JP6367332B2 - インバータ制御装置及びモータ駆動システム - Google Patents
インバータ制御装置及びモータ駆動システム Download PDFInfo
- Publication number
- JP6367332B2 JP6367332B2 JP2016535264A JP2016535264A JP6367332B2 JP 6367332 B2 JP6367332 B2 JP 6367332B2 JP 2016535264 A JP2016535264 A JP 2016535264A JP 2016535264 A JP2016535264 A JP 2016535264A JP 6367332 B2 JP6367332 B2 JP 6367332B2
- Authority
- JP
- Japan
- Prior art keywords
- command value
- current command
- current
- calculation unit
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/182—Circuit arrangements for detecting position without separate position detecting elements using back-emf in windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/24—Vector control not involving the use of rotor position or rotor speed sensors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/08—Reluctance motors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
第1実施形態に係るモータ駆動システム(以下、「システム」という)について、図1〜図13を参照して説明する。図1は、本実施形態に係るシステムの構成を示す図である。図1に示すように、本実施形態に係るシステムは、モータ1と、インバータ制御装置2と、を備える。

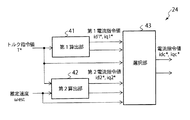
本実施形態に係る電流指令値算出部24の変形例1について、図7を参照して説明する。図7は、電流指令値算出部24の変形例1の構成を示す図である。図7に示すように、第2算出部43は、q軸成分算出部44と、d軸成分算出部45と、を備える。電流指令値算出部24の他の構成は図4と同様である。
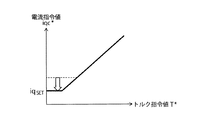
本実施形態に係る電流指令値算出部24の変形例2について、図8〜図10を参照して説明する。図8は、電流指令値算出部24の変形例2の構成を示す図である。図8に示すように、この電流指令値算出部24は、トルク指令値T*及び推定速度ωestに基づいて、電流指令値iqc*,idc*を算出する。
本実施形態に係る電流指令値算出部24の変形例3について、図11及び図12を参照して説明する。以上で説明した電流指令値算出部24は、2つの電流指令値から一方を選択することにより、出力電圧が目標値VSET以上となる電流指令値を算出した。これに対して、本変形例では、1つの電流指令値を補正することにより、出力電圧が目標値VSET以上となる電流指令値を算出する。
本実施形態に係る電流指令値算出部24の変形例4について、図16を参照して説明する。本変形例では、変形例3と同様に、1つの電流指令値を補正することにより、出力電圧が目標値VSET以上となる電流指令値を算出する。変形例3では、補正部47によって補正値Δiq*を生成し、これを加算器48で電流指令値iq3*に加算することで、電流指令値iqc*を生成した。これに対して、本変形例では、下限リミッタ91によって、電流指令値iq3*の下限をリミットすることで、電流指令値iqc*を生成する。
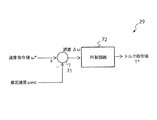
次に、第2実施形態に係る制御装置2について、図14〜図16を参照して説明する。図14は、本実施形態に係るシステムの構成を示す図である。図14に示すように、本実施形態に係る制御装置2は、トルク指令値算出部29を更に備える。他の構成は、第1実施形態と同様である。
Claims (13)
- シンクロナスリラクタンスモータの回転子を駆動するインバータ主回路と、
前記インバータ主回路から出力される電流値を検出する電流検出器と、
前記インバータ主回路から出力される電流で生じる鎖交磁束により前記シンクロナスリラクタンスモータの固定子で発生する出力電圧が、所定値以上となるための電流指令値を算出する電流指令値算出部と、
前記電流値が、前記電流指令値と等しくなるように電圧指令値を算出する電圧指令値算出部と、
前記電圧指令値及び前記電流値に基づいて、前記シンクロナスリラクタンスモータの回転子の推定回転位相角を算出する推定部と、
を備えるインバータ制御装置。 - 前記電流指令値算出部は、トルク指令値に基づいて第1電流指令値を、前記トルク指令値及び推定速度に基づいて第2電流指令値をそれぞれ算出し、前記第1電流指令値に応じた前記出力電圧が前記所定値より低いか判定し、前記所定値以上のとき、前記第1電流指令値を前記電流指令値として出力し、前記所定値より低いとき、前記第2電流指令値を前記電流指令値として出力する
請求項1に記載のインバータ制御装置。 - 前記第2電流指令値に応じた前記出力電圧は前記所定値である請求項2に記載のインバータ制御装置。
- 前記電流指令値算出部は、トルク指令値に基づいて第1電流指令値を、前記トルク指令値及び推定速度に基づいて第2電流指令値をそれぞれ算出し、前記第1電流指令値及び前記第2電流指令値のうち、電流位相角がq軸に近い方を前記電流指令値として出力する
請求項1に記載のインバータ制御装置。 - 前記電流指令値算出部は、トルク指令値に基づいて第1電流指令値を、前記トルク指令値及び推定速度に基づいて第2電流指令値をそれぞれ算出し、前記第1電流指令値及び前記第2電流指令値のうち、q軸成分が大きい方を前記電流指令値として出力する
請求項1に記載のインバータ制御装置。 - 前記電流指令値算出部は、前記第1電流指令値に基づいて算出した前記出力電圧の電圧値と、前記所定値と、を比較することにより前記判定を行う
請求項2又は請求項3に記載のインバータ制御装置。 - 前記電流指令値算出部は、前記第1電流指令値のd軸成分と、前記第2電流指令値のd軸成分と、を比較することにより前記判定を行う
請求項2に記載のインバータ制御装置。 - 前記電流指令値算出部は、前記第1電流指令値の電流位相角と、前記第2電流指令値の電流位相角と、を比較することにより判定を行う
請求項4に記載のインバータ制御装置。 - 前記電流指令値算出部は、前記出力電圧が前記所定値より低いとき、前記出力電圧と前記所定値との誤差に基づいて補正値を算出し、前記電流指令値に前記補正値を加算する
請求項1に記載のインバータ制御装置。 - 速度指令値及び推定速度に基づいて、前記トルク指令値を算出するトルク指令値算出部を更に備える
請求項2乃至請求項8のいずれか1項に記載のインバータ制御装置。 - 前記電流指令値算出部は、前記電流指令値の下限をリミットする下限リミッタを備える
請求項1に記載のインバータ制御装置。 - 前記下限リミッタは、最低速度における前記出力電圧が前記所定値となるように設定される
請求項11に記載のインバータ制御装置。 - シンクロナスリラクタンスモータと、
前記シンクロナスリラクタンスモータを駆動するインバータ主回路と、
前記インバータ主回路から出力される電流値を検出する電流検出器と、
前記インバータ主回路から出力される電流で生じる鎖交磁束により前記シンクロナスリラクタンスモータの固定子で発生する出力電圧が、所定値以上となるための電流指令値を算出する電流指令値算出部と、
前記電流値が、前記電流指令値と等しくなるように電圧指令値を算出する電圧指令値算出部と、
前記電圧指令値及び前記電流値に基づいて、前記シンクロナスリラクタンスモータの回転子の推定回転位相角を算出する推定部と、
を備えるモータ駆動システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015014722 | 2015-01-28 | ||
| JP2015014722 | 2015-01-28 | ||
| PCT/JP2016/052161 WO2016121751A1 (ja) | 2015-01-28 | 2016-01-26 | インバータ制御装置及びモータ駆動システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2016121751A1 JPWO2016121751A1 (ja) | 2017-04-27 |
| JP6367332B2 true JP6367332B2 (ja) | 2018-08-01 |
Family
ID=56543362
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016535264A Active JP6367332B2 (ja) | 2015-01-28 | 2016-01-26 | インバータ制御装置及びモータ駆動システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10158305B2 (ja) |
| EP (1) | EP3252941B1 (ja) |
| JP (1) | JP6367332B2 (ja) |
| CN (1) | CN107078674B (ja) |
| WO (1) | WO2016121751A1 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10770966B2 (en) | 2016-04-15 | 2020-09-08 | Emerson Climate Technologies, Inc. | Power factor correction circuit and method including dual bridge rectifiers |
| US9933842B2 (en) | 2016-04-15 | 2018-04-03 | Emerson Climate Technologies, Inc. | Microcontroller architecture for power factor correction converter |
| US10277115B2 (en) | 2016-04-15 | 2019-04-30 | Emerson Climate Technologies, Inc. | Filtering systems and methods for voltage control |
| US10284132B2 (en) | 2016-04-15 | 2019-05-07 | Emerson Climate Technologies, Inc. | Driver for high-frequency switching voltage converters |
| US10656026B2 (en) | 2016-04-15 | 2020-05-19 | Emerson Climate Technologies, Inc. | Temperature sensing circuit for transmitting data across isolation barrier |
| US10305373B2 (en) | 2016-04-15 | 2019-05-28 | Emerson Climate Technologies, Inc. | Input reference signal generation systems and methods |
| US10763740B2 (en) | 2016-04-15 | 2020-09-01 | Emerson Climate Technologies, Inc. | Switch off time control systems and methods |
| TWI668953B (zh) * | 2016-08-22 | 2019-08-11 | 日商東芝股份有限公司 | Inverter control device and drive system |
| JP6776066B2 (ja) | 2016-09-05 | 2020-10-28 | 東芝インフラシステムズ株式会社 | インバータ制御装置および電動機駆動システム |
| TWI654827B (zh) | 2016-09-05 | 2019-03-21 | 日商東芝股份有限公司 | 換流器控制裝置及馬達驅動系統 |
| JP2020031454A (ja) * | 2016-12-28 | 2020-02-27 | アルプスアルパイン株式会社 | 直流整流子電動機の回転に関する情報を取得する装置及び方法 |
| DE112018006843T5 (de) | 2018-01-12 | 2020-10-01 | Mitsubishi Electric Corporation | Rotationsmaschinen-steuervorrichtung |
| DK3522362T3 (da) * | 2018-02-01 | 2024-03-04 | Siemens Gamesa Renewable Energy As | Styring af en elektrisk permanentmagnetmaskine med multiviklingssæt |
| JP7032250B2 (ja) * | 2018-06-28 | 2022-03-08 | 株式会社日立産機システム | 電力変換装置 |
| CN112039401A (zh) * | 2019-05-17 | 2020-12-04 | 杭州三花研究院有限公司 | 一种控制方法和控制装置及其系统 |
| CN113839605B (zh) * | 2020-06-23 | 2024-03-15 | 苏州宝时得电动工具有限公司 | 电机转速控制方法及装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4061517B2 (ja) * | 1998-07-16 | 2008-03-19 | 株式会社安川電機 | 交流電動機の可変速制御装置 |
| KR100354775B1 (ko) * | 2000-03-25 | 2002-11-04 | 엘지전자 주식회사 | 동기 릴럭턴스 모터의 속도 제어장치 |
| KR100421373B1 (ko) * | 2001-06-20 | 2004-03-06 | 엘지전자 주식회사 | 동기 릴럭턴스 모터의 회전 속도 제어장치 |
| KR20040019323A (ko) * | 2001-07-04 | 2004-03-05 | 가부시키가이샤 야스카와덴키 | 동기 전동기의 전류 제어 방법 및 제어 장치 |
| JP3692085B2 (ja) | 2002-02-21 | 2005-09-07 | 株式会社東芝 | モータ制御方法及び装置 |
| WO2003081765A1 (fr) * | 2002-03-22 | 2003-10-02 | Matsushita Electric Industrial Co., Ltd. | Dispositif de commande d'un moteur a reluctance synchrone |
| JP4579627B2 (ja) | 2004-09-02 | 2010-11-10 | 三菱電機株式会社 | 回転機の制御装置 |
| JP4715158B2 (ja) * | 2004-10-19 | 2011-07-06 | 富士電機システムズ株式会社 | 誘導電動機の可変速制御装置 |
| JP5267848B2 (ja) * | 2008-04-15 | 2013-08-21 | 株式会社ジェイテクト | モータ制御装置 |
| JP2010119284A (ja) * | 2008-10-16 | 2010-05-27 | Panasonic Corp | モータ駆動装置 |
| JP4746667B2 (ja) | 2008-11-26 | 2011-08-10 | 本田技研工業株式会社 | 電動機の相電流推定装置および電動機の磁極位置推定装置 |
| JP2010136586A (ja) * | 2008-12-08 | 2010-06-17 | Honda Motor Co Ltd | 電動機の磁極位置推定装置 |
| WO2010070723A1 (ja) * | 2008-12-15 | 2010-06-24 | 三菱電機株式会社 | 電動機駆動用電力変換装置 |
| JP5971707B2 (ja) * | 2011-08-29 | 2016-08-17 | 株式会社東芝 | 同期電動機のセンサレス制御装置ならびにインバータ装置 |
| JP6056959B2 (ja) * | 2013-03-28 | 2017-01-11 | アイシン・エィ・ダブリュ株式会社 | 回転電機制御装置 |
| JP6193006B2 (ja) * | 2013-06-20 | 2017-09-06 | 株式会社東芝 | 電気車制御装置 |
-
2016
- 2016-01-26 WO PCT/JP2016/052161 patent/WO2016121751A1/ja active Application Filing
- 2016-01-26 CN CN201680003392.4A patent/CN107078674B/zh active Active
- 2016-01-26 EP EP16743354.9A patent/EP3252941B1/en active Active
- 2016-01-26 JP JP2016535264A patent/JP6367332B2/ja active Active
-
2017
- 2017-06-28 US US15/636,198 patent/US10158305B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2016121751A1 (ja) | 2017-04-27 |
| US20170317623A1 (en) | 2017-11-02 |
| EP3252941A4 (en) | 2018-10-03 |
| EP3252941A1 (en) | 2017-12-06 |
| CN107078674B (zh) | 2019-09-17 |
| WO2016121751A1 (ja) | 2016-08-04 |
| EP3252941B1 (en) | 2021-06-30 |
| US10158305B2 (en) | 2018-12-18 |
| CN107078674A (zh) | 2017-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6367332B2 (ja) | インバータ制御装置及びモータ駆動システム | |
| JP4674525B2 (ja) | 磁極位置推定方法及びモータ制御装置 | |
| JP4989075B2 (ja) | 電動機駆動制御装置及び電動機駆動システム | |
| KR102108911B1 (ko) | 드라이브 시스템 및 인버터 장치 | |
| JP5494760B2 (ja) | 電動機制御装置 | |
| TWI654827B (zh) | 換流器控制裝置及馬達驅動系統 | |
| WO2016121237A1 (ja) | インバータ制御装置及びモータ駆動システム | |
| JP6776066B2 (ja) | インバータ制御装置および電動機駆動システム | |
| JP2007159212A (ja) | 永久磁石同期モータのベクトル制御装置,インバータモジュール、及び永久磁石同期電動機モータ定数表示システム | |
| JP2009060688A (ja) | 同期電動機の制御装置 | |
| JP5499965B2 (ja) | 交流回転機の制御装置 | |
| JP2000037098A (ja) | 速度センサレスベクトル制御を用いた電力変換装置 | |
| JP2009284684A (ja) | ベクトル制御装置 | |
| KR102409792B1 (ko) | 영구 자석 동기 전동기의 제어 장치, 마이크로 컴퓨터, 전동기 시스템 및 영구 자석 동기 전동기의 운전 방법 | |
| JP7251424B2 (ja) | インバータ装置及びインバータ装置の制御方法 | |
| JP5660191B2 (ja) | 電動機制御装置 | |
| JP2016100997A (ja) | 電動モータの制御装置 | |
| JP7226211B2 (ja) | インバータ装置及びインバータ装置の制御方法 | |
| JP7099226B2 (ja) | モータ制御装置 | |
| JP5390970B2 (ja) | モータ制御装置 | |
| JP2010268663A (ja) | ロータ角度推定装置 | |
| JP7012931B2 (ja) | インバータ制御装置および電動機駆動システム | |
| JP2009100600A (ja) | インバータ制御装置とその制御方法 | |
| JP6015647B2 (ja) | 電動機駆動装置の制御装置及び電動機駆動システム | |
| JP6584371B2 (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170526 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170719 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20170904 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170905 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180605 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180704 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6367332 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |