WO2013146364A1 - 試料保持担体およびそれを用いた蛍光検出システム、蛍光検出装置 - Google Patents
試料保持担体およびそれを用いた蛍光検出システム、蛍光検出装置 Download PDFInfo
- Publication number
- WO2013146364A1 WO2013146364A1 PCT/JP2013/057462 JP2013057462W WO2013146364A1 WO 2013146364 A1 WO2013146364 A1 WO 2013146364A1 JP 2013057462 W JP2013057462 W JP 2013057462W WO 2013146364 A1 WO2013146364 A1 WO 2013146364A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- track
- sample
- well
- substrate
- excitation light
- Prior art date
Links
- 238000001917 fluorescence detection Methods 0.000 title claims abstract description 124
- 239000000758 substrate Substances 0.000 claims abstract description 234
- 230000003287 optical effect Effects 0.000 claims description 47
- 238000003860 storage Methods 0.000 claims description 36
- 238000000926 separation method Methods 0.000 claims description 7
- 230000005284 excitation Effects 0.000 abstract description 254
- 238000005259 measurement Methods 0.000 abstract description 4
- 210000004027 cell Anatomy 0.000 description 59
- 238000000034 method Methods 0.000 description 58
- 239000010410 layer Substances 0.000 description 49
- 238000001514 detection method Methods 0.000 description 38
- 230000008569 process Effects 0.000 description 37
- 238000010586 diagram Methods 0.000 description 30
- 239000004065 semiconductor Substances 0.000 description 24
- 210000003743 erythrocyte Anatomy 0.000 description 22
- 239000011295 pitch Substances 0.000 description 21
- 201000004792 malaria Diseases 0.000 description 18
- 244000045947 parasite Species 0.000 description 16
- 230000002093 peripheral effect Effects 0.000 description 15
- 230000010287 polarization Effects 0.000 description 14
- 230000003321 amplification Effects 0.000 description 10
- 230000004048 modification Effects 0.000 description 10
- 238000012986 modification Methods 0.000 description 10
- 238000003199 nucleic acid amplification method Methods 0.000 description 10
- 238000012545 processing Methods 0.000 description 10
- 238000011282 treatment Methods 0.000 description 10
- 239000000463 material Substances 0.000 description 9
- 238000004519 manufacturing process Methods 0.000 description 7
- 239000004417 polycarbonate Substances 0.000 description 7
- 229920000515 polycarbonate Polymers 0.000 description 7
- 239000002344 surface layer Substances 0.000 description 7
- 230000001678 irradiating effect Effects 0.000 description 6
- 238000000465 moulding Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 239000011347 resin Substances 0.000 description 5
- 229920005989 resin Polymers 0.000 description 5
- 201000009310 astigmatism Diseases 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 238000001746 injection moulding Methods 0.000 description 4
- 229910052751 metal Inorganic materials 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 4
- 239000004926 polymethyl methacrylate Substances 0.000 description 4
- 229920000098 polyolefin Polymers 0.000 description 4
- 239000000969 carrier Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000009191 jumping Effects 0.000 description 3
- 238000002372 labelling Methods 0.000 description 3
- 238000002360 preparation method Methods 0.000 description 3
- 238000003672 processing method Methods 0.000 description 3
- 108090000623 proteins and genes Proteins 0.000 description 3
- 238000004528 spin coating Methods 0.000 description 3
- 229910001316 Ag alloy Inorganic materials 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 2
- 241000224016 Plasmodium Species 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 239000003989 dielectric material Substances 0.000 description 2
- 239000003814 drug Substances 0.000 description 2
- 229940079593 drug Drugs 0.000 description 2
- 230000007935 neutral effect Effects 0.000 description 2
- HFLAMWCKUFHSAZ-UHFFFAOYSA-N niobium dioxide Chemical compound O=[Nb]=O HFLAMWCKUFHSAZ-UHFFFAOYSA-N 0.000 description 2
- 229910000484 niobium oxide Inorganic materials 0.000 description 2
- URLJKFSTXLNXLG-UHFFFAOYSA-N niobium(5+);oxygen(2-) Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Nb+5].[Nb+5] URLJKFSTXLNXLG-UHFFFAOYSA-N 0.000 description 2
- 230000001717 pathogenic effect Effects 0.000 description 2
- 229920001296 polysiloxane Polymers 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 241000238631 Hexapoda Species 0.000 description 1
- 241000124008 Mammalia Species 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 229910010413 TiO 2 Inorganic materials 0.000 description 1
- 241000251539 Vertebrata <Metazoa> Species 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 244000052616 bacterial pathogen Species 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 210000004748 cultured cell Anatomy 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000002900 effect on cell Effects 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 230000008020 evaporation Effects 0.000 description 1
- 239000007850 fluorescent dye Substances 0.000 description 1
- 238000010353 genetic engineering Methods 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 150000002632 lipids Chemical class 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 238000002493 microarray Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 102000039446 nucleic acids Human genes 0.000 description 1
- 108020004707 nucleic acids Proteins 0.000 description 1
- 150000007523 nucleic acids Chemical class 0.000 description 1
- 244000052769 pathogen Species 0.000 description 1
- 230000001575 pathological effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 102000004169 proteins and genes Human genes 0.000 description 1
- 230000006798 recombination Effects 0.000 description 1
- 238000005215 recombination Methods 0.000 description 1
- 238000003892 spreading Methods 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 235000000346 sugar Nutrition 0.000 description 1
- 150000008163 sugars Chemical class 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images






























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/62—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light
- G01N21/63—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light optically excited
- G01N21/64—Fluorescence; Phosphorescence
- G01N21/645—Specially adapted constructive features of fluorimeters
- G01N21/6452—Individual samples arranged in a regular 2D-array, e.g. multiwell plates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/62—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light
- G01N21/63—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light optically excited
- G01N21/64—Fluorescence; Phosphorescence
- G01N21/645—Specially adapted constructive features of fluorimeters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L3/00—Containers or dishes for laboratory use, e.g. laboratory glassware; Droppers
- B01L3/50—Containers for the purpose of retaining a material to be analysed, e.g. test tubes
- B01L3/508—Containers for the purpose of retaining a material to be analysed, e.g. test tubes rigid containers not provided for above
- B01L3/5085—Containers for the purpose of retaining a material to be analysed, e.g. test tubes rigid containers not provided for above for multiple samples, e.g. microtitration plates
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L9/00—Supporting devices; Holding devices
- B01L9/56—Means for indicating position of a recipient or sample in an array
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/01—Arrangements or apparatus for facilitating the optical investigation
- G01N21/03—Cuvette constructions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/62—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light
- G01N21/63—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light optically excited
- G01N21/64—Fluorescence; Phosphorescence
- G01N21/6447—Fluorescence; Phosphorescence by visual observation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00029—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor provided with flat sample substrates, e.g. slides
- G01N35/00069—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor provided with flat sample substrates, e.g. slides whereby the sample substrate is of the bio-disk type, i.e. having the format of an optical disk
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/08—Disposition or mounting of heads or light sources relatively to record carriers
- G11B7/09—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/02—Identification, exchange or storage of information
- B01L2300/024—Storing results with means integrated into the container
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/06—Auxiliary integrated devices, integrated components
- B01L2300/0627—Sensor or part of a sensor is integrated
- B01L2300/0654—Lenses; Optical fibres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/08—Geometry, shape and general structure
- B01L2300/0803—Disc shape
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/08—Geometry, shape and general structure
- B01L2300/0803—Disc shape
- B01L2300/0806—Standardised forms, e.g. compact disc [CD] format
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/08—Geometry, shape and general structure
- B01L2300/0809—Geometry, shape and general structure rectangular shaped
- B01L2300/0819—Microarrays; Biochips
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/08—Geometry, shape and general structure
- B01L2300/0893—Geometry, shape and general structure having a very large number of wells, microfabricated wells
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/16—Surface properties and coatings
- B01L2300/168—Specific optical properties, e.g. reflective coatings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/62—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light
- G01N21/63—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light optically excited
- G01N21/64—Fluorescence; Phosphorescence
- G01N21/645—Specially adapted constructive features of fluorimeters
- G01N2021/6463—Optics
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/62—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light
- G01N21/63—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light optically excited
- G01N21/64—Fluorescence; Phosphorescence
- G01N21/645—Specially adapted constructive features of fluorimeters
- G01N2021/6482—Sample cells, cuvettes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2201/00—Features of devices classified in G01N21/00
- G01N2201/10—Scanning
- G01N2201/105—Purely optical scan
Definitions
- the present invention relates to a sample holding carrier for holding a sample prepared by fluorescently labeling a specimen such as a cell, a fluorescence detection system and a fluorescence detection apparatus using the sample holding carrier.
- Detecting cells infected with pathogenic bacteria or cells having a predetermined form from a large number of cells is particularly important in the medical field such as clinical sites.
- a technique for detecting such a cell quickly simply and with high accuracy, for example, a technique described in WO2010 / 027003 is introduced.
- a technique described in WO2010 / 027003 is introduced.
- a plurality of microchambers (wells) are formed on a microarray chip, and cells with fluorescent labels are filled in each well. Then, specific cells that emit fluorescence are detected by observing each well with a fluorescence microscope while irradiating laser light.
- Japanese Patent Application Laid-Open No. 2006-322819 describes a configuration for detecting fluorescence generated from cells by scanning a series of wells filled with cells with laser light.
- a series of wells are formed in the circumferential direction of the disk, and a series of information pits are arranged in a layer separated from the layer where the wells are formed on the light incident side along the well array. Is formed. Address information is held in the information pit.
- a light source for irradiating the well with excitation light and a light source for irradiating the information pit with laser light are separately prepared and emitted from each light source.
- Light is focused by a common objective lens.
- the objective lens is controlled so that the laser light for information pits is focused on the information pits and follows a series of information pit rows (tracks), so that the excitation light is focused on the cells filled in the wells, A series of wells are sequentially scanned by laser light.
- the optical system also includes a photodetector for detecting fluorescence emitted from the cells and a photodetector for receiving the laser light modulated by the information pits.
- a signal for controlling the objective lens and a signal for reproducing the information held in the information pit are generated by the output from the photodetector that receives the laser light.
- fluorescence When fluorescence is emitted from the cells when irradiated with excitation light, this fluorescence is detected by a photodetector for fluorescence detection.
- the position information acquired from the information pit when fluorescence is detected identifies the position of the well that accommodates the cells that emit fluorescence. In this way, the presence / absence of cells to be detected and the position of the well containing the cells are automatically detected from a large number of cells accommodated in a series of wells arranged on the disk without observation with a fluorescence microscope. .
- Japanese Patent Laid-Open No. 2006-322819 since two laser light sources are required, there arises a problem that the configuration of the apparatus is complicated. In addition, since the excitation light is not directly focus-controlled, the convergence position of the excitation light may deviate from the cells on the bottom surface of the well, and there is a possibility that the cell detection accuracy may be lowered. Further, according to Japanese Patent Laid-Open No. 2006-322819, since the well dimensions are several steps larger than the information pit dimensions, a plurality of tracks cross one well. For this reason, a plurality of pieces of address information acquired from the information pits are associated with one well, and the location of the wells based on the address information is considerably complicated. In addition, the address information may be switched while a predetermined track crosses the well. In this case, it becomes a problem which address information before and after the switching should be applied to the well.
- the present invention has been made in view of the above points, and provides a sample holding carrier capable of accurately measuring a sample with a simple configuration, and a fluorescence detection system and a fluorescence detection apparatus using the same. With the goal. It is another object of the present invention to provide a sample holding carrier that can accurately correspond address information to a well (sample storage unit) and a fluorescence detection apparatus using the same.
- the first aspect of the present invention relates to a sample holding carrier.
- the sample holding carrier according to this aspect is disposed on the substrate on which the irradiation light is incident from the lower surface, the reflection film that is disposed on the upper surface of the substrate and reflects a part of the irradiation light, and the upper surface side of the reflection film. And a plurality of sample accommodating portions having a bottom surface.
- the irradiation light is converged and incident on the substrate.
- the distance between the reflection surface that is an interface between the reflection film and the substrate and the bottom surface of the housing portion is equal to or less than the focal depth of the irradiation light.
- the control for focusing the irradiation light on the reflection surface on the apparatus side since the distance between the reflection surface and the bottom surface of the sample storage unit is equal to or less than the focal depth of the irradiation light, the control for focusing the irradiation light on the reflection surface on the apparatus side.
- the bottom surface of the sample container can be included in the range of the focal depth of the irradiation light. For this reason, it is possible to reliably and efficiently irradiate the sample housed on the bottom surface of the sample housing portion with irradiation light, and to measure the sample with high accuracy.
- the sample holding carrier since the focal depth of the irradiation light is applied to the bottom surface of the sample storage unit, it is possible to realize both the adjustment of the in-focus position and the irradiation of the sample only by the irradiation light. it can. Therefore, it is not necessary to provide a servo light source in addition to the light source for irradiation light, and the configuration of the optical system can be simplified.
- the sample holding carrier according to this aspect may include a track formed on the upper surface of the substrate.
- address information for specifying a position on the sample holding carrier is held in the track. In this way, on the apparatus side, the position on the sample holding carrier of the sample container where the fluorescence is detected can be specified based on the address information.
- the track stores parameter values used for deriving a depth of focus applied to the sample holding carrier.
- the depth of focus suitable for each sample holding carrier can be grasped, and measures such as adjusting the depth of focus can be taken accordingly.
- a sample holding carrier for holding a fluorescently labeled sample is irradiated with irradiation light from a fluorescence detection device, and fluorescence generated from the sample by irradiation of the irradiation light is emitted from the fluorescence detection device.
- the present invention relates to a fluorescence detection system that detects the above.
- the sample holding carrier is a substrate on which the irradiation light is incident from the lower surface, a reflection film that is disposed on the upper surface of the substrate and reflects a part of the irradiation light, and the reflection A plurality of sample storage portions disposed on the upper surface side of the membrane and having a bottom surface.
- the fluorescence detection apparatus includes an optical system for converging the irradiation light to make it incident on the substrate. And the distance between the reflective surface which is an interface of the said reflecting film and the said board
- the fluorescence detection system since the distance between the reflection surface and the bottom surface of the housing is equal to or less than the focal depth of the irradiation light, the irradiation light is focused on the reflection surface on the fluorescence detection device side.
- the bottom surface of the sample container can be included within the range of the focal depth of the irradiation light. For this reason, it is possible to reliably and efficiently irradiate the sample housed on the bottom surface of the sample housing portion with irradiation light, and to measure the sample with high accuracy.
- the sample holding carrier may be configured to hold a parameter value used for deriving a focal depth applied to the sample holding carrier.
- the fluorescence detection apparatus corresponds to the parameter value read by the reading unit for reading the parameter value, the focal depth adjustment unit for changing the focal depth of the irradiation light, and the reading unit.
- a control unit that controls the depth-of-focus adjustment unit so as to obtain a depth of focus.
- the depth of focus suitable for the sample holding carrier by referring to the parameter value held on the sample holding carrier on the fluorescence detection device side. Then, by controlling the focal depth adjustment unit so that the grasped focal depth is obtained, the focal depth of the irradiation light can be made suitable for the sample holding carrier. Therefore, according to this configuration, the depth of focus can be optimized for various sample holding carriers, and the sample can be measured more appropriately.
- a third aspect of the present invention relates to a fluorescence detection apparatus that irradiates a sample holding carrier that holds a fluorescently labeled sample with irradiation light and detects fluorescence generated from the sample by irradiation of the irradiation light.
- the sample holding carrier is disposed on the substrate on which the irradiation light is incident from the lower surface, the track formed on the upper surface of the substrate, the upper surface of the substrate, and one of the irradiation lights.
- a plurality of sample storage portions disposed on the upper surface side of the reflection film and having a bottom surface.
- the fluorescence detection apparatus includes a light source that emits the irradiation light, an objective lens that converges the irradiation light on the sample holding carrier, and the objective lens at least in a focus direction parallel to the optical axis and the track.
- An objective lens actuator driven in a vertical tracking direction, and the irradiation light emitted from the light source is guided to the objective lens, and the fluorescence is separated from the reflected light of the irradiation light reflected by the sample holding carrier.
- a fluorescence detector that receives the separated fluorescence, and light that changes a relative position between the objective lens and the sample holding carrier so that the irradiation light moves on the sample holding carrier along the track.
- a scanning unit that the distance between the reflection surface that is an interface between the reflection film and the substrate and the bottom surface of the housing portion is equal to or less than the depth of focus of the irradiation light.
- the fluorescence detection apparatus is suitable for use in fluorescence detection with respect to the sample holding carrier according to the first aspect. That is, by using the fluorescence detection apparatus according to this aspect, the bottom surface of the sample storage unit can be included within the range of the focal depth of the irradiation light, and the sample stored in the bottom surface of the sample storage unit Thus, the irradiation light can be irradiated reliably and efficiently. Therefore, the sample can be measured with high accuracy.
- both the tracking of the track and the irradiation of the sample can be realized only by the irradiation light emitted from one light source. It is not necessary to provide a servo light source, and the configuration of the optical system can be simplified.
- the fluorescence detection device When the sample holding carrier holds a parameter value used to derive the depth of focus applied to the sample holding carrier, the fluorescence detection device according to this aspect includes a reading unit for reading the parameter value, A depth-of-focus adjustment unit for changing the depth of focus of the irradiation light, and a depth-of-focus control unit that controls the depth-of-focus adjustment unit so that the depth of focus corresponds to the parameter value read by the reading unit; , May be further provided.
- a fourth aspect of the present invention relates to a sample holding carrier.
- the sample holding carrier according to the present aspect includes a substrate, a track formed on the upper surface of the substrate and holding predetermined information, and a plurality of sample storage units arranged on the upper surface side of the substrate and storing samples. Prepare. Here, the track crosses below the sample storage portion, and the same well address information for specifying the position of the sample storage portion is given to a plurality of track portions crossing the same sample storage portion.
- the sample holding carrier since the same well address information for specifying the position of the sample storage unit is given to the plurality of track portions crossing the same sample storage unit, The position of the sample container specified by the well address information can be made to correspond one-to-one. Therefore, it is possible to easily and smoothly specify the position of the sample storage portion based on the well address information.
- the sample holding carrier has a width corresponding to a predetermined number of tracks in a direction crossing the track, a width corresponding to a predetermined track length in a direction along the track, and a width including the sample storage portion.
- An address common area can be configured to be set along the track.
- the sample accommodating part is arranged so that one sample accommodating part is assigned to one address common area, and the same well address information is included in the track portion included in the same address common area. Is granted.
- the same well address information is given to the address common area wider than the sample container, even when the sample container is misaligned when the sample container is arranged on the sample holding carrier, The sample container can be positioned in the address common area. Therefore, the same well address information can be more reliably given to one sample container.
- the sample holding carrier according to the present aspect has track address information for distinguishing one track portion from other track portions among a group of the track portions to which the same address information is given. Can be configured to be granted. According to this configuration, by acquiring the track address information on the fluorescence detection device side, the position in the direction across the track on the sample storage unit can be grasped. Therefore, it is possible to grasp the generation position of the fluorescence more finely.
- a fifth aspect of the present invention relates to a fluorescence detection apparatus that irradiates a sample holding carrier that holds a fluorescently labeled sample with irradiation light and detects fluorescence generated from the sample by irradiation with the irradiation light.
- the sample holding carrier includes a substrate, a track formed on the upper surface of the substrate and holding predetermined information, and a plurality of sample storage portions arranged on the upper surface side of the substrate and storing samples. And the track crosses below the sample container, and the same well address information for specifying the position of the sample container is given to a plurality of track portions that cross the same sample container. Prepare.
- the fluorescence detection apparatus includes a light source that emits the irradiation light, an objective lens that converges the irradiation light on the sample holding carrier, and the irradiation light converged by the objective lens is scanned along the track.
- An optical scanning unit a photodetector for receiving the irradiation light reflected by the sample holding carrier, a reproducing unit for reproducing the well address information from an output from the photodetector, and the track portion on the track portion.
- a scanning position detection unit for detecting the scanning position of the irradiation light.
- the position of the sample storage unit is based on the well address information regenerated by the reproduction unit. Can be easily identified.
- the scanning position of the irradiation light on the track portion is detected by the scanning position detector, it is possible to specify the scanning position of the fluorescence when the fluorescence is detected on each track portion. Therefore, it is possible to grasp the fluorescence detection position in the sample container more finely.
- the sample holding carrier has track address information for distinguishing one track portion from other track portions among a group of the track portions to which the same address information is given. It can be configured to be applied to the track portion.
- the reproduction unit of the fluorescence detection device is configured to further reproduce the track address information based on an output from the photodetector.
- the fluorescence detection apparatus according to this aspect includes the well address information and the track address information reproduced by the reproduction unit based on the output from the photodetector, and the scanning position detected by the scanning position detection unit.
- the generation position of the fluorescence is specified by the position of the sample storage unit, and further specified by the track in the sample storage unit and the scanning position on the track. Therefore, in the fluorescence detection apparatus, the position where fluorescence is generated can be grasped in more detail.
- the fluorescence detection apparatus may include an objective lens actuator that drives the objective lens and a control unit that controls the objective lens actuator.
- the sample holding carrier may be configured such that the sample holding unit is not arranged in a band-shaped region having a predetermined width in a direction perpendicular to the track.
- the control unit controls the objective lens actuator to move the irradiation position of the irradiation light in a direction across the track. Can be.
- a sample holding carrier capable of measuring a sample with a simple configuration with high accuracy, a fluorescence detection system and a fluorescence detection apparatus using the same.
- a sample holding carrier capable of accurately associating address information with a well (sample storage unit) and a fluorescence detection apparatus using the sample holding carrier.
- the perspective view which shows typically the structure of the external appearance of the biosensor board
- the perspective view which shows typically the structure of the external appearance of the biosensor board
- FIG. 1A is a perspective view schematically showing an external configuration of the biosensor substrate 10 according to the present embodiment.
- the biosensor substrate 10 is used, for example, for detecting red blood cells infected with malaria parasites in human blood.
- the biosensor substrate 10 has a disk shape like an optical disk (CD, DVD, etc.), and a circular hole 10a is formed at the center.
- the biosensor substrate 10 has a structure in which a well layer 12 is laminated on the upper surface of a base substrate 11. As shown in the enlarged view at the right end of FIG. 1A, the well layer 12 has a plurality of minute wells 13 formed of cylindrical depressions. The wells 13 are arranged concentrically or spirally from the inner periphery to the outer periphery of the biosensor substrate 10.
- the well 13 has a bottom surface portion 13a that is one step lower than the top surface of the well layer 12, and the diameter and height are set so that the sample can be accommodated when the sample is dropped.
- FIG. 1B is a cross-sectional view of the biosensor substrate 10 taken along a plane perpendicular to the surface
- FIG. 1C is an enlarged view of a broken line portion of FIG.
- a reflective film 14 is disposed between the base substrate 11 and the well layer 12. By reflecting the reflective film 14 on the upper surface of the base substrate 11, a reflective surface 11 a that is an interface between the reflective film 14 and the base substrate 11 is formed on the upper surface of the base substrate 11.
- the well 13 is formed on the upper surface side of the well layer 12 with a predetermined interval. The bottom surface portion 13a of the well 13 is positioned slightly above the reflective film 14, and the bottom surface portion 13a of the well 13 and the top surface of the reflective film 14 are separated from each other.
- the diameter and height of the well 13 are d1 and d2, respectively, the distance between the bottom surface portion 13a and the reflecting surface 11a is d3, the distance between the wells 13 is d4, and the thickness of the base substrate 11 is d5.
- the track pitch of the surface 11a is d6.
- the diameter d1 and the height d2 are set to 100 ⁇ m and 50 ⁇ m, respectively, the intervals d3 and d4 are set to 2 ⁇ m and 300 ⁇ m, respectively, and the thickness d5 is set to 0.6 mm.
- the track pitch d6 is set to 1 ⁇ m.
- the reflectance of the reflective film 14 with respect to excitation light (described later) is set to 3 to 4%.
- the base substrate 11 is made of polycarbonate
- the well layer 12 is made of an ultraviolet curable resin
- the reflective film 14 is made of metal such as aluminum or silver alloy, niobium oxide, or wavelength selection. It consists of a film or the like.
- the base substrate 11 may be made of polymethyl methacrylate, amorphous polyolefin, or the like in addition to polycarbonate.
- the well layer 12 may be made of silicone, polycarbonate, polymethyl methacrylate, amorphous polyolefin, or the like.
- the film thickness of the reflective film 14 is set to, for example, 5 nm to 20 nm so as to obtain a desired reflectance.
- FIG. 2 (a) to 2 (d) are diagrams showing a method for producing the biosensor substrate 10.
- FIG. This production method is substantially the same as the production method of the optical disk as shown below.
- the base substrate 11 is formed by injection molding. As a result, the thickness of the base substrate 11 becomes d5, and a series of pits are formed on the upper surface of the base substrate 11.
- the reflective film 14 is deposited on the upper surface of the base substrate 11, thereby forming the reflective surface 11 a on the upper surface of the base substrate 11.
- a bottom layer 12a is laminated on the upper surface of the reflective film 14 by spin coating.
- an upper surface layer 12b having a thickness d2 is formed on the upper surface of the bottom surface layer 12a by 2P molding.
- a plurality of wells 13 as shown in FIG. 1B are formed.
- the well layer 12 is formed by combining the bottom layer 12a and the top layer 12b.
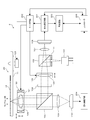
- FIG. 3 is a diagram illustrating a configuration of the fluorescence detection apparatus 1 according to the present embodiment.
- the fluorescence detection device 1 is used, for example, to determine whether red blood cells contained in the well 13 of the biosensor substrate 10 are infected with malaria parasites.
- a sample prepared by fluorescently labeling a subject is stored in the well 13 of the biosensor substrate 10 in advance.
- a red blood cell having a diameter of about 10 ⁇ m and a thickness of about 2 ⁇ m is infected with malaria parasite, the inside thereof is fluorescently labeled, and both infected red blood cells and uninfected red blood cells are both.
- a plurality of parallel arrangements are provided on the bottom surface portion 13a of the well 13 having a diameter of 100 ⁇ m.
- the optical system of the fluorescence detection apparatus 1 includes a semiconductor laser 101, a polarization beam splitter (PBS) 102, a collimator lens 103, a quarter wavelength plate 104, a dichroic prism 105, an objective lens 106, an anamorphic lens 107, A photodetector 108, a condenser lens 109, a fluorescence detector 110, and an aperture 111 are provided.
- the fluorescence detection device 1 includes a holder 121, an objective lens actuator 122, a rotation device 123, a signal calculation circuit 201, a servo circuit 202, a reproduction circuit 203, and a signal amplification circuit 204.
- the controller 205 is provided.
- the semiconductor laser 101 emits laser light having a wavelength of about 405 nm (hereinafter referred to as “excitation light”).
- the excitation light in this Embodiment is an example of the irradiation light as described in a claim.
- the excitation light guided to the biosensor substrate 10 that is, the excitation light passing through the aperture 111 is indicated by a broken line.
- a circular opening having a predetermined aperture is formed in the aperture 111, and the aperture 111 limits the aperture of the excitation light.
- the position of the semiconductor laser 101 is adjusted so that the excitation light emitted from the semiconductor laser 101 is S-polarized with respect to the PBS 102.
- the excitation light emitted from the semiconductor laser 101 is reflected by the PBS 102 after entering the collimator lens 103 after the aperture is limited by the aperture 111.
- the collimator lens 103 converts excitation light incident from the PBS 102 side into parallel light. Thereby, the excitation light that has passed through the collimator lens 103 becomes parallel light having a predetermined diameter.
- the quarter-wave plate 104 converts the excitation light incident from the collimator lens 103 side into circularly polarized light, and is orthogonal to the polarization direction when the excitation light incident from the dichroic prism 105 side is incident from the collimator lens 103 side. Convert to linearly polarized light. Thereby, the excitation light incident on the PBS 102 from the collimator lens 103 side passes through the PBS 102.
- the dichroic prism 105 is configured to reflect laser light having a wavelength of about 405 nm and transmit laser light having a wavelength of about 450 to 540 nm. As a result, the excitation light incident from the 1 ⁇ 4 wavelength plate 104 side is reflected by the dichroic prism 105 and enters the objective lens 106.
- the objective lens 106 is configured to appropriately converge the excitation light with respect to the biosensor substrate 10. Specifically, the objective lens 106 is configured such that excitation light incident from the dichroic prism 105 side converges with a predetermined NA (numerical aperture, here 0.34). The diameter of the excitation light incident on the objective lens 106 is determined by the diameter of the aperture 111. The focal depth of the excitation light converged by the objective lens 106 varies depending on the NA of the excitation light. The depth of focus of the excitation light will be described later with reference to FIGS. 5 (a) to 5 (c).
- the objective lens 106 is driven in the focus direction (direction perpendicular to the biosensor substrate 10) and the tracking direction (radial direction of the biosensor substrate 10) by the objective lens actuator 122 while being held by the holder 121. That is, the objective lens 106 is driven so that the excitation light follows the track composed of the pit row in a state where the excitation light is focused on the reflection surface 11 a of the biosensor substrate 10. A part of the excitation light focused on the reflection surface 11a is reflected by the reflection surface 11a, and most of the excitation light is transmitted through the reflection surface 11a.
- Excitation light reflected by the reflecting surface 11 a (hereinafter referred to as “reflected excitation light”) is reflected by the dichroic prism 105, changed to linearly polarized light by the quarter-wave plate 104, and becomes convergent light by the collimator lens 103.
- the reflected excitation light that enters the PBS 102 from the collimator lens 103 side passes through the PBS 102 as described above.
- the anamorphic lens 107 introduces astigmatism into the reflected excitation light incident from the PBS 102 side.
- the reflected excitation light that has passed through the anamorphic lens 107 enters the photodetector 108.
- the photodetector 108 has a four-divided sensor for receiving reflected excitation light on the light receiving surface.
- a detection signal of the photodetector 108 is input to the signal calculation circuit 201.
- the excitation light transmitted through the reflection surface 11 a reaches the bottom surface portion 13 a of the well 13.
- fluorescence is generated from the malaria protozoa.
- Such fluorescence has a NA (numerical aperture) larger than the NA of the excitation light, as indicated by a one-dot chain line in FIG.
- NA of fluorescence is, for example, 0.65.
- the wavelength of the fluorescence is different from the wavelength of the excitation light, and is 450 to 540 nm in this embodiment.
- red blood cells that are not infected with Plasmodium do not generate fluorescence because they are not fluorescently labeled. In this way, it is possible to distinguish between red blood cells infected with malaria parasites and non-infected red blood cells.
- Fluorescence incident on the dichroic prism 105 from the objective lens 106 side passes through the dichroic prism 105.
- the condensing lens 109 condenses the fluorescence incident from the dichroic prism 105 side and guides it to the fluorescence detector 110.
- the fluorescence detector 110 has a sensor for receiving fluorescence on the light receiving surface. The detection signal of the fluorescence detector 110 is input to the signal amplification circuit 204.
- the signal arithmetic circuit 201 generates a focus error signal FE and a tracking error signal TE, which will be described later, from the detection signal of the photodetector 108, and generates a reproduction RF signal, which will be described later, from the detection signal of the photodetector 108.
- the servo circuit 202 controls driving of the objective lens actuator 122 using the focus error signal FE and the tracking error signal TE output from the signal calculation circuit 201.
- the servo circuit 202 controls the rotation device 123 so that the biosensor substrate 10 is rotated at a constant linear velocity, using the reproduced RF signal output from the signal calculation circuit 201.
- the reproduction circuit 203 demodulates the reproduction RF signal output from the signal arithmetic circuit 201 to generate reproduction data.
- the signal amplification circuit 204 amplifies the detection signal of the fluorescence detector 110.
- the controller 205 controls each part of the fluorescence detection apparatus 1 in addition to the signal calculation circuit 201, the servo circuit 202, and the reproduction circuit 203. In addition, the controller 205 determines the position of the well 13 in which the fluorescence is detected on the biosensor substrate 10 based on the reproduction data (address information) output from the reproduction circuit 203 and the signal output from the signal amplification circuit 204. The address information corresponding to the well 13 in which fluorescence is detected is held in the internal memory.
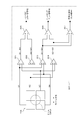
- FIG. 4 is a diagram showing a circuit configuration of the signal arithmetic circuit 201.
- the photodetector 108 has a quadrant sensor for receiving the reflected excitation light on the light receiving surface, and the upper left, upper right, lower right, and lower left sensors of the quadrant sensor respectively received light. Detection signals S1 to S4 are output based on the beam spot of the reflected excitation light. On the light receiving surface of the photodetector 108 in FIG. 4, the direction corresponding to the radial direction (radial direction) of the disk is the left-right direction. Further, the focus error signal FE and the tracking error signal TE are generated according to the astigmatism method and the one-beam push-pull method used in the existing optical disc apparatus.
- the signal operation circuit 201 includes adders 301 to 304 and 307 and subtractors 305 and 306.
- the adder 301 outputs a signal obtained by adding the detection signals S1 and S3 to the subtractor 305
- the adder 302 outputs a signal obtained by adding the detection signals S2 and S4 to the subtractor 305.
- the adder 303 outputs a signal obtained by adding the detection signals S1 and S4 to the subtracter 306 and the adder 307
- the adder 304 outputs a signal obtained by adding the detection signals S2 and S3 to the subtracter 306 and the adder 307. To do.
- the subtracter 305 subtracts the output signals of the adders 301 and 302 and outputs a focus error signal FE.
- the subtracter 306 subtracts the output signals from the adders 303 and 304 and outputs a tracking error signal TE.
- the adder 307 adds the output signals of the adders 303 and 304 and outputs a reproduction RF signal. That is, the focus error signal FE, the tracking error signal TE, and the reproduction RF signal can be obtained by the calculations of the following equations (1) to (3), respectively.
- FIGS. 5A and 5B are diagrams for explaining the focal depth of the excitation light.
- the wavelength of the excitation light is 405 nm
- the NA (numerical aperture) of the excitation light is 0.34.
- the depth of focus can be calculated by the wavelength / (NA ⁇ NA). Therefore, the focal depth of the excitation light in this embodiment is about 3.5 ⁇ m.
- the distance d3 between the bottom surface portion 13a and the reflecting surface 11a shown in FIGS. 1B and 1C is set to be smaller than the focal depth of the excitation light, and is set to 2.0 ⁇ m here.
- the spot diameter at the focal position is about 1 ⁇ m.
- the track pitch interval d6 shown in FIG. 1C is set to 1 ⁇ m so as to be substantially the same as the spot diameter.
- FIG. 5A shows a state where the lowest point in the range of the focal depth of the excitation light coincides with the reflecting surface 11a
- FIG. 5B shows the state where the highest point in the range of the focal depth of the excitation light is the bottom surface.
- the state which corresponds with the part 13a is shown.
- the distance d3 between the bottom surface portion 13a of the well 13 and the reflecting surface 11a is 2 ⁇ m, and the focal depth of the excitation light is 3.5 ⁇ m.
- Both the bottom surface portion 13a and the reflection surface 11a are included in the range corresponding to the depth. Accordingly, when the focus position of the excitation light is positioned on the reflection surface 11a by the focus servo, the sample placed on the bottom surface portion 13a is also focused.
- FIG. 5C shows a state where the lowest point in the range of the focal depth of the excitation light is positioned between the bottom surface portion 13a and the reflecting surface 11a.
- the focus position of the excitation light is not positioned as shown in FIG.
- the focal position of the excitation light can be slightly shifted upward, as shown in FIG. 5C. It is also possible to position the focal point position. In this case as well, as in FIGS. 5A and 5B, the sample placed on the bottom surface portion 13a is focused.
- the range of the focal depth is positioned as shown in FIG. 5A, the range of the focal depth is easily applied to the red blood cells, so that the sample can be measured with higher accuracy than in FIG. 5B.
- the focal position of the excitation light is slightly changed due to the follow-up characteristics of the focus servo, the flatness of the biosensor substrate 10, and the like. Shifts up and down.
- the measurement accuracy of the sample does not become a problem.
- the sample can be irradiated with the excitation light in a focused state without spreading, and the irradiation efficiency of the laser light on the sample can be increased.
- the bottom surface portion 13a of the well 13 is positioned in the range of the focal depth defined by the excitation light and the objective lens 106.
- the focal position of the objective lens 106 is positioned with respect to the sample arranged on the bottom surface portion 13a, the irradiation efficiency of the excitation light to the sample can be increased, and the sample can be measured with high accuracy.
- the optical system can be simplified. Therefore, it is possible to reduce the number of parts and the cost. In addition, the optical system can be made compact.
- the excitation light when the excitation light is focused on the reflecting surface 11a, it is also focused on the sample. That is, since the excitation light is directly focused on the sample, the laser light for sample excitation is indirectly controlled by controlling the objective lens using the servo laser light as in Patent Document 2 described above.
- the excitation light can be focused on the sample more reliably than when focused on the sample.
- the spot diameter of the excitation light at the focal position of the objective lens 106 is set to 1 ⁇ m, and the track pitch formed on the reflecting surface 11a is set to 1 ⁇ m.
- the nucleus of the malaria parasite emits a fluorescent luminescent spot having a size of about 1 ⁇ m by excitation light. Accordingly, the sample is scanned with the spot of the excitation light without any gap while converging the spot of the excitation light to the size of the nucleus of the malaria parasite, so that the nucleus of the malaria parasite can be reliably detected. Furthermore, since the position where the malaria parasite is detected is known from the address information based on the detection signal of the photodetector 108, it is possible to easily grasp which well 13 contains the detected malaria parasite.
- FIG. 6 is a diagram schematically showing the configuration of the biosensor substrate 20 according to the first modification of the first embodiment.
- the biosensor substrate 20 is divided into a lead-in region and a well region in the radial direction.
- No well 13 is formed in the well layer 12 in the inner peripheral lead-in region, and the well 13 is formed only in the outer well region.
- the pits are formed in the entire region from the lead-in region to the well region, as in the first embodiment. That is, a track formed of a pit row extends spirally from the innermost periphery of the lead-in region to the outermost periphery of the well region.
- the address information is held by these pit rows as in the first embodiment. Further, in the lead-in area, information on the biosensor substrate 20 is held in addition to address information by a pit row. Specifically, information including the distance d3 between the bottom surface portion 13a of the well 13 of the biosensor substrate 20 and the reflecting surface 11a is stored in the lead-in area. Other configurations of the biosensor substrate 20 are substantially the same as those of the biosensor substrate 10.
- the reason why the well 13 is not formed in the lead-in region is as follows.
- the first reason is that information on the reflecting surface 11a on which the lead-in region is formed can be reproduced (acquired) better when the well 13 is not present in this region than when the well 13 is present.
- the second reason is that when the sample is dropped inside the biosensor substrate 20 and the sample is poured into the well 13 by slowly rotating the biosensor substrate 20, the upper surface of the well layer 12 corresponding to the lead-in region is flat. This is because the sample can be uniformly poured into the well 13 as compared with the case where the well 13 exists in this region.
- FIG. 7 is a diagram showing a configuration of the fluorescence detection apparatus 2 according to this modification.
- the fluorescence detection device 2 has a configuration in which an aperture limiting element 131 and a polarization filter 132 are arranged between the semiconductor laser 101 and the aperture 111 in the fluorescence detection device 1 shown in FIG.
- the aperture limiting element 131 is controlled by the servo circuit 202.
- FIG. 8A and 8B are views of the aperture limiting element 131 and the polarizing filter 132, respectively, viewed in the optical axis direction of the excitation light emitted from the semiconductor laser 101.
- FIG. 8A and 8B are views of the aperture limiting element 131 and the polarizing filter 132, respectively, viewed in the optical axis direction of the excitation light emitted from the semiconductor laser 101.
- the aperture limiting element 131 is made of TN type liquid crystal, and transparent electrodes are provided at positions corresponding to the respective areas so that voltages can be individually applied to the four areas 131a to 131d having concentric boundaries. ing. When a voltage is applied to the regions 131a to 131d, the polarization direction of the excitation light incident on the region to which the voltage is applied rotates 90 degrees.
- the aperture limiting element 131 is arranged so that the centers of the regions 131 a to 131 d coincide with the emission optical axis of the semiconductor laser 101. Excitation light that has passed through the region 131 a is not shielded by the aperture 111, and excitation light that has passed outside the region 131 a is shielded by the aperture 111.
- the polarizing filter 132 shields excitation light whose polarization direction is rotated by 90 degrees when voltage is applied to the regions 131a to 131d, and transmits excitation light whose polarization direction is not rotated without voltage being applied to the regions 131a to 131d. Has been placed.
- FIG. 8C is a schematic diagram showing excitation light when no voltage is applied to all the regions 131 a to 131 d of the aperture limiting element 131.
- the beam diameter of the excitation light is the same as that in the first embodiment (see FIG. 3).
- the NA (numerical aperture) of the excitation light converged by the objective lens 106 is 0.34, which is the same as in the first embodiment.
- FIG. 8D is a schematic diagram showing excitation light when a voltage is applied to the outside of the aperture limiting element 131, for example, the regions 131a and 131b.
- the excitation light emitted from the semiconductor laser 101 and incident on the regions 131 a and 131 b has its polarization direction rotated by 90 degrees and is shielded by the polarization filter 132.
- the beam diameter of the excitation light passing through the collimator lens 103 is smaller than that shown in FIG.
- the diameter of the excitation light beam incident on the objective lens 106 from the dichroic prism 105 side is reduced, and the NA (numerical aperture) of the excitation light converged by the objective lens 106 is 0.34 in the case of FIG. 8C. Smaller than.
- the NA (numerical aperture) of the excitation light of the objective lens 106 can be reduced by reducing the beam diameter of the excitation light. Further, as described above, the depth of focus can be calculated by the wavelength / (NA ⁇ NA). Therefore, by reducing the beam diameter of the excitation light, the focal depth of the excitation light can be increased as compared with the first embodiment.
- the polarizing filter 132 can be omitted.
- the excitation light whose polarization direction is rotated by 90 degrees by the aperture limiting element 131 becomes P-polarized light with respect to the PBS 102, it passes through the PBS 102 and is not guided to the collimator lens 103. That is, the PBS 102 exhibits the same action as the polarizing filter 132.
- the beam diameter of the excitation light reflected to the collimator lens 103 side becomes small, and the excitation light is the same as in the case where the polarization filter 132 is arranged.
- the depth of focus can be changed. In this configuration, when the excitation light transmitted through the PBS 102 becomes noise light in the fluorescence detection device 2 and a problem occurs in fluorescence detection, it is desirable to arrange the polarization filter 132 as described above.
- FIG. 9A is a flowchart showing the driving operation of the aperture limiting element 131 by the controller 205.
- the controller 205 moves the objective lens 106, irradiates the lead-in area with excitation light, and reads the lead-in area (S2). At this time, the controller 205 determines the interval between the bottom surface portion 13a of the well 13 of the biosensor substrate 20 and the reflection surface 11a from the reproduction data output from the reproduction circuit 203 based on the excitation light reflected from the lead-in area. d3 is acquired.
- the controller 205 refers to a table stored in advance in a memory in the controller 205, and acquires a region to which a voltage is applied from this table (S3).
- this table as shown in FIG. 9B, the area of the aperture limiting element 131 to which a voltage is to be applied is stored according to the distance between the bottom surface portion 13a and the reflecting surface 11a. Five ranges are set as the distance between the bottom surface portion 13a and the reflecting surface 11a, and five drive patterns indicating regions to which a voltage should be applied are associated with these five ranges. Note that, when the distance between the bottom surface portion 13a and the reflecting surface 11a is D0 to D1, no voltage is applied to any region.
- the controller 205 controls the aperture limiting element 131 according to the region to which the voltage acquired in S3 is applied, and applies a voltage to the corresponding region (S4).
- the beam diameter of the excitation light incident on the objective lens 106 from the dichroic prism 105 side changes, and the NA of the excitation light suitable for the biosensor substrate 20 is set.
- the focal depth of the excitation light is set to a focal depth that covers the interval d3 of the biosensor substrate 20.
- the fluorescence detection device 2 is shut down, the process returns to S1 (S5).
- the distance d3 between the bottom surface portion 13a and the reflecting surface 11a is written in the lead-in area of the biosensor substrate 20.
- the interval d3 may be different.
- the interval d3 applied to the biosensor substrate 20 is held in the lead-in area of the biosensor substrate 20.
- the controller 205 reads the interval d3 from the lead-in area, and drives the aperture limiting element 131 based on the read value and the table shown in FIG. 9B.
- an appropriate NA of excitation light is set for the biosensor substrate 20, and the range of the focal depth of the excitation light is adjusted to be larger than the distance d3 between the bottom surface portion 13a of the biosensor substrate 20 and the reflecting surface 11a. Is done. Therefore, as in the case of FIGS. 5A to 5C, the bottom surface portion 13a is positioned in the range of the focal depth defined by the excitation light and the objective lens 106, so that the sample can be measured with high accuracy.
- the five drive patterns Of these the default drive pattern (for example, the drive pattern when the interval is D0 to D1) is used. Note that, among the regions 131a to 131d, as the number of driven regions increases, the amount of excitation light blocked increases, and thus the amount of excitation light irradiated on the sample decreases. Therefore, the drive pattern set as the default is, for example, the uppermost drive pattern in FIG. 9B, that is, no voltage is applied to any region so that the amount of excitation light irradiated onto the sample is as large as possible. The driving pattern is used.
- the distance d3 between the bottom surface portion 13a and the reflecting surface 11a is maintained in the lead-in region of the biosensor substrate 20, but the NA (numerical aperture) of excitation light and the type (size) of cells
- Other parameter values that can define a depth of focus suitable for the distance d3 may be held in the lead-in area of the biosensor substrate 20.
- the left column in FIG. 9B is corrected to correspond to other parameter values.
- the aperture limiting element 131 and the polarization filter 132 are used to adjust the diameter of the beam incident on the objective lens 106.
- a lens actuator 133 is used as shown in FIG. Also good.
- the lens actuator 133 causes the servo circuit 202 to move the collimator lens 103 in the optical axis direction of the excitation light.
- the collimator lens 103 when the collimator lens 103 is driven, the divergence angle of the excitation light incident on the objective lens 106 from the dichroic prism 105 side changes, and accordingly, the numerical aperture of the excitation light converged by the objective lens 106 changes. To do. Thereby, the focal depth of excitation light is adjusted. In this configuration, since the focal depth of the excitation light can be linearly changed with the movement of the collimator lens 103, the focal depth can be adjusted more finely than in the first embodiment. In this modified example, the right column of the table in FIG. 9B is changed to the drive voltage supplied to the lens actuator 133.
- FIG. 11A is a perspective view schematically showing an external configuration of the biosensor substrate 10 according to the present embodiment.
- the biosensor substrate 10 is used, for example, for detecting red blood cells infected with malaria parasites in human blood.
- the biosensor substrate 10 has a disk shape like an optical disk (CD, DVD, etc.), and a circular hole 10a is formed at the center.
- the biosensor substrate 10 has a structure in which a well layer 12 is laminated on the upper surface of a base substrate 11. As shown in the enlarged view at the right end of FIG. 11A, the well layer 12 has a plurality of minute wells 13 formed of cylindrical recesses. The wells 13 are arranged substantially concentrically from the inner periphery to the outer periphery of the biosensor substrate 10.
- the well 13 has a bottom surface portion 13a that is one step lower than the top surface of the well layer 12, and the diameter and height are set so that the sample can be accommodated when the sample is dropped.
- FIG. 11B is a cross-sectional view when the biosensor substrate 10 is cut along a plane perpendicular to the surface
- FIG. 11C is an enlarged view of a broken line portion of FIG.
- a reflective film 14 is disposed between the base substrate 11 and the well layer 12. By reflecting the reflective film 14 on the upper surface of the base substrate 11, a reflective surface 11 a that is an interface between the reflective film 14 and the base substrate 11 is formed on the upper surface of the base substrate 11.
- the well 13 is formed on the upper surface side of the well layer 12 with a predetermined interval. The bottom surface portion 13a of the well 13 is positioned slightly above the reflective film 14, and the bottom surface portion 13a of the well 13 and the top surface of the reflective film 14 are separated from each other.
- the diameter and height of the well 13 are d1 and d2, respectively, the distance between the bottom surface portion 13a and the reflecting surface 11a is d3, the distance between the wells 13 is d4, and the thickness of the base substrate 11 is d5.
- the track pitch of the surface 11a is d6.
- the diameter d1 and the height d2 are set to 100 ⁇ m and 50 ⁇ m, respectively, the intervals d3 and d4 are set to 2 ⁇ m and 300 ⁇ m, respectively, and the thickness d5 is set to 0.6 mm.
- the track pitch d6 is set to 1 ⁇ m.
- the reflectance of the reflective film 14 with respect to excitation light (described later) is set to 3 to 4%.
- the track pitch d6 may be adjusted according to the size of the subject to be detected with fluorescence.
- the track pitch d6 is set to 1 ⁇ m so that the track always crosses the subject when the sample is stored in the well 13. That is, the track pitch needs to be set smaller than the width of the subject to be detected with fluorescence.
- the track pitch d6 is set so that the track crosses each subject at least once even if the size of the subject varies. Good.
- the base substrate 11 is made of polycarbonate
- the well layer 12 is made of an ultraviolet curable resin
- the reflective film 14 is made of metal such as aluminum or silver alloy, niobium oxide, or wavelength selection. It consists of a film or the like.
- the base substrate 11 may be made of polymethyl methacrylate, amorphous polyolefin, or the like in addition to polycarbonate.
- the well layer 12 may be made of silicone, polycarbonate, polymethyl methacrylate, amorphous polyolefin, or the like.
- the film thickness of the reflective film 14 is set to, for example, 5 nm to 20 nm so as to obtain a desired reflectance.
- 12 (a) and 12 (b) are diagrams for explaining how to separate tracks according to the present embodiment.
- the region on the biosensor substrate 10 is divided into m zones in the radial direction from the inner periphery to the outer periphery.
- Each zone is set to be substantially concentric.
- the widths of the zones in the radial direction are the same as each other. That is, the width in the radial direction of each zone is a width corresponding to n track pitches (n ⁇ track pitch).
- FIG. 12 (b) is an enlarged view of the broken line area of FIG. 12 (a).
- the tracks in zones 1 and 3 are indicated by solid lines and the tracks in zone 2 are indicated by broken lines.
- the track is composed of a series of pit rows.
- one diameter of the biosensor substrate 10 is set to the reference diameter D0.
- each zone includes n track pieces. .
- the starting end of the innermost track piece (track 1) in the zone 2 is connected to the end of the track piece (track n) in the zone 1 inside one at the position of the reference diameter D0.
- the start end of the innermost track piece (track 1) is connected to the end of the track piece (track n) in the inner zone 1 at the position of the reference diameter D0.
- the number of track pieces included in each zone is n.
- the width in the radial direction of each zone is set to 300 ⁇ m, for example.
- FIG. 13 is a diagram illustrating a method for setting an address common area according to the present embodiment.
- Each zone set as described above is equally divided into a predetermined number in the circumferential direction so that the width in the circumferential direction is around a predetermined length (for example, 300 ⁇ m).
- An area formed by dividing the zone in this way becomes an address common area.
- the address common area is shown as a square shape.
- the disk inner peripheral side has a pseudo trapezoidal shape shorter than the side of the disk outer peripheral side. That is, the address common area is formed by equally dividing each ring-shaped zone in the circumferential direction, so that the ring is cut at a predetermined angle. Therefore, the n track portions included in one address common area become longer toward the outer periphery of the disk.
- the common address area is set by equally dividing the zone in the circumferential direction, the common address areas included in the same zone have the same shape. However, if the included zones are different, the circumferential width of the address common area may be different.
- the circumferential width of the outermost track portion of the address common area is, for example, a quotient of L / j (j is a natural number other than 0) where L is the length of one track of the outermost track of the zone. The value of the quotient when closest to 300 ⁇ m is taken. In this case, the zone is divided into j in the circumferential direction. As described above, the circumferential width of the address common area is determined by dividing the zone into j.
- the circumferential width of the address common area may differ depending on the zone.
- the number of divisions j of the zones differs for each zone, and the number of divisions j increases in the outer zone. Note that the boundary between the address common areas adjacent in the circumferential direction coincides with a predetermined diameter of the disk.
- the radial width of the address common area that is, the radial width of the zone is determined by the number n of track pieces included in the zone. In this embodiment, since the track pitch is 1 ⁇ m, when the radial width of the address common area is 300 ⁇ m, the number of track portions included in one address common area is 300.
- FIG. 14 is a diagram for explaining a method for setting a synchronization area, an address area, a reserve area, a well area, and a non-well area for an address common area, and a structure of data held in the address area.
- each track portion included in the address common area has a configuration in which a unique synchronization pattern is arranged at the head, followed by an address area and a reserve area.
- Address information is held in the address area.
- the address information includes a well address and a track number.
- the well address is position information for specifying the position of the well on the biosensor substrate 10, and the track number is one track portion from the other track portions in the group of track portions included in the address common area. This is information for distinguishing.
- the well addresses held in the respective track portions included in one address common area are all the same.
- the well addresses of the track portions included in the address common area are all unified to Wk (kth well from the start position).
- the track number is set so that the track number of the innermost track portion of the track portions included in the address common area is 1, and the track number of the track portion increases by 1 toward the outer periphery.
- the track number T1 of the inner track portion is 1 and the track number Tn of the outermost track portion is 300.
- pits and spaces having a monotonous width are formed in order to generate a clock.
- the length of the track portion included in one address common area becomes longer toward the outer periphery
- the length of the reserve area (the number of pits included in the reserve area) also becomes longer toward the outer periphery.
- the reserved area may not have a monotonous pit row but may have predetermined information in the reserved area.
- a single well is placed in the center of the address common area set in this way.
- the address common region is sufficiently wider than the well. Accordingly, even when the well arrangement position with respect to the address common region is slightly shifted during well formation, the well is accommodated in the address common region.
- the address common region is sufficiently wider than the well as described above, a non-well region without a well is generated in the address common region. Even if a track included in a non-well region generated in the radial direction is scanned with excitation light (described later), the excitation light is not applied to the well, and thus such scanning is useless. In the present embodiment, as will be described later, measures are taken on the fluorescence detection apparatus side to avoid such unnecessary scanning.
- the address common area is set by equally dividing the zone in the circumferential direction.
- the width of the address common area in the circumferential direction is fixed in advance, and the number can be included in each zone.
- the address common area may be continuously assigned in the circumferential direction of each zone. In this case, in the zone, a surplus area that does not have a sufficient width in the circumferential direction to allocate the address common area may occur. For such an area, measures such as filling with a monotonous pit row may be taken.
- FIG. 15 (a) to 15 (d) are diagrams showing a method for producing the biosensor substrate 10.
- FIG. This production method is substantially the same as the production method of the optical disk as shown below.
- the base substrate 11 is formed by injection molding. As a result, the thickness of the base substrate 11 becomes d5, and a series of pits are formed on the upper surface of the base substrate 11.
- the reflective film 14 is deposited on the upper surface of the base substrate 11, thereby forming the reflective surface 11 a on the upper surface of the base substrate 11.
- a bottom layer 12a is laminated on the upper surface of the reflective film 14 by spin coating.
- an upper surface layer 12b having a thickness d2 is formed on the upper surface of the bottom surface layer 12a by 2P molding. Thereby, a plurality of wells 13 as shown in FIG. 11B are formed.
- the well layer 12 is formed by combining the bottom layer 12a and the top layer 12b.
- a stamper for 2P molding is provided so that the well 13 is disposed in the central portion of the address common region. It is necessary to dispose the base substrate 11 appropriately.
- 16A and 16B are views for explaining a method for adjusting the position of the well stamper WS with respect to the base substrate 11.
- two minute diffraction areas M1 that serve as markers at the time of position adjustment are formed on the base substrate 11 at positions symmetrical to each other with respect to the center of the base substrate 11. These diffraction areas M1 are provided by forming a diffraction pattern in an outer peripheral region where no pits are formed on the upper surface of the base substrate 11 during injection molding.
- two minute diffraction areas M2 serving as markers are formed at positions corresponding to the diffraction areas M1, respectively.
- two laser light sources are arranged at positions where the laser beams are incident on the two diffraction areas M1 when the base substrate 11 is positioned at an appropriate position, and the laser beams are emitted upward from these laser light sources.
- an optical sensor LS is disposed at a position where the laser light (diffracted light) diffracted by the diffraction areas M1 and M2 is received.
- the circumferential position of the base substrate 11 is adjusted so that the diffracted light generated by the two diffraction areas M1 is received by the optical sensor LS, respectively.
- a part of the laser light (0th order diffracted light: non-diffracted light) passes through the diffraction area M1 as it is without being diffracted by the diffraction area M1.
- the position of the well stamper WS in the circumferential direction is adjusted so that the well stamper WS approaches the upper surface of the base substrate 11 and at the same time, the non-diffracted light transmitted through the diffraction area M1 is incident on the diffraction area M2.
- the circumferential position of the well stamper WS is adjusted so that the diffracted light generated by the two diffraction areas M2 by the incidence of non-diffracted light is received by the optical sensor LS.
- the well stamper WS is pressed against the upper surface of the base substrate 11 in a state where the position of the base substrate 11 and the well stamper WS is adjusted.
- the upper surface layer 12b is formed by irradiating with ultraviolet rays and curing the ultraviolet curable resin.
- the positioning between the base substrate 11 and the well stamper WS may be performed by a method other than the above.
- the positioning between the base substrate 11 and the well stamper WS may be performed by providing the well stamper WS and the base substrate 11 with a convex portion and a concave portion, respectively, and fitting them together.
- FIG. 17 is a diagram illustrating a configuration of the fluorescence detection apparatus 1 according to the present embodiment.
- the fluorescence detection device 1 is used, for example, to determine whether red blood cells contained in the well 13 of the biosensor substrate 10 are infected with malaria parasites.
- a sample prepared by fluorescently labeling a subject is stored in the well 13 of the biosensor substrate 10 in advance.
- a red blood cell having a diameter of about 10 ⁇ m and a thickness of about 2 ⁇ m is infected with malaria parasite, the inside thereof is fluorescently labeled, and both infected red blood cells and uninfected red blood cells are both.
- a plurality of parallel arrangements are provided on the bottom surface portion 13a of the well 13 having a diameter of 100 ⁇ m.
- the optical system of the fluorescence detection apparatus 1 includes a semiconductor laser 101, a polarization beam splitter (PBS) 102, a collimator lens 103, a quarter wavelength plate 104, a dichroic prism 105, an objective lens 106, an anamorphic lens 107, A photodetector 108, a condenser lens 109, a fluorescence detector 110, and an aperture 111 are provided.
- the fluorescence detection device 1 includes a holder 121, an objective lens actuator 122, a rotation device 123, a signal calculation circuit 201, a servo circuit 202, a reproduction circuit 203, and a signal amplification circuit 204.
- the controller 205 and the clock generation circuit 206 are provided.
- the semiconductor laser 101 emits laser light having a wavelength of about 405 nm (hereinafter referred to as “excitation light”).
- the excitation light in this Embodiment is an example of the irradiation light as described in a claim.
- the excitation light guided to the biosensor substrate 10 that is, the excitation light passing through the aperture 111 is indicated by a broken line.
- a circular opening having a predetermined aperture is formed in the aperture 111, and the aperture 111 limits the aperture of the excitation light.
- the position of the semiconductor laser 101 is adjusted so that the excitation light emitted from the semiconductor laser 101 is S-polarized with respect to the PBS 102.
- the excitation light emitted from the semiconductor laser 101 is reflected by the PBS 102 after entering the collimator lens 103 after the aperture is limited by the aperture 111.
- the collimator lens 103 converts excitation light incident from the PBS 102 side into parallel light. Thereby, the excitation light that has passed through the collimator lens 103 becomes parallel light having a predetermined diameter.
- the quarter-wave plate 104 converts the excitation light incident from the collimator lens 103 side into circularly polarized light, and is orthogonal to the polarization direction when the excitation light incident from the dichroic prism 105 side is incident from the collimator lens 103 side. Convert to linearly polarized light. Thereby, the excitation light incident on the PBS 102 from the collimator lens 103 side passes through the PBS 102.
- the dichroic prism 105 is configured to reflect laser light having a wavelength of about 405 nm and transmit laser light having a wavelength of about 450 to 540 nm. As a result, the excitation light incident from the 1 ⁇ 4 wavelength plate 104 side is reflected by the dichroic prism 105 and enters the objective lens 106.
- the objective lens 106 is configured to appropriately converge the excitation light with respect to the biosensor substrate 10. Specifically, the objective lens 106 is configured such that excitation light incident from the dichroic prism 105 side converges with a predetermined NA (numerical aperture, here 0.34). The diameter of the excitation light incident on the objective lens 106 is determined by the diameter of the aperture 111. The focal depth of the excitation light converged by the objective lens 106 is determined by the NA of the excitation light. The depth of focus of the excitation light will be described later with reference to FIGS. 19 (a) and 19 (b).
- the objective lens 106 is driven in the focus direction (direction perpendicular to the biosensor substrate 10) and the tracking direction (radial direction of the biosensor substrate 10) by the objective lens actuator 122 while being held by the holder 121. That is, the objective lens 106 is driven so that the excitation light follows the track composed of the pit row in a state where the excitation light is focused on the reflection surface 11 a of the biosensor substrate 10. A part of the excitation light focused on the reflection surface 11a is reflected by the reflection surface 11a, and most of the excitation light is transmitted through the reflection surface 11a.
- Excitation light reflected by the reflecting surface 11 a (hereinafter referred to as “reflected excitation light”) is reflected by the dichroic prism 105, converted into linearly polarized light by the quarter-wave plate 104, and becomes convergent light by the collimator lens 103.
- the reflected excitation light that enters the PBS 102 from the collimator lens 103 side passes through the PBS 102 as described above.
- the anamorphic lens 107 introduces astigmatism into the reflected excitation light incident from the PBS 102 side.
- the reflected excitation light that has passed through the anamorphic lens 107 enters the photodetector 108.
- the photodetector 108 has a four-divided sensor for receiving reflected excitation light on the light receiving surface.
- a detection signal of the photodetector 108 is input to the signal calculation circuit 201.
- the excitation light transmitted through the reflection surface 11 a reaches the bottom surface portion 13 a of the well 13.
- fluorescence is generated from the malaria protozoa.
- Such fluorescence has a NA (numerical aperture) larger than the NA of the excitation light, as indicated by a one-dot chain line in FIG.
- NA of fluorescence is, for example, 0.65.
- the wavelength of the fluorescence is different from the wavelength of the excitation light, and is 450 to 540 nm in this embodiment.
- red blood cells that are not infected with Plasmodium do not generate fluorescence because they are not fluorescently labeled. In this way, it is possible to distinguish between red blood cells infected with malaria parasites and non-infected red blood cells.
- Fluorescence incident on the dichroic prism 105 from the objective lens 106 side passes through the dichroic prism 105.
- the condensing lens 109 condenses the fluorescence incident from the dichroic prism 105 side and guides it to the fluorescence detector 110.
- the fluorescence detector 110 has a sensor for receiving fluorescence on the light receiving surface. The detection signal of the fluorescence detector 110 is input to the signal amplification circuit 204.
- the signal arithmetic circuit 201 generates a focus error signal FE and a tracking error signal TE, which will be described later, from the detection signal of the photodetector 108, and generates a reproduction RF signal, which will be described later, from the detection signal of the photodetector 108.
- the servo circuit 202 controls driving of the objective lens actuator 122 using the focus error signal FE and the tracking error signal TE output from the signal calculation circuit 201.
- the servo circuit 202 controls the rotation device 123 using the clock signal input from the clock generation circuit 206 so that the biosensor substrate 10 is rotated at a constant linear velocity.
- the rotation device 123 outputs a rotation detection signal to the controller 205 every rotation.
- the reproduction circuit 203 demodulates the reproduction RF signal output from the signal arithmetic circuit 201 to generate reproduction data.
- the signal amplification circuit 204 amplifies the detection signal of the fluorescence detector 110.
- the controller 205 controls each part of the fluorescence detection apparatus 1 in addition to the signal calculation circuit 201, the servo circuit 202, and the reproduction circuit 203.
- the controller 205 includes a CPU and a memory, and controls each unit according to a program stored in the memory.
- the controller 205 has functions as a scanning position detection unit 205a and a fluorescence position specification unit 205b by a program stored in the memory.
- the scanning position detection unit 205a is included in each address common area based on a signal (reproduced RF signal) input from the signal calculation circuit 201 and a signal (clock signal) input from the clock generation circuit 206.
- the scanning position of the excitation light in the track portion is detected.
- the fluorescence position specifying unit 205b detects the well based on the reproduction data (address information: well address) input from the reproduction circuit 203 and the signal (fluorescence detection signal) input from the signal amplification circuit 204. It is determined in which position of the biosensor substrate 10 is 13, and address information (well address) corresponding to the well 13 in which fluorescence is detected is held in the internal memory.
- the fluorescence position specifying unit 205b is detected by the reproduction data (address information: track number) input from the reproduction circuit 203, the signal (fluorescence detection signal) input from the signal amplification circuit 204, and the scanning position detection unit 205a. Based on the scanned position, the fluorescence generation position in the well is specified by the track number by the scanning position, and these are stored in the internal memory.
- FIG. 18 is a diagram showing a circuit configuration of the signal arithmetic circuit 201.
- the photodetector 108 has a quadrant sensor for receiving the reflected excitation light on the light receiving surface, and the upper left, upper right, lower right, and lower left sensors of the quadrant sensor respectively received light. Detection signals S1 to S4 are output based on the beam spot of the reflected excitation light. Note that on the light receiving surface of the photodetector 108 in FIG. 17, the direction corresponding to the radial direction (radial direction) of the disk is the left-right direction. Further, the focus error signal FE and the tracking error signal TE are generated according to the astigmatism method and the one-beam push-pull method used in the existing optical disc apparatus.
- the signal operation circuit 201 includes adders 301 to 304 and 307 and subtractors 305 and 306.
- the adder 301 outputs a signal obtained by adding the detection signals S1 and S3 to the subtractor 305
- the adder 302 outputs a signal obtained by adding the detection signals S2 and S4 to the subtractor 305.
- the adder 303 outputs a signal obtained by adding the detection signals S1 and S4 to the subtracter 306 and the adder 307
- the adder 304 outputs a signal obtained by adding the detection signals S2 and S3 to the subtracter 306 and the adder 307. To do.
- the subtracter 305 subtracts the output signals of the adders 301 and 302 and outputs a focus error signal FE.
- the subtracter 306 subtracts the output signals from the adders 303 and 304 and outputs a tracking error signal TE.
- the adder 307 adds the output signals of the adders 303 and 304 and outputs a reproduction RF signal (SUM signal). That is, the focus error signal FE, the tracking error signal TE, and the reproduction RF signal can be obtained by the calculations of the following equations (1) to (3), respectively.
- 19 (a) and 19 (b) are diagrams for explaining the focal depth of the excitation light.
- the wavelength of the excitation light is 405 nm
- the NA (numerical aperture) of the excitation light is 0.34.
- the depth of focus can be calculated by the wavelength / (NA ⁇ NA). Therefore, the focal depth of the excitation light in this embodiment is about 3.5 ⁇ m.
- the distance d3 between the bottom surface portion 13a and the reflecting surface 11a is set to be smaller than the focal depth of the excitation light, and is set to 2.0 ⁇ m here.
- the spot diameter at the focal position is about 1 ⁇ m.
- the track pitch interval d6 shown in FIG. 11C is set to 1 ⁇ m so as to be substantially the same as the spot diameter.
- FIG. 19A shows a state in which the lowest point in the range of the focal depth of the excitation light coincides with the reflective film 14, and FIG. 19B shows the state where the highest point in the range of the focal depth of the excitation light is the bottom surface. The state which corresponds with the part 13a is shown.
- the focal depth of the excitation light can be shifted in the back direction (upward direction in the figure) from FIG. .
- the distance d3 between the bottom surface portion 13a of the well 13 and the reflecting surface 11a is 2 ⁇ m, and the focal depth of the excitation light is 3.5 ⁇ m.
- Both the bottom surface portion 13a and the reflection surface 11a are included in the range corresponding to the depth. Accordingly, when the focus position of the excitation light is positioned on the reflection surface 11a by the focus servo, the sample placed on the bottom surface portion 13a is also focused.
- 20 (a) and 20 (b) are diagrams illustrating functions of the scanning position detection unit 205a and the fluorescence position specification unit 205b of the controller 205 shown in FIG.
- FIG. 20A is a timing chart showing changes in signals output when excitation light scans one track portion included in the address common area (see FIG. 14).
- the uppermost waveform indicates the reproduced RF signal output from the signal arithmetic circuit 201
- the second waveform from the top indicates the clock signal output from the clock generation circuit 206
- the third waveform from the left indicates the count value of the counter built in the controller 205
- the lowermost waveform indicates the fluorescence detection signal output from the signal amplification circuit 204.
- the start position of the synchronization signal is the boundary in the circumferential direction of the address common area (see FIG. 14), and the track portion included in the address common area starts from this position.
- the clock generation circuit 206 generates and outputs a clock signal whose phase matches with the reproduction RF signal.
- the frequency of the clock signal is the frequency at which the track of the biosensor substrate 10 is scanned at a predetermined linear velocity (constant linear velocity) by the excitation light.
- the servo circuit 202 controls the rotation device 123 so that the frequency of the clock signal becomes the target frequency and the phases of the reproduction RF signal and the clock signal are matched.
- the scanning position detection unit 205a resets the counter at the timing when the synchronization signal of the unique pattern is detected from the reproduction RF signal, and causes the counter to start counting the number of pulses of the clock signal. As a result, the count value of the counter increases as time elapses, that is, as the scanning of the excitation light with respect to the track portion proceeds. The scanning position detection unit 205a acquires the counter value thus counted up as the scanning position of the excitation light with respect to the track portion.
- the fluorescence position specifying unit 205b compares the fluorescence detection signal shown at the bottom of FIG. 20A with a predetermined threshold SH. Specifically, the value of the fluorescence detection signal is acquired for each pulse of the clock signal, and the acquired value of the fluorescence detection signal is compared with a threshold SH. Then, the fluorescence position specifying unit 205b acquires the count value of the counter when the value of the fluorescence detection signal exceeds the threshold value SH as the scan position of the track portion when the fluorescence is generated.
- the value of the fluorescence detection signal exceeds the threshold SH during the period ⁇ t.
- the period ⁇ t includes three clock signal pulses, and the counter value changes between Cka, Ckb, and Ckk during this period.
- the fluorescence position specifying unit 205b associates the three counter values Cka, Ckb, and Ckc with the fluorescence detection signal values La, Lb, and Lc acquired at clock timings corresponding to the counter values, Keep it in memory.
- the fluorescent position specifying unit 205b scans the address area of the track portion to obtain the well address Wa and the track number Ta acquired by the reproduction circuit 203, and the counter values Cka, Ckb, Ckc and the fluorescence detection signal value La,
- the data is stored in the internal memory of the controller 205 in association with Lb and Lc.
- the fluorescence specifying information for specifying the generation position of the fluorescence is configured.
- FIG. 20B is a diagram showing the data structure of the fluorescence specifying information held in the internal memory of the controller 205 by the fluorescence position specifying unit 205b.
- the fluorescence specifying information has a configuration in which the fluorescence detection signal value when the value of the fluorescence detection signal exceeds the threshold SH is associated with the scanning position (counter value) of the excitation light at that timing. .
- the well address of the well 13 scanned with the excitation light at the fluorescence generation timing and the track number of the scanned track portion are associated with the fluorescence detection signal value.
- the scanning positions (counter values) Cka, Ckb, Ckc are associated with the fluorescence detection signal values La, Lb, Lc, and the track portion scanned at these timings
- a track number for identifying the well 13 and a well address are associated with each other.
- the fluorescence specifying information further includes identification information for identifying the biosensor substrate 10.
- the identification information of the biosensor substrate 10 may be stored in, for example, a predetermined reserve area, or a management area without the well 13 is provided on the biosensor board 10 and the biosensor board 10 is provided with a biometric information on a track (pit row). The identification information of the sensor substrate 10 may be held.
- FIG. 21A is a flowchart showing the excitation light scanning control executed by the controller 205 during the fluorescence detection operation.
- FIG. 21B is a diagram for explaining a well detection method.
- the excitation light scans the portion where the well 13 is present, the excitation light transmitted through the reflection surface 11 a enters the well layer 12 and reaches the bottom surface portion 13 a of the well 13. A part of this excitation light is reflected by the bottom surface portion 13 a of the well 13, passes through the reflective film 14 and the base substrate 11, and enters the objective lens 106. Thereafter, the excitation light travels backward along the optical path of FIG. 17 and enters the photodetector 108 in the same manner as the first reflected stray light. For this reason, the signal component of this excitation light (hereinafter referred to as “second reflected stray light”) is superimposed on the output signal from the photodetector 108.
- second reflected stray light the signal component of this excitation light
- the first reflected stray light enters the photodetector 108, and when the excitation light scans the portion with the well 13, Second reflected stray light enters.
- the first reflected stray light and the second reflected stray light are the optical paths until the corresponding excitation light passes through the reflection surface 11a from the base substrate 11 side and then escapes from the lower surface of the base substrate 11, and the excitation light therebetween. Since the optical environment such as the surface where the light is reflected, the medium (refractive index) behind the surface where the light is reflected, the convergence state of the excitation light on the reflected surface, etc. are greatly different, the light enters the photodetector 108.
- the strength at the time will be different from each other. Therefore, the magnitudes of the signal components generated by the first reflected stray light and the second reflected stray light superimposed on the output signal from the photodetector 108 are also different from each other. As a result, whether the excitation light scans the portion where the well 13 is present. Depending on whether the portion without the well 13 is scanned, a difference occurs in the level of the signal output from the photodetector 108. Therefore, by detecting this difference by, for example, a reproduction RF signal (SUM signal), it is possible to determine the presence or absence of the well 13 at the scanning position of the excitation light.
- SUM signal reproduction RF signal
- the light quantity of the second reflected stray light is larger than the light quantity of the first reflected stray light, as shown in the upper part of FIG.
- the magnitude of the reproduction RF signal is larger when scanning the portion having the. Therefore, when the difference ⁇ P in the peak value of the waveform of the reproduction RF signal exceeds a predetermined threshold, it can be determined that the scanning position of the excitation light has passed the boundary between the portion without the well and the portion with the well. .
- the scanning control of excitation light executed by the controller 205 during the fluorescence detection operation will be described.
- this scanning control the non-well region in the radial direction is jumped in the track scanning during the fluorescence detection operation, and the scanning time is shortened.
- the management information of the biosensor substrate 10 is held in a reserved area of a predetermined track arranged on the biosensor substrate 10, and by reproducing this, the number of wells arranged on the biosensor substrate 10 and It is assumed that information such as the well address of the address common area in which the last well 13 is set is acquired. Such management information is held, for example, on the inner track.
- the fluorescence detection device 1 At the start of the fluorescence detection operation, the fluorescence detection device 1 first reads this management information and stores it in the internal memory of the controller 205.
- the controller 205 starts scanning with excitation light from the innermost track of the biosensor substrate 10 (S1). After that, the controller 205 acquires jump information for track jump while the excitation light scans the innermost zone (S2).
- the specific process of step S2 will be described later with reference to FIGS. 23 (a), 24 (a), and 25 (a).
- the controller 205 executes jump scanning control (S4).
- the jump scanning control the track is scanned while skipping the non-well region (see FIG. 14) generated in the radial direction.
- the specific process of step S4 will be described later with reference to FIGS. 23 (b), 24 (b), and 25 (b).
- the controller 205 performs jump scanning control until the fluorescence detection operation is completed. Thereafter, when the fluorescence detection operation is completed (S5: YES), for example, when the scanning of the last well 13 is completed, the controller 205 ends the scanning control.
- FIG. 22 is a diagram for explaining a non-well region generated in the radial direction of the biosensor substrate 10.
- FIG. 22A shows the state of the non-well region when the well 13 is arranged at the center of the address common region
- FIG. 22B shows the well 13 shifted to the left from the center of the address common region. The state of the non-well region when arranged as shown in FIG.
- the well 13 is formed by pressing the well stamper WS onto the base substrate 11. For this reason, the position of each well 13 is uniformly positioned at the center of the address common area, or is uniformly shifted in one direction from the center of the address common area.
- FIGS. 22A and 22B show address common areas arranged on the left side and the right side with respect to the center of the disk (biosensor substrate 10).
- the well 13 since the well 13 is appropriately arranged, the well 13 is arranged at the center of the address common area in both the left and right address common areas.
- the radial width of the address common region is set to about 300 ⁇ m and the diameter of the well 13 is set to about 100 ⁇ m, the well 13 is arranged in the center of the address common region in this way.
- the width of the non-well region is about 200 ⁇ m, and the non-well region includes about 200 tracks.
- the well 13 when the arrangement position of the well 13 is shifted to the left from the center of the address common area, the well 13 is shifted in the outer peripheral direction in the address common area on the left side of the disk center. In the right address common area, the well 13 is displaced in the inner circumferential direction. In this case, a region from the outer peripheral side boundary Da of the well 13 arranged in the left address common region to the inner peripheral side boundary Db of the well 13 arranged in the right address common region is a non-well region. . That is, the well 13 is not detected while the excitation light scans the track between the boundary Da and the boundary Db. Therefore, the non-well region is narrower than in the case of FIG.
- the width of the non-well region is narrower than in the case of FIG. Also in this case, by rotating the disc so that the shifted direction becomes the left direction, the same diagram as FIG. 22B is obtained. Further, the width of the non-well region changes according to the shift amount of the well 13 with respect to the center position of the address common region.
- FIG. 23A shows the contents of the jump information acquisition process.
- the controller 205 is scanned at that timing.
- the track number reproduced from the track in the address common area is acquired as the start track number Tr_start of the well 13 in the zone (S12). Since the track number assigned to each address common area is the same while the biosensor substrate 10 makes one rotation from the reference diameter D0, the track number reproduced from one address common area is thus started. There is no problem even if it is acquired as the track number Tr_start.
- the controller 205 determines whether the excitation light has not scanned the well 13 while the biosensor substrate 10 rotates a predetermined number of times (S13). Whether or not the excitation light has scanned the well 13 is determined by monitoring the output of the reproduction RF signal (SUM signal) as described above. Further, the rotation of the biosensor substrate 10 a predetermined number of times is determined by a rotation detection signal output from the rotating device 123 to the controller 205.
- the controller 205 If it is determined that the excitation light has not scanned the well 13 while the biosensor substrate 10 is rotated a predetermined number of times (S13: YES), the controller 205 is reproduced from the track in the address common area scanned at that timing. The track number is acquired as the end track number Tr_end of the well 13 in the zone (S14). Thereby, the jump information acquisition process ends.
- the start track number Tr_start acquired in the innermost zone as described above is obtained in other zones.
- the track number Tr_end substantially coincides with the track number where the well 13 is scanned first, and the end track number Tr_end is also abbreviated to the track number slightly outside the track where the well 13 is scanned last in other zones. Match. Therefore, the start track number Tr_start and the end track number Tr_end acquired in the innermost zone as described above can be used as information for jumping the non-well region in other zones. Moreover, it is possible to acquire these information in the shortest time by acquiring these information in the innermost circumference.
- FIG. 23B is a diagram showing the contents of the jump scanning process.
- step S5 the fluorescence detection operation is finished in step S5 (S5: YES), and the scanning control is finished.
- the address search operation can use a technique in an existing CD player or DVD player.
- the controller 205 ends the jump scanning process and proceeds to step S5 in FIG. If the determination in step S5 is NO, the controller 205 advances the process to step S4 and executes the jump scanning process again.
- FIG. 24A is a diagram showing other processing contents of the jump information acquisition processing.
- the controller 205 causes the well 13 to be scanned. It waits for it to come off (S32). Thereafter, if the well 13 is not scanned by the excitation light while the scanning position deviates from the well 13 and the biosensor substrate 10 rotates a predetermined number of times (S32: YES), the controller 205 counts the number of tracks Tr_jp. Is reset to 0 (S33), and counting of the number of tracks included in the non-track area in the radial direction is started.
- the controller 205 determines whether the well 13 is detected while the biosensor substrate 10 rotates once (S34). If the well 13 is not detected (S34: NO), the counter value is incremented by one. (S35). The counting up of the number of tracks Tr_jp is continued until the next well 13 is detected (S34: YES). Thus, the number of tracks Tr_jp in the radial direction of the tracks included in the non-well region is counted.
- the track number Tr_jp (the width in the radial direction of the non-well region) acquired in the well region is substantially the same in the non-well region between other adjacent zones. Therefore, the track number Tr_jp acquired as described above can be used as information for jumping the non-well region in other zones.
- FIG. 24B is a diagram showing other processing contents of the jump scanning processing.
- the controller 205 After acquiring the track number Tr_jp as described above, the controller 205 continues to scan the track as it is (S41). Thereafter, when the well 13 is not scanned by the excitation light while the biosensor substrate 10 rotates a predetermined number of times (S42: YES), the controller 205 scans the last well 13 disposed on the biosensor substrate 10. It is determined whether or not (S43). If it is determined that the scanning of the last well 13 has been completed (S43: YES), the controller 205 ends the jump scanning process and proceeds to step S5 in FIG. In this case, in step S5, the fluorescence detection operation ends (S5: YES), and the scanning control ends.
- step S5 the controller 205 finishes the jump scanning process, and proceeds to step S5 in FIG. If the determination in step S5 is NO, the controller 205 advances the process to step S4 and executes the jump scanning process again.
- the scan for the non-well region is skipped in the scan for the biosensor substrate 10, so that the entire biosensor substrate 10 can be quickly It is possible to scan efficiently. Therefore, the fluorescence detection operation for the biosensor substrate 10 can be rapidly and efficiently advanced.
- step S24 in FIG. 23 address search is used to skip the non-well region, but track jump can be used instead.
- the number of jumps Tr_jp to be track jumped can be obtained by the following equation.
- Tr_jp (N ⁇ Tr_end) + Tr_start ⁇ 2q (4)
- N is the number of track portions included in the address common area, which is 300 in the present embodiment.
- steps S51 and S52 are the same as steps S31 and S32 of FIG.
- the controller 205 sets P0 (for example, 128) to the variable ⁇ P (S53), and the variable ⁇ P.
- P0 for example, 128
- the scanning position of the excitation light is jumped to the outer peripheral side by the number (S54).
- the controller 205 determines whether the well 13 is detected at the position after the jump (S55).
- variable ⁇ P ⁇
- the variable ⁇ P +
- the sign of the variable indicates the track jump direction, + (plus) indicates the outer peripheral side, and-(minus) indicates the inner peripheral side.
- the controller 205 determines whether the absolute value
- the controller 205 cumulatively adds the variable ⁇ P and updates the track jump number Tr_jp every time the variable ⁇ P changes from step S53 in FIG. 25 until the variable ⁇ P becomes 1.
- the sign of the variable ⁇ P is ⁇ (minus)
- a negative value ⁇ P is added to the track jump number Tr_jp, and the track jump number Tr_jp is decreased by
- the track jump number Tr_jp when the variable ⁇ P becomes 1 is substantially equal to the number of tracks in the radial direction included in the non-well region. Therefore, this track jump number Tr_jp can be used in place of the track jump number Tr_jp acquired in the process of FIG.
- the scanning position of the excitation light can be positioned on the track in the vicinity of the inner boundary of the well region of the outer zone, this process is not performed by counting the number of tracks.
- the non-well region may be used for the skip operation.
- FIG. 26 is a diagram showing processing in this case.
- steps S1 and S5 are the same as S1 and S5 in FIG. Also, steps S51 to S58 in FIG. 26 are the same as the processes in FIG.
- the controller 205 determines whether the scanning position has deviated from the well region. (S52). When the scanning position deviates from the well region (S52: YES), the controller 205 executes the processes of steps S53 to S58, and sets the scanning position of the excitation light to the inner peripheral boundary of the well region in the outer zone. Jump to a nearby track.
- the controller 205 resumes normal scanning (S59), determines whether the fluorescence detection operation is finished (S5), and if not finished (S5: NO), the process is returned to step S51, and the same process is repeated. In this way, the biosensor substrate 10 is scanned by the excitation light from the innermost periphery to the outermost periphery while skipping non-well regions between adjacent zones.
- the same well address for specifying the position of the well 13 is given to the track portions crossing the same well 13, the well specified by the well 13 and the well address information.
- the 13 positions can be made to correspond one-to-one. Therefore, in the fluorescence detection apparatus 1, the position of the well 13 by the well address can be specified easily and smoothly, and the processing load can be reduced.
- the same well address is given to the address common region wider than the well 13, even if the well 13 is displaced when the well 13 is arranged on the biosensor substrate 10.
- Well 13 can be positioned in the address common area. Therefore, the same well address can be more reliably given to one well 13.
- the radial position on the well 13 can be grasped by the track number. Therefore, in the fluorescence detection apparatus 1, the position where fluorescence is generated can be grasped more finely.
- the scanning position of the excitation light on the track portion included in one address common area is detected by the scanning position detection unit 205a, and therefore the fluorescence scanning position when the fluorescence is detected.
- the fluorescence detection position in the address common area can be grasped in more detail.
- the fluorescence generation position is specified by the position of the well 13 based on the fluorescence specifying information shown in FIG. 20B, and the track in the well 13 and the track on the track are also detected. Since it is specified by the scanning position, the fluorescence detection apparatus 1 can grasp the generation position of the fluorescence in more detail.
- the non-well region where the well 13 is not disposed is skipped by the control shown in FIG. 21A, so that the scanning of the excitation light with respect to the biosensor substrate 10 can be performed quickly and smoothly. Can be done.
- red blood cells were contained in the well 13 and the red blood cells were infected with the malaria parasite. It is not limited to this.
- a cell expressing a specific gene or a cell in which biological substances such as nucleic acids, proteins, lipids, and sugars are excessive or deficient than usual is detected as a specific cell from various cell groups. May be. Or, conversely, a normal functioning cell may be detected from the cell group as a specific cell. This is used for the purpose of detecting normally differentiated cells, for example, in the induction of iPS cells or ES cells from an undifferentiated state to a differentiated state.
- Such specific cells may be cells that exist in nature or may be cells that have been subjected to artificial treatment.
- the artificial treatment is not particularly limited, and examples thereof include physical treatment (eg, electromagnetic wave irradiation), chemical treatment (eg: drug treatment), genetic engineering treatment (eg: gene recombination treatment) and the like.
- a treatment that has a known effect on cells can be applied to the cell group, and a cell that does not show the effect or a cell that shows the effect more strongly can be detected as a specific cell.
- a cell that are resistant or highly sensitive to drug treatment can be detected as specific cells.
- the type of cell group is not particularly limited.
- a group of cells derived from a multicellular organism may be used.
- cells derived from multicellular organisms include cells obtained from normal tissues or pathological tissues of organisms, cultured cells derived from these cells, and the like.
- the organism from which these cells are obtained is not particularly limited.
- it may be a cell collected from an animal or a cell collected from a plant. More specifically, for example, cells collected from vertebrates (especially mammals and birds), cells collected from insects, plant culture cells, etc. can be mentioned as the cells to be detected, but the cells to be detected are limited to these. Is not to be done.
- the group in which multiple types of cells are mixed may be sufficient.
- the reflective film 14 is made of metal.
- the reflective film 14 is not limited to this, and may be a translucent dielectric material.
- reflection can be generated by making the refractive index of the base substrate 11 different from the refractive index of the dielectric material.
- polycarbonate reffractive index: 1.59
- TiO 2 reffractive index: 2.65) or the like can be used as the material of the reflective film.
- niobium dioxide Nb 2 O 5
- the reflectance near the wavelength of 400 nm can be increased, while the reflectance near the wavelength of 500 nm can be lowered, and the excitation light can be reduced.
- the reflection film 14 can be made high in reflectance and suppresses reflection with respect to fluorescence.
- the reflective film 14 may be a laminated film of a dielectric film and a metal film.
- the shape of the well 13 was set to the column shape as shown to Fig.1 (a) and Fig.11 (a), not only this but the shape which can accommodate a sample. If it exists, it may be set to other than the cylindrical shape. Further, the diameter d1 and height d2 of the well 13, the distance d3 between the bottom surface portion 13a and the reflecting surface 11a, the distance d4 between the wells 13, the thickness d5 of the base substrate 11, and the track pitch d6 of the reflecting surface 11a are as described above. It is not restricted to the value of this form, You may set suitably. Further, the address length of the reflecting surface 11a only needs to be able to specify the position of the well 13, and various setting methods can be used.
- the wavelength of the excitation light emitted from the semiconductor laser 101 is set to 405 nm.
- the wavelength is not limited to this, and is appropriately set according to the type of fluorescent label used in the sample to be measured. It may be set.
- various parameters of the optical system such as the transmission wavelength band of the dichroic prism 105 are appropriately changed.
- NA of excitation light was set to 0.34, it may not be restricted to this but may be suitably set according to the magnitude
- the focal depth of the excitation light is 63.5 ⁇ m.
- the distance d3 between the bottom surface portion 13a of the well 13 and the reflection surface 11a is set to the above-described distance. It can be set larger than the interval (2 ⁇ m) of the embodiment.
- the base substrate 11 is formed by injection molding, and is formed on the upper surface of the reflecting surface 11a.
- the reflective film 14 was deposited, the bottom layer 12a was laminated by spin coating, and the top layer 12b was formed by 2P molding to produce the biosensor substrate 10.
- the production method of the biosensor substrate 10 is not limited to this, and may be produced by another method as appropriate.
- the well 13 is not formed in the well layer 12 corresponding to the lead-in region, but the well 13 may be formed in this region.
- the well 13 may be formed in this region.
- a lid may be provided on the upper portion of the well 13 when the biosensor substrates 10 and 20 are rotated by the rotating device 123. Thereby, undesired outflow (unintentional outflow), evaporation or movement of the sample from the well 13 can be prevented.
- the reflective film 14 itself may be used as the well layer 12. That is, as shown in FIG. 27A, a plurality of minute wells 13 may be formed in the reflective film 14 formed on the upper surface of the base substrate 11.
- the reflective film 14 may be any material having a refractive index different from that of the base substrate 11, and a resin material having a different refractive index can be used.
- the reflective film 14 shown in FIG. 27A may be composed of a bottom layer 14a and a top layer 14b. In this case, the bottom layer 14a and the top layer 14b may be formed using different materials.
- the shape of the biosensor substrates 10 and 20 is a disc shape.
- the shape is not limited to this, and may be a rectangular outline.
- FIG. 28A is a diagram schematically showing a configuration example when the outline of the biosensor substrate 30 is a square shape.
- FIG. 28A is a diagram of the biosensor substrate 30 as viewed from the upper surface side.
- a plurality of linear tracks (pit rows) are formed on the biosensor substrate 30 at a constant pitch.
- the wells 13 are arranged so as to be aligned in a direction parallel to the track.
- Other configurations of the biosensor substrate 30 are the same as those in the above embodiment.
- the cross-sectional structure of the biosensor substrate 30 when cut along the A-A ′ line is the same as FIG.
- address information is held in the pit row.
- the biosensor substrate 30 and the objective lens 106 are relatively moved in a direction parallel to the track.
- the biosensor substrate 30 is fixed, and the housing that holds the optical system including the semiconductor laser 101 to the aperture 111, the holder 121, and the objective lens actuator 122 extends along the guide shaft in a direction parallel to the track.
- focus control and tracking control are performed on the objective lens 106 as described above, and the beam spot of the excitation light is moved along one track.
- the objective lens 106 is moved by the track pitch in the direction perpendicular to the track, and a track jump to the adjacent track is performed.
- the housing is moved in a direction parallel to the track, and the next track is scanned.
- the biosensor substrate 30 is moved in a direction perpendicular to the tracks so that the objective lens 106 returns to the neutral position at the scanning position. Thereafter, the same operation as described above is repeated, and all the tracks are scanned.
- the irradiation efficiency of the excitation light to the sample can be increased, and the sample can be accurately obtained. Can be measured.
- a lead-in area may be provided, and information including the distance d3 between the bottom surface portion 13a and the reflecting surface 11a may be held in the lead-in area, as in the above modification. . And you may make it adjust the focal depth of excitation light using this information.
- the track is formed by a pit row.
- the track may be formed by a continuous groove, and the track is formed by a combination of the pit row and the groove. It may be formed.
- the address information is held by meandering the groove. That is, the meandering shape of the groove is modulated according to the address information.
- the aperture 111 is disposed between the semiconductor laser 101 and the PBS 102.
- the present invention is not limited to this, and the holder 121 is held on the dichroic prism 105 side of the objective lens 106 as shown in FIG.
- an aperture 134 for limiting the aperture of the excitation light may be provided.
- the aperture 134 has wavelength selectivity, shields a predetermined peripheral portion from the excitation light, and transmits all the fluorescence.
- FIG. 29 is a diagram showing a case where the aperture 134 is used in the fluorescence detection device 1 shown in FIG. 3, but also in the fluorescence detection device 2 shown in FIGS. 7 and 10, the objective lens 106 has a dichroic prism 105 side.
- the aperture 134 may be arranged so as to be held by the holder 121.
- the incident aperture of the excitation light with respect to the objective lens 106 is determined by the aperture 134 as in the first embodiment.
- the aperture 134 moves integrally with the objective lens 106, so that the excitation light beam incident on the objective lens 106 is reflected by the objective lens 106. Does not deviate from the center. Therefore, as compared with the case where the aperture 111 is used as shown in FIGS.
- the reflective film 14 itself may be used as the well layer 12. That is, as shown in FIG. 30A, a plurality of minute wells 13 may be formed in the reflective film 14 formed on the upper surface of the base substrate 11.
- the reflective film 14 may be any material having a refractive index different from that of the base substrate 11, and a resin material having a different refractive index can be used.
- the reflective film 14 shown in FIG. 30A may be composed of a bottom layer 14a and a top layer 14b. In this case, the bottom layer 14a and the top layer 14b may be formed using different materials. *
- the well layer 12 disposed on the reflective film 14 is provided with the well 13 having the bottom surface portion 13 a.
- the bottom surface portion 13 a of the well 13 is the upper surface of the reflective film 14. It is good also as a structure. That is, as shown in FIG. 30C, the well 13 may be formed by a through hole of the well layer 12 and may be formed on the reflective film 14.
- the shape of the biosensor substrate 10 is a disc shape.
- the shape is not limited to this and may be a rectangular outline.
- FIG. 31 (a) is a diagram schematically showing a configuration example when the outline of the biosensor substrate 20 is a square shape.
- FIG. 31A is a diagram of the biosensor substrate 20 viewed from the upper surface side.
- a plurality of linear tracks are formed on the biosensor substrate 20 at a constant pitch.
- the wells 13 are arranged so as to be aligned in a direction parallel to the track.
- Other configurations of the biosensor substrate 20 are the same as those in the above embodiment.
- the cross-sectional structure of the biosensor substrate 20 when cut along the A-A ′ line is the same as FIG.
- address information is held in the pit row.
- the address common area is, for example, a square and assigned so as to be arranged along the track.
- the same well address is assigned to the track portion included in the same address common area.
- the physical address applied to the track portion is the same as that in FIG. 14 of the second embodiment.
- Each track portion holds a track number together with a well address.
- the address common area is set wider than the well 13.
- the well 13 is disposed substantially at the center of the address common area.
- the biosensor substrate 20 and the objective lens 106 are relatively moved in a direction parallel to the track.
- the biosensor substrate 20 is fixed, and the housing that holds the optical system including the semiconductor laser 101 to the aperture 111, the holder 121, and the objective lens actuator 122 extends along the guide shaft in a direction parallel to the track.
- focus control and tracking control are performed on the objective lens 106 as described above, and the beam spot of the excitation light is moved along one track.
- the objective lens 106 is moved by the track pitch in the direction perpendicular to the track, and a track jump to the adjacent track is performed.
- the housing is moved in a direction parallel to the track, and the next track is scanned.
- the biosensor substrate 20 is moved in a direction perpendicular to the tracks so that the objective lens 106 returns to the neutral position at the scanning position. Thereafter, the same operation as described above is repeated, and all the tracks are scanned.
- the well 13 and the well address information are used.
- the specified positions of the wells 13 can be made to correspond one to one.
- the track is formed by the pit row.
- the track may be formed by a continuous groove (groove), or the track may be formed by a combination of the pit row and the groove (groove). good.
- the address information is held by meandering the groove. That is, the meandering shape of the groove is modulated according to the address information.
- the aperture 111 is disposed between the semiconductor laser 101 and the PBS 102.
- the present invention is not limited to this, and the holder 121 is held on the dichroic prism 105 side of the objective lens 106 as shown in FIG.
- an aperture 134 for limiting the aperture of the excitation light may be provided.
- the aperture 134 has wavelength selectivity, shields a predetermined peripheral portion from the excitation light, and transmits all the fluorescence.
- the incident aperture of the excitation light with respect to the objective lens 106 is determined by the aperture 134 as in the second embodiment.
- the aperture 134 moves integrally with the objective lens 106, so that the excitation light beam incident on the objective lens 106 is reflected by the objective lens 106. Does not deviate from the center. Therefore, as compared with a case where the aperture 111 is used as shown in FIG.
- one semiconductor laser 101 is used as a light source.
- the present invention is applicable to a fluorescence detection apparatus having an optical system other than the above and a sample holding carrier having a configuration other than the above. is there.
- a fluorescence detection apparatus in which a light source for irradiating excitation light to a well and a light source for irradiating a track with laser light are separately prepared, and a sample holder used therefor It can also be applied to carriers.
- control process related to the track jump described with reference to FIGS. 21A to 26 is not limited to the case where the address common area is set as described above. When the well region exists, it can be widely used. That is, the control relating to the track jump can be extracted as follows, for example, as an invention in a wider range.
- a fluorescence detection apparatus that irradiates a sample holding carrier that holds a fluorescently labeled sample with irradiation light and detects fluorescence generated from the sample by irradiation of the irradiation light
- the sample holding carrier includes a substrate, a track formed on the upper surface of the substrate, and a plurality of sample storage portions that are arranged on the upper surface side of the substrate and store a sample.
- the sample holder is not disposed in a band-shaped region having a predetermined width in a direction perpendicular to the track,
- a light source that emits the irradiation light;
- An objective lens for focusing the irradiation light on the sample holding carrier;
- An objective lens actuator for driving the objective lens;
- a control unit for controlling the objective lens actuator;
- An optical scanning unit that scans the irradiation light converged by the objective lens along the track;
- the control unit controls the objective lens actuator to move the irradiation position of the irradiation light in a direction crossing the track when the scanning position of the irradiation light is included in the band-shaped region.
- the irradiation position control unit acquires information for skipping the band-shaped region, and the irradiation is performed in a direction across the track based on the acquired information. Move the light irradiation position.
- the irradiation light can be scanned quickly and smoothly on the sample holding carrier.
- Aperture limiting element depth of focus adjustment unit 132 ... Polarizing filter (depth of focus adjustment unit) 133 ... Lens actuator (depth of focus adjustment unit) 134 ... Aperture (optical system) 202 ... Servo circuit (control unit, depth of focus control unit) 203... Reproduction circuit (reading unit) 205 ... Controller (control unit) 205a ... Scanning position detection unit 205b ... Fluorescence position specifying unit
Landscapes
- Health & Medical Sciences (AREA)
- Chemical & Material Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Analytical Chemistry (AREA)
- Pathology (AREA)
- Biochemistry (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Clinical Laboratory Science (AREA)
- Hematology (AREA)
- Investigating, Analyzing Materials By Fluorescence Or Luminescence (AREA)
- Optical Measuring Cells (AREA)
- Sampling And Sample Adjustment (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Measuring Or Testing Involving Enzymes Or Micro-Organisms (AREA)
Abstract
【課題】簡素な構成により精度良く試料を測定することが可能な試料保持担体およびそれを用いた蛍光検出システム、蛍光検出装置を提供する。 【解決手段】バイオセンサ基板(10)は、下面から励起光が入射されるベース基板(11)と、ベース基板(11)の上面に配置され、励起光の一部を反射する反射膜(14)と、反射膜(14)の上面側に配置され、底面部(13a)を有する複数のウエル(13)と、を備える。励起光は、収束されてベース基板(11)に対して入射する。反射膜(14)とベース基板(11)との界面である反射面(11a)と、ウエル(13)の底面部(13a)との間の間隔d3が、励起光の焦点深度以下である。これにより、ウエル(13)の底面部(13a)に収容された試料に対して、励起光を確実かつ効率的に照射することができ、精度良く試料を測定することができる。
Description
本発明は、細胞等の被検体を蛍光標識することにより調製された試料を保持する試料保持担体およびそれを用いた蛍光検出システム、蛍光検出装置に関する。
多数の細胞中から、病原菌に感染した細胞や所定の態様を有する細胞を検出することは、特に、臨床現場等の医療の分野において重要である。このような細胞の検出を迅速、簡便かつ高精度に検出するための手法として、たとえば、WO2010/027003号公報に記載の手法が紹介されている。この手法では、マイクロアレイチップ上に複数のマイクロチャンバー(ウエル)が形成され、各ウエルの中に、蛍光標識が施された細胞が充填される。そして、レーザ光を照射しながら、各ウエルを蛍光顕微鏡で観測することにより、蛍光を発する特定の細胞が検出される。
さらに、特開2006-322819号公報には、細胞が充填された一連のウエルをレーザ光で走査することにより、細胞から生じる蛍光を検出するための構成が記載されている。この構成では、ディスクの周方向に一連のウエルが形成され、ウエルが形成された層から光入射側に隔離した層に、一連の情報ピットが、ウエルの配列に沿って並ぶように、トラック状に形成されている。情報ピットには、アドレス情報が保持されている。
この構成において、蛍光を検出するための光学系には、ウエルに励起光を照射するための光源と、情報ピットにレーザ光を照射するための光源が個別に準備され、各光源から出射された光が共通の対物レンズによって収束される。情報ピット用のレーザ光が情報ピットに合焦し且つ一連の情報ピット列(トラック)を追従するよう対物レンズが制御されることにより、励起光が、ウエルに充填された細胞に合焦され、一連のウエルがレーザ光により順次走査される。また、光学系は、細胞から発せられた蛍光を検出するための光検出器と、情報ピットによって変調されたレーザ光を受光するための光検出器を備えている。レーザ光を受光する光検出器からの出力によって、対物レンズを制御するための信号と、情報ピットに保持された情報を再生するための信号が生成される。
励起光が照射されることによって細胞から蛍光が発せられると、この蛍光が、蛍光検出用の光検出器により検出される。また、蛍光が検出されたときに情報ピットから取得される位置情報によって、蛍光を発した細胞を収容するウエルの位置が特定される。こうして、ディスク上に配された一連のウエルに収容された多数の細胞から、検出対象の細胞の有無と、当該細胞を収容するウエルの位置が、蛍光顕微鏡による観察なしに、自動で検出される。
しかしながら、上記特開2006-322819号公報によれば、2つのレーザ光源が必要となるため、装置の構成が複雑になるとの問題が生じる。また、励起光が直接フォーカス制御されないため、励起光の収束位置がウエル底面の細胞からずれる可能性があり、このため、細胞の検出精度が低下する惧れがある。
また、上記特開2006-322819号公報によれば、情報ピットの寸法に比べてウエルの寸法が数段大きいため、一つのウエルを複数本のトラックが横切ることになる。このため、一つのウエルに対して、情報ピットから取得される複数のアドレス情報が対応づけられることになり、アドレス情報によるウエルの位置特定がかなり煩雑となる。また、所定のトラックがウエルを横切る途中において、アドレス情報が切り替わることもあり、こうなると、切り替わる前後の何れのアドレス情報をこのウエルに適用すれば良いかが問題となる。
また、上記特開2006-322819号公報によれば、情報ピットの寸法に比べてウエルの寸法が数段大きいため、一つのウエルを複数本のトラックが横切ることになる。このため、一つのウエルに対して、情報ピットから取得される複数のアドレス情報が対応づけられることになり、アドレス情報によるウエルの位置特定がかなり煩雑となる。また、所定のトラックがウエルを横切る途中において、アドレス情報が切り替わることもあり、こうなると、切り替わる前後の何れのアドレス情報をこのウエルに適用すれば良いかが問題となる。
本発明は、このような点に鑑みてなされたものであり、簡素な構成により精度良く試料を測定することが可能な試料保持担体およびそれを用いた蛍光検出システム、蛍光検出装置を提供することを目的とする。
また、本発明は、アドレス情報を的確にウエル(試料収容部)に対応させることが可能な試料保持担体およびそれを用いた蛍光検出装置を提供することを目的とする。
また、本発明は、アドレス情報を的確にウエル(試料収容部)に対応させることが可能な試料保持担体およびそれを用いた蛍光検出装置を提供することを目的とする。
本発明の第1の態様は、試料保持担体に関する。この態様に係る試料保持担体は、下面から照射光が入射される基板と、前記基板の上面に配置され、前記照射光の一部を反射する反射膜と、前記反射膜の上面側に配置され、底面を有する複数の試料収容部と、を備える。前記照射光は、収束されて前記基板に対して入射する。前記反射膜と前記基板との界面である反射面と、前記収容部の底面との間の距離が、前記照射光の焦点深度以下である。
本態様に係る試料保持担体によれば、反射面と試料収容部の底面との間の距離が、照射光の焦点深度以下であるため、装置側において、照射光を反射面に合焦させる制御を行うことにより、試料収容部の底面を、照射光の焦点深度の範囲内に含めることができるようになる。このため、試料収容部の底面に収容された試料に対して、照射光を確実かつ効率的に照射することができ、精度良く試料を測定することができる。
また、本態様に係る試料保持担体によれば、照射光の焦点深度が試料収容部の底面に掛かるため、照射光のみにより、合焦位置の調整と試料への照射の両方を実現することができる。このため、照射光用の光源の他にサーボ用の光源を配さずとも良く、光学系の構成の簡素化を図ることができる。
本態様に係る試料保持担体は、前記基板の上面に形成されたトラックを備える構成とされ得る。ここで、前記トラックには、前記試料保持担体上の位置を特定するためのアドレス情報が保持されているのが望ましい。こうすると、装置側において、蛍光が検出された試料収容部の試料保持担体上の位置をアドレス情報に基づき特定することができる。
また、本態様に係る試料保持担体において、前記トラックには、当該試料保持担体に適用される焦点深度の導出に用いられるパラメータ値が記憶されているのが望ましい。こうすると、装置側において、当該パラメータ値を参照することにより、各試料保持担体に適する焦点深度を把握することができ、これに応じて、焦点深度を調整する等の措置をとることができる。
本発明の第2の態様は、蛍光標識が施された試料を保持する試料保持担体に対し蛍光検出装置から照射光を照射し、当該照射光の照射により前記試料から生じる蛍光を前記蛍光検出装置により検出する蛍光検出システムに関する。この態様に係る蛍光検出システムにおいて、前記試料保持担体は、下面から前記照射光が入射される基板と、前記基板の上面に配置され、前記照射光の一部を反射する反射膜と、前記反射膜の上面側に配置され、底面を有する複数の試料収容部と、を備える。また、前記蛍光検出装置は、前記照射光を収束させて前記基板に入射させるための光学系を備える。そして、前記反射膜と前記基板との界面である反射面と、前記収容部の底面との間の距離が、前記照射光の焦点深度以下である。
本態様に係る蛍光検出システムによれば、反射面と収容部の底面との間の距離が、照射光の焦点深度以下であるため、蛍光検出装置側において、照射光を反射面に合焦させる制御を行うことにより、試料収容部の底面を、照射光の焦点深度の範囲内に含めることができるようになる。このため、試料収容部の底面に収容された試料に対して、照射光を確実かつ効率的に照射することができ、精度良く試料を測定することができる。
本態様に係る蛍光検出システムにおいて、前記試料保持担体は、当該試料保持担体に適用される焦点深度の導出に用いられるパラメータ値を保持する構成とされ得る。この場合、前記蛍光検出装置は、前記パラメータ値を読み取るための読取部と、前記照射光の焦点深度を変化させるための焦点深度調整部と、前記読取部によって読み取られた前記パラメータ値に対応する焦点深度となるように、前記焦点深度調整部を制御する制御部と、を備える。
この構成によれば、蛍光検出装置側において、試料保持担体に保持されたパラメータ値を参照することにより、当該試料保持担体に適する焦点深度を把握することができる。そして、把握した焦点深度となるように、焦点深度調整部を制御することにより、照射光の焦点深度を、当該試料保持担体に適するものとすることができる。よって、この構成によれば、多様な試料保持担体に対して、焦点深度の適正化を図ることができ、試料の測定をより適正に行うことができる。
本発明の第3の態様は、蛍光標識が施された試料を保持する試料保持担体に対し照射光を照射するとともに、当該照射光の照射により前記試料から生じる蛍光を検出する蛍光検出装置に関する。この態様に係る蛍光検出装置において、前記試料保持担体は、下面から照射光が入射される基板と、前記基板の上面に形成されたトラックと、前記基板の上面に配置され、前記照射光の一部を反射する反射膜と、前記反射膜の上面側に配置され、底面を有する複数の試料収容部と、を備える。この態様に係る蛍光検出装置は、前記照射光を出射する光源と、前記照射光を前記試料保持担体上に収束させる対物レンズと、前記対物レンズを少なくとも光軸に平行なフォーカス方向と前記トラックに垂直なトラッキング方向に駆動する対物レンズアクチュエータと、前記光源から出射された前記照射光を前記対物レンズに導くとともに、前記蛍光を、前記試料保持担体によって反射された前記照射光の反射光から分離する分離素子と、前記分離素子によって前記蛍光から分離された前記反射光を受光してフォーカスエラー信号とトラッキングエラー信号を生成するための信号を出力する光検出器と、前記フォーカスエラー信号とトラッキングエラー信号に基づいて前記対物レンズアクチュエータを制御する制御部と、前記分離素子によって分離された前記蛍光を受光する蛍光検出器と、前記照射光が前記トラックに沿って前記試料保持担体上を移動するよう、前記対物レンズと前記試料保持担体との間の相対位置を変化させる光走査部と、を備える。ここで、前記反射膜と前記基板との界面である反射面と、前記収容部の底面との間の距離が、前記照射光の焦点深度以下である。
本態様に係る蛍光検出装置は、第1の態様に係る試料保持担体に対する蛍光検出に用いて好適なものである。すなわち、本態様に係る蛍光検出装置を用いることにより、試料収容部の底面を、照射光の焦点深度の範囲内に含めることができるようになり、試料収容部の底面に収容された試料に対して、照射光を確実かつ効率的に照射することができる。よって、精度良く試料を測定することができる。
また、本態様に係る蛍光検出装置によれば、一つの光源から出射される照射光のみによって、トラックの追従と試料への照射の両方を実現することができるため、照射光用の光源の他にサーボ用の光源を配さずとも良く、光学系の構成の簡素化を図ることができる。
なお、前記試料保持担体が、当該試料保持担体に適用される焦点深度の導出に用いられるパラメータ値を保持する場合、本態様に係る蛍光検出装置は、前記パラメータ値を読み取るための読取部と、前記照射光の焦点深度を変化させるための焦点深度調整部と、前記読取部によって読み取られた前記パラメータ値に対応する焦点深度となるように、前記焦点深度調整部を制御する焦点深度制御部と、をさらに備える構成とされ得る。
この構成によれば、試料保持担体に保持されたパラメータ値を参照することにより、当該試料保持担体に適する焦点深度を把握することができ、把握した焦点深度となるように、焦点深度調整部を制御することにより、照射光の焦点深度を、当該試料保持担体に適するものとすることができる。よって、この構成によれば、多様な試料保持担体に対して、焦点深度の適正化を図ることができ、試料の測定をより適正に行うことができる。
本発明の第4の態様は、試料保持担体に関する。本態様に係る試料保持担体は、基板と、前記基板の上面に形成され、所定の情報を保持するトラックと、前記基板の上面側に配置され、試料を収容する複数の試料収容部と、を備える。ここで、前記試料収容部の下方を前記トラックが横切り、同一の前記試料収容部を横切る複数のトラック部分に、前記試料収容部の位置を特定するための同一のウエルアドレス情報が付与される。
本発明の第4の態様は、試料保持担体に関する。本態様に係る試料保持担体は、基板と、前記基板の上面に形成され、所定の情報を保持するトラックと、前記基板の上面側に配置され、試料を収容する複数の試料収容部と、を備える。ここで、前記試料収容部の下方を前記トラックが横切り、同一の前記試料収容部を横切る複数のトラック部分に、前記試料収容部の位置を特定するための同一のウエルアドレス情報が付与される。
本態様に係る試料保持担体によれば、同一の試料収容部を横切る複数のトラック部分には、試料収容部の位置を特定するための同一のウエルアドレス情報が付与されるため、試料収容部とウエルアドレス情報によって特定される試料収容部の位置とを一対一に対応させることができる。よって、ウエルアドレス情報による試料収容部の位置特定を簡易かつ円滑に行うことができる。
本態様に係る試料保持担体は、前記トラックを横切る方向に所定トラック数分の幅を有するとともに、前記トラックに沿う方向に所定トラック長分の幅を有し、前記試料収容部を含む広さを有するアドレス共通領域が前記トラックに沿って設定されるよう構成され得る。この場合、一つの前記アドレス共通領域に対して一つの前記試料収容部が割り当てられるよう、前記試料収容部が配置され、同一の前記アドレス共通領域に含まれるトラック部分に、同一の前記ウエルアドレス情報が付与される。
この構成によれば、試料収容部よりも広いアドレス共通領域に対して同じウエルアドレス情報が付与されるため、試料収容部を試料保持担体に配置する際に試料収容部に位置ずれが生じても、試料収容部をアドレス共通領域内に位置付けることができる。よって、一つの試料収容部に対して同じウエルアドレス情報をより確実に付与することができる。
また、本態様に係る試料保持担体は、同一のアドレス情報が付与された一群の前記トラック部分のうち、一のトラック部分を他のトラック部分から区別するためのトラックアドレス情報が、前記トラック部分に付与されるよう構成され得る。この構成によれば、蛍光検出装置側において、トラックアドレス情報を取得することにより、試料収容部上のトラックを横切る方向の位置を把握することができるようになる。よって、蛍光の発生位置を、より細かく把握することができる。
本発明の第5の態様は、蛍光標識が施された試料を保持する試料保持担体に対し照射光を照射するとともに、当該照射光の照射により前記試料から生じる蛍光を検出する蛍光検出装置に関する。ここで、前記試料保持担体は、基板と、前記基板の上面に形成され、所定の情報を保持するトラックと、前記基板の上面側に配置され、試料を収容する複数の試料収容部と、を備え、前記試料収容部の下方を前記トラックが横切り、同一の前記試料収容部を横切る複数のトラック部分に、前記試料収容部の位置を特定するための同一のウエルアドレス情報が付与される構成を備える。本態様に係る蛍光検出装置は、前記照射光を出射する光源と、前記照射光を前記試料保持担体に収束させる対物レンズと、前記対物レンズによって収束された前記照射光を前記トラックに沿って走査させる光走査部と、前記試料保持担体によって反射された前記照射光を受光する光検出器と、前記光検出器からの出力から前記ウエルアドレス情報を再生する再生部と、前記トラック部分上における前記照射光の走査位置を検出するための走査位置検出部と、を有する。
本態様に係る蛍光検出装置によれば、同一の試料収容部を横切るトラック部分に同一のウエルアドレス情報が付与されるため、再生部によって再生されたウエルアドレス情報に基づいて、試料収容部の位置を簡易に特定することができる。また、トラック部分上における照射光の走査位置が、走査位置検出部によって検出されるため、各トラック部分上において、蛍光が検出されたときの蛍光の走査位置を特定することができる。よって、試料収容部内における蛍光の検出位置をより細かく把握することができる。
本態様に係る蛍光検出装置において、試料保持担体は、同一のアドレス情報が付与された一群の前記トラック部分のうち、一のトラック部分を他のトラック部分から区別するためのトラックアドレス情報が、前記トラック部分に付与される構成とされ得る。この場合、本態様に係る蛍光検出装置の前記再生部は、前記光検出器からの出力に基づいて前記トラックアドレス情報をさらに再生するよう構成される。また、本態様に係る蛍光検出装置は、前記光検出器からの出力に基づいて、前記再生部によって再生された前記ウエルアドレス情報およびトラックアドレス情報と、前記走査位置検出部によって検出された走査位置とを互いに対応付けることにより、前記試料保持担体上における蛍光の発生位置を特定する蛍光位置特定部をさらに備える構成とされ得る。
本態様に係る蛍光検出装置によれば、蛍光の発生位置が、試料収容部の位置によって特定されるとともに、さらに、試料収容部内のトラックと、当該トラック上の走査位置とによって特定される。よって、蛍光検出装置において、蛍光の発生位置をより細かく把握することができる。
また、本態様に係る蛍光検出装置は、前記対物レンズを駆動する対物レンズアクチュエータと、前記対物レンズアクチュエータを制御する制御部と、を備える構成とされ得る。また、本態様に係る蛍光検出装置において、前記試料保持担体は、前記トラックに垂直な方向に所定の幅を有する帯状の領域において前記試料保持部が配置されていない構成とされ得る。この場合、前記制御部は、前記照射光の走査位置が前記帯状の領域に含まれると、前記トラックを横切る方向に、前記照射光の照射位置を移動させるように前記対物レンズアクチュエータを制御する構成とされ得る。
この構成によれば、試料収容部が配置されていない領域をスキップすることができるため、試料保持担体に対する照射光の走査を迅速かつ円滑に行うことができる。
以上のとおり、本発明によれば、簡素な構成により精度良く試料を測定することが可能な試料保持担体およびそれを用いた蛍光検出システム、蛍光検出装置を提供することができる。
また、本発明によれば、アドレス情報を的確にウエル(試料収容部)に対応させることが可能な試料保持担体およびそれを用いた蛍光検出装置を提供することができる。
また、本発明によれば、アドレス情報を的確にウエル(試料収容部)に対応させることが可能な試料保持担体およびそれを用いた蛍光検出装置を提供することができる。
本発明の効果ないし意義は、以下に示す実施の形態の説明により更に明らかとなろう。ただし、以下の実施の形態は、あくまでも、本発明を実施する際の一つの例示であって、本発明は、以下の実施の形態によって何ら制限されるものではない。
<第1実施例>
以下、本発明の第1実施例につき図面を参照して説明する。
以下、本発明の第1実施例につき図面を参照して説明する。
<バイオセンサ基板>
図1(a)は、本実施例に係るバイオセンサ基板10の外観の構成を模式的に示す斜視図である。バイオセンサ基板10は、たとえば、人の血液中においてマラリア原虫に感染した赤血球を検出するために用いられる。
図1(a)は、本実施例に係るバイオセンサ基板10の外観の構成を模式的に示す斜視図である。バイオセンサ基板10は、たとえば、人の血液中においてマラリア原虫に感染した赤血球を検出するために用いられる。
バイオセンサ基板10は、光ディスク(CDやDVD等)と同様に円盤形状を有しており、中心に円形状の孔10aが形成されている。また、バイオセンサ基板10は、ベース基板11の上面にウエル層12が積層された構造となっている。ウエル層12には、図1(a)の右端の拡大図に示すように、円柱形状の窪みからなる微小なウエル13が複数形成されている。ウエル13は、バイオセンサ基板10の内周から外周に向かって同心円状または螺旋状に並んでいる。ウエル13は、ウエル層12の上面よりも一段低い底面部13aを有しており、試料が滴下されたときにその試料を収容することができるよう直径と高さが設定されている。
図1(b)は、バイオセンサ基板10を面に垂直な平面で切断したときの断面図であり、図1(c)は、図1(b)の破線部分の拡大図である。
ベース基板11の上側(ウエル層12側)には、光ディスクと同様の螺旋状のトラック(ピット列)が形成されている。ピットは、バイオセンサ基板10の面上の位置を特定するためのアドレス情報を保持している。CDやDVDと同様、線速度一定でトラックが励起光(後述)により走査されることにより、アドレス情報が再生される。ベース基板11とウエル層12との間には、反射膜14が配されている。ベース基板11の上面に反射膜14が積層されることにより、ベース基板11の上面に、反射膜14とベース基板11との界面である反射面11aが形成される。ウエル13は、ウエル層12の上面側に所定の間隔を開けて形成されている。ウエル13の底面部13aは、反射膜14よりも僅かに上側に位置付けられており、ウエル13の底面部13aと反射膜14の上面とは離間している。
ここで、ウエル13の直径と高さを、それぞれd1、d2とし、底面部13aと反射面11aとの間隔をd3とし、ウエル13の間隔をd4とし、ベース基板11の厚みをd5とし、反射面11aのトラックピッチをd6とする。本実施例では、直径d1と、高さd2は、それぞれ、100μmと50μmに設定されており、間隔d3、d4は、それぞれ、2μmと300μmに設定されており、厚みd5は0.6mmに設定されており、トラックピッチd6は、1μmに設定されている。また、反射膜14の励起光(後述)に対する反射率は、3~4%に設定されている。
また、本実施例では、ベース基板11はポリカーボネートから構成されており、ウエル層12は紫外線硬化樹脂から構成されており、反射膜14はアルミニウム、銀合金等の金属、あるいは、酸化ニオブ、波長選択膜等から構成されている。なお、ベース基板11は、ポリカーボネートの他、ポリメチルメタクリレート、非晶質ポリオレフィン等から構成されても良い。ウエル層12は、シリコーン、ポリカーボネート、ポリメチルメタクリレート、非晶質ポリオレフィン等から構成されても良い。反射膜14の膜厚は、所望の反射率となるよう、たとえば5nm~20nmに設定される。
図2(a)~(d)は、バイオセンサ基板10の作成方法を示す図である。なお、かかる作成方法は、以下に示すように、光ディスクの作成方法と略同様となっている。
まず、図2(a)に示すように、ベース基板11が射出成型により形成される。これにより、ベース基板11の厚みはd5となり、ベース基板11の上面に、一連のピットが形成される。続いて、図2(b)に示すように、ベース基板11の上面に、反射膜14が蒸着され、これにより、ベース基板11の上面に反射面11aが形成される。続いて、図2(c)に示すように、反射膜14の上面に、スピンコートにより底面層12aが積層される。続いて、図2(d)に示すように、底面層12aの上面に、2P成型により厚さd2の上面層12bが形成される。これにより、図1(b)に示すようなウエル13が複数形成される。なお、ウエル層12は、底面層12aと上面層12bが合わせられて形成されることになる。
<蛍光検出装置>
図3は、本実施例に係る蛍光検出装置1の構成を示す図である。蛍光検出装置1は、たとえば、上記バイオセンサ基板10のウエル13に収容された赤血球がマラリア原虫に感染しているかを判定するために用いられる。
図3は、本実施例に係る蛍光検出装置1の構成を示す図である。蛍光検出装置1は、たとえば、上記バイオセンサ基板10のウエル13に収容された赤血球がマラリア原虫に感染しているかを判定するために用いられる。
なお、蛍光検出装置1を使用する際、予め、被検体を蛍光標識することにより作成した試料を、バイオセンサ基板10のウエル13に収容させておく。本実施例では、被検体である直径約10μm、厚さ約2μmの赤血球がマラリア原虫に感染していた場合にその内部が蛍光標識され、感染している赤血球と感染していない赤血球とが共に直径100μmのウエル13の底面部13aに並列的に複数配される。このように試料が収容されたバイオセンサ基板10の孔10a(図1(a)参照)が、蛍光検出装置1の回転装置123(ターンテーブル)にセットされ、測定が開始される。
蛍光検出装置1の光学系は、半導体レーザ101と、偏光ビームスプリッタ(PBS)102と、コリメータレンズ103と、1/4波長板104と、ダイクロイックプリズム105と、対物レンズ106と、アナモレンズ107と、光検出器108と、集光レンズ109と、蛍光検出器110と、アパーチャ111を備えている。また、蛍光検出装置1は、上記光学系の他、ホルダ121と、対物レンズアクチュエータ122と、回転装置123と、信号演算回路201と、サーボ回路202と、再生回路203と、信号増幅回路204と、コントローラ205を備えている。
半導体レーザ101は、波長405nm程度のレーザ光(以下、「励起光」という)を出射する。なお、本実施の形態における励起光は、特許請求の範囲に記載の照射光の一例である。図3には、半導体レーザ101から出射される励起光のうち、バイオセンサ基板10に導かれる励起光、すなわち、アパーチャ111を通過する励起光が、破線で示されている。アパーチャ111には、所定の口径を有する円形の開口が形成されており、このアパーチャ111により励起光の口径が制限される。また、半導体レーザ101の位置は、半導体レーザ101から出射される励起光がPBS102に対してS偏光となるよう調整されている。これにより、半導体レーザ101から出射された励起光は、アパーチャ111により口径を制限された後、PBS102によって反射され、コリメータレンズ103に入射する。
コリメータレンズ103は、PBS102側から入射する励起光を平行光に変換する。これにより、コリメータレンズ103を通過した励起光は、所定径の平行光となる。1/4波長板104は、コリメータレンズ103側から入射する励起光を円偏光に変換するとともに、ダイクロイックプリズム105側から入射する励起光を、コリメータレンズ103側から入射する際の偏光方向に直交する直線偏光に変換する。これにより、コリメータレンズ103側からPBS102に入射する励起光は、PBS102を透過する。
ダイクロイックプリズム105は、波長405nm程度のレーザ光を反射し、波長450~540nm程度のレーザ光を透過するよう構成されている。これにより、1/4波長板104側から入射する励起光は、ダイクロイックプリズム105によって反射され、対物レンズ106に入射する。
対物レンズ106は、励起光をバイオセンサ基板10に対して適正に収束させるよう構成されている。具体的には、対物レンズ106は、ダイクロイックプリズム105側から入射する励起光が所定のNA(開口数、ここでは、0.34)で収束するよう構成されている。対物レンズ106に対する励起光の入射口径は、アパーチャ111の口径によって決められる。対物レンズ106により収束される励起光の焦点深度は、励起光のNAによって変化する。励起光の焦点深度については、追って図5(a)~(c)を参照して説明する。
対物レンズ106は、ホルダ121に保持された状態で、対物レンズアクチュエータ122により、フォーカス方向(バイオセンサ基板10に垂直な方向)とトラッキング方向(バイオセンサ基板10の径方向)に駆動される。すなわち、対物レンズ106は、励起光が、バイオセンサ基板10の反射面11aに合焦された状態で、ピット列からなるトラックを追従するよう、駆動される。反射面11aに合焦された励起光は、一部が反射面11aによって反射され、大部分が反射面11aを透過する。
反射面11aによって反射された励起光(以下、「反射励起光」という)は、ダイクロイックプリズム105によって反射され、1/4波長板104により直線偏光に変更され、コリメータレンズ103により収束光となる。そして、コリメータレンズ103側からPBS102に入射する反射励起光は、上述したようにPBS102を透過する。
アナモレンズ107は、PBS102側から入射する反射励起光に非点収差を導入する。アナモレンズ107を透過した反射励起光は、光検出器108に入射する。光検出器108は、受光面上に反射励起光を受光するための4分割センサを有している。光検出器108の検出信号は、信号演算回路201に入力される。
バイオセンサ基板10に照射された励起光のうち、反射面11aを透過した励起光は、ウエル13の底面部13aに到達する。底面部13aに並列的に配されている蛍光標識されたマラリア原虫に感染している赤血球に励起光が照射されると、マラリア原虫から蛍光が発生する。かかる蛍光は、図3において一点鎖線で示されるように、NA(開口数)が励起光のNAよりも大きい。このため、対物レンズ106とダイクロイックプリズム105との間において、蛍光のビーム径は励起光のビーム径よりも大きくなっている。蛍光のNAは、たとえば、0.65である。また、蛍光の波長は励起光の波長と異なっており、本実施例では450~540nmとなっている。
一方でマラリア原虫に感染していない赤血球は蛍光標識されていないので蛍光を発生しない。このようにして、マラリア原虫に感染している赤血球と感染していない赤血球とを区別することができる。
一方でマラリア原虫に感染していない赤血球は蛍光標識されていないので蛍光を発生しない。このようにして、マラリア原虫に感染している赤血球と感染していない赤血球とを区別することができる。
対物レンズ106側からダイクロイックプリズム105に入射する蛍光は、ダイクロイックプリズム105を透過する。集光レンズ109は、ダイクロイックプリズム105側から入射する蛍光を集光して、蛍光検出器110に導く。蛍光検出器110は、受光面上に蛍光を受光するためのセンサを有している。蛍光検出器110の検出信号は、信号増幅回路204に入力される。
信号演算回路201は、光検出器108の検出信号から、後述するフォーカスエラー信号FEとトラッキングエラー信号TEを生成し、光検出器108の検出信号から、後述する再生RF信号を生成する。サーボ回路202は、信号演算回路201から出力されたフォーカスエラー信号FEとトラッキングエラー信号TEを用いて、対物レンズアクチュエータ122の駆動を制御する。また、サーボ回路202は、信号演算回路201から出力された再生RF信号を用いて、線速度一定でバイオセンサ基板10が回転されるよう、回転装置123を制御する。再生回路203は、信号演算回路201から出力された再生RF信号を復調して再生データを生成する。信号増幅回路204は、蛍光検出器110の検出信号を増幅する。
コントローラ205は、信号演算回路201と、サーボ回路202と、再生回路203の他、蛍光検出装置1の各部を制御する。また、コントローラ205は、再生回路203から出力される再生データ(アドレス情報)と、信号増幅回路204から出力された信号に基づいて、蛍光を検出したウエル13がバイオセンサ基板10のどの位置にあるかを判定し、蛍光を検出したウエル13に対応するアドレス情報を内部メモリに保持する。
図4は、信号演算回路201の回路構成を示す図である。
光検出器108は、上述したように受光面上に反射励起光を受光するための4分割センサを有しており、4分割センサの左上、右上、右下、左下のセンサは、それぞれ受光した反射励起光のビームスポットに基づいて検出信号S1~S4を出力する。なお、図4の光検出器108の受光面上において、ディスクのラジアル方向(径方向)に対応する方向は、左右方向である。また、フォーカスエラー信号FEとトラッキングエラー信号TEは、既存の光ディスク装置において用いられる非点収差法と1ビームプッシュプル法に従って生成される。
信号演算回路201は、加算器301~304、307と、減算器305、306を備えている。加算器301は、検出信号S1、S3を加算した信号を減算器305に出力し、加算器302は、検出信号S2、S4を加算した信号を減算器305に出力する。加算器303は、検出信号S1、S4を加算した信号を減算器306と加算器307に出力し、加算器304は、検出信号S2、S3を加算した信号を減算器306と加算器307に出力する。
減算器305は、加算器301、302の出力信号を減算して、フォーカスエラー信号FEを出力する。減算器306は、加算器303、304の出力信号を減算して、トラッキングエラー信号TEを出力する。加算器307は、加算器303、304の出力信号を加算して、再生RF信号を出力する。すなわち、フォーカスエラー信号FEと、トラッキングエラー信号TEと、再生RF信号は、それぞれ以下の式(1)~(3)の演算により取得することができる。
FE=(S1+S3)-(S2+S4) …(1)
TE=(S1+S4)-(S2+S3) …(2)
RF=(S1+S2+S3+S4) …(3)
ここで、対物レンズ106の焦点位置が反射面11aに位置付けられているとき、光検出器108の4分割センサ上のビームスポットは最小錯乱円となり、上記式(1)のフォーカスエラー信号FEの値が0となる。また、対物レンズ106の焦点位置が反射面11aのトラック(ピット)の真上に位置付けられているとき、光検出器108の4分割センサ上のビームスポットは、左側の2つのセンサと右側の2つのセンサに対して等しく掛かり、上記式(2)のトラッキングエラー信号TEの値が0となる。
TE=(S1+S4)-(S2+S3) …(2)
RF=(S1+S2+S3+S4) …(3)
ここで、対物レンズ106の焦点位置が反射面11aに位置付けられているとき、光検出器108の4分割センサ上のビームスポットは最小錯乱円となり、上記式(1)のフォーカスエラー信号FEの値が0となる。また、対物レンズ106の焦点位置が反射面11aのトラック(ピット)の真上に位置付けられているとき、光検出器108の4分割センサ上のビームスポットは、左側の2つのセンサと右側の2つのセンサに対して等しく掛かり、上記式(2)のトラッキングエラー信号TEの値が0となる。
図5(a)、(b)は、励起光の焦点深度を説明するための図である。
上述したように、励起光の波長は405nmであり、励起光のNA(開口数)は0.34である。また、一般に焦点深度は、波長/(NA×NA)により算出することができる。よって、本実施例の励起光の焦点深度は、約3.5μmとなる。図1(b)、(c)に示す底面部13aと反射面11aとの間隔d3は、励起光の焦点深度よりも小さくなるよう設定され、ここでは、2.0μmに設定されている。
上記のように、励起光のNAが設定されると、焦点位置におけるスポット径は約1μmとなる。図1(c)に示すトラックピッチの間隔d6は、かかるスポット径と略同じとなるよう、1μmに設定されている。
図5(a)は、励起光の焦点深度の範囲の最下点が反射面11aと一致している状態を示し、図5(b)は、励起光の焦点深度の範囲の最上点が底面部13aと一致している状態を示している。なお、サーボ回路202から対物レンズアクチュエータ122に出力されるオフセット電圧を調整することで、励起光の焦点深度の範囲を図5(a)、(b)の何れの状態とすることもでき、また、図5(a)、(b)の間の状態にすることもできる。
図5(a)、(b)の状態のとき、ウエル13の底面部13aと反射面11aとの間隔d3は2μmであり、励起光の焦点深度は3.5μmであるため、励起光の焦点深度に対応する範囲に、底面部13aと反射面11aの両方が含まれるようになる。したがって、フォーカスサーボにより、励起光の焦点位置を反射面11aに位置付けると、底面部13aに配されている試料にも焦点が合わせられることとなる。
なお、図5(c)は、励起光の焦点深度の範囲の最下点が、底面部13aと反射面11aとの間に位置付けられている状態を示している。通常のフォーカスサーボ動作では、フォーカスエラー信号FEの値が0となるように対物レンズ106が駆動されると、図5(c)のように励起光の焦点位置が位置付けられることはない。しかし、フォーカスサーボ信号に所定のオフセット電圧を重畳して対物レンズアクチュエータ122に供給することにより、励起光の焦点位置を上方向に僅かにずらすことができ、図5(c)のように励起光の焦点位置を位置付けることもできる。この場合も、図5(a)、(b)と同様、底面部13aに配されている試料に焦点が合わせられることとなる。
また、図5(a)のように焦点深度の範囲が位置付けられると、焦点深度の範囲が赤血球に掛かり易くなるため、図5(b)よりも試料を精度良く測定することが可能となる。また、図5(a)~(c)の状態となるようフォーカスサーボが行われた場合でも、フォーカスサーボの追従特性や、バイオセンサ基板10の平坦度などにより、励起光の焦点位置は僅かに上下にずれる。しかしながら、焦点位置の上下方向のずれは、通常、数百nm程度以内に押さえられるため、試料の測定精度が問題となることはない。このように、本実施例では、広がることなく合焦された状態で試料に励起光を照射することができ、試料に対するレーザ光の照射効率を高めることができる。
以上、本実施例によれば、図5(a)~(c)に示すように、ウエル13の底面部13aが、励起光と対物レンズ106によって規定される焦点深度の範囲に位置付けられる。これにより、底面部13aに配された試料に対して対物レンズ106の焦点位置が位置付けられるため、試料に対する励起光の照射効率を高めることができ、精度良く試料を測定することができる。
また、本実施例によれば、試料を励起させるためのレーザ光と、トラックを追従させるためのレーザ光の光源として、一つの半導体レーザ101が用いられるため、光学系を簡素にすることができ、部品点数の削減とコストの低減を図ることができる。また、光学系をコンパクトにすることができる。
また、本実施例によれば、励起光は、反射面11aに合焦されると、試料にも合焦される。すなわち、励起光は、直接的に試料に合焦されるため、上記特許文献2のように、サーボ用のレーザ光を用いて対物レンズを制御することにより試料励起用のレーザ光が間接的に試料に合焦される場合に比べ、より確実に、励起光を試料に合焦させることができる。
なお、本実施例によれば、対物レンズ106の焦点位置における励起光のスポット径は1μmに設定され、反射面11aに形成されているトラックピッチが1μmに設定されている。これに対し、マラリア原虫の核は励起光により1μm程度の大きさの蛍光輝点を発する。したがって、励起光のスポットをマラリア原虫の核のサイズに収束させながら、隙間無く、試料が励起光のスポットで走査されるため、マラリア原虫の核を確実に検出することができる。さらに、マラリア原虫が検出された位置が光検出器108の検出信号に基づくアドレス情報から分かるため、検出されたマラリア原虫がどのウエル13に収容されているかを容易に把握することができる。
<第1変更例>
図6は、上記第1実施例の第1変更例に係るバイオセンサ基板20の構成を模式的に示す図である。バイオセンサ基板20は、図1(a)~(c)に示すバイオセンサ基板10と異なり、径方向にリードイン領域とウエル領域に区分されている。内周側のリードイン領域のウエル層12には、ウエル13が形成されておらず、外周側のウエル領域にのみ、ウエル13が形成されている。なお、ピットは、上記第1実施例と同様、リードイン領域からウエル領域に亘る全領域に形成されている。すなわち、ピット列からなるトラックが、リードイン領域の最内周からウエル領域の最外周まで、螺旋状に延びている。
図6は、上記第1実施例の第1変更例に係るバイオセンサ基板20の構成を模式的に示す図である。バイオセンサ基板20は、図1(a)~(c)に示すバイオセンサ基板10と異なり、径方向にリードイン領域とウエル領域に区分されている。内周側のリードイン領域のウエル層12には、ウエル13が形成されておらず、外周側のウエル領域にのみ、ウエル13が形成されている。なお、ピットは、上記第1実施例と同様、リードイン領域からウエル領域に亘る全領域に形成されている。すなわち、ピット列からなるトラックが、リードイン領域の最内周からウエル領域の最外周まで、螺旋状に延びている。
本変更例においても、上記第1実施例と同様、これらピット列によって、アドレス情報が保持されている。さらに、リードイン領域には、ピット列によって、アドレス情報の他、バイオセンサ基板20に関する情報が保持されている。具体的には、リードイン領域には、このバイオセンサ基板20のウエル13の底面部13aと反射面11aとの間隔d3を含む情報が記憶されている。バイオセンサ基板20のその他の構成は、バイオセンサ基板10と略同じである。
なお、リードイン領域にウエル13が形成されていない理由は、以下のとおりである。第1の理由は、この領域にウエル13が無い方が、ウエル13がある場合に比べて、リードイン領域の形成された反射面11aの情報を良好に再生(取得)できるためである。第2の理由は、バイオセンサ基板20の内側に試料を落とし、バイオセンサ基板20をゆっくり回転させてウエル13に試料を流し込む場合に、リードイン領域に対応するウエル層12の上面が平坦である方が、この領域にウエル13がある場合に比べて、ウエル13に試料を均一に流し込めるためである。
図7は、本変更例に係る蛍光検出装置2の構成を示す図である。
蛍光検出装置2は、図3に示す上記蛍光検出装置1において、半導体レーザ101とアパーチャ111の間に、開口制限素子131と偏光フィルタ132が配置された構成となっている。開口制限素子131は、サーボ回路202によって制御される。
図8(a)、(b)は、それぞれ、開口制限素子131と偏光フィルタ132を、半導体レーザ101から出射された励起光の光軸方向に見た図である。
開口制限素子131は、TN型液晶からなっており、同心円状の境界を有する4つの領域131a~131dに、個別に電圧を加えることができるよう、各領域に対応する位置に透明電極が設けられている。領域131a~131dに電圧が加えられると、電圧が加えられた領域に入射する励起光の偏光方向が90度回転する。開口制限素子131は、領域131a~131dの中心が半導体レーザ101の出射光軸に一致するように配置される。領域131aを通った励起光は、アパーチャ111によって遮光されず、領域131aの外側を通った励起光は、アパーチャ111によって遮光される。
偏光フィルタ132は、領域131a~131dに電圧が加えられて偏光方向が90度回転した励起光を遮光し、領域131a~131dに電圧が加えられずに偏光方向が回転しない励起光を透過するよう配置されている。
図8(c)は、開口制限素子131の全ての領域131a~131dに電圧が加えられていない状態のときの励起光を示す模式図である。この場合、励起光のビーム径は、上記第1実施例(図3参照)と同様になる。これにより、対物レンズ106によって収束された励起光のNA(開口数)は、上記第1実施例と同じ0.34となる。
図8(d)は、開口制限素子131の外側、たとえば領域131a、131bの領域に電圧が加えられた状態のときの励起光を示す模式図である。この場合、半導体レーザ101から出射され領域131a、131bに入射する励起光は、偏光方向が90度回転し、偏光フィルタ132により遮光される。この場合、コリメータレンズ103を通過する励起光のビーム径は、図8(c)に示す場合よりも小さくなる。これにより、ダイクロイックプリズム105側から対物レンズ106に入射する励起光ビーム径が小さくなり、対物レンズ106により収束された励起光のNA(開口数)は、図8(c)の場合の0.34よりも小さくなる。
このように、励起光のビーム径を小さくすることにより対物レンズ106の励起光のNA(開口数)を小さくすることができる。また、焦点深度は上述したように、波長/(NA×NA)により算出することができる。よって、励起光のビーム径を小さくすることにより、励起光の焦点深度を上記第1実施例に比べて大きくすることができる。
なお、本変更例では、偏光フィルタ132を省略することもできる。この場合、開口制限素子131により偏光方向が90度回転された励起光は、PBS102に対してP偏光となるため、PBS102を透過し、コリメータレンズ103には導かれない。すなわち、PBS102が上記偏光フィルタ132と同様の作用を発揮する。これにより、たとえば、開口制限素子131の領域131a、131bに電圧を印加すると、コリメータレンズ103側に反射される励起光のビーム径は小さくなり、偏光フィルタ132が配される場合と同様、励起光の焦点深度を変化させることができる。なお、この構成において、PBS102を透過した励起光が、蛍光検出装置2内でノイズ光となって、蛍光検出に問題が生じる場合は、上記のように偏光フィルタ132を配するのが望ましい。
図9(a)は、コントローラ205による開口制限素子131の駆動動作を示すフローチャートである。
コントローラ205は、バイオセンサ基板20がセットされると(S1:YES)、対物レンズ106を移動させてリードイン領域に励起光を照射し、リードイン領域を読み取る(S2)。このとき、コントローラ205は、リードイン領域から反射された励起光に基づいて、再生回路203から出力される再生データから、このバイオセンサ基板20のウエル13の底面部13aと反射面11aとの間隔d3を取得する。
続いて、コントローラ205は、コントローラ205内のメモリに予め記憶されているテーブルを参照し、このテーブルから電圧を加える領域を取得する(S3)。かかるテーブルには、図9(b)に示すように、底面部13aと反射面11aとの間隔に応じて、電圧を加えるべき開口制限素子131の領域が格納されている。底面部13aと反射面11aとの間隔は、5つの範囲が設定されており、これら5つの範囲に対応して電圧を加えるべき領域を示す5つの駆動パターンが関連付けられている。なお、底面部13aと反射面11aとの間隔がD0~D1の場合、何れの領域にも電圧は印加されない。
続いて、コントローラ205は、S3で取得した電圧を加える領域に従って開口制限素子131を制御し、対応する領域に対して電圧を加える(S4)。これにより、ダイクロイックプリズム105側から対物レンズ106に入射する励起光のビーム径が変化し、バイオセンサ基板20に適した励起光のNAが設定される。こうして、励起光の焦点深度が、当該バイオセンサ基板20の間隔d3をカバーする焦点深度に設定される。そして、蛍光検出装置2がシャットダウンされない限り、処理がS1に戻される(S5)。
以上、本変更例によれば、底面部13aと反射面11aとの間隔d3が、このバイオセンサ基板20のリードイン領域に書き込まれている。バイオセンサ基板20が異なると、間隔d3が異なり得る。本変更例では、バイオセンサ基板20のリードイン領域に、当該バイオセンサ基板20に適用された間隔d3が保持されている。コントローラ205は、リードイン領域から間隔d3を読み取り、読み取った値と図9(b)に示すテーブルに基づいて、開口制限素子131を駆動する。これにより、バイオセンサ基板20に適正な励起光のNAが設定され、励起光の焦点深度の範囲が、当該バイオセンサ基板20の底面部13aと反射面11aとの間隔d3よりも大きくなるよう調整される。よって、図5(a)~(c)の場合と同様、底面部13aが、励起光と対物レンズ106から規定される焦点深度の範囲に位置付けられるため、精度良く試料を測定することができる。
なお、リードイン領域から読み取られた間隔d3が図9(b)に記述された間隔の範囲に含まれない場合、あるいは、リードイン領域から間隔d3を読み取れない場合には、5つの駆動パターンのうち、デフォルト設定された駆動パターン(たとえば、間隔がD0~D1である場合の駆動パターン)が用いられる。なお、領域131a~131dのうち、駆動される領域の数が増えるほど、励起光の遮光量が増えるため、試料に照射される励起光の光量が減少する。よって、デフォルト設定された駆動パターンは、たとえば、試料に照射される励起光の光量がなるべく多くなるよう、図9(b)の最上段の駆動パターン、すなわち、何れの領域にも電圧が印加されない駆動パターンとされる。
なお、本変更例では、バイオセンサ基板20のリードイン領域に、底面部13aと反射面11aとの間隔d3が保持されたが、励起光のNA(開口数)、細胞の種類(大きさ)等、間隔d3に適する焦点深度を規定可能な他のパラメータ値が、バイオセンサ基板20のリードイン領域に保持されても良い。この場合、図9(b)の左欄は、他のパラメータ値に対応するよう修正される。
また、本変更例では、対物レンズ106に入射するビーム径を調節するために開口制限素子131と偏光フィルタ132を用いたが、これに替えて、図10に示すようにレンズアクチュエータ133を用いても良い。かかるレンズアクチュエータ133は、サーボ回路202により、コリメータレンズ103を励起光の光軸方向に移動させる。
この場合、コリメータレンズ103が駆動されると、ダイクロイックプリズム105側から対物レンズ106に入射する励起光の広がり角が変化し、これに伴い、対物レンズ106により収束される励起光の開口数が変化する。これにより、励起光の焦点深度が調整される。この構成では、励起光の焦点深度を、コリメータレンズ103の移動に伴ってリニアに変化させることができるため、上記第1実施例に比べて、焦点深度の調整をより微細に行うことができる。なお、この変更例では、図9(b)のテーブルの右欄が、レンズアクチュエータ133に供給される駆動電圧に変更される。また、焦点深度をリニアに調整できるため、テーブルの左欄は、細かく段階的に区分され、一区分における間隔d3の範囲が微小に設定される。これにより、図7に示す変更例に比べて、さらに、バイオセンサ基板20の間隔d3に適する焦点深度を設定することができ、より精度良く試料を測定することができる。
<第2実施例>
以下、本発明の第2実施例につき図面を参照して説明する。
<第2実施例>
以下、本発明の第2実施例につき図面を参照して説明する。
<バイオセンサ基板>
図11(a)は、本実施例に係るバイオセンサ基板10の外観の構成を模式的に示す斜視図である。バイオセンサ基板10は、たとえば、人の血液中においてマラリア原虫に感染した赤血球を検出するために用いられる。
図11(a)は、本実施例に係るバイオセンサ基板10の外観の構成を模式的に示す斜視図である。バイオセンサ基板10は、たとえば、人の血液中においてマラリア原虫に感染した赤血球を検出するために用いられる。
バイオセンサ基板10は、光ディスク(CDやDVD等)と同様に円盤形状を有しており、中心に円形状の孔10aが形成されている。また、バイオセンサ基板10は、ベース基板11の上面にウエル層12が積層された構造となっている。ウエル層12には、図11(a)の右端の拡大図に示すように、円柱形状の窪みからなる微小なウエル13が複数形成されている。ウエル13は、バイオセンサ基板10の内周から外周に向かって略同心円状に並んでいる。ウエル13は、ウエル層12の上面よりも一段低い底面部13aを有しており、試料が滴下されたときにその試料を収容することができるよう直径と高さが設定されている。
図11(b)は、バイオセンサ基板10を面に垂直な平面で切断したときの断面図であり、図11(c)は、図11(b)の破線部分の拡大図である。
ベース基板11の上側(ウエル層12側)には、光ディスクと同様の螺旋状のトラック(ピット列)が形成されている。ピットは、バイオセンサ基板10の面上の位置を特定するためのアドレス情報を保持している。CDやDVDと同様、線速度一定でトラックが励起光(後述)により走査されることにより、アドレス情報が再生される。ベース基板11とウエル層12との間には、反射膜14が配されている。ベース基板11の上面に反射膜14が積層されることにより、ベース基板11の上面に、反射膜14とベース基板11との界面である反射面11aが形成される。ウエル13は、ウエル層12の上面側に所定の間隔を開けて形成されている。ウエル13の底面部13aは、反射膜14よりも僅かに上側に位置付けられており、ウエル13の底面部13aと反射膜14の上面とは離間している。
ここで、ウエル13の直径と高さを、それぞれd1、d2とし、底面部13aと反射面11aとの間隔をd3とし、ウエル13の間隔をd4とし、ベース基板11の厚みをd5とし、反射面11aのトラックピッチをd6とする。本実施例では、直径d1と、高さd2は、それぞれ、100μmと50μmに設定されており、間隔d3、d4は、それぞれ、2μmと300μmに設定されており、厚みd5は0.6mmに設定されており、トラックピッチd6は、1μmに設定されている。また、反射膜14の励起光(後述)に対する反射率は、3~4%に設定されている。
なお、トラックピッチd6は、蛍光検出対象の被検体の寸法に応じて調整すれば良い。本実施例では、被検体である赤血球の直径が10μm程度であるため、ウエル13に試料が収容されたときに必ず被検体をトラックが横切るよう、トラックピッチd6が1μmに設定されている。すなわち、トラックピッチは、蛍光検出対象の被検体の幅よりも小さく設定される必要がある。ただし、トラックピッチが小さくなるほど、バイオセンサ基板10の全領域を走査するために必要な時間が長くなる。したがって、トラックピッチd6を被検体の寸法よりも小さくする場合には、被検体の寸法にバラつきがあったとしても各被検体を少なくとも1回トラックが横切ることとなる程度に、トラックピッチd6を設定すると良い。
また、本実施例では、ベース基板11はポリカーボネートから構成されており、ウエル層12は紫外線硬化樹脂から構成されており、反射膜14はアルミニウム、銀合金等の金属、あるいは、酸化ニオブ、波長選択膜等から構成されている。なお、ベース基板11は、ポリカーボネートの他、ポリメチルメタクリレート、非晶質ポリオレフィン等から構成されても良い。ウエル層12は、シリコーン、ポリカーボネート、ポリメチルメタクリレート、非晶質ポリオレフィン等から構成されても良い。反射膜14の膜厚は、所望の反射率になるよう、たとえば5nm~20nmに設定される。
図12(a)、(b)は、本実施例に係るトラックの区切り方を説明する図である。
図12(a)に示すように、バイオセンサ基板10上の領域は、内周から外周に向かって径方向に、m個のゾーンに区切られている。各ゾーンは、略同心円状に設定されている。また、各ゾーンの径方向の幅は、互いに同じである。すなわち、各ゾーンの径方向の幅は、n個のトラックピッチに相当する幅(n×トラックピッチ)となっている。
図12(b)は、図12(a)の破線の領域を拡大した図である。便宜上、ゾーン1、3のトラックは実線で示され、ゾーン2のトラックは破線で示されている。上記のようにトラックは、一連のピット列により構成されている。
ここで、図12(a)のように、バイオセンサ基板10の一つの径を基準径D0に設定する。この場合、図12(b)のように、基準径D0の位置から1周するトラックを1トラック片として、各ゾーンのトラック片をカウントすると、各ゾーンには、n本のトラック片が含まれる。ゾーン2の最内周のトラック片(トラック1)の始端は、基準径D0の位置において、一つ内側のゾーン1のトラック片(トラックn)の終端に繋がっている。他のゾーンも同様に、最内周のトラック片(トラック1)の始端が、基準径D0の位置において、一つ内側のゾーン1のトラック片(トラックn)の終端に繋がっている。上記のように、各ゾーンに含まれるトラック片の数は、何れも、n個である。各ゾーンの径方向の幅は、たとえば、300μmに設定される。
図13は、本実施例に係るアドレス共通領域の設定方法を説明する図である。
上記のように設定された各ゾーンは、周方向の幅が所定の長さ(たとえば、300μm)付近となるように、周方向に所定数に均等に分割される。こうしてゾーンが分割されることにより形成される領域が、アドレス共通領域となる。
なお、図13では、アドレス共通領域が方形形状で示されているが、厳密には、ディスク内周側がディスク外周側の辺よりも短い擬似台形形状となる。すなわち、アドレス共通領域は、リング状の各ゾーンを周方向に均等に分割して形成されるため、リングを所定角度毎に切断した形状となる。したがって、一つのアドレス共通領域に含まれるn本のトラック部分は、ディスク外周に向かうほど、長くなる。
アドレス共通領域は、ゾーンを周方向に均等に区分して設定されるため、同じゾーンに含まれるアドレス共通領域の形状は、互いに同じである。しかし、含まれるゾーンが異なると、アドレス共通領域の周方向の幅は異なり得る。アドレス共通領域の最も外側のトラック部分の周方向の幅は、たとえば、ゾーンの最も外側のトラック1周分の長さをLとしたとき、L/j(jは0以外の自然数)の商が300μmに最も接近するときの商の値とされる。この場合、ゾーンは周方向にj個に分割される。このように、ゾーンをj個に分割することによりアドレス共通領域の周方向の幅が決まるため、ゾーンが異なるとアドレス共通領域の周方向の幅は異なり得る。当然ながら、ゾーンの分割数jは、ゾーン毎に異なっており、外側のゾーンほど、分割数jは多くなる。なお、周方向に隣り合うアドレス共通領域の境界は、ディスクの所定の径に一致する。
アドレス共通領域の径方向の幅、すなわち、ゾーンの径方向の幅は、ゾーンに含まれるトラック片の数nによって決まる。本実施例では、トラックピッチが1μmであるため、アドレス共通領域の径方向の幅が300μmである場合、一つのアドレス共通領域に含まれるトラック部分の数は300本となる。
図14は、アドレス共通領域に対する同期領域、アドレス領域、リザーブ領域、ウエル領域および非ウエル領域の設定方法と、アドレス領域に保持されるデータの構造を説明する図である。
図14に示すように、アドレス共通領域に含まれる各トラック部分の物理フォーマットは、先頭に固有の同期パターンが配され、これにアドレス領域、リザーブ領域が続く構成となっている。アドレス領域には、アドレス情報が保持される。アドレス情報は、ウエルアドレスとトラック番号とを含んでいる。ウエルアドレスは、バイオセンサ基板10上におけるウエルの位置を特定するための位置情報であり、トラック番号は、アドレス共通領域に含まれるトラック部分の群のうち、一のトラック部分を他のトラック部分から区別するための情報である。
一つのアドレス共通領域に含まれるそれぞれのトラック部分に保持されるウエルアドレスは、全て同じである。図14では、当該アドレス共通領域に含まれるトラック部分のウエルアドレスが、全て、Wk(開始位置からk番目のウエル)に統一されている。トラック番号は、アドレス共通領域に含まれるトラック部分のうち、最も内周側のトラック部分のトラック番号を1とし、外周側に向かってトラック部分のトラック番号が1ずつ増加するように設定される。図14では、再内周のトラック部分のトラック番号T1は1であり、最外周のトラック部分のトラック番号Tnは300である。リザーブ領域には、クロックを生成するため、単調な幅のピットとスペースが形成されている。一つのアドレス共通領域の含まれるトラック部分の長さは、外周に向かうほど長くなるため、リザーブ領域の長さ(リザーブ領域に含まれるピット数)も外周に向かうほど長くなる。なお、リザーブ領域を単調なピット列とせず、リザーブ領域に所定の情報を持たせても良い。
このように設定されたアドレス共通領域の中央に、ウエルが一つ配置される。本実施例では、ウエルの径が100μmであるため、アドレス共通領域はウエルよりも十分広い。よって、ウエル形成時に、アドレス共通領域に対するウエルの配置位置がややずれても、ウエルは、アドレス共通領域内に収容されるようになる。
なお、このようにアドレス共通領域はウエルよりも十分広いため、アドレス共通領域内には、ウエルの無い非ウエル領域が生じることとなる。径方向に生じる非ウエル領域に含まれるトラックが励起光(後述)によって走査されても、励起光がウエルに掛かることがないため、このような走査は無駄な走査となってしまう。本実施例では、後述のように、蛍光検出装置側において、このような無駄な走査を回避するための措置が採られている。
なお、本実施例では、ゾーンを周方向に均等に区分することによりアドレス共通領域が設定されたが、アドレス共通領域の周方向の幅を予め固定しておき、各ゾーンに含まれ得る数だけアドレス共通領域を各ゾーンの周方向に連続的に割り当てても良い。この場合、ゾーンには、アドレス共通領域を割り当てるには周方向の幅が足りない余剰な領域が生じ得る。このような領域については、単調なピット列で埋める等の措置が採られ得る。
図15(a)~(d)は、バイオセンサ基板10の作成方法を示す図である。なお、かかる作成方法は、以下に示すように、光ディスクの作成方法と略同様となっている。
まず、図15(a)に示すように、ベース基板11が射出成型により形成される。これにより、ベース基板11の厚みはd5となり、ベース基板11の上面に、一連のピットが形成される。続いて、図15(b)に示すように、ベース基板11の上面に、反射膜14が蒸着され、これにより、ベース基板11の上面に反射面11aが形成される。続いて、図15(c)に示すように、反射膜14の上面に、スピンコートにより底面層12aが積層される。続いて、図15(d)に示すように、底面層12aの上面に、2P成型により厚さd2の上面層12bが形成される。これにより、図11(b)に示すようなウエル13が複数形成される。ウエル層12は、底面層12aと上面層12bが合わせられて形成されることになる。
なお、底面層12aの上面に上面層12bを2P成型により形成する場合、上記のように、ウエル13がアドレス共通領域の中心部分に配置されるよう、2P成型のためのスタンパ(ウエルスタンパ)をベース基板11に対して適正に配置する必要がある。
図16(a)、(b)は、ベース基板11に対するウエルスタンパWSの位置調整方法を説明する図である。
この位置調整方法では、ベース基板11に、位置調整時にマーカーとなる2つの微小な回折エリアM1が、ベース基板11の中心に対して互いに対称な位置に形成されている。これらの回折エリアM1は、射出成型時にベース基板11上面のピットが形成されていない外周領域に回折パターンを形成することにより設けられる。また、ウエルスタンパWSには、回折エリアM1にそれぞれ対応する位置に、マーカーとなる2つの微小な回折エリアM2が形成されている。そして、ベース基板11が適正な位置に位置付けられたときに2つの回折エリアM1にレーザ光が入射する位置に2つのレーザ光源が配置され、これらレーザ光源からレーザ光を上向きに出射させる。また、回折エリアM1、M2によって回折されたレーザ光(回折光)を受光する位置に光センサLSが配置される。
2P成形時には、まず、図16(a)に示すように、2つの回折エリアM1によって生じた回折光がそれぞれ光センサLSによって受光されるよう、ベース基板11の周方向の位置が調整される。このとき、レーザ光の一部(0次回折光:非回折光)は、回折エリアM1によって回折されずにそのまま回折エリアM1を透過する。次に、ウエルスタンパWSをベース基板11の上面に接近させ、同時に、回折エリアM1を透過した非回折光が、それぞれ、回折エリアM2に入射するよう、ウエルスタンパWSの周方向の位置が調整される。すなわち、非回折光が入射することにより2つの回折エリアM2によって生じた回折光がそれぞれ光センサLSによって受光されるよう、ウエルスタンパWSの周方向の位置が調整される。こうして、ベース基板11とウエルスタンパWSが位置調整された状態で、ウエルスタンパWSがベース基板11の上面に押し付けられる。この状態で、紫外線が照射され、紫外線硬化樹脂が硬化することにより、上面層12bが形成される。
なお、ベース基板11とウエルスタンパWSとの間の位置決めは、上記以外の方法によって行われても良い。たとえば、ウエルスタンパWSとベース基板11に、それぞれ、凸部と凹部を設けておき、両者を嵌合させることによって、ベース基板11とウエルスタンパWSとの間の位置決めが行われても良い。
<蛍光検出装置>
図17は、本実施例に係る蛍光検出装置1の構成を示す図である。蛍光検出装置1は、たとえば、上記バイオセンサ基板10のウエル13に収容された赤血球がマラリア原虫に感染しているかを判定するために用いられる。
図17は、本実施例に係る蛍光検出装置1の構成を示す図である。蛍光検出装置1は、たとえば、上記バイオセンサ基板10のウエル13に収容された赤血球がマラリア原虫に感染しているかを判定するために用いられる。
なお、蛍光検出装置1を使用する際、予め、被検体を蛍光標識することにより作成した試料を、バイオセンサ基板10のウエル13に収容させておく。本実施例では、被検体である直径約10μm、厚さ約2μmの赤血球がマラリア原虫に感染していた場合にその内部が蛍光標識され、感染している赤血球と感染していない赤血球とが共に直径100μmのウエル13の底面部13aに並列的に複数配される。このように試料が収容されたバイオセンサ基板10の孔10a(図11(a)参照)が、蛍光検出装置1の回転装置123(ターンテーブル)にセットされ、測定が開始される。
蛍光検出装置1の光学系は、半導体レーザ101と、偏光ビームスプリッタ(PBS)102と、コリメータレンズ103と、1/4波長板104と、ダイクロイックプリズム105と、対物レンズ106と、アナモレンズ107と、光検出器108と、集光レンズ109と、蛍光検出器110と、アパーチャ111を備えている。また、蛍光検出装置1は、上記光学系の他、ホルダ121と、対物レンズアクチュエータ122と、回転装置123と、信号演算回路201と、サーボ回路202と、再生回路203と、信号増幅回路204と、コントローラ205と、クロック生成回路206を備えている。
半導体レーザ101は、波長405nm程度のレーザ光(以下、「励起光」という)を出射する。なお、本実施の形態における励起光は、特許請求の範囲に記載の照射光の一例である。図17には、半導体レーザ101から出射される励起光のうち、バイオセンサ基板10に導かれる励起光、すなわち、アパーチャ111を通過する励起光が、破線で示されている。アパーチャ111には、所定の口径を有する円形の開口が形成されており、このアパーチャ111により励起光の口径が制限される。また、半導体レーザ101の位置は、半導体レーザ101から出射される励起光がPBS102に対してS偏光となるよう調整されている。これにより、半導体レーザ101から出射された励起光は、アパーチャ111により口径を制限された後、PBS102によって反射され、コリメータレンズ103に入射する。
コリメータレンズ103は、PBS102側から入射する励起光を平行光に変換する。これにより、コリメータレンズ103を通過した励起光は、所定径の平行光となる。1/4波長板104は、コリメータレンズ103側から入射する励起光を円偏光に変換するとともに、ダイクロイックプリズム105側から入射する励起光を、コリメータレンズ103側から入射する際の偏光方向に直交する直線偏光に変換する。これにより、コリメータレンズ103側からPBS102に入射する励起光は、PBS102を透過する。
ダイクロイックプリズム105は、波長405nm程度のレーザ光を反射し、波長450~540nm程度のレーザ光を透過するよう構成されている。これにより、1/4波長板104側から入射する励起光は、ダイクロイックプリズム105によって反射され、対物レンズ106に入射する。
対物レンズ106は、励起光をバイオセンサ基板10に対して適正に収束させるよう構成されている。具体的には、対物レンズ106は、ダイクロイックプリズム105側から入射する励起光が所定のNA(開口数、ここでは、0.34)で収束するよう構成されている。対物レンズ106に対する励起光の入射口径は、アパーチャ111の口径によって決められる。対物レンズ106により収束される励起光の焦点深度は、励起光のNAによって決まる。励起光の焦点深度については、追って図19(a)、(b)を参照して説明する。
対物レンズ106は、ホルダ121に保持された状態で、対物レンズアクチュエータ122により、フォーカス方向(バイオセンサ基板10に垂直な方向)とトラッキング方向(バイオセンサ基板10の径方向)に駆動される。すなわち、対物レンズ106は、励起光が、バイオセンサ基板10の反射面11aに合焦された状態で、ピット列からなるトラックを追従するよう、駆動される。反射面11aに合焦された励起光は、一部が反射面11aによって反射され、大部分が反射面11aを透過する。
反射面11aによって反射された励起光(以下、「反射励起光」という)は、ダイクロイックプリズム105によって反射され、1/4波長板104により直線偏光に変換され、コリメータレンズ103により収束光となる。そして、コリメータレンズ103側からPBS102に入射する反射励起光は、上述したようにPBS102を透過する。
アナモレンズ107は、PBS102側から入射する反射励起光に非点収差を導入する。アナモレンズ107を透過した反射励起光は、光検出器108に入射する。光検出器108は、受光面上に反射励起光を受光するための4分割センサを有している。光検出器108の検出信号は、信号演算回路201に入力される。
バイオセンサ基板10に照射された励起光のうち、反射面11aを透過した励起光は、ウエル13の底面部13aに到達する。底面部13aに並列的に配されている蛍光標識されたマラリア原虫に感染している赤血球に励起光が照射されると、マラリア原虫から蛍光が発生する。かかる蛍光は、図17において一点鎖線で示されるように、NA(開口数)が励起光のNAよりも大きい。このため、対物レンズ106とダイクロイックプリズム105との間において、蛍光のビーム径は励起光のビーム径よりも大きくなっている。蛍光のNAは、たとえば、0.65である。また、蛍光の波長は励起光の波長と異なっており、本実施例では450~540nmとなっている。
一方でマラリア原虫に感染していない赤血球は蛍光標識されていないので蛍光を発生しない。このようにして、マラリア原虫に感染している赤血球と感染していない赤血球とを区別することができる。
一方でマラリア原虫に感染していない赤血球は蛍光標識されていないので蛍光を発生しない。このようにして、マラリア原虫に感染している赤血球と感染していない赤血球とを区別することができる。
対物レンズ106側からダイクロイックプリズム105に入射する蛍光は、ダイクロイックプリズム105を透過する。集光レンズ109は、ダイクロイックプリズム105側から入射する蛍光を集光して、蛍光検出器110に導く。蛍光検出器110は、受光面上に蛍光を受光するためのセンサを有している。蛍光検出器110の検出信号は、信号増幅回路204に入力される。
信号演算回路201は、光検出器108の検出信号から、後述するフォーカスエラー信号FEとトラッキングエラー信号TEを生成し、光検出器108の検出信号から、後述する再生RF信号を生成する。サーボ回路202は、信号演算回路201から出力されたフォーカスエラー信号FEとトラッキングエラー信号TEを用いて、対物レンズアクチュエータ122の駆動を制御する。また、サーボ回路202は、クロック生成回路206から入力されたクロック信号を用いて、線速度一定でバイオセンサ基板10が回転されるよう、回転装置123を制御する。回転装置123は、1回転毎に、回転検出信号をコントローラ205に出力する。再生回路203は、信号演算回路201から出力された再生RF信号を復調して再生データを生成する。信号増幅回路204は、蛍光検出器110の検出信号を増幅する。
コントローラ205は、信号演算回路201と、サーボ回路202と、再生回路203の他、蛍光検出装置1の各部を制御する。コントローラ205は、CPUとメモリを備え、メモリに格納されたプログラムに従って各部を制御する。また、コントローラ205は、メモリに格納されたプログラムによって、走査位置検出部205aと蛍光位置特定部205bとしての機能を有している。
このうち、走査位置検出部205aは、信号演算回路201から入力される信号(再生RF信号)とクロック生成回路206から入力される信号(クロック信号)とに基づいて、アドレス共通領域に含まれる各トラック部分における励起光の走査位置を検出する。また、蛍光位置特定部205bは、再生回路203から入力される再生データ(アドレス情報:ウエルアドレス)と、信号増幅回路204から入力された信号(蛍光検出信号)に基づいて、蛍光を検出したウエル13がバイオセンサ基板10のどの位置にあるかを判定し、蛍光を検出したウエル13に対応するアドレス情報(ウエルアドレス)を内部メモリに保持する。さらに、蛍光位置特定部205bは、再生回路203から入力される再生データ(アドレス情報:トラック番号)と、信号増幅回路204から入力された信号(蛍光検出信号)と、走査位置検出部205aによって検出された走査位置とに基づいて、ウエル内の蛍光発生位置を、トラック番号を走査位置とによって特定し、これらを内部メモリに保持する。
なお、走査位置検出部205aと蛍光位置特定部205bの機能については、追って、図20(a)、(b)を参照して説明する。
図18は、信号演算回路201の回路構成を示す図である。
光検出器108は、上述したように受光面上に反射励起光を受光するための4分割センサを有しており、4分割センサの左上、右上、右下、左下のセンサは、それぞれ受光した反射励起光のビームスポットに基づいて検出信号S1~S4を出力する。なお、図17の光検出器108の受光面上において、ディスクのラジアル方向(径方向)に対応する方向は、左右方向である。また、フォーカスエラー信号FEとトラッキングエラー信号TEは、既存の光ディスク装置において用いられる非点収差法と1ビームプッシュプル法に従って生成される。
信号演算回路201は、加算器301~304、307と、減算器305、306を備えている。加算器301は、検出信号S1、S3を加算した信号を減算器305に出力し、加算器302は、検出信号S2、S4を加算した信号を減算器305に出力する。加算器303は、検出信号S1、S4を加算した信号を減算器306と加算器307に出力し、加算器304は、検出信号S2、S3を加算した信号を減算器306と加算器307に出力する。
減算器305は、加算器301、302の出力信号を減算して、フォーカスエラー信号FEを出力する。減算器306は、加算器303、304の出力信号を減算して、トラッキングエラー信号TEを出力する。加算器307は、加算器303、304の出力信号を加算して、再生RF信号(SUM信号)を出力する。すなわち、フォーカスエラー信号FEと、トラッキングエラー信号TEと、再生RF信号は、それぞれ以下の式(1)~(3)の演算により取得することができる。
FE=(S1+S3)-(S2+S4) …(1)
TE=(S1+S4)-(S2+S3) …(2)
RF=(S1+S2+S3+S4) …(3)
ここで、対物レンズ106の焦点位置が反射面11aに位置付けられているとき、光検出器108の4分割センサ上のビームスポットは最小錯乱円となり、上記式(1)のフォーカスエラー信号FEの値が0となる。また、対物レンズ106の焦点位置が反射面11aのトラック(ピット)の真上に位置付けられているとき、光検出器108の4分割センサ上のビームスポットは、左側の2つのセンサと右側の2つのセンサに対して等しく掛かり、上記式(2)のトラッキングエラー信号TEの値が0となる。
TE=(S1+S4)-(S2+S3) …(2)
RF=(S1+S2+S3+S4) …(3)
ここで、対物レンズ106の焦点位置が反射面11aに位置付けられているとき、光検出器108の4分割センサ上のビームスポットは最小錯乱円となり、上記式(1)のフォーカスエラー信号FEの値が0となる。また、対物レンズ106の焦点位置が反射面11aのトラック(ピット)の真上に位置付けられているとき、光検出器108の4分割センサ上のビームスポットは、左側の2つのセンサと右側の2つのセンサに対して等しく掛かり、上記式(2)のトラッキングエラー信号TEの値が0となる。
図19(a)、(b)は、励起光の焦点深度を説明するための図である。
上述したように、励起光の波長は405nmであり、励起光のNA(開口数)は0.34である。また、一般に焦点深度は、波長/(NA×NA)により算出することができる。よって、本実施例の励起光の焦点深度は、約3.5μmとなる。底面部13aと反射面11aとの間隔d3は、励起光の焦点深度よりも小さくなるよう設定され、ここでは、2.0μmに設定されている。
上記のように、励起光のNAが設定されると、焦点位置におけるスポット径は約1μmとなる。図11(c)に示すトラックピッチの間隔d6は、かかるスポット径と略同じとなるよう、1μmに設定されている。
図19(a)は、励起光の焦点深度の範囲の最下点が反射膜14と一致している状態を示し、図19(b)は、励起光の焦点深度の範囲の最上点が底面部13aと一致している状態を示している。なお、サーボ回路202から対物レンズアクチュエータ122に出力されるオフセット電圧を調整することで、励起光の焦点深度を図19(a)よりも奥方向(図中の上方向)にシフトさせることもできる。
図19(a)、(b)の状態のとき、ウエル13の底面部13aと反射面11aとの間隔d3は2μmであり、励起光の焦点深度は3.5μmであるため、励起光の焦点深度に対応する範囲に、底面部13aと反射面11aの両方が含まれるようになる。したがって、フォーカスサーボにより、励起光の焦点位置を反射面11aに位置付けると、底面部13aに配されている試料にも焦点が合わせられることとなる。
図20(a)、(b)は、図17に示すコントローラ205の走査位置検出部205a、蛍光位置特定部205bの機能を説明する図である。
まず、図20(a)を参照して、走査位置検出部205aの機能について説明する。図20(a)は、アドレス共通領域(図14参照)に含まれる一つのトラック部分を励起光が走査したときに出力される信号の変化を示すタイミングチャートである。
図20(a)において、最上段の波形は、信号演算回路201から出力される再生RF信号を示し、上から2段目の波形は、クロック生成回路206から出力されるクロック信号を示し、上から3段目の波形は、コントローラ205に内蔵されたカウンタのカウント値を示し、最下段の波形は、信号増幅回路204から出力される蛍光検出信号を示している。また、同期信号の開始位置がアドレス共通領域の周方向の境界となっており(図14参照)、この位置から、アドレス共通領域に含まれるトラック部分が始まっている。
クロック生成回路206は、再生RF信号と位相が整合するクロック信号を生成して出力する。クロック信号の周波数は、バイオセンサ基板10のトラックが励起光によって所定の線速度(線速度一定)で走査されるときの周波数となっている。換言すれば、サーボ回路202は、クロック信号の周波数が目標周波数となり、且つ、再生RF信号とクロック信号の位相が整合するよう、回転装置123を制御する。
走査位置検出部205aは、再生RF信号から固有パターンの同期信号を検出したタイミングでカウンタをリセットし、カウンタにクロック信号のパルス数のカウントを開始させる。これにより、カウンタのカウント値は、時間の経過に伴って、すなわち、トラック部分に対する励起光の走査が進むのに伴って増加する。走査位置検出部205aは、こうしてカウントアップされるカウンタの値を、トラック部分に対する励起光の走査位置として取得する。
次に、蛍光位置特定部205bの機能について説明する。蛍光位置特定部205bは、図20(a)の最下段に示す蛍光検出信号と所定の閾値SHとを比較する。具体的には、クロック信号のパルス毎に蛍光検出信号の値を取得し、取得した蛍光検出信号の値を閾値SHと比較する。そして、蛍光位置特定部205bは、蛍光検出信号の値が閾値SHを越えるときのカウンタのカウント値を、蛍光の発生したときのトラック部分の走査位置として取得する。
図20(a)の場合、Δtの期間において蛍光検出信号の値が閾値SHを越えている。期間Δtには、クロック信号のパルスが3つ含まれており、その間、カウンタの値は、Cka、Ckb、Ckcと変化する。蛍光位置特定部205bは、これら3つのカウンタ値Cka、Ckb、Ckcを、これらカウンタ値に対応するクロックタイミングで取得された蛍光検出信号の値La、Lb、Lcに対応付けて、コントローラ205の内部メモリに保持させる。同時に、蛍光位置特定部205bは、当該トラック部分のアドレス領域を走査することにより再生回路203によって取得されたウエルアドレスWaとトラック番号Taを、カウンタ値Cka、Ckb、Ckcと蛍光検出信号値La、Lb、Lcに対応付けて、コントローラ205の内部メモリに保持させる。これにより、蛍光の発生位置を特定するための蛍光特定情報が構成される。
図20(b)は、蛍光位置特定部205bによってコントローラ205の内部メモリに保持される蛍光特定情報のデータ構造を示す図である。
図示のとおり、蛍光特定情報は、蛍光検出信号の値が閾値SHを越えたときの蛍光検出信号値と、そのタイミングにおける励起光の走査位置(カウンタ値)とを対応づけた構成となっている。さらに、蛍光発生タイミングにおいて励起光によって走査されたウエル13のウエルアドレスと、走査されたトラック部分のトラック番号が、蛍光検出信号値に対応付けられる。図20(b)の例では、蛍光検出信号値La、Lb、Lcに対して、走査位置(カウンタ値)Cka、Ckb、Ckcが対応付けられ、さらに、これらのタイミングで走査されたトラック部分とウエル13を特定するトラック番号、ウエルアドレスが対応付けられている。こうして構成された蛍光特定情報を参照することにより、バイオセンサ基板10上における蛍光の発生位置と、蛍光の強度を把握することができる。
なお、蛍光特定情報には、さらに、バイオセンサ基板10を識別するための識別情報が含まれているのが望ましい。バイオセンサ基板10の識別情報は、たとえば、所定のリザーブ領域に格納されても良いし、あるいは、バイオセンサ基板10にウエル13のない管理領域を設け、当該管理領域のトラック(ピット列)にバイオセンサ基板10の識別情報を保持させても良い。
図21(a)は、蛍光検出動作時にコントローラ205が実行する励起光の走査制御を示すフローチャートである。図21(b)は、ウエルの検出方法を説明する図である。
まず、図21(b)を参照して、ウエル13の検出方法について説明する。図21(b)の下段に示すように励起光が反射面11aを走査すると、励起光の一部は、反射面11aによって反射され、それ以外の励起光は反射面11aを透過する。励起光がウエル13の無い部分を走査するとき、反射面11aを透過した励起光は、ウエル層12へと入り、ウエル層12の上面に到達する。そして、この励起光は、ウエル層12の上面で一部が反射され、反射膜14、ベース基板11を通って、対物レンズ106へと入射する。その後、この励起光は、図17の光路を逆行して、光検出器108へと入射する。このため、光検出器108からの出力信号には、この励起光(以下、「第1反射迷光」という)による信号成分が重畳される。
他方、励起光がウエル13の有る部分を走査するとき、反射面11aを透過した励起光は、ウエル層12へと入り、ウエル13の底面部13aに到達する。そして、この励起光は、ウエル13の底面部13aで一部が反射され、反射膜14、ベース基板11を通って、対物レンズ106へと入射する。その後、この励起光は、上記第1反射迷光と同様、図17の光路を逆行して、光検出器108へと入射する。このため、光検出器108からの出力信号には、この励起光(以下、「第2反射迷光」という)による信号成分が重畳される。
このように、励起光がウエル13の無い部分を走査する際は、光検出器108に第1反射迷光が入射し、励起光がウエル13の有る部分を走査する際は、光検出器108に第2反射迷光が入射する。しかしながら、第1反射迷光と第2反射迷光は、対応する励起光がベース基板11側から反射面11aを透過した後、ベース基板11の下面から外部に抜けるまでの光路や、その間にこれら励起光が反射される面、反射される面の奥にある媒質(屈折率)、反射される面におけるこれら励起光の収束状態等、光学的な環境が大きく相違するため、光検出器108に入射する際の強度が、互いに相違することとなる。したがって、光検出器108からの出力信号に重畳される第1反射迷光および第2反射迷光による信号成分の大きさもまた互いに相違することとなり、結果、励起光がウエル13の有る部分を走査するかウエル13の無い部分を走査するかによって、光検出器108から出力される信号のレベルに差が生じる。したがって、この差を、たとえば、再生RF信号(SUM信号)により検出することにより、励起光の走査位置におけるウエル13の有無を判別することができる。
たとえば、第1反射迷光の光量よりも第2反射迷光の光量の方が大きい場合、図21(b)の上段に示すように、励起光がウエル13の無い部分を走査するときよりもウエル13の有る部分を走査するときの方が、再生RF信号の大きさが大きくなる。よって、再生RF信号の波形のピーク値の差分ΔPが所定の閾値を越えたときに、励起光の走査位置が、ウエルの無い部分とウエルの有る部分の境界を通過したと判定することができる。
次に、図21(a)を参照して、蛍光検出動作時にコントローラ205によって実行される励起光の走査制御について説明する。この走査制御では、蛍光検出動作時のトラック走査において、径方向の非ウエル領域がジャンプされ、走査時間の短縮が図られる。
なお、ここでは、バイオセンサ基板10に配された所定トラックのリザーブ領域に、バイオセンサ基板10の管理情報が保持され、これを再生することにより、バイオセンサ基板10に配置されたウエルの個数や、最後尾のウエル13が設定されたアドレス共通領域のウエルアドレス等の情報が取得されることが前提となっている。かかる管理情報は、たとえば、再内周のトラックに保持される。蛍光検出動作の開始時には、蛍光検出装置1によって、まず、この管理情報が読み取られ、コントローラ205の内部メモリに格納される。
蛍光検出動作時の走査制御において、コントローラ205は、バイオセンサ基板10の最内周トラックから励起光による走査を開始させる(S1)。その後、コントローラ205は、励起光が最内周ゾーンを走査する間に、トラックジャンプのためのジャンプ情報を取得する(S2)。ステップS2の具体的処理は、追って、図23(a)、図24(a)および図25(a)を参照して説明する。こうして、ジャンプ情報が取得されると(S3:YES)、コントローラ205は、ジャンプ走査制御を実行する(S4)。ジャンプ走査制御では、径方向に生じる非ウエル領域(図14参照)をスキップしながら、トラックに対する走査が行われる。ステップS4の具体的処理は、追って、図23(b)、図24(b)および図25(b)を参照して説明する。コントローラ205は、蛍光検出動作が終了されるまで、ジャンプ走査制御を実行する。その後、最後尾のウエル13に対する走査が完了する等によって、蛍光検出動作が終了されると(S5:YES)、コントローラ205は、走査制御を終了する。
図22は、バイオセンサ基板10の径方向に生じる非ウエル領域について説明する図である。図22(a)は、ウエル13がアドレス共通領域の中央に配置されているときの非ウエル領域の状態を示し、図22(b)は、ウエル13がアドレス共通領域の中央から左方向にずれて配置されているときの非ウエル領域の状態を示している。
図16(a)、(b)を参照して説明したように、ウエル13は、ウエルスタンパWSをベース基板11上に押し付けることにより形成される。このため、各ウエル13の位置は、一様に、アドレス共通領域の中央に位置付けられるか、あるいは、一様に、アドレス共通領域の中央から一方向のずれることとなる。
図22(a)、(b)には、ディスク(バイオセンサ基板10)の中心に対して左側および右側に配されたアドレス共通領域が示されている。図22(a)では、ウエル13が適正に配置されているため、左右のアドレス共通領域の何れにおいても、ウエル13がアドレス共通領域の中央に配置されている。本実施の形態では、アドレス共通領域の径方向の幅が300μm程度、ウエル13の径が100μm程度に設定されているため、このようにウエル13がアドレス共通領域の中央に配置されている場合の非ウエル領域の幅は200μm程度となり、非ウエル領域には、200本程度のトラックが含まれる。
これに対し、図22(b)のように、ウエル13の配置位置が、アドレス共通領域の中央から左方向にずれると、ディスク中心に対して左側のアドレス共通領域ではウエル13が外周方向にずれ、右側のアドレス共通領域ではウエル13が内周方向にずれることとなる。この場合、左側のアドレス共通領域に配されたウエル13の外周側の境界Daから、右側のアドレス共通領域に配されたウエル13の内周側の境界Dbまでの間が、非ウエル領域となる。すなわち、境界Daから境界Dbの間のトラックを励起光が走査する間、ウエル13が検出されなくなる。したがって、非ウエル領域は、図22(a)の場合よりも狭くなる。
なお、ここでは、ウエル13の位置がアドレス共通領域の中央から左方向にずれた場合について説明したが、ウエル13の位置がアドレス共通領域の中央から他の方向にずれた場合も、同様に、非ウエル領域の幅が図22(a)の場合よりも狭くなる。この場合も、ずれた方向が左方向になるようにディスクを回転させることで、図22(b)と同様の図となる。また、非ウエル領域の幅は、アドレス共通領域の中央位置に対するウエル13のズレ量に応じて変化する。
図21(a)の処理において、ウエルの無い非ウエル領域に対する走査を回避するためには、まず、非ウエル領域の幅(トラック数)、または、図22(b)に示す境界Da、Dbの位置(トラック番号)を検出する必要がある。図21(a)のS2(ジャンプ情報取得処理)では、最内周のゾーンを励起光が走査する間に、これらの情報が取得される。
図23(a)は、ジャンプ情報取得処理の内容を示す図である。
図21のステップS1において励起光が最内周ゾーンを走査する間に、上記図21(b)の手法によってウエル13が検出されると(S11:YES)、コントローラ205は、そのタイミングで走査されたアドレス共通領域内のトラックから再生されたトラック番号を、当該ゾーンにおけるウエル13の開始トラック番号Tr_startとして取得する(S12)。なお、バイオセンサ基板10が基準径D0から1回転する間、各アドレス共通領域に付されたトラック番号は同じであるため、このように、一つのアドレス共通領域から再生されたトラック番号を、開始トラック番号Tr_startとして取得しても、何ら問題はない。
その後、コントローラ205は、バイオセンサ基板10が所定回数回転する間に、励起光がウエル13を走査しなかったかを判定する(S13)。励起光がウエル13を走査したか否かは、上記のように、再生RF信号(SUM信号)の出力を監視することによって判別される。また、バイオセンサ基板10が所定回数回転したことは、回転装置123からコントローラ205に出力される回転検出信号によって判別される。
バイオセンサ基板10が所定回数回転する間に、励起光がウエル13を走査しなかったと判定すると(S13:YES)、コントローラ205は、そのタイミングで走査されたアドレス共通領域内のトラックから再生されたトラック番号を、当該ゾーンにおけるウエル13の終了トラック番号Tr_endとして取得する(S14)。これにより、ジャンプ情報取得処理が終了する。
なお、ウエル13のアドレス共通領域に対する位置ずれの状態は、全てのウエル13において略一様であるため、上記のように最内周のゾーンで取得された開始トラック番号Tr_startは、他のゾーンにおいても、ウエル13が最初に走査されるトラックの番号に略一致し、また、終了トラック番号Tr_endは、他のゾーンにおいても、ウエル13が最後に走査されるトラックよりやや外側のトラックの番号に略一致する。したがって、上記のように最内周のゾーンで取得された開始トラック番号Tr_startと終了トラック番号Tr_endは、他のゾーンにおいても、非ウエル領域をジャンプするための情報として利用可能である。また、これらの情報を最内周で取得することにより、最も短時間で取得することが可能である。
こうして、ジャンプ情報(開始トラック番号Tr_start、終了トラック番号Tr_end)の取得が完了すると、図21のS3においてYESと判定され、処理がS4(ジャンプ走査処理)に進められる。
図23(b)は、ジャンプ走査処理の内容を示す図である。
上記のように開始トラック番号Tr_startと終了トラック番号Tr_endを取得した後、コントローラ205は、そのまま、トラックの走査を継続する(S21)。その後、励起光の走査位置が、終了トラック番号Tr_endよりもq(たとえば、q=10)だけ大きいトラック番号のトラックに入ると、コントローラ205は、当該バイオセンサ基板10に配された最後尾のウエル13に対する走査が終了したか否かを判定する(S23)。この判定は、たとえば、現在の走査位置からバイオセンサ基板10が1回転する間に最後尾のウエル13が設定されたアドレス共通領域のウエルアドレスが再生されるか否かによって行われる。
最後尾のウエル13に対する走査が終了したと判定すると(S23:YES)、コントローラ205は、ジャンプ走査処理を終了し、図21(a)のステップS5に処理を進める。この場合、最後尾のウエル13の走査が終了しているため、ステップS5において、蛍光検出動作が終了となり(S5:YES)、走査制御が終了する。
最後尾のウエル13に対する走査が終了していないと判定すると(S23:NO)、コントローラ205は、サーボ回路202を制御して、一つ外側のゾーンの開始トラック番号Tr_startよりもq(たとえば、q=10)だけ小さいトラック番号のトラック位置に励起光の走査位置をジャンプさせるアドレスサーチ動作を実行する。アドレスサーチ動作は、既存のCDプレーヤやDVDプレーヤにおける技術を用いることができる。アドレスサーチが終了すると、コントローラ205は、ジャンプ走査処理を終了し、図21(a)のステップS5に処理を進める。そして、ステップS5の判定がNOであれば、コントローラ205は、処理をステップS4に進め、再度、ジャンプ走査処理を実行する。
図24(a)は、ジャンプ情報取得処理の他の処理内容を示す図である。
図21のステップS1において励起光が最内周ゾーンを走査する間に、上記図21(b)の手法によってウエル13が検出されると(S31:YES)、コントローラ205は、走査位置がウエル13から外れるのを待つ(S32)。その後、走査位置がウエル13から外れて、バイオセンサ基板10が所定回数回転する間に、ウエル13が励起光により走査されなくなると(S32:YES)、コントローラ205は、トラック数Tr_jpを計数するカウンタを0にリセットし(S33)、径方向の非トラック領域に含まれるトラックの数のカウントを開始する。すなわち、コントローラ205は、バイオセンサ基板10が1回転する間にウエル13が検出されたかを判定し(S34)、ウエル13が検出されなければ(S34:NO)、カウンタの値を1カウントアップさせる(S35)。かかるトラック数Tr_jpのカウントアップは、次にウエル13が検出されるまで(S34:YES)行われる。こうして、非ウエル領域に含まれるトラックの径方向のトラック数Tr_jpがカウントされる。
なお、上記のようにウエル13のアドレス共通領域に対する位置ずれの状態は、全てのウエル13において略一様であるため、上記のように最内周のゾーンとその一つ外側のゾーンとの非ウエル領域において取得されたトラック数Tr_jp(非ウエル領域の径方向の幅)は、互いに隣接する他のゾーン間の非ウエル領域においても、略同じとなる。したがって、上記のように取得されたトラック数Tr_jpは、他のゾーンにおいても、非ウエル領域をジャンプするための情報として利用可能である。
こうして、ジャンプ情報(トラック数Tr_jp)の取得が完了すると、図21のS3においてYESと判定され、処理がS4(ジャンプ走査処理)に進められる。
図24(b)は、ジャンプ走査処理の他の処理内容を示す図である。
上記のようにトラック数Tr_jpを取得した後、コントローラ205は、そのまま、トラックの走査を継続する(S41)。その後、バイオセンサ基板10が所定回数回転する間に、ウエル13が励起光により走査されなくなると(S42:YES)、コントローラ205は、当該バイオセンサ基板10に配された最後尾のウエル13に対する走査が終了したか否かを判定する(S43)。ここで、最後尾のウエル13に対する走査が終了したと判定すると(S43:YES)、コントローラ205は、ジャンプ走査処理を終了し、図21(a)のステップS5に処理を進める。この場合、ステップS5において、蛍光検出動作が終了となり(S5:YES)、走査制御が終了する。
最後尾のウエル13に対する走査が終了していないと判定すると(S43:NO)、コントローラ205は、サーボ回路202を制御して、励起光の走査位置を、トラック数Tr_jpよりもq(たとえば、q=10)だけ小さいトラック数だけ、外周側にジャンプさせる(S44)。このとき、サーボ回路202は、トラッキングサーボをOFFにして、指定されたトラック数(Tr_jp-q)だけトラックジャンプを実行する。そして、所定のトラックジャンプを行った後、再び、トラッキングサーボをONにし、ジャンプ後のトラックに励起光を位置付ける。これにより、ジャンプ後のトラックに対する励起光の走査が開始される。トラックジャンプの動作は、既存のCDプレーヤやDVDプレーヤにおける技術を用いることができる。
こうして、トラックジャンプが終了すると、コントローラ205は、ジャンプ走査処理を終了し、図21(a)のステップS5に処理を進める。そして、ステップS5の判定がNOであれば、コントローラ205は、処理をステップS4に進め、再度、ジャンプ走査処理を実行する。
図23(a)、(b)および図24(a)、(b)の処理により、バイオセンサ基板10に対する走査において、非ウエル領域に対する走査がスキップされるため、バイオセンサ基板10全体を迅速かつ効率的に走査することができる。よって、バイオセンサ基板10に対する蛍光検出動作を迅速かつ効率的に進めることができる。
なお、図23のステップS24では、非ウエル領域をスキップするために、アドレスサーチを用いたが、これに代えて、トラックジャンプを用いることもできる。この場合、トラックジャンプすべきジャンプ数Tr_jpは、次式で求めることができる。
Tr_jp = (N-Tr_end)+Tr_start-2q …(4)
ここで、Nは、アドレス共通領域に含まれるトラック部分の数で、本実施の形態では、300である。qは、上記と同様、たとえば、10である。この処理によっても、励起光の走査位置を、一つ外側のゾーンの開始トラック番号Tr_startよりもq(たとえば、q=10)だけ小さいトラック番号の位置付近にジャンプさせることができる。
ここで、Nは、アドレス共通領域に含まれるトラック部分の数で、本実施の形態では、300である。qは、上記と同様、たとえば、10である。この処理によっても、励起光の走査位置を、一つ外側のゾーンの開始トラック番号Tr_startよりもq(たとえば、q=10)だけ小さいトラック番号の位置付近にジャンプさせることができる。
また、図24(a)のジャンプ情報取得処理は、図25のように変更され得る。図25において、ステップS51、S52は、図24のステップS31、S32と同じである。バイオセンサ基板10が所定回数回転する間に、ウエル13が励起光により走査されなくなると(S32:YES)、コントローラ205は、変数ΔPにP0(たとえば、128)を設定し(S53)、変数ΔPの数だけ、励起光の走査位置を外周側にジャンプさせる(S54)。そして、コントローラ205は、ジャンプ後の位置においてウエル13が検出されるかを判定し(S55)、ウエル13が検出されれば(S55:YES)、変数ΔPを、ΔP=-|ΔP/2|に設定し(S56)、ウエル13が検出されなければ(S55:NO)、変数ΔPを、ΔP=+|ΔP/2|に設定する。ここで、変数の符号は、トラックジャンプの方向を示し、+(プラス)は外周側、-(マイナス)は内周側を示している。
そして、コントローラ205は、絶対値|ΔP|が1よりも小さいかを判定し、小さければ、処理を終了する。絶対値|ΔP|が1よりも小さくなければ、コントローラ205は、処理をステップS54に戻し、同様の処理を実行する。こうして、ステップS54~S58の処理が繰り返されると、励起光の走査位置が、一つ外側のゾーンのウエル領域の内周側境界近傍のトラックに近づく。そして、ステップS58において、変数ΔPの絶対値|ΔP|が1未満(すなわち、1/2)になったと判定されたとき、励起光の走査位置は、一つ外側のゾーンのウエル領域(図14参照)の内周側境界近傍のトラックに位置付けられる。
コントローラ205は、図25のステップS53から変数ΔPが1になるまでの間、変数ΔPが変わる毎に、変数ΔPを累積加算して、トラックジャンプ数Tr_jpを更新する。変数ΔPの符号が-(マイナス)の場合、トラックジャンプ数Tr_jpにマイナスの値ΔPが加算され、トラックジャンプ数Tr_jpが|ΔP|だけ減少する。こうして、変数ΔPが1になったときのトラックジャンプ数Tr_jpは、非ウエル領域に含まれる径方向のトラック数に略等しくなる。よって、このトラックジャンプ数Tr_jpを、図24(a)の処理で取得されたトラックジャンプ数Tr_jpに代えて用いることができる。
なお、図25の処理によれば、励起光の走査位置を、一つ外側のゾーンのウエル領域の内周側境界近傍のトラックに位置付けることができるため、この処理を、トラック数の計数ではなく、非ウエル領域のスキップ動作に用いても良い。
図26は、この場合の処理を示す図である。
図26のフローチャートにおいて、最初と最後のステップS1、S5は、図21のS1、S5と同じである。また、図26のステップS51~S58は、図25の処理と同じである。
図26の処理では、バイオセンサ基板10の最内周から励起光による走査が開始された後(S1)、ウエル13が検出されると、コントローラ205は、走査位置がウエル領域から外れたかを判定する(S52)。そして、走査位置がウエル領域から外れると(S52:YES)、コントローラ205は、ステップS53~S58の処理を実行し、励起光の走査位置を、一つ外側のゾーンのウエル領域の内周側境界近傍のトラックにジャンプさせる。そして、かかるジャンプが終了すると(S58:YES)、コントローラ205は、通常の走査を再開し(S59)、蛍光の検出動作が終了したかを判定し(S5)、終了していなければ(S5:NO)、処理をステップS51に戻して、同様の処理を繰り返す。こうして、隣接するゾーン間の非ウエル領域をスキップしながら、バイオセンサ基板10が、最内周から最外周まで、励起光により走査される。
以上、本実施例によれば、同一のウエル13を横切るトラック部分には、ウエル13の位置を特定するための同一のウエルアドレスが付与されるため、ウエル13とウエルアドレス情報によって特定されるウエル13の位置とを一対一に対応させることができる。よって、蛍光検出装置1において、ウエルアドレスによるウエル13の位置特定を簡易かつ円滑に行うことができ、処理負担の軽減を図ることができる。
また、本実施例によれば、ウエル13よりも広いアドレス共通領域に対して同じウエルアドレスが付与されるため、ウエル13をバイオセンサ基板10に配置する際にウエル13に位置ずれが生じても、ウエル13をアドレス共通領域内に位置付けることができる。よって、一つのウエル13に対して同じウエルアドレスをより確実に付与することができる。
また、本実施例によれば、蛍光検出装置1側において、トラック番号が取得されるため、ウエル13上の径方向の位置をトラック番号によって把握することができる。よって、蛍光検出装置1において、蛍光の発生位置を、より細かく把握することができる。
また、本実施例によれば、一つのアドレス共通領域に含まれるトラック部分上における励起光の走査位置が、走査位置検出部205aによって検出されるため、蛍光が検出されたときの蛍光の走査位置を特定することができ、蛍光検出装置1において、アドレス共通領域内における蛍光の検出位置をより細かく把握することができる。
また、本実施例によれば、図20(b)に示す蛍光特定情報によって、蛍光の発生位置が、ウエル13の位置によって特定されるとともに、さらに、ウエル13内のトラックと、当該トラック上の走査位置とによって特定されるため、蛍光検出装置1において、蛍光の発生位置をより細かく把握することができる。
さらに、本実施例によれば、図21(a)に示された制御によって、ウエル13が配置されていない非ウエル領域がスキップされるため、バイオセンサ基板10に対する励起光の走査を迅速かつ円滑に行うことができる。
以上、本発明の実施例について説明したが、本発明は、上記実施例に何ら制限されるものではなく、また、本発明の実施例も上記以外に種々の変更が可能である。
たとえば、上記実施例1、2では、ウエル13に赤血球を収容させて、赤血球がマラリア原虫に感染しているか否かが判定されたが、ウエル13に収容させる試料および判定対象となる事象は、これに限られない。
たとえば、特定の遺伝子を発現している細胞や、核酸、タンパク質、脂質、糖等の生体物質が通常より過剰である、または不足している細胞を、特定の細胞として種々の細胞群から検出しても良い。あるいは、逆に細胞群の中から正常に機能している細胞を、特定の細胞として検出しても良い。これは、例えばiPS細胞やES細胞の未分化状態から分化状態への誘導において、正常に分化した細胞を検出する目的で使われる。このような特定の細胞は自然界に存在する細胞であってもよいし、人為的処理が施された細胞であってもよい。自然界に存在する細胞としては、特に限定されないが、たとえば病原細胞、病変細胞、病原菌または病原生物に感染された細胞、突然変異した細胞、特定の性質を有する未知の細胞等が挙げられる。また、人為的処理は、特に限定されないが、たとえば物理的処理(例:電磁波照射)、化学的処理(例:薬剤処理)、遺伝子工学的処理(例:遺伝子組み換え処理)等が挙げられる。
また、このような人為的処理のうち、細胞に与える影響が既知である処理を細胞群に施し、当該影響が表れない細胞または当該影響がより強く表れる細胞を特定の細胞として検出することもできる。たとえば、薬剤処理へ耐性または高感受性を示す細胞を特定の細胞として検出することができる。
また、細胞群の種類も特に限定はされるものではない。単細胞生物の群の他、多細胞生物由来の細胞の群であってもよい。多細胞生物由来の細胞としては、たとえば生物の正常組織または病態組織から得られた細胞や、これらの細胞に由来する培養細胞等が挙げられる。また、これらの細胞を得る生物も、特に限定されない。たとえば、動物から採取した細胞または植物から採取した細胞であってよい。より具体的には、たとえば脊椎動物(特に哺乳類及び鳥類)から採取した細胞、昆虫から採取した細胞、植物培養細胞等を検出対象の細胞として挙げることができるが、検出対象の細胞はこれらに限定されるものではない。また、同一の細胞の群であっても、複数種の細胞が混在する群であってもよい。
また、上記実施例1、2では、反射膜14は金属から構成されているが、これに限らず、透光性の誘電体材料であってもよい。この場合、ベース基板11の屈折率と誘電体材料の屈折率とを異なるものとすることにより、反射を生じさせることが可能となる。具体的には、ベース基板11の材料としてポリカーボネート(屈折率:1.59)を用い、反射膜14の材料としてTiO2(屈折率:2.65)等を用いることができる。また、反射膜14の材料として、二酸化ニオブ(Nb2O5)を用いることにより、波長400nm近傍の反射率を高くする一方、波長500nm近傍の反射率を低くすることができ、励起光に対して反射率を高く、蛍光に対して反射を抑える反射膜14とすることができる。また、反射膜14として、誘電体膜と金属膜の積層膜としてもよい。
また、上記実施例1、2では、図1(a)、図11(a)に示すように、ウエル13の形状は円柱形状に設定されたが、これに限らず、試料を収容できる形状であれば円柱形状以外に設定されても良い。また、ウエル13の直径d1と高さd2、底面部13aと反射面11aとの間隔d3、ウエル13の間隔d4、ベース基板11の厚みd5、および、反射面11aのトラックピッチd6は、上記実施の形態の値に限られず、適宜設定されても良い。また、反射面11aのアドレス長は、ウエル13の位置が特定できれば良く、種々の設定方法を用いることができる。
また、上記実施例1、2では、半導体レーザ101から出射される励起光の波長は405nmに設定されたが、これに限らず、測定対象となる試料で用いられる蛍光標識の種類に応じて適宜設定されても良い。励起光の波長の変更に伴い、ダイクロイックプリズム105の透過波長帯域等、光学系の種々のパラメータが適宜変更される。また、上記実施の形態では、励起光のNAは0.34に設定されたが、これに限らず、測定対象となる試料の大きさに応じて適宜設定されても良い。たとえば、励起光の波長を635nmに設定し、励起光のNAを0.1に設定すると、励起光の焦点深度は63.5μmとなる。このように、励起光の焦点深度が、上記実施の形態の励起光の焦点深度(約3.5μm)に比べて大きくなると、ウエル13の底面部13aと反射面11aとの間隔d3を、上記実施の形態の間隔(2μm)よりも大きく設定することができる。
また、上記実施例1、2では、図2(a)~(d)、図15(a)~(d)に示すように、ベース基板11が射出成型により成型され、反射面11aの上面に反射膜14が蒸着され、底面層12aがスピンコートにより積層され、上面層12bが2P成型に形成されて、バイオセンサ基板10が作成された。しかしながら、バイオセンサ基板10の作成方法は、これに限らず、適宜別の方法により作成されても良い。
また、上記変更例1では、図6に示すように、リードイン領域に対応するウエル層12にウエル13は形成されていないが、この領域にウエル13が形成されていても良い。ただし、上述したように、バイオセンサ基板20の内側に試料を落とし、バイオセンサ基板20をゆっくり回転させてウエル13に試料を流し込む場合、この領域にウエル13が形成されていない方が望ましい。
また、上記実施例1、2において、バイオセンサ基板10、20を回転装置123により回転させる際に、ウエル13の上部にふたを設けても良い。これにより、ウエル13からの試料の不所望な流出(意図しない流出)、蒸発または移動を防ぐことができる。
また、上記実施例1では、反射膜14上に配置されたウエル層12の構成を記載したが、反射膜14自体をウエル層12としても良い。即ち、図27(a)に示すように、ベース基板11の上面に形成された反射膜14に微小なウエル13を複数形成しても良い。この場合、反射膜14としては、ベース基板11と異なる屈折率を有する材料であればよく、屈折率の異なる樹脂材料を用いることができる。また、図27(a)に示す反射膜14を、図27(b)に示すように、底面層14aと上面層14bとで構成しても良い。この場合、底面層14aと上面層14bとで材料を変えて形成しても良い。
また、上記実施例1では、バイオセンサ基板10、20の形状は円盤形状とされたが、これに限らず、方形形状の輪郭であっても良い。
図28(a)は、バイオセンサ基板30の輪郭が方形形状であるときの構成例を模式的に示す図である。図28(a)は、バイオセンサ基板30を上面側から見た図である。この構成例では、図28(a)に示すように、バイオセンサ基板30に、複数本の直線状のトラック(ピット列)が、一定のピッチで形成されている。また、ウエル13が、トラックに平行な方向に並ぶように配置されている。バイオセンサ基板30のその他の構成は、上記実施例と同じである。A―A’線で切断したときのバイオセンサ基板30の断面構造は、図1(c)と同じである。上記実施例と同様、ピット列には、アドレス情報が保持されている。
この構成例では、バイオセンサ基板30と対物レンズ106がトラックに平行な方向に相対的に移動される。このとき、たとえば、バイオセンサ基板30は固定され、半導体レーザ101~アパーチャ111からなる光学系とホルダ121、対物レンズアクチュエータ122とを保持するハウジングが、ガイドシャフトに沿って、トラックに平行な方向に移動される。その間、対物レンズ106に対し、上記と同様、フォーカス制御とトラッキング制御が行われ、励起光のビームスポットが一本のトラックに沿って移動される。ビームスポットが1本のトラックの終端まで移動すると、対物レンズ106がトラックに垂直な方向にトラックピッチ分だけ移動され、隣のトラックに対するトラックジャンプが行われる。その後、ハウジングがトラックに平行な方向に移動されて、隣のトラックに対する走査が行われる。こうして、所定本数のトラックに対する走査が行われると、その走査位置において対物レンズ106が中立位置に戻るように、バイオセンサ基板30がトラックに垂直な方向に移動される。以後、上記と同様の動作が繰り返され、全てのトラックに対する走査が行われる。
この構成例においても、上記実施例と同様、ウエル13の底面部13aが、励起光の焦点深度の範囲内に位置付けられるため、試料に対する励起光の照射効率を高めることができ、精度良く試料を測定することができる。
なお、図28(b)に示すように、リードイン領域を設け、このリードイン領域に、上記変更例と同様、底面部13aと反射面11aとの間隔d3を含む情報を保持させても良い。そして、この情報を用いて、励起光の焦点深度を調整するようにしても良い。
また、上記実施例1および変更例1では、トラックがピット列によって形成されたが、連続的な溝(グルーブ)によってトラックが形成されても良く、ピット列と溝(グルーブ)の組合せによってトラックが形成されても良い。溝(グルーブ)によってトラックが形成される場合、たとえば、溝(グルーブ)を蛇行させることによってアドレス情報が保持される。すなわち、アドレス情報に従って溝(グルーブ)の蛇行形状が変調される。
また、上記実施例1では、半導体レーザ101とPBS102の間にアパーチャ111が配されたが、これに限らず、図29に示すように、対物レンズ106のダイクロイックプリズム105側に、ホルダ121に保持されるようにして、励起光の口径を制限するためのアパーチャ134が配されても良い。アパーチャ134は、波長選択性を有しており、励起光に対しては所定の周辺部を遮光し、蛍光に対しては全てを透過する。なお、図29は、図3に示す蛍光検出装置1においてアパーチャ134が用いられる場合を示す図であるが、図7、10に示す蛍光検出装置2においても、対物レンズ106のダイクロイックプリズム105側に、ホルダ121に保持されるようにして、アパーチャ134が配される構成とされても良い。
この場合も、対物レンズ106に対する励起光の入射口径は、上記実施例1と同様、アパーチャ134により決められる。また、この場合、トラッキング制御等において、対物レンズ106がトラッキング方向に変位しても、アパーチャ134は対物レンズ106と一体的に移動するため、対物レンズ106に入射する励起光の光束が対物レンズ106の中心からずれない。よって、図3、7、10に示すようにアパーチャ111が用いられる場合に比べて、励起光の光学特性が劣化し難くなる。
また、上記実施例2では、反射膜14上に配置されたウエル層12の構成を記載したが、反射膜14自体をウエル層12としても良い。即ち、図30(a)に示すように、ベース基板11の上面に形成された反射膜14に微小なウエル13を複数形成しても良い。この場合、反射膜14としては、ベース基板11と異なる屈折率を有する材料であればよく、屈折率の異なる樹脂材料を用いることができる。また、図30(a)に示す反射膜14を、図30(b)に示すように、底面層14aと上面層14bとで構成しても良い。この場合、底面層14aと上面層14bとで材料を変えて形成しても良い。
また、上記実施例2では、反射膜14上に配置されたウエル層12に底面部13aを有するウエル13を備えた構成を記載したが、ウエル13の底面部13aが反射膜14の上面となる構成としても良い。即ち、図30(c)に示すように、ウエル13はウエル層12の貫通穴で構成され、反射膜14上に形成されても良い。
また、上記実施例2では、バイオセンサ基板10の形状は円盤形状とされたが、これに限らず、方形形状の輪郭であっても良い。
図31(a)は、バイオセンサ基板20の輪郭が方形形状であるときの構成例を模式的に示す図である。図31(a)は、バイオセンサ基板20を上面側から見た図である。
この構成例ではバイオセンサ基板20に、複数本の直線状のトラック(ピット列)が、一定のピッチで形成されている。また、ウエル13が、トラックに平行な方向に並ぶように配置されている。バイオセンサ基板20のその他の構成は、上記実施例と同じである。A―A’線で切断したときのバイオセンサ基板20の断面構造は、図11(c)と同じである。上記実施例2と同様、ピット列には、アドレス情報が保持されている。
図31(b)に示すように、アドレス共通領域は、たとえば正方形とされ、トラックに沿って並ぶように割り当てられる。上記実施例2と同様、同じアドレス共通領域に含まれるトラック部分には、同じウエルアドレスが付与される。トラック部分に適用される物理アドレスは、上記実施例2の図14と同様である。各トラック部分には、ウエルアドレスとともに、トラック番号が保持される。また、アドレス共通領域は、ウエル13よりも広く設定される。ウエル13は、アドレス共通領域の略中央に配置される。
この構成例では、バイオセンサ基板20と対物レンズ106がトラックに平行な方向に相対的に移動される。このとき、たとえば、バイオセンサ基板20は固定され、半導体レーザ101~アパーチャ111からなる光学系とホルダ121、対物レンズアクチュエータ122とを保持するハウジングが、ガイドシャフトに沿って、トラックに平行な方向に移動される。その間、対物レンズ106に対し、上記と同様、フォーカス制御とトラッキング制御が行われ、励起光のビームスポットが一本のトラックに沿って移動される。ビームスポットが1本のトラックの終端まで移動すると、対物レンズ106がトラックに垂直な方向にトラックピッチ分だけ移動され、隣のトラックに対するトラックジャンプが行われる。その後、ハウジングがトラックに平行な方向に移動されて、隣のトラックに対する走査が行われる。こうして、所定本数のトラックに対する走査が行われると、その走査位置において対物レンズ106が中立位置に戻るように、バイオセンサ基板20がトラックに垂直な方向に移動される。以後、上記と同様の動作が繰り返され、全てのトラックに対する走査が行われる。
この構成例においても、上記実施例2と同様、同一のウエル13を横切るトラック部分には、ウエル13の位置を特定するための同一のウエルアドレスが付与されるため、ウエル13とウエルアドレス情報によって特定されるウエル13の位置とを一対一に対応させることができる。
また、上記実施例2では、トラックがピット列によって形成されたが、連続的な溝(グルーブ)によってトラックが形成されても良く、ピット列と溝(グルーブ)の組合せによってトラックが形成されても良い。溝(グルーブ)によってトラックが形成される場合、たとえば、溝(グルーブ)を蛇行させることによってアドレス情報が保持される。すなわち、アドレス情報に従って溝(グルーブ)の蛇行形状が変調される。
また、上記実施例2では、半導体レーザ101とPBS102の間にアパーチャ111が配されたが、これに限らず、図32に示すように、対物レンズ106のダイクロイックプリズム105側に、ホルダ121に保持されるようにして、励起光の口径を制限するためのアパーチャ134が配されても良い。アパーチャ134は、波長選択性を有しており、励起光に対しては所定の周辺部を遮光し、蛍光に対しては全てを透過する。
この場合も、対物レンズ106に対する励起光の入射口径は、上記実施例2と同様、アパーチャ134により決められる。また、この場合、トラッキング制御等において、対物レンズ106がトラッキング方向に変位しても、アパーチャ134は対物レンズ106と一体的に移動するため、対物レンズ106に入射する励起光の光束が対物レンズ106の中心からずれない。よって、図17に示すようにアパーチャ111が用いられる場合に比べて、励起光の光学特性が劣化し難くなる。
さらに、上記実施例2では、光源として一つの半導体レーザ101が用いられたが、本発明は、上記以外の光学系を有する蛍光検出装置および上記以外の構成を有する試料保持担体にも適用可能である。たとえば、本発明は、上記特許文献2のように、ウエルに励起光を照射するための光源と、トラックにレーザ光を照射するための光源が個別に準備された蛍光検出装置およびそれに用いる試料保持担体にも、適用可能である。
この他、本発明の実施の形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
なお、図21(a)ないし図26を参照して説明したトラックジャンプに係る制御処理は、上記のようにアドレス共通領域が設定されている場合に限らず、トラックを横切る方向に所定幅の非ウエル領域が存在する場合に、広く用いることができるものである。すなわち、上記のトラックジャンプに係る制御は、さらに広範な範囲の発明として、たとえば、以下のように抽出することができる。
(1)蛍光標識が施された試料を保持する試料保持担体に対し照射光を照射するとともに、当該照射光の照射により前記試料から生じる蛍光を検出する蛍光検出装置であって、
前記試料保持担体は、基板と、前記基板の上面に形成されたトラックと、前記基板の上面側に配置され、試料を収容する複数の試料収容部と、を備え、前記試料保持担体には、前記トラックに垂直な方向に所定の幅を有する帯状の領域において前記試料保持部が配置されておらず、
前記照射光を出射する光源と、
前記照射光を前記試料保持担体に収束させる対物レンズと、
前記対物レンズを駆動する対物レンズアクチュエータと、
前記対物レンズアクチュエータを制御する制御部と、
前記対物レンズによって収束された前記照射光を前記トラックに沿って走査させる光走査部と、
前記制御部は、前記照射光の走査位置が前記帯状の領域に含まれると、前記トラックを横切る方向に、前記照射光の照射位置を移動させるように前記対物レンズアクチュエータを制御する、蛍光検出装置。
前記試料保持担体は、基板と、前記基板の上面に形成されたトラックと、前記基板の上面側に配置され、試料を収容する複数の試料収容部と、を備え、前記試料保持担体には、前記トラックに垂直な方向に所定の幅を有する帯状の領域において前記試料保持部が配置されておらず、
前記照射光を出射する光源と、
前記照射光を前記試料保持担体に収束させる対物レンズと、
前記対物レンズを駆動する対物レンズアクチュエータと、
前記対物レンズアクチュエータを制御する制御部と、
前記対物レンズによって収束された前記照射光を前記トラックに沿って走査させる光走査部と、
前記制御部は、前記照射光の走査位置が前記帯状の領域に含まれると、前記トラックを横切る方向に、前記照射光の照射位置を移動させるように前記対物レンズアクチュエータを制御する、蛍光検出装置。
(2)上記(1)の蛍光検出装置において、前記照射位置制御部は、前記帯状の領域をスキップするための情報を取得し、取得した情報に基づいて、前記トラックを横切る方向に、前記照射光の照射位置を移動させる。
抽出された上記発明によれば、試料収容部が配置されていない領域をスキップすることができるため、試料保持担体に対する照射光の走査を迅速かつ円滑に行うことができる。
1、2 … 蛍光検出装置
10、20、30 … バイオセンサ基板(試料保持担体)
11 … ベース基板(基板)
11a … 反射面
13 … ウエル(試料収容部)
13a … 底面部(底面)
14 … 反射膜
101 … 半導体レーザ(光源)
103 … コリメータレンズ(光学系)
105 … ダイクロイックプリズム(光学系、分離素子)
106 … 対物レンズ(光学系)
108 … 光検出器
109 … 蛍光検出器
111… アパーチャ(光学系)
122 … 対物レンズアクチュエータ
123 … 回転装置(光走査部)
131 … 開口制限素子(焦点深度調整部)
132 … 偏光フィルタ(焦点深度調整部)
133 … レンズアクチュエータ(焦点深度調整部)
134… アパーチャ(光学系)
202 … サーボ回路(制御部、焦点深度制御部)
203 … 再生回路(読取部)
205 … コントローラ(制御部)
205a … 走査位置検出部
205b … 蛍光位置特定部
10、20、30 … バイオセンサ基板(試料保持担体)
11 … ベース基板(基板)
11a … 反射面
13 … ウエル(試料収容部)
13a … 底面部(底面)
14 … 反射膜
101 … 半導体レーザ(光源)
103 … コリメータレンズ(光学系)
105 … ダイクロイックプリズム(光学系、分離素子)
106 … 対物レンズ(光学系)
108 … 光検出器
109 … 蛍光検出器
111… アパーチャ(光学系)
122 … 対物レンズアクチュエータ
123 … 回転装置(光走査部)
131 … 開口制限素子(焦点深度調整部)
132 … 偏光フィルタ(焦点深度調整部)
133 … レンズアクチュエータ(焦点深度調整部)
134… アパーチャ(光学系)
202 … サーボ回路(制御部、焦点深度制御部)
203 … 再生回路(読取部)
205 … コントローラ(制御部)
205a … 走査位置検出部
205b … 蛍光位置特定部
Claims (13)
- 下面から照射光が入射される基板と、
前記基板の上面に配置され、前記照射光の一部を反射する反射膜と、
前記反射膜の上面側に配置され、底面を有する複数の試料収容部と、を備え、
前記照射光が、収束されて前記基板に対して入射し、
前記反射膜と前記基板との界面である反射面と、前記収容部の底面との間の距離が、前記照射光の焦点深度以下である、試料保持担体。 - 前記基板の上面に形成されたトラックを備え、
前記トラックには、前記試料保持担体上の位置を特定するためのアドレス情報が保持されている、請求項1に記載の試料保持担体。 - 前記トラックに、当該試料保持担体に適用される焦点深度の導出に用いられるパラメータ値が記憶されている、請求項1または2に記載の試料保持担体。
- 蛍光標識が施された試料を保持する試料保持担体に対し蛍光検出装置から照射光を照射し、当該照射光の照射により前記試料から生じる蛍光を前記蛍光検出装置により検出する蛍光検出システムであって、
前記試料保持担体は、
下面から前記照射光が入射される基板と、
前記基板の上面に配置され、前記照射光の一部を反射する反射膜と、
前記反射膜の上面側に配置され、底面を有する複数の試料収容部と、を備え、
前記蛍光検出装置は、前記照射光を収束させて前記基板に入射させるための光学系を備え、
前記反射膜と前記基板との界面である反射面と、前記収容部の底面との間の距離が、前記照射光の焦点深度以下である、蛍光検出システム。 - 前記試料保持担体は、当該試料保持担体に適用される焦点深度の導出に用いられるパラメータ値を保持し、
前記蛍光検出装置は、
前記パラメータ値を読み取るための読取部と、
前記照射光の焦点深度を変化させるための焦点深度調整部と、
前記読取部によって読み取られた前記パラメータ値に対応する焦点深度となるように、前記焦点深度調整部を制御する制御部と、を備える、請求項4に記載の蛍光検出システム。 - 蛍光標識が施された試料を保持する試料保持担体に対し照射光を照射するとともに、当該照射光の照射により前記試料から生じる蛍光を検出する蛍光検出装置であって、
前記試料保持担体は、下面から照射光が入射される基板と、前記基板の上面に形成されたトラックと、前記基板の上面に配置され、前記照射光の一部を反射する反射膜と、前記反射膜の上面側に配置され、底面を有する複数の試料収容部と、を備え、
前記照射光を出射する光源と、
前記照射光を前記試料保持担体上に収束させる対物レンズと、
前記対物レンズを少なくとも光軸に平行なフォーカス方向と前記トラックに垂直なトラッキング方向に駆動する対物レンズアクチュエータと、
前記光源から出射された前記照射光を前記対物レンズに導くとともに、前記蛍光を、前記試料保持担体によって反射された前記照射光の反射光から分離する分離素子と、
前記分離素子によって前記蛍光から分離された前記反射光を受光してフォーカスエラー信号とトラッキングエラー信号を生成するための信号を出力する光検出器と、
前記フォーカスエラー信号とトラッキングエラー信号に基づいて前記対物レンズアクチュエータを制御する制御部と、
前記分離素子によって分離された前記蛍光を受光する蛍光検出器と、
前記照射光が前記トラックに沿って前記試料保持担体上を移動するよう、前記対物レンズと前記試料保持担体との間の相対位置を変化させる光走査部と、を備え、
前記反射膜と前記基板との界面である反射面と、前記収容部の底面との間の距離が、前記照射光の焦点深度以下である、蛍光検出装置。 - 前記試料保持担体は、当該試料保持担体に適用される焦点深度の導出に用いられるパラメータ値を保持し、
前記パラメータ値を読み取るための読取部と、
前記照射光の焦点深度を変化させるための焦点深度調整部と、
前記読取部によって読み取られた前記パラメータ値に対応する焦点深度となるように、前記焦点深度調整部を制御する焦点深度制御部と、をさらに備える、請求項6に記載の蛍光検出装置。 - 基板と、
前記基板の上面に形成され、所定の情報を保持するトラックと、
前記基板の上面側に配置され、試料を収容する複数の試料収容部と、を備え、
前記試料収容部の下方を前記トラックが横切り、
同一の前記試料収容部を横切る複数のトラック部分に、前記試料収容部の位置を特定するための同一のウエルアドレス情報が付与される、試料保持担体。 - 前記トラックを横切る方向に所定トラック数分の幅を有するとともに、前記トラックに沿う方向に所定トラック長分の幅を有し、前記試料収容部を含む広さを有するアドレス共通領域が前記トラックに沿って設定され、
一つの前記アドレス共通領域に対して一つの前記試料収容部が割り当てられるよう、前記試料収容部が配置され、
同一の前記アドレス共通領域に含まれるトラック部分に、同一の前記ウエルアドレス情報が付与される、請求項8に記載の試料保持担体。 - 同一のアドレス情報が付与された一群の前記トラック部分のうち、一のトラック部分を他のトラック部分から区別するためのトラックアドレス情報が、前記トラック部分に付与される、請求項8または9に記載の試料保持担体。
- 蛍光標識が施された試料を保持する試料保持担体に対し照射光を照射するとともに、当該照射光の照射により前記試料から生じる蛍光を検出する蛍光検出装置であって、
前記試料保持担体は、基板と、前記基板の上面に形成され、所定の情報を保持するトラックと、前記基板の上面側に配置され、試料を収容する複数の試料収容部と、を備え、前記試料収容部の下方を前記トラックが横切り、同一の前記試料収容部を横切る複数のトラック部分に、前記試料収容部の位置を特定するための同一のウエルアドレス情報が付与される構成を備え、
前記照射光を出射する光源と、
前記照射光を前記試料保持担体に収束させる対物レンズと、
前記対物レンズによって収束された前記照射光を前記トラックに沿って走査させる光走査部と、
前記試料保持担体によって反射された前記照射光を受光する光検出器と、
前記光検出器からの出力から前記ウエルアドレス情報を再生する再生部と、
前記トラック部分上における前記照射光の走査位置を検出するための走査位置検出部と、を有する、蛍光検出装置。 - 同一のアドレス情報が付与された一群の前記トラック部分のうち、一のトラック部分を他のトラック部分から区別するためのトラックアドレス情報が、前記トラック部分に付与されており、
前記再生部は、前記光検出器からの出力に基づいて前記トラックアドレス情報をさらに再生し、
前記光検出器からの出力に基づいて、前記再生部によって再生された前記ウエルアドレス情報およびトラックアドレス情報と、前記走査位置検出部によって検出された走査位置とを互いに対応付けることにより、前記試料保持担体上における蛍光の発生位置を特定する蛍光位置特定部をさらに備える、請求項11に記載の蛍光検出装置。 - 前記対物レンズを駆動する対物レンズアクチュエータと、前記対物レンズアクチュエータを制御する制御部と、を備え、
前記試料保持担体には、前記トラックに垂直な方向に所定の幅を有する帯状の領域において前記試料保持部が配置されておらず、
前記制御部は、前記照射光の走査位置が前記帯状の領域に含まれると、前記トラックを横切る方向に、前記照射光の照射位置を移動させるように前記対物レンズアクチュエータを制御する、請求項11または12に記載の蛍光検出装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13769735.5A EP2821779A4 (en) | 2012-03-29 | 2013-03-15 | SAMPLE HOLDER, AND FLUORESCENCE DETECTION SYSTEM, AND FLUORESCENCE DETECTION DEVICE USING THE SAME |
| JP2014507703A JP6205584B2 (ja) | 2012-03-29 | 2013-03-15 | 試料保持担体およびそれを用いた蛍光検出システム、蛍光検出装置 |
| US14/498,877 US9128056B2 (en) | 2012-03-29 | 2014-09-26 | Sample holding carrier, and fluorescence detection system and fluorescence detection device that use same |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012077896 | 2012-03-29 | ||
| JP2012-077896 | 2012-03-29 | ||
| JP2012-077902 | 2012-03-29 | ||
| JP2012077902 | 2012-03-29 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/498,877 Continuation US9128056B2 (en) | 2012-03-29 | 2014-09-26 | Sample holding carrier, and fluorescence detection system and fluorescence detection device that use same |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013146364A1 true WO2013146364A1 (ja) | 2013-10-03 |
Family
ID=49259625
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/057462 WO2013146364A1 (ja) | 2012-03-29 | 2013-03-15 | 試料保持担体およびそれを用いた蛍光検出システム、蛍光検出装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9128056B2 (ja) |
| EP (1) | EP2821779A4 (ja) |
| JP (2) | JP6205584B2 (ja) |
| WO (1) | WO2013146364A1 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014068951A1 (ja) * | 2012-10-30 | 2014-05-08 | パナソニック株式会社 | 試料保持担体およびそれを用いた蛍光検出装置 |
| WO2014083766A1 (ja) * | 2012-11-30 | 2014-06-05 | パナソニック株式会社 | 試料保持担体およびそれを用いた蛍光検出装置 |
| JP5864009B1 (ja) * | 2015-05-18 | 2016-02-17 | シャープ株式会社 | 微小粒子検出装置 |
| WO2016024429A1 (ja) * | 2014-08-11 | 2016-02-18 | シャープ株式会社 | 微小粒子検出装置 |
| WO2016052118A1 (ja) * | 2014-09-30 | 2016-04-07 | 株式会社Jvcケンウッド | 分析装置及び分析方法 |
| JPWO2015118843A1 (ja) * | 2014-02-04 | 2017-03-23 | パナソニックIpマネジメント株式会社 | 試料検出プレート、これを用いた蛍光検出システム及び蛍光検出方法 |
| WO2017154751A1 (ja) * | 2016-03-11 | 2017-09-14 | パナソニック株式会社 | 試料収容ディスクおよびそれを用いた蛍光検出装置 |
| JP2018163102A (ja) * | 2017-03-27 | 2018-10-18 | Phcホールディングス株式会社 | 試料分析装置、試料分析システムおよび試料の発光を測定する方法 |
| CN112649401A (zh) * | 2019-10-10 | 2021-04-13 | 采钰科技股份有限公司 | 生物感测器 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SG10201811725SA (en) | 2015-02-06 | 2019-02-27 | Life Technologies Corp | Systems and methods for assessing biological samples |
| DE102015101847B4 (de) * | 2015-02-10 | 2017-11-02 | Eyesense Gmbh | Strahlteiler und Anordnung zur Untersuchung einer mittels elektromagnetischer Strahlung anregbaren Probe |
| JP7524941B2 (ja) * | 2020-03-25 | 2024-07-30 | 日本電気株式会社 | 光干渉断層撮像装置、および光干渉断層撮像装置の制御方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10504397A (ja) * | 1994-09-21 | 1998-04-28 | ザ ユニバーシティ コート オブ ザ ユニバーシティ オブ グラスゴー | サンプル分析実施用装置及び方法 |
| JP2001238674A (ja) * | 2000-02-29 | 2001-09-04 | Nikon Corp | Dnaアレイ、dnaアレイ読み取り装置、及びdnaアレイ製造装置 |
| JP2003248007A (ja) * | 2002-02-25 | 2003-09-05 | Matsushita Electric Ind Co Ltd | 分析装置 |
| JP2005523684A (ja) * | 2001-10-24 | 2005-08-11 | バースタイン テクノロジーズ,インコーポレイティド | バイオドライブ用のセグメント領域検出器とその関連方法 |
| JP2006153639A (ja) * | 2004-11-29 | 2006-06-15 | Sony Corp | ノイズ蛍光処理方法及び蛍光検出システム |
| JP2006317426A (ja) * | 2005-04-13 | 2006-11-24 | Sharp Corp | 分析用基板および分析装置 |
| JP2006322819A (ja) | 2005-05-19 | 2006-11-30 | Sony Corp | バイオアッセイ用の基板と装置、並びに基板の製造方法 |
| JP2006349501A (ja) * | 2005-06-16 | 2006-12-28 | Matsushita Electric Ind Co Ltd | 生体サンプル判別装置 |
| WO2010027003A1 (ja) | 2008-09-02 | 2010-03-11 | 独立行政法人産業技術総合研究所 | 細胞検出方法及び該方法に用いるマイクロアレイチップ |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0282777A (ja) * | 1988-09-19 | 1990-03-23 | Olympus Optical Co Ltd | 画像再生装置 |
| JPH033158A (ja) * | 1989-05-31 | 1991-01-09 | Canon Inc | 再生装置 |
| JPH07296388A (ja) * | 1994-04-26 | 1995-11-10 | Canon Inc | ディスク状情報記録媒体およびそのシーク方法 |
| US20020177144A1 (en) * | 1997-12-30 | 2002-11-28 | Jose Remacle | Detection and/or quantification method of a target molecule by a binding with a capture molecule fixed on the surface of a disc |
| JP3445501B2 (ja) | 1998-09-04 | 2003-09-08 | 日立ソフトウエアエンジニアリング株式会社 | シート状部材積層体及びシート状プローブ保持体の製造方法 |
| JP2000304698A (ja) | 1999-04-16 | 2000-11-02 | Canon Inc | 蛍光測定方法と装置及びそれに適した基板 |
| JP3597729B2 (ja) | 1999-05-11 | 2004-12-08 | 日立ソフトウエアエンジニアリング株式会社 | 蛍光測光方法及び蛍光測光装置 |
| JP2002014106A (ja) * | 2000-06-29 | 2002-01-18 | Nippon Laser & Electronics Lab | 試料ディスク及び試料解析装置 |
| AU2001277486A1 (en) * | 2000-07-19 | 2002-01-30 | Fraunhofer-Gesellschaft Zur Forderung Der Angewandten Forschung E.V. | Device for carrying out biochemical fluorescence tests |
| DE10112455C2 (de) * | 2000-07-19 | 2003-10-23 | Fraunhofer Ges Forschung | Vorrichtung zur Durchführung von biochemischen Fluoreszenztests |
| WO2002079762A2 (en) * | 2000-10-27 | 2002-10-10 | Dumas David P | Apparatus for fluorescence detection on arrays |
| JP4010171B2 (ja) * | 2001-04-16 | 2007-11-21 | 東ソー株式会社 | 微小流路構造体、その製造方法及びその用途 |
| JP2002340894A (ja) * | 2001-05-11 | 2002-11-27 | Mitsuaki Oshima | 基板および検査装置 |
| WO2003036337A2 (en) | 2001-10-24 | 2003-05-01 | Burstein Technologies, Inc. | Optical biological disk analyser |
| JP3678192B2 (ja) * | 2001-11-21 | 2005-08-03 | 横河電機株式会社 | 計測装置 |
| JP4194787B2 (ja) * | 2002-03-14 | 2008-12-10 | パナソニック株式会社 | 分析装置とそれに使用する分析用ディスク |
| JP4321085B2 (ja) * | 2002-03-15 | 2009-08-26 | ソニー株式会社 | バイオアッセイ用基板とバイオアッセイ装置及び読み取り装置 |
| JP4193421B2 (ja) * | 2002-06-06 | 2008-12-10 | ソニー株式会社 | バイオアッセイ装置及びその製造方法、並びにバイオアッセイ方法 |
| JP2004093415A (ja) * | 2002-08-30 | 2004-03-25 | Sony Corp | バイオアッセイ用基板と基板情報読み取り装置及び基板情報読み取り方法 |
| US7285789B2 (en) * | 2003-06-06 | 2007-10-23 | Oc Oerlikon Balzers Ag | Optical device for surface-generated fluorescence |
| JP2005147949A (ja) * | 2003-11-18 | 2005-06-09 | Sharp Corp | 試料検出デバイスおよび試料検出装置 |
| JP2005156327A (ja) * | 2003-11-25 | 2005-06-16 | Sony Corp | バイオアッセイ用基板及びその製造方法 |
| WO2005081801A2 (en) * | 2004-02-09 | 2005-09-09 | Blueshift Biotechnologies, Inc. | Methods and apparatus for scanning small sample volumes |
| JP2007033170A (ja) | 2005-07-26 | 2007-02-08 | Fujifilm Corp | 蛍光検出方法および蛍光検出システム |
-
2013
- 2013-03-15 EP EP13769735.5A patent/EP2821779A4/en not_active Withdrawn
- 2013-03-15 WO PCT/JP2013/057462 patent/WO2013146364A1/ja active Application Filing
- 2013-03-15 JP JP2014507703A patent/JP6205584B2/ja not_active Expired - Fee Related
-
2014
- 2014-09-26 US US14/498,877 patent/US9128056B2/en not_active Expired - Fee Related
-
2017
- 2017-06-26 JP JP2017123939A patent/JP2017211390A/ja active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10504397A (ja) * | 1994-09-21 | 1998-04-28 | ザ ユニバーシティ コート オブ ザ ユニバーシティ オブ グラスゴー | サンプル分析実施用装置及び方法 |
| JP2001238674A (ja) * | 2000-02-29 | 2001-09-04 | Nikon Corp | Dnaアレイ、dnaアレイ読み取り装置、及びdnaアレイ製造装置 |
| JP2005523684A (ja) * | 2001-10-24 | 2005-08-11 | バースタイン テクノロジーズ,インコーポレイティド | バイオドライブ用のセグメント領域検出器とその関連方法 |
| JP2003248007A (ja) * | 2002-02-25 | 2003-09-05 | Matsushita Electric Ind Co Ltd | 分析装置 |
| JP2006153639A (ja) * | 2004-11-29 | 2006-06-15 | Sony Corp | ノイズ蛍光処理方法及び蛍光検出システム |
| JP2006317426A (ja) * | 2005-04-13 | 2006-11-24 | Sharp Corp | 分析用基板および分析装置 |
| JP2006322819A (ja) | 2005-05-19 | 2006-11-30 | Sony Corp | バイオアッセイ用の基板と装置、並びに基板の製造方法 |
| JP2006349501A (ja) * | 2005-06-16 | 2006-12-28 | Matsushita Electric Ind Co Ltd | 生体サンプル判別装置 |
| WO2010027003A1 (ja) | 2008-09-02 | 2010-03-11 | 独立行政法人産業技術総合研究所 | 細胞検出方法及び該方法に用いるマイクロアレイチップ |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2821779A4 |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9500587B2 (en) | 2012-10-30 | 2016-11-22 | Panasonic Intellectual Property Management Co., Ltd. | Specimen holding carrier and fluorescence detector using same |
| WO2014068951A1 (ja) * | 2012-10-30 | 2014-05-08 | パナソニック株式会社 | 試料保持担体およびそれを用いた蛍光検出装置 |
| WO2014083766A1 (ja) * | 2012-11-30 | 2014-06-05 | パナソニック株式会社 | 試料保持担体およびそれを用いた蛍光検出装置 |
| JPWO2015118843A1 (ja) * | 2014-02-04 | 2017-03-23 | パナソニックIpマネジメント株式会社 | 試料検出プレート、これを用いた蛍光検出システム及び蛍光検出方法 |
| WO2016024429A1 (ja) * | 2014-08-11 | 2016-02-18 | シャープ株式会社 | 微小粒子検出装置 |
| JP2016038360A (ja) * | 2014-08-11 | 2016-03-22 | シャープ株式会社 | 微小粒子検出装置 |
| WO2016052118A1 (ja) * | 2014-09-30 | 2016-04-07 | 株式会社Jvcケンウッド | 分析装置及び分析方法 |
| JP2016070782A (ja) * | 2014-09-30 | 2016-05-09 | 株式会社Jvcケンウッド | 分析装置及び分析方法 |
| WO2016185623A1 (ja) * | 2015-05-18 | 2016-11-24 | シャープ株式会社 | 微小粒子検出装置 |
| JP5864009B1 (ja) * | 2015-05-18 | 2016-02-17 | シャープ株式会社 | 微小粒子検出装置 |
| WO2017154751A1 (ja) * | 2016-03-11 | 2017-09-14 | パナソニック株式会社 | 試料収容ディスクおよびそれを用いた蛍光検出装置 |
| JP2018163102A (ja) * | 2017-03-27 | 2018-10-18 | Phcホールディングス株式会社 | 試料分析装置、試料分析システムおよび試料の発光を測定する方法 |
| JP7013137B2 (ja) | 2017-03-27 | 2022-01-31 | Phcホールディングス株式会社 | 試料分析装置、試料分析システムおよび試料の発光を測定する方法 |
| CN112649401A (zh) * | 2019-10-10 | 2021-04-13 | 采钰科技股份有限公司 | 生物感测器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017211390A (ja) | 2017-11-30 |
| JPWO2013146364A1 (ja) | 2015-12-10 |
| JP6205584B2 (ja) | 2017-10-04 |
| EP2821779A1 (en) | 2015-01-07 |
| EP2821779A4 (en) | 2015-08-19 |
| US9128056B2 (en) | 2015-09-08 |
| US20150048256A1 (en) | 2015-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6205584B2 (ja) | 試料保持担体およびそれを用いた蛍光検出システム、蛍光検出装置 | |
| JP6281771B2 (ja) | 蛍光検出装置 | |
| JP6244556B2 (ja) | 試料保持担体およびそれを用いた蛍光検出装置 | |
| US7911907B2 (en) | Optical disc judgment method and optical disc device | |
| WO2013146365A1 (ja) | 蛍光検出装置 | |
| JP2007122850A (ja) | 光ディスク装置 | |
| US8238210B2 (en) | Optical recording medium, optical recording medium driving apparatus, and optical recording medium driving method | |
| WO2011125157A1 (ja) | 情報記録媒体、情報記録装置及び方法、並びに情報再生装置及び方法 | |
| JP4623147B2 (ja) | 記録装置、記録方法 | |
| JP2008159137A (ja) | 光記録再生方法、光記録再生装置、光記録媒体 | |
| US20070279480A1 (en) | Optical disk apparatus | |
| CN100397507C (zh) | 光学头及备有该光学头的光信息处理装置 | |
| US20100002554A1 (en) | Optical disk device and optical disk type determination method | |
| JP2020046178A (ja) | 試料収容ディスクおよびそれを用いた蛍光検出装置 | |
| KR20040085033A (ko) | 광 픽업장치 및 광 디스크장치 | |
| JP2019074315A (ja) | 蛍光検出用ピックアップおよびそれを用いた蛍光検出装置 | |
| JP2005235282A (ja) | 光記録媒体、光記録再生装置及び方法、フォーカス及びトラッキング制御方法 | |
| JP2019074314A (ja) | 試料収容ディスクおよびそれを用いた蛍光検出装置 | |
| JP2015001998A (ja) | 光記録装置およびその合焦制御方法 | |
| JP2011118999A (ja) | 光学ドライブ装置 | |
| JP2019074313A (ja) | 試料収容ディスクおよびそれを用いた蛍光検出装置 | |
| JP2019074312A (ja) | 試料収容ディスクおよびそれを用いた蛍光検出装置 | |
| JP2003157571A (ja) | 透過式多層記録媒体及びその記録再生装置 | |
| JP2019074316A (ja) | 試料収容ディスクおよびそれを用いた蛍光検出装置 | |
| JP2008192190A (ja) | 光ディスクドライブ装置および光ディスクの種別判別方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13769735 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2014507703 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2013769735 Country of ref document: EP |