JP4904997B2 - 駐車支援方法及び駐車支援装置 - Google Patents
駐車支援方法及び駐車支援装置 Download PDFInfo
- Publication number
- JP4904997B2 JP4904997B2 JP2006232487A JP2006232487A JP4904997B2 JP 4904997 B2 JP4904997 B2 JP 4904997B2 JP 2006232487 A JP2006232487 A JP 2006232487A JP 2006232487 A JP2006232487 A JP 2006232487A JP 4904997 B2 JP4904997 B2 JP 4904997B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- width
- parking
- image
- line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





















Description
請求項8に記載の発明によれば、接点までの拡張予想軌跡線と、接点から延びる直進補助線とが描画される。
請求項10に記載の発明によれば、車両周辺画像は、最新の現在画像データと、画像データ記憶手段に蓄積した画像データとを用いて表示される。従って、そのときの撮影手段の死角を表示することができるので、死角に入った白線と車両との相対位置を把握することができる。このため、駐車領域内の所望の位置により、車両を簡単に駐車させることができる。
図1に示すように、駐車支援システム1は、駐車支援装置としての支援制御装置2、各種画面を表示するディスプレイ20、撮影手段としてのバックモニタカメラ(以下、単にカメラ35という)、スピーカ36を備えている。
ル30から、イグニッションモジュール30のオン信号及びオフ信号を入力し、入力した信号を制御部3に出力する。制御部3は、オン信号を入力した場合には、駐車支援システム1を起動し、オフ信号を入力した場合には駐車支援システム1をシャットダウンする。
た予想軌跡線を演算する。予想軌跡演算部15により予想軌跡線の座標が演算されると、画像合成部13は、出力用データ、予想軌跡線、及び画像合成部13に記憶された車両画像データをVRAM19に一時記憶した後、所定のタイミングでディスプレイ20に出力する。
35の撮像範囲Dに含まれている場合には、図12(a)に示すように、駐車領域を区画する白線に相当するエッジEが検出される。エッジEを検出すると、駐車枠検出部14は、各白線のエッジEによって区画されたスペースを駐車領域Rとする。また、駐車領域Rに、他車両C2の車輪等、車両特有の特徴的なエッジEが検出された場合には、その駐車領域Rに他車両C2が駐車していると判断する。他車両C2が駐車していないと判断した場合には、その駐車領域Rが、車両Cが駐車可能な駐車領域としての空き駐車スペースR1であると判断する。
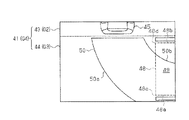
跡線50b及び後端表示線50cを有し、各軌跡線50a,50bの間の幅は、目標駐車スペース49と同じ一定の幅Waになっている。また、幅方向の中心(後端表示線50cの中心)が、車両Cの後端中心と合致している。さらに、各軌跡線50a,50bは、各予想軌跡線42の左側予想軌跡線42a及び右側予想軌跡線42bと平行して描画されている。これにより、各軌跡線50a,50bと各予想軌跡線42a,42bとの間隔は、目標駐車スペース49の幅Waと車幅とのクリアランスΔWと同じ幅になっている。
(1)上記実施形態では、駐車支援システム1の画像プロセッサ11は、車両Cのステアリング値に応じて、車幅とほぼ同じ幅の予想軌跡線42の座標を演算するようにした。また、画像プロセッサ11の駐車枠検出部14は、カメラ35から入力した画像データGに基づいて、空き駐車スペースR1を検出するようにした。そして、空き駐車スペースR1の幅Waを算出し、予想軌跡線42を、空き駐車スペースR1の幅Waに拡張した拡張予想軌跡線50を描画するようにした。このため、ドライバーは、その拡張予想軌跡線50と空き駐車スペースR1とが幅方向において合致するようにステアリング操作を行うことにより、車両Cの両側に所望のスペースを設けた状態で、車両Cを空き駐車スペースR1の中央に容易に駐車させることができる。
・上記実施形態では、ニュートラルスタートスイッチ33から、その時点のシフトポジション信号を入力するようにしたが、その他のセンサで車両Cの後退(又はシフトポジションがリバース)を検出するようにしても良い。
値以上になったとき、即ち車両Cが所定距離(例えば200mm等、100〜500mmの範囲内の距離)だけ後退した際に、画像データGを取得する。このようにしても、カメラ35の死角領域の画像データGを蓄積することができる。
画像41をディスプレイに表示するようにしたが、図17に示すように過去画像43を省略した俯瞰合成画像60でもよい。俯瞰合成画像60は、下部に現在画像データG3を俯瞰変換した現在画像61を表示するとともに、現在の車両位置に応じた位置に、車両画像63を表示している。現在のカメラ35の死角に相当する領域は、画像非表示であることを示すマスク64が表示されている。この場合でも、画像メモリ16に書き込んだ俯瞰画像データG1や、現在画像データG3を用いて、現在画像61に拡張予想軌跡線50を表示することにより、運転者が目標駐車スペース49の所望の位置に車両Cを駐車させることができる。
張予想軌跡線52は、その後端表示線52cの中央位置が、車両Cの位置に対して右側に偏倚している。このように偏倚した拡張予想軌跡線51,52を描画することにより、車両Cを目標駐車スペース49のうち左側又は右側に寄った位置に駐車させることができる。また、これらの拡張予想軌跡線50〜52を、ドライバーの入力操作により選択できるようにしてもよい。これにより、助手席降車スペースの確保や、隣の他車両C2のドア接触被害の防止等、各用途に応じて車両Cを所望の位置に駐車させることができる。
Claims (10)
- 車両に設けられた撮影手段から映像信号を取得し、前記映像信号に基づく車両周辺画像を表示手段に表示する駐車支援方法において、
前記車両周辺画像を描画する周辺画像描画工程と、
前記車両周辺の駐車領域を検出する検出工程と、
前記検出工程で検出した前記駐車領域の幅を算出する幅取得工程と、
前記車両の舵角に基づいて前記車両の進行方向に延びる予想軌跡線を演算し、該演算した予想軌跡線を前記車両周辺画像上において前記車両の幅方向両側に描画する軌跡演算工程とを有し、
前記軌跡演算工程では、前記検出工程で前記駐車領域が検出されなかったときには、前記両側の予想軌跡線の間隔を前記車両の幅に合わせた車幅予想軌跡線を、前記予想軌跡線として前記車両周辺画像上に描画し、前記検出工程で前記駐車領域が検出されて前記幅取得工程で前記駐車領域の幅が算出されたときには、前記両側の予想軌跡線の間隔を前記駐車領域の幅に合わせて拡張した拡張予想軌跡線を、前記予想軌跡線として前記車両周辺画像上に描画することを特徴とする駐車支援方法。 - 車両に設けられた撮影手段から映像信号を取得し、前記映像信号に基づく車両周辺画像を表示手段に表示する駐車支援装置において、
前記車両周辺画像を描画する周辺画像描画手段と、
前記車両周辺の駐車領域を検出する検出手段と、
前記検出手段により検出した前記駐車領域の幅を算出する幅取得手段と、
前記車両の舵角に基づいて前記車両の進行方向に延びる予想軌跡線を演算し、該演算した予想軌跡線を前記車両周辺画像上において前記車両の幅方向両側に描画する軌跡演算手段とを備え、
前記軌跡演算手段は、前記検出手段により前記駐車領域が検出されていないときには、前記両側の予想軌跡線の間隔を前記車両の幅に合わせた車幅予想軌跡線を、前記予想軌跡線として前記車両周辺画像上に描画し、前記検出手段により前記駐車領域が検出されて前記幅取得手段により前記駐車領域の幅が算出されたときには、前記両側の予想軌跡線の間隔を前記駐車領域の幅に合わせて拡張した拡張予想軌跡線を、前記予想軌跡線として前記車両周辺画像上に描画することを特徴とする駐車支援装置。 - 請求項2に記載の駐車支援装置において、
前記軌跡演算手段は、前記両側の車幅予想軌跡線を演算し、該両側の車幅予想軌跡線の間隔が前記幅取得手段により算出した前記駐車領域の幅と同一となるように前記両側の車幅予想軌跡線をそれぞれ平行移動させることにより、前記拡張予想軌跡線を演算することを特徴とする駐車支援装置。 - 請求項2又は3に記載の駐車支援装置において、
前記軌跡演算手段は、前記両側の予想軌跡線の間隔の中心を、前記車両の幅方向の中心に合わせて描画することを特徴とする駐車支援装置。 - 請求項2又は3に記載の駐車支援装置において、
前記軌跡演算手段は、前記両側の予想軌跡線の間隔の中心を、前記車両の幅方向の中心に対して偏倚させて描画することを特徴とする駐車支援装置。 - 請求項2〜5のいずれか1項に記載の駐車支援装置において、
前記検出手段により前記駐車領域が検出された際に、検出した前記駐車領域を区画する区画表示を描画する第1駐車領域描画手段をさらに備えたことを特徴とする駐車支援装置。 - 請求項2〜6のいずれか1項に記載の駐車支援装置において、
前記予想軌跡線が延びる向きと近い前記駐車領域を、目標駐車領域として強調表示する第2駐車領域描画手段をさらに備えたことを特徴とする駐車支援装置。 - 請求項2〜7のいずれか1項に記載の駐車支援装置において、
前記軌跡演算手段は、前記拡張予想軌跡線と前記検出手段により検出された前記駐車領域の側端とがマッチングした場合に、前記駐車領域の側端と前記拡張予想軌跡線との接点までの前記拡張予想軌跡線を前記車両周辺画像上に描画するとともに、前記接点から前記駐車領域の側端に対して平行に延びる直進補助線を前記車両周辺画像上に描画することを特徴とする駐車支援装置。 - 請求項2〜8のいずれか1項に記載の駐車支援装置において、
前記周辺画像描画手段は、前記車両周辺を俯瞰した俯瞰変換データを生成し、その俯瞰変換データに基づく俯瞰画像を前記表示手段に出力することを特徴とする駐車支援装置。 - 請求項2〜9のいずれか1項に記載の駐車支援装置において、
前記周辺画像描画手段は、前記車両が前記駐車領域に向かって移動する過程で画像データを画像データ記憶手段に蓄積し、その時点で取得した最新の現在画像データと、前記画像データ記憶手段に蓄積した前記画像データとを用いて前記車両周辺画像を前記表示手段に表示することを特徴とする駐車支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006232487A JP4904997B2 (ja) | 2006-08-29 | 2006-08-29 | 駐車支援方法及び駐車支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006232487A JP4904997B2 (ja) | 2006-08-29 | 2006-08-29 | 駐車支援方法及び駐車支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008055958A JP2008055958A (ja) | 2008-03-13 |
| JP4904997B2 true JP4904997B2 (ja) | 2012-03-28 |
Family
ID=39239225
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006232487A Expired - Fee Related JP4904997B2 (ja) | 2006-08-29 | 2006-08-29 | 駐車支援方法及び駐車支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4904997B2 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5015718B2 (ja) * | 2007-10-17 | 2012-08-29 | アルパイン株式会社 | 駐車支援装置 |
| JP2009292339A (ja) * | 2008-06-05 | 2009-12-17 | Aisin Seiki Co Ltd | 駐車支援装置 |
| JP4900326B2 (ja) | 2008-06-10 | 2012-03-21 | 日産自動車株式会社 | 駐車支援装置及び駐車支援方法 |
| WO2009157298A1 (ja) * | 2008-06-26 | 2009-12-30 | アイシン精機株式会社 | 駐車支援装置と、当該駐車支援装置を用いた駐車案内装置 |
| JP5309891B2 (ja) * | 2008-10-27 | 2013-10-09 | 三菱自動車工業株式会社 | 駐車支援装置 |
| JP2011051403A (ja) * | 2009-08-31 | 2011-03-17 | Fujitsu Ltd | 駐車支援装置 |
| JP2012232610A (ja) * | 2011-04-28 | 2012-11-29 | Toshiba Alpine Automotive Technology Corp | 駐車支援装置 |
| JP2012030797A (ja) * | 2011-11-14 | 2012-02-16 | Nissan Motor Co Ltd | 駐車支援装置及び駐車支援方法 |
| TWI494899B (zh) | 2012-12-19 | 2015-08-01 | Ind Tech Res Inst | 影像內週期性雜訊修補方法 |
| JP6745456B2 (ja) * | 2015-12-08 | 2020-08-26 | パナソニックIpマネジメント株式会社 | 駐車支援装置、駐車支援方法及び駐車支援プログラム |
| JP6642906B2 (ja) * | 2016-02-18 | 2020-02-12 | 三菱重工業株式会社 | 駐車位置検出システム及びそれを用いた自動駐車システム |
| JP2019054480A (ja) * | 2017-09-19 | 2019-04-04 | 株式会社Jvcケンウッド | 運転支援装置、運転支援方法およびプログラム |
| JP2020066505A (ja) * | 2018-10-24 | 2020-04-30 | 株式会社豊田自動織機 | フォークリフトの遠隔操作システム |
| CN109816588B (zh) * | 2018-12-29 | 2023-03-21 | 百度在线网络技术(北京)有限公司 | 行车轨迹线的记录方法、装置及设备 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11208420A (ja) * | 1998-01-27 | 1999-08-03 | Nissan Motor Co Ltd | 駐車誘導装置および自動駐車装置 |
| JP3951465B2 (ja) * | 1998-06-26 | 2007-08-01 | アイシン精機株式会社 | 駐車補助装置 |
| JP2004114879A (ja) * | 2002-09-27 | 2004-04-15 | Clarion Co Ltd | 駐車補助装置および画像表示装置 |
| JP4427953B2 (ja) * | 2003-01-29 | 2010-03-10 | 株式会社豊田自動織機 | 駐車支援装置 |
-
2006
- 2006-08-29 JP JP2006232487A patent/JP4904997B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008055958A (ja) | 2008-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4904997B2 (ja) | 駐車支援方法及び駐車支援装置 | |
| US7363130B2 (en) | Parking assist systems, methods, and programs | |
| US10268905B2 (en) | Parking assistance apparatus | |
| JP4561479B2 (ja) | 駐車支援方法及び駐車支援装置 | |
| EP3650285B1 (en) | Parking assistance method and parking assistance device | |
| US7930078B2 (en) | Parking assist method and a parking assist apparatus | |
| JP4914458B2 (ja) | 車両周辺表示装置 | |
| JP6045796B2 (ja) | 映像処理装置、映像処理方法、および映像表示システム | |
| JP2007099261A (ja) | 駐車支援方法及び駐車支援装置 | |
| JP5724446B2 (ja) | 車両の運転支援装置 | |
| US20110228980A1 (en) | Control apparatus and vehicle surrounding monitoring apparatus | |
| JP4696691B2 (ja) | 駐車支援方法及び駐車支援装置 | |
| JP2007030630A (ja) | 駐車支援方法及び駐車支援装置 | |
| JP2007094045A (ja) | ナビゲーション装置、ナビゲート方法および車両 | |
| JP7354649B2 (ja) | 周辺監視装置 | |
| JP5516988B2 (ja) | 駐車支援装置 | |
| JP2009083680A (ja) | 駐車支援装置および駐車支援方法 | |
| JP2008083990A (ja) | 駐車支援装置および駐車支援方法 | |
| JP7426174B2 (ja) | 車両周囲画像表示システム及び車両周囲画像表示方法 | |
| JP5400316B2 (ja) | 駐車支援装置 | |
| JP2021044751A (ja) | 周辺監視装置 | |
| JP4595902B2 (ja) | 車両周辺画像表示システム及び車両周辺画像表示方法 | |
| JP5961821B2 (ja) | 運転支援装置 | |
| JP2012001126A (ja) | 車両用周辺監視装置 | |
| JP4059309B2 (ja) | 車載カメラの画像表示制御方法及びその装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110322 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110324 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111213 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111226 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150120 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |