JP4541024B2 - 回転体駆動制御装置および画像形成装置 - Google Patents
回転体駆動制御装置および画像形成装置 Download PDFInfo
- Publication number
- JP4541024B2 JP4541024B2 JP2004129906A JP2004129906A JP4541024B2 JP 4541024 B2 JP4541024 B2 JP 4541024B2 JP 2004129906 A JP2004129906 A JP 2004129906A JP 2004129906 A JP2004129906 A JP 2004129906A JP 4541024 B2 JP4541024 B2 JP 4541024B2
- Authority
- JP
- Japan
- Prior art keywords
- rotation
- rotating body
- detected
- motor
- photosensitive drum
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







































Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/50—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control
- G03G15/5008—Driving control for rotary photosensitive medium, e.g. speed control, stop position control
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/01—Apparatus for electrophotographic processes for producing multicoloured copies
- G03G2215/0103—Plural electrographic recording members
- G03G2215/0119—Linear arrangement adjacent plural transfer points
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/01—Apparatus for electrophotographic processes for producing multicoloured copies
- G03G2215/0151—Apparatus for electrophotographic processes for producing multicoloured copies characterised by the technical problem
- G03G2215/0158—Colour registration
Description
(i) トルクリップル等によるモータ回転周期変動
(ii) 歯車の累積ピッチ誤差、回転軸の偏心等による伝達駆動系誤差
本発明の実施例を、図7の構成を持つ画像形成装置で説明する。図7は、図6に示した感光体ドラム駆動制御機構のうちの単体の駆動制御装置の構成図である。
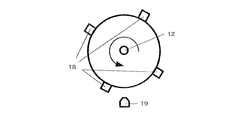
まず、感光体ドラム軸1回転周期の変動を検出するための検出手段について、図1、図2、図4および図20を用いて説明する。図1のスリット検出型回転板、図2および図4のエッジ検出型回転板におけるスリットとエッジは、図7における被検出部13に対応している。被検出部13と検出器14の構成は、感光体ドラム軸方向の両端のどちらに設置されても良いし、大口径歯車(従動ギヤ11)側に設置されてもよい。ただし、大口径歯車側に構成した場合は大口径歯車軸と感光体ドラム回転軸間の軸心位置誤差を減らす必要がある。図20は、被検出部を最少にした構成であり、3個のスリットで構成されている。スリットが構成する区間は3個あるが、検出区間としては2個でよいので、余った検出区間はホーム位置判定用としてもよい。

T1=(T1a+T1b)/2
T2=(T2a+T2b)/2
T3=(T3a+T3b)/2
となる。この補正した通過時間T1,T2,T3を式(1)に代入する。こうすることで、回転板取付け偏心の影響を補正して、感光体ドラム回転軸の回転周期変動を高精度に検出できる。
14a:Aa・sin(ωd・t+αa)
14b:Ab・sin(ωd・t+αb)
このとき、回転板取付け偏心を補正した回転周期変動は、以下の通りになる。
・・・式(9)
・・・式(10)
2a〜2d 露光装置
3 ベルト
4 ベルト駆動用モータ
5 制御器
6,6a〜6d 感光体ドラム駆動用モータ
7 転写紙
8 感光体ドラム駆動制御器
9,9a,9b,9c カップリング
10 駆動ギヤ
11 従動ギヤ
12 感光体ドラム回転軸
12A 回転板
13 被検出部
14,14a,14b 検出器
15 パルス信号
16 速度基準信号
17 被基準検出部
18 磁性体
19 磁気センサ
20 回転板の軸心
21 モータに接続された角速度検出器からの信号
22 感光体ドラムのフランジ
23 中間ギヤ
Claims (15)
- モータと、
前記モータの回転力を伝達する伝達機構と、
前記伝達機構に連結され前記モータの回転力で回転駆動される回転体と、
前記回転体の回転軸を中心に環状に配設された複数の被検出部と、
前記被検出部を検出する検出器と、
前記複数の被検出部のうちの2つの被検出部を両端に有する第1の区間と、両端に被検出部を有するとともに少なくとも一端は前記第1の区間の被検出部とは異なる第2の区間とが設定されているとき、前記回転体の回転時に、前記第1の区間と前記第2の区間が前記検出器を通過する通過時間を該検出器からの信号に基づいて検出する通過時間検出手段と、
前記通過時間検出手段で検出された通過時間に基づいて、前記回転体の所望周期に関する回転周期変動の振幅と位相を生成する振幅位相生成手段と、
前記振幅位相生成手段で生成された振幅と位相に基づき、前記回転周期変動を低減するように前記モータの回転を制御する回転制御手段と、を備えたことを特徴とする回転体駆動制御装置。 - モータと、
前記モータの回転力を伝達する伝達機構と、
前記伝達機構に連結され前記モータの回転力で回転駆動される回転体と、
前記回転体の回転軸を中心に環状に配設された複数の被検出部と、
前記被検出部を検出する検出器と、
前記複数の被検出部のうち2つの被検出部を両端に有する区間が2個以上設定されているとき、前記回転体の回転時に、前記2個以上の区間が前記検出器を通過する通過時間を該検出器からの信号に基づいて検出する通過時間検出手段と、
前記通過時間検出手段で検出された通過時間に基づいて、前記回転体の所望周期に関する回転周期変動の振幅と位相を生成する振幅位相生成手段と、
前記振幅位相生成手段で生成された振幅と位相に基づき、前記回転周期変動を低減するように前記モータの回転を制御する回転制御手段とを備え、
前記通過時間検出手段、前記振幅位相生成手段および前記回転制御手段により、少なくとも二つ以上の回転周期変動を補正することを繰り返すことを特徴とする回転体駆動制御装置。 - 前記通過時間検出手段で検出される通過時間は、前記モータもしくは前記伝達機構の回転周期の自然数倍であることを特徴とする請求項1又は2に記載の回転体駆動制御装置。
- 前記所望周期は、前記モータ、前記伝達機構および前記回転体の各回転周期変動の最小公倍数となるよう設定され、
前記回転制御手段は、前記所望周期に関する回転周期変動を前記周期変動の大きい周期から逐次的に小さくしていき、前記回転周期変動を低減することを特徴とする請求項2に記載の回転体駆動制御装置。 - 前記通過時間検出手段で検出される通過時間は、前記回転体の所望周期に関する回転周期変動の半周期であり、
前記各区間のうち隣合う各区間の位相差は前記回転周期変動の4分の1周期ずれるよう設定されていることを特徴とする請求項1又は2に記載の回転体駆動制御装置。 - 前記振幅位相生成手段は、前記複数の被検出部のうち任意の被検出部を基点として、前記回転周期変動の振幅と位相を生成することを特徴とする請求項1又は2に記載の回転体駆動制御装置。
- 前記回転制御手段は、前記複数の被検出部のうち任意の被検出部を基点として、前記モータの回転を制御することを特徴とする請求項1又は2に記載の回転体駆動制御装置。
- 前記検出器は、前記回転体の回転軸に対して軸対称に2箇所に設けられていることを特徴とする請求項1又は2に記載の回転体駆動制御装置。
- 前記回転体の回転軸には、前記伝達機構の一部として、該回転体の外径よりも大きな径を有する大口径歯車が設けられていることを特徴とする請求項1又は2に記載の回転体駆動制御装置。
- 前記被検出部は、前記大口径歯車上に設けられていることを特徴とする請求項9に記載の回転体駆動制御装置。
- 前記被検出部は、前記回転体の回転軸に設けられた回転板上に設けられていることを特徴とする請求項1又は2に記載の回転体駆動制御装置。
- 前記被検出部は、前記回転体上に設けられていることを特徴とする請求項1又は2に記載の回転体駆動制御装置。
- 前記振幅位相生成手段を用いて、前記回転体の所望周期に関する回転周期変動の振幅と位相を逐次的に生成し、補正制御することを特徴とする請求項1又は2に記載の回転体駆動制御装置。
- 請求項1〜13のいずれか一項に記載の回転体駆動制御装置が搭載され、且つ前記回転体として感光体ドラムが設けられたことを特徴とする画像形成装置。
- 前記通過時間検出手段で検出される通過時間が、前記感光体ドラム上の露光から転写に要する時間と一致することを特徴とする請求項14に記載の画像形成装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004129906A JP4541024B2 (ja) | 2004-04-26 | 2004-04-26 | 回転体駆動制御装置および画像形成装置 |
| PCT/JP2005/008320 WO2005104344A1 (en) | 2004-04-26 | 2005-04-25 | Rotor driving control device and image forming apparatus |
| EP05736651.0A EP1741179A4 (en) | 2004-04-26 | 2005-04-25 | ROTOR DRIVE CONTROL UNIT AND PICTURE GENERATING DEVICE |
| US11/587,922 US7923959B2 (en) | 2004-04-26 | 2005-04-25 | Rotor driving control device and image forming apparatus |
| CNB2005800132828A CN100481705C (zh) | 2004-04-26 | 2005-04-25 | 转子驱动控制设备和成像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004129906A JP4541024B2 (ja) | 2004-04-26 | 2004-04-26 | 回転体駆動制御装置および画像形成装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005312262A JP2005312262A (ja) | 2005-11-04 |
| JP4541024B2 true JP4541024B2 (ja) | 2010-09-08 |
Family
ID=35197319
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004129906A Expired - Fee Related JP4541024B2 (ja) | 2004-04-26 | 2004-04-26 | 回転体駆動制御装置および画像形成装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7923959B2 (ja) |
| EP (1) | EP1741179A4 (ja) |
| JP (1) | JP4541024B2 (ja) |
| CN (1) | CN100481705C (ja) |
| WO (1) | WO2005104344A1 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007137535A (ja) | 2005-11-15 | 2007-06-07 | Ricoh Co Ltd | ベルト駆動制御装置及びこれを備えた画像形成装置 |
| JP2007151342A (ja) * | 2005-11-29 | 2007-06-14 | Ricoh Co Ltd | 回転体駆動制御装置および画像形成装置 |
| JP5101825B2 (ja) * | 2006-02-27 | 2012-12-19 | 株式会社リコー | 回転体駆動制御装置および画像形成装置 |
| JP4919679B2 (ja) * | 2006-03-15 | 2012-04-18 | 株式会社リコー | 回転体駆動装置、プロセスカートリッジ、及び画像形成装置 |
| JP4330614B2 (ja) * | 2006-04-14 | 2009-09-16 | シャープ株式会社 | カラー画像形成装置 |
| JP5229604B2 (ja) * | 2007-01-12 | 2013-07-03 | 株式会社リコー | 画像形成装置 |
| JP5003420B2 (ja) * | 2007-11-09 | 2012-08-15 | コニカミノルタビジネステクノロジーズ株式会社 | 画像形成装置 |
| JP2009223083A (ja) | 2008-03-18 | 2009-10-01 | Ricoh Co Ltd | 画像形成装置 |
| US8340552B2 (en) * | 2009-03-17 | 2012-12-25 | Ricoh Company, Limited | Image forming apparatus |
| JP5317878B2 (ja) * | 2009-07-30 | 2013-10-16 | キヤノン株式会社 | 画像形成装置 |
| JP2011043569A (ja) * | 2009-08-19 | 2011-03-03 | Fuji Xerox Co Ltd | 画像形成装置 |
| JP2012181185A (ja) * | 2011-02-08 | 2012-09-20 | Ricoh Co Ltd | 検知装置、画像形成装置、プログラムおよび検知システム |
| JP6079047B2 (ja) * | 2012-08-23 | 2017-02-15 | 株式会社リコー | 回転体駆動装置および画像形成装置 |
| CA2965910C (en) * | 2015-01-29 | 2023-08-01 | Zeras S.R.L. | Apparatus and procedure for homing and subsequent positioning of axes of a numerical control machine |
| KR102441844B1 (ko) * | 2015-02-04 | 2022-09-08 | 삼성전자주식회사 | 회전체를 제어하기 위한 방법 및 그 전자 장치 |
| US11392071B2 (en) * | 2020-07-10 | 2022-07-19 | Canon Kabushiki Kaisha | Image forming apparatus |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001054296A (ja) * | 1999-08-09 | 2001-02-23 | Sharp Corp | モータの制御装置 |
| JP2001078474A (ja) * | 1999-09-06 | 2001-03-23 | Nidec-Shimpo Corp | 回転駆動装置及び回転駆動方法 |
| JP2001359294A (ja) * | 2000-06-14 | 2001-12-26 | Fujitsu General Ltd | ブラシレスモータの制御方法 |
| JP2002244395A (ja) * | 2001-02-16 | 2002-08-30 | Toshiba Tec Corp | 画像形成装置 |
| JP2003066676A (ja) * | 2001-08-23 | 2003-03-05 | Matsushita Electric Ind Co Ltd | 位相合わせ方法および画像形成装置 |
| JP2004069801A (ja) * | 2002-08-02 | 2004-03-04 | Canon Inc | カラー画像形成装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4228396A (en) * | 1978-05-26 | 1980-10-14 | Dataproducts Corporation | Electronic tachometer and combined brushless motor commutation and tachometer system |
| US4223261A (en) * | 1978-08-23 | 1980-09-16 | Exxon Research & Engineering Co. | Multi-phase synchronous machine system |
| JPH0810372A (ja) | 1994-06-28 | 1996-01-16 | Matsushita Electric Ind Co Ltd | ゴルフ練習機 |
| JP3186610B2 (ja) * | 1996-07-08 | 2001-07-11 | 富士ゼロックス株式会社 | 画像形成装置 |
| JP2000137424A (ja) | 1998-11-02 | 2000-05-16 | Sharp Corp | 画像形成装置 |
| JP2000356929A (ja) | 1999-06-16 | 2000-12-26 | Canon Inc | 画像形成装置および画像形成装置の制御方法 |
| JP2002072816A (ja) | 2000-09-01 | 2002-03-12 | Matsushita Electric Ind Co Ltd | 画像形成装置 |
| JP2002139112A (ja) * | 2000-11-06 | 2002-05-17 | Ricoh Co Ltd | 無端状ベルト駆動装置および画像形成装置 |
| EP1806631B1 (en) * | 2002-03-14 | 2011-01-05 | Ricoh Company, Ltd. | Colour image forming apparatus avoiding speed related pixel size variation |
| JP4312570B2 (ja) | 2003-08-08 | 2009-08-12 | 株式会社リコー | 回転体駆動制御方法及びその装置、画像形成装置、プロセスカートリッジ、プログラム、並びに記録媒体 |
| JP2007137535A (ja) * | 2005-11-15 | 2007-06-07 | Ricoh Co Ltd | ベルト駆動制御装置及びこれを備えた画像形成装置 |
| JP2007151342A (ja) * | 2005-11-29 | 2007-06-14 | Ricoh Co Ltd | 回転体駆動制御装置および画像形成装置 |
-
2004
- 2004-04-26 JP JP2004129906A patent/JP4541024B2/ja not_active Expired - Fee Related
-
2005
- 2005-04-25 CN CNB2005800132828A patent/CN100481705C/zh not_active Expired - Fee Related
- 2005-04-25 US US11/587,922 patent/US7923959B2/en not_active Expired - Fee Related
- 2005-04-25 WO PCT/JP2005/008320 patent/WO2005104344A1/en active Application Filing
- 2005-04-25 EP EP05736651.0A patent/EP1741179A4/en not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001054296A (ja) * | 1999-08-09 | 2001-02-23 | Sharp Corp | モータの制御装置 |
| JP2001078474A (ja) * | 1999-09-06 | 2001-03-23 | Nidec-Shimpo Corp | 回転駆動装置及び回転駆動方法 |
| JP2001359294A (ja) * | 2000-06-14 | 2001-12-26 | Fujitsu General Ltd | ブラシレスモータの制御方法 |
| JP2002244395A (ja) * | 2001-02-16 | 2002-08-30 | Toshiba Tec Corp | 画像形成装置 |
| JP2003066676A (ja) * | 2001-08-23 | 2003-03-05 | Matsushita Electric Ind Co Ltd | 位相合わせ方法および画像形成装置 |
| JP2004069801A (ja) * | 2002-08-02 | 2004-03-04 | Canon Inc | カラー画像形成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005312262A (ja) | 2005-11-04 |
| US7923959B2 (en) | 2011-04-12 |
| US20080231223A1 (en) | 2008-09-25 |
| WO2005104344A1 (en) | 2005-11-03 |
| CN1947328A (zh) | 2007-04-11 |
| EP1741179A4 (en) | 2013-04-10 |
| EP1741179A1 (en) | 2007-01-10 |
| CN100481705C (zh) | 2009-04-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4541024B2 (ja) | 回転体駆動制御装置および画像形成装置 | |
| US6760559B2 (en) | Image-formation apparatus, controlling method thereof and image-formation method | |
| US6501930B2 (en) | Image forming method and apparatus with controlled image carrier rotation driving based on previous rotation state | |
| JP2007151342A (ja) | 回転体駆動制御装置および画像形成装置 | |
| JP4312570B2 (ja) | 回転体駆動制御方法及びその装置、画像形成装置、プロセスカートリッジ、プログラム、並びに記録媒体 | |
| JP2754582B2 (ja) | カラー画像形成装置の転写方法及び装置 | |
| JP2006189660A (ja) | 回転体駆動制御装置並びに画像形成装置 | |
| JP4798878B2 (ja) | 画像形成装置 | |
| JP4810170B2 (ja) | 回転速度調節装置 | |
| JP2007041468A (ja) | 回転速度制御装置、画像形成装置 | |
| JP2004219363A (ja) | 回転数検出装置 | |
| JP3078830B2 (ja) | 画像形成装置 | |
| US20050129427A1 (en) | Rotary member driving mechanism, and image forming apparatus employing this mechanism | |
| JP5101825B2 (ja) | 回転体駆動制御装置および画像形成装置 | |
| JP4726475B2 (ja) | 回転速度検出装置、画像形成装置 | |
| JPH06324062A (ja) | 感光体の角速度検出装置 | |
| JP2000352898A (ja) | 画像形成装置 | |
| JP2005309309A (ja) | カラー画像形成装置の駆動制御装置 | |
| JP2005091609A (ja) | 回転検出装置、回転制御装置、回転同調装置及びそれを用いた画像形成装置 | |
| JP2007101916A (ja) | 回転装置及び画像形成装置 | |
| JP2007259517A (ja) | 回転体駆動制御装置、画像形成装置および位置ずれ補正方法 | |
| JP2005033927A (ja) | モータ駆動装置及びこれを備えた画像形成装置 | |
| JP5113380B2 (ja) | 画像形成装置 | |
| JP3225686B2 (ja) | カラー画像形成装置 | |
| JP2006201309A (ja) | 回転体駆動装置および画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070202 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100420 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100602 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100622 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100623 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130702 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |