JP4622872B2 - 車両の電源装置、車両および車両の電源装置の制御方法 - Google Patents
車両の電源装置、車両および車両の電源装置の制御方法 Download PDFInfo
- Publication number
- JP4622872B2 JP4622872B2 JP2006018055A JP2006018055A JP4622872B2 JP 4622872 B2 JP4622872 B2 JP 4622872B2 JP 2006018055 A JP2006018055 A JP 2006018055A JP 2006018055 A JP2006018055 A JP 2006018055A JP 4622872 B2 JP4622872 B2 JP 4622872B2
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- rotating electrical
- vehicle
- operation state
- power supply
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/007—Physical arrangements or structures of drive train converters specially adapted for the propulsion motors of electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P5/00—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors
- H02P5/74—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors controlling two or more ac dynamo-electric motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/10—DC to DC converters
- B60L2210/14—Boost converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/30—Driver interactions by voice
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/308—Electric sensors
- B60Y2400/3084—Electric currents sensors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2201/00—Indexing scheme relating to controlling arrangements characterised by the converter used
- H02P2201/09—Boost converter, i.e. DC-DC step up converter increasing the voltage between the supply and the inverter driving the motor
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
Description
図1は、本発明の実施の形態1に係る車両100のモータジェネレータ制御に関する構成を示す回路図である。
図2を参照して、レゾルバ20は、ステータSTと、ロータRTと、ステータ部分に配置されたコイルLA,LB,LCとを含む。
車両100は、モータジェネレータMGと、モータジェネレータMGを駆動するインバータ14とを含む。車両の電源装置は、蓄電装置であるバッテリBと、蓄電装置の電圧を昇圧してインバータに供給する昇圧コンバータ12と、昇圧コンバータ12に対して、モータジェネレータMGの目標動作状態に応じた昇圧電圧目標値を指示する制御装置30とを含む。制御装置30は、モータジェネレータMGの現在の動作状態信号が正常でないと判断した場合に、昇圧電圧目標値を最大値まで増加させる。
実施の形態1においては、駆動用モータの回転数が正常に検出できない場合に昇圧コンバータの目標昇圧指令値を最大まで引上げることについて説明した。しかし、モータ回転数を、故障が発生したと思われるレゾルバの出力以外の信号によって正しく算出することができれば、これに基づき図4のマップを用いて目標昇圧電圧VHを求めてもよい。
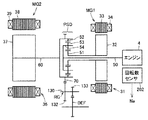
図6を参照して、エンジン4のクランクシャフト50とモータジェネレータMG1のロータ32とモータジェネレータMG2のロータ37とは同じ軸を中心に回転する。
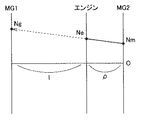
図8に示すように、モータジェネレータMG1の回転数Ngはエンジン回転数NeとモータジェネレータMG2の回転数Nmとを結んだ直線上にある。つまり、ハイブリッド自動車である車両200は、動力分割機構としてプラネタリギヤを使用しているため、モータジェネレータMG1の回転数、エンジン回転数およびモータジェネレータMG2の回転数は図8に示すように直線上に並ぶように連動して動く。
Ne=Nm×1/(1+ρ)+Ng×ρ/(1+ρ) …(1)
この式からエンジン回転数Neと、モータジェネレータMG2の回転数NmがわかればモータジェネレータMG1の回転数Ngを求めることができる。そしてステップS17において回転数Ngを求めた後に処理はステップS21に進む。
一方ステップS18においてレゾルバ21も異常であると判断された場合には回転数を求めることができないのでステップS23に進み、実施の形態1と同様に目標昇圧指令値を最大値のVHmaxに設定する。そしてステップS24において制御はメインルーチンに戻される。
車両は、モータジェネレータMG1、MG2と、モータジェネレータMG1、MG2をそれぞれ駆動するインバータ22,14と、エンジン4と、モータジェネレータMG1の回転軸、モータジェネレータMG2の回転軸およびエンジン4のクランクシャフト50と機械的に結合される動力分割機構PSDとを含む。車両の電源装置は、蓄電装置であるバッテリBと、蓄電装置の電圧を昇圧してインバータ22,14に供給する昇圧コンバータ12と、昇圧コンバータ12に対して、モータジェネレータMG1、MG2の目標動作状態に応じた昇圧電圧目標値を指示する制御装置230とを含む。制御装置230は、モータジェネレータMG1、MG2のうちの一方の現在の動作状態信号が正常でないと判断した場合に、モータジェネレータMG1、MG2のうちの他方の現在の動作状態信号とエンジンの運転状態を示す信号に基づいて、モータジェネレータMG1、MG2のうちの一方の現在の動作状態信号を予測する。
ハイブリッド車両には、前輪駆動用のモータに加え後輪駆動用のモータを搭載する四輪駆動車も存在する。後輪を前輪駆動用モータと独立したモータで駆動させることにより、一般的な四輪駆動システムに必要不可欠なトランスファやプロペラシャフトが不要となる。これにより駆動ロスの低減が図れ、後輪用モータジェネレータによる回生発電の効果もあいまって通常の四輪駆動車よりも低燃費走行が期待できる。
車両300は、車両の速度に応じた回転を行なう複数のモータジェネレータMG1,MG2,MGRと、モータジェネレータMG1,MG2,MGRをそれぞれ駆動する複数のインバータ22,14,302とを含む。車両の電源装置は、蓄電装置である電池ユニット40と、蓄電装置の電圧を昇圧して複数のインバータに共通の昇圧電圧を供給する昇圧コンバータ12と、モータジェネレータMG1,MG2,MGRの目標動作状態からモータジェネレータMG1,MG2,MGRの必要電圧のうちから最大電圧を求めて、昇圧コンバータ12に対して、最大電圧を昇圧電圧目標値として指示する制御装置330とを含む。制御装置330は、モータジェネレータMG1,MG2,MGRの現在の動作状態信号の少なくともいずれか1つが正常でないと判断した場合に、昇圧電圧目標値を最大値まで増加させる。
Claims (11)
- 第1の回転電機と前記第1の回転電機を駆動するインバータと前記第1の回転電機の動作状態を検知する動作状態検知手段とを含む車両の電源装置であって、
蓄電装置と、
前記蓄電装置の電圧を昇圧して前記インバータに供給する電圧変換部と、
前記電圧変換部に対して、前記動作状態検知手段が出力する第1の動作状態信号に応じて昇圧電圧目標値を指示する制御装置とを含み、
前記制御装置は、前記動作状態検知手段が正常でないと判断した場合に、前記第1の動作状態信号を使用せずに前記昇圧電圧目標値を定めて前記電圧変換部の動作を維持させ、
前記制御装置は、前記動作状態検知手段が正常でないと判断した場合には前記昇圧電圧目標値を設定可能上限値に定める、車両の電源装置。 - 前記動作状態検知手段は、
前記第1の回転電機のロータの回転数を検知する第1の回転数センサを含み、
前記制御装置は、前記第1の回転数センサの出力が所定条件を満たさない場合に前記動作状態検知手段が正常でないと判断する、請求項1に記載の車両の電源装置。 - 前記第1の回転電機は、
コイルを含み、
前記車両は、
前記コイルに流れる電流を検知する電流センサをさらに含み、
前記制御装置は、前記電流センサの出力が所定条件を満たさない場合に前記動作状態検知手段が正常でないと判断する、請求項1に記載の車両の電源装置。 - 前記車両は、
複数の回転電機を含み、
前記第1の回転電機は、前記複数の回転電機のうちの1つであり、
前記インバータは、
前記複数の回転電機をそれぞれ駆動する複数のインバータユニットとを含み、
前記電圧変換部は、前記蓄電装置の電圧を昇圧して前記複数のインバータユニットに共通の昇圧電圧を供給し、
前記制御装置は、前記複数の回転電機の動作状態に基づき前記複数の回転電機が必要とする複数の電圧のうちから最大電圧を求めて、前記電圧変換部に対して、前記最大電圧を昇圧電圧目標値として指示し、
前記制御装置は、前記複数の回転電機の動作状態をそれぞれ検出する複数の動作状態検知手段のいずれかが正常でないと判断した場合には、前記昇圧電圧目標値を設定可能上限値まで増加させる、請求項1に記載の車両の電源装置。 - 前記複数の動作状態検知手段は、
前記複数の回転電機のロータの回転数をそれぞれ検知する複数の回転数センサを含み、
前記制御装置は、前記複数の回転数センサの少なくともいずれか1つの出力が所定条件を満たさない場合には、対応する回転電機の動作状態を検知する動作状態検知手段が正常でないと判断する、請求項4に記載の車両の電源装置。 - 請求項1〜5のいずれか1項に記載の車両の電源装置を備える車両。
- 第1の回転電機と前記第1の回転電機を駆動するインバータと前記第1の回転電機の動作状態を検知する動作状態検知手段とを含む車両の電源装置の制御方法であって、
前記電源装置は、
蓄電装置と、
前記蓄電装置の電圧を昇圧して前記インバータに供給する電圧変換部とを含み、
前記制御方法は、
前記電圧変換部に対して、前記動作状態検知手段が出力する第1の動作状態信号に応じて昇圧電圧目標値を指示するステップと、
前記動作状態検知手段が正常でないと判断した場合に、前記第1の動作状態信号を使用せずに前記昇圧電圧目標値を定めて前記電圧変換部の動作を維持させるステップとを含み、
前記電圧変換部の動作を維持させるステップにおいて、前記動作状態検知手段が正常でないと判断した場合には、前記昇圧電圧目標値は、設定可能上限値に定められる、車両の電源装置の制御方法。 - 前記動作状態検知手段は、
前記第1の回転電機のロータの回転数を検知する第1の回転数センサを含み、
前記制御方法は、
前記第1の回転数センサの出力が所定条件を満たさない場合に前記動作状態検知手段が正常でないと判断するステップをさらに含む、請求項7に記載の車両の電源装置の制御方法。 - 前記第1の回転電機は、
コイルを含み、
前記車両は、
前記コイルに流れる電流を検知する電流センサをさらに含み、
前記制御方法は、
前記電流センサの出力が所定条件を満たさない場合に前記動作状態検知手段が正常でないと判断するステップをさらに含む、請求項7に記載の車両の電源装置の制御方法。 - 前記車両は、
複数の回転電機を含み、
前記第1の回転電機は、前記複数の回転電機のうちの1つであり、
前記インバータは、
前記複数の回転電機をそれぞれ駆動する複数のインバータユニットを含み、
前記電圧変換部は、前記蓄電装置の電圧を昇圧して前記複数のインバータユニットに共通の昇圧電圧を供給し、
前記制御方法は、
前記複数の回転電機の動作状態に基づき前記複数の回転電機がそれぞれ必要とする複数の電圧のうちから最大電圧を求めて、前記電圧変換部に対して、前記最大電圧を昇圧電圧目標値として指示するステップと、
前記複数の回転電機の動作状態をそれぞれ示す複数の動作状態検知手段の少なくともいずれかが正常でないと判断した場合には、前記昇圧電圧目標値を設定可能上限値まで増加させるステップをさらに含む、請求項7に記載の車両の電源装置の制御方法。 - 前記複数の動作状態検知手段は、
前記複数の回転電機のロータの回転数をそれぞれ検知する複数の回転数センサを含み、
前記制御方法は、
前記複数の回転数センサの少なくともいずれか1つの出力が所定条件を満たさない場合には、対応する回転電機の動作状態を検知する動作状態検知手段が正常でないと判断するステップをさらに含む、請求項10に記載の車両の電源装置の制御方法。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006018055A JP4622872B2 (ja) | 2006-01-26 | 2006-01-26 | 車両の電源装置、車両および車両の電源装置の制御方法 |
| CN2006800517702A CN101336173B (zh) | 2006-01-26 | 2006-12-26 | 车辆用电源设备、车辆以及控制电源设备的方法 |
| AU2006336711A AU2006336711B2 (en) | 2006-01-26 | 2006-12-26 | Power source apparatus for vehicle, vehicle and method of controlling power source apparatus |
| DE602006014447T DE602006014447D1 (de) | 2006-01-26 | 2006-12-26 | Energiequellenvorrichtung für ein fahrzeug, fahrzeug und verfahren zur steuerung einer energiequellenvorrichtung |
| PCT/JP2006/326351 WO2007086235A1 (en) | 2006-01-26 | 2006-12-26 | Power source apparatus for vehicle, vehicle and method of controlling power source apparatus |
| KR1020087020820A KR100985837B1 (ko) | 2006-01-26 | 2006-12-26 | 차량의 전원 장치, 차량, 및 전원 장치를 제어하는 방법 |
| EP06843723A EP1981733B1 (en) | 2006-01-26 | 2006-12-26 | Power source apparatus for vehicle, vehicle and method of controlling power source apparatus |
| US12/084,648 US7781999B2 (en) | 2006-01-26 | 2006-12-26 | Power source apparatus for vehicle, vehicle and method of controlling power source apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006018055A JP4622872B2 (ja) | 2006-01-26 | 2006-01-26 | 車両の電源装置、車両および車両の電源装置の制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007202311A JP2007202311A (ja) | 2007-08-09 |
| JP2007202311A5 JP2007202311A5 (ja) | 2008-05-01 |
| JP4622872B2 true JP4622872B2 (ja) | 2011-02-02 |
Family
ID=37908284
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006018055A Active JP4622872B2 (ja) | 2006-01-26 | 2006-01-26 | 車両の電源装置、車両および車両の電源装置の制御方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7781999B2 (ja) |
| EP (1) | EP1981733B1 (ja) |
| JP (1) | JP4622872B2 (ja) |
| KR (1) | KR100985837B1 (ja) |
| CN (1) | CN101336173B (ja) |
| AU (1) | AU2006336711B2 (ja) |
| DE (1) | DE602006014447D1 (ja) |
| WO (1) | WO2007086235A1 (ja) |
Families Citing this family (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4679891B2 (ja) * | 2004-11-30 | 2011-05-11 | トヨタ自動車株式会社 | 交流電圧発生装置および動力出力装置 |
| JP4114697B2 (ja) * | 2006-06-23 | 2008-07-09 | ダイキン工業株式会社 | インバータ制御方法 |
| JP5188783B2 (ja) * | 2007-11-14 | 2013-04-24 | アイシン・エィ・ダブリュ株式会社 | 車両駆動システム |
| JP5018516B2 (ja) * | 2008-01-31 | 2012-09-05 | アイシン・エィ・ダブリュ株式会社 | 回転電機制御装置 |
| JP4424428B2 (ja) * | 2008-03-18 | 2010-03-03 | トヨタ自動車株式会社 | 電動機駆動制御装置、それを備えた車両および電動機駆動制御方法 |
| JP4670882B2 (ja) | 2008-03-18 | 2011-04-13 | トヨタ自動車株式会社 | 電動機駆動制御装置、それを備えた車両および電動機駆動制御方法 |
| JP4969503B2 (ja) * | 2008-04-16 | 2012-07-04 | 三菱電機株式会社 | 車両用電力変換装置及び車両用駆動制御装置 |
| JP4969504B2 (ja) * | 2008-04-16 | 2012-07-04 | 三菱電機株式会社 | 車両用電力変換装置及び車両用駆動制御装置 |
| JP5178400B2 (ja) * | 2008-08-28 | 2013-04-10 | 株式会社東芝 | 洗濯乾燥機 |
| JP5412839B2 (ja) * | 2009-01-13 | 2014-02-12 | トヨタ自動車株式会社 | 電源装置およびその制御方法並びに車両 |
| JP5471255B2 (ja) * | 2009-09-30 | 2014-04-16 | アイシン・エィ・ダブリュ株式会社 | 電動機駆動装置の制御装置 |
| JP5362840B2 (ja) | 2009-10-13 | 2013-12-11 | 本田技研工業株式会社 | ハイブリッド車両 |
| CN102548819A (zh) * | 2009-10-13 | 2012-07-04 | 本田技研工业株式会社 | 混合动力车辆 |
| US8620507B2 (en) | 2009-10-13 | 2013-12-31 | Honda Motor Co., Ltd. | Hybrid vehicle |
| JP5083305B2 (ja) * | 2009-12-24 | 2012-11-28 | 株式会社デンソー | 電動機駆動装置、および、これを用いた電動パワーステアリング装置 |
| CN102859866B (zh) * | 2010-04-21 | 2014-10-15 | 丰田自动车株式会社 | 用于马达驱动系统的控制装置及搭载有该控制装置的车辆 |
| JP5234050B2 (ja) * | 2010-04-27 | 2013-07-10 | 株式会社デンソー | 車両用電源装置 |
| JP5229644B2 (ja) | 2010-06-24 | 2013-07-03 | 株式会社デンソー | 電動機駆動装置、および、これを用いた電動パワーステアリング装置 |
| JP5229645B2 (ja) | 2010-06-24 | 2013-07-03 | 株式会社デンソー | 電動機駆動装置、および、これを用いた電動パワーステアリング装置 |
| JP5195888B2 (ja) * | 2010-06-24 | 2013-05-15 | 株式会社デンソー | 電動機駆動装置、および、これを用いた電動パワーステアリング装置 |
| WO2012011155A1 (ja) * | 2010-07-23 | 2012-01-26 | 三菱電機株式会社 | 交流回転機の制御装置および制御方法 |
| BR112013001384A2 (pt) * | 2010-07-27 | 2016-05-24 | Mitsubishi Electric Corp | aparelho de controle para uma máquina giratória de ca |
| JP2012066624A (ja) * | 2010-09-21 | 2012-04-05 | Suzuki Motor Corp | 電動車両の発電制御装置両 |
| WO2012070104A1 (ja) * | 2010-11-22 | 2012-05-31 | ヤマハ発動機株式会社 | 電動二輪車 |
| KR101172331B1 (ko) * | 2010-12-07 | 2012-08-09 | 현대자동차주식회사 | 차량용 모터 제어 장치 |
| JP5605436B2 (ja) * | 2010-12-20 | 2014-10-15 | トヨタ自動車株式会社 | 電動車両およびその制御方法 |
| JP5189659B2 (ja) * | 2011-01-13 | 2013-04-24 | 三菱電機株式会社 | レゾルバの異常検出装置 |
| JP5329574B2 (ja) * | 2011-01-25 | 2013-10-30 | 住友重機械工業株式会社 | ハイブリッド型建設機械 |
| JP5413420B2 (ja) * | 2011-08-08 | 2014-02-12 | 株式会社デンソー | 回転機の制御装置 |
| JP5661008B2 (ja) | 2011-09-06 | 2015-01-28 | トヨタ自動車株式会社 | モータ制御システム |
| CN103023426A (zh) * | 2011-09-28 | 2013-04-03 | 西门子公司 | 电机驱动器及驱动方法 |
| EP2765024B1 (en) * | 2011-10-06 | 2021-04-07 | Yamaha Hatsudoki Kabushiki Kaisha | Electric vehicle |
| FR2989543B1 (fr) * | 2012-04-11 | 2014-03-28 | Valeo Sys Controle Moteur Sas | Procede de commande d'une chaine de propulsion electrique d'un vehicule |
| JP6062324B2 (ja) * | 2013-06-14 | 2017-01-18 | 日立オートモティブシステムズ株式会社 | エンジン始動装置およびエンジン始動制御方法 |
| JP5971265B2 (ja) * | 2014-01-20 | 2016-08-17 | トヨタ自動車株式会社 | 昇圧コンバータの制御装置 |
| DE102015102163B4 (de) * | 2014-02-18 | 2021-01-28 | Subaru Corporation | Batteriespannungs-Steuerung und Verfahren zur Steuerung einer Batteriespannung |
| JP6197690B2 (ja) * | 2014-02-21 | 2017-09-20 | トヨタ自動車株式会社 | モータ制御システム |
| JP6335040B2 (ja) * | 2014-06-20 | 2018-05-30 | 株式会社東芝 | 車両用制御装置 |
| JP6350208B2 (ja) * | 2014-10-24 | 2018-07-04 | トヨタ自動車株式会社 | 自動車 |
| JP6497298B2 (ja) * | 2015-11-10 | 2019-04-10 | 株式会社デンソー | 異常診断装置 |
| JP6272291B2 (ja) * | 2015-12-24 | 2018-01-31 | 株式会社Subaru | 車両用電源装置 |
| JP6558291B2 (ja) * | 2016-04-01 | 2019-08-14 | 株式会社デンソー | モータ制御装置 |
| US10782155B2 (en) * | 2016-09-09 | 2020-09-22 | Kabushiki Kaisha Toshiba | Angle detection apparatus and integrated circuit |
| US10500966B2 (en) * | 2016-12-01 | 2019-12-10 | Ford Global Technologies, Llc | Adaptive boost voltage for hybrid vehicle operation |
| JP6933469B2 (ja) * | 2017-02-10 | 2021-09-08 | 株式会社コロナ | モータ制御回路、モータ制御方法、及びプログラム |
| JP6790980B2 (ja) * | 2017-04-12 | 2020-11-25 | トヨタ自動車株式会社 | ハイブリッド車両及びその制御方法 |
| US11186199B2 (en) * | 2019-11-22 | 2021-11-30 | Toyota Motor Engineering & Manufacturing North America, Inc. | HEV battery SOC meter and boost power display |
| US11296644B2 (en) * | 2020-01-20 | 2022-04-05 | Ford Global Technologies, Llc | Alternating passive rectification and 3-phase-short control for motor fault protection |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06225402A (ja) * | 1993-01-21 | 1994-08-12 | Toyota Motor Corp | 電気自動車の制御装置 |
| JPH0923508A (ja) * | 1995-07-07 | 1997-01-21 | Honda Motor Co Ltd | 電動車両の制御装置 |
| JP2003189599A (ja) * | 2001-12-20 | 2003-07-04 | Toyota Motor Corp | 電圧変換装置および電圧変換方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2861680B2 (ja) | 1992-10-13 | 1999-02-24 | 株式会社日立製作所 | 電気自動車用故障検出法及びそれを用いたフェールセイフ制御方法 |
| JPH08140202A (ja) | 1994-11-07 | 1996-05-31 | Hitachi Ltd | 電気車用保護装置及び保護方法 |
| JP3746334B2 (ja) | 1996-08-22 | 2006-02-15 | トヨタ自動車株式会社 | 永久磁石型同期モータの駆動制御装置及び方法 |
| WO2003061104A1 (fr) * | 2002-01-16 | 2003-07-24 | Toyota Jidosha Kabushiki Kaisha | Dispositif de regulation d'un convertisseur de tension, procede de conversion de tension, support de stockage, programme, systeme d'entrainement et vehicule equipe du systeme d'entrainement |
| DE10223384A1 (de) * | 2002-05-25 | 2003-12-04 | Conti Temic Microelectronic | Verfahren zum Betreiben eines Elektromotors |
| JP3928559B2 (ja) | 2003-01-10 | 2007-06-13 | トヨタ自動車株式会社 | 電圧変換装置、故障処理をコンピュータに実行させるプログラムを記録したコンピュータ読取り可能な記録媒体および故障処理方法 |
| JP4103781B2 (ja) * | 2003-11-19 | 2008-06-18 | トヨタ自動車株式会社 | 負荷駆動回路における異常監視装置 |
| JP3991983B2 (ja) | 2003-12-19 | 2007-10-17 | 日産自動車株式会社 | 車両の駆動制御装置 |
| JP4665569B2 (ja) * | 2004-11-30 | 2011-04-06 | トヨタ自動車株式会社 | 電圧変換装置および電圧変換装置における電圧変換の制御をコンピュータに実行させるためのプログラムを記録したコンピュータ読取り可能な記録媒体 |
-
2006
- 2006-01-26 JP JP2006018055A patent/JP4622872B2/ja active Active
- 2006-12-26 AU AU2006336711A patent/AU2006336711B2/en active Active
- 2006-12-26 DE DE602006014447T patent/DE602006014447D1/de active Active
- 2006-12-26 WO PCT/JP2006/326351 patent/WO2007086235A1/en active Application Filing
- 2006-12-26 EP EP06843723A patent/EP1981733B1/en active Active
- 2006-12-26 CN CN2006800517702A patent/CN101336173B/zh active Active
- 2006-12-26 KR KR1020087020820A patent/KR100985837B1/ko active IP Right Grant
- 2006-12-26 US US12/084,648 patent/US7781999B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06225402A (ja) * | 1993-01-21 | 1994-08-12 | Toyota Motor Corp | 電気自動車の制御装置 |
| JPH0923508A (ja) * | 1995-07-07 | 1997-01-21 | Honda Motor Co Ltd | 電動車両の制御装置 |
| JP2003189599A (ja) * | 2001-12-20 | 2003-07-04 | Toyota Motor Corp | 電圧変換装置および電圧変換方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20090230901A1 (en) | 2009-09-17 |
| US7781999B2 (en) | 2010-08-24 |
| KR20080089668A (ko) | 2008-10-07 |
| AU2006336711B2 (en) | 2012-10-04 |
| JP2007202311A (ja) | 2007-08-09 |
| CN101336173B (zh) | 2010-12-22 |
| CN101336173A (zh) | 2008-12-31 |
| AU2006336711A1 (en) | 2007-08-02 |
| EP1981733B1 (en) | 2010-05-19 |
| DE602006014447D1 (de) | 2010-07-01 |
| KR100985837B1 (ko) | 2010-10-08 |
| EP1981733A1 (en) | 2008-10-22 |
| WO2007086235A1 (en) | 2007-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4622872B2 (ja) | 車両の電源装置、車両および車両の電源装置の制御方法 | |
| JP4678374B2 (ja) | 負荷装置の制御装置、および車両 | |
| JP4747968B2 (ja) | モータ駆動装置 | |
| US7759817B2 (en) | Power supply system for driving vehicle | |
| JP4264843B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4618167B2 (ja) | 車両の駆動制御装置、車両の駆動制御方法、および車両 | |
| US7259530B2 (en) | Power output apparatus, motor driving method and computer-readable recording medium having program recorded thereon for allowing computer to execute motor drive control | |
| US8052571B2 (en) | Control device and control method for hybrid vehicle | |
| US8026679B2 (en) | Hybrid vehicle | |
| WO2012120630A1 (ja) | 車両の冷却システム | |
| JP4784339B2 (ja) | 電源制御装置および車両 | |
| WO2007142165A1 (ja) | 車両駆動システムおよびそれを備える車両 | |
| JP2011072067A (ja) | 車両の電源システムおよびそれを備える電動車両 | |
| JP2007185043A (ja) | インバータ装置および車両 | |
| JP2013207833A (ja) | ハイブリッド車両およびその制御方法 | |
| JP2010142073A (ja) | 電動車両の漏電検出システムおよび電動車両 | |
| JP2017165280A (ja) | ハイブリッド車両 | |
| JP2010241361A (ja) | 車両の制御装置および車両 | |
| JP6344345B2 (ja) | ハイブリッド車両 | |
| JP4134988B2 (ja) | モータ制御装置およびそれを備える車両 | |
| JP4518852B2 (ja) | ハイブリッド自動車およびハイブリッド用駆動装置 | |
| JP2011083106A (ja) | 車両の駆動装置 | |
| JP2008022640A (ja) | 車両駆動装置、車両駆動装置の制御方法、車両駆動装置の制御方法をコンピュータに実行させるためのプログラム、およびそのプログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP2007228777A (ja) | 電源制御装置および車両 | |
| JP2010273512A (ja) | モータ駆動システムおよび車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080318 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080318 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100720 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100809 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101005 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101018 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4622872 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131112 Year of fee payment: 3 |