JP3585643B2 - ナビゲーション装置 - Google Patents
ナビゲーション装置 Download PDFInfo
- Publication number
- JP3585643B2 JP3585643B2 JP12384296A JP12384296A JP3585643B2 JP 3585643 B2 JP3585643 B2 JP 3585643B2 JP 12384296 A JP12384296 A JP 12384296A JP 12384296 A JP12384296 A JP 12384296A JP 3585643 B2 JP3585643 B2 JP 3585643B2
- Authority
- JP
- Japan
- Prior art keywords
- intersection
- guidance
- guidance target
- target intersection
- intersections
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












































Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3629—Guidance using speech or audio output, e.g. text-to-speech
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3632—Guidance using simplified or iconic instructions, e.g. using arrows
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3655—Timing of guidance instructions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/0969—Systems involving transmission of navigation instructions to the vehicle having a display in the form of a map
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
- G09B29/106—Map spot or coordinate position indicators; Map reading aids using electronic means
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L13/00—Speech synthesis; Text to speech systems
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Educational Administration (AREA)
- Business, Economics & Management (AREA)
- Educational Technology (AREA)
- Mathematical Physics (AREA)
- Health & Medical Sciences (AREA)
- Audiology, Speech & Language Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Multimedia (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Instructional Devices (AREA)
Description
【発明の属する技術分野】
この発明は、車両等の移動体に搭載されて移動経路のガイド等を行うナビゲーション装置に関するものである。
【0002】
【従来の技術】
従来のナビゲーション装置は、設定された走行経路上の交差点に関する案内について、案内のポイントとなる交差点である案内対象交差点の形状とともに、その案内対象交差点からの進行方向を音声にて案内するものであった。
【0003】
図62は例えば特開平6−34383号公報に示された、そのような従来のナビゲーション装置における処理の流れを示したフローチャートであり、その要部にのみ符号を付してその動作を説明する。このナビゲーション装置では、まずステップST1において移動体の現在位置ptを算出し、ステップST2において最先(当該移動体の前方)の指定地点Xiとその次の指定地点Xi+1との距離を算出する。次にステップST3において、その2地点間の距離が所定以内であるか否かについて判定し、所定以内であればステップST4に分岐してそれら2地点に関する案内の音声情報を出力する。一方、2地点間の距離が所定値以上であった場合にはステップST5に分岐して、指定地点Xiに関する案内の音声情報のみを出力する。
【0004】
【発明が解決しようとする課題】
従来のナビゲーション装置は以上のように構成されているので、案内対象交差点間の関係を案内内容に加味しておらず、案内対象交差点間の関係がわかりにくいばかりか、案内内容を音声においてのみ出力しており、それらを可視的に表示する手段が存在しないという課題があり、さらに、案内対象交差点までの距離感がわかりにくく、案内対象交差点を特定しにくいという課題があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、案内対象交差点間の距離が規定値内の案内対象交差点に関する案内を、案内対象交差点間の関係を案内内容に加味して同時に行うことにより、案内対象交差点間の関係をわかりやすくし、案内対象交差点以外の交差点を案内対象交差点と同時に表示することにより案内対象交差点をわかりやすくしたナビゲーション装置を得ることを目的とする。
【0006】
【課題を解決するための手段】
請求項1記載の発明に係るナビゲーション装置は、案内手段を備えて、地図情報記憶手段に記憶されている道路データ、交差点データ等をデジタル化した地図データと、経路設定手段がその地図データ上で設定した2地点間の経路から、当該経路上の交差点案内すべき案内対象交差点を抽出し、その隣接する2つの案内対象交差点間の距離を検出して、それが規定値以内であれば、それら2つの案内対象交差点に対する案内を同時するようにし、案内手段内に、複数の案内対象交差点に関する案内を行った場合に、案内した案内対象交差点間の距離が所定値以上であれば、移動体の現在位置が出発地側の案内対象交差点通過後に目的地側の案内対象交差点に関する音声メッセージを再報知する制御手段を設けたものである。
また、請求項2記載の発明に係るナビゲーション装置は、案内手段内に、複数の案内対象交差点に関する案内を行った場合に、その案内報知後、出発地側の案内対象交差点通過までにかかった時間が一定値以上であった場合に、移動体の現在位置が出発地側の案内対象交差点通過後に目的地側の案内対象交差点に関する音声メッセージを再報知する制御手段を設けたものである。
【0007】
請求項3記載の発明に係るナビゲーション装置は、案内手段内に、抽出された隣接する2つの案内対象交差点間の道路属性を検出して、その道路属性に基づいてそれら隣接する2つの案内対象交差点の案内を同時に行うか否かを判定するための規定値を決定する距離決定手段を設けたものである。
【0008】
請求項4記載の発明に係るナビゲーション装置は、案内手段内に、検出された隣接する2つの案内対象交差点間の距離に基づいてその距離を表す単語を含んだ音声メッセージを選択し、その音声メッセージの音声報知を行う音声報知手段を設けたものである。
【0009】
請求項5記載の発明に係るナビゲーション装置は、案内手段内に、抽出された隣接する2つの案内対象交差点間の道路属性を検出して、その道路属性を表す単語を含んだ音声メッセージを選択し、その音声メッセージの音声報知を行う音声報知手段を設けたものである。
【0010】
請求項6記載の発明に係るナビゲーション装置は、案内手段内に、抽出された隣接する2つの案内対象交差点の進行方向を検出し、その進行方向の組合せが同一方向か逆方向かに基づいて報知する音声メッセージを選択し、その音声報知を行う音声報知手段を設けたものである。
【0013】
請求項7記載の発明に係るナビゲーション装置は、表示手段を備えて、地図情報記憶手段に記憶されている道路データ、交差点データ等をデジタル化した地図データと、経路設定手段がその地図データ上で設定した経路から、当該経路上の交差点案内すべき案内対象交差点を抽出し、抽出された当該案内対象交差点と、地図情報記憶手段に記憶された地図データ、および経路設定手段で設定した経路から、経路上の案内対象交差点より移動体の現在位置までの間に存在する案内対象交差点以外の交差点を検出して、案内対象交差点とともに表示するようにしたものである。
【0014】
請求項8記載の発明に係るナビゲーション装置は、案内手段内に経路上の案内対象交差点から規定値以内の距離に存在する案内対象交差点以外の交差点を検出する検出手段を設けて、現在位置から案内対象交差点までの間の交差点中の当該案内対象交差点付近のものについてのみ、案内対象交差点とともに表示するようにしたものである。
【0015】
請求項9記載の発明に係るナビゲーション装置は、案内手段内に経路上の運転者の意識する交差点を検出する検出手段を設けて、現在位置から案内対象交差点までの間の運転者が意識する交差点についてのみ、案内対象交差点とともに表示するようにしたものである。
【0016】
請求項10記載の発明に係るナビゲーション装置は、案内手段内に経路上の特徴的な交差点を検出する検出手段を設けて、現在位置から案内対象交差点までの間の特徴的な交差点についてのみ、案内対象交差点とともに表示するようにしたものである。
【0017】
請求項11記載の発明に係るナビゲーション装置は、検出手段に特徴的な交差点の検出を規定値だけ行う機能を持たせて、表示する特徴的な交差点の数を制限するようにしたものである。
【0018】
請求項12記載の発明に係るナビゲーション装置は、案内手段内に、交差点案内図に表示する交差点の数に応じて表示するオブジェクトを変更する制御手段を設けたものである。
【0019】
請求項13記載の発明に係るナビゲーション装置は、案内手段内に、複数の案内対象交差点または案内対象交差点以外の交差点を同時に表示する場合に、表示するオブジェクトの総数を規定値に制限する制御手段を設けたものである。
【0020】
請求項14記載の発明に係るナビゲーション装置は、案内手段内に、案内対象交差点にそれが案内対象交差点であることを示すマークをつけて表示する表示手段を設けたものである。
【0021】
請求項15記載の発明に係るナビゲーション装置は、案内手段内に、交差点案内図の全体が表示画面内に収まるように交差点間の表示距離を調整する制御手段を設けたものである。
【0022】
【発明の実施の形態】
以下、この発明の実施の一形態について説明する。
実施の形態1.
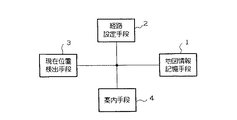
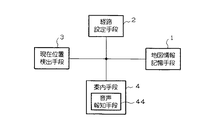
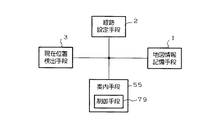
図1はこの発明の実施の形態1によるナビゲーション装置の機能構成を示すブロック図である。図において、1は少なくとも道路データ、交差点データを含むデジタル化された地図データが格納されている地図情報記憶手段であり、2はその地図情報記憶手段1に記憶されている地図データ上で、指定された2地点間の経路を設定する経路設定手段である。3は地図情報記憶手段1に記憶された地図データ上における、当該ナビゲーション装置を搭載した移動体の現在位置を検出する現在位置検出手段であり、4はそれら地図情報記憶手段1に記憶された地図データと経路設定手段2にて設定された経路より、当該経路上の案内のポイントとなる案内対象交差点を抽出して、隣接している2つの案内対象交差点間の距離を検出し、その距離があらかじめ定められた規定値LR 以内であるか否かを判定して、規定値LR 以内であった場合に当該2つの案内対象交差点に関する表示と音声の案内を行う案内手段である。
【0023】
図2はそのような機能構成を持つナビゲーション装置のハードウェア構成を示すブロック図である。図において、5は地図情報を記憶したコンパクト・ディスク・リード・オンリ・メモリ(CD−ROM)であり、6aは当該ナビゲーション装置を搭載した移動体の現在位置を検出するためのグローバル・ポジショニング・システム受信機(GPS受信機)、6bは移動体の方位を検出する方位センサ、6cは移動体の移動距離を検出する距離センサである。7は各種演算および当該ナビゲーション装置全体の制御を行うコントロールユニットであり、8はこのコントロールユニット7からの表示データを表示する液晶ディスプレイなどによる表示装置、9は音声メッセージを出力する音声出力装置である。
【0024】
上記コントロールユニット7内において、7aはその中央演算処理装置(CPU)、7bはリード・オンリ・メモリ(ROM)、7cはランダム・アクセス・メモリ(RAM)であり、7dは表示装置8の表示制御を行う表示制御部、7eはコントロールユニット7と外部との入出力を行う入出力装置(I/O)である。また、上記音声出力装置9内において、9aはディジタル信号で記録された音声データ信号をアナログ信号に変換するディジタル・アナログ変換器(D/Aコンバータ)、9bは信号を増幅するアンプ、9cは音声メッセージを出力するスピーカである。
【0025】
なお、図1に示した地図情報記憶手段1は上記CD−ROM5に対応し、現在位置検出手段3は上記GPS受信機6a、方位センサ6bおよび距離センサ6cによって構成されている。また、経路設定手段2はコントロールユニット7によって実現され、案内手段4は表示装置8、音声出力装置9、およびコントロールユニット7によって実現されている。
【0026】
図3は上記地図情報記憶手段1に記憶された地図データの構成を示す説明図でである。図において、10は地図データの1つの構成要素としての交差点に関するデータの集合である交差点データ群であり、11は他の構成要素としての道路に関するデータの集合である道路データ群である。12は各交差点のそれぞれに対する諸データを集めた交差点データレコードであり、13は各道路のそれぞれに対する諸データを集めた道路データレコードである。
【0027】
12a〜12fは各交差点データレコード12のそれぞれを形成している諸データであり、12aは交差点に対して一意に付与されたID番号を表す交差点番号、12bは地図上の交差点の位置を経緯度等によって表す交差点座標、12cは交差点に接続する道路の本数を表した接続道路数、12dは接続する道路の道路番号、12eは交差点の名前を表す交差点名称、12fは交差点付近に存在する施設に関するデータの集合である施設データである。また、13a〜13fは各道路データレコード13のそれぞれを形成している諸データであり、13aは1つの道路に対して一意に付与されたID番号を表す道路番号、13bは道路の始点側に接続する交差点を表す始点側交差点番号、13cは道路の終点側に接続する交差点を表す終点側交差点番号、13dは道路の長さを表す道路長、13eは道路の属性を表す道路属性、13fは道路の通行規制情報を表す通行規制である。
【0028】
図4は経路設定手段2が設定した実際の経路の一例を示す説明図である。図において、14,15は案内手段4が決定した案内対象交差点であり、16〜18は設定された経路上の道路(以下経路道路という)である。19〜22は案内対象交差点14あるいは15に接続する経路道路16〜18以外の道路、23は移動体の位置を表した現在位置である。
【0029】
図5はこの実施の形態1によるナビゲーション装置の処理の流れを示したフローチャートであり、図中のST11〜ST21は各処理単位を表したステップである。
【0030】
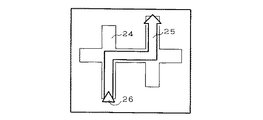
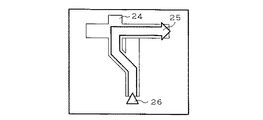
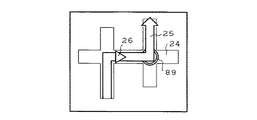
図6および図7は案内手段4によって表示される交差点案内図の一例を示した説明図であり、図において、24は案内対象交差点および案内対象交差点間の道路の形状を表し、25は案内対象交差点からの進行方向を表し、26は図4に示した移動体の現在位置23を表したものである。
【0031】
図8は案内条件に対応して案内手段4から出力される音声メッセージの内容の一例を示す説明図であり、図において、27は音声を報知する場合に音声メッセージの内容を選択する案内条件、28は音声メッセージの内容の例である。
【0032】
次に動作について説明する。
まずステップST11において、経路設定手段2は地図データ上の出発地および目的地などの2つの地点を経緯度等で設定して、それら2つの地点の間の経路を、ネットワーク上の一般的な探索アルゴリズムであるダイクストラ法等を用いて地図上に設定し、さらにステップST12において現在位置検出手段3にて現在位置を検出する。次にステップST13に進み、案内手段4は設定された経路に存在する交差点および経路設定手段2で設定した2つの地点の中から、現在位置検出手段3で検出した現在位置から前方の交差点中の、例えば交差点に接続する道路が3本以上の交差点を前方案内対象交差点C1 (図4に示した案内対象交差点14に対応)として抽出する。次にステップST14において、抽出された前方案内対象交差点C1 がすでに案内されているか判定し、案内されている場合にはステップST12に戻って、現在位置の検出以降の処理を繰り返す。
【0033】
一方、案内されていなかった場合にはステップST15に分岐して、当該前方案内対象交差点C1 の次の案内対象交差点C2 (図4に示した案内対象交差点15に対応)を検出し、さらにステップST16に進んで、これら前方案内対象交差点C1 とその次の案内対象交差点C2 の間の道なり距離L1 を検出する。次にステップST17において、この距離L1 が規定値LR (例えば300m)より小さいか否かを判定し、この規定値LR よりも小さいならば、ステップST18に分岐して、それら前方案内対象交差点C1 および次の案内対象交差点C2 に関する案内を出力した後、ステップST19において、次の案内対象交差点C2 に関する案内がすでに出力されたことを記録する。ここで、上記ステップST18で実行される案内の出力では、例えば図6に示すような、移動体前方の案内対象交差点C1 とその次の案内対象交差点C2 に関する交差点案内図を表示するとともに、図8に示したこれら前方案内対象交差点C1 と次の案内対象交差点C2 に関する「まもなく右です。その先左です。」の音声メッセージが出力される。なお、この案内出力では、図6に示した前方案内対象交差点C1 と次の案内対象交差点C2 に関する交差点案内図の表示のみとしてもよい。
【0034】
一方、ステップST17における判定の結果、距離L1 が規定値LR 以上であった場合にはステップST20に分岐して、移動体前方の案内対象交差点C1 に関する案内を出力する。この案内出力では、例えば図7に示すような前方案内対象交差点C1 に関する交差点案内図を表示するとともに、図8に示した前方案内対象交差点C1 に関する「まもなく右です。」の音声メッセージを出力する。なお、この場合もこの案内出力として、図7に示すような前方案内対象交差点C1 に関する交差点案内図のみの表示としてもよい。以下、ステップST21によって経路の終了が検出されるまで、処理をステップST12に戻して上記一連の処理を繰り返す。
【0035】
以上のように、この実施の形態1によれば、案内対象交差点C1 とC2 の距離L1 が規定値LR 以下ならば、それら案内対象交差点C1 ,C2 に対する案内の表示を同時に行うことにより、案内対象交差点C1 とC2 との間の距離が短い場合に、あらかじめ次の案内対象交差点C2 についての表示案内を運転者に対して行うことが可能となる効果がある。
【0036】
実施の形態2.
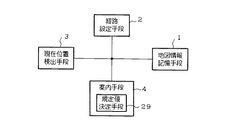
図9はこの発明の実施の形態2によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態1の各部と同一の部分には図1と同一の符号を付してその説明を省略する。図において、29は案内手段4内に配置され、隣接する2つの案内対象交差点間の道路属性を検出し、その道路属性に基づいて案内出力を選択するための規定値を決定する規定値決定手段であり、案内手段4はこの規定値決定手段29を備えている点で、図1に示した実施の形態1のそれとは異なっている。
【0037】
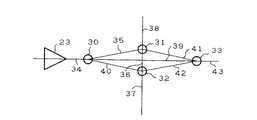
図10は経路設定手段2が設定した実際の経路の一例を示す説明図である。図において、30,31は案内手段4が決定した案内対象交差点であり、32、33はこの案内対象交差点30,31以外の交差点である、34〜37は経路道路であり、38〜43は各交差点30〜33に接続するこの経路道路34〜37以外の道路である。なお、23は図4と同様に、移動体の位置を表した現在位置を示している。
【0038】
図11はこの実施の形態2によるナビゲーション装置の処理の流れを示したフローチャートであり、図中のST22〜ST34は各処理単位を表したステップである。
【0039】
図12は案内手段4によって表示される交差点案内図の一例を示した説明図であり、図において、24は案内対象交差点および案内対象交差点間の道路の形状を表し、25は案内対象交差点からの進行方向を表し、26は図10に示した移動体の現在位置23を表したものであり、これらは実施の形態1における図6および図7の場合と同様である。
【0040】
次に動作について説明する。
実施の形態1の場合と同様に、まず経路設定手段2がステップST22で、地図上の2つの地点を設定してその間の経路をダイクストラ法等を用いて設定し、現在位置検出手段3がステップST23で現在位置を検出する。そして案内手段4がステップST24で移動体前方の案内対象交差点C1 を抽出して、この前方案内対象交差点C1 がすでに案内されているか否かをステップST25で判定する。その結果、案内されていない場合にはステップST26に分岐して、前方案内対象交差点C1 のその次の案内対象交差点C2 を検出し、ステップST27において、これら前方案内対象交差点C1 と次の案内対象交差点C2 の間の道路属性を検出する。次にステップST28に進み、規定値決定手段29によって当該道路属性から距離判定を行うための規定値LR (例えば、一般道路なら300m、ランプ、側道なら400m)を決定する。
【0041】
以下、実施の形態1の場合と同様に、ステップST29において前方案内対象交差点C1 と次の案内対象交差点C2 の間の距離L1 を検出し、それが規定値LR より小さいか否かの判定をステップST30にて行う。規定値LR より小さければステップST31で前方案内対象交差点C1 と次の案内対象交差点C2 に関する案内を出力し、ステップST32で次の案内対象交差点C2 に関する案内がすでに出力されたことを記録する。なお、上記案内出力では、例えば図12に示すような前方案内対象交差点C1 と次の案内対象交差点C2 に関する交差点案内図を表示するとともに、実施の形態1における図8に示した前方案内対象交差点C1 と次の案内対象交差点C2 に関する音声メッセージの出力を行う。この場合には、上記案内出力を、図12に示す交差点案内図の表示のみとしてもよく、さらには前記音声メッセージの出力のみとしてもよい。
【0042】
一方、ステップST30にて距離L1 が規定値LR 以上であると判定された場合には、ステップST33において実施の形態1の場合と同様に、前方案内対象交差点C1 に関する案内を、図7に示すような交差点案内図と図8に示した案内音声で、あるいはそのいずれか一方で出力する。以下、ステップST34によって経路の終了が検出されるまで、処理をステップST23に戻して上記一連の処理を繰り返す。
【0043】
ここで、ランプや側道が案内対象交差点の間に存在するような場合には、速度を落さずに現在位置より前方の次の案内対象交差点まで進入することが一般的であるため、規定値決定手段29はこのように道路属性に基づいて、例えば「一般道路ならば300m、ランプや側道ならば400m」などのように規定値LR を決定する。
【0044】
以上のように、この実施の形態2によれば、案内対象交差点C1 とC2 の間の道路属性に応じて規定値LR を決定し、案内対象交差点C1 ,C2 間の距離L1 が規定値LR 以下であれば、それら案内対象交差点C1 ,C2 に対する案内を同時に行うことができるようになるため、より運転者の感覚に合った案内が可能となる効果がある。
【0045】
実施の形態3.
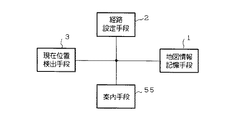
図13はこの発明の実施の形態3によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態1の各部に相当する部分には図1と同一の符号を付してその説明を省略する。図において、44は案内手段4内に配置され、当該案内手段4にて検出された隣接する2つの案内対象交差点間の距離を表す単語を含んだ音声メッセージを選択して、それを音声で報知する音声報知手段であり、案内手段4はこの音声報知手段44を備えている点で、図1に示した実施の形態1のそれとは異なっている。
【0046】
図14はこの実施の形態3によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST35、ステップST36は各処理単位を表したステップである。
【0047】
図15は案内条件に対応して案内手段4から出力される音声メッセージの内容の一例を示す説明図であり、図において、45は音声を報知する場合に音声メッセージの内容を選択する距離範囲、46は音声メッセージの内容の例である。
【0048】
次に動作について説明する。
ここで、図14のフローチャートに示した処理は、図5のフローチャートに示した実施の形態1の処理におけるステップST18に相当する部分である。図5におけるステップST17で距離L1 が規定値LR 以内と判定されると、音声報知手段44はステップST35において、図5のステップST16ですでに検出されている移動体前方の案内対象交差点C1 とその次の案内対象交差点C2 の間の距離L1 より報知する音声メッセージ内容を決定し、ステップST36においてそのメッセージの音声報知を行う。これにより、例えば、距離範囲が100m未満の場合には「まもなく右です。すぐ左です。」の音声メッセージが、100m以上、200m未満の場合には「まもなく右です。その先左です。」の音声メッセージが、200m以上、規定値LR 未満の場合には「まもなく右です。その後左です。」の音声メッセージがそれぞれ出力される。
【0049】
以上のように、この実施の形態3によれば、案内する音声メッセージが、「すぐ」、「その先」、「その後」等の隣接した案内対象交差点C1 ,C2 間の距離L1 を示唆する単語を含んだものとなっているため、運転者は音声メッセージを聞いただけで、連続する案内対象交差点C1 とC2 の間の距離L1 を直感的に知ることが可能となる効果がある。
【0050】
実施の形態4.
図16はこの発明の実施の形態4によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態1の各部に相当する部分には図1と同一の符号を付してその説明を省略する。図において、47は案内手段4内に配置され、隣接する2つの案内対象交差点間の道路属性を検出し、その道路属性を表す単語を含んだ音声メッセージを選択して音声で報知する音声報知手段であり、案内手段4はこの音声報知手段47を備えている点で、図1に示した実施の形態1のそれとは異なっている。
【0051】
図17はこの実施の形態4によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST37〜ST39は各処理単位を表したステップである。
【0052】
図18は案内条件に対応して案内手段4から出力される音声メッセージの内容の一例を示す説明図であり、図において、48は音声を報知する場合に音声メッセージの内容を選択する道路属性、49は音声メッセージの内容の例である。
【0053】
次に動作について説明する。
ここで、図17のフローチャートに示した処理は、図5のフローチャートに示した実施の形態1の処理におけるステップST18に相当する部分である。図5におけるステップST17で距離L1 が規定値LR 以内と判定されると、音声報知手段47はステップST37において、移動体前方の案内対象交差点C1 とその次の案内対象交差点C2 の間の道路属性A1 を検出する。次にステップST38において、検出された道路属性A1 に基づいて報知する音声メッセージ内容を決定し、ステップST39においてそのメッセージの音声報知を行う。これにより、例えば、道路属性A1 が本線である場合には「まもなく右です。その先左です。」の音声メッセージが、ランプである場合には「まもなく左の側道を通って右です。」の音声メッセージがそれぞれ出力される。
【0054】
以上のように、この実施の形態4によれば、案内対象交差点C1 とC2 の間の道路属性A1 に応じて案内する音声メッセージを変更することができるため、単に進行方向のみを報知する場合より的確に経路誘導することが可能となる効果がある。
【0055】
実施の形態5.
図19はこの発明の実施の形態5によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態1の各部に相当する部分には図1と同一の符号を付してその説明を省略する。図において、50は案内手段4内に配置され、隣接する2つの案内対象交差点における進行方向を検出して、その進行方向の組合せに基づいた音声メッセージの選択を行い、選択された音声メッセージを音声で報知する音声報知手段であり、案内手段4はこの音声報知手段50を備えている点で、図1に示した実施の形態1のそれとは異なっている。
【0056】
図20はこの実施の形態5によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST40〜ST42は各処理単位を表したステップである。
【0057】
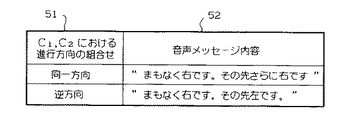
図21は案内条件に対応して案内手段4から出力される音声メッセージの内容の一例を示す説明図であり、図において、51は音声を報知する場合に音声メッセージの内容を選択する進行方向の組合せ、52は音声メッセージの内容の例である。
【0058】
次に動作について説明する。
ここで、図20のフローチャートに示した処理は、図5のフローチャートに示した実施の形態1の処理におけるステップST18に相当する部分である。図5におけるステップST17で距離L1 が規定値LR 以内と判定されると、音声報知手段50はステップST40において、移動体前方の案内対象交差点C1 とその次の案内対象交差点C2 における進行方向を検出する。次にステップST41において、検出された進行方向の組合せに従って報知する音声メッセージ内容を決定し、ステップST42においてそのメッセージの音声報知を行う。これにより、例えば、進行方向の組合せが同一方向であった場合には「まもなく右です。その先さらに右です。」の音声メッセージが、逆方向であった場合には「まもなく右です。その先左です。」の音声メッセージがそれぞれ出力される。
【0059】
以上のように、この実施の形態5によれば、2つの案内対象交差点C1 とC2 における進行方向の組合せに応じて案内する音声メッセージを変更することができるため、運転者に2案内対象交差点の進行方向の関係を音声によって、より的確に伝えることが可能となる効果がある。
【0060】
実施の形態6.
図22はこの発明の実施の形態6によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態1の各部に相当する部分には図1と同一の符号を付してその説明を省略する。図において、53は案内手段4内に配置され、案内した案内対象交差点間の距離が規定値LR よりも小さな規定値LR2以上であるか否かを判定し、規定値LR2以上であれば、現在位置が発地側の案内対象交差点を通過した後に再度、目的地側の案内対象交差点に関する音声の報知を行う制御手段であり、案内手段4はこの制御手段53を備えている点で、図1に示した実施の形態1のそれとは異なっている。
【0061】
図23はこの実施の形態6によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST43〜ST45は各処理単位を表したステップである。
【0062】
次に動作について説明する。
ここで、図23のフローチャートに示した処理は、図5のフローチャートに示した実施の形態1の処理におけるステップST19に相当する部分である。図5におけるステップST16において検出された2つの案内対象交差点C1 とC2 との距離L1 が、ステップST17で規定値LR (例えば300m)以内と判定された後、ステップST18にてそれら2つの案内対象交差点C1 およびC2 に関する案内メッセージの出力が行われると、制御手段53はステップST43において、さらにその距離L1 が規定値LR2(例えば100m)より小さいか否かを判定する。その結果、規定値LR2より小さかった場合にはステップST44に分岐して、すでに案内対象交差点C2 に関する案内を行ったことを記録する。一方、距離L1 が規定値LR2より大きかった場合にはステップST45に分岐して、案内対象交差点C2 に関する音声メッセージのみを再度報知するように記録する。
【0063】
このように、ステップST45において案内対象交差点C1 とC2 の間の距離L1 が規定値LR2以上であれば、案内対象交差点C2 に関する音声のみを再報知するように記録しておくことにより、図5のフローチャートに示すステップST14において条件が偽となり、移動体の現在位置が案内対象交差点C1 を通過した後に、ステップST18またはST20において再度音声メッセージを報知することができる。
【0064】
また、図23のフローチャートにおけるステップST43で用いている規定値LR2は、実施の形態2における図11のフローチャートにおいて、規定値LR を算出するステップST27、ステップST28と同様に、例えば一般道路ならば100m、ランプや側道ならば150mというように、道路属性から求めるようにしてもよい。
【0065】
以上のように、この実施の形態6によれば、隣接する案内対象交差点C1 ,C2 に関する案内を行った地点から、目的地側の案内対象交差点C2 までの距離が離れている場合には再度音声案内をすることができるようになり、運転者に対して忘れかけていた案内をもう一度伝えることが可能になる効果がある。
【0066】
実施の形態7.
図24はこの発明の実施の形態7によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態1の各部に相当する部分には図1と同一の符号を付してその説明を省略する。図において、54は案内手段4内に配置され、複数の案内対象交差点に関する案内メッセージを報知した後、移動体が出発地側の案内対象交差点を通過するまでにかかった時間が一定の時間以上となった場合に、当該移動体の現在位置が出発地側の案内対象交差点を通過した後に、目的地側の案内対象交差点に関する案内メッセージの報知を再度行う制御手段であり、案内手段4はこの制御手段54を備えている点で、図1に示した実施の形態1のそれとは異なっている。
【0067】
図25はこの実施の形態7によるナビゲーション装置の処理の流れを示したフローチャートであり、図中のST46〜ST59は各処理単位を表したステップである。
【0068】
次に動作について説明する。
実施の形態1の場合と同様に、まず経路設定手段2がステップST46で、地図上の2つの地点を設定してその間の経路をダイクストラ法等を用いて設定し、現在位置検出手段3がステップST47で現在位置を検出する。そして案内手段4がステップST48で移動体前方の案内対象交差点C1 を抽出して、この前方案内対象交差点C1 がすでに案内されているか否かをステップST49で判定する。その結果、前方案内対象交差点C1 がすでに案内されていれば、ステップST50に分岐して当該案内報知をしてからの経過時間を算出し、ステップST51においてその時間が規定値(たとえば60秒)を越えているか否かを判定する。経過時間が規定値以内であれば処理をステップST47に戻して、現在位置検出以降の処理を繰り返す。また、ステップST51による判定の結果、時間が規定値以上であればステップST52に分岐して、前方案内対象交差点C1 に関する音声を再報知するよう記録した後、ステップST53に進む。
【0069】
一方、ステップST49による判定の結果、案内されていなかった場合には処理は直接ステップST53に進む。以下、実施の形態1の場合と同様に、ステップST53にて前方案内対象交差点C1 の次の案内対象交差点C2 を検出し、ステップST54でこれら案内対象交差点C1 とC2 の間の距離L1 を検出する。次いでそれが規定値LR より小さいか否かの判定をステップST55で行い、規定値LR よりも小さければステップST56で前方案内対象交差点C1 と次の案内対象交差点C2 に関する案内の出力を行った後、ステップST57で案内対象交差点C2 に関する案内がすでに出力されたことを記録する。なお、上記案内の出力は、例えば図6に示すような交差点案内図と、図8に示した前方案内対象交差点C1 と次の案内対象交差点C2 に関する音声メッセージの双方、あるいはそのいずれか一方によって行われる。また、ステップST55にて距離L1 が規定値LR 以上であると判定された場合は、ステップST58で前方案内対象交差点C1 に関する案内を、図7に示すような交差点案内図と図8に示した案内音声の双方で、あるいはそのいずれか一方で出力する。以下、ステップST59によって経路の終了が検出されるまで、処理をステップST47に戻して上記一連の処理を繰り返す。
【0070】
このように、複数の案内対象交差点に関する案内メッセージを報知した後、出発地側の案内対象交差点を通過するまでに一定以上の時間がかかったことがステップST51で検出された場合、ステップST52で目的地側の案内対象交差点に関する音声メッセージを再報知するように記録しておくことにより、ステップST56またはST58において再度その音声メッセージを報知することができる。
【0071】
また、ステップST51において用いた規定値は、実施の形態2における図11のフローチャートにおいて、規定値LR を算出するステップST27、ステップST28と同様に、例えば一般道路ならば60秒、ランプや側道ならば90秒というように道路属性から求めるようにしてもよい。
【0072】
以上のように、この実施の形態7によれば、隣接する案内対象交差点に関する案内を行った時点から、出発地側の案内対象交差点を通過するまでに一定以上の時間がかかった場合には、再度目的地側の案内対象交差点C2 の音声案内が行われるようになるため、運転者に対して忘れかけていた案内をもう一度伝えることが可能になる効果がある。
【0073】
実施の形態8.
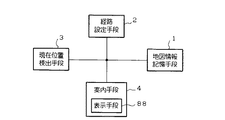
図26はこの発明の実施の形態8によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態1の各部と同一の部分には図1と同一の符号を付してその説明を省略する。図において、55は地図情報記憶手段1に記憶されている地図データと経路設定手段2にて設定された経路から、当該経路上にある交差点案内すべき案内対象交差点を抽出し、その抽出された案内対象交差点と、地図情報記憶手段1に記憶されている地図データおよび経路設定手段2で設定した経路より、その経路上にあって案内対象交差点から当該ナビゲーション装置を搭載した移動体の現在位置の間に存在する案内対象交差点以外の交差点を、案内対象交差点とともに表示する点で、図1に符号4を付して示したものとは異なる案内手段である。
【0074】
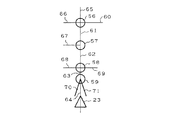
図27は経路設定手段2が設定した実際の経路の一例を示す説明図である。図において、56は案内手段55が抽出した案内対象交差点であり、57〜59は案内対象交差点56以外の交差点である。60〜64は経路道路であり、65〜71は各交差点56〜59に接続する経路道路60〜64以外の道路である。なお、23は移動体の位置を表した現在位置である。
【0075】
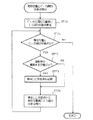
図28はこの実施の形態8によるナビゲーション装置の処理の流れを示したフローチャートであり、図中のST60〜ST65は各処理単位を表したステップである。
【0076】
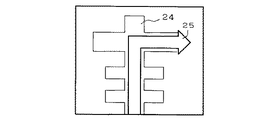
図29は案内手段55によって表示される交差点案内図の一例を示した説明図である。図において、24は道路の形状、25は案内対象交差点からの進行方向、26は図27に示した移動体の現在位置23を表したものであり、これらは実施の形態1における図6および図7の場合と同様である。なお、この場合には、道路の形状24は案内対象交差点および案内対象交差点以外の交差点に接続する道路の形状を表している。
【0077】
次に動作について説明する。
経路設定手段2はステップST60においてまず、地図データ上の2つの地点を経緯度等にて設定し、それら2つの地点間の経路をダイクストラ法等を用いて設定する。次にステップST61にて現在位置検出手段3が移動体の現在位置を検出する。その後案内手段55はステップST62において、設定された経路に存在する交差点および経路設定手段2で設定した2つの地点の中から、現在位置検出手段3で検出した現在位置から前方の交差点中の、例えば交差点に接続する道路が3本以上の交差点を案内対象交差点C1 (図27に示した案内対象交差点56に対応)として検出する。次にステップST63において、現在位置と案内対象交差点C1 との間の案内対象交差点C1 以外の交差点(図27に示した交差点57〜59に対応)を検出し、ステップST64に進んで、その案内対象交差点C1 と案内対象交差点C1 以外の交差点に関する交差点案内図を表示する。なお、この場合、表示される交差点案内図は、例えば図29に示すように、案内対象交差点C1 と、この案内対象交差点C1 と現在位置の間に存在する案内対象交差点C1 以外の交差点に関する情報とがデフォルメされて表示される。以下、ステップST65で経路の終了が検出されるまで、処理をステップST61に戻して上記一連の処理を繰り返す。
【0078】
なお、ステップST64において表示する交差点案内図は、図29に示す例のように、案内対象交差点C1 に接続する道路と案内対象交差点以外の交差点に接続する道路については、その太さ、あるいは長さのどちらか一方または両方に変化をつけて表示するようにしてもよい。
【0079】
以上のように、この実施の形態8によれば、案内対象交差点C1 と現在位置の間の交差点が表示されるようになるため、案内対象交差点C1 の位置を運転者にわかりやすく伝えることが可能となる効果がある。
【0080】
実施の形態9.
図30はこの発明の実施の形態9によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態8の各部に相当する部分には図26と同一の符号を付してその説明を省略する。図において、72は案内手段55内に配置され、案内対象交差点C1 から移動体の現在位置までの間の経路上に存在する、案内対象交差点C1 以外の交差点のうちの案内対象交差点C1 から規定値(例えば300m)以内に存在する交差点を検出する検出手段であり、案内手段55はこの検出手段72を備えて、それが検出した交差点を案内対象交差点C1 とともに表示する点で、図26に示した実施の形態8のそれとは異なっている。
【0081】
図31はこの実施の形態9によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST66〜ST69は各処理単位を表したステップである。
【0082】
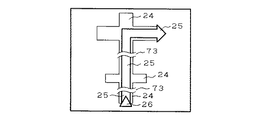
図32および図33は案内手段55によって表示される交差点案内図の一例を示した説明図であり、図において、24は案内対象交差点および案内対象交差点以外の交差点に接続する道路の形状を表し、25は案内対象交差点からの進行方向を表し、26は移動体の位置を表し、73は交差点の表示を省略したことを示す省略記号を表している。
【0083】
次に動作について説明する。
ここで、図31のフローチャートに示した処理は、図28のフローチャートに示した実施の形態8の処理におけるステップST63に相当する部分である。図28におけるステップST62にて案内対象交差点C1 が検出されると、検出手段72はステップST66において、その検出された案内対象交差点C1 から移動体の現在位置側に1つ目の交差点を検出し、ステップST67にて当該交差点から案内対象交差点C1 までの距離が規定値(例えば300m)より小さいか否かを判定する。その結果、当該規定値よりも小さい場合にはステップST68に進んで、検出された交差点を交差点案内図に表示するように記録した後、ステップST69において、上記検出された交差点からさらに現在位置側に1つ目の交差点を検出して処理をステップST67に戻す。以下、このステップST67において、案内対象交差点C1 から規定値以上離れた交差点が検出されるまで、以上の処理を繰り返して実行する。
【0084】
案内手段55は案内対象交差点C1 とともに、検出手段72がこのようにして検出した案内対象交差点C1 から規定値以内にある交差点のみを、交差点案内図に表示することにより、図32に示すように、案内対象交差点C1 付近の紛らわしい交差点のみを表示することが可能となって、案内対象交差点C1 の特定を容易なものとしたまま、現在位置と案内対象交差点C1 の関係を表現することが可能となる。
【0085】
また、交差点案内図の表示例としては図33に示すように、表示していない交差点があることを示す省略記号73を交差点を省略した位置につけるようにしてもよい。
【0086】
以上のように、この実施の形態9によれば、案内対象交差点C1 とともに、その案内対象交差点C1 付近の交差点のみが同時に表示されることになるため、案内対象交差点C1 の位置を運転者によりわかりやすく伝えることが可能となる効果がある。
【0087】
実施の形態10.
図34はこの発明の実施の形態10によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態8の各部に相当する部分には図26と同一の符号を付してその説明を省略する。図において、74は案内手段55内に配置され、案内対象交差点C1 から移動体の現在位置までの間の経路上に存在する、案内対象交差点C1 以外の交差点のうちの運転者が意識する交差点のみを検出する検出手段であり、案内手段55はこの検出手段74を備えて、それが検出した交差点を案内対象交差点C1 とともに表示する点で、図26に示した実施の形態8のそれとは異なっている。
【0088】
図35はこの実施の形態10によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST70〜ST74は各処理単位を表したステップである。
【0089】
図36は案内手段55によって表示される交差点案内図の一例を示した説明図であり、図において、24は案内対象交差点および案内対象交差点以外の交差点に接続する道路の形状を表し、25は案内対象交差点からの進行方向を表し、26は移動体の位置を表している。
【0090】
次に動作について説明する。
ここで、図35のフローチャートに示した処理は、図28のフローチャートに示した実施の形態8の処理におけるステップST63に相当する部分である。図28におけるステップST62にて案内対象交差点C1 が検出されると、検出手段74はステップST70において、その検出された案内対象交差点C1 から移動体の現在位置側に1つ目の交差点を検出する。次にステップST71において、その検出された交差点が案内対象交差点C1 と移動体の現在位置との間にあるか否かを判定する。その結果、それらの間にある場合にはステップST72に進んで、検出した交差点が運転者の意識する交差点であるか否かを判定する。なお、運転者の意識する交差点とは、例えば合流点や、対向車線に接続する道路しか存在しない交差点など、運転者が交差点とは認識しないポイントを除いたものである。このステップST72による判定の結果、運転者の意識する交差点であった場合にはステップST73に分岐し、検出した交差点を交差点案内図に表示するように記録した後、ステップST74において、検出した交差点からさらに現在位置側に1つ目の交差点を検出する。一方、運転者の意識する交差点ではなかった場合には直接ステップST74に分岐する。その後処理をステップST71に戻して、案内対象交差点C1 と移動体の現在位置との間に存在するすべての交差点について上記一連の処理を繰り返す。
【0091】
案内手段55は図36に示すように、交差点案内図に案内対象交差点C1 とともに、検出手段74がこのようにして検出した案内対象交差点と現在位置の間の運転者が意識する交差点のみを表示して、合流点などの運転者が意識しない交差点を表示しないようにすることによって、よりわかりやすい表示を行うことが可能となる。
【0092】
以上のように、この実施の形態10によれば、案内対象交差点C1 と移動体の現在位置との間にある運転者の意識する交差点だけを案内対象交差点C1 とともに表示することができるため、案内対象交差点C1 を運転者によりわかりやすく伝えることが可能となる効果がある。
【0093】
実施の形態11.
図37はこの発明の実施の形態11によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態8の各部に相当する部分には図26と同一の符号を付してその説明を省略する。図において、75は案内手段55内に配置され、案内対象交差点C1 から移動体の現在位置までの間の経路上に存在する、案内対象交差点C1 以外の交差点のうちの特徴的な交差点のみを検出する検出手段であり、案内手段55はこの検出手段75を備えて、それが検出した交差点を案内対象交差点C1 とともに表示する点で、図26に示した実施の形態8のそれとは異なっている。
【0094】
図38はこの実施の形態11によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のS75〜ST79は各処理単位を表したステップである。
【0095】
図39および図40は案内手段55によって表示される交差点案内図の一例を示した説明図であり、図において、24は案内対象交差点および案内対象交差点以外の交差点に接続する道路の形状を表し、25は案内対象交差点からの進行方向を表し、26は移動体の位置を表し、73は交差点の表示を省略したことを示す省略記号を表している。
【0096】
次に動作について説明する。
ここで、図38のフローチャートに示した処理は、図28のフローチャートに示した実施の形態8の処理におけるステップST63に相当する部分である。図28におけるステップST62にて案内対象交差点C1 が検出されると、検出手段75はステップST75でその案内対象交差点C1 から現在位置側に1つ目の交差点を検出し、ステップST76でそれが案内対象交差点C1 と現在位置との間にあるか否かを判定する。判定の結果、それらの間にあればステップST77に進んで検出した交差点が特徴的な交差点であるか否かについて判定を行う。なお、特徴的な交差点とは、例えば国道と接続する交差点などのような特徴のある交差点のことである。上記ステップST77の判定の結果、特徴的な交差点であった場合にはステップST78に分岐して、検出された交差点を交差点案内図に表示するように記録した後、ステップST79でその検出された交差点からさらに現在位置側に1つ目の交差点を検出する。一方、特徴的な交差点でなかった場合には直接ステップST79に分岐する。その後処理をステップST76に戻して、案内対象交差点C1 と現在位置との間に存在するすべての交差点について上記一連の処理を繰り返す。
【0097】
案内手段55は案内対象交差点C1 とともに、検出手段75がこのようにして検出した特徴的な交差点のみを交差点案内図に表示することにより、図39に示すように、案内対象交差点C1 と現在位置との間の、国道と接続する交差点などの特徴的な交差点のみを表現することが可能となる。
【0098】
また、交差点案内図の表示例としては図40に示すように、表示していない交差点があることを示す省略記号73を交差点を省略した位置につけるようにしてもよい。
【0099】
以上のように、この実施の形態11によれば、案内対象交差点C1 と移動体の現在位置との間にある特徴的な交差点を案内対象交差点C1 とともに表示することができるため、案内対象交差点C1 を運転者によりわかりやすく伝えることが可能となる効果がある。
【0100】
実施の形態12.
図41はこの発明の実施の形態12によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態8の各部に相当する部分には図26と同一の符号を付してその説明を省略する。図において、76は案内手段55内に配置され、案内対象交差点C1 から移動体の現在位置までの間の経路上に存在する、案内対象交差点C1 以外の交差点のうちの特徴的な交差点のみを検出する検出手段であるが、その特徴的な交差点の検出個数を規定数(例えば3個)に限定している点で、図37に示した実施の形態11のそれとは異なっている。
【0101】
図42はこの実施の形態12によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST80〜ST85は各処理単位を表したステップである。
【0102】
次に動作について説明する。
ここで、図42のフローチャートに示した処理は、図28のフローチャートに示した実施の形態8の処理におけるステップST63に相当する部分である。図28におけるステップST62にて案内対象交差点C1 が検出されると、検出手段76はステップST80でその案内対象交差点C1 から現在位置側に1つ目の交差点を検出し、ステップST81でその交差点が案内対象交差点C1 と現在位置との間にあるか否かを判定する。それらの間にあればステップST82に進んで、それが特徴的な交差点であるか否かを判定し、特徴的な交差点であればステップST83において、その交差点を交差点案内図に表示するように記録する。次にステップST84において、その記録されている交差点の個数が規定値(例えば3個)を越えたか否かを判定する。判定の結果、規定値未満であればステップST85に分岐して、その検出された交差点からさらに現在位置側に1つ目の交差点を検出した後、処理をステップST81に戻す。以下、ステップST81で案内対象交差点C1 と現在位置との間にない交差点が検出されるか、ステップST84で交差点の記録数が規定値以上になったと判定されるまで、上記一連の処理を繰り返す。
【0103】
このようにして、案内対象交差点C1 と現在位置との間の特徴的な交差点を表示する数を制限することにより、国道と接続する交差点などの特徴的な交差点を、案内対象交差点C1 に近い順に規定数だけ表示することができる。
【0104】
以上のように、この実施の形態12によれば、案内対象交差点C1 から現在位置の間の国道と接続する交差点などの特徴的な交差点の表示数が規定数だけ表示することができるため、運転者に対してさらにわかりやすい案内対象交差点C1 の表示を行うことが可能となる効果がある。
【0105】
実施の形態13.
なお、上記実施の形態12では、案内対象交差点C1 と現在位置のと間の特徴的な交差点を、案内対象交差点C1 に近いものから順番に規定数(例えば3個)だけ交差点案内図に表示する場合について説明したが、案内対象交差点C1 と現在位置の間の特徴的な交差点を、その優先順位に応じて規定数だけ交差点案内図に表示するようにしてもよい。
【0106】
図43はそのようなこの実施の形態13によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST86〜ST92は各処理単位を表したステップである。
【0107】
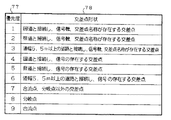
図44は各交差点の形状に応じて設定された優先順位が記録されているテーブルを示す説明図であり、図において、77は交差点の表示の優先順位を表す優先度、78は交差点の特徴を示す交差点形状の例である。
【0108】
次に動作について説明する。
ここで、図43のフローチャートに示した処理は、図28のフローチャートに示した実施の形態8の処理におけるステップST63に相当する部分である。図28におけるステップST62にて案内対象交差点C1 が検出されると、検出手段76は実施の形態12の場合と同様に、ステップST86からST89において、案内対象交差点C1 から現在位置側に1つ目の間の交差点を検出して、それが特徴的な交差点であるか否かを判定し、特徴的な交差点であればそれを交差点案内図に表示するように記録する。次にステップST90において、記録された交差点の個数が規定値を越えたか否かの判定を行い、規定値未満であればステップST91に分岐して、実施の形態12の場合と同様に、その検出された交差点からさらに現在位置側に1つ目の交差点を検出する。一方、ステップST90における判定の結果、記憶数が規定値以上であった場合にはステップST92に分岐して、記録されている交差点のうち最も優先度が低い交差点を削除した後、ステップST91に進む。以下、案内対象交差点C1 と現在位置の間の交差点以外の交差点が検出されるまで、処理をステップST87に戻して上記一連の処理を繰り返す。
【0109】
このようにして、案内対象交差点から現在位置の間の特徴的な交差点を表示する数を制限することにより、案内対象交差点と現在位置の間の国道と接続する交差点など特徴的な交差点を、優先度の高い順に規定の個数だけ表示することができる。
【0110】
以上のように、この実施の形態13によれば、案内対象交差点C1 と現在位置の間の特徴的な交差点を、優先度の高い順に個数を限定して表示することができるため、案内対象交差点C1 を運転者にさらにわかりやすく伝えることが可能となる効果がある。
【0111】
実施の形態14.
図45はこの発明の実施の形態14によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態8の各部に相当する部分には図26と同一の符号を付してその説明を省略する。図において、79は案内手段55内に配置され、この案内手段55によって交差点案内図に表示される、道路、交差点、交差点名称、施設記号、路線番号などのオブジェクトの種類を、交差点案内図上に表示される交差点の数に対応して変更する制御手段であり、案内手段55はこの制御手段79を備えている点で、図26に示した実施の形態8のそれとは異なっている。
【0112】
図46はこの実施の形態14によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST93〜ST95は各処理単位を表したステップである。
【0113】
図47は制御手段79が交差点案内図に表示するオブジェクトを交差点の数に応じて決定する際に用いるテーブルの一例を示す説明図であり、図において、80は表示される交差点数、81は表示するオブジェクトの例を示している。
【0114】
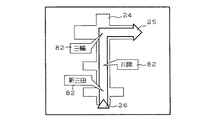
図48ないし図50は案内手段55によって表示される交差点案内図の一例を示した説明図である。図において、24は案内対象交差点および案内対象交差点以外の交差点に接続する道路の形状を表し、25は案内対象交差点からの進行方向を表し、26は移動体の位置を表している。また、82は交差点の名称を吹きだし等の手法を用いて表現した交差点名称を表し、83は交差点周辺の施設を表す施設記号を表し、84はその道路の路線番号を表している。
【0115】
次に動作について説明する。
ここで、図46のフローチャートに示した処理は、図28のフローチャートに示した実施の形態8の処理におけるステップST64に相当する部分である。図28におけるステップST63にて移動体の現在位置と案内対象交差点C1 の間の交差点が検出されると、制御手段79はステップST93においてまず、交差点案内図に同時に表示する交差点の数を算出する。次にステップST94に進んで図47に示すテーブルを参照し、ステップST93で算出された交差点の数から表示すべきオブジェクトの種類を決定する。その後案内手段55がステップST95において、制御手段79によって決定されたオブジェクトを含んだ交差点案内図の表示を行う。
【0116】
従って、交差点数が1つであった場合には、表示されるオブジェクトは図47に示すテーブルによれば、道路、交差点、交差点名称、施設記号、および路線番号であるため、交差点案内図には図48に示すように、交差点に接続する道路の形状24、案内対象交差点からの進行方向25、移動体の位置26とともに、交差点名称82、交差点周辺の施設記号83、および路線番号84も同時に表示される。一方、交差点数が3つであった場合には、表示されるオブジェクトは図47に示すテーブルによれば、道路、交差点、交差点名称のみであるため、交差点案内図には図49に示すように、交差点に接続する道路の形状24、案内対象交差点からの進行方向25、移動体の位置26とともに、交差点名称82のみが同時に表示される。
【0117】
このように、交差点案内図に表示するオブジェクトの種類を、表示される交差点の数に応じて制限することによって、交差点数が少ない場合には図48に示すように、表示するオブジェクトの種類を増やして、より多くの情報を運転者に与え、交差点の数が多い場合には、図49に示すように、表示するオブジェクトの種類を減らすことによって、図50に示すようにオブジェクト数が多くなりすぎて交差点案内図が煩雑になるのを防止し、いかなる場合でも運転者に見やすい交差点案内図を提供している。
【0118】
なお、上記説明では実施の形態8によるナビゲーション装置に適用した場合について示したが、実施の形態1によるナビゲーション装置に適用することも可能である。その場合には、上記制御手段79は図1に示した案内手段4に持たせることとなり、図46に示したフローチャートによる処理は、図5に示したフローチャートにおけるステップST18またはステップST20に対応することになる。
【0119】
以上のように、この実施の形態14によれば、交差点案内図に表示する交差点の数に応じて表示するオブジェクトの種類を決定することができるため、多数の交差点に関する表示を行う場合には、情報量が多量になって交差点案内図が煩雑な見にくいものとなるのを防止するとともに、交差点数が少ない場合にはより多くの情報を運転者に提供することが可能となる効果がある。
【0120】
実施の形態15.
図51はこの発明の実施の形態15によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態8の各部に相当する部分には図26と同一の符号を付してその説明を省略する。図において、85は案内手段55内に配置され、この案内手段55によって交差点案内図に表示される、道路、交差点、交差点名称、施設記号、路線番号などのオブジェクトの総数が、あらかじめ定められた規定値(例えば20個)以下となるように制御する制御手段であり、案内手段55はこの制御手段85を備えている点で、図26に示した実施の形態8のそれとは異なっている。
【0121】
図52はこの実施の形態15によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST96〜ST99は各処理単位を表したステップである。
【0122】
図53は制御手段85が交差点案内図に規定値以下のオブジェクト表示する際に使用するテーブルの一例を示す説明図であり、図において、86は交差点案内図への表示の優先度、87はその優先度が与えられたオブジェクトの種類の例を示している。
【0123】
次に動作について説明する。
ここで、図52のフローチャートに示した処理は、図28のフローチャートに示した実施の形態8の処理におけるステップST64に相当する部分である。図28におけるステップST63にて移動体の現在位置と案内対象交差点C1 の間の交差点が検出されると、制御手段85はステップST96においてまず、交差点案内図に表示するオブジェクトを算出し、次にステップST97に進んでそのオブジェクト数が規定値(例えば20個)以下であるか否かの判定を行う。判定の結果、オブジェクト数が規定値を越えている場合には、ステップST98において図53に示すテーブルを参照し、最も優先度の低いオブジェクト(例えば路線番号)を表示するオブジェクト群から削除する。その後、処理をステップST96に戻して、ステップST97でオブジェクト総数が規定値以下になったことが検出されるまで上記の処理を繰り返す。ステップST97にてオブジェクト総数が規定値以下になったことが検出されると、案内手段55がステップST99において、この制御手段85によって決定されたオブジェクトを含む交差点案内図の表示を行う。
【0124】
このように、交差点案内図に表示するオブジェクトの総数を制限することによって、複数の交差点に関する交差点案内図の場合には、優先度の低いオブジェクトは表示されなくなって、表示されるオブジェクト数が多くなりすぎることにより交差点案内図が煩雑になるのを防止して、運転者に対して見やすい交差点案内図の提供を可能とし、1つの交差点に関する交差点案内図の場合には、優先度の低いオブジェクトも表示されるようになって、より多くの情報を運転者に与えることができる。
【0125】
なお、上記説明では実施の形態8によるナビゲーション装置に適用した場合について示したが、実施の形態1によるナビゲーション装置に適用することも可能である。その場合には、上記制御手段85は図1に示した案内手段4に持たせることとなり、図52に示したフローチャートによる処理は、図5に示したフローチャートにおけるステップST18およびステップST20に対応することになる。
【0126】
以上のように、この実施の形態15によれば、交差点案内図に表示するオブジェクトの総数を規定値以下に制限することができるため、多数の交差点に関する表示を行う場合には、情報量が多量になって交差点案内図が煩雑な見にくいものとなるのを防止できるとともに、交差点数が少ない場合にはより多くの情報を運転者に提供することが可能となる効果がある。
【0127】
実施の形態16.
図54はこの発明の実施の形態16によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態1の各部に相当する部分には図1と同一の符号を付してその説明を省略する。図において、88は案内手段4内に配置され、この案内手段4によって表示される交差点案内図の案内対象交差点に、それが案内対象交差点であることを示すマークをつけて表示する表示手段であり、案内手段4はこの表示手段88を備えている点で、図1に示した実施の形態1のそれとは異なっている。
【0128】
図55はこの実施の形態16によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST100〜ST104は各処理単位を表したステップである。
【0129】
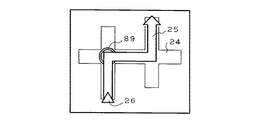
図56および図57は案内手段4によって表示される交差点案内図の一例を示した説明図である。図において、24は案内対象交差点に接続する道路の形状を表し、25は案内対象交差点からの進行方向を表し、26は移動体の位置を表している。また、89はその交差点が移動体の前方の案内対象交差点であることを示すマークである。
【0130】
次に動作について説明する。
ここで、図55のフローチャートに示した処理は、図5のフローチャートに示した実施の形態1の処理におけるステップST18またはステップST20に相当する部分である。表示手段88はステップST100においてまず、案内対象交差点C1 およびC2 による交差点案内図を生成し、次にステップST101に進んで、現在位置検出手段3の検出した移動体の現在位置を抽出する。その後ステップST102において、その現在位置前方の案内対象交差点C1 を検出する。次にステップST103において、交差点案内図に表示された該当交差点にそれが案内対象交差点であることを示すマークを付加し、さらにステップST104において、その案内対象交差点C1 にマークが付加された交差点案内図の表示を行う。
【0131】
従って、図56に示すように、交差点案内図に移動体の現在位置26の前方にある案内対象交差点C1 にそれが案内対象交差点であることを示すマーク89が表示されるため、複数の交差点を表示しても案内対象交差点がわかりやすい交差点案内図を提供することができる。また、移動体の移動によって、図57に示すように移動体の現在位置26が移動した場合には、当該現在位置26の前方にある次の案内対象交差点C2 に案内対象交差点であることを示すマーク89を移動させて表示する。
【0132】
なお、上記説明では実施の形態1によるナビゲーション装置に適用した場合について示したが、実施の形態8によるナビゲーション装置に適用することも可能である。その場合には、上記表示手段88は図26に示した案内手段55に持たせることとなり、図55に示したフローチャートによる処理は、図28に示したフローチャートにおけるステップST64に対応することになる。
【0133】
以上のように、この実施の形態16によれば、交差点案内図に複数の交差点を表示する際、移動体の現在位置の前方の案内対象交差点に、それが案内対象交差点とわかるマーク89を追加して表示することができるため、運転者に対してよりわかりやすく案内対象交差点を伝えることが可能となる効果がある。
【0134】
実施の形態17.
図58はこの発明の実施の形態17によるナビゲーション装置の機能構成を示すブロック図であり、実施の形態8の各部に相当する部分には図26と同一の符号を付してその説明を省略する。図において、90は案内手段55内に配置され、この案内手段55によって表示される交差点案内図の縮尺を変更することによって、表示画面内に交差点案内図が収まるように制御する制御手段であり、案内手段55はこの制御手段90を備えている点で、図26に示した実施の形態8のそれとは異なっている。
【0135】
図59はこの実施の形態17によるナビゲーション装置の処理の流れを、その要部のみを抜き出して示したフローチャートであり、図中のST105〜ST109は各処理単位を表したステップである。
【0136】
図60および図61は案内手段55によって表示される交差点案内図の一例を示した説明図であり、図60は制御手段90による縮尺変更前の状態が、図61には縮尺変更後の状態がそれぞれ示されている。図において、24は案内対象交差点および案内対象交差点以外の交差点に接続する道路の形状を表し、25は案内対象交差点からの進行方向を表し、26は移動体の位置を表している。
【0137】
次に動作について説明する。
ここで、図59のフローチャートに示した処理は、図28のフローチャートに示した実施の形態8の処理におけるステップST64に相当する部分である。制御手段90はステップST105においてまず交差点案内図を生成し、次にステップST106においてその交差点案内図内のオブジェクトの最大のx座標およびy座標を求める。次にステップST107において、その最大のx座標とy座標に基づいて交差点案内図が表示画面内に収まるようにその縮尺率を設定し、ステップST108に進んでその縮尺率より交差点案内図を再度生成する。その後ステップST109において、案内手段55がその再度生成された交差点案内図の表示を行う。
【0138】
このようにして、図60に示した表示画面をはみ出すにような交差点案内図についても、その縮尺率の変更によって、図61に示すように交差点案内図を表示画面内に収めることができる。
【0139】
なお、上記説明では実施の形態8によるナビゲーション装置に適用した場合について示したが、実施の形態1によるナビゲーション装置に適用することも可能である。その場合には、上記制御手段90は図1に示した案内手段4に持たせることとなり、図59に示したフローチャートによる処理は、図5に示したフローチャートにおけるステップST18およびステップST20に対応することになる。
【0140】
以上のように、この実施の形態17によれば、交差点案内図に複数の交差点を表示する際、交差点案内図の縮尺率の調整によって、交差点案内図の全体が表示画面内に収まるようにすることが可能となるため、運転者に対して常に交差点案内図全体を提供できるようになる効果がある。
【0141】
【発明の効果】
以上のように、請求項1記載の発明によれば、地図情報記憶手段に記憶された地図データと経路設定手段が設定した経路に基づいて、案内手段が経路上の案内対象交差点を抽出し、その隣接する2つの案内対象交差点間の距離が規定値以内であれば、それら2つの案内対象交差点に対する案内の表示を行うように構成したので、移動体前方の案内対象交差点とその先の案内対象交差点との距離が短い場合には、それら両案内対象交差点に対する案内が同時に表示されることとなり、案内対象交差点間の距離が短い場合に、次の案内対象交差点に関する状況を運転者が事前に知ることができる効果がある。さらに、案内手段内に設けた制御手段により、複数の案内対象交差点に関する案内を行った場合に、案内した案内対象交差点間の距離と規定値との比較結果に基づいて、目的地側の案内対象交差点に関する音声メッセージを再報知するか否かを決定するように構成したので、隣接する案内対象交差点に関する案内を行った地点から目的地側の案内対象交差点までの距離が離れている場合に、移動体が出発地側の案内対象交差点を通過した後に目的地側の案内対象交差点に関する音声メッセージが再度報知されるようになるため、運転者が忘れかけていた案内をもう一度受けることができる効果がある。
また、請求項2記載の発明によれば、案内手段内に設けた制御手段により、複数の案内対象交差点に関する案内を行った場合に、その後出発地側の案内対象交差点通過までにかかった時間と規定値との比較結果に基づいて、目的地側の案内対象交差点に関する音声メッセージを再報知するか否かを決定するように構成したので、隣接する案内対象交差点に関する案内を行った時点から出発地側の案内対象交差点を通過するまでに一定以上の時間がかかった場合に、移動体が出発地側の前記案内対象交差点を通過した後に目的地側の案内対象交差点に関する音声メッセージが再度報知されるようになるため、運転者は忘れかけていた案内をもう一度受けることができる効果がある。
【0142】
請求項3記載の発明によれば、案内手段内に設けた距離決定手段によって、隣接する案内対象交差点間の道路属性を検出し、それに基づいてそれら2つの案内対象交差点の案内を同時に行うか否かの判定のための規定値を決定するように構成したので、同時に案内される案内対象交差点の間隔がその道路属性に応じて決定されるようになるため、より運転者の感覚に合った案内が行うことができる効果がある。
【0143】
請求項4記載の発明によれば、案内手段内に設けた音声報知手段により、隣接する2つの案内対象交差点間の距離に基づいて、その距離を表す単語を含んだ音声メッセージを選択してその音声報知を行うように構成したので、連続した案内対象交差点間の距離に応じて変化する案内メッセージによって音声報知が行われるため、運転者は前方の案内対象交差点から次の案内対象交差点までの距離を音声によって知ることができる効果がある。
【0144】
請求項5記載の発明によれば、案内手段内に設けた音声報知手段により、隣接する2つの案内対象交差点間の道路属性を検出し、その道路属性を表す単語を含んだ音声メッセージを選択してその音声報知を行うように構成したので、案内対象交差点間の道路属性に応じて変化する案内メッセージによって音声報知が行われるため、運転者は連続する案内対象交差点間の道路属性を音声によって知ることができる効果がある。
【0145】
請求項6記載の発明によれば、案内手段内に設けた音声報知手段により、隣接する2つの案内対象交差点の進行方向を検出し、その進行方向の組合せにより音声メッセージを選択してその音声報知を行うように構成したので、案内対象交差点の進行方向に応じて変化する案内メッセージによって音声報知が行われるため、運転者は案内対象交差点の進行方向の関係を音声によって知ることができる効果がある。
【0148】
請求項7記載の発明によれば、地図情報記憶手段に記憶された地図データと経路設定手段が設定した経路に基づいて、案内手段が経路上の案内対象交差点を抽出し、その案内対象交差点より移動体の現在位置までの間に存在する案内対象交差点以外の交差点を検出して、それを案内対象交差点とともに表示するように構成したので、案内対象交差点と移動体の現在位置との間の交差点が交差点案内図上に表示されるようになり、運転者がその案内対象交差点の位置を、その案内対象交差点と移動体の現在位値の間にある交差点との関係に基づいて容易に知ることができる効果がある。
【0149】
請求項8記載の発明によれば、案内手段内に検出手段を設けて、経路上の案内対象交差点から規定値以内の距離に存在する案内対象交差点以外の交差点を検出し、それを案内対象交差点とともに表示するように構成したので、案内対象交差点付近の交差点だけが案内対象交差点と同時に表示されるようになるため、運転者が案内対象交差点の位置を、案内対象交差点付近の交差点との関係からより容易に知ることができる効果がある。
【0150】
請求項9記載の発明によれば、案内手段内に検出手段を設けて、経路上の運転者の意識する交差点を検出し、それを案内対象交差点とともに表示するように構成したので、案内対象交差点と現在位置の間の運転者の意識する交差点だけが案内対象交差点と同時に表示されるようになるため、運転者が案内対象交差点の位置を、案内対象交差点と現在位値の間の意識する交差点との関係からより容易に知ることができる効果がある。
【0151】
請求項10記載の発明によれば、案内手段内に検出手段を設けて、経路上の特徴的な交差点を検出し、それを案内対象交差点とともに表示するように構成したので、案内対象交差点と現在位置の間の特徴的な交差点だけが案内対象交差点と同時に表示されるようになるため、運転者が案内対象交差点の位置を、案内対象交差点と現在位値の間の特徴的な交差点との関係からより容易に知ることができる効果がある。
【0152】
請求項11記載の発明によれば、案内手段内に設けた検出手段による特徴的な交差点の検出個数を、規定値以下に限定するように構成したので、案内対象交差点と同時に表示される案内対象交差点と現在位置の間の特徴的な交差点の数が制限されるため、表示される交差点案内図が煩雑になることがなくなり、運転者が案内対象交差点と現在位置の間の特徴的な交差点との関係から、案内対象交差点の位置をさらに容易に知ることができる効果がある。
【0153】
請求項12記載の発明によれば、案内手段内に制御手段を設けて、交差点案内図に表示するオブジェクトを表示される交差点の数に応じて変更するように構成したので、交差点案内図の表示に際して情報量が多すぎて表示が煩雑になることを防止することができ、運転者にとってより見やすい交差点案内図が得られる効果がある。
【0154】
請求項13記載の発明によれば、案内手段内に制御手段を設けて、複数の案内対象交差点または案内対象交差点以外の交差点を同時に表示する際の、表示するオブジェクトの総数を規定値に制限するように構成したので、交差点案内図の表示に際して情報量を一定に抑えることが可能となり、運転者にとってより見やすい交差点案内図が得られる効果がある。
【0155】
請求項14記載の発明によれば、案内手段内に表示手段を設けて、案内対象交差点にそれが案内対象交差点であることを示すマークをつけて表示するように構成したので、交差点案内図の表示に際して案内対象交差点にそれが案内対象交差点とわかるマークが表示されるため、運転者がそのマークによって案内対象交差点を速やかに認識することができる効果がある。
【0156】
請求項15記載の発明によれば、案内手段内に制御手段を設けて、交差点案内図の全体が表示画面内に収まるように交差点間の表示距離を調整するように構成したので、交差点案内図の表示を行う際に、交差点案内図が表示画面の外にはみ出すことなく全体が画面内に収まるように表示されるため、運転者は常に交差点案内図の全体を参照することができる効果がある。
【図面の簡単な説明】
【図1】この発明の実施の形態1によるナビゲーション装置の機能構成を示すブロック図である。
【図2】この発明の実施の形態1によるナビゲーション装置のハードウェア構成を示すブロック図である。
【図3】この発明の実施の形態1における地図データのデータ構成の一例を示す説明図である。
【図4】この発明の実施の形態1にて設定された実際の経路の一例を示す説明図である。
【図5】この発明の実施の形態1における処理の流れを示すフローチャートである。
【図6】この発明の実施の形態1にて表示される交差点案内図の一例を示す説明図である。
【図7】この発明の実施の形態1にて表示される交差点案内図の他の例を示す説明図である。
【図8】この発明の実施の形態1にて報知される音声メッセージの一例を示す説明図である。
【図9】この発明の実施の形態2によるナビゲーション装置の機能構成を示すブロック図である。
【図10】この発明の実施の形態2にて設定された実際の経路の一例を示す説明図である。
【図11】この発明の実施の形態2における処理の流れを示すフローチャートである。
【図12】この発明の実施の形態2にて表示される交差点案内図の一例を示す説明図である。
【図13】この発明の実施の形態3によるナビゲーション装置の機能構成を示すブロック図である。
【図14】この発明の実施の形態3における処理の流れの要部を示すフローチャートである。
【図15】この発明の実施の形態3にて報知される音声メッセージの一例を示す説明図である。
【図16】この発明の実施の形態4によるナビゲーション装置の機能構成を示すブロック図である。
【図17】この発明の実施の形態4における処理の流れの要部を示すフローチャートである。
【図18】この発明の実施の形態4にて報知される音声メッセージの一例を示す説明図である。
【図19】この発明の実施の形態5によるナビゲーション装置の機能構成を示すブロック図である。
【図20】この発明の実施の形態5における処理の流れの要部を示すフローチャートである。
【図21】この発明の実施の形態5にて報知される音声メッセージの一例を示す説明図である。
【図22】この発明の実施の形態6によるナビゲーション装置の機能構成を示すブロック図である。
【図23】この発明の実施の形態6における処理の流れの要部を示すフローチャートである。
【図24】この発明の実施の形態7によるナビゲーション装置の機能構成を示すブロック図である。
【図25】この発明の実施の形態7における処理の流れを示すフローチャートである。
【図26】この発明の実施の形態8によるナビゲーション装置の機能構成を示すブロック図である。
【図27】この発明の実施の形態8にて設定された実際の経路の一例を示す説明図である。
【図28】この発明の実施の形態8における処理の流れを示すフローチャートである。
【図29】この発明の実施の形態8にて表示される交差点案内図の一例を示す説明図である。
【図30】この発明の実施の形態9によるナビゲーション装置の機能構成を示すブロック図である。
【図31】この発明の実施の形態9における処理の流れの要部を示すフローチャートである。
【図32】この発明の実施の形態9にて表示される交差点案内図の一例を示す説明図である。
【図33】この発明の実施の形態9にて表示される交差点案内図の他の例を示す説明図である。
【図34】この発明の実施の形態10によるナビゲーション装置の機能構成を示すブロック図である。
【図35】この発明の実施の形態10における処理の流れの要部を示すフローチャートである。
【図36】この発明の実施の形態10にて表示される交差点案内図の一例を示す説明図である。
【図37】この発明の実施の形態11によるナビゲーション装置の機能構成を示すブロック図である。
【図38】この発明の実施の形態11における処理の流れの要部を示すフローチャートである。
【図39】この発明の実施の形態11にて表示される交差点案内図の一例を示す説明図である。
【図40】この発明の実施の形態11にて表示される交差点案内図の一例を示す説明図である。
【図41】この発明の実施の形態12によるナビゲーション装置の機能構成を示すブロック図である。
【図42】この発明の実施の形態12における処理の流れの要部を示すフローチャートである。
【図43】この発明の実施の形態13によるナビゲーション装置の処理の流れの要部を示すフローチャートである。
【図44】この発明の実施の形態13における交差点の表示の優先度を示すテーブルの一例を示す説明図である。
【図45】この発明の実施の形態14によるナビゲーション装置の機能構成を示すブロック図である。
【図46】この発明の実施の形態14における処理の流れの要部を示すフローチャートである。
【図47】この発明の実施の形態14における交差点数に応じて表示するオブジェクトの種類を示すテーブルの一例を示す説明図である。
【図48】この発明の実施の形態14にて表示される交差点案内図の一例を示す説明図である。
【図49】この発明の実施の形態14にて表示される交差点案内図の他の例を示す説明図である。
【図50】この発明の実施の形態14にてすべてのオブジェクトを表示した場合の交差点案内図の一例を示す説明図である。
【図51】この発明の実施の形態15によるナビゲーション装置の機能構成を示すブロック図である。
【図52】この発明の実施の形態15における処理の流れの要部を示すフローチャートである。
【図53】この発明の実施の形態15におけるオブジェクトの表示の優先度を示すテーブルの一例を示す説明図である。
【図54】この発明の実施の形態16によるナビゲーション装置の機能構成を示すブロック図である。
【図55】この発明の実施の形態16における処理の流れの要部を示すフローチャートである。
【図56】この発明の実施の形態16にて表示される交差点案内図の一例を示す説明図である。
【図57】この発明の実施の形態16にて表示される交差点案内図の他の例を示す説明図である。
【図58】この発明の実施の形態17によるナビゲーション装置の機能構成を示すブロック図である。
【図59】この発明の実施の形態17における処理の流れの要部を示すフローチャートである。
【図60】この発明の実施の形態17にて表示される交差点案内図の一例を示す説明図である。
【図61】この発明の実施の形態17にて表示される交差点案内図の他の例を示す説明図である。
【図62】従来のナビゲーション装置の処理の流れを示すフローチャートである。
【符号の説明】
1 地図情報記憶手段、2 経路設定手段、3 現在位置検出手段、4,55案内手段、29 規定値決定手段、44,47,50 音声報知手段、53,54,79,85,90 制御手段、72,74,75,76 検出手段、88表示手段。
Claims (15)
- 道路データ、交差点データ等によるデジタル化された地図データを格納した地図情報記憶手段と、
前記地図情報記憶手段に記憶された地図データ上で2地点間の経路を設定する経路設定手段と、
前記地図情報記憶手段に記憶された地図データ上における移動体の現在位置を検出する現在位置検出手段と、
前記地図情報記憶手段に記憶された地図データと、前記経路設定手段で設定した経路から、経路上の交差点案内すべき案内対象交差点を抽出し、抽出された隣接する2つの案内対象交差点間の距離を検出して、当該距離が規定値以内である場合に、それら2つの案内対象交差点に対する案内を行う案内手段とを備えたナビゲーション装置おいて、
前記案内手段が、複数の案内対象交差点に関する案内をした場合に、案内した前記案内対象交差点間の距離が所定値以内であるか否かを判定し、当該所定値以上であった場合には、移動体の現在位置が出発地側の前記案内対象交差点を通過した後に、再度目的地側の前記案内対象交差点に関する音声メッセージの報知を行う制御手段を有していることを特徴とするナビゲーション装置。 - 道路データ、交差点データ等によるデジタル化された地図データを格納した地図情報記憶手段と、
前記地図情報記憶手段に記憶された地図データ上で2地点間の経路を設定する経路設定手段と、
前記地図情報記憶手段に記憶された地図データ上における移動体の現在位置を検出する現在位置検出手段と、
前記地図情報記憶手段に記憶された地図データと、前記経路設定手段で設定した経路から、経路上の交差点案内すべき案内対象交差点を抽出し、抽出された隣接する2つの案内対象交差点間の距離を検出して、当該距離が規定値以内である場合に、それら2つの案内対象交差点に対する案内を行う案内手段とを備えたナビゲーション装置において、
前記案内手段が、複数の案内対象交差点に関する案内をした場合に、案内メッセージの報知を行った後、出発地側の前記案内対象交差点を通過するまでに一定以上の時間がかかった場合、移動体の現在位置が出発地側の前記案内対象交差点を通過した後に、再度目的地側の前記案内対象交差点に関する音声メッセージの報知を行う制御手段を有していることを特徴とするナビゲーション装置。 - 案内手段が、抽出された隣接する2つの案内対象交差点間の道路属性を検出し、その道路属性に基づいて規定値を決定する規定値決定手段を有していることを特徴とする請求項1または請求項2記載のナビゲーション装置。
- 案内手段が、検出された隣接する2つの案内対象交差点間の距離に基づいて、当該距離を表す単語を含んだ音声メッセージを選択して、それを音声報知する音声報知手段を有していることを特徴とする請求項1または請求項2記載のナビゲーション装置。
- 案内手段が、抽出された隣接する2つの案内対象交差点間の道路属性を検出し、その道路属性を表す単語を含んだ音声メッセージを選択して音声報知する音声報知手段を有していることを特徴とする請求項1または請求項2記載のナビゲーション装置。
- 案内手段が、抽出された隣接する2つの案内対象交差点の進行方向を検出し、その進行方向の組合せが同一方向か逆方向かに基づいて報知する音声メッセージを選択して音声報知する音声報知手段を有していることを特徴とする請求項1または請求項2記載のナビゲーション装置。
- 案内手段が、案内対象交差点から前記現在位置検出手段によって検出された移動体の現在位置までの間の、前記経路上に存在する前記案内対象交差点以外の交差点を検出して、それを前記案内対象交差点とともに表示することを特徴とする請求項1または請求項2記載のナビゲーション装置。
- 案内手段が、案内対象交差点から移動体の現在位置までの間の経路上に存在する案内対象交差点以外の交差点を、前記案内対象交差点から規定値以内の距離にあるものについてのみ検出する検出手段を有していることを特徴とする請求項7記載のナビゲーション装置。
- 案内手段が、案内対象交差点から移動体の現在位置までの間の経路上に存在する運転者の意識のする交差点を検出する検出手段を有していることを特徴とする請求項7記載のナビゲーション装置。
- 案内手段が、案内対象交差点から移動体の現在位置までの間の経路上に存在する特徴的な交差点を検出する検出手段を有していることを特徴とする請求項7記載のナビゲーション装置。
- 検出手段が、案内対象交差点から移動体の現在位置までの間の経路上に存在する特徴的な交差点を検出する際に、前記特徴的な交差点の検出数を規定値以内に制限するものであることを特徴とする請求項10記載のナビゲーション装置。
- 案内手段が、交差点案内図に表示するオブジェクトを、前記交差点案内図に表示する交差点の数に応じて変更する制御手段を有していることを特徴とする請求項1または請求項7記載のナビゲーション装置。
- 案内手段が、交差点案内図に表示するオブジェクトの総数を規定値以内に制限する制御手段を有していることを特徴とする請求項7記載のナビゲーション装置。
- 案内手段が、交差点案内図に表示された案内対象交差点に対して、それが案内対象交差点であることを示すマークをつける表示手段を有していることを特徴とする請求項7記載のナビゲーション装置。
- 案内手段が、交差点案内図の全体が表示画面内に収まるように、前記交差点案内図に表示される各交差点間の表示距離を調整する制御手段を有していることを特徴とする請求項7記載のナビゲーション装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP12384296A JP3585643B2 (ja) | 1996-05-17 | 1996-05-17 | ナビゲーション装置 |
| US08/759,222 US5893045A (en) | 1996-05-17 | 1996-12-05 | Navigation apparatus with relationship between guide target intersections |
| DE19700388A DE19700388C2 (de) | 1996-05-17 | 1997-01-08 | Navigationsvorrichtung |
| KR1019970002189A KR100248681B1 (ko) | 1996-05-17 | 1997-01-27 | 네비게이션 장치 |
| CNB971020922A CN1172161C (zh) | 1996-05-17 | 1997-01-29 | 导向设备 |
| HK98103931.9A HK1004684B (en) | 1996-05-17 | 1998-05-07 | A navigation apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP12384296A JP3585643B2 (ja) | 1996-05-17 | 1996-05-17 | ナビゲーション装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH09304105A JPH09304105A (ja) | 1997-11-28 |
| JP3585643B2 true JP3585643B2 (ja) | 2004-11-04 |
Family
ID=14870747
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP12384296A Expired - Fee Related JP3585643B2 (ja) | 1996-05-17 | 1996-05-17 | ナビゲーション装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US5893045A (ja) |
| JP (1) | JP3585643B2 (ja) |
| KR (1) | KR100248681B1 (ja) |
| CN (1) | CN1172161C (ja) |
| DE (1) | DE19700388C2 (ja) |
Families Citing this family (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100267543B1 (ko) * | 1996-04-28 | 2000-10-16 | 모리 하루오 | 도로정보 또는 교차점정보의 처리장치 |
| KR100269070B1 (ko) * | 1996-08-30 | 2000-10-16 | 모리 하루오 | 차량용네비게이션장치 |
| DE19728470A1 (de) * | 1997-07-03 | 1999-01-07 | Siemens Ag | Navigationssystem mit regulierbarer Sprachausgabe |
| JP3771044B2 (ja) * | 1998-04-20 | 2006-04-26 | アイシン・エィ・ダブリュ株式会社 | ナビゲーション装置 |
| JP3473398B2 (ja) * | 1998-05-01 | 2003-12-02 | 株式会社日立製作所 | 地図応用システムおよび地図表示制御方法 |
| US6259989B1 (en) | 1998-06-12 | 2001-07-10 | Mitsubishi Denki K.K. | Navigation device |
| US6356840B2 (en) | 1998-06-12 | 2002-03-12 | Mitsubishi Denki Kabushiki Kaisha | Navigation device with a three dimensional display |
| WO1999064822A1 (en) | 1998-06-12 | 1999-12-16 | Mitsubishi Denki Kabushiki Kaisha | Navigation device |
| JP2000258179A (ja) * | 1999-03-12 | 2000-09-22 | Denso Corp | 車載用ナビゲーション装置 |
| JP2001124568A (ja) † | 1999-10-29 | 2001-05-11 | Pioneer Electronic Corp | 地図表示装置及び地図表示方法 |
| US6405128B1 (en) | 1999-12-20 | 2002-06-11 | Navigation Technologies Corp. | Method and system for providing an electronic horizon in an advanced driver assistance system architecture |
| JP2001324339A (ja) * | 2000-05-12 | 2001-11-22 | Fujitsu Ten Ltd | ナビゲーション装置 |
| KR20040040903A (ko) * | 2002-11-08 | 2004-05-13 | 엘지전자 주식회사 | 네비게이션 시스템에서 이동체의 주행경로 안내방법 |
| JP4098106B2 (ja) * | 2003-01-29 | 2008-06-11 | 三菱電機株式会社 | 車両用ナビゲーションシステム |
| JP2004286559A (ja) * | 2003-03-20 | 2004-10-14 | Mitsubishi Electric Corp | 車両用ナビゲーションシステムおよび経路案内方法 |
| KR100594144B1 (ko) * | 2003-11-28 | 2006-06-28 | 삼성전자주식회사 | 이미지 데이터를 이용한 텔레매틱스 시스템 및 그의 경로안내방법 |
| JP2005345201A (ja) * | 2004-06-01 | 2005-12-15 | Denso Corp | 走行軌跡表示装置及びプログラム |
| JP4722433B2 (ja) * | 2004-08-25 | 2011-07-13 | アルパイン株式会社 | 車載用ナビゲーション装置 |
| JP4213097B2 (ja) * | 2004-09-13 | 2009-01-21 | 三菱電機株式会社 | カーナビゲーション装置 |
| JP2006153757A (ja) * | 2004-11-30 | 2006-06-15 | Denso Corp | 経路案内装置およびプログラム |
| JP2006189345A (ja) * | 2005-01-06 | 2006-07-20 | Denso Corp | 車載ナビゲーション装置 |
| JP4647394B2 (ja) * | 2005-05-23 | 2011-03-09 | パイオニア株式会社 | 情報生成装置、その方法、そのプログラム、および、そのプログラムを記録した記録媒体 |
| JP2006329713A (ja) * | 2005-05-24 | 2006-12-07 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| DE102006002741A1 (de) * | 2006-01-20 | 2007-08-02 | Robert Bosch Gmbh | Verfahren zur Darstellung eines Kartenausschnitts auf einer Anzeige eines Fahrerinformationssystems und Fahrerinformationssystem mit Kartendarstellung |
| JP5028851B2 (ja) * | 2006-04-24 | 2012-09-19 | 株式会社デンソー | 道路情報検出装置及びプログラム |
| CN101197094B (zh) * | 2006-12-08 | 2010-06-16 | 高德软件有限公司 | 电子地图中连续分歧的引导方法 |
| WO2008120296A1 (ja) * | 2007-03-28 | 2008-10-09 | Navitime Japan Co., Ltd. | 地図表示システム、地図表示装置および地図表示方法 |
| KR101054091B1 (ko) * | 2007-08-31 | 2011-08-03 | 주식회사 디아테크 | 네비게이션에서의 경로구별안내 방법 및 시스템 |
| JP4446204B2 (ja) * | 2007-10-30 | 2010-04-07 | アイシン・エィ・ダブリュ株式会社 | 車両用ナビゲーション装置及び車両用ナビゲーションプログラム |
| JP5035842B2 (ja) * | 2007-11-02 | 2012-09-26 | アルパイン株式会社 | ナビゲーション装置 |
| DE102008025053B4 (de) * | 2008-01-18 | 2023-07-06 | Garmin Switzerland Gmbh | Navigationseinrichtung |
| JP2009250622A (ja) * | 2008-04-01 | 2009-10-29 | Pioneer Electronic Corp | ナビゲーション装置、ルート案内方法、及びルート案内プログラム |
| US8337397B2 (en) | 2009-03-26 | 2012-12-25 | Intuitive Surgical Operations, Inc. | Method and system for providing visual guidance to an operator for steering a tip of an endoscopic device toward one or more landmarks in a patient |
| US10004387B2 (en) | 2009-03-26 | 2018-06-26 | Intuitive Surgical Operations, Inc. | Method and system for assisting an operator in endoscopic navigation |
| JP2010261747A (ja) * | 2009-04-30 | 2010-11-18 | Denso Corp | 警報装置 |
| JP5533762B2 (ja) * | 2011-03-31 | 2014-06-25 | アイシン・エィ・ダブリュ株式会社 | 移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム |
| US20120303265A1 (en) * | 2011-05-23 | 2012-11-29 | Microsoft Corporation | Navigation system with assistance for making multiple turns in a short distance |
| US10156455B2 (en) * | 2012-06-05 | 2018-12-18 | Apple Inc. | Context-aware voice guidance |
| CN103808327A (zh) * | 2012-11-15 | 2014-05-21 | 比亚迪股份有限公司 | 导航方法与系统及导航服务器 |
| EP3689284B1 (en) | 2013-10-24 | 2025-02-26 | Auris Health, Inc. | System for robotic-assisted endolumenal surgery |
| EP4070723B1 (en) | 2015-09-18 | 2025-08-06 | Auris Health, Inc. | Navigation of tubular networks |
| DE102016207991B4 (de) * | 2016-05-10 | 2022-09-15 | Volkswagen Aktiengesellschaft | Verfahren zur fahrsituationsabhängigen Wiedergabe einer Kartendarstellung in einem Fahrzeug |
| IT201600084942A1 (it) * | 2016-08-12 | 2018-02-12 | Paolo Andreucci | Sistema di analisi, misurazione e classificazione automatica di percorsi stradali e relativo metodo di funzionamento. |
| US10792466B2 (en) | 2017-03-28 | 2020-10-06 | Auris Health, Inc. | Shaft actuating handle |
| EP3621520B1 (en) | 2017-05-12 | 2025-09-24 | Auris Health, Inc. | Biopsy apparatus and system |
| US10022192B1 (en) | 2017-06-23 | 2018-07-17 | Auris Health, Inc. | Automatically-initialized robotic systems for navigation of luminal networks |
| KR102341451B1 (ko) | 2017-06-28 | 2021-12-23 | 아우리스 헬스, 인코포레이티드 | 기기의 삽입 보상을 위한 로봇 시스템, 방법 및 비일시적 컴퓨터 가독 저장 매체 |
| TWI666423B (zh) * | 2018-01-31 | 2019-07-21 | 光陽工業股份有限公司 | 可運算及顯示岔路數量資訊之導航方法及系統 |
| KR102500422B1 (ko) | 2018-03-28 | 2023-02-20 | 아우리스 헬스, 인코포레이티드 | 기구의 추정된 위치를 디스플레이하기 위한 시스템 및 방법 |
| JP7082634B2 (ja) * | 2020-03-31 | 2022-06-08 | 本田技研工業株式会社 | 経路案内装置 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61209316A (ja) * | 1985-03-14 | 1986-09-17 | Nissan Motor Co Ltd | 車両用経路誘導装置 |
| JPS61216098A (ja) * | 1985-03-20 | 1986-09-25 | 日産自動車株式会社 | 車両用経路誘導装置 |
| JPH0643899B2 (ja) * | 1985-03-20 | 1994-06-08 | 日産自動車株式会社 | 車両用経路誘導装置 |
| JPH0650559B2 (ja) * | 1985-04-03 | 1994-06-29 | 日産自動車株式会社 | 車両用経路誘導装置 |
| JPH0627973B2 (ja) * | 1985-05-16 | 1994-04-13 | 日本電装株式会社 | 地図表示装置 |
| US4879658A (en) * | 1987-02-10 | 1989-11-07 | Yazaki Corporation | Navigation system using angular rate sensor |
| JP2680312B2 (ja) * | 1987-07-10 | 1997-11-19 | アイシン・エィ・ダブリュ株式会社 | 車両用ナビゲーション装置 |
| JPH0820265B2 (ja) * | 1987-07-10 | 1996-03-04 | アイシン・エィ・ダブリュ株式会社 | 車両用ナビゲーション装置 |
| WO1989006341A1 (fr) * | 1987-12-28 | 1989-07-13 | Aisin Aw Co., Ltd. | Unite d'affichage d'un systeme indicateur de route |
| US5293163A (en) * | 1990-06-06 | 1994-03-08 | Mazda Motor Corporation | Navigation apparatus for vehicles |
| JP2673403B2 (ja) * | 1992-06-23 | 1997-11-05 | 本田技研工業株式会社 | 経路探索装置 |
| JP3000793B2 (ja) * | 1992-07-14 | 2000-01-17 | ソニー株式会社 | ナビゲーション装置 |
| JPH0634384A (ja) * | 1992-07-16 | 1994-02-08 | Zexel Corp | 車両用ナビゲーション装置 |
| DE69323355T2 (de) * | 1992-07-20 | 1999-08-26 | Aisin Aw Co. | Navigationsgerät für Fahrzeuge mit Erkennung von Kurven und Leitung der Fahrzeuge mittels Sprache |
| US5410486A (en) * | 1992-07-20 | 1995-04-25 | Toyota Jidosha K.K. | Navigation system for guiding vehicle by voice |
| EP0580166B1 (en) * | 1992-07-23 | 1999-06-16 | Aisin Aw Co., Ltd. | Vehicle navigation system |
| DE69331485T2 (de) * | 1992-08-19 | 2002-06-20 | Aisin Aw Co., Ltd. | Navigationssystem für Fahrzeuge |
| US5398189A (en) * | 1992-11-16 | 1995-03-14 | Masprodenkoh Kabushikikaisha | Navigation system for motor vehicles |
| JP2556650B2 (ja) * | 1993-03-31 | 1996-11-20 | マスプロ電工株式会社 | 車両の走行経路設定装置 |
| JP2912119B2 (ja) * | 1993-06-03 | 1999-06-28 | 三菱自動車工業株式会社 | ナビゲーション装置 |
| JP3202122B2 (ja) * | 1994-01-20 | 2001-08-27 | 富士通テン株式会社 | ナビゲーション装置 |
| JP3415298B2 (ja) * | 1994-11-30 | 2003-06-09 | 本田技研工業株式会社 | 車載用ナビゲーション装置 |
-
1996
- 1996-05-17 JP JP12384296A patent/JP3585643B2/ja not_active Expired - Fee Related
- 1996-12-05 US US08/759,222 patent/US5893045A/en not_active Expired - Lifetime
-
1997
- 1997-01-08 DE DE19700388A patent/DE19700388C2/de not_active Expired - Fee Related
- 1997-01-27 KR KR1019970002189A patent/KR100248681B1/ko not_active Expired - Fee Related
- 1997-01-29 CN CNB971020922A patent/CN1172161C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE19700388A1 (de) | 1997-11-20 |
| HK1004684A1 (zh) | 1998-12-04 |
| JPH09304105A (ja) | 1997-11-28 |
| CN1172161C (zh) | 2004-10-20 |
| CN1165950A (zh) | 1997-11-26 |
| KR100248681B1 (ko) | 2000-03-15 |
| KR970076411A (ko) | 1997-12-12 |
| DE19700388C2 (de) | 1999-07-08 |
| US5893045A (en) | 1999-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3585643B2 (ja) | ナビゲーション装置 | |
| KR100313055B1 (ko) | 네비게이션장치 | |
| EP0119674B1 (en) | Travel guidance system for vehicles | |
| US6388582B2 (en) | Lane guidance display method, and navigation device and recording medium for realizing the method | |
| JP4170178B2 (ja) | 経路探索装置 | |
| US5948041A (en) | Information service device having simple data retrieval capabilities | |
| JP2000500878A (ja) | 車両内交通関連情報供給装置及び方法 | |
| KR101023516B1 (ko) | 내비게이션 장치 및 내비게이션 장치용 프로그램의 저장매체 | |
| JP3414872B2 (ja) | 車載用ナビゲーション装置 | |
| JPH1019596A (ja) | 車両用ナビゲーション装置 | |
| EP1273887B1 (en) | Navigation system | |
| JP3228640B2 (ja) | 車載用ナビゲーション装置 | |
| JP3511902B2 (ja) | 経路情報提供装置、経路案内装置および通信型ナビゲーションシステム | |
| JP3396724B2 (ja) | 車両用渋滞情報案内方法 | |
| JP2003177024A (ja) | 車載用ナビゲーション装置 | |
| JP3696727B2 (ja) | 車載用ナビゲーション装置 | |
| JP2002333330A (ja) | 交通情報表示装置 | |
| JP4726121B2 (ja) | ナビゲーション用交通情報案内装置 | |
| JP2005140676A (ja) | ナビゲーションシステム | |
| JP3209823B2 (ja) | 車載用ナビゲーション装置 | |
| JP3485743B2 (ja) | ナビゲーション装置 | |
| JPH11190637A (ja) | 車両用のナビゲーションシステムの作動方法及び車両用のナビゲーションシステム | |
| JPH0567294A (ja) | 車両制限速度警報装置 | |
| JP2002013935A (ja) | ナビゲーション装置 | |
| JPH09264747A (ja) | ナビゲーション装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040706 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040804 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20070813 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080813 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080813 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090813 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090813 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100813 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110813 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110813 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120813 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120813 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130813 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |