JP6279151B2 - 交流回転機の制御装置および電動パワーステアリング装置 - Google Patents
交流回転機の制御装置および電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP6279151B2 JP6279151B2 JP2017515294A JP2017515294A JP6279151B2 JP 6279151 B2 JP6279151 B2 JP 6279151B2 JP 2017515294 A JP2017515294 A JP 2017515294A JP 2017515294 A JP2017515294 A JP 2017515294A JP 6279151 B2 JP6279151 B2 JP 6279151B2
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- phase
- current
- sets
- axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004804 winding Methods 0.000 claims description 378
- 230000001360 synchronised effect Effects 0.000 claims description 32
- 238000000034 method Methods 0.000 description 52
- 238000010586 diagram Methods 0.000 description 37
- 230000000694 effects Effects 0.000 description 33
- 230000004907 flux Effects 0.000 description 17
- 238000004364 calculation method Methods 0.000 description 14
- 238000005259 measurement Methods 0.000 description 8
- 239000011159 matrix material Substances 0.000 description 6
- 238000012935 Averaging Methods 0.000 description 4
- 230000010349 pulsation Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000000052 comparative effect Effects 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- NAWXUBYGYWOOIX-SFHVURJKSA-N (2s)-2-[[4-[2-(2,4-diaminoquinazolin-6-yl)ethyl]benzoyl]amino]-4-methylidenepentanedioic acid Chemical compound C1=CC2=NC(N)=NC(N)=C2C=C1CCC1=CC=C(C(=O)N[C@@H](CC(=C)C(O)=O)C(O)=O)C=C1 NAWXUBYGYWOOIX-SFHVURJKSA-N 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/08—Arrangements for controlling the speed or torque of a single motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/16—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using ac to ac converters without intermediate conversion to dc
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Power Steering Mechanism (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
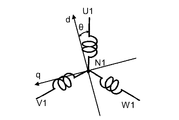
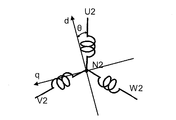
図1は、本発明の実施の形態1における交流回転機の制御装置の全体を示す構成図である。図2は、図1の交流回転機1の第1三相巻線を示す構成図である。図3は、図1の交流回転機1の第2三相巻線を示す構成図である。なお、図1には、本実施の形態1における交流回転機の制御装置の制御対象である交流回転機1も併せて図示されている。

di1d=id*−i1dc
di1q=iq*−i1qc
di2d=id*−i2dc
di2q=iq*−i2qc
ΔR=(R1−Rc)/Rc×100
平均値=(θest1+θest2)/2
本発明の実施の形態2では、先の実施の形態1に対して、第1dq軸電圧指令および第2dq軸電圧指令の一方を2倍にした値を、dq軸電圧和として演算するように構成する場合について説明する。なお、本実施の形態2では、先の実施の形態1と同様である点の説明を省略し、先の実施の形態1と異なる点を中心に説明する。
本発明の実施の形態3では、先の実施の形態1に対して、第1dq軸電流および第2dq軸電流の一方を2倍にした値を、dq軸電流和として演算するように構成する場合について説明する。なお、本実施の形態3では、先の実施の形態1と同様である点の説明を省略し、先の実施の形態1と異なる点を中心に説明する。
本発明の実施の形態4では、先の実施の形態1に対して、第1三相電圧指令の位相と第2三相電圧指令の位相とがずれるように構成する場合について説明する。なお、本実施の形態4では、先の実施の形態1と同様である点の説明を省略し、先の実施の形態1と異なる点を中心に説明する。
θest’=θest+(X/2)
θest’’=θest−(X/2)
X=180/n
本発明の実施の形態5では、先の実施の形態1に対して、交流回転機1の代わりに交流回転機1Aを制御対象とする場合について説明する。なお、本実施の形態5では、先の実施の形態1と同様である点の説明を省略し、先の実施の形態1と異なる点を中心に説明する。
θest’’’=θest−X
X=180/n
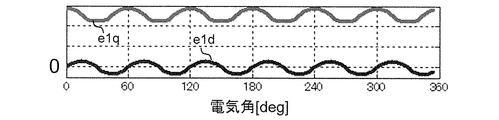
d軸誘起電圧和=e1d+e2d
q軸誘起電圧和=e1q+e2q
本発明の実施の形態6では、先の実施の形態1に対して、交流回転機1の代わりに交流回転機1Bを制御対象とする場合について説明する。なお、本実施の形態6では、先の実施の形態1と同様である点の説明を省略し、先の実施の形態1と異なる点を中心に説明する。
本発明の実施の形態7では、先の実施の形態1〜6におけるそれぞれの交流回転機の制御装置を備えた電動パワーステアリング装置について説明する。先の実施の形態1〜6におけるそれぞれの交流回転機の制御装置は、操舵トルクを補助するトルクを発生させる電動パワーステアリング装置に適用することができる。
Claims (9)
- Nを2以上の自然数としたとき、N組の三相巻線を有する交流回転機の回転位置を推定回転位置として推定する交流回転機の制御装置であって、
N組の三相巻線のそれぞれに流れるN組の電流を検出して出力する電流検出器と、
前記交流回転機への制御指令と、前記電流検出器から入力された前記N組の電流とに基づいて、前記N組の三相巻線のそれぞれへのN組の電圧指令を演算して出力する制御器と、
入力された前記N組の電圧指令に基づいて、前記N組の三相巻線のそれぞれへ交流電圧を印加する電力変換器と、
を備え、
前記制御器は、
入力された前記N組の電圧指令から電圧和を演算して出力する電圧和演算器と、
入力された前記N組の電流から電流和を演算して出力する電流和演算器と、
入力された前記電圧和と、入力された前記電流和とに基づいて、前記推定回転位置を演算する回転位置推定器と、
を有し、
前記電圧和演算器は、
前記N組の電圧指令のいずれか1つをN倍にした値を、前記電圧和として演算し、
前記電流和演算器は、
前記N組の電流をそれぞれ加算した値を、前記電流和として演算する
交流回転機の制御装置。 - Nを2以上の自然数としたとき、N組の三相巻線を有する交流回転機の回転位置を推定回転位置として推定する交流回転機の制御装置であって、
N組の三相巻線のそれぞれに流れるN組の電流を検出して出力する電流検出器と、
前記交流回転機への制御指令と、前記電流検出器から入力された前記N組の電流とに基づいて、前記N組の三相巻線のそれぞれへのN組の電圧指令を演算して出力する制御器と、
入力された前記N組の電圧指令に基づいて、前記N組の三相巻線のそれぞれへ交流電圧を印加する電力変換器と、
を備え、
前記制御器は、
入力された前記N組の電圧指令から電圧和を演算して出力する電圧和演算器と、
入力された前記N組の電流から電流和を演算して出力する電流和演算器と、
入力された前記電圧和と、入力された前記電流和とに基づいて、前記推定回転位置を演算する回転位置推定器と、
を有し、
前記電圧和演算器は、
前記N組の電圧指令をそれぞれ加算した値を、前記電圧和として演算し、
前記電流和演算器は、
前記N組の電流のいずれか1つをN倍にした値を、前記電流和として演算する
交流回転機の制御装置。 - 前記制御器は、
入力された前記N組の電流を、前記推定回転位置に基づいて回転二軸上に座標変換することで、前記N組の三相巻線のそれぞれに流れるN組のd軸電流およびN組のq軸電流を演算して出力する電流座標変換器と、
前記交流回転機への制御指令と、入力された前記N組のd軸電流および前記N組のq軸電流とに基づいて、前記N組の電圧指令として、N組のd軸電圧指令およびN組のq軸電圧指令を演算して出力する電流制御器と、
入力された前記N組のd軸電圧指令および前記N組のq軸電圧指令を、前記推定回転位置に基づいて回転二軸上に座標変換することでN組の三相電圧指令を演算して出力する電圧座標変換器と、
を有し、
前記電圧和演算器は、
前記電圧和として、前記N組のd軸電圧指令からd軸電圧和、前記N組のq軸電圧指令からq軸電圧和をそれぞれ演算し、
前記電流和演算器は、
前記電流和として、前記N組のd軸電流からd軸電流和、前記N組のq軸電流からq軸電流和をそれぞれ演算する
請求項1または2に記載の交流回転機の制御装置。 - 前記Nは、2であり、
前記交流回転機は、2組の三相巻線として、第1三相巻線および第2三相巻線を有し、
前記電流検出器は、
前記第1三相巻線に流れる第1三相巻線電流を検出する第1電流検出器と、
前記第2三相巻線に流れる第2三相巻線電流を検出する第2電流検出器と、
によって構成され、
前記制御器は、
前記交流回転機への制御指令と、2組の電流として入力された前記第1三相巻線電流および前記第2三相巻線電流とに基づいて、前記第1三相巻線への第1三相電圧指令および前記第2三相巻線への第2三相電圧指令を演算し、
前記電力変換器は、
入力された前記第1三相電圧指令に基づいて、前記第1三相巻線へ前記交流電圧を印加する第1電力変換器と、
入力された前記第2三相電圧指令に基づいて、前記第2三相巻線へ前記交流電圧を印加する第2電力変換器と、
によって構成される
請求項1から3のいずれか1項に記載の交流回転機の制御装置。 - nを4以上の自然数としたとき、
前記制御器は、
前記第1三相電圧指令の位相と前記第2三相電圧指令の位相とが互いに(180/n)度だけずれるように、前記第1三相電圧指令および前記第2三相電圧指令を演算する
請求項4に記載の交流回転機の制御装置。 - 前記交流回転機は、永久磁石同期回転機であり、
nを4以上の自然数とし、mを自然数としたとき、
前記第1三相巻線と前記第2三相巻線とで(180/n)度の位相差を有し、
前記交流回転機が回転することで、前記第1三相巻線に誘起される第1三相誘起電圧と前記第2三相巻線に誘起される第2三相誘起電圧とのそれぞれに(n×m±1)次の成分が含まれる
請求項4または5に記載の交流回転機の制御装置。 - Nを2以上の自然数としたとき、N組の三相巻線を有する交流回転機の回転位置を推定回転位置として推定する交流回転機の制御装置であって、
N組の三相巻線のそれぞれに流れるN組の電流を検出して出力する電流検出器と、
前記交流回転機への制御指令と、前記電流検出器から入力された前記N組の電流とに基づいて、前記N組の三相巻線のそれぞれへのN組の電圧指令を演算して出力する制御器と、
入力された前記N組の電圧指令に基づいて、前記N組の三相巻線のそれぞれへ交流電圧を印加する電力変換器と、
を備え、
前記制御器は、
入力された前記N組の電圧指令から電圧和を演算して出力する電圧和演算器と、
入力された前記N組の電流から電流和を演算して出力する電流和演算器と、
入力された前記電圧和と、入力された前記電流和とに基づいて、前記推定回転位置を演算する回転位置推定器と、
を有し、
前記Nは、2であり、
前記交流回転機は、2組の三相巻線として、第1三相巻線および第2三相巻線を有し、
前記電流検出器は、
前記第1三相巻線に流れる第1三相巻線電流を検出する第1電流検出器と、
前記第2三相巻線に流れる第2三相巻線電流を検出する第2電流検出器と、
によって構成され、
前記制御器は、
前記交流回転機への制御指令と、2組の電流として入力された前記第1三相巻線電流および前記第2三相巻線電流とに基づいて、前記第1三相巻線への第1三相電圧指令および前記第2三相巻線への第2三相電圧指令を演算し、
前記電力変換器は、
入力された前記第1三相電圧指令に基づいて、前記第1三相巻線へ前記交流電圧を印加する第1電力変換器と、
入力された前記第2三相電圧指令に基づいて、前記第2三相巻線へ前記交流電圧を印加する第2電力変換器と、
によって構成され、
前記交流回転機は、永久磁石同期回転機であり、
nを4以上の自然数とし、mを自然数としたとき、
前記第1三相巻線と前記第2三相巻線とで(180/n)度の位相差を有し、
前記交流回転機が回転することで、前記第1三相巻線に誘起される第1三相誘起電圧と前記第2三相巻線に誘起される第2三相誘起電圧とのそれぞれに(n×m±1)次の成分が含まれる
交流回転機の制御装置。 - 前記第1三相巻線と前記第2三相巻線とが互いに磁気的に結合している
請求項4から7のいずれか1項に記載の交流回転機の制御装置。 - 請求項1から8のいずれか1項に記載の交流回転機の制御装置と、
操舵トルクを検出するトルク検出器と、
前記交流回転機が操舵トルクを補助するトルクを発生させるように、前記トルク検出器によって検出された前記操舵トルクに基づいて前記交流回転機への制御指令を演算する制御指令演算器と、
を備えた電動パワーステアリング装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/062644 WO2016174702A1 (ja) | 2015-04-27 | 2015-04-27 | 交流回転機の制御装置および電動パワーステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2016174702A1 JPWO2016174702A1 (ja) | 2017-07-13 |
| JP6279151B2 true JP6279151B2 (ja) | 2018-02-14 |
Family
ID=57199028
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017515294A Active JP6279151B2 (ja) | 2015-04-27 | 2015-04-27 | 交流回転機の制御装置および電動パワーステアリング装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10439535B2 (ja) |
| EP (1) | EP3291437B1 (ja) |
| JP (1) | JP6279151B2 (ja) |
| CN (1) | CN107660325B (ja) |
| WO (1) | WO2016174702A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10439535B2 (en) * | 2015-04-27 | 2019-10-08 | Mitsubishi Electric Corporation | Control device of AC rotating machine and electric power steering device |
| JP6536479B2 (ja) * | 2016-05-17 | 2019-07-03 | 株式会社デンソー | 回転機の制御装置 |
| JP6338030B1 (ja) * | 2016-07-20 | 2018-06-06 | 日本精工株式会社 | 電動パワーステアリング装置 |
| CN109496190B (zh) * | 2016-07-20 | 2020-01-21 | 日本精工株式会社 | 电动助力转向装置 |
| US10427710B2 (en) * | 2016-08-24 | 2019-10-01 | Nsk Ltd. | Electric power steering apparatus |
| JP2018199433A (ja) * | 2017-05-29 | 2018-12-20 | 三菱電機株式会社 | 自動操舵制御装置および操舵制御方法 |
| CN111034020B (zh) * | 2017-08-21 | 2022-12-13 | 三菱电机株式会社 | 功率转换装置及电动助力转向装置 |
| JP7032514B2 (ja) * | 2018-03-05 | 2022-03-08 | 三菱電機株式会社 | 交流回転機の制御装置および電動パワーステアリングの制御装置 |
| US10587214B1 (en) * | 2019-03-22 | 2020-03-10 | Hamilton Sundstrand Corporation | Matrix converter operation in current control mode with regulation of output voltage vector |
| US11218096B2 (en) * | 2019-11-29 | 2022-01-04 | Steering Solutions Ip Holding Corporation | Feedforward control of multiphase permanent magnet direct current motor drives |
| CN115461981A (zh) * | 2020-05-07 | 2022-12-09 | 三菱电机株式会社 | 电动机控制装置以及电动助力转向装置 |
| CN115128456B (zh) * | 2022-06-29 | 2023-04-07 | 哈尔滨工业大学 | 一种双余度电机开路故障检测及故障定位方法 |
| US11936316B2 (en) * | 2022-07-12 | 2024-03-19 | Steering Solutions Ip Holding Corporation | Position estimation for permanent magnet synchronous machines via rotor flux space vector identification |
| CN117228020B (zh) * | 2023-11-13 | 2024-01-09 | 深圳市好盈科技股份有限公司 | 一种折叠桨旋翼无人机的折叠桨的控制方法和装置 |
Family Cites Families (69)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3584276A (en) * | 1969-05-13 | 1971-06-08 | Allis Chalmers Mfg Co | Vehicle electric motor drive system |
| JPS58139687A (ja) * | 1982-02-10 | 1983-08-19 | Mitsubishi Electric Corp | トランジスタモ−タの制御装置 |
| US4472666A (en) * | 1982-09-21 | 1984-09-18 | Matsushita Electric Industrial Co., Ltd. | Brushless DC motor |
| US4812729A (en) * | 1986-08-19 | 1989-03-14 | Hitachi Ltd. | Protecting apparatus for secondary excitation type variable speed AC generator/motor |
| US4772839A (en) * | 1987-10-27 | 1988-09-20 | General Electric Company | Rotor position estimator for switched reluctance motor |
| US4994684A (en) * | 1989-01-30 | 1991-02-19 | The State Of Oregon Acting By And Through The State Board Of Higher Education On Behalf Of Oregon State University | Doubly fed generator variable speed generation control system |
| US4896089A (en) * | 1989-01-31 | 1990-01-23 | General Electric Company | Fault management system for a switched reluctance motor |
| US5300870A (en) * | 1990-10-05 | 1994-04-05 | Smith Otto J M | Three-phase motor control |
| JPH05344773A (ja) * | 1992-06-09 | 1993-12-24 | Mitsubishi Electric Corp | Pwmインバータの並列運転制御装置 |
| US5708346A (en) * | 1994-01-10 | 1998-01-13 | Sulzer Electronics Ag | Method and control apparatus for controlling an AC-machine |
| JP3550584B2 (ja) * | 1995-04-21 | 2004-08-04 | 正 深尾 | 電磁回転機械 |
| US5703456A (en) * | 1995-05-26 | 1997-12-30 | Emerson Electric Co. | Power converter and control system for a motor using an inductive load and method of doing the same |
| US6051942A (en) * | 1996-04-12 | 2000-04-18 | Emerson Electric Motor Co. | Method and apparatus for controlling a switched reluctance machine |
| DE19715468C1 (de) * | 1997-04-14 | 1998-10-01 | Piller Gmbh | System zur Stabilisierung eines Stromversorgungsnetzes |
| KR100326104B1 (ko) * | 1997-08-04 | 2002-10-11 | 가부시끼가이샤 도시바 | 전력변환장치의제어방법 |
| JP3262046B2 (ja) * | 1997-09-17 | 2002-03-04 | トヨタ自動車株式会社 | ギヤ機構における歯打ち音の低減方法、動力出力装置およびこの動力出力装置を搭載したハイブリッド車輌 |
| US6462491B1 (en) * | 1999-01-27 | 2002-10-08 | Matsushita Electric Industrial Co., Ltd. | Position sensorless motor control apparatus |
| US6548981B1 (en) * | 1999-02-10 | 2003-04-15 | Sony Corporation | Actuator |
| SE514817C2 (sv) * | 1999-10-05 | 2001-04-30 | Abb Ab | Anordning för spänningssättning av en spänningsstyv omriktare samt transformatorutrustning för anslutning till dylik anordning |
| JP3634270B2 (ja) * | 2001-02-02 | 2005-03-30 | 株式会社豊田中央研究所 | モータ駆動回路 |
| WO2002091558A1 (fr) | 2001-04-24 | 2002-11-14 | Mitsubishi Denki Kabushiki Kaisha | Systeme de controle d'un moteur synchronise |
| US6703809B2 (en) * | 2002-03-05 | 2004-03-09 | Rockwell Automation Technologies, Inc. | Flux position identifier using high frequency injection with the presence of a rich harmonic spectrum in a responding signal |
| DK200200572A (da) * | 2002-04-17 | 2003-10-18 | Danfoss Drives As | Fremgangsmåde til måling af strøm i en motorstyring og motorstyring som bruger denne fremgangsmåde |
| JP2004336885A (ja) * | 2003-05-07 | 2004-11-25 | Toyota Motor Corp | 動力出力装置、モータ駆動方法およびモータの駆動制御をコンピュータに実行させるためのプログラムを記録したコンピュータ読取り可能な記録媒体 |
| JP4230276B2 (ja) * | 2003-05-19 | 2009-02-25 | 本田技研工業株式会社 | ブラシレスdcモータの制御装置 |
| JP4062264B2 (ja) * | 2003-06-06 | 2008-03-19 | アイシン・エィ・ダブリュ株式会社 | 車両駆動制御装置、車両駆動制御方法及びプログラム |
| JP4438417B2 (ja) * | 2004-01-13 | 2010-03-24 | トヨタ自動車株式会社 | 交流電圧発生装置および動力出力装置 |
| JP4555640B2 (ja) * | 2004-09-03 | 2010-10-06 | 東芝機械株式会社 | サーボモータにおける電流制御方法、および、サーボモータ |
| JP2006141123A (ja) * | 2004-11-11 | 2006-06-01 | Toshiba Corp | 回転機制御装置、回転機制御方法および洗濯機 |
| JP4682740B2 (ja) * | 2005-08-08 | 2011-05-11 | トヨタ自動車株式会社 | 車両の電源装置 |
| JP4839722B2 (ja) * | 2005-08-08 | 2011-12-21 | トヨタ自動車株式会社 | 車両の電源装置 |
| US7511979B2 (en) * | 2005-08-12 | 2009-03-31 | Newman Jr Robert Charles | Automatic phase converter |
| JP2007099223A (ja) * | 2005-10-07 | 2007-04-19 | Toyota Motor Corp | ハイブリッド自動車 |
| TW200721655A (en) * | 2005-10-07 | 2007-06-01 | Sony Corp | Switching power supply circuit |
| JP4816919B2 (ja) * | 2006-03-23 | 2011-11-16 | 株式会社ジェイテクト | ブラシレスモータ用制御装置 |
| JP5167631B2 (ja) * | 2006-11-30 | 2013-03-21 | 株式会社デンソー | モータの制御方法及びそれを利用するモータ制御装置 |
| JP4561841B2 (ja) * | 2008-02-12 | 2010-10-13 | 株式会社デンソー | 回転機の制御装置、及び回転機の制御システム |
| US7786608B2 (en) * | 2008-11-17 | 2010-08-31 | General Electric Company | Protection system for wind turbine |
| WO2010119662A1 (ja) * | 2009-04-13 | 2010-10-21 | パナソニック株式会社 | 同期電動機駆動システム |
| JP5590428B2 (ja) * | 2011-03-25 | 2014-09-17 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| JP5387630B2 (ja) * | 2011-08-01 | 2014-01-15 | 株式会社デンソー | 多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置 |
| JP5626592B2 (ja) * | 2011-08-08 | 2014-11-19 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| JP5730174B2 (ja) * | 2011-11-10 | 2015-06-03 | 本田技研工業株式会社 | モータ制御装置、歩行補助装置及びモータ制御方法 |
| JP2013236413A (ja) * | 2012-03-06 | 2013-11-21 | Suri-Ai:Kk | スイッチドリラクタンス機械駆動用のパワーコンバータ |
| JP5398861B2 (ja) * | 2012-03-07 | 2014-01-29 | 三菱電機株式会社 | 多重巻線モータの駆動装置 |
| KR101961106B1 (ko) * | 2012-03-20 | 2019-03-25 | 삼성전자 주식회사 | 센서리스 제어 방법 및 장치 |
| JP5502126B2 (ja) | 2012-03-26 | 2014-05-28 | 三菱電機株式会社 | 多重巻線回転機の駆動装置 |
| US8836256B2 (en) * | 2012-07-12 | 2014-09-16 | Deere & Company | Switched reluctance motor torque estimation |
| TWI530360B (zh) * | 2012-09-28 | 2016-04-21 | 荏原製作所股份有限公司 | 研磨裝置 |
| JP6022951B2 (ja) * | 2013-01-18 | 2016-11-09 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| JP5569606B1 (ja) * | 2013-02-01 | 2014-08-13 | 株式会社安川電機 | インバータ装置および電動機ドライブシステム |
| EP3337028B1 (en) * | 2013-02-12 | 2021-01-20 | Mitsubishi Electric Corporation | Motor drive device |
| JP5919207B2 (ja) * | 2013-02-15 | 2016-05-18 | 日立オートモティブシステムズ株式会社 | Dc−dcコンバータの制御装置 |
| WO2014157629A1 (ja) * | 2013-03-29 | 2014-10-02 | アイシン・エィ・ダブリュ株式会社 | 回転電機駆動装置 |
| BR112014016286B1 (pt) * | 2013-06-04 | 2021-10-13 | Toshiba Mitsubishi-Electric Industrial Systems Corporation | Dispositivo de conversão de potência |
| JP6289825B2 (ja) * | 2013-06-28 | 2018-03-07 | 株式会社東芝 | 発電機励磁装置および電力変換システム |
| JP6303354B2 (ja) * | 2013-09-19 | 2018-04-04 | 株式会社デンソー | モータ駆動装置 |
| US10232875B2 (en) * | 2014-09-04 | 2019-03-19 | Nsk Ltd. | Motor control unit, failure detecting method, and electric power steering apparatus and vehicle equipped with the same |
| JP6390337B2 (ja) * | 2014-10-21 | 2018-09-19 | 株式会社デンソー | 回転電機の制御装置 |
| EP3261246B1 (en) * | 2015-02-16 | 2020-07-08 | Mitsubishi Electric Corporation | Power conversion device |
| WO2016143121A1 (ja) * | 2015-03-12 | 2016-09-15 | 三菱電機株式会社 | 交流回転機の制御装置および電動パワーステアリングの制御装置 |
| JP6455295B2 (ja) * | 2015-04-22 | 2019-01-23 | 株式会社デンソー | 3相回転機の制御装置 |
| US10439535B2 (en) * | 2015-04-27 | 2019-10-08 | Mitsubishi Electric Corporation | Control device of AC rotating machine and electric power steering device |
| JP6651782B2 (ja) * | 2015-10-13 | 2020-02-19 | 株式会社デンソー | 回転電機制御装置、および、これを用いた電動パワーステアリング装置 |
| JP6623740B2 (ja) * | 2015-12-17 | 2019-12-25 | 株式会社デンソー | 電力変換装置、および、これを用いた電動パワーステアリング装置 |
| US10305402B2 (en) * | 2016-04-13 | 2019-05-28 | Canon Kabushiki Kaisha | Motor control apparatus, sheet conveyance apparatus, document feeding apparatus, document reading apparatus, and image forming apparatus |
| DE102016215175A1 (de) * | 2016-08-15 | 2018-02-15 | Brose Fahrzeugteile GmbH & Co. Kommanditgesellschaft, Würzburg | Verfahren zum Betreiben einer elektrischen Maschine und elektrische Maschine |
| US10348222B2 (en) * | 2016-08-26 | 2019-07-09 | Deere & Company | Systems and methods for reducing DC link voltage dynamics with limited energy storage element |
| BR112019019629A2 (pt) * | 2017-03-29 | 2020-04-14 | Qm Power Inc | motor de corrente alternada multivelocidade |
-
2015
- 2015-04-27 US US15/569,136 patent/US10439535B2/en active Active
- 2015-04-27 CN CN201580079241.2A patent/CN107660325B/zh active Active
- 2015-04-27 EP EP15890686.7A patent/EP3291437B1/en active Active
- 2015-04-27 WO PCT/JP2015/062644 patent/WO2016174702A1/ja active Application Filing
- 2015-04-27 JP JP2017515294A patent/JP6279151B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10439535B2 (en) | 2019-10-08 |
| JPWO2016174702A1 (ja) | 2017-07-13 |
| EP3291437B1 (en) | 2023-01-11 |
| CN107660325B (zh) | 2020-02-28 |
| EP3291437A4 (en) | 2019-01-16 |
| EP3291437A1 (en) | 2018-03-07 |
| CN107660325A (zh) | 2018-02-02 |
| WO2016174702A1 (ja) | 2016-11-03 |
| US20180294755A1 (en) | 2018-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6279151B2 (ja) | 交流回転機の制御装置および電動パワーステアリング装置 | |
| JP6324627B2 (ja) | 交流回転機の制御装置および電動パワーステアリングの制御装置 | |
| JP6367332B2 (ja) | インバータ制御装置及びモータ駆動システム | |
| JP5435282B2 (ja) | モータ制御装置 | |
| JP6644172B2 (ja) | モータ制御装置 | |
| JP5333256B2 (ja) | 交流回転機の制御装置 | |
| JP5709932B2 (ja) | 同期機制御装置 | |
| JP2015136237A (ja) | 回転電機制御装置、回転電機制御方法、及び制御マップの作成方法 | |
| JP5321792B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP5561550B2 (ja) | 回転電機制御装置 | |
| JP6166601B2 (ja) | モータ制御装置及び発電機制御装置 | |
| JP5733404B2 (ja) | Pmモータの位置センサレス制御装置 | |
| JP2010166638A (ja) | 回転電機の制御装置 | |
| JP7196469B2 (ja) | 同期リラクタンスモータの制御装置 | |
| JP6032047B2 (ja) | モータ制御装置 | |
| WO2018159103A1 (ja) | モータ制御方法、モータ制御システムおよび電動パワーステアリングシステム | |
| WO2023026352A1 (ja) | 回転機の制御装置 | |
| KR102409792B1 (ko) | 영구 자석 동기 전동기의 제어 장치, 마이크로 컴퓨터, 전동기 시스템 및 영구 자석 동기 전동기의 운전 방법 | |
| JP5744151B2 (ja) | 電動機の駆動装置および電動機の駆動方法 | |
| JP6108114B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP7166425B2 (ja) | 電力変換装置および電動パワーステアリング装置 | |
| WO2018159099A1 (ja) | モータ制御方法、モータ制御システムおよび電動パワーステアリングシステム | |
| JP7357112B2 (ja) | 回転機制御装置 | |
| JP5456873B1 (ja) | 同期機制御装置 | |
| WO2021106609A1 (ja) | 電力変換装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171031 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6279151 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |