KR20170048558A - 저 필드 자기 공명 이미징 시스템의 자동 구성 - Google Patents
저 필드 자기 공명 이미징 시스템의 자동 구성 Download PDFInfo
- Publication number
- KR20170048558A KR20170048558A KR1020177009177A KR20177009177A KR20170048558A KR 20170048558 A KR20170048558 A KR 20170048558A KR 1020177009177 A KR1020177009177 A KR 1020177009177A KR 20177009177 A KR20177009177 A KR 20177009177A KR 20170048558 A KR20170048558 A KR 20170048558A
- Authority
- KR
- South Korea
- Prior art keywords
- magnetic resonance
- imaging system
- resonance imaging
- field
- magnet
- Prior art date
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/5608—Data processing and visualization specially adapted for MR, e.g. for feature analysis and pattern recognition on the basis of measured MR data, segmentation of measured MR data, edge contour detection on the basis of measured MR data, for enhancing measured MR data in terms of signal-to-noise ratio by means of noise filtering or apodization, for enhancing measured MR data in terms of resolution by means for deblurring, windowing, zero filling, or generation of gray-scaled images, colour-coded images or images displaying vectors instead of pixels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/34—Constructional details, e.g. resonators, specially adapted to MR
- G01R33/34007—Manufacture of RF coils, e.g. using printed circuit board technology; additional hardware for providing mechanical support to the RF coil assembly or to part thereof, e.g. a support for moving the coil assembly relative to the remainder of the MR system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/36—Electrical details, e.g. matching or coupling of the coil to the receiver
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/36—Electrical details, e.g. matching or coupling of the coil to the receiver
- G01R33/3614—RF power amplifiers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/3802—Manufacture or installation of magnet assemblies; Additional hardware for transportation or installation of the magnet assembly or for providing mechanical support to components of the magnet assembly
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/3804—Additional hardware for cooling or heating of the magnet assembly, for housing a cooled or heated part of the magnet assembly or for temperature control of the magnet assembly
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/3806—Open magnet assemblies for improved access to the sample, e.g. C-type or U-type magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/381—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using electromagnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/383—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using permanent magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/385—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using gradient magnetic field coils
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/385—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using gradient magnetic field coils
- G01R33/3852—Gradient amplifiers; means for controlling the application of a gradient magnetic field to the sample, e.g. a gradient signal synthesizer
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/385—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using gradient magnetic field coils
- G01R33/3854—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using gradient magnetic field coils means for active and/or passive vibration damping or acoustical noise suppression in gradient magnet coil systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/385—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using gradient magnetic field coils
- G01R33/3856—Means for cooling the gradient coils or thermal shielding of the gradient coils
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/385—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using gradient magnetic field coils
- G01R33/3858—Manufacture and installation of gradient coils, means for providing mechanical support to parts of the gradient-coil assembly
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/387—Compensation of inhomogeneities
- G01R33/3875—Compensation of inhomogeneities using correction coil assemblies, e.g. active shimming
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/445—MR involving a non-standard magnetic field B0, e.g. of low magnitude as in the earth's magnetic field or in nanoTesla spectroscopy, comprising a polarizing magnetic field for pre-polarisation, B0 with a temporal variation of its magnitude or direction such as field cycling of B0 or rotation of the direction of B0, or spatially inhomogeneous B0 like in fringe-field MR or in stray-field imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/543—Control of the operation of the MR system, e.g. setting of acquisition parameters prior to or during MR data acquisition, dynamic shimming, use of one or more scout images for scan plane prescription
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/546—Interface between the MR system and the user, e.g. for controlling the operation of the MR system or for the design of pulse sequences
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/565—Correction of image distortions, e.g. due to magnetic field inhomogeneities
- G01R33/56518—Correction of image distortions, e.g. due to magnetic field inhomogeneities due to eddy currents, e.g. caused by switching of the gradient magnetic field
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/58—Calibration of imaging systems, e.g. using test probes, Phantoms; Calibration objects or fiducial markers such as active or passive RF coils surrounding an MR active material
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/02—Permanent magnets [PM]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/42—Screening
- G01R33/422—Screening of the radio frequency field
Landscapes
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Health & Medical Sciences (AREA)
- Electromagnetism (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Power Engineering (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Epidemiology (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Coils Or Transformers For Communication (AREA)
- Laminated Bodies (AREA)
- Parts Printed On Printed Circuit Boards (AREA)
- Aeration Devices For Treatment Of Activated Polluted Sludge (AREA)
- Gas Separation By Absorption (AREA)
Abstract
일부 양태들에서, B0 자석과, 동작 동안에 B0 자석으로부터 열을 멀리 전달하도록 구성된 적어도 하나의 열 관리 컴포넌트를 포함하는 자기 공명 이미징 시스템을 동작시키는 방법이 제공된다. 방법은 동작 전력을 B0 자석에 제공하는 단계, B0 자석의 현재 온도를 결정하기 위하여 B0 자석의 온도를 모니터링하는 단계, 적어도 하나의 이벤트의 발생에 응답하여 적어도 하나의 열 관리 컴포넌트를 동작 용량 미만에서 동작시키는 단계를 포함한다.
Description
자기 공명 이미징(magnetic resonance imaging; MRI)은 다수의 응용들에 대한 중요한 이미징 양식을 제공하고, 인간 신체의 내부의 이미지들을 생성하기 위한 임상적 및 연구 설정들에서 폭넓게 사용된다. 일반론으로서, MRI는 인가된 전자기장들로부터 기인하는 상태 변화들에 응답하여 원자들에 의해 방출된 전자기파들인 자기 공명(magnetic resonance; MR) 신호들을 검출하는 것에 기초한다. 예를 들어, 핵 자기 공명(nuclear magnetic resonance; NMR) 기법들은 이미징되고 있는 객체에서의 원자들(예컨대, 인간 신체의 조직에서의 원자들)의 핵 스핀(nuclear spin)의 재정렬 또는 이완 시에 여기된 원자들의 핵들로부터 방출된 MR 신호들을 검출하는 것을 수반한다. 검출된 MR 신호들은 이미지들을 생성하기 위하여 프로세싱될 수도 있고, 이것은 의료적 응용들의 전후상황에서, 진단, 치료 및/또는 연구 목적들을 위한 신체 내의 내부 구조체들 및/또는 생물학적 프로세스들의 조사를 허용한다.
MRI는 다른 양식들의 안전 우려들 없이(예컨대, 대상자를 이온화 방사선, 예컨대, x-선들에 노출할 필요 없이, 또는 방사성 재료를 신체에 도입하지 않으면서) 상대적으로 높은 해상도(resolution) 및 콘트라스트(contrast)를 가지는 비-침습적(non-invasive) 이미지들을 생성하기 위한 능력으로 인해 생물학적 이미징을 위한 매력적인 이미징 양식을 제공한다. 추가적으로, MRI는 다른 이미징 양식들이 만족스럽게 이미징할 수 없는 대상물을 이미징하기 위하여 활용될 수 있는 연약한 조직 콘트라스트를 제공하기 위하여 특히 적합하다. 또한, MR 기법들은 다른 양식들이 취득할 수 없는 구조체들 및/또는 생물학적 프로세스들에 대한 정보를 포착(capture)할 수 있다. 그러나, 주어진 이미징 응용을 위하여, 장비의 상대적으로 높은 비용, 제한된 이용가능성, 및/또는 임상적 MRI 스캐너들에 대한 접근을 얻음에 있어서의 어려움, 및/또는 이미지 취득 프로세스의 길이를 수반할 수도 있는 MRI에 대한 다수의 단점들이 있다.
임상적 MRI에 있어서의 추세는 스캔 시간, 이미지 해상도, 및 이미지 콘트라스트 중의 하나 이상을 개선시키기 위하여 MRI 스캐너들의 필드 강도(field strength)를 증가시켜 왔고, 이것은 궁극적으로, 비용들을 계속 끌어올린다. 막대한 다수의 설치된 MRI 스캐너들은 주 자기장(main magnetic field) B0의 필드 강도를 지칭하는 1.5 또는 3 테슬라(tesla)(T)에서 동작한다. 임상적 MRI 스캐너의 대략적인 비용 추정치는 대략 테슬라 당 백만 달러이고, 이것은 실질적인 동작, 서비스, 및 이러한 MRI 스캐너들을 동작시킴에 있어서 수반된 유지보수 비용들을 고려하지 않는다.
추가적으로, 기존의 고 필드(high-field) MRI 시스템들은 전형적으로, 객체(예컨대, 환자)가 이미징되는 강한 균일한 정적 자기장(B0)을 생성하기 위하여 큰 초전도 자석들 및 연관된 전자기기들을 요구한다. 이러한 시스템들의 크기는 자석, 전자기기들, 열 관리 시스템, 및 제어 콘솔 영역들을 위한 다수의 방들을 포함하는 전형적인 MRI 설비에 있어서 상당하다. MRI 시스템들의 크기 및 비용은 일반적으로 그 사용을, 충분한 공간과, 그것들을 구입하고 유지하기 위한 자원들을 가지는 병원들 및 학술적 연구 센터들과 같은 시설들로 제한한다. 고 필드 MRI 시스템들의 높은 비용 및 실질적인 공간 요건들은 MRI 스캐너들의 제한된 이용가능성으로 귀착된다. 이와 같이, MRI 스캔이 유익할 것이지만, 위에서 논의된 제한들 중의 하나 이상으로 인해, 이하에서 더욱 상세하게 논의된 바와 같이 실용적이지 않거나 불가능한 임상적 상황들이 빈번하게 있다.
저 필드(low-field) MRI는 매력적인 이미징 해결책을 제시하여, 상대적으로 낮은 비용, 고 필드 MRI에 대안적인 높은 이용가능성을 제공한다. 발명자들은 저 필드 MRI의 특성들이 폭넓게 다양한 상황들 및 시설들에서 전개될 수 있는 실질적으로 더 작고 및/또는 더 신축성 있는 설비들의 구현을 가능하게 하고, 휴대용 또는 운반가능한 저 필드 MRI 시스템들의 개발을 추가로 허용한다는 것을 인지하였다. 이러한 시스템들이 상이한 시간들에서 상이한 환경들에서 동작하고 있을 수도 있으므로, 및/또는 이러한 시스템들이 일반적으로 제어되지 않는 환경들에서 동작될 수도 있으므로(예컨대, 저 필드 MRI 시스템들이 고 필드 MRI 시스템들이 전형적으로 동작하는 특수하게 차폐된 방들 외부에서 동작될 수도 있음), 시스템이 위치되는 환경에 대하여 시스템을 조절하거나 최적화하기 위하여 MRI 시스템의 하나 이상의 컴포넌트들의 "인-필드(in-field)" 및/또는 동적 교정(dynamic calibration)을 제공하는 것이 유리할 수도 있다. 일부 실시형태들에 따르면, 자동화된 기법들은 이하에서 더욱 상세하게 논의된 바와 같이, 시스템의 환경 및/또는 동작 조건들에 기초하여 MRI 시스템의 하나 이상의 양태들을 수정하거나 조절하기 위하여 제공된다. 일부 실시형태들에 따르면, 저 필드 MRI 시스템의 이용의 용이함을 가능하게 하는 자동화된 기법들이 제공되고, 이에 따라, 특화된 훈련 또는 전문지식을 전혀 포함하지 않는, 더욱 광범위한 훈련 및/또는 전문지식을 가지는 사용자들/조작자들에 의한 이용을 가능하게 한다.
일부 실시형태들은 B0 자석, 및 동작 동안에 B0 자석으로부터 열을 멀리 전달하도록 구성된 적어도 하나의 열 관리 컴포넌트를 포함하는 자기 공명 이미징 시스템을 동작시키는 방법을 포함하고, 방법은 동작 전력을 B0 자석에 제공하는 단계, B0 자석의 현재 온도를 결정하기 위하여 B0 자석의 온도를 모니터링하는 단계, 및 적어도 하나의 이벤트의 발생에 응답하여, 적어도 하나의 열 관리 컴포넌트를 동작 용량 미만에서 동작시키는 단계를 포함한다.
일부 실시형태들은 B0 필드의 적어도 부분을 제공하도록 구성된 B0 자석, 동작 동안에 B0 자석으로부터 열을 멀리 전달하도록 구성된 적어도 하나의 열 관리 컴포넌트, 및 B0 자석의 현재 온도를 결정하기 위하여 B0 자석의 온도를 모니터링하고, 적어도 하나의 이벤트의 발생에 응답하여, 적어도 하나의 열 관리 컴포넌트를 동작 용량 미만에서 동작시키도록 프로그래밍된 적어도 하나의 프로세서를 포함하는 자기 공명 이미징 시스템을 포함한다.
일부 실시형태들은 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법을 포함하고, 방법은 B0 필드에 기여하는 B0 자석에 의해 생성된 제 1 자기장을 검출하는 단계, 및 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 조절하기 위하여, 검출된 제 1 자기장에 기초하여 제 2 자기장을 생성하기 위한 적어도 하나의 심 코일(shim coil)을 선택적으로 동작시키는 단계를 포함한다.
일부 실시형태들은 B0 필드에 기여하는 제 1 자기장을 제공하도록 구성된 B0 자석, 복수의 심 코일들, B0 자석이 동작될 때에 제 1 자기장을 검출하도록 배열된 적어도 하나의 센서, 및 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 조절하기 위하여, 적어도 하나의 센서에 의해 검출된 제 1 자기장에 기초하여 제 2 자기장을 생성하도록, 복수의 심 코일들 중의 적어도 하나를 선택적으로 동작시키도록 구성된 적어도 하나의 제어기를 포함하는 자기 공명 이미징 시스템을 포함한다.
일부 실시형태들은 B0 필드를 적어도 부분적으로 제공하도록 구성된 B0 자석을 포함하는 자기 공명 이미징 시스템에 인접한 대상물을 소자(degauss)하는 방법을 포함하고, 방법은 제 1 극성으로 B0 자석을 동작시키는 단계, 및 제 1 극성과 반대인 제 2 극성으로 B0 자석을 주기적으로 동작시키는 단계를 포함한다.
일부 실시형태들은 인접한 대상물을 소자하도록 구성된 자기 공명 이미징 시스템을 포함하고, 자기 공명 이미징 시스템은 B0 필드를 적어도 부분적으로 제공하도록 구성된 B0 자석, 및 제 1 극성으로 B0 자석을 동작시키고, 제 1 극성과 반대인 제 2 극성으로 B0 자석을 주기적으로 동작시키도록 구성된 제어기를 포함한다.
일부 실시형태들은 임의적인 환경에서의 이용을 위하여 자기 공명 이미징 시스템을 동적으로 구성하는 방법을 포함하고, 방법은 자기 공명 이미징을 수행하는 것에 대한 적어도 하나의 장애물을 식별하는 단계, 식별된 적어도 하나의 장애물에 적어도 부분적으로 기초하여 적어도 하나의 치유 액션(remedial action)을 자동으로 수행하는 단계를 포함한다.
일부 실시형태들은 상이한 타입들의 라디오 주파수 코일들이 동작가능하게 결합될 수 있는 컴포넌트를 가지는 자기 공명 이미징 시스템을 구성하는 방법을 포함하고, 방법은 라디오 주파수 코일이 자기 공명 이미징 시스템의 컴포넌트에 동작가능하게 결합되는지 여부를 검출하는 단계, 라디오 주파수 코일이 자기 공명 이미징 시스템에 동작가능하게 결합되는 것으로 결정하는 것에 응답하여 라디오 주파수 코일에 대한 정보를 결정하는 단계, 및 라디오 주파수 코일에 대한 정보에 적어도 부분적으로 기초하여, 라디오 주파수 코일로 동작하도록 자기 공명 이미징 시스템을 구성하기 위한 적어도 하나의 액션을 주기적으로 수행하는 단계를 포함한다.
일부 실시형태들은 B0 필드의 적어도 부분을 제공하도록 구성된 B0 자석, 상이한 타입들의 라디오 주파수 코일들이 동작가능하게 결합될 수 있는 컴포넌트, 및 라디오 주파수 코일이 자기 공명 이미징 시스템의 컴포넌트에 동작가능하게 결합되는지 여부를 검출하고, 라디오 주파수 코일이 자기 공명 이미징 시스템에 동작가능하게 결합되는 것으로 결정하는 것에 응답하여 라디오 주파수 코일에 대한 정보를 결정하고, 라디오 주파수 코일에 대한 정보에 적어도 부분적으로 기초하여, 라디오 주파수 코일로 동작하도록 자기 공명 이미징 시스템을 구성하기 위한 적어도 하나의 액션을 자동으로 수행하도록 구성된 적어도 하나의 제어기를 포함하는 자기 공명 이미징 시스템을 포함한다.
일부 실시형태들은 자기 공명 이미징 시스템이 하나 이상의 외부 컴퓨팅 디바이스들과 통신하는 것을 허용하는 적어도 하나의 통신 인터페이스를 포함하는 저 필드 자기 공명 이미징 시스템을 동작시키는 방법을 포함하고, 방법은 저 필드 자기 공명 이미징 시스템의 적어도 하나의 프로세서에 의해, 적어도 하나의 외부 컴퓨팅 디바이스와의 접속을 개시하는 단계, 및 적어도 하나의 프로세서를 이용하여 적어도 하나의 외부 컴퓨팅 디바이스와 정보를 교환하는 단계를 포함한다.
일부 실시형태들은 저 필드에서의 동작을 위하여 구성된 적어도 하나의 자기적 컴포넌트, 저 필드 자기 공명 이미징 시스템이 하나 이상의 외부 컴퓨팅 디바이스들과 통신하는 것을 허용하는 적어도 하나의 통신 인터페이스, 및 적어도 하나의 외부 컴퓨팅 디바이스와의 접속을 개시하고, 적어도 하나의 프로세서를 이용하여 적어도 하나의 외부 컴퓨팅 디바이스와 정보를 교환하도록 구성된 적어도 하나의 프로세서를 포함하는 저 필드 자기 공명 이미징 시스템을 포함한다.
일부 실시형태들은 자기 공명 이미징 시스템의 자동 설정을 보조하는 방법을 포함하고, 방법은 자기 공명 이미징 시스템에 접속된 라디오 주파수 코일의 타입 및/또는 환자 지지체의 위치를 결정하는 단계, 및 검출된 라디오 주파수 코일의 타입 및/또는 환자 지지체의 위치에 적어도 부분적으로 기초하여 적어도 하나의 설정 프로세스를 자동으로 수행하는 단계를 포함한다.
개시된 기술의 다양한 양태들 및 실시형태들은 다음의 도면들을 참조하여 설명될 것이다. 도면들은 반드시 축척에 맞게 그려지지 않는다는 것이 인식되어야 한다.
도 1은 본원에서 설명된 기법들에 따라 자동으로 구성될 수도 있는 저 필드 MRI 시스템의 개략적인 예시도이고;
도 2a 및 도 2b는 일부 실시형태들에 따라, 휴대용 저 필드 MRI 시스템의 예시도이고;
도 2c 및 도 2d는 일부 실시형태들에 따라, 수송가능한 저 필드 MRI 시스템의 예시도이고;
도 3은 일부 실시형태들에 따라 저 필드 MRI 시스템을 자동으로 구성하기 위한 프로세스의 플로우차트이고;
도 4는 일부 실시형태들에 따라 저 필드 MRI 시스템에 전력 공급(power up)하기 위한 프로세스의 플로우차트이고; 그리고
도 5는 본원에서 설명된 기법들의 일부가 수행될 수도 있는 네트워크화된 환경의 개략도이다.
도 1은 본원에서 설명된 기법들에 따라 자동으로 구성될 수도 있는 저 필드 MRI 시스템의 개략적인 예시도이고;
도 2a 및 도 2b는 일부 실시형태들에 따라, 휴대용 저 필드 MRI 시스템의 예시도이고;
도 2c 및 도 2d는 일부 실시형태들에 따라, 수송가능한 저 필드 MRI 시스템의 예시도이고;
도 3은 일부 실시형태들에 따라 저 필드 MRI 시스템을 자동으로 구성하기 위한 프로세스의 플로우차트이고;
도 4는 일부 실시형태들에 따라 저 필드 MRI 시스템에 전력 공급(power up)하기 위한 프로세스의 플로우차트이고; 그리고
도 5는 본원에서 설명된 기법들의 일부가 수행될 수도 있는 네트워크화된 환경의 개략도이다.
MRI 스캐너 시장은 고 필드 시스템들에 의해 압도적으로 지배되고, 의료적 또는 임상적 MRI 응용들에 대하여 배타적으로 그러하다. 위에서 논의된 바와 같이, 의료적 이미징에서의 일반적인 추세는 점점 더 큰 필드 강도들을 갖는 MRI 스캐너들을 생성하여 왔고, 막대한 다수의 임상적 MRI 스캐너들은 1.5 T 또는 3 T에서 동작하고, 7 T 및 9 T의 더 고 필드 강도들이 연구 설정들에서 이용된다. 본원에서 이용된 바와 같이, "고 필드"는 임상적 설정에서 현재 이용 중인 MRI 시스템들, 및 더욱 상세하게는, 1.5 T 에서, 또는 1.5 T를 초과하는 주 자기장(즉, B0 필드)으로 동작하는 MRI 시스템들을 일반적으로 지칭하지만, .5 T 내지 1.5 T 사이에서 동작하는 임상적 시스템들이 "고 필드"로 일반적으로 또한 고려된다. 대조적으로, "저 필드"는 대략 0.2 T 이하의 B0 필드로 동작하는 MRI 시스템들을 일반적으로 지칭한다. 고 필드 MRI 시스템들의 매력은 더 저 필드 시스템들과 비교하여 개선된 해상도 및/또는 감소된 스캔 시간들을 포함하여, 임상적 및 의료적 MRI 응용들을 위한 점점 더 고 필드 강도들에 대한 압박을 자극한다.
발명자들은 병원들 및 연구 시설들에서의 설비들을 포함하지만, 또는 이것을 초월하는 다양한 환경들에서 MRI 기술의 대규모 전개가능성(deployability)을 개선시킬 수 있는 개선된 품질의, 휴대용, 및/또는 더욱 저비용인 저 필드 MRI 시스템들을 생성하기 위한 기법들을 개발하였다. 예를 들어, 병원들 및 연구 시설들에 추가하여, 저 필드 MRI 시스템들은 영구적 또는 반-영구적 설비들로서 중의 어느 하나로서, 사물실들, 전문병원들, 병원 내의 다수의 부서들(예컨대, 응급실들, 수술실들, 방사선학 부서들 등)에서 전개될 수도 있거나, 희망하는 로케이션(location)들로 수송될 수 있는 이동식/휴대용/운반가능한 시스템들로서 전개될 수도 있다.
발명자들은 이러한 저 필드 MRI 시스템들의 광범위한 전개는 MRI 시스템이 시스테이 동작되는 임의의 환경에서 적당하게 수행하는 것을 보장함에 있어서 과제들을 제시한다는 것을 인지하였다. 특정한 환경 및/또는 응용을 위하여 저 필드 MRI 시스템의 파라미터들을 수동으로 구성하는 것은 번거롭고, 저 필드 MRI 시스템의 전형적인 사용자들이 가지지 않을 수도 있는 기술적 전문지식을 종종 요구한다. 추가적으로, 시스템의 동작에 대해 중요할 수도 있는 환경의 성질들은 인간 조작자에 의해 확인가능하거나, 또는 그렇지 않을 경우에 획득가능하지 않을 수도 있다.
따라서, 일부 실시형태들은 저 필드 MRI 시스템의 환경 및/또는 동작 조건에 적어도 부분적으로 기초하여 저 필드 MRI 시스템을 자동으로 구성하기 위한 기법들에 관한 것이다. 자동 구성을 위한 기법들은 이하에서 더욱 상세하게 논의된 바와 같이, 환경 및/또는 동작 조건들에서, 또는 임의의 다른 적당한 시간에서 하나 이상의 변화들을 검출하는 것에 응답하여, 시스템의 전력 온(power on) 시에 수행될 수도 있다. 일부 양태들은 시스템의 컴포넌트(들)가 저 필드 MRI 시스템이 동작되는 환경 및/또는 동작 조건들에 적어도 부분적으로 기초하여 자동으로 구성되는 저 필드 MRI 시스템을 위한 자동 설정 프로세스에 관한 것이다. 일부 양태들은 변화하는 환경 및/또는 동작 조건들을 고려하여 MRI 시스템을 동적으로 구성하는 것에 관한 것이다. 일부 양태들은 시스템의 동작 모드(예컨대, 저전력 모드, 워밍 업(wram-up), 아이들(idle) 등)에 기초하여 시스템의 동작을 조절하기 위한 자동 기법들에 관한 것이다.
추가적으로, 위에서 논의된 바와 같이, MRI 시스템들의 필드 강도를 증가시키는 것은 점점 더 비싸고 복잡한 MRI 스캐너들을 산출하고, 이에 따라, 이용가능성을 제한하고, 일반적인 목적 및/또는 일반적으로 이용가능한 이미징 해결책으로서의 그 이용을 방지한다. 고 필드 MRI의 상대적으로 높은 비용, 복잡도, 및 크기는 그 이용을 전용 시설들로 주로 한정한다. 또한, 기존의 고 필드 MRI 시스템들은 희망하는 이미지들을 생성할 수 있기 위하여 시스템에 대한 대규모 훈련을 가졌던 기술자들에 의해 전형적으로 동작된다. 고도로 훈련된 기술자들이 고 필드 MRI 시스템들을 동작시키기 위하여 존재해야 한다는 요건은 고 필드 MRI의 제한된 이용가능성과, 폭넓게 이용가능한 및/또는 일반 목적의 이미징 해결책으로서 채용되도록 하기 위한 고 필드 MRI의 무능력에 추가로 기여한다.
발명자들은 이용의 용이함은 저 필드 MRI 시스템들이 다양한 상황들 및 환경들에서 폭넓게 이용가능하고, 전개되고, 및/또는 이용되는 것을 허용함에 있어서 상당한 기여 인자일 수도 있다는 것을 인지하였다. 이 목적을 위하여, 발명자들은 저 필드 MRI 시스템의 간단하고 직관적인 이용을 가능하게 하는 자동, 반-자동, 및/또는 보조된 설정 기법들을 개발하였다. 그 결과, 이러한 저 필드 MRI 시스템을 동작시키기 위하여 필요한 훈련의 양은 실질적으로 감소될 수도 있어서, 저 필드 MRI 시스템이 희망하는 이미징 응용들을 수행하기 위하여 채용될 수 있는 상황들을 증가시킬 수도 있다.
저 필드 MRI를 포함하는 저 필드 자기 공명 응용들을 위한 방법들 및 장치에 관련된 다양한 개념들 및 이 방법들 및 장치의 실시형태들의 더욱 상세한 설명들이 이하에서 뒤따른다. 본원에서 설명된 다양한 양태들은 많은 방법들 중의 임의의 것으로 구현될 수도 있다는 것이 인식되어야 한다. 특정 구현예들의 예들은 오직 예시적인 목적들을 위하여 본원에서 제공된다. 게다가, 이하의 실시형태들에서 설명된 다양한 양태들은 단독으로 또는 임의의 조합으로 이용될 수도 있고, 본원에서 명시적으로 설명된 조합들로 제한되지 않는다. 본원에서 설명된 기법들의 일부가 저 필드 및/또는 휴대용 MRI와 연관된 과제들을 해결하도록 적어도 부분적으로 설계되었지만, 양태들이 임의의 특정한 타입의 MRI 시스템과의 이용을 위하여 제한되지 않으므로, 이 기법들은 이 점에서 제한되지 않고 고 필드 MRI 시스템들에 적용될 수 있다.
도 1은 저 필드 MRI 시스템(100)의 예시적인 컴포넌트들의 블록도이다. 도 1의 예시적인 예에서, 저 필드 MRI 시스템(100)은 워크스테이션(workstation; 104), 제어기(106), 펄스 시퀀스들 저장소(108), 전력 관리 시스템(110), 및 자기기기 컴포넌트들(120)을 포함한다. 시스템(100)은 예시적이고, 저 필드 MRI 시스템은 도 1에서 예시된 컴포넌트들에 추가하여 또는 그 대신에, 임의의 적당한 타입의 하나 이상의 다른 컴포넌트들을 가질 수도 있다는 것이 인식되어야 한다.
도 1에서 예시된 바와 같이, 자기기기 컴포넌트들(120)은 자석(122), 심 코일들(124), RF 송신/수신 코일들(126), 및 경사 코일(gradient coil)들(128)을 포함한다. 자석(122)은 주 자기장 B0을 생성하기 위하여 이용될 수도 있다. 자석(122)은 저 필드 강도를 가지는 주 자기장(즉, 0.2 테슬라(Tesla) 이하의 강도를 가지는 자기장)을 생성할 수 있는 임의의 적당한 타입의 자석일 수도 있다. 심 코일들(124)은 자석(122)에 의해 생성된 B0 필드의 균질성(homogeneity)을 개선시키도록 자기장(들)에 기여하기 위하여 이용될 수도 있다. 경사 코일들(128)은 경사 필드(gradient field)들을 제공하도록 배열될 수도 있고, 예를 들어, 3 개의 실질적으로 직교하는 방향들(X, Y, Z)로 자기장에서 경사(gradient)들을 생성하도록 배열될 수도 있다.
RF 송신/수신 코일들(126)은 발진하는 주 자기장 B1을 유도하기 위한 RF 펄스들을 생성하기 위하여 이용될 수도 있는 하나 이상의 송신 코일들을 포함한다. 송신 코일(들)은 저 필드 MR 이미징을 수행하기 위하여 유용한 임의의 적당한 타입들의 RF 펄스들을 생성하도록 구성될 수도 있다. 일부 실시형태들에서, 저 필드 MR 이미징을 수행하기 위하여 유용한 적당한 타입들의 RF 펄스들은 이하에서 더욱 상세하게 논의된 바와 같이, 환경 조건들에 대해 적어도 부분적으로 선택될 수도 있다.
자기기기 컴포넌트들(120)의 각각은 임의의 적당한 방법으로 구성될 수도 있다. 예를 들어, 일부 실시형태들에서, 자기기기 컴포넌트들(120) 중의 하나 이상은, 그 전체적으로 참조로 본원에 편입되는, 2015년 9월 4일자로 출원된, "Low Field Magnetic Resonance Imaging Methods and Apparatus(저 필드 자기 공명 이미징 방법들 및 장치)"라는 명칭인, 대리인 관리번호: 제O0354.70000US01호 하에서의 공동-출원된 미국 출원에서 설명된 기법들을 이용하여 제작될 수도 있다.
전력 관리 시스템(110)은 동작 전력을 저 필드 MRI 시스템(100)의 하나 이상의 컴포넌트들에 제공하기 위한 전자기기를 포함한다. 예를 들어, 이하에서 더욱 상세하게 논의된 바와 같이, 전력 관리 시스템(110)은 하나 이상의 전력 공급 장치들, 경사 전력 증폭기(gradient power amplifier)들, 송신 코일 증폭기들, 및/또는 저 필드 MRI 시스템(100)의 컴포넌트들을 급전시키고 동작시키기 위하여 적당한 동작 전력을 제공하기 위하여 필요한 임의의 다른 적당한 전력 전자기기들을 포함할 수도 있다.
도 1에서 예시된 바와 같이, 전력 관리 시스템(110)은 전력 공급 장치(112), 증폭기(들)(114), 송신/수신 스위치(116), 및 열 관리 컴포넌트들(118)을 포함한다. 전력 공급 장치(112)는 동작 전력을 저 필드 MRI 시스템(100)의 자기적 컴포넌트들(120)에 제공하기 위한 전자기기들을 포함한다. 예를 들어, 전력 공급 장치(112)는 저 필드 MRI 시스템을 위한 주 자기장을 생성하기 위하여 동작 전력을 하나 이상의 B0 코일들(예컨대, B0 자석(122))에 제공하기 위한 전자기기들을 포함할 수도 있다. 일부 실시형태들에서, 전력 공급 장치(112)는 단극성의 연속파(continuous wave; CW) 전력 공급 장치이지만, 그러나, 임의의 적당한 전력 공급 장치가 이용될 수도 있다. 송신/수신 스위치(116)는 RF 송신 코일들 또는 RF 수신 코일들이 동작되고 있는지 여부를 선택하기 위하여 이용될 수도 있다.
증폭기(들)(114)는 하나 이상의 RF 수신 코일들(예컨대, 코일들(124))에 의해 검출된 MR 신호들을 증폭시키는 하나 이상의 RF 수신(RX) 전치-증폭기(pre-amplifier)들, 전력을 하나 이상의 RF 송신 코일들(예컨대, 코일들(126))에 제공하도록 구성된 하나 이상의 RF 송신(Tx) 증폭기들, 전력을 하나 이상의 경사 코일들(예컨대, 경사 코일들(128))에 제공하도록 구성된 하나 이상의 경사 전력 증폭기들, 전력을 하나 이상의 심 코일들(예컨대, 심 코일들(124))에 제공하도록 구성된 심 증폭기들을 포함할 수도 있다.
열 관리 컴포넌트들(118)은 저 필드 MRI 시스템(100)의 컴포넌트들을 위한 냉각을 제공하고, 그 컴포넌트들로부터 멀어지도록, 저 필드 MRI 시스템(100)의 하나 이상의 컴포넌트들에 의해 생성된 열 에너지의 전달을 가능하게 함으로써 그렇게 행하도록 구성될 수도 있다. 열 관리 컴포넌트들(118)은, B0 코일들, 경사 코일들, 심 코일들, 및/또는 송신/수신 코일들을 포함하지만, 이것으로 제한되지는 않는, 열을 생성하는 MRI 컴포넌트들과 통합될 수도 있거나 MRI 컴포넌트들에 밀접하게 근접하도록 배열될 수도 있는, 물-기반 또는 공기-기반 냉각을 수행하기 위한 컴포넌트들을 제한 없이 포함할 수도 있다. 열 관리 컴포넌트들(118)은 저 필드 MRI 시스템(100)의 컴포넌트들로부터 열을 멀리 전달하기 위하여, 물 및 공기를 포함하지만, 이것으로 제한되지 않는 임의의 적당한 열 전달 매체를 포함할 수도 있다. 열 관리 컴포넌트는 예를 들어, 그 전체적으로 참조로 본원에 편입되는, 2015년 9월 4일자로 출원된, "Thermal Management Methods and Apparatus(열 관리 방법들 및 장치)"라는 명칭인, 대리인 관리 번호: 제O0354.70004US01호 하에서의 공동-출원된 미국 출원에서 설명된 열 관리 컴포넌트들 및/또는 기법들 중의 임의의 것일 수도 있다.
도 1에서 예시된 바와 같이, 저 필드 MRI 시스템(100)은 명령들을 전력 관리 시스템(110)으로 전송하고 전력 관리 시스템(110)으로부터 정보를 수신하기 위한 제어 전자기기들을 가지는 제어기(106)(콘솔(console)로서 본원에서 또한 지칭됨)를 포함한다. 제어기(106)는 희망하는 시퀀스로 자기적 컴포넌트들(120) 중의 하나 이상을 동작시키기 위하여 전력 관리 시스템(110)으로 전송된 명령들을 결정하기 위하여 이용되는 하나 이상의 펄스 시퀀스(pulse sequence)들을 구현하도록 구성될 수도 있다. 본원에서 제공된 개시물의 양태들이 이 점에서 제한되지 않으므로, 제어기(106)는 하드웨어, 소프트웨어, 또는 하드웨어 및 소프트웨어의 임의의 적당한 조합으로서 구현될 수도 있다.
일부 실시형태들에서, 제어기(106)는 하나 이상의 펄스 시퀀스들의 각각에 대한 정보를 저장하는 펄스 시퀀스들 저장소(pulse sequences repository; 108)로부터 펄스 시퀀스에 대한 정보를 획득함으로써 펄스 시퀀스를 구현하도록 구성될 수도 있다. 특정한 펄스 시퀀스를 위한 펄스 시퀀스들 저장소(108)에 의해 저장된 정보는 제어기(106)가 특정한 펄스 시퀀스를 구현하는 것을 허용하는 임의의 적당한 정보일 수도 있다. 예를 들어, 펄스 시퀀스를 위한 펄스 시퀀스들 저장소(108)에서 저장된 정보는 펄스 시퀀스에 따라 자기적 컴포넌트들(120)을 동작시키기 위한 하나 이상의 파라미터들(예컨대, RF 송신/수신 코일들(126)을 동작시키기 위한 파라미터들, 경사 코일들(128)을 동작시키기 위한 파라미터들 등), 펄스 시퀀스에 따라 전력 관리 시스템(110)을 동작시키기 위한 하나 이상의 파라미터들, 제어기(106)에 의해 실행될 때, 제어기(106)로 하여금, 펄스 시퀀스에 따라 동작하도록 시스템(100)을 제어하게 하는 명령들을 포함하는 하나 이상의 프로그램들, 및/또는 임의의 다른 적당한 정보를 포함할 수도 있다. 펄스 시퀀스들 저장소(108)에서 저장된 정보는 하나 이상의 비-일시적(non-transitory) 저장 매체들 상에 저장될 수도 있다.
도 1에서 예시된 바와 같이, 제어기(106)는 또한, 수신된 MR 데이터를 프로세싱하도록 프로그래밍된 컴퓨팅 디바이스(104)와 상호작용한다. 예를 들어, 컴퓨팅 디바이스(104)는 임의의 적당한 이미지 재구성 프로세스(들)를 이용하여 하나 이상의 MR 이미지들을 생성하기 위하여 수신된 MR 데이터를 프로세싱할 수도 있다. 제어기(106)는 컴퓨팅 디바이스에 의한 MR 데이터의 프로세싱을 가능하게 하기 위하여, 하나 이상의 펄스 시퀀스들에 대한 정보를 컴퓨팅 디바이스(104)에 제공할 수도 있다. 예를 들어, 제어기(106)는 하나 이상의 펄스 시퀀스들에 대한 정보를 컴퓨팅 디바이스(104)에 제공할 수도 있고, 컴퓨팅 디바이스는 제공된 정보에 적어도 부분적으로 기초하여 이미지 재구성 프로세스를 수행할 수도 있다.
컴퓨팅 디바이스(104)는, 취득된 MR 데이터를 프로세싱하고 이미징되고 있는 대상자의 하나 이상의 이미지들을 생성하도록 구성된 임의의 전자 디바이스일 수도 있다. 일부 실시형태들에서, 컴퓨팅 디바이스(104)는, MR 데이터를 프로세싱하고 이미징되고 있는 대상자의 하나 이상의 이미지들을 생성하도록 구성될 수도 있는 데스크톱 컴퓨터, 서버, 랙-장착형(rack-mounted) 컴퓨터, 또는 임의의 다른 적당한 고정된 전자 디바이스와 같은 고정된 전자 디바이스일 수도 있다. 대안적으로, 컴퓨팅 디바이스(104)는, MR 데이터를 프로세싱하고 이미징되고 있는 대상자의 하나 또는 이미지들을 생성하도록 구성될 수도 있는 스마트 폰, 개인 정보 단말, 랩톱 컴퓨터, 태블릿 컴퓨터, 또는 임의의 다른 휴대용 디바이스와 같은 휴대용 디바이스일 수도 있다. 일부 실시형태들에서, 본원에서 제공된 개시물의 양태들이 이 점에서 제한되지 않으므로, 컴퓨팅 디바이스(104)는 임의의 적당한 타입의 다수의 컴퓨팅 디바이스들을 포함할 수도 있다. 사용자(102)는 저 필드 MR 시스템(100)의 양태들을 제어하고(예컨대, 특정한 펄스 시퀀스에 따라 동작하도록 시스템(100)을 프로그래밍하고, 시스템(100)의 하나 이상의 파라미터들을 조절하는 등) 및/또는 저 필드 MR 시스템(100)에 의해 획득된 이미지들을 시청하기 위하여 컴퓨팅 디바이스(104)와 상호작용할 수도 있다.
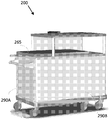
도 2a 및 도 2b는 일부 실시형태들에 따라, 휴대용 또는 운반가능한 저 필드 MRI 시스템(200)을 예시한다. 시스템(200)은 도 1과 관련하여 위에서 설명된 컴포넌트들 중의 하나 이상을 포함할 수도 있다. 예를 들어, 시스템(200)은 단일의 일반적으로 수송가능하고 변형가능한 구조체 상에 함께 배열된, 자기적 및 전력 컴포넌트들 및 잠재적으로 다른 컴포넌트들(예컨대, 열 관리, 콘솔 등)을 포함할 수도 있다. 시스템(200)은 적어도 2 개의 구성들: 수송 및 보관을 위하여 구비된 구성, 및 동작을 위하여 구비된 구성을 가지도록 설계될 수도 있다. 도 2a는 수송 및/또는 보관을 위하여 고정될 때의 시스템(200)을 도시하고, 도 2b는 동작을 위하여 변형될 때의 시스템(200)을 도시한다. 시스템(200)은 도 2b에서 도시된 화살표들에 의해 표시된 바와 같이, 시스템을 그 수송 구성으로부터 그 동작 구성으로 변형할 때에 부분(290B)으로 슬라이딩될 수 있고 부분(290B)으로부터 후퇴될 수 있는 부분(290A)을 포함한다. 부분(290A)은 전력 전자기기(110), (도 2a 및 도 2b에서 예시된 터치 패널 디스플레이와 같은 인터페이스 디바이스를 포함할 수도 있는) 콘솔(106), 및 열 관리부(118)를 실장할 수도 있다. 부분(290 A)은 또한, 시스템(200)을 필요한 대로 동작시키기 위하여 이용된 다른 컴포넌트들을 포함할 수도 있다.
부분(290B)은, 하나 이상의 자기적 컴포넌트들(예컨대, 자석(112), 심 코일들(124), RF 송신/수신 코일들(126), 경사 코일들(128))이 임의의 구성으로 그 위에 통합되는 라미네이트 패널들(210A 및 210B)을 포함하는, 저 필드 MRI 시스템(200)의 자기적 컴포넌트들(120)을 포함한다. (도 2b에서 도시된 바와 같이) MRI를 수행하도록 시스템을 동작시키기 위하여 구비된 구성으로 변형될 때, 부분들(290A 및 290B)의 지지 표면들은 이미징되어야 할 대상자가 그 위에 누울 수 있는 표면을 제공한다. 슬라이딩가능한 표면(265)은 대상자의 부분이 대응하는 저 필드 MRI 자석들을 제공하는 라미네이트 패널들의 시야 내에 있도록 하는 위치로 대상자를 슬리이딩하는 것을 가능하게 하기 위하여 제공될 수도 있다. 시스템(200)은 그것이 기존에는 (예컨대, 응급실에서) 이용가능하지 않은 상화들에서 MRI 이미징에 대한 접근을 가능하게 하는 저 필드 MRI 시스템의 휴대용의 간결한 구성을 제공한다.
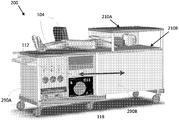
도 2c 및 도 2d는 일부 실시형태들에 따라, 또 다른 일반적으로 수송가능한 저 필드 MRI 시스템을 예시한다. 도 21c는 일부 실시형태들에 따라, 이중-평면 하이브리드 자석을 사용하는 전환가능한 저 필드 MRI 시스템(280)의 예를 예시한다. 도 2c에서, 전환가능한 시스템은 그것이 이용 중이지 않을 때에 시스템을 수송하거나 시스템을 보관하기 위해 편리한 접혀진 구성으로 되어 있다. 전환가능한 시스템(280)은, 인간 환자를 지지하고 환자가 화살표들(2281)의 방향으로 하우징들(286A 및 286B) 사이의 이미징 영역 내로 그리고 이미징 영역으로부터 슬라이딩되는 것을 허용하도록 구성된 슬라이딩가능한 침대(284)를 포함한다. 하우징들(286A 및 286B)은 MRI를 수행하기 위한 자기장들을 생성하기 위하여 전환가능한 시스템(280)을 위한 자기적 컴포넌트들을 실장한다. 일부 실시형태들에 따르면, 자기적 컴포넌트들은 라미네이트 기법들을 배타적으로 이용하여, 전통적인 기법들을 배타적으로 이용하여, 또는 양자의 조합을 이용하여(예컨대, 하이브리드 기법들을 이용하여) 생성될 수도 있고, 제조될 수도 있고, 배열될 수도 있다.
도 2d는 이미징되어야 할 하우징들(286A 및 286B) 사이에 삽입되기 이전에 슬라이딩가능한 침대(284) 상에 위치된 환자를 갖는, 연장된 전환가능한 시스템(280)을 예시한다. 일부 실시형태들에 따르면, 하우징들(286A 및 286B)의 각각은 자기적 컴포넌트들로부터 멀어지도록 열을 끌어들이기 위한 열 관리 컴포넌트에 결합된 하이브리드 자석을 실장한다. 구체적으로, 이미징 영역의 대향하는 면들 상의 하우징들(286A 및 286B)의 각각은 B0 코일들(205a 및 205b), 라미네이트 패널(210)(얼굴-상향 배열에서 하우징(286B) 내에서 가시적인 210b), 및 B0 코일들 사이에 제공된 열 관리 컴포넌트(230)를 그 내부에 포함한다. 양태들이 하이브리드 자석의 임의의 특정한 설계 또는 구성과의 이용을 위하여 제한되지 않으므로, 286A 및 286B에서 실장된 자기적 컴포넌트들은 대칭적인 이중-평면 하이브리드 자석을 형성하기 위하여 실질적으로 동일할 수도 있거나, 286A 및 286B에서 실장된 자기적 컴포넌트들은 비대칭적인 이중-평면 하이브리드 자석을 형성하기 위하여 상이할 수도 있다.
본원에서 설명된 기법들에 따라, 저 필드 MRI 시스템(예컨대, 시스템(100, 200, 및/또는 280))의 하나 이상의 컴포넌트들은 시스템이 동작 동안에 적절하게 수행할 것이거나 수행하고 있다는 것을 보장하도록 자동으로 구성된다. 위에서 논의된 바와 같이, 이러한 MRI 시스템은 주어진 환경에서 만족스러운 동작을 보장하기 위하여, 시스템의 하나 이상의 파라미터들이 조절될 것을 요구하는 다양한 환경들에서 동작될 수도 있다. 또한, 위에서 논의된 바와 같이, 저 필드 MRI 시스템의 컴포넌트들의 수동 구성은 번거롭고, MRI 시스템의 많은 사용자들이 가지지 않을 수도 있는 전문지식을 요구한다. 많은 사례들에서, 시스템이 조절하거나 적응할 필요가 있는 환경 및/또는 동작 조건은 인간 조작자에게 확인가능하지 않을 수도 있어서(예컨대, 라디오 주파수 잡음 또는 다른 전자기 간섭(electromagnetic interference; EMI), 의도적이지 않은 단락 또는 개방 회로들, 오정렬된 컴포넌트들 등), 시스템에 대한 적절한 조절은 심지어 전문가에도 가능하지 않다. 따라서, 일부 실시형태들은 특정한 이벤트(예컨대, 저 필드 MRI 시스템의 전력 온, 슬립 모드 또는 저전력 모드로부터의 웨이크-업, 변화하는 환경 조건들의 검출 등)의 발생에 응답하여 구성 및/또는 설정 동작들의 세트를 자동으로 수행하도록 구성된다.
도 3은 일부 실시형태들에 따라, 이벤트의 발생에 응답하여 수행될 수도 있는 자동 구성 프로세스를 예시한다. 도 3은 수행될 수도 있는 다수의 구성 또는 설정 동작들을 예시하지만, 양태들이 이 점에서 제한되지 않으므로, 동작들 중의 임의의 하나 또는 조합이 수행될 수도 있다는 것이 인식되어야 한다. 추가적으로, 도 3에서 도시된 예시적인 구성 동작들이 직렬로 수행되는 것으로서 도시되지만, 하나 이상의 구성 동작들이 부분적으로 또는 완전히 병렬로 수행될 수도 있고, 어느 특정한 구성 동작들이 수행되는지 및/또는 특정한 구성 동작들이 언제 수행되는지에 대한 제한들이 없다는 것이 인식되어야 한다.
액트(act)(310)에서, 저 필드 MRI 시스템이 전력 온 된다. 도 4는 일부 실시형태들에 따라 액트(310)에서 수행될 수도 있는 전력 온 프로세스를 예시한다. 도 4는 수행될 수도 있는 다수의 전력-공급(power-up) 동작들을 예시하지만, 양태들이 이 점에서 제한되지 않으므로, 동작들 중의 임의의 하나 또는 조합이 수행될 수도 있다는 것이 인식되어야 한다. 추가적으로, 도 4에서 도시된 예시적인 구성 동작들이 직렬로 수행되는 것으로서 도시되지만, 하나 이상의 구성 동작들이 부분적으로 또는 완전히 병렬로 수행될 수도 있고, 어느 특정한 구성 동작들이 수행되는지 및/또는 특정한 구성 동작들이 언제 수행되는지에 대한 제한들이 없다는 것이 인식되어야 한다.
액트(410)에서, 저 필드 MRI 시스템은 전원에 접속된다. 예를 들어, 저 필드 MRI 시스템은 표준 벽 접속구(wall outlet)에 접속될 수도 있거나, 발전기와 같은 외부 전력 공급 장치에 접속될 수도 있거나, 동작 전력을 저 필드 MRI 시스템의 컴포넌트들에 제공하기 위한 임의의 다른 적당한 타입의 전원에 접속될 수도 있다. 액트(412)에서, 긴급 전력 차단이 동작하는지가 검증된다. 환자 안전은 의료적 디바이스들을 설계할 때에 주요한 고려사항이다. 따라서, 본원에서 설명된 기법들에 따라 이용된 일부 저 필드 MRI 시스템들은 환자 안전이 걱정일 수도 있는 상황들(예컨대, 자석의 과열)에서 수동으로 또는 자동으로 트리거링될 수도 있는 긴급 전력 차단을 포함한다. 이에 따라, 안전한 동작을 보장하기 위하여, 시스템은 임의의 그리고 모든 전력 차단(또는 다른 안전 메커니즘들)이 인에이블(enable)되고 및/또는 동작하는지를 확인할 것을 검사할 수도 있다.
액트(414)에서, 콘솔(console)(104)은 예를 들어, 사용자가 콘솔 상의 전력 스위치, 버튼, 또는 다른 메커니즘을 누름으로써 전력 온 된다. 전력 온 되는 것에 응답하여, 콘솔은 저 필드 MRI 시스템의 하나 이상의 동작들을 제어하기 위하여 이용된 제어 애플리케이션을 기동(launch)하기 이전에 다수의 시동(startup) 프로세스들을 실행할 수도 있다. 임의의 시동 프로세스들의 실행 후에 또는 실행 동안에, 저 필드 MRI 시스템의 하나 이상의 동작들을 제어하도록 구성된 제어 애플리케이션은 콘솔 상에서 기동된다(액트(416)). 제어 애플리케이션은 이하에서 더욱 상세하게 논의된 바와 같이, 콘솔의 전력 온 시에, 또는 콘솔, 또는 콘솔과 상호작용하도록 구성된 외부 전자 디바이스와의 사용자 상호작용에 응답하여, 자동으로 기동될 수도 있다. 제어 애플리케이션이 기동되는 것에 응답하여, 애플리케이션은 시스템 DC 전력을 턴 온(turn on) 할 것을 전력 공급 장치(112)에 명령하는 것을 포함하지만, 이것으로 제한되지 않는 하나 이상의 동작들을 수행할 것을 콘솔에 명령할 수도 있다.
제어 애플리케이션의 기동 후에 또는 기동 동안에, 저 필드 MRI 시스템의 다른 컴포넌트들은 인에이블될 수도 있고 및/또는 구성될 수도 있다. 예를 들어, 액트(418)에서, 제어 애플리케이션은 자석을, 결과적인 B0 필드가 예를 들어, 저 필드 MRI를 수행하기 위한 이미징을 위하여 적당한 온도로 워밍 업함으로써, 자석(122)에 전력 공급할 것을 전력 공급 장치(112)에 명령할 수도 있다. 일부 구현예들에서, 자석을 워밍 업하는 프로세스는 이미징을 위하여 적당한 안정된 B0 필드를 제공하기 위하여 상당한 시간량(예컨대, 30 분)이 걸릴 수도 있다. 자석(122)을 워밍 업하기 위하여 필요한 시간량을 감소시키기 위하여, 일부 실시형태들은 하나 이상의 "예열(pre-heating)" 동작들을 수행한다. 예를 들어, 저 필드 MRI 시스템의 동작 동안에, 저 필드 MRI 시스템의 자기적 컴포넌트들(120)로부터 열을 멀리 전달하는 열 관리 컴포넌트들(118) 중의 하나 이상은 열 관리 컴포넌트들이 정상적으로 동작하고 있었을 경우보다 더 빨리 자석이 워밍 업하는 것을 허용하기 위하여 턴 다운(turn down) 또는 턴 오프(turn off) 될 수도 있다. 일부 실시형태들에서, 열 관리 컴포넌트들(118)은 저 필드 MRI 시스템의 자기기기 컴포넌트들의 냉각을 제공하기 위하여 공기 또는 물 냉각 시스템들(예컨대, 팬(fan)들 및/또는 펌프(pump)들)을 포함한다. 자석의 예열 동안, 팬들 및/또는 펌프들은 자석 워밍 업 프로세스를 촉진시키기 위하여 (예컨대, 냉각 용량 또는 세기를 감소시킴으로써) 턴 오프 또는 턴 다운 될 수도 있다. 하나 이상의 열 관리 컴포넌트들을 동작 용량 미만에서 동작시키는 것은 하나 이상의 열 관리 컴포넌트들을 전혀 동작시키지 않는 것에 의한 것을 포함하여, 열을 제거하기 위한 용량이 그 정상 동작으로부터 감소되도록 하나 이상의 열 관리 컴포넌트들을 의도적으로 조절하는 것을 본원에서 지칭한다.
열 관리 컴포넌트들(118)의 동작을 수정하는 실시형태들에서, 자석의 온도는 자석이 과열하지 않는다는 것을 보장하기 위하여, 및/또는 열 관리 컴포넌트들의 용량/세기를 언제 턴 온하거나 증가시킬 것인지를 결정하기 위하여 면밀하게 모니터링되어야 한다. 자석의 온도는 온도 센서를 이용하는 것, 자석의 측정된 전압에 적어도 부분적으로 기초하여 자석의 온도를 결정하는 것 등을 포함하지만, 이것으로 제한되지 않는 임의의 적당한 방법으로 결정될 수도 있다. 일부 실시형태들에 따르면, (예컨대, 센서들 및/또는 전압 측정들을 통한) 온도 감지는 워밍을 촉진시키도록, 및/또는 자석이 열 균형 또는 적당한 B0 필드 안정성에 접근할 때에 냉각 세기를 관여하고 및/또는 증가시키도록, 열 관리의 제어를 자동화하기 위하여 제공된다.
일부 실시형태들은 시스템이 자석 워밍을 유지하기 위하여 아이들(예컨대, 이미징을 위하여 이용되지 않음)일 때의 이용을 위한 저전력 모드를 포함한다. 예를 들어, 저전력 모드에서는, 자석(112)이 이미징을 위하여 용인가능한 온도에서 유지되는 것을 허용하면서, 더 적은 전류가 자석에 제공될 수도 있다. 저전력 모드는 자석이 희망하는 온도에서 유지되는 것을 가능하게 하는 임의의 적당한 방법으로 구현될 수도 있다. 예를 들어, 자석의 워밍-업 시간을 감소시키기 위하여 위에서 설명된 기법들 중의 하나 이상(예컨대, 하나 이상의 열 관리 컴포넌트들을 턴 오프 또는 다운하는 것)은 또한, 저 필드 MRI 시스템을 저전력 모드로 설정하기 위하여 이용될 수도 있다. 이에 따라, 이용 중이지 않는 동안, 자석은 더 적은 전력으로 워밍 상태에 머물 수 있어서, 필요할 때, 자석은 워밍-업 주기를 필요로 하지 않으면서 준비된다. 일부 실시형태들에서, 저전력 모드에서의 동작은 저 필드 MRI 시스템(100)이 특정한 시간량 동안에 동작하고 있지 않았을 때에 자동으로 개시될 수도 있고, 및/또는 저전력 모드는 스위치, 버튼, 또는 시스템에 의해 제공된 다른 인터페이스 메커니즘에 의해 수동으로 개시될 수도 있다.
대안적으로, 저전력 모드는 저 필드 MRI 시스템(100)이 동작하고 있는 환경의 주변 온도가 특정한 온도를 초과하는 것으로 결정하는 것에 응답하여 이용될 수도 있다. 예를 들어, 저 필드 MRI 시스템이 고온 환경(예컨대, 사막)에서 전개될 경우, 정상 동작 모드에서의 자석의 동작은 자석 과열의 가능성으로 인해 가능하지 않을 수도 있다. 그러나, 이러한 상황들에서, MRI 시스템(100)은 더 낮은 온도들을 갖는 환경들에서 이용되었던 것보다 더 적은 전류로 자석을 구동함으로써 저전력 모드에서 동작할 수 있을 수도 있다. 따라서, 이러한 저전력 모드는 MRI 시스템들이 동작하기가 보통은 부적당할 환경들에 도전할 시에 저 필드 MRI 시스템들의 이용을 가능하게 한다.
일부 실시형태들에서, 이미징 이전에 자석의 워밍 업을 수행하기 위하여 요구된 시간은 변동들이 안정화되기 전에 이미징을 가능하게 하기 위하여, 워밍 업 프로세스 동안에 저 필드 MRI 파라미터들에서의 변동들을 결정하고 이 변동들을 보상함으로써 감소될 수도 있다. 예를 들어, B0 자석의 라모어 주파수(Larmor frequency)는 자석이 워밍 업하고 안정적으로 될 때에 종종 변동된다. 일부 실시형태들은 어떻게 라모어 주파수가 자석의 전압(또는 온도)을 추적하고, 자석이 그 정상 동작 온도에 도달하기 전에 이미징을 허용하기 위하여 주파수에 있어서의 변화들을 보상하는지를 특징화한다. B0 필드의 균질성(homogeneity)은 자석의 워밍 업 동안에 변동하도록 알려진 또 다른 파라미터이다. 따라서, 일부 실시형태들은 어떻게 B0 필드 균질성이 자석의 전압(또는 온도)을 추적하고, 필드 균질성이 정상 동작 레벨들에 도달하기 전에 이미징을 가능하게 하기 위하여 (예컨대, 하나 이상의 심 코일들을 이용하여) 필드 균질성에 있어서의 변화들을 보상하는지를 특징화한다. 이 파라미터들에서의 변동들이 자석의 전압(또는 온도), 또는 저 필드 MRI 시스템의 일부 다른 파라미터들을 측정함으로써 특징화될 수도 있다면, 자석(112)의 워밍 업 동안에 변동되는 다른 저 필드 MRI 파라미터들은 또한, 자석이 열 균형 및/또는 필드 안정성에 도달하기 전에 저 필드 MRI 시스템에 의한 이미징을 제공하기 위하여 추적될 수도 있고 보상될 수도 있다.
도 4의 프로세스로 돌아가면, 액트(420)에서, 경사 코일들이 인에이블된다. 발명자들은 일부 실시형태들에서, 경사 코일들을 인에이블하는 프로세스가 저 필드 MRI 시스템의 전력 소비를 감소시키기 위하여, 이미징이 진행하도록 준비되기 바로 전까지 지연될 수도 있다는 것을 인지하였다. 저 필드 MRI 시스템이 동작한 후, 액트(422)는 자석이 동작을 위하여 적당한 상태에서 유지되는 것을 보장하기 위하여 자석의 하나 이상의 성질들을 모니터링하도록 수행될 수도 있다. 자석의 하나 이상의 성질들이 만족스러운 이미지들을 취득하기 위한 능력에 영향을 주는 방식으로, 자석의 하나 이상의 성질들이 드리프트(drift)하였거나, 또는 그렇지 않을 경우에 변화한 것으로 검출될 경우, 하나 이상의 치유 액션들이 수행될 수도 있다.
도 3의 프로세스로 돌아가면, 액트(312)에서, 하나 이상의 일반적인 시스템 검사들은 저 필드 MRI 시스템(100)의 적당한 동작을 보장하도록 수행된다. 예를 들어, 일반적인 시스템 검사들은 자석(112)이 단락되거나 개방되는지 여부를 검사하는 것을 포함할 수도 있다. 자석(112)의 단락은 다수의 이유들 중의 임의의 이유로 발생할 수도 있다. 예를 들어, 정상 동작 이용 동안, 및/또는 상이한 환경들에서의 동작의 결과로, 저 필드 MRI 시스템의 다양한 컴포넌트들의 열 수축 및 팽창(열 사이클링)은 MRI 시스템의 자석(112) 또는 그 부분, 또는 다양한 다른 회로부, 코일들 등 중의 임의의 것의 단락으로 귀착될 수도 있다. 예를 들어, 열 사이클링(thermal cycling)은 그렇지 않을 경우에, 격리된 전도성 재료가 시스템의 단락 회로부(예컨대, 코일에서의 권선들)에 접촉하게 할 수도 있다. 예를 들어, 열 관리 시스템(118)의 컴포넌트로서 포함된 냉각 판의 전도성(예컨대, 알루미늄) 표면은 일부 경우들에는, 코일의 단락을 야기시키기 위하여 냉각되는 하나 이상의 코일들의 전도성 재료와 접촉할 수도 있다. 일부 실시형태들은 단락이 있는지 여부를 결정하기 위하여 시스템(예컨대, 자석(112))을 테스트하고, 그러할 경우, 시스템이 동작하고 있지 않고 서비스될 필요가 있다는 경보가 사용자에게 제공될 수도 있다. 단락은 IV 곡선이 예상된 대로 응답하는지 여부를 평가하기 위하여 하나 이상의 컴포넌트들에 전력을 공급하는 것으로부터 기인하는 전류-전압(current-voltage; IV) 곡선을 모니터링함으로써, 또는 임의의 다른 적당한 기법을 이용함으로써 검출될 수도 있다.
일부 실시형태들에 따르면, 시스템을 개방 회로에 대하여 검출한다. 예를 들어, 임의의 수의 인자들은 자석(112)(또는 임의의 다른 시스템 회로부)이 개방하게 할 수도 있음으로써, 전류가 흐르는 것을 허용하지 않을 수도 있다. 개방 회로들은 열 사이클링에 의해, 및/또는 시스템의 이용을 통해, 예를 들어, 전기적 접속들을 분리시킴으로써, 또는 컴포넌트들이 느슨해지도록(예컨대, 저 필드 MRI 시스템(100)의 컴포넌트들을 접속하기 위하여 이용된 탈거된 볼트들 또는 나사들) 함으로써 야기될 수도 있다. 예를 들어, 자석의 열 사이클링은 자석 어셈블리에서의 볼트들/나사들의 느슨함에 기여할 수도 있고, 이것은 자석이 개방 회로를 가지게 할 수도 있다. 일부 실시형태들은 (예컨대, 전압을 인가하는 것이 전류를 인출하는지 여부를 관찰함으로써) 그것이 개방되어 있는지 여부를 결정하기 위하여 자석(112)을 테스트하고, 그러할 경우, 자석이 동작하지 않고 서비스되어야 할 필요가 있다는 경보가 사용자에게 제공될 수도 있다.
일부 실시형태들에 따라 수행될 수도 있는 다른 일반적인 시스템 검사들은 전력 공급 장치(112)의 안정성을 결정하는 것을 포함한다. 발명자들은 일부 구현예들에서, 전력 공급 장치(112)가 안정성의 마진(margin)들 근처에서 동작될 수도 있고, 이 범위 외부에서의 작은 편차들은 전력 공급 장치가 불안정해지게 하고 발진하게 할 수도 있다는 것을 인지하였다. 전력 공급 장치(112)는 또한, 전력 공급 장치 내부에서의 회로 오류를 포함하지만, 이것으로 제한되지 않는 다른 이유들로 발진할 수도 있다. 전력 공급 장치의 안정성은 인출되고 있는 전류가 예상된 대로인 것을 보장하기 위하여 전력 공급 장치로부터 인출된 전류를 측정하는 것을 포함하지만, 이것으로 제한되지 않는 임의의 적당한 방법으로 결정될 수도 있다.
발명자들은 저 필드 MRI 시스템(100)에 전력 공급하기 위하여 이용된 전원의 품질은 저 필드 MRI 시스템이 전개되는 환경에 따라 변동될 수도 있다는 것을 인지하였다. 예를 들어, 필드에서 동작되는 저 필드 MRI 시스템은 예를 들어, 저 필드 MRI 시스템이 병원에서의 표준 전력 접속구를 이용하여 전력 공급될 때에 존재하지 않는 과제들을 전원에 제시할 수도 있는 발전기에 의해 전력 공급될 수도 있다. 또 다른 예로서, 전력 공급 장치 품질은 동일한 로컬 전력 그리드(local power grid) 상에서의 다른 디바이스들의 동작과 함께 변동될 수도 있다. 또 다른 예로서, 구급차에서와 같은 이동 환경에서 전개된 저 필드 MRI 시스템은 배터리 및 변환기(converter)를 통해 전력 공급될 필요가 있을 수도 있다. 이러한 쟁점들을 해결하기 위하여, 일부 실시형태들은 전원이 시스템을 동작시키기 위하여 충분한 품질인지 여부를 확인하기 위한 임의의 적당한 방법으로 전원의 특성들을 평가하기 위하여 일반적인 시스템 검사들을 수행한다.
또 다른 예로서, 저 필드 MRI 시스템들은 전력 후크-업(power hook-up)의 품질 및/또는 표준들이 알려지지 않을 수도 있는 비-표준 환경들에서 전개될 수도 있다. 이것을 해결하기 위하여, 일부 실시형태들은 전원이 시스템의 컴포넌트들을 손상시키는 것을 회피하기 위하여 시스템에 전력 공급하기 위한 전원을 신뢰하기 이전에 접속구가 적절하게 배선되는지 여부를 결정하기 위하여 전력 접속구의 배선을 검사하는 것을 포함한다. 전력 접속구의 배선을 검사하는 것은 전력 접속구로부터의 전압을 측정하는 것, 전력 접속구에 의해 제공된 전류에서의 잡음 레벨을 측정하는 것, 및/또는 전력 접속구가 올바르게 배선되는지 여부(예컨대, 라이브(live), 중립(neutral), 및 접지(ground)가 모두 적절한 값들에 있음)를 결정하는 것을 포함할 수도 있지만, 이것으로 제한되지 않는다. 발명자들은 일부 전원들(예컨대, 발전기 또는 전력 인버터(power inverter))에 의해 생성된 전력이 잡음성일 수도 있다는 것을 인식하였다. 전력 접속구가 적절하게 배선되지 않거나 잡음의 용인불가능한 레벨을 가지는 것으로 결정될 경우, 시스템의 사용자는 통지받을 수도 있고, 대안적인 전원은 저 필드 MRI 시스템을 전력 온 하기 이전에 위치될 수도 있다.
발명자들은 전자기 잡음의 외부 소스(source)들이 시스템이 전개될 수도 있는 다양한 환경들에서 적절하게 동작하기 위한 저 필드 MRI 시스템의 능력에 영향을 줄 수도 있다는 것을 인지하였다. 도 3의 프로세스로 돌아가면, 액트(314)에서, 검출된 잡음 소스(들)가 저 필드 MRI 시스템의 하나 이상의 동작 파라미터들을 수정함으로써 적당하게 처리될 수 있는지 여부, 잡음 소스가 잡음 보상 기법들을 이용하여 보상될 수 있는지 여부, 또는 저 필드 MRI 시스템이 하나 이상의 검출된 잡음 소스들의 존재 시에 적당하게 동작할 것인지 여부를 결정하기 위하여, 외부 잡음 소스들이 평가되고, 이 경우, 저 필드 MRI 시스템은 시스템이 잡음에 의해 덜 영향받는 또 다른 로케이션으로 이동되어야 한다는 것을 조작자에게 경보하여야 한다.
일부 실시형태들에 따르면, 외부 온도 드리프트 및/또는 시스템 온도 드리프트를 포함하지만, 이것으로 제한되지 않는 환경 조건들이 검출될 수도 있고 및/또는 모니터링될 수도 있고, 저 필드 MRI 시스템에 의해 이미징을 수행하기 위하여 이용된 하나 이상의 펄스 시퀀스들의 반송파 주파수(라모어 주파수)는 환경 조건들에서의 변화들을 보상하기 위하여 수정될 수도 있다. 펄스 시퀀스 파라미터들 이외의 저 필드 MRI 시스템의 양태들은 추가적으로 또는 대안적으로, 환경 조건들에서의 변화들을 보상하기 위하여 조절될 수도 있거나 수정될 수도 있다. 예를 들어, 경사 전류들 또는 심 전류들은 또한, 검출된 환경 조건들에 적어도 부분적으로 기초하여 결정될 수도 있다.
일부 실시형태들에 따른 이용을 위한 일부 저 필드 MRI 시스템들은 잡음의 외부 소스들을 검출하고 잡음의 외부 소스들을 적어도 부분적으로 보상하도록 구성된 잡음 상쇄 시스템을 포함할 수도 있다. 예를 들어, 잡음 상쇄는 주변 라디오 주파수 간섭(radio frequency interference; RFI)을 검출하기 위하여 보조 수신 채널을 제공함으로써 수행될 수도 있다. 예를 들어, 하나 이상의 수신 코일들은 이미징되는 객체에 의해 방출된 MR 신호들을 검출하는 것이 아니라 RFI를 샘플링하기 위하여, B0 필드의 시야에 인접하지만, 그 시야의 외부에 위치될 수도 있다. 하나 이상의 보조 수신 코일들에 의해 샘플링된 RFI는 방출된 MR 신호들을 검출하기 위하여 위치된 하나 이상의 수신 코일들에 의해 수신된 신호들로부터 차감될 수도 있다. 이러한 배열은 저 필드 MRI 시스템이 동작되는 환경에 따라 RFI의 상이하고 및/또는 변동되는 레벨들을 거칠 가능성이 있는 일반적으로 수송가능한 및/또는 운반가능한 저 필드 MRI 시스템의 제공을 가능하게 하기 위하여 RFI를 동적으로 처리하고 억압하기 위한 능력을 가진다. 저 필드 MRI 시스템과 함께 이용될 수도 있는 적당한 잡음 상쇄 기법들의 일부 예들은, 그 전체적으로 참조로 본원에 편입되는, 2015년 9월 4일자로 출원된, "Noise Suppression Methods and Apparatus(잡음 억압 방법들 및 장치)"라는 명칭인, 대리인 관리번호 제O0354.70001US01호 하에서의 공동-출원된 미국 출원에서 설명되어 있다.
일부 실시형태들은 수신된 신호들의 공간적 로케이션을 어레이의 내부 또는 어레이의 외부의 어느 하나에 있는 것으로서 검출하도록 구성된 멀티채널 수신 코일 어레이를 이용하여 잡음 소스들을 검출할 수도 있고 잡음 소스들을 보상할 수도 있다. 어레이의 외부로부터인 것으로 결정된 신호들은 잡음으로 고려될 수도 있고, 어레이의 내부로부터인 것으로 결정된 신호들로부터 차감될 수 있다. 일부 실시형태들에 따른 잡음 상쇄 기법들은 잡음 상쇄를 수행하기 위하여 이용된 멀티채널 수신 코일 어레이 및 하나 이상의 보조 코일들의 양자를 채용하는 것을 포함한다.
또 다른 예로서, 잡음 상쇄 시스템은 저 필드 MRI 시스템의 동작에 영향을 줄 전자기 잡음을 생성하는 근처의 디바이스가 있는지를 검출할 수도 있고, 이것은 저 필드 MRI 시스템의 조작자가, 잡음성 디바이스가 동작 이전에 언플러그(unplug)될 수 있거나 제거될 수 있는지 여부, 및/또는 검출된 잡음성 디바이스에 의해 도입된 잡음도(noisiness)가 다양한 잡음 상쇄 기법들 중의 임의의 것을 이용하여 보상될 수 있는지 여부를 결정하는 것을 가능하게 할 것이다. 외부 잡음은 용인가능한 품질의 이미지들을 생성하기 위한 저 필드 MRI 시스템의 능력과 간섭하는 몇몇 상이한 타입들의 소스들로부터 발생할 수도 있다. 예를 들어, 저 필드 MRI 시스템은 간섭을 회피하기 위하여 상이한 주파수 범위에서 동작하도록 저 필드 MRI 시스템을 구성하였던 특정한 주파수 대역에서 잡음을 검출할 수도 있다. 또 다른 예로서, 저 필드 MRI 시스템은 시스템이 잡음을 회피하고 및/또는 적절하게 억압할 수 없도록 충분한 잡음을 검출할 수도 있다. 예를 들어, 저 필드 MRI 시스템이 AM 방송국 근처에 전개될 경우, 잡음 상쇄 시스템은 방송 잡음을 상쇄시킬 수 없을 수도 있는 것으로 결정될 수도 있고, 저 필드 MRI 시스템의 사용자는, 시스템이 저 필드 MRI 시스템의 적절한 동작을 보장하기 위하여 AM 방송국으로부터 멀어진 또 다른 로케이션으로 이동될 필요가 있다는 것을 통지받을 수도 있다.
발명자들은 저 필드 MRI 시스템의 감소된 성능에 기여할 수도 있는 외부 신호들이 전통적인 잡음 소스들인 것으로 종종 고려되지 않는다는 것을 인지하였다. 예를 들어, 구성되고 있는 주어진 저 필드 MRI 시스템의 근처에서 동작하는 다른 저 필드 MRI 시스템들은 또한, 간섭할 수도 있고 저 필드 MRI 시스템의 성능에 부정적으로 영향을 줄 수도 있는 신호들을 생성할 수도 있다. 일부 실시형태들에 따르면, 저 필드 MRI 시스템은 동작을 간섭하기에 충분한 밀접하게 인접한 다른 시스템들을 검출하도록 구성될 수도 있고, 서로 상호적으로 간섭하는 것을 회피하기 위하여 임의의 이러한 시스템과 통신할 수도 있다. 예를 들어, 다수의 저 필드 MRI 시스템들은 네트워킹 프로토콜(예컨대, 블루투스(Bluetooth), WiFi 등)을 이용하여 서로 통신하도록 구성될 수도 있고, 구성되고 있는 저 필드 MRI 시스템 근처에서 동작하는 다른 저 필드 MRI 시스템들은 네트워킹 프로토콜을 이용하는 범위 내에서 다른 저 필드 MRI 시스템들에 자동으로 접속하는 것을 시도함으로써 식별될 수도 있다.
고 필드 MRI 시스템들은 전자기 간섭이 MRI 시스템의 동작에 영향을 주는 것을 방지하기 위하여 특화된 차폐된 방들에서 전개된다. 그 결과, 고 필드 MRI 시스템들은 또한, 외부 통신들로부터 격리된다. 게다가, 고 필드 강도들로 인해, 전자 디바이스들은 전형적으로 MRI 시스템의 B0 자석과 동일한 방에서 동작될 수 없다. 다른 한편으로, 저 필드 MRI 시스템들은 일반적으로 휴대용이되도록, 그리고 특화된 차폐된 방들 이외의 로케이션들에서 동작하도록 구성될 수 있다. 그 결과, 저 필드 MRI 시스템들은 고 필드 MRI 시스템들이 할 수 없는 방법들로, 다수의 장점들을 가능하게 하는 다른 저 필드 MRI 시스템들을 포함하는 다른 디바이스들에 통신가능하게 결합될 수 있고, 그 일부는 이하에서 더욱 상세하게 논의된다.
도 5는 하나 이상의 저 필드 MRI 시스템들이 동작할 수도 있는 네트워크화된 환경(500)을 예시한다. 예를 들어, 다수의 저 필드 MRI 시스템들은 전문병원 또는 병원의 상이한 방들에서 전개될 수도 있거나, 원격으로 위치된 상이한 시설들에서 전개될 수도 있다. 시스템들은 다른 시스템들의 존재를 식별하기 위하여 네트워크를 통해 통신하도록 구성될 수도 있고, 시스템들 사이의 간섭을 감소시키기 위하여 검출 기능들을 갖는 하나 이상의 저 필드 MRI 시스템의 동작 조건들을 자동으로 구성할 수도 있다. 도시된 바와 같이, 네트워크화된 환경(500)은 제 1 저 필드 MRI 시스템(510), 제 2 저 필드 MRI 시스템(520), 및 제 3 저 필드 MRI 시스템(530)을 포함한다. 저 필드 MRI 시스템들의 각각은 네트워크를 통해, 또는 임의의 다른 적당한 메커니즘을 이용하는 것(예컨대, 디바이스-대-디바이스 통신, 잡음 소스로서의 또 다른 저 필드 MRI 시스템의 검출 등을 통해)의 어느 하나로, 다른 저 필드 MRI 시스템들의 존재를 탐색하기 위한 검출 기능들로 구성된다.
일부 실시형태들에서, 저 필드 MRI 시스템은 다른 동작 중인 저 필드 MRI 시스템과 직접적으로 통신함으로써 또 다른 동작 중인 저 필드 MRI 시스템의 존재를 자동으로 검출하도록 구성될 수도 있다. 예를 들어, 저 필드 MRI 시스템들은 단거리 무선 프로토콜(예컨대, 블루투스, WiFi, 지그비(Zigbee))을 이용하여 서로 통신하도록 구성될 수도 있고, 시동 시에, 저 필드 MRI 시스템은 임의의 다른 저 필드 MRI 시스템이 단거리 무선 프로토콜을 이용하여 근처에서 동작하고 있는지를 탐색하는 것을 시도할 수도 있다.
일부 실시형태들에서, 저 필드 MRI 시스템은 예컨대, 네트워크에 접속된 시스템들의 로케이션을 추적하도록 구성된 중앙 컴퓨터, 서버(예컨대, 서버(585)), 또는 중간 디바이스와 통신함으로써, 간접적인 기법을 이용하여(즉, 또 다른 저 필드 MRI 시스템과 직접적으로 통신하지 않음으로써) 또 다른 동작 중인 저 필드 MRI 시스템의 존재를 자동으로 검출하도록 구성될 수도 있다. 임의의 적당한 간접적인 기법이 이용될 수도 있다. 예를 들어, 일부 실시형태들에서, 시동 시에, 및/또는 동작 동안에 그 후에 때때로, 저 필드 MRI 시스템은 자신을 데이터베이스에서 등록하기 위하여, 하나 이상의 메시지들을 네트워크(540)를 통해 데이터베이스(550)로 전송할 수도 있다. 데이터베이스(550)에서의 저 필드 MRI 시스템의 등록은, 저 필드 MRI 시스템의 식별자, 시스템의 동작(예컨대, 라모어) 주파수, 시스템의 로케이션, 및 시스템이 활성인지 또는 대기(standby) 모드에 있는지 여부의 표시를 포함하지만, 이것으로 제한되지 않는, 데이터베이스에서의 저장을 위한 임의의 적당한 정보를 제공하는 것을 포함할 수도 있다.
데이터베이스(550)에서 저장된 정보는 저 필드 MRI 시스템이 최초로 시동할 때, 저 필드 MRI 시스템이 그 동작 상태(예컨대, 활성 모드로부터 대기 모드로의 전환)를 변화시킬 때, 시스템이 하나 이상의 파라미터들(예컨대, 동작 주파수)을 변화시킬 때 등에 업데이트될 수도 있다. 시동 시에 및/또는 그 후에 때때로, 저 필드 MRI 시스템은 추가적인 저 필드 MRI 시스템이 근처에서 동작하고 있는지를 결정하기 위하여, 그리고 임의의 검출된 저 필드 MRI 시스템들에 대한 정보를 획득하기 위하여, 질의(query)를 데이터베이스와 연관된 컴퓨터(예컨대, 서버(585))로 전송할 수도 있다. 질의는 질의를 발행하는 저 필드 MRI 시스템의 식별자 및 저 필드 MRI 시스템의 로케이션을 포함하지만, 이것으로 제한되지 않는, 데이터베이스(550)를 검색하는 것을 가능하게 하기 위한 임의의 적당한 정보를 포함할 수도 있다. 저 필드 MRI 시스템은 시스템이 간섭하지 않도록 동작 파라미터들을 확립하기 위하여, 직접적으로 또는 컴퓨터를 통한 것의 어느 하나로, 다른 인접한 시스템들과 추후에 협상할 수도 있다.
다른 실시형태들에서, 다른 근처의 저 필드 MRI 시스템들의 존재를 검출하는 것은 MR 데이터의 측정들을 통해 달성될 수도 있다. 예를 들어, RF 펄스들에 응답하는 검출된 신호들은 근처의 저 필드 MRI 시스템의 존재를 특징화하는 신호에서 잡음의 존재를 식별하기 위하여 분석될 수도 있다. 이러한 실시형태들은 다수의 저 필드 MRI 시스템들 사이의 네트워크화된(직접 또는 간접의 어느 하나) 통신을 요구하지 않는다. 그러나, 데이터 취득 및 데이터의 분석은 검출 프로세스를 위하여 요구되고, 이것은 근처의 시스템들의 식별을 지연시킬 수도 있다.
발명자들은 다수의 저 필드 MRI 시스템들이 밀접하게 인접하여 동작하고 있는 구현예들에서, 시스템들이 시스템들 사이의 간섭을 감소시키거나 저 필드 MRI 시스템의 성능에 대한 임의의 다른 잡음 소스(예컨대, AM 라디오 방송국)의 영향을 감소시키도록 구성될 수도 있다는 것을 인지하였다. 예를 들어, 제 1 저 필드 MRI 시스템의 B0 필드는 잡음이 검출되었던 임의의 다른 주파수 범위에 근접하게, 또는 임의의 다른 주파수 범위로부터 멀어지도록 동작하는 제 2 저 필드 MRI 시스템의 라모어 주파수로부터 멀어지도록, 시스템의 라모어 주파수를 시프트하기 위하여 조절될 수도 있다. 이용하기 위한 적절한 동작 주파수들 및/또는 필드 강도들(또는 임의의 다른 적당한 구성 파라미터)은 다수의 저 필드 MRI 시스템들 사이에서 직접적으로 협상에 의해, 또는 시스템들 사이의 충돌들을 해결하는 것을 담당하는 중앙 서버와의 통신을 통해 확립될 수도 있다. 예를 들어, 데이터베이스(550)와 연관된 컴퓨터는 동작 구성 파라미터들을 근접하게 위치된 저 필드 MRI 시스템들에 배정하는 것을 담당할 수도 있다.
발명자들은 다수의 저 필드 MRI 시스템들이 또한, 펄스 시퀀스들, 파형 테이블들, 펄스 타이밍 스케줄들, 또는 임의의 다른 적당한 정보를 포함하지만, 이것으로 제한되지 않는 정보를 공유함으로써 하나 이상의 네트워크들을 이용하여 서로에 접속되는 것으로부터 이익을 얻을 수도 있다는 것을 인지하였다. 일부 실시형태들에서, 다수의 저 필드 MRI 시스템들 사이의 잠재적인 충돌은 시스템들 사이의 간섭의 효과를 감소시키기 위하여 시스템들의 시간-슬라이싱(time-slicing) 동작에 의해 관리될 수도 있다. 예를 들어, 시간공유(timesharing) 배열은 송신 및/또는 수신 사이클들이 시스템들 사이의 간섭을 감소시키기 위하여 적절하게 엇갈리도록, 펄스 시퀀스들을 교대시키거나 또는 그렇지 않을 경우에 조정하기 위하여 적어도 2 개의 저 필드 MRI 시스템들 사이에서 확립될 수도 있다.
도시된 바와 같이, 네트워크화된 환경은 또한, 하나 이상의 픽처 아카이빙 및 통신 시스템들(picture archiving and communication system; PACS)(560)을 포함할 수도 있고, 저 필드 MRI 시스템은 저 필드 MRI 시스템으로 캡처된 이미지들의 저장을 가능하게 하기 위하여, PACS(560)에 의해 저장된 하나 이상의 이미지(또는 그로부터의 정보)를 획득하기 위하여, 또는 그렇지 않을 경우에 그 안에 저장된 정보를 사용하기 위하여, PACS(560)를 자동으로 검출하고 PACS(560)에 접속하도록 구성될 수도 있다. 네트워크화된 환경은 또한, 네트워크에 접속된 저 필드 MRI 시스템들의 활동 및/또는 네트워크에 접속된 저 필드 MRI 시스템들 사이의 활동을조정할 수 있는 서버(585)를 포함할 수도 있다. 서버(585)는 또한, 데이터, 예를 들어, MR 지문(fingerprint)들을 이용하여 MRI를 가능하게 하기 위한 자기 공명 지문 데이터를 저 필드 MRI 시스템들에 제공하도록 역할을 할 수 있다. 서버(585)는 또한, 다른 점들에서 정보 자원으로서 동작할 수 있다.
도 3에서 예시된 프로세스로 돌아가면, 액트(316)에서, 저 필드 MRI 시스템의 기계적 구성이 검사된다. 예를 들어, 저 필드 MRI 시스템의 기계적 컴포넌트들 중의 하나 이상은 마이크로-스위치, 센서, 또는 하나 이상의 기계적 컴포넌트들이 적절하게 정 위치에 있는지를 결정하기 위한 임의의 다른 적당한 디바이스를 포함할 수도 있다. 그것들이 적당하게 관여된다는 것을 보장하기 위한 수단들을 채용할 수도 있는 저 필드 MRI 시스템의 기계적 컴포넌트들의 예들은 하나 이상의 RF 코일들(예컨대, 헤드 코일(head coil)), 환자가 이미징 동안에 배치되는 침대 또는 테이블, 및 휴대용 시스템으로서 구현될 때에 저 필드 MRI 시스템를 위한 제동 디바이스를 포함하지만, 이것으로 제한되지 않는다.
일부 실시형태들에 따르면, 도 2에서 예시된 예시적인 시스템은, 상이한 타입들의 송신/수신 코일들이 해부구조(anatomy)의 상이한 부분들을 이미징하도록 구성된 예를 들어, 송신/수신 코일들로 정 위치에 스냅(snap)되는 것을 허용하는 컴포넌트를 포함할 수도 있다. 이러한 방식으로, 해부구조의 특정한 부분을 위하여 구성된 헤드 코일, 가슴 코일, 팔 코일, 다리 코일, 또는 임의의 다른 코일은 대응하는 이미징 동작을 수행하기 위하여 시스템으로 스냅될 수도 있다. 교환가능한 코일들이 접속(예컨대, 정 위치에 스냅)되는 인터페이스는 코일이 언제 정확하게 부착되었는지를 결정하기 위한 메커니즘을 포함할 수도 있고, 이 정보는 시스템의 조작자에게 통신될 수도 있다. 대안적으로 또는 추가적으로, 송신/수신 코일은 코일이 언제 정확하게 위치되었고 시스템에 결합(예컨대, 정 위치에 스냅)되었는지를 검출할 수 있는 임의의 적당한 타입의 센서로 구성될 수도 있다. 일부 실시형태들에 따르면, 다양한 송신/수신 코일들은 이하에서 더욱 상세하게 논의된 바와 같이, 예를 들어, 코일 타입, 동작 요건들, 시야(field of view), 채널들의 수, 및/또는 시스템에 대한 이용일 수도 있는 다른 정보 중의 임의의 하나 또는 조합을 포함하는 코일에 대한 정보를 저장하는 저장 디바이스 및/또는 마이크로제어기를 포함할 수도 있다. 송신/수신 코일은 시스템에 정확하게 부착될 때에 정보(예컨대, 방송 정보)를 시스템에 자동으로 제공하도록 구성될 수도 있고, 및/또는 송신/수신 코일은 시스템으로부터의 질의에 응답하여 임의의 요청된 정보를 제공하도록 구성될 수도 있다. 양태들이 이 점에서 제한되지 않으므로, 임의의 다른 컴포넌트들은 모든 관련된 기계적 접속들이 정확하게 행해지는지를 확실하게 하기 위하여 검사될 수도 있다.
일부 실시형태들에 따르면, 시스템은 시스템에 접속되는 송신/수신 코일의 타입에 기초하여 스캐닝 프로토콜(scanning protocol)을 자동으로 선택할 수도 있다. 예를 들어, 헤드 코일이 접속되는 것으로 검출될 경우, 시스템은 적당한 헤드 이미징 프로토콜들을 자동으로 선택할 수도 있다. 시스템은 선택을 위하여 그 후에 사용자에게 제시되는 이용가능한 헤드 이미징 프로토콜들의 리스트를 제공할 수도 있다. 대안적으로, 시스템이 추가의 정보(예컨대, 이하에서 더욱 상세하게 논의된 바와 같이, 환자와 연관된 RFID 태그로부터 획득된 정보), 또는 환자 스케줄링 시스템으로부터의 정보를 가질 경우, 시스템은 특정 헤드 이미징 프로토콜을 선택할 수도 있고 대응하는 이미징 절차(예컨대, 스트로크(stroke)에 대하여 검사하기 위한 이미징 절차)를 수행하도록 시스템을 설정할 수도 있다. 유사하게, 다수의 프로토콜들이 제시되고 사용자가 옵션(option)들로부터 선택할 때, 시스템은 대응하는 이미징 절차를 수행하도록 시스템을 설정할 수도 있다. 예들로서, 시스템은 적절한 펄스 시퀀스(들)를 획득(예컨대, 로딩 또는 생성)할 수도 있고, 적절한 콘트라스트 타입(contrast type)을 선택할 수도 있고, 적절한 시야를 선택할 수도 있고, 하나 이상의 스카우트 이미지(scout image)들의 취득을 준비할 수도 있는 등과 같다. 검출된 송신/수신 코일의 타입이 무엇이든지, 시스템은 이용가능한 프로토콜들을 제시할 수도 있고 및/또는 선택되거나 자동으로 식별된 스캐닝 프로토콜을 수행하도록 시스템을 준비시키고 설정할 수도 있다는 것이 인식되어야 한다.
일부 실시형태들에 따르면, 시스템은 시스템의 하나 이상의 컴포넌트들의 위치에 기초하여 스캐닝 프로토콜을 자동으로 선택할 수도 있다. 예를 들어, 시스템은 환자 지지체(예컨대, 침대, 테이블, 또는 의자)의 위치를 검출할 수도 있고, 적당한 이미징 프로토콜을 자동으로 선택할 수도 있거나, 환자의 현재의 위치에 대하여 적당한 이용가능한 이미징 프로토콜들의 리스트를 제시할 수도 있고 및/또는 적절한 이미징 절차를 수행하도록 시스템을 설정할 수도 있다. 양태들이 이 점에서 제한되지 않으므로, 적절한 이미징 프로토콜(들)을 자동으로 선택하는 것 및/또는 다른 자동 설정 활동들을 수행하는 것은 시스템의 다른 컴포넌트들의 위치 및/또는 구성을 검출하는 것에 기초하여 수행될 수도 있다는 것이 인식되어야 한다.
액트(318)에서는, RF 코일의 자동 튜닝이 수행될 수도 있다. 일부 실시형태들은 접속된 RF 코일의 타입을 자동으로 검출하기 위한 기능성을 포함할 수도 있고, RF 코일의 자동 튜닝은 검출되는 접속된 RF 코일의 특정한 타입에 대한 정보에 적어도 부분적으로 기초하여 수행될 수도 있다. 다른 실시형태들은 접속된 RF 코일의 타입을 자동으로 검출하기 위한 기능성을 포함하지 않을 수도 있고, RF 코일의 자동 튜닝은 현재 접속된 코일의 타입에 대한 상호 입력된 정보에 적어도 부분적으로 기초하여 수행될 수도 있다.
접속된 RF 코일의 타입의 자동 검출은 임의의 적당한 방법으로 구현될 수도 있다. 예를 들어, 접속된 RF 코일의 타입은 코일의 커넥터에서의 배선에 적어도 부분적으로 기초할 수도 있다. 또 다른 예로서, 코일에 대한 구성 정보로 프로그래밍된 프로그래밍가능한 저장 디바이스(예컨대, EPROM)는 코일의 부분으로서 포함될 수도 있고, 구성 정보는 코일이 접속될 때, 또는 그 후의 약간 다른 시간에 저 필드 MRI 시스템으로 다운로딩될 수도 있다. 구성 정보는 RF 코일을 식별하는 정보와, RF 코일의 구성 및/또는 교정을 가능하게 하기 위한 임의의 다른 적당한 정보를 포함할 수도 있다. 예를 들어, 위에서 논의된 바와 같이, 코일의 시야(field of view; FOV)에 대한 정보, 코일의 주파수 범위, 코일의 전력 스케일링, 코일을 위한 교정 데이터, 또는 임의의 다른 적당한 정보는 저장 디바이스 상에 저장되 ㄹ수도 있고, 저 필드 MRI 시스템으로 전달될 때, RF 코일을 자동으로 튜닝하기 위하여 이용될 수도 있다. 또 다른 예로서, 접속된 RF 코일은 RF 코일을 특정한 타입인 것으로서 식별하는 RFID 태그를 포함할 수도 있고, 코일의 타입은 RFID 태그에 적어도 부분적으로 기초하여, 저 필드 MRI 시스템에 의해 식별될 수도 있다. RFID 태그는 대응하는 코일에 대한 다른 정보, 예를 들어, 상기에서 설명된 정보 중의 임의의 것을 저장할 수도 있고 제공할 수도 있다. 양태들이 이 점에서 제한되지 않으므로, 능동적으로 또는 수동적으로 중의 어느 하나로 액세스가능한 정보를 저장할 수 있ㄴ느 임의의 타입의 디바이스가 사용될 수도 있다는 것이 인식되어야 한다.
자동 RF 코일 구성의 다양한 양태들은 구성 프로세스 동안에 수집된 데이터에 적어도 부분적으로 기초하여 수행될 수도 있다. 예를 들어, 일부 실시형태들은 테스트 로컬라이저 펄스 시퀀스(test localizer pulse sequence)를 수행함으로써, 그리고 MR 응답을 분석함으로써 이미징하기 이전에 환자의 시야 및/또는 위치를 자동으로 검출하도록 구성될 수도 있다. 구성 프로세스의 속력을 올리기 위하여, 일부 구현예들에서, 이러한 로컬라이저 펄스 시퀀스는 위에서 논의된 바와 같이, 자석이 완전히 워밍 업되기 이전에 수행될 수도 있다. 그 다음으로, 환자 및/또는 저 필드 MRI 시스템의 컴포넌트들에 대한 적절한 조절들은 자석이 워밍 업 하는 동안에 행해질 수도 있다. 그러나, 이 기법들은 시간에 있어서의 임의의 특정한 포인트에 대한 이용을 위하여 제한되지 않으므로, 이러한 펄스 시퀀스들은 자석이 워밍 업 된 후에 인가될 수 있다.
일부 실시형태들에 따르면, 시야 및/또는 중심 위치는 대상자의 공간적 한도를 찾기 위하여 저해상도 이미지를 취득함으로써 결정된다. 대안적으로, 공간적 한도는 대상자들을 통한 신호 투영들을 취득함으로써 획득될 수도 있다. 조절들은 대상자가 시야 내에서 어디에 위치되는지를 검출하는 것에 기초하여 시스템에 대하여 행해질 수도 있거나, 경고 메시지는 대상자가 조절되거나 보상될 수 없는 한도까지 시야의 외부에 있을 경우에 제공될 수도 있다. 하나 이상의 고속 스카우트 이미지들은 시야 및/또는 중심 위치를 이용하여 획득될 수도 있다. 이 스카우트 이미지는 이미징 절차를 가능하게 하기 위한 다수의 방법들로 사용될 수 있다. 예를 들어, 사용자는 스캔 이미지의 희망하는 부분 상에서 박스를 드래그(drag)함으로써, 또는 그렇지 않을 경우에, 이미징 취득을 수행하기 위한 희망하는 영역을 표시하기 위하여 스카우트 이미지를 주석표시(annotate)함으로써 스캔 체적을 선택할 수 있다. 대안적으로, 사용자는 더 높은 또는 전체 해상도 스캔을 수행하기 위한 스캔 체적을 선택하기 위하여 (예컨대, 줌 도구(zoom tool)를 이용하여, 터치 스크린 상의 제스처(gesture)들을 이용하는 등으로) 줌 인(zoom in) 또는 줌 아웃(zoom out) 할 수 있다. 일부 실시형태들에 따르면, 스카우트 이미지는 이미지 상에 중첩된 하나 이상의 수신 코일들의 위치와 함께 디스플레이될 수도 있다. 이 정보는 해부구조의 타겟 부분을 만족스럽게 이미징하기 위하여 환자가 시야 내에 위치되는지를 결정하기 위하여 사용될 수 있다.
일부 실시형태들에 따르면, 공간적 한도는 다른 기법들을 이용하여, 예를 들어, 하나 이상의 광학 카메라들을 이용하여 결정될 수도 있다. 하나 이상의 광학 카메라들로부터 획득된 정보는 환자가 어디에 위치되는지와, 환자가 이미징하기 위하여 적당한 방식으로 위치되는지 여부를 평가하기 위하여 이용될 수 있다.
도 3의 프로세스로 돌아가면, 액트(320)에서는, 자동 시밍(automatic shimming)이 수행된다. 위에서 논의된 바와 같이, 본원에서 설명된 기법들과의 이용을 위한 일부 저 필드 MRI 시스템들은 필드에서의 비균질성들을 참작하도록 B0 필드를 조절하기 위하여 급전될 수도 있는 하나 이상의 심 코일들을 포함한다. 심 코일들을 포함하는 일부 실시형태들에서, B0 필드의 교정은 B0 필드의 균질성을 개선시키기 위하여 심 코일들을 선택적으로 활성화함으로써 유사한 방식으로 수행될 수도 있다. 일부 실시형태들에 따르면, 하나 이상의 센서들은 시스템 특성들(예컨대, 자기장의 균질성, 시스템의 안정성) 및/또는 환경 잡음의 특성들을 결정하기 위하여 이용되고, 센서들로부터의 정보는, B0 자석을 조절하는 것, 동작시키기 위한 하나 이상의 심 코일들을 선택하는 것, 및/또는 하나 이상의 심 코일들의 동작 파라미터들을 선택하는 것을 포함하지만, 이것으로 제한되지 않는, 자기기기의 동작 파라미터들을 조절하는 것에 의해 자기장을 튜닝하기 위하여 이용될 수도 있다.
일부 실시형태들에서, 자동 시밍은 자석이 완전히 워밍 업 한 후에만 수행된다. 다른 실시형태들에서, 자석이 완전히 워밍 업 하기 전에 이미지들을 취득하기 위한 필요에 따라, 자동 시밍은 워밍 업 프로세스 동안에 수행된다. 발명의 양태들이 이 점에서 제한되지 않으므로, 자동 시밍은 사전-정의된 시퀀스를 이용하여, 또는 B0 필드의 측정들에 응답하여 수행될 수도 있다. 추가적으로, 자동 시밍은 시동 시에, 및/또는 저 필드 MRI 시스템이 이용 중인 동안의 임의의 다른 적당한 간격들로 수행될 수도 있다. 동작 동안에 자동 시밍을 주기적으로 또는 연속적으로 이용하는 것에 의한 B0 필드의 동적 조절은 변화하는 성질들, 잡음 레벨들을 갖는 환경들에서, 및/또는 동작 동안에, 또는 자석이 열 균형에 도달하지 않았으므로, 자석 온도가 변동하는 상황들 하에서, 더 높은 품질의 이미지들의 취득을 가능하게 할 수도 있다.
일부 실시형태들에 따르면, 저 필드 MRI 시스템은 저 필드 MRI 시스템에 의해 생성된 자기장들 및/또는 환경에서의 자기장들과 관련하여 로컬 자기장 측정들을 획득하도록 배열된 필드 센서들을 포함할 수도 있다. 이 자기장 측정들은 시스템의 성능을 개선시키기 위한 저 필드 MRI 시스템의 다양한 성질들, 특성들, 및/또는 파라미터들을 동적으로 조절하기 위하여 이용될 수도 있다. 예를 들어, 공간적으로 분산된 필드 센서들의 네트워크는 저 필드 MRI 시스템에 의해 생성된 자기장들의 실시간 특징화(characterization)를 가능하게 하기 위하여 공간에서 알려진 로케이션들에서 배열될 수도 있다. 센서들의 네트워크는 시스템에 대한 임의의 수의 조절들 또는 수정들을 가능하게 하는 정보를 제공하기 위하여 저 필드 MRI 시스템의 로컬 자기장들을 측정할 수 있고, 그 일부 예들은 이하에서 더욱 상세하게 설명된다. 관심 있는 자기장들을 측정할 수 있는 임의의 타입의 센서가 사용될 수도 있다. 자기장 측정들을 이용하는 것에 관련된 개념들이 센서들을 제공하는 타입, 수, 또는 방법으로 제한되지 않으므로, 이러한 센서들은 하나 이상의 라미네이트 패널들 내에서 통합될 수 있거나 별도로 제공될 수도 있다.
일부 실시형태들에 따르면, 센서들의 네트워크에 의해 제공된 측정들은 희망하는 강도 및 균질성의 B0 필드를 제공하기 위하여 적당한 시밍(shimming)의 확립을 가능하게 하는 정보를 제공한다. 위에서 논의된 바와 같이, 임의의 기하구조 및 배열의 임의의 희망하는 수의 심 코일들은 단독으로, 또는 다른 자기적 컴포넌트들과 조합하여 중의 어느 하나로, 라미네이트 패널에서 통합될 수 있어서, 심 코일들의 상이한 조합들은 선택적으로 동작될 수도 있고, 및/또는 희망하는 전력 레벨들에서 동작될 수도 있다. 이와 같이, 저 필드 MRI 시스템이 특정한 환경에서 동작될 때, 필드 센서들의 네트워크로부터의 측정들은 심 코일들의 어떤 조합이 동작을 위하여 선택되어야 하는지와, 및/또는 저 필드 MRI 시스템이 희망하는 강도 및 균질성에서 B0 필드를 생성하도록 자기장들에 영향을 주기 위하여 선택된 심 코일들을 어떤 전력 레벨들에서 동작시킬 것인지를 결정하기 위하여, 예를 들어, B0 자석 및/또는 경사 코일들에 의해 생성된 자기장을 특징화하기 위하여 이용될 수도 있다. B0 필드는 시스템이 사용되고 있는 주어진 로케이션에 대하여 교정될 수 있으므로, 이 기능은 일반적으로 휴대용, 수송가능한, 및/또는 운반가능한 시스템들의 전개를 가능하게 한다.
일부 실시형태들에 따르면, 필드 센서들의 네트워크로부터의 측정들은 시스템의 동작 동안에 동적 시밍을 수행하기 위하여 사용될 수도 있다. 예를 들어, 센서들의 네트워크는 저 필드 MRI 시스템에 의해 생성된 자기장들이 희망하거나 예상된 특성들을 가지거나 가지는 것에 근접하도록(예컨대, 결과적인 B0 필드는 희망하는 필드 강도 및 균질성에서 생성되거나 희망하는 강도 및 균질성에 더 근접함), 하나 이상의 심 코일들을 동적으로 (예컨대, 실시간으로, 실시간에 근접하여, 또는 그렇지 않을 경우에 시스템을 동작시키는 것과 함께) 조절하기 위하여, 및/또는 (예컨대, 하나 이상의 추가적인 심 코일들을 동작시킴으로써, 또는 하나 이상의 심 코일들의 동작을 중단시킴으로써) 심 코일들의 상이한 조합을 동작시키기 위하여 이용될 수 있는 정보를 제공하기 위한 동작 동안에 저 필드 MRI 시스템에 의해 생성된 자기장들을 측정할 수도 있다. 필드 센서들의 네트워크로부터의 측정들은 또한, 자기장 품질(예컨대, B0 필드, 경사 필드들 등)이 희망하는 기준들 또는 메트릭(metric)을 충족시키는 것에 실패한 것을 조작자에게 통지하기 위하여 사용될 수도 있다. 예를 들어, 조작자는 생성되는 B0 필드가 필드 강도 및/또는 균질성에 관한 어떤 요건을 충족시키는 것에 실패할 경우에 경보를 받을 수도 있다.
일부 실시형태들에 따르면, 센서들의 네트워크로부터의 측정들은 저 필드 MRI 스캐너를 동작시키는 것으로부터 획득된 MR 데이터의 재구성 및/또는 프로세싱을 안내하고 및/또는 정정하기 위하여 이용될 수도 있다. 특히, 센서 네트워크에 의해 획득된 실제적인 공간적-시간적(spatial-temporal) 자기장 패턴들은 취득된 MR 데이터로부터 이미지들을 재구성할 때의 지식으로서 이용될 수도 있다. 그 결과, 적당한 이미지들은 그렇지 않을 경우에, 데이터를 취득하고 및/또는 이미지들을 생성하기 위하여 불만족스러울 필드 비균질성의 존재 시에도 재구성될 수도 있다. 따라서, 이미지 재구성을 보조하기 위하여 필드 센서 데이터를 이용하기 위한 기법들은 일부 상황들에서 개선된 이미지들을 획득하는 것과, 필드 강도 및/또는 균질성이 열화되는 환경들 및/또는 상황들에서 저 필드 MRI의 성능을 가능하게 하는 것을 용이하게 한다.
일부 실시형태들에 따르면, 필드 센서들의 네트워크는 시스템 성능(예컨대, 와전류들, 시스템 지연들, 타이밍 등)을 측정하고 정량화하기 위하여 이용될 수도 있고, 및/또는 측정된 로컬 자기장들 등에 기초하여 경사 파형 설계를 가능하게 하기 위하여 이용될 수도 있다. 양태들이 이 점에서 제한되지 않으므로, 필드 센서들의 네트워크로부터 획득된 측정들은 저 필드 MRI를 수행하는 것을 가능하게 하기 위하여 임의의 다른 방식으로 사용될 수도 있다는 것이 인식되어야 한다. 일반적으로 휴대용, 수송가능한, 또는 운반가능한 시스템들에서, MRI 시스템이 전개되는 환경은 일반적으로 알려지지 않을 수도 있고, 차폐되지 않을 수도 있고, 일반적으로 제어되지 않을 수도 있다. 이와 같이, 특정한 환경(자기적 및 그 외의 것)이 주어질 경우에 저 필드 MRI 시스템에 의해 생성된 자기장들을 특징화하기 위한 능력은 광범위한 환경들 및 상황들에서 이러한 시스템들을 전개하기 위한 능력을 가능하게 하여, 시스템들이 주어진 환경에 대하여 최적화되는 것을 허용한다.
일부 실시형태들에 따르면, 저 필드 MRI 시스템에 의해 행해진 하나 이상의 측정들은 위에서 논의된 바와 같이, 필드 센서들의 네트워크를 위한 대체물에 추가하여, 또는 이러한 대체물로서 이용될 수도 있다. 필드 센서들의 네트워크에 의해 행해진 측정들을 대신하여, 저 필드 MRI 시스템에 의해 행해진 MR-기반 측정들의 이용을 대체하는 것은 저 필드 MRI 시스템의 설계를 간략화할 수도 있고, 감소된 비용으로 저 필드 MRI 시스템의 생성을 가능하게 할 수도 있다.
일부 실시형태들에서, 저 필드 MRI 시스템은 시스템이 환자를 이미징하기 위하여 준비되는 것으로 결정하기 이전에, 진단 정보를 중앙집중화된 로케이션(예컨대, 데이터베이스(550)와 연관된 하나 이상의 네트워크화된 접속된 컴퓨터들)으로 전송할 수도 있다. 이러한 방식으로, 저 필드 MRI 시스템은 이미징하기 이전에, 또는 설정, 구성, 및/또는 동작 동안의 임의의 시간에 정보를 교환하기 위하여 클라우드(cloud)에 접속할 수도 있다. 송신된 진단 정보는 중앙집중화된 로케이션에서 분석될 수도 있고, 저 필드 MRI 시스템이 적절하게 기능하고 있는 것으로 결정될 경우, 시스템이 이미징을 위하여 준비되어 있다는 것을 통지하기 위하여, 메시지가 시스템으로 다시 전송될 수도 있다. 그러나, 문제가 송신된 정보를 분석하는 것에 응답하여 검출될 경우, 시스템이 동작 문제를 가질 수도 있다는 것을 표시하는 정보는 시스템으로 다시 전송될 수도 있다. 저 필드 MRI 시스템으로 반환된 정보는 간단한 준비/준비되지 않음 표시, 및 발견될 경우, 검출된 문제의 상세한 분석을 포함하지만, 이것으로 제한되지 않는 임의의 형태를 취할 수도 있다. 일부 실시형태들에서, 저 필드 MRI 시스템으로 다시 송신된 정보는 저 필드 MRI 시스템이 서비스할 필요가 있다는 것을 단지 표시한다.
일부 실시형태들에 따르면, 제공된 진단 정보는 저 필드 MRI 시스템 상에 설치된 소프트웨어의 현재 버전을 포함할 수도 있다. 이 정보로부터, MRI 시스템이 소트웨어의 최신 버전을 이용하여 동작하고 있다는 결정이 행해질 수도 있다. 저 필드 MRI 시스템 상에 설치된 소프트웨어의 현재 버전이 최신이 아닌 것으로 결정될 경우, MRI 시스템으로 다시 전송된 정보는 소프트웨어가 업데이트되어야 한다는 표시를 포함할 수도 있다. 일부 실시형태들에서, 저 필드 MRI 시스템을 동작시키기 위한 능력은 소프트웨어 업데이트의 중요도에 기초하여 한정될 수도 있다. 일부 실시형태들에 따르면, 소프트웨어의 최신 버전은 시스템이 소프트웨어의 가장 최신 버전을 이용하고 있지 않고 및/또는 과거 및/또는 그렇지 않을 경우에, 오래된 소프트웨어를 이용하여 동작하고 있는 것으로 검출될 때, 시스템을 동적으로 업데이트하기 위하여 클라우드 접속된 컴퓨터로부터 다운로딩될 수도 있다.
일부 실시형태들은 콘솔이 MRI 시퀀스들이 희망하는 품질 및 해상도의 이미지들을 생성하기 위하여 이용되는 방법을 조절하는 것을 가능하게 함으로써, MRI 시스템의 동적 구성을 제공하도록 구성될 수도 있다. 기존의 MRI 콘솔들은 사용자가 그 후에, 하나 이상의 이미지들을 재구성하도록 프로세싱되는 MR 데이터를 취득하기 위하여 이용되는 사전-프로그래밍된 MRI 펄스 시퀀스를 선택하게 함으로써 전형적으로 동작한다. 그 다음으로, 의사는 결과적인 하나 이상의 이미지들을 해독할 수도 있다. 발명자들은 사전-프로그래밍된 MRI 펄스 시퀀스들을 이용하여 MRI 시스템들을 동작시키는 것이 희망하는 품질의 이미지를 생성함에 있어서 효과적이지 않을 수도 있다는 것을 인지하였고 인식하였다. 따라서, 일부 실시형태들에서, 사용자는 취득하기 위한 이미지의 타입을 규정할 수도 있고, 콘솔은 초기 이미징 파라미터들에 대하여 결정하는 것으로 태스크를 할당받을 수도 있어서, 스캔이 수신된 MR 데이터를 분석하는 것에 기초하여 희망하는 타입의 이미지들을 제공하도록 진행할 때에 파라미터들을 임의적으로 업데이트할 수도 있다. 연산 피드백에 기초하여 이미징 파라미터들을 동적으로 조절하는 것은 "푸시-버튼(push-button)" MRI 시스템의 개발을 가능하게 하고, 여기서, 사용자는 희망하는 이미지 또는 응용을 선택할 수 있고, MRI 시스템은 취득 동안에 획득된 MR 데이터에 기초하여 동적으로 최적화될 수도 있는 희망하는 이미지를 취득하기 위하여 이용된 이미징 파라미터들의 세트에 대해 판단할 수 있다.
도 3의 프로세스로 돌아가면, 액트(322)에서는, 외부 전자 디바이스들(예컨대, 도 5에서 예시된 외부 전자 디바이스(585))이 검출될 수도 있다. 발명자들은 저 필드 MRI 시스템들의 이용이 환자들, 의료 종사자들, 및 다른 사람들이 이러한 디바이스들이 고 필드 MRI 시스템들에 밀접하게 인접하게 위치될 때에 발생하는 안전성 유려들 없이 MRI 시스템에 밀접하게 인접하게 전자 디바이스들(460)을 가지고 이용하는 것을 허용한다는 것을 인지하였다. 외부 전자 디바이스들의 하나의 이러한 클래스는 저 필드 환경들에서 안전하게 이용될 수도 있는 웨어러블 전자기기들(예컨대, 스마트시계들, 센서들, 모니터들 등)이다. 웨어러블 전자기기들은 저 필드 MRI 시스템을 이용한 이미지들의 취득을 가능하게 할 수도 있는 환자 데이터를 저장할 수도 있고 및/또는 검출할 수도 있다. 따라서, 일부 실시형태들은 이러한 전자 디바이스들의 존재를 자동으로 검출하고, 이미징 데이터를 취득함에 있어서의 이용을 위하여, 환자 데이터(예컨대, 심박수, 호흡률, 신장, 중량, 나이, 환자 식별자 등)를 저 필드 MRI 시스템으로 다운로딩한다. 예를 들어, 환자 데이터는 특정한 개인의 환자-특정 데이터에 기초하여 데이터 취득 프로세스를 맞춤화하기 위한 하나 이상의 데이터 취득 파라미터들(예컨대, 펄스 시퀀스들)을 게이팅(gating)하거나 수정하기 위하여 이용될 수도 있다.
환자 데이터는 또한, 가능한 펄스 시퀀스들 또는 동작 파라미터들의 세트로부터 저 필드 MRI 시스템의 적절한 펄스 시퀀스들 또는 다른 동작 파라미터들을 선택하기 위하여 이용될 수도 있다. 대안적으로, 환자 데이터는 저 필드 MRI 시스템에 의한 이미징을 개선시키기 위한 임의의 다른 목적을 위하여 이용될 수도 있다. 예를 들어, 웨어러블 전자 디바이스로부터 수신된 심박수 데이터 및/또는 호흡률 데이터는 환자 모션에 의해 야기된 모션 아티팩트(motion artifact)들을 완화하고 및/또는 정정하기 위하여 이용될 수도 있다. 게다가, 심박수 또는 호흡률과 같은 생릭학적 데이터는 이미징 프로세스를 위한 동기화 정보를 제공하기 위하여 이용될 수도 있다. 웨어러블 전자 디바이스들은 그 예들이 알려져 있는 임의의 적당한 무선 탐색 기법을 이용하여 임의의 적당한 방법으로 검출될 수도 있다.
웨어러블 디바이스는 인구통계학적 정보, 환자에 대한 건강 정보(예컨대, 환자가 심장 박동기(pacemaker), 임플란트 등을 가지는지 여부), 환자를 위한 이미징 프로토콜에 관한 정보 등과 같은 환자 데이터를 포함하는 RFID 태그를 포함할 수도 있다. 이 정보는 적절한 프로토콜에 따라 이미징을 수행하도록 시스템을 자동으로 준비하고 및/또는 설정하기 위하여 시스템에 의해 이용될 수도 있다. 예를 들어, 시스템은 희망하는 이미징 절차를 위하여, 시스템이 적절하게 구성되는 것(예컨대, 정확한 송신/수신 코일이 시스템에 접속되고, 침대가 적절한 위치에 있는 것 등)을 확실하게 하기 위하여 하나 이상의 검사들을 수행할 수도 있고, 적절한 펄스 시퀀스를 선택할 수도 있고, 시스템의 하나 이상의 파라미터들을 자동으로 구성할 수도 있고, 하나 이상의 스카우트 이미지들을 취득하도록 준비할 수도 있고, 및/또는 희망하는 프로토콜에 따라 이미지(들)를 획득하기 위하여 준비하기 위한 임의의 다른 적당한 절차를 자동으로 수행할 수도 있다. RFID 태그로부터 획득된 정보는 콘트라스트 작용제 타입, 양 등, 취득된 이미지들의 목적지(예컨대, PACS, 클라우드, 원격-방사선사, 중앙집중화된 서버 등), 및/또는 이미징 절차를 가능하게 하는 임의의 다른 정보를 포함하지만, 이것으로 제한되지 않는 임의의 다른 정보를 포함할 수도 있다.
환자 및/또는 희망하는 이미징 절차에 대한 정보를 자동으로 획득하는 것이 임의의 특정한 기법에 대한 이용을 위하여 제한되지 않으므로, 상기 설명된 정보 중의 임의의 것은 바 코드 또는 병원 태그를 스캐닝하는 것, 또는 스마트 폰 또는 웨어러블 디바이스와 같은 환자의 이동 디바이스 상에서 이용가능한 정보를 획득하는 것과 같이, 시스템이 다른 기법들을 이용함으로써 획득될 수도 있다는 것이 인식되어야 한다. 예를 들어, 환자의 이동 디바이스(예컨대, 스마트 폰, 웨어러블 디바이스 등)는 이미징 프로토콜 및/또는 이미징 절차를 자동으로 설정하는 양태들을 통지할 수 있는 정보를 획득하기 위하여 액세스될 수도 있고 사용될 수도 있는 건강 정보, 진단 정보, 또는 다른 정보를 포함할 수도 있다.
발명자들은 또한, 일부 외부 전자 디바이스들(예컨대, 이동 컴퓨팅 디바이스)이 저 필드 MRI 시스템의 다양한 동작 양태들을 제어하기 위하여 이용될 수도 있다는 것을 인지하였다. 예를 들어, 전용 콘솔로부터 저 필드 MRI 시스템을 제어할 것을 건강관리 전문가에게 요구하는 것이 아니라, 일부 실시형태들은 스마트폰 또는 태블릿 컴퓨터와 같은 외부 전자 디바이스가 저 필드 MRI 시스템의 동작을 제어하는 것을 허용할 수도 있다. 전자 디바이스는, 저 필드 MRI 시스템의 범위 내에 있을 때, 전자 디바이스의 사용자가 시스템의 적어도 일부 동작들을 제어하는 것을 가능하게 하는 제어 명령들로(예컨대, 제어 애플리케이션을 이용하여) 프로그래밍될 수도 있다. 따라서, 본원에서 설명된 기법들의 일부에 따른 이용을 위한 일부 저 필드 MRI 시스템들은 저 필드 MRI 시스템의 적어도 일부 동작들을 원격으로 제어하기 위하여 이용될 수 있는 외부 전자 디바이스들의 존재를 자동으로 검출하도록 구성될 수도 있다. 추가적으로, 외부 전자 디바이스 상에 설치된 하나 이상의 애플리케이션들은 또한, 디바이스를 이용하는 건강관리 전문가가 PACS(560) 상에 저장된 하나 이상의 이미지들을 액세스하고 시청하는 것을 가능하게 하는 명령들을 포함할 수도 있다.
위에서 논의된 바와 같이, 이미징 절차는 사용자의 이동 디바이스, 원격-방사선사에 대해 로컬인 컴퓨터, 시스템에서의 로컬 및/또는 통합된 컴퓨터 등을 포함하는 임의의 수의 로컬 또는 원격 디바이스들을 이용하여 제어될 수도 있다. 발명자들은 어떤 디바이스가 사용되든지, 사용자 인터페이스 기능성이 조사 프로세스를 가능하게 하도록 구현될 수도 있다는 것을 인식하였다. 예를 들어, 조사 프로세스 동안, 관심 있는 영역들은 하나 이상의 스카우트 이미지들을 통해, 또는 하나 이상의 더 높은 해상도 이미지들을 통해 선택될 수도 있고, 추가적인 스캔들은 관심 있는 선택된 영역들에 대응하는 추가의 이미지들을 취득하도록 자동으로 수행될 수도 있다. 일부 실시형태들에 따르면, 로컬 사용자 및/또는 원격-방사선사를 보조하기 위하여, 대상자의 이전에 획득된 이미지들이 디스플레이될 수도 있고, 및/또는 예상된 또는 건강한 해부구조/조직의 기준 이미지들이 디스플레이될 수도 있다. 이전에 획득된 이미지들은 이례적인 영역들을 식별하거나, (예컨대, 치료의 효험을 결정하기 위하여) 환자에서의 변화들을 모니터링하거나, 또는 그렇지 않을 경우에 진단 보조를 제공하기 위한 비교로서 이용될 수도 있다. 기준 이미지들은 비정상적인 해부구조, 이례적인 조직을 식별하는 것을 보조하기 위하여, 및/또는 기준들 이미지들에 의해 특징화된 바와 같은 예상으로부터 이탈하는 임의의 다른 조건을 식별하기 위하여 이용될 수도 있다.
발명자들은 획득된 이미지들에 대한 자동 분석이 다양한 이벤트들, 발생들, 또는 조건들을 검출하기 위하여 수행될 수도 있다는 것을 추가로 인식하였다. 예를 들어, 하나 이상의 영역들에서의 열악한 이미지 품질이 검출될 수도 있고, 갭들을 채우기 위한 추가의 이미지 데이터를 취득하기 위하여 획득된 적절한 펄스 시퀀스들은 신호-대-잡음 비율을 증가시키고 및/또는 그렇지 않을 경우에, 더 높은 품질의 이미지 데이터를 획득하고 및/또는 선택된 영역들에서 이미지 품질을 개선시킨다. 또 다른 예로서, 취득된 이미지들은 언제 타겟 해부구조가 취득된 이미지들에서 적절하게 캡처되지 않는지를 검출하기 위하여, 그리고 추가의 이미징이 수행될 필요가 있을 수도 있다는 것을 사용자에게 경고하기 위하여 분석될 수도 있다.
위에서 논의된 도 3의 구성 동작들은 초기 시스템 시동 동안에 저 필드 MRI 시스템을 구성하는 상황에서 주로 설명되었다. 그러나, 구성 동작들 중의 하나 이상은 추가적으로 또는 대안적으로, 저 필드 MRI 시스템의 동작 동안에 자동으로 수행될 수도 있다는 것이 인식되어야 한다. 예로서, 자석의 온도는 위에서 설명된 바와 같이, 온도 센서를 이용하여, 또는 자석의 전압을 측정함으로써 시스템 동작 동안에 모니터링될 수도 있다. 자석 전압/온도는 또한, 열 관리 시스템의 컴포넌트들(예컨대, 펌프들, 팬들 등)이 적절하게 작동하고 있는지 여부를 평가하기 위하여, 동작 동안에 모니터링될 수도 있다. 추가적으로, 열 관리 시스템의 하나 이상의 컴포넌트들은 저 필드 MRI 시스템의 컴포넌트들이 희망하는 대로 적절하게 냉각되고 있다는 것을 보장하기 위하여, 저 필드 MRI 시스템의 동작 동안에 직접적으로 모니터링될 수도 있다.
동작 동안에 저 필드 MRI 시스템의 전력 소비를 감소시키기 위하여, 시스템의 콘솔 상에서 실행되는 제어 애플리케이션은 사용자 활동에 대하여 모니터링할 수도 있다. 사용자 활동이 특정한 시간량(예컨대, 30 분, 1 시간) 동안에 검출되지 않을 때, 저 필드 MRI 시스템은 전력 소비, 및/또는 장비의 유효 수명을 단축시킬 수 있는 컴포넌트들에 대한 동작 부담을 감소시키기 위하여 저전력 모드에 자동으로 진입할 수도 있다. 일부 실시형태들에 따르면, 저 필드 MRI 시스템은 사용자 비활동의 상이한 상태들을 나타내는 다수의 저전력 모드들을 가질 수도 있고, 저 필드 MRI 시스템은 사용자 활동을 검출하지 않을 시에 완전히 셧 다운(shut down)하는 것이 아니라, 상이한 저전력 모드들 사이에서 전환할 수도 있다. 예를 들어, 저 필드 MRI 시스템은 3 개의 저전력 모드들을 가지도록 구성될 수도 있고, 그 각각은 자석을 희망하는 전력 및 온도에서 유지하는 상이한 상태에 대응한다. 짧은 시간의 주기(예컨대, 30 분) 동안의 사용자 비활동의 검출 시에, 자석은 자석에 제공된 전류가 전력 소비를 감소시키기 위하여 약간 감소되는 "가벼운" 저전력 모드에 자동으로 진입할 수도 있다. 사용자 비활동이 더 긴 시간의 주기(예컨대, 1 시간) 동안에 검출될 경우, 자석은 "중간" 저전력 모드로 자동으로 전환할 수도 있고, 여기서, 자석에 제공된 전류는 더 적은 전력을 소비하기 위하여 더욱 감소된다. 사용자 비활동이 훨씬 더 긴 시간의 주기(예컨대, 4 시간) 동안에 검출될 경우, 자석은 "깊은" 저전력 모드로 자동으로 전환할 수도 있고, 여기서, 자석에 제공된 전류는 더 적은 전력 자원들을 소비하기 위하여 훨씬 더 감소된다.
자석이 상이한 저전력 모드들에서 냉각되므로, 열 관리 시스템의 컴포넌트들(예컨대, 팬들, 펌프들)은 이에 따라 조절될 수도 있다. 3 개의 상이한 저전력 모드들이 위에서 설명되지만, (제로 또는 하나의 저전력 모드를 포함하는) 임의의 적당한 수의 저전력 모드들이 대안적으로 이용될 수도 있다는 것이 인식되어야 한다. 게다가, 위에서 주어진 시간 주기들은 단지 예시적이고, 임의의 시간 주기는 저전력 모드로의 전환을 트리거링하기 위한 기초로서 역할을 할 수 있다. 또한, 저전력 모드로의 자동화된 전환은 임의의 특정한 타입의 트리거로 제한되지 않으므로, 시스템의 다른 양태가 모니터링될 수도 있고, 및/또는 다른 이벤트들은 저전력 모드로의 전환을 트리거링하기 위하여 이용될 수도 있다.
일부 실시형태들에 따르면, 사용자는 자동화된 프로세스들(예컨대, 사용자 비활동의 검출)에 의존하는 것이 아니라, 자석을 저전력 모드로 설정하기 위하여 제어 애플리케이션과 상호작용할 수도 있다. 저전력 모드로부터 저 필드 MRI 시스템의 정상 동작으로의 복귀는 콘솔 상의 제어 애플리케이션을 통해(예컨대, 사용자가 콘솔 상의 사용자 인터페이스 제어에 관여함), 저 필드 MRI 시스템과 통신하는 외부 전자 디바이스를 통해, 또는 임의의 다른 적당한 방법으로 제어 명령을 수신하는 것과 같이, 사용자 활동의 검출에 응답하여 개시될 수도 있다.
발명자들은 B0 필드의 극성이 일정하게 유지될 경우에, 저 필드 MRI 시스템 그?@? 환경에서의 객체들이 자화된 상태로 될 수도 있고, 환경에서의 객체들의 자화는 B0 필드에서의 왜곡들(예컨대, 오프셋)을 야기시킬 수도 있어서, 더 열악한 이미지 품질로 귀착된다는 것을 인지하였다. 환경 객체들을 역자화(demagnetize)하는 것은 객체에서의 자화가 감소되는 소자 프로세스(degaussing process)를 수행하는 것을 포함할 수도 있다. 일부 실시형태들은 그 효과들을 처리하는 것이 아니라, 자화의 소스를 감소시키는 것에 관한 것이다. 예를 들어, 일부 저 필드 MRI 시스템들은 주변 환경에서 객체들의 자화를 방지하기 위하여 B0 필드의 극성을 (예컨대, 하루에 한 번) 스위칭하도록 구성될 수도 있다. B0 필드의 극성이 주기적으로 스위칭되는 실시형태들에서, 위에서 설명된 자동 시밍 프로세스는 정확한 시밍을 수행하기 위하여 B0 필드의 현재의 극성을 참작할 수도 있다.
일부 실시형태들에 따르면, 강자성 컴포넌트들은 추가적인 전력을 요구하거나 감소된 양의 전력을 이용하여 동일한 B0 필드를 생성하지 않으면서, B0 자석의 필드 강도를 증가시키기 위하여 이용된다. 이러한 강자성 컴포넌트들은 저 필드 MRI 시스템을 동작시키는 결과로서 자화된 상태로 될 수도 있고, 상대적으로 급속하게 그렇게 행할 수도 있음으로써, 바람직하지 않은 방법들(즉, 의도된 것과는 상이하게) B0 필드를 교란시킬 수도 있다. 따라서, 상기 설명된 소자 기법들(예컨대, B0 자석의 극성을 스위칭하는 것)은 B0 필드 및 결과적으로, 저 필드 MRI 시스템의 동작에 악영향을 주는 것으로부터 강자성 컴포넌트들의 자화를 방지하기 위하여 이용될 수도 있다.위에서 논의된 바와 같이, 저 필드 MRI는 고 필드 MRI, 예를 들어, 상대적은 낮은-비용, 감소된 풋프린트(footprint), 및/또는 일반적으로 휴대용 또는 수송가능한 MRI 시스템들의 상황에서 일반적으로 실현가능하지 않은 MRI 시스템들의 설계 및 전개를 가능하게 한다.
개시물에서 기재된 기술의 몇몇 양태들 및 실시형태들을 이와 같이 설명하였지만, 다양한 변경들, 수정들, 및 개선들이 당해 분야의 당업자들에게 용이하게 발생할 것이라는 것이 인식되어야 한다. 이러한 변경들, 수정들, 및 개선들은 본원에서 설명된 기술의 사상 및 범위 내에 있도록 의도된다. 예를 들어, 당해 분야의 당업자들은 기능을 수행하고 및/또는 결과들 및/또는 본원에서 설명된 장점들 중의 하나 이상을 획득하기 위한 다양한 다른 수단들 및/또는 구조들을 용이하게 구상할 것이고, 이러한 변동들 및/또는 수정들의 각각은 본원에서 설명된 실시형태들의 범위 내에 있도록 간주된다. 당해 분야의 당업자들은 본원에서 설명된 특정 실시형태들에 대한 다수의 등가물들을 인지할 것이고, 이 등가물들을 단지 일상적인 실험을 이용하여 확인할 수 있을 것이다. 그러므로, 상기한 실시형태들은 단지 예로서 제시되고, 첨부된 청구항들 및 그것에 대한 등가물들의 범위 내에서, 발명의 실시형태들은 구체적으로 설명된 것 외에 이와 다르게 실시될 수도 있다는 것이 이해되어야 한다. 게다가, 본원에서 설명된 2 개 이상의 특징들, 시스템들, 물품들, 재료들, 키트들, 및/또는 방법들의 임의의 조합은, 이러한 특징들, 시스템들, 물품들, 재료들, 키트들, 및/또는 방법들이 상호 불일치하지 않을 경우, 본 개시물의 범위 내에 포함된다.
상기 설명된 실시형태들은 많은 방법들 중의 임의의 것으로 구현될 수 있다. 프로세스들 또는 방법들의 수행을 수반하는 본 개시물의 하나 이상의 양태들 및 실시형태들은 프로세스들 또는 방법들을 수행하거나, 프로세스들 또는 방법들의 수행을 제어하기 위하여 디바이스(예컨대, 컴퓨터, 프로세서, 또는 다른 디바이스)에 의해 실행가능한 프로그램 명령들을 사용할 수도 있다. 이 점에서, 다양한 발명 개념들은, 하나 이상의 컴퓨터들 또는 다른 프로세서들 상에서 실행될 때, 위에서 설명된 다양한 실시형태들 중의 하나 이상을 구현하는 방법들을 수행하는 하나 이상의 프로그램들로 인코딩된 컴퓨터 판독가능 저장 매체(또는 다수의 컴퓨터 판독가능 저장 매체들)(예컨대, 컴퓨터 메모리, 하나 이상의 플로피 디스크들, 컴팩트 디스크들, 광학 디스크들, 자기 테이프들, 플래시 메모리들, 필드 프로그래밍가능 게이트 어레이들 또는 다른 반도체 디바이스들에서의 회로 구성들, 또는 다른 유형의(tangible) 컴퓨터 저장 매체)로서 구체화될 수도 있다. 컴퓨터 판독가능 매체 또는 매체들은 수송가능할 수 있어서, 그 위에 저장된 프로그램 또는 프로그램들은 위에서 설명된 양태들의 다양한 것들을 구현하기 위하여 하나 이상의 상이한 컴퓨터들 또는 다른 프로세서들 상으로 로딩될 수 있다. 일부 실시형태들에서, 컴퓨터 판독가능 매체들은 비-일시적 매체들일 수도 있다.
용어들 "프로그램" 또는 "소프트웨어"는 위에서 설명된 바와 같은 다양한 양태들을 구현하도록 컴퓨터 또는 다른 프로세서를 프로그래밍하기 위하여 채용될 수 있는 임의의 타입의 컴퓨터 코드 또는 컴퓨터-실행가능 명령들의 세트를 지칭하기 위하여 일반적인 의미로 본원에서 이용된다. 추가적으로, 하나의 양태들에 따르면, 실행될 때, 본 개시물의 방법들을 수행하는 하나 이상의 컴퓨터 프로그램들은 단일 컴퓨터 또는 프로세서 상에 상주할 필요가 없지만, 본 개시물의 다양한 양태들을 구현하기 위하여 다수의 상이한 컴퓨터들 또는 프로세서들 사이에 모듈 방식으로 분산될 수도 있다는 것이 인식되어야 한다.
컴퓨터-실행가능 명령들은 하나 이상의 컴퓨터들 또는 다른 디바이스들에 의해 실행된, 프로그램 모듈들과 같은 다수의 형태들로 되어 있을 수도 있다. 일반적으로, 프로그램 모듈들은, 특정한 태스크들을 수행하거나 특정한 추상 데이터 타입(abstract data type)들을 구현하는 루틴들, 프로그램들, 오브젝트들, 컴포넌트들, 데이터 구조들 등을 포함한다. 전형적으로, 프로그램 모듈들의 기능성은 다양한 실시형태들에서 희망하는 대로 조합될 수도 있거나 분산될 수도 있다.
또한, 데이터 구조들은 임의의 적당한 형태로 컴퓨터-판독가능 매체들에서 저장될 수도 있다. 예시의 간략함을 위하여, 데이터 구조들은 데이터 구조에서 로케이션을 통해 관련되는 필드들을 가지도록 도시될 수도 있다. 이러한 관계들은 필드들 사이의 관계를 전달하는 컴퓨터-판독가능 매체에서의 로케이션들로 필드들을 위한 저장을 배정함으로써 마찬가지로 달성될 수도 있다. 그러나, 임의의 적당한 메커니즘은 데이터 엘리먼트들 사이의 관계를 확립하는 포인터(pointer)들, 태그(tag)들, 또는 다른 메커니즘들의 이용을 통하는 것을 포함하여, 데이터 구조의 필드들에서의 정보 사이의 관계를 확립하기 위하여 이용될 수도 있다.
소프트웨어로 구현될 때, 소프트웨어 코드는 단일 컴퓨터에서 제공되든지, 또는 다수의 컴퓨터들 사이에서 분산되든지 간에, 임의의 적당한 프로세서 또는 프로세서들의 집합 상에서 실행될 수 있다.
또한, 컴퓨터는 비-제한적인 예들로서, 랙-장착형 컴퓨터, 데스크톱 컴퓨터, 랩톱 컴퓨터, 태블릿 컴퓨터와 같은 다수의 형태들 중의 임의의 것으로 구체화될 수도 있다는 것이 인식되어야 한다. 추가적으로, 컴퓨터는 개인 정보 단말(PDA), 스마트폰, 또는 임의의 다른 적당한 휴대용 또는 고정식 전자 디바이스를 포함하는, 컴퓨터로서 일반적으로 간주되는 것이 아니라, 적당한 프로세싱 기능들을 갖는 디바이스에서 구체화될 수도 있다.
또한, 컴퓨터는 하나 이상의 입력 및 출력 디바이스들을 가질 수도 있다. 이 디바이스들은 그 중에서도, 사용자 인터페이스를 제시하기 위하여 이용될 수 있다. 사용자 인터페이스를 제공하기 위하여 이용될 수 있는 출력 디바이스들의 예들은 출력의 시각적 제시를 위한 프린터들 또는 디스플레이 스크린들과, 출력의 청각적 제시를 위한 다른 사운드 생성 디바이스들을 포함한다. 사용자 인터페이스를 위하여 이용될 수 있는 입력 디바이스들의 예들은 키보드들과, 마우스들, 터치 패드들, 및 디지털화 태블릿들과 같은 포인팅 디바이스들을 포함한다. 또 다른 예로서, 컴퓨터는 음식 인식을 통해 다른 청각 포맷들로 입력 정보를 수신할 수도 있다.
이러한 컴퓨터들은 기업 네트워크와 같은 로컬 영역 네트워크 또는 광역 네트워크, 및 지능형 네트워크(intelligent network; IN) 또는 인터넷을 포함하는 임의의 적당한 형태로 하나 이상의 네트워크들에 의해 상호접속될 수도 있다. 이러한 네트워크들은 임의의 적당한 기술에 기초할 수도 있고, 임의의 적당한 프로토콜에 따라 동작할 수도 있고, 무선 네트워크들, 유선 네트워크들, 또는 광섬유 네트워크들을 포함할 수도 있다.
또한, 설명된 바와 같이, 일부 양태들은 하나 이상의 방법들로서 구체화될 수도 있다. 방법의 일부로서 수행된 액트(act)들은 임의의 적당한 방법으로 순서화될 수도 있다. 따라서, 예시적인 실시형태들에서 순차적인 액트들로서 도시되더라도, 일부 액트들을 동시에 수행하는 것을 포함할 수도 있는, 예시된 것과는 상이한 순서로 액트들이 수행되는 실시형태들이 구성될 수도 있다.
본원에서 정의되고 이용된 바와 같은 모든 정의들은 사전적 정의들, 참조로 편입된 문서들에서의 정의들, 및/또는 정의된 용어들의 정상적인 의미들에 대해 통제하는 것으로 이해되어야 한다.
상세한 설명 및 청구항들에서 본원에서 이용된 바와 같은 부정 관사들 "a" 및 "an"은 반대로 명확하게 표시되지 않으면, "적어도 하나(at least one)"를 의미하는 것으로 이해되어야 한다.
상세한 설명 및 청구항들에서 본원에서 이용된 바와 같은 어구 "및/또는(and/or)"은 그렇게 결합된 엘리먼트들, 즉, 일부 경우들에는 결합하여 존재하고 다른 경우들에는 분리되어 존재하는 엘리먼트들의 "어느 하나 또는 양자(either or both)"를 의미하는 것으로 이해되어야 한다. "및/또는"으로 열거된 다수의 엘리먼트들은 동일한 방식으로, 즉, 그렇게 결합된 엘리먼트들의 "하나 이상(one or more)"으로 해석되어야 한다. 구체적으로 식별된 그 엘리먼트들에 관련되든지 관련되지 않든지 간에, "및/또는" 절(clause)에 의해 구체적으로 식별된 엘리먼트들 이외에, 다른 엘리먼트들이 임의적으로 존재할 수도 있다. 이에 따라, 비-제한적인 예로서, "A 및/또는 B"에 대한 참조는, "포함하는(comprising)"과 같은 개방-종료형 언어(open-ended language)와 함께 이용될 때, 하나의 실시형태에서 오직 A(임의적으로, B 이외의 엘리먼트들을 포함함); 또 다른 실시형태에서, 오직 B(임의적으로, A 이외의 엘리먼트들을 포함함); 또 다른 실시형태에서, A 및 B 양자(임의적으로, 다른 엘리먼트들을 포함함); 등을 지칭할 수 있다.
상세한 설명 및 청구항들에서 본원에서 이용된 바와 같이, 어구 "적어도 하나"는, 하나 이상의 엘리먼트들의 리스트를 참조하여, 엘리먼트들의 리스트 내에서 구체적으로 열거된 각각 및 모든 엘리먼트의 적어도 하나를 반드시 포함하지 않고, 엘리먼트들의 리스트에서 엘리먼트들의 임의의 조합들을 제외하지 않는, 엘리먼트들의 리스트에서의 엘리먼트들 중의 임의의 하나 이상로부터 선택된 적어도 하나의 엘리먼트를 의미하도록 이해되어야 한다. 이 정의는 또한, 구체적으로 식별된 그 엘리먼트들에 관련되든지 관련되지 않든지 간에, 어구 "적어도 하나"가 지칭하는 엘리먼트들의 리스트 내에서 구체적으로 식별된 엘리먼트들 이외에, 엘리먼트들이 임의적으로 존재할 수도 있다는 것을 허용한다. 이에 따라, 비-제한적인 예로서, "A 및 B 중의 적어도 하나(at least one of A and B)"(또는 등가적으로, "A 또는 B 중의 적어도 하나(at least one of A or B)", 또는 등가적으로, "A 및/또는 B 중의 적어도 하나(at least one of A and/or B)")는 하나의 실시형태에서, B가 존재하지 않는, 하나를 초과하는 것을 임의적으로 포함하는 적어도 하나의 A(그리고 임의적으로, B 이외의 엘리먼트들을 포함함); 또 다른 실시형태에서, A가 존재하지 않는, 하나를 초과하는 것을 임의적으로 포함하는 적어도 하나의 B(그리고 임의적으로, A 이외의 엘리먼트들을 포함함); 또 다른 실시형태에서, 하나를 초과하는 것을 임의적으로 포함하는 적어도 하나의 A, 및 하나를 초과하는 것을 임의적으로 포함하는 적어도 하나의 B(그리고 임의적으로, 다른 엘리먼트들을 포함함); 등을 지칭할 수 있다.
또한, 본원에서 이용된 어법 및 용어는 설명의 목적을 위한 것이고, 제한하는 것으로서 간주되지 않아야 한다. "포함하는(including)", "포함하는(comprising)", 또는 "가지는(having)", "포함하는(containing)", "수반하는(involving)", 및 본원에서의 그 변동들의 이용은 그 후에 열거된 항목들 및 그 등가물들뿐만 아니라, 추가적인 항목들도 망라하는 것으로 의도된다.
청구항들에서 뿐만 아니라, 상기 상세한 설명에서도, "포함하는(comprising)", "포함하는(including)", "반송하는(carrying)", "가지는(having)", "포함하는(containing)", "수반하는(involving)", "보유하는(holding)", "구성되는(composed of)" 등등과 같은 모든 연결 어구들은 개방-종료형인 것으로, 즉, 포함하지만 그것으로 제한되지 않는 것을 의미하는 것으로 이해되어야 한다. 오직 연결 어구들 "구성되는(consisting of)" 및 "필수적으로 구성되는(consisting essentially of)"은 각각 폐쇄형 또는 반-폐쇄형 연결 어구들일 것이다.
Claims (127)
- B0 자석과, 동작 동안에 상기 B0 자석으로부터 열을 멀리 전달하도록 구성된 적어도 하나의 열 관리 컴포넌트를 포함하는 자기 공명 이미징 시스템을 동작시키는 방법으로서,
동작 전력을 상기 B0 자석에 제공하는 단계;
상기 B0 자석의 현재 온도를 결정하기 위하여 상기 B0 자석의 온도를 모니터링하는 단계; 및
적어도 하나의 이벤트의 발생에 응답하여, 상기 적어도 하나의 열 관리 컴포넌트를 동작 용량 미만에서 동작시키는 단계
를 포함하는 자기 공명 이미징 시스템을 동작시키는 방법. - 제 1 항에 있어서,
상기 B0 자석의 온도를 모니터링하는 단계는, 상기 온도를 모니터링하기 위하여 온도 센서를 이용하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 1 항에 있어서,
상기 B0 자석의 온도를 모니터링하는 단계는, 상기 B0 자석과 연관된 전압을 측정하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 1 항에 있어서,
상기 적어도 하나의 이벤트의 발생은 상기 자기 공명 이미징 시스템에 전력 공급하는 것을 포함하고, 상기 적어도 하나의 열 관리 컴포넌트를 동작 용량 미만에서 동작시키는 단계는 이미징을 위하여 준비되어야 할 상기 B0 자석을 위하여 필요한 시간을 감소시키는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 1 항에 있어서,
상기 적어도 하나의 이벤트의 발생은 저전력 모드로의 전환을 포함하는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 1 항에 있어서,
상기 적어도 하나의 열 관리 컴포넌트는 상기 B0 자석의 상기 현재 온도가 제 1 문턱 값 미만인 동안에 동작 용량 미만에서 동작되는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 6 항에 있어서,
상기 제 1 문턱 값은 열 균형 및/또는 상기 B0 자석의 B0 필드 안정성에 대응하는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 1 항에 있어서,
상기 적어도 하나의 이벤트의 발생은 상기 자기 공명 이미징 시스템이 지정된 시간량 동안에 아이들(idle)인 것을 포함하는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 1 항에 있어서,
상기 적어도 하나의 열 관리 컴포넌트가 저전력 모드에서 전력 소비를 감소시키기 위하여 동작 용량 미만에서 동작되는 동안에, 감소된 전류의 양을 이용하여 상기 B0 자석을 동작시키는 단계
를 더 포함하는, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 1 항에 있어서,
상기 적어도 하나의 열 관리 컴포넌트가 동작 용량 미만에서 동작하고 있는 동안에, 적어도 하나의 이미지를 취득하는 단계
를 더 포함하는, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 10 항에 있어서,
상기 자기 공명 이미징 시스템의 적어도 하나의 파라미터에서의 변동들을 결정하는 단계를 더 포함하고, 적어도 하나의 이미지를 취득하는 단계는, 상기 적어도 하나의 파라미터에서의 상기 결정된 변동들을 보상하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 11 항에 있어서,
상기 적어도 하나의 파라미터는 상기 B0 자석의 라모어 주파수(Larmor frequency) 및/또는 상기 B0 필드에 의해 생성된 상기 B0 필드의 균질성(homogeneity)인 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 11 항에 있어서,
상기 적어도 하나의 파라미터에서의 변동들을 결정하는 단계는, 상기 B0 자석의 상기 현재 온도에 적어도 부분적으로 기초하여 변동들을 결정하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 13 항에 있어서,
상기 B0 자석의 온도를 모니터링하는 단계는, 상기 B0 자석과 연관된 전압을 측정하는 단계를 포함하고, 적어도 하나의 파라미터에서의 변동들을 결정하는 단계는, 상기 B0 자석의 상기 측정된 전압에 적어도 부분적으로 기초하여 상기 변동들을 결정하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 1 항에 있어서,
상기 자기 공명 이미징 시스템은 적어도 하나의 경사 코일을 더 포함하고, 상기 방법은 상기 적어도 하나의 이벤트의 상기 발생에 응답하여 상기 적어도 하나의 경사 코일의 동작 상태를 수정하는 단계를 더 포함하는, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 15 항에 있어서,
상기 적어도 하나의 경사 코일의 동작 상태를 수정하는 단계는, 동작 전력을 상기 적어도 하나의 경사 코일에 제공하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 15 항에 있어서,
상기 적어도 하나의 경사 코일의 동작 상태를 수정하는 단계는, 상기 적어도 하나의 경사 코일에 제공된 동작 전력을 감소시키는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동작시키는 방법. - 제 1 항에 있어서,
저 필드 자기 공명 이미징을 위하여 적당한 B0 필드의 적어도 부분을 생성하기 위하여 상기 B0 자석을 동작시키는 단계
를 더 포함하는, 자기 공명 이미징 시스템을 동작시키는 방법. - 자기 공명 이미징 시스템으로서,
B0 필드의 적어도 부분을 제공하도록 구성된 B0 자석;
동작 동안에 상기 B0 자석으로부터 열을 멀리 전달하도록 구성된 적어도 하나의 열 관리 컴포넌트; 및
적어도 하나의 프로세서
를 포함하고, 상기 적어도 하나의 프로세서는,
상기 B0 자석의 현재 온도를 결정하기 위하여 상기 B0 자석의 온도를 모니터링하고;
적어도 하나의 이벤트의 발생에 응답하여, 상기 적어도 하나의 열 관리 컴포넌트를 동작 용량 미만에서 동작시키도록 프로그래밍된 것인, 자기 공명 이미징 시스템. - 제 19 항에 있어서,
적어도 하나의 경사 코일을 더 포함하고, 상기 적어도 하나의 프로세서는 상기 B0 자석의 상기 현재 온도에 적어도 부분적으로 기초하여 상기 적어도 하나의 경사 코일의 동작 상태를 제어하도록 추가로 프로그래밍되는 것인, 자기 공명 이미징 시스템. - 제 19 항에 있어서,
B1 필드를 제공하도록 구성된 적어도 하나의 라디오 주파수 코일을 더 포함하고, 상기 적어도 하나의 프로세서는 상기 자석의 상기 현재 온도에 적어도 부분적으로 기초하여 상기 적어도 하나의 라디오 주파수 코일의 동작 상태를 제어하도록 추가로 프로그래밍되는 것인, 자기 공명 이미징 시스템. - 제 19 항에 있어서,
적어도 하나의 심 코일(shim coil)을 더 포함하고, 상기 적어도 하나의 프로세서는 상기 B0 자석의 상기 현재 온도에 적어도 부분적으로 기초하여 상기 적어도 하나의 심 코일의 동작 상태를 제어하도록 추가로 프로그래밍되는 것인, 자기 공명 이미징 시스템. - 제 19 항에 있어서,
상기 B0 자석은 저 필드 자기 공명 이미징을 위하여 적당한 B0 필드를 제공하도록 구성되는 것인, 자기 공명 이미징 시스템. - 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법으로서,
상기 B0 필드에 기여하는 B0 자석에 의해 생성된 제 1 자기장을 검출하는 단계; 및
상기 자기 공명 이미징 시스템에 의해 생성된 상기 B0 필드를 조절하기 위하여 상기 희망하는 제 1 자기장에 기초하여 제 2 자기장을 생성하기 위한 적어도 하나의 심 코일을 선택적으로 동작시키는 단계
를 포함하는, 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법. - 제 24 항에 있어서,
상기 검출된 제 1 자기장에 기초하여 상기 제 2 자기장에 대한 필드 강도를 결정하는 단계
를 더 포함하는, 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법. - 제 24 항에 있어서,
상기 적어도 하나의 심 코일을 선택적으로 동작시키는 단계는, 상기 검출된 제 1 자기장에 기초하여 결정된 개개의 필드 강도에서 복수의 심 코일들의 각각을 선택적으로 동작시키는 단계를 포함하는 것인, 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법. - 제 24 항에 있어서,
상기 제 1 자기장을 검출하는 단계는 상기 B0 자석이 워밍 업(warm up) 하고 있는 동안에 상기 자기 공명 이미징 시스템의 전력-공급 시에 수행되는 것인, 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법. - 제 24 항에 있어서,
상기 제 1 자기장을 검출하는 단계는 상기 B0 자석이 열 균형을 달성하기 이전에 수행되는 것인, 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법. - 제 24 항에 있어서,
상기 제 1 자기장을 검출하는 단계는 상기 자기 공명 이미징 시스템이 적어도 하나의 이미지를 취득하도록 동작된 후에 수행되는 것인, 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법. - 제 29 항에 있어서,
상기 적어도 하나의 심 코일을 선택적으로 동작시키는 단계는, 상기 제 2 자기장을 생성하기 위하여 상기 적어도 하나의 심 코일에 의해 생성된 상기 필드 강도를 조절하는 단계를 포함하는 것인, 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법. - 제 30 항에 있어서,
상기 적어도 하나의 심 코일에 의해 생성된 상기 필드 강도를 조절하는 단계는 상기 B0 자석의 열 드리프트를 보상하기 위하여 수행되는 것인, 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법. - 제 24 항에 있어서,
상기 B0 자석 및 상기 적어도 하나의 심 코일은 저 필드 자기 공명 이미징을 위하여 적당한 B0 자기장에 적어도 부분적으로 기초하여 생성하도록 구성되는 것인, 자기 공명 이미징 시스템에 의해 생성된 B0 필드를 동적으로 조절하는 방법. - 자기 공명 이미징 시스템으로서,
B0 필드에 기여하는 제 1 자기장을 제공하도록 구성된 B0 자석;
복수의 심 코일들;
상기 B0 자석이 동작될 때에 상기 제 1 자기장을 검출하도록 배열된 적어도 하나의 센서; 및
상기 자기 공명 이미징 시스템에 의해 생성된 상기 B0 필드를 조절하기 위하여, 상기 적어도 하나의 센서에 의해 검출된 상기 제 1 자기장에 기초하여 제 2 자기장을 생성하기 위한 상기 복수의 심 코일들 중의 적어도 하나를 선택적으로 동작시키도록 구성된 적어도 하나의 제어기
를 포함하는, 자기 공명 이미징 시스템. - 제 33 항에 있어서,
상기 적어도 하나의 제어기는 상기 적어도 하나의 센서에 의해 검출된 상기 제 1 자기장에 기초하여 상기 제 2 자기장에 대한 필드 강도를 결정하도록 구성되는 것인, 자기 공명 이미징 시스템. - 제 33 항에 있어서,
상기 적어도 하나의 제어기는 상기 적어도 하나의 센서에 의해 검출된 상기 제 1 자기장에 기초하여 결정된 개개의 필드 강도에서 상기 복수의 심 코일들의 각각을 선택적으로 동작시키도록 구성되는 것인, 자기 공명 이미징 시스템. - 제 33 항에 있어서,
상기 적어도 하나의 센서는 상기 B0 자석이 워밍 업 하는 동안에 상기 자기 공명 이미징 시스템의 전력 공급 시에 상기 제 1 자기장을 검출하도록 동작되는 것인, 자기 공명 이미징 시스템. - 제 33 항에 있어서,
상기 적어도 하나의 센서는 상기 B0 자석이 열 균형을 달성하기 이전에 상기 제 1 자기장을 검출하도록 동작되는 것인, 자기 공명 이미징 시스템. - 제 33 항에 있어서,
상기 적어도 하나의 센서는 상기 자기 공명 이미징 시스템이 적어도 하나의 이미지를 획득하도록 동작된 후에 상기 제 1 자기장을 검출하도록 동작되는 것인, 자기 공명 이미징 시스템. - 제 38 항에 있어서,
상기 제어기는는 상기 제 2 자기장을 생성하기 위하여 상기 복수의 심 코일들 중의 상기 적어도 하나에 의해 생성된 상기 필드 강도를 조절함으로써 상기 복수의 심 코일들 중의 상기 적어도 하나를 선택적으로 동작시키도록 구성되는 것인, 자기 공명 이미징 시스템. - 제 39 항에 있어서,
상기 제어기는 상기 B0 자석의 열 드리프트를 보상하기 위하여 상기 복수의 심 코일들 중의 상기 적어도 하나에 의해 생성된 상기 필드 강도를 조절하도록 구성되는 것인, 자기 공명 이미징 시스템. - 제 33 항에 있어서,
상기 B0 자석 및 상기 복수의 심 코일들 중의 상기 적어도 하나는 저 필드 자기 공명 이미징을 위하여 적당한 B0 자기장에 적어도 부분적으로 기초하여 생성하도록 구성되는 것인, 자기 공명 이미징 시스템. - B0 필드를 적어도 부분적으로 생성하도록 구성된 B0 자석을 포함하는 자기 공명 이미징 시스템에 인접한 대상물을 소자하는 방법으로서,
제 1 극성으로 상기 B0 자석을 동작시키는 단계; 및
상기 제 1 극성과 반대인 제 2 극서으로 상기 B0 자석을 주기적으로 동작시키는 단계
를 포함하는, 자기 공명 이미징 시스템에 인접한 대상물을 소자하는 방법. - 제 42 항에 있어서,
상기 B0 자석은 저 필드 자기 공명 이미징에서의 이용을 위하여 적당한 B0 필드의 적어도 일부를 생성하도록 구성되는 것인, 자기 공명 이미징 시스템에 인접한 대상물을 소자하는 방법. - 제 42 항에 있어서,
상기 B0 자석은 제 1 시간 간격 동안에 상기 제 1 극성으로 동작되는 것인, 자기 공명 이미징 시스템에 인접한 대상물을 소자하는 방법. - 제 44 항에 있어서,
상기 B0 자석은 상기 제 1 시간 간격과 기간에 있어서 대략 동일한 제 2 시간 간격 동안에 상기 제 2 극성으로 동작되는 것인, 자기 공명 이미징 시스템에 인접한 대상물을 소자하는 방법. - 제 45 항에 있어서,
상기 B0 자석은 상기 제 1 시간 간격 동안의 상기 제 1 극성에 의한 동작과, 상기 제 2 시간 간격 동안의 상기 제 2 극성에 의한 동작 사이에서 교대하는 것인, 자기 공명 이미징 시스템에 인접한 대상물을 소자하는 방법. - 제 42 항에 있어서,
상기 B0 자석이 상기 제 1 극성 또는 상기 제 2 극성으로 동작되는지 여부에 따라, 상기 제 1 극성 또는 상기 제 2 극성으로 적어도 하나의 심 코일을 동작시키는 단계
를 더 포함하는, 자기 공명 이미징 시스템에 인접한 대상물을 소자하는 방법. - 인접한 대상물을 소자하도록 구성된 자기 공명 이미징 시스템으로서,
B0 필드를 적어도 부분적으로 제공하도록 구성된 B0 자석; 및
제 1 극성으로 상기 B0 자석을 동작시키고, 상기 제 1 극성과 반대인 제 2 극성으로 상기 B0 자석을 주기적으로 동작시키도록 구성된 제어기
를 포함하는, 자기 공명 이미징 시스템. - 제 48 항에 있어서,
상기 B0 자석은 저 필드 자기 공명 이미징에서의 이용을 위하여 적당한 B0 필드의 적어도 일부를 생성하도록 구성되는 것인, 자기 공명 이미징 시스템. - 제 48 항에 있어서,
상기 제어기는 제 1 시간 간격 동안에 상기 제 1 극성으로 상기 B0 자석을 동작시키도록 구성되는 것인, 자기 공명 이미징 시스템. - 제 50 항에 있어서,
상기 제어기는 상기 제 1 시간 간격과 기간에 있어서 대략 동일한 제 2 시간 간격 동안에 상기 제 2 극성으로 상기 B0 자석을 동작시키도록 구성되는 것인, 자기 공명 이미징 시스템. - 제 51 항에 있어서,
상기 제어기는 상기 제 1 시간 간격 동안에 상기 제 1 극성으로 상기 B0 자석을 동작시키는 것과, 상기 제 2 시간 간격 동안에 상기 제 2 극성으로 상기 B0 자석을 동작시키는 것 사이에서 교대하도록 구성되는 것인, 자기 공명 이미징 시스템. - 제 48 항에 있어서,
적어도 하나의 심 코일
을 더 포함하고,
상기 제어기는 상기 제어기가 상기 제 1 극성 또는 상기 제 2 극성으로 상기 B0 자석을 동작시키고 있는지 여부에 따라, 상기 제 1 극성 또는 상기 제 2 극성으로 상기 적어도 하나의 심 코일을 동작시키도록 구성되는 것인, 자기 공명 이미징 시스템. - 임의적인 환경에서의 이용을 위한 자기 공명 이미징 시스템을 동적으로 구성하는 방법으로서,
자기 공명 이미징을 수행하는 것에 대한 적어도 하나의 장애물을 식별하는 단계; 및 상기 식별된 적어도 하나의 장애물에 적어도 부분적으로 기초하여 적어도 하나의 치유 액션을 자동으로 수행하는 단계
를 포함하는, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 54 항에 있어서,
적어도 하나의 장애물을 식별하는 단계는, 상기 자기 공명 이미징 시스템의 상기 환경에서 적어도 하나의 잡음 소스를 식별하는 단계를 포함하고, 적어도 하나의 치유 액션을 수행하는 단계는, 상기 적어도 하나의 식별된 잡음 소스에 적어도 부분적으로 기초하여 적어도 하나의 치유 액션을 수행하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 55 항에 있어서,
상기 적어도 하나의 잡음 소스를 식별하는 단계는, 상기 환경에서 또 다른 자기 공명 이미징 시스템을 검출하는 단계를 포함하고, 상기 적어도 하나의 치유 액션을 수행하는 단계는, 상기 자기 공명 이미징 시스템들 사이의 간섭을 감소시키거나 제거하기 위하여 적어도 하나의 동작 파라미터를 협상하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 56 항에 있어서,
상기 적어도 하나의 동작 파라미터를 협상하는 단계는, 함께 동작하기 위한 상기 자기 공명 이미징 시스템들의 각각에 대한 개개의 상이한 라모어 주파수 및/또는 B0 필드 강도를 선택하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 55 항에 있어서,
상기 적어도 하나의 치유 액션을 수행하는 단계는, 상기 식별된 적어도 하나의 잡음 소스를 조작자에게 통지하는 경보를 제공하고 및/또는 상기 식별된 적어도 하나의 잡음 소스를 자동으로 보상하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 55 항에 있어서,
상기 적어도 하나의 치유 액션을 수행하는 단계는, 상기 자기 공명 이미징 시스템이 상기 검출된 잡음 환경에서 동작할 수 없다는 통지를 제공하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 55 항에 있어서,
상기 적어도 하나의 치유 액션을 수행하는 단계는, 상기 식별된 적어도 하나의 잡음 소스에 대한 정보를 조작자에게 제공하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 60 항에 있어서,
정보를 조작자에게 제공하는 단계는, 상기 식별된 적어도 하나의 잡음 소스의 타입 및/또는 로케이션에 대한 정보를 제공하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 54 항에 있어서,
상기 자기 공명 이미징 시스템은 저 필드 자기 공명 이미징 시스템인 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 62 항에 있어서,
상기 적어도 하나의 치유 액션은,
상대적으로 저 잡음 주파수 범위를 식별하는 것; 및
상기 식별된 주파수 범위에서 동작하도록 저 필드 자기 공명 이미징 디바이스를 구성하는 것
을 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 63 항에 있어서,
상기 저 필드 자기 공명 이미징 시스템을 구성하는 것은,
상기 식별된 주파수 범위에서 상기 저 필드 자기 공명 이미징 시스템의 동작을 허용하기 위하여, 자기장을 생성하도록 B0 자석 및/또는 적어도 하나의 심 코일을 구성하는 것; 및
상기 식별된 주파수 범위에서 동작하도록 적어도 하나의 송신/수신 코일을 구성하는 것
을 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 62 항에 있어서,
상기 방법은 상기 저 필드 자기 공명 이미징 시스템의 시동 시에 수행되는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 62 항에 있어서,
상기 방법은 저전력 모드로부터 동작 모드로 전환할 시에 수행되는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 62 항에 있어서,
적어도 하나의 장애물을 식별하는 단계는, 상기 저 필드 자기 공명 이미징 시스템의 상기 적어도 하나의 컴포넌트에서 단락 회로를 검출하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 62 항에 있어서,
적어도 하나의 장애물을 식별하는 단계는, 상기 저 필드 자기 공명 이미징 시스템의 상기 적어도 하나의 컴포넌트에서 개방 회로를 검출하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 62 항에 있어서,
적어도 하나의 장애물을 식별하는 단계는, 동작 전력을 상기 저 필드 자기 공명 이미징 시스템의 상기 적어도 하나의 컴포넌트들에 제공하는 전력 공급 장치의 안정성을 결정하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 62 항에 있어서,
적어도 하나의 장애물을 식별하는 단계는, 상기 저 필드 자기 공명 이미징 시스템이 접속되는 전원의 적어도 하나의 특성을 결정하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 70 항에 있어서,
전원의 적어도 하나의 특성을 결정하는 단계는, 상기 전원의 배선 구성을 결정하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 70 항에 있어서,
상기 전원의 적어도 하나의 특성을 결정하는 단계는, 상기 전원에 의해 제공된 전압을 측정하는 것, 상기 전원에 의해 제공된 전류에서 잡음 레벨을 측정하는 것, 및 상기 전원의 배선이 예상된 대로 구성되는지 여부를 결정하는 것으로 구성되는 그룹으로부터 선택된 동작을 수행하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 제 62 항에 있어서,
적어도 하나의 장애물을 식별하는 단계는, 라디오 주파수 코일이 상기 저 필드 자기 공명 이미징 시스템에 동작가능하게 결합되는지 여부를 결정하는 단계를 포함하고, 상기 적어도 하나의 치유 액션은, 라디오 주파수 코일이 상기 저 필드 자기 공명 이미징 시스템에 동작가능하게 결합되지 않는 것으로 결정될 때에 경보를 제공하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 동적으로 구성하는 방법. - 상이한 타입들의 라디오 주파수 코일들이 동작가능하게 결합될 수 있는 컴포넌트를 가지는 자기 공명 이미징 시스템을 구성하는 방법으로서,
라디오 주파수 코일이 상기 자기 공명 이미징 시스템의 상기 컴포넌트에 동작가능하게 결합되는지 여부를 검출하는 단계;
상기 라디오 주파수 코일이 상기 자기 공명 이미징 시스템의 상기 컴포넌트에 동작가능하게 결합되는 것으로 결정하는 것에 응답하여 상기 라디오 주파수 코일에 대한 정보를 결정하는 단계; 및
상기 라디오 주파수 코일에 대한 상기 정보에 적어도 부분적으로 기초하여 상기 라디오 주파수 코일로 동작하도록 상기 자기 공명 이미징 시스템을 구성하기 위하여 적어도 하나의 액션을 자동으로 수행하는 단계
를 포함하는, 자기 공명 이미징 시스템을 구성하는 방법. - 제 74 항에 있어서,
상기 라디오 주파수 코일이 상기 적어도 하나의 컴포넌트에 동작가능하게 결합될 때에 상기 적어도 하나의 코일의 적어도 하나의 전기적 성질 및/또는 적어도 하나의 기계적 성질을 검출하는 것에 적어도 부분적으로 기초하여, 상기 라디오 주파수 코일에 대한 정보의 적어도 일부를 결정하는 단계
를 더 포함하는, 자기 공명 이미징 시스템을 구성하는 방법. - 제 74 항에 있어서,
적어도 하나의 액션을 수행하는 단계는, 상기 라디오 주파수 코일에 대한 상기 정보에 적어도 부분적으로 기초하여 상기 라디오 주파수 코일로 동작하도록 상기 자기 공명 이미징 시스템의 적어도 하나의 컴포넌트를 자동으로 구성하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 구성하는 방법. - 제 74 항에 있어서,
상기 라디오 주파수 코일에 대한 정보를 결정하는 단계는, 상기 라디오 주파수 코일로부터 정보를 자동으로 획득하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 구성하는 방법. - 제 77 항에 있어서,
상기 라디오 주파수 코일로부터의 정보는 코일 타입, 동작 요건들, 시야, 및/또는 이용가능한 채널들의 수에 대한 정보를 포함하는 것인, 자기 공명 이미징 시스템을 구성하는 방법. - 제 76 항에 있어서,
상기 적어도 하나의 컴포넌트를 자동으로 구성하는 단계는, 상기 라디오 주파수 코일을 자동으로 튜닝하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 구성하는 방법. - 제 77 항에 있어서,
상기 라디오 주파수 코일은 상기 라디오 주파수 코일에 대한 정보를 가지는, 그것에 결합된 저장 디바이스를 포함하는 것인, 자기 공명 이미징 시스템을 구성하는 방법. - 제 80 항에 있어서,
상기 저장 디바이스는 상기 라디오 주파수 코일을 위한 구성 정보로 프로그래밍된 프로그래밍가능한 저장 디바이스를 포함하는 것인, 자기 공명 이미징 시스템을 구성하는 방법. - 제 80 항에 있어서,
상기 저장 디바이스는 상기 라디오 주파수 코일에 대한 정보를 저장하는 RFID 태그를 포함하는 것인, 자기 공명 이미징 시스템을 구성하는 방법. - 제 80 항에 있어서,
상기 저장 디바이스는 상기 라디오 주파수 코일에 결합된 마이크로제어기의 일부인 것인, 자기 공명 이미징 시스템을 구성하는 방법. - 제 74 항에 있어서,
적어도 하나의 액션을 수행하는 단계는, 상기 라디오 주파수 코일을 이용하여 이용가능한 적어도 하나의 이미징 절차를 적어도 하나의 조작자에 의한 선택을 위하여 제시하는 단계를 포함하는 것인, 자기 공명 이미징 시스템을 구성하는 방법. - 제 74 항에 있어서,
상기 자기 공명 이미징 시스템은 저 필드 자기 공명 이미징 시스템인 것인, 자기 공명 이미징 시스템을 구성하는 방법. - 자기 공명 이미징 시스템으로서,
B0 필드의 적어도 부분을 제공하도록 구성된 B0 자석;
상이한 타입들의 라디오 주파수 코일들이 동작가능하게 결합될 수 있는 컴포넌트; 및
적어도 하나의 제어기
를 포함하고, 상기 적어도 하나의 제어기는,
라디오 주파수 코일이 상기 자기 공명 이미징 시스템의 상기 컴포넌트에 동작가능하게 결합되는지 여부를 검출하고;
상기 라디오 주파수 코일이 상기 자기 공명 이미징 시스템의 상기 컴포넌트에 동작가능하게 결합되는 것으로 결정하는 것에 응답하여 상기 라디오 주파수 코일에 대한 정보를 결정하고;
상기 라디오 주파수 코일에 대한 상기 정보에 적어도 부분적으로 기초하여 상기 라디오 주파수 코일로 동작하도록 상기 자기 공명 이미징 시스템을 구성하기 위하여 적어도 하나의 액션을 자동으로 수행하도록 구성된 것인, 자기 공명 이미징 시스템. - 제 86 항에 있어서,
상기 B0 자석은 저 필드 자기 공명 이미징을 위하여 적당한 B0 필드의 적어도 부분을 제공하도록 구성되는 것인, 자기 공명 이미징 시스템. - 자기 공명 이미징 시스템이 하나 이상의 외부 컴퓨팅 디바이스들과 통신하는 것을 허용하는 적어도 하나의 통신 인터페이스를 포함하는 저 필드 자기 공명 이미징 시스템을 동작시키는 방법으로서,
상기 저 필드 자기 공명 이미징 시스템의 적어도 하나의 프로세서에 의해, 적어도 하나의 외부 컴퓨팅 디바이스와의 접속을 개시하는 단계; 및
상기 적어도 하나의 프로세서를 이용하여 상기 적어도 하나의 외부 컴퓨팅 디바이스와 정보를 교환하는 단계
를 포함하는, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 88 항에 있어서,
상기 적어도 외부 컴퓨팅 디바이스는 이동 컴퓨팅 디바이스를 포함하고, 정보를 교환하는 단계는, 상기 이동 컴퓨팅 디바이스로부터 상기 자기 공명 이미징 시스템의 동작을 가능하게 하는 정보를 상기 이동 컴퓨팅 디바이스에 제공하는 단계를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 89 항에 있어서,
상기 자기 공명 이미징 시스템은 상기 자기 공명 이미징 시스템의 타입 및/또는 기능에 관한 정보를 상기 이동 컴퓨팅 디바이스에 제공하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 89 항에 있어서,
상기 자기 공명 이미징 시스템은 상기 자기 공명 이미징 시스템에 관한 상태를 상기 이동 컴퓨팅 디바이스에 제공하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 91 항에 있어서,
상기 자기 공명 이미징 시스템은 상기 자기 공명 이미징 시스템이 동작을 위하여 준비되어 있다는 표시를 상기 이동 컴퓨팅 디바이스에 제공하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 91 항에 있어서,
상기 자기 공명 이미징 시스템은 상기 자기 공명 이미징 시스템을 동작시키는 것에 대한 적어도 하나의 장애물에 관한 정보를 상기 이동 컴퓨팅 디바이스에 제공하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 91 항에 있어서,
상기 적어도 하나의 장애물에 관한 상기 정보는 상기 자기 공명 이미징 시스템에 의해 검출된 적어도 하나의 잡음 소스, 상기 자기 공명 시스템 내에서 검출된 개방 및/또는 단락 회로, 하나 이상의 누락된 컴포넌트들의 검출, 및/또는 시동 및/또는 워밍-업 절차가 완료되지 않았다는 표시 중의 적어도 하나를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 89 항에 있어서,
적어도 하나의 이미지 취득 프로세스를 수행하기 위하여 상기 이동 컴퓨팅 디바이스로부터 명령들을 수신하는 단계
를 더 포함하는, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 95 항에 있어서,
상기 이동 컴퓨팅 디바이스는 사용자가 상기 자기 공명 이미징 시스템을 동작시키는 것을 허용하는 인터페이스를 포함하고, 상기 방법은 적어도 하나의 이미지를 취득하기 위하여, 상기 이동 컴퓨팅 디바이스 상의 상기 인터페이스를 통해 상기 자기 공명 이미징 시스템을 동작시키는 단계를 더 포함하는, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 89 항에 있어서,
상기 이동 컴퓨팅 디바이스는 태블릿을 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 89 항에 있어서,
상기 이동 디바이스는 스마트 폰인 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 89 항에 있어서,
상기 이동 컴퓨팅 디바이스는 웨어러블 디바이스인 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 99 항에 있어서,
정보를 교환하는 단계는, 착용자의 적어도 하나의 생리학적 파라미터를 상기 웨어러블 디바이스로부터 수신하는 단계를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 100 항에 있어서,
상기 적어도 하나의 생리학적 파라미터는 심박수, 심장 박동 및/또는 심장 사이클의 표시, 및/또는 호흡 사이클의 표시를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 88 항에 있어서,
상기 적어도 하나의 외부 컴퓨팅 디바이스는 적어도 하나의 다른 저 필드 자기 공명 이미징 시스템의 적어도 하나의 프로세서를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 102 항에 있어서,
정보를 교환하는 단계는, 상기 적어도 하나의 다른 저 필드 자기 공명 이미징 시스템과 적어도 하나의 동작 파라미터를 교환하는 단계를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 103 항에 있어서,
정보를 교환하는 단계는, 상기 적어도 하나의 다른 저 필드 자기 공명 이미징 시스템과의 간섭을 회피하기 위하여 적어도 하나의 동작 파라미터를 협상하는 단계를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 102 항에 있어서,
상기 접속을 개시하는 단계는, 적어도 하나의 네트워크를 통한 상기 적어도 하나의 다른 저 필드 자기 공명 이미징 시스템으로의 접속을 개시하는 단계를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 102 항에 있어서,
상기 접속을 개시하는 단계는, 디바이스-대-디바이스 통신을 통한 상기 적어도 하나의 다른 저 필드 자기 공명 이미징 시스템으로의 접속을 개시하는 단계를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 88 항에 있어서,
상기 적어도 하나의 외부 컴퓨팅 디바이스는 적어도 하나의 네트워크를 통해 액세스가능한 원격 서버를 포함하고, 접속을 개시하는 단계는, 상기 적어도 하나의 네트워크를 통해 상기 원격 서버로 접속하는 단계를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 107 항에 있어서,
상기 원격 서버는 복수의 저 필드 자기 공명 이미징 시스템들에 대한 정보를 저장하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 108 항에 있어서,
상기 원격 서버는 상기 복수의 저 필드 자기 공명 이미징 시스템들의 활동 및/또는 상기 복수의 저 필드 자기 공명 이미징 시스템들 사이의 활동을 조정하도록 구성되는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 제 107 항에 있어서,
정보를 교환하는 단계는, 상기 자기 공명 이미징 시스템의 동작 시에 이용된 정보를 상기 원격 서버로부터 수신하는 단계를 포함하는 것인, 저 필드 자기 공명 이미징 시스템을 동작시키는 방법. - 저 필드 자기 공명 이미징 시스템으로서,
저 필드에서의 동작을 위하여 구성된 적어도 하나의 자기적 컴포넌트;
상기 저 필드 자기 공명 이미징 시스템이 하나 이상의 외부 컴퓨팅 디바이스와 통신하는 것을 허용하는 적어도 하나의 통신 인터페이스; 및
적어도 하나의 프로세서
를 포함하고, 상기 적어도 하나의 프로세서는,
적어도 하나의 외부 컴퓨팅 디바이스와의 접속을 개시하고;
상기 적어도 하나의 프로세서를 이용하여 상기 적어도 하나의 외부 컴퓨팅 디바이스와 정보를 교환하도록 구성된 것인, 저 필드 자기 공명 이미징 시스템. - 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법으로서,
상기 자기 공명 이미징 시스템에 접속된 라디오 주파수 코일의 타입 및/또는 환자 지지체의 위치를 검출하는 단계; 및
검출된 라디오 주파수 코일의 상기 타입 및/또는 상기 환자 지지체의 상기 위치에 적어도 부분적으로 기초하여 적어도 하나의 설정 프로세스를 자동으로 수행하는 단계
를 포함하는, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 112 항에 있어서,
상기 적어도 하나의 설정 프로세스를 수행하는 단계는 이미징 프로토콜을 선택하는 단계를 포함하는 것인, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 113 항에 있어서,
이미징 프로토콜을 선택하는 단계는, 대응하는 펄스 시퀀스를 로딩하는 단계를 포함하는 것인, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 112 항에 있어서,
상기 적어도 하나의 설정 프로세스를 수행하는 단계는, 선택을 위하여 적어도 하나의 이미징 프로토콜을 제시하는 단계를 포함하는 것인, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 112 항에 있어서,
라디오 주파수 식별 태그, 바 코드, 병원 태그, 및/또는 이동 디바이스로부터 환자에 대한 정보를 자동으로 획득하는 단계
를 더 포함하는, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 116 항에 있어서,
적어도 하나의 설정 프로세스를 수행하는 단계는, 상기 획득된 정보에 적어도 부분적으로 기초하여 적어도 하나의 설정 프로세스를 수행하는 단계를 포함하는 것인, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 116 항에 있어서,
정보를 획득하는 단계는, 이동 디바이스로부터 정보를 획득하는 단계를 포함하는 것인, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 118 항에 있어서,
상기 이동 디바이스는 스마트 폰인 것인, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 118 항에 있어서,
상기 이동 컴퓨팅 디바이스는 웨어러블 디바이스인 것인, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 112 항에 있어서,
적어도 하나의 스카우트 이미지를 취득하는 단계
를 더 포함하는, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 121 항에 있어서,
디스플레이를 위하여 상기 적어도 하나의 스카우트 이미지를 제시하고 디스플레이된 상기 적어도 하나의 스카우트 이미지를 통해 희망하는 스캔 체적의 표시를 수신하는 단계
를 더 포함하는, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 112 항에 있어서,
이미지 취득 시퀀스를 수행하는 단계
를 더 포함하는, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 123 항에 있어서,
상기 이미지 취득 시퀀스 동안, 관심 있는 영역을 표시하는 정보를 사용자로부터 수신하고, 관심 있는 영역에 대응하는 추갖거인 시퀀스들을 자동으로 수행하는 단계
를 더 포함하는, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 123 항에 있어서,
상기 이미지 취득 시퀀스를 통해 취득된 적어도 하나의 자기 공명 데이터의 열악한 품질을 자동으로 검출하고, 상기 적어도 일부 자기 공명 데이터에 대응하는 추가의 자기 공명 데이털르 획득하기 위한 하나 이상의 펄스 시퀀스들을 자동으로 생성하는 단계
를 더 포함하는, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 123 항에 있어서,
사용자 인터페이스 상에서 적어도 하나의 기준 이미지를 제시하는 단계
를 더 포함하는, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법. - 제 126 항에 있어서,
상기 적어도 하나의 기준 이미지는 상기 환자의 적어도 하나의 이전에 취득된 이미지를 포함하는 것인, 자기 공명 이미징 시스템의 환경에서 자동 설정을 보조하는 방법.
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462046814P | 2014-09-05 | 2014-09-05 | |
| US62/046,814 | 2014-09-05 | ||
| US201562110049P | 2015-01-30 | 2015-01-30 | |
| US62/110,049 | 2015-01-30 | ||
| US201562111320P | 2015-02-03 | 2015-02-03 | |
| US62/111,320 | 2015-02-03 | ||
| US201562174666P | 2015-06-12 | 2015-06-12 | |
| US62/174,666 | 2015-06-12 | ||
| PCT/US2015/048484 WO2016037030A1 (en) | 2014-09-05 | 2015-09-04 | Automatic configuration of a low field magnetic resonance imaging system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170048558A true KR20170048558A (ko) | 2017-05-08 |
Family
ID=55437316
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177009312A KR20170048577A (ko) | 2014-09-05 | 2015-09-04 | 자기 공명 이미징을 위한 강자성 증강 |
| KR1020177008944A KR20170052621A (ko) | 2014-09-05 | 2015-09-04 | 잡음 억제 방법 및 장치 |
| KR1020177009185A KR20170048560A (ko) | 2014-09-05 | 2015-09-04 | 낮은 필드 자기 공명 이미징 방법들 및 장치 |
| KR1020177009177A KR20170048558A (ko) | 2014-09-05 | 2015-09-04 | 저 필드 자기 공명 이미징 시스템의 자동 구성 |
Family Applications Before (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177009312A KR20170048577A (ko) | 2014-09-05 | 2015-09-04 | 자기 공명 이미징을 위한 강자성 증강 |
| KR1020177008944A KR20170052621A (ko) | 2014-09-05 | 2015-09-04 | 잡음 억제 방법 및 장치 |
| KR1020177009185A KR20170048560A (ko) | 2014-09-05 | 2015-09-04 | 낮은 필드 자기 공명 이미징 방법들 및 장치 |
Country Status (12)
| Country | Link |
|---|---|
| US (27) | US9817093B2 (ko) |
| EP (5) | EP3189341A4 (ko) |
| JP (9) | JP6684804B2 (ko) |
| KR (4) | KR20170048577A (ko) |
| CN (8) | CN111896903A (ko) |
| AU (7) | AU2015311825B2 (ko) |
| BR (4) | BR112017004353A2 (ko) |
| CA (8) | CA2960194C (ko) |
| IL (5) | IL250939B (ko) |
| MX (4) | MX366786B (ko) |
| TW (1) | TWI627428B (ko) |
| WO (5) | WO2016037030A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018190676A1 (ko) | 2017-04-14 | 2018-10-18 | 국립암센터 | 말산-아스파르트산 왕복수송 억제제 및 항암제를 유효성분으로 함유하는 암 예방 및 치료용 약학적 조성물 |
Families Citing this family (104)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101518751B1 (ko) * | 2013-11-21 | 2015-05-11 | 연세대학교 산학협력단 | 다중 대조도 자기공명영상에서 잡음 제거 방법 및 장치 |
| CN111896903A (zh) | 2014-09-05 | 2020-11-06 | 海珀菲纳研究股份有限公司 | 噪声抑制方法和设备 |
| EP3217872A4 (en) | 2014-11-11 | 2018-07-18 | Hyperfine Research, Inc. | Pulse sequences for low field magnetic resonance |
| US10813564B2 (en) | 2014-11-11 | 2020-10-27 | Hyperfine Research, Inc. | Low field magnetic resonance methods and apparatus |
| AU2016250077B2 (en) | 2015-04-13 | 2021-04-15 | Hyperfine Operations, Inc. | Magnetic coil power methods and apparatus |
| US10288711B1 (en) * | 2015-04-30 | 2019-05-14 | Life Services, LLC | Device and method for simultaneous TX/RX in strongly coupled MRI coil loops |
| JP6784697B2 (ja) | 2015-05-12 | 2020-11-11 | ハイパーファイン リサーチ,インコーポレイテッド | 高周波コイルの方法および装置 |
| US10901055B2 (en) * | 2015-05-15 | 2021-01-26 | Eidgenossische Technische Hochschule (Eth) | Active noise suppression for magnetic resonance based magnetic field probes |
| US11119171B2 (en) * | 2015-07-16 | 2021-09-14 | Synaptive Medical Inc. | Systems and methods for adaptive multi-resolution magnetic resonance imaging |
| CN106483483B (zh) * | 2015-08-27 | 2019-09-06 | 通用电气公司 | 梯度线圈及其制造方法 |
| CN109073681B (zh) * | 2016-03-22 | 2020-10-23 | 海珀菲纳研究股份有限公司 | 用于磁场匀场的方法和设备 |
| CN115407252A (zh) | 2016-06-22 | 2022-11-29 | 优瑞技术公司 | 低场强磁共振成像 |
| EP3236375A3 (de) * | 2016-08-24 | 2018-01-24 | Siemens Healthcare GmbH | Verfahren und system zum ausgeben einer medizinischen information |
| US10650621B1 (en) | 2016-09-13 | 2020-05-12 | Iocurrents, Inc. | Interfacing with a vehicular controller area network |
| TWI667487B (zh) | 2016-09-29 | 2019-08-01 | 美商超精細研究股份有限公司 | 射頻線圈調諧方法及裝置 |
| US10539637B2 (en) | 2016-11-22 | 2020-01-21 | Hyperfine Research, Inc. | Portable magnetic resonance imaging methods and apparatus |
| US10627464B2 (en) | 2016-11-22 | 2020-04-21 | Hyperfine Research, Inc. | Low-field magnetic resonance imaging methods and apparatus |
| WO2018098141A1 (en) | 2016-11-22 | 2018-05-31 | Hyperfine Research, Inc. | Systems and methods for automated detection in magnetic resonance images |
| US10585153B2 (en) | 2016-11-22 | 2020-03-10 | Hyperfine Research, Inc. | Rotatable magnet methods and apparatus for a magnetic resonance imaging system |
| DE102017200446A1 (de) * | 2017-01-12 | 2018-07-12 | Siemens Healthcare Gmbh | Korrektur eines MR-Sendesignals |
| EP3535594B1 (de) * | 2017-01-13 | 2023-03-29 | Siemens Healthcare GmbH | Magnetresonanztomograph und lokalspulenmatrix zum betrieb bei niedrigen magnetfeldstärken |
| EP3401695A1 (en) | 2017-05-08 | 2018-11-14 | Koninklijke Philips N.V. | Cooling a gradient coil of a magnetic resonance imaging system |
| US10732248B2 (en) | 2017-05-22 | 2020-08-04 | Synaptive Medical (Barbados) Inc. | System and method to reduce eddy current artifacts in magnetic resonance imaging |
| US20190041481A1 (en) * | 2017-08-04 | 2019-02-07 | Muralidhara Subbarao | Massively parallel magnetic resonance imaging wherein numerous off-surface coils are used to acquire partially under-sampled magnetic resonance signal data |
| EP3467531A1 (de) * | 2017-10-05 | 2019-04-10 | Siemens Healthcare GmbH | Magnetresonanztomograph mit aktiver störunterdrückung und verfahren zur störunterdrückung in einem magnetresonanztomographen |
| JP6867926B2 (ja) * | 2017-10-12 | 2021-05-12 | 株式会社日立製作所 | ノイズ発生源探索装置及びノイズ発生源探索方法 |
| CN109717869B (zh) * | 2017-10-31 | 2024-05-14 | 通用电气公司 | 磁共振成像过程中的运动监测方法、计算机程序、存储设备 |
| US10489943B2 (en) * | 2018-02-28 | 2019-11-26 | General Electric Company | System and method for sparse image reconstruction |
| US20210050092A1 (en) * | 2018-03-14 | 2021-02-18 | Koninklijke Philips N.V. | Intelligent scheduler for centralized control of imaging examinations |
| CN108627789B (zh) * | 2018-03-28 | 2020-07-28 | 重庆大学 | 空心线圈传感器的τ曲线标定方法 |
| EP3553547A1 (en) * | 2018-04-12 | 2019-10-16 | Koninklijke Philips N.V. | Shim irons for a magnetic resonance apparatus |
| FR3080509B1 (fr) * | 2018-04-19 | 2021-05-14 | Zodiac Data Systems | Dispositif d'acquisition de donnees pour l'instrumentation d'une structure |
| CA3096397A1 (en) | 2018-04-20 | 2019-10-24 | Hyperfine Research, Inc. | Deployable guard for portable magnetic resonance imaging devices |
| ES2730123A1 (es) * | 2018-05-07 | 2019-11-08 | Tesoro Imaging S L | Bobina magnetica con configuracion geometrica incompleta |
| US11209509B2 (en) * | 2018-05-16 | 2021-12-28 | Viewray Technologies, Inc. | Resistive electromagnet systems and methods |
| BR112020021872A2 (pt) | 2018-05-21 | 2021-01-26 | Hyperfine Research, Inc. | métodos e aparelhos de magneto b0 para um sistema de ressonância magnética |
| AU2019272580A1 (en) | 2018-05-21 | 2020-11-12 | Hyperfine Operations, Inc. | Radio-frequency coil signal chain for a low-field MRI system |
| CN108828484B (zh) * | 2018-05-25 | 2024-08-09 | 中国计量科学研究院 | 一种磁共振成像仪的质控模体 |
| CN108983134B (zh) * | 2018-05-31 | 2020-07-03 | 上海东软医疗科技有限公司 | 信号接收通道校准方法和磁共振校准系统 |
| EP3581953A1 (en) | 2018-06-11 | 2019-12-18 | Koninklijke Philips N.V. | A method for configuring a rf transmit assembly |
| TW202015621A (zh) | 2018-07-19 | 2020-05-01 | 美商超精細研究股份有限公司 | 在磁共振成像中患者定位之方法及設備 |
| JP2021532875A (ja) | 2018-07-30 | 2021-12-02 | ハイパーファイン,インコーポレイテッド | 磁気共鳴画像再構成のための深層学習技術 |
| TW202012951A (zh) | 2018-07-31 | 2020-04-01 | 美商超精細研究股份有限公司 | 低場漫射加權成像 |
| JP2021534852A (ja) * | 2018-08-15 | 2021-12-16 | ハイパーファイン,インコーポレイテッド | 磁気共鳴画像においてアーティファクトを抑制するためのディープラーニング技術 |
| CA3168499A1 (en) | 2018-09-14 | 2020-03-19 | 10250929 Canada Inc. | Method and system for in-vivo, and non-invasive measurement of metabolite levels |
| US10761162B2 (en) * | 2018-09-18 | 2020-09-01 | General Electric Company | Gradient coil cooling systems |
| EP3633400B1 (de) * | 2018-10-02 | 2022-09-21 | Siemens Healthcare GmbH | Magnetresonanztomograph sowie system und verfahren zum verhindern von übersprech-störungen |
| DE102018128254A1 (de) * | 2018-11-12 | 2020-05-14 | Endress+Hauser SE+Co. KG | Verfahren zur Verbesserung derMessperformance eines zu konfigurierenden Feldgeräts der Automatisierungstechnik |
| EP3657193B1 (en) * | 2018-11-20 | 2021-02-17 | Bruker Switzerland AG | Method for magnetizing a superconductor bulk magnet, with generating an auxiliary magnetic field in the superconductor bore |
| DE102018221695A1 (de) * | 2018-12-13 | 2020-06-18 | Siemens Healthcare Gmbh | Verfahren zur quantitativen Magnetresonanzbildgebung, Magnetresonanzeinrichtung, Computerprogramm und elektronisch lesbarer Datenträger |
| CA3122087A1 (en) | 2018-12-19 | 2020-06-25 | Hyperfine Research, Inc. | System and methods for grounding patients during magnetic resonance imaging |
| WO2020139476A2 (en) | 2018-12-28 | 2020-07-02 | Hyperfine Research, Inc. | Correcting for hysteresis in magnetic resonance imaging |
| EP3928108A4 (en) * | 2019-02-22 | 2023-03-15 | Promaxo, Inc. | SYSTEMS AND METHODS FOR PERFORMING MAGNETIC RESONANCE IMAGING |
| EP3937774A1 (en) | 2019-03-12 | 2022-01-19 | Hyperfine, Inc. | Systems and methods for magnetic resonance imaging of infants |
| JP2022526718A (ja) | 2019-03-14 | 2022-05-26 | ハイパーファイン,インコーポレイテッド | 空間周波数データから磁気共鳴画像を生成するための深層学習技術 |
| CN109946631B (zh) * | 2019-03-27 | 2021-06-25 | 中国计量大学 | 最小化最大温度值的盘式梯度线圈 |
| CN109946630B (zh) * | 2019-03-27 | 2021-05-28 | 中国计量大学 | 最小化最大温度值的盘式梯度线圈设计方法 |
| KR20220005492A (ko) | 2019-04-26 | 2022-01-13 | 하이퍼파인, 인크. | 자기 공명 영상 시스템의 동적 제어를 위한 기술 |
| KR20220007876A (ko) * | 2019-05-07 | 2022-01-19 | 하이퍼파인, 인크. | 유아의 자기 공명 이미징을 위한 시스템, 디바이스 및 방법 |
| US11698430B2 (en) | 2019-08-15 | 2023-07-11 | Hyperfine Operations, Inc. | Eddy current mitigation systems and methods |
| WO2021071938A2 (en) | 2019-10-08 | 2021-04-15 | Hyperfine Research, Inc. | System and methods for detecting electromagnetic interference in patients during magnetic resonance imaging |
| EP3808265B1 (en) * | 2019-10-16 | 2024-02-28 | Esaote S.p.A. | Patient support device, such as a patient bed, table or chair, for use with magnetic resonance imaging apparatuses |
| EP4049052A2 (en) | 2019-10-25 | 2022-08-31 | Hyperfine Operations, Inc. | Artefact reduction in magnetic resonance imaging |
| US12013453B2 (en) | 2019-10-25 | 2024-06-18 | Hyperfine Operations, Inc. | Systems and methods for detecting patient motion during magnetic resonance imaging |
| DE102019216755A1 (de) * | 2019-10-30 | 2021-05-06 | Robert Bosch Gmbh | Verfahren zum Betrieb eines NMR-Spektrometers sowie NMR-Spektrometer |
| DE102019216761A1 (de) * | 2019-10-30 | 2021-05-06 | Robert Bosch Gmbh | Verfahren zum Betrieb eines NMR-Spektrometers sowie NMR-Spektrometer |
| DE102019216759A1 (de) * | 2019-10-30 | 2021-05-06 | Robert Bosch Gmbh | Verfahren zum Betrieb eines NMR-Spektrometers sowie NMR-Spektrometer |
| US11510588B2 (en) | 2019-11-27 | 2022-11-29 | Hyperfine Operations, Inc. | Techniques for noise suppression in an environment of a magnetic resonance imaging system |
| US11415651B2 (en) | 2019-12-10 | 2022-08-16 | Hyperfine Operations, Inc. | Low noise gradient amplification components for MR systems |
| US11422213B2 (en) | 2019-12-10 | 2022-08-23 | Hyperfine Operations, Inc. | Ferromagnetic frame for magnetic resonance imaging |
| USD932014S1 (en) | 2019-12-10 | 2021-09-28 | Hyperfine, Inc. | Frame for magnets in magnetic resonance imaging |
| USD912822S1 (en) | 2019-12-10 | 2021-03-09 | Hyperfine Research, Inc. | Frame for magnets in magnetic resonance imaging |
| CN115552269A (zh) | 2019-12-10 | 2022-12-30 | 海珀菲纳运营有限公司 | 用于磁共振成像的具有非铁磁框架的永磁体装配件 |
| CN113050010B (zh) * | 2019-12-26 | 2023-03-21 | 上海联影医疗科技股份有限公司 | 噪音分析的系统、方法 |
| DE102020200013A1 (de) * | 2020-01-03 | 2021-07-08 | Siemens Healthcare Gmbh | Magnetresonanzeinrichtung und Verfahren zum Betrieb einer Magnetresonanzeinrichtung, Computerprogramm und elektronisch lesbarer Datenträger |
| WO2021144876A1 (ja) * | 2020-01-15 | 2021-07-22 | 朝日インテック株式会社 | 測定装置、検出装置、および測定方法 |
| CN110873855B (zh) * | 2020-01-20 | 2020-04-21 | 华中科技大学 | 一种基于磁通压缩的脉冲磁体装置及高通量测量方法 |
| US20210302518A1 (en) | 2020-03-24 | 2021-09-30 | Hyperfine Research, Inc. | Gradient waveform design for low-field magnetic resonance imaging systems |
| US11754650B2 (en) * | 2020-04-10 | 2023-09-12 | Howmedica Osteonics Corp. | MRI shield |
| US20230132819A1 (en) * | 2020-04-24 | 2023-05-04 | The General Hospital Corporation | System and method for electromagnetic interference mitigation for portable mri systems |
| US20230136830A1 (en) * | 2020-04-24 | 2023-05-04 | The General Hospital Corporation | Point-of-care magnetic resonance imaging system for lumbar puncture guidance |
| WO2022026644A1 (en) * | 2020-07-31 | 2022-02-03 | Synex Medical Inc. | Weak signal detection system and method |
| US20220133240A1 (en) * | 2020-10-30 | 2022-05-05 | Chengdu Yijian Medical Technology Co., Ltd | System and method for reducting or eliminating artifacts in magnectic resonance imaging |
| CN112698256B (zh) * | 2020-12-07 | 2023-08-29 | 深圳航天科技创新研究院 | 降低磁共振成像设备电磁噪声的主动降噪系统的降噪方法 |
| DE102020215738B4 (de) * | 2020-12-11 | 2024-08-22 | Siemens Healthineers Ag | Verfahren zum Betreiben eines Magnetresonanztomographie-systems mit iterativer Störungsreduktion mittels wenigstens einer Hilfsempfangsantenne und einer Hauptempfangsantenne |
| EP4264304A1 (en) | 2020-12-15 | 2023-10-25 | Hyperfine Operations, Inc. | Opto-isolator circuitry for magnetic resonance imaging applications |
| DE102020133923B4 (de) * | 2020-12-17 | 2023-03-23 | Isovolta Gatex GmbH | Verfahren zum lagefixierten Verbinden eines schlauchförmigen Elementes auf einer Trägerplatte |
| CN118112474A (zh) | 2021-02-02 | 2024-05-31 | 海珀菲纳运营有限公司 | Mri系统、使用mri系统对被检体进行成像的方法及存储介质 |
| DE102021104344A1 (de) * | 2021-02-24 | 2022-08-25 | Otto-Von-Guericke-Universität Magdeburg | MR-Bildgebung mit Reduktion von Zipper-Artefakten |
| CN113176528A (zh) * | 2021-04-29 | 2021-07-27 | 杭州微影医疗科技有限公司 | 干扰消除方法、介质及设备 |
| KR20220152457A (ko) | 2021-05-07 | 2022-11-16 | 삼성전자주식회사 | 이미지 센서 및 그 동작 방법 |
| JP2023002228A (ja) * | 2021-06-22 | 2023-01-10 | 昭和電工株式会社 | 情報処理装置および磁気センサシステム |
| FR3130391B1 (fr) * | 2021-12-10 | 2023-11-03 | Multiwave Imaging | Dispositif d’imagerie par résonnance magnétique pourvu d’un assemblage magnétique |
| WO2023194228A1 (en) * | 2022-04-04 | 2023-10-12 | Renaissance Fusion | Modular mri machine |
| EP4257999A1 (en) * | 2022-04-04 | 2023-10-11 | Renaissance Fusion | Modular mri machine |
| EP4270038A1 (de) * | 2022-04-27 | 2023-11-01 | Siemens Healthcare GmbH | Magnetanordnung für eine magnetresonanzvorrichtung |
| FR3135787B1 (fr) | 2022-05-17 | 2024-07-19 | Multiwave Imaging | Procédé de formation d’une image d’un corps au moyen d’un dispositif irm |
| WO2024025828A1 (en) * | 2022-07-25 | 2024-02-01 | Promaxo, Inc. | Low-field mri texture analysis |
| EP4312043A1 (de) * | 2022-07-25 | 2024-01-31 | Siemens Healthcare GmbH | Magnetresonanztomograph und verfahren für einen energiesparenden betrieb des magnetresonanztomographen |
| EP4328611A1 (de) * | 2022-08-25 | 2024-02-28 | Siemens Healthineers AG | Vorrichtung und verfahren zur störunterdrückung bei einem magnetresonanztomographen |
| US20240094322A1 (en) * | 2022-09-19 | 2024-03-21 | Synaptive Medical Inc. | System and methods for monitoring medical equipment by using cloud-based telemetry |
| CN115778395A (zh) * | 2022-11-08 | 2023-03-14 | 成都原力辰教育科技有限公司 | 一种心脏磁场测量系统、方法、电子设备及存储介质 |
| US20240168105A1 (en) * | 2022-11-19 | 2024-05-23 | Neuro42 Inc. | System and method for removing electromagnetic interference from low-field magnetic resonance images |
| EP4390430A1 (en) * | 2022-12-21 | 2024-06-26 | Koninklijke Philips N.V. | Method and system for determining a position of a portable mri system |
Family Cites Families (365)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1397244A (en) * | 1920-08-07 | 1921-11-15 | Saco Lowell Shops | Angular driving mechanism |
| US3622869A (en) | 1967-06-28 | 1971-11-23 | Marcel J E Golay | Homogenizing coils for nmr apparatus |
| US3735306A (en) | 1970-10-22 | 1973-05-22 | Varian Associates | Magnetic field shim coil structure utilizing laminated printed circuit sheets |
| US4621299A (en) | 1982-11-05 | 1986-11-04 | General Kinetics Inc. | High energy degausser |
| JPS6063972A (ja) | 1983-09-17 | 1985-04-12 | Sumitomo Electric Ind Ltd | クライオスタツト |
| US4595899A (en) | 1984-07-06 | 1986-06-17 | The Board Of Trustees Of The Leland Stanford Junior University | Magnetic structure for NMR applications and the like |
| JPS6197806A (ja) * | 1984-10-18 | 1986-05-16 | Yokogawa Medical Syst Ltd | Nmr画像装置に用いられるマグネツト部の冷却装置 |
| US4638252A (en) * | 1984-12-21 | 1987-01-20 | General Electric Company | Circuit for detecting RF coil assembly position in an MR scanner |
| US4680545A (en) * | 1985-01-04 | 1987-07-14 | General Electric Company | Method for reduction of acoustical noise generated by magnetic field gradient pulses |
| US4668915A (en) | 1985-03-15 | 1987-05-26 | Honda Giken Kogyo Kabushiki Kaisha | Non-uniform field magnetic resonance dual patient imaging system |
| JPH0636789B2 (ja) * | 1985-07-29 | 1994-05-18 | 株式会社島津製作所 | Mri装置 |
| US5038785A (en) * | 1985-08-09 | 1991-08-13 | Picker International, Inc. | Cardiac and respiratory monitor with magnetic gradient noise elimination |
| US4675609A (en) | 1985-09-18 | 1987-06-23 | Fonar Corporation | Nuclear magnetic resonance apparatus including permanent magnet configuration |
| JP2588700B2 (ja) * | 1986-09-05 | 1997-03-05 | 株式会社 日立メディコ | 核磁気共鳴イメ−ジング装置 |
| US4770182A (en) * | 1986-11-26 | 1988-09-13 | Fonar Corporation | NMR screening method |
| FR2609206B1 (fr) | 1986-12-30 | 1992-02-14 | Thomson Cgr | Dispositif correcteur par elements magnetiques d'inhomogeneites du champ magnetique dans un aimant |
| JPS63266804A (ja) * | 1987-04-24 | 1988-11-02 | Hitachi Metals Ltd | 磁界発生装置 |
| JPS63311945A (ja) | 1987-06-12 | 1988-12-20 | Matsushita Electric Ind Co Ltd | 核磁気共鳴断層像撮像装置 |
| US5203332A (en) | 1987-06-23 | 1993-04-20 | Nycomed Imaging As | Magnetic resonance imaging |
| ES2026257T3 (es) * | 1987-06-23 | 1992-04-16 | Hafslund Nycomed Innovation Ab | Mejoras introducidas en la presentacion de imagenes por resonancia magnetica nuclear. |
| JPH084044B2 (ja) | 1987-09-04 | 1996-01-17 | 株式会社フジクラ | 超電導シートコイル |
| JPS6464637A (en) * | 1987-09-07 | 1989-03-10 | Hitachi Medical Corp | Nuclear magnetic resonance imaging apparatus |
| EP0307516A1 (en) | 1987-09-18 | 1989-03-22 | Koninklijke Philips Electronics N.V. | Magnetic resonance imaging apparatus with eddy-current disturbances correction system |
| JPH0164637U (ko) | 1987-10-19 | 1989-04-25 | ||
| JPH01242057A (ja) | 1988-03-23 | 1989-09-27 | Toshiba Corp | 磁気共鳴イメージング装置 |
| JPH0271727A (ja) * | 1988-09-06 | 1990-03-12 | Hitachi Medical Corp | 核磁気共鳴イメージング装置 |
| US4893082A (en) * | 1989-02-13 | 1990-01-09 | Letcher Iii John H | Noise suppression in magnetic resonance imaging |
| US5134374A (en) | 1989-06-01 | 1992-07-28 | Applied Superconetics | Magnetic field control apparatus |
| JPH03188831A (ja) | 1989-12-20 | 1991-08-16 | Hitachi Medical Corp | 磁気共鳴イメージング装置 |
| US5252924A (en) * | 1991-11-18 | 1993-10-12 | Sumitomo Special Metals Co., Ltd. | Magnetic field generating apparatus for MRI |
| FI86506C (fi) * | 1990-05-29 | 1992-09-10 | Instrumentarium Oy | Avbildningsfoerfarande. |
| JP2808198B2 (ja) * | 1990-07-02 | 1998-10-08 | 住友特殊金属株式会社 | Mri用磁界発生装置とその製法 |
| DE69129687T2 (de) * | 1990-09-29 | 1999-03-11 | Sumitomo Special Metals Co., Ltd., Osaka | Vorrichtung zur Erzeugung eines Magnetfeldes für die Bildgebung mittels magnetischer Resonanz |
| JPH04337614A (ja) * | 1991-05-15 | 1992-11-25 | Toshiba Corp | 傾斜磁場コイルの製造方法 |
| US5153546A (en) | 1991-06-03 | 1992-10-06 | General Electric Company | Open MRI magnet |
| JP2561591B2 (ja) | 1991-12-27 | 1996-12-11 | 住友特殊金属株式会社 | Mri用磁界発生装置 |
| US5382904A (en) | 1992-04-15 | 1995-01-17 | Houston Advanced Research Center | Structured coil electromagnets for magnetic resonance imaging and method for fabricating the same |
| JPH05344960A (ja) | 1992-06-15 | 1993-12-27 | Hitachi Ltd | 磁気共鳴検査装置 |
| US6023165A (en) | 1992-09-28 | 2000-02-08 | Fonar Corporation | Nuclear magnetic resonance apparatus and methods of use and facilities for incorporating the same |
| US5291137A (en) * | 1992-11-02 | 1994-03-01 | Schlumberger Technology Corporation | Processing method and apparatus for processing spin echo in-phase and quadrature amplitudes from a pulsed nuclear magnetism tool and producing new output data to be recorded on an output record |
| EP0597528B1 (en) * | 1992-11-10 | 1998-02-04 | Koninklijke Philips Electronics N.V. | Magnetic resonance apparatus with noise cancellation |
| US5490509A (en) | 1993-03-18 | 1996-02-13 | The Regents Of The University Of California | Method and apparatus for MRI using selectively shaped image volume of homogeneous NMR polarizing field |
| US5483158A (en) | 1993-10-21 | 1996-01-09 | The Regents Of The University Of California | Method and apparatus for tuning MRI RF coils |
| US5423315A (en) | 1993-11-22 | 1995-06-13 | Picker International, Inc. | Magnetic resonance imaging system with thin cylindrical uniform field volume and moving subjects |
| US5390673A (en) | 1994-01-14 | 1995-02-21 | Cordata, Incorporated | Magnetic resonance imaging system |
| DE4422781C1 (de) * | 1994-06-29 | 1996-02-01 | Siemens Ag | Aktiv geschirmte planare Gradientenspule für Polplattenmagnete |
| JPH0831635A (ja) * | 1994-07-08 | 1996-02-02 | Sumitomo Special Metals Co Ltd | Mri用磁界発生装置 |
| JPH10510135A (ja) | 1994-11-28 | 1998-09-29 | アナロジック コーポレーション | 医療用画像作成システムのためのups |
| JPH0927416A (ja) * | 1995-07-12 | 1997-01-28 | Toshiba Corp | 超電導コイルおよびその製造方法 |
| JP3705861B2 (ja) * | 1996-03-21 | 2005-10-12 | 株式会社日立メディコ | 超電導磁石装置及びその着磁調整方法 |
| US5864236A (en) * | 1996-07-05 | 1999-01-26 | Toshiba America Mri, Inc. | Open configuration MRI magnetic flux path |
| US6150911A (en) * | 1996-07-24 | 2000-11-21 | Odin Technologies Ltd. | Yoked permanent magnet assemblies for use in medical applications |
| US5900793A (en) * | 1997-07-23 | 1999-05-04 | Odin Technologies Ltd | Permanent magnet assemblies for use in medical applications |
| DE19721985C2 (de) * | 1997-05-26 | 1999-11-04 | Siemens Ag | Gradientenspulenbaugruppe und Herstellungsverfahren |
| US6157278A (en) * | 1997-07-23 | 2000-12-05 | Odin Technologies Ltd. | Hybrid magnetic apparatus for use in medical applications |
| US6411187B1 (en) * | 1997-07-23 | 2002-06-25 | Odin Medical Technologies, Ltd. | Adjustable hybrid magnetic apparatus |
| WO1999015914A1 (en) | 1997-09-25 | 1999-04-01 | Odin Technologies Ltd. | Magnetic apparatus for mri |
| US6144204A (en) * | 1997-11-28 | 2000-11-07 | Picker Nordstar Oy | Gradient coils for magnetic resonance meeting |
| US5936502A (en) * | 1997-12-05 | 1999-08-10 | Picker Nordstar Inc. | Magnet coils for MRI |
| US5877665A (en) | 1997-12-17 | 1999-03-02 | General Electric Company | Thermally passive magnet mounting system for an MRI signa profile magnet in mobile trailer van |
| US6235409B1 (en) | 1997-12-17 | 2001-05-22 | Alcoa Inc. | Aluminum laminate |
| US6011396A (en) | 1998-01-02 | 2000-01-04 | General Electric Company | Adjustable interventional magnetic resonance imaging magnet |
| EP1058933A4 (en) | 1998-02-09 | 2006-03-01 | Odin Medical Technologies Ltd | CONSTRUCTION PROCEDURE OF OPEN MAGNETS AND OPEN MAGNETIC DEVICE FOR MRI / MRI SENSORS |
| US6029081A (en) * | 1998-03-19 | 2000-02-22 | Picker International, Inc. | Movable magnets for magnetic resonance surgery |
| RU98106937A (ru) * | 1998-04-14 | 2000-02-10 | Пикер Нордстар ОЮ (FI) | Устройство для формирования изображения с помощью магнитного резонанса |
| JP4689040B2 (ja) * | 1998-05-04 | 2011-05-25 | クラッド・メタルズ・エルエルシー | 五層複合材金属調理容器の製造方法 |
| US6131690A (en) | 1998-05-29 | 2000-10-17 | Galando; John | Motorized support for imaging means |
| JP3034841B2 (ja) * | 1998-06-05 | 2000-04-17 | ジーイー横河メディカルシステム株式会社 | Mri用コイル、クレードル及びmri装置 |
| US6311389B1 (en) * | 1998-07-01 | 2001-11-06 | Kabushiki Kaisha Toshiba | Gradient magnetic coil apparatus and method of manufacturing the same |
| US6417797B1 (en) * | 1998-07-14 | 2002-07-09 | Cirrus Logic, Inc. | System for A multi-purpose portable imaging device and methods for using same |
| IT1305971B1 (it) * | 1998-08-31 | 2001-05-21 | Esaote Spa | Macchina per il rilevamento di immagini in risonanza magneticanucleare del tipo dedicato al rilevamento d'immagini di limitate |
| JP2000139874A (ja) * | 1998-09-02 | 2000-05-23 | Sumitomo Special Metals Co Ltd | Mri用磁界発生装置 |
| US6102497A (en) * | 1998-11-03 | 2000-08-15 | Sherwood Services Ag | Universal cart |
| US6259252B1 (en) * | 1998-11-24 | 2001-07-10 | General Electric Company | Laminate tile pole piece for an MRI, a method manufacturing the pole piece and a mold bonding pole piece tiles |
| US6396266B1 (en) * | 1998-11-25 | 2002-05-28 | General Electric Company | MR imaging system with interactive MR geometry prescription control |
| US6166544A (en) | 1998-11-25 | 2000-12-26 | General Electric Company | MR imaging system with interactive image contrast control |
| AU1582400A (en) * | 1998-12-08 | 2000-06-26 | Odin Medical Technologies Ltd | A device and a system for moving and positioning an open magnetic resonance imaging probe |
| JP3817383B2 (ja) | 1999-02-24 | 2006-09-06 | 株式会社日立製作所 | Mri装置 |
| JP2000287950A (ja) | 1999-04-07 | 2000-10-17 | Ge Yokogawa Medical Systems Ltd | 磁場安定化方法、磁場発生装置および磁気共鳴撮像装置 |
| US6317618B1 (en) | 1999-06-02 | 2001-11-13 | Odin Technologies Ltd. | Transportable intraoperative magnetic resonance imaging apparatus |
| US7019610B2 (en) | 2002-01-23 | 2006-03-28 | Stereotaxis, Inc. | Magnetic navigation system |
| US7313429B2 (en) | 2002-01-23 | 2007-12-25 | Stereotaxis, Inc. | Rotating and pivoting magnet for magnetic navigation |
| JP2001137212A (ja) * | 1999-11-11 | 2001-05-22 | Hitachi Medical Corp | 静磁場発生装置及びそれを用いた磁気共鳴イメージング装置 |
| DE60026426T2 (de) | 1999-11-16 | 2006-11-16 | Neomax Co., Ltd. | Polstückeinheit für einen Magnet der bildgebenden magnetischen Resonanz |
| US6262576B1 (en) | 1999-11-16 | 2001-07-17 | Picker International, Inc. | Phased array planar gradient coil set for MRI systems |
| WO2001053847A1 (en) | 2000-01-19 | 2001-07-26 | Millennium Technology Inc. | C-shaped magnetic resonance imaging system |
| US6845262B2 (en) | 2000-03-29 | 2005-01-18 | The Brigham And Women's Hospital, Inc. | Low-field MRI |
| US6998841B1 (en) * | 2000-03-31 | 2006-02-14 | Virtualscopics, Llc | Method and system which forms an isotropic, high-resolution, three-dimensional diagnostic image of a subject from two-dimensional image data scans |
| JP4317646B2 (ja) * | 2000-06-26 | 2009-08-19 | 独立行政法人理化学研究所 | 核磁気共鳴装置 |
| WO2002002010A1 (fr) * | 2000-07-05 | 2002-01-10 | Hitachi Medical Corporation | Dispositif d'imagerie par resonance magnetique et bobine de champ magnetique a gradient utilisee dans un tel dispositif |
| DE10032836C1 (de) * | 2000-07-06 | 2002-01-17 | Siemens Ag | Magnetresonanzgerät mit einem Gradientenspulensystem |
| US6294972B1 (en) * | 2000-08-03 | 2001-09-25 | The Mcw Research Foundation, Inc. | Method for shimming a static magnetic field in a local MRI coil |
| AU2001283371A1 (en) | 2000-08-15 | 2002-02-25 | The Regents Of The University Of California | Method and apparatus for reducing contamination of an electrical signal |
| JP3728199B2 (ja) * | 2000-11-14 | 2005-12-21 | 株式会社日立メディコ | 磁気共鳴イメージング装置 |
| JP2002159463A (ja) * | 2000-11-15 | 2002-06-04 | Ge Medical Systems Global Technology Co Llc | Mri装置の磁界変動測定方法、磁界変動補償方法およびmri装置 |
| US6677752B1 (en) | 2000-11-20 | 2004-01-13 | Stereotaxis, Inc. | Close-in shielding system for magnetic medical treatment instruments |
| US6454293B1 (en) * | 2000-12-01 | 2002-09-24 | Greg H. Anderson | Transport cart for medical-related supplies |
| US6529000B2 (en) * | 2000-12-29 | 2003-03-04 | Ge Medical Systems Global Technology Company, Llc | Method and system for processing magnetic resonance signals to remove transient spike noise |
| US20020084782A1 (en) * | 2001-01-04 | 2002-07-04 | Warren Guthrie | Noise detector and suppressor for magnetic resonance imaging equipment |
| US6662434B2 (en) | 2001-04-03 | 2003-12-16 | General Electric Company | Method and apparatus for magnetizing a permanent magnet |
| US6518867B2 (en) | 2001-04-03 | 2003-02-11 | General Electric Company | Permanent magnet assembly and method of making thereof |
| US6611702B2 (en) | 2001-05-21 | 2003-08-26 | General Electric Company | Apparatus for use in neonatal magnetic resonance imaging |
| ITSV20010020A1 (it) | 2001-06-08 | 2002-12-08 | Esaote Spa | Macchina per l'acquisizione di immagini della zona interna di un corpo in particolare per l'acquisizione di immagini diagnostiche |
| ITSV20010017A1 (it) * | 2001-05-28 | 2002-11-28 | Esaote Spa | Dispositivo per il rilevamento d'immagini in risonanza magnetica nucleare |
| US6725893B1 (en) * | 2001-06-07 | 2004-04-27 | Tomiko Erickson | Cover assembly for a crash cart |
| JP2003024296A (ja) | 2001-07-04 | 2003-01-28 | Ge Medical Systems Global Technology Co Llc | 静磁界調整方法およびmri装置 |
| JP2005507278A (ja) * | 2001-10-29 | 2005-03-17 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 医療検査装置とフレーム及び患者テーブルの結合体との組立体、並びにこのような結合体 |
| AP2004003127A0 (en) | 2002-02-06 | 2004-09-30 | Univ California | Squid detected NMR and MR1 at ultralow fields |
| ITSV20020014A1 (it) | 2002-04-09 | 2003-10-09 | Esaote Spa | Metodo e dispositivo per la compensazione di campi magnetici di disturbo in volumi di spazio e macchina per il rilevamento di immagini in ri |
| WO2003093853A1 (de) * | 2002-05-02 | 2003-11-13 | Siemens Aktiengesellschaft | Gradientenspulensystem für ein magnet-resonanz-tomographiegerät mit effektiverer kühlung |
| US7130675B2 (en) | 2002-06-28 | 2006-10-31 | Tristan Technologies, Inc. | High-resolution magnetoencephalography system and method |
| JP2004065398A (ja) | 2002-08-02 | 2004-03-04 | Hitachi Medical Corp | 永久磁石と電磁石から成るハイブリット型磁石を有する磁気共鳴イメージング装置 |
| US7215231B1 (en) | 2002-08-16 | 2007-05-08 | Fonar Corporation | MRI system |
| JP2004081264A (ja) | 2002-08-23 | 2004-03-18 | Hitachi Medical Corp | 遠隔医療システム及び制御モダリティーの遠隔操作装置 |
| FI113615B (fi) | 2002-10-17 | 2004-05-31 | Nexstim Oy | Kallonmuodon ja sisällön kolmiulotteinen mallinnusmenetelmä |
| ITSV20020057A1 (it) | 2002-11-28 | 2004-05-29 | Esaote Spa | Combinazione di macchina per rilevamento di immagini in risonanza nucleare e lettino porta paziente |
| JP2004187945A (ja) | 2002-12-11 | 2004-07-08 | Ge Medical Systems Global Technology Co Llc | 医用イメージング装置及び医用イメージングシステム |
| JP4419954B2 (ja) | 2003-02-10 | 2010-02-24 | 日立金属株式会社 | 磁界発生装置 |
| US6788063B1 (en) * | 2003-02-26 | 2004-09-07 | Ge Medical Systems Technology Company, Llc | Method and system for improving transient noise detection |
| US6819108B2 (en) | 2003-03-21 | 2004-11-16 | General Electric Company | Method of magnetic field controlled shimming |
| US7239143B2 (en) | 2003-05-20 | 2007-07-03 | Koninklijke Philips Electronics N.V. | Digital magnetic resonance gradient pre-emphasis |
| CN100473336C (zh) | 2003-07-24 | 2009-04-01 | 沙丘医疗设备有限公司 | 用于检查特别是组织的物质以表征其类型的方法和设备 |
| US20050035764A1 (en) | 2003-08-14 | 2005-02-17 | Anthony Mantone | Method and apparatus for directly cooling hollow conductor wound transverse gradient coil boards |
| US20050154291A1 (en) * | 2003-09-19 | 2005-07-14 | Lei Zhao | Method of using a small MRI scanner |
| US8203341B2 (en) * | 2003-09-19 | 2012-06-19 | Xbo Medical Systems Co., Ltd. | Cylindrical bi-planar gradient coil for MRI |
| JP2005118098A (ja) | 2003-10-14 | 2005-05-12 | Hitachi Medical Corp | 磁気共鳴イメージング装置 |
| US6809619B1 (en) * | 2003-10-16 | 2004-10-26 | G.E. Medical Systems Global Technology Co., Llc | System and method for adjusting magnetic center field for permanent MRI magnetic field generator |
| CN1875288A (zh) * | 2003-10-29 | 2006-12-06 | 皇家飞利浦电子股份有限公司 | 用于磁共振成像的可变视野梯度线圈系统 |
| US6937018B2 (en) * | 2003-10-31 | 2005-08-30 | General Electric Company | Systems and methods for fabricating pole pieces for magnetic resonance imaging systems |
| US7140420B2 (en) * | 2003-11-05 | 2006-11-28 | General Electric Company | Thermal management apparatus and uses thereof |
| JP4724668B2 (ja) | 2003-11-26 | 2011-07-13 | アシスト メディカル システムズ,インク. | 医療手順の一部として媒体を投与するための装置、方法、およびコンピュータプログラムプロダクト |
| US6956375B2 (en) * | 2004-01-09 | 2005-10-18 | General Electric Company | Magnetic resonance imaging magnetic field generator |
| US20050179512A1 (en) * | 2004-02-12 | 2005-08-18 | Ge Medical Systems Global Technology Company, Llc | Mri system with liquid cooled rf space |
| JP2005237501A (ja) | 2004-02-25 | 2005-09-08 | Shin Etsu Chem Co Ltd | 磁気回路および磁気回路磁界調整方法 |
| CN1669525A (zh) | 2004-03-19 | 2005-09-21 | 西门子公司 | 带有一定位单元的磁共振设备 |
| US7126333B2 (en) * | 2004-04-19 | 2006-10-24 | Baker Hughes Incorporated | Method and apparatus for correcting ringing in NMR signals |
| ITSV20040020A1 (it) | 2004-05-07 | 2004-08-07 | Esaote Spa | Struttura magnetica per macchine mri e macchina mri |
| WO2005116676A1 (en) | 2004-05-25 | 2005-12-08 | Hvidovre Hospital | Encoding and transmission of signals as rf signals for detection using an mr apparatus |
| ITSV20040032A1 (it) | 2004-08-05 | 2004-11-05 | Esaote Spa | Metodo e sonda per la compensazione di campi magnetici di disturbo in volumi di spazio in particolare nelle macchine per il rilevamento di immagini in risonanza magnetica nucleare |
| JP4279747B2 (ja) * | 2004-08-11 | 2009-06-17 | 株式会社日立製作所 | 核磁気共鳴装置 |
| US6906517B1 (en) * | 2004-09-28 | 2005-06-14 | General Electric Company | Method and apparatus for maintaining thermal stability of permanent magnets in MRI systems |
| US7135863B2 (en) * | 2004-09-30 | 2006-11-14 | General Electric Company | Thermal management system and method for MRI gradient coil |
| GB2419417B (en) | 2004-10-20 | 2007-05-16 | Gen Electric | Gradient bore cooling and RF shield |
| GB2419416A (en) * | 2004-10-20 | 2006-04-26 | Gen Electric | Method of manufacturing gradient coil for MRI device |
| US8626342B2 (en) | 2004-10-27 | 2014-01-07 | Acist Medical Systems, Inc. | Data collection device, system, method, and computer program product for collecting data related to the dispensing of contrast media |
| EP1839065A2 (en) * | 2004-11-23 | 2007-10-03 | M2M Imaging Corp. | Apparatus for cooling an rf coil on a magnetic resonance imaging system |
| US8129991B2 (en) * | 2004-11-24 | 2012-03-06 | Fonar Corporation | Anatomical fixture for magnetic resonance position imaging |
| US8014867B2 (en) * | 2004-12-17 | 2011-09-06 | Cardiac Pacemakers, Inc. | MRI operation modes for implantable medical devices |
| WO2006067746A2 (en) * | 2004-12-22 | 2006-06-29 | Koninklijke Philips Electronics, N.V. | Radio frequency coil with transmission line end-rings |
| GB0503622D0 (en) * | 2005-02-22 | 2005-03-30 | Siemens Magnet Technology Ltd | Shielding for mobile MRI systems |
| US20090033327A1 (en) * | 2005-04-18 | 2009-02-05 | Koninklijke Philips Electronics N. V. | Magnetic Resonance Imaging of a Continuously Moving Object |
| DE602006011749D1 (de) | 2005-04-21 | 2010-03-04 | Ksm Inc | Elektromagnetische behandlungsvorrichtung |
| US7307423B2 (en) | 2005-05-05 | 2007-12-11 | Wisconsin A.Umni Research Foundation | Magnetic resonance elastography using multiple drivers |
| US8614575B2 (en) | 2005-06-17 | 2013-12-24 | The Regents Of The University Of California | NMR, MRI, and spectroscopic MRI in inhomogeneous fields |
| US8514043B2 (en) | 2005-09-14 | 2013-08-20 | General Electric Company | Systems and methods for passively shielding a magnetic field |
| US20070063801A1 (en) * | 2005-09-16 | 2007-03-22 | Laskaris Evangelos T | System and method for magnetic resonance imaging |
| US7835785B2 (en) | 2005-10-04 | 2010-11-16 | Ascension Technology Corporation | DC magnetic-based position and orientation monitoring system for tracking medical instruments |
| EP1943536A1 (en) | 2005-10-27 | 2008-07-16 | Koninklijke Philips Electronics N.V. | Active decoupling of transmitters in mri |
| GB2435327B (en) * | 2005-11-01 | 2008-01-09 | Siemens Magnet Technology Ltd | Transportable magnetic resonance imaging (MRI) system |
| AU2006331312A1 (en) | 2005-11-17 | 2007-07-05 | Brain Research Institute Pty Ltd | Apparatus and method for detection and monitoring of electrical activity and motion in the presence of a magnetic field |
| JP5283839B2 (ja) * | 2005-11-25 | 2013-09-04 | 東芝メディカルシステムズ株式会社 | 医用画像診断システム |
| US7659719B2 (en) | 2005-11-25 | 2010-02-09 | Mr Instruments, Inc. | Cavity resonator for magnetic resonance systems |
| CN100411585C (zh) * | 2005-11-30 | 2008-08-20 | 西门子(中国)有限公司 | 磁共振成像系统的大视野成像装置 |
| JP4665751B2 (ja) * | 2005-12-22 | 2011-04-06 | 株式会社日立製作所 | 高抵抗磁石を用いたmri装置 |
| US7573268B2 (en) | 2006-02-22 | 2009-08-11 | Los Alamos National Security, Llc | Direct imaging of neural currents using ultra-low field magnetic resonance techniques |
| EP1991888A4 (en) | 2006-03-09 | 2010-01-20 | Insight Neuroimaging Systems L | MICROSTRUCTURE COIL FOR MRI DEVICES |
| WO2007106765A2 (en) | 2006-03-11 | 2007-09-20 | Xigo Nanotools Llc | Compact and portable low-field pulsed nmr dispersion analyzer |
| US7271591B1 (en) | 2006-03-15 | 2007-09-18 | General Electric Company | Methods and apparatus for MRI shims |
| US8120358B2 (en) | 2006-04-13 | 2012-02-21 | The Regents Of The University Of California | Magnetic resonance imaging with high spatial and temporal resolution |
| CN1831552B (zh) * | 2006-04-20 | 2010-05-12 | 华东师范大学 | 基于usb总线的一体化核磁共振谱仪控制台 |
| CN101427150B (zh) | 2006-04-24 | 2012-09-05 | 皇家飞利浦电子股份有限公司 | 多元件rf线圈的去耦系统以及方法 |
| US7592807B2 (en) * | 2006-04-25 | 2009-09-22 | The Board Of Trustees Of The Leland Stanford Junior University | Maximum likelihood estimator in the presence of non-identically distributed noise for decomposition of chemical species in MRI |
| US7821402B2 (en) | 2006-05-05 | 2010-10-26 | Quality Electrodynamics | IC tags/RFID tags for magnetic resonance imaging applications |
| JP4969148B2 (ja) * | 2006-05-17 | 2012-07-04 | 株式会社日立メディコ | シムコイルの製造方法および磁気共鳴イメージング装置 |
| US8626266B1 (en) * | 2006-06-01 | 2014-01-07 | Perinatronics Medical Systems, Inc. | ECG triggered heart and arterial magnetic resonance imaging |
| US20070285197A1 (en) | 2006-06-08 | 2007-12-13 | General Electric Company | Method for disassembling a magnetic field generator |
| JP4847236B2 (ja) * | 2006-07-07 | 2011-12-28 | 株式会社日立メディコ | 磁気共鳴イメージング装置 |
| WO2008008447A2 (en) | 2006-07-12 | 2008-01-17 | The Regents Of The University Of California | Portable device for ultra-low field magnetic resonance imaging (ulf-mri) |
| US7253627B1 (en) * | 2006-07-19 | 2007-08-07 | Univ King Fahd Pet & Minerals | Method for removing noise from nuclear magnetic resonance signals and images |
| US20080027306A1 (en) | 2006-07-31 | 2008-01-31 | General Electric Company | System and method for initiating a diagnostic imaging scan |
| US20080048658A1 (en) * | 2006-08-24 | 2008-02-28 | Stephen Gerard Hushek | Automatic noise cancellation for unshielded mr systems |
| US7436180B2 (en) | 2006-10-04 | 2008-10-14 | General Electric Company | Gradient coil apparatus and method of fabricating a gradient coil to reduce artifacts in MRI images |
| US8850338B2 (en) | 2006-10-13 | 2014-09-30 | Siemens Medical Solutions Usa, Inc. | System and method for selection of anatomical images for display using a touch-screen display |
| US20080139896A1 (en) | 2006-10-13 | 2008-06-12 | Siemens Medical Solutions Usa, Inc. | System and Method for Graphical Annotation of Anatomical Images Using a Touch Screen Display |
| WO2008057578A1 (en) | 2006-11-08 | 2008-05-15 | T2 Biosystems, Inc. | Nmr systems for in vivo detection of analytes |
| GB2445759A (en) * | 2006-11-28 | 2008-07-23 | Inst Of Food Res | Magnetic resonance imaging scanner |
| US7511502B2 (en) * | 2007-01-05 | 2009-03-31 | Kabushiki Kaisha Toshiba | Magnetic resonance imaging apparatus |
| US7759938B2 (en) | 2007-02-05 | 2010-07-20 | Morpho Detection, Inc. | Apparatus and method for varying magnetic field strength in magnetic resonance measurements |
| JP5222735B2 (ja) * | 2007-02-06 | 2013-06-26 | 株式会社日立メディコ | 磁気共鳴イメージング装置および傾斜磁場コイル |
| EP1962100A1 (en) * | 2007-02-20 | 2008-08-27 | Esaote S.p.A. | Magnetic structure for MRI machines and MRI machine particularly for orthopedic or rheumatologic applications |
| DE102007009203B4 (de) | 2007-02-26 | 2012-03-22 | Siemens Ag | Verfahren zur Bestimmung oder Anpassung eines Shims zur Homogenisierung eines Magnetfeldes einer Magnetresonanzeinrichtung und zugehörige Magnetresonanzeinrichtung |
| US7414401B1 (en) | 2007-03-26 | 2008-08-19 | General Electric Company | System and method for shielded dynamic shimming in an MRI scanner |
| US7489131B2 (en) * | 2007-04-23 | 2009-02-10 | General Electric Co. | System and apparatus for direct cooling of gradient coils |
| WO2008137485A2 (en) | 2007-05-04 | 2008-11-13 | California Institute Of Technology | Low field squid mri devices, components and methods |
| US8175677B2 (en) | 2007-06-07 | 2012-05-08 | MRI Interventions, Inc. | MRI-guided medical interventional systems and methods |
| WO2008153036A1 (ja) * | 2007-06-14 | 2008-12-18 | Hitachi Medical Corporation | オープン型磁気共鳴イメージング装置 |
| US20080315879A1 (en) * | 2007-06-19 | 2008-12-25 | General Electric Company | System and apparatus for electromagnetic noise detection in an mr imaging scanner environment |
| US20120003160A1 (en) | 2007-06-29 | 2012-01-05 | Amag Pharmaceuticals, Inc. | Macrophage-Enhanced MRI (MEMRI) in a Single Imaging Session |
| CN104316953B (zh) * | 2007-07-02 | 2018-05-15 | 皇家飞利浦电子股份有限公司 | 用于混合pet-mr系统的热稳定的pet探测器 |
| US8335359B2 (en) | 2007-07-20 | 2012-12-18 | General Electric Company | Systems, apparatus and processes for automated medical image segmentation |
| US20100219833A1 (en) | 2007-07-26 | 2010-09-02 | Emscan Limited | Magnet assembly |
| US8466681B2 (en) * | 2007-08-30 | 2013-06-18 | Hitachi Medical Corporation | Open-type MRI apparatus, and open-type superconducting MRI apparatus |
| WO2009029896A1 (en) | 2007-08-31 | 2009-03-05 | The Regents Of The University Of California | Adjustable permanent magnet assembly for nmr and mri |
| CN101388271A (zh) * | 2007-09-14 | 2009-03-18 | Ge医疗系统环球技术有限公司 | 磁体系统和mri设备 |
| CN101162637B (zh) * | 2007-09-17 | 2011-05-11 | 山西省平遥县新星磁材有限公司 | 超高场强磁选机用永磁体装置 |
| US8169221B2 (en) * | 2007-10-31 | 2012-05-01 | Griswold Mark A | Multi-frequency excitation coils for MRI |
| AU2008325088A1 (en) | 2007-11-06 | 2009-05-14 | T2 Biosystems, Inc. | Small magnet and RF coil for magnetic resonance relaxometry |
| EP2229097A4 (en) | 2007-11-09 | 2011-01-26 | Vista Clara Inc | MULTILAYER NUCLEAR CORE MAGNETIC RESONANCE DETECTION AND IMAGING APPARATUS AND METHOD |
| US7812604B2 (en) | 2007-11-14 | 2010-10-12 | General Electric Company | Thermal management system for cooling a heat generating component of a magnetic resonance imaging apparatus |
| ITTO20070840A1 (it) | 2007-11-23 | 2009-05-24 | Paramed Medical Systems S R L | Sistema di posizionamento per un'apparecchiatura medicale, ed apparecchiatura di imaging a risonanza magnetica comprendente un tale sistema |
| US8232799B2 (en) * | 2007-11-27 | 2012-07-31 | Arjae Spectral Enterprises | Noise reduction apparatus, systems, and methods |
| US8570035B2 (en) | 2007-12-14 | 2013-10-29 | The Regents Of The University Of California | Magnetic resonance imaging of living systems by remote detection |
| US7753165B2 (en) * | 2007-12-21 | 2010-07-13 | Robert Bosch Gmbh | Device and method for active noise cancellation in exhaust gas channel of a combustion engine |
| JP2009240767A (ja) | 2008-03-10 | 2009-10-22 | Toshiba Corp | 磁気共鳴イメージング装置 |
| EP2262570A1 (en) | 2008-03-12 | 2010-12-22 | Navotek Medical Ltd. | Combination mri and radiotherapy systems and methods of use |
| JP5170540B2 (ja) | 2008-04-24 | 2013-03-27 | 株式会社日立メディコ | 磁気共鳴イメージング装置 |
| WO2009137354A1 (en) | 2008-05-05 | 2009-11-12 | Mayo Foundation For Medical Education And Research | Method for assessing the probability of disease development in tissue |
| US7834270B2 (en) | 2008-07-07 | 2010-11-16 | Imris Inc. | Floating segmented shield cable assembly |
| US7936170B2 (en) * | 2008-08-08 | 2011-05-03 | General Electric Co. | RF coil and apparatus to reduce acoustic noise in an MRI system |
| US8255038B2 (en) | 2008-08-28 | 2012-08-28 | Siemens Medical Solutions Usa, Inc. | System and method for non-uniform image scanning and acquisition |
| JP5567305B2 (ja) * | 2008-09-10 | 2014-08-06 | 株式会社竹中工務店 | 磁気シールドシステム及び磁気シールド方法 |
| US8692412B2 (en) | 2008-09-27 | 2014-04-08 | Witricity Corporation | Temperature compensation in a wireless transfer system |
| AR073770A1 (es) * | 2008-10-20 | 2010-12-01 | Imclone Llc | Anticuerpo aislado que se enlaza especificamente con, e induce la degradacion del receptor-3 del factor de crecimiento del fibroblasto humano (fgfr-3), fragmento de enlace fgfr-3 humano del mismo, composicion farmaceutica y producto que lo comprenden |
| EP2184615A1 (en) | 2008-11-05 | 2010-05-12 | Koninklijke Philips Electronics N.V. | A magnetic resonance imaging system comprising a power supply unit adapted for providing direct current electrical power |
| US7902826B2 (en) * | 2008-12-12 | 2011-03-08 | General Electric Company | Transverse gradient coil for MRI systems and method for manufacturing the same |
| US9222998B2 (en) | 2008-12-18 | 2015-12-29 | Grum Teklemariam | Compact inhomogeneous permanent magnetic field generator for magnetic resonance imaging |
| US8328732B2 (en) | 2008-12-18 | 2012-12-11 | Devicor Medical Products, Inc. | Control module interface for MRI biopsy device |
| JP4852091B2 (ja) * | 2008-12-22 | 2012-01-11 | 株式会社日立メディコ | 傾斜磁場コイル装置、核磁気共鳴撮像装置、および、コイルパターンの設計方法 |
| JP4982881B2 (ja) * | 2008-12-26 | 2012-07-25 | 国立大学法人 熊本大学 | 位相差強調画像化法(PhaseDifferenceEnhancedImaging;PADRE)、機能画像作成法、位相差強調画像化プログラム、位相差強調画像化装置、機能画像作成装置および磁気共鳴画像化(MagneticResonanceImaging;MRI)装置 |
| CN101788655A (zh) | 2009-01-24 | 2010-07-28 | Ge医疗系统环球技术有限公司 | 磁共振成像系统以及使该系统中主磁体的温度稳定的方法 |
| US8253416B2 (en) * | 2009-03-10 | 2012-08-28 | Time Medical Holdings Company Limited | Superconductor magnetic resonance imaging system and method (super-MRI) |
| EP2230530A1 (en) * | 2009-03-20 | 2010-09-22 | Koninklijke Philips Electronics N.V. | A tesseral shim coil for a magnetic resonance system |
| DE212010000045U1 (de) * | 2009-04-21 | 2012-01-23 | Aspect Magnet Technologies Ltd. | Permanentmagnetenanordnung mit fest gegenüberliegender Platte |
| US20100292564A1 (en) * | 2009-05-18 | 2010-11-18 | Cantillon Murphy Padraig J | System and Method For Magnetic-Nanoparticle, Hyperthermia Cancer Therapy |
| US8064183B2 (en) * | 2009-06-01 | 2011-11-22 | Olliges William E | Capacitor based bi-directional degaussing device with chamber |
| WO2010144419A2 (en) | 2009-06-08 | 2010-12-16 | Surgivision, Inc. | Mri-guided interventional systems that can track and generate dynamic visualizations of flexible intrabody devices in near real time |
| US8198891B2 (en) * | 2009-06-15 | 2012-06-12 | General Electric Company | System, method, and apparatus for magnetic resonance RF-field measurement |
| DE102009027119B4 (de) * | 2009-06-23 | 2013-01-17 | Sirona Dental Systems Gmbh | Magnetfeldeinheit eines MRT-Systems zur bildgebenden Erfassung eines Kopfbereichs |
| GB2471705B (en) | 2009-07-09 | 2011-07-27 | Siemens Magnet Technology Ltd | Methods and apparatus for storage of energy removed from superconducting magnets |
| ITGE20090059A1 (it) | 2009-07-28 | 2011-01-29 | Esaote Spa | Macchina per il rilevamento di immagini mri |
| JP5570910B2 (ja) * | 2009-09-28 | 2014-08-13 | 株式会社東芝 | 磁気共鳴イメージング装置 |
| WO2011047376A2 (en) | 2009-10-16 | 2011-04-21 | Emprimus, Inc. | Modular electromagnetically shielded enclosure |
| US20110142316A1 (en) | 2009-10-29 | 2011-06-16 | Ge Wang | Tomography-Based and MRI-Based Imaging Systems |
| US10162026B2 (en) | 2009-11-09 | 2018-12-25 | Vista Clara Inc. | Noise canceling in-situ NMR detection |
| US8816684B2 (en) * | 2009-11-09 | 2014-08-26 | Vista Clara Inc. | Noise canceling in-situ NMR detection |
| US8378682B2 (en) | 2009-11-17 | 2013-02-19 | Muralidhara Subbarao | Field image tomography for magnetic resonance imaging |
| US8593141B1 (en) | 2009-11-24 | 2013-11-26 | Hypres, Inc. | Magnetic resonance system and method employing a digital squid |
| JP5782450B2 (ja) * | 2009-12-10 | 2015-09-24 | コーニンクレッカ フィリップス エヌ ヴェ | 高周波遮蔽若しくはエンクロージャを持つ磁気共鳴対応電気機器 |
| WO2011075770A1 (en) * | 2009-12-21 | 2011-06-30 | Nmr Holdings No. 2 Pty Limited | Open-bore magnet for use in magnetic resonance imaging |
| RU2573545C2 (ru) | 2009-12-28 | 2016-01-20 | Конинклейке Филипс Электроникс Н.В. | Трубчатый тепловой переключатель для магнита, не использующего криогенные среды |
| BR112012015630A2 (pt) | 2009-12-28 | 2018-04-10 | Koninklijke Philips Eletronics N V | "aparelho terapêutico e produto de programa de computador que contém instruções executáveis por maquina para execução por um controlador de um aparelho terapêutico" |
| US8427148B2 (en) | 2009-12-31 | 2013-04-23 | Analogic Corporation | System for combining magnetic resonance imaging with particle-based radiation systems for image guided radiation therapy |
| CN106388823B (zh) | 2010-02-24 | 2019-11-29 | 优瑞技术公司 | 分体式磁共振成像系统 |
| US8970217B1 (en) * | 2010-04-14 | 2015-03-03 | Hypres, Inc. | System and method for noise reduction in magnetic resonance imaging |
| WO2011127946A1 (en) | 2010-04-15 | 2011-10-20 | Elekta Ab (Publ) | Radiotherapy apparatus |
| EP2388610A1 (en) * | 2010-05-20 | 2011-11-23 | Koninklijke Philips Electronics N.V. | Magnetic Resonance Imaging Gradient Coil, Magnet Assembly, and System |
| GB201009101D0 (en) * | 2010-06-01 | 2010-07-14 | Nordic Bioscience As | Computer based analysis of MRI images |
| CN101869479B (zh) * | 2010-06-13 | 2012-04-18 | 苏州纽迈电子科技有限公司 | 可移动式低场核磁共振成像系统 |
| BR112013001488A2 (pt) * | 2010-07-23 | 2016-05-31 | Konink Philps Electronics Nv | dispositivo de detecção do estado fisiológico para a detecção de um estado fisiológico de um paciente e a minimização da quantidade de interferência gerada durante uma varredura de ressonância magnética por um sistema de ressonância magnética, sistema de irm, método para a detecção de um estado fisiológico de um paciente e a minimização de uma quantidade de interferência gerada durante uma verradura de ressonância magnética, método para a operação de um sistema de irm e dispositivo de detecção de pressão para a detecção de um sinal de pressão e a minimização da quantidade de interferência gerada durante uma varredura de ressonância magnética por um sistema de ressonância magnética com um orifício. |
| JP5618683B2 (ja) * | 2010-08-03 | 2014-11-05 | 株式会社日立メディコ | 磁気共鳴イメージング装置及び輝度不均一補正方法 |
| JP5482554B2 (ja) * | 2010-08-04 | 2014-05-07 | 株式会社村田製作所 | 積層型コイル |
| EP2418516A3 (en) * | 2010-08-12 | 2014-02-19 | E-Pharma Trento S.p.A. | Apparatus and method for detecting the presence of a particle of a ferromagnetic metal in a packaging of a paramagnetic material |
| EP2609443A1 (en) * | 2010-08-25 | 2013-07-03 | Koninklijke Philips Electronics N.V. | Rf shield for mri comprising conductive coating as shielding material |
| EP2423699A1 (en) * | 2010-08-30 | 2012-02-29 | Koninklijke Philips Electronics N.V. | Magnetic resonance imaging system, computer system, and computer program product for sending control messages to an anesthesia system |
| GB2483890A (en) * | 2010-09-22 | 2012-03-28 | Tesla Engineering Ltd | MRIS gradient coil assembly with screening layers connected to respective coil layers |
| GB2483889A (en) * | 2010-09-22 | 2012-03-28 | Tesla Engineering Ltd | Gradient coil sub assemblies |
| US9500731B2 (en) | 2010-10-15 | 2016-11-22 | Eleazar Castillo | Shimming device and method to improve magnetic field homogeneity in magnetic resonance imaging devices |
| US8638096B2 (en) * | 2010-10-19 | 2014-01-28 | The Board Of Trustees Of The Leland Stanford Junior University | Method of autocalibrating parallel imaging interpolation from arbitrary K-space sampling with noise correlations weighted to reduce noise of reconstructed images |
| US8563298B2 (en) | 2010-10-22 | 2013-10-22 | T2 Biosystems, Inc. | NMR systems and methods for the rapid detection of analytes |
| US8409807B2 (en) | 2010-10-22 | 2013-04-02 | T2 Biosystems, Inc. | NMR systems and methods for the rapid detection of analytes |
| US8901928B2 (en) | 2010-11-09 | 2014-12-02 | Imris Inc. | MRI safety system |
| KR101152835B1 (ko) * | 2010-12-27 | 2012-06-12 | 한국표준과학연구원 | 자기장 상쇄 장치 및 자기장 상쇄 방법 |
| CN102073024B (zh) * | 2011-01-31 | 2013-03-06 | 汕头市超声仪器研究所有限公司 | 一种手持式超低场mri的成像装置 |
| US8374663B2 (en) | 2011-01-31 | 2013-02-12 | General Electric Company | Cooling system and method for cooling superconducting magnet devices |
| US20140178901A1 (en) | 2011-03-22 | 2014-06-26 | The General Hospital Corporation | Molecular Analysis of Tumor Samples |
| CN103597370B (zh) * | 2011-04-21 | 2016-01-06 | 马普协会 | 空间编码的相位对比磁共振成像 |
| US8558547B2 (en) * | 2011-05-05 | 2013-10-15 | General Electric Company | System and method for magnetic resonance radio-frequency field mapping |
| US9833168B2 (en) * | 2011-06-06 | 2017-12-05 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Noise tolerant localization systems and methods |
| WO2012173635A1 (en) | 2011-06-13 | 2012-12-20 | Vanderbilt University | Multiple resonance nmr spectroscopy using a single transmitter |
| US9351662B2 (en) | 2011-06-17 | 2016-05-31 | Microsoft Technology Licensing, Llc | MRI scanner that outputs bone strength indicators |
| CN102360691B (zh) * | 2011-06-24 | 2013-03-13 | 中国科学院电工研究所 | 一种带有铁环结构的开放式核磁共振磁体系统 |
| EP2736409A4 (en) | 2011-07-28 | 2015-04-22 | Brigham & Womens Hospital | Systems and methods for mobile magnetic resonance measurements of lung properties |
| US9254097B2 (en) | 2011-09-19 | 2016-02-09 | Los Alamos National Security, Llc | System and method for magnetic current density imaging at ultra low magnetic fields |
| DE102011083204B4 (de) * | 2011-09-22 | 2018-12-20 | Siemens Healthcare Gmbh | Kühleinrichtung für eine Gradientenspule und deren Verwendung |
| WO2013058062A1 (ja) * | 2011-10-21 | 2013-04-25 | 株式会社 日立メディコ | 磁気共鳴イメージング装置およびその運転方法 |
| FI125397B (en) * | 2012-01-24 | 2015-09-30 | Elekta Ab | A method for using spatial and temporal oversampling in multichannel measurements |
| TWI587597B (zh) * | 2012-02-17 | 2017-06-11 | Lg伊諾特股份有限公司 | 無線電力傳輸器,無線電力接收器,以及無線電力傳輸系統的電力傳輸方法 |
| JP2013175028A (ja) | 2012-02-24 | 2013-09-05 | Alps Electric Co Ltd | 操作感触付与型入力装置 |
| US9316707B2 (en) | 2012-04-18 | 2016-04-19 | General Electric Company | System and method of receive sensitivity correction in MR imaging |
| US9500727B2 (en) | 2012-04-20 | 2016-11-22 | Regents Of The University Of Minnesota | System and method for control of RF circuits for use with an MRI system |
| US9883878B2 (en) | 2012-05-15 | 2018-02-06 | Pulse Therapeutics, Inc. | Magnetic-based systems and methods for manipulation of magnetic particles |
| US9244139B2 (en) | 2012-05-18 | 2016-01-26 | Neocoil, Llc | Method and apparatus for MRI compatible communications |
| PL2852423T3 (pl) * | 2012-05-21 | 2019-03-29 | Boehringer Ingelheim International Gmbh | System z inhalatora i kapsułki |
| KR102020534B1 (ko) | 2012-06-15 | 2019-09-10 | 더 제너럴 하스피탈 코포레이션 | 영구 자석들의 로테이팅 어레이를 사용하는 자기 공명 이미징을 위한 시스템 및 방법 |
| US8993898B2 (en) | 2012-06-26 | 2015-03-31 | ETS-Lindgren Inc. | Movable EMF shield, method for facilitating rapid imaging and treatment of patient |
| US8825132B2 (en) * | 2012-07-04 | 2014-09-02 | Bruker Biospin Gmbh | Field cycling method for magnetic resonance |
| GB201212813D0 (en) | 2012-07-19 | 2012-09-05 | Univ Aberdeen | Apparatus for use with an MRI scanner |
| US20140066739A1 (en) | 2012-08-29 | 2014-03-06 | Bin He | System and method for quantifying or imaging pain using electrophysiological measurements |
| CN102800057A (zh) * | 2012-09-18 | 2012-11-28 | 苏州安科医疗系统有限公司 | 一种用于磁共振成像基于相位一致性的图像去噪方法 |
| US9910115B2 (en) | 2012-10-22 | 2018-03-06 | The General Hospital Corporation | System and method for portable magnetic resonance imaging using a rotating array of magnets |
| JP5902317B2 (ja) | 2012-11-16 | 2016-04-13 | 株式会社日立製作所 | 磁気共鳴イメージング装置および定量的磁化率マッピング法 |
| CN103852740B (zh) * | 2012-11-30 | 2016-12-07 | 通用电气公司 | 降低涡电流磁场的系统和方法 |
| US10060997B2 (en) | 2012-12-05 | 2018-08-28 | Hitachi, Ltd. | Magnetic resonance imaging apparatus and operating method of cooling fan motor of magnetic resonance imaging apparatus |
| US9268572B2 (en) | 2012-12-11 | 2016-02-23 | International Business Machines Corporation | Modify and execute next sequential instruction facility and instructions therefor |
| EP2749318A1 (en) | 2012-12-28 | 2014-07-02 | Theraclion SA | Image-guided therapeutic apparatus and method of preparation of an image-guided therapeutic apparatus for treatment of tissue |
| US9355774B2 (en) * | 2012-12-28 | 2016-05-31 | General Electric Company | System and method for manufacturing magnetic resonance imaging coils using ultrasonic consolidation |
| US9782141B2 (en) | 2013-02-01 | 2017-10-10 | Kineticor, Inc. | Motion tracking system for real time adaptive motion compensation in biomedical imaging |
| EP2765437B1 (en) * | 2013-02-12 | 2020-05-06 | Siemens Healthcare GmbH | A simple method to denoise ratio images in magnetic resonance imaging |
| WO2014133186A1 (ja) * | 2013-03-01 | 2014-09-04 | 株式会社東芝 | 磁気共鳴イメージング装置及び傾斜磁場コイル |
| WO2014143796A2 (en) | 2013-03-15 | 2014-09-18 | Mobius Imaging, Llc | Mobile x-ray imaging system |
| US9814390B2 (en) | 2013-03-15 | 2017-11-14 | Synaptive Medical (Barbados) Inc. | Insert imaging device for surgical procedures |
| US10311598B2 (en) | 2013-05-16 | 2019-06-04 | The Regents Of The University Of California | Fully automated localization of electroencephalography (EEG) electrodes |
| US20160011290A1 (en) | 2013-05-21 | 2016-01-14 | Victor Iannello | Non-Invasive, In-Vivo Measurement of Blood Constituents Using a Portable Nuclear Magnetic Resonance Device |
| DE102013210237B4 (de) | 2013-06-03 | 2016-12-29 | Siemens Healthcare Gmbh | Verfahren zum Betreiben eines mobilen Magnetresonanztomographiesystems |
| EP3047292B1 (en) | 2013-09-17 | 2021-06-30 | Synaptive Medical Inc. | Coil assembly for magnetic resonance imaging |
| DE202013105212U1 (de) | 2013-11-17 | 2013-12-19 | Aspect Imaging Ltd. | Schließvorrichtung eines MRT-Inkubators |
| US10264995B2 (en) * | 2013-12-04 | 2019-04-23 | Obalon Therapeutics, Inc. | Systems and methods for locating and/or characterizing intragastric devices |
| WO2015085257A1 (en) | 2013-12-06 | 2015-06-11 | Sonitrack Systems, Inc. | Mechanically driven ultrasound scanning system and method |
| US20150198684A1 (en) * | 2014-01-13 | 2015-07-16 | Tamer BASHA | System and Method For Flexible Automated Magnetic Resonance Imaging Reconstruction |
| DE202014101104U1 (de) | 2014-03-09 | 2014-04-03 | Aspect Imaging Ltd. | Eine wärmeisolierende MRT-Ummantelung |
| EP3126861B1 (en) * | 2014-03-31 | 2023-10-18 | Koninklijke Philips N.V. | Magnetic resonance imaging with rf noise detection coils |
| US20150285882A1 (en) | 2014-04-03 | 2015-10-08 | University Of Maryland, Baltimore | Portable system and method for mri imaging and tissue analysis |
| CN103913778B (zh) * | 2014-04-10 | 2017-02-15 | 吉林大学 | 多个近端参考线圈的核磁共振信号实时噪声抵消装置 |
| EP3132276A2 (en) | 2014-04-15 | 2017-02-22 | Imperial Innovations Ltd | Mri apparatus and methods |
| DK3151663T3 (da) | 2014-06-02 | 2020-11-30 | Transmedics Inc | Ex vivo-organplejesystem |
| US9678183B2 (en) | 2014-08-14 | 2017-06-13 | General Electric Company | Wireless actuator circuit for wireless actuation of micro electromechanical system switch for magnetic resonance imaging |
| CN111896903A (zh) | 2014-09-05 | 2020-11-06 | 海珀菲纳研究股份有限公司 | 噪声抑制方法和设备 |
| US20160069967A1 (en) * | 2014-09-10 | 2016-03-10 | General Electric Company | Apparatus and system for imaging an intubated patient |
| JP6464637B2 (ja) * | 2014-09-26 | 2019-02-06 | 株式会社ノーリツ | コージェネレーションシステム |
| EP3217872A4 (en) | 2014-11-11 | 2018-07-18 | Hyperfine Research, Inc. | Pulse sequences for low field magnetic resonance |
| US10813564B2 (en) | 2014-11-11 | 2020-10-27 | Hyperfine Research, Inc. | Low field magnetic resonance methods and apparatus |
| JP6268108B2 (ja) * | 2015-01-30 | 2018-01-24 | 株式会社日立製作所 | 超電導磁石ならびに磁気共鳴撮像装置 |
| AU2016250077B2 (en) | 2015-04-13 | 2021-04-15 | Hyperfine Operations, Inc. | Magnetic coil power methods and apparatus |
| JP6784697B2 (ja) | 2015-05-12 | 2020-11-11 | ハイパーファイン リサーチ,インコーポレイテッド | 高周波コイルの方法および装置 |
| US9958521B2 (en) | 2015-07-07 | 2018-05-01 | Q Bio, Inc. | Field-invariant quantitative magnetic-resonance signatures |
| US10194829B2 (en) | 2015-07-07 | 2019-02-05 | Q Bio, Inc. | Fast scanning based on magnetic resonance history |
| US10031198B2 (en) * | 2015-08-04 | 2018-07-24 | General Electric Company | Methods and systems for a dual wind gradient coil |
| CN106483483B (zh) * | 2015-08-27 | 2019-09-06 | 通用电气公司 | 梯度线圈及其制造方法 |
| KR102454746B1 (ko) * | 2015-10-01 | 2022-10-17 | 삼성전자주식회사 | 통신 시스템에서 미디어 리소스 식별 정보를 송수신하는 장치 및 방법 |
| CN109073681B (zh) | 2016-03-22 | 2020-10-23 | 海珀菲纳研究股份有限公司 | 用于磁场匀场的方法和设备 |
| US10359486B2 (en) | 2016-04-03 | 2019-07-23 | Q Bio, Inc. | Rapid determination of a relaxation time |
| DE102016211072A1 (de) * | 2016-06-21 | 2017-12-21 | Siemens Healthcare Gmbh | Verfahren zu einem Bereitstellen einer Auswahl von zumindest einem Protokollparameter aus einer Vielzahl von Protokollparametern sowie eine Magnetresonanzvorrichtung hierzu |
| TWI667487B (zh) | 2016-09-29 | 2019-08-01 | 美商超精細研究股份有限公司 | 射頻線圈調諧方法及裝置 |
| US10539637B2 (en) | 2016-11-22 | 2020-01-21 | Hyperfine Research, Inc. | Portable magnetic resonance imaging methods and apparatus |
| US10585153B2 (en) | 2016-11-22 | 2020-03-10 | Hyperfine Research, Inc. | Rotatable magnet methods and apparatus for a magnetic resonance imaging system |
| WO2018098141A1 (en) | 2016-11-22 | 2018-05-31 | Hyperfine Research, Inc. | Systems and methods for automated detection in magnetic resonance images |
| US10627464B2 (en) | 2016-11-22 | 2020-04-21 | Hyperfine Research, Inc. | Low-field magnetic resonance imaging methods and apparatus |
| EP3467531A1 (de) * | 2017-10-05 | 2019-04-10 | Siemens Healthcare GmbH | Magnetresonanztomograph mit aktiver störunterdrückung und verfahren zur störunterdrückung in einem magnetresonanztomographen |
| CA3096397A1 (en) | 2018-04-20 | 2019-10-24 | Hyperfine Research, Inc. | Deployable guard for portable magnetic resonance imaging devices |
| AU2019272580A1 (en) | 2018-05-21 | 2020-11-12 | Hyperfine Operations, Inc. | Radio-frequency coil signal chain for a low-field MRI system |
| BR112020021872A2 (pt) | 2018-05-21 | 2021-01-26 | Hyperfine Research, Inc. | métodos e aparelhos de magneto b0 para um sistema de ressonância magnética |
| TW202015621A (zh) | 2018-07-19 | 2020-05-01 | 美商超精細研究股份有限公司 | 在磁共振成像中患者定位之方法及設備 |
| JP2021532875A (ja) | 2018-07-30 | 2021-12-02 | ハイパーファイン,インコーポレイテッド | 磁気共鳴画像再構成のための深層学習技術 |
| TW202012951A (zh) | 2018-07-31 | 2020-04-01 | 美商超精細研究股份有限公司 | 低場漫射加權成像 |
| CA3106683A1 (en) | 2018-07-31 | 2020-02-06 | Hyperfine Research, Inc. | Medical imaging device messaging service |
| JP2021534852A (ja) | 2018-08-15 | 2021-12-16 | ハイパーファイン,インコーポレイテッド | 磁気共鳴画像においてアーティファクトを抑制するためのディープラーニング技術 |
| CA3122087A1 (en) | 2018-12-19 | 2020-06-25 | Hyperfine Research, Inc. | System and methods for grounding patients during magnetic resonance imaging |
| WO2020139476A2 (en) | 2018-12-28 | 2020-07-02 | Hyperfine Research, Inc. | Correcting for hysteresis in magnetic resonance imaging |
| EP3937774A1 (en) | 2019-03-12 | 2022-01-19 | Hyperfine, Inc. | Systems and methods for magnetic resonance imaging of infants |
| JP2022526718A (ja) | 2019-03-14 | 2022-05-26 | ハイパーファイン,インコーポレイテッド | 空間周波数データから磁気共鳴画像を生成するための深層学習技術 |
| KR20220005492A (ko) | 2019-04-26 | 2022-01-13 | 하이퍼파인, 인크. | 자기 공명 영상 시스템의 동적 제어를 위한 기술 |
| KR20220007876A (ko) | 2019-05-07 | 2022-01-19 | 하이퍼파인, 인크. | 유아의 자기 공명 이미징을 위한 시스템, 디바이스 및 방법 |
| US11698430B2 (en) | 2019-08-15 | 2023-07-11 | Hyperfine Operations, Inc. | Eddy current mitigation systems and methods |
| US11510588B2 (en) | 2019-11-27 | 2022-11-29 | Hyperfine Operations, Inc. | Techniques for noise suppression in an environment of a magnetic resonance imaging system |
| DE102020202830A1 (de) * | 2020-03-05 | 2021-09-09 | Siemens Healthcare Gmbh | Magnetresonanztomograph und Verfahren zum Betrieb mit dynamischer B0-Kompensation |
-
2015
- 2015-09-04 CN CN202010597758.3A patent/CN111896903A/zh active Pending
- 2015-09-04 BR BR112017004353A patent/BR112017004353A2/pt not_active Application Discontinuation
- 2015-09-04 AU AU2015311825A patent/AU2015311825B2/en not_active Ceased
- 2015-09-04 CA CA2960194A patent/CA2960194C/en not_active Expired - Fee Related
- 2015-09-04 MX MX2017002938A patent/MX366786B/es active IP Right Grant
- 2015-09-04 BR BR112017004336A patent/BR112017004336A2/pt not_active Application Discontinuation
- 2015-09-04 US US14/845,652 patent/US9817093B2/en active Active
- 2015-09-04 EP EP15838192.1A patent/EP3189341A4/en active Pending
- 2015-09-04 CA CA3043061A patent/CA3043061A1/en not_active Abandoned
- 2015-09-04 CN CN201580054059.1A patent/CN107110931B/zh active Active
- 2015-09-04 IL IL250939A patent/IL250939B/en unknown
- 2015-09-04 MX MX2017002939A patent/MX2017002939A/es unknown
- 2015-09-04 KR KR1020177009312A patent/KR20170048577A/ko not_active Application Discontinuation
- 2015-09-04 WO PCT/US2015/048484 patent/WO2016037030A1/en active Application Filing
- 2015-09-04 US US14/846,255 patent/US9638773B2/en active Active
- 2015-09-04 US US14/846,042 patent/US9645210B2/en active Active
- 2015-09-04 EP EP15838773.8A patent/EP3189343A4/en active Pending
- 2015-09-04 CN CN202010843413.1A patent/CN112098912B/zh active Active
- 2015-09-04 CA CA2960200A patent/CA2960200A1/en not_active Abandoned
- 2015-09-04 KR KR1020177008944A patent/KR20170052621A/ko active IP Right Grant
- 2015-09-04 AU AU2015311830A patent/AU2015311830B2/en not_active Ceased
- 2015-09-04 EP EP15837569.1A patent/EP3189340A4/en active Pending
- 2015-09-04 CA CA2960191A patent/CA2960191A1/en not_active Abandoned
- 2015-09-04 BR BR112017004369A patent/BR112017004369A2/pt not_active Application Discontinuation
- 2015-09-04 CN CN201580053879.9A patent/CN107110930B/zh active Active
- 2015-09-04 CN CN202010717926.8A patent/CN111983536A/zh active Pending
- 2015-09-04 CN CN201580054097.7A patent/CN107110932B/zh active Active
- 2015-09-04 KR KR1020177009185A patent/KR20170048560A/ko active IP Right Grant
- 2015-09-04 CN CN201580055003.8A patent/CN107110933B/zh not_active Expired - Fee Related
- 2015-09-04 WO PCT/US2015/048470 patent/WO2016037025A1/en active Application Filing
- 2015-09-04 CN CN202010767527.2A patent/CN112083365B/zh active Active
- 2015-09-04 JP JP2017531981A patent/JP6684804B2/ja active Active
- 2015-09-04 JP JP2017531982A patent/JP6761416B2/ja active Active
- 2015-09-04 EP EP15838618.5A patent/EP3189342A4/en active Pending
- 2015-09-04 CA CA2960178A patent/CA2960178C/en not_active Expired - Fee Related
- 2015-09-04 WO PCT/US2015/048631 patent/WO2016037101A1/en active Application Filing
- 2015-09-04 AU AU2015311749A patent/AU2015311749B2/en not_active Ceased
- 2015-09-04 KR KR1020177009177A patent/KR20170048558A/ko active IP Right Grant
- 2015-09-04 CA CA3066755A patent/CA3066755A1/en not_active Abandoned
- 2015-09-04 CA CA3043063A patent/CA3043063A1/en not_active Abandoned
- 2015-09-04 EP EP15838504.7A patent/EP3189344A4/en not_active Withdrawn
- 2015-09-04 AU AU2015311828A patent/AU2015311828B2/en not_active Ceased
- 2015-09-04 AU AU2015311725A patent/AU2015311725A1/en not_active Abandoned
- 2015-09-04 CA CA2960189A patent/CA2960189C/en not_active Expired - Fee Related
- 2015-09-04 WO PCT/US2015/048515 patent/WO2016037042A1/en active Application Filing
- 2015-09-04 JP JP2017531985A patent/JP6832852B2/ja active Active
- 2015-09-04 US US14/846,158 patent/US10768255B2/en not_active Expired - Fee Related
- 2015-09-04 WO PCT/US2015/048479 patent/WO2016037028A1/en active Application Filing
- 2015-09-04 US US14/845,949 patent/US9547057B2/en active Active
- 2015-09-04 BR BR112017004357A patent/BR112017004357A2/pt active Search and Examination
- 2015-09-04 MX MX2017002940A patent/MX2017002940A/es unknown
- 2015-09-04 MX MX2017002937A patent/MX2017002937A/es unknown
- 2015-09-04 JP JP2017531980A patent/JP6674645B2/ja active Active
-
2016
- 2016-02-22 US US15/049,596 patent/US9625543B2/en active Active
- 2016-02-22 US US15/049,309 patent/US9541616B2/en active Active
- 2016-04-06 US US15/091,971 patent/US9625544B2/en active Active
- 2016-04-19 US US15/132,617 patent/US20160231402A1/en not_active Abandoned
- 2016-04-19 US US15/132,671 patent/US10145922B2/en active Active
- 2016-04-19 US US15/132,703 patent/US10379186B2/en active Active
- 2016-04-19 US US15/132,742 patent/US10591564B2/en active Active
- 2016-09-02 TW TW105128467A patent/TWI627428B/zh not_active IP Right Cessation
- 2016-12-21 US US15/387,320 patent/US9797971B2/en active Active
-
2017
- 2017-03-05 IL IL250933A patent/IL250933B/en active IP Right Grant
- 2017-03-05 IL IL250935A patent/IL250935B/en unknown
- 2017-03-05 IL IL250934A patent/IL250934A0/en unknown
- 2017-04-26 US US15/498,432 patent/US10241177B2/en active Active
- 2017-09-29 US US15/721,340 patent/US10495712B2/en active Active
- 2017-09-29 US US15/721,309 patent/US10139464B2/en active Active
-
2018
- 2018-10-04 US US16/152,126 patent/US10613181B2/en active Active
- 2018-11-19 US US16/195,518 patent/US10488482B2/en active Active
- 2018-12-03 US US16/207,971 patent/US10466327B2/en active Active
-
2019
- 2019-01-31 US US16/264,241 patent/US11397233B2/en active Active
- 2019-03-12 AU AU2019201685A patent/AU2019201685B2/en not_active Ceased
- 2019-09-18 US US16/574,727 patent/US20200011952A1/en active Pending
- 2019-09-25 US US16/583,175 patent/US11175364B2/en active Active
- 2019-09-25 US US16/583,190 patent/US11221386B2/en active Active
-
2020
- 2020-02-19 JP JP2020025749A patent/JP6955595B2/ja active Active
- 2020-03-30 JP JP2020059620A patent/JP6882569B2/ja active Active
- 2020-04-23 JP JP2020076553A patent/JP2020127750A/ja active Pending
-
2021
- 2021-05-06 JP JP2021078699A patent/JP2021120001A/ja active Pending
- 2021-05-21 AU AU2021203286A patent/AU2021203286A1/en not_active Abandoned
- 2021-07-08 IL IL284727A patent/IL284727B/en unknown
- 2021-10-01 JP JP2021162485A patent/JP2022000241A/ja active Pending
- 2021-10-26 US US17/510,919 patent/US20220043088A1/en not_active Abandoned
- 2021-12-02 US US17/541,070 patent/US11662412B2/en active Active
-
2022
- 2022-07-19 US US17/868,212 patent/US20220349975A1/en not_active Abandoned
-
2023
- 2023-04-24 US US18/138,261 patent/US20230333188A1/en not_active Abandoned
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018190676A1 (ko) | 2017-04-14 | 2018-10-18 | 국립암센터 | 말산-아스파르트산 왕복수송 억제제 및 항암제를 유효성분으로 함유하는 암 예방 및 치료용 약학적 조성물 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10466327B2 (en) | Automatic configuration of a low field magnetic resonance imaging system | |
| TWI685668B (zh) | 磁共振成像系統,以及搭配該磁共振成像系統使用之調諧系統 | |
| EP3830594B1 (en) | Low-field diffusion-weighted magnetic resonance imaging | |
| JP7494198B2 (ja) | 磁気共鳴撮像を実行するシステムおよび方法 | |
| US10310036B2 (en) | Magnetic resonance imaging apparatus and method for detecting error of magnetic resonance imaging apparatus | |
| TWI619473B (zh) | 低場磁共振成像系統之自動組態 | |
| US20200025847A1 (en) | Local coil device | |
| OA20840A (en) | Systems and methods for performing magnetic resonance imaging. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E701 | Decision to grant or registration of patent right |