WO2015151864A1 - 三次元積層装置及び三次元積層方法 - Google Patents
三次元積層装置及び三次元積層方法 Download PDFInfo
- Publication number
- WO2015151864A1 WO2015151864A1 PCT/JP2015/058496 JP2015058496W WO2015151864A1 WO 2015151864 A1 WO2015151864 A1 WO 2015151864A1 JP 2015058496 W JP2015058496 W JP 2015058496W WO 2015151864 A1 WO2015151864 A1 WO 2015151864A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- unit
- dimensional
- powder
- heating
- molding layer
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 52
- 238000003475 lamination Methods 0.000 title claims abstract description 27
- 239000000843 powder Substances 0.000 claims abstract description 251
- 238000010438 heat treatment Methods 0.000 claims abstract description 160
- 238000010030 laminating Methods 0.000 claims abstract description 122
- 239000000463 material Substances 0.000 claims abstract description 68
- 238000002844 melting Methods 0.000 claims abstract description 6
- 230000008018 melting Effects 0.000 claims abstract description 6
- 238000005245 sintering Methods 0.000 claims abstract description 3
- 238000000465 moulding Methods 0.000 claims description 152
- 230000007246 mechanism Effects 0.000 claims description 47
- 238000001514 detection method Methods 0.000 claims description 42
- 238000005259 measurement Methods 0.000 claims description 33
- 239000004065 semiconductor Substances 0.000 claims description 32
- 239000013307 optical fiber Substances 0.000 claims description 23
- 238000009826 distribution Methods 0.000 claims description 17
- 230000001678 irradiating effect Effects 0.000 claims description 17
- 239000000155 melt Substances 0.000 claims description 14
- 238000007493 shaping process Methods 0.000 claims description 7
- 238000005507 spraying Methods 0.000 claims description 4
- 238000007711 solidification Methods 0.000 claims description 2
- 230000008023 solidification Effects 0.000 claims description 2
- 238000003754 machining Methods 0.000 description 91
- 238000003860 storage Methods 0.000 description 58
- 239000007789 gas Substances 0.000 description 36
- 238000010586 diagram Methods 0.000 description 33
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 33
- 238000004519 manufacturing process Methods 0.000 description 32
- 230000008569 process Effects 0.000 description 31
- 238000012545 processing Methods 0.000 description 24
- 238000011084 recovery Methods 0.000 description 12
- 230000015572 biosynthetic process Effects 0.000 description 10
- 238000004891 communication Methods 0.000 description 9
- 238000013461 design Methods 0.000 description 9
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 8
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 8
- 230000008859 change Effects 0.000 description 8
- 239000001301 oxygen Substances 0.000 description 8
- 229910052760 oxygen Inorganic materials 0.000 description 8
- 238000003384 imaging method Methods 0.000 description 7
- 238000002156 mixing Methods 0.000 description 6
- 238000003756 stirring Methods 0.000 description 6
- 238000000105 evaporative light scattering detection Methods 0.000 description 5
- 230000005484 gravity Effects 0.000 description 5
- 239000002245 particle Substances 0.000 description 5
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 4
- 229910052786 argon Inorganic materials 0.000 description 4
- 239000011261 inert gas Substances 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 229910052751 metal Inorganic materials 0.000 description 4
- 230000003746 surface roughness Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 239000000654 additive Substances 0.000 description 2
- 230000000996 additive effect Effects 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 229910052757 nitrogen Inorganic materials 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000012255 powdered metal Substances 0.000 description 2
- 239000002994 raw material Substances 0.000 description 2
- 239000007921 spray Substances 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000006837 decompression Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 239000012778 molding material Substances 0.000 description 1
- 238000003921 particle size analysis Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000004611 spectroscopical analysis Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000007723 transport mechanism Effects 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images




















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/34—Laser welding for purposes other than joining
- B23K26/342—Build-up welding
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F10/00—Additive manufacturing of workpieces or articles from metallic powder
- B22F10/20—Direct sintering or melting
- B22F10/25—Direct deposition of metal particles, e.g. direct metal deposition [DMD] or laser engineered net shaping [LENS]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F10/00—Additive manufacturing of workpieces or articles from metallic powder
- B22F10/30—Process control
- B22F10/36—Process control of energy beam parameters
- B22F10/368—Temperature or temperature gradient, e.g. temperature of the melt pool
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F12/00—Apparatus or devices specially adapted for additive manufacturing; Auxiliary means for additive manufacturing; Combinations of additive manufacturing apparatus or devices with other processing apparatus or devices
- B22F12/40—Radiation means
- B22F12/44—Radiation means characterised by the configuration of the radiation means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F12/00—Apparatus or devices specially adapted for additive manufacturing; Auxiliary means for additive manufacturing; Combinations of additive manufacturing apparatus or devices with other processing apparatus or devices
- B22F12/50—Means for feeding of material, e.g. heads
- B22F12/53—Nozzles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F12/00—Apparatus or devices specially adapted for additive manufacturing; Auxiliary means for additive manufacturing; Combinations of additive manufacturing apparatus or devices with other processing apparatus or devices
- B22F12/90—Means for process control, e.g. cameras or sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F3/00—Manufacture of workpieces or articles from metallic powder characterised by the manner of compacting or sintering; Apparatus specially adapted therefor ; Presses and furnaces
- B22F3/12—Both compacting and sintering
- B22F3/16—Both compacting and sintering in successive or repeated steps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/0093—Working by laser beam, e.g. welding, cutting or boring combined with mechanical machining or metal-working covered by other subclasses than B23K
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/02—Positioning or observing the workpiece, e.g. with respect to the point of impact; Aligning, aiming or focusing the laser beam
- B23K26/03—Observing, e.g. monitoring, the workpiece
- B23K26/034—Observing the temperature of the workpiece
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/02—Positioning or observing the workpiece, e.g. with respect to the point of impact; Aligning, aiming or focusing the laser beam
- B23K26/03—Observing, e.g. monitoring, the workpiece
- B23K26/0342—Observing magnetic fields related to the workpiece
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/02—Positioning or observing the workpiece, e.g. with respect to the point of impact; Aligning, aiming or focusing the laser beam
- B23K26/04—Automatically aligning, aiming or focusing the laser beam, e.g. using the back-scattered light
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/02—Positioning or observing the workpiece, e.g. with respect to the point of impact; Aligning, aiming or focusing the laser beam
- B23K26/06—Shaping the laser beam, e.g. by masks or multi-focusing
- B23K26/0604—Shaping the laser beam, e.g. by masks or multi-focusing by a combination of beams
- B23K26/0608—Shaping the laser beam, e.g. by masks or multi-focusing by a combination of beams in the same heat affected zone [HAZ]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/02—Positioning or observing the workpiece, e.g. with respect to the point of impact; Aligning, aiming or focusing the laser beam
- B23K26/06—Shaping the laser beam, e.g. by masks or multi-focusing
- B23K26/064—Shaping the laser beam, e.g. by masks or multi-focusing by means of optical elements, e.g. lenses, mirrors or prisms
- B23K26/0643—Shaping the laser beam, e.g. by masks or multi-focusing by means of optical elements, e.g. lenses, mirrors or prisms comprising mirrors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/02—Positioning or observing the workpiece, e.g. with respect to the point of impact; Aligning, aiming or focusing the laser beam
- B23K26/06—Shaping the laser beam, e.g. by masks or multi-focusing
- B23K26/064—Shaping the laser beam, e.g. by masks or multi-focusing by means of optical elements, e.g. lenses, mirrors or prisms
- B23K26/0648—Shaping the laser beam, e.g. by masks or multi-focusing by means of optical elements, e.g. lenses, mirrors or prisms comprising lenses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/08—Devices involving relative movement between laser beam and workpiece
- B23K26/082—Scanning systems, i.e. devices involving movement of the laser beam relative to the laser head
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/12—Working by laser beam, e.g. welding, cutting or boring in a special atmosphere, e.g. in an enclosure
- B23K26/127—Working by laser beam, e.g. welding, cutting or boring in a special atmosphere, e.g. in an enclosure in an enclosure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/14—Working by laser beam, e.g. welding, cutting or boring using a fluid stream, e.g. a jet of gas, in conjunction with the laser beam; Nozzles therefor
- B23K26/144—Working by laser beam, e.g. welding, cutting or boring using a fluid stream, e.g. a jet of gas, in conjunction with the laser beam; Nozzles therefor the fluid stream containing particles, e.g. powder
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/14—Working by laser beam, e.g. welding, cutting or boring using a fluid stream, e.g. a jet of gas, in conjunction with the laser beam; Nozzles therefor
- B23K26/1462—Nozzles; Features related to nozzles
- B23K26/1464—Supply to, or discharge from, nozzles of media, e.g. gas, powder, wire
- B23K26/1476—Features inside the nozzle for feeding the fluid stream through the nozzle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B33—ADDITIVE MANUFACTURING TECHNOLOGY
- B33Y—ADDITIVE MANUFACTURING, i.e. MANUFACTURING OF THREE-DIMENSIONAL [3-D] OBJECTS BY ADDITIVE DEPOSITION, ADDITIVE AGGLOMERATION OR ADDITIVE LAYERING, e.g. BY 3-D PRINTING, STEREOLITHOGRAPHY OR SELECTIVE LASER SINTERING
- B33Y10/00—Processes of additive manufacturing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B33—ADDITIVE MANUFACTURING TECHNOLOGY
- B33Y—ADDITIVE MANUFACTURING, i.e. MANUFACTURING OF THREE-DIMENSIONAL [3-D] OBJECTS BY ADDITIVE DEPOSITION, ADDITIVE AGGLOMERATION OR ADDITIVE LAYERING, e.g. BY 3-D PRINTING, STEREOLITHOGRAPHY OR SELECTIVE LASER SINTERING
- B33Y30/00—Apparatus for additive manufacturing; Details thereof or accessories therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B33—ADDITIVE MANUFACTURING TECHNOLOGY
- B33Y—ADDITIVE MANUFACTURING, i.e. MANUFACTURING OF THREE-DIMENSIONAL [3-D] OBJECTS BY ADDITIVE DEPOSITION, ADDITIVE AGGLOMERATION OR ADDITIVE LAYERING, e.g. BY 3-D PRINTING, STEREOLITHOGRAPHY OR SELECTIVE LASER SINTERING
- B33Y50/00—Data acquisition or data processing for additive manufacturing
- B33Y50/02—Data acquisition or data processing for additive manufacturing for controlling or regulating additive manufacturing processes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F10/00—Additive manufacturing of workpieces or articles from metallic powder
- B22F10/30—Process control
- B22F10/32—Process control of the atmosphere, e.g. composition or pressure in a building chamber
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F10/00—Additive manufacturing of workpieces or articles from metallic powder
- B22F10/50—Treatment of workpieces or articles during build-up, e.g. treatments applied to fused layers during build-up
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F10/00—Additive manufacturing of workpieces or articles from metallic powder
- B22F10/70—Recycling
- B22F10/73—Recycling of powder
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F12/00—Apparatus or devices specially adapted for additive manufacturing; Auxiliary means for additive manufacturing; Combinations of additive manufacturing apparatus or devices with other processing apparatus or devices
- B22F12/22—Driving means
- B22F12/222—Driving means for motion along a direction orthogonal to the plane of a layer
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F12/00—Apparatus or devices specially adapted for additive manufacturing; Auxiliary means for additive manufacturing; Combinations of additive manufacturing apparatus or devices with other processing apparatus or devices
- B22F12/22—Driving means
- B22F12/224—Driving means for motion along a direction within the plane of a layer
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F12/00—Apparatus or devices specially adapted for additive manufacturing; Auxiliary means for additive manufacturing; Combinations of additive manufacturing apparatus or devices with other processing apparatus or devices
- B22F12/30—Platforms or substrates
- B22F12/37—Rotatable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F12/00—Apparatus or devices specially adapted for additive manufacturing; Auxiliary means for additive manufacturing; Combinations of additive manufacturing apparatus or devices with other processing apparatus or devices
- B22F12/40—Radiation means
- B22F12/41—Radiation means characterised by the type, e.g. laser or electron beam
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F12/00—Apparatus or devices specially adapted for additive manufacturing; Auxiliary means for additive manufacturing; Combinations of additive manufacturing apparatus or devices with other processing apparatus or devices
- B22F12/40—Radiation means
- B22F12/44—Radiation means characterised by the configuration of the radiation means
- B22F12/45—Two or more
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F2301/00—Metallic composition of the powder or its coating
- B22F2301/05—Light metals
- B22F2301/052—Aluminium
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F2301/00—Metallic composition of the powder or its coating
- B22F2301/10—Copper
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F2301/00—Metallic composition of the powder or its coating
- B22F2301/20—Refractory metals
- B22F2301/205—Titanium, zirconium or hafnium
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F2301/00—Metallic composition of the powder or its coating
- B22F2301/35—Iron
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22F—WORKING METALLIC POWDER; MANUFACTURE OF ARTICLES FROM METALLIC POWDER; MAKING METALLIC POWDER; APPARATUS OR DEVICES SPECIALLY ADAPTED FOR METALLIC POWDER
- B22F2998/00—Supplementary information concerning processes or compositions relating to powder metallurgy
- B22F2998/10—Processes characterised by the sequence of their steps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K2103/00—Materials to be soldered, welded or cut
- B23K2103/02—Iron or ferrous alloys
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K2103/00—Materials to be soldered, welded or cut
- B23K2103/08—Non-ferrous metals or alloys
- B23K2103/10—Aluminium or alloys thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K2103/00—Materials to be soldered, welded or cut
- B23K2103/08—Non-ferrous metals or alloys
- B23K2103/12—Copper or alloys thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K2103/00—Materials to be soldered, welded or cut
- B23K2103/08—Non-ferrous metals or alloys
- B23K2103/14—Titanium or alloys thereof
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P10/00—Technologies related to metal processing
- Y02P10/25—Process efficiency
Definitions
- the present invention relates to a three-dimensional laminating apparatus and a three-dimensional laminating method for producing a three-dimensional shape object by laminating.
- Patent Document 1 discloses a three-dimensional shape in which a powder layer formed of a metal powder material is irradiated with a light beam to form a sintered layer, and a plurality of sintered layers are laminated integrally by repeating this process.
- a method for manufacturing a shaped object is described.
- Patent Document 2 a laser beam and powdered metal are output from a central opening formed in a conical nozzle that can be freely attached and detached, and the workpiece to be processed is irradiated with a laser to shallowly store a liquefied metal. Is formed, and a device for depositing by supplying powdered metal to the position is described.
- An object of the present invention is to provide a three-dimensional laminating apparatus and a three-dimensional laminating method for manufacturing a three-dimensional object with high accuracy.
- the present invention is a three-dimensional laminating apparatus for forming a three-dimensional shape by laminating a molding layer on a base part, and a powder supply unit for supplying a powder material Irradiating the powder material with a light beam, and sintering or melting and solidifying at least a part of the powder material irradiated with the light beam to form the molding layer, and the base portion or A heating unit that selectively heats a region of the molding layer that has passed through the position irradiated with the light beam or a region that has not passed through the position irradiated with the light beam; the powder supply unit; the light irradiation unit; And a control device for controlling the operation of the heating unit.
- the powder supply unit injects the powder material toward the base, and the light irradiation unit irradiates the powder material moving from the powder supply toward the base with a light beam.
- the molding material is formed by melting the powder material and solidifying the melted powder material on the base portion.
- the powder supply unit is disposed concentrically on the outer periphery of the light irradiation unit, and the space between the inner tube surrounding the path through which the light beam of the light irradiation unit passes and the outer tube covering the inner tube is the It is preferable to be a powder flow path through which the powder material flows.
- the light irradiation unit, the powder supply unit, and the base unit have a moving mechanism that relatively moves, and the control device is configured to move the light irradiation unit and the base unit by the moving mechanism. It is preferable to determine a path through which the powder supply unit passes.
- the heating unit has a light source unit that outputs a light beam, and performs heating by irradiating the light beam output from the light source unit.
- the light beam is preferably a laser beam.
- the heating unit includes an irradiation position adjusting mechanism including a mirror that reflects the light beam output from the light source unit and an angle adjusting mechanism that adjusts an angle of the mirror.
- the light source unit includes a semiconductor laser that outputs laser light, a condensing unit that condenses the laser light output from the semiconductor laser, and light into which the laser light condensed by the condensing unit is incident. It is preferable to have a fiber.
- the light source unit includes a plurality of the semiconductor lasers and the condensing unit, It is preferable that laser beams output from the plurality of semiconductor lasers and collected by the respective condensing units are incident on one optical fiber.
- the semiconductor laser is preferably a vertical light emitting semiconductor laser.
- the optical fiber includes a plurality of the semiconductor lasers, and the condensing unit combines the collimating lens disposed in each of the plurality of semiconductor lasers and the laser beams collimated by the plurality of collimating lenses. It is preferable to have a combining part that is incident on the light source.
- a temperature detection unit configured to detect a temperature of the surface of the molding layer; and the control device controls heating by the heating unit according to a measurement result of the surface temperature of the molding layer by the temperature detection unit. It is preferable.
- control device controls the heating by the heating unit based on the measurement result of the surface temperature of the molding layer by the temperature detection unit and the characteristics of the base and the molding layer.
- a plasma light emission detection unit for detecting plasma light emission on the surface of the molding layer is provided, and the control device controls heating by the heating unit in accordance with a measurement result by the plasma light emission detection unit.
- a reflected light detection unit that detects reflected light from the surface of the molding layer, and the control device controls heating by the heating unit according to a measurement result by the reflected light detection unit.
- the heating unit heats a region that has passed through the position irradiated with the light beam.
- the heating unit heats a region before passing through the position irradiated with the light beam.
- the region heated by the part is a region that has passed through the position where the light beam is irradiated on the base part or the molding layer, or a region before passing through the position where the light beam is irradiated
- the relative position between the light irradiation unit and the heating unit is preferably controlled by the switching mechanism.
- the present invention provides a three-dimensional laminating method in which a molding layer is laminated on a base portion to form a three-dimensional shape, and a powder material is used on the base portion.
- the powder material is melted by irradiating the powder material with a light beam while being sprayed, and the molded powder layer is formed on the base portion by solidifying the molten powder material on the base portion.
- a mechanism for stacking a three-dimensional object and a heating unit are provided, and a region that has passed through a position irradiated with a light beam or a region that has not passed through a position irradiated with a light beam is selectively selected.
- New devices and methods that can be heated can be provided. Thereby, a three-dimensional shaped object can be manufactured with high accuracy.
- FIG. 1 is a schematic diagram showing a three-dimensional laminating apparatus according to this embodiment.
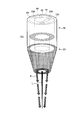
- FIG. 2 is a cross-sectional view showing an example of the tip of the laminated head.
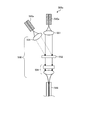
- FIG. 3 is a schematic diagram showing a schematic configuration of a structure for supplying a powder material of the laminated head.
- FIG. 4 is an exploded view showing a schematic configuration of the distribution unit and the branch pipe of the laminated head.
- FIG. 5 is a perspective view showing a schematic configuration of a structure for supplying the powder material around the nozzles of the stacking head.
- FIG. 6 is a schematic diagram illustrating the configuration of the control device.
- FIG. 7 is a schematic diagram illustrating a schematic configuration of each unit installed in the stacking head storage chamber.
- FIG. 8 is a schematic diagram showing a schematic configuration of the heating head.
- FIG. 9 is a schematic diagram showing a schematic configuration of the light source unit of the heating head.
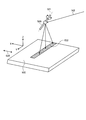
- FIG. 10 is a perspective view showing a schematic configuration of the heating head.
- FIG. 11 is a schematic diagram illustrating a schematic configuration of another example of the light source unit of the heating head.
- FIG. 12 is a schematic diagram illustrating a schematic configuration of another example of the heating head.
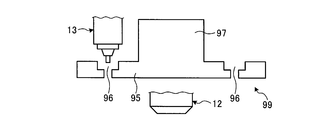
- FIG. 13 is a schematic diagram illustrating an example of a machining unit measurement unit.
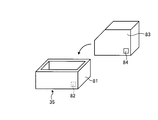
- FIG. 14A is a schematic diagram illustrating an example of a powder introduction unit.
- FIG. 14B is a schematic diagram illustrating an example of a powder introduction unit.
- FIG. 15 is a schematic diagram illustrating an example of a powder recovery unit.
- FIG. 14A is a schematic diagram illustrating an example of a powder introduction unit.
- FIG. 14B is a schematic diagram illustrating an example of a powder introduction unit.
- FIG. 15 is
- FIG. 16 is an explanatory diagram illustrating a method for manufacturing a three-dimensional object by the three-dimensional stacking apparatus according to the present embodiment.
- FIG. 17A is an explanatory diagram illustrating a method for manufacturing a three-dimensional object by the three-dimensional stacking apparatus according to the present embodiment.
- FIG. 17B is an explanatory diagram illustrating a method of manufacturing a three-dimensional shape by the three-dimensional stacking apparatus according to the present embodiment.
- FIG. 17C is an explanatory diagram illustrating a method for manufacturing a three-dimensional object by the three-dimensional stacking apparatus according to the present embodiment.
- FIG. 18 is a flowchart illustrating a manufacturing process of a three-dimensional shape object by the three-dimensional stacking apparatus according to the present embodiment.
- FIG. 19 is a flowchart illustrating an example of a process of determining a forming layer forming condition by the three-dimensional laminating apparatus according to the present embodiment.
- FIG. 20 is a flowchart illustrating an example of a process for determining the forming condition of the molding layer.
- FIG. 21 is a schematic diagram illustrating another example of the peripheral portion of the stacking head of the three-dimensional stacking apparatus.
- FIG. 22 is a flowchart illustrating an example of a process for determining the forming condition of the molding layer.
- FIG. 23 is a flowchart illustrating an example of a process for determining the forming condition of the molding layer.
- FIG. 24 is a flowchart illustrating an example of a process for determining the forming condition of the molding layer.
- FIG. 25 is a schematic diagram illustrating another example of the stacked head storage chamber.
- FIG. 26 is a flowchart illustrating an example of a processing operation performed by the three-dimensional stacking apparatus.
- FIG. 1 is a schematic diagram showing a three-dimensional laminating apparatus 1 according to this embodiment.
- one direction in the horizontal plane is the X-axis direction
- the direction orthogonal to the X-axis direction is the direction orthogonal to the Y-axis direction, the X-axis direction, and the Y-axis direction (that is, the vertical direction).
- a three-dimensional laminating apparatus 1 shown in FIG. 1 is an apparatus for manufacturing a three-dimensional object on the base part 100.
- the base part 100 is a member that becomes a base on which a three-dimensional shaped object is formed, and is transported to a predetermined position by the three-dimensional laminating apparatus 1 to form a three-dimensional formed object on the surface.
- the base part 100 of this embodiment is a plate-shaped member.
- the base unit 100 is not limited to this.
- the base unit 100 may use a member that becomes a base of a three-dimensional shape object, or may use a member that adds a three-dimensional shape object.
- a member that becomes a part or product may be used as the base part 100 by forming a three-dimensional formed object at a predetermined position.
- the three-dimensional laminating apparatus 1 includes a three-dimensional laminating chamber 2, a spare chamber 3, a laminating head storage chamber 4, a machining unit storage chamber 5, a bed 10, a table unit 11, a laminating head 12, and machining.
- Unit 13 control device 20, heating head 31, machining unit measuring unit 32, tool changing unit 33, nozzle changing unit 34, powder introducing unit 35, air discharging unit 37, and gas introducing unit 38.
- a powder recovery unit 39 a temperature detection unit 120, and a mass detection unit 130.
- the three-dimensional stacking chamber 2 is a casing (chamber) that is sealed from outside except for designed communication parts such as connected pipes.
- the designed communication part is provided with a valve or the like for switching between a sealed state and an open state, and the three-dimensional stacking chamber 2 can be sealed if necessary.
- the three-dimensional laminating chamber 2 includes a bed 10, a table unit 11, a laminating head 12, a part of the machining unit 13, a part of the heating head 31, a machining unit measurement unit 32, and a tool changer 33.
- exchange part 34 is arrange
- the preliminary chamber 3 is provided adjacent to the three-dimensional stacking chamber 2.
- the spare chamber 3 is sealed from the outside except for designed communication parts such as connected pipes.
- the preliminary chamber 3 is a decompression chamber that connects the outside and the three-dimensional stacking chamber 2.
- a base moving unit 36 is provided in the preliminary chamber 3.
- a door 6 having airtightness is provided at a connection portion of the three-dimensional stacking chamber 2.
- the preliminary chamber 3 is connected to the outside by a door 7 having airtightness.
- the spare chamber 3 is provided with an air discharge unit 25 that discharges air from the spare chamber 3.
- the preliminary chamber 3 can carry in a necessary member from the outside by opening the door 7.
- backup chamber 3 can carry in and carrying out a member between the three-dimensional lamination
- the stacking head storage chamber 4 is provided on the upper surface of the three-dimensional stacking chamber 2 in the Z-axis direction.
- the stacking head storage chamber 4 is supported by the Z-axis slide portion 4a so as to be movable in the Z-axis direction (arrow 102) with respect to the three-dimensional stacking chamber 2.
- the laminated head storage chamber 4 has a lower surface in the Z-axis direction connected to the three-dimensional laminated chamber 2 by a bellows 18.
- the bellows 18 connects the lower surface of the stacked head storage chamber 4 in the Z-axis direction and the three-dimensional stacked chamber 2, and the lower surface of the stacked head storage chamber 4 in the Z-axis direction is part of the three-dimensional stacked chamber 2. To do.
- the three-dimensional stacking chamber 2 has an opening formed in a region surrounded by the bellows 18.
- a space surrounded by the lower surface of the stacked head storage chamber 4 in the Z-axis direction and the bellows 18 is connected to the three-dimensional stacked chamber 2 and is sealed together with the three-dimensional stacked chamber 2.
- the laminated head storage chamber 4 supports the laminated head 12, the shape measuring unit 30, and the heating head 31. Further, in the stacking head storage chamber 4, a part including the nozzle 23 of the stacking head 12 and a part including the tip 24 of the heating head 31 protrude from the lower surface in the Z-axis direction toward the three-dimensional stacking chamber 2. ing.
- the stacking head storage chamber 4 is moved in the Z-axis direction by the Z-axis slide part 4a, thereby moving the held stacking head 12, the shape measuring unit 30, and the heating head 31 in the Z-axis direction. Further, since the laminated head storage chamber 4 is connected to the three-dimensional laminated chamber 2 via the bellows 18, the bellows 18 is deformed in accordance with the movement in the Z-axis direction, so that the three-dimensional laminated chamber 2 and the laminated head storage are accommodated. A sealed state with the chamber 4 can be maintained.
- the machining section storage chamber 5 is provided on the upper surface of the three-dimensional stacking chamber 2 in the Z-axis direction. Further, the machining section storage chamber 5 is disposed adjacent to the laminated head storage chamber 4. The machining section storage chamber 5 is supported by the Z-axis slide section 5a so as to be movable in the Z-axis direction (the direction of the arrow 104) with respect to the three-dimensional stacking chamber 2. The machined portion storage chamber 5 is connected to the three-dimensional stacking chamber 2 by a bellows 19 on the lower surface in the Z-axis direction.
- the bellows 19 connects the lower surface of the machining unit storage chamber 5 in the Z-axis direction and the three-dimensional stacking chamber 2, and the lower surface of the machining unit storage chamber 5 in the Z-axis direction of the three-dimensional stacking chamber 2.
- the three-dimensional stacking chamber 2 has an opening formed in a region surrounded by the bellows 19. A space surrounded by the Z-axis direction lower surface of the machined portion storage chamber 5 and the bellows 19 is connected to the three-dimensional stacking chamber 2 and sealed together with the three-dimensional stacking chamber 2.
- the machining unit storage chamber 5 supports the machining unit 13. Further, in the machining portion storage chamber 5, a part including the tool 22 of the machining portion 13 protrudes from the lower surface in the Z-axis direction toward the three-dimensional stacking chamber 2.
- the machining section storage chamber 5 moves in the Z-axis direction by moving the Z-axis slide section 5a in the Z-axis direction, thereby moving the held machining section 13 in the Z-axis direction. Further, since the machining section storage chamber 5 is connected to the three-dimensional stacking chamber 2 via the bellows 19, the bellows 19 is deformed in accordance with the movement in the Z-axis direction, and the three-dimensional stacking chamber 2 is machined. The sealed state with the part storage chamber 5 can be maintained.
- the bed 10 is provided at the bottom in the Z-axis direction in the three-dimensional stacking chamber 2.
- the bed 10 supports the table unit 11.
- the bed 10 is provided with various wirings, piping, and driving mechanisms.
- the table unit 11 is disposed on the upper surface of the bed 10 and supports the base unit 100.
- the table unit 11 includes a Y-axis slide unit 15, an X-axis slide unit 16, and a rotary table unit 17.
- the table part 11 attaches the base part 100 and moves the base part 100 on the bed 10.
- the Y-axis slide part 15 moves the X-axis slide part 16 with respect to the bed 10 along the Y-axis direction (the direction of the arrow 106).
- the X-axis slide unit 16 is fixed to a member that is an operation unit of the Y-axis slide unit 15, and the rotary table unit 17 is moved along the X-axis direction (the direction of the arrow 108) with respect to the Y-axis slide unit 15.
- Let The rotary table unit 17 is fixed to a member that is an operation unit of the X-axis slide unit 16 and supports the base unit 100.
- the rotary table unit 17 is, for example, an inclined circular table, and includes a fixed base 17a, a rotary table 17b, an inclined table 17c, and a rotary table 17d.
- the fixed base 17 a is fixed to a member that becomes an operating part of the X-axis slide part 16.
- the rotary table 17b is supported by the fixed base 17a, and rotates around the rotary shaft 110 parallel to the Z-axis direction.
- the tilt table 17c is supported by the rotary table 17b, and is rotated about the rotary shaft 112 orthogonal to the surface of the rotary table 17b.
- the rotary table 17d is supported by the tilt table 17c, and is rotated about a rotary shaft 114 orthogonal to the surface of the tilt table 17c that is supported.
- the tilting table 17d fixes the base part 100.
- the rotary table unit 17 can rotate the base unit 100 around three orthogonal axes by rotating each unit around the rotation shafts 110, 112, and 114.
- the table unit 11 moves the base unit 100 fixed to the rotary table unit 17 in the Y-axis direction and the X-axis direction by the Y-axis slide unit 15 and the X-axis slide unit 16.
- the table part 11 rotates the base part 100 around three orthogonal axes by rotating each part around the rotation axes 110, 112, and 114 by the rotary table part 17.
- the table unit 11 may further move the base unit 100 along the Z-axis direction.
- the laminating head 12 injects a powder material toward the base part 100, further melts the powder by irradiating the injected powder material with laser light, and solidifies the molten powder on the base part 100.
- a molding layer is formed.
- the powder introduced into the lamination head 12 is a powder of a material that is a raw material for a three-dimensional shape.
- a metal material such as iron, copper, aluminum, or titanium can be used as the powder.
- a material other than a metal material such as ceramic may be used.
- the laminated head 12 is provided at a position facing the upper surface of the bed 10 in the Z-axis direction, and faces the table unit 11.
- the laminated head 12 is provided with a nozzle 23 at the bottom in the Z-axis direction. In the laminated head 12, the nozzle 23 is attached to the main body 46.
- FIG. 2 is a cross-sectional view showing an example of the nozzle 23 of the laminated head 12.
- the nozzle 23 is a double tube having an outer tube 41 and an inner tube 42 inserted into the outer tube 41.
- the outer tube 41 is a tubular member, and has a diameter that decreases toward the tip (lower side in the Z-axis direction).
- the inner tube 42 is inserted into the outer tube 41.
- the inner tube 42 is also a tubular member and has a shape whose diameter decreases toward the tip (lower side in the Z-axis direction).
- the nozzle 23 is a powder flow path 43 through which the powder material (powder) P passes between the inner periphery of the outer tube 41 and the outer periphery of the inner tube 42.
- the inner peripheral surface side of the inner tube 42 becomes a laser path 44 through which the laser light L passes.
- the main body 46 to which the nozzle 23 is mounted is a double tube like the nozzle 23, and the powder flow path 43 and the laser path 44 are also formed in the same manner.
- the powder flow path 43 is disposed so as to surround the laser path 44.
- the powder flow path 43 serves as a powder injection unit that injects powder.
- the powder material P introduced from the powder introduction part 35 flows through the powder flow path 43 and is ejected from the nozzle ejection port part 45 which is an opening at the end between the outer tube 41 and the inner tube 42. .
- the laminated head 12 includes a light source 47, an optical fiber 48, and a condensing unit 49.
- the light source 47 outputs laser light L.
- the optical fiber 48 guides the laser light L output from the light source 47 to the laser path 44.
- the condensing unit 49 is disposed in the laser path 44 and is disposed in the optical path of the laser light L output from the optical fiber 48.
- the condensing unit 49 condenses the laser light L output from the optical fiber 48.
- the laser beam L condensed by the condenser 49 is output from the end of the inner tube 42.
- the three-dimensional laminating apparatus 1 has a focal position adjustment unit 140.
- the focal position adjusting unit 140 moves the condensing unit 49 along the traveling direction of the laser light L.
- the focal position adjusting unit 140 can adjust the focal position of the laser light L by moving the position of the condensing unit 49 along the traveling direction of the laser light L.
- a mechanism for adjusting the focal length of the light collecting unit 49 can also be used.
- the Z-axis slide part 4a is also one of the focal position adjustment parts.
- the focal position P1 of the laser light L and the position where the powder material is ejected move integrally.
- the focal position P1 of the laser beam L can be moved also with respect to the focal position P2 from which is emitted.
- the three-dimensional laminating apparatus 1 can switch an object to be controlled according to an object to be adjusted.
- the laminating head 12 ejects the powder P from the powder flow path 43 and outputs the laser light L from the laser path 44.
- the powder P ejected from the lamination head 12 enters the region irradiated with the laser beam L output from the lamination head 12 and is heated by the laser beam L. After the powder P irradiated with the laser beam L is melted, it reaches the base 100.
- the powder P that has reached the base 100 in a molten state is cooled and solidified. Thereby, a molding layer is formed on the base part 100.
- the laminated head 12 of the present embodiment guided the laser beam L output from the light source 47 by the optical fiber 48, but may guide it by an optical member other than the optical fiber. Further, the condensing part 49 may be provided on the main body 46, the nozzle 23, or both. Since the laminated head 12 of the present embodiment can be processed effectively, the powder flow path 43 for injecting the powder P and the laser path 44 for irradiating the laser light L are provided coaxially, but the present invention is not limited to this.
- the stacking head 12 may have a mechanism for spraying the powder P and a mechanism for irradiating the laser beam L as separate bodies. In the laminated head 12 of this embodiment, the powder material is irradiated with the laser beam L, but it is sufficient if the powder material can be dissolved or sintered, and a light beam other than the laser beam may be irradiated.
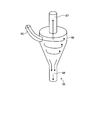
- FIG. 3 is a schematic diagram showing a schematic configuration of a structure for supplying a powder material of the laminated head.
- FIG. 4 is an exploded view showing a schematic configuration of the distribution unit and the branch pipe of the laminated head.
- FIG. 5 is a perspective view showing a schematic configuration of a structure for supplying the powder material around the nozzles of the stacking head.
- FIG. 6 is a schematic diagram illustrating a schematic configuration of the mixing unit.
- FIG. 7 is an explanatory diagram showing transition of the cross section of the mixing portion.
- the laminating head 12 is supplied with the powder material from the powder introduction unit 35 via the powder supply pipe 150.
- the stacking head 12 includes a distribution unit 152 and a plurality of branch pipes 154 as a mechanism for supplying the supplied powder material to the powder flow path 43.
- the distribution unit (distributor) 152 equalizes the powder supplied from the powder supply pipe 150 and supplies the powder to the branch pipe 154.
- the plurality of branch pipes 154 are pipes that connect the distribution unit 152 and the powder channel 43, and supply the powder P supplied from the distribution unit 152 to the powder channel 43.
- three branch pipes 154 are arranged evenly in the circumferential direction, that is, at intervals of 120 °.
- the branch pipe 154 is provided with a mixing unit 156 therein.
- the mixing unit 156 is a mechanism for homogenizing the powder P flowing through the branch pipe 154 in the branch pipe 154, and a plurality of stirring plates 156a are arranged.
- the stirring plate 156 a has a structure twisted around the axial direction of the branch pipe 154 along the flow direction of the branch pipe 154. Further, the direction of twisting of the stirring plate 156a and the stirring plate 156a adjacent in the flow direction is reversed. Thereby, the flow of the fluid passing through the mixing unit 156 becomes a flow that changes according to the position of the branch pipe 154 in the axial direction. This promotes stirring.
- the number of branch pipes 154 is three, but the number is not particularly limited.
- the branch pipes 154 are preferably arranged evenly in the circumferential direction, that is, at regular angular intervals.
- the laminating head 12 has a rectifier 158 installed in the powder flow path 43.
- the rectifier 158 rectifies the flow containing the powder material supplied from the three branch pipes 154.
- stacking head 12 can make the flow of the powder material inject
- the machining unit 13 performs machining of a molded layer, for example.
- the machining portion 13 is provided at a position facing the upper surface of the bed 10 in the Z-axis direction, and faces the table portion 11.
- the machined portion 13 has a tool 22 attached to the lower portion in the Z-axis direction.
- the machining part 13 should just be provided in the movable range of the base part 100 by the table part 11 in the Z-axis direction upper side than the bed 10, and an arrangement position is not restricted to the position of this embodiment. .
- FIG. 6 is a schematic diagram showing the configuration of the control device 20.
- the control device 20 is electrically connected to each part of the three-dimensional laminating apparatus 1 and controls the operation of each part of the three-dimensional laminating apparatus 1.
- the control device 20 is installed outside the three-dimensional stacking chamber 2 and the spare chamber 3.
- the control device 20 includes an input unit 51, a control unit 52, a storage unit 53, an output unit 54, and a communication unit 55.
- storage part 53, the output part 54, and the communication part 55 is electrically connected.
- the input unit 51 is, for example, an operation panel.
- the worker inputs information, commands, and the like to the input unit 51.
- the control unit 52 is, for example, a CPU (Central Processing Unit) and a memory.
- the control unit 52 outputs a command for controlling the operation of each part of the three-dimensional laminating apparatus 1 to each part of the three-dimensional laminating apparatus 1.
- information from each unit of the three-dimensional laminating apparatus 1 is input to the control unit 52.
- the storage unit 53 is a storage device such as a RAM (Random Access Memory) or a ROM (Read Only Memory).
- the storage unit 53 stores an operation program of the three-dimensional laminating apparatus 1 that controls the operation of each unit by being executed by the control unit 52, information of the three-dimensional laminating apparatus 1, design information of a three-dimensional shape object, and the like. Is done.
- the output unit 54 is a display, for example.
- the output unit 54 displays information from each unit of the three-dimensional laminating apparatus 1, for example.
- the communication unit 55 communicates with a communication line such as the Internet or a LAN (Local Area Network) and exchanges information with the communication line.
- the control apparatus 20 should just have the control part 52 and the memory
- the shape measuring unit 30 is fixed to the stacked head storage chamber 4.
- the shape measuring unit 30 is disposed adjacent to the laminated head 12.
- the shape measuring unit 30 measures the surface shape of the molding layer formed on the base unit 100.
- a 3D scanner or a device that measures a relative distance can be used as the shape measuring unit 30.
- the shape measuring unit 30 scans (scans) the laser beam on the surface of the molding layer on the base unit 100, and calculates the position information (the distance indicated by the arrow 160) of the surface of the molding layer from the reflected light. Measure the surface shape of the molding layer.
- the shape measuring unit 30 is attached to the laminated head storage chamber 4, but it is sufficient that the surface shape of the molding layer formed on the base unit 100 can be measured, and it is attached to another position. May be.
- FIG. 7 is a schematic diagram showing a schematic configuration of each part installed in the stacking head storage chamber.
- the heating head 31 heats the base part 100, the molded layer on the base part 100, or the molten powder P.
- the heating head 31 is disposed adjacent to the laminated head 12 as shown in FIGS. 1 and 7, and is an upstream portion (a portion before being processed) of a region processed by the laminated head 12, and a downstream side. This part (the part after being processed) is selectively heated.
- the heating head 31 is fixed to the laminated head storage chamber 4.
- the heating head 31 is disposed adjacent to the laminated head 12.
- the heating head 31 irradiates the laser beam 162 to heat the base part 100, the molding layer, the melted powder P (melt A), the solidified body B, and the like.
- the temperature of the molding layer or the melted powder P can be controlled. Thereby, the rapid temperature fall of the shaping
- the heating head 31 can also heat the molding layer and the base part 100 before the melt A adheres, that is, before the molding layer is formed by the laminated head 12.
- FIG. 8 is a schematic diagram showing a schematic configuration of the heating head.
- FIG. 9 is a schematic diagram showing a schematic configuration of the light source unit of the heating head.
- FIG. 10 is a perspective view showing a schematic configuration of the heating head.
- the heating head 31 includes a light source unit 502 and a heating position adjustment mechanism 504.
- the light source unit 502 outputs a laser beam 162 that heats the molding layer, the base 100, and the like.
- the light source unit 502 includes two semiconductor lasers 540, two condensing units 542, and an optical fiber 544.
- the two semiconductor lasers 540 each output laser light.
- the condensing unit 542 is installed for each of the semiconductor lasers 540 and condenses the laser output from the semiconductor laser 540.
- the optical fiber 544 receives the laser beam condensed by each of the two condensing units 542.
- the optical fiber 544 outputs the incident laser light toward the heating position adjusting mechanism 504.
- the light source unit 502 condenses the light incident from the two semiconductor lasers 540 by the condensing unit 542 and causes the light to enter one optical fiber 544. Accordingly, the light source unit 502 outputs a laser beam 162 obtained by combining (merging) the laser beams output from the two semiconductor lasers 540.
- the laser beams of the two semiconductor lasers 540 are combined, but the number of semiconductor lasers is not limited to two, and may be one or three or more.
- the light source unit 502 can increase the output of the laser light 162 by increasing the number of semiconductor lasers.
- the heating position adjustment mechanism 504 includes a mirror 512 and a galvano mirror 514.
- the heating position adjustment mechanism 504 reflects the laser beam 162 output from the light source unit 502 by the mirror 512 and then reflects the laser beam 162 to the galvano mirror 514 to change the direction and irradiate the region 532 of the base unit 100.
- the galvanometer mirror 514 includes a mirror 520 and an angular position adjustment mechanism 522 that rotates the mirror 520 around the rotation shaft 521 and changes the orientation of the mirror 520.
- the galvanometer mirror 514 rotates the mirror 520 around the rotation axis 521 to move the position irradiated with the laser beam 162 on the surface of the base portion 100 according to the orientation of the mirror 520 as shown in FIG.
- the irradiation position of the laser beam 162 can be moved within the region 532.
- the heating position adjusting mechanism 504 can scan the laser beam by rotating the mirror 520 with a galvano mirror 514 in a predetermined speed pattern.
- the heating position adjustment mechanism 504 scans the laser beam in a direction orthogonal to the direction of the arrow 528 that is the relative movement direction of the base 100 or the molding layer and the heating head 31.
- the direction orthogonal to the arrow 528 is the longitudinal direction.
- the direction in which the laser light is moved by the heating position adjusting mechanism 504 is not limited to this, and may be any direction as necessary.
- the heating position adjustment mechanism 504 can adjust the direction in which the laser light can move by adjusting the direction of the rotating shaft 521 of the galvanometer mirror 514, for example.
- the heating head 31 heats the base part 100 or the molding layer in the region 532 by moving the laser beam 162 output from the light source unit 502 by the heating position adjusting mechanism 504.
- the heating head 31 can adjust the position of the base part 100 to be heated with high accuracy by moving the irradiation position of the laser beam, and can perform heating with high accuracy.
- the heating head 31 can output laser light having a short wavelength by using the semiconductor laser 540 as a laser light source, and can increase the energy absorption rate of the base portion 100, the molding layer, and the like. Thereby, it can heat efficiently.
- the oscillator can be made smaller and the light source unit 502 can be made smaller.
- the light source unit 502 is disposed inside the casing of the heating head 31, but may be disposed outside the casing.
- the light source unit of the heating head preferably uses a vertical cavity surface emitting laser (VCSEL, Vertical Cavity Surface Emitting Laser) that outputs a beam in a direction perpendicular to the substrate surface as a laser light source.
- VCSEL Vertical Cavity Surface Emitting Laser
- FIG. 11 is a schematic diagram showing a schematic configuration of another example of the light source unit of the heating head.
- the light source unit 502 a includes two semiconductor lasers 540 a, a multiplexing unit 550, and an optical fiber 544.
- the multiplexing unit 550 includes two collimating lenses 551, a diffraction grating 552, and a light collecting unit 554.
- the two semiconductor lasers 540a each output laser light.
- the semiconductor laser 540a is a vertical cavity surface emitting laser.
- the collimating lens 551 is installed for each of the semiconductor lasers 540a, and collimates the laser output from the semiconductor laser 540a.
- the laser beam collimated by the two collimating lenses 551 is incident on the diffraction grating 552.
- the diffraction grating 552 diffracts at least one of the laser beams incident from two different directions to form laser beams in the same direction.
- the condensing unit 554 condenses the laser light that has passed through the diffraction grating 552 and causes the laser light to enter the optical fiber 544.
- the optical fiber 544 receives the laser beam condensed by the condensing unit 554.
- the optical fiber 544 outputs the incident laser light toward the heating position adjusting mechanism 504.
- the light source unit 502a can be made smaller by using a vertical cavity surface emitting laser. Moreover, in the said embodiment, although the laser beam was entered into the optical fiber, it is not necessary to use an optical fiber.
- FIG. 12 is a schematic diagram illustrating a schematic configuration of another example of the heating head.
- the heating head 31a shown in FIG. 12 includes a light source unit 502 and a heating position adjusting mechanism 504a.
- the heating position adjustment mechanism 504a includes a galvano mirror 512a instead of the mirror 512 of the heating position adjustment mechanism 504.
- the heating position adjusting mechanism 504a includes a galvanometer mirror 512a and a galvanometer mirror 514.
- the heating position adjusting mechanism 504a reflects the laser beam 162 output from the light source unit 502 by the galvano mirror 512a and then reflects the laser beam 162 to the galvano mirror 514 to change the direction and irradiate the region 532 of the base unit 100.
- the galvanometer mirror 512 a includes a mirror 560 and an angular position adjustment mechanism 562 that rotates the mirror 560 about the rotation shaft 564 and changes the orientation of the mirror 560.
- the rotation shaft 564 is an axis in a different direction from the rotation shaft 521.
- the galvanometer mirror 512a can move the position of the laser beam 162 reaching the galvanometer mirror 520 by rotating the mirror 562 around the rotation axis 564, as shown in FIG.
- the heating position adjusting mechanism 504a rotates the mirror 560 of the galvanometer mirror 512a to change the position of the laser beam reaching the mirror 520, and further rotates the mirror 520 of the galvanometer mirror 514 to move to the base 100.
- the position of the laser beam reaching the base unit 100 can be moved in a two-dimensional direction.
- the heating head 31a can adjust the irradiation position in two dimensions by moving the irradiation position of the laser beam 162 in the biaxial direction on the surface of the base 100. Thereby, the heating head 31a can adjust the position where heating is performed on the base part 100 with higher accuracy, and can perform heating with higher accuracy.
- the heating head 31a of this embodiment irradiated the laser beam and heated the object area
- the heating head 31a only needs to be able to selectively heat the heating region.
- the heating head 31a may be heated by using a light beam other than laser light, for example, a light beam with infrared light, or heated by irradiation with electromagnetic waves. May be performed.
- the temperature detector 120 is disposed adjacent to the heating head 31. As shown in FIG. 7, the temperature detection unit 120 outputs the measurement wave 164 to a range including the position where the laser light L is irradiated and the range where the laser light 162 is irradiated and heated by the heating head 31, and sets the temperature. measure.
- the temperature detection unit 120 can use various temperature sensors that measure the temperature of the surface on which the molding layer is formed.
- the mass detection unit 130 detects the mass of the base unit 100 attached to the rotary table 17d of the rotary table unit 17.
- the mass detector 130 can use a load cell.
- the machining unit measurement unit 32 measures the position of the tip 56 of the tool 22 of the machining unit 13.
- FIG. 13 is a schematic diagram illustrating an example of the machining unit measurement unit 32.
- the machining unit measurement unit 32 includes a light source unit 57 and an imaging unit 58.
- the machining unit measurement unit 32 positions the tip 56 of the tool 22 of the machining unit 13 between the light source unit 57 and the imaging unit 58.
- the light source unit 57 is, for example, an LED.
- the imaging unit 58 is, for example, a CCD (Charge Coupled Device) camera.
- the machining unit measurement unit 32 emits the light LI from the light source unit 57 toward the imaging unit 58 in a state where the tip 56 of the tool 22 is disposed between the light source unit 57 and the imaging unit 58. Get an image. Thereby, an image in which light is blocked by the tip 56 of the tool 22 can be acquired.
- the machining unit measurement unit 32 analyzes the image acquired by the imaging unit 58, and specifically detects the boundary between the position where the light is incident and the position where the light is not incident, whereby the shape of the tip 56, The position can be acquired. Based on the acquired position of the tip 56 of the tool 22 and the position of the machining unit 13 (position of the machining unit accommodating chamber 5), the control device 20 determines the tip 56 of the tool 22 attached to the machining unit 13. Detect the exact position.
- the machining unit measurement unit 32 is not limited to this configuration as long as it measures the position of the tip 56 of the machining unit 13, and may be measured by laser light, for example.
- the tool changer 33 is disposed inside the three-dimensional stacking chamber 2.
- the tool exchange unit 33 exchanges the tool 22 attached to the machining unit 13.
- the tool changer 33 moves a portion not holding the tool 22 to a position facing the machining unit 13.
- the tool changer 33 moves the tool 22 to a position where the tool 22 is not gripped at a position facing the machining unit 13.
- worn is performed.
- the part holding another tool 22 to be mounted on the machining unit 13 is moved to a position facing the machining unit 13, and the other tool 22 is attached to the machining unit 13.
- the tool changer 33 can replace the tool 22 of the machining unit 13 by attaching and detaching the tool 22 of the machining unit 13.
- the tool change part 33 will not be restricted to this structure, if the tool 22 of the machining part 13 can be changed.
- the nozzle replacement part 34 is arranged inside the three-dimensional stacking chamber 2.
- the nozzle replacement unit 34 replaces the nozzles 23 attached to the stacking head 12.
- the nozzle changer 34 can use the same structure as the tool changer 33.
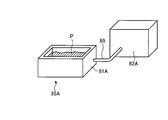
- the powder introduction unit 35 introduces a powder material that is a raw material of the three-dimensional shape into the laminated head 12.
- FIG. 14A and FIG. 14B are schematic views each showing an example of a powder introduction part.
- the powder P is managed in a state of being enclosed in a cartridge 83. That is, the powder P is shipped in a cartridge 83 for each type of material, for example.
- the cartridge 83 is provided with a material display portion 84.
- the material display part 84 is a display which shows the information of powder, such as the kind of material, for example.
- the material display unit 84 is not limited to information that can be visually confirmed, and may be a display such as an IC chip, a two-dimensional code, or a mark that can acquire information by reading with a reader.
- the material display part 84 will not be restricted to these, if the kind of powder material can be shown.
- the material display unit 84 can display information on powder necessary for manufacturing a three-dimensional shape, such as powder particle size, weight, purity, or oxygen content.
- the material display part 84 may contain the information which shows whether powder is a regular product.
- the powder introduction unit 35 includes a powder storage unit 81 and a powder identification unit 82.
- the powder storage unit 81 is a box-shaped member, for example, and stores the cartridge 83 therein.
- the powder storage unit 81 is connected to a conveyance air supply unit for carrying out the powder and a conveyance path for conveying the powder to the lamination head 12.
- the powder storage unit 81 introduces the powder stored in the cartridge 83 to the stacking head 12.
- the powder identification unit 82 detects that the cartridge 83 is stored in the powder storage unit 81, the powder identification unit 82 reads the material display unit 84 of the cartridge 83 and reads information on the powder stored in the cartridge 83.
- the powder introduction unit 35 can supply known powder to the stacking head 12 by acquiring powder information by the powder identification unit 82.
- the powder introduction unit 35 may supply powder that is not managed in a state of being enclosed in the cartridge 83 to the stacking head 12.
- FIG. 14B shows the powder introduction portion 35 ⁇ / b> A when the powder is not sealed in the cartridge 83.
- the powder introduction unit 35A includes a powder storage unit 81A, a powder identification unit 82A, and a powder guide tube 89 that connects the powder storage unit 81A and the powder identification unit 82A.
- the powder storage unit 81A is, for example, a box-shaped member, and stores the powder P therein.
- the powder identification unit 82A analyzes the powder P supplied through the powder guide tube 89, and manufactures a three-dimensional shape such as the material type, particle size, weight, purity, oxide coating, or oxygen content of the powder P. The information on the necessary powder P is measured.
- the powder identification unit 82A it is possible to use a spectroscopic analyzer that identifies a powder material by spectroscopic analysis, and use a particle size analyzer that measures the particle size of the powder P by particle size analysis, a weigh scale that measures the weight of the powder, or the like. it can.
- the powder identification unit 82A measures the purity of the powder from, for example, the measured material type, particle size, and weight of the powder P.
- the powder identification part 82 measures the oxide film of a powder by electrical conductivity, for example.
- the powder introduction unit 35 ⁇ / b> A can also supply known powder to the stacking head 12 by acquiring powder information by the powder identification unit 82 ⁇ / b> A.
- the base moving part 36 is arranged in the spare room 3.
- the base moving unit 36 moves the base unit 100 a from the preliminary chamber 3 into the three-dimensional stacked chamber 2, and moves the base unit 100 in the three-dimensional stacked chamber 2 into the preliminary chamber 3.
- the base moving part 36 is attached with a base part 100a carried into the spare chamber 3 from the outside.
- the base moving part 36 carries the attached base part 100a from the preliminary chamber 3 into the three-dimensional stacking chamber 2. More specifically, the base moving unit 36 moves the base unit 100 attached to the base moving unit 36 into the three-dimensional stacking chamber 2 and attaches it to the rotary table unit 17.
- the base moving unit 36 moves the base unit 100 using, for example, a robot arm or an orthogonal axis transport mechanism.
- the air discharge unit 37 is, for example, a vacuum pump, and discharges air in the three-dimensional stacking chamber 2.
- the gas introduction unit 38 introduces a predetermined component gas, for example, an inert gas such as argon or nitrogen, into the three-dimensional stacking chamber 2.
- the three-dimensional stacking apparatus 1 discharges air from the three-dimensional stacking chamber 2 through the air discharge unit 37 and introduces gas into the three-dimensional stacking chamber 2 through the gas introduction unit 38.
- the three-dimensional laminating apparatus 1 can make the inside of the three-dimensional laminating chamber 2 a desired gas atmosphere.
- the gas introduction part 38 is provided below the air discharge part 37 in the Z-axis direction.
- the gas introduction part 38 When the gas introduction part 38 is provided below the air discharge part 37 in the Z-axis direction and a gas for introducing argon having a higher specific gravity than a gas such as oxygen in the air is used, it is suitable for the three-dimensional stacking chamber 2. Can be filled with argon gas. In addition, what is necessary is just to reverse arrangement
- the powder collection unit 39 collects the powder P that has been ejected from the nozzle ejection port 45 of the stacking head 12 and that has not formed the molding layer.
- the powder recovery unit 39 sucks the air in the three-dimensional stacking chamber 2 and recovers the powder P contained in the air.
- the powder P sprayed from the lamination head 12 is melted and solidified by the laser light L to form a molding layer.
- a part of the powder P may remain in the three-dimensional stacking chamber 2 as it is, for example, when the laser beam L is not irradiated.
- the chips cut by the machining unit 13 and discharged from the molding layer remain in the three-dimensional stacking chamber 2.
- the powder recovery unit 39 recovers the powder P and chips remaining in the three-dimensional stacking chamber 2.
- the powder recovery unit 39 may include a mechanism for mechanically recovering powder such as a brush.
- FIG. 15 is a schematic diagram showing an example of the powder recovery unit 39.
- the powder recovery unit 39 includes an introduction unit 85, a cyclone unit 86, a gas discharge unit 87, and a powder discharge unit 88.
- the introduction portion 85 is, for example, a tubular member, and one end portion is connected to, for example, the three-dimensional stacking chamber 2.
- the cyclone portion 86 is, for example, a hollow frustoconical member, and its diameter decreases, for example, downward in the vertical direction.
- the other end of the introduction part 85 is connected to the cyclone part 86 along the tangential direction of the outer periphery of the cyclone part 86.
- the gas discharge part 87 is a tubular member, and one end part is connected to the upper end part of the cyclone part 86 in the vertical direction.
- the powder discharge portion 88 is a tubular member, and one end portion is connected to the end portion of the cyclone portion 86 on the lower side in the vertical direction.
- a pump for sucking gas is connected to the other end of the gas discharge part 87. Therefore, the gas discharge part 87 draws gas from the cyclone part 86, and makes the cyclone part 86 into a negative pressure. Since the cyclone portion 86 has a negative pressure, the introduction portion 85 sucks gas from the three-dimensional stacking chamber 2. The introduction part 85 sucks the powder P that has not formed the molding layer together with the gas in the three-dimensional stacking chamber 2. The introduction part 85 is connected to the cyclone part 86 along the tangential direction of the outer periphery of the cyclone part 86. Accordingly, the gas and the powder P sucked into the introduction part 85 swirl along the inner periphery of the cyclone part 86.
- the powder P Since the specific gravity of the powder P is higher than that of the gas, the powder P is centrifuged outward in the radial direction of the inner periphery of the cyclone portion 86.
- the powder P is discharged from the powder discharge unit 88 toward the powder discharge unit 88 below the stretching direction by its own weight. Further, the gas is discharged by the gas discharge unit 87.
- the powder collection unit 39 collects the powder P that has not formed the molding layer in this way.
- recovery part 39 in this embodiment may divide
- recovery part 39 will not be restricted to such a structure, if the powder P which did not form a shaping
- FIG. 16 is a schematic diagram showing a method for manufacturing a three-dimensional object by the three-dimensional laminating apparatus 1 according to this embodiment. Moreover, the manufacturing method shown in FIG. 16 can be executed by the control device 20 controlling the operation of each part.
- a case where a three-dimensional object is manufactured on the pedestal 91 will be described.
- the pedestal 91 is, for example, a metal plate-like member, but the shape and material are arbitrary as long as a three-dimensional shape is manufactured on the top.
- the pedestal 91 is attached on the base part 100.
- the base unit 100 is fixed to the rotary table unit 17 of the table unit 11 together with the base 91.
- the pedestal 91 can also be used as the base part 100.
- the control device 20 moves the base unit 100 by the table unit 11 so that the pedestal 91 on the base unit 100 is arranged below the stacked head 12 in the Z-axis direction, as shown in step S1.
- step S ⁇ b> 2 the control device 20 introduces the powder P from the powder introduction unit 35 to the lamination head 12, and sweeps the laser light L while ejecting the powder P together with gas from the lamination head 12.
- the powder P is sprayed toward the base 91 on the base 100 with a predetermined convergence diameter.
- the laser beam L is applied to the powder P with a predetermined spot diameter between the laminated head 12 and the pedestal 91.
- the spot diameter in the Z-axis direction of the spot diameter of the laser beam L with respect to the position in the Z-axis direction of the convergence diameter of the powder P and the spot diameter at the position in the Z-axis direction of the convergence diameter of the powder P are, for example, condensing It can be controlled by moving the position of the portion 49.
- the control device 20 sprays the powder P while irradiating the laser beam L with the stacking head 12, so that the powder P is melted by the irradiation with the laser beam L as shown in step S3.
- the melted powder P falls as a melt A downward toward the pedestal 91 on the base part 100 in the Z-axis direction.
- the melt A that has fallen downward in the Z-axis direction reaches a predetermined position of the base 91 on the base 100.
- the melt A on the pedestal 91 is cooled, for example, by being allowed to cool at a predetermined position on the pedestal 91.
- the cooled melt A is solidified as a solidified body B on the pedestal 91 as shown in step S4.
- the control device 20 forms the solidified body B on the base unit 100 by the stacking head 12 according to the procedure shown in steps S2 to S4 while moving the base unit 100 on the base unit 100 to a predetermined position.
- the solidified body B forms a molding layer 92 having a predetermined shape on the pedestal 91 as shown in step S5.
- step S ⁇ b> 6 the control device 20 moves the base 91 of the base portion 100 by the table portion 11 so that the molding layer 92 formed on the base 91 is disposed below the machining portion 13 in the Z-axis direction. Move. Further, the control device 20 performs machining on the molded layer 92 by the machining unit 13. The control device 20 selects whether or not the machining by the machining unit 13 is performed, and may not be performed if unnecessary. Therefore, the machining shown in step S6 may not be performed depending on the command of the control device 20.
- step S ⁇ b> 7 the control unit 20 causes the table unit 11 to place the base unit 100, for example, so that the molding layer 92 is positioned below the stacking head 12 in the Z-axis direction according to a command from the control device 20. Move to. And the procedure shown to step S2 to step S6 is repeated, the shaping
- the three-dimensional laminating apparatus 1 produces a three-dimensional object as follows.
- the powder injection unit of the laminated head 12 injects the powder P toward the base 91 on the base unit 100. Further, the inner tube 42 of the laminated head 12 irradiates the powder P with the laser light L between the laminated head 12 and the pedestal 91. The powder P irradiated with the laser light L is melted and solidified on a pedestal 91 on the base part 100 to form a molding layer 92.
- the three-dimensional laminating apparatus 1 sequentially laminates the molding layer 93 on the molding layer 92, and applies appropriate machining to the molding layers 92, 93 by the machining unit 13 to produce a three-dimensional shape product.
- the three-dimensional shape is manufactured on the pedestal 91, but the three-dimensional shape may not be manufactured on the pedestal 91.
- the three-dimensional shape may be manufactured directly on the base 100, for example.
- the three-dimensional laminating apparatus 1 may perform what is called build-up welding by laminating a molding layer on an existing modeled object.
- FIG. 17A to FIG. 17C are explanatory views showing a method for manufacturing a three-dimensional object by the three-dimensional laminating apparatus 1 according to this embodiment.
- FIG. 17A to FIG. 17C show a procedure in which the three-dimensional laminating apparatus 1 manufactures the member 99 shown in FIG. 17C.
- the member 99 has a disk portion 95, a shaft portion 97, and a truncated cone portion 98.
- the member 99 has a screw hole 96 formed in the disk portion 95.
- the disc portion 95 is a disc-shaped member.
- the shaft portion 97 is a shaft-shaped member having a diameter smaller than that of the disc portion 95 and extends from the central portion of one surface of the disc portion 95.
- the screw hole portion 96 is provided outside the shaft portion 97 of the disc portion 95.
- the truncated cone part 98 is provided at the tip of the shaft part 97, and its outer diameter increases in the direction opposite to the disk part 95.
- the major axis of the truncated cone part 98 is, for example, the same size as the outer diameter of the disk part 95. That is, the screw hole portion 96 is located inside the major axis of the truncated cone portion 98.
- the three-dimensional laminating apparatus 1 forms a disk portion 95 and a shaft portion 97 by laminating molded layers by the laminating head 12.
- the three-dimensional laminating apparatus 1 after manufacturing the disc part 95 and the shaft part 97, as shown in FIG.
- the three-dimensional laminating apparatus 1 forms the truncated cone part 98 on the shaft part 97 by laminating the molding layer by the laminating head 12 after forming the screw hole part 96.
- the member 99 is manufactured in this way.
- the long diameter portion of the truncated cone portion 98 is located outside the screw hole portion 96.
- the screw hole portion 96 is covered with the truncated cone portion 98 at the top. Therefore, for example, when the member 99 is manufactured by machining, the processing tool of the screw hole portion 96 cannot be moved from the upper portion of the truncated cone portion 98 toward the disc portion 95.
- the three-dimensional laminating apparatus 1 forms the screw hole portion 96 before the truncated cone portion 98 is manufactured. In this case, the upper part of the screw hole 96 is not covered.
- the three-dimensional laminating apparatus 1 can process the screw hole portion 96 by moving the machining portion 13 from the upper portion in the Z-axis direction along the Z-axis direction.
- the machining unit 13 can facilitate machining by adjusting the timing of forming the molding layer and machining.
- FIG. 18 is a flowchart illustrating a manufacturing process of a three-dimensional shape by the three-dimensional stacking apparatus 1 according to the present embodiment.
- the control device 20 reads design information of a three-dimensional shape object stored in the storage unit 53.
- the control device 20 discharges the air in the three-dimensional stacking chamber 2 by the air discharge unit 37 (step S11).
- the three-dimensional stacking chamber 2 has a door 6 closed and is separated from the preliminary chamber 3. Further, the three-dimensional stacking chamber 2 is also closed and sealed at a portion communicating with other outside air.
- the control device 20 discharges air by the air discharge unit 37 so that the oxygen concentration in the three-dimensional stacked chamber 2 is 100 ppm or less, preferably 10 ppm or less.
- the control device 20 can be in an inactive state when the oxygen concentration in the three-dimensional stacking chamber 2 is 100 ppm or less, and can be more reliably in an inactive state by being 10 ppm or less.
- step S12 the base part 100 having the base 91 is attached to the base moving part 36 in the preliminary chamber 3 (step S12).
- the three-dimensional laminating apparatus 1 may perform the process of step S12 prior to the process of step S11.
- the control device 20 closes the door 7 of the spare room 3, and discharges the air in the spare room 3 by the air discharge part 25 (step S13).
- the control device 20 reduces the oxygen concentration in the preliminary chamber 3 by discharging air from the air discharge unit 25.
- the oxygen concentration in the preliminary chamber 3 is preferably the same as that in the three-dimensional stacked chamber 2, for example.
- the control device 20 opens the door 6 of the three-dimensional stacking chamber 2, and the base moving unit 36 moves the base unit 100 to the rotary table unit 17 in the three-dimensional stacking chamber 2. Attach (step S14).
- the base unit 100 is fixed to the rotary table unit 17.
- the control device 20 returns the base moving unit 36 into the spare chamber 3 and closes the door 6.
- the gas introduction unit 38 introduces gas into the three-dimensional stacking chamber 2 (step S15).
- the control device 20 makes the introduced gas atmosphere in the three-dimensional stacking chamber 2 by the gas introduction unit 38.
- the gas introduced by the gas introduction unit 38 is an inert gas such as nitrogen or argon.
- the gas introduction unit 38 introduces an inert gas so that the residual oxygen concentration in the three-dimensional stacking chamber 2 is 100 ppm or less.
- the three-dimensional laminating apparatus 1 may omit step S11, step S13, and step S15 depending on the type of powder material. For example, when the quality of the three-dimensional shape does not become a problem even when the powder material is oxidized, these steps may be omitted, and the three-dimensional stacking chamber 2 and the preparatory chamber 3 may be set to an air atmosphere.
- the control device 20 determines whether to machine the pedestal 91 on the base unit 100 (step S16). For example, the control device 20 causes the shape measuring unit 30 to measure the surface shape of the pedestal 91. The control device 20 determines whether to machine the pedestal 91 based on the measurement result of the shape measuring unit 30. For example, when the surface roughness of the pedestal 91 is larger than a predetermined value, the control device 20 determines to machine the pedestal 91.
- the necessity determination of the machining of the pedestal 91 by the control device 20 is not limited to this, and may not be based on the measurement result of the shape measuring unit 30.
- control device 20 may store information on the pedestal 91 in the storage unit 53, and determine whether or not the pedestal 91 needs to be processed from the information on the pedestal 91 and the design information of the three-dimensional shape object. Moreover, the control apparatus 20 is good also as the setting which always processes the base 91. FIG.
- the control device 20 determines that machining of the pedestal 91 is necessary (Yes in step S16), the machining unit 13 performs machining of the pedestal 91 under predetermined conditions (step S17).
- the control device 20 determines the machining conditions of the pedestal 91 based on, for example, the shape measurement result of the pedestal 91 by the shape measuring unit 30 or the information on the pedestal 91 and the design information of the three-dimensional shape.
- the formation condition of the molding layer is determined (step S18).
- the forming conditions of the forming layer include, for example, the shape of each layer of the forming layer, the type of powder P, the spraying speed of the powder P, the spraying pressure of the powder P, the irradiation condition of the laser light L, the convergent diameter of the powder P and the laser light L.
- the control device 20 sprays the powder P toward the pedestal 91 on the base portion 100 by the laminated head 12, irradiates the laser beam L, and heats the base portion 100.
- Start (step S19).
- the control device 20 can melt the powder P with the laser light L by irradiating the laser light L while injecting the powder P, and solidify the melted powder P. Form.
- the control device 20 irradiates the base unit 100 with the laser light L from the heating head 31 and starts heating the base unit 100.
- the control device 20 irradiates the laser beam L while injecting the powder P, and moves the base portion 100 by the table portion 11 to form the molding layer 92 on the pedestal 91 (step S20).
- the control device 20 heats the formed molding layer 92 by heating with the heating head 31 or heats the portion before the solidified body B adheres.
- the control device 20 determines whether the molding layer 92 needs to be machined (step S21). For example, the control device 20 causes the shape measuring unit 30 to measure the surface shape of the molding layer 92. The control device 20 determines whether machining of the molding layer 92 is necessary based on the measurement result of the shape measuring unit 30. For example, the control device 20 determines that the molding layer 92 is to be machined when the surface roughness of the molding layer 92 is larger than a predetermined value. However, the criteria for determining whether machining of the molded layer 92 is necessary are not limited to this.
- the control device 20 may determine whether or not the molding layer 92 needs to be machined based on the design information of the three-dimensional shape and the formation conditions of the molding layer. For example, when the surface roughness of the molding layer 92 calculated from the molding layer forming conditions is larger than the necessary surface roughness based on the design information of the three-dimensional shape, the control device 20 needs to machine the molding layer 92. You may make it judge that it is.
- step S21 When the control device 20 determines that machining of the molded layer 92 is not necessary (No in step S21), the control device 20 proceeds to step S24.
- the control device 20 determines machining conditions for the molding layer 92 (step S22). For example, the control device 20 determines the processing condition based on the measurement result of the shape measuring unit 30, or the design information of the three-dimensional shape object, the forming layer forming condition, and the like. After determining the molding layer processing conditions, the control device 20 causes the machining unit 13 to machine the molding layer 92 based on the determined processing conditions (step S23).
- control device 20 When the control device 20 performs machining of the molding layer 92 or determines that the machining of the molding layer 92 is not necessary, is it necessary to further stack the molding layer 93 on the molding layer 92? Is determined (step S24). For example, the control device 20 determines whether it is necessary to further stack the molding layer 93 on the molding layer 92 based on the design information of the three-dimensional shape read from the storage unit 53.
- Step S24 When it is determined that the molding layer 93 needs to be stacked (Yes in Step S24), the control device 20 returns to Step S18 and stacks the molding layer 93 on the molding layer 92. When the control device 20 determines that the formation of the molding layer 93 is unnecessary (No in step S24), the manufacture of the three-dimensional shape is completed.
- the three-dimensional laminating apparatus 1 manufactures a three-dimensional shape in this way.
- the three-dimensional laminating apparatus 1 according to the present embodiment produces a three-dimensional shape by injecting the powder P by the laminating head 12 and irradiating the powder P with the laser light L.
- the three-dimensional laminating apparatus 1 irradiates the powder P facing the object with the laser light L, melts it before reaching the object, and attaches the melt A to the object. Thereby, it is possible to form the molding layer without dissolving the object with the laser light L or reducing the amount to be dissolved.
- the three-dimensional laminating apparatus 1 can manufacture a three-dimensional shape with high accuracy.
- the three-dimensional laminating apparatus 1 can more appropriately control the conditions for forming the molding layer by heating the base portion or the molding layer while selecting the heating position using the heating head 31.
- the heating head 31 is used to adjust the temperature reduction rate of the molding layer by heating the region of the molding layer that has passed the position where the laser beam is irradiated, that is, the region after the molding layer is formed. Can do. Thereby, the state of the molding layer can be controlled with higher accuracy, and the strength and the like of the molding layer can be adjusted.
- the machining head 31 heats the region before passing through the position where the laser beam is irradiated, that is, the base portion or the molding layer before the melt A adheres, so that when the melt adheres, Therefore, the powder can be made into a melt more reliably.
- the three-dimensional laminating apparatus 1 can perform processing with higher accuracy, and can manufacture a three-dimensional shape with high accuracy.
- the three-dimensional laminating apparatus 1 can appropriately perform machining on the molding layer 92 by the machining unit 13. Therefore, the three-dimensional laminating apparatus 1 can manufacture a three-dimensional shape with high accuracy. In the above embodiment, machining can be performed with higher accuracy by machining the molding layer 92 and the base part 100 using the machining part 13. It is not necessary to perform machining without providing 13.
- the base moving unit 36 moves the base unit 100 into the three-dimensional stacking chamber 2. Air may be exhausted inside the three-dimensional stacking chamber 2.
- the base moving unit 36 can move the base unit 100 to the inside of the three-dimensional stacking chamber 2 without, for example, an operator entering the three-dimensional stacking chamber 2.
- the three-dimensional laminating apparatus 1 includes the shape measuring unit 30 to determine the forming layer forming conditions.
- FIG. 19 is a flowchart illustrating an example of a process of determining a forming layer forming condition by the three-dimensional laminating apparatus 1 according to the present embodiment. The process of FIG. 19 can be executed as part of the process of step S18 of FIG.
- the control apparatus 20 measures the shape of the molding layer 92 by the shape measurement part 30 (step S31).
- the control device 20 may cause the shape measuring unit 30 to measure the shape of the molding layer 92 while forming the molding layer 92 on the laminated head 12.
- the shape measuring unit 30 can measure both the shape of the portion where the laminated head 12 is to form the solidified body B and the shape of the solidified body B formed at that portion. That is, the shape measuring unit 30 can measure the surface shape before and after the formation of the molding layer 92. After measuring the shape of the molding layer 92, the control device 20 determines the forming conditions of the molding layer 92 including the heating conditions based on the measurement result of the shape measuring unit 30 (step S33).
- the control device 20 can determine the heating amount at each position according to the shape of the molding layer 92 by determining the heating condition according to the measurement result of the surface shape of the molding layer 92 by the shape measuring unit 30. It is possible to heat each position more appropriately. Thereby, the temperature of each position can be made uniform or the temperature change can be made uniform, and more accurate processing can be performed.
- control device 20 determines the formation condition of the molding layer according to the measurement result of the surface shape of the molding layer 92 by the shape measuring unit 30 and controls the operation of the laminated head 12. Therefore, the three-dimensional laminating apparatus 1 can more appropriately form the molding layer, for example, by making the distance between the portion where the molding layer is formed and the lamination head 12 constant. Furthermore, the three-dimensional laminating apparatus 1 can measure the shape of the molding layer 92 by the shape measuring unit 30 while forming the molding layer by the lamination head 12. Therefore, the three-dimensional laminating apparatus 1 can make the forming layer forming conditions more appropriate, and can manufacture a three-dimensional shape with higher accuracy.
- the processing by the laminated head 12 has been described, but the processing by the machining unit 13 can be performed in the same manner.
- the forming layer formation condition determined in the above embodiment may be a condition that varies depending on the position, or may be a constant condition.
- the three-dimensional laminating apparatus 1 determines the movement path of the laminating head 12, that is, the relative relationship between the position of the laminating head 12 in the Z-axis direction and the movement by the table unit 11 as the forming layer formation condition. It is preferable. Thereby, the thickness of the molding layer laminated
- the three-dimensional laminating apparatus 1 may determine the processing operation based on the temperature distribution detected by the temperature detection unit 120.
- FIG. 20 is a flowchart illustrating an example of a process for determining the forming condition of the molding layer.
- the control device 20 detects the temperature distribution on the surface of the molding layer with the temperature detector 120 (step S42).
- the control device 20 can detect the temperature distribution over the entire surface of the molding layer by performing measurement with the temperature detection unit 120 while moving the base unit 100 with the table unit 11.
- the control device 20 may perform measurement before processing with the laminated head 12, or may perform measurement while performing processing with the laminated head 12.
- the shape measuring unit 30 detects the shape (surface shape) of the molding layer (step S44). Detection of the surface shape of the molding layer and detection of the temperature distribution may be performed simultaneously.
- the control device 20 When detecting the shape of the molding layer, the control device 20 specifies a detection position at which the temperature detection unit detects the temperature based on the shape of the molding layer and the temperature distribution (step S46), and detects the temperature at the specified position. (Step S48). The control device 20 determines the forming layer forming conditions including the heating conditions based on the detected temperature (step S49), and ends this process.
- the three-dimensional laminating apparatus 1 can control the temperature and temperature change of each position with high accuracy by measuring the temperature at a specific position, for example, a place where it is difficult to cool or a place where it is easy to warm, More appropriate processing can be performed.
- the three-dimensional laminating apparatus 1 determines the moving path of the laminating head 12 as a processing condition based on the temperature distribution and the shape, that is, the molding to be laminated by determining the processing condition in consideration of the temperature distribution.
- the thickness of the layer, the solidified part temperature, and the lamination speed can be made uniform. In other words, it is possible to grasp a place where it is difficult to cool or a place where it is easy to warm, and to perform a more uniform machining with definitive machining conditions.
- the temperature is detected again.
- the forming layer forming conditions including the heating conditions may be determined without performing the processes of step S46 and step S48.
- the three-dimensional laminating apparatus 1 can control the temperature and temperature change at each position with high accuracy by determining the heating condition based on the temperature distribution and the shape.
- the three-dimensional laminating apparatus 1 may determine the processing operation using the detection result of the mass detection unit 130. For example, a change in mass caused by the formed molded product may be detected to evaluate the three-dimensional laminate being manufactured. Specifically, the density of the three-dimensional laminate can be calculated by detecting changes in the formed size and mass, and it can be determined whether or not voids are formed in the three-dimensional laminate. In addition, the three-dimensional laminating apparatus 1 is based on the weight of the mass detection unit 130, and the base unit 100 has a foreign object, specifically, a powder material that has not been melted or chips generated by machining by the machining unit 13. It is also possible to detect whether or not there is adhesion. Thereby, it can use for control of operation
- the three-dimensional laminating apparatus may further include another detection unit as an apparatus for detecting parameters for controlling the formation conditions.
- FIG. 21 is a schematic diagram illustrating another example of the peripheral portion of the stacking head of the three-dimensional stacking apparatus.
- the three-dimensional laminating apparatus shown in FIG. 21 includes a temperature detection unit 120a, a half mirror 182, a plasma emission detection unit 190, and a reflected light detection unit 192 around the laser beam path of the lamination head.
- the half mirror 182 is disposed between the light source 47 and the condensing unit 49, transmits laser light from the light source 47 toward the condensing unit 49, and reflects laser light from the condensing unit 49 toward the light source 47. That is, the half mirror 182 reflects the laser beam reflected by the base part 100 and the molding layer in a predetermined direction.
- the plasma emission detection unit 190 detects plasma generated by irradiating the base unit 100, the molding layer, and the supplied powder with the laser light L.
- the reflected light detection unit 192 detects the laser light L reflected by the half mirror 182. Further, the temperature detection unit 120a detects the temperature based on the state of the irradiation position of the laser beam reflected and reflected by the half mirror 182.
- FIG. 22 is a flowchart illustrating an example of a process for determining a forming layer formation condition, specifically, a heating condition by a heating head.
- the processing of FIGS. 22 to 24 is preferably performed in parallel with the processing by the stacking head, but may be executed when determining the formation conditions.
- the control device 20 detects the temperature with the temperature detection unit 120a (step S102), determines the heating condition based on the detected temperature (result) (step S104), and ends the present process.
- the control device 20 determines the heating condition by the heating head 31 based on the result detected by the temperature detection unit 120a, thereby making the temperature of the molding layer more uniform and performing higher-precision processing. it can.
- the same control can be performed in the case of the temperature detection unit 120.
- FIG. 23 is a flowchart showing an example of a process for determining the forming condition of the molding layer.
- the control device 20 detects the plasma emission with the plasma emission detector 190 (step S112), determines the heating condition based on the detected plasma emission (step S114), and ends the present process.
- the control device 20 can also make the temperature of the molding layer more uniform and perform higher-precision processing by determining the heating condition by the heating head 31 based on the result detected by the plasma light emission detection unit 190. Can do.
- the control device 20 can monitor the temperature of the focal position of the laser by detecting the plasma emission with the plasma emission detection unit 190.
- the powder melting state in the air can be monitored by detecting plasma that emits light when the injected powder enters the laser beam and melts.
- FIG. 24 is a flowchart showing an example of a process for determining the forming condition of the molding layer.
- the control device 20 detects the reflected light by the reflected light detection unit 192 (step S122), determines the heating condition based on the detected reflected light (step S124), and ends the present process.
- the control device 20 can also make the temperature of the molding layer more uniform and perform higher-precision processing by determining the heating condition by the heating head 31 based on the result detected by the reflected light detection unit 192. Can do.
- the control apparatus 20 can monitor the temperature of the position where the melt A adheres by detecting the reflected light with the reflected light detection unit 192.
- the three-dimensional laminating apparatus 1 enables the temperature detection unit 120 and the heating head 31 to rotate around the Z axis with respect to the laminating head 12. Thereby, according to the moving direction of the table part 11, the relative position of the lamination
- FIG. 25 is a schematic diagram showing another example of the laminated head storage chamber.
- a laminated head storage chamber 570 illustrated in FIG. 25 supports the laminated head 12, the shape measuring unit 30, and the heating head 31.
- a portion that supports the laminated head 12, the shape measuring unit 30, and the heating head 31 serves as a switching mechanism 580.
- the switching mechanism 580 includes a fixed portion 581, a movable portion 582, a rotation mechanism 584, and a seal portion 586.
- the fixed portion 581 is supported by the Z-axis slide portion 4 a and the bottom surface is connected to the bellows 18.
- the movable part 582 is built in the fixed part 581, and fixes the laminated head 12, the shape measuring part 30, and the heating head 31.
- the rotation mechanism 584 rotates the movable part 582 around the axis 590 with respect to the fixed part 581.
- the seal 586 seals the space between the fixed portion 581 and the movable portion 582 on the lower surface in the vertical direction, that is, the surface exposed to the three-dimensional stacking chamber 2 in a rotatable state.
- the switching mechanism 580 can switch the relative position between the laminated head 12 supported by the movable portion 582 and the heating head 31 by rotating the movable portion 582 relative to the fixed portion 581.
- the switching mechanism 580 allows the stacking head 12 to be upstream of the heating head 31 with respect to the relative movement direction of the stacking head 12 and the base unit 100, that is, the direction in which the table unit 11 moves the base unit 100.
- a state in which the laminated head 12 is on the downstream side of the heating head 31 can be switched. That is, when the base part 100 is moving in the same direction, the front-rear relation with respect to the processing positions of the laminated head 12 and the heating head 31 can be switched by rotating the movable part 582 by 180 degrees.
- the heating head 31 heats the base part 100 or the molding layer before passing through the lamination head 12 (before forming the molding layer) or after passing through the lamination head 12 (forming the molding layer). It is possible to switch whether to heat the base part 100 or the molding layer after).
- FIG. 26 is a flowchart showing an example of processing operation by the three-dimensional laminating apparatus.
- the control device 20 detects the relative movement direction between the stacked head 12 and the base 100 (step S170), and specifies the heating area of the heating head 31 (step S172).
- the heating area of the heating head 31 is set with respect to the base part 100 processed by the laminated head 12, and the area for heating the base part 100 or the molding layer before passing through the laminated head 12, the laminated head There is an area for heating the base part 100 or the molding layer after passing through 12.
- the control device 20 determines whether the heating head 31 is at an appropriate position with respect to the laminated head 12 (step S174). That is, based on the relative movement direction of the laminated head 12 and the base unit 100, the heating area, and the relative position of the current laminated head 12 and the heating head 31, it is determined whether the heating head can heat the heating area. To do.
- step S174 When the control device 20 determines that the heating head 31 is in an appropriate position with respect to the laminated head 12 (Yes in step S174), the control device 20 proceeds to step S178.
- the switching mechanism 580 switches the relative position between the heating head 31 and the laminated head 12 ( Step S176), the process proceeds to step S178.
- the control apparatus 20 determines whether the relative movement direction of the lamination
- the three-dimensional laminating apparatus 1 performs the process shown in FIG. 26, and switches the relative position between the laminating head and the heating head according to the relative movement direction of the laminating head and the base portion,
- the relationship with the heating head can be set to a position corresponding to the setting. Thereby, it can suppress that the position heated with a heating head changes with respect to the position which a lamination
- the three-dimensional laminating apparatus 1 is not limited to the configuration in which the powder P is ejected by the laminating head 12 and the powder P is irradiated with the laser light L.
- the three-dimensional laminating apparatus 1 is only required to supply the powder P, irradiate the powder P with the laser light L, form a molding layer, and appropriately apply machining to the molding layer.
- the three-dimensional laminating apparatus 1 may form a molding layer by forming a powder layer with a powder supply unit and irradiating a part of the powder layer with laser light L to sinter the powder. Good.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Mechanical Engineering (AREA)
- Plasma & Fusion (AREA)
- Chemical & Material Sciences (AREA)
- Manufacturing & Machinery (AREA)
- Materials Engineering (AREA)
- Toxicology (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Automation & Control Theory (AREA)
- Analytical Chemistry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Powder Metallurgy (AREA)
- Laser Beam Processing (AREA)
Abstract
Description
複数の前記半導体レーザで出力され、それぞれの前記集光部で集光されたレーザ光が1つの光ファイバに入射されることが好ましい。
2 三次元積層室
3 予備室
4 積層ヘッド収納室
4a、5a Z軸スライド部
5 機械加工部収納室
6、7 扉
10 ベッド
11 テーブル部
12 積層ヘッド
13 機械加工部
15 Y軸スライド部
16 X軸スライド部
17 回転テーブル部
18、19 ベローズ
20 制御装置
22 工具
23 ノズル
24 先端部
25 空気排出部
30 形状計測部
31、31a 加熱ヘッド
32 機械加工部計測部
33 工具交換部
34 ノズル交換部
35、35A 粉末導入部
36 基台移動部
37 空気排出部
38 ガス導入部
39 粉末回収部
41 外管
42 内管
43 粉末流路
44 レーザ経路
46 本体
47 光源
48 光ファイバ
49 集光部
51 入力部
52 制御部
53 記憶部
54 出力部
55 通信部
56 先端
57 光源部
58 撮像部
81、81A 粉末収納部
82、82A 粉末識別部
83 カートリッジ
84 材料表示部
85 導入部
86 サイクロン部
87 気体排出部
88 粉末排出部
91 台座
92、93 成形層
95 円板部
96 ねじ穴部
97 軸部
98 円錐台部
99 部材
100 基台部
102、104、106、108 矢印
110、112、114 回転軸
120、120a 温度検出部
130 質量検出部
140 焦点位置調整部
150 粉末供給管
152 分配部
154 分岐管
156 混合部
156a 撹拌板
158 整流装置
162 レーザ光
164 測定波
182 ハーフミラー
190 プラズマ発光検出部
192 反射光検出部
502、502a 光源ユニット
504、504a 加熱位置調整機構
512、520、560 ミラー
512a、514 ガルバノミラー
522、562 角度位置調整機構
532 領域
540、540a 半導体レーザ
542 集光部
544 光ファイバ
550 合波部
551 コリメートレンズ
552 回折格子
554 集光部
A 溶融体
B 固化体
L レーザ光
P 粉末
P1、P2 焦点位置
Claims (19)
- 基台部に成形層を積層させて三次元形状を形成する三次元積層装置であって、
粉末材料を供給する粉末供給部と、
前記粉末材料に光ビームを照射し、前記光ビームが照射された前記粉末材料の少なくとも一部を焼結又は溶融固化させて前記成形層を形成する光照射部と、
前記基台部または成形層の前記光ビームが照射される位置を通過した領域または前記光ビームが照射される位置を通過する前の領域を選択的に加熱する加熱部と、
前記粉末供給部、前記光照射部及び前記加熱部の動作を制御する制御装置と、を有する三次元積層装置。 - 前記粉末供給部は、前記基台部に向かって前記粉末材料を噴射し、
前記光照射部は、前記粉末供給部から前記基台部に向けて移動する前記粉末材料に光ビームを照射し、前記粉末材料を溶融させて、溶融した前記粉末材料を前記基台部上で固化させて前記成形層を形成する請求項1に記載の三次元積層装置。 - 前記粉末供給部は、前記光照射部の外周に同心円状に配置され、前記光照射部の前記光ビームが通過する経路を囲う内管と前記内管を覆う外管との間が前記粉末材料の流れる粉末流路となる請求項2に記載の三次元積層装置。
- 前記光照射部及び前記粉末供給部と、前記基台部と、を相対移動させる移動機構を有し、
前記制御装置は、前記移動機構によって前記基台部に対して前記光照射部及び前記粉末供給部が通過する経路を決定する請求項2または3に記載の三次元積層装置。 - 前記加熱部は、光ビームを出力する光源ユニットを有し、
前記光源ユニットから出力する光ビームを照射して加熱を行う請求項1から4のいずれか一項に記載の三次元積層装置。 - 前記光ビームは、レーザ光である請求項5に記載の三次元積層装置。
- 前記加熱部は、前記光源ユニットから出力された光ビームを反射するミラー及び前記ミラーの角度を調整する角度調整機構を備える照射位置調整機構を備える請求項5または6に記載の三次元積層装置。
- 前記光源ユニットは、レーザ光を出力する半導体レーザと、前記半導体レーザから出力されたレーザ光を集光する集光部と、前記集光部で集光されたレーザ光が入射される光ファイバとを有する請求項5から7のいずれか一項に記載の三次元積層装置。
- 前記光源ユニットは、前記半導体レーザと前記集光部とを複数有し、
複数の前記半導体レーザで出力され、それぞれの前記集光部で集光されたレーザ光が1つの光ファイバに入射される請求項8に記載の三次元積層装置。 - 前記半導体レーザは、垂直発光型半導体レーザである請求項8に記載の三次元積層装置。
- 前記半導体レーザを複数有し、
前記集光部は、複数の前記半導体レーザのそれぞれに配置されたコリメートレンズと、
複数の前記コリメートレンズでコリメートされたレーザ光を合波して前記光ファイバに入射させる合波部と、を有する請求項10に記載の三次元積層装置。 - 前記成形層の表面の温度と分布を検出する温度検出部を有し、
前記制御装置は、前記温度検出部による前記成形層の表面温度の計測結果に応じて、前記加熱部による加熱を制御する請求項1から11のいずれか一項に記載の三次元積層装置。 - 前記制御装置は、前記温度検出部による前記成形層の表面温度の計測結果と、前記基台部及び前記成形層の特性とに基づいて、前記加熱部による加熱を制御する請求項12に記載の三次元積層装置。
- 前記成形層の表面のプラズマ発光を検出するプラズマ発光検出部を有し、
前記制御装置は、前記プラズマ発光検出部による計測結果に応じて、前記加熱部による加熱を制御する請求項1から13のいずれか一項に記載の三次元積層装置。 - 前記成形層の表面からの反射光を検出する反射光検出部を有し、
前記制御装置は、前記反射光検出部による計測結果に応じて、前記加熱部による加熱を制御する請求項1から14のいずれか一項に記載の三次元積層装置。 - 前記加熱部は、前記光ビームが照射される位置を通過した領域を加熱する請求項1から15のいずれか一項に記載の三次元積層装置。
- 前記加熱部は、前記光ビームが照射される位置を通過する前の領域を加熱する請求項1から15のいずれか一項に記載の三次元積層装置。
- 前記光照射部と前記加熱部の相対位置を切り換える切換機構を有し、
前記制御装置は、前記光照射部と前記加熱部と、前記基台部との相対移動の方向と、前記加熱部で加熱する領域が、前記基台部または成形層の前記光ビームが照射される位置を通過した領域であるか前記光ビームが照射される位置を通過する前の領域であるかに応じて、前記切換機構により前記光照射部と前記加熱部の相対位置を制御する請求項1から15のいずれか一項に記載の三次元積層装置。 - 基台部に成形層を積層して三次元形状物を形成する三次元積層方法であって、
粉末材料を基台部に向かって噴射しつつ、前記粉末材料に光ビームを照射することにより前記粉末材料を溶融させ、前記溶融した粉末材料を前記基台部上で固化させることにより前記基台部上に成形層を形成し、当該成形層を積層する積層ステップと、
前記基台部または成形層の前記光ビームが照射される位置を通過した領域または前記光ビームが照射される位置を通過する前の領域に光ビームを照射し選択的に加熱するステップと、を有する三次元積層方法。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15773604.2A EP3127685B1 (en) | 2014-03-31 | 2015-03-20 | Three-dimensional deposition device and three-dimensional deposition method |
| CN201580017061.1A CN106163703B (zh) | 2014-03-31 | 2015-03-20 | 三维层叠装置及三维层叠方法 |
| MX2016012702A MX2016012702A (es) | 2014-03-31 | 2015-03-20 | Dispositivo para deposicion tridimensional y metodo de deposicion tridimensional. |
| KR1020187012290A KR20180049219A (ko) | 2014-03-31 | 2015-03-20 | 3차원 적층 장치 및 3차원 적층 방법 |
| US15/129,923 US10898971B2 (en) | 2014-03-31 | 2015-03-20 | Three-dimensional deposition device and three-dimensional deposition method |
| KR1020167027064A KR20160129871A (ko) | 2014-03-31 | 2015-03-20 | 3차원 적층 장치 및 3차원 적층 방법 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014074058A JP6254036B2 (ja) | 2014-03-31 | 2014-03-31 | 三次元積層装置及び三次元積層方法 |
| JP2014-074058 | 2014-03-31 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015151864A1 true WO2015151864A1 (ja) | 2015-10-08 |
Family
ID=54240194
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/058496 WO2015151864A1 (ja) | 2014-03-31 | 2015-03-20 | 三次元積層装置及び三次元積層方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10898971B2 (ja) |
| EP (1) | EP3127685B1 (ja) |
| JP (1) | JP6254036B2 (ja) |
| KR (2) | KR20180049219A (ja) |
| CN (1) | CN106163703B (ja) |
| MX (1) | MX2016012702A (ja) |
| TW (1) | TWI600485B (ja) |
| WO (1) | WO2015151864A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107042306A (zh) * | 2016-02-09 | 2017-08-15 | 株式会社捷太格特 | 造型物的制造装置以及制造方法 |
| DE102016120044A1 (de) * | 2016-10-20 | 2018-04-26 | Cl Schutzrechtsverwaltungs Gmbh | Vorrichtung zur additiven Herstellung dreidimensionaler Objekte |
| US10479018B2 (en) | 2015-03-30 | 2019-11-19 | Renishaw Plc | Additive manufacturing apparatus and methods |
| EP3372061A4 (en) * | 2015-11-06 | 2019-11-27 | IPG Photonics Corporation | MODULAR LASER PROCESSING HOUSING AND SYSTEM |
| JP6758532B1 (ja) * | 2019-06-25 | 2020-09-23 | 三菱電機株式会社 | 数値制御装置および付加製造装置の制御方法 |
| US11123799B2 (en) | 2013-06-11 | 2021-09-21 | Renishaw Plc | Additive manufacturing apparatus and method |
| US11478856B2 (en) | 2013-06-10 | 2022-10-25 | Renishaw Plc | Selective laser solidification apparatus and method |
Families Citing this family (370)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10378106B2 (en) | 2008-11-14 | 2019-08-13 | Asm Ip Holding B.V. | Method of forming insulation film by modified PEALD |
| US9394608B2 (en) | 2009-04-06 | 2016-07-19 | Asm America, Inc. | Semiconductor processing reactor and components thereof |
| US8802201B2 (en) | 2009-08-14 | 2014-08-12 | Asm America, Inc. | Systems and methods for thin-film deposition of metal oxides using excited nitrogen-oxygen species |
| US9312155B2 (en) | 2011-06-06 | 2016-04-12 | Asm Japan K.K. | High-throughput semiconductor-processing apparatus equipped with multiple dual-chamber modules |
| US10364496B2 (en) | 2011-06-27 | 2019-07-30 | Asm Ip Holding B.V. | Dual section module having shared and unshared mass flow controllers |
| US10854498B2 (en) | 2011-07-15 | 2020-12-01 | Asm Ip Holding B.V. | Wafer-supporting device and method for producing same |
| US20130023129A1 (en) | 2011-07-20 | 2013-01-24 | Asm America, Inc. | Pressure transmitter for a semiconductor processing environment |
| US9017481B1 (en) | 2011-10-28 | 2015-04-28 | Asm America, Inc. | Process feed management for semiconductor substrate processing |
| US9659799B2 (en) | 2012-08-28 | 2017-05-23 | Asm Ip Holding B.V. | Systems and methods for dynamic semiconductor process scheduling |
| US9021985B2 (en) | 2012-09-12 | 2015-05-05 | Asm Ip Holdings B.V. | Process gas management for an inductively-coupled plasma deposition reactor |
| US10714315B2 (en) | 2012-10-12 | 2020-07-14 | Asm Ip Holdings B.V. | Semiconductor reaction chamber showerhead |
| US20160376700A1 (en) | 2013-02-01 | 2016-12-29 | Asm Ip Holding B.V. | System for treatment of deposition reactor |
| US9484191B2 (en) | 2013-03-08 | 2016-11-01 | Asm Ip Holding B.V. | Pulsed remote plasma method and system |
| US9589770B2 (en) | 2013-03-08 | 2017-03-07 | Asm Ip Holding B.V. | Method and systems for in-situ formation of intermediate reactive species |
| US9240412B2 (en) | 2013-09-27 | 2016-01-19 | Asm Ip Holding B.V. | Semiconductor structure and device and methods of forming same using selective epitaxial process |
| US10683571B2 (en) | 2014-02-25 | 2020-06-16 | Asm Ip Holding B.V. | Gas supply manifold and method of supplying gases to chamber using same |
| US10167557B2 (en) | 2014-03-18 | 2019-01-01 | Asm Ip Holding B.V. | Gas distribution system, reactor including the system, and methods of using the same |
| US11015245B2 (en) | 2014-03-19 | 2021-05-25 | Asm Ip Holding B.V. | Gas-phase reactor and system having exhaust plenum and components thereof |
| JP6359316B2 (ja) | 2014-03-31 | 2018-07-18 | 三菱重工業株式会社 | 三次元積層装置及び三次元積層方法 |
| US10618131B2 (en) | 2014-06-05 | 2020-04-14 | Nlight, Inc. | Laser patterning skew correction |
| US10858737B2 (en) | 2014-07-28 | 2020-12-08 | Asm Ip Holding B.V. | Showerhead assembly and components thereof |
| US9890456B2 (en) | 2014-08-21 | 2018-02-13 | Asm Ip Holding B.V. | Method and system for in situ formation of gas-phase compounds |
| US9657845B2 (en) | 2014-10-07 | 2017-05-23 | Asm Ip Holding B.V. | Variable conductance gas distribution apparatus and method |
| US10941490B2 (en) | 2014-10-07 | 2021-03-09 | Asm Ip Holding B.V. | Multiple temperature range susceptor, assembly, reactor and system including the susceptor, and methods of using the same |
| KR102263121B1 (ko) | 2014-12-22 | 2021-06-09 | 에이에스엠 아이피 홀딩 비.브이. | 반도체 소자 및 그 제조 방법 |
| US10529542B2 (en) | 2015-03-11 | 2020-01-07 | Asm Ip Holdings B.V. | Cross-flow reactor and method |
| US10276355B2 (en) | 2015-03-12 | 2019-04-30 | Asm Ip Holding B.V. | Multi-zone reactor, system including the reactor, and method of using the same |
| US10458018B2 (en) | 2015-06-26 | 2019-10-29 | Asm Ip Holding B.V. | Structures including metal carbide material, devices including the structures, and methods of forming same |
| US10600673B2 (en) | 2015-07-07 | 2020-03-24 | Asm Ip Holding B.V. | Magnetic susceptor to baseplate seal |
| US10083836B2 (en) | 2015-07-24 | 2018-09-25 | Asm Ip Holding B.V. | Formation of boron-doped titanium metal films with high work function |
| US9960072B2 (en) | 2015-09-29 | 2018-05-01 | Asm Ip Holding B.V. | Variable adjustment for precise matching of multiple chamber cavity housings |
| US10211308B2 (en) | 2015-10-21 | 2019-02-19 | Asm Ip Holding B.V. | NbMC layers |
| US10322384B2 (en) | 2015-11-09 | 2019-06-18 | Asm Ip Holding B.V. | Counter flow mixer for process chamber |
| US10434600B2 (en) | 2015-11-23 | 2019-10-08 | Nlight, Inc. | Fine-scale temporal control for laser material processing |
| US11179807B2 (en) | 2015-11-23 | 2021-11-23 | Nlight, Inc. | Fine-scale temporal control for laser material processing |
| US10688596B2 (en) * | 2015-12-18 | 2020-06-23 | Illinois Tool Works Inc. | Wire manufactured by additive manufacturing methods |
| US11139308B2 (en) | 2015-12-29 | 2021-10-05 | Asm Ip Holding B.V. | Atomic layer deposition of III-V compounds to form V-NAND devices |
| FR3046367A1 (fr) * | 2015-12-31 | 2017-07-07 | Nantes Ecole Centrale | Dispositif de fabrication additive par projection et fusion de poudre |
| US10468251B2 (en) | 2016-02-19 | 2019-11-05 | Asm Ip Holding B.V. | Method for forming spacers using silicon nitride film for spacer-defined multiple patterning |
| US10529554B2 (en) | 2016-02-19 | 2020-01-07 | Asm Ip Holding B.V. | Method for forming silicon nitride film selectively on sidewalls or flat surfaces of trenches |
| US10831180B2 (en) | 2016-02-25 | 2020-11-10 | General Electric Company | Multivariate statistical process control of laser powder bed additive manufacturing |
| US10501866B2 (en) | 2016-03-09 | 2019-12-10 | Asm Ip Holding B.V. | Gas distribution apparatus for improved film uniformity in an epitaxial system |
| US10343920B2 (en) | 2016-03-18 | 2019-07-09 | Asm Ip Holding B.V. | Aligned carbon nanotubes |
| US9892913B2 (en) | 2016-03-24 | 2018-02-13 | Asm Ip Holding B.V. | Radial and thickness control via biased multi-port injection settings |
| JP6357540B2 (ja) * | 2016-03-25 | 2018-07-11 | 技術研究組合次世代3D積層造形技術総合開発機構 | 3次元積層造形装置、3次元積層造形装置の制御方法および3次元積層造形装置の制御プログラム |
| US10865475B2 (en) | 2016-04-21 | 2020-12-15 | Asm Ip Holding B.V. | Deposition of metal borides and silicides |
| US10190213B2 (en) | 2016-04-21 | 2019-01-29 | Asm Ip Holding B.V. | Deposition of metal borides |
| US10032628B2 (en) | 2016-05-02 | 2018-07-24 | Asm Ip Holding B.V. | Source/drain performance through conformal solid state doping |
| US10367080B2 (en) | 2016-05-02 | 2019-07-30 | Asm Ip Holding B.V. | Method of forming a germanium oxynitride film |
| KR102592471B1 (ko) | 2016-05-17 | 2023-10-20 | 에이에스엠 아이피 홀딩 비.브이. | 금속 배선 형성 방법 및 이를 이용한 반도체 장치의 제조 방법 |
| US11453943B2 (en) | 2016-05-25 | 2022-09-27 | Asm Ip Holding B.V. | Method for forming carbon-containing silicon/metal oxide or nitride film by ALD using silicon precursor and hydrocarbon precursor |
| DE102016210042B3 (de) | 2016-06-07 | 2017-10-19 | Sauer Gmbh | Werkzeugmaschine zum Auftragsschweißen |
| KR101787718B1 (ko) * | 2016-06-21 | 2017-11-16 | 한국기계연구원 | 3차원 레이저 프린팅 장치 및 방법 |
| US10388509B2 (en) | 2016-06-28 | 2019-08-20 | Asm Ip Holding B.V. | Formation of epitaxial layers via dislocation filtering |
| US10612137B2 (en) | 2016-07-08 | 2020-04-07 | Asm Ip Holdings B.V. | Organic reactants for atomic layer deposition |
| US9859151B1 (en) | 2016-07-08 | 2018-01-02 | Asm Ip Holding B.V. | Selective film deposition method to form air gaps |
| US10714385B2 (en) | 2016-07-19 | 2020-07-14 | Asm Ip Holding B.V. | Selective deposition of tungsten |
| KR102354490B1 (ko) | 2016-07-27 | 2022-01-21 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 방법 |
| US9887082B1 (en) | 2016-07-28 | 2018-02-06 | Asm Ip Holding B.V. | Method and apparatus for filling a gap |
| KR102532607B1 (ko) | 2016-07-28 | 2023-05-15 | 에이에스엠 아이피 홀딩 비.브이. | 기판 가공 장치 및 그 동작 방법 |
| US9812320B1 (en) | 2016-07-28 | 2017-11-07 | Asm Ip Holding B.V. | Method and apparatus for filling a gap |
| US10395919B2 (en) | 2016-07-28 | 2019-08-27 | Asm Ip Holding B.V. | Method and apparatus for filling a gap |
| US10423015B2 (en) | 2016-09-29 | 2019-09-24 | Nlight, Inc. | Adjustable beam characteristics |
| TWI633994B (zh) * | 2016-10-06 | 2018-09-01 | 國立中興大學 | 3D printing device capable of instantly monitoring temperature and temperature monitoring method thereof |
| US10410943B2 (en) | 2016-10-13 | 2019-09-10 | Asm Ip Holding B.V. | Method for passivating a surface of a semiconductor and related systems |
| US10643826B2 (en) | 2016-10-26 | 2020-05-05 | Asm Ip Holdings B.V. | Methods for thermally calibrating reaction chambers |
| US11532757B2 (en) | 2016-10-27 | 2022-12-20 | Asm Ip Holding B.V. | Deposition of charge trapping layers |
| US10714350B2 (en) | 2016-11-01 | 2020-07-14 | ASM IP Holdings, B.V. | Methods for forming a transition metal niobium nitride film on a substrate by atomic layer deposition and related semiconductor device structures |
| US10643904B2 (en) | 2016-11-01 | 2020-05-05 | Asm Ip Holdings B.V. | Methods for forming a semiconductor device and related semiconductor device structures |
| US10435790B2 (en) | 2016-11-01 | 2019-10-08 | Asm Ip Holding B.V. | Method of subatmospheric plasma-enhanced ALD using capacitively coupled electrodes with narrow gap |
| US10229833B2 (en) | 2016-11-01 | 2019-03-12 | Asm Ip Holding B.V. | Methods for forming a transition metal nitride film on a substrate by atomic layer deposition and related semiconductor device structures |
| US10134757B2 (en) | 2016-11-07 | 2018-11-20 | Asm Ip Holding B.V. | Method of processing a substrate and a device manufactured by using the method |
| KR102546317B1 (ko) | 2016-11-15 | 2023-06-21 | 에이에스엠 아이피 홀딩 비.브이. | 기체 공급 유닛 및 이를 포함하는 기판 처리 장치 |
| US10340135B2 (en) | 2016-11-28 | 2019-07-02 | Asm Ip Holding B.V. | Method of topologically restricted plasma-enhanced cyclic deposition of silicon or metal nitride |
| KR20180068582A (ko) | 2016-12-14 | 2018-06-22 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| US11447861B2 (en) | 2016-12-15 | 2022-09-20 | Asm Ip Holding B.V. | Sequential infiltration synthesis apparatus and a method of forming a patterned structure |
| US11581186B2 (en) | 2016-12-15 | 2023-02-14 | Asm Ip Holding B.V. | Sequential infiltration synthesis apparatus |
| KR102700194B1 (ko) | 2016-12-19 | 2024-08-28 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| US10269558B2 (en) | 2016-12-22 | 2019-04-23 | Asm Ip Holding B.V. | Method of forming a structure on a substrate |
| JP6856238B2 (ja) * | 2016-12-27 | 2021-04-07 | 白光株式会社 | 加熱工具の先端部材の製造方法 |
| US10867788B2 (en) | 2016-12-28 | 2020-12-15 | Asm Ip Holding B.V. | Method of forming a structure on a substrate |
| US10821512B2 (en) * | 2017-01-06 | 2020-11-03 | General Electric Company | Systems and methods for controlling microstructure of additively manufactured components |
| US11390950B2 (en) | 2017-01-10 | 2022-07-19 | Asm Ip Holding B.V. | Reactor system and method to reduce residue buildup during a film deposition process |
| US10655221B2 (en) | 2017-02-09 | 2020-05-19 | Asm Ip Holding B.V. | Method for depositing oxide film by thermal ALD and PEALD |
| US10468261B2 (en) | 2017-02-15 | 2019-11-05 | Asm Ip Holding B.V. | Methods for forming a metallic film on a substrate by cyclical deposition and related semiconductor device structures |
| US10283353B2 (en) | 2017-03-29 | 2019-05-07 | Asm Ip Holding B.V. | Method of reforming insulating film deposited on substrate with recess pattern |
| US10529563B2 (en) | 2017-03-29 | 2020-01-07 | Asm Ip Holdings B.V. | Method for forming doped metal oxide films on a substrate by cyclical deposition and related semiconductor device structures |
| US10103040B1 (en) * | 2017-03-31 | 2018-10-16 | Asm Ip Holding B.V. | Apparatus and method for manufacturing a semiconductor device |
| WO2018181334A1 (ja) * | 2017-03-31 | 2018-10-04 | 株式会社ニコン | 造形システム及び造形方法 |
| US11173548B2 (en) | 2017-04-04 | 2021-11-16 | Nlight, Inc. | Optical fiducial generation for galvanometric scanner calibration |
| JP6626036B2 (ja) * | 2017-04-18 | 2019-12-25 | ファナック株式会社 | 測定機能を有するレーザ加工システム |
| KR102457289B1 (ko) | 2017-04-25 | 2022-10-21 | 에이에스엠 아이피 홀딩 비.브이. | 박막 증착 방법 및 반도체 장치의 제조 방법 |
| CN107415239A (zh) * | 2017-05-05 | 2017-12-01 | 南通理工学院 | 一种uv光固化3d快速成型系统及其打印方法 |
| US10770286B2 (en) | 2017-05-08 | 2020-09-08 | Asm Ip Holdings B.V. | Methods for selectively forming a silicon nitride film on a substrate and related semiconductor device structures |
| US10446393B2 (en) | 2017-05-08 | 2019-10-15 | Asm Ip Holding B.V. | Methods for forming silicon-containing epitaxial layers and related semiconductor device structures |
| US10892156B2 (en) | 2017-05-08 | 2021-01-12 | Asm Ip Holding B.V. | Methods for forming a silicon nitride film on a substrate and related semiconductor device structures |
| KR101974722B1 (ko) * | 2017-05-26 | 2019-05-02 | 전북대학교산학협력단 | 3차원 적층 가공의 실시간 가공 상태 검사와 보정 장치 및 이를 적용한 방법 |
| US10504742B2 (en) | 2017-05-31 | 2019-12-10 | Asm Ip Holding B.V. | Method of atomic layer etching using hydrogen plasma |
| US10886123B2 (en) | 2017-06-02 | 2021-01-05 | Asm Ip Holding B.V. | Methods for forming low temperature semiconductor layers and related semiconductor device structures |
| JP6289713B1 (ja) * | 2017-06-12 | 2018-03-07 | 南海鋼材株式会社 | 溶接システム及び溶接方法 |
| US12040200B2 (en) | 2017-06-20 | 2024-07-16 | Asm Ip Holding B.V. | Semiconductor processing apparatus and methods for calibrating a semiconductor processing apparatus |
| US11306395B2 (en) | 2017-06-28 | 2022-04-19 | Asm Ip Holding B.V. | Methods for depositing a transition metal nitride film on a substrate by atomic layer deposition and related deposition apparatus |
| US10685834B2 (en) | 2017-07-05 | 2020-06-16 | Asm Ip Holdings B.V. | Methods for forming a silicon germanium tin layer and related semiconductor device structures |
| KR20190009245A (ko) | 2017-07-18 | 2019-01-28 | 에이에스엠 아이피 홀딩 비.브이. | 반도체 소자 구조물 형성 방법 및 관련된 반도체 소자 구조물 |
| US10541333B2 (en) | 2017-07-19 | 2020-01-21 | Asm Ip Holding B.V. | Method for depositing a group IV semiconductor and related semiconductor device structures |
| US11374112B2 (en) | 2017-07-19 | 2022-06-28 | Asm Ip Holding B.V. | Method for depositing a group IV semiconductor and related semiconductor device structures |
| US11018002B2 (en) | 2017-07-19 | 2021-05-25 | Asm Ip Holding B.V. | Method for selectively depositing a Group IV semiconductor and related semiconductor device structures |
| US10312055B2 (en) | 2017-07-26 | 2019-06-04 | Asm Ip Holding B.V. | Method of depositing film by PEALD using negative bias |
| US10605530B2 (en) | 2017-07-26 | 2020-03-31 | Asm Ip Holding B.V. | Assembly of a liner and a flange for a vertical furnace as well as the liner and the vertical furnace |
| US10590535B2 (en) | 2017-07-26 | 2020-03-17 | Asm Ip Holdings B.V. | Chemical treatment, deposition and/or infiltration apparatus and method for using the same |
| CN109366981B (zh) * | 2017-08-03 | 2021-06-11 | 株式会社松浦机械制作所 | 三维物体造型方法 |
| DE102017213720A1 (de) * | 2017-08-07 | 2019-02-07 | Eos Gmbh Electro Optical Systems | Optimiertes Segmentierungsverfahren |
| US10692741B2 (en) | 2017-08-08 | 2020-06-23 | Asm Ip Holdings B.V. | Radiation shield |
| US10770336B2 (en) | 2017-08-08 | 2020-09-08 | Asm Ip Holding B.V. | Substrate lift mechanism and reactor including same |
| US11769682B2 (en) | 2017-08-09 | 2023-09-26 | Asm Ip Holding B.V. | Storage apparatus for storing cassettes for substrates and processing apparatus equipped therewith |
| US11139191B2 (en) | 2017-08-09 | 2021-10-05 | Asm Ip Holding B.V. | Storage apparatus for storing cassettes for substrates and processing apparatus equipped therewith |
| US10249524B2 (en) | 2017-08-09 | 2019-04-02 | Asm Ip Holding B.V. | Cassette holder assembly for a substrate cassette and holding member for use in such assembly |
| US10236177B1 (en) | 2017-08-22 | 2019-03-19 | ASM IP Holding B.V.. | Methods for depositing a doped germanium tin semiconductor and related semiconductor device structures |
| USD900036S1 (en) | 2017-08-24 | 2020-10-27 | Asm Ip Holding B.V. | Heater electrical connector and adapter |
| US11830730B2 (en) | 2017-08-29 | 2023-11-28 | Asm Ip Holding B.V. | Layer forming method and apparatus |
| KR102491945B1 (ko) | 2017-08-30 | 2023-01-26 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| US11295980B2 (en) | 2017-08-30 | 2022-04-05 | Asm Ip Holding B.V. | Methods for depositing a molybdenum metal film over a dielectric surface of a substrate by a cyclical deposition process and related semiconductor device structures |
| US11056344B2 (en) | 2017-08-30 | 2021-07-06 | Asm Ip Holding B.V. | Layer forming method |
| KR102401446B1 (ko) | 2017-08-31 | 2022-05-24 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| JP6393873B1 (ja) * | 2017-09-05 | 2018-09-26 | 株式会社松浦機械製作所 | 三次元造形装置 |
| DE102017215838A1 (de) | 2017-09-07 | 2019-03-07 | Sauer Gmbh | Austauschbares Optikmodul für eine Laserbearbeitungsmaschine |
| DE102017215839A1 (de) * | 2017-09-07 | 2019-03-07 | Sauer Gmbh | Optikmodul mit Vorrichtung zum automatischen Wechseln einer Kollimationsoptik |
| DE102017215840A1 (de) | 2017-09-07 | 2019-03-07 | Sauer Gmbh | Austauschbares Fokussiermodul |
| DE102017215841A1 (de) | 2017-09-07 | 2019-03-07 | Sauer Gmbh | Pulverdüse für eine Laserbearbeitungsmaschine |
| US10607895B2 (en) | 2017-09-18 | 2020-03-31 | Asm Ip Holdings B.V. | Method for forming a semiconductor device structure comprising a gate fill metal |
| KR102630301B1 (ko) | 2017-09-21 | 2024-01-29 | 에이에스엠 아이피 홀딩 비.브이. | 침투성 재료의 순차 침투 합성 방법 처리 및 이를 이용하여 형성된 구조물 및 장치 |
| US10844484B2 (en) | 2017-09-22 | 2020-11-24 | Asm Ip Holding B.V. | Apparatus for dispensing a vapor phase reactant to a reaction chamber and related methods |
| US10658205B2 (en) | 2017-09-28 | 2020-05-19 | Asm Ip Holdings B.V. | Chemical dispensing apparatus and methods for dispensing a chemical to a reaction chamber |
| US10403504B2 (en) | 2017-10-05 | 2019-09-03 | Asm Ip Holding B.V. | Method for selectively depositing a metallic film on a substrate |
| JP6577110B2 (ja) * | 2017-10-06 | 2019-09-18 | 株式会社アマダホールディングス | レーザ加工方法及びレーザ加工装置 |
| WO2019070032A1 (ja) * | 2017-10-06 | 2019-04-11 | 株式会社Ihi | 三次元造形装置及び三次元造形方法 |
| US10319588B2 (en) | 2017-10-10 | 2019-06-11 | Asm Ip Holding B.V. | Method for depositing a metal chalcogenide on a substrate by cyclical deposition |
| US10923344B2 (en) | 2017-10-30 | 2021-02-16 | Asm Ip Holding B.V. | Methods for forming a semiconductor structure and related semiconductor structures |
| KR102443047B1 (ko) | 2017-11-16 | 2022-09-14 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 방법 및 그에 의해 제조된 장치 |
| US10910262B2 (en) | 2017-11-16 | 2021-02-02 | Asm Ip Holding B.V. | Method of selectively depositing a capping layer structure on a semiconductor device structure |
| US11022879B2 (en) | 2017-11-24 | 2021-06-01 | Asm Ip Holding B.V. | Method of forming an enhanced unexposed photoresist layer |
| CN111344522B (zh) | 2017-11-27 | 2022-04-12 | 阿斯莫Ip控股公司 | 包括洁净迷你环境的装置 |
| KR102597978B1 (ko) | 2017-11-27 | 2023-11-06 | 에이에스엠 아이피 홀딩 비.브이. | 배치 퍼니스와 함께 사용하기 위한 웨이퍼 카세트를 보관하기 위한 보관 장치 |
| US10290508B1 (en) | 2017-12-05 | 2019-05-14 | Asm Ip Holding B.V. | Method for forming vertical spacers for spacer-defined patterning |
| US11919106B2 (en) * | 2017-12-18 | 2024-03-05 | Northwestern University | Systems and methods for global thermal control of additive manufacturing |
| US10872771B2 (en) | 2018-01-16 | 2020-12-22 | Asm Ip Holding B. V. | Method for depositing a material film on a substrate within a reaction chamber by a cyclical deposition process and related device structures |
| TWI799494B (zh) | 2018-01-19 | 2023-04-21 | 荷蘭商Asm 智慧財產控股公司 | 沈積方法 |
| CN111630203A (zh) | 2018-01-19 | 2020-09-04 | Asm Ip私人控股有限公司 | 通过等离子体辅助沉积来沉积间隙填充层的方法 |
| USD903477S1 (en) | 2018-01-24 | 2020-12-01 | Asm Ip Holdings B.V. | Metal clamp |
| US11018047B2 (en) | 2018-01-25 | 2021-05-25 | Asm Ip Holding B.V. | Hybrid lift pin |
| US20210069793A1 (en) * | 2018-01-31 | 2021-03-11 | Panasonic Intellectual Property Management Co., Ltd. | Method for manufacturing three-dimensional shaped object |
| USD880437S1 (en) | 2018-02-01 | 2020-04-07 | Asm Ip Holding B.V. | Gas supply plate for semiconductor manufacturing apparatus |
| US10535516B2 (en) | 2018-02-01 | 2020-01-14 | Asm Ip Holdings B.V. | Method for depositing a semiconductor structure on a surface of a substrate and related semiconductor structures |
| US11081345B2 (en) | 2018-02-06 | 2021-08-03 | Asm Ip Holding B.V. | Method of post-deposition treatment for silicon oxide film |
| JP7039009B2 (ja) * | 2018-02-08 | 2022-03-22 | 中村留精密工業株式会社 | レーザクラッディング装置 |
| US10896820B2 (en) | 2018-02-14 | 2021-01-19 | Asm Ip Holding B.V. | Method for depositing a ruthenium-containing film on a substrate by a cyclical deposition process |
| US11685991B2 (en) | 2018-02-14 | 2023-06-27 | Asm Ip Holding B.V. | Method for depositing a ruthenium-containing film on a substrate by a cyclical deposition process |
| US10731249B2 (en) | 2018-02-15 | 2020-08-04 | Asm Ip Holding B.V. | Method of forming a transition metal containing film on a substrate by a cyclical deposition process, a method for supplying a transition metal halide compound to a reaction chamber, and related vapor deposition apparatus |
| KR102636427B1 (ko) | 2018-02-20 | 2024-02-13 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 방법 및 장치 |
| US10658181B2 (en) | 2018-02-20 | 2020-05-19 | Asm Ip Holding B.V. | Method of spacer-defined direct patterning in semiconductor fabrication |
| US10975470B2 (en) | 2018-02-23 | 2021-04-13 | Asm Ip Holding B.V. | Apparatus for detecting or monitoring for a chemical precursor in a high temperature environment |
| US11473195B2 (en) | 2018-03-01 | 2022-10-18 | Asm Ip Holding B.V. | Semiconductor processing apparatus and a method for processing a substrate |
| US11629406B2 (en) | 2018-03-09 | 2023-04-18 | Asm Ip Holding B.V. | Semiconductor processing apparatus comprising one or more pyrometers for measuring a temperature of a substrate during transfer of the substrate |
| US11114283B2 (en) | 2018-03-16 | 2021-09-07 | Asm Ip Holding B.V. | Reactor, system including the reactor, and methods of manufacturing and using same |
| KR102646467B1 (ko) | 2018-03-27 | 2024-03-11 | 에이에스엠 아이피 홀딩 비.브이. | 기판 상에 전극을 형성하는 방법 및 전극을 포함하는 반도체 소자 구조 |
| US11230766B2 (en) | 2018-03-29 | 2022-01-25 | Asm Ip Holding B.V. | Substrate processing apparatus and method |
| US11088002B2 (en) | 2018-03-29 | 2021-08-10 | Asm Ip Holding B.V. | Substrate rack and a substrate processing system and method |
| US10510536B2 (en) | 2018-03-29 | 2019-12-17 | Asm Ip Holding B.V. | Method of depositing a co-doped polysilicon film on a surface of a substrate within a reaction chamber |
| KR102501472B1 (ko) | 2018-03-30 | 2023-02-20 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 방법 |
| US12090552B2 (en) | 2018-04-27 | 2024-09-17 | Arcam Ab | Method and device for additive manufacturing |
| US12025484B2 (en) | 2018-05-08 | 2024-07-02 | Asm Ip Holding B.V. | Thin film forming method |
| TWI811348B (zh) | 2018-05-08 | 2023-08-11 | 荷蘭商Asm 智慧財產控股公司 | 藉由循環沉積製程於基板上沉積氧化物膜之方法及相關裝置結構 |
| KR20190129718A (ko) | 2018-05-11 | 2019-11-20 | 에이에스엠 아이피 홀딩 비.브이. | 기판 상에 피도핑 금속 탄화물 막을 형성하는 방법 및 관련 반도체 소자 구조 |
| KR102596988B1 (ko) | 2018-05-28 | 2023-10-31 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 방법 및 그에 의해 제조된 장치 |
| US11718913B2 (en) | 2018-06-04 | 2023-08-08 | Asm Ip Holding B.V. | Gas distribution system and reactor system including same |
| TWI840362B (zh) | 2018-06-04 | 2024-05-01 | 荷蘭商Asm Ip私人控股有限公司 | 水氣降低的晶圓處置腔室 |
| US11286562B2 (en) | 2018-06-08 | 2022-03-29 | Asm Ip Holding B.V. | Gas-phase chemical reactor and method of using same |
| CN118181768A (zh) * | 2018-06-13 | 2024-06-14 | 株式会社尼康 | 运算装置 |
| US10797133B2 (en) | 2018-06-21 | 2020-10-06 | Asm Ip Holding B.V. | Method for depositing a phosphorus doped silicon arsenide film and related semiconductor device structures |
| KR102568797B1 (ko) | 2018-06-21 | 2023-08-21 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 시스템 |
| TWI815915B (zh) | 2018-06-27 | 2023-09-21 | 荷蘭商Asm Ip私人控股有限公司 | 用於形成含金屬材料及包含含金屬材料的膜及結構之循環沉積方法 |
| JP2021529254A (ja) | 2018-06-27 | 2021-10-28 | エーエスエム・アイピー・ホールディング・ベー・フェー | 金属含有材料ならびに金属含有材料を含む膜および構造体を形成するための周期的堆積方法 |
| KR102686758B1 (ko) | 2018-06-29 | 2024-07-18 | 에이에스엠 아이피 홀딩 비.브이. | 박막 증착 방법 및 반도체 장치의 제조 방법 |
| US10612136B2 (en) | 2018-06-29 | 2020-04-07 | ASM IP Holding, B.V. | Temperature-controlled flange and reactor system including same |
| US10755922B2 (en) | 2018-07-03 | 2020-08-25 | Asm Ip Holding B.V. | Method for depositing silicon-free carbon-containing film as gap-fill layer by pulse plasma-assisted deposition |
| US10388513B1 (en) | 2018-07-03 | 2019-08-20 | Asm Ip Holding B.V. | Method for depositing silicon-free carbon-containing film as gap-fill layer by pulse plasma-assisted deposition |
| US10767789B2 (en) | 2018-07-16 | 2020-09-08 | Asm Ip Holding B.V. | Diaphragm valves, valve components, and methods for forming valve components |
| US10483099B1 (en) | 2018-07-26 | 2019-11-19 | Asm Ip Holding B.V. | Method for forming thermally stable organosilicon polymer film |
| US11053591B2 (en) | 2018-08-06 | 2021-07-06 | Asm Ip Holding B.V. | Multi-port gas injection system and reactor system including same |
| US10883175B2 (en) | 2018-08-09 | 2021-01-05 | Asm Ip Holding B.V. | Vertical furnace for processing substrates and a liner for use therein |
| US11426818B2 (en) | 2018-08-10 | 2022-08-30 | The Research Foundation for the State University | Additive manufacturing processes and additively manufactured products |
| US10829852B2 (en) | 2018-08-16 | 2020-11-10 | Asm Ip Holding B.V. | Gas distribution device for a wafer processing apparatus |
| US11430674B2 (en) | 2018-08-22 | 2022-08-30 | Asm Ip Holding B.V. | Sensor array, apparatus for dispensing a vapor phase reactant to a reaction chamber and related methods |
| KR102707956B1 (ko) | 2018-09-11 | 2024-09-19 | 에이에스엠 아이피 홀딩 비.브이. | 박막 증착 방법 |
| US11024523B2 (en) | 2018-09-11 | 2021-06-01 | Asm Ip Holding B.V. | Substrate processing apparatus and method |
| US11049751B2 (en) | 2018-09-14 | 2021-06-29 | Asm Ip Holding B.V. | Cassette supply system to store and handle cassettes and processing apparatus equipped therewith |
| KR20200038184A (ko) | 2018-10-01 | 2020-04-10 | 에이에스엠 아이피 홀딩 비.브이. | 기판 유지 장치, 장치를 포함하는 시스템, 및 이를 이용하는 방법 |
| US11232963B2 (en) | 2018-10-03 | 2022-01-25 | Asm Ip Holding B.V. | Substrate processing apparatus and method |
| KR102592699B1 (ko) | 2018-10-08 | 2023-10-23 | 에이에스엠 아이피 홀딩 비.브이. | 기판 지지 유닛 및 이를 포함하는 박막 증착 장치와 기판 처리 장치 |
| US10847365B2 (en) | 2018-10-11 | 2020-11-24 | Asm Ip Holding B.V. | Method of forming conformal silicon carbide film by cyclic CVD |
| US10811256B2 (en) | 2018-10-16 | 2020-10-20 | Asm Ip Holding B.V. | Method for etching a carbon-containing feature |
| KR102605121B1 (ko) | 2018-10-19 | 2023-11-23 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 및 기판 처리 방법 |
| KR102546322B1 (ko) | 2018-10-19 | 2023-06-21 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 및 기판 처리 방법 |
| USD948463S1 (en) | 2018-10-24 | 2022-04-12 | Asm Ip Holding B.V. | Susceptor for semiconductor substrate supporting apparatus |
| US10381219B1 (en) | 2018-10-25 | 2019-08-13 | Asm Ip Holding B.V. | Methods for forming a silicon nitride film |
| JP2020066038A (ja) * | 2018-10-26 | 2020-04-30 | カンタツ株式会社 | レーザ加工装置、レーザ加工装置の制御方法およびレーザ加工装置の制御プログラム |
| US11087997B2 (en) | 2018-10-31 | 2021-08-10 | Asm Ip Holding B.V. | Substrate processing apparatus for processing substrates |
| KR20200051105A (ko) | 2018-11-02 | 2020-05-13 | 에이에스엠 아이피 홀딩 비.브이. | 기판 지지 유닛 및 이를 포함하는 기판 처리 장치 |
| US11572620B2 (en) | 2018-11-06 | 2023-02-07 | Asm Ip Holding B.V. | Methods for selectively depositing an amorphous silicon film on a substrate |
| US11031242B2 (en) | 2018-11-07 | 2021-06-08 | Asm Ip Holding B.V. | Methods for depositing a boron doped silicon germanium film |
| US11534961B2 (en) | 2018-11-09 | 2022-12-27 | General Electric Company | Melt pool monitoring system and method for detecting errors in a multi-laser additive manufacturing process |
| US10818758B2 (en) | 2018-11-16 | 2020-10-27 | Asm Ip Holding B.V. | Methods for forming a metal silicate film on a substrate in a reaction chamber and related semiconductor device structures |
| US10847366B2 (en) | 2018-11-16 | 2020-11-24 | Asm Ip Holding B.V. | Methods for depositing a transition metal chalcogenide film on a substrate by a cyclical deposition process |
| US10559458B1 (en) | 2018-11-26 | 2020-02-11 | Asm Ip Holding B.V. | Method of forming oxynitride film |
| US12040199B2 (en) | 2018-11-28 | 2024-07-16 | Asm Ip Holding B.V. | Substrate processing apparatus for processing substrates |
| JP7004088B2 (ja) * | 2018-11-29 | 2022-02-04 | 日立金属株式会社 | 付加製造体の製造方法、および、付加製造体の製造装置 |
| US11217444B2 (en) | 2018-11-30 | 2022-01-04 | Asm Ip Holding B.V. | Method for forming an ultraviolet radiation responsive metal oxide-containing film |
| KR102636428B1 (ko) | 2018-12-04 | 2024-02-13 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치를 세정하는 방법 |
| US11158513B2 (en) | 2018-12-13 | 2021-10-26 | Asm Ip Holding B.V. | Methods for forming a rhenium-containing film on a substrate by a cyclical deposition process and related semiconductor device structures |
| TW202037745A (zh) | 2018-12-14 | 2020-10-16 | 荷蘭商Asm Ip私人控股有限公司 | 形成裝置結構之方法、其所形成之結構及施行其之系統 |
| TW202405220A (zh) | 2019-01-17 | 2024-02-01 | 荷蘭商Asm Ip 私人控股有限公司 | 藉由循環沈積製程於基板上形成含過渡金屬膜之方法 |
| KR20200091543A (ko) | 2019-01-22 | 2020-07-31 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| CN111524788B (zh) | 2019-02-01 | 2023-11-24 | Asm Ip私人控股有限公司 | 氧化硅的拓扑选择性膜形成的方法 |
| JP7149627B2 (ja) * | 2019-02-05 | 2022-10-07 | 技術研究組合次世代3D積層造形技術総合開発機構 | 3次元積層造形装置 |
| TW202044325A (zh) | 2019-02-20 | 2020-12-01 | 荷蘭商Asm Ip私人控股有限公司 | 填充一基板之一表面內所形成的一凹槽的方法、根據其所形成之半導體結構、及半導體處理設備 |
| US11482533B2 (en) | 2019-02-20 | 2022-10-25 | Asm Ip Holding B.V. | Apparatus and methods for plug fill deposition in 3-D NAND applications |
| TWI845607B (zh) | 2019-02-20 | 2024-06-21 | 荷蘭商Asm Ip私人控股有限公司 | 用來填充形成於基材表面內之凹部的循環沉積方法及設備 |
| KR102626263B1 (ko) | 2019-02-20 | 2024-01-16 | 에이에스엠 아이피 홀딩 비.브이. | 처리 단계를 포함하는 주기적 증착 방법 및 이를 위한 장치 |
| TWI842826B (zh) | 2019-02-22 | 2024-05-21 | 荷蘭商Asm Ip私人控股有限公司 | 基材處理設備及處理基材之方法 |
| JP7165603B2 (ja) * | 2019-03-04 | 2022-11-04 | 三菱重工業株式会社 | 積層体成形装置の校正部材、積層体成形装置及び積層体成形方法 |
| KR20200108248A (ko) | 2019-03-08 | 2020-09-17 | 에이에스엠 아이피 홀딩 비.브이. | SiOCN 층을 포함한 구조체 및 이의 형성 방법 |
| KR20200108242A (ko) | 2019-03-08 | 2020-09-17 | 에이에스엠 아이피 홀딩 비.브이. | 실리콘 질화물 층을 선택적으로 증착하는 방법, 및 선택적으로 증착된 실리콘 질화물 층을 포함하는 구조체 |
| KR20200108243A (ko) | 2019-03-08 | 2020-09-17 | 에이에스엠 아이피 홀딩 비.브이. | SiOC 층을 포함한 구조체 및 이의 형성 방법 |
| WO2020194445A1 (ja) * | 2019-03-25 | 2020-10-01 | 株式会社ニコン | 加工システム |
| JP2020167398A (ja) | 2019-03-28 | 2020-10-08 | エーエスエム・アイピー・ホールディング・ベー・フェー | ドアオープナーおよびドアオープナーが提供される基材処理装置 |
| KR20200116855A (ko) | 2019-04-01 | 2020-10-13 | 에이에스엠 아이피 홀딩 비.브이. | 반도체 소자를 제조하는 방법 |
| US11447864B2 (en) | 2019-04-19 | 2022-09-20 | Asm Ip Holding B.V. | Layer forming method and apparatus |
| KR20200125453A (ko) | 2019-04-24 | 2020-11-04 | 에이에스엠 아이피 홀딩 비.브이. | 기상 반응기 시스템 및 이를 사용하는 방법 |
| KR20200130118A (ko) | 2019-05-07 | 2020-11-18 | 에이에스엠 아이피 홀딩 비.브이. | 비정질 탄소 중합체 막을 개질하는 방법 |
| KR20200130121A (ko) | 2019-05-07 | 2020-11-18 | 에이에스엠 아이피 홀딩 비.브이. | 딥 튜브가 있는 화학물질 공급원 용기 |
| KR20200130652A (ko) | 2019-05-10 | 2020-11-19 | 에이에스엠 아이피 홀딩 비.브이. | 표면 상에 재료를 증착하는 방법 및 본 방법에 따라 형성된 구조 |
| JP2020188255A (ja) | 2019-05-16 | 2020-11-19 | エーエスエム アイピー ホールディング ビー.ブイ. | ウェハボートハンドリング装置、縦型バッチ炉および方法 |
| JP2020188254A (ja) | 2019-05-16 | 2020-11-19 | エーエスエム アイピー ホールディング ビー.ブイ. | ウェハボートハンドリング装置、縦型バッチ炉および方法 |
| USD975665S1 (en) | 2019-05-17 | 2023-01-17 | Asm Ip Holding B.V. | Susceptor shaft |
| USD947913S1 (en) | 2019-05-17 | 2022-04-05 | Asm Ip Holding B.V. | Susceptor shaft |
| USD935572S1 (en) | 2019-05-24 | 2021-11-09 | Asm Ip Holding B.V. | Gas channel plate |
| USD922229S1 (en) | 2019-06-05 | 2021-06-15 | Asm Ip Holding B.V. | Device for controlling a temperature of a gas supply unit |
| KR20200141002A (ko) | 2019-06-06 | 2020-12-17 | 에이에스엠 아이피 홀딩 비.브이. | 배기 가스 분석을 포함한 기상 반응기 시스템을 사용하는 방법 |
| JP2020199535A (ja) * | 2019-06-11 | 2020-12-17 | 三菱重工工作機械株式会社 | 表面加工装置および方法並びに三次元積層装置 |
| JP7274948B2 (ja) * | 2019-06-11 | 2023-05-17 | ニデックマシンツール株式会社 | 三次元積層装置および方法 |
| KR20200143254A (ko) | 2019-06-11 | 2020-12-23 | 에이에스엠 아이피 홀딩 비.브이. | 개질 가스를 사용하여 전자 구조를 형성하는 방법, 상기 방법을 수행하기 위한 시스템, 및 상기 방법을 사용하여 형성되는 구조 |
| USD944946S1 (en) | 2019-06-14 | 2022-03-01 | Asm Ip Holding B.V. | Shower plate |
| IT201900009366A1 (it) | 2019-06-18 | 2020-12-18 | Prima Ind Spa | Apparato di lavorazione laser e procedimento di lavorazione laser corrispondente |
| USD931978S1 (en) | 2019-06-27 | 2021-09-28 | Asm Ip Holding B.V. | Showerhead vacuum transport |
| KR20210005515A (ko) | 2019-07-03 | 2021-01-14 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치용 온도 제어 조립체 및 이를 사용하는 방법 |
| JP7499079B2 (ja) | 2019-07-09 | 2024-06-13 | エーエスエム・アイピー・ホールディング・ベー・フェー | 同軸導波管を用いたプラズマ装置、基板処理方法 |
| CN112216646A (zh) | 2019-07-10 | 2021-01-12 | Asm Ip私人控股有限公司 | 基板支撑组件及包括其的基板处理装置 |
| KR20210010307A (ko) | 2019-07-16 | 2021-01-27 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| KR20210010816A (ko) | 2019-07-17 | 2021-01-28 | 에이에스엠 아이피 홀딩 비.브이. | 라디칼 보조 점화 플라즈마 시스템 및 방법 |
| KR20210010820A (ko) | 2019-07-17 | 2021-01-28 | 에이에스엠 아이피 홀딩 비.브이. | 실리콘 게르마늄 구조를 형성하는 방법 |
| US11643724B2 (en) | 2019-07-18 | 2023-05-09 | Asm Ip Holding B.V. | Method of forming structures using a neutral beam |
| KR20210010817A (ko) | 2019-07-19 | 2021-01-28 | 에이에스엠 아이피 홀딩 비.브이. | 토폴로지-제어된 비정질 탄소 중합체 막을 형성하는 방법 |
| TWI839544B (zh) | 2019-07-19 | 2024-04-21 | 荷蘭商Asm Ip私人控股有限公司 | 形成形貌受控的非晶碳聚合物膜之方法 |
| CN112309843A (zh) | 2019-07-29 | 2021-02-02 | Asm Ip私人控股有限公司 | 实现高掺杂剂掺入的选择性沉积方法 |
| CN112309899A (zh) | 2019-07-30 | 2021-02-02 | Asm Ip私人控股有限公司 | 基板处理设备 |
| CN112309900A (zh) | 2019-07-30 | 2021-02-02 | Asm Ip私人控股有限公司 | 基板处理设备 |
| US11227782B2 (en) | 2019-07-31 | 2022-01-18 | Asm Ip Holding B.V. | Vertical batch furnace assembly |
| US11587815B2 (en) | 2019-07-31 | 2023-02-21 | Asm Ip Holding B.V. | Vertical batch furnace assembly |
| US11587814B2 (en) | 2019-07-31 | 2023-02-21 | Asm Ip Holding B.V. | Vertical batch furnace assembly |
| KR20210018759A (ko) | 2019-08-05 | 2021-02-18 | 에이에스엠 아이피 홀딩 비.브이. | 화학물질 공급원 용기를 위한 액체 레벨 센서 |
| USD965044S1 (en) | 2019-08-19 | 2022-09-27 | Asm Ip Holding B.V. | Susceptor shaft |
| USD965524S1 (en) | 2019-08-19 | 2022-10-04 | Asm Ip Holding B.V. | Susceptor support |
| JP2021031769A (ja) | 2019-08-21 | 2021-03-01 | エーエスエム アイピー ホールディング ビー.ブイ. | 成膜原料混合ガス生成装置及び成膜装置 |
| USD979506S1 (en) | 2019-08-22 | 2023-02-28 | Asm Ip Holding B.V. | Insulator |
| KR20210024423A (ko) | 2019-08-22 | 2021-03-05 | 에이에스엠 아이피 홀딩 비.브이. | 홀을 구비한 구조체를 형성하기 위한 방법 |
| USD949319S1 (en) | 2019-08-22 | 2022-04-19 | Asm Ip Holding B.V. | Exhaust duct |
| USD930782S1 (en) | 2019-08-22 | 2021-09-14 | Asm Ip Holding B.V. | Gas distributor |
| USD940837S1 (en) | 2019-08-22 | 2022-01-11 | Asm Ip Holding B.V. | Electrode |
| US11286558B2 (en) | 2019-08-23 | 2022-03-29 | Asm Ip Holding B.V. | Methods for depositing a molybdenum nitride film on a surface of a substrate by a cyclical deposition process and related semiconductor device structures including a molybdenum nitride film |
| KR20210024420A (ko) | 2019-08-23 | 2021-03-05 | 에이에스엠 아이피 홀딩 비.브이. | 비스(디에틸아미노)실란을 사용하여 peald에 의해 개선된 품질을 갖는 실리콘 산화물 막을 증착하기 위한 방법 |
| KR20210029090A (ko) | 2019-09-04 | 2021-03-15 | 에이에스엠 아이피 홀딩 비.브이. | 희생 캡핑 층을 이용한 선택적 증착 방법 |
| KR20210029663A (ko) | 2019-09-05 | 2021-03-16 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| US11562901B2 (en) | 2019-09-25 | 2023-01-24 | Asm Ip Holding B.V. | Substrate processing method |
| CN112593212B (zh) | 2019-10-02 | 2023-12-22 | Asm Ip私人控股有限公司 | 通过循环等离子体增强沉积工艺形成拓扑选择性氧化硅膜的方法 |
| TWI846953B (zh) | 2019-10-08 | 2024-07-01 | 荷蘭商Asm Ip私人控股有限公司 | 基板處理裝置 |
| KR20210042810A (ko) | 2019-10-08 | 2021-04-20 | 에이에스엠 아이피 홀딩 비.브이. | 활성 종을 이용하기 위한 가스 분배 어셈블리를 포함한 반응기 시스템 및 이를 사용하는 방법 |
| TWI846966B (zh) | 2019-10-10 | 2024-07-01 | 荷蘭商Asm Ip私人控股有限公司 | 形成光阻底層之方法及包括光阻底層之結構 |
| US12009241B2 (en) | 2019-10-14 | 2024-06-11 | Asm Ip Holding B.V. | Vertical batch furnace assembly with detector to detect cassette |
| TWI834919B (zh) | 2019-10-16 | 2024-03-11 | 荷蘭商Asm Ip私人控股有限公司 | 氧化矽之拓撲選擇性膜形成之方法 |
| US11637014B2 (en) | 2019-10-17 | 2023-04-25 | Asm Ip Holding B.V. | Methods for selective deposition of doped semiconductor material |
| KR20210047808A (ko) | 2019-10-21 | 2021-04-30 | 에이에스엠 아이피 홀딩 비.브이. | 막을 선택적으로 에칭하기 위한 장치 및 방법 |
| KR20210050453A (ko) | 2019-10-25 | 2021-05-07 | 에이에스엠 아이피 홀딩 비.브이. | 기판 표면 상의 갭 피처를 충진하는 방법 및 이와 관련된 반도체 소자 구조 |
| KR102224016B1 (ko) * | 2019-10-28 | 2021-03-08 | 주식회사 인스텍 | 레이저 성형 장치 |
| KR102224037B1 (ko) * | 2019-10-29 | 2021-03-08 | 주식회사 인스텍 | 레이저 성형 장치 |
| US11646205B2 (en) | 2019-10-29 | 2023-05-09 | Asm Ip Holding B.V. | Methods of selectively forming n-type doped material on a surface, systems for selectively forming n-type doped material, and structures formed using same |
| KR20210054983A (ko) | 2019-11-05 | 2021-05-14 | 에이에스엠 아이피 홀딩 비.브이. | 도핑된 반도체 층을 갖는 구조체 및 이를 형성하기 위한 방법 및 시스템 |
| US11501968B2 (en) | 2019-11-15 | 2022-11-15 | Asm Ip Holding B.V. | Method for providing a semiconductor device with silicon filled gaps |
| KR20210062561A (ko) | 2019-11-20 | 2021-05-31 | 에이에스엠 아이피 홀딩 비.브이. | 기판의 표면 상에 탄소 함유 물질을 증착하는 방법, 상기 방법을 사용하여 형성된 구조물, 및 상기 구조물을 형성하기 위한 시스템 |
| CN112951697A (zh) | 2019-11-26 | 2021-06-11 | Asm Ip私人控股有限公司 | 基板处理设备 |
| US11450529B2 (en) | 2019-11-26 | 2022-09-20 | Asm Ip Holding B.V. | Methods for selectively forming a target film on a substrate comprising a first dielectric surface and a second metallic surface |
| CN112885693A (zh) | 2019-11-29 | 2021-06-01 | Asm Ip私人控股有限公司 | 基板处理设备 |
| CN112885692A (zh) | 2019-11-29 | 2021-06-01 | Asm Ip私人控股有限公司 | 基板处理设备 |
| JP7527928B2 (ja) | 2019-12-02 | 2024-08-05 | エーエスエム・アイピー・ホールディング・ベー・フェー | 基板処理装置、基板処理方法 |
| KR20210070898A (ko) | 2019-12-04 | 2021-06-15 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| IT201900023991A1 (it) | 2019-12-13 | 2021-06-13 | Cms Spa | Centro di lavoro e metodo per lavorare pezzi |
| TW202125596A (zh) | 2019-12-17 | 2021-07-01 | 荷蘭商Asm Ip私人控股有限公司 | 形成氮化釩層之方法以及包括該氮化釩層之結構 |
| KR20210080214A (ko) | 2019-12-19 | 2021-06-30 | 에이에스엠 아이피 홀딩 비.브이. | 기판 상의 갭 피처를 충진하는 방법 및 이와 관련된 반도체 소자 구조 |
| JP2021109175A (ja) | 2020-01-06 | 2021-08-02 | エーエスエム・アイピー・ホールディング・ベー・フェー | ガス供給アセンブリ、その構成要素、およびこれを含む反応器システム |
| TW202142733A (zh) | 2020-01-06 | 2021-11-16 | 荷蘭商Asm Ip私人控股有限公司 | 反應器系統、抬升銷、及處理方法 |
| US11993847B2 (en) | 2020-01-08 | 2024-05-28 | Asm Ip Holding B.V. | Injector |
| JP7439520B2 (ja) * | 2020-01-10 | 2024-02-28 | 株式会社ジェイテクト | 付加製造装置 |
| KR102675856B1 (ko) | 2020-01-20 | 2024-06-17 | 에이에스엠 아이피 홀딩 비.브이. | 박막 형성 방법 및 박막 표면 개질 방법 |
| TW202130846A (zh) | 2020-02-03 | 2021-08-16 | 荷蘭商Asm Ip私人控股有限公司 | 形成包括釩或銦層的結構之方法 |
| TW202146882A (zh) | 2020-02-04 | 2021-12-16 | 荷蘭商Asm Ip私人控股有限公司 | 驗證一物品之方法、用於驗證一物品之設備、及用於驗證一反應室之系統 |
| US11776846B2 (en) | 2020-02-07 | 2023-10-03 | Asm Ip Holding B.V. | Methods for depositing gap filling fluids and related systems and devices |
| CN111331135B (zh) * | 2020-02-07 | 2022-06-21 | 江苏大学 | 一种用于激光选区熔化混合粉末的装置及方法 |
| US11781243B2 (en) | 2020-02-17 | 2023-10-10 | Asm Ip Holding B.V. | Method for depositing low temperature phosphorous-doped silicon |
| TW202203344A (zh) | 2020-02-28 | 2022-01-16 | 荷蘭商Asm Ip控股公司 | 專用於零件清潔的系統 |
| US11876356B2 (en) | 2020-03-11 | 2024-01-16 | Asm Ip Holding B.V. | Lockout tagout assembly and system and method of using same |
| KR20210116240A (ko) | 2020-03-11 | 2021-09-27 | 에이에스엠 아이피 홀딩 비.브이. | 조절성 접합부를 갖는 기판 핸들링 장치 |
| KR20210117157A (ko) | 2020-03-12 | 2021-09-28 | 에이에스엠 아이피 홀딩 비.브이. | 타겟 토폴로지 프로파일을 갖는 층 구조를 제조하기 위한 방법 |
| KR20210124042A (ko) | 2020-04-02 | 2021-10-14 | 에이에스엠 아이피 홀딩 비.브이. | 박막 형성 방법 |
| TW202146689A (zh) | 2020-04-03 | 2021-12-16 | 荷蘭商Asm Ip控股公司 | 阻障層形成方法及半導體裝置的製造方法 |
| TW202145344A (zh) | 2020-04-08 | 2021-12-01 | 荷蘭商Asm Ip私人控股有限公司 | 用於選擇性蝕刻氧化矽膜之設備及方法 |
| KR20210128343A (ko) | 2020-04-15 | 2021-10-26 | 에이에스엠 아이피 홀딩 비.브이. | 크롬 나이트라이드 층을 형성하는 방법 및 크롬 나이트라이드 층을 포함하는 구조 |
| US11821078B2 (en) | 2020-04-15 | 2023-11-21 | Asm Ip Holding B.V. | Method for forming precoat film and method for forming silicon-containing film |
| US11996289B2 (en) | 2020-04-16 | 2024-05-28 | Asm Ip Holding B.V. | Methods of forming structures including silicon germanium and silicon layers, devices formed using the methods, and systems for performing the methods |
| KR20210132576A (ko) | 2020-04-24 | 2021-11-04 | 에이에스엠 아이피 홀딩 비.브이. | 바나듐 나이트라이드 함유 층을 형성하는 방법 및 이를 포함하는 구조 |
| TW202146831A (zh) | 2020-04-24 | 2021-12-16 | 荷蘭商Asm Ip私人控股有限公司 | 垂直批式熔爐總成、及用於冷卻垂直批式熔爐之方法 |
| KR20210132600A (ko) | 2020-04-24 | 2021-11-04 | 에이에스엠 아이피 홀딩 비.브이. | 바나듐, 질소 및 추가 원소를 포함한 층을 증착하기 위한 방법 및 시스템 |
| KR20210134226A (ko) | 2020-04-29 | 2021-11-09 | 에이에스엠 아이피 홀딩 비.브이. | 고체 소스 전구체 용기 |
| KR20210134869A (ko) | 2020-05-01 | 2021-11-11 | 에이에스엠 아이피 홀딩 비.브이. | Foup 핸들러를 이용한 foup의 빠른 교환 |
| TW202147543A (zh) | 2020-05-04 | 2021-12-16 | 荷蘭商Asm Ip私人控股有限公司 | 半導體處理系統 |
| KR20210141379A (ko) | 2020-05-13 | 2021-11-23 | 에이에스엠 아이피 홀딩 비.브이. | 반응기 시스템용 레이저 정렬 고정구 |
| TW202146699A (zh) | 2020-05-15 | 2021-12-16 | 荷蘭商Asm Ip私人控股有限公司 | 形成矽鍺層之方法、半導體結構、半導體裝置、形成沉積層之方法、及沉積系統 |
| KR20210143653A (ko) | 2020-05-19 | 2021-11-29 | 에이에스엠 아이피 홀딩 비.브이. | 기판 처리 장치 |
| KR20210145078A (ko) | 2020-05-21 | 2021-12-01 | 에이에스엠 아이피 홀딩 비.브이. | 다수의 탄소 층을 포함한 구조체 및 이를 형성하고 사용하는 방법 |
| KR102702526B1 (ko) | 2020-05-22 | 2024-09-03 | 에이에스엠 아이피 홀딩 비.브이. | 과산화수소를 사용하여 박막을 증착하기 위한 장치 |
| TW202201602A (zh) | 2020-05-29 | 2022-01-01 | 荷蘭商Asm Ip私人控股有限公司 | 基板處理方法 |
| JP6825148B1 (ja) * | 2020-06-02 | 2021-02-03 | 株式会社ソディック | 積層造形装置 |
| TW202212620A (zh) | 2020-06-02 | 2022-04-01 | 荷蘭商Asm Ip私人控股有限公司 | 處理基板之設備、形成膜之方法、及控制用於處理基板之設備之方法 |
| TW202218133A (zh) | 2020-06-24 | 2022-05-01 | 荷蘭商Asm Ip私人控股有限公司 | 形成含矽層之方法 |
| TW202217953A (zh) | 2020-06-30 | 2022-05-01 | 荷蘭商Asm Ip私人控股有限公司 | 基板處理方法 |
| TW202202649A (zh) | 2020-07-08 | 2022-01-16 | 荷蘭商Asm Ip私人控股有限公司 | 基板處理方法 |
| KR20220010438A (ko) | 2020-07-17 | 2022-01-25 | 에이에스엠 아이피 홀딩 비.브이. | 포토리소그래피에 사용하기 위한 구조체 및 방법 |
| TW202204662A (zh) | 2020-07-20 | 2022-02-01 | 荷蘭商Asm Ip私人控股有限公司 | 用於沉積鉬層之方法及系統 |
| US12040177B2 (en) | 2020-08-18 | 2024-07-16 | Asm Ip Holding B.V. | Methods for forming a laminate film by cyclical plasma-enhanced deposition processes |
| KR20220027026A (ko) | 2020-08-26 | 2022-03-07 | 에이에스엠 아이피 홀딩 비.브이. | 금속 실리콘 산화물 및 금속 실리콘 산질화물 층을 형성하기 위한 방법 및 시스템 |
| TW202229601A (zh) | 2020-08-27 | 2022-08-01 | 荷蘭商Asm Ip私人控股有限公司 | 形成圖案化結構的方法、操控機械特性的方法、裝置結構、及基板處理系統 |
| USD990534S1 (en) | 2020-09-11 | 2023-06-27 | Asm Ip Holding B.V. | Weighted lift pin |
| USD1012873S1 (en) | 2020-09-24 | 2024-01-30 | Asm Ip Holding B.V. | Electrode for semiconductor processing apparatus |
| US12009224B2 (en) | 2020-09-29 | 2024-06-11 | Asm Ip Holding B.V. | Apparatus and method for etching metal nitrides |
| KR20220045900A (ko) | 2020-10-06 | 2022-04-13 | 에이에스엠 아이피 홀딩 비.브이. | 실리콘 함유 재료를 증착하기 위한 증착 방법 및 장치 |
| CN114293174A (zh) | 2020-10-07 | 2022-04-08 | Asm Ip私人控股有限公司 | 气体供应单元和包括气体供应单元的衬底处理设备 |
| TW202229613A (zh) | 2020-10-14 | 2022-08-01 | 荷蘭商Asm Ip私人控股有限公司 | 於階梯式結構上沉積材料的方法 |
| TW202217037A (zh) | 2020-10-22 | 2022-05-01 | 荷蘭商Asm Ip私人控股有限公司 | 沉積釩金屬的方法、結構、裝置及沉積總成 |
| TW202223136A (zh) | 2020-10-28 | 2022-06-16 | 荷蘭商Asm Ip私人控股有限公司 | 用於在基板上形成層之方法、及半導體處理系統 |
| TW202235649A (zh) | 2020-11-24 | 2022-09-16 | 荷蘭商Asm Ip私人控股有限公司 | 填充間隙之方法與相關之系統及裝置 |
| TW202235675A (zh) | 2020-11-30 | 2022-09-16 | 荷蘭商Asm Ip私人控股有限公司 | 注入器、及基板處理設備 |
| US11946137B2 (en) | 2020-12-16 | 2024-04-02 | Asm Ip Holding B.V. | Runout and wobble measurement fixtures |
| TW202231903A (zh) | 2020-12-22 | 2022-08-16 | 荷蘭商Asm Ip私人控股有限公司 | 過渡金屬沉積方法、過渡金屬層、用於沉積過渡金屬於基板上的沉積總成 |
| US20220266522A1 (en) * | 2021-02-23 | 2022-08-25 | Palo Alto Research Center Incorporated | In situ thermo acoustic non-destructive testing during three-dimensional printing |
| USD1023959S1 (en) | 2021-05-11 | 2024-04-23 | Asm Ip Holding B.V. | Electrode for substrate processing apparatus |
| USD981973S1 (en) | 2021-05-11 | 2023-03-28 | Asm Ip Holding B.V. | Reactor wall for substrate processing apparatus |
| USD980814S1 (en) | 2021-05-11 | 2023-03-14 | Asm Ip Holding B.V. | Gas distributor for substrate processing apparatus |
| USD980813S1 (en) | 2021-05-11 | 2023-03-14 | Asm Ip Holding B.V. | Gas flow control plate for substrate processing apparatus |
| CN113500778B (zh) * | 2021-08-16 | 2022-03-15 | 吉林大学 | 一种多材料多功能可切换3d打印系统及方法 |
| USD990441S1 (en) | 2021-09-07 | 2023-06-27 | Asm Ip Holding B.V. | Gas flow control plate |
| WO2024013931A1 (ja) * | 2022-07-14 | 2024-01-18 | 株式会社ニコン | 造形システム |
| TWI842433B (zh) * | 2023-03-15 | 2024-05-11 | 中國鋼鐵股份有限公司 | 傳動軸元件的修護方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0332481A (ja) * | 1989-06-29 | 1991-02-13 | Komatsu Ltd | レーザ肉盛溶接装置 |
| JPH11333584A (ja) * | 1998-05-26 | 1999-12-07 | Mitsubishi Heavy Ind Ltd | レーザ加工ヘッド |
| JP2003019589A (ja) * | 2001-07-05 | 2003-01-21 | Denso Corp | 溶融部温度をフィードバック制御する溶接制御装置及び溶接制御方法 |
| JP2004253783A (ja) * | 2003-01-31 | 2004-09-09 | Fuji Photo Film Co Ltd | レーザモジュール |
| JP2007222869A (ja) * | 2006-02-22 | 2007-09-06 | General Electric Co <Ge> | レーザネットシェイプ製造法のためのノズル |
| JP2007286481A (ja) * | 2006-04-19 | 2007-11-01 | Jtekt Corp | 分割合波ユニット及び半導体レーザ集光装置 |
| JP2007301980A (ja) * | 2006-04-10 | 2007-11-22 | Matsushita Electric Ind Co Ltd | レーザ積層方法およびレーザ積層装置 |
| JP2008183614A (ja) * | 2007-01-31 | 2008-08-14 | Tokyu Car Corp | レーザ溶接部形成方法 |
| JP2009274136A (ja) * | 2008-05-15 | 2009-11-26 | General Electric Co <Ge> | レーザビームを使用する予熱 |
| JP2010207874A (ja) * | 2009-03-11 | 2010-09-24 | Panasonic Corp | 溶接装置と溶接方法 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5393482A (en) * | 1993-10-20 | 1995-02-28 | United Technologies Corporation | Method for performing multiple beam laser sintering employing focussed and defocussed laser beams |
| US5477026A (en) | 1994-01-27 | 1995-12-19 | Chromalloy Gas Turbine Corporation | Laser/powdered metal cladding nozzle |
| US6046426A (en) * | 1996-07-08 | 2000-04-04 | Sandia Corporation | Method and system for producing complex-shape objects |
| US5993554A (en) | 1998-01-22 | 1999-11-30 | Optemec Design Company | Multiple beams and nozzles to increase deposition rate |
| US6811744B2 (en) * | 1999-07-07 | 2004-11-02 | Optomec Design Company | Forming structures from CAD solid models |
| US6401001B1 (en) * | 1999-07-22 | 2002-06-04 | Nanotek Instruments, Inc. | Layer manufacturing using deposition of fused droplets |
| US7385157B2 (en) * | 2001-04-27 | 2008-06-10 | Honda Giken Kogyo Kabushiki Kaisha | Laser beam welding method and apparatus |
| JP2004082556A (ja) | 2002-08-27 | 2004-03-18 | Matsushita Electric Works Ltd | 三次元形状造形物の製造方法及びその装置 |
| JP2004335640A (ja) * | 2003-05-06 | 2004-11-25 | Fuji Photo Film Co Ltd | 投影露光装置 |
| JP4660074B2 (ja) * | 2003-05-26 | 2011-03-30 | 富士フイルム株式会社 | レーザアニール装置 |
| CN100349077C (zh) | 2004-12-03 | 2007-11-14 | 清华大学 | 一种电子束选区同步烧结工艺及三维分层制造设备 |
| DE102005016940B4 (de) * | 2005-04-12 | 2007-03-15 | Eos Gmbh Electro Optical Systems | Vorrichtung und Verfahren zum Auftragen von Schichten eines pulverförmigen Materials auf eine Oberfläche |
| CN100386173C (zh) | 2005-12-09 | 2008-05-07 | 大连理工大学 | 基于覆膜粉末材料轮廓线扫描的激光快速成型方法 |
| JP4997925B2 (ja) * | 2006-11-08 | 2012-08-15 | 日新電機株式会社 | シリコンドット形成方法及び装置並びにシリコンドット及び絶縁膜付き基板の形成方法及び装置 |
| WO2008146698A1 (ja) | 2007-05-23 | 2008-12-04 | Panasonic Electric Works Co., Ltd. | 三次元形状造形物の製造方法 |
| DE102007056984A1 (de) | 2007-11-27 | 2009-05-28 | Eos Gmbh Electro Optical Systems | Verfahren zum Herstellen eines dreidimensionalen Objekts mittels Lasersintern |
| JP2009142865A (ja) * | 2007-12-14 | 2009-07-02 | Keyence Corp | レーザ加工装置、レーザ加工方法及びレーザ加工装置の設定方法 |
| WO2009122758A1 (ja) * | 2008-04-04 | 2009-10-08 | 三菱電機株式会社 | 加工制御装置およびレーザ加工装置 |
| US20100193480A1 (en) * | 2009-01-30 | 2010-08-05 | Honeywell International Inc. | Deposition of materials with low ductility using solid free-form fabrication |
| JP2011212730A (ja) * | 2010-04-01 | 2011-10-27 | Hitachi Ltd | 肉盛溶接方法およびレーザ肉盛溶接装置 |
| DE202010006047U1 (de) * | 2010-04-22 | 2010-07-22 | Trumpf Werkzeugmaschinen Gmbh + Co. Kg | Strahlformungseinheit zur Fokussierung eines Laserstrahls |
| CN103959442B (zh) * | 2011-12-07 | 2017-09-15 | 应用材料公司 | 用于基板处理的激光反射仪 |
| WO2015029466A1 (ja) * | 2013-08-28 | 2015-03-05 | 三菱重工業株式会社 | レーザ加工装置 |
-
2014
- 2014-03-31 JP JP2014074058A patent/JP6254036B2/ja active Active
-
2015
- 2015-03-20 US US15/129,923 patent/US10898971B2/en active Active
- 2015-03-20 MX MX2016012702A patent/MX2016012702A/es active IP Right Grant
- 2015-03-20 KR KR1020187012290A patent/KR20180049219A/ko active Search and Examination
- 2015-03-20 CN CN201580017061.1A patent/CN106163703B/zh active Active
- 2015-03-20 EP EP15773604.2A patent/EP3127685B1/en active Active
- 2015-03-20 KR KR1020167027064A patent/KR20160129871A/ko active Search and Examination
- 2015-03-20 WO PCT/JP2015/058496 patent/WO2015151864A1/ja active Application Filing
- 2015-03-27 TW TW104110108A patent/TWI600485B/zh active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0332481A (ja) * | 1989-06-29 | 1991-02-13 | Komatsu Ltd | レーザ肉盛溶接装置 |
| JPH11333584A (ja) * | 1998-05-26 | 1999-12-07 | Mitsubishi Heavy Ind Ltd | レーザ加工ヘッド |
| JP2003019589A (ja) * | 2001-07-05 | 2003-01-21 | Denso Corp | 溶融部温度をフィードバック制御する溶接制御装置及び溶接制御方法 |
| JP2004253783A (ja) * | 2003-01-31 | 2004-09-09 | Fuji Photo Film Co Ltd | レーザモジュール |
| JP2007222869A (ja) * | 2006-02-22 | 2007-09-06 | General Electric Co <Ge> | レーザネットシェイプ製造法のためのノズル |
| JP2007301980A (ja) * | 2006-04-10 | 2007-11-22 | Matsushita Electric Ind Co Ltd | レーザ積層方法およびレーザ積層装置 |
| JP2007286481A (ja) * | 2006-04-19 | 2007-11-01 | Jtekt Corp | 分割合波ユニット及び半導体レーザ集光装置 |
| JP2008183614A (ja) * | 2007-01-31 | 2008-08-14 | Tokyu Car Corp | レーザ溶接部形成方法 |
| JP2009274136A (ja) * | 2008-05-15 | 2009-11-26 | General Electric Co <Ge> | レーザビームを使用する予熱 |
| JP2010207874A (ja) * | 2009-03-11 | 2010-09-24 | Panasonic Corp | 溶接装置と溶接方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3127685A4 * |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11478856B2 (en) | 2013-06-10 | 2022-10-25 | Renishaw Plc | Selective laser solidification apparatus and method |
| US11123799B2 (en) | 2013-06-11 | 2021-09-21 | Renishaw Plc | Additive manufacturing apparatus and method |
| US11446863B2 (en) | 2015-03-30 | 2022-09-20 | Renishaw Plc | Additive manufacturing apparatus and methods |
| US10479018B2 (en) | 2015-03-30 | 2019-11-19 | Renishaw Plc | Additive manufacturing apparatus and methods |
| US11780161B2 (en) | 2015-03-30 | 2023-10-10 | Renishaw Plc | Additive manufacturing apparatus and methods |
| EP3372061A4 (en) * | 2015-11-06 | 2019-11-27 | IPG Photonics Corporation | MODULAR LASER PROCESSING HOUSING AND SYSTEM |
| CN107042306A (zh) * | 2016-02-09 | 2017-08-15 | 株式会社捷太格特 | 造型物的制造装置以及制造方法 |
| US11198251B2 (en) | 2016-10-20 | 2021-12-14 | Concept Laser Gmbh | Apparatus for additively manufacturing of three-dimensional objects |
| DE102016120044A1 (de) * | 2016-10-20 | 2018-04-26 | Cl Schutzrechtsverwaltungs Gmbh | Vorrichtung zur additiven Herstellung dreidimensionaler Objekte |
| JP6758532B1 (ja) * | 2019-06-25 | 2020-09-23 | 三菱電機株式会社 | 数値制御装置および付加製造装置の制御方法 |
| WO2020261386A1 (ja) * | 2019-06-25 | 2020-12-30 | 三菱電機株式会社 | 数値制御装置および付加製造装置の制御方法 |
| US11351736B2 (en) | 2019-06-25 | 2022-06-07 | Mitsubishi Electric Corporation | Numerical control device and method for controlling additive manufacturing apparatus |
| DE112019007356B4 (de) | 2019-06-25 | 2024-10-17 | Mitsubishi Electric Corporation | Numerische Steuerung und Verfahren zum Steuern einer additiven Herstellungsvorrichtung |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106163703B (zh) | 2020-01-14 |
| EP3127685B1 (en) | 2020-08-12 |
| EP3127685A1 (en) | 2017-02-08 |
| KR20160129871A (ko) | 2016-11-09 |
| MX2016012702A (es) | 2016-12-14 |
| TWI600485B (zh) | 2017-10-01 |
| JP2015196164A (ja) | 2015-11-09 |
| CN106163703A (zh) | 2016-11-23 |
| TW201601860A (zh) | 2016-01-16 |
| EP3127685A4 (en) | 2017-04-19 |
| US10898971B2 (en) | 2021-01-26 |
| US20170136578A1 (en) | 2017-05-18 |
| KR20180049219A (ko) | 2018-05-10 |
| JP6254036B2 (ja) | 2017-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6254036B2 (ja) | 三次元積層装置及び三次元積層方法 | |
| JP6359316B2 (ja) | 三次元積層装置及び三次元積層方法 | |
| JP6320123B2 (ja) | 三次元積層装置及び三次元積層方法 | |
| JP6338422B2 (ja) | 三次元積層装置 | |
| JP6535785B2 (ja) | 三次元積層装置 | |
| JP2020533175A (ja) | コリメーション光学系を自動的に交換するための装置を有する光学モジュール | |
| JP2020533176A (ja) | レーザー加工機械用の交換可能な光学モジュール |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15773604 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: IDP00201606368 Country of ref document: ID |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015773604 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15129923 Country of ref document: US Ref document number: 2015773604 Country of ref document: EP Ref document number: MX/A/2016/012702 Country of ref document: MX |
|
| ENP | Entry into the national phase |
Ref document number: 20167027064 Country of ref document: KR Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |