JP2010082748A - ワーク把持装置 - Google Patents
ワーク把持装置 Download PDFInfo
- Publication number
- JP2010082748A JP2010082748A JP2008254508A JP2008254508A JP2010082748A JP 2010082748 A JP2010082748 A JP 2010082748A JP 2008254508 A JP2008254508 A JP 2008254508A JP 2008254508 A JP2008254508 A JP 2008254508A JP 2010082748 A JP2010082748 A JP 2010082748A
- Authority
- JP
- Japan
- Prior art keywords
- gripping
- rod
- workpiece
- claws
- shaped portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 210000000078 claw Anatomy 0.000 claims abstract description 125
- 230000007246 mechanism Effects 0.000 claims abstract description 30
- 230000005540 biological transmission Effects 0.000 claims abstract description 16
- 238000001179 sorption measurement Methods 0.000 claims description 2
- 238000003860 storage Methods 0.000 description 10
- 230000036544 posture Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 230000002452 interceptive effect Effects 0.000 description 5
- 230000000052 comparative effect Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0616—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0253—Gripping heads and other end effectors servo-actuated comprising parallel grippers
- B25J15/0266—Gripping heads and other end effectors servo-actuated comprising parallel grippers actuated by articulated links
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
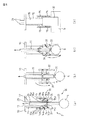
【解決手段】把持装置1は、吸着力によりワーク5を保持可能な吸着パッド22、および、それが一端に取り付けられた棒状部21を有する一次捕捉機構20と、ワーク5を挟み込んで保持する把持爪31,32と、駆動装置50、および駆動装置50の駆動力を把持爪31,32に伝達する伝動機構40と、を有している。伝動機構40は、把持爪31,32が吸着パッド22よりベース板10側に位置する退避位置と、把持爪31,32が吸着パッド22を越えて突出する把持位置との間で、把持爪31,32を棒状部21の軸線方向に移動させ、かつ、把持爪31,32を、棒状部21の軸線方向に把持位置へと移動させるのと同時に、把持爪31,32の間の距離を狭めるように移動させる。
【選択図】図1
Description
図1は、本発明の第1の実施形態の把持装置1を示している。同図に示すように、この把持装置1は、円柱状のワーク5を吸着によって捕捉し、さらに両側から挟み込んで把持するように構成されている。図1(a)〜(c)は、ワーク5の軸線方向に平行な方向に見た正面図であり、ワーク5を吸着した後の把持動作を時系列で示している。図1(d)は、ワーク5の軸線に垂直な方向に見た、図1(c)に対応する状態の側面図である。
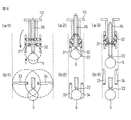
次に、図5は、本発明の第2の実施形態の把持装置2を示している。図5において、第1の実施形態と同様の部分には同一の符号を付し、詳細な説明は省略する。
20 一次捕捉機構
21 棒状部
22 吸着パッド(捕捉部)
31,32 把持爪
40,70 伝動機構
50 駆動装置
Claims (6)
- 吸着力または磁力によりワークを保持可能な捕捉部、および、該捕捉部が一端に取り付けられた棒状部を有する一次捕捉機構と、
前記捕捉部によって保持された前記ワークを挟み込んで保持する少なくとも2つの把持爪と、
駆動装置、および該駆動装置の駆動力を前記把持爪に伝達する伝動機構と、
を有し、
前記伝動機構は、前記捕捉部より前記棒状部の、前記捕捉部と反対の端部側に前記把持爪が位置する退避位置と、前記把持爪が、前記棒状部の、前記捕捉部が設けられた端部を越えて突出する把持位置との間で、前記把持爪を前記棒状部の軸線方向に移動させ、かつ、前記把持爪を、前記棒状部の軸線方向に前記把持位置へと移動させるのと同時に、前記把持爪の間の距離を狭めるように移動させる、ワーク把持装置。 - 前記伝動機構は、前記棒状部に対して前記把持爪の姿勢を一定に保ったまま前記把持爪を動作させる、請求項1に記載のワーク把持装置。
- 前記伝動機構は、
前記把持爪よりも前記棒状部の、前記捕捉部と反対の端部の近くに配置され、前記駆動装置によって、前記棒状部に対して該棒状部の軸線方向に移動させられる進退ベースと、
前記把持爪に一端が回転可能に連結され、他端が前記棒状部に回転可能に連結された、前記各把持爪毎に少なくとも2つずつのリンクと、
前記各把持爪と前記棒状部との間の前記リンクのうちの、前記各把持爪毎にそれぞれ1つの中央付近に一端が回転可能に連結され、他端が前記進退ベースに連結されたリンクと、
を有する、請求項1または2に記載のワーク把持装置。 - 前記駆動装置によって、前記棒状部が、その軸線方向に、把持装置ベースに対して移動させられるように構成されており、
前記伝動機構は、
前記把持装置ベースに結合され、前記棒状部の側方で該棒状部に沿ってそれぞれ延びる少なくとも2つのベース突出板と、
前記各把持爪に一端が回転可能に連結され、中央付近が前記各ベース突出板に回転可能に連結されたリンクであって、該各リンクの他端は、前記棒状部に回転可能に、かつ当該リンクの長手方向にスライド可能に連結されたリンクと、
前記各把持爪に一端が回転可能に連結され、他端が前記各ベース突出板に回転可能に連結されたリンクと、
を有する、請求項1または2に記載のワーク把持装置。 - ロボットのアームに取り付けるための把持装置ベースを有し、
前記駆動装置は、前記把持装置ベースの、前記ロボットのアーム側に配置されている、請求項1から4のいずれか1項に記載のワーク把持装置。 - 前記捕捉部が、少なくとも2つの前記把持爪の間の中心線上に位置している、請求項1から5のいずれか1項に記載のワーク把持装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008254508A JP4708464B2 (ja) | 2008-09-30 | 2008-09-30 | ワーク把持装置 |
| US12/555,150 US8132835B2 (en) | 2008-09-30 | 2009-09-08 | Workpiece gripping device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008254508A JP4708464B2 (ja) | 2008-09-30 | 2008-09-30 | ワーク把持装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010082748A true JP2010082748A (ja) | 2010-04-15 |
| JP4708464B2 JP4708464B2 (ja) | 2011-06-22 |
Family
ID=42056610
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008254508A Expired - Fee Related JP4708464B2 (ja) | 2008-09-30 | 2008-09-30 | ワーク把持装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8132835B2 (ja) |
| JP (1) | JP4708464B2 (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5120991B1 (ja) * | 2012-03-28 | 2013-01-16 | 秀二郎 乙武 | 収穫ハンド装置 |
| JP2015112656A (ja) * | 2013-12-10 | 2015-06-22 | 川崎重工業株式会社 | ロボットハンド、ロボット、およびロボットセル |
| CN105538335A (zh) * | 2016-02-22 | 2016-05-04 | 上海理工大学 | 实验室加香加料可拆卸多功能抓手 |
| CN106239547A (zh) * | 2016-08-30 | 2016-12-21 | 昆山邦泰汽车零部件制造有限公司 | 适用于小尺寸零件的机械手 |
| CN106239538A (zh) * | 2016-08-30 | 2016-12-21 | 昆山邦泰汽车零部件制造有限公司 | 精细操作机械手 |
| CN106272512A (zh) * | 2016-08-30 | 2017-01-04 | 昆山邦泰汽车零部件制造有限公司 | 精细机械手 |
| CN106313092A (zh) * | 2016-08-30 | 2017-01-11 | 昆山邦泰汽车零部件制造有限公司 | 适用于小尺寸零件的微调机械手 |
| WO2018073336A1 (de) * | 2016-10-20 | 2018-04-26 | Kuka Systems Gmbh | Robotergreifer mit beweglichen hilfssaugelementen |
| KR20180065242A (ko) * | 2016-12-07 | 2018-06-18 | 주식회사 삼인이엔지 | 흡착대상물의 측면 동시 파지가 가능한 진공흡착장치용 흡착수단 |
| CN109502332A (zh) * | 2018-11-23 | 2019-03-22 | 晋城鸿刃科技有限公司 | 下料装置 |
| KR20200003018A (ko) * | 2017-05-18 | 2020-01-08 | 에스엠시 가부시키가이샤 | 워크피스 유지장치 |
| JP2022063365A (ja) * | 2016-01-20 | 2022-04-21 | ソフト ロボティクス, インコーポレイテッド | 散乱した握持環境、高加速移動、食品操作、および自動貯蔵および回収システムのためのソフトロボットグリッパ |
| WO2023037647A1 (ja) * | 2021-09-13 | 2023-03-16 | 株式会社日立製作所 | ロボットハンド及びピッキングシステム |
| JP2023090089A (ja) * | 2021-12-17 | 2023-06-29 | 倉敷紡績株式会社 | 線状物把持装置および線状物把持システム |
| JP7349189B1 (ja) | 2022-09-29 | 2023-09-22 | ナショナル チェン クン ユニバーシティー | スマートセンサ化グリッパ |
| WO2024108564A1 (zh) * | 2022-11-25 | 2024-05-30 | 上海非夕机器人科技有限公司 | 抓取装置及具有抓取装置的机器人 |
| JP2024537129A (ja) * | 2021-10-06 | 2024-10-10 | デクステリティ・インコーポレーテッド | マルチモードロボットエンドエフェクタ |
| WO2025257978A1 (ja) * | 2024-06-12 | 2025-12-18 | ファナック株式会社 | 把持機構、及びロボットハンド |
Families Citing this family (82)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NO331630B1 (no) * | 2009-08-19 | 2012-02-13 | Seabed Rig As | Anordning ved griper for petroleumsrør |
| JP5685027B2 (ja) * | 2010-09-07 | 2015-03-18 | キヤノン株式会社 | 情報処理装置、物体把持システム、ロボットシステム、情報処理方法、物体把持方法およびプログラム |
| US20120076610A1 (en) * | 2010-09-29 | 2012-03-29 | King Abdul Aziz City For Science And Technology | System and apparatus for holding an object |
| US9789603B2 (en) | 2011-04-29 | 2017-10-17 | Sarcos Lc | Teleoperated robotic system |
| CN102320479B (zh) * | 2011-07-01 | 2013-04-17 | 广西大学 | 一种可控机构式码垛机器人机构 |
| US9616580B2 (en) | 2012-05-14 | 2017-04-11 | Sarcos Lc | End effector for a robotic arm |
| US9573289B2 (en) | 2013-10-28 | 2017-02-21 | Flow International Corporation | Fluid jet cutting systems |
| US10406676B2 (en) | 2014-05-06 | 2019-09-10 | Sarcos Lc | Energy recovering legged robotic device |
| US10766133B2 (en) | 2014-05-06 | 2020-09-08 | Sarcos Lc | Legged robotic device utilizing modifiable linkage mechanism |
| JP6140204B2 (ja) * | 2015-02-06 | 2017-05-31 | ファナック株式会社 | 3次元センサを備えた搬送ロボットシステム |
| CN104742118A (zh) * | 2015-03-19 | 2015-07-01 | 刘庆芳 | 多功能液压机械手 |
| EP4219096B1 (en) | 2015-08-26 | 2025-03-26 | Berkshire Grey Operating Company, Inc. | Systems and methods for providing vacuum valve assemblies for end effectors |
| CN108349090B (zh) | 2015-08-26 | 2021-12-03 | 伯克希尔格雷股份有限公司 | 用于在铰接臂中提供接触检测的系统和方法 |
| CN113954106B (zh) | 2015-09-08 | 2023-10-27 | 伯克希尔格雷营业股份有限公司 | 用于在自动系统中提供高流量真空采集的系统和方法 |
| WO2017048942A1 (en) | 2015-09-15 | 2017-03-23 | Berkshire Grey Inc. | Everting end effector for use with an articulated arm in a robotic system |
| US10625432B2 (en) | 2015-11-13 | 2020-04-21 | Berkshire Grey, Inc. | Processing systems and methods for providing processing of a variety of objects |
| CN106808489B (zh) * | 2015-12-01 | 2021-06-01 | 鸿富锦精密电子(郑州)有限公司 | 夹爪机构 |
| CA3169689C (en) | 2016-01-08 | 2024-04-02 | Berkshire Grey Operating Company, Inc. | Systems and methods for acquiring and moving objects |
| US10569422B2 (en) | 2016-01-20 | 2020-02-25 | Soft Robotics, Inc. | End of arm tools for soft robotic systems |
| CN105729438A (zh) * | 2016-03-27 | 2016-07-06 | 苏州科技学院 | 一种薄型微小零件吸放装置 |
| CN105835081B (zh) * | 2016-04-26 | 2018-01-19 | 江南大学 | 刚柔耦合可转位手指的欠驱动机械手 |
| CN105835051B (zh) * | 2016-04-26 | 2018-06-12 | 江南大学 | 双电机驱动协同控制的欠驱动机械手 |
| US10576530B2 (en) * | 2016-05-26 | 2020-03-03 | Daido Steel Co., Ltd. | Holding mechanism |
| US10828767B2 (en) | 2016-11-11 | 2020-11-10 | Sarcos Corp. | Tunable actuator joint modules having energy recovering quasi-passive elastic actuators with internal valve arrangements |
| US10821614B2 (en) | 2016-11-11 | 2020-11-03 | Sarcos Corp. | Clutched joint modules having a quasi-passive elastic actuator for a robotic assembly |
| US10765537B2 (en) | 2016-11-11 | 2020-09-08 | Sarcos Corp. | Tunable actuator joint modules having energy recovering quasi-passive elastic actuators for use within a robotic system |
| US10919161B2 (en) | 2016-11-11 | 2021-02-16 | Sarcos Corp. | Clutched joint modules for a robotic system |
| CN110392623B (zh) | 2017-03-06 | 2022-09-23 | 伯克希尔格雷运营股份有限公司 | 用于有效地移动各种物体的系统和方法 |
| JP6514254B2 (ja) * | 2017-03-13 | 2019-05-15 | 株式会社東芝 | 把持ツールおよび把持システム |
| JP7155479B2 (ja) * | 2017-05-15 | 2022-10-19 | Thk株式会社 | ハンド機構、把持システム、および把持プログラム |
| JP2018203480A (ja) * | 2017-06-07 | 2018-12-27 | 株式会社東芝 | 仕分装置および仕分システム |
| US10369806B2 (en) * | 2017-07-10 | 2019-08-06 | Xerox Corporation | Universal part gripper with conformable gripper ball with vacuum assist |
| US10059007B1 (en) | 2017-07-24 | 2018-08-28 | Amazon Technologies, Inc. | Finger-aligned extendable gripping mechanisms for item manipulation |
| US10556338B1 (en) | 2017-07-31 | 2020-02-11 | Amazon Technologies, Inc. | Compliant finger tip for item manipulation |
| CN110958932B (zh) | 2017-08-02 | 2023-05-16 | 伯克希尔格雷营业股份有限公司 | 用于获取和移动具有复杂的外表面的物体的系统和方法 |
| JP6942576B2 (ja) * | 2017-09-15 | 2021-09-29 | 株式会社東芝 | 搬送装置 |
| US10843330B2 (en) | 2017-12-07 | 2020-11-24 | Sarcos Corp. | Resistance-based joint constraint for a master robotic system |
| US11331809B2 (en) | 2017-12-18 | 2022-05-17 | Sarcos Corp. | Dynamically controlled robotic stiffening element |
| JP2019111615A (ja) | 2017-12-22 | 2019-07-11 | 株式会社東芝 | 物品把持装置、物品把持システム |
| EP3740355B1 (en) | 2018-01-17 | 2025-07-30 | Berkshire Grey Operating Company, Inc. | Systems and methods for efficiently moving a variety of objects |
| CN108127652A (zh) * | 2018-01-31 | 2018-06-08 | 宁夏巨能机器人股份有限公司 | 一种重型桁架机械手 |
| US10603800B1 (en) * | 2018-03-13 | 2020-03-31 | Amazon Technologies, Inc. | Gripper having a four bar linkage |
| US10822177B2 (en) | 2018-05-09 | 2020-11-03 | Intelligrated Headquarters, Llc | Method and system for manipulating articles |
| US11458635B2 (en) | 2018-05-09 | 2022-10-04 | Intelligrated Headquarters, Llc | Method and system for manipulating articles |
| US11318620B2 (en) | 2018-05-09 | 2022-05-03 | Intelligrated Headquarters, Llc | Method and system for manipulating items |
| CN108639751A (zh) * | 2018-07-10 | 2018-10-12 | 深圳福美信自动化工程有限公司 | 一种吸附装置及多余吸附产品的分离方法 |
| CA3107825C (en) | 2018-07-27 | 2023-06-13 | Berkshire Grey, Inc. | Systems and methods for efficiently exchanging end effector tools |
| CN109129539B (zh) * | 2018-09-29 | 2025-03-14 | 武汉易知鸟科技有限公司 | 一种人工手动模组夹爪 |
| WO2020072813A1 (en) * | 2018-10-03 | 2020-04-09 | Nicholas Payton | Hybrid robotic picking device |
| CA3113358A1 (en) * | 2018-10-08 | 2020-04-16 | Advanced Farm Technologies, Inc. | Autonomous crop harvester |
| CN109465840B (zh) * | 2018-11-26 | 2021-05-07 | 清华大学 | 一种吸盘-手爪复合抓取装置 |
| US11207786B1 (en) * | 2018-11-27 | 2021-12-28 | Amazon Technologies, Inc. | Concentric suction cup array for end-of-arm tool |
| US11241801B2 (en) | 2018-12-31 | 2022-02-08 | Sarcos Corp. | Robotic end effector with dorsally supported actuation mechanism |
| US11351675B2 (en) | 2018-12-31 | 2022-06-07 | Sarcos Corp. | Robotic end-effector having dynamic stiffening elements for conforming object interaction |
| US10906191B2 (en) * | 2018-12-31 | 2021-02-02 | Sarcos Corp. | Hybrid robotic end effector |
| CN110920126B (zh) * | 2019-11-18 | 2020-08-28 | 苏州鸿凌达电子科技有限公司 | 一种用于石墨烯纤维取向排列的导热片制备的装置 |
| JP7345372B2 (ja) * | 2019-11-29 | 2023-09-15 | 川崎重工業株式会社 | 保持装置、制御方法、制御装置及びロボットシステム |
| CN111037260B (zh) * | 2019-12-23 | 2025-02-11 | 深圳市威雄精机有限公司 | 组合刀具制作装置 |
| CN111360724A (zh) * | 2020-03-24 | 2020-07-03 | 天津职业技术师范大学(中国职业培训指导教师进修中心) | 一种便于调节的机械自动化加工用夹持装置 |
| FR3109548B1 (fr) * | 2020-04-28 | 2023-08-25 | Acri Ingenierie | Dispositif pour le prélèvement d’un objet à sensibilité magnétique |
| CN116194259A (zh) | 2020-07-22 | 2023-05-30 | 伯克希尔格雷营业股份有限公司 | 用于使用被动塌缩真空夹持器进行物体处理的系统和方法 |
| CA3189615A1 (en) | 2020-07-22 | 2022-01-27 | Berkshire Grey Operating Company, Inc. | Systems and methods for object processing using a vacuum gripper that provides object retention by shroud inversion |
| CN111977497B (zh) * | 2020-08-20 | 2025-03-14 | 杭州乔戈里科技有限公司 | 可抓取多种滚动体的机构 |
| US11648690B2 (en) * | 2020-08-21 | 2023-05-16 | House of Design LLC | Robotic end-of-arm tools and methods of use |
| JP2022038603A (ja) * | 2020-08-27 | 2022-03-10 | 株式会社日立製作所 | ロボットハンド及びピッキングシステム |
| CN116583385A (zh) | 2020-11-19 | 2023-08-11 | 伯克希尔格雷营业股份有限公司 | 用于对姿态权限低的对象使用抓取器进行对象处理的系统和方法 |
| US11745297B2 (en) | 2020-11-24 | 2023-09-05 | GM Global Technology Operations LLC | Shape control in gripping systems and methods |
| CN112518178B (zh) * | 2020-11-25 | 2025-02-21 | 广州瑞松智能科技股份有限公司 | 一种标准节上料夹持装置 |
| US11833676B2 (en) | 2020-12-07 | 2023-12-05 | Sarcos Corp. | Combining sensor output data to prevent unsafe operation of an exoskeleton |
| US11794345B2 (en) | 2020-12-31 | 2023-10-24 | Sarcos Corp. | Unified robotic vehicle systems and methods of control |
| EP4308348A4 (en) * | 2021-03-18 | 2025-01-22 | Dexterity, Inc. | Multi-mode robotic end effector |
| DE102021113345A1 (de) * | 2021-05-21 | 2022-11-24 | LST-Automation GmbH | Verfahren zum Betreiben einer Greifvorrichtung zur Vereinzelung von Wäschestücken aus einem Wäschehaufen |
| CN113977621B (zh) * | 2021-11-09 | 2024-04-30 | 常州和仕达机械装备制造有限公司 | 一种带旋转装置的棒料夹持机构 |
| WO2023141260A1 (en) | 2022-01-21 | 2023-07-27 | Berkshire Grey Operating Company, Inc. | Systems and methods for object processing with programmable motion devices using yawing grippers |
| CN115012021B (zh) * | 2022-06-14 | 2023-09-19 | 广德正大电子科技有限公司 | 一种非浸入式电镀夹具结构 |
| US11826907B1 (en) | 2022-08-17 | 2023-11-28 | Sarcos Corp. | Robotic joint system with length adapter |
| US11717956B1 (en) | 2022-08-29 | 2023-08-08 | Sarcos Corp. | Robotic joint system with integrated safety |
| US12172298B2 (en) | 2022-11-04 | 2024-12-24 | Sarcos Corp. | Robotic end-effector having dynamic stiffening elements with resilient spacers for conforming object interaction |
| US11924023B1 (en) | 2022-11-17 | 2024-03-05 | Sarcos Corp. | Systems and methods for redundant network communication in a robot |
| US11897132B1 (en) | 2022-11-17 | 2024-02-13 | Sarcos Corp. | Systems and methods for redundant network communication in a robot |
| WO2024125761A1 (en) * | 2022-12-13 | 2024-06-20 | Abb Schweiz Ag | End effector, industrial robot and method |
| CN119795216A (zh) * | 2025-01-16 | 2025-04-11 | 北京斯贝克科技有限责任公司 | 一种夹爪装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4734768U (ja) * | 1971-05-06 | 1972-12-18 | ||
| JPS5269152A (en) * | 1975-12-08 | 1977-06-08 | Hitachi Ltd | Clamping device |
| JPS5934992U (ja) * | 1982-08-27 | 1984-03-05 | 株式会社久保田農機製作所 | 苗吸着装置付フィンガ−ハンド |
| JPS61163184U (ja) * | 1985-03-29 | 1986-10-09 | ||
| JPS62159292U (ja) * | 1986-03-28 | 1987-10-09 | ||
| JPH0451327U (ja) * | 1990-09-03 | 1992-04-30 | ||
| JPH08198578A (ja) * | 1995-01-30 | 1996-08-06 | Mitsubishi Chem Corp | チャック装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3306646A (en) * | 1965-07-30 | 1967-02-28 | Flexicore Company Inc | Lifting hook assembly |
| DE2937061C2 (de) * | 1979-09-13 | 1981-11-12 | Pfaff Industriemaschinen Gmbh, 6750 Kaiserslautern | Handhabungsgerät mit einer Greifvorrichtung |
| JPS5934992A (ja) | 1982-08-24 | 1984-02-25 | Yokohama Rubber Co Ltd:The | 海上流体荷役用ホ−スライン保持システム |
| JPS61163184A (ja) | 1985-01-16 | 1986-07-23 | Seiko Epson Corp | 単結晶の製造方法 |
| JPH0636190B2 (ja) | 1986-01-07 | 1994-05-11 | 松下電器産業株式会社 | ビス穴位置認識方法 |
| JP3643674B2 (ja) | 1997-07-04 | 2005-04-27 | 三菱重工業株式会社 | コア把持装置 |
| JP3782679B2 (ja) | 2001-05-09 | 2006-06-07 | ファナック株式会社 | 干渉回避装置 |
| JP2002331488A (ja) | 2001-05-10 | 2002-11-19 | Ekusu:Kk | 円筒状物品の把持装置 |
| JP2004025326A (ja) | 2002-06-24 | 2004-01-29 | Okura Yusoki Co Ltd | 把持装置および移載機 |
| JP4082429B2 (ja) | 2005-11-21 | 2008-04-30 | 株式会社Ihi | 砲弾把持装置 |
| JP4801523B2 (ja) | 2006-07-21 | 2011-10-26 | 本田技研工業株式会社 | 板材の把持装置 |
-
2008
- 2008-09-30 JP JP2008254508A patent/JP4708464B2/ja not_active Expired - Fee Related
-
2009
- 2009-09-08 US US12/555,150 patent/US8132835B2/en not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4734768U (ja) * | 1971-05-06 | 1972-12-18 | ||
| JPS5269152A (en) * | 1975-12-08 | 1977-06-08 | Hitachi Ltd | Clamping device |
| JPS5934992U (ja) * | 1982-08-27 | 1984-03-05 | 株式会社久保田農機製作所 | 苗吸着装置付フィンガ−ハンド |
| JPS61163184U (ja) * | 1985-03-29 | 1986-10-09 | ||
| JPS62159292U (ja) * | 1986-03-28 | 1987-10-09 | ||
| JPH0451327U (ja) * | 1990-09-03 | 1992-04-30 | ||
| JPH08198578A (ja) * | 1995-01-30 | 1996-08-06 | Mitsubishi Chem Corp | チャック装置 |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5120991B1 (ja) * | 2012-03-28 | 2013-01-16 | 秀二郎 乙武 | 収穫ハンド装置 |
| JP2015112656A (ja) * | 2013-12-10 | 2015-06-22 | 川崎重工業株式会社 | ロボットハンド、ロボット、およびロボットセル |
| JP2022063365A (ja) * | 2016-01-20 | 2022-04-21 | ソフト ロボティクス, インコーポレイテッド | 散乱した握持環境、高加速移動、食品操作、および自動貯蔵および回収システムのためのソフトロボットグリッパ |
| CN105538335A (zh) * | 2016-02-22 | 2016-05-04 | 上海理工大学 | 实验室加香加料可拆卸多功能抓手 |
| CN106239547A (zh) * | 2016-08-30 | 2016-12-21 | 昆山邦泰汽车零部件制造有限公司 | 适用于小尺寸零件的机械手 |
| CN106239538A (zh) * | 2016-08-30 | 2016-12-21 | 昆山邦泰汽车零部件制造有限公司 | 精细操作机械手 |
| CN106272512A (zh) * | 2016-08-30 | 2017-01-04 | 昆山邦泰汽车零部件制造有限公司 | 精细机械手 |
| CN106313092A (zh) * | 2016-08-30 | 2017-01-11 | 昆山邦泰汽车零部件制造有限公司 | 适用于小尺寸零件的微调机械手 |
| WO2018073336A1 (de) * | 2016-10-20 | 2018-04-26 | Kuka Systems Gmbh | Robotergreifer mit beweglichen hilfssaugelementen |
| KR20180065242A (ko) * | 2016-12-07 | 2018-06-18 | 주식회사 삼인이엔지 | 흡착대상물의 측면 동시 파지가 가능한 진공흡착장치용 흡착수단 |
| KR101878325B1 (ko) * | 2016-12-07 | 2018-07-16 | 주식회사 삼인이엔지 | 흡착대상물의 측면 동시 파지가 가능한 진공흡착장치용 흡착수단 |
| KR102337111B1 (ko) * | 2017-05-18 | 2021-12-08 | 에스엠시 가부시키가이샤 | 워크피스 유지장치 |
| KR20200003018A (ko) * | 2017-05-18 | 2020-01-08 | 에스엠시 가부시키가이샤 | 워크피스 유지장치 |
| US11279046B2 (en) | 2017-05-18 | 2022-03-22 | Smc Corporation | Workpiece holding device |
| CN109502332A (zh) * | 2018-11-23 | 2019-03-22 | 晋城鸿刃科技有限公司 | 下料装置 |
| WO2023037647A1 (ja) * | 2021-09-13 | 2023-03-16 | 株式会社日立製作所 | ロボットハンド及びピッキングシステム |
| JP2023041141A (ja) * | 2021-09-13 | 2023-03-24 | 株式会社日立製作所 | ロボットハンド及びピッキングシステム |
| JP2024537129A (ja) * | 2021-10-06 | 2024-10-10 | デクステリティ・インコーポレーテッド | マルチモードロボットエンドエフェクタ |
| JP7756243B2 (ja) | 2021-10-06 | 2025-10-17 | デクステリティ・インコーポレーテッド | マルチモードロボットエンドエフェクタ |
| JP2023090089A (ja) * | 2021-12-17 | 2023-06-29 | 倉敷紡績株式会社 | 線状物把持装置および線状物把持システム |
| JP7789542B2 (ja) | 2021-12-17 | 2025-12-22 | 倉敷紡績株式会社 | 線状物把持装置および線状物把持システム |
| JP7349189B1 (ja) | 2022-09-29 | 2023-09-22 | ナショナル チェン クン ユニバーシティー | スマートセンサ化グリッパ |
| JP2024049485A (ja) * | 2022-09-29 | 2024-04-10 | ナショナル チェン クン ユニバーシティー | スマートセンサ化グリッパ |
| WO2024108564A1 (zh) * | 2022-11-25 | 2024-05-30 | 上海非夕机器人科技有限公司 | 抓取装置及具有抓取装置的机器人 |
| WO2025257978A1 (ja) * | 2024-06-12 | 2025-12-18 | ファナック株式会社 | 把持機構、及びロボットハンド |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4708464B2 (ja) | 2011-06-22 |
| US20100078953A1 (en) | 2010-04-01 |
| US8132835B2 (en) | 2012-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4708464B2 (ja) | ワーク把持装置 | |
| JP6019409B2 (ja) | 電子部品実装装置及び電子部品実装方法 | |
| KR101423781B1 (ko) | 산업용 로봇 | |
| JP4439751B2 (ja) | 被挿入物の把持・挿入装置、被挿入物の把持・挿入方法および組立ユニット | |
| JP6019410B2 (ja) | 電子部品実装装置及び電子部品実装方法 | |
| JP6208601B2 (ja) | ワーク位置決め機能を有するロボットハンド、ロボットシステム、及びワークの位置決め把持方法 | |
| WO2017017710A1 (ja) | ロボットおよびその制御方法 | |
| JP2013223905A (ja) | ロボット用ハンド及びロボット装置 | |
| JP2014188616A (ja) | ロボットおよびロボットシステム | |
| CN108622655A (zh) | 板握持装置及板握持方法 | |
| JP2011177862A (ja) | 把持装置 | |
| CN103862255A (zh) | 一种用于微小组件装配的换接式微夹钳 | |
| JP2009206264A (ja) | 搬送ロボット | |
| JP6420533B2 (ja) | 作業装置 | |
| JP6233053B2 (ja) | 溶接部品の製造方法 | |
| JP2007320630A (ja) | チャック付き包装袋のチャック部分離装置及び方法 | |
| JP4486911B2 (ja) | コイル巻線方法及び装置 | |
| JP6582689B2 (ja) | ロボットハンド、情報処理装置製造装置、情報処理装置製造方法 | |
| KR102592970B1 (ko) | 병진 및 회전 운동이 가능한 석션 그리퍼 | |
| CN111170005A (zh) | 上下料装置 | |
| JP7507612B2 (ja) | 双腕ロボット及び整列方法 | |
| JP2010537209A (ja) | プランジャを移動する空動シリンダ装置を備える電子部品、特にicの取扱装置 | |
| TWI787860B (zh) | 螺絲供給治具、使用螺絲供給治具之雙臂機器人以及螺絲供給方法 | |
| JP2014128841A (ja) | 多関節型双腕ロボットによるベルト組付けシステム | |
| JP2005138241A (ja) | ピッキング用ツールおよび該ツールを備えたピッキング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20100216 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20100312 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100708 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100720 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100915 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101005 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101202 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110222 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110316 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4708464 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |