JP4680355B2 - コンバイン - Google Patents
コンバイン Download PDFInfo
- Publication number
- JP4680355B2 JP4680355B2 JP2000242703A JP2000242703A JP4680355B2 JP 4680355 B2 JP4680355 B2 JP 4680355B2 JP 2000242703 A JP2000242703 A JP 2000242703A JP 2000242703 A JP2000242703 A JP 2000242703A JP 4680355 B2 JP4680355 B2 JP 4680355B2
- Authority
- JP
- Japan
- Prior art keywords
- frame
- tension
- track
- crawler
- track frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/104—Suspension devices for wheels, rollers, bogies or frames
- B62D55/116—Attitude or position control of chassis by action on suspension, e.g. to compensate for a slope
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/084—Endless-track units or carriages mounted separably, adjustably or extensibly on vehicles, e.g. portable track units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/10—Bogies; Frames
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/30—Track-tensioning means
- B62D55/305—Track-tensioning means acting on pivotably mounted idlers
Description
【発明の属する技術分野】
本発明は圃場の穀稈を連続的に刈取って脱穀するコンバインに関する。
【0002】
【発明が解決しようとする課題】
従来、特開平1−28079号公報に示す如く、駆動スプロケット及びアイドルローラに支持させる左右走行クローラを左右トラックフレームにトラックローラを介して装設させると共に、本機にクローラ昇降アームを介して左右トラックフレームを昇降制御動作自在に設け、本機の左右傾斜を修正して昇降に支持させる技術がある。しかし乍ら、前記従来技術は、本機を上昇させるとき、トラックフレームを駆動スプロケット側に近づける方向に下降させるから、走行クローラの同長変化を少なくしてテンションが変化するのを防止できるが、機体重心が走行クローラの前後接地幅の後側に移動して機体が後傾し、機体前部の刈取部が上昇して刈高さが変化する不具合があると共に、機体重心の後方移動により走行クローラ後側の接地圧が高くなり、後進走行させることによって走行クローラ後側が土中に突入し易くなり、湿田など軟弱な圃場枕地での方向転換性能が低下する不具合がある。
【0003】
【課題を解決するための手段】
然るに、本発明は、駆動スプロケット及びテンションローラに支持させる左右走行クローラを左右トラックフレームにトラックローラを介して装設させると共に、本機にクローラ昇降アームを介して左右トラックフレームを昇降制御動作自在に設けるコンバインにおいて、前記クローラ昇降アームを昇降させて本機の対地高さを変化させる油圧昇降シリンダを設ける構造であって、前記左右トラックフレームの後方上方にテンションローラをテンション調節自在に取付けるテンションフレームを上下揺動可能に設け、テンションフレームを介してテンションローラを前記走行クローラの接地面に対して移動可能となし、クローラ昇降アームを昇降制御動作させる油圧昇降シリンダ(35)の本機高さ制御によってトラックフレーム(1、2)を昇降制御動作させながら前後方向にも移動させるとともに、クローラ昇降アームの昇降制御動作に連動してテンションフレーム(44)を上下揺動させながらテンションフレーム(44)に取付けたテンションローラ(42)をトラックフレーム(1、2)とは逆の方向に移動させることで、走行クローラの前後接地長を変更可能に構成したことを特徴とするコンバインを提供するものである。
【0004】
また、前記クローラ昇降アームを介してトラックフレームを下方前方に移動させることで機台の地上高を高くする際に、左右トラックフレームを前下方に移動させるとともに、テンションフレーム後側を下方に移動させることにより、テンションフレーム後部に設けたテンションローラをトラックフレームの後方下方に移動させて、走行クローラの前後方向接地幅を拡大させている。
【0005】
さらに、前記テンションフレームは、該テンションフレームの後部を前記トラックフレーム後部に前後方向移動自在に連結する支点リンクと、テンションフレーム前部両側に固定した左右一対の座板と、トラックフレーム後部の支軸に固定した補助アームとにより左右トラックフレームの後方上方に設けて、機台の地上高を高くする際に、テンションフレーム前側を座板と補助アームとを介して前記トラックフレームから持上げると共に、テンションフレーム後側を支点リンクを介して下降させることにより、テンションローラをトラックフレームの後方下方に移動させて、走行クローラの前後方向接地幅を拡大させている。
【0006】
さらには、前記クローラ昇降アームは側面視L形の上下スイングアームで構成し、左右一対の本機フレームの前後方向延設両端部に固定した軸受体に支点軸を介して上下スイングアームをそれぞれ回転自在に取り付けるとともに、下スイングアームの後端側を前記トラックフレームに設けた支軸に回転自在に連結し、テンション調節用ボルトの操作により出入させる伸縮軸体を介して前記テンションローラを設けたテンションフレームと、前記テンションフレームの後部を前記トラックフレーム後部に前後方向移動自在に連結する支点リンクと、前記テンションフレーム前部両側に固定した左右一対の座板と、前記トラックフレーム後部の前記支軸に固定した補助アームと、後側の下スイングアーム及び前記補助アームと前記座板を回転自在に連結する軸とにより、前記テンションフレームをトラックフレームの後方上方に揺動可能に設け、下スイングアームを支点軸回りに下方に回転させて、トラックフレームを前下方に移動させて機台の地上高を高くする際に、前記座板を介してテンションフレーム前側をトラックフレームから持上げるとともに、支点リンクを後方に傾倒させてテンションフレーム後側を下降させ、テンションフレーム後部に設けたテンションローラをトラックフレームの後方下方に移動させて、走行クローラの前後方向接地幅を拡大させている。
【0008】
【発明の実施の形態】
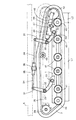
以下、本発明の実施例を図面に基づいて詳述する。図1はコンバインの全体側面図、図2は同平面図、図3はトラックフレーム部の側面図、図4は同部分拡大図、図5は同平面図、図6は同部分拡大図であり、図中(1)(2)は左右走行クローラ(3)(4)を装設する左右トラックフレーム、(5)は前記トラックフレーム(1)(2)に架設する機台、(6)はフィードチェン(7)を左側に張架し扱胴(8)及び処理胴(9)を内蔵している脱穀部、(10)は刈刃(11)及び穀稈搬送機構(12)などを備える刈取部、(13)は刈取フレーム(14)を介して刈取支点軸(15)回りに刈取部(10)を昇降させる油圧刈取昇降シリンダ、(16)は排藁チェン(17)終端を臨ませる排藁カッター、(18)は脱穀部(6)からの穀粒を揚穀筒(19)を介して搬入する穀物タンク、(20)は前記タンク(18)の穀粒を機外に搬出する排出オーが、(21)は操向ハンドルなど運転操作部(22)及び運転席(23)を備える運転キャビン、(24)は運転キャビン(21)下方に設けるエンジンであり、連続的に穀稈を刈取って脱穀するように構成している。
【0009】
さらに、前記機台(5)下面に一対の左右本機フレーム(25)(26)を前後横フレーム(27)によってを固定させ、左右本機フレーム(25)(26)の前後方向延設両端部に軸受体(28)を固定させ、前後支点軸(29)(30)を軸受体(28)に回転自在に軸支させ、左右一対で前後略同一形状の側面視L形の上下スイングアーム(31)(32)を前記支点軸(29)(30)両端部に固定させ、前記トラックフレーム(1)(2)に回転自在に軸支させる支軸(33)に下スイングアーム(32)の後端側を回転自在に連結させ、前後方向に延設させる連結ロッド(34)両端に前後の上スイングアーム(31)の上端側を連結させ、連結ロッド(34)の中間に油圧昇降シリンダ(35)を設け、昇降シリンダ(35)の油圧力によって連結ロッド(34)を前後に押引動作させ、左右一対の前後スイングアーム(31)(32)を介して左右トラックフレーム(1)(2)を機台(5)に対して各別に昇降自在に取付ける。また、前記機台(5)に台座(36)を介して昇降シリンダ(35)を取付ける。
【0010】
さらに、前記機台(5)前側のミッションケース(37)に車軸ケース(38)を介して取付ける駆動スプロケット(39)と、前記トラックフレーム(1)(2)の機外側面に取付ける複数のトラックローラ(40)及びイコライザローラ(41)及びテンションローラ(42)と、本機フレーム(25)(26)に取付けるキャリヤローラ(43)とを備え、トラックフレーム(1)(2)に走行クローラ(3)(4)接地側を張設させると共に、トラックフレーム(1)(2)後部に取付けるテンションフレーム(44)にテンション調節用ボルト(45)及び伸縮軸体(46)を介してテンションローラ(42)を設け、前記テンションフレーム(44)後方にボルト(45)操作により伸縮軸体(46)を出入させる半固定テンション調節によって走行クローラ(3)(4)のテンションを設定するもので、昇降シリンダ(35)によって前後スイングアーム(31)(32)を支点軸(29)(30)回りに揺動させ、各ローラ(40)(41)(42)とトラックフレーム(1)(2)を昇降させ、走行クローラ(3)(4)の接地側を昇降させるもので、運転操作部(22)に設ける昇降調節スイッチの手動操作、並びに機台(5)の左右傾動を検出する傾斜センサの検出結果に基づく自動制御などにより、左右昇降シリンダ(35)(35)を各別に作動させ、左右走行クローラ(3)(4)の接地高さを変更して機台(5)の左右傾斜を修正して略昇降に支持させるように構成している。
【0011】
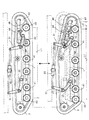
さらに、前記トラックフレーム(1)(2)後部にテンションフレーム(44)後部を左右一対の支点リンク(47)を介して前後方向移動自在に連結させ、トラックフレーム(1)(2)後端側上面に後下り斜面(1a)(2a)を形成すると共に、前記テンションフレーム(44)前部両側に左右一対の座板(48)を固定させ、またトラックフレーム(1)(2)後部の前記支軸(33)に補助アーム(49)を固定させ、後側の下スイングアーム(33)及び補助アーム(49)を前記座板(48)に軸(50)を介して回転自在に連結させるもので、図3及び図4に示す如く、機台(5)に対してトラックフレーム(1)(2)を最も接近させ、昇降シリンダ(35)による昇降制御動作を中止している状態、または乾田及び農道など硬い走行路面を移動する状態のとき、前記支点リンク(47)を略垂直に立設させ、かつ前記補助アーム(49)を支軸(33)前方に略昇降に突出させ、下スイングアーム(32)及び支軸(33)と前記座板(48)を連結する軸(50)を支軸(33)と略同一高さに支持させ、トラックフレーム(1)(2)前後端部のトラックローラ(40)間で走行クローラ(3)(4)を接地させる。このときの左右走行クローラ(3)(4)の接地長(L)と軌間幅(B)の比(L/B)を1.5以下に設定して旋回半径が最小になるように構成し、前記比(L/B)が例えば1,7以上に大きくなることにより旋回半径も大きくなり旋回抵抗モーメントが増大する不具合をなくしている。
【0012】
また、図7乃至図9に示す如く、前記昇降シリンダ(35)を駆動してピストンを兼用する連結ロッド(34)を後方に摺動させ、支点軸(29)(30)回りに上スイングアーム(31)を後方に回転させ、支点軸(29)(30)回りに下スイングアーム(32)を下方に回転させ、トラックフレーム(1)(2)を下方前方に移動させ、トラックローラ(40)及びイコライザローラ(41)に支持させる走行クローラ(2)(3)接地側を下方前方に移動させ、機台(5)の地上高を高くすると共に、後方の下スイングアーム(32)の下方回転によって支軸(33)回りに各アーム(32)(49)の軸(50)を上昇させ、座板(48)を介してテンションフレーム(44)前側をトラックフレーム(1)(2)から持上げ、支点リンク(47)を後方に傾倒させてテンションフレーム(44)後側をトラックフレーム(1)(2)の後下り斜面(1a)(2a)方向に下降させ、テンションフレーム(44)後部のテンションローラ(42)を下降させてトラックフレーム(1)(2)に対して後方下方に移動させ、走行クローラ(3)(4)の同長を略一定に保ち乍らテンションローラ(42)の後方下方移動によりトラックローラ(1)(2)後方に走行クローラ(3)(4)の前後方向接地幅を拡大させ、最前部と最後部のトラックローラ(40)間に支持させる走行クローラ(3)(4)の接地長(L1)に、最後部のトラックローラ(40)とテンションローラ(42)間に支持させる走行クローラ(3)(4)の接地長(L2)を加え、走行クローラ(3)(4)の接地長(L1+L2)を後方に長くする。このときの左右走行クローラ(3)(4)の接地長(L=L1+L2)と軌間幅(B)の比(L/B)を約1.7以下に保ち、前記比が大きくなって旋回半径が大きくなり旋回抵抗モーメントが増大するのを防ぐと共に、走行クローラ(3)(4)の接地長を後方に延長させることによって、走行クローラ(3)(4)接地側の前後方向の機体重心移動を少なくし、走行クローラ(3)(4)後部の土中沈下を防ぎ、しかも走行クローラ(3)(4)接地面の拡大により単位面積当りの接地圧を低下させ、走行クローラ(3)(4)の土中沈下を少なくする。
【0013】
上記から明らかなように、駆動スプロケット(39)及びアイドルローラであるテンションローラ(42)に支持させる左右走行クローラ(3)(4)を左右トラックフレーム(1)(2)にトラックローラ(40)を介して装設させると共に、本機にクローラ昇降アームであるスイングアーム(31)(32)を介して左右トラックフレーム(1)(2)を昇降制御動作自在に設けるコンバインにおいて、走行クローラ(3)(4)の接地方向にテンションローラ(42)を移動自在に設ける。そして、例えば湿田など走行クローラ(3)(4)の沈下量が多くなる軟弱走行面のとき、トラックフレーム(1)(2)を下動させる昇降制御動作を行っても、テンションローラ(42)の移動によって走行クローラ(3)(4)の前後接地長さを拡大させ、走行クローラ(3)(4)の接地面に対する前後方向の機体重心移動を少なくして前後バランスを維持し、かつ走行クローラ(3)(4)の接地面が大きくなって接地圧を低下させ、走行クローラ(3)(4)の沈下を低減して方向転換など走行性能の向上などを図ると共に、例えば乾田または農道など硬い走行面では走行クローラ(3)(4)の前後接地長さを短くして所定の旋回性能を確保する。
【0014】
また、トラックフレーム(1)(2)にリンク機構である支点リンク(47)を揺動自在に設け、テンションローラ(42)をテンション調節自在に取付けるテンションフレーム(44)を前記支点リンク(47)に設け、トラックフレーム(1)(2)延長方向に離反させ乍ら下降させる方向にテンションローラ(42)を移動させ、走行クローラ(3)(4)の同長を変化させることなくテンションローラ(42)の後方下方移動によって走行クローラ(3)(4)後側の前後接地長を拡大または縮少させ、走行クローラ(3)(4)のテンション構造の簡略化並びに走行性能の向上などを図ると共に、テンションローラ(42)をテンション調節自在に取付けるテンションフレーム(44)をスイングアーム(31)(32)の昇降制御動作と連動して移動させ、昇降制御動作によるトラックフレーム(1)(2)の前後方向移動と逆の方向にテンションローラ(42)を移動させて走行クローラ(3)(4)後側の接地長を伸縮させ、昇降制御動作に伴う機体重心の後方移動を少なくして走行クローラ(3)(4)後側の接地圧変化を低減させ、昇降制御動作によって生じる従来の走行クローラ(3)(4)後部が過大に沈下する等の不具合をなくし、走行クローラ(3)(4)の沈下量が多くなる湿田作業または圃場枕地での旋回性など走行性能の向上を図る。
【0015】
また、走行クローラ(3)(4)前側を駆動スプロケット(39)に支持させ、走行クローラ(3)(4)後側をテンションローラ(42)に支持させ、トラックローラ(40)及びトラックフレーム(1)(2)をスイングアーム(31)(32)の機体持上げ動作によって前方移動させる動作に、テンションローラ(42)を走行クローラ(3)(4)接地方向に移動させる動作を連動させて行わせるもので、機体を持上げる昇降制御動作時に走行クローラ(3)(4)後側に接地長を伸張させ、走行クローラ(3)(4)後側の不適正な沈下を防止し、従来の重心移動によって走行クローラ(3)(4)の前部と後部とで沈下量に差が生じて後傾状態に傾くのを阻止し、湿田走行性能の向上などを図る。
【0016】
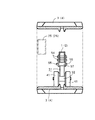
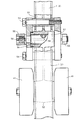
さらに、図10乃至図13に示す如く、左右一対で前後二組の前記イコライザローラ(41)をイコライザフレーム(51)両端の前後車軸受部(52)に回転自在に軸支させると共に、左右支点ブラケット(53)を前記トラックフレーム(1)(2)左右側面にボルト(54)によって締結固定させ、ナット(55)によって締結させる両端ボルト形イコライザ支点軸(56)を左右ブラケット(53)に固定させ、イコライザフレーム(51)前後幅中間の支点軸受部(57)をイコライザ支点軸(56)に回転自在に軸支させ、イコライザ支点軸(56)回りにイコライザフレーム(51)を回転自在に設け、前後のイコライザローラ(41)を昇降自在に設け、イコライザフレーム(51)を左右支点ブラケット(53)によって両側から挾み込んで締め付けて固定させ、組立作業の簡略化を図る。また、前記イコライザ支点軸(56)の一端面にグリス注入ノズル(58)を設け、イコライザ支点軸(56)に形成する注入路(59)を介して支点軸(56)と支点軸受部(57)の接触面にノズル(58)からグリスを注入させ、支点軸(56)または支点軸受部(57)の発熱及び摩耗損傷を低減させる。
【0017】
さらに、図14に示す如く、3位置4ポート電磁切換型油圧昇降バルブ(60)と分流弁(61)を介して油圧ポンプ(62)に昇降シリンダ(35)を油圧接続させ、上昇及び下降ソレノイド(63)(64)によって昇降バルブ(60)を切換えて昇降シリンダ(35)を往復油圧駆動して前後ピストン(34)を出入させると共に、機台(5)の左右傾斜を傾斜センサ(65)と高さセンサ(67)によって検出させ、水平制御回路(66)によって各ソレノイド(63)(64)を励磁動作させ、左右の昇降シリンダ(35)を駆動させる水平制御と高さ制御を自動的に行わせるもので、図15のように、機台(5)の低支持のときに走行クローラ(3)(4)の前後接地長(L1)が最も短くなり、機台(5)の高支持のときに走行クローラ(3)(4)の前後接地長(L1+L2)が最も長くなる。そして、本機に対して左右トラックフレーム(1)(2)を各別に昇降させる左右昇降シリンダ(35)を設け、昇降シリンダ(35)の両端側に前後ピストンである前後連結ロッド(34)を突出させて前後のクローラ昇降アームに連結させ、昇降シリンダ(35)を上下方向にだけ移動自在に本機に取付けたもので、前後クローラ昇降アームの間に前後連結ロッド(34)を介して昇降シリンダ(35)を連結させて上下方向設置幅のコンパクト化を行うと共に、昇降シリンダ(35)を複動油圧構造に構成して昇降制御機能の向上などを図る。
【0018】
さらに、図16、図17に示す如く、走行クローラ(3)(4)の左右幅の外側で機内側に上下スイングアーム(31)(32)を配設させ、走行クローラ(3)(4)と下スイングアーム(32)との干渉または泥土堆積を防ぐことも行える。
【0019】
【発明の効果】
以上実施例から明らかなように本発明は、駆動スプロケット(39)及びテンションローラ(42)に支持させる左右走行クローラ(3、4)を左右トラックフレーム(1、2)にトラックローラ(40、40)を介して装設させると共に、本機にクローラ昇降アームを介して左右トラックフレーム(1、2)を昇降制御動作自在に設けるコンバインにおいて、前記クローラ昇降アームを昇降させて本機の対地高さを変化させる油圧昇降シリンダ(35)を設ける構造であって、前記左右トラックフレーム(1、2)の後方上方にテンションローラ(42)をテンション調節自在に取付けるテンションフレーム(44)を上下揺動可能に設け、テンションフレーム(44)を介してテンションローラ(42)を前記走行クローラ(3、4)の接地面に対して移動可能となし、クローラ昇降アームを昇降制御動作させる油圧昇降シリンダ(35)の本機高さ制御によってトラックフレーム(1、2)を昇降制御動作させながら前後方向にも移動させるとともに、クローラ昇降アームの昇降制御動作に連動してテンションフレーム(44)を上下揺動させながらテンションフレーム(44)に取付けたテンションローラ(42)をトラックフレーム(1、2)とは逆の方向に移動させることで、走行クローラ(3、4)の前後接地長を変更可能に構成したもので、例えば湿田など走行クローラ(3)(4)の沈下量が多くなる軟弱走行面のとき、トラックフレーム(1)(2)を下動させる昇降制御動作を行っても、テンションローラ(42)の移動によって走行クローラ(3)(4)の前後接地長さを拡大でき、走行クローラ(3)(4)の接地面に対する前後方向の機体重心移動を少なくして前後バランスを容易に維持でき、かつ走行クローラ(3)(4)の接地面が大きくなって接地圧を低下でき、走行クローラ(3)(4)の沈下を低減して方向転換など走行性能の向上などを容易に図ることができると共に、例えば乾田または農道など硬い走行面では走行クローラ(3)(4)の前後接地長さを短くして所定の旋回性能を確保できるものである。
また、トラックフレーム(1)(2)延長方向に離反させ乍ら下降させる方向にテンションローラ(42)を容易に移動でき、走行クローラ(3)(4)の同長を変化させることなくテンションローラ(42)の移動によって走行クローラ(3)(4)の前後接地長を容易に拡大または縮少させることができ、走行クローラ(3)(4)のテンション構造の簡略化並びに走行性能の向上などを容易に図ることができるものである。
【図面の簡単な説明】
【図1】全体の側面図。
【図2】同平面図。
【図3】走行クローラ部の側面図。
【図4】同部分拡大図。
【図5】走行クローラ部の平面図。
【図6】同部分拡大図。
【図7】走行クローラ部の昇降制御動作説明図。
【図8】同部分拡大図。
【図9】同側面図。
【図10】イコライザローラ部の側面図。
【図11】同正面図。
【図12】同平面図。
【図13】同部分拡大図。
【図14】昇降制御油圧回路図。
【図15】昇降制御動作説明図。
【図16】図5の変形例を示す平面図。
【図17】前図の正面説明図。
【符号の説明】
(1)(2) トラックフレーム
(3)(4) 走行クローラ
(31)(32) スイングアーム(クローラ昇降アーム)
(34) 連結ロッド(ピストン)
(35) 昇降シリンダ
(39) 駆動スプロケット
(40) トラックローラ
(42) テンションローラ(アイドルローラ)
(44) テンションフレーム
(47) 支点リンク(リンク機構)
Claims (4)
- 駆動スプロケット(39)及びテンションローラ(42)に支持させる左右走行クローラ(3、4)を左右トラックフレーム(1、2)にトラックローラ(40、40)を介して装設させると共に、本機にクローラ昇降アームを介して左右トラックフレーム(1、2)を昇降制御動作自在に設けるコンバインにおいて、
前記クローラ昇降アームを昇降させて本機の対地高さを変化させる油圧昇降シリンダ(35)を設ける構造であって、前記左右トラックフレーム(1、2)の後方上方にテンションローラ(42)をテンション調節自在に取付けるテンションフレーム(44)を上下揺動可能に設け、テンションフレーム(44)を介してテンションローラ(42)を前記走行クローラ(3、4)の接地面に対して移動可能となし、
クローラ昇降アームを昇降制御動作させる油圧昇降シリンダ(35)の本機高さ制御によってトラックフレーム(1、2)を昇降制御動作させながら前後方向にも移動させるとともに、クローラ昇降アームの昇降制御動作に連動してテンションフレーム(44)を上下揺動させながらテンションフレーム(44)に取付けたテンションローラ(42)をトラックフレーム(1、2)とは逆の方向に移動させることで、走行クローラ(3、4)の前後接地長を変更可能に構成したことを特徴とするコンバイン。 - 前記クローラ昇降アームを介してトラックフレーム(1、2)を下方前方に移動させることで機台(5)の地上高を高くする際に、左右トラックフレーム(1、2)を前下方に移動させるとともに、テンションフレーム(44)後側を下方に移動させることにより、テンションフレーム(44)後部に設けたテンションローラ(42)をトラックフレーム(1、2)の後方下方に移動させて、走行クローラ(3、4)の前後方向接地幅を拡大させることを特徴とする請求項1記載のコンバイン。
- 前記テンションフレーム(44)は、該テンションフレーム(44)の後部を前記トラックフレーム(1、2)後部に前後方向移動自在に連結する支点リンク(47)と、テンションフレーム(44)前部両側に固定した左右一対の座板(48)と、トラックフレーム(1、2)後部の支軸(33)に固定した補助アーム(49)とにより左右トラックフレーム(1、2)の後方上方に設けて、
機台(5)の地上高を高くする際に、テンションフレーム(44)前側を座板(48)と補助アーム(49)とを介して前記トラックフレーム(1,2)から持上げると共に、テンションフレーム(44)後側を支点リンク(47)を介して下降させることにより、テンションローラ(42)をトラックフレーム(1、2)の後方下方に移動させて、走行クローラ(3、4)の前後方向接地幅を拡大させることを特徴とする請求項2記載のコンバイン。 - 前記クローラ昇降アームは側面視L形の上下スイングアーム(31、32)で構成し、左右一対の本機フレーム(25、26)の前後方向延設両端部に固定した軸受体(28、28)に支点軸(29、30)を介して上下スイングアーム(31、32)をそれぞれ回転自在に取り付けるとともに、下スイングアーム(32、32)の後端側を前記トラックフレーム(1、2)に設けた支軸(33、33)に回転自在に連結し、
テンション調節用ボルト(45)の操作により出入させる伸縮軸体(46)を介して前記テンションローラ(42)を設けたテンションフレーム(44)と、
前記テンションフレーム(44)の後部を前記トラックフレーム(1、2)後部に前後方向移動自在に連結する支点リンク(47)と、
前記テンションフレーム(44)前部両側に固定した左右一対の座板(48)と、
前記トラックフレーム(1、2)後部の前記支軸(33)に固定した補助アーム(49)と、
後側の下スイングアーム(32)及び前記補助アーム(49)と前記座板(48)を回転自在に連結する軸(50)とにより、前記テンションフレーム(44)をトラックフレーム(1、2)の後方上方に揺動可能に設け、
下スイングアーム(32)を支点軸(29、30)回りに下方に回転させて、トラックフレーム(1、2)を前下方に移動させて機台(5)の地上高を高くする際に、前記座板(48)を介してテンションフレーム(44)前側をトラックフレーム(1、2)から持上げるとともに、支点リンク(47)を後方に傾倒させてテンションフレーム(44)後側を下降させ、テンションフレーム(44)後部に設けたテンションローラ(42)をトラックフレーム(1、2)の後方下方に移動させて、走行クローラ(3、4)の前後方向接地幅を拡大させることを特徴とする請求項3記載のコンバイン。
Priority Applications (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000242703A JP4680355B2 (ja) | 2000-08-10 | 2000-08-10 | コンバイン |
| DE60132095T DE60132095T2 (de) | 2000-08-10 | 2001-08-06 | Landwirtschaftliches fahrzeug |
| PCT/JP2001/006766 WO2002014140A1 (fr) | 2000-08-10 | 2001-08-06 | Machine agricole mobile |
| KR1020037001962A KR100830551B1 (ko) | 2000-08-10 | 2001-08-06 | 이동농기 |
| CNB018139957A CN1211244C (zh) | 2000-08-10 | 2001-08-06 | 履带式农机 |
| AU7674501A AU7674501A (en) | 2000-08-10 | 2001-08-06 | Mobile agricultural machinery |
| AT01954477T ATE382013T1 (de) | 2000-08-10 | 2001-08-06 | Landwirtschaftliches fahrzeug |
| AU2001276745A AU2001276745B2 (en) | 2000-08-10 | 2001-08-06 | Mobile agricultural machinery |
| EP01954477A EP1308378B1 (en) | 2000-08-10 | 2001-08-06 | Mobile agricultural machinery |
| US10/343,441 US6962222B2 (en) | 2000-08-10 | 2001-08-06 | Mobile agricultural machinery |
| TW090119541A TW515697B (en) | 2000-08-10 | 2001-08-09 | Mobile agricultural machinery |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000242703A JP4680355B2 (ja) | 2000-08-10 | 2000-08-10 | コンバイン |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002053083A JP2002053083A (ja) | 2002-02-19 |
| JP4680355B2 true JP4680355B2 (ja) | 2011-05-11 |
Family
ID=18733687
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000242703A Expired - Fee Related JP4680355B2 (ja) | 2000-08-10 | 2000-08-10 | コンバイン |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US6962222B2 (ja) |
| EP (1) | EP1308378B1 (ja) |
| JP (1) | JP4680355B2 (ja) |
| KR (1) | KR100830551B1 (ja) |
| CN (1) | CN1211244C (ja) |
| AT (1) | ATE382013T1 (ja) |
| AU (2) | AU2001276745B2 (ja) |
| DE (1) | DE60132095T2 (ja) |
| TW (1) | TW515697B (ja) |
| WO (1) | WO2002014140A1 (ja) |
Families Citing this family (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1298578C (zh) * | 2004-11-01 | 2007-02-07 | 大连大学 | 变形履带系统 |
| WO2007023586A1 (ja) * | 2005-08-23 | 2007-03-01 | Yanmar Co., Ltd. | コンバイン |
| JP2007055329A (ja) * | 2005-08-23 | 2007-03-08 | Yanmar Co Ltd | 作業車両の走行装置 |
| DE102006015307A1 (de) * | 2005-11-17 | 2007-05-24 | Terex-Demag Gmbh & Co. Kg | Mobiler Großkran |
| DE502007000671D1 (de) * | 2007-01-24 | 2009-06-10 | Klemm Bohrtechnik Gmbh | Pendelfahrwerk, insbesondere für ein Bohrgerät |
| US7874387B2 (en) * | 2007-02-15 | 2011-01-25 | Despres Jean | Track extension for vehicle track systems and method |
| US7520575B2 (en) * | 2007-06-29 | 2009-04-21 | Agco Corporation | Tension management system for an endless track of a work machine |
| KR101072654B1 (ko) * | 2007-09-26 | 2011-10-11 | 가부시끼 가이샤 구보다 | 작업차 |
| RU2388642C2 (ru) * | 2008-04-29 | 2010-05-10 | Эдуард Аркадьевич Геращенко | Рычажно-балансирная подвеска гусеничного движителя (варианты) |
| US7967088B2 (en) * | 2008-08-22 | 2011-06-28 | Shawn Watling | Snowmobile suspension and drive train |
| JP5006854B2 (ja) * | 2008-09-22 | 2012-08-22 | 株式会社クボタ | 作業機 |
| KR101146092B1 (ko) | 2009-12-11 | 2012-05-15 | 한국카모플라스트(주) | 충격흡수 홈을 구성한 고무 크로라 |
| KR101603216B1 (ko) * | 2010-05-26 | 2016-03-14 | 한화테크윈 주식회사 | 이동형 감시 로봇 시스템 |
| CA2744681C (en) * | 2010-06-28 | 2018-08-28 | Camoplast Solideal Inc. | All-terrain vehicle (atv) propellable on wheels or endless tracks |
| US8967737B2 (en) | 2010-06-30 | 2015-03-03 | Camoplast Solideal Inc. | Wheel of a track assembly of a tracked vehicle |
| DE102010036756A1 (de) * | 2010-07-30 | 2012-02-02 | Claas Selbstfahrende Erntemaschinen Gmbh | Selbstfahrende Erntemaschine |
| US9334001B2 (en) | 2010-12-14 | 2016-05-10 | Camso Inc. | Drive sprocket, drive lug configuration and track drive arrangement for an endless track vehicle |
| US9162718B2 (en) | 2010-12-14 | 2015-10-20 | Camso Inc. | Endless track for traction of a vehicle |
| US8985250B1 (en) | 2010-12-14 | 2015-03-24 | Camoplast Solideal Inc. | Track drive mode management system and methods |
| WO2014160728A2 (en) * | 2013-03-25 | 2014-10-02 | Polaris Industries Inc. | Tracked all-terrain vehicle |
| BE1022418B1 (nl) | 2014-01-21 | 2016-03-25 | Cnh Industrial Belgium Nv | Maaidorser met rupsbandeenheden uitgerust met actuatoren die het kantelen tegenwerken |
| JP6067598B2 (ja) * | 2014-01-31 | 2017-01-25 | ヤンマー株式会社 | 走行車両 |
| JP6067599B2 (ja) * | 2014-01-31 | 2017-01-25 | ヤンマー株式会社 | 走行車両 |
| RU2547318C1 (ru) * | 2014-02-11 | 2015-04-10 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Курганский государственный университет" | Механизм автоматического натяжения гусениц |
| DE102014003964A1 (de) * | 2014-03-20 | 2015-09-24 | Claas Industrietechnik Gmbh | Raupenfahrzeug |
| US11167810B2 (en) | 2015-03-04 | 2021-11-09 | Camso Inc. | Track system for traction of a vehicle |
| US10783723B2 (en) | 2015-06-29 | 2020-09-22 | Camso Inc. | Systems and methods for monitoring a track system for traction of a vehicle |
| CN113562089B (zh) * | 2015-08-07 | 2024-04-12 | 株式会社久保田 | 履带行驶装置、联合收割机、收割机 |
| US10814935B2 (en) * | 2015-09-30 | 2020-10-27 | Bombardier Recreational Products Inc. | Snowmobile rear suspension |
| CN106211832B (zh) * | 2016-07-19 | 2020-05-22 | 农业部南京农业机械化研究所 | 一种浮动式三点悬挂装置 |
| US10730551B2 (en) | 2016-08-09 | 2020-08-04 | Polaris Industries Inc. | Tracked all-terrain vehicle |
| SE540523C2 (en) * | 2016-11-18 | 2018-09-25 | Bae Systems Haegglunds Ab | Tracked vehicle arranged with pivotable bogie |
| JP6895875B2 (ja) * | 2016-12-19 | 2021-06-30 | 株式会社クボタ | クローラ走行装置 |
| CN106585373B (zh) * | 2016-12-27 | 2024-04-19 | 甘肃省机械科学研究院有限责任公司 | 一种带静液压驱动的姿态可调整履带底盘 |
| SE542243C2 (sv) * | 2017-03-17 | 2020-03-24 | Komatsu Forest Ab | Fjädringsanordning för bandgående fordon |
| CN107351930A (zh) * | 2017-06-16 | 2017-11-17 | 太原理工大学 | 一种履带式底盘的变位装置及方法 |
| DE102017119796A1 (de) * | 2017-08-29 | 2019-02-28 | Claas Selbstfahrende Erntemaschinen Gmbh | Feldhäcksler sowie Verfahren zu dessen Umrüstung |
| US11835955B2 (en) | 2017-12-08 | 2023-12-05 | Camso Inc. | Systems and methods for monitoring off-road vehicles |
| CN108496565A (zh) * | 2018-05-07 | 2018-09-07 | 江苏大学 | 联合收获机可升降履带式底盘 |
| CN108773421A (zh) * | 2018-08-13 | 2018-11-09 | 湖南农业大学 | 一种具有电液调节水平与升降功能的履带底盘 |
| CN108974158A (zh) * | 2018-08-13 | 2018-12-11 | 张祝 | 一种采用电液调节履带底盘水平与升降功能的控制方法 |
| SE542494C2 (sv) * | 2018-09-14 | 2020-05-26 | Komatsu Forest Ab | Lastbärande fordonsdel och ett hjulburet fordon utrustat med en sådan fordonsdel |
| CN110800467A (zh) * | 2019-11-19 | 2020-02-18 | 山东交通学院 | 一种履带式吊振收获机 |
| CN111547146A (zh) * | 2020-03-27 | 2020-08-18 | 金华职业技术学院 | 履带比压自适应机构 |
| US20230347999A1 (en) * | 2020-08-18 | 2023-11-02 | Camso Inc. | Track system for traction of a vehicle |
| US20220105998A1 (en) * | 2020-10-06 | 2022-04-07 | Camso Inc. | Track system for traction of a vehicle |
| JP7381439B2 (ja) | 2020-12-18 | 2023-11-15 | 株式会社クボタ | 作業車 |
| JP7381440B2 (ja) | 2020-12-18 | 2023-11-15 | 株式会社クボタ | 作業車 |
| KR102612327B1 (ko) * | 2022-12-30 | 2023-12-08 | 장진만 | 다목적 농용 작업기 |
| CN117842223A (zh) * | 2024-03-07 | 2024-04-09 | 襄垣县仁达机电设备有限公司 | 一种履带底盘悬浮式升降机构 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11220931A (ja) * | 1991-11-01 | 1999-08-17 | Yanmar Agricult Equip Co Ltd | 農作業機の水平制御装置 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1401309A (fr) * | 1964-04-20 | 1965-06-04 | Creusot Forges Ateliers | Véhicule à chenilles à poulies de tension réglables longitudinalement et verticalement |
| US3863727A (en) * | 1973-05-10 | 1975-02-04 | Allied Leisure Inc | Suspension system for tracked vehicles |
| DE2344688B2 (de) * | 1973-09-05 | 1979-07-12 | Dr.Ing.H.C. F. Porsche Ag, 7000 Stuttgart | Laufwerk für Gleiskettenfahrzeuge |
| US3938605A (en) * | 1974-06-24 | 1976-02-17 | Clark Equipment Company | Track suspension |
| WO1985002824A1 (en) * | 1983-12-20 | 1985-07-04 | Caterpillar Tractor Co. | Frictionally driven belted work vehicle |
| JPS63188284A (ja) | 1987-01-31 | 1988-08-03 | Toshiba Corp | 文字読取装置 |
| JPS63188284U (ja) * | 1987-05-26 | 1988-12-02 | ||
| FR2619070B1 (fr) * | 1987-08-07 | 1991-09-06 | Colmant Cuvelier | Dispositif tendeur pour l'element souple ou articule d'un systeme de transmission ou de roulement |
| JPH01142383A (ja) | 1987-11-30 | 1989-06-05 | Taiyo Yuden Co Ltd | セラミック焼成用熱処理炉 |
| US4819754A (en) * | 1987-12-23 | 1989-04-11 | Caterpillar Inc. | Multiple mode vehicle suspension system |
| DE3805494A1 (de) * | 1988-02-22 | 1989-08-31 | Bavaria Cargo Tech | Foerderkugeleinheit |
| US4893883A (en) * | 1988-03-02 | 1990-01-16 | Caterpillar Inc. | Belt tension control system |
| JPH01142383U (ja) * | 1988-03-25 | 1989-09-29 | ||
| JPH0280084A (ja) | 1988-09-16 | 1990-03-20 | Brother Ind Ltd | ミシンに装着可能な刺繍装置 |
| JPH0280084U (ja) * | 1988-12-08 | 1990-06-20 | ||
| JP2824694B2 (ja) * | 1990-07-31 | 1998-11-11 | 三菱農機株式会社 | クローラ走行車輌における機体制御装置 |
| US5191952A (en) * | 1991-09-19 | 1993-03-09 | Caterpillar Inc. | Track-type vehicle having steerable wheels |
| JPH0582772A (ja) | 1991-09-20 | 1993-04-02 | Mitsubishi Electric Corp | 半導体装置及びその製造方法 |
| JP2594108Y2 (ja) * | 1992-04-20 | 1999-04-19 | セイレイ工業株式会社 | コンバイン用走行装置 |
| JP3270975B2 (ja) * | 1993-02-19 | 2002-04-02 | ヤンマー農機株式会社 | クローラ走行装置の水平制御機構 |
| WO1997037885A1 (fr) * | 1996-04-10 | 1997-10-16 | Komatsu Ltd. | Dispositif a chenilles pour vehicule sur chenilles |
| US5775447A (en) * | 1996-09-25 | 1998-07-07 | Caterpillar Inc. | Material deflecting assembly for a track assembly |
| JPH10100953A (ja) * | 1996-09-27 | 1998-04-21 | Seirei Ind Co Ltd | 農作業機 |
| US6024183A (en) * | 1997-10-24 | 2000-02-15 | Caterpillar Inc. | Track belt tension management system |
| US6164399A (en) * | 1999-06-02 | 2000-12-26 | Sercel, Inc. | Track-type carriage system for heavy vehicles |
-
2000
- 2000-08-10 JP JP2000242703A patent/JP4680355B2/ja not_active Expired - Fee Related
-
2001
- 2001-08-06 AT AT01954477T patent/ATE382013T1/de not_active IP Right Cessation
- 2001-08-06 US US10/343,441 patent/US6962222B2/en not_active Expired - Fee Related
- 2001-08-06 WO PCT/JP2001/006766 patent/WO2002014140A1/ja active IP Right Grant
- 2001-08-06 EP EP01954477A patent/EP1308378B1/en not_active Expired - Lifetime
- 2001-08-06 KR KR1020037001962A patent/KR100830551B1/ko not_active IP Right Cessation
- 2001-08-06 CN CNB018139957A patent/CN1211244C/zh not_active Expired - Fee Related
- 2001-08-06 AU AU2001276745A patent/AU2001276745B2/en not_active Ceased
- 2001-08-06 DE DE60132095T patent/DE60132095T2/de not_active Expired - Lifetime
- 2001-08-06 AU AU7674501A patent/AU7674501A/xx active Pending
- 2001-08-09 TW TW090119541A patent/TW515697B/zh not_active IP Right Cessation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11220931A (ja) * | 1991-11-01 | 1999-08-17 | Yanmar Agricult Equip Co Ltd | 農作業機の水平制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1211244C (zh) | 2005-07-20 |
| WO2002014140A1 (fr) | 2002-02-21 |
| EP1308378A1 (en) | 2003-05-07 |
| TW515697B (en) | 2003-01-01 |
| AU7674501A (en) | 2002-02-25 |
| KR100830551B1 (ko) | 2008-05-22 |
| EP1308378A4 (en) | 2006-06-07 |
| ATE382013T1 (de) | 2008-01-15 |
| DE60132095D1 (de) | 2008-02-07 |
| US20030161687A1 (en) | 2003-08-28 |
| JP2002053083A (ja) | 2002-02-19 |
| KR20030022383A (ko) | 2003-03-15 |
| AU2001276745B2 (en) | 2004-12-09 |
| US6962222B2 (en) | 2005-11-08 |
| EP1308378B1 (en) | 2007-12-26 |
| DE60132095T2 (de) | 2008-12-11 |
| CN1446165A (zh) | 2003-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4680355B2 (ja) | コンバイン | |
| JP4011807B2 (ja) | コンバイン | |
| JP4584502B2 (ja) | 移動農機 | |
| JP4727854B2 (ja) | 移動農機 | |
| US7028460B1 (en) | Rock windrower | |
| JP4727855B2 (ja) | 移動農機 | |
| JPH06115465A (ja) | コンバインの走行装置 | |
| JP3632801B2 (ja) | クローラ式走行装置のイコライザ支持構成 | |
| JP2536191B2 (ja) | コンバイン等の走行装置 | |
| JP2010083242A (ja) | クローラ走行装置 | |
| JP2688059B2 (ja) | 履帯式走行車両における履帯式走行装置の昇降装置 | |
| JP2004106727A (ja) | コンバインのクローラ走行装置 | |
| JP2867544B2 (ja) | コンバイン等の走行車台 | |
| JP3319047B2 (ja) | コンバインの水平制御車体 | |
| JP2575676Y2 (ja) | クローラ型走行車 | |
| JP2861141B2 (ja) | コンバインの走行制御装置 | |
| JP2861145B2 (ja) | コンバイン等の姿勢制御装置 | |
| JP3336643B2 (ja) | コンバイン | |
| JP3277639B2 (ja) | 作業機の傾斜制御装置 | |
| JPH06144307A (ja) | コンバインの走行装置 | |
| JPH0740867A (ja) | コンバインの水平制御車体 | |
| JPH04278016A (ja) | コンバイン等のクローラ走行装置 | |
| JPH09322635A (ja) | 農作業車の走行装置 | |
| JP2004106728A (ja) | コンバインのクローラ走行装置 | |
| JP2000159157A (ja) | 走行車の走行装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20040610 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20040810 |
|
| A072 | Dismissal of procedure [no reply to invitation to correct request for examination] |
Free format text: JAPANESE INTERMEDIATE CODE: A073 Effective date: 20040921 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070425 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20070815 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20090729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091215 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100803 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100929 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110104 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110203 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4680355 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140210 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140210 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150210 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |