JP6814403B2 - シート材搬送装置、画像読取装置及び画像形成装置 - Google Patents
シート材搬送装置、画像読取装置及び画像形成装置 Download PDFInfo
- Publication number
- JP6814403B2 JP6814403B2 JP2016190720A JP2016190720A JP6814403B2 JP 6814403 B2 JP6814403 B2 JP 6814403B2 JP 2016190720 A JP2016190720 A JP 2016190720A JP 2016190720 A JP2016190720 A JP 2016190720A JP 6814403 B2 JP6814403 B2 JP 6814403B2
- Authority
- JP
- Japan
- Prior art keywords
- sheet material
- double feed
- double
- document
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H5/00—Feeding articles separated from piles; Feeding articles to machines
- B65H5/06—Feeding articles separated from piles; Feeding articles to machines by rollers or balls, e.g. between rollers
- B65H5/062—Feeding articles separated from piles; Feeding articles to machines by rollers or balls, e.g. between rollers between rollers or balls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/02—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors
- B65H7/06—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors responsive to presence of faulty articles or incorrect separation or feed
- B65H7/12—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors responsive to presence of faulty articles or incorrect separation or feed responsive to double feed or separation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/02—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors
- B65H7/06—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors responsive to presence of faulty articles or incorrect separation or feed
- B65H7/12—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors responsive to presence of faulty articles or incorrect separation or feed responsive to double feed or separation
- B65H7/125—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors responsive to presence of faulty articles or incorrect separation or feed responsive to double feed or separation sensing the double feed or separation without contacting the articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/18—Modifying or stopping actuation of separators
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00127—Connection or combination of a still picture apparatus with another apparatus, e.g. for storage, processing or transmission of still picture signals or of information associated with a still picture
- H04N1/0032—Connection or combination of a still picture apparatus with another apparatus, e.g. for storage, processing or transmission of still picture signals or of information associated with a still picture with a medium handling apparatus, e.g. a sheet sorter
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2301/00—Handling processes for sheets or webs
- B65H2301/40—Type of handling process
- B65H2301/44—Moving, forwarding, guiding material
- B65H2301/443—Moving, forwarding, guiding material by acting on surface of handled material
- B65H2301/4431—Moving, forwarding, guiding material by acting on surface of handled material by means with operating surfaces contacting opposite faces of material
- B65H2301/44318—Moving, forwarding, guiding material by acting on surface of handled material by means with operating surfaces contacting opposite faces of material between rollers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2404/00—Parts for transporting or guiding the handled material
- B65H2404/10—Rollers
- B65H2404/14—Roller pairs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/50—Occurence
- B65H2511/52—Defective operating conditions
- B65H2511/524—Multiple articles, e.g. double feed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2513/00—Dynamic entities; Timing aspects
- B65H2513/50—Timing
- B65H2513/51—Sequence of process
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2513/00—Dynamic entities; Timing aspects
- B65H2513/50—Timing
- B65H2513/512—Starting; Stopping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2801/00—Application field
- B65H2801/03—Image reproduction devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2801/00—Application field
- B65H2801/03—Image reproduction devices
- B65H2801/06—Office-type machines, e.g. photocopiers
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/00362—Apparatus for electrophotographic processes relating to the copy medium handling
- G03G2215/00535—Stable handling of copy medium
- G03G2215/00548—Jam, error detection, e.g. double feeding
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/00362—Apparatus for electrophotographic processes relating to the copy medium handling
- G03G2215/00535—Stable handling of copy medium
- G03G2215/00548—Jam, error detection, e.g. double feeding
- G03G2215/00552—Purge of recording medium at jam
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00567—Handling of original or reproduction media, e.g. cutting, separating, stacking
- H04N1/0057—Conveying sheets before or after scanning
- H04N1/00599—Using specific components
- H04N1/00602—Feed rollers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00567—Handling of original or reproduction media, e.g. cutting, separating, stacking
- H04N1/00628—Separating, e.g. preventing feeding of two sheets at a time
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N2201/00—Indexing scheme relating to scanning, transmission or reproduction of documents or the like, and to details thereof
- H04N2201/0077—Types of the still picture apparatus
- H04N2201/0081—Image reader
Description
なお、本発明に係るシート材搬送装置は、ADFに限らず、画像形成装置内部で記録紙等の記録材を用紙積載部から搬送する給紙部などにも適用可能である。また、画像形成装置や画像読取装置に適用されるシート材搬送装置に限らず、シート材を搬送させるシート材搬送装置であれば、幅広く適用可能である。
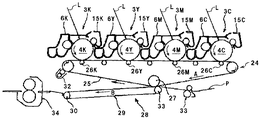
図2は、本実施形態の複写機500を示す概略構成図である。
本実施形態の複写機500は、画像形成手段としての画像形成部1と、記録紙供給装置40と、画像読取装置としての画像読取ユニット50とを備えている。画像読取ユニット50は、画像形成部1の上に固定された画像読取手段としてのスキャナ150と、スキャナ150に支持されるADF51とを有している。
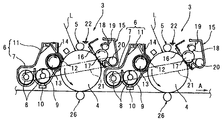
図4は、四つのプロセスユニット3K,3Y,3M,3Cからなるタンデム部の一部を示す部分拡大図である。
四つのプロセスユニット3K,3Y,3M,3Cは、それぞれ使用するトナーの色が異なる他はほぼ同様の構成になっているので、図4においては各符号に付すK、Y、M、Cというトナーの色を示す添字を省略している。
図2及び図3中の図中矢印A方向(時計回り方向)の無端移動に伴ってK、Y、M、C用の一次転写ニップを順次通過していく中間転写ベルト25のおもて面には、各一次転写ニップでトナー像が順次重ね合わせて一次転写される。この重ね合わせの一次転写により、中間転写ベルト25のおもて面には四色重ね合わせトナー像(以下「四色トナー像」という。)が形成される。
両面プリントを行う場合には、片面に対する画像定着処理を終えた記録紙Pの搬送経路が、切換爪によって記録紙反転装置36側に切り換えられ、そこで記録紙Pは反転されて再び二次転写ニップに進入する。そして、記録紙Pのもう片面にも画像の二次転写処理と定着処理とが施された後、記録紙Pは排紙トレイ501上に排紙される。
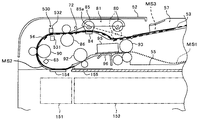
図1は、ADF51の要部構成を示す拡大構成図である。
スキャナ150やこれの上に固定されたADF51からなる画像読取ユニット50は、後述する二つの固定画像読取部や移動読取部152を有している。
画像読取ユニット50は、原稿読取方式として二種類の方式を用いることができる。一つ目はADF51を開放し、第二コンタクトガラス155上に原稿MSを配置してADF51を閉じ、原稿MSの表面を移動読取部152で読取る原稿固定読取方式である。二つ目は、ADF51に装備されている原稿載置台53に原稿MSを配置し、ADF51によって第一コンタクトガラス154に原稿MSを搬送して原稿の表面を固定読取部151,95で読取る原稿搬送読取方式である。
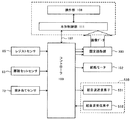
ADF51の制御部は、給紙モータ、各種センサ部、固定画像読取部300等の、一連の動作を制御するコントローラ100等から構成されている。給紙モータ102は、原稿の搬送動作の駆動を行う駆動部であり、図5中の固定画像読取部300は第一固定読取部151及び第二固定読取部95である。
フィードローラ85のフィードローラ軸85aは、給紙モータ102によって回転駆動されるとともに、給紙モータ102の出力回転方向に応じて正転および逆転するようになっている。ここにいう正転とは、原稿MSを給紙方向へ搬送する向きの回転であり、逆転とは、その逆向きの回転である。
図7は、重送検知機構530の重送検知箇所に原稿MSが一枚存在する状態の説明図である。
図8は、重送検知機構530の重送検知箇所に原稿MSが二枚存在する状態の説明図である。
本実施形態における重送検知機構530は、超音波送信素子531と超音波受信素子532とを備える。超音波送信素子531は、原稿搬送路54に対して装置内部側に配置され、超音波受信素子532は、原稿搬送路54に対して装置外部側に配置され、両者は互いに対向するように配置されている。重送検知機構530による重送検知箇所は、分離ニップの原稿搬送方向下流側、本実施形態では突き当てセンサ72の検知位置の原稿搬送方向下流側に配置されている。
第一に、超音波送信素子531から超音波を発信しない状態で、超音波受信素子532の出力信号がLレベル(受信する超音波の強さが弱い状態)であるかを確認する。
第二に、超音波送信素子531から超音波を発信した状態で、超音波受信素子532の出力信号がHレベル(受信する超音波の強さが強い状態)であるかを確認する。
図9は、本実施形態における重送発生検知制御の流れを示すフローチャートである。
本実施形態では、コントローラ100が原稿給紙信号を受信して原稿載置台53上の原稿MSが分離ニップを通じて送り出されると、突き当てセンサ72に原稿MSの先端が検知される(S1のYes)。この検知信号を受信したコントローラ100は、タイマーのカウントを開始し(S2)、タイマーのカウント値が規定値に達したら(S3のYes)、重送検知機構530の超音波送信素子531から超音波の発信を開始して、重送検知動作を開始する(S4)。この規定値は、上述したとおり、原稿MSの先端から所定のシート材搬送方向長さ分(ここでは25mm分)の原稿先端部分が重送検知箇所に存在する時期に重送検知動作が行われないように設定されているが、適宜設定可能である。この規定値を設定変更することで、原稿MSに対してどの位置から重送検知動作を開始するかを調整することができる。
次に、重送が発生した際に実行される先行紙救済動作の一例(以下、本例を「先行紙救済動作例1」という。)について説明する。
図10は、本先行紙救済動作例1の流れを示すフローチャートである。
本先行紙救済動作例1では、重送が発生した場合、まず、重送が発生した原稿MSが1枚目の原稿であるか否かを判断する(S11)。1枚目の原稿であると判断した場合には(S11のYes)、重送発生を検知した時点で、即座に給紙モータ102の駆動を停止し(S13)、第一搬送ローラ対86、第二搬送ローラ対90、読取出口ローラ対92、排紙ローラ対93等のすべての搬送駆動部材の駆動を停止する。その後、操作部108に重送が発生した旨の通知を出し(S14)、ユーザーに重送した原稿を取り除いてその原稿を原稿載置台53に再セットするように促す。
次に、重送が発生した際に実行される先行紙救済動作の他の例(以下、本例を「先行紙救済動作例2」という。)について説明する。
先行紙MS1が原稿スタック台55(搬送完了位置)へ排紙された後に給紙モータ102の駆動を停止させた際に、重送した原稿がいずれかのシート材検知手段の検知箇所に差し掛かるように設定することは、種々の事情により困難な場合がある。本先行紙救済動作例2では、先行紙MS1が原稿スタック台55(搬送完了位置)へ排紙された後に給紙モータ102の駆動を停止させた時点では、重送した原稿がいずれかのシート材検知手段の検知箇所に差し掛からない場合でも、その後の搬送動作によって、重送した原稿がいずれかのシート材検知手段の検知箇所に差し掛かるように制御する。
本先行紙救済動作例2でも、重送が発生した場合、まず、重送が発生した原稿MSが1枚目の原稿であるか否かを判断する(S11)。1枚目の原稿であると判断した場合には(S11のYes)、重送発生を検知した時点で、即座に給紙モータ102の駆動を停止し(S13)、第一搬送ローラ対86、第二搬送ローラ対90、読取出口ローラ対92、排紙ローラ対93等のすべての搬送駆動部材の駆動を停止する。この場合、シート材検知手段である突き当てセンサ72とレジストセンサ65のいずれかによって、重送した原稿が検知されていることを確認して(S21のYes)、操作部108に重送が発生した旨の通知を出し(S14)、ユーザーに重送した原稿を取り除いてその原稿を原稿載置台53に再セットするように促す。
(態様A)
原稿載置台53等のシート材収容部から原稿MS等の一枚のシート材を呼出ローラ80、分離パッド84、フィードローラ85等の分離送出手段により分離して送り出し、同時に駆動する第一搬送ローラ対86、第二搬送ローラ対90、読取出口ローラ対92、排紙ローラ対93等の2以上の搬送駆動部材によって原稿スタック台55等の所定の搬送完了位置まで搬送するシート材搬送経路上で重送検知機構530等の重送検知手段により重送発生を検知するADF51等のシート材搬送装置において、前記シート材搬送経路上の所定のシート材検知箇所でシート材の有無を検知する突き当てセンサ72及びレジストセンサ65等のシート材検知手段と、前記重送検知手段が重送の発生を検知したとき、重送したシート材に先行する先行シート材が前記搬送完了位置まで搬送されるまでは前記2以上の搬送駆動部材の駆動を継続し、該先行シート材が該搬送完了位置まで搬送された後、重送したシート材が前記シート材検知箇所に存在する期間に該2以上の搬送駆動部材の駆動を停止させるように、前記シート材搬送手段を制御する搬送制御手段とを有することを特徴とする。
本態様によれば、重送検知手段が重送の発生を検知して、重送したシート材に先行する先行シート材を搬送完了位置まで搬送した後、重送したシート材がシート材検知箇所に存在する期間に、同時に駆動する2以上の搬送駆動部材の駆動が停止する。よって、重送したシート材と先行シート材とを個別に搬送できなくても、先行シート材を搬送完了位置まで搬送しつつ、重送したシート材がシート材検知手段のシート材検知箇所外でシート材搬送経路上に残ってしまう事態を防止できる。したがって、重送したシート材がユーザーによって適切に取り除かれないままシート材搬送経路内に残った状態で、シート材の搬送が再開されてジャムが発生するような事態を防止できる。
前記態様Aにおいて、前記搬送制御手段は、前記重送検知手段が重送の発生を検知したとき、前記先行シート材が存在しない場合(1枚目の原稿で重送が発生した場合等)、又は、前記先行シートが既に前記搬送完了位置まで搬送されている場合には、重送したシート材が前記シート材検知箇所に存在する期間のうちの最も早いタイミングで、前記2以上の搬送駆動部材の駆動を停止させることを特徴とする。
これによれば、重送した原稿が搬送継続されてダメージを負うことを最小限に抑えることができる。
前記態様Bにおいて、前記シート材検知手段は、重送検知手段が重送発生を検知する重送検知箇所に対してシート材搬送方向上流側と下流側に少なくとも1つずつ位置する2以上のシート材検知箇所でシート材の有無を検知するものであり、前記シート材搬送経路上における前記重送検知箇所を挟んで隣り合う2つのシート材検知箇所間の距離は、当該シート材搬送装置で搬送可能なシート材のうちシート材搬送方向長さが最も短いシート材のシート材搬送方向長さよりも短く設定されていることを特徴とする。
これによれば、前記重送検知手段が重送の発生を検知したときに即座に前記2以上の搬送駆動部材の駆動を停止させたときでも、その時点で、重送したシート材はいずれかのシート材検知箇所に存在するように停止した状態になる。よって、駆動停止後に、重送したシート材がいずれかのシート材検知箇所に存在するように2以上の搬送駆動部材を駆動させるような制御が不要であり、重送した原稿が搬送継続されてダメージを負うことを抑制できる。
前記態様A〜Cのいずれかの態様において、前記搬送制御手段は、前記重送検知手段が重送の発生を検知したとき、前記先行シート材が前記搬送完了位置まで搬送された後、前記2以上の搬送駆動部材の駆動を逆転させて前記重送したシート材を逆搬送し、該重送したシート材が前記シート材検知箇所に存在する期間に該2以上の搬送駆動部材の駆動を停止させることを特徴とする。
先行シート材が搬送完了位置まで搬送された後に同時に駆動する2以上の搬送駆動部材の駆動を停止させた時点で、どのような重送パターンでも、重送した原稿がいずれかのシート材検知手段の検知箇所に差し掛かるように設定することは、種々の事情により困難な場合がある。本態様によれば、先行シート材が搬送完了位置まで搬送された後に同時に駆動する2以上の搬送駆動部材の駆動を停止させた時点で、重送した原稿がいずれのシート材検知手段の検知箇所にも差し掛からないような重送パターンがあったとしても、重送したシート材の逆搬送により、重送した原稿がいずれかのシート材検知手段の検知箇所に差し掛かる位置で停止させることができる。よって、上述した種々の事情があっても、重送したシート材がシート材検知手段のシート材検知箇所外でシート材搬送経路上に残ってしまう事態を防止できる。
前記態様Dにおいて、前記搬送制御手段は、前記逆搬送を開始してから所定時間内に前記シート材検知手段がシート材を検知しない場合、前記2以上の搬送駆動部材の駆動を停止させることを特徴とする。
本態様によれば、何らかの原因によって重送した原稿の逆搬送が適切に行われない場合があっても、2以上の搬送駆動部材の駆動がいつまでも継続される事態を防止できる。
原稿載置台53等のシート材収容部から原稿MS等の一枚のシート材を呼出ローラ80、分離パッド84、フィードローラ85等の分離送出手段により分離して送り出して搬送するシート材搬送経路上で重送検知機構530等の重送検知手段により重送発生を検知するADF51等のシート材搬送装置において、前記シート材搬送経路上の所定のシート材検知箇所でシート材の有無を検知する突き当てセンサ72及びレジストセンサ65等のシート材検知手段と、前記シート材検知手段の検知結果から取得されるシート材のシート材搬送方向長さに応じて該シート材の重送検知期間を決定し、決定した重送検知期間に重送発生の検知動作を行わせるように前記重送検知手段を制御する重送検知制御手段とを有することを特徴とする。
特許文献1に開示の給紙装置などの従来のシート材搬送装置は、通常、搬送方向長さが異なるいずれの種類のシート材に対しても、重送検知期間は一定である。そのため、搬送方向長さが異なる複数種類のシート材に対しては、例えば、シート材の先端部分や後端部分だけを除いたシート材部分について重送検知動作を行うということはできない。
本態様によれば、搬送方向長さが異なる複数種類のシート材に対し、それぞれの種類のシート材における適切な範囲に対して重送検知動作を実施することが可能となる。よって、例えば、シート材の先端部分や後端部分だけを除いたシート材部分について重送検知動作を行うということも可能となる。
前記態様Fにおいて、前記シート材検知手段は、少なくとも、重送検知手段が重送発生を検知する重送検知箇所よりもシート材搬送方向上流側に位置する上流側シート材検知箇所でシート材の有無を検知し、前記重送検知制御手段は、前記上流側シート材検知箇所での検知結果から取得されるシート材のシート材搬送方向長さに応じて、シート材の重送検知期間を決定することを特徴とする。
本態様によれば、重送検知動作が開始されるシート材上の位置が重送検知箇所に進入する前にシート材上の当該位置を把握し、また、重送検知動作が終了するシート材上の位置が重送検知箇所に進入する前にシート材上の当該位置を把握することができる。よって、必要最小限の範囲で重送検知動作を実施することができる。
前記態様Gにおいて、前記重送検知制御手段は、前記上流側シート材検知箇所でシート材の先端を検知した結果から前記重送検知期間の始期を決定し、該上流側シート材検知箇所で該シート材の後端を検知した結果から前記重送検知期間の終期を決定することを特徴とする。
本態様によれば、上流側シート材検知箇所を重送検知箇所の直前(シート材搬送方向上流側の近接位置)に位置させることが可能となる。
前記態様Hにおいて、前記重送検知制御手段は、前記上流側シート材検知箇所でシート材の先端を検知したタイミングとシート材搬送速度とから前記重送検知期間の始期を決定し、該上流側シート材検知箇所で該シート材の後端を検知したタイミングとシート材搬送速度とから前記重送検知期間の終期を決定することを特徴とする。
本態様によれば、重送検知期間の始期と終期を適切に決定することができる。
前記態様F〜Iのいずれかの態様において、前記重送検知制御手段は、シート材先端から所定のシート材搬送方向長さ分のシート材先端部分、若しくは、シート材後端から所定のシート材搬送方向長さ分のシート材後端部分、又は、その両方が、前記重送検知箇所に存在する時期を含まないように、前記重送検知期間を決定することを特徴とする。
本態様によれば、搬送方向長さが異なるいずれの種類のシート材に対しても、シート材の先端ばたつきや先端の変形の影響で重送の誤検知が発生したり、シート材の後端ばたつきや後端の変形の影響で重送の誤検知が発生したりするのを抑制することができる。
原稿MS等のシート材を搬送するADF51等のシート材搬送手段と、前記シート材搬送手段によって搬送されるシート材上の画像を読み取るスキャナ150等の画像読取手段とを備えた画像読取ユニット50等の画像読取装置において、前記シート材搬送手段として、前記態様A〜Jのいずれかの態様に係るシート材搬送装置を用いたことを特徴とする。
本態様によれば、重送したシート材と先行シート材とを個別に搬送できなくても、先行シート材を搬送完了位置まで搬送しつつ、重送したシート材がシート材検知手段のシート材検知箇所外でシート材搬送経路上に残ってしまう事態を防止できる。
前記態様Kにおいて、前記画像読取手段は、前記シート材検知手段の検知タイミングに基づいて、シート材上の画像読み取りを開始し、若しくは、シート材上の画像読み取りを終了し、又は、その両方を行うことを特徴とする。
本態様によれば、画像読取手段による画像読み取りの開始タイミングや終了タイミングを決定するのに用いられるシート材検知手段を利用して、重送したシート材がシート材検知手段のシート材検知箇所外でシート材搬送経路上に残ってしまう事態を防止できる。
画像読取ユニット50等の画像読取装置と、前記画像読取装置で読み取った読取画像に基づいて画像を形成する画像形成部1等の画像形成手段とを備える複写機500等の画像形成装置において、前記画像読取装置として、前記態様K又はLに係る画像読取装置を用いたことを特徴とする。
本態様によれば、重送したシート材と先行シート材とを個別に搬送できなくても、先行シート材を搬送完了位置まで搬送しつつ、重送したシート材がシート材検知手段のシート材検知箇所外でシート材搬送経路上に残ってしまう事態を防止できる。
50 画像読取ユニット
52 カバー
53 原稿載置台
54 原稿搬送路
55 原稿スタック台
63 原稿セットセンサ
65 レジストセンサ
72 突き当てセンサ
80 呼出ローラ
81 ピックアップホルダ
84 分離パッド
85 フィードローラ
85a フィードローラ軸
86 第一搬送ローラ対
90 第二搬送ローラ対
92 読取出口ローラ対
93 排紙ローラ対
95 第二固定読取部
96 白色ガイド部材
100 コントローラ
101 給紙クラッチ
102 給紙モータ
108 操作部
111 本体制御部
150 スキャナ
151 第一固定読取部
152 移動読取部
153 画像読取センサ
154 第一コンタクトガラス
155 第二コンタクトガラス
500 複写機
530 重送検知機構
531 超音波送信素子
532 超音波受信素子
Claims (11)
- シート材収容部から一枚のシート材を分離送出手段により分離して送り出し、同時に駆動する2以上の搬送駆動部材によって所定の搬送完了位置まで搬送するシート材搬送経路上で重送検知手段により重送発生を検知するシート材搬送装置において、
前記シート材搬送経路上の所定のシート材検知箇所でシート材の有無を検知するシート材検知手段と、
前記重送検知手段が重送の発生を検知したとき、重送したシート材に先行する先行シート材が前記搬送完了位置まで搬送されるまでは前記2以上の搬送駆動部材の駆動を継続し、該先行シート材が該搬送完了位置まで搬送された後、重送したシート材が前記シート材検知箇所に存在する期間に該2以上の搬送駆動部材の駆動を停止させるように、制御する搬送制御手段とを有し、
前記搬送制御手段は、前記重送検知手段が重送の発生を検知したとき、前記先行シート材が存在しない場合、又は、前記先行シート材が既に前記搬送完了位置まで搬送されている場合には、重送したシート材が前記シート材検知箇所に存在する期間のうちの最も早いタイミングで、前記2以上の搬送駆動部材の駆動を停止させ、
前記シート材検知手段は、重送検知手段が重送発生を検知する重送検知箇所に対してシート材搬送方向上流側と下流側に少なくとも1つずつ位置する2以上のシート材検知箇所でシート材の有無を検知するものであり、
前記シート材搬送経路上における前記重送検知箇所を挟んで隣り合う2つのシート材検知箇所間の距離は、当該シート材搬送装置で搬送可能なシート材のうちシート材搬送方向長さが最も短いシート材のシート材搬送方向長さよりも短く設定されていることを特徴とするシート材搬送装置。 - 請求項1に記載のシート材搬送装置において、
前記搬送制御手段は、前記重送検知手段が重送の発生を検知したとき、前記先行シート材が前記搬送完了位置まで搬送された後、前記2以上の搬送駆動部材の駆動を逆転させて前記重送したシート材を逆搬送し、該重送したシート材が前記シート材検知箇所に存在する期間に該2以上の搬送駆動部材の駆動を停止させることを特徴とするシート材搬送装置。 - 請求項2に記載のシート材搬送装置において、
前記搬送制御手段は、前記逆搬送を開始してから所定時間内に前記シート材検知手段がシート材を検知しない場合、前記2以上の搬送駆動部材の駆動を停止させることを特徴とするシート材搬送装置。 - 請求項1乃至3のいずれか1項に記載のシート材搬送装置において、
前記シート材検知手段の検知結果から取得されるシート材のシート材搬送方向長さに応じて該シート材の重送検知期間を決定し、決定した重送検知期間に重送発生の検知動作を行わせるように前記重送検知手段を制御する重送検知制御手段とを有することを特徴とするシート材搬送装置。 - 請求項4に記載のシート材搬送装置において、
前記重送検知制御手段は、前記重送検知箇所に対してシート材搬送方向上流側に位置する上流側シート材検知箇所での検知結果から取得されるシート材のシート材搬送方向長さに応じて、シート材の重送検知期間を決定することを特徴とするシート材搬送装置。 - 請求項5に記載のシート材搬送装置において、
前記重送検知制御手段は、前記上流側シート材検知箇所でシート材の先端を検知した結果から前記重送検知期間の始期を決定し、該上流側シート材検知箇所で該シート材の後端を検知した結果から前記重送検知期間の終期を決定することを特徴とするシート材搬送装置。 - 請求項6に記載のシート材搬送装置において、
前記重送検知制御手段は、前記上流側シート材検知箇所でシート材の先端を検知したタイミングとシート材搬送速度とから前記重送検知期間の始期を決定し、該上流側シート材検知箇所で該シート材の後端を検知したタイミングとシート材搬送速度とから前記重送検知期間の終期を決定することを特徴とするシート材搬送装置。 - 請求項4乃至7のいずれか1項に記載のシート材搬送装置において、
前記重送検知制御手段は、シート材先端から所定のシート材搬送方向長さ分のシート材先端部分、若しくは、シート材後端から所定のシート材搬送方向長さ分のシート材後端部分、又は、その両方が、重送検知箇所に存在する時期を含まないように、前記重送検知期間を決定することを特徴とするシート材搬送装置。 - シート材を搬送するシート材搬送手段と、
前記シート材搬送手段によって搬送されるシート材上の画像を読み取る画像読取手段とを備えた画像読取装置において、
前記シート材搬送手段として、請求項1乃至8のいずれか1項に記載のシート材搬送装置を用いたことを特徴とする画像読取装置。 - 請求項9に記載の画像読取装置において、
前記画像読取手段は、前記シート材検知手段の検知タイミングに基づいて、シート材上の画像読み取りを開始し、若しくは、シート材上の画像読み取りを終了し、又は、その両方を行うことを特徴とする画像読取装置。 - 画像読取装置と、
前記画像読取装置で読み取った読取画像に基づいて画像を形成する画像形成手段とを備える画像形成装置において、
前記画像読取装置として、請求項9又は10に記載の画像読取装置を用いたことを特徴とする画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016190720A JP6814403B2 (ja) | 2016-09-29 | 2016-09-29 | シート材搬送装置、画像読取装置及び画像形成装置 |
| US15/717,862 US10118781B2 (en) | 2016-09-29 | 2017-09-27 | Sheet conveying device, image reading device, and image forming apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016190720A JP6814403B2 (ja) | 2016-09-29 | 2016-09-29 | シート材搬送装置、画像読取装置及び画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018052684A JP2018052684A (ja) | 2018-04-05 |
| JP2018052684A5 JP2018052684A5 (ja) | 2019-03-28 |
| JP6814403B2 true JP6814403B2 (ja) | 2021-01-20 |
Family
ID=61688290
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016190720A Active JP6814403B2 (ja) | 2016-09-29 | 2016-09-29 | シート材搬送装置、画像読取装置及び画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10118781B2 (ja) |
| JP (1) | JP6814403B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6661465B2 (ja) * | 2016-05-20 | 2020-03-11 | キヤノン株式会社 | 画像読取装置及び画像形成装置 |
| JP2019080166A (ja) * | 2017-10-24 | 2019-05-23 | 株式会社東芝 | 画像処理装置、及び制御方法 |
| JP7187952B2 (ja) * | 2018-10-02 | 2022-12-13 | 富士フイルムビジネスイノベーション株式会社 | 重送検出装置、用紙搬送装置及びプログラム |
| JP2020098980A (ja) * | 2018-12-17 | 2020-06-25 | セイコーエプソン株式会社 | 画像読取装置、画像読取方法および画像読取システム |
| JP7298367B2 (ja) * | 2019-07-30 | 2023-06-27 | セイコーエプソン株式会社 | 読取装置および重送検出方法 |
| JP7435177B2 (ja) * | 2020-03-31 | 2024-02-21 | ブラザー工業株式会社 | 読取装置 |
| JP2023043291A (ja) * | 2021-09-16 | 2023-03-29 | コニカミノルタ株式会社 | 画像形成システム及びその制御方法 |
| CN114037704B (zh) * | 2022-01-10 | 2022-04-22 | 安徽高哲信息技术有限公司 | 入料系统及其控制方法、控制装置及存储介质 |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0472250A (ja) | 1990-07-12 | 1992-03-06 | Nisca Corp | ダブルフィード検出方法及び装置 |
| JPH07215537A (ja) | 1994-02-07 | 1995-08-15 | Ricoh Co Ltd | 自動原稿搬送装置に搭載された原稿重送検知装置 |
| JPH09142699A (ja) | 1995-09-22 | 1997-06-03 | Ricoh Co Ltd | 画像読取装置の原稿重送検知装置及び同検知方法 |
| JP4381133B2 (ja) * | 2003-12-24 | 2009-12-09 | ニスカ株式会社 | シート供給装置及びこれを用いた画像読取装置 |
| JP2007223688A (ja) | 2006-02-21 | 2007-09-06 | Canon Inc | シート搬送装置及び画像形成装置 |
| JP4519084B2 (ja) * | 2006-02-22 | 2010-08-04 | シャープ株式会社 | 原稿読取装置及び画像形成装置 |
| JP2007266767A (ja) | 2006-03-27 | 2007-10-11 | Canon Electronics Inc | 画像読取装置 |
| JP4242884B2 (ja) * | 2006-09-01 | 2009-03-25 | シャープ株式会社 | シート搬送装置、および、それを備えた原稿搬送装置、画像処理装置 |
| JP4217736B2 (ja) | 2006-11-09 | 2009-02-04 | シャープ株式会社 | シート搬送装置、前記シート搬送装置を備えてなる自動原稿送り装置、および、前記シート搬送装置を備えてなる画像形成装置 |
| JP2009040577A (ja) * | 2007-08-10 | 2009-02-26 | Murata Mach Ltd | 用紙搬送装置と用紙搬送方法 |
| JP5070029B2 (ja) * | 2007-12-20 | 2012-11-07 | キヤノン電子株式会社 | シート給送装置、画像読取装置、画像形成装置、シート給送装置の制御方法、画像読取装置の制御方法及び画像形成装置の制御方法 |
| JP2010001137A (ja) | 2008-06-20 | 2010-01-07 | Murata Mach Ltd | 給紙装置 |
| JP5136237B2 (ja) * | 2008-06-24 | 2013-02-06 | 村田機械株式会社 | 給紙装置 |
| JP5056614B2 (ja) | 2008-06-24 | 2012-10-24 | 株式会社デンソー | 有機elパネルの駆動装置及び有機elパネルの駆動方法 |
| JP2010136274A (ja) | 2008-12-08 | 2010-06-17 | Kyocera Mita Corp | 画像読取装置及び画像形成装置 |
| JP5172803B2 (ja) * | 2009-09-25 | 2013-03-27 | 京セラドキュメントソリューションズ株式会社 | 用紙搬送装置および画像形成装置 |
| JP2011111317A (ja) | 2009-11-30 | 2011-06-09 | Canon Electronics Inc | シート給送装置 |
| JP2013082539A (ja) | 2011-10-11 | 2013-05-09 | Kyocera Document Solutions Inc | 給紙装置、原稿搬送装置、画像形成装置 |
| JP6000675B2 (ja) | 2012-06-14 | 2016-10-05 | キヤノン電子株式会社 | 画像読取装置 |
| JP5815493B2 (ja) * | 2012-10-15 | 2015-11-17 | 京セラドキュメントソリューションズ株式会社 | シート搬送装置、原稿搬送装置および画像形成装置 |
| JP2014084184A (ja) | 2012-10-22 | 2014-05-12 | Kyocera Document Solutions Inc | シート搬送装置、原稿搬送装置および画像形成装置 |
| JP5587461B2 (ja) | 2013-05-08 | 2014-09-10 | キヤノン電子株式会社 | シート給送装置、スキャナ、プリンタ、ファクシミリ、及び複写機 |
| JP2016088645A (ja) | 2014-10-30 | 2016-05-23 | 株式会社リコー | シート搬送装置 |
| US9571690B2 (en) | 2015-03-19 | 2017-02-14 | Ricoh Company, Ltd. | Image scanner and image forming apparatus incorporating the image scanner |
| JP6528544B2 (ja) | 2015-06-02 | 2019-06-12 | 株式会社リコー | 自動原稿搬送装置および画像形成装置 |
| JP6550958B2 (ja) | 2015-06-22 | 2019-07-31 | 株式会社リコー | 自動原稿搬送装置 |
| US20170134598A1 (en) | 2015-11-10 | 2017-05-11 | Ricoh Company, Ltd. | Image forming apparatus incorporating automatic coupling device |
| JP6589586B2 (ja) | 2015-11-13 | 2019-10-16 | 株式会社リコー | 自動原稿搬送装置、画像読取装置および画像形成装置 |
| US10027831B2 (en) | 2015-11-16 | 2018-07-17 | Ricoh Company, Ltd. | Image reading unit |
| JP6638372B2 (ja) | 2015-12-17 | 2020-01-29 | 株式会社リコー | 画像読取装置 |
| JP2017120958A (ja) | 2015-12-28 | 2017-07-06 | 株式会社リコー | 原稿搬送装置、及び、画像形成装置 |
| JP2017128421A (ja) * | 2016-01-21 | 2017-07-27 | コニカミノルタ株式会社 | 自動原稿搬送装置、およびそれを備えた画像読取システムと画像形成装置 |
-
2016
- 2016-09-29 JP JP2016190720A patent/JP6814403B2/ja active Active
-
2017
- 2017-09-27 US US15/717,862 patent/US10118781B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018052684A (ja) | 2018-04-05 |
| US10118781B2 (en) | 2018-11-06 |
| US20180086579A1 (en) | 2018-03-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6814403B2 (ja) | シート材搬送装置、画像読取装置及び画像形成装置 | |
| JP5825549B2 (ja) | シート搬送装置、画像読取装置及び画像形成装置 | |
| US8444135B2 (en) | Sheet conveyance device, and image forming apparatus and image reading unit including same | |
| JP6198123B2 (ja) | シート材搬送装置、画像読取装置および画像形成装置 | |
| US7539432B2 (en) | Image forming apparatus | |
| JP5605698B2 (ja) | シート材搬送装置、画像読取装置および画像形成装置 | |
| JP2007051005A (ja) | 自動原稿給紙装置及び画像形成装置 | |
| US9667835B2 (en) | Image forming apparatus and image forming system including the image forming apparatus | |
| JP2014177326A (ja) | シート材給送装置並びにこれを備えた画像形成装置及び画像読取装置 | |
| JP5754625B2 (ja) | 画像読取装置および画像形成装置 | |
| JP6788818B2 (ja) | シート搬送装置、画像読取装置および画像形成装置 | |
| JP5448066B2 (ja) | シート材搬送装置、画像読取装置および画像形成装置 | |
| JP2012232839A (ja) | シート材搬送装置、画像読取装置および画像形成装置 | |
| JP6807048B2 (ja) | シート材搬送装置、画像読取装置及び画像形成装置 | |
| JP4975518B2 (ja) | 画像形成装置 | |
| JP2006052082A (ja) | 原稿給紙装置、原稿読取装置および画像形成装置 | |
| JP6270103B2 (ja) | 自動原稿搬送装置、原稿読取システム、及び複写機 | |
| JP5303942B2 (ja) | 記録媒体搬送装置、転写装置及び画像形成装置 | |
| JP6829836B2 (ja) | 画像読取装置および画像形成装置 | |
| JP2014001053A (ja) | シート給送装置並びにこれを用いる画像読取装置及び画像形成装置 | |
| JP6701561B2 (ja) | シート搬送装置及び画像形成システム | |
| JP5741997B2 (ja) | シート材搬送装置、画像読取装置および画像形成装置 | |
| JP4721837B2 (ja) | 原稿搬送装置 | |
| JP2024031808A (ja) | シート搬送装置、自動原稿搬送装置および画像形成装置 | |
| JP2004286778A (ja) | 画像形成装置及び画像形成装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190213 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190703 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200529 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200728 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201120 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201203 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6814403 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |