JP5716879B1 - 混注装置、混注方法 - Google Patents
混注装置、混注方法 Download PDFInfo
- Publication number
- JP5716879B1 JP5716879B1 JP2014561208A JP2014561208A JP5716879B1 JP 5716879 B1 JP5716879 B1 JP 5716879B1 JP 2014561208 A JP2014561208 A JP 2014561208A JP 2014561208 A JP2014561208 A JP 2014561208A JP 5716879 B1 JP5716879 B1 JP 5716879B1
- Authority
- JP
- Japan
- Prior art keywords
- syringe
- medicine
- container
- infusion
- control means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002347 injection Methods 0.000 title claims abstract description 835
- 239000007924 injection Substances 0.000 title claims abstract description 835
- 238000000034 method Methods 0.000 title claims abstract description 463
- 239000003814 drug Substances 0.000 claims abstract description 899
- 238000001802 infusion Methods 0.000 claims abstract description 701
- 229940079593 drug Drugs 0.000 claims abstract description 178
- 238000002360 preparation method Methods 0.000 claims abstract description 92
- 230000008569 process Effects 0.000 claims description 395
- 238000003756 stirring Methods 0.000 claims description 194
- 239000000126 substance Substances 0.000 claims description 191
- 238000005303 weighing Methods 0.000 claims description 151
- 238000007689 inspection Methods 0.000 claims description 87
- 239000003708 ampul Substances 0.000 claims description 85
- 238000003780 insertion Methods 0.000 claims description 81
- 230000037431 insertion Effects 0.000 claims description 81
- 239000003978 infusion fluid Substances 0.000 claims description 80
- 238000003384 imaging method Methods 0.000 claims description 53
- 230000001133 acceleration Effects 0.000 claims description 35
- 239000007788 liquid Substances 0.000 claims description 29
- 238000001514 detection method Methods 0.000 claims description 21
- 230000007423 decrease Effects 0.000 claims description 11
- 238000005070 sampling Methods 0.000 claims description 11
- 230000000740 bleeding effect Effects 0.000 claims description 7
- 238000007599 discharging Methods 0.000 claims description 7
- 230000002452 interceptive effect Effects 0.000 claims description 3
- 239000000284 extract Substances 0.000 claims 1
- 238000002156 mixing Methods 0.000 claims 1
- 238000012545 processing Methods 0.000 abstract description 135
- 238000012790 confirmation Methods 0.000 description 112
- 239000000243 solution Substances 0.000 description 86
- 210000000078 claw Anatomy 0.000 description 75
- 239000003795 chemical substances by application Substances 0.000 description 52
- 238000013500 data storage Methods 0.000 description 32
- 238000005452 bending Methods 0.000 description 30
- 238000010586 diagram Methods 0.000 description 29
- 230000036544 posture Effects 0.000 description 28
- 230000032258 transport Effects 0.000 description 28
- 239000002904 solvent Substances 0.000 description 25
- 239000000843 powder Substances 0.000 description 19
- 238000012937 correction Methods 0.000 description 18
- 238000003860 storage Methods 0.000 description 18
- 239000000428 dust Substances 0.000 description 16
- 230000005484 gravity Effects 0.000 description 16
- 230000008859 change Effects 0.000 description 15
- 238000003825 pressing Methods 0.000 description 15
- 230000007246 mechanism Effects 0.000 description 14
- 238000012546 transfer Methods 0.000 description 13
- 238000013022 venting Methods 0.000 description 13
- 230000003028 elevating effect Effects 0.000 description 12
- 238000000605 extraction Methods 0.000 description 12
- 230000006870 function Effects 0.000 description 11
- 238000004891 communication Methods 0.000 description 9
- 230000001965 increasing effect Effects 0.000 description 9
- 230000003287 optical effect Effects 0.000 description 9
- 238000000926 separation method Methods 0.000 description 9
- 239000002699 waste material Substances 0.000 description 9
- 238000006073 displacement reaction Methods 0.000 description 8
- 238000005259 measurement Methods 0.000 description 7
- 239000008155 medical solution Substances 0.000 description 7
- 239000002246 antineoplastic agent Substances 0.000 description 5
- 238000013459 approach Methods 0.000 description 5
- 238000013019 agitation Methods 0.000 description 4
- 238000004140 cleaning Methods 0.000 description 4
- 238000004090 dissolution Methods 0.000 description 4
- 239000002504 physiological saline solution Substances 0.000 description 4
- 239000000203 mixture Substances 0.000 description 3
- 238000004904 shortening Methods 0.000 description 3
- 238000007711 solidification Methods 0.000 description 3
- 230000008023 solidification Effects 0.000 description 3
- 230000001954 sterilising effect Effects 0.000 description 3
- 238000004659 sterilization and disinfection Methods 0.000 description 3
- 229940041181 antineoplastic drug Drugs 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 239000002552 dosage form Substances 0.000 description 2
- 230000008030 elimination Effects 0.000 description 2
- 238000003379 elimination reaction Methods 0.000 description 2
- 230000002070 germicidal effect Effects 0.000 description 2
- 230000036541 health Effects 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000012015 optical character recognition Methods 0.000 description 2
- 239000000047 product Substances 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 238000012795 verification Methods 0.000 description 2
- 206010010071 Coma Diseases 0.000 description 1
- FBOZXECLQNJBKD-ZDUSSCGKSA-N L-methotrexate Chemical compound C=1N=C2N=C(N)N=C(N)C2=NC=1CN(C)C1=CC=C(C(=O)N[C@@H](CCC(O)=O)C(O)=O)C=C1 FBOZXECLQNJBKD-ZDUSSCGKSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 230000000844 anti-bacterial effect Effects 0.000 description 1
- 239000000164 antipsychotic agent Substances 0.000 description 1
- 229940005529 antipsychotics Drugs 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000005345 coagulation Methods 0.000 description 1
- 230000015271 coagulation Effects 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 238000009472 formulation Methods 0.000 description 1
- 239000012634 fragment Substances 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 235000012054 meals Nutrition 0.000 description 1
- 229960000485 methotrexate Drugs 0.000 description 1
- 239000004570 mortar (masonry) Substances 0.000 description 1
- 239000004081 narcotic agent Substances 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000012466 permeate Substances 0.000 description 1
- 239000000546 pharmaceutical excipient Substances 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 239000002574 poison Substances 0.000 description 1
- 231100000614 poison Toxicity 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000000475 sunscreen effect Effects 0.000 description 1
- 239000000516 sunscreening agent Substances 0.000 description 1
- 239000003826 tablet Substances 0.000 description 1
- 229940126585 therapeutic drug Drugs 0.000 description 1
- 230000000699 topical effect Effects 0.000 description 1
Images


























































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J1/00—Containers specially adapted for medical or pharmaceutical purposes
- A61J1/14—Details; Accessories therefor
- A61J1/20—Arrangements for transferring or mixing fluids, e.g. from vial to syringe
- A61J1/2096—Combination of a vial and a syringe for transferring or mixing their contents
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J1/00—Containers specially adapted for medical or pharmaceutical purposes
- A61J1/14—Details; Accessories therefor
- A61J1/16—Holders for containers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J1/00—Containers specially adapted for medical or pharmaceutical purposes
- A61J1/14—Details; Accessories therefor
- A61J1/18—Arrangements for indicating condition of container contents, e.g. sterile condition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J1/00—Containers specially adapted for medical or pharmaceutical purposes
- A61J1/14—Details; Accessories therefor
- A61J1/20—Arrangements for transferring or mixing fluids, e.g. from vial to syringe
- A61J1/22—Arrangements for transferring or mixing fluids, e.g. from vial to syringe with means for metering the amount of fluid
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J3/00—Devices or methods specially adapted for bringing pharmaceutical products into particular physical or administering forms
- A61J3/002—Compounding apparatus specially for enteral or parenteral nutritive solutions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/1782—Devices aiding filling of syringes in situ
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B3/00—Packaging plastic material, semiliquids, liquids or mixed solids and liquids, in individual containers or receptacles, e.g. bags, sacks, boxes, cartons, cans, or jars
- B65B3/003—Filling medical containers such as ampoules, vials, syringes or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B39/00—Nozzles, funnels or guides for introducing articles or materials into containers or wrappers
- B65B39/12—Nozzles, funnels or guides for introducing articles or materials into containers or wrappers movable towards or away from container or wrapper during filling or depositing
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D9/00—Level control, e.g. controlling quantity of material stored in vessel
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J2200/00—General characteristics or adaptations
- A61J2200/70—Device provided with specific sensor or indicating means
- A61J2200/74—Device provided with specific sensor or indicating means for weight
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Pharmacology & Pharmacy (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Biomedical Technology (AREA)
- Hematology (AREA)
- Chemical & Material Sciences (AREA)
- Vascular Medicine (AREA)
- Anesthesiology (AREA)
- Medicinal Chemistry (AREA)
- Heart & Thoracic Surgery (AREA)
- Nutrition Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Medical Preparation Storing Or Oral Administration Devices (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
- Manipulator (AREA)
Abstract
Description
まず、図1〜図38を参照しつつ、本発明の第1の実施形態について説明する。
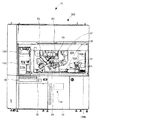
図1及び図2に示すように、本実施形態に係る混注装置1は、混注制御装置100、薬品装填部200、及び混注処理部300を備える。そして、前記混注装置1では、前記混注制御装置100により前記混注処理部300の動作が制御されることによって、調製データに示された抗がん剤などの薬品を既定量の前記薬品が収容された一又は複数の薬品容器から輸液容器に注入する混注処理が実行される。
まず、図1を参照しつつ前記混注制御装置100の概略構成について説明する。前記混注制御装置100は、通信可能に接続された第1制御部400及び第2制御部500を備える。前記第1制御部400は、前記薬品装填部200側に設けられ、前記第2制御部500は、前記混注処理部300側に設けられている。
次に、図2及び図3を参照しつつ、前記薬品装填部200の概略構成について説明する。
続いて、前記混注処理部300の概略構成について説明する。
図3及び図4に示すように、前記混注処理室104には、第1ロボットアーム21、第2ロボットアーム22、アンプルカッター31、攪拌装置32、載置棚33、回転用載置部33A、薬品読取部34、秤量計35、針曲り検知部36、混注連通口37、針挿入確認透明窓38、及びゴミ蓋132aなどが設けられている。さらに、図6に示すように、前記混注処理室104の天井側には、トレイ確認カメラ41、注射器確認カメラ42、注射針着脱装置43、針挿入確認カメラ44、殺菌灯45などが設けられている。
前記第1ロボットアーム21及び前記第2ロボットアーム22は、多関節構造を有する駆動部であり、前記混注処理室104の天井側に基端部を固定して垂下状に設けられている。前記第1ロボットアーム21及び前記第2ロボットアーム22の間接はそれぞれ5〜8軸程度である。そして、前記混注装置1では、双腕型の前記第1ロボットアーム21及び前記第2ロボットアーム22により混注処理における各作業工程が実行される。具体的に、前記第2制御部500は、前記第1ロボットアーム21及び前記第2ロボットアーム22の各間接に設けられた駆動モーターを個別に駆動させ、前記第1ロボットアーム21及び前記第2ロボットアーム22に前記混注処理における各作業を実行させる。なお、前記混注処理部300は、前記混注処理を実行することができる構造であれば、例えば1本のロボットアームを有する構成、3本以上のロボットアームを含む構成、又はロボットアームを用いない構成であってもよい。
また、前記混注処理部300には、図6における右側端部の前記トレイ挿入口114から供給される前記トレイ101を、左側端部のトレイ搬送終端部110aまで搬送するトレイ搬送部110が設けられている。
図11に示すように、前記アンプルカッター31には、ヤスリ部31a、屑トレイ31b、頭部差し込み部31c、駆動ボックス31f、屑ボックス31g、及び把持部31hが設けられている。
前記攪拌装置32は、前記バイアル瓶10Bに粉薬(散薬)などの溶解が必要な薬品が収容されている場合に、前記バイアル瓶10B内に輸液又は薬品などを注入して前記薬品を溶解させ、混合薬品を生成するときに使用される。具体的に、前記攪拌装置32には、図12に示すように、ローラー32a、押さえ部32b、回動支持部32c、支持台32d、水平揺動機構32e、支持部32f、及び駆動モーター32gなどが設けられている。
図4に示すように、前記載置棚33は、前記混注装置1において実行される混注処理において前記薬品容器10及び前記注射器11などを仮置きするために用いられる。前記載置棚33は、前記第1ロボットアーム21及び前記第2ロボットアーム22の双方がアクセス可能な位置に設けられている。前記載置棚33において、前記バイアル瓶10Bは予め定められた位置に立てた状態で載置される。一方、前記載置棚33には、前記アンプル10Aを傾斜した状態で保持するための傾斜保持部が設けられており、前記アンプル10Aは、前記傾斜保持部に傾斜した状態で載置される。また、前記載置棚33には、前記注射器11の首部が嵌る予め定められた所定径の首保持穴が形成されており、前記注射器11は、注射針11cが付けられていないシリンジのみの状態で首部を下向きにして仮置きされる。
図示しないが、回転用載置部33Aは、前記注射器11を周方向に回転させるための作業に用いられ、前記第1ロボットアーム21がアクセス可能な位置に設けられている。例えば、前記回転用載置部33Aは、前記載置棚33と同様に、前記注射器11の首部が嵌る予め定められた所定径の首保持穴が形成されており、前記注射器11は、注射針11cが付けられていないシリンジのみの状態で首部を下向きにして載置される。そして、前記第1ロボットアーム21は、前記注射器11を前記回転用載置部33Aに載置した後、前記注射器11を周方向に180度回転させることが可能である。例えば、前記第1ロボットアーム21は、下記(a)、(b)を繰り返し実行することにより前記注射器11を周方向に180度まで徐々に回転させる。(a)前記注射器11を把持して周方向における一の方向に所定量回転させた後、前記注射器11を離して前記第1ロボットアーム21の角度を周方向における他の方向に所定量移動する。(b)前記注射器11を再度把持し、前記注射器11を周方向における一の方向に所定回転させる。
前記薬品読取部34は、前記アンプル10A及び前記バイアル瓶10Bなどの前記薬品容器10に貼付されたラベルに記載され、収容された薬品の薬品情報を示すバーコードを読み取る。具体的に、前記薬品読取部34は、図13に示すように、二つのローラー34a(回転駆動手段の一例)、及びバーコードリーダ34b(容器読取手段の一例)を備える。前記ローラー34aは、所定の間隔だけ離間して対向配置されている。一方の前記ローラー34aは回動自在に支持され、他方の前記ローラー34aは不図示の駆動モーターに連結されている。二つの前記ローラー34aは、前記駆動モーターによって駆動されることにより、前記ローラー34aの間に載置された前記薬品容器10を周方向に回転させる。これにより、前記薬品容器10を周方向に1回転させることができるため、前記薬品容器10に貼付されたラベルの全域を前記バーコードリーダ34bに向けることができる。そして、前記バーコードリーダ34bは、前記ローラー34aにより回転される前記薬品容器10のラベルからバーコードを読み取る。
前記秤量計35は、前記混注装置1において実行される混注処理において前記注射器11の重量を測定するために用いられ、前記秤量計35による測定結果は前記第2制御部500に入力される。なお、前記秤量計35は、前記第2ロボットアーム22の可動範囲内に配置されており、前記第2ロボットアーム22により載置された前記注射器11の重量を測定する。
図14に示すように、前記針曲り検知部36には、前記注射器11の前記注射針11cを挿入して移動させることが可能な長穴36aが形成されている。また、前記針曲り検知部36は、前記長穴36aを挟んで光線を照射及び受光し、互いの光線が非平行となるように配置された第1光センサ361及び第2光センサ362を備える。前記第1光センサ361と第2光センサ362による検知結果は前記第2制御部500に入力される。
前記混注連通口37は、図3に示すように、前記混注処理室104の側壁における外側に突出するドーム状箇所に形成されており、且つ前記ドーム状箇所には上下方向に前記輸液バッグ12の混注口を通すための切欠きが形成されている。そのため、前記輸液バッグ保持部103が上昇すると、前記輸液バッグ12の混注口が前記混注処理室104内に位置することになる。
前記針挿入確認透明窓38は、前記トレイ搬送終端部110aの前記輸液バッグ12を前記混注処理部300から視認可能な窓であり、前記注射器11の注射針11cが前記輸液バッグ12に挿入された状態を確認するための画像撮影時に使用される。
また、前記注射器確認カメラ42は、図6に示すように、前記混注処理部300の天井部に配置されている。そして、前記注射器確認カメラ42は、前記注射器11に吸引された薬品の有無及び量などを確認するために前記注射器11を撮影するために用いられる。前記注射器確認カメラ42は、予め固定された撮影範囲R1内の画像を撮影するものであってもよいが、前記第2制御部500によって制御されることにより前記撮影範囲R1の位置及びサイズを任意に変更可能なものであってもよい。また、後述するように、前記混注装置1では、前記注射器確認カメラ42により、前記注射器11及び前記薬品容器10が一度に撮影され、信憑性の高い鑑査画像が提供される。前記第2制御部500は、前記注射器確認カメラ42による前記撮影画像を、例えば前記混注装置1で実行される混注処理の適否を画像で鑑査するために、前記データ記憶部404、前記データ記憶部504、又は前記混注装置1の外部に設けられたハードディスク等の記憶部に記録させる。そして、前記第2制御部500は、ユーザーによる前記鑑査の際に、前記注射器確認カメラ42による撮影画像を前記タッチパネルモニタ14又は前記ディスプレイ203などの表示装置に表示させる。
前記注射針着脱装置43は、図15及び図16に示すように、切り込み部が形成されたチャック部43aの穴部43bにキャップ付きの注射針11cの針先が上向きで差し込まれる。モーター43cが駆動されると、図示しないカム機構によって前記チャック部43aの穴部43bが拡がって前記キャップ付きの注射針11cを差し込むことができる。前記モーター43cの駆動が停止されると、バネ43dによって前記キャップ付き注射針11cの保持状態が維持される。針回しモーター43eが駆動されると、ギア43f及びギア43gが回転し、前記チャック部43aが回転して、前記キャップ付き注射針11cが回転される。前記注射針11cでは、キャップが前記注射針11cに装着された状態で周方向に回転したときに接触するリブが前記キャップ及び前記注射針11c各々に設けられている。そのため、前記注射針11cは、前記チャック部43aによって前記注射針11cのキャップが回転されたときに前記キャップと共に回転し、前記シリンジ11aに対して着脱される。具体的に、前記注射針着脱装置43では、前記アンプル10Aを使用する際のシリンジフィルター付きの注射針11cへの付け替えを自動で行うことが可能である。また、前記注射針着脱装置43は、前記キャップ付きの注射針11cの針先が上に向くので、前記注射針11cが外された前記シリンジ11aの先端開口は上向きとなり、前記シリンジ11aの首部開口からの液垂れを防止することができる。
また、前記針挿入確認カメラ44は、前記混注処理室104外に位置する前記輸液バッグ12と、前記混注処理室104内の前記注射器11を1つの画像内に収まるように撮影する。前記第2制御部500は、前記輸液バッグ12の混注口を前記注射針11cで穿刺した際に、前記針挿入確認カメラ44によって前記針挿入確認透明窓38の方向を撮影する。そして、前記針挿入確認カメラ44による撮影画像は、例えば前記タッチパネルモニタ14に表示される。ここに、図17は、前記針挿入確認カメラ44による撮影画像の一例である。これにより、ユーザーは、前記注射針11cの先端側が前記輸液バッグ12内に位置しているか否かを前記撮影画像によって確認することができる。なお、前記撮影画像は、例えば最終鑑査のために前記混注装置1の内部又は外部に設けられたハードディスク等の記憶部に保存される。そして、前記撮影画像が表示されている前記タッチパネルモニタ14で、ユーザーによりOKボタンが操作されて適切に混注処理が終了したと判断されると、前記輸液バッグ12が前記バッグ昇降部113によって降下され、前記トレイ101に戻される。
前記殺菌灯45は、例えば前記混注処理の開始の3時間前から点灯される。図6に示すように、二つの前記殺菌灯45のうち1つは前記第1ロボットアーム21及び前記第2ロボットアーム22の間の位置に設けられている。そのため、前記第1ロボットアーム21及び前記第2ロボットアーム22に遮られる殺菌光の量は少なくなり、前記混注処理室14内を満遍なく殺菌することができる。また、前記混注処理部300には、前記混注処理室104内の空気を当該混注処理室104の側壁の下部に形成されたスリット104b(図3、図4参照)から吸引して前記混注処理室104の上方に設けられた不図示の排気ファンから排出する排気システムが設けられている。また、前記混注処理室104の天井部に形成された吸気口から外気を清浄にして前記混注処理室104等に導く給気システムも設けられている。
次に、前記混注装置1において前記混注処理部300が実行する混注処理の手順の一例について説明する。前記混注処理では、以下に説明するように、前記第2制御部500が、前記第1ロボットアーム21及び前記第2ロボットアーム22などを制御することにより、前記調製データに基づいて一又は複数の前記薬品容器10から前記注射器11で薬品を吸引すると共に前記注射器11から前記輸液バッグ12に前記薬品を注入する。ここに、前記第1ロボットアーム21及び前記第2ロボットアーム22を制御して前記注射器11により前記薬品容器10から薬品を吸引するための処理を実行するときの前記第2制御部500が吸引制御手段の一例である。
まず、前記アンプル10Aに収容された薬品を前記輸液バッグ12に注入する際の混注処理の基本動作について説明する。
続いて、前記バイアル瓶10Bに収容された薬品が溶解の必要のある粉薬のような薬品である場合に、その薬品を輸液と混合してから前記輸液バッグ12に注入する際の混注処理の基本動作について説明する。
以下では、前記第2制御部500が前記混注処理において実行する各種の処理の詳細について説明する。具体的に、前記第2制御部500は、下記の注射器位置調整処理、容器位置調整処理、鑑査制御処理、トレイ照合処理、器材取込処理、及び注入制御処理などを実行する。なお、前記第2制御部500は、前記混注処理において下記で説明する各種の処理を略並行して実行可能である。
前記第2制御部500は、前記混注処理において、前記混注処理の適否を鑑査する際に参照される鑑査画像の撮影時に前記注射器11の目盛りの文字が前記注射器確認カメラ42の撮影範囲R1に収まるように、前記第2ロボットアーム22により保持される前記注射器11の周方向の位置を調整する注射器位置調整処理を実行する。前記第2制御部500は、前記トレイ確認カメラ41により前記器材載置部102の画像が撮影されたときに前記注射器位置調整処理を開始する。なお、前記注射器位置調整処理を実行するときの前記第2制御部500が注射器位置調整手段の一例である。ここに、図18は、前記注射器位置調整処理の手順の一例を示すフローチャートである。
まず、ステップS1において、前記第2制御部500は、前記トレイ確認カメラ41による撮影画像に基づいて、予め定められた載置位置である前記器材載置部102に載置された前記注射器11のシリンジ11aの向きを判別する。ここに、前記ステップS1を実行するときの前記第2制御部500が向き検出手段の一例である。具体的に、前記シリンジ11aの端部にはフランジが設けられており、前記器材載置部102に載置された前記シリンジ11aは、前記目盛りの文字が上向き又は下向きのいずれかの状態となる。そのため、前記第2制御部500は、前記注射器11が、前記注射器11のシリンジ11aに付された目盛りの文字が上向き(前記トレイ確認カメラ41側に目盛りの文字が向いている状態)又は下向き(前記トレイ確認カメラ41側に対して周方向に180°回転した状態)のいずれの状態で前記器材載置部102に載置されているかを判断する。
ステップS2において、前記第2制御部500は、前記器材載置部102内の前記注射器11が前記第1特定状態であるか否かに応じて処理を分岐する。具体的に、前記注射器11が前記第1特定状態でない場合は(S2:No)、処理がステップS3に移行し、前記第2制御部500は、前記注射器11の回転操作が必要である旨を示す回転フラグをONにする。なお、前記回転フラグは、前記第2制御部500の前記RAM503に設けられたフラグレジスタである。一方、前記注射器11が前記第1特定状態である場合は(S2:Yes)、処理がステップS4に移行する。
ステップS4において、前記第2制御部500は、前記注射器11を前記第2ロボットアーム22に移動するタイミングの到来を待ち受ける(S4:No)。そして、前記注射器11を前記第2ロボットアーム22に移動するタイミングが到来すると(S4:Yes)、処理がステップS5に移行する。なお、前記混注装置1では、前記注射器11が前記第1ロボットアーム21によって前記載置棚33に一時的に載置されるため、前記ステップS4では、前記第1ロボットアーム21により前記載置棚33から前記第2ロボットアーム22に引き渡すタイミングの到来が監視される。
ステップS5において、前記第2制御部500は、前記回転フラグがONであるか否かを判断する。ここで、前記回転フラグがONであれば(S5:Yes)、処理はステップ6に移行し、前記回転フラグがOFFであれば(S5:No)、処理はステップS7に移行する。
ステップS6において、前記第2制御部500は、前記第1ロボットアーム21を制御することにより、前述したように前記回転用載置部33Aを使用して前記注射器11を周方向に180度回転させる。ここに、前記ステップS6を実行するときの前記第2制御部500が注射器回転手段の一例である。これにより、前記注射器11の向きは、前記器材載置部102において前記注射器11が前記第1特定状態で載置されていた場合と同じ向きになる。従って、前記混注装置1では、前記第2ロボットアーム22により前記注射器11を前記注射器確認カメラ42の前記撮影範囲R1内に移動させたときに、前記注射器11の目盛りの文字を前記撮影範囲R1内に収めることができる。なお、前記第2ロボットアーム22を用いて前記注射器11が回転可能な構成も他の実施形態として考えられる。
その後、ステップS7において、前記第2制御部500は、前記第1ロボットアーム21及び前記第2ロボットアーム22を制御して、前記注射器11を前記第1ロボットアーム21から前記第2ロボットアーム22に移動させる。
前記第2制御部500は、前記混注処理において、前記混注処理の適否を鑑査する際に参照される鑑査画像の撮影時に前記薬品容器10の薬品名の文字が前記注射器確認カメラ42の撮影範囲R1に収まるように前記薬品容器10の周方向の位置を調整する容器位置調整処理を実行する。なお、前記容器位置調整処理を実行するときの前記第2制御部500が容器位置調整手段の一例である。ここに、図19は、前記容器位置調整処理の手順の一例を示すフローチャートである。
まず、ステップS11において、前記第2制御部500は、前記薬品読取部34により前記薬品容器10のバーコードから薬品情報が読み取られるまで処理を待機させる(S11:No)。そして、前記薬品読取部34により前記薬品容器10から薬品情報が読み取られたと判断すると(S11:Yes)、処理はステップS12に移行する。
ステップS12において、前記第2制御部500は、前記薬品読取部34の前記ローラー34aの駆動モーターを停止させることにより、前記薬品容器10の回転を停止させる。
ステップS13において、前記第2制御部500は、前記薬品容器10に対応する特定回転量を読み出す。具体的に、前記第2制御部500の前記データ記憶部504には、前記薬品容器10の前記バーコードが読み取られてから前記薬品容器10が予め定められた第2特定状態になるまでの特定回転量の情報が前記薬品容器10ごとに記憶されている。前記第2特定状態は、前記第1ロボットアーム21により前記薬品容器10が前記注射器確認カメラ42の撮影範囲R1内に移動されたときに、前記薬品容器10の薬品名が前記撮影範囲R1内に収まる場合の前記薬品読取部34における前記薬品容器10の状態である。具体的に、本実施形態では、前記第2特定状態は、前記薬品容器10の薬品名が下方に向けられた状態(前記薬品読取部34の前記ローラー34a側に薬品名が向いた状態)である。これにより、前記第1ロボットアーム21で前記薬品容器10が掴まれた場合に、前記薬品容器10の薬品名が前記保持部25反対側を向くため、前記薬品名を前記注射器確認カメラ42で撮影することが可能になる。なお、前記第2特定状態は、前記薬品容器10の薬品名の全てが前記撮影範囲R1内に収まる状態だけでなく、例えば前記薬品容器10の薬品名を識別可能な程度に前記薬品名の一部が前記撮影範囲R1内に収まる状態が含まれることも他の実施形態として考えられる。
その後、ステップS14において、前記第2制御部500は、前記ローラー34aの駆動モーター(不図示)を制御することにより、前記ローラー34aにより前記薬品容器10を前記特定回転量だけ回転させて停止させる。これにより、前記薬品容器10は、前記バーコードリーダ34bにより前記薬品容器10の薬品情報が読み取られた後、前記特定回転量だけ回転して前記第2特定状態で停止することになる。なお、前記ステップS12を省略することにより前記ローラー34aによる前記薬品容器10の回転を停止させることなく、前記ステップS13〜S14を実行することも他の実施形態として考えられる。
前記第2制御部500は、前記混注処理において、前記混注処理のユーザーによる画像鑑査を実現するために下記の鑑査制御処理を実行する。なお、前記鑑査制御処理を実行するときの前記第2制御部500が移動制御手段の一例である。ここに、図20は、前記鑑査制御処理の手順の一例を示すフローチャートである。
まず、ステップS21において、前記第2制御部500は、前記注射器11により前記薬品容器10内の薬品の吸引終了を待ち受ける(S21:No)。ここで、前記注射器11による薬品の吸引が終了したと判断されると(S21:Yes)、処理はステップS22に移行する。
ステップS22において、前記第2制御部500は、前記注射器11により前記薬品容器10から薬品が吸引された後の前記薬品容器10及び前記薬品を吸引した状態の前記注射器11を、前記第1ロボットアーム21及び前記第2ロボットアーム22の一方又は両方を制御することにより、前記注射器確認カメラ42の撮影範囲R1内に移動させる。このとき、前記第2制御部500は、前記注射器11により前記薬品容器10から前記薬品が吸引されてから前記注射器確認カメラ42により前記薬品容器10及び前記注射器11が撮影されるまでの間、前記第1ロボットアーム21及び前記第2ロボットアーム22による前記薬品容器10及び前記注射器11の保持状態を継続させる。即ち、前記第2制御部500は、前記第1ロボットアーム21及び前記第2ロボットアーム22により保持した前記薬品容器10及び前記注射器11を一度も離すことなく前記撮影範囲R1内に移動させる。これにより、前記注射器確認カメラ42による撮影画像における前記注射器11内の薬品が前記薬品容器10内の薬品であることの信憑性が高まる。
次に、前記第2制御部500は、前記注射器確認カメラ42を制御することにより、前記注射器確認カメラ42により前記撮影範囲R1を撮影する。即ち、前記第2制御部500は、前記撮影範囲R1内に収まっている前記薬品容器10及び前記注射器11を一度に撮影する。これにより、前記注射器11を複数回撮影して合成する場合に比べて前記注射器11の鑑査画像として信憑性の高い画像を得ることができる。また、前記薬品容器10と前記注射器11とが同時に撮影されるため、前記薬品容器10と前記注射器11とを個別に撮影する場合に比べて、前記薬品容器10と前記注射器11との対応関係の信憑性も確保される。
そして、前記第2制御部500は、前記ステップS23で撮影された前記注射器確認カメラ42による撮影画像を鑑査画像として前記データ記憶部504に記録する。なお、前記第2制御部500は、前記混注装置1に通信網を介して接続される他のサーバー装置などに前記鑑査画像を記憶させてもよい。
次に、前記第2制御部500は、前記混注処理における調整対象の前記調製データで示された前記薬品容器10の薬品に対応する採取方法が全量採取であるか否かを判断する。前記全量採取は、前記薬品容器10内の薬品を全て採取する場合の採取方法である。他に、前記採取方法には、前記薬品容器10内の薬品を前記調製データに示された所定量だけ採取する端数採取がある。なお、前記薬品ごとの採取方法は、前記薬品マスターなどに予め登録されている。ここで、前記採取方法が全量採取であると判断されると(S25:Yes)、処理はステップS26に移行し、前記採取方法が全量採取でないと判断されると(S26:No)、処理はステップS27に移行する。
ステップS26において、前記第2制御部500は、前記第1ロボットアーム21及び前記注射器確認カメラ42を制御し、前記薬品容器10の底部を撮影する。ここに、前記注射器確認カメラ42が全量採取時撮影手段の一例である。なお、前記混注装置1が、前記注射器確認カメラ42とは別に前記混注処理室104の下面に設けられ、前記薬品容器10の底部を撮影する容器撮影カメラ(全量採取時撮影手段)を備えることも考えられる。
ステップS27において、前記第2制御部500は、前記第2ロボットアーム22及び前記秤量計35を制御することにより、前記注射器11の重量を前記秤量計35によって測定する。ここで測定された前記注射器11の重量は吸引後重量として前記第2制御部500の前記RAM503に記憶される。
その後、ステップS28において、前記第2制御部500は、前記混注処理における前記注射器11から前記輸液バッグ12への薬品の注入工程の終了を待ち受ける(S28:No)。そして、前記第2制御部500は、前記注射器11から前記輸液バッグ12への薬品の注入工程が終了すると(S28:Yes)、処理をステップS29に移行させる。
ステップS29において、前記第2制御部500は、前記第2ロボットアーム22及び前記秤量計35を制御することにより、前記注射器11の重量を前記秤量計35によって測定する。ここで測定された前記注射器11の重量は注入後重量として前記第2制御部500の前記RAM503に記憶される。
そして、ステップS30において、前記第2制御部500は、前記ステップS27で測定された前記吸引後重量と前記ステップS29で測定された前記注入後重量との差分を算出することにより、実際に前記輸液バッグ12に注入された薬品の重量を取得する。ここで算出された前記薬品の重量は実重量として前記第2制御部500の前記RAM503に記憶される。なお、係る処理を実行するときの前記第2制御部500が薬品重量取得手段の一例である。また、前記第2制御部500が、前記薬品容器10から薬品を吸引する前の前記注射器11の重量と前記薬品容器10から薬品を吸引した後の前記注射器11の重量との差分を前記薬品容器10から前記輸液バッグ12に注入された薬品の重量として取得することも考えられる。
その後、ステップS31において、前記第2制御部500は、前記混注処理の鑑査の開始タイミングを待ち受ける(S31:No)。そして、前記混注処理の鑑査の開始タイミングが到来すると(S31:Yes)、処理がステップS32に移行する。なお、前記混注処理の鑑査の開始タイミングは、例えば前記混注処理が終了してから前記輸液バッグ12が払い出される前のタイミングである。また、前記混注処理の鑑査の開始タイミングは、複数の前記混注処理が実行された後、前記タッチパネルモニタ14に対して鑑査対象の前記混注処理(調製データ)の選択操作が行われたタイミングであってもよい。
ステップS32において、前記第2制御部500は、前記混注処理の画像鑑査を行うための鑑査画面D1を前記タッチパネルモニタ14に表示させる。ここに、図25及び図26は、前記鑑査画面D1の一例を示す図である。図25及び図26に示すように、前記鑑査画面D1には、鑑査に用いる情報が表示される表示領域R11〜R13が含まれる。なお、前記鑑査画面D1には、鑑査される複数の画像を順に表示させるための操作部R14、鑑査の承認、否認、中断などの操作を行うための操作部R15なども表示されている。
前記第2制御部500は、前記混注処理において、前記トレイ101及び前記トレイ101に載置される器材の適否を判断するトレイ照合処理を実行する。前記第2制御部500は、前記トレイ101が前記トレイ挿入口114から装填されたことを不図示のセンサによって検出した場合に前記トレイ照合処理を開始する。なお、前記トレイ照合処理を実行するときの前記第2制御部500が照合手段の一例である。ここに、図28は、前記トレイ照合処理の手順の一例を示すフローチャートである。
まず、ステップS41において、前記第2制御部500は、前記トレイ挿入口114から装填された前記トレイ101の前記ICタグ101bから前記ICリーダ101cによって識別情報が読み取られたか否かを判断する。ここで、前記識別情報が読み取られたと判断されると(S41:Yes)、処理はステップS42に移行し、前記識別情報が読み取られなかったと判断されると(S41:No)、処理はステップS411に移行する。
ステップS42において、前記第2制御部500は、前記ステップS41で読み取られた前記トレイ101の識別情報に予め対応付けられた前記調製データが存在するか否かを判断する。ここで、前記トレイ101の識別情報に対応する前記調製データが存在すると判断された場合(S42:Yes)、処理はステップS43に移行し、前記トレイ101の識別情報に対応する前記調製データが存在しないと判断された場合(S42:No)、処理は前記ステップS411に移行する。
ステップS411において、前記第2制御部500は、前記トレイ挿入口114から前記トレイ101を取り出すことをユーザーに促すエラー表示を前記タッチパネルモニタ14に表示させる。例えば、前記エラー表示では、「トレイ挿入口からトレイを取り出してください。」のようなメッセージが表示される。このように、前記トレイ101から前記識別情報が読み取れない場合(S41:No)、又は前記識別情報が前記調製データに対応付けられていない場合(S42:No)、前記第2制御部500は、前記トレイ101を使用する前記混注処理を中止する。なお、前記ステップS411の時点で前記トレイ101が前記トレイ挿入口114から離れた位置に既に搬送される構成では、前記ステップS411において、前記第2制御部500が、前記トレイ101を前記トレイ挿入口114に戻す処理を実行する。
ステップS43において、前記第2制御部500は、前記器材載置部102に載置された器材が全て正常に取り込まれたか否かを判断する。具体的に、前記第2制御部500は、前記器材載置部102に載置された前記薬品容器10、前記注射器11のシリンジ11a、及び前記注射器11の注射針11cなどの器材を前記調製データの内容と照合しつつ前記第1ロボットアーム21によって取り込む。ここで、前記器材載置部102から取り込んだ前記器材の全ての照合結果が一致であった場合に、前記器材が全て正常に取り込まれたと判断する。そして、前記器材載置部102に載置された器材が全て正常に取り込まれたと判断されると(S43:Yes)、処理はステップS44に移行し、前記器材載置部102に載置された器材が正常に取り込まれなかったと判断されると(S43:No)、処理はステップS431に移行する。
ステップS431において、前記第2制御部500は、前記ステップS43で照合結果が一致しなかった器材を前記トレイ101と共に前記トレイ挿入口114から取出可能な状態にする。ここに、係る処理を実行するときの前記第2制御部500が排出制御手段の一例である。具体的に、前記第2制御部500は、前記器材を前記器材載置部102に戻した後、前記器材載置部102を前記昇降部112により降下させて前記トレイ101に戻す。これにより、前記器材は、前記トレイ101と共に前記トレイ挿入口114から取出可能になる。また、ステップS431において、前記第2制御部500は、前記ステップS43で照合結果が一致しなかった器材は、前記トレイ101と共に前記トレイ排出口115から取出可能な状態にしてもよい。
そして、ステップS432において、前記第2制御部500は、前記トレイ挿入口114から前記トレイ101を取り出すことをユーザーに促すエラー表示を前記タッチパネルモニタ14に表示させる。例えば、前記エラー表示では、「トレイ挿入口からトレイを取り出して、正しい器材を装填してください。」のようなメッセージが表示される。さらに、前記エラー表示には、前記器材載置部102に載置されているべき器材のリストが含まれることが望ましい。例えば、前記第2制御部500は、前記調製データに含まれる器材のリストを表示させると共に、照合結果が一致しなかった器材を識別可能に表示することが考えられる。これにより、ユーザーは、前記器材載置部102に載置するべき器材を容易に把握することができ、ユーザーの作業効率を高めることができる。
その後、ステップS433において、前記第2制御部500は、前記トレイ101が前記トレイ挿入口114から装填されたか否かを不図示のセンサによる検出結果に応じて判断する。ここで、前記トレイ101が前記トレイ挿入口114から装填されたと判断されると(S433:Yes)、処理はステップS434に移行し、前記トレイ101が前記トレイ挿入口114から装填されたと判断されるまでの間は(S433:Yes)、処理は前記ステップS433で待機する。なお、前記タッチパネルモニタ14に対して前記混注処理をキャンセルするための操作が行われた場合、前記第2制御部500は、前記トレイ照合処理を終了する。
そして、ステップS434において、前記第2制御部500は、前記ステップS41と同様に、前記トレイ挿入口114から装填された前記トレイ101の前記ICタグ101bから識別情報が前記ICリーダ101cによって読み取られたか否かを判断する。ここで、前記識別情報が読み取られたと判断されると(S433:Yes)、処理はステップS435に移行し、前記識別情報が読み取られなかったと判断されると(S433:No)、処理はステップS436に移行する。
また、ステップS435において、前記第2制御部500は、前記トレイ101の識別情報が、現在の処理対象の調製データに割り当てられている前記トレイ101の識別情報と一致するか否かを判断する。即ち、前記ステップS41で読み取られた前記識別情報と前記ステップS434で読み取られた前記識別情報とが一致するか否かが判断される。これにより、前記ステップS431により前記トレイ101が取出可能になった後、次に前記混注装置1に装填された前記トレイ101から前記ICリーダ101cによって読み取られた前記識別情報と前記ステップS431により前記トレイ101が取出可能になった前記トレイ101から前記ICリーダ101cによって読み取られた前記識別情報とが一致するか否かが判断されることになる。ここで、前記トレイ101の識別情報が一致すると判断された場合(S435:Yes)、前記混注処理が再開されて処理がステップS43に移行する。一方、前記トレイ101の識別情報が一致しないと判断された場合(S435:No)、処理は前記ステップS436に移行する。
ステップS436において、前記第2制御部500は、前記トレイ101の識別情報が、現在の処理対象の調製データに割り当てられている前記トレイ101の識別情報と一致しない旨のエラーを前記タッチパネルモニタ14に表示させて報知する。ここに、係る処理を実行するときの前記第2制御部500が報知手段の一例である。例えば、前記エラーの表示には、「トレイが違います。トレイ挿入口からトレイを取り出して、正しいトレイを装填してください。」のようなメッセージも表示される。その後、処理は前記ステップS433に移行する。
一方、前記器材載置部102に載置された器材が全て正常に取り出されたと判断された場合(S43:Yes)、続くステップS44において、前記第2制御部500は、前記トレイ101を前記トレイ搬送終端部110aに移動させる。
ステップS45において、前記第2制御部500は、前記調製データと前記輸液用カメラ121により読み取られる前記輸液バッグ12のバーコードの情報とを照合する。
そして、ステップS46において、前記第2制御部500は、前記ステップS45における照合結果に応じて処理を分岐する。ここで、前記輸液バッグ12が前記調製データと一致したと判断されると(S46:Yes)、当該トレイ照合処理は終了する。一方、前記輸液バッグ12が前記調製データと一致しないと判断されると(S46:No)、処理はステップS47に移行する。
ステップS47において、前記第2制御部500は、前記ステップS46で照合結果が一致しなかった前記輸液バッグ12を前記トレイ101と共に前記トレイ排出口15から取出可能な状態にする。ここに、係る処理を実行するときの前記第2制御部500が排出制御手段の一例である。具体的に、前記第2制御部500は、前記輸液バッグ保持部103を前記バッグ昇降部113により降下させて前記トレイ101に戻す。これにより、前記輸液バッグ12は、前記トレイ101と共に前記トレイ排出口15から取出可能になる。なお、前記トレイ搬送終端部110aと前記トレイ排出口15との間が離れている場合は、前記第2制御部500は、前記ステップS47において、前記トレイ101を前記トレイ排出口15に搬送する処理を実行する。
そして、ステップS48において、前記第2制御部500は、前記トレイ排出口15から前記トレイ101を取り出すことをユーザーに促すエラー表示を前記タッチパネルモニタ14に表示させる。例えば、前記エラー表示では、「トレイが違います。トレイ排出口からトレイを取り出して、正しい輸液バッグを装填し、トレイ排出口から入れてください。」のようなメッセージが表示される。これにより、ユーザーは、前記トレイ101に正しい前記輸液バッグ12を載置して前記トレイ101を前記トレイ排出口15から再装填する。
その後、ステップS49において、前記第2制御部500は、前記トレイ101が前記トレイ排出口15から再装填されたか否かを不図示のセンサによる検出結果に応じて判断する。ここで、前記トレイ101が前記トレイ排出口15から再装填されたと判断されると(S49:Yes)、処理はステップS50に移行し、前記トレイ101が前記トレイ排出口15から再装填されるまでの間は(S49:Yes)、処理は前記ステップS49で待機する。なお、前記タッチパネルモニタ14に対して前記混注処理をキャンセルするための操作が行われた場合、前記第2制御部500は、前記トレイ照合処理を終了する。
次に、ステップS50において、前記第2制御部500は、前記トレイ排出口15から装填された前記トレイ101の前記ICタグ101bから前記ICリーダ15aによって識別情報が読み取られたか否かを判断する。ここで、前記識別情報が読み取られたと判断されると(S50:Yes)、処理はステップS51に移行し、前記識別情報が読み取られなかったと判断されると(S50:No)、処理はステップS52に移行する。
また、ステップS51において、前記第2制御部500は、前記トレイ101の識別情報が、現在の処理対象の調製データに割り当てられている前記トレイ101の識別情報と一致するか否かを判断する。即ち、前記ステップS41で読み取られた前記識別情報と前記ステップS50で読み取られた前記識別情報とが一致するか否かが判断される。これにより、前記ステップS431により前記トレイ101が取出可能になった後、次に前記混注装置1に装填された前記トレイ101から前記ICリーダ101cによって読み取られた前記識別情報と前記ステップS431により前記トレイ101が取出可能になった前記トレイ101から前記ICリーダ101cによって読み取られた前記識別情報とが一致するか否かが判断されることになる。ここで、前記トレイ101の識別情報が一致すると判断された場合は(S51:Yes)、前記混注処理が再開されて処理が前記ステップS45に移行する。一方、前記トレイ101の識別情報が一致しないと判断された場合(S51:No)、処理はステップS52に移行する。
ステップS52において、前記第2制御部500は、前記トレイ101の識別情報が、現在の処理対象の調製データに割り当てられている前記トレイ101の識別情報と一致しない旨のエラーを前記タッチパネルモニタ14に表示させて報知する。ここに、係る処理を実行するときの前記第2制御部500が報知手段の一例である。例えば、前記エラーの表示には、「トレイが違います。トレイ排出口からトレイを取り出して、正しいトレイを装填してください。」のようなメッセージが表示される。その後、処理は前記ステップS49に移行する。なお、前記ステップS52の時点で前記トレイ101が前記トレイ排出口15から離れた位置に搬送されている構成では、前記ステップS52において、前記第2制御部500が、前記トレイ101を前記トレイ排出口15に戻す処理を実行する。
ところで、前記第1ロボットアーム21の前記把持爪25aにより、前記トレイ101の前記器材載置部102から各種の器材が取り込まれる際、前記器材載置部102において前記器材が他の器材に干渉していることがある。そこで、前記第2制御部500は、このような場合でも前記器材を取込可能とするために下記の器材取込処理を実行する。具体的に、前記第2制御部500は、前記トレイ確認カメラ41による撮影結果に基づいて特定される前記薬品容器10又は前記注射器11の状態について予め設定された優先条件に応じて、前記薬品容器10又は前記注射器11を前記器材載置部102から前記第1ロボットアーム21によって順に取り込む。なお、前記第2制御部500は、前記トレイ確認カメラ41により前記器材載置部102の画像が撮影された場合に前記器材取込処理を開始する。ここに、前記器材取込処理を実行するときの前記第2制御部500が取込制御手段の一例である。
まず、ステップS61において、前記第2制御部500は、前記トレイ確認カメラ41による撮影画像に基づいて、前記器材載置部102に載置された器材の中に、他の器材又は前記器材載置部102の側壁又は前記支持部102Aなどの構成要素(側面など)に干渉しない器材が存在するか否かを判断する。そして、干渉のない器材が存在すると判断された場合(S61:Yes)、処理はステップS62に移行する。なお、干渉のない器材が存在しないと判断された場合(S61:No)、処理はステップS64に移行する。
ステップS62において、前記第2制御部500は、前記第1ロボットアーム21を制御して、前記ステップS61で干渉なしと判断された前記器材を取り込む。例えば、図30に示す例では、複数の前記バイアル瓶10Bのうち最も右側のバイアル瓶10Bには両側に十分な間隙があるため、当該バイアル瓶10Bが優先して前記第1ロボットアーム21によって取り込まれる。
ステップS63において、前記第2制御部500は、前記ステップS62で前記器材が取り込まれた後の前記器材載置部102を前記トレイ確認カメラ41によって撮影する。
その後、ステップS64において、前記第2制御部500は、前記ステップS63により前記トレイ確認カメラ41によって撮影された画像に基づいて、前記器材載置部102内に器材が残っているか否かを判断する。例えば、前記第2制御部500は、前記トレイ確認カメラ41による撮影画像に基づいて前記器材載置部102内の器材の有無を判断する。ここで、前記器材載置部102内に器材が残っていると判断された場合は(S64:Yes)、処理はステップS61に戻される。一方、前記器材載置部102内に器材が残っていないと判断された場合は(S64:No)、当該器材取込処理は終了する。
一方、ステップS611において、前記第2制御部500は、前記トレイ確認カメラ41により撮影された撮影画像に基づいて、前記器材載置部102に載置された器材の中に、片側のみが他の器材と干渉している器材が存在するか否かを判断する。ここに、係る処理を実行するときの前記第2制御部500が干渉判断手段の一例である。ここで、片側のみが他の器材と干渉している器材が存在すると判断された場合(S611:Yes)、処理はステップS612に移行する。なお、片側のみが他の器材と干渉している器材が存在しないと判断された場合(S611:No)、処理はステップS613に移行する。
ステップS612において、前記第2制御部500は、前記ステップS611で前記器材載置部102に載置された器材のうち片側のみが他の器材と干渉していると判断された二つの器材の干渉を解消するための処理を実行する。ここに、係る処理を実行するときの前記第2制御部500が離間手段の一例である。
一方、ステップS613において、前記第2制御部500は、前記トレイ確認カメラ41により撮影された撮影画像に基づいて、前記器材載置部102からの器材の取込を中止するための中止条件が充足しているか否かを判断する。具体的に、前記中止条件は、前記器材載置部102に載置された全ての器材が、片側又は両側が前記器材載置部102の構成要素と干渉する器材、或いは両側が他の器材と干渉する器材に該当することである。ここで、前記中止条件が充足していると判断された場合(S613:Yes)、処理はステップS614に移行し、前記中止条件が充足していないと判断された場合(S613:No)、処理は前記ステップS61に戻る。なお、前記中止条件には、前記器材取込処理が開始されてから予め設定された中止時間が経過したことも含まれ、前記中止時間が経過した場合にも処理がステップS614に移行する。また、前記ステップS613を省略し、前記ステップS611において片側のみが前記器材に干渉する器材が存在しないと判断された場合に(S611:No)、処理がステップS614に移行することも他の実施形態として考えられる。
ステップS614において、前記第2制御部500は、前記タッチパネルモニタ14にエラーを表示させると共に、前記器材載置部102からの器材の取込を中止する。前記エラー表示には、前記器材載置部102内の器材を正常に取り込むことができない旨のメッセージ、及び前記トレイ挿入口114から前記器材載置部102を取り出すことをユーザーに促すメッセージが含まれる。また、このとき前記第2制御部500は、前記器材載置部102を前記トレイ昇降部112によって前記トレイ101に戻し、前記トレイ101を前記トレイ挿入口114から取り出し可能な状態にする。例えば、図32に示す前記器材載置部102では、前記バイアル瓶10Bのうち一つの前記バイアル瓶10Bが前記器材載置部102の側壁に接触している状態である。そのため、前記器材載置部102の側壁に接触する前記バイアル瓶10Bは取り込まれることなく前記トレイ101と共に前記トレイ挿入口114から排出される。これにより、ユーザーは、前記トレイ101の前記器材載置部102に載置された前記器材の干渉を解消してから前記トレイ101を前記トレイ挿入口114から再装填することができる。
前記混注装置1では、前記混注処理において、前記注射器11から前記輸液バッグ12内に薬品が注入されるが、前記輸液バッグ12に予め設定された注入可能量を超える量の薬品が注入されると、前記輸液バッグ12内が陽圧になって前記輸液バッグ12から薬品が噴き出すおそれがある。そのため、前記混注装置1では、前記第2制御部500が、前記混注処理において前記輸液バッグ12内が陽圧にならないように前記輸液バッグ12内の空気量を調整する注入制御処理を実行する。なお、前記注入制御処理を実行するときの前記第2制御部500が注入制御手段の一例である。ここに、図33は、前記注入制御処理の手順の一例を示すフローチャートである。
まず、ステップS71において、前記第2制御部500は、前記輸液バッグ12に対応する注入可能量を特定する。例えば、前記データ記憶部404に記憶されている前記薬品マスターには、前記輸液バッグ12ごとに、容量、形状、満量、エアー抜き無しの注入可能量、及びエアー抜き有りの注入可能量などの輸液情報が記憶されている。そして、前記第2制御部500は、前記輸液情報に基づいて前記輸液バッグ12に対応するエアー抜き無しの注入可能量及びエアー抜き有りの注入可能量を特定する。前記注入可能量は、前記輸液バッグ12内が陽圧にならない注入量として予め設定された値である。
ステップS72において、前記第2制御部500は、前記調製データに基づいて、前記注射器11から前記輸液バッグ12への薬品の注入量が、前記ステップS71で特定された前記輸液バッグ12のエアー抜き無しの注入可能量を超えるか否かを判断する。ここで、前記注入量がエラー抜き無しの注入可能量を超えると判断されると(S72:Yes)、処理はステップS73に移行し、前記注入量がエラー抜き無しの注入可能量を超えないと判断されると(S72:YeNo)、処理はステップS75に移行する。
ステップS73において、前記第2制御部500は、前記調製データに基づいて、前記注射器11から前記輸液バッグ12への薬品の注入量が、前記ステップS71で特定された前記輸液バッグ12のエアー抜き有りの注入可能量を超えるか否かを判断する。ここで、前記注入量がエラー抜き無しの注入可能量を超えないと判断されると(S73:YeNo)、処理はステップS74に移行する。一方、前記注入量がエラー抜き有りの注入可能量を超えると判断されると(S73:Yes)、前記第2制御部500は、エラー表示などを行った後、当該注入制御処理を終了させる。
ステップS74において、前記第2制御部500は、前記第2ロボットアーム22を制御することにより、前記注射器11により薬品が吸引される前に、前記注射器11を用いて前記輸液バッグ12から空気を抜き取る。具体的に、前記第2制御部500は、前記モーター113cを制御することにより、前記バッグ昇降部113を駆動させて前記輸液バッグ保持部103を傾斜させ、前記輸液バッグ12の混注口を上向きにする。これにより、前記輸液バッグ12の混注口に空気を集めることができる。そして、前記第2制御部500は、前記第2ロボットアーム22により、前記注射器11の注射針11cを前記輸液バッグ12に挿入して、前記注射器11のプランジャ11bを引くことにより前記輸液バッグ12内の空気を抜く。なお、ここで抜き取られる空気の量は、例えば前記混注処理において前記注射器11から前記輸液バッグ12に注入される薬品量の容積に相当する量である。また、ここで抜き取られる空気の量が予め設定された一定量であることも考えられる。
ステップS75において、前記第2制御部500は、前記混注処理における前記注射器11を用いた前記薬品容器10からの薬品の吸引工程の終了を待ち受ける(S75:No)。そして、前記注射器11を用いた前記薬品容器10からの薬品の吸引工程が終了すると(S75:Yes)、処理はステップS76に移行する。
ステップS76において、前記第2制御部500は、前記第2ロボットアーム22を制御することにより、前記注射器11から前記輸液バッグ12に薬品を注入する。このとき、前記注射器11から注入される薬品量が、前記輸液バッグ12のエアー抜き無しの混注可能量を超えている場合であっても、前記ステップS74により事前に空気が抜き取られている。従って、前記輸液バッグ12内が陽圧になることが防止され、前記輸液バッグ12からの薬品の噴き出しが防止される。
また、前記第2制御部500が、前記注入制御処理(図33参照)に代えて図35に示す注入制御処理を実行することも考えられる。具体的に、図35に示す前記注入制御処理では、前記ステップS74に代えて、下記のステップS81〜S83が実行されることにより、前記注射器11により薬品が吸引され、前記注射器11から前記輸液バッグ12に前記薬品を注入した後に続けて前記注射器11による前記輸液バッグ12からの空気の抜き取りが実行される。
ステップS81において、前記第2制御部500は、前記輸液バッグ12からの空気の抜き取りが必要である旨を示す抜き取りフラグをONにする。即ち、この時点では、前記輸液バッグ12からの空気の抜き取りが実行されない。なお、前記抜き取りフラグは、前記第2制御部500の前記RAM503に設けられたフラグレジスタである。
そして、前記注射器11による薬品の吸引が終了し、前記注射器11から前記輸液バッグ12に薬品が注入された後、続くステップS82において、前記第2制御部500は、前記抜き取りフラグがONであるか否かを判断する。ここで、前記抜き取りフラグがONであれば(S82:Yes)、処理はステップ83に移行し、前記抜き取りフラグがOFFであれば(S82:No)、当該注入制御処理は終了する。
ステップS83において、前記第2制御部500は、前記注射器11の注射針11cを前記輸液バッグ12に挿通したままの状態で続けて前記輸液バッグ12から空気を抜き取る。このように、前記注射器11から前記輸液バッグ12の薬品の注入時に空気が抜き取られるため、事前に前記輸液バッグ12から空気を抜き取る場合に比べて、前記注射器11の注射針11cの前記輸液バッグ12への挿通回数を減らすことができる。なお、当該注入制御処理が実行される場合、前記針挿入確認カメラ44による撮影タイミングは、前記注射器11から前記輸液バッグ12に薬品を注入した後、前記空気の抜き取りを開始するまでの間であることが考えられる。これにより、前記注射器11のプランジャ11bが最後まで押し込まれた状態を前記針挿入確認カメラ44で撮影することができる。
以下、前記混注装置1が備える他の機能について説明する。当該他の機能は、前記混注制御装置100において前記第1制御部400又は前記第2制御部500によって各種の処理が実行されることにより具現される。
前記混注装置1では、前記アンプル10Aを使用する際に、前記シリンジフィルター付きの前記注射針11cが使用されることについては前述した。このとき、前記シリンジフィルターには、浸水する前は空気を通過させるが、浸水することにより空気を通過させない特性を有するものがある。そのため、シリンジフィルター付きの前記注射針11cを用いて前記注射器11内の薬品を前記輸液バッグ12に注入する際には、前記注射器11内に空気が存在しないことが重要である。例えば、前記注射器11内に空気が存在する場合には、前記第2ロボットアーム22により前記注射器11のプランジャ11bを押し込む際に前記注射器11が破損するおそれがある。
まず、手順S101では、図36(A)に示すように、前記注射針着脱装置43及び前記第2ロボットアーム22により、前記注射器11に前記シリンジフィルターなしの注射針11cを装着させる。このとき、前記シリンジ11a内には空気が存在しないが、前記シリンジ11aから前記注射針11cの先端までの間には空気が存在する。
次に、手順S102では、図36(B)に示すように、前記第2ロボットアーム22により、前記注射器11の注射針11cの針先を下方に向けて前記アンプル10Aに挿入した後、前記注射器11のプランジャ11bを引いて前記アンプル10Aから薬品を吸引する。このとき、前記シリンジ11a内には、前記シリンジ11aから前記注射針11cの先端までの間に存在していた空気が流入することになる。このとき前記シリンジ11aに吸引される初期空気量をαとする。ここで、前記第2制御部500は、前記調製データに基づいて前記アンプル10Aから採取するべき薬品の容量をLnとしたとき、前記容量Lnに対して補正量Sだけ多く前記プランジャ11bを引く。このとき、前記注射器11のシリンジ11aの目盛りは、前記容量Ln+前記補正量Sとなる。
手順S103では、図36(C)に示すように、前記第2ロボットアーム22により、前記注射器11を上方に移動させ、前記注射針11cが前記アンプル10Aの液面から浮いた状態で、予め定められた一定量c1だけ前記プランジャ11bを引く。これにより、前記注射器11からの液漏れが防止される。このとき、前記注射器11のシリンジ11aの目盛りは、前記容量Ln+前記補正量S+前記一定量c1となる。
手順S104では、図37(A)に示すように、前記第2ロボットアーム22により、前記注射器11の注射針11cの先端を上方に向け、予め定められた一定量c2だけ前記プランジャ11bを引く。なお、前記一定量c2は、少なくとも前記注射針11c内の薬品を全て前記シリンジ11a内に取り込むことが可能な量である。これにより、前記注射器11の注射針11c内の薬品が前記シリンジ11a内に取り込まれ、前記注射器11から空気を抜く際の薬品の噴き出しが防止される。このとき、前記注射器11のシリンジ11aの目盛りは、前記容量Ln+前記補正量S+前記一定量c1+前記一定量c2となる。
手順S105では、前記第2ロボットアーム22により、前記注射器11を水平方向に平行な回転軸を中心に一回又は複数回だけ回転させた後、前記注射器11の前記注射針11cの針先を上方に向ける。これにより、前記注射器11内に気泡として存在する空気が前記注射器11内で上方に集められる。なお、前記注射器11を揺動させ、又は前記注射器11に加振することにより、前記注射器11内の空気を上方に集めることも考えられる。
そして、前記手順S106では、図37(B)に示すように、前記第2ロボットアーム22により、前記注射器11の注射針11cの先端を上方に向けた状態で、前記一定量c1及び前記一定量c2に相当する量だけ前記プランジャ11bを押し込む。これにより、前記シリンジ11a内から前記一定量c1及び前記一定量c2の空気が抜ける。前記シリンジフィルター付きの前記注射針11cに交換した後は、前記シリンジフィルターを通過させて空気を抜く必要があるため、前記プランジャ11bの押し込み速度を遅くする必要がある。そこで、手順S105において、前記注射針11cを前記シリンジフィルター付きの前記注射針11cに交換する前に前記シリンジ11aの空気を抜いておくことにより作業時間を短縮することができる。このとき、前記注射器11のシリンジ11aの目盛りは、前記容量Ln+前記補正量Sとなる。
次に、手順S107では、図37(C)に示すように、前記注射針着脱装置43及び前記第2ロボットアーム22により、前記注射器11の前記注射針11cを前記シリンジフィルター付きの前記注射針11cに交換する。このとき、前記注射針11cにはキャップが被せられた状態である。なお、前記シリンジフィルター付きの前記注射針11cには、図37(C)に示すように、シリンジフィルター11dが含まれており、前記注射針11c全体の容量は、前記注射針11cの針部分の容量に前記シリンジフィルター11dの容量を加えた値となる。
そして、手順S108では、図37(D)に示すように、前記第2ロボットアーム22により、前記注射器11の注射針11cの先端を上方に向けた状態で、前記初期空気量αよりも多く前記補正量Sよりも少ない量だけ前記プランジャ11bを押し込んで所定量fの空気を押し出す。これにより、前記シリンジ11a内から少なくとも前記初期空気量αの空気が抜けて前記注射針11cの一部まで薬品が到達することになる。このとき、前記注射器11のシリンジ11aの目盛りは、前記容量Ln+前記補正量S−前記所定量fとなる。なお、このとき、前記第2ロボットアーム22は、前記注射針着脱装置43により前記注射針11cのキャップを取り外す。また、前記注射針11cのキャップは後述の手順S109で外されてもよい。
その後、手順S109では、図37(E)に示すように、前記第2ロボットアーム22により、前記注射器11の注射針11cの先端を下方に向けて、前記アンプル10A内の空間に挿入した後、前記シリンジ11aの目盛りが前記容量Lnに相当する位置になるまで前記プランジャ11bを押し込むことにより、前記注射器11内の余分な薬品を排出する。なお、前記第2制御部500は、前記第2ロボットアーム22の前記移動部263の位置に応じて前記シリンジ11aの目盛りを特定することが可能である。
前記混注装置1では、前記薬品容器10の薬品が前記輸液バッグ12内に注入されて払い出される場合について説明した。一方、前述したように、前記混注装置1では、前記薬品容器10内の薬剤を前記注射器11で吸引した状態で前記注射器11を払い出すことも可能である。このとき、前記薬品容器10の薬品を前記薬品容器10の容量を超える溶媒で希釈した状態で払い出す必要があることも考えられる。そこで、前記混注装置1では、前記第2制御部500が、前記第2ロボットアーム22を制御することにより、前記薬品容器10内の薬品を前記注射器11で吸引した後、前記輸液バッグ12から溶媒をさらに吸引することのできる溶媒量調整機能を有することが考えられる。なお、このような溶媒量の調整作業は一般にメスアップとも称される。
ところで、前記混注装置1における調製対象の薬品には、遮光が必要となる抗がん剤(例えばダカルバシン)などの薬品(以下「遮光薬」と称する)も含まれる。この場合、前記遮光薬が収容される前記薬品容器10として遮光性を有する遮光容器が使用されるが、前記混注装置1において前記注射器11を用いて前記遮光容器から前記輸液バッグ12に注入されるまでの間は前記遮光薬が光にさらされてしまうという問題が生じる。
前述したように、前記混注装置1において、前記薬品容器10を用いた前記混注処理では、前記注射器11により前記薬品容器10から吸引されて前記輸液バッグ12に注入された薬品の重量が、前記注射器11の重量に基づいて測定される。具体的には、前記第2制御部500が、前記薬品容器10から薬品を吸引した後の前記注射器11の重量と前記輸液バッグ12に薬品を注入した後の前記注射器11の重量との差分を、前記注射器11により前記薬品容器10から吸引されて前記輸液バッグ12に注入された薬品の重量として算出する。なお、前記第2制御部500が、前記薬品容器10から薬品を吸引する前の前記注射器11の重量と前記薬品容器10から薬品を吸引した後の前記注射器11の重量との差分を、前記薬品容器10から前記輸液バッグ12に注入された薬品の重量として算出することも考えられる。
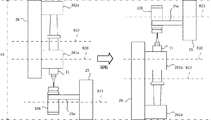
前記混注装置1Aは、図39及び図40に示すように、前記混注装置1が備える構成要素に加えて秤量計39(秤量装置の一例)を備える。前記秤量計39は、前記第1ロボットアーム21の可動範囲内であって、前記載置棚33が設けられた前記混注装置1Aの背面近傍の位置に設けられている。これにより、前記秤量計39は、前記第1ロボットアーム21で搬送される前記バイアル瓶10B又は前記注射器11などの器材を秤量することが可能である。なお、前記秤量計39による秤量結果は前記第2制御部500に入力される。
次に、図41及び図42を参照しつつ、前記バイアル瓶10Bを用いて実行される混注処理において前記第2制御部500が実行する第1ロボットアーム制御処理及び第2ロボットアーム制御処理を説明する。この場合の前記第1ロボットアーム21及び前記第2ロボットアーム22の動作については、後段で図43及び図44を参照しつつ説明する。なお、前記混注装置1Aで前記アンプル10Aを用いて実行される前記混注処理は前記混注装置1と同様であるため説明を省略する。また、前記第2制御部500は、前記混注処理に伴って、前述の注射器位置調整処理(図18参照)、容器位置調整処理(図19)、鑑査制御処理(図20参照)、トレイ照合処理(図28参照)、器材取込処理(図29参照)、注入制御処理(図33又は図35参照)、及び溶媒量調整処理(図38参照)なども実行可能である。
まず、図41を参照しつつ、前記第2制御部500が実行する前記第1ロボットアーム制御処理の一例について説明する。
ステップS1001において、前記第2制御部500は、前記第1ロボットアーム21を制御して、前記バイアル瓶10Bを前記秤量計39まで移動させ、輸液注入前の前記バイアル瓶10Bを前記秤量計39で秤量する第1秤量工程を実行する。即ち、前記混注装置1Aでは、前記第2ロボットアーム22を用いることなく、前記第1ロボットアーム21を用いて前記バイアル瓶10Bの重量が測定される。このとき、前記混注装置1では、前記第2制御部500が、前記ステップS1001の第1秤量工程を、後述のステップS2001(図42参照)の第1輸液吸引工程と並行して実行する。
次に、ステップS1002において、前記第2制御部500は、前記攪拌装置32が使用可能であるか否かを判断する。具体的に、前記攪拌装置32は、前述したように二つの前記支持部32fを備えており、同時に二つの前記バイアル瓶10Bを攪拌することが可能である。以下、前記支持部32fのうち一方の前記支持部32fを第1攪拌部32f1と称し、他方の前記支持部32fを第2攪拌部32f2と称する。なお、前記攪拌装置32は、三つ以上の前記バイアル瓶10Bを同時に攪拌可能な構成であってもよい。
ステップS1003において、前記第2制御部500は、前記第1ロボットアーム21を制御し、後述のステップS2003(図42参照)で制御される前記第2ロボットアーム22と共に動作させることにより、前記注射器11で前記バイアル瓶10Bに輸液を注入する注入工程を実行する。これにより、前記バイアル瓶10B内に収容されていた薬品が輸液で溶解される。以下、前記バイアル瓶10B内で薬品が溶解した輸液を薬液と称する。
ステップS1004において、前記第2制御部500は、前記第1ロボットアーム21を制御して、前記バイアル瓶10Bを前記秤量計39まで移動させ、輸液注入後の前記バイアル瓶10Bを前記秤量計39で秤量する第2秤量工程を実行する。この場合も、前記ステップS1001と同様に、前記第2ロボットアーム22を用いることなく、前記第1ロボットアーム21を用いて前記バイアル瓶10Bの重量が測定される。
ステップS1005において、前記第2制御部500は、前記ステップS1001の秤量結果である前記バイアル瓶10Bの重量と前記ステップS1004の秤量結果である前記バイアル瓶10Bの重量との差分を算出する。これにより、前記第2制御部500は、前記差分値を前記注射器11から前記バイアル瓶10Bに注入された輸液の重量として取得する。ここに、前記ステップS1005を実行するときの前記第2制御部500が輸液重量取得手段の一例である。このように、前記混注装置1Aでは、輸液注入前後の前記バイアル瓶10Bの重量から前記バイアル瓶10Bへの輸液の重量を測定することができる。従って、前記バイアル瓶10Bに注入された輸液の重量を取得するために前記第2ロボットアーム22を用いて前記注射器11の重量を測定する必要はない。
ステップS1006において、前記第2制御部500は、前記攪拌装置32の駆動を停止させる。なお、前記攪拌装置32が既に停止している場合には、そのまま処理がステップS1007に移行する。また、前記攪拌装置32が、複数の前記バイアル瓶10Bの攪拌の有無を個別に制御可能な構成である場合には、前記攪拌装置32の駆動を停止させる必要はない。
ステップS1007において、前記第2制御部500は、前記第1攪拌部32f1が使用可能であるか否かを判断する。ここで、前記第1攪拌部32f1が使用可能であると判断されると(S1007のYes側)、処理はステップS1008に移行し、前記第1攪拌部32f1が使用可能でないと判断されると(S1007のNo側)、処理はステップS1071に移行する。
ステップS1008において、前記第2制御部500は、前記第1ロボットアーム21を制御して、前記秤量計39で重量が測定された後の前記バイアル瓶10Bを前記第1攪拌部32f1にセットして前記バイアル瓶10Bを攪拌する攪拌工程を実行する。また、ステップS1071において、前記第2制御部500は、前記第1ロボットアーム21を制御して、前記秤量計39で重量が測定された後の前記バイアル瓶10Bを前記第2攪拌部32f2にセットして前記バイアル瓶10Bを攪拌する攪拌工程を実行する。
そして、ステップS1009において、前記第2制御部500は、前記攪拌装置32の駆動を開始させる。これにより、前記攪拌装置32で前記バイアル瓶10Bに収容されている輸液及び薬品が攪拌されて十分に混合された輸液が生成される。なお、既に前記攪拌装置32が駆動している場合には、そのまま処理がステップS1010に移行する。
ステップS1010において、前記第2制御部500は、前記第1攪拌部32f1の攪拌が終了したか否かを判断する。具体的に、前記第2制御部500は、前記ステップS1008において前記バイアル瓶10Bを前記第1攪拌部32f1にセットしてから前記攪拌装置32の駆動を開始したときに前記第1攪拌部32f1における攪拌時間の計時を開始する。同様に、前記第2制御部500は、前記ステップS1071において前記バイアル瓶10Bを前記第2攪拌部32f2にセットしてから前記攪拌装置32の駆動を開始したときに前記第2攪拌部32f2における攪拌時間の計時を開始する。そして、前記第2制御部500は、前記第1攪拌部32f1又は前記第2攪拌部32f2に対応する計時時間が予め設定された攪拌時間に達した場合に前記第1攪拌部32f1又は前記第2攪拌部32f2における攪拌が終了したと判断する。なお、前記攪拌時間は、前記バイアル瓶10Bに収容された薬品種別及び薬品量などに応じて予め設定される。なお、前記攪拌装置32の駆動が停止されている間は、前記第1攪拌部32f1及び前記第2攪拌部32f2の攪拌時間の計時も一時停止する。
ステップS1011において、前記第2制御部500は、前記攪拌装置32の駆動を停止させる。そして、ステップS1012において、前記第2制御部500は、前記第1ロボットアーム21を制御して、前記攪拌装置32の前記第1攪拌部32f1から前記バイアル瓶10Bを取り出し、前記第1ロボットアーム21を後述のステップS2041(図42参照)で制御される前記第2ロボットアーム22と共に動作させることにより、前記注射器11で前記バイアル瓶10Bから薬液を吸引する。
一方、ステップS1013において、前記第2制御部500は、前記第2攪拌部32f2の攪拌が終了したか否かを判断する。ここで、前記第2攪拌部32f2の攪拌が終了したと判断されると(S1013のYes側)、処理はステップS1014に移行し、前記第2攪拌部32f2の攪拌が終了していないと判断されると(S1013のNo側)、処理はステップS1016に移行する。
ステップS1014において、前記第2制御部500は、前記攪拌装置32の駆動を停止させる。そして、ステップS1015において、前記第2制御部500は、前記第1ロボットアーム21を制御して、前記攪拌装置32の前記第2攪拌部32f2から前記バイアル瓶10Bを取り出し、前記第1ロボットアーム21を後述のステップS2031(図42参照)で制御される前記第2ロボットアーム22と共に動作させることにより、前記注射器11で前記バイアル瓶10Bから薬液を吸引する。
その後、ステップS1016において、前記第2制御部500は、続いて使用する他の前記バイアル瓶10Bが存在するか否かを前記調製データに基づいて判断する。例えば、前記ステップS1016では、一の前記調製データに基づいて複数の前記バイアル瓶10Bを用いた調製作業を実行する場合、又は前記バイアル瓶10Bを用いる複数の前記調製データの調製作業を連続して実行する場合などに、続いて使用する他の前記バイアル瓶10Bが存在すると判断する。
ステップS1017において、前記第2制御部500は、前記攪拌装置32の前記第1攪拌部32f1又は前記第2攪拌部32f2に前記バイアル瓶10Bが残存しているか否かを判断する。ここで、前記第1攪拌部32f1又は前記第2攪拌部32f2に前記バイアル瓶10Bが残存していると判断されると(S1017のYes側)、処理は前記ステップS1009に移行して前記攪拌装置32による残りの前記バイアル瓶10Bの攪拌が再開される。なお、前記攪拌装置32が既に駆動している場合には、そのまま処理が前記ステップS1010に移行する。一方、前記第1攪拌部32f1及び前記第2攪拌部32f2に前記バイアル瓶10Bが残存していないと判断されると(S1017のNo側)、当該第1ロボットアーム制御処理は終了する。
次に、図42を参照しつつ、前記第2制御部500が実行する前記第2ロボットアーム制御処理の一例について説明する。
ステップS2001において、前記第2制御部500は、前記第2ロボットアーム22を制御して、前記注射器11で前記輸液バッグ12から前記調製データに基づく必要量の輸液を吸引する第1輸液吸引工程を実行する。ここで、前記混注装置1Aでは、前記ステップS1001(図41参照)において前記第1ロボットアーム21を用いて前記バイアル瓶10Bの重量が測定される。これにより、前記第2ロボットアーム22は、前記第1ロボットアーム21が前記バイアル瓶10Bの秤量を行っている間に、前記注射器11で前記輸液バッグ12から輸液を吸引することが可能である。即ち、前記混注装置1では、前記第2制御部500が、前記ステップS2001の第1輸液吸引工程を、前記ステップS1001の第1秤量工程(図41参照:ステップS1001)と並行して実行する。
次に、ステップS2002において、前記第2制御部500は、前記ステップS1002(図41参照)と同様に、前記攪拌装置32が使用可能であるか否かを判断する。ここで、前記攪拌装置32が使用可能であると判断された場合(S2002のYes側)、処理はステップS2003に移行し、前記攪拌装置32が使用可能でないと判断された場合(S2002のNo側)、処理はステップS2004に移行する。
ステップS2003において、前記第2制御部500は、前記第2ロボットアーム22を制御し、前記ステップS1003(図41参照)で制御される前記第1ロボットアーム21と共に動作させることにより、前記注射器11で前記バイアル瓶10Bに輸液を注入する注入工程を実行する。このように、前記混注装置1Aでは、前記注射器11で前記輸液バッグ12から輸液が吸引された後、前記攪拌装置32が使用可能でない場合には(S2002のNo側)、前記バイアル瓶10Bへの輸液の注入工程が実行されずに、処理が前記ステップS2002で待機する。即ち、前記攪拌装置32が使用可能であることを条件に前記ステップS2003が実行される。
ステップS2004において、前記第2制御部500は、前記ステップS1010及び前記ステップS1013(図41参照)と同様に、前記攪拌装置32の前記第1攪拌部32f1又は前記第2攪拌部32f2のいずれかにおける前記バイアル瓶10Bの攪拌が終了したか否かを判断する。ここで、前記攪拌装置32における前記バイアル瓶10Bの攪拌が終了したと判断されると(S2004のYes側)、処理はステップS2041に移行し、前記攪拌装置32における前記バイアル瓶10Bの攪拌が終了していないと判断されると(S2004のNo側)、処理はステップS2005に移行する。
ステップS2005において、前記第2制御部500は、前記ステップS1016(図41参照)と同様に、続けて使用する他の前記バイアル瓶10Bが存在するか否かを前記調製データに基づいて判断する。ここで、続けて使用する他の前記バイアル瓶10Bが存在すると判断された場合(S2005のYes側)、処理は前記ステップS2001に戻り、続けて使用する他の前記バイアル瓶10Bについて同様の処理が実行される。また、続けて使用する他の前記バイアル瓶10Bが存在しないと判断された場合は(S2005のNo側)、処理はステップ前記S2004に移行する。
ステップS2041において、前記第2制御部500は、前記第2ロボットアーム22を制御し、前記ステップS1012又は前記ステップS1015(図41参照)で制御される前記第1ロボットアーム21と共に動作させることにより、前記注射器11で前記バイアル瓶10Bから薬液を吸引する。なお、前記第2制御部500は、前記ステップS1005で取得された前記輸液の重量に基づいて、前記注射器11で前記バイアル瓶10Bから吸引する薬液量を設定することが考えられる。ここに、係る処理を実行するときの前記第2制御部500が吸引量設定手段の一例である。
そして、ステップS2042において、前記第2制御部500は、前記第2ロボットアーム22を制御して、前記ステップS2041で吸引された前記注射器11内の薬液を前記輸液バッグ12に注入するバッグ注入工程を実行する。
その後、ステップS2043において、前記第2制御部500は、前記ステップS2005と同様に、続けて使用する他の前記バイアル瓶10Bが存在するか否かを前記調製データに基づいて判断する。ここで、続けて使用する他の前記バイアル瓶10Bが存在すると判断された場合(S2043のYes側)、処理は前記ステップS2003に戻り、続けて使用する他の前記バイアル瓶10Bについて同様の処理が実行される。また、続けて使用する他の前記バイアル瓶10Bが存在しないと判断された場合は(S2043のNo側)、処理がステップS2044に移行する。
ステップS2044において、前記第2制御部500は、前記攪拌装置32の前記第1攪拌部32f1又は前記第2攪拌部32f2に前記バイアル瓶10Bが残存しているか否かを判断する。ここで、前記第1攪拌部32f1又は前記第2攪拌部32f2に前記バイアル瓶10Bが残存していると判断されると(S2044のYes側)、処理は前記ステップS2004に移行する。一方、前記第1攪拌部32f1及び前記第2攪拌部32f2に前記バイアル瓶10Bが残存していないと判断されると(S2044のNo側)、当該第2ロボットアーム制御処理は終了する。
続いて、図43及び図44を参照しつつ、前記第1ロボットアーム制御処理及び前記第2ロボットアーム制御処理が実行された場合の前記第1ロボットアーム21及び前記第2ロボットアーム22の動作の概略を時系列に従って説明する。なお、図43及び図44における上下方向は時系列を示す。
まず、図43を参照しつつ、一つの前記バイアル瓶10Bを用いる前記混注処理が実行される場合の前記第1ロボットアーム21及び前記第2ロボットアーム22の動作例について説明する。
まず、ステップS3001では、前記第1ロボットアーム21が、輸液が注入される前の前記バイアル瓶10Bを前記秤量計39で秤量し、ステップS3002では、前記第2ロボットアーム22が、前記注射器11で前記輸液バッグ12から輸液を吸引する。前記ステップS3001及び前記ステップS3002の動作は、前記第2制御部500が、前記第1秤量工程(図41参照:ステップS1001)と前記第1輸液吸引工程(図42参照:ステップS2001)とを並行して実行することにより並行して行われる。
次に、ステップS3003では、前記第1ロボットアーム21及び前記第2ロボットアーム22が共に動作することにより、前記注射器11で前記バイアル瓶10Bに輸液が注入される。前記ステップS3003の動作は、前記第2制御部500が、前記注入工程(ステップS1003、ステップS2003)を実行することによって実行される。ここに、前記注入工程を実行するときの前記第2制御部500が第2制御手段の一例である。
そして、ステップS3004では、前記第1ロボットアーム21が、輸液が注入された後の前記バイアル瓶10Bを前記秤量計39で秤量する。前記ステップS3004の動作は、前記第2制御部500が、前記第2秤量工程(ステップS1004)を実行することによって実行される。ここに、前記第2秤量工程を実行するときの前記第2制御部500が第2制御手段の一例である。
続いて、ステップS3005では、前記第1ロボットアーム21が、前記バイアル瓶10Bを前記攪拌装置32まで移動させて前記攪拌装置32で前記バイアル瓶10Bを攪拌させる。前記ステップS3005の動作は、前記第2制御部500が、前記攪拌工程(ステップS1008、S1071)を実行することによって実行される。
その後、ステップS3006では、前記第1ロボットアーム21及び前記第2ロボットアーム22が共に動作することにより、前記注射器11で前記バイアル瓶10Bから薬液が吸引される。
そして、ステップS3007では、前記第2ロボットアーム22により、前記注射器11で前記バイアル瓶10Bから吸引された薬液が前記輸液バッグ12に注入される。前記ステップS3007の動作は、前記第2制御部500が、前記バッグ注入工程(ステップS2042)を実行することによって実行される。
次に、図44を参照しつつ、二つの前記バイアル瓶10Bを用いる前記混注処理が実行される場合の前記第1ロボットアーム21及び前記第2ロボットアーム22の動作例について説明する。なお、図43で説明した前記混注処理と同様の処理について同じ符号を付しており、その説明を省略する。
前記混注処理で二つの前記バイアル瓶10Bが使用される場合には、前記ステップS3005の実行後に、前記第1ロボットアーム21が、輸液が注入される前の2本目の前記バイアル瓶10Bを前記秤量計39で秤量する(S4001)。前記ステップS4001の動作は、前記第2制御部500が、2本目の前記バイアル瓶10Bに対応する前記第1秤量工程(図41参照:ステップS1001)を実行することにより実行される。
一方、前記混注処理で二つの前記バイアル瓶10Bが使用される場合には、前記ステップS3003の実行後に、前記第2ロボットアーム22が、前記注射器11で2本目の前記バイアル瓶10Bに対応する輸液を前記輸液バッグ12から吸引する(S4002)前記ステップS4002の動作は、前記第2制御部500が、前記ステップS2001を実行することによって実行される。ここに、前記ステップS2001を実行することにより、2本目の前記バイアル瓶10Bに対応する輸液を前記輸液バッグ12から吸引する工程が第2輸液吸引工程の一例であり、前記第2輸液吸引工程を実行するときの前記第2制御部500が第3制御手段の一例である。
その後、ステップS4003では、前記ステップS3003と同様にして、前記第1ロボットアーム21及び前記第2ロボットアーム22が共に動作することにより、前記注射器11で2本目の前記バイアル瓶10Bに輸液が注入される。
また、ステップS4004、S4005では、前記ステップS3004、S3005と同様に、前記第1ロボットアーム21が、輸液が注入された後の2本目の前記バイアル瓶10Bを前記秤量計39で秤量し、その2本目の前記バイアル瓶10Bを前記攪拌装置32まで移動させて前記攪拌装置32で前記バイアル瓶10Bを攪拌させる。
そして、ステップS4006では、前記ステップS3006と同様に、前記第1ロボットアーム21及び前記第2ロボットアーム22が共に動作することにより、前記注射器11で2本目の前記バイアル瓶10Bから薬液が吸引される。
また、ステップS4007では、前記ステップS3007と同様に、前記第2ロボットアーム22により、前記注射器11で2本目の前記バイアル瓶10Bから吸引された薬液が前記輸液バッグ12に注入される。
ところで、複数の前記バイアル瓶10Bを用いて前記混注処理を実行する場合、前記混注装置1Aでは、前記注射器11で前記バイアル瓶10B各々に輸液を注入する際に前記バイアル瓶10Bごとに対応する輸液の必要量がその都度前記輸液バッグ12から吸引されることが考えられる。しかしながら、このような手法では、前記バイアル瓶10Bの数と同じ回数だけ前記注射器11で前記輸液バッグ12から輸液の吸引を行う必要があるため前記混注処理の所要時間が長くなるという問題が生じる。
以下、図46を参照しつつ、本実施形態に係る前記混注装置1Aにおいて前記第2制御部500が実行する前記第2ロボットアーム制御処理の一例について説明する。なお、図42に示した前記第2ロボットアーム制御処理と同様の処理手順には同じ符号を付しており、その説明を省略する。
まず、前記第2ロボットアーム制御処理では、ステップS5001において、前記第2制御部500が、前記第2ロボットアーム22を制御して、前記注射器11で複数の前記バイアル瓶10Bに注入する輸液の合計量を前記輸液バッグ12から吸引する。
その後、前記ステップS2004において、前記バイアル瓶10Bの攪拌が終了すると、(S2004のYes側)、処理がステップS5002に移行する。ステップS5002において、前記第2制御部500は、前記注射器11で前記バイアル瓶10Bから薬液を吸引する。具体的に、前記ステップS5002において、前記第2制御部500は、前記ステップS1005(図41参照)で算出される輸液の重量、即ち前記バイアル瓶10Bに注入された輸液の重量に基づいて、前記バイアル瓶10Bから吸引する薬液量を設定し、その薬液量を前記注射器11で前記バイアル瓶10Bから吸引する。
そして、前記混注装置1Aでは、前記バイアル瓶10B各々について同様の処理が実行されることにより、前記注射器11によって前記バイアル瓶10B各々に収容されている薬液が吸引されると(S2044のYes側)、処理がステップS5003に移行する。ステップS5003において、前記第2制御部500は、前記第2ロボットアーム22を制御して、前記注射器11内の薬液を前記輸液バッグ12に注入する。このとき、前記注射器11内に吸引された薬液は、前記バイアル瓶10B各々から前記バイアル瓶10Bごとの秤量結果に応じて誤差なく吸引されたものである。
ところで、前記混注装置1Aでは、前記注射器11で前記バイアル瓶10Bから薬液を吸引した後、前記注射器11の注射針11cが前記バイアル瓶10Bから抜かれた状態で、前記注射器11の目盛りが撮影されることが考えられる。例えば、前記注射器11の目盛りの撮影は、前記鑑査制御処理(図20参照)の前記ステップS23などで行われる。なお、前記ステップS23では、前記バイアル瓶10B及び前記注射器11が一度に撮影される場合について説明したが、これに限らず、図47に示すように、前記注射器11のみを撮影することも考えられる。また、前記注射器11で複数の前記バイアル瓶10Bから連続して薬液が吸引される場合には、個々の前記バイアル瓶10Bから薬液が吸引される毎に、或いは、全ての前記バイアル瓶10Bから薬液が吸引された後に前記注射器11が撮影される。
ところで、前記混注装置1Aでは、例えば前記注射器11から前記バイアル瓶10Bに輸液を注入する場合、及び前記注射器11で前記バイアル瓶10Bから薬液を吸引する場合など、前記注射器11の注射針11cが前記バイアル瓶10Bのゴム栓10Cに複数回挿通されることがある。このとき、前記注射器11の注射針11cが前記バイアル瓶10Bのゴム栓10Cにおける同一箇所又は近傍箇所に挿通されると、前記ゴム栓10Cの一部が削り取られる所謂コアリングと称される問題が生じ、前記バイアル瓶10Bのゴム栓10Cから薬液が漏れやすくなる。
前記混注装置1Aでは、前記トレイ搬送終端部110a(図9参照)において、前記バッグ昇降部113により、前記輸液バッグ12の混注口が前記混注連通口37に位置するように前記輸液バッグ保持部103が移動される。このとき、前記バッグ昇降部113が、前記輸液バッグ保持部103を前記バッグ昇降部113によって上方向に移動可能であると共に、前記混注連通口37に向けて水平方向にも移動可能な構成が考えられる。もちろん、前記輸液バッグ保持部103をスライド移動させることが可能な機構が前記バッグ昇降部113とは別に設けられることも考えられる。
本実施形態では、前記混注装置1Aにおいて、前記第2制御部500によって前記第1ロボットアーム21及び前記第2ロボットアーム22が制御されることにより実行される混注動作の他の例について説明する。ここに、図50及び図51は、前記混注動作のフローを説明するための図であり、左側が前記第1ロボットアーム21の動作、右側が第2ロボットアーム22の動作を示す。また、図50及び図51では、時間経過に伴って下方向に処理が進行する。
まず、前記第1ロボットアーム21は、前記トレイ101から前記注射器11を取り出す(S6001)。そして、前記第1ロボットアーム21は、前記注射器11を前記第2ロボットアーム22に渡し(S6002)、前記第2ロボットアーム22は、前記第1ロボットアーム21から前記注射器11を受け取る(S7001)。
次に、前記第2ロボットアーム22は、前記注射器11の前記プランジャ11bの位置合わせを行うと共に、前記プランジャ11bを前記プランジャ保持部262の把持爪262aによって把持する(S7002)。具体的に、前記トレイ101にセットされている前記注射器11では、前記プランジャ11bが完全に押し込まれていないことも考えられる。例えば、前記注射器11では、前記プランジャ11bの先端のゴムが前記シリンジ11aの先端に圧接されていると、前記プランジャ11bのゴムが劣化するおそれがある。そのため、前記プランジャ11bのゴムの劣化を避けるべく、使用開始前は前記プランジャ11bが前記シリンジ11aに最後まで押し込まれていない状態であることが考えられる。
次に、前記第2ロボットアーム22は、前記注射器11の前記注射針11cに装着されているキャップ11eの位置合わせ工程を実行する(S7003)。ここで、図53及び図54を参照しつつ、前記注射針11cのキャップ11eの位置合わせ工程について説明する。
次に、前記第2ロボットアーム22は、前記キャップ11eを前記注射針着脱装置43に挿入して前記注射器11から前記キャップ11eを取り外すと共に(S7004)、前記注射器11を持ち直す(S7005)。
一方、前記第1ロボットアーム21は、前記トレイ101から1本目の前記バイアル瓶10B1を取り出し(S6003)、前記バイアル瓶10B1を前記薬品読取部34にセットする(S6004)。これにより、前記薬品読取部34で前記バイアル瓶10B1の薬品の種類が読み取られる。その後、前記第1ロボットアーム21は、前記バイアル瓶10B1を前記載置棚33に載置させる(S6005)。
続いて、前記第1ロボットアーム21は、前記トレイ101から2本目の前記バイアル瓶10B2を取り出し(S6006)、前記バイアル瓶10B2を前記薬品読取部34にセットする(S6007)。これにより、前記薬品読取部34で前記バイアル瓶10B2の薬品の種類が読み取られる。その後、前記第1ロボットアーム21は、前記バイアル瓶10B2を前記秤量計39にセットする(S6008)。これにより、前記バイアル瓶10B2の重量が前記秤量計39で秤量される。なお、前記秤量計39による秤量が行われるとき、その後の前記第1ロボットアーム21の動作は、前記秤量計39の秤量値が安定し、その秤量値が予め定められた値の範囲内であることが確認された後に進行し、以下同様である。もちろん、前記秤量計39による秤量中に、前記秤量計39による秤量対象に関係なく前記第1ロボットアーム21で実行可能な動作がある場合には、その動作が行われてもよい。
また、前記第2ロボットアーム22は、前記注射器11を前記針曲り検知部36に移動させて(S7006)、前記注射器11の前記注射針11cの針曲り状態を検知させた後、前記注射器11を用いて前記輸液バッグ12から必要量の輸液を採取する(S7007)。このとき、前記注射器11で前記輸液バッグ12から輸液が吸引される際には、前記注射器11の前記注射針11cの先端が水平より上向きになり、前記輸液バッグ12の注入口が水平より下向きになるように姿勢が制御される。一方、前記輸液バッグ12から必要量の輸液が採取された後、前記第2ロボットアーム22は、前記注射針11cの先端を前記輸液バッグ12内の空気層に移動させ、所定量の空気を前記注射器11によって吸引してから前記注射針11cを前記輸液バッグ12から引き抜く。例えば、前記第2制御部500が、前記バッグ昇降部113を駆動させて前記輸液バッグ12の混注口が水平より上向きになるように前記輸液バッグ保持部103を傾斜させると共に、前記第2ロボットアーム22を制御して前記注射器11の前記注射針11cの先端を水平より下向きになるように前記輸液バッグ12及び前記注射器11の姿勢を制御する。これにより、前記注射針11cの先端を前記輸液バッグ12内の空気層に位置させることが可能である。そして、この状態で前記プランジャ11bが引かれて前記注射器11の注射針11c内の輸液が前記シリンジ11a内に引き込まれると、前記注射針11c内が気体層になるため、例えば前記注射針11cが前記輸液バッグ12から引き抜かれる際における前記注射針11cからの輸液の滴下が防止される。その後、前記第2ロボットアーム22は、前記注射器11を前記針曲り検知部36に再度移動させて(S7008)、前記注射器11の前記注射針11cの針曲り状態を検知させる。
次に、前記第2ロボットアーム22は、前記シリンジ11aの目盛りを前記ステップS7007で採取した前記必要量に合わせるための動作を行う(S7009)。具体的に、前記第2ロボットアーム22は、前記シリンジ11aの前記注射針11cの先端を鉛直上方向に向けた状態で所定量の空気を吸引した後、一旦前記注射針11cの先端を鉛直下方向に向けて前記シリンジ11a内の気泡を1つに纏める。その後、前記第2ロボットアーム22は、前記シリンジ11aの前記注射針11cを前記注射針着脱装置43で保持されている前記キャップ11eに挿入し、その状態で前記プランジャ11bを所定量だけ押し込んで前記シリンジ11a内の空気を排出する。これにより、前記シリンジ11aでは、前記プランジャ11bのゴムの先端が示す目盛りの位置が前記前記ステップS7007で採取された前記必要量に合わせられる。そして、前記第2ロボットアーム22は、前記注射器11を前記注射器確認カメラ42の撮影範囲に移動させる(S7010)。このとき、前記第2制御部500は、前記注射器確認カメラ42によって前記注射器11を撮影させる。このように、前記ステップS7009では、前記輸液バッグ12から前記注射針11cが抜かれる際に前記注射針11cからの輸液の滴下を防止する目的で前記シリンジ11a内に吸引されていた空気が排出される。従って、前記注射針11cが前記輸液バッグ12から抜かれる際には輸液の滴下を防止することができ、且つ、前記注射器11が撮影される際には前記プランジャ11bのゴムの先端が示す目盛りの位置を輸液の必要量に相当する目盛りに一致させた状態を画像で記録することができる。
その後、前記第1ロボットアーム21及び前記第2ロボットアーム22は、前記バイアル瓶10B2に前記注射器11の輸液を注入する注入工程を実行する(S6009、S7011)。なお、前記注入工程では、前記第2制御部500が、前記第1ロボットアーム21及び前記第2ロボットアーム22を制御して、前記バイアル瓶10B2の開口部を上方に向けると共に前記注射器11の先端を下方に向ける。このとき、前記第2制御部500は、前記注射器11の注射針11cを前記バイアル瓶10B2のゴム栓10Cに穿刺する。続いて、前記第2制御部500は、前記保持部26を制御して前記注射器11により前記バイアル瓶10B2から空気を吸引する第1置換工程と前記注射器11内の輸液を前記バイアル瓶10B2に注入する第2置換工程とを交互に実行させる。ここに、前記注入工程を実行するための処理を実行するときの前記第2制御部500が第6制御手段の一例である。
ところで、前記バイアル瓶10B2内に輸液が注入された後、しばらく放置されると前記バイアル瓶10B2内の粉薬が凝固する所謂スタッキング現象が生じ、その後の攪拌工程が行われた場合でも粉薬が溶解しにくくなることがある。そのため、前記混注動作では、前記第1ロボットアーム21が、前記バイアル瓶10B2内への輸液注入後に、前記バイアル瓶10B2を揺動させる動作を実行する(S6010)。例えば、前記第1ロボットアーム21は、前記第1ロボットアーム21が有する所定の回転軸の軸回りに前記バイアル瓶10B2を所定角度の範囲で回動させることが考えられる。これにより、前記バイアル瓶10B2への輸液注入直後の粉薬の凝固が抑制される。なお、前記バイアル瓶10B2の揺動動作は、前記バイアル瓶10B2内の粉薬の輸液への溶解が促されればその態様はこれに限らない。
次に、前記第1ロボットアーム21は、前記載置棚33から前記バイアル瓶10B1を取り出し(S6013)、前記バイアル瓶10B1を前記秤量計39にセットする(S6014)。このとき、前記バイアル瓶10B1の重量が前記秤量計39によって秤量される。
また、前記第2ロボットアーム22は、前記注射器11を前記針曲り検知部36に再度移動させて(S7012)、前記注射器11の前記注射針11cの針曲り状態を検知させる。その後、前記第2ロボットアーム22は、前記シリンジ11aのエアー抜き動作を行う(S7013)。前記エアー抜き動作は、前記ステップS6009及び前記ステップS7011における前記第1置換工程で前記バイアル瓶10B2から吸引されて前記シリンジ11a内に残存している空気を排出するための動作である。なお、前記シリンジ11aのエアー抜き動作が、前記輸液バッグ12から輸液を採取する際に前記輸液バッグ12内で行われることも考えられるが、前記輸液バッグ12内に空気が排出されると、前記輸液バッグ12内が陽圧になることがある。そのため、前記混注装置1Aでは、前記ステップS7013において前記シリンジ11aのエアー抜き動作が行われる。
次に、前記第2ロボットアーム22は、前記ステップS7007〜S7008と同様に、前記注射器11を用いて前記輸液バッグ12から必要量の輸液を採取し(S7014)、前記注射器11を前記針曲り検知部36に再度移動させて前記注射器11の前記注射針11cの針曲り状態を検知させる(S7015)。また、前記第2ロボットアーム22は、前記ステップS7009〜S7010と同様に、前記注射器11の目盛りを合わせた後(S7016)、前記注射器11を前記注射器確認カメラ42の撮影範囲に移動させる(S7017)。このとき、前記第2制御部500は、前記注射器確認カメラ42によって前記注射器11を撮影させる。
その後、前記第1ロボットアーム21及び前記第2ロボットアーム22は、前記バイアル瓶10B1に前記注射器11の輸液を注入する注入工程を実行する(S6015、S7018)。なお、前記注入工程では、前記ステップS6009、S7011と同様に、前記バイアル瓶10B1の開口部が上方に向けられると共に前記注射器11の先端が下方に向けられた後、前記バイアル瓶10B1からの空気の吸引と前記バイアル瓶10Bへの輸液の注入とが交互に実行される。
続いて、前記第1ロボットアーム21は、前記ステップS6010と同様に前記バイアル瓶10B1を揺動させて攪拌し(S6016)、前記バイアル瓶10B1を前記秤量計39にセットする(S6017)。その後、前記第1ロボットアーム21は、前記秤量計39から前記攪拌装置32に移動させる(S6018)。なお、この場合にも、前述したように、前記第1ロボットアーム21が、前記ステップS6016における揺動動作を前記ステップS6017及び前記ステップS6018のいずれか一方又は両方の動作と並行して実行することが考えられる。
次に、前記第1ロボットアーム21は、前記バイアル瓶10B2を前記攪拌装置32から取り出し(S6019)、前記バイアル瓶10B2内の薬液の攪拌状態を検査者に確認させるための攪拌確認動作を実行する(S6020)。
その後、前記第1ロボットアーム21は、前記バイアル瓶10B2を前記薬品読取部34にセットする(S6021)。これにより、前記薬品読取部34で前記バイアル瓶10B2の薬品のバーコードが読み取られて、前記バイアル瓶10B2の周方向の位置が検出又は調整される。ここで検出又は調整された前記バイアル瓶10B2の周方向の位置関係は、例えば前記バイアル瓶10B2への前記注射器11の注射針11cの穿刺位置の決定時、又は、後述の前記バイアル瓶10B2の写真撮影時の姿勢の決定時に用いられる。
一方、前記第2ロボットアーム22は、前記ステップS7012〜S7013と同様に、前記注射器11を前記針曲り検知部36に再度移動させて、前記注射器11の前記注射針11cの針曲り状態を検知させた後(S7019)、前記シリンジ11aのエアー抜き動作を行う(S7020)。
その後、前記第1ロボットアーム21及び前記第2ロボットアーム22は、前記バイアル瓶10B2に収容されている薬液を吸引する吸引工程として、前記バイアル瓶10B2内の薬液のうち予め定められた所定量の薬液を採取する端数採取を実行する(S6022、S7022)。なお、前記吸引工程では、前記第2制御部500が、前記第1ロボットアーム21及び前記第2ロボットアーム22を制御して、前記バイアル瓶10B2の開口部が上方に向けられると共に前記注射器11の先端が下方に向けられた状態で、前記注射器11の注射針11cが前記バイアル瓶10B2に穿刺される。次に、前記第2制御部500が、前記第1ロボットアーム21及び前記第2ロボットアーム22を制御して、前記バイアル瓶10B2の開口部が下方に向けられると共に前記注射器11の先端が上方に向けられる。そして、前記第2制御部500は、前記保持部26を制御して前記注射器11による前記バイアル瓶10B2からの薬液の吸引と前記注射器11から前記バイアル瓶10B2への空気の注入とを交互に実行させる。
そして、前記第1ロボットアーム21及び前記第2ロボットアーム22は、前記端数採取が終了すると、前記バイアル瓶10B2に前記注射器11の注射針11cが穿刺された状態のまま前記バイアル瓶10B2及び前記注射器11を前記注射器確認カメラ42の撮影範囲R1に移動させ(S6023、S7022)、前記バイアル瓶10B2及び前記注射器11の写真を撮影させる。なお、前記写真の撮影後、前記第1ロボットアーム21及び前記第2ロボットアーム22は、前記注射器11の注射針11cを前記バイアル瓶10B2から引き抜く。
そして、前記第2制御部500によって前記ゴミ蓋132aが開かれ、前記第1ロボットアーム21は、前記バイアル瓶10B2を前記ゴミ収容室13a内に落下させて廃棄する(S6024)。
続いて、前記第1ロボットアーム21は、前記ステップS6019〜S6021と同様に、前記バイアル瓶10B1を前記攪拌装置32から取り出し(S6025)、前記バイアル瓶10B1の攪拌状態を確認するための攪拌確認動作を実行した後(S6026)、前記バイアル瓶10B1を前記薬品読取部34にセットする(S6027)。
一方、前記第2ロボットアーム22は、前記注射器11を前記秤量計35にセットして前記秤量計35で前記注射器11の重量が秤量された後(S7023)、前記注射器11を前記針曲り検知部36に移動させて(S7024)、前記注射器11の前記注射針11cの針曲り状態を検知させる。そして、前記第2ロボットアーム22は、前記注射器11内の薬液を前記輸液バッグ12内に注入する注入工程を実行する(S7025)。その後、前記第2ロボットアーム22は、前記注射器11を前記秤量計35に再度セットして前記秤量計35で前記注射器11の重量が秤量された後(S7026)、前記注射器11を前記針曲り検知部36に移動させて前記注射器11の前記注射針11cの針曲り状態を検知させる(S7027)。
次に、前記第1ロボットアーム21及び前記第2ロボットアーム22は、前記バイアル瓶10B1に収容されている薬液を吸引する吸引工程として、前記バイアル瓶10B1内の薬液を全量採取する全量採取を実行する(S6028、S7028)。なお、前記吸引工程では、前記ステップS6022、S7021と同様に、前記第1ロボットアーム21及び前記第2ロボットアーム22が制御されて前記バイアル瓶10B1の開口部が下方に向けられると共に前記注射器11の先端が上方に向けられた後、前記バイアル瓶10B1からの薬液の吸引と前記バイアル瓶10B1への空気の注入とが交互に実行される。
そして、前記第1ロボットアーム21及び前記第2ロボットアーム22は、前記端数採取が終了すると、前記バイアル瓶10B1に前記注射器11の注射針11cが穿刺された状態のまま前記バイアル瓶10B1及び前記注射器11を前記注射器確認カメラ42の撮影範囲R1に移動させ(S6029、S7029)、前記バイアル瓶10B1及び前記注射器11の写真を撮影させる。なお、前記写真の撮影後、前記第1ロボットアーム21及び前記第2ロボットアーム22は、前記注射器11の注射針11cを前記バイアル瓶10B1から引き抜く。
そして、前記第1ロボットアーム21は、前記バイアル瓶10B1の瓶底を撮影するため、前記バイアル瓶10B1を前記注射器確認カメラ42の撮影範囲R1に移動させ、前記バイアル瓶10B1の瓶底の写真を撮影させる。そして、前記第2制御部500によって前記ゴミ蓋132aが開かれ、前記第1ロボットアーム21は、前記バイアル瓶10B1を前記ゴミ収容室13a内に落下させて廃棄する(S6031)。
一方、前記第2ロボットアーム22は、前記注射器11を前記秤量計35にセットして前記秤量計35で前記注射器11の重量が秤量された後(S7030)、前記注射器11を前記針曲り検知部36に移動させて(S7031)、前記注射器11の前記注射針11cの針曲り状態を検知させる。そして、前記第2ロボットアーム22は、前記注射器11内の薬液を前記輸液バッグ12内に注入する注入工程を実行する(S7032)。その後、前記第2ロボットアーム22は、前記注射器11を前記秤量計35に再度セットして前記秤量計35で前記注射器11の重量が秤量された後(S7033)、前記注射器11を前記針曲り検知部36に移動させて前記注射器11の前記注射針11cの針曲り状態を検知させる(S7034)。
次に、前記第2ロボットアーム22は、前記注射器11を前記注射針着脱装置43に移動させて、前記注射器11の前記注射針11cに前記キャップ11eを装着させる(S7035)。そして、前記第2ロボットアーム22は、前記第2制御部500によって前記ゴミ蓋132aが開かれ、前記第2ロボットアーム22は、前記注射器11を前記ゴミ収容室13a内に落下させて廃棄する(S7036)。
本実施形態では、前記混注装置1又は前記混注装置1Aにおける前記バイアル瓶10Bの攪拌動作の他の例について説明する。具体的に、前述の実施形態では、前記混注装置1又は前記混注装置1Aにおいて、前記攪拌装置32によって前記バイアル瓶10B内の薬品及び輸液が攪拌される場合について説明した。この場合、前記注射器11の注射針11cが前記バイアル瓶10Bに穿刺されて前記バイアル瓶10Bに輸液が注入される注入工程が実行された後、前記バイアル瓶10B内の薬品及び輸液が攪拌され、前記注射器11の注射針11cが前記バイアル瓶10Bに再度穿刺されて前記バイアル瓶10Bから薬液が吸引される吸引工程が実行される。そのため、前記注入工程及び前記吸引工程で前記注射針11cが前記バイアル瓶10Bに穿刺される工程が個別に実行され、前記混注動作の所要時間が長くなる。
本実施形態では、前記混注装置1又は前記混注装置1Aにおいて実行され、前記注射器11を用いて前記バイアル瓶10Bに輸液を注入する注入工程の他の例について説明する。具体的に、前記混注装置1又は前記混注装置1Aでは、図58(A)に示すように、前記バイアル瓶10Bの開口部が上方に向けられた状態で、前記バイアル瓶10Bのゴム栓10Cに前記注射針11cが穿刺された後、前記注射器11による前記バイアル瓶10Bへの輸液M1の注入が行われる。なお、前記バイアル瓶10B内の空気A1の初期の気圧は大気圧であるとする。
本実施形態では、図59(A)〜図59(E)を参照しつつ、前記混注装置1又は前記混注装置1Aにおいて実行され、前記注射器11を用いて前記バイアル瓶10Bから薬液を吸引する吸引工程の他の例について説明する。なお、図59(A)〜図59(E)では図示の簡略化のため、前記注射器11については前記注射針11cのみを示し、前記シリンジ11a及び前記プランジャ11bの図示を省略する。
ところで、前記混注装置1又は前記混注装置1Aでは、前記混注処理室104内の温度が低すぎると前記バイアル瓶10B内の粉薬が未溶解になるおそれがあり、温度が高すぎると薬液が気化するおそれがある。そのため、前記混注装置1又は前記混注装置1Aでは、前記混注処理室104内の温度を測定する温度計が設けられており、前記温度計による測定結果が前記第2制御部500に入力されることが考えられる。なお、前記混注処理室104内において、前記温度計は、前記バイアル瓶10Bを攪拌する前記攪拌装置32の近傍に設けられていることが考えられる。
10:薬品容器
11:注射器
11a:シリンジ
11b:プランジャ
11c:注射針
11d:シリンジフィルター
12:輸液バッグ
13:ゴミ収容室扉
15a:ICリーダ
21:第1ロボットアーム
22:第2ロボットアーム
25:保持部
26:保持部
31:アンプルカッター
32:攪拌装置
33:載置棚
33A:回転用載置部
34:薬品読取部
35:秤量計
36:針曲り検知部
37:混注連通口
38:針挿入確認透明窓
39:秤量計
41:トレイ確認カメラ
42:注射器確認カメラ
43:注射針着脱装置
44:針挿入確認カメラ
45:殺菌灯
100:混注制御装置
101:トレイ
101a:電子ペーパー
101b:ICタグ
101c:ICリーダ
104:混注処理室
110:トレイ搬送部
121:輸液用カメラ
200:薬品装填部
300:混注処理部
400:第1制御部
401:CPU
402:ROM
403:RAM
404:データ記憶部
500:第2制御部
501:CPU
502:ROM
503:RAM
504:データ記憶部
600:上位システム
Claims (47)
- 調製データに基づいて薬品容器から注射器で薬品を吸引すると共に前記注射器から輸液容器に前記薬品を注入する混注装置であって、
前記薬品容器及び前記注射器のいずれか一方又は両方を任意の位置に移動させることが可能な第1駆動手段と、
前記注射器を操作可能な第2駆動手段と、
前記第1駆動手段及び前記第2駆動手段を制御して前記注射器により前記薬品容器から薬品を吸引する吸引制御手段と、
前記第1駆動手段を制御して、前記吸引制御手段により前記薬品が吸引された後の前記薬品容器及び前記薬品を吸引した状態の前記注射器を撮影範囲内に移動させる移動制御手段と、
前記移動制御手段により前記撮影範囲内に移動された前記薬品容器及び前記注射器を一度に撮影する吸引時撮影手段と、
を備え、
前記移動制御手段が、前記薬品容器及び前記注射器を前記薬品容器の薬品名の文字及び前記注射器の目盛りの文字の向きを揃えて前記撮影範囲内に配置する混注装置。 - 前記第1駆動手段が、多関節構造を有する第1ロボットアーム及び第2ロボットアームを含む、
請求項1に記載の混注装置。 - 前記移動制御手段が、前記薬品容器の薬品名の文字及び前記注射器の目盛りの文字の上下方向と前記撮影範囲における上下方向とを揃えて前記薬品容器及び前記注射器を前記撮影範囲内に配置する、
請求項1又は2に記載の混注装置。 - 前記移動制御手段が、前記薬品容器及び前記注射器を前記注射器の長手方向に垂直な方向に並べた状態で前記撮影範囲内に配置する、
請求項1〜3のいずれかに記載の混注装置。 - 前記移動制御手段が、前記注射器により前記薬品容器から前記薬品が吸引されてから前記吸引時撮影手段により前記薬品容器及び前記注射器が撮影されるまでの間、前記第1駆動手段による前記薬品容器及び前記注射器の保持状態を継続させる、
請求項1〜4のいずれかに記載の混注装置。 - 前記吸引時撮影手段により撮影された画像を鑑査画像として表示する鑑査画像表示手段を更に備える、
請求項1〜5のいずれかに記載の混注装置。 - 調製データに基づいて薬品容器から注射器で薬品を吸引すると共に前記注射器から輸液容器に前記薬品を注入する混注装置であって、
前記薬品容器及び前記注射器のいずれか一方又は両方を任意の位置に移動させることが可能な第1駆動手段と、
前記注射器を操作可能な第2駆動手段と、
前記第1駆動手段及び前記第2駆動手段を制御して前記注射器により前記薬品容器から薬品を吸引する吸引制御手段と、
前記第1駆動手段を制御して、前記吸引制御手段により前記薬品が吸引された後の前記薬品容器及び前記薬品を吸引した状態の前記注射器を撮影範囲内に移動させる移動制御手段と、
前記移動制御手段により前記撮影範囲内に移動された前記薬品容器及び前記注射器を一度に撮影する吸引時撮影手段と、
前記吸引時撮影手段により撮影された画像を鑑査画像として表示する鑑査画像表示手段と、
を備え、
前記鑑査画像表示手段が、前記調製データに含まれる薬品名及び薬品容量を前記鑑査画像と共に表示させる混注装置。 - 前記注射器により前記薬品容器から前記輸液容器に注入された前記薬品の重量を取得する薬品重量取得手段を更に備え、
前記鑑査画像表示手段が、前記薬品重量取得手段により取得された前記薬品の重量、及び前記薬品の重量について予め設定された許容範囲を前記鑑査画像と共に表示させる、
請求項7に記載の混注装置。 - 前記薬品重量取得手段が、前記薬品容器から薬品を吸引した後の前記注射器の重量と前記注射器から前記輸液容器に薬品が注入された後の前記注射器の重量との差分を前記薬品の重量として算出する、
請求項8に記載の混注装置。 - 前記薬品重量取得手段により取得された前記薬品の重量と前記調製データに含まれる薬品容量に対応する前記薬品の重量との差分が予め設定された許容範囲内であるか否かを判断する重量鑑査手段を更に備え、
前記鑑査画像表示手段が、前記重量鑑査手段の判断結果を前記鑑査画像と共に表示させる、
請求項8又は9に記載の混注装置。 - 前記許容範囲が、前記注射器の規格容量ごとに予め設定された範囲である、
請求項10に記載の混注装置。 - 調製データに基づいて薬品容器から注射器で薬品を吸引すると共に前記注射器から輸液容器に前記薬品を注入する混注装置であって、
前記薬品容器及び前記注射器のいずれか一方又は両方を任意の位置に移動させることが可能な第1駆動手段と、
前記注射器を操作可能な第2駆動手段と、
前記第1駆動手段及び前記第2駆動手段を制御して前記注射器により前記薬品容器から薬品を吸引する吸引制御手段と、
前記第1駆動手段を制御して、前記吸引制御手段により前記薬品が吸引された後の前記薬品容器及び前記薬品を吸引した状態の前記注射器を撮影範囲内に移動させる移動制御手段と、
前記移動制御手段により前記撮影範囲内に移動された前記薬品容器及び前記注射器を一度に撮影する吸引時撮影手段と、
前記吸引制御手段により前記調製データに基づいて前記薬品容器に収容されている薬品の全量が前記注射器により吸引される全量採取処理が実行される場合に、前記薬品容器の口部を鉛直上方向に向けた状態、又は前記薬品容器の口部を鉛直上方向に対して予め定められた角度だけ傾斜させた状態で前記薬品容器の底面又は側面を撮影する全量採取時撮影手段と、
を備える混注装置。 - 調製データに基づいて薬品容器から注射器で薬品を吸引すると共に前記注射器から輸液容器に前記薬品を注入する混注装置であって、
前記薬品容器及び前記注射器のいずれか一方又は両方を任意の位置に移動させることが可能な第1駆動手段と、
前記注射器を操作可能な第2駆動手段と、
前記第1駆動手段及び前記第2駆動手段を制御して前記注射器により前記薬品容器から薬品を吸引する吸引制御手段と、
前記第1駆動手段を制御して、前記吸引制御手段により前記薬品が吸引された後の前記薬品容器及び前記薬品を吸引した状態の前記注射器を撮影範囲内に移動させる移動制御手段と、
前記移動制御手段により前記撮影範囲内に移動された前記薬品容器及び前記注射器を一度に撮影する吸引時撮影手段と、
前記薬品容器の薬品名の文字が前記撮影範囲に収まるように前記第1駆動手段により保持される前記薬品容器の周方向の位置を調整する容器位置調整手段と、
を備える混注装置。 - 前記薬品容器を周方向に回転させる回転駆動手段と、前記回転駆動手段により回転される前記薬品容器から薬品情報を読み取る容器読取手段と、を更に備え、
前記容器位置調整手段が、前記容器読取手段により前記薬品情報が読み取られた後、前記薬品容器ごとに予め設定された回転量だけ前記回転駆動手段により前記薬品容器を回転させて停止させる、
請求項13に記載の混注装置。 - 調製データに基づいて薬品容器から注射器で薬品を吸引すると共に前記注射器から輸液容器に前記薬品を注入する混注装置であって、
前記薬品容器及び前記注射器のいずれか一方又は両方を任意の位置に移動させることが可能な第1駆動手段と、
前記注射器を操作可能な第2駆動手段と、
前記第1駆動手段及び前記第2駆動手段を制御して前記注射器により前記薬品容器から薬品を吸引する吸引制御手段と、
前記第1駆動手段を制御して、前記吸引制御手段により前記薬品が吸引された後の前記薬品容器及び前記薬品を吸引した状態の前記注射器を撮影範囲内に移動させる移動制御手段と、
前記移動制御手段により前記撮影範囲内に移動された前記薬品容器及び前記注射器を一度に撮影する吸引時撮影手段と、
前記注射器の目盛りの文字が前記撮影範囲に収まるように前記第1駆動手段により保持される前記注射器の周方向の位置を調整する注射器位置調整手段と、
を備える混注装置。 - 前記注射器位置調整手段が、予め定められた載置位置に載置された前記注射器の周方向の向きを検出する向き検出手段と、前記第1駆動手段により前記注射器が前記撮影範囲内に移動されたときに前記注射器の目盛りの文字が前記撮影範囲に収まるように、前記向き検出手段の検出結果に基づいて前記第1駆動手段により前記注射器を回転させる注射器回転手段と、を含む、
請求項15に記載の混注装置。 - 調製データに基づいて薬品容器から注射器で薬品を吸引すると共に前記注射器から輸液容器に前記薬品を注入する混注装置であって、
前記薬品容器及び前記注射器のいずれか一方又は両方を任意の位置に移動させることが可能な第1駆動手段と、
前記注射器を操作可能な第2駆動手段と、
前記第1駆動手段及び前記第2駆動手段を制御して前記注射器により前記薬品容器から薬品を吸引する吸引制御手段と、
前記第1駆動手段を制御して、前記吸引制御手段により前記薬品が吸引された後の前記薬品容器及び前記薬品を吸引した状態の前記注射器を撮影範囲内に移動させる移動制御手段と、
前記移動制御手段により前記撮影範囲内に移動された前記薬品容器及び前記注射器を一度に撮影する吸引時撮影手段と、
前記混注装置に装填される前記薬品容器、前記注射器のシリンジ、前記注射器の注射針、及び前記輸液容器の少なくとも1つが装填される際に前記薬品容器、前記注射器のシリンジ、前記注射器の注射針、及び前記輸液容器の少なくとも1つが載置されるトレイが有する記録媒体から識別情報を読み取るトレイ読取手段と、
前記トレイ読取手段により読み取られた前記識別情報に予め対応付けられた前記調製データの内容と前記混注装置に装填された前記薬品容器、前記注射器のシリンジ、前記注射器の注射針、及び前記輸液容器の少なくとも1つの内容とを照合する照合手段と、
前記照合手段による照合結果が一致しない前記薬品容器、前記注射器のシリンジ、前記注射器の注射針、又は前記輸液容器を、前記トレイと共に予め定められた排出口から取出可能にする排出制御手段と、
を備える混注装置。 - 前記排出制御手段により前記トレイが取出可能になった後、次に前記混注装置に装填された前記トレイから前記トレイ読取手段により読み取られた前記識別情報と前記排出制御手段により取出可能になった前記トレイから前記トレイ読取手段により読み取られた前記識別情報とが一致していない場合にその旨を報知する報知手段を更に備える、
請求項17に記載の混注装置。 - 調製データに基づいて薬品容器から注射器で薬品を吸引すると共に前記注射器から輸液容器に前記薬品を注入する混注装置であって、
前記薬品容器及び前記注射器のいずれか一方又は両方を任意の位置に移動させることが可能な第1駆動手段と、
前記注射器を操作可能な第2駆動手段と、
前記第1駆動手段及び前記第2駆動手段を制御して前記注射器により前記薬品容器から薬品を吸引する吸引制御手段と、
前記第1駆動手段を制御して、前記吸引制御手段により前記薬品が吸引された後の前記薬品容器及び前記薬品を吸引した状態の前記注射器を撮影範囲内に移動させる移動制御手段と、
前記移動制御手段により前記撮影範囲内に移動された前記薬品容器及び前記注射器を一度に撮影する吸引時撮影手段と、
予め定められた器材載置部に載置された前記薬品容器及び前記注射器を含む器材を前記器材載置部の上方から撮影する載置時撮影手段と、
前記載置時撮影手段による撮影結果に基づいて前記器材載置部に載置されている前記器材の中に片側のみが他の前記器材と干渉する器材が存在するか否かを判断する干渉判断手段と、
前記干渉判断手段により片側のみが他の前記器材と干渉する前記器材が存在すると判断された場合に、前記器材を把持する前記第1駆動手段の把持部を閉じた状態で、干渉する二つの前記器材の間に挿入する離間手段と、
を備える混注装置。 - 前記載置時撮影手段による撮影結果において両側に予め定められた間隙が形成されている前記器材を、前記載置時撮影手段による撮影結果において片側又は両側に前記間隙が形成されていない前記器材よりも優先的に取り込む取込制御手段を更に備える、
請求項19に記載の混注装置。 - 前記取込制御手段が、前記器材載置部に載置された全ての器材が、片側又は両側が前記器材載置部の構成要素と干渉する器材、或いは両側が他の器材と干渉する器材に該当する場合に、前記器材載置部からの前記器材の取込を中止する、
請求項20に記載の混注装置。 - 調製データに基づいて薬品容器から注射器で薬品を吸引すると共に前記注射器から輸液容器に前記薬品を注入する混注装置であって、
前記薬品容器及び前記注射器のいずれか一方又は両方を任意の位置に移動させることが可能な第1駆動手段と、
前記注射器を操作可能な第2駆動手段と、
前記第1駆動手段及び前記第2駆動手段を制御して前記注射器により前記薬品容器から薬品を吸引する吸引制御手段と、
前記第1駆動手段を制御して、前記吸引制御手段により前記薬品が吸引された後の前記薬品容器及び前記薬品を吸引した状態の前記注射器を撮影範囲内に移動させる移動制御手段と、
前記移動制御手段により前記撮影範囲内に移動された前記薬品容器及び前記注射器を一度に撮影する吸引時撮影手段と、
を備え、
前記吸引制御手段が、前記薬品容器がアンプルである場合は、前記注射器の針先を下方に向けて前記アンプルから薬品を吸引し、前記注射器の針先を上方に向けた後、前記注射器の注射針をシリンジフィルター付きの注射針に交換して前記注射器内の空気を所定量だけ押し出す混注装置。 - 前記吸引制御手段が、前記アンプルから前記薬品を予め設定された余剰量だけ余分に抜き取り、前記注射器内の空気を所定量だけ押し出した後に前記注射器の針先を下方に向けて余分な薬品を排出する、
請求項22に記載の混注装置。 - 調製データに基づいて薬品容器から注射器で薬品を吸引すると共に前記注射器から輸液容器に前記薬品を注入する混注装置であって、
前記薬品容器及び前記注射器のいずれか一方又は両方を任意の位置に移動させることが可能な第1駆動手段と、
前記注射器を操作可能な第2駆動手段と、
前記第1駆動手段及び前記第2駆動手段を制御して前記注射器により前記薬品容器から薬品を吸引する吸引制御手段と、
前記第1駆動手段を制御して、前記吸引制御手段により前記薬品が吸引された後の前記薬品容器及び前記薬品を吸引した状態の前記注射器を撮影範囲内に移動させる移動制御手段と、
前記移動制御手段により前記撮影範囲内に移動された前記薬品容器及び前記注射器を一度に撮影する吸引時撮影手段と、
前記注射器から前記輸液容器に注入される薬品の注入量が前記輸液容器に対応して予め定められた注入可能量よりも多い場合に、前記輸液容器から空気を抜く注入制御手段と、
を備える混注装置。 - 前記注入制御手段が、前記注射器により薬品が吸引される前に前記注射器により前記輸液容器の空気を抜く処理を実行する、
請求項24に記載の混注装置。 - 前記注入制御手段が、前記注射器により薬品が吸引され、前記注射器から前記輸液容器に前記薬品を注入した後に続けて前記注射器により前記輸液容器の空気を抜く処理を実行する、
請求項25に記載の混注装置。 - 注射器で輸液容器から輸液を吸引して薬品容器に注入可能な混注装置であって、
前記薬品容器を保持して移動させることが可能な第1ロボットアームと、
前記注射器を保持して移動させることが可能であって前記注射器の操作が可能な第2ロボットアームと、
前記第1ロボットアームの可動範囲内又は前記第1ロボットアームに配置された秤量装置と、
前記第1ロボットアームを制御して前記薬品容器を前記秤量装置で秤量する第1秤量工程と前記第2ロボットアームを制御して前記注射器で前記輸液容器から輸液を吸引する第1輸液吸引工程とを並行して実行する第1制御手段と、
前記第1秤量工程及び前記第1輸液吸引工程の終了後に、前記第1ロボットアーム及び前記第2ロボットアームを制御して前記注射器内の輸液を前記薬品容器に注入する注入工程を実行する第2制御手段と、
前記注入工程の終了後に前記第1ロボットアームを制御して前記薬品容器を前記秤量装置で秤量する第2秤量工程を実行する第3制御手段と、
前記第1秤量工程による秤量結果と前記第2秤量工程による秤量結果との差分を前記薬品容器に注入された輸液の重量として取得する輸液重量取得手段と、
を備える混注装置。 - 前記第3制御手段は、一の前記薬品容器について実行される前記第2秤量工程と前記第2ロボットアームを制御して前記注射器で他の前記薬品容器に注入する輸液を前記輸液容器から吸引する第2輸液吸引工程とを並行して実行する、
請求項27に記載の混注装置。 - 前記第1制御手段が、一の前記薬品容器についての前記第2秤量工程及び他の前記薬品容器についての前記第1秤量工程を前記第2輸液吸引工程と並行して実行する、
請求項28に記載の混注装置。 - 前記薬品容器を攪拌可能な攪拌装置を更に備え、
前記第3制御手段が、前記第2秤量工程及び前記第2秤量工程の終了後に前記第1ロボットアームを制御して前記薬品容器を前記攪拌装置で攪拌させる攪拌工程を前記第2輸液吸引工程と並行して実行する、
請求項29に記載の混注装置。 - 前記攪拌装置が、予め定められた複数の前記薬品容器を同時に攪拌可能であり、
前記第2制御手段が、前記攪拌装置が使用可能であることを条件に前記注入工程を開始する、
請求項30に記載の混注装置。 - 前記輸液重量取得手段によって取得された前記輸液の重量に基づいて、前記注射器で前記薬品容器から吸引する薬液量を設定する吸引量設定手段を更に備える請求項27〜31のいずれかに記載の混注装置。
- 前記薬品容器のゴム栓に前記注射器の注射針を複数回挿通する場合に前記ゴム栓への前記注射針の挿通位置をその都度異なる位置に変更する第4制御手段を更に備える、
請求項27〜32のいずれかに記載の混注装置。 - 複数の前記挿通位置が、前記ゴム栓において半径方向に離間する複数の位置を含む、
請求項33に記載の混注装置。 - 前記薬品容器を周方向に回転させる回転駆動手段と、
前記回転駆動手段により回転される前記薬品容器から薬品情報を読み取る容器読取手段と、
前記容器読取手段により前記薬品情報が読み取られた時点で前記回転駆動手段による前記薬品容器の回転を停止させ、又は、前記容器読取手段により前記薬品情報が読み取られた後、前記薬品容器ごとに予め設定された回転量だけ前記回転駆動手段により前記薬品容器を回転させて停止させる容器位置調整手段と、
を更に備え、
前記第4制御手段が、前記容器位置調整手段により回転が停止されるときの前記薬品容器の回転停止位置に基づいて、前記ゴム栓に前記注射針を挿通する度に異なる前記挿通位置を設定する、
請求項33に記載の混注装置。 - 前記薬品容器を周方向に回転させる回転駆動手段と、
前記回転駆動手段により回転される前記薬品容器から薬品情報を読み取る容器読取手段と、
前記容器読取手段により前記薬品情報が読み取られた時点で前記回転駆動手段による前記薬品容器の回転を停止させ、又は、前記容器読取手段により前記薬品情報が読み取られた後、前記薬品容器ごとに予め設定された回転量だけ前記回転駆動手段により前記薬品容器を回転させて停止させる容器位置調整手段と、
を更に備え、
前記第4制御手段が、前記ゴム栓に前記注射針を挿通する度に、前記容器位置調整手段による前記薬品容器の回転停止位置を変化させる、
請求項33に記載の混注装置。 - 注射器で輸液容器から輸液を吸引して薬品容器に注入可能な混注方法であって、
前記薬品容器を保持して移動させることが可能な第1ロボットアームを制御して前記薬品容器を前記第1ロボットアームの可動範囲内又は前記第1ロボットアームに配置された秤量装置で秤量する第1秤量工程と、前記注射器を保持して移動させることが可能であって前記注射器の操作が可能な第2ロボットアームを制御して前記注射器で前記輸液容器から輸液を吸引する第1輸液吸引工程とを並行して実行するステップと、
前記第1秤量工程及び前記第1輸液吸引工程の終了後に、前記第1ロボットアーム及び前記第2ロボットアームを制御して前記注射器内の輸液を前記薬品容器に注入する注入工程を実行するステップと、
前記注入工程の終了後に前記第1ロボットアームを制御して前記薬品容器を前記秤量装置で秤量する第2秤量工程を実行するステップと、
前記第1秤量工程による秤量結果と前記第2秤量工程による秤量結果との差分を前記薬品容器に注入された輸液の重量として取得するステップと、
を備える混注方法。 - 注射器で輸液容器から輸液を吸引して薬品容器に注入可能な混注装置であって、
前記薬品容器を保持して移動させることが可能な第1ロボットアームと、
前記注射器を保持して移動させることが可能であって前記注射器の操作が可能な第2ロボットアームと、
前記第1ロボットアーム及び前記第2ロボットアームを制御し、前記注射器で輸液を前記薬品容器に注入する注入工程及び前記注射器で前記薬品容器から輸液を吸引する吸引工程を実行する第5制御手段と、
前記吸引工程において前記薬品容器から輸液を吸引した後、前記注射器の注射針が前記薬品容器に挿通されたままの状態で前記注射器の目盛りを撮影可能な撮影制御手段と、
を備える混注装置。 - 前記吸引工程が、前記薬品容器のゴム栓が下方に向けられると共に前記注射器の注射針が上方に向けられた状態において前記注射器で前記薬品容器から輸液を吸引し、前記注射器の注射針が前記薬品容器内に挿通されたままの状態で前記注射器及び前記薬品容器の上下位置を反転させた後、前記注射器で予め定められた量の空気を吸引してから前記注射器の注射針を前記薬品容器から引き抜く工程であり、
前記撮影制御手段が、前記薬品容器内に挿通された状態で前記注射器及び前記薬品容器の上下位置を反転させた後、前記注射器で予め定められた量の空気を吸引する前に前記注射器の目盛りを撮影する請求項38に記載の混注装置。 - 注射器で輸液容器から輸液を吸引して薬品容器に注入可能な混注方法であって、
前記薬品容器を保持して移動させることが可能な第1ロボットアームと前記注射器を保持して移動させることが可能であって前記注射器の操作が可能な第2ロボットアームとを制御して、前記注射器で輸液を前記薬品容器に注入する注入工程及び前記注射器で前記薬品容器から輸液を吸引する吸引工程を実行し、前記吸引工程において前記薬品容器から輸液を吸引した後、前記注射器の注射針が前記薬品容器から抜かれる前の状態で前記注射器の目盛りを撮影する混注方法。 - 注射器のプランジャを操作可能な第2駆動手段と、
前記注射器のシリンジを前記プランジャの操作方向に垂直な方向で挟持する挟持部と、
薬品容器の開口部が上方に向けられ、前記注射器の先端が下方に向けられた状態で、前記第2駆動手段を制御して前記注射器により前記薬品容器から空気を吸引する第1置換工程と前記注射器内の輸液を前記薬品容器に注入する第2置換工程とを交互に実行させる第6制御手段と、
前記第1置換工程において前記第2駆動手段が前記プランジャを引く速度、前記プランジャの引き始めの加速度、又は前記プランジャを引く量の少なくとも1つを前記第1置換工程の実行済回数に応じて変化させる第7制御手段と、
を備える混注装置。 - 前記第7制御手段が、前記第1置換工程の実行済回数が増加するに従って前記プランジャの引き始めの加速度を段階的に大きくする請求項41に記載の混注装置。
- 前記第7制御手段が、前記第1置換工程の実行済回数が増加するに従って前記プランジャを引く量を段階的に増加させる請求項41又は42に記載の混注装置。
- 前記第7制御手段が、前記第1置換工程の実行済回数が増加するに従って前記プランジャを引く速度を段階的に速くする請求項41〜43のいずれかに記載の混注装置。
- 注射器のプランジャを操作可能な第2駆動手段と、
前記注射器のシリンジを前記プランジャの操作方向に垂直な方向で挟持する挟持部と、
薬品容器の開口部が上方に向けられ、前記注射器の先端が下方に向けられた状態で、前記第2駆動手段を制御して前記注射器により前記薬品容器から空気を吸引する第1置換工程と前記注射器内の輸液を前記薬品容器に注入する第2置換工程とを交互に実行させる第6制御手段と、
前記第1置換工程において前記第2駆動手段が前記プランジャを引く速度、前記プランジャの引き始めの加速度、又は前記プランジャを引く量の少なくとも1つを、前記プランジャを引くときの前記シリンジ内の空気の膨張率に応じて変化させる第8制御手段と、
を備える混注装置。 - 注射器の注射針のキャップを取り外すために用いられ、前記注射器から取り外された前記キャップを保持可能なキャップ着脱手段と、
前記注射器を操作可能な第2駆動手段と、
前記注射器及び前記キャップ着脱手段のいずれか一方又は両方を任意の位置に移動させることが可能な第3駆動手段と、
薬品容器の開口部が上方に向けられ、前記注射器の先端が下方に向けられた状態で、前記第2駆動手段を制御して前記注射器により前記薬品容器から空気を吸引する第1置換工程と前記注射器内の輸液を前記薬品容器に注入する第2置換工程とを交互に実行させる第6制御手段と、
前記第6制御手段により前記注射器内の輸液が前記薬品容器に注入された後、前記第3駆動手段を制御して、前記キャップ着脱手段で保持されている前記キャップに前記注射器の注射針を挿入すると共に、前記第2駆動手段を制御して前記注射器内に存在する空気を排出させる第9制御手段と、
を備える混注装置。 - 注射器及び薬品容器のいずれか一方又は両方を任意の位置に移動させることが可能な第1駆動手段と、
前記注射器を操作可能な第2駆動手段と、
前記薬品容器の開口部が下方に向けられ、前記注射器の注射針の先端が上方に向けられた状態で、前記第2駆動手段を制御して前記注射器により前記薬品容器から輸液を吸引する吸引工程を実行させる第10制御手段と、
前記第1駆動手段を制御して前記吸引工程において前記薬品容器内の輸液量が減少するに従って前記注射器の注射針の前記薬品容器への挿入量を段階的に減少させる第11制御手段と、
を備える混注装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014561208A JP5716879B1 (ja) | 2013-09-19 | 2014-09-08 | 混注装置、混注方法 |
Applications Claiming Priority (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013194548 | 2013-09-19 | ||
| JP2013194548 | 2013-09-19 | ||
| JP2014039249 | 2014-02-28 | ||
| JP2014039249 | 2014-02-28 | ||
| JP2014064597 | 2014-03-26 | ||
| JP2014064597 | 2014-03-26 | ||
| PCT/JP2014/073699 WO2015041092A1 (ja) | 2013-09-19 | 2014-09-08 | 混注装置、混注方法 |
| JP2014561208A JP5716879B1 (ja) | 2013-09-19 | 2014-09-08 | 混注装置、混注方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015029097A Division JP6160636B2 (ja) | 2013-09-19 | 2015-02-17 | 混注装置、混注制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5716879B1 true JP5716879B1 (ja) | 2015-05-13 |
| JPWO2015041092A1 JPWO2015041092A1 (ja) | 2017-03-02 |
Family
ID=52688743
Family Applications (8)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014561208A Active JP5716879B1 (ja) | 2013-09-19 | 2014-09-08 | 混注装置、混注方法 |
| JP2015029097A Active JP6160636B2 (ja) | 2013-09-19 | 2015-02-17 | 混注装置、混注制御プログラム |
| JP2017104492A Pending JP2017140514A (ja) | 2013-09-19 | 2017-05-26 | 混注装置、混注制御プログラム |
| JP2019134614A Pending JP2019171210A (ja) | 2013-09-19 | 2019-07-22 | 混注装置、混注制御プログラム |
| JP2019218678A Pending JP2020032271A (ja) | 2013-09-19 | 2019-12-03 | 混注装置、混注方法、混注制御プログラム |
| JP2020154589A Active JP6965974B2 (ja) | 2013-09-19 | 2020-09-15 | 混注装置、混注方法、混注制御プログラム |
| JP2021171732A Pending JP2022002793A (ja) | 2013-09-19 | 2021-10-20 | 混注装置、混注方法、混注制御プログラム |
| JP2023037794A Active JP7553848B2 (ja) | 2013-09-19 | 2023-03-10 | 混注装置、混注方法、混注制御プログラム |
Family Applications After (7)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015029097A Active JP6160636B2 (ja) | 2013-09-19 | 2015-02-17 | 混注装置、混注制御プログラム |
| JP2017104492A Pending JP2017140514A (ja) | 2013-09-19 | 2017-05-26 | 混注装置、混注制御プログラム |
| JP2019134614A Pending JP2019171210A (ja) | 2013-09-19 | 2019-07-22 | 混注装置、混注制御プログラム |
| JP2019218678A Pending JP2020032271A (ja) | 2013-09-19 | 2019-12-03 | 混注装置、混注方法、混注制御プログラム |
| JP2020154589A Active JP6965974B2 (ja) | 2013-09-19 | 2020-09-15 | 混注装置、混注方法、混注制御プログラム |
| JP2021171732A Pending JP2022002793A (ja) | 2013-09-19 | 2021-10-20 | 混注装置、混注方法、混注制御プログラム |
| JP2023037794A Active JP7553848B2 (ja) | 2013-09-19 | 2023-03-10 | 混注装置、混注方法、混注制御プログラム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9770388B2 (ja) |
| EP (1) | EP2992870B1 (ja) |
| JP (8) | JP5716879B1 (ja) |
| KR (1) | KR102274424B1 (ja) |
| CN (1) | CN105307621B (ja) |
| WO (1) | WO2015041092A1 (ja) |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016009907A1 (ja) * | 2014-07-15 | 2016-01-21 | 株式会社湯山製作所 | 混注装置 |
| WO2017056304A1 (ja) * | 2015-10-01 | 2017-04-06 | 株式会社安川電機 | 薬液調製方法及び薬液調製システム |
| WO2017115687A1 (ja) * | 2015-12-28 | 2017-07-06 | 株式会社湯山製作所 | 混注装置 |
| JP2022002793A (ja) * | 2013-09-19 | 2022-01-11 | 株式会社湯山製作所 | 混注装置、混注方法、混注制御プログラム |
| EP3956903A4 (en) * | 2019-04-17 | 2023-01-11 | ICU Medical, Inc. | ON-BOARD ELECTRONIC CODING SYSTEM FOR THE CONTENTS AND PARAMETERS FOR THE ADMINISTRATION OF IV CONTAINERS AND THE SAFE USE AND DISPOSAL THEREOF |
| US11868161B2 (en) | 2017-12-27 | 2024-01-09 | Icu Medical, Inc. | Synchronized display of screen content on networked devices |
| US11933650B2 (en) | 2012-03-30 | 2024-03-19 | Icu Medical, Inc. | Air detection system and method for detecting air in a pump of an infusion system |
| US11972395B2 (en) | 2011-08-19 | 2024-04-30 | Icu Medical, Inc. | Systems and methods for a graphical interface including a graphical representation of medical data |
| US12048831B2 (en) | 2013-05-24 | 2024-07-30 | Icu Medical, Inc. | Multi-sensor infusion system for detecting air or an occlusion in the infusion system |
| US12059551B2 (en) | 2013-05-29 | 2024-08-13 | Icu Medical, Inc. | Infusion system and method of use which prevents over-saturation of an analog-to-digital converter |
| US12076531B2 (en) | 2016-06-10 | 2024-09-03 | Icu Medical, Inc. | Acoustic flow sensor for continuous medication flow measurements and feedback control of infusion |
| US12076525B2 (en) | 2013-11-11 | 2024-09-03 | Icu Medical, Inc. | Thermal management system and method for medical devices |
| US12083310B2 (en) | 2014-02-28 | 2024-09-10 | Icu Medical, Inc. | Infusion system and method which utilizes dual wavelength optical air-in-line detection |
| US12115337B2 (en) | 2015-03-02 | 2024-10-15 | Icu Medical, Inc. | Infusion system, device, and method having advanced infusion features |
Families Citing this family (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011014525A2 (en) | 2009-07-29 | 2011-02-03 | Icu Medical, Inc. | Fluid transfer devices and methods of use |
| US10723497B2 (en) * | 2014-11-03 | 2020-07-28 | Vanrx Pharmasystems Inc. | Apparatus and method for monitoring and controlling the filling of a container with a pharmaceutical fluid in an aseptic environment |
| EP4218857A3 (en) | 2011-12-22 | 2023-10-25 | ICU Medical, Inc. | Fluid transfer devices and methods of use |
| US11014696B2 (en) * | 2017-07-12 | 2021-05-25 | Vanrx Pharmasystems Inc. | Purgeable pharmaceutical fill needle |
| JP6259113B2 (ja) | 2013-11-25 | 2018-01-10 | アイシーユー・メディカル・インコーポレーテッド | 点滴バッグに治療用流体を充填するための方法およびシステム |
| JP6393225B2 (ja) * | 2015-03-30 | 2018-09-19 | テルモ株式会社 | コネクタ |
| JP6319223B2 (ja) * | 2015-08-11 | 2018-05-09 | 株式会社安川電機 | 薬液調製方法及び薬液調製システム |
| JP6319222B2 (ja) * | 2015-08-11 | 2018-05-09 | 株式会社安川電機 | 薬品搾取方法及び薬品搾取システム |
| JP6319224B2 (ja) * | 2015-08-11 | 2018-05-09 | 株式会社安川電機 | 薬液調製方法及び薬液調製システム |
| TWI730974B (zh) * | 2015-08-11 | 2021-06-21 | 日商湯山製作所有限公司 | 藥劑配發裝置 |
| JP6714986B2 (ja) * | 2015-10-05 | 2020-07-01 | 株式会社タカゾノテクノロジー | シリンジ駆動装置 |
| JP6710758B2 (ja) | 2015-12-04 | 2020-06-17 | アイシーユー・メディカル・インコーポレーテッド | 医療用流体を移送するための電子式医療用流体移送装置 |
| KR20170068368A (ko) * | 2015-12-09 | 2017-06-19 | 큐렉소 주식회사 | 항암 주사제 조제장치 및 이를 포함하는 항암 주사제 조제시스템 |
| US10589022B2 (en) * | 2015-12-30 | 2020-03-17 | Baxter Corporation Englewood | Syringe plunger positioning apparatus and method |
| CN105536093B (zh) * | 2016-03-10 | 2019-05-03 | 京东方科技集团股份有限公司 | 智能输液系统以及使用智能输液系统的输液方法 |
| KR20180001208A (ko) * | 2016-06-27 | 2018-01-04 | 큐렉소 주식회사 | 항암 주사제 조제장치 |
| USD851745S1 (en) | 2016-07-19 | 2019-06-18 | Icu Medical, Inc. | Medical fluid transfer system |
| WO2018022640A1 (en) | 2016-07-25 | 2018-02-01 | Icu Medical, Inc. | Systems, methods, and components for trapping air bubbles in medical fluid transfer modules and systems |
| JP2018027581A (ja) * | 2016-08-17 | 2018-02-22 | 株式会社安川電機 | ピッキングシステム |
| US11752274B2 (en) * | 2016-08-17 | 2023-09-12 | Sawhney Nisha | Injection monitoring device and system |
| SG10201608757PA (en) * | 2016-10-19 | 2018-05-30 | Component Aerospace Singapore Pte Ltd | Method and apparatus for facilitating part verification |
| EP3335844B1 (de) | 2016-12-15 | 2019-10-30 | Pharma Integration S.R.L. | Konstruktiver aufbau eines containments, bestimmt zur automatisierten produktion pharmazeutischer oder biotechnischer artikel |
| JP2019076632A (ja) * | 2017-10-26 | 2019-05-23 | 株式会社タカゾノテクノロジー | 薬液移注装置 |
| JP2019118701A (ja) * | 2018-01-10 | 2019-07-22 | 株式会社S&Sエンジニアリング | 調整支援システム |
| CN111742226A (zh) * | 2018-01-10 | 2020-10-02 | 株式会社日立高新技术 | 自动分析装置 |
| GB2573263B (en) * | 2018-03-08 | 2022-03-09 | Olympus Automation Ltd | Weighing system |
| JP7397274B2 (ja) | 2018-03-16 | 2023-12-13 | 株式会社湯山製作所 | 混注装置、混注方法、混注制御プログラム |
| IT201800004068A1 (it) * | 2018-03-29 | 2019-09-29 | Marchesini Group Spa | Macchina per il riempimento e la chiusura di contenitori farmaceutici, quali siringhe, flaconi e simili |
| JP6730361B2 (ja) * | 2018-04-05 | 2020-07-29 | ファナック株式会社 | ロボットシステム |
| CN108974410A (zh) * | 2018-09-26 | 2018-12-11 | 华蓥市铜堡初级中学 | 一种注射器灌装机构 |
| US20220016409A1 (en) * | 2018-11-14 | 2022-01-20 | The Johns Hopkins University | Sterilizable peritoneal dialysis connection device |
| JP7343771B2 (ja) | 2018-11-22 | 2023-09-13 | 株式会社湯山製作所 | モデル登録装置、薬剤向き登録装置、及びプログラム |
| WO2021055948A1 (en) * | 2019-09-19 | 2021-03-25 | Flacktek, Inc. | Servo-robotic asymmetric rotational mixer and system |
| US11590057B2 (en) | 2020-04-03 | 2023-02-28 | Icu Medical, Inc. | Systems, methods, and components for transferring medical fluids |
| JP6757963B1 (ja) * | 2020-04-21 | 2020-09-23 | 株式会社エクサウィザーズ | 制御装置、採取システムおよび方法 |
| JP7401779B2 (ja) | 2020-05-27 | 2023-12-20 | 株式会社湯山製作所 | 混注制御装置、混注制御プログラム、混注システム、混注装置 |
| CN214018492U (zh) * | 2020-09-22 | 2021-08-24 | 基罗基立福有限公司 | 用于制备化疗中使用的静脉药物的药物配制装置 |
| CN112520085B (zh) * | 2020-12-15 | 2022-04-05 | 武汉天楚吉因宝生物科技有限公司 | 一种公猪精液自动灌装机 |
| AU2021410785A1 (en) | 2020-12-23 | 2023-06-29 | Relavo, Inc. | System and method for injection and retraction of fluid |
| CN112830270B (zh) * | 2020-12-31 | 2022-12-13 | 宜春万申制药机械有限公司 | 一种包衣机料桶进料称重装置 |
| US20220257868A1 (en) * | 2021-02-12 | 2022-08-18 | Eric Yan | Medication delivery device |
| KR102374837B1 (ko) * | 2021-07-20 | 2022-03-18 | 재단법인 오송첨단의료산업진흥재단 | 약물의 정량 자동 펌핑이 가능한 실린지 자동 펌핑 장치 |
| CN114247015B (zh) * | 2021-11-04 | 2023-06-13 | 中国计量大学 | 一种无针注射器用自动换取药管的装置 |
| NL2033713B1 (en) * | 2022-12-12 | 2024-06-17 | Sjj Solutions B V | Method and device for filling syringes |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009504199A (ja) * | 2005-05-16 | 2009-02-05 | インテリジェント ホスピタル システムズ リミテッド | 自動薬局混合システム(apas) |
| JP5224013B2 (ja) * | 2011-03-25 | 2013-07-03 | 株式会社湯山製作所 | 混注装置 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02102654A (ja) * | 1988-10-12 | 1990-04-16 | Terumo Corp | 医療用容器 |
| GB8824925D0 (en) * | 1988-10-25 | 1988-11-30 | Bowater Packaging Ltd | Aseptic filling apparatus |
| US5330426A (en) * | 1992-08-13 | 1994-07-19 | Science Incorporated | Mixing and delivery syringe assembly |
| JPH0852196A (ja) * | 1994-08-09 | 1996-02-27 | Material Eng Tech Lab Inc | 薬剤連結口を有する輸液容器 |
| JPH10119905A (ja) * | 1996-10-11 | 1998-05-12 | Fuji Seal Co Ltd | 容器への内容物充填方法 |
| EP1386251A4 (en) | 2001-03-02 | 2005-11-23 | Euro Celtique Sa | METHOD AND DEVICE FOR COMPACTING INDIVIDUALIZED DOSAGE FORMS |
| JP4344127B2 (ja) * | 2002-11-11 | 2009-10-14 | テルモ株式会社 | シリンジ |
| JP2005526540A (ja) * | 2001-12-31 | 2005-09-08 | ビー ブラウン メディカル インコーポレイテッド | 薬剤調合情報管理システム |
| CN100511247C (zh) * | 2004-02-26 | 2009-07-08 | 株式会社汤山制作所 | 配药系统 |
| WO2005123162A1 (en) * | 2004-06-18 | 2005-12-29 | Synthes Gmbh | Device for the filling of a plurality of syringes |
| DK1830782T3 (da) * | 2004-12-22 | 2013-09-08 | Intelligent Hospital Systems Ltd | Automatiseret apotek-blandesystem (APAS) |
| US7783383B2 (en) * | 2004-12-22 | 2010-08-24 | Intelligent Hospital Systems Ltd. | Automated pharmacy admixture system (APAS) |
| GB2433928B (en) * | 2006-01-07 | 2009-10-14 | Shane Richard Wootton | Apparatus for producing material by a chemical reaction |
| CN101627406A (zh) * | 2006-03-03 | 2010-01-13 | 株式会社汤山制作所 | 混注监查系统 |
| KR100801149B1 (ko) * | 2006-05-18 | 2008-02-11 | (주)엠아이반도체 | 패키지된 반도체 및 전자부품의 몰딩 수지 제거장치 |
| WO2007147741A1 (en) * | 2006-06-21 | 2007-12-27 | Novo Nordisk A/S | A one-hand operated drug mixing and expelling device |
| US8317743B2 (en) * | 2007-09-18 | 2012-11-27 | Medimop Medical Projects Ltd. | Medicament mixing and injection apparatus |
| JP5261016B2 (ja) * | 2008-04-25 | 2013-08-14 | 株式会社吉野工業所 | 液剤供給用自立袋 |
| JP5311623B2 (ja) | 2008-05-09 | 2013-10-09 | 株式会社島津製作所 | 自動調剤装置及び調剤システム |
| WO2010113401A1 (ja) * | 2009-03-31 | 2010-10-07 | パナソニック株式会社 | 薬剤混合装置および薬剤混合方法 |
| JP5467336B2 (ja) * | 2009-06-02 | 2014-04-09 | パナソニック株式会社 | 薬液吸入用複合針およびこれを用いた薬液容器並びに薬液吸入方法 |
| JP5359756B2 (ja) * | 2009-10-06 | 2013-12-04 | パナソニック株式会社 | シリンジ駆動装置 |
| WO2011093103A1 (ja) * | 2010-01-29 | 2011-08-04 | パナソニック株式会社 | シリンジ駆動装置およびシリンジ駆動方法 |
| CN101804225B (zh) * | 2010-02-05 | 2011-10-26 | 深圳市卫邦科技有限公司 | 自动输液配药设备及自动输液配药方法 |
| JP5804543B2 (ja) * | 2010-04-05 | 2015-11-04 | 株式会社根本杏林堂 | ミキシングデバイス、ミキシングチューブ、薬液注入システム及び薬液の混合方法 |
| JP2014039570A (ja) * | 2010-12-24 | 2014-03-06 | Panasonic Corp | 液体移送方法 |
| JP5891684B2 (ja) | 2011-03-25 | 2016-03-23 | 株式会社湯山製作所 | 混注装置 |
| CN102151228B (zh) * | 2011-05-25 | 2013-07-10 | 深圳市桑谷科技有限公司 | 全功能液体药物配制智能机器人及其配药方法 |
| IL213783A0 (en) * | 2011-06-27 | 2011-07-31 | Medimop Medical Projects Ltd | Medical apparatus and single use kit including linear flow control device for use therewith for reconstitution and administration of liquid drug dosage |
| CN103841945B (zh) * | 2011-08-08 | 2017-04-12 | 株式会社汤山制作所 | 混注装置 |
| WO2013038593A1 (ja) * | 2011-09-12 | 2013-03-21 | パナソニック株式会社 | 薬剤注入装置 |
| CN102716028B (zh) * | 2012-03-06 | 2014-09-17 | 中国科学院深圳先进技术研究院 | 配药机器人及其配药方法 |
| US9474691B2 (en) * | 2012-10-25 | 2016-10-25 | Yuyama Mfg. Co., Ltd. | Coinfusion apparatus |
| EP2992870B1 (en) * | 2013-09-19 | 2018-06-27 | Yuyama Mfg. Co., Ltd. | Coinjection device and coinjection method |
-
2014
- 2014-09-08 EP EP14845541.3A patent/EP2992870B1/en not_active Not-in-force
- 2014-09-08 CN CN201480031977.8A patent/CN105307621B/zh active Active
- 2014-09-08 WO PCT/JP2014/073699 patent/WO2015041092A1/ja active Application Filing
- 2014-09-08 US US14/898,673 patent/US9770388B2/en active Active
- 2014-09-08 KR KR1020157034112A patent/KR102274424B1/ko active IP Right Grant
- 2014-09-08 JP JP2014561208A patent/JP5716879B1/ja active Active
-
2015
- 2015-02-17 JP JP2015029097A patent/JP6160636B2/ja active Active
-
2017
- 2017-05-26 JP JP2017104492A patent/JP2017140514A/ja active Pending
-
2019
- 2019-07-22 JP JP2019134614A patent/JP2019171210A/ja active Pending
- 2019-12-03 JP JP2019218678A patent/JP2020032271A/ja active Pending
-
2020
- 2020-09-15 JP JP2020154589A patent/JP6965974B2/ja active Active
-
2021
- 2021-10-20 JP JP2021171732A patent/JP2022002793A/ja active Pending
-
2023
- 2023-03-10 JP JP2023037794A patent/JP7553848B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009504199A (ja) * | 2005-05-16 | 2009-02-05 | インテリジェント ホスピタル システムズ リミテッド | 自動薬局混合システム(apas) |
| JP5224013B2 (ja) * | 2011-03-25 | 2013-07-03 | 株式会社湯山製作所 | 混注装置 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11972395B2 (en) | 2011-08-19 | 2024-04-30 | Icu Medical, Inc. | Systems and methods for a graphical interface including a graphical representation of medical data |
| US11933650B2 (en) | 2012-03-30 | 2024-03-19 | Icu Medical, Inc. | Air detection system and method for detecting air in a pump of an infusion system |
| US12048831B2 (en) | 2013-05-24 | 2024-07-30 | Icu Medical, Inc. | Multi-sensor infusion system for detecting air or an occlusion in the infusion system |
| US12059551B2 (en) | 2013-05-29 | 2024-08-13 | Icu Medical, Inc. | Infusion system and method of use which prevents over-saturation of an analog-to-digital converter |
| JP2022002793A (ja) * | 2013-09-19 | 2022-01-11 | 株式会社湯山製作所 | 混注装置、混注方法、混注制御プログラム |
| US12076525B2 (en) | 2013-11-11 | 2024-09-03 | Icu Medical, Inc. | Thermal management system and method for medical devices |
| US12083310B2 (en) | 2014-02-28 | 2024-09-10 | Icu Medical, Inc. | Infusion system and method which utilizes dual wavelength optical air-in-line detection |
| JP2016028714A (ja) * | 2014-07-15 | 2016-03-03 | 株式会社湯山製作所 | 混注装置 |
| WO2016009907A1 (ja) * | 2014-07-15 | 2016-01-21 | 株式会社湯山製作所 | 混注装置 |
| US12115337B2 (en) | 2015-03-02 | 2024-10-15 | Icu Medical, Inc. | Infusion system, device, and method having advanced infusion features |
| WO2017056304A1 (ja) * | 2015-10-01 | 2017-04-06 | 株式会社安川電機 | 薬液調製方法及び薬液調製システム |
| JPWO2017056304A1 (ja) * | 2015-10-01 | 2018-05-31 | 株式会社安川電機 | 薬液調製方法及び薬液調製システム |
| JP6195037B1 (ja) * | 2015-12-28 | 2017-09-13 | 株式会社湯山製作所 | 混注装置 |
| WO2017115687A1 (ja) * | 2015-12-28 | 2017-07-06 | 株式会社湯山製作所 | 混注装置 |
| US12076531B2 (en) | 2016-06-10 | 2024-09-03 | Icu Medical, Inc. | Acoustic flow sensor for continuous medication flow measurements and feedback control of infusion |
| US11868161B2 (en) | 2017-12-27 | 2024-01-09 | Icu Medical, Inc. | Synchronized display of screen content on networked devices |
| EP3956903A4 (en) * | 2019-04-17 | 2023-01-11 | ICU Medical, Inc. | ON-BOARD ELECTRONIC CODING SYSTEM FOR THE CONTENTS AND PARAMETERS FOR THE ADMINISTRATION OF IV CONTAINERS AND THE SAFE USE AND DISPOSAL THEREOF |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102274424B1 (ko) | 2021-07-07 |
| CN105307621A (zh) | 2016-02-03 |
| EP2992870A1 (en) | 2016-03-09 |
| EP2992870A9 (en) | 2017-01-11 |
| JP2020032271A (ja) | 2020-03-05 |
| EP2992870B1 (en) | 2018-06-27 |
| JP2022002793A (ja) | 2022-01-11 |
| WO2015041092A1 (ja) | 2015-03-26 |
| JPWO2015041092A1 (ja) | 2017-03-02 |
| JP7553848B2 (ja) | 2024-09-19 |
| US20160136052A1 (en) | 2016-05-19 |
| JP6160636B2 (ja) | 2017-07-12 |
| CN105307621B (zh) | 2020-01-10 |
| JP2019171210A (ja) | 2019-10-10 |
| US9770388B2 (en) | 2017-09-26 |
| JP2020195902A (ja) | 2020-12-10 |
| JP2015192860A (ja) | 2015-11-05 |
| JP2017140514A (ja) | 2017-08-17 |
| EP2992870A4 (en) | 2016-07-20 |
| JP2023063396A (ja) | 2023-05-09 |
| JP6965974B2 (ja) | 2021-11-10 |
| KR20160058070A (ko) | 2016-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6965974B2 (ja) | 混注装置、混注方法、混注制御プログラム | |
| JP6364833B2 (ja) | 注射針、注射器、混注装置、混注方法 | |
| JP7235145B2 (ja) | 混注装置、プログラム | |
| JP2021126558A (ja) | 混注装置 | |
| JP6098704B2 (ja) | 混注装置、混注制御プログラム | |
| JP2018042821A (ja) | 混注装置 | |
| JP2019033790A (ja) | 混注制御装置、混注装置、混注制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20150212 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150217 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150302 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5716879 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |