JP6355393B2 - シート給送装置及び画像形成装置 - Google Patents
シート給送装置及び画像形成装置 Download PDFInfo
- Publication number
- JP6355393B2 JP6355393B2 JP2014077862A JP2014077862A JP6355393B2 JP 6355393 B2 JP6355393 B2 JP 6355393B2 JP 2014077862 A JP2014077862 A JP 2014077862A JP 2014077862 A JP2014077862 A JP 2014077862A JP 6355393 B2 JP6355393 B2 JP 6355393B2
- Authority
- JP
- Japan
- Prior art keywords
- sheet
- sheet feeding
- detection
- height
- feeding apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H1/00—Supports or magazines for piles from which articles are to be separated
- B65H1/08—Supports or magazines for piles from which articles are to be separated with means for advancing the articles to present the articles to the separating device
- B65H1/14—Supports or magazines for piles from which articles are to be separated with means for advancing the articles to present the articles to the separating device comprising positively-acting mechanical devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H1/00—Supports or magazines for piles from which articles are to be separated
- B65H1/08—Supports or magazines for piles from which articles are to be separated with means for advancing the articles to present the articles to the separating device
- B65H1/18—Supports or magazines for piles from which articles are to be separated with means for advancing the articles to present the articles to the separating device controlled by height of pile
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H1/00—Supports or magazines for piles from which articles are to be separated
- B65H1/08—Supports or magazines for piles from which articles are to be separated with means for advancing the articles to present the articles to the separating device
- B65H1/24—Supports or magazines for piles from which articles are to be separated with means for advancing the articles to present the articles to the separating device with means for relieving or controlling pressure of the pile
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H1/00—Supports or magazines for piles from which articles are to be separated
- B65H1/26—Supports or magazines for piles from which articles are to be separated with auxiliary supports to facilitate introduction or renewal of the pile
- B65H1/266—Support fully or partially removable from the handling machine, e.g. cassette, drawer
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/02—Separating articles from piles using friction forces between articles and separator
- B65H3/06—Rollers or like rotary separators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/02—Separating articles from piles using friction forces between articles and separator
- B65H3/06—Rollers or like rotary separators
- B65H3/0669—Driving devices therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/02—Separating articles from piles using friction forces between articles and separator
- B65H3/06—Rollers or like rotary separators
- B65H3/0684—Rollers or like rotary separators on moving support, e.g. pivoting, for bringing the roller or like rotary separator into contact with the pile
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/02—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/02—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors
- B65H7/04—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors responsive to absence of articles, e.g. exhaustion of pile
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/20—Controlling associated apparatus
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2404/00—Parts for transporting or guiding the handled material
- B65H2404/10—Rollers
- B65H2404/14—Roller pairs
- B65H2404/142—Roller pairs arranged on movable frame
- B65H2404/1421—Roller pairs arranged on movable frame rotating, pivoting or oscillating around an axis, e.g. parallel to the roller axis
- B65H2404/14211—Roller pairs arranged on movable frame rotating, pivoting or oscillating around an axis, e.g. parallel to the roller axis the axis being one the roller axis, i.e. orbiting roller
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2405/00—Parts for holding the handled material
- B65H2405/10—Cassettes, holders, bins, decks, trays, supports or magazines for sheets stacked substantially horizontally
- B65H2405/15—Large capacity supports arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/50—Occurence
- B65H2511/515—Absence
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2513/00—Dynamic entities; Timing aspects
- B65H2513/40—Movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2553/00—Sensing or detecting means
- B65H2553/40—Sensing or detecting means using optical, e.g. photographic, elements
- B65H2553/41—Photoelectric detectors
- B65H2553/412—Photoelectric detectors in barrier arrangements, i.e. emitter facing a receptor element
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2553/00—Sensing or detecting means
- B65H2553/60—Details of intermediate means between the sensing means and the element to be sensed
- B65H2553/61—Mechanical means, e.g. contact arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2553/00—Sensing or detecting means
- B65H2553/80—Arangement of the sensing means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/10—Handled articles or webs
- B65H2701/11—Dimensional aspect of article or web
- B65H2701/112—Section geometry
- B65H2701/1125—Section geometry variable thickness
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2801/00—Application field
- B65H2801/03—Image reproduction devices
- B65H2801/06—Office-type machines, e.g. photocopiers
Description
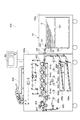
図1に示すように、画像形成装置600は、画像形成装置本体(以下、装置本体という)600aと、装置本体600aに接続された給紙デッキ100とを備えている。シート給送装置としての給紙デッキ100は、装置本体600aの図1の右側方に接続されている。
次に、図3を参照して、画像形成装置600の制御系について説明する。なお、図3は、画像形成装置600の制御系を示すブロック図である。
本実施形態では、収納庫106内に突出した位置検知レバー119の突出部119cによりトレイ位置を検知する方式を採用した。しかし、図15(a)に示す変形例1のように、リフタモータM3の駆動系統の回転軸上に、回転角を検知する検知部材124と回転角検知センサ206を設け、駆動の回転移動量からリフタトレイ107の高さを検知するように構成してもよい。
また、図15(b)に示す変形例2のように、発光・受光部を有する反射式の光学センサ207をリフタトレイ107の積載面に当てて、リフタトレイ107からの反射応答によってリフタトレイ107の高さを検知する構成としてもよい。この場合、光学センサ207が、位置検知手段Pを構成し、リフタトレイ107に上方から光を照射してリフタトレイ107で反射する光の反射応答に基づきリフタトレイ107の高さ位置を確実に検知することができる。
Claims (12)
- シートが積載されるシート積載手段と、
前記シート積載手段を昇降させる昇降手段と、
前記シート積載手段に積載されたシートの最上位のシートに当接して給送する給送手段と、
前記シート積載手段に積載されたシートの最上位のシートの位置を検知するシート高さ検知手段と、
前記シート積載手段に積載されているシートの有無を検知するシート有無検知手段であって、前記シート高さ検知手段によるシート検知位置よりもシート給送方向上流においてシートと当接するシート有無検知部材と、前記シート有無検知部材の移動に基づく信号を出力するシート有無検知センサと、を備えるシート有無検知手段と、
前記シート積載手段の高さ方向の位置を検知する位置検知手段と、を備え、
前記昇降手段は、前記シート高さ検知手段の検知に基づいて、前記シート積載手段を上昇させて最上位シートの位置が所定の範囲内に維持されるように制御手段により制御され、
前記制御手段は、最上位シートの位置が前記所定の範囲内にある場合、かつ、前記位置検知手段の検知に基づき前記シート積載手段の位置が所定高さよりも上にある場合には前記シート有無検知手段の信号に基づく所定の制御を行い、最上位シートの位置が前記所定の範囲内にある場合、かつ、前記位置検知手段の検知に基づき前記シート積載手段の位置が所定高さよりも下にある場合には前記所定の制御を行わない、
ことを特徴とするシート給送装置。 - 前記所定の制御は、前記シート有無検知センサからの信号に基づいて、表示部にシートの無しに関する表示を行う制御である、
ことを特徴とする請求項1に記載のシート給送装置。 - 前記所定の制御は、前記シート有無検知センサからの信号に基づいて、前記給送手段によるシート給送動作を停止させる制御である、
ことを特徴とする請求項1又は2に記載のシート給送装置。 - 前記シート有無検知部材は、装置本体に回動可能に支持され、
前記シート有無検知センサは、前記シート有無検知部材の回動位置に基づいて信号を出力する、
ことを特徴とする請求項1乃至3の何れか1項に記載のシート給送装置。 - 前記位置検知手段は、回動可能に設けられ、昇降する前記シート積載手段に当接可能な位置検知レバーと、前記位置検知レバーの回動位置に応じた信号を出力する位置検知センサと、を有する、
ことを特徴とする請求項1又は2に記載のシート給送装置。 - 前記昇降手段は、ステッピングモータを有し、
前記位置検知手段は、前記ステッピングモータの回転軸の回転角を検知することに基づき前記シート積載手段の高さ位置を検知する回転角検知センサを有する、
ことを特徴とする請求項1又は2に記載のシート給送装置。 - 前記位置検知手段は、前記シート積載手段に上方から光を照射して前記シート積載手段で反射する光の反射応答に基づき前記シート積載手段の高さ位置を検知する光学センサから構成される、
ことを特徴とする請求項1乃至3の何れか1項に記載のシート給送装置。 - 前記給送手段は、回動可能に支持されている給送ローラであり、
前記シート高さ検知手段は、前記給送ローラの回動位置に基づく信号を出力するシート高さ検知センサを有する、
ことを特徴とする請求項1乃至7の何れか1項に記載のシート給送装置。 - 前記所定高さは、前記シート有無検知部材がシートの上面と当接可能な高さである、
ことを特徴とする請求項1乃至8の何れか1項に記載のシート給送装置。 - 前記制御手段は、前記シート有無検知センサの検知と前記シート高さ検知手段の検知と前記位置検知手段の検知とに基づいて前記所定の制御を実行する、
ことを特徴とする請求項1乃至9の何れか1項に記載のシート給送装置。 - 前記制御手段を備える、
ことを特徴とする請求項1乃至10の何れか1項に記載のシート給送装置。 - 請求項1乃至11の何れか1項に記載のシート給送装置と、
前記シート給送装置から給送されるシートに画像を形成する画像形成部と、を備えることを特徴とする画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014077862A JP6355393B2 (ja) | 2014-04-04 | 2014-04-04 | シート給送装置及び画像形成装置 |
| US14/667,966 US9592973B2 (en) | 2014-04-04 | 2015-03-25 | Sheet feeding apparatus and image forming apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014077862A JP6355393B2 (ja) | 2014-04-04 | 2014-04-04 | シート給送装置及び画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015199556A JP2015199556A (ja) | 2015-11-12 |
| JP2015199556A5 JP2015199556A5 (ja) | 2017-05-25 |
| JP6355393B2 true JP6355393B2 (ja) | 2018-07-11 |
Family
ID=54209112
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014077862A Active JP6355393B2 (ja) | 2014-04-04 | 2014-04-04 | シート給送装置及び画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9592973B2 (ja) |
| JP (1) | JP6355393B2 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10315868B2 (en) | 2015-03-05 | 2019-06-11 | Canon Kabushiki Kaisha | Sheet feeding apparatus and image forming apparatus |
| JP6545003B2 (ja) * | 2015-06-03 | 2019-07-17 | キヤノン株式会社 | シート給送装置及び画像形成装置 |
| JP6354738B2 (ja) * | 2015-12-03 | 2018-07-11 | コニカミノルタ株式会社 | 給紙装置、画像形成装置および画像形成システム |
| US9836003B2 (en) | 2016-03-22 | 2017-12-05 | Fuji Xerox Co., Ltd. | Transport device |
| JP6737032B2 (ja) | 2016-07-21 | 2020-08-05 | 富士ゼロックス株式会社 | 搬送装置 |
| JP6858551B2 (ja) * | 2016-12-26 | 2021-04-14 | キヤノンファインテックニスカ株式会社 | 給紙装置 |
| WO2018194682A1 (en) * | 2017-04-21 | 2018-10-25 | Hewlett-Packard Development Company, L.P. | Sensors calibration |
| JP7262165B2 (ja) * | 2017-06-01 | 2023-04-21 | キヤノンファインテックニスカ株式会社 | 給紙装置 |
| EP3421397A1 (en) | 2017-06-29 | 2019-01-02 | Canon Finetech Nisca Inc. | Stacking apparatus |
| JP7099813B2 (ja) * | 2017-10-20 | 2022-07-12 | キヤノンファインテックニスカ株式会社 | 給紙装置 |
| JP7400277B2 (ja) | 2019-09-06 | 2023-12-19 | 富士フイルムビジネスイノベーション株式会社 | 送出装置、画像形成装置、制御装置及び制御プログラム |
| CN112758716B (zh) * | 2019-10-21 | 2023-03-07 | 京瓷办公信息系统株式会社 | 原稿输送装置 |
| JP7472507B2 (ja) * | 2020-01-27 | 2024-04-23 | 富士フイルムビジネスイノベーション株式会社 | シート搬送装置及びシート搬送プログラム |
| JP2021182062A (ja) * | 2020-05-19 | 2021-11-25 | キヤノン株式会社 | 画像形成装置 |
| JP2023045781A (ja) | 2021-09-22 | 2023-04-03 | キヤノン株式会社 | 画像読取装置及び画像形成装置 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS545505Y2 (ja) * | 1973-10-09 | 1979-03-10 | ||
| DE3733412A1 (de) * | 1986-10-03 | 1988-04-14 | Sharp Kk | Papierzufuehreinrichtung und damit ausgeruesteter aktenvernichter |
| EP0281136B1 (en) * | 1987-03-04 | 1991-07-17 | Sharp Kabushiki Kaisha | Shredding machine |
| JPH0326637A (ja) * | 1989-06-23 | 1991-02-05 | Ricoh Co Ltd | 大量排紙スタッカの用紙検出装置 |
| US5351112A (en) | 1992-01-13 | 1994-09-27 | Canon Kabushiki Kaisha | Original feeding apparatus and image forming system with it |
| JP3277945B2 (ja) * | 1992-08-07 | 2002-04-22 | 株式会社リコー | 給紙トレイ装置 |
| US5455667A (en) | 1992-09-16 | 1995-10-03 | Canon Kabushiki Kaisha | Sheet handling apparatus with plural sheet storage units |
| JPH06100200A (ja) * | 1992-09-25 | 1994-04-12 | Copyer Co Ltd | 画像形成装置の記録用紙残量検出装置及び方法 |
| JPH06179544A (ja) * | 1992-12-15 | 1994-06-28 | Ricoh Co Ltd | 給紙装置 |
| US5552859A (en) | 1994-02-08 | 1996-09-03 | Canon Kabushiki Kaisha | Sheet supplying apparatus with means for rocking sheet stacking plate |
| JP3249721B2 (ja) | 1995-08-28 | 2002-01-21 | キヤノン株式会社 | シート材給送装置及び画像形成装置 |
| JP3745045B2 (ja) | 1996-09-30 | 2006-02-15 | キヤノン株式会社 | 原稿表裏反転装置を備える原稿搬送装置及び画像形成装置 |
| EP0842880B1 (en) | 1996-11-18 | 2003-10-29 | Canon Kabushiki Kaisha | Image forming apparatus |
| JP3961154B2 (ja) * | 1999-05-21 | 2007-08-22 | 株式会社リコー | 画像形成装置 |
| US7034925B2 (en) | 2003-03-19 | 2006-04-25 | Canon Kabushiki Kaisha | Original feeding device having original size indicator |
| JP4246135B2 (ja) | 2004-10-08 | 2009-04-02 | 株式会社リコー | 給紙トレイおよび画像形成装置 |
| US7411205B2 (en) * | 2005-03-04 | 2008-08-12 | Xerox Corporation | In-stack sheet thickness measuring system |
| JP4663571B2 (ja) | 2005-06-10 | 2011-04-06 | キヤノン株式会社 | シート積載装置、シート処理装置、及び画像形成装置 |
| US7703758B2 (en) | 2005-08-31 | 2010-04-27 | Canon Kabushiki Kaisha | Sheet stacking device and sheet processing device, and image forming apparatus provided therewith |
| JP4777211B2 (ja) | 2006-10-13 | 2011-09-21 | キヤノン株式会社 | シート給送装置及び画像形成装置 |
| US8020848B2 (en) * | 2006-12-25 | 2011-09-20 | Ricoh Company, Ltd. | Paper feeder and image forming apparatus |
| JP5344571B2 (ja) | 2008-02-28 | 2013-11-20 | キヤノン株式会社 | シート積載装置及びこれを備えるシート処理装置 |
| US8231124B2 (en) * | 2009-06-23 | 2012-07-31 | Kyocera Mita Corporation | Paper feeding device and image forming apparatus |
| JP5069771B2 (ja) * | 2010-05-28 | 2012-11-07 | 京セラドキュメントソリューションズ株式会社 | 用紙残量検出装置、画像形成装置 |
| JP2013028471A (ja) | 2011-06-23 | 2013-02-07 | Canon Inc | シート積載装置及び画像形成装置 |
| JP5713954B2 (ja) | 2011-07-29 | 2015-05-07 | キヤノン株式会社 | シート積載装置及び画像形成装置 |
| JP5925162B2 (ja) | 2013-07-19 | 2016-05-25 | キヤノン株式会社 | シート給送装置及び画像形成装置 |
| JP6305108B2 (ja) | 2013-08-06 | 2018-04-04 | キヤノン株式会社 | シート積載装置、シート給送装置及び画像形成装置 |
-
2014
- 2014-04-04 JP JP2014077862A patent/JP6355393B2/ja active Active
-
2015
- 2015-03-25 US US14/667,966 patent/US9592973B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9592973B2 (en) | 2017-03-14 |
| JP2015199556A (ja) | 2015-11-12 |
| US20150284195A1 (en) | 2015-10-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6355393B2 (ja) | シート給送装置及び画像形成装置 | |
| US6308952B1 (en) | Paper sheet discharge apparatus | |
| JP6545003B2 (ja) | シート給送装置及び画像形成装置 | |
| JP2020070137A (ja) | 用紙種類判別装置および用紙種類判別装置の制御プログラム | |
| JP4099717B2 (ja) | 被記録媒体供給装置及び画像形成装置 | |
| JP6593298B2 (ja) | 画像形成装置 | |
| JP4667097B2 (ja) | シート給送装置及び画像形成装置 | |
| JP6489323B2 (ja) | シート積載装置、シート後処理装置及び画像形成装置 | |
| JP2009249080A (ja) | シート積載装置 | |
| JP7131129B2 (ja) | 画像形成装置、プログラム及び寿命判断方法 | |
| JP7134736B2 (ja) | 画像形成装置 | |
| JP6601061B2 (ja) | シート体収容装置、画像形成装置 | |
| JP2019156544A (ja) | シート供給装置 | |
| JP2016060634A (ja) | シート給送装置及び画像形成装置 | |
| JP2000198578A (ja) | 画像形成装置 | |
| JP6597170B2 (ja) | 画像形成装置 | |
| JP2005263450A (ja) | 給紙カセット | |
| JP5747607B2 (ja) | 給紙装置 | |
| JP2012180184A (ja) | シート積載装置、シート給送装置および画像形成装置 | |
| JP2009249103A (ja) | シート積載装置 | |
| JP2021187595A (ja) | シート給送装置及び画像形成システム | |
| JP2007131414A (ja) | 画像形成装置 | |
| JP6029476B2 (ja) | シート給送装置及び画像形成装置 | |
| JP2022039250A (ja) | シート給送装置及び画像形成システム | |
| JP5267081B2 (ja) | 排紙装置及び画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170403 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170403 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180515 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180612 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6355393 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |