JP4918047B2 - 遅延ロックループを初期化する方法および装置 - Google Patents
遅延ロックループを初期化する方法および装置 Download PDFInfo
- Publication number
- JP4918047B2 JP4918047B2 JP2007553423A JP2007553423A JP4918047B2 JP 4918047 B2 JP4918047 B2 JP 4918047B2 JP 2007553423 A JP2007553423 A JP 2007553423A JP 2007553423 A JP2007553423 A JP 2007553423A JP 4918047 B2 JP4918047 B2 JP 4918047B2
- Authority
- JP
- Japan
- Prior art keywords
- delay
- lock
- dll
- signal
- clock signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 53
- 230000008569 process Effects 0.000 claims description 39
- 239000000872 buffer Substances 0.000 claims description 25
- 230000003111 delayed effect Effects 0.000 claims description 20
- 230000001934 delay Effects 0.000 claims description 13
- 230000008859 change Effects 0.000 claims description 11
- 230000010354 integration Effects 0.000 claims 1
- 230000000630 rising effect Effects 0.000 description 61
- 238000010586 diagram Methods 0.000 description 30
- 230000010363 phase shift Effects 0.000 description 13
- 230000009467 reduction Effects 0.000 description 5
- 230000003139 buffering effect Effects 0.000 description 4
- 230000000295 complement effect Effects 0.000 description 4
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 238000000605 extraction Methods 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000003071 parasitic effect Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000011423 initialization method Methods 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images















Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/081—Details of the phase-locked loop provided with an additional controlled phase shifter
- H03L7/0812—Details of the phase-locked loop provided with an additional controlled phase shifter and where no voltage or current controlled oscillator is used
- H03L7/0816—Details of the phase-locked loop provided with an additional controlled phase shifter and where no voltage or current controlled oscillator is used the controlled phase shifter and the frequency- or phase-detection arrangement being connected to a common input
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/085—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal
- H03L7/089—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal the phase or frequency detector generating up-down pulses
- H03L7/0891—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal the phase or frequency detector generating up-down pulses the up-down pulses controlling source and sink current generators, e.g. a charge pump
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/085—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal
- H03L7/089—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal the phase or frequency detector generating up-down pulses
- H03L7/0891—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal the phase or frequency detector generating up-down pulses the up-down pulses controlling source and sink current generators, e.g. a charge pump
- H03L7/0895—Details of the current generators
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/085—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal
- H03L7/095—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal using a lock detector
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/10—Details of the phase-locked loop for assuring initial synchronisation or for broadening the capture range
Landscapes
- Stabilization Of Oscillater, Synchronisation, Frequency Synthesizers (AREA)
- Dram (AREA)
- Pulse Circuits (AREA)
Description
Claims (25)
- クロック信号についての遅延を与える遅延ロックループであって、複数の遅延のところに複数の潜在的なロック点をもち:
前記複数の潜在的なロック点のうち第一の潜在的なロック点への近接を検出するロック検出器と;
前記ロック検出器の出力に結合された初期化コントロールとを有しており、
前記初期化コントロールは、クロック信号の遅延をある初期遅延から一方向に変化させ、前記第一の潜在的なロック点をスキップし、前記複数の潜在的なロック点のうちから選択される動作点を探索するために前記と同じ一方向に遅延を変化させ続ける、
遅延ロックループ。 - 前記初期化コントロールが、動作点への近接を検出すると、遅延の増加および減少の両方を可能にする、請求項1記載の遅延ロックループ。
- 前記ロック検出器が:
複数の段を有し、各段が異なる精度でロック点近接を示す、請求項1または2記載の遅延ロックループ。 - 前記初期化コントロールが電源投入後に従事する、請求項1ないし3のうちいずれか一項記載の遅延ロックループ。
- 前記初期化コントロールがリセット後に従事する、請求項1ないし3のうちいずれか一項記載の遅延ロックループ。
- クロック信号の位相をシフトさせることによって前記第一の潜在的なロック点がスキップされる、請求項1ないし5のうちいずれか一項記載の遅延ロックループ。
- 前記クロック信号と遅延されたフィードバック・クロックのエッジが互いにどのくらい近いかに基づいて前記第一の潜在的なロック点への近接が検出される、請求項1ないし6のうちいずれか一項記載の遅延ロックループ。
- 複数の所定の時間期間を使い、前記クロック信号および遅延されたフィードバック・クロックのエッジが前記複数の所定の時間期間それぞれの範囲内にあるかどうかを判定することによって前記第一の潜在的なロック点への近接が解析される、請求項7記載の遅延ロックループ。
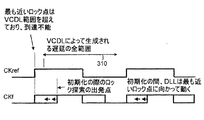
- 前記所定の時間期間の値が、二つの隣り合う電圧制御遅延線の取り出される出力の間の遅延時間のある割合である、請求項8記載の遅延ロックループ。
- クロック信号についての遅延を与える遅延ロックループであって、複数の遅延のところに複数の潜在的なロック点をもち:
前記複数の潜在的なロック点のうち第一の潜在的なロック点への近接を検出するロック検出器と;
前記ロック検出器の出力に結合された初期化コントローラを有しており、前記初期化コントローラが:
ある初期遅延から一方向にクロック信号の遅延を変化させ;
第一の潜在的なロック点をスキップし、前記複数の潜在的なロック点のうちから選択される動作点を探索するために前記と同じ一方向に遅延を変化させ続け;
動作点への所望の度合いの近接が検出されると、当該遅延ロックループの通常動作を許容する、
論理を含んでいる、
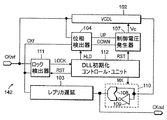
遅延ロックループ。 - 遅延ロックループ(DLL)を初期化する方法であって、前記DLLは位相検出器および前記位相検出器に結合された制御電圧発生器を含み、前記位相検出器は前記制御電圧発生器によって積分されてDLL制御電圧を与えるよう適応された信号を出力し、当該方法は:
初期制御電圧を設定するために前記制御電圧発生器に第一の信号(RST)を提供する段階と;
アサートされているときにDLL内で初期化プロセスが行われているという指標を与える、前記第一の信号と異なる第二の信号を前記位相検出器において受信する段階と;
前記第二の信号がアサートされている場合、前記DLL制御電圧を安定性が増したDLL動作領域に位置される目標電圧レベルに近づけるような仕方で前記DLL制御電圧の調整を引き起こすよう前記出力される信号を制御する段階とを有する、
方法。 - 前記制御する段階が、前記出力される信号のうちの選択された一つの生成を妨げることを含む、請求項11記載の方法。
- 前記制御する段階のあとに、前記初期化プロセスが完了されたとの指標を受信する段階をさらに有する、請求項11または12記載の方法。
- 前記指標が、前記第二の信号がデアサートされることである、請求項13記載の方法。
- 遅延ロックループ(DLL)であって:
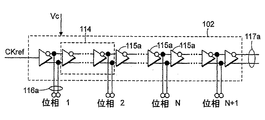
電圧制御遅延線と;
初期制御電圧を設定するための第一の信号を受信するよう適応され、前記電圧制御遅延線にDLL制御電圧を与える制御電圧発生器と;
位相検出器とを有しており、該位相検出器は
i)通常動作のもとで、前記制御電圧発生器による積分のために少なくとも二つの信号を出力し;
ii)アサートされているときにDLL内で初期化プロセスが行われているという指標を与える、前記第一の信号とは異なる第二の信号を受信し;
iii)前記第二の信号がアサートされている場合、前記出力される信号を制御して、前記DLL制御電圧を安定性が増したDLL動作領域に位置される目標電圧レベルに近づけるような仕方で前記DLL制御電圧の調整を引き起こすようにする、
遅延ロックループ。 - 前記初期化プロセスの完了時に、前記位相検出器が完了の指標を受信する、請求項15記載の位相ロックループ。
- 前記指標が、前記第二の信号がデアサートされることである、請求項16記載の位相ロックループ。
- 参照クロックと遅延されたフィードバック・クロックのエッジが第一の所定の時間期間以内にあるかどうかを判定するよう前記初期化プロセスの間使うための粗い整列判定要素をさらに有する、請求項15ないし17のうちいずれか一項記載の遅延ロックループ。
- 前記粗い整列判定要素がロック検出器であり、前記位相検出器が、参照クロックと遅延されたフィードバック・クロックのエッジが前記第一の所定の時間期間より短い第二の所定の時間期間以内にあるかどうかを判定するよう適応されている、請求項18記載の遅延ロックループ。
- 参照クロック信号についての遅延を与える遅延ロックループであって、当該遅延ロックループは少なくとも一つの潜在的なロック点をもち:
前記少なくとも一つの潜在的なロック点への近接を検出するロック点近接検出器と;
前記ロック点近接検出器の出力に結合された初期化コントロール回路と;
マルチプレクサおよび前記マルチプレクサの入力に結合された出力をもつ少なくとも一つの反転器を有する反転回路であって、前記参照クロック信号の遅延を変えるために前記初期化コントロール回路の出力に基づいて異なる遅延をもつ二つのバージョンのクロック信号のうちの単一の信号の選択を可能にする反転回路と;
前記反転回路に結合された出力を有する可変遅延線とを有する、
遅延ロックループ。 - 前記少なくとも一つの潜在的なロック点が、複数の遅延のところにある複数の潜在的なロック点である、請求項20記載の遅延ロックループ。
- 前記複数の潜在的なロック点が三つ以上である、または前記複数の潜在的なロック点の数が約3ないし5の範囲にある、請求項21記載の遅延ロックループ。
- 前記可変遅延線が電圧制御遅延線である、請求項20記載の遅延ロックループ。
- 前記電圧制御遅延線が直列に接続された複数のシングル・エンドのバッファを有する、請求項23記載の遅延ロックループ。
- 前記電圧制御遅延線が直列に接続された複数の差動バッファを有する、請求項23記載の遅延ロックループ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/050,644 | 2005-02-03 | ||
| US11/050,644 US7190201B2 (en) | 2005-02-03 | 2005-02-03 | Method and apparatus for initializing a delay locked loop |
| PCT/CA2006/000143 WO2006081668A1 (en) | 2005-02-03 | 2006-02-03 | Method and apparatus for initializing a delay locked loop |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008529426A JP2008529426A (ja) | 2008-07-31 |
| JP2008529426A5 JP2008529426A5 (ja) | 2010-10-07 |
| JP4918047B2 true JP4918047B2 (ja) | 2012-04-18 |
Family
ID=36755887
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007553423A Expired - Fee Related JP4918047B2 (ja) | 2005-02-03 | 2006-02-03 | 遅延ロックループを初期化する方法および装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (6) | US7190201B2 (ja) |
| EP (1) | EP1844549B1 (ja) |
| JP (1) | JP4918047B2 (ja) |
| KR (2) | KR101176804B1 (ja) |
| CN (2) | CN101116245B (ja) |
| CA (1) | CA2596258A1 (ja) |
| WO (1) | WO2006081668A1 (ja) |
Families Citing this family (83)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BRPI0516496A (pt) * | 2004-10-15 | 2008-09-09 | Trico Products Corp Of Tenness | sistema de detecção de objeto com autocalibração |
| US7564869B2 (en) * | 2004-10-22 | 2009-07-21 | Cisco Technology, Inc. | Fibre channel over ethernet |
| US7190201B2 (en) * | 2005-02-03 | 2007-03-13 | Mosaid Technologies, Inc. | Method and apparatus for initializing a delay locked loop |
| US8164368B2 (en) * | 2005-04-19 | 2012-04-24 | Micron Technology, Inc. | Power savings mode for memory systems |
| US7620126B2 (en) * | 2005-09-27 | 2009-11-17 | International Business Machines Corporation | Method and apparatus for detecting frequency lock in a system including a frequency synthesizer |
| US7590194B2 (en) * | 2005-09-27 | 2009-09-15 | International Business Machines Corporation | Information handling system capable of detecting frequency lock of signals downstream from a signal synthesized by frequency synthesizer |
| US7627003B1 (en) * | 2005-09-30 | 2009-12-01 | The United States Of America As Represented By The Secretary Of The Navy | Automatic clock synchronization and distribution circuit for counter clock flow pipelined systems |
| US8054876B2 (en) * | 2005-12-13 | 2011-11-08 | Infinera Corporation | Active delay line |
| KR100743493B1 (ko) * | 2006-02-21 | 2007-07-30 | 삼성전자주식회사 | 적응식 지연 고정 루프 |
| KR100801741B1 (ko) * | 2006-06-29 | 2008-02-11 | 주식회사 하이닉스반도체 | 지연고정루프 |
| US20080111599A1 (en) * | 2006-11-14 | 2008-05-15 | Rajendran Nair | Wideband dual-loop data recovery DLL architecture |
| US20080116949A1 (en) * | 2006-11-21 | 2008-05-22 | Rajendran Nair | Wideband dual-loop data recovery DLL architecture |
| KR100861297B1 (ko) * | 2006-12-28 | 2008-10-01 | 주식회사 하이닉스반도체 | 반도체 메모리 장치 및 그에 포함되는 지연 고정 루프 |
| KR100850285B1 (ko) | 2007-01-11 | 2008-08-04 | 삼성전자주식회사 | 지연고정루프회로 및 그의 제어방법 |
| JP5153789B2 (ja) * | 2007-01-30 | 2013-02-27 | モサイド・テクノロジーズ・インコーポレーテッド | 遅延ロックループ/フェーズロックループにおける移相処理 |
| US7459949B2 (en) * | 2007-01-30 | 2008-12-02 | Mosaid Technologies Incorporated | Phase detector circuit and method therefor |
| US7443216B2 (en) * | 2007-02-20 | 2008-10-28 | Micron Technology, Inc. | Trimmable delay locked loop circuitry with improved initialization characteristics |
| US7724049B2 (en) * | 2007-02-28 | 2010-05-25 | Micron Technology, Inc. | Multiphase generator with duty-cycle correction using dual-edge phase detection and method for generating a multiphase signal |
| KR100891335B1 (ko) * | 2007-07-02 | 2009-03-31 | 삼성전자주식회사 | 비트 에러율 측정을 수행 할 수 있는 클럭 발생 장치 |
| KR100956770B1 (ko) * | 2007-12-10 | 2010-05-12 | 주식회사 하이닉스반도체 | Dll 회로 및 그 제어 방법 |
| KR100930405B1 (ko) * | 2007-12-11 | 2009-12-08 | 주식회사 하이닉스반도체 | 지연 고정 루프의 지연 회로 및 그 제어 방법 |
| US7755404B2 (en) * | 2008-02-05 | 2010-07-13 | Micron Technology, Inc. | Delay locked loop circuit and method |
| KR101393311B1 (ko) * | 2008-03-19 | 2014-05-12 | 삼성전자주식회사 | 프로세스 변화량을 보상하는 멀티 칩 패키지 메모리 |
| KR20090117118A (ko) * | 2008-05-08 | 2009-11-12 | 주식회사 하이닉스반도체 | 지연 고정 루프 회로 및 지연 고정 방법 |
| US8754683B2 (en) * | 2008-06-18 | 2014-06-17 | Micron Technology, Inc. | Locked-loop quiescence apparatus, systems, and methods |
| US7929356B2 (en) * | 2008-09-05 | 2011-04-19 | Atmel Corporation | Method and system to access memory |
| KR101027678B1 (ko) * | 2008-11-10 | 2011-04-12 | 주식회사 하이닉스반도체 | Dll 회로 및 그 제어 방법 |
| US8036614B2 (en) * | 2008-11-13 | 2011-10-11 | Seiko Epson Corporation | Replica DLL for phase resetting |
| US8030980B2 (en) * | 2008-11-24 | 2011-10-04 | Texas Instruments Incorporated | Simplified, extendable, edge-based watchdog for DLL |
| KR101046227B1 (ko) | 2008-12-23 | 2011-07-04 | 주식회사 하이닉스반도체 | Dll 회로 |
| US7999585B2 (en) * | 2009-06-25 | 2011-08-16 | Analog Devices, Inc. | Calibrating multiplying-delay-locked-loops (MDLLS) |
| KR101050403B1 (ko) * | 2009-07-03 | 2011-07-19 | 주식회사 하이닉스반도체 | 지연라인 |
| JP2011050004A (ja) * | 2009-08-28 | 2011-03-10 | Elpida Memory Inc | 半導体装置及び位相検知回路 |
| KR101034617B1 (ko) * | 2009-12-29 | 2011-05-12 | 주식회사 하이닉스반도체 | 지연 고정 루프 |
| KR101068567B1 (ko) * | 2010-02-26 | 2011-09-30 | 주식회사 하이닉스반도체 | 데이터 출력 회로 |
| KR101086882B1 (ko) | 2010-04-30 | 2011-11-25 | 주식회사 하이닉스반도체 | 차동 신호 생성 회로 |
| US8279761B2 (en) * | 2010-05-28 | 2012-10-02 | Altera Corporation | Input/output interface for periodic signals |
| KR20120005290A (ko) * | 2010-07-08 | 2012-01-16 | 주식회사 하이닉스반도체 | 지연 동기 회로 |
| KR20120035755A (ko) * | 2010-10-06 | 2012-04-16 | 삼성전기주식회사 | 적응형 지연 조절 기능이 구비된 데이터 인터페이스 장치 |
| JP5600049B2 (ja) * | 2010-11-11 | 2014-10-01 | ピーエスフォー ルクスコ エスエイアールエル | 半導体装置 |
| US8522087B2 (en) * | 2011-02-02 | 2013-08-27 | Micron Technology, Inc. | Advanced converters for memory cell sensing and methods |
| CN102651647B (zh) * | 2011-02-23 | 2015-01-07 | 联咏科技股份有限公司 | 延迟锁相回路及时脉信号产生方法 |
| JP5932237B2 (ja) | 2011-04-20 | 2016-06-08 | ピーエスフォー ルクスコ エスエイアールエルPS4 Luxco S.a.r.l. | 半導体装置 |
| US8373462B2 (en) * | 2011-05-19 | 2013-02-12 | Nanya Technology Corp. | Delay lock loop and delay lock method |
| US8671380B2 (en) * | 2011-07-18 | 2014-03-11 | Apple Inc. | Dynamic frequency control using coarse clock gating |
| KR101883652B1 (ko) * | 2011-11-18 | 2018-08-02 | 에스케이하이닉스 주식회사 | 반도체 장치 및 그 구동방법 |
| CN102522994B (zh) * | 2011-12-07 | 2015-01-14 | 清华大学 | 一种用于高速和高精度模数转换器的时钟产生电路 |
| US8638145B2 (en) * | 2011-12-30 | 2014-01-28 | Advanced Micro Devices, Inc. | Method for locking a delay locked loop |
| CN103259535B (zh) * | 2012-02-15 | 2018-11-23 | 联咏科技股份有限公司 | 延迟锁相回路电路及延迟锁相方法 |
| JP2013172344A (ja) * | 2012-02-21 | 2013-09-02 | Toshiba Corp | ロック検出回路、dll回路及び受信回路 |
| KR102016532B1 (ko) * | 2012-07-16 | 2019-09-02 | 에스케이하이닉스 주식회사 | 반도체 장치 및 그의 구동방법 |
| KR102047793B1 (ko) * | 2012-12-04 | 2019-11-22 | 에스케이하이닉스 주식회사 | 지연고정루프 |
| KR101735147B1 (ko) * | 2013-05-22 | 2017-05-15 | 매그나칩 반도체 유한회사 | Dll 회로 장치 및 그의 dll 락킹 방법 |
| TWI483554B (zh) * | 2013-06-19 | 2015-05-01 | Univ Nat Taiwan | 倍頻延遲鎖定迴路 |
| US9191185B2 (en) | 2014-01-27 | 2015-11-17 | Qualcomm Incorporated | Differential bang-bang phase detector using standard digital cells |
| EP2903163B1 (en) * | 2014-02-04 | 2019-08-21 | Hittite Microwave LLC | Apparatus and methods for fast charge pump holdover on signal interruption |
| US9613665B2 (en) * | 2014-03-06 | 2017-04-04 | Mediatek Inc. | Method for performing memory interface control of an electronic device, and associated apparatus |
| KR102222622B1 (ko) * | 2014-12-19 | 2021-03-05 | 에스케이하이닉스 주식회사 | 지연 고정 루프 회로 |
| RU2580445C1 (ru) * | 2014-12-31 | 2016-04-10 | Михаил Владимирович Ефанов | Система стабилизации задержки |
| CN105321552B (zh) * | 2015-11-17 | 2018-08-10 | 西安紫光国芯半导体有限公司 | 一种延迟锁相环及其复位控制方法 |
| CN105337608B (zh) * | 2015-12-02 | 2018-09-14 | 上海兆芯集成电路有限公司 | 延迟锁定回路 |
| CN105515571B (zh) * | 2015-12-02 | 2018-07-20 | 上海兆芯集成电路有限公司 | 延迟锁定回路 |
| CN105337610B (zh) * | 2015-12-02 | 2018-09-14 | 上海兆芯集成电路有限公司 | 延迟锁定回路 |
| CN105337609B (zh) * | 2015-12-02 | 2018-07-20 | 上海兆芯集成电路有限公司 | 延迟锁定回路 |
| CN105656477B (zh) * | 2015-12-30 | 2018-11-16 | 深圳大学 | 一种防止错锁的延时锁相环及方法 |
| CN107733428B (zh) | 2016-08-12 | 2022-03-04 | 三星电子株式会社 | 延迟锁定环电路、集成电路和用于控制它的方法 |
| JP2018101958A (ja) * | 2016-12-21 | 2018-06-28 | ルネサスエレクトロニクス株式会社 | 半導体装置及び制御システム |
| US10382014B2 (en) * | 2016-12-23 | 2019-08-13 | Ati Technologies Ulc | Adaptive oscillator for clock generation |
| US11962313B2 (en) | 2016-12-23 | 2024-04-16 | Advanced Micro Devices, Inc. | Adaptive DCO VF curve slope control |
| US10044357B1 (en) * | 2017-08-03 | 2018-08-07 | Novatek Microelectronics Corp. | Clock recovery device and method |
| US10263627B1 (en) | 2017-12-12 | 2019-04-16 | Nxp Usa, Inc. | Delay-locked loop having initialization circuit |
| KR102569429B1 (ko) | 2018-05-24 | 2023-08-24 | 에스케이하이닉스 주식회사 | 동기 회로 |
| KR102598913B1 (ko) * | 2018-06-14 | 2023-11-07 | 에스케이하이닉스 주식회사 | 반도체장치 |
| US10848137B1 (en) | 2019-05-08 | 2020-11-24 | Ati Technologies Ulc | Symmetrical balanced c-element |
| KR20210042748A (ko) * | 2019-10-10 | 2021-04-20 | 삼성전자주식회사 | Pll 회로 및 이를 포함하는 클록 발생기 |
| US10951199B1 (en) | 2019-11-05 | 2021-03-16 | Samsung Electronics Co., Ltd. | Timing data acquisition device that supports efficient set-up and hold time determination in synchronous systems |
| KR20220003712A (ko) | 2020-07-02 | 2022-01-11 | 삼성전자주식회사 | 지연 고정 루프 회로의 지연 회로 및 지연 고정 루프 회로 |
| KR20220021505A (ko) | 2020-08-14 | 2022-02-22 | 삼성전자주식회사 | 듀티 조절 회로, 이를 포함하는 지연 동기 루프 회로 및 반도체 메모리 장치 |
| KR20220036175A (ko) | 2020-09-15 | 2022-03-22 | 삼성전자주식회사 | 메모리 장치 및 그것의 클록 라킹 방법 |
| US11601130B2 (en) * | 2021-06-23 | 2023-03-07 | Nxp B.V. | Initialization circuit of delay locked loop |
| US11885646B2 (en) | 2021-08-12 | 2024-01-30 | Allegro Microsystems, Llc | Programmable active pixel test injection |
| CN115987275A (zh) * | 2021-10-14 | 2023-04-18 | 澜起科技股份有限公司 | 校准方法、校准装置及多相时钟电路 |
| US11722141B1 (en) * | 2022-04-22 | 2023-08-08 | Allegro Microsystems, Llc | Delay-locked-loop timing error mitigation |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08316827A (ja) * | 1995-05-15 | 1996-11-29 | Nec Corp | クロック位相調整回路 |
| JPH11205102A (ja) * | 1998-01-13 | 1999-07-30 | Mitsubishi Electric Corp | 遅延同期回路 |
| JP2000082954A (ja) * | 1998-08-08 | 2000-03-21 | Samsung Electronics Co Ltd | 遅延同期ル―プ及びその位相比較器並びに遅延同期方法 |
| JP2003110423A (ja) * | 2001-09-20 | 2003-04-11 | Hynix Semiconductor Inc | 混合型遅延固定ループ回路及びそのクロック信号同期方法 |
| WO2004114524A1 (en) * | 2003-06-25 | 2004-12-29 | Mosaid Technologies Incorporated | Start up circuit for delay locked loop |
Family Cites Families (80)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4338569A (en) | 1980-03-11 | 1982-07-06 | Control Data Corporation | Delay lock loop |
| US4590602A (en) * | 1983-08-18 | 1986-05-20 | General Signal | Wide range clock recovery circuit |
| US4754164A (en) | 1984-06-30 | 1988-06-28 | Unisys Corp. | Method for providing automatic clock de-skewing on a circuit board |
| US4623805A (en) | 1984-08-29 | 1986-11-18 | Burroughs Corporation | Automatic signal delay adjustment apparatus |
| US4637018A (en) | 1984-08-29 | 1987-01-13 | Burroughs Corporation | Automatic signal delay adjustment method |
| US4604582A (en) | 1985-01-04 | 1986-08-05 | Lockheed Electronics Company, Inc. | Digital phase correlator |
| US4755704A (en) | 1987-06-30 | 1988-07-05 | Unisys Corporation | Automatic clock de-skewing apparatus |
| GB2249443B (en) | 1990-10-31 | 1994-06-08 | Gen Electric Co Plc | Charge pump circuit |
| US5109394A (en) | 1990-12-24 | 1992-04-28 | Ncr Corporation | All digital phase locked loop |
| US5223755A (en) | 1990-12-26 | 1993-06-29 | Xerox Corporation | Extended frequency range variable delay locked loop for clock synchronization |
| US5272729A (en) | 1991-09-20 | 1993-12-21 | International Business Machines Corporation | Clock signal latency elimination network |
| US5233314A (en) * | 1992-03-27 | 1993-08-03 | Cyrix Corporation | Integrated charge-pump phase-locked loop circuit |
| US5317202A (en) | 1992-05-28 | 1994-05-31 | Intel Corporation | Delay line loop for 1X on-chip clock generation with zero skew and 50% duty cycle |
| US5544203A (en) | 1993-02-17 | 1996-08-06 | Texas Instruments Incorporated | Fine resolution digital delay line with coarse and fine adjustment stages |
| US5362990A (en) * | 1993-06-02 | 1994-11-08 | Motorola, Inc. | Charge pump with a programmable pump current and system |
| WO1995022206A1 (en) | 1994-02-15 | 1995-08-17 | Rambus, Inc. | Delay-locked loop |
| US5440514A (en) | 1994-03-08 | 1995-08-08 | Motorola Inc. | Write control for a memory using a delay locked loop |
| US5440515A (en) | 1994-03-08 | 1995-08-08 | Motorola Inc. | Delay locked loop for detecting the phase difference of two signals having different frequencies |
| JP2771464B2 (ja) | 1994-09-29 | 1998-07-02 | 日本電気アイシーマイコンシステム株式会社 | ディジタルpll回路 |
| US5796673A (en) | 1994-10-06 | 1998-08-18 | Mosaid Technologies Incorporated | Delay locked loop implementation in a synchronous dynamic random access memory |
| US5473283A (en) * | 1994-11-07 | 1995-12-05 | National Semiconductor Corporation | Cascode switched charge pump circuit |
| EP0755120A1 (en) | 1995-07-18 | 1997-01-22 | Nec Corporation | Phase-locked loop circuit |
| CA2204089C (en) | 1997-04-30 | 2001-08-07 | Mosaid Technologies Incorporated | Digital delay locked loop |
| DE19720446A1 (de) * | 1997-05-15 | 1998-11-19 | Siemens Ag | Einrasterkennungsschaltung für einen Phasenregelkreis |
| US6100736A (en) * | 1997-06-05 | 2000-08-08 | Cirrus Logic, Inc | Frequency doubler using digital delay lock loop |
| US5933037A (en) * | 1997-08-29 | 1999-08-03 | Adaptec, Inc. | High speed phase lock loop having constant bandwidth |
| US6124755A (en) * | 1997-09-29 | 2000-09-26 | Intel Corporation | Method and apparatus for biasing a charge pump |
| US5977805A (en) * | 1998-01-21 | 1999-11-02 | Atmel Corporation | Frequency synthesis circuit tuned by digital words |
| US6088255A (en) * | 1998-03-20 | 2000-07-11 | Fujitsu Limited | Semiconductor device with prompt timing stabilization |
| US6330296B1 (en) * | 1998-06-12 | 2001-12-11 | International Business Machines Corporation | Delay-locked loop which includes a monitor to allow for proper alignment of signals |
| KR100555471B1 (ko) * | 1998-07-29 | 2006-03-03 | 삼성전자주식회사 | 적응적으로 전류 옵셋을 제어하는 전하 펌프 |
| US6369624B1 (en) * | 1998-11-03 | 2002-04-09 | Altera Corporation | Programmable phase shift circuitry |
| US6448820B1 (en) * | 1998-11-04 | 2002-09-10 | Altera Corporation | Fast locking phase frequency detector |
| JP2000163961A (ja) * | 1998-11-26 | 2000-06-16 | Mitsubishi Electric Corp | 同期型半導体集積回路装置 |
| US20020041196A1 (en) * | 1999-02-12 | 2002-04-11 | Paul Demone | Delay locked loop |
| US6160432A (en) * | 1999-04-30 | 2000-12-12 | Conexant Systems, Inc. | Source-switched or gate-switched charge pump having cascoded output |
| US6239634B1 (en) * | 1999-05-19 | 2001-05-29 | Parthus Technologies | Apparatus and method for ensuring the correct start-up and locking of a delay locked loop |
| US6316987B1 (en) * | 1999-10-22 | 2001-11-13 | Velio Communications, Inc. | Low-power low-jitter variable delay timing circuit |
| US6731667B1 (en) * | 1999-11-18 | 2004-05-04 | Anapass Inc. | Zero-delay buffer circuit for a spread spectrum clock system and method therefor |
| US6278332B1 (en) * | 2000-02-15 | 2001-08-21 | Agere Systems Guardian Corp. | Charge pump for low-voltage, low-jitter phase locked loops |
| JP3467446B2 (ja) * | 2000-03-30 | 2003-11-17 | Necエレクトロニクス株式会社 | デジタル位相制御回路 |
| US6346839B1 (en) * | 2000-04-03 | 2002-02-12 | Mosel Vitelic Inc. | Low power consumption integrated circuit delay locked loop and method for controlling the same |
| US6356158B1 (en) * | 2000-05-02 | 2002-03-12 | Xilinx, Inc. | Phase-locked loop employing programmable tapped-delay-line oscillator |
| KR100374631B1 (ko) * | 2000-06-09 | 2003-03-04 | 삼성전자주식회사 | 전하펌프 회로 |
| KR100362199B1 (ko) * | 2000-06-30 | 2002-11-23 | 주식회사 하이닉스반도체 | 링 딜레이와 카운터를 이용한 레지스터 제어 지연고정루프 |
| JP2002026728A (ja) * | 2000-07-11 | 2002-01-25 | Fujitsu Ltd | Pll回路のモード制御回路及び半導体装置 |
| US6636093B1 (en) | 2000-07-14 | 2003-10-21 | Micron Technology, Inc. | Compensation for a delay locked loop |
| JP4449193B2 (ja) * | 2000-08-01 | 2010-04-14 | ソニー株式会社 | 遅延回路、電圧制御遅延回路、電圧制御発振回路、遅延調整回路、dll回路及びpll回路 |
| US6452431B1 (en) * | 2000-08-28 | 2002-09-17 | Micron Technology, Inc. | Scheme for delay locked loop reset protection |
| FR2813720B1 (fr) * | 2000-09-05 | 2002-12-13 | Electricite De France | Procede et dispositif de commande d'alimentation |
| JP4407031B2 (ja) * | 2000-09-21 | 2010-02-03 | ソニー株式会社 | 位相同期ループ回路および遅延同期ループ回路 |
| JP4497708B2 (ja) * | 2000-12-08 | 2010-07-07 | 三菱電機株式会社 | 半導体装置 |
| US6633201B1 (en) * | 2001-01-12 | 2003-10-14 | Applied Micro Circuits Corporation | System and method for determining frequency tolerance without a reference |
| US6710670B2 (en) * | 2001-01-26 | 2004-03-23 | True Circuits, Inc. | Self-biasing phase-locking loop system |
| US6617936B2 (en) * | 2001-02-20 | 2003-09-09 | Velio Communications, Inc. | Phase controlled oscillator |
| US6512404B2 (en) * | 2001-05-25 | 2003-01-28 | Infineon Technologies Ag | Low voltage charge pump for use in a phase locked loop |
| US6504408B1 (en) | 2001-07-09 | 2003-01-07 | Broadcom Corporation | Method and apparatus to ensure DLL locking at minimum delay |
| US6556643B2 (en) * | 2001-08-27 | 2003-04-29 | Micron Technology, Inc. | Majority filter counter circuit |
| JP4608153B2 (ja) * | 2001-09-10 | 2011-01-05 | ルネサスエレクトロニクス株式会社 | チャージポンプ電流補正回路 |
| NL1021440C2 (nl) * | 2001-09-28 | 2004-07-15 | Samsung Electronics Co Ltd | Vertragingsvergrendelde lus met meervoudige fasen. |
| DE10149104B4 (de) * | 2001-10-05 | 2005-10-27 | Infineon Technologies Ag | Halbleiterbaustein zum Verarbeiten von Daten und Verfahren zum Erfassen eines Betriebszustandes |
| US6683478B2 (en) * | 2001-11-13 | 2004-01-27 | Samsung Electronics Co., Ltd. | Apparatus for ensuring correct start-up and phase locking of delay locked loop |
| US6636098B1 (en) * | 2001-12-05 | 2003-10-21 | Rambus Inc. | Differential integrator and related circuitry |
| US6741110B2 (en) * | 2002-05-28 | 2004-05-25 | Lsi Logic Corporation | Method and/or circuit for generating precision programmable multiple phase angle clocks |
| FR2841406A1 (fr) * | 2002-06-25 | 2003-12-26 | St Microelectronics Sa | Circuit dephaseur variable,interpolateur de phase l'incorporant, et synthetiseur de frequence numerique incorpoant un tel interpolateur |
| US6664829B1 (en) * | 2002-09-04 | 2003-12-16 | National Semiconductor Corporation | Charge pump using dynamic charge balance compensation circuit and method of operation |
| US6670834B1 (en) * | 2002-09-12 | 2003-12-30 | Lsi Logic Corporation | Digital lock detect for dithering phase lock loops |
| US6744292B2 (en) * | 2002-10-25 | 2004-06-01 | Exar Corporation | Loop filter capacitor multiplication in a charge pump circuit |
| KR100484252B1 (ko) * | 2002-11-27 | 2005-04-22 | 주식회사 하이닉스반도체 | 지연 고정 루프 회로 |
| US7336752B2 (en) | 2002-12-31 | 2008-02-26 | Mosaid Technologies Inc. | Wide frequency range delay locked loop |
| US6839301B2 (en) * | 2003-04-28 | 2005-01-04 | Micron Technology, Inc. | Method and apparatus for improving stability and lock time for synchronous circuits |
| US6998889B2 (en) | 2003-08-11 | 2006-02-14 | Rambus Inc. | Circuit, apparatus and method for obtaining a lock state value |
| US7092689B1 (en) * | 2003-09-11 | 2006-08-15 | Xilinx Inc. | Charge pump having sampling point adjustment |
| US6867627B1 (en) | 2003-09-16 | 2005-03-15 | Integrated Device Technology, Inc. | Delay-locked loop (DLL) integrated circuits having high bandwidth and reliable locking characteristics |
| JP3949636B2 (ja) * | 2003-09-30 | 2007-07-25 | Necエレクトロニクス株式会社 | Lvdsドライバー回路 |
| US7098714B2 (en) * | 2003-12-08 | 2006-08-29 | Micron Technology, Inc. | Centralizing the lock point of a synchronous circuit |
| KR101099947B1 (ko) * | 2003-12-11 | 2011-12-28 | 모사이드 테크놀로지스, 인코포레이티드 | Pll/dll의 고출력 임피던스 충전 펌프 |
| KR100553833B1 (ko) | 2003-12-24 | 2006-02-24 | 삼성전자주식회사 | 지연동기회로의 인버젼 제어회로 및 방법과, 이를 이용한지연동기회로 및 반도체 메모리 장치 |
| KR100605588B1 (ko) * | 2004-03-05 | 2006-07-28 | 주식회사 하이닉스반도체 | 반도체 기억 소자에서의 지연 고정 루프 및 그의 클럭록킹 방법 |
| US7190201B2 (en) * | 2005-02-03 | 2007-03-13 | Mosaid Technologies, Inc. | Method and apparatus for initializing a delay locked loop |
-
2005
- 2005-02-03 US US11/050,644 patent/US7190201B2/en active Active
-
2006
- 2006-02-03 EP EP20060704527 patent/EP1844549B1/en not_active Not-in-force
- 2006-02-03 KR KR1020077017930A patent/KR101176804B1/ko not_active IP Right Cessation
- 2006-02-03 CN CN2006800038021A patent/CN101116245B/zh not_active Expired - Fee Related
- 2006-02-03 CN CN2010102678336A patent/CN101917189A/zh active Pending
- 2006-02-03 CA CA002596258A patent/CA2596258A1/en not_active Abandoned
- 2006-02-03 JP JP2007553423A patent/JP4918047B2/ja not_active Expired - Fee Related
- 2006-02-03 KR KR1020117015959A patent/KR101213004B1/ko not_active IP Right Cessation
- 2006-02-03 WO PCT/CA2006/000143 patent/WO2006081668A1/en active Application Filing
-
2007
- 2007-01-29 US US11/699,268 patent/US7285997B2/en active Active
- 2007-10-04 US US11/906,872 patent/US7532050B2/en not_active Ceased
-
2011
- 2011-05-11 US US13/105,749 patent/USRE43947E1/en active Active
-
2012
- 2012-12-18 US US13/718,783 patent/US8704569B2/en active Active
-
2014
- 2014-04-21 US US14/257,635 patent/US20140225651A1/en not_active Abandoned
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08316827A (ja) * | 1995-05-15 | 1996-11-29 | Nec Corp | クロック位相調整回路 |
| JPH11205102A (ja) * | 1998-01-13 | 1999-07-30 | Mitsubishi Electric Corp | 遅延同期回路 |
| JP2000082954A (ja) * | 1998-08-08 | 2000-03-21 | Samsung Electronics Co Ltd | 遅延同期ル―プ及びその位相比較器並びに遅延同期方法 |
| JP2003110423A (ja) * | 2001-09-20 | 2003-04-11 | Hynix Semiconductor Inc | 混合型遅延固定ループ回路及びそのクロック信号同期方法 |
| WO2004114524A1 (en) * | 2003-06-25 | 2004-12-29 | Mosaid Technologies Incorporated | Start up circuit for delay locked loop |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101116245A (zh) | 2008-01-30 |
| CN101116245B (zh) | 2010-10-13 |
| KR20070110844A (ko) | 2007-11-20 |
| JP2008529426A (ja) | 2008-07-31 |
| KR101176804B1 (ko) | 2012-08-24 |
| CN101917189A (zh) | 2010-12-15 |
| USRE43947E1 (en) | 2013-01-29 |
| US8704569B2 (en) | 2014-04-22 |
| EP1844549A1 (en) | 2007-10-17 |
| US7532050B2 (en) | 2009-05-12 |
| US7285997B2 (en) | 2007-10-23 |
| KR101213004B1 (ko) | 2012-12-20 |
| US7190201B2 (en) | 2007-03-13 |
| EP1844549A4 (en) | 2012-10-24 |
| US20060170471A1 (en) | 2006-08-03 |
| US20140225651A1 (en) | 2014-08-14 |
| EP1844549B1 (en) | 2015-05-20 |
| US20080030247A1 (en) | 2008-02-07 |
| CA2596258A1 (en) | 2006-08-10 |
| US20130176061A1 (en) | 2013-07-11 |
| WO2006081668A1 (en) | 2006-08-10 |
| US20070120587A1 (en) | 2007-05-31 |
| KR20110083762A (ko) | 2011-07-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4918047B2 (ja) | 遅延ロックループを初期化する方法および装置 | |
| US6867627B1 (en) | Delay-locked loop (DLL) integrated circuits having high bandwidth and reliable locking characteristics | |
| US8000430B2 (en) | Wide frequency range delay locked loop | |
| US7746182B2 (en) | Systems and methods for voltage controlled oscillator calibration | |
| JP6450825B2 (ja) | スプリアス相殺を備えた統合された位相ロック及び乗算遅延ロックループ | |
| US7477716B2 (en) | Start up circuit for delay locked loop | |
| US7876137B2 (en) | Configurable architecture hybrid analog/digital delay locked loop (DLL) and technique with fast open loop digital locking for integrated circuit devices | |
| KR100868015B1 (ko) | 지연 장치, 이를 이용한 지연 고정 루프 회로 및 반도체메모리 장치 | |
| KR101394869B1 (ko) | Dll/pll 에서의 위상 시프트 | |
| US7453301B1 (en) | Method of and circuit for phase shifting a clock signal | |
| KR101363798B1 (ko) | 제로 스큐 기능을 가지는 분수배 주파수 합성기 | |
| US7233183B1 (en) | Wide frequency range DLL with dynamically determined VCDL/VCO operational states | |
| Chen et al. | A fast-lock analog multiphase delay-locked loop using a dual-slope technique |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080911 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080911 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100818 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110222 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110519 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110526 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110823 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111116 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120117 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120127 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |