WO2017026535A1 - 変速装置 - Google Patents
変速装置 Download PDFInfo
- Publication number
- WO2017026535A1 WO2017026535A1 PCT/JP2016/073680 JP2016073680W WO2017026535A1 WO 2017026535 A1 WO2017026535 A1 WO 2017026535A1 JP 2016073680 W JP2016073680 W JP 2016073680W WO 2017026535 A1 WO2017026535 A1 WO 2017026535A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- shift
- speed
- gear
- shift drum
- gears
- Prior art date
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/02—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion
- F16H3/08—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts
- F16H3/087—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears
- F16H3/089—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears all of the meshing gears being supported by a pair of parallel shafts, one being the input shaft and the other the output shaft, there being no countershaft involved
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M11/00—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels
- B62M11/04—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio
- B62M11/06—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio with spur gear wheels
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D11/00—Clutches in which the members have interengaging parts
- F16D11/08—Clutches in which the members have interengaging parts actuated by moving a non-rotating part axially
- F16D11/10—Clutches in which the members have interengaging parts actuated by moving a non-rotating part axially with clutching members movable only axially
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D11/00—Clutches in which the members have interengaging parts
- F16D11/14—Clutches in which the members have interengaging parts with clutching members movable only axially
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D21/00—Systems comprising a plurality of actuated clutches
- F16D21/02—Systems comprising a plurality of actuated clutches for interconnecting three or more shafts or other transmission members in different ways
- F16D21/04—Systems comprising a plurality of actuated clutches for interconnecting three or more shafts or other transmission members in different ways with a shaft carrying a number of rotatable transmission members, e.g. gears, each of which can be connected to the shaft by a clutching member or members between the shaft and the hub of the transmission member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D23/00—Details of mechanically-actuated clutches not specific for one distinct type
- F16D23/12—Mechanical clutch-actuating mechanisms arranged outside the clutch as such
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D23/00—Details of mechanically-actuated clutches not specific for one distinct type
- F16D23/12—Mechanical clutch-actuating mechanisms arranged outside the clutch as such
- F16D23/14—Clutch-actuating sleeves or bearings; Actuating members directly connected to clutch-actuating sleeves or bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/02—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion
- F16H3/08—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts
- F16H3/083—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts with radially acting and axially controlled clutching members, e.g. sliding keys
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/02—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion
- F16H3/08—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts
- F16H3/087—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears
- F16H3/091—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion without gears having orbital motion exclusively or essentially with continuously meshing gears, that can be disengaged from their shafts characterised by the disposition of the gears including a single countershaft
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H61/32—Electric motors actuators or related electrical control means therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/08—Multiple final output mechanisms being moved by a single common final actuating mechanism
- F16H63/16—Multiple final output mechanisms being moved by a single common final actuating mechanism the final output mechanisms being successively actuated by progressive movement of the final actuating mechanism
- F16H63/18—Multiple final output mechanisms being moved by a single common final actuating mechanism the final output mechanisms being successively actuated by progressive movement of the final actuating mechanism the final actuating mechanism comprising cams
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/304—Constructional features of the final output mechanisms the final output mechanisms comprising elements moved by electrical or magnetic force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/10—Road Vehicles
- B60Y2200/12—Motorcycles, Trikes; Quads; Scooters
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/04—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for radial load mainly
- F16C19/06—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for radial load mainly with a single row or balls
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/04—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for radial load mainly
- F16C19/08—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for radial load mainly with two or more rows of balls
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/52—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions
- F16C19/527—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions related to vibration and noise
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2326/00—Articles relating to transporting
- F16C2326/01—Parts of vehicles in general
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2326/00—Articles relating to transporting
- F16C2326/20—Land vehicles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2361/00—Apparatus or articles in engineering in general
- F16C2361/65—Gear shifting, change speed gear, gear box
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D23/00—Details of mechanically-actuated clutches not specific for one distinct type
- F16D23/12—Mechanical clutch-actuating mechanisms arranged outside the clutch as such
- F16D2023/123—Clutch actuation by cams, ramps or ball-screw mechanisms
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H2061/0474—Smoothing ratio shift by smoothing engagement or release of positive clutches; Methods or means for shock free engagement of dog clutches
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H2061/2869—Cam or crank gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/304—Constructional features of the final output mechanisms the final output mechanisms comprising elements moved by electrical or magnetic force
- F16H2063/3056—Constructional features of the final output mechanisms the final output mechanisms comprising elements moved by electrical or magnetic force using cam or crank gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H2063/3093—Final output elements, i.e. the final elements to establish gear ratio, e.g. dog clutches or other means establishing coupling to shaft
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/0013—Transmissions for multiple ratios specially adapted for rear-wheel-driven vehicles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/003—Transmissions for multiple ratios characterised by the number of forward speeds
- F16H2200/0052—Transmissions for multiple ratios characterised by the number of forward speeds the gear ratios comprising six forward speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/32—Gear shift yokes, e.g. shift forks
Definitions
- the present invention relates to a transmission.
- a predetermined number of gears among the plurality of gears provided on the main shaft and the counter shaft are provided to be movable in the axial direction of the main shaft or the counter shaft.
- the gear provided to be movable in the axial direction is referred to as a slide gear.
- the slide gear is provided on the main shaft or the counter shaft so as not to be relatively rotatable.
- the slide gear is provided with a dog (drive dog or driven dog).
- a gear adjacent to the slide gear is provided on the main shaft or the counter shaft so as to be relatively rotatable.
- the gear provided to be relatively rotatable is referred to as an idle gear.
- the idle gear is provided so as not to move in the axial direction.
- a slide gear provided on one of the main shaft and the countershaft is meshed with an idler gear provided on the other shaft.
- the idle gear is provided with a dog that can mesh with a dog of a slide gear provided on the same shaft.
- the shift mechanism includes, for example, a shift drum and a plurality of shift forks.
- a plurality of guide grooves are formed on the outer peripheral surface of the shift drum.
- One end of each shift fork is positioned in the guide groove of the shift drum.
- the other end of each shift fork is connected to a slide gear.
- a desired set of gears can be selected as a set of transmission gears by moving a predetermined slide gear in the axial direction. Thereby, rotation can be transmitted from the main shaft to the counter shaft at a desired gear ratio.
- a gear set including a slide gear is also selected as a transmission gear set in accordance with the rotation angle of the shift drum. That is, the slide gear plays a role of selecting a set of transmission gears and a role of directly transmitting the rotation transmitted from one shaft to the gear provided on the other shaft.
- Patent Document 1 discloses a transmission provided with an actuator for rotating a shift drum.
- the shift drum can be quickly rotated by the actuator.
- the responsiveness of the shifting operation can be improved.
- the moving speed of the shift fork increases.
- the moving speed of the slide gear connected to the shift fork is also increased. For this reason, the sound and impact which are generated when the dog of the slide gear and the dog of the idle gear which are moved by the shift fork are engaged with each other are increased.
- the actuator is controlled based on the relative rotational positions of the driving dog and the driven dog.
- this automatic transmission it is possible to reduce the time required for shifting while suppressing the generation of a loud sound and impact when the driving dog and the driven dog are engaged with each other.
- according to the automatic transmission of Patent Document 1 it is possible to achieve both suppression of generation of sound and impact during shifting and improvement of response of shifting operation.
- an object of the present invention is to provide a transmission device that performs a shift operation by rotating a shift drum by an actuator, and obtains a configuration that can achieve both suppression of generation of noise and impact during shift and improvement of response of the shift operation. .
- the present inventor tried to change the relationship between the selector (shift fork) and a plurality of gears in the transmission having the same configuration as the automatic transmission described in Patent Document 1 while researching the transmission. It was.
- the present inventor changed the configuration of the shift mechanism to a configuration in which the gear having the dog is not moved by the selector but the slider having the dog is moved by the selector. That is, apart from a plurality of gears for transmitting rotation from the main shaft to the counter shaft, a slider for selecting a specific gear set is provided.
- a slider movable in the axial direction of the one shaft is disposed between a pair of idle gears provided on one of the main shaft and the counter shaft. The slider does not always mesh with the gear provided on the other shaft.
- the slider mass can be reduced, it has been found that the slider can be moved with a smaller force than when the slide gear is moved. Further, it has been found that the frictional force generated between the selector and the shift drum can be reduced by reducing the mass of the slider. As a result, it was found that the load when rotating the shift drum can be reduced, so that the shift drum can be smoothly rotated with a small force. As a result, it was found that the responsiveness of the shifting operation can be improved.
- one end of the selector (shift fork) is positioned in the guide groove of the shift drum. For this reason, when the slider moves according to the rotation of the shift drum, the shift drum receives a reaction force from the slider via the selector. In order to prevent the shift drum from moving even when this reaction force is received, the shift drum is configured to have a certain weight. For this reason, when the rotational speed of the shift drum is increased, it takes a long time to reach the desired rotational speed due to the large inertial mass of the shift drum. In this case, even if the rotational speed of the shift drum is increased, it is difficult to improve the responsiveness of the speed change operation. Further, when the rotation speed of the shift drum is increased, a large inertial force acts on the shift drum.
- the present inventor has proceeded with a study on a configuration capable of improving the responsiveness of the shift operation without increasing the rotation speed of the shift drum.
- a study it was considered to shorten the time required for the rotation of the shift drum by reducing the rotation angle of the shift drum (hereinafter referred to as the transmission rotation angle) when switching the gear stage to one stage.
- the transmission rotation angle the rotation angle of the shift drum
- the shift rotation angle when the shift rotation angle is reduced, the amount of movement of the selector in the axial direction of the shift drum with respect to the rotation angle of the shift drum must be increased.
- the inclination angle of the guide groove with respect to the rotation direction of the shift drum must be increased.
- the rotation angle of the shift drum when changing the gear stage to one stage is as large as possible.
- the shift rotation angle is generally set to 60 degrees or more.
- the present inventor has noticed the characteristic of the electric motor that it is easy to obtain a large torque in the extremely low speed region (immediately after the start of rotation).
- the present inventor can smoothly rotate the shift drum by using the electric motor as the actuator even if the rotational load of the shift drum is increased by setting the shift rotation angle to be less than 60 degrees. I thought that.
- the inventor has focused on the above-described effect that the rotational load of the shift drum can be reduced by using the slider. That is, since the present inventor can reduce the rotational load of the shift drum by using the slider, even if the rotational load of the shift drum is increased by making the shift rotation angle less than 60 degrees, the rotational load of the shift drum is reduced. Noticed that it was not much different from the conventional transmission.
- the present inventor used a slider instead of a slide gear, and used an electric motor as an actuator, and dared to set the shift rotation angle of the shift drum to less than 60 degrees. As a result, it is possible to improve the responsiveness of the shifting operation without increasing the rotation speed of the shift drum, and to suppress the generation of noise and impact during shifting.
- a transmission according to an embodiment of the present invention is a transmission that can be switched to a plurality of shift stages and that transmits rotation of a main shaft that is rotated by a power source to a countershaft at each shift stage. .
- the transmission is provided on the main shaft, and is provided with the same number of first gears as the number of gears of the plurality of gears, and provided with the counter shaft, and constantly meshes with the first gears.
- a plurality of gears including the same number of second gears as the plurality of first gears, and one of the main shaft and the counter shaft are provided to be movable in the axial direction of the one shaft,
- the plurality of first gears are provided on the main shaft so that the main shaft cannot move in the axial direction.
- the plurality of second gears are provided on the countershaft so that the countershaft cannot move in the axial direction.
- a gear provided on the one shaft is provided with a second dog portion that can mesh with the first dog portion of the slider.
- the gear provided with the second dog portion is provided on the one shaft so as to be relatively rotatable.
- the slider provided on the one shaft is separate from the plurality of first gears and the plurality of second gears, and of the plurality of gears, the main shaft and the counter shaft.
- the shift drum has a guide groove including a linear portion extending in the circumferential direction and an inclined portion inclined with respect to the linear portion on the outer peripheral surface thereof. .
- One end of the selector is positioned in the guide groove, and the other end of the selector is connected to the slider.
- the control unit controls the electric motor so that the shift rotation angle of the shift drum is less than 60 degrees when the shift speed is switched by one stage at all the shift speeds.
- the shift drum rotates at the gear shift rotation angle of less than 60 degrees so that the selector has the plurality of first gears and the plurality of second gears.
- the slider which is configured separately from the first gear and is not always meshed with the gear provided on the other shaft among the plurality of gears, is moved in the axial direction of the first shaft.
- the slider which is configured separately from the plurality of first gears and the plurality of second gears and does not always mesh with a gear provided on the other shaft of the plurality of gears, rotates the shift drum. Accordingly, when the first dog portion meshes with the second dog portion by moving in the axial direction of the one shaft, the main shaft rotates through the first gear, the second gear, and the slider. Is transmitted to the countershaft.
- FIG. 1 is a right side view showing a schematic configuration of a motorcycle equipped with a transmission according to an embodiment of the present invention.
- 1A is a schematic diagram showing a power transmission path of a motorcycle
- FIG. 1B is a schematic diagram showing a guide groove of a shift drum.
- It is a schematic diagram showing a power transmission path of a motorcycle.
- It is sectional drawing which shows schematic structure of a transmission.
- It is a figure which shows the structure of a shift mechanism typically.
- FIG. 2 is a view corresponding to FIG. 1 showing a schematic configuration of a motorcycle equipped with a transmission according to a reference example.
- FIG. 4 is a view corresponding to FIG. 3 showing a power transmission path of a motorcycle according to a reference example.
- FIG. 5 is a diagram corresponding to FIG.
- FIG. 9 is a view corresponding to FIG. 8 illustrating guide grooves of a shift drum of a transmission according to a reference example.
- FIGS. 1 A motorcycle 1 according to an embodiment will be described with reference to FIGS.
- the scale is appropriately changed to make each member a recognizable size.
- “left” and “right” respectively represent “left” and “right” as viewed from the driver who rides the motorcycle 1.
- FIG. 1 shows the appearance of a motorcycle 1 when the motorcycle 1 equipped with a transmission 20 according to an embodiment of the present invention is viewed from the right side.
- An arrow Fr indicates the forward direction of the motorcycle 1.
- An arrow Rr indicates the backward direction of the motorcycle 1.
- An arrow U indicates the upward direction of the motorcycle 1.
- An arrow D indicates the downward direction of the motorcycle 1.
- the motorcycle 1 includes a body frame 2, an engine 3 (power source), a front wheel 4, a rear wheel 5, and a handle 6.
- the engine 3 is supported by the body frame 2.
- the rear wheel 5 is driven by the power output from the engine 3.
- the steering wheel 6 is provided with an operation unit 80 that allows the driver of the motorcycle 1 to perform an operation of switching the gear position of the transmission 20.
- the operation unit 80 includes a shift-up button 81 that increases the gear position of the transmission 20 and a shift-down button 82 that decreases the gear position of the transmission 20 (see FIG. 3).
- the operation unit 80 transmits a signal corresponding to the operation of the driver to a control unit 83 (see FIG. 3) described later.
- FIG. 3 is a schematic diagram showing a power transmission path of the motorcycle 1.
- the motorcycle 1 includes a clutch mechanism 10, a transmission 20, and a drive chain 14.
- the transmission 20 includes a control unit 83 (an example of a control unit).
- the control unit 83 generates a switching signal according to the signal transmitted from the operation unit 80 and transmits it to the transmission 20. That is, the control unit 83 switches the gear position of the transmission 20 by controlling an electric motor 58 described later in accordance with the signal transmitted from the operation unit 80.
- the control unit 83 can switch the gear position of the transmission 20 without the driver performing a clutch operation.
- the transmission 20 of the motorcycle 1 has six shift stages.
- the transmission 20 can be shifted up in the order of neutral, 1st speed, 2nd speed, 3rd speed, 4th speed, 5th speed, 6th speed, 6th speed, 5th speed, 4th speed, 3rd speed, 2nd speed, 1st speed, Shift down is possible in the order of neutral.
- the transmission 20 is switched to a neutral state or any one of the first to sixth gears by the electric motor 58 controlled by the control unit 83. Details will be described later.
- the power generated in the engine 3 is transmitted to the rear wheel 5 via the clutch mechanism 10, the transmission 20 and the drive chain 14.
- the clutch mechanism 10 is a wet multi-plate clutch.
- the clutch mechanism 10 includes an outer plate 11 and an inner plate 12.
- the outer plate 11 is connected to the crankshaft 13 of the engine 3 via a gear 13a.
- the inner plate 12 is provided on a main shaft 21 described later of the transmission 20.
- the outer plate 11 and the inner plate 12 are configured to be relatively movable in the axial direction of the main shaft 21.
- the clutch mechanism 10 can be switched between a connected state in which the rotation of the crankshaft 13 is transmitted to the main shaft 21 and a disconnected state in which the rotation of the crankshaft 13 is not transmitted to the main shaft 21.
- the outer plate 11 and the inner plate 12 are relatively moved in the axial direction, and the outer plate 11 and the inner plate 12 are brought into contact with each other, whereby the clutch mechanism 10 is switched to the connected state. be able to.
- the clutch mechanism 10 can be switched to a disconnected state by relatively moving the outer plate 11 and the inner plate 12 in the axial direction to separate the outer plate 11 and the inner plate 12.
- the transmission 20 includes a main shaft 21 and a counter shaft 22.
- the main shaft 21 and the counter shaft 22 are arranged in parallel.
- the main shaft 21 is connected to the crankshaft 13 of the engine 3 via the clutch mechanism 10.
- the counter shaft 22 is connected to the main shaft 21 via a plurality of gears described later of the transmission 20.
- the drive sprocket 7 is fixed to the counter shaft 22. That is, the drive sprocket 7 can rotate integrally with the counter shaft 22.
- the drive chain 14 is stretched over the drive sprocket 7 and the driven sprocket 8 fixed to the axle shaft 9 of the rear wheel 5. As a result, power is transmitted from the engine 3 to the rear wheel 5.
- the drive sprocket 7 is shown at the left end of the countershaft 22 in order to avoid making the drawing complicated, but as shown in FIG. 4 described later, in this embodiment, the drive sprocket 7 is shown. 7 is provided at the right end of the counter shaft 22, for example.
- the extending direction of the main shaft 21 and the counter shaft 22 is defined as an “axial direction”. That is, that the main shaft 21 or the counter shaft 22 extends in the axial direction means that the main shaft 21 or the counter shaft 22 has a shape that is long in the axial direction.
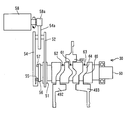
- FIG. 4 is a diagram showing a more detailed configuration of the transmission 20.
- FIG. 4 is a view showing the transmission 20 in a cross section extending along the axial direction.
- the transmission 20 includes a first speed drive gear 421, a second speed drive gear 422, a third speed drive gear 423, a fourth speed drive gear 424, a fifth speed drive gear 425, and a sixth speed drive gear. 426.
- the first speed drive gear 421, the second speed drive gear 422, the third speed drive gear 423, the fourth speed drive gear 424, the fifth speed drive gear 425, and the sixth speed drive gear 426 are arranged on the main shaft 21 along the axial direction. ing.
- a second speed driving gear 422 a fourth speed driving gear 424, A sixth speed drive gear 426, a fifth speed drive gear 425, a third speed drive gear 423, and a first speed drive gear 421 are arranged.
- the transmission 20 includes a first speed driven gear 441, a second speed driven gear 442, a third speed driven gear 443, a fourth speed driven gear 444, a fifth speed driven gear 445, and a sixth speed driven gear 446. Yes.
- the first-speed driven gear 441, the second-speed driven gear 442, the third-speed driven gear 443, the fourth-speed driven gear 444, the fifth-speed driven gear 445, and the sixth-speed driven gear 446 are arranged on the countershaft 22 with axes. They are arranged side by side.
- the second-speed driven gear 422, the four-speed driven gear 422, and the four in order from the side corresponding to the input side of the main shaft 21 in the axial direction of the counter shaft 22 (right side in FIGS. 3 and 4).
- a high speed driven gear 444, a six speed driven gear 446, a five speed driven gear 445, a three speed driven gear 443, and a first speed driven gear 441 are arranged.
- the first speed driving gear 421, the second speed driving gear 422, the third speed driving gear 423, the fourth speed driving gear 424, the fifth speed driving gear 425, and the sixth speed driving gear 426 are examples of a plurality of first gears. It is.
- the first-speed driven gear 441, the second-speed driven gear 442, the third-speed driven gear 443, the fourth-speed driven gear 444, the fifth-speed driven gear 445, and the sixth-speed driven gear 446 include a plurality of second-speed driven gears 443. It is an example of a gear.
- the first speed driven gear 441 is always meshed with the first speed driven gear 421.
- the state in which the first speed driven gear 441 and the first speed driven gear 421 transmit power from the main shaft 21 to the counter shaft 22 is the first gear.
- the second speed driven gear 442 is always meshed with the second speed driven gear 422.
- a state in which the second-speed driven gear 442 and the second-speed driving gear 422 transmit power from the main shaft 21 to the counter shaft 22 is the second-speed gear stage.
- the third speed driven gear 443 always meshes with the third speed driven gear 423.
- the state in which the third speed driven gear 443 and the third speed driven gear 423 transmit power from the main shaft 21 to the counter shaft 22 is the third gear.
- the fourth speed driven gear 444 is always meshed with the fourth speed driven gear 424.
- the state in which the four-speed driven gear 444 and the four-speed drive gear 424 transmit power from the main shaft 21 to the counter shaft 22 is the fourth gear.
- the fifth speed driven gear 445 is always meshed with the fifth speed driven gear 425.
- the state in which the fifth speed driven gear 445 and the fifth speed driven gear 425 transmit power from the main shaft 21 to the counter shaft 22 is the fifth speed gear stage.
- the 6-speed driven gear 446 is always meshed with the 6-speed driven gear 426.
- the state in which the six-speed driven gear 446 and the six-speed driving gear 426 transmit power from the main shaft 21 to the counter shaft 22 is the six-speed gear stage.
- the first speed drive gear 421 cannot rotate with respect to the main shaft 21.
- the first speed driven gear 441 is rotatable with respect to the counter shaft 22.
- the second speed drive gear 422 cannot rotate with respect to the main shaft 21.
- the second speed driven gear 442 is rotatable with respect to the counter shaft 22.
- the third speed driving gear 423 is not rotatable with respect to the main shaft 21.
- the third speed driven gear 443 is rotatable with respect to the counter shaft 22.
- the fourth speed drive gear 424 is not rotatable with respect to the main shaft 21.
- the four-speed driven gear 444 is rotatable with respect to the counter shaft 22.
- the fifth speed driving gear 425 is rotatable with respect to the main shaft 21.
- the fifth speed driven gear 445 is not rotatable with respect to the counter shaft 22.
- the six-speed drive gear 426 is rotatable with respect to the main shaft 21.
- the six-speed driven gear 446 cannot rotate with respect to the counter shaft 22.
- the transmission 20 includes an annular first slider 451 as viewed from the axial direction.
- the first slider 451 is disposed on the main shaft 21 between the fifth speed drive gear 425 (first gear) and the sixth speed drive gear 426 (first gear).
- the first slider 451 is movable in the axial direction on the main shaft 21.
- the first slider 451 is not rotatable with respect to the main shaft 21.
- the transmission 20 includes an annular second slider 452 as viewed from the axial direction.
- the second slider 452 is disposed on the counter shaft 22 between the first-speed driven gear 441 (second gear) and the third-speed driven gear 443 (second gear).
- the second slider 452 is movable in the axial direction on the counter shaft 22.
- the second slider 452 is not rotatable with respect to the counter shaft 22.
- the transmission 20 includes an annular third slider 453 as viewed from the axial direction.
- the third slider 453 is disposed on the counter shaft 22 between the second speed driven gear 442 (second gear) and the fourth speed driven gear 444 (second gear).
- the third slider 453 is movable in the axial direction on the counter shaft 22. The third slider 453 cannot rotate with respect to the counter shaft 22.
- the first slider 451 does not always mesh with the gear provided on the countershaft 22.
- the second slider 452 and the third slider 453 do not always mesh with the gear provided on the main shaft 21. That is, each of the sliders 451 to 453 is provided on one of the main shaft 21 and the counter shaft 22 so as to be movable in the axial direction, and does not always mesh with a gear provided on the other shaft. Further, the sliders 451 to 453 are configured separately from the gears provided on the main shaft 21 and the counter shaft 22, respectively.
- the transmission 20 includes a fifth speed dog convex portion 465 and a fifth speed dog concave portion 475.
- the fifth speed dog convex portion 465 (first dog portion) is provided on the first slider 451. That is, the first slider 451 is provided with a plurality of five-speed dog convex portions 465 arranged in the circumferential direction of the first slider 451.
- the 5-speed dog convex portion 465 is provided on the first slider 451 so as to protrude toward the 5-speed drive gear 425 along the axial direction of the main shaft 21.
- the fifth speed dog recess 475 (second dog part) is provided in the fifth speed drive gear 425.
- the fifth speed drive gear 425 is provided with a plurality of fifth speed dog recesses 475 arranged side by side in the circumferential direction of the fifth speed drive gear 425.
- the 5-speed dog recess 475 is configured to be able to mesh with the 5-speed dog protrusion 465.
- the transmission 20 includes a six-speed dog convex portion 466 and a six-speed dog concave portion 476.
- the six-speed dog convex portion 466 (first dog portion) is provided on the first slider 451. That is, the first slider 451 is provided with a plurality of six-speed dog protrusions 466 arranged in the circumferential direction of the first slider 451.
- the six-speed dog convex portion 466 is provided on the first slider 451 so as to protrude toward the six-speed drive gear 426 along the axial direction of the main shaft 21.
- the 6-speed dog recess 476 (second dog portion) is provided in the 6-speed drive gear 426. That is, the six-speed drive gear 426 is provided with a plurality of six-speed dog recesses 476 arranged side by side in the circumferential direction of the six-speed drive gear 426.
- the six-speed dog recess 476 is configured to be able to mesh with the six-speed dog protrusion 466.
- the transmission 20 includes a first-speed dog convex portion 461 and a first-speed dog concave portion 471.
- the first speed dog convex portion 461 (first dog portion) is provided on the second slider 452. That is, the second slider 452 is provided with a plurality of first-speed dog convex portions 461 aligned in the circumferential direction of the second slider 452.
- the first speed dog protrusion 461 is provided on the second slider 452 so as to protrude toward the first speed driven gear 441 along the axial direction of the counter shaft 22.
- the first-speed dog recess 471 (second dog portion) is provided in the first-speed driven gear 441. That is, the first-speed driven gear 441 is provided with a plurality of first-speed dog recesses 471 aligned in the circumferential direction of the first-speed driven gear 441.
- the first-speed dog recess 471 is configured to be able to mesh with the first-speed dog protrusion 461.
- the transmission 20 includes a third-speed dog convex portion 463 and a third-speed dog concave portion 473.
- the third speed dog convex portion 463 (first dog portion) is provided on the second slider 452. That is, the second slider 452 is provided with a plurality of third-speed dog convex portions 463 arranged side by side in the circumferential direction of the second slider 452.
- the third speed dog protrusion 463 is provided on the second slider 452 so as to protrude toward the third speed driven gear 443 along the axial direction of the counter shaft 22.
- the third speed dog recess 473 (second dog part) is provided in the third speed driven gear 443.
- the third-speed driven gear 443 is provided with a plurality of third-speed dog recesses 473 arranged side by side in the circumferential direction of the third-speed driven gear 443.
- the third-speed dog recess 473 is configured to be able to mesh with the third-speed dog protrusion 463.
- the transmission 20 includes a second-speed dog convex portion 462 and a second-speed dog concave portion 472.
- the second speed dog convex portion 462 (first dog portion) is provided on the third slider 453. That is, the third slider 453 is provided with a plurality of second-speed dog protrusions 462 arranged in the circumferential direction of the third slider 453.
- the second-speed dog convex portion 462 is provided on the third slider 453 so as to protrude toward the second-speed driven gear 442 along the axial direction of the counter shaft 22.
- the second speed dog recess 472 (second dog part) is provided in the second speed driven gear 442. That is, the second-speed driven gear 442 is provided with a plurality of second-speed dog recesses 472 aligned in the circumferential direction of the second-speed driven gear 442. Second-speed dog recess 472 is configured to engage with second-speed dog protrusion 462.
- the transmission 20 includes a four-speed dog convex portion 464 and a four-speed dog concave portion 474.
- the fourth speed dog convex portion 464 (first dog portion) is provided on the third slider 453. That is, the third slider 453 is provided with a plurality of four-speed dog convex portions 464 arranged side by side in the circumferential direction of the third slider 453.
- the four-speed dog convex portion 464 is provided on the third slider 453 so as to protrude toward the four-speed driven gear 444 along the axial direction of the counter shaft 22.
- the 4-speed dog recess 474 (second dog portion) is provided in the 4-speed driven gear 444. That is, the four-speed driven gear 444 is provided with a plurality of four-speed dog recesses 474 aligned in the circumferential direction of the four-speed driven gear 444.
- the four-speed dog recess 474 is configured to be able to mesh with the four-speed dog protrusion 464.
- the dog convex portions 461 to 466 are examples of the first dog portion, and the dog concave portions 471 to 476 are examples of the second dog portion, respectively.
- the transmission 20 includes a shift drum 50.
- FIG. 5 shows a specific configuration of the shift drum 50.
- the shift drum 50 is columnar or cylindrical.
- the shift drum 50 is rotatable around a central axis extending in the axial direction.
- the transmission 20 includes a shift mechanism 30 that moves the first slider 451, the second slider 452, and the third slider 453 in the axial direction.
- the shift mechanism 30 moves the slider 451 in the axial direction of the main shaft 21.
- the shift mechanism 30 moves the sliders 452 and 453 in the axial direction of the counter shaft 22. Accordingly, the engagement between the fifth speed dog convex portion 465 and the fifth speed dog concave portion 475, the engagement between the sixth speed dog convex portion 466 and the sixth speed dog concave portion 476, and the engagement between the first speed dog convex portion 461 and the first speed dog concave portion 471.
- the shift mechanism 30 includes a shift drum 50, a stopper plate 51 (an example of a stopper member), a position holding lever 52, a shift arm 54, a hook plate 56, and an electric motor 58. ing.
- the electric motor 58 is driven by the control unit 83 to drive the shift drum 50 as described later.
- the shift drum 50 is disposed in parallel with the main shaft 21 and the counter shaft 22. That is, the shift drum 50 also extends in the axial direction like the main shaft 21 and the counter shaft 22.
- the stopper plate 51 is fixed to the shift drum 50 coaxially with the shift drum 50.
- the stopper plate 51 rotates with the shift drum 50.
- the position holding lever 52 maintains the stopper plate 51 at a predetermined rotation angle.
- the hook plate 56 is fixed to one end of the shift drum 50.
- the shift arm 54 can contact the hook plate 56.
- the electric motor 58 drives the shift arm 54 via a gear 54a (an example of a speed reduction mechanism) and rotates the shift drum 50.
- a first guide groove 61, a second guide groove 62, and a third guide groove 63 are provided on the outer peripheral surface of the shift drum 50.
- Each of the first guide groove 61, the second guide groove 62, and the third guide groove 63 has a straight portion 64 that extends in the circumferential direction of the shift drum 50, and an inclined portion 65 that is inclined with respect to the straight portion 64.
- the first guide groove 61, the second guide groove 62, and the third guide groove 63 are schematically shown. Specific configurations of the first guide groove 61, the second guide groove 62, and the third guide groove 63 are shown in FIG.
- the shift mechanism 30 includes a first shift fork 491, a second shift fork 492, and a third shift fork 493.
- One end of the first shift fork 491 is positioned in the first guide groove 61 of the shift drum 50.
- One end of the second shift fork 492 is positioned in the second guide groove 62 of the shift drum 50.
- One end of the third shift fork 493 is positioned in the third guide groove 63 of the shift drum 50.
- each of the shift forks 491 to 493 is an example of a selector.
- the first slider 451 has a first fork receiving groove 451a.
- the other end of the first shift fork 491 is positioned in the first fork receiving groove 451a of the first slider 451. That is, the other end of the first shift fork 491 is connected to the first slider 451.
- the second slider 452 has a second fork receiving groove 452a.
- the other end of the second shift fork 492 is positioned in the second fork receiving groove 452a of the second slider 452. That is, the other end of the second shift fork 492 is connected to the second slider 452.
- the third slider 453 is formed with a third fork receiving groove 453a.
- the other end of the third shift fork 493 is positioned in the third fork receiving groove 453 a of the third slider 453. That is, the other end of the third shift fork 493 is connected to the third slider 453.
- Rotation of the shift drum 50 causes the second shift fork 492 to move in the axial direction of the shift drum 50 when one end of the second shift fork 492 passes through the inclined portion 65 of the second guide groove 62. Since the other end of the second shift fork 492 is connected to the second slider 452, when the second shift fork 492 moves in the axial direction as described above, the second slider 452 moves in the axial direction of the counter shaft 22. Move in line direction.
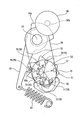
- FIG. 6 is a diagram showing the configuration of the stopper plate 51 and the position holding lever 52 in the shift mechanism 30. 6 and later-described FIG. 7 schematically show the electric motor 58, the shift arm 54, and the like.
- the outer peripheral surface of the stopper plate 51 has a plurality of convex portions 78, a number of shift recesses 70 corresponding to the number of shift stages (six in the illustrated example), and a neutral state. And a neutral recess 79 is provided.
- the plurality of convex portions 78 and the plurality of speed change concave portions 70 are formed so as to be alternately arranged along the rotation direction of the stopper plate 51.
- the position holding lever 52 is provided with a pressing portion 52 a that is pressed against the outer peripheral surface of the stopper plate 51.
- the position holding lever 52 is provided so as to be swingable around the rotation center O1.
- a spring 53 is attached to the position holding lever 52.
- the spring 53 applies a force to the position holding lever 52 so as to press the pressing portion 52 a of the position holding lever 52 against the stopper plate 51 toward the rotation center of the stopper plate 51.
- the speed change recess 70 of the stopper plate 51 has a shape capable of positioning the pressing portion 52 a of the position holding lever 52.
- the plurality of shift recesses 70 of the stopper plate 51 are provided corresponding to the shift stages of the transmission 20. That is, the stopper plate 51 has a first-speed recess 71, a second-speed recess 72, a third-speed recess 73, a fourth-speed recess 74, and a fifth-speed recess corresponding to the first to sixth gears. 75 and a six-speed recess 76 are provided.
- the second guide fork 492 of the shift drum 50 causes the second shift fork 492 to be close to the one-speed driven gear 441 of the counter shaft 22 in the axial direction of the shift drum 50. It is positioned in the direction toward the end, to the left of FIG. As a result, the second slider 452 is positioned on the one side of the shift drum 50. Therefore, the first-speed dog convex portion 461 of the second slider 452 meshes with the first-speed dog concave portion 471 of the first-speed driven gear 441.
- the third shift fork 493 moves along the third guide groove 63 of the shift drum 50 to the one side of the shift drum 50 (left side in FIG. 5).
- the third slider 453 moves on the counter shaft 22 toward the one side of the shift drum 50.
- the pressing portion 52 a of the position holding lever 52 is pressed toward the rotation center of the stopper plate 51 by the spring 53. Therefore, when the pressing portion 52 a is positioned in the gear shift recess 70 or the neutral recess 79, the pressing portion 52 a is pressed against the outer peripheral surface of the stopper plate 51 by the spring 53 in the gear shift recess 70 or the neutral recess 79. . Accordingly, the rotation of the stopper plate 51 is suppressed in a state where the pressing portion 52a of the position holding lever 52 is positioned in the speed change recess 70 or the neutral recess 79 of the stopper plate 51.
- FIG. 7 is a view showing the hook plate 56 and the shift arm 54 of the shift drum 50.
- FIG. 7A shows the state of the hook plate 56 and the shift arm 54 when the position holding lever 52 maintains the shift drum 50 at a rotation angle corresponding to the fourth gear.
- FIG. 7B shows the state of the hook plate 56 and the shift arm 54 when the gear position is switched from the fourth speed to the fifth speed.
- one end of shift arm 54 is connected to output shaft 58a of electric motor 58 via fan-shaped gear 54a.
- a claw 55 capable of holding the pin 57 of the hook plate 56 is provided.
- the electric motor 58 rotates the shift arm 54 counterclockwise around the rotation center O ⁇ b> 1 when viewed from the motor 58. In this case, since the pin 57 is pulled by the claw 55, the stopper plate 51 and the shift drum 50 rotate counterclockwise.
- the electric motor 58 has the pressing portion 52a of the position holding lever 52 over the convex portion 78 from the bottom 77 of the four-speed recess 74, and the fifth speed.
- the shift arm 54 is rotated until it is positioned at the bottom 77 of the recess 75 for use.
- an angle formed by the bottoms 77 of the adjacent shift recesses 70 around the rotation center O ⁇ b> 1 of the stopper plate 51 as viewed from the axial direction of the shift drum 50 is referred to as a shift rotation angle.
- This shift rotation angle is the rotation angle of the shift drum 50 when the shift stage of the transmission 20 is switched.
- the shift rotation angle when switching the shift speed by one step is set to less than 60 degrees.
- the shift rotation angle of the shift drum 50 when changing the gear position from the first speed to the second speed, the second speed to the third speed, the third speed to the fourth speed, the fourth speed to the fifth speed, and the fifth speed to the sixth speed. are set to 45 degrees.
- the shift rotation angle defined here is a concept that does not include the rotation angle when the electric motor 58 switches the shift stage of the transmission 20 from the first speed to the neutral.
- the rotational position of the shift drum 50 when the transmission 20 is neutral is the position of the shift drum 50 when the transmission 20 is switched between the plurality of shift speeds (first speed to sixth speed). Out of rotation area. With such a configuration, the shift speed can be switched smoothly.
- the output shaft 58a of the electric motor 58 rotates by 60 degrees or more.
- the rotation of the output shaft 58a of 60 degrees or more is transmitted to the shift drum 50 through the speed reduction mechanism (gear 54a) as a rotation of a variable speed rotation angle of less than 60 degrees.
- the electric motor 58 can drive the shift drum 50 with a small torque. Thereby, the shift drum 50 can be smoothly rotated without using a large-sized electric motor.
- the main shaft 21 and the countershaft 22 are configured separately from the gears, and sliders 451 to 453 that do not always mesh with the gears provided on the other shaft. Is provided.
- the mass and radius of the sliders 451 to 453 can be reduced as compared with the slide gear having the conventional dog portion. Therefore, the collision energy when the dog portions hit each other can be reduced, and the generation of noise and impact during shifting can be suppressed.
- the sliders 451 to 453 can be moved with a smaller force than the slide gear. Furthermore, by reducing the mass of the sliders 451 to 453, the frictional force generated between the shift forks 491 to 493 and the shift drum 50 can be reduced. Thereby, since the load at the time of rotating the shift drum 50 can be made small, the shift drum 50 can be smoothly rotated with a small force. Therefore, the responsiveness of the speed change operation in the transmission 20 can be improved.
- one end portions of the shift forks 491 to 493 are positioned in the guide grooves 61 to 63 of the shift drum 50. Therefore, when the sliders 451 to 453 move according to the rotation of the shift drum 50, the shift drum 50 receives a reaction force from the sliders 451 to 453 via the shift forks 491 to 493. In order to prevent the shift drum 50 from moving even when this reaction force is received, the shift drum 50 is configured to have a certain weight.
- the rotation angle of the shift drum 50 (referred to as a shift rotation angle) when changing the gear position to one step is set to less than 60 degrees. Thereby, the time required for the rotation of the shift drum 50 is shortened.
- the electric motor 58 is used as an actuator for rotating the shift drum 50.
- the electric motor 58 has a characteristic that a large torque can be easily obtained in an extremely low speed region (immediately after the start of rotation). Therefore, even if the rotational load of the shift drum 50 is increased as described above by setting the shift rotation angle to be less than 60 degrees, the shift drum 50 can be smoothly rotated by using the electric motor 58.
- the transmission 20 according to the present embodiment it is possible to achieve both the suppression of the generation of sound and impact during shifting and the improvement of responsiveness of shifting operation.
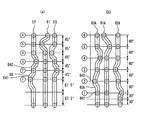
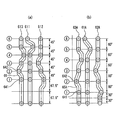
- FIG. 8A is a schematic diagram showing the first guide groove 61 to the third guide groove 63 provided on the outer peripheral surface of the shift drum 50 of the transmission 20 according to the present embodiment.
- all shift rotation angles are set to 45 degrees.
- FIG. 8B shows guide grooves 61A to 63A of the shift drum in the transmission described in Patent Document 2.
- all the shift rotation angles are set to 60 degrees.
- the shift rotation angle (45 degrees) in the configuration of the present embodiment is the shift rotation angle in the comparative example. It is smaller than (60 degrees). Note that the shift rotation angle is represented as a distance in the vertical direction of the drawing in FIGS. 8A and 8B.
- the distance that the shift forks 491 to 493 move in the axial direction of the shift drum is the same.
- one end of the shift fork 492 is positioned at the straight line portion 641 when the transmission is in the first speed.
- one end of the shift fork 492 is positioned at the linear portion 642.
- the distance between the center position of the straight line portion 641 and the center position of the straight line portion 642 is the same as that of the transmission device 20 (FIG. 8A) according to the present embodiment and the transmission device of FIG. 8 (b)).
- the force that the shift forks 491 to 493 receive from the shift drum when passing through the inclined portions 65 and 65A increases as the inclination angle of the inclined portions 65 and 65A with respect to the circumferential direction of the shift drum increases. That is, in the transmission using the shift drum 50 shown in FIG. 8A, the force required for the shifting operation becomes larger than in the transmission using the shift drum shown in FIG. . For this reason, as in Patent Document 2, the shift rotation angle of the shift drum is generally set to an angle of 60 degrees or more.
- the electric motor 58 has a characteristic of outputting the largest torque at an extremely low speed (immediately after the start of rotation).
- the shift rotation angle of the shift drum 50 is small, it is only necessary to rotate the stationary shift drum 50 by a small rotation angle with a large driving force during the shift operation. That is, the characteristics of the driving force required when the shift rotation angle of the shift drum 50 is made small coincide with the output characteristics of the electric motor 58.
- the present inventor has realized that the shift drum 50 having a small shift rotation angle can be rotated without using the electric motor 58 having a large maximum output.
- the speed change device 20 with high responsiveness to the speed change operation can be provided without increasing the size of the electric motor 58.
- the transmission 20 according to the present embodiment includes a mechanism with improved responsiveness of a shift operation. For this reason, as described in Patent Document 1, the gear shifting operation can be further enhanced by devising a control method for controlling the electric motor 58 that drives the shift drum 50. At this time, since the transmission 20 according to the present embodiment can move the member quickly, it is easy to move the member at a target timing and can be suitably combined with a technique for devising a control method.
- the position holding lever 52 is provided. After the pressing portion 52a of the position holding lever 52 moves from the bottom 77 of the speed change concave portion 70 to the convex portion 78, a spring force acting on the position holding lever 52 is used to move from the convex portion 78 to the adjacent speed change concave portion 70.
- the shift drum 50 can be rotated toward the bottom 77 of the main body. Further, when the predetermined gear position is continuously maintained, the pressing portion 52a of the position holding lever 52 suppresses the rotation of the shift drum 50. Therefore, it is necessary to continue energizing the electric motor 58 in order to suppress the rotation of the shift drum 50. There is no.
- FIG. 9 is a right side view of the motorcycle 100 equipped with the transmission 200 according to the reference example of the present invention.
- the motorcycle 100 includes a body frame 2, an engine 3, a front wheel 4, a rear wheel 5, and a handle 6.
- the engine 3 is supported by the body frame 2.
- the rear wheel 5 is driven by the power output from the engine 3.
- An operation unit 80 is provided on the handle 6 for the driver of the motorcycle 100 to perform an operation of switching the gear position.
- FIG. 10 is a schematic diagram showing a power transmission path of the motorcycle 100.
- the operation unit 80 includes a shift-up button 81 that increases the gear position of the transmission 200 and a shift-down button 82 that decreases the gear position of the transmission 200.
- the operation unit 80 transmits a signal corresponding to the driver's operation to the control unit 83.
- the control unit 83 switches the gear position of the transmission 200 by transmitting a switching signal corresponding to the signal to the transmission 200. That is, when the driver operates the operation unit 80, the control unit 83 switches the gear position of the transmission 200. Thereby, the control unit 83 can switch the gear position of the transmission 200 without the driver performing a clutch operation.
- the transmission 200 of the motorcycle 100 has six shift stages.
- the transmission 200 can be shifted up in the order of neutral, 1st speed, 2nd speed, 3rd speed, 4th speed, 5th speed, 6th speed, 6th speed, 5th speed, 4th speed, 3rd speed, 2nd speed, 1st speed, Shift down is possible in the order of neutral.
- the power generated in the engine 3 is transmitted to the rear wheel 5 via the clutch mechanism 10, the transmission 200, and the drive chain 14.
- the clutch mechanism 10 is a wet multi-plate clutch.
- the clutch mechanism 10 includes an outer plate 11 and an inner plate 12.
- the outer plate 11 is connected to the crankshaft 13 of the engine 3 via a gear 13a.
- the inner plate 12 is provided on the main shaft 21 of the transmission 200 described later.
- the clutch mechanism 10 can be switched between the connected state and the disconnected state by relatively moving the outer plate 11 and the inner plate 12 in the axial direction.
- the transmission 200 includes a main shaft 21 and a counter shaft 22.
- the main shaft 21 is connected to the crankshaft 13 of the engine 3 via the clutch mechanism 10.
- the counter shaft 22 is connected to the main shaft 21 via gears A, B, C, D, E, F of the first gear train 23 and gears a, b, c, d, e, f of the second gear train 24. Has been.
- the drive sprocket 7 is fixed to the counter shaft 22. That is, the drive sprocket 7 can rotate integrally with the counter shaft 22.
- the drive chain 14 is stretched over the drive sprocket 7 and the driven sprocket 8 fixed to the axle shaft 9 of the rear wheel 5. As a result, power is transmitted from the engine 3 to the rear wheel 5.
- the transmission 200 can be switched between a neutral state and six shift stages from the first speed to the sixth speed.
- the transmission 200 includes a first gear train 23 including six gears A to F provided on the main shaft 21 and a second gear train 24 including six gears a to f provided on the counter shaft 22. ing.
- gears A to F are arranged in order from the input side where the clutch mechanism 10 is connected to the main shaft 21.
- gears a to f are sequentially arranged from the side corresponding to the input side of the main shaft 21 in the axial direction of the counter shaft 22.
- the gear A of the first gear train 23 is always in mesh with the gear a of the second gear train 24.
- a state in which the gear A and the gear a transmit power from the main shaft 21 to the counter shaft 22 is a first gear.
- the gear B of the first gear train 23 is always meshed with the gear b of the second gear train 24.
- the state in which the gear B and the gear b transmit power from the main shaft 21 to the counter shaft 22 is the fifth gear.
- the gear C of the first gear train 23 is always in mesh with the gear c of the second gear train 24.
- the state in which the gear C and the gear c transmit power from the main shaft 21 to the counter shaft 22 is the third gear.
- the gear D of the first gear train 23 is always meshed with the gear d of the second gear train 24.
- the state in which the gear D and the gear d transmit power from the main shaft 21 to the counter shaft 22 is the fourth gear.
- the gear E of the first gear train 23 is always meshed with the gear e of the second gear train 24.
- a state in which the gear E and the gear e transmit power from the main shaft 21 to the counter shaft 22 is the sixth speed.
- the gear F of the first gear train 23 is always meshed with the gear f of the second gear train 24.
- the state in which the gear F and the gear f transmit power from the main shaft 21 to the counter shaft 22 is the second gear.
- the control unit 83 controls the transmission 200 according to the signal from the operation unit 80 and transmits the power of the main shaft 21 to the counter shaft 22 and the gears A to F of the first gear train 23 and the gear a of the second gear train 24. Switch the group of ⁇ f.
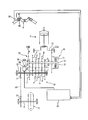
- FIG. 11 is a diagram showing a schematic configuration of the transmission 200. 11 shows the first gear train 23, the second gear train 24, and the shift mechanism 30 in a state where the first gear train 23 and the second gear train 24 are separated from each other. Actually, the first gear train 23 and the second gear train 24 are arranged in mesh with each other.
- the gear A and the gear F cannot move in the axial direction with respect to the main shaft 21 and cannot rotate.
- the gear C and the gear D are provided on the first slider 31.
- the first slider 31 can move in the axial direction with respect to the main shaft 21 and cannot rotate.
- the gear B and the gear E are not movable and rotatable in the axial direction with respect to the main shaft 21.
- the gear a, gear c, gear d and gear f are immovable and rotatable in the axial direction with respect to the counter shaft 22.
- the gear b is provided on the second slider 32.
- the second slider 32 can move in the axial direction with respect to the counter shaft 22 and cannot rotate.
- the gear e is provided on the third slider 33.
- the third slider 33 can move in the axial direction with respect to the counter shaft 22 and cannot rotate.
- the first slider 31 is movable in the axial direction on the main shaft 21 by a first shift fork 47 that is displaced in the axial direction of the shift drum 50A according to the rotation of the shift drum 50A.
- the first slider 31 is integrally provided with a gear C, a gear D, a convex five-speed dog convex portion 45a, and a convex six-speed dog convex portion 46a.
- the fifth speed dog convex portion 45 a protrudes toward the gear B along the axial direction of the main shaft 21.
- a concave fifth-speed dog recess 45b that can mesh with the fifth-speed dog protrusion 45a is provided.
- the six-speed dog convex portion 46 a protrudes toward the gear E along the axial direction of the main shaft 21.
- a concave six-speed dog recess 46b that can mesh with the six-speed dog protrusion 46a is provided.
- the second slider 32 is movable on the counter shaft 22 in the axial direction by a second shift fork 48 that is displaced in the axial direction of the shift drum 50A in accordance with the rotation of the shift drum 50A.
- the second slider 32 is integrally provided with a gear b, a convex first speed dog convex portion 41a, and a convex third speed dog convex portion 43a.
- the first-speed dog protrusion 41 a protrudes toward the gear a along the axial direction of the countershaft 22.
- a concave first-speed dog concave portion 41b that can mesh with the first-speed dog convex portion 41a is provided.
- the third-speed dog convex portion 43 a protrudes toward the gear c along the axial direction of the counter shaft 22.
- a concave third-speed dog recess 43b that can mesh with the third-speed dog protrusion 43a is provided.
- the third slider 33 is movable in the axial direction on the counter shaft 22 by a third shift fork 49 that is displaced in the axial direction of the shift drum 50A in accordance with the rotation of the shift drum 50A.
- the third slider 33 is integrally provided with a gear e, a convex fourth-speed dog convex portion 44a, and a convex second-speed dog convex portion 42a.
- the four-speed dog convex portion 44 a protrudes toward the gear d along the axial direction of the counter shaft 22.
- a concave four-speed dog recess 44b that can mesh with the four-speed dog protrusion 44a is provided.
- the second-speed dog convex portion 42 a protrudes toward the gear f along the axial direction of the counter shaft 22.
- a concave second-speed dog concave portion 42b that can mesh with the second-speed dog convex portion 42a is provided.
- the first speed dog convex portion 41a, the second speed dog convex portion 42a, the third speed dog convex portion 43a, and the fourth speed dog convex portion 44a rotate in synchronization with the counter shaft 22 at all times. Further, the fifth-speed dog convex portion 45a and the sixth-speed dog convex portion 46a rotate in synchronization with the main shaft 21 at all times.
- the first-speed dog recess 41b to the sixth-speed dog recess 46b are engaged with the first-speed dog protrusion 41a to the sixth-speed dog protrusion 46a, respectively, so that the gears A to F of the first gear train 23 and the gears of the second gear train 24 are engaged. Power is transmitted between a and f.
- the first-speed dog convex portion 41a to the sixth-speed dog convex portion 46a are moved toward and away from the corresponding first-speed dog concave portion 41b to the sixth-speed dog concave portion 46b. Thereby, the first-speed dog convex portion 41a to the sixth-speed dog convex portion 46a and the corresponding first-speed dog concave portion 41b to the sixth-speed dog concave portion 46b are engaged with each other or released from the engagement. As a result, the gear set for transmitting the power of the main shaft 21 to the counter shaft 22 is switched.
- the second slider 32 is located on the other side (right side in the figure) of the counter shaft 22 in the axial direction.
- the first-speed dog convex portion 41a meshes with the first-speed dog concave portion 41b.
- the rotation of the main shaft 21 is transmitted to the gear a meshed with the gear A through the gear A fixed to the main shaft 21 so as not to rotate.
- the rotation of the gear a is transmitted to the second slider 32 via the first speed dog concave portion 41 b of the gear a and the first speed dog convex portion 41 a of the second slider 32.
- the rotation transmitted to the second slider 32 is transmitted to the counter shaft 22.
- the gear set other than the set of gears A and a is idle with respect to the main shaft 21 or the counter shaft 22 with the gear belonging to one of the gear trains 23 and 24. ing. Specifically, the gear B and the gear E are idle with respect to the main shaft 21, and the gear c, the gear d, and the gear f are idle with respect to the counter shaft 22. For this reason, when the first speed is selected in the operation unit 80, power is not transmitted from the main shaft 21 to the counter shaft 22 via the set of gears B to F and gears b to f.
- the first-speed dog convex portion 41a to the sixth-speed dog convex portion 46a are not engaged with the corresponding first-speed dog concave portion 41b to the sixth-speed dog concave portion 46b, respectively.
- the gears A to F of the first gear train 23 are engaged with the gears a to f of the second gear train 24, respectively, but power is transmitted between the main shaft 21 and the counter shaft 22. Absent.
- the transmission 200 includes a shift mechanism 30 that moves the first slider 31, the second slider 32, and the third slider 33 in the axial direction of the main shaft 21 and the counter shaft 22, respectively.
- the shift mechanism 30 moves the sliders 31 to 33 to move the first speed dog convex portion 41a to the sixth speed dog convex portion 46a closer to and away from the first speed dog concave portion 41b to the sixth speed dog concave portion 46b.
- the first-speed dog convex portion 41a to the sixth-speed dog convex portion 46a and the first-speed dog concave portion 41b to the sixth-speed dog concave portion 46b are engaged with each other or released from the engagement.
- the shift mechanism 30 has a configuration similar to that of the above-described embodiment. Therefore, it demonstrates using the above-mentioned FIGS. 5-7.
- the shift mechanism 30 includes a shift drum 50 ⁇ / b> A, a stopper plate 51, a position holding lever 52, a shift arm 54, a hook plate 56, and an electric motor 58.
- the shift drum 50 ⁇ / b> A is disposed in parallel with the main shaft 21 and the counter shaft 22.
- the stopper plate 51 is fixed to the shift drum 50A.
- the stopper plate 51 rotates together with the shift drum 50A.
- the position holding lever 52 maintains the stopper plate 51 at a predetermined rotation angle.
- the hook plate 56 is fixed to one end of the shift drum 50A.
- the shift arm 54 can lock the hook plate 56.
- the electric motor 58 rotates the shift drum 50A by driving the shift arm 54 via the gear 54a.
- a first guide groove 611, a second guide groove 612, and a third guide groove 613 are provided on the outer peripheral surface of the shift drum 50A.
- Each of the first guide groove 611, the second guide groove 612, and the third guide groove 613 includes a linear portion 64 that extends in the circumferential direction of the shift drum 50A, and an inclined portion 65 that is inclined with respect to the linear portion 64. Yes.
- the first shift fork 47 moves in the axial direction of the shift drum 50A.
- the other end of the first shift fork 47 is connected to the first slider 31 by being positioned in the first fork receiving groove 34 of the first slider 31.
- the second shift fork 48 moves in the axial direction of the shift drum 50A.
- the other end of the second shift fork 48 is connected to the second slider 32 by being positioned in the second fork receiving groove 34 of the second slider 32.
- the second slider 32 moves in the axial direction of the counter shaft 22.
- the third shift fork 49 moves in the axial direction of the shift drum 50A.
- the other end of the third shift fork 49 is connected to the third slider 33 by being positioned in the third fork receiving groove 34 of the third slider 33.
- the third slider 33 moves in the axial direction of the counter shaft 22.
- the position holding lever 52 is provided with a pressing portion 52a that can come into contact with the outer peripheral edge of the stopper plate 51.
- the position holding lever 52 is provided so as to be swingable around the rotation center O1.
- a spring 53 is attached to the position holding lever 52.
- the spring 53 applies a force to the position holding lever 52 so as to press the pressing portion 52a of the position holding lever 52 against the stopper plate 51 toward the rotation center O1 of the stopper plate 51.
- the speed change recess 70 of the stopper plate 51 has a shape capable of positioning the pressing portion 52 a of the position holding lever 52.
- the recess 70 for shifting of the stopper plate 51 is provided corresponding to the gear position. That is, the stopper plate 51 has a first-speed recess 71, a second-speed recess 72, a third-speed recess 73, a fourth-speed recess 74, and a fifth-speed recess corresponding to the first to sixth gears. 75 and a six-speed recess 76 are provided.
- the second shift fork 48 is moved to the other side of the shift drum 50 by the second guide groove 612 of the shift drum 50A in FIG. It is positioned on the right side of FIG. Thereby, the second slider 32 moves on the counter shaft 22 to the other side (the right side in FIG. 11). Therefore, the first-speed dog convex portion 41a of the second slider 32 meshes with the first-speed dog concave portion 41b of the gear a.
- the third shift fork 49 moves to the one side of the shift drum 50A along the third guide groove 613 of the shift drum 50A, thereby moving the third slider 33 to one side of the counter shaft 22.
- the upshift is performed from the first speed to the second speed.
- One end of the shift arm 54 is connected to the output shaft 58a of the electric motor 58 via a sector gear 54a.
- a claw 55 capable of holding the pin 57 of the hook plate 56 is provided. With the claw 55 holding the pin 57, the pin 57 is pulled by the claw 55 by rotating the shift arm 54 counterclockwise around the rotation center O ⁇ b> 1 by the electric motor 58. Accordingly, the stopper plate 51 and the shift drum 50A rotate counterclockwise.
- the electric motor 58 has the pressing portion 52 a of the position holding lever 52 that moves over the convex portion 78 from the bottom portion 77 of the four-speed concave portion 74.
- the shift arm 54 is rotated until it is positioned at the bottom 77 of the speed recess 75.
- an angle formed by the bottom portions 77 of the adjacent shift recesses 70 around the rotation center O1 of the stopper plate 51 as viewed from the axial direction of the shift drum 50A is referred to as a shift rotation angle.
- This shift rotation angle is the rotation angle of the shift drum 50A when the shift stage of the transmission 200 is switched.
- the shift rotation angle of the shift drum 50A when changing the gear stage from the first speed to the second speed, the second speed to the third speed, the third speed to the fourth speed, the fourth speed to the fifth speed, and the fifth speed to the sixth speed. are set to 45 degrees.
- the shift rotation angle defined here is a concept that does not include the rotation angle when switching from the first speed to the neutral.
- the shift drum 50 moves the one end of the shift forks 47 to 49 along the guide grooves 611 to 613, so that the dog convex portion is formed at the other end of the shift forks 47 to 49.
- the sliders 31 to 33 including 41a to 46a are displaced. Therefore, when the sliders 31 to 33 are moved, the shift drum 50A receives a reaction force. In order to prevent the shift forks 47 to 49 and the shift drum 50A from moving even when this reaction force is received, the shift drum 50A needs a certain amount of weight. For this reason, the inertial mass of the shift drum 50A is large.
- the present inventor does not increase the rotation speed of the shift drum 50A, but reduces the rotation angle of the shift drum 50A to shorten the time for moving the shift drum 50A, thereby improving the response of the speed change operation. investigated.
- FIG. 12A is a schematic diagram showing the first guide groove 611 to the third guide groove 613 provided on the outer peripheral surface of the shift drum 50A.
- all the shift rotation angles are set to 45 degrees.
- FIG. 12B shows the guide grooves 61A to 63A of the shift drum in the transmission described in Patent Document 2. In the configuration of the comparative example shown in FIG. 12B, all the shift rotation angles are set to 60 degrees.
- the shift rotation angle (45 degrees) in the configuration of the reference example is the shift rotation angle (45 degrees) in the comparative example ( Smaller than 60 degrees). Note that the shift rotation angle is represented as a distance in the vertical direction of the drawing in FIGS. 12 (a) and 12 (b).
- the shift forks 47 to 49 move in the same axial direction of the shift drum when the shift stage is switched by one step between the transmission 200 according to the reference example and the transmission of Patent Document 2.
- one end of the shift fork 49 is positioned at the straight line portion 641 when the transmission is in the first speed.
- one end portion of the shift fork 49 is positioned at the linear portion 642.
- the distance between the center position of the straight portion 641 and the center position of the straight portion 642 is the same as that of the transmission 200 according to the reference example (FIG. (B)) is the same.
- the force that the shift forks 47 to 49 receive from the shift drum when passing through the inclined portions 65 and 65A increases as the inclination angle of the inclined portions 65 and 65A with respect to the circumferential direction of the shift drum increases. That is, in the transmission using the shift drum 50A shown in FIG. 12 (a), the force required for the shifting operation becomes larger than in the transmission using the shift drum shown in FIG. 12 (b). .
- the shift rotation angle of the shift drum is generally set to an angle of 60 degrees or more.
- the electric motor 58 has a characteristic of outputting the largest torque at an extremely low speed (immediately after the start of rotation).
- the shift drum 50A that has been stationary may be rotated by a small rotation angle with a large driving force during the shift operation. That is, the characteristics of the driving force required when the shift rotation angle of the shift drum 50A is made small match the output characteristics of the electric motor 58.
- the present inventor has noticed that the shift drum 50A having a small shift rotation angle can be rotated without using the electric motor 58 having a large maximum output.
- the speed change device 200 with high responsiveness to the speed change operation can be provided without increasing the size of the electric motor 58.
- the transmission 200 according to the reference example is provided with a mechanism in which the responsiveness of the shift operation is enhanced. For this reason, as described in Patent Document 1, a gear shifting operation can be further enhanced by devising a control method for controlling the electric motor 58 that drives the shift drum 50A. At this time, since the speed change device 200 according to the reference example can move the member quickly, it is easy to move the member at a target timing, and can be suitably combined with a technique for devising a control method.
- the position holding lever 52 is provided. After the pressing portion 52a of the position holding lever 52 moves from the bottom 77 of the speed change concave portion 70 to the convex portion 78, a spring force acting on the position holding lever 52 is used to move from the convex portion 78 to the adjacent speed change concave portion 70.
- the shift drum 50 ⁇ / b> A can be rotated toward the bottom 77. Further, when the predetermined gear position is continuously maintained, the pressing portion 52a of the position holding lever 52 suppresses the rotation of the shift drum 50A. Therefore, it is necessary to continue energizing the electric motor 58 in order to suppress the rotation of the shift drum 50A. There is no.
- the transmission having six shift stages has been described.
- the present invention is applied to a transmission having seven shift stages, eight shift stages, or nine or more shift stages. May be.
- the shift rotation angle is set to 50 degrees, for example.
- the shift rotation angle is set to 45 degrees, for example.
- the example in which the shift fork is used as the selector has been described.
- a member having a non-fork shape such as a rod shape may be used as the selector.
- an example using three shift forks has been described.
- four or more selectors may be used.
- the dog is provided with the dog convex portion
- the gear is provided with the dog concave portion.
- the dog concave portion (first dog portion) may be provided on the slider
- the dog convex portion (second dog portion) may be provided on the gear.
Abstract
Description
図9から図12の図面を参照しつつ、本発明の参考例について、以下詳細に説明する。この参考例では、スライド歯車が設けられた変速装置に、上述の変速回転角度でシフトドラムを回転させる構成を適用した場合について説明する。なお、以下の説明において、上述の実施形態と同一の構成は同一の符号を付す。
上述した実施形態においては、複数の変速回転角度が全て互いに等しい場合を説明したが、本発明はこれに限らない。例えば、特定の変速段に対応する変速回転角度が他の変速回転角度と異なり、かつ、他の変速回転角度が互いに等しくもよい。あるいは、全ての変速回転角度が互いに異なっていてもよい。
Claims (4)
- 複数の変速段に切替可能で、かつ、各変速段のときに、動力源によって回転されるメインシャフトの回転をカウンタシャフトに伝達する変速装置であって、
前記メインシャフトに設けられ、かつ、前記複数の変速段の段数と同数の複数の第一歯車、および前記カウンタシャフトに設けられ、かつ、前記複数の第一歯車に常時噛み合う、前記複数の第一歯車と同数の第二歯車、を含む複数の歯車と、
前記メインシャフトまたは前記カウンタシャフトのいずれか一方のシャフトにおいて、前記一方のシャフトの軸線方向に移動可能に設けられ、第一ドグ部を有し、かつ、前記一方のシャフトと常時同期して回転するスライダと、
電動モータと、
円筒状または円柱状に形成され、前記電動モータに機械的に連結され、かつ前記電動モータによって回転されるシフトドラムと、
前記シフトドラムの回転に応じて、前記スライダを前記一方のシャフトの軸線方向に移動させるセレクタと、
前記電動モータを制御する制御部と、を備え、
前記複数の第一歯車は、前記メインシャフトの軸線方向における移動が不能に前記メインシャフトに設けられ、
前記複数の第二歯車は、前記カウンタシャフトの軸線方向における移動が不能に前記カウンタシャフトに設けられ、
前記複数の第一歯車および前記複数の第二歯車のうち、前記一方のシャフトに設けられた歯車に、前記スライダの前記第一ドグ部に噛み合い可能な第二ドグ部が設けられ、
前記第二ドグ部が設けられた前記歯車は、前記一方のシャフトに相対回転可能に設けられ、
前記一方のシャフトに設けられた前記スライダは、前記複数の第一歯車および前記複数の第二歯車とは別体であり、かつ、前記複数の歯車のうち、前記メインシャフトおよび前記カウンタシャフトのうちの他方のシャフトに設けられた歯車に常時噛み合っておらず、
前記シフトドラムは、その外周面に、周方向に延びる直線部と前記直線部に対して傾斜した傾斜部とを含むガイド溝を有し、
前記セレクタの一端部は、前記ガイド溝内に位置付けられ、前記セレクタの他端部は、前記スライダに接続されており、
前記制御部は、全ての変速段において、変速段を1段階切り替える際の前記シフトドラムの変速回転角度が60度未満になるように、前記電動モータを制御し、
任意の変速段から異なる変速段に切り替えられる際に、前記シフトドラムが、60度未満の前記変速回転角度で回転することによって、前記セレクタが、前記複数の第一歯車および前記複数の第二歯車とは別体に構成されかつ前記複数の歯車のうち前記他方のシャフトに設けられた歯車に常時噛み合っていない前記スライダを、前記一方のシャフトの軸線方向に移動させ、
前記複数の第一歯車および前記複数の第二歯車とは別体に構成されかつ前記複数の歯車のうち前記他方のシャフトに設けられた歯車に常時噛み合っていない前記スライダが、前記シフトドラムの回転に応じて前記一方のシャフトの軸線方向に移動して前記第一ドグ部が前記第二ドグ部と噛み合うことによって、前記第一歯車、前記第二歯車および前記スライダを介して前記メインシャフトの回転が前記カウンタシャフトに伝達される、
変速装置。 - 前記変速装置は、さらに、前記メインシャフトから前記カウンタシャフトに回転を伝達しないニュートラルに切替可能であり、
前記制御部は、前記電動モータを制御して前記シフトドラムを回転させることによって前記変速装置を前記ニュートラルおよび前記複数の変速段のいずれかに切り替え、
前記変速装置が前記ニュートラルのときの前記シフトドラムの回転位置は、前記変速装置が前記複数の変速段の間で切り替えられる際の前記シフトドラムの回転領域から外れている、
請求項1に記載の変速装置。 - 前記シフトドラムに同期して回転可能に、かつ、前記シフトドラムと同軸上に前記シフトドラムに固定された板状のストッパー部材と、
前記ストッパー部材の外周面に押しつけられる押し付け部と、をさらに備え、
前記ストッパー部材の前記外周面には、前記ストッパー部材の軸線方向から見て、前記ストッパー部材の回転方向に沿って複数の凸部と複数の凹部とが交互に並ぶように形成され、
前記複数の凹部のうち、前記複数の変速段の数と同数の凹部がそれぞれ、変速用凹部に設定され、
前記複数の変速用凹部は、前記ストッパー部材の回転方向に沿って、60度未満の前記変速回転角度ごとに設けられ、
前記変速装置が前記複数の変速段のうちの所定の変速段の状態の場合に、前記押し付け部は、前記所定の変速段に対応する前記変速用凹部に押し付けられる、
請求項1または2に記載の変速装置。 - 前記電動モータが発生した動力を前記シフトドラムに伝達する減速機構をさらに備え、
前記電動モータは、出力軸を有し、
前記変速装置の変速段が1段階切り替えられる際に、前記電動モータの前記出力軸は60度以上回転し、前記減速機構は、前記出力軸の60度以上の回転を、60度未満である前記変速回転角度の回転として、前記シフトドラムに伝達する、
請求項1から3のいずれかに記載の変速装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16835232.6A EP3336391B1 (en) | 2015-08-10 | 2016-08-10 | Transmission |
| BR112018000667-0A BR112018000667B1 (pt) | 2015-08-10 | 2016-08-10 | Transmissão |
| CN201680046487.4A CN107923528B (zh) | 2015-08-10 | 2016-08-10 | 变速装置 |
| US15/893,620 US11137049B2 (en) | 2015-08-10 | 2018-02-10 | Transmission |
Applications Claiming Priority (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015158324 | 2015-08-10 | ||
| JP2015-158327 | 2015-08-10 | ||
| JP2015-158324 | 2015-08-10 | ||
| JP2015158325 | 2015-08-10 | ||
| JP2015-158326 | 2015-08-10 | ||
| JP2015-158325 | 2015-08-10 | ||
| JP2015158326 | 2015-08-10 | ||
| JP2015158327 | 2015-08-10 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/893,620 Continuation-In-Part US11137049B2 (en) | 2015-08-10 | 2018-02-10 | Transmission |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017026535A1 true WO2017026535A1 (ja) | 2017-02-16 |
Family
ID=57983594
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/073681 WO2017026536A1 (ja) | 2015-08-10 | 2016-08-10 | 変速装置および車両 |
| PCT/JP2016/073680 WO2017026535A1 (ja) | 2015-08-10 | 2016-08-10 | 変速装置 |
| PCT/JP2016/073679 WO2017026534A1 (ja) | 2015-08-10 | 2016-08-10 | 変速装置 |
| PCT/JP2016/073682 WO2017026537A1 (ja) | 2015-08-10 | 2016-08-10 | 変速装置および車両 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/073681 WO2017026536A1 (ja) | 2015-08-10 | 2016-08-10 | 変速装置および車両 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/073679 WO2017026534A1 (ja) | 2015-08-10 | 2016-08-10 | 変速装置 |
| PCT/JP2016/073682 WO2017026537A1 (ja) | 2015-08-10 | 2016-08-10 | 変速装置および車両 |
Country Status (6)
| Country | Link |
|---|---|
| US (3) | US11111986B2 (ja) |
| EP (4) | EP3336392A4 (ja) |
| JP (4) | JP6807842B2 (ja) |
| CN (2) | CN107923529B (ja) |
| BR (1) | BR112018000667B1 (ja) |
| WO (4) | WO2017026536A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108612813A (zh) * | 2018-05-31 | 2018-10-02 | 厦门理工学院 | 一种电动车专用的变速器和减速器组合装置 |
| CN108730512A (zh) * | 2018-06-15 | 2018-11-02 | 山东理工大学 | 汽车变速器换挡轴三角形滑槽设计方法 |
| CN109606530B (zh) * | 2018-11-15 | 2024-01-23 | 八方电气(苏州)股份有限公司 | 自行车变速机构和自行车 |
| CN111981116B (zh) * | 2019-05-21 | 2022-02-01 | 上海汽车集团股份有限公司 | 一种汽车及其电驱换挡执行装置 |
| JP2020190291A (ja) * | 2019-05-22 | 2020-11-26 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 変速システム及び変速システムの制御方法 |
| KR102470739B1 (ko) * | 2019-08-14 | 2022-11-29 | 오토딘시스 주식회사 | 엑셀 및 브레이크 페달과 연동된 클러치 시스템 |
| JP2021042845A (ja) * | 2019-09-13 | 2021-03-18 | ヤマハ発動機株式会社 | 変速装置および車両 |
| JP2021042846A (ja) * | 2019-09-13 | 2021-03-18 | ヤマハ発動機株式会社 | 変速装置および車両 |
| KR102360572B1 (ko) * | 2019-10-16 | 2022-02-10 | 오토딘시스 주식회사 | 신규한 구조의 회전축 어셈블리 |
| EP3916259B1 (en) * | 2019-10-16 | 2023-10-25 | Autodyn Sys Inc. | Rotary shaft assembly having novel structure |
| JP2021099146A (ja) * | 2019-12-23 | 2021-07-01 | ヤマハ発動機株式会社 | 変速装置および車両 |
| CN110920799B (zh) * | 2019-12-25 | 2020-10-09 | 台州春来机电有限公司 | 一种电动车动力装置 |
| US11692626B2 (en) | 2020-08-03 | 2023-07-04 | Dana Heavy Vehicle Systems Group, Llc | Methods and systems for a transmission shift assembly |
| CN113090753B (zh) * | 2021-03-31 | 2022-07-22 | 华为数字能源技术有限公司 | 换档机构、两档换档系统及车辆 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009197823A (ja) * | 2008-02-19 | 2009-09-03 | Yamaha Motor Co Ltd | 電子制御式変速装置およびそれを備えた鞍乗型車両 |
| JP2014059002A (ja) * | 2012-09-14 | 2014-04-03 | Yamaha Motor Co Ltd | 変速装置及び車両 |
| JP2014206233A (ja) * | 2013-04-12 | 2014-10-30 | ヤマハ発動機株式会社 | 自動変速機 |
| JP2015117798A (ja) * | 2013-12-19 | 2015-06-25 | ヤマハ発動機株式会社 | 変速装置、シフト機構及びこれを備える車輌 |
Family Cites Families (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4938835Y1 (ja) | 1970-06-17 | 1974-10-24 | ||
| JPS4844373Y1 (ja) | 1970-10-16 | 1973-12-20 | ||
| JPS4865961U (ja) * | 1971-11-29 | 1973-08-21 | ||
| JPS5628346A (en) | 1979-08-10 | 1981-03-19 | Yamaha Motor Co Ltd | Shift mechanism for speed change gear |
| JPS5666544A (en) * | 1979-11-05 | 1981-06-05 | Toyota Motor Corp | Speed change gear for vehicle |
| JPS59140127A (ja) * | 1983-01-31 | 1984-08-11 | Yamaha Motor Co Ltd | 自動三輪車等の変速装置 |
| JPH0121229Y2 (ja) * | 1984-10-01 | 1989-06-26 | ||
| JPH085378Y2 (ja) * | 1987-05-26 | 1996-02-14 | 本田技研工業株式会社 | トランスミッションのシフターギヤ |
| JPH03148391A (ja) * | 1990-04-30 | 1991-06-25 | Honda Motor Co Ltd | 鞍乗型車両 |
| JPH06123355A (ja) * | 1992-10-12 | 1994-05-06 | Suzuki Motor Corp | 自動二輪車の変速装置 |
| US5368145A (en) * | 1993-02-16 | 1994-11-29 | Eaton Corporation | Nonsynchronized positive clutch structure |
| DE19624774C2 (de) | 1996-06-21 | 2000-06-08 | Blw Praezisionsschmiede Gmbh | Kupplungsverzahnung in einem Schaltgetriebe |
| US6095004A (en) | 1997-09-13 | 2000-08-01 | Honda Giken Kogyo Kabushiki Kaisha | Shift control method for an electric-power-assist transmission |
| JPH11303991A (ja) * | 1998-04-20 | 1999-11-02 | Yamaha Motor Co Ltd | 車両のパーキングブレーキ装置 |
| JP4165779B2 (ja) | 1998-07-10 | 2008-10-15 | 本田技研工業株式会社 | 電動式変速装置における変速軸のニュートラル位置決定方法 |
| JP4170534B2 (ja) * | 1999-09-03 | 2008-10-22 | 本田技研工業株式会社 | 変速機 |
| JP2005042910A (ja) | 2003-07-10 | 2005-02-17 | Yamaha Motor Co Ltd | クラッチ断続装置及び車両 |
| US6880420B2 (en) * | 2003-08-22 | 2005-04-19 | Yen-Hsing Shen | Automatic control device for a motorized vehicle gearbox |
| JP4346483B2 (ja) * | 2004-03-25 | 2009-10-21 | 本田技研工業株式会社 | ツインクラッチ式変速機 |
| US20060027434A1 (en) | 2004-08-04 | 2006-02-09 | Capito Russell T | Positive clutch with staggered teeth height |
| JP4602026B2 (ja) * | 2004-08-10 | 2010-12-22 | 本田技研工業株式会社 | 車両用自動変速機を備えるエンジン |
| US20060090584A1 (en) * | 2004-11-04 | 2006-05-04 | Kwang Yang Motor Co., Ltd. | Gear shift assembly for all-terrain vehicles |
| FR2887604B1 (fr) * | 2005-06-23 | 2007-07-27 | Renault Sas | Agencement a clabots pour boite de vitesses a clabots |
| JP4698367B2 (ja) | 2005-09-30 | 2011-06-08 | 本田技研工業株式会社 | 変速機 |
| JP4762705B2 (ja) * | 2005-12-13 | 2011-08-31 | ヤマハ発動機株式会社 | 変速機構およびその変速機構を備える車両 |
| JP5121159B2 (ja) * | 2006-04-18 | 2013-01-16 | ヤマハ発動機株式会社 | 自動変速制御装置および車両 |
| JP5164337B2 (ja) * | 2006-04-18 | 2013-03-21 | ヤマハ発動機株式会社 | 自動変速制御装置および鞍乗型車両 |
| JP4832204B2 (ja) * | 2006-08-01 | 2011-12-07 | 本田技研工業株式会社 | 車両用変速装置のシフトドラム駆動装置 |
| JP4890186B2 (ja) * | 2006-09-29 | 2012-03-07 | 本田技研工業株式会社 | 車両用変速機 |
| JP4963058B2 (ja) | 2006-10-27 | 2012-06-27 | ヤマハ発動機株式会社 | 変速制御装置および車両 |
| US8096202B2 (en) * | 2006-11-22 | 2012-01-17 | Kyoto University | Transmission and gear changing method |
| EP1961994A3 (en) | 2007-01-23 | 2010-08-25 | Kanzaki Kokyukoki Mfg. Co., Ltd. | Working-vehicle transmission system |
| US7752936B2 (en) | 2007-03-06 | 2010-07-13 | Honda Motor Co., Ltd. | Automatic transmission assembly for a vehicle, and vehicle incorporating same |
| JP2009024790A (ja) * | 2007-07-20 | 2009-02-05 | Yamaha Motor Co Ltd | 変速操作装置 |
| JP4998728B2 (ja) * | 2007-09-28 | 2012-08-15 | 本田技研工業株式会社 | ツインクラッチ式変速装置 |
| EP2080884A3 (en) | 2008-01-16 | 2013-11-20 | Yamaha Hatsudoki Kabushiki Kaisha | Control system and saddle-straddling type vehicle including the same |
| JP5161644B2 (ja) | 2008-04-25 | 2013-03-13 | ヤマハ発動機株式会社 | 変速制御装置、鞍乗型車両、及び変速制御方法 |
| US8328686B2 (en) | 2008-09-29 | 2012-12-11 | Honda Motor Co., Ltd. | Shift controller |
| JP2010096190A (ja) | 2008-10-14 | 2010-04-30 | Daihatsu Motor Co Ltd | かみ合い式クラッチ装置 |
| JP5340106B2 (ja) | 2009-10-07 | 2013-11-13 | 川崎重工業株式会社 | 自動二輪車用動力伝達装置 |
| JP5557567B2 (ja) * | 2010-03-23 | 2014-07-23 | 本田技研工業株式会社 | 内燃機関の変速装置 |
| JP5658068B2 (ja) * | 2011-03-25 | 2015-01-21 | 富士重工業株式会社 | 変速装置 |
| JP2012215230A (ja) * | 2011-03-31 | 2012-11-08 | Honda Motor Co Ltd | ドグクラッチ式変速装置 |
| JP5197791B2 (ja) * | 2011-04-20 | 2013-05-15 | ヤマハ発動機株式会社 | 変速装置及び鞍乗型車両 |
| CN202195025U (zh) * | 2011-07-02 | 2012-04-18 | 王德刚 | 双齿轮滑动齿 |
| KR20130061788A (ko) * | 2011-12-02 | 2013-06-12 | 현대자동차주식회사 | 자동화 수동변속기 |
| JP2013217491A (ja) | 2012-03-14 | 2013-10-24 | Aisin Seiki Co Ltd | 自動変速機用ドグクラッチ |
| JP2014035063A (ja) | 2012-08-10 | 2014-02-24 | Yamaha Motor Co Ltd | 自動変速装置およびそれを備えた鞍乗型車両 |
| JP6212893B2 (ja) * | 2013-03-26 | 2017-10-18 | アイシン精機株式会社 | 自動変速機用ドグクラッチ制御装置 |
| JP6255980B2 (ja) * | 2013-12-20 | 2018-01-10 | スズキ株式会社 | 変速装置 |
| JP5840670B2 (ja) | 2013-12-27 | 2016-01-06 | 本田技研工業株式会社 | 変速制御装置 |
| JP6578833B2 (ja) | 2015-09-08 | 2019-09-25 | スズキ株式会社 | エンジンユニットを有する車両 |
-
2016
- 2016-08-10 EP EP16835233.4A patent/EP3336392A4/en not_active Ceased
- 2016-08-10 WO PCT/JP2016/073681 patent/WO2017026536A1/ja active Application Filing
- 2016-08-10 JP JP2017534500A patent/JP6807842B2/ja active Active
- 2016-08-10 WO PCT/JP2016/073680 patent/WO2017026535A1/ja active Application Filing
- 2016-08-10 WO PCT/JP2016/073679 patent/WO2017026534A1/ja active Application Filing
- 2016-08-10 EP EP16835234.2A patent/EP3336393B1/en active Active
- 2016-08-10 CN CN201680046491.0A patent/CN107923529B/zh active Active
- 2016-08-10 EP EP16835232.6A patent/EP3336391B1/en active Active
- 2016-08-10 EP EP23188981.7A patent/EP4296539A3/en active Pending
- 2016-08-10 JP JP2017534498A patent/JP6587687B2/ja active Active
- 2016-08-10 JP JP2017534501A patent/JP6426291B2/ja active Active
- 2016-08-10 WO PCT/JP2016/073682 patent/WO2017026537A1/ja active Application Filing
- 2016-08-10 BR BR112018000667-0A patent/BR112018000667B1/pt active IP Right Grant
- 2016-08-10 CN CN201680046487.4A patent/CN107923528B/zh active Active
-
2017
- 2017-12-29 US US15/858,184 patent/US11111986B2/en active Active
-
2018
- 2018-02-10 US US15/893,622 patent/US11187305B2/en active Active
- 2018-02-10 US US15/893,620 patent/US11137049B2/en active Active
-
2019
- 2019-09-30 JP JP2019179746A patent/JP2019215089A/ja not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009197823A (ja) * | 2008-02-19 | 2009-09-03 | Yamaha Motor Co Ltd | 電子制御式変速装置およびそれを備えた鞍乗型車両 |
| JP2014059002A (ja) * | 2012-09-14 | 2014-04-03 | Yamaha Motor Co Ltd | 変速装置及び車両 |
| JP2014206233A (ja) * | 2013-04-12 | 2014-10-30 | ヤマハ発動機株式会社 | 自動変速機 |
| JP2015117798A (ja) * | 2013-12-19 | 2015-06-25 | ヤマハ発動機株式会社 | 変速装置、シフト機構及びこれを備える車輌 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3336391A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107923529A (zh) | 2018-04-17 |
| WO2017026536A1 (ja) | 2017-02-16 |
| WO2017026534A1 (ja) | 2017-02-16 |
| EP3336392A4 (en) | 2018-07-25 |
| US20180187755A1 (en) | 2018-07-05 |
| US11137049B2 (en) | 2021-10-05 |
| CN107923529B (zh) | 2019-09-03 |
| EP3336391B1 (en) | 2021-12-22 |
| JP6587687B2 (ja) | 2019-10-09 |
| WO2017026537A1 (ja) | 2017-02-16 |
| EP3336393A1 (en) | 2018-06-20 |
| EP3336391A1 (en) | 2018-06-20 |
| JPWO2017026536A1 (ja) | 2018-05-31 |
| CN107923528A (zh) | 2018-04-17 |
| JP6807842B2 (ja) | 2021-01-06 |
| US11187305B2 (en) | 2021-11-30 |
| EP4296539A3 (en) | 2024-03-20 |
| BR112018000667A2 (ja) | 2018-09-18 |
| US20180119749A1 (en) | 2018-05-03 |
| JP6426291B2 (ja) | 2018-11-21 |
| JP2019215089A (ja) | 2019-12-19 |
| BR112018000667B1 (pt) | 2023-03-07 |
| JPWO2017026537A1 (ja) | 2018-05-31 |
| US20180187756A1 (en) | 2018-07-05 |
| US11111986B2 (en) | 2021-09-07 |
| EP3336392A1 (en) | 2018-06-20 |
| EP4296539A2 (en) | 2023-12-27 |
| EP3336393B1 (en) | 2019-10-02 |
| EP3336391A4 (en) | 2018-09-26 |
| JPWO2017026534A1 (ja) | 2018-04-26 |
| EP3336393A4 (en) | 2018-07-25 |
| CN107923528B (zh) | 2020-07-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017026535A1 (ja) | 変速装置 | |
| JP5707119B2 (ja) | トランスミッション | |
| JP4809843B2 (ja) | ツインクラッチ変速機用のセレクタドラム付きアクチュエータ構造体 | |
| JP2012127471A5 (ja) | ||
| JP4501986B2 (ja) | 手動変速機のギヤ鳴り防止装置 | |
| JP2003314635A (ja) | 自動変速機 | |
| JP5545778B2 (ja) | 変速機 | |
| JP2016070355A (ja) | 内燃機関の変速駆動機構 | |
| JP6251585B2 (ja) | トランスミッション | |
| JP5658068B2 (ja) | 変速装置 | |
| JP2007120549A (ja) | 自動変速機 | |
| JP2015135174A (ja) | 変速機 | |
| JP5439555B2 (ja) | 変速機 | |
| JP6068866B2 (ja) | 変速機 | |
| JP5658069B2 (ja) | 変速装置 | |
| JP6550820B2 (ja) | 車両の動力伝達制御装置 | |
| JP6756260B2 (ja) | ドグクラッチ機構 | |
| JP2005133877A (ja) | 車両用自動変速機 | |
| JP6178745B2 (ja) | 動力伝達装置 | |
| JP6018457B2 (ja) | 変速機 | |
| JP2003307257A (ja) | 車両用自動変速機 | |
| JP2019032083A (ja) | トランスミッション | |
| JP2015187485A (ja) | 動力伝達装置 | |
| JP2003307256A (ja) | 車両用自動変速機 | |
| JP2010107011A (ja) | 変速機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16835232 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016835232 Country of ref document: EP |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112018000667 Country of ref document: BR |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |
|
| ENP | Entry into the national phase |
Ref document number: 112018000667 Country of ref document: BR Kind code of ref document: A2 Effective date: 20180112 |