JP4660883B2 - 電動パワーステアリング装置の制御装置 - Google Patents
電動パワーステアリング装置の制御装置 Download PDFInfo
- Publication number
- JP4660883B2 JP4660883B2 JP2000152517A JP2000152517A JP4660883B2 JP 4660883 B2 JP4660883 B2 JP 4660883B2 JP 2000152517 A JP2000152517 A JP 2000152517A JP 2000152517 A JP2000152517 A JP 2000152517A JP 4660883 B2 JP4660883 B2 JP 4660883B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- torque
- gain
- electric power
- steering torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
【発明の属する技術分野】
本発明は、自動車や車両の操舵系にモータによる操舵補助力を付与するようにした電動パワーステアリング装置の制御装置に関し、特に安価な構成で連続的な操舵感を与えることにより、安全かつ快適な操舵性能を与えるようにした電動パワーステアリング装置の制御装置に関する。
【0002】
【従来の技術】
自動車や車両のステアリング装置をモータの回転力で補助負荷付勢する電動パワーステアリング装置は、モータの駆動力を減速機を介してギア又はベルト等の伝達機構により、ステアリングシャフト或いはラック軸に補助負荷付勢するようになっている。かかる従来の電動パワーステアリング装置は、アシストトルク(操舵補助トルク)を正確に発生させるため、モータ電流のフィードバック制御を行っている。フィードバック制御は、電流制御値とモータ電流検出値との差が小さくなるようにモータ印加電圧を調整するものであり、モータ印加電圧の調整は、一般的にPWM(パルス幅変調)制御のデュ−ティ比の調整で行っている。
【0003】
ここで、電動パワーステアリング装置の一般的な構成を図9に示して説明すると、操向ハンドル1の軸2は減速ギア3、ユニバーサルジョイント4a及び4b、ピニオンラック機構5を経て操向車輪のタイロッド6に結合されている。軸2には、操向ハンドル1の操舵トルクを検出するトルクセンサ10が設けられており、操向ハンドル1の操舵力を補助するモータ20がクラッチ21、減速ギア3を介して軸2に結合されている。パワーステアリング装置を制御するコントロールユニット30には、バッテリ14からイグニションキー11を経て電力が供給され、コントロールユニット30は、トルクセンサ10で検出された操舵トルクTと車速センサ12で検出された車速Vとに基いてアシスト指令の操舵補助指令値Iの演算を行い、演算された操舵補助指令値Iに基いてモータ20に供給する電流を制御する。クラッチ21はコントロールユニット30でON/OFF制御され、通常の動作状態ではON(結合)されている。そして、コントロールユニット30によりパワーステアリング装置が故障と判断された時、及びイグニションキー11によりバッテリ14の電源(電圧Vb)がOFFとなっている時に、クラッチ21はOFF(切離)される。
【0004】
コントロールユニット30は主としてCPUで構成されるが、そのCPU内部においてプログラムで実行される一般的な機能を示すと図10のようになる。例えば位相補償器31は独立したハードウェアとしての位相補償器を示すものではなく、CPUで実行される位相補償機能を示している。
【0005】
コントロールユニット30の機能及び動作を説明すると、トルクセンサ10で検出されて入力される操舵トルクTは、操舵系の安定性を高めるために位相補償器31で位相補償され、位相補償された操舵トルクTAが操舵補助指令値演算器32に入力される。また、車速センサ12で検出された車速Vも操舵補助指令値演算器32に入力される。操舵補助指令値演算器32は、入力された操舵トルクTA及び車速Vに基いてモータ20に供給する電流の制御目標値である操舵補助指令値Iを決定する。操舵補助指令値Iは減算器30Aに入力されると共に、応答速度を高めるためのフィードフォワード系の微分補償器34に入力され、減算器30Aの偏差(I−i)は比例演算器35に入力されると共に、フィードバック系の特性を改善するための積分演算器36に入力される。微分補償器34及び積分補償器36の出力も加算器30Bに加算入力され、加算器30Bでの加算結果である電流制御値Eが、モータ駆動信号としてモータ駆動回路37に入力される。モータ20のモータ電流値iはモータ電流検出回路38で検出され、モータ電流値iは減算器30Aに入力されてフィードバックされる。
【0006】
モータ駆動回路37の構成例を図11に示して説明すると、モータ駆動回路37は加算器30Bからの電流制御値Eに基いて電界効果トランジスタ(FET)FET1〜FET4の各ゲートを駆動するFETゲート駆動回路371、FET1〜FET4で成るHブリッジ回路、FET1及びFET2のハイサイド側を駆動する昇圧電源372等で構成されている。FET1及びFET2は、電流制御値Eに基いて決定されるデューティ比D1のPWM(パルス幅変調)信号によってON/OFFされ、実際にモータ20に流れる電流Irの大きさが制御される。FET3及びFET4は、デューティ比D1の小さい領域では所定1次関数式(a,bを定数としてD2=a・D1+b)で定義されるデューティ比D2のPWM信号で駆動され、デューティ比D2も100%に達した以降、PWM信号の符号により決定されるモータ20の回転方向に応じてON/OFFされる。
【0007】
一方、広く普及している油圧式パワーステアリング装置では、図12に示すようにシリンダ圧Pに比例して(横軸Tは操舵トルク)、シリンダ部の摩擦が増加する特性を有し、この摩擦特性のためにヒステリシスを持つことになり、例えばコーナリング時にセルフアライニングトルクによってハンドルが急に戻されるのを防ぎ、ドライバの操舵感の向上にも役立っている。図13はその様子を示しており、操舵トルクTが急激にΔTだけ変化した場合、ヒステリシスがない場合にはP1なるシリンダ圧が変化することになるが、ヒステリシスがある場合にはP2(<P1)の変化となる。従って、ヒステリシスがあれば操舵トルクTの変化に対して、シリンダ圧Pの変化を緩やかにすることができる。ここで、ヒステリシス幅は摩擦の大きさに応じて変化することが知られており、油圧シリンダのゴムパッキンでは、シリンダ圧の上昇に伴ってゴムが圧迫されることにより、クーロン摩擦が増えてヒステリシス幅が増える。そして、ドライバとしては中立点近くではセルフアライニングトルクを強く感じ、コーナリング時等にはセルフアライニングを余り感じないことが、操舵感の上で重要である。この意味から理想的には油圧式パワーステアリング装置のように、操舵角θが小さい領域では摩擦(ヒステリシス)が小さく、操舵角θが大きい領域では摩擦(ヒステリシス)が大きいことが望ましい。
【0008】
これに対して、電動パワーステアリング装置では、図14に示すようにアシストトルクTに関係なく一定の摩擦を有する。電動パワーステアリング装置の場合、主にモータが持つクーロン摩擦が支配的であるため、操舵力によらず一定の摩擦特性を持つことが特徴であり、このため図14に示すように一定幅のヒステリシス特性となる。但し、ヒステリシス幅は、油圧式パワーステアリング装置の高トルク時のヒステリシス幅よりも狭くなっている。従って、電動パワーステアリング装置では操舵トルクTの小さい領域での摩擦特性を重視して、摩擦を補償するようにしている。しかしながら、このような補償による場合、図15に示すように操舵トルクTの大きい領域では摩擦が小さくなり過ぎ、結果としてコーナリング時等の操舵トルクTが大きいときに、安定した操舵感を失なうことになっていた。
【0009】
【発明が解決しようとする課題】
上述のような問題を解決した制御装置として、例えば特開平9−156526号公報に示されるものがある。これは、操舵トルクを検出する操舵トルク検出手段を設け、前記操舵トルク検出手段から出力される検出信号に基づき、電気的なパワーアシスト手段のアシスト量を制御する車両用操舵制御装置において、前記操舵トルク検出手段の検出信号にヒステリシスを与える調整手段を備えたことを特徴とするものである。
【0010】
調整手段を設けることにより、操舵トルク検出手段の検出信号にヒステリシスを与えることができる。よって、操舵トルクの検出信号に基づき、作動するパワーアシスト手段のヒステリシス特性を操舵状態に応じて可変することができるため、トルクアシスト量を最適化することが可能となる。 しかしながら、この従来装置では、操舵動作に断続感が残り、トルク制御系が不安定であると共に、新たにハードウェアの構成を具備するためにコストアップになるといった欠点がある。
【0011】
また、本出願人による特開2000−95131で示されるように、ハンドル戻り時に負の微分ゲインを適応し、アシスト量の急激な減少を防ぎ、切り増し時に正の微分ゲインを適応して応答性を高め、結果として高トルク領域では大きなヒステリシス特性を、中立点近傍の低トルク領域では小さなヒステリシス特性を与えるようにしているものがある。しかしながら、この装置では、ハンドル戻りと切り増し操舵パターンにより、負と正の微分ゲインを切り換えることによって負と正の微分ゲインが離れ過ぎた場合、不自然な操舵感が発生する問題がある。
【0012】
更に、走行速度及びステアリングホイールの操舵角度に拘らず快適な操舵感を得る装置として特開平10−291481号に示されるものがあるが、制御系の安定性のみに着目しているため、アシストトルクの応答性の点で問題がある。
【0013】
本発明は上述のような事情よりなされたものであり、本発明の目的は、電動パワーステアリング装置にソフトウェア上の安価な構成で、連続的なヒステリシス特性を調整可能な幅で与えることにより、連続的で安定かつ快適な操舵感を得るようにし、ハンドルの操舵性能を向上した電動パワーステアリング装置の制御装置を提供することにある。
【0014】
【課題を解決するための手段】
本発明は、ステアリングシャフトに発生する操舵トルクに基いて演算された操舵補助指令値と、モータの電流値とから演算した電流制御値に基いてステアリング機構に操舵補助力を与える前記モータを制御するようになっている電動パワーステアリング装置の制御装置に関するもので、本発明の上記目的は、前記操舵トルクの信号を微分して前記操舵補助指令値に加算すると共に、前記微分のゲインが前記操舵トルク及び車速の増大に従って正の値から連続的に減小し、かつハンドルの切り増しの場合に、前記操舵トルク及び前記車速が所定値以上になった時に前記微分のゲインが正から負に変化する特性を有する補助演算手段を設けることによって達成される。
【0015】
また、前記補助演算手段を前記演算手段と並列に接続すると共に、近似微分器、ゲイン調整器及び加算器で構成することにより、或は前記ゲイン調整器のゲインを、前記操舵トルクが小さくなるに従って大きく、前記操舵トルクが大きくなるに従って小さくなるようにすることにより、或は前記ゲイン調整器のゲインを、前記操舵トルクの所定領域において、前記車速が大きくなるに従って小さくなるようにすることによって、本発明の上記目的はより効果的に達成される。
【0016】
【発明の実施の形態】
本発明では、アシストトルクの応答性向上とトルク制御系の安定性向上を目的として、アシスト量(操舵補助指令値)に対して操舵トルク信号の微分に比例した値を、しかも操舵トルク及び車速の大きさに応じて微分ゲインを変化させて、制御系の応答性を高めるために加算している。このように微分ゲインを連続的に変化させることにより、操舵トルク、車速、操舵パターンなどの変化時の微分ゲインに大きな変化がないため、不自然な操舵感を防ぐことができ、快適な操舵性能を得ることができる。また、操舵トルクの小さな領域での微分ゲインを大きくすることにより、中立点近傍の応答性を高めて小さなヒステリシス特性が得られ、快適な操舵性能が得られると共に、操舵トルクの大きな領域での応答性及び安定性も保たれる。
【0017】
更に、所定操舵トルクの領域において、車速が増加することに従って微分ゲインを小さく、負の微分ゲインを含むようにしており、これによりハンドル戻り時のアシスト量の急激な減少を防ぐことができ、等価的に大きなヒステリシス特性が得られ、コーナリング時の操舵安定性を実現している。
【0018】
以下、本発明の実施例を、図面を参照して説明する。
【0019】
先ず本発明によるコントロールユニット30Aの構成を、図9に対応させて図1に示す。本発明では、位相補償器31からの操舵トルクTAは操舵補助指令値Iを演算するための演算器310に入力され、演算器310は車速Vをパラメータとして操舵補助指令値Iを演算する。演算器310から出力された操舵補助指令値Iは加算器313に入力され、また、操舵トルクTAは近似微分器312で微分され、その微分出力信号は車速Vをパラメータとするゲイン調整器315に入力され、ゲイン調整された微分トルクSTAが加算器313に入力され、加算器313で加算された電流指令値Irefが加減算器314に入力されるようになっている。車速Vはパラメータとして、ゲイン調整器315に入力されている。近似微分器312、ゲイン調整器315及び加算器313で補助演算手段を構成している。
【0020】
更に、コントロールユニット30A内のモータ角速度推定器301は、電流制御値E(モータ端子間電圧に対応)及びモータ電流値iよりモータ角速度ωを推定し、推定されたモータ角速度ωをロストルク補償器303及び収れん性制御器304に入力する。ロストルク補償器303及び収れん性制御器304の出力はそれぞれ加減算器314に入力され、ロストルク補償器303はモータ20のロストルクの発生する方向、つまりモータ20の回転方向に対してロストルク相当のアシストを行ない、収れん性制御器304は、車両のヨーの収れん性を改善するためにハンドルが振れ回る動作に対してブレーキをかけるようになっている。また、モータ角速度ωはモータ角加速度推定器(微分器)302に入力されてモータ角加速度が推定され、モータ角加速度は慣性補償器305に入力され、その補償信号が加減算器314に入力されている。慣性補償器305はモータ20の慣性により発生する力相当分をアシストするものであり、慣性感又は制御の応答性の悪化を防止する。
【0021】
ここにおいて、演算器310による操舵補助指令値Iの演算は、図2のブロック310Aに示すような関数特性で演算出力され、△I/△TA=Kとし、簡略化のためにK∝TAなる関係を仮定する。近似微分器312の伝達関数はゲインを“1”として図2のブロック312のようになっており、その後段に接続されたゲイン調整器315のゲインKddは車速V及び操舵トルクTに従って変化するようになっている。尚、T1は積分時定数であり、sはラプラス変数である。
図2のブロック図より、電流指令値Irefについて下記数1が成り立つ。
【0022】
【数1】
Iref=K+Kdd・s/(T1・s+1)
=(K・T1・s+K+Kdd・s)/(T1・s+1)
={(K・T1+Kdd)s+K}/(T1・s+1)
={K/(T1・s+1)}{(K・T1+Kdd)s/K+1}
ここで、下記数2が成り立つ。
【0023】
【数2】
(K・T1+Kdd)/K>T1
従って、上記数1の周波数特性は図3のようになる。
【0024】
図3で示されるように、アシスト特性ゲインKが小のときとアシスト特性ゲインKが大のときとを比較すると、アシスト特性ゲインKが大のときの周波数a以上の帯域では、アシスト特性ゲインKの大小に拘らずゲインGの差は小さい。即ち、周波数a以上の帯域では、アシスト特性ゲインKの大小に拘らずほぼ一定の応答性が得られる。演算器310の出力である操舵補助指令値Iは、図4に示すように操舵トルクTAが小のときはアシスト特性ゲインKが小で、操舵トルクTAが大のときはアシスト特性ゲインKが大となっている。この結果、操舵トルクTAが小のときは、操舵トルクTAが大のときに比べて応答性が低下する。従って、図3のような特性をもたせることにより、高周波帯域での応答性を保ち、モータの摩擦や慣性の影響を補償することができる。
【0025】
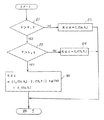
図5は本発明の動作例を示すフローチャートであり、車速VをV2>V1≧0として、先ず車速VがV1より大きいか否かを判定し(ステップS1)、車速V1以下の場合には微分ゲインKddをf1(TA,V1)とする(ステップS3)。また、車速VがV1より大きい場合には更に車速VがV2より大きいか否かを判定し(ステップS2)、車速V2以下の場合には微分ゲインKddをf2(TA,V2)とする(ステップS4)。そして、車速VがV2よりも大きい場合には、微分ゲインKddを下記数3とする(ステップS5)。
【0026】
【数3】
Kdd=[f2(TA,V2) - f1(TA,V1)]×g(TA) + f1(TA,V1)
ここにおいて、本発明では微分ゲインKddを、車速Vをパラメータとして変化させると共に、操舵トルクTAに対して図6に示すように変化させる。即ち、図6は車速Vが0のときの操舵トルクTAと微分ゲインKddとの関係を示しており、操舵トルクTAの小さい領域において微分ゲインKddを大きく、操舵トルクTAが増加するに従って微分ゲインKddが小さくなるようにする。そして、図7に示すように、微分ゲインKddを所定の操舵トルクTAの領域において、車速Vが増加するに従って小さくなるようにする。
【0027】
上述のように、車速Vが増加するに従って微分ゲインKddを小さくすることにより、等価的なアシスト特性のヒステリシスを調整することができる。微分ゲインKddが0になったときに、アシスト特性のヒステリシスは機械系の摩擦により定まる。そして、微分ゲインKddが負になったときに図8に示すように、アシスト特性のヒステリシスが機械系の摩擦によるヒステリシスより大きくなる。
【0028】
【発明の効果】
本発明では、アシストトルクの応答性向上とトルク制御系の安定性向上を目的として、アシスト量(操舵補助指令値)に対して操舵トルクの微分に比例した値を、操舵トルク及び車速の大きさに応じて微分ゲインを変化させ、応答性及び安定性を高めるために加算している。このように微分した値で車速をパラメータとする大きさの信号をアシスト量に加算しているため、中立近傍での応答性とコーナリング時のアシスト量の急激な減少を両立でき、かつ不自然な操舵感を防ぐことができ、快適な操舵フィーリングを得ることができる。
【図面の簡単な説明】
【図1】本発明の構成例を示すブロック図である。
【図2】本発明の要部を示す伝達関数ブロック図である。
【図3】本発明の動作を説明するための図である。
【図4】演算器の特性例を示す図である。
【図5】本発明の動作例を示すフローチャートである。
【図6】本発明で使用する車速ゼロ時の微分ゲイン対操舵トルクの特性例を示す図である。
【図7】本発明で使用する車速増大時の微分ゲイン対操舵トルクの特性例を示す図である。
【図8】微分ゲイン負のときのヒステリシスを有するアシスト特性を示す図である。
【図9】電動パワーステアリング装置の一例を示すブロック構成図である
【図10】コントロールユニットの一般的な内部構成を示すブロック図である。
【図11】モータ駆動回路の一例を示す結線図である。
【図12】油圧式パワーステアリング装置の動作例を示す図である。
【図13】ヒステリシス特性の効果を説明するための図である。
【図14】電動パワーステアリング装置の動作例を示す図である。
【図15】電動パワーステアリング装置の動作例を示す特性図である。
【符号の説明】
10 トルクセンサ
12 車速センサ
20 モータ
30,30A コントロールユニット
312 近似微分器
315 ゲイン調整器
Claims (4)
- ステアリングシャフトに発生する操舵トルクに基いて演算手段で演算された操舵補助指令値と、モータの電流値とから演算した電流制御値に基いてステアリング機構に操舵補助力を与える前記モータを制御するようになっている電動パワーステアリング装置の制御装置において、前記操舵トルクの信号を微分して前記操舵補助指令値に加算すると共に、前記微分のゲインが前記操舵トルク及び車速の増大に従って正の値から連続的に減小し、かつハンドルの切り増しの場合に、前記操舵トルク及び前記車速が所定値以上になった時に前記微分のゲインが正から負に変化する特性を有する補助演算手段を具備したことを特徴とする電動パワーステアリング装置の制御装置。
- 前記補助演算手段が前記演算手段と並列に接続されると共に、近似微分器、ゲイン調整器及び加算器で成っている請求項1に記載の電動パワーステアリング装置の制御装置。
- 前記ゲイン調整器のゲインが、前記操舵トルクが小さくなるに従って大きく、前記操舵トルクが大きくなるに従って小さくなるようになっている請求項2に記載の電動パワーステアリング装置の制御装置。
- 前記ゲイン調整器のゲインが、前記操舵トルクの所定領域において、前記車速が大きくなるに従って小さくなるようになっている請求項2に記載の電動パワーステアリング装置の制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000152517A JP4660883B2 (ja) | 2000-05-24 | 2000-05-24 | 電動パワーステアリング装置の制御装置 |
| US10/009,780 US6876911B2 (en) | 2000-05-24 | 2001-05-14 | Controller for motor power steering system |
| GB0125736A GB2366550B (en) | 2000-05-24 | 2001-05-14 | Control unit for electric power steering apparatus |
| DE10191916T DE10191916T1 (de) | 2000-05-24 | 2001-05-14 | Steuereinheit für elektrische Servolenkung |
| PCT/JP2001/003981 WO2001089910A1 (fr) | 2000-05-24 | 2001-05-14 | Dispositif de commande pour systeme de direction d'un vehicule a moteur |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000152517A JP4660883B2 (ja) | 2000-05-24 | 2000-05-24 | 電動パワーステアリング装置の制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001328553A JP2001328553A (ja) | 2001-11-27 |
| JP2001328553A5 JP2001328553A5 (ja) | 2007-06-28 |
| JP4660883B2 true JP4660883B2 (ja) | 2011-03-30 |
Family
ID=18657932
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000152517A Expired - Fee Related JP4660883B2 (ja) | 2000-05-24 | 2000-05-24 | 電動パワーステアリング装置の制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6876911B2 (ja) |
| JP (1) | JP4660883B2 (ja) |
| DE (1) | DE10191916T1 (ja) |
| GB (1) | GB2366550B (ja) |
| WO (1) | WO2001089910A1 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3777961B2 (ja) * | 2000-09-11 | 2006-05-24 | 日本精工株式会社 | 電動パワーステアリング装置の制御装置 |
| JP4623824B2 (ja) * | 2000-12-28 | 2011-02-02 | カヤバ工業株式会社 | 電動パワーステアリング制御装置 |
| JP4581299B2 (ja) * | 2001-06-28 | 2010-11-17 | 日本精工株式会社 | 電動パワーステアリング装置の制御装置 |
| US6943512B2 (en) | 2002-02-04 | 2005-09-13 | Nsk Ltd. | Control apparatus for electric power steering system |
| US6995679B2 (en) * | 2002-04-30 | 2006-02-07 | International Rectifier Corporation | Electronically controlled power steering system for vehicle and method and system for motor control |
| US7202622B2 (en) * | 2002-04-30 | 2007-04-10 | International Rectifier Corporation | Method for controlling an electric motor to reduce EMI |
| FR2848173B1 (fr) * | 2002-12-06 | 2005-09-30 | Soc Mecanique Irigny | Procede d'etablissement, dans un systeme de direction assistee electrique pour vehicule automobile, de la consigne du couple d'assistance et systeme de direction assistee ele ctrique pour la mise en oeuvre de ce procede |
| JP4089435B2 (ja) * | 2003-01-08 | 2008-05-28 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP4037321B2 (ja) * | 2003-06-09 | 2008-01-23 | 三菱電機株式会社 | 電動油圧式パワーステアリング装置 |
| US7668635B2 (en) * | 2004-08-06 | 2010-02-23 | National University Corporation Tokyo University Of Agriculture And Technology | Front wheel steering control device |
| EP2256020B1 (en) * | 2005-01-14 | 2013-06-05 | NSK Ltd. | Control apparatus for electric power steering apparatus |
| JP4594784B2 (ja) * | 2005-04-05 | 2010-12-08 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| WO2007005533A2 (en) * | 2005-06-30 | 2007-01-11 | Globe Motors, Inc. | Steering system torque sensor |
| JP4629533B2 (ja) * | 2005-08-22 | 2011-02-09 | 日立オートモティブシステムズ株式会社 | 液圧制御装置及びその製造方法 |
| US20070144814A1 (en) * | 2005-12-22 | 2007-06-28 | Arnold Steven D | Torque sensor based steering response |
| JP5045872B2 (ja) * | 2006-02-16 | 2012-10-10 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP5137456B2 (ja) * | 2007-04-27 | 2013-02-06 | オムロンオートモーティブエレクトロニクス株式会社 | 電動式パワーステアリング制御装置 |
| JP4997534B2 (ja) * | 2007-06-01 | 2012-08-08 | 株式会社ジェイテクト | 電気式動力舵取装置 |
| US8296011B2 (en) * | 2007-12-12 | 2012-10-23 | Steering Solutions IP Holding Corporations | Systems and methods involving quadrant dependent active damping |
| EP2323890B1 (de) * | 2008-09-10 | 2012-09-05 | Continental Teves AG & Co. oHG | Verfahren zur lenkunterstützung bei notmanöver |
| JP2010104112A (ja) * | 2008-10-22 | 2010-05-06 | Jtekt Corp | モータおよび電気式動力舵取装置 |
| JP5526630B2 (ja) * | 2009-07-08 | 2014-06-18 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| US8489282B2 (en) * | 2011-02-16 | 2013-07-16 | Steering Solutions Ip Holding Corporation | Electric power steering control methods and systems |
| KR101557967B1 (ko) * | 2013-10-22 | 2015-10-06 | 현대모비스 주식회사 | Mdps 마찰 보상 로직 및 이를 이용한 마찰 보상 방법 |
| KR102172576B1 (ko) * | 2014-09-02 | 2020-11-02 | 현대모비스 주식회사 | Mdps 시스템의 프릭션 보상 제어 장치 및 방법 |
| JP6409821B2 (ja) * | 2016-05-02 | 2018-10-24 | マツダ株式会社 | 電動パワーステアリングの制御装置 |
| JP6409820B2 (ja) * | 2016-05-02 | 2018-10-24 | マツダ株式会社 | 電動パワーステアリングの制御装置 |
| CN107176204B (zh) * | 2017-07-13 | 2018-05-04 | 吉林大学 | 液压轮毂马达辅助差动助力转向系统 |
| FR3071473B1 (fr) * | 2017-09-25 | 2021-12-10 | Jtekt Europe Sas | Adaptation d’un gain de derivee en fonction du couple volant pour ameliorer le ressenti d’un systeme de direction assistee |
| JP7314636B2 (ja) * | 2019-06-14 | 2023-07-26 | 株式会社ジェイテクト | 転舵制御装置 |
| JP7342738B2 (ja) * | 2020-03-09 | 2023-09-12 | ニデック株式会社 | 電動パワーステアリング装置に用いられる制御装置、制御方法、およびモータモジュール |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10291481A (ja) * | 1997-04-21 | 1998-11-04 | Kayaba Ind Co Ltd | 電動式パワーステアリングシステム |
| JPH10310072A (ja) * | 1997-05-09 | 1998-11-24 | Kayaba Ind Co Ltd | 電動式パワーステアリングシステム |
| JP2000095131A (ja) * | 1998-09-22 | 2000-04-04 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4637483A (en) * | 1984-11-23 | 1987-01-20 | Toyoda Koki Kabushiki Kaisha | Steering characteristic controller for a power steering system |
| JPH0710672B2 (ja) * | 1985-07-03 | 1995-02-08 | 株式会社日立製作所 | 電動式パワ−ステアリング制御装置 |
| JP2981625B2 (ja) * | 1991-07-09 | 1999-11-22 | 光洋精工株式会社 | 動力舵取装置 |
| JP3047598B2 (ja) * | 1992-01-30 | 2000-05-29 | オムロン株式会社 | 電動式パワーステアリング装置 |
| JP3525275B2 (ja) * | 1996-02-23 | 2004-05-10 | 光洋精工株式会社 | 電動パワーステアリング装置 |
| JP2962683B2 (ja) * | 1996-12-04 | 1999-10-12 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3058323B2 (ja) * | 1997-04-08 | 2000-07-04 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3625662B2 (ja) * | 1998-10-05 | 2005-03-02 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| US6240350B1 (en) * | 1998-07-24 | 2001-05-29 | Nsk Ltd. | Control apparatus for electric power steering system |
| JP2000139324A (ja) * | 1998-11-09 | 2000-05-23 | Nippon Eisei Center:Kk | ワイヤー張設用支持具 |
| JP3968401B2 (ja) * | 1999-07-28 | 2007-08-29 | カヤバ工業株式会社 | 電動式パワーステアリング装置 |
-
2000
- 2000-05-24 JP JP2000152517A patent/JP4660883B2/ja not_active Expired - Fee Related
-
2001
- 2001-05-14 DE DE10191916T patent/DE10191916T1/de not_active Withdrawn
- 2001-05-14 US US10/009,780 patent/US6876911B2/en not_active Expired - Lifetime
- 2001-05-14 GB GB0125736A patent/GB2366550B/en not_active Expired - Fee Related
- 2001-05-14 WO PCT/JP2001/003981 patent/WO2001089910A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10291481A (ja) * | 1997-04-21 | 1998-11-04 | Kayaba Ind Co Ltd | 電動式パワーステアリングシステム |
| JPH10310072A (ja) * | 1997-05-09 | 1998-11-24 | Kayaba Ind Co Ltd | 電動式パワーステアリングシステム |
| JP2000095131A (ja) * | 1998-09-22 | 2000-04-04 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| GB2366550B (en) | 2003-08-06 |
| WO2001089910A1 (fr) | 2001-11-29 |
| GB2366550A (en) | 2002-03-13 |
| DE10191916T1 (de) | 2003-04-24 |
| JP2001328553A (ja) | 2001-11-27 |
| US20020116105A1 (en) | 2002-08-22 |
| US6876911B2 (en) | 2005-04-05 |
| GB0125736D0 (en) | 2001-12-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4660883B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3777961B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4192442B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| US6570352B2 (en) | Control unit for electric power steering apparatus | |
| US6744232B2 (en) | Control unit for electric power steering apparatus | |
| JPH10236323A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4356456B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4849065B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3826582B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3812229B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4114349B2 (ja) | 電動パワーステアリング装置 | |
| JP4089161B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2000185660A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4660988B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3637764B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3922010B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4797294B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2003312510A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4040309B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4581299B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3637714B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3945224B2 (ja) | 自動車の電源システム | |
| JP2009248838A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4058264B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2003175837A (ja) | 電動パワーステアリング装置の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070511 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070511 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100202 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100402 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100831 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101007 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101220 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4660883 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140114 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |