CN100585427C - 标签通信装置及其控制方法 - Google Patents
标签通信装置及其控制方法 Download PDFInfo
- Publication number
- CN100585427C CN100585427C CN200510079525A CN200510079525A CN100585427C CN 100585427 C CN100585427 C CN 100585427C CN 200510079525 A CN200510079525 A CN 200510079525A CN 200510079525 A CN200510079525 A CN 200510079525A CN 100585427 C CN100585427 C CN 100585427C
- Authority
- CN
- China
- Prior art keywords
- antenna
- rfid label
- electric wave
- tag communication
- communication apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000006854 communication Effects 0.000 title claims abstract description 161
- 238000004891 communication Methods 0.000 title claims abstract description 160
- 238000000034 method Methods 0.000 title claims description 44
- 238000012545 processing Methods 0.000 claims description 31
- 230000015572 biosynthetic process Effects 0.000 claims description 29
- 238000003860 storage Methods 0.000 description 15
- 238000001514 detection method Methods 0.000 description 12
- 238000005516 engineering process Methods 0.000 description 9
- 230000002093 peripheral effect Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 230000004888 barrier function Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 6
- RDYMFSUJUZBWLH-UHFFFAOYSA-N endosulfan Chemical compound C12COS(=O)OCC2C2(Cl)C(Cl)=C(Cl)C1(Cl)C2(Cl)Cl RDYMFSUJUZBWLH-UHFFFAOYSA-N 0.000 description 5
- 239000006096 absorbing agent Substances 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- 238000007689 inspection Methods 0.000 description 4
- 238000007493 shaping process Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 235000007516 Chrysanthemum Nutrition 0.000 description 1
- 244000189548 Chrysanthemum x morifolium Species 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000008676 import Effects 0.000 description 1
- 230000005055 memory storage Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000000053 physical method Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000004304 visual acuity Effects 0.000 description 1
Images















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K17/00—Methods or arrangements for effecting co-operative working between equipments covered by two or more of main groups G06K1/00 - G06K15/00, e.g. automatic card files incorporating conveying and reading operations
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/0008—General problems related to the reading of electronic memory record carriers, independent of its reading method, e.g. power transfer
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/74—Multi-channel systems specially adapted for direction-finding, i.e. having a single antenna system capable of giving simultaneous indications of the directions of different signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/04—Position of source determined by a plurality of spaced direction-finders
-
- H04B5/48—
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0218—Multipath in signal reception
Abstract
一种标签通信装置,通过电波而与RFID标签进行无线通信,以简单的构成就能够确定各RFID标签的位置。方向推定部(11)推定各天线(3)上的来自RFID标签(1)的电波的到来方向。位置算出部(14)根据方向推定部(11)所推定的到来方向,算出该RFID标签(1)的位置。
Description
技术领域
本发明涉及通过电波而与RFID标签进行无线通信的标签通信装置、标签通信装置的控制方法、记录有标签通信控制程序的记录介质和标签通信管理系统。
背景技术
近年来,RFID(Radio Frequency Identification)标签(无线标签)的运用正在不断普及。无线标签作为条形码的替代物,尤其是在物流领域有良好前景,预计在不远的将来就会广泛普及。
现在,作为面向无线标签的频率带域,有13.56MHz频段、800MHz~960MHz左右的所谓的UHF频段和2.45GHz频段等。其中,UHF频段和2.45GHz频段的电波(radio wave)与13.56MHz频段的电波相比,具有通信距离容易拉长的优点。另外,UHF频段的电波与2.45GHz频段的电波相比,具有容易绕过障碍物的优点。因此,利用UHF频段的电波的无线标签和读写器的开发工作正在进行。
利用UHF频段的电波时,与利用现在的主流即13.56MHz频段的电波时相比,能够把读写器与无线标签能够通信的距离拉长到几十厘米到数米左右。因此,利用UHF频段的电波,就可以把读写器与无线标签能够通信的空间区域即通信区域扩大到相对较大的范围。
专利文献1:特开2002-198722号公报(2002年7月12日公开)
专利文献2:特开平9-5431号公报(1997年1月10日公开)
非专利文献1:“GPS技术展望”,电子信息通信学会论文集BVol.J84-B No.12 pp.2082-20912001年12月
非专利文献2:“在室内也能够利用位置信息服务的、使用手机的高精度位置测定技术”http://www.hitachi.co.jp/Sp/TJ/2001/hrnjan01/hrn0111j.htm
非专利文献3:“阵列天线的适应信号处理”,第9章利用阵列天线的高分辨率到来方向推定,菊间信良,科学技术出版,发行日期(1998年11月25日)
发明内容
如上所述,当读写器与无线标签能够通信的距离为数米的程度时,由于通信区域变大,所以通信区域内存在的无线标签就会太多,这是存在的弊端。对此,考虑了为将通信区域限制在确定的空间区域的各种方法。
图15(a)表示的是通过使波束成形叠合来控制通信区域的例子。在此例中,并排配置了多个通过波束成形而缩窄了指向性的天线51。这样由读写器所具备的各天线51所决定的各通信区域52互相叠合而形成的空间区域就被设定为该读写器的通信区域。
图15(b)表示的是通过波束扫描来控制通信区域的例子。在此例中,是在缩窄了指向性的天线51上,通过使指向方向在预定的范围内顺次变化,来对预定的空间区域进行扫描。另外,在此例中,设置了分别对不同空间区域进行扫描的两个天线51、51,各扫描范围互相叠合而形成的空间区域就被设定为该读写器的通信区域。
在以上两个例子中,利用了指向性强的天线51,所以与利用指向性差的天线51时相比,具有以下的优点。首先,由于1个天线51覆盖的通信区域52比较狭窄,所以能够抑制通信冲突的发生,从而能够提高通信的可靠性。通信冲突是指由于在某个天线51对应的通信区域52内同时存在多个无线标签而在天线51和多个无线标签之间发生通信的冲突。一旦发生这种通信冲突,通信的可靠性就会降低。
另外,利用指向性差的天线时,由于来自读写器的直接波和由地面或墙面反射后的反射波之间的干涉而在通信范围内出现读写器不能与无线标签通信的不能通信部分,而利用指向性强的天线51时,能够消除这种问题。
但是,上述方式有以下的问题点。第一个问题点是,产生多路径的影响(不能通信范围)。图16(a)表示的是产生了多路径的状态。在天线51的指向性的方向上存在反射物54时,由于自天线51射出的波束经反射物54反射,因而在偏离了天线51的指向性的方向的空间区域里也会有波束照射。这样一来,就会跟位于假定的通信区域以外的空间区域的无线标签也进行通信。
为了防止这种区域失真,需要在设置读写器的每个场所,进行设置环境的协调,或者设置避免受多路径影响的电波阻断构造。例如,如图16(b)所示,通过在通信区域,在与天线51相对的面上等处设置电波吸收体来防止多路径。
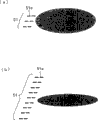
另外,作为第二个问题点,是天线51的结构会变大。像上述的方式那样,通过使波束成形叠合或扫描来控制通信区域时,需要相对增强天线51的指向性。天线51由例如插片式天线或阵列天线等构成,为了增强指向性,需要增加天线51所具备的天线元件51a…的数量。图17(a)和图17(b)分别表示的是指向性较差时的天线51所具备的天线元件51a…的状态和指向性较强时的天线51所具备的天线元件51a…的状态。
另外,作为第三个问题点,是在进行波束扫描时,为了提高扫描方向的分辨率,对天线元件51a…施加的电压及其相位的控制会很复杂。图18表示的是改变天线51的扫描方向时的状态。如该图所示,在各天线元件51a上设置了电压控制相位器51b。这样,在改变扫描方向时,对于各电压控制相位器51b,需要控制对相应的天线元件51a…施加的电压及其相位。在此,为了提高扫描方向的变化的分辨率,需要更加仔细地进行对各电压控制相位器51b的控制,因此,控制运算变得复杂化,同时也需要高精度的各电压控制相位器51b。
另一方面,通过确定在进行通信的无线标签的位置,判断该无线标签的位置是否在预定的空间区域内,来限制通信区域的方法也可以考虑。在此,上述的非专利文献1中公开了采用GPS确定GPS接收机的位置的技术。在该技术中,是GPS接收机通过测定来自多个GPS卫星的电波的到达时间,算出与各GPS卫星之间的距离,以此来确定位置。
另外,在上述的非专利文献2中,公开了通过在手机中采用与用GPS进行位置检测相同的方式,来确定手机的位置的技术。在该技术中,是通过由移动电话网的基地电台承担GPS中的GPS卫星的任务,来进行位置计测。
可以考虑通过将以上技术运用于确定无线标签的位置来限制通信区域,但是,在这种情况下,会产生下面的问题。首先,在无限标签一侧,需要有复杂的电路用于例如测定与多个天线之间的距离。例如,为了测定与天线之间的距离,需要有计时装置用于测定电波的传输时间,而为了测定数米以内程度的电波的传输时间,需要进行极高精度的计时,同时,与各天线之间的时间的同步也需要极高精度地进行。无线标签原则上优选的是具有价格低廉、小巧、功耗低的特点,因此,在无线标签上安装这种高功能的电路不是优选的。
本发明是鉴于上述问题点而提出的,其目的在于提供一种通过电波而与RFID标签进行无线通信的标签通信装置、标签通信装置的控制方法、标签通信控制程序和标签通信管理系统。该标签通信装置通过简单的构成即可确定各RFID标签的位置。
为了解决上述的课题,本发明所涉及的标签通信装置,是一种通过电波而与RFID标签进行无线通信的标签通信装置,其特征在于具有:接收来自上述RFID标签的电波的1个或多个天线;在上述各天线上接受到来自上述RFID标签的电波时,推定各天线上的来自该RFID标签的电波的到来方向的方向推定装置;和根据由上述方向推定装置推定的方向,算出上述RFID标签的位置的位置算出装置。
另外,为了解决上述的课题,本发明所涉及的标签通信装置的控制方法,是一种具有接收来自RFID标签的电波的1个或多个天线,与该RFID标签进行无限通信的标签通信装置的控制方法,其特征在于具有:在上述各天线上接收到来自上述RFID标签的电波时,推定各天线上的来自该RFID标签的电波的到来方向的方向推定步骤;和根据由上述方向推定步骤推定的方向,算出上述RFID标签的位置的位置算出步骤。
在上述的构成和方法中,首先,标签通信装置上具备1个或多个天线。并且,能够推定各天线上的来自RFID标签的电波的到来方向。这样分别推定1个或多个天线上的电波的到来方向,就能够推定为RFID标签位于这些到来方向会聚的点的附近。因此,根据上述的构成和方法,就能够提供一种不需要在RFID标签一侧附加任何特殊的构成,而只通过在标签通信装置一侧对由多个天线接收的信号进行信号处理,即可确定可通信的RFID标签的位置的标签通信装置。
另外,根据一种叫做ESPRIT的方向推定方式,可以使用构成1个天线的阵列天线的两个地方,推定各个地方的电波的到来方向。也就是说,使用该方向推定方式,看上去可由1个天线实现本发明所涉及的上述构成和方法。
另外,本发明所涉及的标签通信装置,也可以是在上述构成中,还具备区域判断装置的构成,该区域判断装置判断由上述位置算出装置算出的RFID标签的位置是否在预定的空间区域内。
过去,为了只与位于预定的空间区域内的RFID标签进行通信,需要例如在该预定的空间区域的周围设置电波吸收体等构成等等。对此,根据上述构成,是根据由位置算出装置算出的位置,来判断RFID标签是否在预定的空间区域内。因此,不需要在RFID标签可能存在的范围里设置特殊的构成等等,并且不受设置环境的影响,能够进行区域限制。
另外,因为在标签通信装置一侧,也是通过信号处理来进行区域限制,所以能够简单地进行区域限制的变更等。因此,能够提供一种灵活性更高的标签通信装置。
另外,本发明所涉及的标签通信装置也可以构成为,在上述构成中具有:测定上述各天线上实际接收到的来自上述RFID标签的电波的强度的电波测定装置;和根据由上述位置算出装置算出的RFID标签的位置和各天线之间的距离,来推定各天线上接收到的电波的强度之比的强度比推定装置,上述位置算出装置根据由上述电波测定装置测定的各天线上的电波的强度之比和由上述强度比推定装置推定的各天线上的电波的强度之比,来判断由该位置算出装置算出的RFID标签的位置的妥当性。
各天线中从RFID标签接收的电波有时会受到上述多路径的影响。受到多路径的影响时,位置算出装置算出的RFID标签的位置会与实际的位置不同。对此,在上述构成中,利用根据包括多路径的方向推定而检测出来的RFID标签的位置和实际的RFID标签1的位置到各天线3的距离不同的事实,进行多路径的检测。也就是说,进行了包括多路径的方向推定时,实际的接收电波电功率之比与基于算出位置的接收电波电功率之比会不同,所以通过对此进行检测,位置算出装置能够检测基于多路径的位置检测的错误。因此,能够进行更高精度的位置检测。
另外,本发明所涉及的标签通信装置也可以构成为,在上述构成中,上述各天线具备多个天线元件,上述方向推定装置根据来自具备上述多个天线元件的天线的输出,通过信号处理来实现扫描,推定电波的到来方向。
根据上述构成,是根据来自具备多个天线元件的天线的输出,通过信号处理来进行扫描,推定到来方向,所以,与例如靠物理方法改变天线的方向,进行扫描的构成相比,能够以结构更简单的构成来实现扫描天线。因此,能够提供价格更低廉的标签通信装置。
另外,本发明所涉及的标签通信装置也可以构成为,在上述构成中,上述方向推定装置以零(ヌル)扫描方式来推定电波的到来方向。
以零扫描方式推定到来方向时,与波束扫描方式相比,在相同的天线构成、相同的条件下,能够进行分辨率更高的到来方向检测。换言之,当分辨率相同时,如果用零扫描方式,与波束扫描方式相比,就能够减少天线中天线元件的数量,从而能够更加缩小天线的尺寸。
另外,本发明所涉及的标签通信装置所具备的各装置,也可以由计算机来实现,在这种情况下,使计算机作为上述各装置来工作,就能够用计算机来实现上述各装置的功能。
另外,本发明所涉及的标签通信管理系统,其特征在于具有:本发明所涉及的标签通信装置;和根据由上述标签通信装置与上述RFID标签进行通信的结果,来对与该RFID标签有关的物品、人和生物进行管理的管理装置。
根据上述构成,能够轻易地建立在管理与RFID标签有关的物品、人和生物的基础上,还能够识别其位置信息的系统。
另外,本发明所涉及的标签通信管理系统也可以构成为,在上述构成中,上述管理装置具有拍摄预定空间区域的摄像装置和控制上述摄像装置的摄像方向和/或摄像范围的摄像控制装置,上述摄像控制装置根据由上述标签通信装置所确定的上述RFID标签的位置,来进行摄像控制。
根据上述构成,在需要根据与RFID标签的通信结果来确定特定的物品、人和生物等时,用摄像装置面向确定了的RFID标签的位置进行摄像,就能够确定该物并留下其证据。
本发明所涉及的标签通信装置及其控制方法是,如上所述,推定各天线上的来自该RFID标签的电波的到来方向,根据该推定的到来方向算出RFID标签的位置。因此,具有以下的效果:能够提供一种不需要在RFID标签一侧附加任何特殊的构成,而只通过在标签通信装置一侧对由多个天线接收的信号进行信号处理,即可确定可通信的RFID标签的位置的标签通信装置。
附图说明
图1是表示本发明的一种实施方式所涉及的RFID标签通信系统的简要构成的框图。
图2(a)是表示根据天线所具有的天线元件的输出进行扫描的示意图,图2(b)和图2(C)是表示改变权重Wn的组合后的指向性的变化的图。
图3(a)是表示波束扫描方式下的指向性的例子的图,图3(b)是表示零扫描方式下的指向性的例子的图。
图4(a)是表示作为波束扫描方式的例子,采用Beamformer法时的方向推定结果的图,图4(b)是表示作为零扫描方式的例子,采用LP法时的方向推定结果的图。
图5(a)和图5(b)是分别表示在相同的分辨率下,波束扫描方式下的天线的构成和零扫描方式下的天线的构成的概略图。
图6是说明根据基于两个天线的到来方向推定,推定RFID标签的位置的方法的图。
图7是说明因多路径而做出错误的位置检测的现象的图。
图8是说明区域判断处理的图。
图9是表示读写器的处理流程的流程图。
图10是说明设置4根天线时的位置算出方法的图。
图11是表示在进行物品流通的系统中,在进行流通物品的检查、确认等的系统中运用了本RFID标签通信系统时的例子的图。
图12是表示在店铺等地方进行商品防盗监视等的系统中运用了本RFID标签通信系统时的例子的图。
图13是表示在例如车站或电影院等需要检票的地方运用了本RFID标签通信系统时的例子的图。
图14是表示在RFID标签通信系统中设置了监视器的系统的构成例的框图。
图15(a)是表示通过使波束成形叠合来控制通信区域的例子的图,图15(b)是表示通过波束扫描来控制通信区域的例子的图。
图16(a)是表示产生了多路径的状态的图,图16(b)是表示通过设置电波吸收体来防止多路径的例子的图。
图17(a)是表示指向性较差时的天线所具备的天线元件的状态,图17(b)是表示指向性较强时的天线所具备的天线元件的状态的图。
图18是表示改变天线的扫描方向时的状态的图。
具体实施方式
下面,根据图1至图14,就本发明的一种实施方式说明如下。
(读写器的构成)
图1是表示本实施方式所涉及的RFID标签通信系统的简要构成的框图。如该图所示,RFID标签通信系统形成为具有一个以上的RFID标签1…和读写器(标签通信装置)2的构成。
RFID标签1装在各种物品上,用于存储装有标签的物品或与之相关的物、人的有关信息。该RFID标签1形成为具有无线通信用IC(Integrated Circuit)、存储部和天线等的构成。一般的RFID标签1没有电池等电源,电路借助于从读写器2通过电波提供的电功率来工作,与读写器2进行无线通信。
读写器2是与各RFID标签1之间进行无线通信,进行RFID标签1中存储信息的读写工作的装置。另外,在本实施方式中,读写器2是进行RFID标签1中存储信息的读写工作的装置,但并不受此限制,也可以是只进行RFID标签1中存储信息的读出工作的RFID读出器。
在本实施方式中,读写器2发出电波的频率带域是800MHz~960MHz左右的所谓的UHF频段。利用这种频率带域的电波,读写器2就可以和位于数米距离范围内的RFID标签1通信。
读写器2形成为具有两个以上的天线3、位置检测部4、区域判断部(区域判断装置)5、标签通信控制部6、区域信息存储部7和外部通信部8的构成。
天线3是用于对RFID标签1…发出电波,并接收自RFID标签1…发出的电波的天线。该天线3由例如插片式天线或阵列天线等构成,形成为具有多个天线元件和与各天线元件对应的电压控制相位器等的构成。
位置检测部4是根据各天线3上的电波的接收状态,检测各RFID标签1的位置的部分。该位置检测部4具有方向推定部(方向推定装置)11、电功率计测部(电波测定装置)12、电功率比推定部(强度比推定装置)13和位置算出部(位置算出装置)14。
方向推定部11是在各天线3上接收到来自特定的RFID标签1的电波时,进行各天线3上该RFID标签1所在的方向(角度)的推定的处理的部分。关于该方向推定的处理的详细内容,在后面讲述。
电功率计测部12是在各天线3上接收到来自特定的RFID标签1的电波时,计测各天线3上接收电波的强度的部分。具体地讲,电功率计测部12对各天线3上接收电波的电功率进行计测。另外,接收电波的强度不仅限于计测电功率,别的只要是能够测定电波强度的物理量,计测任何物理量都可以。
位置算出部14是根据由方向推定部11推定的、各天线3上的特定的RFID标签1所在的方向,算出该RFID标签1的位置的部分。关于该位置的算出处理的详细内容,在后面讲述。
电功率比推定部13是根据由位置算出部14算出的RFID标签1的位置,进行各天线3上的来自该RFID标签1的接收电波的强度之比的推定处理的部分。在此所推定的各天线3上的推定接收电波强度之比,和实际由电功率计测部12所计测的实际接收电波强度之比在位置算出部14进行比较,由此检测因多路径所导致的位置检测错误。另外,关于电功率比推定处理的详细内容和位置检测错误的检测处理的详细内容,在后面讲述。
区域判断部5是根据在位置算出部14算出的位置,判断该RFID标签1是否位于预定的空间区域(通信区域)内的部分。关于通信区域是怎样的空间区域的区域信息,存储在区域信息存储部7。区域判断部5通过判断在位置算出部14算出的位置是否存在于上述区域信息所规定的通信区域内,来判断该RFID标签1是否存在于通信区域内。
标签通信控制部6是对由区域判断部5判断为存在于通信区域内的RFID标签1,通过天线3进行信息的读出和/或写入控制的部分。
外部通信部8是向外部装置发出由读写器2读出的RFID标签1的信息,接收自外部装置对RFID标签1的写入信息的部分。外部装置和外部通信部8之间通过有线或无线进行通信连接。在此,也可以是以下的构成:根据由读写器2对RFID标签1进行的读写处理而动作的外部装置将该读写器2内置。
另外,存储在区域信息存储部7中的区域信息要按照设置读写器2的环境来设定。该区域信息的设定,例如可以是通过外部通信部8由外部装置来进行,也可以是在读写器2上安装用于输入区域信息的用户接口。
另外,上述读写器2所具备的位置检测部4、区域判断部5、标签通信控制部6和外部通信部8,可以通过CPU等运算装置运行ROM(Read Only Memory)或RAM等存储装置中存储的程序来实现。因此,只需由具有这些装置的计算机读取存储有上述程序的存储介质,运行该程序,就能够实现位置检测部4、区域判断部5、标签通信控制部6和外部通信部8的各种功能和各种处理。另外,将上述程序存储在可移动的存储介质中,就可以在任意的计算机上实现上述各种功能和各种处理。
作为该存储介质,为了用计算机进行处理,既可以是未图示的存储器,例如ROM之类作为程序介质,另外,虽然没有图示,也可以是设置程序读取装置作为外部存储装置,在其中插入记录介质而能够读取的程序介质。
另外,无论哪种情况,存储的程序优选的是由微处理器存取而运行的构成。更优选的是,读出程序,把读出的程序下载到微型计算机的程序存储区,然后再运行该程序的方式。另外,该下载用的程序预先存储在本体装置中。
另外,如果是可连接包括互联网的通信网络的系统结构,优选的是从通信网络下载程序的那种动态地保持程序的存储介质。
而且,像这样从通信网络下载程序时,该下载用的程序优选的是预先存储在本体装置中,或者从另外的存储介质安装。
(天线的方向推定)
下面,说明方向推定部11根据天线3上接收到的电波,推定接收电波的发出源RFID标签1相对于该天线3位于哪个方向的方法。图2(a)是表示根据天线3所具有的天线元件3a…的输出进行方向推定的方式的示意图。如该图所示,方向推定部11对各天线元件3a的输出,分别给予不同的权重Wn,并根据它们之和的信号,检测特定方向的电波强度。然后,通过改变对各天线元件3a的输出的权重Wn的组合,经信号处理来实现扫描。图2(b)和图2(c)表示的是改变权重Wn的组合后的指向性(主波瓣)的变化。
像这样,根据具有多个天线元件的天线的输出,经信号处理实现扫描,推定电波到来方向的技术被称为DOA(Direction Of Arrival)。作为DOA的方式,可列举Beamformer法、Capon法、LP(Linear Prediction)法、Min-Norm法、MUSIC法和ESPRIT法等。在这些方式中,Beamformer法和Capon法类属波束扫描方式的方向推定方式,LP法、Min-Norm法、MUSIC法和ESPRIT法类属零扫描方式的方向推定方式。
波束扫描方式是根据接收电波的电功率的大的程度来推定到来方向的方式。图3(a)是表示波束扫描方式下的指向性的例子的图。在波束扫描方式的情况下,主波瓣的粗细(束宽)会影响角度分辨率。因此,为了提高分辨率,需要增加天线3上的天线元件3a的数量等,以缩小束宽。
另一方面,零扫描方式与波束扫描方式的思路完全相反,是根据接收电波的电功率的小的程度来推定到来方向的方式。图3(b)是表示零扫描方式下的指向性的例子的图。零扫描方式具有以少量的阵列数(天线元件数量)也能够得到高精度的方向分辨率的优点。
在此,说明波束扫描方式和零扫描方式下的角度分辨率的精度的差别。图4(a)是表示作为波束扫描方式的例子,采用Beamformer法时的方向推定结果的图,图4(b)是表示作为零扫描方式的例子,采用LP法时的方向推定结果的图。在这些图中,横轴表示对应方向的角度,纵轴表示对应角度的强度。可判断电波是从强度较大的角度到来的。另外,在每个例子中,都采用了以λ(到来波波长)/2的间隔线性排列着6个天线元件的天线,3个到来波从0°、10°和60°的角度方向以相同的强度到达天线。另外,SNR(Signal to Noise Ratio)为20dB。
如这些图所示,可以看出用Beamformer法时,分辨率相对较低,从0°和10°来的到来波的检测重叠在一起,不清晰,而用LP法时,3个到来波都被高精度地检测出来了。
像这样,如果采用零扫描方式的LP法,与波束扫描方式相比,在相同的天线构成和相同的条件下,能够进行分辨率更高的到来方向检测。换言之,当分辨率相同时,如果采用零扫描方式的LP法,与波束扫描方式相比,可以减少天线上的天线元件的数量,从而能够更加缩小天线的尺寸。图5(a)和图5(b)分别表示在相同的分辨率下,波束扫描方式下的天线3的构成和零扫描方式下的天线3的构成。
如上所述,采用零扫描方式,可以一面抑制天线3的尺寸的增加,一面提高到来方向的角度分辨率。在本实施方式中,方向推定部11采用零扫描方式的LP法来进行方向推定。另外,方向推定部11采用的DOA的方式,不仅限于LP法,也可以是零扫描方式的另外的方式。另外,根据天线3的尺寸的容许量或需要的分辨率,方向推定部11也可以采用波束扫描方式。
(位置算出处理)
下面,说明位置算出部14根据由方向推定部11所推定的各天线3上的RFID标签1的配置方向,算出该RFID标签1的配置位置的方法。图6是说明根据基于2个天线3X、3Y的到来方向推定,推定RFID标签1的位置的方法的图。
首先,方向推定部11根据天线3X上的接收状况,推定表示RFID标签1的配置方向的角度为θ1。另外,同样地,方向推定部11根据天线3Y上的接收状况,推定表示RFID标签1的配置方向的角度为θ2。
然后,位置算出部14根据上述θ1和θ2以及天线3X和天线3Y的配置位置P1、P2,算出RFID标签1的位置。具体地讲,是算出从天线3X向角度θ1的方向的直线和从天线3Y向角度θ2的方向的直线的交点,作为RFID标签1的位置。
(多路径检测处理)
下面,说明位置算出部14中因多路径而导致的位置检测错误的检测方法。首先,参照图7,说明因多路径而做出错误的位置检测的现象。在该图中,RFID标签1配置在P11所示的位置。如果2个天线3X、3Y是直接从该RFID标签1接收电波,那么就可以正确地检测出位置P11。但是,如该图所示,当存在反射物X时,例如天线3Y接收到从RFID标签1发射、经反射物X反射后的电波时,方向推定部11就会认为天线3Y上的电波的到来方向是与实际的RFID标签1所配置的方向不同的方向。结果,位置算出部14就会把RFID标签1的配置位置作为与实际的位置不同的位置P12而算出来。
因此,位置算出部14通过比较由电功率比推定部13所推定的各天线3上的推定接收电波强度之比和实际由电功率计测部12所计测的实际接收电波强度之比,来检测出位置检测的错误。
如果详细说明,首先,电功率计测部12计测出天线3X上的接收电波的电功率PX和天线3Y上的接收电波的电功率PY。另一方面,电功率比推定部13根据在位置算出部14中算出的RFID标签1的位置,识别从天线3X到RFID标签1的距离和从天线3Y到RFID标签1的距离。并根据这些距离,算出天线3X上的接收电波的推定电功率PX’和天线3Y上的接收电波的推定电功率PY’之比。
然后,位置算出部14算出PX/PY和PX’/PY’的差,当该差的绝对值大于预定值Ps时,就判断该位置检测是因多路径而导致的误检测。也就是说,由位置算出部14进行的位置检测错误的检测,是利用了以下的原理:首先,根据包括多路径在内的方向推定所检测出的RFID标签1的位置和实际的RFID标签1的位置到各天线3的距离不一样。因此,在进行了包括多路径的方向推定的情况下,实际的接收电波电功率之比与基于算出位置的接受电波电功率之比就会不一样。通过以上处理,位置算出部14就能够检测出基于多路径的位置检测的错误。
(基于位置检测的区域判断)
下面,说明区域判断部5的区域判断处理。图8是说明区域判断处理的图。区域判断部5从位置算出部14获取算出的RFID标签1的位置信息,并读出区域信息存储部7中存储的有关通信区域的区域信息。
例如,在图8所示的例子中,通信区域是用21表示的空间区域,当算出的RFID标签1的位置为位置P21时,由于位置P21是通信区域21内的位置,所以该RFID标签1就会被识别为是存在于通信区域内的物体。另一方面,当算出的RFID标签1的位置为位置P22时,由于位置P22是通信区域21以外的位置,所以该RFID标签1就会被识别为是存在于通信区域之外的物体。
在此,当通信区域内存在障碍物等时,也可以使区域信息存储部7中存储的区域信息中包含该障碍物的位置信息。这种情况下,即使位置算出部14算出的位置是在通信区域内,当判断是位于障碍物所在的空间区域时,也能够识别出是有位置的错误检测的位置信息。
(读写器的处理流程)
下面,就读写器2的处理流程,参照图9所示的流程图说明如下。首先在步骤1(以下称S1)中进行初期设定。作为初期设定,有区域信息存储部7中存储的区域信息的设定和在位置算出部14中对因多路径导致的误检测进行检测处理所使用的预定值Ps的设定等。该初期设定处理,既可以像上述那样,例如通过外部通信部8由外部装置来进行,也可以通过读写器2上安装的用于输入区域信息的用户接口来输入。该初期设定,例如可在最初设置读写器2时等的时候进行。一旦进行了初期设定以后,只要没有变更初期设定的需要,在开始使用读写器2(打开电源)时,就不再进行初期设定,而直接开始从下面的S2开始的处理。
进行初期设定之后,各天线3等就待接收来自RFID标签1的电波。然后,在S2中,各天线3接收到来自RFID标签1的电波后,由方向推定部11进行各天线3上的到来角度推定处理。当设置有两个天线3、3时,由方向推定部11算出各自的到来角度θ1、θ2。
接下来,在S3中,由电功率计测部12计测各天线3上接收到的来自RFID标签1的电波的电功率。当设置有两个天线3、3时,由电功率计测部12计测其各自的接收电功率PX、PY。
接下来,在S4中,位置算出部14根据在S2中由方向推定部11算出的各天线上的到来角度,算出该RFID标签1的位置。当设置有两个天线3、3时,根据其各自的到来角度θ1、θ2,算出该RFID标签1的位置。
接下来,在S5中,电功率比推定部13根据在S4中由位置算出部14算出的RFID标签1的位置,进行推定各天线3上的来自该RFID标签1的接收电波的强度之比(功率比)的处理。当设置有两个天线3、3时,推定接收电波的强度之比PX’/PY’。
接下来,在S6中,位置算出部14对基于多路径的位置检测错误进行检测处理。具体地讲,位置算出部14算出PX/PY和PX’/PY’的差,当该差的绝对值大于预定值Ps时,就判断为该位置检测是因多路径导致的误检测。
当在S6中为NO,即PX/PY和PX’/PY’的差的绝对值大于预定值Ps时,就判断为该位置检测是因多路径导致的误检测(S7),并回到从S2开始的处理,而不进行与该RFID标签1的通信。另一方面,当在S6中为YES,即PX/PY和PX’/PY’的差的绝对值小于预定值Ps时,就判断为该位置检测没有受到多路径的影响,并进行从下面的S8开始的处理。
在S8中,区域判断部5判断由位置算出部14算出的位置是否在通信区域内。当在S8中为NO,即判断由位置算出部14算出的位置在通信区域以外时,就判断为该RFID标签1位于通信区域之外(S9),并回到从S2开始的处理,而不进行与该RFID标签1的通信。
另一方面,当在S8中为YES,即判断为由位置算出部14算出的位置在通信区域内时,就在S10中由区域判断部5判断在由位置算出部14算出的位置上是否存在障碍物。当在S10中为NO,即判断为由位置算出部14算出的位置上存在障碍物时,就判断为算出的位置是误计测的结果(S11),并回到从S2开始的处理,而不进行与该RFID标签1的通信。
另一方面,当在S10中为YES,即判断为由位置算出部14算出的位置上不存在障碍物时,就判断为位置的算出是正确进行的结果,并在标签通信控制部6的控制下进行与该RFID标签1的通信处理(S12)。另外,由标签通信控制部6进行的通信结果,通过外部通信部8发给外部装置。而且,根据通过外部通信部8从外部装置接收的通信指示,标签通信控制部6进行通信处理。然后,重复从S2开始的处理,直到出现读写器2的停止工作的指示。
(设置3个以上天线时的位置算出)
在上述例中,是设置两个天线3、3,进行RFID标签1的位置算出,而随着天线设置到3个以上,也可以设定成根据该所有的天线3…的到来方向推定,进行RFID标签1的位置算出。这种情况下,是设想从多个天线3…中,取出两个天线3、3的组合,根据由各个组合算出的位置,来确定RFID标签1的位置。更具体地讲,是根据由各个组合算出的位置通过多数决定来确定RFID标签1的位置。
图10是说明设置4根天线3X、3Y、3W、3Z时的位置算出方法的图。这种情况下,要算出天线3X和天线3Y、天线3X和天线3W、天线3X和天线3Z、天线3Y和天线3W、天线3Y和天线3Z、天线3W和天线3Z的6种位置。
在该图所示的情况下,由天线3X和天线3Y、天线3X和天线3Z以及天线3Y和天线3Z算出的位置为P31;由天线3Y和天线3W算出的位置为P32;由天线3X和天线3W算出的位置为P33;由天线3W和天线3Z算出的位置为P34。在这种情况下,算出位置P31的天线3的组合为多数,因此,位置算出部14就算出该位置P31作为对应该RFID标签1的位置。也就是说,位置P32、位置P33和位置P34被识别为因多路径的影响而产生的误检测。在该图所示的例中,由于因多路径的影响,使得天线3W上的RFID标签1的方向推定发生错误,在这种情况下检测出了位置P32、位置P33和位置P34。
像这样设置3个以上的天线,就能够检测出因多路径而产生的位置检测的错误。因此,例如通过功率比的比较未能检测出来的多路径的影响,就能够通过上述的位置检测而检测出来。从而能够进行更加准确的位置算出。
另外,当由各天线3的组合算出的位置,在相对较小的预定的距离范围内有偏离时,可以预测因方向推定的误差而产生了位置的偏离。因此,也可以是将位置偏离很远的部分除外,算出在预定的距离范围内的位置的平均位置,作为RFID标签1的位置。
(RFID标签通信系统的运用例)
下面,说明在具体的系统中运用本实施方式所涉及的RFID标签通信系统的例子。图11表示的是在进行物品流通的系统中,在进行流通物品的检查、确认等的系统中运用本RFID标签通信系统时的例子。在该图所示的例中,在用叉车搬运的货物41的内部,有多个装了RFID标签1的物品。而且,该叉车一经过通信区域21,读写器2就会和各RFID标签1进行通信,能够对各物品的流通实行管理。
对于这种系统,如果是未明确设定通信区域21的RFID标签通信系统的话,那么,如果不需要进行通信的RFID标签1位于离读写器相对较近的位置,就会与该RFID标签1也进行通信。因此,需要明确设定通信区域21,但是,很多情况下,从环境考虑,设置电波吸收体等比较困难。对此,根据本实施方式所涉及的RFID标签通信系统,由于是通过读写器2的处理来确定通信区域21,所以对环境不需要做任何设置。也就是说,根据本实施方式所涉及的RFID标签通信系统,能够简单地进行设定,而不需设置环境。
图12表示的是在店铺等地方进行商品防盗监视等的系统中运用本RFID标签通信系统时的例子。过去,例如在CD商店等地方采用的系统是在作为商品的CD等上面装RFID标签,并在店铺入口处设置具有与RFID标签进行通信的读写器的大门。但是,对于这种系统,存在以下的问题:需要在进入店铺的所有入口处设置大门,而像图12所示的那种在开放场所设店铺的情况下,运用起来比较困难。
对此,根据本实施方式所涉及的RFID标签通信系统,通过将通信区域21设定为如图12所示,覆盖整个店铺的区域,就能够消除设置大门等的必要性。从而能够在各种各样的店铺环境下灵活地建立RFID标签通信系统。
另外,根据本实施方式所涉及的RFID标签通信系统,能够将整个店铺设定为通信区域21,所以不仅能进行商品的防盗监视,还可以检测某个商品放在哪里。
图13表示的是在例如车站或电影院等需要检票的地方运用本RFID标签通信系统时的例子。最近,例如在车站检票时,采用了RFID标签的检票系统比较普及,而在该系统中,是通过在大门上设置读写器来进行检票。对此,根据本实施方式所涉及的RFID标签通信系统,将进行检票的整个通道设定成通信区域21,则不需设置大门就能够检票了。另外,在这种情况下,也可以是将RFID标签1内置于用户所持有的手机内的构成。
(RFID标签通信系统的系统构成例)
下面,说明在上述的RFID标签通信系统中,设置了监视器的系统。例如,在上述的图13所示的系统运用例中,根据与RFID标签1的通信结果,当存在不能允许通过的用户时,就可能需要确定该未经许可的用户。此时,用监视器朝着由读写器2确定的未经许可的用户的位置进行拍摄,就能够确定未经许可的用户并留下相关证据。图14表示在RFID标签通信系统中设置了监视器(摄像装置)43时的构成例。
如该图所示,监视器43形成为具有通信部44、方向控制部(摄像控制装置)45、变焦控制部(摄像控制装置)46和摄像部47的构成。通信部44是与读写器2进行通信的部分,从读写器2获取关于应该拍摄的位置的信息。
方向控制部45根据通信部44接收的关于应该拍摄的位置的信息,进行控制,改变摄像部47的拍摄方向。变焦控制部46根据通信部44接收的应该拍摄的位置与摄像部47之间的距离,进行摄像部47的变焦控制。通过以上这种构成,能够恰当地进行对未经许可的用户的拍摄。
本发明并不限于上述的实施方式,可以在权利要求项所示的范围内进行各种改变。也就是说,将在权利要求项所示的范围内适当改变了的技术装置进行组合所得到的实施方式也包含在本发明的技术范围之内。
工业实用性
本发明所涉及的标签通信装置以及具备该标签通信装置的标签通信系统,可运用于例如上述的进行流通物品的检查确认等的系统、在店铺等地方进行商品防盗监视等的系统以及在车站或电影院等需要检票的地方设置的检票系统等。
Claims (7)
1.一种标签通信装置,为了通过电波而与RFID标签进行无线通信而构成,其特征在于具有:
为了接收来自所述RFID标签的电波而构成的1个或多个天线;
为了在所述1个或多个天线上接受到来自所述RFID标签的电波时,推定各天线上的来自该RFID标签的电波的到来方向而构成的方向推定装置;
为了测定由所述各天线接收到的来自所述RFID标签的电波的强度而构成的电波测定装置;
为了根据由所述方向推定装置推定的方向,算出所述RFID标签的位置而构成的位置算出装置;和
为了根据由所述位置算出装置算出的RFID标签的位置和各天线之间的距离,来推定各天线上接收到的电波的强度之比而构成的强度比推定装置,
所述位置算出装置为了根据由所述电波测定装置测定的各天线上的电波的强度之比和由所述强度比推定装置推定的各天线上的电波的强度之比,来判断由所述位置算出装置算出的RFID标签的位置的妥当性而构成。
2.根据权利要求1所述的标签通信装置,其特征在于:
还具有区域判断装置,该区域判断装置为了判断由所述位置算出装置算出的RFID标签的位置是否在预定的空间区域内而构成。
3.根据权利要求1所述的标签通信装置,其特征在于:
所述各天线是具有多个天线元件的构成,
所述方向推定装置通过对来自具有所述多个天线元件的天线的输出进行信号处理来实现扫描,推定电波的到来方向。
4.根据权利要求3所述的标签通信装置,其特征在于:
所述方向推定装置以零扫描方式来推定电波的到来方向。
5.一种标签通信装置的控制方法,所述标签通信装置与RFID标签进行无线通信,所述标签通信装置的控制方法的特征在于,
由1个或多个天线接收来自所述RFID标签的电波,
并且具有:
在所述1个或多个天线上接收到了来自所述RFID标签的电波时,推定各天线上的来自该RFID标签的电波的到来方向的方向推定步骤;
测定由所述各天线接收到的来自所述RFID标签的电波的强度的电波测定步骤;
根据由所述方向推定步骤推定的方向,算出所述RFID标签的位置的位置算出步骤;和
根据由所述位置算出步骤算出的RFID标签的位置和各天线之间的距离,来推定由各天线接收到的电波的强度之比的强度比推定步骤,
所述位置算出步骤根据由所述电波测定步骤测定的各天线上的电波的强度之比和由所述强度比推定步骤推定的各天线上的电波的强度之比,来判断由所述位置算出步骤算出的RFID标签的位置的妥当性。
6.一种标签通信管理系统,其特征在于具有:
权利要求1至4中的任意一项所述的标签通信装置;和
管理装置,根据通过所述标签通信装置与所述RFID标签进行通信的结果,来管理与该RFID标签有关的物品、人和生物。
7.根据权利要求6所述的标签通信管理系统,其特征在于,
所述管理装置具有:
为了拍摄预定空间区域而构成的摄像装置;和
为了控制所述摄像装置的摄像方向和/或摄像范围而构成的摄像控制装置,
所述摄像控制装置根据由所述标签通信装置所确定的所述RFID标签的位置,进行摄像控制。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004184094 | 2004-06-22 | ||
| JP2004184094A JP4123195B2 (ja) | 2004-06-22 | 2004-06-22 | タグ通信装置、タグ通信装置の制御方法、タグ通信制御プログラム、および、タグ通信管理システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1712984A CN1712984A (zh) | 2005-12-28 |
| CN100585427C true CN100585427C (zh) | 2010-01-27 |
Family
ID=34941749
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200510079525A Active CN100585427C (zh) | 2004-06-22 | 2005-06-22 | 标签通信装置及其控制方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7573418B2 (zh) |
| EP (1) | EP1610258B1 (zh) |
| JP (1) | JP4123195B2 (zh) |
| KR (2) | KR100737047B1 (zh) |
| CN (1) | CN100585427C (zh) |
| AT (1) | ATE490513T1 (zh) |
| CA (1) | CA2510388C (zh) |
| DE (1) | DE602005025060D1 (zh) |
Families Citing this family (89)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4019986B2 (ja) * | 2003-03-20 | 2007-12-12 | セイコーエプソン株式会社 | 非接触データ通信システム、位置情報管理システム、データ通信装置及びデータ通信装置制御プログラム |
| KR100540194B1 (ko) * | 2003-09-23 | 2006-01-10 | 한국전자통신연구원 | 차량을 이용한 알에프아이디 태그 설치 시스템 및 그 방법 |
| JP4123195B2 (ja) * | 2004-06-22 | 2008-07-23 | オムロン株式会社 | タグ通信装置、タグ通信装置の制御方法、タグ通信制御プログラム、および、タグ通信管理システム |
| JP2006020083A (ja) * | 2004-07-01 | 2006-01-19 | Omron Corp | タグ通信用アンテナ、タグ通信装置、タグ通信システム、タグ通信装置のスキャン調整方法、およびスキャン調整プログラム |
| JP4982966B2 (ja) * | 2005-05-18 | 2012-07-25 | ブラザー工業株式会社 | 無線タグ検出システム |
| JP2006277233A (ja) * | 2005-03-29 | 2006-10-12 | Fujitsu Ltd | タグ試験装置、タグ試験方法およびタグ試験プログラム |
| US20070228179A1 (en) * | 2005-07-06 | 2007-10-04 | Paul Atkinson | System and Method for Loading an Embedded Device to Authenticate and Secure Transactions |
| JP2007187563A (ja) * | 2006-01-13 | 2007-07-26 | Seiko Precision Inc | 位置同定方法及び位置同定システム |
| JP2007198919A (ja) * | 2006-01-26 | 2007-08-09 | Matsushita Electric Works Ltd | 測位方法および測位装置 |
| JP4832123B2 (ja) * | 2006-03-13 | 2011-12-07 | セイコープレシジョン株式会社 | フィルタ、位置同定装置、データ処理方法、位置同定方法及びプログラム |
| JP5070726B2 (ja) * | 2006-03-30 | 2012-11-14 | 株式会社大林組 | 建設現場における移動体の位置特定システム及び方法 |
| JP4904930B2 (ja) * | 2006-06-01 | 2012-03-28 | 三菱電機株式会社 | Rfidリーダ装置およびrfidシステム |
| GB2445384A (en) * | 2006-10-12 | 2008-07-09 | Nokia Corp | Determining the position of a signal source |
| DE102006052708B3 (de) * | 2006-11-08 | 2008-06-19 | Siemens Ag | Anordnung und Verfahren zur Datenerfassung |
| JP2008160456A (ja) * | 2006-12-22 | 2008-07-10 | Oki Electric Ind Co Ltd | 無線タグ位置推定装置、無線タグ通信装置、無線タグ位置推定システム、無線タグ位置推定方法、及び、無線タグ位置推定プログラム |
| JP5179054B2 (ja) * | 2006-12-25 | 2013-04-10 | パナソニック株式会社 | 測位方法及び測位装置 |
| JP4352414B2 (ja) * | 2007-03-05 | 2009-10-28 | オムロン株式会社 | タグ通信装置及びタグ通信システム |
| KR20080087942A (ko) * | 2007-03-28 | 2008-10-02 | 주식회사 이엠따블유안테나 | Rfid 안테나 모듈 및 그를 포함하는 rfid리더/라이터 |
| KR100859093B1 (ko) | 2007-04-30 | 2008-09-17 | 광주과학기술원 | Rfid를 이용한 내비게이션 장치 및 그 방법 |
| JP4968678B2 (ja) * | 2007-06-14 | 2012-07-04 | 清水建設株式会社 | 位置情報取得システム |
| KR100872677B1 (ko) * | 2007-07-20 | 2008-12-10 | 엘지이노텍 주식회사 | Rfid 네트워크 측정이 가능한 통신 장치 |
| JP5170838B2 (ja) | 2007-11-12 | 2013-03-27 | オムロン株式会社 | タグ対応付け方法、タグ移動方向検知システム |
| KR20090052411A (ko) * | 2007-11-21 | 2009-05-26 | 엘지이노텍 주식회사 | 근거리 무선 통신을 이용한 위치 추적 시스템 |
| JP4285576B1 (ja) | 2007-12-04 | 2009-06-24 | オムロン株式会社 | 非接触ic媒体通信装置とその方法、およびそのプログラム |
| JP4353298B2 (ja) | 2007-12-13 | 2009-10-28 | オムロン株式会社 | 非接触ic媒体方向検知装置とその方法、およびそのプログラム |
| US20090160638A1 (en) * | 2007-12-20 | 2009-06-25 | 3M Innovative Properties Company | Radio frequency identification reader system |
| US8537015B2 (en) | 2008-01-08 | 2013-09-17 | Omron Corporation | Tag communication device, tag communication system, and tag communication method |
| US9262912B2 (en) | 2008-02-25 | 2016-02-16 | Checkpoint Systems, Inc. | Localizing tagged assets using modulated backscatter |
| JP5256793B2 (ja) * | 2008-03-12 | 2013-08-07 | オムロン株式会社 | タグ情報処理装置、タグ情報処理システム、タグ情報処理方法、およびプログラム |
| US8217760B2 (en) * | 2008-03-20 | 2012-07-10 | Checkpoint Systems, Inc. | Applique nodes for performance and functionality enhancement in radio frequency identification systems |
| JP2009230469A (ja) * | 2008-03-24 | 2009-10-08 | Kyocera Mita Corp | 操作装置及び画像形成装置 |
| WO2009147662A1 (en) * | 2008-06-03 | 2009-12-10 | Hisep Technology Ltd. | Direction finding method and device |
| JP5163421B2 (ja) * | 2008-10-22 | 2013-03-13 | 株式会社デンソー | 方位検出装置 |
| JP5397028B2 (ja) * | 2009-06-05 | 2014-01-22 | 富士通株式会社 | 電波制御装置、電波制御システムおよび電波制御方法 |
| JP5048021B2 (ja) * | 2009-06-16 | 2012-10-17 | 株式会社エヌ・ティ・ティ・ドコモ | 建物影響推定装置及び建物影響推定方法 |
| WO2011025843A1 (en) * | 2009-08-25 | 2011-03-03 | Maria Estela Seitz | Trans-security components system and methods |
| US8508367B2 (en) | 2009-09-21 | 2013-08-13 | Checkpoint Systems, Inc. | Configurable monitoring device |
| WO2011035256A2 (en) * | 2009-09-21 | 2011-03-24 | Checkpoint Systems, Inc. | Beamforming and localizing in a configurable monitoring device system |
| MX2012003457A (es) | 2009-09-21 | 2012-08-03 | Checkpoint Systems Inc | Sistema, método y aparato de rastreo de productos de venta por menudeo. |
| EP2483877B1 (en) * | 2009-09-28 | 2015-10-21 | Checkpoint Systems, Inc. | System, method, and apparatus for triggering an alarm |
| US8786440B2 (en) | 2009-10-02 | 2014-07-22 | Checkpoint Systems, Inc. | Calibration of beamforming nodes in a configurable monitoring device system |
| EP2483869A1 (en) | 2009-10-02 | 2012-08-08 | Checkpoint Systems, Inc. | Key device for monitoring systems |
| US20120274524A1 (en) | 2009-12-16 | 2012-11-01 | Adant Srl | Metamaterial reconfigurable antennas |
| CN102103678B (zh) * | 2009-12-18 | 2015-09-02 | 上海科斗电子科技有限公司 | 物品查找系统及其配套的电子标签 |
| CN102103682B (zh) * | 2009-12-18 | 2015-03-18 | 上海本星电子科技有限公司 | 电子扫描式物品查找系统及其配套的电子标签 |
| JP5541207B2 (ja) * | 2010-03-23 | 2014-07-09 | 株式会社デンソーウェーブ | 無線タグリーダ、監視システム |
| CN102243703A (zh) * | 2010-05-11 | 2011-11-16 | 上海科斗电子科技有限公司 | 快件查找系统及其配套的电子标签和应用 |
| JP5589569B2 (ja) * | 2010-06-02 | 2014-09-17 | ソニー株式会社 | 無線通信装置、プログラム、および無線通信方法 |
| JP5875221B2 (ja) | 2010-10-12 | 2016-03-02 | インターナショナル・ビジネス・マシーンズ・コーポレーションInternational Business Machines Corporation | 物体の管理方法及びその装置 |
| US9166289B2 (en) * | 2011-03-16 | 2015-10-20 | Aliphcom | Apparatus and method for determining relative direction of a wireless peer device from another device |
| JP5708391B2 (ja) * | 2011-09-10 | 2015-04-30 | 株式会社デンソーウェーブ | 無線タグリーダおよび監視システム |
| ES2632440T3 (es) * | 2011-10-14 | 2017-09-13 | Siemens Aktiengesellschaft | Procedimiento y sistema para la alimentación con energía de al menos un componente móvil en un sistema de comunicación inalámbrico, en particular de etiquetas RFID de un sistema RFID |
| JP5810911B2 (ja) * | 2011-12-28 | 2015-11-11 | 富士通株式会社 | 読み取り処理装置、読み取り処理システム、読み取り処理方法、読み取り処理プログラム |
| WO2013118557A1 (ja) * | 2012-02-08 | 2013-08-15 | アルプス電気株式会社 | マルチパス検出方法及び到来角度算出装置 |
| JP2013217663A (ja) * | 2012-04-04 | 2013-10-24 | Nec Corp | 電波発射源推定装置、その推定方法及び推定プログラム |
| EP2867691B1 (fr) | 2012-06-29 | 2016-11-02 | Blinksight | Dispositif et procédé de localisation d'un émetteur rfid |
| US9715609B1 (en) | 2013-03-11 | 2017-07-25 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Systems, apparatuses and methods for beamforming RFID tags |
| CN103927503B (zh) * | 2014-04-03 | 2017-06-16 | 北京智谷睿拓技术服务有限公司 | 关联方法和关联设备 |
| JP6522902B2 (ja) * | 2014-08-08 | 2019-05-29 | 株式会社Soken | 位置推定装置 |
| WO2016065314A1 (en) * | 2014-10-23 | 2016-04-28 | Automaton, Inc. | Systems and methods for rfid tag locating using constructive interference |
| KR101682129B1 (ko) * | 2014-12-31 | 2016-12-02 | 큐빗 주식회사 | Rfid 태그를 이용한 물품 관리 방법 및 물류 감시 방법 |
| KR101579705B1 (ko) * | 2015-01-30 | 2015-12-23 | 세종대학교산학협력단 | Wi-Fi 백스캐터 시스템 및 그것을 이용한 빔포밍 방법 |
| DE112015006184T5 (de) | 2015-02-17 | 2017-11-02 | Mitsubishi Electric Corporation | Empfangsvorrichtung und Empfangsverfahren |
| JP2016200478A (ja) * | 2015-04-09 | 2016-12-01 | 株式会社日本自動車部品総合研究所 | 位置推定装置 |
| CN105139044B (zh) * | 2015-05-27 | 2018-07-27 | 北京万集科技股份有限公司 | 基于汽车电子标识的车辆超载超限检测方法、装置及系统 |
| JP6401671B2 (ja) * | 2015-07-15 | 2018-10-10 | 日本電信電話株式会社 | 位置検出装置及び位置検出方法 |
| JP6041944B1 (ja) * | 2015-08-18 | 2016-12-14 | 佐藤 創一 | 対象者監視システム |
| US10013829B2 (en) * | 2015-10-09 | 2018-07-03 | Walmart Apollo, Llc | Apparatus and method for securing merchandise with optical lock and key |
| CN106446733B (zh) * | 2015-11-13 | 2018-12-07 | 湖南大学 | 一种uhf rfid etc应用的标签接收功率预测方法 |
| JP6582945B2 (ja) | 2015-12-08 | 2019-10-02 | 富士通株式会社 | 無線通信システム、無線通信方法、送信装置、及び、送信方法 |
| DE102016213234A1 (de) | 2016-02-12 | 2017-08-31 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung zur Darstellung von Benutzerinformationen und entsprechendes Verfahren |
| JP6084742B1 (ja) * | 2016-07-01 | 2017-02-22 | 佐藤 創一 | 対象者監視システム |
| JP6747688B2 (ja) * | 2016-07-29 | 2020-08-26 | 国立大学法人東京工業大学 | 発信源推定方法およびそれを利用した発信源推定装置 |
| WO2018121437A1 (zh) * | 2016-12-26 | 2018-07-05 | 华为技术有限公司 | 确定候选视线路径的方法及无线局域网设备 |
| US10334454B2 (en) * | 2017-05-11 | 2019-06-25 | Intel Corporation | Multi-finger beamforming and array pattern synthesis |
| CN107204057A (zh) * | 2017-05-23 | 2017-09-26 | 陈维龙 | 一种自助支付的解锁方法和系统 |
| US10366257B1 (en) * | 2018-01-15 | 2019-07-30 | Amazon Technologies, Inc. | RFID tag singulation in dense RFID environments |
| JP7109016B2 (ja) * | 2018-02-21 | 2022-07-29 | 国立大学法人富山大学 | アンテナ装置 |
| JP6874734B2 (ja) | 2018-04-23 | 2021-05-19 | オムロン株式会社 | タグ通信装置およびその制御方法、ならびに制御プログラム |
| DE102018209732A1 (de) | 2018-06-15 | 2019-12-19 | Bayerische Motoren Werke Aktiengesellschaft | Überwachungseinrichtung für ein Kraftfahrzeug mit RFID-Erkennungssystem |
| DE102018209731A1 (de) | 2018-06-15 | 2019-12-19 | Bayerische Motoren Werke Aktiengesellschaft | Kollisionsvermeidung zwischen Fahrzeugen und Objekten |
| CN109143163A (zh) * | 2018-08-06 | 2019-01-04 | 西南石油大学 | 一种基于无线信号强度定位的室内定位方法及装置 |
| CN111667608B (zh) * | 2020-02-19 | 2022-09-13 | 中国银联股份有限公司 | 用于闸机通行的控制方法、系统和装置以及闸机 |
| KR102325053B1 (ko) * | 2020-04-21 | 2021-11-11 | 엘에스전선 주식회사 | 케이블 드럼 위치 감지 시스템 및 방법 |
| KR102328610B1 (ko) * | 2020-04-21 | 2021-11-17 | 엘에스전선 주식회사 | 케이블 드럼 위치 감지 시스템 및 방법 |
| CN111815886B (zh) * | 2020-06-16 | 2022-02-15 | 广东齐达科技有限公司 | 安防天线装置的控制方法、装置、防盗系统及存储介质 |
| JP7416670B2 (ja) | 2020-07-06 | 2024-01-17 | 株式会社東海理化電機製作所 | 通信制御装置及びそれを備える車両、並びに通信制御方法 |
| CN114339861A (zh) * | 2020-09-30 | 2022-04-12 | 中国移动通信集团广东有限公司 | 一种室分设备故障定位方法、装置和系统 |
| CN116432670B (zh) * | 2023-04-20 | 2024-01-23 | 欧科华创自动化(深圳)有限公司 | 一种自调节功率的节能型rfid方法及系统 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0580139A2 (en) * | 1992-07-22 | 1994-01-26 | Hughes Aircraft Company | Transponder location and tracking system and method |
| EP0583522A2 (en) * | 1992-08-20 | 1994-02-23 | Nexus Telecommunication Systems Ltd. | Remote position determination system |
| US5835060A (en) * | 1996-10-07 | 1998-11-10 | Lockheed Martin Corporation | Self-resolving LBI triangulation |
| US6046683A (en) * | 1996-12-31 | 2000-04-04 | Lucent Technologies Inc. | Modulated backscatter location system |
| US6380894B1 (en) * | 1999-08-30 | 2002-04-30 | Wherenet Corporation | Multi-lateration system with automatic calibration and error removal |
| CN1349639A (zh) * | 1999-05-04 | 2002-05-15 | 传感电子公司 | 自检出/检入rfid和电子物品监视系统 |
| GB2383708A (en) * | 2001-12-31 | 2003-07-02 | Systems Engineering & Assessme | Position determination |
| US20040027243A1 (en) * | 2002-08-09 | 2004-02-12 | Battelle Memorial Institute | System and method for acquisition management of subject position information |
| US20040035927A1 (en) * | 2002-08-23 | 2004-02-26 | Yoram Neumark | Inventory control and identification method |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3100860B2 (ja) * | 1995-03-10 | 2000-10-23 | 株式会社ヨコオ | 通信装置 |
| JP2666891B2 (ja) | 1995-06-23 | 1997-10-22 | 運輸省船舶技術研究所長 | 空港面における航空機識別方法およびその識別装置 |
| US6175332B1 (en) * | 1997-09-16 | 2001-01-16 | The United States Of America As Represented By The Secretary Of The Air Force | Diffractive beam forming and scanning antenna array |
| US6714121B1 (en) * | 1999-08-09 | 2004-03-30 | Micron Technology, Inc. | RFID material tracking method and apparatus |
| JP3872953B2 (ja) * | 1999-12-27 | 2007-01-24 | 株式会社東芝 | アダプティブアンテナを用いた無線通信装置 |
| CN1280640C (zh) * | 2000-06-05 | 2006-10-18 | Tc许可有限公司 | 确定调制的反向散射通信系统中应答器方向的方法和设备 |
| JP4263848B2 (ja) | 2000-12-22 | 2009-05-13 | 京セラ株式会社 | ビームスキャンアンテナ |
| EP1220475A3 (en) * | 2000-12-25 | 2003-11-19 | Kabushiki Kaisha Toshiba | Mobile communication terminal apparatus with antenna array |
| JP2002262328A (ja) * | 2000-12-25 | 2002-09-13 | Toshiba Corp | 移動通信端末装置 |
| JP2003157477A (ja) * | 2001-11-19 | 2003-05-30 | Hitachi Ltd | タグ管理サーバとこれを用いた情報の取得・活用システム |
| US20050159187A1 (en) * | 2002-03-18 | 2005-07-21 | Greg Mendolia | Antenna system and method |
| US20050113138A1 (en) * | 2002-03-18 | 2005-05-26 | Greg Mendolia | RF ID tag reader utlizing a scanning antenna system and method |
| JP3787700B2 (ja) | 2002-11-29 | 2006-06-21 | 株式会社 渡守建設 | シールド推進工法における推進体の推進軌跡の計測装置ならびに計測方法 |
| US20040174434A1 (en) * | 2002-12-18 | 2004-09-09 | Walker Jay S. | Systems and methods for suggesting meta-information to a camera user |
| US7440762B2 (en) * | 2003-12-30 | 2008-10-21 | Trueposition, Inc. | TDOA/GPS hybrid wireless location system |
| US7199712B2 (en) * | 2004-06-17 | 2007-04-03 | Tafas Triantafyllos P | System for automatically locating and manipulating positions on an object |
| JP4123195B2 (ja) * | 2004-06-22 | 2008-07-23 | オムロン株式会社 | タグ通信装置、タグ通信装置の制御方法、タグ通信制御プログラム、および、タグ通信管理システム |
| US20060010027A1 (en) * | 2004-07-09 | 2006-01-12 | Redman Paul J | Method, system and program product for measuring customer preferences and needs with traffic pattern analysis |
| JP2006106897A (ja) * | 2004-09-30 | 2006-04-20 | Fujitsu Ltd | リーダライタおよびrfidシステム |
| US20060258442A1 (en) * | 2005-05-13 | 2006-11-16 | Ryan Chad A | Multi-purpose casino chips |
| JP4701849B2 (ja) * | 2005-06-14 | 2011-06-15 | 日本電気株式会社 | 受信品質表示方法及びそのシステム |
-
2004
- 2004-06-22 JP JP2004184094A patent/JP4123195B2/ja active Active
-
2005
- 2005-06-20 US US11/155,776 patent/US7573418B2/en active Active
- 2005-06-21 KR KR1020050053439A patent/KR100737047B1/ko active IP Right Grant
- 2005-06-21 CA CA2510388A patent/CA2510388C/en not_active Expired - Fee Related
- 2005-06-22 EP EP05253882A patent/EP1610258B1/en active Active
- 2005-06-22 CN CN200510079525A patent/CN100585427C/zh active Active
- 2005-06-22 DE DE602005025060T patent/DE602005025060D1/de active Active
- 2005-06-22 AT AT05253882T patent/ATE490513T1/de not_active IP Right Cessation
-
2007
- 2007-03-26 KR KR1020070029163A patent/KR100959739B1/ko active IP Right Grant
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0580139A2 (en) * | 1992-07-22 | 1994-01-26 | Hughes Aircraft Company | Transponder location and tracking system and method |
| EP0583522A2 (en) * | 1992-08-20 | 1994-02-23 | Nexus Telecommunication Systems Ltd. | Remote position determination system |
| US5835060A (en) * | 1996-10-07 | 1998-11-10 | Lockheed Martin Corporation | Self-resolving LBI triangulation |
| US6046683A (en) * | 1996-12-31 | 2000-04-04 | Lucent Technologies Inc. | Modulated backscatter location system |
| CN1349639A (zh) * | 1999-05-04 | 2002-05-15 | 传感电子公司 | 自检出/检入rfid和电子物品监视系统 |
| US6380894B1 (en) * | 1999-08-30 | 2002-04-30 | Wherenet Corporation | Multi-lateration system with automatic calibration and error removal |
| GB2383708A (en) * | 2001-12-31 | 2003-07-02 | Systems Engineering & Assessme | Position determination |
| US20040027243A1 (en) * | 2002-08-09 | 2004-02-12 | Battelle Memorial Institute | System and method for acquisition management of subject position information |
| US20040035927A1 (en) * | 2002-08-23 | 2004-02-26 | Yoram Neumark | Inventory control and identification method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1712984A (zh) | 2005-12-28 |
| ATE490513T1 (de) | 2010-12-15 |
| EP1610258B1 (en) | 2010-12-01 |
| US7573418B2 (en) | 2009-08-11 |
| EP1610258A1 (en) | 2005-12-28 |
| KR20070041480A (ko) | 2007-04-18 |
| JP2006010345A (ja) | 2006-01-12 |
| CA2510388C (en) | 2010-07-27 |
| US20050280538A1 (en) | 2005-12-22 |
| CA2510388A1 (en) | 2005-12-22 |
| KR100737047B1 (ko) | 2007-07-09 |
| JP4123195B2 (ja) | 2008-07-23 |
| KR100959739B1 (ko) | 2010-05-25 |
| DE602005025060D1 (de) | 2011-01-13 |
| KR20060049645A (ko) | 2006-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100585427C (zh) | 标签通信装置及其控制方法 | |
| Hekimian-Williams et al. | Accurate localization of RFID tags using phase difference | |
| US7528721B2 (en) | Identification and location of RF tagged articles | |
| US20140145825A1 (en) | Localization Using Virtual Antenna Arrays in Modulated Backscatter Rfid Systems | |
| CN101142758B (zh) | 距离测量装置、距离测量方法及通信系统 | |
| JP2006010345A5 (zh) | ||
| US8248210B2 (en) | Method and system to determine the position, orientation, size, and movement of RFID tagged objects | |
| US20060092040A1 (en) | Detecting activity of RFID objects via multiple tags/readers | |
| Bai et al. | Overview of RFID-Based Indoor Positioning Technology. | |
| CN101840488A (zh) | 射频环境对象监视系统和使用方法 | |
| US20070273530A1 (en) | Tag communication device, tag moving direction detecting system and tag moving direction detecting method | |
| US20090219157A1 (en) | Apparatus and methods for placing radio frequency identification (rfid) antennas, tags, and/or interrogators | |
| CN102193080A (zh) | 用于估计到达角的方法和设备 | |
| Krukowski et al. | RFID-based positioning for building management systems | |
| CN102193091A (zh) | 一种近场距离判断装置和方法 | |
| Liu et al. | RLLL: Accurate relative localization of RFID tags with low latency | |
| CN111199258A (zh) | 商品定位系统及方法、带rfid读头的pda设备 | |
| Bolić et al. | Performance of passive UHF RFID systems in practice | |
| CN101183431A (zh) | 无线通信系统和无线通信方法 | |
| Ma et al. | RFID-based positioning system for telematics location-aware applications | |
| WO2006129370A1 (ja) | Rfidタグ構造体及びrfid評価装置 | |
| Lechner et al. | Concept for an intelligent UHF RFID reader according to the Ideas of Industry 4.0 | |
| CN110392339A (zh) | 无线通信系统以及通信终端的控制方法 | |
| Zhao et al. | Enabling real-time and high accuracy tracking with COTS RFID devices | |
| Heo et al. | Towards the optimal design of an RFID-based positioning system for the ubiquitous computing environment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |