JP3544208B2 - 磁気浮上搬送装置 - Google Patents
磁気浮上搬送装置 Download PDFInfo
- Publication number
- JP3544208B2 JP3544208B2 JP50317294A JP50317294A JP3544208B2 JP 3544208 B2 JP3544208 B2 JP 3544208B2 JP 50317294 A JP50317294 A JP 50317294A JP 50317294 A JP50317294 A JP 50317294A JP 3544208 B2 JP3544208 B2 JP 3544208B2
- Authority
- JP
- Japan
- Prior art keywords
- levitation
- magnetic
- electromagnet
- carrier
- tunnel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005291 magnetic effect Effects 0.000 title claims description 230
- 238000012546 transfer Methods 0.000 title claims description 209
- 238000005339 levitation Methods 0.000 title claims description 171
- 238000005192 partition Methods 0.000 claims description 100
- 238000006073 displacement reaction Methods 0.000 claims description 46
- 230000003014 reinforcing effect Effects 0.000 claims description 17
- 230000032258 transport Effects 0.000 description 104
- 238000007667 floating Methods 0.000 description 73
- 239000000696 magnetic material Substances 0.000 description 65
- 238000000034 method Methods 0.000 description 34
- 230000008569 process Effects 0.000 description 28
- 238000012545 processing Methods 0.000 description 24
- 238000010586 diagram Methods 0.000 description 23
- 235000012431 wafers Nutrition 0.000 description 22
- 238000013016 damping Methods 0.000 description 14
- 230000033001 locomotion Effects 0.000 description 14
- 239000004065 semiconductor Substances 0.000 description 14
- 230000008859 change Effects 0.000 description 12
- 239000000758 substrate Substances 0.000 description 11
- 230000001965 increasing effect Effects 0.000 description 10
- 238000004519 manufacturing process Methods 0.000 description 9
- 229910052782 aluminium Inorganic materials 0.000 description 8
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 8
- 239000004020 conductor Substances 0.000 description 7
- 239000002245 particle Substances 0.000 description 7
- 230000003749 cleanliness Effects 0.000 description 6
- 230000004907 flux Effects 0.000 description 6
- 239000007789 gas Substances 0.000 description 6
- 239000000463 material Substances 0.000 description 6
- 230000002829 reductive effect Effects 0.000 description 6
- 229910001220 stainless steel Inorganic materials 0.000 description 6
- 239000010935 stainless steel Substances 0.000 description 6
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 5
- 230000003321 amplification Effects 0.000 description 5
- 230000002238 attenuated effect Effects 0.000 description 5
- 239000000428 dust Substances 0.000 description 5
- 230000001976 improved effect Effects 0.000 description 5
- 238000003199 nucleic acid amplification method Methods 0.000 description 5
- 239000000919 ceramic Substances 0.000 description 4
- 238000011109 contamination Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 230000005284 excitation Effects 0.000 description 4
- 239000007769 metal material Substances 0.000 description 4
- 230000008093 supporting effect Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 229910001873 dinitrogen Inorganic materials 0.000 description 3
- 239000000314 lubricant Substances 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000010419 fine particle Substances 0.000 description 2
- -1 for example Inorganic materials 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000011261 inert gas Substances 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229910052755 nonmetal Inorganic materials 0.000 description 2
- 230000005298 paramagnetic effect Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000001141 propulsive effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 238000010008 shearing Methods 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 230000005653 Brownian motion process Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 238000005219 brazing Methods 0.000 description 1
- 238000005537 brownian motion Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000000356 contaminant Substances 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 239000012811 non-conductive material Substances 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 238000000206 photolithography Methods 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000007723 transport mechanism Effects 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
Images





































Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67161—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers
- H01L21/67167—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers surrounding a central transfer chamber
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/04—Coating on selected surface areas, e.g. using masks
- C23C14/042—Coating on selected surface areas, e.g. using masks using masks
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67184—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the presence of more than one transfer chamber
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67709—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations using magnetic elements
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67736—Loading to or unloading from a conveyor
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Materials Engineering (AREA)
- Mechanical Engineering (AREA)
- Metallurgy (AREA)
- Organic Chemistry (AREA)
- Non-Mechanical Conveyors (AREA)
- Control Of Vehicles With Linear Motors And Vehicles That Are Magnetically Levitated (AREA)
- Intermediate Stations On Conveyors (AREA)
- Branching, Merging, And Special Transfer Between Conveyors (AREA)
- Specific Conveyance Elements (AREA)
Description
技術分野
本発明は磁気浮上搬送装置に係り、真空中等の高清浄度雰囲気のトンネル内でウエハ等の被搬送物を搭載する搬送台を磁力により浮上させて、隔壁に対して非接触状態にして走行せしめる磁気浮上搬送装置に関する。
背景技術
半導体製造工程においては、加工、各種処理等の工程間のウエハの移送・授受を一貫して清浄空間で行う要求が高まっている。特に、半導体製品は不純物に汚染されると品質不良となり易いので、高度に清浄化されたクリーンルーム内で搬送することが好ましい。しかしながら、半導体の微細化とともに、問題となる粒子径が小さくなるため、従来のクリーンルームで清浄空間を形成するのが難しくなってきており、代わりにブラウン運動が少ないために、空間を粒子が漂うことがない真空中にて、ウエハ等を搬送することが考えられている。すなわちトンネル内部を真空に保ち、真空中でウエハ等の搬送対象物を搭載する搬送台を磁力により浮上させて、隔壁に対して非接触状態にして走行せしめる磁気浮上真空搬送装置が従来から提案されている。
また、一方真空にする代わりにトンネル内に清浄な窒素ガス等を封入して、トンネル隔壁に対して搬送台を非接触状態で走行せしめる磁気浮上搬送装置も提案されている。
例えば、特開昭61−295926号公報、特開平1−299119号公報によれば、搬送台を真空に保持された高清浄度環境の隔壁内の搬送路に沿って、磁気浮上した状態で走行移動させる磁気浮上真空搬送装置が開示されている。又、特開昭63−194502号公報、実開平1−134998号公報等によれば、上述とは逆に、搬送路に列設された浮上用電磁石、変位センサ及び走行に必要なリニアモータ等をトンネル(キャン)内に収納し、トンネル(キャン)外側の真空(清浄雰囲気)中を搬送台を走行させる、トンネル内部に発塵等の可能性のある部材を収納するタイプの磁気浮上真空搬送装置が開示されている。
尚、特開昭53−34272号公報、特開昭61−277303号公報、特開平4−75404号公報、実開昭59−146326号公報等によれば、搬送台(可動体)を搬送路に沿って列設された浮上用電磁石の磁気吸引力により吊り上げ、搬送路から浮上した状態で走行させる磁気浮上搬送装置が開示されている。
しかしながら、例えば特開昭61−295926号公報に開示される真空トンネル(隔壁)内の搬送台を隔壁外の浮上用電磁石により吊上げ走行させる磁気浮上搬送装置においては、搬送台に永久磁石を取り付ける必要があり、又、隔壁断面を複雑な構造にしなければならなかった。このため、搬送台を構成する各種部品及び隔壁自体から種々のガスが放出されたり微粒子が発生するため、高真空度を得難く、被搬送物を汚染させるという問題点があった。
また、トンネル内部に窒素ガスを流して清浄空間を作る場合には、従来はトンネル内部に浮上用電磁石、リニアモータ等を配置していたが、この場合には、電磁石コイルの隙間等に付着した粒子を清浄で完全に取り除くことが難しいため、これら粒子がそのままトンネル内部に放出されてしまうという問題点があった。また、コイルの断線等で、電磁石のコイルを交換するためには、トンネル内部に配置されているため、多大な労力を要するという問題点があった。
又、上述のいわゆるトンネル内部に発塵等の可能性のある部材を収納するタイプの磁気浮上真空搬送装置では、トンネル(キャン)内の浮上用電磁石、変位センサあるいはリニアモータ等に制御電流を供給するケーブルをトンネル(キャン)外の真空等の高清浄度雰囲気中に出さねばならず、ケーブル処理上の問題点、トンネル(キャン)内の構成部品のメンテナンス上の問題点等が発生してしまう。
本発明は、上述の事情に鑑みなされたもので、浮上用電磁石、リニアモータ及び変位センサ等をトンネルの外側に配置し、トンネル内を走行する搬送台を単純な構造、いわゆるキャン化構造としてガス等の発生を防止すると共にトンネル断面積を小さくし、トンネル内の高清浄度を達成すると共に、良好な浮上制御又は走行制御を行うことのできる磁気浮上搬送装置を提供することを目的とする。
又、半導体製造工程では、リソグラフィ、各種被膜の成長、拡散等の多様な処理設備が配備されており、これら各種処理設備間をトンネルで接続し、高清浄度(高真空)雰囲気中で半導体ウエハ等を搬送しなければならない。
このため、トンネルは分岐を有し、分岐点では搬送台はトンネル内を浮上したまま非接触で主搬送路から分岐搬送路に方向転換して浮上走行することのできる実用的な磁気浮上搬送装置を提供することを目的とする。
発明の開示
本発明の第1の態様は、隔壁で形成されたトンネルと、該トンネル内に配置された搬送台と、該搬送台を非接触状態にて浮上支持する複数の浮上用電磁石と、前記搬送台を走行移動させるリニアモータと、前記搬送台の垂直方向距離を検出する変位センサとを備えた磁気浮上搬送装置において、前記浮上用電磁石、リニアモータ及び変位センサを前記トンネルの外側に配置するとともに前記浮上用電磁石、リニアモータ及び変位センサを前記隔壁を貫通してトンネル内にその一部が露出した薄肉の容器状の収納部材に収納したトンネルの構造に関するものである。
本発明の第2の態様は、隔壁で形成された略直交方向の分岐路を有するトンネルと、該トンネル内を浮上して走行し被搬送物を搬送する搬送台と、該搬送台を非接触状態にて浮上支持する前記トンネルの隔壁上部に磁極が少なくとも2列列設された浮上用電磁石と、前記搬送台を非接触状態にて走行させる前記トンネルの隔壁下部に磁極が少なくとも1列列設されたリニアモータを構成する電磁石と、前記搬送台の浮上位置を検出する前記トンネルの隔壁下部に少なくとも2列列設された変位センサと、該変位センサの出力値に基づいて前記浮上用電磁石の励磁電流の制御を行う制御回路とからなり、前記搬送台はその上面の外周に前記2列の浮上用電磁石の磁極に対応した2本の平行な磁性材片と、該磁性材片に直交した2本の平行な磁性材片とを備え、その下面に、前記リニアモータを構成する電磁石の磁極に対応した導電材を備えたことを特徴とする搬送路及び搬送台の構造に関するものである。
【図面の簡単な説明】
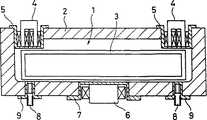
第1図乃至第3図は、本発明の第1実施例に係る磁気浮上搬送装置を示すものであり、第1図はトンネルの構造を示す断面図であり、第2図は浮上用電磁石と薄肉キャップとの関係を示す拡大断面図であり、第3図は変位センサと薄肉キャップとの関係を示す拡大断面図である。
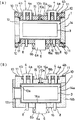
第4図乃至第6図は、本発明の第2実施例に係る磁気浮上搬送装置を示すものであり、第4図はトンネルの構造を示す断面図であり、第5図は第4図の平面図であり、第6図は第5図の要部拡大断面図である。
第7図乃至第16図は、本発明の第3実施例に係る磁気浮上搬送装置を示すものであり、第7図は搬送路と搬送台の構造を示す断面正面図であり、第8図は第7図の磁性材料製板状部材20と浮上用電磁石4の磁極との相対位置関係を説明する部分拡大正面図である。第9図は第7図及び第8図に示す搬送装置に用いられる搬送台の斜視図であり、第10図は略直交方向の分岐を有するトンネルの分岐点における浮上用電磁石の磁極面の配置を示す説明図である。第11図は搬送台上面に固着された磁性材の構造を説明するものであり、(A)は浮上用電磁石の磁極面との関係を示す平面図、(B)は側面図、(C)は磁性材の斜視図である。第12図は搬送台上面に固着された磁性材の構造を説明するものであり、(A)は浮上用電磁石の磁極面との関係を示す平面図、(B)は側面図、(C)は(B)の部分拡大図である。第13図は溝を有する磁性材の構造を説明するものであり、(A)は磁性材の形状を示す平面図、(B)は浮上用電磁石のコの字形の磁極との位置関係を示す側面図、(C)は(B)の拡大図である。第14図、第15図、第16図は本実施例の搬送台上面に固着された磁性材の各種形状を示す斜視図である。
第17図乃至第24図は、本発明の第6実施例に係る磁気浮上搬送装置を示すものであり、第17図は分岐点における搬送路の構造を示す平面構造図であり、移動方向の切換え前の状態を示している。第18図は第17図に示す搬送路の立面構造図であり、第19図は第17図の部分拡大斜視図であり、搬送台が主搬送路を走行している状態を示している。第20図は第17図の部分拡大斜視図であり、搬送台が分岐点に位置している状態を示している。第21図は制御系のブロック図であり、第22図は浮上用電磁石の作動/非作動の磁極を切り換える手順を示す説明図である。第23図及び第24図(A)、(B)は浮上用電磁石のゲインの制御を示す説明図であり、横軸は磁極切換時間を、縦軸はゲインの値をそれぞれ示している。
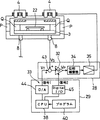
第25図乃至第30図は、本発明の第7実施例に係る磁気浮上搬送装置を示すものであり、第25図は搬送路に沿った断面図であり、第26図は磁気浮上搬送装置の制御系のブロック図であり、第27図は従来の浮上用磁極の切換のシーケンスの説明図であり、第28図は従来の磁極の切換えの説明図であり、第29図は本発明に係る磁極の切換の説明図であり、第30図は本発明の他の実施例の磁極の切換えの説明図である。
第31図乃至第33図は、本発明の第8実施例に係る磁気浮上搬送装置を示すものであり、第31図は制御系のブロック図であり、第32図は着地時のオフセット電圧の時間特性を示す特性図であり、第33図は浮上時のオフセット電圧の時間特性を示す特性図である。
第34図は、本発明の第9実施例に係る磁気浮上搬送装置を示すものであり、受動ダンパを備えた浮上用電磁石の部分断面側面図である。
第35図乃至第36図は、本発明の第10実施例に係る磁気浮上搬送装置を示すものであり、第35図は搬送路及び搬送台の構造を示す断面図であり、第36図はその平面図である。
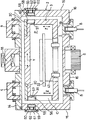
第37図乃至第38図は、本発明の第11実施例に係る磁気浮上搬送装置を示すものであり、第37図は鉛直方向の搬送路を備えた搬送路構造の断面説明図であり、第38図はテーブル部と搬送台の構造の詳細を示す説明図である。
第39図乃至第41図は、本発明の第12実施例に係る磁気浮上搬送装置を示すものであり、第39図はトンネルとプロセス処理装置との接続の説明図であり、第40図は他の実施例のトンネルとプロセス処理装置との接続の説明図であり、第41図は従来のトンネルとプロセス処理装置との接続の説明図である。
発明を実施するための最良の形態
本発明をより詳細に説述するために、添付の図面に従ってこれを説明する。以下の実施例の説明においては、トンネルを内部が真空状態に保持されたトンネルとして説明するが、トンネル内に清浄な窒素(N2)ガス等の気体を流す事によって、外部から隔離された清浄空間を実現する場合にも本発明は適用可能である。
(第1実施例)
以下、本発明に係る磁気浮上搬送装置の第1実施例を第1図乃至第3図を参照して説明する。第1図において、磁気浮上搬送装置は、隔壁2によって形成され内部が真空状態に保持されたトンネル1と、トンネル1内に配置された搬送台3とを備えている。トンネル1の上部には左右に搬送台3を非接触状態にて浮上支持する浮上用電磁石4,4が配設されている。これら浮上用電磁石4,4は大気側に設けられるとともにそれぞれ薄肉の容器状の収納部材を構成する薄肉キャップ5,5に収納されている。薄肉キャップ5は隔壁2を貫通してその底部がトンネル1内に露出して配置されている。
第2図は浮上用電磁石4(コイルは省略している)及び薄肉キャップ5の詳細を示す図であり、薄肉キャップ5はその上部にフランジ部5aを有しており、このフランジ部5aによって隔壁2にボルト10によって固定されている。そして、隔壁2とフランジ部5aとの間にはOリング11が介装され、トンネル1内の真空をシールするようになっている。また薄肉キャップ5の底部5bは浮上用電磁石4の磁力を妨げないように薄肉(t=1〜2mm)に形成されている。そして、薄肉キャップ5の材料は、セラミックスなどの非金属材料または常磁性で電気抵抗がアルミと比べて大きい金属材料、例えばステンレススチール(SUS304)を用いる
一方、トンネル1の下部には、搬送台3を走行移動させるリニアモータを構成する電磁石6が配設されている。リニアモータの電磁石6は大気側に設けられるとともに薄肉の容器状の収納部材を構成する薄肉キャップ7に収納されている。薄肉キャップ7は隔壁2を貫通してその頂部がトンネル1内に露出して配置されている。また薄肉キャップ7の材料は、セラミックスなどの非金属材料または常磁性で電気抵抗がアルミと比べて大きい金属材料、例えばステンレススチール(SUS304)を用いる。
また、トンネル1の底部には、左右に変位センサ8が配置されており、この変位センサ8は隔壁2を貫通してトンネル1内にその頂部が露出した薄肉の容器状の薄肉キャップ9に収納されている。変位センサ8は渦電流センサからなり、薄肉キャップ9は渦電流センサのセンシング作用を妨げないようにセラミックスによって形成されている。第3図は変位センサ8と薄肉キャップ9の詳細を示す図であり、薄肉キャップ9はフランジ部9aを有し、このフランジ部9aと隔壁2との間にはトンネル1内の真空をシールするためのOリング11が介装されている。そして、薄肉キャップ9の頂部9bの肉厚は薄肉(t=1〜2mm)に設定されており、変位センサ8と搬送台3との距離が変位センサ8のセンシング範囲内に入るようにしている。
図示はされていないが、浮上用電磁石4、リニアモータの電磁石6及び変位センサ8は、搬送台進行方向(図1の紙面に垂直な方向)に等間隔にて列設されている。そして、電磁ブレーキを構成する電磁石(図示せず)が搬送台3が停止するべき位置に設けられている。
前述のように構成された磁気浮上搬送装置によれば、変位センサ8は該センサから搬送台3までの垂直方向距離を検出し、検出結果を図示しない浮上制御回路へ出力する。この浮上制御回路は変位センサ8からの出力に応答して、浮上用電磁石4に供給される励磁電流を増減し、搬送台3に作用する磁気的吸引力を制御する。以て搬送台3を鉛直方向に非接触にて安定して浮上させることができる。そして、リニアモータの電磁石6により搬送台3下面に備えられた導電材(図示しない)に渦電流を生ぜしめ、進行方向(図1の紙面に垂直な方向)に付勢し走行せしめる。
本実施例によれば、浮上用電磁石4、リニアモータ6及び変位センサ8がトンネル1の隔壁外側に配設されており、かつ浮上用電磁石4、リニアモータ6及び変位センサ8は、それぞれ隔壁2を貫通してトンネル1内にその一部が露出した薄肉の容器状の薄肉キャップ5,7,9に収納されている。したがって、トンネル1内には搬送台3以外の構成部品が配置されていないため、トンネル1内でのガスの発生が抑えられるとともに微粒子の発生が抑えられ、被搬送物の汚染が防止される。また本実施例によれば、トンネル1内でのガスの発生が抑制できるため、高真空が達成できる。
尚、上記実施例の説明においては、薄肉キャップと隔壁との間をシールするためにOリングを用いたが、薄肉キャップと隔壁との間にメタルシールを介装してもよいし、また薄肉キャップを隔壁に溶接してトンネル内の真空をシールすることもできる。
また、浮上用電磁石、リニアモータ及び変位センサをトンネルの外側に配置したため、コイルや変位センサのメンテナンスの容易化を図ることができる。しかも、これらの部品のメンテナンスを真空を保持したままで行うことが可能となる。
(第2実施例)
以下、本発明に係る磁気浮上搬送装置の第2実施例を第4図乃至第6図を参照して説明する。第4図は磁気浮上搬送装置のトンネル構造(A)、(B)を示す縦断面図であり、第5図はその平面図である。第4図(A)、(B)に示されるように、磁気浮上搬送装置は隔壁で形成され、内部が真空状態に保持されたトンネル1と、このトンネル1内に配設された搬送台3とを備えている。
トンネル構造(A)では、トンネル1の隔壁は左右隔壁13,14と上下隔壁15,16とから構成されている。上下隔壁15,16は,それぞれ真空側に設けられた真空シールド用のステンレス鋼板(SUS304系)からなる薄肉プレート15a,16aと、大気側に設けられた薄肉プレート15a,16aを補強するための剛性を有した厚肉のステンレス鋼板の補強板15b,16bとから構成されている。左右隔壁13,14は、厚肉のアルミ板から構成されている。薄肉プレート15a,16aの板厚tは1mm程度に設定されている。
トンネル構造(B)では、真空トンネル1の隔壁は、真空側に設けられたステンレス鋼板からなる薄肉プレート13a,14a,15a,16aと、大気側に設けられた剛性を有した厚肉のアルミ材の補強板13b,14b,15bとから構成されている。薄肉プレート13a,14a,15a,16aは相互に溶接又はロー付けにより気密封止されている。補強板15bと13b,14bとは二つ割れした構造となっており、相互に接着剤又はボルトにより締結されている。
トンネル構造(A)では、前記上下隔壁15,16と左右隔壁13,14との間には真空シール用のOリング11が介装されている。また上下隔壁15,16と左右隔壁13,14とはボルト10によって締結されている。
また、第6図に示されるように、薄肉プレート15aにはアンカーボルト10aが溶接によって固着されており、このアンカーボルト10aにナット10bを螺合することにより薄肉プレート15aと補強板15bとは一体に締結されている。そして、上部隔壁15を構成する薄肉プレート15aと補強板15bとは前記アンカーボルト10a以外の箇所で接着によって一体化されている。一方、下部隔壁16を構成する薄肉プレート16aと補強板16bとは接着によって一体化されている。
前記上部隔壁15には左右に搬送台3を非接触状態で浮上支持する浮上用電磁石4,4が搬送台の進行方向に等間隔に列設されている(第5図参照)。浮上用電磁石4の磁極4aは補強板15bを貫通して薄肉プレート15aに隣接するように配設されており、コイル4bは補強板15bの外側に配設されている。
また下部隔壁16には搬送台3を走行移動させる電磁石から構成されるリニアモータ6が配設されている。リニアモータ6は搬送台の進行方向に等間隔に配置されている。リニアモータ6の磁極6aは補強板16bを貫通して薄肉プレート16aに隣接するように配設されており、コイル6bは補強板16bの外側に配設されている。また、下部隔壁16には搬送台3の垂直方向距離を検出する変位センサ8が配設されている。
第4図(A)又は(B)に示す搬送装置の作動に際しては、先ず図示しない制御回路により浮上用電磁石4が励磁され、薄肉プレート16aを介して、磁性材(図示せず)が上面に配置された搬送台3に磁気吸引力を作用せしめて搬送台3を浮上させる。そして、搬送台3の浮上量は変位センサ8により薄肉プレート15aを介して検出されて、該センサ8の出力に対応して浮上用電磁石4に供給される励磁電流が制御される。これにより、搬送台3の浮上量が目標浮上位置に制御される。そして、浮上用電磁石4により搬送台3を浮上状態にて保持し、リニアモータ6により搬送台3を進行方向(図1の紙面に垂直な方向)に付勢し走行させる。
本実施例によれば、トンネルの少なくとも上下面の隔壁を真空シールド用の薄肉プレートとこの薄肉プレートを補強する補強板とにより構成し、これら薄肉プレートと補強板とを接着やボルトナット等により接合するようにしたため、隔壁が剛性に優れトンネルの変形を最小限に抑えることができる。しかも、トンネルの隔壁を2ピースで構成することにより、部品特性に合った加工ができ、加工が容易となり製作コストの低減を図ることができる。またOリングの数量を最小限に抑えることができ、高真空を実現できる。
(第3実施例)
以下、本発明に係る磁気浮上搬送装置の第3実施例である搬送路と搬送台の構造を第7図乃至第16図を参照して説明する。
第7図は、搬送路と搬送台の断面構造を示すものであり、搬送台3はステンレス鋼等の非磁性材料製の隔壁2で包囲されたトンネル内を走行する。そして、隔壁2の天井部である隔壁上板15には、浮上用電磁石4が左右の2列に列設されている。一方、隔壁2の下側には、変位センサ8、及びリニアモータを構成する電磁石6が列設されている。
搬送台3の外郭部材19はアルミニウム製であり、該アルミニウム部材19はリニアモータ6と対向する搬送台の下面部分で二次導体(導電体)を構成する。そのため、搬送台3は第7図の紙面に向かって垂直方向に付勢される。
搬送台3の外郭部材19の上面には磁性材料製板状部材(磁性材)20が設けられ、第8図に示すように、該磁性材20は浮上用電磁石4の磁極の幅Wpと等しい幅寸法で形成されている。そして、浮上用電磁石4の磁極の位置に対して、案内方向(第8図の矢印H方向)において搬送台3の両端側(第8図の矢印H方向外側)へ距離aだけ偏寄させて配置してある。但しaは零でもよい。
再び第7図において、搬送台3下方の浮上用電磁石4に相対して配置された変位センサ8は、該センサから搬送台3の下面までの垂直方向距離を検出し、検出結果を図示しない浮上制御回路へ出力する。該浮上制御回路は変位センサ8からの出力に応答して、浮上用電磁石4に供給される励磁電流を増減し、搬送台上面の磁性材料製板状部材20に作用する磁気的吸引力を制御する。以て搬送台3を鉛直方向に吊上げ、隔壁から非接触にて安定して目標位置に浮上させることができる。
浮上用電磁石4に電流が供給され、磁性材料製板状部材20に電磁石20からの磁気吸引力が作用する際に、磁性材20と浮上用電磁石4の磁極面とが上記のような相対位置関係にあるため、該磁性材20には搬送台3の中心に向かう力が作用する。その結果、搬送台3は受動的に案内方向(第8図に示すH方向)に位置決めされるのである。
第7図から明らかなように、搬送台3の外郭部材19の側部には搬送台開口部3−0が形成され、一方、隔壁2の側部には隔壁開口部2−0が形成され、被搬送物を出し入れすることができるようになっている。なお、磁性材料製板状部材20、搬送台3及び搬送台開口部3−0の位置関係については、第9図においてその一例が示されている。
なお、第7図の実施例において、変位センサ8は渦電流型でありアルミ板からなる搬送台下面に生じる渦電流から、搬送台下面の鉛直方向位置を検出するものである。そして、隔壁2の電磁気的影響を避けるため、例えばセラミック製の非導電材料製センサキャップを介装して配置されている。そして、符号46は非常用車輪を示している。
第7図において、浮上用電磁石4,4の中央には電磁石から構成される電磁ブレーキ18が設けられている。該電磁ブレーキを構成する電磁石18は、搬送台3上面中央に固定されたブレーキターゲット(図示せず)と共磁路を形成し、磁気吸引力により搬送台3の位置決めを行う。
ここで、搬送台3内には載置部材21が設けられ、該載置部材21は被搬送物である半導体ウェハ22等が移動中に破損しないように拘束している。
図示はされていないが、左右に配設された浮上用電磁石4、下面のリニアモータ6、浮上用電磁石に対応して下面に配置される変位センサ8は、搬送台進行方向(紙面に垂直な方向)に等間隔にて列設されている。そして、電磁ブレーキ18は搬送台3が停止するべき位置にのみ設けられている。第7図で示す位置は停止位置、すなわち搬送されたウェハ22に所定の処理を施す施設が存在する箇所であるが、搬送台3が停止しない途中箇所には電磁ブレーキ18は設けられていない。そして、隔壁2も進行方向(紙面に垂直な方向)に延びた形状となっている。
作動に際しては、浮上用電磁石4,4により搬送台3を浮上状態にて保持しつつ、リニアモータ6により進行方向に非接触で付勢、走行せしめる。そして、停止箇所において電磁ブレーキ18により停止し、ロボットアーム(図示せず)等を使用して、隔壁開口部2−0、搬送台開口部3−0を介して、ウェハ22の出し入れ作業が行われるのである。
第9図に示すように、搬送台3の外郭部材19の上面にはロの字形の形状の磁性材料製板状部材20が固設されている。そして、搬送台3の外郭部材19の側部には搬送台開口部3−0がその四面に設けられている。
磁性材料製板状部材20は、第14図(A)、(B)に示すような、2列に列設された浮上用電磁石の磁極面に対応した、2本の平行な磁性材片20xと、該磁性材片に直交した2本の平行な磁性材片20yとから構成される。
第10図は、搬送路が直角方向に分岐しているトンネルの分岐点を示している。このような分岐点においては、移動方向M及びPに沿ってトンネル1が分岐しており、2列の浮上用電磁石4がそれぞれ主搬送路及び分岐搬送路に沿って列設されている。搬送台3はその上面に搬送方向及びその直交方向の磁極面に対応した2本の平行な磁性材片及びその直交方向の2本の平行な磁性材片からなる磁性材料製板状部材20を備えていることから、移動方向MからP、或いはPからMへ浮上したまま方向転換することが可能である。
このように搬送台3の上面に第9図に示すようなロの字形の磁性材料製板状部材20を固設すると、搬送台を走行させるリニアモータも移動磁界を生成する電磁石であるので、仮にリニアモータを上部隔壁の中央部に配置すると磁性材料製板状部材20に磁気吸引力を及ぼすこととなり好ましくない。また、空間使用率やリニアモータの及ぼす推力の安定性を考慮すると、搬送台中心に対応する配置が好ましい。そこでリニアモータ6は必然的に下部隔壁の中央部分に配置される。
変位センサ8は渦電流センサ又は誘導型センサであり、鉛直方向の検出対象である搬送台下面のターゲットとの隙間が小さくなる方が、感度、直線性が良い。そして、搬送台は下方(重力方向)に落ちる時に正しく制御される必要がある。従って、変位センサ8を隔壁2のトンネル下面に配置することによって、より精度の高い搬送台の鉛直方向位置制御が可能となる。また、変位センサを隔壁上部に配置するとすれば、浮上用電磁石の磁極間に配置しなければならなくなり、このように配置するとその分磁極幅を大きくしなければならず、浮上用電磁石を大型化するという問題が生じる。それ故、変位センサ8は隔壁2の下面の浮上用電磁石に対応した下方位置に配置されることが好ましい。電磁ブレーキを構成する電磁石18は、残ったスペースである隔壁2の天井板15の浮上用電磁石4の間に配置され、第7図に示すような全体としてバランスのとれたコンパクトな搬送路を構成する部材が配置される。
次に搬送台上面に備えられた磁性材料製板状部材(磁性材)20について詳細に説明する。第11図(A)は、浮上用電磁石の磁極面4と搬送台上面の磁性材20との搬送路の分岐点における位置関係を示している。ロの字型の磁性材20が固設された搬送台は、搬送台が移動する主搬送路、分岐搬送路に沿って列設された、浮上用電磁石の磁極面4a,4bの磁気吸引力によって浮上保持され、リニアモータ(図示しない)により駆動され隔壁から非接触でトンネル中を走行移動する。第11図(A)は、搬送路の分岐場所を示しており、移動方向Mの主搬送路と、移動方向Pの分岐搬送路とが交差している。第11図(C)は、搬送台3に固設される磁性材20の斜視図であり、磁性材20の一辺の幅Wa,Wbは、それぞれ電磁石の磁極の幅Wと概ね同じ幅で構成されている。
第11図(B)は、第11図(A)の側面図であり、搬送台が浮上用電磁石により浮上保持された状態を説明するものである。搬送装置の本体フレームには浮上用電磁石が列設されており、電磁石の磁極面4a,4bは、搬送台の上面に固設された磁性材20に対向するように配置されている。浮上用電磁石は、それぞれコの字形の磁極を有しており、第12図(C)の部分拡大図に示すように電磁石の磁極面より図示しない隔壁及び空隙を介して、磁性材20を通る閉磁路(磁束Φ)が形成される。従って、磁極面4a,4bの端部と磁性材20の一辺の端部間には磁気剪断力Bが生じ、搬送台を受動的に磁気的中心に案内するいわゆる案内剛性が発生する。
第12図(A)は、搬送台上面に固設された磁性材20と、電磁石の磁極面4bとの位置関係の一例を示す上面図であり、電磁石の磁極面4bが、斜線で示すように磁性材20のコート部分に位置している場合を示す。第12図(B)は、そのAA′線に沿った断面図である。電磁石が励磁されると、図中B′で示される2ヶ所の部分が磁極4b及び磁性材20の端部となり、そこで磁気剪断力Bが発生し、移動方向Pに走行する搬送台3は磁気的中心に案内される。
係る口の字形の磁性材が固設された搬送台は、第11図に示すように移動方向Mの主搬送路に沿って走行し、移動方向Pの分岐搬送路との交差点で図示しない電磁ブレーキにより停止する。この交差点で搬送台を浮上保持する磁極面4aより4bに切替え、図示しないリニアモータ等の走行手段によりP方向に駆動することにより分岐搬送路に沿って移動方向Pに走行する。以上は、移動方向MからPへの方向転換であるが、その逆も勿論可能である。即ち、口の字形の磁性材を固設した搬送台では、その移動方向を浮上保持する電磁石の属する搬送路を切替えることによって方向転換を容易に行うことが可能となる。この浮上保持する電磁石の切換方法については、第6実施例において詳述する。
(第4及び第5実施例)
第13図、第15図乃至第16図は、本発明の第4及び第5実施例の磁気浮上搬送装置を示すものである。第13図(A)は磁性材20bの形状を示す平面図である。ロの字型の磁性材20は4辺を構成する部材20b1と、4コーナを構成する部材20bsに分かれており、分かれた部材間にはそれぞれ隙間dを有する。即ち、磁性材20bは、凸状部である4辺の部材20b1と、4コーナの部材20bsとから構成されており、それぞれの部材間には溝である隙間dを有し、この隙間(溝)dは、搬送台の移動方向及びその直交方向に形成されている。
4辺の部材20b1には、それぞれその中央部の搬送台の移動方向及びその直交方向に凹部(溝)24を備えており、4コーナの部材20bsにも、それぞれ中央部に凹部(溝)24を備えている。
第13図(B)は、浮上用電磁石の磁極と磁性材の位置関係を示す側断面図であり、(C)は、その部分拡大断面図である。浮上用電磁石4a,4bは、図示するような断面コの字形の磁極を備えており、磁極面は4b1と4b2に分離されている。磁束Φは、図示するように磁極4b1から磁性材の凸部2b11又は2bs1を通り、溝24の下を通って凸部2b12又は2bs2を通って、磁極4b2を通る閉ループが形成される。4辺の磁性材及び4コーナの磁性材はそれぞれ中央部に凹部(溝)24を有し、且つ隣接材との間に隙間dを有することから、断面コの字形の磁極を有する1個の電磁石に対して、符号Dで示す4ヶ所で磁気剪断力が発生する。従って、搬送台を受動的に磁気的中心に案内するいわゆる案内剛性は、第1の実施例と比較して大幅に増加する。尚、本実施例においても、略口の字形の磁性材2bであるので、搬送路の分岐点で容易に方向転換できることは勿論である。
第15図及び第16図は、磁性材20の変形例である。それぞれ、磁性材の4辺又は4コーナには凹部(溝)24又は隙間dが設けられている。これらの凹部24又は隙間dはその部分で浮上用電磁石の断面コの字形の磁極の磁極面との間に磁気剪断力が発生し、磁気求心力により、搬送台を受動的に磁気的中心に案内するいわゆる案内剛性が高められる。又、これらの変形例においても、略口の字形の磁性材であるので、搬送路の分岐点で容易に方向転換できることは勿論である。
(第6実施例)
以下、本発明に係る磁気浮上搬送装置の第6実施例である略直交方向の分岐路を有する分岐点における搬送台の方向転換動作について第17図乃至第24図を参照しながら説明する。
第17図及び第18図に示すように、本発明に係る磁気浮上搬送装置は、多数の浮上用電磁石4が列設され、分岐点2で主搬送路23aから分岐搬送路23b,23cに分岐された搬送路23と、浮上用電磁石4の磁力により浮上支持され、搬送路23に沿って、図示されていないリニアモータから発生する推進力によって隔壁で仕切られたトンネル(図示しない)内を移動する搬送台4と、分岐点26において搬送台4の移動方向を転換する切換手段25とを備えている。この切換手段25は、分岐点26において複数(この図では4個)の主搬送路の方向に列設された作動状態の浮上用電磁石4にこれと同数の搬送方向の異なる方向に配設された浮上用電磁石4をそれぞれ隣接配置するとともに、搬送台3が一方の搬送路(例えば主搬送路23a)から分岐点26に到着した時に作動状態の一方の浮上用電磁石(例えば電磁石4x)から非作動状態の他方の浮上用電磁石(例えば電磁石4y)に徐々に切換えるようになっている。
搬送台3の搬送路23において、主搬送路23aは主搬送方向Cに向けて配設され、また、分岐搬送路23b,23cはこの主搬送方向に対して例えばT字状又は十字状に直交する方向D,Eに向けて配設されている。なお、分岐搬送路23b,23cはいずれか一方のみでもよく、また主搬送方向Cに対して分岐搬送路23b,23cの方向は直交に限られないが、直交以外では浮上用電磁石を直交方向に対してずらして列設することになるため、概ね90゜の角度が適当である。
本実施例における搬送装置は、第17図乃至第19図に示すように、搬送路23の本体フレーム27の下面に、磁気軸受を構成し浮上磁極とも呼ばれている左右一対の多数の浮上用電磁石4を、搬送方向C,D,又はEに対して所定のピッチで列設している。一次側をなす電磁石4はコイルと磁性体ヨークからなっており、また、搬送台3の本体の上面の周縁部には、浮上用ターゲットとなるヨーク(継鉄)等により形成されて二次側をなす前実施例で詳述した磁性材20が取付けられている。この磁性材20は励磁された電磁石4の磁気吸引力により搬送台3を非接触状態で浮上させるように、電磁石4の下方に図示しないトンネルの隔壁を介して位置している。上記一次側の電磁石4と二次側の磁性材20とにより搬送方向C,D,Eに展開された磁気浮上装置列を構成している。
搬送台3の移動は、図示しないリニアモータによって非接触で駆動されることによって行われる。搬送路23には、リニアモータのステータ(電磁石)が、トンネルの隔壁下面に列設されている。一方、搬送台3の下面には、アルミ板等の導電体が備えられており、リニアモータのステータが形成する空間移動磁界によって、搬送台3の下面の導電体には渦電流が生じ、搬送台3は非接触で移動方向の推進力を受ける。
搬送路23の浮上用電磁石4は、搬送台3の浮上保持に必要な箇所のみを作動状態とする。即ち、列設された電磁石4への電流を、搬送台位置検出信号に従って搬送台3の移動方向に従って順次作動状態、非作動状態にして、浮上対象磁極を切換えて搬送台3の磁性材20への磁気吸引力を次々に生成させることにより、搬送台3は搬送路隔壁の下面と所定のギャップを保持しながら搬送方向C,D,Eに走行する。尚、搬送台の走行に伴う浮上用電磁石の切換動作については次の第8実施例で詳述する。
次に、分岐点26においておこなわれる切換手段25のハード的な構成について第20図により説明する。分岐点26において、図示しないトンネルの隔壁上面には、主搬送路23aの浮上用電磁石4と同一の方向を向いて規則的な列状をなす主搬送路方向に列設された電磁石4xと、分岐搬送路3b,3cの浮上用電磁石4と同一の方向を向いて規則的な列状をなす分岐搬送路方向に列設された電磁石4yとが、下方に磁極面を向けて取付けられている。また、両電磁石4x,4yは互いに直交する位置関係にあり、搬送方向転換のために行われる浮上用電磁石の切換時の振動防止のために隣接配設されている。さらに、各浮上用電磁石4x,4yの直下位置には、搬送台3の浮上位置を検出するための変位センサ8が、トンネルの隔壁(図示しない)に位置するように取付けられている。
第21図は磁気浮上搬送装置の浮上用電磁石の制御系のブロック図である、浮上対象磁極の切換え及び搬送台の浮上位置の制御について以下に、本ブロック図により説明する。
制御回路28は、センサ8の出力値に基づいて、浮上用電磁石4xの励磁電流を制御する閉ループの制御回路である。搬送台3の浮上位置(変位)を検出するセンサ8の信号は、センサアンプ31で増幅され、ゲインコントローラ32で予め制御ユニット29で設定される制御回路28のゲインが調整される。次に、浮上目標値コントローラ33で、予め制御ユニット29で設定された浮上目標値と比較され、補償回路34で閉ループの制御回路の位相が調整され、電力増幅器35で電力増幅され、浮上用電磁石4xの励磁電流として印加される。浮上用電磁石4xには励磁電流に対応した磁気吸引力が生じ、搬送台3の磁性材ターゲットを吸引することにより、浮上位置が制御される。
制御ユニット29は、A/D変換器37、D/A変換器39、ゲイン・浮上目標値の制御信号発生器40、CPU38を包括したものであり、浮上対象磁極の切換え制御を行う。センサ8の信号をセンサアンプ31で増幅後、A/D変換器37によりディジタル信号に変換してCPU38に取込むことにより搬送台3の浮上対象磁極に対する位置が検出される。例えば、移動中の搬送台に対して、ある浮上用電磁石が非作動状態から作動状態に移行するための搬送台位置検出信号を与えることができる。ゲイン・浮上目標値の制御信号発生器40は、制御回路28のゲインコントローラ32及び浮上目標値コントローラ33に、それぞれ、制御回路28のループゲイン及び搬送台の浮上目標位置の信号を与える。従って、非作動状態の浮上用電磁石に対して、ゲイン・浮上目標値の制御信号発生器40にゲインを0からある設定値に(又は浮上目標値を非作動状態に対応するある設定値から作動状態に対応するある設定値に)変化することによって、与えられたゲイン・浮上目標値で作動状態とすることができる。
第26図に示すように、搬送台の進行方向に列設された浮上用電磁石と変位センサは、搬送台の進行にともない進行方向に順番に切り替えられ、進行する搬送台を浮上保持する。センサアンプ8で浮上位置を検出して電力増幅器35の励磁で目標位置に浮上制御する制御回路は、本装置では8セット備えられており、2列に列設された電磁石の相隣接する4対を制御する。制御対象となる電磁石対は、選択信号発生器41からの信号で、スイッチ42が閉じられることによって選択される。
上記のように構成された搬送装置において、制御ユニット29、制御回路28からの制御信号により主搬送路23aの浮上用電磁石4が制御されると、第17図乃至第19図に示すように、この浮上用電磁石4の励磁により発生する磁気吸引力により磁性材20が吸引され、これにより、搬送台3は浮上して、リニアモータによって付勢されて主搬送路23aを矢印C方向に移動し、やがて分岐点26に到着する。搬送台3がさらに主搬送路23aを直進走行する時には、分岐点26において行われる切換手段25における主搬送路方向に列設された電磁石4xを浮上用電磁石4と同様に制御することにより、搬送台3は浮上したままこの分岐点26を通過してさらに前方の主搬送路23aの電磁石4に乗り移り、主搬送路23aの浮上用電磁石4の磁力により浮上し、該電磁石を搬送台位置検出信号に従って切り換えることにより走行が続けられる。これに対して、分岐点26で搬送台3の移動方向を主搬送路23aの方向Cから分岐搬送路3b又は3cの方向D又はEに切換える場合には、切換手段25を上記制御ユニット29、制御回路28により以下のように制御することとなる。
この切換えシーケンスを第22図及び第23図を参照しながら説明する。第22図(A)乃至(D)の符号I,III,1,3は主搬送路方向に列設された電磁石4xの位置に、符号I',III',1',3'は分岐搬送路方向に列設された電磁石4yの位置にそれぞれ対応している。
まず第22図に示すように、搬送台3が分岐点26に到着すると、記号I,III,1,3で示す位置にある主搬送方向の浮上制御対象の電磁石4xの発生する磁気吸引力と案内剛性により、搬送台3は浮上した状態を保ちながら非接触支持される(第22図(A)の状態)。
記号III',1'の位置の電磁石4yによるそれぞれの浮上制御系(ループ)について制御信号発生器40から浮上目標電圧を出力し、上記浮上制御系のゲイン(利得)を0に設定して、開いていたスイッチ42を閉じる。
そして記号III',1'の位置の電磁石4yによるそれぞれの浮上制御系(ループ)について制御信号発生器40を介してゲインを0からある作動状態となる設定値まであらかじめ設定された時間をかけて徐々に増加させて、上記電磁石4yに徐々に電流を流し、電磁石4yを作動状態にさせながら、且つ、記号III,1の位置の電磁石4xによるそれぞれの浮上制御系(ループ)について制御信号発生器40を介して、ゲインをその作動状態の設定値から0まで、ある設定された時間をかけて徐々に減少させた後、閉じていたスイッチ42を開く(第22図(B),第23図参照)。
次に、あらかじめ設定された待ち時間経過後、記号I',3'の位置の電磁石4yによるそれぞれの浮上制御系(ループ)について制御信号発生器40から浮上目標電圧を出力し、上記浮上制御系のゲイン(利得)を0に設定して、開いていたスイッチ42を閉じる。
更に記号I',3'の位置の電磁石4yによるそれぞれの浮上制御系(ループ)について制御信号発生器40を介してゲインを0からある作動状態となる設定値まであらかじめ設定された時間をかけて徐々に増加させて、上記電磁石4yに徐々に電流を流し、電磁石4yを作動状態にさせながら、且つ、記号I,3の位置の電磁石4xによるそれぞれの浮上制御系(ループ)について制御信号発生器40を介して、ゲインをその作動状態の設定値から0まで、ある設定された時間をかけて徐々に減少させた後、閉じていたスイッチ42を開く(第22図(C)、第23図参照)。
以上の切替えシーケンスを通じて、搬送台3は、位置I',III',1',3'に配設され新たに浮上対象磁極となった4個の電磁石4yが生成する磁気吸引力により吊り上げられることとなる(第22図(D)参照)。上記の工程により、当初浮上対象磁極であった主搬送方向に列設された電磁石4xから、搬送台走行方向について約90゜回転させた位置にある分岐搬送路方向に列設された浮上用電磁石4yに浮上対象磁極が切換わることとなり、搬送台3は、分岐搬送路23b又は23cに従ってD方向又はE方向に移動する。本実施例では、分岐点26の電磁石4x,4yのゲインを制御する場合に、第22図に示すように、対角の位置関係にある電磁石を組として、まずIIIからIII'と1から1'の組を同時に切換え、次に、Iから3'と3からI'の組を同時に切換える。切換えはゲインをクロスオーバさせて徐々に変化させているので、切換えの際に発生する搬送台3の振動を大幅に軽減させることができる。
上述の実施例では、作動状態の浮上用電磁石を非作動状態に、且つ非作動状態の浮上用電磁石を作動状態に変化させる際に、制御ユニット29を通じて、予め設定された変化時間に従って、それぞれの制御回路のゲイン(利得)を徐々に変化させる制御手段について説明した。同様に搬送台の浮上目標値となる浮上目標電圧を、制御ユニット29によって徐々に変化させることによっても、同様の効果が達成できる。又、制御回路のゲインを徐々に変化させ、更に浮上目標値となるオフセット電圧を同時に徐々に変化させることによっても、同様の効果が達成できる。更に、第23図は変化時間t0で、ゲイン又は浮上目標値となる電圧を直線的に変化させているが、第24図(A),(B)に示すように、曲線的に変化させてもよい。
また作動状態の浮上用電磁石を非作動状態に、且つ搬送方向の異なる方向に配設された非作動状態の浮上用電磁石を作動状態に変化させる際に、最も隣接した非作動状態の電磁石と作動状態の電磁石を1組として切換える。上述の実施例は、IIIからIII'と1から1'の2組を同時に、次にIから3'と3からI'の2組を同時に切換えるシーケンスを採用している。
しかしながら、この切換えの組合せは各種考えられる。例えば、まずIIIからIII'、次に1から1'、次にIから3'、最後に3からI'という手順で切換えることが考えられる。このような切換える組のシーケンスを適宜選択できるように、制御ユニット29にプログラムしておくことによって、切換え時の搬送台の振動の発生状況等を観察しながら最適の組合せを選択することが可能となる。
このように、本実施例では、浮上対象磁極を搬送台走行方向について約90゜回転させた位置にある切換え対象磁極に切換えているので、T字又は十字の移動が可能となる。また、各磁極のゲインの制御をクロスオーバーしているので、切換の際に搬送台に及ぼされる振動を効果的に抑えることが可能となる。
なお、これとは逆に、搬送台3を分岐搬送路23b又は23cから主搬送路23aに搬送することも同様に容易にできる。
したがって、本実施例によれば、搬送台3の移動方向は、主搬送路23a以外の任意の分岐搬送路23b又は23cに方向転換することができ、搬送台3を水平面上において浮上した状態のままいわゆる直交2自由度をもって移動させることができる。
(第7実施例)
以下、第7実施例である搬送台の走行に伴う、搬送台を吊り上げる浮上用電磁石の切換動作について、第25図乃至第30図を参照して説明する。
第25図は、前述の磁気浮上搬送装置の搬送路に沿った断面図である。搬送台3はリニアモータ6によって駆動され、浮上用電磁石41,42・・・によって浮上保持された状態で、図示しない隔壁で仕切られたトンネル中を矢印の移動方向に走行する。この時、浮上用電磁石43,45は作動状態にあり、浮上用電磁石41,42,44,46,47,48,49は非作動状態にある。そして、搬送台3の移動に伴って、これらの浮上用電磁石には励磁電流が供給され、その磁極は非作動状態から作動状態へ、又、励磁電流が遮断され作動状態から非作動状態に切換えられることによって移動する搬送台を浮上保持する。例えば、図示の状態から、搬送台3が左方向に移動すると磁極42,44が非作動から、作動状態に切換えられ、磁極43,45が作動から、非作動状態に切換えられる。
第26図は、係る磁気浮上搬送装置の制御系のブロック図である。搬送台の浮上位置の制御及び磁極の作動、非作動の切換え制御は、第26図のブロック図に従って行われる。変位センサ81,85・・・からの信号は、センサアンプ31で増幅され、ゲイン設定器32により制御回路ループのゲインが調整される。そして、浮上目標電圧設定器33により、あらかじめ与えられた目標浮上位置となるように電圧が比較され、補償回路34により位相等が調整され、電力増幅器35により電力増幅され、浮上用電磁石の磁極41,45・・・に励磁電流を印加する。本装置においては、センサアンプ31から電力増幅器35に到る制御回路は8セット(電磁石は2列で列設されているので4対分)備えられており、浮上用電磁石41,45・・・に対応する1対分の制御回路のみが図示されている。浮上用電磁石42,43,44,46,47・・・は、それぞれ対応する図示しない制御回路によって制御される。この閉ループ制御回路において、搬送台の浮上目標位置、制御ループのゲインがゲイン・浮上目標電圧信号発生器40からの信号により与えられる。これに対して、磁極の作動から非作動へ、又は、非作動から作動への切換え動作は、変位センサ81,82・・・等からの信号をセンサアンプ31で増幅後、A/D変換器によってディジタル信号に変換して、制御ユニットに取込むことによって行われる。即ち、変位センサ81,82・・・等の信号から、搬送台3の移動を検出し、非作動から作動状態に、或いは、作動から非作動状態に切換える位置選択信号を発生し、ゲイン・浮上目標電圧信号発生器40により、制御回路のゲイン又は浮上目標電圧の信号をゲイン設定器32、浮上目標電圧設定器33に印加することによってそれぞれの磁極の作動、非作動の励磁制御が行われる。
第27図は、従来の浮上用磁極の切換えのシーケンスの説明図である。搬送台移動方向に複数配置された浮上用磁極の作動している磁極を、搬送台移動に伴い搬送台移動方向の次に配置されている非作動の磁極に選択信号発生器41、スイッチ群42を通じて切換える。その切換えの際に、ゲインを個々の磁極に関して設定値から0もしくは0から設定値に到達するまでの制御時間を搬送台の移動速度に応じた設定を行い、それぞれ個別に徐々に変化させることにより磁極の作動から非作動、非作動から作動に移行することにより、浮上用磁極を順次切換える。
第28図(A)は従来の磁極の非作動から作動に移行する動作の説明図である。この例では、スイッチ群42でスイッチを閉じ、制御時間t1で、ゲインが0から設定値V1(浮上目標値VS1からVS2)に達することにより、非作動から作動状態に移行する。第28図(B)は従来の磁極の作動から非作動に移行する動作の説明図である。この例では、制御時間t2で、ゲインが設定値V2から0(浮上目標値VS2からVS1)に達することにより、スイッチ群42でスイッチを開き、作動から非作動状態に移行する。このように、従来、磁極の非作動から作動状態へ、或いは、作動から非作動状態への切換え動作は、搬送方向に配列された磁極毎に個別に搬送台の移動に伴って行われていた。
しかしながら、係る磁気浮上搬送装置において、搬送路上を搬送台が滑らかに走行移動し、搬送台の発進・停止をできる限りスムーズに行う必要があるが、その際に最も問題となるのは、浮上磁極の切換えにより搬送台そのものが振動してしまう現象である。よって、搬送台に振動を及ぼす一原因である浮上用電磁石の磁極を切換える際のその作動から非作動、或いは、非作動から作動に移行させる動作の問題点を解決し、搬送台を滑らかに走行移動させることのできる浮上用電磁石の切換動作方法を開示するものである。
本実施例では、搬送台の移動方向に多数の浮上用電磁石が列設され、該搬送台の移動に伴い作動磁極を切換えて、浮上移動中の搬送台を支持する磁気浮上搬送装置において、作動から非作動又は非作動から作動に電磁石を順次切換える際に、移動方向に配列された少なくとも1組の磁極について、作動から非作動への切換動作及び非作動から作動への切換動作を同時に徐々に進行させるように制御している。
第29図は、作動から非作動又は非作動から作動に浮上用電磁石を順次切換える際に、移動方向に配列された相隣接する1組の磁極について、作動から非作動への切換動作及び非作動から作動への切換動作を同時に徐々に進行させることを示している。第26図において、搬送台3が左方向に移動すると、磁極42の変位センサ82は、搬送台3の到達を検出する。そして、第29図に示すように、作動状態の磁極43と、搬送方向に相隣接する非作動状態の磁極42とを同時に徐々に、それぞれ、作動から非作動状態へ、及び非作動から作動状態へ切換える。この切換動作は、制御時間t0の間に徐々に進行する。尚第29図に示す切換動作は直線的であるが、第30図(A),(B)に示すように、曲線的に行っても良い。
この浮上用電磁石の切換制御は、第26図に示す制御系のブロック図において、ゲイン設定器32により制御回路のトータルのゲインを徐々に磁極42について0から設定値V2迄上昇及び磁極43について現在値V1から0迄下降させることによって行われる。又、浮上目標電圧設定器33により、浮上目標電圧のパラメータであるオフセット電圧を、磁極42についてVS1から設定値VS2迄上昇させると共に、磁極43について現在値VS3からVS4迄下降させることを、同時に制御時間t0で徐々に行ってもよい。更に、ゲイン設定器32により制御回路のゲインを変化させ、次に、浮上目標電圧設定器33の浮上目標値であるオフセット電圧を変化させることを組合せて行うこともできる。
以上の説明は、非作動から作動状態に切換える磁極42と、作動から非作動状態に切換える磁極43の搬送方向に配列された1組の磁極について、状態の切換え動作を同時に進行させるものである。このような磁極の同時切換動作を搬送路の磁極の複数組について行うことも勿論可能であり、更に搬送台の走行安定性を改善する可能性がある。
例えば、磁極42と磁極43の組の他に、磁極44と磁極45の組を同時に切換え動作を進行させることも可能である。即ち,磁極42の変位センサ82が移動してくる搬送台3の到達を検出し、選択信号発生器41及びスイッチ群42を通じて所定のスイッチの開閉を行い磁極42と磁極44を非作動から作動状態に、磁極43と磁極45を作動から非作動状態に同時に、徐々に制御時間t0で切換え動作を進行させる。このように、搬送方向の2組の磁極42,43,44,45を同時に徐々に切換え動作を進行させることにより、搬送台の走行安定性を更に向上させることができる。
尚、第25図では、搬送台3は、搬送方向に3個の磁極によって浮上保持されている。搬送台3をより多数の磁極、例えば4個又は5個によって浮上保持した場合に、3組の磁極を同時に切換えることが可能である。このように、作動から非作動及び非作動から作動の磁極の同時切換の組合わせは、各種考えられる。このような場合には、同時切換の組合わせを適宜選択することが可能であり、組合せの選択により、搬送台の走行に伴う浮上磁極の切換時に生じる搬送台の振動をより低減できる可能性がある。
以上に説明したように、本実施例では磁気浮上搬送装置の搬送台を浮上保持し走行させる浮上磁極の作動、非作動状態の切換え動作を同時に徐々に進行させるようにしたものである。従って、走行に伴う浮上磁極の切換えによる搬送台の振動の発生が防止され、搬送台の走行、或いは停止、発進時の浮上磁極の切換えがスムーズとなり、搬送台を安定走行させることができる。
(第8実施例)
以下、第8実施例である搬送台の浮上/着地の制御について第31図乃至第33図を参照して説明する。
上記した様な磁気浮上搬送装置は、搬送台のトンネル下側隔壁面からの浮上及びトンネル下側隔壁面への着地の際には、一般に制御装置の電源を入、切するだけなので、前記動作が急激に行われるという問題がある。換言すると、浮上或いは着地に際して被搬送物に衝撃を与え、破損してしまうという問題がある。ここで、磁気浮上搬送装置は半導体製造工場等においてウエハ等の各種ワークの移送に用いられることを想定しており、ウエハは非常に割れやすいため、搬送対象物の破損は非常に重大な問題である。又、浮上や着地が急激に行われることは粉塵発生の原因ともなり、半導体製造の際の歩留まりを劣化させてしまう。更に、搬送の際には被搬送物(例えばウエハ等のワーク)の受け渡しを容易にするため、その垂直方向高さが可変であることが望ましい。そして磁気浮上搬送装置の場合は、搬送台の浮上量が自由に調整出来ることが好ましい。また、被搬送物が搬送台に搭載されていないときは、短時間で搬送台を着地状態から浮上状態にでき、搬送時間を短縮できることが好ましい。
本実施例は係る課題を解決するもので、搬送台の浮上及び着地の衝撃を緩和することが出来て、しかも搬送台の浮上量と、浮上・着地に要する時間を自由に調整することが出来る磁気浮上搬送装置を開示する。
第31図は制御系の基本的な構成を示しており、浮上用電磁石4の磁気吸引力を制御して搬送台3を目標位置に浮上させる基本的な動作は、前述の第6実施例、第7実施例と同様であり、その説明を省略する。
センサ8の出力Vsは浮上目標値であるオフセット電圧Vfと加算器43で比較され、その差分がゲイン設定器32に導かれ、センサ8から電力増幅器35に至る制御回路28の制御系の増幅率Kpを決定する。即ち、ゲイン設定器32の出力は位相補償器34に導かれ、更に電力増幅器35に導かれ、浮上用電磁石4に巻回したコイルに流す励磁電流を増減する。電磁石4はコイルに流れる励磁電流による磁気吸引力を搬送台3に及ぼし、搬送台3を磁気吸引力により浮上支持する。従って、制御系が安定な範囲で制御系の増幅率をゲイン設定器32により高く設定することによって、より大きな磁気軸受剛性で搬送台を支持することができる。
オフセット電圧供給手段33は、デジタル処理手段(CPU)38にプログラム40から指令を与え、オフセット電圧Vofを発生させる。また、デジタル処理手段38は、オフセット電圧を決定する発生機構としての機能をも有している。
デジタル処理手段38には、符号40で表現する各種のプログラムを自由に組み込むことが出来て、しかもプログラム40の変更も自在である。そしてプログラム40は、オフセット電圧供給手段から加算器43へ印加されるオフセット電圧の各種特性(例えば時間特性)を所望のものとなる様に作成する。このプログラム作成の手法は、従来公知のソフトウエア作成技法であるため、説明は省略する。
浮上時においては、オフセット電圧VOfと時間tとの関係(時間特性)は第33図の様であるのが好ましい。第33図における時間t0が経過すれば、オフセット電圧VOfが0Vとなるため、搬送台13は制御回路(補償回路)28で固定された基準浮上位置で安定浮上する。
この様なオフセット電圧VOfの時間特性を達成する様なプログラムを作成し、デジタル処理手段38に組み込めば、図示しないオフセット電圧発生機構が作動して、第33図に示す時間特性のオフセット電圧VOfが加算器43へ印加されるのである。
着地時においては、時間特性が第32図の様になるのが好ましい。この場合も上記と同様な処理を行えば、第32図に示す時間特性のオフセット電圧VOfが加算器43へ印加される。
さらに、製造に要する時間全体を第32図、第33図における横軸(時間軸)にとって、各加工ステーションに到達する時点で必要な浮上量の変化に対応してオフセット電圧VOfを変化させて、ライン全体に亘る時間特性を作成し、それをプログラミングすることも可能である。その様にすれば、浮上及び着地の際に衝撃が発生することが無く、しかも加工ステーションにおけるワークの受け渡しが円滑に行われるのである。
搬送台3の浮上位置は、電磁石4が搬送台3に及ぼす鉛直方向の磁気吸引力と搬送台3の重力が等しくなる状態で制御される。つまり位相補償器34に入力する信号が電磁石4に流す励磁電流を決定するのであるから、搬送台3の浮上位置変化と、搬送台3と電磁石4の磁極面との距離の比が比較的小さいならば、電磁石4と搬送台3で構成される磁気回路の洩れ磁束変化が小さく、搬送台3の重量が不変であるならば、制御結果として位相補償器34の入力信号は概ね不変である。
また位相補償器34に入力する信号(VPとする)は、センサ8の出力信号(VSとする)と、加算器43に導くオフセット電圧・ゲイン設定出力供給手段である制御ユニット29が有するデジタル/アナログ変換器44の出力信号1(オフセット電圧、Vfとする)と、オフセット電圧・ゲイン設定出力供給手段である制御ユニット29が有するデジタル信号出力手段45の出力信号2とゲイン設定器60によって設定される増幅率(Kpとする)によって決定され、以下の式に従う。
VP=Kp×(VS−Vf) (1)
D/A変換器44とデジタル信号出力器45はデジタル処理手段(CPU)38の指令によってそれぞれの機能を発揮する。また符号40で示すプログラムによってデジタル処理手段38の行う処理手順を自在に設定、変更が可能である。従って上記位相補償器34の入力電圧VPはプログラム40によって自在に設定できる。
上述したように、搬送台3の浮上位置変化と、搬送台3と電磁石4の磁極面との距離の比が比較的小さい時は、位相補償器28の入力電圧VPを一定に保持する様に制御する。従って増幅率Kpが一定の時、搬送台3の浮上位置を変化させる(センサ出力電圧VSが変化する)には、(1)式で拘束される条件でオフセット電圧Vfを変化させればよい。またオフセット電圧Vfが一定の時には、ゲイン設定器60の増幅率Kpを同様に変化させれば良い。
搬送台3の浮上位置変化が大きい場合は、電磁石4と搬送台3で構成される磁気回路の漏れ磁束が大きく変化し、搬送台3に作用する磁気吸引力を与える有効磁束数が大きく増減するため、電磁石4に流す励磁電流と搬送台3に作用する磁気吸引力の比が大きく変化する。
電磁石4の磁極面と搬送台3の距離が大きく増加すれば漏れ磁束は多くなるため、搬送台3を支持するために電磁石4に流す励磁電流を増加する必要がある。このことは電磁石4、搬送台3、センサ8、制御回路28で構成する磁気浮上制御系のルーブゲインが大きく低下することになり、搬送台3の安定浮上を損なう恐れがある。
この場合にはオフセット電圧Vfの調整だけでは安定浮上の持続を維持できない。そこでゲイン設定器60の増幅率Kpを増加させれば上記の理由による制御系のループゲインの低下を補償でき、搬送台の安定浮上を持続できる。また搬送台3と電磁石4の距離が減少した場合は上述と逆の操作を行う事で同様に補償できる。
本実施例は上記のように構成されているので、ゲイン設定器32の増幅率Kp及びオフセット電圧Vfを変化させることで、搬送台3の浮上位置を任意に設定可能である。
したがって、適当な処理プログラムによって、搬送台の浮上及び着地の衝撃を緩和する制御ができるのに加えて、搬送台の浮上量の調整と浮上着地に要する時間の調整を達成できることができる。そのため、半導体製造ラインに適用することにより、ウエハ等のワークの破損及び粉塵の発生等が防止されて、歩留りが向上する。それと共に、下降ステーションと搬送台との間のワークの受け渡しが改善されて、搬送効率が向上する。
(第9実施例)
以下、第9実施例である搬送路に設けられた受動ダンパについて第34図を参照して説明する。本実施例の受動ダンパは、磁気浮上状態でトンネル中を走行する搬送台と、搬送路と直交する方向の振動が生じた場合に、その振動を吸収して搬送台の振動を減衰させるものである。
浮上用電磁石により吊上げられた搬送台は、案内方向には第3実施例で詳述したように、電磁石のバネ力であるいわゆる案内剛性で支持されている。このため、搬送台になんらかの外力が作用し、Y方向に振動が生じると減衰力が作用しないため振動が止まらないという問題がある。特に搬送台の停止点付近で電磁ブレーキにより走行中の搬送台を停止させようのすると、いちじるしい振動が発生し、隔壁と衝突し金属粉を発生させる。或いは、振動の停止に長時間を要し被搬送物の装填に待ち時間を要するという問題が従来生じていた。本実施例の受動ダンプによれば磁気浮上された搬送台の搬送方向と直交する方向(案内方向)の振動を速やかに吸収することができる。
第34図に示す搬送装置は、搬送路23に設けられた電磁石4の磁気吸引力により、隔壁で形成されたトンネル(図示しない)内の搬送台3を浮上支持して搬送路に従って搬送方向に走行させるようにしている。なお、図中X,Y,Z軸は互いに直交する三次元直交座標をなしており、X方向は搬送方向を、Y方向はこの搬送方向Xに直交する左右方向を、Z方向はX,Y方向に直交する磁気吸引力の方向即ち電磁石4の磁極面4nの法線方向を、それぞれ示している。
本実施例装置においては受動ダンパを備えており、受動ダンパは、吸引力の方向Zと搬送方向Xに対しては電磁石4を所定位置に拘束して支持し、搬送方向Xに直交する左右方向Yに対しては電磁石4を移動可能に支持する支持装置51により構成される。一次側をなす電磁石4は、搬送路の搬送方向Xに所定ピッチで多数個列設されて、磁気軸受を構成し、浮上磁極とも呼ばれている。また、搬送台3の本体の上面の周縁部には、浮上用ターゲットとなるヨーク(継鉄)等により形成されて二次側をなす磁性体ターゲット(磁性材)20が取付けられている。この磁性材20は、励磁された電磁石4の吸引力により搬送台3を非接触状態で浮上させるように、図示しないトンネルの隔壁を介して電磁石4の下方に位置している。上記一次側の電磁石4と二次側の磁性材20とにより、搬送方向Xに展開された磁気軸受列をなす磁気軸受装置を構成している。
受動ダンパを構成する支持装置51について説明すると、搬送路の停止位置等において、本体フレームの固定壁27に上記左右方向(即ちY方向)に向けてリニアレール52が配設されている。浮上用電磁石4の上部にはリニアベアリング53が取付けられ、このリニアベアリング53は、リニアレール52に従ってY方向のみに任意の位置に摺動するようになっている。このリニアレール52とリニアベアリング53とにより、Y方向に自由度を有するリニアガイド支持装置51を構成している。このように、浮上用電磁石4は、リニアベアリング53とともにY方向にのみ移動し,X,Z方向及びX,Y,Z軸回りには常にガタがない状態になっておりしかも移動することがないので、X,Z方向及びX,Y,Z軸回りの運動自由度はなく、Y方向の並進自由度を任意に設定できることとなる。
本支持装置51は、搬送路に対向配置されている本体フレームの固定壁27aと、この固定壁27a間に配設されている電磁石4との間に減衰力付与手段である一対のばね部材54と一対のダッシュポット55とを配設して、電磁石4をY方向の所定位置に保持している。リニアレール52とリニアベアリング53との間に潤滑剤を塗布すれば、この潤滑剤の粘性とこの摺動部における摩擦抵抗力により減衰力が発生して、減衰力付与手段となる。従って、電磁石4がリニアガイドユニットを介してY方向に振動すれば、潤滑剤によりY方向に対する電磁石4の振動を減衰させることもできるが、これだけでは十分な減衰力を得ることはできないことがある。そこで本実施例では、ばね部材54によるばね力に加えて、高い緩衝効率を有するダッシュポット55の緩衝作用を利用することにより、適切な減衰力を任意に設定できるようにしており、これにより、本当の意味で受動安定軸(Y軸)を実現することができる。即ち、電磁石4は、ばね部材54とダッシュポット55とによりY軸方向の並進自由度を制限されているが、この制限要素であるばね部材54とダッシュポット55とを適当に調節することによりY軸を良好な受動安定軸とすることができる。
従って、このような受動ダンパを例えば搬送路の停止点付近に設ければ、停止点付近で生じる搬送台の振動を速やかに吸収減衰させることができる。
(第10実施例)
以下、第10実施例であるトンネルに設けられたマグネットを用いた振動減衰機構(ダンパ)を第35図乃至第36図を参照して説明する。
第35図は本実施例に係る磁気浮上搬送装置の断面正面図、第36図はその平面図である。この磁気浮上搬送装置の基本的な構成は、第3実施例において詳述しているので、同一部分又は相当部分には同一の符号を付してその説明を省略する。
搬送台3における外郭部材19のX方向の両側部には、第1の磁石としての一対の永久磁石56がそれぞれ取付けられている。この第1の永久磁石56は、搬送台側部に形成された凹部57内に固着されている。また、一方の側部には、ウエハ22を出し入れするための矩形状の開口部Oが形成されている。
隔壁2の両側壁15には、第1の永久磁石56との間に磁力を作用させるとともに搬送台3の振動に対して減衰力を付与する第2の磁石としての永久磁石58が取付けられている。両側壁15には、外方(大気側)に開口するとともに、第1の永久磁石56の位置に対応する場所に有底の嵌合溝59が形成されており、この嵌合溝59に第2の永久磁石58がX方向に進退動自在に嵌合されている。嵌合溝59の開口部は蓋部材60により覆われてシール部材を介して密封されており、この蓋部材60は側壁15に着脱可能に取付けられている。
この蓋部材60と第2の永久磁石58との間には、X方向のばね力を付与するためのばね部材61が介装され、このばね部材61により第2の永久磁石58は側壁15の内面側に付勢されている。また、ばね部材61が配設された嵌合溝59の内部スペースには、減衰作用を発揮させるための手段としてのオイル62が充填されており、合2の永久磁石58を含むこの構成により、搬送台3の振動に対して減衰力を付与している。なお、減衰作用を発揮させるためには、上記オイル62の代わりにゴム等の弾性部材を使用してもよく、この場合には、この弾性部材を介してばね部材61を蓋部材60と第2の永久磁石58との間に介装させることになる。
本実施例では第1,第2の永久磁石56,58は互いに反発し合うような磁極の組合せのものにしている。
上記構成を有する本実施例装置においては、電磁石4により搬送台3を、隔壁2で囲まれたトンネル1内に浮上させた状態で、リニアモータ6により進行方向に付勢して走行せしめる。そして停止位置Sにおいて電磁ブレーキ18により搬送台3を停止して、ここで図示しないロボットアーム等を使用して、開口部Oを介してウエハ22の出し入れ作業を行う。
搬送台3がトンネル1を走行する際の搬送台3のX方向に関する位置決めは、磁性材20と電磁石4の磁極面の幅を等しくすることにより、搬送台3をY方向の中心位置に常に引張ることにより行っている。搬送台3がY方向の中心位置にあるときは、搬送台3の第1の永久磁石56と隔壁2の第2の永久磁石58との間に作用する反発力のバランスがとれていて、上記搬送台3はその位置を維持しながら走行する。ところが、搬送台3に遠心力が作用したり振動が発生して搬送台3が方向に外れた場合には、両永久磁石56,58間に働く反発力により、搬送台3は常にY方向中心部に押し戻されて、隔壁2の内面に搬送台3が接触することはない。また、第1の永久磁石56からの磁力が作用する第2の永久磁石58は、ばねと減衰手段を介してトンネル隔壁に取り付けられているため、搬送台3が振動すると、永久磁石58にも反発力が変動して、その動きが伝わる。その動きに対して減衰があるので、振動エネルギーが吸収されて搬送台3の振動を減衰させることとなる。これにより、搬送台3が一旦振動を開始してもその振動は速やかに減衰する。
なお、上記第1,第2の磁石56,58は永久磁石の代わりに電磁石を使用することも可能である。
(第11実施例)
以下、第11実施例である鉛直方向のトンネルを備えた搬送機構を第37図乃至第38図を参照して説明する。
第37図において、搬送台3が走行する第1の搬送路1aは、隔壁2により空間分離され、隔壁内は高真空等の高度の清浄空間であり、トンネルとなっている。
搬送台3は、隔壁2の外側に配備された浮上用電磁石4の磁気吸引力により隔壁2から非接触で浮上支持される。すなわち、浮上用電磁石4は、磁性材を備えた搬送台3を磁気力により吸引し、浮上保持する。リニアモータ6は電磁石であり、搬送台3の下面の導電体に渦電流を発生させることにより搬送台を水平方向に駆動し、搬送台を同様に非接触で水平方向に走行させる。
第2の搬送路1bは、第1の搬送路1aと高さが異なるのみで、トンネル内の搬送台3を浮上用電磁石4により浮上保持し、リニアモータ6により水平方向に搬送台3を走行させる搬送路の構造は共通している。この磁気浮上搬送装置は、これら高さの異なる第1の搬送路1aと第2の搬送路1bとを接続する鉛直方向のトンネルである搬送路65を備える。
鉛直方向の搬送路65は、搬送台3を磁気力で非接触浮上支持する浮上機構とリニアモータとを備えたテーブル部66と、このテーブル部66を鉛直方向に昇降させるエレベータ機構67とを備える。エレベータ機構67は、隔壁により空間分離された鉛直方向の搬送路65を真空状態に保ったまま固定側68に対して軸69を上下方向に移動させる。
従って、例えば第1の搬送路1aを浮上用電磁石4により浮上支持され、リニアモータ6により駆動されて走行する搬送台3が、鉛直方向の搬送路65に入る。テーブル部66のリニアモータが制動力を発生し、搬送台3は鉛直方向の搬送路65のテーブル部66で停止し、浮上用電磁石によりテーブル部66に非接触で浮上支持される。そして、エレベータ機構67によりテーブル部66が降下し、第2の搬送路1bと水平位置に到達した時点でセンサ8が搬送台の位置を検出しエレベータ機構67の動作を停止させる。この時点で、搬送台3は第2の搬送路1bと同じ高さとなる。このようにして、搬送台3は第1の搬送路1aから、第2の搬送路1bへ、或いは第2の搬送路1bから第1の搬送路1aへ高さの異なる搬送路をトンネル隔壁と非接触状態で移動することができる。尚、鉛直方向の搬送路65も、搬送路1a,1bと同様な材質の隔壁2により空間分離された高真空の高度の清浄度空間である。
第38図は、テーブル部66と搬送台3の詳細の構造を示すものである。テーブル部66は、浮上用電磁石4と駆動用電磁石18とを備えている。搬送台3は、例えば半導体ウエハ22を搭載し、搬送するものであり、搬送台3の上面には、浮上用電磁石4のターゲットとなる磁性材20が固定されており、駆動用電磁石18のターゲットとなる磁性材70が同様に固定されている。
浮上用電磁石4はその励磁コイルに電流を流すと磁気吸引力を発生し磁性材20を吸引することにより搬送台3を非接触で浮上保持する。駆動用電磁石18は、水平方向の磁気吸引力を発生し、テーブル部66の直下に進入してくる搬送台3に水平方向のブレーキ力を発生し停止保持する。また、搬送台3を他の搬送路に移動進行させるために、水平方向の駆動力を発生し、搬送台3を他の搬送路に発進させることができる。電磁石4の磁極間にあるセンサ8は、浮上位置の検出のためのものであり、検出された搬送台の位置データをもとに電磁石4のコイルに流れる電流を制御することにより、適正浮上位置に搬送台3を保持する。
これらの電磁石4,18及びセンサ8は、キャン71によってカバーされ、これらの電磁石等より発生する汚染物質が隔壁2内の高真空度空間を汚染するのを防止している。
尚、以上の説明は被搬送物として半導体ウエハを一例として説明したが、例えば、液晶ディスプレイの製造工程における液晶基板の搬送等、トンネルを用いた被搬送物の浮上状態での非接触搬送に広く適用可能である。又、清浄度環境としては、真空状態に限らず、高純度の不活性ガス雰囲気等であってもよい。
以上に説明したように、本実施例の搬送装置は鉛直方向の高さの異なる複数のトンネルである搬送路と、該搬送路を接続する鉛直方向のトンネルの搬送路とを備えたものである。従って、高さの異なる複数の搬送路間を搬送台を非接触で浮上保持した状態で相互に移動させることが可能となる。それゆえ、隔壁により囲まれたトンネル内で、搬送台を鉛直方向に移動させることができ、磁気浮上搬送装置の適用領域を拡大することができる。
(第12実施例)
以下、第12実施例である処理装置へ被搬送物を搬入するための接続室について、第39図乃至第41図を参照しながら説明する。
第41図は、処理装置へ被搬送物を搬入する従来の技術を示す。トンネル1は、半導体ウエハ或いは液晶基板等の被搬送物を搭載した搬送台3が密閉空間の隔壁から浮上した状態で非接触で走行する磁気浮上搬送装置の搬送路である。トンネル1内は真空または高清浄度のN2ガス等で満たされた高清浄度の空間である。トンネル1の隔壁外には、図示しないが搬送台を密閉空間内で磁気浮上させるための磁極を備えた電磁石と、密閉空間隔壁面と搬送台との間の隙間を計測するための変位センサと、該センサの信号によって浮上用電磁石の励磁電流を制御する制御回路と、搬送台を走行させるための加減速用リニアモータと搬送台を停止させるための停止装置とを備えている。
係るトンネル1内を搬送される半導体ウエハ等の被搬送物が、例えば、蒸着、フォトリソグラフィ等のプロセス処理を行うプロセス室74に搬入されるためには、その間の被搬送物の清浄度を保つためバッファとなるチャンバ72が設けられていた。
しかしながら、プロセス前室のロボット73により、搬送台1とプロセス室74との間の基板22の受け渡しを行おうとすると、ロボットの必要とされるリーチが長くなり、ロボットハンドの剛性上の問題を生じる。このため、チャンバ72には別個のハンドリングロボット75を備え、該ロボットにより密閉空間内の搬送台3からウエハ等の基板22を、置き台76に一端移し、プロセス前室77のロボット75が置き台76から基板22を引き出し、プロセス室74に移していた。
このように、プロセス前室77にあるロボット73が、密閉空間内の搬送台から直接プロセス室74へウエハの受渡しを行うのには、ロボット73のハンドのリーチが長くなり、剛性上の問題を生じる。又、チャンバ72にロボット75を設けプロセス室74へ2段階の基板の受け渡しを行うと、高価でありコントロールが複雑なハンドリングロボットをチャンバ72に増設することになる。また基板の受け渡しがチャンバ72のロボット75及びプロセス前室77のロボット73と2回に渡り、ハンドリング回数の増加により生ずる粒子汚染の増加という問題が発生する。
第39図は本発明の接続室を設けた実施例の説明図である。
トンネル1とプロセス前室77との間には、トンネル1と接続する接続室78が設けられており、トンネル1側には仕切りバルブ79が、プロセス前室77側には仕切りバルブ80が設けられている。そして、接続室78には図示しない真空ポンプ或いは高清浄度の不活性ガスの供給源等を備えることから接続室78もトンネル1及びプロセス室74と同様な雰囲気の高清浄度の空間とすることができる。そして、接続室78にはトンネル1と同様に隔壁外に、搬送台3を磁気浮上させるための磁極を備えた浮上用電磁石と、接続室隔壁面と浮上している搬送台との間の隙間を計測するための変位センサと、該センサの信号によって浮上用電磁石の励磁電流を制御する制御回路と、搬送台を走行させるための加減速用リニアモータを構成する電磁石と搬送台を停止させるための停止装置を構成する電磁石とを備えている。
したがって、接続室78の動作は次のようになる。先ずバルブ79,80を閉じた状態で接続室78内を真空ポンプにより真空引きする。そして搬送路であるトンネル1内と同じ真空度に達した時点でバルブ79を開くことによりトンネル1と同様の雰囲気とすることができる。そして搬送台3が基板22を搭載してトンネル1中を走行して、接続室前の位置で停止装置により停止する。そして搬送台3を接続室側にリニアモータにより加速させると搬送台は接続室78に磁気浮上した状態で走行進入してくる。そして接続室78の停止装置により接続室78内部で搬送台3は停止する。
次にバルブ79を閉じてバルブ80を開くことにより、接続室78の雰囲気をプロセス前室77の雰囲気と合わせることができる。そしてプロセス室74のバルブ81を開き、基板22を搬送台3からロボット73により取り出し、プロセス室74に直接移送することができる。また逆にプロセス室74からロボット73により基板22を取り出し搬送台3に移送することも同様である。
第40図は、接続室に関する他の実施例であり、プロセス前室77をトンネル1に対して3方向に接続した例を示す。図に示すようにトンネル1の端部82は、3方向に接続室78を介してプロセス前室77に接続されている。接続室78には搬送台3を磁気浮上させ走行させることのできる浮上用電磁石とリニアモータと停止装置を備えており、各接続室78はそれぞれ搬送台3を磁気浮上状態で壁面から非接触で走行させることができ又停止させることができる。それ故、搬送路であるトンネル1を走行してくる搬送台3は、端部82で一端停止し密閉空間に直接接続された各接続室78に非接触浮上した状態で移動し、そこで各プロセス室74との間でそれぞれのプロセス前室77のロボット73によりウエハ等の被搬送物22の受け渡しを行うことができる。又、例えば接続室78、端部82、接続室78のルートにより、トンネル1を経なくとも、3方向の接続室を介してマルチチャンバのプロセス室間で相互に被搬送物22の受け渡しが可能となる。
以上に説明したように、本実施例はプロセス処理装置へ被搬送物を直接搬入するための接続室を備え、該接続室には搬送台を浮上保持し非接触で走行させ、停止させるための手段を備える。従ってプロセス室とのウエハの受渡しはプロセス前室のロボット1台で行うことが可能となり、ハンドリングロボットの数を増やすことなく、トンネルの清浄雰囲気のままで、粒子汚染の問題を生じることなくプロセス処理装置へ基板を直接搬入することが可能となる。
産業上の利用可能性
以上のように、本発明に係る磁気浮上搬送装置は、隔壁で仕切られたトンネル中を、搬送台を隔壁から非接触で安定に浮上走行させるようにしたものである。従って、被搬送物を、直交方向への分岐等を含めて隔壁との接触による塵埃、粒子汚染等を発生させることなく、自在に高清浄度空間である真空中、又は窒素ガス雰囲気中を安定に搬送することができる。それ故、本発明の磁気浮上搬送装置は、高清浄度空間での搬送が要求され、多様な処理装置が多数配置された半導体製造工場或いは液晶基板の製造工場等での利用に好適である。
本発明は磁気浮上搬送装置に係り、真空中等の高清浄度雰囲気のトンネル内でウエハ等の被搬送物を搭載する搬送台を磁力により浮上させて、隔壁に対して非接触状態にして走行せしめる磁気浮上搬送装置に関する。
背景技術
半導体製造工程においては、加工、各種処理等の工程間のウエハの移送・授受を一貫して清浄空間で行う要求が高まっている。特に、半導体製品は不純物に汚染されると品質不良となり易いので、高度に清浄化されたクリーンルーム内で搬送することが好ましい。しかしながら、半導体の微細化とともに、問題となる粒子径が小さくなるため、従来のクリーンルームで清浄空間を形成するのが難しくなってきており、代わりにブラウン運動が少ないために、空間を粒子が漂うことがない真空中にて、ウエハ等を搬送することが考えられている。すなわちトンネル内部を真空に保ち、真空中でウエハ等の搬送対象物を搭載する搬送台を磁力により浮上させて、隔壁に対して非接触状態にして走行せしめる磁気浮上真空搬送装置が従来から提案されている。
また、一方真空にする代わりにトンネル内に清浄な窒素ガス等を封入して、トンネル隔壁に対して搬送台を非接触状態で走行せしめる磁気浮上搬送装置も提案されている。
例えば、特開昭61−295926号公報、特開平1−299119号公報によれば、搬送台を真空に保持された高清浄度環境の隔壁内の搬送路に沿って、磁気浮上した状態で走行移動させる磁気浮上真空搬送装置が開示されている。又、特開昭63−194502号公報、実開平1−134998号公報等によれば、上述とは逆に、搬送路に列設された浮上用電磁石、変位センサ及び走行に必要なリニアモータ等をトンネル(キャン)内に収納し、トンネル(キャン)外側の真空(清浄雰囲気)中を搬送台を走行させる、トンネル内部に発塵等の可能性のある部材を収納するタイプの磁気浮上真空搬送装置が開示されている。
尚、特開昭53−34272号公報、特開昭61−277303号公報、特開平4−75404号公報、実開昭59−146326号公報等によれば、搬送台(可動体)を搬送路に沿って列設された浮上用電磁石の磁気吸引力により吊り上げ、搬送路から浮上した状態で走行させる磁気浮上搬送装置が開示されている。
しかしながら、例えば特開昭61−295926号公報に開示される真空トンネル(隔壁)内の搬送台を隔壁外の浮上用電磁石により吊上げ走行させる磁気浮上搬送装置においては、搬送台に永久磁石を取り付ける必要があり、又、隔壁断面を複雑な構造にしなければならなかった。このため、搬送台を構成する各種部品及び隔壁自体から種々のガスが放出されたり微粒子が発生するため、高真空度を得難く、被搬送物を汚染させるという問題点があった。
また、トンネル内部に窒素ガスを流して清浄空間を作る場合には、従来はトンネル内部に浮上用電磁石、リニアモータ等を配置していたが、この場合には、電磁石コイルの隙間等に付着した粒子を清浄で完全に取り除くことが難しいため、これら粒子がそのままトンネル内部に放出されてしまうという問題点があった。また、コイルの断線等で、電磁石のコイルを交換するためには、トンネル内部に配置されているため、多大な労力を要するという問題点があった。
又、上述のいわゆるトンネル内部に発塵等の可能性のある部材を収納するタイプの磁気浮上真空搬送装置では、トンネル(キャン)内の浮上用電磁石、変位センサあるいはリニアモータ等に制御電流を供給するケーブルをトンネル(キャン)外の真空等の高清浄度雰囲気中に出さねばならず、ケーブル処理上の問題点、トンネル(キャン)内の構成部品のメンテナンス上の問題点等が発生してしまう。
本発明は、上述の事情に鑑みなされたもので、浮上用電磁石、リニアモータ及び変位センサ等をトンネルの外側に配置し、トンネル内を走行する搬送台を単純な構造、いわゆるキャン化構造としてガス等の発生を防止すると共にトンネル断面積を小さくし、トンネル内の高清浄度を達成すると共に、良好な浮上制御又は走行制御を行うことのできる磁気浮上搬送装置を提供することを目的とする。
又、半導体製造工程では、リソグラフィ、各種被膜の成長、拡散等の多様な処理設備が配備されており、これら各種処理設備間をトンネルで接続し、高清浄度(高真空)雰囲気中で半導体ウエハ等を搬送しなければならない。
このため、トンネルは分岐を有し、分岐点では搬送台はトンネル内を浮上したまま非接触で主搬送路から分岐搬送路に方向転換して浮上走行することのできる実用的な磁気浮上搬送装置を提供することを目的とする。
発明の開示
本発明の第1の態様は、隔壁で形成されたトンネルと、該トンネル内に配置された搬送台と、該搬送台を非接触状態にて浮上支持する複数の浮上用電磁石と、前記搬送台を走行移動させるリニアモータと、前記搬送台の垂直方向距離を検出する変位センサとを備えた磁気浮上搬送装置において、前記浮上用電磁石、リニアモータ及び変位センサを前記トンネルの外側に配置するとともに前記浮上用電磁石、リニアモータ及び変位センサを前記隔壁を貫通してトンネル内にその一部が露出した薄肉の容器状の収納部材に収納したトンネルの構造に関するものである。
本発明の第2の態様は、隔壁で形成された略直交方向の分岐路を有するトンネルと、該トンネル内を浮上して走行し被搬送物を搬送する搬送台と、該搬送台を非接触状態にて浮上支持する前記トンネルの隔壁上部に磁極が少なくとも2列列設された浮上用電磁石と、前記搬送台を非接触状態にて走行させる前記トンネルの隔壁下部に磁極が少なくとも1列列設されたリニアモータを構成する電磁石と、前記搬送台の浮上位置を検出する前記トンネルの隔壁下部に少なくとも2列列設された変位センサと、該変位センサの出力値に基づいて前記浮上用電磁石の励磁電流の制御を行う制御回路とからなり、前記搬送台はその上面の外周に前記2列の浮上用電磁石の磁極に対応した2本の平行な磁性材片と、該磁性材片に直交した2本の平行な磁性材片とを備え、その下面に、前記リニアモータを構成する電磁石の磁極に対応した導電材を備えたことを特徴とする搬送路及び搬送台の構造に関するものである。
【図面の簡単な説明】
第1図乃至第3図は、本発明の第1実施例に係る磁気浮上搬送装置を示すものであり、第1図はトンネルの構造を示す断面図であり、第2図は浮上用電磁石と薄肉キャップとの関係を示す拡大断面図であり、第3図は変位センサと薄肉キャップとの関係を示す拡大断面図である。
第4図乃至第6図は、本発明の第2実施例に係る磁気浮上搬送装置を示すものであり、第4図はトンネルの構造を示す断面図であり、第5図は第4図の平面図であり、第6図は第5図の要部拡大断面図である。
第7図乃至第16図は、本発明の第3実施例に係る磁気浮上搬送装置を示すものであり、第7図は搬送路と搬送台の構造を示す断面正面図であり、第8図は第7図の磁性材料製板状部材20と浮上用電磁石4の磁極との相対位置関係を説明する部分拡大正面図である。第9図は第7図及び第8図に示す搬送装置に用いられる搬送台の斜視図であり、第10図は略直交方向の分岐を有するトンネルの分岐点における浮上用電磁石の磁極面の配置を示す説明図である。第11図は搬送台上面に固着された磁性材の構造を説明するものであり、(A)は浮上用電磁石の磁極面との関係を示す平面図、(B)は側面図、(C)は磁性材の斜視図である。第12図は搬送台上面に固着された磁性材の構造を説明するものであり、(A)は浮上用電磁石の磁極面との関係を示す平面図、(B)は側面図、(C)は(B)の部分拡大図である。第13図は溝を有する磁性材の構造を説明するものであり、(A)は磁性材の形状を示す平面図、(B)は浮上用電磁石のコの字形の磁極との位置関係を示す側面図、(C)は(B)の拡大図である。第14図、第15図、第16図は本実施例の搬送台上面に固着された磁性材の各種形状を示す斜視図である。
第17図乃至第24図は、本発明の第6実施例に係る磁気浮上搬送装置を示すものであり、第17図は分岐点における搬送路の構造を示す平面構造図であり、移動方向の切換え前の状態を示している。第18図は第17図に示す搬送路の立面構造図であり、第19図は第17図の部分拡大斜視図であり、搬送台が主搬送路を走行している状態を示している。第20図は第17図の部分拡大斜視図であり、搬送台が分岐点に位置している状態を示している。第21図は制御系のブロック図であり、第22図は浮上用電磁石の作動/非作動の磁極を切り換える手順を示す説明図である。第23図及び第24図(A)、(B)は浮上用電磁石のゲインの制御を示す説明図であり、横軸は磁極切換時間を、縦軸はゲインの値をそれぞれ示している。
第25図乃至第30図は、本発明の第7実施例に係る磁気浮上搬送装置を示すものであり、第25図は搬送路に沿った断面図であり、第26図は磁気浮上搬送装置の制御系のブロック図であり、第27図は従来の浮上用磁極の切換のシーケンスの説明図であり、第28図は従来の磁極の切換えの説明図であり、第29図は本発明に係る磁極の切換の説明図であり、第30図は本発明の他の実施例の磁極の切換えの説明図である。
第31図乃至第33図は、本発明の第8実施例に係る磁気浮上搬送装置を示すものであり、第31図は制御系のブロック図であり、第32図は着地時のオフセット電圧の時間特性を示す特性図であり、第33図は浮上時のオフセット電圧の時間特性を示す特性図である。
第34図は、本発明の第9実施例に係る磁気浮上搬送装置を示すものであり、受動ダンパを備えた浮上用電磁石の部分断面側面図である。
第35図乃至第36図は、本発明の第10実施例に係る磁気浮上搬送装置を示すものであり、第35図は搬送路及び搬送台の構造を示す断面図であり、第36図はその平面図である。
第37図乃至第38図は、本発明の第11実施例に係る磁気浮上搬送装置を示すものであり、第37図は鉛直方向の搬送路を備えた搬送路構造の断面説明図であり、第38図はテーブル部と搬送台の構造の詳細を示す説明図である。
第39図乃至第41図は、本発明の第12実施例に係る磁気浮上搬送装置を示すものであり、第39図はトンネルとプロセス処理装置との接続の説明図であり、第40図は他の実施例のトンネルとプロセス処理装置との接続の説明図であり、第41図は従来のトンネルとプロセス処理装置との接続の説明図である。
発明を実施するための最良の形態
本発明をより詳細に説述するために、添付の図面に従ってこれを説明する。以下の実施例の説明においては、トンネルを内部が真空状態に保持されたトンネルとして説明するが、トンネル内に清浄な窒素(N2)ガス等の気体を流す事によって、外部から隔離された清浄空間を実現する場合にも本発明は適用可能である。
(第1実施例)
以下、本発明に係る磁気浮上搬送装置の第1実施例を第1図乃至第3図を参照して説明する。第1図において、磁気浮上搬送装置は、隔壁2によって形成され内部が真空状態に保持されたトンネル1と、トンネル1内に配置された搬送台3とを備えている。トンネル1の上部には左右に搬送台3を非接触状態にて浮上支持する浮上用電磁石4,4が配設されている。これら浮上用電磁石4,4は大気側に設けられるとともにそれぞれ薄肉の容器状の収納部材を構成する薄肉キャップ5,5に収納されている。薄肉キャップ5は隔壁2を貫通してその底部がトンネル1内に露出して配置されている。
第2図は浮上用電磁石4(コイルは省略している)及び薄肉キャップ5の詳細を示す図であり、薄肉キャップ5はその上部にフランジ部5aを有しており、このフランジ部5aによって隔壁2にボルト10によって固定されている。そして、隔壁2とフランジ部5aとの間にはOリング11が介装され、トンネル1内の真空をシールするようになっている。また薄肉キャップ5の底部5bは浮上用電磁石4の磁力を妨げないように薄肉(t=1〜2mm)に形成されている。そして、薄肉キャップ5の材料は、セラミックスなどの非金属材料または常磁性で電気抵抗がアルミと比べて大きい金属材料、例えばステンレススチール(SUS304)を用いる
一方、トンネル1の下部には、搬送台3を走行移動させるリニアモータを構成する電磁石6が配設されている。リニアモータの電磁石6は大気側に設けられるとともに薄肉の容器状の収納部材を構成する薄肉キャップ7に収納されている。薄肉キャップ7は隔壁2を貫通してその頂部がトンネル1内に露出して配置されている。また薄肉キャップ7の材料は、セラミックスなどの非金属材料または常磁性で電気抵抗がアルミと比べて大きい金属材料、例えばステンレススチール(SUS304)を用いる。
また、トンネル1の底部には、左右に変位センサ8が配置されており、この変位センサ8は隔壁2を貫通してトンネル1内にその頂部が露出した薄肉の容器状の薄肉キャップ9に収納されている。変位センサ8は渦電流センサからなり、薄肉キャップ9は渦電流センサのセンシング作用を妨げないようにセラミックスによって形成されている。第3図は変位センサ8と薄肉キャップ9の詳細を示す図であり、薄肉キャップ9はフランジ部9aを有し、このフランジ部9aと隔壁2との間にはトンネル1内の真空をシールするためのOリング11が介装されている。そして、薄肉キャップ9の頂部9bの肉厚は薄肉(t=1〜2mm)に設定されており、変位センサ8と搬送台3との距離が変位センサ8のセンシング範囲内に入るようにしている。
図示はされていないが、浮上用電磁石4、リニアモータの電磁石6及び変位センサ8は、搬送台進行方向(図1の紙面に垂直な方向)に等間隔にて列設されている。そして、電磁ブレーキを構成する電磁石(図示せず)が搬送台3が停止するべき位置に設けられている。
前述のように構成された磁気浮上搬送装置によれば、変位センサ8は該センサから搬送台3までの垂直方向距離を検出し、検出結果を図示しない浮上制御回路へ出力する。この浮上制御回路は変位センサ8からの出力に応答して、浮上用電磁石4に供給される励磁電流を増減し、搬送台3に作用する磁気的吸引力を制御する。以て搬送台3を鉛直方向に非接触にて安定して浮上させることができる。そして、リニアモータの電磁石6により搬送台3下面に備えられた導電材(図示しない)に渦電流を生ぜしめ、進行方向(図1の紙面に垂直な方向)に付勢し走行せしめる。
本実施例によれば、浮上用電磁石4、リニアモータ6及び変位センサ8がトンネル1の隔壁外側に配設されており、かつ浮上用電磁石4、リニアモータ6及び変位センサ8は、それぞれ隔壁2を貫通してトンネル1内にその一部が露出した薄肉の容器状の薄肉キャップ5,7,9に収納されている。したがって、トンネル1内には搬送台3以外の構成部品が配置されていないため、トンネル1内でのガスの発生が抑えられるとともに微粒子の発生が抑えられ、被搬送物の汚染が防止される。また本実施例によれば、トンネル1内でのガスの発生が抑制できるため、高真空が達成できる。
尚、上記実施例の説明においては、薄肉キャップと隔壁との間をシールするためにOリングを用いたが、薄肉キャップと隔壁との間にメタルシールを介装してもよいし、また薄肉キャップを隔壁に溶接してトンネル内の真空をシールすることもできる。
また、浮上用電磁石、リニアモータ及び変位センサをトンネルの外側に配置したため、コイルや変位センサのメンテナンスの容易化を図ることができる。しかも、これらの部品のメンテナンスを真空を保持したままで行うことが可能となる。
(第2実施例)
以下、本発明に係る磁気浮上搬送装置の第2実施例を第4図乃至第6図を参照して説明する。第4図は磁気浮上搬送装置のトンネル構造(A)、(B)を示す縦断面図であり、第5図はその平面図である。第4図(A)、(B)に示されるように、磁気浮上搬送装置は隔壁で形成され、内部が真空状態に保持されたトンネル1と、このトンネル1内に配設された搬送台3とを備えている。
トンネル構造(A)では、トンネル1の隔壁は左右隔壁13,14と上下隔壁15,16とから構成されている。上下隔壁15,16は,それぞれ真空側に設けられた真空シールド用のステンレス鋼板(SUS304系)からなる薄肉プレート15a,16aと、大気側に設けられた薄肉プレート15a,16aを補強するための剛性を有した厚肉のステンレス鋼板の補強板15b,16bとから構成されている。左右隔壁13,14は、厚肉のアルミ板から構成されている。薄肉プレート15a,16aの板厚tは1mm程度に設定されている。
トンネル構造(B)では、真空トンネル1の隔壁は、真空側に設けられたステンレス鋼板からなる薄肉プレート13a,14a,15a,16aと、大気側に設けられた剛性を有した厚肉のアルミ材の補強板13b,14b,15bとから構成されている。薄肉プレート13a,14a,15a,16aは相互に溶接又はロー付けにより気密封止されている。補強板15bと13b,14bとは二つ割れした構造となっており、相互に接着剤又はボルトにより締結されている。
トンネル構造(A)では、前記上下隔壁15,16と左右隔壁13,14との間には真空シール用のOリング11が介装されている。また上下隔壁15,16と左右隔壁13,14とはボルト10によって締結されている。
また、第6図に示されるように、薄肉プレート15aにはアンカーボルト10aが溶接によって固着されており、このアンカーボルト10aにナット10bを螺合することにより薄肉プレート15aと補強板15bとは一体に締結されている。そして、上部隔壁15を構成する薄肉プレート15aと補強板15bとは前記アンカーボルト10a以外の箇所で接着によって一体化されている。一方、下部隔壁16を構成する薄肉プレート16aと補強板16bとは接着によって一体化されている。
前記上部隔壁15には左右に搬送台3を非接触状態で浮上支持する浮上用電磁石4,4が搬送台の進行方向に等間隔に列設されている(第5図参照)。浮上用電磁石4の磁極4aは補強板15bを貫通して薄肉プレート15aに隣接するように配設されており、コイル4bは補強板15bの外側に配設されている。
また下部隔壁16には搬送台3を走行移動させる電磁石から構成されるリニアモータ6が配設されている。リニアモータ6は搬送台の進行方向に等間隔に配置されている。リニアモータ6の磁極6aは補強板16bを貫通して薄肉プレート16aに隣接するように配設されており、コイル6bは補強板16bの外側に配設されている。また、下部隔壁16には搬送台3の垂直方向距離を検出する変位センサ8が配設されている。
第4図(A)又は(B)に示す搬送装置の作動に際しては、先ず図示しない制御回路により浮上用電磁石4が励磁され、薄肉プレート16aを介して、磁性材(図示せず)が上面に配置された搬送台3に磁気吸引力を作用せしめて搬送台3を浮上させる。そして、搬送台3の浮上量は変位センサ8により薄肉プレート15aを介して検出されて、該センサ8の出力に対応して浮上用電磁石4に供給される励磁電流が制御される。これにより、搬送台3の浮上量が目標浮上位置に制御される。そして、浮上用電磁石4により搬送台3を浮上状態にて保持し、リニアモータ6により搬送台3を進行方向(図1の紙面に垂直な方向)に付勢し走行させる。
本実施例によれば、トンネルの少なくとも上下面の隔壁を真空シールド用の薄肉プレートとこの薄肉プレートを補強する補強板とにより構成し、これら薄肉プレートと補強板とを接着やボルトナット等により接合するようにしたため、隔壁が剛性に優れトンネルの変形を最小限に抑えることができる。しかも、トンネルの隔壁を2ピースで構成することにより、部品特性に合った加工ができ、加工が容易となり製作コストの低減を図ることができる。またOリングの数量を最小限に抑えることができ、高真空を実現できる。
(第3実施例)
以下、本発明に係る磁気浮上搬送装置の第3実施例である搬送路と搬送台の構造を第7図乃至第16図を参照して説明する。
第7図は、搬送路と搬送台の断面構造を示すものであり、搬送台3はステンレス鋼等の非磁性材料製の隔壁2で包囲されたトンネル内を走行する。そして、隔壁2の天井部である隔壁上板15には、浮上用電磁石4が左右の2列に列設されている。一方、隔壁2の下側には、変位センサ8、及びリニアモータを構成する電磁石6が列設されている。
搬送台3の外郭部材19はアルミニウム製であり、該アルミニウム部材19はリニアモータ6と対向する搬送台の下面部分で二次導体(導電体)を構成する。そのため、搬送台3は第7図の紙面に向かって垂直方向に付勢される。
搬送台3の外郭部材19の上面には磁性材料製板状部材(磁性材)20が設けられ、第8図に示すように、該磁性材20は浮上用電磁石4の磁極の幅Wpと等しい幅寸法で形成されている。そして、浮上用電磁石4の磁極の位置に対して、案内方向(第8図の矢印H方向)において搬送台3の両端側(第8図の矢印H方向外側)へ距離aだけ偏寄させて配置してある。但しaは零でもよい。
再び第7図において、搬送台3下方の浮上用電磁石4に相対して配置された変位センサ8は、該センサから搬送台3の下面までの垂直方向距離を検出し、検出結果を図示しない浮上制御回路へ出力する。該浮上制御回路は変位センサ8からの出力に応答して、浮上用電磁石4に供給される励磁電流を増減し、搬送台上面の磁性材料製板状部材20に作用する磁気的吸引力を制御する。以て搬送台3を鉛直方向に吊上げ、隔壁から非接触にて安定して目標位置に浮上させることができる。
浮上用電磁石4に電流が供給され、磁性材料製板状部材20に電磁石20からの磁気吸引力が作用する際に、磁性材20と浮上用電磁石4の磁極面とが上記のような相対位置関係にあるため、該磁性材20には搬送台3の中心に向かう力が作用する。その結果、搬送台3は受動的に案内方向(第8図に示すH方向)に位置決めされるのである。
第7図から明らかなように、搬送台3の外郭部材19の側部には搬送台開口部3−0が形成され、一方、隔壁2の側部には隔壁開口部2−0が形成され、被搬送物を出し入れすることができるようになっている。なお、磁性材料製板状部材20、搬送台3及び搬送台開口部3−0の位置関係については、第9図においてその一例が示されている。
なお、第7図の実施例において、変位センサ8は渦電流型でありアルミ板からなる搬送台下面に生じる渦電流から、搬送台下面の鉛直方向位置を検出するものである。そして、隔壁2の電磁気的影響を避けるため、例えばセラミック製の非導電材料製センサキャップを介装して配置されている。そして、符号46は非常用車輪を示している。
第7図において、浮上用電磁石4,4の中央には電磁石から構成される電磁ブレーキ18が設けられている。該電磁ブレーキを構成する電磁石18は、搬送台3上面中央に固定されたブレーキターゲット(図示せず)と共磁路を形成し、磁気吸引力により搬送台3の位置決めを行う。
ここで、搬送台3内には載置部材21が設けられ、該載置部材21は被搬送物である半導体ウェハ22等が移動中に破損しないように拘束している。
図示はされていないが、左右に配設された浮上用電磁石4、下面のリニアモータ6、浮上用電磁石に対応して下面に配置される変位センサ8は、搬送台進行方向(紙面に垂直な方向)に等間隔にて列設されている。そして、電磁ブレーキ18は搬送台3が停止するべき位置にのみ設けられている。第7図で示す位置は停止位置、すなわち搬送されたウェハ22に所定の処理を施す施設が存在する箇所であるが、搬送台3が停止しない途中箇所には電磁ブレーキ18は設けられていない。そして、隔壁2も進行方向(紙面に垂直な方向)に延びた形状となっている。
作動に際しては、浮上用電磁石4,4により搬送台3を浮上状態にて保持しつつ、リニアモータ6により進行方向に非接触で付勢、走行せしめる。そして、停止箇所において電磁ブレーキ18により停止し、ロボットアーム(図示せず)等を使用して、隔壁開口部2−0、搬送台開口部3−0を介して、ウェハ22の出し入れ作業が行われるのである。
第9図に示すように、搬送台3の外郭部材19の上面にはロの字形の形状の磁性材料製板状部材20が固設されている。そして、搬送台3の外郭部材19の側部には搬送台開口部3−0がその四面に設けられている。
磁性材料製板状部材20は、第14図(A)、(B)に示すような、2列に列設された浮上用電磁石の磁極面に対応した、2本の平行な磁性材片20xと、該磁性材片に直交した2本の平行な磁性材片20yとから構成される。
第10図は、搬送路が直角方向に分岐しているトンネルの分岐点を示している。このような分岐点においては、移動方向M及びPに沿ってトンネル1が分岐しており、2列の浮上用電磁石4がそれぞれ主搬送路及び分岐搬送路に沿って列設されている。搬送台3はその上面に搬送方向及びその直交方向の磁極面に対応した2本の平行な磁性材片及びその直交方向の2本の平行な磁性材片からなる磁性材料製板状部材20を備えていることから、移動方向MからP、或いはPからMへ浮上したまま方向転換することが可能である。
このように搬送台3の上面に第9図に示すようなロの字形の磁性材料製板状部材20を固設すると、搬送台を走行させるリニアモータも移動磁界を生成する電磁石であるので、仮にリニアモータを上部隔壁の中央部に配置すると磁性材料製板状部材20に磁気吸引力を及ぼすこととなり好ましくない。また、空間使用率やリニアモータの及ぼす推力の安定性を考慮すると、搬送台中心に対応する配置が好ましい。そこでリニアモータ6は必然的に下部隔壁の中央部分に配置される。
変位センサ8は渦電流センサ又は誘導型センサであり、鉛直方向の検出対象である搬送台下面のターゲットとの隙間が小さくなる方が、感度、直線性が良い。そして、搬送台は下方(重力方向)に落ちる時に正しく制御される必要がある。従って、変位センサ8を隔壁2のトンネル下面に配置することによって、より精度の高い搬送台の鉛直方向位置制御が可能となる。また、変位センサを隔壁上部に配置するとすれば、浮上用電磁石の磁極間に配置しなければならなくなり、このように配置するとその分磁極幅を大きくしなければならず、浮上用電磁石を大型化するという問題が生じる。それ故、変位センサ8は隔壁2の下面の浮上用電磁石に対応した下方位置に配置されることが好ましい。電磁ブレーキを構成する電磁石18は、残ったスペースである隔壁2の天井板15の浮上用電磁石4の間に配置され、第7図に示すような全体としてバランスのとれたコンパクトな搬送路を構成する部材が配置される。
次に搬送台上面に備えられた磁性材料製板状部材(磁性材)20について詳細に説明する。第11図(A)は、浮上用電磁石の磁極面4と搬送台上面の磁性材20との搬送路の分岐点における位置関係を示している。ロの字型の磁性材20が固設された搬送台は、搬送台が移動する主搬送路、分岐搬送路に沿って列設された、浮上用電磁石の磁極面4a,4bの磁気吸引力によって浮上保持され、リニアモータ(図示しない)により駆動され隔壁から非接触でトンネル中を走行移動する。第11図(A)は、搬送路の分岐場所を示しており、移動方向Mの主搬送路と、移動方向Pの分岐搬送路とが交差している。第11図(C)は、搬送台3に固設される磁性材20の斜視図であり、磁性材20の一辺の幅Wa,Wbは、それぞれ電磁石の磁極の幅Wと概ね同じ幅で構成されている。
第11図(B)は、第11図(A)の側面図であり、搬送台が浮上用電磁石により浮上保持された状態を説明するものである。搬送装置の本体フレームには浮上用電磁石が列設されており、電磁石の磁極面4a,4bは、搬送台の上面に固設された磁性材20に対向するように配置されている。浮上用電磁石は、それぞれコの字形の磁極を有しており、第12図(C)の部分拡大図に示すように電磁石の磁極面より図示しない隔壁及び空隙を介して、磁性材20を通る閉磁路(磁束Φ)が形成される。従って、磁極面4a,4bの端部と磁性材20の一辺の端部間には磁気剪断力Bが生じ、搬送台を受動的に磁気的中心に案内するいわゆる案内剛性が発生する。
第12図(A)は、搬送台上面に固設された磁性材20と、電磁石の磁極面4bとの位置関係の一例を示す上面図であり、電磁石の磁極面4bが、斜線で示すように磁性材20のコート部分に位置している場合を示す。第12図(B)は、そのAA′線に沿った断面図である。電磁石が励磁されると、図中B′で示される2ヶ所の部分が磁極4b及び磁性材20の端部となり、そこで磁気剪断力Bが発生し、移動方向Pに走行する搬送台3は磁気的中心に案内される。
係る口の字形の磁性材が固設された搬送台は、第11図に示すように移動方向Mの主搬送路に沿って走行し、移動方向Pの分岐搬送路との交差点で図示しない電磁ブレーキにより停止する。この交差点で搬送台を浮上保持する磁極面4aより4bに切替え、図示しないリニアモータ等の走行手段によりP方向に駆動することにより分岐搬送路に沿って移動方向Pに走行する。以上は、移動方向MからPへの方向転換であるが、その逆も勿論可能である。即ち、口の字形の磁性材を固設した搬送台では、その移動方向を浮上保持する電磁石の属する搬送路を切替えることによって方向転換を容易に行うことが可能となる。この浮上保持する電磁石の切換方法については、第6実施例において詳述する。
(第4及び第5実施例)
第13図、第15図乃至第16図は、本発明の第4及び第5実施例の磁気浮上搬送装置を示すものである。第13図(A)は磁性材20bの形状を示す平面図である。ロの字型の磁性材20は4辺を構成する部材20b1と、4コーナを構成する部材20bsに分かれており、分かれた部材間にはそれぞれ隙間dを有する。即ち、磁性材20bは、凸状部である4辺の部材20b1と、4コーナの部材20bsとから構成されており、それぞれの部材間には溝である隙間dを有し、この隙間(溝)dは、搬送台の移動方向及びその直交方向に形成されている。
4辺の部材20b1には、それぞれその中央部の搬送台の移動方向及びその直交方向に凹部(溝)24を備えており、4コーナの部材20bsにも、それぞれ中央部に凹部(溝)24を備えている。
第13図(B)は、浮上用電磁石の磁極と磁性材の位置関係を示す側断面図であり、(C)は、その部分拡大断面図である。浮上用電磁石4a,4bは、図示するような断面コの字形の磁極を備えており、磁極面は4b1と4b2に分離されている。磁束Φは、図示するように磁極4b1から磁性材の凸部2b11又は2bs1を通り、溝24の下を通って凸部2b12又は2bs2を通って、磁極4b2を通る閉ループが形成される。4辺の磁性材及び4コーナの磁性材はそれぞれ中央部に凹部(溝)24を有し、且つ隣接材との間に隙間dを有することから、断面コの字形の磁極を有する1個の電磁石に対して、符号Dで示す4ヶ所で磁気剪断力が発生する。従って、搬送台を受動的に磁気的中心に案内するいわゆる案内剛性は、第1の実施例と比較して大幅に増加する。尚、本実施例においても、略口の字形の磁性材2bであるので、搬送路の分岐点で容易に方向転換できることは勿論である。
第15図及び第16図は、磁性材20の変形例である。それぞれ、磁性材の4辺又は4コーナには凹部(溝)24又は隙間dが設けられている。これらの凹部24又は隙間dはその部分で浮上用電磁石の断面コの字形の磁極の磁極面との間に磁気剪断力が発生し、磁気求心力により、搬送台を受動的に磁気的中心に案内するいわゆる案内剛性が高められる。又、これらの変形例においても、略口の字形の磁性材であるので、搬送路の分岐点で容易に方向転換できることは勿論である。
(第6実施例)
以下、本発明に係る磁気浮上搬送装置の第6実施例である略直交方向の分岐路を有する分岐点における搬送台の方向転換動作について第17図乃至第24図を参照しながら説明する。
第17図及び第18図に示すように、本発明に係る磁気浮上搬送装置は、多数の浮上用電磁石4が列設され、分岐点2で主搬送路23aから分岐搬送路23b,23cに分岐された搬送路23と、浮上用電磁石4の磁力により浮上支持され、搬送路23に沿って、図示されていないリニアモータから発生する推進力によって隔壁で仕切られたトンネル(図示しない)内を移動する搬送台4と、分岐点26において搬送台4の移動方向を転換する切換手段25とを備えている。この切換手段25は、分岐点26において複数(この図では4個)の主搬送路の方向に列設された作動状態の浮上用電磁石4にこれと同数の搬送方向の異なる方向に配設された浮上用電磁石4をそれぞれ隣接配置するとともに、搬送台3が一方の搬送路(例えば主搬送路23a)から分岐点26に到着した時に作動状態の一方の浮上用電磁石(例えば電磁石4x)から非作動状態の他方の浮上用電磁石(例えば電磁石4y)に徐々に切換えるようになっている。
搬送台3の搬送路23において、主搬送路23aは主搬送方向Cに向けて配設され、また、分岐搬送路23b,23cはこの主搬送方向に対して例えばT字状又は十字状に直交する方向D,Eに向けて配設されている。なお、分岐搬送路23b,23cはいずれか一方のみでもよく、また主搬送方向Cに対して分岐搬送路23b,23cの方向は直交に限られないが、直交以外では浮上用電磁石を直交方向に対してずらして列設することになるため、概ね90゜の角度が適当である。
本実施例における搬送装置は、第17図乃至第19図に示すように、搬送路23の本体フレーム27の下面に、磁気軸受を構成し浮上磁極とも呼ばれている左右一対の多数の浮上用電磁石4を、搬送方向C,D,又はEに対して所定のピッチで列設している。一次側をなす電磁石4はコイルと磁性体ヨークからなっており、また、搬送台3の本体の上面の周縁部には、浮上用ターゲットとなるヨーク(継鉄)等により形成されて二次側をなす前実施例で詳述した磁性材20が取付けられている。この磁性材20は励磁された電磁石4の磁気吸引力により搬送台3を非接触状態で浮上させるように、電磁石4の下方に図示しないトンネルの隔壁を介して位置している。上記一次側の電磁石4と二次側の磁性材20とにより搬送方向C,D,Eに展開された磁気浮上装置列を構成している。
搬送台3の移動は、図示しないリニアモータによって非接触で駆動されることによって行われる。搬送路23には、リニアモータのステータ(電磁石)が、トンネルの隔壁下面に列設されている。一方、搬送台3の下面には、アルミ板等の導電体が備えられており、リニアモータのステータが形成する空間移動磁界によって、搬送台3の下面の導電体には渦電流が生じ、搬送台3は非接触で移動方向の推進力を受ける。
搬送路23の浮上用電磁石4は、搬送台3の浮上保持に必要な箇所のみを作動状態とする。即ち、列設された電磁石4への電流を、搬送台位置検出信号に従って搬送台3の移動方向に従って順次作動状態、非作動状態にして、浮上対象磁極を切換えて搬送台3の磁性材20への磁気吸引力を次々に生成させることにより、搬送台3は搬送路隔壁の下面と所定のギャップを保持しながら搬送方向C,D,Eに走行する。尚、搬送台の走行に伴う浮上用電磁石の切換動作については次の第8実施例で詳述する。
次に、分岐点26においておこなわれる切換手段25のハード的な構成について第20図により説明する。分岐点26において、図示しないトンネルの隔壁上面には、主搬送路23aの浮上用電磁石4と同一の方向を向いて規則的な列状をなす主搬送路方向に列設された電磁石4xと、分岐搬送路3b,3cの浮上用電磁石4と同一の方向を向いて規則的な列状をなす分岐搬送路方向に列設された電磁石4yとが、下方に磁極面を向けて取付けられている。また、両電磁石4x,4yは互いに直交する位置関係にあり、搬送方向転換のために行われる浮上用電磁石の切換時の振動防止のために隣接配設されている。さらに、各浮上用電磁石4x,4yの直下位置には、搬送台3の浮上位置を検出するための変位センサ8が、トンネルの隔壁(図示しない)に位置するように取付けられている。
第21図は磁気浮上搬送装置の浮上用電磁石の制御系のブロック図である、浮上対象磁極の切換え及び搬送台の浮上位置の制御について以下に、本ブロック図により説明する。
制御回路28は、センサ8の出力値に基づいて、浮上用電磁石4xの励磁電流を制御する閉ループの制御回路である。搬送台3の浮上位置(変位)を検出するセンサ8の信号は、センサアンプ31で増幅され、ゲインコントローラ32で予め制御ユニット29で設定される制御回路28のゲインが調整される。次に、浮上目標値コントローラ33で、予め制御ユニット29で設定された浮上目標値と比較され、補償回路34で閉ループの制御回路の位相が調整され、電力増幅器35で電力増幅され、浮上用電磁石4xの励磁電流として印加される。浮上用電磁石4xには励磁電流に対応した磁気吸引力が生じ、搬送台3の磁性材ターゲットを吸引することにより、浮上位置が制御される。
制御ユニット29は、A/D変換器37、D/A変換器39、ゲイン・浮上目標値の制御信号発生器40、CPU38を包括したものであり、浮上対象磁極の切換え制御を行う。センサ8の信号をセンサアンプ31で増幅後、A/D変換器37によりディジタル信号に変換してCPU38に取込むことにより搬送台3の浮上対象磁極に対する位置が検出される。例えば、移動中の搬送台に対して、ある浮上用電磁石が非作動状態から作動状態に移行するための搬送台位置検出信号を与えることができる。ゲイン・浮上目標値の制御信号発生器40は、制御回路28のゲインコントローラ32及び浮上目標値コントローラ33に、それぞれ、制御回路28のループゲイン及び搬送台の浮上目標位置の信号を与える。従って、非作動状態の浮上用電磁石に対して、ゲイン・浮上目標値の制御信号発生器40にゲインを0からある設定値に(又は浮上目標値を非作動状態に対応するある設定値から作動状態に対応するある設定値に)変化することによって、与えられたゲイン・浮上目標値で作動状態とすることができる。
第26図に示すように、搬送台の進行方向に列設された浮上用電磁石と変位センサは、搬送台の進行にともない進行方向に順番に切り替えられ、進行する搬送台を浮上保持する。センサアンプ8で浮上位置を検出して電力増幅器35の励磁で目標位置に浮上制御する制御回路は、本装置では8セット備えられており、2列に列設された電磁石の相隣接する4対を制御する。制御対象となる電磁石対は、選択信号発生器41からの信号で、スイッチ42が閉じられることによって選択される。
上記のように構成された搬送装置において、制御ユニット29、制御回路28からの制御信号により主搬送路23aの浮上用電磁石4が制御されると、第17図乃至第19図に示すように、この浮上用電磁石4の励磁により発生する磁気吸引力により磁性材20が吸引され、これにより、搬送台3は浮上して、リニアモータによって付勢されて主搬送路23aを矢印C方向に移動し、やがて分岐点26に到着する。搬送台3がさらに主搬送路23aを直進走行する時には、分岐点26において行われる切換手段25における主搬送路方向に列設された電磁石4xを浮上用電磁石4と同様に制御することにより、搬送台3は浮上したままこの分岐点26を通過してさらに前方の主搬送路23aの電磁石4に乗り移り、主搬送路23aの浮上用電磁石4の磁力により浮上し、該電磁石を搬送台位置検出信号に従って切り換えることにより走行が続けられる。これに対して、分岐点26で搬送台3の移動方向を主搬送路23aの方向Cから分岐搬送路3b又は3cの方向D又はEに切換える場合には、切換手段25を上記制御ユニット29、制御回路28により以下のように制御することとなる。
この切換えシーケンスを第22図及び第23図を参照しながら説明する。第22図(A)乃至(D)の符号I,III,1,3は主搬送路方向に列設された電磁石4xの位置に、符号I',III',1',3'は分岐搬送路方向に列設された電磁石4yの位置にそれぞれ対応している。
まず第22図に示すように、搬送台3が分岐点26に到着すると、記号I,III,1,3で示す位置にある主搬送方向の浮上制御対象の電磁石4xの発生する磁気吸引力と案内剛性により、搬送台3は浮上した状態を保ちながら非接触支持される(第22図(A)の状態)。
記号III',1'の位置の電磁石4yによるそれぞれの浮上制御系(ループ)について制御信号発生器40から浮上目標電圧を出力し、上記浮上制御系のゲイン(利得)を0に設定して、開いていたスイッチ42を閉じる。
そして記号III',1'の位置の電磁石4yによるそれぞれの浮上制御系(ループ)について制御信号発生器40を介してゲインを0からある作動状態となる設定値まであらかじめ設定された時間をかけて徐々に増加させて、上記電磁石4yに徐々に電流を流し、電磁石4yを作動状態にさせながら、且つ、記号III,1の位置の電磁石4xによるそれぞれの浮上制御系(ループ)について制御信号発生器40を介して、ゲインをその作動状態の設定値から0まで、ある設定された時間をかけて徐々に減少させた後、閉じていたスイッチ42を開く(第22図(B),第23図参照)。
次に、あらかじめ設定された待ち時間経過後、記号I',3'の位置の電磁石4yによるそれぞれの浮上制御系(ループ)について制御信号発生器40から浮上目標電圧を出力し、上記浮上制御系のゲイン(利得)を0に設定して、開いていたスイッチ42を閉じる。
更に記号I',3'の位置の電磁石4yによるそれぞれの浮上制御系(ループ)について制御信号発生器40を介してゲインを0からある作動状態となる設定値まであらかじめ設定された時間をかけて徐々に増加させて、上記電磁石4yに徐々に電流を流し、電磁石4yを作動状態にさせながら、且つ、記号I,3の位置の電磁石4xによるそれぞれの浮上制御系(ループ)について制御信号発生器40を介して、ゲインをその作動状態の設定値から0まで、ある設定された時間をかけて徐々に減少させた後、閉じていたスイッチ42を開く(第22図(C)、第23図参照)。
以上の切替えシーケンスを通じて、搬送台3は、位置I',III',1',3'に配設され新たに浮上対象磁極となった4個の電磁石4yが生成する磁気吸引力により吊り上げられることとなる(第22図(D)参照)。上記の工程により、当初浮上対象磁極であった主搬送方向に列設された電磁石4xから、搬送台走行方向について約90゜回転させた位置にある分岐搬送路方向に列設された浮上用電磁石4yに浮上対象磁極が切換わることとなり、搬送台3は、分岐搬送路23b又は23cに従ってD方向又はE方向に移動する。本実施例では、分岐点26の電磁石4x,4yのゲインを制御する場合に、第22図に示すように、対角の位置関係にある電磁石を組として、まずIIIからIII'と1から1'の組を同時に切換え、次に、Iから3'と3からI'の組を同時に切換える。切換えはゲインをクロスオーバさせて徐々に変化させているので、切換えの際に発生する搬送台3の振動を大幅に軽減させることができる。
上述の実施例では、作動状態の浮上用電磁石を非作動状態に、且つ非作動状態の浮上用電磁石を作動状態に変化させる際に、制御ユニット29を通じて、予め設定された変化時間に従って、それぞれの制御回路のゲイン(利得)を徐々に変化させる制御手段について説明した。同様に搬送台の浮上目標値となる浮上目標電圧を、制御ユニット29によって徐々に変化させることによっても、同様の効果が達成できる。又、制御回路のゲインを徐々に変化させ、更に浮上目標値となるオフセット電圧を同時に徐々に変化させることによっても、同様の効果が達成できる。更に、第23図は変化時間t0で、ゲイン又は浮上目標値となる電圧を直線的に変化させているが、第24図(A),(B)に示すように、曲線的に変化させてもよい。
また作動状態の浮上用電磁石を非作動状態に、且つ搬送方向の異なる方向に配設された非作動状態の浮上用電磁石を作動状態に変化させる際に、最も隣接した非作動状態の電磁石と作動状態の電磁石を1組として切換える。上述の実施例は、IIIからIII'と1から1'の2組を同時に、次にIから3'と3からI'の2組を同時に切換えるシーケンスを採用している。
しかしながら、この切換えの組合せは各種考えられる。例えば、まずIIIからIII'、次に1から1'、次にIから3'、最後に3からI'という手順で切換えることが考えられる。このような切換える組のシーケンスを適宜選択できるように、制御ユニット29にプログラムしておくことによって、切換え時の搬送台の振動の発生状況等を観察しながら最適の組合せを選択することが可能となる。
このように、本実施例では、浮上対象磁極を搬送台走行方向について約90゜回転させた位置にある切換え対象磁極に切換えているので、T字又は十字の移動が可能となる。また、各磁極のゲインの制御をクロスオーバーしているので、切換の際に搬送台に及ぼされる振動を効果的に抑えることが可能となる。
なお、これとは逆に、搬送台3を分岐搬送路23b又は23cから主搬送路23aに搬送することも同様に容易にできる。
したがって、本実施例によれば、搬送台3の移動方向は、主搬送路23a以外の任意の分岐搬送路23b又は23cに方向転換することができ、搬送台3を水平面上において浮上した状態のままいわゆる直交2自由度をもって移動させることができる。
(第7実施例)
以下、第7実施例である搬送台の走行に伴う、搬送台を吊り上げる浮上用電磁石の切換動作について、第25図乃至第30図を参照して説明する。
第25図は、前述の磁気浮上搬送装置の搬送路に沿った断面図である。搬送台3はリニアモータ6によって駆動され、浮上用電磁石41,42・・・によって浮上保持された状態で、図示しない隔壁で仕切られたトンネル中を矢印の移動方向に走行する。この時、浮上用電磁石43,45は作動状態にあり、浮上用電磁石41,42,44,46,47,48,49は非作動状態にある。そして、搬送台3の移動に伴って、これらの浮上用電磁石には励磁電流が供給され、その磁極は非作動状態から作動状態へ、又、励磁電流が遮断され作動状態から非作動状態に切換えられることによって移動する搬送台を浮上保持する。例えば、図示の状態から、搬送台3が左方向に移動すると磁極42,44が非作動から、作動状態に切換えられ、磁極43,45が作動から、非作動状態に切換えられる。
第26図は、係る磁気浮上搬送装置の制御系のブロック図である。搬送台の浮上位置の制御及び磁極の作動、非作動の切換え制御は、第26図のブロック図に従って行われる。変位センサ81,85・・・からの信号は、センサアンプ31で増幅され、ゲイン設定器32により制御回路ループのゲインが調整される。そして、浮上目標電圧設定器33により、あらかじめ与えられた目標浮上位置となるように電圧が比較され、補償回路34により位相等が調整され、電力増幅器35により電力増幅され、浮上用電磁石の磁極41,45・・・に励磁電流を印加する。本装置においては、センサアンプ31から電力増幅器35に到る制御回路は8セット(電磁石は2列で列設されているので4対分)備えられており、浮上用電磁石41,45・・・に対応する1対分の制御回路のみが図示されている。浮上用電磁石42,43,44,46,47・・・は、それぞれ対応する図示しない制御回路によって制御される。この閉ループ制御回路において、搬送台の浮上目標位置、制御ループのゲインがゲイン・浮上目標電圧信号発生器40からの信号により与えられる。これに対して、磁極の作動から非作動へ、又は、非作動から作動への切換え動作は、変位センサ81,82・・・等からの信号をセンサアンプ31で増幅後、A/D変換器によってディジタル信号に変換して、制御ユニットに取込むことによって行われる。即ち、変位センサ81,82・・・等の信号から、搬送台3の移動を検出し、非作動から作動状態に、或いは、作動から非作動状態に切換える位置選択信号を発生し、ゲイン・浮上目標電圧信号発生器40により、制御回路のゲイン又は浮上目標電圧の信号をゲイン設定器32、浮上目標電圧設定器33に印加することによってそれぞれの磁極の作動、非作動の励磁制御が行われる。
第27図は、従来の浮上用磁極の切換えのシーケンスの説明図である。搬送台移動方向に複数配置された浮上用磁極の作動している磁極を、搬送台移動に伴い搬送台移動方向の次に配置されている非作動の磁極に選択信号発生器41、スイッチ群42を通じて切換える。その切換えの際に、ゲインを個々の磁極に関して設定値から0もしくは0から設定値に到達するまでの制御時間を搬送台の移動速度に応じた設定を行い、それぞれ個別に徐々に変化させることにより磁極の作動から非作動、非作動から作動に移行することにより、浮上用磁極を順次切換える。
第28図(A)は従来の磁極の非作動から作動に移行する動作の説明図である。この例では、スイッチ群42でスイッチを閉じ、制御時間t1で、ゲインが0から設定値V1(浮上目標値VS1からVS2)に達することにより、非作動から作動状態に移行する。第28図(B)は従来の磁極の作動から非作動に移行する動作の説明図である。この例では、制御時間t2で、ゲインが設定値V2から0(浮上目標値VS2からVS1)に達することにより、スイッチ群42でスイッチを開き、作動から非作動状態に移行する。このように、従来、磁極の非作動から作動状態へ、或いは、作動から非作動状態への切換え動作は、搬送方向に配列された磁極毎に個別に搬送台の移動に伴って行われていた。
しかしながら、係る磁気浮上搬送装置において、搬送路上を搬送台が滑らかに走行移動し、搬送台の発進・停止をできる限りスムーズに行う必要があるが、その際に最も問題となるのは、浮上磁極の切換えにより搬送台そのものが振動してしまう現象である。よって、搬送台に振動を及ぼす一原因である浮上用電磁石の磁極を切換える際のその作動から非作動、或いは、非作動から作動に移行させる動作の問題点を解決し、搬送台を滑らかに走行移動させることのできる浮上用電磁石の切換動作方法を開示するものである。
本実施例では、搬送台の移動方向に多数の浮上用電磁石が列設され、該搬送台の移動に伴い作動磁極を切換えて、浮上移動中の搬送台を支持する磁気浮上搬送装置において、作動から非作動又は非作動から作動に電磁石を順次切換える際に、移動方向に配列された少なくとも1組の磁極について、作動から非作動への切換動作及び非作動から作動への切換動作を同時に徐々に進行させるように制御している。
第29図は、作動から非作動又は非作動から作動に浮上用電磁石を順次切換える際に、移動方向に配列された相隣接する1組の磁極について、作動から非作動への切換動作及び非作動から作動への切換動作を同時に徐々に進行させることを示している。第26図において、搬送台3が左方向に移動すると、磁極42の変位センサ82は、搬送台3の到達を検出する。そして、第29図に示すように、作動状態の磁極43と、搬送方向に相隣接する非作動状態の磁極42とを同時に徐々に、それぞれ、作動から非作動状態へ、及び非作動から作動状態へ切換える。この切換動作は、制御時間t0の間に徐々に進行する。尚第29図に示す切換動作は直線的であるが、第30図(A),(B)に示すように、曲線的に行っても良い。
この浮上用電磁石の切換制御は、第26図に示す制御系のブロック図において、ゲイン設定器32により制御回路のトータルのゲインを徐々に磁極42について0から設定値V2迄上昇及び磁極43について現在値V1から0迄下降させることによって行われる。又、浮上目標電圧設定器33により、浮上目標電圧のパラメータであるオフセット電圧を、磁極42についてVS1から設定値VS2迄上昇させると共に、磁極43について現在値VS3からVS4迄下降させることを、同時に制御時間t0で徐々に行ってもよい。更に、ゲイン設定器32により制御回路のゲインを変化させ、次に、浮上目標電圧設定器33の浮上目標値であるオフセット電圧を変化させることを組合せて行うこともできる。
以上の説明は、非作動から作動状態に切換える磁極42と、作動から非作動状態に切換える磁極43の搬送方向に配列された1組の磁極について、状態の切換え動作を同時に進行させるものである。このような磁極の同時切換動作を搬送路の磁極の複数組について行うことも勿論可能であり、更に搬送台の走行安定性を改善する可能性がある。
例えば、磁極42と磁極43の組の他に、磁極44と磁極45の組を同時に切換え動作を進行させることも可能である。即ち,磁極42の変位センサ82が移動してくる搬送台3の到達を検出し、選択信号発生器41及びスイッチ群42を通じて所定のスイッチの開閉を行い磁極42と磁極44を非作動から作動状態に、磁極43と磁極45を作動から非作動状態に同時に、徐々に制御時間t0で切換え動作を進行させる。このように、搬送方向の2組の磁極42,43,44,45を同時に徐々に切換え動作を進行させることにより、搬送台の走行安定性を更に向上させることができる。
尚、第25図では、搬送台3は、搬送方向に3個の磁極によって浮上保持されている。搬送台3をより多数の磁極、例えば4個又は5個によって浮上保持した場合に、3組の磁極を同時に切換えることが可能である。このように、作動から非作動及び非作動から作動の磁極の同時切換の組合わせは、各種考えられる。このような場合には、同時切換の組合わせを適宜選択することが可能であり、組合せの選択により、搬送台の走行に伴う浮上磁極の切換時に生じる搬送台の振動をより低減できる可能性がある。
以上に説明したように、本実施例では磁気浮上搬送装置の搬送台を浮上保持し走行させる浮上磁極の作動、非作動状態の切換え動作を同時に徐々に進行させるようにしたものである。従って、走行に伴う浮上磁極の切換えによる搬送台の振動の発生が防止され、搬送台の走行、或いは停止、発進時の浮上磁極の切換えがスムーズとなり、搬送台を安定走行させることができる。
(第8実施例)
以下、第8実施例である搬送台の浮上/着地の制御について第31図乃至第33図を参照して説明する。
上記した様な磁気浮上搬送装置は、搬送台のトンネル下側隔壁面からの浮上及びトンネル下側隔壁面への着地の際には、一般に制御装置の電源を入、切するだけなので、前記動作が急激に行われるという問題がある。換言すると、浮上或いは着地に際して被搬送物に衝撃を与え、破損してしまうという問題がある。ここで、磁気浮上搬送装置は半導体製造工場等においてウエハ等の各種ワークの移送に用いられることを想定しており、ウエハは非常に割れやすいため、搬送対象物の破損は非常に重大な問題である。又、浮上や着地が急激に行われることは粉塵発生の原因ともなり、半導体製造の際の歩留まりを劣化させてしまう。更に、搬送の際には被搬送物(例えばウエハ等のワーク)の受け渡しを容易にするため、その垂直方向高さが可変であることが望ましい。そして磁気浮上搬送装置の場合は、搬送台の浮上量が自由に調整出来ることが好ましい。また、被搬送物が搬送台に搭載されていないときは、短時間で搬送台を着地状態から浮上状態にでき、搬送時間を短縮できることが好ましい。
本実施例は係る課題を解決するもので、搬送台の浮上及び着地の衝撃を緩和することが出来て、しかも搬送台の浮上量と、浮上・着地に要する時間を自由に調整することが出来る磁気浮上搬送装置を開示する。
第31図は制御系の基本的な構成を示しており、浮上用電磁石4の磁気吸引力を制御して搬送台3を目標位置に浮上させる基本的な動作は、前述の第6実施例、第7実施例と同様であり、その説明を省略する。
センサ8の出力Vsは浮上目標値であるオフセット電圧Vfと加算器43で比較され、その差分がゲイン設定器32に導かれ、センサ8から電力増幅器35に至る制御回路28の制御系の増幅率Kpを決定する。即ち、ゲイン設定器32の出力は位相補償器34に導かれ、更に電力増幅器35に導かれ、浮上用電磁石4に巻回したコイルに流す励磁電流を増減する。電磁石4はコイルに流れる励磁電流による磁気吸引力を搬送台3に及ぼし、搬送台3を磁気吸引力により浮上支持する。従って、制御系が安定な範囲で制御系の増幅率をゲイン設定器32により高く設定することによって、より大きな磁気軸受剛性で搬送台を支持することができる。
オフセット電圧供給手段33は、デジタル処理手段(CPU)38にプログラム40から指令を与え、オフセット電圧Vofを発生させる。また、デジタル処理手段38は、オフセット電圧を決定する発生機構としての機能をも有している。
デジタル処理手段38には、符号40で表現する各種のプログラムを自由に組み込むことが出来て、しかもプログラム40の変更も自在である。そしてプログラム40は、オフセット電圧供給手段から加算器43へ印加されるオフセット電圧の各種特性(例えば時間特性)を所望のものとなる様に作成する。このプログラム作成の手法は、従来公知のソフトウエア作成技法であるため、説明は省略する。
浮上時においては、オフセット電圧VOfと時間tとの関係(時間特性)は第33図の様であるのが好ましい。第33図における時間t0が経過すれば、オフセット電圧VOfが0Vとなるため、搬送台13は制御回路(補償回路)28で固定された基準浮上位置で安定浮上する。
この様なオフセット電圧VOfの時間特性を達成する様なプログラムを作成し、デジタル処理手段38に組み込めば、図示しないオフセット電圧発生機構が作動して、第33図に示す時間特性のオフセット電圧VOfが加算器43へ印加されるのである。
着地時においては、時間特性が第32図の様になるのが好ましい。この場合も上記と同様な処理を行えば、第32図に示す時間特性のオフセット電圧VOfが加算器43へ印加される。
さらに、製造に要する時間全体を第32図、第33図における横軸(時間軸)にとって、各加工ステーションに到達する時点で必要な浮上量の変化に対応してオフセット電圧VOfを変化させて、ライン全体に亘る時間特性を作成し、それをプログラミングすることも可能である。その様にすれば、浮上及び着地の際に衝撃が発生することが無く、しかも加工ステーションにおけるワークの受け渡しが円滑に行われるのである。
搬送台3の浮上位置は、電磁石4が搬送台3に及ぼす鉛直方向の磁気吸引力と搬送台3の重力が等しくなる状態で制御される。つまり位相補償器34に入力する信号が電磁石4に流す励磁電流を決定するのであるから、搬送台3の浮上位置変化と、搬送台3と電磁石4の磁極面との距離の比が比較的小さいならば、電磁石4と搬送台3で構成される磁気回路の洩れ磁束変化が小さく、搬送台3の重量が不変であるならば、制御結果として位相補償器34の入力信号は概ね不変である。
また位相補償器34に入力する信号(VPとする)は、センサ8の出力信号(VSとする)と、加算器43に導くオフセット電圧・ゲイン設定出力供給手段である制御ユニット29が有するデジタル/アナログ変換器44の出力信号1(オフセット電圧、Vfとする)と、オフセット電圧・ゲイン設定出力供給手段である制御ユニット29が有するデジタル信号出力手段45の出力信号2とゲイン設定器60によって設定される増幅率(Kpとする)によって決定され、以下の式に従う。
VP=Kp×(VS−Vf) (1)
D/A変換器44とデジタル信号出力器45はデジタル処理手段(CPU)38の指令によってそれぞれの機能を発揮する。また符号40で示すプログラムによってデジタル処理手段38の行う処理手順を自在に設定、変更が可能である。従って上記位相補償器34の入力電圧VPはプログラム40によって自在に設定できる。
上述したように、搬送台3の浮上位置変化と、搬送台3と電磁石4の磁極面との距離の比が比較的小さい時は、位相補償器28の入力電圧VPを一定に保持する様に制御する。従って増幅率Kpが一定の時、搬送台3の浮上位置を変化させる(センサ出力電圧VSが変化する)には、(1)式で拘束される条件でオフセット電圧Vfを変化させればよい。またオフセット電圧Vfが一定の時には、ゲイン設定器60の増幅率Kpを同様に変化させれば良い。
搬送台3の浮上位置変化が大きい場合は、電磁石4と搬送台3で構成される磁気回路の漏れ磁束が大きく変化し、搬送台3に作用する磁気吸引力を与える有効磁束数が大きく増減するため、電磁石4に流す励磁電流と搬送台3に作用する磁気吸引力の比が大きく変化する。
電磁石4の磁極面と搬送台3の距離が大きく増加すれば漏れ磁束は多くなるため、搬送台3を支持するために電磁石4に流す励磁電流を増加する必要がある。このことは電磁石4、搬送台3、センサ8、制御回路28で構成する磁気浮上制御系のルーブゲインが大きく低下することになり、搬送台3の安定浮上を損なう恐れがある。
この場合にはオフセット電圧Vfの調整だけでは安定浮上の持続を維持できない。そこでゲイン設定器60の増幅率Kpを増加させれば上記の理由による制御系のループゲインの低下を補償でき、搬送台の安定浮上を持続できる。また搬送台3と電磁石4の距離が減少した場合は上述と逆の操作を行う事で同様に補償できる。
本実施例は上記のように構成されているので、ゲイン設定器32の増幅率Kp及びオフセット電圧Vfを変化させることで、搬送台3の浮上位置を任意に設定可能である。
したがって、適当な処理プログラムによって、搬送台の浮上及び着地の衝撃を緩和する制御ができるのに加えて、搬送台の浮上量の調整と浮上着地に要する時間の調整を達成できることができる。そのため、半導体製造ラインに適用することにより、ウエハ等のワークの破損及び粉塵の発生等が防止されて、歩留りが向上する。それと共に、下降ステーションと搬送台との間のワークの受け渡しが改善されて、搬送効率が向上する。
(第9実施例)
以下、第9実施例である搬送路に設けられた受動ダンパについて第34図を参照して説明する。本実施例の受動ダンパは、磁気浮上状態でトンネル中を走行する搬送台と、搬送路と直交する方向の振動が生じた場合に、その振動を吸収して搬送台の振動を減衰させるものである。
浮上用電磁石により吊上げられた搬送台は、案内方向には第3実施例で詳述したように、電磁石のバネ力であるいわゆる案内剛性で支持されている。このため、搬送台になんらかの外力が作用し、Y方向に振動が生じると減衰力が作用しないため振動が止まらないという問題がある。特に搬送台の停止点付近で電磁ブレーキにより走行中の搬送台を停止させようのすると、いちじるしい振動が発生し、隔壁と衝突し金属粉を発生させる。或いは、振動の停止に長時間を要し被搬送物の装填に待ち時間を要するという問題が従来生じていた。本実施例の受動ダンプによれば磁気浮上された搬送台の搬送方向と直交する方向(案内方向)の振動を速やかに吸収することができる。
第34図に示す搬送装置は、搬送路23に設けられた電磁石4の磁気吸引力により、隔壁で形成されたトンネル(図示しない)内の搬送台3を浮上支持して搬送路に従って搬送方向に走行させるようにしている。なお、図中X,Y,Z軸は互いに直交する三次元直交座標をなしており、X方向は搬送方向を、Y方向はこの搬送方向Xに直交する左右方向を、Z方向はX,Y方向に直交する磁気吸引力の方向即ち電磁石4の磁極面4nの法線方向を、それぞれ示している。
本実施例装置においては受動ダンパを備えており、受動ダンパは、吸引力の方向Zと搬送方向Xに対しては電磁石4を所定位置に拘束して支持し、搬送方向Xに直交する左右方向Yに対しては電磁石4を移動可能に支持する支持装置51により構成される。一次側をなす電磁石4は、搬送路の搬送方向Xに所定ピッチで多数個列設されて、磁気軸受を構成し、浮上磁極とも呼ばれている。また、搬送台3の本体の上面の周縁部には、浮上用ターゲットとなるヨーク(継鉄)等により形成されて二次側をなす磁性体ターゲット(磁性材)20が取付けられている。この磁性材20は、励磁された電磁石4の吸引力により搬送台3を非接触状態で浮上させるように、図示しないトンネルの隔壁を介して電磁石4の下方に位置している。上記一次側の電磁石4と二次側の磁性材20とにより、搬送方向Xに展開された磁気軸受列をなす磁気軸受装置を構成している。
受動ダンパを構成する支持装置51について説明すると、搬送路の停止位置等において、本体フレームの固定壁27に上記左右方向(即ちY方向)に向けてリニアレール52が配設されている。浮上用電磁石4の上部にはリニアベアリング53が取付けられ、このリニアベアリング53は、リニアレール52に従ってY方向のみに任意の位置に摺動するようになっている。このリニアレール52とリニアベアリング53とにより、Y方向に自由度を有するリニアガイド支持装置51を構成している。このように、浮上用電磁石4は、リニアベアリング53とともにY方向にのみ移動し,X,Z方向及びX,Y,Z軸回りには常にガタがない状態になっておりしかも移動することがないので、X,Z方向及びX,Y,Z軸回りの運動自由度はなく、Y方向の並進自由度を任意に設定できることとなる。
本支持装置51は、搬送路に対向配置されている本体フレームの固定壁27aと、この固定壁27a間に配設されている電磁石4との間に減衰力付与手段である一対のばね部材54と一対のダッシュポット55とを配設して、電磁石4をY方向の所定位置に保持している。リニアレール52とリニアベアリング53との間に潤滑剤を塗布すれば、この潤滑剤の粘性とこの摺動部における摩擦抵抗力により減衰力が発生して、減衰力付与手段となる。従って、電磁石4がリニアガイドユニットを介してY方向に振動すれば、潤滑剤によりY方向に対する電磁石4の振動を減衰させることもできるが、これだけでは十分な減衰力を得ることはできないことがある。そこで本実施例では、ばね部材54によるばね力に加えて、高い緩衝効率を有するダッシュポット55の緩衝作用を利用することにより、適切な減衰力を任意に設定できるようにしており、これにより、本当の意味で受動安定軸(Y軸)を実現することができる。即ち、電磁石4は、ばね部材54とダッシュポット55とによりY軸方向の並進自由度を制限されているが、この制限要素であるばね部材54とダッシュポット55とを適当に調節することによりY軸を良好な受動安定軸とすることができる。
従って、このような受動ダンパを例えば搬送路の停止点付近に設ければ、停止点付近で生じる搬送台の振動を速やかに吸収減衰させることができる。
(第10実施例)
以下、第10実施例であるトンネルに設けられたマグネットを用いた振動減衰機構(ダンパ)を第35図乃至第36図を参照して説明する。
第35図は本実施例に係る磁気浮上搬送装置の断面正面図、第36図はその平面図である。この磁気浮上搬送装置の基本的な構成は、第3実施例において詳述しているので、同一部分又は相当部分には同一の符号を付してその説明を省略する。
搬送台3における外郭部材19のX方向の両側部には、第1の磁石としての一対の永久磁石56がそれぞれ取付けられている。この第1の永久磁石56は、搬送台側部に形成された凹部57内に固着されている。また、一方の側部には、ウエハ22を出し入れするための矩形状の開口部Oが形成されている。
隔壁2の両側壁15には、第1の永久磁石56との間に磁力を作用させるとともに搬送台3の振動に対して減衰力を付与する第2の磁石としての永久磁石58が取付けられている。両側壁15には、外方(大気側)に開口するとともに、第1の永久磁石56の位置に対応する場所に有底の嵌合溝59が形成されており、この嵌合溝59に第2の永久磁石58がX方向に進退動自在に嵌合されている。嵌合溝59の開口部は蓋部材60により覆われてシール部材を介して密封されており、この蓋部材60は側壁15に着脱可能に取付けられている。
この蓋部材60と第2の永久磁石58との間には、X方向のばね力を付与するためのばね部材61が介装され、このばね部材61により第2の永久磁石58は側壁15の内面側に付勢されている。また、ばね部材61が配設された嵌合溝59の内部スペースには、減衰作用を発揮させるための手段としてのオイル62が充填されており、合2の永久磁石58を含むこの構成により、搬送台3の振動に対して減衰力を付与している。なお、減衰作用を発揮させるためには、上記オイル62の代わりにゴム等の弾性部材を使用してもよく、この場合には、この弾性部材を介してばね部材61を蓋部材60と第2の永久磁石58との間に介装させることになる。
本実施例では第1,第2の永久磁石56,58は互いに反発し合うような磁極の組合せのものにしている。
上記構成を有する本実施例装置においては、電磁石4により搬送台3を、隔壁2で囲まれたトンネル1内に浮上させた状態で、リニアモータ6により進行方向に付勢して走行せしめる。そして停止位置Sにおいて電磁ブレーキ18により搬送台3を停止して、ここで図示しないロボットアーム等を使用して、開口部Oを介してウエハ22の出し入れ作業を行う。
搬送台3がトンネル1を走行する際の搬送台3のX方向に関する位置決めは、磁性材20と電磁石4の磁極面の幅を等しくすることにより、搬送台3をY方向の中心位置に常に引張ることにより行っている。搬送台3がY方向の中心位置にあるときは、搬送台3の第1の永久磁石56と隔壁2の第2の永久磁石58との間に作用する反発力のバランスがとれていて、上記搬送台3はその位置を維持しながら走行する。ところが、搬送台3に遠心力が作用したり振動が発生して搬送台3が方向に外れた場合には、両永久磁石56,58間に働く反発力により、搬送台3は常にY方向中心部に押し戻されて、隔壁2の内面に搬送台3が接触することはない。また、第1の永久磁石56からの磁力が作用する第2の永久磁石58は、ばねと減衰手段を介してトンネル隔壁に取り付けられているため、搬送台3が振動すると、永久磁石58にも反発力が変動して、その動きが伝わる。その動きに対して減衰があるので、振動エネルギーが吸収されて搬送台3の振動を減衰させることとなる。これにより、搬送台3が一旦振動を開始してもその振動は速やかに減衰する。
なお、上記第1,第2の磁石56,58は永久磁石の代わりに電磁石を使用することも可能である。
(第11実施例)
以下、第11実施例である鉛直方向のトンネルを備えた搬送機構を第37図乃至第38図を参照して説明する。
第37図において、搬送台3が走行する第1の搬送路1aは、隔壁2により空間分離され、隔壁内は高真空等の高度の清浄空間であり、トンネルとなっている。
搬送台3は、隔壁2の外側に配備された浮上用電磁石4の磁気吸引力により隔壁2から非接触で浮上支持される。すなわち、浮上用電磁石4は、磁性材を備えた搬送台3を磁気力により吸引し、浮上保持する。リニアモータ6は電磁石であり、搬送台3の下面の導電体に渦電流を発生させることにより搬送台を水平方向に駆動し、搬送台を同様に非接触で水平方向に走行させる。
第2の搬送路1bは、第1の搬送路1aと高さが異なるのみで、トンネル内の搬送台3を浮上用電磁石4により浮上保持し、リニアモータ6により水平方向に搬送台3を走行させる搬送路の構造は共通している。この磁気浮上搬送装置は、これら高さの異なる第1の搬送路1aと第2の搬送路1bとを接続する鉛直方向のトンネルである搬送路65を備える。
鉛直方向の搬送路65は、搬送台3を磁気力で非接触浮上支持する浮上機構とリニアモータとを備えたテーブル部66と、このテーブル部66を鉛直方向に昇降させるエレベータ機構67とを備える。エレベータ機構67は、隔壁により空間分離された鉛直方向の搬送路65を真空状態に保ったまま固定側68に対して軸69を上下方向に移動させる。
従って、例えば第1の搬送路1aを浮上用電磁石4により浮上支持され、リニアモータ6により駆動されて走行する搬送台3が、鉛直方向の搬送路65に入る。テーブル部66のリニアモータが制動力を発生し、搬送台3は鉛直方向の搬送路65のテーブル部66で停止し、浮上用電磁石によりテーブル部66に非接触で浮上支持される。そして、エレベータ機構67によりテーブル部66が降下し、第2の搬送路1bと水平位置に到達した時点でセンサ8が搬送台の位置を検出しエレベータ機構67の動作を停止させる。この時点で、搬送台3は第2の搬送路1bと同じ高さとなる。このようにして、搬送台3は第1の搬送路1aから、第2の搬送路1bへ、或いは第2の搬送路1bから第1の搬送路1aへ高さの異なる搬送路をトンネル隔壁と非接触状態で移動することができる。尚、鉛直方向の搬送路65も、搬送路1a,1bと同様な材質の隔壁2により空間分離された高真空の高度の清浄度空間である。
第38図は、テーブル部66と搬送台3の詳細の構造を示すものである。テーブル部66は、浮上用電磁石4と駆動用電磁石18とを備えている。搬送台3は、例えば半導体ウエハ22を搭載し、搬送するものであり、搬送台3の上面には、浮上用電磁石4のターゲットとなる磁性材20が固定されており、駆動用電磁石18のターゲットとなる磁性材70が同様に固定されている。
浮上用電磁石4はその励磁コイルに電流を流すと磁気吸引力を発生し磁性材20を吸引することにより搬送台3を非接触で浮上保持する。駆動用電磁石18は、水平方向の磁気吸引力を発生し、テーブル部66の直下に進入してくる搬送台3に水平方向のブレーキ力を発生し停止保持する。また、搬送台3を他の搬送路に移動進行させるために、水平方向の駆動力を発生し、搬送台3を他の搬送路に発進させることができる。電磁石4の磁極間にあるセンサ8は、浮上位置の検出のためのものであり、検出された搬送台の位置データをもとに電磁石4のコイルに流れる電流を制御することにより、適正浮上位置に搬送台3を保持する。
これらの電磁石4,18及びセンサ8は、キャン71によってカバーされ、これらの電磁石等より発生する汚染物質が隔壁2内の高真空度空間を汚染するのを防止している。
尚、以上の説明は被搬送物として半導体ウエハを一例として説明したが、例えば、液晶ディスプレイの製造工程における液晶基板の搬送等、トンネルを用いた被搬送物の浮上状態での非接触搬送に広く適用可能である。又、清浄度環境としては、真空状態に限らず、高純度の不活性ガス雰囲気等であってもよい。
以上に説明したように、本実施例の搬送装置は鉛直方向の高さの異なる複数のトンネルである搬送路と、該搬送路を接続する鉛直方向のトンネルの搬送路とを備えたものである。従って、高さの異なる複数の搬送路間を搬送台を非接触で浮上保持した状態で相互に移動させることが可能となる。それゆえ、隔壁により囲まれたトンネル内で、搬送台を鉛直方向に移動させることができ、磁気浮上搬送装置の適用領域を拡大することができる。
(第12実施例)
以下、第12実施例である処理装置へ被搬送物を搬入するための接続室について、第39図乃至第41図を参照しながら説明する。
第41図は、処理装置へ被搬送物を搬入する従来の技術を示す。トンネル1は、半導体ウエハ或いは液晶基板等の被搬送物を搭載した搬送台3が密閉空間の隔壁から浮上した状態で非接触で走行する磁気浮上搬送装置の搬送路である。トンネル1内は真空または高清浄度のN2ガス等で満たされた高清浄度の空間である。トンネル1の隔壁外には、図示しないが搬送台を密閉空間内で磁気浮上させるための磁極を備えた電磁石と、密閉空間隔壁面と搬送台との間の隙間を計測するための変位センサと、該センサの信号によって浮上用電磁石の励磁電流を制御する制御回路と、搬送台を走行させるための加減速用リニアモータと搬送台を停止させるための停止装置とを備えている。
係るトンネル1内を搬送される半導体ウエハ等の被搬送物が、例えば、蒸着、フォトリソグラフィ等のプロセス処理を行うプロセス室74に搬入されるためには、その間の被搬送物の清浄度を保つためバッファとなるチャンバ72が設けられていた。
しかしながら、プロセス前室のロボット73により、搬送台1とプロセス室74との間の基板22の受け渡しを行おうとすると、ロボットの必要とされるリーチが長くなり、ロボットハンドの剛性上の問題を生じる。このため、チャンバ72には別個のハンドリングロボット75を備え、該ロボットにより密閉空間内の搬送台3からウエハ等の基板22を、置き台76に一端移し、プロセス前室77のロボット75が置き台76から基板22を引き出し、プロセス室74に移していた。
このように、プロセス前室77にあるロボット73が、密閉空間内の搬送台から直接プロセス室74へウエハの受渡しを行うのには、ロボット73のハンドのリーチが長くなり、剛性上の問題を生じる。又、チャンバ72にロボット75を設けプロセス室74へ2段階の基板の受け渡しを行うと、高価でありコントロールが複雑なハンドリングロボットをチャンバ72に増設することになる。また基板の受け渡しがチャンバ72のロボット75及びプロセス前室77のロボット73と2回に渡り、ハンドリング回数の増加により生ずる粒子汚染の増加という問題が発生する。
第39図は本発明の接続室を設けた実施例の説明図である。
トンネル1とプロセス前室77との間には、トンネル1と接続する接続室78が設けられており、トンネル1側には仕切りバルブ79が、プロセス前室77側には仕切りバルブ80が設けられている。そして、接続室78には図示しない真空ポンプ或いは高清浄度の不活性ガスの供給源等を備えることから接続室78もトンネル1及びプロセス室74と同様な雰囲気の高清浄度の空間とすることができる。そして、接続室78にはトンネル1と同様に隔壁外に、搬送台3を磁気浮上させるための磁極を備えた浮上用電磁石と、接続室隔壁面と浮上している搬送台との間の隙間を計測するための変位センサと、該センサの信号によって浮上用電磁石の励磁電流を制御する制御回路と、搬送台を走行させるための加減速用リニアモータを構成する電磁石と搬送台を停止させるための停止装置を構成する電磁石とを備えている。
したがって、接続室78の動作は次のようになる。先ずバルブ79,80を閉じた状態で接続室78内を真空ポンプにより真空引きする。そして搬送路であるトンネル1内と同じ真空度に達した時点でバルブ79を開くことによりトンネル1と同様の雰囲気とすることができる。そして搬送台3が基板22を搭載してトンネル1中を走行して、接続室前の位置で停止装置により停止する。そして搬送台3を接続室側にリニアモータにより加速させると搬送台は接続室78に磁気浮上した状態で走行進入してくる。そして接続室78の停止装置により接続室78内部で搬送台3は停止する。
次にバルブ79を閉じてバルブ80を開くことにより、接続室78の雰囲気をプロセス前室77の雰囲気と合わせることができる。そしてプロセス室74のバルブ81を開き、基板22を搬送台3からロボット73により取り出し、プロセス室74に直接移送することができる。また逆にプロセス室74からロボット73により基板22を取り出し搬送台3に移送することも同様である。
第40図は、接続室に関する他の実施例であり、プロセス前室77をトンネル1に対して3方向に接続した例を示す。図に示すようにトンネル1の端部82は、3方向に接続室78を介してプロセス前室77に接続されている。接続室78には搬送台3を磁気浮上させ走行させることのできる浮上用電磁石とリニアモータと停止装置を備えており、各接続室78はそれぞれ搬送台3を磁気浮上状態で壁面から非接触で走行させることができ又停止させることができる。それ故、搬送路であるトンネル1を走行してくる搬送台3は、端部82で一端停止し密閉空間に直接接続された各接続室78に非接触浮上した状態で移動し、そこで各プロセス室74との間でそれぞれのプロセス前室77のロボット73によりウエハ等の被搬送物22の受け渡しを行うことができる。又、例えば接続室78、端部82、接続室78のルートにより、トンネル1を経なくとも、3方向の接続室を介してマルチチャンバのプロセス室間で相互に被搬送物22の受け渡しが可能となる。
以上に説明したように、本実施例はプロセス処理装置へ被搬送物を直接搬入するための接続室を備え、該接続室には搬送台を浮上保持し非接触で走行させ、停止させるための手段を備える。従ってプロセス室とのウエハの受渡しはプロセス前室のロボット1台で行うことが可能となり、ハンドリングロボットの数を増やすことなく、トンネルの清浄雰囲気のままで、粒子汚染の問題を生じることなくプロセス処理装置へ基板を直接搬入することが可能となる。
産業上の利用可能性
以上のように、本発明に係る磁気浮上搬送装置は、隔壁で仕切られたトンネル中を、搬送台を隔壁から非接触で安定に浮上走行させるようにしたものである。従って、被搬送物を、直交方向への分岐等を含めて隔壁との接触による塵埃、粒子汚染等を発生させることなく、自在に高清浄度空間である真空中、又は窒素ガス雰囲気中を安定に搬送することができる。それ故、本発明の磁気浮上搬送装置は、高清浄度空間での搬送が要求され、多様な処理装置が多数配置された半導体製造工場或いは液晶基板の製造工場等での利用に好適である。
Claims (2)
- 隔壁で形成されれたトンネルと、該トンネル内に配置された搬送台と、該搬送台を非接触状態にて浮上支持する複数の浮上用電磁石と、前記搬送台を走行移動させるリニアモータと、前記搬送台の垂直方向距離を検出する変位センサとを備えた磁気浮上搬送装置において、前記浮上用電磁石、リニアモータ及び変位センサを前記トンネル隔壁の外側に配置するとともに前記浮上用電磁石、リニアモータ及び変位センサを前記隔壁を貫通してトンネル内にその一部が露出した薄肉の容器状の収納部材に収納したことを特徴とする磁気浮上搬送装置。
- 隔壁で形成されたトンネルと、該トンネル内に配置された搬送台と、該搬送台を非接触状態にて浮上支持する浮上用電磁石と、前記搬送台を走行移動させるリニアモータとを備えた磁気浮上搬送装置において、前記トンネルの少なくとも上下面の隔壁を該隔壁内側に設けたシールド用の薄肉プレートと、該隔壁外側に設けた前記薄肉プレートを補強するための剛性を有した厚肉の補強板とにより構成し、前記浮上用電磁石及びリニアモータを前記トンネルの外側に配置するとともに、前記補強板を貫通して前記薄肉プレートに隣接するように設けたことを特徴とする磁気浮上搬送装置。
Applications Claiming Priority (12)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP20298992 | 1992-07-07 | ||
| JP20601092 | 1992-07-09 | ||
| JP20847292 | 1992-07-13 | ||
| JP21095492 | 1992-07-15 | ||
| JP21362492A JPH06179524A (ja) | 1992-07-18 | 1992-07-18 | 磁気浮上真空搬送装置 |
| JP22804292 | 1992-08-04 | ||
| JP29640592 | 1992-10-08 | ||
| JP30464092 | 1992-10-16 | ||
| JP33371592 | 1992-11-19 | ||
| JP2372193 | 1993-01-19 | ||
| JP4989593 | 1993-02-17 | ||
| PCT/JP1993/000930 WO1994001354A1 (en) | 1992-07-07 | 1993-07-06 | Magnetically levitated carrying apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP3544208B2 true JP3544208B2 (ja) | 2004-07-21 |
Family
ID=27581889
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP50317294A Expired - Fee Related JP3544208B2 (ja) | 1992-07-07 | 1993-07-06 | 磁気浮上搬送装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US5641054A (ja) |
| EP (1) | EP0648698B1 (ja) |
| JP (1) | JP3544208B2 (ja) |
| DE (1) | DE69316214T2 (ja) |
| WO (1) | WO1994001354A1 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150078173A (ko) * | 2013-12-30 | 2015-07-08 | 삼성디스플레이 주식회사 | 기판 이송장치 |
| KR20160108549A (ko) * | 2014-01-21 | 2016-09-19 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| KR20170106464A (ko) * | 2015-01-23 | 2017-09-20 | 어플라이드 머티어리얼스, 인코포레이티드 | 반도체 프로세스 장비 |
| KR20170137159A (ko) * | 2015-04-09 | 2017-12-12 | 어플라이드 머티어리얼스, 인코포레이티드 | 물체를 홀딩하고 포지셔닝하고 이동시키기 위한 디바이스 |
| KR101825595B1 (ko) * | 2007-07-17 | 2018-02-05 | 브룩스 오토메이션 인코퍼레이티드 | 챔버 벽들에 일체화된 모터들을 갖는 기판 처리 장치 |
| KR20180116222A (ko) * | 2017-03-16 | 2018-10-24 | 어플라이드 머티어리얼스, 인코포레이티드 | 대상물을 유지하고, 포지셔닝하고, 그리고 이동시키는 것 중 적어도 하나를 위한 장치 및 대상물을 유지하고, 포지셔닝하고, 그리고 이동시키는 것 중 적어도 하나를 위한 장치를 동작시키는 방법 |
| KR20190038328A (ko) * | 2017-09-29 | 2019-04-08 | 숭실대학교산학협력단 | 선형 모터를 이용한 비접촉 이송 장치 |
| TWI687361B (zh) * | 2017-11-20 | 2020-03-11 | 美商應用材料股份有限公司 | 磁浮系統、真空系統與運輸載體之方法 |
| KR20210011437A (ko) * | 2018-05-24 | 2021-02-01 | 어플라이드 머티어리얼스, 인코포레이티드 | 캐리어를 이송하기 위한 자기 부상 시스템, 자기 부상 시스템을 위한 캐리어, 기판을 수직으로 프로세싱하기 위한 프로세싱 시스템, 및 캐리어를 이송하는 방법 |
| KR20210046746A (ko) * | 2018-08-29 | 2021-04-28 | 어플라이드 머티어리얼스, 인코포레이티드 | 제1 캐리어 및 제2 캐리어를 이송하기 위한 장치, 기판을 수직으로 프로세싱하기 위한 프로세싱 시스템, 및 이를 위한 방법들 |
| KR20210062655A (ko) * | 2018-09-19 | 2021-05-31 | 어플라이드 머티어리얼스, 인코포레이티드 | 자기 부상 시스템, 자기 부상 시스템의 베이스, 진공 시스템, 및 진공 챔버에서 캐리어를 비접촉식으로 홀딩하고 이동시키는 방법 |
Families Citing this family (118)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4441512C2 (de) * | 1993-11-22 | 1996-03-28 | Ebara Corp | Positioniersystem |
| US6206176B1 (en) * | 1998-05-20 | 2001-03-27 | Applied Komatsu Technology, Inc. | Substrate transfer shuttle having a magnetic drive |
| US6279728B1 (en) * | 1998-07-20 | 2001-08-28 | Norbert G Jung | Electro-magnetic conveyor |
| US6146086A (en) * | 1998-08-31 | 2000-11-14 | Midcom, Incorporated | Magnetic fanning accumulator |
| US6374746B1 (en) * | 1999-06-21 | 2002-04-23 | Orlo James Fiske | Magnetic levitation transportation system and method |
| US6354781B1 (en) | 1999-11-01 | 2002-03-12 | Chartered Semiconductor Manufacturing Company | Semiconductor manufacturing system |
| US6271606B1 (en) * | 1999-12-23 | 2001-08-07 | Nikon Corporation | Driving motors attached to a stage that are magnetically coupled through a chamber |
| JP2001182746A (ja) * | 1999-12-27 | 2001-07-06 | Ebara Corp | 磁気軸受装置 |
| EP1281194A1 (de) * | 2000-05-09 | 2003-02-05 | Siemens Production and Logistics Systems AG | Längsförderer |
| CN1996553A (zh) * | 2001-08-31 | 2007-07-11 | 阿赛斯特技术公司 | 用于半导体材料处理系统的一体化机架 |
| JP4389424B2 (ja) * | 2001-12-25 | 2009-12-24 | 東京エレクトロン株式会社 | 被処理体の搬送機構及び処理システム |
| US6800833B2 (en) | 2002-03-29 | 2004-10-05 | Mariusch Gregor | Electromagnetically levitated substrate support |
| NL1020633C2 (nl) * | 2002-05-21 | 2003-11-24 | Otb Group Bv | Samenstel voor het behandelen van substraten. |
| US7959395B2 (en) * | 2002-07-22 | 2011-06-14 | Brooks Automation, Inc. | Substrate processing apparatus |
| AU2003259203A1 (en) * | 2002-07-22 | 2004-02-09 | Brooks Automation, Inc. | Substrate processing apparatus |
| US7988398B2 (en) | 2002-07-22 | 2011-08-02 | Brooks Automation, Inc. | Linear substrate transport apparatus |
| WO2004084396A1 (ja) * | 2003-03-17 | 2004-09-30 | Iai Corporation | 超音波浮上装置 |
| US6994649B2 (en) * | 2004-03-24 | 2006-02-07 | General Motors Corporation | Wide ratio transmissions having three gear sets and a stationary planetary member |
| JP4543181B2 (ja) * | 2004-12-20 | 2010-09-15 | 国立大学法人九州工業大学 | 超電導磁気浮上による非接触搬送装置 |
| WO2007024031A1 (en) * | 2005-08-23 | 2007-03-01 | Korea Institute Of Machinery & Materials | Static bearing conveying apparatus having magnetically preloading and motional error correcting functions |
| KR101288599B1 (ko) * | 2007-05-29 | 2013-07-22 | 엘지디스플레이 주식회사 | 기판 이송 장치 |
| US7834618B2 (en) | 2007-06-27 | 2010-11-16 | Brooks Automation, Inc. | Position sensor system |
| US9752615B2 (en) | 2007-06-27 | 2017-09-05 | Brooks Automation, Inc. | Reduced-complexity self-bearing brushless DC motor |
| US8602706B2 (en) * | 2009-08-17 | 2013-12-10 | Brooks Automation, Inc. | Substrate processing apparatus |
| JP5677785B2 (ja) | 2009-08-27 | 2015-02-25 | 三星ディスプレイ株式會社Samsung Display Co.,Ltd. | 薄膜蒸着装置及びこれを利用した有機発光表示装置の製造方法 |
| US8047976B2 (en) * | 2009-11-05 | 2011-11-01 | Pitney Bowes Inc. | Item handling system with tracking |
| DE102010028769A1 (de) | 2010-05-07 | 2011-11-10 | Pvt Probenverteiltechnik Gmbh | System zum Transportieren von Behältern zwischen unterschiedlichen Stationen und Behälterträger |
| KR20130004830A (ko) * | 2011-07-04 | 2013-01-14 | 삼성디스플레이 주식회사 | 유기층 증착 장치 및 이를 이용한 유기 발광 표시 장치의 제조 방법 |
| JP2013062316A (ja) * | 2011-09-12 | 2013-04-04 | Tokyo Electron Ltd | 搬送装置及びプラズマ処理システム |
| EP2589968A1 (en) | 2011-11-04 | 2013-05-08 | Roche Diagnostics GmbH | Laboratory sample distribution system, laboratory system and method of operating |
| EP2589966A1 (en) | 2011-11-04 | 2013-05-08 | Roche Diagnostics GmbH | Laboratory sample distribution system and corresponding method of operation |
| EP2589967A1 (en) | 2011-11-04 | 2013-05-08 | Roche Diagnostics GmbH | Laboratory sample distribution system and corresponding method of operation |
| KR20130069037A (ko) * | 2011-12-16 | 2013-06-26 | 삼성디스플레이 주식회사 | 유기층 증착 장치, 이를 이용한 유기 발광 표시 장치의 제조 방법 및 유기 발광 표시 장치 |
| US8890353B2 (en) | 2012-05-22 | 2014-11-18 | Frank Patrick Cunnane | Power generating hydroconveyor |
| JP6156716B2 (ja) * | 2012-08-21 | 2017-07-05 | シンフォニアテクノロジー株式会社 | 搬送装置 |
| KR102081284B1 (ko) * | 2013-04-18 | 2020-02-26 | 삼성디스플레이 주식회사 | 증착장치, 이를 이용한 유기발광 디스플레이 장치 제조 방법 및 유기발광 디스플레이 장치 |
| DE102014202838B3 (de) | 2014-02-17 | 2014-11-06 | Roche Pvt Gmbh | Transportvorrichtung, Probenverteilungssystem und Laborautomatierungssystem |
| DE102014202843B3 (de) | 2014-02-17 | 2014-11-06 | Roche Pvt Gmbh | Transportvorrichtung, Probenverteilungssystem und Laborautomatisierungssystem |
| JP6522667B2 (ja) * | 2014-02-20 | 2019-05-29 | インテヴァック インコーポレイテッド | 基板両面処理システム及び方法 |
| DE102014003882B4 (de) * | 2014-03-19 | 2017-07-13 | Applied Materials, Inc. (N.D.Ges.D. Staates Delaware) | Transportvorrichtung zum Bewegen und/oder Positionieren von Objekten |
| EP2927168A1 (de) | 2014-03-31 | 2015-10-07 | Roche Diagniostics GmbH | Transportvorrichtung, Probenverteilungssystem und Laborautomatisierungssystem |
| EP2927167B1 (de) | 2014-03-31 | 2018-04-18 | F. Hoffmann-La Roche AG | Versandvorrichtung, Probenverteilungssystem und Laborautomatisierungssystem |
| EP2927625A1 (de) | 2014-03-31 | 2015-10-07 | Roche Diagniostics GmbH | Probenverteilungssystem und Laborautomatisierungssystem |
| EP2927163B1 (de) * | 2014-03-31 | 2018-02-28 | Roche Diagnostics GmbH | Vertikalfördervorrichtung, Probenverteilungssystem und Laborautomatisierungssystem |
| EP2927695B1 (de) | 2014-03-31 | 2018-08-22 | Roche Diagniostics GmbH | Probenverteilungssystem und Laborautomatisierungssystem |
| EP2957914B1 (en) | 2014-06-17 | 2018-01-03 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| EP2977766A1 (en) | 2014-07-24 | 2016-01-27 | Roche Diagniostics GmbH | Laboratory sample distribution system and laboratory automation system |
| EP2995960B1 (en) | 2014-09-09 | 2020-07-15 | Roche Diagniostics GmbH | Laboratory sample distribution system and method for calibrating magnetic sensors |
| EP2995580A1 (en) | 2014-09-09 | 2016-03-16 | Roche Diagniostics GmbH | Laboratory sample distribution system and laboratory automation system |
| US9952242B2 (en) | 2014-09-12 | 2018-04-24 | Roche Diagnostics Operations, Inc. | Laboratory sample distribution system and laboratory automation system |
| EP2995958A1 (en) | 2014-09-15 | 2016-03-16 | Roche Diagniostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| EP3006943B1 (en) | 2014-10-07 | 2020-04-22 | Roche Diagniostics GmbH | Module for a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| US9988214B2 (en) | 2014-10-14 | 2018-06-05 | Laitram, L.L.C. | Radius conveyor with magnetic bearing |
| EP3016116A1 (en) | 2014-11-03 | 2016-05-04 | Roche Diagniostics GmbH | Printed circuit board arrangement, coil for a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| JP6456177B2 (ja) * | 2015-02-12 | 2019-01-23 | 株式会社ディスコ | ウェーハ処理システム |
| EP3070479B1 (en) | 2015-03-16 | 2019-07-03 | Roche Diagniostics GmbH | Transport carrier, laboratory cargo distribution system and laboratory automation system |
| EP3537160B1 (en) | 2015-03-23 | 2020-08-12 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| KR102561719B1 (ko) * | 2015-04-22 | 2023-07-31 | 인티그레이티드 다이나믹스 엔지니어링 게엠베하 | 메인터넌스 장치 |
| EP3096146A1 (en) | 2015-05-22 | 2016-11-23 | Roche Diagniostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| EP3096145B1 (en) | 2015-05-22 | 2019-09-04 | Roche Diagniostics GmbH | Method of operating a laboratory automation system and laboratory automation system |
| EP3095739A1 (en) | 2015-05-22 | 2016-11-23 | Roche Diagniostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| EP3112874A1 (en) | 2015-07-02 | 2017-01-04 | Roche Diagnostics GmbH | Storage module, method of operating a laboratory automation system and laboratory automation system |
| EP3121603A1 (en) | 2015-07-22 | 2017-01-25 | Roche Diagnostics GmbH | Sample container carrier, laboratory sample distribution system and laboratory automation system |
| CN107924859A (zh) * | 2015-08-21 | 2018-04-17 | 应用材料公司 | 用于基板的运输的设备、用于基板的真空处理的设备、和用于磁悬浮系统的维护的方法 |
| EP3139175B1 (en) | 2015-09-01 | 2021-12-15 | Roche Diagnostics GmbH | Laboratory cargo distribution system, laboratory automation system and method of operating a laboratory cargo distribution system |
| EP3153866A1 (en) | 2015-10-06 | 2017-04-12 | Roche Diagnostics GmbH | Method of determining a handover position and laboratory automation system |
| EP3153867B1 (en) | 2015-10-06 | 2018-11-14 | Roche Diagniostics GmbH | Method of configuring a laboratory automation system, laboratory sample distribution system and laboratory automation system |
| EP3156352B1 (en) | 2015-10-13 | 2019-02-27 | Roche Diagniostics GmbH | Laboratory sample distribution system and laboratory automation system |
| EP3156353B1 (en) | 2015-10-14 | 2019-04-03 | Roche Diagniostics GmbH | Method of rotating a sample container carrier, laboratory sample distribution system and laboratory automation system |
| CN106769273B (zh) * | 2015-11-24 | 2019-06-04 | 中国科学院沈阳科学仪器股份有限公司 | 一种用于超高真空下的全自动样品多工序生产系统及方法 |
| EP3211428A1 (en) | 2016-02-26 | 2017-08-30 | Roche Diagnostics GmbH | Transport device unit for a laboratory sample distribution system |
| EP3211430A1 (en) | 2016-02-26 | 2017-08-30 | Roche Diagnostics GmbH | Transport device with base plate modules |
| EP3211429A1 (en) | 2016-02-26 | 2017-08-30 | Roche Diagnostics GmbH | Transport device having a tiled driving surface |
| CN109196363A (zh) | 2016-06-03 | 2019-01-11 | 豪夫迈·罗氏有限公司 | 实验室样品分配系统和实验室自动化系统 |
| EP3255519B1 (en) | 2016-06-09 | 2019-02-20 | Roche Diagniostics GmbH | Laboratory sample distribution system and method of operating a laboratory sample distribution system |
| EP3260867A1 (en) | 2016-06-21 | 2017-12-27 | Roche Diagnostics GmbH | Method of setting a handover position and laboratory automation system |
| EP3494398B1 (en) | 2016-08-04 | 2022-04-06 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| EP3330717B1 (en) | 2016-12-01 | 2022-04-06 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| CN110035965B (zh) * | 2016-12-27 | 2021-03-02 | Abb瑞士股份有限公司 | 输送系统 |
| EP3343232B1 (en) | 2016-12-29 | 2021-09-15 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| EP3355065B1 (en) | 2017-01-31 | 2021-08-18 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| EP3357842B1 (en) | 2017-02-03 | 2022-03-23 | Roche Diagnostics GmbH | Laboratory automation system |
| US10737911B2 (en) | 2017-03-02 | 2020-08-11 | Hand Held Products, Inc. | Electromagnetic pallet and method for adjusting pallet position |
| EP3592678B1 (en) * | 2017-03-07 | 2024-10-16 | ABB Schweiz AG | Magnetic rack, conveying truck and corresponding conveyor |
| KR20180118593A (ko) * | 2017-03-17 | 2018-10-31 | 어플라이드 머티어리얼스, 인코포레이티드 | 프로세싱 시스템에서 캐리어를 라우팅하기 위한 장치, 캐리어 상의 기판을 프로세싱하기 위한 시스템, 및 진공 챔버에서 캐리어를 라우팅하는 방법 |
| CN107082284A (zh) * | 2017-03-29 | 2017-08-22 | 中国科学院苏州纳米技术与纳米仿生研究所 | 样品传送装置及超高真空传输设备 |
| EP3410123B1 (en) | 2017-06-02 | 2023-09-20 | Roche Diagnostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| EP3428653B1 (en) | 2017-07-13 | 2021-09-15 | Roche Diagnostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| US10786832B2 (en) * | 2017-07-26 | 2020-09-29 | Dematic Corp. | Sorter performance monitoring method and system |
| WO2019037858A1 (en) * | 2017-08-24 | 2019-02-28 | Applied Materials, Inc. | APPARATUS AND METHOD FOR CONTACTLESS TRANSPORT OF A DEVICE IN A VACUUM TREATMENT SYSTEM |
| EP3457144B1 (en) | 2017-09-13 | 2021-10-20 | Roche Diagnostics GmbH | Sample container carrier, laboratory sample distribution system and laboratory automation system |
| EP3456415B1 (en) | 2017-09-13 | 2021-10-20 | Roche Diagnostics GmbH | Sample container carrier, laboratory sample distribution system and laboratory automation system |
| EP3537159B1 (en) | 2018-03-07 | 2022-08-31 | Roche Diagnostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| EP3540443B1 (en) | 2018-03-16 | 2023-08-30 | Roche Diagnostics GmbH | Laboratory system, laboratory sample distribution system and laboratory automation system |
| CN109037118B (zh) * | 2018-09-07 | 2023-11-17 | 国网浙江省电力有限公司台州供电公司 | 一种将永久磁铁用于多颗晶粒的取放方法及设备 |
| JP7231721B2 (ja) | 2018-10-04 | 2023-03-01 | アプライド マテリアルズ インコーポレイテッド | 搬送システム |
| FR3086934B1 (fr) * | 2018-10-08 | 2021-01-01 | Commissariat Energie Atomique | Systeme de transport d’objets sous atmosphere controlee |
| EP3656709B1 (en) | 2018-11-23 | 2022-01-05 | Tetra Laval Holdings & Finance S.A. | Flow control in a system for production of packaged food products |
| EP3656707B1 (en) | 2018-11-23 | 2023-03-15 | Tetra Laval Holdings & Finance S.A. | Handling of containers in a system for production of packaged food products |
| EP3656684B1 (en) | 2018-11-23 | 2021-07-21 | Tetra Laval Holdings & Finance S.A. | Capping apparatus for a system for production of packaged food products |
| JP7249142B2 (ja) * | 2018-12-14 | 2023-03-30 | キヤノントッキ株式会社 | 搬送キャリア、蒸着装置、および電子デバイスの製造装置 |
| JP7316782B2 (ja) * | 2018-12-14 | 2023-07-28 | キヤノントッキ株式会社 | 蒸着装置、電子デバイスの製造装置、および、蒸着方法 |
| KR102697418B1 (ko) * | 2019-04-29 | 2024-08-20 | 어플라이드 머티어리얼스, 인코포레이티드 | 자기 부상 시스템, 자기 부상 시스템의 베이스 및 캐리어, 및 캐리어를 부상시키는 방법 |
| KR102690850B1 (ko) * | 2019-06-17 | 2024-07-31 | 어플라이드 머티어리얼스, 인코포레이티드 | 자기 부상 시스템 및 캐리어를 부상시키는 방법 |
| US20220393618A1 (en) * | 2019-11-27 | 2022-12-08 | Applied Materials, Inc. | Magnetic levitation system, processing system, and method of transporting a carrier |
| CN111056252A (zh) * | 2020-01-07 | 2020-04-24 | 青岛乐悠悠家居有限公司 | 一种磁吸式轨道输送机构 |
| TW202137866A (zh) | 2020-02-20 | 2021-10-01 | 美商布魯克斯自動機械公司 | 基板處理裝置 |
| JP7162631B2 (ja) * | 2020-03-13 | 2022-10-28 | キヤノントッキ株式会社 | 基板キャリア、成膜装置、基板キャリアの搬送方法、及び成膜方法 |
| US11527424B2 (en) | 2020-03-20 | 2022-12-13 | Applied Materials, Inc. | Substrate transfer systems and methods of use thereof |
| EP3925911B1 (en) | 2020-06-19 | 2023-05-24 | Roche Diagnostics GmbH | Laboratory sample distribution system and corresponding method of operation |
| US11521870B2 (en) | 2020-07-08 | 2022-12-06 | Applied Materials, Inc. | Annealing chamber |
| EP3940388B1 (en) | 2020-07-15 | 2024-04-10 | Roche Diagnostics GmbH | Laboratory sample distribution system and method for operating the same |
| KR20230070290A (ko) * | 2020-10-28 | 2023-05-22 | 나부테스코 가부시키가이샤 | 진공 시일 장치 및 구동 전달 장치 |
| US11747356B2 (en) | 2020-12-21 | 2023-09-05 | Roche Diagnostics Operations, Inc. | Support element for a modular transport plane, modular transport plane, and laboratory distribution system |
| US12106991B2 (en) * | 2021-09-22 | 2024-10-01 | Applied Materials, Inc. | Substrate transfer systems and methods of use thereof |
| CN114018609B (zh) * | 2021-11-01 | 2024-07-09 | 山东和顺电气有限公司 | 永磁电动悬浮试验托举装置 |
| CN114900009B (zh) * | 2022-07-13 | 2022-10-11 | 常州海特赐仁传动科技有限公司 | 稳定型竖向磁悬浮直线电机模组 |
| CN117361042B (zh) * | 2023-10-30 | 2024-04-02 | 中国人民解放军陆军工程大学 | 一种城市地下物资运输系统及其工作方法 |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS594330B2 (ja) * | 1976-09-09 | 1984-01-28 | 三菱電機株式会社 | 磁気浮上鋼板搬送装置 |
| JPS5594501A (en) * | 1979-01-11 | 1980-07-18 | Mitsubishi Electric Corp | Magnetic float control device |
| JPS5817018A (ja) * | 1981-07-16 | 1983-02-01 | Nippon Telegr & Teleph Corp <Ntt> | ウエハ移送装置 |
| JPS59146326A (ja) * | 1983-02-09 | 1984-08-22 | Fujitsu Ltd | チヤネル装置の制御方式 |
| JPS6036222A (ja) * | 1983-08-05 | 1985-02-25 | Irie Koken Kk | 高真空中の物品搬送装置 |
| JPS60261302A (ja) * | 1984-06-06 | 1985-12-24 | Irie Koken Kk | 高真空中の物品搬送装置 |
| JPS6127759A (ja) * | 1984-07-16 | 1986-02-07 | 松下電器産業株式会社 | 移載装置 |
| JPS6188707A (ja) * | 1984-10-05 | 1986-05-07 | Fuji Electric Co Ltd | 磁気吸引浮上搬送装置 |
| JPH0624405B2 (ja) * | 1985-07-03 | 1994-03-30 | 株式会社東芝 | 浮上式搬送装置 |
| JPS61277303A (ja) * | 1985-06-03 | 1986-12-08 | Nippon Telegr & Teleph Corp <Ntt> | 磁気浮上移送装置 |
| JPS61295926A (ja) * | 1985-06-25 | 1986-12-26 | Ulvac Corp | 真空装置用磁気浮上搬送装置 |
| JPS62114403A (ja) * | 1985-11-13 | 1987-05-26 | Fuji Electric Co Ltd | 搬送装置 |
| US4826360A (en) * | 1986-03-10 | 1989-05-02 | Shimizu Construction Co., Ltd. | Transfer system in a clean room |
| JP2547403B2 (ja) * | 1986-10-06 | 1996-10-23 | 日本真空技術株式会社 | 真空装置用磁気浮上搬送装置 |
| JPS63194502A (ja) * | 1987-02-04 | 1988-08-11 | Yaskawa Electric Mfg Co Ltd | 磁気浮上搬送装置 |
| JPH01134998A (ja) * | 1987-11-20 | 1989-05-26 | Citizen Watch Co Ltd | 磁気シールド装置 |
| JPH01228530A (ja) * | 1988-03-08 | 1989-09-12 | Fujitsu Ltd | 真空装置の結合方法 |
| JPH01299119A (ja) * | 1988-05-24 | 1989-12-01 | Irie Koken Kk | 磁気浮上物品搬送装置 |
| JPH0253202U (ja) * | 1988-10-04 | 1990-04-17 | ||
| JP2964145B2 (ja) * | 1988-10-25 | 1999-10-18 | セイコー精機株式会社 | 磁気浮上搬送装置 |
| JPH0728482B2 (ja) * | 1989-12-15 | 1995-03-29 | 株式会社安川電機 | 磁気浮上搬送方法と装置 |
| JPH03273802A (ja) * | 1990-02-05 | 1991-12-05 | Sumitomo Electric Ind Ltd | 磁気浮上搬送車 |
| JP2941374B2 (ja) * | 1990-07-18 | 1999-08-25 | 株式会社荏原総合研究所 | 磁気浮上搬送装置の制御装置 |
| US5180048A (en) * | 1990-10-12 | 1993-01-19 | Mitsubishi Jukogyo Kabushiki Kaisha | Magnetic levitating transportation system |
| US5360470A (en) * | 1992-07-06 | 1994-11-01 | Fujitsu Limited | Magnetic levitating transporting apparatus with a movable magnetic unit |
| JPH0624559A (ja) * | 1992-07-07 | 1994-02-01 | Ebara Corp | 搬送装置 |
| JPH0624561A (ja) * | 1992-07-08 | 1994-02-01 | Ebara Corp | 搬送装置 |
| JPH0636222A (ja) * | 1992-07-16 | 1994-02-10 | Nec Kansai Ltd | 磁気ヘッドの製造方法及びその中間構体 |
| US5222436A (en) * | 1992-07-28 | 1993-06-29 | United States Department Of Energy | Propulsion and stabilization system for magnetically levitated vehicles |
| JP2777962B2 (ja) * | 1993-08-31 | 1998-07-23 | 株式会社荏原製作所 | ガス冷却・加湿・浄化用スプレー塔及び方法 |
-
1993
- 1993-07-06 JP JP50317294A patent/JP3544208B2/ja not_active Expired - Fee Related
- 1993-07-06 EP EP93914962A patent/EP0648698B1/en not_active Expired - Lifetime
- 1993-07-06 WO PCT/JP1993/000930 patent/WO1994001354A1/ja active IP Right Grant
- 1993-07-06 DE DE69316214T patent/DE69316214T2/de not_active Expired - Fee Related
- 1993-07-06 US US08/362,451 patent/US5641054A/en not_active Expired - Fee Related
Cited By (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180014247A (ko) * | 2007-07-17 | 2018-02-07 | 브룩스 오토메이션 인코퍼레이티드 | 챔버 벽들에 일체화된 모터들을 갖는 기판 처리 장치 |
| KR20210119580A (ko) * | 2007-07-17 | 2021-10-05 | 브룩스 오토메이션 인코퍼레이티드 | 기판 운송 장치 |
| KR102617936B1 (ko) * | 2007-07-17 | 2023-12-27 | 브룩스 오토메이션 인코퍼레이티드 | 기판 운송 장치 |
| KR101825595B1 (ko) * | 2007-07-17 | 2018-02-05 | 브룩스 오토메이션 인코퍼레이티드 | 챔버 벽들에 일체화된 모터들을 갖는 기판 처리 장치 |
| KR102192244B1 (ko) * | 2013-12-30 | 2020-12-17 | 삼성디스플레이 주식회사 | 기판 이송장치 |
| KR20150078173A (ko) * | 2013-12-30 | 2015-07-08 | 삼성디스플레이 주식회사 | 기판 이송장치 |
| KR102424958B1 (ko) * | 2014-01-21 | 2022-07-25 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| KR102432133B1 (ko) * | 2014-01-21 | 2022-08-12 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| KR20180004315A (ko) * | 2014-01-21 | 2018-01-10 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| US11205583B2 (en) | 2014-01-21 | 2021-12-21 | Persimmon Technologies Corporation | Substrate transport vacuum platform |
| KR20160108549A (ko) * | 2014-01-21 | 2016-09-19 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| KR20220032127A (ko) * | 2014-01-21 | 2022-03-15 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| KR20220116079A (ko) * | 2014-01-21 | 2022-08-19 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| KR102371308B1 (ko) * | 2014-01-21 | 2022-03-07 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| US11769680B2 (en) | 2014-01-21 | 2023-09-26 | Persimmon Technologies Corporation | Substrate transport vacuum platform |
| KR102654132B1 (ko) * | 2014-01-21 | 2024-04-03 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| KR20170106464A (ko) * | 2015-01-23 | 2017-09-20 | 어플라이드 머티어리얼스, 인코포레이티드 | 반도체 프로세스 장비 |
| KR102479920B1 (ko) * | 2015-01-23 | 2022-12-20 | 어플라이드 머티어리얼스, 인코포레이티드 | 반도체 프로세스 장비 |
| KR102090950B1 (ko) * | 2015-04-09 | 2020-03-19 | 어플라이드 머티어리얼스, 인코포레이티드 | 물체를 홀딩하고 포지셔닝하고 이동시키기 위한 디바이스 |
| KR20170137159A (ko) * | 2015-04-09 | 2017-12-12 | 어플라이드 머티어리얼스, 인코포레이티드 | 물체를 홀딩하고 포지셔닝하고 이동시키기 위한 디바이스 |
| JP2019205342A (ja) * | 2015-04-09 | 2019-11-28 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | 物体を保持、位置づけし、移動させるための装置 |
| KR102126341B1 (ko) * | 2017-03-16 | 2020-06-24 | 어플라이드 머티어리얼스, 인코포레이티드 | 대상물을 유지하고, 포지셔닝하고, 그리고 이동시키는 것 중 적어도 하나를 위한 장치 및 대상물을 유지하고, 포지셔닝하고, 그리고 이동시키는 것 중 적어도 하나를 위한 장치를 동작시키는 방법 |
| US11139759B2 (en) | 2017-03-16 | 2021-10-05 | Applied Materials, Inc. | Apparatus for at least one of holding, positioning and moving an object and method of operating an apparatus for at least one of holding, positioning and moving an object |
| CN108886008B (zh) * | 2017-03-16 | 2022-02-22 | 应用材料公司 | 用以物体的支承、定位及/或移动的设备及其操作方法 |
| JP2019512064A (ja) * | 2017-03-16 | 2019-05-09 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | 物体を保持し、位置付け、かつ/又は動かすための装置、及び、物体を保持し、位置付け、かつ/又は動かすための装置を動作させる方法 |
| CN108886008A (zh) * | 2017-03-16 | 2018-11-23 | 应用材料公司 | 用以物体的支承、定位及/或移动的设备及用以物体的支承、定位及/或移动的设备的操作方法 |
| KR20180116222A (ko) * | 2017-03-16 | 2018-10-24 | 어플라이드 머티어리얼스, 인코포레이티드 | 대상물을 유지하고, 포지셔닝하고, 그리고 이동시키는 것 중 적어도 하나를 위한 장치 및 대상물을 유지하고, 포지셔닝하고, 그리고 이동시키는 것 중 적어도 하나를 위한 장치를 동작시키는 방법 |
| KR102138321B1 (ko) * | 2017-09-29 | 2020-07-27 | 숭실대학교산학협력단 | 선형 모터를 이용한 비접촉 이송 장치 |
| KR20190038328A (ko) * | 2017-09-29 | 2019-04-08 | 숭실대학교산학협력단 | 선형 모터를 이용한 비접촉 이송 장치 |
| TWI687361B (zh) * | 2017-11-20 | 2020-03-11 | 美商應用材料股份有限公司 | 磁浮系統、真空系統與運輸載體之方法 |
| KR102430391B1 (ko) * | 2018-05-24 | 2022-08-05 | 어플라이드 머티어리얼스, 인코포레이티드 | 캐리어를 이송하기 위한 자기 부상 시스템, 자기 부상 시스템을 위한 캐리어, 기판을 수직으로 프로세싱하기 위한 프로세싱 시스템, 및 캐리어를 이송하는 방법 |
| KR20210011437A (ko) * | 2018-05-24 | 2021-02-01 | 어플라이드 머티어리얼스, 인코포레이티드 | 캐리어를 이송하기 위한 자기 부상 시스템, 자기 부상 시스템을 위한 캐리어, 기판을 수직으로 프로세싱하기 위한 프로세싱 시스템, 및 캐리어를 이송하는 방법 |
| KR102468292B1 (ko) * | 2018-08-29 | 2022-11-16 | 어플라이드 머티어리얼스, 인코포레이티드 | 제1 캐리어 및 제2 캐리어를 이송하기 위한 장치, 기판을 수직으로 프로세싱하기 위한 프로세싱 시스템, 및 이를 위한 방법들 |
| KR20210046746A (ko) * | 2018-08-29 | 2021-04-28 | 어플라이드 머티어리얼스, 인코포레이티드 | 제1 캐리어 및 제2 캐리어를 이송하기 위한 장치, 기판을 수직으로 프로세싱하기 위한 프로세싱 시스템, 및 이를 위한 방법들 |
| KR20210062655A (ko) * | 2018-09-19 | 2021-05-31 | 어플라이드 머티어리얼스, 인코포레이티드 | 자기 부상 시스템, 자기 부상 시스템의 베이스, 진공 시스템, 및 진공 챔버에서 캐리어를 비접촉식으로 홀딩하고 이동시키는 방법 |
| KR102710618B1 (ko) * | 2018-09-19 | 2024-09-25 | 어플라이드 머티어리얼스, 인코포레이티드 | 자기 부상 시스템, 자기 부상 시스템의 베이스, 진공 시스템, 및 진공 챔버에서 캐리어를 비접촉식으로 홀딩하고 이동시키는 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO1994001354A1 (en) | 1994-01-20 |
| EP0648698A4 (en) | 1995-12-20 |
| EP0648698A1 (en) | 1995-04-19 |
| EP0648698B1 (en) | 1998-01-07 |
| DE69316214T2 (de) | 1998-08-13 |
| US5641054A (en) | 1997-06-24 |
| DE69316214D1 (de) | 1998-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3544208B2 (ja) | 磁気浮上搬送装置 | |
| JP4543181B2 (ja) | 超電導磁気浮上による非接触搬送装置 | |
| KR101531656B1 (ko) | 자기 부상 이송 장치 | |
| US7293950B2 (en) | Universal modular wafer transport system | |
| JPH07228345A (ja) | トンネル搬送装置 | |
| WO1999027540A1 (fr) | Dispositif de positionnement d'une plaquette | |
| US7318517B2 (en) | Process system and device for transporting substrates | |
| KR20110049936A (ko) | 자기부상 및 자기베어링을 이용한 직선이송장치 | |
| KR102193613B1 (ko) | 기판의 진공 프로세싱을 위한 장치, 유기 재료들을 갖는 디바이스들의 제조를 위한 시스템, 및 2개의 압력 구역들을 연결시키는 개구를 밀봉하기 위한 방법 | |
| KR101957960B1 (ko) | 자기 부상 이송 장치 | |
| JPH06100164A (ja) | 磁気的に結合された搬送装置 | |
| US11867229B2 (en) | Linear guideway assembly for contactless linear displacement of a rigid body relative to another rigid body along a linear displacement path | |
| JPH06179524A (ja) | 磁気浮上真空搬送装置 | |
| JP2547403B2 (ja) | 真空装置用磁気浮上搬送装置 | |
| JP3599782B2 (ja) | 磁気浮上搬送装置に於けるワーク検出方法と装置 | |
| JP7478774B2 (ja) | 搬送システム | |
| JPH07108159A (ja) | 搬送装置 | |
| KR100917499B1 (ko) | 비접촉 평면 스테이지 및 이의 제어방법 | |
| JP3393692B2 (ja) | 停止位置決め装置 | |
| JPH0327454B2 (ja) | ||
| JPH07228344A (ja) | トンネル搬送方法及び装置 | |
| JPH01227672A (ja) | 超電導部材を利用した駆動機構 | |
| JPH05238683A (ja) | 磁気浮上エレベータ | |
| JPH0743048Y2 (ja) | 搬送部材用除振装置 | |
| JPH054718A (ja) | 磁気浮上搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040330 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040401 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |