JP2025041256A - 駐車支援方法、駐車支援装置および駐車支援プログラム - Google Patents
駐車支援方法、駐車支援装置および駐車支援プログラム Download PDFInfo
- Publication number
- JP2025041256A JP2025041256A JP2023148443A JP2023148443A JP2025041256A JP 2025041256 A JP2025041256 A JP 2025041256A JP 2023148443 A JP2023148443 A JP 2023148443A JP 2023148443 A JP2023148443 A JP 2023148443A JP 2025041256 A JP2025041256 A JP 2025041256A
- Authority
- JP
- Japan
- Prior art keywords
- parking
- vehicle
- route
- branch
- setting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/0285—Parking performed automatically
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/06—Automatic manoeuvring for parking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/3415—Dynamic re-routing, e.g. recalculating the route when the user deviates from calculated route or after detecting real-time traffic data or accidents
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Abstract

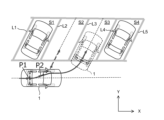
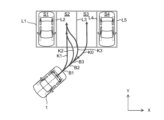
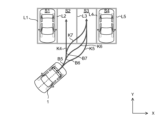
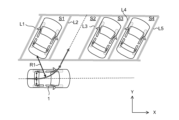
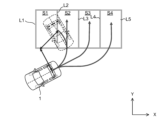
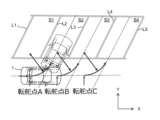
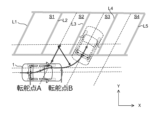
【解決手段】駐車支援方法は、車両の乗員の操作を受け付け、駐車枠を検知し、車両の駐車経路を設定し、駐車経路から分岐する分岐路を設定し、駐車経路に沿って車両を自動駐車させる。検知ステップにおいて駐車枠を複数検出している場合に、経路設定において、車両を第1の駐車枠に駐車させる駐車経路を設定し、分岐設定において、駐車経路上に分岐点を設定して、車両を分岐点から第2の駐車枠に駐車させる分岐路を設定する。自動駐車において、車両を第1の駐車経路に沿って自動駐車させている時に、目標駐車枠を変更させる変更指示操作を受け付け、変更指示操作を検出した場合、分岐路に沿って車両を自動駐車させる。
【選択図】図4
Description
車両の乗員の操作を受け付ける受付けステップと、
駐車枠を検知する検知ステップと、
前記車両の駐車経路を設定する経路設定ステップと、
前記駐車経路から分岐する分岐路を設定する分岐設定ステップと、
前記駐車経路に沿って前記車両を自動駐車させる自動駐車ステップと、
を有し、
前記検知ステップにおいて前記駐車枠を複数検出している場合に、
前記経路設定ステップは、
前記車両を第1の駐車枠に駐車させる駐車経路を設定するステップを含み、
前記分岐設定ステップは、
前記駐車経路上に分岐点を設定して、前記車両を前記分岐点から第2の駐車枠に駐車させる分岐路を設定するステップを含み、
前記自動駐車ステップにおいて、
前記車両を第1の駐車経路に沿って自動駐車させている時に、
目標駐車枠を変更させる変更指示操作を受け付けるステップと、
前記変更指示操作を受け付けるステップにおいて、前記変更指示操作を検出した場合、前記分岐路に沿って前記車両を自動駐車させるステップと、
をさらに含む。
車両の乗員の操作を受け付ける操作受付部と、
駐車枠を検知する駐車枠検知部と、
前記車両の駐車経路を設定する経路設定部と、
前記駐車経路に沿って前記車両を自動駐車させる走行制御部と、
を備え、
前記経路設定部は、前記駐車経路から分岐する分岐路を設定し、
前記駐車枠検知部が前記駐車枠を複数検出している場合に、
前記経路設定部は、前記車両を第1の駐車枠に駐車させる駐車経路を設定し、
前記経路設定部は、前記駐車経路上に分岐点を設定して、前記車両を前記分岐点から第2の駐車枠に駐車させる分岐路を設定し、
前記走行制御部が、前記車両を第1の駐車経路に沿って自動駐車させている時に、
前記操作受付部は、目標駐車枠を変更させる変更指示操作を受け付け、
前記操作受付部が前記変更指示操作を検出した場合、
前記走行制御部は、前記分岐路に沿って前記車両を自動駐車させる。
車両のコンピュータに、
車両の乗員の操作を受け付ける受付け処理と、
駐車枠を検知する検知処理と、
前記車両の駐車経路を設定する経路設定処理と、
前記駐車経路から分岐する分岐路を設定する分岐設定処理と、
前記駐車経路に沿って前記車両を自動駐車させる自動駐車処理と、
を実行させ、
前記検知処理において前記駐車枠を複数検出している場合に、
前記経路設定処理は、
前記車両を第1の駐車枠に駐車させる駐車経路を設定する処理を含み、
前記分岐設定処理は、前記駐車経路上に分岐点を設定して、前記車両を前記分岐点から第2の駐車枠に駐車させる分岐路を設定する処理を含み、
前記自動駐車処理において、
前記車両を第1の駐車経路に沿って自動駐車させている時に、
目標駐車枠を変更させる変更指示操作を受け付ける処理と、
前記変更指示操作を受け付ける処理において、前記変更指示操作を検出した場合、
前記分岐路に沿って前記車両を自動駐車させる処理と、
を前記コンピュータに実行させる。
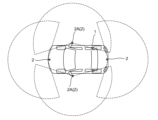
以下、本開示の実施の形態を図面に基づいて詳細に説明する。図1は、本開示の実施の形態に係る駐車支援装置100を適用した車両1による自動駐車を説明するための図である。図2は、本実施の形態に係る駐車支援装置100を適用可能な車両1を示す図である。
・操舵トルクが第1閾値未満である場合、ノイズと判断して無視する(回避操作とも変更指示とも判定しない)。
・操舵トルクが、第1閾値より大きい第2閾値以上である場合、順方向トルクを発生させ、操舵を支援する(操舵は回避操作だと判定する)。
・操舵トルクが第1閾値以上であって、第2閾値未満である場合、逆方向トルクを発生させ、ハンドルを振動させる。
・振動開始から所定時間が経過しても操舵トルクが第1閾値以上である場合、回避操作と判定し、振動を停止して順方向トルクを発生させ、操舵を支援する。
・振動開始から所定時間内に操舵トルクが第1閾値未満となった場合、変更指示と判定し、振動を停止して、経路または分岐路に合流するための自動操舵を開始する。
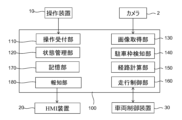
2 カメラ
10 操作装置
20 HMI装置
30 車両制御装置
40 ナビゲーション装置
100 駐車支援装置
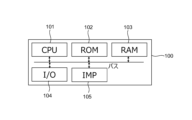
101 CPU
102 ROM
103 RAM
104 I/O
105 IMP
110 操作受付部
120 状態管理部
130 画像取得部
140 駐車枠検知部
150 経路設定部
160 走行制御部
170 記憶部
180 報知部
Claims (18)
- 車両の乗員の操作を受け付ける受付けステップと、
駐車枠を検知する検知ステップと、
前記車両の駐車経路を設定する経路設定ステップと、
前記駐車経路から分岐する分岐路を設定する分岐設定ステップと、
前記駐車経路に沿って前記車両を自動駐車させる自動駐車ステップと、
を有し、
前記検知ステップにおいて前記駐車枠を複数検出している場合に、
前記経路設定ステップは、
前記車両を第1の駐車枠に駐車させる駐車経路を設定するステップを含み、
前記分岐設定ステップは、前記駐車経路上に分岐点を設定して、前記車両を前記分岐点から第2の駐車枠に駐車させる分岐路を設定するステップを含み、
前記自動駐車ステップにおいて、
前記車両を第1の駐車経路に沿って自動駐車させている時に、
目標駐車枠を変更させる変更指示操作を受け付けるステップと、
前記変更指示操作を受け付けるステップにおいて、前記変更指示操作を検出した場合、前記分岐路に沿って前記車両を自動駐車させるステップと、
をさらに含む、
駐車支援方法。 - 前記分岐設定ステップは、
前記分岐路に関わる設定の一部、または全部を、前記自動駐車の開始前に行うステップを含む、
請求項1に記載の駐車支援方法。 - 前記分岐設定ステップは、
前記分岐路の旋回区間の回転半径、
または、前記旋回区間の弧の長さ、
または、前記分岐路の直線区間の角度、
のうち少なくとも一つを、
前記第1の駐車経路の設定値に基づいて設定するステップを含む、
請求項1に記載の駐車支援方法。 - 前記分岐設定ステップは、前記分岐点を前記第1の駐車経路上に、複数、設定するステップを含み、
前記自動駐車ステップにおいて、前記変更指示操作を検出した時に、複数の分岐点のうち最寄りの分岐点を選択し、
前記最寄りの分岐点までは前記第1の駐車経路に沿って走行し、
前記最寄りの分岐点からは分岐路に沿って自動駐車する、
請求項1に記載の駐車支援方法。 - 前記分岐設定ステップは、
前記複数の分岐点の間隔を、前記分岐路の設定に要する時間に基づいて設定するステップを含み、
前記分岐設定ステップは、前記第1の駐車経路に沿って自動駐車している時に前記分岐路を設定するステップを含む、
請求項4に記載の駐車支援方法。 - 前記自動駐車ステップにおいて、前記車両が前記第1の駐車経路に沿って自動駐車をしている時に、ステアリングの操作、ウインカレバーの操作、または、所定のボタンの操作を検出した場合に、前記変更指示操作を検出したと判定する、
請求項1に記載の駐車支援方法。 - 前記自動駐車ステップにおいて、前記ステアリングの操作の、操舵力、操舵時間、角速度の値の何れかが、第1の閾値を超え、かつ、第2の閾値を超えない場合に、前記変更指示操作を検出したと判定する、
請求項6に記載の駐車支援方法。 - 前記自動駐車ステップにおいて、
前記ステアリングの操作の前記値が前記第2の閾値を超えない場合、前記ステアリングの操作に逆らうトルクを、前記車両の電動パワーステアリングで発生させ、
前記ステアリングの操作の前記値が前記第2の閾値を超える場合、前記ステアリングの操作に逆らうトルクを前記電動パワーステアリングで発生させない、
請求項7に記載の駐車支援方法。 - 前記自動駐車ステップにおいて、前記ステアリングの操作とブレーキの操作の両方を検出している場合は、
前記ステアリングの操作に逆らうトルクを前記車両の電動パワーステアリングで発生させないか、または、
前記ステアリングの操作を検出して前記ブレーキの操作を検出していない場合と比較して、前記ステアリングの操作に逆らうトルクを前記電動パワーステアリングで発生させ難くする、
請求項7または請求項8に記載の駐車支援方法。 - 前記車両は、前記ステアリングを振動させる機能を有し、
前記自動駐車ステップにおいて、
前記ステアリングの操作を検出した時に前記ステアリングを振動させ、
前記ステアリングに加えられた力、または、トルクが第3の閾値未満になった場合に、前記変更指示操作を検出したと判定する、
請求項6に記載の駐車支援方法。 - 前記駐車経路を設定するステップにおいて、複数の駐車枠を検出している場合に設定する駐車経路は、前記駐車枠を1つだけ検出している場合に設定する駐車経路と比較して、
前進駐車または後退駐車の場合に、旋回を開始する時期が、より早い、および、
前記前進駐車の場合に、旋回区間の回転半径が、より大きい、および、
前記後退駐車の場合に、経路の支点から直進する距離が、より長い、
のうちの何れかに該当する、
請求項1に記載の駐車支援方法。 - 前記乗員に対して前記車両の動作を報知するステップをさらに含み、複数の駐車枠を検出している場合に、
前記報知するステップは、目標駐車位置の報知を含む報知をするか、または
前記車両の動作のタイミングよりも早いタイミングで、前記車両の動作を報知する、
請求項1に記載の駐車支援方法。 - 前記目標駐車枠を変更させる意図を照会する報知を、前記乗員に対して報知するステップをさらに含み、
前記自動駐車ステップにおいて、前記車両が前記第1の駐車経路に沿って自動駐車をしている時に、ステアリングの操作、ブレーキペダルの操作、および、所定のボタンの操作、の何れかを検出した場合、前記目標駐車枠を変更させる意図を照会する報知を行う、
請求項1に記載の駐車支援方法。 - 前記自動駐車ステップにおいて、前記変更指示操作を検出した時に、前記車両を減速させるように前記車両の速度を制御する、
請求項1に記載の駐車支援方法。 - 前記自動駐車ステップにおいて、前記目標駐車枠を変更させる意図を照会する報知を行う際に、前記車両を減速させるように前記車両の速度を制御する、
請求項13に記載の駐車支援方法。 - 前記自動駐車ステップにおいて、前記第1の駐車枠に隣接する駐車枠から前記第2の駐車枠を選択する、
請求項1に記載の駐車支援方法。 - 車両の乗員の操作を受け付ける操作受付部と、
駐車枠を検知する駐車枠検知部と、
前記車両の駐車経路を設定する経路設定部と、
前記駐車経路に沿って前記車両を自動駐車させる走行制御部と、
を備え、
前記経路設定部は、前記駐車経路から分岐する分岐路を設定し、
前記駐車枠検知部が前記駐車枠を複数検出している場合に、
前記経路設定部は、前記車両を第1の駐車枠に駐車させる駐車経路を設定し、
前記経路設定部は、前記駐車経路上に分岐点を設定して、前記車両を前記分岐点から第2の駐車枠に駐車させる分岐路を設定し、
前記走行制御部が、前記車両を第1の駐車経路に沿って自動駐車させている時に、
前記操作受付部は、目標駐車枠を変更させる変更指示操作を受け付け、
前記操作受付部が前記変更指示操作を検出した場合、
前記走行制御部は、前記分岐路に沿って前記車両を自動駐車させる、
駐車支援装置。 - 車両のコンピュータに、
車両の乗員の操作を受け付ける受付け処理と、
駐車枠を検知する検知処理と、
前記車両の駐車経路を設定する経路設定処理と、
前記駐車経路から分岐する分岐路を設定する分岐設定処理と、
前記駐車経路に沿って前記車両を自動駐車させる自動駐車処理と、
を実行させ、
前記検知処理において前記駐車枠を複数検出している場合に、
前記経路設定処理は、
前記車両を第1の駐車枠に駐車させる駐車経路を設定する処理を含み、
前記分岐設定処理は、前記駐車経路上に分岐点を設定して、前記車両を前記分岐点から第2の駐車枠に駐車させる分岐路を設定する処理を含み、
前記自動駐車処理において、
前記車両を第1の駐車経路に沿って自動駐車させている時に、
目標駐車枠を変更させる変更指示操作を受け付ける処理と、
前記変更指示操作を受け付ける処理において、前記変更指示操作を検出した場合、
前記分岐路に沿って前記車両を自動駐車させる処理と、
を前記コンピュータに実行させる、
駐車支援プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023148443A JP7646278B1 (ja) | 2023-09-13 | 2023-09-13 | 駐車支援方法、駐車支援装置および駐車支援プログラム |
| US18/825,142 US12583444B2 (en) | 2023-09-13 | 2024-09-05 | Parking support method, parking support apparatus, and computer-readable recording medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023148443A JP7646278B1 (ja) | 2023-09-13 | 2023-09-13 | 駐車支援方法、駐車支援装置および駐車支援プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP7646278B1 JP7646278B1 (ja) | 2025-03-17 |
| JP2025041256A true JP2025041256A (ja) | 2025-03-26 |
Family
ID=94873169
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023148443A Active JP7646278B1 (ja) | 2023-09-13 | 2023-09-13 | 駐車支援方法、駐車支援装置および駐車支援プログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US12583444B2 (ja) |
| JP (1) | JP7646278B1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7646278B1 (ja) * | 2023-09-13 | 2025-03-17 | パナソニックオートモーティブシステムズ株式会社 | 駐車支援方法、駐車支援装置および駐車支援プログラム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011025753A (ja) * | 2009-07-22 | 2011-02-10 | Equos Research Co Ltd | 走行支援装置及び走行支援方法 |
| JP2016060243A (ja) * | 2014-09-12 | 2016-04-25 | アイシン精機株式会社 | 駐車支援装置 |
| WO2017068698A1 (ja) * | 2015-10-22 | 2017-04-27 | 日産自動車株式会社 | 駐車支援方法及び駐車支援装置 |
| WO2017068694A1 (ja) * | 2015-10-22 | 2017-04-27 | 日産自動車株式会社 | 駐車支援方法及び駐車支援装置 |
| US20190193724A1 (en) * | 2017-12-26 | 2019-06-27 | Lg Electronics Inc. | Autonomous vehicle and controlling method thereof |
| JP2021151815A (ja) * | 2020-03-24 | 2021-09-30 | パナソニックIpマネジメント株式会社 | 駐車支援装置、駐車支援システム、及び駐車支援方法 |
| JP2022077093A (ja) * | 2020-11-11 | 2022-05-23 | フォルシアクラリオン・エレクトロニクス株式会社 | 駐車支援装置及び駐車支援方法 |
Family Cites Families (87)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4931930A (en) * | 1988-04-19 | 1990-06-05 | Industrial Technology Research Institute | Automatic parking device for automobile |
| JPH0696397A (ja) * | 1992-09-16 | 1994-04-08 | Mitsubishi Electric Corp | 画像追尾装置および画像追尾方法 |
| DE4336288C1 (de) * | 1993-10-25 | 1995-03-30 | Daimler Benz Ag | Einrichtung zur Überwachung des Rück- bzw. Frontraumes eines einparkenden Kraftfahrzeugs |
| US5742141A (en) * | 1996-06-04 | 1998-04-21 | Ford Motor Company | Semi-autonomous parking control system for a vehicle providing tactile feedback to a vehicle operator |
| JP3645969B2 (ja) * | 1996-10-09 | 2005-05-11 | 本田技研工業株式会社 | 車両の自動操舵装置 |
| DE19650808A1 (de) * | 1996-12-06 | 1998-06-10 | Bosch Gmbh Robert | Einparkvorrichtung für ein Kraftfahrzeug |
| CA2199999A1 (en) * | 1997-03-14 | 1998-09-14 | Peter Johann Kielland | Parking regulation enforcement system |
| JP3182509B2 (ja) * | 1997-04-28 | 2001-07-03 | 本田技研工業株式会社 | 自動変速機付き車両の自動操舵装置 |
| JP4057743B2 (ja) * | 1999-05-26 | 2008-03-05 | 本田技研工業株式会社 | 車両の操舵装置 |
| US7366595B1 (en) * | 1999-06-25 | 2008-04-29 | Seiko Epson Corporation | Vehicle drive assist system |
| US6411867B1 (en) * | 1999-10-27 | 2002-06-25 | Fujitsu Ten Limited | Vehicle driving support system, and steering angle detection device |
| JP4245817B2 (ja) * | 2001-02-22 | 2009-04-02 | アルパイン株式会社 | 車載用ナビゲーション装置 |
| JP3749483B2 (ja) * | 2002-01-11 | 2006-03-01 | トヨタ自動車株式会社 | 駐車支援装置 |
| DE10354661A1 (de) * | 2003-11-22 | 2005-06-30 | Robert Bosch Gmbh | Vorrichtung zur semiautonomen Unterstützung des Einparkvorgangs bei Fahrzeugen |
| JP4495160B2 (ja) * | 2004-06-25 | 2010-06-30 | パイオニア株式会社 | 案内報知装置 |
| DE102005046827A1 (de) * | 2004-09-30 | 2006-04-06 | Robert Bosch Gmbh | Verfahren zur Einparkunterstützung |
| DE102005032095A1 (de) * | 2005-07-08 | 2007-01-18 | Robert Bosch Gmbh | Parkvorrichtung |
| DE102007009745A1 (de) * | 2007-02-28 | 2008-09-04 | Continental Automotive Gmbh | Einparkhalbautomat |
| DE102007062244A1 (de) * | 2007-12-21 | 2009-06-25 | Robert Bosch Gmbh | Vorrichtung zur semiautonomen Unterstützung eines Einparkvorganges eines Fahrzeuges |
| ATE548245T1 (de) * | 2008-04-03 | 2012-03-15 | Valeo Schalter & Sensoren Gmbh | Verfahren und vorrichtung zur unterstützung eines fahres eines fahrzeugs beim ausparken aus einer parklücke |
| US20110080304A1 (en) * | 2009-10-07 | 2011-04-07 | Ford Global Technologies, Llc | Vehicle Park Assist System and Method for Parking a Vehicle Using Such System |
| DE102010002105A1 (de) * | 2010-02-18 | 2011-08-18 | Robert Bosch GmbH, 70469 | Verfahren zur Unterstützung eines Fahrers eines Fahrzeugs bei einem Fahrmanöver |
| WO2012143033A1 (en) * | 2011-04-18 | 2012-10-26 | Valeo Schalter Und Sensoren Gmbh | Method for assisting a driver of a motor vehicle in parking into a parking space, driver assistance system and motor vehicle |
| DE102011086210A1 (de) * | 2011-11-11 | 2013-05-16 | Robert Bosch Gmbh | Verfahren zur Unterstützung eines Fahrers eines Kraftfahrzeugs sowie Vorrichtung zur Durchführung des Verfahrens |
| WO2014091613A1 (ja) * | 2012-12-13 | 2014-06-19 | トヨタ自動車株式会社 | 駐車支援装置 |
| EP3015319B1 (en) * | 2013-06-26 | 2017-10-04 | Toyota Jidosha Kabushiki Kaisha | Parking assist device |
| JP5962604B2 (ja) * | 2013-07-11 | 2016-08-03 | トヨタ自動車株式会社 | 車両制御システム |
| KR102108056B1 (ko) * | 2013-07-26 | 2020-05-08 | 주식회사 만도 | 주차 제어 장치 및 주차 제어 방법 |
| DE102013214805A1 (de) * | 2013-07-29 | 2015-01-29 | Bayerische Motoren Werke Aktiengesellschaft | Entscheiden über die Fahrtrichtung beim Wiederanfahren bei einem automatisierten Parkvorgang mit einem Parkassistenzsystem |
| DE102014108949A1 (de) * | 2014-06-26 | 2015-12-31 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Unterstützen eines Fahrers eines Kraftfahrzeugs beim Einparken, Fahrerassistenzsystem und Kraftfahrzeug |
| JP6278920B2 (ja) * | 2015-03-23 | 2018-02-14 | 三菱電機株式会社 | 駐車支援装置 |
| DE102016210297A1 (de) * | 2015-06-17 | 2016-12-22 | Robert Bosch Gmbh | Verwaltung eines Parkplatzes |
| KR101637842B1 (ko) * | 2015-07-08 | 2016-07-07 | 현대자동차주식회사 | 주차장 내 자율주행 시스템 및 방법 |
| US9557741B1 (en) * | 2015-08-24 | 2017-01-31 | Ford Global Technologies, Llc | System and method for autonomous valet parking using plenoptic cameras |
| JP6594736B2 (ja) * | 2015-10-27 | 2019-10-23 | クラリオン株式会社 | 駐車支援装置 |
| KR101827058B1 (ko) * | 2015-11-11 | 2018-02-07 | 현대자동차주식회사 | 주차지원장치 및 그의 차속 제어 방법 |
| KR102395879B1 (ko) * | 2015-12-14 | 2022-05-09 | 현대모비스 주식회사 | 주차장 내 최적 경로 생성방법 및 그 시스템 |
| WO2017145364A1 (ja) | 2016-02-26 | 2017-08-31 | 三菱電機株式会社 | 駐車支援装置および駐車支援方法 |
| DE102016122289A1 (de) * | 2016-11-21 | 2018-05-24 | Valeo Schalter Und Sensoren Gmbh | Verfahren zur Lokalisierung eines Fahrzeugs entlang einer Route in einer Parkplatzumgebung |
| US9969386B1 (en) * | 2017-01-10 | 2018-05-15 | Mitsubishi Electric Research Laboratories, Inc. | Vehicle automated parking system and method |
| JP6699602B2 (ja) * | 2017-03-08 | 2020-05-27 | トヨタ自動車株式会社 | 自動駐車装置 |
| DE102017204830A1 (de) * | 2017-03-22 | 2018-09-27 | Ford Global Technologies, Llc | Verfahren und Fahrerassistenzsystem zur Unterstützung des Ein- und/oder Ausparkens eines Kraftfahrzeugs |
| JP6911434B2 (ja) * | 2017-03-23 | 2021-07-28 | 株式会社アイシン | 車両走行支援装置 |
| JP6793085B2 (ja) * | 2017-04-07 | 2020-12-02 | クラリオン株式会社 | 駐車支援装置 |
| JP6724853B2 (ja) * | 2017-04-24 | 2020-07-15 | アイシン精機株式会社 | 駐車支援装置 |
| US10852153B2 (en) * | 2017-05-12 | 2020-12-01 | Lg Electronics Inc. | Autonomous vehicle and method of controlling the same |
| KR101964919B1 (ko) * | 2017-05-26 | 2019-08-13 | 주식회사 만도 | 주차 제어 장치 및 그 방법 |
| KR102001916B1 (ko) * | 2017-05-30 | 2019-07-19 | 엘지전자 주식회사 | 주차 보조 시스템 |
| JP2018203218A (ja) * | 2017-06-09 | 2018-12-27 | アイシン精機株式会社 | 駐車支援システム |
| US10593212B2 (en) * | 2017-06-12 | 2020-03-17 | GM Global Technology Operations LLC | Autonomous parking methods and systems for autonomous vehicles |
| KR20180136134A (ko) * | 2017-06-14 | 2018-12-24 | 주식회사 만도 | 스마트 주차 보조 시스템 및 스마트 주차 보조 시스템의 제어 방법 |
| US11155257B2 (en) * | 2017-06-26 | 2021-10-26 | Hitachi Automotive Systems, Ltd. | Automatic parking control device |
| WO2019058781A1 (ja) | 2017-09-20 | 2019-03-28 | 日立オートモティブシステムズ株式会社 | 駐車支援装置 |
| KR102060070B1 (ko) * | 2017-10-24 | 2019-12-27 | 엘지전자 주식회사 | 자동주차장치 및 이의 제어방법 |
| JP6932662B2 (ja) * | 2018-03-01 | 2021-09-08 | 日立Astemo株式会社 | 車両走行制御装置 |
| JP6917330B2 (ja) * | 2018-03-28 | 2021-08-11 | 日立Astemo株式会社 | 駐車支援装置 |
| JP7133336B2 (ja) * | 2018-04-06 | 2022-09-08 | 日立Astemo株式会社 | 駐車支援装置 |
| DE102018207863A1 (de) * | 2018-05-18 | 2019-11-21 | Bayerische Motoren Werke Aktiengesellschaft | Vorrichtung und Verfahren zum Ausgeben von Navigationsinformation sowie Fahrzeug |
| KR102567015B1 (ko) * | 2018-05-21 | 2023-08-14 | 에스케이텔레콤 주식회사 | 주차 안내 장치 및 방법 |
| US11117569B2 (en) * | 2018-06-27 | 2021-09-14 | Baidu Usa Llc | Planning parking trajectory generation for self-driving vehicles using optimization method |
| JP7367329B2 (ja) * | 2019-04-11 | 2023-10-24 | 株式会社アイシン | 駐車領域案内システム及びプログラム |
| JP7018048B2 (ja) * | 2019-06-24 | 2022-02-09 | 本田技研工業株式会社 | 駐車支援システム |
| JP2021000958A (ja) * | 2019-06-24 | 2021-01-07 | 本田技研工業株式会社 | 駐車支援システム |
| KR102052188B1 (ko) * | 2019-07-16 | 2019-12-05 | (주)성원티피에스 | 자율주행 차량용 주차 보조 시스템 |
| JPWO2021033632A1 (ja) * | 2019-08-20 | 2021-02-25 | ||
| US11648934B2 (en) * | 2019-08-29 | 2023-05-16 | Nissan Motor Co., Ltd. | Parking assistance method and parking assistance device |
| JP7476509B2 (ja) * | 2019-10-10 | 2024-05-01 | 株式会社アイシン | 駐車支援装置、駐車支援方法、および駐車支援プログラム |
| JP7172961B2 (ja) * | 2019-11-11 | 2022-11-16 | トヨタ自動車株式会社 | 自動駐車システム |
| WO2021176691A1 (ja) * | 2020-03-06 | 2021-09-10 | キオクシア株式会社 | 情報処理装置、情報処理方法、及び情報処理プログラム |
| JP7541843B2 (ja) * | 2020-03-19 | 2024-08-29 | 本田技研工業株式会社 | 車両制御装置 |
| WO2021235212A1 (ja) * | 2020-05-20 | 2021-11-25 | 株式会社デンソー | 駐車支援装置、駐車支援方法、及び駐車支援プログラム |
| CN112185107B (zh) * | 2020-08-27 | 2022-08-12 | 北京北大千方科技有限公司 | 一种最优停车场计算方法、装置、存储介质及终端 |
| EP4246491A4 (en) * | 2020-11-27 | 2023-12-27 | Huawei Technologies Co., Ltd. | NAVIGATION METHOD, DEVICE AND SYSTEM |
| JP7224402B2 (ja) * | 2021-07-20 | 2023-02-17 | 三菱電機株式会社 | 駐車場管理装置 |
| DE102021125861A1 (de) * | 2021-10-05 | 2023-04-06 | Graphmasters SA | Verfahren und Parkleitsystem zur Zuweisung eines Parkplatzes für ein Fahrzeug und zur Navigation des Fahrzeugs zu dem Parkplatz |
| WO2023140041A1 (ja) * | 2022-01-24 | 2023-07-27 | 株式会社アイシン | 運転支援装置及びコンピュータプログラム |
| JP7504334B2 (ja) * | 2022-01-28 | 2024-06-24 | パナソニックオートモーティブシステムズ株式会社 | 駐車支援装置および駐車支援方法 |
| US12291191B1 (en) * | 2022-12-22 | 2025-05-06 | Zoox, Inc. | Parking location filter |
| US12269464B2 (en) * | 2022-12-22 | 2025-04-08 | Zoox, Inc. | Trajectory determination based on pose data |
| US12269508B1 (en) * | 2022-12-22 | 2025-04-08 | Zoox, Inc. | Determining parking locations based on multistage filtering |
| CN120584061A (zh) * | 2023-01-31 | 2025-09-02 | 日产自动车株式会社 | 驻车辅助方法及驻车辅助装置 |
| US12291193B1 (en) * | 2023-02-23 | 2025-05-06 | Zoox, Inc. | Trajectory determination based on heuristic grid data |
| JP7646278B1 (ja) * | 2023-09-13 | 2025-03-17 | パナソニックオートモーティブシステムズ株式会社 | 駐車支援方法、駐車支援装置および駐車支援プログラム |
| US12337830B2 (en) * | 2023-09-21 | 2025-06-24 | Ford Global Technologies, Llc | Parking assist systems and methods |
| CN119953354A (zh) * | 2023-11-08 | 2025-05-09 | 比亚迪股份有限公司 | 一种泊车方法及相关装置 |
| CN120564456A (zh) * | 2024-02-27 | 2025-08-29 | 鸿海精密工业股份有限公司 | 车辆泊车方法与车辆寻车方法 |
| CN120663915A (zh) * | 2025-08-13 | 2025-09-19 | 赛力斯汽车有限公司 | 自动泊车方法及装置、电子设备、存储介质 |
-
2023
- 2023-09-13 JP JP2023148443A patent/JP7646278B1/ja active Active
-
2024
- 2024-09-05 US US18/825,142 patent/US12583444B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011025753A (ja) * | 2009-07-22 | 2011-02-10 | Equos Research Co Ltd | 走行支援装置及び走行支援方法 |
| JP2016060243A (ja) * | 2014-09-12 | 2016-04-25 | アイシン精機株式会社 | 駐車支援装置 |
| WO2017068698A1 (ja) * | 2015-10-22 | 2017-04-27 | 日産自動車株式会社 | 駐車支援方法及び駐車支援装置 |
| WO2017068694A1 (ja) * | 2015-10-22 | 2017-04-27 | 日産自動車株式会社 | 駐車支援方法及び駐車支援装置 |
| US20190193724A1 (en) * | 2017-12-26 | 2019-06-27 | Lg Electronics Inc. | Autonomous vehicle and controlling method thereof |
| JP2021151815A (ja) * | 2020-03-24 | 2021-09-30 | パナソニックIpマネジメント株式会社 | 駐車支援装置、駐車支援システム、及び駐車支援方法 |
| JP2022077093A (ja) * | 2020-11-11 | 2022-05-23 | フォルシアクラリオン・エレクトロニクス株式会社 | 駐車支援装置及び駐車支援方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20250083664A1 (en) | 2025-03-13 |
| US12583444B2 (en) | 2026-03-24 |
| JP7646278B1 (ja) | 2025-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6451854B2 (ja) | 走行制御装置の制御方法および走行制御装置 | |
| JP6451855B2 (ja) | 走行制御方法および走行制御装置 | |
| JP7040098B2 (ja) | 操舵支援装置 | |
| JP6368574B2 (ja) | 車両制御装置 | |
| CN104395946B (zh) | 用于自动实施驾驶操纵的方法 | |
| JP7159600B2 (ja) | 車両制御装置、インタフェース装置、およびコンピュータ | |
| JP2021020497A (ja) | 衝突回避支援装置 | |
| JP6607826B2 (ja) | 走行制御装置 | |
| JP6975766B2 (ja) | 駐車支援装置、駐車支援方法及びプログラム | |
| WO2013008299A1 (ja) | 車両の緊急退避装置 | |
| CN112977416B (zh) | 驻车辅助系统及其控制方法 | |
| CN114212024B (zh) | 方向指示器的控制方法以及方向指示器的控制装置 | |
| JP6318204B2 (ja) | 駐車出庫支援装置 | |
| JP2015049823A (ja) | 衝突回避支援装置及び衝突回避支援方法 | |
| JP2023544628A (ja) | 運転者データに依存して走行機能を動作させる車両運転システム及び方法 | |
| WO2020230300A1 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP2018045397A (ja) | 自動運転車両 | |
| JP2018163113A (ja) | 駐車支援方法およびそれを利用した駐車支援装置、移動制御装置、プログラム | |
| JP2002307976A (ja) | 走行支援装置 | |
| JP7646278B1 (ja) | 駐車支援方法、駐車支援装置および駐車支援プログラム | |
| JP2006176069A (ja) | インターチェンジ合流支援装置 | |
| JP7481070B2 (ja) | 車両制御装置、車両用合流支援装置及び車両 | |
| JP6373916B2 (ja) | 駐車出庫支援装置 | |
| JP7139632B2 (ja) | 車両の自動運転制御ecuおよび自動運転制御方法 | |
| JP2002362181A (ja) | 走行支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20240306 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20250106 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20250106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250303 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7646278 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |