JP4367383B2 - 車両の操舵アシスト装置 - Google Patents
車両の操舵アシスト装置 Download PDFInfo
- Publication number
- JP4367383B2 JP4367383B2 JP2005200520A JP2005200520A JP4367383B2 JP 4367383 B2 JP4367383 B2 JP 4367383B2 JP 2005200520 A JP2005200520 A JP 2005200520A JP 2005200520 A JP2005200520 A JP 2005200520A JP 4367383 B2 JP4367383 B2 JP 4367383B2
- Authority
- JP
- Japan
- Prior art keywords
- gain
- steering
- electric motor
- steering angle
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
Description
まず、第1制御例について図面を用いて詳しく説明すると、図2は、この第1制御例に係る電子制御ユニット24の機能ブロック図である。目標電流値決定部BL1が、操舵トルクセンサ21および車速センサ23によってそれぞれ検出された操舵トルクTおよび車速Vを用いて目標電流値テーブルを参照し、操舵トルクTおよび車速Vに応じて変化する目標電流値I*を決定する。この目標電流値テーブルは、電子制御ユニット24内のROMに予め記憶されており、図3に示すように、複数の代表的な車速値ごとに、操舵トルクTの増加に従って非線形増加する複数の目標電流値I*を記憶している。この目標電流値I*は、同一の操舵トルクTに対して、車速Vが低いほど大きい。なお、この目標電流値テーブルを利用するのに代えて、操舵トルクTおよび車速Vに応じて変化する目標電流値I*を関数により予め定義しておき、同関数を利用して目標電流値I*を計算するようにしてもよい。
次に、第2制御例について説明すると、この第2制御例に係る電子制御ユニット24の機能ブロック図は図8に示されている。この図8の機能ブロック図は、図2の機能ブロック図に対して、PIゲイン設定部BL6の前段に操舵角判定部BL8が追加されている。また、この図8のPIゲイン設定部BL6は前記図2の機能ブロック図のPIゲイン設定部BL6とは異なる機能を有するが、その他の部分に関しては図2の機能ブロック図の場合と同じであるので、前記第1制御例とは異なる部分についてのみ説明して、その他の部分に関しては説明を省略する。
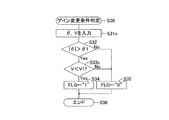
次に、第3制御例について説明すると、この第3制御例に係る電子制御ユニット24の機能ブロック図は図12に示されている。この図12の機能ブロック図は、第2制御例に関する図8の機能ブロック図の操舵角判定部BL8が操舵速度演算部BL9およびゲイン変更条件判定部BL10に変更されている。PIゲイン設定部BL6を含む他の部分に関しては、図8の機能ブロック図の場合と同じであるので、前記第2制御例とは異なる部分についてのみ説明して、その他の部分に関しては説明を省略する。
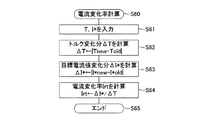
次に、第4制御例について説明すると、この第4制御例に係る電子制御ユニット24の機能ブロック図は図16に示されている。この図16の機能ブロック図は、第3制御例に関する図12の機能ブロック図の操舵速度演算部BL9を省略して、ゲイン変更条件判定部BL10には、操舵速度ωに代えて電流センサ25aによって検出された電動モータ15に流れる実電流値Iが入力されている。その他の部分に関しては、図12の機能ブロック図の場合と同じであるので、前記第3制御例とは異なる部分についてのみ説明して、その他の部分に関しては説明を省略する。
次に、第5制御例について説明すると、この第5制御例に係る電子制御ユニット24の機能ブロック図は図18に示されている。この図18の機能ブロック図は、第3制御例に関する図12の機能ブロック図の操舵速度演算部BL9に代えて電流変化率計算部BL11を用い、ゲイン変更条件判定部BL10には、操舵速度ωに代えて電流変化率計算部BL11によって計算された電流変化率Irtが入力されている。その他の部分に関しては、図12の機能ブロック図の場合と同じであるので、前記第3制御例とは異なる部分についてのみ説明して、その他の部分に関しては説明を省略する。
次に、第6制御例について説明すると、この第6制御例に係る電子制御ユニット24の機能ブロック図は図21に示されている。この図21の機能ブロック図は、第3制御例に関する図12の機能ブロック図の操舵速度演算部BL9を省略して、ゲイン変更条件判定部BL10には、操舵速度ωに代えて車速センサ23によって検出された車速Vが入力されている。その他の部分に関しては、図12の機能ブロック図の場合と同じであるので、前記第3制御例とは異なる部分についてのみ説明して、その他の部分に関しては説明を省略する。
上記実施形態のその他の変形例について図面を用いて説明すると、図23ないし図28は上記第1ないし第6制御例の変形例に係る機能ブロックを示している。これらの各機能ブロック図においては、図2、図8、図12、図16、図18および図21に示した第1ないし第6制御例の機能ブロックの各PIゲイン設定部BL6の後段にローパスフィルタ処理部BL12がそれぞれ接続されている。これらのローパスフィルタ処理部BL12は、PIゲイン設定部BL6に設定されるPゲインKpおよびIゲインKiを順次入力して、入力したこれらのPゲインKpおよびIゲインKiにそれぞれローパルフィルタ処理を施してPゲイン制御部BL4およびIゲイン制御部BL5にそれぞれ出力する。
Claims (13)
- 操舵ハンドルの回動操作による操舵輪の操舵に対してアシスト力を付与する電動モータを有し、前記電動モータの実制御量をフィードバックして前記電動モータが目標制御量に従って作動するようにフィードバック制御するようにした車両の操舵アシスト装置において、
前記電動モータの目標制御量と前記電動モータの実制御量との差に応じた制御信号のゲインを制御して前記電動モータに供給するゲイン制御部と、
操舵ハンドルの操舵角を検出する操舵角検出手段と、
前記操舵角検出手段によって検出された操舵角が大きいとき、同操舵角が小さいときに比べて前記制御信号のゲインを大きくなる側に変更して、前記フィードバック制御における応答性が低いために発生する異音を減少させるゲイン変更手段とを設けたことを特徴とする車両の操舵アシスト装置。 - 請求項1に記載した車両の操舵アシスト装置において、
前記ゲイン制御部は、前記電動モータの目標制御量と前記電動モータの実制御量との差に比例した制御信号、および前記電動モータの目標制御量と前記電動モータの実制御量との差を積分した制御信号のうちの少なくともいずれか一方の制御信号のゲインを制御する車両の操舵アシスト装置。 - 請求項1または2に記載した車両の操舵アシスト装置において、
前記電動モータの目標制御量は、前記電動モータに流される目標電流値であり、かつ
前記電動モータの実制御量は、電流センサによって検出される前記電動モータに流れている実電流値である車両の操舵アシスト装置 - 請求項1ないし3のうちのいずれか一つに記載した車両の操舵アシスト装置において、さらに
操舵ハンドルに付与される操舵トルクを検出する操舵トルク検出手段と、
車速を検出する車速検出手段と、
前記検出された操舵トルクおよび車速に応じて前記電動モータの目標制御量を決定する目標制御量決定手段とを備えた車両の操舵アシスト装置。 - 操舵ハンドルの回動操作による操舵輪の操舵に対してアシスト力を付与する電動モータを有し、前記電動モータの実制御量をフィードバックして前記電動モータが目標制御量に従って作動するようにフィードバック制御するようにした車両の操舵アシスト装置において、
前記電動モータの目標制御量と前記電動モータの実制御量との差に応じた制御信号のゲインを制御して前記電動モータに供給するゲイン制御部と、
操舵ハンドルの操舵角を検出する操舵角検出手段と、
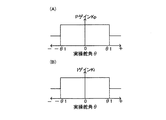
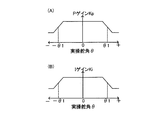
前記操舵角検出手段によって検出された操舵角が所定操舵角よりも大きくなると、前記制御信号のゲインを第1のゲインから第2のゲインに変更するゲイン変更手段と、
操舵ハンドルの操舵速度を検出する操舵速度検出手段と、
前記操舵速度検出手段によって検出された操舵速度が所定操舵速度よりも小さいとき前記ゲイン変更手段による制御信号のゲインの変更を許容し、同検出された操舵速度が前記所定操舵速度以上であるとき前記ゲイン変更手段による制御信号のゲインの変更を禁止するゲイン変更制御手段とを設けた車両の操舵アシスト装置。 - 請求項5に記載した車両の操舵アシスト装置において、
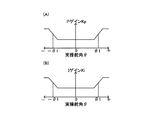
前記操舵角検出手段によって検出された操舵角および前記操舵速度検出手段によって検出された操舵速度の変化に応じた、前記ゲイン変更手段および前記ゲイン変更制御手段による制御信号のゲインの変更制御に対して、ヒステリシス特性をもたせた車両の操舵アシスト装置。 - 操舵ハンドルの回動操作による操舵輪の操舵に対してアシスト力を付与する電動モータを有し、前記電動モータの実電流値をフィードバックして前記電動モータが目標電流値に従って作動するようにフィードバック制御するようにした車両の操舵アシスト装置において、
操舵ハンドルに付与される操舵トルクを検出する操舵トルク検出手段と、
車速を検出する車速検出手段と、
前記検出された操舵トルクおよび車速に応じて前記電動モータの目標電流値を決定する目標電流値決定手段であって、前記検出された車速の増加に従って減少する前記電動モータの目標電流値を決定する目標電流値決定手段と、
前記電動モータの目標電流値と前記電動モータの実電流値との差に応じた制御信号のゲインを制御して前記電動モータに供給するゲイン制御部と、
操舵ハンドルの操舵角を検出する操舵角検出手段と、
前記操舵角検出手段によって検出された操舵角が所定操舵角よりも大きくなると、前記制御信号のゲインを第1のゲインから第2のゲインに変更するゲイン変更手段と、
前記電動モータに流れる電流が所定電流よりも大きいとき前記ゲイン変更手段による制御信号のゲインの変更を許容し、同電動モータに流れる電流が前記所定電流以下であるとき前記ゲイン変更手段による制御信号のゲインの変更を禁止するゲイン変更制御手段とを設けた車両の操舵アシスト装置。 - 請求項7に記載した車両の操舵アシスト装置において、
前記操舵角検出手段によって検出された操舵角および前記電動モータに流れる電流の変化に応じた、前記ゲイン変更手段および前記ゲイン変更制御手段による制御信号のゲインの変更制御に対して、ヒステリシス特性をもたせた車両の操舵アシスト装置。 - 操舵ハンドルの回動操作による操舵輪の操舵に対してアシスト力を付与する電動モータを有し、前記電動モータの実制御量をフィードバックして前記電動モータが目標制御量に従って作動するようにフィードバック制御するようにした車両の操舵アシスト装置において、
操舵ハンドルに付与される操舵トルクを検出する操舵トルク検出手段と、
車速を検出する車速検出手段と、
前記検出された操舵トルクおよび車速に応じて前記電動モータの目標制御量を決定する目標制御量決定手段と、
前記電動モータの目標制御量と前記電動モータの実制御量との差に応じた制御信号のゲインを制御して前記電動モータに供給するゲイン制御部と、
操舵ハンドルの操舵角を検出する操舵角検出手段と、
前記操舵角検出手段によって検出された操舵角が所定操舵角よりも大きくなると、前記制御信号のゲインを第1のゲインから第2のゲインに変更するゲイン変更手段と、
前記操舵トルク検出手段によって検出された操舵トルクの変化率に対する前記電動モータに流れる電流の変化率の比の値を電流変化率として検出する電流変化率検出手段と、
前記電流変化率検出手段によって検出された電流変化率が所定変化率よりも大きいとき前記ゲイン変更手段による制御信号のゲインの変更を許容し、同検出された電流変化率が前記所定変化率以下であるとき前記ゲイン変更手段による制御信号のゲインの変更を禁止するゲイン変更制御手段とを設けた車両の操舵アシスト装置。 - 請求項9に記載した車両の操舵アシスト装置において、
前記操舵角検出手段によって検出された操舵角および前記電流変化率検出手段によって検出された電流変化率の変化に応じた、前記ゲイン変更手段および前記ゲイン変更制御手段による制御信号の変更制御に対して、ヒステリシス特性をもたせた車両の操舵アシスト装置。 - 操舵ハンドルの回動操作による操舵輪の操舵に対してアシスト力を付与する電動モータを有し、前記電動モータの実制御量をフィードバックして前記電動モータが目標制御量に従って作動するようにフィードバック制御するようにした車両の操舵アシスト装置において、
操舵ハンドルに付与される操舵トルクを検出する操舵トルク検出手段と、
車速を検出する車速検出手段と、
前記検出された操舵トルクおよび車速に応じて前記電動モータの目標制御量を決定する目標制御量決定手段と、
前記電動モータの目標制御量と前記電動モータの実制御量との差に応じた制御信号のゲインを制御して前記電動モータに供給するゲイン制御部と、
操舵ハンドルの操舵角を検出する操舵角検出手段と、
前記操舵角検出手段によって検出された操舵角が所定操舵角よりも大きくなると、前記制御信号のゲインを第1のゲインから第2のゲインに変更するゲイン変更手段と、
前記車速検出手段によって検出された車速が所定車速未満であるとき前記ゲイン変更手段による制御信号のゲインの変更を許容し、同車速が前記所定車速以上であるとき前記ゲイン変更手段による制御信号のゲインの変更を禁止するゲイン変更制御手段とを設けた車両の操舵アシスト装置。 - 請求項11に記載した車両の操舵アシスト装置において、
前記操舵角検出手段によって検出された操舵角および前記車速検出手段によって検出された車速の変化に応じた、前記ゲイン変更手段および前記ゲイン変更制御手段による制御信号のゲインの変更制御に対して、ヒステリシス特性をもたせた車両の操舵アシスト装置。 - 請求項1ないし12のうちのいずれか一つに記載した車両の操舵アシスト装置において、
前記ゲイン変更手段は、前記操舵角に応じて変更された制御信号のゲインをローパスフィルタ処理するローパスフィルタ処理手段を含む車両の操舵アシスト装置。
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005200520A JP4367383B2 (ja) | 2005-07-08 | 2005-07-08 | 車両の操舵アシスト装置 |
| US11/913,902 US7974752B2 (en) | 2005-07-08 | 2006-07-03 | Steering assistance device for vehicle |
| EP06780900A EP1900608B1 (en) | 2005-07-08 | 2006-07-03 | Steering assistance device for vehicle |
| RU2008104696/11A RU2376185C2 (ru) | 2005-07-08 | 2006-07-03 | Устройство, облегчающее рулевое управление транспортным средством (варианты) |
| KR1020077028704A KR20080009158A (ko) | 2005-07-08 | 2006-07-03 | 차량용 조타 보조 장치 |
| PCT/JP2006/313625 WO2007007694A1 (ja) | 2005-07-08 | 2006-07-03 | 車両の操舵アシスト装置 |
| DE602006012320T DE602006012320D1 (de) | 2005-07-08 | 2006-07-03 | Lenkhilfevorrichtung für fahrzeug |
| BRPI0613826-8A BRPI0613826B1 (pt) | 2005-07-08 | 2006-07-03 | Aparelho de assistência de direção para veículos |
| CN2006800249450A CN101218146B (zh) | 2005-07-08 | 2006-07-03 | 用于车辆的转向辅助设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005200520A JP4367383B2 (ja) | 2005-07-08 | 2005-07-08 | 車両の操舵アシスト装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007015608A JP2007015608A (ja) | 2007-01-25 |
| JP4367383B2 true JP4367383B2 (ja) | 2009-11-18 |
Family
ID=37637085
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005200520A Expired - Fee Related JP4367383B2 (ja) | 2005-07-08 | 2005-07-08 | 車両の操舵アシスト装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US7974752B2 (ja) |
| EP (1) | EP1900608B1 (ja) |
| JP (1) | JP4367383B2 (ja) |
| KR (1) | KR20080009158A (ja) |
| CN (1) | CN101218146B (ja) |
| BR (1) | BRPI0613826B1 (ja) |
| DE (1) | DE602006012320D1 (ja) |
| RU (1) | RU2376185C2 (ja) |
| WO (1) | WO2007007694A1 (ja) |
Families Citing this family (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007138772A1 (ja) * | 2006-05-26 | 2007-12-06 | Mitsubishi Electric Corporation | 電動パワーステアリング装置 |
| US8296011B2 (en) * | 2007-12-12 | 2012-10-23 | Steering Solutions IP Holding Corporations | Systems and methods involving quadrant dependent active damping |
| JP5401801B2 (ja) * | 2008-02-18 | 2014-01-29 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP5534292B2 (ja) * | 2008-06-30 | 2014-06-25 | 株式会社ジェイテクト | 車両用操舵装置 |
| KR101205685B1 (ko) * | 2008-07-23 | 2012-11-27 | 주식회사 만도 | 조향각 센서 및 이를 구비한 차량 시스템 |
| JP5376215B2 (ja) * | 2009-01-30 | 2013-12-25 | 株式会社ジェイテクト | モータ制御装置 |
| JP5223718B2 (ja) * | 2009-02-17 | 2013-06-26 | 株式会社デンソー | 操舵負荷推定装置及び電動パワーステアリング装置 |
| JP5495018B2 (ja) | 2009-03-12 | 2014-05-21 | 株式会社ジェイテクト | モータ制御装置 |
| JP4883134B2 (ja) * | 2009-05-15 | 2012-02-22 | 株式会社デンソー | 電動パワーステアリング制御装置 |
| CN101590874B (zh) * | 2009-06-26 | 2012-09-05 | 株洲时代电子技术有限公司 | 一种电动助力转向装置 |
| JP5561516B2 (ja) * | 2009-07-06 | 2014-07-30 | 株式会社ジェイテクト | モータ制御装置および車両用操舵装置 |
| US7920946B2 (en) * | 2009-07-08 | 2011-04-05 | Nexteer (Beijing) Technology Co., Ltd. | Methods and systems for end of travel harshness reduction |
| JP5526630B2 (ja) * | 2009-07-08 | 2014-06-18 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP5532295B2 (ja) * | 2009-11-12 | 2014-06-25 | 株式会社ジェイテクト | モータ制御装置および車両用操舵装置 |
| JP5440846B2 (ja) * | 2009-11-16 | 2014-03-12 | 株式会社ジェイテクト | モータ制御装置および車両用操舵装置 |
| JP5495020B2 (ja) * | 2009-11-17 | 2014-05-21 | 株式会社ジェイテクト | モータ制御装置および車両用操舵装置 |
| JP5614583B2 (ja) * | 2009-11-17 | 2014-10-29 | 株式会社ジェイテクト | モータ制御装置および車両用操舵装置 |
| JP5692569B2 (ja) | 2010-08-23 | 2015-04-01 | 株式会社ジェイテクト | 車両用操舵装置 |
| KR20120029084A (ko) * | 2010-09-16 | 2012-03-26 | 주식회사 만도 | 전동식 파워 스티어링 장치 |
| JP5582197B2 (ja) * | 2010-11-29 | 2014-09-03 | 日産自動車株式会社 | 車両及びその操舵制御方法 |
| CN103269937A (zh) * | 2010-12-23 | 2013-08-28 | 莱卡地球系统公开股份有限公司 | 用于确定转向角的方法和系统 |
| CN103415406B (zh) | 2011-03-16 | 2016-01-13 | 日产自动车株式会社 | 汽车及转舵轮的转舵控制方法 |
| JP5842482B2 (ja) * | 2011-06-21 | 2016-01-13 | 株式会社ジェイテクト | モータ制御装置および電動パワーステアリング装置 |
| CN102419263B (zh) * | 2011-09-09 | 2014-02-05 | 沙市久隆汽车动力转向器有限公司 | 一种循环球动力转向器噪音试验台 |
| DE112011105939B4 (de) * | 2011-12-12 | 2018-12-13 | Toyota Jidosha Kabushiki Kaisha | Lenkvorrichtung |
| US8924082B2 (en) * | 2012-03-30 | 2014-12-30 | Steering Solutions Ip Holding Corporation | System and method for controlling a motor |
| JP2013244798A (ja) * | 2012-05-24 | 2013-12-09 | Jtekt Corp | 電動パワーステアリング装置 |
| JP5994480B2 (ja) * | 2012-08-22 | 2016-09-21 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| US9663139B2 (en) | 2013-02-26 | 2017-05-30 | Steering Solutions Ip Holding Corporation | Electric motor feedforward control utilizing dynamic motor model |
| US9136785B2 (en) | 2013-03-12 | 2015-09-15 | Steering Solutions Ip Holding Corporation | Motor control system to compensate for torque ripple |
| US9143081B2 (en) | 2013-03-14 | 2015-09-22 | Steering Solutions Ip Holding Corporation | Motor control system having bandwidth compensation |
| PL2799310T3 (pl) | 2013-04-30 | 2018-06-29 | Steering Solutions Ip Holding Corporation | Dostarczanie momentu obrotowego wspomagania bez czujnika momentu obrotowego kierownicy |
| CN104627237B (zh) * | 2013-11-06 | 2017-09-26 | 上海航天汽车机电股份有限公司 | 基于eps的路面高频干扰的阻尼抑制方法及系统 |
| WO2015083215A1 (ja) * | 2013-12-02 | 2015-06-11 | 三菱電機株式会社 | 電動パワーステアリング制御装置 |
| US10389289B2 (en) | 2014-02-06 | 2019-08-20 | Steering Solutions Ip Holding Corporation | Generating motor control reference signal with control voltage budget |
| US10003285B2 (en) | 2014-06-23 | 2018-06-19 | Steering Solutions Ip Holding Corporation | Decoupling current control utilizing direct plant modification in electric power steering system |
| CN104285529B (zh) * | 2014-09-13 | 2016-06-22 | 东北农业大学 | 水田筑埂机筑埂部件转向调节机构 |
| US10144445B2 (en) | 2014-09-15 | 2018-12-04 | Steering Solutions Ip Holding Corporation | Modified static tire model for providing assist without a torque sensor for zero to low vehicle speeds |
| US9809247B2 (en) | 2015-01-30 | 2017-11-07 | Steering Solutions Ip Holding Corporation | Motor control current sensor loss of assist mitigation for electric power steering |
| US9550522B2 (en) * | 2015-02-19 | 2017-01-24 | Caterpillar Paving Products Inc. | Compactor turning speed limiter |
| EP3282576B1 (en) * | 2015-04-10 | 2020-02-12 | NSK Ltd. | Motor control device and electric power steering device equipped with same |
| JP6484520B2 (ja) * | 2015-07-16 | 2019-03-13 | 本田技研工業株式会社 | 車両用操舵装置 |
| US10464594B2 (en) | 2015-09-03 | 2019-11-05 | Steering Solutions Ip Holding Corporation | Model based driver torque estimation |
| US10336363B2 (en) | 2015-09-03 | 2019-07-02 | Steering Solutions Ip Holding Corporation | Disabling controlled velocity return based on torque gradient and desired velocity error |
| KR102350043B1 (ko) * | 2015-11-20 | 2022-01-12 | 주식회사 만도 | 자동 조향 제어 시스템 및 방법 |
| EP3260355B1 (en) * | 2016-03-08 | 2020-02-12 | NSK Ltd. | Tuning device for electric power steering device |
| US10155534B2 (en) | 2016-06-14 | 2018-12-18 | Steering Solutions Ip Holding Corporation | Driver intent estimation without using torque sensor signal |
| KR102516689B1 (ko) * | 2016-09-07 | 2023-04-03 | 현대모비스 주식회사 | 전동식 파워 스티어링 시스템의 컬럼토크 보상 장치 및 방법 |
| US10135368B2 (en) | 2016-10-01 | 2018-11-20 | Steering Solutions Ip Holding Corporation | Torque ripple cancellation algorithm involving supply voltage limit constraint |
| US10618548B2 (en) * | 2017-02-02 | 2020-04-14 | Nsk Ltd. | Electric power steering apparatus |
| CN107472354A (zh) * | 2017-06-21 | 2017-12-15 | 宝沃汽车(中国)有限公司 | 车辆的转向助力控制方法、系统及车辆 |
| JP6592067B2 (ja) * | 2017-11-29 | 2019-10-16 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP7131345B2 (ja) * | 2017-12-14 | 2022-09-06 | トヨタ自動車株式会社 | 転舵システム |
| JP7268990B2 (ja) * | 2018-11-15 | 2023-05-08 | 株式会社Subaru | 車両の自動操舵制御装置 |
| US11724735B2 (en) * | 2018-12-19 | 2023-08-15 | Hl Mando Corporation | Steering control apparatus, steering control method, and steering apparatus |
| JP2020131783A (ja) * | 2019-02-14 | 2020-08-31 | 日立オートモティブシステムズ株式会社 | 操舵制御装置 |
| DE102019133025A1 (de) * | 2019-12-04 | 2021-06-10 | Zf Automotive Germany Gmbh | Verfahren zur Positionsregelung für ein Lenksystem |
| CN114421853B (zh) * | 2022-02-10 | 2023-11-03 | 三一汽车制造有限公司 | 电流控制方法、电流控制系统、臂架控制系统和车辆 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH064417B2 (ja) | 1985-02-12 | 1994-01-19 | 本田技研工業株式会社 | 電動式パワーステアリング装置 |
| JPH0471959A (ja) | 1990-07-10 | 1992-03-06 | Fujitsu Ltd | 電動式パワーステアリング装置 |
| JP2722883B2 (ja) | 1991-09-04 | 1998-03-09 | 日産自動車株式会社 | 車両の補助操舵装置 |
| JP3317361B2 (ja) | 1992-06-23 | 2002-08-26 | 富士電機株式会社 | メモリのバッテリバックアップ制御方式 |
| JP3231932B2 (ja) | 1994-01-10 | 2001-11-26 | 本田技研工業株式会社 | 電動式パワーステアリング装置 |
| JP2914610B2 (ja) | 1994-06-28 | 1999-07-05 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3120003B2 (ja) | 1994-08-31 | 2000-12-25 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JPH0885470A (ja) * | 1994-09-19 | 1996-04-02 | Nissan Motor Co Ltd | 車両用補助舵角制御装置 |
| JP3152339B2 (ja) | 1995-06-07 | 2001-04-03 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3755273B2 (ja) | 1997-01-22 | 2006-03-15 | トヨタ自動車株式会社 | 操舵制御装置 |
| US6032757A (en) * | 1997-01-22 | 2000-03-07 | Toyota Jidosha Kabushiki Kaisha | Steering control apparatus |
| US6046560A (en) | 1998-03-20 | 2000-04-04 | Trw Inc. | Electric assist steering system having an improved motor current controller with gain scheduler |
| JP3412579B2 (ja) * | 1999-10-19 | 2003-06-03 | トヨタ自動車株式会社 | 車両の電動パワーステアリング装置 |
| JP2001171533A (ja) | 1999-12-20 | 2001-06-26 | Toyoda Mach Works Ltd | 電動パワーステアリング装置 |
| RU2185301C2 (ru) | 2000-04-26 | 2002-07-20 | Открытое акционерное общество "АВТОВАЗ" | Сервопривод рулевого механизма автомобиля и регулятор тока электродвигателя |
| JP4670161B2 (ja) * | 2000-07-13 | 2011-04-13 | マツダ株式会社 | 自動車の電動パワーステアリング装置 |
| JP3888864B2 (ja) | 2001-07-12 | 2007-03-07 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP4322450B2 (ja) * | 2001-09-04 | 2009-09-02 | 三菱電機株式会社 | 電動式パワーステアリング制御装置 |
| JP3894765B2 (ja) | 2001-10-16 | 2007-03-22 | 株式会社ジェイテクト | 車両の操舵装置 |
| US6651771B2 (en) * | 2001-10-20 | 2003-11-25 | Ford Global Technologies, Llc | H-infinity control and gain scheduling method for electric power assist steering system |
| JP4269677B2 (ja) * | 2002-12-24 | 2009-05-27 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP2004338696A (ja) | 2003-04-25 | 2004-12-02 | Toyoda Mach Works Ltd | 電動パワーステアリング装置 |
| JP2005022468A (ja) | 2003-06-30 | 2005-01-27 | Koyo Seiko Co Ltd | 電動パワーステアリング装置 |
| JP3966274B2 (ja) * | 2003-12-04 | 2007-08-29 | トヨタ自動車株式会社 | 操舵制御装置 |
| JP2005170283A (ja) | 2003-12-12 | 2005-06-30 | Toyota Motor Corp | 電動パワーステアリング装置 |
| RU43837U1 (ru) | 2004-09-13 | 2005-02-10 | Общество с ограниченной ответственностью "МИГ-Автокомпоненты" | Система управления электромеханического усилителя руля |
-
2005
- 2005-07-08 JP JP2005200520A patent/JP4367383B2/ja not_active Expired - Fee Related
-
2006
- 2006-07-03 DE DE602006012320T patent/DE602006012320D1/de active Active
- 2006-07-03 EP EP06780900A patent/EP1900608B1/en not_active Expired - Fee Related
- 2006-07-03 WO PCT/JP2006/313625 patent/WO2007007694A1/ja active Application Filing
- 2006-07-03 KR KR1020077028704A patent/KR20080009158A/ko not_active Application Discontinuation
- 2006-07-03 BR BRPI0613826-8A patent/BRPI0613826B1/pt not_active IP Right Cessation
- 2006-07-03 CN CN2006800249450A patent/CN101218146B/zh not_active Expired - Fee Related
- 2006-07-03 US US11/913,902 patent/US7974752B2/en not_active Expired - Fee Related
- 2006-07-03 RU RU2008104696/11A patent/RU2376185C2/ru active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2007007694A1 (ja) | 2007-01-18 |
| CN101218146A (zh) | 2008-07-09 |
| DE602006012320D1 (de) | 2010-04-01 |
| JP2007015608A (ja) | 2007-01-25 |
| EP1900608B1 (en) | 2010-02-17 |
| KR20080009158A (ko) | 2008-01-24 |
| US7974752B2 (en) | 2011-07-05 |
| CN101218146B (zh) | 2012-10-03 |
| BRPI0613826A2 (pt) | 2011-02-15 |
| RU2008104696A (ru) | 2009-08-20 |
| RU2376185C2 (ru) | 2009-12-20 |
| US20090069979A1 (en) | 2009-03-12 |
| EP1900608A4 (en) | 2008-12-10 |
| EP1900608A1 (en) | 2008-03-19 |
| BRPI0613826B1 (pt) | 2018-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4367383B2 (ja) | 車両の操舵アシスト装置 | |
| EP1935757B1 (en) | Vehicle steering apparatus | |
| JP5407171B2 (ja) | 電動パワーステアリング装置 | |
| US7832522B2 (en) | Vehicle steering system, vehicle including the same and method for turning wheel of vehicle | |
| US20070062755A1 (en) | Method and system for improved active damping of steering systems | |
| JP2011131629A (ja) | 電動パワーステアリング装置 | |
| JP2020082915A (ja) | 操舵装置および操舵装置におけるモータ制御方法 | |
| JP4682836B2 (ja) | 車両の操舵装置 | |
| JP4906333B2 (ja) | 車両の操舵装置 | |
| JP2007090924A (ja) | 車両の操舵装置 | |
| JP4929892B2 (ja) | 車両の操舵装置 | |
| JP4858694B2 (ja) | 伝達比可変操舵装置 | |
| JP4251126B2 (ja) | 車両の操舵装置 | |
| JP4604991B2 (ja) | 車両の操舵装置 | |
| JP2005306184A (ja) | 車両の操舵装置 | |
| JP2009096414A (ja) | ステアリング装置 | |
| JP2006076413A (ja) | 車両の操舵装置 | |
| JP7420128B2 (ja) | ステアリングシステム | |
| JP2007223443A (ja) | 電動パワーステアリング装置 | |
| US20220332368A1 (en) | Steering system | |
| JP5217901B2 (ja) | 電動パワーステアリング装置 | |
| JP4285369B2 (ja) | 車両の操舵装置 | |
| JP2008018865A (ja) | 電動パワーステアリング装置 | |
| JP4696932B2 (ja) | 車両の操舵装置 | |
| JP6319620B2 (ja) | 油圧式パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090327 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090804 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090817 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4367383 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120904 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130904 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |