JP2018164126A - 振動デバイス、発振器、ジャイロセンサー、電子機器および移動体 - Google Patents
振動デバイス、発振器、ジャイロセンサー、電子機器および移動体 Download PDFInfo
- Publication number
- JP2018164126A JP2018164126A JP2017058706A JP2017058706A JP2018164126A JP 2018164126 A JP2018164126 A JP 2018164126A JP 2017058706 A JP2017058706 A JP 2017058706A JP 2017058706 A JP2017058706 A JP 2017058706A JP 2018164126 A JP2018164126 A JP 2018164126A
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- support member
- substrate
- vibration device
- vibration element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000000758 substrate Substances 0.000 claims abstract description 161
- 239000013078 crystal Substances 0.000 claims description 66
- 239000000463 material Substances 0.000 claims description 30
- 230000010355 oscillation Effects 0.000 claims description 9
- 230000008646 thermal stress Effects 0.000 abstract description 47
- 238000001514 detection method Methods 0.000 description 26
- 239000010453 quartz Substances 0.000 description 26
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 26
- 230000035882 stress Effects 0.000 description 12
- 239000000853 adhesive Substances 0.000 description 11
- 230000001070 adhesive effect Effects 0.000 description 11
- 230000006870 function Effects 0.000 description 8
- 239000000919 ceramic Substances 0.000 description 7
- 230000000694 effects Effects 0.000 description 7
- 238000003384 imaging method Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 230000032683 aging Effects 0.000 description 4
- 230000006866 deterioration Effects 0.000 description 4
- 230000005284 excitation Effects 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 4
- 239000003566 sealing material Substances 0.000 description 4
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 3
- 239000005388 borosilicate glass Substances 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 239000002131 composite material Substances 0.000 description 3
- 239000010931 gold Substances 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000005219 brazing Methods 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 229910000154 gallium phosphate Inorganic materials 0.000 description 2
- LWFNJDOYCSNXDO-UHFFFAOYSA-K gallium;phosphate Chemical compound [Ga+3].[O-]P([O-])([O-])=O LWFNJDOYCSNXDO-UHFFFAOYSA-K 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 229910052737 gold Inorganic materials 0.000 description 2
- 239000011229 interlayer Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- 241000251468 Actinopterygii Species 0.000 description 1
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 1
- 229910013641 LiNbO 3 Inorganic materials 0.000 description 1
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- PSHMSSXLYVAENJ-UHFFFAOYSA-N dilithium;[oxido(oxoboranyloxy)boranyl]oxy-oxoboranyloxyborinate Chemical compound [Li+].[Li+].O=BOB([O-])OB([O-])OB=O PSHMSSXLYVAENJ-UHFFFAOYSA-N 0.000 description 1
- 238000001312 dry etching Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000008103 glucose Substances 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 239000010410 layer Substances 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 229910052750 molybdenum Inorganic materials 0.000 description 1
- 239000011733 molybdenum Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 150000004767 nitrides Chemical class 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000000206 photolithography Methods 0.000 description 1
- UKDIAJWKFXFVFG-UHFFFAOYSA-N potassium;oxido(dioxo)niobium Chemical compound [K+].[O-][Nb](=O)=O UKDIAJWKFXFVFG-UHFFFAOYSA-N 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 238000001039 wet etching Methods 0.000 description 1
Images















Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/15—Constructional features of resonators consisting of piezoelectric or electrostrictive material
- H03H9/21—Crystal tuning forks
- H03H9/215—Crystal tuning forks consisting of quartz
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/02007—Details of bulk acoustic wave devices
- H03H9/02015—Characteristics of piezoelectric layers, e.g. cutting angles
- H03H9/02023—Characteristics of piezoelectric layers, e.g. cutting angles consisting of quartz
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders; Supports
- H03H9/08—Holders with means for regulating temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B3/00—Devices comprising flexible or deformable elements, e.g. comprising elastic tongues or membranes
- B81B3/0064—Constitution or structural means for improving or controlling the physical properties of a device
- B81B3/0067—Mechanical properties
- B81B3/0072—For controlling internal stress or strain in moving or flexible elements, e.g. stress compensating layers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B7/00—Microstructural systems; Auxiliary parts of microstructural devices or systems
- B81B7/0032—Packages or encapsulation
- B81B7/0045—Packages or encapsulation for reducing stress inside of the package structure
- B81B7/0048—Packages or encapsulation for reducing stress inside of the package structure between the MEMS die and the substrate
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
- G01C19/5621—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks the devices involving a micromechanical structure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
- G01C19/5733—Structural details or topology
- G01C19/574—Structural details or topology the devices having two sensing masses in anti-phase motion
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03B—GENERATION OF OSCILLATIONS, DIRECTLY OR BY FREQUENCY-CHANGING, BY CIRCUITS EMPLOYING ACTIVE ELEMENTS WHICH OPERATE IN A NON-SWITCHING MANNER; GENERATION OF NOISE BY SUCH CIRCUITS
- H03B5/00—Generation of oscillations using amplifier with regenerative feedback from output to input
- H03B5/30—Generation of oscillations using amplifier with regenerative feedback from output to input with frequency-determining element being electromechanical resonator
- H03B5/32—Generation of oscillations using amplifier with regenerative feedback from output to input with frequency-determining element being electromechanical resonator being a piezoelectric resonator
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H3/00—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators
- H03H3/007—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators for the manufacture of electromechanical resonators or networks
- H03H3/0072—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators for the manufacture of electromechanical resonators or networks of microelectro-mechanical resonators or networks
- H03H3/0076—Apparatus or processes specially adapted for the manufacture of impedance networks, resonating circuits, resonators for the manufacture of electromechanical resonators or networks of microelectro-mechanical resonators or networks for obtaining desired frequency or temperature coefficients
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/02007—Details of bulk acoustic wave devices
- H03H9/02086—Means for compensation or elimination of undesirable effects
- H03H9/02102—Means for compensation or elimination of undesirable effects of temperature influence
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/02007—Details of bulk acoustic wave devices
- H03H9/02157—Dimensional parameters, e.g. ratio between two dimension parameters, length, width or thickness
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders; Supports
- H03H9/0504—Holders; Supports for bulk acoustic wave devices
- H03H9/0509—Holders; Supports for bulk acoustic wave devices consisting of adhesive elements
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders; Supports
- H03H9/0538—Constructional combinations of supports or holders with electromechanical or other electronic elements
- H03H9/0542—Constructional combinations of supports or holders with electromechanical or other electronic elements consisting of a lateral arrangement
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders; Supports
- H03H9/0538—Constructional combinations of supports or holders with electromechanical or other electronic elements
- H03H9/0547—Constructional combinations of supports or holders with electromechanical or other electronic elements consisting of a vertical arrangement
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders; Supports
- H03H9/10—Mounting in enclosures
- H03H9/1007—Mounting in enclosures for bulk acoustic wave [BAW] devices
- H03H9/1014—Mounting in enclosures for bulk acoustic wave [BAW] devices the enclosure being defined by a frame built on a substrate and a cap, the frame having no mechanical contact with the BAW device
- H03H9/1021—Mounting in enclosures for bulk acoustic wave [BAW] devices the enclosure being defined by a frame built on a substrate and a cap, the frame having no mechanical contact with the BAW device the BAW device being of the cantilever type
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/15—Constructional features of resonators consisting of piezoelectric or electrostrictive material
- H03H9/17—Constructional features of resonators consisting of piezoelectric or electrostrictive material having a single resonator
- H03H9/177—Constructional features of resonators consisting of piezoelectric or electrostrictive material having a single resonator of the energy-trap type
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/15—Constructional features of resonators consisting of piezoelectric or electrostrictive material
- H03H9/17—Constructional features of resonators consisting of piezoelectric or electrostrictive material having a single resonator
- H03H9/19—Constructional features of resonators consisting of piezoelectric or electrostrictive material having a single resonator consisting of quartz
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION, OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L1/00—Stabilisation of generator output against variations of physical values, e.g. power supply
- H03L1/02—Stabilisation of generator output against variations of physical values, e.g. power supply against variations of temperature only
- H03L1/028—Stabilisation of generator output against variations of physical values, e.g. power supply against variations of temperature only of generators comprising piezoelectric resonators
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION, OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L1/00—Stabilisation of generator output against variations of physical values, e.g. power supply
- H03L1/02—Stabilisation of generator output against variations of physical values, e.g. power supply against variations of temperature only
- H03L1/04—Constructional details for maintaining temperature constant
Abstract
Description
水晶振動子は、パッケージ内に導電性接着剤等で支持されているため、水晶振動子の周囲温度が変化した場合に、水晶振動片を支持している支持部分に容器(パッケージ)との熱膨張係数の違いによって生じる熱歪みが発生し、更には、水晶振動子の温度が元の温度に戻ったときに支持部分と水晶振動片との熱歪みの回復の程度の差により、ヒステリシスが発生してしまう。即ち、水晶振動子の温度が元の温度に戻っても支持部分からの応力により水晶振動子の周波数が元の周波数に戻るまでに長い時間を要する、あるいは水晶振動子の温度がt1とt2との間で往復する変化をしたときに温度上昇時と下降時において水晶振動子の周波数温度依存性が異なるといった温度特性のヒステリシス現象が起こる。
(第1実施形態)
本発明の第1実施形態〜第3実施形態に係る振動デバイスとして、中央部に凸部を有するメサ形状で厚み滑り振動するATカット水晶基板で構成された振動素子を実装した振動デバイスを一例として挙げ説明する。
先ず、本発明の第1実施形態に係る振動デバイス1について、図1A〜図1Dを参照して説明する。
図1Aは、第1実施形態に係る振動デバイス1の構成を示す概略平面図であり、図1Bは、図1AのP1−P1線における概略断面図であり、図1Cは、図1AのP2−P2線における概略断面図であり、図1Dは、図1Aの裏面の構成を示す概略平面図である。図1Aにおいて、振動デバイス1の内部の構成を説明する便宜上、蓋部材42を取り外した状態を図示している。また、図1A〜以降で参照する図4Bでは、説明の便宜上、互いに直交する3つの軸として、X軸、Y’軸およびZ’軸を図示しており、各軸については水晶の結晶方向と一致するので、後述する図2において詳細に説明する。また、以下の説明では、説明の便宜上、振動素子10の厚さ方向であるY’軸方向から見たときの平面視を単に「平面視」とも言う。また、説明の便宜上、Y’軸方向(矢印の先端方向)から見たときの平面視において、+Y’軸方向(矢印方向)の面を上面、−Y’軸方向(矢印方向と反対側の方向)の面を下面として説明する。
第1の基板32および第2の基板34を構成する材料は、例えば、酸化物系セラミックス、窒化物系セラミックス、炭化物系セラミックス等の各種セラミックスである。
また、実装端子36を構成する材料は、タングステン(W)やモリブデン(Mo)等の金属配線材料上にニッケル(Ni)や金(Au)等のめっきが施されている。
振動デバイス1は、パッケージ本体30を構成する基板としての第1の基板32の上面に、接合部材24を介して、支持部材18の接合部20が接合され、支持部材18の上面に、接合部材22を介して、振動素子10の固定部16が接合・固定されている。従って、振動素子10は、支持部材18を介して、第1の基板32の上面に実装されているため、第1の基板32と振動素子10との熱膨張係数の違いによる熱応力に伴う歪を緩和することができる。なお、第1の基板32を構成材料であるセラッミクスの熱膨張係数は、7.5×10-6/Kであり、振動素子10を構成材料のATカット水晶基板の熱膨張係数は13.2×10-6/Kである。
また、より好ましくは、0.5≦(A2/A1)≦0.8を満たすことで、支持部材18を第1の基板32に接合する機械的強度を向上させ、より安定して保持することができる。
また、より好ましくは、2≦(A2/A3)≦5を満たすことで、小型化を図りつつ、第1の基板32と実装基板とによる熱応力に伴う歪を大幅に緩和し、熱応力に伴う歪を振動素子10に伝わり難くすることができる。
図2は、ATカット水晶基板と結晶軸との関係を説明するための図である。
振動素子10を構成する水晶基板は、図2に示すように、互いに直交する結晶軸X,Y,Zを有し、X軸は電気軸、Y軸は機械軸、Z軸は光学軸と、それぞれ呼称され、XZ面をX軸の回りに所定の角度θだけ回転させた平面に沿って、切り出された平板で、回転Yカット水晶基板である。
なお、本実施形態では、メサ形状のATカット水晶基板で構成された振動素子10を一例として挙げ説明したが、これに限定されることはなく、平板状の水晶基板でも構わない。
振動デバイス1が低温と高温との間の温度変化を繰り返す温度サイクルを受けた時、第1の基板32に接合されている支持部材18の接合部20を内包する最小の矩形の面積A2が、支持部材18に接合されている振動素子10の固定部16を内包する最小の矩形の面積A1より小さいため、支持部材18と第1の基板32との熱膨張係数の違いによる熱応力に伴う歪を緩和し、第1の基板32が受ける歪が振動素子10へ伝わるのを低減することができる。従って、温度サイクルを受けた時、周波数変化等の振動特性の変化が低減された振動デバイス1を得ることができる。
また、振動素子10を第1の基板32に実装する際に、支持部材18を介しているため、振動素子10と第1の基板32との熱膨張係数の違いによる熱応力に伴う歪を緩和することができる。また、第1の基板32に接合する支持部材18の接合部20を内包する面積A2が、支持部材18に接合する振動素子10の固定部16を内包する面積A1より小さい、つまり、A1≧A2であるため、支持部材18を第1の基板32に接合する際に、支持部材18と第1の基板32との熱膨張係数の違いによる熱応力に伴う歪を緩和し、支持部材18実装時の歪が振動素子10へ伝わるのを低減することができる。従って、第1の基板32への実装前後における周波数変化や実装時の歪によるエージング変化等の振動特性の劣化を低減した振動デバイス1を得ることができる。
また、振動素子10を支持部材18に接合する際に、熱膨張係数の違いによる熱応力に伴う歪がほとんどないので、支持部材18への接合時の歪の影響をより低減することができる。
次に、本発明の第2実施形態に係る振動デバイス1aについて、図3Aおよび図3Bを参照して説明する。
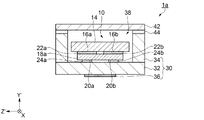
図3Aは、第2実施形態に係る振動デバイス1aの構成を示す概略平面図であり、図3Bは、図3AのP3−P3線における概略断面図である。図3Aにおいて、振動デバイス1aの内部の構成を説明する便宜上、蓋部材42を取り外した状態を図示している。なお、上述した実施形態との相違点を中心に説明し、同様の構成には、同一の符号を附してあり、同様の事項については、その説明を省略する。
本実施形態の振動デバイス1aは、図3Aおよび図3Bに示すように、振動素子10と、振動素子10の長手方向(X軸方向)と交差する方向(Z’軸方向)を長手方向とする矩形状の支持部材18aと、支持部材18aに接合された振動素子10を収納するパッケージ本体30と、を含み構成されている。
振動素子10が接合された支持部材18aは、Z’軸に沿って並ぶ2つの接合部20a,20bにおいて、導電性接着剤等の接合部材24a,24bを介して基板としての第1の基板32に接合されている。
また、振動素子10を支持部材18aに接合する接合部材22a,22bと、支持部材18aを第1の基板32に接合する接合部材24a,24bと、を異なる材料で構成することで、例えば、導電性接着剤に換えて金バンプや半田バンプ等とすると、導電性接着剤の硬化時に発生するガスによる周波数変動を低減することができる。従って、安定な振動特性を有する振動デバイス1aを得ることができる。
第1の基板32に接合する支持部材18aの2つの接合部20a,20bを内包する面積A2が、支持部材18aに接合する振動素子10の2つの固定部16a,16bを内包する面積A1より小さい、つまりA1≧A2であるため、振動デバイス1aが車載環境のような温度サイクルを受けた時、支持部材18と第1の基板32との熱膨張係数の違いによる熱応力に伴う歪を緩和し、第1の基板32が受ける歪が振動素子10へ伝わるのを低減することができる。従って、温度サイクルを受けた時、周波数変化等の振動特性の変化が低減された振動デバイス1aを得ることができる。
また、支持部材18aを第1の基板32に接合する際に、支持部材18aと第1の基板32との熱膨張係数の違いによる熱応力に伴う歪を緩和し、支持部材18a実装時の歪が振動素子10へ伝わるのを低減することができる。従って、第1の基板32への実装前後における周波数変化や実装時の歪によるエージング変化等の振動特性の劣化を低減した振動デバイス1aを得ることができる。
また、支持部材18aの結晶方位を振動素子10の結晶方位とは異ならせることにより、支持部材18aと振動素子10との熱膨張係数の差を異ならせることができるので、振動素子10を支持部材18aに接合する接合部材22a,22bと、支持部材18aを第1の基板32に接合する接合部材24a,24bと、を異なる材料で構成することができる。そのため、実装時に接合部材22a,22b,24a,24bから発生するガス等の影響を低減し、安定な振動特性を有する振動デバイス1aを得ることができる。
次に、本発明の第3実施形態に係る振動デバイス1bについて、図4Aおよび図4Bを参照して説明する。
図4Aは、第3実施形態に係る振動デバイス1bの構成を示す概略平面図であり、図4Bは、図4AのP4−P4線における概略断面図である。図4Aにおいて、振動デバイス1bの内部の構成を説明する便宜上、蓋部材42を取り外した状態を図示している。なお、上述した実施形態との相違点を中心に説明し、同様の構成には、同一の符号を附してあり、同様の事項については、その説明を省略する。
本実施形態の振動デバイス1bは、図4Aおよび図4Bに示すように、ATカット水晶基板からなる振動素子10bの中央部に凸部を有する振動素子10bと、ATカット水晶基板からなる支持部材18bの中央部に凹部を有する支持部材18bと、支持部材18bに接合された振動素子10bを収納するパッケージ本体30と、を含み構成されている。
第1の基板32に接合する支持部材18bの2つの接合部21a,21bを内包する面積A2が、支持部材18bに接合する振動素子10bの2つの固定部17a,17bを内包する面積A1より小さい、つまりA1≧A2であるため、振動デバイス1bが車載環境のような温度サイクルを受けた時、支持部材18bと第1の基板32との熱膨張係数の違いによる熱応力に伴う歪を緩和し、第1の基板32が受ける歪が振動素子10bへ伝わるのを低減することができる。従って、温度サイクルを受けた時、周波数変化等の振動特性の変化が低減された振動デバイス1bを得ることができる。
また、支持部材18bを第1の基板32に接合する際に、支持部材18bと第1の基板32との熱膨張係数の違いによる熱応力に伴う歪を緩和し、支持部材18b実装時の歪が振動素子10bへ伝わるのを低減することができる。従って、第1の基板32への実装前後における周波数変化や実装時の歪によるエージング変化等の振動特性の劣化を低減した振動デバイス1bを得ることができる。
次に、本発明の第4実施形態に係る振動デバイス1cについて、ダブルT型と呼ばれる構成の振動ジャイロ素子100を実装した振動デバイスを一例として挙げ、図5Aおよび図5Bを参照して説明する。
図5Aは、第4実施形態に係る振動デバイス1cの構成を示す概略平面図であり、図5Bは、図5AのP5−P5線における概略断面図である。図5Aにおいて、振動デバイス1cの内部の構成を説明する便宜上、蓋部材142を取り外した状態を図示している。また、各図では、説明の便宜上、互いに直交する3つの軸として、X軸、Y軸およびZ軸を図示しており、Z軸方向から見たときの平面視を単に「平面視」とも言う。なお、上述した実施形態との相違点を中心に説明し、同様の構成には、同一の符号を附してあり、同様の事項については、その説明を省略する。
本実施形態の振動デバイス1cは、図5Aおよび図5Bに示すように、振動素子としての振動ジャイロ素子100と、振動ジャイロ素子100を支持する支持部材102と、支持部材102に接合された振動ジャイロ素子100を収納するパッケージ本体130と、を含み構成されている。
そして、振動ジャイロ素子100は、水晶結晶軸において直交するX軸及びY軸で規定される平面に沿って切り出されて平板状に加工され、平面と直交するZ軸方向に所定の厚さを有している。なお、所定の厚さは、発振周波数(共振周波数)、外形サイズ、加工性などにより適宜設定される。
振動ジャイロ素子100は、フォトリソグラフィ技術を用いたエッチング(ウエットエッチングまたはドライエッチング)により形成されている。なお、振動ジャイロ素子100は、1枚の水晶ウエハーから複数個取りすることが可能である。
振動ジャイロ素子100は、中心部分に位置する基部110と、基部110からY軸に沿って、直線状に、一方がY軸のプラス方向へ延出され、他方がY軸のマイナス方向へ延出された振動部としての1対の検出用振動腕111a,111bと、検出用振動腕111a,111bと直交するように、基部110からX軸に沿って、直線状に、一方がX軸のプラス方向へ延出され、他方がX軸のマイナス方向へ延出された1対の連結腕113a,113bと、検出用振動腕111a,111bと平行になるように、各連結腕113a,113bの先端側からY軸に沿って、直線状に、一方がY軸のプラス方向へ延出され、他方がY軸のマイナス方向へ延出された振動部としての各1対の駆動用振動腕114a,114b,115a,115bとを備えている。
支持腕120aは、連結腕113aと検出用振動腕111aとの間の基部110の外縁から、X軸方向のマイナス側に延出した後に、Y軸方向のプラス側に延出し、その後、X軸方向のプラス側に延出した後、再度Y軸方向のプラス側に延出する蛇行形状部120dを備えている。
支持腕120bは、連結腕113bと検出用振動腕111aとの間の基部110の外縁から、X軸方向のプラス側に延出した後に、Y軸方向のプラス側に延出し、その後、X軸方向のマイナス側に延出した後、再度Y軸方向のプラス側に延出する蛇行形状部120cを備えている。
支持腕121aは、連結腕113aと検出用振動腕111bとの間の基部110の外縁から、X軸方向のマイナス側に延出した後に、Y軸方向のマイナス側に延出し、その後、X軸方向のプラス側に延出した後、再度Y軸方向のマイナス側に延出する蛇行形状部121dを備えている。
支持腕121bは、連結腕113bと検出用振動腕111bとの間の基部110の外縁から、X軸方向のプラス側に延出した後に、Y軸方向のマイナス側に延出し、その後、X軸方向のマイナス側に延出した後、再度Y軸方向のマイナス側に延出する蛇行形状部121cを備えている。
なお、支持部122と支持部123とは、振動ジャイロ素子100の重心Gを回転中心として、回転対称形状となっていることが、バランス上好ましい。
また、振動ジャイロ素子100が接合された支持部材102は、支持部材102のY軸方向の両端にX軸に沿って並ぶ3つの接合部152a,152bにおいて、導電性接着剤等の接合部材106を介してパッケージ本体の130の第1の基板132に接合されている。
第1の基板132に接合する支持部材102の6つの接合部152a,152bを内包する面積A2が、支持部材102に接合する振動ジャイロ素子100の6つの固定部150a,150bを内包する面積A1より小さい、つまりA1≧A2であるため、振動デバイス1cが車載環境のような温度サイクルを受けた時、支持部材102と第1の基板132との熱膨張係数の違いによる熱応力に伴う歪を緩和し、第1の基板132が受ける歪が振動ジャイロ素子100へ伝わるのを低減することができる。従って、温度サイクルを受けた時、周波数変化等の振動特性の変化が低減された振動デバイス1cを得ることができる。
また、支持部材102を第1の基板132に接合する際に、支持部材102と第1の基板132との熱膨張係数の違いによる熱応力に伴う歪を緩和し、支持部材102実装時の歪が振動ジャイロ素子100へ伝わるのを低減することができる。従って、第1の基板132への実装前後における周波数変化や実装時の歪によるエージング変化等の振動特性の劣化を低減した振動デバイス1cを得ることができる。
次に、本発明の一実施形態に係る振動デバイス1〜1bの少なくとも1つを備える発振器200について、図6を参照して説明する。
図6は、本発明の振動デバイス1を備える発振器200の構造を示す概略断面図である。なお、説明の便宜上、互いに直交する3つの軸として、X軸、Y軸およびZ軸を図示している。
発振器200は、振動デバイス1と、振動デバイス1を発振させるための発振回路を有するICチップ(チップ部品)70と、キャビティー58内に振動デバイス1およびICチップ70を収納するパッケージ本体50と、ガラス、セラミック、又は金属等から成る蓋部材62と、を含み構成されている。
従って、振動素子10,10b実装時の熱応力に伴う歪の影響を低減した振動デバイス1〜1bを備えていることにより、所望の共振周波数を安定して取り出すことができる発振器200を得ることができる。
次に、本発明の一実施形態に係る振動デバイス1c(振動ジャイロ素子100)を備えるジャイロセンサー300について、図7を参照して説明する。
図7は、本発明の振動デバイス1cを備えるジャイロセンサー300の構造を示す概略断面図である。なお、説明の便宜上、互いに直交する3つの軸として、X軸、Y軸およびZ軸を図示しており、図5Aおよび図5Bに用いた軸と同一である。
セラミックなどで形成され、キャビティー188内が3段の凹部で構成されたパッケージ本体180は、第1の基板181と、第2の基板182と、第3の基板183と、第4の基板184と、実装端子186と、を積層して形成されている。
そして、ジャイロセンサー300のキャビティー188内は、略真空又は減圧雰囲気に保持され、ホウケイ酸ガラス等の封止材194により蓋部材193が接合されることで、気密封止されている。
次に、本発明の一実施形態に係る振動デバイス1〜1cの少なくとも1つを適用した電子機器について、図8、図9および図10を参照して説明する。なお、以下の例では1つの振動デバイス1のみを図示しているが、2個以上の振動デバイス1〜1cが搭載されていてもよいし、2個以上の振動デバイス1〜1cが同じものでも、振動デバイス1〜1cのうち異なるものであってもよい。
デジタルスチールカメラ1300におけるケース(ボディー)1302の背面には、ディスプレイ1000が設けられ、CCDによる撮像信号に基づいて表示を行なう構成になっており、ディスプレイ1000は、被写体を電子画像として表示するファインダーとして機能する。また、ケース1302の正面側(図中裏面側)には、光学レンズ(撮像光学系)やCCD等を含む受光ユニット1304が設けられている。
撮影者がディスプレイ1000に表示された被写体像を確認し、シャッターボタン1306を押下すると、その時点におけるCCDの撮像信号が、メモリー1308に転送・格納される。また、このデジタルスチールカメラ1300においては、ケース1302の側面に、ビデオ信号出力端子1312と、データ通信用の入出力端子1314とが設けられている。そして、図示されるように、ビデオ信号出力端子1312にはテレビモニター1330が、データ通信用の入出力端子1314にはパーソナルコンピューター1340が、それぞれ必要に応じて接続される。さらに、所定の操作により、メモリー1308に格納された撮像信号が、テレビモニター1330や、パーソナルコンピューター1340に出力される構成になっている。このようなデジタルスチールカメラ1300には、基準クロック等として機能する振動デバイス1が内蔵されている。
次に、本発明の一実施形態に係る振動デバイス1〜1cを適用した移動体について説明する。
図11は、本発明の移動体の一例としての自動車1400を概略的に示す斜視図である。自動車1400には、振動デバイス1が搭載されている。振動デバイス1は、キーレスエントリー、イモビライザー、ナビゲーションシステム、エアコン、アンチロックブレーキシステム(ABS:Antilock Brake System)、エアバック、タイヤプレッシャーモニタリングシステム(TPMS:Tire Pressure Monitoring System)、エンジンコントロール、ハイブリッド自動車や電気自動車の電池モニター、車体姿勢制御システム等の電子制御ユニット(ECU:Electronic Control Unit)1410に広く適用できる。
Claims (15)
- 振動部と固定部とを有する振動素子と、
前記固定部が接合されて前記振動素子を支持する支持部材と、
前記支持部材が接合されている基板と、を備え、
前記支持部材は、前記基板に接合されている接合部を有し、
前記振動素子の厚さ方向からの平面視において、前記固定部を内包する矩形領域の面積をA1、前記接合部を内包する矩形領域の面積をA2とした場合に、A1≧A2を満たすことを特徴とする振動デバイス。 - 前記平面視において、前記振動部は、前記固定部を内包する矩形領域および前記接合部を内包する矩形領域に重なる領域を有することを特徴とする請求項1に記載の振動デバイス。
- 前記A1と前記A2との関係が、0.1≦(A2/A1)≦1.0を満たすことを特徴とする請求項1又は請求項2に記載の振動デバイス。
- 前記A1と前記A2との関係が、0.5≦(A2/A1)≦0.8を満たすことを特徴とする請求項3に記載の振動デバイス。
- 前記支持部材は、少なくとも一部が前記振動素子と同じ材料であることを特徴とする請求項1乃至請求項4のいずれか一項に記載の振動デバイス。
- 前記支持部材は、第1の結晶方位を有する結晶材料を含み、
前記振動素子は、前記支持部材の前記結晶材料と同じ結晶材料であって、第2の結晶方位を有する結晶材料を含み、
前記平面視において、前記第1の結晶方位は、前記第2の結晶方位とは異なることを特徴とする請求項5に記載の振動デバイス。 - 前記平面視において、前記支持部材のアスペクト比は、前記振動素子のアスペクト比とは異なることを特徴とする請求項1乃至請求項6のいずれか一項に記載の振動デバイス。
- 前記基板は、複数の外部接続部を備え、
前記平面視において、前記複数の外部接続部を内包する矩形領域の面積をA3とした場合に、A3≧A2を満たすことを特徴とする請求項1乃至請求項7のいずれか一項に記載の振動デバイス。 - 前記A2と前記A3との関係が、1≦(A2/A3)≦100を満たすことを特徴とする請求項8に記載の振動デバイス。
- 前記A2と前記A3との関係が、2≦(A2/A3)≦5を満たすことを特徴とする請求項8又は請求項9に記載の振動デバイス。
- 前記振動素子は、基部と、前記基部から延出する前記振動部と、前記基部から延出する複数の支持腕と、を備え、
前記複数の支持腕は、各々前記固定部と蛇行形状部とを備えていることを特徴とする請求項1に記載の振動デバイス。 - 請求項1乃至請求項10のいずれか一項に記載の振動デバイスと、
前記振動デバイスを発振させる発振回路と、
を備えていることを特徴とする発振器。 - 請求項11に記載の振動デバイスと、
前記振動デバイスを駆動させる駆動回路と、
を備えていることを特徴とするジャイロセンサー。 - 請求項1乃至請求項11のいずれか一項に記載の振動デバイスを備えていることを特徴とする電子機器。
- 請求項1乃至請求項11のいずれか一項に記載の振動デバイスを備えていることを特徴とする移動体。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017058706A JP2018164126A (ja) | 2017-03-24 | 2017-03-24 | 振動デバイス、発振器、ジャイロセンサー、電子機器および移動体 |
| CN201810182370.XA CN108631749B (zh) | 2017-03-24 | 2018-03-06 | 振动器件、振荡器、陀螺仪传感器、电子设备和移动体 |
| US15/926,571 US10651819B2 (en) | 2017-03-24 | 2018-03-20 | Vibrator device, oscillator, gyro sensor, electronic apparatus, and vehicle |
| US16/839,125 US11509288B2 (en) | 2017-03-24 | 2020-04-03 | Vibrator device, oscillator, gyro sensor, electronic apparatus, and vehicle |
| US17/967,927 US20230040197A1 (en) | 2017-03-24 | 2022-10-18 | Vibrator Device, Oscillator, Gyro Sensor, Electronic Apparatus, And Vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017058706A JP2018164126A (ja) | 2017-03-24 | 2017-03-24 | 振動デバイス、発振器、ジャイロセンサー、電子機器および移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018164126A true JP2018164126A (ja) | 2018-10-18 |
| JP2018164126A5 JP2018164126A5 (ja) | 2020-04-02 |
Family
ID=63583007
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017058706A Pending JP2018164126A (ja) | 2017-03-24 | 2017-03-24 | 振動デバイス、発振器、ジャイロセンサー、電子機器および移動体 |
Country Status (3)
| Country | Link |
|---|---|
| US (3) | US10651819B2 (ja) |
| JP (1) | JP2018164126A (ja) |
| CN (1) | CN108631749B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021057651A (ja) * | 2019-09-27 | 2021-04-08 | 日本電波工業株式会社 | ブランクを搭載する台座、振動子及び発振器 |
| JP2021061500A (ja) * | 2019-10-04 | 2021-04-15 | 日本電波工業株式会社 | ブランクを搭載する台座、振動子及び発振器 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018164126A (ja) * | 2017-03-24 | 2018-10-18 | セイコーエプソン株式会社 | 振動デバイス、発振器、ジャイロセンサー、電子機器および移動体 |
| CN111224635B (zh) * | 2018-11-27 | 2024-01-19 | 京瓷株式会社 | 压电器件以及电子设备 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02261211A (ja) * | 1989-03-31 | 1990-10-24 | Nippon Dempa Kogyo Co Ltd | 多重モード型水晶振動子 |
| JPH1123285A (ja) * | 1997-07-08 | 1999-01-29 | Alps Electric Co Ltd | 振動子の支持構造 |
| JP2001358554A (ja) * | 2000-06-14 | 2001-12-26 | Murata Mfg Co Ltd | 圧電共振部品 |
| JP2010060398A (ja) * | 2008-09-03 | 2010-03-18 | Alps Electric Co Ltd | ジャイロセンサ及びその製造方法 |
| JP2015039162A (ja) * | 2013-07-19 | 2015-02-26 | 日本電波工業株式会社 | 表面実装型水晶デバイス |
| JP2015080039A (ja) * | 2013-10-15 | 2015-04-23 | 日本電波工業株式会社 | 圧電デバイス |
| JP2016086383A (ja) * | 2014-10-29 | 2016-05-19 | セイコーエプソン株式会社 | 振動素子、電子デバイス、電子機器および移動体 |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW567664B (en) * | 2001-10-09 | 2003-12-21 | Ebauchesfabrik Eta Ag | Piezoelectric resonator and assembly comprising the same enclosed in a case |
| JP4141432B2 (ja) | 2003-11-10 | 2008-08-27 | 日本電波工業株式会社 | 音叉型水晶振動子 |
| FR2872501B1 (fr) | 2004-07-01 | 2006-11-03 | Commissariat Energie Atomique | Microresonateur composite a forte deformation |
| US8384486B2 (en) | 2007-07-18 | 2013-02-26 | Seiko Epson Corporation | Piezoelectric oscillator and transmitter |
| JP5157641B2 (ja) | 2008-01-28 | 2013-03-06 | セイコーエプソン株式会社 | 圧電発振器及び送信機 |
| JP2009253883A (ja) * | 2008-04-10 | 2009-10-29 | Nippon Dempa Kogyo Co Ltd | 圧電振動デバイス |
| JP5340788B2 (ja) | 2008-09-29 | 2013-11-13 | 日本電波工業株式会社 | 水晶振動片及び水晶振動子 |
| JP2010135890A (ja) | 2008-12-02 | 2010-06-17 | Nippon Dempa Kogyo Co Ltd | 水晶デバイス |
| JP5533135B2 (ja) * | 2010-03-30 | 2014-06-25 | 富士通株式会社 | パッケージ、圧電振動子及び圧電発振器 |
| JP2012090202A (ja) | 2010-10-22 | 2012-05-10 | Seiko Epson Corp | 圧電デバイス、圧電発振器 |
| JP2012169962A (ja) | 2011-02-16 | 2012-09-06 | Seiko Epson Corp | 圧電デバイス |
| JP2012191559A (ja) | 2011-03-14 | 2012-10-04 | Nippon Dempa Kogyo Co Ltd | 水晶振動片及び水晶デバイス |
| JP5708089B2 (ja) * | 2011-03-18 | 2015-04-30 | セイコーエプソン株式会社 | 圧電振動素子、圧電振動子、圧電発振器及び電子デバイス |
| JP2013021667A (ja) * | 2011-03-23 | 2013-01-31 | Nippon Dempa Kogyo Co Ltd | 水晶デバイス |
| JP2013098678A (ja) | 2011-10-31 | 2013-05-20 | Nippon Dempa Kogyo Co Ltd | 水晶振動子 |
| JP2013165404A (ja) * | 2012-02-10 | 2013-08-22 | Seiko Instruments Inc | 振動デバイス及び発振器 |
| JP6175743B2 (ja) * | 2012-06-06 | 2017-08-09 | セイコーエプソン株式会社 | 振動素子の製造方法 |
| JP2014011644A (ja) | 2012-06-29 | 2014-01-20 | Kyocera Crystal Device Corp | 温度補償型圧電デバイス |
| JP2014033368A (ja) | 2012-08-03 | 2014-02-20 | Nippon Dempa Kogyo Co Ltd | 電子部品及び発振器 |
| JP2014175880A (ja) | 2013-03-08 | 2014-09-22 | Seiko Epson Corp | 振動子、発振器、電子機器および移動体 |
| JP6107332B2 (ja) * | 2013-03-29 | 2017-04-05 | セイコーエプソン株式会社 | 振動子、発振器、電子機器および移動体 |
| JP2015002314A (ja) | 2013-06-18 | 2015-01-05 | セイコーエプソン株式会社 | 電子デバイス、電子機器、および移動体 |
| JP2015008353A (ja) * | 2013-06-24 | 2015-01-15 | セイコーエプソン株式会社 | 振動素子、振動デバイス、電子機器、移動体、および振動素子の製造方法 |
| JP2015046778A (ja) | 2013-08-28 | 2015-03-12 | 日本電波工業株式会社 | 振動子パッケージ及び発振器 |
| JP2015046779A (ja) | 2013-08-28 | 2015-03-12 | 日本電波工業株式会社 | 振動子パッケージ及び発振器 |
| JP2015088876A (ja) * | 2013-10-30 | 2015-05-07 | セイコーエプソン株式会社 | 振動素子、振動子、電子デバイス、電子機器及び移動体 |
| JP2015091100A (ja) | 2013-11-07 | 2015-05-11 | 京セラクリスタルデバイス株式会社 | 弾性表面波デバイス |
| JP6318590B2 (ja) * | 2013-12-05 | 2018-05-09 | セイコーエプソン株式会社 | 振動素子、振動子、振動デバイス、電子機器および移動体 |
| JP2015122607A (ja) | 2013-12-24 | 2015-07-02 | セイコーエプソン株式会社 | 発振器、電子機器および移動体 |
| JP2016029762A (ja) * | 2014-07-25 | 2016-03-03 | セイコーエプソン株式会社 | 振動素子、振動子、発振器、電子機器、および移動体 |
| JP2016051959A (ja) | 2014-08-29 | 2016-04-11 | セイコーエプソン株式会社 | Mems振動子、電子機器および移動体 |
| JP2016051942A (ja) | 2014-08-29 | 2016-04-11 | セイコーエプソン株式会社 | Mems振動子、電子機器および移動体 |
| JP2016063521A (ja) | 2014-09-22 | 2016-04-25 | セイコーエプソン株式会社 | 振動子、電子機器および移動体 |
| US9631923B2 (en) * | 2014-09-22 | 2017-04-25 | The Boeing Company | Real-time non-linear optical strain gauge system |
| JP2016119517A (ja) | 2014-12-18 | 2016-06-30 | セイコーエプソン株式会社 | 振動子、電子機器および移動体 |
| US9712109B2 (en) * | 2015-01-06 | 2017-07-18 | Seiko Epson Corporation | Resonation device, oscillator, electronic apparatus, and moving object |
| JP2016149595A (ja) | 2015-02-10 | 2016-08-18 | セイコーエプソン株式会社 | 振動子、発振器、リアルタイムクロック、電子機器、および移動体 |
| JP2016174301A (ja) * | 2015-03-17 | 2016-09-29 | セイコーエプソン株式会社 | 振動片、振動子、振動デバイス、発振器、電子機器、および移動体 |
| JP2017079388A (ja) * | 2015-10-20 | 2017-04-27 | セイコーエプソン株式会社 | 圧電振動子、電子機器及び移動体 |
| JP2018085705A (ja) * | 2016-11-25 | 2018-05-31 | 太陽誘電株式会社 | 電子部品およびその製造方法 |
| JP2018164126A (ja) * | 2017-03-24 | 2018-10-18 | セイコーエプソン株式会社 | 振動デバイス、発振器、ジャイロセンサー、電子機器および移動体 |
-
2017
- 2017-03-24 JP JP2017058706A patent/JP2018164126A/ja active Pending
-
2018
- 2018-03-06 CN CN201810182370.XA patent/CN108631749B/zh active Active
- 2018-03-20 US US15/926,571 patent/US10651819B2/en active Active
-
2020
- 2020-04-03 US US16/839,125 patent/US11509288B2/en active Active
-
2022
- 2022-10-18 US US17/967,927 patent/US20230040197A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02261211A (ja) * | 1989-03-31 | 1990-10-24 | Nippon Dempa Kogyo Co Ltd | 多重モード型水晶振動子 |
| JPH1123285A (ja) * | 1997-07-08 | 1999-01-29 | Alps Electric Co Ltd | 振動子の支持構造 |
| JP2001358554A (ja) * | 2000-06-14 | 2001-12-26 | Murata Mfg Co Ltd | 圧電共振部品 |
| JP2010060398A (ja) * | 2008-09-03 | 2010-03-18 | Alps Electric Co Ltd | ジャイロセンサ及びその製造方法 |
| JP2015039162A (ja) * | 2013-07-19 | 2015-02-26 | 日本電波工業株式会社 | 表面実装型水晶デバイス |
| JP2015080039A (ja) * | 2013-10-15 | 2015-04-23 | 日本電波工業株式会社 | 圧電デバイス |
| JP2016086383A (ja) * | 2014-10-29 | 2016-05-19 | セイコーエプソン株式会社 | 振動素子、電子デバイス、電子機器および移動体 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021057651A (ja) * | 2019-09-27 | 2021-04-08 | 日本電波工業株式会社 | ブランクを搭載する台座、振動子及び発振器 |
| JP2021061500A (ja) * | 2019-10-04 | 2021-04-15 | 日本電波工業株式会社 | ブランクを搭載する台座、振動子及び発振器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180278235A1 (en) | 2018-09-27 |
| US20230040197A1 (en) | 2023-02-09 |
| US20200235717A1 (en) | 2020-07-23 |
| CN108631749B (zh) | 2023-10-10 |
| US10651819B2 (en) | 2020-05-12 |
| US11509288B2 (en) | 2022-11-22 |
| CN108631749A (zh) | 2018-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11509288B2 (en) | Vibrator device, oscillator, gyro sensor, electronic apparatus, and vehicle | |
| US9525400B2 (en) | Resonator element, resonator, oscillator, electronic apparatus and moving object | |
| US20140292433A1 (en) | Resonator element, resonator, oscillator, electronic apparatus, and moving object | |
| CN105987690B (zh) | 振动片、振子、振动装置、振荡器、电子设备以及移动体 | |
| US20150381184A1 (en) | Composite electronic component, oscillator, electronic apparatus, and mobile object | |
| JP6155897B2 (ja) | 振動片、振動子、電子デバイス、電子機器及び移動体 | |
| US9354128B2 (en) | Resonator element, resonator, oscillator, electronic apparatus, sensor, and mobile object | |
| US10103710B2 (en) | Resonator, oscillator, electronic apparatus, and mobile object | |
| US11075613B2 (en) | Vibrator device, electronic apparatus, and vehicle | |
| US9178471B2 (en) | Resonating element, resonator, oscillator, electronic apparatus, and mobile object | |
| JP7314562B2 (ja) | 振動デバイス、発振器、電子機器および移動体 | |
| JP2019102848A (ja) | 振動デバイス、振動デバイスの製造方法、電子機器および移動体 | |
| US10305426B2 (en) | Method for manufacturing resonator element, wafer, resonator element, resonator, oscillator, real-time clock, electronic apparatus, and moving object | |
| JP2019009619A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6044222B2 (ja) | 振動片、振動子、電子デバイス、電子機器、および移動体 | |
| JP2019176224A (ja) | 振動子、発振器、電子機器および移動体 | |
| JP2019153855A (ja) | 振動デバイス、電子機器および移動体 | |
| JP2019118073A (ja) | 振動デバイス、振動デバイスの製造方法、電子機器および移動体 | |
| JP6340774B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2019022140A (ja) | 振動デバイス、振動デバイスの製造方法、発振器、電子機器および移動体 | |
| JP6680372B2 (ja) | 振動子、振動デバイス、発振器、電子機器、および移動体 | |
| JP6465152B2 (ja) | 振動片、振動子、電子デバイス、電子機器及び移動体 | |
| JP2019169796A (ja) | 振動デバイス、電子機器および移動体 | |
| JP2018085620A (ja) | 振動デバイス、振動デバイスの製造方法、発振器、電子機器、および移動体 | |
| JP2015046666A (ja) | 振動素子、発振器、センサー、電子機器及び移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180910 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20190402 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200218 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200218 |
|
| RD07 | Notification of extinguishment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7427 Effective date: 20200803 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210317 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210720 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210915 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210921 |