KR20180093872A - 전기 기계 - Google Patents
전기 기계 Download PDFInfo
- Publication number
- KR20180093872A KR20180093872A KR1020187007025A KR20187007025A KR20180093872A KR 20180093872 A KR20180093872 A KR 20180093872A KR 1020187007025 A KR1020187007025 A KR 1020187007025A KR 20187007025 A KR20187007025 A KR 20187007025A KR 20180093872 A KR20180093872 A KR 20180093872A
- Authority
- KR
- South Korea
- Prior art keywords
- carrier
- struts
- rotor
- stator
- unevenness
- Prior art date
Links
Images


























































































Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/28—Means for mounting or fastening rotating magnetic parts on to, or to, the rotor structures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/20—Stationary parts of the magnetic circuit with channels or ducts for flow of cooling medium
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0009—Gripping heads and other end effectors comprising multi-articulated fingers, e.g. resembling a human hand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0206—Gripping heads and other end effectors servo-actuated comprising articulated grippers
- B25J15/0233—Gripping heads and other end effectors servo-actuated comprising articulated grippers actuated by chains, cables or ribbons
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
- B25J19/0029—Means for supplying energy to the end effector arranged within the different robot elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/126—Rotary actuators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/02—Details of the magnetic circuit characterised by the magnetic material
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/08—Salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/16—Stator cores with slots for windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/18—Means for mounting or fastening magnetic stationary parts on to, or to, the stator structures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/24—Rotor cores with salient poles ; Variable reluctance rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/276—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM]
- H02K1/2766—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM] having a flux concentration effect
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/276—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM]
- H02K1/2766—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM] having a flux concentration effect
- H02K1/2773—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM] having a flux concentration effect consisting of tangentially magnetized radial magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/278—Surface mounted magnets; Inset magnets
- H02K1/2783—Surface mounted magnets; Inset magnets with magnets arranged in Halbach arrays
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2786—Outer rotors
- H02K1/2787—Outer rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/2789—Outer rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2791—Surface mounted magnets; Inset magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2793—Rotors axially facing stators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2793—Rotors axially facing stators
- H02K1/2795—Rotors axially facing stators the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2796—Rotors axially facing stators the rotor consisting of two or more circumferentially positioned magnets where both axial sides of the rotor face a stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/32—Rotating parts of the magnetic circuit with channels or ducts for flow of cooling medium
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K15/00—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines
- H02K15/04—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines of windings, prior to mounting into machines
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K16/00—Machines with more than one rotor or stator
- H02K16/04—Machines with one rotor and two stators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K19/00—Synchronous motors or generators
- H02K19/02—Synchronous motors
- H02K19/10—Synchronous motors for multi-phase current
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/02—Details
- H02K21/04—Windings on magnets for additional excitation ; Windings and magnets for additional excitation
- H02K21/046—Windings on magnets for additional excitation ; Windings and magnets for additional excitation with rotating permanent magnets and stationary field winding
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/22—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating around the armatures, e.g. flywheel magnetos
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/24—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets axially facing the armatures, e.g. hub-type cycle dynamos
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/12—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors arranged in slots
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/24—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors with channels or ducts for cooling medium between the conductors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/26—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors consisting of printed conductors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/32—Windings characterised by the shape, form or construction of the insulation
- H02K3/34—Windings characterised by the shape, form or construction of the insulation between conductors or between conductor and core, e.g. slot insulation
- H02K3/345—Windings characterised by the shape, form or construction of the insulation between conductors or between conductor and core, e.g. slot insulation between conductor and core, e.g. slot insulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/16—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/18—Casings or enclosures characterised by the shape, form or construction thereof with ribs or fins for improving heat transfer
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K9/00—Arrangements for cooling or ventilating
-
- H02K9/005—
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K9/00—Arrangements for cooling or ventilating
- H02K9/02—Arrangements for cooling or ventilating by ambient air flowing through the machine
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K9/00—Arrangements for cooling or ventilating
- H02K9/19—Arrangements for cooling or ventilating for machines with closed casing and closed-circuit cooling using a liquid cooling medium, e.g. oil
- H02K9/197—Arrangements for cooling or ventilating for machines with closed casing and closed-circuit cooling using a liquid cooling medium, e.g. oil in which the rotor or stator space is fluid-tight, e.g. to provide for different cooling media for rotor and stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2201/00—Specific aspects not provided for in the other groups of this subclass relating to the magnetic circuits
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2201/00—Specific aspects not provided for in the other groups of this subclass relating to the magnetic circuits
- H02K2201/12—Transversal flux machines
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/14—Structural association with mechanical loads, e.g. with hand-held machine tools or fans
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Thermal Sciences (AREA)
- Manufacturing & Machinery (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
- Manufacture Of Motors, Generators (AREA)
- Motor Or Generator Frames (AREA)
- Linear Motors (AREA)
- Motor Or Generator Cooling System (AREA)
- Windings For Motors And Generators (AREA)
Abstract
전자석 요소들의 어레이를 포함하는 제1 캐리어와, 자극을 형성하는 전자석 요소들의 어레이를 포함하며 제1 캐리어에 대해 운동하도록 배치된 제2 캐리어를 포함한다. 에어갭이 제1 캐리어와 제2 캐리어 사이에 배치된다. 제1 캐리어용 전자석 요소는 지주들과, 지주들 사이에 배치된 슬롯을 포함하고, 하나 이상의 전기 컨덕터들이 각 슬롯에 배치된다. 제1 캐리어의 지주들은 mm로 지주 높이를 가진다. 제1 캐리어와 제2 캐리어는 함께 전기 기계의 크기를 규정한다. 모터 크기, 자극 피치와 지주 높이는 여자 레벨 마다의 중량당의 토크나 힘의 면에서 이득을 제공하는 크기, 자극 피치와 지주 높이에 의하여 규정되는 공간의 영역 내에 속하도록 선택된다.
Description
본 발명은 전기 기계의 추가적인 신규 특징과 함께, 로봇에 특히 적합한 신규한 범위의 구조적인 파라미터들을 가진 전기 기계에 대한 것으로, 특히, 전기 기계, 컨덕터 디자인, 냉각, 로터 디자인, 스테이터 디자인 및 작동 파라미터들을 강화하기 위하여 전자석 요소의 구조로부터 발생하는 향상된 열 방출에 가진 전기 기계에 대한 것이다.
전기 기계 디자인에서, 의도된 실시와 기계의 소정의 성능 특성에 따라 슬롯수와 같은 구조상의 파라미터들을 선택하는 것이 알려져 있다. 그러나, 실제는 모든 구조 파라미터들이 사용되는 것은 아니다. 전기 기계, 특히 로봇의 성능을 향상시킬 여지가 있다.
전기 기계들은 통상적으로 플럭스를 발생하기 위하여 연성 자석 스테이터 지주(톱니) 둘레에 감긴 전기적으로 전도성 와이어 턴들을 사용한다. 이러한 유형의 모터 구조의 제조 공정은 시간 소비적이고 고가이다. 또한, 그러한 모터들은 통상적으로 하류 액튜에이터의 중량이 상류 액튜에이터에 의하여 지지되고 가속되어야 하는 로봇과 같은 이동식 액튜에이터 실시예는 모터들을 상대적으로 무겁게 만드는 토크대 중량 비율을 가진다.
발명자는 전기 기계의 추가적인 신규 특징과 함께, 로봇에 특히 적합한 신규한 범위의 구조적인 파라미터들을 가진 전기 기계을 제안하였다. 예로서의 특징들은 전기 기계, 컨덕터 디자인, 냉각, 로터 디자인, 스테이터 디자인 및 작동 파라미터들을 강화하기 위하여 전자석 요소의 구조로부터 발생하는 향상된 열 방출에 관한 것이다.
일 실시예에서, 전기 기계는 전자석 요소들의 어레이를 가지는 제1 캐리어 및 자극을 형성하는 전자석 요소를 가지며, 제1 캐리어에 대해 이동가능하도록 설치된 제2 캐리어를 포함한다. 제1 캐리어와 제2 캐리어 사이에 에어갭이 제공된다. 제1 캐리어의 전자석 요소는 mm로서 지주 높이를 가지는 지주들, 지주들 사이의 슬롯들, 각 슬롯의 하나 이상의 컨덕터들을 포함한다. 제1 캐리어와 제2 캐리어는 같이 전기 기계의 크기를 규정한다. mm로 자극 피치를 가지는 자극, 모터 크기, 자극 피치, 및 자극 높이는 여자 레벨당 중량에 대해 토크 또는 힘의 측면에서 이점을 제공하는 크기, 자극 피치 및 지주 높이에 의하여 규정되는 공간의 영역 내에 속하도록 선택된다. 자극을 형성하는 전자석 요소들은 영구자석일 수 있다. 이 실시예는 개시된 기계들의 어느 것에 적용될 수 있다.
여러 실시예들에서, 하나 이상의 이하의 특징들이 포함될 수 있다; 전기 기계는 에어갭 직경을 가지는 반경 방향 플럭스 기계일 수 있고, 전기 기계의 직경은 에어갭 직경일 수 있다. 전기 기계가 평균 에어갭 직경을 가지는 축방향 플럭스 기계일 수 있고, 전기 기계의 크기는 평균 에어갭 직경일 수 있다. 전기 기계는 병진 방향을 가지는 선형 기계일수 있으며, 제1 캐리어는 제1 병진 방향으로 제1 길이를 가지고, 제2 캐리어는 병진 방향으로 제2 길이를 가지며, 전기 기계의 길이는 제1 길이가 제2 길이와 같거나 짧으면 제1 길이이며, 제2 길이가 제1 길이보다 짧으면 제2 길이이다. 전기 컨덕터들은 집중된 권선을 포함할 수 있다. 전기 컨덕터들은 분포된 권선을 포함할 수 있다. 제1 캐리어는 자기적으로 허용가능한 재료의 유닛 부재로 형성된 스테이터를 포함할 수 있으며, 각 지주는 스테이터의 일부를 포함한다. 스테이터는 20,000psi 아래의 측정가능한 크리프를 갖는 재료를 포함할 수 있다. 스테이터는 자기적으로 허용가능한 재료를 포함할 수 있다. 지주들은 각각 직각 폭을 가지며 스테이터는 조임쇠 부분을 포함할 수 있고, 조임쇠 부분은 지주의 직각 폭보다 작거나 같은 두께를 가진다. 제2 캐리어는 재료의 단위 부재로 형성되고 축을 규정하고, 내측 에지와 외측 에지를 가지는 환형 디스크를 포함할 수 있으며, 둘레방향으로 이격된 제2 캐리어 지주들은 환형 디스크로부터 축방향으로 연장하고 제2 캐리어 지주들 사이에 제2 캐리어 슬롯을 규정하고, 환형 디스크가 규정하는 홀은 내측 에지와 외측 에지 사이로 연장한다. 전기 기계는 축 방향을 규정하는 축을 가질 수 있고, 제2 캐리어는 내측 둘레와 외측 둘레를 가지며, 내측 둘레는 내측 축방향 길이를 가지며, 외측 둘레는 외측 축방향 길이를 가지며, 내측 축방향 길이는 외측 축방향 이와 같지 않을 수 있다. 내측 축방향 길이는 외측 축방향 길이보다 작을 수 있다. 제2 캐리어는 원추형 형상을 가질 수 있다. 전기 컨덕터들은 양극화된 알루미늄 컨덕터들을 가질 수 있다. 제1 캐리어와 제2 캐리어의 일측 또는 양측에 냉각 유체를 공급하도록 연결된 냉매 공급원이 있을 수 있다. 전기 컨덕터들에 적어도 70A/mm2의 전기 에너지를 공급하기 위한 전원 공급부가 있을 수 있다. 제2 캐리어는 자석 슬롯들을 포함할 수 있고 제2 캐리어의 전자석 요소는 자력에 의하여 자석 슬롯 내에 유지되는 영구 자석을 포함할 수 있다. 전기 컨덕터들은 지주들 둘레에 지주들로부터 반경방향 외측으로 측정된 단일 층들을 형성할 수 있다. 에어갭은 0.001" 내지 0.010"일 수 있다. 에어갭은 0.005"에서 0.010"일 수 있다. 전기 기계는 로봇 암 위에 장착될 수 있다. 로봇 암의 부품들은 제1 캐리어와 제2 캐리어를 지지하는 전기 기계용 하우징을 형성할 수 있다. 전기 기계는 횡방향 플럭스 기계일 수 있다. 전기 기계는 프레임없는 전기 기계일 수 있다.
전자석 요소를 포함하는 스테이터를 구비하는 전기 모터가 제공되며, 스테이터는 일 측면에 지주들을 가지며 반대 측면에 냉각 핀들을 가지는 조임쇠를 가지며, 스테이터는 지주의 적어도 일부분을 포함하고 냉각 핀의 적어도 일 부분을 포함하는 재료의 유닛 부재를 포함한다. 여러 실시예들에서, 하나 이상의 이하의 특징들이 포함될 수 있다. 지주들은 둘레 방향으로 지주 폭을 가질 수 있으며, 핀들을 포함하는 조임쇠는 지주 폭의 50%보다 더 큰 높이를 가질 수 있다. 핀들은 유닛 재료부재와는 다른 재료를 포함하는 팁들을 가질 수 있다. 전기 모터는 축방향 플럭스 모터일 수 있다. 냉각 핀들은 나선 형상일 수 있다. 전기 모터는 자극들을 형성하는 전자석 요소들을 가지는 로터를 가질 수 있고, 로터는 스테이터에 대해 회전하도록 배치될 수 있고, 자극들은 5mm의 자극 피치를 가지며 스테이터와 로터 사이의 에어갭, 스테이터의 지주들은 mm의 지주 높이를 가지며, 스테이터와 로터는 같이 전기 기계의 크기를 규정하고, 모터의 크기, 자극 피치 및 지주 높이는 여기 레벨마다 중량당의 힘 또는 토크의 면에서 이점을 제공하는 크기, 자극 피치, 및 지주 높이에 의하여 규정되는 공간 영역에 속하도록 선택된다.
또한 전자석 요소들을 포함하는 하나 이상의 스테이터들에 대해 회전하도록 배치된 영구자석이 장입된 영구자석 캐리어를 포함하는 로터, 출력 링, 및 회전하도록 로터를 지지하기 위하여, 영구자석 캐리어와 출력 링 사이의 중간에 위치된 베어링들을 포함하는 전기 모터가 제공된다. 여러 실시예들에서, 이하의 하나 이상의 특징들이 포함되며: 모터는 축방향 플럭스 모터일 수 있고, 하나 이상의 스테이터들은 두 개의 스테이터들일 수 있고, 로터는 두 개의 스테이터들 사이에 배치될 수 있다. 베어링들은 로터와 스테이터들 사이의 자력에 의하여 예비 장전될 수 있다. 로터는 두 개의 축방향 측면들을 가질 수 있고, 로터의 각 축방향 측면에 자석을 포함하고, 각 축방향 측면의 자석들은 직각으로 향하고, 각 자석은 다른 축방향 측면 위의 각각의 자석과 축방향으로 정렬되고, 각 자석의 직각 정위는 다른 측면의 각 자석의 직각 정위와 다르다. 하나 이상의 스테이터들은 나선형 냉각 핀들을 포함할 수 있다.
또한 에어갭들에 의하여 로터가 분리된 두 개의 스테이터들 사이에 회전하도록 베어링 위에 배치된 로터를 포함하는 전기 모터가 제공되며, 로터와 스테이터들 사이의 자력이 로터로 스테이터들을 당기며 베어링에 예비 압축 힘을 적용한다. 다양한 실시예들에서, 하나 이상의 이하의 특징들이 포함되며: 로터는 자석들로부터 반경방향 내측으로 위치된 출력 링을 가질 수 있다.
베어링들은 로터에 부착된 외경(OD) 레이스를 가질 수 있다. 로터는 자석들로부터 반경방향 외측으로 위치된 출력 링을 가질 수 있다. 베어링들은 로터에 부착된 내경(ID) 레이스들을 가질 수 있다. 에어갭들은 베어링들이 조립체에 없으면 자력에 의하여 50% 보다 크게 닫혀질 수 있다. 스테이터들과 로터는 조립체에 베어링들이 없으면 접촉될 수 있다. 하우징의 축방향 내측으로 향하는 면이 있을 수 있고 베어링들은 하우징의 축방향 내측으로 향하는 표면에 접촉하는 축방향 외측으로 향하는 베어링 레이스들을 가질 수 있으며, 하우징의 축방향 내측으로 향하는 표면은 자력에 의하여 변형될 수 있으므로 축방향 내측으로 향하는 표면과 베어링이 없을 때의 내측으로 향하는 가정 위치 사이의 위치 차이가 0.002"보다 크다.
또한 전자석 요소들의 어레이를 가지는 제1 캐리어와, 자극을 형성하는 전자석 요소들을 가지며, 제1 캐리어에 대해 이동하도록 배치된 제2 캐리어, 및 제1 캐리어와 제2 캐리어 사이의 에어갭을 포함하는 전기 기계가 제공되고, 제1 캐리어의 전자석 요소들은 지주들을 포함하고, 슬롯들이 지주들 사이에 위치되고, 슬롯들은 각 슬롯에 하나 이상의 전기 컨덕터들을 가지며, 제2 캐리어는 자극들을 형성하는 전자석 요소들을 위한 적어도 제1의 유지 요소와 지주들을 포함하고, 제2 캐리어의 전자석 요소들은 제1 캐리어의 전자석 요소들의 지주들을 포화시키기 위하여 필요한 깊이보다 더 긴 깊이를 가진다. 다양한 실시예들에서, 이하의 특징들의 하나 이상이 포함된다: 자극들을 형성하는 전자석 요소들은 영구자석들을 포함할 수 있다. 제1 유지 요소는 조임쇠일 수 있다. 제1 유지 요소는 측면 조임쇠일 수 있다. 제1 유지 요소는 단부 조임쇠일 수 있다. 제2 캐리어의 지주들과 제1 유지 요소는 단단한 연결부에 의하여 연결될 수 있다. 지주들, 제1 유지 요소 및 단단한 연결부는 등방성 재료를 포함할 수 있다. 단단한 연결부는 플럭스 경로 제한부를 포함할 수 있다. 제1 유지 요소는 동질의 단단한 요소를 포함할 수 있고 지주들은 단단한 요소의 동질 연장부를 포함할 수 있다. 영구자석들은 각각 폭을 가질 수 있고, 자석 폭에 대한 자석 깊이 비율이 2:1 및 3:1보다 크고, 또는 4:1보다 더 클 수 있다. 제1 캐리어와 제2 캐리어의 전자석 요소는 자속의 더 큰 부분이 에어갭을 통해 흐르는 보다 단단한 요소들을 통해 자속의 더 큰 부분이 흐른다. 영구 자석들은 자력에 의하여 유지될 수 있다. 영구자석들은 제1 캐리어를 향한 방향으로 좁아지도록 테이퍼될 수 있다. 제2 캐리어의 지주들은 제1 캐리어로부터 멀어지는 방향으로 좁아지도록 테이퍼될 수 있다. 제2 캐리어의 지주들은 제2 캐리어의 전자석 요소들이 제1 캐리어를 향하는 방향으로 이동하는 것을 방지한다. 제2 캐리어는 동질의 단단한 요소를 포함할 수 있고, 제2 캐리어의 지주들은 단단한 요소의 동질 연장부를 포함할 수 있고, 동질의 단단한 요소는 플럭스 경로 제한부를 포함한다. 제1 캐리어의 지주들은 mm로 지주 높이를 가질 수 있고 제1 캐리어와 제2 캐리어는 같이 전기 기계의 크기를 규정할 수 있고 자극들은 mm로 자극 피치(S)를 가질 수 있고, 모터 크기, 자극 피치 및 지주 높이는 여자 레벨에 대해 중량마다 토크 또는 힘의 면에서 이득을 제공하는 크기, 자극 피치 및 지주 높이에 의하여 규정되는 공간 영역 내에 속하도록 선택될 수 있다.
또한 전자석 요소들의 어레이를 포함하는 제1 캐리어, 자극을 규정하는 전자석 요소들을 가지며, 제1 캐리어에 대해 이동하도록 배치된 제2 캐리어, 제1 캐리어와 제2 캐리어 사이의 에어갭을 포함하고, 제1 캐리어의 전자석 요소는 지주들을 포함하고, 슬롯들이 지주들 사이에 위치되고, 슬롯들은 각 슬롯에 하나 이상의 전기 컨덕터들을 가지며, 그리고 상기 제2 캐리어는 동질의 단단한 요소와 지주들을 포함하고, 지주들은 단단한 요소의 동질의 연장부를 포함하고, 제2 캐리어의 지주들은 제2 캐리어의 전자석 요소들을 유지하기 위한 이완부를 포함한다. 다양한 실시예들에서, 이하의 특징들의 하나 이상이 포함될 수 있다: 제2 캐리어의 전자석 요소들은 제1 및 제2 단부들을 포함하고, 제2 단부들은 제1 캐리어를 향하고 제2 단부들은 제1 캐리어로부터 멀리 향하고, 제2 단부들은 테이퍼된다. 제1 캐리어의지주들은 mm로 지주 높이를 가지며, 제1 캐리어와 제2 캐리어는 같이 전기 기계의 크기를 규정하고, 자극들은 mm로 자극 피치(S)를 가지며, 모터 크기, 자극 피치 및 지주 높이는 여자 레벨에 대해 중량마다 토크 또는 힘의 면에서 이득을 제공하는 크기, 자극 피치 및 지주 높이에 의하여 규정되는 공간 영역 내에 속하도록 선택될 수 있다.
전기 기계용 로터가 제공되는 데, 로터는 재료의 단위 부재로 형성되고 축을 규정하는 환형 디스크를 포함하며, 내측 에지와 외측 에지를 가지며, 환형 디스크로부터 축방향으로 연장하고 지주들과 환형 디스크 사이에 슬롯들을 형성하는 둘레방향으로 이격된 지주들은 내측 에지로부터 외측 에지로 환형 디스크 내에서 반경 방향으로 연장하는 홀을 형성한다. 다양한 실시예들에서, 이하의 특징들의 하나 이상이 포함된다: 지주들은 유닛 부재로 형성될 수 있다.
지주들은 환형 디스크의 양측에 배치될 수 있다. 디스크의 각 측의 지주들은 축에 수직인 평면에 투사된 것과 같이 디스크의 반대 측의 각각의 지주들과 정렬될 수 있다. 홀들이 내측 에지와 외측 에지 사이로 환형 디스크를 통해 완전히 연장할 수 있다. 환형 디스크는 홀들을 슬롯들에 연결하는 구멍들을 형성할 수 있다. 각각의 지주는 내측 에징화 외측 에지 사이로 연장할 수 있다. 지주들은 내측 에지에서 제1 축방향 높이와 외측 에지에서 제1 축방향 높이로부터 다른 제2 축방향 높이를 가질 수 있다. 제2 축방향 높이는 제1 축방향 높이보다 더 클 수 있다. 지주들은 내측 에지와 외측 에지 사이에 직선을 규정할 수 있고, 인접 지주들은 실질적으로 평행인 선들을 형성한다. 지주들은 자석들을 유지하기 위하여 둘레 방향 두께와 축방향 높이를 가진 역 테이퍼 형상을 가질 수 있다. 로터를 포함하는 전기 기계가 있을 수 있으며, 추가로 전자석 요소들의 어레이를 가지는 스테이터를 포함할 수 있으며, 로터는 자극을 형성하는 전자석 요소들을 가지며 스테이터에 대해 이동하도록 배치되고, 스테이터와 로터 사이에 에어갭이 형성되고, 스테이터의 전자석 요소들은 스테이터 지주들을 포함하고, 스테이터 지주들 사이에 슬롯들이 구비되고, 각 슬롯에는 하나 이상의 전기 컨덕터들이 설치되고, 스테이터 지주들은 mm로 지주 높이를 가지며, 스테이터와 로터는 같이 전기 기계의 크기를 규정하고, 자극들은 mm로 자극 피치(S)를 가지며, 모터 크기, 자극 피치 및 지주 높이는 여자 레벨에 대해 중량마다 토크 또는 힘의 면에서 이득을 제공하는 크기, 자극 피치 및 지주 높이에 의하여 규정되는 공간 영역 내에 속하도록 선택될 수 있다.
전기 기계용 로터가 제공되며, 로터는: 외측으로 돌출하는 부분을 포함하는 내측 로터 부분, 및 내측으로 돌출하는 부재를 포함하는 외측 로터 부분을 포함하며, 외측 로터 부분은 내측으로 돌출하는 부재와 외측으로 돌출하는 부재들이 상호 체결되도록 외측 로터 부분은 내측 로터 부분 둘레에 배치되고; 상호체결된 내측으로 돌출하는 부재와 외측으로 돌출하는 부재 사이에 영구 자석들이 배치되므로 내측으로 돌출하는 부재와 외측으로 돌출하는 부재는 영구 자석들용 플럭스 경로를 제공한다.
일 실시예에서 내측으로 돌출하는 부재들은 규칙적으로 이격되고 외측으로 돌출하는 부재들은 규칙적으로 이격된다.
전기 기계용 스테이터가 제공되고, 이 스테이터는: 지주들 사이에 슬롯들을 형성하는 둘레 방향으로 이격된 지주들, 지주들 둘레에 배치된 전도성 요소들을 포함하고, 각각의 전도성 요소는 슬롯들의 각각의 선택의 슬롯들의 둘레방향 배치의 순서로 슬롯들의 각각의 선택을 통해 연장하는 각각의 전기흐름 경로를 규정하고, 슬롯들의 각각의 선택의 연속적인 슬롯들을 통해 내측으로 그리고 외측으로 교대로 연장한다.
다양한 실시예들에서, 이하의 특징들의 하나 이상이 포함될 수 있다: 슬롯들의 각각의 선택은 각각 스테이터의 각 섹터의 모든 슬롯들로 구성된다. 슬롯들의 각각의 선택은 각각 스테이터 각각의 섹터에서 제3 슬롯마다 배제할 수 있다. 전도성 요소들은 지주들의 반경방향 단부 부분들에 인접해서 축방향 흐름 경로를 형성하기 위하여 지주들의 반경 방향 단부들의 적어도 세그먼트로부터 이격될 수 있다. 전도성 요소들의 적어도 일부가 관통하여 연장하는 슬롯들을 형성하는 적어도 일부의 지주들로부터 전도성 요소들의 적어도 일부가 둘레 방향으로 이격된다. 축방향으로 인접한 컨덕터 요소들의 전기적인 흐름 경로를 직렬로 연결하기 위하여 축방향으로 인접한 컨덕터 요소들 사이에 전기적 연결이 있을 수 있다. 일부 전도성 요소들에 대해 적어도, 전도성 요소는 단부 턴과 슬롯 턴을 가질 수 있고 단부 턴은 슬롯 턴보다 더 넓다. 전도성 요소들의 적어도 일부가 단부 턴 둘레에 균등한 폭을 가질 수 있다. 전도성 요소들은 지주들로부터 반경 방향 외측으로 측정된, 지주들 둘레에 단일 층을 형성할 수 있다. 지주들은 mm로 지주 이를 가질 수 있으며 전기 기계는 추가로 자극들을 형성하는 전자석 요소들을 가지는 로터를 포함할 수 있고, 제2 캐리어는 스테이터에 대해 이동하도록 배치되고, 스테이터와 로터 사이에 에어갭이 구비되고, 스테이터와 로터는 함께 전기 기계의 크기를 규정하고, 자극들은 mm로 자극 피치(S)를 가지며, 모터 크기, 자극 피치 및 지주 높이는 여자 레벨에 대해 중량마다 토크 또는 힘의 면에서 이득을 제공하는 크기, 자극 피치 및 지주 높이에 의하여 규정되는 공간 영역 내에 속하도록 선택될 수 있다.
전자석 요소들의 어레이를 가지는 제1 캐리어와, 자극을 형성하는 전자석 요소들을 가지며, 제1 캐리어에 대해 이동하도록 배치된 제2 캐리어, 및 제1 캐리어와 제2 캐리어 사이의 에어갭을 포함하는 전기 기계가 제공되고, 제1 캐리어의 전자석 요소들은 지주들을 포함하고, 슬롯들이 지주들 사이에 위치되고, 하나 이상의 슬롯들은 인접 슬롯의 전기 컨덕터의 위치에 대응하는 하나 이상의 승옰들의 레벨에서 전기 컨덕터가 없으며 도관을 형성하며, 도관들은 액각 유체의 소스에 연결된다.
전자석 요소들의 어레이를 가지는 제1 캐리어와, 자극을 형성하는 전자석 요소들을 가지며, 제1 캐리어에 대해 이동하도록 배치된 제2 캐리어, 및 제1 캐리어와 제2 캐리어 사이의 에어갭을 포함하는 전기 기계가 제공되고, 제1 캐리어의 전자석 요소들은 복수의 전기 컨덕터 층들을 포함하고, 상기 전기 컨덕터 층들은 코너 갭들을 가지는 양극화된 알루미늄 컨덕터들이며, 코너 갭들은 코팅으로 코팅된다. 다양한 실시예들에서, 하나 이상의 특징들이 포함된다: 코팅은 유전 코팅일 수 있다. 코팅은 폴리머 코팅일 수 있다. 코팅은 니스일 수 있다. 전기 컨덕터층들은 한 쌍의 컨택 탭들을 추가로 포함할 수 있다. 쌍을 이루는 컨택 탭들은 알루미늄을 포함할 수 있다. 양극화된 알루미늄 컨덕터들은 또한 하나 이상의 표면들을 가질 수 있으며 표면들은 또한 코팅으로 코팅될 수 있다. 전기 기계가 축방향 플럭스 기계을 포함할 수 있다. 전기 기계가 반경방향 플럭스 기계을 포함할 수 있다. 전기 기계는 횡방향 플럭스 기계을 포함할 수 있다. 제1 캐리어의 전자석 요소들은 지주들을 포함할 수 있고, 슬롯들이 지주들 사이에 위치되고, 각 슬롯에 하나 이상의 전기 컨덕터 층들이 배치되고, 제1 캐리어의 지주들은 mm로 지주 높이를 가지며, 제1 캐리어와 제2 캐리어는 함께 전기 기계의 크기를 규정하고, 자극들은 mm로 자극 피치(S)를 가지며, 모터 크기, 자극 피치 및 지주 높이는 여자 레벨에 대해 중량마다 토크 또는 힘의 면에서 이득을 제공하는 크기, 자극 피치 및 지주 높이에 의하여 규정되는 공간 영역 내에 속하도록 선택될 수 있다.
또한 전기 기계용 전기 컨덕터가 제공되는 데, 전기 컨덕터는 제1 및 제2 컨택 탭들, 크게-양극화된 알류미늄 표면, 알루미늄 전도 경로, 및 코팅을 포함한다.
다양한 실시예들에서, 이하의 특징들의 하나 이상이 포함될 수 있다: 코팅은 유전 코팅일 수 있다. 코팅은 폴리머 코팅일 수 있다. 코팅은 니스일 수 있다. 코팅은 크게-양극화된 알루미늄 표면의 코너 갭들을 채울 수 있다. 제1 및 제2 컨택 탭들은 알루미늄을 포함할 수 있다.
또한 전기 기계용 알루미늄 컨덕터들의 제조방법이 제공되는 데, 각각의 알루미늄 컨덕터는 제1 및 제2 컨택 탭들, 표면, 및 전도 경로를 포함하고, 이 방법은 알루미늄 컨덕터의 표면을 크게 양극화하고, 알루미늄 컨덕터들의 표면에 액체 또는 분말 코팅을 적용하고, 및 액체 또는 분말 코팅을 소성하는 것을 포함한다. 다양한 실시예들에서, 이하의 특징들의 하나 이상이 포함될 수 있다: 제1 및 제2의 컨택 탭들을 매스킹하는 추가적인 단계가 있을 수 있다. 액체와 분말 코팅은 폴리머 코팅 또는 분말 코팅을 포함한다. 폴리머 코팅은 액체나 분말 에폭시 코팅을 포함할 수 있다. 폴리머 코팅은 유전 폴리머 코팅을 포함할 수 있다. 에폭시 코팅은 액체 에폭시 코팅이며 이 방법은 추가로 에폭시 코팅을 B 상태로 경화시키는 단계를 포함한다. 에폭시 코팅이 B 상태로 경화하는 것은, 알루미늄 컨덕터들을 적층하는 단계, 제1 컨택 탭을 같이 용접하는 단계, 제2 컨택 탭들을 같이 용접하는 단계ㄷ들이 포함될 수 있다. 액체 코팅을 소성하는 단계는 알루미늄 컨덕터들의 적층을 소성하는 단계를 포함할 수 있다. 알루미늄 컨덕터의 에지 갭들 내로 액체 코팅을 인도하는 추가적인 단계가 있을 수 있다. 알루미늄 컨덕터들의 적층 단계가 발생하면, 그리고 코팅이 액체 코팅이면, 추가적인 단계들이 층들 사이에 하나 이상의 스페이서들을 삽입시켜 알루미늄 컨덕터들의 적층의 하나 이상의 층들을 분리시키는 단계사 실행되고, 액체 코팅을 소성시킨 후에 알루미늄 컨덕터들의 적층으로부터 스페이서들을 제거하는 단계가 취해질 수 있다. 코팅은 분말 코팅이고 이 방법은 분말 코팅을 부분적으로 경화시키는 단계를 추가로 포함할 수 있다. 분말 코팅이 부분적으로 경화되면 알루미늄 컨덕터들을 적층하고, 제1 컨택 탭을 함께 용접하고, 제2 컨택 탭을 함께 용접하는 단계가 포함될 수 있다. 분말 코팅을 소성하는 단계는 알루미늄 컨덕터들의 적층을 소성하는 단계를 포함할 수 있다. 코팅은 분말 코팅일 수 있고 분말 코팅을 적용하는 단계는 반대로 하전된 분말을 알루미늄 컨덕터에 분무하는 것을 포함할 수 있다. 코팅은 분말 코팅이고 분말 코팅을 적용하는 단계는 알루미늄 컨덕터를 반대로 하전된 유전 분말의 유동화된 베드 내에 침지하는 단계를 포함할 수 있다. 알루미늄 컨덕터를 적층하는 단계가 발생하면, 코팅은 분말 코팅이고, 스페이서들을 설치하여 하나 이상의 스페이서들에 의하여 알루미늄 컨덕터의 적층의 하나 이상의 층들을 분리고, 분말 코팅을 소성 후, 알루미늄 컨덕터의 적층으로부터 스페이서를 제거하는 추가적인 단계들이 취해질 수 있다.제2 코팅은 알루미늄 컨덕터들의 표면에 적용될 수 있다.
전자석 요소들을 포함하는 제1 외측 캐리어, 전자석 요소들을 포함하는 제2 외측 캐리어, 전자석 요소를 포함하고 제1 외측 캐리어와 제2 외측 캐리어 사이에 배치되는 내측 캐리어로 내측 캐리어 또는 제1 외측 캐리어와 제2 외측 캐리어 양측이 자극을 형성하고, 제2 외측 캐리어에 제1 외측 캐리어를 고정 연결하는 스페이서 요소, 및 제1 외측 캐리어와 제2 외측 캐리어에 대해 운동하도록 내측 캐리어를 지지하기 위하여, 내측 캐리어와 제1 외측 캐리어 및 제2 외측 캐리어 사이, 내측 캐리어와 스페이서 요소 사이에 배치되는 저마찰 코팅 또는 부싱을 포함하는 전기 기계가 제공된다.
다양한 실시예들에서, 이하의 특징들의 하나 이상이 포함될 수 있다: 내측 캐리어는 자극들을 형성하고 제1 외측 캐리어와 제2 외측 캐리어는 각각 캐리어들의 전자석 요소들이 그 위에 지지되는 재료의 유닛 부재를 포함할 수 있다. 제1 외측 캐리어와 제2 외측 캐리어는 자극들을 형성할 수 있고 내측 캐리어는 캐리어의 전자석 요소들이 그 위에 지지되는 유닛 부재의 재료를 포함할 수 있다. 제1 외측 캐리어와 제2 외측 캐리어는 사용시 내측 캐리어를 향한 자력의 영향 아래 내측 캐리어를 향하여 굽어질 수 있으나, 내측 캐리어와 제1 외측 캐리어와 제2 외측 캐리어 사이에 배치된 부싱이나 저마찰 코팅에는 실질적인 힘을 미치지 않도록 일정 형상으로 예비 성형될 수 있다. 자극들은 mm로 피치(S)를 가지며, 제1 외측 캐리어 와 제2 외측 캐리어, 및 내측 캐리어는 함께 전기 기계의 크기를 규정하고, 내측 캐리어는 자극들을 형성하고, 제1 및 제2 외측 캐리어의 전자석 요소들은 지주들을 포함하고, 지주들 사이에 슬롯들이 위치되고, 각 슬롯에는 하나 이상의 전기 컨덕터들이 위치되고, 지주들은 mm로 지주 높이를 가지며, 제1 및 제2 외측 캐리어는 자극들을 형성하고, 내측 캐리어의 전자석 요소들은 지주들을 포함하고, 슬롯들이 지주들 사이에 있고, 하나 이상의 전기 컨덕터들이 각 슬롯에 있고, 지주들은 mm로 지주 높이를 가지며, 모터 크기, 자극 피치 및 지주 높이는 여자 레벨에 대해 중량마다 토크 또는 힘의 면에서 이득을 제공하는 크기, 자극 피치 및 지주 높이에 의하여 규정되는 공간 영역 내에 속하도록 선택될 수 있다.
장치 및 방법의 이들 및 다른 측면들은 특허청구범위들에 표현된다.
기재 없음
실시예들이 이제 도면들을 참조하여 설명될 것인 데, 여기서 유사한 참조 부호들은 유사한 요소들을 지시하고, 여기서:
도 1은 완전한 예시적인 액튜에이터 기본형의 CAD 모델이며;
도 2는 도 1의 예시적인 액튜에이터를 도시한 도면이며;
도 3은 도 1의 예시적인 액튜에이터의 로터와 스테이터의 세부의 측면도를 도시하며;
도 4는 도 1의 예시적인 액튜에이터의 로터와 스테이터 전체의 개요를 도시하며;
도 5는 지주들 위의 개략적인 CAD 모델의 코일들을 가진 도 1의 예시적인 액튜에이터의 로터와 스테이터의 단순화된 개략적인 도면을 도시하고;
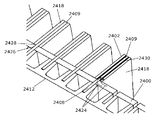
도 6은 선형 전기 기계의 스테이터의 비제한적인 단순화된 예시적인 실시예를 도시하며;
도 7은 도 6의 스테이터의 등축 도면이고;
도 8은 상부 절연층이 제거된 도 6과 도 7의 스테이터의 평면도를 도시하고;
도 9는 두 개의 상부 위상 회로들이 제거된 도 8의 스테이터의 평면도를 도시하고;
도 10은 도 6 내지 도 9의 스테이터의 부분 도면이고;
도 11은 도 10 도시 단면의 상세 도면이고;
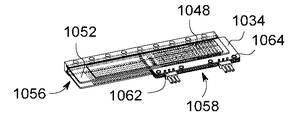
도 12는 비제한적인 예시적인 선형 전기 기계의 등축 도면이고;
도 13은 내부 라인들을 가진 도 12의 전기 기계을 도시하고;
도 14는 상부 영구자석 캐리어의 조임쇠가 제거된 도 12의 전기 기계을 도시하며;
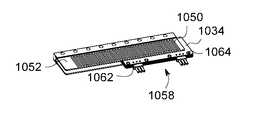
도 15는 상부 영구자석 판들과 대부분의 상부 영구자석들이 제거된 도 14의 전기 기계을 도시하고;
도 16은 모든 영구자석들이 제거되고 상부 절연판이 제거된 도 15의 전기 기계을 도시하고;
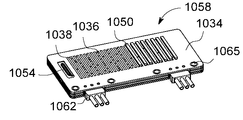
도 17은 전기 커넥터들이 제거되고 상부 스페이서 층이 제거된 도 16의 전기 기계을 도시하고;
도 18은 상부의 위상회로 컨덕터들이 제거되고 제2 절연층이 제거된 도 17의 전기 기계을 도시하고;
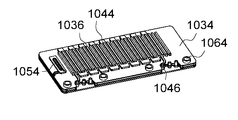
도 19는 제2 스페이서 층이 제거되고 대부분의 지주들이 제거된 도 18의 전기 기계을 도시하고;
도 20은 상부 에어 코어 센서, 제2 위상 회로, 구조상 원통형 스페이서들, 및 잔여 지주들이제거된 도 19의 전기 기계을 도시하고;
도 21은 제3 위상 회로와 바닥 스페이서 층이 제거된 도 20의 전기 기계을 도시하고;
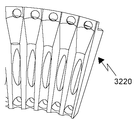
도 22는 축방향 플럭스의 회전 스테이터 전기 기계의 비제한적인 예시적인 실시예용 포팅 복합 링, 지주들과, 컨덕터 회로들을 도시하고;
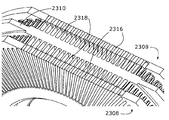
도 23은 도 22의 스테이터의 상세 도면을 도시하고;
도 24는 포팅 복합 링이 제거된 위상당 하나의 컨덕터 회로와 세 위상들을 가진 축방향 플럭스의 회전 스테이터를 도시하고;
도 25는 조립 동안 알루미늄 회로에 의하여 위치된 연성 자성 재료 지주들을 가진 세 개의 위상 회로들의 등축 도면이고;
도 26은 도 25의 분리 도면이고;
도 27은 도 25와 도 26의 실시예의 개별 층의 근접 도면이고;
도 28은 도 25와 도 26의 실시예의 개별층의 근접 도면이고;
도 29는 단일 스테이터 회로의 상세부의 평면도이고;
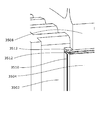
도 30은 축방향 플럭스 전기 기계의 단면을 도시하고;
도 31은 에어갭을 가로지르는 전자석 요소(여기서, 영구자석)을 향하는 선형 전기 기계의 전자석 요소(여기서, 코일)들의 어레이를 도시하고;
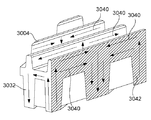
도 32는 잔전 아암을 가진 단면형 축방향 플럭스의 전기 기계을 예시하고;
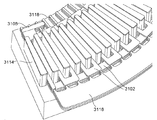
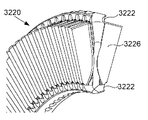
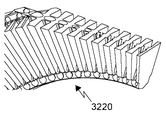
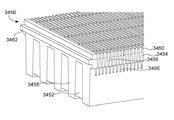
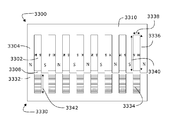
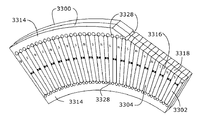
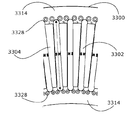
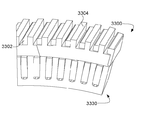
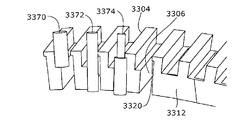
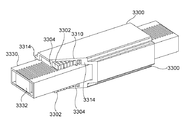
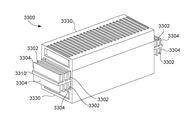
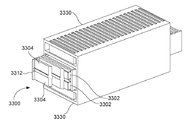
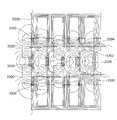
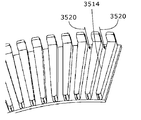
도 33은 축방향 플럭스 전기 기계의 스테이터를 도시하고;
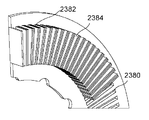
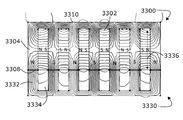
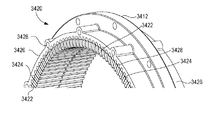
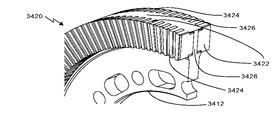
도 34는 도 33의 스테이터의 상세부를 도시하고;
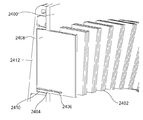
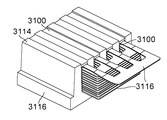
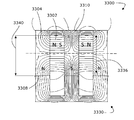
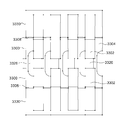
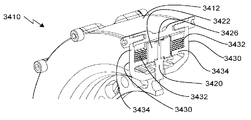
도 35는 도 33의 스테이터에 사용하는 전기 컨덕터층들의 상세부이며;
도 36은 도 33의 스테이터에 사용하기 위한 전기 컨덕터 층들의 추가적인 상세부이고;
도 37은 도 33의 스테이터에 사용하기 위한 전기 컨덕터 층들의 추가적인 상세부이고;
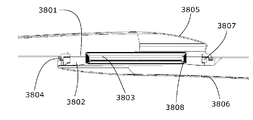
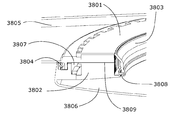
도 38은 도 33의 스테이터의 전기 컨덕터 층들을 도시하고;
도 39는 도 33의 스테이터의 전기 컨덕터 층들을 도시하고;
도 40은 개시된 전기 기계의 실시예를 조안트에 구비할 수 있는 로봇 암의 실시예를 도시하고;
도 41은 개시된 전기 기계의 실시예를 조안트에 구비할 수 있는 로봇 암의 실시예를 도시하고;
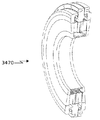
도 42는 개시된 전기 기계의 실시예용 자석 구조를 도시하고;
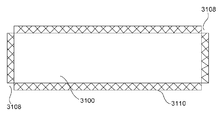
도 43은 선형 전기 기계의 연속 층들을 도시하는 상세부의 제1 도면이고;
도 44는 선형 전기 기계의 연속 층들을 도시하는 상세부의 제2 도면이고;
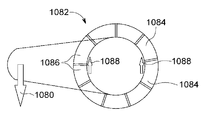
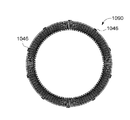
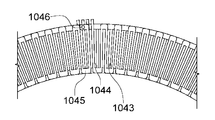
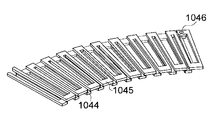
도 45는 선형 전기 기계의 연속 층들을 도시하는 상세부의 제3 도면이고;
도 46은 선형 전기 기계의 연속 층들을 도시하는 상세부의 제4 도면이고;
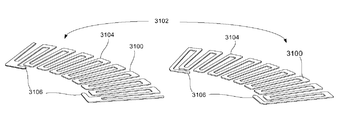
도 47은 전기 여기부의 다상 소스에 선형 전기 기계의 층들을 연결하기 위한 연결부의 상세부를 도시하고;
도 48은 전기 여기부의 다상 소스에 선형 전기 기계의 층들을 연결하기 위한 연결부의 상세부를 도시하고;
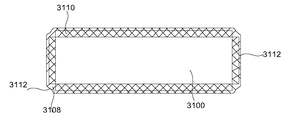
도 49는 선형 전기 기계의 실시예의 연속 층들을 도시하는 제1 도면이고;
도 50은 선형 전기 기계의 연속 층들을 도시하는 상세부의 제2 도면이고;
도 51은 선형 전기 기계의 연속 층들을 도시하는 상세부의 제3 도면이고;
도 52는 선형 전기 기계의 연속 층들을 도시하는 상세부의 제4 도면이고;
도 53은 로터와 스테이터 양측의 코일을 가진 전기 기계의 실시예를 도시하고;
도 54는 로터와 스테이터 양측의 코일을 가진 전기 기계의 실시예를 도시하고;
도 55는 자석들의 홀배치 어레이를 가진 전기 기계의 실시예를 도시하고;
도 56은 두-부분 스테이터와, 세 상들, 및 3:2의 스테이터 지주: 영구자석 비율을 가지는 예시적인 액튜에이터 조립체의 단면을 도시하고;
도 57은 도 56의 실시예의 상세 도면을 도시하고;
도 58은 다른 스테이터에 대해 하나의 스테이터를 회전시킨 효과를 예시하는 3:2 비율 또는 스테이터 지주: 영구자석들에 대한 로터 위치의 함수로서 표시된 토크를 도시하고;
도 59는 도 56의 예시적인 실시예의 분리 도면을 도시하고;
도 60은 도 56의 예시적인 실시예의 부분 분리 도면의 단면을 도시하고;
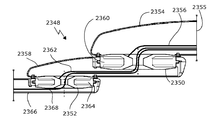
도 61은 도 56의 예시적인 실시예의 하우징의 단면 상세 도면을 도시하고;
도 62는 도 56의 예시적인 실시예의 조립된 하우징과 스테이터의 일부를 도시하고;
도 63은 스테이터 위에 제1 컨덕터 층을 구비한 도 56의 예시적인 실시예의 조립된 하우징과 스테이터의 일부를 도시하며;
도 64는 도 63의 일부의 평면도를 도시하고;
도 65는 도 56의 예시적인 실시예로부터 같은 상의 네 개의 컨덕터 층들을 도시하고;
도 66은 도 56의 예시적인 실시예로부터 다른 상으로부터의 세 개의 인접 컨덕터 층들의 배치를 도시하고;
도 67은 지시된 컨덕터들 사이에 반경방향 유체 흐름 채널을 구비한 도 56의 예시적인 실시예로부터의 조립된 하우징과 스테이터의 일부를 도시하며;
도 68은 도 56의 예시적인 실시예의 컨덕터들 사이의 냉각 유체용 반경방향, 축방향, 및 둘레 유체 흐름 경로의 평면도를 도시하고;
도 69는 냉각유체 흐름 경로를 도시하는 도 68의 스테이터를 관통하는 도면을 도시하고;
도 70은 두 스테이터들과 로터를 가진 예시적인 실시예의 부분 도면을 도시하고;
도 71은 하나의 단면으로 도시된 컨덕터들을 가진 도 70의 예시적인 실시예로부터의 스테이터를 도시하며;
도 72는 컨덕터를 가진 간략화된 스테이터의 부분 도면을 도시하며;
도 73은 컨덕터들이 슬롯들을 건너뛰지 않는 스테이터 위의 컨덕터들의 예시적인 구조를 도시하며;
도 74는 일부 컨덕터들이 가변 컨덕터 폭을 가진 스테이터 위의 컨덕터들의 예시적인 구조를 도시하며;
도 75는 도 74로부터의 컨덕터들의 네 개 층들의 분리된 도면을 도시하고;
도 76은 다층-두께의 유체 흐름 갭을 가진 컨덕터들의 예시적인 구조를 도시하고;
도 77은 예시적인 조립 방법에서 컨덕터 층들의 구조를 도시하며;
도 78은 반경방향 유체흐름 갭이 없는 컨덕터들의 예시적인 구조를 도시하고;
도 79는 굽은,가변-폭의 지주들을 가진 스테이터의 예시적인 실시예를 도시하며;
도 80은 직각으로 향하는 영구 자석들과 반경방향으로 연장하는 플러스 경로 부재들을 가진 로터의 예시적인 실시예를 도시하며;
도 81은 도 80의 로터의 상세 도면을 도시하며;
도 82는 도 80의 로터의 내측 부재들과 내측 부분 사이의 구조상 연결부를 도시하며;
도 83은 도 80의 로터의 외측 부분과 외측 부재들 사이의 구조상 연결부를 도시하며;
도 84는 자석들이 제거된 도 80의 로터의 상세 도면을 도시하며;
도 85는 조립체의 예시적인 방법을 반영한 도 80의 로터의 확대 도면을 도시하며;
도 86은 내측 로터 링과 외측으로 돌출하는 플럭스 부재들이 흑색으로 도시된 도 60의 로터의 도면을 도시하고;
도 87은 두 개의 축방향 절반 및 테이퍼된 자석들을 포함하는 로터의 예시적인 실시예를 도시하고;
도 88은 도 87의 로터의 부분을 도시하고;
도 89는 도 87의 로터의 분리 도면을 도시하고;
도 90은 자석의 극성을 도시하는, 도 87의 로터에서의 자석의 평면도를 도시하고;
도 91은 도 87의 로터의 외측 부분과 외측 부재들 사이의 구조상 연결부를 도시하며;
도 92는 로터 절반부를 같이 유지하는 외부 링을 가진 도 87의 로터를 도시하고;
도 93은 두 로터 절반부들과 두 스테이터 절반부들을 포함하는 예시적인 실시예의 분리 도면을 도시하고;
도 94는 도 93 도시의 실시예의 부분을 도시하고;
도 95는 도 93 도시의 실시예의 스테이터를 도시하고;
도 96은 도 93의 실시예의 베이스판과 스테이터들의 분리 도면을 도시하고;
도 97은 도 93의 실시예의 부분을 도시하고;
도 98은 두 개의 로터 절반부들과 하나의 스테이터를 가진 예시적인 실시예의 부분을 도시하고;
도 99는 도 98의 예시적인 실시예의 부분을 도시하고;
도 100은 액튜에이터로서 작용하는 일련의 전기 기계을 가지며 아암을 따라 이격된 로봇 아암의 예시적인 구조를 도시하며;
도 101은 로봇 아암 위의 전기 기계의 장착 구조를 도시하며;
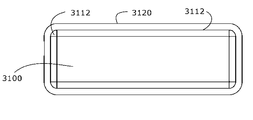
도 102는 로터 구조의 실시예를 도시하며;
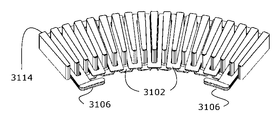
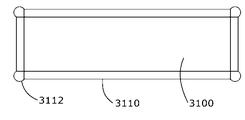
도 103은 적층된 지주 스테이터의 예시적인 구조를 도시하며;
도 104는 반경방향으로 정렬된 지주 적층을 가진 스테이터의 예시적인 실시예의 부분을 도시하며;
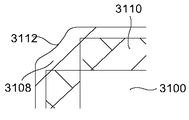
도 105는 기계적인 방출 정지부로서의 테이퍼된 돌기를 가지고, 조암쇠를 관통하여 지주들이 연장하는 적층된 지주 구성의 예시적인 실시예를 도시하며;
도 106은 도 105 도시의 실시예의 부분을 도시하고;
도 107은 적층들과 형성된 자석 플럭스 경로의 일부 사이의 절연 패턴을 도시하는, 도 105 도시 실시예의 부분을 도시하고;
도 108은 날카로운 에지를 양극화한 효과를 도시하는 개략적인 도면이며;
도 109는 둥근 에지를 가진 컨덕터들을 포함하는 스테이터 단면의 개략적인 도면이고;
도 110은 날카로운 에지를 가진 컨덕터들을 포함하는 스테이터 단면의 개략적인 도면이고;
도 111은 조립 전에 나란히 도시된 적층가능한 평평한 컨덕터들의 두 개의 인접한 층들의 사시도이며;
도 112는 양극화된 컨덕터의 표면 위로 실시된 유전체 코팅을 가진 코팅된 컨덕터의 예를 도시하는 개략적인 도면이고;
도 113은 도 112의 컨덕터의 코너의 근접 도면이고;
도 114는 스테이터 지주들 사이에 적층된 컨덕터 쌍을 가진 층들로 같이 적층된 컨덕터들의 사시도를 도시하는 도면이고;
도 115는 날카로운 에지에서 갭들을 완전히 덮는 코팅된 컨덕터 예를 도시하는 개략적인 도면이고;
도 116은 날카로운 에지에서 갭들을 더욱 완전히 덮는 코팅된 컨덕터 예를 도시하는 개략적인 도면이고;
도 117은 추가적인 폴리머 층으로 코팅된, 도 115의 코팅된 컨덕터의 예를 도시하는 개략적인 도면이고;
도 118은 하나 이상의 슬롯들에 하나 이상의 컨덕터 층들을 배치한 스페이서를 가진 조립된 스테이터와 컨덕터들의 도면을 도시하고;
도 119는 분말 에지 코팅이 컨덕터들을 서로 및/또는 지주 측벽들에 접촉시키고 고착하면서 스페이서를 제거하기 전에 스페이서들과 컨덕터들의 부분 도면을 도시하고;
도 120은 스페이서 부분이 제거된 스테이터의 단순화된 부분을 도시하고;
도 121은 양극화된 컨덕터들의 제조방법을 도시하고;
도 122는 양극화된 컨덕터들의 제조방법의 추가적인 상세부를 도시하고;
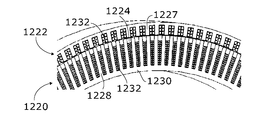
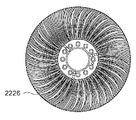
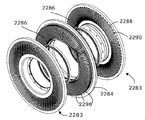
도 123은 원추형 로터의 실시예의 단면을 도시하고;
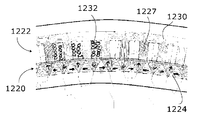
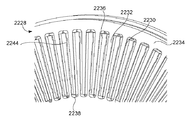
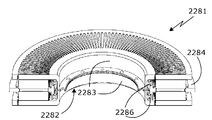
도 124는 도 123의 실시예의 근접 단면을 도시하고;
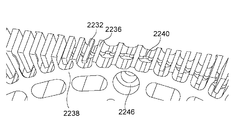
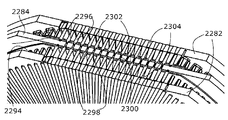
도 125는 도 123의 실시예의 근접 단면을 도시하고;
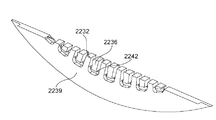
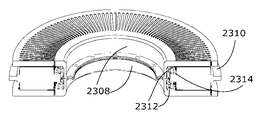
도 126은 도 123의 실시예의 근접 단면을 도시하고;
도 127은 도 123의 실시예의 근접 단면을 도시하고;
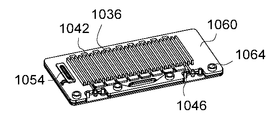
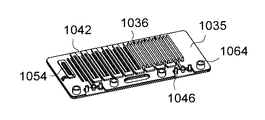
도 128은 동력 커넥터 및 인코더 커넥터를 포함하는 조립된 액튜에이터의 실시예의 축방향 도면이고;
도 129는 두 스테이터들 사이의 사이의 중심 평면을 따른 내부 로터를 도시하는 도 128의 액튜에이터의 일부 도면이고;
도 130은 적층된 컨덕터들의 부분 단면을 가진 도 128의 액튜에이터의 스테이터와 하우징의 조립체의 등축 부분 도면이고;
도 131은 도 128의 액튜에이터의 적층된 컨덕터들과, 스테이터, 내측 하우징, 외측 하우징의 축방향 도면이고;
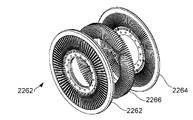
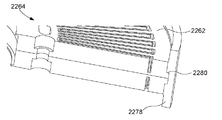
도 132는 도 128의 실시예의 로터 부품의 등축 도면이고;
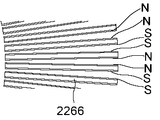
도 133은 인접 자석들이 반대로 직각으로 분극화된 예로서의 자석 배치를 가진 로터와 스테이터들의 측면도이고;
도 134는 두 스테이터들을 분리하기 위하여 분리 부재를 포함하는 액튜에이터의 사시도이고;
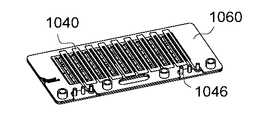
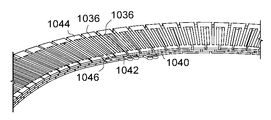
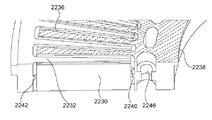
도 135는 냉각 핀을 관통하여 자속 경로를 도시하는 도 128의 액튜에이터의스테이터의 또 다른 부분 도면이고;
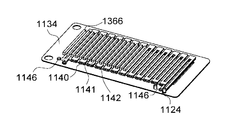
도 136은 지주들 사이의 대각선에서 플럭스 연결을 위한 단면적을 도시하는냉각 핀을 가진 스테이터의 부분 도면이고;
도 137은 둘레 냉각 핀들을 가진 스테이터의 단순화된 부분 도면이고;
도 138은 내부 베어링 위의 사전 부하를 감축하도록 구성된 분리 부재를 포함하는 액튜에이터의 부분 도면이고;
도 139는 내측 베어링 위의 사전 부하를 향상시키도록 구성된 분리 부재를 포함하는 액튜에이터의 부분 도면이고;
도 140은 실링된 냉각 채널을 가진 액튜에이터의 단면도이고;
도 140A는 반-원형 냉각 채널을 가진 실시예의 사시도이고;
도 140B는 내경의 강성 연결부에 의하여 연결된 하우징, 로터 및 두 개의 스테이터들을 가진 실시예의 단면도이고;
도 140C는 도 140B 도시 실시예의 확대된 단면도이고;
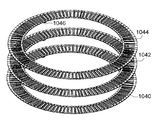
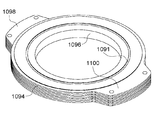
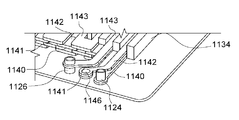
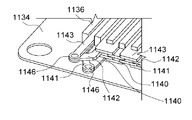
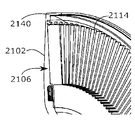
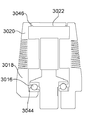
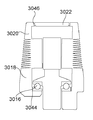
도 141은 집중된 플럭스 로터의 신형 실시예의 간략화된 부분 도면이고;
도 142는 자속 라인을 도시하는 조임쇠를 가진 집중된 플럭스 로터의 모델이고;
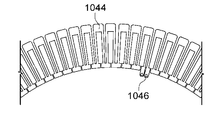
도 143은 부품 길이를 추가로 도시하는, 자속 라인을 도시하는, 조임쇠를 가진 집중된 플럭스 로터의 모델이고;
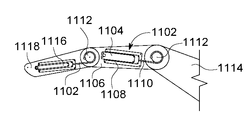
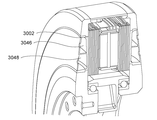
도 144는 테이퍼된 자석과 플럭스 경로 제한부를 가진 축방향 플럭스 집중 플럭스 로터의 세그먼트를 관통하는 단면도이고;
도 145는 연장된 길이의 자석을 가진 축방향 플럭스 집중 플럭스 로터의 일부분의 근접 부분 도면이고;
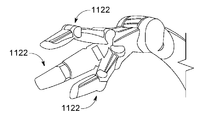
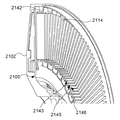
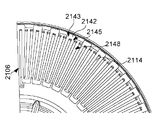
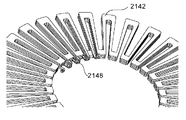
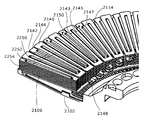
도 146은 스테이터를 가진 반경방향 플럭스 집중 플럭스 로터의 실시예의 간략화된 각진 단면도이고;
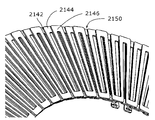
도 147은 도 146 도시의 반경방향 플럭스 집중된 플럭스 로터와 스테이터의 간략화된 부분 도면이고;
도 148은 밀(mill)을 추가로 도시하는 도 146 도시의 집중된 플럭스 로터의 간략화된 각진 단면도이고;
도 149는 자속 라인들을 도시하고 가변 형상을 가진 조임쇠를 구비한 집중된 플럭스 로터의 모델이고;
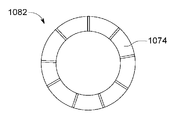
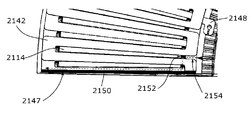
도 150은 로터 릴리프와 테이퍼된 로터 단부를 가진 반경방향 플럭스의 집중된 플럭스 로터의 실시예의 간략화된 각진 단면도이고;
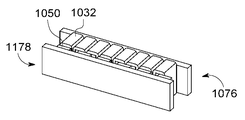
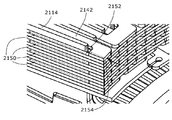
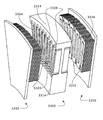
도 151은 단부 조임쇠를 가진 집중된 플럭스 로터의 축방향 플럭스 스테이 터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
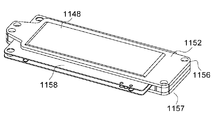
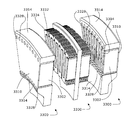
도 152는 후방 조임쇠, 단부 조임쇠, 및 플럭스 결로 제한부를 가진 집중된 플럭스 로터의 축방향 플럭스 스테이터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
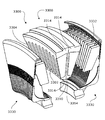
도 153은 단부 조임쇠들과 플럭스 경로 제한부를 가진 집중된 플럭스 로터의 축방향 플럭스 스테이터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
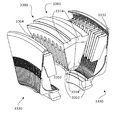
도 154는 단부 조임쇠, 플럭스 제한부 및 후방 조임쇠를 가진 집중된 플럭스 로터의 축방향 플럭스 스테이터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
도 155는 후부 조임쇠들과 단부 조임쇠를 가진 집중된 플럭스 로터의 사다리형 스테이터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
도 156은 후부 조임쇠가 없는 도 155 도시의 실시예의 간략화된 분리된 부분 도면이고;
도 157은 단부 조임쇠를 가진 집중된 플럭스 로터의 사다리형 스테이터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
도 158은 후부 조임쇠를 가지고 단부 조임쇠가 없는 도 157 도시의 실시예의 간략화된 분리된 부분 도면이고;
도 159는 후부 조임쇠와 단부 조임쇠를 가진 로터-스테이터-로터 구조의 선형 플럭스 기계의 실시예의 간략화된 부분 도면이고;
도 160은 후부 조임쇠가 없는 도 159 도시의 실시예의 간략화된 부분 도면이고;
도 161은 후부 조임쇠를 가진 선형 플럭스 기계의 스테이터-로터-스테이터 구조의 실시예의 간략화된 부분 도면이고;
도 162는 로터의 각진 단면을 도시하고, 단부 조임쇠를 가지는 선형 플럭스 기계의 스테이터-로터-스테이터 구조의 실시예의 간략화된 부분 도면이고;
도 163은 중단된 로터 지주들을 가진 축방향 모터의 집중된 플럭스 로터의 모델이고;
도 164는 도시된 자속 라인들을 가진 도 164 도시의 축방향 모터의 집중된 플럭스 로터의 모델이고;
도 165는 플럭스가 반경방향으로 에어갭을 가로지르는 횡방향 플럭스 기계의 실시예의 단면도이고;
도 166A는 도 165 도시의 횡방향 플럭스 기계의 실시예의 스테이터의 사시도이고;
도 166B는 도 165 도시의 횡방향 플럭스 기계의 실시예의 로터의 상부 부분의 사시도이고;
도 167은 플럭스가 축방향으로 에어갭을 가로지르는 횡방향 플럭스 기계의 실시예의 단면도이고;
도 168은 도 167 도시의 횡방향 플럭스 기계의 실시예의 스테이터 부분의 사시도이고;
도 169는 도 168 도시의 횡방향 플럭스 기계의 실시예의 로터의 상부 부분의 단면도이고;
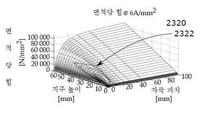
도 170A는 슬롯 피치와 지주 높이가 다른 모사된 일련의 모터들의 일정한 전류 밀도에서의 토크 그래프를 도시하며;
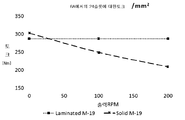
도 170B는 슬롯 피치와 지주 높이가 다른 모사된 일련의 모터들의 일정한 온도에서의 가능한 최고 스테이터 전류 밀도를 도시하며;
도 170C는 일련의 전기 기계의 슬롯 피치와 지주 높이의 함수로서의 일ㅈ벙한 온도 토크를 도시하며;
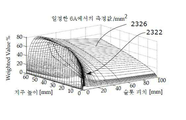
도 170D는 슬롯 피치와 지주 높이가 다른 모사된 일련의 모터들에서 일정한 온도에서 가능한 최고 스테이터 전류 밀도에 대한 계량 함수 값을 도시하며;
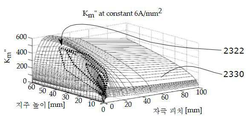
도 170E는 고정된 전류 밀도에 대한, 슬롯 피치와 지주 높이가 다른 일련의 모사된 일련의 모터들의 Km"을 도시하며;
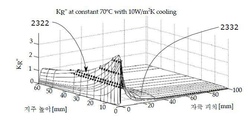
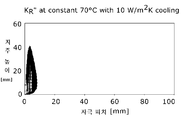
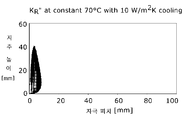
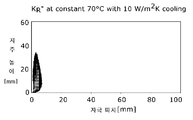
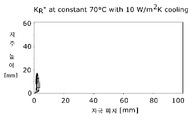
도 170F는 고정된 전류 밀도에 대한, 슬롯 피치와 지주 높이가 다른 모사된 일련의 모터들의 KR"을 도시하며;
도 171은 200mm 크기와 KR" > 1.3의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 172는 200mm 크기와 KR" > 1.5의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 173은 200mm 크기와 KR" > 1.8의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 174는 100mm 크기와 KR" > 1.5의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 175는 100mm 크기와 KR" > 1.7의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 176은 100mm 크기와 KR" > 1.9의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 177은 50mm 크기와 KR" > 2.2의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 178은 50mm 크기와 KR" > 2.5의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 179는 50mm 크기와 KR" > 2.9의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 180은 25mm 크기와 KR" > 3.3의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 181은 25mm 크기와 KR" > 3.4의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 182는 25mm 크기와 KR" > 3.6의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 183은 전류가 인가되지않은 200rpm의 로터 속도에서 슬롯 피치의 범위에 걸친 모터 시리즈의 히스테리시스 손실과 와류 전류의 합을 도시하는 그래프이고;
도 184는 6A/㎟의 전류 밀도가 인가된 24개의 슬롯 적층된 M-19와 고형 M-19 스테이터들에 대한 토크를 도시하는 그래프이고;
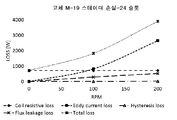
도 185는 24개의 슬롯 고형 M-19 스테이터의 개별 및 총 스테이터 손실을 도시하는 그래프이고;
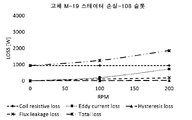
도 186은 108개의 슬롯 고형 M-19 스테이터의 개별 및 총 스테이터 손실을 도시하는 그래프이고;
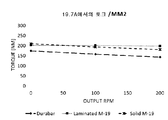
도 187은 19.7A/㎟의 전류 밀도가 인가된 108개의 슬롯 듀러바, 적층된 M-19와 고형 M-19 스테이터들에 대한 토크를 도시하는 그래프이고;
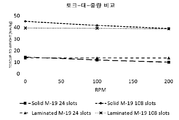
도 188은 매우 강력한 NdFeBN52 영구 자석들이 로터에 사용된 모사에서의 다양한 모터들의 토크-대-중량 비교를 도시하는 그래프이고;
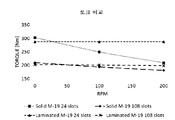
도 189는 여러 모터들에 대한 토크 비교를 도시하는 그래프이고;
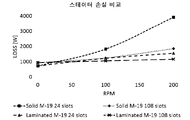
도 190은 여러 모터들에 대한 스테이터 손실 비교를 도시하는 그래프이고;
도 191은 흐름 채널을 통해 액튜에이터를 냉각하는 방법을 도시하고;
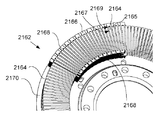
도 192는 액튜에이터 조립체의 실시예의 사시도이고;
도 193A는 도 192의 액튜에이터 조립체의 근접 사시도이고;
도 193B는 도 193A의 액튜에이터 조립체의 사시도에서 부싱 또는 저 마찰 코팅의 더욱 근접한 도면이고;
도 194는 도 192의 액튜에이터 조립체의 스테이터와 고정된 링의 부분 도면이고;
도 195는 연장부 상부 위로 지주 위에 컨덕터들이 설치될 수 있는 방식을 화살표가 표시하는, 도 192의 액튜에이터 조립체용 스테이터의 실시예의 근접 도면이고;
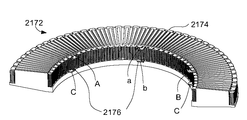
도 196은 하나의 스테이터와 대응하는 부싱 또는 저 마찰의 코팅이 제거된 도 192의 액튜에이터 조립체의 근접 일부 도면이고;
도 197은 도 192의 액튜에이터 조립체의 영구자석 캐리어의 일부 도면이고
도 198은 도 192의 액튜에이터 조립체의 로터와 스테이터의 근접 일부 도면이고;
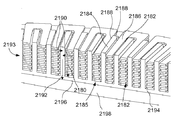
도 199A는 도 192의 액튜에이터 조립체의 스테이터와 로터 지주들의 축방향 등축 도면이고;
도 199B는 도 199A의 액튜에이터 조립체의 스테이터와 로터 지주들의 추가적인 근접 도면이고;
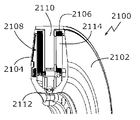
도 200은 프레임 없는 모터/액튜에이터를 사용하는 로봇 암의 죠인트를 도시하고;
도 201은 프레임 없는 모터/액튜에이터 및 로봇 암의 단면도를 보여주고;
도 202는 프레임 없는 모터/액튜에이터, 스테이터, 로터 및 하우징 조립체의 일부 도면의 근접 도면을 도시하고;
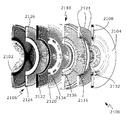
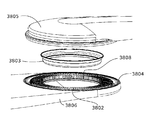
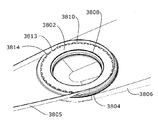
도 203은 프레임 없는 모터/액튜에이터 로봇 암 조립체의 분리된 도면을 도시하고;
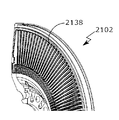
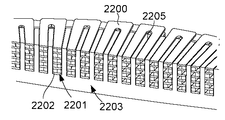
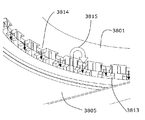
도 204는 로터 위의 스테이터와 탭 특징을 보이기 위하여 하우징을 관통하는 일부 도면을 보여주고;
도 205는 로터를 고정하기 위하여 탭 특징과 같이 사용되는 위, 위로 및 아래로의 조립 이동을 개략적으로 도시하고;
도 206은 로터를 고정하기 위하여 사용되는 탭 특징을 나타내는 일부 도면의 근접 도면을 도시하고;
도 207은 스테이터를 고정하기 위하여 스테이터 위에 사용되는 탭 특징을 나타내기 위하여 하우징을 관통하는 일부 도면을 도시한다.
도 1은 완전한 예시적인 액튜에이터 기본형의 CAD 모델이며;
도 2는 도 1의 예시적인 액튜에이터를 도시한 도면이며;
도 3은 도 1의 예시적인 액튜에이터의 로터와 스테이터의 세부의 측면도를 도시하며;
도 4는 도 1의 예시적인 액튜에이터의 로터와 스테이터 전체의 개요를 도시하며;
도 5는 지주들 위의 개략적인 CAD 모델의 코일들을 가진 도 1의 예시적인 액튜에이터의 로터와 스테이터의 단순화된 개략적인 도면을 도시하고;
도 6은 선형 전기 기계의 스테이터의 비제한적인 단순화된 예시적인 실시예를 도시하며;
도 7은 도 6의 스테이터의 등축 도면이고;
도 8은 상부 절연층이 제거된 도 6과 도 7의 스테이터의 평면도를 도시하고;
도 9는 두 개의 상부 위상 회로들이 제거된 도 8의 스테이터의 평면도를 도시하고;
도 10은 도 6 내지 도 9의 스테이터의 부분 도면이고;
도 11은 도 10 도시 단면의 상세 도면이고;
도 12는 비제한적인 예시적인 선형 전기 기계의 등축 도면이고;
도 13은 내부 라인들을 가진 도 12의 전기 기계을 도시하고;
도 14는 상부 영구자석 캐리어의 조임쇠가 제거된 도 12의 전기 기계을 도시하며;
도 15는 상부 영구자석 판들과 대부분의 상부 영구자석들이 제거된 도 14의 전기 기계을 도시하고;
도 16은 모든 영구자석들이 제거되고 상부 절연판이 제거된 도 15의 전기 기계을 도시하고;
도 17은 전기 커넥터들이 제거되고 상부 스페이서 층이 제거된 도 16의 전기 기계을 도시하고;
도 18은 상부의 위상회로 컨덕터들이 제거되고 제2 절연층이 제거된 도 17의 전기 기계을 도시하고;
도 19는 제2 스페이서 층이 제거되고 대부분의 지주들이 제거된 도 18의 전기 기계을 도시하고;
도 20은 상부 에어 코어 센서, 제2 위상 회로, 구조상 원통형 스페이서들, 및 잔여 지주들이제거된 도 19의 전기 기계을 도시하고;
도 21은 제3 위상 회로와 바닥 스페이서 층이 제거된 도 20의 전기 기계을 도시하고;
도 22는 축방향 플럭스의 회전 스테이터 전기 기계의 비제한적인 예시적인 실시예용 포팅 복합 링, 지주들과, 컨덕터 회로들을 도시하고;
도 23은 도 22의 스테이터의 상세 도면을 도시하고;
도 24는 포팅 복합 링이 제거된 위상당 하나의 컨덕터 회로와 세 위상들을 가진 축방향 플럭스의 회전 스테이터를 도시하고;
도 25는 조립 동안 알루미늄 회로에 의하여 위치된 연성 자성 재료 지주들을 가진 세 개의 위상 회로들의 등축 도면이고;
도 26은 도 25의 분리 도면이고;
도 27은 도 25와 도 26의 실시예의 개별 층의 근접 도면이고;
도 28은 도 25와 도 26의 실시예의 개별층의 근접 도면이고;
도 29는 단일 스테이터 회로의 상세부의 평면도이고;
도 30은 축방향 플럭스 전기 기계의 단면을 도시하고;
도 31은 에어갭을 가로지르는 전자석 요소(여기서, 영구자석)을 향하는 선형 전기 기계의 전자석 요소(여기서, 코일)들의 어레이를 도시하고;
도 32는 잔전 아암을 가진 단면형 축방향 플럭스의 전기 기계을 예시하고;
도 33은 축방향 플럭스 전기 기계의 스테이터를 도시하고;
도 34는 도 33의 스테이터의 상세부를 도시하고;
도 35는 도 33의 스테이터에 사용하는 전기 컨덕터층들의 상세부이며;
도 36은 도 33의 스테이터에 사용하기 위한 전기 컨덕터 층들의 추가적인 상세부이고;
도 37은 도 33의 스테이터에 사용하기 위한 전기 컨덕터 층들의 추가적인 상세부이고;
도 38은 도 33의 스테이터의 전기 컨덕터 층들을 도시하고;
도 39는 도 33의 스테이터의 전기 컨덕터 층들을 도시하고;
도 40은 개시된 전기 기계의 실시예를 조안트에 구비할 수 있는 로봇 암의 실시예를 도시하고;
도 41은 개시된 전기 기계의 실시예를 조안트에 구비할 수 있는 로봇 암의 실시예를 도시하고;
도 42는 개시된 전기 기계의 실시예용 자석 구조를 도시하고;
도 43은 선형 전기 기계의 연속 층들을 도시하는 상세부의 제1 도면이고;
도 44는 선형 전기 기계의 연속 층들을 도시하는 상세부의 제2 도면이고;
도 45는 선형 전기 기계의 연속 층들을 도시하는 상세부의 제3 도면이고;
도 46은 선형 전기 기계의 연속 층들을 도시하는 상세부의 제4 도면이고;
도 47은 전기 여기부의 다상 소스에 선형 전기 기계의 층들을 연결하기 위한 연결부의 상세부를 도시하고;
도 48은 전기 여기부의 다상 소스에 선형 전기 기계의 층들을 연결하기 위한 연결부의 상세부를 도시하고;
도 49는 선형 전기 기계의 실시예의 연속 층들을 도시하는 제1 도면이고;
도 50은 선형 전기 기계의 연속 층들을 도시하는 상세부의 제2 도면이고;
도 51은 선형 전기 기계의 연속 층들을 도시하는 상세부의 제3 도면이고;
도 52는 선형 전기 기계의 연속 층들을 도시하는 상세부의 제4 도면이고;
도 53은 로터와 스테이터 양측의 코일을 가진 전기 기계의 실시예를 도시하고;
도 54는 로터와 스테이터 양측의 코일을 가진 전기 기계의 실시예를 도시하고;
도 55는 자석들의 홀배치 어레이를 가진 전기 기계의 실시예를 도시하고;
도 56은 두-부분 스테이터와, 세 상들, 및 3:2의 스테이터 지주: 영구자석 비율을 가지는 예시적인 액튜에이터 조립체의 단면을 도시하고;
도 57은 도 56의 실시예의 상세 도면을 도시하고;
도 58은 다른 스테이터에 대해 하나의 스테이터를 회전시킨 효과를 예시하는 3:2 비율 또는 스테이터 지주: 영구자석들에 대한 로터 위치의 함수로서 표시된 토크를 도시하고;
도 59는 도 56의 예시적인 실시예의 분리 도면을 도시하고;
도 60은 도 56의 예시적인 실시예의 부분 분리 도면의 단면을 도시하고;
도 61은 도 56의 예시적인 실시예의 하우징의 단면 상세 도면을 도시하고;
도 62는 도 56의 예시적인 실시예의 조립된 하우징과 스테이터의 일부를 도시하고;
도 63은 스테이터 위에 제1 컨덕터 층을 구비한 도 56의 예시적인 실시예의 조립된 하우징과 스테이터의 일부를 도시하며;
도 64는 도 63의 일부의 평면도를 도시하고;
도 65는 도 56의 예시적인 실시예로부터 같은 상의 네 개의 컨덕터 층들을 도시하고;
도 66은 도 56의 예시적인 실시예로부터 다른 상으로부터의 세 개의 인접 컨덕터 층들의 배치를 도시하고;
도 67은 지시된 컨덕터들 사이에 반경방향 유체 흐름 채널을 구비한 도 56의 예시적인 실시예로부터의 조립된 하우징과 스테이터의 일부를 도시하며;
도 68은 도 56의 예시적인 실시예의 컨덕터들 사이의 냉각 유체용 반경방향, 축방향, 및 둘레 유체 흐름 경로의 평면도를 도시하고;
도 69는 냉각유체 흐름 경로를 도시하는 도 68의 스테이터를 관통하는 도면을 도시하고;
도 70은 두 스테이터들과 로터를 가진 예시적인 실시예의 부분 도면을 도시하고;
도 71은 하나의 단면으로 도시된 컨덕터들을 가진 도 70의 예시적인 실시예로부터의 스테이터를 도시하며;
도 72는 컨덕터를 가진 간략화된 스테이터의 부분 도면을 도시하며;
도 73은 컨덕터들이 슬롯들을 건너뛰지 않는 스테이터 위의 컨덕터들의 예시적인 구조를 도시하며;
도 74는 일부 컨덕터들이 가변 컨덕터 폭을 가진 스테이터 위의 컨덕터들의 예시적인 구조를 도시하며;
도 75는 도 74로부터의 컨덕터들의 네 개 층들의 분리된 도면을 도시하고;
도 76은 다층-두께의 유체 흐름 갭을 가진 컨덕터들의 예시적인 구조를 도시하고;
도 77은 예시적인 조립 방법에서 컨덕터 층들의 구조를 도시하며;
도 78은 반경방향 유체흐름 갭이 없는 컨덕터들의 예시적인 구조를 도시하고;
도 79는 굽은,가변-폭의 지주들을 가진 스테이터의 예시적인 실시예를 도시하며;
도 80은 직각으로 향하는 영구 자석들과 반경방향으로 연장하는 플러스 경로 부재들을 가진 로터의 예시적인 실시예를 도시하며;
도 81은 도 80의 로터의 상세 도면을 도시하며;
도 82는 도 80의 로터의 내측 부재들과 내측 부분 사이의 구조상 연결부를 도시하며;
도 83은 도 80의 로터의 외측 부분과 외측 부재들 사이의 구조상 연결부를 도시하며;
도 84는 자석들이 제거된 도 80의 로터의 상세 도면을 도시하며;
도 85는 조립체의 예시적인 방법을 반영한 도 80의 로터의 확대 도면을 도시하며;
도 86은 내측 로터 링과 외측으로 돌출하는 플럭스 부재들이 흑색으로 도시된 도 60의 로터의 도면을 도시하고;
도 87은 두 개의 축방향 절반 및 테이퍼된 자석들을 포함하는 로터의 예시적인 실시예를 도시하고;
도 88은 도 87의 로터의 부분을 도시하고;
도 89는 도 87의 로터의 분리 도면을 도시하고;
도 90은 자석의 극성을 도시하는, 도 87의 로터에서의 자석의 평면도를 도시하고;
도 91은 도 87의 로터의 외측 부분과 외측 부재들 사이의 구조상 연결부를 도시하며;
도 92는 로터 절반부를 같이 유지하는 외부 링을 가진 도 87의 로터를 도시하고;
도 93은 두 로터 절반부들과 두 스테이터 절반부들을 포함하는 예시적인 실시예의 분리 도면을 도시하고;
도 94는 도 93 도시의 실시예의 부분을 도시하고;
도 95는 도 93 도시의 실시예의 스테이터를 도시하고;
도 96은 도 93의 실시예의 베이스판과 스테이터들의 분리 도면을 도시하고;
도 97은 도 93의 실시예의 부분을 도시하고;
도 98은 두 개의 로터 절반부들과 하나의 스테이터를 가진 예시적인 실시예의 부분을 도시하고;
도 99는 도 98의 예시적인 실시예의 부분을 도시하고;
도 100은 액튜에이터로서 작용하는 일련의 전기 기계을 가지며 아암을 따라 이격된 로봇 아암의 예시적인 구조를 도시하며;
도 101은 로봇 아암 위의 전기 기계의 장착 구조를 도시하며;
도 102는 로터 구조의 실시예를 도시하며;
도 103은 적층된 지주 스테이터의 예시적인 구조를 도시하며;
도 104는 반경방향으로 정렬된 지주 적층을 가진 스테이터의 예시적인 실시예의 부분을 도시하며;
도 105는 기계적인 방출 정지부로서의 테이퍼된 돌기를 가지고, 조암쇠를 관통하여 지주들이 연장하는 적층된 지주 구성의 예시적인 실시예를 도시하며;
도 106은 도 105 도시의 실시예의 부분을 도시하고;
도 107은 적층들과 형성된 자석 플럭스 경로의 일부 사이의 절연 패턴을 도시하는, 도 105 도시 실시예의 부분을 도시하고;
도 108은 날카로운 에지를 양극화한 효과를 도시하는 개략적인 도면이며;
도 109는 둥근 에지를 가진 컨덕터들을 포함하는 스테이터 단면의 개략적인 도면이고;
도 110은 날카로운 에지를 가진 컨덕터들을 포함하는 스테이터 단면의 개략적인 도면이고;
도 111은 조립 전에 나란히 도시된 적층가능한 평평한 컨덕터들의 두 개의 인접한 층들의 사시도이며;
도 112는 양극화된 컨덕터의 표면 위로 실시된 유전체 코팅을 가진 코팅된 컨덕터의 예를 도시하는 개략적인 도면이고;
도 113은 도 112의 컨덕터의 코너의 근접 도면이고;
도 114는 스테이터 지주들 사이에 적층된 컨덕터 쌍을 가진 층들로 같이 적층된 컨덕터들의 사시도를 도시하는 도면이고;
도 115는 날카로운 에지에서 갭들을 완전히 덮는 코팅된 컨덕터 예를 도시하는 개략적인 도면이고;
도 116은 날카로운 에지에서 갭들을 더욱 완전히 덮는 코팅된 컨덕터 예를 도시하는 개략적인 도면이고;
도 117은 추가적인 폴리머 층으로 코팅된, 도 115의 코팅된 컨덕터의 예를 도시하는 개략적인 도면이고;
도 118은 하나 이상의 슬롯들에 하나 이상의 컨덕터 층들을 배치한 스페이서를 가진 조립된 스테이터와 컨덕터들의 도면을 도시하고;
도 119는 분말 에지 코팅이 컨덕터들을 서로 및/또는 지주 측벽들에 접촉시키고 고착하면서 스페이서를 제거하기 전에 스페이서들과 컨덕터들의 부분 도면을 도시하고;
도 120은 스페이서 부분이 제거된 스테이터의 단순화된 부분을 도시하고;
도 121은 양극화된 컨덕터들의 제조방법을 도시하고;
도 122는 양극화된 컨덕터들의 제조방법의 추가적인 상세부를 도시하고;
도 123은 원추형 로터의 실시예의 단면을 도시하고;
도 124는 도 123의 실시예의 근접 단면을 도시하고;
도 125는 도 123의 실시예의 근접 단면을 도시하고;
도 126은 도 123의 실시예의 근접 단면을 도시하고;
도 127은 도 123의 실시예의 근접 단면을 도시하고;
도 128은 동력 커넥터 및 인코더 커넥터를 포함하는 조립된 액튜에이터의 실시예의 축방향 도면이고;
도 129는 두 스테이터들 사이의 사이의 중심 평면을 따른 내부 로터를 도시하는 도 128의 액튜에이터의 일부 도면이고;
도 130은 적층된 컨덕터들의 부분 단면을 가진 도 128의 액튜에이터의 스테이터와 하우징의 조립체의 등축 부분 도면이고;
도 131은 도 128의 액튜에이터의 적층된 컨덕터들과, 스테이터, 내측 하우징, 외측 하우징의 축방향 도면이고;
도 132는 도 128의 실시예의 로터 부품의 등축 도면이고;
도 133은 인접 자석들이 반대로 직각으로 분극화된 예로서의 자석 배치를 가진 로터와 스테이터들의 측면도이고;
도 134는 두 스테이터들을 분리하기 위하여 분리 부재를 포함하는 액튜에이터의 사시도이고;
도 135는 냉각 핀을 관통하여 자속 경로를 도시하는 도 128의 액튜에이터의스테이터의 또 다른 부분 도면이고;
도 136은 지주들 사이의 대각선에서 플럭스 연결을 위한 단면적을 도시하는냉각 핀을 가진 스테이터의 부분 도면이고;
도 137은 둘레 냉각 핀들을 가진 스테이터의 단순화된 부분 도면이고;
도 138은 내부 베어링 위의 사전 부하를 감축하도록 구성된 분리 부재를 포함하는 액튜에이터의 부분 도면이고;
도 139는 내측 베어링 위의 사전 부하를 향상시키도록 구성된 분리 부재를 포함하는 액튜에이터의 부분 도면이고;
도 140은 실링된 냉각 채널을 가진 액튜에이터의 단면도이고;
도 140A는 반-원형 냉각 채널을 가진 실시예의 사시도이고;
도 140B는 내경의 강성 연결부에 의하여 연결된 하우징, 로터 및 두 개의 스테이터들을 가진 실시예의 단면도이고;
도 140C는 도 140B 도시 실시예의 확대된 단면도이고;
도 141은 집중된 플럭스 로터의 신형 실시예의 간략화된 부분 도면이고;
도 142는 자속 라인을 도시하는 조임쇠를 가진 집중된 플럭스 로터의 모델이고;
도 143은 부품 길이를 추가로 도시하는, 자속 라인을 도시하는, 조임쇠를 가진 집중된 플럭스 로터의 모델이고;
도 144는 테이퍼된 자석과 플럭스 경로 제한부를 가진 축방향 플럭스 집중 플럭스 로터의 세그먼트를 관통하는 단면도이고;
도 145는 연장된 길이의 자석을 가진 축방향 플럭스 집중 플럭스 로터의 일부분의 근접 부분 도면이고;
도 146은 스테이터를 가진 반경방향 플럭스 집중 플럭스 로터의 실시예의 간략화된 각진 단면도이고;
도 147은 도 146 도시의 반경방향 플럭스 집중된 플럭스 로터와 스테이터의 간략화된 부분 도면이고;
도 148은 밀(mill)을 추가로 도시하는 도 146 도시의 집중된 플럭스 로터의 간략화된 각진 단면도이고;
도 149는 자속 라인들을 도시하고 가변 형상을 가진 조임쇠를 구비한 집중된 플럭스 로터의 모델이고;
도 150은 로터 릴리프와 테이퍼된 로터 단부를 가진 반경방향 플럭스의 집중된 플럭스 로터의 실시예의 간략화된 각진 단면도이고;
도 151은 단부 조임쇠를 가진 집중된 플럭스 로터의 축방향 플럭스 스테이 터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
도 152는 후방 조임쇠, 단부 조임쇠, 및 플럭스 결로 제한부를 가진 집중된 플럭스 로터의 축방향 플럭스 스테이터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
도 153은 단부 조임쇠들과 플럭스 경로 제한부를 가진 집중된 플럭스 로터의 축방향 플럭스 스테이터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
도 154는 단부 조임쇠, 플럭스 제한부 및 후방 조임쇠를 가진 집중된 플럭스 로터의 축방향 플럭스 스테이터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
도 155는 후부 조임쇠들과 단부 조임쇠를 가진 집중된 플럭스 로터의 사다리형 스테이터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
도 156은 후부 조임쇠가 없는 도 155 도시의 실시예의 간략화된 분리된 부분 도면이고;
도 157은 단부 조임쇠를 가진 집중된 플럭스 로터의 사다리형 스테이터-로터-스테이터 구조의 실시예의 간략화된 분리된 부분 도면이고;
도 158은 후부 조임쇠를 가지고 단부 조임쇠가 없는 도 157 도시의 실시예의 간략화된 분리된 부분 도면이고;
도 159는 후부 조임쇠와 단부 조임쇠를 가진 로터-스테이터-로터 구조의 선형 플럭스 기계의 실시예의 간략화된 부분 도면이고;
도 160은 후부 조임쇠가 없는 도 159 도시의 실시예의 간략화된 부분 도면이고;
도 161은 후부 조임쇠를 가진 선형 플럭스 기계의 스테이터-로터-스테이터 구조의 실시예의 간략화된 부분 도면이고;
도 162는 로터의 각진 단면을 도시하고, 단부 조임쇠를 가지는 선형 플럭스 기계의 스테이터-로터-스테이터 구조의 실시예의 간략화된 부분 도면이고;
도 163은 중단된 로터 지주들을 가진 축방향 모터의 집중된 플럭스 로터의 모델이고;
도 164는 도시된 자속 라인들을 가진 도 164 도시의 축방향 모터의 집중된 플럭스 로터의 모델이고;
도 165는 플럭스가 반경방향으로 에어갭을 가로지르는 횡방향 플럭스 기계의 실시예의 단면도이고;
도 166A는 도 165 도시의 횡방향 플럭스 기계의 실시예의 스테이터의 사시도이고;
도 166B는 도 165 도시의 횡방향 플럭스 기계의 실시예의 로터의 상부 부분의 사시도이고;
도 167은 플럭스가 축방향으로 에어갭을 가로지르는 횡방향 플럭스 기계의 실시예의 단면도이고;
도 168은 도 167 도시의 횡방향 플럭스 기계의 실시예의 스테이터 부분의 사시도이고;
도 169는 도 168 도시의 횡방향 플럭스 기계의 실시예의 로터의 상부 부분의 단면도이고;
도 170A는 슬롯 피치와 지주 높이가 다른 모사된 일련의 모터들의 일정한 전류 밀도에서의 토크 그래프를 도시하며;
도 170B는 슬롯 피치와 지주 높이가 다른 모사된 일련의 모터들의 일정한 온도에서의 가능한 최고 스테이터 전류 밀도를 도시하며;
도 170C는 일련의 전기 기계의 슬롯 피치와 지주 높이의 함수로서의 일ㅈ벙한 온도 토크를 도시하며;
도 170D는 슬롯 피치와 지주 높이가 다른 모사된 일련의 모터들에서 일정한 온도에서 가능한 최고 스테이터 전류 밀도에 대한 계량 함수 값을 도시하며;
도 170E는 고정된 전류 밀도에 대한, 슬롯 피치와 지주 높이가 다른 일련의 모사된 일련의 모터들의 Km"을 도시하며;
도 170F는 고정된 전류 밀도에 대한, 슬롯 피치와 지주 높이가 다른 모사된 일련의 모터들의 KR"을 도시하며;
도 171은 200mm 크기와 KR" > 1.3의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 172는 200mm 크기와 KR" > 1.5의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 173은 200mm 크기와 KR" > 1.8의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 174는 100mm 크기와 KR" > 1.5의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 175는 100mm 크기와 KR" > 1.7의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 176은 100mm 크기와 KR" > 1.9의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 177은 50mm 크기와 KR" > 2.2의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 178은 50mm 크기와 KR" > 2.5의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 179는 50mm 크기와 KR" > 2.9의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 180은 25mm 크기와 KR" > 3.3의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 181은 25mm 크기와 KR" > 3.4의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 182는 25mm 크기와 KR" > 3.6의 경계선을 가지는 기계의 경우, 영역의 잔여 형상에 대해 KR"의 이득 영역을 도시하며;
도 183은 전류가 인가되지않은 200rpm의 로터 속도에서 슬롯 피치의 범위에 걸친 모터 시리즈의 히스테리시스 손실과 와류 전류의 합을 도시하는 그래프이고;
도 184는 6A/㎟의 전류 밀도가 인가된 24개의 슬롯 적층된 M-19와 고형 M-19 스테이터들에 대한 토크를 도시하는 그래프이고;
도 185는 24개의 슬롯 고형 M-19 스테이터의 개별 및 총 스테이터 손실을 도시하는 그래프이고;
도 186은 108개의 슬롯 고형 M-19 스테이터의 개별 및 총 스테이터 손실을 도시하는 그래프이고;
도 187은 19.7A/㎟의 전류 밀도가 인가된 108개의 슬롯 듀러바, 적층된 M-19와 고형 M-19 스테이터들에 대한 토크를 도시하는 그래프이고;
도 188은 매우 강력한 NdFeBN52 영구 자석들이 로터에 사용된 모사에서의 다양한 모터들의 토크-대-중량 비교를 도시하는 그래프이고;
도 189는 여러 모터들에 대한 토크 비교를 도시하는 그래프이고;
도 190은 여러 모터들에 대한 스테이터 손실 비교를 도시하는 그래프이고;
도 191은 흐름 채널을 통해 액튜에이터를 냉각하는 방법을 도시하고;
도 192는 액튜에이터 조립체의 실시예의 사시도이고;
도 193A는 도 192의 액튜에이터 조립체의 근접 사시도이고;
도 193B는 도 193A의 액튜에이터 조립체의 사시도에서 부싱 또는 저 마찰 코팅의 더욱 근접한 도면이고;
도 194는 도 192의 액튜에이터 조립체의 스테이터와 고정된 링의 부분 도면이고;
도 195는 연장부 상부 위로 지주 위에 컨덕터들이 설치될 수 있는 방식을 화살표가 표시하는, 도 192의 액튜에이터 조립체용 스테이터의 실시예의 근접 도면이고;
도 196은 하나의 스테이터와 대응하는 부싱 또는 저 마찰의 코팅이 제거된 도 192의 액튜에이터 조립체의 근접 일부 도면이고;
도 197은 도 192의 액튜에이터 조립체의 영구자석 캐리어의 일부 도면이고
도 198은 도 192의 액튜에이터 조립체의 로터와 스테이터의 근접 일부 도면이고;
도 199A는 도 192의 액튜에이터 조립체의 스테이터와 로터 지주들의 축방향 등축 도면이고;
도 199B는 도 199A의 액튜에이터 조립체의 스테이터와 로터 지주들의 추가적인 근접 도면이고;
도 200은 프레임 없는 모터/액튜에이터를 사용하는 로봇 암의 죠인트를 도시하고;
도 201은 프레임 없는 모터/액튜에이터 및 로봇 암의 단면도를 보여주고;
도 202는 프레임 없는 모터/액튜에이터, 스테이터, 로터 및 하우징 조립체의 일부 도면의 근접 도면을 도시하고;
도 203은 프레임 없는 모터/액튜에이터 로봇 암 조립체의 분리된 도면을 도시하고;
도 204는 로터 위의 스테이터와 탭 특징을 보이기 위하여 하우징을 관통하는 일부 도면을 보여주고;
도 205는 로터를 고정하기 위하여 탭 특징과 같이 사용되는 위, 위로 및 아래로의 조립 이동을 개략적으로 도시하고;
도 206은 로터를 고정하기 위하여 사용되는 탭 특징을 나타내는 일부 도면의 근접 도면을 도시하고;
도 207은 스테이터를 고정하기 위하여 스테이터 위에 사용되는 탭 특징을 나타내기 위하여 하우징을 관통하는 일부 도면을 도시한다.
특허청구범위에 의하여 보호되는 바로부터 벗어나지 않고 여기 설명된 실시예들에 대해 중요하지 않은 변형들이 이루어질 수 있다. 특허청구범위에서, "포함하는(comprising)"이라는 단어는 내포적인 의미로 사용되고 존재하는 다른 요소들을 포함하는 것을 제외하지 않는다. 청구하는 특징 앞의 부정 관사인 "하나(a)" 및 "하나(an)"는 존재하는 하나 이상의 특징들을 제외하지 않는다. 여기 설명된 개별적인 특징들의 각각의 하나는 하나 이상의 실시예들에서 사용될 수 있고 여기 설명된 것에 의해서는, 특허청구범위들에 의하여 규정되는 모든 실시예들에 기본적인 것으로 해석되지는 않는다.
[정의(definition)]
본 명세서를 통하여 사용되는 여러 용어들이 먼저 정의된다.
전기 기계과 관련해서 여기 사용되는 캐리어(carrier)는 회전 기계을 언급할 때 스테이터(stator) 또는 로터(rotor)를 포함할 수 있다.
여기 사용되는 로터는 원형일 수 있다. 로터는 또한 선형(linear) 모터의 아마츄어(armature) 또는 반작용 레일(reaction rail)을 의미할 수 있다. 스테이터는 원형일 수 있다. 스테이터는 또한 선형 모터의 아마츄어 또는 반작용 레일을 의미할 수 있다.
치아(teeth)는 지주(post)로서 설명될 수 있다.
전기 모터에서, 스테이터 또는 로터는 지주들 둘레로 감겨진 코일들에 의하여 규정된 정류된 전자석 어레이를 가질 수 있고, 다른 스테이터 또는 로터는 영구 자석들 또는 코일 또는 영구자석과 코일 양측에 의하여 형성된 자극을 가질 수 있다.
영구 자석들은 시스템에 플럭스를 부가하기 위하여 로터 및/또는 스테이터에 전자석과 결합하여 사용될 수 있다. PM은 영구자석을 의미하고 EM은 전자석을 의미한다.
전자석 요소들은 영구자석들, 지주(치아), 연성 자성 지주일 수 있는, 자성 지주에 의하여 규정된 슬롯들, 및 전기 전도체들을 포함할 수 있다. 소정 실시예에서, 하나의 캐리어가 슬롯들과 캐리어를 가지며, 다른 캐리어는 전자석 요소들을 위한 다른 영구 자석을 가질 수 있으며, 그러한 실시예의 경우, 전자석 요소라는 용어는 영구 자석으로 교체될 수 있다. 일부 경우들에서, 예컨대, 집중된 플럭스 로터 실시예에서, 자극들은 영구 자석에 의하여 자기장이 형성된 인접 지주들과 결합하여 영구자석에 의하여 규정될 수 있다.
달리 구체적으로 설명된 바가 없으면, "플럭스"는 자속이다.
부분적인 슬롯 모터는 상마다의 극당 부분적인 수의 슬롯들을 가지는 모터이다. 슬롯들의 수가 자석들의 수에 의하여 구분되고, 그리고 상 수에 의하여 다시 분할되고 그 결과가 정수가 아니면, 이어서 모터는 부분적인 슬롯 모터이다.
캐리어는 프레임이나 베어링들에 의하여 또 다른 캐리어에 대해 이동하도록 지지될 수 있고, 베어링들은 슬라이딩, 롤러, 유체, 공기 또는 자기 베어링일 수 있다. 축방향 전기 기계는 축방향 에어갭을 가로질러 자속 연결이 발생하는 전기 기계가고, 캐리어들은 축방향으로 나란히 장착된 디스크들의 형태이다. 제1 캐리어는 프레임, 하우징 또는 다른 요소에 의하여 지지되는 캐리어에 의하여 또 다른 캐리어에 대해 이동하도록 배치될 수 있고, 다른 캐리어는 제1 캐리어에 대해 이동한다.
반경방향(radial) 전기 기계는 자속이 반경방향으로 향해지도록 에어갭이 향해지는 전기 기계이고, 캐리어들은 동심으로 서로 외측으로 장착된다. 선형 액튜에이터는 이동 방향이 굽은 경로보다 직선인 축방향 플럭스 또는 반경방향 플럭스 회전 모터의 일부에 구조상 비교할만하다.
사다리형 전기 기계는 축방향 및 반경 방향 플럭스 기계들의 양측의 결합인 전기 기계이고, 에어갭 평면이 축방향 및 반경 방향 구조의 에어갭들에 의하여 형성된 평면들 사이에 도중의 각도에 위치된다.
회전 기계의 에어갭 직경은 에어갭 표면의 중심에서의 회전축에 수직인 직경으로 정의된다. 반경방향 플럭스 모터에서, 모든 갭들은 동일한 직경에 있다. 에어갭 표면이 축방향 플럭스 모터에서와 같이 디스크-형상의 슬라이스이면, 평균 에어갭 직경은 내측 및 외측 직경의 평균이다. 대각선 또는 굽은 표면들과 같은 다른 에어갭 표면들에 대해, 평균 에어갭 직경은 단면의 에어갭으로부터의 평균 에어갭 직경으로 발견될 수 있다.
반경방향 플럭스 모터의 경우, 에어갭 직경은 로터 내측 직경과 스테이터 외측 직경(외측 로터 반경방향 플럭스 모터의 경우)의 평균 또는 로터 에어갭 외경과 스테이터 에어갭 내경의 평균(내측 로터 반경방향 플럭스 모터의 경우)의 평균이다. 반경방향 플럭스 모터의 에어갭 직경의 유사어가 다른 유형의 회전 모터들에 사용될 수 있다. 축방향 플럭스 기계의 경우, 에어갭 직경은 PM 내경과 PM 외경 및EM 내경과 EM 외경의 평균으로서 정의된다.
전기 기계의 크기는 여기 정의된 바와 같은 축방향 플럭스 기계 또는 반경 방향 플럭스 기계의 에어갭 직경 또는 선형 기계의 캐리어들의 병진 방향으로의 길이를 의미한다. 하나의 캐리어가 다른 캐리어보다 더 긴 선형 기계의 경우, 이어서 길이는 더 짧은 캐리어의 길이이다. 경계의 불균등성을 참조하여 사용하기 위하여, 회전 기계의 크기는 직경으로 주어지나, 선형 기계에 대해 이는 회전 기계의 둘레에 대응하는 길이이다. 그러므로, 크기(Y)의 회전 모터에 식으로 대응하는 선형 모터의 크기(X)는 Y에 관련되고 X = pi *Y이다. 이러한 일반적인 원리로서 및 횡방향 플럭스 기계을 포함하는, 개시된 범위를 위하여 회전 전기 기계의 크기는 회전 축에 수직인 평면으로 투사된 때 자기적으로 활성인 에어갭에 의하여 규정된 최대 및 최소 직경의 평균으로서 규정된다.
스테이터의 후면(back surface)은 자기적으로 활성인 에어갭에서의 표면에 대해 스테이터의 반대 측 위의 표면으로서 정의된다. 반경방향 플럭스 모터에서, 이는 외측 로터 구조에서 스테이터의 내측 표면에 대응하거나, 또는 내측 로터 구조에서 스테이터의 외경 표면에 대응한다. 축방향 플럭스 모터에서, 스테이터의 후면은 스테이터의 축방향 외면이다.
Km은 모터의 전기 저항 손실의 제곱근에 의하여 나누어진 일 정지 토크로서 정의된다. 이 특허 명세서에서, 모터의 활성 자성 질량에 의하여 나뉘어진 Km을 이용하여 모터 성능을 평가하는 것이 제안되며, 이 명세서에서 KR 또는 KR로서 설명된다. 활성 자성 질량은 프레임 없는 모터의 제조업자들에 의하여 통상 보고되는 바와 같이, 자석, 코일, 지주, 및 조임쇠를 포함하는 로터와 스테이터 질량으로 구성된다. KR 계량이 작은 모터 질량이 로봇과 같은 전체 파워 소비에 효과적인 용도들의 경우의 모터 성능을 평가하기 위하여 유용할 수 있다. 일부 경우들에서, Km과 KR, 즉, Km"와 KR"의 크기-무관 유사성은 명세서 전반에 걸쳐 사용된다. 크기-의존 계량 및 크기-무관 계량의 전환은 이하의 식과 같다:
Km = Km"(πL)1 / 2 D3 /2 /2 및 KR = KR"(D/πL)1 / 2 /2
여기서, D는 평균 에어갭 직경이고 L은 반경방향 치아 길이이다. 모터의 정해진 크기에 대해, D와 L은 분석에서 고정된 것으로 가정되고, 따라서, KR 과 Km은 에 KR " 또는 Km"에 비례할 것이다. 따라서, KR 에서의 트렌드에 대한 진술은 일반적으로 암시적으로 또한 KR "에 적용하도록 설정된다.
슬롯 밀도는 평균 에어갭 직경에서 기계의 둘레 길이에 의하여 슬롯들의 수를 나눈 것이다. 슬롯들의 피치가 변하면, 장치의 슬롯 밀도의 평균이 사용될 것이다. 슬롯 밀도는 또한 슬롯 피치의 역수로 표시될 수 있다. 이는 에어갭 직경에서 에어갭을 따라 둘레 길이 mm마다 슬롯들이 얼마나 생성되는지에 대한 정도(또는 유사성)이다. 회전 모터들의 경우, 이는 다음과 같이 표시된다:
슬롯 밀도 = Ns /πDAG
여기서 Ns는 슬롯들의 수이고, DAG는 에어갭의 직경이다. 선형 모터의 경우, 이 함수의 표준은 병진 이동 방향을 따른 캐리어 길이에 의하여 대체될 수 있다.
자극 밀도는 평균 에어갭 직경에서의 기계의 둘레 길이에 의하여 나뉘어진 극들의 수이다. 극들의 피치가 변하면, 장치의 평균 극밀도가 사용될 것이다. 극 밀도는 또한 극 피치의 역수로 표시될 수 있다. 극 피치는 반대 극성을 가지는 동일한 캐리어 위의 하나의 극성의 PM 극의 중심과 다음 PM 극의 중심 사이의 평균 에어갭에서의 이동 방향을 따라 측정된 평균 거리로서 정의된다. 회전 모터에서, 이 거리는 평균 에어갭 직경(DAG)에서 측정된 둘레 피치이다. 이것은 에어갭 직경(또는 그의 유사물)에서의 에어갭을 따른 둘레 길이의 mm마다 생성된 자극들의 수의 정도로서 이하와 같이 표시된다.
자극 밀도 = Np/πDAG
여기서 Np는 극의 수이고, DAG는 에어갭의 직경이다. 선형 모터의 경우, 이 함수의 표준은 병진 이동 방향을 따른 캐리어의 길이에 의하여 대체될 수 있다.
분배된 권선의 경우, 슬롯들의 수가 N x 극들의 수일 것이며 여기서 N은 상들의 수의 배수이다. 그래서 3상 기계의 경우, N은 3, 6, 9, 12, 등이다. 집중된 권선의 경우, 슬롯들의 수는 변할 수 있으나 상들의 수의 배수이어야 한다. 슬롯과자극의 결합이 더 큰 토크를 발생하고 양호한 소음-감소 또는 코깅(cogging) 감소 특성을 발생하는 경우를 제외하고, 이것은 극들의 수에 의존하지 않는다. 일정 수의 극들에 대해 슬롯의 최소 숫자는 충분한 토크를 얻기 위하여 50% 아래는 안된다.
컨덕터 용적은 단일 스테이터의 길이당 슬롯 면적을 나타내기 위하여 사용될 수 있다. 슬롯 면적은 치아에 수직이나 캐리어들의 상대 운동 평면에 평행이 아닌 평면에서의 슬롯의 단면적 영역이다. 축방향 모터에서, 이 평면은 슬롯을 관통하여 지나는 반경에 수직이다. 슬롯 면적은 효과적으로 스테이터 디자인에 포함될 수 있는 최대 컨덕터 용적을 규정하고, 컨덕터용 모든 유용한 공간을 이용하기 위하여 가능한 높은 충진 인자를 가지는 것이 모터 설계자들에게는 보통이다.
스테이터에서의 최대 컨덕터 용적은 슬롯 면적에 의하여 규정되므로, 최대 컨덕터 용적 또는 슬롯 면적을 가지는 것으로 설명되는 특정 스테이터는 슬롯들을 정의하기 위하여 슬롯들과 치아를 가져야 한다. 이러한 파라미터는 회전 모터들에 대해 이하와 같이 규정된다:
길이당 슬롯 면적 = Ns· As/πDAG = 슬롯 밀도 · As
여기서, As는 단일 슬롯의 단면적이고, 또는 변하는 슬롯 면적을 가지는 스테이터 디자인의 경우의 단닐 슬롯의 평균 면적이다.
비교적 정확한 근사 계산으로서, As는 치아 높이(ht)와, 슬롯의 평균 폭(ws)의 곱이므로, 위의 식은 이하와 같이 변한다:
길이당 슬롯 = Ns· ht ·ws/πDAG = 슬롯 밀도 ·htws
이들 정의들은 크기 의존적이다. 그들은 모터를 특징짓기 위하여 사용될 수 있다.
극 피치와 치아 높이는 특정 스테이터 또는 로터 형상을 규정하기 위하여 사용될 수 있다. 파라미터들이 크기-의존적이고, 여기 개시된 이득 정도가, 면적당 힘 및 질량당 힘으로 기재되는, 유사한 크기-의존성이며, 여기서 질량은 자석과 코일을 포함하는 스테이터와 로터의 질량을 의미하므로, 특정 크기의 회전 모터의 질량당 토크는 에어갭에서의 반경을 포함하는 적절한 배율 인자에 의하여 발견될 수 있다. 동일한 에어갭 직경을 가지는 두 개의 모터들의 경우, 그래프들은 힘/면적에 과 같은 토크에 대해, 그리고 힘/질량과 같이 토크 밀도에 대해 같은 형상을 가질 것이다.
냉각 채널은 핀들에 의하여 형성된 통로, 또는 슬롯의 점유되지 않은 공간, 또는 구조를 둘러싸거나 관통하는 도관들과 같은, 유체 흐름 또는 가스 흐름을 포함하는, 냉각 유체용 흐름 경로를 규정하는 구조물이다.
슬롯 깊이 또는 지주 높이는 또한 컨덕터 용적에 대한 대안으로서 사용될 수 있다. 치아 높이 또는 슬롯 깊이로서 알려진 지주 높이는, 컨덕터가 점유할 수 있는 슬롯의 단면적 양에 대한 대안이다. 슬롯들이 굽거나 테이퍼되는 프로파일과 같이 다양한 형상을 가질 수 있으므로, 슬롯 높이는 컨덕터들에 의하여 점유되는 슬롯의 총 면적을 가장 잘 나타내는 최근접 직사각형 근사에 기초한다. 이러한 치수는 슬롯 면적에 실질적으로 추가하지 않고 지주 높이에 부가되는 극의 기초와 같은 특징을 포함하지 않는다. 횡방향 플럭스 모터에 대해, 지주 높이는 코일 권선 방향에 수직인 컨덕터 코일에 직접 인접한 지주의 일부로서 정의된다.
모터 시리즈는 같은 구조와 권선을 가지나 극 피치의 범위, 또는 지주 높이의 범위와 같은 하나 또는 두 개의 차이들을 가진, 분석에 의하여 표시된다.
로터 극들의 수는 에어갭을 가로지르는 교대적인 극성 자속 영역의 수와 같다. 예컨대, 표면의 영구자석 로터에서, 극들의 수는 교대적인 극성의 영구자석의 수에 의하여 결정된다. 그러나, 극들은 또한 홀바(Halbach) 어레이와 같은 자석들의 그룹에 의하거나 또는, 전자석에 의하거나, 또는 전자석과 영구자석의 결합에 의하여 생성될 수 있다. 컨덕터 층은 컨덕터가 평면으로 도시될 때 그 자신과 교차하지 않는 전도성 경로를 형성하는 유닛으로서 형성된 전기 컨덕터이다. 컨덕터 층은 이와 같이 층의 최소 또는 소성 변형 없이 지주드 둘레에 직접 설치될 수 있다. 각각의 컨덕터 층은, 예컨대, 축방향 플럭스 기계의 다른 축방향 위치들 또는 반경방향 플럭스 기계에서 다른 반경방향 위치에 대응하는 슬롯의 다른 레벨에서 슬롯의 다른 부분을 점유한다. 일부 실시예들에서, 컨덕터 층은 지주들 둘레로 개별적으로 나선형으로 감기지 않고 유닛으로서 슬롯 내로 지주들 위에 설치될 수 있는 충분한 강성을 가진 소재로 제조될 수 있다.
직접 구동 모터의 연속 구획의 토크는 생성된 열과 소비된 열이 최대 허용가능한 전기 컨덕터 온도에서 일정한 냉각 수단에 대해 균형에 도달하는 제로 속도에서 연속 토크 출력이다.
집중된 권선은 가동시 인접 지주들의 교대적인 극성을 생성하는 개별적으로 감긴 구조 또는 권선 구조를 포함한다. 모두가 아닌 지주들은 항상 인접한 모든 지주들의 반대 극성임이 이해된다. 그러나, 집중된 권선 구조에 의하여 모터가 작동될 때, 대부분의 지주들은 대부분의 시간에서 어느 하나 또는 모두의 인접한 지주들에 대해 반대 극성이다. 집중된 권선은 위상마다 극들에 대한 슬롯의 비율이 1보다 작은 부분적인 슬롯 권선의 형태이다.
"고체 스테이터(solid stator)"라는 용어는 전기 기계의 스테이터로서 작용하는 동질성의 자기적으로 작동가능한 지지 구조물을 의미한다.
예시적인
반경방향
플럭스의 전기
기계
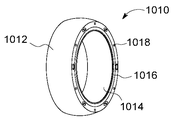
도 1은 외측 하우징(1012)과 내측 하우징(1014)을 가진 기본형의 완전한 예시적인 액튜에이터(1010)의 CAD 모델을 도시한다. 내측 하우징(1014)은 고정된(기준) 부재이고, 외측 하우징(1012)은 회전 부재이다. 하우징들은 제한되는 것이 아닌 알루미늄, 강 또는 플라스틱과 같은 강성 소재로 제조될 수 있다. 예시적인 액튜에이터(1010)는 베어링/실(1016)과 출력 장착홀(1018)을 포함한다. 도 1 도시의 시제품은 높은 중량 대 토크 비율을 생성하였다. 이는 제한되는 것이 아닌 로봇과 같은 용도들에서 중요하다. 도 1 도시 디자인은 KR의 견지에서 이점을 제공하여, 로봇 용도에서 사용하기에 특히 적합한 것으로 믿어지는 슬롯 밀도와 지주 높이의 규정 내에 있는 슬롯 밀도와 지주 높이를 가진다.
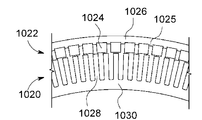
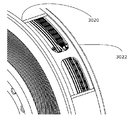
도 2는 내측 하우징(1014)에 부착된 내측 스테이터(1020)와 외측 하우징(1012)에 부착된 외측로터(1022)를 가진 예시적인 동일한 액튜에이터(1010)의 일부 도면을 도시한다. 로터(1022)는 로터 요크(1026)에 부착된 영구 자석(1024)을 포함한다. 스테이터(1020)는 스테이터 요크(1030)에 부착된 스테이터 치아(1028)를 포함한다. 스테이터(1020)는 제한되는 것이 아닌 적층 전기강과 같은 연성 자성 재료로 제조된다. 감소된 와류 전류와 및/또는 감소된 히스테리시스를 나타내는 제한 되는 것이 아닌 분말화된 연성 자성 재료와 같은 고체 재료가 스테이터(1020)에 사용될 수 있다. 와류 손실을 감소시키는 이 장치의 비정상적인 얇은 플럭스 통로의 단면에 의하여, 소정의 낮은 속도의 용도들에 허용가능한 성능을 가진 스테이터(1020)에 고체 강 또는 철이 사용될 수 있다. 도 2의 일부 도면은 스테이터(1020) 위에 코일이 없는 간략화된 베어링(1016)을 도시한다.
도 3은 스테이터(1020)와 로터(1022)의 측면 상세 도면을 도시한다(예시의 명확화를 위하여 이 도면에서 코일이 도시되지 않음). 도 4는 스테이터(1020) 위에 코일이 없로 로터(1022) 위에 영구 자석(1024)을 가진 전체 스테이터(1020)와 로터(1022)의 개요를 도시한다.
예컨대, 0.16 내지 0.5 및 그 이상의 범위의 슬롯 밀도에서, 그리고 지주와 같이 거의 넓은 슬롯의 경우에 정상적이 아닌 것을 고려하면, 지주 폭은 200mm 넓은 기계에 대해 2mm 정도이다. 더 넓거나 좁은 지주들이 사용될 수 있다. 더 얇은 지주의 이점은 정상적인 모터 박편의 두께에 지주가 더욱 근접하므로 고체 재료는 최소 와류 전류로서 사용될 수 있는 것이다. 공통의 모터 박편은 0.015" 내지 0.025"범위일 수 있다. 이러한 시제품은 고온 압연 강 코어에 의하여 만족스럽게 실행될 수 있다. 이는 저가의 제조 이점을 가진다. 고체 코어를 사용하는 다른 이점은 철과 같은 재료에서의 더 높은 플럭스 밀도의 가능성을 포함한다. 영구자석(1024)은 연성 자성 재료의 로터(1022)에 고착될 수 있다. 로터(1022)에서 도 3 도시의 스페이서(1025)들은 필수적이 아니고 자석(1024)이 정확한 간격으로 조립되는 것을 보장하기 위하여 사용될 수 있다.
도 1 내지 도 5는 4상 구조에대해 여기 개시된 원리에 따른 4:3의 PM(1024)에 대한 지주(1028)의 비율의 비제한적인 예를 도시한다. 일반적으로, n 상의 경우, 지주와 극들의 비율이 n: n-1일 수 있으며, 극들의 수는 영구 자석들의 수일 수 있다. 3:2 비율이 사용될 수 있고(3상의 경우), 또는 가능하면 2:1(2상의 경우) 비율 또는 5:4의 비율(5상의 경우) 또는 6:5(6상의 경우)의 비율 또는 7:6(7상의 경우) 비율, 등이 사용될 수 있다. 4:3이 높은 토크를 생성하는 비율인 것으로 도시되었고 여기서 비제한적인 예로서 사용된다. 또는 n 상의 경우, 극에 대한 지주의 비율이 n: n+1일 수 있다. 많은 다른 지주-대-PM 비율 및 결합이 가능하고 본 발명 장치의 원리에 따라 사용될 수 있다.
도 1 내지 도 5의 실시예는 172개의 지주들을 가지며, 제안된 슬롯 밀도를 가진 전기 기계는 더 많거나 더 적은 수의 지주들을 가질 수 있다. 일부 로봇 용도들의 경우의 충분한 토크 밀도를 얻기 위한 최소 수의 지주들은 100이다. 도 5는 지주들 위에 개략적인 CAD 모델 코일이 구비된 스테이터(1020)와 로터(1022)의 간략화된 개략적인 일부 도면을 도시한다.
설명된 바와 같은 전기 기계의 4상 구조에 대해, 지주들의 수는 8로 나뉘어질 수 있고, 4개의 지주들과 3개의 영구자석들의 비율을 가진다. 영구자석들은 교대적인 반경 방향 극성으로 배치될 수 있다.
높은 수의 지주들에 의하여 지주당 권선의 수가 작아질 수 있다. 비제한적인 예시적인 실시예에서, 각 지주들 위의 권선은 단지 1층 두께이다(지주로부터 둘레방향 외측으로 측정). 이로써 에어갭 및/또는 포팅(potting) 복합 갭 및/또는 와이어 차단층의 수가 감소되므로 컨덕터들로부터의 열은 스테이터 지주들로 열을 전도 방출하기 위하여 컨덕터들을 통해 전도되어야 한다. 이는 열 성능에 대해 이점을 가지며(순간적인 높은 전류의 경우), 연속 작동 냉각의 경우에 이점을 가진다. 컨덕터들에 직접 접촉한 가스나 액체 냉매에 의한 코일들의 직접 냉각의 경우, 작은 수의 둘레 층들과, 예컨대, 지주 위의 와이어의 단일 둘레층이 높은 슬롯 밀도와 결합에 의하여, 냉각 유체에 대해 높은 컨덕터들의 표면적(컨덕터들의 용적에 대해)이 노출된다. 이는 컨덕터들의 냉각에 유익하고 전기 기계의 낮은 컨덕터 용적을 이용하는 많은 예시적인 방안들의 하나이다. 지주당 하나의 열(또는 낮은 수의 열)의 코일이 또한 제조 복잡성을 감소시켜 저 비용 제조를 가능하게 한다. 또 다른 실시예에서, 각지주의 권선은 두 개 층 두께이다.
예시적인 선형 전기
기계
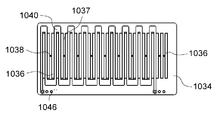
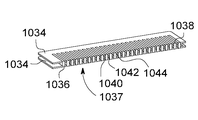
도 6 도시와 같은 일 실시예에서, 전기 기계는 예컨대 주요 부품이, 제한되는 것이 아닌 압인(stamping)이나 미세 블랭킹과 같은 고속이며 저가의 제조 공정으로, 제한되는 것이 아닌, 구리와 같은 컨덕터 재료, 강하게 양극화된 알루미늄과 같은 절연체 재료의 시트 스톡으로부터 제조될 수 있다. 지주들 둘레에 컨덕터 와이어를 감는 대신에, 컨덕터 회로들이 압인되고 이어서 층들로 조립될 수 있다. 절연체 층들이 다른 컨덕터 층들과 교대로 사용되면, 컨덕터 층들은 일부 구조들에서 절연 코팅 없이 조립될 수 있다. 대신해서, 컨덕터 회로 층은 추가적인 절연 효과를 위하여, 또는 별개의 절연층의 필요를 제거하기 위하여 조립 전에 절연재로 코팅될 수 있다.
절연층들은 많은 다른 유형의 재료일 수 있다. 알루미늄은 압인되고 미세하게 블랭킹되고 이어서 크게 양극화될 수 있다. 크게 양극화된 알루미늄은 높은 전압 절연과 전도체로부터의 우수한 열 전도를 제공한다. 이는 또한 우수한 구조적인 일체성을 제공한다. 컨덕터와 절연층은 제한적이 아닌 에폭시, 점토(potting) 화합물, 열적으로 활성화된 접착제, 및 열가소성 접착제에 의하여 같이 고정될 수 있다.
비전기적인 컨덕터(절연된 전기적으로 전도성) 재료가 구조적 일체성과 열 싱크/방출 특성을 제공하기 위하여 전도체 층과 같은 층에 사용될 수 있다. 컨덕터 층들 사이의 슬롯의 이들 비충진 층들은 냉각 가스 또는 액체의 흐름 경로를 제공하기 위하여 사용될 수 있으므로 개방된 슬롯들은 도관을 형성한다. 냉각 유체는 또한 공기 또는 액체 함유 매체로서 사용될 수 있다. 많은 다른 재료들이 제한되는 것이 아닌 양극화된 알루미늄, Torlon(트리멜리틱 안하이드라이드(trimellitic anhydride) 및 방향족 디아민의 반응물), 페놀, 또는 제한적이 아닌 금속 매트릭스 복합체와 같은 복합 재료를 포함하는 재료들이 스페이서 층들에 대해 사용될 수 있다.
각각의 컨덕터는 층일 수 있다. 층들은 하나 이상의 섹션(section)들로 이루어질 수 있다. 하나의 섹션은 예컨대, 전 길이의 선형 모터, 또는 완전한 둘레의 회전 모터일 수 있고, 또는 회전 모터의 하나 이상의 각도적인 부분들 또는 선형 모터의 둘 이상의 길이방향 부분일 수 있다. 각 부분의 각 층은 단지 하나의 상에 대해 컨덕터 회로일 수 있다. 와이어 권선을 가지는 공통 전기 기계에서, 컨덕터 와이어는 나선으로 감기고 해당 상의 다른 와이어 및/또는 다른 상으로부터의 와이어에 중첩한다. 이러한 유형의 3차원 와이어 권선 구조는 상마다 단일 층의 경우 제작될 수 없는 데, 단일 층의 조립체는 통상적으로 권선 이후 필요로 되는 직조되거나 또는 나선으로 중첩하는 구조가 허용되지 않기 때문이다.
배선은, 각각의 인접한 슬롯이 다른 상으로부터의 컨덕터들을 포함하거나 또는 인접한 슬롯보다 상들의 다른 결합인, 다상 모터를 제작하기 위하여 사용될 수 있다. 이는 감소된 비용으로 간단하게 제작할 수 있고 아래 설명되는 바와 같은 매우 효과적인 냉각을 제공하는 성능을 포함하는 많은 이점을 가진다.
개시된 컨덕터 제작 방법은 높은 슬롯 밀도를 가진 장치의 제조에 효과적인 데, 높은 정밀도의 와이어 배선을 대체할 수 있기 때문이다.
일 실시예에서 상의 권선당 단일 층은 두 개의 인접하고 이어서 하나 이상의 슬롯들을 건너뛰는 슬롯들 내의 컨덕터를 제공할 수 있으므로(예컨대, 상들의 수에 따라), 해당 상으로부터의 해당 층 위의 컨덕터들이 없는 하나 이상의 슬롯들에 의하여 이어지는 두 개의 인접 슬롯들에 층이 존재할 수 있다. 이와 같이, 지주들 사이에 슬롯들이 있는, 캐리어의 전자석 요소들이 지주들을 포함하는 전기 기계에서, 인접 슬롯의 전기 컨덕터의 위치에 대응하는 하나 이상의 슬롯들의 레벨에서 하나 이상의 슬롯들은 전기 컨덕터가 없다.
구멍들을 가진
컨덕터
층
일부 실시예들에서, 개시된 전기 기계는 유체 흐름을 위한 높은 단면적을 제공하고, 동시에 컨덕터마다 그 길이의 절반을 닫도록 냉각 유체에 확실히 접하도록 지속적으로 분배된 공기흐름 채널 패턴을 제공한다. 달리 말하면, 일 실시예에서, 둘 이상의 컨덕터 층들이 한 번에 접촉하는 경우가 없다. 슬롯에서의 수직 시퀀스는 예컨대, 컨덕터-컨덕터-공간-컨덕터-컨덕터-공간-컨덕터-컨덕터-공간일 수 있다. 이는, 모든 컨덕터들의 일 측면이 항상 상실된 컨덕터에 의하여 생성된 냉각 채널의 유체에 접하는 것이다. 이러한 균등하게 분포된 냉각 채널 어레이가 감소된 컨덕터 부피로부터 발생되는 더 높은 열 발생을 보충하기에 충분한 열 방출을 달성하도록 지원한다.
효과적인 냉각 채널 간격 패턴의 일부 실시예들은 각 지주 단부에서의 수직 공기 흐름을 발생하도록 각각의 지주들의 단부에서 갭과 결합된 상들의 오프셋과 결합된 컨덕터의 단부 턴들의 중첩을 포함한다. 이러한 세부 구조에 의하여, 에어갭들은 일치하고, 더 작은(큰) 채널들이 피해지고, 컨덕터 표면적은 증가되고 단부를 지난 수직 도관이 없으므로 정체된 에어갭들이 없다.
일 실시예에서, 하나의 상으로부터의 컨덕터와 이어서 해당 층 위의 소정 상으로부터의 컨덕터가 없는 p-2 슬롯을 가진 하나의 열의 두 슬롯들이 있을 수 있다(p는 상의 수). 하나의 상으로부터의 컨덕터를 가진 두 개의 슬롯들이 있는 세 개의 상들에 대해, 해당 상 또는 다른 상으로부터의 컨덕터가 없는 하나의 슬롯이 이어진다. 4상의 경우, 하나의 상으로부터의 하나의 컨덕터를 가진 하나의 열의 두 슬롯들이 있으며, 이어서 해당 층 위의 해당 상 또는 다른 상으로부터의 컨덕터가 없이 두 슬롯들이 이어질 수 있는, 등이다. 해당 상 또는 다른 상으로부터의 컨덕터가 없는 것은 열 추출 인서트와 같은 필러 소재 및/또는 도기 화합물로 충진될 수 있는 공기 공간 또는 공간이 있음을 의미한다.
비제한 적인 예로서의 3상 구조의 경우, 해당 층에 컨덕터를 가지지 않는 제3 슬롯이 제1 및 제2 슬롯에 이어지는 구조에서, 두 개의 인접 슬롯들은 제1 상으로부터의 컨덕터를 가진 단일 층을 가질 것이다. 이 패턴은 반복되어 단일 권선층을 제공하고 세 지주들의 제1 지주마다 양측 둘레 측에 컨덕터를 제공한다. 또 다른 층 위에서, 제2 상 회로는 단닐 층 위에 존재하고 해당 층 위의 상으로부터의 컨덕터를 가지지 않는 슬롯이 이어지는 제2 및 제3 슬롯의 이러한 제2 상으로부터의 컨덕터를 가진다. 제3 및 제1 슬롯 마다 컨덕터들이 존재하면서 제3의 상은 또 다른 별도의 층 위에 존재하나 제2 슬롯 마다의 층으로부터의 컨덕터는 없다.
층을 이루는 구조에 의하여 직경이 10m 이상인 모터에 이르는 마이크로/MEMS 모터들로부터 측정가능한 구조가 달성될 수 있다. 층을 이루는 구조에 의하여 추가적인 제조 공정에 의하여 부품들이 적층되고, 또는 단일 또는 다수의 부품들로부터 사전 제작된 스페이서 층, 및/또는 절연체 부품 및/또는 각각의 컨덕터에 의해서 조립될 수 있다.
이러한 권선 구조는 각 층 위의 굽혀질 수 있는 와이어 컨덕터에 의하여 시행될 수 있다(비제한적인 예로서, 이는 단지 다음 층에 연결하기 위하여 두 지주들 위에 나선으로 단지 감겨진다). 또는 이러한 컨덕터 구조는 사전 제작된 컨덕터 층으로부터 조립될 수 있으므로 제작 및 조립 동안 컨덕터들의 굽힘은 필요가 거의 없거나 필요가 없다.
슬롯을 건너 뛰는 것에서 감소된 슬롯 충진 비율의 손해가 인식되었다. 그러나, 주기적인 슬롯들에서 이러한 누락된 슬롯은 컨덕터 및/또는 절연층 및/또는 EM 지주들의 표면적의 높은 비율을 직접 냉각하도록 냉각 채널로서 사용될 수 있다.
냉각 채널 또는 도관에는 냉각제 흐름이 제공될 수 있다. 주기적인 슬롯들에서 누락된 컨덕터는 장치의 중량을 감소시키기 위하여 공기 채널로서 사용될 수 있다.
컨덕터들을 굽히는 것이 필요하지 않으나 조립 전에 컨덕터들을 형성하기 위한 능력은구리 와이어보다 통상적으로 덜 연성인 수퍼 컨덕터를 사용하는 것에 적합하다. 냉각 접촉에 유용한 높은 표면적은, DC 전류를 사용하고 슈퍼 컨덕터를 사용하면, 초 전도성에 필요 온도 아래 컨덕터를 유지하기 위하여 슈퍼 컨덕터의 용도에 적합하다. 저온 냉매의 사용은 또한 구리와 알루미늄과 같은 종래의 컨덕터들이 전기 저항을 감소시킴으로써 보다 효율적으로 될 수 있다. 층으로 이루어진 컨덕터들의 실시예들은 또한 소정 용도에 대해 증가된 효율성을 위한 인위적으로 저온으로 다른 컨덕터 재료나 구리를 유지하기에 적합하다.
선형 전기
기계의
스테이터
도 6에는 선형 전기 기계의 스테이터(1058)의 비제한적인 간략화된 예시적인 실시예가 도시된다. 도 6 도시의 디자인은 상부 절연층(1034), 하부 절연층(1034), 및 컨덕터층(1040, 1042 및 1044)의 스택을 포함할 수 있다. 다양한 수의 컨덕터 층들이 사용될 수 있다. 지주(1036)들은 절연층(1034)의 구멍(1035)들을 통해 연장할 수 있다. 연결부(1046)들은 전기 여기 소스에 제공될 수 있다. 각 층(1040, 1042, 1044)에 대해, 별도 층이 제공될 수 있다.
스테이터(1058)의 간단한 구조는 작은 수의 용이하게 제조된 부품들로부터 명백하다. 절연층(1034)은 비전기적인 전도성 재료 또는 절연된 전도성 재료로 제조될 수 있고 예컨대 크게 양극화된 알루미늄으로 제조될 수 있다. 이는 펀칭되거나 미세하게 블랭킹될 수 있고 이어서 날카로운 에지를 제거하기 위하여 화학적으로 에칭 처리될 수 있고 이어서 크게 양극화 처리될 수 있다(크게 양극화 처리될 때 에지에서 높은 절연 값을 달성하는 것이 중요). 비제한적인 예시적인 실시예에서, 층(1034)은 0.5mm 두께이나, 도 6의 전기 기계는 일정한 치수 범위를 가질 수 있다. 절연층(1034)은 EM 지주(1036)에 대해 직사각형 절개부(1035)를 가진다(지주(1036) 및 절개부(1035)의 다른 형상이 다양한 효과와 같이 사용될 수 있지만, 조립 동안 지주(1036)들을 정확하게 위치시키도록 작용). 절연층(1034)이 전기적으로 전도성이면(절연층을 가지더라도), 일부 용도들의 경우, 층(1034)내의 단일 지주 둘레에 전기적인 연결부가 없는 것이 중요하다. 이러한 이유로서, 절개부(1038)가 가능한 와류 회로를 차단하기 위하여 각 슬롯 사이에 제공된다. 이 슬롯이 조립 전, 동안, 후에 레이저에 의하는 것과 같이 공정의 다른 지점에서 펀칭되거나 블랭킹처리되고, 또는 절개될 수 있다. 전기 컨덕터의 최소 두께는 컨덕터 층의 최대 두께의 > 75%일 수 있다. 전기 컨덕터의 최소 두께는 컨덕터 층의 최대 두께의 > 50%일 수 있다. 이로써 교차 지점에서 컨덕터들의 펀칭과 최소 박화(thinning)가 가능하다. > 50% 이상은 갭들에게 여전히 필요하다. 제조 방법은 일정한 두께 재료로부터의 컨덕터 층의 펀칭 및 압인 및 컨덕터 층을 슬롯 내에 설치하는 것을 포함할 수 있다. 생성되는 컨덕터 층은 가변 두께를 가질 수 있다.
EM 지주(1036)들은 제한되는 것이 아닌 강 또는 분말 철 또는 다른 유형의 연성 자성 재료와 같은 연성 자성 재료로 제조될 수 있다. 컨덕터(1040, 1042 및 1044)들은 구리(또는 가능하면 알루미늄 또는 일부 용도들을 위한 슈퍼 컨덕터들)로 제조될 수 있고 와이어 컨덕터들에 공통인 제한 되는 것이 아닌 코팅과 같은 절연층(도시 없음)으로 형성되거나 또는 펀칭되거나 또는 미세-블랭킹 처리되고 이어서 코팅될 수 있다. 표면 연결 비아스(vias)(1046)은 잔여 층들과 조립되고 또는 필요시 이후 천공되고 추가될 것이다.
스테이터(1058)는 손 또는 기계으로 조립되고, 이어서 두 평탄한 표면들 사이에 클램핑되고 점토(pot) 화합물에 의하여 소성된다. 소성 공정 동안, 상부 및 바닥 몰드판들은 수축될 수 있어서 접촉하거나 근접하게 접근하도록 다시 축방향으로 같이 이동되기 전에 모든 표면이 적셔질 수 있다. 지주(1036)들의 길이는 상부 및 하부 점토 성형 부품(도시 없음)들을 배치하기 위하여 사용될 수 있다.
내부 냉각이 필요하면, 넓은 갭들로부터 중력을 이용하여 점토 화합물을 제거하거나 또는 공동으로부터 점토 화합물을 밀어 내기 위하여 장치를 통해 공기를 밀어내는 식으로 점토 화합물을 개방된 슬롯 부분으로부터 제거된다.
도 7은 도 6의 스테이터(1058)의 등축 도면을 도시한다(컨덕터들에 도시된 점토 화합물이나 절연층이 없이). 비제한적인 예시적인 실시예는 부분마다 상마다 하나의 컨덕터를 가진다(이 예에서 완전한 선형 액튜에이터 스테이터(1058)이다).동일한 상의 다수의 컨덕터 층들이 스테이터 부분에 사용될 수 있다.
도 8은 각각의 상 회로(1040, 1042, 및 1044)가 제1, 제2 및 제3의 세 개의 연속된 지주(1036)들 마다 거의 에워싸는 단일 부품(그리고 이 경우, 동일한 형상을 가지는)인 것을 밝히고, 상부 절연층(1034)이 제거된 도 6과 도 7의 비제한적인 예시적인 실시예의 평면도를 도시한다. 상 회로(1040, 1042, 및 1044)들은 상 1, 2, 및 3에 각각 대응한다.
도 9는 매 제3 지주(1036)의 어느 측면의 슬롯(1037)을 충진하고 매 제1 슬롯(1037)을 건너뛰는 것에 의하여 세 개의 연속적인 지주들의 제3 지주(1036)를 거의 에워싸기 위하여 명확히 상(1040)의 회로 형상이 보여질 수 있도록 제거된 상 회로(1042 및 1044)를 도시한다. 다른 두 상 회로들은 다른 슬롯(1037)을 건너 뛰고 다른 지주(1036)를 거의 에워 싼다.
도 10은 도 6 내지 도 9의 비제한적인 예시적인 스테이터(1040)의 일부 도면이다. 각각의 컨덕터 층(1040, 1042, 및 1044)의 세 개의 연속적인 슬롯(1037)마다 의 하나로부터 누락되는 것을 도시한다. 도 11은 도 10 도시 단면의 상세 도면이다.
층들이 같이 접합되거나 또는 같이 융합되거나 또는 같이 납땜될 수 있다. 제한되는 것이 아닌 구리층들과, 양극화된 알루미늄 또는 다른 분리기 층들 사이의 스페이서 층들과 같은 일부 내부 층들이 주석 도금되고, 모든 부품들 또는 그들의 코팅들이 일정한 납땜 화합물에 의하여 접합할 수 있으면, 부분들은 조립되고 이어서 오븐 내에서 가압 하에 가열되어 같이 모두 융착할 수 있다. 납땜으로 사전에 주석-도금하는 것이 사용되면, 분리층들이 코팅되지 않으므로 컨덕터 층-대-층의 전도성이 없는 것이 중요하다. 대신해서, 열가소성 수지는 부분을 코탕하기 위하여 사용될 수 있고 이어서 그들은 조립되고 충분한 압력 하에 오븐에서 가열되어 정확한 축방향 및 다른 치수를 보장한다. 에폭시 또는 다른 경화 접착제가 부품을 고착하고 소성하기 위하여 조립 동안 또는 후에 사용될 수 있다. 공기 유동 채널들은 디자인에 포함되고, 소성은 에폭시가 경화되기 전에 큰 챔버로부터 접착제를 취입할 수 있다. 접착제 또는 땜납의 얇고 일정한 코팅을 제공하는 프리-프레그 또는 닙땜 주석 도금 공정의 이점은 공기 흐름 채널이 퍼지처리되는 것이 필요하지 않을 수 있는 것이다. 근접한 고정면만이 서로 고착할 수 있다. 소정 수의 지주들 또는 영구 자석들이 사용될 수 있다.
도 12 내지 도 21은 연속으로 상부 층을 제거하여 하부 층을 노출시키는 것을 도시하는 영구 자석(PM) 캐리어(1056) 및 인코더들을 가진 비제한적인 선형 모터 실시예를 도시한다. 통상의 전문가에게 잘 알려진 인코더들에 대해 많은 선택 방안들이 있다. 이 예에서, 필요한 정밀성을 보장하기 위하여 주의가 기울여져야 하지만, 지주 단부에서의 미니-코일은 와류 전류 센서로 사용된다. PM 자석 코팅 및/또는 자석들 사이의 재료의 와류 전류를 발생하는 고주파수 신호에 의하여 가동된다. 와류의 변화는 위치 변화를 판독하기 위하여 사용된다. 도 12는 전기 기계의 비제한적인 예시적인 선형 액튜에이터 실시예의 등축 도면을 도시한다. 도 13은 내부 라인들이 도시된 도 12의 액튜에이터이다. 도 14는 조임쇠(1048)가 제거된 상부 영구자석 캐리어를 도시한다.
도 15는 상부 영구자석 캐리어판(1052)을 도시하고 상부 PMs(1050)의 대부분이 제거되고 PMs 사이의 스페이서의 슬롯과 PMs 사이의 절연층의 공냉 배출홀을 노출시켜 와류 전류가 지주(1056)들을 둘러싸는 것을 방지한다. 또한 노출되는 것은 PCB 위에 제조될 수 있는 공기-코어 유도 센서이며 조립 동안 잔여 부품에 추가된다. 유도 센서(1054)는 PMs(1050) 사이의 알루미늄 및 PMs(1050) 위의 전기적으로 유도 코팅과 같은 PM 캐리어(1056) 위의 전기적으로 유도성인 물건의 위치를 감지하기 위하여 사용될 수 있다. 이 센서는 스테이터(1058)와 PM 캐리어(1056)의 상대적인 선형 및/또는 축방향 위치를 결정하기 위하여 사용될 수 있다. 도 16은 모든 PMs(1050)이 제거되고 상부 절연판(1034)이 제거된 것을 도시한다. 도 17은 전기 커넥터(1062)들이 제거되고 상부 스페이서 층(1060)이 제거된 것을 도시한다. 도 18은 상부 상회로 컨덕터(1044)가 제거되고 제2 절연층(1034)이 제거되어 내부 냉각 채널용 공기 유입구를 노출시키는 것을 도시한다. 도 19는 제2 스페이서 층(1060)이 제거되고 지주(1036)들의 대부분이 제거된 것을 도시한다. 도 20은 상부 공기 코어 센서(1054)가 제거되고 제2 상 회로(1042)가 제거되고 구조의 원통 스페이서(1064)들 및 잔여 지주(1036)들이 제거된 것을 도시한다. 도 21은 제3 상 회로(1040) 및 바닥 스페이서 층(1060)이 제거된 것을 도시하여, 하부 공기 코어 PCB 인서트(1066) 및 하부 절연층(1034)을 노출시킨다.
도 12 내지 도 21의 예시적인 실시예가 다수의 스테이터(1058) 층들 및/또는 PM 캐리어(1056)들에 의하여 구성될 수 있고 하나 이상의 스테이터(1058)들 축방향 단부들 또는 하나 이상의 PM 캐리어(1056)들과 축방향 단부들 위의 둘 이상의 스테이터(1058)들이 도시된다. 스테이터(1058)와 축방향 단부에서의 PM 캐리어(1056)만이 조임쇠를 필요로 한다.
예시적인
축방향
플럭스 모터용
컨덕터
층
도 22는 전기 기계의 실시예에 따른 축방향 플럭스, 회전 스테이ㅌ터(1070)의 비제한적인 예시적인 실시예의 점토 화합물 링(1068)과 지주(1036) 및 컨덕터 회로(1044)(도면에서 단지 하나의 층만이 도시)를 도시한다. 도 23은 도 22의 스테이터(107)의 상세 도면을 도시하고, 작동시키거나 또는 그로부터 작동되도록 다른 스테이터 디스크 및/또는 고정 또는 이동 부재에 스테이터를 부착하기 위한 장착홀이 도시된다.
도 24는 3상과 상마다의 하나의 컨덕터 회로를 가진 축방향 플럭스 회전 스테이터(1070)로부터 점토 화합물 링(1068)이 제거된 것을 도시한다. 이 실시예에서, 컨덕터 부재(1040, 1042, 및 1044)들은 각각 세 상들의 각각에 대한 In 및 OUT 연결부(1046)를 가진 완전한 360°용 단일 회로이다. 컨덕터(1040, 1042 및 1044)들은 예컨대 크게 양극화된 알루미늄으로 제조될 수 있고 이는 컨덕터(1040, 1042 및 1044)들 또는 로터 사이의 별도 절연기 층의 필요를 제거할 수 있다.
도 25는 조립 동안 알루미늄 회로(1040, 1042 및 1044)(및/또는 조립 고정물)에 의하여 위치된 연성 자성 재료 지주(1036)를 가진 3상 회로(1040, 1042 및 1044)의 등축 도면을 도시한다. 소정 용도에 대해 충분한 겹치는 알루미늄이 존재하고, 알루미늄 회로(1040, 1042 및 1044) 및 지주(1036)의 매트릭스 구조가 다른 루조 부품 유사 단부판 디스크의 필요를 감소시키거나 제거하기에 충분히 강력할 수 있다. 이러한 구조에 의하여, 도 15의 스테이터는 알루미늄으로 하여금 두터운 층들 사이에서 절연되어야 하는 구리에 대한 유사한 저항을 제공하도록 함에 따라, 여분의 양의 알루미늄이 동일한 공간 내로 삽입될 수 있다. 구리는 또한 이와 같이 더 적은 절연층과 같이 사용되거나 절연층이 없이 사용될 수 있으나, 구리 절연은 알루미늄 양극화처럼 강력하지 않다.
도 26은 회로(1040, 1042 및 1044) 형상의 간단성을 도시하는 도 25의 분리된 도면이며, 다른 층들이 다른 회로와 같은 지주(1036)를 거의 에워싸지 않는 동안, 모두가 하나 이상의 지주(1036)들에 의하여 서로에 대해 단순히 회전될 수 있고 대칭일 수 있다.
도 27은 지주(1036)를 가진 바로 제2 컨덕터 층(1042)의 근접 도면을 도시한다. 도 28은 컨덕터층들 사이의 접합 영역을 증가시키기 위하여 구조적 일체성을 위한 ID를 따른 겹치는 부분을 도시하기 위하여 컨덕터 층(1042) 바로 위의 상세 도면을 도시한다. 도 29는 단일 스테이터 회로(1044)의 상세 평면도이다.
이러한 층을 이룬 컨덕터 구조의 실시예에 의하여 가능해진 바와 같이, 단부 턴들의 단면적은 예컨대 슬롯들의 컨덕터의 평균 또는 최대 단면적보다 더 클 수 있다. 이는 단부 턴들의 저항을 감소시켜 컨덕터들의 슬롯 부분보다 더 저온으로 작동될 수 있으며 따라서 높은 가속 동안, 정상 작동 동안 또는 비상 정지 동안과 같은 단시간 동안 매우 높은 전류 밀도에서 작동할 수 있는 성능을 증가시키도록 컨덕터들의 열 성능을 증가시키기 위하여 히트 싱크로서 기능할 수 있도록 한다.
또한, 컨덕터들의 슬롯 부분(슬롯 턴)에 비교해서 단부 턴의 더 큰 표면적은, 슬롯 턴으로부터 단부 턴으로의 낮은 열 흐름 저항에 기인하여 매우 효과적인 냉각핀 효과를 제공하며, 그 결과 구리와 알루미늄과 같은 높은 전도성 재료의 동일한 부품으로 된다. 이들 단부 턴의 "냉각 핀"의 냉각은 소정 수의 액체 또는 가스 냉각 수단에 의하여 이루어질 수 있다.
예시적인
축방향
플럭스 전기
기계
실시예는 개별적으로 제어되는 스테이터 섹터들을 포함할 수 있고, 토크를 생성하는 것은 불문하고, 상기 스테이터 섹터의 콘트롤러들의 제2 목적은 상기 섹터에 로터 정렬을 유지하는 것이며, 전체로서 회전 및/또는 슬라이드 이동하는 접촉 베어링의 필요성을 가능한 제거하는 것이다. 각 부분은 개별적인 다상 BLDC 모터 드라이버를 포함할 수 있다. 도 30 도시와 같은 다수 -부분의 액튜에이터(1082)와 유사한 중공 디스크 형상의 실시예를 고려하면, 어느 정도 아크 섹터(1074)마다 다소 선형 액튜에이터(도 31 예시와 같은)로서 작동하여야 하고, 선형 액튜에이터가 선형(이 경우 둘레방향) 운동 또는 위치를 유지하는 동안, 로터의 각각의 대응하는 부분은 일정한 순간에서 둘레 방향으로 위치되므로, 스테이터와 로터는 동축으로 유지될 것을 주장할 수 있다. 도면으로부터 로터의 스테이터 섹터(78)는 각각 로터의 대응하는 섹터(78)만을 전후로 직각으로 이동하게 할 수 있는 주요 접선 힘에 대해서만 책임을 져야 하는 것이 명확하다. 스테이터와 로터가 베어링에 기계적으로 결합되지 않더라도, 개별 섹터(1074)들을 적절히 정류시킴으로써 축방향 정렬을 유지하는 가능성은 실제이다. 제안된 생각은 토크 생성 장치, 및 자체-정렬 동적인 자기 베어링의 결합하는 방식의 하나인 것으로 말해질 수 있다.
전기 기계의 실시예는 도 32 도시와 같이 액튜에이터(1082)의 회전 부분에 수평으로 장착된 단부에 중량을 가진, 로봇 아암과 같은, 더 긴 레버와 같이 사용될 수 있다. 액튜에이터가 수직으로 장착되면, 즉, 수평 축과 같이, 로터 조립체는 하향력(1080)을 경험할 것이며 수평축 위에 대각선으로 반대로 위치된 개별 섹터(1084 및 1086)들은 약간 수직 하향 변위를 경험할 것이다. 각 스테이터 섹터들에서의 인코더는 이러한 변위를 기입하고 모터 드라이버와 콘트롤러는 이들 섹터들의 정확한 스테이터-대-로터의 직각 정렬을 유지하기 위하여 이들 섹터들에 파워 입력을 이동시킬 것이다. 이로써 아암 위의 수직 하향 힘을 상쇄하는 수직 인양 힘(1088)을 생성할 것이며, 그러므로 로터는 개별 섹터들의 능동적인 제어에 의하여 정해진 공차 내에 동축으로 유지될 수 있다. 이는 도 32에 도시된다. 모든 다른 섹터들은 정상적으로 작동하는 바와 같이 토크를 생성한다. 콘트롤러에서, 이것은 하나 또는 두 개의 가능한 방향으로의 단순한 힘(토크)의 증가이고, 단지 둘 중의 하나이므로 기존의 모터 드라이버에게 구동 알고리듬에 대한 복잡한 추가는 아니다.
예시적인
스테이터의
권선 구조
도 33 내지 도 37은 스테이터를 구성하는 6개 층(1040, 1041, 1042, 1043, 1044, 및 1045)들을 가진 비제한적인 예시적인 스테이터 권선 구조의 개요를 도시하고, 그 평면도가 도 33에 도시된다.스테이터는 1010 섹터들로 구분되고, 그의 각각은 스테이터 권선 구조 부분(1090)을 포함한다. 각각의 섹터는, 예컨대 각 섹터에 대해 PM 캐리어(1056) 위의 PMs(1050)의 둘레 위치를 판독하는 각 섹터에서 인코더 피드백을 기초로 별도의 모터 콘트롤러(도시 없음)에 의하여 제어될 수 있다. 각각의 섹터를 별개로 제어하면, 반경방향 힘이 CPU에 의하여 제어되므로 로터와 스테이터는 자기력에 의하여 동심으로 활성으로 유지될 수 있다. 효과는 반경 방향으로 활성 자기 베어링의 효과이다. 권선의 세부는 도 34에 도시된다. 도 35는 도 33의 스테이터 권선의 단일 부분(1090)의 등축 도면을 도시한다. 도 36은 모두 동일한 상에 있고 관통-층에 의하여 연결되는 최상부 두 개의 층(1044 및 1045)들을 도시하고; 두 컨덕터 층들의 하부 층(1044)은 도 37에 도시된다.
예시적인
축방향
플럭스 전기
기계
많은 실시예들이 가능하다. 5개의 로터 디스크(1094)들의 외측 로터 스택들이 완전한 회전을 달성하도록 4개의 스테이터 디스크(1092)들의 내부 스테이터 스택으로서 하나의 예시적인 실시예가 도 38에 도시된다. 또 다른 예시적인 실시예가 도 39에 도시되고, 외측 로터가 4개의 스테이터 디스크 둘레에 같이 적층된 5개의 디스크들을 가진다. 스테이터 디스크(1092)들은 ID 링 부재(1096)와 같이 고정되고 스테이터 디스크(1092)와 로터 디스크(1094) 각각 위의 고정 탭(1098)과 출력 탭(1100)들은 매우 얇은 축방향 치수를 가지고 연속으로 작동할 수 있다. 추가적인 토크를 위하여, 더 많은 스테이터와 로터 디스크들이 부가될 수 있다.
지주들의 단일 또는 이중 또는 다른 상 어레이가 하나 이상의 컨덕터 층들을 가진 이 장치의 원리에 따라 구성될 수 있다. 전기 기계의 실시예의 이러한 구조에 의하여 로봇 핑거 조인트를 제어하기 위하여 선형 모터에 제한되는 것이 아닌 선형 또는 회전 또는 다른 모터 구조의 간략한 제어가 이루어질 수 있다.
전기
기계을
가진 예시적인 로봇
죠인트
도 40은 제1 캐리어(1104)와 유사한 액튜에이터91116)로 형성된전기 기계(1102) 또는 액튜에이터의 실시예를 사용하여 두-죠인트의 로봇 핑거(1122)의 비제한적인 예시적인 실시예의 개략적인 부분을 도시한다. 이러한 액튜에이터(1102)는 다수의 자극들을 가지나 단지 하나의 상을 가지는 단상 선형 액튜에이터일 수 있으며 따라서 정류되지 않고 충분한 힘을 발생하므로 액튜에이터(케이블 또는 스트랩 또는 연결기구 등을 통해 작용하는)의 적절히 작은 기계적인 이점은 충분한 토크와 액튜에이터가 부착된 죠인트의 회전을 발생한다. 도 40에서, 액튜에이터(1102)는 밀집부(phanlax)(1106)에 고정된 스테이터(1104)와 케이블 또는 스트랩(1110)에 고정된 PM 캐리어(1108)를 가진다. 케이블(1110)은 다른 단부에서 풀리 또는 다른 부재(1112)에 고정된다. 풀리(1112)는 핸드 부재(1114)에 고정된다. 스테이터(1104)가 하나의 극성으로 작동되면, 액튜에이터(1102)가 신장될 때 핸드 부재(1114)에 대해 핑거를 직선으로 당기는 밀집부(1102)와 핸드 부재(1114) 사이에 작용하는 CW 스프링(도시 없음)의 결과로서 밀집부(1102)를 시계방향으로 회전할 수 있도록 한다. 반대 극성이 스테이터(1104)에 인가되면, 케이블(1110)은 스테이터(1104)를 향하여 당겨지고, 따라서 밀집부(1102)는 CCW 방향으로 회전한다.
제2 스테이터(1116)는 제2 밀집부(1118)에 고정되고 밀집부(1102)에 고정된 풀리(1112)에 고정된 케이블91120)을 작동시킨다. 스테이터(1104 및 1116)들은 동일한 및/또는 다른 모터 콘트롤러들에 의하여 구동될 수 있다.
스테이터(1104)는 또한 핸드 부재(1114)에 위치될 수 있고, 추가적인 액튜에이터(1104)는 핸드 부재에 위치될 수 있고 밀집부재(1102)에 회전을 발생하도록 작용할 수 있다.밀집부(1102)에 고정된 액튜에이터는 또한 스테이터(1116) 대신에 또는 부가해서 밀집부(1118)의 회전 및/또는 토크를 생성할 수 있다.
위에서 설명된 바와 같은 각 죠인트의 작동을 사용하는 세 가지 핑거(1122)들을 가지는 로봇 그리퍼의 비제한적인 예의 두가지-도면이 도 41에 도시된다. 전기 기계의 실시예의 이들이나 다른 작동 구조를 사용하는 그리퍼의 많은 다른 구조가 가능하다.
전기
기계의
예시적인 자석 구조
도 42는 절연층(1134)에 안착된 지주(1136)를 가진 전기 컨덕터층(1140 내지 1143)의 층을 이룬 배치의 어느 일 측면에 배치된 교대하는 극성의 자석(1050)들이 실시예를 예시한다. 이러한 도면은 회전식 또는 선형일 수 있는 축방향 플럭스 실시예를 도시한다.
도 42의 층을 이루는 액튜에이터가 제한되는 것이 아닌 PCB 제조 기술을 이용하거나, 또는 사전-제작된 부품의 조립을 이용하는 것에 제한되는 것이 아닌 본 명세서의 방법들의 어느 것에 의하여 제조될 수 있다. 일정한 선형 힘을 생성하기 위하여 필요한 전류를 감소시키기 위하여 단일층 이상의 전기 컨덕터들이 사용될 수 있다. 각 층(1140 내지 1143)들이 그와 다음 층 사이에 별개의 절연기 층을 가질 수 있거나, 또는 각 컨덕터 층은 조립 공정 전에 또는 도중에 개별적으로(종래의 와이어 절연과 유사) 절연될 수 있고 따라서 별개의 절연층은 컨덕터 층들 사이에는 필요로 되지 않는다.
도 42 도시와 같은 비제한적인 예에 대한 단일 상의 장치에서, EM 지주들은 정류되지 않는다. 양 또는 음의 전류가 당일 상에 인가되어 일 방향 또는 다른 방향으로의 PM 캐리어의 이동 및/또는 힘을 생성한다. 출력의 적절한 총 이동은 따라서 지주 피치일 것이다. 이 장치의 이점은 스테이터에 대한 PM 캐리어의 힘 또는 운동을 생성하기 위한 가변 양 및/또는 음의 전류를 제공하기 위하여 단지 필요로 되는 모터 콘트롤러의 복잡성이 감소되는 것이다.
예컨대 로봇
핑거
죠인트에
대한 예시적인 선형 전기
기계
로봇이나 운동 제어에서의 핑거 죠인트나 다른 장치들과 같은 많은 운동 제어 어플리케이션들에서, 작은 양의 운동이 기계적으로 증폭되어 도 40 및 도 41 도시의 사람 핑거와 같은 케이블 "힘줄" 에서 당기는 케이블과 풀리에 의하여 소정의 과제를 달성할 수 있다. 성인의 집게 손가락은 예컨대 모두 세 마디의 운동의 전 범위에 걸쳐 대략 18mm의 힘줄 운동을 필요로 한다. 로봇 핑거의 각 마디는 별도의 선형 모터 및 힘줄에 의하여 제어되고, 사람 손가락 마디 운동을 복제하기 위하여 각 액튜에이터의 총 이동은 ~6mm일 것이다. 로봇 힘줄의 기계적인 이점은 사람 손가락의 1/2로 감소되고, 인간 손가락 마디의 운동 범위를 달성하기 위하여 각 마디에서 개별 액튜에이터에서의 전체 액튜에이터 운동의 3mm를 필요로 한다.
도 42는 EM 지주들의 어레이의 양측 축방향 단부들 위에 PMs 의 선형 어레이를 가진 네 층의 단상 액튜에이터의 비제한적인 예시적인 실시예의 간략화된 단면도를 도시한다. 도 42의 화살표는 PMs(도 42에 도시되지 않은 - 이동가능한 PM 캐리어에 고정된) 위의 힘을 표시한다. PMs 위의 힘은 도시된 EM 극성에서 우측일 것이며 반대 EM 극성에 대해 좌측으로 일 것이다. PWM 신호와 같이 가변 전류를 사용함으로써, 이 힘은 전류에 비례할 것이다. 지주 간격이 ~3mm이면, 이어서 일반적으로 사람 크기의 핑거 마디의 핑거 작동이 달성될 수 있다.
이러한 액튜에이터 시스템의 이점은 관절에 힘이 용이하게 인가될 수 있는 것이다(제어된 힘 적용을 달성하기 위하여 피드백 시스템을 가져야 하는 다상 선형 또는 회전 모터의 정류된 자석 어레이에 비교해서). 액튜에이터에 의하여 생성된 힘은 전류에 비례할 것이므로, 힘 피드백 센서는 많은 용도들의 경우 필요하지 않을 것이다. 인코더는 많은 용도들의 경우 필요하지 않을 것이다. 이러한 구조는 제한된 이동의 선형 운동이 필요한 힘 및/또는 운동을 제공하는 많은 다른 로봇 또는 이동 제어 요건들에 적절할 수 있다.
핑거에서 모든 액튜에이터들에 동일한 가변 전류를 적용하면, 각 액튜에이터가 다른 관절을 제어하면서, 전체 핑거에 대해 단지 단일 전류 제어를 적용하면서 각 관절에서 일정한 유료 하중에 합치하는 매우 복잡한 핑거 조립이 달성될 수 있다. 개별 액튜에이터들의 별개의 전류 제어에 의하여 개별적인 마디 제어가 허용될 것이다.
예시적인 전기
기계의
층상 구조
도 42의 상기 자석 구조는 도 43 내지 도 52의 조립체에 도시되고 층을 이루는 구조를 보이기 위하여 각 후속 도면에서 층이 제거되었다.
절연 층(1134)은 비전기적인 전도 층, 또는 알루미늄과 같은 절연 재료 위의 절연 코팅으로 이루어질 수 있다. 양극화된 알루미늄은 그의 높은 열 전도성에 기인하여 사용될 수 있다. 핑거 액튜에이텅와 같은 낮은 주파수의 용도에 대해, 와류 전류는 문제 없으며 따라서 전기적으로 전도성인 스테이터층은 지주들 둘레에서 단절이 필요하지 않다.
도 43은 PM 캐리어 조임쇠(1148), 상부 PM 캐리어(1152), 하부 PM 캐리어 (1157) 및 스테이터(1158)를 가진 도 42의 완전한 액튜에이터(1156)를 도시한다. 도 44는 PM 캐리어 조임쇠(1148)가 제거된 액튜에이터(1156)를 도시한다. 도 45는 PM 캐리어(1152, 1157)들과 PMs가 제거된 스테이터(1158)를 도시한다. 도 46은 단상 전류 소스(도시 없음)에 연결하기 위한 커넥터(1124, 1126)들을 가진, 네 개 층의 단상 단일 회로 컨덕터를 도시하기 위하여 스테이터(1158)의 상부 절연층(1134)이 제거된 액튜에이터(1156)를 도시한다.
도 47은 컨덕터 층(1140 내지 1143)의 전기 컨덕터들에 연결하는 지주들로 형성되는 IN 및 OUT 커넥터(1124 및 1126)들과 컨덕터 층(1141 및 1142)들 사이의 비아 커넥터(1146)의 세부 도면이다. 도 48은 도 47 도시의 IN 및 OUT 커넥터(1124 및 1126)로의 스테이터(1158)의 대향 단부에서의 층(1140 및 1143) 사이의 비아 커넥터(1146)의 상세 도면이다.
도 49는 많은 EM 지주(1136)들이 제거된 상부 컨덕터층(1143)을 도시한다. 도 50, 도 51 및 도 52는 각각 전기 컨덕터 층(1143)들이 제거되고, 층(1142)이 제거되고 단지 층(1140)만을 도시하는 액튜에이터(1158)를 각각 도시한다.
도 42 내지 도 52의 비제한적인 예시적인 실시예에서 인접 컨덕터층들 사이에별개의 절연층이 필요하지 않다. 컨덕터층이 조립/구성 동안 또는 전에 절연층으로 코팅되면, 이것은 가능하다. 컨덕터층들 사이에 절연층을 사용하는 것은 컨덕터들을 절연하는 필요를 제거할 것이다.
상기는 하나 이상의 PM 캐리어들의 어느 하나의 축방향 단부들 위의 둘 이상의 스테이터들에 의하여 구성될 수 있다. PM 캐리어는 소정 유형의 PM 자석을 가질 수 있고 유사 홀바(Halbach) 어레이 또는 홀바 어레이에 의하여 구성될 수 있다(플럭스 연결을 제공하기 위하여 그들 사이에 강을 가진 캐리어 운동 방향으로 PMs 극화되고). 스테이터와 "로터"는 양측이 작동되어 영구 자석들의 필요성을 감소시키거나 제거할 것이다. 지주들 및 PMs 또는 다른 부품들의 크기 또는 형상 또는 수는 다양하게 사용될 수 있다. 코일들에 대해 도전성 트레이스가 사용되고 지주들이 픽-앤-설치 설비로 조립되는 PCB 제조 기술을 제조 기술이 포함한다. MEMS 기계는 전기동태적인 힘이 전자석 힘을 극복하는 하부 한도에 따라, 매우 작은 크기로 이들 기술에 의하여 구축될 수 있다. 더 큰 모터들, 액튜에이터들 또는 발전기들이 이 명세서에서 다른 실시예들에 대해 설명된 바와 같이 사전-제작된 컨덕터 공정을 사용할 수 있다.
양측
캐리어들
위에 코일들을 가진 예시적인 전기
기계
양측 캐리어들 위에 코일들을 가진 전기 기계의 예가 도 53, 도 54, 및 도 55에 도시된다. 여기 개시된 다른 전기 기계과 같이, 도 53의 전기 기계는 개시된 슬롯 밀도와 지주 높이 또는 컨덕터 용적을 가질 수 있다. 주어진 예는 반경방향 플럭스이나, 디자인 원리는 축방향 플럭스 및 선형 전기 기계에 대해 사용될 수 있다. 내측 캐리어(1220) 또는 외측 캐리어(1222)가 고정될 수 있다. 스테이터(1220)는 제한되는 것이 아닌 구리 와이어와 같은 와이어에 의하여 감길 수 있다. 개별 지주들이나 상들로 전류를 변동시키도록 정류될 수 있으며, 또는 가변 DC 전류에 의하여 가동될 수 있으므로, DC 전자석 지주들은 코일로 감기고 가동되어 동시에 모든 PMs(1224)들로부터 플럭스를 조종할 수 있다. 이러한 플럭스 조종에 의하여 스테이터(1220)를 통한 회로 단락으로부터 PMs(1224)로부터의 플럭스가 다시 안내될 수 있고 에어갭을 가로질러 로터(1222)로의 낮은 릴럭턴스 경로를 형성할 수 있다. 로터(1222)는 수동식(그러나 스테이터 코일들이 정류되면)이거나 지주(1237) 둘레에 코일(1232)들에 의하여 정류될 수 있다(스테이터가 정류되거나 또는 DC 전류에 의하여 작동되면). 결과는 스테이터(1220)와 로터(1222) 위의 코일들이 가동되지 않을 때 에어갭을 가로지르는 플럭스가 없고 플럭스가 감소되는 실시예이다. 코일들이 가동되지 않을 때 로터는 역 구동될 때 코깅(cogging) 및 후방 EMF(또한 감쇄력으로 불림)을 감소시키거나 또는 제거한다. 역 구동(Backdrivability)은 로봇이나 휠 모터들을 포함한 많은 용도들에서 이점이다. 이 실시예는 여전히 발전기로서 작동할 수 있으나 스테이터 코일들의 여자가 필요하다.
도 53, 도 54, 및 도 55에서, 스테이터(1220)에는 168개의 지주들이 있고 로터(1222)에는 140개의 지주들이 있다(스테이터 지주들과 로터 지주들의 다른 많은 결합ㄷㄹ이 사용될 수 있다). 이러한 비제한적인 예의 외경(OD)은 대략 8.4"이고 축방향 길이는 1"이다. 스테이터는 연성 자성 강으로 제조될 수 있고 철계 재료 또는 적층 재료의 고체 부재로부터 제조될 수 있다. 로터(1222)는 연성 자성 재료로 제조될 수 있고 적층 재료 또는 철계 재료의 고체 부재로부터 제조될 수 있다. 와이어는 구리 또는 알루미늄이나 박판이나 사각 와이어 또는 초전도체 재료를 포함하는 소정 종류의 컨덕터들로 제조될 수 있다. 이러한 액튜에이터 크기는 발명자에 의하면 인간 크기의 로봇 아암의 어깨 또는 엘보우 죠인트에 양호하제 적합하다. 여기 하우징은 도시되지 않지만, 스테이터(1220)와 로터(1222)를 동심으로 절렬되게 유지하도록 작용하면 어떤 형상도 가능하다. 도 53은 지주(1227, 1228)마다 단일 와이어 층을 포함하는 코일(1232)을 가진 168개의 지주들과, 스테이터(12200의 외경(OD) 근처에서 각 지주에 접촉하는 영구 자석(1224)을 포함하는 스테이터의 등축 부분 도면이다. 이는 또한 140 로터 지주들의 어레이를 도시하고 코일(1232)들은 각각 위에 단일 층의 권선과 스테이터(1220) 위의 조임쇠(1230)를 포함할 수 있다.
스테이터 코일(1232)들에 동력이 공급되지 않으면 PMs로부터의 플럭스는 스테이터를 통해 "회로를 단락"할 수 있고 따라서 에어갭을 가로지르는 "점프(jump)"가 존재하며는 플럭스가 감소되거나 없다. 코일들이 여자되지 않으면 이는 코깅 토크를 감소시키거나 제거한다. 내측 코일이 여자되면, 예컨대, DC 전류에 의하여 여자되면, PMs(1224)로부터의 플럭스의 일부가 에어갭을 향하여 가로 질러 로터 지주들로 조종된다(스테이터 지주 플럭스와 같이). 스테이터 코일의 전류가 클수록 에어갭의 플럭스 밀도가 더 높다.
스테이터 지주(1228)들은 동시에 모두 여자되는 단일 회로로 배선된다. 로터 지주들은 상(이 예에서 5상, 다른 수의 상들이 또한 사용될 수 있다)들로 배선되고 여자될 수 있으며 이어서 연속으로 극성들의 패턴을 따라 이동시킴으로써 정류될 수 있다. 이 예에서, 로터 지주 극성은 S N S N S S N S N S S N S N S S N S N S등이다. 다른 극성 구조들이 NS의 반복 패턴에 예컨대 사용될 수 있다. 제1 및 제2 세트의 인접 S 극들은 또한 차단될 수 있다. 사인 또는 다른 전류 프로파일이 또한 각각의 정류 지주들에 적용될 수 있다. 이 예에서, 로터와 스테이터는 24 게이지 와이어로서 감겨질 수 있고 20amps로서 여자될 수 있다. 스테이터와 로터는 0.5:1일 수 있다. 전체 조립체는 대략 2lbs의 무게이며 대략 50Nm의 20amps에서 토크를 가진다. 더 높은 전류는 더 높은 토크를 달성하기 위하여 짧은 시간 동안 가능한 것으로 믿어진다.
도 54 도시와 같이 하우징(1212, 1214)이 구비되면, 코일로부터 하우징으로의 열 방출은 내측 하우징(1214)과 외측 하우징(1212) 사이에 공유될 수 있다.
자석들의
할바
(
Halbach
) 어레이를 가진 예시적인 전기
기계
도 55는 내측 스테이터 위의 할바 배열의 영구자석들을 이용한 전기 기계의 실시예를 도시한다. 할바 배열은 전기 모터의 영구 자석들로서 사용하는 것으로 알려져 있다. 이는 영구 자석을 사용하는 효과적인 방식으로 분석이 도 53과 도 54 도시의 플럭스 조종 스테이터의 중량대 토크에 유사한 비율을 가진다. 영구 자석들은 강보다 작은 플럭스 밀도를 가지며 따라서 할바 배열 실시예의 최대 가능한 토크는 이 명세서에서 이미 설명되었던 플럭스 조종 실시예에 의한 것보다 일정한 직경(가능한 스테이터/로터 질량)에 대해 더 작은 것으로 예측된다. 할바 배열을 사용하는 이점은 많은 용도들에서 중요한 값인 낮은 프로파일의 형태 인자를 포함한다. 높은 슬롯 밀도로부터 발생한 컨덕터들을 위한 짧은 열 흐름 경로는 향상된 토크 밀도를 제공할 것으로 예측된다. 할바 배열은 스테이터 또는 로터 측에 제공될 수 있으며, 또는 내측일 수 있다. 또 다른 실시예에서, 삼각형 자석이 교대적인 반경방향 극성과 함께 사용될 수 있으며 그러나 할바 자석들과 유사한 크기와 형상을 가지는 각 자석들 사이에 연성의 자성 재료의 삼각형 플럭스 경로 커넥터들과 같이 사용될 수 있다. 이러한 구조의 이점은 자석들의 수의 절반에 기인하는 저렴한 비용, 단일 조임쇠 부품으로 모든 강 삼각형 부품을 연결할 수 있는 것에 기인하는 낮은 공차의 적층, 및 연성 자석 재료 로터 조임쇠에 자기적으로 부착된 것에 기인하는 영구 자석들의 더욱 양호한 고정을 포함한다.
내측 베어링과
외측
출력을 가지는
예시적인
축방향
플럭스의 전기
기계
도 56은 예시적인 액튜에이터(2100)의 단면을 도시한다. 외측 하우징(2102)은 외측 하우징(2104)에 고정된다. 두 부분들의 스테이터 또는 균등하게 제1 스테이터(2106)와 제2 스테이터(2108)는 나사 패스너들이나, 및/또는 접착제 또는 다른 고정 방법과 같은 기계적 수단에 의하여 각각의 내측으로 향하는 하우징 표면(2102, 2104)에 고정된다.
로터(2110)는 동심으로 하우징(2102 및 2104)에 대해 고정된 축방향 위치에 로터를 유지하는 베어링(2112)과 같이 회전하도록 고정된다.
도 57은 도 56으로부터의 실시예의 상세 단면도를 도시한다. 영구 자석(도시 없음)은 로터(2110)에 장착된다. 부분 평면이 스테이터(2106) 위의 지주(2114)를 관통하여 연장하나, 부분 평면은 스테이터(2108) 위의 지주를 관통하여 연장하지 않는다. 이러한 예시적인 실시예에서 스테이터(2108)는 지주 피치의 1/4턴 정도 회전되어 스테이터(2102 및 2104)들과 상호 작용하는 로터(2110)의 영구 자석들의 코깅 힘을 감소시킨다. 다른 스테이터에 대해 하나의 스테이터를 회전시키면 로터(2110)와 스테이터(2106 및 2108)들 사이에 생성된 다소 사인파형 치합 토크를 취소하도록 작용한다. 이러한 효과는 도 58에 도시되고, 여기서 전기파에 의하여 생성된 제1의 기본적인 조화로운 토크(2300)와 제1의 치합 토크(2302)는 전기 사이클의 시작과 종료에 각각 대응하는 0과 6으로 수(0 내지 6)에 의하여 표시된 로터 위치의 함수로서 라인(1b) 위에 표시된다. 스테이터(2106)의 지주(1b)와 스테이터(2108)의 지주(2b)는 로터의 영구자석(2124)에 인력(2306)을 미친다. 이러한 비제한적인 예시적인 실시예에서, 지주 대 자석들의 3:2의 비율이 존재하고 이는 스테이터의 지주에 대해 2개의 치합 단계(2308 및 2310)를 발생한다. 1/4 피치의 다른 스테이터에 대한 하나의 스테이터의 회전 오프셋은, 따라서 다소 하나의 스테이터의 사인파식의 치합 토크(2302)를 다른 스테이터의 치합 토크(2304)로부터의 상에서 180도에 정렬시켜 효과적인 수준의 치합 토크 취소를 달성한다. 로터 자석(2124)들에 대한 스테이터 지주(2114)의 다른 비율은 다른 수의 치합 단계들을 가질 것이며 이하의 계산에 따라 최대 치합 취소를 달성하기 위하여 다른 오프셋 각도를 필요로 할 것이다.
치합 단계들은 LCM - 지주들의 수(P)와 자석들의 수(M) 사이에 최소 공통 배율(LCM)이 주어지면, 3:2 비율에 대해, 치합 단계들의 수는 lcm (3.2) = 6이다.
예들:
3:2 비율 - lcm(3.2) = 6 치합 단계들
24:16 비율 - lcm(24,16)= 48
144:96 비율 - lcm(144, 96) = 288
144: 142 비율 - lcm(144, 142) = 10224
144: 146 비율 - lcm(144, 146) = 10512
오프셋 각도는 치합 단계들의 수에 기초하는 것이 발견되었으므로, 하나의 전자석 사이클에 대해 360 전자 각도이면, 6 치합 사이클이 있으며 이는 치합 사이클은 매 360/6 = 60 전자 각도에서 종료하는 것을 의미한다.
60 전자 각도는 치합 기계적 파동의 360도에 대응한다. 파동을 취소하기 위하여 180도 위상이 이동된 동일한 주파수의 파동이 필요하다. 180도 기계적인 상 이동은 15도 전자 파동에 대응하며, 이는 제2 스테이터는 15도만큼 전기 위상을 이동되어야 함을 의미한다. 2xTQ 대신에 전체 토크는 하나의 스테이터에 대해, 2xTQx cos(15도) = 2*TQ*0.966 = 1.932*TQ이다
스테이터가 스테이터 피치의 절반만큼 이동하면, 치합 단계들의 파동은 360도만큼 그의 상을 이동시키고, 이는 파동을 취소시키는 대신 두 개의 파동을 추가하는 완전한 치합 단계들을 의미한다. 파동을 취소시키기 위하여, 180도의 기계적인 파동 각도에 해당하는 피치의 1/4만큼 이동이 완수되어야 한다.
도 58 도시와 같이, 1/4 피치 오프셋은 3:2 비율로부터 발생되고, 6개의 치합 단계들이 있으면, 토크가 제로인 6개의 중립 위치가 있어야 한다.
위치(0, 2, 4, 및 6)은 기하학적으로 절반 피치 및 완전 피치에 해당한다.
0과 4는 제로 또는 절반의 피치에 해당한다.
2와 6은 절반 피치에 해당한다.
위치(1, 3, 5)들은 1/4피치, 3/4 피치, 및 4/5 피치에 해당한다.
도 59는 도 56에서의 장치의 분리된 도면을 도시한다. 이러한 비제한적인 예시적인 실시예(2100)는 로터(2110)의 어느 축방향 단부로부터 돌출하고, 어느 축방향 단부에 스테이터(2106, 2108)(도시 없음)들을 가진다. 스테이터들은 조임쇠(2126)를 가지며 핀(2139)들의 어레이는 후면으로부터 돌출하고 2144개의 반경방향으로 정렬되는, 축방향으로 연장하는 지주(2114)들이 2144개의 슬롯들에 대응한다. 96개의 자석(2124)들이 존재하고 스테이터(2106, 2108)들은 모터 콘트롤러로부터의 3상 사인 파워에 의하여 구동된다. 일벙한 범위의 슬롯들이 사용될 수 있고 일정 수의 자석 수들이 개시된 범위 내에서 사용될 수 있다. 다양한 수의 상들이 사용될 수 있고, 많은 다른 배선 구조들이 사용될 수 있다.
예시적인 실시예는 NS2 영구자석들을 가진 부분적인 슬롯 권선을 사용한다. 많은 다른 영구 자석들이 사용될 수 있고 많은 다른 자석 재료들이 사용될 수 있다.
층상 구조를 가진 예시적인
축방향
플럭스 전기
기계
도 59와 도 60 도시의 실시예에서, 직각으로 자화된 영구자석(2124)들이 시퀀스 N S S N N S S N N S S N N S--로서 직각으로 자화된다. 따라서 로터(2110) 위의 매 제1 반경 방향 플럭스 경로 부재(2128)가 양측 축방향 단부에서 N 극성이고 매 제2 플럭스 경로 부재(2130)는 양측 축방향 단부에서 S 극성이다. 모터 콘트롤러에 대해 로터(2110)의 반경방향 위치를 제공하기 위하여 제한되는 것이 아닌 와류 전류 센서, 광학 센서, 또는 다른 센서와 같은 인코더와 연관되어 로터(2110)는 사용될 수 있다. 많은 다른 유형의 인코더들이 이러한 장치의 실시예와 같이 사용될 수 있다. 로터(2110)의 원통 부분(2118)은 로터(2110)로부터 로봇 아암과 같은 출력으로 장착면을 제공하고, 또 로터(2110)에 강성을 제공하기 위하여 작용한다. 이러한 원통 부재(2118)는 로터(2110)와 일체일 수 있으며 또는 열 팽창에 의하여 디스크에 조립되거나 또는 아니면 로터(2110)의 디스크 부분에 부착되는 알루미늄 링에 제한되는 것이 아닌 바와 같은 별개 부품일 수 있다. 분리기 디스크(2120)는 스테이터 지주(2114)들 사이 슬롯에 컨덕터들을 밀봉하고 수용하기 위하여 사용될 수 있다. 분리기 디스크(2120)가 사용되면, 그들은 와류 전류를 ㅂ바방지하기 위하여 TorlonTM(폴리아미드-이미드)와 같은 비전기적으로 전도성인 재료 또는 다른 비금속 재료일 수 있다. 컨덕터(2122)들은 와이어들을 포함하는 어느 구조일 수 있으며, 그러나 여기 도시된 바와 같은 층식 구조일 수 있다. 컨덕터들은 구리 또는 알루미늄과 같은 어느 재료로 제조될 수 있다.
도 60은 하우징(2102)과 스테이터(2106) 조립체가 분리되고, 로터(2110)와 자석(2124)들이 분리되고, 하우징(2104) 및 스테이터(2108)가 조립된 도 56으로부터의 장치의 일부 도면을 도시한다. 공기흐름 유입구(2132)가 하우징(2104) 위에 도시되고, 분리 디스크(2120) 및 로터(2110)의 교차-흐름 구멍(2134, 2136)들에 의하여 액튜에이터(2100)의 일 측면으로부터 반대 스테이터로 냉각 유체가 흐를 수 있다.
도 61은 하우징(2102)의 일부 상세 도면이다. 하우징(2102)의 내면은 스테이터(2106) 후면의 핀(2139)들의 어레이를 위한 수용 슬롯(2138) 어레이를 가진다.이들 수용 슬롯(2138)들은 스테이터(2106)의 후면을 하우징(2102)에 고정하도록 작용하고, 스테이터(2106)의 후면으로부터 열을 전도성으로 하우징(2102)으로 전달하도록 작용한다. 스테이터(2106)와 하우징(2102) 사이, 그리고 수용 슬롯(2138)들 사이의 용적은 스테이터(2106) 후면과 하우징 내면으로부터 멀리 열을 인출하기 위한 유체흐름 챔버로서 사용될 수 있다. 가스 또는 액체는 펌프나 압축기(도시 없음)에 의하여 이러한 챔버를 관통하여 순환될 수 있다. 개시된 슬롯 구조의 냉각 효율에 의하여 많은 예들에서 냉각 유체로서의 공기에 의하여 높은 성능이 달성될 수 있다. 액체 대신에 공기를 사용하면 낮은 비용과 중량 및 많은 예들에서의 누출의 문제 제거를 포함하는 많은 가능한 이점을 가진다.
도 62는 하우징(2102)에 조립된 스테이터(2106)를 도시한다. 이러한 예시적인 실시예에서, 스테이터(2106)는 개시된 범위 내의 슬롯 밀도와 컨덕터 부피를 가진 축방향으로 연장하는 반경바향으로 정렬된 지주(2114)의 어레이를 포함한다. 유체 포트(2140)의 어레이는 스테이터(2106)와 하우징(2102 및 2104) 사이의 챔버 유체용 유입구 또는 유출구를 제공하기 위하여 스테이터(2106) 위에 도시된다.
도 63은 전기 기계 실시예의 3;2 층의 컨덕터 구조의 상(A)의 제1 컨덕터 층(2142)을 갖는 하우징(2102)에 조립된 스테이터(2106)를 도시한다. 컨덕터들의 이 실시예의 상의 각 층은 스테이터(2106) 위의 단일 축방향 층을 가지며 동일한 층 위의 다른 상으로부터 다른 컨덕터들이 없다. 층 위의 컨덕터(2142)는 연속으로 두 개의 슬롯(2143, 2145)들을 점유하고 이어서 슬롯(2147)을 생략하므로 층 위의 제1 슬롯(2143)은 하나의 반경 방향으로 전류 흐름을 제공하는 상으로부터 컨덕터(2142)를 가지며, 해당 층 위의 제2 슬롯(2145)은 반대 반경 방향으로 전류 흐름을 제공하는 상으로부터 컨덕터(2142)를 가지며, 해당 층 위의 제3 슬롯(2147)은 컨덕터가 없다. 도 64에는 이러한 컨덕터 형상과 하나의 상에 하나의 컨덕터 층(2142)의 시퀀스가 도시된다.
도 65는 명확성을 위하여 다른 상들로부터의 스테이터(2106)와 컨덕터들이 제거된 동일한 상의 컨덕터(2142)들의 4개 층들을 도시한다. 축방향 인서트(2148)들은 층 위의 상으로부터의 각 컨덕터(2142)의 단부를 다른 층 위의 같은 상으로부터의 또 다른 컨덕터(2142)의 시작에 연결한다.
도 66은 각 상으로부터의 하나의 컨덕터 층(2142)을 가지는 예시적인 실시예의 컨덕터 배열을 도시한다. 하나의 컨덕터 층(2142)의 단부-턴은 다음 컨덕터 층(2144)의 단부-턴들과 겹치므로 슬롯의 층들 사이로 반경방향으로(이 예에서 외측으로 그러나 유체는 어느 방향으로나 유동할 수 있다) 유체흐름 통로(2150)를 제공한다. 스테이터 지주들은 도 66에 도시되지 않았다. 도 67에서, 동일 층 위의 매 제3 슬롯(2147)의 유체흐름 채널은 에시적인 슬롯에서 점선 화살선으로 도시된다. 스테이터(2106) 위의 매 제1 지주(2250)는 어느 직각 측면 위의 상(A)으로부터 컨덕터(2144)를 가진다. 스테이터(2106) 위의 매 제3 지주(2254)는 어느 직각 측면 위의 상(C)으로부터의 컨덕터(2146)를 가진다.
이러한 층을 이루는 권선 구조에 의하여 지주들 사이의 컨덕터들 사이 공간으로 반경방향 냉각 유체가 흐를 수 있으나, 단부-턴들이 슬롯들의 채널로의 반경 방향 접근을 밀봉한다. 반경 방향 채널(2150)들로의 흐름을 제공하기 위하여, 컨덕터(2142)들은 도 68 도시와 같이 각각의 지주(2114)emfd의 단부에서 축방향 흐름 경로(2152)가 예비-형성된다. 이러한 축방향 흐름 경로에 의하여 슬롯(2147)의 채널(2150)에서 유체가 반경방향으로 흐를 수 있으며 지주(2114) 단부에서 둘레 방향으로 흐르고, 이어서 축방향 유체 경로(2152)에서 축방향으로 흐르고, 이어서 다른 층의 반경 흐름 채널(2150)에서 반경방향 외측으로 흐를 수 있다(또는 냉매 흐름 방향에 따라 내측으로).
이러한 흐름 경로가 도 68에 도시되는 데, 두터운 화살표가 지주(2114)와 반경으로 정렬된 유입 채널(2154)까지의 공기 흐름을 도시한다. 두터운 점선 화살표는 유입 채널(2154)에서의 반경 흐름을 도시한다. 가는 점선은 지주(2114) 단부를 가로 지르는 직각 흐름을 나타내고, 이어서 지주(2114) 단부에서의 공간(2152)의 축방향 흐름을 나타낸다. 긴 점선은 컨덕터(2142)들 사이의 채널(2150)에서의 반경방향 외측으로의 흐름을 표시한다. 이와 같이, 지주(2154)들 단부에서 축방향 흐름 경로(2152)를 생성함으로써 냉각 유체는 다수 경로를 가지며 여기서 유체는 직각으로 그리고 축방향으로 흐를 수 있으므로 반경방향 흐름 채널(2150)로 유입 및 배출 공기를 연결한다.
도 69는 유사한 화살표의 동일한 흐름 경로를 도시한다. 지주 단부 공간(2152)에 의하여 냉각 유체는 일 층으로 유입하고 다른 층에서 채널(2150)로 반경방향으로 유동하는 것이 중요하다.
층을 이루는 컨덕터 시스템의 실시예들이 더 높은 슬롯 충진 비율을 달성하기 위하여 반경방향으로 테이퍼된 슬롯에서 반경방향으로 테이퍼된 컨덕터를 포함할 수 있고, 용이하게 제조할 수 있도록 컨덕터를 압인할 수 있는 성능, 조립의 정밀성을 단순화하고 증가시키기 위하여 층을 이루는 구성을 가지며, 더 큰 제조의 일치성을 달성하기 위한 성능, 균등한 냉각을 위한 지속적인 유체 흐름 채널을 달성하기 위한 성능, 능동적인 냉각 수단을 통해 더욱 효과적인 냉각을 위하여 컨덕터들의 용적에 대해 컨덕터들과 접촉하는 냉매의 더 큰 표면적을 생성하기 위한 성능을 포함할 수 있다.
도 63 및 다른 도면들 도시와 같은 층을 이루는 컨덕터 시스템의 실시예들은 대부분의 층에 대해 동일한 컨덕터 두께 및 전류 흐름 방향에 수직인 더 큰 단면적을 가진 단부 턴에서의 더 넓은 부분을 포함하는 가병 폭을 특징으로 한다. 단부 턴에서의 더 넓은 단면적은 저항을 감소시키고 정사각형 효과에 의하여 단부 턴에서의 열 발생을 감소시켜서 슬롯들에서의 더 좁은 컨덕터들보다 단부 턴이 더 낮은 온도에서 동작하도록 하기 때문에 유익하다. 단부 턴들에서의 더 큰 단면적과 함께 슬롯 턴들과 단부 턴들 사이에서의 매우 낮은 열 흐름 저항이 슬롯에서 생성된 열에 대해 매우 효과적인 히트 싱크를 제공한다. 단부 턴의 표면적이 넓으면(단부 턴들이 슬롯에서의 컨덕터의 최대 폭에 비교해서 더 작거나 동일한 폭인 것에 비교하면), 단부 턴들이 능동적으로 냉각되는 경우의 유체 상호 작용 및/또는 전기 컨덕터 단부 턴들의 연속 층들을 통한 하우징으로의 전도성 열 전달을 위한 증가된 표면적을 제공한다.
소정 수의 층들은 이러한 층을 이루는 컨덕터 시스템과 같이 사용될 수 있다. 소정 수의 상들이 이러한 컨덕터 시스템과 같이 사용될 수 있다. 모든 수의 상들과 같이, 예컨대, 컨덕터는 두 인접한 슬롯들을 이들 슬롯들에서의 반대 방향으로의 전류 흐름으로 충진할 수 있고, 이어서 X-2 슬롯슬롯들을 생략하며 "X"는 상들의 수이다. 4상의 경우, 예컨대, 층 위의 각 컨덕터는 3상의 경우에서 하나의 슬롯을 생략하는 것보다 2개의 슬롯을 건너뛸 것이다. 5상의 경우 각 컨덕터는 세 개의 슬롯들을 건너뛰는 등이다.
예시적인 축방향 플럭스 기계
장치의 비제한적인 예시적인 실시예(2156)의 단면도가 도 70에 도시되고, 평균 에어갭 직경은 175mm이다. 2146개의 반경방향 플럭스 경로 부재들(2160)에 대응하는 2146개의 영구자석(도시 없음)을 가진 로터(2158)가 각각 144개의 지주(2164)들과 144개의 슬롯들을 가진 두 스테이터(2162)들 사이에 베어링 위에 회전하도록 고정된다. 다른 수의 상들이 가능하지만, 3상 제어가 사용된다. 도 71 도시와 같이, 3상들의 각각으로부터의 컨덕터(2166)들이 두 개의 균등하게 대각선으로 반대로 배치된 24슬롯들 각각의 부분들에 위치된다. 3상 각각의 제2 부분은 역 전류 흐름 방향으로 제1 부분으로 배선되고 상의 각 부분은 그에 인접한 상으로 역으로 회전되어 배선된다. 컨덕터(2166)들은 종래의 와이어이나 도 70 내지 도 78 도시와 같이 층을 이루는 컨덕터 시스템일 수 있다. 이 실시예에서, 각 부분의 상의 컨덕터(2166)들은 하나의 둘레 방향에서 각 인접 슬롯의 반경 방향을 교대로 향하고; 부분의 단부에서 역 둘레 방향으로 향하고; 반대 둘레방향에서 반경 방향으로 교대로 향하므로 슬롯의 모든 컨덕터들에서 전류는 항상 같은 반경 방향으로 흐르고, 각 슬롯은 해당 부분에서 인접 슬롯에 비교해서 일정한 순간에 반대 전류 흐름 방향을 가지므로 일 부분의 지주들은 여자된 순간에서 교대적인 극성으로 자화될 수 있다.
24 슬롯의 6 부분의 와이어 패턴 각각이 여기 도시되고 "A"는 회로가 일 방향으로 배선되고 "a"는 같은 회로가 반대 방향으로 배선된 것을 나타내며, 다른 문자는 다른 상들을 표시한다. 처음의 6개의 슬롯만이 도시된다.
슬롯들
부분(sections) 1 2 3 4 5 6 ---
1 A a A a A a ----
2 b B b B b B ----
3 C c C c C c ----
4 a A a A a A ---
5 B b B b B b ----
6 c C c C c C ----
위는 하나의 스테이터에 대한 상과 극성 패턴이다. 두 스테이터들을 가지며, 그리고 이 명세서에서 예컨대 개시된 바와 같은 로터를 사용하는 실시예에서, 반경방향 플럭스 경로 부재의 양측 축방향 단부 위에서 동일한 극성을 가지며, 제2 스테이터 배선의 물리적 구조는 로터 중심을 관통하는 평면 둘레로 반영되어야 한다.그러나, 전류 흐름은 다른 스테이터들에 비교해서 스테이터들의 하나 위의 축방향으로 정렬된 지주들의 반대 방향이어야 한다.
144: 146 크기는 결코 한정적이 아니고; 넓은 QJQADNL의 슬롯 부재들과 자석 부재가 가능하다.
도 72는 상기 설명된 바와 같은 종래 구조를 사용한 가시 상들로부터의 컨덕터(2174)들의 극성과 시작 및 종료 연결부 상(2176)을 갖는 간략화된 스테이터(2172)의 부분 도면을 도시한다.
이 장치의 매우 높은 수의 치합 단계들에 기인하여, 치합 진폭은 매우 낮을 것으로 예측된다. 따라서 스테이터들을 도 56 도시와 같이 서로 소정의 각도로 위치시키는 것은 필요하지 않은 것으로 예측된다.
축방향
플럭스 전기
기계의
예시적인 냉각 구조
수동적인 냉각은 예컨대 전가 전도체들로부터 각 스테이터의 스테이터 조임쇠의 후면으로의 전도성 열 전달을 통해 사용될 수 있다. 도 70과 도 71의 실시예에서, 조임쇠(2170)는 고체 철 또는 강과 같은 일체형 부재로 제조되고 제한되는 것이 아닌, 평평하지 않을 수 있는 또 다른 연성 자성 재료 또는 분말화된 PermendurTM 49Fe-49Co-2V와 같은 낮은 전기 전도성이나 높은 자성 포화성 재료일 수 있다. 본 명세서에서 고체는 스테이터의 자성 재료가 연속이고 비자성 적층들이 없는 것을 의미한다.
스테이터(2162)는 표면적을 증가시키고 방사 효과와 대류성의 유체 흐름에 의하여 수동적인 냉각을 위한 증가된 냉각 비율을 제공하는 스테이터(2162)의 후면 위의 냉각 핀(2178)들의 어레이를 가진다. 냉각 핀(2178)들은 또한 냉각 핀(2178) 위로의 가스 또는 액체의 압송과 같은 능동 냉각의 효율을 증가시킬 것이다.냉각 핀(2178)들은 하우징(도시 없음)과 같은 챔버 내측에 밀봉될 수 있다. 여기 도시된 냉각 핀(2178)들은 반경으로 정렬되지 않는다. 이는 증가된 둘레 강성을 위한 반경으로 정렬된 지주(2164)들을 가진 구조상 매트릭스를 생성하기 위한 것이다. 이러한 스테이터 구조의 짧은 축방향 특징과 축방향 구조는 분말 자성 재료로부터의 구성에 적합하게 된다. 지주(2164)들과 핀(2178)들은 가압 성형 또는 다른 제조 방법을 지원하기 위하여 축방향으로 테이퍼될 수 있다. 컨덕터(2166)들은 각각의 슬롯 깊이에서 소정의 슬롯 충진을 달성하기 위하여 슬롯의 바닥으로부터 슬롯의 상부까지 폭들이 다를 수 있다.
도 73 도시 실시예에서, 컨덕터 시스템은 슬롯(2185)들의 컨덕터들의 폭의 50%보다 더 큰 결과로서 차단되지 않은 축방향 전도성 열 흐름 경로(2180)의 결합과 컨덕터(2186)들의 누락 층들, 및 필요하면 채널(2182)을 통한 반경방향 냉각 유체 챔버의 가능성을 제공한다. 이는 여기 개시된 원리들에 따라 많은 방식들에 의하여 달성된다. 도 73 도시의 예시적인 실시예에서, 지주(2184) 위의 어느 일 측의 컨덕터(2186)는 지주(2184)의 양측 위의 지주(2184)에 충분히 근접하므로 지주(2184)는 양측 둘레 방향으로 컨덕터(2186)를 정확하게 위치시키고 컨덕터(2186)와 지주(2184) 측면 사이의 결합부(2188)를 생성한다. 이러한 정밀한 배치에 의하여 컨덕터(2186)의 반대 측면에 갭(2182)이 생성된다. 중심에서 벗어나고 슬롯(2185)의 하나의 벽에 접하는 형상과 컨덕터(2186)의 예비-형성된 좁아짐에 의하여 접촉하지 않는 둘레로 향하는 측면 위의 유체 흐름 기능과 구조상 강성이 제공된다.
이 구조의 또 다른 특성은 슬롯(2185)의 컨덕터(2186)의 단지 하나의 둘레 방향으로 향하는 측면 위의 갭(2182)이다. 도자기 화합물 또는 피복은 하나의 큰 채널에 비해 두 개의 작은 채널들을 가진 경우, 더욱 그러하였을 바와 같이 채널(2182)을 충진하지 않는 것을 확실히 지원한다. 이러한 구조에 의하여 또한 각각의 컨덕터(2186)는 지주(2184)의 측면으로의 전도성 열 흐름 경로(2190)를 확실히 가지도록 지원한다.
도 73 도시의 구성의 결과, 슬롯(2185)의 컨덕터(2186)들로부터의 열이 컨덕터(2186)들을 통해 스테이터(2193)의 조임쇠(2194)로의 중단되지 않는 축방향 열 전도 경로, 지주(2190)로의 둘레 방향 열 전도 경로를 가지므로, 지주로부터 조임쇠(2192)로의 짧은 열 흐름 경로를 허용한다. 조임쇠(2196)의 후면으로부터, 스테이터(2193)로부터의 열은 이 도면에 도시된 바와 같이 전도적으로 하우징(2198)으로, 또는 냉각 유체로, 또는 또 다른 본체(다른 실시예에서 도시된 바와 같이)로 방사될 수 있다.(322)
도 74의 실시예는 전 폭의 슬롯(2203)인 주기적인 층(2200)들, 슬롯(2203)보다 좁은 주기적인 층(2202)들을 가진다. 층(2202)들은 각 제2 지주(2205)의 양측에 위치시키기 위하여 사전 제작될 수 있다. 이로써 더 좁은 컨덕터(2202)가 집중되면 위험이 증가될 수 있는 바와 같이 점토 화합물에 의하여 채널을 차단할 최소 가능성을 가지며 지속적이고 반복적인 유체 흐름 채널(2201)이 제공된다. 좁은 컨덕터(2202)들은 더 넓은 컨덕터(2200)의 단면적에 합치하기 위하여 축방향으로 더 두터울 수 있다. 이러한 구조의 컨덕터(2202)들은 슬롯(2203)에서 컨덕터(2203)의 구조적 강성을 여전히 제공하면서 50%보다 좁아질 수 있다. 층에 대해 50%보다 좁은 폭을 사용함으로써 도 73 도시의 단일 두께 구성보다 채널(2201)의 더 큰 단면적이 제공될 수 있다.
도 75는 도 74 실시예의 4개 층들의 분리된 도면을 도시한다. 더 좁으나 축방향으로 더 두터운 컨덕터(2202)에 대조적으로 컨덕터(2200)들의 더 넓은 그러나 축방향의 더 얇은 부분이 여기 명확히 도시된다.
지주당 더 많은 수의 턴들이 실시예에 따라 필요할 수 있으면, 더 얇은 다수 층의 컨덕터(2206)들이 도 76 도시의 동일한 축방향 프로파일을 가질 수 있다. 이로써 다층 두께의 유체 흐름 갭(2208)이 달성되고 점토 화합물에 의하여 갭이 차단되는 것을 방지하는 이점이 있으며, 또는 유체 흐름 갭을 영구히 채우지 않고 더 두터운 점토 화합물이 사용될 수 있다.
다층의 더 얇은 층(2206)들이 병렬로 또는 직렬로 사용되어 다양한 효과를 발생할 수 있다. 일 실시예에서, 더 두터운 층(도시 없음)들은 슬롯의 바닥에서 인접층들과 직렬로 연결될 수 있고, 더 얇은 층들은 슬롯의 상부에서 병렬로 연결될 수 있다. 병렬의 더 얇은 층들은 로터 회전 동안 영구 자석들에 가장 근접한 컨덕터들에서 와류를 감소시키는 이점을 가지는 것으로 믿어진다.
이들 모든 실시예들은 지주의 하나 또는 양측의 반경 단부들에서 축방향 냉각유체 흐름 경로로부터 이점을 가지며 이는 부분적으로 에워싸는 스테이터 지주보다 더 긴 반경방향 컨덕터 슬롯으로부터 발생하며, 슬롯들의 유체 흐름을 슬롯의 밤경방향 흐름보다 다른 층의 컨덕터부분에 집중하거나 또는 배츨될 수 있도록 한다.
이들 컨덕터 구성의 변형은 이 컨덕터 시스템의 다른 실시예들의 다른 변형과 결합될 수 있다.
도 71의 컨덕터들은 사전-형성되어 컨덕터(2166)들의 측면과 지주92164)의 측면들 사이에 슬롯(2167)의 일 측면에 갭을 형성한다. 이 갭(2169)은 지주92164)의 단부에서 축방향 흐름 경로와 결합하여 냉각 유체를 지주(2164)의 단부에서 둘레방향으로 흐르게 하고 이어서 갭(2168)을 통하여 지주(2168) 단부를 따라 축방향으로 흐르고, 이어서 다른 층 위의 두 개의 슬롯(2167)들로부터의 컨덕터들 사이 갭(2169)의 반경방향 외측으로 흐른다(또는 흐름이 역전되면 내측으로). 컨덕터(2166)는 각각의 제1 지주(2164)의 양 측면에 틈새를 가지며, 각 제2 지주(2165)의 양 측면에 밀착 고정된다.
축방향으로 인접한 컨덕터 층들 사이의 전기적인 연결은 많은 방식으로 이루어질 수 있다. 전기적인 연결은 축방향으로 인접한 컨덕터 요소들의 전기적인 흐름 경로를 직렬로 연결하기 위하여 축방향으로 인접한 컨덕터 요소들 사이에 이루어질 수 있다. 일 실시예는 일 부분의 단부에서 슬롯에서 두 개의 컨덕터들의 표면적을 겹치는 것을 사용하여 큰 납땜 표면적을 제공한다(또는 다른 전기적인 연결 방식). 슬롯에서 두 층들로부터의 두 개의 컨덕터들을 사용하면, 두 층들의 전체 슬롯 길이를 단일 컨덕터로서 사용할 수 있다. 이로써 해당 슬롯에서 냉각 요건을 감축하기에 충분하게 전기 저항을 감소시킨다. 정확한 흐름 채널을 유지하는 것이 납땜 연결부에서 보다 어렵고 따라서 유체 흐름이 높은 생산성을 보장하기가 더욱 어려우므로 이는 매우 중요하다.
도 77에는 슬롯에서 이중으로 중첩하는 표면층이 연결된 컨덕터들의 구성이 도시된다. 컨덕터(2208)들은 층들 사이에 종이로서 코팅되거나 또는 절연되고, 또는 양극화되며, 다만 인접 표면 위의 컨덕터(2218)들로부터의 두 개의 치합면(2220 및 2222)들이 절연되지 않거나 전기 컨덕터와 같이 연결되는 단부 슬롯의 영역을 제외한다. 구성 방법들은 각 층이 또 다른 층의 상부에 배치됨에 따라 일부분의 교대적인 단부에서의 연결의 수동 또는 자동화된 납땜을 포함한다. 이들 표면의 사전-주석 도금에 의하여 이 공정이 정밀하게 실행될 수 있다. 이들 표면의 스팟-용접은 접합부에 두께를 부가하지 않고 전기적인 연결을 형성할 수 있으며 과도한 납땜의 위험을 제거하여 다른 표면들과의 불필요한 접촉을 방지한다. 알루미늄 컨덕터들이 사용되면, 그들은 크게 양극화되고 이어서 주석 도금이 준비될 것이다(양극화 동안 매스킹을 실행하여, 이어서 연결부 표면은 불활성 분위기에서 산화층의 박리가 이루어진다). 여전히 불활성 분위기서, 이어서 표면은 땜납 페이스트에 의하여 주석 도금되거나 코팅된다. 이는 보관 및 조립 동안 알루미늄 연결부 표면이 산화하는 것을 방지한다. 동일한 공정이 단부 연결부(2224)에 대해 사용될 수 있다. 컨덕터(2218)들의 일부분의 조립 동안, 이어서 층들은 별도 조립 고정물 내에서 또는 스테이터 내측에서(도시 없음) 모두 적층될 수 있다. 단시간 동안 컨덕터들에 높은 전류를 이니가하면 죽석 도금된 땜납을 같이 용해하기에 충분한 열을 생성할 수 있고, 또는 재유동 오븐이 땜납 또는 땜납 페이스트를 용해하기 위하여 사용될 수 있다. 층들이 연결되고 컨덕터들이 스테이터 슬롯에 위치되면, 스테이터 슬롯에서 모든 공기(또는 다른 가스)를 제거하기 위하여 점토 화합물 또는 니스, 등이 사용될 수 있다. 사용 동안, 냉매 흐름 통로가 개방되도록, 점토 화합물 또는 니스, 등은 제한되는 것이 아닌 공기 흐름 및/또는 중력 및/또는 원심력에 의하여 냉매흐름 통로로부터 제거된다.
슬롯 내의 반경방향 냉매 흐름 챔버가 일 실시예에서 실시되지 않으면, 도 78의 장치는 여전히 단부 턴들과 축방향으로 정렬된 하우징(도시 없음) 또는 조임쇠로 낮은 저항에서 열이 흐를 수 있도록 축방향으로 적층된 단부 턴들의 더 큰 중단되지 않은 단면적을 제공하고 냉각을 위하여 표면적을 증가시키고 열 생성을 감소시키기 위하여 전기 컨덕터(2218)들의 더 큰 단부 턴의 둘레방향 표면 영역(슬롯 부분의 반경방향 단면 영역에 비교해서)의 이점을 제공할 것이다. 더 큰 단면적은 또한 단부 턴들에서의 동일하거나 더 작은 단면적(전류 흐름에 수직인)에 비교해서 단부 턴들에서 더 큰 용적을 제공한다.
이 실시예의 활성 냉각은 또한 반경 방향 유체 흐름에 의하여 실행될 수 있으나, 누락된 컨덕터 층들은 없고, 그래서 대체적인 구성이 일관된 크기의 이격된 반경 방향 유체흐름 채널들을 제공하도록 사용될 수 있다. 컨덕터들을 축방향으로 이격시키는 것은 가능할 것이며 유체에 대해 컨덕터들의 더 큰 표면적을 노출시킬 것이나, 이는 합치하는 갭을 달성하는 것이 어려울 것이며, 낮은 강성을 가진 얇은 컨덕터층들에 적합하지 않을 것이다. 하나 이상의 컨덕터층들은 다른 층들의 ㅋ커컨덕터들보다 더 좁은 폭을 가진 슬롯에 사용될 수 있고 및/또는 하나 이상의 컨덕터들이 같은 폭이나 둘레 방향으로 비스듬한 슬롯에 사용될 수 있으므로 컨덕터들은 축방향으로 겹칠 수 있으나, 다른 것보다 슬롯의 하나의 둘레 방향 측면에 더 근접한다. 슬롯의 둘레 측면으로부터 슬롯의 다른 둘레측면으로 연속ㄷ적이거나 주기적인 층들을 반복함으로써, 중단되지 않은 열 전도 경로가 스테이터 조임쇠로부터 가장 먼 컨덕터로부터 슬롯 바닥으로 생성될 수 있다. 동시에, 하나 이상의 반경 방향 채널이 슬롯의 컨덕터 표면을 가로질러 냉매 흐름을 제공하기 위하여 컨덕터 층들 사이에 생성될 수 있다.
일 실시예에서, 슬롯의 하나 이상의 컨덕터들이 슬롯의 전 폭이고(절연 및 조립을 위하여 틈새 제외), 슬롯의 하나 이상의 층들은 유체 흐름용 갭을 생성하기 위하여 슬롯보다 더 좁다.
일 실시예에서, 슬롯의 하나 이상의 컨덕터들은 슬롯의 전 폭이고(절연 및 조립을 위하여 틈새 제외), 슬롯의 하나 이상의 층들은 더 좁은 컨덕터의 단지 하나의 둘레 방향 측면 위에 유체 흐름용 갭을 생성하기 위하여 슬롯보다 더 좁고 ㅈ조심되지 않는다.
일 실시예에서, 슬롯의 하나 이상의 컨덕터들은 슬롯의 전 폭이고(절연 및 조립을 위하여 틈새 제외), 슬롯의 전 폭이고(절연 및 조립을 위하여 틈새 제외), 슬롯의 하나 이상의 층들은 유체 흐름용 갭을 생성하기 위하여 슬롯보다 더 좁고 더 넓은 컨덕터들보다 더 두터우므로 슬롯의 모든 컨덕터들의 단면적이 더욱 지속적이다.
도 67의 실시예에 유사하게, 이 실시예는 반경 방향 흐름 경로 채널에 진입하거나 배출하도록 반경방향/둘레 방향/ 축방향 흐름 유체 경로를 제공하기 위하여 지주의 단부에서 축방향 흐름 채널을 사용한다.
냉매 흐름 채널을 제공하는 모든 컨덕터 실시예들은 단단함을 위하여 그리고 조립 동안 스테이터로의 열 전달을 위하여 도료 또는 점토 화합물로 형성될 수 있다. 점토 화합물 또는 도료가 경화된 후에 냉각 채널을 유지하기 위하여, 스테이터는 큰 흐름 채널로부터 점토 화합물 또는 니스 등을 원심 분리하기 위하여 회전되어야 한다. 설치/경화/건조 공정이 흐름 통로가 개방되어 점토 화합물과 니스 등이 경화하기까지 확실히 개방 유지되도록 사용되는 동안, 중력 낙하 배출이낮은 충분한 점성의 화합물 또는 가압 가스 흐름에 대해 작용할 수 있다. 화합물의 점성과 액체 화합물 제거 방법과 컨덕터들과 지주들 사이에 근접-접촉 갭들은 액체 제거 공정이 채널로부터 화합물을 제거하나 화합물이나 니스 등이 근접 접촉 갭들 내에 잔류하도록 형성된다.
전기 기계에서 예시적인 플럭스 제어 구조물
도 79 도시의 권선에 의하면 구부러지거나 가변-폭의 지주(2226)와 같은 비직선 지주 형상이 제공된다.
로터와 스테이터 사이의 에어갭을 가로지르는 영구 자석으로부터의 플럭스를 증가시키기 위하여 영구자석의 N 측면으로부터 영구 자석의 S 측면으로의 플럭스 연결 경로는 감축될 수 있다. 축방향으로 정렬된 영구 자석 로터에서, 도 102 도시와 같은 제한 되는 것이 아닌, 강과 같은 연성 자성 재료로 제조된 고체 조임쇠에 의하여 달성될 수 있다. 이 경우, 영구 자석(2370)으로부터의 플럭스는 조임쇠(2372)를 통해 인접 영구 자석(2370)으로 및/또는 조임쇠(2372) 위의 반대 축방향 면 위의 반대 영구 자석(2370)의 반대 극성 면으로 연결할 것이다.
축방향 플럭스의 영구자석(AFPM) 기계에 의하여 생성된 토크는 다른 것들 중에서 로터와 스테이터 사이에 상호 작용하는 플럭스 밀도에 의하여 영향을 받는다. 로터/스테이터 계면에서의 플럭스 밀도를 최대화하여 생성될 수 있는 토크를 최대화하기 위하여, 로터는 로터의 양측 단부들 위의 스테이터 계면으로 플럭스를 연통하기 위하여 영구 자석(PMs)의 직각으로 향해진 극 면들 사이에서 밀착 고정되는 연성 자성 재료를 이용할 수 있다. PMs의 축방향 치수들이 그들을 위하여 사용가능한 유용한 직각 공간보다 휠씬 크고, 스테이터와 상호 작용하는 플럭스 밀도가 증가된다. PM's들은 수직으로 NSSNNSSNNS 등으로 배치되므로 각은 극성 극들의 둘이 직각으로 서로 대면한다. PM's 교대적인 방향은 그들 사이의 연성 자성 재료의 내측 및 외측으로 향하는 연장부들이 교대로 SNSN 등으로 극성으로 되고, 각각의 반경방향으로 연장하는 플럭스 경로 부재는 양측 축방향 단부들에서 동일한 극성인 것을 의미한다. PM's의 축방향 치수 범위는 그 길이에 맞도록 변할 수 있으므로, 비교적 큰 토크가 낮은 세기의 자석들을 이용하여 생성될 수 있다. 축방향 치수들은 교대적인 극성의 축방향 면을 지나 PM's이 돌출하지 않도록 설정된다.
상대적인 각도 운동과 외부 하중에 기인한 구부러짐을 수용하기 위하여, 로터와 스테이터들의 축방향 면 사이에 에어갭으로 불리는 축방향 갭이 정상적으로 존재할 수 있다. PMs로부터의 플럭스는 그들 사이의 연성 자성 반경방향 재료에 ryeoo적인 자극들을 생성하고, 스테이터의 전자석들의 자극들은, EMs에는 전원이 공급되지 않아도, 이들 교대적인 자극들을 연결하기 위한 플럭스 경로를 제공한다. 로터와 스테이터 사이의 인력이 더 높고 에어갭이 더 작으면, 로터 양측 단부들 사이의 동일한 에어갭을 가지고 스테이터들을 향하는 인력은 동일하고 반대이며, 소정의 각도상 위치에서의 에어갭의 변화는 이동을 증가시키는 순 힘을 발생할 것이다. 이러한 경향은 작동 동안의 스테이터와 로터의 접촉을 피하기 위하여 베어링과 충분한 로터 강성을 필요로 한다.
이하 설명되는 디자인은, 플럭스를 운반하고, 구조적 강성을 또한 제공하기 위하여 사용되고, 강이나 철 또는 코발트 또는 다른 연성 자성 재료 또는 합금이 사용되는 일체형 로터 구조를 구성한다. 제한되는 것이 아닌, 한-쌍의 사전-제작된 각도상 접촉 베어링과 같은 베어링이 구부러짐을 제어하고 공진을 피하기 위하여 필요한 로터와 스테이터 사이의 순간 강성을 제공한다.
일 실시예에서, 도 80 내지 도 86 도시의 로터(2228)는 같은 극성의 자극들 둘이 직각으로 서로 향하도록 NSSNNSSNNS등으로 배치된 직각으로 배열된 영구 자석(2230)들을 가진다. 로터(2228)의 외측 영역(2234)은 로터의 내측 영역(2238)의 같은 수의 규칙적이거나 균등하게 이격된 외측으로 돌출하는 반경방향 플럭스 경로 부재(2236)들과 상호 결합되고 영구 자석(2230)에 플럭스 경로를 제공하는 내측으로 돌출하는 규칙적이거나 균등하게 이격된 반경방향 플럭스 경로 부재(2232)의 어레이를 포함한다. 반경방향 부재(2232, 2236)들의 상호 결합은 로터92238)를 매우 강성으로 만들도록 지원한다. 상호결합에 의하여 영구자석92230)의 회로를 단락시키는 플럭스 연결 경로를 생성하지 않고 일체형(또는 두-부재의) 페라이트 구조를 제공하는 어려움을 극복한다. 로터(2228)는 충분히 강성이므로 로터(2228)의 작동 동안 구부러짐은 에어갭 길이의 일부이다.
영구 자석(2230)들의 정위가 직각으로 반복하는 결과, 로터(2234)의 외측 영역과 일체인 그의 내측으로 돌출하는 반경방향 플럭스 경로 부재(2232)는 모두 하나의 극성이고, 로터의 내측 영역(2238)과 하나의 부재인 외측으로 돌출하는 반경방향 플럭스 경로 부재(2236)들은 반대 극성일 것이다. 이러한 예시적인 실시예에서, 추가적인 베어링들이 사용될 수 있지만, 로터(2228)의 내측 영역(2238)만이 스테이터 하우징(도시 없음)에 베어링(도시 없음)에 의하여 지지된다.
로터의 ID 위에 베어링을 사용하면 제조 비용, 및 모터/액튜에이터 중량만을 감소시킬 뿐이며, 고 강도 및 로터의 강성의 강성이 달성될 수 있다. 일 실시예에서, 로터(2228)의 내측 및 외측 영역들은 도 82와 도 83에 의하여 도시된 작은 탭(2240, 2242)들에 의하여 일체 연결된다. 도 82는 내측 부재(2232)와 로터(2238)의 내측 부분 및 외측 부재들 사이의 구조상 연결이감소된 축방향 폭의 탭(2240) 및/또는 영구 자석(도시 없음)을 통해 이루어질 수 있음을 도시한다. 도 83은 rath된 축방향 폭의 탭(2242)을 통한 외측 부재(2236)의 최외측 부분과 로터(2228)의 외측 외측 부분(2234) 사이의 구조상 연결을 도시한다. 이들 탭들은 내측 또는 외측 로터 링(2238, 2234)들의 하나의 N 자석 면들로부터 내측 또는 외측 로터 링(2238, 2234)들의 다른 것 위의 S 면으로의 플럭스 복귀 경로를 생성할 것이다. 이러한 플럭스 복귀 경로는 로터와 스테이터(도시 없음) 사이의 에어갭 플럭스 ㅁ밀도를 감소시킬 것이나, FEA 및 FEMM 분석, 및 시제품 시험에 의하여 입증된 바와 같이, 내측 및 외측 로터 부재(2238, 2234)들 사이의 연결 강도 및 강성은 단지 매우 작은 비율의 영구자석(PM) 플럭스만이 상실되는 충분히 작은 단면적을 가지는 탭(2240, 2242)들의 어레이에 의하여 달성되었다.
도 84는 자석 리테이너(2244)를 도시하기 위하여 자석(2230) 없이 로터(2228)의 예시적인 실시예를 도시한다. 이들은 자석92230)들을 축방향으로 위치시키기 위하여 사용되고 슬롯92248)의 양측 단부들에 위치되고, 도 85 도시와 같이, 조립 동안, 절반의 자석(2230)들이 로터(2228)의 일 측면으로부터 삽입되고 자석(2230)의 다른 절반은 로터(2228)의 다른 측면으로부터 삽입된다. 각각의 자석(2230)의 절반의 세트는 조립을 위한 안정성을 향상시키는 같은 직각 정위로서 극성을 가질 것이다. 자석(2230)들은 접착제를 사용하여 위치에 고정될 수 있고 유지 탭(2244)들로의 유사한 반경방향 위치의 두 위치들에서와 같이 국부적인 슬롯 폭을 자석(2230) 두께보다 작도록 감소시키는 것과 같이, 개방된 슬롯 단부들을 두드려서 고정될 수 있다. 로터(2228)를 관통하는 홀(2245)들에 의하여 공기가 흐르므로 로터(2228)의 양 측에서의 스테이터 전자석(도시 없음)의 냉각은 하우징 구조물(도시 없음)의 단지 일 측면을 관통하여 공기 또는 다른 유체를 유동시킴으로써 달성될 수 있다. 제조 동안 고정하기 위하여 로터(2228)를 관통하여 역방향의 홀(2246)들이 형성된다. 도 86은 내측 및 외측으로 연장하는 플럭스 경로 부재(2232, 2236)들은 모두 하나의 부재 구조로 제조될 수 있으나, 내측 및 외측으로 연장하는 부재(2232, 2236)들은 감소된 단면의 탭(2240, 2242)으로부터 서로 분리되어 자기적으로 고립된것을 명확하게 예시하기 위하여 흑색으로 도시된 내측 로터 링(2238)과 외측으로 돌출하는 플럭스 부재(2236)들의 축방향 표면을 가진다. 탭(2240, 2242)들은 반경방향으로 연장하는 플럭스 경로 부재(2232, 2236)들에 비교해서 충분히 작은 단면일 수 있으므로 그들은 PM 플럭스로부터 적셔지고 따라서 해당 플럭스 레벨을 너머 상당한 추가적인 플럭스 연결을 허용하지 않을 것이다.
다른 변형은 연결 탭이 없는, 여기 도시된 바와 같은 반경방향으로 연장하는 플럭스 경로 부재들을 가진 탭들의 내측 및 외측 부재들에 대해, 다른 비자성 재료들의 인서트를 포함한다.
예컨대, 희토류 자석에 의하여 생성된 자력은, 플럭스 경로 부재의 집중 효과와 결합하여, 굉장한 축방향 힘을 발생할 수 있다. 대략 9"의 외경에서 여기 도시된 예에서, 1500lbs 와 같은 높은 스테이터에 대한 축방향 인력이 생성될 수 있다. 적절하게 강하고 견고한 구조물이 사용 동안 문제 있는 진동과 손상을 방지하기 위하여 사용될 수 있다. 상호 결합된 부재들을 가진 로터는 구조상의 강성과 동일한 반경방향으로 연장하는 부재들로의 플럭스 집중 기능을 제공한다. 이들 내측 및 외측 부재들의 상호 결합은 효과적인 플럭스 사용과 높은 강도 및 강성을 위한 부재의 직각면과 자석들 사이의 높은 표면 접촉을 제공한다.
축방향 플럭스의 전기 기계용 예시적인 로터
로터는 여기 도시된 바와 같은 단일 부재 구조로 제조될 수 있고, 또는 같 이 겹치는 둘 이상의 부재로 제조될 수 있다. 자석들은 플럭스 경로 효과 및 구조적인 효과를 위하여 어느 방향나 테이퍼되는 것을 포함하는 소정 형상일 수 있다. 어느 형상의 자석도 사용될 수 있다. 어느 숫자의 자석도 사용될 수 있다. 어느 폭의 자석도 사용될 수 있다. 로터의 하나 또는 양측 면들은 스테이터와같이 사용될 수 있다. 다수의 로터들이 사용될 수 있다. 자석들의 다수의 원형 어레이다 둘 이상의 어레이의 다른 숭의 자석들과 같이 사용될 수 있다. 이러한 로터는 소정 수의 상들 또는 자극을 갖는 액튜에이터 또는 모터 또는 어느 자석 기계 또는 장치와 같이 사용될 수 있다.
이러한 장치에 의하여 매우 높을 수 있는 자력에 대해 로터를 위치시고, 액튜에이터 위에 출력 부하를 지지하기 위하여 구조적 강성을 제공하고, 플럭스를 운반하기 위하여 사용되는, 강이나 철 또는 코발트 또는 다른 연성 자성 재료 또는 합금과 같은 연성 자성 재료가 사용되는 두-부재의 로터 구조를 이하 설명되는 디자인은 포함한다. 제한되는 것이 아닌 사전-장전된 쌍의 각도상 접촉 베어링과 같은 베어링은, 구부러짐을 제어하고 공진을 피하기 위하여 필요한 정적 구조물과 로터 사이의 순간 강성을 제공한다.
도 87 내지 도 92는 같이 볼트로 결합되거나 아니면 고정되거나 연결된 두 개의 다소 대칭의 영상의 절반부(2262 및 2264)로 구성되는 로터(2260)의 실시예를 도시한다. 이 실시예에서, 테이퍼형 자석(2266)들이 테이퍼형 로터 부재92268, 2269)들과 결합하여 자석(2266)들에 대한 기계적인 안전을 제공하고, 더 넓은 직각 자석 부분을 플럭스 경로 부재(2268, 2269)들의 플럭스 밀도가 작은 로터(2260)의 중심면에 더욱 근접시킬 수 있다. 이로써 영구 자석(2266)에 유용한 공간과 연성 자성 재료에 유용한 공간을 더 잘 이용할 수 있다. 도 90은 로터(2260)에 장착된 때와 같이 동일한 상대 위치에 설치된 영구 자석(2266)들을 도시한다. 이는 영구 자석(2266)들이 교대적인 직각 극성, NSSNNSSNNS, 등으로서 배치되므로 동일한 극성 자극의 둘이 직각으로 서로 향하는 것을 도시한다.
로터(2262,2264)들의 양측 절반부는 이미 설명되었던 로터(2228)의 실시예와 유사하게, 내측으로 돌출하고 외측으로 돌출하는 반경방향 플럭스 경로 부재(2268, 2269)들을 포함한다. 도 87 도시의 예시적인 실시예(2260)에서, 예컨대, 로터의 ID 또는 OD에 추가적인 베어링들이 사용될 수 있지만, 로터(2260)의 단지 내측 영역(2272)만이 베어링(도시 없음)에 의하여 스테이터 하우징(도시 없음)으로 지지된다. 로터의 ID 위에 베어링을 사용하면 단지 제조 비용과, 모터/액튜에이터 중량을 감소시킬 수 있고, 많은 용도들에서 추가적인 베어링을 불필요하게 하는 로터의 강성과 높은 강도에 의하여 가능해진다.
일 실시예에서, 로터(2260)의 내측 및 외측 영역은 도 86의 탭(2240 및 2242)에 유사한 작은 탭들에 의하여 일체로 연결된다.
도 91은 외측으로 돌출하는 반경방향 플럭스 부재(2269)들과 로터(2274)의 외측 부분 사이의 연결 탭(2270)의 축방향 영역을 도시하는 양측 로터 절반부(2262, 2264)들을 관통하여 직각으로 취한 부분 도면이다. 이들 탭(2270)들은 내측으로 돌출하는 반경방향 플럭스 경로 부재(2268) 위의 자석면으로부터 대향하는 자극의 외측으로 돌출하는 반경방향 플럭스 경로 부재(2269)로 향하는 플럭스 복귀 경로를 생성할 것이다. 이러한 플럭스 복귀 경로는 로터와 스테이터(도시 없음) 사이의 에어갭에서의 플럭스 밀도를 감소시킬 것이나, FEA 및 FEMM 분석, 및 시제품 시험에 의하여 입증된 바와 같이, 내측 및 외측 로터 부재(2272, 2274)들 사이의 연결 강도 및 강성은 단지 매우 작은 비율의 영구자석(PM) 플럭스만이 상실되는 충분히 작은 단면적을 가지는 탭(2270)들의 어레이에 의하여 달성되었다. 자석(2266)들은 그들의 테이퍼 형상에 의하여 양으로 유지되었고 접착제를 사용하여 더욱 제 위치에 고정될 수 있었다. 로터(2260)를 관통한 홀(2275)들에 의하여 공기가 흐를 수 있으므로 로터(2260)의 양 측면의 스테이터 전자석(도시 없음)들의 냉각은 하우징 구조물(도시 없음)의 단지 한 측면을 통해 공기 또는 다른 유체를 유동시키는 것에 의하여 달성될 수 있다. 로터(2260)를 관통하는 반대방향의 홀(2276)은 제직 동안 고정하기 위한 것이다.
내측 및 외측으로 연장하는 플럭스 경로 부재(2268, 2269)들은 모두 일 부재 구조로 이루어질 수 있고, 내측 및 외측으로 연장하는 부재(2268, 2269)들은 내측 로터 부분(2260) 위의 유사한 탭 및 감소된 단면의 탭(2270)으로부터 서로 떨어진 서로 자기적으로 고립되며, 이들 탭들은 반경방향으로 연장하는 플럭스 경로 부재(2268, 2269)들에 비교해서 충분히 작은 단면을 가질 수 있으므로 따라서 해당 플럭스 레벨을 너머 상당한 플럭스 연결을 허용하지 않을 것이다.
상기 설명된 바와 같이, 비록 로터(2260)의 절반부(2262, 2264)들을 같이 유지하기 위하여 볼트, 리벳, 또는 유사한 것들이 사용될 수 있지만, 추가적이거나 또는 대체적인 유지 방법은 도 92 도시와 같이 하나 또는 두 개의 내측으로 테이퍼되는 면(2280)들을 가진 외측 링(2278)을 사용하는 것이다. 외측 링의 내경은 로터의 두 개의 절반부(2262, 2264)들 사이의 동심을 확보하기 위하여 사용될 수 있다. 외측 링(2278)은 로터의 두 절반부(2262, 2264)들과 링 사이의 열적 차이를 생성함으로써 설치될 수 있다. 링(2278)에 대해 제한적이 아닌 알루미늄 합금과 같은 높은 팽창성 재료를 사용하면, 링(2278)을 설치하기 위해 필요한 온도 차이를 감소시킬 것이다.
다양한 실시예들은 하나의 스테이터에 인접한 하나의 로터롤 포함할 수 있고, 로터는 하나의 스테이터의 각 측면에 있고, 로터는 한쌍의 백-앤-백 스테이터의 각 측면에 있고, 또는 이들 구조의 결합이다.
로터들 사이의 두 개의 스테이터를 가진 예시적인 축방향 플럭스 전기 기계
도 93 내지 도 97은 로터가 한 쌍의 백-투-백 스테이터들의 각 측면에 위치된 전기 기계(2281)을 도시한다. 도 94는 로터(2282)가 이 예에서 두 개의 각도상 접촉 베어링(2286)들에 의하여 스테이터 베이스판(2284)으로부터 지지되는 두 개의 다소 대칭인 절반부(2283)들을 로터(2282)가 포함하는 것을 도시한다. 이전에 설명된 스테이터들 사이에 로터가 설치된 디자인과 같이, 로터의 절반부(2283)의 외측 영역은 도 93의 본 실시예의 확대된 도면에 도시된 바와 같은 로터(2282)의 내측 영역의 두 개의 절반부(2283)들 위의 같은 수의 균등하게 이격된 외측으로 돌출하는 반경방향 플럭스 경로 부재(2290)와 상호 결합된 내측으로 돌출하는 균등하게 이격된 반경방향 플럭스 경로 부재(2288)의 어레이를 포함한다. 스테이터 베이스판(2284)은 알루미늄과 같은 높은 열 전도성 재료일 수 있다. 이 실시예의 스테이터(2292)의 구성은 도 95에 도시된다. 스테이터(2292)는 조임쇠(2294), 지주(2296)들, 및 조임쇠의 후부로부터의 축방향 돌출부(2298)들을 포함한다. 스테이터들의 후면의 축방향 돌출부(2298)는 도 96 도시와 같이 기계적 수단 또는 접착제 본드에 의하여 스테이터 베이스판(2284) 위의 슬롯(2300)에 고정된다. 도 97에는 장치(2281)의 단면이 도시된다. 반경방향 채널(2302)이 공기 또는 유체와 같은 유체 흐름을 위하여, 또는 장치(2281)를 냉각하기 위하여 사용될 수 있는 상 변화 유체를 위하여 스테이터 지주(2296)들과, 스테이터 조임쇠(2294), 및 스테이터 베이스판(2284) 사이에 형성된다. 각 스테이터 지주(2296)는 조임쇠(2294)의 두께를 관통하여 지지되고 스테이터 베이스판(2284)의 슬롯(2300)에 결합한다. 여기 사용된 스테이터 조립체는 조임쇠(2294)에 융착된 스테이터 지주(2296)들을 도시하고, 따라서 경계 선이 보이지 않는다. 스테이터(2292)를 향한 인력이 로터(2282) 본체에 자석들을 고정하므로 이 예에서 테이퍼된 자석(2304)들이 사용된다. 스테이터 지주들 둘레에 위치된 컨덕터들은 이들 도면들에 도시되지 않으나, 스테이터들이 로터 외측에 위치된 구조들에서 설명된 이것들에 유사할 것이다.
스테이터가 로터들 사이에 배치된 예시적인 축방향 플럭스 전기 기계
또 다른 실시예는 하나의 스테이터의 각 측면에 하나의 로터를 포함한다. 도 98은 전기 기계(2306)의 일 실시예의 단면도를 도시한다. 로터는 이 예에서 두 개의 각도상 접촉 베어링(2312) 들에 의하여 스테이터(2310)로부터 지지되는 두 개의 다소 대칭인 절반부(2308)들을 포함한다. 로터들 사이에 스테이터를 가진 이미 설명된 디자인에서와 같이, 로터의 각 절반부(2308)의 외측 부분은 도 81의 로터에 유사하고, 로터의 내측 부분 위의 같은 수의 균등하게 이격된 외측으로 돌출하는 반경방향 플럭스 경로 부재들과 상호 결합된 내측으로 돌출하는 균등하게 이격된 반경방향 플럭스 경로 부재들의 어레이를 포함한다. 로터의 두 절반부(2308)들 사이의 플럭스 흐름을 방지하기 위하여, 절반부들은 같은 극성을 가진다. 각 로터 절반부(2308)의 내측 부분은 그 자석들의 작극들의 정위에 따라 분극되므로, 동일한 자극이 각 로터 절반부 위에 외측으로 돌출하는 반경방향 플럭스 경로 부재들에 대해 위치된다. 장치(2306)를 냉각하기 위하여 사용될 수 있는 유체를 운반하기 위하여 사용될 수 있는 스테이터(2310)의 중심 부분을 관통하는 홀(2314)들이 도시된다. 장치(2306)의 단면은 도 99에 도시된다. 테이퍼된 자석(2316)은 이 예에서 그들을 각 로터 절반부(2308)의 본체 내로 고정하는 스테이터(2310)를 향하는 인력으로서 사용된다. 스테이터 지주(2318)들 둘레에 위치된 컨덕터들은 이들 도면들에 도시되지 않으나, 스테이터가 로터 외측에 위치된 구조에서 설명된 바와 유사할 것이다.
이 실시예의 전도성 열 전달은, 에어갭에서의 컨덕터 상부가 열 전달 표면인 이 경우를 제외하고, 컨덕터로부터 열 소비 표면으로의 낮은 열 흐름 저항에 관한 다른 실시예들에 유사하다. 냉각을 위하여, 에어갭을 관통하는 냉각 유체의 능동 순환이 제공될 수 있다. 코일들의 직접 냉각은 또한 개시된 범위 외측의 형상에 비교한 이 구조의 이러한 형상으로부터 또한 이점을 가진다. 유사한 구조가 하나의 스테이터와 하나의 로터에 의하여 달성될 수 있다.
예시적인 로봇 구조
액튜에이터(슬롯 밀도와 컨덕터 용적, 또는 다른 개시된 특징을 가진 개시된 구조의 하나를 갖는 모터)가 로봇 용도에서 사용되는 방식의 비제한적인 예가 이하에서 설명된다. 이 예의 시스템의 개요는 도 100에 도시된다. 예의 시스템은 10kg의 공칭 중량(2338)인 10Kg을 지지하고 암을 따라 이격된 4개의 액튜에이터(2340, 2342)들을 가지는 정적인 로봇 암(2336)으로 구성된다. 이와 같이, 로봇 암(2336) 위의 적어도 하나의 액튜에이터(2340, 2342)들은 또 다른 액튜에이터에 의하여 지지된다. 액튜에이터(2340)들의 셋은 크기가 같을 수 있고 토크 생성 성능이 같을 수 있으며 어깨 관절에 하나 및 엘보우 관절에서 하나가 구비된다. 손목에 위치된 잔여 액튜에이터(2342)는 이전 액튜에이터들의 크기와 중량이 절반이다. 손목 액튜에이터(2342)는 이 예에서 불활성이고 시스템에 부가하는 중량만이 고려될 것이다.활성 액튜에이터들은 200mm의 평균 에어갭 직경을 가지며 32mm의 반경방향 톱니 길이를 가진다. 각 액튜에이터(2340, 2342)들과 결합된 둘레와 하우징은 액튜에이터의 활성 중량과 같은 것으로 평가되므로 전체 중량은 두 배의 활성 중량으로 평가된다. 중심 대 중심의 액튜에이터(2340)들 사이의 거리는 0.5m이다. 각 암(2336)의 중량은 공칭 중량을 포함하는 하류 시스템의 부품들의 질량의 20%로 평가된다. 이예에서 시물레이션은 매 액튜에이터(2340)의 각 스테이터의 후부에 700W/m2K의 압송 냉각 속도를 적용한다. 시스템이 암(2336)이 수평이고 중량(2338)을 유지하기 위하여 충분한 토크를 공급하는 고정 위치에서 분석된다. 시스템의 동력 소비는 엘보우 및 두 개의 어깨 액튜에이터(2340)들에 의하여 소비되는 총 동력과 같다. 이 예에서, 시스템의 동력 소비는 개시된 범위 내측에서 크게 낙하한 것이 발견되었다. 이는 필요한 토크에서 장치 중량의 복합 효과에 기인한다. 각각의 개별 액튜에이터의 중량이 낙하함에 따라, 상류 액튜에이터들로부터 요구되는 토크가 감소된다. 특정 구조와 중량을 가진 특정 시스템의 경우, 시스템의 동력 소비가 최소화되는 구조가 존재한다. 이러한 결론에 도달하기 위하여 필요한 계산은 연속 토크에 대해 70℃ 온도 한계를 가정한다. 시스템의 하나의 액튜에이터가 중량을 지원하기 위하여 이러한 온도 한계를 초과하여야 하는 형상은 과열로서 분류되고 배제된다. 매우 큰 슬롯 피치와 컨덕터 용적을 가진 구조들은 상류 액튜에이터들이 하류 액튜에이터들을 지원하기 위하여 충분히 연속적인 토크를 생성할 수 없으므로 과열한다. 그들은 액튜에이터 중량에 의하여 제한된다. 특정 시스템에 대한 최적의 형상은 시스템 요건을 충족하기 위하여 충분한 토크를 생성하는 것과 전체 동력 소비를 감소시키기 위하여 액튜에이터 중량을 최소화하는 것 사이의 균형일 것이다.
도 101은 로봇 암(2348) 위의 전기 기계용 장착 구조를 도시한다. 세 개 이상의 액튜에이터들이 도 101에 예시된 바와 개략적으로 설치될 수 있다. 전기 기계(2350 및 2352)들은 예컨대 도 56 도시와 같이 개시된 하나 이상의 신규 특징을 가진 것으로 개시된 것과 같이 구성될 수 있다. 전기 기계(2350 및 2356)들은 이 예에서 액튜에이터들로 작동하고 그와 같이 언급될 수 있다. 액튜에이터(2350)는 적절한 수단에 의하여 로봇 아암(2348)의 제1 하우징 또는 구조상 부분(2354)에 의하여 지지된다. 적절한 동력 소스(도시 없음)로부터 케이블(2356)에 의하여 액튜에이터(2350)에 제공될 수 있다. 하우징 부분(2354)은 예컨대 로봇의 또 다른 부분 또는 벽(2355)(개략적으로 예시)에 부착될 수 있다.
제2 하우징 부분(2358)은 액튜에이터(2350)의 로터(2360)에 고정된다. 액튜에이터(2352)는 적절한 수단에 의하여 하우징 부분(2358)에 고정되므로 액튜에이터(2352)는 액튜에이터(2350)에 의하여 지지된다. 동력은 케이블(2362)에 의하여 액튜에이터(2352)에 공급된다. 액튜에이터(2352)의 로터(2364)는 적절한 수단에 의하여 로봇 암(2348)의 제3 하우징 부분(2366)에 고정된다. 도 100에 예시된 추가적인 액튜에이터가 하우징 부분(2366)에 설치될 수 있고 이러한 액튜에이터는 도 56에 따라 제조될 수 있고 케이블(2368)로부터 동력이 공급된다. 액튜에이터(2350, 2352)들과 암 위의 다른 액튜에이터들은 서포트(2355)로부터의 거리를 증가시킴으로써 더 작게 제작된다. 로봇 암(2348) 위의 소정의 액튜에이터들은 예컨대 360도 회전 액튜에이터(2352)를 가지도록 암을 따라 충분히 이격될 수 있다.
고체 및 적층 스테이터 또는 로터 구조
일부 실시예들에서, 적층된 스테이터 또는 로터가 사용될 수 있다. 도 103에서, 적층된 지주 스테이터 구조가 도시된다. 이러한 예시적인 실시예는 적층된 지주(2382)들의 어레이를 수용하도록 슬롯(2380)들의 어레이를 가진다. 조임쇠 디스크(2384)는 여기 도시된 바와 같이 적층 구조 또는 소결된 구조 또는 고형 구조일 수 있다. 플럭스 라인은 일반적으로 축방향 플럭스 모터에서 직각으로 이동하고 따라서 효과적인 적층 구조가 각 지주용 적층 및 조임쇠가 직각으로 정렬되는 것을 필요로 한다. 이러한 정렬을 달성하는 하나의 방법은 긴밀한 나선으로 적층 스트립을 테이프 롤과 같이 각 박판 층 사이에 접착제 층에 의하여 감는 것이다. 코일이 경화된 후, 재료는 반경 지주들과 슬롯을 형성하기 위하여 가공 공정에 의하여 제거된다.
개시된 범위의 특징을 가진 전기 기계의 실시예의 비교적 작은 지주들의 수가 많으며 스테이터의 구성에서 가능한 적은 수의 부분들을 사용하는 것이 바람직할 것이다. 적층판(laminates)들이 사용되면, 적층된 부분들의 수는 도 104 도시와 같이 반경으로 정렬된 적층들의 사용에 의하여 감소될 수 있다. 이 실시예 구성의 결점은 조임쇠(2384)를 통해 지주에서 지주로 연결하는 플럭스가 적층(2390)들 사이의 하나 이상의 절연층(2388)을 통과하여야 하는 조임쇠(2384)와 적층 지주(2382)의 접합부에서 도 104에 개략적으로 도시된다. 절연층(두터운 선으로 지주(2382)에서 개략적으로 도시된)들은 유용하고 와류 전류를 감소시키기 위하여 필요하며, 그러나 플럭스 경로의 릴럭턴스를 증가시키는 에어갭으로서 작용하며 토크와 효율의 손실이 발생된다. 이러한 구성의 형상의 또 다른 결점은 개시된 범위의 특징을 가지는 전기 기계의 매우 얇은 조임쇠로부터 발생하는 최소 접합 라인(2392)이다. 전기 기계의 실시예의 지주(2382) 위의 매우 높은 축방향 하중을 고려하면, 일부 용도들에서 이러한 접합 라인(2392)에 의존하는 것은 구조적으로 양호하지 않을 수 있다.
슬롯에서 스테이터 지주들이 인출되는 것이 방지되고 동시에 지주들과 조임쇠 사이의 금속 대 금속 접촉을 제공하여 플럭스가 절연층들을 관통하여 유동하지 않는 구성이 제안된다. 도 105와 도 106은 조임쇠(2400)와 지주(2402)들 사이의 플럭스 접속 연결의 대부분을 위한 금속-대-금속 접촉 및 충분한 인출 강도를 제공하는 하우징 또는 커버 부재(2412) 및 스테이터(2398)의 적층된 지주 구성의 비제한적인 예시적인 실시예를 도시한다. 필요한 구조적인 일체성을 달성하기 위하여, 지주(2402)들은 다수 기능을 제공하기에 충분하도록 조임쇠(2400)를 관통하여 연장한다. 연신된 재료에 의하여 용이하게 조립하고 기계적인 인출 정지부를 제공할 수 있도록 테이퍼된 바브(barb)를 사용할 수 있다. 이러한 비제한적인 예시적인 실시예에서, 바브(2404)는 조립 동안 지주(2402)의 탄성 변형을 허용할 수 있도록 충분히 긴 슬릿(2406)에 근접한다. 다른 기계적인 수단이 기계적인 인출-정지부로서 작용하도록 사용될 수 있으므로 일 측면으로부터 지주들을 삽입할 수 있고 이어서 해당 측면에서의 지주들의 추출에 저항을 제공할 수 있다. 예컨대, 래치-형상 디자인이 사용될 수 있으며, 스테이터 내에 지주들을 삽입 후에, 압력을 가하도록 형성된 스프링에 의하거나 또는 다른 기계적인 수단에 의하여 표면으로 압력을 적용할 때 추출 방향으로 서로를 지나 슬라이드 이동하는 것을 방지하도록 지주 및 조임쇠 접촉 표면이 형성된다.
조임쇠(2400)의 후면을 지나 지주(2402)의 돌출 부분(2408)은 커버 부재(2412)의 유사 폭의 슬롯(2410) 내에 삽입된다. 일 실시예에서, 이러한 커버(2412)는 알루미늄과 같은 경량 재료 또는 탄소 섬유와 같은 복합체로 제조된다. 지주(2402)의 돌출 부분(2408)의 표면적은 커버 슬롯(2410)과의 접합을 허용하기에 충분하여 조립체가 개시된 범위의 특징을 가지는 전기 기계의 실시예의 높은 자기력으르 견디기 위하여 필요한 강성을 부가할 수 있다. 도시된 실시예는 지주 마다의 돌출 부분(2408)을 가진 하나의 중심 적층(2409)을 포함한다.
커버 부재(2412)의 내면 위의 슬롯(2410)들 사이의 반경 방향 공간은 중량 감소 및 냉각 유체의 흐름을 위하여 사용될 수 있다. 도 106에는 또한 도시된 바와 같이, 더 짧은 적층(2418)은 바브(2404)를 포함하지 않더라도 중심 적층(2409) 및 지주(2402) 위의 축방향으로 더 짧은 적층(2418)을 관통하여 지나는 슬릿(2416)의 사용이 도시된다. 이는 돌출 적층(들) 위의 바브가 조립 동안 구부러지도록 하기 위함이다.
이러한 예시적인 실시예에서 각각의 지주(2402)는 스테이터 슬롯(2420) 내에 삽입하기 전에 부조립체에 같이 접합된다. 이어서 컨덕터(도시 없음)들은 지주(2402)들 둘레에 설치되거나 감겨지고 컨덕터들은 이어서 점토 화합물에 의하여 성형된다. 커버 부재 슬롯(2410)의 안정화 효과에 부가해서, 점토 화합물은 적층된 지주(2402)들에 둘레방향 강도 및 강성을 제공한다.
분말 금속 또는 고형 재료가 적층된 지주들에 대해 여기서 도시된 바와 같은 유사한 특징을 유지하기 위하여 사용될 수 있다. 고형 또는 분말 금속이 지주들에 사용되면, 덜 복잡하고 고가가 아닌 것으로 믿어질 뿐더러 유닛 구조의 조임쇠와 지주들을 더욱 기계적으로 강하게 제조할 수 있도록 한다.
도 107 도시와 같이, 조임쇠(2400)를 통해 일 부분(2408)이 돌출하는 더 긴 적층(2409)의 측면에 축방향으로 더 짧은 적층(2418)을 사용함으로써 예시적인 실시예에서 자기적인 플럭스 경로의 일체성이 달성된다. 작은 릴럭턴스 플럭스 ㅇ여연결을 위하여 스테이터 조임쇠(2400)와 지주(2402)들 사이의 충분한 금속-대-금속의 접촉을 달성하기 위하여, 조임쇠(2400)와 적층판(2409) 사이의 접합부(2426) 및 조임쇠(2400)와 적층(2418) 사이의 접합부(2428)의 모든 절연이 도 107 도시와 같이 제거되었다. 잔여 절연층92430)이굵은 선으로 지주(2402)들의 하나에 개략적으로 도시된다. 도 104에서 예시적인 실시예의 플럭스 경로로부터 2388에서 절연을 제거하는 것과 달리, 도 107의 2426 및 2428에서의 절연의 제거는 적층(2409)과 조임쇠(2400) 사이 및 적층(2418)과 조임쇠(2400) 사이의 낮은 릴럭턴스의 플럭스 연결(2424)을 위한 금속-대-금속 접촉을 발생한다.
도 107 도시의 예시적인 실시예에서, 고체 조임쇠 디스크(2400)의 사용은 100% 고체 스테이터 및 지주들에 비교해서 조임쇠가 플럭스 경로(도시 없음)의 상당히 작은 부분이고 조임쇠 디스크(2400)는 지주(2402)의 플럭스 밀도에 비교해서 플럭스 밀도를 감소시키기에 축방향으로 충분히 두꺼우므로 와류 전류를 감소시킬 것으로 믿어진다. 와유 전류와 히스테리시스 손실은 플럭스 밀도와 함께 증가하고, 따라서 적층된 지주들의 이점이 가치를 가지는 용도들에서, 철이나 코발트 또는 니켈 합금과 같은 고체 금속으로 제조된 조임쇠 디스크를 사용하면, 충분한 효율이 달성되고 필요한 구조적 일체성이 달성될 수 있다. 조임쇠에 사용된 고체 재료에 의하여 낮은 전기 전도성(및 높은 열전도성)과 높은 플럭스 밀도를 가진 합금이 사용될 수 있다.
커버의 슬롯에 돌출하는 지주 부분을 고착시키는 것은 에폭시나 다른 접착제 또는 땜납 또는 브레이징 또는 초음파 용접 등에 의하여 이루어질 수 있다. 높은 강도의 땜납이 냉각을 지원하는 양호한 열 전달을 제공하는 이점을 가진다.
알루미늄 컨덕터 코팅 구성 및 방법
개시된 전기 기계의 일부 실시예들은 코팅된 알루미늄 컨덕터들을 포함한다. 높은 열 방출 및 낮은 컨덕터의 제조 비용이 가능한 방식으로 전기 절연용 컨덕터에 양극 표면 마무리를 생성하는 것을 포함하는 전기 기계용 알루미늄 컨덕터의 코팅 및 제조 공정이 개시된다. 설명된 공정은 또한, 특히 개시된 범위에서 모터/액튜에이터들과 같이 결합하여 사용될 때, 높은 전류 밀도를 달성하기 위하여 다양한 구성 및 조립 단계들을 이용할 수 있다. 이 공정은 제한되는 것이 아닌 전기 기계의 실시예와 같은 전기 기계의 제조에 사용될 수 있다.
개시된 전기 기계의 이러한 실시예의 경우, 그리고 일반적인 전기 기계의 경우, 경량이고, 양호한 열 전도 및 낮은 비용을 가지는 컨덕터 구성을 생성하는 것이 유익하다. 전기 모터 컨덕터들은 공통으로 폴리머 코팅이나 알루미늄 와이어 또는 포일로 사전-절연된 구리선으로 제조된다. 알루미늄의 이점은 용적당 휠씬 작은 중량 및 구리에 비교한 낮은 가격이다. 알루미늄의 단점은 그것이 구리보다 더 높은 전기 저항을 가지며 같은 전류 밀도에 대해 더 많은 열을 생성하는 것이다. 알루미늄 컨덕터들을 사전-절연하는 하나의 방법은 양극화된 표면 마무리를 이용하는 것이다. 양극화의 이점은 조립 동안 와이어를 보호하는 매우 단단한 표면이고, 높은 유전 강도, 및 공통의 와이어 컨덕터들에 사용되는 예시적인 폴리머 필름에 비해 2 내지 4 배 더욱 양호한 열 전도성이다.
양극처리된 알루미늄 컨덕터들은 낮은 가격, 높은 표면 강도, 및 경량의 성능을 제공하고, 그러나 그들은 여러 면들에서 통상적으로 제한되었다.
하나의 문제는 날카로운 에지이다. 도 108 도시와 같이, 옥살산 또는 황상 양그처리와 같은 양극 처리는 초기 알루미늄 표면에 대해 수직으로 내측 및 외측으로 알루미늄 산화물(3110) 층을 "성장'시킨다. 이로써 소정의 날카로운 에지에서, 코너 갭(108)로서 불리는, 더 적은 또는 비절연 영역이 생성되고, 코너 갭은 또한 에지 갭으로 불릴 수 있다. 따라서, 양극처리된 알루미늄 컨덕터들은 이러한 비절연 부분들이 형성되는 것을 방지하기 위하여 둥근 에지들을 필요로 한다. 이들 에지를 둥글게 하는 것은 추가적인 기계적 또는 화학적 처리를 필요로 하므로 비용이 고가이다. 0.15" 반경이 양호한 양극 처리를 가진 양호한 에지 피복에 필요하고, 따라서 0.030"의 최소 컨덕터 두께가 필요하다. 이는 매우 두꺼운 컨덕터이며 승인할 수 없을 정도로 높은 전류가 필요할 것인 데, 많은 용도들에서 슬롯에서의 턴의 수가 낮기 때문이다.
평평하고, 원추형, 등의 컨덕터(3100)들이 레이저, 다이, 나이프, 펀칭 또는 미세-블랭킹 공정에 의하여 형성될 때, 화학 또는 기계적 공정에 의하여 이들 에지드르을 라운딩하는 것은 또한 감소된 컨덕터 단면적을 초래할 것이다. 이는 전류 밀도를 높이고 일정한 전류에 대해 열 발생율을 높이며, 슬롯의 상부 또는 바닥으로의 이러한 열의 전달을 위한, 컨덕터 층들 사이의 표면적의 상실을 초래한다. 이들 세 가지 효과들의 결합은 같은 두께와 폭을 가지는 날카로운 코너의 컨덕터들에 비교해서 전기 기계에서 더욱 높은 온도를 충분히 발생할 수 있다.
이들 원리들은 또한 구리 또는 알루미늄(또는 다른 전도성 재료) 컨덕터들 위의 폴리머 코팅 절연에 대해 적용되나, 이유는 다르다. 폴리머 코팅 시스템의 표면 장력은 날카로운 에지로부터 코팅을 당기는 특성이 있으며, 이러한 이유로서, 와이어나 컨덕터의 에지들이 둥글게 가공되면 더욱 균등한 코팅을 발생할 것이다.
두 개의 예시적인 실시예의 개략적인 스테이터 부분들의 비교가 도 109와 도 110에 도시된다. 하나의 스테이터는 날카로운 에지를 가진 컨덕터들을 포함하고 다른 스테이터는 둥근 에지들을 가진 컨덕터들을 포함한다. 양측 스테이터들은 개시된 범위에 있으나, 원리가 개시된 범위의 외측의 스테이터들에 적용된다. 컨덕터들은 100" 폭과 0.020" 두께이다. 도 109의 스테이터는 0.17W/(m*K)의 열 전도성을 가진 폴리머 코팅과 둥근 에지들, 및 390W/(m*K)의 열 전도성을 가진 구리 컨덕터(3130)를 포함하며, 도 110에 도시된 실시예는 220W/(m*K)의 열 전도성, 날카로운 에지들, 및 0.001"의 두께와 0.75W/(m*K)의 열 전도성을 가진 크게 양극 처리된 코팅을 가진 알루미늄 컨덕터(3110)를 포함한다. 동일한 두께와 폭에 대해, 정사각형 컨덕터는 ~5%의 더 넓은 단면적과, ~20%의 인접층과의 더 큰 열 전달 접촉 면적 및 지주들과의 거의 두 배의 열 전달 접촉 면적을 가진다. 전류 밀도에 결합한 i2 손실에 기인하여, 둥근 컨덕터에서의 단면의 5% 손실은 대략 10%의 허용가능한 전류 밀도의 감소를 초래하고, 20% 내지 30%의 둥근 컨덕터들 사이의 열 전달 표면적의 감소는 30% 이상의 일정한 스테이터 온도의 전류 밀도의 감소를 발생하고, 이는 가능한 모터 성능에 대해 상당한 감소이다. 미세 블랭킹과 이어지는 에지를 둥글게 가공함이 없이 양극 처리하는 것과 같은 고속 공정으로 알루미늄 컨덕터들을 형성할 수 있는 비용 이점과 결합하여 이들 이유로서, 이 컨덕터 제조 방법과 구성은 상당한 비용 및 성능 이점을 제공한다. FEA 분석에 의하여 개시된 컨덕터 구조는 정사각형/날카로운 에지의 알루미늄 컨덕터의 사용이 양극 처리와 같은 높은 열 전도성의 전기 절연기와 결합된 때, 구리에 비교되는 알루미늄의 높은 전기 저항이 일부 경우들에서 구리 컨덕터들 위의 폴리머 절연 코팅과 비교해서 알루미늄의 증가된 단면적 및 양극처리 층의 증가된 열 전도성에 의하여 부분적으로 또는 오프셋되는 것으로 입증되었다. FEA 열 분석을 기초로, 알루미늄 컨덕터들이 더 높은 저항을 가지며 대략 50% 많은 열을 발생하지만, 이 예에서, 알루미늄 컨덕터들의 더 높은 전도성과 열 전달 표면적의 효과가 구리 컨덕터 예에서와 같은 유사한 최대 컨덕터 온도를 유지하기에 충분함이 발견되었다. 이와 같이 유사한 최대 컨덕터 온도를 가진 폴리머 코팅된 구리 컨덕터들에 비교해서 양극 처리된 알루미늄 컨덕터들의 이점이 있다. 알루미늄 컨덕터들은 더 많은 동력을 필요로 하고, 그러나 구리 컨덕터들의 중량의 1//3이고 따라서 이러한 증가된 동력은 일정 정도 액튜에이터 질량의 감소 및 증가된 KR에 의해 상쇄된다. 양극처리된 알루미늄 컨덕터들의 문제는 많은 공정들의 경우 0.010" 또는 이하의 에지 반경을 가진 양호한 에지 범위를 달성하는 것이다. 이는 컨덕터들이 0.020"보다 더 두껍고 그리고 바람직하게 최소 0.030"인 것을 필요로 한다. 컨덕터들의 두께가 얇으면 더 많은 턴들을 허용하는 것에 의하여 필요한 전류가 감소하는 많은 모터 용도에서 이는 바람직하지 않다. 이로써 날카로운 에지를 보호하는 표면 마무리 코팅 시스템에서 0.020" 또는 그 이하의 컨덕터들이 이점을 가지는 상황을 초래한다.
일 실시예에서, 전기 기계는 증가된 단면적을 제공하기 위하여 날카로운 에지를 남기고 양극 처리되지 않은 날카로운 에지를 보호하는 방법을 제공하는 저 비용 제조 공정을 이용할 수 있다. 일 실시예에서, 에지 보호 시스템은 또한 슬롯에 컨덕터들을 고정하는 방법을 제공하도록 기능한다. 실시예는 또한 슬롯에 컨덕터들을 고정하고 냉각 유체에 노출된 더 큰 비율의 컨덕터 표면적을 제공하기 위하여 날카로운 에지 절연 방법을 이용한다.
날카로운 에지의 알루미늄 컨덕터들의 절연 공정의 비제한적인 예는 이하와 같다. 알루미늄 컨덕터(3100)는 스테이터 지주들 사이에 적층하기 위하여 특정 패턴으로 형성된 알루미늄 시트들로부터 펀칭되거나 압인되고 또는 미세 블랭킹되고 또는 레이저 절단되는 등으로 제조된다. 알루미늄 컨덕터들은 이유있게 정사각형인 에지를 남긴다. 이로써 양극처리된 표면이 날카로운 에지로부터 외측으로 형성되는 것을 방지하고 따라서 표면 장력이 액체 유전 재료를 유지할 수 있고, 또는 에지들에서의 증가된 정적 전하는 유전 분말의 코팅 재료를 당기도록 작용한다. 많은 유형의 알루미늄이 사용될 수 있다. 1100 시리즈의 알루미늄이 이러한 용도에 효과적인 높은 전기 및 열 전도성을 가지는 것으로 알려져 있다. 적층가능한 평평한 컨덕터들의 두 개의 인접한 층(3102)들이 도 111에 조립 전에 나란히 도시된다. 이 도면에 도시된 컨덕터들은 교대로 적층되도록 구성된다. 각각의 컨덕터 층(E3102)은 전류 흐름에 대해 전도 경로로서 작용한다. 각각의 컨덕터 층은, 회로에 연결되어 컨ㄷ거터를 통해 전류가 흐르는 것을 허용하는 한 쌍의 접촉 탭(E3106)들을 포함한다. 많은 다른 평평하고 평탄하지 않은 알루미늄 컨덕터 구조는 여기 개시된 컨덕터 절연 시스템의 측면과 결합하여 사용될 수 있다.
컨덕터들은 이어서 컨택 탭(3106)들에서 매스킹되어 양극처리후 층93102)들을 같이 연결하기 전에 준비 시간을 감소시킬 수 있다. 이어서 부분들이 잔여 표면 위에서 크게 양극 처리된다. 양극처리 공정은 상부와 바닥 및 측면의 보호와 코팅을 보장한다. 초기 알루미늄 표면에 대해 수직으로 진행하는 양극 처리층(3110)에 기인하여, 양극처리 층의 수직 면은 그들 사이에 코너갭(3108)을 형성한다.
폴리머에 의하여 날카로운 에지를 코팅할 때, 표면 장력이 날카로운 에지에서 코팅의 얇음을 발생한다. 유사하게, 그러나 다른 이유로서, 알루미늄에 적용된 양극처리 공정은 코팅의 수직 성장에 기인하여 모든 날카로운 에지에서 보호되지 않는 영역을 생성할 것이다. 그러나 이들 양측의 코팅 방법들은 그 자체로 충분하지 않고, 양극처리 코팅(3110)과 이어지는 유전 폴리머 코팅(3112)의 연속적인 결합에 의하여 양극처리 공정에 의하여 생성된 갭(3108)이 양극처리 코팅(3110)에서 액체 폴리머를 갭(3108) 내로 당기는 표면장력 효과를 발생하는 양호한 조건을 생성한다.
폴리머 코팅(3112)은 컨덕터들을 분무하거나 침지시켜 시행될 수 있다. 많은 다른 폴리머 또는 니스와 같은 다른 액체 코팅이 사용될 수 있다. 에폭시 코팅이 사용되면, B 상태로 경화되거나 또는 소성될 수 있고 이어서 최종 경화 상이 스테이터로의 모든 컨덕터들의 최종 조립 후에 적용ㄷ될 수 있다. 모든 코팅 및 경화 공정 동안, 양호한 조건을 유지하기 위하여 충분한 공정 제어가 가능한 것으로 믿어지고, 따라서 양극처리 코팅들 사이에 형성된 초승달 형태가 많은 용도들에서 충분히 두꺼운 코팅을 유지시킬 것이다. 도 112는 양극처리 컨덕터의 표면 위로 유전 코팅을 가진 코팅된 컨덕터의 예를 도시한다. 양극처리 코팅은 평평한 표면에서 매우 효과적이므로 모든 표면 위의 얇은 코팅은 절연을 위하여 많은 용도들에서 필요하지 않다. 낮은 점성의 폴리머에 의하여, 가열이나 또 다른 최종 고착 공정 조건에 의하여 스테이터에 컨덕터들을 고정하기 위하여 최종 조립 동안 사용될 수 있는 잔여 컨덕터 위에 얇은 코팅층을 제공하면서 동시에 에지 갭 내로의 폴리머를 확실히 유동시킬 수 있는 것으로 믿어진다. 도 113은 유전 코팅 및 코너 코팅에 의하여 오목한 초승달을 형성하는 예측된 결과를 도시한다. 컨덕터층의 경화 또는 소성의 경우, 컨덕터들의 층이 일체 구조를 형성하기 위하여 스택으로 같이 경화되거나 또는 소성된다.
조립 상태의 개시된 전기 기계의 일 실시예에서, 스테이터(3116)의 스테이터 지주(3114)들 사이에 컨덕터 쌍이 적층되면서 매스킹된 탭(3106)들은 컨덕터(3100)들이 도 114 도시와 같이 층으로 같이 적층된 후에 같이 납땜되고 용접된다. 이들 영역은 모든 층들의 조립 동안 또는 후에 스팟 용접되고, 레이저 용접되고, 또는 플러그 용접되거나 또는 다른 기계적인 수단에 의하여 결합된다. 예컨대, 최종 단계는 유전 코팅의 용착 및 경화를 위하여 조립된 부품들을 소성시키고, 컨덕터들을 같이 그리고 스테이터에 고착하는 것을 포함한다.
이러한 코팅 시스템은 많은 유용한 특징과 이점을 가진다. 하나의 이점은 예컨대 작은 비용과 내재적인 높은 정밀성의 이점을 가지는 미세 블랭킹에 의한 컨덕터 부품의 고속 제작 가능성이다. 에지를 마무리 처리하기 위한 필요가 최소이거나 없으며, 이는 비용을 절감하고 구리(균등한 코팅을 달성하기 위하여 둥글게 가공된 에지를 가져야 하는)에 비교해서 알루미늄의 더 높은 저항을 상쇄하도록 지원하기 위하여 더 큰 표면적을 제공할 수 있다. 버 제거 공정은 유용할 수 있으나, 최소 처리가 필요하다.
개시된 코팅 시스템은 알루미늄 컨덕터들의 실제 사용을 허용하며, 이는 구리보다 작은 비용을 필요로 하고 중량이 1/3이다. 코팅 시스템에 의하여 매우 강력한 양극 처리가 이루어지고, 이는 폴리머 코팅보다 더욱 단단하여 손상 없이 스테이터에 긴밀하게 결합될 수 있다. 강한 양극 처리는 또한 통상적으로 폴리머 코팅보다 더욱 큰, 때로 3 또는 4의 인자만큼 열 전도성을 가진다. 코팅 시스템에 의하면, 알루미늄 컨덕터들은 공지의 0.020-0.03"최소 두께보다 휠씬 작을 수 있으므로 모든 에지에서 0.010" - 0.015"의 반경을 가질 수 있다. 더 얇은 컨덕터는 더 큰 수의 턴들을 제공하는 것에 의하여 더 낮은 전류를 허용한다. 개시된 기계의 일부 실시예들에서, 더 얇은 층들은 또한 컨덕터들의 직접 냉각을 위하여 슬롯마다 더 큰 표면적을 제공한다.
코팅 시스템은 동일한 상을 가진 컨덕터층들과 같이 사용될 때 개시된 기계의 실시예와 같이 특히 양호하게 작동한다. 일 실시예에서, 해당 부분의 모든 층들이 같은 상이므로 층들 사이에 최소 전압 포텐셜이 존재한다. 이로써 더 얇고 폴리머 에지 코팅이 가능해진다. 다른 상들로부터의 컨덕터들의 상호 결합이 없으므로 층형 구조가 달성된다. 컨덕터들의 최소의 탄성 및 최소 소성 변형 또는 변형이 없으므로 취약한 양극처리 코팅이 조립 동안 양호하게 유지될 수 있다.
날카로운-에지 알루미늄 컨덕터들을 절연하는 공정의 또 다른 비제한적인 예는 분말 코팅을 포함한다. 분말 코팅은 통상적으로 분말의 대향하는 정적인 전기 전하를 가진 부품에 폴리머 분말의 균등한 코탕을 적용하기 위하여 사용된다. 분말은 이어서 컨덕터 층을 소성함으로써 보통 열 형태의 에너지의 인가에 의하여 연속 코팅으로서 부품에 융착된다. 컨덕터 층들은 일체 구조를 생성하기 위하여 스택으로 소성될 수 있다. 날카로운 에지를 가진 알루미늄 컨덕터는 반대 전하의 유전 분말이 분무되거나 반대로 하전된 유전 분말의 유동화된 베드에 침지될 수 있다. 양극 처리층은 분말과 평탄한 상부 및 바닥 그리고 에지 표면들 사이의 충분한 견인을 야기하지 않도록 정적 전하를 감소시키기 위하여 절연체를 제공하는 것으로 믿어지며, 날카로운 에지의 덜 절연된 갭들은 컨덕터 에지들로의 분말의 견인의 치우침을 발생할 것으로 예측된다. 이어서 컨덕터는 분무 또는 유동화된 베드로부터 제거되고 컨덕터로 반 또는 완전 융착되고 반 또는 완전-경화된다. 에폭시 유전 분말이 사용되면, 분말은 에지들이 코팅된 후에 부분적으로 경화될 것이다. 컨덕터들이 이어서 스테이터 내로 조립되면(또는 코어 둘레에, 또는 전기 기계의 일부 다른 측면으로), 에지들이 코팅된 후에 분말은 부분적으로 경화될 수 있다. 컨덕터들이 이어서 스테이터 내로 조립된다(또는 코어 둘레로, 전기 기계의 일부 다른 측면으로). 최종 조립 후에, 에지-코팅은 이어서 완전히 경화되고 공정에서 스테이터나 다른 컨덕터들로 한정된다.
공정 상태에 따라, 에지의 분말 코팅은 양극 처리 코팅에서 에지 갭의 완전한 또는 부분적인 덮음을 제공할 수 있다. 도 115는 날카로운 에지에서 갭의 완전히 덮기를 가진 예시적인 실시예를 도시한다. 도 116은 완전한 덮기 이상의 예시적인 실시예를 도시한다. 또 다른 예시적인 실시예는, 컨덕터들이 최종 조립체에 같이 고착되도록 접착층을 제공하기 위하여 컨덕터 층에 적용된 도 117 도시와 같이 열가소성 또는 에폭시 또는 니스와 같은 제2의 폴리머 코팅(3120)과 같은 코팅을 가진 도 115 또는 도 116 도시의 실시예를 포함할 수 있다.
추가적인 접착제(3120)이 사용되거나 또는 에지 분말 코팅이 접착제로서 사용되면, 실시예들은 제한적이 아닌 PEEK 또는 UHMW와 같은 제거가능한 재료의 얇은 층이 컨덕터들 사이에 조립될 수 있다. 부분들은 이어서 열에 의하여 예컨대 경화될 수 있고 스페이서 층들이 그들을 외측으로 당겨서 제거될 수 있다.
도 118은 하나 이상의 슬롯들의 하나 이상의 컨덕터층(3102)들 사이에 스페이서(3118)를 가진 조립된 스테이터(3116)와 컨덕터(3108)들의 일부 도면이다. 도 119는 분말 에지 코팅이 컨덕터들을 서로 및/또는 지주 측벽들에 접촉시키고 고착하면서 스페이서를 제거하기 전의 컨덕터들과 스페이서의 일부 도면을 도시한다. 이들 최소 접착점들을 가짐으로써 컨덕터들로부터 스테이터로의 전도성 열 방출이 감소할 수 있으나, 컨덕터들로부터 열을 멀리 방출하기 위하여 사용될 수 있는, 공기나 액체 또는 다상 유체와 같은 냉각 유체에 더 큰 표면적이 노출된다.
PEEK 또는 UHMW와 같은 재료에 의하여 분자들이 더욱 정렬되고 소성이 그 강도의 높은 비율을 유지하는 제2의 재료 상태로 변동하나, 스페이서로 사용될 때 컨덕터 사이로부터 제거할 수 있도록 상당히 더 얇게 된다. PEEK는 신장될 때 매우 강력한 것이 발견되었고 매우 내열성이므로 이 재료는 통상의 열 경화 과정을 견딜 수 있으나 PEEK는 몰드 분리 코팅 또는 그에 고착하지 않는 접착제와 같이 사용되어야 한다. UHMW는 덜 강력하나 이완제 없이 분리할 수 있는 우수한 분리 특성을 가진다.
스페이서(3118) 부분이 제거된 스테이터(3116)의 간략화된 부분이 도 120에 도시되고 재료의 신장의 결과 스페이서의 일부가 얇아진다. 0.004" 두께의 PEEK와 같은 재료는, 예컨대, 두께가 단지 0.003"인 새로운 소성 변형 모드로 신장할 것이다. 이로써 스페이서의 제거를 위한 0.001"의 틈새가 제공된다. 스페이서의 길이를 따른 컨덕터들과의 접합 또는 마찰의 결과 스페이서의 신장과 그 결과로서의 얇아짐이 발생하고 장력이 외부에 위치된 스페이서 단부에 적용된다. 스페이서가 신장하고 얇아짐에 따라, 마찰 또는 접착 접촉 표면의 선단 에지는 스페이서가 충분히 신장/얇아져서 스페이서를 완전히 제거할 수 있기까지 장력이 가해지는 외측 단부의 반대 방향으로 이동한다.
폴리머 또는 다른 접착제 대신, 충분히 높은 온도의 분말 코팅이 사용되면, 금속 납땜이 컨덕터들을 같이 스테이터에 고착하기 위하여 사용될 수 있을 것으로 믿어진다. 이는 폴리머에 비해서 매우 높은 열 전도의 이점을 가진다.
평면이 아닌 로터와 스테이터의 예시적인 전기 기계
전기 기계의 일부 실시예들은 홀들이 디스크 평면을 관통하여 연장하는 화형 디스크를 포함하는 로터를 포함한다. 일부 실시예들에서, 홀들이 내측 에지와 외측 에지 사이로 연장하고; 다른 실시예들에서, 홀들은 디스크를 관통하여 단지 일부 연장할 수 있다. 단면이 원형인 홀들과, 디스크 평면에 수직인 단면의 평면이, 로터에 강성을 부여하는 로만 아치 서포트를 가진 로터를 제공할 수 있다. 로터의 홀을 사용하면 로터의 소재 양을 감소시켜, 작은 질량을 발생한다. 완전히 반경방향으로는 아니지만, 홀들은 반경방향으로 연장하고; 그러나, 나선 배치와 같은 다른 배치가 또한 가능하다. 홀들은 슬롯들에 평행일 수 있으며; 홀들은 축방향 평면으로의 돌출부 위에 슬롯과 정렬할 수 있다. 홀들과 슬롯들은 구멍들에 의하여 연결될 수 있다. 로터는 rd이나 철과 같은 재료의 유닛 부재로 제조될 수 있고 로터 지주들은 유닛 부재로 제조될 수 있다. 지주들은 로터의 내측 에지와 외측 에지 사이로 연장할 수 있다. 로터 지주들은 내측 에지와 외측 에지 사이에 직선을 규정할 수 있고 서로 실질적으로 평행일 수 있다. 그러한 구조는 자석 삽입을 용이화 할 수 있다. 지주들은 향상된 자석 유지를 위하여 축방향 높이를 가진 둘레 두께의 역 테이퍼(좁아짐)이다. 이중-측면의 로터에서, 로터의 각 측면에 지주들이 있을 수 있으며, 디스크의 일 측면 위의 지주들이 축에 수직인 평면 위로 투영된 디스크의 반대 측면 위의 각각의 지주들과 정렬된다. 로터는 낮은 밀도의 마그네슘 또는 알루미늄 링에 의하여 강화될 수 있다. 로터의 축방향 단면은 중심으로부터 다른 반경 거리에서 다른 두께를 가질 수 있다. 특히, 로터는 내경보다 더 크고 외경보다 더 작은 로터의 중심으로부터의 반경 거리에서 더 작은 축방향 높이를 가질 수 있다.
홀들을 가진 로터를 포함하는, 위에 설명된 실시예들은, 많은 이점들을 가진다. 로터의 질량은 더 적은 재료를 가지므로 감소된다. 자석의 단면에 비교해서, 플럭스 경로에 정렬된 직각 방향으로 로터의 작은 단면은 낮은 플럭스 누설 및 높은 가능한 플럭스 밀도를 발생하고, 테이퍼 자석의 사용에 의하여 증가된다. 로만 아치의 지지가 강성을 부여한다. 연장된 얇은 부분들이 없으므로 모든 응력 영역에서 굽힘 하중보다 전단 하중을 발생한다. 구부러짐을 야기하도록 길이가 상당한 얇은 부분은 없다. 응력이 비교적 작으므로, DurabarTM와 같은 저가 소재가 충분한 강성을 얻기 위하여 사용될 수 있다. 비용 및 제조 복잡성의 면에서 유익하고 힘을 감지하도록, 로터는 내측 베어링만으로 제조될 수 있다. 일체형 인코더가 사용될 수 있다. 영구 자석들 사이의 힘이 공정 동안 존재하는 영구 자석에 의한 조립을 정상적으로 어렵게 할 수 있으므로, 로터 조립 후의 자석 삽입 가능성은 또한 유익하다. 테이퍼형 계면에 의하여 영구자석들과 로터 재료가 완전히 접촉할 수 있고 제조 공차를 더 작게 할 수 있고, 토크를 약간 증가시킬 수 있다. 일정 각도에서 충분한 자루를 가진 작은 엔드밀 대신에 샤프트 틈새를 제공하기 위하여 큰 디스크 커터를 사용하여 테이퍼 슬롯들이 제조될 수 있다.
전기 기계의 일부 실시예들은 내측 에지에서 하나의 축방향 높이 또는 두께를 나타내고 제2 에지에서 제1 축방향 높이와 다른 제2의 축방향 높이 또는 두께를 보여주는 로터와, 보충적인 형상의 스테이터를 포함한다. 예컨대, 제2 축방향 높이는 제1 축방향 높이보다 더 클 수 있다. 예시적인 실시예는 원추형 로터 및 스테이터를 포함한다. 원추형 로터와 스테이터는 각각 유사한 평면형 로터 또는 스테이터보다 휠씬 더 큰 강성을 보유하는 것으로 발견된다. 높은 강성에 의하여 매우 일관되고 작은 에어갭이 유지된다.
도 123은 로터의 내측 및 외측 위에서 낮은 밀도의 마그네슘 또는 알루미늄 링(3212, 3214)들에 의하여 보강된 원추형 로터(3200)의 예시적인 실시예의 단면을 도시한다. 원추형 로터는 예컨대 쌍곡선 또는 포물선의 형상을 가지는, 예컨대, 비평면상 회전 표면일 수 있다. 로터는 축을 가지며, 환형 디스크의 각 측면으로부터 축방향으로 연장하는 둘레방향으로 이격된 캐리어 지주들을 가질 수 있다. 이러한 차이는 역전되므로 로터가 외측 위에서의 축방향으로 보다 얇을 수 있지만, 그러한 원추형 장치에서, 로터는 가병 축방향 두께를 가지며, 축에 더 근접하게 내측에서보다 축방향으로 더욱 얇다.
도 124는 마그네슘이나 알루미늄 링들이 제거된 도 123의 실시예의 근접 단면도를 도시한다. 마그네슘 링들이 없어도, 최대 단면이 단지 0.015"이므로 로터는 믿을 수 없게 단단하다. 스테이터 슬롯은 테이퍼될 수 있다. 축방향 단면의 쌍곡선 형상에 의하여 플럭스의 많은 병목 부분이 존재하지만, 필수적인 것은 아니지만, 작은 질량의 로터 구성이 가능하고 고속 가공에 아주-적합하다. 원추형 또는 둥근 홀(3222)은 로터의 조임쇠(3220)를 통해 천공되고, 슬롯(3224)들은 디스크 커터에 의하여 절단될 수 있다. 양측 작동들은 매우 신속하다. 그러한 구조에 의하여 질량이 최소화되고, 모든 얇은 부분에 대해 로만 아치 지지를 제공하고, 강도와 강성의 균형을 달성한다. 중요한 것은, 신장된 얇은 부분이 없는 것이다. 따라서, 구부리기에 충분한 얇은 부분은 없다. 따라서 모든 응력을 받은 영역은 굽힘 응력보다 전단 응력을 받는다. 지주(3226)들 사이의 단면 영역은 최소이나, 강성은 최대이다.
500N의 절반의 힘에 의한, 로터의 20%에 대해 계산 분석의 출력은, 구부러짐은 0.0005"보다 작고, 최대 응력은 단지 2000psi인 것을 보여준다.
도 123 내지 도 127 도시의 로터의 예시적인 실시예는 많은 이점들을 가진다. 원추형 형상과 로만 아치들은 상당한 강성을 제공하고, 이는 필요한 최소 갭을 유지하기 위하여 중요하다. 실시예는 자석 단면적(플럭스 경로에 일치하는 수직 방향으로)에 비교한 매우 작은 단면적에 기인하는 최소 플럭스 누설과, 최소 누설 경로 및 테이퍼 자석에 기인하는 최고 가능한 플럭스 밀도를 보여준다. 구성은 경량이며, 내측 베어링만으로 구축될 수 있다. 이는 비용 이득을 재공하고 힘 감지를 허용한다. 일체화된 엔코더가 사용될 수 있다.
테이퍼된 계면에 의하여 로터 재료와 영구 자석의 완전한 접촉이 가능하고, 이로써 더 작은 제작 공차가 가능하다. 더우기, 구성에 의하면 영구 자석들이 로터 조립 후에 삽입될 수 있다. 자석들 사이의 큰 힘에 기인하여 영구 자석을 그대로 두고서 조립하는 것은 매우 어렵고, 조립 후의 삽입이 상당히 안전하고 비용 절감적이다. 기계적이고 자기적인 유지력은 인접 자석들 사이의 강력한 척력이 존재하는 구조에서 매우 중요하다. 최소 누설 경로 및 테이퍼된 자석들이 높은 플럭스 밀도를 제공한다. 응력이 작으므로 저가 재료들이 가능하다.
많은 수의 작은 특성들에 기인하여, 가공은 매우 시간 소비적이며, 그러나 테이퍼된 슬롯에 의하면: 샤프트 여유를 제공하도록 일정한 각도에서 충분히 큰 자루를 가진 작은 엔드밀 대신에 큰 디스크의 커터를 사용하면, PM's의 기계적 보유력이 확보될 수 있고; ~5% 더 높은 토크가 얻어질 수 있다. DurabarTM와 같은 저가 재료의 이점의 대부분을 달성할 수 있는 성능을 형상이 제공한다.
냉각 핀들을 가진 특수 실시예
개시된 범위의 장치의 형상에 의하여 토크-대-중량이 제공되고 예컨대, 0.001"또는 그 이하와 같이 아주 낮거나 또는 0.010" 또는 그 이상과 같이 아주 높은, 로터와 스테이터 사이의 에어갭의 범위에 걸친 KR 이점이 제공된다. 개시된 범위에서의 높은 자극 밀도는 개시된 범위 외측인 일정한 직경의 모터들에 비교해서 더 작은 직경의 이점을 가지는 비정상적으로 잘은 자장을 생성한다. 분석 ac 실험에 의하면 175mm의 평균 에어갭 직경의 액튜에이터에 대흔 0.005" 에어갭은 효과적이며 여기 개시된 원리를 실행함으로써 합리적인 제조 공차로 달성할 수 있다.
도 128은 동력과 엔코더 연결부를 포함하는 조립된 액튜에이터의 실시예의 축방향 도면이다. 도 128 도시와 같이, 액튜에이터(3000)은 핀(3004)들을 가진 스테이터(3002)와, 로터(3006)을 포함한다. 로터는 도 132 도시의 조립체이다. 동력 연결부(3008)와 엔코더 연결부(3010)는 액튜에이터의 일 측면에서 연장한다. 스테이터(3002)는 구조적 강성과 플럭스 경로 설비를 냉각하기 위한 핀(3004)들을 포함한다. 도 129 도시와 같이, 로터(3006)는 각각 핀들을 가지는 두 스테이터(3002)들 사이에 중심면을 따라 배치된다. 도 129에서, 로터는 자석들로부터 반경방향 내측으로 위치된 출력 링을 가진다. 스테이터(3002)들은 하우징(3014)에 고정된다. 베어링(3016)들은 로터(3004)를 하우징(3014)에 회전하게 연결시켜, 액튜에이터 하우징(3014)의 내측 부분(3018)을 분리시키고, 분리기 링(3022)은 하우징의 외측 부분(3020)을 분리한다. 도시와 같은 베어링들은 로터와 스테이터들 사이의 대략 일정한 자력을 사용하여 예비장전된 각도상 접촉 베어링이며, 액튜에이터들을 같이 유지한다. 로터(3006)는 영구자석(PM) 캐리어(3024) 및 PM 캐리어(3024)에 의하여 수용된 PMs(3012)를 포함한다. 로터는 또한 PM 캐리어(3024)에 고정되고 베어링(3016)에 의하여 내측 하우징 링(3026)에 연결된다. 내측 링(3026)은 액튜에이터에 의하여 회전되는 요소가 연결될 수 있는 출력 링(3028)을 포함한다. 출력 링(3028)에 의하여 고정 링(3050)에 연결된 또 다른 요소에 대해 일 요소를 회전하도록 구성된다. 이 실시예에서는 하우징(3014)의 내측 부분(3018)에 연결된 내경 레이스(3052), 및 로터(3006)에 연결된 외경 레이스(3054)의 두 레이스들 사이에, 베어링(3016)은 장착된다. PM 캐리어(3024)는 철 합금이나 강 합금과 같은 연성 재료로 제조되고 슬롯들(도 132 도시의 슬롯들)에 영구자석의 어레이에 의하여 자화된다. 스테이터는 철 합금이나 강 합금과 같은 연성 자성 재료이다. 높은 플럭스 포화 밀도를 가지는 연성 자성 재료는 통상적으로 매우 치밀하다. 액튜에이터의 중량을 감소시키기 위하여, 전기 기계의 실시예는 내측 및 외측 하우징 링들 및 분리 링에 저 밀도 재료를 사용한다. 사용될 수 있는 재료들은 알루미늄 합금, 마그네슘 합금, 또는 탄소섬유 복합체와 같은 복합 재료를 포함한다.
샤프트가 하우징 내측에서 회전하는 경우, 종래의 베어링 장치는 베어링의 ID에 의하여 지지되는 로터(회전 샤프트) 및 베어링의 OD를 지지하는 하우징(외부의 정적 구조물)을 가질 것이다. 베어링의 예비 하중은 베어링의 OD 또는 ID에 작용하는 나사 너트 또는 볼트 클램핑 링과 같은 기계적인 수단에 의하여 그리고 통상적으로 베어링들을 보다 근접하게 이동시키려는 방식으로 제공될 것이다. 종래의 베어링 장치가 바람직한 실시예에 적용되려면, 따라서 베어링의 ID에 연결하는 샤프트에 로터를 부착시키고 하우징에 의하여 보유되는 자기력이 베어링의 OD를 같이 더욱 근접하도록 이도오시키도록 작용한다. 베어링의 외측 레이스들이 축방향으로 같이 밀어지면서 베어링의 내측 레이스들은 외측으로 향하는 축방향 힘에 의하여 인가된 부하에 대항하여 작용하며; 베어링을 관통하는 작ㄹ용 선의 발생되는 정위는 "면-대-면" 구조로서 알려진다. 한 쌍의 베어링들이 그들 사이에, 베어링 직경(도 128 내지 도 135 및 도 138 내지 도 140의 실시예의 경우와 같이) 보다 작은 단 거리를 가질 때, 베어링 예비 하중의 작용 선들의 "면-대-면" 정위는 "등-대-등" 배치보다 휠씬 적은 모멘트 운반 성능을 가진 샤프트 조립체를 생성한다. 베어링의 OD에 로터 샤프트를 장착하고 베어링ID(덜 명확한 장치)에서 하우징의 내측으로 향하는 힘에 반응하면, 등-대-등(Back-to-Back)의 작용선 베어링 구조가 달성되고, 이는 충분히 축방향으로 가요성인 하우징과 결합하여, 로터와 스테이터의 자기적인 인력이 베어링에 예비 하중을 인가하도록 작용시켜 베어링의 평행한 작용 선들 사이를 넓게 분리하고, 이로써 일정한 베어링의 축방향 분리 거리에 대해 샤프트 안정성을 최대화시킨다.
도 130은 층을 이루는 컨덕터(3030)의 부분 도면과 같이, 도 128의 액튜에이터의 스테이터(3002)와 하우징(3014) 조립체의 등축 부분 도면이다. 도 130 도시와 같이, 스테이터가 좌측에 전기 기계의 일 실시예에 따른 지주(3032)를 가지며 스테이터의 후면에 나선 플럭스 경로 냉각핀(3004)을 가진다. 스테이터는 철 합금이나 강 합금과 같은 하나의 등방성 재료로 제조될 수 있다. 나선 냉각핀(3004)들은 냉각을 위하여 표면적을 증가시키면서 플럭스 연결 기능성 및 둘레 강성을 제공하기 위하여 적어도 부분적으로 동일한 등방성 재료로 제조될 수 있고 주로 둘레방향 정위이다.
도 131은 도 128의 액튜에이터의 예시적인 층을 이루는 컨덕터(3030)들과, 외측 하우징(3020), 내측 하우징(3018), 스테이터(3002)의 축방향 도면이다. 컨덕터들의 상들 사이의 연결부는 도시되지 않는다. 층을 이루는 컨덕터(3030)들은 지주(3032) 둘레에 배치된다.
도 132는 도 128의 액튜에이터용 집중 플럭스 로터 지주 어레이(3024)와, 로터 지주 어레이(3024)가 고정되는 로터 지지링(3026)의 등축 도면이다. 로터 지주 어레이(3024)는 조임쇠를 관통하는 반경 홀(3036)을 규정하는 조임쇠(3034)를 포함한다.
스테이터와 자기적으로 상호작용하는 로터가 액튜에이터의 출력 부하를 부담하지 않으므로 여기 도시된 축방향 플럭스 실시예는 매우 작은 에어갭을 달성하는 데 매우 적합하다. 대신에 베어링(3016)은 출력 링(3028)과 PM 캐리어(3024) 사이에 위치되고, 따라서 출력 부하의 변동은 스테이터들에 대해 PM 캐리어의 축방향 위치에 최소 영향을 미친다. 이 실시예에서 스테이터들은 서로에 대한 스테이터들의 축방향 운동을 방지하는 액튜에이터의 OD 위의 축방향 스페이서 링에 의한 정밀한 축방향 간격을 유지한다. 이러한 구조에 의하여 장치들은 각각의 경계에서 최소 평균 에어갭 직경의 액튜에이터에 대해 0.005"의 에어갭을 달성하고 유지할 수 있다. 발명자에 의하여 믿어지는 것은 0.005"의 에어갭은 각각의 경계에서 최소 모터와 같거나 더 큰 모터들에 대해 달성가능하다. 특별한 모터에 대한 소정 에어갭은 용도 및 일정한 제조 공차, 및 구조물이 직면하는 하중을 고려하여 가장 잘 결정될 것이다.
이제 도 133을 참조하면, 실시예는 평행한 측면의 PMs(3038)과 같이 집중 플럭스 로터를 가진다. 테이퍼된 자석들이 더 큰 토크를 제공할 수 있으나, 평행 측면의 자석들의 더 낮은 비용과 단순성에 의하여 많은 용도들에 대해 이것이 더욱 양호한 실시예로 결정되었다. 예비-자화된 PM's는 슬롯 내에 개별적으로 삽입될 수 있고, 자석 재료는 분사되고, 주입되며, 또는 달리 비고체 상태에서 삽입될 수 있다. 이어서 로터 자극에 매우 높은 플럭스 밀도를 적용함으로써 PM 재료를 자화시킬 수 있다.
두 PM 어레이들 사이의 로터의 조임쇠는 바람직하게 슬롯 내로 PM's를 자기적으로 유지하도록 구성된다. 이는 조립 공정을 단순화하고 로터에서의 기계적인 PM 보유 특징의 필요성을 제거한다. 로터는 일 측면의 PM's이 다른 측면에서 PM's의 동일한 수직 극성과 정렬되도록 구성될 수 있다. 대신해서, 로터의 어느 일 측면의 PM's는 반대의 수직 극성일 수 있다. 이러한 예시적인 실시예에서, 축방향으로 정렬된 PM's들은 로터의 중심면을 향하여 자력을 제공하도록 반대 극성이다. 양의 PM의 보유력이 조임쇠를 가로 질러 연결하는 데 필요한 것보다 더 큰 플럭스를 방지하기 위하여; 강성 지주와 조임쇠 구조를 여전히 유지하면서 조임쇠를 관통하여 로터 지주들 사이에 플럭스 경로 제한부를 생성하도록 조임쇠에 그리고 지주들 사이에 반경방향 홀(3036)이 제공된다.로터 지주들의 내측을 향한 축방향 홀들의 어레이(도시 없음)가 강성의 지주와 단부-조임쇠 구조를 유지하면서 또 다른 플럭스 누설 제한부를 제공한다.
일 세트의 각도상 접촉 베어링(3016)이 하우징에 로터를 지지하기 위하여 사용되고 하우징은 내측 레이스에 고정되고 로터는 외측 레이스에 고정된다. NdfeB52와 같은 높은 세기의 자석들에서, 스테이터와 로터 사이의 전체 인력은 0.005" 갭을 갖는 175mm의 평균 에어갭의 액튜에이터에 대해 400kg 이상일 수 있다. 이러한 힘은 항상 존재하고 전자석 스테이터 자극들의 교대적인 극성으로부터 발생하는 로터 지주들의 동시적인 인력과 척력에 기인하여 전체 힘은 여자 작동 동안 10% 이상 변하지 않을 것이다. 이러한 거대한 인력은 소정의 에어갭을 생성하여 유지하기 위하여 지지되어야 한다. 개시된 범위 내의 모터들의 바람직하게 작은 갭은 개시 범위 외측의 모터들보다 더욱 강성의 구조를 필요로 한다. 동시에, 개시된 범위의 모터들에서 가능하고 장치의 전체 토크-대-중량의 이점을 달성하기 위하여 필요한 더 얇은 조임쇠는 이들이 두 가지의 고유의 경쟁하는 특성들이더라도 축방향으로 더 얇은 스테이터에 의하여 더욱 강성의 구조가 달성되는 것을 필요로 한다. 필요한 강성을 달성하기 위하여, 장치의 실시예는 양측 축방향 측면에서 당기는 균등한 자력을 가진 중심 로터를 사용하며, 별도의 링(3022)에 의하여 그들의 OD에서 단단하게 연결된 로터의 양측에서 스테이터들의 세트를 사용한다. OD 위의 분리 링은 스테이터들의 외측 영역(3020)이 에어갭을 닫는 것을 방지하고, 각도상 접촉 베어링(3016)이 스테이터들의 내측 영역이 에어갭을 닫는 것을 방지한다.
이러한 구조의 강성에 부가해서, 이 실시예는 스테이터들 및/또는 하우징의 단부 판들에 충분한 가요성을 허용함으로써 베어링 위에 지속적인 예비 하중을 제공하고 스테이터들과의 로터의 축방향 인력이 베에링에 충분한 예비 하중을 제공하여 베어링 유격을 제거하고 캔틸레버식 하중에 대한 사전-결정된 디자인 한계로 예비 압축된 베어링을 유지한다.
일부 케이스들에서, 베어링들의 자력은 최대 캔틸레버식 하중에 대해 충분할 것이다. 다른 경우들에서, 베어링들은 로터에 의하여 제공된 것보다 더 큰 예비하중을 필요로 할 수 있다. 다른 경우들에서, 로터에 의하여 생성된 힘은 베어링에 대해 필요하거나 바람직한 것보다 더 클 수 있다. 로터 힘이 베어링에 예비 하중을 제공하기에 적합하면, 하우징은 바람직하게 구성되고, 조립된 로터와 하우징에서 로터의 PM's을 감하면, 하우징은 베어링과 접촉하나 베어링을 사전 압축하지 않는다. 이어서 하우징은 바람직하게 베어링이 사전 압축되도록 축방향으로 하우징을 탄성으로 충분히 굽히도록 구성된다.
이러한 예비 압축이 캔틸레버식 하중에 대해 최대 디자인 요건을 견디기에 충분하지 않으면, 하우징은 베어링에 초기의 기계적인 예비 압축을 제공하도록 구성될 수 있고 이어서 자력은 조립될 때 이러한 예비 압축을 증가시킨다.
자력이 필요한 이상으로 또는 일정한 베어링에 대해 바람직한 이상으로 더 큰 예비 압축을 제공하면, 하우징은 베어링에 축방향 하중을 적용하도록 탄성적으로 굽혀져야 하므로 로터에 PM's이 장착되지 않고 조립되도록 구성될 수 있다. 이 경우, 자기적인 로터 힘의 일부는 구부러진 하우징과 베어링 사이의 접촉을 발생할 것이며, 잔여 자력은 소정의 베어링의 예비압축을 제공할 것이다.
이들 대단한 힘 아래 지속적인 에어갭을 제공하기 위하여 매우 경량이고 충분히 단단한 구조를 제공함이 바람직하다. 베어링을 예비 압축하기 위하여 자력을 사용함으로써 패스너의 필요성이 감소되거나 제거된다. 이는 제조 및 조립을 단순화하고 복잡성을 감소시키며 액튜에이터의 중량을 감소시킨다. 핀(3004)들에 의하여 철이나 강 또는 강 합금으로 제조되는, 스테이터 재료의 용적이 감소되고, 마그네슘, 알루미늄 또는 복합 재료와 같은 저밀도 재료를 포함하는 성분에 의하여 지지된다. 스테이터와 하우징 재료는 볼트나 접착제에 의하여 같이 고정될 수 있으나 바람직하게 하우징과 스테이터에서의 정렬 특성에 의하여 위치되고 로터의 자력에 의하여 적어도 부분적으로 서로에 대한 상대 위치에 유지된다. 하우징은 스테이터보다 작은 밀도의 베어링과 스테이터 사이의 부재를 포함하고(예컨대, 내측 하우징(3018)), 에어갭을 닫기 위하여 로터 방향으로 스테이터가 이동하는 것을 방지하는 특성을 이것은 포함한다. 일 실시예에서, 중량과 비용을 추가하고 조립 공정을 복잡화할 수 있으므로 이 하우징 부재는 스테이터 부재가 로터로부터 멀어지게 이동하는 것을 방지하는 특성을 가지지 않는다.
작동 동안 베어링에 충분한 예비하중을 제공하기에 자력이 항상 충분하지 않으면, 스테이터 부재의 OD 위의 하우징 부재에는 스테이터 위에 정렬되고 로터로부터 멀어지는 스테이터 부재의 축방향으로의 운동을 방지하는 특성(도시 없음)이 제공된다. 이러한 부재는 액튜에이터의 중심선을 따라서와 같이 유사한 부재에 고정되고, 이는 로터의 반대 측면의 로터를 향하여 당긴다. 이들 두 개의 하우징 부재는 볼트나 나사들 또는 접착제로 또는 프레스 또는 눌러 고정해서 같이 고정될 수 있다. 스테이터 및/또는 로터는 바람직하게 하우징 부재들이 같이 고정되기 전에 외측 하우징 부재들을 스테이터들의 OD가 로터를 향하도록 당기고, 에어갭의 반경 거리를 따라 일정한 에어갭을 생성하고, 또는 스테이터와 로터 사이에 에어갭의 반경방향 거리를 따라 테이퍼된 에어갭을 생성하여 더 작은 에어갭이 액튜에이터의 축을 향하도록 허용하는, 원추형 형상과 같은 에어갭 표면 형상으로 구성된다. 로터 및/또는 스테이터 위의 힘이 에어갭을 폐쇄하도록 작용할 때 내측 부분이 외측 부분보다 더 일찍 접촉하지 않고, 축을 향하는 더 작은 에어갭에 의하여 스테이터와 로터의 내측 부분들은 로터와 스테이터의 외측 부분보다 축방향으로 더 근접될 수 있다. 이러한 테이퍼에 의하여 스테이터 또는 로터의 외측 부분의 더 많은 운동이 허용되지 않으나, 이들 더 작은 에어갭 영역의 사전 접촉의 염려 없이 내측 부분에 대해 더 작은 에어갭을 허용한다.
지속적인 에어갭을 유지하기에 충분히 단단하지만 로터의 PM's가 소정의 베어링 예비 하중을 제공하기에 충분한 신축성을 유지하는 하우징 구조물을 제공하기 위하여, 이러한 예시적인 실시예에서 두 스테이터들 사이의 일정한 정도의 축방향 이동이나 가요성을 허용하도록 OD 연결 링(3022)을 구성하는 것이 유익할 수 있다. 이는 스테이터들 사이의 소정 정도의 상대적인 축방향 운동을 허용하면서 두 스테이터들의 상대 회전을 방지하는 벨로우즈 또는 다른 다소 디스크-형상 또는 다소 원추형 또는 다른 유사한 형성에 의하여 실행된다. 이러한 가요성 부재 또는 조립체는 스테이터들 사이에 축방향으로 있거나 또는 스테이터들과 일치할 수 있다. 매우 작은 축방향 운동이 필요하고, 바람직하게 액튜에이터의 열 팽창의 결과로서 스테이터들 사이에 상대적인 축방향 거리의 변화 및 제조 공차의 전 범위에 걸친 에어갭의 자기적인 인력의 결과로서 베어링들에 소정의 예비하중이 적용되기에 충분하다.
도 128의 예시적인 실시예에서, 자석의 힘은 FEMM 소프트웨어를 사용하여 산출되었다. 이러한 인력에 의하여 조립체에 베어링이 없을 때 0.010"의 축방향 구부러짐이 발생한다. 합리적인 가공 공차를 이용하고 이러한 크기의 장치의 베어링 면에 대해 최대 0.002"보다 작은 것으로 예측될 수 있는, 열 팽창에 기인한 치수 변화 및 제조 공차의 합리적인 범위에 걸쳐 베어링의 일정한 예비하중을 달성하기에 충분한 가요성으로서 이는 발명자에 의하여 생각된다.
내측으로 스테이터들을 당기는 자력이 베어링들 위의 예비하중에 대해 필요한 것보다 더 크면, 스테이터 부재의 OD 위의 하우징 부재에는 스테이터 위에 정렬하고 로터를 축방향으로 향하는 스테이터 부재의 운동을 방지하는 특성이 제공된다. 이러한 부재, 예컨대, 분리기 링(3202)은 액튜에이터의 중심선을 따르는 바와 같이 유사 부재에 고정될 수 있으며, 이는 또한 로터의 반대측에서 반대측 스테이터를 로터로부터 멀리 민다. 이들 두 개의 하우징 부재들은 볼트나 나사 또는 접착제나 누름 또는 스냅 고정에 의하여 같이 고정될 수 있거나 또는 그들은 마찰 고정되거나 또는 서로에 대해 간단히 눌러지거나 또는 분리 링에 의하여 고정될 수 있다. 도 134 도시와 같이, 그들은 또한 단일 부품일 수 있고; 그들은 스테이터들의 연장부일 수 있다. 스테이터 및/또는 로터는 바람직하게 내측 하우징 부재가 같이 고정되기 전에, 로터로부터 스테이터들의 OD를 향해 외측 하우징 부재가 외측으로 밀 수 있도록 허용하는 원추형 표면 형상과 같은, 에어갭 표면 형상에 의하여 구성되며, 따라서 로터를 향하여 스테이터를 당기는 로터의 PM's과 조립 후에 로터와 스테이터 사이 소정 에어갭을 생성한다.
상기 구성의 요소들은 단일 로터 및 단일 스테이터에 적용될 수 있고, 또는 중심의 두 측면의 스테이터의 어느 일 측의 축방향 단부 위의 두 개의 외측 로터들에 적용될 수 있다. 상기 구성의 요소들은 또한 외측 출력 링 구조에 적용될 수 있으며 축방향 외측 부재는 스테이터들의 ID 내측에 같이 단단히 고정될 수 있다.
도 128 내지 도 135 및 도 138 내지 도 140의 예시적인 실시예의 열 전기 기계의 실시예의 원리에 따른 것이다. 슬롯 밀도와 컨덕터 용적은 이러한 장치의 크기에 대한 한도 내이며, 컨덕터들로부터의 스테이터들의 후면으로의 열의 전도는 충분히 효과적이므로 스테이터들의 후면에 적용된 일정한 냉각 속도에 대해 매우 높은 전류 밀도를 허용한다. 스테이터들의 후면의 냉각은 방사, 전도, 및 대류를 포함하는 많은 방법들에 의하여 실행될 수 있다. 냉각 핀(3004)들은 스테이터의 후면 및 하우징을 둘러싸는 표면적을 증가시킨다. 냉각 핀들이 스테이터와 일체 부재이고 비반경-라인 또는 곡선을 따라 각을 형성하고, 핀들이 도 135의 일련의 화살표와 같이 도시된 플럭스 경로(3040)로서 사용될 수 있다.
조임쇠의 중량에 대해 조임쇠의 플럭스 담지 성능을 최대화하는 것이 바람직하다. 둘 이상의 지주들과 핀이 정렬되도록 냉각/핀들을 지주들에 대해 배치함으로써, 그리고 지주 및/또는 조임쇠와 일체인 바와 같이 연성 자성 재료의 핀들을 구성함으로써, 핀들은 이하의 세 가지 별개 기능들로 사용될 수 있다. 구체적으로, 핀은 이와 같이 사용될 수 있다.
A) 반경방향 및 둘레 방향의 세기 및 강성
B) 냉각을 위하여 표면적을 증가시키며,
C) 일체화된 플럭스 경로 부재로서. 플럭스 경로를 향상시키기 위하여 냉각 및/또는 강성 핀들을 사용하는 것은 낮은 전체 중량을 달성하기 위하여 높은 밀도의 스테이터 조임쇠 재료를 효과적으로 사용할 수 있다.
도 136은 바람직하게 스테이터와 일체의 부재이고 스테이터 지주들에 대해 45도보다 작은 각도에서 50%보다 크게 반경방향으로 정렬되는(즉, 반ㄷ경방향 정렬로부터 45도보다 작은) 스테이터의 후면의 냉각/구조 핀들의 단순화된 부분을 도시한다. 이로써 핀들은 화상표들로 표시된 바와 같이 지주들 사이의 플럭스 연결 경로(3040)를 제공하는 추가 기능을 실행할 수 있다. 빗금친 단면적(3042)은 이 실시예에서 축방향 정렬에 근접한 핀들에 기인하는 지주들 사이의 핀들을 플럭스가 통과하는 더 큰 거리 및 지주들 사이에 대각선으로 연장하는 플럭스 연결 경로(3040)를 표시한다.
도 128 내지 도 135 및 도 138 내지 도 140의 실시예에서와 같이, 일부 구조에서, 스테이터는 ID 및 OD 위에 지지되고 지주들은 스테이터 자체의 충분한 반경방향 강성을 제공한다. 이 경우, 전기 기계의 실시예는 핀들이 없는 50% 두께의 두꺼운 조임쇠에 비교한 바와 같이, 지주에서 지주로 조임쇠를 통해 플럭스를 연결하기 위한 유사한 단면을 제공할 수 있는 일련의 동심 핀들과 홈들을 이용하나, 핀들과 홈들은 세 가지의 추가적인 이점을 제공한다. 첫째는 스테이터의 후면의 크게 증가된 냉각 표면적이다. 제2는 둘레 방향으로의 증가된 강성이다. 이는 스테이터들과 로터 지주들의 수 사이의 작은 차가 있는 구조의 경우 이익(90도 각도에 대해 40-50% 힘의 변화)이고 조임쇠는 충분히 얇아서 결과적으로 바람직한 것보다 더 큰 둘레방향 구부러짐을 발생한다. 일련의 동심 핀들을 고체 스테이터 재료에 통합함으로써, 둘레방향 강성은 스테이터의 중량을 증가시키지 않고 증가될 수 있다. 이러한 구조의 제3 이점은 다수의 핀 부분들이 지주들 사이의 스테이터 조임쇠에서 와류 발생을 감소시킬 것이다. 더 긴 플럭스 경로에 기인하여 조임쇠를 가로 질러 릴럭턴스의 약간의 증가가 있을 것이나, 감소된 전류의 이점은 이러한 손해를 부분적으로 또는 완전히 상쇄할 것이다.
도 137 도시의 간략화된 예시적인 도면에서, 최대 조임쇠 두께(즉, 핀들의 전체 높이를 포함)는 대략 지주들의 두께의 50%의 가정의 핀이 없는 조임쇠의 대략 두 배이다. 이는 대략 같은 단면적을 가지며, 그러나 유사한 자기적인 릴럭턴스를 가질 것으로 예측된다. 이와 같이, 중량이나 자기적 특성을 포함하지 않고, 열 추출을 위하여 유용한 표면적은 더욱 효과적인 냉각을 위하여 핀이 없는 표면적보다 수배일 수 있으며, 동시에 증가된 둘레 방향 강성의 이점을 제공한다. 도 137 도시의 실시예에서, 냉각 핀(3454)들은 지주(3458)들과 일치하지 않는 방향으로 스테이터(3450)에 통합된다. 핀들은 테이퍼될 수 있다. 하나 이상의 냉각 슬롯(3456)들이 스테이터 지주 슬롯(3452)의 기저부에 구멍을 생성하기 위하여 충분히 깊을 수 있다. 핀들을 포함하는 조임쇠는 지주 폭의 50%보다 더 큰 높이를 가질 수 있다. 스테이터 슬롯의 구멍에 의하여 컨덕터들은 냉각 유체 또는 열 방출 부재(도시 없음)에 의하여 전도를 통하여 직접 냉각될 수 있다. 공기 또는 냉각 유체는 컨덕터들 둘레의 구멍을 통해 냉각 슬롯 또는 지주 슬롯의 교차부를 통해 액튜에이터의 외측 또는 내측으로 유동할 수 있다. 냉각 유체의 운동은 가압 대류에 의하거나 또는 컨덕터들과 스테이터의 가열 결과fhh서의 자연 대류에 의해서 일 수 있다. 일 실시예에서, 스테이터는 제한되는 것이 아닌, 강 또는 강 합금, 또는 철 또는 철 합금과 같은 연성 자성 재료로 제조되거나, 및 3D 프린팅이나 소결과 같은 추가적인 제조 또는 폭발 용접에 의한 융착된 선 또는 점차적인 전이를 따라, 알루미늄 또는 마그네슘 합금과 같은 비자성 재료로 융착된다. 냉각 핀들은 이어서 스테이터의 후면 내로 절단된다. 잔여 스테이터(3450)보다 더 낮은 밀도와 더 큰 열 전도성을 가질 수 있는 융착된 핀 팁(3460)을 형성하고 증가된 표면적을 제공한다. 하우징(도시 없음)에 고정하기 위한 스테이터 지주들에 수직인 스테이터(350)의 에지에 고정 돌출부(3462)들이 제공된다.
개시된 경계 내측의 모터들은 컨덕터들로부터 스테이터 후면으로의 낮은 열 흐름 저항을 발생하는 비정상적으로 작은 컨덕터 용적 및 비정상적으로 높은 슬롯 밀도를 특징으로 한다.
개시된 범위 내의 고유의 열 방출 이점에 부가해서, 여기 설명되는 하나 이상의 특징을 적용함으로써 스테이터의 후면으로부터 열 추출을 증가시킬 수 있다. 이하의 냉각 시스템의 특징의 다수가 개시된 범위 외측 모터들을 포함한 직렬 모터들에 적용될 수 있음이 이해될 것이다. 개시된 범위 내의 형상을 가진 이들 냉각 시스템 구조의 하나 이상을 적용하면, 그러나 컨덕터들로부터 스테이터 후면으로의 열 흐름 저항이 이들 모든 모터들의 제한 인자들이므로 연속 토크 밀도에서 더 높은 성능을 생성하고, 개시된 범위 내의 모터들의 고유 이점들은 컨덕터들로부터 스테이터 후면으로의 낮은 열 흐름 저항이다.
스테이터 후면으로 일정한 냉각 속도가 적용되면, 표면적과, 냉각 속도와 스테이터와 냉각 유체 사이의 온도 차이를 기초로 장치로부터의 소정 정도의 와트의 열을 추출할 수 있을 것이다. 구체적으로, 다른 변수들이 모두 일정하면, 냉각 유체에 의하여 접촉된 표면적과 추출된 열의 와트 수 사이에 비례 관계가 있다. 그러므로, 가열 구조 내의 온도 인자들의 변화를 무시하면, 표면적의 증가는 구조로부터 방출된 열 와트의 양의 대략 비레적인 증가를 생성할 것이다. 표면적이 핀들의 추가에 의하여 10x만큼 증가하면, 같은 냉각 속도에 대해상당히 더 많은 열이 추출될 것으로 예측하는 것이 합리적이다. 역으로, 모든 다른 변수들을 일정하게 유지하면서 핀이 없는 표면으로서 동일한 양의 열을 방출하기 위하여 핀이 부착된 표면의 경우, 냉각 속도의 일부만을 필요로 할 것이다.
도 128 내지 도 135 및 도 138 내지도 140의 실시예들의 냉각(핀들이 스테이터에 통합된)은 바람직하게 제한되는 것이 아닌 강 또는 철 또는 코발트 합금 또는 니켈 합금과 같은 강 합금과 같은 고체 연성 자성 재료 또는 제한되는 걱ㅅ이 아닌 페라이트 분말 또는 코발트 철 분말 재료와 같은 소결된 연성 자성 분말 재료 또는 존재하였거나 아직 존재하지 않은 가능한 다른 연성 자성 재료로 제조된 고체 스테이터에 의하여 달성된다. 적층된 전기강은 또한 사용될 수 있으나 높은 토크 밀도를 달성하기 위하여 필요한 얇은 부분과 결합된 층들 사이에 사용되는 접착제의 기계적인 한계에 기인하여 강하고 단단한 구조를 달성하는 것이 보다 위험할 수 있다. 접착제들이 그들의 강도의 일부를 상실하는 상승된 온도에서 이는 특히 적용된다. 스테이터와 로터 사이의 자기력에 기인한 스테이터의 일정한 부하는 이들 접착제의 크리프 변형을 피해져야 하는 중요한 문제로 만든다. 100% 적층 재료로 제조된 스테이터는 층들 사이의 접착제에 높은 응력-집중을 발생하여 여기 도시된 소결 금속 스테이터 또는 고체 금속보다 구조적으로 덜 건전한 것으로 발명자에 의하여 생각된다.
로터와 스테이터 사이에 자기적인 인력을 사용하면 베어링에 일정한 예비 부하가 미치고 액튜에아터들을 같이 유지하기 위하여 패스너나 접착제의 필요성을 제거하거나 감소시킨다. 일부 용도들에서, 항상 베어링들에 예비 하중을 미치기 위하여 필요한 것보다 자력은 더 클 수 있다. 다른 용도들에서 로터와 스테이터 사이의 자력은 항상 베어링에 예비 하중을 미치기에 충분하지 않을 수 있이다. 도 138은 도 128의 구조를 도시하는 데, 분리 링의 축방향 표면은 내측 하우징의 축방향 표면이 베어링들의 내측 레이스들에 접촉하여 예비 하중을 미치기 전에 외측 하우징의 축방향으로 향하는 표면에 접촉할 것이다. 즉, 조립 전에 베어링-하우징 갭(3044)은 분리 링-하우징 갭(3046)보다 더 크다. 이러한 구조에 의하여 하우징과 스테이터들의 탄성 변형을 통해 로터와 스테이터 사이의 자기 인력으로부터 발생하는 예비 하중의 일부가 제거될 것이다.
도 139에서, 내측 하우징의 축방향으로 향하는 표면은 분리 링의 축방향 표면과 외측 하우징의 표면이 접하기 전에 베어링들의 내측 레이스의 축방향 표면들에 접촉한다. 즉, 조립 전에 베어링-하우징 갭(3044)은 분리 링-하우징 갭(3046)보다 더 작다. 이러한 구조는 로터와 스테이터들 사이의 자력에 의하여 제공된 것 이상으로 베어링에 대한 예비 하중을 증가시킬 수 있다. 그러나, 이러한 구조는 외측 하우징(3020)과 분리 링(3022)의 기계적이거나 접착제 고정을 필요로 할 것이다.
도 140 도시와 같이, 가스나 액체 냉각과 같은 유체 냉각을 위하여 사용될 수 있는 스테이터(3002)들의 후면에서의 밀봉된 유체 통로(3048)를 가진 실시예의 단면도가 도시된다.
도 140A를 참조하면, 기계(3470)의 하우징(3472)의 유체 통로들의 유체 흐름을 도시하는 실시예가 도시된다. 냉각 유체는 냉각 유체 유입구(3476)를 통해 외측 반원통로(3474)에 유입한다. 냉각 유체 흐름이 화살표로 도시된다. 유체 통로(3490)에 의하여 유체 흐름이 외측 반원 채널(3471)로부터 내측 반원 채널(3478)로 이동할 수 있다. 이어서 유체 흐름은 내측 반원 채널(3478)을 통해 냉각 유체 유출구(3480)로 배출된다.
도 140B와 도 140C를 참조하면,두 개의 하우징 절반부93472)들 사이 및 액튜에이터의 내경 둘레에 단단한 연결부(3488)를 가진 액튜에이터93770)의 실시예가 도시된다. 하우징(3472)의 외경은 부착 특성(3486)을 포함한다. 작동에서, 스테이터(3482)들과 로터(3484)에 의하여 생성된 자기 인력은 축방향으로 두 개의 하우징 절반부를 같이 가압한다. 단단한 연결부(3488)는 내경에서의 구조의 강성을 유지한다. 추가적인 지지 구조물 또는 베어링과 같은 다른 접촉 점들이 없으면, 로터와 스테이터들 사이의 에어 갭은 이들 견인 자기력에 의하여 닫혀질 수 있다.
구조적인 그리고 조립 특성을 가진 집중 플럭스 로터
정렬된 영구자석 로터
공지의 영구자석 로터 구조는 플럭스 경로 방향으로 극화된 자석들을 사용한다. 이러한 유형의 로터는 인접한 반대 극성 자석들 사이에 플럭스 연결 경로를 제공함으로써 연성 자석 조임쇠를 사용한다. 연성 자석 재료는 용이하게 자화되고 탈자화되는 재료이다. 조임쇠에서의 플럭스 연결 경로는 에어갭의 플럭스 밀도를 감소시키며 영구자석과 조임쇠 사이의 자기 인력을 감소시켜 작동 동안 자석들을 제 위치에 유지하기 위한 접착제 또는 기계적인 고정물의 필요성을 제거 또는 감소시킨다.
전기 기계의 일 실시예가 그의 모든 구조들에서 정렬된 영구자석 로터와 같이 사용될 수 있다.
집중된 플럭스 로터
집중된 플럭스 로터들은 교대적인 극성의 직각으로 극화된 자석들을 사용하고, 이 기술 분야의 통상의 일부 기술자에게는, 동일한 자석들이 정렬된 PM 구조에 사용되면 가능한 것보다 에어갭에서 로터 지주들의 더 높은 플럭스 밀도를 제공하는 것으로서 알려져 있다.
집중된 로터는 균등한 수의 연성 자석 재료의 플럭스 집중 로터 지주들의 어레이에 의하여 분리된 직각으로 극화된 교대 극성의 자석들의 어레이를 포함한다. 로터는 바람직하게 하나의 부재의 등방성 또는 균질의 강 또는 철 합금으로 제조되고 지주들과 연결 재료 사이의 접착제들이 없거나 최소가 되도록 같은 등방성 블랭크로부터 가공된 주조 부품 또는 부분과 같은 등방성 또는 균질의 재료로 바람직하게 제조된 단단한 연결부들 및 인접한 지주들 사이의 재료의 단단한 연결이 되도록 구성된다. 모든 방향으로 동일한 구조 특성을 가지면 재료는 등방성 재료이다. 전체를 일관해서 균일한 조성을 가지면 재료는 동질이다. 로터가 양측면이면(로터의 양측 축방향 단부들에서 스테이터를 갖는 중앙 로터 축방향 모터와 같은) 또한 로터의 하나의 축방향 측면 위의 지주와 로터의 다른 축방향 측면 위의 지주 사이에 단단한 연결부가 존재할 수 있으며, 단단한 연결부는 바람직하게 긴은 등방성 또는 동질의 블랭크로부터 가공된 주조 부품 또는 부분과 같은 등방성 또는 동질의 블랭크로 제조된다. 이러한 단단한 연결부에 의하여 생성된 지주에서 지주로의 플럭스 누설 경로로부터의 손실은 개신된 자극 피치와 지주 높이의 범위 내의 전기 기계에 의하여 감소된다. 충분히 단단한 등방성 구조를 제공하면서, 전기 기계 실시예에서 토크를 유지하는 하나의 방법은 로터 지주 팁들을 포화시키기 위하여 필요한 것보다 더 깊은 영구 자석 깊이 및 영구자석 자석 세기의 결합을 사용하는 것이다. 영구 자석의 깊이는, 축방향 플럭스 구조에서의 영구자석의 축방향 길이로, 그리고 반경방향 플럭스 구조에서는 영구자석의 반경방향 길이로 규정된다. 영구자석의 폭은 반경방향 및 축방향 플럭스 구조에서 영구자석의 직각 길이로서 규정된다. 영구자석의 길이는 반경방향 플럭스 구조에서 자석의 축방향 길이, 그리고 축방향 플럭스 구조에서 자석의 반경방향 길이로서 규정된다. 로터 지주들의 팁들이 일단 추가적인 PM 깊이에 의하여 포화되면, 토크는 감소되는 이득을 제공할 것이다. 전기 기계의 실시예는 에어갭에서 로터 지주 팁들을 포화시키기 위하여 필요한 것보다 더 깊은 자석 깊이를 사용하고 따라서 조임쇠를 통해 누설되는 추가적인 플럭스는 토크에 대해 최소 영향을 미친다. 증가된 자석 깊이에 부가해서, 전기 기계의 실시예들은 조임쇠를 통한 플럭스 누설을 감소시키기 위하여 플럭스 누설 경로의 하나 이상의 플럭스 누설 제한부를 사용할 수 있다.
PMs와 포화된 지주들의 척력에 의하여 생성된 내부 응력에 부가해서, 이러한 구조와 결합된 N52 자석과 같은 큰 세기의 PM's에 의해 생성된 축방향 힘은, 본 발명 장치의 실시예의 175mm 평균 에어갭 액튜에이터의 경우, 400㎏을 초과한다. 다양하게 조임쇠, 측면 조임쇠, 또는 단부 조임쇠일 수 있는 유지 요소들은 더 작은 에어갭을 사용할 수 있도록 허용하는 추가적인 구조적인 강성을 제공한다.
개시된 전기 기계의 실시예들은 집중된 플럭스 구조의 결과 로터 지주의 에어갭 단부에서 매우 높은 플럭스 밀도를 제공한다. 더우기, 전기 기계의 일부 실시예들은 그 자체의 플럭스에 의하여 제 위치에 유지되는 영구 자석에 대해 자석들을 로터 지주들에 고정하기 위하여 접착제에 의존할 필요를 제거하거나 감소시킨다.
전기 기계의 실시예들은 둘 이상의 스테이터의 지주들 사이의 고체 연결부를 조임쇠의 사용에 의하여 이용한다. 이러한 조임쇠는 그렇지 않으면 에어갭을 가로질러 연결하여 토크를 제공할 PM 플럭스 일부에 대해 단락 회로를 생성하는 명백한 단점을 가지며, 그러나 여기 개시된 일정한 기하적인 고려에 의하면 분석과 시험에 의하여 조임쇠를 통해 하나의 자석 지주로부터 다음 지주로 영구 자석의 플럭스의 높은 비율이 누설할 수 있더라도 토크의 최소 손실이 허용될 수 있음이 입증되었다.
충분한 조임쇠의 사용은 에어갭을 가로 지르는 플럭스 연결에 의하여 생성되는 상당한 힘을 견디기 위하여 구조적인 강도와 강성을 제공하는 것이 유익한 것을 보여준다. 로터 지주들 사이에 고체 철 도는 강 합금 연결에 의하여 일 부재로서 구성될 때, 분석에 의하면 개시된 자극 피치와 지주 높이를 가지는 전기 기계의 실시예가 175mm 평균 에어갭 장치에 대해 0.005" 또는 그 이하의 에어갭을 포함하는 일치하는 에어갭을 유지할 수 있음을 보여주었다. 집중된 플럭스 로터를 가진 전기 기계의 이하의 구조에 의하면 지주의 반대 단부로부터 인접 지주의 반대 단부로의 조임쇠를 통한 높은 플럭스 누설에도 불구하고 에어갭의 충분한 플럭스 비율이 제공된다.
조임쇠를 가진 깊은 자석들(Deep Magnets with Back Iron)
도 141을 참조하면, 본 발명 장치의 실시예의 로터(3300)와 스테이터(3330)가 도시된다. 로터는 연속 구조를 형성하는 로터 지주(3304)들과 조임쇠(3310)를 포함한다. 로터 지주(3304)들과 조임쇠(3310)는 동질이며 등방성 재료로 형성되고, 로터 지주(3304)들은 조임쇠로부터의 동질 연장부이다. 로터 지주(3304)들 사이의 공간은 로터 슬롯(3306)을 형성한다. 로터 슬롯(3306)은 영구 자석(3302)으로 채워진다. 스테이터(3330)는 스테이터 지주(3332)들과 컨덕터 층(3334)들을 포함한다.
영구자석(3302)들은 로터 지주(3304)의 단부가 에어갭(3308)에서 포화되는 자석 포화 깊이를 포함하며 추가적인 자석 깊이(3336)는 에어갭(3308)의 플럭스 밀도를 별로 부가하지 않는다. 이러한 영구 자석 깊이를 너머 조임쇠의 사용은 에어갭에서 감소하는 최소 효과를 가지는 것이 발견되었다. 1:1의 자석 깊이 대 자석 폭 비율에서, 조임쇠는 에어갭에서의 상당히 해로운 효과를 가진다. 2:1 및 4:1의 비율에서 에어갭을 가로지르는 플럭스 밀도가 연속으로 더 작은 손실이 발생한다.
도 141은 또한 위에 설명된 바와 같은 영구 자석 폭(3338), 로터 지주 깊이(3340), 및 스테이터 지주 깊이(3342)를 보여준다. 로터 지주 깊이와 스테이터 지주 깊이는 축방향 플럭스 구조에 있을 때 축방향으로 또는 반경방향 플럭스 구조에 있을 때 반경 방향으로 로터 또는 스테이터 지주 길이로서 규정된다.
충분한 구조적인 세기와 강성을 제공하기 위하여, 실시예들은 최대 에어갭 플럭스 밀도에 대해 필요한 것보다 더 긴 자석 깊이를 사용한다. 이러한 과잉 깊이 자석들은 조임쇠 없이 필요한 것보다 더 긴 로터 지주들을 필요로 하고, 이는 축방향 구조에 있을 때 축방향으로 더 긴 로터 구조를 발생하고 로터의 세기와 강성을 증가시키는 효과를 생성한다. 또한, 실시예들은 바람직하게 지주 부재들과 일체인 연성 자석 조임쇠를 포함한다. 여분의 축방향 지주 길이에 결합해서, 조임쇠 특징이 매우 높은 세기와 강성의 일체의 로터 지주 어레이 구조를 제공한다.
로터의 세기와 강성을 증가시키는, 로터 지주들의 증가된 길이에 부가해서, 깊이 초과 자석들의 제2의 이점은 에어갭에서의 매우 포화된 로터 지주들이다. 따라서 작은 에어갭과 결합하여, 구조적인 세기와 강성을 위한 두꺼운 조임쇠는 에어갭에서 플럭스 밀도를 크게 감소시키지 않고 사용될 수 있다.
장치의 실시예들은 필요 강성을 제공하기 위하여 PM's와 로터 지주의 추가적인 깊이를 제공한다. 동시에, 이들 PM's의 추가적인 깊이에 의하여 로터 지주들 사이의 단단한 연결이 이루어지고 바람직하게 로터 지주들 사이에 일체의 자기적으로 연성인 조임쇠를 제공하고 에어갭에서 플럭스 밀도에 크게 영향을 미치지 않는다.
이 기술 분야의 통상의 전문가에 공지인 하나의 이유는 조임쇠 특성이 집중된 플럭스 로터에 해로울 수 있는 것으로 예측되는 것이며 자석으로부터의 플럭스의 높은 비율이 에어갭의 높은 릴럭턴스의 플럭스 경로를 가로질러 연결하는 대신 조임쇠의 낮은 릴럭턴스의 플럭스 경로를 통해 지주에서 지주로 연결할 것이다. 그러나, 조임쇠의 하나의 효과는, 이러한 구성에 의하여 매우 작은 자력이 생성되더라도 매우 작은 에어갭이 달성할 수 있는 충분히 높은 세기와, 강성 및 크리프 저항을 제공하는 것이다. 0.005"에 이르는 매우 작은 에어갭을 달성함으로써, 에어갭의 릴럭턴스는 비정상적으로 낮고 조임쇠를 관통하는 플럭스 연결 경로를 큰 에어갭의 경우보다 덜 해롭게 할 수 있다.
최대 플럭스 밀도가 필요한 용도들에 대해, 그리고 집중된 플럭스 로터가 조임쇠 부품을 포함하는 일체형 구성의 사용에 의하여 제공된 높은 세기와 강성을 필요로 하는 하는 경우, PM's와 로터 지주들의 깊이를 증가시키면 영구 자석의 길이가 더 짧아지고 조임쇠가 없으며 에어갭의 플럭스 밀도를 초과하거나 같게 된다.
이와 같이, 본 발명 장치의 실시예는 일체화된 연성 자석 재료의 지주 어레이 및 조임쇠를 사용하여 높은 세기와 높은 기계적 강성 및 집중된 플럭스의 로터가 제공되고 증가된 자석 깊이와 지주 높이를 사용함으로써 에어갭 플럭스 밀도의 최소 감축과 함께 이를 달성한다.
조임쇠 구조를 가진 자석 유지
도 142와 도 143을 참조하면, 장치의 실시예들은 고 전류 상태와 무 전류 상태를 포함하는 영구 자석을 유지하기 위하여 작용하는 자력을 제공하기 위하여 조임쇠를 통해 플럭스 연결 경로를 제공하는 일정 범위의 구조적 특성과 영구자석을 사용한다. 조임쇠를 관통하는 자속은 슬롯 내로 자석들을 당기는 자력을 생성하고 따라서 자석을 유지하도록 지원한다. 영구 자석들이 항상 슬롯들의 바닥에 대해 자기적으로 유지되도록 장치의 일부 실시예의 형상은 로터 지주와 조임쇠를 관통하여 연결하는 전체 자속이 에어갭을 가로지르는 플럭스보다 더 높도록 구성된다. 또한 다양한 영향력 있는 조건들 하에서 로터 지주와 조임쇠를 통해 연결하는 총 자속은 스테이터가 최대 전류에서 여자될 때 에어갭을 가로질러 연결하는 플럭스보다 더 크다.
에어갭보다 로터를 통해 플럭스 연결을 실행하는 다양한 방식들이 있다. 일부 비제한적인 예들이 여기 도시된다. 슬롯들 내에 PM's을 자기적으로 유지하는 다른 방법들이 가능하다. 에어갭보다 로터 조임쇠를 통해 더 큰 플럭스 연결을 제공하는 특정 구조는 자석에 대한 자기적인 유지 효과를 제공하기 위한 가능성을 가진다. 슬롯에 자석을 고정하기 위하여 접착제를 사용하는 것이 바람직할 것이나, 이 경우 접착제 목적은 자석들의 이동을 방지하는 것이 아니고 작동 동안 자석들의 ㅈ진동을 방지하는 것이다.
테이퍼된 슬롯
또한 기계적이고 자기적인 힘의 결합을 사용하여 로터 슬롯 내에 자석들을 유지하기 위하여 힘을 제공할 수 있다. 테이퍼된 자석들은 상당한 비율의 자속이 에어갭을 관통하면서 로터 슬롯 내에 자석을 유지하는 구조를 제공할 수 있다.
에어갭을 향하여 더 얇아지도록 직각으로 테이퍼되는 자석들이 집중된 플럭스 로터 구조에서 높은 성능을 제공할 수 있다. 도 144를 참조하면, 자석(3302)들이 테이퍼된 단부(3316)들을 가지며 로터 지주(3304)들이 테이퍼된 단부(3318)들을 가지는 축방향 플럭스 구조의 로터(3300)가 도시된다. 자석들과 로터 지주들은 반대 방향으로 테이퍼되어 상호 체결되는 장치를 형성한다. 영구자석들은 스테이터(3330)들의 방향으로 테이퍼되고 로터 지주(3304)들은 스테이터로부터 멀리 테이퍼된다. 이 실시예에서, 두 개의 실질적으로 대칭인 로터(3300)들이 한 쌍의 스테이터들 사이에 조립될 수 있고, 각 로터의 테이퍼된 지주들은 등과 등이 접하고 각 로터의 테이퍼된 자석들이 등에서 등이 접한다. 이와 같이 자석(3302)들을 테이퍼시키면, 에어갭(3308)에서 더 큰 로터 지주 폭을 허용한다. 또한 넓은 자석 단부에서 더 큰 자석 폭(3338)을 허용하기 위하여 테이퍼되도록 에어갭(3308)으로부터 멀리 있는 로터 지주(3304)에 더 큰 플럭스를 제공하며, 측면들이 평행이면 지주(3304)들은 덜 포화될 것이다. 이와 같이, 활성 영구 자석(3302)들과 연성 자석 재료는 에어갭(3308)에서 더 많은 플럭스를 제공하도록 더욱 효과적으로 사용된다. 두 개의 로터 부분들은 예컨대 접착제에 의하여 같이 고정될 수 있고, 그러나 일부 바람직한 변형에서 볼트(도시 없음)나 고정 링(도시 없음)들과 같은 기계적인 특성이 사용될 수 있다.
테이퍼된 지주(3304)들과 자석(3302)들의 상호 체결 배치에 의하여 영구 자석들의 이동을 방지하고, 이는 로터에 자석을 유지하기 위한 자력의 필료를 감소시키며, 따라서 단부 조임쇠(3314)를 통해 자속 누설 필요를 감소시킨다.
일부 실시예들에서, 플럭스 경로 제한부(3328)의 어레이가 단부 조임쇠(3312)에 연결하는 각 로터(3304)의 베이스에서 단부 조임쇠(3314)의 홀로서 형성될 수 있다. 이들 플럭스 경로 제한부(3328)들은 로터(3304)들과 단부 조임쇠(3314) 사이의 유용한 플럭스 경로를 감소시킨다.
도 144는 테이퍼된 슬롯 로터의 축방향 플럭스 구조를 도시하며, 그러나 테이퍼된 슬롯 로터는 반경 방향 플럭스 구조로서 균등하게 구성될 수 있다. 테이퍼된 자석들은 대향하는 캐리어들로부터 멀어지거나 향하여 좁아질 수 있다.
이와 같이 자석들을 테이퍼하는 제2 효과는 에어갭을 향한 영구 자석으로부터의 플럭스의 높은 비율을 편향시키는 것이다. 이는 적어도 두 가지 측면에서 유익하다. 첫째는 테이퍼된 영구 자석은 에어갭을 향하여 당겨질 것인 데, 여기서 릴럭턴스 플럭스 연결을 저하시키기 위하여 영구 자석과 로터 슬롯 벽 사이에 에어갭을 폐쇄하며, 자석들이 추가로 운동하는 것이 기계적으로 방지되고 따라서 테이퍼된 로터 지주들에 의하여 확실히 유지된다. 둘째로, 후면에서의 로터 지주들이 좁을수록 로터의 중심면을 따라 지주로부터 지주로 더 큰 거리를 발생하는 것이다. 이로써 로터의 중심면을 따른 지주에서 지주로의 공기를 통한 누설 양을 감소시킨다. 테이퍼된 지주들과 테이퍼된 자석들을 가진 두 개의 실질적으로 대칭인 로터 절반부들을 후면에서 후면으로 조립하면 영구 자석들로부터의 상당한 양의 플럭스들이 에어갭을 가로 질러 가압 연결될 수 있다.
이와 같이, 자석들을 자기적으로 그리고 기계적으로 유지하면서 매우 높은 플럭스 밀도가 에어 갭에서 달성될 수 있다. 테이퍼된 로터 지주를 제조하기 위한 비용 효과적인 방식은 후부에서 후부로 두 개의 대칭인 로터들을 사용하는 것이다. 이러한 구조에 의하여 로터를 강화하기 위하여 조임쇠(3310)의 사용을 허용하지 않으며, 따라서 연성 자석 조임쇠(3314)가 대신에 사용된다. 단부 조임쇠(3314)는 바람직하게 매우 얇고, 작고 합치하는 에어 갭을 유지하기 위하여 기계적인 세기와 강성을 충분히 제공하도록 두꺼운 단부 조임쇠를 관통하는 로터 지주들 사이로 높은 릴럭턴스 플럭스 경로를 생성할 수 있는 부분을 가진다.
단부 조임쇠 연결부를 통한 지주로부터 인접 지주로의 플럭스 손실을 보충하기 위하여, 일 실시예는 에어 갭(3308)에서 연성 자석 스테이터 지주(3332)보다 더 긴 영구 자석(3302)을 이용한다. 이는 도 145에 도시되는 데, 여기서 영구 자석(3302)은 스테이터 지주(3332)들과 같거나 거의 같은 길이를 가지는 로터 지주(3304)보다 더 긴 것으로 도시된다. 스테이터의 반경방향 길이에 비해서 영구자석 깊이(3336)를 증가시킴으로써 영구 자석(3302)은 에어갭에서 로터 지주들의 높은 플럭스 밀도를 여전히 유지하면서 단부 조임쇠(3314)를 포화시키기에 충분할 것이다. 이는 도 145에 도시되었는 데, 여기서 영구 자석(3302)은 스테이터 지주(3332)들과 같거나 거의 같은 길이를 가지는 로터 지주(3304)보다 더 긴 것으로 도시된다. 스테이터 반경 길이에 비해 영구자석 깊이(3336)를 증가시킴으로써, 영구 자석(3302)은 에어갭에서 로터 지주들에 높은 플럭스 밀도를 여전히 유지시키면서 단부 조임쇠(3314)를 포화시키기에 충분할 것이다.
로터 제조방법들은 주조 또는 성형 또는 분말 금속 구성, 첨가적인 제조, 가공 등을 포함할 수 있다. 자석들의 제조는 성형 또는 추가적인 또는 빼는 식의 제조에 의하여 실행될 수 있다. 자석들은 또한 슬롯들 내에 삽입 후에 자화될 수 있다. 이는, 분말 경질 자석 재료를 로터 슬롯들 내에 가압하고 이어서 프레싱 후에 PM 재료를 자화하는 현재 또는 장래 공정들에 의하여 가능할 수 있고, 또는 에폭시 또는 다른 폴리머 내의 PM 자석 재료의 슬러리가 슬롯들을 충진하기 위하여 사용되고 이어서 경화 후에 자화될 수 있다. 경질 자석 재료의 자화는 둘 이상의 지주들을 동시에 매우 높은 플럭스 밀도를 적용함으로써 실행될 수 있다.
조임쇠들, 측면 조임쇠들 및 단부 조임쇠들이 유지 요소들로서 기능하고 로터 지주들과의 단단한 연결부를 형성한다. 일 실시예의 특징은 다른 실시예들의 특징과 결합될 수 있다.
예시적인 집중 플럭스 로터 구조
도 146 및 도 147을 참조하면, 반경방향 플럭스 구조에서 집중된 플럭스 로터의 실시예의 각진 부분 도면이 도시된다. 로터 지주(3304)들은 로터 슬롯(3306)으로부터 자석(3302)이 반경 방향으로 외측으로 이동하는 것을 방지하는 로터 릴리프(3320)를 포함한다. 로터 지주(3304)들은 측면 조임쇠(3312)(도 146에 도시되지 않으며, 도 147 참조)에 의하여 연결된다. 측면 조임쇠(3312)는 플럭스 연결 경로를 생성하고 이는 자속이 측면 조임쇠(3312)를 통하여 이동할 수 있도록 하고 영구 자석(3302)과 측면 조임쇠(3312) 사이에 견인력을 생성한다. 측면 조임쇠(3312)와 로터 릴리프(3320)의 결합은 영구 자석(3302)을 적극적으로 로터(3300)에 유지시킨다. 이 실시예에서, 로터 지주(3304) 부분은 이완되어 슬롯 바닥의 자석들을 유지하고 자석을 고정하도록(이 경우 반경방향 외측으로) 지원한다.
도 148은 연성 자석 재료와 같은 단일의 재료 블록으로부터 지주들과 조임쇠 구조물을 형성하기 위하여 사용될 수 있는 밀과 결합된 집중 플럭스 로터 지주(3304)와 측면 조임쇠(3314)의 각진 부분 도면이다. 규칙적인 단부 밀(3370)이 로터의 외측 둘레로부터 안으로 작용하는 넓은 리세스를 블록에 형성하기 위하여 사용될 수 있다. 더 작은 직경의 단부 밀(3372)이 영구 자석(3302)이 삽입될 수 있는 리세스를 형성하기 위하여 사용될 수 있다. 이완된 샤프트 단부 밀(3374)이 이어서 로터 리리리프(3320)를 형성하기 위하여 로터 지주(3304)를 가공하기 위하여 사용될 수 있다. 더 작은 직경의 단부 밀(3372)과 이완된 샤프트 단부 밀(3374)이 로터(3300)의 내측 둘레로부터 작동할 수 있다. 하나 이상의 벽들이 측면 조임쇠(3312)를 형성하기 위하여 재료 블록의 축방향 단부에 잔류될 수 있다.
도 146 내지 도 148은 반경방향 플럭스 구조를 도시하고, 이 디자인의 변형인 축방향 플럭스 구조는 균등한 구조와 방법들에 의하여 제조될 수 있다.
이제 도 149를 참조하면, 도 146 내지 도 148에 도시된 실시예의 로터의 선형 표현의 개략적인 FEMM 분석으로 슬롯 형상이 도시된다. 도 149는 로터의 두 개의 슬롯 형상의 플럭스 경로를 도시한다. 개략 도면의 좌측 위의 4개의 영구 자석(3302)은 직사각형이다. 개략 도면의 우측 위의 4개의 영구 자석(3302)은 슬롯에 영구 자석(3302)을 유지하는 자력을 증가시키는 테이퍼된 단부를 가진다. 이는 슬롯에 영구 자석을 고정하는 다른 방법의 필요성을 감소시키는 이점을 가질 수 있다.
도 150은 단부 조임쇠(3314)를 가진 반경방향 플럭스 구조의 로터(3300)의 실시예의 각진 부분 도면을 도시한다. 이 실시예에서 로터 지주(3304)들은 로터 개방부(3320),및 테이퍼된 로터 지주 단부(3318)를 포함한다. 테이퍼된 로터 지주 단부(3318)는 로터(3300)의 중량을 감소시키도록 작용한다. 로터 개방부(3320)는 영구 자석(3302)을 유지하도록 지원할 수 있고 일부 변형들에서 슬롯을 가로 질러 연장하여 조임쇠(3310)를 형성할 수 있으며, 여분의 강성을 제공하는 효과를 생성하고 자력에 의하여 슬롯에 영구 자석(3302)을 유지하도록 지원한다.
도 151을 참조하면, 단부 조임쇠(3314)를 가진 스테이터-로터-스테이터 구조가 도시된다. 단부 조임쇠(3314)와 로터 지주(3304)들은 등방성 연성 금속 재료의 단일 부재로부터 형성될 수 있고, 로터 지주(3304)들 사이에 단일 어레이의 영구 자석(3302)들이 고정된다. 단부 조임쇠(3314)는 로터(3304)의 양 단부들에 형성된다. 이 실시예에서, 플럭스 경로 제한부(3328)는 도 152 도시와 같이 포함될 수 있다.
도 152는 조임쇠(3310), 단부 조임쇠(3314), 및 플럭스 경로 제한부(3328)를 가진 스테이터-로터-스테이터 구조의 실시예를 도시한다. 이 실시예에서 두 어레이의 영구 자석(3302)들이 조임쇠(3310)에 의하여 분리된다. 프ㅍ럭스 경로 제한부(3328)는 단부 조임쇠(3314)에서의 플럭스 누설을 감소시키기 위하여 영구 자석(3304)의 단부에서 보어들로 형성된다.
도 153은 로터-스테이터-로터 구조의 실시예를 도시한다. 두 개의 집중된 플럭스 로터(3300)들이 중심 스테이터(3330)에 결합한다. 로터(3300)들은 각각 단부 조임쇠(3314)와 플럭스 경로 제한부(3328)를 포함한다. 많은 실시예들에서 단부 종뫼만이 또는 조임쇠만이 집중된 플럭스 로터(3300)에 충분한 강성을 제공할 수 있다.
도 154는 로터-스테이터-로터 궂도의 실시예를 도시한다. 실시예는 각 로터(3300) 위에 두꺼운 조임쇠(3310)를 추가해서 도 153 도시와 기본적으로 같다.
도 155는 사다리형 로터-스테이터-로터 구조의 실시예를 도시한다. 스테이터(3330)들은 컨덕터 층(3334)이 없이 도시된다. 로터(3300)는 조임쇠93310)와 단부 조임쇠(3314)를 포함하고 원통형 축방향으로 대략 사다리형 형상의 단면을 가진다. 로터는 두 개의 로터 절반부들로 구성되고 조임ㄱ쇠93310)와 단부 조임쇠(3314)와 결합하여 로터에 높은 기계적 강성을 제공한다. 도 156은 단부 조임쇠(3314)만을 가지며 조임쇠(3310)는 없는 도 155 도시의 스테이터-로터-스테이터 구조 실시예의 변형을 도시한다.
도 157은 사다리형 로터-스테이터-로터 구조의 실시예를 도시한다. 스테이터(3330)는 컨덕터 층(3334) 없이 도시된다. 로터(3300)는 영구 자석(3302)의 내경 및 외경 단부들에 도시된 단부 조임쇠(3314)를 포함한다. 이 실시예에서, 로터(3330)의 후면은 저밀도 하우징 부품과 상호 결합된다. 도 158은 조임쇠(3310)와 단부 조임쇠(3314)를 가진 도 157 도시의 사다리형 로터-스테이터-로터 구조의 실시예를 도시한다.
도 159는 선형 플럭스 기계의 로터-스테이터-로터 구조의 실시예를 도시한다. 스테이터(3330)는 지주93332)들의 어레이를 가지며, 컨덕터(3334)들은 도시되지 않는다. 로터는 스테이터를 둘러 싸고 하나 이상의 재료들, 예컨대, 연성 자석 등방성 재료로 제조된다. 로터 하우징(3300)의 내부 구조 위의 영구자석(3302)을 위한 수용 슬롯은 로터 지주(3304), 로터 조임쇠(3310) 및 로터 단부 조임쇠93314)로서 작용한다. 선형 모터의 많은 구성이 발명자에 의하여 착안되었다. 로터(3330)의 측면 부분은 예컨대, 상부 및 하부 로터 부분들보다 다른 재료일 것이다. 도 160은 로터(3330) 위의 조임쇠(3310) 없이 도 159 도시의 선형 플럭스 기계의 로터-스테이터-로터 구조의 실시예를 도시한다.
도 161은 로터 지주(3304)들과 조임쇠(3310)에 의하여 분리된 두 개의 자석(3302)들의 어레이로 형성된 로터(3300)를 가진 선형 플럭스 기계의 스테이터-로터-스테이터 구조의 실시예를 도시한다. 다른 집중된 플럭스 로터와 같이, 영구자석들은 직선 방향으로 교대적인 극성이며, 조임쇠의 다른 측에서 대향하는 자석들과 같은 극성일 수 있으며 또는 조임쇠의 다른 측의 대향하는 자석들과 같은 반대 극성일 수 있다. 이 실시예의 이동자는 등방성 연성 자석 재료로 제조될 수 있다. 도 162는 로터(330)가 단부 조임쇠(3314)를 가지며 후부 조임쇠(3310)가 없는 선형 플럭스 기계의 스테이터-로터-스테이터 구조의 부분적으로 조립된 실시예를 도시한다. 이러한 장치에서, 영구자석 정지부들은 자석들을 슬롯에서 정밀한 위치에 배치하도록 사용된다. 로터의 상부 및 바닥의 영구 자석들은 동일한 극성이거나 반대 극성일 수 있으나 바람직하게 로터 지주들을 통해 상부로부터 바닥 자석으로의 플럭스 연결을 감소시키기 위하여 동일한 극성이다. 로터 지주(3304)들과 단수 조임쇠(3314)는 등방성 연성 자석 재료의 단일 부재로 제조될 수 있다.
FEMM 분석에 의하면 로터 지주들의 측면 일부로부터 재료를 제거하면 로터 질량을 감소시키는 추가적인 이점과 함께 영구자석에 양의 보유력을 생성하는 것이 보여졌다.
도 163과 도 164는 로터의 중심면을 향하는 로터 지주 벽에 중단된 조임쇠(3310)와 개방부(3322)를 가진 등방성 로터 지주 어레이를 도시한다. 이 실시예에서, 영구 자석드ㅡㄹ은 둘레 방향으로 극화되고 축방향으로 정렬된 대응 부분에 대응하는 극성을 가진다. 영구 자석으로부터의 플럭스 라인의 50% 이상이 에어갭을 가로 질러 연결하더라도, 이러한 효과는 수동 상태에서 상당한 힘으로 구자석들을 슬롯의 바닥 내로 유지하는 것이다. 여기 도시된 바와 같이 중단된 조임쇠를 갖는 실시예에서 충분히 강하고 강성인 등방성 지주와 커넥터 부재를 제공하기 위하여, 로터 지주들 위의 적어도 일 단부에는 단부 조임쇠 커넥터(도시 없음)가 필요할 것이다. 영구 자석들이 더 길수록(도 163의 Z축에서), 에어갭의 플럭스에 미치는 단부 쇠의 영향은 작을 것이며 생성될 수 있는 토크(또는 선형 모터의 경우 힘)는 ㅈ줄어들 것이다.
횡방향 플럭스 기계
횡방향 플럭스 모터들과 같은 개시된 형상을 모터 유형에 적용함에서, 개시된 범위에서 열 방출 및 다른 이점들이 실현되는 정도에 영향을 미치는 다른 디자인적 요소들이 있을 수 있다. 예컨대, 횡방향 플럭스 모터의 경우, 지주들의 폭(코일 방향에 평행인 방향으로)은 자극 피치에 독립적이다. 그러나, 이 폭은 스테이터 조임쇠의 필요 두께에 직접 관련되므로 시스템의 중량에 영향을 미친다. 또한 코일의 축방향 폭에 대한 지주의 축방향 폭의 비율을 고려하여야 한다. 이들 양들이 감소되면, 전체 에어갭 표면적과 컨덕터 단면적은 전체 조립체를 축방향으로 배치함으로써 일정하게 유지될 수 있다. 그러므로, 최적의 토크-대-중량 및 열 방출은 또한 어레이 피치와 지주 축방향 폭에 의존할 것이다.
예시적인 횡방향 모터
횡방향 플럭스 모터들의 많은 알려진 변형들이 있다. 여기에는 본 발명의 장치의 원리에 따른 횡방향 플럭스 모터의 비제한적인 예시적인 실시예가 도시된다. 다소간의 상들이 다른 효과를 미치면서 사용될 수 있지만, 두 개의 상들이 여기 도시된다. 도 165 내지 도 166B 도시의 제1 실시예에서, 다소 반경방향으로 로터로부터 스테이터로 플럭스는 연결하나, 횡방향 플럭스 원리의 변화는, 예컨대, 도 167 내지 도 169 도시와 같이, 플럭스 연결을 축방향으로 또는 장치의 축에 대해 일정한 각도로 구성하는 것이다.
도 165 내지 도 166B를 참조하면, 예시적인 횡방향 플럭스 모터(3410)가 도시된다. 횡방향 플럭스 모터(3410)는 하우징(3412)을 가지며 두 개의 스테이터 절반부(343)들과 로터(3420)를 가질 수 있다. 스테이터(3430)는 컨덕터(3432)와 스테이터 지주(3434)를 포함한다. 도시와 같은 컨덕터(3432)는 둘레방향 컨덕터 코일을 포함하나 컨덕터의 다른 변형이 사용될 수 있다. 도시된 두 개의 상의 디자인에서 상마다 하나의 컨덕터 코일(3432)이 있으며, 각각의 컨덕터 코일은 다수의 턴(turn)들을 가진다. 집중된 플럭스 모터(3420)는 도 166B와 같이 사용될 수 있다. 집중된 플럭스 모터(3420)는 직각으로 극성화된 교대적인 극성을 가진 영구 자석Z(3422)들을 사용한다. 로터는 또한 플럭스 제한 홀(3428)과 후방 조임쇠(3426)를 포함할 수 있다. 후방 조임쇠(3426)와 로터 지주(3424)들은 등방성 연성 자석 재료의 단일 부재로부터 제조될 수 있다. 이러한 구조에서,, 로터와 스테이터 사이의 에어갭을 가로 지르는 플럭스 흐름은 반경 방향으로 이루어진다.
개시된 범위의 열 방출 이득은 스테이터 지주의 OD로부터 둘레방향 컨덕터 슬롯의 OD까지의 낮은 반경 방향 거리에 따라, 예시적인 횡방향 플럭스 기계에 적용된다. 로터의 높은 자극 밀도는 횡방향 플럭스 기계에서 통상적인 스테이터 지주-대-로터 자석 비율인 1:1의 결과로서 스테이터의 동일한 슬롯 밀도에 대응한다.
많은 두 개의 상의 횡방향 플럭스 기계의 경우와 같이, 각각의 스테이터 위의 스테이터 지주들은 반 피치만큼 오프셋된 지주들을 가진다. 이어서 스테이터들은 서로로부터 1/4 피치만큼 오프셋되고 따라서 모터는 두 코일들의 어느 쪽으로의 전류를 제어함으로써 일정한 토크를 어느 하나의 방향으로 공급할 수 있다.
개시된 구조의 결과로서의 지주에서 지주로의 플럭스 경로의 얇은 부분에 기인하여, 발명자는 등방성 연성 자석 스테이터 재료가 로봇에 적합한 속도에서 적층 형태의 동일한 재료에 비교해서 증가된 토크와 효율을 제공할 것이다.
도 167 내지 도 169를 참조하면, 로터와 스테이터 사이의 에어갭을 가로질러 일반적으로 축방향의 플럭스 연결 경로를 갖는 횡방향 플럭스 가기계 도시된다. 이러한 구조에서 집중된 플럭스의 로터(3420)가 하우징(3412) 내에서 두 개의 스테이터 부재(3430)들 사이에 유지된다. 이 구조에서 자속은 로터(3420)와 스테이터(3430) 사이에 축방향으로 에어갭을 가로질러 흐른다. 이 구조에서 로터(3420)는 두 개 어레이의 자석(3422)들을 포함하고, 두 어레이들은 로터 지주(3424)들 사이에 각 어레이에 설치된 자석들과 조임쇠(3426)에 의하여 분리된다. 반경방향으로 향하는 횡방햐으플럭스 모터에서와 같이, 조임쇠(3426)와 로터 지주(3424)들은 단일 부재의 등방성 연성 자석 재료의 단일 부재로 제조될 수 있다.
일부 실시예들의 일반 원리
소정의 개시된 구조들은 지주들 사이의 슬롯들과 지주들을 포함하는 전자석 요소들을 가지는 전기 기계과 같이 사용될 수 있으며, 지주들은 스테이터와 로터의 적어도 어느 일방에 자극을 형성하도록 감기고, 자극 밀도는 이 특허 공보에 특정된 식에 의하여 규정된 자극 밀도 범위이며 지주 높이는 이 특허 공보에 특정된 식에 의하여 규정된 지주 높이의 범위 내이다. 이들 식들은 각각 경계 영역을 규정할 수 있다. 경계 영역은 전기 기계의 크기에 의존하고, 크기는 기계의 반경에 의하여 규정된다. 경계 영역은 기계의 크기와 지주 높이, 자극 밀도에 의하여 규정된 공간 에서 경계 표면을 함께 규정한다. 전기 기계의 각각의 반경에 대해, 경계 영역은 발명자들에 의하여 새롭고 불명확한 것으로 믿어진다.
모델링 연구와 FEMM 분석을 기초로, 발명자들은 적어도 특정 자극 밀도를 초과하여, 특정 컨덕터 용적에 대해 또는 일정 직경의 모터에 대한 지주 높이에 대해, 이하와 같이 신뢰한다: 1) 개시된 바와 같은 자극 밀도와 컨덕터 용적 또는 지주 높이를 가진 전기 기계는 더 낮은 자극 밀도 및/또는 더 높은 컨덕터 용적을 가지나 대응하는 유효 열 방출을 가지는 다른 균등한 기계과 비교해서 일정한 토크 또는 힘에 대해 증가된 열 생성(및 따라서 낮은 효율)을 가지며; 2) 증가된 자극 밀도와 더 낮은 컨덕터 용적 또는 지주 높이는 또한 더 낮은 자극 밀도와 및/또는 더 높은 컨덕터 용적을 가지는 달리 균등한 기계에 비교해서 질량을 감소시키는 효과를 가지며, 토크대 질량의 비율(토크 밀도)을 전체적으로 증가시킨다.
증가된 토크 대 질량 비율을 가지는 전기 기계는 여러 전기 기계들이 로봇 암과 같은 암을 따라 이격된 때 특히 유용한 데, 하나의 전기 기계의 경우 하나 이상의 다른 전기 기계들을 가속하거나 인양하기 위한 필요성에 대해 효율은 덜 중요하기 때문이다. 발명자들이 믿는 바로서는 개시된 바와 같은 자극 밀도 또는 컨덕터 용적 또는 지주 높이를 가지는 전기 기계의 향상된 성능은 부분적으로 이하로부터 발생되는 것으로 믿어진다: 1) 최고온 컨덕터로부터 지주로의 더 짧은 열 흐름 경로를 가지는 더 좁은 슬롯; 2) 지주 상부로부터 열 방출 표면으로의 더 짧은 열 흐름 경로.
예컨대, 개시된 각각의 전기 기계 실시예는 KR의 면에서 이득을 제공하는 것으로 믿어지는 자극 밀도와 지주 높이의 정의 내에 있는 자극 밀도와 지주 높이를 가지는 것으로 도시된다.
예컨대, 0.5 및 그 이상의 범위의 자극 밀도에서 그리고 슬롯이 지주(teeth)와 같이 아주 넓은 슬롯에 대해, 지주 폭이 25 mm 넓이의 기계에 대해 1mm 정도일 수 있다. 더 좁은 지주가 사용될 수 있다. 더 얇은 지주의 이점은, 정상 모터 적층의 두께에 지주가 더욱 근접하는 것에 기인하여 제한되는 것은 아닌, 강 또는 철 또는 자석 재료 합금과 같은 고체 재료가 최소 와류 전류와 같이 사용될 수 있다. 이러한 모터 크기의 공통 모터 적층은 0.0015" 내지 0.025" 범위일 수 있다. 제안된 자극 밀도와 지주 형상(많은 짧은 지주)은 또한 제1 캐리어(스테이터)에서 와류 전류를 피하도록 지원한다. 예컨대, 144개의 슬롯들을 가진 전기 기계의 경우, 와류 전류손은 200rpm 및 70A/mm2의 권선에서 전체 저항손의 단지 7%인 것으로 발견되었다. 고체(비적층) 재료의 사용은 세기, 강성 및 신뢰성의 이점을 제공한다.
개시된 기계의 실시예들은 부분적인 권선을 사용한다. 일부 실시예들은 분배된 구너선을 사용하고, 또 다른 실시예는 집중된 권선을 사용한다. 분배된 권선들은 단부 턴들에서의 더 많은 구리와 더 작은 동력에 기인해서 더 무겁다(더 큰 모터를 요구). 권선들은 또한 플럭스가 부분 권선의 경우와 같이 다음 지주로 ㅇ이eh동하기보다 적어도 세 개의 지주들을 이동해야 하기때문에 더 두꺼운 조임쇠를 요구한다. 분배된 권선은 더 긴 컨덕터들에 기인하여 더 많은 열을 생성한다(단부 턴이 연결해야 하는 더 긴 거리의 결과).
제안된 자극 밀도를 가진 전기 기계의 실시예는 적절한 수의 지주들을 가질 수 있다. 지주들의 최소 수는 100개의 지주일 수 있다. 지주들의 수가 클수롯 지주당 권선이 작을 수 있다. 비제한적인 예시적인 실시예에서, 각 지주 위의 권선들은 단지 하나의 층 두께이다(지주로부터 둘레로 외측으로 측정된). 컨덕터들로부터의 열이 스테이터 지주들로 전도적으로 열을 방출하기 위하여 컨덕터들을 통해 전도하는 에어갭들 및/또는 점토 화합물 갬 및/또는 와이어 절연층의 수를 감소시킨다. 이는 연속 작동 냉각을 위하여 가열 성능의 이점(일시적인 고 전류의 경우)을 가진다. 컨덕터들에 직접 접촉하는 가스 또는 액체 냉매에 의하여 코일들의 직접 냉각 때, 적은 수의 둘레층, 그리고 예컨대 지주 위의 와이어의 단일 둘레 층이 높은 자극 밀도와 결합하여 냉각 유체에 노출된 매우 큰 표면적을 발생한다(컨덕터들의 용적에 대해). 이는 컨덕터들의 냉각에 유익하고 개시된 바와 같은 작은 컨덕터 용적을 이용하는 많은 예시적인 방법들의 하나이다. 지주당 단일 열의 코일(또는 열들의 작은 수)는 또한 제조 복잡성을 감소시켜 낮은 비용의 제조를 가능하게 한다. 또 다른 실시예에서, 각 지주의 권선은 두 층 두께이다.
175mm 이상의 평균 에어갭의 전기 기계의 경우, 슬롯들의 수는 축방향 플럭스 전기 기계의 경우, 60 이상 또는 100 이상일 수 있고, 예컨대, 예시적인 175mm직경의 실시예에서 108개의 슬롯들이 있을 수 있다. 더우기, 그러한 전기 기계의 경우, 지주들의 평균 반경 길이-대-둘레 폭의 비율은 4;1 이상으로, 약 8:1일 수 있고 10:1 이상으로 증가할 수 있다. 예시적인 108개의 슬롯 실시예에서, 비율은 약8:1이다. 그러한 구조에서, 열 방출이 향상된다. 많은 재료의 경우, 낮은 애스펙트 비율은 매우 작은 토크에 대해 적합하고, 따라서 애스펙트 비율이 높은 KR 및 로봇에 대해 유용한 토크를 달성하도록 지원하고 동시에 열 방출 효과를 이용한다.
일 실시예에서, 전기 기계는 주 부품이 예컨대 제한되는 것이 아닌 구리 또는 알루미늄, 및 제한되는 것이 아닌, 유전층, NomexTM 또는 다른 시트 절연재, 또는 알루미늄 컨덕터들을 크게 양극 표면 처리하기 위한 재료와 같은, 절연 재료로부터 제조될 수 있도록 층화된 구조로 제조될 수 있다. 컨덕터층들은 지주들 둘레에 컨덕터 와이어들을 건취하는 대신, 제한되는 것이 아닌, 레이저 절단, 압인 또는 미세 블랭킹과 같은 고속 저가의 제조 공정들에 의하여 제조될 수 있고, 컨덕터 회로들은 압인되고 이어서 층들로 조립될 수 있다. 절연층이 각각의 컨덕터 층들과 교대로 사용되면, 컨덕터 층들은, 일부 구조에서, 절연층 없이 조립될 수 있다. 대신해서, 컨덕터 회로 층들은 추가적인 절연 효과를 위하여, 또는 별도의 절연층을 위한 필요를 제거하기 위하여 조립 전에 절연재로 코팅될 수 있다.
비전기적인 전도성(또는 절연된 전기적으로 전도성인)재료는 구조적인 일체성과 열 싱크/방출 품질을 제공하기 위하여 전도성 층들로서 동일한 층에 사용될 수 있다. 컨덕터 층들 사이의 슬롯들에 채워지지 않은 층들 또는 컨덕터 층들 사이의 슬롯들에 부분적으로 채원진 층들(슬롯의 반경 방향 길이에 대해 채워지지 않은 갭을 형성하도록 충분히 좁은 컨덕터들)은 냉각 가스 또는 액체에 대해 흐름 경로를 제공하기 위하여 사용되므로 층 위의 개방 또는 부분 개방된 슬롯들이 도관을 형성한다. 냉각 유체는 또한 로터 또는 스테이터들의 접촉을 방지하기 위하여 공기나 액체 함유 매체로서 사용될 수 있다. 양극화된 알루미늄, TorlonTM(트리메틸 무수 및 방향족 디아민의 반응물), 페놀, 또는 제한적이 아닌 금속 매트릭스 복합체를 포함하나 제한되지 않는 많은 다른 재료들이 스페이서 층들에 사용될 수 있다.
각 컨덕터는 층일 수 있다. 층들은 하나 이상의 부분들로 이루어진다. 일 부분은, 예컨대, 회전 모터의 완전한 둘레일 수 있으며, 또는 회전 모터의 둘 이상의 각도상 부분일 수 있다. 각 부분의 각 층은 단 하나의 상을 위한 컨덕터 회로일 수 있다. 와이어 권선을 가진 공통 전기 기계에서, 컨덕터 와이어는 나선으로 감겨지고 해당 상의 와이어 및/또는 다른 상으로부터의 와이어와 중첩될 수 있다. 이러한 유형의 3-차원 와이어 권선 구조는 상마다의 단일 층에 의하여 제조될 수 없는 데, 간단한 층의 조립체가 통상의 지주 권선이 요구하는 상호 결합되거나 나선으로 중첩하는 구성을 허용하지 않기 때문이다.
다른 상들로부터 또는 인접 슬롯보다 상들의 다른 결합으로부터의 컨덕터들을 포함할 수 있는 각각의 인접 슬롯을 가진 다상 모터를 생성하기 위하여 굽힐 수 있는 와이어가 사용될 수 있다. 이는 일정 수의 이점들을 가지며 이는 이하 설명되는 바와 같이 매우 효과적인 냉각을 제공하는 성능과 감소된 비용에 대한 단순한 제조를 포함한다.
이들 높은 슬롯 밀도에서 그렇지 않으면 필요하였을 매우 높은 정밀한 와이어 권선 메카니즘을 컨덕터 제조 방법들이 제거하므로 개시된 컨덕터 제조방법들은 특히 높은 자극 밀도의 장치를 구성함에 효과적이다.
일 실시예에서 상 권선 당의 단일 층은 두 인접 슬롯들에 컨덕터를 제공할 수 있고 이어서 하나 이상의 슬롯들을 건너 뛰므로(예컨대, 상들의 수에 따라) 해당 상으로부터 해당 층에 컨덕터들이 없는 하나 이상의 슬롯들이 이어지는 두 개의 인접한 슬롯들에 층이 존재한다. 이와 같이, 캐리어의 전자석 재료가 지주와, 지주들 사이의 슬롯들을 포함하는 전기 기계에서, 인접 슬롯의 전기 컨덕터의 위치에 대응하는 하나 이상의 슬롯들에서 일정 레벨에서 하나 이상의 슬롯들은 전기 컨덕터가 없다.
일부 실시예들에서, 개시된 전기 기계는 유체 흐름에 대해 높은 단면적을 제공할 뿐더러, 슬롯의 내측으로 향하는 단부로부터 슬롯의 외측으로 향하는 면으로 일정하게 분포된 공기흐름 채널의 패턴을 제공하므로 컨덕터 마다 각 슬롯의 냉각 유체에 접촉하는 것까지 포함하여 높은 비율의 컨덕터들이 냉각 유체에 접촉하는 것을 보장한다. 달리 말하면, 일 실시예에서, 한 번에 접촉하는 둘 이상의 컨덕터층들은 없다. 슬롯에서의 수직으로의 순서는 예컨대, 컨덕터-공간-컨덕터-컨덕터-공간-컨덕터-컨덕터-공간일 수 있다. 이것은, 모든 컨덕터들의 일 측면은 항상 컨덕터를 누락하여 생성된 냉각 채널의 유체에 접촉하는 것을 의미한다. 이러한 균일하게 분포된 냉각 채널 어레이에 의하여 지주가 짤은 것에 기인하는 감소된 컨덕터 용적으로부터 발생하는 더 큰 열 생성을 보충하기 위하여 충분한 열 방출을 달성하도록 지원한다.
냉각 채널 이격 패턴용 일부 실시예들은 컨덕터들 사이 및 둘레로 유체 흐름 통로에서 배출되기 전에 각 지주의 단부에서 수직으로 그리고 반경 방향으로 공기가 흐를 수 있도록 각 지주들의 단부에서 갭과 결합된 상들의 오프셋과 결합하는 컨덕터의 모든 단부 턴들의 전부가 아닌 부분에 겹치는 것을 포함한다. 이러한 상세 내용과 함께, 에어갭은 일정하게 이격되고, 더 작은(더 큰) 채널들이 피해질 수 있고, 냉각 유체에 노출된 컨덕터 표면적이 증가될 수 있고 지주-단부의 직각 도관들에 기인하여 정체하는 유체 갭들이 없다. 시험에 의하면 이러한 구조의 변형들은 공통 모터 하우징의 수냉각과 같은 공통 냉각 방안에 의한 액체 냉각을 필요로 하는 전류 밀도에서 허용가능한 컨덕터 온도를 유지하기에 충분한 공기 흐름을 허용하도록 충분히 효과적인 냉각을 허용한다.
일 실시예에서, 하나의 상으로부터의 하나의 컨덕터와 하나의 열의 두 슬롯들이 있을 수 있고 이어서 해당 층의 어느 상으로부터의 컨덕터도 없는 p-2 슬롯들이 이어질 수 있다(p는 상들의 수). 3상의 경우, 하나의 상으로부터의 컨덕터를 가지느 두 개의 슬롯들이 있으며 그 또는 다른 어느 상으로부터의 컨덕터도 없는 하나의 슬롯이 이어질 것이다. 4상의 경우, 하나의 상으로부터의 하나의 컨덕터와 일 열에 두 개의 슬롯이 있을 것이며 이어서 해당 층 위의 해당 상 또는 다른 상으로부터 컨덕터가 없는 두 슬롯들이 이어지는 등이다. 해당 상 또는 다른 상으로부터 의 컨덕터가 없는 것은 공기 공간 또는 점토 화합물 또는 열 추출 인서트와 같은 필러 재료로 충진될 수 있는 공간이 있는 것이며, 또는 해당 공간이 가스나 액체와 같은 이동하는 냉각 유체의 경로를 형성하기 위하여 사용될 수 있음을 의미한다.
3상 구조에서, 비제한적인 예로서, 두 개의 인접 슬롯들은 제1 및 제2 슬롯의 제1 상으로부터의 컨덕터를 가진 단일 층을 가지며 해당 층에 컨덕터를 가지지 않는 제3 슬롯이 이어진다. 이 패턴은 해당 층 위의 세 개의 지주들의 제1 지주마다 양측의 둘레방향 측면 위에 단일 상으로부터의 컨덕터를 제공하기 위하여 단일 층의 권선을 제공하기까지 반복한다. 또 다른 층 위에서, 단일 층 위에 제2 상회로가 존재하고 제2 및 제3 슬롯의 제2 상으로부터의 컨덕터를 가지며 해당 층 위의 어느 상으로부터의 컨덕터를 가지지 않는 슬롯이 이어진다. 제3 상은 또 다른 별개의 층 위에 있으며 제3 및 제1슬롯 마다 컨덕터들이 있고 매 제2 슬롯의 어느 층으로부터의 컨덕터는 없다. 이와 같은 3상 구조에서, 각 상 회로는 세 슬롯들의 세트, 세 슬롯들의 각 세트의 둘이 컨덕터들을 수용하는 슬롯들의 선택을 정의한다. 다른 상 구조에서, 슬롯들의 다른 선택이 사용될 수 있다. 각 컨덕터 층은 이어서 단일 상의 전기 여자를 수용할 수 있다.
층을 이루는 구성에 의하여 밀봉 구조가 달성된다. 층을 이루는 구성에 의하여 부품들은 추가적인 공정에 의하여 부착될 수 있고, 또는 각 컨덕터 및/또는 절연 부품 및/또는 스페이서 층이단일 또는 다수 부품들로부터 예비-제작될 수 있다.
이러한 컨덕터 구조는 각 층(비제한적인 예로서, 다음 층에 연결하기 위하여 각 부분의 단부에서 두 지주들 위에 나선으로 단지 감겨지는) 위의 굽힐 수 있는 와이어 컨덕터에 의하여 이루어질 수 있다. 또는 이러한 컨덕터 구조는 예비 제작된 컨덕터 층들로부터 조립될 수 있으므로 컨덕터들의 굽힘은 구성 및 조립 동안 요구되지 않거나 약간만 요구된다.
주기적인 슬롯들에서 컨덕터를 건너 뛰는 것은 컨덕터들의 표면 및/또는 절연층 및/또는 EM 지주들의 높은 비율을 직접 냉각할 수 있도록 냉각 채널로서 사용될 수 있다. 슬롯의 컨덕터의 건너뛰기는 주기적으로 이격된, 층당 복수의 슬롯들에서 발생할 수 있다. 냉각 채널 또는 도관에는 냉매 흐름이 제공될 수 있다. 일부 실시예들에서, 냉각 채널 또는 도관은 냉각 유체의 소스에 연결될 수 있다. 주기적인 슬롯의 누락된 컨덕터는 일정 용도들에서 증가된 효율성을 위하여 인위적으로 낮은 온도에서 물이나 오일과 같은 더 높은 밀도의 유체를 사용하는 것에 비하여 장치의 중량을 감소시키기 위하여 공기 또는 다른 가스 흐름 냉각 채널로서 사용될 수 있다. 도관들은 냉매 흐름을 배출하기 위한 오리피스에 축방향으로 연통할 수 있다.
컨덕터 층들을 가진 개시된 실시예는 손 또는 기계으로 조립될 수 있고, 이어서 두 개의 평탄한 층들 사이에 점토 화합물로 클램핑될 수 있다. 제조공정 동안, 상부 및 바닥 성형 판들은 충분히 후퇴되어 다시 접촉하거나 근접하도록 같이 축방향으로 이동되기 전에 모든 표면들을 적신다. 지주들의 길이는 상부 및 하부 가공 몰드 판(도시 없음)들을 배치시키기 위하여 사용될 수 있다.
내부 냉각이 필요하면, 중력을 사용하여 큰 갭들로부터 점토 화합물을 제거하거나 또는 공동에서 점토 화합물을 밀어내기 위하여 장치를 통해 공기를 미는 것에 의하여, 또는 원심력으로 냉매 채널로부터 점토 화합물을 제거하기 위하여 스테이터를 회전시키는 것에 의하여 개방된 슬롯 부분에서 점토 화합물은 제거될 수 있다. 이러한 작동에서 공기 흐름 또는 원심력은 충분히 작아서 밀착한 고정 부품들 사이로부터 점토 화합물을 제거하지 못한다.
층들은 같이 접합ㅈ되거나 또는 같이 융합되거나 또는 달리 같이 고정될 수 있다. 제한적이 아닌 양극화된 알루미늄 또는 다른 분리층 사이에 구리 층 및 스페이서 층과 같은 일부 내부층들은 주석 도금되고, 모든 부품들 또는 그들의 코팅이 일정한 땜납 화합물에 의하여 접합할 수 있으면, 부분들은 조립되고 이어서 오븐 내에서 가압하에 가열되어 모든 것들을 같이 융착될 수 있다. 땜납으로 사전-주석 도금하는 것이 사용되면, 분리층들이 강한 양극 처리와 같은 적절한 절연에 의하여 코팅되고 따라서 컨덕터의 층-대-층의 전도성이 없는 것이 중요하다. 대신해서, 열가소성 수지가 부분들을 코팅하기 위하여 사용될 수 있고 그들이 이어서 조립되고 오븐에서 가열되어 충분한 압력 하에 융착되어 정확한 축방향 및 다른 치수를 확보할 수 있다. 부품들을 고정 및 제조하기 위하여 조립 동안 또는 후에 에폭시 또는 다른 경화 접착제가 사용될 수 있다. 공기 흐름 채널들이 디자인에 포함되면, 부품 성형에 이어서 에폭시의 경화 전에 큰 챔버로부터 접착제를 취입하거나 회전시키는 것이 이어진다. 접착제 또는 땜납의 얇고 일정한 코팅을 제공하는 프리-프레그 또는 땜납 주석 도금 공정의 이점은, 공기흐름 채널이 세정될 필요가 없는 것이다. 표면들을 단지 밀착 고정시키면 서로 고착할 것이다. 소정의 지주들 또는 영구자석들은 사용될 수 있다. 접합제로서 땜납을 사용하는 것은 또한 컨덕터로부터 크게 양극처리된 절연층으로 그리고 냉각 채널의 냉각 유체로 우수한 열 전달을 제공할 것이다.
예시적인 실시예는 다수 층의 스테이터들 및/또는 PM 캐리어들에 의하여 구성될 수 있고 PM 캐리어들은 하나 이상의 스테이터들의 양측 축방향 단부들 위에 설치되거나 또는 하나 이상의 PM 캐리어들 위의 축방향 단부들에 둘 이상이 스테이터들을 설치한다. 축방향 단부들에서 스테이터 및/또는 PM 캐리어만이 조임쇠를 가질 수 있다.
층을 이루는 컨덕터들의 실시예에서, 단부 턴들의 단면적은 슬롯의 컨덕터들의 평균 또는 최대 단면적보다 더 클 수 있다. 이는 단부 턴의 저항을 감소시켜 단부 턴들이 컨덕터들의 슬롯 부분보다 더 냉각시키며 따라서 슬롯들에서 컨덕터들의 효과적인 히트 싱크로서 작용하고 컨덕터들의 열 성능을 증가시켜 높은 가속 동안의 정상 작동 동안 또는 비상 정지 동안과 같은 단기간 동안 매우 높은 전류 밀도에서 작동하는 성능을 증가시키는 것이다. 단부 턴들은 슬롯 턴들보다 더 넓을 수 있다. 단부 턴들은 또한 균일한 폭을 가질 수 있다. 또한, 컨덕터들의 슬롯 부분에 비교해서 단부 턴의 더 큰 표면적은, 구리나 알루미늄과 같은 높은 열 전도성의 재료 또는 그와 같은 부품이 되는 결과, 슬롯 턴으로부터 단부 턴으로의 낮은 열 흐름 저항에 기인하여 매우 효과적인 냉각 핀 효과를 제공한다. 이들 단부 턴의 "냉각 핀"들의 냉각은 상기 설명된 슬롯 채널 냉각 없이 또는 냉각과 함께 소정 수의 액체 또는 가스 냉각 수단에 의하여 실행될 수 있다.
상기는 하나 이상의 PM 캐리어들 위의 어느 일 방의 축 방향 단부 위에 둘 이상의 스테이터들을 구비하여 구성될 수 있다. PM 캐리어는 PM 자성의 소정 형태일 수 있고 할바(Halbach) 어레이 또는 의사 할바 어레이(플럭스 연결을 제공하기 위하여 그들 사이에 강이 구비된 캐리어 운동 방향으로 PMs 분극화된)를 구비하여 구성될수 있다. 스테이터와 "로터"는 영구자석들의 필요를 제거하기 위하여 또는 감소시키기 위하여 양측이 가동될 수 있다. 지주들 및 PMs 또는 다른 부품들의 소정 수의 구조 또는 크기가 사용될 수 있다. 제조 기술은 픽-앤-플레이스 설비에 의하여 조립된 지주들과 코일을 위해 사용된 전도성 트레이스를 가진 PCB 제조 기술을 포함한다. 더 큰 모터들 또는 액튜에이터들 또는 발전기들은 이 명세서의 다른 실시예들에 대해 설명된 바와 같은 사전-제작된 컨덕터 공정을 사용할 수 있다.
전기 기계의 일부 실시예들에서, 권선은 인접 지주들의 권선들과 상호 결합되거나 또는 나란히 단일 층으로 제공된다. 단일 층들은 감소된 와이어 길이를 제공하고 일정 전류에 대해 적은 열을 생성한다. 모든 와이어들의 직접 접촉(절연을 통한)은 와이어들로부터 하우징 또는 다른 냉각 부재들로의 열의 방출을 위한 낮은 열 흐름 저항 경로를 제공한다. 지주들의 길이가 짧으면 와이어로부터 하우징으로의 열 경로를 단축한다. 증가된 지주 수는 스테이터(로터) 및 코일에서 생성된 열을 위한 방사 또는 대류 냉각핀들로 작용하도록 스테이터 위에 더 큰 표면적을 제공할 수 있는 스테이터(또는 로터)의 표면적을 증가시킬 수 있다. 이들 특징에 의하여 그렇지 않은 경우보다 컨덕터들을 통해 더 큰 전류를 흐르게 할 수 있다.
다양한 디자인의 특징이 개시된 실시예들의 어느 것에서 사용될 수 있다. 슬롯 충진은 가능한 높을 수 있으며 직경에 대해 지주가 짧으면, 슬롯 벽들은 더욱 평행이며, 슬롯 충진이 더욱 높게 구성된다. 전류 밀도는 사용된 재료에 의존하고, 개시된 형상의 향상된 냉각 효과에 의하여 증가될 수 있다. 개시된 형상은 3 또는 5의 적절한 상의 수에 의하여 사용될 수 있다. 집중되거나 분배된 권선이 사용될 수 있다. 다양한 지주 형상들이 사용될 수 있고, 예컨대, 평행한 측면들이 사용될 수 있다. 스테이터 자극과 로터 자극의 비율은 5:4, 예컨대, 각각의 4개의 영구자석에 대해 5개의 지주들이 사용된다. 그러나, 다양한 비율이 사용될 수 있다. 활성 냉각이 사용될 수 있다. 에어갭은 예컨대 0.005" 내지 0.009"일 수 있으나 더 작은 에어갭들이 제조 복잡성을 다소 부담하면서 또는 토크의 손실을 다소 감당하면서 사용될 수 있다. 자석 치수는 1:1의 반경 높이에 대한 둘레 폭이나 다른 치수들이 사용될 수 있다. 제공된 분석을 위하여 모터의 중량을 산출할 때, 중량은 스테이터 조임쇠의 두께에 지주 높이를 더하고 구리 용적을 더하고 PM 용적을 더하고 로터 조임쇠를 더하여 구해진다. 개시된 분석은 유체 냉각된 하우징을 가정하지만, 다양한 가압 냉각 방법들이 사용될 수 있다.
개시된 자극 밀도와 컨덕터 용적(지주 높이) 특징은 이하의 전기 기계을 포함하는 슬롯들과 톱니를 가진 모든 유형의 전기 기계에 적용될 수 있다: DC, AC, 동기식, 비동기식, 축방향, 반경방향, 내측 스테이터, 외측 스테이터, 선형, 유도, 무정류자, PM, 전환된 릴럭턴스, 이중-도약의, 플럭스-역방향의, 플럭스-절환, 하이브리드-여자, 플럭스 기억증진(mnemonic), 자기-치합의, 버니어(vernier), 무자석의, 이중-공급 버니어 및 이중 로터.
출력 토크를 증가시키면서, 자력은 스테이터/로터의 왜곡을 야기할 수 있고, 정밀성의 결여, 증가된 소음, 진동, 피로 스트레스 및 부품들의 최종적인 손상을 발생한다. 자력의 보다 균등한 분포는 개시된 자극 밀도, 지주-대-PM 비율, 및 컨덕터 권선들이 제공될 수 있으므로 인접 스테이터 지주들의 대다수는 다른 상들에 의하여 가동될 수 있다. 일 실시예에서, 이들 특징의 결합은 평균 세 개의 지주들 마다 자력을 반복시킨다. 매우 높은 자극 밀도와 결합하여 이는 스테이터와 로터에 매우 균등한 힘의 분배를 발생하고, 이는 일부 실시예들에서 제조 비용과 복잡성을 절감하고 추가적인 베어링 및 지지 구조의 필요를 제거한다.
일부 실시예들에서, 에어갭을 유지하는 저마찰 표면을 가진 에어갭을 코팅함으로써 강성 요건이 감소된다. 선형 모터의 일 실시예에서, 저 마찰 표면은 0.008" 에어갭을 유지하는 에어갭에 적용된다. DLC(다이아몬드 유사 코팅)와 같은 코팅은 로터와 스테이터 양측에 0.0025" 부착될 수 있고 갭은 유지될 것이다.
자극 밀도 및 지주 높이를 규정하는 식
자극 피치와 컨덕터 용적의 범위들은 KR의 견지에서 상당한 이점을 주거나 또는 토크와 결합하는 기능, 토크-대-중량, 및 Km(이하 설명되는 바와 같은)에 비추어 상당한 이득을 제공하는 것으로 발견되었다. 기능을 계량하는 측면에서 이득의 양은 냉각 및 다른 인자들의 양에 의존하나, 식들은 표시와 같은 이득을 제공하는 전기 기계의 신규한 구조를 규정한다. 이들 이익들을 발생하는 컨덕터 용적과 자극 밀도의 범위에 의하여 결정되는 경계 영역을 규정하는 식들이 제공된다.
일 실시예에서, 기계 크기, 자극 밀도 및 지주 높이에 의하여 규정된 상 공간 영역 내에서 작동하여 이점이 얻어진다. 도 170A 내지 도 170F 도시의 일련의 그래프들은 OCTAVETM(수치게산 해소용 프로그램임)에서 생성된 자동 솔버를 사용하는 FEMM 소프트웨어를 이용하여 생성되고 분석된 예시적인 일련의 선형 모터 부분 구조에 대한 지주 높이(y축)와 슬롯 밀도(x축) 및 토크 밀도(z축)을 도시한다.
이하의 규칙들과 가정들은 모든 직렬 모터들에 적용되었다. 각 부분은 144개의 전자석들과 146개의 영구 자석들로 구성된다. 로터는 NdFeB 52 자석들의 부분들과 M-19 규소 강으로 구성된다. 각 영구 자석은 로터에 직각으로 배치되고 정위되므로 그의 자장 방향이 로터에 직각으로 정렬되고 인접한 영구 자석들에 대향한다. M-19 규소 강 부분은 영구자석들 사이에 배치된다. 스테이터는 M-19 규소강으로 제조된다. 사용된 전자석들은 3상 구조에서 권선 코일들을 집중하였다. 코일의 75% 충진 인자가 가정되었으며, 슬롯 영역의 75%로 구성된다. 조사되었던 두 개의 가변 변수들은 지주 높이와 슬롯 밀도이었다. 잔여 형상 변수들은 이하의 관계에 따라 측정되었다: 모든 시물레이션에 걸친 1.25인치 일정한 모델의 두께. 로터 영구자석의 폭은 영구자석 피치의 50%에서 설정되었다. 로터 영구자석 높이는 영구자석 폭의 2.3배에서 설정되었고, 스테이터 슬롯 폭은 스테이터 전자석 피치(지주들과 슬롯들의 폭에 같음)의 50%이다. 스테이터 조임쇠 높이는 스테이터 지주 폭의 50%로 설정되었다. 에어갭 축방향 높이는 0.005인치이다.
개시된 독특한 형상을 나타내는 경계 영역은 바람직한 실시예, 즉, 최고의 토크-대-중량 및 KR을 생성하는 실시예에 대해 모델링된다. 이 실시예에서 로터에서 N52 NdFeB 자석 등급의 선택과 같은 소정의 디자인 선택이 이루어졌으며, 로터 자극 대 스테이터 자극 비율은 146: 144이며, 조임쇠를 가진 플럭스 집중 로터이다. 발명자의 최선의 지식의 범위에서, 이러한 구조는 개시된 직경들에서 액튜에이터들의 크기에 대해 최고의 실제적인 토크-대-중량 구조의 하나를 나타내고, 여전히 합리적인 수준의 제조가능성 및 안정성을 유지한다. 다른 로터 유형(표면 영구자석, 매립 영구자석, 등), 제한 적이 아닌, 세라믹, 사마리움 코발트, 고온 NdFeB와 같은 다른 자석 재료 및 등급, 다른 로터 자극 대 스테이터 지주 비율, 다른 스테이터 권선 구조, 다른 스테이터 재료 등의 많은 다른 구조들이 가능하다. 많은 경우들에서, 이들 파라미터들에 대한 다른 디자인 선택은, 바람직한 실시예와 같은 동일한 자극 피치 및 지주 높이에 대해 감소된 토크와 증가된 중량을 발생하므로 바람직한 실시예들에 비교해서 큰 KR 이득을 가지지 않을 것이다. 그러나, 대부분의 디자인의 경우, 모든 다른 디자인 변수들 및 구조적인 관계가 일정하게 유지될 때 개시된 영역 외측의 형상에 대해 개시된 영역 내의 자극 피치와 지주 높이를 이용함으로써 KR에 대한 이득이 있다. 이 원리는 집중된 권선 디자인 및 분포된 권선 디자인 모두에 대해, 선형 모터에 대해, 축방향 플럭스 회전 모터에 대해, 반경방향 플럭스 회전 모터에 대해, 사다리형/원환체(toroidal) 회전 모터에 대해, 및 횡방향 플럭스 선형 및 회전 모터에 대해 모두 적용된다.
이들 모터 부분 구조 각각에 대해, 자석 시물레이션 및 열 시물레이션이 시행되었다. 자석 시물레이션마다, 프로그램은 질량 값, 수평력, 및 전원 소비를 산출하였다. 코일의 단면적의 구조적인 외삽은 전체 시스템의 질량과 전원 소비를 보다 정확하게 예측하기 위하여 단부 권선의 질량 및 전원 소비를 발견하기 위하여 사용되었다. 작은 토크 및 저속에서의 토크를 계산하기 위하여, 저항 손실의 제곱근이 동력 소비의 주요 부분이고, 단부 권선의 저항 손실을 설명하기 위하여 슬롯 형상에 기초하여 배율기를 사용하였다. 이들 값들은 시물레이션마다의 질량 힘 밀도(단위 질략에 대한 힘) 및 면적 기준 힘(에어갭의 단위면적당 힘)을 산출하기 위하여 사용되었다. 열 시물레이션마다, 프로그램은 코일 온도, 로터 온도 및 스테이터 온도 값들을 산출하였다. 냉매로서 물을 사용하고 대류 계수로서 700W/m2K를 사용하여 스테이터의 내부 표면에 일 세트의 냉각 속도가 적용되었다. 물의 온도는 15℃로 설정되고 6-20mm/s의 흐름 속도를 가졌다. 연속상태 조건이 상정되었다.
일정한 전류 밀도 시물레이션에 대해, 고정된 전류 밀도는 컨덕터에 적용되었고, 발생된 힘, 질량, 전원 소비, 및 최대 스테이터 온도가 프로그램에 의하여 산출되었다.
일정한 온도, 면적당 힘, 또는 힘 밀도 시물레이션, 전류 밀도가 관련 파라미터가 목표값에 도달할 때까지 각 형상 지점에서 조정되었으며, 다른 파라미터들은 해당지점에서 기록되었다. 일정한 온도, 면적당 힘, 또는 힘 밀도 시물레이션, 에 대한 목표 오차는 각각 1도, 0.002N/mm2, 및 1N/Kg이었다. 이 데이터는 회전 모터에서의 에어갭의 둘레 면적에 의하여 면적-기준 힘을 곱함으로써, 그리고 얻어지는 토크를 산출하기 위하여 힘과 직경을 곱함으로써 회전 모터의 크기에 직접 적용될 수 있다. 모터의 곡률 반경에 기인하는 일부 작은 편차가 있을 수 있으며, 선형 구조에 곡선 구조를 근사시킨 것과 연관된 오차들이 있으나, 우리의 시물레이션에 의하면, 회전 모사된 토크는 통상적으로 선형모델에 의하여 예측된 것의 10% 내에 있음이 발견되었다.
높은 토크-대-중량 비율은 일부 실시예들에서 이점이나, 토크의 최소 레벨이 로봇과 같은 용도에서 필요할 수 있고, 로봇에서는 암이, 높은 토크-대-중량 비율의 결과, 아무리 가벼워도 여전히 하중을 인양하여 이동시키기 위하여 충분한 토크를 가져야 한다. 이 특허 공보에서 개시된 범위 내의 자극 밀도와 컨덕터 용적을 가지는 전기 기계는 허용가능한 전원 소비 레벨에서 높은 토크 및 토크-대-중량 비율을 제공한다.
슬롯 피치와 지주 높이의 함수로서, 도 170A에는 일정한 전류 밀도(2320)에서의 면적당 힘이 도시된다. 실제 직렬인 모든 모터들에 동일한 전류가 적용되면 개시된 범위(2322)에서 매우 낮은 면적당힘이 발생한다(개략적으로 점선으로 표시). 점선은 3D 표면에 투사된 각 크기의 중간 경계에 대응한다(이하 식에 관련되어 설명된 바와 같은 25mm, 50mm, 100mm 및 200mm). 중간 경계는 식(A2, B2, C2 및 D2)들에 대응한다. 이 그래프에서, 일정한 전류 밀도(2320)에서 면적당 힘은 3상 입력 전원에 대해 최고 토크 회전 위치를 발견하기 위하여 OCTAVETM의 부기를 이용하여 FEMM에서 분석된 일련의 모터들에 대해 도시된다. 이들 모터들은 도시와 같이 변경되는, 컨덕터 용적과 슬롯 밀도를 제외하고 여러 면에서 동일하다.
일정한 온도(2324)에서의 가능한 최고 전류밀도는 슬롯 피치와 지주 높이의 함수로서 도 170B에 도시된다. 개시된 범위에서 지수적으로 높은 열 방출 특성이 높아질수록 일정 온도에서 전류 밀도가 휠씬 더 높아진다. 낮은 컨덕터 용적은 액튜에이터 중량을 감소시키나, 낮은 컨덕터 용적은 또한 액튜에이터 토크를 감소시킨다. 컨덕터 용적과 슬롯 밀도가 개시된 범위 내에 있을 때, 그러나, 컨덕터들로부터 스테이터의 후면으로 또는 냉각이 적용될 수 있는 다른 표면으로의 열 흐름 저항의 큰 감소가 있으며, 이로써 액튜에이터를 과열하지 않고 매우 높은 전류 밀도가 컨덕터들에 적용된다.
도 170B에서, 도 170A에서와 같은 계열의 모터가 사용되나, 각 모터에 일정한 전류 밀도가 적용되는 대신, 전류 밀도는 컨덕터들의 연속 상태 온도가 ~70℃이기까지 변경되었다. 통상의 물 냉각 효과의 합리적인 표현이 700W/m2K의 대류 계수에서 스테이터들의 외측 축방향 표면에 적용되었다. 물 온도는 15℃로 설정되었다. 주위 온도는 15℃이었다. 단순성을 위하여 공기 없는 대류 냉각이 적용되었으며, 물 냉각된 표면은 냉각의 면에서 매우 지배적이고 로터는 그 자체의 열을 발생하지 않았기 때문이다. 연속 상태 조건들이 가정되었다. 3D 그래프 위의 각 지점에 대해, 모터의 전류 밀도는 제로에서 코일 온도가 ~70℃에 이르기까지 증가되었다.
도 170C는 70℃의 일정한 온도에 병치된 바와 같은 6A/mm에서 일정한 전류를 가지는 것을 제외하고 도 170D와 같다. 이와 같이 짧은 지주의 열 방출 이득이 도 170C 개시 예측되지 않은 이득을 제공하는 정도를 보여주는 것은 이하의 계량 컨벤션을 이용하여 진전되었다. 1의 토크-계량, 3의 토크-대-중량-계량, 2의 전원 소비-계량. 암의 중량이 액튜에이터의 중량에 의하여 결정되므로 그리고 암의 중량은 통상적으로 하중의 중량보다 휠씬 더 크므로 토크-대-중량은 매우 높이 계량되어야 한다. 토크는 1에서 중요한 고려로서 그것을 포함하도록 계량되나 하중은 암의 중량보다 더 작을 수 있는 것을인식하였다. 전원 소비는 중요한 생각이므로 적절한 계량을 발생하나, 전원 소비는 토크-대-중량의 더 높은 계량에 의하여 달성되는 바와 같은, 더 작은 중량으로부터 이득을 얻는 것으로 알려지고, 그래서 전원 소비에 대한 더 큰 계량은 비생산적인 것으로 생각된다.
일련의 모터들에 일정한 전류 밀도를 적용함으로써, 그리고 상기 계량 결과와 결합함으로써, 도 170D의 표면(2238)은 슬롯(자극) 밀도와 컨덕터 용적의 개시된 범위(2232)를 향해 그를 관통해 계속하는 더 낮은 전체 성능을 향한 경향을 도시한다. 도 170B로부터 일정한 온도 전류 밀도가 적용된 때, 도 170D는 개시된 범위의 이득을 보여준다.
모터 성능에 대한 산업표준 계량은, 기본적으로 토크-대-전원 소비인 KM이다. KM은 일정한 전원에 대해 충분한 냉각 성능을 가정한다. 일정한 레벨의 토크를 생성하기 위하여 필요한 전원 양을 단지 고려한다. 슬롯 피치와 지주 높이의 함수로서 Km" 표면이 도 170F에 도시된다.
토크 대 중량 대 전원 소비는 도 170F의 슬롯 피치와 지주 높이의 함수로서의 KR" 표면(2332)의 그래프로부터 보여진 개시된 범위(2322)의 가장 예측하지 않은 큰 이득을 도시한다. 높은 KR은 고정적인 용도들에서 큰 이득일 수 없고, 로봇과 같은 용도들에서 KR은 전원 소비 이득이 전체 시스템의 중량을 감소시킴으로써 달성될 수 있다.
자극 밀도와 지주 높이와 함께 KR "이 변하는 방식을 도시하는 그래프를 생성하는 방법은 이하와 같다. 작은 컨덕터 용적(낮은 지주 높이)과 낮은 자극 밀도를 가지는 형상(A)을 가지는 모터 부분을 고려한다. 형상(A)을 가지는 모터 부분은 모사되고; 설정 냉각 속도가 냉매로서 물과 700 W/m2K의 대류 계수를 사용하여 스테이터 내면에 적용된다. 물의 온도는 15℃로 설정되고 6-20mm/s 사이의 흐름 속도를 가진다. 연속 상태 조건이 상정된다. 형상(A)의 컨덕터를 관통하는 전류는 이어서 컨덕터의 최대 온도가 70℃에 도달하기까지 증가한다. 이 지점에서의 형상(A)의 토크 밀도는 이어서 기록되고 지주 높이 및 자극 밀도의 대응 값들에 대해 그래프로 표시된다. 다른 형상에 대해 공정이 반복되고, 예컨대, 지주 높이와 자극 밀도를 변경함으로써 달성되고 위에 설명된 바와 같이 파라미터들을 유지한다. 예컨대, 형상(B)은 지주 높이를 증가시킴으로써 형상(A)으로부터 획득되고, 모든 다른 파라미터들이 위에 설명된 바와 같이 측정된다. 형상(C)은 형상(A)과 같은 지주 높이를 가지나 더 큰 자극 밀도를 가진다. 형상(A)에 비교해서 형상(D)은 지주 높이를 증가시켰고 자극 밀도를 증가시킬 수 있다. 토크 밀도를 그래프에서 표면에 표시한다.
자극 밀도가 증가하고 지주 높이가 감소함에 따라 토크 밀도가 증가함이 발견되었다. 토크 밀도의 그러한 증가는 낮은 지주 높이 또는 높은 자극 밀도를 가지는 형상들에서 발생하지 않는 것이 도시되며; 토크 밀도의 이점은 단지 이들 두 인자들을 결합한 형상에서 발견된다. 그러나, 이 영역에서, 효율이 감소한다. 표시된 가정을 기초로 그래프가 작성되었지만, 발명자는 진실로 개시된 냉각 효과와 증가된 자극 밀도 및 컨덕터 용적 또는 지주 높이의 감소의 플럭스 손실의 감소에 기초해서, 같은 형상이 시물레이션에서 사용되었던 파라미터들의 다른 값에서 이득을 가질 것으로 예측한다. 지주 높이 또는 자극 밀도에 영향을 미치지 않는 모터 디자인 요소의 변화는 이득의 손실을 발생할 것으로 예측되지 않는다. 예컨대, 직각으로 저위된 영구 자석을 가진 로터를 포함하는 전기 기계 및 표면에 장착된 영구자석을 가진 로터를 포함하는 유사한 전기 기계는 다소 다른 KR" 표면을 소유할 수 있으며; 그럼에도 불구하고 위에 설명된 원리는 여전히 적용될 것이고 이전에 설명된 바와 같은 낮은 지주 높이와 높은 자극 밀도의 형상 영역 내로 여전히 예측될 것이다. 현재 이해되는 바와 같이, 원리가 축방향 플럭스 및 반경방향 플럭스 기계과 같은 지주를 가진 전기 기계에 단지 적용된다.
설명된 식과 그래프에서, 파라미터(KR")는 크기-의존적이고 토크 대신 힘을 사용하고 둘레 길이 및 축방향 길이 모두로부터 독립적이 되도록 종래의 KR에서 역전된다. 그러므로, 소정 크기 모터의 종래의 KR는 KR" 값으로부터 발견될 수 있다. 동일한 크기(에어갭에서의 직경 및 축방향 길이)이나 다른 형상의 경우(즉, 자극 밀도 및 지주 높이), 배율 인자는 동일할 것이고, 그래서 KR"이 커질수록 종래의 KR은 커질 것이다.
자극 밀도와 지주 높이의 함수로서의 KR"은 종래의 KR을 도시하는 그래프 표면을 크게 모사한다. 그러나, 토크 밀도에 대응하는, 이러한 특별한 표면은 분석에서 제한으로 다른 온도가 사용될 때 상당히 변할 수 있다. 대조적으로 KR"은 실질적으로 변하지 않는다(직렬 모터들이 포화하기 시작하는 경우 전류가 충분히 높게 공급되지 않으면; 이어서 3D 곡선 형상은 변할 것이다). 그러므로, 이미 설명된 이점을 발생하는 지주 높이와 자극 밀도의 특별한 범위를 규정하기 위하여 사용되는 것은 KR"이다.
개시된 이득의 범위는 에어갭에서의 발생되는 모터 직경에 의존한다. 모터의 물리적 크기에 의하여 더 작은 슬롯 밀도가 사용되는 것이 방지되므로 작은 모터들은 더욱 한정된다. 200mm 이상, 100mm 이상, 50mm 이상, 및 25mm 이상, 등에 대응하여 4개의 분리된 모터 직경 범위를 규정하였다. 각각의 직경 범위에 대해, 세 개의 KR" 레벨을 기재한다. 제1 레벨은 KR"로의 작은 이득이 시작하는 레벨이고, 제2 레벨은 중간의 KR" 이득에 대응하고 제3 레벨은 해당 특별한 직경 범위에 대해 높은 KR" 이득에 대응한다. 더 높은 KR" 값은 일반적으로 해당 모터 크기 범위에 대해 더 낮은 전체 토크 값에 대응한다.
개시된 이들 모터 크기(25mm에서 200mm 직경 및 그 이상)들은 소형 내지 대형 모터들을 표시한다. 시물레이션에 사용된 0.005" 인치의 에어갭은 이러한 모터 범위에 대한 최소의 합리적인 에어갭 크기로 믿어진다. 더 작은 에어갭은 제조 공차, 베어링 정밀도, 부품 편향, 및 열 팽창에 기인하여 이 모터 범위에 대해 실용적이지 않다.
위 식의 계수는 관련된 영역을 한정하고 형성되는 관계를 거의 연속으로 규정하도록 선택된다.
지주: 슬롯의 폭의 50: 50 비율은 비율이 40: 60 및 60: 40일 때 최고 이득이 얻어지는 것을 분석이 보여주므로 이들 시물레이션에 대해 선택되었다. 50: 50의 비율은 통상의 최선의 방안이며; 고정된 지주 높이에서 10:90의 슬롯:지주 폭의 비율을 사용하는 것은 비교에 의하면 상당히 후퇴된 성능을 가질 것이다. 분석에 의하면, 일정한 지주 높이에서, 실시예는 최대 토크와 50% 슬롯 폭에서의 토크 밀도, 및 40% 슬롯 폭에서의 최대 Km 및 Kr을 나타낸다. 그러나, Km과 Kr의 최대 값은 50: 50 형상에서 주어진 값의 5% 내이므로, 따라서 50: 50 비율은 시물레이션을 위하여 파라미터를 측정하는 합리적인 선택으로 보여졌다. 지주: 슬롯 폭의 다른 비율은 개시된 이점의 일부를 제시할 것이다.
다른 실시예들에 대해, KR의 면에서, 또는 토크, 토크-대-중량을 결합하는 계량 함수, 및 Km의 면에서, 이하 설명되는 식들과 그래프는 상당한 이점을 제공하는 컨덕터 용적과 자극 밀도의 범위를 보인다. 이전에 설명되었던 식들과 같이, 계량 함수의 면에서의 이득 영역은 냉각의 양에 의존한다.
전기 기계의 크기는 여기 규정된 바와 같이, 축방향 플럭스 기계 또는 반경방향 플럭스 기계의 에어갭 직경 또는 선형 기계의 캐리어들의 병진 방향의 길이를 의미한다.
제1 경계 영역은 상당한 KR 이득이 영역의 잔여 형상들에 대해 발견되는 영역에 대응한다. 일정한 장치 크기에 대해, KR은 범위 외측보다 개시된 형상 범위에서 더 높은 값을 가지며, 이들 형상의 장치를 사용하는 일정 용도들에 대해 전체 시스템 효율에 대한 잠재 이득을 나타낸다. KR"의 그래프는 특정 KR" 값에서 수평면을 설치함으로써 경계를 규정하기 위하여 사용된다. 네 개의 KR"의 값들이 200mm 이상, 100m 이상, 50mm이상, 및 25mm 이상의 크기에 대응하는 네 개의 다른 액튜에이터 크기에 대한 이득의 영역을 규정하기 위하여 사용된다.
이하의 표들에서, 자극 피치는 mm의 변수(S)로 표현된다. 지주 높이는 또한 밀리미터로 표현된다.
25mm크기를 가지는 기계에서 KR" > 3.3에 대해 경계선이 표 1에 도시된 값에 의하여 규정되고 대응하는 그래프는 도 180이다.
| [표 1]세트(A1) | |||||
| 지주 높이 > | 지점들 | ||||
| 자극 피치 | 지주 높이 | ||||
| -1.070*S+2.002 | 에 대해(for) | 0.572<S<1.189 | 0.572 | 1.390 | |
| 1.175*S+0.667 | 1.189<S<2.269 | 1.189 | 0.730 | ||
| 13.502*S-28.637 | 2.269<S<2.500 | 2.269 | 1.999 | ||
| 2.500 | 5.118 | ||||
| -5.898*S+19.863 | 1.970<S<2.500 | 1.970 | 8.244 | ||
| 0.229*S+7.794 | 1.349<S<1.970 | 1.349 | 8.102 | ||
| 7.607*S-2.160 | 0.723<S<1.349 | 0.723 | 3.340 | ||
| 11.430*S-4.924 | 0.572<S<0.723 | 0.572 | 1.614 | ||
| 0.572 | 1.390 | ||||
25mm크기를 가지는 기계에서 KR" > 3.4에 대해 경계선이 표 2에 도시된 값에 의하여 규정되고 대응하는 그래프는 도 181이다.
| [표 2]세트(A2) | ||||
| 지주 높이 > | 지점들 | |||
| 자극 피치 | 지주 높이 | |||
| -1.340*S+2.305 | 0.619<S<1.120 | 0.619 | 1.475 | |
| 1.100*S-0.429 | 1.120<S<2.074 | 1.120 | 0.803 | |
| 3.830*S-6.082 | 2.074<S<2.269 | 2.074 | 1.852 | |
| 지주 높이 < | 2.269 | 2.598 | ||
| -69.510*S+160.318 | 2.222<S<2.269 | 2.222 | 5.865 | |
| -3.430*S+13.492 | 1.667<S<2.222 | 1.667 | 7.770 | |
| 2.830*S+3.056 | 1.133<S<1.667 | 1.133 | 6.260 | |
| 8.650*S-3.545 | 0.619<S<1.133 | 0.619 | 1.812 | |
| 0.619 | 1.475 | |||
25mm크기를 가지는 기계에서 KR" > 3.6에 대해 경계선이 표 3에 도시된 값에 의하여 규정되고 대응하는 그래프는 도 182이다.
| [표 3]세트(A3) | ||||
| 지주 높이 > | 지점들 | |||
| 자극 피치 | 지주 높이 | |||
| -4.160*S+5.032 | 에 대해 | 0.723<S<0.967 | 0.723 | 2.014 |
| 0.839*S+0.198 | 0.967<S<1.692 | 0.967 | 1.009 | |
| 2.713*S-2973 | 1.692<S<1.939 | 1.692 | 1.617 | |
| 지주 높이< | 1.939 | 2.287 | ||
| -53.233*S+105.506 | 1.970<S<2.500 | 1.879 | 5.481 | |
| -1.406*S+8.122 | 1.349<S<1.970 | 1.465 | 6.063 | |
| 3.898*S+0.353 | 1.035<S<1.465 | 1.035 | 4.387 | |
| 7.535*S-3.412 | 0.723<S<1.035 | 0.723 | 2.036 | |
| 0.723 | 2.024 | |||
50mm크기를 가지는 기계에서 KR" > 2.2에 대해 경계선이 표 4에 도시된 값에 의하여 규정되고 대응하는 그래프는 도 177이다.
| [표 4]세트(B1) | ||||
| 지주 높이 > | 지점들 | |||
| 자극 피치 | 지주 높이 | |||
| 0.254*S+0.462 | 에 대해 | 0.319<S<3.667 | 0.319 | 0.543 |
| 2.665*S+8.380 | 3.667<S<5.000 | 3.667 | 1.394 | |
| 지주 높이< | 5.000 | 4.947 | ||
| -18.282*S+96.357 | 에 대해 | 4.500<S<5.000 | 4.500 | 14.088 |
| -4.663*S+35.071 | 2.738<S<4.500 | 2.738 | 22.304 | |
| 2.585*S+15.227 | 1.447<S<2.738 | 1.447 | 18.967 | |
| 16.013*S-4.204 | 0.319<S<1.447 | 0.319 | 0.904 | |
| 0.319 | 0.543 | |||
50mm크기를 가지는 기계에서 KR" > 2.5에 대해 경계선이 표 5에 도시된 값에 의하여 규정되고 대응하는 그래프는 도 178이다.
| [표 5]세트(B2) | ||||
| 지주 높이 > | 지점들 | |||
| 자극 피치 | 지주 높이 | |||
| 0.269*S+0.456 | 0.380<S<3.016 | 0.380 | 0.558 | |
| 3.051*S-7.936 | 3.016<S<4.167 | 3.016 | 1.367 | |
| 지주 높이< | 4.167 | 4.779 | ||
| -14.766*S+66.309 | 에 대해 | 3.667<S<4.167 | 3.667 | 12.162 |
| -3.952*S+26.654 | 2.315<S<3.667 | 2.315 | 17.505 | |
| 3.108*S+10.310 | 1.278<S<2.315 | 1.278 | 14.282 | |
| 14.542*S-4.303 | 0.389<S<1.278 | 0.389 | 1.354 | |
| 88.444*S-33.051 | 0.380<S<0.389 | 0.380 | 0.558 | |
50mm크기를 가지는 기계에서 KR" > 2.9에 대해 경계선이 표 6에 도시된 값에 의하여 규정되고 대응하는 그래프는 도 179이다.
| [표 6]세트(B3) | ||||
| 지주 높이 > | 지점들 | |||
| 자극 피치 | 지주 높이 | |||
| 0.191*S+0.626 | 0.472<S<2.181 | 0.472 | 0.716 | |
| 2.135*S+3.613 | 2.181<S<3.095 | 2.181 | 1.043 | |
| 53.475*S-162.511 | 3.095<S<3.175 | 3.095 | 2.994 | |
| 지주 높이 < | 3.175 | 7.272 | ||
| -5.095*S+23.450 | 에 대해 | 2.222<S<3.175 | 2.222 | 12.128 |
| 0.805*S+10.339 | 1.381<S<2.222 | 1.381 | 11.451 | |
| 10.251*S-2.706 | 0.572<S<1.381 | 0.572 | 3.158 | |
| 24.420*S-10.810 | 0.472<S<0.572 | 0.572 | 0.716 | |
100mm크기를 가지는 기계에서 KR" > 1.5에 대해 경계선이 표 7에 도시된 값에 의하여 규정되고 대응하는 그래프는 도 174이다.
| [표 7]세트(C1) | ||||
| 지주 높이 > | 지점들 | |||
| 자극 피치 | 지주 높이 | |||
| 0.322*S+0.359 | 에 대해 | 0.233<S<6.667 | 0.233 | 0.434 |
| 2.202*S-12.179 | 6.667<S<8.333 | 6.667 | 2.504 | |
| 지주 높이 < | 8.333 | 6.175 | ||
| -25.555*S+219.122 | 에 대해 | 7.778<S<8.333 | 7.778 | 20.356 |
| -5.585*S+63.794 | 4.000<S<7.778 | 4.000 | 41.455 | |
| 3.214*S+28.600 | 1.793<S<4.000 | 1.793 | 34.362 | |
| 21.749*S-4.633 | 0.233<S<1.793 | 0.233 | 0.434 | |
100mm크기를 가지는 기계에서 KR" > 1.7 대해 경계선이 표 8에 도시된 값에 의하여 규정되고 대응하는 그래프는 도 175이다.
| [표 8]세트(C2) | ||||
| 지주 높이 > | 지점들 | |||
| 자극 피치 | 지주 높이 | |||
| 0.277*S+0.593 | 에 대해 | 0.250<S<5.182 | 0.250 | 0.662 |
| 2.342*S-10.111 | 5.182<S<7.222 | 5.182 | 2.026 | |
| 지주 높이 < | 7.222 | 6.804 | ||
| -13.149*S+101.763 | 에 대해 | 6.111<S<7.222 | 6.111 | 21.412 |
| -4.885*S+51.265 | 3.333<S<6.111 | 3.333 | 34.983 | |
| 4.291*S+20.680 | 1.520<S<3.333 | 1.520 | 27.203 | |
| 20.788*S-4.395 | 0.251<S<1.520 | 0.251 | 0.823 | |
| 161.000*S-39.588 | 0.250<S<0.251 | 0.250 | 0.662 | |
100mm크기를 가지는 기계에서 KR" > 1.9에 대해 경계선이 표 9에 도시된 값에 의하여 규정되고 대응하는 그래프는 도 176이다.
| [표 9]세트(C3) | ||||
| 지주 높이 > | 지점들 | |||
| 자극 피치 | 지주 높이 | |||
| 0.277*S+0.591 | 에 대해 | 0.278<S<4.425 | 0.278 | 0.668 |
| 1.916*S-6.663 | 4.425<S<6.111 | 4.425 | 1.817 | |
| 지주 높이 < | 6.111 | 5.048 | ||
| -21.337*S+135.438 | 에 대해 | 5.556<S<6.111 | 5.556 | 16.890 |
| -4.985*S+44.588 | 3.1755<S<5.556 | 3.175 | 26.76 | |
| 2.749*S+20.031 | 1.560<S<3.175 | 1.560 | 24.320 | |
| 18.321*S-4.260 | 0.278<S<1.560 | 0.278 | 0.833 | |
| 0.278 | 0.646 | |||
200mm크기를 가지는 기계에서 KR" > 1.3에 대해 경계선이 표 10의 값에 의하여 규정되고 대응하는 그래프는 도 171이다.
| [표 10]세트(D1) | ||||
| 지주 높이 > | 지점들 | |||
| 자극 피치 | 지주 높이 | |||
| 0.257*S+0.327 | 에 대해 | 0.208<S<7.778 | 0.208 | 0.381 |
| 1.977*S-13.044 | 7.778<S<9.444 | 7.778 | 2.330 | |
| 지주 높이 < | 0.444 | 5.623 | ||
| -36.195*S+347.445 | 에 대해 | 8.889<S<9.444 | 8.889 | 25.711 |
| -5.777*S+77.062 | 4.833<S<8.889 | 4.833 | 49.142 | |
| 1.950*S+39.718 | 2.222<S<4.833 | 2.222 | 44.051 | |
| 20.301*S-1.058 | 0.389<S<2.222 | 0.389 | 6.839 | |
| 34.481*S-6.574 | 0.208<S<0.389 | 0.208 | 0.598 | |
| 0.208 | 0.381 | |||
200mm 크기를 가지는 기계에서 KR" > 1.5에 대해 경계선이 표 11의 값에 의하여 규정되고 대응하는 그래프는 도 172이다.
| [표 11]세트(D2) | ||||
| 지주 높이 > | 지점들 | |||
| 자극 피치 | 지주 높이 | |||
| 0.322*S + 0.359 | 에 대해 | 0.233<S<6.667 | 0.233 | 0.434 |
| 2.202*S - 12.179 | 6.667<S<8.333 | 6.667 | 2.504 | |
| 지주 높이 < | 8.333 | 6.173 | ||
| -25.555*S+219.122 | 에 대해 | 7.778<S<8.333 | 7.778 | 20.356 |
| -5.585*S + 63.794 | 4.000<S<7.778 | 4.000 | 41.455 | |
| 3.214*S+28.600 | 1.793<S<4.000 | 1.793 | 34.362 | |
| 21.749*S-4.633 | 0.233<S<1.793 | 0.233 | 0.434 | |
200mm 크기를 가지는 기계에서 KR" > 1.8에 대해 경계선이 표 12의 값에 의하여 규정되고 대응하는 그래프는 도 173이다.
| [표 12]세트(D3) | |||||
| 지주 높이 > | 지점들 | ||||
| 자극 피치 | 지주 높이 | ||||
| 0.212*S+0.600 | 에 대해 | 0.264<S<4.833 | 0.264 | 0.656 | |
| 3.017*S-12.960 | 4.833<S<6.667 | 4.833 | 1.623 | ||
| 지주 높이 < | 6.667 | 7.157 | |||
| -12.356*S+89.531 | 에 대해 | 5.556<S<6.667 | 5.556 | 20.884 | |
| -4.551*S+46.170 | 3.175<S<5.556 | 3.175 | 31.72 | ||
| 3.850*S+19.496 | 1.502<S<3.175 | 1.502 | 25.279 | ||
| 19.751*S-4.487 | 0.264<S<1.502 | 0.264 | 0.827 | ||
| 0.264 | 0.656 | ||||
각 기계 크기에서, 각각의 경계선은 일정한 K" 값에 대해 규정되므로 각 기계 크기에 대해, K"값의 세트들과 대응하는 경계선의 세트가 있다. 쌍을 이루는 경계선들은, 하나의 경계선이 두 개의 연속적인 장치 크기들, 즉, 25mm 및 50mm, 50mm 및 100mm, 또는 100mm 및 200mm와 같이, 에서 선택되는 것이다. 경계선들은 크기, 자극 피치, 지주 높이에 의하여 규정된 용적 또는 공간을 가진다. 경계면은 제1 경계선의 임의 지점과 제2 경계선의 임의 지점을 연결하는 모든 선들의 연합의 외부 면인 공간의 2차원 불연속 표면으로 규정될 수 있다. 경계면은 dlemmr 공간을 둘러싼다. 각 쌍의 경계선에 대해, 경계면은 이득 공간을 규정한다. 일정한 이득 공간 내인 지주 높이 자극 피치와 크기를 가진 전기 기계는 해당 크기의 기계에 대한 대응하는 경계선에 의하여 규정된 실시예 내에 속하는 것으로 생각된다.
최대 산출 크기보다 더 큰 기계 크기에 대해, 최대 산출 크기에 대해 산출된 경계선이 사용된다. 최대 산출 크기를 초과하는 이득 공간은 이와 같이 단순히 해당 크기 및 더 큰 크기에 대응하나 자극 피치와 지주 높이는 표면 위의 지점에 일치하는 지점의 용적에 대해 산출된 경계선에 의하여 규정되는 면이다.
전기 기계의 주요 부품은 전자석 요소의 어레이를 가지는 제1 캐리어(로터, 스테이터, 또는 리니어 기계의 부분)와 자극을 형성하는 전자석 요소들을 가지며, 예컨대, 자성 베어링일 수 있는 베어링에 의하여 제1 캐리어에 대해 운동하도록 배치된 제2 캐리어를 포함한다. 운동은 제1 캐리어와 제2 캐리어(모터 실시예)의 전자석 요소들에 의하여 또는 이 경우 운동이 전기 기계(발전기 실시예)의 권선에 의하여 생성된 전동력을 유발할 수 있는, 외부 소스에 의하여 생성된 자기 플럭스의 상호 작용에 의하여 발생될 수 있다. 제1 캐리어와 제2 캐리어 사이에는 에어갭이 제공된다. 제1 캐리어의 전자석 요소들은 지주들을 포함하고, 지주들 사이에 슬롯이 구비되고, 각 슬롯에는 하나 이상의 전기 컨덕터들이 배치되고, 제1 캐리어의 지주들은 mm로 지주 높이를 가진다. 제1 캐리어와 제2 캐리어는 같이 전기기계의 크기를 규정한다. 자극들은 mm로 자극 피치를 가진다. 모터, 자극 피치, 및 지주 높이의 크기는 크기, 자극 피치 및 지주 높이에 의하여 규정된 공간 영역에 속하도록 선택된다. 1) a) 전기 기계의 제1 크기의 제1 세트의 불균등성에 의하여 규정된 제1 표면, b) 전기 기계의 제2 크기용 제2 세트의 불균등성; 및 c) 제1 표면 위의 제1 단부 점과 제2 표면 위의 제2 단부 점을 가지는 선 세그넌트들 위의 모든 지점들을 포함하는 것으로 규정된 세트의 연합; 또는 2) 표면 위의 지점들에 대응하는 자극 피치와 지주 높이를 가진 더 큰 크기에 대응하는 모든 지점들 및 불균등성의 세트에 의하여 규정된 표면에 의하여 영역은 형성된다.
제1 세트의 불균등성과 제2 세트의 불균등성은 각각 불균등성(A 및 B, 또는 B 및 C, 또는 C 및 D의 각각의 세트이며, 여기서 A는 표 1, 2 및 3에 기재된 전방으로의 식 세트들의 그룹에서 선택되고(균등성 (A1, A2 및 A3)의 각각의 세트), B는 표 4, 5 및 6에 기재된 전방으로의 식 세트들로 구성된 불균등성의 세트의 그룹에서 선택되고(균등성 (B1, B2 및 B3)의 각각의 세트), C는 표 7, 8 및 9에 기재된 전방으로의 식 세트들로 구성된 불균등성의 세트의 그룹에서 선택되고(균등성 (C1, C2 및 C3)의 각각의 세트) 그리고 D는 표 10, 11 및 12에 기재된 전방으로의 식 세트들로 구성된 불균등성의 세트의 그룹에서 선택된다(균등성 (D1, D2 및 D3)의 각각의 세트).
전기 가기계 특징지워지는 공간은, 예컨대 이하와 같은 인접 크기들용 불균등성의 세트들에 의하여 규정된 불균등성의 어느 쌍에 의하여 형성될 수 있다: A1 B1, A1 B2, A1 B3, A2 B1, A2 B2, A2 B3, A3 B1, A3 B2, A3 B3, B1 C1, B1 C2, B1 C3, B2 C1, B2 C2, B2 C3, B3 C1, B3 C2, B3 C3, C1 D1, C1 D2, C1 D3, C2 D1, C2 D2, C2 D3, C3 D1, C3 D2, C3 D3. 또한 불균등성의 소정의 세트와 더 큰 크기에 대응하나 불균등성의 세트에 의하여 규정된 영역 내에 자극 피치와 지주 높이를 가지는 모든 지점들에 의하여 형성될 수 있다.
이 출원에서 기재된 모든 장치들은 이들 균등성들에 의하여 규정된 영역과 공간들 내에 속하는 크기, 자극 피치 및 지주 높이를 가질 수 있다.
도 1-도 5에 의하여 표현된 실시예의 형상의 시물레이션에서, 0.005" 에어갭을 사용하고 N52 자석을 사용하고, 시물레이션은 해당 크기의 이득 범위 내측에 있는 1.53Nm/Kg/W의 KR"를 산출한다. 도 128-도 129 도시의 실시예의 형상의 시물레이션은 해당 크기의 이득 범위 내에 또한 속하는 2.13nM/kG/W의 KR"를 산출한다.
형상의 논의
형상(geometry) 범위는 일정한 전력의 입력에 대해 비정상적으로 높은 토크-대-중량을 제공한다. 이러한 효율은 온도 의존성이다. 예컨대, 일정한 토크-대-중량에서, 개시된 범위 외측의 유사한 액튜에이터보다 개시된 범위 내의 액튜에이터가 일정한 냉각 방법에 대해 냉각기를 가동할 수 있는 데, 개시된 범위의 장치가 덜 전력을 소비하기 때문이다.
이 경우 낮은 컨덕터 용적은 짧은 컨덕터에 기인하는 작은 열 저항의 이익을 가진다. 개시된 범위 내에서, 더 높은 전류 밀도에서 이들 컨덕터들에 동력을 공급할 필요는 일정한 토크-대-중량을 달성하기 위하여 장치의 열 방출 이득에 의하여 보충되는 이상이다. 설명된 KR" 범위 내에서, 중량의 감소(부분적으로 작은 컨덕터 용적으로부터 기인)는 여분의 필요 전력을 초과할 수 있고(더 높은 전류 밀도로부터 발생) 따라서 KR의 면에서 순 이득이 생성될 수 있다. 일정한 직경의 기계에서 기재된 형상 범위는 많은 더 작은 기계들에 대해 공지된 그러나 큰 직경 기계의 이 장치의 원리에 따라 사용된 특징적인 형상과 결합된 열 방출을 제공한다.
명확성을 위하여, KR 이득을 달성하는 것이 여전히 필요로 되고, 그러나 KR 산출의 경우 충분한 냉각이 사용되는 것으로 생각된다. 일부 모터들과 용도들에 대해 방사상 냉각이 충분하다. 다른 경우 팬 및 냉각 핀들이 필요하다. 전 동력에서 다른 경우, 수 냉각이 필요하다.
개시된 전기 기계에 대해, KR은 낮은 출력에서 높은 출력에 이르기까지 같으며(KR이 감소되는 시간에서 스테이터가 포화하기까지), 따라서 출력에 따라 다른 냉각 레벨이 필요로 될 것이나 토크-대-중량-전력 소비는 합리적으로 일정하게 유지된다. 자극 밀도 및 컨덕터 용적의 개시된 범위는 일정한 냉각 방법에 의하면 일정한 열 방출 속도에 대해 비정상적으로 높은 토크-대-중량을 제공한다. 자극 밀도와 컨덕터 용적의 개시된 범위는 스테이터의 후면 및 일정한 컨덕터 온도에 적용된 일정한 냉각 방법에 대한 더 높은 토크-대-중량을 발생한다. 자극 밀도 및 컨덕터 용적의 개시된 범위에 대한 전기 컨덕터 냉각의 주요 형태는 전기 컨덕터로부터 스테이터의 후면으로의 열 전도성 열 전달이다.
열은 냉각 유체와의 직접 접촉을 통해 또는 하우징과 같은 또 다른 부재로의 전도를 통해 또는 예컨대 방사를 통해, 스테이터의 후면으로부터 열이 추출될 수 있다. 스테이터나 컨덕터들의 다른 표면들은 또한 다양한 수단에 의하여 냉각될 수 있다. 스테이터의 후면을 냉각하는 것은 많은 모터 유형에 대해 비용 효과적이고 간단한 방안이다. 샘플 분석(여기 도시되지 않은)에 의하면 스테이터의 후면(개시된 범위의 외측의 모터들에 비교해서)으로부터 더욱 양호한 열 방출을 보이는 개시된 범위의 형상은 또한 스테이터 또는 컨덕터의 다른 측면이 냉각될 때 일반적으로 개시된 범위 외측의 모터들보다 향상된 열 방출을 보일 것이다. 그러므로 스테이터의 후면은 유용한 냉각 면으로 보여지고, 스테이터와 컨덕터의 다른 표면으로의 낸각 적용에 대한 직렬인 각 모터의 유효성의 표시기로서 보여진다. 스테이터의 후면은 개시된 범위를 확인하기 위하여 사용되는 모터 시리즈 분석의 주요 냉각면으로 선택된다.
자극 밀도와 컨덕터 용적을 가진 개시된 범위의 전기 기계에 다른 냉각 방법들이 적용될 수 있으나, 컨덕터들로부터 스테이터 후면으로의 열 흐름 경로는 바람직하게 항상 어느 다른 유형의 냉각(EG: 직접 코일 냉각)이 사용되는 여부에 상관 없이 모터를 냉각하기 위하여 사용될 것이다.
스테이터의 조임쇠는 지주 폭(둘레 또는 직각 폭)의 50%인 축방향 깊이를 가질 수 있다. 지주들은 각각 직각 폭을 을 가질 수 있고 스테이터는 조임쇠 부분을 가질 수 있고, 조임쇠 부분은 지주들의 직각 폭과 같거나 절반보다 작은 두께를 가지며, 또는 지주들의 직각 폭보다 작을 수 있다. 더 두꺼운 조임쇠는 최소 이득으로 중량을 부가한다. 더 얇은 조임쇠는 냉각을 지원하나 조임쇠 두께의 냉각에 대한 영향은 별로 중요하지 않다. 조임쇠 표면은 스테이터로부터 하우징으로 물리적으로 열을 전도시키기 위하여 하우징에 물리적으로 접촉될 수 있거나 및/또는 스테이터 후면은 활성으로 순환되는 냉각 유체체 노출될 수 있거나 및/또는 스테이터의 후면이 주위로 또는 하우징 또는 다른 부품들로 방사 열 방출하도록 구성될 수 있고, 및/또는 스테이터의 후면이 스테이터 및/또는 하우징의 표면 위로 액체나 공기의 이동을 통해 대류 또는 수동으로 냉각하도록 구성될 수 있다. 스테이터의 후면을 지나 이동하는 가스 또는 액체는 함유되거나 함유되지 않을 수 있다. 스테이터의 후면은 대기로부터 밀봉될 수 있고 또는 대기에 노출될 수 있다. 대기는 공기 또는 물 또는 액튜에이터를 에워싸는 다른 유체일 수 있다. 환경은 또한 일부 제조 공정 또는 진공 공간에 대해 필요한 바와 같이 진공일 수 있다. 스테이터의 후면은 표면적을 증가시키는 냉각 핀으로 구성될 수 있다. 이들 냉각 핀들은 냉각 유체에 노출될 수 있고 및/또는 하우징이나 다른 고형 부재와 같은 히트 싱크에 접촉한다. 스테이터 위의 냉각 핀들은 둘레 방향으로 지주 폭의 50%보다 더 큰 높이를 가질 수 있다.
스테이터의 후면으로부터 열이 방출되는 외에, 다른 열 방출 표면이 컨덕터와 지주 사이와 같은 슬롯을 통해 순환되는 공기 또는 액체와 같은 냉각 유체에 노출될 수 있는 지주 표면을 포함할 수 있다.
스테이터 및/또는 컨덕터의 다른 냉각 방법들은 스테이터의 표면 위 또는 아래 또는 컨덕터들의 표면 위 또는 아래 냉각 채널을 포함할 수 있다. 이들 및 다른 냉각 유형들은 컨덕터로부터 스테이터 후면으로의 주요 열 전도성 냉각에 보충적인 것으로 보여진다. 일부 경우들에서, 보충적인 냉각 방법들은 주요 전도성 냉각 효과보다 스테이터로부터 열을 더욱 멀리 배출할 수 있으나, 활성 냉각 방법들은 에너지 및 추가적인 비용과 복잡성을 요구하므로, 컨덕터들로부터 스테이터의 후면으로의 전도성 냉각 경로는 여기서 주요 냉각 모드로서 개시된다.
고정 토크를 생성하는 단일 액튜에이터에 대해, 전력 소비는 개시된 범위에서 증가하고, 개시된 범위 내의 최소 지주 높이 및 슬롯 피치를 향하여 지수적으로 더 커진다. 단일 200mm 평균 에어갭 직경의 액튜에이터와 반경방향 치아 길이 32mm 및 로터와 권선으로 100Nm 의 토크를 생성하기 위하여 필요한 전력 소비의 시물레이션으로부터, 최소 전력 소비가 개시된 범위 외측에서 발생하고, 전력 소비는 개시된 범위 내측에서 상당히 증가한다. 전력 소비를 최소화하기 위하여, 디자이너는 더 큰 슬롯 피치와 더 큰 컨덕터 용적의 장치를 향하여 인도될 것이다. 본 발명 장치의 형상을 사용하는 액튜에이터는, 개시된 범위 외측의 장치보다 더 큰 전력 소비를 가질 것이며 이러한 유형의 용도를 위하여 더 큰 슬롯 피치와 컨덕터 ㅇ용적 값을 가질 것이다.
개시된 구조에서, 전기 기계의 자극 캐리어가, 슬롯들은 슬롯 또는 자극 피치(s)를 가지며 지주들은 높이(h)를 가지는 슬롯들과 지주들을 포함하며, 피치(s)는 개시된 식에 따라 높이(h)와 관련성을 가지며, 전기 여자는 슬롯들 내의 컨덕터들에 적용되고 전류 밀도가 적어도 70A/mm2이다. 70A/mm2를 넘는 전기 여자는 일반적으로 개시된 장치의 작동을 위하여 적합한 것으로 생각된다. 개시된 슬롯 및 컨덕터 구조에 의한 냉각 효과는 컨덕터들에서의 전류에 의하여 생성된 열의 일부 또는 전부를 제거하기 위하여 냉각을 제공한다. 생성된 잔류 열은 채널의 하나 이상의 냉각 구조 또는 채널들을 이용하여 방출될 수 있다. 개시된 범위 내측의 모터들은 일정한 전기 입력 전원에 대해 자속 경로의 평균 플럭스 밀도의 감소를 보여준다. 이는 부분적으로 더 짧은 지주들의 감소된 플럭스 경로 길이 및 조임쇠를 통한 지주로부터 인접 지주로의 감소된 거리, 및 지주들 사이의 감소된 플럭스 누설에 기인한다. 결과는 포화에 도달하지 않고 개시된 범위에서 모터들의 더 높은 전류 밀도를 가동하기 위한 성능이다. 개시된 범위 외측에서의 모터들에 비교해서, 일정한 전류 밀도에서의 증가된 냉각 성능과 낮은 플럭스 밀도의 결합에 의하여, 더 높은 연속 토크-대-중량 비율이 일정한 냉각 속도에서 일정한 온도에 대해 달성될 수 있고, 개시된 범위에서의 피크 순간의 모터의 토크-대-중량이 개시된 범위에서 일정한 토크-대-중량에 대해 낮은 플럭스 밀도에서 작동하는 것에 기인하여 상당히 높을 수 있는 조건들의 결합을 발생한다.
개시된 구조의 성능과 전력 소비를 달성하기 위하여 극복되어야 하는 가장 중요한 하나의 문제는 로터와 스테이터 사이에 존재한 대단한 자력을 견딜 수 있는 구조를 제공하는 것이다. 개시된 로터의 실시예들은 스테이터 지주들에서 높은 견인력을 발생하는 에어갭의 비정상적으로 높은 플럭스 밀도를 달성할 수 있다. 동시에 개시된 전기 기계의 실시예의 토크-대-중량을 달성하는 것은 일 실시예에서 지주들의 둘레 방향 두께보다 더 작은 축방향 두께를 가지는 조임쇠의 시용을 필요로 한다(그리고, 일 실시예에서, 지주들의 두께의 약 절반). 또한, 개시된 축방향 플럭스 모터 구조와, 개시된 범위의 상대적으로 짧은 스테이터 지주들은 내재적으로 얇은 스테이터 구조를 발생한다. 반경방향 플럭스 모터, 일체형 지주들을 가진 원형 적층이 사용될 수 있다. 이는 고유의 강성을 가지고 자연적으로 적층의 둘레방향 및 반경방향 정위를 따라 소정의 플럭스 경로를 제공한다. 대조적으로, 본 발명 장치의 실시예의 축방향 플럭스 함수는 개별적인 적층 부분의 조립을 필요로 한다. 결과는 각각의 액튜에이터에 대해 수 백의 지주 부품들에 이르는 제조 필요이며, 이는 제조 복잡성, 시간 및 비용을 증가시킨다. 더우기, 상대적으로 얇은 조임쇠는 조임쇠에 지주들을 신뢰할만하게 고정하기 위하여, 특히 전기 기계들에 공통인 높은 주파수의 힘 변동 및 상승된 온도에서 많은 점토 화합물 또는 접착제에 대해 충분한 표면적을 제공하지 못한다. 예로서, 스테이터의 수용 슬롯에 스테이터 지주를 고정하기 위하여 사용될 수 있는 통상의 항공 접착제가, 300psi 보다 작은 에폭시에 응력을 부여하기 위하여 80℃ 아래의 열 편향 온도를 가질 수 있다.
일 실시예의 조임쇠용 각 입자 위의 전기 절연재 코팅을 가진 분말 금속의 사용은 와류 전류의 이점을 가진다. 그러나, 이러한 코팅은 통상적으로 자력을 감소시키는 데 플럭스 경로에서 다수의 작은 에어갭과 같이 작용하기 때문이다. 이 재료는 또한 통상적으로 특히 증가된 온도에서 상당히 더 높은 크리프 속도를 가지고 고체 강 또는 철보다 덜 강하다.
고체 강으로 제조된 스테이터는 통상적으로 높은 와류 전류 손실을 가진다. 그러나, 개시된 범위에서 모터의 구조적 특징은 와류 전류를 가지며 히스테리시스 감소 효과를 가지며, 본 발명 장치의 실시예들의 일부 작동 상황에서, 예컨대, 로봇에 적합한 속도에서 작동할 때, 와류 전류 손실은 고체 스테이터를 사용할 수 있도록 충분히 낮을 수 있다. 고체 재료의 사용은 세기, 강성, 열 저항, 및 피로 강도에서 유익하다. 본 발명 장치의 실시예는 자주 소정 용도들에서 기어박스 없이 사용되는 충분한 토크를 발생할 수 있고, 발생하는 작동 속도는 충분히 낮아서 와류 전류 손실은 고형 강 스테이터의 경우도 수용가능하다. 고체 주조 철은 일부 구조 및 작동 상황에서 실제적인 충분히 낮은 와류 전류 손실을 제공하는 것으로 발견되었다.
스테이터들은 적층 스택들 또는 소결 분말 금속으로 구성될 수 있다. 고체 재료의 사용에 비교해서, 이들 구성의 목적은 플럭스 경로에 수직인 전기적으로 연성인 자석 재료의 단면적을 감소시키는 것이며 이로써 와류 전류의 생성을 감소시키는 것이다. 와류 전류는 추가적인 입력 전력을 요구함으로써 효율을 감소시킬 수 있으며; 와류 전류는 시스템에 의하여 방출되어야 하는 과잉 열을 발생하며; 전류는 감쇄 효과를 생성함으로써 출력 토크를 감소시킨다.
고체 전기 전도성 재료로 제조된 단일 부재 스테이터는 자극 밀도와 지주 높이의 개시된 범위에서의 개시된 장치의 실시예와 같이 사용될 수 있다. 와류 전류 생성을 피하기 위하여, 출원은 충분히 낮은 속도, 예컨대, 개시된 범위의 형상을 가지는 175mm의 평균 에어갭 직경 모터에 대해 200rpm 또는 보다 작은 작동의 50%(60%, 70%, 80%, 90%)로 구성된 정격 사용율을 가진다. 이러한 상대적으로 낮은 속도 범위와 개시된 범위의 스테이터 지주의 비교적 작은 단면 형상을 결합함으로써, 개별 스테이터 지주는 다소 적층과 같이 작용하고 와류 전류의 발생을 감소시킨다. 200rpm 보다 작은 속도는 일반적으로 장치의 작동에 적합하다. 100rpm보다 작은, 50rpm보다 작은 그리고 25rpm보다 작은 속도는 또한 장치의 작동에 적합하다.
추가적으로, 와류 전류의 발생은 개시된 범위의 상대적으로 짧은 지주 높이에 의하여 감소된다. 와류 전류와 히스테리시스 손실은 용량적이고, 따라서 본 발명 장치의 작은 용적이 일정한 플럭스 밀도 및 전환 주파수에 대해 전체 철 손실을 감소시킨다.
비록 실시예에 따라 냉각 핀들이 존재하거나 존재하지 않지만, 고체 스테이터, 또는 단위 스테이터는 예컨대, 도 136 및 도 137에 도시된 바와 같이 지주에서 지주로의 연속적인 플럭스 경로를 가진다. 이와 같이 각 지주는 단위 스테이터의 일부이다. 연속 플럭스 경로는 자기적으로 허용가능한 재료의 단위 부재에 의하여 제공될 수 있다.
연속 플럭스 경로는 연성 철과 같은 등방성 재료, 코발트나 규소 강과 같은 강 합금, 또는 예컨대, 가압된 또는 소결된 분말 금속으로 제조된 스테이터에 의하여 제공될 수 있다. 금속은 지주에서 인접 지주로 등방성일 수 있고 지주에서 베어링 레이스로 또는 지주에서 베어링으로 연결하는 부재 또는 조립체로 비등방성일 수 있다. 금속은 조임쇠로부터 냉각 핀 및/또는 베어링으로의 가변 재료 합금을 포함한다. 이는 폭발 용접 또는 융착 부착 첨가제 제조, 또는 교반 용접 또는 다른 유사하지 않은 재료들을 결합하는 다른 형태에 의하여 실행될 수 있다.
스테이터는 하나의 부재 또는 지주로부터 인접 지주로 또는 지주로부터 베어링 레이스 시트(또는 부싱 시트 또는 컨택)일 수 있다. 스테이터는 지주에서 지주로 유닛일 수 있으며 이들 지주들의 하나의 지주로부터 베어링 또는 부싱을 예비 압축하기 위하여 압축되는 조립체 또는 부재로의 단위일 수 있으며, 압축 하중의 전부 또는 일부는 스테이터와 로터 사이의 자기적인 인력의 결과이다. 예비-압축 베어링의 경우, 하우징 조립체는 베어링 시트 위치를 지나 예비 압축된 베어링의 방향으로 베어링 레이스 시트를 이동시키기 위하여 충분히 신축성 일 수 있으며 베어링이 존재하지 않으면 0.002"보다 많이 이동시킬 수 있을 것이다. 예비-압축 베어링의 경우, 베어링이 존재하면 0.002"보다 많게 베어링 시트 위치를 지나 하우징 조립체는 베어링 레이스 시트를 베어링 예비 압축 방향으로 이동시키기에 충분하도록 신축성일 수 있고, 베어링이 존재하지 않으면 하우징의 이러한 변형을 야기하기 위하여 스테이터에 미치는 힘은 스테이터의 로터로의 자기적인 견인에 의하여 적어도 부분적으로 제공된다.
개시된 범위의 모터에 대한 고체 스테이터의 성능 이득
모터에 고체 스테이터를 사용하는 것은 비용 및 제조 이득의 가능성을 제공하기 위한 것으로 알려져 있다. 고체 스테이터들은 공통으로 사용되지 않으나, 그들은 통상의 회전 모터 속도에서 상당한 와류 전류 손실을 발생하는 것으로 알려져 있다. 와류 전류는 열을 발생하고, 또한 모터의 토크 성능을 감소시키는 2차 효과를 가지며, 특히 더 높은 속도에서 50rpm 액튜에이터 출력은 많은 로봇 용도들에서 매우 높은 속도로 생각된다. 로봇들에 사용되는 공통 모터들은 직접 구동 액튜에이터로서 조인트에 사용되기에 충분히 높은 토크를 생성하지 못하고, 토크-증가 기어박스 없이 사용되어야 한다. 토크-증가 기어박스를 사용하는 결과, 액튜에이터 출력보다 휠씬 더 높은 속도에서 모터를 작동시켜야 하는 필요성이다. 와류 전류 손실은 속도에 의해 지수적으로 증가하고, 따라서 로봇 액튜에이터에 고체 스테이터를 사용하는 것은 매우 빈약한 성능을 초래할 것이다.
적층재 또는 전기적으로 절연된 분말 재료는 모터에 공통으로 사용되어 로봇에 적합한 출력 속도에서 토크 증가 기어박스를 구동하기 위하여 필요한 속도에서 낮은 와류 전류 특성을 제공한다. 그러나 적층 또는 전기적으로 절연된 분말 재료를 사용할 필요는 청구된 범위 외측의 예시적인 모터에 유익한 것으로 도시되었지만, 청구된 범위 내측의 모터들은 와류 전류와 적층 재료의 사용이 로봇과 같은 운동 제어 용도에서 성능에 실제로 해로울 수 있는 지점으로 히스테리시스를 감축시키는 면에서 기대하지 않은 이득을 보인다.
분석 설정
이러한 기재하지 않은 이득을 시현하기 위하여, 일련의 모터들이 시물레이션되어 200rpm에서 오하류 전류 발생과 히스테리시스 손실을 보였으며, 낮은 자극 밀도에서 시작하고 개시된 범위 내로 자극 밀도를 증가시키는 것을 보였다. 시물레이션들은 본 발명 장치의 집중된 플럭스의 로터 실시예를 가진 예시적인 모터 시리즈에대해, 로터로부터의 PM 플럭스는 전체 와류 전류의 대략 80% 이상을 책임지며, 19.7A아암/mm2에 이르는 전류 레벨에서 스테이터에서의 히스테리시스 손실에 대해 책임이 있음을 보여준다. 로터가 200rpm에서 회전하는 경우 비분말 와류 전류 손실은 따라서 인가된 전류 밀도의 합리적인 범위에 걸친 전체 손실의 신뢰할만한 지표로서 사용되었다.
스테이터 손실 추세의 역전
도 183은 지주 높이와 슬롯 피치의 동일한 애스펙트 비, 및 같은 반경방향 지주 길이를 가지는 일련의 예시적인 모터들에 대해, 적층된 스테이터의 와류 전류 및 히스테리시스 손실에 비교한 두 개의 고체 스테이터 재료의 와류 전류 및 히스테리시스 손실을 도시한다. 손실은 위에 설명된 바와 같이 전류가 인가되지 않은 200rpm 속도의 로터에서 시물레이션되거나 산출되었다. 판 또는 블록 형태로 공통으로 유용하지는 않더라도 M 19 적층 스테이터와 직접 비교를 위하여 고체 스테이터 재료들의 하나로서 시물레이션에 M-19 전기강이 사용되었음을 유의하자. 판이나 블록 형태로 유용한 다른 재료, 또는 M19에 유사한 자기적 성능 특성을 가지는, 네트 형상의 부품에 유사하게 주조딜 수 있는 다른 재료가 이 산업에서 유용하다.
이제 도 183을 참조하면, 일정한 속도에서 더 많은 자극 수에 대해 필요한 주파수가 더 높을 것이므로 개시된 범위를 향하여 그리고 내측에서 적층된 스테이터 시리즈에서 손실은 기대된 대로 지수적으로 증가할 것임이 알 수 있다. 또한 예측된 바와 같이, 그래프의 우측 구석에 도시된 바와 같이, 큰 자극 피치를 가지는 모터의 경우 적층된 스테이터에 비교해서 고체 스테이터에서 더 큰 손실이 도시된다. 이어서 구동 주파수가 증가하여야 하므로 자극 피치가 우측으로부터 그래프의 중간을 향하여 감소됨에 따라 이들 손실은 적층 스테이터보다 더욱 빠른 속도로 증가한다. 자극 피치가 청구된 범위에 근접함에 따라, 그러나, 와류 전류의 크기는 적층된 스테이터 시리즈에서 증가하는 바와 같이 계속 증가하지 못한다. 이는, 청구된 범위를 향하는 감소된 스테이터 용적으로부터 발생하는 감소된 와류 전류 및 히스테리시스 손실과 함께, 개시된 범위를 향한 모터들의 더 얇은 플럭스 경로 단면이 전체 효과에서 지배적으로 되고, 손실을 증가시키는 것으로 향하는 추세가 역전되기 때문이다. 이러한 예측된 추세의 역전은, 일련의 예들의 어디에서나 그 아래로 저하하는 고체 스테이터에서의 전체 와류 전류와 히스테리시스 손실이 발생하기 때문이다.
증가된 토크-대-중량
도 183의 이러한 분석에 도시된 손실이, 개시된 범위의 모터에서, 항상 적층 스테이터에 비교해서 고체 스테이터가 높지만, 이러한 추세의 역전은 도 188 도시의 적층 스테이터에서 보다 고체 스테이터에 의한 대략 200rpm 에 이르기까지 향상된 토크-대-중량 성능의 향상을 발생한다. 개시된 범위에서의 모터들의 이러한 매우 높은 토크-대-중량 성능은 충분히 높은 것으로 도시되므로 토크-증가 기어박스를 필요로 하지 않고 로봇 관절에 직접-구동 액튜에이터로서 사용돨 수 있다. 이로써 본 발명 장치의 매우 높은 토크-대-중량 성능에 의해, 동시에 고체 스테이터의 사용으로부터 이득이 발생할 수 있다. 로봇 관절에 대한 직접 구동 액튜에이터로서 그리고 직접 구동 액튜에이터에게는 높은 속도로 생각되지만 본 발명 장치의 손실 저감 형상을 이용하기에 충분히 낮은 작동 속도에서 작동시킬 수 있으므로 고체 스테이터로서 사용할 수 있다. 동시에 청구된 범위에서 모터들은 동일 재료의 적층 스테이터로서 가능하였던 것을 초과하여 토크-대-중량 성능을 증가시킴으로써 고체 스테이터의 사용으로부터 이득을 얻는다.
토크-대-중량 분석 구성
와류 전류 손실에 기인한 토크-대-중량 성능의 감소는 200rpm에 이르는 속도에서 시물레이션을 통해 산출되었다. 6A/mm2의 전류 밀도를 인가하면서 청구된 범위 외측의 대략 24개의 슬롯의 토크-대-중량 분석은 매우 낮은 속도에서의 적층 스테이터 아래로 도시되고 200rpm에 이르는 적층 스테이터 아래로 더욱 계속 저하하였다.
본 발명 장치의 대략 108개의 슬롯에 대한 토크-대-중량 분석은 적층된 케이스에서 에어갭을 유지하기 위하여 더 두꺼운 조임쇠를 요구하는 강성 요건들에 기인하여 적층 스테이터보다 상당히 높은 속도에서 기동하는 것으로 도시되었다. 그러나 고체 스테이터는 최소 조임쇠 두께에서 충분한 강성을 가지며 추가 재료의 부가를 필요로 하지않았다. 추가적으로, 고체 스테이터의 정지 토크는 자석 플럭스 경로의 같은 단면적에서의 증가된 자석 재료에 기인하여 약간 더 높다.
19.7A/mm2 의 인가된 전류 밀도는 본 발명 장치의 108개의 슬롯 모터에 대해 선택되었는 데, 이는 정지 토크 조건에서 6A/mm2 에서 24개의 슬롯 모터에 유사한 전력 소비를 발생하기 때문이다.
토크대 중량이 낮은 슬롯 밀도를 가진 예시적인 모터에 대한 제로 속도의 토크-대-중량 아래로 즉시 하락하는 것은 놀랍지 않다. 개시된 범위 내의 예시적인 모터에서, 그러나, 비자석 절연층과 접착제에 의하여 점유된 플럭스 경로의 비율을 가지는 적층들에 비해 100% 자석 재료 밀도로부터 발생하는 높은 재료 밀도와 결합하여, 최소 조임쇠 두께의 강성을 유지하기 위한 성능에 기인해서 제로 속도에서 토크-대-중량은 상당히 더 높다. 속도가 증가함에 따라, 토크-대-중량은 낮은 슬롯 밀도의 모터에서와 같이 본 발명 장치에서 하락하며, 그러나, 200rpm까지 계속 적층된 모터의 토크-대-중량 위로 유지된다. 200rpm은 로봇 용도들에서 매우 높은 속도인 것을 고려하면, 그리고 감소된 비용과 증가된 스테이터 강도 및 강성의 면에서의 고체 스테이터의 다른 가능한 이득을 고려하면, 본 발명 장치는 유사한 속도와 토크-대-중량 요건을 가진 로봇 및 다른 용도들에 사용된 때 토크-대-중량 감소 없이 고체 스테이터의 공지 이득을 제공할 수 있다.
깊이 설명에서
깊이 설명에서 위의 분석이 이루어진 과정을 설명하면 이하와 같다. 3-D 시물레이션이 InfolyticaTM에서 판매하는 소프트웨어인 MagNetTM를 사용하여 실행되었다. 108개의 슬롯들과 100개의 자극을 가진 청구된 범위 내의 형상을 가지는 축방향 플럭스 기계의 선형 근사는 고체 및 적층 스테이터에서 손실을 예측하기 위하여 Transient with MotionTM 해석자를 사용하여 구성되고 시물레이션 시험되었다. 유사한 시험이 동일한 직경으로 24개의 슬로소들과 26개의 자극을 가진 균등물에 의하여 청구된 범위 외측의 형상을 사용하여 시행되었다. 시물레이션에 의하여 슈타인메츠(Steinmetz) 식의 해석 적용을 사용하여 적층 구조에서의 와류 전류 및 히스테리시스 손실을 에측하였다. 고체 구조에서, 와류 전류 손실은 재료의 저항성에 기초하여 구조물의 평균 옴 손실을 사용하여 시물레이션에 의하여 예측되었다. 일련의 시리즈, 예컨대, Durabar65-45-12가와류 전류 크기를 생성하기 위하여 사용되d었고, 다른 고체 와류 전류 크기는 그의 각각의 저항성의 비율에 의하여 곱함으로써 평가되었다. 24 게이지의 M-19 전기강에 대해, 고체의 히스테리시스 손실은 적층의 경우와 같은 것으로 상정되었다. 그러나, 발명자 인식하기에 실제로 고체 재료 블록의 히스테리시스 손실은 적층 스택에 비해 더 클 것이다. 여전히, 속도에서의 대부분의 손실은 이 연구의 초점인 와류 전류에 기인하며 따라서 이러한 가정은 이 연구의 목적에 충분할 것으로 믿어진다. 고체 Durabar65-45-12의경우, 히스테리시스 손실은 실험 측정에 기초하는 평가를 사용하여 분석적으로 산출되었고 실험 측정은 손실이 대략 5062J/m2이고 빈도 지수는 1.1로 가정되었다. 스테이터에서 자기적으로 활성인 용적은 지주의 용적에 시물레이션 결과를 기초로 개별 지주의 깊이에서 폭에 대응하는 조임쇠 부분을 더하여 평가되었다. 그러므로 듀라바의 경우 히스테리시스 손실은 이하와 같이 산출되었다:
Physt -Dura = 5062 Vactive· f 1.1
여기서 Physt - Dura는 Durabar65-45-12에서의히스테리시스에 기인하는 전력 손실이고, Vactive은 스테이터의 자기적으로 활성인 용적이고, f는 기본적인 자석의 전환 빈도이다. 소정의 장치의 경우, 기본적인 자석의 전환 빈도는 이하의 식에 따른 출력 속도와 자극 수이다.
히스테리시스 손실에 기인하는 토크 감소는 시물레이션에 의하여 산출된 바와 같은 와루 전류 손실에 기인하는 토크의 감소를 기초로 산출되었다. 19.7A/mm2와 6A/mm2의 인가된 전류 밀도에서 본 발명 장치의 대략 108개의 슬롯 및 청구된 범위 외측의 대략 24개의 슬롯을 가진 장치의 발생되는 토크는 도 187 및 도 184에 각각 도시되었다.
도 183은 지주 높이와 슬롯 피치의 동일한 애스펙트 비, 및 같은 반경방향 지주 길이를 가지는 일련의 예시적인 모터들에 대해, 적층된 스테이터의 와류 전류 및 히스테리시스 손실에 비교한 두 개의 고체 스테이터 재료의 와류 전류 및 히스테리시스 손실을 도시한다. 손실은 위에 설명된 바와 같이 전류가 인가되지 않은 200rpm 속도의 로터에서 시물레이션되거나 산출되었다. 적층된 스테이터의 손실이 청구된 범위를 향하여 그리고 내측으로 지수적으로 증가하지만, 고체 스테이터들을 가진 모터들이 처음에는 큰 슬롯 피치로부터 더 작은 슬롯 피치로 좌측으로 이동할 때 구동 빈도가 증가함에 따라 증가된 손실을 보여주는 것을 알 수 있다. 그러나, 더 좁은 지주에서 와류 전류를 제한하고 지주 용적을 감소시키는 것의 결합된 효과는 증가된 빈도의 효과를 상쇄시키고 슬롯 피치가 계속 감소함에 따라 전체 손실을 감소시키기 시작한다. 이러한 역전 추세는 속도가 항상 비교적 낮은 로봇 용도들의 허용가능한 손실에 대해 청구된 형상 범위를 가진 고체 스테이터를 결합한 자명하지 않은 이득을 도시한다.
시물레이션에 의하면 본 발명 장치의 로터 실시예를 가진 예시적인 모터 시리즈의 경우, 19.7A/mm2에 이르는 전류 밀도에서 로터로부터의 PM 플럭스가 스테이터에서의 총 와류 전류 및 히스테리시스 손실의 대략 80%를 발생한다. 200rpm에서 로터가 회전하는 비구동 와류 전류 손실은 따라서 적용된 전류 밀도의 합리적인 범위에 걸쳐 전체 손실의 충분한 표시기로서 사용될 수 있다. 도 183의 데이터는 전류가 인가되지 않은 200rpm의 로터 속도에서 슬롯 피치 범위에 걸쳐 3개의 모터 시리즈에 대해 와류 전류와 히스테리시스 손실의 합을 도시한다.
큰 슬롯 피치를 가진 모터들에 대해, 도 183의 200rpm에서 적층된 스테이터에 비교한 바와 같이, 고체 스테이터에서 더욱 많은 손실이 도시되고, 이들 손실은 슬롯 피치가 감소함에 따라 크게 증가하였다. 그러나, 소정 시점에서 얇은 단면적의 이점을 감소시키는 와류 전류는 전체 효과를 지배하게 되고, 손실을 증가시키는 추세가 역전된다. 이러한 추세의 역전은 예의 시리즈에서 청구된 범위의 고체 스테이터에서 전체 와류 전류 및 히스테리시스 손실이 어디서나 상당히 아래로 하락하는 것을 도시한다. 손실은 항상 적층 스테이터보다 더 높으나, 다른 인자들이 또한 이들 손실을 수용가능하도록 작용한다.
기본적인 비교로서, 시물레이션은 동일한 평균 에어갭 직경에 대해 24개의 슬롯들과 26개의 자극을 가지며 본 발명 장치의 예와 같은 지주 폭과 높이의 애스펙트 비를 가진 더 큰 폭의 지주들에 의해 본 발명 장치의 외측에서 예시적인 형상에 대해 시행되었다. 지주의 반경 방향 길이는 본 발명 장치의 예에 비교해서 일정하게 유지되므로 양측 모터들은 동일한 외측 및 내측 직경들을 표시한다. 6A/mm2의 통상의 인가된 전류 밀도에 대해 도 184 도시의 결과는 이들 비교적 낮은 속도에서조차 고체 스테이터에서의 토크가 31% 인자에 의하여 상당히 하락하며, 적층 스테이터의 토크는 단지 조금 하락한다. 유사하게, 청구된 범위 외측의 예시적인 형상의 와류 전류에 기인한 손실은 도 185 도시의 다른 시스템의 손실보다 더 크다.
고체 스테이터를 가진 본 발명 장치의 실제 사용을 보이기 위하여, 도 184와 도 185와 같으나 위에 설명된 바와 같은 청구된 범위의 형상을 가진 동일한 OD를 가진 모터를 시물레이션하기 위하여 도 186 및 도 187에서 분석이 시행되고 기록되었다. 인가된 전류 밀도는, 정지 토크 조건(0 rpm으로의 속도)에 대해 도 185 도시 장치와 유사한 전력 소비를 보이는 19.7A/mm2 이었다.
도 186에는 고체 M-19 스테이터에서 개별적인 총 스테이터 손실이 도시된다. 속도와 함께 와류 전류 손실이 크게 증가하지만, 컨덕터들의 저항 손실은 이 예에서 200rpm에 이르는 모든 경우에 손실의 대부분을 표시한다. 본 발명 장치의 형상에 의하여, 발명자에 의하여 로봇 용도의 액튜에이터에서, 특히 고체 스테이터를 사용하는 다른 가능한 많은 이점에 비추어 높은 속도로 생각되는 속도에 이르기까지 허용가능한 것으로 생각되는 수준 이하인 와류 전류 손실을 발생한다.
200rpm 이상의 속도에서 와류 전류 손실은 지수적으로 계속 증가하고 이익 범위 내의 형상에서도 많은 용도들에 대해 허용할 수 없을 정도로 커진다. 그러므로, 이 형상을 사용하는 고체 스테이터는 이러한 크기의 모터에 대해 200rpm보다 큰 작동 속도를 포함하는 많은 통상적인 직접-구동 모터 용도들에는 실제적이지 않다. 통상의 로봇 용도의 비교적 낮은 속도 범위(통상의 직접 구동 모터 용도들에 비교해서)와 고체 스테이터를 유용하게 허용하는 본 발명 장치의 형상을 결합함으로써 실제적으로 된다.
고체 스테이터의 이점들의 하나는 적층되거나 절연된 분말 재료에 비교한 고체 재료의 휠씬 더 높은 기계적 강도의 결과로서 본 발명 장치의 토크-대-중량을 증가시키는 성능이다. 청구된 범위 외측에서, 도 185의 예시적인 형상에서와 같이, 최적으ㅢ 자기 특성에 필요한 스테이터 조임쇠의 두께는 또한 충분한 강성을 제공하므로 적층 및 고체 스테이터는 동일한 용적을 가진다. 그러나, 청구된 범위에서, 최소 조임쇠 두께는 로터 자석의 견인력이 스테이터를 변형시키고 작은 에어갭 및/또는 강한 로터 자석들이 사용된 경우 소정 케이스에서 에어갭을 폐쇄하는 것을 방지하기 위하여 적층되거나 또는 분말 소결 스테이터의 경우 증가되는 것이 필요하였다. 도 188의 비교에서, 매우 강력한 NdFeB와 N52영구 자석들이 로터에 사용되었으므로, 본 장치 범위의 적층된 스테이터는 평가의 고체 스테이터의 두께의 두 배두께가 제공되고, 그러나, 적층을 결합하는 방식에 따라, 이 두께는 보다 더 증가되는 것이 필요할 수 있다. 그러므로, 고체 스테이터는 통상적으로 본 발명 장치 범위에서 예컨대 200rpm에 이르는 속도에 대해, 동일한 조임쇠 두께에 대해 더 강한 로터 자석들을 사용하여, 토크를 증가시키거나, 또는 같은 로터 자석들에 대해 더 얇은 조임쇠들을 사용하여 중량을 감소시킴으로써 최고의 토크-대-중량을 달성할 것이다. 토크-대-중량을 증가시키는 것은 많은 로봇 용도들에 대해 합리적으로 높은 속도에 이르는 추가적인 와류 전류 손실을 부분적으로 또는 완전히 상쇄할 수 있는 본 발명에서 모두 설명되고 있는 전력 소비의 이점을 가진다. 고체 스테이터는 처리 시간을 감소시키고 일부 경우들에서 주조 강 부품들과 같이 더 작은 비용의 재료 및 공정들을 사용함으로써 비용을 절감할 수 있다.
구조적이고 제조상의 비용 이득에 부가해서, 고체 스테이터는 또한 같은 재료의 적층 스테이터보다 더 큰 정적 토크를 제공할 수 있다. 도 187 도시와 같이, 고체 M-19 스테이터는 적층된 스테이터의 용적의 대략 5%를 포함하는 적층들 사이에 절연이 없는 것에 기인해서 적층된 M-19 스테이터보다 더 높은 정적 토크를 제공할 수 있다. 초기의 더 높은 정적 토크의 결과, 본 장치의 작은 단면적과 결합하여, 고체 M-19 스테이터는 가능하면 50rpm 이상인 적층된 균등물보다 더 큰 토크를 제공할 수 있고, 50rpm은 통상의 전기 모터의 경우 낮은 속도이나, 많은 로봇 용도들에서 충분히 높은 속도로 생각된다. 로봇의 사용 속도가 평균 50rpm이고 최대 속도가 100rpm이면, 예컨대, 고체 M-19 스테이터의 토크와 평균 효율은 이 예의 적층된 M-19 스테이터와 유사할 수 있다. 많은 로봇 용도들에서 매우 높은 속도로 ㅅ새생각되는, 200 rpm에서, 고체 스테이터를 가진 예시적인 실시예의 토크는 대략 9% 정도 적층 스테이터를 사용하는 경우보다 더 작다. 이는, 단지 도 184의 예시적인 실시예에서 발견된 이러한 속도에서의 토크 손실의 단지 1/3이며, 이러한 예시적인 실시예에서는 고체 대 적층 스테이터의 같은 비교를 사용하고 더 작은 중량을 허용하는 더 적은 비용과 증가된 구조적인 일체성과 같은 고체 스테이터의 다른 이점들을 고려하면 허용가능한 손실로 생각된다. 두 실시예들의 토크의 직접 비교는 도 190에 도시된다. M-19 전기 강은 고체 형태로 통상 사용할 수 없으나, 여기서는 예시적인 목적으로 직접 비교로서 사용되었음이 이해되어야 한다. 많은 다른 합금들이 구성되고 본 장치와 같은 고체 재료로서 사용되었다. 예컨대, 증가된 양의 규소의 첨가는 고체 스테이터 재료의 와류 전류를 더욱 감소시키기 위하여 첨가될 수 있다. 과잉의 규소의 첨가는 정적 토크를 감소시킬 수 있으나 허용가능한 대안으로서 더 높은 속도에서의 손실을 감소시킬 수 있다. 고체 스테이터 재료의 성능 이상적인 특성은 특정 용도에 의존하나 여기 개시된 원리를 적용함으로써 이 기술 분야의 통상의 기술자에 의하여 결정될 수 있다.
증가된 토크-대-중량
도 183의 이러한 분석에 도시된 손실이, 개시된 범위의 모터에서, 항상 적층 스테이터에 비교해서 고체 스테이터가 높지만, 이러한 추세의 역전은 도 188 도시의 적층 스테이터에서 보다 고체 스테이터에 의한 대략 200rpm 에 이르기까지 향상된 토크-대-중량 성능의 향상을 발생한다. 개시된 범위에서의 모터들의 이러한 매우 높은 토크-대-중량 성능은 충분히 높은 것으로 도시되므로 토크-증가 기어박스를 필요로 하지 않고 로봇 관절에 직접-구동 액튜에이터로서 사용돨 수 있다. 이로써 본 발명 장치의 매우 높은 토크-대-중량 성능에 의해, 동시에 고체 스테이터의 사용으로부터 이득이 발생할 수 있다. 로봇 관절에 대한 직접 구동 액튜에이터로서 그리고 직접 구동 액튜에이터에게는 높은 속도로 생각되지만 본 발명 장치의 손실 저감 형상을 이용하기에 충분히 낮은 작동 속도에서 작동시킬 수 있으므로 고체 스테이터로서 사용할 수 있다. 동시에 청구된 범위에서 모터들은 동일 재료의 적층 스테이터로서 가능하였던 것을 초과하여 토크-대-중량 성능을 증가시킴으로써 고체 스테이터의 사용으로부터 이득을 얻는다.
토크-대-중량 분석 구성
와류 전류 손실에 기인한 토크-대-중량 성능의 감소는 200rpm에 이르는 속도에서 시물레이션을 통해 산출되었다. 6A/mm2의 전류 밀도를 인가하면서 청구된 범위 외측의 대략 24개의 슬롯의 토크-대-중량 분석은 매우 낮은 속도에서의 적층 스테이터 아래로 도시되고 200rpm에 이르는 적층 스테이터 아래로 더욱 계속 저하하였다.
본 발명 장치의 대략 108개의 슬롯에 대한 토크-대-중량 분석은 적층된 케이스에서 에어갭을 유지하기 위하여 더 두꺼운 조임쇠를 요구하는 강성 요건들에 기인하여 적층 스테이터보다 상당히 높은 속도에서 기동하는 것으로 도시되었다. 그러나 고체 스테이터는 최소 조임쇠 두께에서 충분한 강성을 가지며 추가 재료의 부가를 필요로 하지않았다. 추가적으로, 고체 스테이터의 정지 토크는 자석 플럭스 경로의 같은 단면적에서의 증가된 자석 재료에 기인하여 약간 더 높다.
19.7A/mm2 의 인가된 전류 밀도는 본 발명 장치의 108개의 슬롯 모터에 대해 선택되었는 데, 이는 정지 토크 조건에서 6A/mm2 에서 24개의 슬롯 모터에 유사한 전력 소비를 발생하기 때문이다.
토크대 중량이 낮은 슬롯 밀도를 가진 예시적인 모터에 대한 제로 속도의 토크-대-중량 아래로 즉시 하락하는 것은 놀랍지 않다. 개시된 범위 내의 예시적인 모터에서, 그러나, 비자석 절연층과 접착제에 의하여 점유된 플럭스 경로의 비율을 가지는 적층들에 비해 100% 자석 재료 밀도로부터 발생하는 높은 재료 밀도와 결합하여, 최소 조임쇠 두께의 강성을 유지하기 위한 성능에 기인해서 제로 속도에서 토크-대-중량은 상당히 더 높다. 속도가 증가함에 따라, 토크-대-중량은 낮은 슬롯 밀도의 모터에서와 같이 본 발명 장치에서 하락하며, 그러나, 200rpm까지 계속 적층된 모터의 토크-대-중량 위로 유지된다. 200rpm은 로봇 용도들에서 매우 높은 속도인 것을 고려하면, 그리고 감소된 비용과 증가된 스테이터 강도 및 강성의 면에서의 고체 스테이터의 다른 가능한 이득을 고려하면, 본 발명 장치는 유사한 속도와 토크-대-중량 요건을 가진 로봇 및 다른 용도들에 사용된 때 토크-대-중량 감소 없이 고체 스테이터의 공지 이득을 제공할 수 있다.
깊이 설명에서
깊이 설명에서 위의 분석이 이루어진 과정을 설명하면 이하와 같다. 3-D 시물레이션이 InfolyticaTM에서 판매하는 소프트웨어인 MagNetTM를 사용하여 실행되었다. 108개의 슬롯들과 100개의 자극을 가진 청구된 범위 내의 형상을 가지는 축방향 플럭스 기계의 선형 근사는 고체 및 적층 스테이터에서 손실을 예측하기 위하여 Transient with MotionTM 해석자를 사용하여 구성되고 시물레이션 시험되었다. 유사한 시험이 동일한 직경으로 24개의 슬로소들과 26개의 자극을 가진 균등물에 의하여 청구된 범위 외측의 형상을 사용하여 시행되었다. 시물레이션에 의하여 슈타인메츠(Steinmetz) 식의 해석 적용을 사용하여 적층 구조에서의 와류 전류 및 히스테리시스 손실을 에측하였다. 고체 구조에서, 와류 전류 손실은 재료의 저항성에 기초하여 구조물의 평균 옴 손실을 사용하여 시물레이션에 의하여 예측되었다. 일련의 시리즈, 예컨대, Durabar65-45-12가와류 전류 크기를 생성하기 위하여 사용되d었고, 다른 고체 와류 전류 크기는 그의 각각의 저항성의 비율에 의하여 곱함으로써 평가되었다. 24 게이지의 M-19 전기강에 대해, 고체의 히스테리시스 손실은 적층의 경우와 같은 것으로 상정되었다. 그러나, 발명자 인식하기에 실제로 고체 재료 블록의 히스테리시스 손실은 적층 스택에 비해 더 클 것이다. 여전히, 속도에서의 대부분의 손실은 이 연구의 초점인 와류 전류에 기인하며 따라서 이러한 가정은 이 연구의 목적에 충분할 것으로 믿어진다. 고체 Durabar65-45-12의경우, 히스테리시스 손실은 실험 측정에 기초하는 평가를 사용하여 분석적으로 산출되었고 실험 측정은 손실이 대략 5062J/m2이고 빈도 지수는 1.1로 가정되었다. 스테이터에서 자기적으로 활성인 용적은 지주의 용적에 시물레이션 결과를 기초로 개별 지주의 깊이에서 폭에 대응하는 조임쇠 부분을 더하여 평가되었다. 그러므로 듀라바의 경우 히스테리시스 손실은 이하와 같이 산출되었다:
Physt -Dura = 5062 Vactive· f 1.1
여기서 Physt - Dura는 Durabar65-45-12에서의 히스테리시스에 기인하는 전력 손실이고, Vactive은 스테이터의 자기적으로 활성인 용적이고, f는 기본적인 자석의 전환 빈도이다. 소정의 장치의 경우, 기본적인 자석의 전환 빈도는 이하의 식에 따른 출력 속도와 자극 수에 관련된다:
f = RPM/60 · Np/2
여기서 RPM은 분당 회전수로 표시되는 장치의 출력 속도이고, Np는 자극의 수이다.
히스테리시스 손실에 기인하는 토크 감소는 시물레이션에 의하여 산출된 바와 같은 와루 전류 손실에 기인하는 토크의 감소를 기초로 산출되었다. 19.7A/mm2와 6A/mm2의 인가된 전류 밀도에서 본 발명 장치의 대략 108개의 슬롯 및 청구된 범위 외측의 대략 24개의 슬롯을 가진 장치의 발생되는 토크는 도 187 및 도 184에 각각 도시되었다.
도 183은 지주 높이와 슬롯 피치의 동일한 애스펙트 비, 및 같은 반경방향 지주 길이를 가지는 일련의 예시적인 모터들에 대해, 적층된 스테이터의 와류 전류 및 히스테리시스 손실에 비교한 두 개의 고체 스테이터 재료의 와류 전류 및 히스테리시스 손실을 도시한다. 손실은 위에 설명된 바와 같이 전류가 인가되지 않은 200rpm 속도의 로터에서 시물레이션되거나 산출되었다. 적층된 스테이터의 손실이 청구된 범위를 향하여 그리고 내측으로 지수적으로 증가하지만, 고체 스테이터들을 가진 모터들이 처음에는 큰 슬롯 피치로부터 더 작은 슬롯 피치로 좌측으로 이동할 때 구동 빈도가 증가함에 따라 증가된 손실을 보여주는 것을 알 수 있다. 그러나, 더 좁은 지주에서 와류 전류를 제한하고 지주 용적을 감소시키는 것의 결합된 효과는 증가된 빈도의 효과를 상쇄시키고 슬롯 피치가 계속 감소함에 따라 전체 손실을 감소시키기 시작한다. 이러한 역전 추세는 속도가 항상 비교적 낮은 로봇 용도들의 허용가능한 손실에 대해 청구된 형상 범위를 가진 고체 스테이터를 결합한 자명하지 않은 이득을 도시한다.
시물레이션에 의하면 본 발명 장치의 로터 실시예를 가진 예시적인 모터 시리즈의 경우, 19.7A/mm2에 이르는 전류 밀도에서 로터로부터의 PM 플럭스가 스테이터에서의 총 와류 전류 및 히스테리시스 손실의 대략 80%를 발생한다. 200rpm에서 로터가 회전하는 비구동 와류 전류 손실은 따라서 적용된 전류 밀도의 합리적인 범위에 걸쳐 전체 손실의 충분한 표시기로서 사용될 수 있다. 도 183의 데이터는 전류가 인가되지 않은 200rpm의 로터 속도에서 슬롯 피치 범위에 걸쳐 3개의 모터 시리즈에 대해 와류 전류와 히스테리시스 손실의 합을 도시한다.
큰 슬롯 피치를 가진 모터들에 대해, 도 183의 200rpm에서 적층된 스테이터에 비교한 바와 같이, 고체 스테이터에서 더욱 많은 손실이 도시되고, 이들 손실은 슬롯 피치가 감소함에 따라 크게 증가하였다. 그러나, 소정 시점에서 얇은 단면적의 이점을 감소시키는 와류 전류는 전체 효과를 지배하게 되고, 손실을 증가시키는 추세가 역전된다. 이러한 추세의 역전은 예의 시리즈에서 청구된 범위의 고체 스테이터에서 전체 와류 전류 및 히스테리시스 손실이 어디서나 상당히 아래로 하락하는 것을 도시한다. 손실은 항상 적층 스테이터보다 더 높으나, 다른 인자들이 또한 이들 손실을 수용가능하도록 작용한다.
기본적인 비교로서, 시물레이션은 동일한 평균 에어갭 직경에 대해 24개의 슬롯들과 26개의 자극을 가지며 본 발명 장치의 예와 같은 지주 폭과 높이의 애스펙트 비를 가진 더 큰 폭의 지주들에 의해 본 발명 장치의 외측에서 예시적인 형상에 대해 시행되었다. 지주의 반경 방향 길이는 본 발명 장치의 예에 비교해서 일정하게 유지되므로 양측 모터들은 동일한 외측 및 내측 직경들을 표시한다. 6A/mm2의 통상의 인가된 전류 밀도에 대해 도 184 도시의 결과는 이들 비교적 낮은 속도에서조차 고체 스테이터에서의 토크가 31% 인자에 의하여 상당히 하락하며, 적층 스테이터의 토크는 단지 조금 하락한다. 유사하게, 청구된 범위 외측의 예시적인 형상의 와류 전류에 기인한 손실은 도 185 도시의 다른 시스템의 손실보다 더 크다.
고체 스테이터를 가진 본 발명 장치의 실제 사용을 보이기 위하여, 도 184와 도 185와 같으나 위에 설명된 바와 같은 청구된 범위의 형상을 가진 동일한 OD를 가진 모터를 시물레이션하기 위하여 도 186 및 도 187에서 분석이 시행되고 기록되었다. 인가된 전류 밀도는, 정지 토크 조건(0 rpm으로의 속도)에 대해 도 185 도시 장치와 유사한 전력 소비를 보이는 19.7A/mm2 이었다.
도 186에는 고체 M-19 스테이터에서 개별적인 총 스테이터 손실이 도시된다. 속도와 함께 와류 전류 손실이 크게 증가하지만, 컨덕터들의 저항 손실은 이 예에서 200rpm에 이르는 모든 경우에 손실의 대부분을 표시한다. 본 발명 장치의 형상에 의하여, 발명자에 의하여 로봇 용도의 액튜에이터에서, 특히 고체 스테이터를 사용하는 다른 가능한 많은 이점에 비추어 높은 속도로 생각되는 속도에 이르기까지 허용가능한 것으로 생각되는 수준 이하인 와류 전류 손실을 발생한다.
200rpm 이상의 속도에서 와류 전류 손실은 지수적으로 계속 증가하고 이익 범위 내의 형상에서도 많은 용도들에 대해 허용할 수 없을 정도로 커진다. 그러므로, 이 형상을 사용하는 고체 스테이터는 이러한 크기의 모터에 대해 200rpm보다 큰 작동 속도를 포함하는 많은 통상적인 직접-구동 모터 용도들에는 실제적이지 않다. 통상의 로봇 용도의 비교적 낮은 속도 범위(통상의 직접 구동 모터 용도들에 비교해서)와 고체 스테이터를 유용하게 허용하는 본 발명 장치의 형상을 결합함으로써 실제적으로 된다.
고체 스테이터의 이점들의 하나는 적층되거나 절연된 분말 재료에 비교한 고체 재료의 휠씬 더 높은 기계적 강도의 결과로서 본 발명 장치의 토크-대-중량을 증가시키는 성능이다. 청구된 범위 외측에서, 도 185의 예시적인 형상에서와 같이, 최적으ㅢ 자기 특성에 필요한 스테이터 조임쇠의 두께는 또한 충분한 강성을 제공하므로 적층 및 고체 스테이터는 동일한 용적을 가진다. 그러나, 청구된 범위에서, 최소 조임쇠 두께는 로터 자석의 견인력이 스테이터를 변형시키고 작은 에어갭 및/또는 강한 로터 자석들이 사용된 경우 소정 케이스에서 에어갭을 폐쇄하는 것을 방지하기 위하여 적층되거나 또는 분말 소결 스테이터의 경우 증가되는 것이 필요하였다. 도 188의 비교에서, 매우 강력한 NdFeB와 N52영구 자석들이 로터에 사용되었으므로, 본 장치 범위의 적층된 스테이터는 평가의 고체 스테이터의 두께의 두 배두께가 제공되고, 그러나, 적층을 결합하는 방식에 따라, 이 두께는 보다 더 증가되는 것이 필요할 수 있다. 그러므로, 고체 스테이터는 통상적으로 본 발명 장치 범위에서 예컨대 200rpm에 이르는 속도에 대해, 동일한 조임쇠 두께에 대해 더 강한 로터 자석들을 사용하여, 토크를 증가시키거나, 또는 같은 로터 자석들에 대해 더 얇은 조임쇠들을 사용하여 중량을 감소시킴으로써 최고의 토크-대-중량을 달성할 것이다. 토크-대-중량을 증가시키는 것은 많은 로봇 용도들에 대해 합리적으로 높은 속도에 이르는 추가적인 와류 전류 손실을 부분적으로 또는 완전히 상쇄할 수 있는 본 발명에서 모두 설명되고 있는 전력 소비의 이점을 가진다. 고체 스테이터는 처리 시간을 감소시키고 일부 경우들에서 주조 강 부품들과 같이 더 작은 비용의 재료 및 공정들을 사용함으로써 비용을 절감할 수 있다.
구조적이고 제조상의 비용 이득에 부가해서, 고체 스테이터는 또한 같은 재료의 적층 스테이터보다 더 큰 정적 토크를 제공할 수 있다. 도 187 도시와 같이, 고체 M-19 스테이터는 적층된 스테이터의 용적의 대략 5%를 포함하는 적층들 사이에 절연이 없는 것에 기인해서 적층된 M-19 스테이터보다 더 높은 정적 토크를 제공할 수 있다. 초기의 더 높은 정적 토크의 결과, 본 장치의 작은 단면적과 결합하여, 고체 M-19 스테이터는 가능하면 50rpm 이상인 적층된 균등물보다 더 큰 토크를 제공할 수 있고, 50rpm은 통상의 전기 모터의 경우 낮은 속도이나, 많은 로봇 용도들에서 충분히 높은 속도로 생각된다. 로봇의 사용 속도가 평균 50rpm이고 최대 속도가 100rpm이면, 예컨대, 고체 M-19 스테이터의 토크와 평균 효율은 이 예의 적층된 M-19 스테이터와 유사할 수 있다. 많은 로봇 용도들에서 매우 높은 속도로 ㅅ새생각되는, 200 rpm에서, 고체 스테이터를 가진 예시적인 실시예의 토크는 대략 9% 정도 적층 스테이터를 사용하는 경우보다 더 작다. 이는, 단지 도 184의 예시적인 실시예에서 발견된 이러한 속도에서의 토크 손실의 단지 1/3이며, 이러한 예시적인 실시예에서는 고체 대 적층 스테이터의 같은 비교를 사용하고 더 작은 중량을 허용하는 더 적은 비용과 증가된 구조적인 일체성과 같은 고체 스테이터의 다른 이점들을 고려하면 허용가능한 손실로 생각된다. 두 실시예들의 토크의 직접 비교는 도 190에 도시된다. M-19 전기 강은 고체 형태로 통상 사용할 수 없으나, 여기서는 예시적인 목적으로 직접 비교로서 사용되었음이 이해되어야 한다. 많은 다른 합금들이 구성되고 본 장치와 같은 고체 재료로서 사용되었다. 예컨대, 증가된 양의 규소의 첨가는 고체 스테이터 재료의 와류 전류를 더욱 감소시키기 위하여 첨가될 수 있다. 과잉의 규소의 첨가는 정적 토크를 감소시킬 수 있으나 허용가능한 대안으로서 더 높은 속도에서의 손실을 감소시킬 수 있다. 고체 스테이터 재료의 성능 이상적인 특성은 특정 용도에 의존하나 여기 개시된 원리를 적용함으로써 이 기술 분야의 통상의 기술자에 의하여 결정될 수 있다.
Durabar65-45-18 연성 철은 스테이터에 사용될 수 있는 고체 재료의 또 다른 비제한적인 예로서 도시된다. 이 재료는 매우 가공성 있으며 여러 시제품들에 사용되었다. M-19로 제조된 동일한 스테이터보다 작은 정적 토크를 가지나 속도가 증가함에 따라 유사한 손실을 가진다. 200rpm에서 토크와 효율은 매우 높은 토크-w대-중량 및 허용가능한 전력 소비를 여전히 제공하는 것으로 생각된다.
고체 스테이터는 에어갭을 가로지르는 자력과 사용된 재료의 강도에 따라, 0.005" 내지 0.010" 범위의 두께를 예컨대 가지는 바와 같은 실제적인 제한 내의 다른 크기의 에어갭을 가지며, 이득 공간 내의 크기를 가지는 기계과 같이 사용될 수 있다. 0.010" 갭에서의 시물레이션에 의하면, 대부분의 개시된 범위에 대해, 해당 범위 면적의 % 이상에서 0.01"에서 KR 이득을 보인다. 더 작은 이득을 보이는 단지 하나는 최고 KR과 같이 작은 크기를 가지는 것으로 즉, 불균등성(A2 및 A3)의 세트들에 또는 그 사이에 있다. 그러므로 모든 모터들에 대해, 이득은 갭에 대해 0.001"에서 0.01"까지 발견된다. 조임쇠 두께는 축방향 플럭스 기계에 대해, 지주들의 둘레 두께의 축방향 두께의 50% 이하일 수 있으나 이 값은 가변적이다. 더 두꺼운 조임쇠는 KR의 손실을 초래하며, 더 얇은 조임쇠는 강도의 손실을 초래한다.
스테이터는 열 성형되고 30000 또는 40000 psi 이상의 산출 강도를 가지는 금속 또는 금속 합금, 예컨대, 규소 강, 코발트 합금, 연성 철 또는 다른 연성 자석 합금으로 제조될 수 있으며, 20,000psi 이하의 크리프 응력을 가지는 측정가능한 재료는 없다. 200mm 평균 에어갭에 대해, 장치의 회전 속도는 대부분의 시간에 대해 100rpm을 초과하지 않으며 시간의 25% 이상에서 200rpm을 초과하지 않으며 고체 스테이터를 사용하는 최선의 결과에서 50rpm 이상의 평균 속도일 수 있다.
이득 공간 내의 전기 기계는 또한 매우 높은 절정 토크 및 매우 높은 안전 정지 성능을 제공한다. 그러한 전기 기계는 일정한 전기 인가 전력에 대해 플럭스 밀도의 감소를 보인다. 이는 부분적으로 더 짧은 지주의 감소된 플럭스 경로 길이 및 조임쇠를 관통하는 지주에서 지주로의 감소된 거리, 및 지주들 사이의 감소된 플럭스 누설에 기인한다. 결과는 포화에 이르지 않고 개시된 범위에서 모터의 더 높은 전류 밀도를 인가하는 성능이다. 개시된 범위 외측의 모터들에 비교해서 증가된 냉각 성능과 낮은 플럭스 밀도의 결합이 더 높은 연속 토크가 일정한 냉각 속도에서 일정한 온도에 대해 달성될 수 있는 조건들, 및 개시된 범위의 모터들의 최고 순간의 토크-대-중량이 이득 공간에서의 일정한 토크-대-중량에 대해 더 낮은 플럭스 밀도에서의 작동에 상당히 기인할 수 있는 조건들의 결합을 생성한다.
이득 공간의 전기 기계는 재료 용적을 감소시켜 제조 비용을 감소시키고 제조 충격을 감소시켰다. 자석들은 이하의 여분의 깊은 자석들에 의하여 자기적으로 유지되고(자석들의 자연 상태가 완전히 또는 부분적으로 척력에 의하여 슬롯으로부터 밀어지더라도), 대부분의 플럭스가 에어갭을 통해 연결하는 것에도 불구하고 지주들의 반대 단부들의 절개부들이 내측으로의 바이어스를 생성한다.
횡방향 플럭스 모터와 같은 모터 유형들에 개시된 형상을 적용하기 위하여, 개시된 범위의 열 방출과 다른 이점들이 구현되는 정도에 영향을 미치는 다른 디자인 고려가 있을 수 있다. 횡방향 플럭스 모터에 대해, 예컨대, 지주들의 폭(코일 축에 평행인 방향으로)은 지주 피치와 별개이다. 그러나, 이 폭은 시스템의 중량을 결정하기 위하여 매우 중요하고, 이는 스테이터 조임쇠의 필요 두께에 직접 관련되기 때문이다. 또한 코일의 축방향 폭에 대해 지주의 축방향 폭의 비율을 고려하여야 한다. 이들 양들이 감소되면, 전체 에어갭 표면적과 컨덕터 표면적은 전체 조립체를 축망향으로 배열함으로써 유지될 수 있다. 그러므로, 최적의 토크-대-중량 및 열 방출이 또한 어레이 피치와 지주 축방향 폭에 의존할 것이다.
전원과 냉각 도면(FIGURE)
도 191 도시와 같이, 액튜에이터(3400)는 냉각 공급원(3402)을 이용하여 냉각될 수 있다. 냉각 공급원(3402)은 흐름 채널(3404)을 통해 냉각 액튜에이터(3400)용 유체 흐름을 제공할 수 있다. 냉각 공급원은, 하우징 또는 구멍의 내부, 또는 스테이터나 로터 또는 개시된 캐리어 위를 포함하는, 개시된 흐름 채널의 어느 것에 연결될 수 있다. 액튜에이터(3400)는 또한 전원 공급부(3406)에 의한 전원(전기 여자)으로 공급될 수 있다. 전원 공급부(3406)는 전원 커넥터(3408)를 이용하여 액튜에이터(3400)에 전원을 공급할 수 있다.
초경량 실시예
도 182 내지 도 199B 도시의 도면은 개시된 원리에 따른 자체-수용 액튜에이터 조립체의 단순화된 도면이다. 이들 도면은 베어링 대신 부싱을 사용하고, 이는 비용과 중량의 이득을 가지며 낮은 속도와 짧은 수명이 통상적인 많은 용도들에 적합하다. 컨덕터들이 어느 이미지들에도 도시되지 않으며 다른 실시예들에 대해 여기 개시된 어느 유형의 컨덕터들을 포함할 수 있다.
도 192를 참조하면, 여기 도시된 액튜에이터(3500)의 실시예는 내부 로터(3504)의 어느 일 측면에 외부 스테이터(3502)를 가진다. 또 다른 실시예에서, 어느 측면에 외부 로터들을 가진 내부 스테이터가 있을 수 있으나, 이는 냉각을 위하여 소망스럽지 않은 것으로 생각된다. 도시된 액튜에이터는 고정 링(3508)에 대해 출력 링(3506)을 이동시킨다. 도시된 실시예에서, 출력 링(3506)은 액튜에이터의 내경(id) 위에 있고 고정 링(3508)은 외경 링(OD)에 있으나, 또 다른 실시예에서 출력 링은 외경에 있고 고정 링이 내경에 있을 수 있다.
부싱 또는 저 마찰 코팅이 도 193a 도시와 같이 로터(3504)와 스테이터(3502) 사이의 마찰을 최소화하기 위하여 사용될 수 있다. 도 193B의 근접 도면에보다 명확한 바와 같이, 도시된 실시예는 각각의 스테이터(3502)와 로터(3504) 사이의 에어갭에 축방향 위치의 부싱 또는 저마찰 코팅을 가지며 로터(3504)와 고정 링(3508) 사이에 반경방향 위치의 부싱 또는 저마찰 코팅을 가진다.
도 194 도시와 같이, 스테이터(3502)들은 지주(3514)들을 가진다. 지주(3514)들은 반경방향으로 향할 수 있고 지주들의 외경 단부들에서 축방향 연장부/스페이서(3516)를 가질 수 있다. 이들 연장부(3516)들은 바람직하게 스테이터 지주(3514)들 및 조임쇠(3518)들과 일체로 제조된다. 이는 축방향으로 매우 큰 강성을 을 제공하고 고정 링(3508)으로 토크를 전달한다.지주 팁을 축방향 스페이서로서 사용함으로써 컨덕터 코일을 간섭받지 않고 지주들 내로 삽입할 수 있다. 부호(3520)로 표시된 화살표로 표시된 바와 같이, 스테이터들은 스테이터들과 로터 사이의 자력에 의하여 내측으로, 특히 도시된 실시예에서 스테이터의 내경을 향하여 수축한다. 스테이터 및/또는 로터의 형상은 자력을 고려할 때 스테이터와 로터 사이의 에어갭 공간의 ID로부터 OD까지의 합리적으로 고정된 에어갭과 같은 소정의 에어갭을 달성하기 위하여 형성될 수 있다. 도 195는 수축 방향을 도시하는 더많은 화살표(3520)를 가진 스테이터 지주(3514)의 근접 도면을 도시한다.
도 196 도시와 같이, 도시된 실시예의 로터(3504)는 영구자석(PMs)(3524)들의 어레이를 유지하는 영구자석(PM) 캐리어(3522)를 포함한다. 도시된 실시예에서, PM 캐리어는 로터 조임쇠(3526)를 가진 집중된 플럭스의 PM 로터 캐리어이다. 로터 출력링(3506)은 예컨대 압입 고정, 접착제, 또는 패스너 등에 의하여 PM 캐리어(3522)의 ID(또는 OD 출력 구조에서 OD)에 고정된다. 이 도면에서 알 수 있는 바와 같이, 이 실시예의 고정 링(3508)은 스테이터 지주들의 축방향 연장부(3516)를 수용하기 위한 슬롯(3532)을 가진다.
도 197은 PM 자석들이 없는 이 실시예의 PM 자석 캐리어(3522)를 도시한다. PM 캐리어는 지주(3528)들과 조임쇠(3526)를 가지며, 모두 바람직하게 강 합금 또는 철 합금과 같은 일체의 등방성 재료로 제조된다. 수축 제한 보어(3530)들이 지주들 사이의 조임쇠에 설치된다.
도 198은 연장부(3516)를 포함하여 스테이터 지주(3514)들의 OD 단부의 형상을 보다 명확하게 도시한다. 대체적인 OD 출력 실시예에서(도시되지 않음), 연장부들은 지주들의 ID 단부들에 있다.
도 199A 및 도 199B는 로터 지주(3528)들과 스테이터 지주(3514)들의 중첩 패턴을 예시하는 목적으로 도시한다. 로터 지주-대-스테이터 지주의 차이를 4개, 또는 그 이상으로 형성함으로써, 그리고 스테이터 또는 로터의 지주들의 둘레 폭의 적어도 일부가 다른 부재의 갭보다 더 넓은 것을 보장함으로써 지주들의 연속 또는 거의 연속 중첩이 달성될 수 있다. 4개의 지주 차이는 여기 도시되지만, 2 또는 6 또는 그 이상과 같은 다소간의 차이가 여러 효과들과 같이 사용될 수 있다.
개시된 범위의 전기 기계의 활성 자기 부품이 프레임 없는 모터로서 시스템에 삽입되거나 프레임을 가진 모터 또는 액튜에이터에서 다른 구조 및 베어링에 의하여 지지될 수 있다. 지주에서 지주로의 비정상적인 얇은 플럭스 경로의 단면이 개시된 범위의 형상에 일반적이다. 이러한 얇은 부분의 형상은 철 합금 또는 강 합금과 같은 등망성 연성 자석 재료에서 스테이터를 구성하기 위하여 가능성을 제공하며 놀라운 결과로서 성능을 향상시키고 및/또는 많은 로봇 용도에서 적합한 속도에서 효울상을 제공한다. 등방성 연성 자석 재료가 또한 높은 비율의 잠재적인 토크를 달성하기 위하여 필요한 비정상적으로 작은 에어갭을 달성하여 유지하기 위하여 구조적 강도, 강성, 및 크리프 저항을 제공한다.
여기 개시된 전기 기계의 실시예들의 로터와 스테이터 사이에 베어링 및 지지 구조물을 구성하기 위한 많은 방안들이 있다. 이들의 일부는 이 기술 분야의 통상의 기술자에게 공지되어 있다. 스페이서 연장부들은 바람직하게 스페이서 링에 압입 고정에 의해 또는 결합 특성(도면에 도시되지 않은)에 의하여 고정되므로 스테이터들에 강성을 추가할 수 있다. 등방성 로터 및 스테이터 조립체에 의하여 제공된 비정상적으로 강성인 구조를 이용하는 다른 방안들이 여기 도시된다. 여기 도시된 실시예는 최소 중량 비용 및 복잡성을 가진 자체-수용 액튜에이터 하우징 및 베어링 구조물을 제공한다.
등방성 스테이터들의 고유의 강성을 이용함으로써 축방향 스페이서들에 의하여 스테이터들을 지지할 수 있으므로 그들은 스테이터들의 ID 또는 OD 위에서 같이 당겨지는 것이 방지된다. 일 실시예에서 스페이서는 스테이터 지주들의 OD 또는 ID 위의 연장 부분들의 형태로서 스테이터와 일체로 형성되거나 가공된다. 이들 스페이서 연장부들은 서로 접촉할 수 있거나 여기 도시된 바와 같은 중간 스페이서로서 작용할 수 있다. 일정 용도들에서 스테이터들과 로터 사이의 자기적인 인력이 추가적인 패스너 또는 접착제의 필요 없이 같이 조립체를 유지하기에 충분하다. 200mm 외경을 갖는 예시적인 실시예에서, 스테이터와 로터 사이의 자기적인 인력은 스테이터/로터 에어갭 마다 400Kg보다 더 클 수 있다. 여기 도시된 구성은 0.001" 내지 0.003"의 로터를 향하는 평균 스테이터 ID 변위를 발생하기에 충분한 강성을 제공한다. 스테이터들과 로터는 이러한 변위가 도시된 부싱이나 비슬립 코팅에 압력을 유발하지 않도록 예비 성형될 수 있다. 스테이터와 로터 사이에 4개 지주 차이를 가지면, 4개의 균등하게 이격된 자기 인력 구역이 스테이터에 합리적으로 일정한 힘을 미치도록 형성될 수 있다. 저가와 경량 베어링 구조가 여기 도시되고 스테이터와 로터 사이의 에어갭에, 그리고 로터의 OD 둘레에 Teflon과 같은 저 마찰 부싱 재료를 가진 구조가 도시된다. 스테이터 위 또는 로터 위의 저 마찰 코팅이 또한 사용될 수 있다. 도 199A와 도 199B는 스테이터와 로터의 지주 형상의 비제한적인 예를 도시하며 이는 바람직하게 모두 또는 스테이터 지주의 높은 비율(비록 낮은 비율이 충분한 중첩을 제공할 수 있지만 50% 또는 그보다 높은)이 항상 로터 지주와 중첩한다. 이러한 높은 비율의 중첩하는 지주들은 스테이터와 로터 사이에 고정된 지지를 제공하여 저마찰 코팅 또는 중간의 부싱 재료가 로터를 스테이터들 사이에 집중되도록 유지할 수 있다.
스테이터에서의 작은 양의 신축성이 스테이터와 로터 사이의 유격을 최소화하거나 제거하기에 유용할 수 있으며 여전히 제조 공차의 변화 및 열 팽창을 발생할 수 있다.
다이아몬드 유사 코팅(DLC) 또는 다른 저 마찰, 낮은 마모 율의 코팅이 스테이터와 로터 지주 팁에 적용될 수 있다.
스테이터와 로터에 대해 사용될 수 있는 많은 재료들이 있다. 비용 및 성능의 면에서 예시적인 재료는 연성 주철이다. 자기 인력에 의하여 생성되는 스테이터에서의 신축성의 작은 양은 스테이터와 로터 지주 표면을 같이 예비압축하기 위하여 사용될 수 있다. 스테이터 및/또는 로터는 평행하거나 다른 에어갭 형상을 달성하기 위하여 다소 원추형 형상을 가지고 예비-성형될 수 있다.
경량 암(LIGHTWEIGHT ARM)
도 200 내지 도 207은 프레임이 없는 모터/액튜에이터로서 로봇 암(3800)에 삽입된 자극 밀도 및 지주 높이의 개시된 범위 내의 장치의 예시적인 스테이터(3802)와 로터(3804)의 개략적인 단순화된 부분 도면을 도시한다. 컨덕터들과 배선들이 이들 도면에 단순화를 위하여 도시되지 않음을 유의한다. 암의 피벗 지지체용으로 사용되는 베어링(3804)이 또한 에어갭(3809)을 규정하기 위하여 도시된다. 이로써 프레임없는 액튜에이터가 별개 액튜에이터 하우징의 질량과 복잡성 없이 시스템에 사용될 수 있다. 추가적인 베어링(3808)은 더 긴 반경방향 지주 길이를 가진 소정의 에어갭 치수를 유지하기 위하여 스페이서 링(3803)과 연관하여 프레임없는 액튜에이터 조립체의 ID 위에 사용될 수 있다. 상호 체결 특징(3812)에 의해, 하우징 탭(3816)들 사이에 스테이터 탭(3812)들을 슬라이드 이동시키고 상부 경로(3815)를 따라 그들을 같이 고정함으로써 하부 암 하우징(3806)에 스테이터 (3802)를 부착할 수 있다. 로터(3814) 위의 유사한 탭들이 상부 암 부재(3806)와 내부 베어링 스페이서 링(3803)에 로터(3802)를 고정한다. 스테이터와 로터의 질량이 단지 추가적인 고정 특징(3814, 3812) 및 베어링 스페이서 링(3803) 및 내부 베어링(3808)에 의하여 증가된다. 스페이서 요소(3803)는 알루미늄 또는 마그네슘과 같은 저밀도 재료로 제조될 수 있다. 이러한 예시적인 실시예는 175mm의 평균 에어갭 직경과 25mm의 반경방향 지주 길이를 가진다. 조임쇠를 가진 등방성 강 합금 또는 철 합금 스테이터(3802)와 등방성 강 합금 또는 철 합금 로터(3801)는 베어링에 의하여 ID 및 OD에서 지지될 때 0.005" 에어갭을 유지하기에 충분히 단단하다.
일 실시예에서, 로터(3801)와 스테이터(3802) 사이의 자력은 베어링(3804, 3808)에 예비 하중을 제공하기 위하여 사용될 수 있고 상부 및 하부 암 부재(3805, 3806)들에 베어링들을 안착 유지하기 위하여 패스너의 필요성을 감소시키거나 제거하도록 사용될 수 있다. 이러한 구조는 개시된 범위 외측에서 모터를 사용한 것보다 전체 암 조립체를 더욱 경량으로 하므로 단순성과 경량의 면에서 유익한 것으로 생각된다.
로터(3801)와 스테이터(3802) 사이의 축방향 내측으로 향하는 인력에 기인하여 그들은 에어갭(3809)에서 서로를 향해 운동하는 것이 방지하도록 모두 고정되어야 한다. 졍량이나 암 하우징을 달성하는 것이 유익하므로, 이러한 예시적인 실시예는 액튜에이터의 에어갭 축방향 단부로부터 암과 자성 부품을 조립하는 방법을 제공한다. 이는 스테이터(3802)와 로터(3801)의 OD에서 탭(3812, 3814)들을 이용함으로써 달성되며 이로써 스테이터와 로터는 하우징(3805, 3806) 내에 삽입되고 이어서 선회되어 하우징(3805, 3806)들 위의 탭(3816, 3813)들의 어레이에 합치하도록 결합될 수 있다. 나사 결합부가 다른 방안일 수 있다.
로터(3801)와 스테이터(3802)가 각각의 암들에 일단 조립되면, 스테이터를 가지는 상부 암 조립체는 로터를 가지는 하부 암 조립체에 함께 이동된다. 로터와 스테이터 사이의 힘은 이어서 베어링(3804, 3808)들을 예비 압축하고 이러한 크기의 장치의 축방향 힘의 대략 400KG에 이르기까지 암 조인트를 같이 유지한다.
Claims (103)
- 하나의 어레이의 전자석 요소를 가지는 제1 캐리어;
자극을 형성하는 전자석 요소들을 가지며, 상기 제1 캐리어에 대해 이동하도록 배치된 제2 캐리어;
상기 제1 캐리어와 제2 캐리어 사이의 에어갭을 포함하며;
제1 캐리어의 전자석 요소는 지주들을 포함하고, 지주들 사이에 슬롯들이 있고, 각 슬롯에는 하나 이상의 전기 도전체들이 있고, 상기 제1 캐리어의 지주들은 mm의 지주 높이를 가지며;
상기 제1 캐리어와 제2 캐리어는 같이 전기 기계의 크기를 규정하고;
상기 자극은 mm로 피치를 가지며;
상기 기계의 크기, 자극 피치 및 지주 높이는 크기, 자극의 피치 및 지주 높이에 의하여 규정되는 공간 영역 내에 속하도록 선택되고,
상기 영역은 제1 유니언 또는 제2 유니언에 의하여 규정되며;
1) 상기 제1 유니언은,
a) 제1 크기의 전기 기계의 제1 세트의 불균등성에 의하여 규정되는 제1 표면;
b) 제2 크기의 전기 기계의 제2 세트의 세트의 불균등성에 의하여 규정되는 제2 표면; 및
c) 제1 표면 위의 제1 단부 점과 제2 표면 위의 제2 단부 점을 가지는 라인 세그먼트 위에 놓이는 모든 점들을 포함하는 것으로 규정되는 세트의 유니언이며,
제1 세트의 불균등성과 제2 세트의 불균등성은 각각 불균등성 A와 B, 또는 B와 C, 또는 C와 D의 세트이며, 여기서 불균등성 그룹(A)은 25mm 크기에 대한 것이며, 불균등성 그룹(B)은 50mm크기에 대한 것이며, 불균등성 그룹(C)은 100mm 크기에 대한 것이며, 불균등성 그룹(D)은 200mm 크기에 대한 것이며; 또는
2) 상기 제2 유니언은 불균등성(D)의 세트와 표면보다 더 큰 크기를 가지나 표면 내의 점들에 대응하는 자극 피치와 지주 높이를 가지는 모든 점들의 대응하는 세트에 의하여 규정되는 표면의 유니온이며;
여기서,A는
이하와 같이 구성되는 불균등성의 세트들의 그룹에서 선택되며:
[세트 A1]

[세트 A2]

[세트 A3]

B는 이하와 같이 구성되는 불균등성 세트의 그룹에서 선택되고:
[세트 B1]

[세트 B2]

[세트 B3]

C는 이하와 같이 구성되는 불균등성 세트의 그룹에서 선택되고:
[세트 C1]

[세트 C2]

[세트 C3]

그리고 D는 이하와 같이 구성되는 불균등성 세트의 그룹에서 선택되고:
[세트 D1]

[세트 D2]

[세트 D3]

- 청구항 1에 있어서, 이하의 한정의 어느 하나 이상이 포함되며:
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는, 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 A1이고 상기 제2 불균등성은 B1이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 A1이고 상기 제2 불균등성은 B2이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 A1이고 상기 제2 불균등성은 B3이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 A2이고 상기 제2 불균등성은 B1이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 A2이고 상기 제2 불균등성은 B2이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 A2이고 상기 제2 불균등성은 B3이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 A3이고 상기 제2 불균등성은 B1이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 A3이고 상기 제2 불균등성은 B2이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 A3이고 상기 제2 불균등성은 B3이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 B1이고 상기 제2 불균등성은 C1이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 B1이고 상기 제2 불균등성은 C2이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 B1이고 상기 제2 불균등성은 C3이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 B2이고 상기 제2 불균등성은 C1이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 B2이고 상기 제2 불균등성은 C2이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 B2이고 상기 제2 불균등성은 C3이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 B3이고 상기 제2 불균등성은 C1이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 B3이고 상기 제2 불균등성은 C2이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 B3이고 상기 제2 불균등성은 C3이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 C1이고 상기 제2 불균등성은 D1이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 C1이고 상기 제2 불균등성은 D2이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 C1이고 상기 제2 불균등성은 D3이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 C2이고 상기 제2 불균등성은 D1이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 C2이고 상기 제2 불균등성은 D2이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 C2이고 상기 제2 불균등성은 D3이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 C3이고 상기 제2 불균등성은 D1이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 C3이고 상기 제2 불균등성은 D2이고;
상기 영역은 제1 크기의 전기 기계에 대한 제1 세트의 불균등성에 의하여 형성된 상기 제1 표면과 제2 크기의 전기 기계에 대한 제2 세트의 불균등성에 의하여 형성된 제2 표면의 유니언에 의하여 규정되고; 라인 세그먼트들 위의 모든 점들을 포함하는 것으로 형성된 상기 세트는 상기 제1 표면 위의 제1 단부 점과 상기 제2 표면 위의 제2 단부점을 가지며; 상기 제1 세트의 불균등성은 C3이고 상기 제2 불균등성은 D3이고;
상기 영역은 불균등성(D1)의 세트와 표면보다 더 큰 크기를 가지며 상기 표면 내의 점들에 대응하는 자극 피치와 지주 높이를 가지는 모든 점들의 대응하는 세트에 의하여 규정된 표면의 유니언에 의하여 규정되며;
상기 영역은 불균등성(D2)의 세트와 표면보다 더 큰 크기를 가지며 상기 표면 내의 점들에 대응하는 자극 피치와 지주 높이를 가지는 모든 점들의 대응하는 세트에 의하여 규정된 표면의 유니언에 의하여 규정되며;
상기 영역은 불균등성(D3)의 세트와 표면보다 더 큰 크기를 가지며 상기 표면 내의 점들에 대응하는 자극 피치와 지주 높이를 가지는 모든 점들의 대응하는 세트에 의하여 규정된 표면의 유니언에 의하여 규정되는 전기 기계. - 청구항 1 또는 2에 있어서, 상기 전기 기계는 에어갭 직경을 가지는 반경방향 플럭스 기계이며, 크기는 에어갭 직경인 전기 기계.
- 청구항 1 또는 2에 있어서, 상기 전기 기계는 평균 에어갭 직경을 가지는 축방향 플럭스 기계이며, 크기가 평균 에어갭 직경인 전기 기계.
- 청구항 1 또는 2에 있어서, 상기 전기 기계는 병진 운동 방향을 가지는 선형 기계이며, 상기 제1 캐리어는 병진 운동 방향으로 제1 길이를 가지며, 상기 제2 캐리어는 병진 운동 방향으로 제2 길이를 가지며, 제1 길이가 제2 길이보다 짧거나 같으면, 전기 기계의 크기는 제1 길이이며, 제2 길이가 제1 길이보다 짧으면 제2 길이인 전기 기계.
- 청구항 1 또는 2에 있어서, 상기 전기 기계는 횡방향 플럭스 기계인 전기 기계.
- 청구항 3, 4, 5, 또는 6의 어느 한 항에 있어서, 상기 전기 컨덕터들은 집중된 권선을 포함하는 전기 기계.
- 청구항 3, 4, 5, 또는 6에 있어서, 상기 전기 컨덕터들은 분배된 권선인 전기 기계.
- 청구항 1-8의 어느 한 항에 있어서, 상기 제1 캐리어는 자기적으로 민감한 소재의 유닛 부재로 형성된 스테이터를 포함하고, 각각의 지주가 스테이터의 일부를 포함하는 전기 기계.
- 청구항 9에 있어서, 상기 스테이터는 20,000psi 아래의 측정가능한 크리프 가 없는 소재를 포함하는 전기 기계.
- 청구항 9 또는 10에 있어서, 지주들은 각각 직각인 폭을 가지며 상기 스테이터는 조임쇠 부분을 포함하고, 상기 조임쇠 부분은 상기 지주들의 직각 폭보다 작거나 같은 전기 기계.
- 청구항 9, 10 또는 11에 있어서, 지주들은 각각 직각 폭을 가지며 상기 스테이터는 조임쇠 부분을 포함하고, 상기 조임쇠 부분은 상기 지주들의 직각 폭의 절반보다 작거나 같은 두께를 가지는 전기 기계.
- 청구항 1-12의 어느 한 항에 있어서, 상기 제2 캐리어는:
내측 에지와 외측 에지를 가지며, 축을 형성하고 소재의 유닛 부재로 형성된 환형 디스크;
상기 환형 디스크로부터 축방향으로 연장하고 제2 캐리어 지주들 사이에 제2 캐리어 슬롯을 형성하는 둘레상으로 이격되는 제2 캐리어 지주들; 및
상기 내측 에지와 상기 외측 에지 사이로 연장하는 홀들을 형성하는 상기 환형 디스크를 포함하는 전기 기계. - 청구항 1-13의 어느 한 항에 있어서, 상기 전기 기계는 축 방향을 형성하는 축을 가지며, 상기 제2 캐리어는 내측 둘레와 외측 둘레를 가지며, 상기 내측 둘레는 내측 축방향 길이를 가지며, 상기 외측 둘레는 외측 축방향 길이를 가지고, 내측 축방향 길이는 외측 축방향 길이와 같지 않은 전기 기계.
- 청구항 14에 있어서, 상기 내측 축방향 길이는 외측 축방향 길이보다 작은 전기 기계.
- 청구항 15에 있어서, 상기 제2 캐리어는 원추 형상을 가지는 전기 기계.
- 청구항 1-16의 어느 한 항에 있어서, 전기 컨덕터도들은 양이온 알루미늄 컨덕터를 포함하는 전기 기계.
- 청구항 1-17의 어느 한 항에 있어서, 제1 캐리어와 제2 캐리어의 어느 하나 또는 모두에게 냉각 유체를 공급하기 위하여 연결된 냉각제 공급수단을 포함하는 전기 기계.
- 청구항 1-18의 어느 한 항에 있어서, 전기 컨덕터들에 적어도 70A/mm2의 전기 에너지를 공급하도록 연결된 동력 공급수단을 더 포함하는 전기 기계.
- 청구항 1-19 어느 한 항에 있어서, 상기 제2 캐리어는 자석 슬롯을 포함하고 상기 제2 캐리어의 전자석 요소들은 자력에 의하여 자석 슬롯 내에 유지되는 영구 자석을 포함하는 전기 기계.
- 청구항 20에 있어서, 전기 컨덕터들은 지주들로부터 반경방향 외측으로 측정된, 지주들 둘레로 단일 층을 형성하는 전기 기계.
- 청구항 1-21의 어느 한 항에 있어서, 상기 에어갭은 0.001" 내지 0.010"인 전기 기계.
- 청구항 1-22의 어느 한 항에 있어서, 상기 에어갭은 0.005" 내지 0.010"인 전기 기계.
- 청구항 1-23의 어느 한 항에 있어서, 상기 전기 기계는 로봇 암 위에 장착되는 전기 기계.
- 청구항 24에 있어서, 상기 로봇 아암의 부품들이 제1 캐리어와 제2 캐리어를 지지하는 전기 기계용 하우징을 형성하는 전기 기계.
- 전자석 요소를 포함하는 스테이터를 포함하고, 상기 스테이터는 일 측면에 지주를 가지며 대향 측면에서 걸쇠는 냉각 핀들을 가지며, 상기 스테이터는 지주들의 적어도 부분들과 냉각 핀들의 적어도 부분들을 포함하는 소재의 유닛 부재를 포함하는 전기 기계.
- 전자석 요소들을 포함하는 하나 이상의 스테이터들에 대해 회전하도록 배치된 로터를 포함하며, 상기 로터는 영구 자석들로 이루어진 영구자석 캐리어, 출력 링, 및 회전하도록 로터를 지지하며 영구자석 캐리어와 출력 링 사이 중간에 위치된 베어링들을 포함하는 전기 기계.
- 청구항 27에 있어서, 상기 기계는 축방향 플럭스 기계이며, 하나 이상의 스테이터들은 두 개의 스테이터들이며 로터는 두 개의 스테이터들 사이에 배치되는 전기 기계.
- 청구항 28에 있어서, 상기 베어링들은 로터들과 스테이터들 사이에 자력에 의하여 사전에 압축되는 전기 기계.
- 청구항 28 또는 29에 있어서, 로터는 두 개의 축방향 측면들을 가지며, 로터의 각각의 축방향 측면에 자석을 가지며, 각각의 축망향 측면은 직각으로 향해지고, 각각의 자석은 다른 축방향 측면 위의 각각의 자석에 축방향으로 정렬되고, 각각의 자석의 수직 방향은 다른 측면 위의 각각의 자석의 수직 방향과 반대인 전기 기계.
- 청구항 27 내지 30의 어느 한 항에 있어서, 하나 이상의 스테이터들이 나선형 냉각핀들을 포함하는 전기 기계.
- 에어갭에 의하여 로터가 그로부터 분리되는 두 스테이터들 사이에 회전하도록 베어링들 위에 배치된 상기 로터를 포함하고, 상기 로터와 스테이터들 사이의 자력이 상기 스테이터들을 상기 로터로 당기며 베어링들 위에 예비 장전 힘을 인가하는 전기 기계.
- 청구항 32에 있어서, 이하의 한정들의 하나 이상을 포함하며:
상기 로터는 자석들로부터 반경방향 내측으로 위치된 출력 링을 가지며; 및
베어링들은 로터에 부착된 외경(OD) 레이스들을 가지는 전기 기계. - 청구항 32에 있어서, 이하의 한정들의 하나 이상을 포함하며:
상기 로터는 자석들로부터 반경방향 외측으로 위치된 출력 링을 가지며; 및
베어링들은 로터에 부착된 내경(ID) 레이스들을 가지는 전기 기계. - 청구항 32 내지 34의 어느 한 항에 있어서, 조립체에 베어링들이 없으면 에어갭은 자력에 의하여 50%보다 많게 닫혀지는 전기 기계.
- 청구항 32 내지 34의 어느 한 항에 있어서, 스테이터들과 로터는 베어링들이 조립체에 없으면 접촉하는 전기 기계.
- 청구항 32 내지 34의 어느 한 항에 있어서, 하우징의 축방향 내측으로 향하는 내면이 존재하고 베어링들은 하우징의 축방향 내측으로 향하는 표면에 접촉하는 축방향 외측으로 향하는 베어링 레이스들을 가지며, 베어링들이 없으면 축방향 내측으로 향하는 표면과 내측으로 향하는 표면의 이론상 위치 사이의 위치 차이가 0.002" 보다 크도록 자기적인 부하아래 변형되는 전기 기계.
- 청구항 26 내지 31의 어느 한 항에 있어서, 이하의 한정들의 하나 이상을 포함하며;
지주들은 둘레 방향으로 지주 폭을 가지며, 핀들은 지주 폭의 50%보다 더 큰 높이를 가지며; 및
핀들은 소재의 유닛 부재와 다른 소재들을 포함하는 단부들을 가지는 전기 기계. - 청구항 26 내지 38의 어느 한 항에 있어서, 전기 기계는 축방향 플럭스 기계인 전기 기계.
- 청구항 39에 있어서, 냉각 핀들은 나선형 형상인 전기 기계.
- 청구항 26 내지 40의 어느 한 항에 있어서, 청구항 1에 규정된 자극 밀도와 지주 높이를 가지는 전기 기계.
- 축방향 또는 반경 방향의 플럭스 구조를 가지는 전기 기계으로서:
전자석 요소들의 어레이를 가지는 제1 캐리어;
자극을 형성하는 전자석 요소들을 가지며, 상기 제1 캐리어에 대해 이동하도록 배치되는 제2 캐리어;
상기 제1 캐리어와 상기 제2 캐리어 사이의 에어갭을 포함하며;
상기 제1 캐리어의 전자석 요소들은, 각 슬롯에 하나 이상의 전기 도전체들을 가지는 슬롯들을 지주들 사이에 가지는 지주들을 포함하고;
상기 제2 캐리어는 자극들을 형성하는 전자석 요소들을 위한 적어도 제1 유지 요소 및 지주들을 포함하고;
제2 캐리어의 전자석 요소들은 상기 제1 캐리어의 전자석 요소들의 지주들을 포화시키기 위하여 필요한 길이보다 더 긴 길이를 가지는 전기 기계. - 청구항 42에 있어서, 이하의 한정들의 하나 이상을 포함하며:
자극들을 형성하는 전자석 요소들은 영구자석들을 포함하며;
상기 제1 유지 요소는 조임쇠를 포함하고;
상기 제1 유지 요소는 측면 조임쇠를 포함하고; 및
상기 제1 유지 요소는 단부 조임쇠를 포함하는 전기 기계. - 청구항 42 또는 43에 있어서, 상기 제2 캐리어는 추가로 지주들을 포함하고, 상기 지주들과 제1 유지 요소는 단단한 연결부에 의하여 연결되는 전기 기계.
- 청구항 44에 있어서, 지주들, 제1 유지 요소 및 단단한 연결부는 등방성 소재를 포함하는 전기 기계.
- 청구항 42에 있어서, 상기 단단한 연결부는 플럭스 통로 제한부를 포함하는 전기 기계.
- 축방향 또는 반경 방향의 플럭스 구조를 가지는 전기 기계으로서:
전자석 요소들의 어레이를 가지는 제1 캐리어;
자극을 형성하는 전자석 요소들을 가지며, 상기 제1 캐리어에 대해 이동하도록 배치되는 제2 캐리어;
상기 제1 캐리어와 상기 제2 캐리어 사이의 에어갭을 포함하며;
상기 제1 캐리어의 전자석 요소들은, 각 슬롯에 하나 이상의 전기 컨덕터들을 가지는 슬롯들을 지주들 사이에 가지는 지주들을 포함하고;
상기 제2 캐리어는 자극들을 형성하는 전자석 요소들을 위한 동질적인 단단한 요소와 지주들을 포함하고, 지주들은 단단한 요소의 동질적인 연장부를 포함하고; 및
상기 영구자석들은 각각 상기 제1 캐리어의 전자석 요소들의 지주를 포화시키기에 필요한 깊이보다 더 긴 깊이를 가지는 전기 기계. - 청구항 47에 있어서, 단단한 요소는 후방 조임쇠, 단부 조임쇠 및 측면 조임쇠의 하나 이상을 포함하는 전기 기계.
- 청구항 47에 있어서, 영구자석들은 각각 폭을 가지며, 자석 폭에 대한 자석 깊이의 비율은 4:1, 3:1 또는 2:1보다 더 큰 전기 기계.
- 축방향 또는 반경 방향의 플럭스 구조를 가지는 전기 기계으로서:
전자석 요소들의 어레이를 가지는 제1 캐리어;
자극을 형성하는 전자석 요소들을 가지며, 상기 제1 캐리어에 대해 이동하도록 배치되는 제2 캐리어;
상기 제1 캐리어와 상기 제2 캐리어 사이의 에어갭을 포함하며;
상기 제1 캐리어의 전자석 요소들은, 각 슬롯에 하나 이상의 전기 컨덕터들을 가지는 슬롯들을 지주들 사이에 가지는 지주들을 포함하고; 및
상기 제2 캐리어는 동질의 단단한 요소와 지주들을 포함하고, 지주들은 단단한 요소의 연장부를 포함하며;
자속의 더 큰 부분이 에어갭을 관통하여 유동하기보다 단단한 요소들을 통해 유동하도록 제1 캐리어와 제2 캐리어의 전자석 요소들은 배치되는 전기 기계. - 축방향 또는 반경 방향의 플럭스 구조를 가지는 전기 기계으로서:
전자석 요소들의 어레이를 가지는 제1 캐리어;
영구자석을 포함하는 전자석 요소들을 가지며, 상기 제1 캐리어에 대해 이동하도록 배치되는 제2 캐리어;
상기 제1 캐리어와 상기 제2 캐리어 사이의 에어갭을 포함하며;
상기 제1 캐리어의 전자석 요소들은, 각 슬롯에 하나 이상의 전기 컨덕터들을 가지는 슬롯들을 지주들 사이에 가지는 지주들을 포함하고; 및
상기 제2 캐리어는 동질의 단단한 요소와 지주들을 포함하고, 지주들은 단단한 요소의 연장부를 포함하며;
상기 영구자석들은 자력에 의하여 유지되는 전기 기계. - 축방향 또는 반경 방향의 플럭스 구조를 가지는 전기 기계으로서:
전자석 요소들의 어레이를 가지는 제1 캐리어;
영구자석들을 포함하는 전자석 요소들을 가지며, 상기 제1 캐리어에 대해 이동하도록 배치되는 제2 캐리어;
상기 제1 캐리어와 상기 제2 캐리어 사이의 에어갭을 포함하며;
상기 제1 캐리어의 전자석 요소들은, 각 슬롯에 하나 이상의 전기 컨덕터들을 가지는 슬롯들을 지주들 사이에 가지는 지주들을 포함하고; 및
상기 제2 캐리어는 동질의 단단한 요소와 지주들을 포함하고, 지주들은 단단한 요소의 연장부를 포함하며;
영구자석들은 상기 제1 캐리어를 향하는 방향으로 좁아지게 테이퍼되는 전기 기계. - 청구항 52에 있어서, 상기 제2 캐리어의 지주들은 상기 제1 캐리어로부터 멀어지는 방향으로 좁아지게 테이퍼되는 전기 기계.
- 청구항 53에 있어서, 상기 제2 캐리어의 지주들은 제2 캐리어의 전자석 요소들을 상기 제1 캐리어를 향하는 방향으로 이동시키는 것을 방지하는 전기 기계.
- 축방향 또는 반경 방향의 플럭스 구조를 가지는 전기 기계으로서:
전자석 요소들의 어레이를 가지는 제1 캐리어;
자극을 형성하는 전자석 요소들을 가지며, 상기 제1 캐리어에 대해 이동하도록 배치되는 제2 캐리어;
상기 제1 캐리어와 상기 제2 캐리어 사이의 에어갭을 포함하며;
상기 제1 캐리어의 전자석 요소들은, 각 슬롯에 하나 이상의 전기 컨덕터들을 가지는 슬롯들을 지주들 사이에 가지는 지주들을 포함하고; 및
상기 제2 캐리어는 동질의 단단한 요소와 지주들을 포함하고, 지주들은 단단한 요소의 연장부를 포함하며;
상기 제2 캐리어의 전자석 요소들은 상기 제1 캐리어의 전자석 요소들의 지주들을 포화시키기에 필요한 길이보다 더 긴 길이를 가지며;
단단한 요소는 플럭스 통로 제한부를 포함하는 전기 기계. - 청구항 삭제
- 전기 기계으로서:
전자석 요소들의 어레이를 가지는 제1 캐리어;
자극을 형성하는 전자석 요소들을 가지며, 상기 제1 캐리어에 대해 이동하도록 배치되는 제2 캐리어;
상기 제1 캐리어와 상기 제2 캐리어 사이의 에어갭을 포함하며;
상기 제1 캐리어의 전자석 요소들은, 각 슬롯에 하나 이상의 전기 컨덕터들을 가지는 슬롯들을 지주들 사이에 가지는 지주들을 포함하고; 및
상기 제2 캐리어는 동질의 단단한 요소와 지주들을 포함하고, 지주들은 단단한 요소의 연장부를 포함하며;
상기 제2 캐리어의 지주들은 상기 제2 캐리어의 전자석 요소들을 유지하기 위한 이완부를 포함하는 전기 기계. - 청구항 42에 있어서, 상기 제2 캐리어의 전자석 요소들은 제1 및 제2 단부들을 포함하며, 제1 단부들은 제1 캐리어를 향하고 제2 단부들은 상기 제1 캐리어로부터 멀어지게 향하고, 제2 단부들은 테이퍼되는 전기 기계.
- 청구항 42-58의 어느 한 항에 있어서, 청구항 1의 자극 밀도와 지주 높이를가지는 전기 기계.
- 전기 기계용 로터로서:
내측 에지와 외측 에지를 가지며, 축을 형성하고 소재의 유닛 부재로 형성된 환형의 디스크;
지주들 사이에 슬롯들을 형성하고 상기 환형 디스크로부터 축방향으로 연장하는 둘레방향으로 이격된 지주들을 포함하고; 및
상기 환형 디스크는 상기 내측 에지와 상기 외측 에지 사이로 연장하는 홀들을 규정하는 전기기계용 로터. - 청구항 60에 있어서, 이하의 한정들의 하나 이상이 포함되며;
지주들은 유닛 부재로 형성되고;
지주들은 상기 환형 디스크의 양측에 배치되고;
상기 디스크의 각 측면 위의 지주들은 축에 수직인 평면 위에 투사된 바와 같이 디스크의 반대 측면 위의 각 지주들과 정렬되고;
상기 홀들은 축에 수직인 평면 위에 투사된 바와 같이 상기 슬롯들과 정렬되고;
상기 홀들은 축에 수직인 상기 평면 위에 투사된 바와 같이 상기 슬롯들과 정렬되고;
상기 홀들은 상기 환형 디스크 내에서 반경방향으로 일정 정도 연장하고;
상기 환형 디스크는 상기 홀들을 상기 슬롯들에 연결하는 구멍들을 형성하고; 및
각각의 지주는 상기 내측 에지와 상기 외측 에지 사이로 연장하는 로터. - 청구항 60 또는 61에 있어서, 각각의 지주는 상기 내측 에지와 상기 외측 에지 사이에 연장하고 지주들은 상기 내측 에지에서 제1의 축방향 높이와 상기 외측 에지에서의 제1 축방향 높이와 다른 제2의 축방향 높이를 가지는 로터.
- 청구항 62에 있어서, 제2의 축방향 높이는 제1의 축방향 높이보다 더 큰 로터.
- 청구항 62 또는 63에 있어서, 지주들은 내측 에지와 외측 에지 사이에 직선들을 형성하고, 인접 지주들은 실질적으로 평행인 선들을 형성하는 로터.
- 청구항 64에 있어서, 지주들은 자석을 유지하기 위하여 축방향 높이와 같이 둘레 두께의 역의 테이퍼를 가지는 로터.
- 전기 기계용 로터로서, 상기 로터는:
외측으로 돌출하는 부재들을 포함하는 내측 로터 부분;
내측으로 돌출하는 부재들을 포함하고, 내측으로 돌출하는 부재들과 외측으로 돌출하는 부재들이 서로 결합하도록 내측 로터 부분 둘레로 배치되는 외측 로터 부분; 및
내측으로 돌출하는 부재들과 외측으로 돌출하는 부재들이 영구자석용 플럭스 통로를 제공하도록 영구자석들이 서로 결합한 내측으로 돌출하는 부재들과 외측으로 돌출하는 부재들 사이에 배치되는 전기 기계용 로터. - 청구항 66에 있어서, 상기 내측으로 돌출하는 부재들은 규칙적으로 이격되고 상기 외측으로 돌출하는 부재들은 규칙적으로 이격되는 로터.
- 청구항 60-67의 어느 한 항에 있어서, 청구항 1에서 규정된 바와 같은 자극
밀도와 지주 높이를 전기 기계가 가지는 로터. - 전기 기계용 스테이터로서, 상기 스테이터는:
지주들 사이에 슬롯들을 형성하는 둘레방향으로 이격된 지주들과;
상기 지주들 둘레에 배치된 전도성 요소들을 포함하며;
각각의 전도성 요소는, 슬롯들의 각각의 선택의 슬롯들의 둘레 배치 순으로 슬롯들의 각각의 선택을 통해 연장하는 각각의 전기 흐름 경로를 형성하고, 슬롯들의 각각의 선택의 연속적인 슬롯들을 통해 교대로 내측으로 그리고 외측으로 연장하고, 이하의 하나 이상의 한정들을 포함하고;
슬롯들의 각각의 선택들은 각각 스테이터의 각각의 섹터의 모든 슬롯들로 구성되며;
슬롯들의 각각의 선택들은 각각 스테이터의 각각의 섹터의 제3의 슬롯을 제외하고;
전도성 요소들은 지주들의 반경 방향 단부 부분 인접해서 축방향 흐름 경로를 형성하기 위하여 지주들의 반경방향 단부 부분의 적어도 하나의 세그먼트로부터 이격되고;
전도성 요소들의 적어도 일부는 전도성 요소들의 적어도 일부가 그를 관통해서 연장하는 슬롯들을 형성하는 적어도 일부의 지주들로부터 둘레 방향으로 이격되고;
축방향으로 인접한 컨덕터 요소들의 전기적인 흐름 통로를 직렬로 연결하기 위하여 축방향으로 인접한 컨덕터 요소들 사이의 전기적인 연결부를 포함하고;
적어도 일부의 전도성 요소에 대해, 전도성 요소는 단부 턴과 슬롯 턴을 가지며 단부 턴이 슬롯 턴보다 더 넓으며;
전도성 요소들의 적어도 일부는 단부 턴 둘레에 균일한 폭을 가지며; 및
전도성 요소들은 지주들로부터 반경방향 외측으로 측정된, 지주들 둘레에 단일 층을 형성하는 전기 기계용 스테이터. - 청구항 69에 있어서, 청구항 1에서 규정된 바와 같은 자극 밀도와 지주 높이를 전기 기계가 가지는 스테이터.
- 전기 기계으로서:
전자석 요소들의 어레이를 가지는 제1 캐리어;
자극들을 형성하는 전자석 요소들을 가지며, 상기 제1 캐리어에 대해 이동하도록 배치되는 제2 캐리어;
상기 제1 캐리어와 상기 제2 캐리어 사이의 에어갭; 및
상기 제1 캐리어의 전자석 요소들은 지주들을 포함하고, 슬롯들이 지주들 사이에 있고, 하나 이상의 슬롯들은 인접한 슬롯에서 전기 컨덕터의 위치에 대응하는 하나 이상의 슬롯들의 레벨에서 전기 컨덕터가 없으며 도관을 형성하고, 도관들은 냉각 유체의 소스에 연결되는 전기 기계. - 청구항 71에 있어서, 하나 이상의 이하의 한정들을 포함하고;
복수의 슬롯들의 각각의 레벨에서의 복수의 슬롯들은 전기 컨덕터들이 없으며 전기 컨덕터가 없는 복수의 슬롯들은 주기적으로 이격되고;
전기 컨덕터가 없는 복수의 슬롯들은 냉매 흐름용 도관을 형성하고;
도관들은 냉매 흐름을 배출하기 위하여 오리피스와 축방향으로 연통하고;
제1 캐리어는 스테이터이고, 제2 캐리어는 에어갭에 의하여 스테이터로부터 축방향으로 분리된 로터이며, 전자석 요소를 가지는 제3 캐리어는 로터로부터 제2 에어갭에 의하여 축방향으로 분리되고;
제1 캐리어와 제3 캐리어의 전자석 요소들은 영구자석들을 포함하고;
제1 캐리어는 조임쇠가 없는 스테이터이며, 제2 캐리어는 제1 로터를 포함하고, 제1 캐리어의 전자석 요소들은 영구 자석들을 포함하고 제2 에어갭에 의하여 제1 캐리어로부터 분리된 제2 로터를 포함하고 영구 자석들을 포함하는 제3 캐리어를 더 포함하며;
각각의 전기 컨덕터 층은 집중된 권선의 일부이고;
각각의 컨덕터 층은 단일 상의 전기 여자부를 수용하기 위하여 연결되고;
지주들은 n:n-1 또는 n: n+1의 자극에 대한 비율을 가지며; 및
일부 컨덕터 층 또는 컨덕터 층들에 대해 적어도, 컨덕터 층은 단부 턴과 슬롯 턴을 가지며 단부 턴은 슬롯턴보다 더 넓은 전기 기계. - 청구항 71 또는 72에 있어서, 청구항 1에서 규정된 바와 같은 자극 밀도와 지주 높이를 가지는 전기 기계.
- 전기 기계용 캐리어의 구성방법으로서, 상기 캐리어는 전기 컨덕터 층을 포함하는 전자석 요소들을 포함하고, 상기 방법은 전기 컨덕터 층을 압인하거나 펀칭하는 것을 포함하고, 상기 전기 컨덕터 층은 전기 컨덕터 층들이 교차하는 점들을 수용하기 위한 가변 두께를 가지는 캐리어 구성 방법.
- 전기 기계으로서:
전자석 요소들의 어레이를 가지는 제1 캐리어;
자극들을 형성하는 전자석 요소들을 가지며, 상기 제1 캐리어에 대해 이동하도록 배치되는 제2 캐리어;
상기 제1 캐리어와 상기 제2 캐리어 사이의 에어갭을 포함하고; 및
상기 제1 캐리어의 전자석 요소들은, 코너 갭들을 가지는, 양극 알루미늄 컨덕터들로 형성되는 복수의 전기 컨덕터 층들을 포함하고, 코너 갭들은 소정의 코팅으로 코팅되는 전기 기계. - 청구항 75에 있어서, 이하의 한정들을 하나 이상 포함하며;
상기 코팅이 유전체 코팅이며;
상기 코팅이 폴리머 코팅이며;
상기 코팅이 니스를 포함하며;
각각의 전기 컨덕터 층은 한 쌍의 컨택 탭을 포함하고;
각각의 전기 컨덕터 층은 한 쌍의 알루미늄 컨택 탭들을 포함하고;
양극 알루미늄 컨덕터들은 또한 소정의 코팅으로 코팅된 하나 이상의 표면들을 가지며; 및
상기 전기 기계는, 축방향, 반경 방향 또는 횡방향 플럭스 기계인 전기 기계. - 청구항 75 또는 76에 있어서, 청구항 1에서 규정된 바와 같은 자극 밀도와 지주 높이를 가지는 전기 기계.
- 청구항 1에 규정된 구조를 가지는 전기 기계용 또는 이와 결합한 전기 컨덕터로서, 상기 전기 컨덕터는:
제1 및 제2의 컨택 탭들;
크게-양극화된 알루미늄 표면;
알루미늄 전도성 경로; 및
코팅을 포함하는 전기 기계용 전기 컨덕터. - 청구항 78에 있어서, 코팅은 유전 코팅이고, 또는 코팅은 폴리머 코팅이고, 또는 코팅은 니스이며, 또는 코팅은 크게-양극화된 알루미늄 표면의 코너 갭을 충진하고, 또는 제1 및 제2 컨택 탭들은 알루미늄을 포함하는 전기 컨덕터.
- 전기 기계용 알루미늄 컨덕터의 제조 방법으로서, 각각의 알루미늄 컨덕터는 제1 및 제2 컨택 탭들, 표면, 전도 경로를 포함하고, 상기 방법은:
알루미늄 컨덕터들의 표면을 크게 양극화시키며;
알루미늄 컨덕터의 표면에 액체 코팅을 적용하고;
액체 코팅을 소성하는 것을 포함하는 알루미늄 컨덕터 제조방법. - 청구항 80에 있어서, 상기 제1 및 제2 컨택 탭들의 매스킹 단계를 더 포함하고, 또는 액체 코팅은 폴리머 코팅을 포함하고, 또는 폴리머 코팅은 에폭시 코팅을 포함하고, 또는 폴리머 코팅은 유전체 폴리머 코팅을 포함하고, 또는 B 상태로 에폭시 코팅을 경화시키는 단계를 더 포함하는 제조방법.
- 청구항 80 또는 81에 있어서,
알루미늄 컨덕터들을 적층하는 단계;
상기 제1 컨택 탭들을 같이 용접하는 단계; 및
상기 제2 컨택 탭들을 같이 용접하는 단계를 포함하는 방법. - 청구항 80에 있어서, 상기 액체 코팅을 소성하는 단계는 알루미늄 컨덕터들의 적층을 소성하는 것을 포함하는 방법.
- 청구항 80-83의 어느 한 항에 있어서, 액체 코팅을 알루미늄 컨덕터들의 에지 갭들 내로 인도하는 단계를 추가로 포함하는 방법.
- 청구항 84에 있어서:
층들 사이에 하나 이상의 스페이서를 삽입함으로써 알루미늄 컨덕터의 적층의 하나 이상의 층들을 분리하는 단계; 및
액체 코팅을 소성 후에 알루미늄 컨덕터들의 적층에서 스페이서를 제거하는 단계를 포함하는 방법. - 각각의 알루미늄 컨덕터가 제1 및 제2 컨택 탭들과, 표면, 및 전도 경로를 포함하는, 전기 기계용 알루미늄 컨덕터의 제조방법으로서, 상기 방법은:
알루미늄 컨덕터의 표면을 크게 양극화하는 단계;
알루미늄 컨덕터의 표면에 분말 코팅을 적용하는 단계;
상기 분말 코팅을 굽는 단계를 포함하는 전기 기계용 알루미늄 컨덕터의 제조방법. - 청구항 86에 있어서, 상기 제1 및 제2 컨택 탭들의 매스킹 단계를 더 포함하고, 또는 분말 코팅은 폴리머 분말을 포함하고, 또는 폴리머 분말은 에폭시 분말을 포함하고, 또는 분말 코팅을 부분적으로 경화시키는 단계를 포함하는 방법.
- 청구항 87에 있어서,
알루미늄 컨덕터들을 적층하는 단계;
상기 제1 컨택 탭들을 같이 용접하는 단계; 및
상기 제2 컨택 탭들을 같이 용접하는 단계를 포함하는 방법. - 청구항 88에 있어서, 분말 코팅을 소성하는 단계는 알루미늄 컨덕터들의 스택을 소성하는 단계를 포함하는 방법.
- 청구항 86-89의 어느 한 항에 있어서, 분말 코팅을 적용하는 단계는 반대로 하전된 분말을 알루미늄 컨덕터에 분무하는 단계를 포함하는 방법.
- 청구항 86-90의 어느 한 항에 있어서,분말 코팅을 적용하는 단계는 반대로 하전된 유전체 분말의 유동화 베드에 알루미늄 컨덕터를 침지시키는 단계를 포함하는 방법.
- 청구항 89에 있어서, 하나 이상의 스페이서들을 가진 알루미늄 컨덕터들의 스택의 하나 이상의 층들을 분리하기 위하여 스페이서들을 배치하는 단계; 및
분말 코팅을 소성 후에 알루미늄 컨덕터들의 스택으로부터 스페이서들을 분리하는 단계를 추가로 포함하는 방법. - 청구항 88, 89 또는 92에 있어서, 알루미늄 컨덕터들의 표면에 제2 코팅층을 적용하는 단계를 추가로 포함하는 방법.
- 전기 기계으로서:
전자석 요소들을 포함하는 제1의 외측 캐리어;
전자석 요소들을 포함하는 제2의 외측 캐리어;
전자석 요소들을 포함하고 상기 제1의 외측 캐리어와 상기 제2의 외측 캐리어 사이에 배치되는 내측 캐리어를 포함하고, 상기 내측 캐리어, 또는 상기 제1의 외측 캐리어와 제2의 외측 캐리어 모두가 자극들을 형성하며,
상기 제2의 외측 캐리어에 상기 제1의 외측 캐리어를 고정 연결하기 위한 스페이서 요소; 및
상기 제1의 외측 캐리어와 상기 제2의 외측 캐리어에 대해 상기 내측 캐리어를 운동하도록 지지하기 위하여 상기 내측 캐리어와 상기 제1 및 제2의 외측 캐리어들 사이, 그리고 상기 내측 캐리어와 상기 스페이서 요소 사이에 배치된 부싱 또는 낮은 마찰의 코팅을 포함하는 전기 기계. - 청구항 94에 있어서, 상기 내측 캐리어는 자극을 형성하고 상기 제1의 외측 캐리어와 제2의 외측 캐리어는 각각의 캐리어들의 전자석 요소들이 그 위에서 지지되는 소재의 유닛 부재를 각각 포함하는 전기 기계.
- 청구항 94에 있어서, 상기 제1의 외측 캐리어와 제2의 외측 캐리어는 자극을 형성하고 상기 내측 캐리어의 전자석 요소들이 그 위에서 지지되는 소재의 유닛 부재를 내측 캐리어는 포함하는 전기 기계.
- 청구항 94-96의 어느 한 항에 있어서, 상기 제1의 외측 캐리어와 제2의 외측 캐리어는, 사용시 그들이 상기 내측 캐리어로의 자력의 영향 아래 상기 내측 캐리어를 향하여 굽어지나, 내측 캐리어와 상기 제1 및 제2의 외측 캐리어 사이에 배치된 부싱이나 낮은 마찰의 코팅에 실질적인 힘을 미치지 않도록 일정 형상으로 사전 제작되는 전기 기계.
- 청구항 1-59, 71-73, 75-77 또는 94-97의 어느 한 항에 있어서, 프레임이 없는 전기 기계인 전기 기계.
- 전기 기계의 작동 방법으로서, 상기 전기 기계는 선행하는 전기 기계 청구항의 어느 한 항에서 규정된 바와 같고 상기 전기 기계는 200rpm 이하의 속도에서 작동되는 전기 기계의 작동방법.
- 청구항 98에 있어서, 상기 전기 기계는 100rpm 이하의 속도에서 작동되는 방법.
- 청구항 98에 있어서, 상기 전기 기계는 50rpm 이하의 속도에서 작동되는 방법.
- 청구항 98에 있어서, 상기 전기 기계는 25rpm 이하의 속도에서 작동되는 방법.
- 전기 기계의 작동 방법으로서, 상기 전기 기계는 선행하는 전기 기계 청구항의 어느 한 항에서 규정된 바와 같고 상기 전기 기계는 70A/㎟ 이하의 전류 밀도에서 작동되는 전기 기계의 작동방법.
Applications Claiming Priority (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562203903P | 2015-08-11 | 2015-08-11 | |
| US62/203,903 | 2015-08-11 | ||
| US201562209333P | 2015-08-24 | 2015-08-24 | |
| US62/209,333 | 2015-08-24 | ||
| US201662292860P | 2016-02-08 | 2016-02-08 | |
| US62/292,860 | 2016-02-08 | ||
| US62/322,217 | 2016-03-14 | ||
| US201662322217P | 2016-04-13 | 2016-04-13 | |
| US201662363202P | 2016-07-15 | 2016-07-15 | |
| US62/363,202 | 2016-07-15 | ||
| PCT/CA2016/050947 WO2017024409A1 (en) | 2015-08-11 | 2016-08-11 | Electric machine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20180093872A true KR20180093872A (ko) | 2018-08-22 |
Family
ID=57982842
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020187007025A KR20180093872A (ko) | 2015-08-11 | 2016-08-11 | 전기 기계 |
| KR1020197006650A KR102225323B1 (ko) | 2015-08-11 | 2017-08-11 | 전기 기계 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197006650A KR102225323B1 (ko) | 2015-08-11 | 2017-08-11 | 전기 기계 |
Country Status (10)
| Country | Link |
|---|---|
| US (12) | US10075030B2 (ko) |
| EP (2) | EP3335299A4 (ko) |
| JP (2) | JP2018529302A (ko) |
| KR (2) | KR20180093872A (ko) |
| CN (3) | CN113078749B (ko) |
| AU (1) | AU2016304787B2 (ko) |
| CA (2) | CA2995286A1 (ko) |
| MX (1) | MX2018001782A (ko) |
| RU (1) | RU2018108629A (ko) |
| WO (2) | WO2017024409A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023279088A1 (en) * | 2021-07-02 | 2023-01-05 | University Of Washington | Electronic pumping of heat without charge current |
Families Citing this family (120)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8662213B2 (en) * | 2011-01-10 | 2014-03-04 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Locomotion of amorphous surface robots |
| US10340768B2 (en) * | 2013-02-20 | 2019-07-02 | Raymond James Walsh | Flywheel energy storage device with induction torque transfer |
| FR3015794B1 (fr) * | 2013-12-20 | 2017-07-14 | Save Ingenierie | Element de machine electromagnetique a circuits electromagnetiques optimises integres a des pistes sous forme de lignes crenelees annulaires |
| CA2968616C (en) | 2014-01-30 | 2022-08-23 | Genesis Advanced Technology Inc. | Roller drive |
| US11121614B2 (en) * | 2017-06-05 | 2021-09-14 | E-Circuit Motors, Inc. | Pre-warped rotors for control of magnet-stator gap in axial flux machines |
| JP6226938B2 (ja) * | 2015-11-24 | 2017-11-08 | 本田技研工業株式会社 | 回転電機 |
| JP2017099180A (ja) * | 2015-11-26 | 2017-06-01 | 株式会社デンソー | 回転電機、および、それを用いたシフトバイワイヤシステム |
| JP6348132B2 (ja) * | 2016-01-13 | 2018-06-27 | ファナック株式会社 | ロボットを用いた重量測定システム及び重量測定方法 |
| EP3443642A4 (en) | 2016-04-13 | 2019-12-25 | Genesis Robotics and Motion Technologies Canada, ULC | AXIAL FLOW ELECTRIC MACHINE WITH A RADIAL PRESSURE BEARING AND RADIAL PRESSURE BEARING |
| EP3235723B1 (en) * | 2016-04-22 | 2019-11-27 | Rolls-Royce plc | Aircraft electrical network |
| US11342813B2 (en) * | 2016-04-30 | 2022-05-24 | Blue Canyon Technologies Inc. | Printed circuit board axial flux motor with thermal element |
| EP3454459B1 (en) * | 2016-05-04 | 2021-02-17 | Yu, Renwei | Efficient laminated coreless generator and manufacturing method therefor |
| US10778049B2 (en) * | 2016-06-07 | 2020-09-15 | Sapphire Motors | Stator assembly with stack of coated conductors |
| EP3485557A4 (en) | 2016-07-15 | 2020-03-18 | Genesis Robotics and Motion Technologies Canada, ULC | ROTARY ACTUATOR |
| CN106446364B (zh) * | 2016-09-08 | 2019-06-25 | 东南大学 | 一种温度场-热路直接耦合的电机热分析方法 |
| KR20230023827A (ko) | 2016-09-13 | 2023-02-17 | 인디고 테크놀로지스, 인크. | 다중 바 연결 전기 구동 시스템 |
| CN107070007B (zh) * | 2016-11-11 | 2019-12-03 | 南方电机科技有限公司 | 一种电机及包括该电机的设备 |
| US10141804B2 (en) | 2017-01-11 | 2018-11-27 | Infinitum Electric Inc. | System, method and apparatus for modular axial field rotary energy device |
| US10186922B2 (en) | 2017-01-11 | 2019-01-22 | Infinitum Electric Inc. | System and apparatus for axial field rotary energy device |
| US11177726B2 (en) | 2017-01-11 | 2021-11-16 | Infinitum Electric, Inc. | System and apparatus for axial field rotary energy device |
| EP3588743B1 (en) * | 2017-02-21 | 2021-05-12 | Panasonic Intellectual Property Management Co., Ltd. | Motor |
| WO2018176131A1 (en) | 2017-03-26 | 2018-10-04 | Genesis Robotics Llp | Robot arm |
| US20200076279A1 (en) | 2017-03-28 | 2020-03-05 | Genesis Robotics And Motion Technologies Canada | Corrugated stator |
| GB201705274D0 (en) | 2017-03-31 | 2017-05-17 | Upgrade Tech Eng Ltd | Combustion centre |
| WO2018217457A1 (en) * | 2017-05-26 | 2018-11-29 | Nuclues Scientific Inc. | Magnetic rotor assembly |
| EP3631947A4 (en) * | 2017-05-31 | 2021-01-27 | Genesis Robotics and Motion Technologies Canada, ULC | INSERTS FOR SUPPORTS OF ELECTRIC MACHINES |
| CA3062451A1 (en) | 2017-06-01 | 2018-12-06 | Genesis Robotics And Motion Technologies Canada, Ulc | Magnetically actuated brake |
| US11005322B2 (en) | 2017-06-05 | 2021-05-11 | E-Circuit Motors, Inc. | Rotor assemblies for axial flux machines |
| EP3418007A1 (en) * | 2017-06-19 | 2018-12-26 | ABB Schweiz AG | Method of determining a joint torque in a joint of an articulated industrial robot |
| RU177749U1 (ru) * | 2017-07-19 | 2018-03-12 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Московский авиационный институт (национальный исследовательский университет)" | Электрическая машина с кольцевой сверхпроводниковой обмоткой якоря |
| CN109428461B (zh) * | 2017-08-20 | 2024-03-29 | 迈格钠磁动力股份有限公司 | 兆瓦级永磁涡流柔性传动装置 |
| KR102359816B1 (ko) | 2017-09-16 | 2022-02-08 | 제네시스 어드밴스드 테크놀러지 인크. | 차동 유성 기어박스 |
| CN107741746B (zh) * | 2017-10-13 | 2020-10-16 | 北京航空航天大学 | 一种控制力矩陀螺用框架系统 |
| KR101956617B1 (ko) * | 2017-11-23 | 2019-03-12 | (주)한국미래기술 | 병렬형 집적 구동장치 |
| DE102017223622A1 (de) * | 2017-12-21 | 2019-06-27 | Brose Fahrzeugteile GmbH & Co. Kommanditgesellschaft, Würzburg | Rotor für einen Elektromotor und Elektromotor |
| CN109968399B (zh) * | 2017-12-28 | 2021-05-11 | 中国科学院沈阳自动化研究所 | 一种单电机变刚度关节 |
| FR3076674B1 (fr) * | 2018-01-09 | 2022-03-04 | Whylot Sas | Moteur ou generatrice electromagnetique a deux rotors et quatre stators et systeme de refroidissement integre |
| WO2019142116A1 (en) * | 2018-01-18 | 2019-07-25 | Genesis Robotics And Motion Technologies Canada, Ulc | Electric machine magnet insertion |
| CN111868631A (zh) | 2018-03-09 | 2020-10-30 | Asml荷兰有限公司 | 用于光刻设备的定位系统 |
| DE102018107142A1 (de) * | 2018-03-26 | 2019-09-26 | M-Robot OHG | Manipulatoreinrichtung |
| WO2019190959A1 (en) | 2018-03-26 | 2019-10-03 | Infinitum Electric Inc. | System and apparatus for axial field rotary energy device |
| US10916993B2 (en) * | 2018-06-14 | 2021-02-09 | Raytheon Company | Method for heat transfer across rotary joint |
| EP3595135A1 (de) * | 2018-07-13 | 2020-01-15 | Siemens Aktiengesellschaft | Leistungsfähige bzw. schnelllaufende dynamoelektrische rotatorische maschine |
| CN110838764A (zh) | 2018-08-16 | 2020-02-25 | 奥的斯电梯公司 | 电机定子组件、同步电机及乘客运输装置 |
| EP3614541A1 (de) * | 2018-08-21 | 2020-02-26 | Siemens Aktiengesellschaft | Verfahren zum herstellen eines einen magnetischen fluss führenden bauteils für eine elektrische oder elektronische komponente mit gradierung von magnetischen eigenschaften, bauteil sowie komponente |
| EP3618246A1 (en) | 2018-08-29 | 2020-03-04 | Siemens Gamesa Renewable Energy A/S | Coil layout for a generator having tape conductors |
| US10873239B2 (en) | 2018-09-07 | 2020-12-22 | Hamilton Sunstrand Corporation | Electric machine cooling features |
| US11331814B2 (en) * | 2018-09-13 | 2022-05-17 | Kinova Inc. | Articulated mechanism with protective sleeve at joint |
| US20210351658A1 (en) * | 2018-10-04 | 2021-11-11 | Montana Technologies, Llc | Rotor and stator for high speed axial flux machine |
| WO2020102354A1 (en) * | 2018-11-13 | 2020-05-22 | National Oilwell Varco, L.P. | Electric rotating machines with increased flux density |
| US11239535B2 (en) * | 2018-11-19 | 2022-02-01 | Optisys, LLC | Waveguide switch rotor with improved isolation |
| US20220021278A1 (en) | 2018-11-20 | 2022-01-20 | Genesis Robotics And Motion Technologies, LP | Integrated encoder and resolver |
| GB2579826B (en) | 2018-12-14 | 2023-04-05 | Safran Electrical & Power | Rotor for an electric machine |
| US11075595B2 (en) | 2018-12-26 | 2021-07-27 | Blue Canyon Technologies Inc. | Axial flux motor |
| SE543274C2 (en) * | 2019-03-04 | 2020-11-10 | Hagnesia Ab | Azimuthal or polodial flux machines |
| JP6972056B2 (ja) * | 2019-03-12 | 2021-11-24 | 株式会社東芝 | 回転電機、回転電機システム、車、発電装置、昇降装置、および、ロボット |
| CA3133822A1 (en) | 2019-03-22 | 2020-10-01 | Dmc Global Inc. | Cladded article with clad layer having varying thickness |
| US10965192B2 (en) | 2019-04-12 | 2021-03-30 | Caterpillar Inc. | Cooling system for a rotary electric machine |
| CN109995153B (zh) * | 2019-04-30 | 2021-02-19 | 天津大学 | 一种多组合可调型pcb集中绕组的定子结构 |
| DE102019206663A1 (de) * | 2019-05-09 | 2020-11-12 | Audi Ag | Stator für eine elektrische Maschine |
| US11973375B2 (en) | 2019-05-24 | 2024-04-30 | Magic Leap, Inc. | Annular axial flux motors |
| US11711003B2 (en) | 2019-05-31 | 2023-07-25 | MagniX USA, Inc. | High voltage converter for use as electric power supply |
| US11472562B2 (en) | 2019-06-14 | 2022-10-18 | Rosemount Aerospace Inc. | Health monitoring of an electrical heater of an air data probe |
| JP2022547506A (ja) * | 2019-09-06 | 2022-11-14 | エムオーティーエックス リミテッド | 回転横磁束モーター |
| JP2021052456A (ja) | 2019-09-24 | 2021-04-01 | セイコーエプソン株式会社 | モーター及びロボット |
| US11081934B2 (en) * | 2019-10-30 | 2021-08-03 | Maxwell Motors, Inc. | Fin-cooled axial flux rotating electrical machine, and applications thereof |
| DE102019216844A1 (de) * | 2019-10-31 | 2021-05-06 | Robert Bosch Gmbh | Axialflussmaschine für ein elektrisches Bearbeitungsgerät sowie elektrisches Bearbeitungsgerät mit einer Axialflussmaschine |
| GB2588823A (en) * | 2019-11-11 | 2021-05-12 | Epropelled Ltd | Electrical machine |
| US11283319B2 (en) | 2019-11-11 | 2022-03-22 | Infinitum Electric, Inc. | Axial field rotary energy device with PCB stator having interleaved PCBS |
| USD986283S1 (en) * | 2019-11-13 | 2023-05-16 | Ebm-Papst Mulfingen Gmbh & Co. Kg | Electric motor |
| CN112803691A (zh) | 2019-11-13 | 2021-05-14 | 通用汽车环球科技运作有限责任公司 | 带分布式绕组的轴向磁通马达 |
| US20220416638A1 (en) * | 2019-11-14 | 2022-12-29 | National Oilwell Varco, L.P. | Helical magnet arrangement for a magnetic linear actuator |
| US11228216B2 (en) | 2019-11-15 | 2022-01-18 | Ford Global Technologies, Llc | Stator for electric machine with conductors with varying cross-sectional shapes |
| CN112821702A (zh) | 2019-11-15 | 2021-05-18 | 通用汽车环球科技运作有限责任公司 | 用于轴向磁通马达的混合定子芯部件设计 |
| DE102020101149A1 (de) * | 2019-12-04 | 2021-06-10 | Schaeffler Technologies AG & Co. KG | Axialflussmaschine mit mechanisch fixierten Statorkernen mit radial verlaufenden Blechsegmenten |
| CN111010008B (zh) * | 2019-12-13 | 2020-11-06 | 南京理工大学 | 一种高强度轴向磁场电机表贴式永磁转子盘 |
| US20210218304A1 (en) | 2020-01-14 | 2021-07-15 | Infinitum Electric, Inc. | Axial field rotary energy device having pcb stator and variable frequency drive |
| US11293995B2 (en) * | 2020-03-23 | 2022-04-05 | Rosemount Aerospace Inc. | Differential leakage current measurement for heater health monitoring |
| DE102020107990A1 (de) * | 2020-03-24 | 2021-09-30 | Schaeffler Technologies AG & Co. KG | Manipulatorarm für einen Roboter sowie Roboter mit einem solchen Manipulatorarm |
| JP2021158751A (ja) * | 2020-03-26 | 2021-10-07 | セイコーエプソン株式会社 | ロボット及びロボットシステム |
| US11502564B2 (en) | 2020-04-03 | 2022-11-15 | Mitsubishi Electric Research Laboratories, Inc. | Multi-layer axial and radial flux vernier permanent magnet motor |
| CN111745630B (zh) * | 2020-06-04 | 2023-12-15 | 广东省智能制造研究所 | 一种机械模块及其安装方法 |
| US11909264B2 (en) * | 2020-07-14 | 2024-02-20 | Board Of Regents, The University Of Texas System | Rotor configuration for switched reluctance motor with minimized torque ripple |
| DE102020127172A1 (de) | 2020-10-15 | 2022-04-21 | Daniel Kerschgens | Elektrischer Scheibenmotor zum Antreiben einer Felge |
| US12027957B2 (en) * | 2020-10-27 | 2024-07-02 | Samsung Electronics Co., Ltd. | Motor assembly |
| DE102020128431A1 (de) | 2020-10-29 | 2022-05-05 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Traktionsmotor für ein Fahrzeug |
| DE102020129528A1 (de) | 2020-11-10 | 2022-05-12 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Elektrische Maschine für ein Fahrzeug |
| CN114552815A (zh) | 2020-11-26 | 2022-05-27 | 通用汽车环球科技运作有限责任公司 | 轴向磁通电机定子的直接接触冷却 |
| MX2023009616A (es) | 2021-02-17 | 2023-08-24 | E Circuit Motors Inc | Configuraciones de estator plano para maquinas de flujo axial. |
| US11342820B1 (en) * | 2021-02-22 | 2022-05-24 | GM Global Technology Operations LLC | Stator welding fixture system and method |
| JP2022131847A (ja) * | 2021-02-26 | 2022-09-07 | ミネベアミツミ株式会社 | モータ |
| DE102021108949A1 (de) | 2021-04-10 | 2022-10-13 | Schaeffler Technologies AG & Co. KG | Elektrische Maschine |
| US11482908B1 (en) | 2021-04-12 | 2022-10-25 | Infinitum Electric, Inc. | System, method and apparatus for direct liquid-cooled axial flux electric machine with PCB stator |
| DE102021108979B4 (de) | 2021-04-12 | 2023-08-03 | Schaeffler Technologies AG & Co. KG | Elektrische Axialflussmaschine |
| DE202022101430U1 (de) | 2021-04-13 | 2022-04-14 | Konstantin Dominik Appelt | Vorrichtung zur Beleuchtung und Desinfektion von Räumen |
| US11845347B2 (en) | 2021-05-12 | 2023-12-19 | David Alan Copeland | Precision charging control of an untethered vehicle with a modular vehicle charging roadway |
| JP2022178014A (ja) * | 2021-05-19 | 2022-12-02 | セイコーエプソン株式会社 | 回転モーター、ロボット、回転モーターの製造方法 |
| US12057747B2 (en) | 2021-05-21 | 2024-08-06 | Douglas S. Beck | Rotary electrical machine using time-invariant magnetic fields |
| DE102021113660A1 (de) | 2021-05-27 | 2022-12-01 | Schaeffler Technologies AG & Co. KG | Elektrische Axialflussmaschine, kollaborativer Roboter mit einer elektrischen Axialflussmaschine |
| CN113241925B (zh) * | 2021-07-12 | 2021-10-15 | 峰岹科技(深圳)股份有限公司 | 直线交流永磁同步电机 |
| US20240322626A1 (en) * | 2021-07-30 | 2024-09-26 | E-Circuit Motors, Inc. | Magnetic material filled printed circuit boards and printed circuit board stators |
| US11336130B1 (en) | 2021-08-17 | 2022-05-17 | E-Circuit Motors, Inc. | Low-loss planar winding configurations for an axial flux machine |
| CN113852308B (zh) * | 2021-08-17 | 2024-04-09 | 中车唐山机车车辆有限公司 | 驱动电机控制方法、装置、电子设备及存储介质 |
| US20230155463A1 (en) * | 2021-11-17 | 2023-05-18 | Baker Hughes Oilfield Operations Llc | Method for external winding of esp motor using a split core stator |
| US12076930B2 (en) | 2021-12-03 | 2024-09-03 | Hamilton Sundstrand Corporation | Additively manufacturing an impeller and motor rotor |
| US12117016B2 (en) | 2021-12-03 | 2024-10-15 | Hamilton Sundstrand Corporation | Shaftless rotary machine |
| DE102021133457A1 (de) | 2021-12-16 | 2023-06-22 | Schaeffler Technologies AG & Co. KG | Verfahren und Vorrichtung zur Prüfung eines SMC-Statorkerns |
| EP4243246A1 (de) | 2022-03-07 | 2023-09-13 | Dr. Ing. h.c. F. Porsche Aktiengesellschaft | Elektrische maschine für ein fahrzeug |
| CN114812628B (zh) * | 2022-03-10 | 2023-09-19 | 朝阳市加华电子有限公司 | 一种光电编码器码盘的安装方法 |
| CN114777821B (zh) * | 2022-03-10 | 2023-07-18 | 朝阳市加华电子有限公司 | 一种新型光电编码器码盘的固定方法与装置 |
| WO2023228518A1 (ja) * | 2022-05-23 | 2023-11-30 | 株式会社ハーモニック・ドライブ・システムズ | アキシャルギャップ型モータ |
| CN115026861B (zh) * | 2022-06-17 | 2024-06-25 | 福州大学 | 一种多功能钢线圈抓取末端执行器 |
| CN115425784A (zh) * | 2022-08-12 | 2022-12-02 | 华为数字能源技术有限公司 | 转子、盘式电机、电机驱动系统及车辆 |
| WO2024044374A2 (en) * | 2022-08-25 | 2024-02-29 | The Texas A&M University System | Magnetic gear systems and methods |
| US11824410B1 (en) | 2023-01-11 | 2023-11-21 | Rolls-Royce Deutschland Ltd & Co Kg | Electrical machines for aircraft power and propulsion systems |
| US11990805B1 (en) | 2023-01-11 | 2024-05-21 | Rolls-Royce Deutschland Ltd & Co Kg | Electrical machines for aircraft power and propulsion systems having a defined machine parameter based on a ratio between an active parts torque density and a power factor |
| US11827371B1 (en) | 2023-01-11 | 2023-11-28 | Rolls-Royce Deutschland Ltd & Co Kg | Electrical machines for aircraft power and propulsion systems |
| GB2627179A (en) | 2023-01-11 | 2024-08-21 | Rolls Royce Deutschland Ltd & Co Kg | Electrical machines for aircraft power and propulsion systems |
| GB2626145A (en) | 2023-01-11 | 2024-07-17 | Rolls Royce Deutschland Ltd & Co Kg | Electrical machines for aircraft power and propulsion systems |
| CN116155012B (zh) * | 2023-04-18 | 2023-07-28 | 浙江大学 | 空气轴承支承的高速电机系统及其控制方法 |
Family Cites Families (290)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB433367A (en) * | 1934-04-25 | 1935-08-13 | Peintal S A | Process for the production of anti-corrosive films on aluminium and its alloys |
| BE517662A (ko) | 1952-02-15 | |||
| US3383534A (en) | 1965-04-05 | 1968-05-14 | Rotron Mfg Co | Stator for electric motors |
| CA1004275A (en) * | 1974-04-04 | 1977-01-25 | Eric Whiteley | Permanent magnet synchronous dynamoelectric machine |
| US4394594A (en) | 1975-07-24 | 1983-07-19 | Papst-Motoren Kg | Motor with a disk rotor |
| US4081726A (en) * | 1976-01-05 | 1978-03-28 | Linear International Corporation | Electric motor |
| JPS5292541A (en) | 1976-01-30 | 1977-08-04 | Mitsubishi Rayon Co | Operating data collecting and transmitting system |
| NL163075C (nl) * | 1976-07-12 | 1980-07-15 | Gils Adrianus Van | Gelamineerde wikkeling voor elektrische machines. |
| US4310390A (en) | 1977-08-10 | 1982-01-12 | Lockheed Corporation | Protective coating process for aluminum and aluminum alloys |
| US4245870A (en) | 1979-04-06 | 1981-01-20 | Emerson Electric Co. | Electric motor bearing assembly |
| US4307309A (en) * | 1980-01-29 | 1981-12-22 | Barrett Edward L | Brushless dynamoelectric machine |
| FR2519483A1 (fr) | 1981-12-31 | 1983-07-08 | Auxilec | Machine synchrone a rotor a aimants permanents |
| US4501980A (en) | 1982-06-04 | 1985-02-26 | Motornetics Corporation | High torque robot motor |
| US4464592A (en) * | 1982-07-14 | 1984-08-07 | Emery Major | Prime mover |
| IT1198556B (it) | 1983-04-15 | 1988-12-21 | Giampiero Tassinario | Motore a corrente continua senza collettore a commutazione elettronica |
| DE3320805A1 (de) | 1983-06-09 | 1984-12-13 | Brown, Boveri & Cie Ag, 6800 Mannheim | Vielpolige, mehrphasige synchronmaschine |
| FR2548843B1 (fr) | 1983-07-07 | 1986-11-07 | Labinal | Perfectionnement aux machines tournantes a aimants au rotor |
| JPS6039336A (ja) * | 1983-08-12 | 1985-03-01 | Nippon Denso Co Ltd | 扁平型回転電機の冷却構造 |
| JPS61221561A (ja) * | 1985-03-27 | 1986-10-01 | Nippon Denso Co Ltd | 扁平型回転電機 |
| MX161230A (es) | 1985-12-23 | 1990-08-24 | Unique Mobility Inc | Mejoras en transductor electromagnetico de peso ligero |
| US4716327A (en) | 1986-11-05 | 1987-12-29 | Universal Electric Company | Electric motor bearing |
| DE3705089A1 (de) | 1987-02-13 | 1988-08-25 | Weh Herbert | Transversalflussmaschine in sammleranordnung |
| DE3806760A1 (de) | 1988-03-02 | 1989-09-14 | Heidelberg Motor Gmbh | Elektrische maschine |
| JPH01234191A (ja) * | 1988-03-10 | 1989-09-19 | Internatl Business Mach Corp <Ibm> | マニピユレータ・アセンブリ |
| NL8801628A (nl) | 1988-06-27 | 1990-01-16 | Philips Nv | Electrische meerpolige machine. |
| US5010267A (en) | 1988-09-09 | 1991-04-23 | Wisconsin Alumni Research Foundation | Variable speed machine with high power density |
| US4900965A (en) | 1988-09-28 | 1990-02-13 | Fisher Technology, Inc. | Lightweight high power electromotive device |
| EP0410003B1 (en) * | 1989-02-14 | 1994-11-02 | Sumitomo Electric Industries, Ltd. | Insulated electric wire |
| US4959577A (en) * | 1989-10-23 | 1990-09-25 | General Motors Corporation | Alternating current generator |
| US5144183A (en) | 1990-11-20 | 1992-09-01 | Kollmorgen Corporation | Flat motor of reduced length |
| NL9002624A (nl) | 1990-11-30 | 1992-06-16 | Kinetron Bv | Miniatuurmotor. |
| JPH04131179U (ja) | 1991-05-20 | 1992-12-02 | テイアツク株式会社 | スピンドルモータ |
| DE4125044A1 (de) | 1991-07-29 | 1993-02-04 | Wolfgang Hill | Als scheibenlaeufer ausgebildeter elektromotor mit radial zur rotationsachse angeordnetem rotor und blechpaket |
| US5334899A (en) | 1991-09-30 | 1994-08-02 | Dymytro Skybyk | Polyphase brushless DC and AC synchronous machines |
| DE4137457C1 (en) * | 1991-11-14 | 1993-01-21 | Dornier Gmbh, 7990 Friedrichshafen, De | Voltage regulator for permanent magnet generator - reduces flux density by iris diaphragm closure and lowers generator voltage for stable supply |
| US5212419A (en) | 1992-01-10 | 1993-05-18 | Fisher Electric Motor Technology, Inc. | Lightweight high power electromotive device |
| US5394321A (en) | 1992-09-02 | 1995-02-28 | Electric Power Research Institute, Inc. | Quasi square-wave back-EMF permanent magnet AC machines with five or more phases |
| US5252880A (en) | 1992-11-24 | 1993-10-12 | General Electric Company | Dynamoelectric machine rotor endwindings with cooling passages |
| US5445456A (en) | 1992-11-26 | 1995-08-29 | Sony Corporation | Bearing assembly |
| JP3294673B2 (ja) | 1993-05-18 | 2002-06-24 | 株式会社エス・エム・シー | シャフトレス薄型モータ |
| US5396140A (en) | 1993-05-28 | 1995-03-07 | Satcon Technology, Corp. | Parallel air gap serial flux A.C. electrical machine |
| US5955808A (en) * | 1994-01-31 | 1999-09-21 | Hill; Wolfgang | Multi-phase electric machine with offset multi-polar electric pole units |
| US6259180B1 (en) | 1996-07-02 | 2001-07-10 | Schlenker Enterprises, Ltd. | Motor including embedded permanent magnet rotor and method for making the same |
| US5942830A (en) | 1994-04-06 | 1999-08-24 | Hill; Wolfgang | Three-phase electric machine with interlaced conductor layers |
| DE4411750C2 (de) | 1994-04-06 | 1997-06-05 | Wolfgang Hill | Dreiphasige elektrische Maschine mit verflochtenen Leiterschichten |
| JP3623269B2 (ja) | 1994-04-15 | 2005-02-23 | コールモージェン・コーポレーション | アキシャル・エアギャップ・モータ |
| DE4423620A1 (de) | 1994-07-06 | 1996-01-11 | Philips Patentverwaltung | Mittels Permanentmagneten erregbarer elektrischer Motor, insbesondere Innenläufer- oder Außenläufermotor |
| US5625241A (en) * | 1994-07-28 | 1997-04-29 | Energy Research Corporation | Carousel electric generator |
| FR2726948B1 (fr) | 1994-11-16 | 1996-12-20 | Wavre Nicolas | Moteur synchrone a aimants permanents |
| US5744888A (en) | 1995-02-03 | 1998-04-28 | Tiedtke-Buhling-Kinne & Partner | Multiphase and multipole electrical machine |
| US5834864A (en) | 1995-09-13 | 1998-11-10 | Hewlett Packard Company | Magnetic micro-mover |
| US5661638A (en) * | 1995-11-03 | 1997-08-26 | Silicon Graphics, Inc. | High performance spiral heat sink |
| JP3306305B2 (ja) | 1996-04-25 | 2002-07-24 | 株式会社三協精機製作所 | モータ |
| SE509072C2 (sv) | 1996-11-04 | 1998-11-30 | Asea Brown Boveri | Anod, anodiseringsprocess, anodiserad tråd och användning av sådan tråd i en elektrisk anordning |
| US5982074A (en) | 1996-12-11 | 1999-11-09 | Advanced Technologies Int., Ltd. | Axial field motor/generator |
| TW364234B (en) | 1997-04-14 | 1999-07-11 | Sanyo Electric Co | Rotor for an electric motor |
| DE19733262A1 (de) | 1997-08-01 | 1999-02-04 | Dornier Gmbh Lindauer | Rotations-Kantendreher mit direkt elektromagnetischem Antrieb für Webmaschinen |
| US6348751B1 (en) | 1997-12-12 | 2002-02-19 | New Generation Motors Corporation | Electric motor with active hysteresis-based control of winding currents and/or having an efficient stator winding arrangement and/or adjustable air gap |
| US6239516B1 (en) | 1998-04-06 | 2001-05-29 | Kollmorgan Corporation | High performance ironless linear motor with supported windings |
| US6803694B2 (en) * | 1998-11-06 | 2004-10-12 | Metglas, Inc. | Unitary amorphous metal component for an axial flux electric machine |
| DE19851439A1 (de) | 1998-11-09 | 2000-03-30 | Daimler Chrysler Ag | Elektrische Maschine mit Kühlung |
| DE19954196A1 (de) | 1998-12-28 | 2000-06-29 | Feldmann Johann | Elektromagnetisch arbeitender Energiewandler |
| US6242831B1 (en) | 1999-02-11 | 2001-06-05 | Seagate Technology, Inc. | Reduced stiction for disc drive hydrodynamic spindle motors |
| DE50001960D1 (de) * | 1999-02-12 | 2003-06-05 | Helmut Schiller | Elektrische maschine |
| US6081059A (en) | 1999-04-21 | 2000-06-27 | Hsu; Chun-Pu | Outer-rotor electric motor having inner-stator formed by concentrically wrapping flattened stator elements on stator core |
| US6633106B1 (en) | 1999-09-30 | 2003-10-14 | Dwight W. Swett | Axial gap motor-generator for high speed operation |
| US6313556B1 (en) | 1999-09-30 | 2001-11-06 | Reliance Electric Technologies, Llc | Superconducting electromechanical rotating device having a liquid-cooled, potted, one layer stator winding |
| DE60027840T2 (de) | 1999-11-18 | 2006-12-28 | Denso Corp., Kariya | Rotierende elektrische Maschine für Fahrzeuge |
| JP3707606B2 (ja) | 2000-02-07 | 2005-10-19 | 三菱電機株式会社 | 回転電機の巻線組立およびその製造方法ならびにその巻線組立を用いた回転電機の固定子 |
| DE10043120A1 (de) | 2000-08-31 | 2002-04-11 | Wolfgang Hill | Elektrische Maschine für hohe Ummagnetisierungsfrequenzen |
| FR2823614B1 (fr) | 2001-04-17 | 2008-07-11 | Leroy Somer Moteurs | Machine tournante electrique comportant un stator forme de secteurs assembles |
| US6700297B2 (en) * | 2001-06-01 | 2004-03-02 | Ut-Battelle, Llc | Superconducting PM undiffused machines with stationary superconducting coils |
| FR2827439B1 (fr) | 2001-07-13 | 2003-10-24 | Leroy Somer Moteurs | Machine discoide |
| DE10153750A1 (de) | 2001-10-31 | 2003-05-22 | Siemens Ag | Rotor für PM-Synchronmaschine |
| US6664704B2 (en) | 2001-11-23 | 2003-12-16 | David Gregory Calley | Electrical machine |
| US6933643B1 (en) | 2002-01-23 | 2005-08-23 | Seagate Technology Llc | Multiple radial/axial surfaces to enhance fluid bearing performance |
| US7291953B1 (en) | 2002-02-21 | 2007-11-06 | Anorad Corporation | High performance motor and magnet assembly therefor |
| WO2003073591A1 (de) | 2002-02-28 | 2003-09-04 | Abb Research Ltd. | Synchrongenerator |
| US6922004B2 (en) * | 2002-04-05 | 2005-07-26 | The Timken Company | Axial flux motor assembly |
| US6822368B2 (en) * | 2002-06-04 | 2004-11-23 | Wavecrest Laboratories, Llc | Rotary permanent magnet electric motor having stator pole shoes of varying dimensions |
| US6995494B2 (en) | 2002-10-14 | 2006-02-07 | Deere & Company | Axial gap brushless DC motor |
| DE10248771A1 (de) | 2002-10-18 | 2004-04-29 | Siemens Ag | Permanenterregte Synchronmaschine |
| JP2004148449A (ja) | 2002-10-30 | 2004-05-27 | Kawasaki Heavy Ind Ltd | 多関節マニピュレータ |
| US8004127B2 (en) | 2002-12-06 | 2011-08-23 | Foster-Miller, Inc. | Rotary reluctance motor |
| EP1432104B1 (de) | 2002-12-16 | 2006-12-06 | ebm-papst St. Georgen GmbH & Co. KG | Aussenläufermotor mit stehender Lagerachse |
| DE10260282A1 (de) | 2002-12-20 | 2004-07-15 | Siemens Ag | Elektrische Maschine |
| JP3952955B2 (ja) | 2003-01-17 | 2007-08-01 | トヨタ自動車株式会社 | 多関節ロボット |
| US7230361B2 (en) * | 2003-01-31 | 2007-06-12 | Light Engineering, Inc. | Efficient high-speed electric device using low-loss materials |
| US7663283B2 (en) | 2003-02-05 | 2010-02-16 | The Texas A & M University System | Electric machine having a high-torque switched reluctance motor |
| ATE395741T1 (de) | 2003-02-07 | 2008-05-15 | Core Motion Inc | Optimierte leiteranordnung für eine axialfeld- drehenergieeinrichtung |
| DE10318624A1 (de) * | 2003-04-24 | 2004-11-25 | Minebea Co., Ltd. | Rotorkörper für einen Elektromotor |
| US6965183B2 (en) | 2003-05-27 | 2005-11-15 | Pratt & Whitney Canada Corp. | Architecture for electric machine |
| JP2005045868A (ja) | 2003-07-23 | 2005-02-17 | Sankyo Seiki Mfg Co Ltd | 振動モータ |
| US20050035678A1 (en) * | 2003-08-11 | 2005-02-17 | Ward Terence G. | Axial flux motor mass reduction with improved cooling |
| US7332837B2 (en) * | 2003-08-11 | 2008-02-19 | General Motors Corporation | Cooling and handling of reaction torque for an axial flux motor |
| US7262536B2 (en) * | 2003-08-11 | 2007-08-28 | General Motors Corporation | Gearless wheel motor drive system |
| US7190101B2 (en) | 2003-11-03 | 2007-03-13 | Light Engineering, Inc. | Stator coil arrangement for an axial airgap electric device including low-loss materials |
| JP2005151725A (ja) | 2003-11-17 | 2005-06-09 | Equos Research Co Ltd | アキシャルギャップ回転電機 |
| DE10361229B4 (de) | 2003-12-24 | 2012-01-26 | Minebea Co., Ltd. | Spindelmotor mit Lagersystem |
| US20060238053A1 (en) | 2004-03-01 | 2006-10-26 | The University Of Toledo | Conical bearingless motor/generator |
| SE0401217D0 (sv) | 2004-05-11 | 2004-05-11 | Hoeganaes Ab | Electrical machine and method for producing an electrical machine |
| FI20041113A0 (fi) | 2004-08-25 | 2004-08-25 | Juha Pyrhoenen | Aksiaalivuoinduktiosähkökone |
| DE102004044985B4 (de) | 2004-09-16 | 2014-01-23 | Siemens Aktiengesellschaft | Elektrische Maschine |
| US7157827B2 (en) | 2004-09-21 | 2007-01-02 | A. O. Smith Corporation | Spoke permanent magnet rotor |
| DE102004045992A1 (de) | 2004-09-22 | 2006-04-06 | Siemens Ag | Elektrische Maschine |
| US7982350B2 (en) | 2004-10-25 | 2011-07-19 | Novatorque, Inc. | Conical magnets and rotor-stator structures for electrodynamic machines |
| JP2006166634A (ja) | 2004-12-08 | 2006-06-22 | Nissan Motor Co Ltd | アキシャルギャップ型回転電機のロータ構造 |
| US7692357B2 (en) | 2004-12-16 | 2010-04-06 | General Electric Company | Electrical machines and assemblies including a yokeless stator with modular lamination stacks |
| FI118448B (fi) * | 2004-12-13 | 2007-11-15 | Kone Corp | Yliaaltojen pienentäminen sähkömoottorissa |
| EP1876350A4 (en) | 2005-04-11 | 2014-01-01 | Vidal Maria Elena Novo | ELECTRIC POWER GENERATING SYSTEM USING RING GENERATORS |
| CN101213729B (zh) | 2005-04-28 | 2013-06-12 | 株式会社电装 | 交流电动机 |
| JPWO2006126552A1 (ja) | 2005-05-24 | 2008-12-25 | 株式会社デンソー | モータとその制御装置 |
| JP4706339B2 (ja) | 2005-06-03 | 2011-06-22 | 株式会社富士通ゼネラル | アキシャルエアギャップ型電動機 |
| JP4692090B2 (ja) | 2005-06-16 | 2011-06-01 | 株式会社富士通ゼネラル | アキシャルエアギャップ型電動機 |
| FI20050866A0 (fi) | 2005-08-31 | 2005-08-31 | Axco Motors Oy | Aggregaatin jäähdytysjärjestelmä |
| US7608965B2 (en) * | 2005-09-01 | 2009-10-27 | Wisconsin Alumni Research Foundation | Field controlled axial flux permanent magnet electrical machine |
| DE102005046617A1 (de) | 2005-09-29 | 2007-04-12 | Zf Friedrichshafen Ag | Antriebseinheit mit verschachtelten Elektromotoren |
| JP4584122B2 (ja) | 2005-11-22 | 2010-11-17 | 本田技研工業株式会社 | ステータ |
| JP4376863B2 (ja) | 2005-12-22 | 2009-12-02 | シナノケンシ株式会社 | 永久磁石型回転機 |
| JP5108236B2 (ja) | 2006-02-08 | 2012-12-26 | 本田技研工業株式会社 | モータ用ロータ |
| US7471026B2 (en) * | 2006-03-13 | 2008-12-30 | Isca Innovatons, Llc | Brushless electric motor |
| US7772735B2 (en) * | 2006-04-19 | 2010-08-10 | Asmo Co., Ltd. | Embedded magnet type rotating electric machine |
| JP4842731B2 (ja) * | 2006-04-19 | 2011-12-21 | アスモ株式会社 | 埋込磁石型回転電機 |
| WO2014100255A1 (en) | 2012-12-18 | 2014-06-26 | Sdg, Llc | Repetitive pulsed electric discharge apparatuses and methods of use |
| JP5259934B2 (ja) | 2006-07-20 | 2013-08-07 | 株式会社日立産機システム | 永久磁石式回転電機及びそれを用いた圧縮機 |
| JP5252789B2 (ja) | 2006-08-11 | 2013-07-31 | カヤバ工業株式会社 | 軸方向空隙型電動機 |
| JP2008113531A (ja) | 2006-10-31 | 2008-05-15 | Hitachi Ltd | 回転電機 |
| JP2008131683A (ja) | 2006-11-16 | 2008-06-05 | Fujitsu General Ltd | アキシャルエアギャップ型電動機 |
| JP4394115B2 (ja) | 2006-12-26 | 2010-01-06 | 本田技研工業株式会社 | アキシャルギャップ型モータ |
| US7646124B2 (en) | 2007-02-15 | 2010-01-12 | Hamilton Sundstrand Corporation | Magnet retention system for permanent magnet motors and generators |
| US7932658B2 (en) | 2007-03-15 | 2011-04-26 | A.O. Smith Corporation | Interior permanent magnet motor including rotor with flux barriers |
| JP2008245356A (ja) * | 2007-03-26 | 2008-10-09 | Moriyama Denki Seisakusho:Kk | アキシャルギャップ型エンジン駆動発電機 |
| US9041264B2 (en) | 2007-05-03 | 2015-05-26 | Regal Beloit America, Inc. | Axial flux electrical machine |
| FI20075310A0 (fi) | 2007-05-03 | 2007-05-03 | Axco Motors Oy | Aksiaalivuoinduktiosähkökone |
| US7923881B2 (en) | 2007-05-04 | 2011-04-12 | A.O. Smith Corporation | Interior permanent magnet motor and rotor |
| JP5052288B2 (ja) * | 2007-06-28 | 2012-10-17 | 信越化学工業株式会社 | アキシャルギャップ型回転機 |
| JP2009044866A (ja) | 2007-08-09 | 2009-02-26 | Fujitsu General Ltd | アキシャルエアギャップ型電動機 |
| US7948340B2 (en) | 2007-08-29 | 2011-05-24 | Siemens Industry, Inc. | Three-phase multi-winding device |
| JP5292541B2 (ja) | 2007-09-12 | 2013-09-18 | 並木精密宝石株式会社 | 回転直動複合動作アクチュエータ |
| US8129880B2 (en) * | 2007-11-15 | 2012-03-06 | GM Global Technology Operations LLC | Concentrated winding machine with magnetic slot wedges |
| EP2063114A1 (en) | 2007-11-26 | 2009-05-27 | Siemens Aktiengesellschaft | Wind turbine |
| TWI394350B (zh) | 2008-03-19 | 2013-04-21 | Hoganas Ab Publ | 一體式轉子磁極件 |
| US7800471B2 (en) | 2008-04-04 | 2010-09-21 | Cedar Ridge Research, Llc | Field emission system and method |
| US8760250B2 (en) | 2009-06-02 | 2014-06-24 | Correlated Magnetics Rsearch, LLC. | System and method for energy generation |
| US7868721B2 (en) | 2008-04-04 | 2011-01-11 | Cedar Ridge Research, Llc | Field emission system and method |
| US8179219B2 (en) | 2008-04-04 | 2012-05-15 | Correlated Magnetics Research, Llc | Field emission system and method |
| ES2402667T5 (es) | 2008-04-19 | 2016-06-28 | Grundfos Management A/S | Componente de carcasa de estator para un motor encapsulado hermético |
| US8847464B2 (en) | 2008-06-12 | 2014-09-30 | General Electric Company | Electrical machine with improved stator flux pattern across a rotor that permits higher torque density |
| CN101615817B (zh) | 2008-06-26 | 2012-07-04 | 中山大洋电机股份有限公司 | 一种外转子电机 |
| DK2143944T3 (en) | 2008-07-07 | 2019-01-14 | Siemens Ag | Windmill |
| KR101248201B1 (ko) | 2008-08-29 | 2013-04-01 | 무그 인코포레이티드 | 영구 자석형 스테핑모터 |
| CA2739727C (en) | 2008-10-06 | 2017-06-27 | Kinova | Portable robotic arm |
| EP2182613B1 (en) | 2008-10-31 | 2018-02-28 | Denso Corporation | Rotor for electric rotary machine |
| KR20110093803A (ko) | 2008-11-03 | 2011-08-18 | 모터 엑셀런스, 엘엘씨 | 횡 자속 기계 또는/및 정류식 자속 기계 및 전기 기계용 로터를 형성하는 방법 |
| DE102009044528A1 (de) | 2008-11-14 | 2010-06-02 | Denso Corporation, Kariya-City | Reluktanzmotor |
| GB0821815D0 (en) | 2008-11-28 | 2009-01-07 | Cummins Generator Technologies | Rotating electrical machine |
| US8179011B2 (en) | 2008-12-17 | 2012-05-15 | Asmo Co., Ltd. | Brushless motor |
| US7741750B1 (en) | 2008-12-29 | 2010-06-22 | Tesla Motors, Inc. | Induction motor with improved torque density |
| JP2012514185A (ja) | 2008-12-30 | 2012-06-21 | シェンツェン アカデミー オブ エアロスペース テクノロジー | ホール回転トランス及びそれで作られたホール回転角エンコーダ |
| CN101783567B (zh) | 2009-01-19 | 2013-02-13 | 德昌电机(深圳)有限公司 | 一种直流电机及使用该直流电机的冷却风扇模组 |
| WO2010141108A2 (en) | 2009-01-27 | 2010-12-09 | Massachusetts Institute Of Technology | Electropermanent magnet-based motors |
| JP5046051B2 (ja) * | 2009-01-28 | 2012-10-10 | 本田技研工業株式会社 | アキシャルギャップ型モータ |
| JP5027169B2 (ja) | 2009-01-30 | 2012-09-19 | 本田技研工業株式会社 | アキシャルギャップ型モータ及びそのロータ製造方法 |
| GB0902394D0 (en) | 2009-02-13 | 2009-04-01 | Isis Innovation | Electric machine- cooling |
| GB0902390D0 (en) | 2009-02-13 | 2009-04-01 | Isis Innovation | Electric machine - flux |
| LV14007B (en) | 2009-03-31 | 2009-11-20 | Imants Dirba | Axial magnetic flux generator/motor with permanent magnets |
| US7843094B2 (en) | 2009-04-09 | 2010-11-30 | Goodzeit Carl L | Dual armature motor/generator with flux linkage between dual armatures and a superconducting field coil |
| GB0906284D0 (en) | 2009-04-14 | 2009-05-20 | Isis Innovation | Electric machine-evaporative cooling |
| US7965011B2 (en) | 2009-05-20 | 2011-06-21 | Unique Product & Design Co., Ltd. | Brushless DC motor structure with a constant ratio of magnetic rotor poles to stator slots |
| US8704626B2 (en) | 2010-05-10 | 2014-04-22 | Correlated Magnetics Research, Llc | System and method for moving an object |
| JP5471867B2 (ja) | 2009-07-17 | 2014-04-16 | 株式会社デンソー | 回転電機の固定子 |
| US8291788B2 (en) | 2009-09-22 | 2012-10-23 | GM Global Technology Operations LLC | Rotary series elastic actuator |
| US8593029B2 (en) * | 2009-09-30 | 2013-11-26 | Mitsubishi Electric Corporation | Lundell type rotating machine |
| JP5723524B2 (ja) | 2009-11-06 | 2015-05-27 | 日立オートモティブシステムズ株式会社 | 回転電機及び電気自動車 |
| CA2780021A1 (en) | 2009-11-13 | 2011-05-19 | Steven Camilleri | Electric motor assembly |
| DK2333933T3 (en) | 2009-12-08 | 2016-05-17 | Siemens Ag | A device for compensating a non-uniform air gap in an electric machine |
| US20120299430A1 (en) | 2009-12-22 | 2012-11-29 | Hoganas Ab (Publ) | Rotor for modulated pole machine |
| WO2011115634A1 (en) | 2010-03-15 | 2011-09-22 | Motor Excellence Llc | Transverse and/or commutated flux systems having phase offset |
| EP2548287A1 (en) | 2010-03-15 | 2013-01-23 | Motor Excellence, LLC | Transverse and/or commutated flux system for electric bicycles |
| WO2011115632A1 (en) | 2010-03-15 | 2011-09-22 | Motor Excellence Llc | Transverse and/or commutated flux systems configured to provide reduced flux leakage, hysteresis loss reduction, and phase matching |
| US9085358B2 (en) | 2010-03-17 | 2015-07-21 | Borealis Technical Limited | Electric motor integrated with a wheel |
| FR2958466B1 (fr) | 2010-03-31 | 2017-09-08 | Valeo Equip Electr Moteur | Machine electrique tournante synchrone a aimants permanents et concentration de flux |
| DE102010018146A1 (de) | 2010-04-24 | 2011-10-27 | Kolektor Group D.O.O. | Mehrphasige dynamoelektrische Maschine der Klauenpolbauart |
| EP2388890A1 (en) | 2010-05-19 | 2011-11-23 | Siemens Aktiengesellschaft | Generator with aluminium winding and wind turbine |
| US9154024B2 (en) | 2010-06-02 | 2015-10-06 | Boulder Wind Power, Inc. | Systems and methods for improved direct drive generators |
| JP4725684B1 (ja) | 2010-08-10 | 2011-07-13 | 株式会社安川電機 | 発電機および風力発電システム |
| US8370868B2 (en) | 2010-08-18 | 2013-02-05 | Samsung Electro-Mechanics Co., Ltd. | Spindle motor and disk driver having the same |
| GB201013881D0 (en) | 2010-08-19 | 2010-10-06 | Oxford Yasa Motors Ltd | Electric machine - construction |
| GB2484341A (en) | 2010-10-08 | 2012-04-11 | Oxford Yasa Motors Ltd | Wheel hub electric motor - Evaporative Cooling |
| DE202010014425U1 (de) | 2010-10-20 | 2011-01-20 | Robert Bosch Gmbh | Isolierendes Halteelement für Phasenpotential-Schienen |
| WO2012061270A2 (en) | 2010-11-03 | 2012-05-10 | Ramu, Inc. | Noise reduction structures for electrical machines |
| GB2485184B (en) * | 2010-11-04 | 2013-12-11 | Evo Electric Ltd | Axial flux electrical machines |
| WO2012067893A2 (en) | 2010-11-17 | 2012-05-24 | Motor Excellence, Llc | Transverse and/or commutated flux systems having segmented stator laminations |
| WO2012067896A2 (en) | 2010-11-17 | 2012-05-24 | Motor Excellence, Llc | Transverse and/or commutated flux systems having laminated and powdered metal portions |
| US8854171B2 (en) | 2010-11-17 | 2014-10-07 | Electric Torque Machines Inc. | Transverse and/or commutated flux system coil concepts |
| JP5549567B2 (ja) | 2010-12-07 | 2014-07-16 | 株式会社デンソー | 電動機装置 |
| US8916999B2 (en) | 2011-01-01 | 2014-12-23 | Asmo Co., Ltd. | Motors containing segment conductor coils |
| US9035503B2 (en) | 2011-01-12 | 2015-05-19 | Kollmorgen Corporation | Environmentally protected housingless generator/motor |
| FI20115076A0 (fi) | 2011-01-26 | 2011-01-26 | Axco Motors Oy | Kestomagneettitahtikoneen laminoitu roottorirakenne |
| FI122755B (fi) | 2011-01-26 | 2012-06-29 | Axco Motors Oy | Liitos ja liitosmenetelmä kestomagneettitahtikohteessa |
| US20120212085A1 (en) | 2011-02-17 | 2012-08-23 | The Hong Kong Polytechnic University | Axial-flux electric machine |
| US8749108B2 (en) | 2011-03-15 | 2014-06-10 | Electric Torque Machines, Inc. | Transverse and/or commutated flux systems having laminated and powdered metal portions |
| JP5289499B2 (ja) | 2011-04-01 | 2013-09-11 | 三菱電機株式会社 | 回転電機 |
| CN103703658B (zh) | 2011-04-12 | 2016-10-26 | 巨石风力股份有限公司 | 气隙控制系统和方法 |
| JP5522117B2 (ja) * | 2011-05-18 | 2014-06-18 | 株式会社豊田中央研究所 | 絶縁被覆アルミニウム導体、絶縁被膜およびその形成方法 |
| GB201108298D0 (en) | 2011-05-18 | 2011-06-29 | Ashwoods Automotive Ltd | Axial flux electrical machines |
| PL218406B1 (pl) | 2011-06-26 | 2014-12-31 | Yasa Motors Poland Spółka Z Ograniczoną Odpowiedzialnością | Wielobiegunowy silnik osiowo-strumieniowy, zwłaszcza do napędu pompy |
| WO2013003639A2 (en) | 2011-06-28 | 2013-01-03 | Motor Excellence Llc | Cogging torque reduction device for electrical machines |
| DE102011083128A1 (de) * | 2011-09-21 | 2013-03-21 | Matuschek Meßtechnik GmbH | Elektromotor |
| JP5861394B2 (ja) | 2011-11-02 | 2016-02-16 | スズキ株式会社 | 電動回転機 |
| US8994243B2 (en) | 2011-11-08 | 2015-03-31 | Electric Torque Machines Inc | Transverse and/or commutated flux systems having multidirectional laminations |
| JP6101200B2 (ja) * | 2011-11-16 | 2017-03-22 | 住友電気工業株式会社 | 絶縁ワニス及びこれを用いた絶縁電線 |
| TWI465006B (zh) | 2011-12-02 | 2014-12-11 | Ind Tech Res Inst | 軸向磁通電機定子組結構 |
| EP2787611B1 (en) | 2011-12-02 | 2018-03-21 | Mitsubishi Electric Corporation | Permanent magnet type concentrated winding motor |
| US9281735B2 (en) | 2012-01-05 | 2016-03-08 | Rensselaer Polytechnic Institute | Flux-switching linear permanent magnet machine with yokeless translator |
| JP5488625B2 (ja) * | 2012-02-13 | 2014-05-14 | 株式会社デンソー | ダブルステータ型同期モータ |
| WO2013124875A1 (ja) | 2012-02-20 | 2013-08-29 | 株式会社 日立製作所 | リニアモータ |
| EP2802061A4 (en) * | 2012-02-22 | 2015-11-25 | Shenzhen Hopewin Technology Co Ltd | AXIAL FLOOD DISK ENGINE FROM AMORPHIC IRON ALLOY, MANUFACTURING METHOD AND STATOR ARRANGEMENT |
| CN102624108B (zh) | 2012-03-14 | 2014-07-30 | 上海海马汽车研发有限公司 | 轴向间隙型电动机的定子及轴向间隙型电动机 |
| US20130249342A1 (en) | 2012-03-20 | 2013-09-26 | Kollmorgen Corporation | Cantilevered Rotor Magnet Support |
| GB2500580B (en) | 2012-03-23 | 2015-07-08 | Dyson Technology Ltd | Stator for an electrical machine |
| DE102012207758A1 (de) * | 2012-05-09 | 2013-11-14 | Aktiebolaget Skf | Vorrichtung mit wenigstens einem Scheibenläufermotorrotor und Montageverfahren |
| US20150028710A1 (en) * | 2012-05-24 | 2015-01-29 | Mitsubishi Electric Corporation | Rotor for rotating electric machine, rotating electric machine, and method for manufacturing rotor for rotating electric machine |
| JP6002217B2 (ja) | 2012-05-28 | 2016-10-05 | 株式会社日立産機システム | 複合トルク型回転電機 |
| US9475199B2 (en) | 2012-06-05 | 2016-10-25 | TRACLabs, Inc. | Apparatus, systems, and methods for reconfigurable robotic manipulator and coupling |
| US20150155749A1 (en) | 2012-06-21 | 2015-06-04 | Volvo Truck Corporation | Method of manufacturing a laminated winding and a laminated winding |
| CN102842974B (zh) | 2012-08-03 | 2015-06-03 | 埃塞克科技有限公司 | 横向磁通发电机 |
| US9419502B2 (en) | 2012-08-03 | 2016-08-16 | Hamilton Sundstrand Corporation | Additive manufacturing of a component having a laminated stack of layers |
| US10326322B2 (en) | 2012-08-20 | 2019-06-18 | Rensselaer Polytechnic Institute | Double-rotor flux-switching machine |
| WO2014033715A1 (en) * | 2012-08-27 | 2014-03-06 | Albus Technologies Ltd. | Rotor with magnet pattern |
| DE102012219003A1 (de) * | 2012-10-18 | 2014-04-24 | Robert Bosch Gmbh | Läuferanordnung für eine rotatorische elektrische Maschine |
| TWI483514B (zh) * | 2012-11-09 | 2015-05-01 | Ind Tech Res Inst | 軸向磁通集磁轉子結構 |
| EP2874227B1 (en) | 2012-11-21 | 2017-09-06 | LG Chem, Ltd. | Lithium secondary battery |
| DE102013223309A1 (de) | 2012-12-10 | 2014-06-12 | Robert Bosch Gmbh | Steuergerät für ein Kraftfahrzeug |
| US9246370B2 (en) | 2013-01-17 | 2016-01-26 | Remy Technologies, Llc | Electric motor stator housing interference gap reducing method and apparatus |
| GB201301758D0 (en) | 2013-01-31 | 2013-03-20 | Yasa Motors Ltd | Shoe cooling cap |
| US9143066B2 (en) | 2013-02-06 | 2015-09-22 | Texas Instruments Incorporated | Permanent magnet motor with sinusoidal back-EMF waveform and related motor controller for position sensorless drives |
| JP6354135B2 (ja) | 2013-02-12 | 2018-07-11 | 株式会社ジェイテクト | 蓄電材料の製造装置および製造方法 |
| GB2511320A (en) | 2013-02-27 | 2014-09-03 | Yasa Motors Ltd | Axial flux motor |
| US8736133B1 (en) | 2013-03-14 | 2014-05-27 | Boulder Wind Power, Inc. | Methods and apparatus for overlapping windings |
| KR20140140185A (ko) | 2013-05-28 | 2014-12-09 | 삼성전자주식회사 | 모터 |
| BG66641B1 (bg) | 2013-06-26 | 2018-02-15 | „Алмотт“ Оод | Електрическа машина с вътрешен статор |
| CN103368197B (zh) | 2013-07-15 | 2015-11-25 | 国家电网公司 | 模块化多电平换流器的阀基控制设备和方法 |
| GB2519060B (en) | 2013-08-08 | 2016-08-03 | Yasa Motors Ltd | Cooling of axial flux motors - centrifugal |
| US9236773B2 (en) | 2013-08-16 | 2016-01-12 | Electric Torque Machines Inc | Segmented stator with controlled eddy current |
| DE102014208662A1 (de) | 2013-09-06 | 2015-03-12 | Robert Bosch Gmbh | Verfahren und Steuer- und Erfassungseinrichtung zum Plausibilisieren einer Falschfahrt eines Kraftfahrzeugs |
| DE102014208622A1 (de) | 2013-09-06 | 2015-03-12 | Robert Bosch Gmbh | Verfahren und Steuer- und Erfassungseinrichtung zum Plausibilisieren einer Falschfahrt eines Kraftfahrzeugs |
| DE102014208659A1 (de) | 2013-09-06 | 2015-03-12 | Robert Bosch Gmbh | System zur Übertragung von Information bei der Feststellung der Falschfahrt eines Kraftfahrzeugs, dazugehörige Sende- und Empfangseinrichtungen und korrespondierende Sende- und Empfangsverfahren |
| DE102014208617A1 (de) | 2013-09-06 | 2015-03-12 | Robert Bosch Gmbh | Verfahren und Steuer- und Erfassungseinrichtung zum Plausibilisieren einer Falschfahrt eines Kraftfahrzeugs |
| DE102014208673A1 (de) | 2013-09-06 | 2015-03-12 | Robert Bosch Gmbh | Verfahren und Verkehrsüberwachungseinrichtung zum Feststellen einer Falschfahrt eines Kraftfahrzeugs |
| GB2518208B (en) | 2013-09-13 | 2016-06-01 | Yasa Motors Ltd | Stator-plate Overmoulding |
| GB2518209B (en) | 2013-09-13 | 2016-08-03 | Yasa Motors Ltd | Pole-piece Bonding |
| JP6158022B2 (ja) | 2013-09-30 | 2017-07-05 | 株式会社東芝 | 回転電機、及び車輌 |
| US9680352B2 (en) * | 2013-09-30 | 2017-06-13 | Ta Instruments-Waters L.L.C. | Convection cooling system for motors |
| DE102013019051A1 (de) | 2013-10-18 | 2015-04-23 | Pett & Pett T.I.P GmbH | Vorrichtung zum Imprägnieren von Wicklungsstäben für elektrische Maschinen |
| EP2869433B1 (en) | 2013-10-30 | 2016-09-21 | SC BMEnergy SRL | Axial flux permanent magnet electrical machine with magnetic flux concentration |
| EP2874279A1 (de) | 2013-11-15 | 2015-05-20 | Siemens Aktiengesellschaft | Verfahren zum Herstellen einer Windung für eine Spulenwicklung eines Läufers einer rotierenden elektrischen Maschine |
| KR101549026B1 (ko) | 2013-11-15 | 2015-09-01 | 엘지전자 주식회사 | 전기자동차 구동장치 |
| GB201320248D0 (en) | 2013-11-15 | 2014-01-01 | Coreteq Ltd | Line start permanent magnet motor |
| EP2873491A1 (de) | 2013-11-15 | 2015-05-20 | HILTI Aktiengesellschaft | Spannungsnachführung bei Tieftemperatur zur Vermeidung von Unterspannungsabschaltungen bei akkubetriebenen handbetriebenen Elektrowerkzeugen |
| KR101531624B1 (ko) | 2013-11-15 | 2015-07-06 | 주식회사 만도 | 전기 자전거 및 그 제어방법 |
| DE102013019197A1 (de) | 2013-11-15 | 2015-05-21 | Audi Ag | Kraftfahrzeug-Klimatisierung mit adaptivem Luftausströmer |
| DE102013019061A1 (de) | 2013-11-15 | 2015-05-21 | Abb Ag | Vorrichtung zur Verriegelung einer beweglichen elektrischen Baugruppe |
| FR3013273B1 (fr) | 2013-11-15 | 2017-03-17 | Ifp Energies Now | Groupe motopropulseur pour l'entrainement d'un vehicule automobile, plus particulierement pour un vehicule de type hybride. |
| DE102013223295A1 (de) | 2013-11-15 | 2015-05-21 | Bayerische Motoren Werke Aktiengesellschaft | Funktionelles Bauteil, insbesondere für ein Kraftfahrzeug, Verfahren zur Herstellung eines funktionellen Bauteils und Kraftfahrzeug, das ein funktionelles Bauteil umfasst |
| DE102013223316A1 (de) | 2013-11-15 | 2015-05-21 | Robert Bosch Gmbh | Überspannungsschutz für Kraftfahrzeugbordnetz bei Lastabwurf |
| GB201320246D0 (en) | 2013-11-15 | 2014-01-01 | Coreteq Ltd | Line start permanent magnet motor using a modular rotor |
| JP6237144B2 (ja) | 2013-11-15 | 2017-11-29 | アイシン精機株式会社 | 回転電機 |
| WO2015070984A1 (de) | 2013-11-15 | 2015-05-21 | Daimler Ag | Verfahren und vorrichtung zur prüfung eines einen kraftstoffdrucksensor aufweisenden kraftstoffdrucksystems einer verbrennungsgeregelten brennkraftmaschine eines kraftfahrzeugs |
| WO2015072018A1 (ja) | 2013-11-15 | 2015-05-21 | 三菱電機株式会社 | 整流子モータ、電動送風機、電気掃除機および整流子モータ製造方法 |
| JP2015097451A (ja) | 2013-11-15 | 2015-05-21 | 三菱重工業株式会社 | 誘導電動機制御方法及び誘導電動機制御装置 |
| DE102013019140B3 (de) | 2013-11-15 | 2015-04-02 | Audi Ag | Kraftfahrzeug mit Fernstart und automatischer Wiederabschaltung |
| FR3013381B1 (fr) | 2013-11-15 | 2016-01-01 | IFP Energies Nouvelles | Procede de depollution des gaz d'echappement, notamment de moteur a combustion interne, en particulier pour vehicule automobile, et installation utilisant un tel procede. |
| FR3013535B1 (fr) | 2013-11-15 | 2015-12-18 | Renault Sas | Procede et systeme de commande d'une machine electrique triphasee de vehicule automobile alimentee par des tensions hachees. |
| DE102014202602A1 (de) | 2013-11-15 | 2015-05-21 | Robert Bosch Gmbh | Verfahren zum Betreiben einer elektrischen Maschine |
| DE102013112631A1 (de) | 2013-11-15 | 2015-05-21 | Valeo Klimasysteme Gmbh | Steuervorrichtung zur Steuerung von wenigstens zwei Luftverteilerklappen einer Heiz- und/oder Klimaanlage eines Kraftfahrzeugs |
| GB201320247D0 (en) | 2013-11-15 | 2014-01-01 | Coreteq Ltd | Line start permanent magnet motor using a hybrid rotor |
| WO2015089518A1 (en) | 2013-12-10 | 2015-06-18 | Electric Torque Machines Inc. | High efficiency transverse flux motor fan |
| US9360020B2 (en) | 2014-04-23 | 2016-06-07 | Electric Torque Machines Inc | Self-cooling fan assembly |
| JP6223835B2 (ja) | 2014-01-10 | 2017-11-01 | 日立オートモティブシステムズ株式会社 | アキシャルギャップ型モータ |
| GB2525157B (en) | 2014-02-18 | 2016-08-24 | Yasa Motors Ltd | Machine cooling systems |
| CN203827088U (zh) | 2014-02-24 | 2014-09-10 | 广东威灵电机制造有限公司 | 永磁电机及其转子 |
| GB2525582B (en) | 2014-02-26 | 2018-06-27 | Yasa Ltd | Asymmetric machines |
| US9748816B2 (en) | 2014-03-21 | 2017-08-29 | Regal Beloit America, Inc. | Axial flux electric machine including an integral brake and methods of assembling the same |
| JP6315790B2 (ja) | 2014-04-30 | 2018-04-25 | マブチモーター株式会社 | ブラシレスモータ |
| EP3311480B1 (en) | 2015-06-16 | 2020-02-12 | Danfoss Editron Oy | Method and arrangement for adjusting the magnetization of a permanent magnet machine |
| CN105196889A (zh) | 2015-08-22 | 2015-12-30 | 成都佰世成科技有限公司 | 一种用于直线电机轨道的爆炸复合感应板装置 |
| US11070115B2 (en) | 2016-01-12 | 2021-07-20 | Prototus, Ltd. | Motor/generator system and method |
| CN109565188B (zh) | 2016-07-15 | 2022-12-06 | 詹尼斯机器人移动技术加拿大公司 | 具有布置在柱之间的永磁体的轴向间隙电机 |
| EP3485557A4 (en) | 2016-07-15 | 2020-03-18 | Genesis Robotics and Motion Technologies Canada, ULC | ROTARY ACTUATOR |
-
2016
- 2016-08-11 US US15/235,036 patent/US10075030B2/en active Active
- 2016-08-11 JP JP2018507606A patent/JP2018529302A/ja active Pending
- 2016-08-11 US US15/235,088 patent/US10476323B2/en active Active
- 2016-08-11 MX MX2018001782A patent/MX2018001782A/es unknown
- 2016-08-11 WO PCT/CA2016/050947 patent/WO2017024409A1/en active Application Filing
- 2016-08-11 KR KR1020187007025A patent/KR20180093872A/ko not_active Application Discontinuation
- 2016-08-11 CA CA2995286A patent/CA2995286A1/en not_active Abandoned
- 2016-08-11 US US15/235,091 patent/US9742225B2/en active Active
- 2016-08-11 US US15/235,071 patent/US9748803B2/en active Active
- 2016-08-11 US US15/235,095 patent/US9742226B2/en active Active
- 2016-08-11 CN CN202110364900.4A patent/CN113078749B/zh active Active
- 2016-08-11 EP EP16834369.7A patent/EP3335299A4/en active Pending
- 2016-08-11 RU RU2018108629A patent/RU2018108629A/ru not_active Application Discontinuation
- 2016-08-11 CN CN201680042809.8A patent/CN108028554B/zh active Active
- 2016-08-11 AU AU2016304787A patent/AU2016304787B2/en not_active Ceased
- 2016-08-11 US US15/235,097 patent/US9742227B2/en active Active
- 2016-08-11 US US15/234,961 patent/US9755463B2/en active Active
- 2016-10-12 US US15/291,867 patent/US20170126079A1/en not_active Abandoned
- 2016-10-12 US US15/291,808 patent/US9748804B2/en active Active
-
2017
- 2017-08-11 JP JP2019507837A patent/JP6848050B2/ja active Active
- 2017-08-11 KR KR1020197006650A patent/KR102225323B1/ko active IP Right Grant
- 2017-08-11 CN CN201780055379.8A patent/CN109690911B/zh not_active Expired - Fee Related
- 2017-08-11 US US16/324,448 patent/US11043862B2/en active Active
- 2017-08-11 WO PCT/CA2017/050957 patent/WO2018027330A1/en unknown
- 2017-08-11 EP EP17838273.5A patent/EP3497779A4/en not_active Withdrawn
- 2017-08-11 CA CA3034707A patent/CA3034707A1/en not_active Abandoned
-
2019
- 2019-10-04 US US16/592,767 patent/US20200161912A1/en not_active Abandoned
-
2021
- 2021-05-21 US US17/326,325 patent/US20210273509A1/en not_active Abandoned
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023279088A1 (en) * | 2021-07-02 | 2023-01-05 | University Of Washington | Electronic pumping of heat without charge current |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20180093872A (ko) | 전기 기계 | |
| CN109155568B (zh) | 包括轴向推力轴承的电机 | |
| US20160329796A1 (en) | Power generation device, armature structure for power generation device, and method for manufacturing armature | |
| US11482905B2 (en) | Stator having housing-integrated bus bars and internal cooling jacket | |
| CN109565188B (zh) | 具有布置在柱之间的永磁体的轴向间隙电机 | |
| US11139707B2 (en) | Axial gap electric machine with permanent magnets arranged between posts |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| WITB | Written withdrawal of application |