JP2017182137A - デマンド型運行管理システムの制御方法及びデマンド型運行管理システム - Google Patents
デマンド型運行管理システムの制御方法及びデマンド型運行管理システム Download PDFInfo
- Publication number
- JP2017182137A JP2017182137A JP2016063524A JP2016063524A JP2017182137A JP 2017182137 A JP2017182137 A JP 2017182137A JP 2016063524 A JP2016063524 A JP 2016063524A JP 2016063524 A JP2016063524 A JP 2016063524A JP 2017182137 A JP2017182137 A JP 2017182137A
- Authority
- JP
- Japan
- Prior art keywords
- point
- demand
- user
- operation plan
- boarding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title description 14
- 238000010586 diagram Methods 0.000 claims abstract description 27
- 238000001514 detection method Methods 0.000 claims description 10
- 230000008859 change Effects 0.000 claims description 6
- 238000004519 manufacturing process Methods 0.000 claims description 6
- 230000033001 locomotion Effects 0.000 claims description 3
- 238000004891 communication Methods 0.000 description 11
- 238000012545 processing Methods 0.000 description 8
- 230000008901 benefit Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 238000010845 search algorithm Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 230000010006 flight Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 206010039203 Road traffic accident Diseases 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/343—Calculating itineraries, i.e. routes leading from a starting point to a series of categorical destinations using a global route restraint, round trips, touristic trips
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/3438—Rendez-vous, i.e. searching a destination where several users can meet, and the routes to this destination for these users; Ride sharing, i.e. searching a route such that at least two users can share a vehicle for at least part of the route
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3605—Destination input or retrieval
- G01C21/362—Destination input or retrieval received from an external device or application, e.g. PDA, mobile phone or calendar application
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q30/00—Commerce
- G06Q30/02—Marketing; Price estimation or determination; Fundraising
- G06Q30/0201—Market modelling; Market analysis; Collecting market data
-
- G06Q50/40—
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/127—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams to a central station ; Indicators in a central station
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/20—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles
- G08G1/202—Dispatching vehicles on the basis of a location, e.g. taxi dispatching
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Abstract
Description
前記運行管理センターは、
前記利用者端末からの利用要求を受け付ける利用受付部と、
前記利用受付部で受け付けた利用要求、並びに運行区間、出発点発車時刻、及び終点到着時刻が予め設定された基準運行ダイヤに基づいて、前記基準運行ダイヤの許容範囲内で運行計画を生成し、前記デマンド車両及び前記利用者端末に対して、生成した運行計画を提供する運行計画生成部と、を有し、
前記利用者端末は、前記運行計画生成部によって提供された運行計画を利用者に提示し、
前記デマンド車両は、前記運行計画生成部によって提供された運行計画に従って運行する。
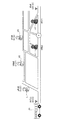
図7は、第1の運行方式を示す図である。第1の運行方式では、デマンドバス20の基準運行ダイヤとして、出発点、終点、経由地点、及び各地点の到着予定時刻が予め決められている。また、デマンドバス20が停車可能な候補地点が予め決められている。図7において、A地点及びB地点が経由地点であり、a地点〜j地点が候補地点である。利用者は、経由地点であるA地点、B地点又は候補地点であるa地点〜j地点の中から乗降地点を設定することができる。なお、A地点及びB地点を乗車地点とする利用要求がない場合、これらの地点を通過してもよい。
図8は、第2の運行方式を示す図である。第2の運行方式では、デマンドバス20の基準運行ダイヤとして、出発点、終点、及び各地点の到着予定時刻が予め決められている。また、デマンドバス20が停車可能な候補地点が予め決められている。第1の運行方式とは、必ず経由する経由地点が決められていない点が異なる。経由地点が決められていないため、第1の運行方式に比較して、運行ルートを探索する際の自由度が高い。図8において、a地点〜j地点、m地点、及びn地点が候補地点である。利用者は、候補地点であるa地点〜j地点、m地点、及びn地点の中から乗降地点を設定することができる。
図9は、第3の運行方式を示す図である。第3の運行方式では、デマンドバス20の基準運行ダイヤとして、出発点、終点、及び各地点の到着予定時刻が予め決められているだけで、デマンドバス20が停車可能な候補地点は決められていない。利用者は、利用エリアの範囲内で、自由に乗降地点を設定することができる。経由地点及び候補地点が決められていないため、第2の運行方式よりも、運行ルートを探索する際の自由度がさらに高い。
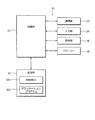
10 運行管理センター
11 制御部
111 利用受付部
112 運行計画生成部
113 利用者管理部
114 バス配車部
115 自動運転プログラム生成部
116 情報提供部
12 記憶部
13 通信部
20 バス(デマンド車両)
30 利用者端末
運行計画に従って運行する車両と、前記車両に搭載された表示装置と、利用者端末と、前記車両、前記表示装置、及び前記利用者端末と通信可能に接続された運行管理装置とを備えたデマンド型運行管理システムの制御方法であって、
前記車両が第1の運行計画に従って運行を開始した後に、前記運行管理装置が前記利用者端末より利用要求を受けた場合、前記利用要求に対応した第2の運行計画を少なくとも前記車両と前記表示装置に通知し、
前記第2の運行計画の通知を受けた前記車両は、前記第2の運行計画に従った運行を開始し、
前記第2の運行計画の通知を受けた前記表示装置は、前記第2の運行計画を表示する。
本発明の一側面を反映したデマンド型運行管理システムは、
運行計画に従って運行する車両と、前記車両に搭載された表示装置と、利用者端末と、前記車両、前記表示装置、及び前記利用者端末と通信可能に接続された運行管理装置とを備えたデマンド型運行管理システムであって、
前記車両が第1の運行計画に従って運行を開始した後に、前記運行管理装置が前記利用者端末より利用要求を受けた場合、前記利用要求に対応した第2の運行計画を少なくとも前記車両と前記表示装置に通知し、
前記第2の運行計画の通知を受けた前記車両は、前記第2の運行計画に従った運行を開始し、
前記第2の運行計画の通知を受けた前記表示装置は、前記第2の運行計画を表示する。
Claims (15)
- 利用者端末と、前記利用者端末からの利用要求に基づいて運行するデマンド車両と、前記デマンド車両の運行を管理する運行管理センターと、を備え、これらが情報通信可能に接続されたデマンド型運行システムであって、
前記運行管理センターは、
前記利用者端末からの利用要求を受け付ける利用受付部と、
前記利用受付部で受け付けた利用要求、並びに運行区間、出発点発車時刻、及び終点到着時刻が予め設定された基準運行ダイヤに基づいて、前記基準運行ダイヤの許容範囲内で運行計画を生成し、前記デマンド車両及び前記利用者端末に対して、生成した運行計画を提供する運行計画生成部と、を有し、
前記利用者端末は、前記運行計画生成部によって提供された運行計画を利用者に提示し、
前記デマンド車両は、前記運行計画生成部によって提供された運行計画に従って運行する、デマンド型運行システム。 - 前記デマンド車両は、前記運行計画生成部によって提供された運行計画を、当該デマンド車両に乗車している利用者に提示する、請求項1に記載のデマンド型運行システム。
- 前記運行計画生成部は、現在の交通状況を考慮して前記運行計画を生成する、請求項1又は2に記載のデマンド型運行システム。
- 前記運行計画生成部は、前記オンデマンド車両から現在の交通状況を取得する、請求項3に記載のデマンド型運行システム。
- 前記運行計画生成部は、前記利用受付部が前記デマンド車両の運行中に当該デマンド車両で処理可能な前記利用者要求を新たに受け付けた場合、当該利用者要求に基づいて前記運行計画を更新する、請求項1から4のいずれか一項に記載のデマンド型運行システム。
- 前記運行計画生成部は、前記利用受付部が利用要求の変更を受け付けた場合、当該変更された利用者要求に基づいて前記運行計画を更新する、請求項1から5のいずれか一項に記載のデマンド型運行システム。
- 前記運行管理センターは、前記利用者端末の利用者に対して識別情報を発行し、前記識別情報が発行された利用者からの利用要求だけを受け付け可能とする利用者管理部を有する、請求項1から6のいずれか一項に記載のデマンド型運行システム。
- 前記運行計画生成部は、前記オンデマンド車両に対して、前記運行計画とともに、当該運行計画を生成する元となった利用要求及び当該利用要求を行った利用者端末の識別情報を提供し、
前記デマンド車両は、降車地点の手前で、当該降車地点で降車すべき利用者の利用者端末に対して、降車案内を提供する、請求項7に記載のデマンド型運行システム。 - 乗車定員数の異なる複数台の前記デマンド車両を備え、
前記運行管理センターは、発車前の運行計画に含まれる乗車予定者数に基づいて、運行するデマンド車両を配車する車両配車部を有する、請求項1から8のいずれか一項に記載のデマンド型運行システム。 - 前記基準運行ダイヤは、前記運行区間に含まれる出発点及び終点以外に必ず経由する経由地点、及び当該経由地点の到着予定時刻を含む、請求項1から9のいずれか一項に記載のデマンド型運行システム。
- 前記利用要求に含まれる乗車地点及び降車地点は、予め設定された複数の候補地点の中から選択される、請求項1から10のいずれか一項に記載のデマンド型運行システム。
- 前記利用要求に含まれる乗車地点及び降車地点は、自由に設定できる、請求項1から9のいずれか一項に記載のデマンド型運行システム。
- 前記運行計画生成部は、複数の前記利用者端末から利用要求を受け付けた場合に、当該複数の利用要求に含まれる乗車地点及び降車地点に基づいて、当該複数の乗車地点及び降車地点の中間地点を、乗降地点として設定する、請求項12に記載のデマンド型運行システム。
- 前記デマンド車両は、自動運転プログラムに従って自動で走行可能な自動運転車両であり、
前記運行管理センターは、前記運行計画に基づいて前記自動運転プログラムを生成し、前記デマンド車両に対して、生成した自動運転プログラムを提供する自動運転プログラム生成部を有する、請求項1から13のいずれか一項に記載のデマンド型運行システム。 - 前記デマンド車両は、前記乗降地点における利用者の乗降を検出する乗降検出部を有し、前記乗降検出部の検出結果に基づいて前記乗降地点を発車する、請求項14に記載のデマンド型運行システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016063524A JP6273656B2 (ja) | 2016-03-28 | 2016-03-28 | デマンド型運行管理システムの制御方法及びデマンド型運行管理システム |
| PCT/JP2017/005044 WO2017169181A1 (ja) | 2016-03-28 | 2017-02-13 | デマンド型運行システム |
| US16/086,967 US10847035B2 (en) | 2016-03-28 | 2017-02-13 | Demand responsive operation system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016063524A JP6273656B2 (ja) | 2016-03-28 | 2016-03-28 | デマンド型運行管理システムの制御方法及びデマンド型運行管理システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017182137A true JP2017182137A (ja) | 2017-10-05 |
| JP6273656B2 JP6273656B2 (ja) | 2018-02-07 |
Family
ID=59962861
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016063524A Active JP6273656B2 (ja) | 2016-03-28 | 2016-03-28 | デマンド型運行管理システムの制御方法及びデマンド型運行管理システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10847035B2 (ja) |
| JP (1) | JP6273656B2 (ja) |
| WO (1) | WO2017169181A1 (ja) |
Cited By (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6408118B1 (ja) * | 2017-12-12 | 2018-10-17 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP6415672B1 (ja) * | 2017-11-20 | 2018-10-31 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019095944A (ja) * | 2017-11-20 | 2019-06-20 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019096287A (ja) * | 2018-06-18 | 2019-06-20 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019096359A (ja) * | 2017-11-20 | 2019-06-20 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019106161A (ja) * | 2018-05-02 | 2019-06-27 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019121109A (ja) * | 2017-12-28 | 2019-07-22 | トヨタ自動車株式会社 | 車両運行管理システム |
| JP2019128635A (ja) * | 2018-01-22 | 2019-08-01 | 日産自動車株式会社 | 車両運行管理方法及び車両運行管理装置 |
| WO2019159605A1 (ja) * | 2018-02-13 | 2019-08-22 | 本田技研工業株式会社 | 運行管理装置、運行管理方法および運行管理システム |
| WO2019220206A1 (ja) * | 2018-05-15 | 2019-11-21 | 日産自動車株式会社 | 乗車位置算出方法、乗車位置算出装置、ならびに、乗車位置算出システム |
| WO2019243861A1 (ja) * | 2018-06-22 | 2019-12-26 | 日産自動車株式会社 | 配車システムのための情報提供方法、配車システム及び情報提供装置。 |
| WO2020002958A1 (ja) * | 2018-06-26 | 2020-01-02 | 日産自動車株式会社 | 降車地点決定方法及び降車地点決定装置 |
| WO2020002960A1 (ja) * | 2018-06-26 | 2020-01-02 | 日産自動車株式会社 | 乗車地点決定方法及び乗車地点決定装置 |
| JP2020036464A (ja) * | 2018-08-30 | 2020-03-05 | トヨタ自動車株式会社 | 車両用電源システム |
| JP2020052888A (ja) * | 2018-09-28 | 2020-04-02 | 株式会社日本総合研究所 | 車両用案内装置 |
| JP2020052885A (ja) * | 2018-09-28 | 2020-04-02 | 株式会社日本総合研究所 | 情報出力装置 |
| WO2020084719A1 (ja) * | 2018-10-24 | 2020-04-30 | ヤマハ発動機株式会社 | 複数のシートベルト無しシートを備えている自動運転車両 |
| WO2020085442A1 (ja) * | 2018-10-24 | 2020-04-30 | ヤマハ発動機株式会社 | 自動運転ビークル |
| WO2020085425A1 (ja) * | 2018-10-24 | 2020-04-30 | ヤマハ発動機株式会社 | 自動運転車両 |
| WO2020090847A1 (ja) * | 2018-10-31 | 2020-05-07 | ヤマハ発動機株式会社 | フリートコントロール補助制御装置 |
| JP2020077167A (ja) * | 2018-11-07 | 2020-05-21 | トヨタ自動車株式会社 | 車両の制御装置及び車両の運用方法 |
| JP2020077166A (ja) * | 2018-11-07 | 2020-05-21 | トヨタ自動車株式会社 | 車両及び車両の運用方法 |
| JP2020086930A (ja) * | 2018-11-26 | 2020-06-04 | トヨタ自動車株式会社 | 運行支援装置、車載装置、運行支援システム、運行支援方法及び運行支援プログラム |
| JP2020095354A (ja) * | 2018-12-10 | 2020-06-18 | トヨタ自動車株式会社 | 運行支援装置、運行支援システム、及び運行支援プログラム |
| CN111539679A (zh) * | 2019-02-06 | 2020-08-14 | 丰田自动车株式会社 | 信息处理装置和移动对象 |
| JP2020149124A (ja) * | 2019-03-11 | 2020-09-17 | トヨタ自動車株式会社 | プログラム及び情報処理方法 |
| JP2020187521A (ja) * | 2019-05-14 | 2020-11-19 | 大和ハウス工業株式会社 | 配達支援システム |
| JP2020187520A (ja) * | 2019-05-14 | 2020-11-19 | 大和ハウス工業株式会社 | 配車システム |
| EP3756979A1 (en) | 2019-06-28 | 2020-12-30 | Toyota Jidosha Kabushiki Kaisha | Automatic driving vehicle, operation management center and vehicle operation system |
| EP3756928A1 (en) | 2019-06-28 | 2020-12-30 | Toyota Jidosha Kabushiki Kaisha | Operation device for autonomous driving vehicle |
| EP3761139A1 (en) | 2019-06-28 | 2021-01-06 | Toyota Jidosha Kabushiki Kaisha | Automatic driving vehicle |
| CN112435491A (zh) * | 2019-08-26 | 2021-03-02 | 罗伯特·博世有限公司 | 乘客门的自动化打开 |
| JP2021060718A (ja) * | 2019-10-04 | 2021-04-15 | トヨタ自動車株式会社 | 自動運転車両の制御装置 |
| CN112863166A (zh) * | 2021-01-25 | 2021-05-28 | 湖南智慧畅行交通科技有限公司 | 基于坐标搜索的新增车次算法 |
| JP2021135692A (ja) * | 2020-02-26 | 2021-09-13 | トヨタ自動車株式会社 | サーバ、配車方法、配車プログラム、及び、配車システム |
| US11205342B2 (en) | 2018-12-27 | 2021-12-21 | Toyota Jidosha Kabushiki Kaisha | Traffic information processing device |
| US11208831B2 (en) | 2019-01-15 | 2021-12-28 | Toyota Jidosha Kabushiki Kaisha | Luggage lock device |
| US11210948B2 (en) | 2018-12-04 | 2021-12-28 | Toyota Jidosha Kabushiki Kaisha | Vehicle and notification method |
| US11235786B2 (en) | 2019-01-24 | 2022-02-01 | Toyota Jidosha Kabushiki Kaisha | Vehicle allocation apparatus and vehicle allocation method |
| US11262205B2 (en) | 2018-12-12 | 2022-03-01 | Toyota Jidosha Kabushiki Kaisha | Traffic control apparatus, traffic control system, traffic control method, and non-transitory computer recording medium |
| JP7038187B1 (ja) | 2020-12-23 | 2022-03-17 | 九州旅客鉄道株式会社 | 列車制御方法及び列車制御システム |
| CN114387810A (zh) * | 2020-10-22 | 2022-04-22 | 丰田自动车株式会社 | 运行管理方法、服务器以及系统 |
| US11333523B2 (en) | 2018-11-12 | 2022-05-17 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device, output device, and input and output device |
| US11367357B2 (en) | 2018-12-12 | 2022-06-21 | Toyota Jidosha Kabushiki Kaisha | Traffic control apparatus, traffic control system, traffic control method, and non-transitory computer recording medium |
| US11378948B2 (en) | 2019-03-19 | 2022-07-05 | Toyota Jidosha Kabushiki Kaisha | Remote control system and self-driving system |
| US11386724B2 (en) | 2018-12-18 | 2022-07-12 | Toyota Jidosha Kabushiki Kaisha | Control device, a control method, and a non-transitory computer readable medium storing a control program of a door lock of a vehicle |
| JPWO2022162842A1 (ja) * | 2021-01-28 | 2022-08-04 | ||
| JP2022132192A (ja) * | 2021-02-26 | 2022-09-07 | モイア ゲー・エム・ベー・ハー | 自動運転車両または自動運転車両の車隊の操作 |
| WO2022224004A1 (ja) * | 2021-04-19 | 2022-10-27 | 日産自動車株式会社 | 車両の走行支援装置、 車両の走行支援システム及び車両の走行支援方法 |
| US11500381B2 (en) | 2018-11-21 | 2022-11-15 | Toyota Jidosha Kabushiki Kaisha | Stopping position control device, stopping position control method, and computer program for stopping position control |
| US11511754B2 (en) | 2018-11-26 | 2022-11-29 | Toyota Jidosha Kabushiki Kaisha | Seat determining apparatus, seat determining method, and computer program for determining seat |
| KR20220168881A (ko) * | 2021-06-17 | 2022-12-26 | 경일대학교산학협력단 | 자율 주행 차량을 제어하는 전자 장치 및 시스템 |
| US11600183B2 (en) | 2019-02-18 | 2023-03-07 | Toyota Jidosha Kabushiki Kaisha | Dispatch device and dispatching method |
| US11651630B2 (en) | 2018-11-20 | 2023-05-16 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device and passenger transportation system |
| US11648964B2 (en) | 2019-02-14 | 2023-05-16 | Toyota Jidosha Kabushiki Kaisha | Travel control device and travel control method |
| JP7460385B2 (ja) | 2020-02-13 | 2024-04-02 | Go株式会社 | プログラム、車両端末及び表示方法 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112189224B (zh) * | 2018-05-15 | 2022-10-14 | 日产自动车株式会社 | 上下车位置决定方法、上下车位置决定装置以及上下车位置决定系统 |
| CN108734353A (zh) * | 2018-05-22 | 2018-11-02 | 青岛海信网络科技股份有限公司 | 一种公交线路行车计划生成方法及装置 |
| US20190360826A1 (en) * | 2018-05-24 | 2019-11-28 | International Business Machines Corporation | Context based ride offer search |
| JP7093515B2 (ja) * | 2018-09-28 | 2022-06-30 | マツダ株式会社 | 自動車運行管理システム |
| WO2020262673A1 (ja) | 2019-06-28 | 2020-12-30 | 株式会社NearMe | 情報処理装置、情報処理方法及びプログラム |
| JP7343437B2 (ja) * | 2020-04-02 | 2023-09-12 | トヨタ自動車株式会社 | 車両の運行管理装置、運行管理方法、および、交通システム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003226184A (ja) * | 2002-02-04 | 2003-08-12 | Nippon Signal Co Ltd:The | 乗車確認システム |
| JP2004199179A (ja) * | 2002-12-16 | 2004-07-15 | Toshihiro Hosokawa | デマンドバス運行管理システムおよび方法 |
| JP2004227262A (ja) * | 2003-01-22 | 2004-08-12 | Nippon Telegraph & Telephone East Corp | 即応型車両乗降システム、方法およびプログラム |
| JP2004287548A (ja) * | 2003-03-19 | 2004-10-14 | Hino Motors Ltd | 乗合車両の乗降支援装置およびその通信方法 |
| JP2007249952A (ja) * | 2006-02-14 | 2007-09-27 | Av Planning Center:Kk | 車両運行情報処理方法及び車両運行情報処理システム |
| JP2009301078A (ja) * | 2008-06-10 | 2009-12-24 | Av Planning Center:Kk | 車両運行システム |
| WO2014045339A1 (ja) * | 2012-09-18 | 2014-03-27 | 独立行政法人産業技術総合研究所 | 糖尿病性末梢神経障害の評価装置、およびその方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4711174B2 (ja) | 2004-03-31 | 2011-06-29 | 博正 千葉 | 複数地点を経由して乗降・集配等を行う車両運行管理システム |
| CN101950479B (zh) * | 2010-08-26 | 2012-02-08 | 张宇康 | 以乘客出行为导向的智能城市公共交通系统及其实施方法 |
| CN104620296B (zh) | 2012-09-20 | 2017-04-26 | 丰田自动车株式会社 | 按需车辆运行管理装置、按需车辆运行管理方法以及按需车辆运行管理系统 |
| US20150324708A1 (en) * | 2014-05-06 | 2015-11-12 | Ford Global Technologies, Llc | On-demand transportation |
| US9786173B2 (en) * | 2015-08-18 | 2017-10-10 | The Florida International University Board Of Trustees | Dynamic routing of transit vehicles |
| US20190227553A1 (en) * | 2015-11-04 | 2019-07-25 | Zoox, Inc. | Interactive autonomous vehicle command controller |
| US20170200249A1 (en) * | 2016-01-08 | 2017-07-13 | Florida International University Board Of Trustees | Systems and methods for intelligent, demand-responsive transit recommendations |
| CN107437183B (zh) * | 2016-05-25 | 2021-06-04 | 北京嘀嘀无限科技发展有限公司 | 一种上车乘客身份的确认方法及系统 |
-
2016
- 2016-03-28 JP JP2016063524A patent/JP6273656B2/ja active Active
-
2017
- 2017-02-13 US US16/086,967 patent/US10847035B2/en active Active
- 2017-02-13 WO PCT/JP2017/005044 patent/WO2017169181A1/ja active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003226184A (ja) * | 2002-02-04 | 2003-08-12 | Nippon Signal Co Ltd:The | 乗車確認システム |
| JP2004199179A (ja) * | 2002-12-16 | 2004-07-15 | Toshihiro Hosokawa | デマンドバス運行管理システムおよび方法 |
| JP2004227262A (ja) * | 2003-01-22 | 2004-08-12 | Nippon Telegraph & Telephone East Corp | 即応型車両乗降システム、方法およびプログラム |
| JP2004287548A (ja) * | 2003-03-19 | 2004-10-14 | Hino Motors Ltd | 乗合車両の乗降支援装置およびその通信方法 |
| JP2007249952A (ja) * | 2006-02-14 | 2007-09-27 | Av Planning Center:Kk | 車両運行情報処理方法及び車両運行情報処理システム |
| JP2009301078A (ja) * | 2008-06-10 | 2009-12-24 | Av Planning Center:Kk | 車両運行システム |
| WO2014045339A1 (ja) * | 2012-09-18 | 2014-03-27 | 独立行政法人産業技術総合研究所 | 糖尿病性末梢神経障害の評価装置、およびその方法 |
Non-Patent Citations (1)
| Title |
|---|
| 上杉健太郎・渡邉豊英・向直人: "K−means法を用いた寄り道型デマンドバスの並列運行手法", 電子情報通信学会 第19回データ工学ワークショップ論文集 [ONLINE], JPN6017032686, 7 April 2008 (2008-04-07), JP, pages 1 - 6, ISSN: 0003628866 * |
Cited By (113)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019095942A (ja) * | 2017-11-20 | 2019-06-20 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP6415672B1 (ja) * | 2017-11-20 | 2018-10-31 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019095944A (ja) * | 2017-11-20 | 2019-06-20 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| US11580615B2 (en) | 2017-11-20 | 2023-02-14 | Yahoo Japan Corporation | Routing a mobile vehicle based on rider characteristics |
| JP2019096359A (ja) * | 2017-11-20 | 2019-06-20 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019106019A (ja) * | 2017-12-12 | 2019-06-27 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| US10972882B2 (en) | 2017-12-12 | 2021-04-06 | Yahoo Japan Corporation | Information processing apparatus, information processing method, and non-transitory computer readable storage medium |
| JP6408118B1 (ja) * | 2017-12-12 | 2018-10-17 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP7035531B2 (ja) | 2017-12-28 | 2022-03-15 | トヨタ自動車株式会社 | 車両運行管理システム |
| JP2019121109A (ja) * | 2017-12-28 | 2019-07-22 | トヨタ自動車株式会社 | 車両運行管理システム |
| US11386790B2 (en) | 2017-12-28 | 2022-07-12 | Toyota Jidosha Kabushiki Kaisha | Vehicle operation management system and vehicle operation management method |
| JP2019128635A (ja) * | 2018-01-22 | 2019-08-01 | 日産自動車株式会社 | 車両運行管理方法及び車両運行管理装置 |
| JP7184521B2 (ja) | 2018-01-22 | 2022-12-06 | 日産自動車株式会社 | 車両運行管理方法及び車両運行管理装置 |
| CN111712863A (zh) * | 2018-02-13 | 2020-09-25 | 本田技研工业株式会社 | 运行管理装置、运行管理方法以及运行管理系统 |
| JPWO2019159605A1 (ja) * | 2018-02-13 | 2021-01-28 | 本田技研工業株式会社 | 運行管理装置、運行管理方法および運行管理システム |
| JP7399077B2 (ja) | 2018-02-13 | 2023-12-15 | 本田技研工業株式会社 | 運行管理装置、運行管理方法および運行管理システム |
| WO2019159605A1 (ja) * | 2018-02-13 | 2019-08-22 | 本田技研工業株式会社 | 運行管理装置、運行管理方法および運行管理システム |
| CN111712863B (zh) * | 2018-02-13 | 2022-07-26 | 本田技研工业株式会社 | 运行管理装置、运行管理方法以及运行管理系统 |
| JP6998827B2 (ja) | 2018-05-02 | 2022-01-18 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019106161A (ja) * | 2018-05-02 | 2019-06-27 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| WO2019220206A1 (ja) * | 2018-05-15 | 2019-11-21 | 日産自動車株式会社 | 乗車位置算出方法、乗車位置算出装置、ならびに、乗車位置算出システム |
| JPWO2019220206A1 (ja) * | 2018-05-15 | 2021-07-29 | 日産自動車株式会社 | 乗車位置算出方法、乗車位置算出装置、ならびに、乗車位置算出システム |
| CN112119436A (zh) * | 2018-05-15 | 2020-12-22 | 日产自动车株式会社 | 乘车位置计算方法、乘车位置计算装置以及乘车位置计算系统 |
| US11776401B2 (en) | 2018-05-15 | 2023-10-03 | Nissan Motor Co., Ltd. | Boarding position setting method, boarding position setting device, and boarding position setting system |
| JP7126875B2 (ja) | 2018-06-18 | 2022-08-29 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| JP2019096287A (ja) * | 2018-06-18 | 2019-06-20 | ヤフー株式会社 | 情報処理装置、情報処理方法および情報処理プログラム |
| US11938965B2 (en) | 2018-06-22 | 2024-03-26 | Nissan Motor Co., Ltd. | Information service method for vehicle dispatch system, vehicle dispatch system, and information service device |
| JPWO2019243861A1 (ja) * | 2018-06-22 | 2021-07-29 | 日産自動車株式会社 | 配車システムのための情報提供方法、配車システム及び情報提供装置。 |
| CN112602107A (zh) * | 2018-06-22 | 2021-04-02 | 日产自动车株式会社 | 用于车辆调度系统的信息提供方法、车辆调度系统以及信息提供装置 |
| CN112602107B (zh) * | 2018-06-22 | 2023-06-06 | 日产自动车株式会社 | 用于车辆调度系统的信息提供方法、车辆调度系统以及信息提供装置 |
| WO2019243861A1 (ja) * | 2018-06-22 | 2019-12-26 | 日産自動車株式会社 | 配車システムのための情報提供方法、配車システム及び情報提供装置。 |
| WO2020002960A1 (ja) * | 2018-06-26 | 2020-01-02 | 日産自動車株式会社 | 乗車地点決定方法及び乗車地点決定装置 |
| WO2020002958A1 (ja) * | 2018-06-26 | 2020-01-02 | 日産自動車株式会社 | 降車地点決定方法及び降車地点決定装置 |
| JP7022827B2 (ja) | 2018-06-26 | 2022-02-18 | 日産自動車株式会社 | 乗車地点決定方法及び乗車地点決定装置 |
| JPWO2020002958A1 (ja) * | 2018-06-26 | 2021-08-05 | 日産自動車株式会社 | 降車地点決定方法及び降車地点決定装置 |
| JPWO2020002960A1 (ja) * | 2018-06-26 | 2021-07-15 | 日産自動車株式会社 | 乗車地点決定方法及び乗車地点決定装置 |
| JP7024667B2 (ja) | 2018-08-30 | 2022-02-24 | トヨタ自動車株式会社 | 車両用電源システム |
| JP2020036464A (ja) * | 2018-08-30 | 2020-03-05 | トヨタ自動車株式会社 | 車両用電源システム |
| JP2020052885A (ja) * | 2018-09-28 | 2020-04-02 | 株式会社日本総合研究所 | 情報出力装置 |
| JP2020052888A (ja) * | 2018-09-28 | 2020-04-02 | 株式会社日本総合研究所 | 車両用案内装置 |
| JP7238229B2 (ja) | 2018-09-28 | 2023-03-14 | 株式会社日本総合研究所 | 情報出力装置 |
| JP7183292B2 (ja) | 2018-10-24 | 2022-12-05 | ヤマハ発動機株式会社 | 自動運転ビークル |
| JPWO2020085425A1 (ja) * | 2018-10-24 | 2021-09-30 | ヤマハ発動機株式会社 | 自動運転車両 |
| WO2020084719A1 (ja) * | 2018-10-24 | 2020-04-30 | ヤマハ発動機株式会社 | 複数のシートベルト無しシートを備えている自動運転車両 |
| WO2020085425A1 (ja) * | 2018-10-24 | 2020-04-30 | ヤマハ発動機株式会社 | 自動運転車両 |
| JPWO2020085442A1 (ja) * | 2018-10-24 | 2021-10-07 | ヤマハ発動機株式会社 | 自動運転ビークル |
| US11897513B2 (en) | 2018-10-24 | 2024-02-13 | Yamaha Hatsudoki Kabushiki Kaisha | Autonomous vehicle |
| WO2020085442A1 (ja) * | 2018-10-24 | 2020-04-30 | ヤマハ発動機株式会社 | 自動運転ビークル |
| JP7166355B2 (ja) | 2018-10-24 | 2022-11-07 | ヤマハ発動機株式会社 | 自動運転車両 |
| JPWO2020090847A1 (ja) * | 2018-10-31 | 2021-09-02 | ヤマハ発動機株式会社 | フリートコントロール補助制御装置 |
| JP7163403B2 (ja) | 2018-10-31 | 2022-10-31 | ヤマハ発動機株式会社 | フリートコントロール補助制御装置 |
| WO2020090847A1 (ja) * | 2018-10-31 | 2020-05-07 | ヤマハ発動機株式会社 | フリートコントロール補助制御装置 |
| JP7172464B2 (ja) | 2018-11-07 | 2022-11-16 | トヨタ自動車株式会社 | 車両及び車両の運用方法 |
| US10928922B2 (en) | 2018-11-07 | 2021-02-23 | Toyota Jidosha Kabushiki Kaisha | Vehicle and operation method of vehicle |
| JP2020077166A (ja) * | 2018-11-07 | 2020-05-21 | トヨタ自動車株式会社 | 車両及び車両の運用方法 |
| JP7225699B2 (ja) | 2018-11-07 | 2023-02-21 | トヨタ自動車株式会社 | 車両の制御装置及び車両の運用方法 |
| JP2020077167A (ja) * | 2018-11-07 | 2020-05-21 | トヨタ自動車株式会社 | 車両の制御装置及び車両の運用方法 |
| US11610490B2 (en) | 2018-11-07 | 2023-03-21 | Toyota Jidosha Kabushiki Kaisha | Control device for vehicle and method of operating vehicle |
| US11333523B2 (en) | 2018-11-12 | 2022-05-17 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device, output device, and input and output device |
| US11651630B2 (en) | 2018-11-20 | 2023-05-16 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device and passenger transportation system |
| US11500381B2 (en) | 2018-11-21 | 2022-11-15 | Toyota Jidosha Kabushiki Kaisha | Stopping position control device, stopping position control method, and computer program for stopping position control |
| JP2020086930A (ja) * | 2018-11-26 | 2020-06-04 | トヨタ自動車株式会社 | 運行支援装置、車載装置、運行支援システム、運行支援方法及び運行支援プログラム |
| JP7067441B2 (ja) | 2018-11-26 | 2022-05-16 | トヨタ自動車株式会社 | 運行支援装置、車載装置、運行支援システム、運行支援方法及び運行支援プログラム |
| US11511754B2 (en) | 2018-11-26 | 2022-11-29 | Toyota Jidosha Kabushiki Kaisha | Seat determining apparatus, seat determining method, and computer program for determining seat |
| US11210948B2 (en) | 2018-12-04 | 2021-12-28 | Toyota Jidosha Kabushiki Kaisha | Vehicle and notification method |
| JP2020095354A (ja) * | 2018-12-10 | 2020-06-18 | トヨタ自動車株式会社 | 運行支援装置、運行支援システム、及び運行支援プログラム |
| US11367357B2 (en) | 2018-12-12 | 2022-06-21 | Toyota Jidosha Kabushiki Kaisha | Traffic control apparatus, traffic control system, traffic control method, and non-transitory computer recording medium |
| US11262205B2 (en) | 2018-12-12 | 2022-03-01 | Toyota Jidosha Kabushiki Kaisha | Traffic control apparatus, traffic control system, traffic control method, and non-transitory computer recording medium |
| US11386724B2 (en) | 2018-12-18 | 2022-07-12 | Toyota Jidosha Kabushiki Kaisha | Control device, a control method, and a non-transitory computer readable medium storing a control program of a door lock of a vehicle |
| US11205342B2 (en) | 2018-12-27 | 2021-12-21 | Toyota Jidosha Kabushiki Kaisha | Traffic information processing device |
| US11208831B2 (en) | 2019-01-15 | 2021-12-28 | Toyota Jidosha Kabushiki Kaisha | Luggage lock device |
| US11235786B2 (en) | 2019-01-24 | 2022-02-01 | Toyota Jidosha Kabushiki Kaisha | Vehicle allocation apparatus and vehicle allocation method |
| JP2020126541A (ja) * | 2019-02-06 | 2020-08-20 | トヨタ自動車株式会社 | 情報処理装置および移動体 |
| CN111539679A (zh) * | 2019-02-06 | 2020-08-14 | 丰田自动车株式会社 | 信息处理装置和移动对象 |
| US11531938B2 (en) | 2019-02-06 | 2022-12-20 | Toyota Jidosha Kabushiki Kaisha | Information processing device and mobile object |
| JP7139985B2 (ja) | 2019-02-06 | 2022-09-21 | トヨタ自動車株式会社 | 情報処理装置 |
| CN111539679B (zh) * | 2019-02-06 | 2023-10-10 | 丰田自动车株式会社 | 信息处理装置和移动对象 |
| US11648964B2 (en) | 2019-02-14 | 2023-05-16 | Toyota Jidosha Kabushiki Kaisha | Travel control device and travel control method |
| US11912309B2 (en) | 2019-02-14 | 2024-02-27 | Toyota Jidosha Kabushiki Kaisha | Travel control device and travel control method |
| US11600183B2 (en) | 2019-02-18 | 2023-03-07 | Toyota Jidosha Kabushiki Kaisha | Dispatch device and dispatching method |
| CN111680812A (zh) * | 2019-03-11 | 2020-09-18 | 丰田自动车株式会社 | 计算机可读存储介质和信息处理方法 |
| CN111680812B (zh) * | 2019-03-11 | 2023-12-26 | 丰田自动车株式会社 | 计算机可读存储介质和信息处理方法 |
| JP7140006B2 (ja) | 2019-03-11 | 2022-09-21 | トヨタ自動車株式会社 | プログラム及び情報処理方法 |
| US11692831B2 (en) | 2019-03-11 | 2023-07-04 | Toyota Jidosha Kabushiki Kaisha | Program and information processing method for determining a travel route of a ride-sharing vehicle |
| JP2020149124A (ja) * | 2019-03-11 | 2020-09-17 | トヨタ自動車株式会社 | プログラム及び情報処理方法 |
| US11378948B2 (en) | 2019-03-19 | 2022-07-05 | Toyota Jidosha Kabushiki Kaisha | Remote control system and self-driving system |
| JP2020187521A (ja) * | 2019-05-14 | 2020-11-19 | 大和ハウス工業株式会社 | 配達支援システム |
| JP7344005B2 (ja) | 2019-05-14 | 2023-09-13 | 大和ハウス工業株式会社 | 配達支援システム |
| JP7296778B2 (ja) | 2019-05-14 | 2023-06-23 | 大和ハウス工業株式会社 | 配車システム |
| JP2020187520A (ja) * | 2019-05-14 | 2020-11-19 | 大和ハウス工業株式会社 | 配車システム |
| EP3756928A1 (en) | 2019-06-28 | 2020-12-30 | Toyota Jidosha Kabushiki Kaisha | Operation device for autonomous driving vehicle |
| US11458990B2 (en) | 2019-06-28 | 2022-10-04 | Toyota Jidosha Kabushiki Kaisha | Automatic driving vehicle |
| EP3761139A1 (en) | 2019-06-28 | 2021-01-06 | Toyota Jidosha Kabushiki Kaisha | Automatic driving vehicle |
| EP3756979A1 (en) | 2019-06-28 | 2020-12-30 | Toyota Jidosha Kabushiki Kaisha | Automatic driving vehicle, operation management center and vehicle operation system |
| US11718325B2 (en) | 2019-06-28 | 2023-08-08 | Toyota Jidosha Kabushiki Kaisha | Operation device comprising touch panel to input controls for autonomous driving vehicle |
| CN112435491A (zh) * | 2019-08-26 | 2021-03-02 | 罗伯特·博世有限公司 | 乘客门的自动化打开 |
| JP7226232B2 (ja) | 2019-10-04 | 2023-02-21 | トヨタ自動車株式会社 | 自動運転車両の制御装置 |
| US11661081B2 (en) | 2019-10-04 | 2023-05-30 | Toyota Jidosha Kabushiki Kaisha | Control device for automated driving vehicle |
| JP2021060718A (ja) * | 2019-10-04 | 2021-04-15 | トヨタ自動車株式会社 | 自動運転車両の制御装置 |
| JP7460385B2 (ja) | 2020-02-13 | 2024-04-02 | Go株式会社 | プログラム、車両端末及び表示方法 |
| JP2021135692A (ja) * | 2020-02-26 | 2021-09-13 | トヨタ自動車株式会社 | サーバ、配車方法、配車プログラム、及び、配車システム |
| CN114387810B (zh) * | 2020-10-22 | 2024-04-05 | 丰田自动车株式会社 | 运行管理方法、服务器以及系统 |
| CN114387810A (zh) * | 2020-10-22 | 2022-04-22 | 丰田自动车株式会社 | 运行管理方法、服务器以及系统 |
| JP2022099519A (ja) * | 2020-12-23 | 2022-07-05 | 九州旅客鉄道株式会社 | 列車制御方法及び列車制御システム |
| JP7038187B1 (ja) | 2020-12-23 | 2022-03-17 | 九州旅客鉄道株式会社 | 列車制御方法及び列車制御システム |
| CN112863166A (zh) * | 2021-01-25 | 2021-05-28 | 湖南智慧畅行交通科技有限公司 | 基于坐标搜索的新增车次算法 |
| JPWO2022162842A1 (ja) * | 2021-01-28 | 2022-08-04 | ||
| JP7248192B2 (ja) | 2021-01-28 | 2023-03-29 | 日産自動車株式会社 | 貨客混載システム、貨客混載システムの配車装置及び貨客混載システムの配車方法 |
| WO2022162842A1 (ja) * | 2021-01-28 | 2022-08-04 | 日産自動車株式会社 | 貨客混載システム、貨客混載システムの配車装置及び貨客混載システムの配車方法 |
| JP2022132192A (ja) * | 2021-02-26 | 2022-09-07 | モイア ゲー・エム・ベー・ハー | 自動運転車両または自動運転車両の車隊の操作 |
| WO2022224004A1 (ja) * | 2021-04-19 | 2022-10-27 | 日産自動車株式会社 | 車両の走行支援装置、 車両の走行支援システム及び車両の走行支援方法 |
| KR102622482B1 (ko) * | 2021-06-17 | 2024-01-09 | 경일대학교산학협력단 | 자율 주행 차량을 제어하는 전자 장치 및 시스템 |
| KR20220168881A (ko) * | 2021-06-17 | 2022-12-26 | 경일대학교산학협력단 | 자율 주행 차량을 제어하는 전자 장치 및 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6273656B2 (ja) | 2018-02-07 |
| US20190103028A1 (en) | 2019-04-04 |
| US10847035B2 (en) | 2020-11-24 |
| WO2017169181A1 (ja) | 2017-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6273656B2 (ja) | デマンド型運行管理システムの制御方法及びデマンド型運行管理システム | |
| US11087291B2 (en) | Action planning and execution support device | |
| JP5594754B2 (ja) | 運行実績を活用したオンデマンドバスの運行スケジューリングシステム及びその方法 | |
| JP5735314B2 (ja) | 経路案内システムおよび車載ナビゲーション装置 | |
| JP2022082640A (ja) | 情報処理装置、端末装置、同乗制御方法、同乗者受付方法、同乗依頼方法、及び、プログラム | |
| JP4118006B2 (ja) | 情報提供システム | |
| JP2010204708A (ja) | 配車管理装置、配車システム、配車方法及びプログラム | |
| JPWO2008142783A1 (ja) | ナビゲーションシステム、経路探索サーバおよび携帯端末装置ならびに経路案内方法 | |
| CN103328929A (zh) | 具有会话传送机制的导航系统及其操作方法 | |
| US10896603B2 (en) | System and method for reducing delays in road traffic | |
| JP6279053B1 (ja) | 情報処理装置、制御方法、プログラム及び通知システム | |
| JP4309866B2 (ja) | バス時刻案内システム、情報配信サーバ、案内端末装置およびプログラム | |
| JPWO2019220205A1 (ja) | 乗降位置決定方法、乗降位置決定装置、ならびに、乗降位置決定システム | |
| JP2017096769A (ja) | 行動計画立案・実行支援装置 | |
| JP2009204457A (ja) | ナビゲーション装置及びプログラム | |
| JP2016189074A (ja) | 通知装置、通知方法および通知プログラム | |
| JP2023026620A (ja) | 輸送管理装置、輸送管理方法、および、輸送システム | |
| JP7020586B2 (ja) | 配車サービス乗車地決定方法及び配車サービス乗車地決定装置 | |
| JP2004227262A (ja) | 即応型車両乗降システム、方法およびプログラム | |
| JPH10170288A (ja) | 乗車情報提供システム | |
| KR102118290B1 (ko) | 예상주행정보를 이용한 차량배차 방법 및 시스템 | |
| JP6129486B2 (ja) | 情報処理システム、情報処理装置、情報処理方法、及び情報処理プログラム | |
| JP2016177396A (ja) | 経路案内システム、方法およびプログラム | |
| JP2017096768A (ja) | 行動計画立案・実行支援装置 | |
| WO2022200820A1 (ja) | 乗車地設定装置、配車サービスシステム、乗車地設定方法、及び乗車地表 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170807 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170807 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170807 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20170822 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170829 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171219 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6273656 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |