JP2014190114A - 搬送用走行体の走行経路構造 - Google Patents
搬送用走行体の走行経路構造 Download PDFInfo
- Publication number
- JP2014190114A JP2014190114A JP2013068432A JP2013068432A JP2014190114A JP 2014190114 A JP2014190114 A JP 2014190114A JP 2013068432 A JP2013068432 A JP 2013068432A JP 2013068432 A JP2013068432 A JP 2013068432A JP 2014190114 A JP2014190114 A JP 2014190114A
- Authority
- JP
- Japan
- Prior art keywords
- movable
- traveling body
- rails
- crossing
- travel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61J—SHIFTING OR SHUNTING OF RAIL VEHICLES
- B61J1/00—Turntables; Traversers; Transporting rail vehicles on other rail vehicles or dollies
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61B—RAILWAY SYSTEMS; EQUIPMENT THEREFOR NOT OTHERWISE PROVIDED FOR
- B61B13/00—Other railway systems
- B61B13/12—Systems with propulsion devices between or alongside the rails, e.g. pneumatic systems
- B61B13/125—Systems with propulsion devices between or alongside the rails, e.g. pneumatic systems the propulsion device being a rotating shaft or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/02—Conveying systems characterised by their application for specified purposes not otherwise provided for for conveying workpieces through baths of liquid
- B65G49/04—Conveying systems characterised by their application for specified purposes not otherwise provided for for conveying workpieces through baths of liquid the workpieces being immersed and withdrawn by movement in a vertical direction
- B65G49/0409—Conveying systems characterised by their application for specified purposes not otherwise provided for for conveying workpieces through baths of liquid the workpieces being immersed and withdrawn by movement in a vertical direction specially adapted for workpieces of definite length
- B65G49/0436—Conveying systems characterised by their application for specified purposes not otherwise provided for for conveying workpieces through baths of liquid the workpieces being immersed and withdrawn by movement in a vertical direction specially adapted for workpieces of definite length arrangements for conveyance from bath to bath
- B65G49/044—Conveying systems characterised by their application for specified purposes not otherwise provided for for conveying workpieces through baths of liquid the workpieces being immersed and withdrawn by movement in a vertical direction specially adapted for workpieces of definite length arrangements for conveyance from bath to bath along a continuous circuit
- B65G49/0445—Conveying systems characterised by their application for specified purposes not otherwise provided for for conveying workpieces through baths of liquid the workpieces being immersed and withdrawn by movement in a vertical direction specially adapted for workpieces of definite length arrangements for conveyance from bath to bath along a continuous circuit the circuit being movable vertically as a whole
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Platform Screen Doors And Railroad Systems (AREA)
- Intermediate Stations On Conveyors (AREA)
Abstract
【課題】床面上に架設されたガイドレール上を走行する搬送用走行体の走行経路と交差する横断通路を使用するとき、前記走行経路の横断通路と交叉する領域を簡単容易に開閉できるようにする。
【解決手段】搬送用走行体の走行経路の横断通路14と交叉する領域が、横断通路14の前後のガイドレール9a,9bどうしを接続する接続作用位置と横断通路14の横側方の退避位置との間で水平に開閉運動可能な可動レールで構成された搬送用走行体の走行経路構造であって、前記可動レールは、接続作用位置にあるときに直列する前後2つの可動レール15,16から構成され、各可動レール15,16は、横断通路14の外側に位置する各外端部において垂直支軸19,21の周りに水平回動自在に軸支され、両可動レール15,16の、前記接続作用位置にあるときに互いに隣接する内端部どうしを連結するロック手段28が設けられた構成。
【選択図】図4
【解決手段】搬送用走行体の走行経路の横断通路14と交叉する領域が、横断通路14の前後のガイドレール9a,9bどうしを接続する接続作用位置と横断通路14の横側方の退避位置との間で水平に開閉運動可能な可動レールで構成された搬送用走行体の走行経路構造であって、前記可動レールは、接続作用位置にあるときに直列する前後2つの可動レール15,16から構成され、各可動レール15,16は、横断通路14の外側に位置する各外端部において垂直支軸19,21の周りに水平回動自在に軸支され、両可動レール15,16の、前記接続作用位置にあるときに互いに隣接する内端部どうしを連結するロック手段28が設けられた構成。
【選択図】図4
Description
本発明は、床面上の通路と交叉するように走行経路が設けられた搬送用走行体の走行経路構造に関するものである。
搬送用走行体の走行経路を横断する横断通路が床面上に設けられている場合、特許文献1に記載のように、当該横断通路と交叉する走行経路部分を構成している昇降ガイドレールを、床面下に設けたピット内に降下退避可能に構成して、横断通路を車両の通行などに使用するときに、前記昇降ガイドレールをピット内に降下退避させ、この降下退避させた昇降ガイドレールの上を車両などが通行出来るように構成することが知られている。この構成は、床下にピットが必要であること、昇降ガイドレールの上端面を横断通路の床面の一部となるように平坦に構成しなければならないこと、そして昇降ガイドレールを水平に精度良く昇降移動させることの出来る構造複雑なモーター駆動の駆動手段が必要であること、などから非常にコスト高になる。これに対して、特許文献2に記載の構成は、対象が搬送用走行体の走行経路ではないが、同じ搬送手段として床面上に配設されるコンベヤが横断通路と交叉する場合の対策として、横断通路と交叉するコンベヤ部分を当該横断通路の前後のコンベヤから切り離して水平に回動自在に構成し、横断通路を使用するときには、前記水平回動自在なコンベヤ部分を横断通路の横側方に水平に開動させることが知られている。
特許文献2に記載のコンベヤの構成を、搬送用走行体の走行経路を構成するガイドレールに置き換えて実施する程度のことは容易に考えられるところであるが、自動車組み立てラインにおいて大型の自動車車体を搬送する搬送用走行体の走行経路を構成するガイドレールは、左右一対並設されるガイドレール間の巾が広く、且つ被搬送物を含めて大重量の搬送用走行体を支持案内するものであるところから、車両などが通行し得る巾広の横断通路と交叉するガイドレール部分、即ち、水平回動自在に構成されるガイドレール部分が非常に大型で大重量なものになる。従って、このガイドレール部分を水平に回動自在に構成しても、手作業で開閉操作することに困難を伴うばかりでなく、水平移動させたときの慣性が大きくなるので、接続作用位置や退避位置の開閉限ストッパーで当て止めするときの衝撃も大きくなり、これに耐え得るだけの開閉限ストッパーも必要になる。
本発明は、上記のような従来の問題点を解消することのできる搬送用走行体の走行経路構造を提案するものであって、本発明に係る搬送用走行体の走行経路構造は、後述する実施例との関係を理解し易くするために、当該実施例の説明において使用した参照符号を括弧付きで付して示すと、床面上に配設されたガイドレール(9a,9b)から成る搬送用走行体(1)の走行経路の横断通路(14)と交叉する領域が、前記横断通路(14)の前後のガイドレール(9a,9b)どうしを接続する接続作用位置と前記横断通路(14)の横側方の退避位置との間で水平に開閉運動可能な可動レールで構成された搬送用走行体の走行経路構造であって、前記可動レールは、前記接続作用位置にあるときに直列する前後2つの可動レール(15,16)から構成され、各可動レール(15,16)は、横断通路(14)の外側に位置する各外端部において垂直支軸(19,21)の周りに水平回動自在に軸支され、両可動レール(15,16)の、前記接続作用位置にあるときに互いに隣接する内端部どうしを連結するロック手段(28)が設けられた構成になっている。
上記本発明の構成によれば、水平に回動自在に構成される2つの可動レールそれぞれの長さが、搬送用走行体の走行経路の横断通路と交叉する開閉領域の長さの半分になり、仮に前記開閉領域内の可動レール全体が大型で大重量物となる場合でも、開閉操作される2つの可動レールそれぞれは、サイズ重量とも半分になるので、手作業での開閉操作も安全容易に行えると共に、開閉限ストッパーで当て止めする場合でもその時の衝撃は半減するので、操作やコストに対する悪影響も小さくなる。又、両可動レールを接続作用位置に閉じた状態では、これら両可動レールの内端部どうしをロック手段で連結するものであるから、両可動レールを2つのロック手段で各別に床面側に固定する場合と比較して、ロック手段が1つで済むだけでなく、両可動レールのガイドレール単体の内端どうしを確実に接続状態に保持させることが出来る。
尚、前後2つの可動レールは、それぞれ反対側へ開動させるように構成しても良いが、前記走行経路に対して同一側でのみ開閉自在な観音開き構造とし、前記ロック手段は、両可動レールの左右両側辺の内、退避位置への開動側の側辺に設けることが出来る。この構成によれば、両可動レールの回動支点となる垂直支軸や前記ロック手段が走行経路の片側に集中するので、これら回動支点となる垂直支軸や前記ロック手段に対する保守作業に便利であるばかりでなく、前記ロック手段の係脱操作や各可動レールの開閉操作も、走行経路の片側で集中的に行え、走行経路の両側での操作が必要になる場合と比較して作業性が良くなり、安全性も高められる。
又、前後2つの前記可動レールを前記退避位置において床面に対し固定する退避状態ロック手段を併設しておけば、退避位置まで開動させた可動レールが不測の事態で横断通路内に閉動して入り込むことにより予想される事故なども未然に防止出来る。
更に、前記横断通路の前後の走行経路端部には、前記可動レールが退避位置にあるときに搬送用走行体が横断通路側へ移動するのを阻止する可動ストッパー片を配設し、各可動レールには、接続作用位置にあるときに前記可動ストッパー片を非作用位置に切り換える操作用カムを設けておくことが出来る。この構成によれば、横断通路を使用するために各可動レールを退避位置に開動させている状況において、何らかの原因で移動した搬送用走行体が横断通路に落ちて脱線事故を招く恐れが回避され、しかも可動レールを閉動させて接続作用位置に戻したときには、当該可動レールの運動を利用して前記可動ストッパー片が自動的に非作用位置に切り換わるので、前記可動ストッパー片を人的操作により非作用位置に戻さなくてはならない場合のように、人的操作を忘れて搬送用走行体の走行を開始させたときに前記可動ストッパー片を破損させてしまうような恐れも無い。
前記ロック手段や退避状態ロック手段は、如何なる構成のものでも良いが、両可動レールが接続作用位置にあるときに互いに重なるように両可動レールから突設された上側板材と下側板材、及びこれら上下両板材に設けられた貫通孔間にわたって差し込まれる係止ピンとから前記ロック手段を構成し、前記退避状態ロック手段は、各可動レールの前記上側板材と下側板材に重なるように床面側に設けられた係止板と、この係止板の貫通孔と前記上下各板材の貫通孔とにわたって差し込まれる係止ピンから構成することにより、少なくとも前記ロック手段の上下両板材を退避状態ロック手段の一部に兼用させ、勿論、前記ロック手段の係止ピンも、退避状態ロック手段に必要な2本の係止ピンの1本に兼用させることも可能であるから、前記ロック手段と退避状態ロック手段の両方を、総部品点数を減らして安価に実施することが出来る。
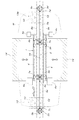
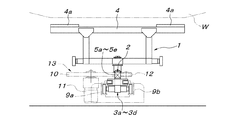
先ず、本発明の実施例において使用される搬送用走行体の構成を、図1〜図3に基づいて説明すると、搬送用走行体1は、被搬送物Wの全長より長いロードバー2、このロードバー2を支持する複数のトロリー3a〜3d、及びこのトロリーの内、中間位置の前後一対のロードトロリー3a,3bにロードバー2を介して支持される台車本体4から構成されている。ロードバー2は、前後一対のロードトロリー3a,3b間に位置する中央ロードバー単体5a、前後両端のガイドトロリー3c,3dと一体の前後両端ロードバー単体5b,5c、これら前後両端ロードバー単体5b,5cと中央ロードバー単体5aとを連結する前後2本の中間ロードバー単体5d,5eから構成され、搬送用走行体1の水平カーブ経路部や昇降勾配経路部での走行を可能にするために、中央ロードバー単体5aと中間ロードバー単体5d,5eとの連結箇所には、上下揺動関節部6a,6bと水平揺動関節部7a,7bが介装されると共に、中間ロードバー単体5d,5eと前後両端ロードバー単体5b,5cとの連結箇所には、水平揺動関節部7c,7dが介装されている。台車本体4を支持する前後一対の支柱部材8a,8bは、中央ロードバー単体5aと中間ロードバー単体5d,5eとの間の水平揺動関節部7a,7bの垂直支軸と同心状に一体化されると共にその下端がロードトロリー3a,3bに左右横向きの水平支軸を介して連結されている。尚、台車本体4上には、自動車車体などの被搬送物Wを支持する被搬送物支持台4aが設けられている。
搬送用走行体1の走行経路は、各トロリー3a〜3dを支持案内する左右一対のガイドレール9a,9bから構成され、前記ロードバー2は、その側面が全長にわたって連続する摩擦駆動面となっている。従って、その走行経路中には、前記ロードバー2の側面(摩擦駆動面)に圧接する摩擦駆動輪10と当該摩擦駆動輪10を回転駆動するモーター11、及び摩擦駆動輪11との間でロードバー2を挟むバックアップローラー12から成る摩擦駆動ユニット13が併設される。ガイドレール9a,9bによって構成される搬送用走行体1の走行区間には、各搬送用走行体1を任意の間隔で定速走行させる等間隔走行区間や、後ろ側の搬送用走行体1のロードバー2の前端で前側の搬送用走行体1のロードバー2の後端を突き押しさせて、各搬送用走行体1を数珠つなぎの状態で走行させる突き押し走行区間などが設定されるが、等間隔走行区間では、前記摩擦駆動ユニット13が搬送用走行体1の走行経路に沿ってロードバー2の全長より短い等間隔おきに配設され、前記突き押し走行区間では、その入り口と出口とに摩擦駆動ユニット13が配設される。
以上のような搬送用走行体1の走行経路、特に前記のように各搬送用走行体1を任意の間隔で定速走行させる等間隔走行区間内の走行経路中に、図2に示すように当該走行経路と交叉する横断通路14が設けられる場合がある。この横断通路14は、通路巾が搬送用走行体1におけるロードバー2の全長より十分に短く、この等間隔走行区間に等間隔おきに配設される摩擦駆動ユニット13は、横断通路14の前後に振り分けられる。従って、横断通路14が使用されるときは、この横断通路14内を走行している搬送用走行体1のロードバー2の後端が当該横断通路14の上手側の摩擦駆動ユニット13aから離れたとき、当該横断通路14より上手側の前記摩擦駆動ユニット13aを含む全ての摩擦駆動ユニット13を停止させて、後続の搬送用走行体1が横断通路14内に進入するのを止め、横断通路14内を走行している搬送用走行体1が当該横断通路14から下手に退出した後に、横断通路14の使用を開始させることになる。
上記横断通路14と交叉する搬送用走行体1の走行経路部分の構成について、図4〜図9に基づいて説明すると、搬送用走行体1の走行経路を構成する左右一対のガイドレール9a,9bの横断通路14と交叉する領域は、前後一対の可動レール15,16に置き換えられる。各可動レール15,16は、前記ガイドレール9a,9bと同一の所要長さの左右一対のガイドレール単体15a,15b及び16a,16bを可動台17,18上に架設して成るものである。
上手側の可動レール15は、その片側のガイドレール単体15aが上手側に接続されるガイドレール9aの端部に、これらガイドレール単体15aとガイドレール9aの外側(ガイドレール9bのある側とは反対側)に隣接する垂直支軸19の周りに水平揺動自在に連結されたもので、可動台17の底部四隅には、床面上を転動する向き固定の車輪20a〜20dが、それぞれの平面視における軸心延長線が前記垂直支軸19の軸心と交わる向きで取り付けられている。下手側の可動レール16は、その片側のガイドレール単体16aが下手側に接続されるガイドレール9aの端部に、これらガイドレール単体16aとガイドレール9aの外側(ガイドレール9bのある側とは反対側)に隣接する垂直支軸21の周りに水平揺動自在に連結されたもので、可動台18の底部四隅には、床面上を転動する向き固定の車輪22a〜22dが、それぞれの平面視における軸心延長線が前記垂直支軸21の軸心と交わる向きで取り付けられている。勿論、これら向き固定の車輪20a〜20d,22a〜22dに代えて、自在車輪を利用することも可能である。
図4に示すように、可動レール15,16が、それぞれのガイドレール単体15a,15b及び16a,16bが互いに接続して、上手側及び下手側のガイドレール9a,9bをガイドレール単体15a,15b及び16a,16bが一直線状に接続する接続作用位置にあるとき、可動レール15のガイドレール単体15bの上手側端部外側(ガイドレール単体15aのある側とは反対側)に当接する制止板23aが、当該ガイドレール単体15bの上手側端部に隣接するガイドレール9bの端部外側に固着され、可動レール16のガイドレール単体16bの下手側端部外側(ガイドレール単体16aのある側とは反対側)に当接する制止板23bが、当該ガイドレール単体16bの下手側端部に隣接するガイドレール9bの端部外側に固着されている。24は、可動レール15のガイドレール単体15bの先端外側に固着された制止板であって、可動レール16のガイドレール単体16bの先端を受け止める。従って、可動レール15,16は、前記接続作用位置から、ガイドレール単体15b,16bに対してガイドレール単体15a,16aのある側への水平回転(水平開動)のみが可能になっている。
上記のように両可動レール15,16が接続作用位置にあるとき、可動レール15のガイドレール単体15aと上手側のガイドレール9aとの接続箇所、即ち、垂直支軸19に隣接する接続箇所25aに対し、ガイドレール単体15bと上手側のガイドレール9bとの接続箇所25bは、搬送用走行体1の走行方向側、即ち、横断通路14のある側に少しずらされ、可動レール16のガイドレール単体16aと上手側のガイドレール9aとの接続箇所、即ち、垂直支軸21に隣接する接続箇所26aに対し、ガイドレール単体16bと下手側のガイドレール9bとの接続箇所26bは、搬送用走行体1の走行方向側とは反対側、即ち、横断通路14のある側に少しずらされている。そして、両可動レール15,16におけるガイドレール単体15a,16a間の接続箇所27aとガイドレール単体15b,16b間の接続箇所27bも、搬送用走行体1の走行方向において互いにずらされている。この実施例では、ガイドレール単体15a,16a間の接続箇所27aに対し、ガイドレール単体15b,16b間の接続箇所27bが搬送用走行体1の走行方向に少しずらされている。
これらの左右対を成すレール間接続箇所25a〜27bの位置のずらしは、横断通路14上を走行通過する搬送用走行体1の各トロリー3a〜3dの左右対をなすローラーが左右対を成すレール間接続箇所を同時に通過する場合に搬送用走行体1が受けるショックや異音の発生を抑制するためである。この抑制効果を一層高めるために、接続箇所25a,25b,27a,27bを形成するレール端辺は、平面視において、垂直支軸19から遠い側の端が搬送用走行体1の走行方向に進む方向にずれるように、斜めに形成され、接続箇所26a,26bを形成するレール端辺は、平面視において、垂直支軸21に近い側の端が搬送用走行体1の走行方向に進む方向にずれるように、斜めに形成されている。
可動レール15,16間には、これら両可動レール15,16を接続作用位置にロックするためのロック手段28が設けられている。このロック手段28は、下手側の可動レール16のガイドレール単体16aの遊端部上面に固着されて、上手側の可動レール15のガイドレール単体15aの遊端部外側に延出する上側板材29と、この上側板材29の下側に重なるように、上手側の可動レール15のガイドレール単体15aの遊端部外側に固着突設された下側板材30、及び上下両板材29,30の重なり部に同心状に設けられた貫通孔29a,30aに上から差し込まれて上側板材29の上面で受け止められる係止ピン31から構成されている。32は、係止ピン31を上側板材29の基部につなげておくためのチエン、ワイヤー、ロープなどの紐状繋ぎ材である。又、上側板材29には、貫通孔29a,30aから抜いた係止ピン31を支持しておくための予備貫通孔33が設けられている。
以上の構成によれば、図4に示すように、各可動レール15,16を制止板23a,23b,24で受け止められる接続作用位置まで垂直支軸19,21の周りに水平に閉動させた状態で、ロック手段28の上下に重なる上下両板材29,30の貫通孔29a,30aに上から係止ピン31を差し込んで、両可動レール15,16を互いに連結して水平揺動不能なロック状態としておくことにより、ガイドレール9a,9bに各トロリー3a〜3dが支持案内される搬送用走行体1を、接続状態の可動レール15,16の各ガイドレール単体15a〜16bを経由させて横断通路14の上を問題なく走行通過させることが出来る。横断通路14を、車両などの通過のために使用するときは、先に説明したタイミングで、この横断通路14の上手側の摩擦駆動ユニット13を停止させ、横断通路14内から搬送用走行体1が下手側に退出した後に、ロック手段28の係止ピン31を引き抜いてロックを解除し、必要に応じて当該係止ピン31を上側板材29の予備貫通孔33に差し込んだ状態で、図6に示すように、可動レール15,16を垂直支軸19,21の周りに水平に開動させ、横断通路14の外側の退避位置に切り換える。これにより横断通路14上が開放されるので、車両などは搬送用走行体1の走行経路に対して横断している横断通路14上を安全に通行することが出来る。
上記実施例の構成では、可動レール15,16の開動操作は、同時か若しくは下手側の可動レール16を先行開動させた後に上手側の可動レール15を開動操作しなければならない。そして横断通路14の使用が完了して再び搬送用走行体1の走行通路を接続させるときは、開動操作時とは逆の手順で両可動レール15,16を元の接続作用位置まで閉動させ、ロック手段28により両可動レール15,16を互いに連結すれば良い。
以上のように使用することが出来るが、図6に示すように、横断通路14を使用するために両可動レール15,16を退避位置まで開動させたとき、これら可動レール15,16が不測に横断通路14内へ閉動するのを防止するために、これら可動レール15,16を退避位置にロックする退避状態ロック手段34,35を設けておくのが望ましい。この実施例における退避状態ロック手段34,35の具体構成を説明すると、可動レール15に対する退避状態ロック手段34は、図7Cにも示すように、可動レール15が退避位置まで開動したとき、ガイドレール単体15aの遊端外側に固着突設された下側板材30の上に重なる係止板34aと係止ピン34bから構成されている。係止板34aは、床面上に固定されるベース板36上に立設された支柱部材37の上端部から水平横向きに固着突設され、この係止板34aに設けられた上下方向の貫通孔と可動レール15側の下側板材30に設けられた貫通孔30aとにわたって係止ピン34bを差し込むことにより、可動レール15を退避位置にロックするものである。尚、係止ピン34bは、差し込み状態で係止板34a上に支持されるもので、チエン、ワイヤー、ロープなどの紐状繋ぎ材38により、支柱部材37(係止板34aでも良い)に繋がれている。
可動レール16に対する退避状態ロック手段35は、図7Dにも示すように、可動レール16が退避位置まで開動したとき、ガイドレール単体16aの遊端外側に固着突設された上側板材29の下に重なる係止板39とロック手段28の係止ピン31から構成されている。係止板39は、床面上に固定されるベース板40上に立設された支柱部材41の上端部から水平横向きに固着突設され、この係止板39に設けられた上下方向の貫通孔と可動レール16側の上側板材29に設けられた貫通孔29aとにわたって係止ピン31を差し込むことにより、可動レール16を退避位置にロックするものである。
尚、各可動レール15,16を退避位置まで開動させたときに、これら可動レール15,16を退避位置(開動限位置)で受け止めるストッパーについて図示していないが、退避状態ロック手段34,35の支柱部材37,41などを利用して当該ストッパーを設けることが望ましい。
又、横断通路14を使用するために可動レール15,16を退避位置に切り換えた状況では、搬送用走行体1が横断通路14に向かって走行することは原則生じないが、何らかの不測の事態により搬送用走行体1が動き出して、ガイドレール9a,9bの横断通路14で途切れた端部から横断通路14側へ前端ガイドトロリー3c(搬送用走行体1が不測に後進走行したときには後端ガイドトロリー3d)が外れ落ちる可能性が考えられる。このような不測の事態に備えるため、図4及び図6に示すように、可動レール15,16に対する上手側の走行経路端部と下手側走行経路端部とに、自動ストッパー装置42,43を併設することが出来る。
両自動ストッパー装置42,43は、同一構造のものであって、図8及び図9に示すように、可動レール15,16のガイドレール単体15b,16bと接続するガイドレール9bの端部内側に設けられた可動ストッパー片44と、当該ガイドレール9bの端部に隣接する可動レール15,16のガイドレール単体15b,16bの端部内側に設けられた操作用カム45とから構成されている。可動ストッパー片44は、ガイドレール9bの外側に取り付けられた垂直基板46に固着されて当該ガイドレール9bの下側を水平内向きに突出する軸受け47に左右横向きの水平支軸48によって上下シーソー運動自在に軸支されたもので、可動レール15,16のある側の端部にカム従動ローラー49が左右横向きの水平支軸によって軸支され、可動レール15,16が退避位置に開動した、図6に示す状況では、図9Bに示すように、このカム従動ローラー49の重量(スプリングを併用しても良い)により、このカム従動ローラー49のある側が下がるように傾動し、可動ストッパー片44が作用位置に達したとき、当該可動ストッパー片44に突設されたストッパーピン50がガイドレール9bの下側面に当接するように構成されている。このときの可動ストッパー片44のカム従動ローラー49のある側とは反対側の作用端44aは、図1〜図3に示した搬送用走行体1の前後両端ガイドトロリー3c,3dのローラー(ガイドレール9a,9bに嵌合する、水平支軸で軸支されたローラー)の軸受け部の移動軌跡内に突出している。
可動レール15,16のガイドレール単体15b,16bの端部内側に設けられた操作用カム45は、ガイドレール単体15b,16bの端部下側から内向きに固着突設された支持部材51の内端部に、当該ガイドレール単体15b,16bの端からガイドレール9bのある側に突出するように付設されたもので、可動レール15,16が図4に示す接続作用位置まで閉動したとき、可動ストッパー片44のカム従動ローラー49を掬い上げて、当該可動ストッパー片44を、作用端44aが下がる向きに水平支軸48の周りに重力に抗して回動させ、作用端44aを搬送用走行体1の走行経路下側に退避させるものである。
上記構成の自動ストッパー装置42,43によれば、可動レール15,16が横断通路14の前後の走行経路(ガイドレール9a,9b)どうしを接続させる接続作用位置に閉じられているときは、横断通路14の前後の走行経路の端部に配設された自動ストッパー装置42,43の可動ストッパー片44が、搬送用走行体1の走行経路の下側に退避した非作用位置に保持されているので、搬送用走行体1は、自動ストッパー装置42,43の存在に全く影響されずに、可動レール15,16を経由して横断通路14の上を走行通過することが出来るが、横断通路14を使用するために可動レール15,16を退避位置に開動させたときには、自動ストッパー装置42,43の可動ストッパー片44が作用位置に自動的に切り換わって、横断通路14で分断された状態の走行経路の、当該横断通路14に隣接する端部を閉じることになり、仮に、横断通路14の両側の走行経路上の搬送用走行体1が何らかの原因で横断通路14側へ不測に移動したとしても、その搬送用走行体1の前端ガイドトロリー3c又は後端ガイドトロリー3dを可動ストッパー片44の作用端44aにより受け止め、強制停止させることが出来る。
尚、以上の実施例では、前後一対の可動レール15,16を走行経路の同一側で観音開き状に開閉自在に構成したが、可動レール15,16のガイドレール単体15a,15bとガイドレール単体16a,16bとの間の接続箇所27a,27bが図示例の通りである場合、可動レール15は走行経路の左側で開閉運動させ、可動レール16は走行経路の右側で開閉運動するように構成することも可能である。又、可動レール15,16の開閉操作は作業者の手作業で行うことが出来るが、場合によっては、モーターなどの動力源を別途使用して、可動レール15,16を人力に代えて動力により開閉させることも出来る。更に、接続作用位置に閉じた両可動レール15,16の内端部どうしを連結するロック手段28の構成も、上記実施例のものに限定されない。例えば、係止ピン31として長尺のものを使用して、上下両板材29,30の貫通孔29a,30aに上から差し込んだ係止ピン31の下端が嵌入する孔を床面側に設けて、両可動レール15,16の内端部どうしを連結すると同時に、当該内端部の位置を床面に対しても固定させることが出来る。
又、人的操作によりロック状態に切り換えるロック手段28を示したが、両可動レール15,16が直列する接続作用位置(閉動限位置)まで閉動したときに自動的に係合する自動ロック手段とすることも可能である。更に、このロック手段28のロック解除操作も手動に限定されるわけではなく、安全が確認されている状況での人的スイッチ操作など、特定の条件が揃った時に、シリンダーユニットやソレノイドなどの適当なアクチュエーターにより自動的にロック解除が行われるロック手段とすることが出来る。このような自動ロック解除機能を備えたロック手段を設けるときは、先に説明したように、両可動レール15,16が所定の順番に動力により開動せしめられるように構成するのが望ましい。
本発明の搬送用走行体の走行経路構造は、床面上に架設されたガイドレール上を走行する搬送用走行体の走行経路と交差するように横断通路が設けられるレイアウトにおいて、当該横断通路での車両などの通行を安全に行うための手段として活用出来る。
1 搬送用走行体
2 ロードバー
3a〜3d トロリー
4 台車本体
9a,9b ガイドレール(搬送用走行体の走行経路)
13 摩擦駆動ユニット
14 横断通路
15,16 前後一対の可動レール
17,18 可動台
19,21 垂直支軸
20a〜20d,22a〜22d 向き固定の車輪
23a,23b,24 制止板
28 ロック手段
31,34a,39b 係止ピン
32,38 紐状繋ぎ材
34,35 退避状態ロック手段
34a,39a 係止板
42,43 自動ストッパー装置
44 可動ストッパー片
45 操作用カム
49 カム従動ローラー
2 ロードバー
3a〜3d トロリー
4 台車本体
9a,9b ガイドレール(搬送用走行体の走行経路)
13 摩擦駆動ユニット
14 横断通路
15,16 前後一対の可動レール
17,18 可動台
19,21 垂直支軸
20a〜20d,22a〜22d 向き固定の車輪
23a,23b,24 制止板
28 ロック手段
31,34a,39b 係止ピン
32,38 紐状繋ぎ材
34,35 退避状態ロック手段
34a,39a 係止板
42,43 自動ストッパー装置
44 可動ストッパー片
45 操作用カム
49 カム従動ローラー
Claims (5)
- 床面上に配設されたガイドレールから成る搬送用走行体の走行経路の横断通路と交叉する領域が、前記横断通路の前後のガイドレールどうしを接続する接続作用位置と前記横断通路の横側方の退避位置との間で水平に開閉運動可能な可動レールで構成された搬送用走行体の走行経路構造であって、前記可動レールは、前記接続作用位置にあるときに直列する前後2つの可動レールから構成され、各可動レールは、横断通路の外側に位置する各外端部において垂直支軸の周りに水平回動自在に軸支され、両可動レールの、前記接続作用位置にあるときに互いに隣接する内端部どうしを連結するロック手段が設けられている、搬送用走行体の走行経路構造。
- 前後2つの前記可動レールは、前記走行経路に対して同一側でのみ開閉自在な観音開き構造であり、前記ロック手段は、両可動レールの左右両側辺の内、退避位置への開動側の側辺に設けられている、請求項1に記載の搬送用走行体の走行経路構造。
- 前後2つの前記可動レールを前記退避位置において床面に対し固定する退避状態ロック手段が併設されている、請求項1又は2に記載の搬送用走行体の走行経路構造。
- 前記横断通路の前後の走行経路端部には、前記可動レールが退避位置にあるときに搬送用走行体が横断通路側へ移動するのを阻止する可動ストッパー片が配設され、各可動レールには、接続作用位置にあるときに前記可動ストッパー片を非作用位置に切り換える操作用カムが設けられている、請求項1〜3の何れか1項に記載の搬送用走行体の走行経路構造。
- 前記ロック手段は、両可動レールが接続作用位置にあるときに互いに重なるように両可動レールから突設された上側板材と下側板材、及びこれら上下両板材に設けられた貫通孔間にわたって差し込まれる係止ピンとから成り、前記退避状態ロック手段は、各可動レールの前記上側板材と下側板材に重なるように床面側に設けられた係止板と、この係止板の貫通孔と前記上下各板材の貫通孔とにわたって差し込まれる係止ピンから構成されている、請求項2に記載の搬送用走行体の走行経路構造。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013068432A JP2014190114A (ja) | 2013-03-28 | 2013-03-28 | 搬送用走行体の走行経路構造 |
| PCT/JP2014/051802 WO2014156270A1 (ja) | 2013-03-28 | 2014-01-28 | 搬送用走行体の走行経路構造 |
| CN201480018265.2A CN105307916B (zh) | 2013-03-28 | 2014-01-28 | 搬运用行走体的行走路径结构 |
| US14/815,456 US9630634B2 (en) | 2013-03-28 | 2015-07-31 | Traveling route structure of conveying traveling body |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013068432A JP2014190114A (ja) | 2013-03-28 | 2013-03-28 | 搬送用走行体の走行経路構造 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014190114A true JP2014190114A (ja) | 2014-10-06 |
| JP2014190114A5 JP2014190114A5 (ja) | 2015-05-07 |
Family
ID=51623272
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013068432A Pending JP2014190114A (ja) | 2013-03-28 | 2013-03-28 | 搬送用走行体の走行経路構造 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9630634B2 (ja) |
| JP (1) | JP2014190114A (ja) |
| CN (1) | CN105307916B (ja) |
| WO (1) | WO2014156270A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014190114A (ja) * | 2013-03-28 | 2014-10-06 | Daifuku Co Ltd | 搬送用走行体の走行経路構造 |
| JP5971737B2 (ja) * | 2015-02-02 | 2016-08-17 | ニチユ三菱フォークリフト株式会社 | レールロック機構 |
| CN104944097A (zh) * | 2015-06-26 | 2015-09-30 | 浙江特拉建材有限公司 | 一种用于输送砖块的输送装置 |
| WO2017150005A1 (ja) * | 2016-03-03 | 2017-09-08 | 村田機械株式会社 | 搬送システム |
| JP6501078B2 (ja) * | 2016-04-29 | 2019-04-17 | 株式会社ダイフク | 搬送用走行体利用の搬送設備 |
| DE102016120257B3 (de) * | 2016-10-24 | 2017-12-21 | Johannes Herbig | Schienenmodul mit Schienenabschnitten und mit einem Linearantrieb, Wagen für ein Schienenmodul und Schienentransportsystem |
| CN106865123A (zh) * | 2017-04-18 | 2017-06-20 | 中科富创(北京)科技有限公司 | 智能轨道 |
| CN113291728B (zh) * | 2021-05-28 | 2022-07-08 | 华北科技学院(中国煤矿安全技术培训中心) | 一种内嵌式轨道交通运输装置的支撑导轨机构 |
Family Cites Families (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4440090A (en) * | 1981-02-20 | 1984-04-03 | Tsubakimoto Chain Company | Storage arrangement for truck conveyor trolleys |
| US4438701A (en) * | 1981-02-20 | 1984-03-27 | Tsubakimoto Chain Company | Truck conveyor |
| JPS61100663U (ja) * | 1984-12-07 | 1986-06-27 | ||
| GB2182621B (en) * | 1985-11-11 | 1989-10-04 | Honda Motor Co Ltd | System and method for suspendingly transporting bodies |
| US5033394A (en) * | 1989-10-06 | 1991-07-23 | Mid-West Conveyor Company, Inc. | Floor conveyor junction seal gap closure |
| US5303655A (en) * | 1992-09-28 | 1994-04-19 | Mid-West Conveyor Company, Inc. | Automatic stabilizer unit for free trolley having vertically movable wheels resonsive to trackside rails |
| KR0183454B1 (ko) * | 1993-10-07 | 1999-04-15 | 마스다 쇼오이치로오 | 실어서 이송하는 장치 |
| JPH082407A (ja) * | 1994-06-27 | 1996-01-09 | Nakanishi Kinzoku Kogyo Kk | 床コンベヤ |
| JPH0848406A (ja) | 1994-08-04 | 1996-02-20 | Toyo Kanetsu Kk | コンベヤ装置 |
| US5544590A (en) * | 1995-09-14 | 1996-08-13 | Mid-West Conveyor Company | Automatic seal crossover system for power and free conveyor on-floor carriages |
| JPH1191915A (ja) * | 1997-09-20 | 1999-04-06 | Mori:Kk | 商品搬送装置 |
| JP3879818B2 (ja) * | 2001-09-06 | 2007-02-14 | 株式会社ダイフク | 搬送装置 |
| JP3994711B2 (ja) * | 2001-10-01 | 2007-10-24 | 株式会社ダイフク | 搬送装置 |
| JP4557683B2 (ja) * | 2003-12-26 | 2010-10-06 | 株式会社大気社 | 搬送設備 |
| JP2005343195A (ja) * | 2004-05-31 | 2005-12-15 | Toyota Motor Corp | 台車搬送装置 |
| WO2006137317A1 (ja) * | 2005-06-22 | 2006-12-28 | Daifuku Co., Ltd. | 搬送用走行体の配送設備 |
| JP4453626B2 (ja) * | 2005-07-25 | 2010-04-21 | 株式会社ダイフク | 搬送設備 |
| JP4189685B2 (ja) * | 2005-08-04 | 2008-12-03 | 株式会社ダイフク | 台車式搬送装置 |
| JP4314497B2 (ja) * | 2007-01-22 | 2009-08-19 | 株式会社ダイフク | 搬送用走行体の上下経路切換装置 |
| JP4895022B2 (ja) * | 2007-01-30 | 2012-03-14 | 株式会社ダイフク | 台車式搬送装置 |
| JP5057039B2 (ja) * | 2007-03-27 | 2012-10-24 | 株式会社ダイフク | 台車式搬送設備 |
| JP4978371B2 (ja) * | 2007-08-24 | 2012-07-18 | 株式会社ダイフク | 台車利用の搬送装置 |
| JP5020129B2 (ja) * | 2008-03-13 | 2012-09-05 | 株式会社ダイフク | コンベヤ上への車両移載装置 |
| JP5255906B2 (ja) * | 2008-05-23 | 2013-08-07 | 本田技研工業株式会社 | 車体に対する足回り部品の同期搬送装置及び同期搬送方法 |
| JP5686501B2 (ja) * | 2009-03-27 | 2015-03-18 | 株式会社ダイフク | 物品搬送設備 |
| JP5099454B2 (ja) * | 2009-03-27 | 2012-12-19 | 株式会社ダイフク | 交差部切換設備 |
| JP5212836B2 (ja) * | 2009-09-15 | 2013-06-19 | 株式会社ダイフク | ワーク搬送設備 |
| JP5327473B2 (ja) * | 2009-10-21 | 2013-10-30 | 株式会社ダイフク | ワーク昇降支持装置 |
| JP5273564B2 (ja) * | 2010-03-26 | 2013-08-28 | 株式会社ダイフク | ワーク搬送設備 |
| JP5560974B2 (ja) * | 2010-07-06 | 2014-07-30 | 株式会社ダイフク | 走行型浸漬処理装置 |
| JP5618062B2 (ja) * | 2010-07-08 | 2014-11-05 | 株式会社ダイフク | 浸漬処理装置 |
| KR101487803B1 (ko) * | 2010-07-09 | 2015-01-29 | 가부시키가이샤 다이후쿠 | 대차식 반송 장치 |
| JP5552393B2 (ja) * | 2010-08-05 | 2014-07-16 | 株式会社ダイフク | 搬送用走行体利用の搬送装置 |
| JP5448102B2 (ja) * | 2011-02-02 | 2014-03-19 | 株式会社ダイフク | 搬送用走行体の走行制御方法 |
| JP5448101B2 (ja) * | 2011-02-02 | 2014-03-19 | 株式会社ダイフク | 搬送用走行体の走行制御方法 |
| JP2015508680A (ja) * | 2012-02-15 | 2015-03-23 | ハンディカレ アクティエボラーグ | 吊り下げ式レールの間の台車移送用装置及び当該装置を具備する、吊り下げ式レールシステム |
| CN104271257B (zh) * | 2012-05-11 | 2016-09-07 | 株式会社大福 | 行走型浸渍处理装置 |
| JP5900748B2 (ja) * | 2013-03-28 | 2016-04-06 | 株式会社ダイフク | 搬送装置 |
| JP2014190114A (ja) * | 2013-03-28 | 2014-10-06 | Daifuku Co Ltd | 搬送用走行体の走行経路構造 |
| US8978874B2 (en) * | 2013-06-07 | 2015-03-17 | Daifuku Co., Ltd. | Friction drive carriage-type conveying apparatus |
-
2013
- 2013-03-28 JP JP2013068432A patent/JP2014190114A/ja active Pending
-
2014
- 2014-01-28 WO PCT/JP2014/051802 patent/WO2014156270A1/ja active Application Filing
- 2014-01-28 CN CN201480018265.2A patent/CN105307916B/zh active Active
-
2015
- 2015-07-31 US US14/815,456 patent/US9630634B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN105307916A (zh) | 2016-02-03 |
| US9630634B2 (en) | 2017-04-25 |
| WO2014156270A1 (ja) | 2014-10-02 |
| CN105307916B (zh) | 2017-05-31 |
| US20150336593A1 (en) | 2015-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2014156270A1 (ja) | 搬送用走行体の走行経路構造 | |
| KR100923330B1 (ko) | 대차식 반송 장치 | |
| JP6501078B2 (ja) | 搬送用走行体利用の搬送設備 | |
| KR100995517B1 (ko) | 반송용 주행체의 배송 설비 | |
| KR101423183B1 (ko) | 유궤도 대차 시스템 및 유궤도 대차 시스템에서의 분기 제어 방법 | |
| JP5057039B2 (ja) | 台車式搬送設備 | |
| KR101912867B1 (ko) | 대차식 반송 장치 | |
| KR100809040B1 (ko) | 철도차량용 탈선복구장치 | |
| TWI621577B (zh) | Trolley type handling device | |
| JP2018100587A (ja) | レール運搬車 | |
| JP5787178B2 (ja) | 生産設備 | |
| KR101791037B1 (ko) | 무정차 방식의 카 덤퍼 시스템 | |
| JP4716101B2 (ja) | 物品搬送設備 | |
| CN113602766A (zh) | 设有功能区域的自动化立体库中的侧移转运输送系统 | |
| KR101809997B1 (ko) | 무정차 방식의 카 덤퍼 시스템 | |
| JP7027055B2 (ja) | 搬送システム | |
| KR101720208B1 (ko) | 화물 이동용 스케이트 | |
| US3490386A (en) | Means for preventing skidding of trucks in materials handling systems | |
| JP5590470B2 (ja) | 搬送用走行体のロック装置 | |
| US3265013A (en) | Low profile floor conveyor | |
| JP6150168B2 (ja) | 連結台車利用の搬送装置 | |
| JPH019890Y2 (ja) | ||
| RU2120906C1 (ru) | Грузоведущий конвейер | |
| JP3665729B2 (ja) | 駐車装置の車両ドア閉扉装置 | |
| JP2015217753A (ja) | 台車搬送コンベア |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150319 |