JP5582197B2 - 車両及びその操舵制御方法 - Google Patents
車両及びその操舵制御方法 Download PDFInfo
- Publication number
- JP5582197B2 JP5582197B2 JP2012546689A JP2012546689A JP5582197B2 JP 5582197 B2 JP5582197 B2 JP 5582197B2 JP 2012546689 A JP2012546689 A JP 2012546689A JP 2012546689 A JP2012546689 A JP 2012546689A JP 5582197 B2 JP5582197 B2 JP 5582197B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- straightness
- wheel
- vehicle
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 87
- 239000000725 suspension Substances 0.000 claims description 151
- 230000004044 response Effects 0.000 claims description 117
- 230000007935 neutral effect Effects 0.000 claims description 65
- 238000004364 calculation method Methods 0.000 claims description 36
- 238000001514 detection method Methods 0.000 claims description 31
- 230000007246 mechanism Effects 0.000 claims description 26
- 238000006073 displacement reaction Methods 0.000 claims description 15
- 238000012937 correction Methods 0.000 claims description 6
- 230000001934 delay Effects 0.000 claims description 4
- 230000008569 process Effects 0.000 description 74
- 238000006243 chemical reaction Methods 0.000 description 19
- 238000010586 diagram Methods 0.000 description 15
- 230000008859 change Effects 0.000 description 12
- 230000000694 effects Effects 0.000 description 11
- 238000012545 processing Methods 0.000 description 11
- 230000009467 reduction Effects 0.000 description 10
- 239000006096 absorbing agent Substances 0.000 description 8
- 230000035939 shock Effects 0.000 description 8
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000004043 responsiveness Effects 0.000 description 7
- 239000013256 coordination polymer Substances 0.000 description 6
- 230000033001 locomotion Effects 0.000 description 6
- IYLGZMTXKJYONK-ACLXAEORSA-N (12s,15r)-15-hydroxy-11,16-dioxo-15,20-dihydrosenecionan-12-yl acetate Chemical compound O1C(=O)[C@](CC)(O)C[C@@H](C)[C@](C)(OC(C)=O)C(=O)OCC2=CCN3[C@H]2[C@H]1CC3 IYLGZMTXKJYONK-ACLXAEORSA-N 0.000 description 5
- IYLGZMTXKJYONK-UHFFFAOYSA-N ruwenine Natural products O1C(=O)C(CC)(O)CC(C)C(C)(OC(C)=O)C(=O)OCC2=CCN3C2C1CC3 IYLGZMTXKJYONK-UHFFFAOYSA-N 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000000052 comparative effect Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000003381 stabilizer Substances 0.000 description 2
- 206010027336 Menstruation delayed Diseases 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000005201 scrubbing Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000001502 supplementing effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images






























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/18—Steering knuckles; King pins
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
Description
例えば、特許文献1に記載の技術では、キングピンを構成する上下ピボット点の転舵時における車両前後方向の動きを抑制するリンク配置とすることにより、操縦性・安定性を向上させることとしている。
本発明の課題は、車両におけるサスペンション装置の操縦性・安定性を向上させることである。
したがって、車両の操縦性・安定性を向上させることができる。
(第1実施形態)
(構成)
図1は、本発明の原理的構成である第1実施形態に係る自動車Cの構成を示す概略図である。
図1において、自動車1は、車体1Aを備えている。この車体1Aには、車輪WFR,WFL,WRR,WRLを支持するサスペンション装置1Bと、前輪側の転舵輪WFR及びWFLを操舵する操舵装置SSとが設けられている。
操舵装置SSは、ステアリング機構SMとこのステアリング機構に操舵補助力を与える電動パワーステアリング装置EPとを備えている。
入力側ステアリング軸SSiには、車両後方側の先端にステアリングホイールSWが装着されている。そして、入力側ステアリング軸SSi及び出力側ステアリング軸SSoは、車体1Aに回転可能に支持されており、互いにトーションバー(図示せず)を介して連結されている。
車両状態パラメータ取得部CPは、車輪速センサWFR〜WRLから出力される車輪の回転速度を示すパルス信号を基に車速を取得する。また、車両状態パラメータ取得部CPは、車速と各車輪の回転速度とを基に、各車輪のスリップ率を取得する。そして、車両状態パラメータ取得部CPは、取得した各パラメータを制御装置CSに出力する。
この転舵制御装置CTは、パワーステアリング制御部PCと直進性担保部SGとを備えている。パワーステアリング制御部PCは、操舵トルクTsと車速Vとに基づいて目標補助操舵トルクを算出し、算出した目標操舵補助トルクに基づいて電動アクチュエータEAを駆動する駆動電流を算出し、この駆動電流を電動アクチュエータEAに供給して電動アクチュエータEAを駆動制御する。
車輪WFR,WFL,WRR,WRLは、ホイールハブ機構WHにタイヤを取り付けて構成したものであり、サスペンション装置1Bを介して車体1Aに設置してある。これらのうち、転舵輪となる前輪(車輪WFR,WFL)は、タイロッド15によってナックルアームが揺動することにより、車体1Aに対する車輪WFR,WFLの向きが変化する。
図2から図4に示すように、サスペンション装置1Bは、ホイールハブ機構WHに取り付けられた車輪17FR,17FLを懸架しており、車輪17FR,17FLを回転自在に支持する車軸(アクスル)32を有するアクスルキャリア33、車体側の支持部から車体幅方向に配置されてアクスルキャリア33に連結する複数のリンク部材、及びコイルスプリング等のバネ部材34を備えている。
(ラック軸力成分の分析)
図5は、転舵時におけるラックストロークとラック軸力との関係を示す図である。
図5に示すように、ラック軸力成分には、主にタイヤの捻りトルクと、車輪の持ち上げトルクとが含まれ、これらのうち、タイヤの捻りトルクが支配的である。
したがって、タイヤの捻りトルクを小さくすることで、ラック軸力を低減することができることとなる。
図6は、転舵時におけるタイヤ接地面中心の軌跡を示す図である。
図6においては、転舵時におけるタイヤ接地面中心の移動量が大きい場合と小さい場合とを併せて示している。
上記ラック軸力成分の分析結果より、ラック軸力を低減するためには、転舵時のタイヤ捻りトルクを最小化することが有効である。
転舵時のタイヤ捻りトルクを最小化するためには、図6に示すように、タイヤ接地面中心の軌跡の変化をより小さくすれば良い。
即ち、タイヤ接地面中心とキングピン接地点を一致させることで、タイヤ捩りトルクを最小化できる。
具体的には、後述するようにキャスタートレイル0mm、スクラブ半径0mm以上のポジティスクラブとすることが有効である。
図7は、キングピン傾角とスクラブ半径とを軸とする座標において、ラック軸力の分布の一例を示す等値線図である。
図7においては、ラック軸力が小、中および大の3つの場合における等値線を例として示している。
タイヤ捻りトルク入力に対し、キングピン傾角が大きくなるほど、その回転モーメントが大きくなり、ラック軸力は大きくなる。したがって、キングピン傾角としては、一定の値より小さく設定することが望まれるが、スクラブ半径との関係から、例えばキングピン傾角15度以下とすると、ラック軸力を望ましいレベルまで小さくすることができる。
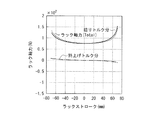
図8は、本実施形態に係るサスペンション装置1Bにおけるラック軸力の解析結果を示す図である。
図8に示す実線は、図2〜4に示すサスペンション構造において、キャスター角0度、キャスタートレイル0mm、スクラブ半径+10mmに設定した場合のラック軸力特性を示している。
なお、図8においては、サスペンション装置1Bと同方式の懸架構造で、キングピン軸に関する設定をステアバイワイヤ方式の操舵装置を備えていない構造に合わせて設定したときの比較例(破線)を併せて示している。
図8に示すように、上記検討結果に従って設定すると、ラック軸力は比較例に対し約30%低減することができる。
図10は、ポジティブスクラブとした場合のセルフアライニングトルクを説明する概念図である。この図10において、転舵時にタイヤ接地中心点(着力点)Oに車体の旋回外側に向かう遠心力が作用すると、この遠心力に抗するように旋回中心に向かう横力が発生する。なお、βは横すべり角である。
図10に示すように、タイヤに働く復元力(セルフアライニングトルク)は、キャスタートレイル、ニューマチックトレイルの和に比例して大きくなる。
そのため、ポジティブスクラブのスクラブ半径が大きければ大きいほど、転舵時にタイヤに働く復元力は大きくなる。
本実施形態においては、キャスター角を0に近づけることによる直進性への影響を、ポジティブスクラブとすることで低減するものである。
本出願人によれば、図2〜4に示すサスペンション装置1Bの構成において、上記検討結果に従い、キングピン傾角13.8度、キャスタートレイル0mm、スクラブ半径5.4mm(ポジティブスクラブ)、キャスター角5.2度、ホイールセンタの高さにおけるキングピンオフセット86mmとした場合、ラック軸力を約30%低減できることを確認している。
即ち、キングピンロアピボット点(仮想ピボットも含む)はホイールセンタ後方、キングピンアッパーピボット点(仮想ピボットも含む)はロアピボット点前方に位置する構成とする。
パワーステアリング制御部PCは、図11に示すように、目標補助トルク電流指令値演算部TOとアクチュエータ電流制御部ACとを備えている。目標補助トルク電流指令値演算部TOは、操舵トルクセンサTSで検出した操舵トルクTsと車速Vとに基づいて制御マップを参照して操舵トルクTsに応じた目標補助トルク電流指令値It*を算出し、算出した目標補助トルク電流指令値It*を、加算器ADに出力する。この加算器ADでは、目標補助トルク電流指令値It*に後述する直進性担保用電流指令値Isa*を加算して目標アクチュエータ電流Ia*を算出し、算出した目標アクチュエータ電流Ia*を減算器SBに出力する。この減算器SBにはアクチュエータ電流センサCSで検出される電動アクチュエータEAに供給されるアクチュエータ電流Iadがフィードバックされている。したがって、減算器SBで、目標アクチュエータ電流指令値Ia*からアクチュエータ電流Iadを減算して電流偏差ΔIを算出する。
一方、直進性担保部SGでは、セルフアライニングトルクTsaを算出し、算出したセルフアライニングトルクTsaに基づいてサスペンション装置1Bの直進性を担保する直進性担保用電流指令値Isa*を演算する。この直進性担保部SGの具体的構成は、左右の駆動輪駆動力を配分制御する駆動力制御装置DCから出力される左右輪の駆動力TR及びTLが入力されると共に、操舵トルクセンサSTで検出した操舵トルクTsが入力され、これらに基づいてセルフアライニングトルクTsaを算出する。また、直進性担保部SGでは、算出したセルフアライニングトルクTsaに所定電流ゲインKiを乗算して直進性担保用電流指令値Isa*(=Ki・Tsa)を算出する。
なお、セルフアライニングトルクTsaの算出は、上述したように左右の駆動力差ΔTに基づいて算出する場合に限らず、左右の制動力差に基づいて同様に算出することができる。また、セルフアライニングトルクTsの算出は、車両のヨーレートγを検出するヨーレートセンサ及び車両の横加速度Gyを検出する横加速度センサとを設け、車両の運動方程式に基づいてヨーレートの微分値と横加速度Gyとに基づいて横力Fyを算出し、この横力Fyにニューマチックトレイルεnを乗算することにより、算出することができる。さらには、ステアリングホイールSWの操舵角θsと、セルフアライニングトルクTsaとの関係を車速Vをパラメータとして実測するか又はシミュレーションによって算出した制御マップを参照して操舵角センサSAで検出した操舵角θsと車速Vとに基づいてセルフアライニングトルクTsaを算出することもできる。
この目標アクチュエータ電流指令値Ia*に基づいて電動アクチュエータEAが制御されるので、電動アクチュエータEAで、ステアリングホイールSWに伝達される操舵力に応じた操舵補助トルクに加えて、サスペンション装置1Bの直進性を担保する転舵トルクを発生し、これらを出力側ステアリング軸SSoに伝達する。
次に、本実施形態に係るサスペンション装置1Bの作用について説明する。
本実施形態に係るサスペンション装置1Bでは、キャスタートレイルがタイヤ接地面内に位置する設定としている。
例えば、キングピン軸の設定を、キャスター角0度、キャスタートレイル0mm、スクラブ半径0mm以上のポジティブスクラブとしている。また、キングピン傾角については、スクラブ半径をポジティブスクラブとできる範囲で、より小さい角度となる範囲(例えば15度以下)で設定する。
そのため、ラック軸力をより小さいものとできることから、キングピン軸KS周りのモーメントをより小さくでき、転舵アクチュエータ8の出力を低減することができる。また、より小さい力で車輪の向きを制御できる。即ち、操縦性・安定性の向上を図ることができる。このため、サスペンション装置1Bを構成する各リンク部材やラック軸の断面積を小さくすることができ、サスペンション装置1B自体を軽量化することができる。したがって、車両1も軽量化することができる。
以上のように、本実施形態に係るサスペンション装置1Bによれば、ステアリングホイールが中立位置にある状態で、キングピン軸がタイヤ接地面内を通るように設定しているため、キングピン軸周りのモーメントをより小さくすることができる。
なお、本実施形態において、第1リンク37、第2リンク38、ショックアブソーバ40が複数のリンク部材に対応する。また、第1リンク37および第2リンク38がロアアームに対応し、バネ部材34およびショックアブソーバ40がストラット部材に対応する。
(1)キングピン軸を、ステアリングホイールの中立位置で、タイヤ接地面内を通るように設定した。
これにより、キングピン軸周りのモーメントをより小さくすることができるため、より小さいラック軸力で転舵を行うことができると共に、より小さい力で車輪の向きを制御できる。
したがって、本実施形態では、サスペンション装置の軽量化を図りながら車両の操縦性・安定性を向上させることができる。
これにより、キングピン軸周りのモーメントをより小さくすることができるため、より小さいラック軸力で転舵を行うことができると共に、より小さい力で車輪の向きを制御できる。
したがって、本実施形態では、サスペンション装置の軽量化を図りながら操縦性・安定性を向上させることができる。
これにより、キング軸周りのモーメントを最小とすることができるため、さらに小さいラック軸力で転舵を行うことができると共に、より小さい力で車輪の向きを制御できる。
したがって、本実施形態では、サスペンション装置の軽量化を図りながら操縦性・安定性を向上させることができる。
したがって、例えば電動パワーステアリング装置における電動アクチュエータを利用して、本発明におけるキングピン軸の設定に対応する直進性担保制御を行うことができる。このため、本実施形態では、サスペンション装置の軽量化を図りながら、車両の操縦性・安定性の向上を図ることができる。
したがって、直進性担保部で、サスペンション装置の高応答性を確保することにより低下した直進性をセルフアライニングトルクで担保することができ、操縦・安定性を向上させることができる。
そのため、サスペンションを構成する部品点数をより少ないものとすることができ、本発明におけるキングピン軸の設定を容易に行うことが可能となる。
これにより、キングピン軸KS周りのモーメントをより小さくすることができるため、より小さいラック軸力で転舵を行うことができると共に、より小さい力で車輪の向きを制御できる。
したがって、本実施形態では、サスペンション装置の軽量化を図りながら、車両の操縦性・安定性を向上させることができる。
第1実施形態では、キングピン軸KSをステアリングホイールの中立位置でタイヤ接地面内を通るように設定し、またタイヤ接地面内にキャスタートレイルを設定するものとし、その一例として、キャスタートレイルをゼロに近い値とする場合について説明した。
これに対し、本応用例では、キングピン軸KSをステアリングホイールの中立位置で、タイヤ接地面中心とタイヤ接地面の前端までの範囲を通るように限定し、また、キャスタートレイルの設定条件をタイヤ接地面中心からタイヤ接地面の前端までの範囲に限定するものとする。
ステアリングホイールの中立位置でキングピン軸をタイヤ接地面中心からタイヤ接地面の前端までの範囲を通るように設定し、またキャスタートレイルをタイヤ接地面中心からタイヤ接地面の前端までに設定すると、直進性の確保と操舵操作の重さの低減を両立できる。即ち、上記構成では、サスペンション装置の軽量化を図りながら、車両の操縦性・安定性の向上を図ることができる。
第1実施形態においては、図7に示す座標平面において、一点鎖線で囲んだ領域を設定に適する領域として例に挙げた。これに対し、注目するラック軸力の等値線を境界線とし、その境界線が示す範囲より内側の領域(キングピン傾角の減少方向でスクラブ半径の増加方向)を設定に適する領域とすることができる。
(効果)
ラック軸力の最大値を想定して、その最大値以下の範囲にサスペンションジオメトリを設定することができる。
なお、上記第1の実施形態においては、転舵制御装置CTが、パワーステアリング制御部PCと直進性担保部SGとで構成される場合について説明した。しかしながら、本発明は、上記構成に限定されるものではなく、転舵制御装置CSとして、パワーステアリング制御部PCを省略して直進性担保部SGのみを設けるようにしてもよい。この場合には、図11の構成において、目標補助トルク電流指令値演算部TO及び加算器ADを省略して、直進性担保部SGから出力される直進性担保用電流指令値Isa*を直接減算器SBに入力するようにすれば良い。
次に、本発明の第2の実施形態を図14〜図19について説明する。
この第2の実施形態では、サスペンション装置1Bの構成をより具体的にしたものでマルチリンクサスペンションに本願を適用したものである。
すなわち、第2の実施形態では、説明を簡単にするために、左右の転舵輪17FL及び17FRのうち左側の転舵輪17FLについて具体的構成を説明する。
そして、アクスル部材81には、上下方向の中央部にアクスルシャフト86が挿通支持され、このアクスルシャフト86に転舵輪17FLが固定されている。
ロアアーム84は、図18に示すように、Aアームの構成を有し、中央部より車両後方側に軽量化を図るための開口部84aが形成されている。このため、ロアアーム84は前後方向に柔構造であり、車両幅方向に剛構造とされている。
また、アクスル部材81の車両後方側には、ストラットの後方側を通るタイロッド15が連結され、このタイロッド15の他端がラック軸14に連結されている。
そして、サスペンション装置1Bのストラットの上端部のアッパーピボット点P1及びロアアーム84のアクスル部材81を支持するロアピボット点P2を結ぶキングピン軸KSの傾角、キャスター角、キャスタートレイル、スクラブ半径、キングピンオフセット等については前述した第1の実施形態と同様に設定されている。
なお、サスペンション装置1Bとしては上述した第1及び第2の実施形態の構成に限定されるものではなく、図20(a)〜(c)に示す構成を有するサスペンション装置を適用するようにしてもよい。すなわち、このサスペンション装置は、転舵輪17FL及び17FRを支持するハブ100を装着したアクスル部材101の上端にストラット102を構成するショックアブソーバ103の下端部に装着されたブラケット104が固定されている。また、アクスル部材101の下端には、変形Aアーム構成を有するロアアーム105の車体外側取り付け部がボールジョイント106を介して固定されている。
さらに、アクスル部材101の車両後方側にタイロッド108を介してラック軸109が連結されている。
この第3の実施形態は、操舵装置としてステアバイワイヤシステムを備えた車両に本発明を適用したものであり、サスペンション装置の直進性をより確実に担保する構成とされている。
すなわち、図21において、自動車1は、車体1Aと、ステアバイワイヤシステムSBWとで構成されている。ステアバイワイヤシステムSBWは、ステアリングホイール2と、入力側ステアリング軸3と、操舵角センサ4と、操舵トルクセンサ5と、操舵反力アクチュエータ6と、操舵反力アクチュエータ角度センサ7と、転舵アクチュエータ8と、転舵アクチュエータ回転角度センサ9と、出力側ステアリング軸10と、転舵トルクセンサ11と、ピニオンギア12と、ピニオン角度センサ13と、ラック軸14と、タイロッド15と、タイロッド軸力センサ16と、車輪17FR,17FL,17RR,17RLと、車両状態パラメータ取得部21と、車輪速センサ24FR,24FL,24RR,24RLと、コントロール/駆動回路ユニット26と、メカニカルバックアップ27とを備えている。
入力側ステアリング軸3は、操舵反力アクチュエータ6を備えており、ステアリングホイール2から入力された操舵入力に対し、操舵反力アクチュエータ6による操舵反力を加える。
操舵トルクセンサ5は、入力側ステアリング軸3に設置してあり、入力側ステアリング軸3の回転トルク(即ち、ステアリングホイール2への操舵入力トルク)を検出する。そして、操舵トルクセンサ5は、検出した入力側ステアリング軸3の回転トルクをコントロール/駆動回路ユニット26に出力する。
操舵反力アクチュエータ角度センサ7は、操舵反力アクチュエータ6の回転角度(即ち、操舵反力アクチュエータ6に伝達した操舵入力による回転角度)を検出し、検出した回転角度をコントロール/駆動回路ユニット26に出力する。
転舵アクチュエータ回転角度センサ9は、転舵アクチュエータ8の回転角度(即ち、転舵アクチュエータ8が出力した転舵のための回転角度)を検出し、検出した回転角度をコントロール/駆動回路ユニット26に出力する。
転舵トルクセンサ11は、出力側ステアリング軸10に設置してあり、出力側ステアリング軸10の回転トルク(即ち、ラック軸14を介した車輪17FR,17FLの転舵トルク)を検出する。そして、転舵トルクセンサ11は、検出した出力側ステアリング軸10の回転トルクをコントロール/駆動回路ユニット26に出力する。
ピニオン角度センサ13は、ピニオンギア12の回転角度(即ち、ラック軸14を介して出力される車輪17FR,17FLの転舵角度)を検出し、検出したピニオンギア12の回転角度をコントロール/駆動回路ユニット26に出力する。
タイロッド15は、ラック軸14の両端部と車輪17FR,17FLのナックルアームとを、ボールジョイントを介してそれぞれ連結している。
タイロッド軸力センサ16は、ラック軸14の両端部に設置されたタイロッド15それぞれに設置してあり、タイロッド15に作用している軸力を検出する。そして、タイロッド軸力センサ16は、検出したタイロッド15の軸力をコントロール/駆動回路ユニット26に出力する。
コントロール/駆動回路ユニット26は、自動車1全体を制御するものであり、各部に設置したセンサから入力する信号を基に、入力側ステアリング軸3の操舵反力、前輪の転舵角、あるいはメカニカルバックアップ27の連結について、各種制御信号を、操舵反力アクチュエータ6、転舵アクチュエータ8、あるいはメカニカルバックアップ27等に出力する。
また、コントロール/駆動回路ユニット26には、前述したように、操舵トルクセンサ5で検出する入力側ステアリング軸3の操舵トルクTsと、車両状態パラメータ取得部21で取得した車速Vと、操舵反力アクチュエータ角度センサ7で検出した操舵反力アクチュエータ6の回転角θmiと、転舵アクチュエータ回転角度センサ9で検出した転舵アクチュエータ8の回転角θmoとが入力されている。さらに、コントロール/駆動回路ユニット26には、車輪速センサ24FR〜24RLで検出した各車輪の回転速度を表すパルス信号が入力されている。
目標転舵角演算部51は、車速V及び操舵角センサ4で検出した操舵角θsが入力され、これらに基づいて目標転舵角δ*を算出する。
Δfl=af・TL …………(1)
Δfr=af・TR …………(2)
遅延制御部56は、図22に示すように、操舵開始検出部56a、単安定回路56b、ゲイン調整部56c及び乗算器56dを有する。
また、単安定回路56bは操舵開始検出部56aから出力される操舵開始信号に基づいて所定の遅延時間例えば0.1秒の間オン状態となる制御開始遅延信号をゲイン調整部56cに出力する。
乗算器56dでは、直進性担保部SGから出力される直進性担保制御値δaが入力され、この直進性担保制御値δaに制御ゲインGaを乗算し、乗算結果を目標転舵角演算部51からの目標転舵角δ*が入力された加算器56eに供給する。
転舵モータ制御部59は、入力される角度偏差Δδが零となるようにアクチュエータ8を構成する転舵モータ8aの目標駆動電流im*を算出し、算出した目標駆動電流im*を電流偏差演算部60に出力する。
モータ電流制御部62は、入力される電流偏差Δiが零となるように、すなわち、実モータ駆動電流imrが目標駆動電流im*に追従するようにフィードバック制御し、実モータ駆動電流imrを転舵モータ8aに出力する。
次に、上記第3の実施形態の動作を図24及び図25を伴って説明する。
今、ステアリングホイール2を中立位置に保持して直進走行しているものとする。
この直進走行状態では、目標転舵角演算部51で演算される目標転舵角δ*が零となる。このとき、ステアリングホイール2が中立位置を保持しているので、左右の駆動輪となる転舵輪17FL及び17FRの駆動力又は制動力が等しくなる。このため、転舵角制御部52で前記(1)式及び(2)式で算出されるコンプライアンスステアによる転舵輪17FL及び17FRの舵角の変位量Δfl及びΔfrは等しい値となる。このため、コンプライアンスステア補正量Acは変位量Δflから変位量Δfr減算した値であるので、コンプライアンスステア補正量Acは零となる。
また、車両の直進走行状態で、外乱補償部54で外乱を検出していない場合には、直進性担保部SGで算出される直進性担保制御値δaが零となり、目標転舵角演算部51から出力される目標転舵角δ*も零となるので、加算器56eから出力される加算後目標転舵角δ*も零となる。
このため、単安定回路56bから所定時間例えば0.1秒間オン状態となる制御遅延信号がゲイン調整部56cに出力される。したがって、ゲイン調整部56cで、制御遅延信号がオン状態を継続している間制御ゲインGaが“0”に設定される。このため、乗算器56dから出力される乗算出力は“0”となり、直進性担保制御値δaの加算器56eへの出力が停止される。
このため、操舵角センサ4で検出した操舵角θsが目標転舵角演算部51に供給され、この目標転舵角演算部51で演算された目標転舵角δ*がそのまま転舵角偏差演算部58に供給される。このため、目標転舵角δ*に一致するように転舵モータ8aが回転駆動される。この間、直進性担保部SGにおける直進性担保制御が停止される。
このとき、サスペンション装置1Bのキャスター角が零に設定されている。このキャスター角と転舵応答性と操縦安定性との関係は、図24(a)に示すように、キャスター角が零であるときには転舵応答性が高い状態をとなるが、操縦安定性を確保することはできない、すなわち、キャスター角に対する転舵応答性と操縦安定性とはトレードオフの関係が存在する。
この初期応答期間T1では、サスペンション装置1Bは、上述したように、キャスター角が零あり、操縦応答性が高いので、図25(a)で実線図示の特性線L1で示すように、一点鎖線図示の特性線L2で示す一般的なステアバイワイヤ形式の操舵系を有する車両における転舵応答特性(ヨーレイト)より高い転舵応答特性(ヨーレイト)とすることができる。このとき、運転者のステアリングホイール2の操舵による操舵角変化に対応した転舵角変化となるので、運転者に違和感を与えることはない。
したがって、第3の実施形態でも、より小さいラック軸力で転舵を行うことができると共に、より小さい力で車輪の向きを制御できるため、転舵応答性を向上させることができる。
このステップS5では、前述した目標転舵角演算部51と同様に車速Vと操舵角θsに基づいて目標転舵角δ*を算出する。
次いで、ステップS9に移行して、目標転舵角δ*と、コンプライアンスステア制御値Acと、セルフアライニングトルク制御値Asaと、外乱補償値Adisとに基づいて下記(3)式の演算を行って加算後目標転舵角δ*aを算出する。
δ*a=δ*+Ga(Ac+Asa+Adis) …………(3)
また、ステップS2の判定結果が操舵開始状態であるときにはステップS11に移行して、制御フラグFを“1”にセットしてからステップS12に移行する。さらに、ステップS3の判定結果が、制御フラグFが“1”にセットされているときに直接ステップS12に移行する。
また、ステップS12の判定結果が、所定の遅延時間(例えば0.1秒)が経過したときには、ステップS14に移行して、制御フラグFを“0”にリセットしてから前記ステップS4に移行して、制御ゲインGaを“1”に設定する。
この図22の処理において、ステップS5の処理が目標転舵角演算部51に対応し、ステップS6の処理が転舵角制御部52に対応し、ステップS7の処理が直進性補完部53に対応し、ステップS5〜S7の処理が直進性担保部に対応しステップS2〜S4、S11〜S14の処理が遅延制御部56に対応し、ステップS2〜14の処理が転舵応答性設定部SRSに対応している。
(1)ステアリングホイールの操舵状態に応じてアクチュエータを作動させて転舵輪を転舵する転舵制御装置と、前記転舵輪を車体に支持するサスペンション装置とを備えている。サスペンション装置は、ステアリングホイールが中立位置にあるときに、キングピン軸の路面接地点をタイヤ接地面内に位置させるように設定されている。また、前記転舵制御部は、前記サスペンション装置の直進性を担保する直進性担保部を備えている。
したがって、転舵応答性を向上させることができる。このとき、キャスター角を零近傍の値とすることにより、転舵応答性をより高めたサスペンション装置を構成することができる。
また、直進性担保部を転舵アクチュエータとアクチュエータ制御装置とを備えたステアバイワイヤシステムで構成するようにしているので、直進性担保部を独立して設ける必要がなく、構成を簡略化することができる。
しかも、直進性担保部としては、転舵応答特性設定部SRSの直進性担保部SGが主直進性担保部となり、アクチュエータ制御装置63が副直進性担保部となるので、双方の直進性担保部によって、サスペンション装置の直進性を確実に担保することができる。
したがって、サスペンション装置を構成するロアアームの車体側支持部に介挿したブッシュの剛性を低下させることが可能となり、車両の乗心地を向上させることができる。
したがって、直進性担保部で、サスペンション装置の高応答性を確保することにより低下した直進性をセルフアライニングトルクで担保することができ、操縦・安定性を向上させることができる。
これにより、転舵開始初期にサスペンション装置の高い転舵応答特性を確保し、初期設定時間経過後に直進性担保部で前記転舵アクチュエータの前記サスペンション装置自体の直進性を担保する制御を行うことができ、理想的な転舵応答特性を得ることができる。
したがって、サスペンション装置を高い転舵応答特性とし、サスペンション装置の直進性を直進性担保部で担保することで、理想的な転舵応答特性を確保することができる。
このため、遅延制御部で、直進性担保部による直進性担保制御の開始を遅らせるので、初期転舵応答特性をサスペンション装置自体の高転舵応答性とすることができる。
これにより、ゲイン調整部で、例えば直進性担保制御における直進性担保制御値に対するゲインを“0”に設定することにより、直進性担保制御を行わず、ゲインを“0”より大きい値例えば“1”に設定することにより、直進性担保制御を開始することができる。このため、ゲイン調整部を設けることにより、直進性担保制御の開始の調整を容易に行うことができる。
したがって、初期転舵応答特性をサスペンション装置自体の高転舵応答特性を有効に利用することができ、0.1秒の初期期間が経過した後に直進性担保部による直進性担保制御を開始させて、理想的な転舵応答特性を得ることができる。
このため、制御開始時点で直ちに転舵角制御や直進性補完によって転舵応答特性を調整することができる。
このため、制御開始時点で転舵応答特性の変化を滑らかにして運転者に実際の操舵感覚と異なる感触を与えることを抑制することができる。
これにより、キングピン軸周りのモーメントをより小さくすることができるため、より小さいラック軸力で転舵を行うことができると共に、より小さい力で車輪の向きを制御できる。
そのため、部品点数をより少ないものとすることができ、本発明におけるキングピン軸の設定を容易に行うことが可能となる。
したがって、ステアリングホイールを中立位置から操舵したときに、サスペンション装置の高転舵応答特性と直進性担保部による直進性担保制御による転舵応答性の調整とによって理想的な転舵応答特性を得ることができる。
なお、上記第3の実施形態においては、外乱補償部54を直進性担保部SGに設けた場合について説明した。しかしながら本発明は、上記構成に限定されるものではなく、図27に示すように、外乱補償部54を直進性担保部SGから独立させ、この外乱補償部54から出力される外乱補償値Adisを加算器56eから出力される加算後目標転舵角δ*aに加算器57で加算するようにしてもよい。この場合には、常時目標転舵角δ*に対して外乱補償値Adisを加算するので、操舵開始状態であるか否かに関わらず常時外乱の影響を抑制することができる。
ここで、直進性補償部111の一の構成としては、転舵アクチュエータ回転角度センサ9で検出する転舵アクチュエータ8の回転角θmoに基づいて実転舵角を算出し、算出した実転舵角に基づいて予め設定された実転舵角と直進性補償値Ascとの関係を表す制御マップを参照して実転舵角に応じた直進性補償値Ascを算出する。
さらに、直進性補償部111のさらに他の構成としては、転舵アクチュエータ回転角度センサ9で検出する転舵アクチュエータ8の回転角θmoに基づいて実転舵角を算出し、算出した実転舵角が中立位置を中心とする所定値以下の範囲内である場合に、予め設定された一定値の直進性補償値Ascを加算後目標転舵角δ*aに加算器57で加算する。
次に、本発明の第4の実施形態を図29について説明する。
この第4の実施形態では、第3の実施形態における遅延制御部56の構成を変更したものである。
すなわち、第4の実施形態では、遅延制御部56を図29に示すように構成されている。この遅延制御部56は、操舵開始検出部56aと、加算器56eと、選択部56gと、ゲイン調整部56hとを備えている。
ここで、第1のゲイン調整部56h及び第2のゲイン調整部56iで設定するゲインについては、0〜1の範囲に限らずサスペンション装置1Bの特性に応じて任意の値に設定することができる。
このように、第4の実施形態によっても、ステアリングホイール2が中立状態を維持している状態から右又は左に操舵する操舵開始時に、ゲイン調整部56hで初期応答期間T1となる例えば0.1秒の間に直進性担保制御値δaの加算器56eへの出力を停止する。その後、初期応答期間T1が経過した後に直進性担保制御値δaの加算器56eへの出力を開始する。このため、前述した第3の実施形態と同様の作用効果を得ることができる。
なお、上記第4の実施形態においては、操舵開始検出部56aで操舵開始状態を検出してから次にステアリングホイール2の中立状態を検出するまで、操舵開始検出信号Sssをオン状態とする場合について説明した。しかしながら、本発明は、上記構成に限定されるものではなく、操舵開始検出部56aで、前述した第3の実施形態と同様に、操舵開始状態を検出したときにパルス状の操舵開始検出信号Sssを出力する場合には、第3の実施形態と同様に、例えば操舵開始検出時点から後期応答期間T3が終了する迄の間オン状態となる操舵開始検出部56a及び選択部56g間に単安定回路を介挿する。これにより、操舵開始時から後期応答期間T3が終了するまでの間選択部56gの可動端子tcを常開固定端子tb側に切り換えておくようにしてもよい。
このステップS25では、前述した目標転舵角演算部51と同様に車速Vと操舵角θsに基づいて目標転舵角δ*を算出する。
次いで、ステップS29に移行して、下記(4)式にしたがって目標転舵角δ*と、コンプライアンスステア制御値Ac、セルフアライニングトルク制御値Asa、外乱補償値Adisの加算値に制御ゲインGaを乗算した値とを加算して加算後目標転舵角δ*aを算出する。
δ*a=δ*+Ga(Ac+Asa+Adis) …………(4)
また、ステップS22の判定結果が操舵開始状態であるときにはステップS31に移行して、制御フラグFを“1”にセットしてからステップS32に移行する。さらに、ステップS23の判定結果が、制御フラグFが“1”にセットされているときに直接ステップS32に移行する。
また、ステップS32の判定結果が、遅延時間が経過したときには、ステップS34に移行して、制御フラグFを“0”にリセットしてから前記ステップS25に移行し、ステップS32の判定結果が、遅延時間が経過していないときには、直接ステップS25に移行する。
なお、上記第3及び第4の実施形態では、ステアリングホイール2が中立位置を保持している状態で、右又は左に操舵が開始されたときに、目標転舵角δ*に直進性担保制御値δaを加算する直進性担保制御を停止する場合について説明した。しかしながら、本発明では、上記に限定されるものではなく、図31に示すように、操舵周波数によって目標転舵角δ*に加算する直進性担保制御を行うか否かを判定して、転舵応答性を調整する転舵応答性調整処理を行うようにしてもよい。
一方、前記ステップS43の判定結果が、F<Fthであるときには、高転舵応答性を必要とせず、操縦安定性が必要であると判断してステップS46に移行して、目標転舵角δ*を算出し、次いでステップS47に移行して、コンプライアンスステア制御値Acを算出し、次いでステップS48に移行して、セルフアライニングトルク制御値Ascを算出する。
さらに、本発明は自動車に適用する場合に限らず、転舵装置を有する他の車両にも適用することができる。
転舵アクチュエータ角度センサ、10 出力側ステアリング軸、11 転舵トルクセンサ、12 ピニオンギア、13 ピニオン角度センサ、14 ラック軸、15 タイロッド、17FR,17FL,17RR,17RL 車輪、21 車両状態パラメータ取得部、24FR,24FL,24RR,24RL 車輪速センサ、26 コントロール/駆動回路ユニット、27 メカニカルバックアップ、32 車軸、33 アクスルキャリア、34 バネ部材、37 第1リンク、38 第2リンク、40 ショックアブソーバ 41 スタビライザ、50 転舵制御部、51 目標転舵角演算部、52 転舵角制御部、53 直進性補完部、54 外乱補償部、55 加算器、56 遅延制御部、56a 操舵開始検出部、56b 単安定回路、56c ゲイン調整部、56d 乗算器、56e 加算器、56g 選択部、56h ゲイン調整部、 57 加算器、58 転舵角偏差演算部、59 転舵モータ制御部、60 電流偏差演算部、61 モータ電流検出部、62 モータ電流制御部、63 アクチュエータ制御装置 81 アクスル部材、84 ロアアーム、86 アクスルシャフト、90 サブフレーム、91 アーム取り付け部、101 アクスル部材、102 ストラット、103 ショックアブソーバ、105 ロアアーム、108 タイロッド、109 ラック軸、111 直進性補償部、SS 操舵装置、SM ステアリング機構、EP 電動パワーステアリング装置、SW ステアリングホイール、SSi 入力側ステアリング軸、SSo 操舵角センサ、TS 操舵トルクセンサ、EA 電動転舵アクチュエータ、RS アクチュエータ回転角度センサ、CT 転舵制御装置、PC パワーステアリング制御部、SG 直進性担保部、CP 車両状態パラメータ取得部、PG ピニオンギア、LS ラック軸、TR タイロッド、WFR,WFL,WRR,WRL 車輪、WSFR,WSFL,WSRR,WSRL 車輪速センサ
Claims (31)
- ステアリングホイールの操舵状態に応じてアクチュエータを作動させて転舵輪を転舵する転舵制御装置と、
前記転舵輪を支持するホイールハブ機構と当該ホイールハブ機構を車体に支持するリンク部材とを有するサスペンション装置とを備え、
前記リンク部材のアッパーピボット点とロアピボット点とを通るキングピン軸を前記ステアリングホイールの中立位置でタイヤ接地面内を通るように設定し、
前記転舵制御装置は、
車両の直進性を担保するためのセルフアライニングトルクを前記転舵輪の転舵状態から算出し、
前記アクチュエータを作動させて前記セルフアライニングトルクを転舵輪に付与する
ことを特徴とする車両。 - 前記キングピン軸は、前記タイヤ接地面内におけるタイヤ接地面中心とタイヤ接地面の前端との間を通るように設定したことを特徴とする請求項1に記載の車両。
- 前記キングピン軸は、前記タイヤ接地面内におけるタイヤ接地面中心近傍を通るように設定したことを特徴とする請求項2に記載の車両。
- 前記サスペンション装置は、前記キングピン軸のキャスタートレイルが、前記タイヤ接地面内に位置することを特徴とする請求項1から3のいずれか1項に記載の車両。
- 前記キングピン軸のキャスタートレイルが路面と交差する交点が、タイヤ接地面中心とタイヤ接地面の前端との間に位置することを特徴とする請求項4記載の車両。
- ステアリングホイールの操舵状態に応じてアクチュエータを作動させて転舵輪を転舵する転舵制御装置と、
前記転舵輪を支持するホイールハブ機構と当該ホイールハブ機構を車体に支持するリンク部材とを有するサスペンション装置とを備え、
前記リンク部材のアッパーピボット点とロアピボット点とを通るキングピン軸を前記ステアリングホイールの中立位置でタイヤ接地面内を通るように設定し、
前記キングピン軸で決まるサスペンションジオメトリをポジティブスクラブ領域に設定し、
前記転舵制御装置は、
車両の直進性を担保するためのセルフアライニングトルクを前記転舵輪の転舵状態から算出し、前記アクチュエータを作動させて前記セルフアライニングトルクを転舵輪に付与する
ことを特徴とする車両。 - ステアリングホイールを操舵したときの操舵角の変位を検出し、検出結果に基づいて転舵アクチュエータを作動させて当該ステアリングホイールと機械的に分離された転舵輪を転舵するステアバイワイヤシステムからなる転舵制御装置と、
前記転舵輪を車体に支持するリンク部材を有するサスペンション装置とを備え、
前記リンク部材のアッパーピボット点とロアピボット点とを通るキングピン軸を前記ステアリングホイールの中立位置でタイヤ接地面内を通るように設定し、
前記転舵制御装置は、車両の直進性を担保するためのセルフアライニングトルクを算出し、算出したセルフアライニングトルクに基づいて前記転舵アクチュエータを作動させる直進性担保部を備えている
ことを特徴とする車両。 - ステアリングホイールの操舵状態に応じてアクチュエータを作動させて転舵輪を転舵する転舵制御装置と、
前記転舵輪を車体に支持するサスペンション装置とを備え、
前記サスペンション装置は、タイヤを取り付けるタイヤホイールを支持するホイールハブ機構及び当該ホイールハブ機構を車体に支持する複数のリンク部材を含み、前記リンク部材のアッパーピボット点とロアピボット点とを通るキングピン軸を前記ステアリングホイールの中立位置でタイヤ接地面内を通るように設定し、
前記転舵制御装置は、車両の直進性を担保する直進性担保部と、
前記ステアリングホイールを中立位置から操舵を開始したときに、前記直進性担保部による直進性担保制御を調整して初期転舵応答性を前記サスペンション装置自体の転舵応答性に設定する転舵応答性設定部とを備え、
前記直進性担保部は、前記ステアリングホイールを操舵したときの操舵角の変位を検出し、検出結果に基づいて転舵輪を転舵させる転舵アクチュエータと該転舵アクチュエータを制御するアクチュエータ制御装置とを備えたステアバイワイヤシステムで構成されている
ことを特徴とする車両。 - 前記キングピン軸は、前記タイヤ接地面内におけるタイヤ接地面中心とタイヤ接地面の前端との間を通るように設定したことを特徴とする請求項7又は8に記載の車両。
- 前記キングピン軸は、前記タイヤ接地面内におけるタイヤ接地面中心近傍を通るように設定したことを特徴とする請求項9に記載の車両。
- 前記サスペンション装置は、前記キングピン軸のキャスタートレイルが、前記タイヤ接地面内に位置することを特徴とする請求項7から10のいずれか1項に記載の車両。
- 前記キングピン軸のキャスタートレイルが路面と交差する交点が、タイヤ接地面中心とタイヤ接地面の前端との間に位置することを特徴とする請求項11に記載の車両。
- 前記サスペンション装置は、前記キングピン軸の傾角とスクラブ半径とで決まるサスペンションジオメトリをポジティブスクラブ領域に設定したことを特徴とする請求項7から12のいずれか1項に記載の車両。
- 前記直進性担保部は、セルフアライニングトルクを算出して車両の直進性を担保することを特徴とする請求項8から13のいずれか1項に記載の車両。
- 前記直進性担保部は、車両の転舵輪の転舵状態に基づいてセルフアライニングトルクを算出し、車両の直進性を担保することを特徴とする請求項8から14のいずれか1項に記載の車両。
- 前記直進性担保部は、算出したセルフアライニングトルクにゲインを乗算して直進性担保用指令値を算出することを特徴とする請求項14または15に記載の車両。
- 前記転舵制御装置は、コンプライアンスステアを推定して転舵輪の変位補正を行う転舵角制御部を有することを特徴とする請求項7から16のいずれか1項に記載の車両。
- 前記転舵制御装置は、前記ステアリングホイールを中立位置から操舵を開始したときに、初期転舵状態では、前記サスペンション装置自体の転舵応答性で高い転舵応答性を設定し、前記初期転舵状態を経過した転舵状態であるときに、前記直進性担保部による直進性担保制御によって必要とする転舵応答性を設定すること特徴とする請求項7から17のいずれか1項に記載の車両。
- 前記転舵応答性設定部は、前記ステアリングホイールを中立位置から操舵したときに、
前記直進性担保部による直進性担保制御を遅らせる遅延制御部を備えていることを特徴とする請求項8から18のいずれか1項に記載の直進性担保部を備えた車両。 - 前記遅延制御部は、前記直進性担保部による直進性担保制御の開始を調整するゲイン調整部を有することを特徴とする請求項19に記載の車両。
- 前記遅延制御部は、直進性担保部による直進性担保制御を前記ステアリングホイールが中立位置を保持している状態から右又は左に操舵した操舵開始タイミングから0.1秒遅延させた後に開始させることを特徴とする請求項19に記載の車両。
- 前記遅延制御部は、前記直進性担保部による直進性担保制御を開始させる場合に、前記直進性担保制御をステップ状に開始させることを特徴とする請求項19から21のいずれか1項に記載の車両。
- 前記遅延制御部は、前記直進性担保部による直進性担保制御を開始させる場合に、前記直進性担保制御を徐々に開始させることを特徴とする請求項20から22のいずれか1項に記載の車両。
- 前記転舵制御装置は、操舵角に応じた目標転舵角を演算する目標転舵角演算部と、該目標転舵角演算部で演算した目標転舵角に前記直進性担保部の直進性担保制御値を加える加算器と、該加算器の加算出力と前記転舵アクチュエータを構成する転舵モータの回転角度とを一致させるモータ指令電流を形成する転舵モータ制御部と、前記モータ指令電流に一致する前記転舵モータに供給するモータ駆動電流を形成する電流制御部とを備えていることを特徴とする請求項7から23のいずれか1項に記載の車両。
- ステアリングホイールの操舵状態に応じて当該ステアリングホイールと機械的に分離された転舵輪を、アクチュエータを作動して転舵するステアバイワイヤシステムからなる転舵制御装置と、
前記転舵輪を取り付けるタイヤホイールを支持するホイールハブ機構と当該ホイールハブ機構を車体に支持するリンク部材とを有するサスペンション装置とを備え、
前記サスペンション装置は、リンク部材のアッパーピボット点とロアピボット点とを通るキングピン軸を前記ステアリングホイールの中立位置でタイヤ接地面内を通るように設定し、
前記転舵制御装置を、
前記転舵輪の転舵状態に基づき車両の直進性を担保するためのセルフアライニングトルクを算出し直進性を担保する指令値を算出する主直進性担保部と、
運転者の操舵角と転舵輪の転舵角とに基づき直進性を担保する指令値を算出する副直進性担保部とで構成し、
前記主直進性担保部及び前記副直進性担保部からの指令値により前記アクチュエータを作動させる
ことを特徴とする車両。 - ステアリングホイールの操舵状態に応じてアクチュエータを作動させて転舵輪を転舵する転舵制御装置と、
前記転舵輪を車体に支持するサスペンション装置とを備え、
前記サスペンション装置は、タイヤを取り付けるタイヤホイールを支持するホイールハブ機構及び当該ホイールハブ機構を車体に支持する複数のリンク部材を含み、
前記リンク部材のアッパーピボット点とロアピボット点とを通るキングピン軸を前記ステアリングホイールの中立位置でタイヤ接地面内を通るように設定し、
前記転舵制御装置は、
前記アクチュエータを作動させて転舵輪にセルフアライニングのための復元力を発生することで転舵輪を転舵し、車両の直進性を担保する
ことを特徴とする車両。 - ステアリングホイールの操舵状態に応じてステアリングホールと機械的に分離された転舵輪をアクチュエータを作動して転舵するステアバイワイヤシステムからなる転舵制御装置と、
前記転舵輪を取り付けるタイヤホイールを支持するホイールハブ機構と当該ホイールハブ機構を車体に支持するリンク部材とを有するサスペンション装置とを備え、
該サスペンション装置はリンク部材のアッパーピボット点とロアピボット点とを通るキングピン軸を前記ステアリングホイールの中立位置でタイヤ接地面内を通るように設定し、
前記転舵制御装置は、
前記転舵輪にセルフアライニングのための復元力を発生する
ことを特徴とする車両。 - ステアリングホイールの操舵状態に応じてステアリングホールと機械的に分離された転舵輪を、アクチュエータを作動して転舵するステアバイワイヤシステムからなる転舵制御装置と、
前記転舵輪を車体に支持するリンク部材とを有するサスペンション装置とを備え、
該サスペンション装置はリンク部材のアッパーピボット点とロアピボット点とを通るキングピン軸を前記ステアリングホイールの中立位置でタイヤ接地面内を通るように設定し、
前記転舵制御装置は、
車両の直進性を担保するためのセルフアライニングトルクを前記転舵輪の転舵状態から算出し、
算出したセルフアライニングトルクに基づき前記アクチュエータを作動させて転舵輪に復元力を付与する
ことを特徴とする車両。 - 転舵輪を車体に支持する複数のリンク部材からなるサスペンション装置のキングピン軸をステアリングホイールの中立位置でタイヤ接地面内を通るように設定した転舵輪の制御方法であって、
ステアリングホイールの操舵状態に応じてアクチュエータにより前記転舵輪を転舵すると共に、
ステアリングホイール中立位置での前記転舵輪の転舵状態から車両の直進性を担保するセルフアライニングトルクを算出し、
算出したセルフアライニングトルクに基づき前記アクチュエータを作動させて前記転舵輪に車両の直進性を担保するセルフアライニング力を付与し前記転舵輪を転舵する
ことを特徴とする車両の操舵制御方法。 - タイヤを取り付けるタイヤホイールを支持するホイールハブ機構及び当該ホイールハブ機構を車体に支持する複数のリンク部材を含むサスペンション装置を、前記リンク部材のアッパーピボット点とロアピボット点とを通るキングピン軸をステアリングホイールの中立位置でタイヤ接地面内を通るように設置した転舵輪の制御方法であって、
ステアバイワイヤシステムによって、前記ステアリングホイールを操舵したときの操舵角の変位を検出し、検出結果に基づいて転舵輪を転舵させる転舵アクチュエータを制御すると共に、
前記ステアリングホイール中立位置での前記転舵輪の転舵状態から車両の直進性を担保するセルフアライニングトルクを算出し、
算出したセルフアライニングトルクに基づき、前記転舵アクチュエータを作動させて前記転舵輪に車両の直進性を担保するセルフアライニング力を付与し前記転舵輪を転舵し、且つ
前記ステアリングホイールを中立位置から操舵を開始したときに、転舵開始初期に前記サスペンション装置自体の転舵応答性を初期転舵応答特性とし、初期設定時間経過後に前記転舵アクチュエータの前記サスペンション装置自体の直進性を担保する制御を開始する
ことを特徴とする車両の操舵制御方法。 - 前記初期設定時間は0.1秒に設定されていることを特徴とする請求項30に記載の車両の操舵制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012546689A JP5582197B2 (ja) | 2010-11-29 | 2011-11-25 | 車両及びその操舵制御方法 |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010265680 | 2010-11-29 | ||
| JP2010265680 | 2010-11-29 | ||
| JP2011232879 | 2011-10-24 | ||
| JP2011232879 | 2011-10-24 | ||
| JP2012546689A JP5582197B2 (ja) | 2010-11-29 | 2011-11-25 | 車両及びその操舵制御方法 |
| PCT/JP2011/006586 WO2012073469A1 (ja) | 2010-11-29 | 2011-11-25 | 車両及びその操舵制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2012073469A1 JPWO2012073469A1 (ja) | 2014-05-19 |
| JP5582197B2 true JP5582197B2 (ja) | 2014-09-03 |
Family
ID=46171443
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012546689A Expired - Fee Related JP5582197B2 (ja) | 2010-11-29 | 2011-11-25 | 車両及びその操舵制御方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US9499193B2 (ja) |
| EP (1) | EP2647548B1 (ja) |
| JP (1) | JP5582197B2 (ja) |
| CN (1) | CN103228522B (ja) |
| BR (1) | BR112013007663A2 (ja) |
| CA (1) | CA2819349C (ja) |
| MX (1) | MX352872B (ja) |
| RU (1) | RU2533854C1 (ja) |
| WO (1) | WO2012073469A1 (ja) |
Families Citing this family (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6261172A (ja) * | 1985-09-11 | 1987-03-17 | Agency Of Ind Science & Technol | 3次元文字表示方式 |
| MX355011B (es) | 2011-03-16 | 2018-03-28 | Nissan Motor | Dispositivo de suspensión para vehículo, método de ajuste de geometria para el mismo, y el automóvil. |
| JP6136136B2 (ja) * | 2012-07-20 | 2017-05-31 | 日産自動車株式会社 | 車両用転舵装置 |
| WO2014013682A1 (ja) * | 2012-07-20 | 2014-01-23 | 日産自動車株式会社 | 車両用サスペンション装置、これを使用した自動車および転舵制御方法 |
| JP6094206B2 (ja) * | 2012-12-20 | 2017-03-15 | 日産自動車株式会社 | 車両用サスペンション装置 |
| DE102014200100B4 (de) * | 2013-01-15 | 2018-04-05 | Ford Global Technologies, Llc | Lenkwinkelfehlerkorrektur |
| US9896122B2 (en) * | 2013-04-08 | 2018-02-20 | Mitsubishi Electric Corporation | Steering control device, and steering control method |
| JP6135278B2 (ja) * | 2013-04-24 | 2017-05-31 | 日産自動車株式会社 | 車両 |
| US9487231B2 (en) * | 2013-11-26 | 2016-11-08 | Steering Solutions Ip Holding Corporation | Tie rod force sensing systems and methods |
| JP2015160504A (ja) * | 2014-02-27 | 2015-09-07 | 株式会社ジェイテクト | 車両用操舵装置、当該装置の故障判定方法、及び転舵モータの制御方法 |
| US9199667B2 (en) * | 2014-03-14 | 2015-12-01 | Mitsubishi Electric Research Laboratories, Inc. | System and method for semi-autonomous driving of vehicles |
| CN103978862B (zh) * | 2014-05-06 | 2015-12-02 | 东南大学 | 一种轮毂电机独立驱动电动汽车的前悬架装置 |
| WO2016105316A1 (en) * | 2014-12-24 | 2016-06-30 | Arslan Mehmet Selçuk | Steering feel generating system for steer-by-wire systems |
| EP3090907B1 (en) * | 2015-05-05 | 2020-08-12 | Volvo Car Corporation | Secondary steering system unit, secondary steering system, vehicle and a method for secondary steering |
| CN104866667A (zh) * | 2015-05-22 | 2015-08-26 | 上海外高桥造船有限公司 | 深水半潜式钻井平台的振动噪声的全频预报方法 |
| JP6112275B1 (ja) * | 2015-06-26 | 2017-04-12 | 日本精工株式会社 | 電動パワーステアリング機構を用いた運転支援制御装置 |
| JP6657757B2 (ja) * | 2015-10-15 | 2020-03-04 | 株式会社ジェイテクト | 操舵制御装置 |
| JP6259797B2 (ja) * | 2015-10-22 | 2018-01-10 | 本田技研工業株式会社 | 車両走行制御装置 |
| US20170190355A1 (en) * | 2016-01-04 | 2017-07-06 | GM Global Technology Operations LLC | Wheel alignment monitoring |
| US20230090923A1 (en) * | 2016-04-05 | 2023-03-23 | Faiveley Transport Italia S.P.A. | Vehicle control system |
| US10351162B1 (en) * | 2016-07-19 | 2019-07-16 | Apple Inc. | Suspension architecture for steer-by-wire vehicle |
| CN107661634B (zh) * | 2016-07-27 | 2019-11-01 | 北京小米移动软件有限公司 | 控制车辆转向的方法、装置及车辆 |
| CA3041177C (en) * | 2016-10-13 | 2021-08-31 | Nissan Motor Co., Ltd. | Self position estimation method and self position estimation device |
| US10501112B2 (en) * | 2016-11-14 | 2019-12-10 | Ford Global Technologies, Llc | Steering system with active compensation for road disturbances |
| US10787192B1 (en) | 2017-04-11 | 2020-09-29 | Apple Inc. | Steer-by-wire system with multiple steering actuators |
| JP2019043412A (ja) * | 2017-09-04 | 2019-03-22 | トヨタ自動車株式会社 | インホイールモータユニットとストラット式サスペンション装置との連結構造 |
| US10507867B2 (en) * | 2017-09-19 | 2019-12-17 | GM Global Technology Operations LLC | Method and system for generating steering commands to cancel out unwanted steering moments |
| JP2019131013A (ja) * | 2018-01-30 | 2019-08-08 | 株式会社ジェイテクト | 操舵制御装置 |
| CN110550011B (zh) * | 2018-05-31 | 2021-11-12 | 比亚迪股份有限公司 | 制动力估算方法、装置、存储介质及车辆 |
| US11697418B2 (en) * | 2018-09-06 | 2023-07-11 | Waymo Llc | Road friction and wheel slippage assessment for autonomous vehicles |
| US10926633B2 (en) | 2018-11-28 | 2021-02-23 | Dana Heavy Vehicle Systems Group, Llc | Method of controlling a tandem axle assembly |
| DE102018132865A1 (de) * | 2018-12-19 | 2020-06-25 | Thyssenkrupp Ag | Verfahren zur Bestimmung eines Lenkgefühls eines Steer-by-Wire-Lenksystems |
| DE102019104392B4 (de) | 2019-02-21 | 2020-12-03 | Schaeffler Technologies AG & Co. KG | Kraftfahrzeug mit angetriebenen Rädern auf mehreren Achsen und Verfahren zu dessen Steuerung |
| JP7445387B2 (ja) * | 2019-02-27 | 2024-03-07 | 株式会社ジェイテクト | 操舵制御装置 |
| WO2020198443A1 (en) * | 2019-03-26 | 2020-10-01 | The Penn State Research Foundation | Friction estimation for steering maneuvers for stationary or slow-rolling automobiles |
| KR102138687B1 (ko) * | 2019-05-27 | 2020-07-28 | 주식회사 센트랄 | 스트러트 현가장치 |
| CN112238896B (zh) * | 2019-07-18 | 2021-10-22 | 上海燧方智能科技有限公司 | 车用转向方法、系统、行驶机构的转向方法及行驶机构 |
| JP7234962B2 (ja) * | 2020-02-11 | 2023-03-08 | トヨタ自動車株式会社 | 転舵装置およびそれが設けられたステアリングシステム |
| DE112021001905T5 (de) * | 2020-03-27 | 2023-01-05 | Horiba, Ltd. | Fahrzeugtestsystem, lenkreaktionskraft-eingabevorrichtung und verfahren zum auswerten einer lenkfunktion |
| JP7342808B2 (ja) * | 2020-06-30 | 2023-09-12 | トヨタ自動車株式会社 | 車輪配設モジュール |
| US11691612B2 (en) | 2021-02-12 | 2023-07-04 | Dana Heavy Vehicle Systems Group, Llc | Systems and methods for disconnecting tandem axles |
| DE102021105174B3 (de) * | 2021-03-04 | 2022-03-31 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren und Vorrichtung zur Spurregelung eines Fahrzeugs |
| US11685427B2 (en) | 2021-04-12 | 2023-06-27 | Toyota Material Handling, Inc. | Electric actuator steering system for forklifts |
| CN113656994B (zh) * | 2021-07-02 | 2023-06-27 | 岚图汽车科技有限公司 | 一种汽车悬置系统的悬置力获取方法及装置 |
| US11999417B2 (en) | 2021-11-29 | 2024-06-04 | Volvo Car Corporation | Steering angle control using haptic controller |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63166610A (ja) * | 1986-12-27 | 1988-07-09 | Honda Motor Co Ltd | 操舵輪の懸架装置 |
| JPH0357709A (ja) * | 1989-07-25 | 1991-03-13 | Mitsubishi Motors Corp | 車両の操舵車輪用サスペンション |
| JP2008265489A (ja) * | 2007-04-19 | 2008-11-06 | Nsk Ltd | 電動パワーステアリング装置 |
Family Cites Families (61)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2979148A (en) | 1957-11-27 | 1961-04-11 | Gen Motors Corp | Vehicle steering system with oscillation damping |
| US3240285A (en) | 1962-08-16 | 1966-03-15 | Clark Equipment Co | Power steering system |
| US3485506A (en) | 1967-03-06 | 1969-12-23 | John J Melbar | Vehicle steering apparatus |
| JPS59148158A (ja) | 1983-02-14 | 1984-08-24 | Victor Co Of Japan Ltd | 走査針の電極保護装置 |
| JPS60151181A (ja) | 1984-01-18 | 1985-08-09 | Honda Motor Co Ltd | 可変キヤスタ−装置 |
| DE3507141A1 (de) | 1985-02-28 | 1986-09-04 | Bayerische Motoren Werke AG, 8000 München | Radaufhaengung fuer lenkbare raeder, insbesondere vorderraeder, von kraftfahrzeugen |
| JP2528307B2 (ja) | 1987-03-20 | 1996-08-28 | 本田技研工業株式会社 | 操舵輪の懸架装置 |
| US4951199A (en) * | 1987-11-16 | 1990-08-21 | Whitehead John C | Steering stabilizing method and apparatus for suppressing the weave mode |
| JPH02204173A (ja) | 1989-02-01 | 1990-08-14 | Nissan Motor Co Ltd | 車両の後輪操舵装置 |
| JPH03279009A (ja) | 1990-03-29 | 1991-12-10 | Nissan Motor Co Ltd | サスペンション装置 |
| JPH04108083A (ja) | 1990-08-28 | 1992-04-09 | Toyota Motor Corp | 操舵制御装置 |
| JPH05169941A (ja) | 1991-12-17 | 1993-07-09 | Mazda Motor Corp | 車両のサスペンション装置 |
| US5754966A (en) | 1995-08-10 | 1998-05-19 | Unisia Jecs Corporation | Method and apparatus for steering rear wheel for four wheel steering vehicle |
| US5941338A (en) * | 1996-08-01 | 1999-08-24 | Michelin Recherche Et Technique S.A. | Vehicle steering correction system |
| JP3076541B2 (ja) | 1997-11-04 | 2000-08-14 | 本田技研工業株式会社 | 操向車輪制御構造 |
| EP1108638B1 (en) * | 1999-12-13 | 2003-08-27 | Kayaba Industry Co., Ltd. | Power steering |
| US20040046350A1 (en) | 2001-05-21 | 2004-03-11 | Wagner Engineering, Llc | Method and apparatus for suspending a vehicular wheel assembly |
| JP3847179B2 (ja) * | 2002-01-31 | 2006-11-15 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| US6655494B2 (en) * | 2002-04-19 | 2003-12-02 | Delphi Technologies, Inc. | Active front steering actuator and method for controlling a vehicle |
| JP3950729B2 (ja) | 2002-04-23 | 2007-08-01 | アイシン精機株式会社 | 車両の運動制御装置 |
| JP3868848B2 (ja) | 2002-05-23 | 2007-01-17 | 三菱電機株式会社 | 車両状態検出装置 |
| US6786296B2 (en) * | 2002-05-30 | 2004-09-07 | Bayerische Motoren Werke Aktiengesellschaft | Back-drivable steer-by-wire system with positive scrub radius |
| US7233850B2 (en) | 2002-10-31 | 2007-06-19 | Koyo Seiko Co., Ltd. | Vehicle steering apparatus |
| DE102004014555A1 (de) | 2004-03-25 | 2005-12-22 | Zf Friedrichshafen Ag | Radaufhängung für ein lenkbares Fahrzeugrad |
| DE102004014556A1 (de) * | 2004-03-25 | 2006-02-09 | Zf Friedrichshafen Ag | Radaufhängung für ein lenkbares Fahrzeug |
| US7441788B2 (en) * | 2004-07-09 | 2008-10-28 | Bombardier Recreational Products Inc. | Front drive geometry for an all-terrain vehicle |
| JP4432709B2 (ja) | 2004-10-01 | 2010-03-17 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| JP4367383B2 (ja) | 2005-07-08 | 2009-11-18 | トヨタ自動車株式会社 | 車両の操舵アシスト装置 |
| JP2007038976A (ja) | 2005-08-05 | 2007-02-15 | Nissan Motor Co Ltd | 車両用サスペンション装置 |
| JP2007118672A (ja) | 2005-10-26 | 2007-05-17 | Toyota Motor Corp | 前輪用サスペンション装置 |
| US7222431B1 (en) | 2006-02-03 | 2007-05-29 | Gilson, Inc. | Alignment correction system and methods of use thereof |
| JP2007237840A (ja) | 2006-03-07 | 2007-09-20 | Nissan Motor Co Ltd | 操舵制御装置、自動車及び操舵制御方法 |
| DE102006025558A1 (de) | 2006-06-01 | 2007-12-06 | Zf Friedrichshafen Ag | Querlenker für eine Radaufhängung |
| EP1864886A2 (en) * | 2006-06-07 | 2007-12-12 | NSK Ltd. | Electric power steering apparatus |
| JP2008018924A (ja) | 2006-06-12 | 2008-01-31 | Nissan Motor Co Ltd | サスペンション装置 |
| JP5088531B2 (ja) * | 2006-12-21 | 2012-12-05 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP4495739B2 (ja) * | 2007-02-16 | 2010-07-07 | 本田技研工業株式会社 | 操舵システム |
| JP5105149B2 (ja) | 2007-04-18 | 2012-12-19 | アイシン精機株式会社 | 駐車支援装置 |
| EP1992549B1 (en) * | 2007-05-18 | 2012-07-25 | GM Global Technology Operations LLC | Method for determining an absolute rotational position of a Vehicle Steering Column |
| JP2009090762A (ja) | 2007-10-05 | 2009-04-30 | Nissan Motor Co Ltd | サスペンション装置 |
| JP5251067B2 (ja) | 2007-10-16 | 2013-07-31 | 株式会社アドヴィックス | 車両の操舵制御装置 |
| DE102007047790A1 (de) | 2007-11-15 | 2009-05-20 | Zf Friedrichshafen Ag | Einzelradaufhängung |
| DE102007047787A1 (de) * | 2007-11-15 | 2009-05-20 | Zf Friedrichshafen Ag | Einzelradaufhängung |
| DE102007047791A1 (de) | 2007-11-15 | 2009-05-20 | Zf Friedrichshafen Ag | Einzelradaufhängung |
| DE102007047789A1 (de) | 2007-11-15 | 2009-05-20 | Zf Friedrichshafen Ag | Einzelradaufhängung |
| DE102007047792A1 (de) | 2007-11-15 | 2009-05-20 | Zf Friedrichshafen Ag | Einzelradaufhängung |
| DE102007047786A1 (de) | 2007-11-15 | 2009-05-20 | Zf Friedrichshafen Ag | Einzelradaufhängung für ein lenkbares Fahrzeugrad einer angetriebenen Fahrzeugachse |
| DE102007047788A1 (de) | 2007-11-15 | 2009-05-20 | Zf Friedrichshafen Ag | Einzelradaufhängung |
| US7914020B2 (en) | 2008-01-31 | 2011-03-29 | Roy Boston | Vehicle suspension system with a variable camber system |
| JP5314670B2 (ja) * | 2008-03-12 | 2013-10-16 | 本田技研工業株式会社 | 車両のトー角制御装置 |
| JP2009248649A (ja) | 2008-04-02 | 2009-10-29 | Nissan Motor Co Ltd | サスペンション装置 |
| JP5407171B2 (ja) * | 2008-04-15 | 2014-02-05 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP2010047193A (ja) * | 2008-08-25 | 2010-03-04 | Honda Motor Co Ltd | 転舵輪用の懸架装置 |
| JP2010058588A (ja) * | 2008-09-02 | 2010-03-18 | Honda Motor Co Ltd | 操舵装置 |
| JP5038997B2 (ja) * | 2008-09-02 | 2012-10-03 | 本田技研工業株式会社 | 車両用操舵装置 |
| DE102008044103A1 (de) | 2008-11-27 | 2010-06-02 | Zf Friedrichshafen Ag | Radaufhängung für ein lenkbares Fahrzeugrad, insbesondere eines Nutzkraftfahrzeuges |
| JP5217963B2 (ja) | 2008-11-28 | 2013-06-19 | 日産自動車株式会社 | フロント・サスペンション装置 |
| SE533784C2 (sv) * | 2009-05-20 | 2011-01-11 | Scania Cv Ab | Styrservosystem |
| CN102470888B (zh) * | 2009-07-02 | 2013-11-20 | Ntn株式会社 | 线控转向式掌舵装置 |
| CN101716954B (zh) * | 2009-11-24 | 2011-12-21 | 深圳职业技术学院 | 各轮独立转向及驱动的电动汽车及其转向与驱动控制方法 |
| MX355011B (es) | 2011-03-16 | 2018-03-28 | Nissan Motor | Dispositivo de suspensión para vehículo, método de ajuste de geometria para el mismo, y el automóvil. |
-
2011
- 2011-11-25 US US13/989,908 patent/US9499193B2/en active Active
- 2011-11-25 JP JP2012546689A patent/JP5582197B2/ja not_active Expired - Fee Related
- 2011-11-25 WO PCT/JP2011/006586 patent/WO2012073469A1/ja active Application Filing
- 2011-11-25 CA CA2819349A patent/CA2819349C/en not_active Expired - Fee Related
- 2011-11-25 CN CN201180057133.7A patent/CN103228522B/zh not_active Expired - Fee Related
- 2011-11-25 RU RU2013129770/11A patent/RU2533854C1/ru not_active IP Right Cessation
- 2011-11-25 BR BR112013007663-1A patent/BR112013007663A2/ja active Search and Examination
- 2011-11-25 EP EP11844970.1A patent/EP2647548B1/en not_active Not-in-force
- 2011-11-25 MX MX2013004251A patent/MX352872B/es active IP Right Grant
-
2013
- 2013-09-18 US US14/030,503 patent/US9994249B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63166610A (ja) * | 1986-12-27 | 1988-07-09 | Honda Motor Co Ltd | 操舵輪の懸架装置 |
| JPH0357709A (ja) * | 1989-07-25 | 1991-03-13 | Mitsubishi Motors Corp | 車両の操舵車輪用サスペンション |
| JP2008265489A (ja) * | 2007-04-19 | 2008-11-06 | Nsk Ltd | 電動パワーステアリング装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| MX352872B (es) | 2017-12-13 |
| EP2647548A4 (en) | 2018-01-10 |
| US9499193B2 (en) | 2016-11-22 |
| CN103228522A (zh) | 2013-07-31 |
| CA2819349A1 (en) | 2012-06-07 |
| JPWO2012073469A1 (ja) | 2014-05-19 |
| CA2819349C (en) | 2016-10-25 |
| US20130245890A1 (en) | 2013-09-19 |
| BR112013007663A2 (ja) | 2018-05-02 |
| US9994249B2 (en) | 2018-06-12 |
| MX2013004251A (es) | 2013-05-30 |
| CN103228522B (zh) | 2016-05-25 |
| RU2533854C1 (ru) | 2014-11-20 |
| EP2647548B1 (en) | 2019-09-11 |
| WO2012073469A1 (ja) | 2012-06-07 |
| EP2647548A1 (en) | 2013-10-09 |
| US20140014433A1 (en) | 2014-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5582197B2 (ja) | 車両及びその操舵制御方法 | |
| JP5910747B2 (ja) | 車両用サスペンション装置、これを使用した自動車および転舵制御方法 | |
| WO2012124272A1 (ja) | 車両用サスペンション装置、そのジオメトリ調整方法及び自動車 | |
| US11014600B2 (en) | Leaning vehicle | |
| JP5900643B2 (ja) | 操舵制御装置 | |
| JP5403182B2 (ja) | 自動車および転舵輪の転舵制御方法 | |
| JP6135278B2 (ja) | 車両 | |
| JP6136136B2 (ja) | 車両用転舵装置 | |
| JP6051846B2 (ja) | 車両用リヤサスペンション装置 | |
| JP6094206B2 (ja) | 車両用サスペンション装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140328 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140617 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140630 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5582197 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |