JP2005517909A - 多関節アームを有する可搬式座標測定器 - Google Patents
多関節アームを有する可搬式座標測定器 Download PDFInfo
- Publication number
- JP2005517909A JP2005517909A JP2003568342A JP2003568342A JP2005517909A JP 2005517909 A JP2005517909 A JP 2005517909A JP 2003568342 A JP2003568342 A JP 2003568342A JP 2003568342 A JP2003568342 A JP 2003568342A JP 2005517909 A JP2005517909 A JP 2005517909A
- Authority
- JP
- Japan
- Prior art keywords
- cmm
- joint
- housing
- read heads
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






















































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q35/00—Control systems or devices for copying directly from a pattern or a master model; Devices for use in copying manually
- B23Q35/04—Control systems or devices for copying directly from a pattern or a master model; Devices for use in copying manually using a feeler or the like travelling along the outline of the pattern, model or drawing; Feelers, patterns, or models therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0241—One-dimensional joints
- B25J17/025—One-dimensional joints mounted in series
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0008—Balancing devices
- B25J19/0016—Balancing devices using springs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0091—Shock absorbers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
- B25J9/0012—Constructional details, e.g. manipulator supports, bases making use of synthetic construction materials, e.g. plastics, composites
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/023—Cartesian coordinate type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
- G01B11/005—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates coordinate measuring machines
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/03—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring coordinates of points
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
- G01B21/04—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness by measuring coordinates of points
- G01B21/045—Correction of measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/004—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/004—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points
- G01B5/008—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points using coordinate measuring machines
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/521—Depth or shape recovery from laser ranging, e.g. using interferometry; from the projection of structured light
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S33/00—Geometrical instruments
- Y10S33/01—Magnetic
Abstract
Description
Claims (37)
- 選択された体積内における物体の位置を測定するための可搬式座標測定器(CMM)であって、
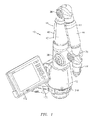
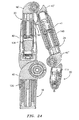
対向する第一および第二の端部を備えて手動で位置決め可能であり、複数の関節を含む多関節アームと、
前記多関節アームの第一端部に取付けられた測定用プローブと、
前記アームのトランスデューサから位置信号を受信して、選択された体積内におけるプローブの位置に対応するデジタル座標を提供する電子回路と、
を含み、
前記関節の少なくとも1個が更に、
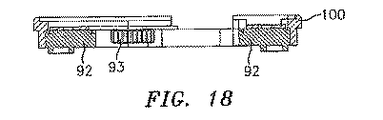
測定可能な特徴の周期的なパターンと、
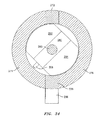
前記パターンから間隔を置かれ、かつ導通している少なくとも2個の読み取りヘッドと、
を含み、前記パターンおよび前記少なくとも2個の読み取りヘッドが、互いに対して回転可能であるように前記関節内に配置されているCMM。 - 請求項1に記載のCMMにおいて、前記少なくとも1個の関節が少なくとも1個のベアリング含むCMM。
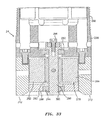
- 請求項1に記載のCMMにおいて、前記少なくとも1個のベアリングが少なくとも1個の初期応力が掛けられているベアリングを含むCMM。
- 請求項3に記載のCMMにおいて、前記少なくとも1個の初期応力が掛けられているベアリングが、
第一のベアリングと、
第二のベアリングと、
前記第一および第二のベアリングの間の内側スペーサスリーブと、
前記第一および第二のベアリングの間の外側スペーサスリーブと、
を含み、
前記内側および外側のスペーサスリーブが異なる所定の長さを有し、
前記内側および外側のスペーサスリーブが前記第一および第二のベアリングに対して圧縮されていて、所定の初期応力を規定するCMM。 - 請求項2に記載のCMMにおいて、前記少なくとも1個のベアリングが密封されているCMM。
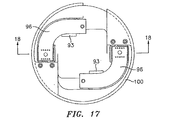
- 請求項1に記載のCMMにおいて、前記2個の読み取りヘッドが互いに180°離されて配置されているCMM。
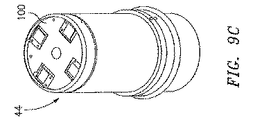
- 請求項1に記載のCMMにおいて、少なくとも3個の読み取りヘッドを含むCMM。
- 請求項7に記載のCMMにおいて、前記3個の読み取りヘッドが互いに120°離されて配置されているCMM。
- 請求項1に記載のCMMにおいて、少なくとも4個の読み取りヘッドを含むCMM。
- 請求項9に記載のCMMにおいて、前記4個の読み取りヘッドが互いに90°離されているCMM。
- 請求項1に記載のCMMにおいて、
前記パターンが光学干渉パターンを含み、
前記少なくとも1個の読み取りヘッドが光学読取りヘッドを含むCMM。 - 請求項11に記載のCMMにおいて、前記光学干渉パターンが光学エンコーダ・ディスク上に配置されているCMM。
- 請求項11に記載のCMMにおいて、
前記導通が、前記干渉パターンに挿入された前記読み取りヘッドから正弦波信号を生成すべく回折次数間の干渉を検出する前記読み取りヘッドを含み、前記正弦波信号を電子的に補完して変位を検出するCMM。 - 請求項13に記載のCMMにおいて、各々の前記読み取りヘッドがレーザー、コリメータ、および開口部を含んでいることにより、前記レーザーが前記コリメータにより平行化されてから開口部によりサイズ調整されるビームを発光し、離散次数に光を回析する格子を前記干渉パターンが含むCMM。
- 請求項14に記載のCMMにおいて、各々の前記読み取りヘッドが更に光検知器の配列を含み、前記干渉パターンと前記読み取りヘッドの間に相対的な運動がある場合に、前記光検知器の配列がほぼ純粋な正弦波出力の4個のチャネルを生成するCMM。
- 請求項1に記載のCMMにおいて、前記少なくとも2個の読み取りヘッドが、平均化可能な相殺効果を生起させるCMM。
- 請求項1に記載のCMMにおいて、
測定可能な特徴の前記パターンは、反射性、不透過性、磁場、電気容量、インダクタンス、および表面の粗さからなるグループから選択された特徴の少なくとも1個であるCMM。 - 請求項1に記載のCMMにおいて、前記少なくとも1個の関節にスリップリング・アセンブリを含むCMM。
- 請求項1に記載のCMMにおいて、前記関節の少なくとも1個が無限回転可能なCMM。
- 請求項1に記載のCMMにおいて、前記関節の少なくとも2個が互いにネジ込み式に相互接続されているCMM。
- 請求項1に記載のCMMにおいて、前記関節の少なくとも2個がネジ込み式固定具を用いて互いに固定されているCMM。
- 請求項1に記載のCMMにおいて、少なくとも2個の関節が、互いに固定された補完的先細部分を含むCMM。
- 請求項1に記載のCMMにおいて、前記関節が、旋回運動用の長関節およびヒンジ運動用の短関節を含むCMM。
- 請求項23に記載のCMMにおいて、3個の関節対を含み、各関節対が長関節および短関節を含むCMM。
- 請求項24に記載のCMMにおいて、各々の関節対の前記長関節が前記短関節に対して約90°であるCMM。
- 請求項1に記載のCMMにおいて、前記測定用プローブに第7の関節を含むCMM。
- 請求項1に記載のCMMにおいて、前記関節が、2−2−2、2−1−2、2−2−3および2−1−3から構成されるグループから選択された関節構成で配置されているCMM。
- 請求項1に記載のCMMにおいて、
前記カートリッジを一意に識別すべく前記関節に関連付けられている電子識別チップを含むCMM。 - 請求項1に記載のCMMにおいて、
前記パターンが前記読み取りヘッドに関して回転可能であって、
前記2個の読み取りヘッドが前記パターンに対して静止しているCMM。 - 請求項42に記載のCMMにおいて、
前記パターンが前記読み取りヘッドに関して静止していて、
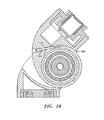
前記2個の読取りヘッドが前記パターンに対して回転可能であるCMM。 - 請求項1に記載のCMMにおいて、前記関節が更に、
第一の筐体と、
第二の筐体と、
前記第二の筐体から伸長して前記第一の筐体へ入る回転可能シャフトと、
前記シャフトと前記第一の筐体の間に配置されていて、前記回転可能シャフトが前記第一の筐体内で回転できるようにするベアリングと、
を含み、
前記パターンが前記回転可能シャフトに取付けられていて、
前記少なくとも2個の読み取りヘッドが前記第一の筐体内に固定されていることにより前記第一の筐体が第二の筐体の回りを回転すれば前記少なくとも2個の読み取りヘッドが前記パターンに相対的に移動するCMM。 - 請求項31に記載のCMMにおいて、前記パターンが前記シャフトに直接取付けられているCMM。
- 請求項31に記載のCMMにおいて、前記読み取りヘッドが、前記回転可能シャフトの軸の回りに約180°離されて配置されているCMM。
- 請求項31に記載のCMMにおいて、前記2個の読み取りヘッドが平均化可能な相殺効果を生起させて最終的な外乱耐性角度の測定が行なえるCMM。
- 請求項1に記載のCMMにおいて、前記少なくとも1個の関節が、
第一の筐体と、
第二の筐体と、
前記第二の筐体に固定されていて、前記第一の筐体に入るまで伸長する回転可能シャフトと、
前記第一の筐体内で支持されていて前記回転可能シャフトを軸の回りに回転させるべく支持する少なくとも1個のベアリングと、
を含み、
前記パターンの1個および前記少なくとも2個の読取りヘッドが前記シャフトの一端および前記パターンのもう一方の端に固定されていて、前記少なくとも2個の読取りヘッドが前記第一の筐体内に固定されているCMM。 - 請求項35に記載のCMMにおいて、前記読み取りヘッドが前記回転可能シャフトの前記軸の回りに約180°離されて配置されているCMM。
- 請求項35に記載のCMMにおいて、前記少なくとも2個の読み取りヘッドが平均化可能な相殺効果を生起させて最終的な外乱耐性角度の測定が行なえるCMM。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US35759902P | 2002-02-14 | 2002-02-14 | |
| US39490802P | 2002-07-10 | 2002-07-10 | |
| PCT/US2003/004312 WO2003069267A1 (en) | 2002-02-14 | 2003-02-13 | Portable coordinate measurement machine with articulated arm |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005517909A true JP2005517909A (ja) | 2005-06-16 |
| JP2005517909A5 JP2005517909A5 (ja) | 2006-03-30 |
Family
ID=27737606
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003568342A Pending JP2005517909A (ja) | 2002-02-14 | 2003-02-13 | 多関節アームを有する可搬式座標測定器 |
| JP2003568352A Expired - Fee Related JP4576002B2 (ja) | 2002-02-14 | 2003-02-13 | 内蔵ラインレーザスキャナを備えた携帯可能な座標測定装置 |
| JP2003568341A Pending JP2005517908A (ja) | 2002-02-14 | 2003-02-13 | 携帯型座標測定器用の関節型アーム |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003568352A Expired - Fee Related JP4576002B2 (ja) | 2002-02-14 | 2003-02-13 | 内蔵ラインレーザスキャナを備えた携帯可能な座標測定装置 |
| JP2003568341A Pending JP2005517908A (ja) | 2002-02-14 | 2003-02-13 | 携帯型座標測定器用の関節型アーム |
Country Status (8)
| Country | Link |
|---|---|
| US (13) | US6904691B2 (ja) |
| EP (3) | EP1474649B1 (ja) |
| JP (3) | JP2005517909A (ja) |
| CN (3) | CN100473940C (ja) |
| AT (2) | ATE382845T1 (ja) |
| AU (3) | AU2003223173A1 (ja) |
| DE (2) | DE60314598T2 (ja) |
| WO (3) | WO2003069277A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010510527A (ja) * | 2006-11-20 | 2010-04-02 | ヘキサゴン メトロロジー アクチボラゲット | 継ぎ手を改良された座標測定機 |
Families Citing this family (238)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9515311D0 (en) | 1995-07-26 | 1995-09-20 | 3D Scanners Ltd | Stripe scanners and methods of scanning |
| US7246030B2 (en) * | 2002-02-14 | 2007-07-17 | Faro Technologies, Inc. | Portable coordinate measurement machine with integrated line laser scanner |
| US7073271B2 (en) | 2002-02-14 | 2006-07-11 | Faro Technologies Inc. | Portable coordinate measurement machine |
| US7881896B2 (en) | 2002-02-14 | 2011-02-01 | Faro Technologies, Inc. | Portable coordinate measurement machine with integrated line laser scanner |
| US6904691B2 (en) | 2002-02-14 | 2005-06-14 | Faro Technologies, Inc. | Portable coordinate measurement machine with improved counter balance |
| USRE42082E1 (en) | 2002-02-14 | 2011-02-01 | Faro Technologies, Inc. | Method and apparatus for improving measurement accuracy of a portable coordinate measurement machine |
| US6957496B2 (en) | 2002-02-14 | 2005-10-25 | Faro Technologies, Inc. | Method for improving measurement accuracy of a portable coordinate measurement machine |
| US6952882B2 (en) | 2002-02-14 | 2005-10-11 | Faro Technologies, Inc. | Portable coordinate measurement machine |
| JP2005518511A (ja) * | 2002-02-26 | 2005-06-23 | ファロ テクノロジーズ インコーポレーテッド | 安定真空アダプタ |
| CA2506043A1 (en) * | 2002-11-15 | 2004-06-03 | Alan George Rock | Level, angle and distance measuring device |
| JP4707306B2 (ja) * | 2003-02-28 | 2011-06-22 | 株式会社小坂研究所 | 多関節型座標測定装置 |
| US7257248B2 (en) * | 2003-03-27 | 2007-08-14 | General Electric Company | Non-contact measurement system and method |
| WO2004096502A1 (en) * | 2003-04-28 | 2004-11-11 | Stephen James Crampton | Cmm arm with exoskeleton |
| EP1682956A1 (en) * | 2003-10-15 | 2006-07-26 | Metris N.V. | A method, device and computer program for evaluating an object using a virtual representation of said object |
| FR2861843B1 (fr) * | 2003-10-29 | 2006-07-07 | Romain Granger | Dispositif de connexion associe a un bras d'appareil de mesure tridimentionnelle a bras articules |
| JP4481137B2 (ja) * | 2003-11-13 | 2010-06-16 | アスモ株式会社 | モータ、回転制御装置、及び回転検出回路 |
| US7693325B2 (en) | 2004-01-14 | 2010-04-06 | Hexagon Metrology, Inc. | Transprojection of geometry data |
| US7152456B2 (en) | 2004-01-14 | 2006-12-26 | Romer Incorporated | Automated robotic measuring system |
| US7508971B2 (en) * | 2004-05-28 | 2009-03-24 | The Boeing Company | Inspection system using coordinate measurement machine and associated method |
| US7253908B2 (en) * | 2004-07-22 | 2007-08-07 | The Boeing Company | Non-destructive inspection using laser profiling and associated method |
| CN100575944C (zh) * | 2004-07-23 | 2009-12-30 | 电力研究所有限公司 | 挠性电磁声学换能传感器 |
| BRPI0513788A (pt) * | 2004-07-26 | 2008-05-13 | Electric Power Res Inst | dispositivo de medição |
| GB0424729D0 (en) * | 2004-11-09 | 2004-12-08 | Crampton Stephen | Probe end module for articulated arms |
| US7167252B2 (en) * | 2004-11-23 | 2007-01-23 | Kevin Gallup | Method and apparatus for creating cavities in packaging materials for artifacts, art objects and fragile or other valuable items |
| US7222543B2 (en) * | 2004-11-23 | 2007-05-29 | Dr. Johannes Heidenhain Gmbh | Modular encoder, method of producing a modular encoder, and system for measuring angular movement |
| WO2006093899A2 (en) | 2005-02-28 | 2006-09-08 | Electric Power Research Institute, Inc. | Method for inspection and repair |
| US7333219B2 (en) * | 2005-03-29 | 2008-02-19 | Mitutoyo Corporation | Handheld metrology imaging system and method |
| FR2884910B1 (fr) * | 2005-04-20 | 2007-07-13 | Romer Sa | Appareil de mesure tridimensionnelle a bras articules comportant une pluralite d'axes d'articulation |
| US7804602B2 (en) * | 2005-06-23 | 2010-09-28 | Faro Technologies, Inc. | Apparatus and method for relocating an articulating-arm coordinate measuring machine |
| GB0516276D0 (en) * | 2005-08-08 | 2005-09-14 | Crampton Stephen | Robust cmm arm with exoskeleton |
| WO2007017235A2 (en) * | 2005-08-08 | 2007-02-15 | 3D Scanners Ltd | Cmm arm with enhanced manual control |
| US7525276B2 (en) * | 2005-09-13 | 2009-04-28 | Romer, Inc. | Vehicle having an articulator |
| FR2892034A1 (fr) * | 2005-10-14 | 2007-04-20 | Soudure Autogene Francaise Sa | Poste de soudage a l'arc a memoire de stockage de masse de donnees |
| US8142528B2 (en) * | 2005-11-30 | 2012-03-27 | General Electric Company | Methods and systems of reducing viscosity of gasification system slag |
| DE202006005643U1 (de) * | 2006-03-31 | 2006-07-06 | Faro Technologies Inc., Lake Mary | Vorrichtung zum dreidimensionalen Erfassen eines Raumbereichs |
| US7568293B2 (en) * | 2006-05-01 | 2009-08-04 | Paul Ferrari | Sealed battery for coordinate measurement machine |
| US7805854B2 (en) | 2006-05-15 | 2010-10-05 | Hexagon Metrology, Inc. | Systems and methods for positioning and measuring objects using a CMM |
| DE102006031580A1 (de) | 2006-07-03 | 2008-01-17 | Faro Technologies, Inc., Lake Mary | Verfahren und Vorrichtung zum dreidimensionalen Erfassen eines Raumbereichs |
| CN101529211B (zh) * | 2006-08-21 | 2011-12-21 | Gsi集团公司 | 采用具有公共刻线基板的多个子编码器的旋转光学编码器 |
| EP2207006B2 (en) * | 2006-09-05 | 2022-01-26 | Renishaw PLC | Surface sensing device |
| GB0617344D0 (en) * | 2006-09-05 | 2006-10-11 | Renishaw Plc | Surface sensing device |
| US7439713B2 (en) * | 2006-09-20 | 2008-10-21 | Pratt & Whitney Canada Corp. | Modulation control of power generation system |
| EP2097711A2 (en) * | 2006-11-30 | 2009-09-09 | Faro Technologies, Inc. | Portable coordinate measurement machine |
| EP2095061B1 (en) * | 2006-12-22 | 2019-02-20 | Hexagon Metrology, Inc | Improved joint axis for coordinate measurement machine |
| US20080189072A1 (en) * | 2007-02-01 | 2008-08-07 | Nescom Inc. | High resolution encoder within a swivel |
| CN104807425A (zh) * | 2007-04-03 | 2015-07-29 | 六边形度量衡股份公司 | 用于物体的精确测量的方法和设备 |
| US9545009B2 (en) | 2007-05-23 | 2017-01-10 | Spectra Logic, Corporation | Passive alterable electrical component |
| WO2008154408A1 (en) * | 2007-06-06 | 2008-12-18 | Tobey Wayland E | Modular hybrid snake arm |
| US7546689B2 (en) * | 2007-07-09 | 2009-06-16 | Hexagon Metrology Ab | Joint for coordinate measurement device |
| DE102007032538B4 (de) * | 2007-07-12 | 2015-03-26 | Siemens Aktiengesellschaft | Medizinisches Diagnose- und/oder Interventionsgerät |
| US8457790B2 (en) * | 2007-09-14 | 2013-06-04 | Zimmer, Inc. | Robotic calibration method |
| EP2037214A1 (de) | 2007-09-14 | 2009-03-18 | Leica Geosystems AG | Verfahren und Messgerät zum vermessen von Oberflächen |
| US7774949B2 (en) * | 2007-09-28 | 2010-08-17 | Hexagon Metrology Ab | Coordinate measurement machine |
| US7797849B2 (en) * | 2007-10-31 | 2010-09-21 | Immersion Corporation | Portable metrology device |
| JP2009122066A (ja) * | 2007-11-19 | 2009-06-04 | Mitsutoyo Corp | 非接触三次元計測方法及びその装置 |
| EP2068124A1 (en) | 2007-12-04 | 2009-06-10 | Metris IPR N.V. | Articulated arm measuring machine endowed with multiple measurement disks |
| US8122610B2 (en) * | 2008-03-28 | 2012-02-28 | Hexagon Metrology, Inc. | Systems and methods for improved coordination acquisition member comprising calibration information |
| US7779548B2 (en) | 2008-03-28 | 2010-08-24 | Hexagon Metrology, Inc. | Coordinate measuring machine with rotatable grip |
| EP2108917B1 (en) | 2008-04-07 | 2012-10-03 | Leica Geosystems AG | Articulated arm coordinate measuring machine |
| US7640674B2 (en) * | 2008-05-05 | 2010-01-05 | Hexagon Metrology, Inc. | Systems and methods for calibrating a portable coordinate measurement machine |
| US8035823B2 (en) * | 2008-09-05 | 2011-10-11 | 3Dm Devices Inc. | Hand-held surface profiler |
| US7908757B2 (en) | 2008-10-16 | 2011-03-22 | Hexagon Metrology, Inc. | Articulating measuring arm with laser scanner |
| US9482755B2 (en) | 2008-11-17 | 2016-11-01 | Faro Technologies, Inc. | Measurement system having air temperature compensation between a target and a laser tracker |
| EP2194357A1 (de) * | 2008-12-03 | 2010-06-09 | Leica Geosystems AG | Optisches Sensorelement für eine Messmaschine, und messmaschinenseitiges Kupplungselement hierfür |
| US8176809B2 (en) * | 2008-12-10 | 2012-05-15 | GM Global Technology Operations LLC | Planar torsion spring |
| DE102008062624A1 (de) * | 2008-12-17 | 2010-06-24 | Kuka Roboter Gmbh | Handgerät und Verfahren zur Erfassung der Raumposition eines Arbeitspunktes eines Manipulators |
| US7983790B2 (en) * | 2008-12-19 | 2011-07-19 | The Boeing Company | Component repair using reverse engineering |
| DE102009010465B3 (de) * | 2009-02-13 | 2010-05-27 | Faro Technologies, Inc., Lake Mary | Laserscanner |
| US9551575B2 (en) | 2009-03-25 | 2017-01-24 | Faro Technologies, Inc. | Laser scanner having a multi-color light source and real-time color receiver |
| DE102009015920B4 (de) | 2009-03-25 | 2014-11-20 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| EP2417306B1 (en) * | 2009-04-06 | 2015-06-10 | Aktiebolaget SKF | Detection system, joint system provided with such a detection system and automotive vehicle equipped with such a joint system |
| DE102009017581B4 (de) * | 2009-04-18 | 2021-06-24 | Igus Gmbh | Mehrachsengelenk insbesondere für die Robotik |
| US8423190B1 (en) | 2009-06-11 | 2013-04-16 | Kabushiki Kaisha Yaskawa Denki | Manipulator system |
| CN102472662B (zh) | 2009-06-30 | 2014-06-18 | 六边形度量衡股份公司 | 使用振动检测的坐标测量机 |
| DE102009031712A1 (de) | 2009-07-04 | 2011-08-04 | Schaeffler Technologies GmbH & Co. KG, 91074 | Lagerkartusche, insbesondere für den Gelenkarm einer dreidimensionalen Koordinatenmessvorrichtung |
| DE102009035337A1 (de) | 2009-07-22 | 2011-01-27 | Faro Technologies, Inc., Lake Mary | Verfahren zum optischen Abtasten und Vermessen eines Objekts |
| DE102009035336B3 (de) | 2009-07-22 | 2010-11-18 | Faro Technologies, Inc., Lake Mary | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US20110285981A1 (en) * | 2010-05-18 | 2011-11-24 | Irvine Sensors Corporation | Sensor Element and System Comprising Wide Field-of-View 3-D Imaging LIDAR |
| WO2011047724A1 (en) * | 2009-10-22 | 2011-04-28 | Abb Research Ltd | A robot part and a method for protecting a robot part |
| US8112896B2 (en) * | 2009-11-06 | 2012-02-14 | Hexagon Metrology Ab | Articulated arm |
| US9113023B2 (en) | 2009-11-20 | 2015-08-18 | Faro Technologies, Inc. | Three-dimensional scanner with spectroscopic energy detector |
| DE102009055989B4 (de) | 2009-11-20 | 2017-02-16 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102009055988B3 (de) | 2009-11-20 | 2011-03-17 | Faro Technologies, Inc., Lake Mary | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9210288B2 (en) | 2009-11-20 | 2015-12-08 | Faro Technologies, Inc. | Three-dimensional scanner with dichroic beam splitters to capture a variety of signals |
| US9529083B2 (en) | 2009-11-20 | 2016-12-27 | Faro Technologies, Inc. | Three-dimensional scanner with enhanced spectroscopic energy detector |
| DE102009057101A1 (de) | 2009-11-20 | 2011-05-26 | Faro Technologies, Inc., Lake Mary | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US20110213247A1 (en) * | 2010-01-08 | 2011-09-01 | Hexagon Metrology, Inc. | Articulated arm with imaging device |
| US8630314B2 (en) | 2010-01-11 | 2014-01-14 | Faro Technologies, Inc. | Method and apparatus for synchronizing measurements taken by multiple metrology devices |
| US8898919B2 (en) | 2010-01-20 | 2014-12-02 | Faro Technologies, Inc. | Coordinate measurement machine with distance meter used to establish frame of reference |
| WO2011090892A2 (en) * | 2010-01-20 | 2011-07-28 | Faro Technologies, Inc. | Coordinate measurement machines with removable accessories |
| US9879976B2 (en) | 2010-01-20 | 2018-01-30 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine that uses a 2D camera to determine 3D coordinates of smoothly continuous edge features |
| US9163922B2 (en) | 2010-01-20 | 2015-10-20 | Faro Technologies, Inc. | Coordinate measurement machine with distance meter and camera to determine dimensions within camera images |
| US20110178753A1 (en) | 2010-01-20 | 2011-07-21 | Faro Technologies, Inc. | Portable Articulated Arm Coordinate Measuring Machine and Integrated Environmental Recorder |
| US9607239B2 (en) | 2010-01-20 | 2017-03-28 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a 2D camera and method of obtaining 3D representations |
| US8875409B2 (en) | 2010-01-20 | 2014-11-04 | Faro Technologies, Inc. | Coordinate measurement machines with removable accessories |
| US8677643B2 (en) | 2010-01-20 | 2014-03-25 | Faro Technologies, Inc. | Coordinate measurement machines with removable accessories |
| US9628775B2 (en) | 2010-01-20 | 2017-04-18 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a 2D camera and method of obtaining 3D representations |
| US8832954B2 (en) | 2010-01-20 | 2014-09-16 | Faro Technologies, Inc. | Coordinate measurement machines with removable accessories |
| US8615893B2 (en) | 2010-01-20 | 2013-12-31 | Faro Technologies, Inc. | Portable articulated arm coordinate measuring machine having integrated software controls |
| WO2011090888A2 (en) | 2010-01-20 | 2011-07-28 | Faro Technologies, Inc. | Coordinate measuring machine having an illuminated probe end and method of operation |
| EP2372302A1 (de) | 2010-03-26 | 2011-10-05 | Leica Geosystems AG | Messverfahren für eine oberflächenvermessende Messmaschine |
| USD643319S1 (en) | 2010-03-29 | 2011-08-16 | Hexagon Metrology Ab | Portable coordinate measurement machine |
| DE102010013923A1 (de) * | 2010-04-01 | 2011-10-06 | Wittenstein Ag | Autarkes Manipulatorelement |
| US8724119B2 (en) | 2010-04-21 | 2014-05-13 | Faro Technologies, Inc. | Method for using a handheld appliance to select, lock onto, and track a retroreflector with a laser tracker |
| US9377885B2 (en) | 2010-04-21 | 2016-06-28 | Faro Technologies, Inc. | Method and apparatus for locking onto a retroreflector with a laser tracker |
| US8537371B2 (en) | 2010-04-21 | 2013-09-17 | Faro Technologies, Inc. | Method and apparatus for using gestures to control a laser tracker |
| US9400170B2 (en) | 2010-04-21 | 2016-07-26 | Faro Technologies, Inc. | Automatic measurement of dimensional data within an acceptance region by a laser tracker |
| US9772394B2 (en) | 2010-04-21 | 2017-09-26 | Faro Technologies, Inc. | Method and apparatus for following an operator and locking onto a retroreflector with a laser tracker |
| US8422034B2 (en) | 2010-04-21 | 2013-04-16 | Faro Technologies, Inc. | Method and apparatus for using gestures to control a laser tracker |
| US8619265B2 (en) | 2011-03-14 | 2013-12-31 | Faro Technologies, Inc. | Automatic measurement of dimensional data with a laser tracker |
| KR20130092989A (ko) * | 2010-04-26 | 2013-08-21 | 가부시키가이샤 니콘 | 프로파일 측정 장치 |
| DE102010020925B4 (de) | 2010-05-10 | 2014-02-27 | Faro Technologies, Inc. | Verfahren zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010017304A1 (de) | 2010-06-09 | 2011-12-15 | Martin Knauer | Koordinatenmessvorrichtung, Verfahren zum Betreiben einer Koordinatenmessvorrichtung und Computerprogrammprodukt |
| US9368046B2 (en) | 2010-07-14 | 2016-06-14 | Macronix International Co., Ltd. | Color tactile vision system |
| DE102010032725B4 (de) * | 2010-07-26 | 2012-04-26 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010032726B3 (de) | 2010-07-26 | 2011-11-24 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010032723B3 (de) | 2010-07-26 | 2011-11-24 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010033561B3 (de) | 2010-07-29 | 2011-12-15 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US8127458B1 (en) * | 2010-08-31 | 2012-03-06 | Hexagon Metrology, Inc. | Mounting apparatus for articulated arm laser scanner |
| DE112011102995B4 (de) | 2010-09-08 | 2016-05-19 | Faro Technologies Inc. | Laserscanner oder Lasernachführungsgerät mit einem Projektor |
| US9168654B2 (en) | 2010-11-16 | 2015-10-27 | Faro Technologies, Inc. | Coordinate measuring machines with dual layer arm |
| DE112011104712B4 (de) | 2011-01-14 | 2015-10-08 | Faro Technologies, Inc. | Verfahren zum Verpacken und zum Transport eines Geräts |
| GB2511236B (en) | 2011-03-03 | 2015-01-28 | Faro Tech Inc | Target apparatus and method |
| EP2511656A1 (de) * | 2011-04-14 | 2012-10-17 | Hexagon Technology Center GmbH | Vermessungssystem zur Bestimmung von 3D-Koordinaten einer Objektoberfläche |
| US9686532B2 (en) | 2011-04-15 | 2017-06-20 | Faro Technologies, Inc. | System and method of acquiring three-dimensional coordinates using multiple coordinate measurement devices |
| US8537376B2 (en) | 2011-04-15 | 2013-09-17 | Faro Technologies, Inc. | Enhanced position detector in laser tracker |
| US9482529B2 (en) | 2011-04-15 | 2016-11-01 | Faro Technologies, Inc. | Three-dimensional coordinate scanner and method of operation |
| US9164173B2 (en) | 2011-04-15 | 2015-10-20 | Faro Technologies, Inc. | Laser tracker that uses a fiber-optic coupler and an achromatic launch to align and collimate two wavelengths of light |
| CN103782130B (zh) * | 2011-07-08 | 2017-06-20 | 卡尔蔡司工业测量技术有限公司 | 在测量工件的坐标时的误差修正和/或避免 |
| JP2014524570A (ja) * | 2011-08-12 | 2014-09-22 | ウオーターズ・テクノロジーズ・コーポレイシヨン | デュアル読み取りヘッド光学エンコーダを備える回転式レオメータ |
| DE102011113611B3 (de) * | 2011-09-16 | 2012-10-04 | PTW-Freiburg Physikalisch-Technische Werkstätten Dr. Pychlau GmbH | Wasserphantom und Messsystem |
| CN102445172A (zh) * | 2011-10-23 | 2012-05-09 | 江苏阳明船舶装备制造技术有限公司 | 一种用于空间物体位置关系的测量方法 |
| CN102410933B (zh) * | 2011-11-24 | 2015-06-10 | 河北省电力建设调整试验所 | 一种岸边测量摇臂基座 |
| CN102519361B (zh) * | 2011-12-28 | 2014-03-05 | 二重集团(德阳)重型装备股份有限公司 | 激光跟踪仪专用工作台及激光跟踪测量方法 |
| US8763267B2 (en) | 2012-01-20 | 2014-07-01 | Hexagon Technology Center Gmbh | Locking counterbalance for a CMM |
| DE102012100609A1 (de) | 2012-01-25 | 2013-07-25 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9638507B2 (en) | 2012-01-27 | 2017-05-02 | Faro Technologies, Inc. | Measurement machine utilizing a barcode to identify an inspection plan for an object |
| CN102632508B (zh) * | 2012-04-17 | 2015-04-29 | 浙江大学 | 一种适用于机器人关节的平面扭簧 |
| CN103455045A (zh) * | 2012-05-30 | 2013-12-18 | 鸿富锦精密工业(深圳)有限公司 | 接触式运动控制系统及方法 |
| US9069355B2 (en) | 2012-06-08 | 2015-06-30 | Hexagon Technology Center Gmbh | System and method for a wireless feature pack |
| JP2015522805A (ja) * | 2012-06-11 | 2015-08-06 | ファロ テクノロジーズ インコーポレーテッド | 着脱可能なアクセサリを有する座標測定機 |
| EP2677270B1 (en) | 2012-06-22 | 2015-01-28 | Hexagon Technology Center GmbH | Articulated Arm CMM |
| US9482560B2 (en) | 2012-07-04 | 2016-11-01 | Hexagon Technology Center Gmbh | Optical position transmitter with analog memory unit |
| US8997362B2 (en) | 2012-07-17 | 2015-04-07 | Faro Technologies, Inc. | Portable articulated arm coordinate measuring machine with optical communications bus |
| EP2690396A1 (de) | 2012-07-24 | 2014-01-29 | Hexagon Technology Center GmbH | Interferometrische Entfernungsmessanordnung und ebensolches Verfahren |
| EP2690395A1 (de) | 2012-07-24 | 2014-01-29 | Hexagon Technology Center GmbH | Interferometrische Entfernungsmessanordnung und ebensolches Verfahren |
| DE102012107544B3 (de) | 2012-08-17 | 2013-05-23 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| EP2698599A1 (de) | 2012-08-17 | 2014-02-19 | Hexagon Technology Center GmbH | Koordinatenmessverfahren und Koordinatenmessmaschine zum Vermessen von Oberflächen mit einem optischen Sensor |
| DE102012109481A1 (de) | 2012-10-05 | 2014-04-10 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US10067231B2 (en) | 2012-10-05 | 2018-09-04 | Faro Technologies, Inc. | Registration calculation of three-dimensional scanner data performed between scans based on measurements by two-dimensional scanner |
| US9513107B2 (en) | 2012-10-05 | 2016-12-06 | Faro Technologies, Inc. | Registration calculation between three-dimensional (3D) scans based on two-dimensional (2D) scan data from a 3D scanner |
| EP2762832B1 (de) | 2013-01-30 | 2018-06-13 | Hexagon Technology Center GmbH | Optische Einzelpunktmessung |
| US9250214B2 (en) | 2013-03-12 | 2016-02-02 | Hexagon Metrology, Inc. | CMM with flaw detection system |
| US9041914B2 (en) | 2013-03-15 | 2015-05-26 | Faro Technologies, Inc. | Three-dimensional coordinate scanner and method of operation |
| WO2015031602A1 (en) * | 2013-08-29 | 2015-03-05 | Rhk Technology, Inc. | Optical alignment interface |
| CN103644861B (zh) * | 2013-12-09 | 2016-04-06 | 中联重科股份有限公司 | 工程机械设备的臂架成型精度的分析系统及分析方法 |
| US9163921B2 (en) | 2013-12-18 | 2015-10-20 | Hexagon Metrology, Inc. | Ultra-portable articulated arm coordinate measurement machine |
| US9594250B2 (en) | 2013-12-18 | 2017-03-14 | Hexagon Metrology, Inc. | Ultra-portable coordinate measurement machine |
| EP2887011B1 (de) | 2013-12-20 | 2017-02-08 | Hexagon Technology Center GmbH | Koordinatenmessmaschine mit hochpräziser 3D-Druckfunktionalität |
| EP2916099B1 (en) | 2014-03-07 | 2020-09-30 | Hexagon Technology Center GmbH | Articulated arm coordinate measuring machine |
| CN103954246B (zh) * | 2014-03-21 | 2017-02-15 | 北京信息科技大学 | 具有磁电式锁臂装置的可变臂的关节式坐标测量机 |
| JP2015227816A (ja) | 2014-05-30 | 2015-12-17 | 株式会社ミツトヨ | 多関節アーム形測定機 |
| US9759540B2 (en) | 2014-06-11 | 2017-09-12 | Hexagon Metrology, Inc. | Articulating CMM probe |
| CN104029068B (zh) * | 2014-06-19 | 2016-04-13 | 李强 | 大型泵体类零件加工的找正定位装置及定位方法 |
| US9395174B2 (en) | 2014-06-27 | 2016-07-19 | Faro Technologies, Inc. | Determining retroreflector orientation by optimizing spatial fit |
| US10656617B2 (en) | 2014-07-16 | 2020-05-19 | Faro Technologies, Inc. | Measurement device for machining center |
| EP3194884B1 (en) | 2014-09-19 | 2023-11-01 | Hexagon Metrology, Inc | Multi-mode portable coordinate measuring machine |
| WO2016073208A1 (en) | 2014-11-03 | 2016-05-12 | Faro Technologies, Inc. | Method and apparatus for locking onto a retroreflector with a laser tracker |
| DE102014118359A1 (de) * | 2014-12-10 | 2016-06-16 | Carl Zeiss Industrielle Messtechnik Gmbh | Rotoranordnung für eine Schleifringbaugruppe und Drehkupplungsanordnung mit einer solchen Rotoranordnung |
| US10285698B2 (en) * | 2015-02-26 | 2019-05-14 | Covidien Lp | Surgical apparatus |
| FR3033635B1 (fr) * | 2015-03-10 | 2019-03-29 | Safran Aircraft Engines | Canne de machine de mesure tridimensionnelle en particulier de dimensions d'une cavite interne d'un rotor de turbomachine |
| US9866035B2 (en) * | 2015-03-27 | 2018-01-09 | Irobot Corporation | Rotatable coupling |
| WO2017002208A1 (ja) * | 2015-06-30 | 2017-01-05 | 株式会社安川電機 | ロボットシステム |
| US10184794B2 (en) * | 2015-07-01 | 2019-01-22 | Makita Corporation | Laser marker |
| CN105058403A (zh) * | 2015-08-17 | 2015-11-18 | 苏州速腾电子科技有限公司 | 一种可折叠的分拣夹具 |
| US10107654B2 (en) * | 2015-09-02 | 2018-10-23 | Nikon Corporation | Rotary probe head |
| WO2017060734A1 (en) * | 2015-10-09 | 2017-04-13 | Automata Technologies Limited | Robot arm |
| CN105203056A (zh) * | 2015-10-09 | 2015-12-30 | 中国电子科技集团公司第三十八研究所 | 一种三坐标测量装置及其测量方法 |
| EP3182053B1 (en) | 2015-12-17 | 2018-08-29 | Hexagon Technology Center GmbH | Optical probe and coordinate measuring machine having an integrally formed interface |
| DE102015122844A1 (de) | 2015-12-27 | 2017-06-29 | Faro Technologies, Inc. | 3D-Messvorrichtung mit Batteriepack |
| US10179282B2 (en) | 2016-02-26 | 2019-01-15 | Impyrium, Inc. | Joystick input apparatus with living hinges |
| CN105843162B (zh) * | 2016-03-16 | 2019-01-22 | 珞石(北京)科技有限公司 | 基于空间解析几何求解工业机器人中圆弧轨迹的方法 |
| DE102016004787B4 (de) * | 2016-04-20 | 2023-02-02 | Franka Emika Gmbh | Antriebsvorrichtung für einen Roboter und Verfahren zu ihrer Herstellung |
| WO2018009981A1 (en) | 2016-07-15 | 2018-01-18 | Fastbrick Ip Pty Ltd | Brick/block laying machine incorporated in a vehicle |
| EP3485109B1 (en) | 2016-07-15 | 2021-09-29 | Fastbrick IP Pty Ltd | Boom for material transport |
| CN106041993B (zh) * | 2016-07-26 | 2018-08-31 | 中国人民解放军军械工程学院 | 一种可准确定位的机械臂及其定位方法 |
| CN106338245B (zh) * | 2016-08-15 | 2019-05-10 | 南京工业大学 | 一种工件非接触移动测量方法 |
| DE202016006669U1 (de) | 2016-10-26 | 2017-08-29 | Tesa Sa | Optischer Sensor mit variierbaren Messkanälen |
| CN106441183A (zh) * | 2016-11-18 | 2017-02-22 | 九江如洋精密科技有限公司 | 一种便携式探针测量机 |
| US10663274B2 (en) * | 2017-01-27 | 2020-05-26 | Faro Technologies, Inc | Articulated arm coordinate measuring machine |
| CN110192144A (zh) * | 2017-02-08 | 2019-08-30 | 惠普发展公司,有限责任合伙企业 | 带开口的物体扫描仪 |
| JP2018155533A (ja) * | 2017-03-16 | 2018-10-04 | 株式会社ミツトヨ | 形状測定装置 |
| US11092419B2 (en) | 2017-04-13 | 2021-08-17 | Sa08700334 | Ultra-light and ultra-accurate portable coordinate measurement machine with multi-piece joint engagement |
| US11054237B2 (en) | 2019-04-04 | 2021-07-06 | Sa08700334 | Ultra-light and ultra-accurate portable coordinate measurement machine with unique base plate arrangement |
| US10267614B2 (en) * | 2017-04-13 | 2019-04-23 | Sa08700334 | Ultra-light and ultra-accurate portable coordinate measurement machine |
| US10634478B2 (en) | 2017-04-13 | 2020-04-28 | Sa08700334 | Ultra-light and ultra-accurate portable coordinate measurement machine with serial bus capture |
| US9803973B1 (en) | 2017-04-13 | 2017-10-31 | Sa08700334 | Ultra-light and ultra-accurate portable coordinate measurement machine |
| US11566880B2 (en) | 2017-04-13 | 2023-01-31 | Sa08700334 | Ultra-light and ultra-accurate portable coordinate measurement machine substantially immune to bearing assembly thermal effects |
| JP6850687B2 (ja) * | 2017-06-16 | 2021-03-31 | 株式会社ミツトヨ | インジケータ検査機とその検査方法及び検査プログラム |
| CN107097122A (zh) * | 2017-06-27 | 2017-08-29 | 长春工程学院 | 一种自主研磨大型自由曲面的机器人 |
| CN111095355B (zh) | 2017-07-05 | 2023-10-20 | 快砖知识产权私人有限公司 | 实时定位和定向跟踪器 |
| CN109269402A (zh) * | 2017-07-17 | 2019-01-25 | 天津玛特检测设备有限公司 | 基于视觉测量的检测系统 |
| EP3435032B1 (de) | 2017-07-26 | 2020-11-11 | Hexagon Technology Center GmbH | Optischer rauheitssensor für eine koordinatenmessmaschine |
| CN111226090B (zh) | 2017-08-17 | 2023-05-23 | 快砖知识产权私人有限公司 | 具有改进的横滚角测量的激光跟踪器 |
| CN107504052B (zh) * | 2017-08-24 | 2019-09-06 | 合肥工业大学 | 一种精密回转俯仰关节机构 |
| CN107457802B (zh) * | 2017-09-13 | 2020-10-09 | 北京理工大学 | 一种仿人机器人摔倒保护装置 |
| EP3688408A1 (en) | 2017-09-28 | 2020-08-05 | Hexagon Metrology, Inc | Systems and methods for measuring various properties of an object |
| EP3688404B1 (en) * | 2017-09-29 | 2023-06-07 | Mitutoyo Corporation | Compact measurement device configuration for integrating complex circuits |
| US11401115B2 (en) | 2017-10-11 | 2022-08-02 | Fastbrick Ip Pty Ltd | Machine for conveying objects and multi-bay carousel for use therewith |
| US11022434B2 (en) | 2017-11-13 | 2021-06-01 | Hexagon Metrology, Inc. | Thermal management of an optical scanning device |
| EP3495771A1 (en) | 2017-12-11 | 2019-06-12 | Hexagon Technology Center GmbH | Automated surveying of real world objects |
| CN107901044A (zh) * | 2017-12-29 | 2018-04-13 | 上海交通大学 | 机器人关节的驱动控制一体化系统 |
| EP3521781A1 (de) | 2018-01-31 | 2019-08-07 | Hexagon Technology Center GmbH | Schwingungsanalyse an einem mittels additiver fertigung produzierten objekt |
| EP3581881A1 (de) | 2018-06-15 | 2019-12-18 | Hexagon Technology Center GmbH | Oberflächenvermessung mittels angeregter fluoreszenz |
| EP3581884A1 (de) | 2018-06-15 | 2019-12-18 | Hexagon Technology Center GmbH | Additive fertigung mit optischer prozessüberwachung |
| CN108789408A (zh) * | 2018-06-20 | 2018-11-13 | 上海交通大学 | 基于力矩传感器的协作机器人驱控一体化控制系统 |
| FR3083600B1 (fr) | 2018-07-06 | 2020-09-18 | Hexagon Metrology Sas | Bras de mesure avec extremite multifonction |
| FR3083603B1 (fr) | 2018-07-06 | 2020-11-20 | Hexagon Metrology Sas | Bras de mesure avec extremite multifonction |
| FR3083602B1 (fr) | 2018-07-06 | 2020-09-18 | Hexagon Metrology Sas | Bras de mesure avec extremite multifonction |
| FR3083604B1 (fr) * | 2018-07-06 | 2020-09-18 | Hexagon Metrology Sas | Bras de mesure avec extremite multifonction |
| US10683067B2 (en) * | 2018-08-10 | 2020-06-16 | Buffalo Automation Group Inc. | Sensor system for maritime vessels |
| JP6875348B2 (ja) * | 2018-10-17 | 2021-05-26 | ファナック株式会社 | ロボットおよび第1アーム部材 |
| CN109676596B (zh) * | 2019-01-30 | 2023-09-22 | 华南理工大学 | 一种六自由度智能抓取机械臂 |
| CN109591032B (zh) * | 2019-01-31 | 2022-03-11 | 四川智吉科技有限公司 | 防倾倒的政务机器人 |
| EP3693694A1 (en) | 2019-02-07 | 2020-08-12 | Hexagon Technology Center GmbH | Method for gauging surfaces with classification of measurements as valid or non-valid |
| CN109732568A (zh) * | 2019-03-12 | 2019-05-10 | 苏州科技大学 | 一种机械手臂自动化起运装置 |
| CN109751943B (zh) * | 2019-03-15 | 2023-10-24 | 福建船政交通职业学院 | 内环面齿轮的接触式测量工具及使用方法 |
| JP7276050B2 (ja) | 2019-09-30 | 2023-05-18 | 株式会社ニデック | 眼鏡枠形状測定装置、及びレンズ加工装置 |
| CN211761651U (zh) * | 2019-11-13 | 2020-10-27 | 富士能电子(昆山)有限公司 | 多轴机械手臂 |
| EP3822578A1 (de) | 2019-11-15 | 2021-05-19 | Hexagon Technology Center GmbH | Adaptiver 3d-scanner mit variablem messbereich |
| US20240083044A1 (en) * | 2020-04-09 | 2024-03-14 | Agile Robots AG | Robot arm having an articulated joint |
| EP3978863A1 (en) * | 2020-09-30 | 2022-04-06 | Nidek Co., Ltd. | Eyeglass frame shape measurement apparatus and control program for eyeglass frame shape measurement apparatus |
| CN112556579A (zh) * | 2020-12-25 | 2021-03-26 | 深圳市中图仪器股份有限公司 | 一种六自由度空间坐标位置和姿态测量装置 |
| CN114454208A (zh) * | 2021-02-01 | 2022-05-10 | 仙居行至科技有限公司 | 电动锁紧回转关节 |
| CN114571451B (zh) * | 2022-02-25 | 2023-08-22 | 山东新一代信息产业技术研究院有限公司 | 一种可调漏斗边界的自适应滑模控制方法及设备 |
| US11747126B1 (en) | 2022-05-20 | 2023-09-05 | Sa08700334 | Ultra-light and ultra-accurate portable coordinate measurement machine with reduced profile swivel joints |
| EP4332495A1 (en) | 2022-09-01 | 2024-03-06 | Leica Geosystems AG | Measuring instrument with a scanning absolute distance meter |
| CN116839634B (zh) * | 2023-08-29 | 2023-11-21 | 北京信普尼科技有限公司 | 一种用机械臂标定陀螺仪的方法与机械臂 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62200225A (ja) * | 1986-02-27 | 1987-09-03 | Canon Inc | ロ−タリ−エンコ−ダ− |
| JPH0699376A (ja) * | 1992-09-22 | 1994-04-12 | Nippon Telegr & Teleph Corp <Ntt> | ロボット軌道を教示するための方法及びシステム |
| JPH06131032A (ja) * | 1992-04-14 | 1994-05-13 | Hitachi Ltd | ロボット装置およびロボット装置のティ−チング方法。 |
| JPH08105738A (ja) * | 1994-09-23 | 1996-04-23 | Carl Zeiss:Fa | マニュアル的にコントロールされる座標測定機による加工物の測定法および座標測定機 |
| JPH08261745A (ja) * | 1995-03-03 | 1996-10-11 | Faro Technol Inc | 三次元座標測定装置 |
| JPH09196703A (ja) * | 1996-01-12 | 1997-07-31 | Yaskawa Electric Corp | 光学式エンコーダ |
| JPH10332732A (ja) * | 1997-06-04 | 1998-12-18 | Harmonic Drive Syst Ind Co Ltd | レゾルバ内蔵型角加速度検出装置 |
| JP2000352525A (ja) * | 1999-06-10 | 2000-12-19 | Nippon Telegr & Teleph Corp <Ntt> | エンコーダ |
Family Cites Families (193)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US344279A (en) * | 1886-06-22 | Jambs m | ||
| US479211A (en) * | 1892-07-19 | Pile-wire | ||
| US410477A (en) * | 1889-09-03 | Chusetts | ||
| US423534A (en) * | 1890-03-18 | Noiseless blackboard-eraser | ||
| US493470A (en) * | 1893-03-14 | Tongue-support | ||
| US377932A (en) * | 1888-02-14 | Haeey m | ||
| US1888454A (en) * | 1927-04-09 | 1932-11-22 | Ames Co B C | Loose play indicator |
| US1778481A (en) * | 1929-10-11 | 1930-10-14 | Leo P Boucher | Dial-test indicator |
| US2280437A (en) * | 1939-11-02 | 1942-04-21 | Brown & Sharpe Mfg | Releasable permanent magnet holding device |
| US2431099A (en) * | 1944-04-21 | 1947-11-18 | Sheffield Corp | Gauging device |
| US2579168A (en) * | 1948-08-05 | 1951-12-18 | Fed Electric Prod Co | Key lock for push-button switches |
| US2906179A (en) * | 1957-01-28 | 1959-09-29 | North American Aviation Inc | Vector gage |
| US3531868A (en) * | 1968-04-18 | 1970-10-06 | Ford Motor Co | Surface scanner for measuring the coordinates of points on a three-dimensional surface |
| US4153998A (en) * | 1972-09-21 | 1979-05-15 | Rolls-Royce (1971) Limited | Probes |
| DE2356030C3 (de) * | 1973-11-09 | 1978-05-11 | Ernst Leitz Wetzlar Gmbh, 6330 Wetzlar | Taster zur Werkstückantastung |
| US3944798A (en) * | 1974-04-18 | 1976-03-16 | Eaton-Leonard Corporation | Method and apparatus for measuring direction |
| US3945129A (en) | 1974-11-13 | 1976-03-23 | Bergkvist Lars A | Instrument for the indication or checking of the angular position of an object |
| US4038756A (en) * | 1975-08-21 | 1977-08-02 | The Valeron Corporation | Electronic column gage |
| GB1568053A (en) | 1975-10-04 | 1980-05-21 | Rolls Royce | Contactsensing probe |
| GB1593050A (en) * | 1976-09-30 | 1981-07-15 | Renishaw Electrical Ltd | Contact sensing probe |
| US4141149A (en) * | 1976-09-30 | 1979-02-27 | Gravure Research Institute, Inc. | Portable comparator gage for measuring the relative deviation in the diameter of cylinders |
| US4136458A (en) | 1976-10-01 | 1979-01-30 | The Bendix Corporation | Bi-axial probe |
| JPS5924516B2 (ja) | 1976-10-09 | 1984-06-09 | エブレン株式会社 | 工具装置 |
| GB1597842A (en) * | 1977-02-07 | 1981-09-09 | Rolls Royce | Indexing mechanism |
| GB2045437B (en) | 1979-03-30 | 1984-02-08 | Renishaw Electrical Ltd | Coordinate measuring machine |
| US4274205A (en) | 1979-04-23 | 1981-06-23 | General Electric Company | Measuring fixture |
| JPS5662783A (en) | 1979-10-19 | 1981-05-28 | Fujikoshi Kk | Multiple joint type continuous course controlling robot |
| US4313238A (en) * | 1980-03-10 | 1982-02-02 | Amcs Corporation | Shoe cleaning machine |
| US4338772A (en) * | 1980-03-11 | 1982-07-13 | Sterlingworth Music, Inc. | Musical instrument string modifying device |
| DE3018496A1 (de) * | 1980-05-14 | 1981-11-19 | Walter Dipl.-Ing. Dr.-Ing. 8012 Ottobrunn Mehnert | Verfahren und vorrichtung zur messung eines winkels |
| US4338722A (en) | 1980-06-16 | 1982-07-13 | Microlec, S.A. | Optoelectronic displacement sensor |
| JPS5745407A (en) * | 1980-09-02 | 1982-03-15 | Kosaka Kenkyusho:Kk | Three dimensional coordinate measuring device |
| JPS5773602A (en) | 1980-10-27 | 1982-05-08 | Kosaka Kenkyusho:Kk | Three-dimensional coordinate measuring instrument |
| JPS57132015A (en) | 1981-02-09 | 1982-08-16 | Kosaka Kenkyusho:Kk | Coordinate transformation device |
| JPS57169611A (en) * | 1981-04-13 | 1982-10-19 | Tokyo Optical Co Ltd | Measuring device for angular displacement |
| US4449292A (en) | 1982-03-26 | 1984-05-22 | Kaufman Lance R | Method of clamping a circuit package to enhance heat transfer |
| JPS58196404A (ja) * | 1982-05-11 | 1983-11-15 | Mitsutoyo Mfg Co Ltd | タッチ信号プロ−ブ |
| US4593470A (en) * | 1982-07-14 | 1986-06-10 | Micro Control Systems, Inc. | Portable three dimensional graphics tablet |
| US4570065A (en) * | 1983-01-28 | 1986-02-11 | Pryor Timothy R | Robotic compensation systems |
| US4567462A (en) | 1983-03-25 | 1986-01-28 | Hewlett-Packard Company | Method and apparatus for reducing crosstalk effects upon phase measurement |
| JPS6080591A (ja) * | 1983-10-05 | 1985-05-08 | 株式会社日立製作所 | マニプレ−タ |
| US4492036A (en) | 1984-01-11 | 1985-01-08 | Brown & Sharp Manufacturing Company | Magnetic ball bar gauge |
| JPS60170709A (ja) * | 1984-02-16 | 1985-09-04 | Toshiba Corp | 形状測定装置 |
| US4571834A (en) * | 1984-02-17 | 1986-02-25 | Orthotronics Limited Partnership | Knee laxity evaluator and motion module/digitizer arrangement |
| US4606696A (en) * | 1984-06-25 | 1986-08-19 | Slocum Alexander H | Mechanism to determine position and orientation in space |
| US4676002A (en) * | 1984-06-25 | 1987-06-30 | Slocum Alexander H | Mechanisms to determine position and orientation in space |
| GB8423086D0 (en) * | 1984-09-12 | 1984-10-17 | March A A C | Position sensor |
| US4693663A (en) * | 1984-10-05 | 1987-09-15 | Donaldson Company, Inc. | Robot with articulated arm |
| JPS61105411A (ja) * | 1984-10-29 | 1986-05-23 | Mitsutoyo Mfg Co Ltd | 多次元測定機の測定方法 |
| GB2171797B (en) | 1985-01-14 | 1988-08-24 | Nissan Motor | Headlight optical axis aiming checking apparatus and method |
| DE3523188A1 (de) * | 1985-06-28 | 1987-01-08 | Zeiss Carl Fa | Steuerung fuer koordinatenmessgeraete |
| US4679331A (en) * | 1985-08-26 | 1987-07-14 | Ppg Industries, Inc. | Apparatus and method for determining contour characteristics of a contoured article |
| US4808064A (en) | 1985-12-05 | 1989-02-28 | Odetics, Inc. | Micropositioning apparatus for a robotic arm |
| US4675502A (en) | 1985-12-23 | 1987-06-23 | General Electric Company | Real time tracking control for taught path robots |
| US4973215A (en) * | 1986-02-18 | 1990-11-27 | Robotics Research Corporation | Industrial robot with servo |
| US4937759A (en) * | 1986-02-18 | 1990-06-26 | Robotics Research Corporation | Industrial robot with controller |
| FR2597969B1 (fr) | 1986-04-29 | 1990-11-16 | Granger Romain | Dispositif de mesure de forme ou de position d'un objet |
| US4766775A (en) * | 1986-05-02 | 1988-08-30 | Hodge Steven W | Modular robot manipulator |
| US4791934A (en) * | 1986-08-07 | 1988-12-20 | Picker International, Inc. | Computer tomography assisted stereotactic surgery system and method |
| US4786847A (en) | 1986-11-20 | 1988-11-22 | Unimation Inc. | Digital control for multiaxis robots |
| CA1299362C (en) * | 1986-12-10 | 1992-04-28 | Gregory James Mcdonald | Coordinate measuring system |
| US4819195A (en) * | 1987-01-20 | 1989-04-04 | The Warner & Swasey Company | Method for calibrating a coordinate measuring machine and the like and system therefor |
| US4945501A (en) * | 1987-01-20 | 1990-07-31 | The Warner & Swasey Company | Method for determining position within the measuring volume of a coordinate measuring machine and the like and system therefor |
| US4932131A (en) | 1987-03-06 | 1990-06-12 | Renishaw Plc | Position determination apparatus |
| IT1214292B (it) * | 1987-05-05 | 1990-01-10 | Garda Impianti Srl | Apparecchiatura per la misura e/o il controllo della posizione edella orientazione di punti o zone caratteristiche di strutture, in particolare di scocche di autoveicoli. |
| DE3726260A1 (de) | 1987-08-07 | 1989-02-16 | Heidenhain Gmbh Dr Johannes | Positionsmesseinrichtung mit mehreren abtaststellen |
| US4939678A (en) | 1987-11-19 | 1990-07-03 | Brown & Sharpe Manufacturing Company | Method for calibration of coordinate measuring machine |
| DE3740070A1 (de) * | 1987-11-26 | 1989-06-08 | Zeiss Carl Fa | Dreh-schwenk-einrichtung fuer tastkoepfe von koordinatenmessgeraeten |
| GB8729638D0 (en) * | 1987-12-19 | 1988-02-03 | Renishaw Plc | Mounting for surface sensing device |
| US5251127A (en) * | 1988-02-01 | 1993-10-05 | Faro Medical Technologies Inc. | Computer-aided surgery apparatus |
| GB8803847D0 (en) * | 1988-02-18 | 1988-03-16 | Renishaw Plc | Mounting for surface-sensing device |
| US4835410A (en) * | 1988-02-26 | 1989-05-30 | Black & Decker Inc. | Dual-mode corded/cordless system for power-operated devices |
| US5008555A (en) | 1988-04-08 | 1991-04-16 | Eaton Leonard Technologies, Inc. | Optical probe with overlapping detection fields |
| US4937769A (en) | 1988-06-15 | 1990-06-26 | Asea Brown Boveri Inc. | Apparatus and method for reducing transient exponential noise in a sinusoidal signal |
| US5050608A (en) * | 1988-07-12 | 1991-09-24 | Medirand, Inc. | System for indicating a position to be operated in a patient's body |
| FR2634279B1 (fr) | 1988-07-13 | 1991-08-09 | France Etat Armement | Dispositif de releve tridimensionnel |
| AU3879789A (en) | 1988-07-22 | 1990-02-19 | Sandoz Ag | Use of benzo(g)quinolines in treatment of nicotine addiction |
| US4904514A (en) * | 1988-09-13 | 1990-02-27 | Kimberly-Clark Corporation | Protective covering for a mechanical linkage |
| US5189806A (en) * | 1988-12-19 | 1993-03-02 | Renishaw Plc | Method of and apparatus for scanning the surface of a workpiece |
| JPH02168303A (ja) | 1988-12-21 | 1990-06-28 | Shin Meiwa Ind Co Ltd | ロボットの制御方法 |
| JPH02212085A (ja) | 1989-02-09 | 1990-08-23 | Toshiba Corp | マニピュレータの姿勢決定方法 |
| GB8921338D0 (en) * | 1989-09-21 | 1989-11-08 | Smiths Industries Plc | Optical encoders |
| JPH02220106A (ja) * | 1989-02-22 | 1990-09-03 | Okuma Mach Works Ltd | 計測機能を有するデジタイズ制御装置 |
| EP0392699B1 (en) * | 1989-04-14 | 1993-09-22 | Renishaw plc | Probe head |
| JPH02290506A (ja) * | 1989-04-28 | 1990-11-30 | Mitsutoyo Corp | 三次元測定機 |
| KR910005508B1 (ko) | 1989-05-23 | 1991-07-31 | 박준호 | 컴퓨터 원용 키이니매틱 트랜듀서 링크 시스템 및 그 시스템을 사용한 nc 공작기계 정밀도의 측정 및 해석방법 |
| JPH02309223A (ja) | 1989-05-24 | 1990-12-25 | Minebea Co Ltd | 荷重変換器の誤差調整方法 |
| US5274203A (en) * | 1989-06-30 | 1993-12-28 | Otis Elevator Company | "Smart" position transducer system for elevators |
| SE8902416L (sv) * | 1989-07-04 | 1991-01-05 | Asea Brown Boveri | Absolutmaetande laegesgivarutrustning foer industrirobot |
| JPH07104146B2 (ja) * | 1989-08-29 | 1995-11-13 | 株式会社ミツトヨ | 座標測定用プローブの回転テーブル倣い制御方法 |
| JPH03140820A (ja) * | 1989-10-25 | 1991-06-14 | Matsushita Electric Ind Co Ltd | エンコーダ |
| US4975548A (en) * | 1989-12-15 | 1990-12-04 | Alco Electronic Products, Inc. | Miniature dual in-line package electrical switch |
| GB9004117D0 (en) * | 1990-02-23 | 1990-04-18 | Renishaw Plc | Touch probe |
| US5086401A (en) * | 1990-05-11 | 1992-02-04 | International Business Machines Corporation | Image-directed robotic system for precise robotic surgery including redundant consistency checking |
| FR2662793B1 (fr) | 1990-05-30 | 1994-03-18 | Renault | Installation de mesure en continu des defauts de forme d'une piece, et procede de mesure mis en óoeuvre dans cette installation. |
| GB9013390D0 (en) * | 1990-06-15 | 1990-08-08 | Renishaw Plc | Method and apparatus for measurement of angular displacement |
| EP0471371B1 (en) * | 1990-08-17 | 1995-04-12 | Kabushiki Kaisha Toshiba | Displacement-measuring apparatus |
| US5251156A (en) * | 1990-08-25 | 1993-10-05 | Carl-Zeiss-Stiftung, Heidenheim/Brenz | Method and apparatus for non-contact measurement of object surfaces |
| US5104225A (en) | 1991-01-25 | 1992-04-14 | Mitutoyo Corporation | Position detector and method of measuring position |
| FR2674017B1 (fr) * | 1991-03-12 | 1995-01-13 | Romer Srl | Dispositif de mesure de forme ou de position d'un objet. |
| US5189866A (en) * | 1991-04-08 | 1993-03-02 | Krutza Lloyd J | Element protection cover applicator for round hay bales |
| DE69207983T2 (de) * | 1991-07-27 | 1996-06-05 | Renishaw Transducer Syst | Kalibrier- und Messgerät |
| EP0527536B1 (en) * | 1991-08-14 | 1998-06-10 | Koninklijke Philips Electronics N.V. | X-ray analysis apparatus |
| US5230623A (en) | 1991-12-10 | 1993-07-27 | Radionics, Inc. | Operating pointer with interactive computergraphics |
| GB9127139D0 (en) | 1991-12-20 | 1992-02-19 | 3D Scanners Ltd | Scanning unit |
| FR2685764B1 (fr) * | 1991-12-30 | 1995-03-17 | Kreon Ind | Capteur optique compact et a haute resolution pour l'analyse de formes tridimensionnelles. |
| GB9127548D0 (en) | 1991-12-31 | 1992-02-19 | 3D Scanners Ltd | Scanning sensor |
| IL100664A0 (en) * | 1992-01-15 | 1992-09-06 | Laser Ind Ltd | Method and apparatus for controlling a laser beam |
| USD344279S (en) * | 1992-01-17 | 1994-02-15 | Kawasaki Jukogyo Kabushiki Kaisha | Industrial robot |
| US5253458A (en) * | 1992-02-21 | 1993-10-19 | Dean Christian | Simulated log and panel prefabricated house structure |
| US5430643A (en) * | 1992-03-11 | 1995-07-04 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Configuration control of seven degree of freedom arms |
| US5486923A (en) * | 1992-05-05 | 1996-01-23 | Microe | Apparatus for detecting relative movement wherein a detecting means is positioned in the region of natural interference |
| JP3390440B2 (ja) * | 1992-05-05 | 2003-03-24 | ビーイーアイ・エレクトロニクス・インク | 相対的な動きを検出する装置 |
| DE4231040C2 (de) | 1992-09-17 | 2002-11-28 | Zett Mess Technik Gmbh | Höhenmess- und Anreißgerät |
| US5283682A (en) * | 1992-10-06 | 1994-02-01 | Ball Corporation | Reactionless scanning and positioning system |
| DE4238139C2 (de) | 1992-11-12 | 2002-10-24 | Zeiss Carl | Koordinatenmeßgerät |
| US5305091A (en) * | 1992-12-07 | 1994-04-19 | Oreo Products Inc. | Optical coordinate measuring system for large objects |
| JPH06186025A (ja) * | 1992-12-16 | 1994-07-08 | Yunisun:Kk | 三次元測定装置 |
| AU4972393A (en) | 1992-12-18 | 1994-07-19 | 3D Scanners Ltd | Scanning sensor |
| US6535794B1 (en) * | 1993-02-23 | 2003-03-18 | Faro Technologoies Inc. | Method of generating an error map for calibration of a robot or multi-axis machining center |
| US5412880A (en) * | 1993-02-23 | 1995-05-09 | Faro Technologies Inc. | Method of constructing a 3-dimensional map of a measurable quantity using three dimensional coordinate measuring apparatus |
| US5402582A (en) | 1993-02-23 | 1995-04-04 | Faro Technologies Inc. | Three dimensional coordinate measuring apparatus |
| KR100303018B1 (ko) | 1993-04-16 | 2001-11-22 | 스탠리 디. 피에코스 | 관절형아암이송장치 |
| US5341574A (en) * | 1993-06-29 | 1994-08-30 | The United States Of America As Represented By The Department Of Energy | Coordinate measuring machine test standard apparatus and method |
| US5413454A (en) * | 1993-07-09 | 1995-05-09 | Movsesian; Peter | Mobile robotic arm |
| US5724264A (en) * | 1993-07-16 | 1998-03-03 | Immersion Human Interface Corp. | Method and apparatus for tracking the position and orientation of a stylus and for digitizing a 3-D object |
| US5519393A (en) | 1993-07-22 | 1996-05-21 | Bouens, Inc. | Absolute digital position encoder with multiple sensors per track |
| EP0640902A3 (en) | 1993-08-26 | 1996-11-06 | Faro Technologies | Method for programming multi-axis devices controlled by computer. |
| DE4344494C2 (de) | 1993-12-24 | 1997-04-30 | Kodak Ag | Verfahren und Vorrichtung zur Vermessung einer Achsdrehbewegung |
| US5515599A (en) * | 1994-05-03 | 1996-05-14 | Best; Norman D. | Apparatus for processing small parts utilizing a robot and an array of tools mounted on the outer robot arm |
| DE69502283T3 (de) | 1994-05-14 | 2004-11-18 | Synaptics (Uk) Ltd., Harston | Positionskodierer |
| DE59510796D1 (de) | 1994-05-27 | 2003-10-23 | Zeiss Carl | Koordinatenmessung an Werkstücken mit einer Korrektur des durch die Messkraft abhängigen Biegeverhaltens des Koordinatenmessgerätes |
| US5510977A (en) * | 1994-08-02 | 1996-04-23 | Faro Technologies Inc. | Method and apparatus for measuring features of a part or item |
| GB9506358D0 (en) | 1995-03-28 | 1995-05-17 | Switched Reluctance Drives Ltd | Position encoder with fault indicator |
| JP2000510945A (ja) | 1995-05-16 | 2000-08-22 | ブラウン・アンド・シャープ・マニュファクチャリング・カンパニー | 関節アームを有する座標測定機械 |
| GB9515311D0 (en) * | 1995-07-26 | 1995-09-20 | 3D Scanners Ltd | Stripe scanners and methods of scanning |
| DE19534535C2 (de) * | 1995-09-18 | 2000-05-31 | Leitz Mestechnik Gmbh | Koordinatenmeßmaschine |
| USD377932S (en) * | 1995-10-31 | 1997-02-11 | Immersion Human Interface Corporation | Mechanical digitizing arm used to input three dimensional data into a computer |
| US5603400A (en) * | 1996-01-24 | 1997-02-18 | The Whitaker Corporation | Rocker switch |
| US5768792A (en) * | 1996-02-09 | 1998-06-23 | Faro Technologies Inc. | Method and apparatus for measuring and tube fitting |
| US6064497A (en) * | 1996-03-08 | 2000-05-16 | Intel Corporation | Low cost digital scanners |
| US5829148A (en) * | 1996-04-23 | 1998-11-03 | Eaton; Homer L. | Spatial measuring device |
| CA2183004A1 (en) | 1996-08-23 | 1998-02-24 | Nino Camurri | Articulated-arm measuring machine and twist-net network |
| US5926782A (en) * | 1996-11-12 | 1999-07-20 | Faro Technologies Inc | Convertible three dimensional coordinate measuring machine |
| DE19648864C2 (de) * | 1996-11-12 | 2000-09-07 | Helmut Piko | Positionierverfahren und Positioniersystem |
| US5807449A (en) * | 1997-01-08 | 1998-09-15 | Hooker; Jeffrey A. | Workpiece treating apparatus and method of treating same |
| EP0858015B1 (en) * | 1997-02-10 | 2003-05-07 | Mitutoyo Corporation | Measuring method and measuring instrument with a trigger probe |
| US6366861B1 (en) * | 1997-04-25 | 2002-04-02 | Applied Materials, Inc. | Method of determining a wafer characteristic using a film thickness monitor |
| US5956857A (en) * | 1997-05-19 | 1999-09-28 | Faro Technologies, Inc. | Mounting device for a coordinate measuring machine |
| US6081339A (en) * | 1997-05-29 | 2000-06-27 | Aim Controls, Inc. | Method and apparatus for measuring the direction and position of rotating bodies |
| US5889658A (en) * | 1997-11-25 | 1999-03-30 | Motorola, Inc. | Package assembly for an electronic component |
| USD410477S (en) * | 1998-03-24 | 1999-06-01 | Fanuc Ltd. | Industrial robot |
| US5991704A (en) * | 1998-03-26 | 1999-11-23 | Chrysler Corporation | Flexible support with indicator device |
| ITTO980462A1 (it) * | 1998-05-29 | 1999-11-29 | Brown & Sharpe Dea Spa | Gruppo di collegamento di un attrezzo di misura ad una testa di misura atta ad essere movimentata da un robot di misura |
| US6131299A (en) * | 1998-07-01 | 2000-10-17 | Faro Technologies, Inc. | Display device for a coordinate measurement machine |
| US6151789A (en) * | 1998-07-01 | 2000-11-28 | Faro Technologies Inc. | Adjustable handgrip for a coordinate measurement machine |
| US5978748A (en) * | 1998-07-07 | 1999-11-02 | Faro Technologies, Inc. | Host independent articulated arm |
| US6219928B1 (en) * | 1998-07-08 | 2001-04-24 | Faro Technologies Inc. | Serial network for coordinate measurement apparatus |
| EP1109497B1 (en) * | 1998-08-04 | 2009-05-06 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| US6157188A (en) * | 1998-08-31 | 2000-12-05 | Mitutoyo Corporation | Compact, long-range absolute position transducer with an extensible compact encoding |
| US6253458B1 (en) * | 1998-12-08 | 2001-07-03 | Faro Technologies, Inc. | Adjustable counterbalance mechanism for a coordinate measurement machine |
| US6215119B1 (en) * | 1999-01-19 | 2001-04-10 | Xerox Corporation | Dual sensor encoder to counter eccentricity errors |
| USD423534S (en) * | 1999-02-19 | 2000-04-25 | Faro Technologies, Inc. | Articulated arm |
| US6271661B2 (en) * | 1999-03-16 | 2001-08-07 | Mitutoyo Corporation | Absolute position transducer having a non-binary code-track-type scale |
| JP3210963B2 (ja) | 1999-06-18 | 2001-09-25 | 経済産業省産業技術総合研究所長 | ボールステップゲージ |
| NO313113B1 (no) * | 1999-07-13 | 2002-08-12 | Metronor Asa | System for scanning av store objekters geometri |
| GB9926574D0 (en) | 1999-11-11 | 2000-01-12 | Renishaw Plc | Absolute position measurement |
| US6435297B1 (en) | 1999-11-29 | 2002-08-20 | Cosma International Inc. | Vehicle component mounting assembly |
| US6543149B1 (en) | 1999-12-02 | 2003-04-08 | The Regents Of The University Of California | Coordinate measuring system |
| DE10008133B4 (de) | 2000-02-22 | 2006-06-14 | Zett-Mess-Technik Gmbh | Höhenmeß- und Anreißgerät |
| FR2806657B1 (fr) * | 2000-03-21 | 2002-08-16 | Romain Granger | Systeme de reperage positionnel d'une machine tridimensionnelle dans un referentiel fixe |
| GB0008303D0 (en) * | 2000-04-06 | 2000-05-24 | British Aerospace | Measurement system and method |
| US6643599B1 (en) * | 2000-10-17 | 2003-11-04 | Charles L. Mohr | Automated machine and method for fruit testing |
| US6519860B1 (en) * | 2000-10-19 | 2003-02-18 | Sandia Corporation | Position feedback control system |
| US6668466B1 (en) | 2000-10-19 | 2003-12-30 | Sandia Corporation | Highly accurate articulated coordinate measuring machine |
| DE10053033A1 (de) | 2000-10-26 | 2002-05-16 | Zett Mess Technik Gmbh | Höhenmess- und Anreißgerät |
| AT410372B (de) | 2000-11-30 | 2003-04-25 | Rsf Elektronik Gmbh | Winkelmesssystem |
| US6435315B1 (en) | 2000-12-11 | 2002-08-20 | Otis Elevator Company | Absolute position reference system for an elevator |
| US6541757B2 (en) * | 2001-02-21 | 2003-04-01 | Fanuc Robotics North America, Inc. | Detection assembly for detecting dispensed material |
| US6606798B2 (en) * | 2001-02-23 | 2003-08-19 | Black & Decker Inc. | Laser level |
| CN1121298C (zh) * | 2001-02-27 | 2003-09-17 | 江苏工业学院 | 用于虚拟轴数控机床、虚拟轴并联坐标测量机及并联机器人的三维平移并联机构 |
| DE10112977C1 (de) | 2001-03-17 | 2002-11-21 | Zett Mess Technik Gmbh | Höhenmess- und Anreißgerät |
| JP4763914B2 (ja) | 2001-05-17 | 2011-08-31 | キヤノン株式会社 | 回転角度検出装置 |
| US6879933B2 (en) * | 2001-11-16 | 2005-04-12 | Faro Technologies, Inc. | Method and system for assisting a user taking measurements using a coordinate measurement machine |
| US6941192B2 (en) * | 2002-01-31 | 2005-09-06 | Abb Research Ltd. | Robot machining tool position and orientation calibration |
| US6904691B2 (en) | 2002-02-14 | 2005-06-14 | Faro Technologies, Inc. | Portable coordinate measurement machine with improved counter balance |
| JP3964754B2 (ja) * | 2002-07-30 | 2007-08-22 | アルプス電気株式会社 | スイッチ装置 |
| US6817108B2 (en) * | 2003-02-05 | 2004-11-16 | Homer L. Eaton | Articulation measuring arm having rotatable part-carrying platen |
| JP4707306B2 (ja) * | 2003-02-28 | 2011-06-22 | 株式会社小坂研究所 | 多関節型座標測定装置 |
| WO2004096502A1 (en) * | 2003-04-28 | 2004-11-11 | Stephen James Crampton | Cmm arm with exoskeleton |
| FR2861843B1 (fr) * | 2003-10-29 | 2006-07-07 | Romain Granger | Dispositif de connexion associe a un bras d'appareil de mesure tridimentionnelle a bras articules |
| US7693325B2 (en) * | 2004-01-14 | 2010-04-06 | Hexagon Metrology, Inc. | Transprojection of geometry data |
| US7152456B2 (en) * | 2004-01-14 | 2006-12-26 | Romer Incorporated | Automated robotic measuring system |
-
2003
- 2003-02-13 US US10/366,591 patent/US6904691B2/en not_active Expired - Lifetime
- 2003-02-13 AU AU2003223173A patent/AU2003223173A1/en not_active Abandoned
- 2003-02-13 JP JP2003568342A patent/JP2005517909A/ja active Pending
- 2003-02-13 US US10/366,678 patent/US6965843B2/en not_active Expired - Lifetime
- 2003-02-13 US US10/366,533 patent/US7043847B2/en not_active Expired - Lifetime
- 2003-02-13 EP EP03707875A patent/EP1474649B1/en not_active Revoked
- 2003-02-13 WO PCT/US2003/004289 patent/WO2003069277A1/en active Application Filing
- 2003-02-13 US US10/366,536 patent/US6920697B2/en not_active Expired - Fee Related
- 2003-02-13 CN CNB038036789A patent/CN100473940C/zh not_active Expired - Fee Related
- 2003-02-13 AT AT03707875T patent/ATE382845T1/de not_active IP Right Cessation
- 2003-02-13 WO PCT/US2003/004312 patent/WO2003069267A1/en active IP Right Grant
- 2003-02-13 AT AT03709088T patent/ATE365903T1/de not_active IP Right Cessation
- 2003-02-13 US US10/366,680 patent/US6935036B2/en not_active Expired - Lifetime
- 2003-02-13 US US10/366,589 patent/US7069664B2/en not_active Expired - Lifetime
- 2003-02-13 WO PCT/US2003/004319 patent/WO2003069266A2/en active IP Right Grant
- 2003-02-13 US US10/366,636 patent/US6892465B2/en not_active Expired - Lifetime
- 2003-02-13 DE DE60314598T patent/DE60314598T2/de not_active Expired - Lifetime
- 2003-02-13 DE DE60318396T patent/DE60318396T2/de not_active Expired - Lifetime
- 2003-02-13 JP JP2003568352A patent/JP4576002B2/ja not_active Expired - Fee Related
- 2003-02-13 CN CNB038036851A patent/CN100523709C/zh not_active Expired - Fee Related
- 2003-02-13 CN CNB038036746A patent/CN100473942C/zh not_active Expired - Fee Related
- 2003-02-13 EP EP03709088A patent/EP1474650B1/en not_active Revoked
- 2003-02-13 JP JP2003568341A patent/JP2005517908A/ja active Pending
- 2003-02-13 AU AU2003209143A patent/AU2003209143A1/en not_active Abandoned
- 2003-02-13 EP EP03719301A patent/EP1474653B1/en not_active Expired - Lifetime
- 2003-02-13 US US10/366,635 patent/US6925722B2/en not_active Expired - Lifetime
- 2003-02-13 AU AU2003213046A patent/AU2003213046A1/en not_active Abandoned
-
2005
- 2005-01-04 US US11/028,844 patent/US7032321B2/en not_active Expired - Lifetime
- 2005-01-07 US US11/031,398 patent/US7017275B2/en not_active Expired - Lifetime
- 2005-05-31 US US11/141,444 patent/US7050930B2/en not_active Expired - Lifetime
- 2005-10-12 US US11/248,407 patent/US7051450B2/en not_active Expired - Lifetime
- 2005-12-20 US US11/312,282 patent/US7174651B2/en not_active Expired - Lifetime
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62200225A (ja) * | 1986-02-27 | 1987-09-03 | Canon Inc | ロ−タリ−エンコ−ダ− |
| JPH06131032A (ja) * | 1992-04-14 | 1994-05-13 | Hitachi Ltd | ロボット装置およびロボット装置のティ−チング方法。 |
| JPH0699376A (ja) * | 1992-09-22 | 1994-04-12 | Nippon Telegr & Teleph Corp <Ntt> | ロボット軌道を教示するための方法及びシステム |
| JPH08105738A (ja) * | 1994-09-23 | 1996-04-23 | Carl Zeiss:Fa | マニュアル的にコントロールされる座標測定機による加工物の測定法および座標測定機 |
| JPH08261745A (ja) * | 1995-03-03 | 1996-10-11 | Faro Technol Inc | 三次元座標測定装置 |
| JPH09196703A (ja) * | 1996-01-12 | 1997-07-31 | Yaskawa Electric Corp | 光学式エンコーダ |
| JPH10332732A (ja) * | 1997-06-04 | 1998-12-18 | Harmonic Drive Syst Ind Co Ltd | レゾルバ内蔵型角加速度検出装置 |
| JP2000352525A (ja) * | 1999-06-10 | 2000-12-19 | Nippon Telegr & Teleph Corp <Ntt> | エンコーダ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010510527A (ja) * | 2006-11-20 | 2010-04-02 | ヘキサゴン メトロロジー アクチボラゲット | 継ぎ手を改良された座標測定機 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005517909A (ja) | 多関節アームを有する可搬式座標測定器 | |
| EP1654517B2 (en) | Providing sensory feedback to the operator of a portable coordinate measurement machine | |
| EP1654514B1 (en) | Improved portable coordinate measurement machine | |
| JP5047158B2 (ja) | ポータブル座標測定機 | |
| USRE42082E1 (en) | Method and apparatus for improving measurement accuracy of a portable coordinate measurement machine | |
| US7269910B2 (en) | Method for improving measurement accuracy of a portable coordinate measurement machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060210 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090529 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090609 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090904 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090911 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20091006 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20091014 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091106 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100126 |