以下、実施形態を図面に基づいて説明する。
[第1実施形態]
(ロボット手術システムの構成)
図1および図2を参照して、第1実施形態によるロボット手術システム100の構成について説明する。
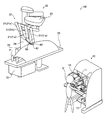
図1に示すように、ロボット手術システム100は、遠隔操作装置10と、患者側装置20と、を備えている。遠隔操作装置10は、患者側装置20に設けられた医療器具(medical equipment)を遠隔操作するために設けられている。患者側装置20によって実行されるべき動作態様指令が術者(surgeon)である操作者Oにより遠隔操作装置10に入力されると、遠隔操作装置10は、動作態様指令をコントローラ26を介して患者側装置20に送信する。そして、患者側装置20は、遠隔操作装置10から送信された動作態様指令に応答して、ロボットアーム21に取り付けられた手術器具(surgical instrument)40、内視鏡50等の医療器具を操作する。これにより、低侵襲手術が行われる。
患者側装置20は、患者Pに対して手術を行うインターフェースを構成する。患者側装置20は、患者Pが横たわる手術台30の傍らに配置される。患者側装置20は、複数のロボットアーム21を有し、このうち1つのロボットアーム21(21b)に内視鏡50が取り付けられ、その他のロボットアーム21(21a)に手術器具40が取り付けられる。各ロボットアーム21は、プラットホーム23に共通に支持されている。複数のロボットアーム21は複数の関節を有し、それぞれの関節には、サーボモータを含む駆動部と、エンコーダ等の位置検出器とが設けられている。ロボットアーム21は、コントローラ26を介して与えられた駆動信号によりロボットアーム21に取り付けられた医療器具が所望の動作を行うように制御されるように構成されている。
プラットホーム23は、手術室の床の上に載置されたポジショナ22に支持されている。ポジショナ22は、鉛直方向に調整可能な昇降軸を有する柱部24が、車輪を備え床面を移動可能なベース25に連結されている。
ロボットアーム21aには、先端部に医療器具としての手術器具40が着脱可能に取り付けられる。手術器具40は、ロボットアーム21aに取り付けられるハウジング43(図4参照)と、細長形状のシャフト42(図4参照)と、シャフト42の先端部に設けられたエンドエフェクタ41(図4参照)とを備えている。エンドエフェクタ41として、例えば、把持鉗子、シザーズ、フック、高周波ナイフ、スネアワイヤ、クランプ、ステイプラーが挙げられるがこれに限られるものではなく、各種の処置具を適用することができる。患者側装置20を用いた手術において、ロボットアーム21aは、患者Pの体表に留置したカニューラ(トロッカ)を介して患者Pの体内に手術器具40を導入する。そして、手術器具40のエンドエフェクタ41は、手術部位の近傍に配置される。
ロボットアーム21bには、先端部に医療器具としての内視鏡50が着脱可能に取り付けられる。内視鏡50は、患者Pの体腔内を撮影するものであり、撮影した画像は、遠隔操作装置10に対して出力される。内視鏡50として、3次元画像を撮影することができる3D内視鏡若しくは2D内視鏡が用いられる。患者側装置20を用いた手術において、ロボットアーム21bは、患者Pに体表に留置したトロッカを介して患者Pの体内に内視鏡50を導入する。そして、内視鏡50が手術部位の近傍に配置される。
遠隔操作装置10は、操作者Oとのインターフェースを構成する。遠隔操作装置10は、ロボットアーム21に取り付けられた医療器具を操作者Oが操作するための装置である。すなわち、遠隔操作装置10は、操作者Oによって入力された手術器具40および内視鏡50によって実行されるべき動作態様指令をコントローラ26を介して患者側装置20へ送信可能に構成されている。遠隔操作装置10は、たとえば、マスタの操作をしながらも患者Pの様子がよく見えるように手術台30の傍らに設置される。なお、遠隔操作装置10は、例えば動作態様指令を無線で送信するようにし、手術台30が設置された手術室とは別室に設置することも可能である。
手術器具40によって実行されるべき動作態様とは、手術器具40の動作(一連の位置及び姿勢)及び手術器具40個別の機能によって実現される動作の態様である。たとえば、手術器具40が把持鉗子である場合には、手術器具40によって実行されるべき動作態様とは、エンドエフェクタ41の手首のロール回転位置及びピッチ回転位置と、ジョーの開閉を行う動作である。また、手術器具40が高周波ナイフである場合には、手術器具40によって実行されるべき動作態様とは、高周波ナイフの振動動作、具体的には高周波ナイフに対する電流の供給であり得る。また、手術器具40がスネアワイヤである場合には、手術器具40によって実行されるべき動作態様とは、束縛動作および束縛状態の解放動作であり得る。また、バイポーラやモノポーラに電流を供給することによって手術対象部位を焼き切る動作であり得る。
内視鏡50によって実行されるべき動作態様とは、たとえば、内視鏡50先端の位置及び姿勢、又はズーム倍率の設定である。
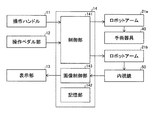
遠隔操作装置10は、図1および図2に示すように、操作ハンドル11と、操作ペダル部12と、表示部13と、制御装置14と、を備えている。
操作ハンドル11は、ロボットアーム21に取り付けられた医療器具を遠隔で操作するために設けられている。具体的には、操作ハンドル11は、医療器具(手術器具40、内視鏡50)を操作するための操作者Oによる操作を受け付ける。操作ハンドル11は、水平方向に沿って2つ設けられている。つまり、2つの操作ハンドル11のうち一方の操作ハンドル11は、操作者Oの右手により操作され、2つの操作ハンドル11のうち他方の操作ハンドル11は、操作者Oの左手により操作される。
また、操作ハンドル11は、遠隔操作装置10の後方側から、前方側に向かって延びるように配置されている。操作ハンドル11は、所定の3次元の操作領域内で動かすことができるように構成されている。すなわち、操作ハンドル11は、上下方向、左右方向、および前後方向に動かすことができるように構成されている。
遠隔操作装置10と患者側装置20とは、ロボットアーム21aおよびロボットアーム21bの動作の制御においては、マスタスレーブ型のシステムを構成する。すなわち、操作ハンドル11は、マスタスレーブ型のシステムにおけるマスタ側の操作部を構成し、医療器具が取り付けられたロボットアーム21aおよびロボットアーム21bはスレーブ側の動作部を構成する。そして、操作ハンドル11を操作者Oが操作すると、操作ハンドル11の動きをロボットアーム21aの先端部(手術器具40のエンドエフェクタ41)またはロボットアーム21bの先端部(内視鏡50)がトレースして移動するようにロボットアーム21aまたはロボットアーム21bの動作が制御される。
また、患者側装置20は、設定された動作倍率に応じてロボットアーム21aの動作を制御するよう構成されている。たとえば、動作倍率が1/2倍に設定されている場合、手術器具40のエンドエフェクタ41は、操作ハンドル11の移動距離の1/2の移動距離を移動するよう制御される。これによって、精細な手術を精確に行うことができる。
操作ペダル部12は、医療器具に関する機能を実行するための複数のペダルを含んでいる。複数のペダルは、凝固ペダルと、切断ペダルと、カメラペダルと、クラッチペダルと、を含んでいる。また、複数のペダルは、操作者Oの足により操作される。
凝固ペダルは、手術器具40を用いて手術部位を凝固させる操作を行うことができる。具体的には、凝固ペダルは、操作されることにより、手術器具40に凝固用の電圧が印加されて、手術部位の凝固が行われる。切断ペダルは、手術器具40を用いて手術部位を切断させる操作を行うことができる。具体的には、切断ペダルは、操作されることにより、手術器具40に切断用の電圧が印加されて、手術部位の切断が行われる。
カメラペダルは、体腔内を撮像する内視鏡50の位置及び姿勢を操作するために用いられる。具体的には、カメラペダルは、内視鏡50の操作ハンドル11による操作を有効にする。つまり、カメラペダルが押されている間は、操作ハンドル11により内視鏡50の位置および姿勢を操作することが可能である。たとえば、内視鏡50は、左右の操作ハンドル11の両方を用いることにより操作される。具体的には、左右の操作ハンドル11の中間点を中心に左右の操作ハンドル11を回動させることにより、内視鏡50が回動される。また、左右の操作ハンドル11を共に押し込むことにより、内視鏡50が奥に進む。また、左右の操作ハンドル11を共に引っ張ることにより、内視鏡50が手前に戻る。また、左右の操作ハンドル11を共に上下左右に移動させることにより、内視鏡50が上下左右に移動する。
クラッチペダルは、ロボットアーム21と、操作ハンドル11との操作接続を一時切断し手術器具40の動作を停止させる場合に用いられる。具体的には、クラッチペダルが操作されている間は、操作ハンドル11を操作しても、患者側装置20のロボットアーム21が動作しない。たとえば、操作により操作ハンドル11が移動可能な範囲の端部近傍に来た場合に、クラッチペダルが操作されることにより、操作接続を一時切断して、操作ハンドル11を中央位置付近に戻すことができる。そして、クラッチペダルの操作を中止するとロボットアーム21と操作ハンドル11とが再び接続され、中央付近で操作ハンドル11の操作を再開することができる。
表示部13は、内視鏡50が撮像した画像を表示することができるものである。表示部13は、スコープ型表示部または非スコープ型表示部からなる。スコープ型表示部とは、たとえば、覗き込むタイプの表示部である。また、非スコープ型表示部とは、通常のパーソナルコンピュータのディスプレイのような覗き込むタイプではない平坦な画面を有する開放型の表示部を含む概念である。
スコープ型表示部が取り付けられた場合、患者側装置20のロボットアーム21bに取り付けられた内視鏡50により撮像された3D画像が表示される。非スコープ型表示部が取り付けられた場合にも、患者側装置20に設けられた内視鏡50により撮像された3D画像が表示される。なお、非スコープ型表示部が取り付けられた場合、患者側装置20に設けられた内視鏡50により撮像された2D画像が表示されてもよい。
図2に示すように、制御装置14は、例えば、CPU等の演算器を有する制御部141と、ROMおよびRAM等のメモリを有する記憶部142と、画像制御部143とを含んでいる。制御装置14は、集中制御する単独の制御装置により構成されていてもよく、互いに協働して分散制御する複数の制御装置により構成されてもよい。制御部141は、操作ハンドル11により入力された動作態様指令を、操作ペダル部12の切替状態に応じて、ロボットアーム21aによって実行されるべき動作態様指令であるか、または、内視鏡50によって実行されるべき動作態様指令であるかを判定する。そして、制御部141は、操作ハンドル11に入力された動作態様指令が手術器具40によって実行されるべき動作態様指令であると判断すると、動作態様指令をロボットアーム21aに対して送信する。これによって、ロボットアーム21aが駆動され、この駆動によってロボットアーム21aに取り付けられた手術器具40の動作が制御される。
また、制御部141は、操作ハンドル11に入力された動作態様指令が内視鏡50によって実行されるべき動作態様指令であると判定すると、当該動作態様指令をロボットアーム21bに対して送信する。これによって、ロボットアーム21bが駆動され、この駆動によってロボットアーム21bに取り付けられた内視鏡50の動作が制御される。
記憶部142には例えば手術器具40の種類に応じた制御プログラムが記憶されていて、取り付けられた手術器具40の種類に応じて制御部141がこれらの制御プログラムを読み出すことにより、遠隔操作装置10の操作ハンドル11及び/又は操作ペダル部12の動作指令が個別の手術器具40に適合した動作をさせることができる。
画像制御部143は、内視鏡50が取得した画像を表示部13に伝送する。画像制御部143は、必要に応じて画像の加工修正処理を行う。
(手術器具、アダプタ、ドレープおよびロボットアームの構成)
図3〜図14を参照して、一実施形態による手術器具40、アダプタ60、ドレープ70およびロボットアーム21の構成について説明する。
〈取り付け状態〉
図3〜図5に示すように、手術器具40は、ロボットアーム21にアダプタ60を介して取り外し可能に接続される。アダプタ60は、ロボットアーム21を覆うための滅菌処理されたドレープ70をロボットアーム21との間に挟み込むためのドレープアダプタである。手術器具40は、Z2方向側に配置されたハウジング43の取付面40aがアダプタ60に取り付けられる。また、アダプタ60は、Z1方向側に配置された取付面60aに手術器具40が取り付けられる。また、アダプタ60は、Z2方向側に配置された取付面60bがロボットアーム21に取り付けられる。また、ロボットアーム21は、Z1方向側に配置された取付面21cにアダプタ60が取り付けられる。
ロボットアーム21は、清潔区域において使用されるため、ドレープ70により覆われる。ここで、手術室では、手術により切開した部分および医療機器が病原菌や異物などにより汚染されることを防ぐため、清潔操作が行われる。この清潔操作においては、清潔区域および清潔区域以外の区域である汚染区域が設定される。手術部位は、清潔区域に配置される。操作者Oを含む手術チームのメンバーは、手術中、清潔区域に殺菌されている物体のみが位置するよう配慮し、かつ、汚染区域に位置している物体を清潔区域に移動させるときは、この物体に滅菌処理を施す。同様に、操作者Oを含む手術チームのメンバーがその手を汚染区域に位置させたときは、清潔区域に位置している物体に直接接触する前に、手の滅菌処理を行う。清潔区域において用いられる器具は、滅菌処理が行われる、または、滅菌処理されたドレープ70により覆われる。
ドレープ70は、ロボットアーム21を覆う本体部71と、ロボットアーム21とアダプタ60との間に挟み込まれる取付部72とを備えている。本体部71は、フィルム状に形成された可撓性フィルム部材により構成されている。可撓性フィルム部材は、熱可塑性ポリウレタンやポリエチレンなどの樹脂材料からなる。本体部71には、ロボットアーム21とアダプタ60とが互いに係合可能なように、開口部が設けられている。本体部71の開口部には、開口部を塞ぐように取付部72が設けられている。取付部72は、樹脂成形部材により構成されている。樹脂成形部材は、ポリエチレンテレフタレートなどの樹脂材料からなる。取付部72は、本体部71に比べて硬く(撓みにくく)形成されている。取付部72は、ロボットアーム21とアダプタ60とが互いに係合可能なように、開口部が設けられている。取付部72の開口部は、ロボットアーム21とアダプタ60との係合する部分に対応するように設けられていてもよい。また、取付部72の開口部は、ロボットアーム21とアダプタ60との複数の係合する部分に対応するように複数個設けられていてもよい。
手術器具40は、ハウジング43内に設けられ、Z方向に延びる回転軸を中心に回転可能に設けられた複数(4つ)の被駆動部材44(図5参照)を備えている。複数の被駆動部材44は、エンドエフェクタ41を操作(駆動)するために設けられている。たとえば、被駆動部材44は、シャフト42内に挿通されたワイヤ(図示せず)により、エンドエフェクタ41と接続されている。これにより、被駆動部材44の回転に応じてワイヤが駆動されるとともに、ワイヤの駆動に応じてエンドエフェクタ41が操作(駆動)される。また、たとえば、被駆動部材44は、ギア(図示せず)を介してシャフト42に接続されている。これにより、被駆動部材44の回転に応じてシャフト42が回転されるとともに、シャフト42の回転に応じてエンドエフェクタ41が操作される。
被駆動部材44は、ロボットアーム21からの駆動力を伝達されるために、アダプタ60の後述する駆動伝達部材61と係合する係合凸部441を含んでいる。係合凸部441は、被駆動部材44のZ2方向側の表面からアダプタ60側(Z2方向側)に向かって突出するように設けられている。また、係合凸部441は、Y1方向側の被駆動部材44に設けられた係合凸部441aと、Y2方向側の被駆動部材44に設けられた係合凸部441bとを含んでいる。係合凸部441aと係合凸部441bとは、互いに異なる形状を有している。また、係合凸部441aと係合凸部441bとは、それぞれ、アダプタ60の後述する係合凹部611aと係合凹部611bと対応する形状を有している。
アダプタ60は、手術器具40の複数(4つ)の被駆動部材44に対応するように設けられ、Z方向に延びる回転軸A1(図6(A)参照)を中心に回転可能な複数(4つ)の駆動伝達部材61を備えている。駆動伝達部材61は、ロボットアーム21からの駆動力を手術器具40の被駆動部材44に伝達するために設けられている。駆動伝達部材61は、手術器具40の被駆動部材44の係合凸部441と係合する係合凹部611(図4参照)を含んでいる。係合凹部611は、駆動伝達部材61の手術器具40側(Z1方向側)に、駆動伝達部材61のZ1方向側の表面から手術器具40側とは反対側(Z2方向側)に向かって窪むように形成されている。また、係合凹部611は、Y1方向側の駆動伝達部材61に設けられた係合凹部611aと、Y2方向側の駆動伝達部材61に設けられた係合凹部611bとを含んでいる。係合凹部611aと係合凹部611bとは、互いに異なる形状を有している。
また、駆動伝達部材61は、ロボットアーム21の後述する第1の係合凸部211aおよび第2の係合凸部211bと係合する係合凹部612(図5参照)を含んでいる。係合凹部612は、駆動伝達部材61のロボットアーム21側(Z2方向側)に、駆動伝達部材61のZ2方向側の表面からロボットアーム21側とは反対側(Z1方向側)に向かって窪むように形成されている。なお、複数の駆動伝達部材61は、係合凹部611aと係合凹部611bとが互いに異なる形状を有していることを除いて、実質的に同様の構成を有している。
図6(A)および(B)に示すように、駆動伝達部材61は、係合凹部612を有する第1の部材621と、係合凹部611を有する第2の部材622とを含んでいる。第1の部材621は、取付面60b側(Z2方向側)に配置されている。第2の部材622は、取付面60a側(Z1方向側)に配置されている。また、第2の部材622は、第1の部材621と嵌合する嵌合凹部622aを有している。また、第1の部材621は、ばね623を収容する収容凹部621aを有している。第1の部材621と第2の部材622とは、ばね623を間に挟んだ状態でZ方向に嵌合している。なお、図6(A)および(B)では、係合凹部611aが設けられた駆動伝達部材61を示している。また、ばね623は、特許請求の範囲の「第2のばね」の一例である。
第1の部材621は、ばね623を介して第2の部材622に対してZ方向に移動可能に設けられている。これにより、アダプタ60をロボットアーム21に装着する際に、駆動伝達部材61の第1の部材621をZ1方向側に窪むように移動させることが可能である。また、第2の部材622は、ばね623を介して第1の部材621に対してZ方向に移動可能に設けられている。これにより、手術器具40をアダプタ60に装着する際に、駆動伝達部材61の第2の部材622をZ2方向側に窪むように移動させることが可能である。ばね623は、第1の部材621をZ2方向側に付勢し、第2の部材622をZ1方向側に付勢している。ばね623は、圧縮ばね(圧縮コイルばね)である。
第1の部材621は、係合凹部612内に設けられた貫通孔621bを有している。貫通孔621bは、第1の部材621を回転軸方向(Z方向)に貫通している。貫通孔621bは、回転軸方向から見て、略円形状を有している。第2の部材622は、第1の部材621の貫通孔621bにZ方向に挿入される挿入部622bを有している。挿入部622bは、貫通孔621bに挿入されることにより、後述する検出部材213(図13参照)に当接して、検出部材213をZ2方向に押すように構成されている。挿入部622bは、Z方向に延びるように設けられている。挿入部622bは、略円柱形状を有している。第1の部材621の貫通孔621bおよび第2の部材622の挿入部622bは、共に、駆動伝達部材61の回転中心に設けられている。
第1の部材621と第2の部材622とは、Z方向に延びる回転軸A1を中心に一体的に回転するように構成されている。具体的には、第1の部材621は、第2の部材622と回転方向に係合する係合凹部621cを有し、第2の部材622は、第1の部材621と回転方向に係合する係合凸部622cを有している。係合凹部621cは、第1の部材621の外周部に内側に窪むように設けられており、第2の部材622の係合凸部622cと係合する。係合凸部622cは、第2の部材622の内周部(嵌合凹部622a)から内側に突出するように設けられており、第1の部材621の係合凹部621cと係合する。また、第1の部材621の係合凹部621cと第2の部材622の係合凸部622cとは、ばね623を介して第1の部材621または第2の部材622がZ方向に移動した場合にも、互いの係合状態を維持するように設けられている。これにより、駆動伝達部材61は、第1の部材621または第2の部材622がZ方向に移動した場合にも、第1の部材621と第2の部材622とが一体的に回転するように構成されている。
第2の部材622は、ロボットアーム21へのアダプタ60の装着時に駆動伝達部材61の回転を停止させるためのストッパ部622dを有している。ストッパ部622dは、第2の部材622の外周部に切欠き状に設けられている。図7(A)および(B)に示すように、ストッパ部622dは、駆動伝達部材61が回転されることにより、アダプタ60に設けられたストッパ係合部631に係合する。また、ストッパ部622dは、ストッパ係合部631に係合することにより、駆動伝達部材61の回転を停止させる。なお、ストッパ部622dは、ばね623を介して第2の部材622が最もZ1方向側の位置に移動した状態で駆動伝達部材61が回転した場合にのみ、ストッパ係合部631と係合するように構成されている。つまり、ストッパ部622dは、第2の部材622が最もZ1方向側の位置よりもZ2方向側の位置に移動した状態で駆動伝達部材61が回転した場合、ストッパ係合部631とZ方向に離れていることにより、ストッパ係合部631と係合しないように構成されている。
図4および図8に示すように、ロボットアーム21には、手術器具40にアダプタ60の駆動伝達部材61を介して駆動を伝達するための駆動部インターフェース200が設けられている。駆動部インターフェース200は、手術器具40のエンドエフェクタ41を駆動するための駆動力を発生させる。駆動部インターフェース200は、アダプタ60の複数(4つ)の駆動伝達部材61に対応するように設けられた複数(4つ)の駆動部210と、複数(4つ)の駆動部210に対応するように設けられた複数(4つ)のセンサ220とを備えている。
図9(A)、図9(B)および図10に示すように、駆動部210は、係合部材211と、アクチュエータ212と、検出部材213と、ばね214と、一対のストッパ部材215と、ベアリング216とを含んでいる。係合部材211は、アダプタ60の駆動伝達部材61と係合する。係合部材211は、駆動伝達部材61の係合凹部612に対応して設けられた第1の係合凸部211aと、第2の係合凸部211bとを有している。第1の係合凸部211aと第2の係合凸部211bとは、係合部材211のZ1方向側の表面からZ1方向側に突出するように設けられている。第1の係合凸部211aと第2の係合凸部211bとは、係合部材211の回転中心を挟んで互いに対向するように設けられている。なお、ばね214は、特許請求の範囲の「第1のばね」の一例である。
また、係合部材211は、係合部材211のZ1方向側の表面から、第1の係合凸部211aおよび第2の係合凸部211bの突出方向側とは反対側(Z2方向側)に窪む溝部211cを有している。溝部211cは、検出部材213の一部を配置するために、第1の係合凸部211aと第2の係合凸部211bとの間に設けられている。溝部211cは、直線状に形成されている。溝部211cは、回転軸方向(Z方向)から見て、第1の係合凸部211aと第2の係合凸部211bとが並ぶ方向に略直交する方向に沿って延びるように設けられている。溝部211cは、検出部材213のZ方向に沿った移動を案内するように設けられている。なお、溝部211cは、特許請求の範囲の「案内部」の一例である。
アクチュエータ212は、モータを有し、駆動伝達部材61をZ方向に延びる回転軸A1を中心に回転させるために、係合部材211をZ方向に延びる回転軸A2を中心に回転させるように構成されている。回転軸A2は、回転軸A1に平行でかつ回転中心が一致している。アクチュエータ212は、駆動軸212aを介して係合部材211に接続されており、駆動軸212aを介して駆動力を係合部材211に伝達するように構成されている。アクチュエータ212の駆動軸212aは、たとえば、止めねじ(図示せず)を介して係合部材211と接続されている。
検出部材213は、センサ220により検出されるために設けられている。検出部材213は、第1の係合凸部211aと第2の係合凸部211bとの間に少なくとも一部が配置されている。検出部材213は、係合部材211の回転軸A2の軸方向に平行な方向(以下、単に「Z方向」という)に沿って移動可能に設けられている。
ここで、第1実施形態では、センサ220は、駆動伝達部材61の第2の部材622の一部(挿入部622b)が当接することによりZ2方向に移動した検出部材213を検出するように構成されている。これにより、第2の部材622の挿入部622bが当接することによりZ方向に移動した検出部材213がセンサ220により検出されることにより、ロボットアーム21への手術器具40の装着を検出することができる。その結果、アダプタ60の一部(駆動伝達部材61の第2の部材622の挿入部622b)を利用して、ロボットアーム21への手術器具40の装着を検出することができる。
センサ220は、光センサである。これにより、検出部材213の移動に応じた受光量の変化を利用して、検出部材213を容易に検出することができる。具体的には、センサ220は、光を出射する投光部221(図10参照)と、投光部221からの光を受光する受光部222(図10参照)とを有する光透過形のセンサである。センサ220は、検出部材213の後述する検出部分213cにより遮光されることにより、検出部材213を検出するように構成されている。これにより、検出部材213の移動に応じて検出部材213を容易かつ確実に検出することができる。また、センサ220は、検出部材213の検出部分213cにより遮光されないことにより、光を受光するように構成されている。なお、センサ220は、受光時(入光時)にHighを検出し、遮光時にLowを検出するように構成されている。
検出部材213は、当接部213aと、被案内部213bと、検出部分213cと、筒部213dとを含んでいる。当接部213aは、第1の係合凸部211aと第2の係合凸部211bとの間に配置され、駆動伝達部材61の第2の部材622の挿入部622bが当接するように設けられている。これにより、挿入部622bが検出部材213をZ2方向に押す力を当接部213aにより確実に受けることができる。また、当接部213aは、係合部材211の溝部211cに対応する位置に配置されている。これにより、当接部213aを案内部である溝部211cに沿って移動させることができるので、挿入部622bが当接した場合、当接部213aをZ方向に沿って容易に移動させることができる。
また、当接部213aは、検出部材213のZ1方向側の表面からZ1方向側に突出する当接凸部である。これにより、挿入部622bが検出部材213をZ2方向に押す力を、当接凸部である当接部213aによりより確実に受けることができる。また、当接凸部である当接部213aは、Z方向において、第1の係合凸部211aおよび第2の係合凸部211bと略同じ位置までZ1方向側に突出するように設けられている。これにより、当接凸部である当接部213aを設けた場合にも、当接部213aが第1の係合凸部211aと第2の係合凸部211bとの係合を阻害することを抑制することができる。当接部213aと第1の係合凸部211aと第2の係合凸部211bとは、Z1方向側の面が略面一になるように設けられている。
また、第1実施形態では、検出部材213は、アクチュエータ212により係合部材211と共に、Z方向に延びる回転軸A2を中心に回転されるように構成されており、当接部213aは、係合部材211および検出部材213の回転中心に設けられている。これにより、係合部材211および検出部材213が回転した場合にも、当接部213aの位置が変わらないようにすることができるので、挿入部622bと当接部213aとを確実に当接させることができる。また、当接部213aは、挿入部622bと対応する形状を有している。具体的には、当接部213aは、Z方向から見て、略円形状を有している。なお、係合部材211は、Z方向に沿って移動しないように構成されている。これにより、係合部材211がZ方向に沿って移動する場合に比べて、係合部材211の構成を簡素化することができるので、駆動部210の構成を簡素化することができる。
被案内部213bは、当接部213aと一体的に移動するように設けられている。被案内部213bは、係合部材211の溝部211cに配置され、案内部である溝部211cに沿って移動することにより、検出部材213のZ方向に沿った移動を行う。これにより、検出部材213をZ方向に沿って円滑に移動させることができる。被案内部213bは、溝部211cに対応する形状を有している。具体的には、被案内部213bは、直線状の棒状に形成されている。
検出部分213cは、係合部材211よりも外側に配置されており、センサ220により検出されるように構成されている。これにより、検出部分213cが係合部材211の内側に配置される場合に比べて、センサ220の配置の自由度を大きくすることができる。また、検出部分213cは、円環状に形成されている。これにより、係合部材211および検出部材213が回転した場合にも、検出部分213cとセンサ220との位置関係が変化しないようにすることができるので、検出部分213cをセンサ220により検出可能な位置に配置し続けることができる。
筒部213dは、円筒形状を有しており、Z方向に延びるように形成されている。筒部213dは、係合部材211の外周面と対向するように設けられている。筒部213dの内周面と係合部材211の外周面との間には、ばね214とベアリング216とが設けられている。
ばね214は、係合部材211をZ1方向側に付勢している。ばね214は、圧縮ばね(圧縮コイルばね)である。検出部材213は、ばね214を介して係合部材211に対してZ方向に沿って移動可能に設けられている。これにより、簡素な構成により、検出部材213をZ方向に沿って移動させることができる。一対のストッパ部材215は、ばね214を介した検出部材213のZ1方向への移動端の位置を規制するように構成されている。一対のストッパ部材215は、検出部材213を挟んで互いに対向するように設けられている。
ベアリング216は、係合部材211と検出部材213との間の摩擦を低減するために、係合部材211と検出部材213との間に設けられている。ベアリング216は、摩擦係数が小さいフッ素樹脂などの樹脂材料により構成されている。ベアリング216は、グリースなどの潤滑剤を配置可能な溝部216aを有している。溝部216aは、ベアリング216の内周面に沿って周状に設けられている。
図8に示すように、駆動部インターフェース200は、ドレープ用検出部材230と、ドレープ用検出部材230に対応するように設けられたセンサ240とを備えている。ドレープ用検出部材230とセンサ240とは、ドレープ70の装着を検出するために設けられている。ドレープ用検出部材230は、ロボットアーム21のハウジング250に設けられた開口部251(図4参照)から突出した突出位置と、開口部251から退避した退避位置との間を移動可能に構成されている。ドレープ用検出部材230は、アダプタ60とドレープ70とが装着されていない場合、突出位置に位置する。また、ドレープ用検出部材230は、アダプタ60とドレープ70とが装着された場合、退避位置に移動する。
センサ240は、センサ220と同様のセンサである。センサ240は、アダプタ60とドレープ70とが装着されていない場合、突出位置に位置するドレープ用検出部材230により遮光されており、Lowを検出するように構成されている。また、センサ240は、アダプタ60とドレープ70とが装着された場合、退避位置に移動したドレープ用検出部材230により遮光されないことにより、受光して、Highを検出するように構成されている。
また、駆動部インターフェース200は、手術器具40と電気的に接続されるための電極部260を備えている。電極部260は、アダプタ60の電極部(図示せず)を介して手術器具40の電極部(図示せず)に電気的に接続される。電極部260は、アダプタ60の電極部を介して手術器具40の電極部に接続されていない場合、Lowが検出されるように構成されている。また、電極部260は、アダプタ60の電極部を介して手術器具40の電極部に接続されている場合、Highが検出されるように構成されている。また、電極部260は、複数(4つ)の電極を有している。
(ドレープ、アダプタおよび手術器具の装着の検出)
次に、図10〜図14を参照して、ロボットアーム21へのドレープ70、アダプタ60および手術器具40の装着の検出について説明する。なお、ロボットアーム21には、ドレープ70、アダプタ60、手術器具40がこの順に装着される。また、ドレープ70、アダプタ60、手術器具40の装着に応じた、センサ220、センサ240および電極部260の状態の変化は、図10〜図14に示す表の通りである。
図10は、ロボットアーム21にドレープ70、アダプタ60および手術器具40が装着されていない状態を示している。この状態では、センサ220は、検出部材213により遮光されていないため、受光状態(High)である。また、センサ240は、ドレープ用検出部材230により遮光されているため、遮光状態(Low)である。また、電極部260は、手術器具40の電極部に接続されていないため、開状態(Low)である。また、図示は省略しているものの、ロボットアーム21にドレープ70が装着された状態では、センサ220、センサ240および電極部260は、図10に示す状態と同じ状態である。
図11は、ロボットアーム21にドレープ70およびアダプタ60が装着され、かつ、アダプタ60の駆動伝達部材61が駆動部210に係合されていない状態を示している。この状態では、センサ220は、検出部材213により遮光されていないため、受光状態(High)である。一方、センサ240は、アダプタ60とドレープ70との装着によりドレープ用検出部材230が突出位置から退避位置に移動されるため、ドレープ用検出部材230により遮光されなくなる。このため、センサ240は、受光状態(High)になる。これにより、アダプタ60およびドレープ70が装着されていることを検出することができる。また、電極部260は、アダプタ60の電極部に接続される一方、手術器具40の電極部に接続されていないため、開状態(Low)である。
また、この状態では、駆動部210の係合部材211の第1の係合凸部211aおよび第2の係合凸部211bが駆動伝達部材61の第1の部材621に当接される。これにより、駆動伝達部材61の第1の部材621がばね623を介して第2の部材622に対してZ1方向に移動される。また、第1の部材621がZ1方向に移動された状態で、駆動部210の係合部材211がZ方向に延びる回転軸A2を中心に回転される。これにより、駆動部210の係合部材211の第1の係合凸部211aおよび第2の係合凸部211bが、駆動伝達部材61の係合凹部612と互いに係合可能な位置まで移動される。この結果、駆動部210の係合部材211の第1の係合凸部211aおよび第2の係合凸部211bと、駆動伝達部材61の係合凹部612とが互いに係合される。これにより、駆動伝達部材61の第1の部材621がばね623を介して第2の部材622に対してZ2方向に移動される。また、駆動伝達部材61がZ方向に延びる回転軸A1を中心に回転可能になる。
図12は、ロボットアーム21にドレープ70およびアダプタ60が装着され、かつ、アダプタ60の駆動伝達部材61が駆動部210に係合されている状態を示している。この状態では、センサ220は、検出部材213により遮光されていないため、受光状態(High)である。また、センサ240は、ドレープ用検出部材230により遮光されていないため、受光状態(High)である。また、電極部260は、アダプタ60の電極部に接続される一方、手術器具40の電極部に接続されていないため、開状態(Low)である。
また、この状態では、駆動部210の係合部材211の回転に応じて、駆動伝達部材61がZ方向に延びる回転軸A1を中心に回転される。また、駆動伝達部材61の第2の部材622は、ばね623を介して最もZ1方向側の位置に移動した状態である。これらの結果、駆動伝達部材61が回転されることにより、駆動伝達部材61のストッパ部622dが、ストッパ係合部631(図7(A)および(B)参照)に係合される。これにより、駆動部210のアクチュエータ212のモータの回転が停止される。この結果、ロボットアーム21にドレープ70およびアダプタ60が装着され、かつ、アダプタ60の駆動伝達部材61が駆動部210に係合されていることを検出することができる。なお、アクチュエータ212のモータの回転の停止を検知するためには、モータのエンコーダの出力値を監視したり、モータの電流値を監視したりすればよい。
図13は、ロボットアーム21に手術器具40がさらに装着され、かつ、手術器具40の被駆動部材44がアダプタ60の駆動伝達部材61に係合されていない状態を示している。この状態では、センサ220は、検出部材213がZ2方向に移動されるため、検出部材213により遮光されるようになる。このため、センサ220は、遮光状態(Low)になる。また、センサ240は、ドレープ用検出部材230により遮光されていないため、受光状態(High)である。また、電極部260は、アダプタ60の電極部を介して手術器具40の電極部に接続されているため、閉状態(High)である。これらの結果、ロボットアーム21に手術器具40が装着され、かつ、手術器具40の被駆動部材44がアダプタ60の駆動伝達部材61に係合されていないことを検出することができる。
また、この状態では、被駆動部材44の係合凸部441が駆動伝達部材61の第2の部材622に当接される。これにより、駆動伝達部材61の第2の部材622がばね623を介して第1の部材621に対してZ2方向に移動される。この結果、第2の部材622の挿入部622bが第1の部材621の貫通孔621bに挿入されるようにZ2方向に移動される。また、第2の部材622の挿入部622bが当接することにより、ばね214を介して検出部材213がZ2方向に移動される。これにより、検出部材213の検出部分213cにより、センサ220が遮光される。
また、第2の部材622がZ2方向に移動されることにより、ストッパ部622dとストッパ係合部631とがZ方向に離れて、ストッパ部622dとストッパ係合部631との係合が解除される。この結果、駆動伝達部材61がZ方向に延びる回転軸A1を中心に回転される。これにより、駆動伝達部材61の係合凹部611が、被駆動部材44の係合凸部441と互いに係合可能な位置まで移動される。この結果、駆動伝達部材61の係合凹部611と、被駆動部材44の係合凸部441とが互いに係合される。これにより、駆動伝達部材61の第2の部材622がばね623を介して第1の部材621に対してZ1方向に移動される。この結果、ばね214を介して検出部材213がZ1方向に移動される(元の位置に戻る)。
図14は、ロボットアーム21に手術器具40が装着され、かつ、手術器具40の被駆動部材44がアダプタ60の駆動伝達部材61に係合されている状態を示している。この状態では、センサ220は、検出部材213がZ1方向に移動されるため、検出部材213により遮光されないようになる。このため、センサ220は、受光状態(High)になる。また、センサ240は、ドレープ用検出部材230により遮光されていないため、受光状態(High)である。また、電極部260は、アダプタ60の電極部を介して手術器具40の電極部に接続されているため、閉状態(High)である。これらの結果、ロボットアーム21に手術器具40が装着され、かつ、手術器具40の被駆動部材44がアダプタ60の駆動伝達部材61に係合されていることを検出することができる。
なお、この状態では、被駆動部材44の係合凸部441が当接することにより、駆動伝達部材61の第2の部材622は、ばね623を介して最もZ1方向側の位置よりもわずかにZ2方向側の位置に移動した状態である。このため、駆動伝達部材61は、回転可能な状態であり、被駆動部材44も回転可能な状態である。
[第2実施形態]
次に、図15〜図22を参照して、第2実施形態について説明する。この第2実施形態では、上記第1実施形態と異なり、駆動伝達部材がさらに押圧部を有している例について説明する。なお、上記第1実施形態と同一の構成については、図中において同じ符号を付して図示し、その説明を省略する。
(ロボット手術システムの構成)
第2実施形態によるロボット手術システム300は、図15(A)(B)に示すように、上記第1実施形態の駆動伝達部材61に代えて、駆動伝達部材361を備えている。
駆動伝達部材361は、第1の部材621に、押圧部621d(図15(B)参照)をさらに有している。
押圧部621dは、駆動部インターフェース200の駆動部210の検出部材213に当接して押圧するように設けられている。具体的には、押圧部621dは、検出部材213の当接部213aに当接して、検出部材213をZ2方向に押圧するように設けられている。押圧部621dは、貫通孔621bからZ2方向側に向かって突出するように設けられている。押圧部621dは、Z方向に延びる略円筒形状を有している。略円筒形状の押圧部621dは、貫通孔621bを介して挿入部622bが挿入されるように形成されている。略円筒形状の押圧部621dと略円柱形状の挿入部622bとは、検出部材213の回転中心を中心とする、同心円状に設けられている。
また、ロボット手術システム300は、図16に示すように、上記第1実施形態のセンサ220に代えて、センサ320を備えている。センサ320は、アダプタ60と手術器具40との係合を検出するためのセンサ320aと、アダプタ60とロボットアーム21との係合を検出するためのセンサ320bとを含んでいる。センサ320aは、複数(4つ)の駆動部210に対応するように設けられた、複数(8つ)のセンサ320aを含んでいる。すなわち、センサ320aは、複数の駆動部210の各々に対して、2つずつ設けられている。また、センサ320bは、複数(4つ)の駆動部210に対応するように設けられた、複数(4つ)のセンサ320bを含んでいる。すなわち、センサ320bは、複数の駆動部210の各々に対して、1つずつ設けられている。
センサ320a(320b)は、光を出射する投光部321a(322b)(図18参照)と、投光部321a(322b)からの光を受光する受光部322a(321b)(図18参照)とを有する光透過形のセンサである。センサ320a(320b)は、検出部材213の検出部分213cにより遮光されることにより、検出部材213を検出するように構成されている。また、センサ320a(320b)は、検出部材213の検出部分213cにより遮光されないことにより、光を受光するように構成されている。なお、センサ320a(320b)は、受光時(入光時)にHighを検出し、遮光時にLowを検出するように構成されている。
ここで、第2実施形態では、センサ320aとセンサ320bとは、互いに異なるタイミングにおいて検出部材213を検出可能なように構成されている。これにより、センサ320aによりアダプタ60と手術器具40との係合を検出することができるだけでなく、センサ320bによりアダプタ60とロボットアーム21との係合を検出することができる。その結果、アクチュエータ212のモータの回転の停止の有無によりアダプタ60とロボットアーム21との係合を検出した上記第1実施形態とは異なり、アクチュエータ212のモータの回転の停止の有無を判断するために、モータのエンコーダの出力値を監視したり、モータの電流値を監視したりする必要がないので、アダプタ60とロボットアーム21との係合をより簡単に検出することができる。なお、センサ320aおよびセンサ320bは、それぞれ、特許請求の範囲の「第1のセンサ」および「第2のセンサ」の一例である。
センサ320aとセンサ320bとは、検出部材213が移動する方向に沿った方向(Z方向、係合部材211の回転軸A2の軸方向に沿った方向)において、検出部材213の検出位置が互いに異なるように構成されている。これにより、センサ320aとセンサ320bとを、互いに異なるタイミングにおいて検出部材213を検出可能なように容易に構成することができる。センサ320aは、センサ320bよりも低い検出位置(Z2方向側の検出位置)において検出部材213を検出するように設けられている。また、センサ320bは、センサ320aよりも高い検出位置(Z1方向側の検出位置)において検出部材213を検出するように設けられている。なお、「高い」とは、Z方向においてアダプタ60により近いこと(すなわち、よりZ1方向側であること)を意味し、「低い」とは、Z方向においてアダプタ60からより遠いこと(すなわち、よりZ2方向側であること)を意味している。
また、センサ320aとセンサ320bとは、プリント基板などの回路基板である基板部370に設けられている。基板部370は、センサ320aが設けられた基板部370aと、センサ320bが設けられた基板部370bとを含んでいる。基板部370aと基板部370bとは、検出部材213が移動する方向に沿った方向(Z方向)において、互いに高さ位置(すなわち、Z方向の位置)が異なるように構成されている。これにより、センサ320aとセンサ320bとを、検出部材213が移動する方向に沿った方向において、検出部材213の検出位置が互いに異なるように容易に構成することができる。基板部370aは、センサ320aの配置面を有し、センサ320aの配置面が、基板部370bにおけるセンサ320bの配置面よりも低い位置(Z2方向側の位置)になるように設けられている。また、基板部370bは、センサ320bの配置面を有し、センサ320bの配置面が、基板部370aにおけるセンサ320aの配置面よりも高い位置(Z1方向側の位置)になるように設けられている。なお、基板部370aおよび基板部370bは、それぞれ、特許請求の範囲の「第1の基板部」および「第2の基板部」の一例である。
また、図17(A)(B)に示すように、基板部370aと基板部370bとは、一体構造を有していてもよいし、分割構造を有していてもよい。一体構造を有している場合、基板部370aと基板部370bとは、基板部370aと基板部370bとの間に段差部を有する1枚の回路基板の互いに異なる部分である。また、分割構造を有している場合、基板部370aと基板部370bとは、互いに独立した回路基板であり、基板部370aと基板部370bとの間に段差部を有するように互いに連結された状態で用いられる。
第2実施形態では、図18〜図22に示すように、センサ320aは、挿入部622bが当接することによりZ2方向に移動した検出部材213を検出するように構成されている。また、センサ320bは、押圧部621dが当接することによりZ2方向に移動した検出部材213を検出するように構成されている。これにより、センサ320aにより、駆動伝達部材361の挿入部622bを有する第2の部材622の移動の状態を検出することができるので、アダプタ60と手術器具40との係合の状態を容易に検出することができる。また、センサ320bにより、駆動伝達部材361の押圧部621dを有する第1の部材621の移動の状態を検出することができるので、アダプタ60とロボットアーム21との係合を容易に検出することができる。
検出部材213は、押圧部621dと挿入部622bとが共に当接する面213eを有している。これにより、押圧部621dと当接する当接面と、挿入部622bが当接する当接面とを互いに独立して検出部材213に設ける場合に比べて、検出部材213の構造を簡素化することができる。面213eは、当接凸部である当接部213aの先端面であり、平坦状に形成されている。面213eは、押圧部621dの先端面、および、挿入部622bの先端面と、Z方向に対向するように設けられている。
また、検出部材213が移動する方向に沿った方向(Z方向)において、挿入部622bの長さL1(図19参照)は、押圧部621dの長さL2(図19参照)よりも大きい。これにより、押圧部621dが当接することにより移動した検出部材213を、押圧部621dよりも長い挿入部622bにより、さらに移動させることができる。その結果、センサ320aとセンサ320bとを、互いに異なるタイミングにおいて検出部材213を検出可能に容易に構成することができる。なお、挿入部622bの長さL1は、挿入部622bの基端部と先端部との間のZ方向の距離である。同様に、押圧部621dの長さL2は、押圧部621dの基端部と先端部との間のZ方向の距離である。
(ドレープ、アダプタおよび手術器具の装着の検出)
次に、図18〜図22を参照して、ロボットアーム21へのドレープ70、アダプタ60および手術器具40の装着の検出について説明する。なお、ドレープ70、アダプタ60、手術器具40の装着に応じた、センサ320a、センサ320b、センサ240および電極部260の状態の変化は、図18〜図22に示す表の通りである。
図18は、ロボットアーム21にドレープ70、アダプタ60および手術器具40が装着されていない状態を示している。この状態では、センサ320aは、検出部材213により遮光されていないため、受光状態(High)である。また、センサ320bは、検出部材213により遮光されていないため、受光状態(High)である。また、センサ240は、ドレープ用検出部材230により遮光されているため、遮光状態(Low)である。また、電極部260は、手術器具40の電極部に接続されていないため、開状態(Low)である。また、図示は省略しているものの、ロボットアーム21にドレープ70が装着された状態では、センサ320a、センサ320b、センサ240および電極部260は、図18に示す状態と同じ状態である。
図19は、ロボットアーム21にドレープ70およびアダプタ60が装着され、かつ、アダプタ60の駆動伝達部材361が駆動部210に係合されていない状態を示している。この状態では、センサ320aは、検出部材213により遮光されていないため、受光状態(High)である。また、センサ320bは、検出部材213により遮光されていないため、受光状態(High)である。一方、センサ240は、アダプタ60とドレープ70との装着によりドレープ用検出部材230が突出位置から退避位置に移動されるため、ドレープ用検出部材230により遮光されなくなる。このため、センサ240は、受光状態(High)になる。これにより、アダプタ60およびドレープ70が装着されていることを検出することができる。また、電極部260は、アダプタ60の電極部に接続される一方、手術器具40の電極部に接続されていないため、開状態(Low)である。
また、この状態では、駆動部210の係合部材211の第1の係合凸部211aおよび第2の係合凸部211bが駆動伝達部材361の第1の部材621に当接される。これにより、駆動伝達部材361の第1の部材621がばね623を介して第2の部材622に対してZ1方向に移動される。また、第1の部材621がZ1方向に移動された状態で、駆動部210の係合部材211がZ方向に延びる回転軸A2を中心に回転される。これにより、駆動部210の係合部材211の第1の係合凸部211aおよび第2の係合凸部211bが、駆動伝達部材361の係合凹部612と互いに係合可能な位置まで移動される。この結果、駆動部210の係合部材211の第1の係合凸部211aおよび第2の係合凸部211bと、駆動伝達部材361の係合凹部612とが互いに係合される。これにより、駆動伝達部材361の第1の部材621がばね623を介して第2の部材622に対してZ2方向に移動される。また、駆動部210からの駆動力により、駆動伝達部材361がZ方向に延びる回転軸A1を中心に回転可能になる。
図20は、ロボットアーム21にドレープ70およびアダプタ60が装着され、かつ、アダプタ60の駆動伝達部材361が駆動部210に係合されている状態を示している。この状態では、センサ320aは、検出部材213により遮光されていないため、受光状態(High)である。一方、センサ320bは、検出部材213がZ2方向に移動されるため、検出部材213により遮光されるようになる。このため、センサ320bは、遮光状態(Low)になる。これにより、ロボットアーム21にドレープ70およびアダプタ60が装着され、かつ、アダプタ60の駆動伝達部材361が駆動部210の係合部材211に係合されていることを検出することができる。また、センサ240は、ドレープ用検出部材230により遮光されていないため、受光状態(High)である。また、電極部260は、アダプタ60の電極部に接続される一方、手術器具40の電極部に接続されていないため、開状態(Low)である。
また、この状態では、駆動部210の係合部材211と駆動伝達部材361の第1の部材621との係合により、駆動伝達部材361の第1の部材621がばね623を介して第2の部材622に対してZ2方向に移動されている。この結果、第1の部材621の押圧部621dが検出部材213に当接する。そして、押圧部621dが当接することにより、ばね214を介して検出部材213がZ2方向に移動される。これにより、検出部材213の検出部分213cにより、センサ320bが遮光される。
図21は、ロボットアーム21に手術器具40がさらに装着され、かつ、手術器具40の被駆動部材44がアダプタ60の駆動伝達部材361に係合されていない状態を示している。この状態では、センサ320aは、検出部材213がZ2方向に移動されるため、検出部材213により遮光されるようになる。このため、センサ320aは、遮光状態(Low)になる。また、センサ320bは、検出部材213により遮光されているため、遮光状態(Low)である。また、センサ240は、ドレープ用検出部材230により遮光されていないため、受光状態(High)である。また、電極部260は、アダプタ60の電極部を介して手術器具40の電極部に接続されているため、閉状態(High)である。これらの結果、ロボットアーム21に手術器具40が装着され、かつ、手術器具40の被駆動部材44がアダプタ60の駆動伝達部材361に係合されていないことを検出することができる。
また、この状態では、被駆動部材44の係合凸部441が駆動伝達部材361の第2の部材622に当接される。これにより、駆動伝達部材361の第2の部材622がばね623を介して第1の部材621に対してZ2方向に移動される。この結果、第2の部材622の挿入部622bが第1の部材621の貫通孔621bと押圧部621dとに挿入されるようにZ2方向に移動される。Z2方向に移動された状態では、挿入部622bの先端部は、押圧部621dの先端部よりもZ2方向側に位置している。このため、挿入部622bと押圧部621dのうちの挿入部622bのみが検出部材213に当接する。そして、挿入部622bが当接することにより、ばね214を介して検出部材213がZ2方向に移動される。これにより、検出部材213の検出部分213cにより、センサ320aが遮光される。
また、この状態では、駆動部210からの駆動力により、駆動伝達部材361がZ方向に延びる回転軸A1を中心に回転される。これにより、駆動伝達部材361の係合凹部611が、被駆動部材44の係合凸部441と互いに係合可能な位置まで移動される。この結果、駆動伝達部材361の係合凹部611と、被駆動部材44の係合凸部441とが互いに係合される。これにより、駆動伝達部材361の第2の部材622がばね623を介して第1の部材621に対してZ1方向に移動される。また、駆動部210からの駆動力により、駆動伝達部材361を介して被駆動部材44がZ方向に延びる回転軸を中心に回転可能になる。また、ばね214を介して検出部材213がZ1方向に移動される(押圧部621dと当接する位置に戻る)。
図22は、ロボットアーム21に手術器具40が装着され、かつ、手術器具40の被駆動部材44がアダプタ60の駆動伝達部材361に係合されている状態を示している。この状態では、センサ320aは、検出部材213がZ1方向に移動されるため、検出部材213により遮光されないようになる。このため、センサ320aは、受光状態(High)になる。また、センサ320bは、検出部材213により遮光されているため、遮光状態(Low)である。また、センサ240は、ドレープ用検出部材230により遮光されていないため、受光状態(High)である。また、電極部260は、アダプタ60の電極部を介して手術器具40の電極部に接続されているため、閉状態(High)である。これらの結果、ロボットアーム21に手術器具40が装着され、かつ、手術器具40の被駆動部材44がアダプタ60の駆動伝達部材361に係合されていることを検出することができる。
[変形例]
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
たとえば、上記第1および第2実施形態では、センサが、光センサである例を示したが、本発明はこれに限られない。本発明では、センサが、光センサ以外のセンサであってもよい。たとえば、センサが、マイクロスイッチなどのスイッチであってもよい。
また、上記第1および第2実施形態では、当接部が、当接凸部である例を示したが、本発明はこれに限られない。本発明では、当接部が、必ずしも当接凸部でなくてもよい。たとえば、当接部が、検出部材の表面から窪む当接凹部であってもよい。
また、上記第1および第2第実施形態では、検出部材が、係合部材と共に回転されるように構成されている例を示したが、本発明はこれに限られない。本発明では、検出部材が、必ずしも係合部材と共に回転されるように構成されていなくてもよい。
また、上記第1および第2実施形態では、アダプタとドレープとが、互いに独立して設けられる例を示したが、本発明はこれに限られない。本発明では、アダプタとドレープとが、一体的に設けられてもよい。つまり、アダプタは、ドレープが一体化されたアダプタであってもよい。
また、上記第2実施形態では、センサ320a(第1のセンサ)とセンサ320b(第2のセンサ)とが共に、検出部材213に対して検出部材213が移動する方向の一方方向側(Z2方向側)に設けられる例を示したが、本発明はこれに限られない。本発明では、第1のセンサと第2のセンサとが、それぞれ、検出部材に対して検出部材が移動する方向の一方方向側と他方方向側とに設けられていてもよい。図23に示す変形例では、センサ320bに代えて、センサ420bが設けられている。この変形例では、センサ320aとセンサ420bとは、それぞれ、検出部材213に対して検出部材213が移動する方向(Z方向)の一方方向側(Z2方向側)と他方方向側(Z1方向側)とに設けられている。また、変形例による検出部材213には、円環状に形成された検出部分213fが設けられている。センサ420bは、検出部材213の検出部分213fにより遮光されることにより、検出部材213を検出するように構成されている。詳細な説明は省略するが、センサ420bは、センサ320bとは図18〜図22に示す表における遮光状態と受光状態とが反対になるように構成されている。なお、センサ420bは、特許請求の範囲の「第2のセンサ」の一例である。