruments with firing system lockout arrangements |
| US20110024477A1 (en) | 2009-02-06 | 2011-02-03 | Hall Steven G | Driven Surgical Stapler Improvements |
| US7464849B2 (en) | 2006-01-31 | 2008-12-16 | Ethicon Endo-Surgery, Inc. | Electro-mechanical surgical instrument with closure system and anvil alignment components |
| US20110006101A1 (en) | 2009-02-06 | 2011-01-13 | EthiconEndo-Surgery, Inc. | Motor driven surgical fastener device with cutting member lockout arrangements |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US20070175951A1 (en) | 2006-01-31 | 2007-08-02 | Shelton Frederick E Iv | Gearing selector for a powered surgical cutting and fastening instrument |
| US20070175955A1 (en) | 2006-01-31 | 2007-08-02 | Shelton Frederick E Iv | Surgical cutting and fastening instrument with closure trigger locking mechanism |
| US7891531B1 (en) | 2006-01-31 | 2011-02-22 | Ward Gary L | Sub-miniature surgical staple cartridge |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US8161977B2 (en) | 2006-01-31 | 2012-04-24 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US7568603B2 (en) | 2006-01-31 | 2009-08-04 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with articulatable end effector |
| US7575144B2 (en) | 2006-01-31 | 2009-08-18 | Ethicon Endo-Surgery, Inc. | Surgical fastener and cutter with single cable actuator |
| US7766210B2 (en) | 2006-01-31 | 2010-08-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with user feedback system |
| US7422139B2 (en) | 2006-01-31 | 2008-09-09 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting fastening instrument with tactile position feedback |
| US7644848B2 (en) | 2006-01-31 | 2010-01-12 | Ethicon Endo-Surgery, Inc. | Electronic lockouts and surgical instrument including same |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US8763879B2 (en) | 2006-01-31 | 2014-07-01 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of surgical instrument |
| US20110290856A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument with force-feedback capabilities |
| US7422138B2 (en) | 2006-02-01 | 2008-09-09 | Ethicon Endo-Surgery, Inc. | Elliptical intraluminal surgical stapler for anastomosis |
| US9629626B2 (en) * | 2006-02-02 | 2017-04-25 | Covidien Lp | Mechanically tuned buttress material to assist with proper formation of surgical element in diseased tissue |
| EP1815950A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| EP1837041A1 (en) | 2006-03-20 | 2007-09-26 | Tissuemed Limited | Tissue-adhesive materials |
| US20070185545A1 (en) | 2006-02-06 | 2007-08-09 | Medtronic Emergency Response Systems, Inc. | Post-download patient data protection in a medical device |
| WO2007095005A1 (en) | 2006-02-10 | 2007-08-23 | Z-Medica Corporation | Agents and devices for providing blood clotting functions to wounds |
| DE212007000029U1 (de) | 2006-02-20 | 2008-10-09 | Black & Decker Inc., Newark | Gleichstrommotor mit Dual-Kommutatorlamellensatz und wahlweise in Reihe und parallel geschalteten Wicklungen |
| US7955380B2 (en) | 2006-03-17 | 2011-06-07 | Medtronic Vascular, Inc. | Prosthesis fixation apparatus and methods |
| US7771396B2 (en) | 2006-03-22 | 2010-08-10 | Ethicon Endo-Surgery, Inc. | Intubation device for enteral feeding |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US8721630B2 (en) | 2006-03-23 | 2014-05-13 | Ethicon Endo-Surgery, Inc. | Methods and devices for controlling articulation |
| US20110163146A1 (en) | 2006-03-23 | 2011-07-07 | Ortiz Mark S | Surgical Stapling And Cuttting Device |
| US20070225562A1 (en) | 2006-03-23 | 2007-09-27 | Ethicon Endo-Surgery, Inc. | Articulating endoscopic accessory channel |
| JP4689511B2 (ja) | 2006-03-24 | 2011-05-25 | 株式会社エヌ・ティ・ティ・ドコモ | 可搬型基地局装置 |
| US9675375B2 (en) | 2006-03-29 | 2017-06-13 | Ethicon Llc | Ultrasonic surgical system and method |
| EP2007466A4 (en) | 2006-03-31 | 2012-01-18 | Automated Medical Instr Inc | SYSTEM AND METHOD FOR ADVANCING, ORIENTATION, AND IMMOBILIZATION ON AN INTERNAL BODY TISSUE OF A CATHETER OR ANY OTHER THERAPEUTIC DEVICE |
| US20090020958A1 (en) | 2006-03-31 | 2009-01-22 | Soul David F | Methods and apparatus for operating an internal combustion engine |
| US7836400B2 (en) | 2006-03-31 | 2010-11-16 | Research In Motion Limited | Snooze support for event reminders |
| JP4102409B2 (ja) | 2006-04-03 | 2008-06-18 | オリンパス株式会社 | 縫合・結紮具アプライヤー |
| US20100081883A1 (en) | 2008-09-30 | 2010-04-01 | Ethicon Endo-Surgery, Inc. | Methods and devices for performing gastroplasties using a multiple port access device |
| US7799965B2 (en) | 2006-04-11 | 2010-09-21 | Tyco Healthcare Group Lp | Wound dressings with anti-microbial and zinc-containing agents |
| US7741273B2 (en) | 2006-04-13 | 2010-06-22 | Warsaw Orthopedic, Inc. | Drug depot implant designs |
| US20070243227A1 (en) | 2006-04-14 | 2007-10-18 | Michael Gertner | Coatings for surgical staplers |
| US20070246505A1 (en) | 2006-04-24 | 2007-10-25 | Medical Ventures Inc. | Surgical buttress assemblies and methods of uses thereof |
| US7650185B2 (en) | 2006-04-25 | 2010-01-19 | Cardiac Pacemakers, Inc. | System and method for walking an implantable medical device from a sleep state |
| US7278563B1 (en) | 2006-04-25 | 2007-10-09 | Green David T | Surgical instrument for progressively stapling and incising tissue |
| JP4566943B2 (ja) | 2006-04-26 | 2010-10-20 | 株式会社マキタ | 充電装置 |
| WO2007130382A2 (en) | 2006-04-29 | 2007-11-15 | Board Of Regents, The University Of Texas System | Devices for use in transluminal and endoluminal surgery |
| EP2015681B1 (en) | 2006-05-03 | 2018-03-28 | Datascope Corp. | Tissue closure device |
| WO2007129121A1 (en) | 2006-05-08 | 2007-11-15 | Tayside Health Board | Device and method for improved surgical suturing |
| JP4829005B2 (ja) | 2006-05-12 | 2011-11-30 | テルモ株式会社 | マニピュレータ |
| EP2018248B1 (en) | 2006-05-19 | 2015-11-04 | Applied Medical Resources Corporation | Surgical stapler |
| EP2486866A3 (en) | 2006-05-19 | 2014-04-02 | Ethicon Endo-Surgery, Inc. | Mechanical force switch for a medical device |
| US8105350B2 (en) | 2006-05-23 | 2012-01-31 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US20070275035A1 (en) | 2006-05-24 | 2007-11-29 | Microchips, Inc. | Minimally Invasive Medical Implant Devices for Controlled Drug Delivery |
| US20070276409A1 (en) | 2006-05-25 | 2007-11-29 | Ethicon Endo-Surgery, Inc. | Endoscopic gastric restriction methods and devices |
| EP2029054A2 (en) | 2006-06-01 | 2009-03-04 | Mor Research Applications Ltd. | Membrane augmentation, such as of for treatment of cardiac valves, and fastening devices for membrane augmentation |
| JP5542295B2 (ja) | 2006-06-02 | 2014-07-09 | 三井・デュポンフロロケミカル株式会社 | フッ素樹脂成形方法及びフッ素樹脂成形品 |
| JP5147837B2 (ja) | 2006-06-02 | 2013-02-20 | タイコ ヘルスケア グループ リミテッド パートナーシップ | タイマーおよびフィードバックディスプレイを有する外科用ステープラ |
| US7530984B2 (en) | 2006-06-05 | 2009-05-12 | Medigus Ltd. | Transgastric method for carrying out a partial fundoplication |
| US7615067B2 (en) | 2006-06-05 | 2009-11-10 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| IL176133A0 (en) | 2006-06-05 | 2006-10-05 | Medigus Ltd | Stapler |
| US9561045B2 (en) | 2006-06-13 | 2017-02-07 | Intuitive Surgical Operations, Inc. | Tool with rotation lock |
| DE202007003114U1 (de) | 2006-06-13 | 2007-06-21 | Olympus Winter & Ibe Gmbh | Medizinische Zange mit Bajonettverbindung |
| US7967813B2 (en) | 2006-06-13 | 2011-06-28 | Intuitive Surgical Operations, Inc. | Surgical instrument control and actuation |
| US8551076B2 (en) | 2006-06-13 | 2013-10-08 | Intuitive Surgical Operations, Inc. | Retrograde instrument |
| US20070286892A1 (en) | 2006-06-13 | 2007-12-13 | Uri Herzberg | Compositions and methods for preventing or reducing postoperative ileus and gastric stasis in mammals |
| JP2009539509A (ja) | 2006-06-14 | 2009-11-19 | マクドナルド デットワイラー アンド アソシエイツ インコーポレーテッド | 直角プーリ駆動機構付きの手術マニピュレータ |
| CA2657433A1 (en) | 2006-06-20 | 2007-12-27 | Aortx, Inc. | Torque shaft and torque drive |
| ATE460897T1 (de) | 2006-06-21 | 2010-04-15 | Rudolf Steffen | Vorrichtung zum einführen und positionieren von chirurgischen instrumenten |
| US8322455B2 (en) | 2006-06-27 | 2012-12-04 | Ethicon Endo-Surgery, Inc. | Manually driven surgical cutting and fastening instrument |
| US20080200835A1 (en) | 2006-06-30 | 2008-08-21 | Monson Gavin M | Energy Biopsy Device for Tissue Penetration and Hemostasis |
| US7391173B2 (en) | 2006-06-30 | 2008-06-24 | Intuitive Surgical, Inc | Mechanically decoupled capstan drive |
| US8932195B2 (en) | 2006-06-30 | 2015-01-13 | Research Foundation Of The City University Of New York | Process and apparatus for improving neuronal performance |
| US20080003196A1 (en) | 2006-06-30 | 2008-01-03 | Jonn Jerry Y | Absorbable cyanoacrylate compositions |
| WO2008003560A1 (en) | 2006-07-03 | 2008-01-10 | Novo Nordisk A/S | Coupling for injection devices |
| EP1875870B1 (en) | 2006-07-07 | 2009-12-02 | Ethicon Endo-Surgery, Inc. | A surgical stapling instrument. |
| US7776037B2 (en) | 2006-07-07 | 2010-08-17 | Covidien Ag | System and method for controlling electrode gap during tissue sealing |
| CA2592221C (en) | 2006-07-11 | 2014-10-07 | Tyco Healthcare Group Lp | Skin staples with thermal properties |
| DE102006031971A1 (de) | 2006-07-11 | 2008-01-17 | Karl Storz Gmbh & Co. Kg | Medizinisches Instrument |
| US7993360B2 (en) | 2006-07-11 | 2011-08-09 | Arthrex, Inc. | Rotary shaver with improved connection between flexible and rigid rotatable tubes |
| IL176889A0 (en) | 2006-07-16 | 2006-10-31 | Medigus Ltd | Devices and methods for treating morbid obesity |
| US20080029574A1 (en) | 2006-08-02 | 2008-02-07 | Shelton Frederick E | Pneumatically powered surgical cutting and fastening instrument with actuator at distal end |
| US7441684B2 (en) | 2006-08-02 | 2008-10-28 | Ethicon Endo-Surgery, Inc. | Pneumatically powered surgical cutting and fastening instrument with audible and visual feedback features |
| US7740159B2 (en) | 2006-08-02 | 2010-06-22 | Ethicon Endo-Surgery, Inc. | Pneumatically powered surgical cutting and fastening instrument with a variable control of the actuating rate of firing with mechanical power assist |
| US20080030170A1 (en) | 2006-08-03 | 2008-02-07 | Bruno Dacquay | Safety charging system for surgical hand piece |
| JP4755047B2 (ja) | 2006-08-08 | 2011-08-24 | テルモ株式会社 | 作業機構及びマニピュレータ |
| JP5334850B2 (ja) | 2006-08-09 | 2013-11-06 | コヒーレックス メディカル インコーポレイテッド | 内部組織孔の寸法を減少させる方法、システムおよび装置 |
| US8271179B2 (en) | 2006-08-14 | 2012-09-18 | Honeywell International Inc. | System and method for aiding airdrop computations |
| US20080042861A1 (en) | 2006-08-16 | 2008-02-21 | Bruno Dacquay | Safety battery meter system for surgical hand piece |
| US7708758B2 (en) | 2006-08-16 | 2010-05-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7674253B2 (en) | 2006-08-18 | 2010-03-09 | Kensey Nash Corporation | Catheter for conducting a procedure within a lumen, duct or organ of a living being |
| US20080051833A1 (en) | 2006-08-25 | 2008-02-28 | Vincent Gramuglia | Suture passer and method of passing suture material |
| US20080125749A1 (en) | 2006-08-29 | 2008-05-29 | Boston Scientific Scimed, Inc. | Self-powered medical devices |
| DE102006041951B4 (de) | 2006-08-30 | 2022-05-05 | Deltatech Controls Usa, Llc | Wippschalter |
| US8323789B2 (en) | 2006-08-31 | 2012-12-04 | Cambridge Enterprise Limited | Nanomaterial polymer compositions and uses thereof |
| US20080071328A1 (en) | 2006-09-06 | 2008-03-20 | Medtronic, Inc. | Initiating medical system communications |
| US8982195B2 (en) | 2006-09-07 | 2015-03-17 | Abbott Medical Optics Inc. | Digital video capture system and method with customizable graphical overlay |
| US20080065153A1 (en) | 2006-09-08 | 2008-03-13 | Warsaw Orthopedic, Inc. | Surgical staple |
| US8794496B2 (en) | 2006-09-11 | 2014-08-05 | Covidien Lp | Rotating knob locking mechanism for surgical stapling device |
| US7648519B2 (en) | 2006-09-13 | 2010-01-19 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US7780663B2 (en) | 2006-09-22 | 2010-08-24 | Ethicon Endo-Surgery, Inc. | End effector coatings for electrosurgical instruments |
| EP1903412B1 (de) | 2006-09-22 | 2011-11-02 | Siemens Aktiengesellschaft | Verfahren zur Freigabe der Bedienung von Automatisierungskomponenten einer technischen Anlage über ein mobiles Bedien- und Beobachtungsgerät |
| US9403604B2 (en) | 2006-09-28 | 2016-08-02 | Israel Aerospace Industries Ltd. | System and method for transferring airplanes |
| US10130359B2 (en) | 2006-09-29 | 2018-11-20 | Ethicon Llc | Method for forming a staple |
| US20100133317A1 (en) | 2006-09-29 | 2010-06-03 | Shelton Iv Frederick E | Motor-Driven Surgical Cutting And Fastening Instrument with Tactile Position Feedback |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US20080082114A1 (en) | 2006-09-29 | 2008-04-03 | Mckenna Robert H | Adhesive Mechanical Fastener for Lumen Creation Utilizing Tissue Necrosing Means |
| US8720766B2 (en) | 2006-09-29 | 2014-05-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments and staples |
| JP5409368B2 (ja) | 2006-10-05 | 2014-02-05 | コヴィディエン リミテッド パートナーシップ | 可撓性の内視鏡的縫合装置 |
| US8708210B2 (en) | 2006-10-05 | 2014-04-29 | Covidien Lp | Method and force-limiting handle mechanism for a surgical instrument |
| US7637410B2 (en) | 2006-10-06 | 2009-12-29 | Tyco Healthcare Group Lp | Surgical instrument including a locking assembly |
| US20080085296A1 (en) | 2006-10-06 | 2008-04-10 | Powell Darrel M | Methods for reduction of post operative ileus. |
| ATE435613T1 (de) | 2006-10-06 | 2009-07-15 | Ethicon Endo Surgery Inc | Verbesserungen betreffend einen applikator zum anbringen von anastomosenringen |
| JP5143840B2 (ja) | 2006-10-06 | 2013-02-13 | タイコ ヘルスケア グループ リミテッド パートナーシップ | 可撓性の関節運動シャフトを有する内視鏡血管封着器および分割器 |
| US7481348B2 (en) | 2006-10-06 | 2009-01-27 | Tyco Healthcare Group Lp | Surgical instrument with articulating tool assembly |
| US8807414B2 (en) | 2006-10-06 | 2014-08-19 | Covidien Lp | System and method for non-contact electronic articulation sensing |
| US7967178B2 (en) | 2006-10-06 | 2011-06-28 | Tyco Healthcare Group Lp | Grasping jaw mechanism |
| CN101273908A (zh) * | 2006-10-06 | 2008-10-01 | 伊西康内外科公司 | 减轻手术后肠梗阻的装置 |
| US7866525B2 (en) | 2006-10-06 | 2011-01-11 | Tyco Healthcare Group Lp | Surgical instrument having a plastic surface |
| US8733614B2 (en) | 2006-10-06 | 2014-05-27 | Covidien Lp | End effector identification by mechanical features |
| US20080086078A1 (en) | 2006-10-06 | 2008-04-10 | Powell Darrel M | Devices for reduction of post operative ileus |
| US8475453B2 (en) | 2006-10-06 | 2013-07-02 | Covidien Lp | Endoscopic vessel sealer and divider having a flexible articulating shaft |
| DE102006047882B3 (de) | 2006-10-10 | 2007-08-02 | Rasmussen Gmbh | Steckverbindungsanordnung für einen Schlauch und ein Rohr |
| US20080091072A1 (en) | 2006-10-13 | 2008-04-17 | Terumo Kabushiki Kaisha | Manipulator |
| EP2314232B1 (en) | 2006-10-17 | 2015-03-25 | Covidien LP | Apparatus for applying surgical clips |
| US8226635B2 (en) | 2006-10-23 | 2012-07-24 | Boston Scientific Scimed, Inc. | Device for circulating heated fluid |
| JP5085996B2 (ja) | 2006-10-25 | 2012-11-28 | テルモ株式会社 | マニピュレータシステム |
| JP5198014B2 (ja) | 2006-10-25 | 2013-05-15 | テルモ株式会社 | 医療用マニピュレータ |
| US8157793B2 (en) | 2006-10-25 | 2012-04-17 | Terumo Kabushiki Kaisha | Manipulator for medical use |
| US7845533B2 (en) | 2007-06-22 | 2010-12-07 | Tyco Healthcare Group Lp | Detachable buttress material retention systems for use with a surgical stapling device |
| WO2008057281A2 (en) | 2006-10-26 | 2008-05-15 | Tyco Healthcare Group Lp | Methods of using shape memory alloys for buttress attachment |
| US7828854B2 (en) | 2006-10-31 | 2010-11-09 | Ethicon, Inc. | Implantable repair device |
| US20080129253A1 (en) | 2006-11-03 | 2008-06-05 | Advanced Desalination Inc. | Battery energy reclamation apparatus and method thereby |
| US8822934B2 (en) | 2006-11-03 | 2014-09-02 | Accuray Incorporated | Collimator changer |
| JP2008114339A (ja) | 2006-11-06 | 2008-05-22 | Terumo Corp | マニピュレータ |
| US7780685B2 (en) | 2006-11-09 | 2010-08-24 | Ethicon Endo-Surgery, Inc. | Adhesive and mechanical fastener |
| US7708180B2 (en) | 2006-11-09 | 2010-05-04 | Ethicon Endo-Surgery, Inc. | Surgical fastening device with initiator impregnation of a matrix or buttress to improve adhesive application |
| US7946453B2 (en) | 2006-11-09 | 2011-05-24 | Ethicon Endo-Surgery, Inc. | Surgical band fluid media dispenser |
| US8656783B2 (en) | 2006-11-10 | 2014-02-25 | Siemens Medical Solutions Usa, Inc. | Transducer array imaging system |
| US8834498B2 (en) | 2006-11-10 | 2014-09-16 | Ethicon Endo-Surgery, Inc. | Method and device for effecting anastomosis of hollow organ structures using adhesive and fasteners |
| US7721930B2 (en) | 2006-11-10 | 2010-05-25 | Thicon Endo-Surgery, Inc. | Disposable cartridge with adhesive for use with a stapling device |
| US20080140159A1 (en) | 2006-12-06 | 2008-06-12 | Transoma Medical, Inc. | Implantable device for monitoring biological signals |
| US8114100B2 (en) | 2006-12-06 | 2012-02-14 | Ethicon Endo-Surgery, Inc. | Safety fastener for tissue apposition |
| US20080154299A1 (en) | 2006-12-08 | 2008-06-26 | Steve Livneh | Forceps for performing endoscopic surgery |
| ES2571580T3 (es) | 2006-12-21 | 2016-05-26 | Doheny Eye Inst | Pieza de mano desechable para vitrectomía |
| US7434716B2 (en) | 2006-12-21 | 2008-10-14 | Tyco Healthcare Group Lp | Staple driver for articulating surgical stapler |
| US8459520B2 (en) | 2007-01-10 | 2013-06-11 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and remote sensor |
| US7954682B2 (en) | 2007-01-10 | 2011-06-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument with elements to communicate between control unit and end effector |
| US7721931B2 (en) | 2007-01-10 | 2010-05-25 | Ethicon Endo-Surgery, Inc. | Prevention of cartridge reuse in a surgical instrument |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US7721936B2 (en) | 2007-01-10 | 2010-05-25 | Ethicon Endo-Surgery, Inc. | Interlock and surgical instrument including same |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US7738971B2 (en) | 2007-01-10 | 2010-06-15 | Ethicon Endo-Surgery, Inc. | Post-sterilization programming of surgical instruments |
| US7900805B2 (en) | 2007-01-10 | 2011-03-08 | Ethicon Endo-Surgery, Inc. | Surgical instrument with enhanced battery performance |
| US20110174861A1 (en) | 2007-01-10 | 2011-07-21 | Shelton Iv Frederick E | Surgical Instrument With Wireless Communication Between Control Unit and Remote Sensor |
| US20080169328A1 (en) | 2007-01-11 | 2008-07-17 | Shelton Frederick E | Buttress material for use with a surgical stapler |
| US7434717B2 (en) | 2007-01-11 | 2008-10-14 | Ethicon Endo-Surgery, Inc. | Apparatus for closing a curved anvil of a surgical stapling device |
| WO2008089404A2 (en) | 2007-01-19 | 2008-07-24 | Synovis Life Technologies, Inc. | Circular stapler anvil introducer |
| US7753246B2 (en) | 2007-01-31 | 2010-07-13 | Tyco Healthcare Group Lp | Surgical instrument with replaceable loading unit |
| US7789883B2 (en) | 2007-02-14 | 2010-09-07 | Olympus Medical Systems Corp. | Curative treatment system, curative treatment device, and treatment method for living tissue using energy |
| US20080243064A1 (en) | 2007-02-15 | 2008-10-02 | Hansen Medical, Inc. | Support structure for robotic medical instrument |
| US20080200933A1 (en) | 2007-02-15 | 2008-08-21 | Bakos Gregory J | Surgical devices and methods for forming an anastomosis between organs by gaining access thereto through a natural orifice in the body |
| US20080200762A1 (en) | 2007-02-16 | 2008-08-21 | Stokes Michael J | Flexible endoscope shapelock |
| US7682367B2 (en) | 2007-02-28 | 2010-03-23 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| US8011550B2 (en) | 2009-03-31 | 2011-09-06 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| US9888924B2 (en) | 2007-03-06 | 2018-02-13 | Covidien Lp | Wound closure material |
| US8529819B2 (en) | 2007-03-06 | 2013-09-10 | Covidien Lp | Wound closure material |
| US20100076489A1 (en) | 2007-03-06 | 2010-03-25 | Joshua Stopek | Wound closure material |
| EP3431016B1 (en) | 2007-03-06 | 2023-07-12 | Covidien LP | Surgical stapling apparatus |
| US8011555B2 (en) | 2007-03-06 | 2011-09-06 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| US20110016960A1 (en) | 2007-03-13 | 2011-01-27 | Franck Debrailly | Device For Detecting Angular Position, Electric Motor, Steering Column And Reduction Gear |
| US20100318085A1 (en) | 2007-03-13 | 2010-12-16 | Smith & Nephew, Inc. | Internal fixation devices |
| US7431188B1 (en) | 2007-03-15 | 2008-10-07 | Tyco Healthcare Group Lp | Surgical stapling apparatus with powered articulation |
| US7673782B2 (en) | 2007-03-15 | 2010-03-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a releasable buttress material |
| US7422136B1 (en) | 2007-03-15 | 2008-09-09 | Tyco Healthcare Group Lp | Powered surgical stapling device |
| EP2139411B1 (en) | 2007-03-22 | 2017-05-03 | Covidien LP | Apparatus for forming variable height surgical fasteners |
| US8608745B2 (en) | 2007-03-26 | 2013-12-17 | DePuy Synthes Products, LLC | System, apparatus, and method for cutting bone during an orthopaedic surgical procedure |
| EP2157920B1 (en) | 2007-03-26 | 2017-09-27 | Covidien LP | Endoscopic surgical clip applier |
| US8056787B2 (en) | 2007-03-28 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting instrument with travel-indicating retraction member |
| EP1975161A1 (en) | 2007-03-28 | 2008-10-01 | Laboratorios del Dr. Esteve S.A. | Heterocyclyl-substituted- tetrahydro-napthalen-amine derivatives, their preparation and use as medicaments |
| US8893946B2 (en) | 2007-03-28 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Laparoscopic tissue thickness and clamp load measuring devices |
| US7490749B2 (en) | 2007-03-28 | 2009-02-17 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting instrument with manually retractable firing member |
| US8377044B2 (en) | 2007-03-30 | 2013-02-19 | Ethicon Endo-Surgery, Inc. | Detachable end effectors |
| US7923144B2 (en) | 2007-03-31 | 2011-04-12 | Tesla Motors, Inc. | Tunable frangible battery pack system |
| JP5006093B2 (ja) | 2007-04-03 | 2012-08-22 | テルモ株式会社 | マニピュレータシステム及び制御装置 |
| US20080249608A1 (en) | 2007-04-04 | 2008-10-09 | Vipul Dave | Bioabsorbable Polymer, Bioabsorbable Composite Stents |
| FR2914554B1 (fr) | 2007-04-05 | 2009-07-17 | Germitec Soc Par Actions Simpl | Procede de suivi de l'uitilisation d'un appareil medical. |
| US8951274B2 (en) | 2007-04-06 | 2015-02-10 | Hologic, Inc. | Methods of high rate, low profile tissue removal |
| WO2008124748A1 (en) | 2007-04-09 | 2008-10-16 | Adrian Edward Park | Frame device |
| US8006885B2 (en) | 2007-04-09 | 2011-08-30 | Tyco Healthcare Group Lp | Surgical stapling apparatus with powered retraction |
| EP2139401B1 (en) | 2007-04-11 | 2014-01-08 | Covidien LP | Surgical clip applier |
| US7950560B2 (en) | 2007-04-13 | 2011-05-31 | Tyco Healthcare Group Lp | Powered surgical instrument |
| US20080255413A1 (en) | 2007-04-13 | 2008-10-16 | Michael Zemlok | Powered surgical instrument |
| US8800837B2 (en) | 2007-04-13 | 2014-08-12 | Covidien Lp | Powered surgical instrument |
| US7708182B2 (en) | 2007-04-17 | 2010-05-04 | Tyco Healthcare Group Lp | Flexible endoluminal surgical instrument |
| EP2548537B1 (en) | 2007-04-20 | 2017-04-05 | Doheny Eye Institute | Independent surgical center |
| EP1986123A1 (en) | 2007-04-27 | 2008-10-29 | Italdata Ingegneria Dell'Idea S.p.A. | Data survey device, integrated with an anti-tamper system |
| US7823760B2 (en) | 2007-05-01 | 2010-11-02 | Tyco Healthcare Group Lp | Powered surgical stapling device platform |
| US20080281171A1 (en) | 2007-05-08 | 2008-11-13 | Abbott Diabetes Care, Inc. | Analyte monitoring system and methods |
| US7931660B2 (en) | 2007-05-10 | 2011-04-26 | Tyco Healthcare Group Lp | Powered tacker instrument |
| JP4348714B2 (ja) | 2007-05-10 | 2009-10-21 | シャープ株式会社 | データ送信システム及びデータ送信方法 |
| CA2691269C (en) | 2007-05-12 | 2016-04-12 | Barosense, Inc. | Devices and methods for stomach partitioning |
| US7810691B2 (en) | 2007-05-16 | 2010-10-12 | The Invention Science Fund I, Llc | Gentle touch surgical stapler |
| US7832611B2 (en) | 2007-05-16 | 2010-11-16 | The Invention Science Fund I, Llc | Steerable surgical stapler |
| US7823761B2 (en) | 2007-05-16 | 2010-11-02 | The Invention Science Fund I, Llc | Maneuverable surgical stapler |
| US9545258B2 (en) | 2007-05-17 | 2017-01-17 | Boston Scientific Scimed, Inc. | Tissue aperture securing and sealing apparatuses and related methods of use |
| US8910846B2 (en) | 2007-05-17 | 2014-12-16 | Covidien Lp | Gear driven knife drive mechanism |
| US8038045B2 (en) | 2007-05-25 | 2011-10-18 | Tyco Healthcare Group Lp | Staple buttress retention system |
| US7798386B2 (en) | 2007-05-30 | 2010-09-21 | Ethicon Endo-Surgery, Inc. | Surgical instrument articulation joint cover |
| US20080297287A1 (en) | 2007-05-30 | 2008-12-04 | Magnetecs, Inc. | Magnetic linear actuator for deployable catheter tools |
| US7549564B2 (en) | 2007-06-22 | 2009-06-23 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an articulating end effector |
| US7810693B2 (en) | 2007-05-30 | 2010-10-12 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting instrument with articulatable end effector |
| US20080296346A1 (en) | 2007-05-31 | 2008-12-04 | Shelton Iv Frederick E | Pneumatically powered surgical cutting and fastening instrument with electrical control and recording mechanisms |
| US8157145B2 (en) | 2007-05-31 | 2012-04-17 | Ethicon Endo-Surgery, Inc. | Pneumatically powered surgical cutting and fastening instrument with electrical feedback |
| US8534528B2 (en) | 2007-06-04 | 2013-09-17 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a multiple rate directional switching mechanism |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US7832408B2 (en) | 2007-06-04 | 2010-11-16 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a directional switching mechanism |
| US7819299B2 (en) | 2007-06-04 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a common trigger for actuating an end effector closing system and a staple firing system |
| US7905380B2 (en) | 2007-06-04 | 2011-03-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a multiple rate directional switching mechanism |
| US8945148B2 (en) | 2007-06-13 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Surgical system instrument manipulator |
| US7665646B2 (en) | 2007-06-18 | 2010-02-23 | Tyco Healthcare Group Lp | Interlocking buttress material retention system |
| US7950561B2 (en) | 2007-06-18 | 2011-05-31 | Tyco Healthcare Group Lp | Structure for attachment of buttress material to anvils and cartridges of surgical staplers |
| US7588176B2 (en) | 2007-06-18 | 2009-09-15 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument with improved closure system |
| US7441685B1 (en) | 2007-06-22 | 2008-10-28 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with a return mechanism |
| US7604150B2 (en) | 2007-06-22 | 2009-10-20 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an anti-back up mechanism |
| US8308040B2 (en) | 2007-06-22 | 2012-11-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an articulatable end effector |
| US7658311B2 (en) | 2007-06-22 | 2010-02-09 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with a geared return mechanism |
| US7753245B2 (en) | 2007-06-22 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments |
| US7597229B2 (en) | 2007-06-22 | 2009-10-06 | Ethicon Endo-Surgery, Inc. | End effector closure system for a surgical stapling instrument |
| US20090004455A1 (en) * | 2007-06-27 | 2009-01-01 | Philippe Gravagna | Reinforced composite implant |
| US8062330B2 (en) | 2007-06-27 | 2011-11-22 | Tyco Healthcare Group Lp | Buttress and surgical stapling apparatus |
| CN101873834B (zh) | 2007-06-29 | 2012-12-05 | 伊西康内外科公司 | 与外科手术缝合器械一起使用的垫圈 |
| DE102007031008A1 (de) | 2007-07-04 | 2009-01-08 | Braun Gmbh | Vorrichtung mit elektrischem Gerät und Ladestation |
| US7600663B2 (en) | 2007-07-05 | 2009-10-13 | Green David T | Apparatus for stapling and incising tissue |
| US8758366B2 (en) | 2007-07-09 | 2014-06-24 | Neotract, Inc. | Multi-actuating trigger anchor delivery system |
| US9358113B2 (en) | 2007-07-10 | 2016-06-07 | Warsaw Orthopedic, Inc. | Delivery system |
| US8348972B2 (en) | 2007-07-11 | 2013-01-08 | Covidien Lp | Surgical staple with augmented compression area |
| JP2009028157A (ja) | 2007-07-25 | 2009-02-12 | Terumo Corp | 医療用マニピュレータシステム |
| US8430898B2 (en) | 2007-07-31 | 2013-04-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US7787256B2 (en) | 2007-08-10 | 2010-08-31 | Gore Enterprise Holdings, Inc. | Tamper respondent system |
| US20090048589A1 (en) | 2007-08-14 | 2009-02-19 | Tomoyuki Takashino | Treatment device and treatment method for living tissue |
| US8202549B2 (en) | 2007-08-14 | 2012-06-19 | The Regents Of The University Of California | Mesocellular oxide foams as hemostatic compositions and methods of use |
| EP2626030A3 (en) | 2007-08-14 | 2017-03-08 | Koninklijke Philips N.V. | Robotic instrument systems and methods utilizing optical fiber sensors |
| JP5475662B2 (ja) | 2007-08-15 | 2014-04-16 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | モジュール式およびセグメント化医療装置ならびに関連するシステム |
| US7556185B2 (en) | 2007-08-15 | 2009-07-07 | Tyco Healthcare Group Lp | Surgical instrument with flexible drive mechanism |
| KR100905784B1 (ko) | 2007-08-16 | 2009-07-02 | 주식회사 하이닉스반도체 | 반도체 패키지용 관통 전극 및 이를 갖는 반도체 패키지 |
| US9005238B2 (en) | 2007-08-23 | 2015-04-14 | Covidien Lp | Endoscopic surgical devices |
| US7967181B2 (en) | 2007-08-29 | 2011-06-28 | Tyco Healthcare Group Lp | Rotary knife cutting systems |
| US7624902B2 (en) | 2007-08-31 | 2009-12-01 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| US8579897B2 (en) | 2007-11-21 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Bipolar forceps |
| US8262655B2 (en) | 2007-11-21 | 2012-09-11 | Ethicon Endo-Surgery, Inc. | Bipolar forceps |
| US8061576B2 (en) | 2007-08-31 | 2011-11-22 | Tyco Healthcare Group Lp | Surgical instrument |
| US7988026B2 (en) | 2007-09-06 | 2011-08-02 | Cardica, Inc. | Endocutter with staple feed |
| US8257386B2 (en) | 2007-09-11 | 2012-09-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US8556151B2 (en) | 2007-09-11 | 2013-10-15 | Covidien Lp | Articulating joint for surgical instruments |
| US8317790B2 (en) | 2007-09-14 | 2012-11-27 | W. L. Gore & Associates, Inc. | Surgical staple line reinforcements |
| US20090076506A1 (en) | 2007-09-18 | 2009-03-19 | Surgrx, Inc. | Electrosurgical instrument and method |
| EP2039302A3 (en) | 2007-09-18 | 2009-06-10 | Ethicon Endo-Surgery, Inc. | Devices for reduction of post operative ileus |
| WO2009039506A1 (en) | 2007-09-21 | 2009-03-26 | Power Medical Interventions, Inc. | Surgical device |
| CN101801283B (zh) | 2007-09-21 | 2012-07-18 | Tyco医疗健康集团 | 手术器械 |
| US9023014B2 (en) | 2007-09-21 | 2015-05-05 | Covidien Lp | Quick connect assembly for use between surgical handle assembly and surgical accessories |
| US8678263B2 (en) | 2007-09-24 | 2014-03-25 | Covidien Lp | Materials delivery system for stapling device |
| US9597080B2 (en) | 2007-09-24 | 2017-03-21 | Covidien Lp | Insertion shroud for surgical instrument |
| US8721666B2 (en) | 2007-09-26 | 2014-05-13 | Ethicon, Inc. | Method of facial reconstructive surgery using a self-anchoring tissue lifting device |
| US20090088659A1 (en) | 2007-09-27 | 2009-04-02 | Immersion Corporation | Biological Sensing With Haptic Feedback |
| US7703653B2 (en) | 2007-09-28 | 2010-04-27 | Tyco Healthcare Group Lp | Articulation mechanism for surgical instrument |
| US9050120B2 (en) | 2007-09-30 | 2015-06-09 | Intuitive Surgical Operations, Inc. | Apparatus and method of user interface with alternate tool mode for robotic surgical tools |
| US8285367B2 (en) | 2007-10-05 | 2012-10-09 | The Invention Science Fund I, Llc | Vasculature and lymphatic system imaging and ablation associated with a reservoir |
| US8960520B2 (en) | 2007-10-05 | 2015-02-24 | Covidien Lp | Method and apparatus for determining parameters of linear motion in a surgical instrument |
| US10500309B2 (en) | 2007-10-05 | 2019-12-10 | Cook Biotech Incorporated | Absorbable adhesives and their formulation for use in medical applications |
| US20130214025A1 (en) | 2007-10-05 | 2013-08-22 | Covidien Lp | Powered surgical stapling device |
| US20110022032A1 (en) | 2007-10-05 | 2011-01-27 | Tyco Healthcare Group Lp | Battery ejection design for a surgical device |
| US8012170B2 (en) | 2009-04-27 | 2011-09-06 | Tyco Healthcare Group Lp | Device and method for controlling compression of tissue |
| US8967443B2 (en) | 2007-10-05 | 2015-03-03 | Covidien Lp | Method and apparatus for determining parameters of linear motion in a surgical instrument |
| CA2640345C (en) | 2007-10-05 | 2017-11-07 | Tyco Healthcare Group Lp | Surgical stapler having an articulation mechanism |
| US8517241B2 (en) | 2010-04-16 | 2013-08-27 | Covidien Lp | Hand-held surgical devices |
| US20120289979A1 (en) | 2007-10-08 | 2012-11-15 | Sherif Eskaros | Apparatus for Supplying Surgical Staple Line Reinforcement |
| ES2426767T3 (es) | 2007-10-08 | 2013-10-25 | Gore Enterprise Holdings, Inc. | Aparato para suministrar un refuerzo de líneas de grapas quirúrgicas |
| US8044536B2 (en) | 2007-10-10 | 2011-10-25 | Ams Research Corporation | Powering devices having low and high voltage circuits |
| US20090099579A1 (en) | 2007-10-16 | 2009-04-16 | Tyco Healthcare Group Lp | Self-adherent implants and methods of preparation |
| US7945792B2 (en) | 2007-10-17 | 2011-05-17 | Spansion Llc | Tamper reactive memory device to secure data from tamper attacks |
| CA2999355C (en) | 2007-10-17 | 2020-12-15 | Davol Inc. | Fixating means between a mesh and mesh deployment means especially useful for hernia repair surgeries and methods thereof |
| US8142425B2 (en) | 2007-10-30 | 2012-03-27 | Hemostatix Medical Techs, LLC | Hemostatic surgical blade, system and method of blade manufacture |
| JP5364255B2 (ja) | 2007-10-31 | 2013-12-11 | テルモ株式会社 | 医療用マニピュレータ |
| US7922063B2 (en) | 2007-10-31 | 2011-04-12 | Tyco Healthcare Group, Lp | Powered surgical instrument |
| WO2009059055A2 (en) | 2007-10-31 | 2009-05-07 | Cordis Corporation | Method of making a vascular closure device |
| US7954687B2 (en) | 2007-11-06 | 2011-06-07 | Tyco Healthcare Group Lp | Coated surgical staples and an illuminated staple cartridge for a surgical stapling instrument |
| JP2009115640A (ja) | 2007-11-07 | 2009-05-28 | Honda Motor Co Ltd | ナビゲーション装置 |
| RU2010123052A (ru) | 2007-11-08 | 2011-12-20 | Сеапро Инк. (Ca) | Авенантрамидсодержащие композиции |
| US8425600B2 (en) | 2007-11-14 | 2013-04-23 | G. Patrick Maxwell | Interfaced medical implant assembly |
| US8125168B2 (en) | 2007-11-19 | 2012-02-28 | Honeywell International Inc. | Motor having controllable torque |
| GB0722820D0 (en) | 2007-11-21 | 2008-01-02 | Smith & Nephew | Vacuum assisted wound dressing |
| CA2705896C (en) | 2007-11-21 | 2019-01-08 | Smith & Nephew Plc | Wound dressing |
| JP5336508B2 (ja) | 2007-11-21 | 2013-11-06 | スミス アンド ネフュー ピーエルシー | 創傷被覆材 |
| WO2009067649A2 (en) | 2007-11-21 | 2009-05-28 | Ethicon Endo-Surgery, Inc. | Bipolar forceps having a cutting element |
| US8457757B2 (en) | 2007-11-26 | 2013-06-04 | Micro Transponder, Inc. | Implantable transponder systems and methods |
| US20090143855A1 (en) | 2007-11-29 | 2009-06-04 | Boston Scientific Scimed, Inc. | Medical Device Including Drug-Loaded Fibers |
| JP5377944B2 (ja) | 2007-11-30 | 2013-12-25 | 住友ベークライト株式会社 | 胃瘻用シース、シース付きダイレータ、挿入補助具付き胃瘻用シース、胃瘻カテーテルキット |
| US7772720B2 (en) | 2007-12-03 | 2010-08-10 | Spx Corporation | Supercapacitor and charger for secondary power |
| US20090143800A1 (en) | 2007-12-03 | 2009-06-04 | Derek Dee Deville | Cordless Hand-Held Ultrasonic Cautery Cutting Device |
| US9314261B2 (en) | 2007-12-03 | 2016-04-19 | Covidien Ag | Battery-powered hand-held ultrasonic surgical cautery cutting device |
| US8663262B2 (en) | 2007-12-03 | 2014-03-04 | Covidien Ag | Battery assembly for battery-powered surgical instruments |
| US9107690B2 (en) | 2007-12-03 | 2015-08-18 | Covidien Ag | Battery-powered hand-held ultrasonic surgical cautery cutting device |
| US8061014B2 (en) | 2007-12-03 | 2011-11-22 | Covidien Ag | Method of assembling a cordless hand-held ultrasonic cautery cutting device |
| US8334468B2 (en) | 2008-11-06 | 2012-12-18 | Covidien Ag | Method of switching a cordless hand-held ultrasonic cautery cutting device |
| WO2009073815A1 (en) | 2007-12-06 | 2009-06-11 | Cpair, Inc. | Cpr system with feed back instruction |
| JP5235394B2 (ja) | 2007-12-06 | 2013-07-10 | 株式会社ハーモニック・エイディ | 切替式回転駆動装置 |
| US8319002B2 (en) | 2007-12-06 | 2012-11-27 | Nanosys, Inc. | Nanostructure-enhanced platelet binding and hemostatic structures |
| US8180458B2 (en) | 2007-12-17 | 2012-05-15 | Thermage, Inc. | Method and apparatus for digital signal processing for radio frequency surgery measurements |
| US20090171147A1 (en) | 2007-12-31 | 2009-07-02 | Woojin Lee | Surgical instrument |
| TWI348086B (en) | 2008-01-02 | 2011-09-01 | Mstar Semiconductor Inc | Dc power converter and mode-switching method |
| US8727199B2 (en) | 2008-01-03 | 2014-05-20 | Covidien Lp | Surgical stapler |
| CA2711130C (en) | 2008-01-10 | 2016-08-30 | Power Medical Interventions, Llc | Imaging system for a surgical device |
| US8647258B2 (en) | 2008-01-10 | 2014-02-11 | Covidien Lp | Apparatus for endoscopic procedures |
| US8031069B2 (en) | 2008-01-14 | 2011-10-04 | Oded Yair Cohn | Electronic security seal and system |
| WO2009091497A2 (en) | 2008-01-16 | 2009-07-23 | John Hyoung Kim | Minimally invasive surgical instrument |
| WO2009093023A2 (en) | 2008-01-25 | 2009-07-30 | Smith & Nephew Plc | Multilayer scaffold |
| EP2257250A2 (en) | 2008-01-29 | 2010-12-08 | Gilbert H. Kliman | Drug delivery devices, kits and methods therefor |
| US8006365B2 (en) | 2008-01-30 | 2011-08-30 | Easylap Ltd. | Device and method for applying rotary tacks |
| CN101219648B (zh) | 2008-01-31 | 2010-12-08 | 北京经纬恒润科技有限公司 | 车灯转向驱动装置 |
| US20090198272A1 (en) | 2008-02-06 | 2009-08-06 | Lawrence Kerver | Method and apparatus for articulating the wrist of a laparoscopic grasping instrument |
| US8540133B2 (en) | 2008-09-19 | 2013-09-24 | Ethicon Endo-Surgery, Inc. | Staple cartridge |
| US7905381B2 (en) | 2008-09-19 | 2011-03-15 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with cutting member arrangement |
| US8561870B2 (en) | 2008-02-13 | 2013-10-22 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument |
| US8348129B2 (en) | 2009-10-09 | 2013-01-08 | Ethicon Endo-Surgery, Inc. | Surgical stapler having a closure mechanism |
| US8453908B2 (en) | 2008-02-13 | 2013-06-04 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with improved firing trigger arrangement |
| US7766209B2 (en) | 2008-02-13 | 2010-08-03 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with improved firing trigger arrangement |
| US8622274B2 (en) | 2008-02-14 | 2014-01-07 | Ethicon Endo-Surgery, Inc. | Motorized cutting and fastening instrument having control circuit for optimizing battery usage |
| US7913891B2 (en) | 2008-02-14 | 2011-03-29 | Ethicon Endo-Surgery, Inc. | Disposable loading unit with user feedback features and surgical instrument for use therewith |
| US20090206133A1 (en) | 2008-02-14 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | Articulatable loading units for surgical stapling and cutting instruments |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| US7857185B2 (en) | 2008-02-14 | 2010-12-28 | Ethicon Endo-Surgery, Inc. | Disposable loading unit for surgical stapling apparatus |
| JP5410110B2 (ja) | 2008-02-14 | 2014-02-05 | エシコン・エンド−サージェリィ・インコーポレイテッド | Rf電極を有する外科用切断・固定器具 |
| US7819297B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with reprocessible handle assembly |
| US7810692B2 (en) | 2008-02-14 | 2010-10-12 | Ethicon Endo-Surgery, Inc. | Disposable loading unit with firing indicator |
| US8584919B2 (en) | 2008-02-14 | 2013-11-19 | Ethicon Endo-Sugery, Inc. | Surgical stapling apparatus with load-sensitive firing mechanism |
| US7793812B2 (en) | 2008-02-14 | 2010-09-14 | Ethicon Endo-Surgery, Inc. | Disposable motor-driven loading unit for use with a surgical cutting and stapling apparatus |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US8752749B2 (en) | 2008-02-14 | 2014-06-17 | Ethicon Endo-Surgery, Inc. | Robotically-controlled disposable motor-driven loading unit |
| US8459525B2 (en) | 2008-02-14 | 2013-06-11 | Ethicon Endo-Sugery, Inc. | Motorized surgical cutting and fastening instrument having a magnetic drive train torque limiting device |
| US7819296B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with retractable firing systems |
| BRPI0903064B8 (pt) | 2008-02-14 | 2021-06-22 | Ethicon Endo Surgery Inc | instrumento cirúrgico de corte e fixação acionado a motor com circuito de controle para otimizar o uso de bateria |
| US7861906B2 (en) | 2008-02-14 | 2011-01-04 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with articulatable components |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US8758391B2 (en) | 2008-02-14 | 2014-06-24 | Ethicon Endo-Surgery, Inc. | Interchangeable tools for surgical instruments |
| US8573465B2 (en) | 2008-02-14 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical end effector system with rotary actuated closure systems |
| US8657174B2 (en) | 2008-02-14 | 2014-02-25 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument having handle based power source |
| US8608044B2 (en) | 2008-02-15 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Feedback and lockout mechanism for surgical instrument |
| US9770245B2 (en) | 2008-02-15 | 2017-09-26 | Ethicon Llc | Layer arrangements for surgical staple cartridges |
| US7980443B2 (en) | 2008-02-15 | 2011-07-19 | Ethicon Endo-Surgery, Inc. | End effectors for a surgical cutting and stapling instrument |
| US20090206137A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | Disposable loading units for a surgical cutting and stapling instrument |
| JP5507093B2 (ja) | 2008-02-15 | 2014-05-28 | エシコン・エンド−サージェリィ・インコーポレイテッド | 支持体保持特徴部を有する外科手術用エンドエフェクタ |
| WO2009105158A2 (en) | 2008-02-15 | 2009-08-27 | Interventional & Surgical Innovations, Llc. | Surgical instrument for grasping and cutting tissue |
| US7959051B2 (en) | 2008-02-15 | 2011-06-14 | Ethicon Endo-Surgery, Inc. | Closure systems for a surgical cutting and stapling instrument |
| US20090206125A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | Packaging for attaching buttress material to a surgical stapling instrument |
| US11272927B2 (en) | 2008-02-15 | 2022-03-15 | Cilag Gmbh International | Layer arrangements for surgical staple cartridges |
| US20090206131A1 (en) | 2008-02-15 | 2009-08-20 | Ethicon Endo-Surgery, Inc. | End effector coupling arrangements for a surgical cutting and stapling instrument |
| DE102008009993B4 (de) | 2008-02-19 | 2016-01-28 | Hof Sonderanlagenbau Gmbh | Verfahren zum reihenweisen Separieren einer Anzahl von Vials aus einer Vielzahl von in mehreren Reihen angeordneten Vials und Vorrichtung hierfür |
| US20090234273A1 (en) | 2008-03-17 | 2009-09-17 | Alfred Intoccia | Surgical trocar with feedback |
| US8020741B2 (en) | 2008-03-18 | 2011-09-20 | Barosense, Inc. | Endoscopic stapling devices and methods |
| US8328802B2 (en) | 2008-03-19 | 2012-12-11 | Covidien Ag | Cordless medical cauterization and cutting device |
| US8491581B2 (en) | 2008-03-19 | 2013-07-23 | Covidien Ag | Method for powering a surgical instrument |
| US8197501B2 (en) | 2008-03-20 | 2012-06-12 | Medtronic Xomed, Inc. | Control for a powered surgical instrument |
| US20090247901A1 (en) | 2008-03-25 | 2009-10-01 | Brian Zimmer | Latching side removal spacer |
| US8136713B2 (en) | 2008-03-25 | 2012-03-20 | Tyco Healthcare Group Lp | Surgical stapling instrument having transducer effecting vibrations |
| US20090242610A1 (en) | 2008-03-26 | 2009-10-01 | Shelton Iv Frederick E | Disposable loading unit and surgical instruments including same |
| US8317744B2 (en) | 2008-03-27 | 2012-11-27 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter manipulator assembly |
| US9895813B2 (en) | 2008-03-31 | 2018-02-20 | Intuitive Surgical Operations, Inc. | Force and torque sensing in a surgical robot setup arm |
| US7886743B2 (en) | 2008-03-31 | 2011-02-15 | Intuitive Surgical Operations, Inc. | Sterile drape interface for robotic surgical instrument |
| US20090247368A1 (en) | 2008-03-31 | 2009-10-01 | Boson Technology Co., Ltd. | Sports health care apparatus with physiological monitoring function |
| US8568411B2 (en) | 2008-03-31 | 2013-10-29 | Applied Medical Resources Corporation | Electrosurgical system |
| JP5301867B2 (ja) | 2008-04-07 | 2013-09-25 | オリンパスメディカルシステムズ株式会社 | 医療用マニピュレータシステム |
| DE102008018158A1 (de) | 2008-04-10 | 2009-10-15 | Aesculap Ag | Ligaturklammermagazin und Lagerkörper zur Verwendung in diesem |
| US8100310B2 (en) | 2008-04-14 | 2012-01-24 | Tyco Healthcare Group Lp | Variable compression surgical fastener apparatus |
| US8231040B2 (en) | 2008-04-14 | 2012-07-31 | Tyco Healthcare Group Lp | Variable compression surgical fastener cartridge |
| US7926691B2 (en) | 2008-04-14 | 2011-04-19 | Tyco Healthcare Group, L.P. | Variable compression surgical fastener cartridge |
| US8231041B2 (en) | 2008-04-14 | 2012-07-31 | Tyco Healthcare Group Lp | Variable compression surgical fastener cartridge |
| US20090255974A1 (en) | 2008-04-14 | 2009-10-15 | Tyco Healthcare Group Lp | Single loop surgical fastener apparatus for applying variable compression |
| US8170241B2 (en) | 2008-04-17 | 2012-05-01 | Intouch Technologies, Inc. | Mobile tele-presence system with a microphone system |
| US20090262078A1 (en) | 2008-04-21 | 2009-10-22 | David Pizzi | Cellular phone with special sensor functions |
| US8021375B2 (en) | 2008-04-21 | 2011-09-20 | Conmed Corporation | Surgical clip applicator |
| US8028884B2 (en) | 2008-04-22 | 2011-10-04 | Tyco Healthcare Group Lp | Cartridge for applying varying amounts of tissue compression |
| WO2009137421A1 (en) | 2008-05-05 | 2009-11-12 | Stryker Corporation | Surgical tool system including a tool and a console, the console capable of reading data from a memory integral with the tool over the conductors over which power is sourced to the tool |
| US7997468B2 (en) | 2008-05-05 | 2011-08-16 | Tyco Healthcare Group Lp | Surgical instrument with clamp |
| US8091756B2 (en) | 2008-05-09 | 2012-01-10 | Tyco Healthcare Group Lp | Varying tissue compression using take-up component |
| US8967446B2 (en) | 2008-05-09 | 2015-03-03 | Covidien Lp | Variable compression surgical fastener cartridge |
| US8464922B2 (en) | 2008-05-09 | 2013-06-18 | Covidien Lp | Variable compression surgical fastener cartridge |
| US8186556B2 (en) | 2008-05-09 | 2012-05-29 | Tyco Healthcare Group Lp | Variable compression surgical fastener apparatus |
| US8795308B2 (en) | 2008-05-09 | 2014-08-05 | Elmer Valin | Laparoscopic gastric and intestinal trocar |
| US9016541B2 (en) | 2008-05-09 | 2015-04-28 | Covidien Lp | Varying tissue compression with an anvil configuration |
| EP2116272B1 (en) | 2008-05-09 | 2013-04-03 | Greatbatch Ltd. | Bi-directional sheath deflection mechanism |
| US8409079B2 (en) | 2008-05-14 | 2013-04-02 | Olympus Medical Systems Corp. | Electric bending operation device and medical treatment system including electric bending operation device |
| US8273404B2 (en) | 2008-05-19 | 2012-09-25 | Cordis Corporation | Extraction of solvents from drug containing polymer reservoirs |
| US20090290016A1 (en) | 2008-05-20 | 2009-11-26 | Hoya Corporation | Endoscope system |
| DE112009001239T5 (de) | 2008-05-21 | 2011-04-07 | Cook Biotech, Inc., West Lafayette | Vorrichtungen und Verfahren zum Anbringen von Verstärkungsmaterialien an chirurgischen Befestigungsvorrichtungen |
| US7922061B2 (en) | 2008-05-21 | 2011-04-12 | Ethicon Endo-Surgery, Inc. | Surgical instrument with automatically reconfigurable articulating end effector |
| US8179705B2 (en) | 2008-05-27 | 2012-05-15 | Power-One, Inc. | Apparatus and method of optimizing power system efficiency using a power loss model |
| US8016176B2 (en) | 2008-06-04 | 2011-09-13 | Tyco Healthcare Group, Lp | Surgical stapling instrument with independent sequential firing |
| US20090306639A1 (en) | 2008-06-06 | 2009-12-10 | Galil Medical Ltd. | Cryoprobe incorporating electronic module, and system utilizing same |
| US7942303B2 (en) | 2008-06-06 | 2011-05-17 | Tyco Healthcare Group Lp | Knife lockout mechanisms for surgical instrument |
| US8701959B2 (en) | 2008-06-06 | 2014-04-22 | Covidien Lp | Mechanically pivoting cartridge channel for surgical instrument |
| US20110091515A1 (en) | 2008-06-12 | 2011-04-21 | Ramot At Tel-Aviv University Ltd. | Drug-eluting medical devices |
| US8267951B2 (en) | 2008-06-12 | 2012-09-18 | Ncontact Surgical, Inc. | Dissecting cannula and methods of use thereof |
| RU2500360C2 (ru) | 2008-06-12 | 2013-12-10 | Этикон Эндо-Серджери, Инк. | Хирургический аппарат для наложения скобок с компонентами многоразового использования |
| US20090308907A1 (en) | 2008-06-12 | 2009-12-17 | Nalagatla Anil K | Partially reusable surgical stapler |
| US8628545B2 (en) | 2008-06-13 | 2014-01-14 | Covidien Lp | Endoscopic stitching devices |
| US20140100558A1 (en) | 2012-10-05 | 2014-04-10 | Gregory P. Schmitz | Micro-articulated surgical instruments using micro gear actuation |
| US8235948B2 (en) | 2008-06-27 | 2012-08-07 | Interrad Medical, Inc. | System for anchoring medical devices |
| US8011551B2 (en) | 2008-07-01 | 2011-09-06 | Tyco Healthcare Group Lp | Retraction mechanism with clutch-less drive for use with a surgical apparatus |
| US8888792B2 (en) | 2008-07-14 | 2014-11-18 | Ethicon Endo-Surgery, Inc. | Tissue apposition clip application devices and methods |
| US9204923B2 (en) | 2008-07-16 | 2015-12-08 | Intuitive Surgical Operations, Inc. | Medical instrument electronically energized using drive cables |
| US8074858B2 (en) | 2008-07-17 | 2011-12-13 | Tyco Healthcare Group Lp | Surgical retraction mechanism |
| CN102099865B (zh) | 2008-07-22 | 2014-05-28 | Lsi公司 | 用于在闪存存储器中每信号电平编程多个编程值的方法和装置 |
| US20100023024A1 (en) | 2008-07-25 | 2010-01-28 | Zeiner Mark S | Reloadable laparoscopic fastener deploying device with disposable cartridge for use in a gastric volume reduction procedure |
| US20110088921A1 (en) | 2008-07-25 | 2011-04-21 | Sylvain Forgues | Pneumatic hand tool rotational speed control method and portable apparatus |
| US8801752B2 (en) | 2008-08-04 | 2014-08-12 | Covidien Lp | Articulating surgical device |
| US8968355B2 (en) | 2008-08-04 | 2015-03-03 | Covidien Lp | Articulating surgical device |
| US8058771B2 (en) | 2008-08-06 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for cutting and coagulating with stepped output |
| US20100036370A1 (en) | 2008-08-07 | 2010-02-11 | Al Mirel | Electrosurgical instrument jaw structure with cutting tip |
| US8109426B2 (en) | 2008-08-12 | 2012-02-07 | Tyco Healthcare Group Lp | Surgical tilt anvil assembly |
| US8211125B2 (en) | 2008-08-15 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Sterile appliance delivery device for endoscopic procedures |
| US8465475B2 (en) | 2008-08-18 | 2013-06-18 | Intuitive Surgical Operations, Inc. | Instrument with multiple articulation locks |
| US8532747B2 (en) | 2008-08-22 | 2013-09-10 | Devicor Medical Products, Inc. | Biopsy marker delivery device |
| US8465502B2 (en) | 2008-08-25 | 2013-06-18 | Covidien Lp | Surgical clip applier and method of assembly |
| US9358015B2 (en) | 2008-08-29 | 2016-06-07 | Covidien Lp | Endoscopic surgical clip applier with wedge plate |
| US8409223B2 (en) | 2008-08-29 | 2013-04-02 | Covidien Lp | Endoscopic surgical clip applier with clip retention |
| US8113405B2 (en) | 2008-09-03 | 2012-02-14 | Tyco Healthcare Group, Lp | Surgical instrument with indicator |
| US20100051668A1 (en) | 2008-09-03 | 2010-03-04 | Milliman Keith L | Surgical instrument with indicator |
| WO2010028332A2 (en) | 2008-09-08 | 2010-03-11 | Mayo Foundation For Medical Education And Research | Devices, kits and methods for surgical fastening |
| US8808294B2 (en) | 2008-09-09 | 2014-08-19 | William Casey Fox | Method and apparatus for a multiple transition temperature implant |
| US8047236B2 (en) | 2008-09-12 | 2011-11-01 | Boston Scientific Scimed, Inc. | Flexible conduit with locking element |
| US20100069942A1 (en) | 2008-09-18 | 2010-03-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with apparatus for measuring elapsed time between actions |
| US8083120B2 (en) | 2008-09-18 | 2011-12-27 | Ethicon Endo-Surgery, Inc. | End effector for use with a surgical cutting and stapling instrument |
| US7837080B2 (en) | 2008-09-18 | 2010-11-23 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with device for indicating when the instrument has cut through tissue |
| RU2509536C2 (ru) | 2008-09-19 | 2014-03-20 | Этикон Эндо-Серджери, Инк. | Хирургический сшивающий скобками инструмент с приспособлением для режущего элемента |
| BRPI0904975B1 (pt) | 2008-09-19 | 2019-09-10 | Ethicon Endo Surgery Inc | grampeador cirúrgico |
| US7896214B2 (en) | 2008-09-23 | 2011-03-01 | Tyco Healthcare Group Lp | Tissue stop for surgical instrument |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US7988028B2 (en) | 2008-09-23 | 2011-08-02 | Tyco Healthcare Group Lp | Surgical instrument having an asymmetric dynamic clamping member |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US9050083B2 (en) | 2008-09-23 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8360298B2 (en) | 2008-09-23 | 2013-01-29 | Covidien Lp | Surgical instrument and loading unit for use therewith |
| JP2010075242A (ja) | 2008-09-24 | 2010-04-08 | Terumo Corp | 医療用マニピュレータ |
| US7969782B2 (en) | 2008-09-26 | 2011-06-28 | Micron Technology, Inc. | Determining memory page status |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| JP5475262B2 (ja) | 2008-10-01 | 2014-04-16 | テルモ株式会社 | 医療用マニピュレータ |
| US8271974B2 (en) | 2008-10-08 | 2012-09-18 | Kaavo Inc. | Cloud computing lifecycle management for N-tier applications |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US8020743B2 (en) | 2008-10-15 | 2011-09-20 | Ethicon Endo-Surgery, Inc. | Powered articulatable surgical cutting and fastening instrument with flexible drive member |
| US20100094340A1 (en) * | 2008-10-15 | 2010-04-15 | Tyco Healthcare Group Lp | Coating compositions |
| US7918377B2 (en) | 2008-10-16 | 2011-04-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with apparatus for providing anvil position feedback |
| JP2010098844A (ja) | 2008-10-16 | 2010-04-30 | Toyota Motor Corp | 車両の電源システム |
| US9889230B2 (en) | 2008-10-17 | 2018-02-13 | Covidien Lp | Hemostatic implant |
| US8063619B2 (en) | 2008-10-20 | 2011-11-22 | Dell Products L.P. | System and method for powering an information handling system in multiple power states |
| US8996165B2 (en) | 2008-10-21 | 2015-03-31 | Intouch Technologies, Inc. | Telepresence robot with a camera boom |
| US9370341B2 (en) | 2008-10-23 | 2016-06-21 | Covidien Lp | Surgical retrieval apparatus |
| US8561617B2 (en) * | 2008-10-30 | 2013-10-22 | Ethicon, Inc. | Implant systems and methods for treating obstructive sleep apnea |
| KR101075363B1 (ko) | 2008-10-31 | 2011-10-19 | 정창욱 | 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 |
| US8231042B2 (en) | 2008-11-06 | 2012-07-31 | Tyco Healthcare Group Lp | Surgical stapler |
| US9119898B2 (en) | 2008-11-07 | 2015-09-01 | Sofradim Production | Medical implant including a 3D mesh of oxidized cellulose and a collagen sponge |
| US7934631B2 (en) | 2008-11-10 | 2011-05-03 | Barosense, Inc. | Multi-fire stapling systems and methods for delivering arrays of staples |
| US8657821B2 (en) | 2008-11-14 | 2014-02-25 | Revascular Therapeutics Inc. | Method and system for reversibly controlled drilling of luminal occlusions |
| JP5212039B2 (ja) | 2008-11-18 | 2013-06-19 | 宇部興産株式会社 | 繊維混入抄造板及びその製造方法 |
| US7886951B2 (en) | 2008-11-24 | 2011-02-15 | Tyco Healthcare Group Lp | Pouch used to deliver medication when ruptured |
| GB0822110D0 (en) | 2008-12-03 | 2009-01-07 | Angiomed Ag | Catheter sheath for implant delivery |
| US8034363B2 (en) | 2008-12-11 | 2011-10-11 | Advanced Technologies And Regenerative Medicine, Llc. | Sustained release systems of ascorbic acid phosphate |
| US20100331856A1 (en) | 2008-12-12 | 2010-12-30 | Hansen Medical Inc. | Multiple flexible and steerable elongate instruments for minimally invasive operations |
| US8060250B2 (en) | 2008-12-15 | 2011-11-15 | GM Global Technology Operations LLC | Joint-space impedance control for tendon-driven manipulators |
| US20100147921A1 (en) | 2008-12-16 | 2010-06-17 | Lee Olson | Surgical Apparatus Including Surgical Buttress |
| US8245594B2 (en) | 2008-12-23 | 2012-08-21 | Intuitive Surgical Operations, Inc. | Roll joint and method for a surgical apparatus |
| US8770460B2 (en) | 2008-12-23 | 2014-07-08 | George E. Belzer | Shield for surgical stapler and method of use |
| US8281974B2 (en) | 2009-01-14 | 2012-10-09 | Tyco Healthcare, Group LP | Surgical stapler with suture locator |
| US20100180711A1 (en) | 2009-01-19 | 2010-07-22 | Comau, Inc. | Robotic end effector system and method |
| US20110278343A1 (en) | 2009-01-29 | 2011-11-17 | Cardica, Inc. | Clamping of Hybrid Surgical Instrument |
| US8228048B2 (en) | 2009-01-30 | 2012-07-24 | Hewlett-Packard Development Company, L.P. | Method and system of regulating voltages |
| US8037591B2 (en) | 2009-02-02 | 2011-10-18 | Ethicon Endo-Surgery, Inc. | Surgical scissors |
| US8523900B2 (en) | 2009-02-03 | 2013-09-03 | Terumo Kabushiki Kaisha | Medical manipulator |
| US8485413B2 (en) | 2009-02-05 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising an articulation joint |
| US20100193566A1 (en) | 2009-02-05 | 2010-08-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument |
| US8414577B2 (en) | 2009-02-05 | 2013-04-09 | Ethicon Endo-Surgery, Inc. | Surgical instruments and components for use in sterile environments |
| US8397971B2 (en) | 2009-02-05 | 2013-03-19 | Ethicon Endo-Surgery, Inc. | Sterilizable surgical instrument |
| US8517239B2 (en) | 2009-02-05 | 2013-08-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument comprising a magnetic element driver |
| RU2525225C2 (ru) | 2009-02-06 | 2014-08-10 | Этикон Эндо-Серджери, Инк. | Усовершенствование приводного хирургического сшивающего инструмента |
| US20110024478A1 (en) | 2009-02-06 | 2011-02-03 | Shelton Iv Frederick E | Driven Surgical Stapler Improvements |
| US8245899B2 (en) | 2009-02-06 | 2012-08-21 | Ethicon Endo-Surgery, Inc. | Driven surgical stapler improvements |
| US8444036B2 (en) | 2009-02-06 | 2013-05-21 | Ethicon Endo-Surgery, Inc. | Motor driven surgical fastener device with mechanisms for adjusting a tissue gap within the end effector |
| CN102316823B (zh) | 2009-02-11 | 2016-06-08 | 新加坡南洋理工大学 | 多层外科用假体 |
| US20100204717A1 (en) | 2009-02-12 | 2010-08-12 | Cardica, Inc. | Surgical Device for Multiple Clip Application |
| US8708211B2 (en) | 2009-02-12 | 2014-04-29 | Covidien Lp | Powered surgical instrument with secondary circuit board |
| US20100298636A1 (en) | 2009-02-19 | 2010-11-25 | Salvatore Castro | Flexible rigidizing instruments |
| US8393516B2 (en) | 2009-02-26 | 2013-03-12 | Covidien Lp | Surgical stapling apparatus with curved cartridge and anvil assemblies |
| EP2442735B1 (en) | 2009-02-27 | 2020-09-02 | Amir Belson | Improved apparatus for hybrid endoscopic and laparoscopic surgery |
| US7918376B1 (en) | 2009-03-09 | 2011-04-05 | Cardica, Inc. | Articulated surgical instrument |
| US8317071B1 (en) | 2009-03-09 | 2012-11-27 | Cardica, Inc. | Endocutter with auto-feed buttress |
| US8356740B1 (en) | 2009-03-09 | 2013-01-22 | Cardica, Inc. | Controlling compression applied to tissue by surgical tool |
| US8066167B2 (en) | 2009-03-23 | 2011-11-29 | Ethicon Endo-Surgery, Inc. | Circular surgical stapling instrument with anvil locking system |
| US20100249497A1 (en) | 2009-03-30 | 2010-09-30 | Peine William J | Surgical instrument |
| US8092443B2 (en) | 2009-03-30 | 2012-01-10 | Medtronic, Inc. | Element for implantation with medical device |
| US8110208B1 (en) | 2009-03-30 | 2012-02-07 | Biolife, L.L.C. | Hemostatic compositions for arresting blood flow from an open wound or surgical site |
| US7967179B2 (en) | 2009-03-31 | 2011-06-28 | Tyco Healthcare Group Lp | Center cinch and release of buttress material |
| US8016178B2 (en) | 2009-03-31 | 2011-09-13 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| US8348126B2 (en) | 2009-03-31 | 2013-01-08 | Covidien Lp | Crimp and release of suture holding buttress material |
| US7988027B2 (en) | 2009-03-31 | 2011-08-02 | Tyco Healthcare Group Lp | Crimp and release of suture holding buttress material |
| US8945163B2 (en) | 2009-04-01 | 2015-02-03 | Ethicon Endo-Surgery, Inc. | Methods and devices for cutting and fastening tissue |
| AU2010232921B2 (en) | 2009-04-03 | 2016-04-28 | The Board Of Trustees Of The Leland Stanford Junior University | Surgical device and method |
| US8257251B2 (en) | 2009-04-08 | 2012-09-04 | Ethicon Endo-Surgery, Inc. | Methods and devices for providing access into a body cavity |
| US8444549B2 (en) | 2009-04-16 | 2013-05-21 | Covidien Lp | Self-steering endoscopic device |
| US20100274160A1 (en) | 2009-04-22 | 2010-10-28 | Chie Yachi | Switching structure and surgical equipment |
| WO2010121356A1 (en) | 2009-04-24 | 2010-10-28 | Storefront.Com Online Inc. | Automated battery and data delivery system |
| CN102458272B (zh) | 2009-04-27 | 2014-09-17 | 因特尔赛克特耳鼻喉公司 | 治疗与扁桃体切除术相关的疼痛的装置 |
| US8167898B1 (en) | 2009-05-05 | 2012-05-01 | Cardica, Inc. | Flexible cutter for surgical stapler |
| US9038881B1 (en) | 2009-05-05 | 2015-05-26 | Cardica, Inc. | Feeder belt actuation mechanism for true multi-fire surgical stapler |
| US8365975B1 (en) | 2009-05-05 | 2013-02-05 | Cardica, Inc. | Cam-controlled knife for surgical instrument |
| US8328064B2 (en) | 2009-05-06 | 2012-12-11 | Covidien Lp | Pin locking mechanism for a surgical instrument |
| US8523881B2 (en) | 2010-07-26 | 2013-09-03 | Valtech Cardio, Ltd. | Multiple anchor delivery tool |
| US8127976B2 (en) | 2009-05-08 | 2012-03-06 | Tyco Healthcare Group Lp | Stapler cartridge and channel interlock |
| US20100292540A1 (en) | 2009-05-12 | 2010-11-18 | Hess Christopher J | Surgical retractor and method |
| US8308043B2 (en) | 2009-05-19 | 2012-11-13 | Covidien Lp | Recognition of interchangeable component of a device |
| US8418909B2 (en) | 2009-06-02 | 2013-04-16 | Covidien Lp | Surgical instrument and method for performing a resection |
| US8056789B1 (en) | 2009-06-03 | 2011-11-15 | Cardica, Inc. | Staple and feeder belt configurations for surgical stapler |
| US9086875B2 (en) | 2009-06-05 | 2015-07-21 | Qualcomm Incorporated | Controlling power consumption of a mobile device based on gesture recognition |
| US8132706B2 (en) | 2009-06-05 | 2012-03-13 | Tyco Healthcare Group Lp | Surgical stapling apparatus having articulation mechanism |
| CH701320B1 (it) | 2009-06-16 | 2013-10-15 | Frii S A | Dispositivo per trattamenti di resezione/rimozione endoscopica dei tessuti. |
| US8827134B2 (en) | 2009-06-19 | 2014-09-09 | Covidien Lp | Flexible surgical stapler with motor in the head |
| US8784404B2 (en) | 2009-06-29 | 2014-07-22 | Carefusion 2200, Inc. | Flexible wrist-type element and methods of manufacture and use thereof |
| US9463260B2 (en) | 2009-06-29 | 2016-10-11 | Covidien Lp | Self-sealing compositions |
| CN101940844A (zh) | 2009-07-03 | 2011-01-12 | 林翠琼 | 模拟狗尾摆动装置 |
| KR101180665B1 (ko) | 2009-07-03 | 2012-09-07 | 주식회사 이턴 | 하이브리드 수술용 로봇 시스템 및 수술용 로봇 제어방법 |
| US8146790B2 (en) | 2009-07-11 | 2012-04-03 | Tyco Healthcare Group Lp | Surgical instrument with safety mechanism |
| US8276802B2 (en) | 2009-07-11 | 2012-10-02 | Tyco Healthcare Group Lp | Surgical instrument with double cartridge and anvil assemblies |
| PL3263054T3 (pl) | 2009-07-15 | 2019-08-30 | Ethicon Llc | Ultradźwiękowe narzędzie chirurgiczne mające zacisk |
| US20110011916A1 (en) | 2009-07-16 | 2011-01-20 | New York University | Anastomosis device |
| US8328062B2 (en) | 2009-07-21 | 2012-12-11 | Covidien Lp | Surgical instrument with curvilinear tissue-contacting surfaces |
| US8205779B2 (en) | 2009-07-23 | 2012-06-26 | Tyco Healthcare Group Lp | Surgical stapler with tactile feedback system |
| US20110021871A1 (en) | 2009-07-27 | 2011-01-27 | Gerry Berkelaar | Laparoscopic surgical instrument |
| US20110025311A1 (en) | 2009-07-29 | 2011-02-03 | Logitech Europe S.A. | Magnetic rotary system for input devices |
| FR2948594B1 (fr) | 2009-07-31 | 2012-07-20 | Dexterite Surgical | Manipulateur ergonomique et semi-automatique et applications aux instruments pour chirurgie mini-invasive |
| US8968358B2 (en) | 2009-08-05 | 2015-03-03 | Covidien Lp | Blunt tissue dissection surgical instrument jaw designs |
| US10383629B2 (en) | 2009-08-10 | 2019-08-20 | Covidien Lp | System and method for preventing reprocessing of a powered surgical instrument |
| US20110036891A1 (en) | 2009-08-11 | 2011-02-17 | Tyco Healthcare Group Lp | Surgical stapler with visual positional indicator |
| US8360299B2 (en) | 2009-08-11 | 2013-01-29 | Covidien Lp | Surgical stapling apparatus |
| US8955732B2 (en) | 2009-08-11 | 2015-02-17 | Covidien Lp | Surgical stapling apparatus |
| US8276801B2 (en) | 2011-02-01 | 2012-10-02 | Tyco Healthcare Group Lp | Surgical stapling apparatus |
| EP2467314A1 (en) | 2009-08-17 | 2012-06-27 | Culligan, Patrick John | Apparatus for housing a plurality of needles and method of use therefor |
| US8733612B2 (en) | 2009-08-17 | 2014-05-27 | Covidien Lp | Safety method for powered surgical instruments |
| US8342378B2 (en) | 2009-08-17 | 2013-01-01 | Covidien Lp | One handed stapler |
| US9265500B2 (en) | 2009-08-19 | 2016-02-23 | Covidien Lp | Surgical staple |
| US8162965B2 (en) | 2009-09-09 | 2012-04-24 | Tyco Healthcare Group Lp | Low profile cutting assembly with a return spring |
| US9168144B2 (en) | 2009-09-14 | 2015-10-27 | Evgeny Rivin | Prosthesis for replacement of cartilage |
| DE102009041329A1 (de) | 2009-09-15 | 2011-03-24 | Celon Ag Medical Instruments | Kombiniertes Ultraschall- und HF Chirurgisches System |
| JP5439105B2 (ja) | 2009-09-29 | 2014-03-12 | ローレル精機株式会社 | 紙葉類表裏取揃装置 |
| US20110082538A1 (en) | 2009-10-01 | 2011-04-07 | Jonathan Dahlgren | Medical device, kit and method for constricting tissue or a bodily orifice, for example, a mitral valve |
| US8470355B2 (en) | 2009-10-01 | 2013-06-25 | Covidien Lp | Mesh implant |
| US8970507B2 (en) | 2009-10-02 | 2015-03-03 | Blackberry Limited | Method of waking up and a portable electronic device configured to perform the same |
| US8430892B2 (en) | 2009-10-06 | 2013-04-30 | Covidien Lp | Surgical clip applier having a wireless clip counter |
| US9168054B2 (en) | 2009-10-09 | 2015-10-27 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| EP2679175A1 (en) | 2009-10-09 | 2014-01-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument |
| US8152041B2 (en) | 2009-10-14 | 2012-04-10 | Tyco Healthcare Group Lp | Varying tissue compression aided by elastic members |
| US20150231409A1 (en) | 2009-10-15 | 2015-08-20 | Covidien Lp | Buttress brachytherapy and integrated staple line markers for margin identification |
| US9610080B2 (en) | 2009-10-15 | 2017-04-04 | Covidien Lp | Staple line reinforcement for anvil and cartridge |
| US9693772B2 (en) | 2009-10-15 | 2017-07-04 | Covidien Lp | Staple line reinforcement for anvil and cartridge |
| US8157151B2 (en) | 2009-10-15 | 2012-04-17 | Tyco Healthcare Group Lp | Staple line reinforcement for anvil and cartridge |
| US8430292B2 (en) | 2009-10-28 | 2013-04-30 | Covidien Lp | Surgical fastening apparatus |
| WO2011052391A1 (ja) | 2009-10-28 | 2011-05-05 | オリンパスメディカルシステムズ株式会社 | 医療用装置 |
| US8322590B2 (en) | 2009-10-28 | 2012-12-04 | Covidien Lp | Surgical stapling instrument |
| US8413872B2 (en) | 2009-10-28 | 2013-04-09 | Covidien Lp | Surgical fastening apparatus |
| US8398633B2 (en) | 2009-10-30 | 2013-03-19 | Covidien Lp | Jaw roll joint |
| US20110112517A1 (en) | 2009-11-06 | 2011-05-12 | Peine Willliam J | Surgical instrument |
| US20110112530A1 (en) | 2009-11-06 | 2011-05-12 | Keller Craig A | Battery Powered Electrosurgery |
| US8162138B2 (en) | 2009-11-09 | 2012-04-24 | Containmed, Inc. | Universal surgical fastener sterilization caddy |
| BR112012011424B1 (pt) | 2009-11-13 | 2020-10-20 | Intuitive Surgical Operations, Inc | instrumento cirúrgico |
| KR101800723B1 (ko) | 2009-11-13 | 2017-11-23 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 독립적으로 회전하는 부재 내의 병렬 구동 샤프트들을 위한 모터 연접부 |
| US8353438B2 (en) | 2009-11-19 | 2013-01-15 | Ethicon Endo-Surgery, Inc. | Circular stapler introducer with rigid cap assembly configured for easy removal |
| US8136712B2 (en) | 2009-12-10 | 2012-03-20 | Ethicon Endo-Surgery, Inc. | Surgical stapler with discrete staple height adjustment and tactile feedback |
| US8851354B2 (en) | 2009-12-24 | 2014-10-07 | Ethicon Endo-Surgery, Inc. | Surgical cutting instrument that analyzes tissue thickness |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US8267300B2 (en) | 2009-12-30 | 2012-09-18 | Ethicon Endo-Surgery, Inc. | Dampening device for endoscopic surgical stapler |
| US8714430B2 (en) | 2009-12-31 | 2014-05-06 | Covidien Lp | Indicator for surgical stapler |
| US8608046B2 (en) | 2010-01-07 | 2013-12-17 | Ethicon Endo-Surgery, Inc. | Test device for a surgical tool |
| US8313509B2 (en) | 2010-01-19 | 2012-11-20 | Covidien Lp | Suture and retainer assembly and SULU |
| EP2525740A4 (en) | 2010-01-21 | 2016-01-20 | Orthalign Inc | SYSTEMS AND METHOD FOR THE REPLACEMENT OF JOINTS |
| WO2011089716A1 (ja) | 2010-01-22 | 2011-07-28 | オリンパスメディカルシステムズ株式会社 | 治療用処置具、治療用処置装置および治療処置方法 |
| CA2786480C (en) | 2010-01-26 | 2018-01-16 | Novolap Medical Ltd. | Articulating medical instrument |
| US9510925B2 (en) | 2010-02-02 | 2016-12-06 | Covidien Lp | Surgical meshes |
| US8328061B2 (en) | 2010-02-02 | 2012-12-11 | Covidien Lp | Surgical instrument for joining tissue |
| US8911426B2 (en) | 2010-02-08 | 2014-12-16 | On Demand Therapeutics, Inc. | Low-permeability, laser-activated drug delivery device |
| JP5432761B2 (ja) | 2010-02-12 | 2014-03-05 | 株式会社マキタ | 複数のバッテリパックを電源とする電動工具 |
| US20110199225A1 (en) | 2010-02-15 | 2011-08-18 | Honeywell International Inc. | Use of token switch to indicate unauthorized manipulation of a protected device |
| US8403945B2 (en) | 2010-02-25 | 2013-03-26 | Covidien Lp | Articulating endoscopic surgical clip applier |
| CN101779977B (zh) | 2010-02-25 | 2011-12-14 | 上海创亿医疗器械技术有限公司 | 外科线形切割缝合器的钉仓 |
| US8403832B2 (en) | 2010-02-26 | 2013-03-26 | Covidien Lp | Drive mechanism for articulation of a surgical instrument |
| US20110218550A1 (en) | 2010-03-08 | 2011-09-08 | Tyco Healthcare Group Lp | System and method for determining and adjusting positioning and orientation of a surgical device |
| AU2011200961B2 (en) | 2010-03-12 | 2014-05-29 | Covidien Lp | Method and apparatus for determining parameters of linear motion in a surgical instrument |
| US8575880B2 (en) | 2010-03-17 | 2013-11-05 | Alan Lyndon Grantz | Direct current motor with independently driven and switchable stators |
| US8696665B2 (en) | 2010-03-26 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical cutting and sealing instrument with reduced firing force |
| DE102010013150A1 (de) | 2010-03-27 | 2011-09-29 | Volkswagen Ag | Vorrichtung zur thermischen Isolierung mindestens einer Fahrzeugbatterie |
| US20110241597A1 (en) | 2010-03-30 | 2011-10-06 | Lin Engineering | H-bridge drive circuit for step motor control |
| US8894654B2 (en) | 2010-03-31 | 2014-11-25 | Smart Medical Devices, Inc. | Depth controllable and measurable medical driver devices and methods of use |
| US20120265220A1 (en) | 2010-04-06 | 2012-10-18 | Pavel Menn | Articulating Steerable Clip Applier for Laparoscopic Procedures |
| US8348127B2 (en) | 2010-04-07 | 2013-01-08 | Covidien Lp | Surgical fastener applying apparatus |
| US8662370B2 (en) | 2010-04-08 | 2014-03-04 | Hidehisa Thomas Takei | Introducer system and assembly for surgical staplers |
| US8961504B2 (en) | 2010-04-09 | 2015-02-24 | Covidien Lp | Optical hydrology arrays and system and method for monitoring water displacement during treatment of patient tissue |
| EP2377477B1 (en) | 2010-04-14 | 2012-05-30 | Tuebingen Scientific Medical GmbH | Surgical instrument with elastically moveable instrument head |
| MX2012012611A (es) | 2010-04-29 | 2013-05-01 | Ethicon Llc | Suturas de autorretención de alta densidad, equipo y métodos de fabricación. |
| US20110275901A1 (en) | 2010-05-07 | 2011-11-10 | Ethicon Endo-Surgery, Inc. | Laparoscopic devices with articulating end effectors |
| US20110276083A1 (en) | 2010-05-07 | 2011-11-10 | Ethicon Endo-Surgery, Inc. | Bendable shaft for handle positioning |
| US8464925B2 (en) | 2010-05-11 | 2013-06-18 | Ethicon Endo-Surgery, Inc. | Methods and apparatus for delivering tissue treatment compositions to stapled tissue |
| US8646674B2 (en) | 2010-05-11 | 2014-02-11 | Ethicon Endo-Surgery, Inc. | Methods and apparatus for delivering tissue treatment compositions to stapled tissue |
| US8685020B2 (en) | 2010-05-17 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instruments and end effectors therefor |
| US20110293690A1 (en) | 2010-05-27 | 2011-12-01 | Tyco Healthcare Group Lp | Biodegradable Polymer Encapsulated Microsphere Particulate Film and Method of Making Thereof |
| KR101095099B1 (ko) | 2010-06-07 | 2011-12-16 | 삼성전기주식회사 | 편평형 진동모터 |
| US8795276B2 (en) | 2010-06-09 | 2014-08-05 | Ethicon Endo-Surgery, Inc. | Electrosurgical instrument employing a plurality of electrodes |
| US8825164B2 (en) | 2010-06-11 | 2014-09-02 | Enteromedics Inc. | Neural modulation devices and methods |
| US20110313894A1 (en) | 2010-06-18 | 2011-12-22 | Dye Alan W | System and Method for Surgical Pack Manufacture, Monitoring, and Tracking |
| US8596515B2 (en) | 2010-06-18 | 2013-12-03 | Covidien Lp | Staple position sensor system |
| US8302323B2 (en) | 2010-06-21 | 2012-11-06 | Confluent Surgical, Inc. | Hemostatic patch |
| US8366559B2 (en) | 2010-06-23 | 2013-02-05 | Lenkbar, Llc | Cannulated flexible drive shaft |
| US9028495B2 (en) | 2010-06-23 | 2015-05-12 | Covidien Lp | Surgical instrument with a separable coaxial joint |
| US20110315413A1 (en) | 2010-06-25 | 2011-12-29 | Mako Surgical Corp. | Kit-Of Parts for Multi-Functional Tool, Drive Unit, and Operating Members |
| US20120004636A1 (en) | 2010-07-02 | 2012-01-05 | Denny Lo | Hemostatic fibrous material |
| WO2012006306A2 (en) | 2010-07-08 | 2012-01-12 | Ethicon Endo-Surgery, Inc. | Surgical instrument comprising an articulatable end effector |
| US9149324B2 (en) | 2010-07-08 | 2015-10-06 | Ethicon Endo-Surgery, Inc. | Surgical instrument comprising an articulatable end effector |
| US8453906B2 (en) | 2010-07-14 | 2013-06-04 | Ethicon Endo-Surgery, Inc. | Surgical instruments with electrodes |
| EP2418503B1 (en) | 2010-07-14 | 2013-07-03 | Sensirion AG | Needle head |
| US20120016413A1 (en) | 2010-07-14 | 2012-01-19 | Ethicon Endo-Surgery, Inc. | Surgical fastening devices comprising rivets |
| US8439246B1 (en) | 2010-07-20 | 2013-05-14 | Cardica, Inc. | Surgical stapler with cartridge-adjustable clamp gap |
| US8840609B2 (en) | 2010-07-23 | 2014-09-23 | Conmed Corporation | Tissue fusion system and method of performing a functional verification test |
| US8968337B2 (en) | 2010-07-28 | 2015-03-03 | Covidien Lp | Articulating clip applier |
| US8789740B2 (en) | 2010-07-30 | 2014-07-29 | Ethicon Endo-Surgery, Inc. | Linear cutting and stapling device with selectively disengageable cutting member |
| US8783543B2 (en) | 2010-07-30 | 2014-07-22 | Ethicon Endo-Surgery, Inc. | Tissue acquisition arrangements and methods for surgical stapling devices |
| US20120029272A1 (en) | 2010-07-30 | 2012-02-02 | Shelton Iv Frederick E | Apparatus and methods for protecting adjacent structures during the insertion of a surgical instrument into a tubular organ |
| CN102378503A (zh) | 2010-08-06 | 2012-03-14 | 鸿富锦精密工业(深圳)有限公司 | 电子装置组合 |
| US8852199B2 (en) | 2010-08-06 | 2014-10-07 | Abyrx, Inc. | Method and device for handling bone adhesives |
| CN101912284B (zh) | 2010-08-13 | 2012-07-18 | 李东瑞 | 弧形切割吻合器 |
| US8360296B2 (en) | 2010-09-09 | 2013-01-29 | Ethicon Endo-Surgery, Inc. | Surgical stapling head assembly with firing lockout for a surgical stapler |
| TWI381915B (zh) | 2010-09-16 | 2013-01-11 | Basso Ind Corp | An electric nail gun with an error prevention function |
| US9289212B2 (en) | 2010-09-17 | 2016-03-22 | Ethicon Endo-Surgery, Inc. | Surgical instruments and batteries for surgical instruments |
| US8632525B2 (en) | 2010-09-17 | 2014-01-21 | Ethicon Endo-Surgery, Inc. | Power control arrangements for surgical instruments and batteries |
| US20130131651A1 (en) | 2010-09-24 | 2013-05-23 | Ethicon Endo-Surgery, Inc. | Features providing linear actuation through articulation joint in surgical instrument |
| US9220559B2 (en) | 2010-09-24 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Articulation joint features for articulating surgical device |
| US9877720B2 (en) | 2010-09-24 | 2018-01-30 | Ethicon Llc | Control features for articulating surgical device |
| US8733613B2 (en) | 2010-09-29 | 2014-05-27 | Ethicon Endo-Surgery, Inc. | Staple cartridge |
| EP4333325A2 (en) | 2010-09-29 | 2024-03-06 | Dexcom, Inc. | Advanced continuous analyte monitoring system |
| US9301753B2 (en) | 2010-09-30 | 2016-04-05 | Ethicon Endo-Surgery, Llc | Expandable tissue thickness compensator |
| US9216019B2 (en) | 2011-09-23 | 2015-12-22 | Ethicon Endo-Surgery, Inc. | Surgical stapler with stationary staple drivers |
| CA2812553C (en) | 2010-09-30 | 2019-02-12 | Ethicon Endo-Surgery, Inc. | Fastener system comprising a retention matrix and an alignment matrix |
| US8978954B2 (en) | 2010-09-30 | 2015-03-17 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising an adjustable distal portion |
| US10123798B2 (en) | 2010-09-30 | 2018-11-13 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US9301752B2 (en) | 2010-09-30 | 2016-04-05 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising a plurality of capsules |
| US9839420B2 (en) | 2010-09-30 | 2017-12-12 | Ethicon Llc | Tissue thickness compensator comprising at least one medicament |
| US9307989B2 (en) | 2012-03-28 | 2016-04-12 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorportating a hydrophobic agent |
| US9364233B2 (en) | 2010-09-30 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Tissue thickness compensators for circular surgical staplers |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US9386988B2 (en) | 2010-09-30 | 2016-07-12 | Ethicon End-Surgery, LLC | Retainer assembly including a tissue thickness compensator |
| US20120080344A1 (en) | 2010-09-30 | 2012-04-05 | Ethicon Endo-Surgery, Inc. | Implantable fastener cartridge comprising a support retainer |
| US9314246B2 (en) | 2010-09-30 | 2016-04-19 | Ethicon Endo-Surgery, Llc | Tissue stapler having a thickness compensator incorporating an anti-inflammatory agent |
| US20120248169A1 (en) | 2010-09-30 | 2012-10-04 | Ethicon Endo-Surgery, Inc. | Methods for forming tissue thickness compensator arrangements for surgical staplers |
| US9220501B2 (en) | 2010-09-30 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensators |
| US8893949B2 (en) | 2010-09-30 | 2014-11-25 | Ethicon Endo-Surgery, Inc. | Surgical stapler with floating anvil |
| US9232941B2 (en) | 2010-09-30 | 2016-01-12 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a reservoir |
| US9332974B2 (en) | 2010-09-30 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Layered tissue thickness compensator |
| US10405854B2 (en) | 2010-09-30 | 2019-09-10 | Ethicon Llc | Surgical stapling cartridge with layer retention features |
| USD650074S1 (en) | 2010-10-01 | 2011-12-06 | Ethicon Endo-Surgery, Inc. | Surgical instrument |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| CN103429182B (zh) | 2010-10-01 | 2016-01-20 | 伊西康内外科公司 | 具有钳口构件的外科器械 |
| US8979890B2 (en) | 2010-10-01 | 2015-03-17 | Ethicon Endo-Surgery, Inc. | Surgical instrument with jaw member |
| JP5636247B2 (ja) | 2010-10-06 | 2014-12-03 | Hoya株式会社 | 電子内視鏡用プロセッサ及び電子内視鏡装置 |
| US20120109186A1 (en) | 2010-10-29 | 2012-05-03 | Parrott David A | Articulating laparoscopic surgical instruments |
| US8568425B2 (en) | 2010-11-01 | 2013-10-29 | Covidien Lp | Wire spool for passing of wire through a rotational coupling |
| US8292150B2 (en) | 2010-11-02 | 2012-10-23 | Tyco Healthcare Group Lp | Adapter for powered surgical devices |
| US9011471B2 (en) | 2010-11-05 | 2015-04-21 | Ethicon Endo-Surgery, Inc. | Surgical instrument with pivoting coupling to modular shaft and end effector |
| US9782214B2 (en) | 2010-11-05 | 2017-10-10 | Ethicon Llc | Surgical instrument with sensor and powered control |
| US9161803B2 (en) | 2010-11-05 | 2015-10-20 | Ethicon Endo-Surgery, Inc. | Motor driven electrosurgical device with mechanical and electrical feedback |
| US9039720B2 (en) | 2010-11-05 | 2015-05-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument with ratcheting rotatable shaft |
| US9072523B2 (en) | 2010-11-05 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Medical device with feature for sterile acceptance of non-sterile reusable component |
| US20120116265A1 (en) | 2010-11-05 | 2012-05-10 | Houser Kevin L | Surgical instrument with charging devices |
| US9510895B2 (en) | 2010-11-05 | 2016-12-06 | Ethicon Endo-Surgery, Llc | Surgical instrument with modular shaft and end effector |
| CN103209657B (zh) | 2010-11-15 | 2016-03-23 | 直观外科手术操作公司 | 在手术仪器中去耦仪器轴滚动和末端执行器促动 |
| US8480703B2 (en) | 2010-11-19 | 2013-07-09 | Covidien Lp | Surgical device |
| US20120175398A1 (en) | 2010-11-22 | 2012-07-12 | Mayo Foundation For Medical Education And Research | Stapling apparatus and methods of assembling or operating the same |
| US8679093B2 (en) | 2010-11-23 | 2014-03-25 | Microchips, Inc. | Multi-dose drug delivery device and method |
| US8523043B2 (en) | 2010-12-07 | 2013-09-03 | Immersion Corporation | Surgical stapler having haptic feedback |
| CN102038532A (zh) | 2010-12-07 | 2011-05-04 | 苏州天臣国际医疗科技有限公司 | 钉仓组件 |
| US8348130B2 (en) | 2010-12-10 | 2013-01-08 | Covidien Lp | Surgical apparatus including surgical buttress |
| CN201949071U (zh) | 2010-12-10 | 2011-08-31 | 苏州天臣国际医疗科技有限公司 | 直线型切割缝合器 |
| US8540735B2 (en) | 2010-12-16 | 2013-09-24 | Apollo Endosurgery, Inc. | Endoscopic suture cinch system |
| US8936614B2 (en) | 2010-12-30 | 2015-01-20 | Covidien Lp | Combined unilateral/bilateral jaws on a surgical instrument |
| DE102011002404A1 (de) | 2011-01-03 | 2012-07-05 | Robert Bosch Gmbh | Handwerkzeugmaschinen-Energieversorgungseinheit |
| DE102012100086A1 (de) | 2011-01-07 | 2012-08-02 | Z-Medical Gmbh & Co. Kg | Chirurgisches Instrument |
| SG193008A1 (en) | 2011-01-14 | 2013-10-30 | New Hope Ventures | Surgical stapling device and method |
| US9084602B2 (en) | 2011-01-26 | 2015-07-21 | Covidien Lp | Buttress film with hemostatic action for surgical stapling apparatus |
| US8336754B2 (en) | 2011-02-04 | 2012-12-25 | Covidien Lp | Locking articulation mechanism for surgical stapler |
| US9393017B2 (en) | 2011-02-15 | 2016-07-19 | Intuitive Surgical Operations, Inc. | Methods and systems for detecting staple cartridge misfire or failure |
| WO2012112705A1 (en) | 2011-02-15 | 2012-08-23 | Intuitive Surgical Operations, Inc. | Seals and sealing methods for a surgical instrument having an articulated end effector actuated by a drive shaft |
| KR102359695B1 (ko) | 2011-02-15 | 2022-02-09 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 클램핑 또는 발사 실패를 검출하기 위한 시스템 |
| EP2675383B1 (en) | 2011-02-18 | 2017-07-19 | Intuitive Surgical Operations, Inc. | Fusing and cutting surgical instrument |
| EP2676101B1 (en) | 2011-02-18 | 2021-04-14 | DePuy Synthes Products, LLC | Tool with integrated navigation and guidance system |
| US8968340B2 (en) | 2011-02-23 | 2015-03-03 | Covidien Lp | Single actuating jaw flexible endolumenal stitching device |
| US8479968B2 (en) | 2011-03-10 | 2013-07-09 | Covidien Lp | Surgical instrument buttress attachment |
| US9211122B2 (en) | 2011-03-14 | 2015-12-15 | Ethicon Endo-Surgery, Inc. | Surgical access devices with anvil introduction and specimen retrieval structures |
| US8857693B2 (en) | 2011-03-15 | 2014-10-14 | Ethicon Endo-Surgery, Inc. | Surgical instruments with lockable articulating end effector |
| US8800841B2 (en) | 2011-03-15 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Surgical staple cartridges |
| US20120234895A1 (en) | 2011-03-15 | 2012-09-20 | Ethicon Endo-Surgery, Inc. | Surgical staple cartridges and end effectors with vessel measurement arrangements |
| US8540131B2 (en) | 2011-03-15 | 2013-09-24 | Ethicon Endo-Surgery, Inc. | Surgical staple cartridges with tissue tethers for manipulating divided tissue and methods of using same |
| US8926598B2 (en) | 2011-03-15 | 2015-01-06 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulatable and rotatable end effector |
| US9044229B2 (en) | 2011-03-15 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical fastener instruments |
| WO2012127462A1 (en) | 2011-03-22 | 2012-09-27 | Human Extensions Ltd. | Motorized surgical instruments |
| WO2012135705A1 (en) | 2011-03-30 | 2012-10-04 | Tyco Healthcare Group Lp | Ultrasonic surgical instruments |
| US20120251861A1 (en) | 2011-03-31 | 2012-10-04 | De Poan Pneumatic Corp. | Shock proof structure of battery pack for receiving battery cell |
| WO2012141679A1 (en) | 2011-04-11 | 2012-10-18 | Hassan Chandra | Surgical technique(s) and/or device(s) |
| CA3022252C (en) | 2011-04-15 | 2020-09-22 | Covidien Ag | Battery powered hand-held ultrasonic surgical cautery cutting device |
| US9655615B2 (en) | 2011-04-19 | 2017-05-23 | Dextera Surgical Inc. | Active wedge and I-beam for surgical stapler |
| WO2012143913A2 (en) | 2011-04-21 | 2012-10-26 | Novogate Medical Ltd | Tissue closure device and method of delivery and uses thereof |
| US8789737B2 (en) | 2011-04-27 | 2014-07-29 | Covidien Lp | Circular stapler and staple line reinforcement material |
| AU2012201645B2 (en) | 2011-04-29 | 2015-04-16 | Covidien Lp | Surgical stapling apparatus |
| RU2606493C2 (ru) | 2011-04-29 | 2017-01-10 | Этикон Эндо-Серджери, Инк. | Кассета со скобками, содержащая скобки, расположенные внутри ее сжимаемой части |
| US9820741B2 (en) | 2011-05-12 | 2017-11-21 | Covidien Lp | Replaceable staple cartridge |
| FR2975534B1 (fr) | 2011-05-19 | 2013-06-28 | Electricite De France | Accumulateur metal-air avec dispositif de protection de l'electrode a air |
| US8852185B2 (en) | 2011-05-19 | 2014-10-07 | Covidien Lp | Apparatus for performing an electrosurgical procedure |
| DK2714152T3 (en) | 2011-05-25 | 2018-03-26 | Sanofi Aventis Deutschland | COVER MEDICINE ADMINISTRATION DEVICE |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| US10542978B2 (en) | 2011-05-27 | 2020-01-28 | Covidien Lp | Method of internally potting or sealing a handheld medical device |
| CN103607968B (zh) | 2011-05-31 | 2017-07-04 | 直观外科手术操作公司 | 机器人外科器械末端执行器的主动控制 |
| CN103561667B (zh) | 2011-05-31 | 2016-08-17 | 直观外科手术操作公司 | 机器人手术器械中的夹持力控制 |
| US8870912B2 (en) | 2011-05-31 | 2014-10-28 | Intuitive Surgical Operations, Inc. | Surgical instrument with single drive input for two end effector mechanisms |
| CN102835977A (zh) | 2011-06-21 | 2012-12-26 | 达华国际股份有限公司 | 微创医疗装置 |
| WO2012178075A2 (en) | 2011-06-24 | 2012-12-27 | Abbott Laboratories | Tamper-evident packaging |
| US20130012983A1 (en) | 2011-07-08 | 2013-01-10 | Tyco Healthcare Group Lp | Surgical Instrument with Flexible Shaft |
| EP2731517A2 (en) | 2011-07-11 | 2014-05-21 | Medical Vision Research & Development AB | Status control for electrically powered surgical tool systems |
| US20140188159A1 (en) | 2011-07-11 | 2014-07-03 | Agile Endosurgery, Inc. | Surgical tool |
| US8758235B2 (en) | 2011-07-13 | 2014-06-24 | Cook Medical Technologies Llc | Foldable surgical retractor |
| US8960521B2 (en) | 2011-07-15 | 2015-02-24 | Covidien Lp | Loose staples removal system |
| US8574263B2 (en) | 2011-07-20 | 2013-11-05 | Covidien Lp | Coaxial coil lock |
| US8603135B2 (en) | 2011-07-20 | 2013-12-10 | Covidien Lp | Articulating surgical apparatus |
| EP2737597B1 (en) | 2011-07-26 | 2019-10-16 | Gogoro Inc. | Apparatus, method and article for physical security of power storage devices in vehicles |
| EP2737593B1 (en) | 2011-07-26 | 2023-11-22 | Gogoro Inc. | Apparatus, method and article for authentication, security and control of power storage devices, such as batteries |
| US9743926B2 (en) | 2011-07-27 | 2017-08-29 | William Casey Fox | Bone staple, instrument and method of use and manufacturing |
| US8998059B2 (en) | 2011-08-01 | 2015-04-07 | Ethicon Endo-Surgery, Inc. | Adjunct therapy device having driver with cavity for hemostatic agent |
| US9492170B2 (en) | 2011-08-10 | 2016-11-15 | Ethicon Endo-Surgery, Inc. | Device for applying adjunct in endoscopic procedure |
| US8956342B1 (en) | 2011-09-01 | 2015-02-17 | Microaire Surgical Instruments Llc | Method and device for ergonomically and ambidextrously operable surgical device |
| JP6385275B2 (ja) | 2011-09-02 | 2018-09-05 | ストライカー・コーポレイション | ハウジングから延びる切断アクセサリ及びハウジングに対する切断アクセサリの位置を確立するアクチュエータを備える手術器具 |
| US8789739B2 (en) | 2011-09-06 | 2014-07-29 | Ethicon Endo-Surgery, Inc. | Continuous stapling instrument |
| US9099863B2 (en) | 2011-09-09 | 2015-08-04 | Covidien Lp | Surgical generator and related method for mitigating overcurrent conditions |
| US8679098B2 (en) | 2011-09-13 | 2014-03-25 | Covidien Lp | Rotation knobs for surgical instruments |
| EP2755549A1 (en) | 2011-09-13 | 2014-07-23 | Dose Medical Corporation | Intraocular physiological sensor |
| US9999408B2 (en) | 2011-09-14 | 2018-06-19 | Ethicon Endo-Surgery, Inc. | Surgical instrument with fluid fillable buttress |
| US8814025B2 (en) | 2011-09-15 | 2014-08-26 | Ethicon Endo-Surgery, Inc. | Fibrin pad matrix with suspended heat activated beads of adhesive |
| US20130068816A1 (en) | 2011-09-15 | 2013-03-21 | Venkataramanan Mandakolathur Vasudevan | Surgical instrument and buttress material |
| US9393018B2 (en) | 2011-09-22 | 2016-07-19 | Ethicon Endo-Surgery, Inc. | Surgical staple assembly with hemostatic feature |
| US8985429B2 (en) | 2011-09-23 | 2015-03-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with adjunct material application feature |
| US9050084B2 (en) | 2011-09-23 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Staple cartridge including collapsible deck arrangement |
| US8899464B2 (en) | 2011-10-03 | 2014-12-02 | Ethicon Endo-Surgery, Inc. | Attachment of surgical staple buttress to cartridge |
| US9089326B2 (en) | 2011-10-07 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Dual staple cartridge for surgical stapler |
| US8585721B2 (en) | 2011-10-12 | 2013-11-19 | Covidien Lp | Mesh fixation system |
| DE102011084499A1 (de) | 2011-10-14 | 2013-04-18 | Robert Bosch Gmbh | Werkzeugvorsatz |
| US9414880B2 (en) | 2011-10-24 | 2016-08-16 | Ethicon Endo-Surgery, Llc | User interface in a battery powered device |
| US8657177B2 (en) | 2011-10-25 | 2014-02-25 | Covidien Lp | Surgical apparatus and method for endoscopic surgery |
| US9480492B2 (en) | 2011-10-25 | 2016-11-01 | Covidien Lp | Apparatus for endoscopic procedures |
| US8672206B2 (en) | 2011-10-25 | 2014-03-18 | Covidien Lp | Apparatus for endoscopic procedures |
| US9016539B2 (en) | 2011-10-25 | 2015-04-28 | Covidien Lp | Multi-use loading unit |
| US20130098970A1 (en) | 2011-10-25 | 2013-04-25 | David Racenet | Surgical Apparatus and Method for Endoluminal Surgery |
| US9675351B2 (en) | 2011-10-26 | 2017-06-13 | Covidien Lp | Buttress release from surgical stapler by knife pushing |
| US8418908B1 (en) | 2011-10-26 | 2013-04-16 | Covidien Lp | Staple feeding and forming apparatus |
| US9364231B2 (en) | 2011-10-27 | 2016-06-14 | Covidien Lp | System and method of using simulation reload to optimize staple formation |
| WO2013063674A1 (en) | 2011-11-04 | 2013-05-10 | Titan Medical Inc. | Apparatus and method for controlling an end-effector assembly |
| US8584920B2 (en) | 2011-11-04 | 2013-11-19 | Covidien Lp | Surgical stapling apparatus including releasable buttress |
| US9486213B2 (en) | 2011-11-14 | 2016-11-08 | Thd Lap Ltd. | Drive mechanism for articulating tacker |
| KR102008221B1 (ko) | 2011-11-15 | 2019-08-07 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 스토잉하는 나이프 블레이드를 가진 수술 기구 |
| US8968312B2 (en) | 2011-11-16 | 2015-03-03 | Covidien Lp | Surgical device with powered articulation wrist rotation |
| US8967448B2 (en) | 2011-12-14 | 2015-03-03 | Covidien Lp | Surgical stapling apparatus including buttress attachment via tabs |
| US9351731B2 (en) | 2011-12-14 | 2016-05-31 | Covidien Lp | Surgical stapling apparatus including releasable surgical buttress |
| US9113885B2 (en) | 2011-12-14 | 2015-08-25 | Covidien Lp | Buttress assembly for use with surgical stapling device |
| US9010608B2 (en) | 2011-12-14 | 2015-04-21 | Covidien Lp | Releasable buttress retention on a surgical stapler |
| US9237892B2 (en) | 2011-12-14 | 2016-01-19 | Covidien Lp | Buttress attachment to the cartridge surface |
| CA2796525A1 (en) | 2011-12-23 | 2013-06-23 | Covidien Lp | Apparatus for endoscopic procedures |
| US9220502B2 (en) | 2011-12-28 | 2015-12-29 | Covidien Lp | Staple formation recognition for a surgical device |
| CN202397539U (zh) | 2011-12-29 | 2012-08-29 | 瑞奇外科器械(中国)有限公司 | 手术缝合器械及其缝钉驱动器 |
| US9186148B2 (en) | 2012-01-05 | 2015-11-17 | Ethicon Endo-Surgery, Inc. | Tissue stapler anvil feature to prevent premature jaw opening |
| US8894647B2 (en) | 2012-01-13 | 2014-11-25 | Covidien Lp | System and method for performing surgical procedures with a reusable instrument module |
| KR102088541B1 (ko) | 2012-02-02 | 2020-03-13 | 그레이트 빌리프 인터내셔널 리미티드 | 기계화된 다중기구 수술 시스템 |
| JP6165780B2 (ja) | 2012-02-10 | 2017-07-19 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | ロボット制御式の手術器具 |
| US9044230B2 (en) | 2012-02-13 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Surgical cutting and fastening instrument with apparatus for determining cartridge and firing motion status |
| US8820606B2 (en) | 2012-02-24 | 2014-09-02 | Covidien Lp | Buttress retention system for linear endostaplers |
| US20130231661A1 (en) | 2012-03-01 | 2013-09-05 | Hasan M. Sh. Sh. Alshemari | Electrosurgical midline clamping scissors |
| KR101965892B1 (ko) | 2012-03-05 | 2019-04-08 | 삼성디스플레이 주식회사 | 전원 생성부 및 이를 이용한 유기전계발광 표시장치 |
| US8752264B2 (en) | 2012-03-06 | 2014-06-17 | Covidien Lp | Surgical tissue sealer |
| US9078653B2 (en) | 2012-03-26 | 2015-07-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with lockout system for preventing actuation in the absence of an installed staple cartridge |
| JP6224070B2 (ja) | 2012-03-28 | 2017-11-01 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 組織厚さコンペンセータを含む保持具アセンブリ |
| US20130256373A1 (en) | 2012-03-28 | 2013-10-03 | Ethicon Endo-Surgery, Inc. | Devices and methods for attaching tissue thickness compensating materials to surgical stapling instruments |
| BR112014024098B1 (pt) | 2012-03-28 | 2021-05-25 | Ethicon Endo-Surgery, Inc. | cartucho de grampos |
| US9198662B2 (en) | 2012-03-28 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator having improved visibility |
| CA2809613C (en) | 2012-04-09 | 2019-11-12 | Covidien Lp | Surgical fastener applying apparatus |
| US9113887B2 (en) | 2012-04-10 | 2015-08-25 | Covidien Lp | Electrosurgical generator |
| AU2013201994B2 (en) | 2012-04-11 | 2017-09-07 | Covidien Lp | Apparatus for endoscopic procedures |
| DE102012207707A1 (de) | 2012-05-09 | 2013-11-28 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Minimalinvasives Instrument für die robotische Chirurgie |
| US9868198B2 (en) | 2012-06-01 | 2018-01-16 | Covidien Lp | Hand held surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical loading units, and methods of use |
| US9597104B2 (en) | 2012-06-01 | 2017-03-21 | Covidien Lp | Handheld surgical handle assembly, surgical adapters for use between surgical handle assembly and surgical end effectors, and methods of use |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US9364220B2 (en) | 2012-06-19 | 2016-06-14 | Covidien Lp | Apparatus for endoscopic procedures |
| US9649111B2 (en) | 2012-06-28 | 2017-05-16 | Ethicon Endo-Surgery, Llc | Replaceable clip cartridge for a clip applier |
| US20140005718A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Multi-functional powered surgical device with external dissection features |
| US9561038B2 (en) | 2012-06-28 | 2017-02-07 | Ethicon Endo-Surgery, Llc | Interchangeable clip applier |
| US9125662B2 (en) | 2012-06-28 | 2015-09-08 | Ethicon Endo-Surgery, Inc. | Multi-axis articulating and rotating surgical tools |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9072536B2 (en) | 2012-06-28 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Differential locking arrangements for rotary powered surgical instruments |
| US20140001234A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Coupling arrangements for attaching surgical end effectors to drive systems therefor |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US20140005640A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical end effector jaw and electrode configurations |
| US8747238B2 (en) | 2012-06-28 | 2014-06-10 | Ethicon Endo-Surgery, Inc. | Rotary drive shaft assemblies for surgical instruments with articulatable end effectors |
| US9119657B2 (en) | 2012-06-28 | 2015-09-01 | Ethicon Endo-Surgery, Inc. | Rotary actuatable closure arrangement for surgical end effector |
| US9028494B2 (en) | 2012-06-28 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Interchangeable end effector coupling arrangement |
| US9101385B2 (en) | 2012-06-28 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Electrode connections for rotary driven surgical tools |
| US9820768B2 (en) | 2012-06-29 | 2017-11-21 | Ethicon Llc | Ultrasonic surgical instruments with control mechanisms |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9283045B2 (en) | 2012-06-29 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Surgical instruments with fluid management system |
| US20140005702A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with distally positioned transducers |
| US9839480B2 (en) | 2012-07-09 | 2017-12-12 | Covidien Lp | Surgical adapter assemblies for use between surgical handle assembly and surgical end effectors |
| US10492814B2 (en) | 2012-07-09 | 2019-12-03 | Covidien Lp | Apparatus for endoscopic procedures |
| US9955965B2 (en) | 2012-07-09 | 2018-05-01 | Covidien Lp | Switch block control assembly of a medical device |
| US9110587B2 (en) | 2012-07-13 | 2015-08-18 | Samsung Electronics Co., Ltd. | Method for transmitting and receiving data between memo layer and application and electronic device using the same |
| US9402604B2 (en) | 2012-07-20 | 2016-08-02 | Covidien Lp | Apparatus for endoscopic procedures |
| CN102783741B (zh) | 2012-08-16 | 2014-10-15 | 东华大学 | 多级展开散热的防火绝热复合织物、制备方法及用途 |
| US20140048580A1 (en) | 2012-08-20 | 2014-02-20 | Covidien Lp | Buttress attachment features for surgical stapling apparatus |
| US9700310B2 (en) | 2013-08-23 | 2017-07-11 | Ethicon Llc | Firing member retraction devices for powered surgical instruments |
| US9131957B2 (en) | 2012-09-12 | 2015-09-15 | Gyrus Acmi, Inc. | Automatic tool marking |
| US9526564B2 (en) | 2012-10-08 | 2016-12-27 | Covidien Lp | Electric stapler device |
| US9161753B2 (en) | 2012-10-10 | 2015-10-20 | Covidien Lp | Buttress fixation for a circular stapler |
| US9386985B2 (en) | 2012-10-15 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Surgical cutting instrument |
| US9421014B2 (en) | 2012-10-18 | 2016-08-23 | Covidien Lp | Loading unit velocity and position feedback |
| US9192384B2 (en) | 2012-11-09 | 2015-11-24 | Covidien Lp | Recessed groove for better suture retention |
| US9289207B2 (en) | 2012-11-29 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical staple with integral pledget for tip deflection |
| US9295466B2 (en) | 2012-11-30 | 2016-03-29 | Covidien Lp | Surgical apparatus including surgical buttress |
| US9050100B2 (en) | 2012-12-10 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Surgical instrument with feedback at end effector |
| CN102973300B (zh) | 2012-12-13 | 2014-10-15 | 常州市新能源吻合器总厂有限公司 | 直线形切割吻合器的组织夹持件及其钉仓座 |
| CN103908313A (zh) | 2012-12-29 | 2014-07-09 | 苏州天臣国际医疗科技有限公司 | 外科手术器械 |
| US9433420B2 (en) | 2013-01-23 | 2016-09-06 | Covidien Lp | Surgical apparatus including surgical buttress |
| US10918364B2 (en) | 2013-01-24 | 2021-02-16 | Covidien Lp | Intelligent adapter assembly for use with an electromechanical surgical system |
| US9149325B2 (en) | 2013-01-25 | 2015-10-06 | Ethicon Endo-Surgery, Inc. | End effector with compliant clamping jaw |
| US20140224857A1 (en) | 2013-02-08 | 2014-08-14 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising a compressible portion |
| BR112015018796B8 (pt) | 2013-02-08 | 2022-10-18 | Ethicon Endo Surgery Inc | Cartucho de grampos para uso com um grampeador cirúrgico que compreende uma bigorna |
| US9386984B2 (en) | 2013-02-08 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Staple cartridge comprising a releasable cover |
| US9839421B2 (en) | 2013-02-28 | 2017-12-12 | Ethicon Llc | Jaw closure feature for end effector of surgical instrument |
| US9795379B2 (en) | 2013-02-28 | 2017-10-24 | Ethicon Llc | Surgical instrument with multi-diameter shaft |
| US9468438B2 (en) | 2013-03-01 | 2016-10-18 | Eticon Endo-Surgery, LLC | Sensor straightened end effector during removal through trocar |
| BR112015021082B1 (pt) | 2013-03-01 | 2022-05-10 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US9492189B2 (en) | 2013-03-13 | 2016-11-15 | Covidien Lp | Apparatus for endoscopic procedures |
| US9566064B2 (en) | 2013-03-13 | 2017-02-14 | Covidien Lp | Surgical stapling apparatus |
| US9345481B2 (en) | 2013-03-13 | 2016-05-24 | Ethicon Endo-Surgery, Llc | Staple cartridge tissue thickness sensor system |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| US9351726B2 (en) | 2013-03-14 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Articulation control system for articulatable surgical instruments |
| KR102526549B1 (ko) | 2013-03-15 | 2023-04-27 | 어플라이드 메디컬 리소시스 코포레이션 | 회전가능 샤프트를 구비한 구동 메커니즘을 갖는 수술용 스테이플러 |
| US20140263558A1 (en) | 2013-03-15 | 2014-09-18 | Cardica, Inc. | Extended curved tip for surgical apparatus |
| US9332984B2 (en) | 2013-03-27 | 2016-05-10 | Ethicon Endo-Surgery, Llc | Fastener cartridge assemblies |
| US9572577B2 (en) | 2013-03-27 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Fastener cartridge comprising a tissue thickness compensator including openings therein |
| US20140291379A1 (en) | 2013-03-27 | 2014-10-02 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a cutting member path |
| US9795384B2 (en) | 2013-03-27 | 2017-10-24 | Ethicon Llc | Fastener cartridge comprising a tissue thickness compensator and a gap setting element |
| US9801626B2 (en) | 2013-04-16 | 2017-10-31 | Ethicon Llc | Modular motor driven surgical instruments with alignment features for aligning rotary drive shafts with surgical end effector shafts |
| EP2996579B1 (en) | 2013-05-15 | 2020-04-22 | Aesculap AG | Surgical stapling and cutting apparatus |
| US9574644B2 (en) | 2013-05-30 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Power module for use with a surgical instrument |
| TWM473838U (zh) | 2013-06-19 | 2014-03-11 | Mouldex Co Ltd | 可旋轉式醫療用連接器 |
| US9757129B2 (en) | 2013-07-08 | 2017-09-12 | Covidien Lp | Coupling member configured for use with surgical devices |
| US9239206B1 (en) | 2013-08-07 | 2016-01-19 | Mattel, Inc. | Toy projectile launcher |
| WO2015025493A1 (ja) | 2013-08-23 | 2015-02-26 | 日本電産コパル電子株式会社 | 減速機構 |
| US9662108B2 (en) | 2013-08-30 | 2017-05-30 | Covidien Lp | Surgical stapling apparatus |
| US20140018832A1 (en) | 2013-09-13 | 2014-01-16 | Ethicon Endo-Surgery, Inc. | Method For Applying A Surgical Clip Having A Compliant Portion |
| JP6007357B2 (ja) | 2013-11-18 | 2016-10-12 | 日信工業株式会社 | 電子制御装置および車両用ブレーキ液圧制御装置 |
| US9724092B2 (en) | 2013-12-23 | 2017-08-08 | Ethicon Llc | Modular surgical instruments |
| US20150173749A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical staples and staple cartridges |
| US9681870B2 (en) | 2013-12-23 | 2017-06-20 | Ethicon Llc | Articulatable surgical instruments with separate and distinct closing and firing systems |
| US20150173756A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical cutting and stapling methods |
| US9642620B2 (en) | 2013-12-23 | 2017-05-09 | Ethicon Endo-Surgery, Llc | Surgical cutting and stapling instruments with articulatable end effectors |
| US9839428B2 (en) | 2013-12-23 | 2017-12-12 | Ethicon Llc | Surgical cutting and stapling instruments with independent jaw control features |
| US20150173789A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulatable shaft arrangements |
| US9962161B2 (en) | 2014-02-12 | 2018-05-08 | Ethicon Llc | Deliverable surgical instrument |
| US20140166725A1 (en) | 2014-02-24 | 2014-06-19 | Ethicon Endo-Surgery, Inc. | Staple cartridge including a barbed staple. |
| US9690362B2 (en) | 2014-03-26 | 2017-06-27 | Ethicon Llc | Surgical instrument control circuit having a safety processor |
| US9913642B2 (en) | 2014-03-26 | 2018-03-13 | Ethicon Llc | Surgical instrument comprising a sensor system |
| US10028761B2 (en) | 2014-03-26 | 2018-07-24 | Ethicon Llc | Feedback algorithms for manual bailout systems for surgical instruments |
| US10004497B2 (en) | 2014-03-26 | 2018-06-26 | Ethicon Llc | Interface systems for use with surgical instruments |
| KR102455799B1 (ko) | 2014-03-31 | 2022-10-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 시프트 가능한 트랜스미션을 가진 수술 기구 |
| US9844369B2 (en) | 2014-04-16 | 2017-12-19 | Ethicon Llc | Surgical end effectors with firing element monitoring arrangements |
| US20150297222A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| US10426476B2 (en) | 2014-09-26 | 2019-10-01 | Ethicon Llc | Circular fastener cartridges for applying radially expandable fastener lines |
| US10045781B2 (en) | 2014-06-13 | 2018-08-14 | Ethicon Llc | Closure lockout systems for surgical instruments |
| US20160066913A1 (en) | 2014-09-05 | 2016-03-10 | Ethicon Endo-Surgery, Inc. | Local display of tissue parameter stabilization |
| US20160069449A1 (en) | 2014-09-08 | 2016-03-10 | Nidec Copal Electronics Corporation | Thin-type gear motor and muscle force assisting device using thin-type gear motor |
| US10076325B2 (en) | 2014-10-13 | 2018-09-18 | Ethicon Llc | Surgical stapling apparatus comprising a tissue stop |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| US10117649B2 (en) | 2014-12-18 | 2018-11-06 | Ethicon Llc | Surgical instrument assembly comprising a lockable articulation system |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US10188385B2 (en) | 2014-12-18 | 2019-01-29 | Ethicon Llc | Surgical instrument system comprising lockable systems |
| US10004501B2 (en) | 2014-12-18 | 2018-06-26 | Ethicon Llc | Surgical instruments with improved closure arrangements |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| US9815183B2 (en) | 2015-01-08 | 2017-11-14 | Yeo Ming Wang | Quick detachable wrench structure |
| US10226250B2 (en) | 2015-02-27 | 2019-03-12 | Ethicon Llc | Modular stapling assembly |
| US10182816B2 (en) | 2015-02-27 | 2019-01-22 | Ethicon Llc | Charging system that enables emergency resolutions for charging a battery |
| US10180463B2 (en) | 2015-02-27 | 2019-01-15 | Ethicon Llc | Surgical apparatus configured to assess whether a performance parameter of the surgical apparatus is within an acceptable performance band |
| US10045776B2 (en) | 2015-03-06 | 2018-08-14 | Ethicon Llc | Control techniques and sub-processor contained within modular shaft with select control processing from handle |
| US9895148B2 (en) | 2015-03-06 | 2018-02-20 | Ethicon Endo-Surgery, Llc | Monitoring speed control and precision incrementing of motor for powered surgical instruments |
| US9901342B2 (en) | 2015-03-06 | 2018-02-27 | Ethicon Endo-Surgery, Llc | Signal and power communication system positioned on a rotatable shaft |
| US9924961B2 (en) | 2015-03-06 | 2018-03-27 | Ethicon Endo-Surgery, Llc | Interactive feedback system for powered surgical instruments |
| US9808246B2 (en) | 2015-03-06 | 2017-11-07 | Ethicon Endo-Surgery, Llc | Method of operating a powered surgical instrument |
| US10687806B2 (en) | 2015-03-06 | 2020-06-23 | Ethicon Llc | Adaptive tissue compression techniques to adjust closure rates for multiple tissue types |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US10052044B2 (en) | 2015-03-06 | 2018-08-21 | Ethicon Llc | Time dependent evaluation of sensor data to determine stability, creep, and viscoelastic elements of measures |
| US10617412B2 (en) | 2015-03-06 | 2020-04-14 | Ethicon Llc | System for detecting the mis-insertion of a staple cartridge into a surgical stapler |
| US10245033B2 (en) | 2015-03-06 | 2019-04-02 | Ethicon Llc | Surgical instrument comprising a lockable battery housing |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| US10390825B2 (en) | 2015-03-31 | 2019-08-27 | Ethicon Llc | Surgical instrument with progressive rotary drive systems |
-
2012
- 2012-03-28 US US13/433,098 patent/US9301753B2/en active Active
- 2012-03-28 US US13/433,115 patent/US9204880B2/en active Active
- 2012-06-26 US US13/532,820 patent/US9314247B2/en active Active
-
2013
- 2013-03-27 WO PCT/US2013/033997 patent/WO2013148762A2/en active Application Filing
- 2013-03-27 EP EP13161494.3A patent/EP2644124B1/en active Active
- 2013-03-27 WO PCT/US2013/034077 patent/WO2013148817A1/en active Application Filing
- 2013-03-27 EP EP13161431.5A patent/EP2656793B1/en active Active
- 2013-03-27 WO PCT/US2013/033999 patent/WO2013148764A2/en active Application Filing
- 2013-06-19 WO PCT/US2013/046549 patent/WO2014004208A1/en active Application Filing
- 2013-06-19 CN CN201380043717.8A patent/CN104582592B/zh active Active
- 2013-06-19 RU RU2015102139A patent/RU2649960C9/ru not_active IP Right Cessation
- 2013-06-19 EP EP20130737720 patent/EP2872050A1/en not_active Withdrawn
- 2013-06-19 JP JP2015520295A patent/JP6309515B2/ja not_active Expired - Fee Related
- 2013-06-19 RU RU2015102154A patent/RU2639035C2/ru not_active IP Right Cessation
- 2013-06-19 WO PCT/US2013/046540 patent/WO2014004205A1/en active Application Filing
- 2013-06-19 JP JP2015520296A patent/JP2015521524A/ja active Pending
- 2013-06-19 EP EP20130735114 patent/EP2872049A1/en not_active Withdrawn
- 2013-06-19 CN CN201380043709.3A patent/CN104582591B/zh active Active
- 2013-06-19 BR BR112014032693-2A patent/BR112014032693B1/pt active IP Right Grant
-
2014
- 2014-11-13 US US14/540,731 patent/US9974538B2/en active Active
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112014032693B1 (pt) | Conjunto de cartucho de grampos para uso com um grampeador cirúrgico | |
| RU2639857C2 (ru) | Компенсатор толщины ткани, содержащий капсулу для среды с низким давлением | |
| JP6193350B2 (ja) | 拡張可能な組織厚コンペンセーター | |
| JP6320989B2 (ja) | 制御放出及び膨張を含む組織厚さコンペンセーター | |
| JP6328667B2 (ja) | 圧縮可能部分を含むステープルカートリッジ | |
| JP6305977B2 (ja) | 弾力性負荷を生成する構造を含む組織厚さコンペンセーター | |
| JP6224070B2 (ja) | 組織厚さコンペンセータを含む保持具アセンブリ | |
| BR112014024285B1 (pt) | Compensador de espessura de tecido para uso com um grampeador cirúrgico | |
| BR112014024228B1 (pt) | dispositivo de grampeamento cirúrgico | |
| BR112014024121B1 (pt) | Compensador de espessura de tecido para uso com um grampeador cirúrgico circular e sistema de grampeamento cirúrgico circular | |
| BR112014024303B1 (pt) | Grampeador cirúrgico | |
| BR112014024102B1 (pt) | Conjunto de cartucho de prendedores para um instrumento cirúrgico, e conjunto de atuador de extremidade para um instrumento cirúrgico | |
| BR112014006841B1 (pt) | cartucho de grampos para uso com um grampeador cirúrgico e atuador de extremidade para uso com um grampeador cirúrgico | |
| BR112013027757B1 (pt) | Cartucho de grampos para uso com um grampeador cirúrgico | |
| JP6193352B2 (ja) | 弾力性部材を含む組織厚さコンペンセーター | |
| BR112013027761B1 (pt) | Instrumento cirúrgico e atuador de extremidade | |
| JP6279546B2 (ja) | 弾力性負荷を生成する繊維を含む組織厚さコンペンセーター | |
| JP7087017B2 (ja) | 疎水性物質を組み込んだ厚さコンペンセータを有する組織ステープラ | |
| BR112014024305B1 (pt) | Unidade de carregamento descartável para um grampeador cirúrgico e grampeador cirúrgico | |
| BR112014024259B1 (pt) | Compensador fixável a uma bigorna de um instrumento de fixação e conjunto de grampeamento para uso com um instrumento de fixação | |
| BR112014024254B1 (pt) | Conjunto de cartucho de grampos e cartucho de grampos | |
| BR112014006991B1 (pt) | atuador de extremidade para um instrumento de grampeamento cirúrgico |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B06G | Technical and formal requirements: other requirements [chapter 6.7 patent gazette] | ||
| B07A | Application suspended after technical examination (opinion) [chapter 7.1 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 19/06/2013, OBSERVADAS AS CONDICOES LEGAIS |