JP2006085285A - 危険車両予測装置 - Google Patents
危険車両予測装置 Download PDFInfo
- Publication number
- JP2006085285A JP2006085285A JP2004267322A JP2004267322A JP2006085285A JP 2006085285 A JP2006085285 A JP 2006085285A JP 2004267322 A JP2004267322 A JP 2004267322A JP 2004267322 A JP2004267322 A JP 2004267322A JP 2006085285 A JP2006085285 A JP 2006085285A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- dangerous
- behavior
- vehicles
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

























Abstract
【解決手段】 危険車両予測装置は、自車両を基準として、周囲を走行中の他車両の方向及び/又は距離を検出する周囲車両検出部121と、自車両、及び周囲車両検出部121により検出された他車両のそれぞれについて、過去から現在に至る挙動を示す挙動情報を累積する車両挙動累積部125と、車両挙動累積部125で累積された挙動情報のそれぞれに基づいて、周囲車両検出部121で検出された他車両から、近い将来危険を及ぼす可能性があるものを危険車両として予測する危険車両予測部126とを備える。
【選択図】 図7
Description
車速検出部は、自車両の速度を検出する。
車両挙動検出部は、自車両の挙動を検出する。
対象物識別部は、車両周囲物体検出部により対象物が識別されると、その対象物と自車両との間の距離及び相対速度を算出し、識別された対象物の方角を検出する。
表示部は、画像生成部により生成された表示画像を生成する。
危険事象は、本予測装置1が運転者に報知する危険の種類を示す情報である。
単独/複数は、危険事象で特定される危険(以下、対象となる危険)が、ある他車両単独で判定可能なものか、それ以外の他車両との関係により判定可能な危険かを示す。
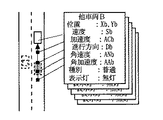
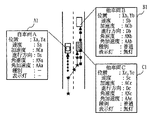
。このような処理を繰り返すことにより、自車両Aを含む3台の車両A−Cが、現在までにどのような挙動をとってきたかを、車両挙動累積部125は時系列的に保持することが可能となる。
2 レーダ部
3 撮像部
4 天候検知器
5 路面状態検知器
6 車車間通信装置
101 CPU
102 RAM
103 ROM
104 表示装置
105 表示制御装置
106 音声出力装置
107 スピーカ
108 角速度センサ
109 インターフェース
121 周囲車両検出部
122 周囲車両種別検出部
123 表示灯状態検出部
124 車線検出部
125 車両挙動累積部
126 危険車両予測部
Claims (18)
- 自身が搭載された自車両の周囲を走行する他車両の危険性を予測する危険車両予測装置であって、
前記自車両を基準として、周囲を走行中の他車両の方向及び/又は距離を検出する周囲車両検出部と、
前記自車両、及び前記周囲車両検出部により検出された他車両のそれぞれについて、過去から現在に至る挙動を示す挙動情報を累積する車両挙動累積部と、
車両挙動累積部で累積された挙動情報のそれぞれに基づいて、前記周囲車両検出部で検出された他車両から、近い将来危険を及ぼす可能性があるものを危険車両として予測する危険車両予測部とを備える、危険車両予測装置。 - 前記危険車両予測部は、現時点で前記自車両に対して直接的な危険を及ぼさなくとも、近い将来危険を及ぼしかねないという潜在的危険性を持っていると予測される危険車両を予測する、請求項1に記載の危険車両予測装置。
- 前記危険車両予測部は、他車両単独で、又は複合事故を起こす可能性がある複数の他車両のいずれかを、危険車両として予測する、請求項1に記載の危険車両予測装置。
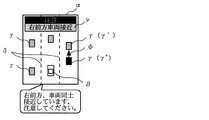
- 前記危険車両予測部は、自車両の運転者の錯視により、他車両に対する運転者の認識と、実情とに差異が生じている可能性がある場合、当該他車両を危険車両として予測する、請求項1に記載の危険車両予測装置。
- 前記自車両周辺の路面の状況及び/又は天候を検出する検出器をさらに備え、
前記危険車両予測部は、前記検出器により検出された路面状況及び/又は路面状況を使って危険車両を予測する、請求項1に記載の危険車両予測装置。 - 前記周囲車両検出部により検出された他車両の種別を検出する種別検出部をさらに備え、
前記危険車両予測部は、前記種別検出部により検出された他車両の種別を参照して危険車両を予測する、請求項1に記載の危険車両予測装置。 - 前記周囲車両検出部により検出された他車両に備わる灯火器の状態を検出する状態検出部をさらに備え、
前記危険車両予測部は、前記状態検出部により検出された他車両の灯火器の状態を参照して危険車両を予測する、請求項1に記載の危険車両予測装置。 - 前記危険車両予測部は、自車両に搭載される記憶装置に格納される道路ネットワークデータと、自車両に搭載されるロケータにより導出される自車両の現在位置とに基づいて危険車両を予測する、請求項1に記載の危険車両予測装置。
- 危険車両の典型的な挙動を表す危険車両挙動モデルデータを格納する記憶装置をさらに備え、
危険車両予測部は、前記記憶装置に格納された危険車両挙動モデルデータをさらに使って、危険車両を予測する、請求項1に記載の危険車両予測装置。 - 前記危険車両挙動モデルデータは、他車両同士の異常接近、他車両同士の割り込み、周辺車両の走行速度にそぐわない速度の他車両、スムーズでない合流地点での合流、ある他車両の急ブレーキや急ハンドル、悪天候時の適正速度超過、大型車の適正速度超過、車線内における不適切な走行位置、夜間の無灯火、頻繁な車線変更、突然な車線変更、方向指示器を出さない車線変更、ふらつきなどの挙動異常、コリジョンコース現象による錯視、夜間の高速道路渋滞末尾へ接近しても渋滞に見えない錯視、夜間の並走二輪車が四輪車に見える錯視、及び、大型車両のブレーキランプの設置位置により夜間の大型車両へ接近時の車間距離が長く感じる錯視から選ばれた1以上の挙動を表す、請求項9に記載の危険車両予測装置。
- 前記自車両の周囲画像を撮影する少なくとも1個の撮像装置をさらに備え、
前記車両挙動累積部は、前記少なくとも1個の撮像装置から得られる周囲画像に基づいて、前記自車両、及び前記周囲車両検出部により検出された他車両のそれぞれについて、過去から現在に至る挙動を示す挙動情報を累積する、請求項1に記載の危険車両予測装置。 - 前記少なくとも1個の撮像装置から得られる周囲画像を使って、前記自車両が走行する道路上の区画線を検出する区画線検出部をさらに備え、
前記車両挙動累積部は、前記区画線検出部により検出された区画線に基づいて、前記自車両、及び前記周囲車両検出部により検出された他車両のそれぞれについて、過去から現在に至る挙動を示す挙動情報を累積する、請求項1に記載の危険車両予測装置。 - 前記周囲車両検出部は、77GHzミリ波レーダ、77GHzレーザレーダ、24GHzUWBレーダ、カメラ及び車車間無線通信による位置情報の送受信から選ばれた1以上を用いて、他車両の方向及び/又は距離を検出する、請求項1に記載の危険車両予測装置。
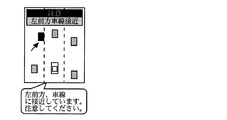
- 前記危険車両予測部により予測された危険車両を、画像及び/又は音声を使って運転者に報知する報知部をさらに備える、請求項1に記載の危険車両予測装置。
- 前記自車両の速度が予め定められた基準速度未満の場合、前記報知部は、前記危険車両予測部により予測された危険車両を報知しない、請求項14に記載の危険車両予測装置。
- 前記危険車両予測部により予測された危険車両を示す情報を外部に送信する車車間無線通信部をさらに備える、請求項1に記載の危険車両予測装置。
- 自身が搭載された自車両の周囲を走行する他車両の危険性を予測する危険車両予測方法であって、
前記自車両を基準として、周囲を走行中の他車両の方向及び/又は距離を検出する周囲車両検出ステップと、
前記自車両、及び前記周囲車両検出ステップで検出された他車両のそれぞれについて、過去から現在に至る挙動を示す挙動情報を累積する車両挙動累積ステップと、
車両挙動累積ステップで累積された挙動情報のそれぞれに基づいて、前記周囲車両検出ステップで検出された他車両から、近い将来危険を及ぼす可能性があるものを危険車両として予測する危険車両予測ステップとを備える、危険車両予測方法。 - 自身が搭載された自車両の周囲を走行する他車両の危険性を予測するためのコンピュータプログラムであって、
前記自車両を基準として、周囲を走行中の他車両の方向及び/又は距離を検出する周囲車両検出ステップと、
前記自車両、及び前記周囲車両検出ステップで検出された他車両のそれぞれについて、過去から現在に至る挙動を示す挙動情報を累積する車両挙動累積ステップと、
車両挙動累積ステップで累積された挙動情報のそれぞれに基づいて、前記周囲車両検出ステップで検出された他車両から、近い将来危険を及ぼす可能性があるものを危険車両として予測する危険車両予測ステップとを備える、コンピュータプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004267322A JP2006085285A (ja) | 2004-09-14 | 2004-09-14 | 危険車両予測装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004267322A JP2006085285A (ja) | 2004-09-14 | 2004-09-14 | 危険車両予測装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006085285A true JP2006085285A (ja) | 2006-03-30 |
| JP2006085285A5 JP2006085285A5 (ja) | 2007-07-26 |
Family
ID=36163767
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004267322A Pending JP2006085285A (ja) | 2004-09-14 | 2004-09-14 | 危険車両予測装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006085285A (ja) |
Cited By (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007310745A (ja) * | 2006-05-19 | 2007-11-29 | Aisin Aw Co Ltd | 運転支援装置 |
| JP2008033872A (ja) * | 2006-07-04 | 2008-02-14 | Denso Corp | 車両用視界状況判定装置 |
| WO2008056806A1 (fr) | 2006-11-10 | 2008-05-15 | Toyota Jidosha Kabushiki Kaisha | Procédé, dispositif et programme de prédiction de parcours d'obstacles |
| JP2008123112A (ja) * | 2006-11-09 | 2008-05-29 | Toyota Motor Corp | 車両警告システム、車両警告方法 |
| JP2008254657A (ja) * | 2007-04-06 | 2008-10-23 | Denso Corp | 走行支援制御システム、及び走行支援の制御方法 |
| DE102008010119A1 (de) | 2007-02-21 | 2008-11-20 | Denso Corp., Kariya-shi | Vorrichtung zum Erfassen eines Objekts und System zur Kommunikation zwischen Fahrzeugen |
| JP2008310690A (ja) * | 2007-06-15 | 2008-12-25 | Denso Corp | 車両用認知支援装置 |
| JP2009157438A (ja) * | 2007-12-25 | 2009-07-16 | Nissan Motor Co Ltd | 車載警報装置及び車両用警報方法 |
| JP2010018162A (ja) * | 2008-07-10 | 2010-01-28 | Fuji Heavy Ind Ltd | 車両の衝突防止装置 |
| JP2010055333A (ja) * | 2008-08-28 | 2010-03-11 | Bosch Corp | 安全運転支援システム |
| JP2010073007A (ja) * | 2008-09-19 | 2010-04-02 | Mazda Motor Corp | 車両の障害物検知装置 |
| JP2010076504A (ja) * | 2008-09-24 | 2010-04-08 | Fuji Heavy Ind Ltd | 車両の運転支援装置 |
| JP2010182236A (ja) * | 2009-02-09 | 2010-08-19 | Toyota Motor Corp | 移動領域予測装置 |
| JP2011100492A (ja) * | 2011-02-07 | 2011-05-19 | Toyota Motor Corp | 移動領域予測装置 |
| JP2012022671A (ja) * | 2010-06-15 | 2012-02-02 | Nissan Motor Co Ltd | 運転支援装置 |
| WO2012141219A1 (ja) * | 2011-04-13 | 2012-10-18 | 日産自動車株式会社 | 走行支援装置及びその隣接車両検出方法 |
| JP2013127754A (ja) * | 2011-12-19 | 2013-06-27 | Fujitsu Ltd | 記録装置、記録プログラム及び記録方法 |
| JP2013214249A (ja) * | 2012-04-03 | 2013-10-17 | Denso Corp | 運転支援装置 |
| JP2015024742A (ja) * | 2013-07-26 | 2015-02-05 | 日産自動車株式会社 | 運転支援装置および運転支援方法 |
| KR101507507B1 (ko) * | 2013-05-31 | 2015-03-31 | (주) 세인 | 스테레오 카메라를 이용한 객체 처리 시스템 및 방법 |
| JPWO2013121898A1 (ja) * | 2012-02-14 | 2015-05-11 | 日産自動車株式会社 | 立体物検出装置 |
| JP2016024509A (ja) * | 2014-07-16 | 2016-02-08 | 株式会社デンソーアイティーラボラトリ | 車両用警告システム |
| CN105329237A (zh) * | 2014-08-08 | 2016-02-17 | 现代自动车株式会社 | 用于基于融合雷达传感器避免车辆碰撞的方法和装置 |
| JP2016509971A (ja) * | 2013-02-21 | 2016-04-04 | グーグル インコーポレイテッド | 運転モード調整 |
| JP2016143089A (ja) * | 2015-01-29 | 2016-08-08 | 住友電気工業株式会社 | 危険車両検知システム及び車載情報処理装置 |
| JP2016143087A (ja) * | 2015-01-29 | 2016-08-08 | 住友電気工業株式会社 | 位置検出システム及び車載情報処理装置 |
| JP2016143091A (ja) * | 2015-01-29 | 2016-08-08 | 住友電気工業株式会社 | 運転支援システム及び車載情報処理装置 |
| CN106394553A (zh) * | 2015-08-03 | 2017-02-15 | Lg电子株式会社 | 驾驶员辅助设备及其控制方法 |
| CN106585623A (zh) * | 2016-12-21 | 2017-04-26 | 驭势科技(北京)有限公司 | 一种用于探测车辆周围目标的探测系统以及其应用 |
| WO2017134897A1 (ja) * | 2016-02-02 | 2017-08-10 | ソニー株式会社 | 映像処理装置及び映像処理方法 |
| JP2017162411A (ja) * | 2016-03-11 | 2017-09-14 | パナソニックIpマネジメント株式会社 | 送信装置、通信システム |
| WO2017169691A1 (ja) * | 2016-04-01 | 2017-10-05 | 株式会社デンソー | 運転支援装置及び運転支援プログラム |
| JP2017204071A (ja) * | 2016-05-10 | 2017-11-16 | 三菱電機株式会社 | 運転支援装置、運転支援システムおよび運転支援プログラム |
| CN107527510A (zh) * | 2016-06-17 | 2017-12-29 | 福特全球技术公司 | 用于车辆之间的安全意识和警告的方法和设备 |
| WO2018225178A1 (ja) * | 2017-06-07 | 2018-12-13 | 三菱電機株式会社 | 危険車両予測装置、危険車両警報システムおよび危険車両予測方法 |
| JP2018205042A (ja) * | 2017-05-31 | 2018-12-27 | 日本信号株式会社 | レーザー測距装置 |
| JP2018206210A (ja) * | 2017-06-07 | 2018-12-27 | 富士通株式会社 | 衝突事故抑制システム及び衝突事故抑制方法 |
| JP2019003537A (ja) * | 2017-06-19 | 2019-01-10 | 株式会社デンソー | 運転支援装置 |
| CN109389863A (zh) * | 2017-08-02 | 2019-02-26 | 华为技术有限公司 | 提示方法及相关设备 |
| JP2019175130A (ja) * | 2018-03-28 | 2019-10-10 | トヨタ自動車株式会社 | 自動運転進路決定装置 |
| US10754347B2 (en) | 2017-09-08 | 2020-08-25 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device |
| WO2020205648A1 (en) * | 2019-03-29 | 2020-10-08 | Intel Corporation | Autonomous vehicle system |
| JPWO2020202357A1 (ja) * | 2019-03-29 | 2020-10-08 | ||
| CN111951548A (zh) * | 2020-07-30 | 2020-11-17 | 腾讯科技(深圳)有限公司 | 一种车辆驾驶风险确定方法、装置、系统及介质 |
| CN111971720A (zh) * | 2018-03-30 | 2020-11-20 | 松下知识产权经营株式会社 | 驾驶辅助装置、车辆、不当驾驶探测系统以及服务器装置 |
| JP2020194528A (ja) * | 2020-03-16 | 2020-12-03 | 東京海上日動火災保険株式会社 | 事故分析装置、事故分析方法及びプログラム |
| KR20210016761A (ko) * | 2019-08-05 | 2021-02-17 | 삼성전자주식회사 | 차량용 전자 장치 및 차량용 전자 장치 동작 방법 |
| JP2021022304A (ja) * | 2019-07-30 | 2021-02-18 | 矢崎エナジーシステム株式会社 | 車載器 |
| CN112888604A (zh) * | 2018-10-03 | 2021-06-01 | 金泰克斯公司 | 后向车道检测覆盖 |
| CN113682301A (zh) * | 2021-10-25 | 2021-11-23 | 江苏日盈电子股份有限公司 | 用于主动避让危险车辆的方法和系统以及车辆 |
| CN113903191A (zh) * | 2020-07-07 | 2022-01-07 | 丰田自动车株式会社 | 危险预测装置、系统、方法及记录有程序的记录介质 |
| JP2022506565A (ja) * | 2018-11-12 | 2022-01-17 | フン キム,ヨン | 実時間で相対車両の速度及び距離を分析及び保存するイベント検知システム |
| US11866062B2 (en) | 2021-03-10 | 2024-01-09 | Yazaki Corporation | Vehicle display device |
| JP7434882B2 (ja) | 2019-12-23 | 2024-02-21 | 株式会社Jvcケンウッド | 危険運転判定装置、危険運転判定方法、および危険運転判定プログラム |
Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0644498A (ja) * | 1992-07-23 | 1994-02-18 | Mazda Motor Corp | 車両の情報伝達装置 |
| JPH06215300A (ja) * | 1993-01-19 | 1994-08-05 | Mitsubishi Electric Corp | 危険状況警報装置 |
| JPH07223488A (ja) * | 1994-02-14 | 1995-08-22 | Mitsubishi Motors Corp | 車両用周囲情報表示装置 |
| JPH07246877A (ja) * | 1994-03-08 | 1995-09-26 | Tsutomu Baba | 車両用警報表示装置 |
| JPH09166452A (ja) * | 1995-12-14 | 1997-06-24 | Pioneer Electron Corp | 運転支援装置 |
| JPH11242799A (ja) * | 1998-02-26 | 1999-09-07 | Nippon Seiki Kk | 出会頭事故回避補助装置 |
| JP2000052808A (ja) * | 1998-08-12 | 2000-02-22 | Mitsubishi Electric Corp | 車両交通管理装置 |
| JP2001067589A (ja) * | 1999-08-25 | 2001-03-16 | Clarion Co Ltd | 周囲車両認識通信システム |
| JP2002046506A (ja) * | 2000-04-24 | 2002-02-12 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| JP2002283913A (ja) * | 2001-03-29 | 2002-10-03 | Denso Corp | 車両周辺表示装置、プログラムおよび記録媒体 |
| JP2003081039A (ja) * | 2001-09-12 | 2003-03-19 | Toyota Central Res & Dev Lab Inc | 環境危険度演算装置 |
| JP2003196800A (ja) * | 2001-12-27 | 2003-07-11 | Sumitomo Electric Ind Ltd | 支援情報提供システム、及び支援情報提供装置 |
| JP2003205804A (ja) * | 2002-01-16 | 2003-07-22 | Denso Corp | 車両用衝突被害軽減装置 |
| JP2004013466A (ja) * | 2002-06-06 | 2004-01-15 | Nissan Motor Co Ltd | 車両周囲監視装置 |
| JP2004118330A (ja) * | 2002-09-24 | 2004-04-15 | Fuji Heavy Ind Ltd | 車両監視装置および車両監視方法 |
| JP2004302621A (ja) * | 2003-03-28 | 2004-10-28 | Calsonic Kansei Corp | 車両衝突防止装置 |
| JP2005115484A (ja) * | 2003-09-17 | 2005-04-28 | Fujitsu Ten Ltd | 運転支援装置 |
-
2004
- 2004-09-14 JP JP2004267322A patent/JP2006085285A/ja active Pending
Patent Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0644498A (ja) * | 1992-07-23 | 1994-02-18 | Mazda Motor Corp | 車両の情報伝達装置 |
| JPH06215300A (ja) * | 1993-01-19 | 1994-08-05 | Mitsubishi Electric Corp | 危険状況警報装置 |
| JPH07223488A (ja) * | 1994-02-14 | 1995-08-22 | Mitsubishi Motors Corp | 車両用周囲情報表示装置 |
| JPH07246877A (ja) * | 1994-03-08 | 1995-09-26 | Tsutomu Baba | 車両用警報表示装置 |
| JPH09166452A (ja) * | 1995-12-14 | 1997-06-24 | Pioneer Electron Corp | 運転支援装置 |
| JPH11242799A (ja) * | 1998-02-26 | 1999-09-07 | Nippon Seiki Kk | 出会頭事故回避補助装置 |
| JP2000052808A (ja) * | 1998-08-12 | 2000-02-22 | Mitsubishi Electric Corp | 車両交通管理装置 |
| JP2001067589A (ja) * | 1999-08-25 | 2001-03-16 | Clarion Co Ltd | 周囲車両認識通信システム |
| JP2002046506A (ja) * | 2000-04-24 | 2002-02-12 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| JP2002283913A (ja) * | 2001-03-29 | 2002-10-03 | Denso Corp | 車両周辺表示装置、プログラムおよび記録媒体 |
| JP2003081039A (ja) * | 2001-09-12 | 2003-03-19 | Toyota Central Res & Dev Lab Inc | 環境危険度演算装置 |
| JP2003196800A (ja) * | 2001-12-27 | 2003-07-11 | Sumitomo Electric Ind Ltd | 支援情報提供システム、及び支援情報提供装置 |
| JP2003205804A (ja) * | 2002-01-16 | 2003-07-22 | Denso Corp | 車両用衝突被害軽減装置 |
| JP2004013466A (ja) * | 2002-06-06 | 2004-01-15 | Nissan Motor Co Ltd | 車両周囲監視装置 |
| JP2004118330A (ja) * | 2002-09-24 | 2004-04-15 | Fuji Heavy Ind Ltd | 車両監視装置および車両監視方法 |
| JP2004302621A (ja) * | 2003-03-28 | 2004-10-28 | Calsonic Kansei Corp | 車両衝突防止装置 |
| JP2005115484A (ja) * | 2003-09-17 | 2005-04-28 | Fujitsu Ten Ltd | 運転支援装置 |
Cited By (92)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4577269B2 (ja) * | 2006-05-19 | 2010-11-10 | アイシン・エィ・ダブリュ株式会社 | 運転支援装置 |
| JP2007310745A (ja) * | 2006-05-19 | 2007-11-29 | Aisin Aw Co Ltd | 運転支援装置 |
| JP2008033872A (ja) * | 2006-07-04 | 2008-02-14 | Denso Corp | 車両用視界状況判定装置 |
| JP4730267B2 (ja) * | 2006-07-04 | 2011-07-20 | 株式会社デンソー | 車両用視界状況判定装置 |
| JP2008123112A (ja) * | 2006-11-09 | 2008-05-29 | Toyota Motor Corp | 車両警告システム、車両警告方法 |
| WO2008056806A1 (fr) | 2006-11-10 | 2008-05-15 | Toyota Jidosha Kabushiki Kaisha | Procédé, dispositif et programme de prédiction de parcours d'obstacles |
| JP2008123217A (ja) * | 2006-11-10 | 2008-05-29 | Toyota Motor Corp | 障害物進路予測方法、装置、およびプログラム |
| US10960891B2 (en) | 2006-11-10 | 2021-03-30 | Toyota Jidosha Kabushiki Kaisha | Method, apparatus and program of predicting obstacle course |
| US10065650B2 (en) | 2006-11-10 | 2018-09-04 | Toyota Jidosha Kabushiki Kaisha | Method, apparatus and program of predicting obstacle course |
| CN101536058B (zh) * | 2006-11-10 | 2011-02-02 | 丰田自动车株式会社 | 障碍物行进道路预测方法、装置以及程序 |
| DE102008010119A1 (de) | 2007-02-21 | 2008-11-20 | Denso Corp., Kariya-shi | Vorrichtung zum Erfassen eines Objekts und System zur Kommunikation zwischen Fahrzeugen |
| JP2008254657A (ja) * | 2007-04-06 | 2008-10-23 | Denso Corp | 走行支援制御システム、及び走行支援の制御方法 |
| JP2008310690A (ja) * | 2007-06-15 | 2008-12-25 | Denso Corp | 車両用認知支援装置 |
| JP2009157438A (ja) * | 2007-12-25 | 2009-07-16 | Nissan Motor Co Ltd | 車載警報装置及び車両用警報方法 |
| JP2010018162A (ja) * | 2008-07-10 | 2010-01-28 | Fuji Heavy Ind Ltd | 車両の衝突防止装置 |
| JP2010055333A (ja) * | 2008-08-28 | 2010-03-11 | Bosch Corp | 安全運転支援システム |
| JP2010073007A (ja) * | 2008-09-19 | 2010-04-02 | Mazda Motor Corp | 車両の障害物検知装置 |
| JP2010076504A (ja) * | 2008-09-24 | 2010-04-08 | Fuji Heavy Ind Ltd | 車両の運転支援装置 |
| JP2010182236A (ja) * | 2009-02-09 | 2010-08-19 | Toyota Motor Corp | 移動領域予測装置 |
| US8676487B2 (en) | 2009-02-09 | 2014-03-18 | Toyota Jidosha Kabushiki Kaisha | Apparatus for predicting the movement of a mobile body |
| JP2012022671A (ja) * | 2010-06-15 | 2012-02-02 | Nissan Motor Co Ltd | 運転支援装置 |
| JP2011100492A (ja) * | 2011-02-07 | 2011-05-19 | Toyota Motor Corp | 移動領域予測装置 |
| JP5637302B2 (ja) * | 2011-04-13 | 2014-12-10 | 日産自動車株式会社 | 走行支援装置及びその隣接車両検出方法 |
| WO2012141219A1 (ja) * | 2011-04-13 | 2012-10-18 | 日産自動車株式会社 | 走行支援装置及びその隣接車両検出方法 |
| US10142595B2 (en) | 2011-04-13 | 2018-11-27 | Nissan Motor Co., Ltd. | Driving assistance device and method of detecting vehicle adjacent thereto |
| CN103348394A (zh) * | 2011-04-13 | 2013-10-09 | 日产自动车株式会社 | 行驶辅助装置及其相邻车辆检测方法 |
| CN103348394B (zh) * | 2011-04-13 | 2015-06-03 | 日产自动车株式会社 | 行驶辅助装置及其相邻车辆检测方法 |
| JP2013127754A (ja) * | 2011-12-19 | 2013-06-27 | Fujitsu Ltd | 記録装置、記録プログラム及び記録方法 |
| JPWO2013121898A1 (ja) * | 2012-02-14 | 2015-05-11 | 日産自動車株式会社 | 立体物検出装置 |
| US8892346B2 (en) | 2012-04-03 | 2014-11-18 | Denso Corporation | Driving assistance device |
| JP2013214249A (ja) * | 2012-04-03 | 2013-10-17 | Denso Corp | 運転支援装置 |
| JP2017171296A (ja) * | 2013-02-21 | 2017-09-28 | グーグル インコーポレイテッド | 付近の強引な運転者を検出し、運転モードを調整する方法 |
| US10347127B2 (en) | 2013-02-21 | 2019-07-09 | Waymo Llc | Driving mode adjustment |
| JP2016509971A (ja) * | 2013-02-21 | 2016-04-04 | グーグル インコーポレイテッド | 運転モード調整 |
| KR101507507B1 (ko) * | 2013-05-31 | 2015-03-31 | (주) 세인 | 스테레오 카메라를 이용한 객체 처리 시스템 및 방법 |
| JP2015024742A (ja) * | 2013-07-26 | 2015-02-05 | 日産自動車株式会社 | 運転支援装置および運転支援方法 |
| JP2016024509A (ja) * | 2014-07-16 | 2016-02-08 | 株式会社デンソーアイティーラボラトリ | 車両用警告システム |
| KR101619599B1 (ko) * | 2014-08-08 | 2016-05-10 | 현대자동차주식회사 | 융합 레이더 센서 기반 저전력 차량 충돌 방지 방법 및 장치 |
| CN105329237A (zh) * | 2014-08-08 | 2016-02-17 | 现代自动车株式会社 | 用于基于融合雷达传感器避免车辆碰撞的方法和装置 |
| JP2016143087A (ja) * | 2015-01-29 | 2016-08-08 | 住友電気工業株式会社 | 位置検出システム及び車載情報処理装置 |
| JP2016143091A (ja) * | 2015-01-29 | 2016-08-08 | 住友電気工業株式会社 | 運転支援システム及び車載情報処理装置 |
| JP2016143089A (ja) * | 2015-01-29 | 2016-08-08 | 住友電気工業株式会社 | 危険車両検知システム及び車載情報処理装置 |
| EP3128462A3 (en) * | 2015-08-03 | 2017-05-17 | Lg Electronics Inc. | Driver assistance apparatus and control method for the same |
| KR101730321B1 (ko) * | 2015-08-03 | 2017-04-27 | 엘지전자 주식회사 | 운전자 보조 장치 및 그 제어방법 |
| CN106394553A (zh) * | 2015-08-03 | 2017-02-15 | Lg电子株式会社 | 驾驶员辅助设备及其控制方法 |
| US10286905B2 (en) | 2015-08-03 | 2019-05-14 | Lg Electronics Inc. | Driver assistance apparatus and control method for the same |
| WO2017134897A1 (ja) * | 2016-02-02 | 2017-08-10 | ソニー株式会社 | 映像処理装置及び映像処理方法 |
| JP2017162411A (ja) * | 2016-03-11 | 2017-09-14 | パナソニックIpマネジメント株式会社 | 送信装置、通信システム |
| WO2017154517A1 (ja) * | 2016-03-11 | 2017-09-14 | パナソニックIpマネジメント株式会社 | 送信装置、通信システム |
| US10549751B2 (en) | 2016-03-11 | 2020-02-04 | Panasonic Intellectual Property Management Co., Ltd. | Transmitting device, and communication system |
| JP2017187848A (ja) * | 2016-04-01 | 2017-10-12 | 株式会社デンソー | 運転支援装置及び運転支援プログラム |
| WO2017169691A1 (ja) * | 2016-04-01 | 2017-10-05 | 株式会社デンソー | 運転支援装置及び運転支援プログラム |
| US11173925B2 (en) | 2016-04-01 | 2021-11-16 | Denso Corporation | Driving assistance device and driving assistance program product |
| US11845462B2 (en) | 2016-04-01 | 2023-12-19 | Denso Corporation | Driving assistance device and driving assistance program product |
| JP2017204071A (ja) * | 2016-05-10 | 2017-11-16 | 三菱電機株式会社 | 運転支援装置、運転支援システムおよび運転支援プログラム |
| CN107527510A (zh) * | 2016-06-17 | 2017-12-29 | 福特全球技术公司 | 用于车辆之间的安全意识和警告的方法和设备 |
| CN107527510B (zh) * | 2016-06-17 | 2022-08-09 | 福特全球技术公司 | 用于车辆之间的安全意识和警告的方法和设备 |
| CN106585623A (zh) * | 2016-12-21 | 2017-04-26 | 驭势科技(北京)有限公司 | 一种用于探测车辆周围目标的探测系统以及其应用 |
| CN106585623B (zh) * | 2016-12-21 | 2023-12-01 | 驭势科技(北京)有限公司 | 一种用于探测车辆周围目标的探测系统以及其应用 |
| JP2018205042A (ja) * | 2017-05-31 | 2018-12-27 | 日本信号株式会社 | レーザー測距装置 |
| WO2018225178A1 (ja) * | 2017-06-07 | 2018-12-13 | 三菱電機株式会社 | 危険車両予測装置、危険車両警報システムおよび危険車両予測方法 |
| JP2018206210A (ja) * | 2017-06-07 | 2018-12-27 | 富士通株式会社 | 衝突事故抑制システム及び衝突事故抑制方法 |
| JP6992285B2 (ja) | 2017-06-19 | 2022-01-13 | 株式会社デンソー | 運転支援装置 |
| JP2019003537A (ja) * | 2017-06-19 | 2019-01-10 | 株式会社デンソー | 運転支援装置 |
| CN109389863A (zh) * | 2017-08-02 | 2019-02-26 | 华为技术有限公司 | 提示方法及相关设备 |
| CN109389863B (zh) * | 2017-08-02 | 2021-08-13 | 华为技术有限公司 | 提示方法及相关设备 |
| US10754347B2 (en) | 2017-09-08 | 2020-08-25 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device |
| US11467596B2 (en) | 2017-09-08 | 2022-10-11 | Toyota Jidosha Kabushiki Kaisha | Target abnormality determination device |
| US11809194B2 (en) | 2017-09-08 | 2023-11-07 | Toyota Jidosha Kabushiki Kaisha | Target abnormality determination device |
| JP2019175130A (ja) * | 2018-03-28 | 2019-10-10 | トヨタ自動車株式会社 | 自動運転進路決定装置 |
| CN111971720A (zh) * | 2018-03-30 | 2020-11-20 | 松下知识产权经营株式会社 | 驾驶辅助装置、车辆、不当驾驶探测系统以及服务器装置 |
| CN112888604A (zh) * | 2018-10-03 | 2021-06-01 | 金泰克斯公司 | 后向车道检测覆盖 |
| CN112888604B (zh) * | 2018-10-03 | 2024-02-02 | 金泰克斯公司 | 后向车道检测覆盖 |
| JP7187080B2 (ja) | 2018-11-12 | 2022-12-12 | フン キム,ヨン | 実時間で相対車両の速度及び距離を分析及び保存するイベント検知システム |
| JP2022506565A (ja) * | 2018-11-12 | 2022-01-17 | フン キム,ヨン | 実時間で相対車両の速度及び距離を分析及び保存するイベント検知システム |
| WO2020205648A1 (en) * | 2019-03-29 | 2020-10-08 | Intel Corporation | Autonomous vehicle system |
| JPWO2020202357A1 (ja) * | 2019-03-29 | 2020-10-08 | ||
| JP7123243B2 (ja) | 2019-03-29 | 2022-08-22 | 本田技研工業株式会社 | 情報提供装置および該装置を有する車両 |
| JP2021022304A (ja) * | 2019-07-30 | 2021-02-18 | 矢崎エナジーシステム株式会社 | 車載器 |
| KR20210016761A (ko) * | 2019-08-05 | 2021-02-17 | 삼성전자주식회사 | 차량용 전자 장치 및 차량용 전자 장치 동작 방법 |
| KR102226419B1 (ko) * | 2019-08-05 | 2021-03-12 | 삼성전자주식회사 | 차량용 전자 장치 및 차량용 전자 장치 동작 방법 |
| US11807231B2 (en) | 2019-08-05 | 2023-11-07 | Samsung Electronics Co., Ltd. | Electronic device for vehicle and operating method thereof |
| JP7434882B2 (ja) | 2019-12-23 | 2024-02-21 | 株式会社Jvcケンウッド | 危険運転判定装置、危険運転判定方法、および危険運転判定プログラム |
| JP7285799B2 (ja) | 2020-03-16 | 2023-06-02 | 東京海上日動火災保険株式会社 | 事故分析装置、事故分析方法及びプログラム |
| JP2020194528A (ja) * | 2020-03-16 | 2020-12-03 | 東京海上日動火災保険株式会社 | 事故分析装置、事故分析方法及びプログラム |
| CN113903191A (zh) * | 2020-07-07 | 2022-01-07 | 丰田自动车株式会社 | 危险预测装置、系统、方法及记录有程序的记录介质 |
| CN113903191B (zh) * | 2020-07-07 | 2024-02-02 | 丰田自动车株式会社 | 危险预测装置、系统、方法及记录有程序的记录介质 |
| CN111951548B (zh) * | 2020-07-30 | 2023-09-08 | 腾讯科技(深圳)有限公司 | 一种车辆驾驶风险确定方法、装置、系统及介质 |
| CN111951548A (zh) * | 2020-07-30 | 2020-11-17 | 腾讯科技(深圳)有限公司 | 一种车辆驾驶风险确定方法、装置、系统及介质 |
| US11866062B2 (en) | 2021-03-10 | 2024-01-09 | Yazaki Corporation | Vehicle display device |
| JP7447039B2 (ja) | 2021-03-10 | 2024-03-11 | 矢崎総業株式会社 | 車両用表示装置 |
| CN113682301A (zh) * | 2021-10-25 | 2021-11-23 | 江苏日盈电子股份有限公司 | 用于主动避让危险车辆的方法和系统以及车辆 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006085285A (ja) | 危険車両予測装置 | |
| US11958504B2 (en) | Method and apparatus for controlling a vehicle's driving operation using advance information | |
| KR102479493B1 (ko) | 자율 주행 차량을 보조하기 위한 방법 및 이를 위한 장치 | |
| US10800455B2 (en) | Vehicle turn signal detection | |
| JP6149846B2 (ja) | 注意喚起装置 | |
| CN113423627B (zh) | 在遮挡的情况下根据道路使用者反应建模来操作自动车辆 | |
| JP6459220B2 (ja) | 事故防止システム、事故防止装置、事故防止方法 | |
| JP6252304B2 (ja) | 車両用認知通知装置、車両用認知通知システム | |
| US20170270798A1 (en) | Auto driving control system | |
| JP5345350B2 (ja) | 車両の運転支援装置 | |
| WO2018135605A1 (ja) | イベント予測システム、イベント予測方法、プログラム、及び移動体 | |
| JP4984876B2 (ja) | 車両間通信装置及び車両間通信システム | |
| US20140070960A1 (en) | Apparatus for gathering surroundings information of vehicle | |
| WO2019060891A1 (en) | VISUALIZATION OF DATA WITH INCREASED REALITY | |
| WO2017104209A1 (ja) | 運転支援装置 | |
| JP7103733B2 (ja) | 運転支援装置および運転支援システム | |
| US11361687B2 (en) | Advertisement display device, vehicle, and advertisement display method | |
| JP2010146459A (ja) | 運転支援装置 | |
| JP5255760B2 (ja) | 車両用監視カメラ装置 | |
| JP2005242526A (ja) | 車両用危険情報提示システム及びその表示装置 | |
| JP4462895B2 (ja) | 車載用物体認識システムおよびこれを用いた運転支援システム | |
| JP6367081B2 (ja) | 走行支援装置、走行支援プログラムおよび走行支援方法 | |
| JP4961311B2 (ja) | 運転支援装置及び運転支援方法 | |
| JP4088288B2 (ja) | 車両用周辺監視装置 | |
| JP5200990B2 (ja) | 運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070612 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070612 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090618 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090831 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100507 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100902 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20101124 |