JP4900326B2 - 駐車支援装置及び駐車支援方法 - Google Patents
駐車支援装置及び駐車支援方法 Download PDFInfo
- Publication number
- JP4900326B2 JP4900326B2 JP2008151473A JP2008151473A JP4900326B2 JP 4900326 B2 JP4900326 B2 JP 4900326B2 JP 2008151473 A JP2008151473 A JP 2008151473A JP 2008151473 A JP2008151473 A JP 2008151473A JP 4900326 B2 JP4900326 B2 JP 4900326B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- parking
- steering
- line
- host vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
- B60R1/27—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view providing all-round vision, e.g. using omnidirectional cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/02—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/0275—Parking aids, e.g. instruction means by overlaying a vehicle path based on present steering angle over an image without processing that image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—Two-dimensional [2D] image generation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/04—Mounting of cameras operative during drive; Arrangement of controls thereof relative to the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/102—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using 360 degree surveillance camera system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/105—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using multiple cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/303—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing using joined images, e.g. multiple camera images
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/60—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective
- B60R2300/607—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective from a bird's eye viewpoint
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/70—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by an event-triggered choice to display a specific image among a selection of captured images
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/806—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for aiding parking
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Transportation (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Closed-Circuit Television Systems (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Traffic Control Systems (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
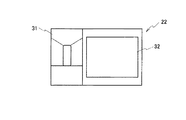
本発明の実施形態として示す駐車支援装置は、図1に示すように、自車両周囲の映像を撮像する複数のカメラ装置11,12,13,14と、これらカメラ装置11,12,13,14によって撮像された自車両周囲の映像を処理する画像処理コントローラ21と、この画像処理コントローラ21によって処理された映像を表示するディスプレイ22とを備える。
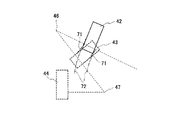
このような各部を備える駐車支援装置は、作成した俯瞰映像上に、駐車を行う際の後退開始位置、目標駐車位置、駐車途中位置、操舵連動線、及び理想進路予想線等を重畳描画し、目標駐車位置に対する駐車を支援する情報を運転者に提示する。以下、縦列駐車を行う場合を例にとり、駐車支援装置の処理について説明する。
まず、上述した第1のステップとして駐車開始位置41に位置する自車両を前進させて後退開始位置42に移動させる際に、ディスプレイ22に表示する線について説明する。
つぎに、上述した第2のステップとして後退開始位置42に位置する自車両を後退させて駐車途中位置43に移動させる際に、ディスプレイ22に表示する線について説明する。
最後に、上述した第3のステップとして駐車途中位置43に位置する自車両を後退させて目標駐車位置44に移動させる際に、ディスプレイ22に表示する線について説明する。
21 画像処理コントローラ
22 ディスプレイ
31 俯瞰映像表示領域
32 非俯瞰映像表示領域
41 駐車開始位置
42 後退開始位置
43 駐車途中位置
44 目標駐車位置
45 第1の回転中心
46 第2の回転中心
47 第3の回転中心
51,71,81 理想進路予想線
52,72,82 操舵連動線
61 理想タイヤ切れ角線
62 タイヤ切れ角連動線
Claims (11)
- 自車両周囲を撮影する複数の車載カメラと、
前記複数の車載カメラで撮影された複数の映像を繋ぎ合わせるとともに前記自車両の上方から見下ろした俯瞰映像を生成する俯瞰映像生成手段と、
前記生成された俯瞰映像と、前記自車両を示す自車両マークと、前記自車両が所定の目標駐車位置へ移動する途中でステアリング転舵を行うための転舵位置に対応するとともに前記自車両の外形形状に相当する転舵枠と、を表示する表示手段と、
ステアリング操舵に連動したタイヤの切れ角を示すタイヤ切れ角連動線と、次に前記自車両が移動すべき前記転舵位置或いは前記目標駐車位置に至る理想的なタイヤの切れ角を示す理想タイヤ切れ角線とを前記俯瞰映像上の同じ位置に重ね合わせて表示させる画像処理制御手段と、
を備えることを特徴とする駐車支援装置。 - 前記転舵枠が前記自車両の車幅よりも広い幅を有することを特徴とする請求項1記載の駐車支援装置。
- 前記転舵枠の形状が矩形形状であることを特徴とする請求項1又は請求項2記載の駐車支援装置。
- 前記画像処理制御手段は、
前記自車両のシフト信号がリバース以外であり、車速VがV>0の場合には、次に前記自車両が移動すべき前記転舵位置の前記転舵枠と、タイヤ切れ角連動線とを前記表示手段に表示させ、車速VがV=0の場合には、次に前記自車両が移動すべき前記転舵位置の前記転舵枠と、タイヤ切れ角連動線と、前記目標駐車位置の枠線とを前記表示手段に表示させ、
前記自車両のシフト信号がリバースであり、車速VがV>0の場合には、次に前記自車両が移動すべき前記転舵位置の前記転舵枠と、タイヤ切れ角連動線とを前記表示手段に表示させ、車速VがV=0の場合には、次に前記自車両が移動すべき前記転舵位置の前記転舵枠と、タイヤ切れ角連動線と、前記目標駐車位置の枠線とを前記表示手段に表示させること
を特徴とする請求項1乃至請求項3のうちいずれか1項記載の駐車支援装置。 - 前記画像処理制御手段は、車速VがV=0からV>0に遷移して前記自車両が移動を開始した場合には、前記目標駐車位置の枠線を前記表示手段に所定時間だけ表示させた後、消去することを特徴とする請求項4記載の駐車支援装置。
- 前記画像処理制御手段は、前記目標駐車位置の枠線を、当該自車両の車幅と同幅で前記表示手段に表示させることを特徴とする請求項1乃至請求項5のうちいずれか1項記載の駐車支援装置。
- 前記画像処理制御手段は、次に前記自車両が移動すべき前記転舵位置又は前記目標駐車位置に当該自車両が近付いている旨を音又は映像以外の手段によって運転者に報知させることを特徴とする請求項1乃至請求項6のうちいずれか1項記載の駐車支援装置。
- 前記画像処理制御手段は、前記タイヤ切れ角連動線を、前記自車両の前進時と後退時とで異なるように前記表示手段に表示させることを特徴とする請求項1乃至請求項7のうちいずれか1項に記載の駐車支援装置。
- 前記画像処理制御手段は、前記転舵枠を、当該自車両の車幅よりも広い幅で前記俯瞰映像上に表示させ、前記目標駐車位置の枠線を、当該自車両の車幅と同幅で前記俯瞰映像上に表示させることを特徴とする請求項1乃至請求項8のうちいずれか1項に記載の駐車支援装置。
- 自車両周囲を複数の車載カメラで撮影する撮影工程と、
撮影された複数の映像を繋ぎ合わせるとともに前記自車両の上方から見下ろした俯瞰映像を生成する俯瞰映像生成工程と、
生成された俯瞰映像と、前記自車両を示す自車両マークと、前記自車両が所定の目標駐車位置へ移動する途中でステアリング転舵を行うための転舵位置に対応するとともに前記自車両の外形形状に相当する転舵枠と、を表示手段に表示する表示工程と、
ステアリング操舵に連動したタイヤの切れ角を示すタイヤ切れ角連動線と、次に前記自車両が移動すべき前記転舵位置或いは前記目標駐車位置に至る理想的なタイヤの切れ角を示す理想タイヤ切れ角線とを前記俯瞰映像上の同じ位置に重ね合わせて表示させる画像処理制御工程と、
を備えることを特徴とする駐車支援方法。 - 前記画像処理制御工程では、前記転舵枠を、当該自車両の車幅よりも広い幅で前記俯瞰映像上に表示させ、前記目標駐車位置の枠線を、当該自車両の車幅と同幅で前記俯瞰映像上に表示させることを特徴とする請求項10に記載の駐車支援方法。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008151473A JP4900326B2 (ja) | 2008-06-10 | 2008-06-10 | 駐車支援装置及び駐車支援方法 |
| CN201310001973.2A CN103057473B (zh) | 2008-06-10 | 2009-06-09 | 停车辅助装置以及停车辅助方法 |
| KR1020117000302A KR101362496B1 (ko) | 2008-06-10 | 2009-06-09 | 주차 지원 장치 및 주차 지원 방법 |
| CN2009801215898A CN102056772B (zh) | 2008-06-10 | 2009-06-09 | 停车辅助装置以及停车辅助方法 |
| US12/997,052 US8803707B2 (en) | 2008-06-10 | 2009-06-09 | Parking assistance system and parking assistance method |
| EP09762483.7A EP2301812B1 (en) | 2008-06-10 | 2009-06-09 | Parking assist apparatus and parking assist method |
| PCT/JP2009/060537 WO2009151053A1 (ja) | 2008-06-10 | 2009-06-09 | 駐車支援装置及び駐車支援方法 |
| KR1020137025977A KR101375944B1 (ko) | 2008-06-10 | 2009-06-09 | 주차 지원 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008151473A JP4900326B2 (ja) | 2008-06-10 | 2008-06-10 | 駐車支援装置及び駐車支援方法 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011248497A Division JP2012030797A (ja) | 2011-11-14 | 2011-11-14 | 駐車支援装置及び駐車支援方法 |
| JP2011248496A Division JP4924770B2 (ja) | 2011-11-14 | 2011-11-14 | 駐車支援装置及び駐車支援方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009298178A JP2009298178A (ja) | 2009-12-24 |
| JP2009298178A5 JP2009298178A5 (ja) | 2010-08-19 |
| JP4900326B2 true JP4900326B2 (ja) | 2012-03-21 |
Family
ID=41416760
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008151473A Active JP4900326B2 (ja) | 2008-06-10 | 2008-06-10 | 駐車支援装置及び駐車支援方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8803707B2 (ja) |
| EP (1) | EP2301812B1 (ja) |
| JP (1) | JP4900326B2 (ja) |
| KR (2) | KR101375944B1 (ja) |
| CN (2) | CN102056772B (ja) |
| WO (1) | WO2009151053A1 (ja) |
Families Citing this family (59)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7277123B1 (en) * | 1998-10-08 | 2007-10-02 | Matsushita Electric Industrial Co., Ltd. | Driving-operation assist and recording medium |
| JP4900232B2 (ja) * | 2007-12-26 | 2012-03-21 | 日産自動車株式会社 | 車両用駐車支援装置および映像表示方法 |
| JP4661917B2 (ja) * | 2008-07-25 | 2011-03-30 | 日産自動車株式会社 | 駐車支援装置および駐車支援方法 |
| CN102933429B (zh) * | 2010-06-09 | 2015-04-29 | 日产自动车株式会社 | 停车模式选择装置以及停车模式选择方法 |
| CN102939223B (zh) * | 2010-06-11 | 2015-08-05 | 日产自动车株式会社 | 停车辅助装置以及停车辅助方法 |
| WO2012017560A1 (ja) | 2010-08-06 | 2012-02-09 | 富士通株式会社 | 画像処理装置および画像処理プログラム |
| JP2012119755A (ja) * | 2010-11-29 | 2012-06-21 | Panasonic Corp | 運転支援表示装置 |
| JP5519479B2 (ja) * | 2010-11-29 | 2014-06-11 | パナソニック株式会社 | 運転支援表示装置 |
| JP5998496B2 (ja) * | 2011-02-02 | 2016-09-28 | 日産自動車株式会社 | 駐車支援装置 |
| US8290657B2 (en) * | 2011-04-06 | 2012-10-16 | Ford Global Technologies | Direction determination for active park assist |
| KR101803973B1 (ko) | 2011-05-09 | 2017-12-01 | 엘지이노텍 주식회사 | 주차용 카메라 시스템과 그의 구동 방법 |
| CN102774380A (zh) * | 2011-05-12 | 2012-11-14 | 无锡维森智能传感技术有限公司 | 一种判断车辆行驶状态的方法 |
| JP2012244600A (ja) * | 2011-05-24 | 2012-12-10 | Fujitsu Ten Ltd | 画像表示システム、画像処理装置、及び、画像表示方法 |
| WO2012169355A1 (ja) * | 2011-06-09 | 2012-12-13 | アイシン精機株式会社 | 画像生成装置 |
| CN103609101A (zh) * | 2011-06-16 | 2014-02-26 | 爱信精机株式会社 | 车辆周边监视装置 |
| WO2013018173A1 (ja) | 2011-07-29 | 2013-02-07 | 富士通株式会社 | 画像処理装置、画像処理方法および画像処理プログラム |
| JP5477515B2 (ja) * | 2011-08-12 | 2014-04-23 | トヨタ自動車株式会社 | 駐車支援装置 |
| KR101829007B1 (ko) * | 2011-11-14 | 2018-02-14 | 현대모비스 주식회사 | 후진 주차 지원 방법 |
| US9697735B2 (en) | 2011-12-15 | 2017-07-04 | Panasonic Intellectual Property Management Co., Ltd. | Drive assistance device |
| KR101327736B1 (ko) * | 2011-12-23 | 2013-11-11 | 현대자동차주식회사 | Avm탑뷰 기반 주차지원 시스템 |
| US9598836B2 (en) | 2012-03-29 | 2017-03-21 | Harnischfeger Technologies, Inc. | Overhead view system for a shovel |
| KR101877570B1 (ko) * | 2012-04-04 | 2018-07-11 | 현대자동차주식회사 | Av 영상 기반의 주차위치 설정 장치 및 그 방법 |
| CN102745198B (zh) * | 2012-07-23 | 2014-12-03 | 北京智华驭新汽车电子技术开发有限公司 | 一种车辆前向轨迹辅助装置 |
| US10163348B2 (en) | 2012-08-01 | 2018-12-25 | Toyota Jidosha Kabushiki Kaisha | Drive assist device |
| KR101366112B1 (ko) * | 2012-09-04 | 2014-02-24 | 전자부품연구원 | 카메라 네트워크를 분리하여 운용하는 차량용 avm 시스템 및 방법 |
| KR101269183B1 (ko) | 2012-09-14 | 2013-06-05 | 주식회사 세코닉스 | 네비게이터의 버드 뷰 영상 제어방법 |
| KR101215563B1 (ko) | 2012-10-24 | 2013-01-21 | 주식회사 세코닉스 | 영상 자동보정 기능을 구비하는 버드 뷰 영상 생성장치 및 방법 |
| RU2643896C2 (ru) | 2013-01-11 | 2018-02-06 | Ниссан Мотор Ко., Лтд. | Устройство управления отображением для транспортного средства и способ управления отображением для транспортного средства |
| US9683861B2 (en) * | 2013-09-27 | 2017-06-20 | Nissan Motor Co., Ltd. | Estimated route presentation apparatus and estimated route presentation method |
| JP5844329B2 (ja) * | 2013-10-04 | 2016-01-13 | 本田技研工業株式会社 | 駐車支援装置 |
| CN106183992B (zh) * | 2013-10-04 | 2019-03-15 | 本田技研工业株式会社 | 停车辅助装置 |
| KR102135900B1 (ko) * | 2013-11-29 | 2020-08-26 | 현대모비스(주) | 주차 보조 장치 및 방법 |
| DE102014200661A1 (de) * | 2014-01-16 | 2015-07-16 | Ford Global Technologies, Llc | Detektion eines Einparkvorgangs eines Kraftwagens |
| US9981605B2 (en) * | 2014-05-16 | 2018-05-29 | GM Global Technology Operations LLC | Surround-view camera system (VPM) and vehicle dynamic |
| JP6096155B2 (ja) * | 2014-09-12 | 2017-03-15 | アイシン精機株式会社 | 運転支援装置及び運転支援システム |
| JP6580872B2 (ja) * | 2015-06-05 | 2019-09-25 | 株式会社デンソーテン | 運転支援装置および運転支援方法 |
| KR101795151B1 (ko) * | 2015-10-05 | 2017-12-01 | 현대자동차주식회사 | 주차안내 장치 및 방법 |
| CN106864369A (zh) * | 2015-12-11 | 2017-06-20 | 华创车电技术中心股份有限公司 | 停车辅助环场影像系统 |
| KR101693820B1 (ko) | 2016-01-13 | 2017-01-06 | 광운대학교 산학협력단 | Avm 영상 보정 장치 및 방법 |
| KR102005944B1 (ko) * | 2016-10-19 | 2019-08-01 | 주식회사 만도 | 주차 보조 시스템 및 그 제어 방법 |
| DE102017200216A1 (de) * | 2017-01-09 | 2018-07-12 | Bayerische Motoren Werke Aktiengesellschaft | Steuereinheit und Verfahren zur Bereitstellung eines Korrekturzugs für ein Rückfahrassistenzsystem |
| WO2018186086A1 (ja) * | 2017-04-03 | 2018-10-11 | 株式会社Jvcケンウッド | 俯瞰映像生成装置、俯瞰映像表示装置、俯瞰映像生成方法およびプログラム |
| JP6873800B2 (ja) * | 2017-04-13 | 2021-05-19 | 三菱ロジスネクスト株式会社 | 作業車両の操舵表示装置および作業車両 |
| KR20180136134A (ko) * | 2017-06-14 | 2018-12-24 | 주식회사 만도 | 스마트 주차 보조 시스템 및 스마트 주차 보조 시스템의 제어 방법 |
| CN109138561A (zh) * | 2017-06-16 | 2019-01-04 | 纵目科技(上海)股份有限公司 | 设置虚拟停车位自动泊车的方法和系统 |
| CN107719234A (zh) * | 2017-09-22 | 2018-02-23 | 郭金林 | 一种动态倒车轨迹视像系统及其应用 |
| JP2019060616A (ja) * | 2017-09-25 | 2019-04-18 | アイシン精機株式会社 | 運転支援装置 |
| US11193784B2 (en) * | 2017-10-13 | 2021-12-07 | Waymo Llc | End of trip sequence |
| JP6917330B2 (ja) * | 2018-03-28 | 2021-08-11 | 日立Astemo株式会社 | 駐車支援装置 |
| FR3084044A1 (fr) * | 2018-07-17 | 2020-01-24 | Psa Automobiles Sa | Procede et dispositif d’assistance a la conduite d’un vehicule, par affichage contextuel d’images panoramiques avant. |
| CN108791279B (zh) * | 2018-07-27 | 2021-10-15 | 江西江铃集团新能源汽车有限公司 | 半自动泊车系统、汽车及泊车方法 |
| US11507087B2 (en) * | 2018-11-07 | 2022-11-22 | Gm Cruise Holdings Llc | Distributed integrated sensing and communication module |
| CN109816588B (zh) * | 2018-12-29 | 2023-03-21 | 百度在线网络技术(北京)有限公司 | 行车轨迹线的记录方法、装置及设备 |
| US11919513B2 (en) | 2019-01-10 | 2024-03-05 | Jaguar Land Rover Limited | Control system, system and method for providing assistance to an occupant of a vehicle |
| KR102921223B1 (ko) * | 2019-05-17 | 2026-02-02 | 삼성전자주식회사 | 첨단 운전자 지원 장치 및 이의 객체를 검출하는 방법 |
| WO2021161378A1 (ja) * | 2020-02-10 | 2021-08-19 | 日産自動車株式会社 | 駐車支援方法及び駐車支援装置 |
| CN113282073B (zh) * | 2021-05-24 | 2022-06-17 | 安徽江淮汽车集团股份有限公司 | 车辆行车轨迹模拟方法、车辆及计算机可读存储介质 |
| EP4141472A1 (en) * | 2021-08-30 | 2023-03-01 | GM Cruise Holdings LLC | Computing architecture of an autonomous vehicle |
| TWI832598B (zh) * | 2022-12-06 | 2024-02-11 | 宏碁股份有限公司 | 智慧停車輔助裝置及智慧停車輔助資訊之顯示方法 |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3734737A1 (de) * | 1986-10-14 | 1988-04-21 | Orbital Eng Pty | Brennstoffeinspritzsystem und mit diesem ausgeruestete verbrennungsmaschine |
| JPH11157404A (ja) * | 1997-11-26 | 1999-06-15 | Toyota Motor Corp | 駐車支援装置 |
| JP3445197B2 (ja) | 1998-10-08 | 2003-09-08 | 松下電器産業株式会社 | 運転操作補助装置 |
| US7277123B1 (en) | 1998-10-08 | 2007-10-02 | Matsushita Electric Industrial Co., Ltd. | Driving-operation assist and recording medium |
| JP3183284B2 (ja) | 1999-01-19 | 2001-07-09 | 株式会社豊田自動織機製作所 | 車両の後退時の操舵支援装置 |
| JP4096445B2 (ja) * | 1999-03-31 | 2008-06-04 | アイシン精機株式会社 | 駐車補助装置 |
| US7366595B1 (en) * | 1999-06-25 | 2008-04-29 | Seiko Epson Corporation | Vehicle drive assist system |
| JP2001106115A (ja) | 1999-10-04 | 2001-04-17 | Yazaki Corp | 駐車支援システムにおける指示装置及びその指示プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP3575364B2 (ja) * | 1999-12-28 | 2004-10-13 | 株式会社豊田自動織機 | 操舵支援装置 |
| US6476730B2 (en) | 2000-02-29 | 2002-11-05 | Aisin Seiki Kabushiki Kaisha | Assistant apparatus and method for a vehicle in reverse motion |
| DE60105684T2 (de) * | 2000-04-05 | 2005-02-10 | Matsushita Electric Industrial Co., Ltd., Kadoma | System und Verfahren zur Fahrerunterstützung |
| DE60119431T3 (de) * | 2000-05-30 | 2013-11-07 | Toyota Jidosha Kabushiki Kaisha | Parkhilfe |
| JP2002036991A (ja) * | 2000-07-27 | 2002-02-06 | Honda Motor Co Ltd | 駐車支援装置 |
| JP4615766B2 (ja) * | 2000-12-15 | 2011-01-19 | 本田技研工業株式会社 | 駐車支援装置 |
| JP3882565B2 (ja) | 2001-10-05 | 2007-02-21 | 三菱自動車工業株式会社 | 駐車支援装置 |
| JP2004098981A (ja) * | 2002-09-12 | 2004-04-02 | Nissan Motor Co Ltd | 車両操舵支援装置 |
| JP2004114879A (ja) * | 2002-09-27 | 2004-04-15 | Clarion Co Ltd | 駐車補助装置および画像表示装置 |
| JP2004198211A (ja) * | 2002-12-18 | 2004-07-15 | Aisin Seiki Co Ltd | 移動体周辺監視装置 |
| JP3916240B2 (ja) * | 2003-08-07 | 2007-05-16 | 松下電器産業株式会社 | 運転支援装置及び運転支援方法 |
| DE102004020424A1 (de) | 2004-04-27 | 2005-11-24 | Robert Bosch Gmbh | Verfahren zum Anzeigen von Fahrerinformationen |
| US7630796B2 (en) | 2004-09-06 | 2009-12-08 | Denso Corporation | Body action information system |
| JP2006142982A (ja) * | 2004-11-19 | 2006-06-08 | Denso Corp | 車体挙動報知システム |
| JP4507872B2 (ja) * | 2004-12-09 | 2010-07-21 | 日産自動車株式会社 | 駐車支援装置 |
| JP4561456B2 (ja) | 2005-04-21 | 2010-10-13 | アイシン・エィ・ダブリュ株式会社 | 駐車支援方法及び駐車支援装置 |
| JP4595649B2 (ja) * | 2005-04-22 | 2010-12-08 | アイシン・エィ・ダブリュ株式会社 | 駐車支援方法及び駐車支援装置 |
| JP4666147B2 (ja) * | 2005-04-27 | 2011-04-06 | 日産自動車株式会社 | 駐車支援装置及び駐車支援方法 |
| CN2835947Y (zh) | 2005-08-30 | 2006-11-08 | 珠海金联安软件有限公司 | 多功能行车、停车引导报警系统 |
| JP4950475B2 (ja) * | 2005-10-28 | 2012-06-13 | アイシン精機株式会社 | 運転支援装置 |
| JP4306670B2 (ja) * | 2005-10-31 | 2009-08-05 | トヨタ自動車株式会社 | 駐車支援装置 |
| JP4414959B2 (ja) | 2005-11-16 | 2010-02-17 | アイシン精機株式会社 | 駐車支援装置 |
| JP2007176244A (ja) | 2005-12-27 | 2007-07-12 | Aisin Seiki Co Ltd | 駐車支援装置 |
| JP2007176324A (ja) * | 2005-12-28 | 2007-07-12 | Aisin Seiki Co Ltd | 駐車支援装置 |
| JP4910425B2 (ja) | 2006-03-01 | 2012-04-04 | 日産自動車株式会社 | 駐車支援装置及び駐車支援方法 |
| CN101059351B (zh) * | 2006-04-19 | 2011-07-06 | 财团法人车辆研究测试中心 | 车辆倒车轨迹辅助装置 |
| JP5309442B2 (ja) | 2006-05-29 | 2013-10-09 | アイシン・エィ・ダブリュ株式会社 | 駐車支援方法及び駐車支援装置 |
| CN101082502A (zh) * | 2006-05-29 | 2007-12-05 | 爱信艾达株式会社 | 驻车辅助方法及驻车辅助装置 |
| JP5087885B2 (ja) | 2006-08-16 | 2012-12-05 | 日産自動車株式会社 | 駐車支援装置、及び駐車支援方法 |
| JP4904997B2 (ja) | 2006-08-29 | 2012-03-28 | アイシン・エィ・ダブリュ株式会社 | 駐車支援方法及び駐車支援装置 |
| JP5115782B2 (ja) | 2006-11-07 | 2013-01-09 | アイシン精機株式会社 | 駐車支援装置 |
| JP5158404B2 (ja) | 2006-12-20 | 2013-03-06 | 株式会社ノーリツ | 熱交換器および温水装置 |
| CN1987357B (zh) * | 2006-12-26 | 2010-05-19 | 浙江工业大学 | 基于全方位计算机视觉的智能停车辅助装置 |
| JP4386083B2 (ja) | 2007-02-27 | 2009-12-16 | トヨタ自動車株式会社 | 駐車支援装置 |
| US20080316056A1 (en) * | 2007-06-19 | 2008-12-25 | Tracker Llc | Vehicle Garage Parking and Stopping Guide |
| JP4900232B2 (ja) | 2007-12-26 | 2012-03-21 | 日産自動車株式会社 | 車両用駐車支援装置および映像表示方法 |
| JP4661917B2 (ja) | 2008-07-25 | 2011-03-30 | 日産自動車株式会社 | 駐車支援装置および駐車支援方法 |
| DE102008049113A1 (de) | 2008-09-26 | 2009-05-14 | Daimler Ag | Verfahren und Vorrichtung zur Unterstützung eines Einparkvorgangs |
-
2008
- 2008-06-10 JP JP2008151473A patent/JP4900326B2/ja active Active
-
2009
- 2009-06-09 KR KR1020137025977A patent/KR101375944B1/ko active Active
- 2009-06-09 WO PCT/JP2009/060537 patent/WO2009151053A1/ja not_active Ceased
- 2009-06-09 CN CN2009801215898A patent/CN102056772B/zh active Active
- 2009-06-09 CN CN201310001973.2A patent/CN103057473B/zh active Active
- 2009-06-09 US US12/997,052 patent/US8803707B2/en active Active
- 2009-06-09 EP EP09762483.7A patent/EP2301812B1/en active Active
- 2009-06-09 KR KR1020117000302A patent/KR101362496B1/ko active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR101375944B1 (ko) | 2014-03-19 |
| KR101362496B1 (ko) | 2014-02-13 |
| WO2009151053A1 (ja) | 2009-12-17 |
| CN103057473A (zh) | 2013-04-24 |
| KR20110026469A (ko) | 2011-03-15 |
| US8803707B2 (en) | 2014-08-12 |
| KR20130117889A (ko) | 2013-10-28 |
| JP2009298178A (ja) | 2009-12-24 |
| EP2301812B1 (en) | 2014-09-10 |
| CN102056772A (zh) | 2011-05-11 |
| EP2301812A4 (en) | 2012-08-22 |
| CN103057473B (zh) | 2015-04-29 |
| EP2301812A1 (en) | 2011-03-30 |
| US20110095910A1 (en) | 2011-04-28 |
| CN102056772B (zh) | 2013-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4900326B2 (ja) | 駐車支援装置及び駐車支援方法 | |
| EP2683164B1 (en) | Driving assistance device and towing vehicle | |
| JP5003946B2 (ja) | 駐車支援装置 | |
| US8319614B2 (en) | Parking assistance apparatus and parking assistance method | |
| JP5182545B2 (ja) | 駐車支援装置 | |
| CN102473353B (zh) | 驾驶辅助装置 | |
| JP4853712B2 (ja) | 駐車支援装置 | |
| CN101977797B (zh) | 停车支援装置 | |
| JP5446139B2 (ja) | 駐車支援装置及び駐車支援方法 | |
| JP5724446B2 (ja) | 車両の運転支援装置 | |
| JP2008007090A (ja) | 駐車支援方法及び駐車支援装置 | |
| JP2009292457A (ja) | 車両周辺表示装置 | |
| CN103101481B (zh) | 倒车泊车辅助方法 | |
| JP2011230563A (ja) | 狭路走行支援装置 | |
| JP2008213647A (ja) | 駐車支援方法及び駐車支援装置 | |
| WO2019073872A1 (ja) | 駐車支援装置 | |
| JP5044136B2 (ja) | 駐車支援装置 | |
| JP2009126353A (ja) | 駐車支援装置 | |
| JP4924770B2 (ja) | 駐車支援装置及び駐車支援方法 | |
| JP7286276B2 (ja) | 駐車支援装置、及び駐車支援装置の制御方法 | |
| JP2006027334A (ja) | 運転支援装置および方法 | |
| JP2012030797A (ja) | 駐車支援装置及び駐車支援方法 | |
| JP6167940B2 (ja) | 撮影画像処理装置 | |
| JP2009206615A (ja) | 駐車支援装置 | |
| JP2004243835A (ja) | 並列駐車補助装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100702 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100702 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20110824 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20110905 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110913 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111206 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4900326 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150113 Year of fee payment: 3 |