JP6869722B2 - 遠隔操作アクチュエータから手術器具に運動を移転する連結器 - Google Patents
遠隔操作アクチュエータから手術器具に運動を移転する連結器 Download PDFInfo
- Publication number
- JP6869722B2 JP6869722B2 JP2016557993A JP2016557993A JP6869722B2 JP 6869722 B2 JP6869722 B2 JP 6869722B2 JP 2016557993 A JP2016557993 A JP 2016557993A JP 2016557993 A JP2016557993 A JP 2016557993A JP 6869722 B2 JP6869722 B2 JP 6869722B2
- Authority
- JP
- Japan
- Prior art keywords
- isa
- surgical instrument
- carriage
- coupler
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
- A61B46/10—Surgical drapes specially adapted for instruments, e.g. microscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00142—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with means for preventing contamination, e.g. by using a sanitary sheath
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
- A61B46/40—Drape material, e.g. laminates; Manufacture thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
- A61B90/98—Identification means for patients or instruments, e.g. tags using electromagnetic means, e.g. transponders
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00172—Connectors and adapters therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0813—Accessories designed for easy sterilising, i.e. re-usable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
- A61B46/20—Surgical drapes specially adapted for patients
- A61B46/23—Surgical drapes specially adapted for patients with means to retain or hold surgical implements
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/02—Toothed gearings for conveying rotary motion without gears having orbital motion
- F16H1/20—Toothed gearings for conveying rotary motion without gears having orbital motion involving more than two intermeshing members
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49815—Disassembling
- Y10T29/49817—Disassembling with other than ancillary treating or assembling
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T403/00—Joints and connections
- Y10T403/59—Manually releaseable latch type
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Optics & Photonics (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Surgical Instruments (AREA)
- Manipulator (AREA)
- Chemical & Material Sciences (AREA)
- Organic Chemistry (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Medicinal Chemistry (AREA)
- Polymers & Plastics (AREA)
- Computer Hardware Design (AREA)
- Materials For Medical Uses (AREA)
- Computer Networks & Wireless Communication (AREA)
- Microelectronics & Electronic Packaging (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Mechanical Engineering (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
- Endoscopes (AREA)
Description
この出願は、以下の先に出願された出願の優先権の権利を主張する。
米国 61/954,497 2014年3月17日(17-03-2014)
米国 61/954,502 2014年3月17日(17-03-2014)
米国 61/954,557 2014年3月17日(17-03-2014)
米国 61/954,571 2014年3月17日(17-03-2014)
米国 61/954,595 2014年3月17日(17-03-2014)
米国 62/019,318 2014年6月30日(30-06-2014)
米国 62/103,991 2015年1月15日(15-01-2015)
米国 62/104,306 2015年1月16日(16-01-2015)
これらの出願の各々を、許容される最大の程度まで、ここに参照として特に援用する。
cauterizer)、組織安定器(tissue stabilizer)又は開創器(retractor)、クリップアプライヤ(clip applier)、吻合デバイス(anastomosis device)、撮像デバイス(imaging device)(例えば、内視鏡又は超音波プローブ)、及び同等物のような、1つ又はそれよりも多くの手術タスクと関連付けられる手術ツールであってよい。本発明の実施態様と共に用いられる幾つかの器具は、手術ツールの位置及び向きを器具のシャフトに対する1つ又はそれよりも多くの機械的な自由度を伴って操縦し得るよう、手術ツール用の関節作動する支持体(「リスト」と呼ぶこともある)を更に提供する。更に、多くの手術エンドエフェクタは、開放し或いは閉塞するジョー、ある経路に沿って並進するナイフのような、機能的な機械的な自由度を含む。手術器具は、恒久的であってよい或いは手術システムによって更新可能であってよい(例えば、器具の内側の半導体メモリに)格納される情報を含んでもよい。従って、システムは、器具と1つ又はそれよりも多くのシステム構成部品との間の一方向の又は双方向の情報通信をもたらすことがある。
図1は、本発明の実施態様に従った、遠隔操作手術システムの例示的な患者側部分100の図である。患者側部分100は、支持アセンブリ110と、各支持アセンブリの端にある1つ又はそれよりも多くの手術器具マニピュレータ112とを含む。支持アセンブリ110は、手術のために患者に対して(複数の)手術器具マニピュレータ112を位置付けるために用いられる、1つ又はそれよりも多くの電力供給されない係止可能なセットアップ関節を任意的に含む。描写されるように、患者側部分100は、フロアの上に位置する。他の実施態様において、患者側部分は、壁に、天井に、患者の体122も支持する手術台126に、或いは他の手術室機器に取り付けられてよい。更に、患者側部分100は、4つの手術器具マニピュレータ112を含むものとして示されているが、より多い又はより少ない手術器具マニピュレータ112が用いられてよい。一層更には、患者側部分100は、図示のような単一のアセンブリで構成されてよく、或いは、患者側部分100は、各々が様々な可能な方法において任意的に取り付けられる、2つ又はそれよりも多くの別個のアセンブリを含んでよい。
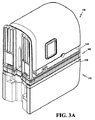
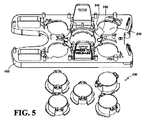
器具無菌アダプタ(ISA)は、とりわけ、頂部構成部品、底部構成部品、及び1つ又はそれよりも多くの連結器を含む、複数の構成部品から組み立てられる。連結器が、底部構成部品の開口を通じて位置付けられ、次に、頂部構成部品が底部構成部品と接合される。
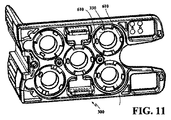
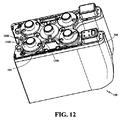
図11を参照すると、ISA300の下面の例示的な例示が示されている。その実施態様において、ISA300は、5つのISA連結器330を含むように示されている。しかしながら、ISA連結器330の数は、5つに限定されず、他の実施態様は、5つよりも多い又は少ない数を含んでよい。更に、ISA連結器330の配置は、図11に例示するものに限定されず、ISA連結器は、様々なパターンにおいて配置されてよい。
上で議論したように、手術器具120と手術器具マニピュレータ130との連結の間の器具無菌アダプタ(ISA)の追加は、ISAが手術器具120及び手術器具マニピュレータ130の両方と適切に係合したことを保証する方法の必要を生む。
第1の実施態様において、モータは、キャリッジ駆動体320の回転速度について制限されることがある。キャリッジ駆動体320の回転速度を制限することによって、キャリッジ駆動体320のバネ荷重機構がISA底部係合構成610をキャリッジ係合構成1220と係合させる程に十分に強いことを保証し得る。同様に、キャリッジ駆動体320の限定的な回転速度は、器具駆動体1520のバネ荷重機構がISA頂部係合構成600と確実に係合するのを可能にする。幾つかの実施態様では、キャリッジ駆動体のみが、ISA底部係合構成とのキャリッジ係合構成の係合及び器具係合構成とのISA頂部係合構成の係合の両方をもたらすバネ荷重機構を提供する。
幾つかの実施態様において、ポケットとして構成される係合構成は、ボスとして構成される係合構成との噛合いプロセスの容易さを増大する進入傾斜路(entry ramp)を備えて構成されてよい。
Claims (9)
- 手術器具と手術器具マニピュレータとを連結する無菌アダプタであって、
底部リップによって定められる底部構成部品開口を含む底部構成部品であって、前記底部リップは係止機構を含む、底部構成部品と、
該底部構成部品に回転可能に連結される連結構成部品とを含み、
該連結構成部品は、係合構成と、係止機構開口とを含み、
前記係合構成は、前記手術器具マニピュレータとの係合状態に置かれるように構成され、
前記係止機構開口は、当該無菌アダプタを前記手術器具マニピュレータと結合させる試みが前記係合構成を前記手術器具マニピュレータとの前記係合状態に置かないときに、いずれの方向における前記連結構成部品の回転をも防止するために、前記係止機構と係合し、前記連結構成部品を係止する、
無菌アダプタ。 - 前記係止機構は、ボスとして構成される、請求項1に記載の無菌アダプタ。
- 前記底部リップは、複数の係止機構を含む、請求項1に記載の無菌アダプタ。
- 前記連結構成部品は、複数の係止機構開口を含む、請求項3に記載の無菌アダプタ。
- 前記複数の係止機構の各1つは、前記複数の係止機構開口の各1つに対応する、請求項4に記載の無菌アダプタ。
- 前記底部リップは、キー溝を更に含み、前記連結構成部品は、保持タブと、連結器リップとを更に含み、前記保持タブは、前記連結構成部品が前記底部構成部品開口を通じて進むのを可能にするよう、前記キー溝と整列し、前記保持タブ及び前記連結器リップは、前記保持タブ及び前記キー溝が整列させられないときに、前記連結構成部品を前記底部構成部品開口内に保持するよう、前記底部リップと係合する、請求項1に記載の無菌アダプタ。
- 前記係合構成は、進入傾斜路を含む、請求項1に記載の無菌アダプタ。
- 手術器具と手術器具マニピュレータとを連結させる無菌アダプタであって、
前記手術器具マニピュレータから当該無菌アダプタを通じて前記手術器具に回転的な動きを連結する手段と、
当該無菌アダプタを前記手術器具マニピュレータと結合させる試みが前記回転的な動きを連結する手段を前記手術器具マニピュレータとの係合状態に置かないときに、いずれの方向における前記回転的な動きを連結する手段の回転をも防止するために、前記回転的な動きを連結する手段を係止する手段とを含む、
無菌アダプタ。 - 前記回転的な動きを連結する手段は、前記回転的な動きを連結する手段の確定的な係合を促進する傾斜路手段を含む、請求項8に記載の無菌アダプタ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019199929A JP6928057B2 (ja) | 2014-03-17 | 2019-11-01 | 遠隔操作アクチュエータから手術器具に運動を移転する連結器 |
Applications Claiming Priority (17)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461954497P | 2014-03-17 | 2014-03-17 | |
| US201461954557P | 2014-03-17 | 2014-03-17 | |
| US201461954595P | 2014-03-17 | 2014-03-17 | |
| US201461954571P | 2014-03-17 | 2014-03-17 | |
| US201461954502P | 2014-03-17 | 2014-03-17 | |
| US61/954,557 | 2014-03-17 | ||
| US61/954,571 | 2014-03-17 | ||
| US61/954,595 | 2014-03-17 | ||
| US61/954,497 | 2014-03-17 | ||
| US61/954,502 | 2014-03-17 | ||
| US201462019318P | 2014-06-30 | 2014-06-30 | |
| US62/019,318 | 2014-06-30 | ||
| US201562103991P | 2015-01-15 | 2015-01-15 | |
| US62/103,991 | 2015-01-15 | ||
| US201562104306P | 2015-01-16 | 2015-01-16 | |
| US62/104,306 | 2015-01-16 | ||
| PCT/US2015/020884 WO2015142791A1 (en) | 2014-03-17 | 2015-03-17 | Coupler to transfer motion to surgical instrument from servo actuator |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019199929A Division JP6928057B2 (ja) | 2014-03-17 | 2019-11-01 | 遠隔操作アクチュエータから手術器具に運動を移転する連結器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017512557A JP2017512557A (ja) | 2017-05-25 |
| JP2017512557A5 JP2017512557A5 (ja) | 2018-04-26 |
| JP6869722B2 true JP6869722B2 (ja) | 2021-05-12 |
Family
ID=54067678
Family Applications (17)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016555833A Active JP6634023B2 (ja) | 2014-03-17 | 2015-03-17 | 手術器具と遠隔操作アクチュエータとの間の無菌障壁 |
| JP2016555834A Active JP6620109B2 (ja) | 2014-03-17 | 2015-03-17 | 手術器具と遠隔操作アクチュエータとの間の無菌障壁のための信号コネクタ |
| JP2016557993A Active JP6869722B2 (ja) | 2014-03-17 | 2015-03-17 | 遠隔操作アクチュエータから手術器具に運動を移転する連結器 |
| JP2016555980A Active JP6510550B2 (ja) | 2014-03-17 | 2015-03-17 | 手術器具のための取付け基準 |
| JP2016557594A Active JP6553633B2 (ja) | 2014-03-17 | 2015-03-17 | マニピュレータ上の手術器具及びアダプタの存在を決定する検出ピン |
| JP2016558038A Active JP6505125B2 (ja) | 2014-03-17 | 2015-03-17 | 遠隔操作手術器具をアクチュエータに固定するラッチ |
| JP2016557618A Active JP6554478B2 (ja) | 2014-03-17 | 2015-03-17 | 手術器具を遠隔操作アクチュエータと係合させる方法 |
| JP2016556255A Active JP6585067B2 (ja) | 2014-03-17 | 2015-03-17 | 遠隔操作手術器具のための整列及び係合 |
| JP2019072171A Active JP6795648B2 (ja) | 2014-03-17 | 2019-04-04 | 手術器具のための取付け基準 |
| JP2019124989A Active JP6985336B2 (ja) | 2014-03-17 | 2019-07-04 | マニピュレータ上の手術器具及びアダプタの存在を決定する検出ピン |
| JP2019124988A Active JP6882381B2 (ja) | 2014-03-17 | 2019-07-04 | マニピュレータ上の手術器具及びアダプタの存在を決定する検出ピン |
| JP2019199985A Pending JP2020032215A (ja) | 2014-03-17 | 2019-11-01 | 手術器具と遠隔操作アクチュエータとの間の無菌障壁 |
| JP2019199929A Active JP6928057B2 (ja) | 2014-03-17 | 2019-11-01 | 遠隔操作アクチュエータから手術器具に運動を移転する連結器 |
| JP2020188901A Active JP7123108B2 (ja) | 2014-03-17 | 2020-11-12 | 手術器具のための取付け基準 |
| JP2021129162A Active JP7240454B2 (ja) | 2014-03-17 | 2021-08-05 | 遠隔操作アクチュエータから手術器具に運動を移転する連結器 |
| JP2021191215A Active JP7434256B2 (ja) | 2014-03-17 | 2021-11-25 | マニピュレータ上の手術器具及びアダプタの存在を決定する検出ピン |
| JP2022023606A Active JP7314337B2 (ja) | 2014-03-17 | 2022-02-18 | 手術器具と遠隔操作アクチュエータとの間の無菌障壁 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016555833A Active JP6634023B2 (ja) | 2014-03-17 | 2015-03-17 | 手術器具と遠隔操作アクチュエータとの間の無菌障壁 |
| JP2016555834A Active JP6620109B2 (ja) | 2014-03-17 | 2015-03-17 | 手術器具と遠隔操作アクチュエータとの間の無菌障壁のための信号コネクタ |
Family Applications After (14)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016555980A Active JP6510550B2 (ja) | 2014-03-17 | 2015-03-17 | 手術器具のための取付け基準 |
| JP2016557594A Active JP6553633B2 (ja) | 2014-03-17 | 2015-03-17 | マニピュレータ上の手術器具及びアダプタの存在を決定する検出ピン |
| JP2016558038A Active JP6505125B2 (ja) | 2014-03-17 | 2015-03-17 | 遠隔操作手術器具をアクチュエータに固定するラッチ |
| JP2016557618A Active JP6554478B2 (ja) | 2014-03-17 | 2015-03-17 | 手術器具を遠隔操作アクチュエータと係合させる方法 |
| JP2016556255A Active JP6585067B2 (ja) | 2014-03-17 | 2015-03-17 | 遠隔操作手術器具のための整列及び係合 |
| JP2019072171A Active JP6795648B2 (ja) | 2014-03-17 | 2019-04-04 | 手術器具のための取付け基準 |
| JP2019124989A Active JP6985336B2 (ja) | 2014-03-17 | 2019-07-04 | マニピュレータ上の手術器具及びアダプタの存在を決定する検出ピン |
| JP2019124988A Active JP6882381B2 (ja) | 2014-03-17 | 2019-07-04 | マニピュレータ上の手術器具及びアダプタの存在を決定する検出ピン |
| JP2019199985A Pending JP2020032215A (ja) | 2014-03-17 | 2019-11-01 | 手術器具と遠隔操作アクチュエータとの間の無菌障壁 |
| JP2019199929A Active JP6928057B2 (ja) | 2014-03-17 | 2019-11-01 | 遠隔操作アクチュエータから手術器具に運動を移転する連結器 |
| JP2020188901A Active JP7123108B2 (ja) | 2014-03-17 | 2020-11-12 | 手術器具のための取付け基準 |
| JP2021129162A Active JP7240454B2 (ja) | 2014-03-17 | 2021-08-05 | 遠隔操作アクチュエータから手術器具に運動を移転する連結器 |
| JP2021191215A Active JP7434256B2 (ja) | 2014-03-17 | 2021-11-25 | マニピュレータ上の手術器具及びアダプタの存在を決定する検出ピン |
| JP2022023606A Active JP7314337B2 (ja) | 2014-03-17 | 2022-02-18 | 手術器具と遠隔操作アクチュエータとの間の無菌障壁 |
Country Status (7)
| Country | Link |
|---|---|
| US (29) | US9839487B2 (ja) |
| EP (18) | EP3711702A1 (ja) |
| JP (17) | JP6634023B2 (ja) |
| KR (12) | KR102462158B1 (ja) |
| CN (15) | CN110123461B (ja) |
| ES (2) | ES3035773T3 (ja) |
| WO (8) | WO2015142789A1 (ja) |
Families Citing this family (471)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8233963B2 (en) | 2007-02-19 | 2012-07-31 | Medtronic Navigation, Inc. | Automatic identification of tracked surgical devices using an electromagnetic localization system |
| US8600478B2 (en) | 2007-02-19 | 2013-12-03 | Medtronic Navigation, Inc. | Automatic identification of instruments used with a surgical navigation system |
| US9339342B2 (en) | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| US12402960B2 (en) | 2010-10-11 | 2025-09-02 | Ecole Polytechnique Federale De Lausanne (Epfl) | Mechanical manipulator for surgical instruments |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| US20140005640A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical end effector jaw and electrode configurations |
| WO2015010189A1 (en) * | 2013-07-24 | 2015-01-29 | Centre For Surgical Invention & Innovation | Multi-function mounting interface for an image-guided robotic system and quick release interventional toolset |
| US10550918B2 (en) | 2013-08-15 | 2020-02-04 | Intuitive Surgical Operations, Inc. | Lever actuated gimbal plate |
| WO2015023793A1 (en) | 2013-08-15 | 2015-02-19 | Intuitive Surgical Operations, Inc. | Variable instrument preload mechanism controller |
| US10076348B2 (en) | 2013-08-15 | 2018-09-18 | Intuitive Surgical Operations, Inc. | Rotary input for lever actuation |
| JP6719376B2 (ja) | 2013-08-15 | 2020-07-08 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | ロボット器具の被駆動要素 |
| WO2015023840A1 (en) | 2013-08-15 | 2015-02-19 | Intuitive Surgical Operations, Inc. | Instrument sterile adapter drive interface |
| CN105611893B (zh) | 2013-08-15 | 2018-09-28 | 直观外科手术操作公司 | 预加载外科手术器械接口 |
| KR102312595B1 (ko) | 2013-08-15 | 2021-10-15 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 기구 살균 어댑터 구동 피처 |
| US9937626B2 (en) | 2013-12-11 | 2018-04-10 | Covidien Lp | Wrist and jaw assemblies for robotic surgical systems |
| US10265129B2 (en) | 2014-02-03 | 2019-04-23 | Distalmotion Sa | Mechanical teleoperated device comprising an interchangeable distal instrument |
| EP3711702A1 (en) | 2014-03-17 | 2020-09-23 | Intuitive Surgical Operations, Inc. | Mounting datum for surgical instrument |
| EP3679885B1 (en) | 2014-03-17 | 2024-02-28 | Intuitive Surgical Operations, Inc. | Systems and methods for confirming disc engagement |
| CA2957750C (en) | 2014-08-13 | 2023-04-04 | Covidien Lp | Robotically controlling mechanical advantage gripping |
| EP3179951B1 (en) | 2014-08-15 | 2021-07-14 | Intuitive Surgical Operations, Inc. | A surgical system with variable entry guide configurations |
| US11504192B2 (en) | 2014-10-30 | 2022-11-22 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| DE102014117407A1 (de) * | 2014-11-27 | 2016-06-02 | avateramedical GmBH | Vorrichtung zur robotergestützten Chirurgie |
| CN107249498B (zh) | 2015-02-19 | 2024-04-23 | 柯惠Lp公司 | 机器人手术系统的输入装置的重定位方法 |
| KR102602379B1 (ko) | 2015-02-20 | 2023-11-16 | 스트리커 코포레이션 | 멸균 차단 조립체, 장착 시스템, 및 수술용 구성 요소들을 결합하기 위한 방법 |
| EP3267920A4 (en) | 2015-03-10 | 2019-03-06 | Covidien LP | MEASURING THE HEALTH OF A CONNECTING ELEMENT OF A SURGICAL ROBOTIC SYSTEM |
| CN113729964B (zh) * | 2015-04-27 | 2024-08-02 | 直观外科手术操作公司 | 手术器械外壳及相关的系统和方法 |
| GB2538326B (en) * | 2015-05-07 | 2019-06-05 | Cmr Surgical Ltd | A surgical drape for transferring drive |
| GB2538230B (en) * | 2015-05-07 | 2019-01-02 | Cmr Surgical Ltd | A surgical drape for transferring drive |
| JP6714618B2 (ja) | 2015-06-03 | 2020-06-24 | コヴィディエン リミテッド パートナーシップ | オフセット計器駆動装置 |
| WO2016201313A1 (en) | 2015-06-11 | 2016-12-15 | Intuitive Surgical Operations, Inc. | Systems and methods for instrument engagement |
| CA2987637C (en) | 2015-06-16 | 2023-10-03 | Covidien Lp | Robotic surgical system torque transduction sensing |
| AU2016284040B2 (en) | 2015-06-23 | 2020-04-30 | Covidien Lp | Robotic surgical assemblies |
| US10806454B2 (en) | 2015-09-25 | 2020-10-20 | Covidien Lp | Robotic surgical assemblies and instrument drive connectors thereof |
| ITUB20155057A1 (it) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Assieme robotico di chirurgia |
| CN108135670B (zh) | 2015-10-23 | 2021-02-26 | 柯惠Lp公司 | 用于检测灌注中逐步变化的手术系统 |
| EP3376988B1 (en) | 2015-11-19 | 2023-08-23 | Covidien LP | Optical force sensor for robotic surgical system |
| JP2019509103A (ja) | 2016-03-04 | 2019-04-04 | コヴィディエン リミテッド パートナーシップ | ロボット外科システムのための逆運動学制御システム |
| WO2017173524A1 (en) | 2016-04-07 | 2017-10-12 | Titan Medical Inc. | Camera positioning method and apparatus for capturing images during a medical procedure |
| CA3022139A1 (en) | 2016-05-26 | 2017-11-30 | Covidien Lp | Instrument drive units |
| CA3022071A1 (en) | 2016-05-26 | 2017-11-30 | Covidien Lp | Robotic surgical assemblies |
| WO2017210500A1 (en) | 2016-06-03 | 2017-12-07 | Covidien Lp | Robotic surgical system with an embedded imager |
| EP3463150B1 (en) | 2016-06-03 | 2023-09-27 | Covidien LP | Control arm for robotic surgical systems |
| EP3463149B1 (en) | 2016-06-03 | 2025-02-19 | Covidien LP | Passive axis system for robotic surgical systems |
| US11612446B2 (en) | 2016-06-03 | 2023-03-28 | Covidien Lp | Systems, methods, and computer-readable program products for controlling a robotically delivered manipulator |
| CN109414300B (zh) | 2016-07-14 | 2021-11-09 | 直观外科手术操作公司 | 器械冲洗系统 |
| WO2018013316A1 (en) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Geared roll drive for medical instrument |
| CN114587609B (zh) | 2016-07-14 | 2025-01-28 | 直观外科手术操作公司 | 多线缆医疗器械 |
| WO2018013187A1 (en) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Instrument release |
| US11007024B2 (en) | 2016-07-14 | 2021-05-18 | Intuitive Surgical Operations, Inc. | Geared grip actuation for medical instruments |
| CN114983575A (zh) | 2016-07-14 | 2022-09-02 | 直观外科手术操作公司 | 包括具有机械封锁的无菌适配器的外科手术设备 |
| US11925431B2 (en) | 2016-07-29 | 2024-03-12 | Cmr Surgical Limited | Motion feedthrough |
| GB2600067B (en) * | 2016-07-29 | 2022-08-10 | Cmr Surgical Ltd | Motion feedthrough |
| GB2552540B (en) | 2016-07-29 | 2021-11-24 | Cmr Surgical Ltd | Interface structure |
| GB201615616D0 (en) * | 2016-09-14 | 2016-10-26 | Cambridge Medical Robotics Ltd | Interfacing a surgical robotic arm and instrument |
| US10478256B2 (en) * | 2016-08-16 | 2019-11-19 | Ethicon Llc | Robotics tool bailouts |
| CN109788994B (zh) * | 2016-10-18 | 2022-07-19 | 直观外科手术操作公司 | 计算机辅助的远程操作手术系统和方法 |
| CN115349951A (zh) | 2016-11-21 | 2022-11-18 | 直观外科手术操作公司 | 线缆长度持恒的医疗器械 |
| US10433920B2 (en) | 2016-12-09 | 2019-10-08 | Ethicon Llc | Surgical tool and robotic surgical system interfaces |
| US10588704B2 (en) * | 2016-12-09 | 2020-03-17 | Ethicon Llc | Surgical tool and robotic surgical system interfaces |
| US10149727B2 (en) | 2016-12-09 | 2018-12-11 | Ethicon Llc | Surgical tool and robotic surgical system interfaces |
| US10149732B2 (en) | 2016-12-09 | 2018-12-11 | Ethicon Llc | Surgical tool and robotic surgical system interfaces |
| KR102479143B1 (ko) | 2016-12-20 | 2022-12-20 | 버브 서지컬 인크. | 로봇 수술 시스템에 사용하기 위한 멸균 어댑터 제어 시스템 및 통신 인터페이스 |
| GB2559420B (en) * | 2017-02-07 | 2022-02-23 | Cmr Surgical Ltd | Mounting an endoscope to a surgical robot |
| US11690691B2 (en) | 2017-02-15 | 2023-07-04 | Covidien Lp | System and apparatus for crush prevention for medical robot applications |
| US10357321B2 (en) | 2017-02-24 | 2019-07-23 | Intuitive Surgical Operations, Inc. | Splayed cable guide for a medical instrument |
| US11076926B2 (en) | 2017-03-21 | 2021-08-03 | Intuitive Surgical Operations, Inc. | Manual release for medical device drive system |
| US10671969B2 (en) * | 2017-05-03 | 2020-06-02 | Summate Technologies, Inc. | Operating room situated, parts-inventory control system and supervisory arrangement for accurately tracking the use of and accounting for the ultimate disposition of an individual component part of a complete implant which is then being surgically engrafted in-vivo upon or into the body of a living subject |
| US11317980B2 (en) * | 2017-05-09 | 2022-05-03 | Asensus Surgical Us, Inc. | Instrument end effector identification |
| US11058503B2 (en) | 2017-05-11 | 2021-07-13 | Distalmotion Sa | Translational instrument interface for surgical robot and surgical robot systems comprising the same |
| WO2018217429A1 (en) | 2017-05-24 | 2018-11-29 | Covidien Lp | Presence detection for electrosurgical tools in a robotic system |
| EP3629981A4 (en) | 2017-05-25 | 2021-04-07 | Covidien LP | SYSTEMS AND METHODS FOR DETECTING OBJECTS IN A FIELD OF VIEW OF AN IMAGE CAPTURE DEVICE |
| WO2018217430A1 (en) | 2017-05-25 | 2018-11-29 | Covidien Lp | Robotic surgical systems and drapes for covering components of robotic surgical systems |
| CN110662507A (zh) | 2017-05-25 | 2020-01-07 | 柯惠Lp公司 | 具有自动引导的机器人手术系统 |
| GB2563234B (en) | 2017-06-06 | 2021-12-08 | Cmr Surgical Ltd | Securing an interface element rail of a robotic surgical instrument interface |
| US11406441B2 (en) | 2017-08-16 | 2022-08-09 | Covidien Lp | End effector including wrist assembly and monopolar tool for robotic surgical systems |
| US11076883B2 (en) | 2017-08-21 | 2021-08-03 | Verb Surgical Inc. | Cannula attachment devices and methods for a surgical robotic system |
| US10695060B2 (en) * | 2017-09-01 | 2020-06-30 | RevMedica, Inc. | Loadable power pack for surgical instruments |
| US11331099B2 (en) | 2017-09-01 | 2022-05-17 | Rev Medica, Inc. | Surgical stapler with removable power pack and interchangeable battery pack |
| US10966720B2 (en) | 2017-09-01 | 2021-04-06 | RevMedica, Inc. | Surgical stapler with removable power pack |
| JP7349992B2 (ja) | 2017-09-05 | 2023-09-25 | コヴィディエン リミテッド パートナーシップ | ロボット手術システムのための衝突処理アルゴリズム |
| US11583358B2 (en) | 2017-09-06 | 2023-02-21 | Covidien Lp | Boundary scaling of surgical robots |
| CA3074685A1 (en) | 2017-09-08 | 2019-03-14 | Covidien Lp | Energy disconnect for robotic surgical assemblies |
| US12350003B2 (en) | 2017-09-19 | 2025-07-08 | Momentis Surgical Ltd | Surgical drape |
| US11096754B2 (en) | 2017-10-04 | 2021-08-24 | Mako Surgical Corp. | Sterile drape assembly for surgical robot |
| US10624709B2 (en) * | 2017-10-26 | 2020-04-21 | Ethicon Llc | Robotic surgical tool with manual release lever |
| US10624708B2 (en) * | 2017-10-26 | 2020-04-21 | Ethicon Llc | Auto cable tensioning system |
| US11510741B2 (en) | 2017-10-30 | 2022-11-29 | Cilag Gmbh International | Method for producing a surgical instrument comprising a smart electrical system |
| US11291510B2 (en) | 2017-10-30 | 2022-04-05 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11564703B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Surgical suturing instrument comprising a capture width which is larger than trocar diameter |
| US11229436B2 (en) | 2017-10-30 | 2022-01-25 | Cilag Gmbh International | Surgical system comprising a surgical tool and a surgical hub |
| US11026687B2 (en) | 2017-10-30 | 2021-06-08 | Cilag Gmbh International | Clip applier comprising clip advancing systems |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11311342B2 (en) | 2017-10-30 | 2022-04-26 | Cilag Gmbh International | Method for communicating with surgical instrument systems |
| US11317919B2 (en) | 2017-10-30 | 2022-05-03 | Cilag Gmbh International | Clip applier comprising a clip crimping system |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11564756B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| JP6936713B2 (ja) * | 2017-11-27 | 2021-09-22 | 株式会社デンソーウェーブ | ロボット用の保護ジャケット |
| EP3716881A4 (en) * | 2017-11-30 | 2021-08-18 | Covidien LP | ROBOTIC SURGICAL INSTRUMENT WITH INSTRUMENT ROTATION BASED ON A TRANSLATION POSITION |
| CN111417356A (zh) | 2017-12-01 | 2020-07-14 | 柯惠Lp公司 | 用于机器人手术系统的帷帘管理组件 |
| US12127729B2 (en) | 2017-12-28 | 2024-10-29 | Cilag Gmbh International | Method for smoke evacuation for surgical hub |
| US11317937B2 (en) | 2018-03-08 | 2022-05-03 | Cilag Gmbh International | Determining the state of an ultrasonic end effector |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US12062442B2 (en) | 2017-12-28 | 2024-08-13 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11937769B2 (en) | 2017-12-28 | 2024-03-26 | Cilag Gmbh International | Method of hub communication, processing, storage and display |
| US11633237B2 (en) | 2017-12-28 | 2023-04-25 | Cilag Gmbh International | Usage and technique analysis of surgeon / staff performance against a baseline to optimize device utilization and performance for both current and future procedures |
| US10918310B2 (en) | 2018-01-03 | 2021-02-16 | Biosense Webster (Israel) Ltd. | Fast anatomical mapping (FAM) using volume filling |
| US11304699B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11234756B2 (en) | 2017-12-28 | 2022-02-01 | Cilag Gmbh International | Powered surgical tool with predefined adjustable control algorithm for controlling end effector parameter |
| US11419630B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Surgical system distributed processing |
| US11540855B2 (en) | 2017-12-28 | 2023-01-03 | Cilag Gmbh International | Controlling activation of an ultrasonic surgical instrument according to the presence of tissue |
| US11324557B2 (en) | 2017-12-28 | 2022-05-10 | Cilag Gmbh International | Surgical instrument with a sensing array |
| BR112020013021A2 (pt) | 2017-12-28 | 2020-11-24 | Ethicon Llc | ajuste de uma função do dispositivo cirúrgico com base em reconhecimento situacional |
| US11364075B2 (en) | 2017-12-28 | 2022-06-21 | Cilag Gmbh International | Radio frequency energy device for delivering combined electrical signals |
| US11666331B2 (en) | 2017-12-28 | 2023-06-06 | Cilag Gmbh International | Systems for detecting proximity of surgical end effector to cancerous tissue |
| US20190201139A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Communication arrangements for robot-assisted surgical platforms |
| US11147607B2 (en) | 2017-12-28 | 2021-10-19 | Cilag Gmbh International | Bipolar combination device that automatically adjusts pressure based on energy modality |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US12396806B2 (en) | 2017-12-28 | 2025-08-26 | Cilag Gmbh International | Adjustment of a surgical device function based on situational awareness |
| US20190201090A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Capacitive coupled return path pad with separable array elements |
| US20190201087A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Smoke evacuation system including a segmented control circuit for interactive surgical platform |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11410259B2 (en) | 2017-12-28 | 2022-08-09 | Cilag Gmbh International | Adaptive control program updates for surgical devices |
| US11056244B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Automated data scaling, alignment, and organizing based on predefined parameters within surgical networks |
| US20190201142A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Automatic tool adjustments for robot-assisted surgical platforms |
| US11612408B2 (en) | 2017-12-28 | 2023-03-28 | Cilag Gmbh International | Determining tissue composition via an ultrasonic system |
| US11602393B2 (en) | 2017-12-28 | 2023-03-14 | Cilag Gmbh International | Surgical evacuation sensing and generator control |
| US11284936B2 (en) | 2017-12-28 | 2022-03-29 | Cilag Gmbh International | Surgical instrument having a flexible electrode |
| US11253315B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Increasing radio frequency to create pad-less monopolar loop |
| US11464535B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Detection of end effector emersion in liquid |
| US11257589B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Real-time analysis of comprehensive cost of all instrumentation used in surgery utilizing data fluidity to track instruments through stocking and in-house processes |
| US11786245B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Surgical systems with prioritized data transmission capabilities |
| US11304720B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Activation of energy devices |
| US10695081B2 (en) | 2017-12-28 | 2020-06-30 | Ethicon Llc | Controlling a surgical instrument according to sensed closure parameters |
| US11446052B2 (en) | 2017-12-28 | 2022-09-20 | Cilag Gmbh International | Variation of radio frequency and ultrasonic power level in cooperation with varying clamp arm pressure to achieve predefined heat flux or power applied to tissue |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US10966791B2 (en) | 2017-12-28 | 2021-04-06 | Ethicon Llc | Cloud-based medical analytics for medical facility segmented individualization of instrument function |
| US11423007B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Adjustment of device control programs based on stratified contextual data in addition to the data |
| US11969142B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
| US11998193B2 (en) | 2017-12-28 | 2024-06-04 | Cilag Gmbh International | Method for usage of the shroud as an aspect of sensing or controlling a powered surgical device, and a control algorithm to adjust its default operation |
| US11202570B2 (en) | 2017-12-28 | 2021-12-21 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US12458351B2 (en) | 2017-12-28 | 2025-11-04 | Cilag Gmbh International | Variable output cartridge sensor assembly |
| WO2019133144A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Detection and escalation of security responses of surgical instruments to increasing severity threats |
| US11659023B2 (en) | 2017-12-28 | 2023-05-23 | Cilag Gmbh International | Method of hub communication |
| US12096916B2 (en) | 2017-12-28 | 2024-09-24 | Cilag Gmbh International | Method of sensing particulate from smoke evacuated from a patient, adjusting the pump speed based on the sensed information, and communicating the functional parameters of the system to the hub |
| US11612444B2 (en) | 2017-12-28 | 2023-03-28 | Cilag Gmbh International | Adjustment of a surgical device function based on situational awareness |
| US11903601B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Surgical instrument comprising a plurality of drive systems |
| US11278281B2 (en) | 2017-12-28 | 2022-03-22 | Cilag Gmbh International | Interactive surgical system |
| US11076921B2 (en) | 2017-12-28 | 2021-08-03 | Cilag Gmbh International | Adaptive control program updates for surgical hubs |
| US11832840B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical instrument having a flexible circuit |
| US11051876B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Surgical evacuation flow paths |
| US11291495B2 (en) | 2017-12-28 | 2022-04-05 | Cilag Gmbh International | Interruption of energy due to inadvertent capacitive coupling |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11529187B2 (en) | 2017-12-28 | 2022-12-20 | Cilag Gmbh International | Surgical evacuation sensor arrangements |
| US11311306B2 (en) | 2017-12-28 | 2022-04-26 | Cilag Gmbh International | Surgical systems for detecting end effector tissue distribution irregularities |
| US11179208B2 (en) | 2017-12-28 | 2021-11-23 | Cilag Gmbh International | Cloud-based medical analytics for security and authentication trends and reactive measures |
| US20190201112A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Computer implemented interactive surgical systems |
| US10898622B2 (en) | 2017-12-28 | 2021-01-26 | Ethicon Llc | Surgical evacuation system with a communication circuit for communication between a filter and a smoke evacuation device |
| US11576677B2 (en) | 2017-12-28 | 2023-02-14 | Cilag Gmbh International | Method of hub communication, processing, display, and cloud analytics |
| US10849697B2 (en) | 2017-12-28 | 2020-12-01 | Ethicon Llc | Cloud interface for coupled surgical devices |
| US11424027B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US12207817B2 (en) | 2017-12-28 | 2025-01-28 | Cilag Gmbh International | Safety systems for smart powered surgical stapling |
| US20190201039A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Situational awareness of electrosurgical systems |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US12376855B2 (en) | 2017-12-28 | 2025-08-05 | Cilag Gmbh International | Safety systems for smart powered surgical stapling |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US10892899B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Self describing data packets generated at an issuing instrument |
| US11419667B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Ultrasonic energy device which varies pressure applied by clamp arm to provide threshold control pressure at a cut progression location |
| US11304745B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical evacuation sensing and display |
| US11559307B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method of robotic hub communication, detection, and control |
| US11571234B2 (en) | 2017-12-28 | 2023-02-07 | Cilag Gmbh International | Temperature control of ultrasonic end effector and control system therefor |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US11266468B2 (en) | 2017-12-28 | 2022-03-08 | Cilag Gmbh International | Cooperative utilization of data derived from secondary sources by intelligent surgical hubs |
| US11096693B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Adjustment of staple height of at least one row of staples based on the sensed tissue thickness or force in closing |
| US10932872B2 (en) | 2017-12-28 | 2021-03-02 | Ethicon Llc | Cloud-based medical analytics for linking of local usage trends with the resource acquisition behaviors of larger data set |
| US11678881B2 (en) | 2017-12-28 | 2023-06-20 | Cilag Gmbh International | Spatial awareness of surgical hubs in operating rooms |
| US11069012B2 (en) | 2017-12-28 | 2021-07-20 | Cilag Gmbh International | Interactive surgical systems with condition handling of devices and data capabilities |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11376002B2 (en) | 2017-12-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument cartridge sensor assemblies |
| US20190206569A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method of cloud based data analytics for use with the hub |
| US10987178B2 (en) | 2017-12-28 | 2021-04-27 | Ethicon Llc | Surgical hub control arrangements |
| US10943454B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Detection and escalation of security responses of surgical instruments to increasing severity threats |
| US11100631B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Use of laser light and red-green-blue coloration to determine properties of back scattered light |
| US11160605B2 (en) | 2017-12-28 | 2021-11-02 | Cilag Gmbh International | Surgical evacuation sensing and motor control |
| US10944728B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Interactive surgical systems with encrypted communication capabilities |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11273001B2 (en) | 2017-12-28 | 2022-03-15 | Cilag Gmbh International | Surgical hub and modular device response adjustment based on situational awareness |
| US10892995B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11432885B2 (en) | 2017-12-28 | 2022-09-06 | Cilag Gmbh International | Sensing arrangements for robot-assisted surgical platforms |
| US11969216B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Surgical network recommendations from real time analysis of procedure variables against a baseline highlighting differences from the optimal solution |
| US11304763B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Image capturing of the areas outside the abdomen to improve placement and control of a surgical device in use |
| US11026751B2 (en) | 2017-12-28 | 2021-06-08 | Cilag Gmbh International | Display of alignment of staple cartridge to prior linear staple line |
| US11589888B2 (en) | 2017-12-28 | 2023-02-28 | Cilag Gmbh International | Method for controlling smart energy devices |
| US11308075B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical network, instrument, and cloud responses based on validation of received dataset and authentication of its source and integrity |
| US11464559B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Estimating state of ultrasonic end effector and control system therefor |
| US11559308B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method for smart energy device infrastructure |
| US11432890B2 (en) | 2018-01-04 | 2022-09-06 | Covidien Lp | Systems and assemblies for mounting a surgical accessory to robotic surgical systems, and providing access therethrough |
| EP4115840B1 (en) * | 2018-01-09 | 2025-11-05 | Covidien LP | Sterile interface module for robotic surgical assemblies |
| JP2021510327A (ja) | 2018-01-10 | 2021-04-22 | コヴィディエン リミテッド パートナーシップ | コンピュータビジョンを利用したロボット外科システムのツールの位置および状態の判定 |
| CN110025337A (zh) * | 2018-01-12 | 2019-07-19 | 杭州术创机器人有限公司 | 一种将无菌适配器组件固定到致动器组件的锁定机构 |
| US20190216554A1 (en) * | 2018-01-12 | 2019-07-18 | SS Innovations China Co. Ltd. | Sterile adapter assembly for a robotic surgical system |
| GB2570520B8 (en) | 2018-01-30 | 2023-05-24 | Cmr Surgical Ltd | Interfacing a surgical robotic arm and instrument |
| US12102403B2 (en) | 2018-02-02 | 2024-10-01 | Coviden Lp | Robotic surgical systems with user engagement monitoring |
| US12376927B2 (en) | 2018-02-07 | 2025-08-05 | Distalmotion Sa | Surgical robot systems comprising robotic telemanipulators and integrated laparoscopy |
| WO2019155383A1 (en) | 2018-02-07 | 2019-08-15 | Distalmotion Sa | Surgical robot systems comprising robotic telemanipulators and integrated laparoscopy |
| US11497567B2 (en) | 2018-02-08 | 2022-11-15 | Intuitive Surgical Operations, Inc. | Jointed control platform |
| US11118661B2 (en) | 2018-02-12 | 2021-09-14 | Intuitive Surgical Operations, Inc. | Instrument transmission converting roll to linear actuation |
| US10695140B2 (en) | 2018-02-15 | 2020-06-30 | Ethicon Llc | Near field communication between a surgical instrument and a robotic surgical system |
| US11189379B2 (en) | 2018-03-06 | 2021-11-30 | Digital Surgery Limited | Methods and systems for using multiple data structures to process surgical data |
| US11259830B2 (en) | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| US11628024B2 (en) | 2018-03-08 | 2023-04-18 | Covidien Lp | Surgical robotic systems |
| US12303159B2 (en) | 2018-03-08 | 2025-05-20 | Cilag Gmbh International | Methods for estimating and controlling state of ultrasonic end effector |
| US11457944B2 (en) | 2018-03-08 | 2022-10-04 | Cilag Gmbh International | Adaptive advanced tissue treatment pad saver mode |
| US11589915B2 (en) | 2018-03-08 | 2023-02-28 | Cilag Gmbh International | In-the-jaw classifier based on a model |
| EP3768187A4 (en) * | 2018-03-21 | 2021-12-22 | The Regents Of The University Of California | FAST AND PRECISE TOOL CHANGE MECHANISM FOR INTRAOCULAR ROBOTIC SURGICAL SYSTEMS |
| US11471156B2 (en) | 2018-03-28 | 2022-10-18 | Cilag Gmbh International | Surgical stapling devices with improved rotary driven closure systems |
| US11278280B2 (en) | 2018-03-28 | 2022-03-22 | Cilag Gmbh International | Surgical instrument comprising a jaw closure lockout |
| US10973520B2 (en) | 2018-03-28 | 2021-04-13 | Ethicon Llc | Surgical staple cartridge with firing member driven camming assembly that has an onboard tissue cutting feature |
| US11166716B2 (en) | 2018-03-28 | 2021-11-09 | Cilag Gmbh International | Stapling instrument comprising a deactivatable lockout |
| US11219453B2 (en) | 2018-03-28 | 2022-01-11 | Cilag Gmbh International | Surgical stapling devices with cartridge compatible closure and firing lockout arrangements |
| US11207067B2 (en) | 2018-03-28 | 2021-12-28 | Cilag Gmbh International | Surgical stapling device with separate rotary driven closure and firing systems and firing member that engages both jaws while firing |
| US11259806B2 (en) | 2018-03-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling devices with features for blocking advancement of a camming assembly of an incompatible cartridge installed therein |
| US11096688B2 (en) | 2018-03-28 | 2021-08-24 | Cilag Gmbh International | Rotary driven firing members with different anvil and channel engagement features |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| WO2019195841A1 (en) * | 2018-04-06 | 2019-10-10 | Project Moray, Inc. | Improved fluidic drivers, devices, methods, and systems for catheters and other uses |
| CN110384557B (zh) * | 2018-04-20 | 2021-03-30 | 赛诺微医疗科技(浙江)有限公司 | 组合定位机构、采用其的器械夹持手及外科手术机器人 |
| EP3781367B1 (en) | 2018-04-20 | 2025-03-05 | Covidien LP | Methods for surgical robotic cart placement |
| US11647888B2 (en) | 2018-04-20 | 2023-05-16 | Covidien Lp | Compensation for observer movement in robotic surgical systems having stereoscopic displays |
| CN110384556B (zh) * | 2018-04-20 | 2021-04-02 | 赛诺微医疗科技(浙江)有限公司 | 快换机构、采用其的器械夹持手及外科手术机器人 |
| WO2019222058A1 (en) * | 2018-05-15 | 2019-11-21 | Intuitive Surgical Operations, Inc. | Backend mechanism of a catheter control system |
| CN110559078B (zh) * | 2018-06-05 | 2021-03-30 | 杭州术创机器人有限公司 | 一种用于微创手术系统的套管固定组件 |
| CN110623748B (zh) * | 2018-06-22 | 2021-02-19 | 深圳市精锋医疗科技有限公司 | 可快速安装的从操作设备、操作臂、动力机构及连接机构 |
| CN109091239B (zh) * | 2018-06-22 | 2021-06-01 | 深圳市精锋医疗科技有限公司 | 具有安装槽的手术机器人 |
| CN110623734B (zh) * | 2018-06-22 | 2021-07-09 | 深圳市精锋医疗科技有限公司 | 高精度手术机器人 |
| CN112105312A (zh) | 2018-07-03 | 2020-12-18 | 柯惠Lp公司 | 用于在手术程序期间检测图像退化的系统、方法和计算机可读介质 |
| US12029507B2 (en) | 2018-07-26 | 2024-07-09 | Covidien Lp | Surgical robotic systems |
| US11759269B2 (en) | 2018-08-20 | 2023-09-19 | Verb Surgical Inc. | Engagement and/or homing of a surgical tool in a surgical robotic system |
| US11406457B2 (en) | 2018-08-20 | 2022-08-09 | Verb Surgical Inc. | Method and system for engagement of a surgical tool with actuators of a tool drive in a surgical robotic system |
| JP6839220B2 (ja) * | 2018-08-28 | 2021-03-03 | 株式会社メディカロイド | 駆動部インターフェース、アダプタ、および駆動部インターフェースへの手術器具の装着検知方法 |
| JP6772226B2 (ja) * | 2018-08-28 | 2020-10-21 | 株式会社メディカロイド | 手術器具 |
| JP6745306B2 (ja) * | 2018-08-28 | 2020-08-26 | 株式会社メディカロイド | アダプタおよび接続方法 |
| US11490971B2 (en) | 2018-08-28 | 2022-11-08 | Medicaroid Corporation | Driver interface, robotic surgical apparatus, and method of detecting attachment of surgical instrument to driver interface |
| JP6902003B2 (ja) | 2018-08-28 | 2021-07-14 | 株式会社メディカロイド | 滅菌ドレープおよび手術器具の取付方法 |
| EP3849456A4 (en) | 2018-09-14 | 2022-06-15 | Covidien LP | SURGICAL ROBOTIC SYSTEMS AND METHODS FOR TRACKING THE USE OF SURGICAL INSTRUMENTS THEREOF |
| EP3852667A4 (en) | 2018-09-17 | 2022-06-15 | Covidien LP | SURGICAL ROBOTIC SYSTEMS |
| US20220031407A1 (en) * | 2018-09-17 | 2022-02-03 | Covidien Lp | Surgical robotic systems |
| WO2020060789A1 (en) | 2018-09-17 | 2020-03-26 | Covidien Lp | Surgical robotic systems |
| US11109746B2 (en) | 2018-10-10 | 2021-09-07 | Titan Medical Inc. | Instrument insertion system, method, and apparatus for performing medical procedures |
| CA3117542A1 (en) * | 2018-10-26 | 2020-04-30 | Eureka Inventions Limited | Surgical apparatus and method |
| US12144574B2 (en) | 2018-10-31 | 2024-11-19 | Intuitive Surgical Operations, Inc. | System and method for assisting tool exchange |
| US12048504B2 (en) | 2018-11-15 | 2024-07-30 | Intuitive Surgical Operations, Inc. | Cable drive limited slip capstan and shaft |
| CN113316431B (zh) | 2018-12-04 | 2024-09-20 | 马科外科公司 | 用于联接外科部件的具有无菌屏障组件的安装系统 |
| US11586106B2 (en) | 2018-12-28 | 2023-02-21 | Titan Medical Inc. | Imaging apparatus having configurable stereoscopic perspective |
| CN111374771B (zh) * | 2018-12-29 | 2024-07-26 | 达科为(深圳)医疗设备有限公司 | 一种无菌适配器 |
| WO2020141517A1 (en) * | 2018-12-30 | 2020-07-09 | Memic Innovative Surgery Ltd. | Surgical drape for a robotic device |
| US11717355B2 (en) | 2019-01-29 | 2023-08-08 | Covidien Lp | Drive mechanisms for surgical instruments such as for use in robotic surgical systems |
| US11576733B2 (en) | 2019-02-06 | 2023-02-14 | Covidien Lp | Robotic surgical assemblies including electrosurgical instruments having articulatable wrist assemblies |
| US11484372B2 (en) | 2019-02-15 | 2022-11-01 | Covidien Lp | Articulation mechanisms for surgical instruments such as for use in robotic surgical systems |
| US11369377B2 (en) | 2019-02-19 | 2022-06-28 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a firing lockout |
| US11464511B2 (en) | 2019-02-19 | 2022-10-11 | Cilag Gmbh International | Surgical staple cartridges with movable authentication key arrangements |
| US11317915B2 (en) | 2019-02-19 | 2022-05-03 | Cilag Gmbh International | Universal cartridge based key feature that unlocks multiple lockout arrangements in different surgical staplers |
| US11357503B2 (en) | 2019-02-19 | 2022-06-14 | Cilag Gmbh International | Staple cartridge retainers with frangible retention features and methods of using same |
| US11298130B2 (en) | 2019-02-19 | 2022-04-12 | Cilag Gmbh International | Staple cartridge retainer with frangible authentication key |
| KR102012620B1 (ko) | 2019-03-08 | 2019-08-20 | 재단법인 대구경북첨단의료산업진흥재단 | 로봇 수술 시스템의 구동 장치 |
| EP3714830A1 (en) | 2019-03-28 | 2020-09-30 | Medicaroid Corporation | Stopper and adaptor |
| JP6912541B2 (ja) * | 2019-03-28 | 2021-08-04 | 株式会社メディカロイド | ストッパおよびアダプタ |
| CN110010207B (zh) * | 2019-04-08 | 2022-05-13 | 大连理工大学 | 一种测定单层二硫化钼弯曲刚度的分子动力学方法 |
| US11471233B2 (en) | 2019-04-30 | 2022-10-18 | Canon U.S.A., Inc. | Preloaded sterile bag |
| US12376934B2 (en) | 2019-05-22 | 2025-08-05 | Covidien Lp | Surgical robotic arm storage assemblies and methods of replacing surgical robotic arms using the storage assemblies |
| CN121041038A (zh) | 2019-06-13 | 2025-12-02 | 直观外科手术操作公司 | 用于致动张力带的带有长度守恒机构的医疗工具 |
| USD950728S1 (en) | 2019-06-25 | 2022-05-03 | Cilag Gmbh International | Surgical staple cartridge |
| USD952144S1 (en) | 2019-06-25 | 2022-05-17 | Cilag Gmbh International | Surgical staple cartridge retainer with firing system authentication key |
| USD964564S1 (en) | 2019-06-25 | 2022-09-20 | Cilag Gmbh International | Surgical staple cartridge retainer with a closure system authentication key |
| US10881478B1 (en) | 2019-06-26 | 2021-01-05 | Titan Medical Inc. | Methods for protecting robotic surgery systems with sterile barriers |
| US11278362B2 (en) * | 2019-06-27 | 2022-03-22 | Cilag Gmbh International | Surgical instrument drive systems |
| US11207146B2 (en) | 2019-06-27 | 2021-12-28 | Cilag Gmbh International | Surgical instrument drive systems with cable-tightening system |
| US11376083B2 (en) * | 2019-06-27 | 2022-07-05 | Cilag Gmbh International | Determining robotic surgical assembly coupling status |
| US11723729B2 (en) | 2019-06-27 | 2023-08-15 | Cilag Gmbh International | Robotic surgical assembly coupling safety mechanisms |
| US11413102B2 (en) | 2019-06-27 | 2022-08-16 | Cilag Gmbh International | Multi-access port for surgical robotic systems |
| US11376082B2 (en) | 2019-06-27 | 2022-07-05 | Cilag Gmbh International | Robotic surgical system with local sensing of functional parameters based on measurements of multiple physical inputs |
| US11399906B2 (en) | 2019-06-27 | 2022-08-02 | Cilag Gmbh International | Robotic surgical system for controlling close operation of end-effectors |
| US11547468B2 (en) | 2019-06-27 | 2023-01-10 | Cilag Gmbh International | Robotic surgical system with safety and cooperative sensing control |
| US11612445B2 (en) | 2019-06-27 | 2023-03-28 | Cilag Gmbh International | Cooperative operation of robotic arms |
| US11607278B2 (en) | 2019-06-27 | 2023-03-21 | Cilag Gmbh International | Cooperative robotic surgical systems |
| US11369443B2 (en) * | 2019-06-27 | 2022-06-28 | Cilag Gmbh International | Method of using a surgical modular robotic assembly |
| EP3998960A4 (en) | 2019-07-19 | 2022-12-14 | Revmedica, Inc. | SURGICAL STAPLE WITH DETACHABLE POWER SUPPLY |
| US12290257B2 (en) | 2019-07-19 | 2025-05-06 | RevMedica, Inc. | Surgical clip applier with removable power pack |
| US12279771B2 (en) | 2019-07-19 | 2025-04-22 | RevMedica, Inc. | Power pack for activating surgical instruments and providing user feedback |
| US12279770B2 (en) | 2019-07-19 | 2025-04-22 | RevMedica, Inc. | Power pack for activating surgical instruments and providing user feedback |
| US12357307B2 (en) | 2022-05-13 | 2025-07-15 | RevMedica, Inc. | Power pack for activating surgical instruments and providing user feedback |
| CN112957127B (zh) | 2019-08-30 | 2022-06-17 | 上海微创医疗机器人(集团)股份有限公司 | 传动、驱动、无菌、器械盒组件与手术器械系统、机器人 |
| EP3808282A3 (en) | 2019-09-01 | 2021-06-30 | Bb Surgical Devices, S.L. | Universal surgical access system |
| WO2021046752A1 (en) | 2019-09-11 | 2021-03-18 | Covidien Lp | Systems and methods for neural-network based color restoration |
| EP4028986A4 (en) | 2019-09-11 | 2023-06-07 | Covidien LP | SYSTEMS AND METHODS FOR REDUCING SMOKE IN PICTURES |
| JP6971284B2 (ja) * | 2019-09-27 | 2021-11-24 | 株式会社メディカロイド | アダプタセットおよびアダプタ |
| JP7046880B2 (ja) * | 2019-09-27 | 2022-04-04 | 株式会社メディカロイド | 手術器具 |
| US11864857B2 (en) | 2019-09-27 | 2024-01-09 | Globus Medical, Inc. | Surgical robot with passive end effector |
| US12408929B2 (en) | 2019-09-27 | 2025-09-09 | Globus Medical, Inc. | Systems and methods for navigating a pin guide driver |
| US11426178B2 (en) | 2019-09-27 | 2022-08-30 | Globus Medical Inc. | Systems and methods for navigating a pin guide driver |
| JP7184728B2 (ja) | 2019-10-21 | 2022-12-06 | 株式会社メディカロイド | ロボット手術装置および手術器具 |
| JP7532513B2 (ja) * | 2019-10-23 | 2024-08-13 | バーブ サージカル インコーポレイテッド | 外科用ロボットシステムにおける外科用ツールの係合及び/又はホーミング |
| US12059219B2 (en) | 2019-11-15 | 2024-08-13 | Siemens Healthineers Ag | Assisted steering of intracardiac echocardiogram catheters |
| US12029497B2 (en) | 2019-11-15 | 2024-07-09 | Siemens Healthineers Ag | Interlocking gear system for sterile robotic catheter navigation systems |
| CN111700683A (zh) * | 2019-11-20 | 2020-09-25 | 山东威高手术机器人有限公司 | 微创手术器械快换装置 |
| CN114727850A (zh) | 2019-11-21 | 2022-07-08 | 奥瑞斯健康公司 | 用于覆盖外科系统的系统和方法 |
| US20230010961A1 (en) * | 2019-11-30 | 2023-01-12 | Xact Robotics Ltd. | Adjustable cover for an automated medical device |
| CN111067633B (zh) * | 2019-12-07 | 2021-04-13 | 广州多得医疗设备服务有限公司 | 一种医疗设备维修保养记录仪及其记录系统 |
| US12350828B2 (en) | 2019-12-16 | 2025-07-08 | Covidien Lp | Surgical robotic systems including surgical instruments with articulation |
| WO2021133483A1 (en) | 2019-12-23 | 2021-07-01 | Covidien Lp | System for guiding surgical procedures |
| CN111045332A (zh) * | 2019-12-27 | 2020-04-21 | 哈尔滨工程大学 | 一种无人艇路径跟踪导引策略和扰动补偿方法 |
| US12075992B1 (en) | 2019-12-31 | 2024-09-03 | Auris Health, Inc. | Force transfer mechanism |
| US20210197401A1 (en) * | 2019-12-31 | 2021-07-01 | Auris Health, Inc. | Tool detection system |
| CN114305710B (zh) * | 2020-01-07 | 2023-08-22 | 深圳市精锋医疗科技股份有限公司 | 手术器械与驱动装置的接合方法、从操作设备及手术机器人 |
| CN113766891B (zh) * | 2020-01-09 | 2023-02-21 | 瑞德医疗机器股份有限公司 | 手术工具 |
| WO2021158328A1 (en) | 2020-02-06 | 2021-08-12 | Covidien Lp | System and methods for suturing guidance |
| IT202000002545A1 (it) * | 2020-02-10 | 2021-08-10 | Medical Microinstruments Spa | Assieme di barriera sterile e sistema di chirurgia robotica |
| IT202000002554A1 (it) * | 2020-02-10 | 2021-08-10 | Medical Microinstruments Spa | Stazione di comando per chirurgia robotica, campo operatorio sterile, sistema di chirurgia robotica e metodo |
| CN115175633B (zh) | 2020-02-10 | 2025-10-28 | 医疗显微器具股份公司 | 无菌屏障组件和机器人手术系统 |
| IT202000002539A1 (it) * | 2020-02-10 | 2021-08-10 | Medical Microinstruments Spa | Assieme di manipolo di comando e sistema di chirurgia robotica |
| WO2021166184A1 (ja) | 2020-02-20 | 2021-08-26 | リバーフィールド株式会社 | 手術具保持装置及び手術支援装置 |
| EP4110221A1 (en) | 2020-02-26 | 2023-01-04 | Covidien LP | Robotic surgical instrument including linear encoders for measuring cable displacement |
| US20230143152A1 (en) * | 2020-03-13 | 2023-05-11 | Intuitive Surgical Operations, Inc. | Alignment of a connector interface |
| CN111329592B (zh) * | 2020-03-17 | 2021-06-22 | 上海奥朋医疗科技有限公司 | 血管介入手术中旋夹手的无菌隔绝方法及系统 |
| JP7257353B2 (ja) * | 2020-03-30 | 2023-04-13 | 株式会社メディカロイド | 内視鏡アダプタ、ロボット手術システムおよび内視鏡アダプタの回転位置調整方法 |
| US12544171B2 (en) | 2020-05-04 | 2026-02-10 | Intuitive Surgical Operations, Inc. | Medical instrument having single input for driving multiple cables |
| CN115484858A (zh) | 2020-05-12 | 2022-12-16 | 柯惠Lp公司 | 用于在外科手术过程期间的图像映射和融合的系统和方法 |
| US12030195B2 (en) | 2020-05-27 | 2024-07-09 | Covidien Lp | Tensioning mechanisms and methods for articulating surgical instruments such as for use in robotic surgical systems |
| EP4157127B1 (en) * | 2020-05-28 | 2024-07-17 | Mazor Robotics Ltd. | System and method for drape volume control |
| CA3183162A1 (en) | 2020-06-19 | 2021-12-23 | Jake Anthony Sganga | Systems and methods for guidance of intraluminal devices within the vasculature |
| USD963851S1 (en) | 2020-07-10 | 2022-09-13 | Covidien Lp | Port apparatus |
| US12458533B2 (en) | 2020-08-13 | 2025-11-04 | Forsight Robotics Ltd. | Capsulorhexis apparatus and method |
| US12564422B2 (en) | 2020-09-30 | 2026-03-03 | Auris Health, Inc. | Systems and methods for docking surgical robotic arms |
| US11793500B2 (en) | 2020-09-30 | 2023-10-24 | Verb Surgical Inc. | Adjustable force and ball bearing attachment mechanism for docking cannulas to surgical robotic arms |
| US11793597B2 (en) | 2020-09-30 | 2023-10-24 | Verb Surgical Inc. | Attachment mechanism for docking cannulas to surgical robotic arms |
| CN112401944A (zh) * | 2020-10-14 | 2021-02-26 | 极限人工智能有限公司 | 一种微创手术装置 |
| CN112401943A (zh) * | 2020-10-14 | 2021-02-26 | 极限人工智能有限公司 | 一种无菌屏障组件和应用其的无菌微创手术装置 |
| JP2022066961A (ja) * | 2020-10-19 | 2022-05-02 | 株式会社メディカロイド | アダプタ、アダプタのロボットアームからの取り外し方法およびロボット手術システム |
| CN114431959B (zh) * | 2020-10-30 | 2023-12-29 | 上海微创医疗机器人(集团)股份有限公司 | 隔离装置和手术机器人系统 |
| CN112370169B (zh) * | 2020-11-12 | 2021-04-27 | 山东威高手术机器人有限公司 | 一种可旋转的微创手术器械快换装置 |
| KR102742619B1 (ko) * | 2020-12-03 | 2024-12-16 | (주)이롭 | 복강경 수술을 보조하는 엔드이펙터 |
| KR20230146575A (ko) * | 2021-02-17 | 2023-10-19 | 아우리스 헬스, 인코포레이티드 | 의료 기구 구동 조립체 및 도킹 시스템 |
| WO2022186994A1 (en) | 2021-03-01 | 2022-09-09 | RevMedica, Inc. | Power pack for activating surgical instruments |
| CN113069213B (zh) * | 2021-02-23 | 2023-12-01 | 深圳康诺思腾科技有限公司 | 无菌围帘及具有其的手术机器人组件 |
| CN115120347B (zh) * | 2021-03-24 | 2025-06-17 | 炳硕生医(新加坡)私人有限公司 | 手术装置 |
| CN113143467B (zh) * | 2021-04-25 | 2023-08-25 | 上海微创医疗机器人(集团)股份有限公司 | 隔离装置和手术设备 |
| CN113081315A (zh) * | 2021-04-27 | 2021-07-09 | 深圳市精锋医疗科技有限公司 | 手术系统的无菌罩以及手术系统 |
| CN115337105B (zh) * | 2021-05-12 | 2025-07-25 | 上海微创医疗机器人(集团)股份有限公司 | 目标区域规划方法、传递路径规划方法、手术机器人系统和存储介质 |
| CN113288430B (zh) * | 2021-05-13 | 2022-07-29 | 上海微创医疗机器人(集团)股份有限公司 | 无菌板组件、手术器械、动力盒及手术机器人系统 |
| US12409003B2 (en) | 2021-05-14 | 2025-09-09 | Covidien Lp | Instrument cassette assemblies for robotic surgical instruments |
| CN120788745A (zh) * | 2021-05-20 | 2025-10-17 | 深圳市精锋医疗科技股份有限公司 | 接合装置、从操作设备及手术机器人 |
| CN113229944B (zh) * | 2021-05-20 | 2025-08-12 | 深圳市精锋医疗科技股份有限公司 | 接合装置、从操作设备及手术机器人 |
| CN113476061B (zh) * | 2021-05-21 | 2024-02-27 | 上海微创医疗机器人(集团)股份有限公司 | 膜体安装机构 |
| US12369998B2 (en) | 2021-05-28 | 2025-07-29 | Covidien Lp | Real time monitoring of a robotic drive module |
| US11948226B2 (en) | 2021-05-28 | 2024-04-02 | Covidien Lp | Systems and methods for clinical workspace simulation |
| CA3218370A1 (en) * | 2021-06-01 | 2022-12-08 | Forsight Robotics Ltd. | Kinematic structures and sterile drapes for robotic microsurgical procedures |
| IT202100016154A1 (it) | 2021-06-21 | 2022-12-21 | Medical Microinstruments Inc | Strumento chirurgico per chirurgia robotica |
| US11974829B2 (en) | 2021-06-30 | 2024-05-07 | Cilag Gmbh International | Link-driven articulation device for a surgical device |
| US11931026B2 (en) | 2021-06-30 | 2024-03-19 | Cilag Gmbh International | Staple cartridge replacement |
| US12358136B2 (en) | 2021-06-30 | 2025-07-15 | Cilag Gmbh International | Grasping work determination and indications thereof |
| AU2022305235A1 (en) | 2021-07-01 | 2024-01-18 | Remedy Robotics, Inc. | Vision-based position and orientation determination for endovascular tools |
| US11707332B2 (en) | 2021-07-01 | 2023-07-25 | Remedy Robotics, Inc. | Image space control for endovascular tools |
| US12121307B2 (en) | 2021-07-01 | 2024-10-22 | Remedy Robotics, Inc. | Vision-based position and orientation determination for endovascular tools |
| CN113367798B (zh) * | 2021-07-14 | 2025-08-22 | 深圳康诺思腾科技有限公司 | 无菌适配器与手术器械的传动连接结构及手术机器人的器械驱动传动机构 |
| CN113693727B (zh) * | 2021-07-14 | 2025-03-07 | 深圳康诺思腾科技有限公司 | 一种手术机器人的装配机构 |
| CN113349936A (zh) * | 2021-07-14 | 2021-09-07 | 深圳康诺思腾科技有限公司 | 一种无菌适配器与手术器械后端的导向定位结构 |
| CN113349934A (zh) * | 2021-07-14 | 2021-09-07 | 深圳康诺思腾科技有限公司 | 无菌适配器与手术器械的连接结构以及手术机器人 |
| CN113349937B (zh) * | 2021-07-14 | 2025-08-01 | 深圳康诺思腾科技有限公司 | 一种手术机器人的器械驱动传动机构及装配机构 |
| EP4360582B1 (en) * | 2021-07-14 | 2025-07-02 | Cornerstone Technology (Shenzhen) Limited | Connecting structures and surgical robot |
| CN113425415A (zh) * | 2021-07-14 | 2021-09-24 | 深圳康诺思腾科技有限公司 | 器械驱动器和无菌适配器的连接结构以及手术机器人 |
| WO2023283735A1 (en) * | 2021-07-15 | 2023-01-19 | Titan Medical Inc. | Sterile adapter assemblies for robotic surgical systems |
| US11903669B2 (en) | 2021-07-30 | 2024-02-20 | Corindus, Inc | Sterile drape for robotic drive |
| US11839440B2 (en) * | 2021-07-30 | 2023-12-12 | Corindus, Inc. | Attachment for robotic medical system |
| US11779518B2 (en) | 2021-08-09 | 2023-10-10 | Express Scripts Strategic Development, Inc. | Blister pack device and method |
| CN113598968B (zh) * | 2021-08-10 | 2022-08-19 | 常州唯精医疗机器人有限公司 | 器械快换装置及微创手术机器人 |
| CN113520606B (zh) * | 2021-08-11 | 2023-03-24 | 上海微创医疗机器人(集团)股份有限公司 | 无菌板组件、手术机器人及手术机器人系统 |
| US12419703B2 (en) | 2022-08-01 | 2025-09-23 | Imperative Care, Inc. | Robotic drive system for achieving supra-aortic access |
| US12564458B2 (en) | 2022-08-01 | 2026-03-03 | Imperative Care, Inc. | Method of robotically driving a multi catheter assembly above the aortic arch |
| US12564414B2 (en) | 2022-08-01 | 2026-03-03 | Imperative Care, Inc. | Method of supra-aortic access for a neurovascular procedure |
| US12558175B2 (en) | 2021-08-12 | 2026-02-24 | Imperative Care, Inc. | Multi catheter method of performing a robotic neurovascular procedure |
| US12440289B2 (en) | 2022-08-01 | 2025-10-14 | Imperative Care, Inc. | Method of priming an interventional device assembly |
| US12447317B2 (en) | 2022-08-01 | 2025-10-21 | Imperative Care, Inc. | Method of priming concentrically stacked interventional devices |
| US12446979B2 (en) | 2022-08-01 | 2025-10-21 | Imperative Care, Inc. | Method of performing a multi catheter robotic neurovascular procedure |
| US11779332B2 (en) | 2021-08-16 | 2023-10-10 | Cilag Gmbh International | Powered surgical stapler having independently operable closure and firing systems |
| US12458348B2 (en) | 2021-08-16 | 2025-11-04 | Cilag Gmbh International | Deflectable firing member for surgical stapler |
| US12089842B2 (en) | 2021-08-16 | 2024-09-17 | Cilag Gmbh International | Firing bailout system for powered surgical stapler |
| US12213668B2 (en) | 2021-08-16 | 2025-02-04 | Cilag Gmbh International | Firing system features for surgical stapler |
| US11992210B2 (en) | 2021-08-16 | 2024-05-28 | Cilag Gmbh International | Multiple-sensor firing lockout mechanism for powered surgical stapler |
| US11986182B2 (en) | 2021-08-16 | 2024-05-21 | Cilag Gmbh International | Multi-position restraining member for sled movement |
| US12171428B2 (en) | 2021-08-16 | 2024-12-24 | Cilag Gmbh International | Firing member tracking feature for surgical stapler |
| US11944297B2 (en) | 2021-08-16 | 2024-04-02 | Cilag Gmbh International | Variable response motor control algorithm for powered surgical stapler |
| US12029508B2 (en) | 2021-08-16 | 2024-07-09 | Cilag Gmbh International | Adjustable power transmission mechanism for powered surgical stapler |
| US11957336B2 (en) | 2021-08-16 | 2024-04-16 | Cilag Gmbh International | Proximally located firing lockout mechanism for surgical stapler |
| US12011164B2 (en) | 2021-08-16 | 2024-06-18 | Cilag Gmbh International | Cartridge-based firing lockout mechanism for surgical stapler |
| US12102321B2 (en) | 2021-08-16 | 2024-10-01 | Cilag Gmbh International | Methods of operating a robotic surgical stapler |
| US11992209B2 (en) | 2021-08-16 | 2024-05-28 | Cilag Gmbh International | Multi-threshold motor control algorithm for powered surgical stapler |
| US12564457B2 (en) | 2021-09-14 | 2026-03-03 | Covidien Lp | Robotic surgical instruments |
| CN113796965B (zh) * | 2021-09-28 | 2023-07-18 | 深圳市爱博医疗机器人有限公司 | 一种可拆装式从端介入手术机器人驱动装置 |
| US20230102358A1 (en) | 2021-09-29 | 2023-03-30 | Cilag Gmbh International | Surgical devices, systems, and methods using fiducial identification and tracking |
| US12137986B2 (en) | 2021-09-29 | 2024-11-12 | Cilag Gmbh International | Methods for controlling cooperative surgical instruments |
| US12290319B2 (en) | 2021-09-29 | 2025-05-06 | Cilag Gmbh International | Methods for controlling cooperative surgical instruments |
| US12295667B2 (en) | 2021-09-29 | 2025-05-13 | Cilag Gmbh International | Surgical devices, systems, and methods using multi-source imaging |
| US20230098670A1 (en) | 2021-09-29 | 2023-03-30 | Cilag Gmbh International | Surgical devices, systems, and methods using multi-source imaging |
| US12376910B2 (en) | 2021-09-29 | 2025-08-05 | Cilag Gmbh International | Methods for controlling cooperative surgical instruments |
| US12364545B2 (en) | 2021-09-29 | 2025-07-22 | Cilag Gmbh International | Surgical devices, systems, and methods using fiducial identification and tracking |
| IT202100026186A1 (it) | 2021-10-13 | 2023-04-13 | Medical Microinstruments Inc | Metodo di fabbricazione di una o più superfici di presa miniaturizzate per uno strumento chirurgico o microchirurgico, e strumento chirurgico miniaturizzato comprendente una o più superfici di presa |
| EP4280998A1 (en) | 2021-10-17 | 2023-11-29 | Forsight Robotics Ltd. | One-sided robotic surgical procedure |
| CN115998438B (zh) * | 2021-10-21 | 2026-02-10 | 瑞龙诺赋(上海)医疗科技有限公司 | 一种无菌适配器、无菌屏障以及医疗系统 |
| CN116058970A (zh) * | 2021-10-29 | 2023-05-05 | 常州唯精医疗机器人有限公司 | 无菌隔离装置及微创手术机器人 |
| CN113842220A (zh) * | 2021-10-29 | 2021-12-28 | 常州唯精医疗机器人有限公司 | 微创手术机器人 |
| CN114081630B (zh) * | 2021-11-11 | 2023-04-07 | 常州唯精医疗机器人有限公司 | 器械快换装置及微创手术机器人 |
| CN114052919A (zh) * | 2021-11-18 | 2022-02-18 | 武汉联影智融医疗科技有限公司 | 动力连接装置、末端执行设备及腹腔镜机器人 |
| WO2023101949A1 (en) | 2021-11-30 | 2023-06-08 | Endoquest, Inc. | Patient console 5-degree of freedom positioning systems |
| WO2023101968A1 (en) | 2021-11-30 | 2023-06-08 | Endoquest Robotics, Inc. | Steerable overtube assemblies for robotic surgical systems |
| JP2024545419A (ja) * | 2021-11-30 | 2024-12-06 | エンドクエスト ロボティクス インコーポレイテッド | ロボット手術システム用のバリアドレープアダプタ |
| WO2023101948A1 (en) | 2021-11-30 | 2023-06-08 | Endoquest, Inc. | Master control systems for robotic surgical systems |
| TWI850880B (zh) | 2021-11-30 | 2024-08-01 | 美商安督奎斯特機器人公司 | 可拋式終端操縱裝置、醫療裝置及其操作方法 |
| EP4440480A4 (en) | 2021-11-30 | 2026-01-21 | Endoquest Robotics Inc | CONTROL DEVICE ARRANGEMENTS FOR ROBOTIC SURGICAL SYSTEMS |
| KR20240152820A (ko) | 2021-11-30 | 2024-10-22 | 엔도퀘스트 로보틱스 인코포레이티드 | 로봇 제어 의료 기기용 힘 전달 시스템 |
| US12496119B2 (en) | 2021-12-06 | 2025-12-16 | Covidien Lp | Jaw member, end effector assembly, and method of manufacturing a jaw member of an electrosurgical instrument |
| US12390294B2 (en) | 2021-12-14 | 2025-08-19 | Covidien Lp | Robotic surgical assemblies including surgical instruments having articulatable wrist assemblies |
| DE102022102805A1 (de) | 2022-02-07 | 2023-08-10 | avateramedical GmBH | Manipulator für die robotische Chirurgie und Sterileinheit |
| DE102022102806A1 (de) | 2022-02-07 | 2023-08-10 | avateramedical GmBH | Sterileinheit und Manipulator für die robotische Chirurgie |
| US12433699B2 (en) | 2022-02-10 | 2025-10-07 | Covidien Lp | Surgical robotic systems and robotic arm carts thereof |
| US12548667B2 (en) | 2022-02-15 | 2026-02-10 | Covidien Lp | System and method for checking compatibility of hardware and software components in a surgical robot |
| WO2023167906A1 (en) | 2022-03-02 | 2023-09-07 | Mako Surgical Corp. | Robotic system including a link tracker |
| CN117426880A (zh) * | 2022-07-15 | 2024-01-23 | 深圳康诺思腾科技有限公司 | 一种无菌隔离组件和手术机器人 |
| US20250241719A1 (en) | 2022-08-01 | 2025-07-31 | Intuitive Surgical Operations, Inc. | Adapter for manual actuation of surgical instrument |
| US20240041480A1 (en) | 2022-08-02 | 2024-02-08 | Imperative Care, Inc. | Multi catheter system with integrated fluidics management |
| US12479098B2 (en) | 2022-08-03 | 2025-11-25 | Covidien Lp | Surgical robotic system with access port storage |
| US12465447B2 (en) | 2022-08-25 | 2025-11-11 | Covidien Lp | Surgical robotic system with instrument detection |
| JP2024036816A (ja) * | 2022-09-06 | 2024-03-18 | 川崎重工業株式会社 | 手術支援システムおよび操作装置の制御方法 |
| CN117838313A (zh) * | 2022-09-30 | 2024-04-09 | 深圳市精锋医疗科技股份有限公司 | 一种医疗机器人的驱动装置及导管机器人 |
| WO2024067335A1 (zh) * | 2022-09-30 | 2024-04-04 | 深圳市精锋医疗科技股份有限公司 | 一种医疗机器人的驱动装置及导管机器人 |
| CN117838301A (zh) * | 2022-09-30 | 2024-04-09 | 深圳市精锋医疗科技股份有限公司 | 一种医疗机器人的驱动装置及导管机器人 |
| US12496728B2 (en) | 2022-10-25 | 2025-12-16 | Covidien Lp | Surgical robotic system and method for restoring operational state |
| US12297956B2 (en) | 2022-10-26 | 2025-05-13 | Mako Surgical Corp. | Joint for a support arm and support arm including the joint |
| CN116999170A (zh) * | 2022-11-25 | 2023-11-07 | 深圳康诺思腾科技有限公司 | 一种无菌适配器 |
| DE102022131663B4 (de) | 2022-11-30 | 2025-08-14 | Karl Storz Se & Co. Kg | Schnittstelle für ein elektrochirurgisches Instrument sowie Operationssystem |
| US12433702B2 (en) | 2022-12-01 | 2025-10-07 | Imperative Care, Inc. | Telescoping drive table |
| EP4626353A1 (en) | 2022-12-01 | 2025-10-08 | Imperative Care, Inc. | Controller for robotic catheter drive system |
| CN116019569B (zh) * | 2022-12-16 | 2026-01-27 | 杭州康基唯精医疗机器人有限公司 | 开缝式锁扣及使用其的隔离板和手术机器人 |
| CN115969537A (zh) * | 2022-12-16 | 2023-04-18 | 杭州唯精医疗机器人有限公司 | 用于隔离板上的分离式锁扣组、隔离板及手术机器人 |
| DE102022134206A1 (de) * | 2022-12-20 | 2024-06-20 | Karl Storz Se & Co. Kg | Steriladapter für eine an einem Roboterarm anbringbare Antriebseinheit |
| DE102022134201A1 (de) | 2022-12-20 | 2024-06-20 | Karl Storz Se & Co. Kg | Chirurgisches Instrument zur Kopplung mit einer Antriebseinheit |
| DE102022134205A1 (de) | 2022-12-20 | 2024-06-20 | Karl Storz Se & Co. Kg | Chirurgisches Instrument |
| WO2024145418A1 (en) * | 2022-12-28 | 2024-07-04 | Vicarious Surgical Inc. | Drape plate assembly |
| WO2024147203A1 (ja) * | 2023-01-06 | 2024-07-11 | リバーフィールド株式会社 | 先側ドレープ、及びドレープセット |
| USD1066405S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066380S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066378S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066381S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066379S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066383S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066382S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| USD1066404S1 (en) | 2023-01-13 | 2025-03-11 | Covidien Lp | Display screen with graphical user interface |
| CN116019570A (zh) * | 2023-02-16 | 2023-04-28 | 杭州唯精医疗机器人有限公司 | 隔离板及手术机器人 |
| US12377206B2 (en) | 2023-05-17 | 2025-08-05 | Imperative Care, Inc. | Fluidics control system for multi catheter stack |
| CN121586597A (zh) | 2023-05-31 | 2026-02-27 | 因普瑞缇夫护理公司 | 通过无菌区域屏障的磁连接 |
| CN116687471A (zh) * | 2023-07-04 | 2023-09-05 | 山东威高手术机器人有限公司 | 外科手术器械及其运动范围控制方法 |
| CN116584986A (zh) * | 2023-07-04 | 2023-08-15 | 山东威高手术机器人有限公司 | 将医疗器械盒与器械操纵器接合的方法 |
| CN117067257A (zh) * | 2023-07-28 | 2023-11-17 | 杭州唯精医疗机器人有限公司 | 调节工装及手术机器人 |
| USD1087995S1 (en) | 2023-08-02 | 2025-08-12 | Covidien Lp | Surgeon display screen with a transitional graphical user interface having staple firing icon |
| USD1087135S1 (en) | 2023-08-02 | 2025-08-05 | Covidien Lp | Surgeon display screen with a graphical user interface having spent staple icon |
| WO2025153572A1 (en) | 2024-01-15 | 2025-07-24 | Symphera Gmbh | Improved surgery system |
| US12257015B1 (en) | 2024-02-02 | 2025-03-25 | Panda Surgical Limited | Robotic surgical systems having handheld controllers for releasably coupling interchangeable dexterous end-effectors |
| CN119112088A (zh) * | 2024-09-06 | 2024-12-13 | 普锐医疗(香港)有限公司 | 手术装置安装机构及手术装置 |
| CN121003487A (zh) * | 2024-10-31 | 2025-11-25 | 敏捷医疗科技(苏州)有限公司 | 手术机器人末端执行装置及动力盒 |
| CN119745456B (zh) * | 2024-11-18 | 2025-08-29 | 北京大学第一医院(北京大学第一临床医学院) | 一种肾窝放疗辅助水囊填塞装置 |
Family Cites Families (136)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1002219A (en) | 1910-03-08 | 1911-09-05 | James J Burke | Automatic boiler-feed and water-level alarm. |
| US1004582A (en) | 1911-01-28 | 1911-10-03 | William D Mcnaull | Tire for vehicle-wheels. |
| US4386933A (en) * | 1981-05-21 | 1983-06-07 | Sanchez Enrique R | Sterile adapter for use in blood transfers |
| US4542272A (en) | 1982-09-28 | 1985-09-17 | The Cross Company | Induction heating device with electronic positioning control |
| US5069221A (en) * | 1987-12-30 | 1991-12-03 | Densa Limited | Displacement sensor and medical apparatus |
| CH681753A5 (ja) | 1991-03-05 | 1993-05-14 | Olten Ag Elektro Apparatebau | |
| US5419343A (en) * | 1992-03-18 | 1995-05-30 | Microtek Medical, Inc. | Arthroscopy drape and collection pouch |
| JP3306108B2 (ja) | 1992-08-21 | 2002-07-24 | 宇宙開発事業団 | 軸継手機構 |
| US5469863A (en) | 1993-08-11 | 1995-11-28 | Polygenex International, Inc. | Polyurethane condom of welded polyurethane film |
| US5405344A (en) | 1993-09-30 | 1995-04-11 | Ethicon, Inc. | Articulable socket joint assembly for an endoscopic instrument for surgical fastner track therefor |
| US5814038A (en) * | 1995-06-07 | 1998-09-29 | Sri International | Surgical manipulator for a telerobotic system |
| DE69635050T2 (de) | 1995-06-07 | 2006-05-24 | Sri International, Menlo Park | Chirurgischer manipulator für ein ferngesteuertes robotersystem |
| US5730740A (en) * | 1995-11-09 | 1998-03-24 | Ethicon Endo-Surgery, Inc. | Latch mechanism for surgical instruments |
| US5803086A (en) | 1996-05-16 | 1998-09-08 | Minnesota Mining And Manufacturing Company | Linerless surgical incise drape |
| US8206406B2 (en) * | 1996-12-12 | 2012-06-26 | Intuitive Surgical Operations, Inc. | Disposable sterile surgical adaptor |
| US7699855B2 (en) | 1996-12-12 | 2010-04-20 | Intuitive Surgical Operations, Inc. | Sterile surgical adaptor |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US8529582B2 (en) | 1996-12-12 | 2013-09-10 | Intuitive Surgical Operations, Inc. | Instrument interface of a robotic surgical system |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US7727244B2 (en) * | 1997-11-21 | 2010-06-01 | Intuitive Surgical Operation, Inc. | Sterile surgical drape |
| US7666191B2 (en) * | 1996-12-12 | 2010-02-23 | Intuitive Surgical, Inc. | Robotic surgical system with sterile surgical adaptor |
| US7758569B2 (en) | 1998-02-24 | 2010-07-20 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US7297142B2 (en) | 1998-02-24 | 2007-11-20 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US7309519B2 (en) | 1998-10-05 | 2007-12-18 | 3M Innovative Properties Company | Friction control articles for healthcare applications |
| US8600551B2 (en) | 1998-11-20 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Medical robotic system with operatively couplable simulator unit for surgeon training |
| US7125403B2 (en) | 1998-12-08 | 2006-10-24 | Intuitive Surgical | In vivo accessories for minimally invasive robotic surgery |
| EP1897511B1 (en) | 1998-12-08 | 2014-02-12 | Intuitive Surgical Operations, Inc. | Surgical robotic tools, data architecture, and use |
| DE19950440A1 (de) | 1999-10-19 | 2001-11-22 | World Of Medicine Lemke Gmbh | Fixiervorrichtung für wenigstens ein, im Sterilbereich bei Operationen einsetzbares Bedienelement, bspw. ein Operationsinstrument |
| JP2001187067A (ja) | 2000-01-05 | 2001-07-10 | Olympus Optical Co Ltd | 内視鏡観察位置検出表示システム |
| US6401313B1 (en) * | 2000-06-07 | 2002-06-11 | Illinois Tool Works Inc. | Buckle |
| DE20015892U1 (de) * | 2000-09-14 | 2001-01-25 | Aesculap AG & Co. KG, 78532 Tuttlingen | Vorrichtung zur Bestimmung der Position eines medizinischen Instrumentes oder Gerätes oder eines Körperteils |
| US6840938B1 (en) | 2000-12-29 | 2005-01-11 | Intuitive Surgical, Inc. | Bipolar cauterizing instrument |
| US7674270B2 (en) * | 2002-05-02 | 2010-03-09 | Laparocision, Inc | Apparatus for positioning a medical instrument |
| JP4073249B2 (ja) | 2002-05-17 | 2008-04-09 | オリンパス株式会社 | 手術システム |
| US7331967B2 (en) * | 2002-09-09 | 2008-02-19 | Hansen Medical, Inc. | Surgical instrument coupling mechanism |
| US7386365B2 (en) | 2004-05-04 | 2008-06-10 | Intuitive Surgical, Inc. | Tool grip calibration for robotic surgery |
| US20040118410A1 (en) | 2002-12-18 | 2004-06-24 | Griesbach Henry L. | Surgical drape having an instrument holder |
| US7100260B2 (en) * | 2002-12-26 | 2006-09-05 | Utica Enterprises, Inc. | Programmable apparatus and method for body panel and clinch nut attachment |
| US8118732B2 (en) | 2003-04-01 | 2012-02-21 | Boston Scientific Scimed, Inc. | Force feedback control system for video endoscope |
| US20050244217A1 (en) | 2004-04-29 | 2005-11-03 | William Burke | Test instrument module latch system and method |
| US7096870B2 (en) * | 2004-09-30 | 2006-08-29 | Lonnie Jay Lamprich | Disposable sterile surgical drape and attached instruments |
| CN1323813C (zh) * | 2004-12-22 | 2007-07-04 | 哈尔滨工业大学 | 用于临床创伤手指康复的感知型仿生机械手及其组合模块 |
| US8463439B2 (en) * | 2009-03-31 | 2013-06-11 | Intuitive Surgical Operations, Inc. | Optic fiber connection for a force sensing instrument |
| US8945095B2 (en) | 2005-03-30 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Force and torque sensing for surgical instruments |
| US7588398B2 (en) | 2005-04-19 | 2009-09-15 | Black & Decker Inc. | Tool chuck with power take off and dead spindle features |
| US20060260622A1 (en) * | 2005-05-19 | 2006-11-23 | Wooley Deborah M | Operating room equipment drapes and methods of making and using the same |
| US7717312B2 (en) * | 2005-06-03 | 2010-05-18 | Tyco Healthcare Group Lp | Surgical instruments employing sensors |
| MX2008000779A (es) * | 2005-07-18 | 2008-02-21 | Bayer Healthcare Ag | Uso de activadores y estimuladores de guanilatociclasa solubles para la prevencion o tratamiento de trastornos renales. |
| WO2007028049A2 (en) | 2005-09-02 | 2007-03-08 | Neato Robotics, Inc. | Multi-function robotic device |
| US9241767B2 (en) | 2005-12-20 | 2016-01-26 | Intuitive Surgical Operations, Inc. | Method for handling an operator command exceeding a medical device state limitation in a medical robotic system |
| CN101340852B (zh) * | 2005-12-20 | 2011-12-28 | 直观外科手术操作公司 | 机器人外科系统的器械对接装置 |
| US9586327B2 (en) | 2005-12-20 | 2017-03-07 | Intuitive Surgical Operations, Inc. | Hook and pivot electro-mechanical interface for robotic medical arms |
| JP5043414B2 (ja) * | 2005-12-20 | 2012-10-10 | インテュイティブ サージカル インコーポレイテッド | 無菌外科手術アダプタ |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| EP1815950A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| EP1991121B1 (en) | 2006-02-16 | 2014-08-06 | Globus Medical, Inc. | System utilizing radio frequency signals for tracking and improving navigation of slender instruments during insertion into the body |
| EP2051644A4 (en) | 2006-08-01 | 2013-03-13 | Eon Surgical Ltd | SYSTEM AND METHOD FOR TELECHIRURGY |
| US8157793B2 (en) * | 2006-10-25 | 2012-04-17 | Terumo Kabushiki Kaisha | Manipulator for medical use |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| DE602008003536D1 (de) | 2007-02-15 | 2010-12-30 | Hansen Medical Inc | Medizinisches roboterinstrumentensystem |
| US8676242B2 (en) | 2007-02-16 | 2014-03-18 | Qualcomm Incorporated | Method and apparatus for registration of location information of wireless devices in a wireless communication network supporting multicast calls |
| JP5726418B2 (ja) * | 2007-02-28 | 2015-06-03 | スミス アンド ネフュー インコーポレーテッド | 目標物を特定するシステム及び方法 |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US8534528B2 (en) * | 2007-06-04 | 2013-09-17 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a multiple rate directional switching mechanism |
| US8945148B2 (en) * | 2007-06-13 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Surgical system instrument manipulator |
| US8139225B2 (en) | 2007-10-24 | 2012-03-20 | Siemens Medical Solutions Usa, Inc. | System for processing patient monitoring power and data signals |
| US8752749B2 (en) | 2008-02-14 | 2014-06-17 | Ethicon Endo-Surgery, Inc. | Robotically-controlled disposable motor-driven loading unit |
| US7886743B2 (en) | 2008-03-31 | 2011-02-15 | Intuitive Surgical Operations, Inc. | Sterile drape interface for robotic surgical instrument |
| US9895813B2 (en) | 2008-03-31 | 2018-02-20 | Intuitive Surgical Operations, Inc. | Force and torque sensing in a surgical robot setup arm |
| WO2009151205A1 (ko) | 2008-06-11 | 2009-12-17 | (주)미래컴퍼니 | 수술용 로봇 암의 인스트루먼트 |
| JP2010022415A (ja) | 2008-07-15 | 2010-02-04 | Terumo Corp | 医療用マニピュレータ及び医療用マニピュレータシステム |
| US9339342B2 (en) * | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| US8720448B2 (en) * | 2008-11-07 | 2014-05-13 | Hansen Medical, Inc. | Sterile interface apparatus |
| US8602031B2 (en) | 2009-01-12 | 2013-12-10 | Hansen Medical, Inc. | Modular interfaces and drive actuation through barrier |
| JP5886043B2 (ja) | 2009-04-30 | 2016-03-16 | カール シュトルツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 医療用マニピュレータ |
| JP5623391B2 (ja) | 2009-04-30 | 2014-11-12 | カール シュトルツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 医療用マニピュレータ |
| EP2467087B1 (en) | 2009-08-21 | 2019-09-25 | 3M Innovative Properties Company | Methods and products for illuminating tissue |
| KR101750518B1 (ko) * | 2010-02-19 | 2017-06-26 | (주)미래컴퍼니 | 휠의 체결 구조 및 수술용 인스트루먼트의 체결 구조 |
| US8623028B2 (en) * | 2009-09-23 | 2014-01-07 | Intuitive Surgical Operations, Inc. | Surgical port feature |
| WO2011037394A2 (ko) | 2009-09-23 | 2011-03-31 | 주식회사 이턴 | 멸균 어댑터, 휠의 체결 구조 및 수술용 인스트루먼트의 체결 구조 |
| CN107028660A (zh) | 2009-09-23 | 2017-08-11 | 伊顿株式会社 | 无菌适配器、转轮联接结构以及手术用器械的联接结构 |
| KR101037069B1 (ko) * | 2009-09-23 | 2011-05-26 | 주식회사 이턴 | 멸균 어댑터 |
| US8555892B2 (en) | 2009-09-28 | 2013-10-15 | Obp Corporation | Mayo stand drape with self-disposing feature |
| KR101590163B1 (ko) | 2009-10-01 | 2016-01-29 | (주)미래컴퍼니 | 수술용 로봇 및 이를 커버하는 멸균 드레이프 |
| US8141762B2 (en) * | 2009-10-09 | 2012-03-27 | Ethicon Endo-Surgery, Inc. | Surgical stapler comprising a staple pocket |
| KR101924394B1 (ko) * | 2009-11-13 | 2018-12-03 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 독립적으로 회전하는 부재 내의 병렬 구동 샤프트들을 위한 모터 연접부 |
| US9358072B2 (en) | 2010-01-15 | 2016-06-07 | Immersion Corporation | Systems and methods for minimally invasive surgical tools with haptic feedback |
| CN103038141A (zh) * | 2010-04-06 | 2013-04-10 | 雷西尔国际有限合作公司 | 用于分配计量体积的纯净或无菌可流动物质的输送系统 |
| US8307910B2 (en) | 2010-04-07 | 2012-11-13 | Robert Bosch Gmbh | Drive mechanism for a reciprocating tool |
| US8206395B2 (en) | 2010-06-18 | 2012-06-26 | Spine Wave, Inc. | Surgical instrument and method for the distraction or compression of bones |
| US9554864B2 (en) | 2010-08-02 | 2017-01-31 | The Johns Hopkins University | Tool exchange interface and control algorithm for cooperative surgical robots |
| JP2012050706A (ja) * | 2010-09-01 | 2012-03-15 | Terumo Corp | 保護カバー |
| EP2616126A4 (en) | 2010-09-17 | 2017-05-24 | Corindus Inc. | Wheel for robotic catheter system drive mechanism |
| CN105748152B (zh) | 2010-11-15 | 2018-06-26 | 直观外科手术操作公司 | 在手术仪器中去耦仪器轴滚动和末端执行器促动 |
| EP2645936B1 (en) * | 2010-11-30 | 2016-09-07 | Interventco, LLC | Radiation shield assembly and method of providing a sterile barrier to radiation |
| EP2646486A1 (en) | 2010-12-02 | 2013-10-09 | DSM IP Assets B.V. | Acrylic polymer |
| JP5460870B2 (ja) | 2010-12-15 | 2014-04-02 | ヤマハ発動機株式会社 | 複式クラッチ変速機の制御装置及び複式クラッチ変速機の制御方法 |
| WO2012109306A2 (en) * | 2011-02-09 | 2012-08-16 | Ohio Urologic Research, Llc | Surgical drape system for urology procedures on male patients |
| JP2012210294A (ja) * | 2011-03-31 | 2012-11-01 | Olympus Corp | 手術支援システム |
| JP5820601B2 (ja) * | 2011-03-31 | 2015-11-24 | オリンパス株式会社 | マスタマニピュレータ |
| JP5834481B2 (ja) | 2011-05-12 | 2015-12-24 | 日本電気株式会社 | サービス提供システム、通信端末、プログラム及びサービス提供方法 |
| US10420822B2 (en) | 2011-06-13 | 2019-09-24 | Ziolase, Llc | Compositions and methods to prevent and treat biofilms |
| JP5953058B2 (ja) | 2011-08-04 | 2016-07-13 | オリンパス株式会社 | 手術支援装置およびその着脱方法 |
| JP5931497B2 (ja) | 2011-08-04 | 2016-06-08 | オリンパス株式会社 | 手術支援装置およびその組立方法 |
| JP6009840B2 (ja) | 2011-08-04 | 2016-10-19 | オリンパス株式会社 | 医療機器 |
| WO2013063522A2 (en) | 2011-10-26 | 2013-05-02 | Reid Robert Cyrus | Surgical instrument motor pack latch |
| KR101828452B1 (ko) * | 2012-01-05 | 2018-02-12 | 삼성전자주식회사 | 서보 제어 장치 및 그 제어 방법 |
| WO2013119545A1 (en) * | 2012-02-10 | 2013-08-15 | Ethicon-Endo Surgery, Inc. | Robotically controlled surgical instrument |
| US9931167B2 (en) | 2012-02-15 | 2018-04-03 | Intuitive Surgical Operations, Inc. | Minimally invasive surgical instrument to provide needle-based therapy |
| JP5826094B2 (ja) | 2012-03-30 | 2015-12-02 | 株式会社半導体エネルギー研究所 | p型半導体材料、および光電変換装置の作製方法 |
| CN202568458U (zh) * | 2012-03-30 | 2012-12-05 | 浙江省淳安县人和医疗用品工贸有限公司 | 医用电钻无菌保护套 |
| KR101434861B1 (ko) | 2012-04-25 | 2014-09-02 | 주식회사 고영테크놀러지 | 구동력 전달장치 |
| DE102012008535A1 (de) | 2012-04-27 | 2013-10-31 | Kuka Laboratories Gmbh | Chirurgierobotersystem |
| EP3623120A1 (en) * | 2012-06-01 | 2020-03-18 | Intuitive Surgical Operations Inc. | Instrument carriage assembly for surgical system |
| US9936863B2 (en) | 2012-06-27 | 2018-04-10 | Camplex, Inc. | Optical assembly providing a surgical microscope view for a surgical visualization system |
| US8747238B2 (en) | 2012-06-28 | 2014-06-10 | Ethicon Endo-Surgery, Inc. | Rotary drive shaft assemblies for surgical instruments with articulatable end effectors |
| US9072536B2 (en) | 2012-06-28 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Differential locking arrangements for rotary powered surgical instruments |
| US20140001234A1 (en) * | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Coupling arrangements for attaching surgical end effectors to drive systems therefor |
| US9204879B2 (en) | 2012-06-28 | 2015-12-08 | Ethicon Endo-Surgery, Inc. | Flexible drive member |
| EP2881073B1 (de) | 2012-07-03 | 2019-07-24 | KUKA Deutschland GmbH | Chirurgische Instrumentenanordnung und Antriebsstranganordnung für ein, insbesondere robotergeführtes, chirurgisches Instrument und chirurgisches Instrument |
| DE102012013242A1 (de) * | 2012-07-03 | 2014-01-09 | Kuka Laboratories Gmbh | Chirurgische Instrumentenanordnung |
| CN103625049A (zh) * | 2012-08-29 | 2014-03-12 | 3M创新有限公司 | 无纺布和聚氨酯复合材料及其制备方法 |
| WO2014035308A1 (en) * | 2012-08-31 | 2014-03-06 | Sca Hygiene Products Ab | A system and a method for data collection and monitoring of a defined space |
| US20140277334A1 (en) | 2013-03-14 | 2014-09-18 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| CN203234838U (zh) * | 2013-05-21 | 2013-10-16 | 陈刚 | 一次性使用的无菌手术适配器 |
| CN105611893B (zh) | 2013-08-15 | 2018-09-28 | 直观外科手术操作公司 | 预加载外科手术器械接口 |
| CN109512519B (zh) | 2013-08-15 | 2022-03-29 | 直观外科手术操作公司 | 通向器械无菌适配器的致动器接口 |
| US10548630B2 (en) | 2014-02-11 | 2020-02-04 | Vanderbilt University | System, method, and apparatus for configuration, design, and operation of an active cannula robot |
| EP3711702A1 (en) | 2014-03-17 | 2020-09-23 | Intuitive Surgical Operations, Inc. | Mounting datum for surgical instrument |
| EP3119331B1 (en) | 2014-03-17 | 2022-05-04 | Intuitive Surgical Operations, Inc. | Surgical drape and systems including surgical drape and attachment sensor |
| EP3679885B1 (en) | 2014-03-17 | 2024-02-28 | Intuitive Surgical Operations, Inc. | Systems and methods for confirming disc engagement |
| DK3188645T3 (da) | 2014-09-04 | 2020-07-13 | Memic Innovative Surgery Ltd | Anordning og system, der indbefatter mekaniske arme |
| US11200560B2 (en) * | 2014-12-19 | 2021-12-14 | Capital One Services, Llc | Systems and methods for contactless and secure data transfer |
| GB2538326B (en) | 2015-05-07 | 2019-06-05 | Cmr Surgical Ltd | A surgical drape for transferring drive |
| KR101633618B1 (ko) | 2015-06-05 | 2016-06-27 | (주)미래컴퍼니 | 수술 로봇용 어댑터 구조 |
| KR102479143B1 (ko) | 2016-12-20 | 2022-12-20 | 버브 서지컬 인크. | 로봇 수술 시스템에 사용하기 위한 멸균 어댑터 제어 시스템 및 통신 인터페이스 |
-
2015
- 2015-03-17 EP EP20172196.6A patent/EP3711702A1/en not_active Withdrawn
- 2015-03-17 CN CN201910409914.6A patent/CN110123461B/zh active Active
- 2015-03-17 ES ES22169553T patent/ES3035773T3/es active Active
- 2015-03-17 CN CN201580013290.6A patent/CN106102638B/zh active Active
- 2015-03-17 WO PCT/US2015/020882 patent/WO2015142789A1/en not_active Ceased
- 2015-03-17 US US14/660,836 patent/US9839487B2/en active Active
- 2015-03-17 JP JP2016555833A patent/JP6634023B2/ja active Active
- 2015-03-17 EP EP15764745.4A patent/EP3119324B1/en active Active
- 2015-03-17 EP EP15764268.7A patent/EP3119316B1/en active Active
- 2015-03-17 KR KR1020167028618A patent/KR102462158B1/ko active Active
- 2015-03-17 US US15/121,351 patent/US10420622B2/en active Active
- 2015-03-17 EP EP20154204.0A patent/EP3679884B1/en active Active
- 2015-03-17 KR KR1020167026585A patent/KR102395425B1/ko active Active
- 2015-03-17 KR KR1020167026579A patent/KR102443404B1/ko active Active
- 2015-03-17 WO PCT/US2015/020885 patent/WO2015142792A1/en not_active Ceased
- 2015-03-17 JP JP2016555834A patent/JP6620109B2/ja active Active
- 2015-03-17 KR KR1020227031302A patent/KR102594595B1/ko active Active
- 2015-03-17 KR KR1020167026582A patent/KR102443416B1/ko active Active
- 2015-03-17 ES ES22179743T patent/ES3031983T3/es active Active
- 2015-03-17 CN CN201580013601.9A patent/CN106132342B/zh active Active
- 2015-03-17 CN CN201580014411.9A patent/CN106132344B/zh active Active
- 2015-03-17 WO PCT/US2015/020876 patent/WO2015142785A1/en not_active Ceased
- 2015-03-17 EP EP15766019.2A patent/EP3119344B1/en active Active
- 2015-03-17 KR KR1020247011599A patent/KR20240051310A/ko active Pending
- 2015-03-17 US US15/121,354 patent/US10485621B2/en active Active
- 2015-03-17 CN CN201910766854.3A patent/CN110448383B/zh active Active
- 2015-03-17 KR KR1020237036330A patent/KR20230152174A/ko active Pending
- 2015-03-17 CN CN201580013952.XA patent/CN106102631B/zh active Active
- 2015-03-17 KR KR1020167025787A patent/KR102377893B1/ko active Active
- 2015-03-17 EP EP19201778.8A patent/EP3610821B1/en active Active
- 2015-03-17 CN CN201580014408.7A patent/CN106102646B/zh active Active
- 2015-03-17 US US15/121,731 patent/US10363109B2/en active Active
- 2015-03-17 EP EP15764089.7A patent/EP3119313B1/en active Active
- 2015-03-17 CN CN202410206298.5A patent/CN118078451A/zh active Pending
- 2015-03-17 EP EP19188212.5A patent/EP3581138B1/en active Active
- 2015-03-17 EP EP22169553.9A patent/EP4052675B1/en active Active
- 2015-03-17 WO PCT/US2015/020880 patent/WO2015142788A1/en not_active Ceased
- 2015-03-17 EP EP20154737.9A patent/EP3662861B1/en active Active
- 2015-03-17 KR KR1020167026575A patent/KR102442336B1/ko active Active
- 2015-03-17 CN CN202010087628.5A patent/CN111281550B/zh active Active
- 2015-03-17 JP JP2016557993A patent/JP6869722B2/ja active Active
- 2015-03-17 EP EP20161337.9A patent/EP3682838A1/en active Pending
- 2015-03-17 EP EP15764940.1A patent/EP3119328B1/en active Active
- 2015-03-17 KR KR1020167027582A patent/KR102396051B1/ko active Active
- 2015-03-17 US US14/660,834 patent/US10213268B2/en active Active
- 2015-03-17 JP JP2016555980A patent/JP6510550B2/ja active Active
- 2015-03-17 EP EP15764881.7A patent/EP3119327B1/en active Active
- 2015-03-17 EP EP23191978.8A patent/EP4248902A3/en active Pending
- 2015-03-17 CN CN202510025942.3A patent/CN119867832A/zh active Pending
- 2015-03-17 CN CN202010993620.5A patent/CN112022244B/zh active Active
- 2015-03-17 CN CN201580013292.5A patent/CN106102639B/zh active Active
- 2015-03-17 US US15/121,723 patent/US9687312B2/en active Active
- 2015-03-17 JP JP2016557594A patent/JP6553633B2/ja active Active
- 2015-03-17 WO PCT/US2015/021020 patent/WO2015142889A1/en not_active Ceased
- 2015-03-17 KR KR1020227037809A patent/KR102656875B1/ko active Active
- 2015-03-17 WO PCT/US2015/020888 patent/WO2015142795A1/en not_active Ceased
- 2015-03-17 US US15/121,374 patent/US10912616B2/en active Active
- 2015-03-17 JP JP2016558038A patent/JP6505125B2/ja active Active
- 2015-03-17 US US15/121,726 patent/US10610320B2/en active Active
- 2015-03-17 CN CN202310216510.1A patent/CN116058981A/zh active Pending
- 2015-03-17 CN CN201580013607.6A patent/CN106102640B/zh active Active
- 2015-03-17 KR KR1020167027274A patent/KR102324665B1/ko active Active
- 2015-03-17 JP JP2016557618A patent/JP6554478B2/ja active Active
- 2015-03-17 WO PCT/US2015/020884 patent/WO2015142791A1/en not_active Ceased
- 2015-03-17 WO PCT/US2015/020886 patent/WO2015142793A1/en not_active Ceased
- 2015-03-17 EP EP15765779.2A patent/EP3119341B1/en active Active
- 2015-03-17 EP EP19181058.9A patent/EP3563792B1/en active Active
- 2015-03-17 EP EP15765493.0A patent/EP3119335B1/en active Active
- 2015-03-17 CN CN202010417746.8A patent/CN111671521B/zh active Active
- 2015-03-17 US US15/121,369 patent/US10639119B2/en active Active
- 2015-03-17 US US15/121,718 patent/US10543051B2/en active Active
- 2015-03-17 JP JP2016556255A patent/JP6585067B2/ja active Active
- 2015-03-17 EP EP22179743.4A patent/EP4079253B1/en active Active
-
2017
- 2017-06-09 US US15/619,325 patent/US10045828B2/en active Active
- 2017-11-10 US US15/809,534 patent/US10278784B2/en active Active
-
2018
- 2018-08-13 US US16/102,225 patent/US10537400B2/en active Active
-
2019
- 2019-02-21 US US16/282,164 patent/US11389259B2/en active Active
- 2019-04-04 JP JP2019072171A patent/JP6795648B2/ja active Active
- 2019-05-03 US US16/403,304 patent/US11717370B2/en active Active
- 2019-07-04 JP JP2019124989A patent/JP6985336B2/ja active Active
- 2019-07-04 JP JP2019124988A patent/JP6882381B2/ja active Active
- 2019-07-29 US US16/524,832 patent/US11446105B2/en active Active
- 2019-08-19 US US16/543,826 patent/US10898288B2/en active Active
- 2019-11-01 JP JP2019199985A patent/JP2020032215A/ja active Pending
- 2019-11-01 JP JP2019199929A patent/JP6928057B2/ja active Active
- 2019-11-06 US US16/676,100 patent/US12357408B2/en active Active
-
2020
- 2020-01-21 US US16/748,419 patent/US11045274B2/en active Active
- 2020-03-25 US US16/829,856 patent/US20200222139A1/en active Pending
- 2020-04-06 US US16/840,730 patent/US12102409B2/en active Active
- 2020-11-12 JP JP2020188901A patent/JP7123108B2/ja active Active
-
2021
- 2021-01-04 US US17/140,373 patent/US12114956B2/en active Active
- 2021-01-22 US US17/155,475 patent/US11944403B2/en active Active
- 2021-08-05 JP JP2021129162A patent/JP7240454B2/ja active Active
- 2021-11-25 JP JP2021191215A patent/JP7434256B2/ja active Active
-
2022
- 2022-02-18 JP JP2022023606A patent/JP7314337B2/ja active Active
- 2022-06-23 US US17/848,030 patent/US12097006B2/en active Active
-
2023
- 2023-06-14 US US18/334,612 patent/US12508095B2/en active Active
-
2024
- 2024-02-02 US US18/431,434 patent/US20240173092A1/en active Pending
- 2024-08-13 US US18/802,290 patent/US20250041015A1/en active Pending
- 2024-08-30 US US18/821,052 patent/US20250134612A1/en active Pending
-
2025
- 2025-06-04 US US19/227,828 patent/US20250359958A1/en active Pending
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6928057B2 (ja) | 遠隔操作アクチュエータから手術器具に運動を移転する連結器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180315 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190426 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191101 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20191101 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20191112 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20191119 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20191206 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20191210 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200714 |
|
| C13 | Notice of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: C13 Effective date: 20201006 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210205 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20210302 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20210406 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20210406 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210414 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6869722 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |